
Modelo de Plataforma EnViBo
173
Modelo de plataforma para el desarrollo de redes de sensores portables en monitoreo fisiológico ambulatorio Por: Gustavo Adolfo Meneses Benavides Asesor: Msc. PhD (c). Juan Diego Lemos Duque Trabajo de Investigación presentado para optar al título de MSc. en Ingeniería Maestría en Ingeniería-Área: Electrónica Línea: Bioinstrumentación Grupo de Investigación en Bioelectrónica e Ingeniería Clínica - GIBIC Universidad de Antioquia Facultad de Ingeniería 2013
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Modelo de Plataforma EnViBo

Modelo de plataforma para el desarrollo de redes
de sensores portables en monitoreo fisiológico
ambulatorio
Por:
Gustavo Adolfo Meneses Benavides
Asesor: Msc. PhD (c). Juan Diego Lemos Duque
Trabajo de Investigación presentado para optar al título
de MSc. en Ingeniería
Maestría en Ingeniería-Área: Electrónica
Línea: Bioinstrumentación
Grupo de Investigación en Bioelectrónica e Ingeniería
Clínica - GIBIC
Universidad de Antioquia
Facultad de Ingeniería
2013

Tabla de Contenido
CAPITULO 1 ______________________________________________________________ 4
Introducción __________________________________________________________________ 4
Evolución histórica de los recursos para el diagnóstico médico ________________________________ 4
La Telemedicina y sus ramas ___________________________________________________________ 5
Fases de desarrollo de la Telemedicina ___________________________________________________ 6
Aspectos que rigen el desarrollo de la telemedicina _________________________________________ 7
Evolución de las tecnologías portátiles ___________________________________________________ 7
Evolución de los nodos utilizados para redes inalámbricas de sensores _________________________ 9
Sensores para aplicaciones biomédicas __________________________________________________ 10
CAPITULO 2 _____________________________________________________________ 17
Estado del Arte ______________________________________________________________ 17
Plataformas de monitorización de variables biomédicas ____________________________________ 17
Dexternet _________________________________________________________________________ 17
Mercury ___________________________________________________________________________ 18
AlarmNet __________________________________________________________________________ 19
Shimmer __________________________________________________________________________ 20
CodeBlue __________________________________________________________________________ 21
Teco Particle _______________________________________________________________________ 22
BTnode ___________________________________________________________________________ 26
MyriaNed __________________________________________________________________________ 28
EMUTEM __________________________________________________________________________ 29
SMGI _____________________________________________________________________________ 30
INTENSA ___________________________________________________________________________ 31
Características generales de las plataformas consultadas ___________________________________ 32
Colombia __________________________________________________________________________ 38
CAPITULO 3 _____________________________________________________________ 40
Marco Técnico y Regulatorio ____________________________________________________ 40
Referentes para la implementación de una plataforma de sensores portátiles __________________ 40
Marco Técnico ______________________________________________________________________ 40
Tecnologías de Comunicación Inalámbrica y Oportunidades para las aplicaciones de e-salud
__________________________________________________________________________________ 50
Elección de los Estándares de Comunicación Inalámbrica ___________________________________ 50
El estándar IEEE 802.11 ______________________________________________________________ 51
El estándar IEEE 802.15.1 _____________________________________________________________ 51
El estándar IEEE 802.15.4 _____________________________________________________________ 51
Marco Regulatorio __________________________________________________________________ 61
Compatibilidad Electromagnética ______________________________________________________ 62
Efectos Biológicos de la Radiación ______________________________________________________ 62
Impacto Ambiental __________________________________________________________________ 63
Regulación Colombiana ______________________________________________________________ 63

Bandas ISM (Industrial, Científica y Médica) ______________________________________________ 65
Otras Regulaciones Internacionales _____________________________________________________ 66
CAPITULO 4 _____________________________________________________________ 70
EnViBo: una propuesta de plataforma para el desarrollo de redes de sensores portátiles en
monitorización fisiológica ambulatoria ___________________________________________ 70
Plataforma EnViBo __________________________________________________________________ 72
Arquitectura de la Plataforma EnViBo ___________________________________________________ 72
Arquitectura de los Nodos ____________________________________________________________ 74
Visión completa de la plataforma EnViBo ________________________________________________ 76
Elementos técnicos para la implementación de las comunicaciones en la plataforma de monitorización
EnViBo ____________________________________________________________________________ 77
Programación de nodos sensores al interior de la plataforma EnViBo__________________________ 83
Interfaz de Programación de Aplicaciones (API) de MiWi: MiApp _____________________________ 84
Programación de Aplicaciones MiWi en MPLAB ___________________________________________ 85
Ejemplo de Implementación de Red con base en la formulación de la plataforma EnViBo _________ 95
Especificaciones para la red de monitorización bajo la plataforma EnViBo _____________________ 106
Procedimiento de implementación y puesta en funcionamiento de la red de monitorización: _____ 107
Interfaz de usuario EnViBo ___________________________________________________________ 110
Trabajos realizados _________________________________________________________________ 112
CAPITULO 5 ____________________________________________________________ 114
Diseños, pruebas y análisis de resultados ________________________________________ 114
Selección de los elementos: __________________________________________________________ 115
Diseño: ___________________________________________________________________________ 119
Montaje de los componentes sobre las tarjetas __________________________________________ 125
Pruebas y depuración sobre elementos de hardware ______________________________________ 129
Pruebas y depuración sobre elementos de firmware: _____________________________________ 130
Pruebas de comunicación en red ______________________________________________________ 133
Simulación ________________________________________________________________________ 152
Pruebas con baterías _______________________________________________________________ 157
Conclusiones y Observaciones ________________________________________________________ 159
Referencias ____________________________________________________________ 161

Modelo de plataforma para el desarrollo de
redes de sensores portables en monitoreo
fisiológico ambulatorio
CAPITULO 1
Introducción
Evolución histórica de los recursos para el diagnóstico médico
En la historia de la medicina, el apoyo en recursos técnicos para complementar los sentidos
humanos u otro tipo de habilidades utilizadas para tratar de diagnosticar enfermedades, dolencias
o condiciones médicas, no se dio sino hasta un periodo relativamente reciente. Es evidente que la
adopción de estas ayudas ha ido de la mano con los avances en campos como la instrumentación
electrónica. En cuanto al apoyo de medios externos para labores diagnósticas, desde tiempos
remotos hasta nuestros días, se puede hacer una clasificación general en seis grandes periodos
[1].
Tabla I. Historia de la medicina diagnóstica clasificada según su utilización de sensores [1]
Periodo en la historia del diagnóstico medico
Fecha histórica aproximada
Sin uso de los sentidos Inicio de los tiempos - presente
Sentidos humanos “Hipócrates”-presente
Sentidos humanos aumentados Siglo XIX-presente
Sentidos humanos remplazados Mediados del siglo XIX-presente
Sensores remotos Finales del siglo XX-presente
Sensores vestibles Siglo XXI
Lo que se llama periodo “sin uso de los sentidos” constituye el enfoque que asume que la causa de
la enfermedad yace por fuera del paciente, por causa de espíritus o dioses, por ejemplo. En el
periodo del uso de los “sentidos humanos” se acepta que la enfermedad tiene una causa física que
puede ser diagnosticada a partir de la observación cuidadosa del paciente, apoyándose en
sentidos como la visión, la audición y el tacto [1].
El mejor ejemplo del periodo de los “sentidos humanos aumentados” es el de la invención del
estetoscopio por Rene Theophile Hyacinthe Läennec en 1819 [2]. Este y otro tipo de aparatos,
como el microscopio, oftalmoscopios y endoscopios, le permitieron a los médicos “ver” dentro el
interior del cuerpo del paciente como nunca antes. Durante el periodo de “sentidos humanos
remplazados”, los sentidos de los médicos fueron reemplazados gradualmente por sensores.
Inicialmente por aquellos sensores que medían o registraban las mismas variables de manera más
confiable, como la temperatura y la presión arterial. Luego por sensores que detectaban

fenómenos no discernibles a través de los sentidos humanos, como los electrocardiogramas y los
rayos X.
En el periodo denominado de “sensores remotos”, el desarrollo de la telemetría le permite a los
médicos acceder a aplicaciones de lo que se denomina “Telemedicina” [3] que permiten observar y
entrevistar un paciente ubicado en un sitio alejado de la clínica o centro médico. Hoy en día existen
muchos ejemplos de tecnologías domiciliarias de telemonitorización con sensores. Por ejemplo,
existen brazaletes de presión arterial, medidores de glucosa, pulsioxímetros y monitores cardíacos
para pacientes con condiciones cardíacas o diabetes [4] y pueden transmitir sus signos vitales
desde el confort de su hogar al profesional de asistencia médica y obtener realimentación o
recomendaciones de seguimiento cuando sea necesario [5].
En el periodo de “sensores vestibles” se cuenta con herramientas que permiten realizar la
monitorización continua de pacientes en entornos como el laboral, el domiciliario, entre otros. Es
entonces que se hace necesario que el paciente o persona bajo observación porte los sensores, lo
que ha resultado en dispositivos muy modernos desde el punto de vista de las comunicaciones, el
nivel de miniaturización, el acondicionamiento y procesamiento de las señales. Sin embargo los
diseñadores de sensores vestibles afrontan grandes retos en cuanto a los requerimientos de
confiabilidad clínica, de consumo de energía y de confort y fiabilidad para el usuario final.
La Telemedicina y sus ramas
La etimología de la palabra Telemedicina sugiere medicina a distancia. En la práctica esta
denominación puede implicar la transferencia de datos médicos en formato electrónico desde una
ubicación a otra, más que la prestación de servicios médicos a la distancia, e involucra el uso de
dispositivos médicos, tecnología avanzada de telecomunicaciones como sistemas de
videoconferencia y redes de cómputo. Cuando se habla de transferencia, está implícito el uso de
las tecnologías de la información y la comunicación. Otros hablan de la telemedicina como el uso
de las telecomunicaciones para entregar servicios e información médica. La información médica
transferida puede utilizarse, entre otros, con fines de diagnóstico, terapia y educación. A partir de
algunos análisis y discusiones, se propone por parte de algunas personas y estamentos no hablar
de telemedicina sino de telesalud, el cambio de denominación busca también ampliar el espectro
de las profesiones involucradas siendo ya no solamente médicos sino también profesionales de
otras ramas como trabajo social y psicología [3].
Aparte de telemedicina y telesalud, también se habla de telecuidado o teleasistencia (telecare),
este último término se utiliza para describir la aplicación de la telemedicina para entregar servicios
médicos a pacientes en sus propias casas o en instituciones supervisadas. El telecuidado es
particular respecto de la telemedicina ya que es especialmente importante para un grupo
específico de pacientes con condiciones crónicas de largo tiempo como enfermedad mental,
discapacidad o simplemente edad avanzada [3][6].

Fig. 1. Telemedicina, Telesalud y Telecuidado, definición y factores de impulso [3].
Fases de desarrollo de la Telemedicina
Los profesionales de la salud y de áreas relacionadas han aprovechado las diversas tecnologías a
medida que estas han hecho su aparición. La telegrafía se utilizó en la guerra civil estadounidense
para reportar las bajas y solicitar medicamentos, el teléfono ha sido utilizado para proveer servicios
de salud desde su invención. Alrededor de 1910 el teléfono se utilizó para transmitir sonidos
amplificados provenientes de un estetoscopio, posteriormente también se usó para
electrocardiogramas y electroencefalogramas. La utilización de las ondas de radio para servicios
de apoyo a los navegantes se extendió desde los años 20 y 30, un ejemplo es el Italian
International Radio Medicine Centre que opera desde 1935 [3][7]. La televisión en blanco y negro
permitió visualizar la condición de un paciente más allá de simplemente apoyarse en una
descripción basada en audio y mejoró notoriamente los diagnósticos y la confianza de los
implicados en los tratamientos. Existen algunos antecedentes de programas apoyados por la
infraestructura de la NASA, agencia espacial estadounidense, como el proyecto STARPAHC para
asistir a comunidades indígenas o apartadas, en condiciones de difícil acceso o bajo situaciones de
catástrofes naturales.
Desde la perspectiva de las épocas actuales podría afirmarse que la telemedicina tuvo un
desarrollo relativamente lento hasta la década de los 80. Luego, con la transición marcada de las
comunicaciones análogas a las digitales y de la importancia creciente de los computadores y de
tecnologías como las de la telefonía móvil se ha notado una rápida aceleración en este campo.
Tabla II. Principales fases de desarrollo de la telemedicina [3][6]
Fase de Desarrollo Escala de tiempo aproximada
Telegrafía y telefonía 1840 - 1920
Radio A partir de 1920 (Fue la tecnología más importante hasta 1950)
Tecnologías televisión/espacial A partir de 1950 (Fue la tecnología más importante hasta 1980)
Tecnologías digitales A partir de 1990

Algunos servicios de telemedicina, telesalud y telecuidado que se prestan en la actualidad:
Teleconsulta y telediagnóstico (Radiología, Patología, Dermatología, Psiquiatría, Cardiología, Otorrinolaringología, entre otros) [6].
Teleradiología
Telecirugía
Telementoring
Teleoncología
Telespirometría
Videoconsulta
Aspectos que rigen el desarrollo de la telemedicina
Aparte de ser una iniciativa tecnológica que resulta bastante loable por sus incidencias filantrópicas
y en pro del bienestar de las personas, el éxito de la telemedicina, la telesalud, el telecuidado y
todas sus áreas afines, depende no solo de la viabilidad tecnológica sino de una serie de aspectos
que tocan áreas como la política, el gobierno y la factibilidad comercial.
Fig. 2. Algunos aspectos que influyen en el desarrollo de la telemedicina.
La calidad del servicio, por ejemplo, tiene que ver con lo que se denomina efectividad clínica que
involucra, entre otros aspectos, precisión de los diagnósticos, privacidad y protección de la
información.
Evolución de las tecnologías portátiles
El año de 1947 marcó un hito en la historia de la telemedicina. El invento del médico
estadounidense Norman Jeff Holter, realizado con el propósito de realizar monitorización
ambulatoria de largo término sobre las características cardíacas de un paciente, se utiliza aún para
utilizar los registros con fines de diagnóstico y estudio. Aprovechándose de los avances en la
miniaturización y en los semiconductores el prototipo inicial pudo ser reducido a un peso de solo
1.2 kilogramos hasta los prototipos actuales que solo pesan unos cuantos gramos [8][9].

Un desarrollo paralelo es el de la computación portátil [10], esta tendencia tecnológica finalmente
ha llegado a un punto convergente donde se ha dado una fusión con los desarrollos de
monitorización médica.
El desarrollo de las tecnologías móviles de comunicación se constituye en un impulsor clave del
paradigma de lo que se conoce como computación ubicua.
Tabla III. Evolución de la telefonía móvil y los sistemas de comunicación personal [11].
Generaciones de Telefonía y Comunicaciones Móviles Comerciales
0G
(70’s en adelante),
Comunicación básica de voz.
1G
(Años 80)
Señales análogas de
radio
2G
(Años 90)
Comunicaciones digitales de voz y datos como fecha y hora,
también disponible
mensajes cortos de texto (SMS)
para ciertos estándares.
3G
Rango más amplio de servicios
avanzados y mayor
capacidad de red a partir de una eficiencia
espectral mejorada
4G
(2006 en adelante)
Redes con paquete
conmutados completamente
IP, tasas de datos de Gigabits
5G
(próximos años)
Próxima generación en la prospectiva
de las comunicaciones
móviles.
[12]
Paralelamente a la evolución de las generaciones de telefonía móvil, se plantea una evolución de
las interfaces de los aparatos, desde aquellos que requieren un alto contacto con las manos,
pasando por los de moderado contacto hasta los modelos venideros de bajo contacto e incluso con
propiedades extendidas, que permitirán liberar las manos totalmente gracias a los comandos
gestuales, el seguimiento de la vista y la mayor capacidad para interpretar las señales lingüísticas
del usuario e incluso algunas relativas al contexto o entorno [13].
El término “computación ubicua”, también conocida como “computación pervasiva” (ubiquitous computing o pervasive computing), fue acuñado en 1988 por Mark Weiser. Para Weiser, la computación ubicua es la tercera etapa dentro la evolución de la informática. En la primera etapa, había grandes computadores (mainframes) compartidos por una gran cantidad de personas. En la segunda etapa, que se prolonga hasta hoy, aparecen los computadores personales, en la tercera etapa, cada persona interactúa con una gran cantidad de computadores. La computación ubicua pretende integrar en el entorno, sistemas computacionales que sean invisibles para el usuario. Gracias a la computación ubicua, los sistemas computacionales se “diluirán” en el entorno, quedando a la vista del usuario solamente sus funcionalidades [14].
Igualmente los sensores y los sistemas de sensado han experimentado transformaciones
significativas a lo largo del siglo XX y en lo corrido del siglo XXI. En la actualidad la madurez
tecnológica de los dispositivos electrónicos programables, las comunicaciones inalámbricas y la
computación ubicua o pervasiva se conjugan en sistemas de redes de sensores.

Fig. 3. Evolución de los sistemas de sensores y del paradigma en cuanto a las capacidades de
procesamiento de los datos.
En el campo especifico de las aplicaciones de telemedicina, telesalud y telecuidado, la línea
evolutiva marca un paso por los sensores portables (portátiles), los sensores vestibles y los
sensores implantados [4][5][15][16]. Una propuesta complementaria tiene que ver con los sensores
y los sistemas de sensores llamados “sin contacto” [17][18].
La fusión de Electrónica, Computación y Telecomunicaciones puede verse claramente en el
análisis de diagrama de bloques de un nodo sensor portátil genérico. Si bien, no es obligatorio que
las comunicaciones sean inalámbricas esto es lo que prevalece para la mayoría de los sistemas y
especialmente para los de telemedicina, con redes de área corporal y personal. Como se verá en
detalle en el próximo capítulo, los estándares de las familias IEEE 802.XX se constituyen en el
principal referente para las comunicaciones.
Fig. 4. Arquitectura de hardware para nodos sensores [19]
Evolución de los nodos utilizados para redes inalámbricas de sensores
En el campo de las redes de sensores un nodo portátil es un dispositivo que puede monitorear una
o múltiples variables. Algunas de las principales característica de estos nodos sensores son su
carácter inalámbrico, su autonomía, sus capacidades de procesamiento y su nivel de

miniaturización. Otros factores de diseño importantes para este tipo de tecnología son su
adaptabilidad a las prendas de vestir o al cuerpo de las personas, un tamaño reducido y un peso
liviano.
Algunas de los avances tecnológicos y de procesamiento que aprovechan los nodos sensores en
la actualidad son:
• Fusión de Datos (Fusión de Sensores) [20]
• Energy Harvesting
• Sistemas Microelectromecanicos (MEMS)
• Microcontroladores de extra-bajo consumo
• Ambientes inteligentes (Smart Environments)
• Miniaturización creciente
• Sistemas Operativos en Tiempo Real (RTOS)
En la actualidad se observa una cierta tendencia en la evolución de las plataformas de sensores
hacia soluciones no propietarias, con protocolos inalámbricos especialmente adaptados para las
redes de sensores portátiles, con nodos altamente eficientes en el uso de la energía y con la
incorporación de elementos de “inteligencia” en el proceso que va desde la captación, hasta la
visualización de la información, añadiendo valor a los datos en el procesamiento intermedio [21].
Sensores para aplicaciones biomédicas
Un sensor es un dispositivo que puede captar los cambios de una variable de interés basándose
en una ley, efecto o principio (físico, químico, electromagnético, etc.) y que, a su vez, entrega una
señal de salida que corresponde de manera lineal, polinómica, exponencial u otra, a la variación
inicialmente captada. En la actualidad se aprovecha el principio de operación de diferentes
sensores en el área de las aplicaciones biomédicas.
Tabla IV. Clasificación de bioseñales según su forma asociada de energía [4]
Forma de energía Variables Ejemplos de bioseñales
Eléctrica Voltaje, corriente, resistencia, capacitancia, inductancia …
Electrocardiografía (ECG), Electroencefalografía (EEG), Electromiografía (EMG), Electrooculograma (EOG), Electronistagmografía (ENG)
Mecánica Desplazamiento, velocidad, aceleración, fuerza, presión, flujo…
Presión arterial, velocidad de onda de pulso
Térmica Temperatura, flujo térmico, conducción térmica
Temperatura interna, temperatura cutánea
Radiante Luz visible, infrarrojo, ondas de radio…
SpO2, fotopletismografía
Magnética Flujo magnético, intensidad de Magnetoencefalografía, flujo

campo
Química Composición química, pH (derivado de muchas formas de energía)…
Glucosa, colesterol, creatina quinasa
Como ejemplo de sensor utilizado en aplicaciones biomédicas podemos mencionar el termistor, un
sensor cuyo principio de operación se basa en las variaciones de resistencia de ciertos materiales
semiconductores ante los cambios de temperatura. Los termistores comerciales usualmente están
fabricados a partir de mezclas de óxidos de metales, como óxido de manganeso con cobre, y
presentan una variación de tipo exponencial que puede resultar muy útil parar la detección de
pequeños cambios de temperatura [22].
Fig. 5. Termistor: Aspecto físico, símbolo, formula genérica y curvas de respuesta típicas para
los tipos NTC y PTC
Se denomina sensor portable, portátil o más propiamente “nodo sensor” a un tipo especial de
dispositivo que tiene la capacidad de realizar las funciones de sensado, acondicionamiento,
procesamiento y transmisión de las señales en el mismo sitio del registro y sobre una misma
tarjeta, de manera similar a lo que se conoce como un sensor inteligente. El término nodo implica
una interacción con otros elementos de red, además este tipo de sensores debe incorporar
características de portabilidad y diseño que lo hagan apropiado para realizar sus tareas de
medición, mientras está sujeto a una parte del cuerpo o a una prenda vestida por una persona [5].
Fig. 6. Diagrama de bloques de un nodo sensor
Los nodos sensores son diseñados bajo parámetros de comodidad y portabilidad para el usuario,
idealmente estos no deben obstruir o impedir el desarrollo de las actividades normales realizadas
por las personas monitorizadas y pueden encontrarse actuando independientemente en
aplicaciones de registro de una sola variable o interconectados en sistemas de redes inalámbricas
de sensores.

Aparte de apoyar estudios de tipo sociométrico [23], psicosocial, de mercado o de otra índole, las
redes de sensores portátiles también son utilizadas para la monitorización ambulatoria de variables
fisiológicas o de interés biomédico en personas [24] y si bien, aun no es posible la implantación de
sensores portables para reemplazar todas las pruebas médicas, se ha avanzado bastante en la
implementación de sistemas portátiles de monitorización para las principales pruebas relacionadas
con signos vitales y señales típicas como las de electrocardiografía, presión arterial, pulsioximetría,
temperatura, entre otras [25]. Otros campos en donde se ha dado un rápido crecimiento de las
aplicaciones de las redes inalámbricas de sensores son el deportivo (fitness) y el del
entretenimiento (interactive gaming, tracking) [26][27].
En el campo específico de la monitorización ambulatoria de variables fisiológicas, existen una
serie de señales biomédicas y de signos vitales ampliamente conocidos por su importancia para
efectos de diagnóstico, prevención y seguimiento a condiciones específicas de los individuos. Entre
estas encontramos las señales electrocardiográficas, electromiográficas y los registros de presión
arterial, ritmo cardiaco, frecuencia respiratoria, actividad, temperatura corporal, gasto metabólico,
entre otros.
Es común encontrar aplicaciones en las que se fusionan los datos de diferentes señales
biomédicas y signos vitales con el fin de establecer con mayor precisión la condición de un
paciente o persona. Los profesionales de las áreas relacionadas, conocen la utilidad del registro de
signos vitales, señales biomédicas, patrones de comportamiento y otras informaciones relativas al
entorno y pueden aprovecharlas para realizar estudios de salud, hábitos y para diagnosticar
diferentes tipos de condiciones médicas.
TABLA V. Algunos sensores utilizados para detectar signos vitales [28]
Sensores Observación
ECG Ritmo cardiaco, variabilidad de ritmo cardíaco (HRV)
EMG Actividad muscular y fatiga
Respuesta galvánica de la piel Conductancia de la piel
Temperatura Temperatura cutánea, estado de salud (fiebre)
Respiración Ritmo respiratorio, actividad física
Oxígeno en la sangre Estado del sistema cardiovascular, ritmo cardíaco
Presión arterial Estado del sistema cardiovascular, hipertensión
TABLA VI. Algunos sensores utilizados para detectar movimiento y ubicación [28]
Sensores Observación
Acelerómetro Patrones de movimiento del tronco y de las extremidades
Micrófono Reconocimiento de voz, localización a partir de sonidos ambientales, detección de actividad,
características de voz.
Sensor de luz visible Ubicación de fuentes de luz
Rotación Movimientos corporales
Brújula electrónica Orientación del cuerpo y de la cabeza
Presión atmosférica Movimiento vertical en ascensor o en escaleras
Sensor de luz Luz del sol, ubicación de luminarias
Temperatura ambiente Exteriores, interiores
Humedad Ubicación, condiciones ambientales

WLAN/GSM/CDMA Ubicación, entorno del usuario
Bluetooth, Zigbee Servicios y dispositivos cercanos
Aprovechando las posibilidades actuales de comunicación inalámbrica y, en particular, las
características de los protocolos de redes de área corporal y de redes de área personal, es posible
entonces establecer redes de sensores que se ajusten a un marco operativo o plataforma de
funcionamiento previamente establecida. Toda plataforma está desarrollada con base en un
modelo, por lo tanto sus características más relevantes están determinadas por los lineamientos
metodológicos planteados en el modelo en aspectos como el tipo y el número de capas de la
plataforma, los protocolos a utilizar para cubrir las comunicaciones, las políticas de manejo de la
energía, los medios y métodos para el almacenamiento de los datos de medición, los modos y
escenarios de operación, el perfil de los usuarios, las conectividad a otras redes, los parámetros de
escalabilidad e interoperabilidad con otros dispositivos o redes, las consideraciones de sensibilidad
al contexto, las especificaciones de radiación electromagnética de los dispositivos que intervendrán
en la plataforma y todos los otros referentes que se consideren de importancia para el modelo [29].
Se puede afirmar entonces que un modelo de plataforma es un marco de referencia técnico-
conceptual a partir del cual se pueden determinar los requerimientos mínimos para los elementos
constitutivos de los sistemas y los alcances y limitaciones del tipo de implementaciones que se
pueden desarrollar en concordancia con lo planteado en el modelo [30] [31].
Si el modelo de plataforma está correctamente formulado, los sistemas implementados a la luz de
este, garantizarán aspectos como la integridad de los datos de medición y satisfarán las
necesidades de información de los investigadores interesados en el seguimiento de las señales
ligadas a la fisiología de los órganos y sistemas principales de las personas bajo observación [5].
Debido a los requerimientos de comunicación de los sistemas de nodos sensores portátiles, las
plataformas de estos sensores normalmente se apoyan también en dispositivos y tecnologías
enmarcados dentro del paradigma de la computación ubicua o pervasiva [32]. Este paradigma
pretende situar en diferentes entornos, sistemas con capacidades de cómputo de modo que estos
sean transparentes para el usuario, el objetivo es que los servicios se sitúen por encima de los
mismos dispositivos o infraestructuras de red. Muchos de los elementos considerados críticos para
la computación ubicua, que en el pasado eran una utopía, ahora son una realidad: smartphones,
redes de área local inalámbricas, nuevos sensores, protocolos, etc. [33], por lo tanto este
paradigma tecnológico encaja muy bien como soporte de las plataformas de sensores para el
monitoreo ambulatorio en aspectos como las comunicaciones, el almacenamiento-procesamiento
de los datos y la conectividad a otras redes.
En los últimos años, al interior del Grupo de Investigación en Bioelectrónica e Ingeniería Clínica:
GIBIC, del programa de Bioingeniería de la Universidad de Antioquia, se han desarrollado diversos
dispositivos para la monitorización de parámetros fisiológicos. En la actualidad no existe
interoperabilidad entre estos prototipos ya que cada uno de ellos se ha desarrollado de manera
independiente para el registro de una sola variable fisiológica. Para superar esta limitante, uno de
los objetivos actuales del grupo es desarrollar un modelo de plataforma de sensores portables que
permita el monitoreo simultaneo de múltiples parámetros fisiológicos de manera ambulatoria. La
integración de los dispositivos existentes, y otros en desarrollo o proyectados a futuro, es posible
mediante un modelo de comunicaciones basado en tecnologías y estándares existentes de redes
inalámbricas de área personal.

Fig. 7. Diagrama de bloques y detalle del módulo portable de monitoreo de Presión Arterial No
Invasiva (PANI) desarrollado por el GIBIC (Fuente: Grupo GIBIC)
El Grupo de Investigación en Bioelectrónica e Ingeniería Clínica GIBIC, perteneciente al programa
de Bioingeniería de la Universidad de Antioquia, adelanta continuamente proyectos de
investigación en sus diferentes líneas, en las modalidades de Proyectos Integrativos de Semestre
(PIS), cofinanciación, adaptación e innovación tecnológica, convocatorias nacionales e
internacionales, tesis de grado, maestría y doctorado [34].
Actualmente se desarrollan, o están planeados a futuro, diferentes proyectos de diseño e
implementación de nodos sensores portables en la división de Bioinstrumentación electrónica del
grupo GIBIC, específicamente en el área de monitorización ambulatoria de variables fisiológicas
[35]. Dada su naturaleza, estos proyectos revisten un especial interés y utilidad para varias líneas
de trabajo del grupo como Equipamiento biomédico, Procesamiento digital de señales médicas y
biológicas y Modelado matemático de procesos fisiológicos y patológicos, sin embargo en la
actualidad no existe un marco metodológico a nivel del grupo que haga posible que estos
prototipos independientes de monitoreo se integren fácilmente a otros proyectos de investigación
en las líneas mencionadas.
A partir del análisis de esta situación y considerando los lineamientos e intereses investigativos del
grupo GIBIC, se ha identificado la necesidad de desarrollar un modelo de plataforma
multiparamétrica de monitorización ambulatoria de parámetros fisiológicos, que se constituya en un
referente sistémico y metodológico que permita integrar, de manera efectiva, en el mediano y largo
plazo, productos como los prototipos portátiles y otras herramientas de monitorización
desarrolladas de manera independiente, a esfuerzos coordinados y continuos de investigación.
Tabla VII. Proyectos de Investigación del grupo GIBIC que pueden integrarse a otros proyectos
mediante un modelo de plataforma de sensores portables de monitoreo de variables fisiológicas.
(Fuente: Grupo GIBIC)
Proyecto de
Investigación
Modalidad Características
Generales
(Estado Actual)
Pendiente por
Implementar
Con miras a la
interoperabilidad
Holter
[34]
Tesis de Grado Aún No es integrable a
sistema multiparamétrico de
monitoreo fisiológico
(Culminado)
Ajustes de
Hardware y Software
al módulo de
comunicaciones

Medidor Portable de Presión
Arterial no Invasiva (PANI)
[35]
Tesis de Grado Conectividad ad-hoc con
dispositivo coordinador
Aún no es integrable a
sistema multiparamétrico de
monitoreo fisiológico
(Culminado)
Ajustes de Software
al módulo de
comunicaciones
Medidor de Saturación de
Oxígeno (SpO2)
PIS
(Proyecto Integrativo de
Semestre)
Aún no es integrable a
sistema multiparamétrico de
monitoreo fisiológico
(En desarrollo)
Módulo completo de
comunicaciones
(Hardware+Software)
Actígrafo PIS Aún no es integrable a
sistema multiparamétrico de
monitoreo fisiológico
(En desarrollo)
Módulo completo de
comunicaciones
(Hardware+Software)
Monitor de Actividad
Cardíaca y Frecuencia
Respiratoria
PIS Aún no es integrable a
sistema multiparamétrico de
monitoreo fisiológico
(En desarrollo)
Módulo completo de
comunicaciones
(Hardware+Software)
Force Plate
(Medidor de Presión plantar)
Adaptación e Innovación
Tecnológica
(Cofinanciado por la UdeA y
la empresa Ilimitada S.A)
Aún no es integrable a
sistema multiparamétrico de
monitoreo fisiológico
Requiere a futuro
conectividad a sistema
multiparamétrico
(Culminado)
Módulo completo de
comunicaciones
(Hardware+Software)
Monitor multiparamétrico de
parámetros fisiológicos
[36]
Maestría Proyecto para la validación
del modelo de plataforma de
sensores portatiles.
Integra varios PIS y tesis de
grado realizados o
actualmente en desarrollo
Integración según
modelo formulado de
plataforma de
sensores portables
Sistema portátil para la
medición del gasto
energético por método de
calorimetría indirecta
Tesis de Grado Debe ser integrable a un
sistema multiparamétrico de
monitoreo fisiológico
(Culminado)
Módulo completo de
comunicaciones
(Hardware+Software)
En la actualidad, el grupo GIBIC solo cuenta con dispositivos de medición que están enfocados a la
monitorización de parámetros fisiológicos específicos y que no están diseñados bajo los criterios
que deben tener los diferentes nodos sensores, para poder integrarse a una plataforma
multiparamétrica [35], bajo un modelo que les permita funcionar en múltiples configuraciones de
monitorización de variables y de acuerdo con las especificaciones propias de los diferentes
trabajos de investigación. Con un modelo de plataforma de sensores es posible desarrollar
proyectos en los que las tareas de monitorización de variables fisiológicas, se pueden realizar con
versatilidad en aspectos tales como el número de parámetros, la periodicidad y la cantidad de las
medidas, el tipo de persona y el escenario de monitoreo, el tipo y el medio de registro.
Aunque en el ámbito comercial existen varios sistemas de monitorización de variables fisiológicas,
se observa que muchos de estos no están concebidos para ofrecer facilidades de adaptación para
labores investigativas, puesto que están soportados sobre tecnologías de nodos sensores

básicamente cerradas, lo que restringe significativamente su campo de utilización para este tipo de
aplicaciones [37][38][39]. El modelo de plataforma que se va desarrollar, debe permitir la
implementación de sistemas de monitoreo fisiológico, que no estén limitados solo a las
aplicaciones clínicas, porque varios de los proyectos de investigación en desarrollo o previstos a
futuro, implican monitorización sobre deportistas, personas con antecedentes de cuadros clínicos
familiares, adultos o ancianos, personas que ejercen oficios o actividades físicas en condiciones de
exigencia extrema y otros públicos específicos.
Se requiere entonces formular y validar un modelo de plataforma de sensores para la
monitorización fisiológica ambulatoria que pueda servir de apoyo para el grupo GIBIC y sus
integrantes en diferentes actividades investigativas, tales como la validación de modelos
biomédicos, la verificación de procedimientos de registro de variables fisiológicas, los estudios
sobre las características físicas de personas pertenecientes a grupos de interés especial
(ancianos, adultos con condiciones médicas especiales, deportistas, mujeres embarazadas,
trabajadores), el diseño de pruebas (de esfuerzo, de valoración, etc.), el seguimiento y valoración
de la respuesta a medicamentos en pacientes, entre otras. Este modelo de plataforma será el
marco metodológico estructural que soportará la implementación de los diversos sistemas de
monitorización y que garantizará su operatividad bajo los requerimientos de los diferentes
proyectos del grupo.

CAPITULO 2
Estado del Arte
Plataformas de monitorización de variables biomédicas
Una plataforma de monitorización de variables fisiológicas es un sistema que integra labores de captación y acondicionamiento de señales, modulación, codificación y transmisión de la información, almacenamiento, visualización procesamiento y análisis de los datos. Aparte de los nodos serán necesarios un conjunto complementario conformado por elementos receptores de la información, bases de datos, medios de visualización, algoritmos de análisis y extracción de conocimientos, personal calificado y redes de comunicación, cableadas y no cableadas, de cobertura corporal, personal, local e incluso metropolitano [40]. La integración de los sistemas de sensado portátiles con otras plataformas e infraestructuras de información, hace uso de tecnologías bien consolidadas relacionadas con protocolos y estándares consolidados aplicados a las intranets, a Internet y a las tecnologías móviles [41]. El tipo de transceptores de radiofrecuencia, de microprocesadores o microcontroladores y de sensores a ser utilizados son elementos fundamentales que determinan muchas de las características de arquitectura y de prestaciones de las plataformas de monitorización ambulatoria de variables biomédicas y, por lo tanto, de sus nodos sensores. Con el fin de determinar las características que debe poseer el modelo de plataforma que deseamos formular, se ha realizado una revisión del estado del arte en cuanto a plataformas de monitorización a nivel mundial, bien sea a nivel de proyectos de investigación, académicos o como variantes comerciales, para encontrar elementos de referencia que nos permitan acercarnos a una formulación propia, que aproveche las lecciones aprendidas que se derivan de los proyectos similares existentes y que se ajuste a nuestras necesidades particulares.
Dexternet
Una de las plataformas analizadas es Dexternet [42], denominada como una Plataforma Abierta para Redes de Sensores Corporales y sus Aplicaciones por sus creadores. Esta plataforma se basa en una arquitectura de tres capas; una capa de sensores corporales que comprende el diseño de los diferentes sensores y su instrumentación sobre el cuerpo, una capa de red personal que se ocupa de la comunicación entre los sensores corporales y una estación de computación móvil con sistema operativo Linux y soporte del protocolo IEEE 802.15.4 y, finalmente, una capa de red global que registra continuamente los datos de los sensores via Internet y soporta otras aplicaciones de alto nivel sobre uno o más servidores de red protegidos. Adicionalmente Dexternet soporta una librería de código abierto para procesamiento de señales on-node (SPINE: Signal Processing In Node Environment) que funciona para diferentes sensores corporales. Esta plataforma fue concebida para realizar aplicaciones de monitorización de largo término, sobre una o varias personas en ambientes interiores y exteriores. En principio Dexternet soportaba sensores de electrocardiografía, neumografía por impedancia eléctrica, movimiento y posicionamiento GPS, también, con la ayuda de SPINE, sensores de otras plataformas comerciales como Shimmer y MicaZ

Fig. 8. Esquema general de la plataforma Dexternet. Estructura de tres capas: Capa de sensores
corporales (BSL por sus siglas en inglés), capa de red personal (PNL) y capa de red global (GNL)
Como se observa en la figura (izquierda), los sensores y los dispositivos móviles se enlazan via
SPINE en las dos capas más bajas de la arquitectura, la de sensado corporal y la de red personal,
luego en la capa de red global están sustentadas las aplicaciones de alto nivel como visualización
de un avatar que se crea a partir de los sensores que porta la persona en sus articulaciones, el
reconocimiento de actividades y estudios de asma, entre otros.
Mercury
Esta plataforma desarrollada en el Hardvard Sensor Networks Lab es una herramienta para el
desarrollo de aplicaciones con sensores vestibles que balancea los requerimientos de tiempo de
duración de las baterías y de calidad de los datos [43]. Una red típica bajo la plataforma Mercury
tiene múltiples sensores portados por un paciente y una estación base, típicamente un computador
portátil con un transceptor 802.15.4. La arquitectura de software de Mercury, mostrada en la figura,
se divide en componentes que se ejecutan en los nodos sensores y la estación base.

Fig. 9. Arquitectura del sistema de monitorización Mercury
La estación base ejecuta un driver que puede ser personalizado por el usuario final para un amplio
rango de aplicaciones clínica. Mercury entrega una API simple para el driver de controlar la
operación del nodo sensor y la recuperación de los datos. De esta forma el encargado médico no
necesita programar los nodos para personalizar la red Mercury. El driver de Mercury puede
emplear un amplio rango de políticas para ajustar el muestreo de los datos, el almacenamiento y la
descarga de estos para negociar entre el consumo de energía y la fidelidad de los datos.
Mercury es una plataforma desarrollada para análisis de movimiento en pacientes con Parkinson,
epilepsia y apoplejía. La plataforma fue diseñada para recoger datos de largo término en pacientes
en ambientes hospitalarios y domésticos. Los pacientes pueden portar hasta ocho nodos
inalámbricos equipados con sensores para la monitorización de movimiento y condiciones
fisiológicas.
AlarmNet
AlarmNet, la plataforma propuesta del laboratorio de Computación Embebida y en Tiempo Real de
la Universidad de Virginia, es una red para la monitorización residencial y para la vida asistida que
sirve para propósitos de investigación en el campo de la asistencia medica inteligente y que ofrece
nuevas oportunidades para la monitorización continua de adultos mayores o de quienes requieren
de asistencia médica [44].
Fig. 10. Plataforma AlarmNet: (izquierda) escenario de operación, (derecha) arquitectura.

La figura (derecha) muestra la arquitectura de la plataforma AlarmNet que consta de los siguientes
elementos:
Red de sensores emplazados (emplaced sensor network)
Redes corporales mobiles (Mobile Body Networks)
Pasarela de enlace AlarmGate (Gateways)
Interfaces de usuario (User interfaces)
Bases de datos y programas de análisis Back-end
Los sensores emplazados se despliegan en el ambiente (cuartos, corredores, muebles) para
soportar el sensado y la monitorización, que incluye: temperatura, humedad, movimiento, acústica,
cámaras, etc. Esto provee sensado y control del entorno, interfaces para otros dispositivos y un
contexto espacial para la operación. Los sensores acoplados al cuerpo que hacen parte de las
redes corporales tienen capacidad de comunicación entre ellos y uno de estos nodos está
designado como la pasarela de enlace hacia la red de sensores emplazados. Los sensores de la
red corporal comprenden sensores fisiológicos y de reconocimiento de actividad.
En la plataforma AlarmNet los niveles de red están conectados mediante dispositivos que actúan
como pasarelas (gateways) entre las capas adyacentes. La pasarela AlarmGate conecta sistemas
tradicionales como PDAs, PCs y bases de datos con la red de sensores emplazados, los nodos
AlarmGate posen más capacidades de almacenamiento y computación que los nodos sensores,
también prestan servicios de procesamiento de peticiones, seguridad y privacidad. La
comunicación del Gateway puede ser inalámbrica o puede soportarse sobre la infraestructura de
redes cableadas existentes. Tambien hay un Gateway especial llamado BlueGate que permite
interaccion con otros nodos como MicaZ y enviar mensajes de alarma a través de dispositivos
móviles mediante un enlace que utiliza Bluetooth.
Finalmente la plataforma AlarmNet suministra varias interfaces para personal médico (healthcare
provider interfaces), interfaces para aspectos de manejo técnico de la plataforma, interfaces para
los residentes e interfaces internas (in-Network interfaces). Se utiliza una base de datos MySQL
como almacenamiento de datos back-end para todo el sistema, esta base de datos se ejecuta en
un pc que almacena toda la información recogida por la infraestructura de red y que se utiliza para
estudios longitudinales y análisis off-line. Los programas de análisis back-end monitorizan
desviaciones de comportamiento de los pacientes sobre largos periodos de tiempo, lo que ayuda a
identificar cambios que pueden indicar el avance de enfermedades degenerativas como el
Alzheimer. La plataforma también cuenta con un aplicativo que analiza los ritmos de actividad
circadiana llamado SAMCAD (Software for Automatic Measurement of Circadian Activity Deviation)
que se apoya en los sensores vestibles de actividad y movimiento portados por los pacientes.
Shimmer
Esta es una plataforma de sensores inalámbricos, comercializada por Realtime Technologies, que
puede grabar y transmitir datos fisiológicos y relativos al movimiento en tiempo real. Su nombre en
realidad se deriva de una sigla Sensing Health with Intelligence, Modularity, Mobility and
Experimental Reusability y ha sido diseñada por el Grupo de Salud Digital de Intel. La plataforma
Shimmer incorpora nodos sensores de electrocardiografía (ECG), electromiografía (EMG),
respuesta galvánica de la piel (GSR), nodo acelerómetro, giróscopo, magnetómetro, sistema de
posicionamiento global (GPS), inclinación y vibración [45].
La arquitectura de la plataforma puede describirse a partir de los siguientes componentes: un
elemento central de computo (Core computation), elementos de comunicación, almacenamiento y

manejo de la energía, así como tarjetas de expansión shimmer (daughterboards) y periféricos. El
elemento central de procesamiento de la tarjeta base de Shimmer es un microcontrolador de Texas
Instruments de bajo consumo, el MSP430, que también provee interfaces I2C, UART y SPI. Las
comunicaciones de los nodos se cubren con transceivers, el CC2420 y el RN41, que soportan
implementaciones de las recomendaciones IEEE802.15.4 e IEEE802.15.1 respectivamente. El
almacenamiento se hace en tarjetas micro SD. Las tarjetas de expansión permiten conectar a la
tarjeta base los sensores que la aplicación requiera y los periféricos incluyen elementos como el
cargador-programador. En conjunto podemos decir que Shimmer se apoya en elementos de
hardware, firmware y software para proveer las funcionalidades de una plataforma de
monitorización.
Fig. 11. Componentes de Hardware, Firmware y Software de la plataforma Shimmer
CodeBlue
Esta plataforma también ha sido desarrollada por Harvard Sensor Networks Lab y se denomina a sí
misma como una infraestructura de sensores inalámbricos para monitorización médica. CodeBlue
está soportada por una arquitectura de red y por una arquitectura de software. Al igual que otras
plataformas, a nivel de la capa de sensores corporales CodeBlue se apoya en IEEE802.15.4,
también se utiliza un Gateway que conecta con el denominado CodeBlue Server que a su vez
conecta con una base de datos y enlaza al nivel de aplicación para finalmente llegar a los usuarios,
principalmente personal médico [46].
Los nodos desarrollados bajo CodeBlue se pueden apoyar en el sistema operativo TinyOS, el cual
es compatible con otros nodos sensores o motas como MicaZ y Telos. La plataforma ha sido
formulada bajo preceptos de escalabilidad y robustez, manejo de peticiones concurrentes múltiples
por parte del personal médico, despliegue de red ad-hoc, soporte de una amplia gama de sensores
biomédicos y de aplicaciones.

Fig. 12. Arquitectura de red y de software de la plataforma CodeBlue
CodeBlue está diseñada para satisfacer los preceptos antes mencionados entregando una un
conjunto integrado de protocolos de comunicación y una interfaz de peticiones (query interface)
para redes de sensores médicos. El núcleo de CodeBlue es un modelo de comunicación
publish/subscribe que le permite a los sensores publicar en uno o más canales y a los dispositivos
receptores suscribirse a los canales de interés. El protocolo de descubrimiento de sensores le
permite a los dispositivos receptores descubrir los nodos a medida que estos se unen a la red,
mientras la interfaz CodeBlue Query se convierte en un mecanismo para que los usuarios soliciten
actualizaciones periódicas o activadas por eventos sobre el status de los pacientes. La capa de
abstracción del hardware de sensores permite la fácil integración de nuevos sensores en la
plataforma. Finalmente, el proxy externo que se basa en servicios web, permite acceso a la red
CodeBlue desde aplicaciones de cliente basadas en internet.
Teco Particle
Esta es una plataforma desarrollada en la Universidad de Karlsruhe [47] derivada del proyecto
Smart-Its Particles que nace dentro del paradigma de la computación ubicua y de los objetos
inteligentes. La figura muestra la arquitectura básica de un nodo sensor de primera generación
dentro del modelo Smart-Its [48]. Dentro de esta propuesta los nodos también están concebidos
como elementos modulares que incorporan las funcionalidades básicas de un sensor inteligente,
es decir, captura de variables, capacidades de procesamiento, comunicaciones y manejo de la

energía.
Fig. 13. Arquitectura de un nodo dentro del modelo Smart-Its de primera generación
En esta propuesta se incorporan microcontroladores de Microchip como elementos de
procesamiento, cada partícula se apoya en una arquitectura de software en la que el programa que
se ejecuta es específico para las tareas del nodo. El firmware que es necesario para cubrir las
necesidades del nodo se encuentra dividido en librerías que se compilan luego para hacerlas
específicas para una aplicación particular. Como se muestra en la figura se tienen tres librerías
principales que poseen drivers para cada componente de hardware especifico, las librerías se
ocupan de la administración de las entradas/salidas físicas (Physical I/O), del manejo de las
comunicaciones y se soportan tareas cooperativas de manera separada utilizando semáforos.
Fig. 14. Modelo por capas para los nodos de los nodos dentro del esquema Teco Particle.
Se observa una distribución general que se apoya en los elementos de hardware al nivel más físico
y luego se apoya en las librerías para posibilitar un nivel de aplicación que permita personalizar la
funcionalidad de los nodos.
Actualmente, en lo que concierne a aplicaciones de monitorización que se deriven del proyecto
Smart-Its encontramos la plataforma Teco Particle que casi después de una década es una
propuesta madura. Dentro de los componentes de esta plataforma tenemos:

Particle computer: denominada dentro de la plataforma como el núcleo inalámbrico (the wireless core), este elemento es básicamente la placa base a partir de la cual se desarrollan los diferentes nodos. El Particle computer está diseñado de forma que sea liviano, de baja potencia y de bajo factor de forma, se apoya en un microcontrolador de 8 bits de Microchip con 128KB de memoria de programa y en un transceptor que opera en la banda ISM de 868.35 MHz.
Fig. 15. Detalle de implementación de un nodo dentro de la plataforma Teco Particle
Selftest: es una tarjeta para chequear la operación del Particle computer. No se puede trabajar en caliente.
Ssimp: se denomina así a la tarjeta de sensores sin el procesador
Spart: se llama así a la tarjeta de sensores con el procesador
Breakout: es el conjunto de conectores de expansión y de tarjetas con sensores propios que pueden ser agregados por el usuario.
Prog Adapter: Es la tarjeta de expansión que permite realizar operaciones de lectura, borrado, programación y depuración sobre el microcontrolador de la tarjeta base.
Serial: es una tarjeta que provee una conexión clásica RS232 serial.
Xbridge: esta tarjeta provee conexión a redes Ethernet mediante una conexión cableada a través de un punto de red de infraestructura de conectividad existente. Se puede obtener acceso a internet por este medio. Se proveen las herramientas de firmware y software para soportar esta funcionalidad de Gateway. A través del XBridge se hace la conversión de los paquetes recibidos via RF a paquetes UDP/IP y viceversa.

Fig. 16. Enlace de las partículas dentro de la plataforma Teco hacia redes de
infraestructura
ParticleAnalyzer: Se denomina así dentro de la plataforma Teco Particle a la interfaz de usuario que permite observar el desempeño de las partículas. Esta interfaz posee varias funcionalidades muy llamativas como el manejo de la configuración de las comunicaciones de las partículas en caliente a través de una utilidad OTAP (on the air programming) que se constituye en uno de los ítems más novedosos y que se presentó como ProgAir desde las formulaciones iniciales en los primeros años de la plataforma, a principios de la década del 2000.
APSConfig: es una interfaz que posibilita la configuración de especificaciones de networking para las partículas dentro de la plataforma. APSConfig es un programa que se ejecuta bajo Windows para configurar los nodos sensores Particle+SSimp y Particle+SPArt. La idea es que luego de configurar la particula con APSConfig se puede utilizar el ParticleAnalyzer para observar las lecturas del nodo sensor.
AwareCon: se llama asi al protocolo de red particular para las partículas que provee una transmisión ad hoc y sincronizada de datos de hasta 48Kbits. Las partículas se sincronizan con sus socios de comunicación y permanecen asi mientras estén en su rango de alcance. El protocolo consta de 3 capas; la capa de RF (para sincronización, codificación de canal, etc.), la capa LL (para control de acceso, codificación de los datos y chequeo de errores mediante CRC16) y la capa ACL que actúa como una interfaz de usuario y de representacin de datos abstracta.
Adicionalmente la plataforma Teco se apoya en la librería llamada LibParticle que sirve para
simplificar el desarrollo de aplicaciones para ejecutarse en el PC que se comuniquen con las
partículas Smart-Its. LibParticle se encuentra disponible como puerto Windows o Linux/Unix,
también está disponible un puerto para lenguajes de alto nivel como JAVA, Ruby, .Net y C#, entre
otros. La imagen muestra la arquitectura de LibParticle.

Fig. 17. Arquitectura de LibParticle, framework de soporte para el desarrollo de aplicaciones bajo la
plataforma Teco
BTnode
La plataforma de computación y comunicación inalámbrica autónoma llamada BTnode [49], que
también hace parte de la iniciativa Smart-Its, se apoya en un microcontrolador y radios Bluetooth.
BTnode sirve como plataforma de demostración para investigación en redes conectadas ad hoc y
mobiles (MANETs por sus siglas en ingles) y redes de sensores distribuidos. Esta plataforma ha
sido desarrollada de manera conjunta en el ETH de Zurich por el Computer Engineering and
Networks Laboratory y el Research Group for Distributed Systems. Los nodos se apoyan en radios
similares a los utilizados en las motas Mica2 de Berkeley.
Los nodos BT utilizan microcontroladores Atmel de 8 bits, un SOC (system on chip) Zeevo que
integra un radio, un controlador de enlace, audio y una CPU ARM7. También se utilizan un
transceptor UHF que opera en la banda ISM de 433-915MHz, el chipcon CC1000. La programación
de los nodos se realiza en lenguace C y existe compatibilidad con TinyOS.
Fig. 18. Arquitectura de hardware de los nodos BT
El software de los nodos pertenecientes a la plataforma BTnode es un sistema operativo liviano,
llamado BTnut OS, que está compuesto de drivers de bajo nivel que se manejan a través de
interrupciones y un despachador simple para planificar los tiempos de multiples hilos de ejecución
(multiple threads). Un modelo de programación manejado por eventos entrega las funciones
apropiadas para el manejo de los recursos. Un componente de software, como un driver, puede

generar un evento para notificarle a otros componentes de la ocurrencia de un cambio en el estado
que requiere de mayores acciones.
Fig. 19. Framework de sistema operativo orientado a las comunicaciones y liviano de la plataforma
BTnode
Como podemos observar la plataforma se apoya en un esquema mediado por un Dispatcher o
despachador que acerca los recursos de hardware de los nodos BT al nivel superior de aplicación
a través de drivers y que, paralelamente se apoya en un Stack de Bluetooth como elemento central
de comunicaciones.
La figura muestra una opción de despliegue de redes inalámbricas de sensores bajo la plataforma
BTnode mediante un esquema de red de apoyo que, a su vez, soporta los nodos sensores como
tal. Es de anotar que los nodos BT en si no poseen sensores específicos y que estos se pueden
acoplar si son digitales, posee interfaz I2C o entregan una señal análoga.
Fig, 20. Ejemplo de despliegue de red y detalles de nodos de la plataforma BT
Es así como aparece la formulación de un toolkit de mantenimiento de las redes de sensores BT
que permite el desarrollo de aplicaciones y el despliegue de estas. Este toolkit (Sensor network
maintenance toolkit) se ha ideado como un conjunto de servicios que puede ser adaptado y
personalizado según los requerimientos de monitorización y mantenimiento como, por ejemplo,
programación remota, autenticación remota y detección de eventos, registro y análisis de datos de
largo termino. Una implementación de referencia de una red de soporte de despliegue (DSN por
sus siglas en inglés) se denomina JAWS y está disponible a través del sitio web del proyecto.

MyriaNed
Esta plataforma comercial de DevLab, un consorcio de unas 45 empresas de base tecnológica, se
caracteriza por la utilización de un protocolo basado en la difusión de rumores (gossiping protocol)
que no requiere infraestructura de red y usa radios con bajas tasas de recepción. Con este
protocolo no se requiere overhead para mantener tablas de enrutamiento, acuse de recibo de
paquetes (acknowleding) ni retransmisión de mensajes [50].
MyriaNed no utiliza sistema operativo para sus nodos, en lugar de esto se apoya en MyriaCore, lo
que permite bajo consumo de energía y, además, utiliza una variante de protocolo de acceso
múltiple por división en el tiempo (TDMA) de controlador de acceso al medio llamado gMAC, que le
permite a los nodos hacer difusión amplia (broadcast) de sus mensajes. De esta manera un nodo
puede comunicarse con multiples nodos con una energía considerablemente menor a la de los
nodos que utilizan comunicación unicast.
MyriaCore es el software de base que gobierna los MyriaNodes y está encargada de planificar las
comunicaciones y las tareas de aplicación. En MyriaNed, un nodo mantiene una estrecha
sincronización con los demás nodos de la red. Para alcanzar dicha sincronización el MyriaCore
llama la aplicación en lugar de que la aplicación llame las funciones del sistema. MyriaCore se ha
diseñado de manera que tenga control completo sobre el sistema de interrupciones del procesador.
Las interfaces con todos los actuadores y sensores son manejadas por la aplicación más que por
el MyriaCore por lo que no se requiere su intervención.
Fig. 21. Trabajo del MyriaCore y del gMAC (gossipMAC) en la plataforma MyriaNed
Los MyriaNodes utilizan transceptores nRF24L01 de Nordic, que operan en la banda de 2.4GHz, y
microcontroladores de Atmel. Estos tienen conectores de expansión para los sensores y
actuadores asi como interfaz USB. Si bien MyriaNed no está explícitamente declarada como una
plataforma para la monitorización de variables biomédicas, tiene una serie de características y
potencialidades que la hacen apta para este tipo de aplicaciones.

EMUTEM
La plataforma EMUTEM (Ambiente multimodal para la televigilancia medica a domicilio, por sus
siglas en francés) es un proyecto que está compuesto por tres sistemas heterogéneos:
Anason: Un conjunto de micrófonos situados estratégicamente al interior de la casa para controlar a distancia el entorno acústico de la persona.
RFPat: Un dispositivo portátil que mide las señales fisiológicas y que también detecta las caídas.
GARDIEN: Un arreglo de sensores infrarrojos que detectan la presencia y la posición de las personas.
Una particularidad de esta plataforma es que se apoya en los múltiples modos (Anason, RFPat y
GARDIEN) para, en conjunto con una base de reglas y un motor de inferencia basado en lógica
difusa, habilitar la detección de situaciones de riesgo de las personas bajo observación [51].
Fig. 22. Arquitectura de la plataforma Emutem y despliegue de los sensores- dispositivos en el
domicilio del paciente bajo monitorización.
El subsistema RFPat consta de dos módulos principales; una terminal móvil (que puede tener la
forma de una pulsera o clips sujetados a la correa del paciente) que toma continuamente los signos
vitales y los envían a la estación base, que es el otro módulo, que consta de un receptor conectado
a un computador personal mediante una interfaz serial RS232, que descarga los datos recogidos
para efectos de su análisis y registro.

Fig. 23. Estructura del sistema de monitorización RFPAT (izquierda) y esquema general de la
fusión de datos multimodales apoyado en lógica difusa
Todos los datos recogidos por los sensores de RFPAT son procesados en el mismo dispositivo.
RFPAT, fue diseñado utilizando dispositivos electrónicos de bajo consumo y su arquitectura se
basa en el uso de diferentes microcontroladores dedicados a la adquisición, procesamiento y
transmisión de señales. Las variables sensadas son ritmo cardiaco, señales actimétricas (postura,
movimiento) y botones de pánico, adicionalmente las señales se preprocesan antes de ser
transmitidas a la estación base para reducir el impacto del ruido ambiental o el ruido inducido por
los movimientos del usuario. Para el sistema RFPAT el ruido se maneja en la etapa de adquisición
utilizando filtros y algoritmos digitales.
SMGI
El Sistema de Monitorizacion y Gestión de la Información, SMGI, propuesto desde la Universidad
Autónoma de Baja California, México, es un sistema multicapa que permite establecer
comunicación entre una red inalámbrica de sensores basada en el estándar IEEE 802.15.4 y un
sitio web [52]. El propósito del SMGI es brindar servicios de monitorización de signos vitales a
través del sitio web de pacientes que portan sensores, como también permitir el establecimiento de
intervalos de muestreo y límites para la emisión de alertas. La estructura del sistema SMGI se basa
en la arquitectura del modelo OSI, por lo tanto para este se desarrollaron componentes para su
funcionamiento que se ubican en las capas del modelo ya mencionado.
Fig. 24. Paralelo con la estructura por capas del modelo OSI con SMGI y esferas de trabajo de la
plataforma para funcionamiento integrado.

La figura muestra la descripción grafica del sistema SMGI, el cual tiene cinco bloques o capas.
Para las capas física (PHY) y de controlador de acceso al medio (MAC) se ha tomado como
referencia un desarrollo de Freescale, igualmente en la capa de red se utiliza como apoyo el
NWK_LAYER de la misma empresa. Para lograr la comunicación efectiva entre la red inalámbrica
de sensores y el sistema de monitorización y control web (SMC_WEB), se tiene un paquete de
datos denominado SCNAD_paq, que contiene cabecera, cuerpo y final de paquete. La interfaz de
comunicación con la red de sensores (ICRS) y el sistema de coordinación de nodos sensores
(SCNS), se encargan de verificar la estructura del paquete (SCNAD_paq) e interpretar la
información de manera congruente, de manera que esta sea almacenada en la base de datos, si
procede de la red de sensores, o para asignarla a las estructuras del nodo sensor cuando la fuente
es el sistema de monitorización.
La plataforma SMGI se apoya en técnicas de IP Móvil, Proxy, TCP-IP (Transport Control Protocol-
Internet Protocol) y Delay-Tolerant Networking (DTN) para garantizar el funcionamiento de esta
infraestructura de naturaleza heterogénea. La figura muestra un diagrama que ilustra la interacción
de estos conceptos y técnicas en pro del sistema SMGI.
INTENSA
Esta plataforma, propuesta por investigadores de varias universidades y entidades españolas, está
concebida como un sistema de monitorización de pacientes con insuficiencia cardiaca basado en el
estándar ISO/IEEE11073 [53]. El objetivo del proyecto INTENSA es desarrollar y evaluar un
sistema interoperable que incluye báscula, tensiómetro y un dispositivo portátil tipo Holter basado
en tecnología Bluetooth llamado HOLTIN.
El estándar ISO/IEEE11073 es también conocido como X73, la topología básica de un sistema de
monitorización basado en X73 tiene tres segmentos: el MD, el dispositivo pasarela (Compute
Engine, CE) y el servidor de monitorización y gestión (Monitoring System, MS). El MD, también
llamado agente, adquiere la información biomédica y la envía al CE usando X73; el CE (manager)
recoge esa información junto con la del resto de MDs de su red personal y la transmite al MS; el
MS tiene la tarea de recopilar toda la información, realizar diagnósticos, enviar alarmas y gestionar
la red.
Fig. 25. Esquema global de operación de la plataforma INTENSA
En el caso específico de INTENSA, la plataforma está compuesta por distintos MDs que recogen
información del estado de salud del paciente y la envían a un CE a través de tecnologías

inalámbricas tales como USB, IrDA, Bluetooth o Zigbee. El CE puede ser un teléfono móvil o un
computador personal que transmite la información recibida de los diferentes MDS al MS vía ADSL,
GPRS u otras tecnologías de transmisión de largo alcance. Toda la información del MS puede ser
analizada por el personal médico e integrada en el sistema de información del hospital (Hospital
Information System, HIS).
Las recomendaciones X73 tienen algunas observaciones como su alta complejidad, el tiempo que
demandan y los requerimientos de hardware para su implementación, entre otras. La plataforma
INTENSA trata de proponer una aproximación a estos estándares y sugiere algunas estrategias
para la utilización de microcontroladores como agentes que puedan enlazarse de manera más
apropiada con los managers.
Fig. 26. Interacción Agente-Manager y Arquitectura global para un nodo con integración de los
estándares X73
La arquitectura propuesta para un agente genérico tiene varios componentes básicos; la librería de
patrones y el núcleo X73. El núcleo X73 se encarga del ensamblado, procesamiento, comparación
y transmisión de los patrones. Además gestiona el estado de la Máquina de estados finitos, de los
objetos en el Modelo de Dominio de Información, propio del enfoque orientado a objetos de X73, y
de algunas señales que incluyen datos recibidos-enviados y estados de conexión. Otros
componentes importantes de esta arquitectura son los drivers específicos que proveen funciones
básicas al núcleo para permitirle manipular el hardware y la capa de adaptación que pone en
contacto al núcleo con la pila del protocolo de transporte.
Características generales de las plataformas consultadas
A continuación se presentan a través varias tablas que resumen las características generales y
algunas particularidades de diversas plataformas de monitorización encontradas y que se
escogieron de acuerdo con criterio de similitud con la plataforma que se desea formular para el
grupo GIBIC.
Como se ha mencionado antes, los campos de donde provienen estas plataformas son
académicos, investigativos o comerciales.
Tabla VIII. Descripción general de algunas plataformas para monitorización ambulatoria

Plataforma
País /Universidad o
Empresa
Campos de aplicación Protocolo (Estándar de
Comunicación) Mercury [43]
EEUU/Harvard Monitoreo de pacientes con desordenes neuromotores (Parkinson, epilepsia y apoplejía)
802.15.4
Alarm-Net [44]
EEUU/University of Virginia
Vida asistida y monitoreo residencial, ritmos de actividad circadiana.
802.15.4
HealthGear [54]
EEUU/Microsoft Oximetría y pulso, detección de eventos de apnea.
802.15.1
Waiter [55]
China/Hong Kong Polytechnic University
Monitorización de ritmo cardiaco, movimiento, temperatura de la piel y sistema de ayuda
para emergencias médicas
802.15.1
DexterNet [42]
EEUU-Italia-Finlandia/ University of California (Berkeley), Cornell University, WSN Lab sponsored by Pirelli and Telecom Italia, Tampere University of Technology, University of Texas
Medición de ECG, Movimiento, Velocidad, Desplazamiento, Gasto energético, Ubicación (vía GPS)
802.15.4
Eco: Ultra-Wearable and Expandable Wireless Sensor Platform [56]
Center for Embedded Computing Systems, University of California
Monitoreo de niños prematuros, Danza interactiva, ECG
ShockBurstTM
(2.4 GhZ) (Nordic’s proprietary
technology)
SENSATION [57] (Advanced Sensor Development for Attention, Stress, Vigilance & Sleep/Wakefulness Monitoring” (SENSATION)
Aristotle University of Thessaloniki-Greece Technische Universitat Berlin-Germany Alexandrian Technological Educational Institute of Thessaloniki Integrated project of the VI EU R&D Framework Programme included in the Strategic Objective Micro & Nano Sensors of the IST Thematic Priority)
Desordenes en el sueño, monitorizacion de los estados de sueño y de vigilia, atención y Stress (ritmo cardiaco, presión arterial, temperatura, movimiento de los ojos, aceleración, actividad electromiográfica y encefalográfica)
IEEE 802.15.4/Zigbee
Health-data [58]
Dongseo University (Korea)
Sistema de monitorización de múltiples signos vitales (glucosa en la sangre, presión arterial, ECG)
IEEE 802.15.4/Zigbee
iCalm [59]
National Science Foundation Graduate Research Fellowship Program and the MIT (Massachusetts Institute of Technology) Media Lab’s Things That Think Consortium
Auto-monitorización fisiológica de largo término (conductancia de la piel, ritmo cardiaco, movimiento, temperatura) Monitorización continua de largo termino del sistema nervioso autónomo y datos de movimiento de infantes con actividad, niños y adultos
IEEE 802.15.4
Wireless Biomedical System [60]
Department of Electrical & Computer Engineering, Sultan Qaboos University, Muscat, OMAN
Monitorización de signos vitales a partir de múltiples sensores: temperatura corporal, Temperatura ambiente, humedad y presión.
IEEE 802.15.4/Zigbee

Wireless Intelligent Assistive Navigation Management System (WIANMS) [61]
School of Electrical and Electronics Engineering, The University of Nottingham, Malaysia Campus
Sistema de monitorización y asistencia web Para personas con discapacidad visual. Asistencia para caminar independientemente y de manera segura en terminales de transporte. También sistema de alerta para los enfermeros.
IEEE 802.15.4/Zigbee
LiveNet [62]
Media Laboratory, Massachusetts Institute of Technology. Massachusetts General Hospital, Department of Psychiatry
Monitorización fisiológica de largo termino. Sensores fisiológicos y contextuales. Respiración/otros sensores. Ritmo cardiaco, respuesta galvánica de la piel, acelerómetro 2D, temperatura (ambiental y corporal ) y flujo calórico. Monitorización de soldados, Parkinson, detección de ataques epilépticos, clasificación de actividades, tendencias de terapia de depresión, cuantificación de niveles de relación social.
GSM
Mobile Sensing Platform (MSP) [63]
Intel Research, University of Washington, Stanford University
Reconocimiento embebido de actividad. Monitorizacion de ejercicios fisicos, soporte de adultos mayores, asistencia de largo termino preventiva y para pacientes crónicos, asistencia cognitiva.
Bluetooth RF Communication (RFCOMM) protocol-Zigbee
MOPET [64]
Department of Mathematics and Computer Science, University of Udine, Italy
Sistema portátil y adaptivo al usuario, consciente del entorno para entrenamiento deportivo. Posición, ECG, Acelerómetro.
GPS-GSM
Opensensor [65]
Aalborg University. Dept. of Electronic Systems Aalborg – Denmark
Recuperación de información contextual Bluetooth RF Communication (RFCOMM) protocol
Scalable Wireless Body Area Nework [66]
Quality of Life Technology Laboratory, The University of Texas at Dallas. North Texas Healthcare System and University of Texas Southwestern Medical Center
Plataforma flexible y escalable para transmitir, monitorear y analizar datos provistos por sensores biomédicos.
Zigbee
Instrumented Wearable Belt [67]
Dep. Of Information Engineering, University of Brescia, , Italy
Dispositivo sensor portátil de señales biomédicas para monitorización de la condición de salud en casa, electrocardiograma (ECG), ritmo cardiaco, temperatura corporal, frecuencia respiratoria, movimiento en tres ejes (aceleración y posición)
Protocolo no revelado que funciona a 13.56 MHz
Shadow Monitor [68]
New Jersey Institute of Technology, Kessler Medical Rehabilitation Research and Education Corporation, Sensory Motor Performance Program, Rehabilitation Institute of Chicago, Department of Biomedical Engineering. United States
Monitor portátil de flexiones de los dedos desarrollado para evaluar la función manual en individuos con disfunción de las manos.
Zigbee (IEEE 802.15.4)
healthcare system based on intelligent wireless
College of Computer, Nanjing University of Posts and Telecommunications,
Monitorización de signos vitales Zigbee

sensor networks [69]
China
Wearable wireless heart rate monitor [70]
AGH University of Science and Technology, Poland
Monitor de ritmo cardiaco para estudios de variabilidad de largo termino.
Bluetooth
Smart Shirt [71]
Division of Computer & Information Engineering, Dongseo University. Division of Electronics, Computer and Telecommunication Engineering, Pukyong National University, Daeyeon-Dong, South Korea
Medición de electrocardiograma (ECG), señales de aceleración y datos de actividad física para monitorización continua y en tiempo real.
IEEE 802.15.4
Ambulatory Stress Monitoring [72]
Department of Computer Science and Engineering, Texas A&M University
Plataforma de sensores vestibles inalámbricos, mínimamente invasiva que puede ser utilizada para monitorizar diferentes variables fisiológica que guardan relación con el estrés.
Simpliciti (A Texas Instruments
proprietary low-power network protocol-2.4GHz)
Smart Vest [73]
Department of Research & Development, Army Public College of Managements and Sciences Rawalpindi, Pakistan.
Chaleco inteligente para prescripción electrónica y sistema de administración para controlar errores médicos, de prescripción y administración, para ayuda del personal médico.
Bluetooth
CodeBlue [46]
Division of Engineering and Applied Sciences Harvard University
Plataforma combinada hardware-software para redes de sensores biomédicos
IEEE 802.15.4
Physical Activities Healthcare System (PATHS) [74]
Shenzhen University, The Chinese University of Hong Kong, China.
Monitorización de actividades físicas y electrocardiograma ambulatorio
Bluetooth
SHIMMER [45]
TRIL Centre (Intel, Trinity College Dublin, University College Dublin, and the National University of Ireland, Galway
Monitorización no invasiva de pacientes y diagnóstico. SHIMMER provee capacidades de sensado ambiental, cinemático y fisiológico.
Bluetooth- IEEE 802.15.4
TEMPO 3.1 [75]
Department of Electrical and Computer Engineering University of Virginia
TEMPO (Technology-Enabled Medical Precision Observation) Plataforma de red de sensores de área personal para evaluación continua del movimiento (e.g. Parkinson, parálisis cerebral, desordenes de marcha) para efectos de prevención, diagnóstico, tratamiento y asistencia.
Bluetooth
Un elemento central de toda plataforma es el transceptor utilizado para los nodos de red, ligado al
transceptor se encuentra el estándar de comunicación inalámbrica utilizado. A partir de la revisión
realizada sobre la literatura de plataformas de monitorización inalámbrica de variables de interés
biomédico, se ha podido identificar una prevalencia de las tecnologías de redes de área personal
basadas en los estándares de comunicación IEEE 802.15.4 e IEEE802.15.1. La elección del
transceptor está ligada a aspectos de consumo de energía, funcionalidades para la comunicación
en red, entre otros. El manejo de los transceptores y de los elementos circuitales (sensores,
actuadores, periféricos, etc.) ligados al funcionamiento de cada nodo, debe estar gobernado por un

elemento con capacidades de procesamiento que usualmente es un microcontrolador o, en
general, un dispositivo programable, como un FPGA o DSP, es por eso que se han identificado las
variantes que se utilizan para las diferentes plataformas analizadas. La identificación de
transceptores y sistemas embebidos permitirá construir criterios de decisión que apoyaran la
elección de dichos elementos para la formulación propia que se presentará en los capítulos
siguientes.
Tabla IX. Características de los transceptores y de los sistemas embebidos de las plataformas
analizadas.
Plataforma Características del transceptor/red Características del sistema embebido
Mercury Chipcon CC2420 radio TI MSP430 microcontroller Alarm-Net
Chipcon CC2420 radio transceiver Nodos sensores MICAz
HealthGear Promi-ESD-2 module (class 2 transmitter) Nonin’s Xpod Board
Waiter Bluetooth transceiver No especificadas
DexterNet cc2420 radio equipped motes TelosB mote, MSP430F1611 microcontroller
Eco: Ultra-Wearable and Expandable Wireless Sensor Platform
Radio nRF24E1 embedded 8051-compatible MCU
SENSATION No revelado Portable Data Processing Unit (BAN coordinator)
Health-data
2.4GHz CC2420 radio motas de tipo TelosB (TIP 710CM) Procesador MSP430F1611
iCalm Chipcon CC2420 radio module Atmel Atmega328 microcontroller
Wireless Biomedical System
XBee RF Module (maxstream) Microchip’s PIC18F4550 microcontroller
Wireless Intelligent Assistive Navigation Management System (WIANMS)
No revelado Microchip’s PIC Microcontroller.
Mobile Sensing Platform (MSP)
No revelado Versión 1: ATMega128 microcontroller on sensor board-ARM7 processor on iMote Versión 2: ATMega128 microcontroller on sensor board PXA271 Xscale processor on iMote
Opensensor nRF905 radio interface 16 bit architecture dsPIC- 30f3013 processor produced by Microchip
Scalable Wireless Body Area Nework
Transceiver Zigbee Microcontrolador 8051-compatible de 8 bits
Instrumented Wearable Belt
Transceiver de 13.56MHz MC9S08GB microcontrolador de 8 bits
Shadow Monitor 2.4 GHz IEEE 802.15.4 Chipcon Wireless Transceiver
Texas Instruments MSP430 microcontroller
healthcare system based on intelligent
CC2420 8 bit ATmega128L MCU (healthcare node)

wireless sensor networks
Wearable wireless heart rate monitor
Bluetooth class 2 ARM7 family processor (Atmel AT91SAM7X256)
Smart Shirt CC2420 wireless transceiver MSP430F1611
Ambulatory Stress Monitoring
CC2500 - 2.4 GHz, ISM band multi-channel low power transceiver
MSP430 microcontroller
Smart Vest Transmisor Bluetooth AT89C2051 ( 20/8051 family)
CodeBlue ChipCon CC2420 radio TI MSP430
Physical Activities Healthcare System (PATHS)
Transmisor Bluetooth No revelado
SHIMMER Roving Networks Bluetooth Module-CC2420 Radio Transceiver
MSP430 MCU
TEMPO 3.1 RN-41 embedded Bluetooth module from Roving Networks
MSP430 microcontroller
Puesto que la mayoría de plataformas estudiadas plantea escenarios de operación en los que se
requiere que los nodos posean buenas características de autonomía, se han identificado, también
en las implementaciones analizadas, los aspectos en cuanto a la elección de los nodos en lo
referente al manejo de los datos de medición y el suministro de energía. Puesto que en las
arquitecturas propuestas por diferentes plataformas, y en el esquema general de evolución de este
tipo de servicios, se plantea el tránsito de datos por diferentes tipos de redes, se ha identificado el
patrón en cuanto a este tipo de funcionalidad para las propuestas analizadas.
Tabla X. Características de las mediciones, la alimentación de energía e interoperabilidad de las
plataformas analizadas.
Plataforma
Características de las Mediciones (Periodicidad, Modos y Medios de Registro)
Características ligadas a la energía
Interoperabilidad con otras redes
Mercury MicroSD flash 250 mAh Li-polymer rechargeable battery.
N/A
Alarm-Net
Base diaria 3V pair of AA batteries N/A
HealthGear
Continua por 12 horas 3V pair of AAA rechargeable batteries
Celular-GPRS
Waiter
Reportes periódicos Baterías (no se especifican detalles)
Celular
DexterNet Continua por 20 horas Baterías 600mAh Bluetooth-WiFi-GPS
Eco: Ultra-Wearable and Expandable Wireless Sensor Platform
4 horas (duty cycle=50%) 30mAh rechargeable Li-Polymer battery
802.11b
SENSATION 1 noche (también monitoreo 24 horas durante tres
día para un escenario de insomnio)
rechargeable Li-ion battery WiFi-GPRS-Internet
Health-data
1 día 2 baterías tipo AA Celular
iCalm 30 horas 250 mAh 3V lithium-ion battery
Bluetooth, Celular, Internet
Wireless Biomedical System
Reportes periódicos Baterías (no se especifican detalles)
WiFi
Wireless Reportes periódicos 2 baterías tipo AA Bluetooth

Intelligent Assistive Navigation Management System (WIANMS)
Mobile Sensing Platform (MSP)
Reportes periódicos (4 horas aprox)
Version 1: 200 mAh Li-Polymer battery Versión 2: 1800 mAH Li-Polymer battery:
GPS, WiFi
Opensensor Reportes periódicos 9V battery block. Bluetooth
Scalable Wireless Body Area Nework
Reportes periódicos 3V lithium ion coin battery WiFi-WiMAX-GPRS-UMTS
Instrumented Wearable Belt
Reportes periódicos 3V, 50 mAh Rechargeable Battery
Bluetooth-GSM
Shadow Monitor
Reportes periódicos (Tanto para periodos cortos o largos de hasta 1 a 2 días)
Dos Baterias AA No
healthcare system based on intelligent wireless sensor networks
Reportes periódicos Batería de litio WLAN-WiFi
Wearable wireless heart rate monitor
Reportes continuos de largo termino Horas y días
Li-Ion 3.6-V accumulator (300 mA h, ca. 7 g)
No
Smart Shirt Reportes periódicos two AAA size batteries No
Ambulatory Stress Monitoring
Reportes continuos: días-horas Li-Po Battery Bluetooth
Smart Vest Reportes periódicos No revalado Infrarrojo
CodeBlue Reportes continuos-días 2 AA batteries TCP/IP
Physical Activities Healthcare System (PATHS)
Reportes periódicos (horas-1 a 2 días)
Registro en tarjeta SD
3.7V Li-Poly battery and1.5V Nickel-Hydrogen AA battery
WiFi
SHIMMER Registro continuo: horas o días. Registro en tarjeta SD
3V-280 mAh rechargeable battery
Bluetooth
TEMPO 3.1 6 hours of run-time for high-precision sensing
applications.
Rechargeable Lithium-Ion Coin Cell battery (3.7V)
No
Colombia
En nuestro país el desarrollo en campos relacionados con la monitorización ambulatoria de
variables biomédicas es aún incipiente. Es por esta razón que no se han encontrado muchas
experiencias que lleguen a una formulación completa de una arquitectura o modelo de plataforma
como tal. Los adelantos realizados al interior del grupo GIBIC no se relacionan en esta sección
porque están detallados en los capítulos I y IV.
Se presenta una relación de algunas experiencias relacionadas con nuestro objeto de interés y una
descripción breve de su naturaleza. A nivel de trabajos de grado se han realizado diferentes
propuestas que tampoco serán referenciadas aquí puesto que no están ligadas a proyectos que
hayan tenido una permanencia en el tiempo.

Tabla XI. Reseña de algunas experiencias significativas realizadas en torno al tema de
monitorización inalámbrica de variables biomédicas en Colombia
Institución-Empresa-Universidad
(Año)
Título Descripción
Universidad de Antioquia
(2012)
[76]
Análisis de métricas de calidad de
servicio para la configuración del
protocolo CSMA/CA en redes de sensores
inalámbricas de área corporal
Este trabajo presenta un análisis importante sobre calidad de servicio, QoS, para redes inalámbricas, que pueden ser aplicadas para monitorización de signos vitales, precisamente este trabajo de investigación se enmarca dentro de un conjunto de proyectos ligados a este campo
Universidad Pontificia Bolivariana
(2012)
[77]
Sistema de telemonitoreo inalámbrico multiparámetro de neonatos
Se presenta un sistema de adquisición, análisis y visualización de señales fisiológicas como apoyo a un sistema de telemonitoreo de neonatos del programa Madre Canguro. Se analizan aspectos de comunicación, de gestión de los datos y de las interfaces de usuario.
Universidad Autónoma de Occidente
(con colaboración de la Universidad Politécnica de Valencia)
(2008)
[78]
Redes de sensores y actuadores inalámbricas: Una caracterización y caso de estudio para aplicaciones médicas en espacios cerrados
Se hace una caracterización de redes de sensores según aspectos como movilidad de los nodos, necesidad de tiempo real en las mediciones, cubrimiento de la red, autonomía energética y requerimientos de cómputo y memoria.
Se plantea un algoritmo de detección de arritmias y una arquitectura de nodos para cumplir esa tarea.
Escuela Colombiana de Carreras Industriales ECCI
(2011)
[79]
Redes inalámbricas y técnicas de minería web aplicadas a un modelo de telemedicina
Se propone un modelo de diagnóstico en tiempo real, junto con servicios agregados para consulta y seguimiento. Se propone una arquitectura para la integración de redes Zigbee de sensores biomédicos y minería web para la aplicación en telemedicina. También se presenta un desarrollo de nodo sensor.
Universidad Militar Nueva Granada
(2010)
[80]
Sistema de transmisión inalámbrica de señales ECG y de temperatura para ambientes hospitalarios (SINHO)
Se reseña el desarrollo de un prototipo de dispositivo multicanal de adquisición y transmisión de señales electrocardiográficas y de temperatura utilizando tecnologías de transmisión inalámbrica como Bluetooth y Zigbee.
Politécnico Jaime Isaza Cadavid
(2009)
[81]
Desarrollo de un sistema de monitoreo inalámbrico para señales biomédicas
Se presenta el diseño de un nodo que envía datos de frecuencia cardiaca mediante Xbee a un computador en donde se visualizan los datos.
Universidad Pontificia Bolivariana
(2008)
[82]
Sistema de detección, registro y telemonitoreo de arritmias cardiacas
Se presenta un esquema de telemonitoreo basado en la transmisión de datos sobre tecnología GSM/GPRS que enfatiza el registro y envío de eventos electrocardíacos. Se propone una arquitectura que permite la transmisión de datos hasta una central donde serán analizados por especialistas. También la arquitectura del nodo sensor y una interfaz de usuario para computadoras de mano (PDA).

CAPITULO 3
Marco Técnico y Regulatorio
Referentes para la implementación de una plataforma de sensores portátiles
A partir del estudio de características específicas de diversas plataformas para monitorización
ambulatoria de signos vitales y señales biomédicas y del estudio de los requerimientos específicos
de los nodos sensores desarrollados al interior del Grupo de Investigación en Bioelectrónica e
Ingeniería Clínica de la Universidad de Antioquia GIBIC, se ha determinado un conjunto de factores
que se constituyen en referentes desde el punto de vista técnico y normativo para la
implementación de aplicaciones de este tipo.
En lo técnico encontramos factores determinantes como el estándar que rige las comunicaciones
de la red de sensores, aspectos tales como la conectividad, las dimensiones físicas y el número de
nodos sensores, el carácter invasivo o no invasivo de las mediciones, la autonomía de operación,
el rango o alcance de las transmisiones, la naturaleza de las transmisiones (audio, video,
únicamente datos), entre otros.
En cuanto a lo regulatorio, están las leyes y normativas concernientes a la compatibilidad
electromagnética, los tipos de materiales utilizados, las bandas de frecuencia autorizadas para la
operación de los equipos, las directivas de las autoridades médicas como la FDA (Food and Drug
Administration) estadounidense o, a nivel local el INVIMA (Instituto Nacional de Vigilancia de
Medicamentos y Alimentos) y, adicionalmente a esto, una serie de aspectos éticos y bioéticos
fundamentales como, por mencionar uno, la integridad de los datos de los usuarios y su carácter
confidencial.
Marco Técnico
Elementos principales de una plataforma para monitorización ambulatoria
Señales: Dependiendo del tipo de variables y del interés que estas revistan desde el punto de vista biomédico, la plataforma puede tomar unas u otras características. Es muy común que las señales monitorizadas correspondan a lo que se conoce como signos vitales, pero también existen otras señales que son utilizadas para análisis complementarios o de mayor complejidad. Recientemente se han incorporado técnicas como la fusión de sensores para extraer información más elaborada e identificar patrones o patologías que configuran un cuadro o condición médica, física, fisiológica determinada. Si bien nuestro trabajo se centra sobre monitorización de variables de tipo biomédico, hoy en día se ha dado la aparición de diversas aplicaciones, que se involucran también monitorización de variables de campos de conocimiento como las ciencias sociales y la psicología, que pueden complementarse con los registros de variables fisiológicas.
Tabla XIV. Algunas variables registradas con nodos sensores portados por personas [5][23]
Variables fisiológicas Variables ambientales Variables Sociométricas
Ritmo cardíaco Frecuencia respiratoria Presión arterial Temperatura corporal
Nivel de iluminación Indoor-outdoor Humedad Temperatura ambiente Presencia de fuego
Estado de ánimo Tipo de actividad Interacción social Nivel de estrés

A partir de las variables o señales biomédicas registradas, es posible realizar evaluaciones
cardiopulmonares, cuidado de adultos mayores, atender emergencias y efectuar labores de
rescate, determinar episodios de epilepsia, realizar valoraciones sobre ejercicio y actividades de
rehabilitación, detectar actividad y valorar la destreza motora, monitorizar a pacientes con
Parkinson, detectar episodios de apnea durante el sueño, identificar los niveles de stress, entre
muchas otras posibilidades [83].
Sensores: Ligado a la naturaleza de la señal, está el tipo de sensor o de sensores utilizados. Por razones de costos, objetivos de estudio y de implementación, la elección puede cambiar de una plataforma a otra. Algunas plataformas simplifican el proceso de adquisición y acondicionamiento de la señal trabajando con sensores comerciales listos para su utilización (comercial off the shelf sensors), soluciones OEM (Original Equipment Manufactures) y similares. Otras plataformas, como en nuestro caso, recurren a sensores adaptados o diseñados por los mismos bioingenieros e investigadores. Para el caso de algunas mediciones los sensores son reemplazables, es decir de un solo uso, en otros casos un mismo sensor puede utilizarse varias veces. Otro aspecto es la ubicación de los sensores, pues estos deben ser adaptados de manera particular para su ubicación sobre la piel o el cuerpo de la persona bajo monitorización. Para el caso de la fusión de sensores, pueden utilizarse sensores tradicionales de la biomédica combinados que otros como acelerómetros, giróscopos, sensores de iluminación, entre otros. Los sensores biomédicos se pueden clasificar según la manera como toman las señales del ser humano, desde este punto de vista, hay sensores que no tienen que hacer contacto con la persona o paciente bajo observación, estos son sensores sin contacto y no invasivos que se apoyan en principios de radiación de energía, de ondas sonoras o similares. También existe una gran cantidad de sensores por contacto externo con la piel u otros órganos, entre estos tenemos sensores de temperatura superficial, electrodos, galgas extensométricas, fotosensores y otros, que pertenecen a la categoría de sensores no invasivos por contacto directo.
Fig. 9. Sensores biomédicos según nivel de invasividad
Los sensores llamados mínimamente invasivos son aquellos que pueden ser ubicados en una cavidad natural del cuerpo que se comunique con el exterior, dentro de esta categoría encontramos termómetros orales, vaginales o rectales y transductores de presión intrauterinos. Finalmente encontramos aquellos sensores que deben ser ubicados en el cuerpo con la ayuda de un procedimiento quirúrgico. En algunos casos estos sensores involucran algún daño de los tejidos adyacentes durante su proceso de instalación. Ejemplos de este tipo de biosensores son los electrodos tipo aguja para medición de señales mioeléctricas directamente desde los músculos, sensores de presión ubicados directamente en las venas o arterias e incluso sobre el corazón, transductores de flujo sobre las venas principales, entre otros. En términos de la naturaleza de las cantidades que miden podemos hablar de sensores físicos y sensores químicos,

Tabla XV. Algunas variables captadas por sensores de aplicación biomédica [84]
Sensores Físicos Sensores Químicos
Desplazamiento Velocidad
Aceleración (lineal y angular) Temperatura
Fuerza Presión
Flujo Energía radiante
Electroquímicos: Amperimétricos
Potenciométricos Coulométricos
Ópticos: Colorimétricos
Emision y absorción espectroscópica Fluorescencia
Quimioluminiscencia
Por Métodos térmicos: Calorimetría
Termoconductividad Por resonancia magnética nuclear
Una clase especial de sensores de evolución reciente es la que se denomina sensores bionanalíticos que aprovechan las reacciones bioquímicas para por ejemplo, determinar la cantidad de glucosa oxidizada midiendo la cantidad de oxígeno consumido.
Comunicaciones: según la revisión realizada, la mayoría de aplicaciones de monitorización ambulatoria de personas con fines de observación de variables fisiológicas, ambientales o sociométricas se basa en estándares de comunicación que apuntan a las redes de área personal, dentro de estos podemos destacar las recomendaciones IEEE 802.15.1 e IEEE 802.15.4, ambas con implementaciones muy reconocidas como Bluetooth y Zigbee respectivamente. El espectro de aplicación de dichas soluciones implica predominantemente la utilización de técnicas de medición no invasivas, que en el caso de la monitorización biomédica, involucra la utilización de electrodos, acelerómetros, sensores por contacto térmico directo, por infrarrojo, etc. A nivel internacional existe una normativa que también es acogida en nuestro país y que establece bandas especiales de operación en las que eventualmente pueden funcionar soluciones de monitorización ambulatoria. Estas bandas se conocen como tipo ISM (Industrial, científica y médica, por sus siglas en inglés) [85]. La elección de la topología es un factor crítico y las opciones para el estándar IEEE 802.15.4, por ser este el de mayor predominancia para redes de nodos sensores, se explicará en detalle más adelante. De manera paralela, también la elección del radio o transceptor también es crítica. Con contadas excepciones, la mayoría de transceptores comerciales se ubican alrededor de la banda de los 900MHz y de la banda de los 2.4GHZ, las tasas de transferencia de datos son de decenas de kilobits por segundo y en algunos casos se alcanzan los megabits por segundo. En cuanto al rango o alcance, este varía si se trata de espacios abiertos (outdoor) o en interiores (indoor-enclosed), en general se alcanzan metros, decenas o cientos de ellos dependiendo del transceptor y del estándar de comunicación adoptado [86].
Adquisición y acondicionamiento de señales: A este respecto también existen variantes importantes. Cuando se integran a la plataforma sensores-transductores comerciales, la adquisición y el acondicionamiento se dan por sentados. No obstante, en algunos casos, la investigación realizada también toma como parte importante este aspecto, por esta razón en la adquisición y acondicionamiento de las señales se centra una gran parte del desarrollo investigativo de las variantes o propuestas.

Tabla XVII. Algunas técnicas o procesos que se realizan sobre las señales biomédicas durante el proceso de adquisición y acondicionamiento.
Técnica o Proceso Descripción
Amplificación Se actúa sobre los niveles de amplitud de la señal original. Las ganancias (G) pueden tener dos situaciones G<1 y G>1 y una situación particular G=1 que tiene que ver con tomar la señal con una alta impedancia de entrada para no afectar sus características. Tradicionalmente se utilizan amplificadores operacionales para realizar estas tareas, dichos dispositivos pueden estar basados en transistores bipolares o de efecto de campo.
Filtrado Los filtros sirven para intervenir la señal en aspectos ligados a sus características espectrales. Durante la adquisición y acondicionamiento de señales biomédicas es común que se deban remover artefactos (debidos por ejemplo a movimientos de la persona) o centrar el análisis sobre bandas específicas de frecuencia para poder extraer las variables o los eventos de interés.
Los filtros utilizados pueden ser activos, digitales o pasivos; en sus configuraciones de pasabajos, pasa-altos, pasabanda, rechazabanda, entre otros.
Conversión Análoga/Digital o Digital/Análoga
Debido a las ventajas de los sistemas digitales en lo relativo a capacidad de almacenamiento, posibilidades de visualización, procesamiento, transmisión y otras más, es común que las señales análogas deban ser digitalizadas. El proceso inverso, el paso de digital a análogo es más poco frecuente pero puede requerirse en algún caso como, por ejemplo, en señales de salida de un sistema de control.
Cambio de Modo Algunas señales biomédicas se toman en modo común o balanceado, estas señales deben referenciarse respecto a un nivel de tierra (0 voltios) local del circuito que hará el procesamiento, por lo tanto es necesario el cambio de un modo balanceado o diferencial a un modo desbalanceado.
Cambio de Variable En el proceso de adquisición y acondicionamiento de la señal biomédica es necesario cambiar el tipo de variable eléctrica o electrónica. Algunos sensores, como los termistores, entregan variaciones de resistencia que deben transformarse en variaciones proporcionales de voltaje o corriente para poder ser ingresados a las etapas o dispositivos posteriores dentro de la cadena de manejo de la señal.
Acople (Matching) El acople con el punto de toma de la señal sobre el cuerpo humano es un aspecto crítico. Una de las razones para esto es la pequeña magnitud de las señales y su susceptibilidad al ruido. Muchas de las técnicas para lograr un buen acople cuerpo-sensor están relacionadas con características de impedancia, es así como se utilizan geles o medios físicos que permitan una transferencia armónica desde el punto de vista
energético en esta interfaz.
Procesamiento: El núcleo de toda plataforma está relacionado con la potencia de cómputo y las prestaciones del procesador (microprocesador, microcontrolador, dsp) elegido. Las diferentes implementaciones encontradas al realizar una revisión de experiencias similares, muestran la adopción de procesadores de 8, 16 y 32 bits. Estos dispositivos pertenecen a familias de dispositivos programables de una gran variedad de fabricantes. Incluso, algunas soluciones proponen la adopción de tecnologías open source. Un factor determinante ligado al dispositivo encargado del procesamiento es su rendimiento y consumo de energía. Adicionalmente está la capacidad de manejar señales análogas, aparte de las digitales, y de manejar periféricos y la posibilidad de programación de protocolos de comunicación de uso extendido y específicamente relacionados con las prestaciones de red de la plataforma. De manera complementaria un factor de elección para la implementación de los diferentes elementos de red que constituyen la plataforma

es la capacidad a nivel de memoria de programa y de memoria de datos de los dispositivos. Algunos factores que sirven para determinar las capacidades de procesamiento de un dispositivo programable, bien sea de manera directa indirecta, son la cantidad de bits en las que basa sus tareas, la velocidad de su reloj central, la capacidad de memoria flash o EEPROM, la cantidad de RAM-Memoria de datos, el número de canales o módulos de conversión A/D y su profundidad de bits, la cantidad de temporizadores y de fuentes de interrupción, las formas de programación (lenguajes soportados y el set de instrucciones). Entre los proveedores que se encuentran con más recurrencia en el campo de las redes inalámbricas de sensores en lo referente a procesadores tenemos a Atmel, Motorola, Hitachi, Cygnal, Microchip, Renesas, Texas Instruments, Intel y Analog Devices, entre otros. Las diferencias de estos dispositivos en cuanto a prestaciones pueden condensarse en características como el tamaño del bus, la velocidad del reloj, la memoria de programa y la memoria de datos [86].
Almacenamiento de los Datos: Dada la naturaleza de las aplicaciones relacionadas con la monitorización ambulatoria, es común que para ciertas variables o para determinados estudios se deba registrar una cantidad considerable de datos de medición. Una de las opciones primarias es la de utilizar la memoria interna EEPROM de datos para los dispositivos de procesamiento que lo poseen. Existe la posibilidad de memorias EEPROM externas que amplían la capacidad de almacenamiento de los nodos pertenecientes a la plataforma. Una tendencia muy interesante, que permite interoperabilidad con otros tipos de dispositivos es el registro de datos en medios extraíbles como memorias tipo flash y tarjetas de tipo SD o micro SD. Algunos medios como los discos duros externos tipo USB y las cintas magnéticas ofrecen capacidades de almacenamiento en el rango de los Gigabytes hasta los Terabytes, pero su utilización está restringidas a aplicaciones muy particulares [87]. Otras características ligadas a estos dispositivos son la naturaleza en el formato de la información (análogo, digital) y el periodo de retención. El registro en cintas magnéticas tiene ventajas en cuanto a la capacidad y ciclos de re-escritura, el registro y lectura de estos medios es secuencial lo que lo dificulta un poco el acceso y la búsqueda de la información.
En el campo de las aplicaciones biomédicas, el tipo de variable determina en gran medida
la capacidad que deben tener los medios de almacenamiento de acuerdo al volumen de
datos generados según factores ligados al proceso de adquisición de datos como la
frecuencia de muestreo. El tipo de estudio, cuadro o condición médica a determinar
establece un mínimo en la frecuencia con la que deben ser registradas las mediciones para
poder generar indicadores válidos para los investigadores o usuarios de los datos.

Fig. 10. Características de almacenamiento de diferentes señales biomédicas [88]
Los medios de almacenamiento MMC, SD y micro SD, así como las Flash NOR y NAND, con interfaces paralelas orientadas a palabra, paralela modo-página y serial modo-página han sido probados exitosamente, por ejemplo, con la mota o nodo sensor llamado Mica2. Los buses paralelos pueden ser de 8 bits y en el caso serial, la interfaz es comúnmente SPI [89]. La selección apropiada del medio de almacenamiento garantizará que los datos se conserven. Los siguientes criterios se pueden aplicar para seleccionar un medio de almacenamiento.
Tabla XVIII. Algunos Criterios de selección para medios de almacenamiento [90]
Criterio Descripción
Longevidad Se recomienda que el medio de almacenamiento escogido tenga un ciclo de vida útil de al menos 10 años. Sin embargo una longevidad mayor a esta no es necesariamente una ventaja: para periodos mayores de tiempo, la obsolescencia de la tecnología de las unidades para leer el medio típicamente será un factor más significativo que incluso el deterioro del medio mismo.
Capacidad El medio de almacenamiento escogido debe entregar una capacidad de almacenamiento apropiada para la cantidad de datos que van a ser almacenados y un tamaño físico adecuado.
Viabilidad El medio de almacenamiento y los medios de lectura-escritura de estos deben soportar métodos de detección de errores. Es recomendable que haya disponibilidad de técnicas de recuperación de datos en caso de pérdida de éstos. Es importante tomar medidas para evitar borrado accidental de los datos.
Obsolescencia En muchos casos es preferible apoyarse en tecnologías suficientemente maduras que en tecnologías de punta. La tecnología utilizada debe estar bien posicionada en el mercado y tener buena disponibilidad. Son preferibles las tecnologías basadas en estándares abiertos que aquellas que son propietarias.

Costo Deben considerarse dos elementos al valorar los costos relativos de los medios de almacenamiento: el costo del medio en sí y el costo de poseerlo. El costo de poseerlo incluye el software y hardware necesario para mantenerlo. Un criterio es el costo por Gigabyte ($/GB)
Susceptibilidad El medio debe tener baja susceptibilidad al daño físico y ser tolerante a una amplia gama de condiciones ambientales sin pérdida de los datos. Los medios magnéticos deben tener un valor alto de coercitividad (preferiblemente mayor a 1000 Oersteds), para minimizar las posibilidades de borrado accidental por exposición a campos magnéticos. Toda medida para contrarrestar las susceptibilidades conocidas del medio (como los requerimientos para guardarlo o para empacarlo) debe ser asequible y alcanzable.
Administración de la Energía: Este es un factor crítico debido a la tendencia de miniaturización de los nodos, por lo tanto se hace necesaria una eficiencia en el manejo de la energía que permite manejar adecuadamente el tamaño de las tarjetas y de las baterías mismas para que estas no resulten en dispositivos incómodos, pesados o demasiado prominentes o visibles. Es por estas razones que usualmente se adoptan circuitos integrados de bajo o extra-bajo consumo, transceptores con igual característica y también se utilizan técnicas de optimización basada en la eficiencia de las transmisiones y la utilización de periodos de hibernación o en modo sleep gestionados por interrupciones y ayudadas por la topología y la gestión de red. En general se habla de tres modos de operación en cuanto a la administración de la energía: Modo activo, modo inactivo (idle) y modo en estado dormido (sleep), en los dos primeros modos en general el consumo es de miliamperios y en el modo sleep se habla del orden de los microamperios [91]. De manera paralela también se valoran las capacidades de los medios de recolección de energía (energy harvesting-energy scavenging) para ser utilizados en nodos sensores [94] como, por mencionar algunos, medios de recolección de energía solar fotovoltaica en exteriores e interiores [92], medios de recolección de energía a partir de vibraciones [95] y sistemas pasivos que son energizados por las personas a partir de sus movimientos [93]. Por otra parte están los medios tradicionales de alimentación basados en baterías que establecen algunos parámetros de diseño en cuanto al tamaño y eficiencia energética. Algunos sistemas “mixtos” comparten fuentes tradicionales con aquellas que aprovechan los métodos de recolección de energía. En cuanto a las baterías algunas características de importancia [91] a la hora de elegir la opción a utilizar en los nodos sensores son el carácter de recargable o no, si estas generan problemas ambientales o de salud y los aspectos ligados a sus dimensiones físicas y su peso (densidad volumétrica y densidad gravimétrica) [95]. Entre los tipos de baterías más utilizados en aplicaciones electrónicas encontramos Alcalina-MnO2, Plata-Óxido, Li/MnO2, Zinc-Aire, NiCd, NiMH, Li-ion y Li-Polímero. La alimentación a partir de baterías es la opción más común para proveer la energía a los nodos sensores, en ese sentido la utilización de medios de recolección de energía (energy harvesting) es aún incipiente, es por esta razón que la elección de las baterías es uno de los aspectos más importantes para garantizar la autonomía de operación de los nodos sensores. Dentro de los factores que afectan el consumo de energía de un nodo sensor tenemos los voltajes de alimentación de las diferentes etapas y dispositivos de sus circuitos, la tasa de muestreo, la frecuencia de operación del núcleo del microprocesador, el número de operaciones sobre los transceptores, entre otros, [95]. En lo relativo a baterías existe en la actualidad una gran variedad para elegir, cada opción tiene sus ventajas y desventajas. En general se habla de dos tipos:

Baterías Primarias: Se llaman también de un solo uso ya que no pueden recargarse para su reutilización luego que su nivel de voltaje cae a un nivel que no resulta efectivo para operación. Baterías Secundarias: Es la denominación que se da a las baterías recargables. Su costo es significativamente mayor que el de las baterías primarias y sus valores nominales de voltajes también difieren. No obstante, para aplicaciones de largo término se justifica su utilización ya que a partir de sus múltiples usos se justifica su costo y con el uso de reguladores, o dispositivos de bajo consumo, se puede equiparar la salida de voltaje de las baterías con los requerimientos de los nodos.
Tabla VIII. Tipos principales de baterías [96]
Baterías Primarias Baterías Secundarias
Carbono Zinc
Alcalina
Litio
Celdas de óxido de plata
Celdas de aire zinc
Alcalina recargable
Níquel-Cadmio
Hidruro Níquel-Metal
Iones de litio
Ácido-plomo
En cuanto a las características técnicas de principales tipos de baterías utilizadas en
aplicaciones con nodos sensores portátiles se destacan la densidad de energía (Wh/kg), la
eficiencia carga-descarga y durabilidad en ciclos, el tiempo de vida, la seguridad en cuanto
a aspectos térmicos, su toxicidad y su costo [97].
Se considera que en para el caso de dispositivos con un consumo bajo o moderado de
corriente, como los nodos sensores, las baterías alcalinas recargables son las mejor opción
desde el punto de vista económico. Este tipo de baterías proporcionan un muy buen tiempo
de operación, mantienen su carga cuando no están en uso y pueden recargarse muchas
veces. Las baterías recargables tienen ventajas frente a sus contrapartes en aspectos
como el rendimiento, el ahorro representado en dinero, además si no contienen tóxicos
pueden desecharse regularmente, si no es así deberán disponerse de ellas de manera
especial.
Para las tecnologías de energy harvesting o energy scavenging, que se constituyen en la
perspectiva más prometedora en lo relacionado con el suministro de energía para nodos
sensores, se puede hacer un análisis general basándose en sus niveles de madurez
tecnológica y la proyección en el cercano futuro de los desarrollos en este campo.
Tabla IX. Niveles de Madurez Tecnológica [95]
Nivel Descripción
1 Los principios básicos han sido observados y reportados
2 El concepto tecnológico y/o la aplicación ha sido formulado
3 Función crítica experimental y analítica y/o característica
4 Validación del componente y/o protoboard en ambiente de laboratorio
5 Validación del componente y/o protoboard en ambiente pertinente
6 Modelo sistema/subsistema o demostración del prototipo en un ambiente pertinente
7 Demostración del prototipo del sistema en un ambiente de operación
8 Sistema actual completo y certificado mediante prueba y demostración

9 Sistema real probado bajo exigencia a lo largo de diversas misiones exitosas
A partir de esta escala de niveles se presenta una proyección para estas soluciones en los años
venideros.
Tabla X. Estimativo del nivel de madurez tecnológica de las diferentes tecnologías de captura de
energía para sensores inalámbricos y sensores remotos [95].
2008 2013 2018 2023
Mecanismo de Conversión de Energía
Sistemas
(escala)
Sistemas
(escala)
Sistemas
(escala)
Sistemas
(escala)
Macro (escala de
cm3)
Micro (escala de
mm3)
Macro Micro Macro Micro Macro Micro
Piezoeléctrico (esfuerzo)
9 4 9 5 9 5 9 6
Electrostático
(vibración)
6 3 7 4 8 5 9 6
Electromagnético
(vibración)
8 5 9 6 9 7 9 8
Termoeléctrico 7 6 8 7 8 7 9 8
Inductivo RF 5 4 6 5 8 6 9 8
Celdas solares
(Si, película delgada)
8 4 9 5 9 7 9 8
A partir de la información presentada en las tablas se revela una prometedora perspectiva de
los sistemas de macro-escala, es decir con dimensiones en centímetros cúbicos, relativos a los
mecanismos piezoeléctricos, electromagnéticos y solares. Esta información no descarta los
otros sistemas listados, ni la perspectiva de los sistemas de micro-escala cuyas dimensiones
cubren los milímetros cúbicos.
Aspectos ligados al consumo y administración de la energía
También son de especial atención los aspectos relacionados con la energía, tanto a nivel de consumos como de alimentación, para las diferentes etapas y dispositivos. Para ilustrar esto, nos podemos enfocar en la etapa de comunicaciones que se ha identificado como una de las de mayor consumo en los nodos sensores. En cuanto a las características de consumo de corriente de los radios o transceptores utilizados en varias plataformas, se observa que, en general, estos manejan valores de una o dos decenas de miliamperios para las tareas de transmisión y recepción de paquetes, mientras que los valores de corriente que se les debe entregar en modo sleep son de muy pocos microamperios [19].
Al observar comparaciones realizadas acerca de las características de consumo de energía de
microcontroladores (MCUs) [19] se encuentra que hay valores de consumo de fracciones de
miliamperios o pocos miliamperios por millón de instrucciones por segundo (MIPS) e
igualmente, podemos decir que se consumen microamperios en modo sleep. En lo relativo a
los sensores, aunque no se puede generalizar, algunos sensores de variables como

aceleración, iluminación, posición y temperatura trabajan con corrientes de miliamperios o
microamperios y tienen un tiempo de sensado de milisegundos. En el diseño de la fuente de
alimentación de los nodos sensores, un elemento clave es el tipo de regulador utilizado,
algunos reguladores de bajo consumo encontrados [19] proveen un máximo de unos cientos
de miliamperios como corriente de carga manejando voltajes de entrada hasta de una o dos
decenas de voltios.
Seguridad de los datos: Dado que las redes de sensores para monitorización ambulatoria de señales biomédicas pueden manejar información sensible o confidencial y debido a aspectos éticos, es necesario manejar un nivel de seguridad sobre los datos transmitidos. Adicionalmente, este tipo de redes también es susceptible de ataques. La tabla muestra algunas de las limitantes que se deben tener en cuenta al diseñar estrategias de seguridad para los datos que se comparten a través de una red inalámbrica de sensores.
Tabla XIX. Limitantes para la implementación de medidas de seguridad sobre los datos transmitidos a través de redes inalámbricas de sensores [98]
Aspecto Descripción Cantidad limitada de memoria y de espacio de almacenamiento.
Dadas estas restricciones, se debe limitar la cantidad de código del algoritmo de seguridad.
Limitaciones de energía Dado que el consumo de energía de los nodos sensores es un factor crítico, debe considerarse el impacto energético del código adicional de seguridad si se implementa un protocolo o función critpográfica. El consumo extra de los nodos debido a aspectos de seguridad está relacionado con el procesamiento requerido para realizar funciones de seguridad (encriptación, desencriptación, verificación de firmas), la energía requerida para transmitir los datos relacionados con la seguridad (overead) y la energía requerida para almacenar los parámetros de seguridad de manera confiable (e.g., almacenamiento de claves criptográficas).
Las redes inalámbricas de sensores comparten algunos requerimientos de seguridad con las redes tradicionales, pero otros son más específicos de este tipo de implementaciones, veamos.
Tabla XX. Aspectos de Seguridad de los Datos [98]
Aspecto Descripción
Confidencialidad de los datos Los datos pueden constituir información sensible que no debe fugarse.
Integridad de los datos Si bien con la confidencialidad los datos pueden quedar protegidos, esto no los libra de ser tergiversados. La integridad garantiza que los datos recibidos no han sido alterados durante su tránsito por la red ya sea por un agente malicioso o de manera fortuita.
Actualidad de los datos Debe garantizarse que se reciban datos recientes y no datos antiguos retransmitidos. Para prevenir esto debe agregarse un marcador de tiempo o fecha.
Autenticación El receptor debe asegurarse que los datos provienen de la fuente correcta. Una forma sencilla de hacer esto es que el nodo que envía y el que recibe, compartan una clave secreta para calcular el código de autenticación del

mensaje.
La figura condensa el conjunto de elementos de índole técnica que se consideran como los más importantes a tener en cuenta a la hora de implementar una plataforma de monitorización ambulatoria. MicroLEAP [99] es una de varias plataformas propuestas para la monitorización de señales, se puede revisar la arquitectura de sus nodos para observar la disposición que hacen de los elementos principales mostrados.
Fig. 11. Elementos técnicos principales a ser considerados en la implementación de una
plataforma de monitorización ambulatoria de señales biomédicas.
Tecnologías de Comunicación Inalámbrica y Oportunidades para las aplicaciones de e-salud
La tendencia de las aplicaciones de e-salud es hacia las redes que utilizan comunicaciones
inalámbricas. Dentro del espectro de posibilidades encontramos soluciones que presentan altas
posibilidades de factibilidad. Algunas de las posibilidades para aplicaciones de monitorización
inalámbrica ambulatoria de signos vitales y señales biomédicas comprenden:
LR-WPAN: Low Rate Wireless Personal Area Networks (Redes inalámbricas de área personal de bajo flujo de datos)
WPAN: Wireless Personal Area Networks (Redes inalámbricas de área personal)
WLAN: Wireless Local Area Networks (Redes inalámbricas de Area Local)
WMAN: Wireless Metropolitan Area Network (Redes inalámbricas de Area Metropolitana)
WWAN: Wireless Wide Area Network (Redes inalámbricas de Area Amplia)
Las tecnologías que soportan los tipos de redes mencionados cubren desde las generaciones de
telefonía celular (1G hasta 4G), las comunicaciones satelitales, Bluetooth, Zigbee, WiMedia,
WiMax, Wifi, entre otras. Las diferencias que se establecen al elegir una u otra tecnología se
materializan en los volúmenes de datos que se pueden manejar, los costos de los de los
dispositivos y la complejidad de las implementaciones principalmente.
Elección de los Estándares de Comunicación Inalámbrica
Los criterios para la adopción de estas tecnologías y tipos de redes están relacionados
principalmente con aspectos como sus costos de implementación, complejidad tecnológica-
operativa, el consumo de energía y su capacidad a nivel de flujo de datos. En el abanico de
opciones se encuentran principalmente las posibilidades de IEEE 802.15.4, IEEE 802.15.1, IEEE.
802.11, RFID y UWB con tasas de transferencia de datos que van desde los kilobits por segundo

hasta los megabits por segundo y alcance o cobertura en el rango de los metros, desde decenas
hasta centenares de estos.
En principio, para los nodos sensores, el espectro de posibilidades se restringe principalmente a
las redes de tipo LR-WPAN y WPAN. El acceso y el tránsito de los datos por otro tipo de redes es
posible a partir de la incorporación de elementos tipo Gateway que constituyan un elemento
vinculante con estas. Específicamente para aplicaciones de monitorización los estándares más
utilizados son IEEE 802.15.1 e IEEE 802.15.4. En redes mixtas, es decir que utilicen los dos
estándares mencionados, IEEE 802.15.1 se constituye en una muy buena opción para la
implementación de Gateways Inalámbricos, adicionalmente la tecnología de RFID se muestra
prometedora para algunos tipos de implementaciones. Veamos los detalles de los estándares que
se utilizan más comúnmente en redes de monitorización ambulatoria de variables biomédicas.
El estándar IEEE 802.11
Aunque está orientado a redes de tipo WLAN, este estándar es importante debido a su amplia
popularidad y también porque se constituye en una opción importante cuando se trata de
implementar gateways o puertas de enlace para las redes de monitorización con el fin de extender
su alcance y lograr entrada a Internet y a otras redes de uso extendido, como intranets o redes
corporativas. Una de las implementaciones más conocidas de IEEE 802.11 se denomina WiFi,
aparte de su compatibilidad con las redes de monitorización, porque se puede incorporar al
coordinador en la forma de tarjetas tipo daughter board, es importante considerar la coexistencia y
las posibles interferencias con los paquetes transmitidos por aspectos como la potencia de señal y
la cercanía de los espectros de transmisión/recepción.
El estándar IEEE 802.15.1
Esta recomendación inalámbrica para redes de área personal (PAN) es tal vez la más conocida a
través de una de sus versiones “Bluetooth”. Si bien, el grueso de las implementaciones cubre
periféricos, audífonos, manos libres para teléfonos celulares, entre otros, existen también
desarrollos para la monitorización de variables de interés biomédico. Las aplicaciones de red no se
han explotado en su verdadera dimensión, su talón de Aquiles puede ser el consumo de energía
de los nodos inalámbricos, sus ventajas son evidentes, interoperabilidad con dispositivos como
smartphones, tablets, computadores, etc, su mayor capacidad de transferencia que en general
cubre los Mbps. Otro punto desfavorable es el alcance que comparado con sus primos del
estándar IEEE 802.15.4 es significativamente menor.
El estándar IEEE 802.15.4
Este estándar tiene unas especificaciones que lo hacen adecuado para aplicaciones basadas en
microcontroladores debido al bajo consumo de la mayoría de los transceptores que cumplen con la
recomendación IEEE 802.15.4 [100] y también a su concepción orientada a aplicaciones con una
velocidad de transmisión de datos moderada y rango dentro del alcance de las redes de área
personal. Si bien el bit rate resulta modesto para transmisión de señales de audio y video, para la
transmisión de mediciones provenientes de sensores y para la monitorización de eventos resulta
bastante interesante. Zigbee aparece como la implementación más conocida que está basada en
las recomendaciones IEEE 802.15.4 (2003) y 802.15.4 A (2006), la alianza internacional que apoya
esta iniciativa busca una estandarización similar a la de Bluetooth pero para campos como el de
las aplicaciones médicas, deportivas, domóticas e industriales, entre otras. Zigbee goza hoy en día
de gran popularidad y sigue avanzando hacia una consolidación mayor. No obstante las
características comentadas, existen aspectos que deben evaluarse concienzudamente como los
royalties ligados al uso del stack y el firmware necesario para correr las aplicaciones sobre

microcontroladores, que pueden convertirse en un factor desfavorable en algún momento. Debido
a las razones expuestas, es que la atención de los desarrolladores de aplicaciones inalámbricas
puede volcarse hacia versiones simplificadas del estándar IEEE 802.15.4 que se acomoden más
fácilmente a las características de recursos computacionales y de firmware ligero requeridos a nivel
de footprint para desarrollos basados en microcontroladores, que se puedan acomodar a las
necesidades de quienes requieren implementar redes con un número moderado de nodos y poca
cantidad de saltos o retransmisiones de paquetes [101].
La recomendación IEEE 802.15.4 establece 27 canales de operación para las transmisiones, no
obstante para la aplicación pretendida de monitorización de variables de interés biomédico, se ha
optado por centrarse sobre los canales 11 al 26 que son los que operan en la banda ISM alrededor
de los 2.4 GHz.
Fig.12. Frecuencias y canales de operación bajo el estándar IEEE 802.15.4
El estándar IEEE 802.15.4 define el protocolo y la interconexión de dispositivos vía radio en una
red de área personal o PAN, utiliza Carrier Sense Multiple Acces with Collision Avoidance (CSMA-
CA: Acceso múltiple por detección de portadora con evasión de colisiones) como mecanismo de
acceso al medio y soporta las topologías peer-to-peer y estrella. El acceso al medio se basa en
contienda; sin embargo, si se utiliza la estructura de supertrama, las ranuras de tiempo o time slots
pueden ser distribuidas por el coordinador de la PAN para los dispositivos con datos críticos en el
tiempo. La conectividad hacia redes de más alto desempeño se provee a través de un coordinador
de Red de área personal (PAN Coordinator). La recomendación IEEE 802.15.4 define la capa física
(PHY) y las especificaciones de la subcapa de control de acceso al medio (MAC) para conectividad
inalámbrica para bajo flujo de datos con dispositivos en movimiento, portátiles y fijos que no utilizan
batería o con requerimientos de consumo de batería muy limitados que funcionan típicamente en
el espacio de operación personal (metros) [100].
Algunas de las definiciones más importantes según el estándar IEEE 802.15.4 [100] son:
.

Red de área personal con beacon habilitado: Una PAN en las que todos los coordinadores emiten regularmente balizas o beacons.
Periodo de acceso por contienda (CAP): El periodo de tiempo inmediatamente posterior a la trama de beacon durante el cual los dispositivos que desean transmitir competirán por el acceso al canal utilizando un mecanismo de acceso múltiple por detección de portadora con evasión de colisiones.
Coordinador: Un dispositivo de funciones completas (Full-function Device ó FFD) que está en capacidad de retransmitir mensajes. Si un coordinador es el controlador principal de una red de área personal, se denomina PAN coordinator.
Autenticación de datos: El proceso mediante el cual una entidad que recibe un mensaje corrobora evidencia acerca la verdadera fuente de la información en el mensaje y, por ese medio, evidencia que el mensaje no ha sido modificado durante el tránsito.
Autenticidad de los datos: Garantía acerca de la fuente de información.
Dispositivo: Toda entidad que contenga una implementación del interfaz física y de control de acceso al medio (MAC) IEEE 802.15.4 para el medio inalámbrico. Un dispositivo puede ser un dispositivo de funciones reducidas (RFD) o un dispositivo de funciones completas (FFD).
Encriptación: La transformación de un mensaje en una nueva representación de modo que se requiere información privilegiada para recobrar la representación original.
Trama: El formato de bits agregados desde una entidad de la subcapa MAC que se transmiten juntos en el tiempo.
Dispositivo de funciones completas (FFD): Un dispositivo en capacidad de funcionar como coordinador.
Nivel de seguridad mínima: Indicación de protección mínima requerida sobre la información en tránsito.
Dispositivo móvil: Un dispositivo cuya ubicación lógica en la red puede cambiar durante el uso.
PAN sin beacon habilitado: Una red de área personal en la cual los coordinadores no emiten beacons regulares, i.e, tienen orden de beacon = 0x0F.
Dispositivo huérfano: Un dispositivo que ha perdido contacto con su coordinador asociado.
Paquete: Los bits agregados, formateados que se transmiten juntos en el tiempo a través del medio físico.
Datos de payload: Los contenidos de un mensaje de datos que está siendo transmitido.
Coordinador PAN: Un coordinador que es el controlador principal de una PAN. Una red IEEE 802.15.4 tiene exactamente un Coordinador PAN.
Espacio de operación personal (POS): El espacio sobre una persona u objeto es de unos 10 metros en todas las direcciones y que circunda a la persona u objeto ya sea en movimiento o si está estacionario.
Radio-esfera de influencia: la región del espacio a través de la cual un radio puede comunicarse exitosamente con otros radios similares.
Dispositivo de funciones reducidas (RFD): Un dispositivo que no está en capacidad de funcionar como coordinador.
Nivel de seguridad: indicación del nivel de protección pretendido aplicado a la información en tránsito.
Autorestauración: la capacidad de la red de detectar y recuperarse de fallas ya sea en los nodos o enlaces de comunicación sin la intervención de humanos.
Auto-organización: La capacidad de los nodos de red para detectar la presencia de otros nodos y organizarse en una red estructurada y en funcionamiento sin la intervención humana.
Transacción: El intercambio de tramas consecutivas relacionadas entre dos entidades MAC pares, requerido para una transmisión exitosa de un comando MAC o trama de datos.

En una red IEEE 802.15.4 pueden participar dos dispositivos diferentes; un dispositivo de
funciones completas (FFD: Full-Function Device) y un dispositivo de funciones reducidas (RFD:
Reduced-Function Device). El FFD puede operar en tres modos sirviendo como un coordinador de
PAN, un coordinador o un dispositivo. Un FFD puede hablarle a RFDs o a otros FFDs, mientras
que un RFD solo puede hablarle a un FFD. Un RFD está destinado a aplicaciones simples, estos
no tienen la necesidad de enviar grandes cantidades de datos y solo pueden asociarse con un FFD
a la vez. Por consiguiente, el RFD puede ser implementado utilizando recursos mínimos y
capacidad de memoria. El estándar de 2006 es compatible con la edición de 2003, es decir, los
dispositivos que conforman este estándar están en capacidad de unirse y funcionar en una PAN
compuesta de dispositivos conformes al estándar IEEE 802.15.4-2003.
Una red IEEE 802.15.4 es parte de la familia de estándares WPAN aunque la cobertura de la red
puede extenderse más allá del espacio de operación personal que define típicamente la WPAN.
Debe tenerse en cuenta que no existe un área de cobertura bien definida para los medios
inalámbricos ya que las características de propagación son dinámicas e inciertas. Pequeños
cambios en posición o dirección pueden resultar en diferencias drásticas en la intensidad de la
señal o la calidad del enlace de comunicación. Estos efectos se dan tanto para los servicios
estacionarios o móviles, ya que los objetos en movimiento pueden impactar la propagación
estación-a-estación.
Topologías de red
Dependiendo de los requerimientos de la aplicación, una LR-WPAN IEEE 802.15.4 puede operar
en cualquiera de dos topologías: la topología estrella o la topología peer-to-peer. Ambas se
muestran en la figura. En la topología estrella la comunicación se establece entre dispositivos y un
controlador central único, llamado el coordinador PAN. Un coordinador PAN puede ser utilizado
para iniciar, terminar o enrutar la comunicación alrededor de la red. El coordinador PAN es el
controlador primario de la PAN. Todos los dispositivos que operan en una red de cualquiera de las
topologías tendrán direcciones únicas de 64 bits. El coordinador PAN puede ser usualmente
energizado por medios tradicionales (mains o alimentación continua del toma eléctrico), mientras
que los dispositivos serán en su mayoría alimentados por batería. Entre las aplicaciones que se
benefician de una topología en estrella tenemos automatización doméstica, periféricos de equipos
de cómputo, juguetes y juegos y cuidado de la salud personal.

Fig. 13. Ejemplo de topologías estrella y peer-to-peer [101]
La topología peer-to-peer también tiene un coordinador PAN; sin embargo, esta difiere de la
topología estrella en que cualquier dispositivo puede comunicarse con cualquier otro dispositivo
mientras que se encuentre en el rango de alcance del otro. La topología peer-to-peer permite la
formación de redes más complejas para ser implementadas, tales como la topología malla (mesh).
Las aplicaciones como el control industrial y el monitoreo de redes inalámbricas de sensores,
seguimiento de inventario y activos, agricultura inteligente y la seguridad pueden beneficiarse de
este tipo de topología de red. Una red peer-to-peer puede ser ad-hoc, auto-organizativa y auto-
regenerativa. Esta también puede permitir múltiples saltos para enrutar mensajes desde cualquier
dispositivo hasta otro dispositivo en la red.
Cada PAN independiente selecciona un identificador único. Este identificador de PAN permite la
comunicación entre dispositivos dentro de una red utilizando direcciones cortas y habilita
transmisiones entre dispositivos a través de redes independientes.
Formación de la red peer-to-peer
En una topología peer-to-peer, cada dispositivo está en capacidad de comunicarse con cualquier
otro dispositivo dentro de su radio esfera de influencia. Un dispositivo es nominado como el
coordinador de la PAN, por ejemplo, en virtud de ser el primer dispositivo en comunicarse sobre el
canal.
Un ejemplo del uso de la topología peer-to-peer es el cluster tree (racimo). La red cluster tree es un
caso especial de red peer-to-peer en la que la mayoría de dispositivos son FFDs. Un RFD se
conecta a una red cluster tree como un dispositivo-hoja en el extremo de una rama porque los
RFDs no permiten que se asocien otros dispositivos. La forma más simple de red cluster tree es
una red cluster simple, pero es posibles tener redes más grandes formando una malla (mesh) de
clusters vecinos. Una vez que la aplicación predeterminada o los requerimientos de red son
cumplidos, el primer coordinador PAN puede enseñarle a un dispositivo a convertirse en el
coordinador PAN de un nuevo cluster adyacente al primero. Otros dispositivos gradualmente se
conectan y forman una estructura de red multicluster, tal como se ve en la figura. Las líneas en la
figura representan las relaciones padre-hijo de los dispositivos y no el flujo de comunicación. La
ventaja de una estructura multicluster es tener un área de cobertura, mientras que la desventaja es
un aumento en la latencia del mensaje.

Fig. 14. Red Cluster Tree [101]
Arquitectura IEEE 802.15.4
La arquitectura IEEE 802.15.4 se define en términos de un conjunto de bloques para simplificar el
estándar. Estos bloques son llamados capas. Cada capa es responsable de una parte del estándar
y ofrece servicios a las capas más altas. La distribución de los bloques está basada en el modelo
de siete capas (OSI). Las interfaces entre las capas sirven para definir los enlaces lógicos que se
describen en este estándar [100].
Un dispositivo de LR-WPAN comprende una PHY, la cual contiene el transceptor de
radiofrecuencia (RF) junto con su mecanismo de control de bajo nivel y una subcapa MAC que
provee acceso al canal físico para todos los tipos de transferencia. La figura muestra estos bloques
en una representación gráfica. La recomendación IEEE 802.15.4 se acomoda a su manera a las
capas del modelo OSI

Fig. 15. Paralelo entre el modelo OSI y las capas para una aplicación basada en IEEE 802.15.4
Las capas superiores constan de una capa de red, que provee configuración de red, manipulación
y enrutamiento de mensajes, y una capa de aplicación que provee la función pretendida del
dispositivo. La arquitectura de la LR-WPAN puede ser implementada en dispositivos embebidos o
en dispositivos que requieren el apoyo de un dispositivo externo como un PC.
Capa Física (PHY)
La PHY provee dos servicios: el servicio de datos PHY y el servicio de administración PHY que se
interfaza a la entidad de administración de la capa física (PLME) punto de acceso servicio (SAP)
(conocido como el PLME-SAP). El servicio de datos PHY habilita la transmisión y recepción de
unidades de datos de protocolo PHY (PPDUs) a través del canal de radio físico.
Las características de la capa PHY son activación y desactivación del transceptor de radio,
detección de energía (ED), indicación de calidad del enlace (LQI), selección del canal, evaluación
de canal libre (CCA) y transmitir así como recibir paquetes a través del medio físico.
El radio opera en una o más de las siguientes bandas libres:
868-868.6 MHz (e.g , Europa)
902-928 MHz (e.g, Estados Unidos)
2400-2483.5 Mhz (en todo el mundo)
Subcapa MAC
Las características de la subcapa MAC son la administración de los beacons, el acceso al canal, el
manejo de los GTS, la validación de las tramas, la entrega de tramas con acuso de recibo, la
asociación y des-asociación. Adicionalmente, la subcapa MAC provee ganchos para implementar
mecanismos de seguridad de aplicación apropiada.
Visión general del aspecto funcional
Un breve vistazo general de las funciones de una LR-WPAN incluye información sobre la estructura
de supertrama, el modelo de transferencia de datos, la estructura de trama, mejoramiento de la
probabilidad de entrega exitosa, consideraciones de consumo de energía y seguridad.

Estructura de supertrama
Este estándar permite el uso opcional de una estructura de supertrama. El formato de la
supertrama es definido por el coordinador. La supertrama es cohesionada por los beacons o
balizas de la red enviados por el coordinador y está dividida en 16 ranuras (slots) de igual tamaño.
Opcionalmente, la supertrama puede tener una porción activa e inactiva. Durante la porción
inactiva, el coordinador puede ingresar en un modo de bajo consumo de energía. La trama de
beacon se transmite en la primera ranura de cada supertrama. Si un coordinador no desea utilizar
una estructura de supertrama, apagará las transmisiones de beacon. Los beacons son utilizados
para sincronizar los dispositivos adjuntos, para identificar la PAN y para describir la estructura de
las supertramas. Cualquier dispositivo que desee comunicarse durante los periodos de acceso por
contienda (CAP) entre dos beacons compite con otros dispositivos que utilizan un mecanismo
CSMA-CA ranurado. Todas las transacciones son completadas para el tiempo en el que se
produzca el próximo beacon de red [100].
Fig. 16. Estructura de la supertrama sin GTS, con periodo inactivo y sin el.
Para aplicaciones de baja latencia o aplicaciones que requieren ancho de banda de datos
especifico, el coordinador PAN puede dedicar porciones de la supertrama activa para esa
aplicación. Estas porciones son llamadas ranuras de tiempo garantizadas (GTSs). Las GTSs
conforman el periodo libre de contienda (CFP), que siempre aparece al final de la supertrama
activa que comienza en una frontera de ranura inmediatamente posterior al CAP, como se muestra
en la figura. El coordinador PAN puede distribuir hasta siete de estos GTSs y un GTS puede
ocupar más de un periodo de ranura. Sin embargo, una porción suficiente del CAP permanece
para acceso basado en contienda de otros dispositivos interconectados en red o nuevos
dispositivos que desean unirse a la red. Todas las transacciones basadas en contienda son
completadas antes de que comience la CFP. También cada dispositivo que transmite en un GTS
garantiza que su transacción este completa antes del tiempo del próximo GTS o el fin del CFP.

Fig. 17. Estructura de supertrama con GTSs en el periodo libre de contienda
Modelo de transferencia de datos
Existen tres tipos de transacciones de transferencia de datos. La primera es la transferencia de
datos para un coordinador en el cual un dispositivo transmite los datos. La segunda transacción es
la transferencia de datos desde un coordinador en la cual el dispositivo recibe los datos. La tercera
transacción es la transferencia de datos entre dos dispositivos pares. En la topología estrella, solo
dos de estas transacciones se utilizan debido a que los datos pueden ser intercambiados solo
entre el coordinador y un dispositivo. En una topología peer-to-peer, los datos pueden ser
intercambiados entre cualquiera de dos dispositivos en la red; en consecuencia las tres
transacciones pueden utilizarse en esta topología [100][101].
Los mecanismos para cada transferencia dependen de sí la red soporta la transmisión de beacons.
Una PAN con beacon habilitado se utiliza en redes que requieran sincronización o soporten
dispositivos de baja latencia, como periféricos de PC. Si la red no necesita sincronización o soporta
dispositivos de baja latencia, puede elegir no utilizar el beacon para transferencias normales. Sin
embargo, el beacon se sigue requiriendo para el descubrimiento de la red.
Fig. 18. Comunicación hacia un coordinador en una PAN con beacon habilitado

Fig. 19. Comunicación hacia un coordinador en una PAN sin beacon habilitado
Transferencia de datos desde un coordinador
Fig. 20. Comunicación desde un coordinador en una PAN con beacon habilitado [100]

Fig. 21. Comunicación desde un coordinador en una red de área personal sin beacon habilitado
[101]
Marco Regulatorio
La regulación incluye temas como la compatibilidad electromagnética y los riesgos relacionados
con la salud que puedan estar relacionados con la producción, el uso y la disposición de los
dispositivos. Algunas regulaciones son solo aplicables en Europa y también existen legislaciones
específicas para otras regiones y países. En la Unión Europea la directiva R&TTE (Dir 1999/5/EC)
regula aspectos relacionados con equipos de radio y equipos terminales de telecomunicaciones en
lo que tiene que ver con un uso eficiente del espectro, interferencias perjudiciales, privacidad de los
datos personales y riesgos para la salud. Los dispositivos que cumplan con los requerimientos
esenciales de esta directiva podrán mostrar la marca de conformidad “CE”. También hay directivas
relacionadas con la protección medioambiental cuando se manufactura, se usa o se dispone de los
dispositivos electrónicos [102].
Tres organizaciones europeas que producen estándares son:
CENELEC (Comité Europeo para Estandarización Electrotécnica)
CEN (Comité Europeo de Estandarización)
ETSI (Instituto Europeo de Estándares de Telecomunicaciones).
Tabla XXI. Aspectos regulatorios y de seguridad ligados a los elementos generales de las Redes
Inalámbricas de Sensores [102].
Aspecto de la Red Inalámbrica de Sensores Aspectos Regulatorios y de Seguridad
Radiación electromagnética Compatibilidad electromagnética con otros dispositivos a sus alrededores
Materiales utilizados en los nodos y baterías Impacto ambiental y riesgos para la salud
Datos procesados, transmitidos y almacenados Seguridad de los datos y privacidad
En los Estados Unidos existe la Federal Communications Commission (FCC) como agencia
reguladora y en países como Canadá están los Industry Canada (IC) Radio Standards
(Specification (RSS) RSS-210 and RSS-Gen)

Compatibilidad Electromagnética
Dependiendo de una aplicación, los nodos de la red inalámbrica de sensores pueden tener que
compartir su entorno con otros dispositivos electrónicos (e.g., computadores, aparatos domésticos
o equipos médicos). Tanto los nodos de las redes de sensores inalámbricas (WSN por sus siglas
en inglés) como los otros dispositivos pueden generar radiación electromagnética o verse
afectados por ella.
Existen estándares europeos bajo la directiva EMC que especifican las pruebas y límites para
certificar que se cubren los requerimientos. Los estándares básicos especifican principalmente las
pruebas y mediciones que deben realizarse pero no tienen límites prescritos. Para encontrar
requerimientos EMC concretos, que incluyan los límites, deben usarse estándares de producto o
genéricos. Algunos estándares establecen su campo de aplicación dependiendo de la frecuencia
de operación de los dispositivos pertenecientes a la red inalámbrica de sensores o a su rango de
potencias. También algunas regulaciones se ajustan a aspectos como el tipo de modulación.
Efectos Biológicos de la Radiación
Es conocido que la exposición a campos electromagnéticos que incluye, por supuesto, a las
radiaciones de radiofrecuencia (RF), produce efectos potencialmente perjudiciales sobre los seres
humanos. Estos efectos biológicos se clasifican en térmicos y no-térmicos.
Existe consenso acerca de que los efectos térmicos producen efectos biológicos indeseados. Estos
surgen cuando el calor inducido por la exposición a las radiaciones es mayor que aquel que puede
ser extraído por la circulación natural del cuerpo. Existe un mayor grado de consenso y
entendimiento acerca de los efectos no térmicos. Estos comprenden todos los efectos biológicos
causados por la exposición a las radiaciones que son independientes del aumento de la
temperatura. Aunque no hay evidencia científica totalmente consensuada acerca de la nocividad
de estos efectos, tampoco hay evidencia total de si inocuidad. Es así como deben tomarse
medidas preventivas cuando sea recomendable dada la existencia de riesgos potenciales.
Los aspectos ligados a los efectos biológicos de la exposición a los campos electromagnéticos se
cubren bajo la directiva de bajo voltaje (LVD) (Dir 2006/95/EC). La Recomendación 1995/519/EC
sobre los límites de exposición del público en general a los campos electromagnéticos (0Hz hasta
300Hz) tiene los límites básicos para prevenir la exposición nociva a los campos
electromagnéticos, derivados solamente de los valores umbral que han demostrado producir
efectos nocivos agudos. Lógicamente, hay un factor de seguridad para ajustar dichos umbrales a
las restricciones presentes en la recomendación, proporcionando en esta forma una protección
contra los posibles efectos de largo plazo.
Las restricciones básicas presentes en la recomendación están expresadas en términos de la
densidad de flujo magnético, la densidad actual, la Tasa Específica de Absorción de Energía (SAR
por sus siglas en inglés) y la densidad de potencia dependiendo de la frecuencia del campo. Las
bandas de frecuencia utilizadas por las plataformas actuales de WSNs oscilan entre los 300 MHz y
2.4GHz, es decir, frecuencias dentro de la banda UHF. Así, el rango de frecuencias aplicable de la
Recomendación 1999/519/EC es 10MHz-10GHz por lo que las restricciones básicas están
expresadas en términos del SAR. Hay tres cifras de SAR a ser consideradas:
El límite del SAR promedio para la totalidad del cuerpo es 0.08 W/Kg
El límite del SAR localizado para la cabeza y el tronco es 2W/Kg
El límite del SAR localizado para las extremidades es 4W/Kg

El SAR se define en la recomendación como la tasa a la cual la energía es absorbida por unidad
de masa de tejido corporal y se expresa en vatios por kilogramo (W/kg). El límite del SAR promedio
para la totalidad del cuerpo es útil para la evaluación los efectos térmicos adversos de la
exposición, mientras que las cifras de SAR localizado son necesarias para los casos en los que
pequeñas partes del cuerpo pueden estar expuestas particularmente a la radiación.
Impacto Ambiental
Las redes inalámbricas de sensores (WSNs), al igual que cualquier otro producto eléctrico o
electrónico, pueden causar efectos medioambientales negativos que pueden ser clasificados en las
categorías siguientes:
Disminución de los recursos a escala mundial: La producción de productos electrónicos basados en semiconductores consumen grandes cantidades de recursos naturales.
Uso de Energía: El consumo de electricidad de la electrónica asociada constituye una porción significativa de la cifra total. En las WSNs, tanto los nodos conectados al suministro eléctrico convencional como aquellos con baterías recargables consumen electricidad.
Producción de sustancias peligrosas: Muchos componentes de los dispositivos y de las baterías pueden representar riesgos para la salud o producir polución si no están delimitados adecuadamente o tratados y reciclados.
Las regulaciones de la Unión Europea con el propósito de minimizar los riesgos ambientales de los
equipos eléctricos y electrónicos pueden resumirse así:
La directiva WEEE (Dir 2002/96/EC) que apunta a la reducción de los efectos medioambientales negativos causados por el desperdicio de equipo eléctrico y electrónico mediante (1) la reducción de la eliminación (promoviendo el reciclaje y la reutilización de los dispositivos) y (2) reduciendo los daños medioambientales causados por los procesos llevados a cabo durante su ciclo de vida (aumentando su rendimiento medioambiental).
La directiva RoHS (Dir 2002/95/EC) restringe la utilización de sustancias en los equipos eléctricos y electrónicos que son conocidas por ser peligrosas para la salud humana y para el medio ambiente. La RoHS no se aplica a las baterías. Esta directiva establece que “los estados miembros asegurarán que, desde el 1 de julio de 2006, los equipos eléctricos y electrónicos puestos en el mercado no contendrán plomo, mercurio, cadmio, cromo hexavalente, bifenil polibrominado (PBB) o éteres difenil polibrominado (PBDE)”. Posteriormente, muchas decisiones de la comisión adoptadas durante 2005 y 2006 enmendaron la directiva RoHS para establecer las aplicaciones exentas de los requerimientos antes mencionados y para indicar la concentración máxima de las sustancias peligrosas tolerables en materiales homogéneos o de composición uniforme.
Existe una directiva europea dedicada totalmente a las baterías (Dir 2006/66/EC). Puesto que las baterías contienen materiales peligrosos (como mercurio, plomo o cadmio) y metales que pueden ser reciclados (como níquel, cobalto o plata) con la consecuente reducción en la energía requerida respecto a tener que extraer y preparar metales vírgenes. El objetivo de esta directiva es promover el reciclaje de baterías y acumuladores así como restringir el uso de ciertas sustancias peligrosas en su composición.
Regulación Colombiana
En este campo se encuentran en nuestro país regulaciones explicitas en el campo de la salud,
desde el Ministerio de la Protección Social y el INVIMA. El INVIMA es una institución oficial de
vigilancia y control de carácter técnico científico, que trabaja para la protección de la salud
individual y colectiva de los colombianos mediante la aplicación de las normas sanitarias
relacionadas con los productos de su competencia. Adicionalmente, el Ministerio de las

Tecnologías de la Información y la Comunicación establece directrices desde el campo de las
telecomunicaciones.
En el campo de directivas del campo de la salud relacionadas con los dispositivos biomédicos
utilizados en aplicaciones de monitorización ambulatoria, encontramos el decreto número 4725 de
2005 del Ministerio de la Protección Social cuyo objeto es: regular el régimen de registros
sanitarios, permiso de comercialización y vigilancia sanitaria en lo relacionado con la producción,
procesamiento, envase, empaque y almacenamiento, expendio, uso, importación, exportación,
comercialización y mantenimiento de los dispositivos médicos para uso humano, los cuales serán
de obligatorio cumplimiento por parte de todas las personas naturales o jurídicas que se dediquen
a dichas actividades en el territorio nacional [103].
En este documento se hace referencia al Concepto Técnico de las Condiciones Sanitarias que es
un documento expedido por el Instituto Nacional de Vigilancia de Medicamentos y Alimentos –
INVIMA- que garantiza la verificación de los requerimientos por parte de los fabricantes, y de sus
productos. Allí también, entre otras, nos encontramos con estas definiciones:
Dispositivo Médico Activo: Cualquier dispositivo médico cuyo funcionamiento dependa de una fuente de energía eléctrica o de cualquier fuente de energía distinta de la generada directamente por el cuerpo humano o por la gravedad, y que actúa mediante la conversión de dicha energía.
Dispositivo Médico Destinado a Investigaciones Clínicas: Es cualquier dispositivo médico para ser utilizado por un facultativo especialista, en investigaciones efectuadas en un entorno cíclico humano adecuado.
Dispositivo Médico para Uso Humano: Se entiende por dispositivo médico para uso humano, cualquier instrumento, aparato, máquina, software, equipo biomédico u otro artículo similar o relacionado, utilizado sólo o en combinación, incluyendo sus componentes, partes, accesorios y programas informáticos que intervengan en su correcta aplicación, propuesta por el fabricante para su uso entre otros en: a) Diagnóstico, prevención, supervisión, tratamiento o alivio de una enfermedad. b) Diagnóstico, prevención, supervisión, tratamiento, alivio o compensación de una lesión
o de una deficiencia.
Equipo Biomédico: Dispositivo médico operacional y funcional que reúne sistemas y
subsistemas eléctricos, electrónicos o hidráulicos, incluidos los programas informáticos que intervengan en su buen funcionamiento, destinado por el fabricante a ser usado en seres humanos con fines de prevención, diagnóstico tratamiento o rehabilitación. No constituyen equipo biomédico, aquellos dispositivos médicos implantados en el ser humano o aquellos destinados para un solo uso.
Equipo Biomédico Prototipo: Incluye todos aquellos que se encuentran en fase de experimentación que aún no se han empleado en la prestación de servicios o en demostraciones y que no cuentan con el certificado de venta libre expedido por el organismo nacional competente o su homólogo en el país de origen.
Incidente adverso: Daño o potencial riesgo no intencionado al paciente, operador o medio ambiente que ocurre como consecuencia de la utilización de un dispositivo médico.
Precauciones: Medidas de seguridad que se deben cumplir al usar todo dispositivo médico.
Registro sanitario: Es el documento público expedido por el INVIMA previo el procedimiento tendiente a verificar el cumplimiento de los requisitos técnico-legales y sanitarios establecidos en el decreto 4725 de 2005, el cual faculta a una persona natural o jurídica para producir, comercializar, importar, exportar, envasar, procesar, expender y/o almacenar un dispositivo médico.
Seguridad: Es la característica de un dispositivo médico, que permite su uso sin mayores posibilidades de causar efectos adversos.

Tecnovigilancia: Es el conjunto de actividades que tienen por objeto la identificación y la cualificación de efectos adversos serios e indeseados producidos por los dispositivos médicos así como la identificación de los factores de riesgo asociados a estos efectos o características con base en la notificación, registro y evaluación sistemática de los efectos adversos de los dispositivos médicos, con el fin de determinar la frecuencia, gravedad e incidencia de los mismos para prevenir su aparición.
El decreto 4725 también da indicaciones sobre la clasificación delos dispositivos médicos:
Tabla XXII. Clases de Dispositivos Médicos
Clase I. Son aquellos dispositivos médicos de bajo riesgo, sujetos a controles generales, no destinados para proteger o mantener la vida o para un uso de importancia especial en la prevención del deterioro de la salud humana y que no representan un riesgo potencial no razonable de enfermedad o lesión.
Ejemplos: Escalpelo, Forceps, Camas eléctricas, Extremidades artificiales, Estetoscopios, Sillas de ruedas, Electrodos externos
Clase II a. Son los dispositivos médicos de riesgo moderado, sujetos a controles especiales en la fase de fabricación para demostrar su seguridad y efectividad.
Ejemplos: Monitores cardíacos, Simuladores eléctricos transcutáneos, Sistemas de resonancia magnética, Analizadores de gas en sangre, Tubos de drenaje, Bolsas de sangre, Sets de administración intravenosa, Termómetros infrarrojos, Agujas para biopsia, Guantes de látex
Clase II b. Son los dispositivos médicos de riesgo alto, sujetos a controles especiales en el diseño y fabricación para demostrar su seguridad y efectividad.
Ejemplos: Equipos de electrocirugía, Desfibriladores cardíacos Externos, Bombas de infusión, Ventiladores, Máquinas de hemodiálisis, Catéteres, Sistemas de electroencefalografía, Sistemas de rayos X, Sistemas de diagnóstico de ultrasonido, Condones de látex.
Clase III. Son los dispositivos médicos de muy alto riesgo sujetos a controles especiales, destinados a proteger o mantener la vida o para un uso de importancia sustancial en la prevención del deterioro de la salud humana, o si su uso presenta un riesgo deterioro de la salud humana, o si su uso presenta un riesgo potencial de enfermedad o lesión. Ejemplos: Marcapasos cardíacos, Válvulas de corazón, Sistema tubular coronario, Prótesis injerto vascular, Pinza para aneurisma, Sistemas aceleradores lineales
Los equipos biomédicos, idealmente, deben seguir estándares, preferiblemente de aceptación
internacional. Los estándares de la familia IEC60601 son aceptados en Colombia, por el Instituto
Colombiano de Normas Técnicas (ICONTEC). Los estándares IEC60601 no son normativos en
Colombia, sino que permiten a los fabricantes asegurarse, mediante su cumplimiento, que el
producto es de calidad. (tomado de CLAIB Regulación Colombia).
Bandas ISM (Industrial, Científica y Médica)
Respecto al uso de las bandas ISM la regulación local, en el documento del cuadro nacional de
atribución de bandas de frecuencia dice:

“Aplicaciones industriales, científicas y médicas (de la energía radioeléctrica) (ICM): Aplicación de
equipos o de instalaciones destinados a producir y utilizar en un espacio reducido energía
radioeléctrica con fines industriales, científicos, médicos, domésticos o similares, con exclusión de
todas las aplicaciones de telecomunicación”, luego complementa especificando las bandas que
están designadas para aplicaciones industriales, científicas y médicas (ICM).
La República de Colombia a través del Ministerio de Tecnologias de la Información y la
Comunicaciones presenta una serie de documentos y normativas como el Manual de Gestión
Nacional del Espectro Radioelectrico y, como anexo de este, el cuadro nacionald de atribución de
bandas de frecuencia.
Otras Regulaciones Internacionales
La Global Harmonization Task Force (GHTF) es una referencia clave en cuanto a validación de
dispositivos biomédicos. Dicha organización tiene como meta proporcionar un foro colaborativo
para los representantes o miembros de las autoridades reguladoras y los representantes de la
industria biomédica con el fin de promover la convergencia internacional en requerimientos
reguladores y prácticas.
La GHTF tiene cinco grupos de estudio:
Regulaciones relacionadas con Seguridad y Desempeño, Clasificación, Marcado y Evaluación
Regulaciones con respecto al reporte de eventos adversos con dispositivos médicos
Armonización relacionada con sistemas de calidad para la producción de dispositivos médicos
Prácticas de auditoría para sistemas de calidad y para dispositivos
Estudio de mecanismos de convergencia de requerimientos y regulación relacionados con la seguridad y el desempeño clínico de los dispositivos médicos y establecimiento de
guías para pruebas clínicas [104].
Un organismo estadounidense tomado como una amplia referencia a nivel mundial es la FDA o
Food and Drug Administration, muchas de las directrices adoptadas en Colombia se basan en
normativas de esta agencia estatal. Esta entidad ha emitido un documento denominado Radio-
Frequency Wireless Technology in Medical Devices el cual es un “Draft Guidance” o documento
preliminar. Este documento se refiere a aspectos específicos relacionados con dispositivos
biomédicos en aplicaciones de monitorización ambulatoria. Este documento de 2007, de unas 30
páginas, trata en general algunas definiciones relevantes, inquietudes relacionadas con el uso de
tecnología inalámbrica RF al interior y alrededor de equipos médicos, conceptos generales sobre el
riesgo en el manejo de dispositivos médicos inalámbricos RF, cuestiones sobre el diseño y
desarrollo: su verificación y validación, el etiquetado, los controles de compra y las actividades de
aceptación, las acciones preventivas y correctivas y tareas de mantenimiento.
A continuación revisaremos algunos de los puntos más relevantes tratados en el documento [105].
Definiciones
Compatibilidad Electromagnética (EMC): la capacidad de un dispositivo de funcionar
adecuadamente en su entorno electromagnético objetivo sin introducir energía electromagnética
excesiva que pueda interferir con otros dispositivos.
Perturbación Electromagnética (EMD): Cualquier fenómeno electromagnético que pueda
degradar el desempeño de los equipos, médicos o equipos electrónicos en general. Los ejemplos

de esto incluyen las caídas e interrupciones en el voltaje de línea, transientes eléctricos rápidos
(EFTs), campos electromagnéticos (emisiones radiadas), descargas electrostáticas y emisiones
conducidas.
Interferencia electromagnética (EMI): degradación en el desempeño de una parte del equipo,
canal de transmisión o del sistema (como dispositivos médicos) que es causada por una
perturbación electromagnética.
Descarga electrostática (ESD): la transferencia rápida de carga electrostática entre cuerpos de
potencial electrostático diferente, bien sea en la proximidad en el aire (descarga en aire) o a través
de contacto directo (descarga por contacto).
Emisiones: energía electromagnética que emana de un dispositivo que generalmente pertenece a
una de dos categorías: conducida y radiada. Ambas categorías de emisión pueden presentarse
simultáneamente, dependiendo de la configuración del dispositivo.
Emisiones conducidas: Energía electromagnética que emana de un producto a través de un
conductor a partir de su resistencia, inductancia o capacitancia. Como conductor se entienden los
cables de alimentación AC, las cubiertas metálicas de un subsistema, los cables que interconectan
los subsistemas o los cables que conectan al paciente con el producto. Las emisiones conducidas
comprenden los armónicos de la línea de alimentación, los picos y la energía de radio frecuencia,
especialmente en el rango entre los 150 KHz y los 80 MHz.
Emisiones radiadas: Energía electromagnética que emana de un dispositivo y se propaga a
través del espacio o de un medio (el cual puede afectar la distancia y la dirección de propagación).
Las emisiones radiadas comprenden tanto las emisiones intencionadas como las radio-
transmisiones que portan información y las emisiones no intencionadas asociadas con el equipo
alimentado eléctricamente como motores, fuentes de alimentación y componentes de los
computadores.
Inmunidad: La capacidad de un producto eléctrico o electrónico de operar como es pretendido sin
degradación del desempeño en presencia de perturbaciones electromagnéticas.
Latencia: El tiempo que toma para una unidad de información cruzar un enlace inalámbrico o
conexión de red, desde el emisor hasta el receptor.
Calidad del servicio (QoS): un nivel de desempeño acordado en un sistema de comunicación u
otro servicio, que abarca multiple parámetros de desempeño tales como la fiabilidad de la
transmisión de datos, la tasa de transferencia, la tasa de errores y los mecanismos y los niveles de
prioridad para las señales críticas en el tiempo.
Radiofrecuencia (RF): una frecuencia en la porción del espectro electromagnético que está entre
las porciones del audio y del infrarrojo; las radiofrecuencias comúnmente utilizadas están entre
9kHz y 100GHz.
Interferencia de radiofrecuencia (RFI): un tipo de interferencia electromagnética que resulta de
las emisiones radiadas a una o más radiofrecuencias.
Dispositivo medico inalámbrico de radiofrecuencia: un dispositivo médico que incluye al menos
una función que está implementada utilizando comunicaciones inalámbricas RF; ejemplos de
funciones que pueden implementarse inalámbricamente incluyen la transferencia de datos, el

control de dispositivos, la programación, la transmisión de energía, el sensado y monitorizacion
remota y la identificación.
Susceptibilidad: El potencial de los equipos (como los dispositivos médicos) para responder a una
perturbación electromagnética.
Coexistencia inalámbrica: la capacidad de un sistema inalámbrico para realizar una tarea en un
entorno compartido especifico en donde otros sistemas tengan la capacidad de realizar sus tareas
y puedan utilizar o no el mismo conjunto de reglas (tal como se refiere en IEEE 802.15.2
Coexistence of Wireless Personal Area Networks with Other Wireless Devices Operating in
Unlicensed Frequency Bands).
Fig. 22. Entidades que emiten regulaciones ligadas con los dispositivos médicos de tecnología
inalámbrica de radiofrecuencia [105].
Tabla XXIII. Algunos estándares aplicables a dispositivos médicos inalámbricos [106]
Organismo Estándar-Asunto
Association for the Advancement of Medical Instrumentation (AAMI)
AAMI TIR No. 18-1997- Compatibilidad Electromagnética de dispositivos médicos
ANSI/AAMI PC69:2000,-Compatibilidad electromagnética de dispositivos médicos implantables
ANSI/AAMI/IEC 60601-1-2:2001- Equipo Médico Eléctrico (versión estadounidense del estándar IEC 60601-1-2).
ANSI C63.18 – Método de prueba para estimar la inmunidad electromagnética de dispositivos médicos para transmisores específicos de radio frecuencia
ANSI C63.19- Métodos de Medición de compatibilidad entre dispositivos de comunicación inalámbrica y ayudas de audición.
Electrostatic Discharge Association (ESD Association)
ANSI/ESD-S20.20-1999 - Protección de partes eléctricas y electrónicas, ensamblajes y equipos

European Telecommunications Standards Institute (ETSI)
I-ETS 300 220- Características técnicas y métodos de prueba para equipos de radio de baja potencia
ETS 300339-Compatiblidad Electromagnética General para equipos de radio comunicaciones
ETS 300683-Compatibilidad electromagnética para equipos de corto rango.
ETSI EN 302 195-1, compatibilidad Electromagnética y aspectos de radio espectro
International Electrotechnical Commission (IEC)
The IEC 60601 family specifies safety standards for medical electrical equipment. EMC is addressed in IEC 60601-1-2 and the IEC 60601-2-X standards for particular types of medical electrical equipment.
IEC 60601-1-2:2001 y Amendment 1:2004, Equipo Eléctrico médico.
IEC 60601-2-X tipos particulares de equipo eléctrico medico
IEC 61326- Requerimientos de compatibilidad electromagnética, equipo eléctrico para medición, control y uso de laboratorio
Institute of Electrical and Electronic Engineers (IEEE)
IEEE 1073.X- Informática en salud, comunicación de dispositivos médicos
Estándares IEEE 802.x
International Organization for Standardization (ISO)
ISO/TR 16056-1 – Informática en salud, Interoperabilidad de sistemas y redes de telesalud
ISO/TR 16056-2, Sistemas en tiempo real
ISO/TR 18307-Comunicacion y mensajería
En la figura se hace una síntesis de los aspectos de mayor relevancia en el interés de las
regulaciones concernientes a los dispositivos biomédicos para monitorización ambulatoria.
Fig. 23. Aspectos principales de los que se ocupa la regulación existente para dispositivos médicos
inalámbricos

CAPITULO 4
EnViBo: una propuesta de plataforma para el desarrollo de redes de
sensores portátiles en monitorización fisiológica ambulatoria
A partir de la revisión de la literatura referenciada en los capítulos anteriores sobre plataformas de
monitorización ambulatoria de variables fisiológicas, se han evidenciado los vacíos de las
diferentes propuestas en lo que se refiere a metodologías para la configuración, puesta en
funcionamiento y gestión de las redes de sensores. Es común encontrar en las publicaciones
consultadas información acerca de temas como la optimización de protocolos, algoritmos de
enrutamiento y estrategias para optimizar el consumo de energía, pero son muy fragmentadas las
referencias específicas en cuanto al despliegue de los nodos sensores y de cómo constituir una
red inalámbrica que cubra los requerimientos específicos de las aplicaciones biomédicas. En la
tabla se presentan las observaciones frente al soporte provisto, para la implementación de redes
inalámbricas de sensores, por un conjunto de plataformas que consideran como una muestra
significativa. Estas plataformas han sido seleccionadas porque se consideran consistentes a nivel
de su concepción y su desempeño, además porque en ellas se pueden encontrar diferencias
marcadas en las características de las soluciones tecnológicas sobre las que están soportadas y
en aspectos como su arquitectura, su vigencia y su naturaleza (académico-investigativa o
comercial).
Tabla XXIV. Observaciones sobre el soporte para la implementación de redes que ofrecen varias
plataformas
Plataforma Observaciones sobre el soporte para la implementación de redes
inalámbricas de sensores Shimmer, Mica, IRIS y TelosB
Soporte a través de software propietario (MoteWorks de Crossbow) que se debe adquirir con un costo adicional al de los nodos [90]
Imote2 de Crossbow Sistema operativo gratuito para el desarrollo de los nodos, pero no entrega mayores detalles acerca de las tareas de implementación y gestión de red [91]
BTNode del
Instituto Federal Suizo de tecnología
Buen soporte, ofrece recursos en línea y abiertos. Orientado a investigación. Se acerca
mucho a la idea global de nuestra propuesta. No obstante la información está algo atomizada y puede requerir un nivel de autogestión alto. No actualizado.[92]
Desarrollo holandés MyriaNED
Provee una información muy básica que no entrega detalles a profundidad. Los servicios de capacitación sobre el uso de la plataforma se ofrecen con costo [93]
plataforma abierta EPIC Mote
Este proyecto de Berkeley ofrece cierto nivel de soporte pero la información de red no es completa [94]
TECO Particle de la Universidad de Karlsruhe
Provee un muy completo soporte en cuanto a los nodos, el software y el firmware, da muchos detalles sobre la implementación de la red, no obstante se requiere un nivel de autogestión muy alto puesto que la información y los recursos están atomizados [95]
sun spot de Sun microsystems
Presenta algún grado de soporte pero los nodos para implementar las redes tienen un costo que puede resultar elevado. [96]
MITES (MIT-USA)
Da orientaciones sobre la implementación de los nodos y la red y es abierta. No actualizado. [97]
Codeblue (Harvard) Plataforma académica e investigativa, con soporte pero desactualizada (2008) [98]
Para el conjunto de plataformas seleccionadas como representativas, se presenta en la tabla una
valoración de los ítems considerados como fundamentales para cumplir con los requerimientos de
soporte en cuanto al montaje, puesta en funcionamiento y gestión, de las redes inalámbricas de
sensores en aplicaciones de monitorización ambulatoria.
Tabla XXIV. Valoración sobre el cubrimiento de requerimientos que se consideran como claves
para la implementación de redes para varias plataformas representativas

PLATAFORMA (VIGENCIA)
PROGRAMACIÓN DE LOS NODOS
DESARROLLO DE LOS NODOS (A NIVEL DE HARDWARE)
SOPORTE A NIVEL DE RED
Disponible Compilador gratuito
Entorno Integrado Desarrollo (IDE) Gratuito
Costos Microcontrolador y disponibilidad en el mercado local
Soporte- información para fabricación de nodos
Despliegue y puesta en operación de redes
Manejo de los datos generados los nodos
SHIMMER
(proyecto vigente)
IDE
(CCStudio) para el
MSP430
No disponible en la ciudad. Solo 1 proveedor en el país Costo alto.
Bajo
IMOTE2
(proyecto vigente)
Soporte para el PXA271 a través de MS .Net micro framework
No disponible en el país Costo: N/A
Bajo
*Con costo
BTNODE
(no vigente)
Soporte a través de eclipse IDE Para el ATmega128L
No disponible en el país Costo: N/A
Alto X
MYRIANED (proyecto vigente)
X X Información no disponible
X Muy Bajo
*Con costo
EPIC
(no vigente)
X X No disponible en el país
Costo: N/A
Medio X
TECO PARTICLE
(proyecto vigente)
X No disponible en el país Costo: N/A
Alto
SUN SPOT
(proyecto vigente)
No disponible en el país Costo: N/A
X Medio
MITES
(no vigente)
X X No disponible en el país Costo: N/A
Medio X
CODEBLUE
(no vigente)
IDE (CCStudio) para el MSP430
No disponible en la ciudad. Solo 1 proveedor en el país Costo alto.
Medio
Observaciones adicionales
La plataforma BTnode [92] provee un muy buen soporte pero opera en una banda un poco atípica
(433-915 MHz) y utiliza el estándar IEEE 802.15.1, sin embargo esta plataforma nos proporciona
bastantes elementos acerca de cómo pueden ser el soporte para nuestra propuesta. El sistema
TECO Particle de la Universidad de Karlsruhe [95] sin duda provee el mejor soporte en cuanto a
los nodos, el software y el firmware, además da muchos detalles sobre la implementación de la red,
el modelo seguido por sus desarrolladores es de los más completos que se encuentra y sin duda
es un gran referente para nuestro caso. Otras plataformas como PowWOW [99] es un esfuerzo
interesante realizado en el INRIA francés pero al ser abierta tiene problemas en cuanto al soporte,
sus documentos son de hace varios años, aunque provee los detalles de hardware y software. La
plataforma Z1 de zolertia [100] provee una amplia información a través de un wiki sobre los nodos

y su programación para diversos sensores, pero no ahonda sobre el despliegue e implementación
de las redes. La plataforma académica Firefly [101] de la Universidad Carnegie Mellon es
interesante pero no provee mayor información. Finalmente cabe señalar que la plataforma
DexterNet [48], un proyecto financiado en parte por la Unión Europea, la cual ha servido de
referencia para la arquitectura de nuestra propuesta, hace parte de la familia SPINE, que aún sigue
evolucionando pero no provee un soporte muy completo en cuanto a aspectos de red.
Con base en el análisis de las valoraciones arrojadas por la tabla se puede afirmar que, si bien hay
propuestas que exhiben fortalezas en varios de los ítems planteados, ninguna de las plataformas
satisface completamente los requerimientos que se consideran claves para el desarrollo de redes
de monitorización con nodos sensores inalámbricos. Además es evidente que la accesibilidad a
plataformas con alto grado de consistencia a nivel de soporte, está sujeta a costos que pueden
resultar bastante altos. Es evidente que las propuestas académico-investigativas se acercan
bastante al ideal buscado de plataforma, no obstante muchos de estos proyectos no han tenido la
permanencia deseada en el tiempo o su información se hace dispersa. Cuando los recursos
aparecen atomizados en diferentes repositorios, wikis, sitios web poco atendidos o
desactualizados, se requiere de altos grados de autogestión del aprendizaje para lograr un manejo
de la plataforma, lo que implica una inversión de tiempo considerable y no tener la garantía de
llegar a resultados satisfactorios.
Plataforma EnViBo
Los ejercicios de elaboración de un estado del arte para plataformas de monitorización de variables
biomédicas, capitulo II, y de valoración de una muestra representativa de dichas plataformas,
realizado al principio de este capítulo, en conjunto con la caracterización del marco técnico-
regulatorio de referencia para la implementación de redes de sensores portátiles, capitulo III,
permiten en este punto llegar a la formulación de una plataforma propia denominada EnViBo:
Embedded Network for Vital Sign and Biomedical Signal Monitoring por sus siglas en inglés, que
se constituye en nuestra propuesta de plataforma para el desarrollo de redes de sensores
portátiles en monitorización fisiológica ambulatoria. Esta plataforma está concebida para superar
las limitaciones anteriormente indicadas. Los diseños y prototipos de nodos sensores, las
interfaces de usuario y las pruebas realizadas, han servido para definir los aspectos más
específicos de nuestra propuesta. Es así como esta formulación no se apoya meramente en
aspectos teóricos, derivados de los análisis realizados sobre la literatura existente, sino que
aprovecha las enseñanzas que son resultado de la experimentación con elementos propios,
desarrollados específicamente para este trabajo de investigación.
Arquitectura de la Plataforma EnViBo
La formulación de una plataforma requiere plantear una arquitectura tanto para el conjunto
completo que constituye el sistema de monitorización como también para los elementos de red, es
decir, los nodos. En la figura se ilustra la arquitectura de tres capas de la plataforma EnViBo [102],
esta supone tres capas cuya naturaleza y funciones se describen a continuación:
Capa de Nodos de Monitorización: Esta es la capa de adquisición y acondicionamiento de las señales biomédicas, está constituida por los nodos sensores portátiles que el usuario transportará atados a su cuerpo o a sus prendas de vestir de manera que no le impidan realizar sus actividades y movimientos normales. Nuestro enfoque se centra sobre la utilización de nodos sensores inalámbricos que se apoyan en procedimientos no invasivos para la captación de las señales de interés. Si bien, en la actualidad se habla de aplicaciones que incluyen la utilización de sensores implantados, consideramos que este tipo de soluciones tienen implicaciones éticas y de

influencia sobre la salud humana que requieren aún de una revisión concienzuda y de seguimiento a su desarrollo, que es incipiente en la mayoría de los casos. En nuestro trabajo futuro se contempla la adopción progresiva de sensores vestibles mediante la fusión de e-textiles con dispositivos electrónicos con los demás elementos: microcontroladores, radios y sensores, entre otros. También se reconocen las posibilidades que ofrecen las tecnologías de recolección de energía (energy harvesting-energy scavenging) y por ende se planea su adopción también en los nodos sensores. Las implementaciones realizadas hasta ahora, tanto a nivel de los nodos sensores como del coordinador de la red de área personal, han estado basadas en microcontroladores y radios pertenecientes a un mismo fabricante: Microchip. Este hecho no es fortuito, tampoco se trata de una elección caprichosa, la escogencia se ha realizado teniendo como base los costos, la disponibilidad de proveedores a nivel nacional y local, al igual que el soporte en software y documentación. En este sentido se han encontrado respuestas bastante favorables en comparación con otros proveedores. Una opción interesante que muestra un buen desarrollo y es considerada desde ya, es la inclusión de nodos sensores que incluyan microprocesadores Atmel que gobiernen aplicaciones con enfoque open hardware/software, como Arduino y Pingüino, puesto que se ha tenido la oportunidad de experimentar con este tipo de desarrollos y se ha encontrado una buena respuesta y una prometedora perspectiva desde el punto de vista de disponibilidad de proveedores y de buenos precios, con un soporte a nivel de software en crecimiento. La plataforma planteada, EnViBo, no restringe el uso de ningún tipo de microcontrolador o de transceptor de radio, por lo tanto, los dispositivos podrán integrarse a la red siempre y cuando se acoplen desde el punto de vista funcional a la operación formulada para la aplicación. Coordinador de la red de área personal (Coordinador PAN): El dispositivo coordinador en nuestro caso se basa en un microcontrolador de 16 bits, que opera como un nodo “estático” proyectado en principio para un escenario de operación en interiores o indoor, con suministro permanente de energía, que posee conexión a un computador vía serial/usb, pero que también permite opciones de visualización local y registro de los datos en medio extraíble [103]. La elección de un coordinador de red de área personal no ambulatorio se basa en un precepto de estabilidad de operación y disponibilidad de conexión a computadores de escritorio, portátiles, dispositivos móviles a través de un dongle Bluetooth e incluso supone el potencial rol mixto de Gateway hacia redes de cobertura Ethernet o WLAN a partir, por ejemplo, de Wi-Fi que es susceptible de implementación sobre sistemas embebidos. También se puede alcanzar el ámbito de las WMAN a través de la interacción con teléfonos celulares o dispositivos móviles similares.
Capa de Sumidero Local de Datos: En esta capa se encuentran los dispositivos y medios que hacen posible el registro en instrumentos con capacidades superiores; de almacenamiento, procesamiento, retransmisión y visualización. El sumidero normal de datos de esta capa es un computador que tiene instalado el software que permite la visualización en una interfaz tipo instrumento virtual y que además, tiene posibilidades de generación de reportes, alimentación de una base de datos y conectividad a nivel de intranet e internet. En paralelo con esta posibilidad de sumidero, se maneja la salida vía Gateway a otras redes alámbricas e inalámbricas con elementos que posibiliten conexiones Ethernet o WiFi. Estos Gateway se convierten en elementos complementarios que amplían el rango de las redes involucradas y son sistemas alternos para alcanzar la capa de sumidero Global de Datos
Capa de Sumidero Global de Datos: Usualmente las implementaciones de redes inalámbricas de monitorización ambulatoria de señales biomédicas cubren el espectro de BAN (Body Area Networks: Redes de área corporal), PAN o redes de área personal y

WLAN; redes inalámbricas de área local. La capa de sumidero global de datos le confiere la posibilidad a este tipo de aplicaciones de alcanzar rangos metropolitanos y amplios, correspondientemente los niveles de WMAN y WWAN. (Redes inalámbrica de alcance metropolitano y de alcance amplio). La posibilidad de una cobertura tan vasta se logra a partir de la ubicación de los datos para que puedan hacer tránsito a través de redes de uso extendido y con infraestructuras bien establecidas, con fiabilidad de servicio garantizado como son las redes de las compañías de telefonía móvil y la red mundial de información a través de Internet.
Fig. 24. Arquitectura de tres capas para la arquitectura de la plataforma EnViBo [102]
Arquitectura de los Nodos
Igualmente se ha procedido a formular una propuesta de arquitectura para los nodos que
conforman las redes desplegadas según la arquitectura EnViBi, es así como cada nodo responde a
una arquitectura en donde se diferencian cuatro capas que son:
Comunicaciones
Algoritmos
Control de Hardware
Hardware de Circuito Esta arquitectura no es jerárquica o, al menos, no está concebida así. El orden establecido tiene que ver con las señales; desde su adquisición hasta su transmisión y el vínculo de los elementos internos del nodo con el medio externo.

Fig. 25. Arquitectura general de los nodos proyectadas por niveles o capas [104]
Comunicaciones: operacionalmente constituye la etapa final de trabajo sobre los datos adquiridos a nivel del nodo sensor o de los nodos que hacen la gestión de la red. En esta capa los datos se formatean para adecuarlos al radio, método de modulación, frecuencia de transmisión-recepción, método de encriptación, longitud de los paquetes de transmisión, tasa de datos (bit-rate), entre otras. Este conjunto de operaciones se logra gracias a la conjunción de aspectos a nivel de firmware, hardware y de modelo o estándar de comunicación. En general la naturaleza de las soluciones implementadas en este nivel de la arquitectura corresponderán al dominio de redes de área corporal y personal (BAN y PAN). En este nivel se hace la elección o adopción del protocolo o estándar de comunicación, teniendo en cuenta que más allá de las características que lo hagan viable a nivel operativo, deben también cubrirse los aspectos de requerimientos mínimos desde el punto de vista regulatorio tanto en el ámbito de las telecomunicaciones como en los de las temáticas vigiladas por las agencias de control de medicamentos y alimentos.
Hardware del circuito: Esta comprende los elementos sensores, los actuadores, los puertos, conectores y demás elementos como baterías.
Control del Hardware y de Módulos: De esta capa hacen parte los drivers, los bloques de conversión análoga/digital, las unidades de control bajo interfaces para comunicación (UART, SPI, I2C, entre otras) con elementos externos como transceptores y memorias EEPROM externas, el manejo de periféricos como módulos LCD, entre otras.
Algoritmos: Se denominan así a los procedimientos de procesamiento de la señal on-chip que hacen posible la estimación de los valores de las variables biomédicas. Estos algoritmos se apoyan en conocimientos técnicos específicos sobre la naturaleza de las señales captadas y el proceso de cálculo o estimación de los diferentes signos vitales o variables fisiológicas que sean de interés. Debido a que este proceso resulta complejo y
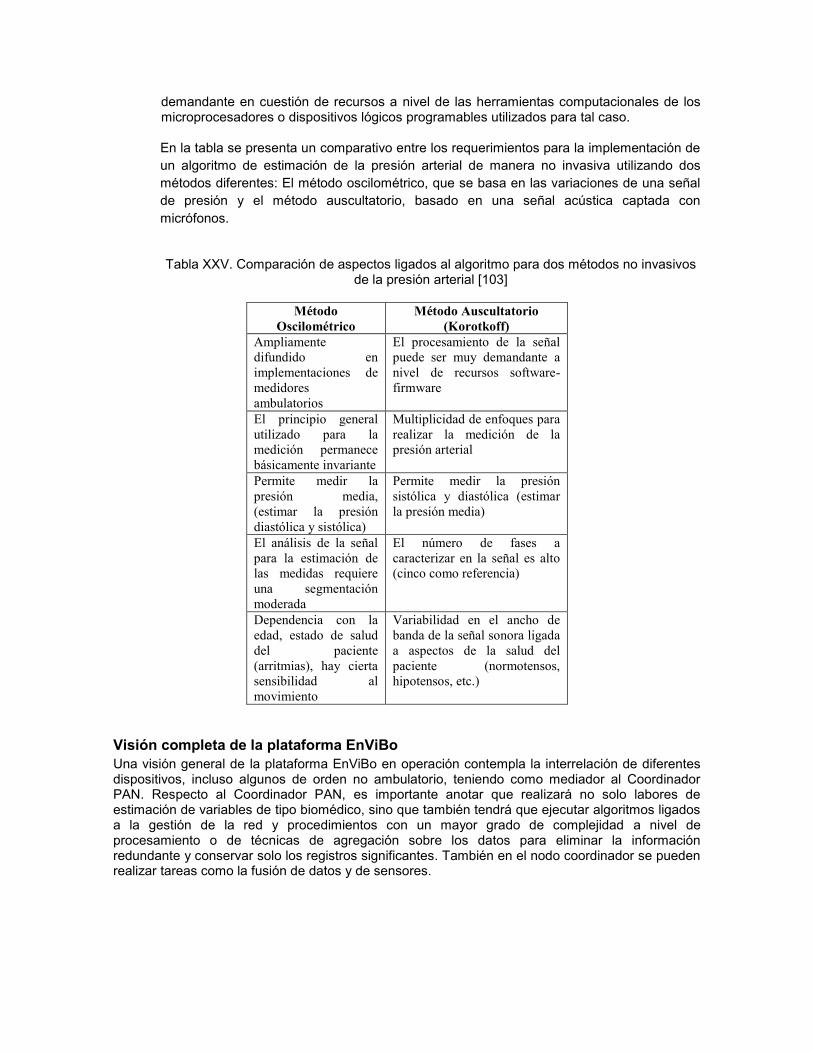
demandante en cuestión de recursos a nivel de las herramientas computacionales de los microprocesadores o dispositivos lógicos programables utilizados para tal caso. En la tabla se presenta un comparativo entre los requerimientos para la implementación de
un algoritmo de estimación de la presión arterial de manera no invasiva utilizando dos
métodos diferentes: El método oscilométrico, que se basa en las variaciones de una señal
de presión y el método auscultatorio, basado en una señal acústica captada con
micrófonos.
Tabla XXV. Comparación de aspectos ligados al algoritmo para dos métodos no invasivos
de la presión arterial [103]
Método
Oscilométrico
Método Auscultatorio
(Korotkoff)
Ampliamente
difundido en
implementaciones de
medidores
ambulatorios
El procesamiento de la señal
puede ser muy demandante a
nivel de recursos software-
firmware
El principio general
utilizado para la
medición permanece
básicamente invariante
Multiplicidad de enfoques para
realizar la medición de la
presión arterial
Permite medir la
presión media,
(estimar la presión
diastólica y sistólica)
Permite medir la presión
sistólica y diastólica (estimar
la presión media)
El análisis de la señal
para la estimación de
las medidas requiere
una segmentación
moderada
El número de fases a
caracterizar en la señal es alto
(cinco como referencia)
Dependencia con la
edad, estado de salud
del paciente
(arritmias), hay cierta
sensibilidad al
movimiento
Variabilidad en el ancho de
banda de la señal sonora ligada
a aspectos de la salud del
paciente (normotensos,
hipotensos, etc.)
Visión completa de la plataforma EnViBo
Una visión general de la plataforma EnViBo en operación contempla la interrelación de diferentes dispositivos, incluso algunos de orden no ambulatorio, teniendo como mediador al Coordinador PAN. Respecto al Coordinador PAN, es importante anotar que realizará no solo labores de estimación de variables de tipo biomédico, sino que también tendrá que ejecutar algoritmos ligados a la gestión de la red y procedimientos con un mayor grado de complejidad a nivel de procesamiento o de técnicas de agregación sobre los datos para eliminar la información redundante y conservar solo los registros significantes. También en el nodo coordinador se pueden realizar tareas como la fusión de datos y de sensores.

Fig. 26. Escenario de operación de la Plataforma EnViBo: integración de los nodos sensores con elementos
complementarios como un PC y otros sistemas de medición [105]
Elementos técnicos para la implementación de las comunicaciones en la plataforma
de monitorización EnViBo
Para el despliegue de una red según la formulación de la plataforma EnViBo es necesario definir los siguientes elementos:
El protocolo de comunicaciones inalámbricas
La topología de Red
El direccionamiento de la red
Los roles y funciones de los elementos de red (nodos)
El aspecto funcional de las comunicaciones
La valoración de los recursos del sistema A continuación se presentará la descripción de cómo se definen estos ítems según los lineamientos de la plataforma EnViBo
Protocolo de Comunicaciones Inalámbricas:
El protocolo de red que se utilizará es el denominado MiWi [106] que es propietario del fabricante estadounidense Microchip y que está basado en el estándar de IEEE 802.15.4 para redes inalámbricas de área personal. Más específicamente, se ha elegido el protocolo MiWi P2P [107]

por sus características de flexibilidad para el despliegue de redes que puedan crecer en el número de nodos sensores. Es así que para ajustar los parámetros de funcionamiento de la red o realizar modificaciones no especificadas en esta formulación, el usuario deberá consultar los siguientes documentos de referencia de Microchip:
Microchip Technology inc., “Microchip MiWi Wireless Protocol,” 2010. [106]
Microchip Technology inc., “Microchip MiWi P2P Wireless Protocol,” 2010. [107]
Microchip Technology inc., “Microchip Wireless (MiWi) Application Programming Interface - MiApp,” 2009. [108]
Microchip Technology, “Microchip Wireless (MiWiTM
) Media Access Controller – MiMAC,” 2009. [109]
MiWi® propone una implementación, liviana y royaltie-free, de la recomendación IEEE 802.15.4-A que se apoya en una herramienta para manejar los transceptores a nivel del controlador de acceso al medio llamada MiMAC [21] y una interfaz de cara al manejo de los protocolos propietarios (MiWi, MiWi P2P y MiWi PRO [110]) llamada MiApp.
MiApp está diseñada para permitir la flexibilidad de utilizar cualquier protocolo inalámbrico propietario de Microchip con poca o ninguna modificación en la capa de aplicación [108].
MiMAC está diseñada para permitir la flexibilidad de utilizar cualquier transceptor RF de Microchip con la misma capa de protocolo propietario de Microchip [109].
El protocolo MiWi (MiWi Wireless Networking Protocol Stack) es un protocolo simple, diseñado
para redes de bajas tasas de transmisión de datos, distancias cortas y bajo costo. MiWi está
orientado a redes relativamente pequeñas, con pocos saltos. Una red que utilice el protocolo MiWi
puede tener un máximo de 1024 nodos. Cada coordinador puede tener máximo 127 nodos a su
cargo o “hijos”, con un máximo de 8 coordinadores en una red. Los paquetes pueden viajar un
máximo de 4 saltos en la red y 2 saltos máximo desde el coordinador de la PAN.
MiWi P2P
El protocolo MiWi P2P [107] modifica la capa de control de acceso al medio (MAC) de la
especificación IEEE 802.15.4 [111] agregándole comandos que simplifican el proceso de
handshaking o establecimiento de la comunicación.
Características del protocolo
Funciona en las plataformas PIC18, PIC24, dsPIC33 y PIC32 de Microchip
Soporta los compiladores C18, C30 y C32 de Microchip
Funciona como una máquina de estados (no es dependiente de un RTOS)
Soporta un dispositivo en reposo en el extremo de la comunicación
Habilita la exploración de detección de energía (ED) para trabajar en el canal menos ruidoso
Entrega exploración activa para la detección de las conexiones existentes Habilita agilidad de frecuencia (channel hopping)
Topologías de Red:
El protocolo soporta las topologías P2P y estrella. No posee mecanismo de enrutamiento, de modo que el cubrimiento de la comunicación inalámbrica se define mediante el rango del radio. No es multihop o multisalto.

Fig. 27. Topologías Estrella y Peer-to-Peer bajo el protocolo MiWi P2P [107]
Direccionamiento de la red: Las direcciones de red se asignaran teniendo como fija para el coordinador de la red (PAN Coordinator) la dirección 11-22-33-44-55-66-77-01. Para los nodos sensores se asignará en el orden de programación e incorporación como elementos de monitorización, es decir a partir del elemento 11-22-33-44-55-66-77-02 y así sucesivamente. La dirección de identificación de la red (PAN ID) será por defecto 1234.
El protocolo MiWi P2P solo soporta comunicación de un-salto, de allí que solo se transmitan
mensajes con la dirección EUI o larga. El direccionamiento corto se utiliza solo cuando el stack
transmite un mensaje de difusión amplia (broadcast). Para los transceptores de Microchip, la
longitud de la dirección única puede estar entre 2 y 8 bytes, dependiendo de las necesidades de la
aplicación. El formato del protocolo MiWi P2P es un subconjunto del formato de mensaje de la
especificación IEEE 802.15.4. La figura ilustra el formato de paquete del stack y sus campos.
Fig. 29. Campos de direccionamiento en el formato de los paquetes del protocolo MiWi
P2P [107]
En el protocolo MiWi P2P, el modo de dirección de destino se pone usualmente en el Long
Address mode. El Short Address mode se utiliza solo para mensajes tipo broadcast. Para mensajes
tipo broadcast, el campo de dirección de destino en los campos de direccionamiento se fijará en
0xFFFF.

Roles y funciones de los dispositivos de red:
Tipos de Dispositivo
El protocolo MiWi P2P categoriza los dispositivos con base en sus definiciones IEEE y su rol en la
realización de las comunicaciones como se indica en las tablas a continuación.
Tabla XXVI. Tipos de Dispositivos IEEE 802.15.4 Basados en la Funcionalidad [107]
Tipo Funcional Fuente de Alimentación
Configuración del Receptor Inactivo
Método de Recepción de los Datos
Dispositivo de Funciones Completas
(FFD)
Alimentación Convencional (Mains)
ON Directo
Dispositivo de Funciones Reducidas
(RFD)
Batería OFF Sondeo desde el dispositivo asociado
Tabla XXVII. Tipos de Dispositivos IEEE802.15.4 Basados en el Rol [107]
Tipo de Rol Tipo Funcional Descripción del Rol Coordinador de la Red de Área
Personal (PAN) FFD El dispositivo inicia en primer lugar y
espera por una conexión
Dispositivo Terminal FFD ó RFD El dispositivo inicia luego de que el coordinador PAN ha iniciado para
establecer una conexión
Aspecto Funcional de las comunicaciones
Transmisión y Recepción
En redes MiWi hay dos tipos de mensajes: Broadcast y Unicast.
Los paquetes tipo Broadcast tienen todos los dispositivos en el rango del radio y su destino IEEE
802.15.4 define una dirección corta específica como la dirección broadcast, pero no tiene definición
para la dirección larga. Como resultado, para el receptor que cumple con IEEE 802.15.4,
broadcasting es la única situación en la que el stack MiWi P2P utiliza una dirección corta. No hay
Acknowledgement para los mensajes de broadcasting.
Las mensajes o paquetes Unicast solo tienen un destino y utilizan al dirección larga como dirección
de destino. El protocolo MiWi P2P requiere Acknowledgement para todos los mensajes unicast.
Variaciones para el Handshaking
La mayor diferencia del protocolo MiWi P2P con la especificación IEEE 802.15.4 reside en el
proceso de Handshaking. El protocolo MiWi P2P está diseñado para la simplicidad y para
conexiones directas en topologías de comunicación P2P y estrella.
Los dispositivos de funciones reducidas (RFDs) pueden recibir el comando de petición de conexión
desde varios dispositivos de funciones completas (FFDs), pero se pueden conectar a solo un FFD.
Un RFD escoge como su par (peer) al FFD desde el que recibe la primera respuesta de conexión
P2P.
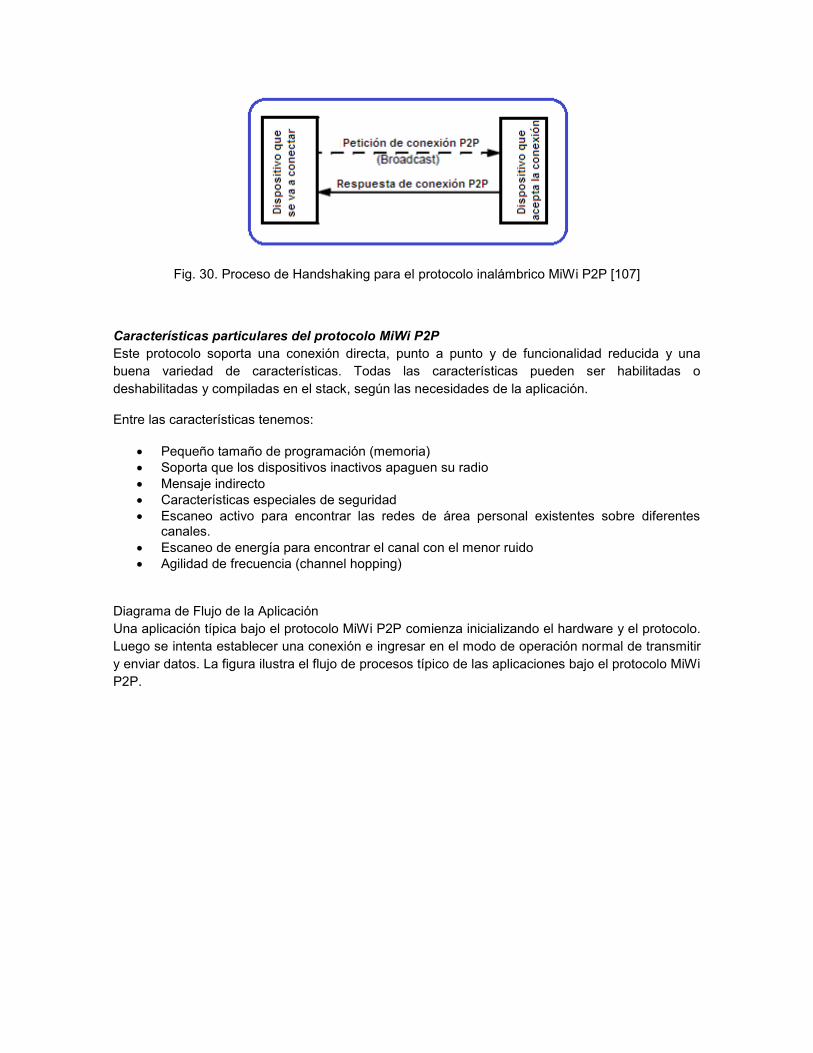
Fig. 30. Proceso de Handshaking para el protocolo inalámbrico MiWi P2P [107]
Características particulares del protocolo MiWi P2P
Este protocolo soporta una conexión directa, punto a punto y de funcionalidad reducida y una
buena variedad de características. Todas las características pueden ser habilitadas o
deshabilitadas y compiladas en el stack, según las necesidades de la aplicación.
Entre las características tenemos:
Pequeño tamaño de programación (memoria)
Soporta que los dispositivos inactivos apaguen su radio
Mensaje indirecto
Características especiales de seguridad
Escaneo activo para encontrar las redes de área personal existentes sobre diferentes canales.
Escaneo de energía para encontrar el canal con el menor ruido
Agilidad de frecuencia (channel hopping)
Diagrama de Flujo de la Aplicación
Una aplicación típica bajo el protocolo MiWi P2P comienza inicializando el hardware y el protocolo.
Luego se intenta establecer una conexión e ingresar en el modo de operación normal de transmitir
y enviar datos. La figura ilustra el flujo de procesos típico de las aplicaciones bajo el protocolo MiWi
P2P.

Fig. 31. Diagrama de flujo para una aplicación bajo MiWi P2P [107]
Los tramos o ranuras de tiempo garantizados (GTS) y las redes con beacon no están soportadas,
de ahí que ambos lados de la comunicación no pueden entrar simultáneamente en modo de
reposo (Sleep Mode)
Valoración de los requerimientos de procesamiento
Requerimientos de recursos de sistema
Debido a que el protocolo inalámbrico MiWi tiene un conjunto de características variado, el habilitar
dichas prestaciones se reflejan en un incremento en los requerimientos de sistema para los
microcontroladores. La tabla muestra los requerimientos de una configuración básica.
Tabla XXVIII. Requerimientos de memoria para la familia de Microcontroladores PIC18 para el
protocolo MiWi P2P [107]
Configuración Memoria de programa (Bytes)
Memoria de acceso aleatorio: RAM (Bytes)
Tamaño reducido de stack < 4 K 100 + Tamaño del Buffer de transmisión + Tamaño del Buffer de Recepción + (9* Tamaño
de la conexión P2P)
La programación de las características adicionales requiere más memoria de programa y RAM.
Tabla XXIX. Requerimientos de memoria para la familia de Microcontroladores PIC18 para el
protocolo MiWi P2P con Características adicionales habilitadas [107]
Configuración Memoria Adicional de Programa (Bytes)
RAM Adicional (Bytes)
Habilitación de Comunicación 462 0

Intra-PAN
Habilitación del modo Sleep 186 0
Habilitación de la Seguridad (Sin chequeo de lo reciente de las
tramas)
500 48
Habilitación de la Seguridad (Con chequeo de lo reciente de
las tramas)
1488 54
Habilitación del Escaneo Activo 1070 69
Habilitación del Escaneo de Energía
752 0
Habilitación de Mensajes Indirectos
950 Tamaño del mensaje indirecto * Tamaño del Buffer de transmisión
Habilitación de Mensajes Indirectos con Capacidad de
Broadcasting
1228 Tamaño del mensaje indirecto * Tamaño del Buffer de transmisión
En la tabla se relacionan los elementos requeridos a nivel de Hardware, Software y Firmware para
integrar un nodo a la plataforma EnViBo. Inicialmente todo se plantea de la manera como se ha
realizado hasta ahora, sin que esto signifique, como se ha dicho antes, que no puedan integrarse
microcontroladores o transceptores o software diferente al de Microchip.
Tabla XXX. Recursos necesarios para desarrollar aplicaciones con nodos sensores para la
plataforma EnViBo
Elementos de Hardware Elementos de Software Elementos de Firmware
Microcontrolador (8, 16 ó 32 bits)
Transceptor Compatible con el estándar IEEE 802.15.4
Sensor(es)
Baterías y porta baterías
Caja (enclosure)
Medio de sujeción
Tarjeta “Sniffer” ZENA
Programador-Debugger (ICD-PicKit)
Módulos Gateway (Bluetooth, WiFi, Ethernet)
MPLAB IDE (Ambiente Integrado de Desarrollo)
Complemento Microchip Solutions
Compilador para microcontroladores (C18, C30 ó XC )
ZENA Wireless Network Analyzer Software
Complementos TCP-IP Stack
Software para simulación de redes inalámbricas de sensores (e.g. OMNET)
Proyecto de MPLAB
Archivos de base (tipo h y tipo c) para la configuración de los transceptores elegidos (Según implementación: MiWi, MiWi P2P ó MiWi Pro).
Archivo principal con las tareas del nodo según
Framework de referencia.
Programación de nodos sensores al interior de la plataforma EnViBo
Microchip pone a disposición de los usuarios de sus productos, a través de los complementos
llamados Microchip Solutions, una serie de archivos de base que soportan varias de las
funcionalidades especiales que se pueden integrar en soluciones embebidas tales como:
Funcionalidades gráficas especiales

Aplicaciones con el protocolo propietario MiWi
Soporte para el stack y las aplicaciones TCP-IP
Soporte para funcionalidades USB
Aplicaciones para registro en medio extraíble tipo SD
Fig. 32. Librerías de referencia para la implementación de los nodos sensores [112].
Para el desarrollo e implementación de los nodos sensores se ha elegido como referencia la suite
de librerías llamada Application Libraries que ofrece Microchip de manera gratuita y que ofrece una
serie de recursos para el desarrollo de aplicaciones avanzadas que aprovechan diferentes
recursos de los microcontroladores de 8, 16 y 32 bits. En este sentido se han encontrado
diferencias significativas entre el soporte y los recursos que ofrece este proveedor con lo ofrecido
por otras compañías que suministran productos similares.
Interfaz de Programación de Aplicaciones (API) de MiWi: MiApp
La especificación MiApp [108] define las interfaces de programación entre la capa de aplicación y
los protocolos de comunicación inalámbricos propietarios de Microchip. La interface MiApp se
implementa en dos formas: como parámetros de definidos en el archivo de configuración y como
un conjunto de llamadas de funciones a los protocolos inalámbricos propietarios de Microchip. Al
cumplir con la especificación MiApp, las aplicaciones pueden utilizar cualquier protocolo propietario
de Microchip. Con poca o ninguna modificación en la capa de aplicación, el desarrollo de software
puede ser cambiado fácilmente entre un protocolo de conexión con topología P2P/estrella a un
protocolo de malla completo para redes pequeñas o grandes, dependiendo de las necesidades de
la aplicación.
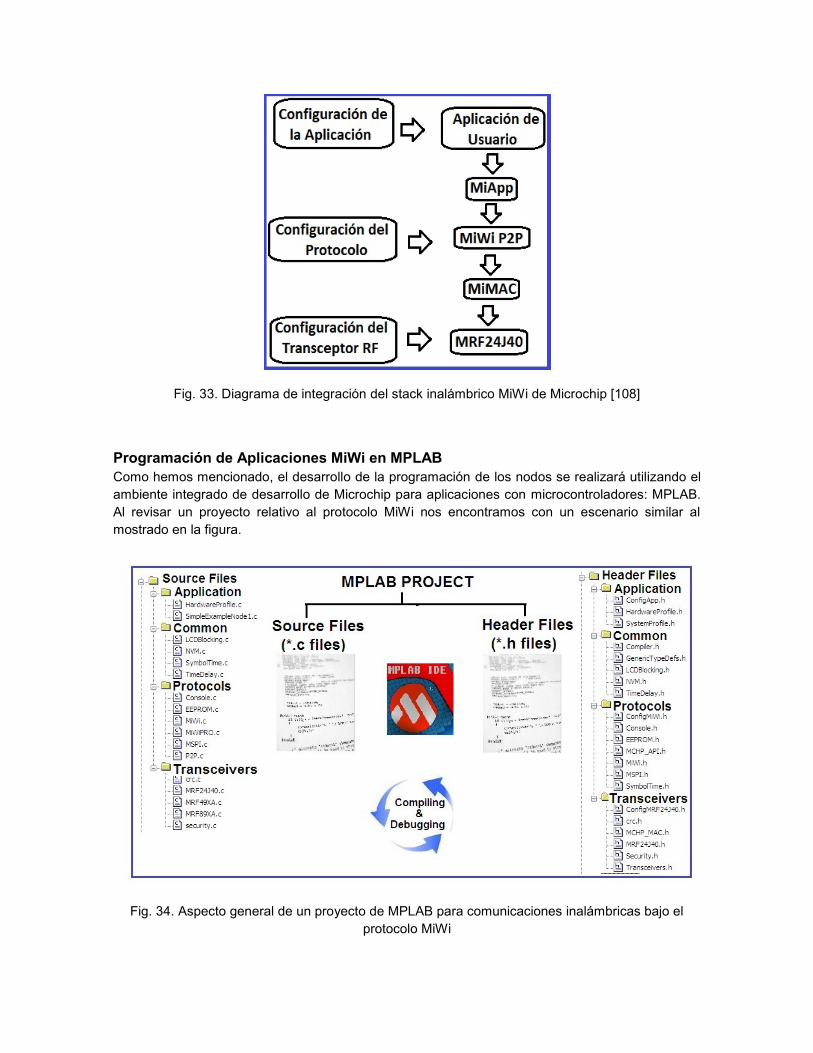
Fig. 33. Diagrama de integración del stack inalámbrico MiWi de Microchip [108]
Programación de Aplicaciones MiWi en MPLAB
Como hemos mencionado, el desarrollo de la programación de los nodos se realizará utilizando el
ambiente integrado de desarrollo de Microchip para aplicaciones con microcontroladores: MPLAB.
Al revisar un proyecto relativo al protocolo MiWi nos encontramos con un escenario similar al
mostrado en la figura.
Fig. 34. Aspecto general de un proyecto de MPLAB para comunicaciones inalámbricas bajo el
protocolo MiWi

Archivos para incluir o de cabecera (Header Files)
En el entorno de programación existen una serie de archivos que contienen la declaración de
funciones especializadas que realizan todo tipo de operaciones matemáticas, lógicas, de
búsqueda, sobre todo tipo de datos, simples y compuestos. Estos archivos utilizan la extensión .h y
se pueden incluir al principio del programa para poder emplear las funciones que declaran.
Estos archivos de cabecera y las funciones que definen se encuentran disponibles en diferentes
entornos de programación de un mismo lenguaje de programación y es una de las características
que hacen portables a los programas en C.
Archivos Fuente (Source files)
En estas carpetas encontramos toda la serie de archivos de extensión .c que abarcan todas las
funciones o firmware propias del microcontrolador y sus módulos, además todo el código que
garantiza el funcionamiento del protocolo de comunicación.
Dependiendo de los microcontroladores utilizados para los elementos de red (Nodos sensores y
Coordinador de la Red de Área Personal), debe elegirse un compilador, la plataforma EnViBo se
apoya en compiladores que poseen la opción de adquirirse sin costo en algunas de sus variantes,
tal es el caso de los compiladores C18, C30 y XC, todos ellos para compilación de proyectos en
lenguaje C. Compiladores de Microchip para el trabajo con microcontroladores de 8,16 y 32 bits
[16]
A continuación se presenta la descripción de los diferentes bloques de archivos agrupados en las
subcarpetas de un proyecto para comunicación MiWi bajo el entorno de MPLAB. Los archivos tipo
header como aquellos tipo source, aparecen agrupados en cuatro bloques o conjuntos llamados:
Application, Common, Protocols y Transceivers
Tabla XXXI. Conjunto de archivos de referencia para la implementación de nodos en la plataforma
Conjunto de archivos
Descripción
Application Definen la funcionalidad básica de los nodos inalámbricos. Es común que estas configuraciones puedan diferir para los diferentes nodos pertenecientes a una misma aplicación, dependiendo del rol del nodo inalámbrico dentro de la red. Las configuraciones en la capa de aplicación incluyen las siguientes categorías:
Elección del protocolo inalámbrico y del transceptor RF
Configuración de interfaces de conexión hacia los transceptores y demás recursos de hardware
Definiciones de los recursos del sistema y configuración de registros
Habilitar/Deshabilitar funcionalidades según las necesidades de la aplicación
Programación específica de la aplicación (código fuente del nodo sensor)
Configuración de la dirección del nodo y de la red, de aspectos de conectividad y funcionalidades especiales del protocolo para gestión de energía, seguridad, asociación de dispositivos, naturaleza y enrutamiento de los mensajes.
Common Configuración de comunicaciones de los módulos UART y SPI
Configuración de rutinas de retardos (delays)
Definiciones especificas del compilador y del hardware del microcontrolador
Funciones de manejo de consola a través de UART Protocols La configuración de los protocolos inalámbricos puede utilizarse para ajustar el
comportamiento de estos. Las posibles configuraciones difieren entre los diferentes protocolos.

Configuración de los detalles de operación de los diferentes protocolos (MiWi, MiWi P2P)
Transceivers Especifican como trabajará el transceptor RF en la capa MiMAC. Las configuraciones en esta capa puede definir la banda de frecuencia, la tasa de datos y otros parámetros RF relacionados. Estas configuraciones varían para los diferentes transceptores. Configuración de elementos de seguridad y código de redundancia cíclica
Al interior del proyecto MPLAB para comunicación utilizando el protocolo MiWi nos encontramos
con un número de archivos asociados que pueden ser de hasta unos treinta y cinco para el caso
de los Demos, no obstante para el caso de aplicaciones definitivas, de este conjunto se pueden
prescindir de unos diez archivos puesto que corresponden a versiones iguales del mismo archivo
(header ó source), replicados para los diferentes tipos de transceptores y de variantes de los
protocolos, además también hay archivos relativos a la consola, recursos UART y manejo de LCD,
que no son necesarios en todos los casos . La totalidad de los archivos tienen que ver con tareas
como la configuración del stack MiWi, de los transceptores, del rol del nodo dentro de la red y su
configuración a nivel de direcciones, de seguridad y de específicamente del elemento de red en
cuanto a sus funciones como Coordinador o como nodo sensor.
De manera simplificada, ilustraremos la integración de un nodo nuevo nodo a la red de
monitorización. En general podemos decir, que esta integración es un proceso de cuatro pasos que
describiremos a continuación.
Fig. 35. Flujograma simplificado de integración de un nuevo nodo a la plataforma EnViBO
Paso 1: Creación del proyecto de MPLAB con los archivos MiWi de Referencia
En el entorno de programación MPLAB se trabaja con base a proyectos, constituidos por el
conjunto de archivos que se compilan para generar el archivo .hex que se transferirá al
microcontrolador para ejecutar la aplicación programada. Los archivos para crear el proyecto
asociado al nuevo nodo estarán agrupados en una carpeta llamada “MiWi_Referencia” y a su vez
al interior de esta, en dos carpetas: “Coordinador” o “NodoSensor” según sea el rol del nodo a ser
implementado.

Se muestra en la tabla el detalle de los nombres, el tipo (source o header file) y el bloque en el cual
aparecen dentro del proyecto, de la totalidad de los archivos que constituyen el proyecto de
referencia para implementar los nodos requeridos dentro de una aplicación de monitorización
ambulatoria.
Tabla XXXII. Conjunto de archivos de referencia para la implementación de nodos en la plataforma
Archivos Fuente (Source Files) Archivos Encabezado (Header files) Application
Nodo.c ó Coordinador.c HardwareProfile.c
ConfigApp.h HardwareProfile.h SystemProfile.h
Common
Console.c MSPI.c
TimeDelay.c
Compiler.h Console.h
GenericTypeDefs.h MSPI.h
TimeDelay.h
Protocols
LCDBlocking.c MiWi.c NVM.c P2P.c
SymbolTime.c
ConfigMiWi.h ConfigP2P.h
LCDBlocking.h MCHP_API.h
MiWi.h NVM.h P2P.h
SymbolTime.h
Transceivers
Crc.c MRF24J40.c
Security.c
ConfigMRF24J40.h Crc.h
MCHP_MAC.h MRF24J40.h
Security.h Transceivers.h
A través del menú “Configure” de MPLAB y dentro de este en la opción “Select Device” se
selecciona la referencia del microcontrolador de 8, 16 o 32 bits que ejecutará la aplicación
programada. La configuración del compilador debe hacerse en concordancia con el número de bits
del microcontrolador seleccionado a través de la opción “Select Language Toolsuite” que pertenece
al menú Project del entorno MPLAB.
Paso 2: Intervención sobre los archivos “HardwareProfile”
Son cuatro los archivos que normalmente se deben intervenir para la incorporación de un nuevo
nodo a la red de monitorización, en este apartado nos ocupamos de la descripción de las
intervenciones que deben realizarse sobre dos de ellos: HardwareProfile.c y HardwareProfile.h
El archivo HardwareProfile provee las configuraciones y las funcionalidades básicas de hardware
para los microcontroladores de referencia (pertenecientes a las familias PIC18, PIC24, PIC32,
dsPIC30 y dsPIC33). Este archivo debe intervenirse para ajustar configuraciones de pines
adicionales a los de las funcionalidades de comunicaciones, lo que se conoce como la palabra de
configuración de la palabra de los registros específicos, el tipo de oscilador, prescaler, watchdog
timer, reset por bajo voltaje, carácter análogo-digital y entrada-salida de los pines, entre otros
aspectos.

En estos dos archivos también se acceden a los detalles de la configuración de las conexiones
microcontrolador-transceptor e, igualmente, se pueden configurar las conexiones a todos los
periféricos o elementos de entrada-salida que estarán en la tarjeta electrónica del nodo sensor. Es
así como encontraremos secciones de código referidas a los leds, pulsadores, módulos LCD, la
interfaz SPI y además se tendrá acceso a configurar recursos como las interrupciones.
Fig. 36. Intervención sobre archivos del proyecto de referencia MiWi
2.1 Intervención sobre el archivo “HardwareProfile.c” En este archivo se encuentran las definiciones y configuraciones que aseguran la funcionalidad del hardware a nivel de registros y de bits de registros. El archivo está estructurado a partir de una serie de selectores múltiples, elaborados con SI condicionales (IF...) que cubren las configuraciones para diferentes tarjetas de evaluación de microchip y diferentes referencias de microcontroladores de 8,16 y 32 bits de las familias PIC18, PIC24, PIC32, dsPIC30 y dsPIC33.
Fig. 36. Selección del hardware para la implementación de nodos de red

En la figura se muestra los detalles de los bits de configuración y de algunas líneas de código que se ocupan de recursos como el Watchdog timer y el oscilador a los que se puede acceder o que pueden modificarse desde HardwareProfile.c (pic24FJ128GA010)
Fig. 36. Acceso a los bits de configuración para los microcontroladores de los nodos sensores
En este archivo está la función BoardInit que se ocupa de los detalles de configuración de los bits y los registros que garantizan que el protocolo MiWi y el transceptor elegido funcionen para la board o el microcontrolador elegido.
Algunos de los registros que se manejan en esta función, dependiendo de la tarjeta o del microcontrolador:
OSCCON
EECON
TRIS
LAT
INTCON
ADCON

Fig. 36. Acceso a los registros y configuración de elementos de entrada-salida a nivel de hardware
para los microcontroladores de los nodos sensores
Finalmente podemos decir que hay otras funciones relacionadas con el LCD (para las tarjetas de
evaluación que lo tienen) y que se encargan de mostrar el conteo de bytes transmitidos y recibidos
así como el mensaje.
Function: void LCDTRXCount(BYTE txCount, BYTE rxCount)
Function: void LCDDisplay(char *text, BYTE value, BOOL delay)
También hay unas funciones ligadas a los botones que ejecutan algunas funciones especiales en
los demos que corren en tarjetas de evaluación.
Function: BYTE ButtonPressed(void)
Igualmente hay algunas funciones que se ocupan de interrupciones que están ligadas al
funcionamiento de algunas tarjetas de evaluación.
Function: void Enable_PB_1_2_Interrupts()
Function: void _CN_Interrupt_ISR(void)
Observaciones finales:
Las únicas modificaciones significativas que deben realizarse sobre este archivo son a nivel de bits
de configuración (Watchdog timer, tipo de oscilador, etc.). Por lo general no se requiere ningún otro
tipo de modificación.
Las modificaciones estarán ligadas al uso de otros recursos no cubiertos en los demos de
referencia o a la adaptación del código para microcontroladores no explícitamente declarados en el
código de este archivo.
2.2 Intervención sobre el archivo “HardwareProfile.h
En este archivo se encuentran las configuraciones que aseguran la funcionalidad del hardware a
nivel de pines. En este archivo se configuran los pines ligados al transceptor ( a la interfaz SPI que

los maneja), a los LCD (para las board que los tienen) y de otros elementos periféricos como teclas
y leds.
Fig. 36. Definiciones para las interfaces a nivel de hardware para los nodos sensores
Este archivo es susceptible de varias modificaciones cuando la persona que está implementando
su aplicación MiWi desarrolla cambios significativos sobre tarjetas con diseños específicos en los
que se toma distancia de las asignaciones realizadas para las tarjetas de evaluación o cuando se
está programando una referencia nueva de microcontrolador.

Fig. 36. Definiciones de hardware y acceso a registros para la tarjeta Explorer16
Consideraciones Finales:
De los dos archivos, HardwareProfile.c y HardwareProfile.h, este último es normalmente el que
debe someterse a mayores modificaciones en un nuevo diseño de nodo siempre y cuando este se
aleje de las configuraciones que se hacen en los archivos de referencia para las evaluation board
de las diferentes familias.
Intervención sobre el archivo ConfigApp
Debe existir coherencia en las direcciones como los roles de red y las funcionalidades a nivel de
seguridad, escaneo de red, administración de energía u otras habilitadas. Por estas razones se
debe intervenir el archivo ConfigApp.h para definir si el nodo va a tener el rol de Coordinador o
Dispositivo Terminal (End Device) si el protocolo va a ser P2P o MiWi, confirmar el transceptor
(MRF24J40, MRF49XA o MRF89XA), definir la dirección de ocho bytes permanente del nodo, el
tamaño del buffer de transmisión y recepción, el identificador de la red de área personal (PAN ID),
el número máximo de conexiones simultaneas que permite el dispositivo, los aspectos de
seguridad, de modo sleep, el manejo de como el dispositivo despierta, el salto entre canales ante
condiciones de ruido, entre otros.

Fig. 37. Ajustes sobre archivo de configuración (ConfigApp.h)
Es importante anotar que el archivo de referencia ConfigApp.h de la carpeta de referencia está ya
bien configurado para garantizar la comunicación y normalmente las modificaciones que deben
realizarse son pocas. En caso de modificaciones avanzadas deben consultarse los archivos del
proyecto de Referencia y la documentación de Microchip relacionada.
Intervención sobre los archivos Nodo-Coordinador
Luego se procede a hacer los ajustes específicos que corresponden a las tareas particulares que
debe realizar el nodo al interior de la red. En este caso específico, se configuran los aspectos
relativos al canal A/D para realizar la adquisicion de la señal, el algoritmo de procesamiento y la
transmisión del valor de temperatura.

Fig. 38. Configuración de modulo A/D
En el coordinador de red deben programarse las funcionalidades que permitan recibir los datos
enviados por los nodos sensores, transferirlos a la interfaz de usuario vía serial/USB o
almacenarlos. En algunos casos, parte del algoritmo de procesamiento de la señal captada por los
nodos sensores puede encargársele al nodo coordinador puesto que es común, más no
imprescindible, que este tenga unas capacidades de procesamiento mayores que las de los nodos
sensores.
En el coordinador también se programan las líneas de código que se ocupan de garantizar la
funcionalidad de los dispositivos tipo enlace o Gateway que hacen posible el paso de los datos de
la plataforma de monitorización hacia redes una jerarquía superior e interfaces alternas para la
visualización, procesamiento y manejo de la información.
Ejemplo de Implementación de Red con base en la formulación de la plataforma
EnViBo
Se muestra a continuación una red de ejemplo implementada siguiendo la formulación de la
plataforma EnViBo. La red está conformada por cuatro nodos; un coordinador de red (Coordinador
PAN) y tres nodos sensores.
Descripción de los Elementos de Red
Coordinador de Red
Especificaciones Técnicas: Nuestro coordinador de red (coordinador de Red de Área Personal o
Coordinador PAN) está basado en un microcontrolador de 16 bits que pertenece a la familia PIC24
y cuyas características se resumen en la figura.

Fig. 39. Resumen de características principales del microcontrolador PIC24FJ128GA010 [113]
El circuito integrado tiene 100 pines que se distribuyen en ocho puertos, desde el puerto A hasta el
puerto G. Por medio de los pines vinculados a estos puertos se desarrollan tareas ligadas a
entradas/salidas digitales, entradas análogas, funciones de comunicación, interrupciones,
modulación por ancho de pulso, entre otras.
La Unidad de Procesamiento Central (CPU) de los microcontroladores de la familia PIC24 [114]
posee una arquitectura Harvard modificada con un conjunto de instrucciones con palabras de 24-
bits de ancho. Las instrucciones se ejecutan en un solo ciclo de programa salvo algunas
excepciones como las instrucciones que cambian el flujo del programa e instrucciones que pueden
ocupar más.
Especificaciones de los elementos de Comunicaciones
En cuanto al transceptor, se ha elegido el MRF24J40MB [115] que es un transceptor que se ajusta
a los requerimientos del estándar IEEE 802.15.4 y cuyas especificaciones técnicas, interfaz de
comunicación SPI y diagrama de bloques se muestra en la tabla.
Tabla XXXIII. Características principales, diagrama de bloques e interfaz del transceptor [115]
Soporta los protocolos propietarios Zigbee, MiWi y MiWi P2P
Certificado según las regulaciones de radio para Estados Unidos (FCC), Canadá (IC) y Europa (ETSI)
Es compatible con las familias de microcontroladores de Microchip: PIC16F, PIC18F, PIC24F/H, dsPIC33 y PIC 32.
Interfaz SPI simple de 4 líneas
Consumo de corriente:
Modo Rx: 25mA (típico)
Modo Tx: 130mA (típico)
Modo Sleep: (Típico)

Opera en la banda ISM de 2.405 a 2.475 GHz
Tasa de datos de 250 kbps
Interfaz SPI: Transceptor-Microcontrolador
Mecanismo de hardware CSMA-CA, respuesta ACK automática y
chequeo FCS
Capacidad automática de retransmisión de paquetes
Motor de seguridad por hardware (AES-128)
Soporta encriptación y desencriptacion para las
subcapas MAC y las capas superiores
El modulo básico para el coordinador PAN a nivel de comunicaciones consta tan solo de un
transceptor MRF24J40MB que soporta el protocolo MiWi y de una interfaz serial-USB. Las pruebas
para la integración de estos y otros módulos como el de almacenamiento local se han realizado
utilizando la tarjeta de desarrollo denominada Explorer 16 [116].
Comunicaciones: Protocolo MiWi – MiWi Stack (MiWi App + MiWi MAC) Analizador de paquetes IEEE 802.15.4 ZENA
Algoritmos:
Algoritmo de gestión de red Estimación del valor de variables
biomédicas mediante procesamiento adicional-fusión de datos
Control de Hardware:
Conversión A/D de 10 bits, Interfaz SPI Interfaz Serial-USB Interfaz paralela para LCD
Hardware de Circuito:
Microcontrolador de 16 bits pic24FJ128GA010 Transceptor MRF24J40MB Tarjeta Ethernet Transceptor MiWi Transceptor Bluetooth Tarjeta SD Conversor dc-dc 5V-3.3V Conexión Programador/Debugger serial Sockets para hacer posible el reemplazo de elementos
Fig. 40. Coordinador PAN detalles arquitectura e implementación en tarjeta de prueba [116]

Especificaciones funcionales
En la figura se muestra un diagrama de flujo que muestra de manera general las tareas que debe
realizar el coordinador de la red de área personal o Coordinador PAN
Fig. 41. Diagrama de flujo de funcionamiento del coordinador PAN
Nodos Sensores
Se relaciona a continuación la descripción, según la arquitectura propuesta por la plataforma
EnViBo, para los nodos de la red de área personal implementad.
Los nodos sensores utilizados para probar la funcionalidad de la red están basados en
microcontroladores de 8 bits, de la familia PIC18. Estos microcontroladores tienen características
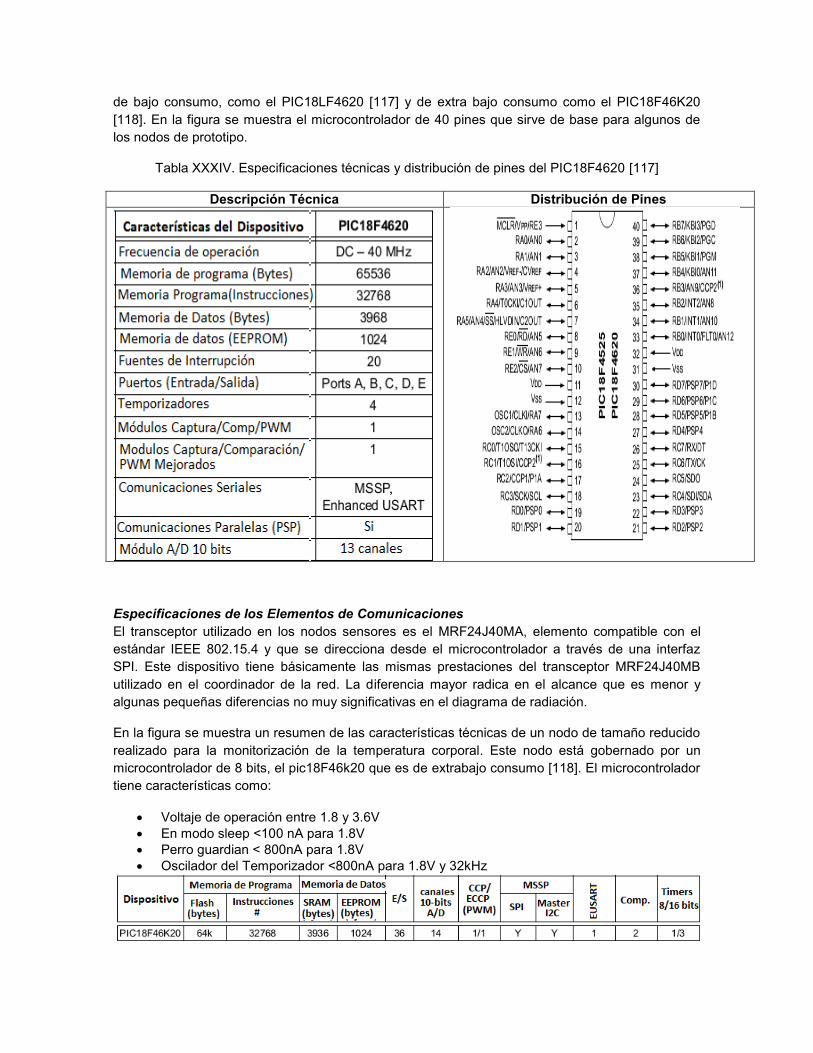
de bajo consumo, como el PIC18LF4620 [117] y de extra bajo consumo como el PIC18F46K20
[118]. En la figura se muestra el microcontrolador de 40 pines que sirve de base para algunos de
los nodos de prototipo.
Tabla XXXIV. Especificaciones técnicas y distribución de pines del PIC18F4620 [117]
Descripción Técnica Distribución de Pines
Especificaciones de los Elementos de Comunicaciones
El transceptor utilizado en los nodos sensores es el MRF24J40MA, elemento compatible con el
estándar IEEE 802.15.4 y que se direcciona desde el microcontrolador a través de una interfaz
SPI. Este dispositivo tiene básicamente las mismas prestaciones del transceptor MRF24J40MB
utilizado en el coordinador de la red. La diferencia mayor radica en el alcance que es menor y
algunas pequeñas diferencias no muy significativas en el diagrama de radiación.
En la figura se muestra un resumen de las características técnicas de un nodo de tamaño reducido
realizado para la monitorización de la temperatura corporal. Este nodo está gobernado por un
microcontrolador de 8 bits, el pic18F46k20 que es de extrabajo consumo [118]. El microcontrolador
tiene características como:
Voltaje de operación entre 1.8 y 3.6V
En modo sleep <100 nA para 1.8V
Perro guardian < 800nA para 1.8V
Oscilador del Temporizador <800nA para 1.8V y 32kHz

Fig. 42. Características técnicas y distribución de pines para el microcontrolador de extrabajo
consumo pic18F46K20 [118]
Diversos nodos han sido realizados y probados en el proceso de optimización de los diseños y del
tamaño de las tarjetas de circuito impreso. Se muestra como estos nodos se acomodan a la
arquitectura propuesta para el caso de los elementos de red que se ubican sobre el cuerpo o
vestimenta de la persona bajo monitorización.
Comunicaciones:
Protocolo MiWi – MiWi Stack (MiWi App + MiWi MAC) Analizador de paquetes IEEE 802.15.4 ZENA
Algoritmos:
Estimación de los ángulos de inclinación en x,y e z Algoritmo de detección de caídas
Control de Hardware:
Conversión A/D de 10 bits, Protocolo SPI
Hardware de Circuito:
Unidad de Medición Inercial (IMU) con Acelerómetro de tres ejes + Giróscopo de tres ejes, 6 grados de libertad). Batería de Ni-MH recargable de 8.4 Voltios Microcontrolador de 8 bits PIC18F4620 Transceptor MRF24J40MA Conversor dc-dc tipo step-down Conexión Programador/Debugger serial Sockets para hacer posible el reemplazo de elementos
Fig. 43. Nodo actígrafo basado en acelerometro
Comunicaciones: Protocolo MiWi – MiWi Stack (MiWi App + MiWi MAC) Analizador de paquetes IEEE 802.15.4 ZENA
Algoritmos:
Estimación del valor de la temperatura
Control de Hardware:
Conversión A/D de 10 bits, Protocolo SPI Hardware de Circuito:
Termistor NTC Batería tipo moneda Li-MnO2 de 3V Microcontrolador de 8 bits de extrabajo consumo en encapsulado QFN PIC18F46k20 Transceptor MRF24J40MA Conversor dc-dc tipo step-up Conexión Programador/Debugger serial
Fig. 44. Nodo sensor de temperatura

Comunicaciones: Protocolo MiWi – MiWi Stack (MiWi App + MiWi MAC) Analizador de paquetes IEEE 802.15.4 ZENA
Algoritmos:
Estimación del valor de la temperatura
Control de Hardware:
Conversión A/D de 10 bits, Protocolo SPI Hardware de Circuito:
Termistor activo lineal de bajo consumo de energía 2 Baterías Alcalinas recargables tipo AAA de 1.2V Microcontrolador de 8 bits de extrabajo consumo en encapsulado QFN PIC18F46k20 Transceptor MRF24J40MA Conversor dc-dc tipo step-up Conexión Programador/Debugger serial
Fig. 45. Nodo sensor de temperatura
Especificaciones funcionales
La figura muestra un diagrama de flujo que trata de resumir de forma genérica las tareas
principales de los nodos sensores de la red que tienen a su cargo la monitorización ambulatoria de
las variables biomédicas.
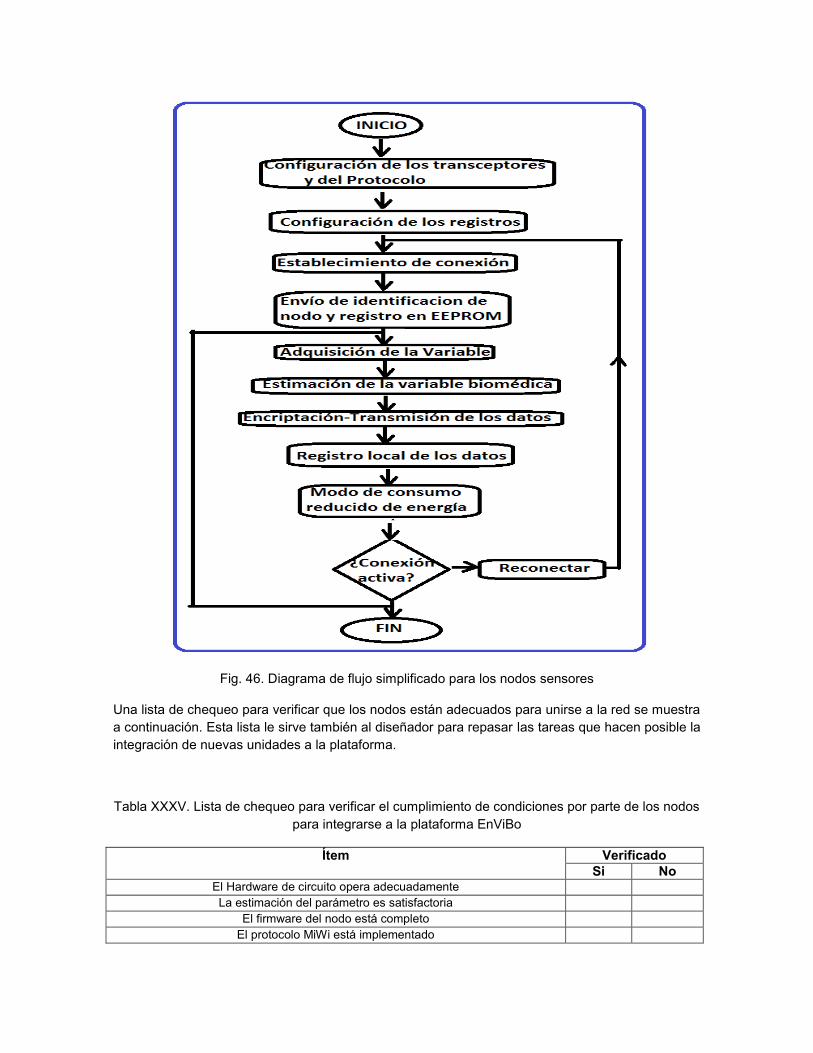
Fig. 46. Diagrama de flujo simplificado para los nodos sensores
Una lista de chequeo para verificar que los nodos están adecuados para unirse a la red se muestra
a continuación. Esta lista le sirve también al diseñador para repasar las tareas que hacen posible la
integración de nuevas unidades a la plataforma.
Tabla XXXV. Lista de chequeo para verificar el cumplimiento de condiciones por parte de los nodos
para integrarse a la plataforma EnViBo
Ítem Verificado
Si No El Hardware de circuito opera adecuadamente La estimación del parámetro es satisfactoria
El firmware del nodo está completo El protocolo MiWi está implementado

La transmisión y recepción de datos se realizan adecuadamente El dispositivo cumple con las regulaciones relativas a emisiones RF
Integridad de los datos El nodo es seguro para los usuarios
La documentación del nodo está completa Se necesita asesoría de expertos para realizar las mediciones
El nodo utiliza baterías de uso común El nodo hace uso eficiente de la energía
El usuario debe ser consultado antes de la utilización del nodo debido a riesgos potenciales derivados de su funcionamiento
El dispositivo es liviano y cómodo para su uso El nodo se ha probado para operación durante periodos extendidos de tiempo
Transmisión de paquetes a través de la red y otros aspectos funcionales
El estándar IEEE 802.15.4 define un tamaño de paquete de 127 bytes y establece que los
paquetes o tramas MAC tienen tres componentes; un encabezado MAC, un payload MAC y un pie
de mensaje o footer que contiene una secuencia de chequeo de trama. El transceptor MRF24J40
tiene buffers de recepción y transmisión de 128 bytes que permiten el envío y recepción de
paquetes completos. La figura muestra una unidad de datos de protocolo MAC (MAC Protocol Data
Unit) para un paquete enviado desde el nodo 3 al coordinador de la PAN y el Acknowledegement o
acuso de recibo que confirma la recepción del paquete.
Fig. 47. Estructura de PDU MAC. Datos y Acknowledgement para un intercambio de información
entre el nodo 3 y el coordinador de la red utilizando el protocolo MiWi P2P [1]
El encabezado MAC tiene un campo de control de trama MAC, la dirección de la PAN o PAN ID y
la información de las direcciones de origen y destino. El payload MAC involucra los datos en sí que
se están transmitiendo y el pie de mensaje (footer) lleva información acerca de la indicación de

intensidad recibida de señal (RSSI: Received Signal Strength Indication) y chequeo de redundancia
cíclica (CRC).
Los paquetes transmitidos en la red utilizando el protocolo MiWi pueden monitorearse y visulizarse
utilizando la herramienta ZENA [119]. Dependiendo del tipo de mensaje o de la dinámica de la red,
un paquete puede ser una secuencia que involucra un conjunto bloques que indican el proceso de
handshaking y el tipo de paquete (comando, beacon, acknowledge o datos), las identificaciones de
los nodos que envían y reciben los mensajes, las peticiones de asociación, los datos encriptados,
los datos no encriptados, el tipo de transmisión (unicast o broadcast) y otros aspectos.
Ejemplo de transacciones en red
Se muestran los resultados de un arreglo experimental con tres nodos; un coordinador de red que
es el nodo 1 (Coordinador PAN) y dos nodos sensores, un nodo genérico (Nodo 3) y un nodo para
monitorización de temperatura (Nodo 2)
Fig. 48. Representación gráfica de la transferencia de paquetes entre los nodos activos [102]
Establecimiento de la comunicación (Handshaking) bajo el protocolo MiWi P2P
El protocolo MiWi P2P simplifica el proceso de handshaking indicado en la recomendación IEEE
802.15.4. La figura muestra el handshaking entre el nodo 3, el cual actúa como un nodo genérico y
el coordinador PAN. Los paquetes mostrados han sido capturados con la herramienta ZENA. El
color rojo de los campos en los paquetes resalta su componente de comandos MAC.

Fig. 49. Procedimiento de handshaking utilizando el protocolo MiWi P2P entre el nodo y el
coordinador PAN [102]
Transferencia de paquetes entre nodos
La figura muestra la transferencia de datos entre el nodo de monitorización de temperatura y el
coordinador PAN.
|
Fig. 50. Transferencia de paquetes entre el nodo de monitorización de temperatura corporal y el
coordinador PAN utilizando el protocolo MiWi P2P [102]
Ajustes sobre el código
Para nuestra implementación se ha realizado una serie de modificaciones significativas sobre los
archivos correspondientes a las comunicaciones para los microcontroladores PIC18 y PIC24. Por
ejemplo, el archivo para el coordinador PAN tiene ajustes que hacen posible la administración de la
red.
Por propósitos de fiabilidad, los datos que se reciben de los nodos estarán marcados con un
carácter ligado a la variable monitorizada, el cual es seguido por los datos numéricos que
corresponden al valor de la variable biomédica; estas marcas adicionales son transmitidas en el

campo correspondiente al payload de los paquetes. De esta forma, un dato de temperatura
corporal será transmitido como un string por ejemplo así “T37.5”. En el lado del transmisor la
función MiApp_WriteData() se invoca recurrentemente para construir el string enviando
secuencialmente los caracteres ASCII que corresponden al valor de la variable y a su marcador
particular. En el lado del coordinador, los datos recibidos se acceden desde rxMessage.Payload[i] y
son concatenados para reconstruir el mensaje completo, como se muestra en la figura.
Fig. 51. Formateo del payload recibido en el lado del coordinador PAN. Los datos más el marcador
de la variable se concatenan para mejorar el proceso de registro de los datos [102].
Las pruebas realizadas han mostrado que la comunicación entre los nodos y el coordinador puede
perderse durante la operación de la red, por esta razón, se ha integrado una función adicional que
permite la reconexión de los nodos y que transmite también un string de identificación del nodo
cuando recién el nodo se conecta a la red. El string de identificación del nodo tiene la siguiente
estructura: NODO-#-LETRA_de_VARIABLE, así para el nodo de temperatura se tiene N2T, el nodo
de monitorización de pulsioximetria (SpO2) tendrá el string N4S, el nodo de actimetría basado en
acelerómetro tendrá el string N3A y así sucesivamente. Esta forma de identificación facilita la
reconexión de manera dinámica y el hace más confiable el registro de los datos cuando un nodo
regresa a la red o se incorpora a esta.
Especificaciones para la red de monitorización bajo la plataforma EnViBo
A partir de los resultados obtenidos, se han realizado una serie de elecciones para definir las
especificaciones más apropiadas para una red inalámbrica que cumpla con los requerimientos de
la plataforma. La red puede tener ajustes en su configuración para realizar diferentes tipos de
pruebas que involucren la monitorización de una o más personas simultáneamente. La cantidad y
naturaleza de signos vitales y señales biomédicas monitorizadas dependerán de las necesidades
específicas e intereses de los investigadores. La tabla resume estas especificaciones para la
implementación de base para la plataforma EnViBo.

Tabla XXVI. Ejemplo de especificaciones técnicas para una red implementada según los
requerimientos de la plataforma EnViBo [102]
Protocol Microchip’s (IEEE 802.15-4 based) MiWi P2P Protocol
Topologies Star/P2P
Networking Non beacon enabled network
Channel Access Contention based (CSMA-CA Mechanism)
Frequency Band 2.4 GHz (ISM)
Channel Number Variable (Depends on Energy Scan)
Bit rate 250 kbps
Number of nodes 1024 (maximum)
Addressing 16-bit short addressing or 64-bit extended addressing
Data Verification FCS: Frame Check Sequence CRC: Cyclic Redundacy Check
Encryption 128-bit Advanced Encryption Standard
Clear Channel Assessment
CCA mode 1,2 or 3
Coordinators Maximum Eight (8) for network
Transceiver MRF24J40MA=>Sensor Nodes MRF24J40MB=>PAN Coordinator
Power Supply Sensor Nodes => Battery PAN Coordinator =>Mains/Battery Backup
Hopping Single Hop
Procedimiento de implementación y puesta en funcionamiento de la red de
monitorización:
1. Inicialmente se pone en funcionamiento el coordinador de red, cuya dirección corresponderá siempre al nodo 1, la alimentación es del tipo “mains” conectado a un tomacorriente estándar de 110 voltios y se podrá contar con un subsistema de apoyo basado en un circuito de conexión a batería que permite la opción de operación bajo las eventuales suspensiones de energía. Este nodo es el encargado de transferir los datos al computador por medio de la interfaz serial/usb que se conecta con el instrumento virtual desarrollado en Labview. En algunos casos este nodo podrá operar enviando los datos hacia otros destinos como Gateway; por ejemplo hacia dispositivos con capacidad de recibir comunicación con Bluetooth, WiFi o Ethernet. En los casos de que el vaciado de los datos hacia otros sinks se realiza vía inalámbrica deberán observarse precauciones en cuanto a evitar la operación simultánea de todos los transceptores debido a problemas de coexistencia en la banda de 2.4 GHz. El mecanismo de comunicación utiliza asociación Peer-to-Peer (P2P) en el cual los nodos envían periódicamente los datos. La asociación de los nodos a la red no utiliza beacon (baliza), ni mecanismo de polling (encuesta cíclica) por parte del coordinador de red. Los nodos envían periódicamente sus datos o según su programación de acuerdo a la naturaleza de la señal que adquieren. Los nodos compiten por el acceso al medio y eventualmente podrán perderse algunos paquetes, sin embargo de acuerdo con los análisis y pruebas realizadas, es más conveniente desde el punto de vista del consumo energético de las unidades de red (nodos sensores), enviar la información de este modo. El coordinador de red lleva un registro de los paquetes enviados y recibidos, al igual que indica el número y la dirección de red de los nodos conectados. En un momento dado que no se reciban paquetes por un tiempo determinado se activará una función de “timeout que reinicia la red para restablecer las comunicaciones puesto que se ha determinado que algunas interferencias pueden llevar a un bloqueo de algunos nodos, entre ellos, del coordinador de la red.

2. Se pone en funcionamiento los nodos sensores, estos envían como primer paquete un mensaje de identificación que puede ser visualizado en el display del nodo coordinador. Los nodos envían los datos numéricos correspondientes a la variable leída concatenados con uno o varios caracteres adicionales que sirven como marcador de los paquetes. Este marcado adicional o remarcado facilita la identificación de los paquetes y la restitución del funcionamiento ante situaciones de fallo, interferencia, ingreso de nuevos nodos a la red, salida de nodos, timeouts, entre otras.
Fig. 52. Secuencia de recepción de datos del nodo actígrafo
La periodicidad de los mensajes si las transmisiones se basan en eventos o si estos son enviados periódicamente lo determina la naturaleza de la medición a la que está ligado el nodo sensor. Por aspectos de optimización del consumo de energía los nodos deben poner en modo “sleep” sus transceptores en los periodos entre transmisiones. Eventualmente se puede programar una función de timeout para superar periodos de bloqueo en las transmisiones por interferencias, obstáculos, ingreso de nuevos nodos u otros aspectos técnicos. Las direcciones para los nodos sensores se asignan desde la número 2 y los paquetes se envían sin retransmisiones a través de los demás nodos, el esquema es entonces de single hop y están condicionadas al rango de alcance de los transceptores. El procedimiento de saltos múltiples con retransmisiones y tablas de ruteo no se considera necesario para el espectro normal de aplicación de la plataforma planteada. Los usuarios pueden utilizar el recurso de la memoria de datos eeprom interna para almacenar datos de backup o para análisis offline, igualmente se pueden utilizar memorias eeprom externas e incluso medios extraíbles como SD cards o memorias flash.
3. Los nodos sensores deberán desplegarse con baterías de uso extendido que correspondan a las categorías AA, AAA, tipo moneda, recargables o de 9V, así como también de LiPo. Es también aceptado el uso de medios alternos de suministro de energía como celdas solares. Las tarjetas usualmente se alimentarán a 3.3V y se utilizarán conversores dc/dc tipo step-up o step-down para acoplar los voltajes de las baterías a las tarjetas de los nodos.

Fig. 53. Detalles del coordinador PAN y de los nodos sensores
4. Los datos de los nodos pueden enviarse en unidades de la variable sensada o en el nivel
de procesamiento que se considere más adecuado, es decir, también se pueden enviar datos en bruto “raw data” o datos con niveles intermedios de procesamiento para su posterior análisis en el computador o en el nodo coordinador si se considera pertinente.
5. Para cada nodo se generará un reporte en archivo plano, con formato txt con el registro de los datos y las etiquetas de fecha y hora de registro de los datos. Los nodos pueden conectarse y desconectarse en cualquier momento de la red.

Fig. 54. Archivos txt con los datos recibidos de los nodos sensores
6. Los nodos deben ser desplegados dentro de un mismo recinto o en espacios en los que no
sea necesario tener transmisiones entre cuartos o salones adyacentes puesto que no se ha implementado la retransmisión lo que implica que las paredes y puertas se constituyen en obstáculos considerables como ya se ha verificado en las pruebas realizadas.
7. Cada nodo puede implementarse con microcontroladores de 8, 16 o 32 bits. Se deben elegir dispositivos con características de consumo reducido.
8. El envío de los datos debe hacerse utilizando una tabla que mapee los resultados numéricos de la medición con sus correspondientes códigos ASCII separando las cifras (centenas, unidades, decenas, decimales, etc.). Se deben enviar los datos uno tras otro. Además los datos deben transmitirse encriptados.
Interfaz de usuario EnViBo
Utilizando el software llamado Labview se ha realizado una interfaz que permite administrar los
datos derivados del funcionamiento de la plataforma EnViBo.
Esta interfaz tiene las siguientes pantallas:
Inicio: Aparece el nombre de la plataforma y los créditos

Fig. 55. Pantalla inicial de la plataforma EnViBo
Mediciones: En este menú aparece una primera ventana en donde se muestran indicadores que muestran los valores numéricos de las variables activas.
Fig. 56. Pantalla Mediciones de la plataforma EnViBo
Configuración: En este apartado se configura todo lo relativo a las comunicaciones serial/usb con el nodo coordinador.

Registros de pacientes: Aquí se consigna toda la información relativa a las personas cuyos datos están siendo monitorizados
Registros de variables: En esta pestaña se administran los archivos de registro o “reportes” de los datos de las diferentes variables.
Fig. 57. Pantalla Registro de la plataforma EnViBo
Red: Aquí se muestra un resumen gráfico de los nodos vinculados a la red, su estado de actividad y sus direcciones ó ID.
Tendencias: En esta pestaña, se muestran gráficos acumulativos o de tendencias de las variables activas.
Fig. 58. Pantalla Tendencias de la plataforma EnViBo
Trabajos realizados
En la tabla se listan los artículos que corresponden a trabajos realizados durante la etapa de
formulación de la plataforma EnViBo

Tabla XXXVII. Artículos publicados sobre la plataforma EnViBo
Evento/Revista: Proceedings of the Seventh Colombian Computing Congress (7CCC) IEEE - 2012 Autores: Gustavo Meneses, Juan D. Lemos Título del Artículo: Implementing IEEE 802.15.4-based Communications in Sensor Nodes aimed for Biomedical Signal Monitoring ISSN: 978-1-4673-1476-3
Evento / Revista: Memorias del Tercer Congreso Internacional de Ingeniería Mecatrónica 2011
UNAB Autores: Gustavo Meneses, Juan D. Lemos Titulo del Articulo: Vital Sign and Biomedical Signal Monitoring Portable System ISSN : 2145-812X
Evento / Revista: Proceedings of the IEEE Intercon 2011, Lima-Perú Autores: Gustavo Meneses, Juan D. Lemos Titulo del Articulo: Integrating Independent Wearable Sensor Units into a Reconfigurable Platform
for Biomedical Signal Monitoring ISBN : 978-612-45345-2-2
Evento / Revista: V Latin American Congress on Biomedical Engineering CLAIB 2011May 16th-
21st, 2011, Habana, Cuba Autores: Gustavo Meneses, Juan D. Lemos Titulo del Articulo: Consideraciones de diseño para la integración de dos métodos no invasivos de
medición de la presión arterial en un dispositivo portable
ISBN : 978-3-642-21197-3
Evento / Revista: Proceedings of the Annual Conference of the IEEE Engineering in Medicine and Biology Society EMBC 2010, Buenos Aires Autores: Gallego J, Lemos D, Meneses G, Hernandez M Titulo del Artículo: Development of a Wearable Vital Signs Monitor for Healthcare ISSN: 1557-170X

CAPITULO 5
Diseños, pruebas y análisis de resultados
Durante el proceso de formulación de la arquitectura de la plataforma EnViBo se procedió a la
elaboración de un conjunto de prototipos de nodos que permitiera verificar el funcionamiento de la
red bajo diversas condiciones de operación. Las tarjetas de unidades de red de prototipo
realizadas también permitieron ajustar parámetros de diseño para la propuesta final de nodos
sensores y comprobar diferentes aspectos de programación tanto en lo relativo al protocolo MiWi
como a la programación de las tareas ligadas a la adquisición y el procesamiento de las señales.
Luego del trabajo realizado, se puede resumir el proceso de desarrollo de los nodos prototipo en
cuatro fases:
Selección de los elementos
Diseño
Montaje
Pruebas y Depuración
La figura resume las actividades principales ligadas a cada fase.
Fig. 59. Secuencia de fases para el desarrollo de los nodos de red bajo la metodología de la
plataforma EnViBo

A continuación se presenta una descripción detallada de lo realizado en cada fase.
Selección de los elementos: En esta fase se seleccionan los elementos de hardware que
harán parte de los nodos sensores.
Fig. 60. Elementos constitutivos de un nodo genérico dentro de la plataforma EnViBo
Selección del microcontrolador: Se ha optado por microcontroladores de Microchip. El stack
MiWi soporta microcontroladores de 8, 16, 32 bits, que corresponden a las familias PIC18, PIC24,
PIC32, dsPIC30 y dsPIC33 respectivamente. Entre otras, las siguientes referencias pueden
utilizarse: PIC18F4620, PIC18F2520, PIC18F87J11, PIC18F46J50, PIC24FJ128GA010,
PIC24FJ256GB110 y dsPIC33FJ256GP710.
Para el coordinador de red se ha elegido el PIC24FJ128GA010, un microcontrolador de 16 bits,
algunas de sus características principales son:
CPU que puede operar hasta 16 MIPS, Oscilador interno de 8Mhz y PLL interno
Memoria de programa de 128kB y Memoria RAM de 8kB
Direccionamiento lineal de memoria de programa de hasta 4MB y Direccionamiento lineal de la memoria de datos de hasta 64kB.
Hardware para multiplicación 16x16, división 32x16 y 16x16.
2 módulos UART, 2 SPI y 2 I2C
Puerto paralelo Master-Slave. Direccionamiento 16-bits, Datos 8-bits o 16-bits.
Módulo AD de 10 bits a 500ksps.
5 Módulos Comparación/Captura/PWM. 16-bits PWM.
Timers, 5 x 16-bit 2 x 32-bit.
RTC (Reloj de tiempo real) y 5 interrupciones externas.
Para los nodos sensores se han utilizado los microcontroladores pic18F4620, PIC18LF4620 y
PIC18F26K20.
Selección del transceptor: Los transceptores elegidos son los que pone a disposición Microchip
para la banda de 2.4 GHz: el MRF24J40MA y el MRF24J40MB. También están las opciones
MRF49XA y MRF89XA que no se incorporan en esta primera versión de la plataforma EnViBo.

Fig. 61. Aspecto físico y Diagramas de Radiación (3D y 2D) del Transceptor MRF24J40MB
Selección del sensor y del tipo de acondicionamiento de señal: Los nodos realizados para
propósitos de prueba de la plataforma registran las variables de temperatura corporal y actividad.
Para la variable de temperatura corporal, después de analizar diferentes opciones se optó por el
termistor activo lineal de bajo consumo MCP9700 de Microchip, este es un sensor de bajo
consumo de energía, es adaptable a e-textiles y, a diferencia de los termistores resistivos, no
requiere circuitos adicionales de acondicionamiento de señal.
Una de las razones por las cuales se optó por este dispositivo fue la disponibilidad de una tarjeta
que hace una disposición especial del sensor de manera que puede hacerse parte de prendas de
vestir o medios de sujeción por medio de aguja e hilo.
Fig. 62. Elementos que hacen posible la incorporación del sensor de temperatura sobre prendas
de vestir o medios de sujeción [120][121].
La utilización de termistores clásicos de coeficiente negativo de temperatura (NTC) también fue
considerada pero, no obstante ser el método más simple, el procedimiento de linealización por el
método de la resistencia en paralelo hace más demandante a nivel de hardware y de firmware el
proceso de acondicionamiento y adquisición de la señal.

Para el registro de actigrafía se utilizó un acelerómetro que hace parte de una unidad de medición
inercial (IMU). El acelerómetro entrega una variación de voltaje proporcional a la intensidad de
campo gravitatorio, las variaciones de las salidas del acelerómetro; x, y, z, (Volts Rx, Ry y Rz)
dependen de su ubicación respecto a los tres ejes coordenados y se entrega un voltaje de
referencia de 0 g (Volts@0g) para el acelerómetro: Volts @ 0 g. Para determinar las componentes
angulares del vector derivado de las lecturas del acelerómetro deben realizarse los cálculos
siguientes:
∆𝑥 = 𝐷𝑒𝑙𝑡𝑎 𝑉𝑜𝑙𝑡𝑎𝑗𝑒 𝑅𝑥 = 𝑉𝑜𝑙𝑡𝑠 𝑅𝑥 − Volts @ 0 g
∆𝑦 = 𝐷𝑒𝑙𝑡𝑎 𝑉𝑜𝑙𝑡𝑎𝑗𝑒 𝑅𝑦 = 𝑉𝑜𝑙𝑡𝑠 𝑅𝑦 − Volts @ 0 g
∆𝑧 = 𝐷𝑒𝑙𝑡𝑎 𝑉𝑜𝑙𝑡𝑎𝑗𝑒 𝑅𝑧 = 𝑉𝑜𝑙𝑡𝑠 𝑅𝑧 − Volts @ 0 g
También, según las especificaciones técnicas del dispositivo tenemos que la sensibilidad del
acelerómetro (Sensb) es de 300 mV/g, de acuerdo con esto podemos calcular las magnitudes de
las componentes del vector determinado por las lecturas del acelerómetro así:
𝑅𝑥 = 𝑅𝑥𝐴𝑐𝑐 =∆𝑥
𝑆𝑒𝑛𝑠𝑏=
∆𝑥
0.3; 𝑅𝑦 = 𝑅𝑦𝐴𝑐𝑐 =
∆𝑦
𝑆𝑒𝑛𝑠𝑏=
∆𝑦
0.3 ; 𝑅𝑧 = 𝑅𝑧𝐴𝑐𝑐
=∆𝑧
𝑆𝑒𝑛𝑠𝑏=
∆𝑧
0.3
La magnitud del vector es:
𝑅𝐴𝑐𝑐 = 𝑅𝑥2 + 𝑅𝑦2 + 𝑅𝑧2
A partir de esta magnitud podemos proceder a calcular los ángulos del vector de posición derivado
de las lecturas del acelerómetro:
∡𝑥𝑟𝐴𝑐𝑐 = cos−1(𝑅𝑥
𝑅) ; ∡𝑦𝑟𝐴𝑐𝑐 = cos−1(
𝑅𝑦
𝑅) 𝑦 ∡𝑧𝑟𝐴𝑐𝑐 = cos−1(
𝑅𝑧
𝑅)

Fig. 63. Vector y ángulos finales derivado de las lecturas arrojadas por el acelerómetro.
Por la naturaleza de los cálculos que se acaban de especificar para determinar el vector de
posición, se ha decidido realizar hacer estos en el software Labview, dentro de la programación de
la interfaz virtual desarrollada para la plataforma EnViBo. Igualmente si se requiere complementar
las mediciones del acelerómetro con los datos que entrega el giróscopo integrado a la IMU, que
son las componentes de la variación de velocidad angular respecto al tiempo, es necesario recurrir
a integración o a herramientas como los filtros de Kalman para caracterizar los ángulos derivados
de las rotaciones del sensor y no solo aquellos debido a las componentes gravitacionales.
Labview cuenta con una gran cantidad de comandos y funciones; matemáticas, gráficas,
alfanuméricas, etc., que garantizan que los datos provenientes del microcontrolador sean
procesados de una manera más eficiente, además cuenta con la ventaja de trabajar números de
coma flotante y también, una serie de medios de visualización que permiten hacer un seguimiento
continuo sobre los datos.
Fig. 64. Panel frontal del Instrumento Virtual (VI) con datos derivados de las lecturas obtenidas
con el acelerómetro.

Diseño: En esta fase se cubrieron todos los detalles ligados a lo que se conoce como diseño
electrónico con las conexiones y disposición de los elementos. Adicionalmente también se han
diseñado las cajas o enclosures para alojar los diferentes dispositivos diseñados y los medios de
sujeción de estos a las prendas o al cuerpo de las personas.
Asignación de conexiones de elementos de entrada/salida: Debido a que muchos de los
ejemplos provistos por Microchip están desarrollados para ser ejecutados sobre tarjetas de
desarrollo propietarias (development boards), una de las actividades de esta fase fue realizar las
consideraciones de diseño necesarias para migrar la ejecución del firmware sobre tarjetas propias,
diseñadas para nuestros propósitos específicos.
Establecimiento de las conexiones Transceptor-Microcontrolador
A partir del análisis de las hojas de datos de los dispositivos se definieron las conexiones
microcontrolador-transceptor a través de la interfaz periférica serial (SPI por sus siglas en inglés)
para los nodos sensoresy el coordinador de red.
Tabla XXXVIII. Correspondencia de conexiones PIC18F4620 y transceptor MiWi MRF24J40
PIC18F4620 MRF24J40A
Pin # Función Pin # Función
15 RC0/T1OSO/T13CKI 8 CS
16 RC1/T1OSI/CCP2 3 WAKE
24 RC5/SDO 5 SDI
18 RC3/SCK/SCL 6 SCK
23 RC4/SDI/SDA 7 SDO
33 RB0/INT0/FLTO/AN12 4 INT
17 RC2/CCP1/P1A 2 RESET
Fig. 65 . Correspondencia de conexiones PIC18F4620 y transceptor MiWi MRF24J40
Tabla XXXIX. Correspondencia de conexiones PIC18F46K20 y transceptor MiWi MRF24J40
PIC18F46K20 MRF24J40A
Pin # Función Pin # Función
34 RC0/T1OSO/T13CKI 8 CS

35 RC1/T1OSI/ICCP2 3 WAKE
43 RC5/SDO 5 SDI
37 RC3/SCK/SCL 6 SCK
42 RC4/SDI/SDA 7 SDO
9 RB0/INT0/FLTO/AN12 4 INT
36 RC2/CCP1/P1A 2 RESET
Fig. 66 . Correspondencia de conexiones PIC18F46K20 y transceptor MiWi MRF24J40
Diseño de los esquemáticos: Los planos o esquemáticos han sido realizados en un software
de diseño asistido por computador, EAGLE, y se apoyan en las asignaciones de conexiones
descritas anteriormente entre los diferentes dispositivos y las etapas circuitales. En la figura se
muestra el esquema de conexiones realizado para un nodo sensor de temperatura corporal.

Fig. 67. Diseño del esquemático (plano de conexiones) del nodo sensor de temperatura
Diseño de las tarjetas de circuito impreso: Luego de haber realizado el plano de conexiones
se procede a generar la tarjeta con la disposición definitiva de los elementos electrónicos así
como de las pistas que los conectan. Este proceso es muy importante y demandante en tiempo
puesto que deben realizarse muchas consideraciones y rediseños continuos con el fin de
encontrar la disposición óptima en cuanto a aspectos de funcionalidad y tamaño de las tarjetas
de los nodos sensores. También se deben resolver adecuadamente los problemas ligados a la
disposición de los elementos y aquellos derivados al paso de las pistas o caminos de conexión
por uno u otra zona o capa de las tarjetas.
La figura muestra el diseño PCB definitivo para la tarjeta correspondiente a uno de los nodos
sensores desarrollado.

Fig. 68 . Diseño de la tarjeta de circuito impreso (PCB) del nodo sensor de temperatura
Fig. 69 . Diseño de la tarjeta de circuito impreso (izquierda) y vista renderizada (derecha) de un
diseño preliminar del nodo coordinador de red
Diseño de las cajas: Las cajas o enclosures han sido diseñadas con la ayuda de un software de
diseño asistido por computador llamado Inventor. Si bien los diseños se han realizado, aún no es
viable económicamente dentro del proyecto construir las cajas para todos los nodos, por lo que se
han usado también cajas disponibles en el mercado local que tienen un precio muy bajo a las
cuales se les han hecho algunas adecuaciones especiales.

Fig. 70 . Concepción inicial sobre el diseño de las cajas
La figura muestra el diseño de las cajas proyectado con la ayuda del software para manejo de
sólidos llamado Inventor.
Fig. 71 . Diseño de las cajas realizado en el CAD para sólidos llamado Inventor

Dada la dificultad que representa la fabricación de cajas personalizadas desde el punto de vista
técnico-económico se optó por considerar cajas disponibles en el mercado local a bajo costo. El
diseño anteriormente mostrado se logró elaborar con el uso de una impresora 3D de Tecnoparque
SENA Nodo Medellín, lo podemos apreciar en el extremo izquierdo de la segunda fila.
Fig. 72 . Cajas (Enclosures) consideradas para el alojamiento de las tarjetas-baterías de los nodos
Diseño de medios de sujeción: dada la naturaleza portátil de los nodos sensores que van
sujetos a las prendas de vestir o al cuerpo de las personas, se han diseñado las formas y los
medios de sujeción necesarios.

Fig. 73. Indicación de los sitios de ubicación y de los modos de sujeción de los sensores y de las
cajas para los nodos portátiles de la plataforma EnViBo (Izquierda). Prueba realizada con medio de
sujeción ubicado sobre el brazo (derecha).
En la figura se muestra la concepción de un nodo sensor que puede registrar ECG o frecuencia
respiratoria y que puede ser ubicado sobre una cinta o banda que se ubica a la altura del pecho.
Fig. 74. Concepción sobre medios de sujeción para los nodos sensores de la plataforma EnViBo
Montaje de los componentes sobre las tarjetas: Para el montaje de los elementos sobre las
tarjetas desarrolladas se desarrollaron tareas de soldadura de componentes especiales como los
microcontroladores de extra-bajo consumo con encapsulado QFN y la disposición de sockets para
algunas tarjetas con el fin de facilitar el reemplazo de componentes como el transceptor, el sensor
y el microcontrolador en caso de falla o ajustes de programación respectivamente.
También se tuvo presente dejar los conectores para la conexión de la alimentación y de los
sensores. En algunas de las tarjetas desarrolladas se tiene la opción de utilizar diferentes tipos de alimentación, baterías recargables o no, también de diferentes valores de voltaje; 1.2, 8.4 y 3
voltios.

Fig. 75. Detalle del montaje de los componentes para tarjeta de nodo sensor de temperatura
(izquierda) y de actigrafía (derecha)
Montaje de los elementos sobre las cajas: Como se señaló anteriormente se realizó una caja en
una impresora tipo 3D pero las demás cajas utilizadas fueron conseguidas en tiendas de
electrónica locales a bajo costo. Algunas modificaciones fueron realizados con el fin de ajustarse a
las tarjetas realizadas y sus elementos.
Fig.76. Detalle del montaje de elementos sobre la caja para el nodo sensor de temperatura
Acople medios de sujeción/caja: Para el caso del nodo sensor de temperatura corporal se tiene
un medio de sujeción que se puede fijar al pantalón de la persona y una banda adhesiva, sobre la
cual está fijada el sensor, que se ubica sobre la parte interior del brazo de la persona bajo
observación.

Fig. 77. Detalle del acople medio de sujeción-caja para el nodo sensor de temperatura
En el caso del nodo basado en acelerómetro para medición de actigrafía, toda la unidad de
caja y sensor está en la misma caja que directamente se acopla al medio de sujeción que
consiste en una correa que se ubica sobre la parte superior de la rodilla.
Fig. 78. Detalle del acople medio de sujeción-caja para el nodo actígrafo
Finalmente se muestra en la figura la disposición de los nodos sensores de temperatura corporal y
de actigrafía sobre el cuerpo de una persona durante una sesión de prueba.

Fig. 79. Detalle del acople medio de sujeción-caja para el nodo actígrafo y nodo sensor de
temperatura

Pruebas y depuración sobre elementos de hardware
La figura muestra uno de los primeros prototipos de nodo sensor realizados. Este prototipo
tiene dos tipos de alimentación, una pila de 3v para pruebas de “corta duración” y una batería
de 12V para realizar pruebas por más largo tiempo. Ninguna de las pilas utilizadas en este
primer prototipo es recargable.
Fig. 80. Primer prototipo realizado on-board para pruebas de nodos sensores
En un segundo momento de diseñaron varias tarjetas, algunas de las cuales incluían en los
nodos sensores, para efectos de pruebas y depuración, módulos LCD para permitir la
visualización de los mensajes, y de los valores de las variables sensadas,

Fig. 81. Primera generación de prototipos para pruebas en red para la plataforma EnViBo
Finalmente, luego de las pruebas con los prototipos mostrados previamente, se llegó al estado
actual de los nodos sensores en los que se ha optimizado en diseño, en cuanto al tamaño y
disposición de los elementos, como en consumo de energía, eliminando los módulos LCD
utilizados inicialmente.
Fig. 82. Segunda generación (generación actual) de prototipos para pruebas en red para la
plataforma EnViBo
Pruebas y depuración sobre elementos de firmware:
Como se explicó en el capítulo IV, se han realizado ajustes y cambios significativos sobre el código
de base que entrega Microchip como soporte para los demos del protocolo MiWi.
La tabla condensa el resumen de los principales elementos de firmware que se incorporaron o que
se intervinieron. Sobre estos elementos se hicieron pruebas y depuración para lograr el
funcionamiento requerido a nivel de tareas de red y de monitorización.
Tabla XL. Resumen de la intervención sobre elementos de firmware ( a nivel de código de
programación) para lograr la funcionalidad requerida de los nodos dentro de la Plataforma EnViBo
Control de Hardware Algoritmo Comunicaciones
A este nivel se realizaron pruebas y depuración para garantizar la operación de las
Se realizaron labores de pruebas y depuración del firmware correspondiente al
La mayor cantidad de pruebas y de labores de depuración se concentró en la integración de

interfaces SPI entre los microcontroladores y los transceptores, la configuración de los canales de conversión A/D y la gestión de los pines I/O digitales de los nodos. Configuración de comunicaciones seriales y el manejo de recursos de visualización también se sometieron a procesos de pruebas y depuración.
algoritmo de estimación de los parámetros fisiológicos. Las adecuaciones realizadas tienen que ver la frecuencia de muestreo de las señales entregadas por los sensores, el procesamiento de los datos y el cálculo de la temperatura corporal en grados Celsius.
Los datos del nodo actigrafo se procesan en Labview.
las funciones MiApp sobre el código para los diferentes nodos de red, el empaquetamiento de los datos para efectos de transmisión y procesamiento en la interfaz de Labview. También para garantizar la funcionalidad de la red y de los nodos se probaron y depuraron los códigos para garantizar el bajo consumo de energía de los nodos, el manejo de las direcciones de red y la seguridad de los datos.
En la figura se muestra la visualización en el display del Coordinador de red de los datos
transmitidos desde el nodo actígrafo. El código de los nodos, como el de coordinador, fue
modificado para que los datos de las lecturas del acelerómetro en los tres ejes, fuera
correctamente marcado y recibido para posteriormente ser reenviado a la interfaz de Labview.
Fig. 83. Secuencia de visualización en el coordinador los de paquetes recibidos correspondientes a
las lecturas para los tres ejes coordenados enviados desde el nodo actígrafo
Si bien, la estrategia de marcar los datos en los nodos y recuperarlos según esas marcas en el
coordinador y a su vez en la interfaz de Labview, aparentemente es sencilla, se tuvo que invertir un
tiempo considerable para que se accediera a los datos específicos del payload de los paquetes
transmitidos, se concatenaran los valores recibidos para formar un string que fuera continuo y se

ajustara a la longitud variable de los mensajes. En la figura se muestra un extracto del código
mencionado.
Fig. 84. Extracto del código de programa para lograr la concatenación de los datos del payload en
el lado del coordinador durante la recepción de los paquetes enviados por los nodos sensores
Con el fin de verificar la cantidad de paquetes transmitidos exitosamente durante las sesiones de
prueba para ejercicios de monitorización sobre periodos extendidos de tiempo, se adoptó también
una función que permite la escritura sobre las posiciones de memoria de la memoria EEPROM de
datos [123]. Esta función se incluyo en el archivo HardwareProfile. Esta función es invocada en el
programa principal y el conteo almacenado en posiciones sucesivas de la memoria EEPROM de
datos le permite a los desarrolladores de aplicaciones bajo la metodología de la plataforma EnViBo
determinar la cantidad de paquetes perdidos cruzando esta información con el conteo que se
realiza en el coordinador de red.
Fig. 85. Función para escritura de datos en la EEPROM de datos para el pic18F46K20
Con la interfaz desarrollada en Labview para la visualización de los datos recibidos por la
plataforma EnViBo se puede seguir la evolución de los datos entregados para los tres ejes por el
nodo actígrafo basado en acelerómetro.

Fig. 86. Recursos de visualización y de registro de datos en la interfaz desarrollada en Labview
para la plataforma EnViBo
Pruebas de comunicación en red
Como es lógico, al tratarse de un proyecto de plataforma de redes de sensores inalámbricos, se
han realizado una gran cantidad de pruebas de comunicación. En un principio se hicieron pruebas
sencillas de comunicación entre dos nodos para verificar el funcionamiento del protocolo MiWi a
partir del código provisto por Microchip en sus demos.
Fig. 87. Datos aportados por el nodo 1 al recibir datos del nodo 2 bajo el demo SimpleExample
provisto por Microchip

Luego de verificar el funcionamiento de las comunicaciones y verificar las funciones que ofrecían
los demos, se procedió a modificar el código e incorporar los elementos de programación que
permitieran personalizar las comunicaciones de acuerdo a los requerimientos de los nodos que se
fueron incorporando. En la figura se muestra la imagen del coordinador de red durante una prueba
en la que el nodo sensor de temperatura envía su mensaje de identificación (N2T).
Fig. 88. Paquete de identificación del nodo sensor (Nodo 2 de Temperatura) ante el nodo
Coordinador para el comienzo de la transmisión de los paquetes con los datos de medición
Para efectos de depuración los datos recibidos por el coordinador se transfirieron vía serial a una
consola de visualización. En la figura se puede ver la secuencia transmitida que comienza con la
identificación del nodo y está seguida por un reporte periódico de los datos de temperatura.

Fig. 89. Pruebas de comunicación y visualización de paquetes con la ayuda de una consola de
visualización de los datos recibidos por conexión serial-usb.
Inicialmente los paquetes transmitidos fueron tipo broadcast, pero luego se procedió a volverlos
unicast. Los datos de temperatura están precedidos de la letra T en la figura se puede apreciar que
el sensor no estaba conectado y los datos variaban de forma aleatoria.
Posteriormente, luego de pasar por la realización de diferentes circuitos en protoboard y tarjetas de
prototipo se llegó a una tarjeta como la mostrada en la figura

Fig. 90. Tarjeta mejorada para el nodo sensor de temperatura
Inicialmente con esta tarjeta se alimentó con una pila recargable de 8.4 voltios y en una primera
prueba se alcanzaron a enviar 323 mensajes con el valor de temperatura al coordinador (PAN
coordinator), esto se hizo sin utilizar las funciones de consumo reducido de energía y, además, el
microcontrolador PIC18F4620 tampoco es de bajo consumo.
Luego de algunos ajustas, como poner en modo sleep el transceptor, se realizaron pruebas con el
nodo de temperatura siendo portado a una distancia variable de 1.5 a 2.5 metros del nodo
coordinador y se transmitieron unos 700 datos en un espacio de unas 4 horas, con un promedio de
dos a tres mensajes por minuto.
La herramienta de análisis de paquetes ZENA
Para realizar pruebas y labores de depuración sobre el código también se utilizaron dos
herramientas de software y hardware para el análisis de paquetes MiWi llamadas ZENA. El
aplicativo para analizar los paquetes se puede obtener de manera gratuita desde el sitio web de
Microchip. La tarjeta que intercepta los paquetes también es conocida como Sniffer.
Fig. 91. Tarjeta para el analisis de tráfico de paquetas (sniffer) y aplicativo de visualización ZENA
de Microchip para trabajo con Zigbee y con el protocolo MiWi
Fig. 92. Opciones para la visualización de paquetes y de los nodos conectados bajo el aplicativo
ZENA
Zena posee una ventana de visualización llamada “Network Traffic Monitor” que permite analizar el
detalle de los paquetes transaccionados por los nodos que hacen parte de la red. Los colores
asignados a los componentes del paquete se asignan según el código que se muestra en la tabla.
Tabla. XLI. Código de colores para el analizador de paquetes MiWi llamado ZENA

Campo Color
Encabezado MAC Blanco
Comandos MAC y Beacons Rojo
Encabezado de Red Lima
Encabezado de Mensaje Amarillo
Datos del Mensaje Aqua
Encabezado de Seguridad y Datos Encriptados Blue
La figura muestra cuatro nodos utilizados para realizar una prueba de comunicación en red de
tiempo extendido para la plataforma EnViBo. Los nodos involucrados son:
Coordinador de red de área personal (PAN Coordinator)
Nodo sensor de temperatura 1
Nodo sensor de temperaura 2
Nodo actígrafo
Para tomar la fotografía los nodos aparecen agrupados, pero durante las pruebas los nodos se
encuentran a una distancia variable del nodo coordinador. En las primeras pruebas los nodos
permanecen separados entre sí y del coordinador para verificar la comunicación de todos en red y
para contrastar el efecto de la distancia y de los obstáculos en lo relacionado con la recepción de
los paquetes.
Fig. 93. Disposición de los nodos de segunda generación para pruebas en red con la plataforma
EnViBo
Para ayudar con la visualización del comportamiento dinámico de la red se configuraron los leds de
la tarjeta Explorer 16, sobre la que se implementó el nodo Coordinador, para mostrar la actividad
de los nodos así como el despliegue de los payloads recibidos como el conteo total de mensajes
transaccionados.

Fig. 94. Indicaciones de la tarjeta del nodo Coordinador para visualizar la dinamica de la
interaccion de los nodos y de las transacciones realizadas
La figura muestra los mensajes desplegados por el coordinador de red a medida que los nodos se
van conectando, es así como para esta prueba se conectó el nodo 3 actígrafo (N3A), el nodo 2 de
temperatura (N2T) y el segundo nodo de temperatura con dirección de red 7 (N7t).
Fig. 95. Secuencia de visualizacion en el nodo coordinador de los paquetes de identificación de los
nodos sensores de temperatura (nodos 2 y 7) y del nodo actígrafo (nodo3)
La figura muestra un segmento de la trama de paquetes mediante un lapso de tiempo de la
conexión en red de los cuatro nodos mostrados anteriormente. Se resaltan los campos más
significativos de las secuencias mostradas por el software ZENA y su interpretación.

Fig. 96. Secuencia de transacciones de paquetes en red para una prueba realizada con cuatro
nodos
Con este tipo de pruebas también se pudo determinar el comportamiento de las baterías para
funcionamiento continuo.
Uno de los cambios más significativos a lo largo del prototipado de los diferentes nodos está
relacionado con la etapa de alimentación y el tamaño de las tarjetas de circuito impreso. Estos
cambios, aparte de mejorar la portabilidad de los nodos, mejoraron las posibilidades en la
autonomía de los nodos en cuanto a rediseño de la fuente de energía y utilización de
microcontroladores de consumo reducido como el pic18LF4620 y del pic18k4620 en lugar del
pic18F4620.

Fig. 97. Detalles de nodo de temperatura con diseño optimizado y del nodo actígrafo
Aparte de poner los transceptores MRF24J40 en modo sleep durante sus tiempos de inactividad se
encontró que era necesario poner el microcontrolador en este modo para variar significativamente
el consumo de los nodos sensores. Es así como se optó por implementar el ingreso al modo sleep
con despertar periódico activado por un desbordamiento del perro guardián de acuerdo al tiempo
determinado por la programación de su post-scaler. Igualmente se decidió poner todos los pines en
bajo de los pines del
microcontrolador en estado bajo
durante los periodos de
sueño (sleep).
Fig. 98. Incorporación del modo sleep dentro del codigo de programa de los nodos sensores para
optimizar el consumo de energía durante periodos de inactividad de red
La gráfica muestran el antes y el después del nodo sensor actígrafo en cuanto a consumo de
corriente sin haber entrado al modo sleep (izquierda) y después de haberlo hecho (derecha). En
este caso se evidencia una disminución de unos 20 miliAmperios en el consumo de corriente.
Luego de analizar el consumo de las diferentes partes de la tarjeta; microcontrolador, transceptor y
sensor de manera independiente, se determinó que el sensor y el transceptor consumen una
cantidad significativa de miliamperios aun estando el microcontrolador en modo sleep. Esta
situación se presenta porque estos dos dispositivos, el transceptor y la unidad de medición inercial
están conectados directamente a la alimentación y, no obstante, poner todos los pines del
microcontrolador en bajo, ellos consumen energía. Esta situación puede resolverse para futuros
diseños de nodos en los que se implemente electrónicamente la manera de suspender la
alimentación de estos dispositivos cuando el microcontrolador ingrese en el modo reducido de
energía.

Fig. 99. Medicion de corriente durante transmisión de paquetes (derecha) y periodos en modo
sleep (izquierda) para el nodo actígrafo
La figura muestra el mismo ejercicio de medición de consumo de corriente para uno de los nodos
de temperatura. Se evidencia que la disminución en el consumo es mucho más pronunciada y que
se reduce en unos 37 miliAmperios cuando el microcontrolador del nodo sensor de temperatura
ingresa en modo sleep.
Fig. 100. Medicion de corriente durante transmisión de paquetes (derecha) y periodos en modo
sleep (izquierda) para el nodo sensor de temperatura

Para verificar los cambios debidos a la incorporación de la activación del modo sleep en los nodos
sensores se hicieron nuevas pruebas para determinar la cantidad de paquetes enviados durante
sesiones de funcionamiento continuo durante horas.
Para determinar la cantidad de paquetes exitosamente recibidos por el nodo coordinador se realizó
una función llamada “PAQUETESCount” que se agregó al archivo HardwareProfile.c, el fragmento
de código correspondiente a esta función se muestra en la figura. Esta función está concebida para
que luego de que se muestre el string concatenado correspondiente al marcador de paquete y al
dato de medición, se despliegue un mensaje actualizado con el total de paquetes recibidos de cada
nodo.
Fig. 101. Funcion incorporada en el código de programa para el conteo de paquetes recibidos
exitosamente por el coordinador según el nodo sensor que los transmite
Luego de los ajustes realizados sobre la programación de los nodos para reducir el consumo de
energía de estos y del ajuste realizado sobre el coordinador para también mostrar el conteo de
paquetes recibidos por cada nodo, se realizó una nueva prueba de funcionamiento continuo para
uno de los nodos de temperatura. En la figura se muestra el despliegue del número de paquetes
recibidos. Con los ajustes realizados se alcanzó la transmisión exitosa de un número de paquetes
superior a 1000 durante un periodo continuo de más de 8 horas para el nodo operando en solitario.

Fig. 102. Visualización del conteo de paquetes recibidos exitosamente desde el nodo T gracias a la
incorporacion en el programa del Coordinador de la función PAQUETESCount
Durante las pruebas nos hemos apoyado en los recursos de visualización que ofrece la interfaz
desarrollada en Labview para la plataforma EnViBo, en la figura se puede apreciar la visualización
del valor actual de temperatura para un momento dado dentro de una prueba.
Fig. 103. Visualización, a través de un indicador en la interfaz grafica de la plataforma EnViBo, del
valor de temperatura indicado por el último paquete recibido desde el nodo T
En otra pestaña se puede observar el gráfico de tendencia para la variable y también un segmento
del archivo de registro y etiquetado de los datos (datalogging).
Fig. 104. Visualización de graficos de tendencia para la variable temperatura y registro-etiquetado
de los paquetes recibidos exitosamente desde el nodo T

En otras pruebas realizadas incluyendo nuevamente los cuatro nodos disponibles; los dos nodos
de medición de temperatura corporal, el nodo actígrafo y el nodo coordinador se hizo la
contabilización de paquetes exitosamente recibidos utilizando la función PAQUETESCount. La
figura muestra el conteo de paquetes recibidos desde uno de los nodos de temperatura y desde el
nodo actígrafo para el comienzo de una de las pruebas.
Fig. 105. Visualización del conteo de paquetes recibidos exitosamente desde el nodo de
temperatura (T) y desde el nodo actígrafo (A)
También durante estas pruebas nos hemos apoyado en la interfaz de visualización EnViBo, en la
figura se observan las tres mediciones simultaneas correspondientes a los tres nodos activos y
otros iconos que corresponden a indicadores para otros sensores que pueden agregarse en el
futuro.

Fig. 106. Pantalla para la visualización de las mediciones activas durante la operación de la
plataforma EnViBo
Para estas pruebas también se aprovecha la opción de registro de datos en archivos txt, estos
datos, como se ha mencionado antes, también se etiquetan con la información de fecha y hora
Fig. 107. Registro y etiquetado con información de fecha y hora para datos recogidos de los nodos
durante pruebas de operación de la plataforma EnViBo
Aparte de los nodos ya mencionados, se cuenta con otras tarjetas que hacen las veces de nodos
genéricos para la realización de pruebas y de otras tarjetas de monitorización de variables como
ritmo cardíaco y frecuencia respiratoria que están en desarrollo. En la imagen se muestra la

disposición simbólica de la conexión en red para los nodos de temperatura, el nodo actígrafo y un
nodo adicional genérico, el nodo X con dirección de red 4.
Fig. 108. Esquema de despliegue de los elementos de red, asignación de roles y direcciones para
una prueba con cinco nodos con la plataforma
En las pruebas desarrolladas durante periodos continuos de monitorización se pudo comprobar la
transmisión exitosa de más de 2000 paquetes en total, por un periodo continuo de unas 10 horas,
superando la cifra de más de 500 paquetes para todos los nodos conectados. Es necesario tener
en cuenta que el nodo actígrafo envía secuencias de tres paquetes por cada transmisión y que
debido a la competencia por el canal de todos los nodos no es igual la cantidad de paquetes que
logran ser transmitidos por cada unidad de red. Se pudo evidenciar la pérdida de paquetes que
puede estar alrededor de un 5% sobre el total de paquetes transmitidos para pruebas con el mayor
número de nodos y distancia variable desde el sitio de ubicación de la persona hasta el nodo
coordinador. Es importante tener en cuenta que todas las pruebas hasta ahora han sido realizadas
en interiores en ambientes domiciliarios.
Luego de varias pruebas se ajustó la función PAQUETESCount y la función LCD para mostrar el
total de los mensajes y el conteo de los paquetes recibidos por todos los nodos en dos
visualizaciones consecutivas en el display que se ejecutan luego de capa recepción exitosa.

Fig, 109. Mejoras sobre la función PAQUETESCount para visualizar el detalle de la cantidad
de paquetes recibidos durante la operación de la plataforma EnViBo
Fig. 110. Cantidad de paquetes recibidos desde el nodo de temperatura y total de paquetes
(izquierda), cantidad de paquetes recibidos exitosamente desde los nodos T y A
Nodos en desarrollo
Durante la fase de pruebas y depuración del software de la plataforma EnViBo y del firmware
de los nodos sensores, se está trabajando en la actualidad en la incorporación de dos nuevos
sensores; uno basado en una solución OEM para monitorización de ritmo cardíaco y uno
basado en un sensor de deflexión para la monitorización de frecuencia respiratoria. En la figura
se muestra el detalle de estos sensores y de los medios de sujeción y conexión a la tarjeta
electrónica.

Fig. 111. Detalle de los sensores y medios de sujeción para los nodos de sensado de ritmo
cardiaco y frecuencia respiratoria
El primero de los nodos sensores en desarrollo es el de monitorización ambulatoria de ritmo
cardíaco, como se ha mencionado antes este nodo se basa en una solución OEM llamada Pulse
Sensor Amped [124].
Fig. 112. Detalle del acople del sensor de ritmo cardiaco a una tarjeta generica desarrollada bajo
la metodología planteada para los nodos de la plataforma EnviBo
Este sensor ofrece un aplicativo de visualización que se ejecuta para tarjetas de prototipaje rápido
de Arduino bajo el IDE llamado Processing. La figura muestra el detalle de ambos.

Fig. 113. Herramienta de visualización del ritmo cardiaco que se ejecuta para Processing y Arduino
El sensor OEM funciona para tarjetas que se basan en microcontroladores ATMEL por lo que no es
posible la implementación del protocolo MiWi sobre ellas. Es por esta razón que el sensor se está
migrando para ser integrado a tarjetas que utilicen microcontroladores de 8 bits como el
pic18F4620 o sus versiones de bajo y extrabajo consumo. El nodo se ha integrado a las
comunicaciones de red utilizando la metodología de la plataforma, para pruebas preliminares se le
ha asignado la dirección de red 4.
Fig. 114. Pruebas de comunicación realizadas con el nodo sensor de pulso: recepción de datos
(izquierda), paquete de identificación (derecha)

En pruebas realizadas se han logrado registrar en archivos txt los datos entregados por el sensor
OEM y se ha reconstruido la señal a partir de esos datos.
Fig. 115. Pruebas de registro y visualización de los datos entregados por el sensor OEM: Pulse
Sensor Amped durante el proceso de migración a la plataforma EnViBo
El otro nodo sensor sobre el que se está trabajando corresponde a la monitorización de la
frecuencia respiratoria a partir de la señal captada por un sensor de deflexión ceñido al torso de la
persona mediante una banda elástica ajustable [124][125]. Para este sensor hay que realizar un
proceso de caracterización y de pruebas a profundidad sobre el proceso de acondicionamiento de
señal que debe llevarse a cabo. Se observa en la figura la manera como el nodo puede integrarse
a las tarjetas genéricas realizadas para la plataforma de monitorización EnViBo.
Fig. 116. Acople de sensor, medio de sujeción y tarjeta genérica para un nodo sensor de
frecuencia respiratoria dentro de la plataforma EnViBo
1110 1120 1130 1140 1150 1160 1170 1180 1190 1200 1210
0
50
100
150
200
250

Otros nodos que han sido desarrollados al interior del grupo GIBIC que han utilizado la
metodología de la plataforma EnViBo para implementar sus comunicaciones son los del proyecto
de monitorización inalámbrica de variables fisiológicas para neonatos dentro del programa madre
canguro. Este es un proyecto que se ha apoyado desde el grupo GIBIC para la Universidad
Pontificia Bolivariana. Para la comunicación se utilizan dos tarjetas similares que fueron diseñadas
e implementadas por el estudiante del grupo GIBIC Andrés Cortés quien participa en el proyecto
como parte de su trabajo de grado para optar al título de ingeniero.
Fig. 117. Tarjeta desarrollada por un estudiante del grupo GIBIC para un proyecto de
monitorización de variables biomédicas de neonatos utilizando el protocolo MiWi bajo la
metodología de la plataforma EnViBo
En la figura podemos apreciar las pantallas de una consola de visualización serial, llamada
CoolTerm, con las que se realizaron pruebas para garantizar la comunicación entre los nodos bajo
el protocolo MiWi. Cabe anotar que para este proyecto solo se requieren dos nodos y por lo tanto
no es necesario asignar direcciones de red diferentes a la 1 y 2.

Fig. 118. Secuencia de comunicación durante pruebas de comunicación realizadas con las dos
tarjetas del proyecto de monitorización de neonatos
La secuencia de funcionamiento de los nodos dentro de las pruebas realizadas es la siguiente
El Nodo1 funciona de coordinador receptor.
En el nodo 2 se recibe toda la información por conexión serial y se guarda en la memoria EEPROM. Al presionar Enter se agrega la fecha y la hora.
Al presionar un switch se envía un paquete unicast hacia el coordinador, esto se hace hasta que se transmitan los datos escritos.
Al continuar escribiendo se siguen guardando datos en la memoria. Al presionar Enter nuevamente se le agrega la fecha y la hora. Una vez se presiona nuevamente el switch se envían estos nuevos datos en paquetes unicast hasta finalizar.
Simulación
Al comienzo del proyecto se procedió a simular el comportamiento de redes inalámbricas de área
personal que se comunicaran bajo el protocolo IEEE 802.15.4, para esto se utilizó el software
OMNET [126], un paquete para modelado de redes de comunicación, que provee tal vez una de
las librerías más completas en cuanto a protocolos para simular redes inalámbricas.
En la figura se muestra el esquema general del entorno de simulación OMNET. Uno de los contras
de esta aplicación es la complejidad para su uso, que va desde su instalación para ejecución bajo
Windows hasta la configuración de la simulación y de los nodos.

Fig. 119. Pantalla del entorno de simulacion OMNET para la simulacion de redes inalambricas de
sensores
Al tratarse de un esfuerzo colaborativo, OMNET, tiene la característica de tener sus ambientes de
simulación, como por ejemplo Castalia, dispersos en repositorios institucionales o de comunidades
open software.
En la figura se muestran las estadísticas de transacciones de paquetes para algunos nodos
simulados

Fig. 120. Utilidad de OMNET para visualizar las transacciones de red durante la simulación de una
red inalámbrica de sensores comunicandose bajo el estandar IEEE802.15.4
Con OMNET también se pueden configurar los modelos de baterías de los nodos para simular
pruebas de desempeño de los nodos para funcionamiento continuo por largos periodos de tiempo.

Fig. 121. Pantalla para la visualización del comportamiento de la batería para un nodo durante una
simulacion
Otros recursos de simulación
Con el software de simulación llamado Proteus se probó la función de registro de datos
(datalogging) en medios extraíbles tipo Secure Digital (SD) para los microcontroladores
pic18F4620.

Fig. 122. Simulación de un microcontrolador PIC18F4620 haciendo registro de datos en una
memoria tipo SD
Se muestra un archivo de prueba creado en una imagen virtual de medio extraíble de
almacenamiento.
Fig. 123. Resultado de registro de datos de medicion en imagen de memoria durante simulacion
La fotografía de la figura muestra el montaje físico para realizar pruebas de datalogging con uno de
los microcontroladores utilizado en los nodos sensores. En cuanto a la posibilidad de hacer registro
en medios extraíbles debe hacerse un análisis para determinar cuándo esta solución es más viable
en relación al costo en consumo de energía para el nodo, es decir si hay más consumo que
cuando se transmiten los datos periódicamente o si es más conveniente realizar agregación de
datos o solo registros basadas en eventos.

Fig. 124. Montaje para la validación de los resultados de registro de datos obtenidos durante
simulacion
Pruebas con baterías
Durante el proceso de desarrollo de los diferentes prototoipos de nodos sensores se ha
experimentado con diferentes tipos de baterías. La mayoría de las pruebas se han realizado con
baterías recargables de Ni-MH a 1.2V para los nodos de temperatura y de 8.4V, también de Ni-MH
para el nodo actígrafo. En la tabla se muestra un resumen de los aspectos más importantes
relacionados con las baterías y su desempeño en pruebas de funcionamiento continuo durante
periodos de tiempo de más de una hora.
Tabla. XLII. Valoración de desempeño y carácterísticas principales de las baterías utilizadas
durante las pruebas de trabajo en red para los nodos sensores.
Tipo de Batería Voltaje Nominal-Corriente
Recargable Valoración
Alcalina AAA
1.5V
No Desempeño adecuado
Ni-MH AAA
1.2V
900mAh y 700mAh
Si Desempeño satisfactorio
Ni-MH PP3
8.4V
220mAh y 170mAh
Si Desempeño satisfactorio
Litio (Moneda)
3V No Desempeño no satisfactorio
Alcalina 23AE
12V No Desempeño aceptable
Ni-CD AA
1.2V Si Desempeño Satisfactorio
Alcalina AA
1.5 No Desempeño adecuado

La valoración realizada se basa en aspectos como el costo, la autonomia de funcionamiento
durante las pruebas y los aspectos ligados a la integración de la batería a la etapa de alimentación
del nodo sensor como por ejemplo, los requerimientos en cuanto a reguladores de voltaje,
conversores dc-dc y su eficiencia energética.
Fig. 125. Tipos de baterías utilizados durante las fases de desarrollo y pruebas de los nodos
sensores de la plataforma EnViBo. (Valoración: +++ Satisfactorio , ++ Adecuado, + Aceptable, --
No satisfactorio)
También se han realizado pruebas para determinar la cantidad máxima de paquetes que se
pueden enviar exitosamente con baterías no recargables. La figura muestra como se registra el
conteo durante una de las pruebas.

Fig. 126. Conteo de paquetes transaccionados durante una prueba con baterías no recargables
para los nodos de temperatura
Energy Harvesting
Una de las opciones consideradas para la incorporacion de capacidades de captación de energía
(energy harvesting-scavenging) en los nodos sensores es el uso de celdas fotovoltaicas como la
que se muestra en la figura. Una de las opciones más básica es conectar en paralelo la celda
fotovoltaica con las baterías, otra opción un poco más elaborada consiste en agregar un circuito
integrado que regule la carga de baterías del tipo Litio-Polímero a partir de la energía captada
durante los periodos de funcionamiento del nodo sensor.
Fig. 127. Celda fotovoltaica para la incorporacion de capacidades de captación de energía en los
nodos sensores
La opción de incorporar funcionalidades de recolección de energía mediante celdas fotovoltaicas,
medios de generación a partir de vibración, de presión u otros está dentro las tareas ligadas al
trabajo futuro dentro del proyecto de la plataforma EnViBo
Conclusiones y Observaciones
Con a relación a las fases de diseño y prueba se pueden anotar lo siguiente:
La mayoría de pruebas de funcionamiento continuo para verificar la funcionalidad de las comunicaciones en red, asi como para evaluar el desempeño de los nodos en aspectos como autonomía de funcionamiento y porcentaje de éxito en la transmisión de paquetes, se han realizado con baterías recargables. Estas baterías se consideran la opción más recomendable para la operación de los nodos durante los periodos de monitorización si se considera que la Plataforma y sus elementos de red resulten viables desde el punto de vista económico.

Si bien se considera lo más conveniente utilizar baterías recargables, todos los nodos tienen la posibilidad de operar con baterías no recargables de 1.5V de tipo AA y AAA, de fácil consecución en cualquier tienda o supermercado, para esto solo es necesario cambiar el conector de alimentación y el holder de la batería que alimentará el nodo sensor.
Las baterías de litio, de tipo moneda, no presentaron un desempeño satisfactorio puesto que su voltaje caía luego de unos cuantos paquetes transmitidos por el nodo y por lo tanto desaparecía la conexiónn del nodo sensor con la red. Esta situación se observó tanto para operación por conexión directa de la batería al circuito del nodo como mediante conexión con un conversor dc-dc tipo step-up.
En general con pruebas de funcionamiento extendido se lograron periodos de operación entre 3 y 10 horas continuas hasta que las baterías se agotaran. En muchos casos algunas baterías se agotaban primero que otras pero este periodo de tiempo ha sido el más característico. La cantidad de paquetes trasmitidos en un periodo de 1 a 10 horas oscila entre 100 y 5000.
Luego de la adopción de la función de sleep en los nodos sensores, se ha notado que el periodo de duración de las baterías para funcionamiento continuo puede extenderse de un 30 a 50% más que en las pruebas en donde la función de sleep no estaba activada para los nodos sensores.
Con la ajustes de programación realizados en los nodos sensores para optimizar su consumo de energía, es altamente probable que bajo condiciones de carga óptima de las baterías, o utilizando baterías no recargables nuevas, se alcance operación continua por más de 24 horas.
Durante las pruebas con los nodos siendo portados durante las actividades normales se nota un incremento de hasta un 10% en el porcentaje de pérdida de paquetes transmitidos, estas pérdidas estan asociados a movimientos de la persona, obstaculos en el enlace nodos-coordinador, presencia de pantallas de computador e interferencia de fuentes electromagnaticas cercanas.
En pruebas durante las cuales la persona está en reposo el porcentaje de pérdida de paquetes disminuye por debajo del 5%.
Cuando todos los nodos se incorporan al mismo tiempo en la red el tiempo en que se logran sincronizar es menor que cuando los nodos se incorporan asincronicamente a la red de monitorización.
En general se ha dado transmisiones exitosas, para interiores de espacios domésticos para distancias en el rango de 1 a 10 metros. Es evidente la influencia de obstaculos como muros y puertas en las conexiones. Para espacios exteriores no se han realizado pruebas pero se prevee que el rango de alcance de las transmisiones debe incrementarse considerablemente.

Referencias [1] A. Bonfiglio and D. De Rossi, Wearable Monitoring Systems. New York: Springer, 2011, Part
I:chapter I.
[2] A. Roguin, “Rene Theophile Hyacinthe Laënnec (1781-1826): the man behind the
stethoscope.,” Clinical medicine & research, vol. 4, no. 3, pp. 230–5, Sep. 2006.
[3] Norris A., Essentials of Telemedicine and Telecare, vol. 0. John Wiley & Sons Ltd, 2001,
chapter I.
[4] E. McAdams, A. Krupaviciute, C. Gehin, A. Dittmar, G. Delhomme, P. Rubel, J. Fayn, and J.
McLaughlin, “Wearable Electronic Systems: Applications to Medical
Diagnostics/Monitoring”, en Wearable Monitoring Systems. New York: Springer, 2011, pp.
179-203.
[5] P. Bonato, “Wearable Sensors/Systems and Their Impact on Biomedical Engineering,” IEEE
Engineering in Medicine and Biology Magazine, vol. 22, no 3. June, pp. 18-20, 2003.
[6] A. W. Darkins, M. Mph, and M. A. Cary, Telemedicine and Telehealth: Principles, Policies
Performance , and Pitfalls. Springer Publishing Company, 1994, pp. 1-5.
[7] “C.I.R.M.” *Online+. Available: http://www.cirm.it/eng/index_eng.html. *Accessed: 17-Sep-
2012].
[8] “Norman ‘Jeff’ Holter Father of Ambulatory ECG Monitoring.”*Online+. Available:
http://resources.metapress.com/pdf-
preview.axd?code=y41220041w874333&size=largest. [Accessed: 17-Sep-2012].
[9] J. Cabo, “Sistema de Adquisición Portátil con Telemetría Bluetooth para Señales
Biomédicas,” Escola Tècnica Superior D’enginyeria De Telecomunicació De Barcelona,
2009.
[10] “Hardware innovation (keynote file).” *Online+. Available:
http://www.slideshare.net/timoreilly/hardware-innovation-keynote-file. [Accessed: 17-
Sep-2012].
[11] M. R. Bhalla and A. V. Bhalla, “Generations of Mobile Wireless Technology: A Survey,”
International Journal of Computer Applications, vol. 5, no. 4, pp. 26–32, Aug. 2010.
[12] A. Aryaputra and N. Bhuvaneshwari, “5G- The Future of Mobile Network,” in Proceedings
of the World Congress on Engineering and Computer Science, 2011, vol. II.
[13] J. Webb, “Mobile Interface Evolution.” *Online+. Available:
http://www.slideshare.net/superjosh/mobile-interface-evolution. [Accessed: 17-Sep-
2012].

[14] J. Antonio, C. Ramón, F. T. Medina, F. Andrés, and C. Herías, “Tecnologías en la inteligencia
ambiental,” in Jornadas en Automática. Universidad de Almería, 2006.
[15] P. Valdastri, S. Rossi, A. Menciassi, V. Lionetti, F. Bernini, F. A. Recchia, and P. Dario, “An
implantable ZigBee ready telemetric platform for in vivo monitoring of physiological
parameters,” Sensors and Actuators, vol. 142, pp. 369–378, 2008.
[16] “High-Low Tech MIT Media Lab.” *Online+. Available:
http://www.media.mit.edu/research/groups/high-low-tech. [Accessed: 17-Sep-2012].
[17] S. Suzuki, T. Matsui, H. Kawahara, H. Ichiki, J. Shimizu, Y. Kondo, S. Gotoh, H. Yura, B.
Takase, and M. Ishihara, “A non-contact vital sign monitoring system for ambulances using
dual-frequency microwave radars.,” Medical & biological engineering & computing, vol.
47, no. 1, pp. 101–5, Jan. 2009.
[18] M. Poh, D. Mcduff, and R. Picard, “A Medical Mirror for Non-contact Health Monitoring,”
ACM SIGGRAPH Emerging Technologies, vol. 18, no. 10, 2011.
[19] M. Kohvakka, “Medium Access Control and Hardware Prototype Designs for Low-Energy
Wireless Sensor Networks,” Tampere University of Technology, 2009.
[20] A. M. Tabar, A. Keshavarz, and H. Aghajan, “Smart home care network using sensor fusion
and distributed vision-based reasoning,” in Proceedings of the 4th ACM international
workshop on Video surveillance and sensor networks - VSSN ’06, 2006, pp. 145–154.
[21] A. Milenkovid, C. Otto, and E. Jovanov, “Wireless sensor networks for personal health
monitoring: Issues and an implementation,” Computer Communications, vol. 29, no. 13–
14, pp. 2521–2533, Aug. 2006.
[22] I. R. Sinclair. Sensors and Transducers. Woburn, MA: Elsevier, 2001, pp.103-109.
[23] R. R. Fletcher et al., “iCalm: wearable sensor and network architecture for wirelessly
communicating and logging autonomic activity.,” IEEE transactions on information
technology in biomedicine : a publication of the IEEE Engineering in Medicine and Biology
Society, vol. 14, no. 2, pp. 215-23, Mar. 2010.
[24] J. W. Zheng, Z. B. Zhang, T. H. Wu, and Y. Zhang, “A wearable mobihealth care system
supporting real-time diagnosis and alarm.,” Medical & biological engineering & computing,
vol. 45, no. 9, pp. 877-85, Sep. 2007.
[25] A. Milenkovid, C. Otto, and E. Jovanov, “Wireless sensor networks for personal health
monitoring: Issues and an implementation,” Computer Communications, vol. 29, no. 13–
14, pp. 2521-2533, Aug. 2006.
[26] F. Buttussi and L. Chittaro, “MOPET: a context-aware and user-adaptive wearable system
for fitness training,” Artificial intelligence in medicine, vol. 42, no. 2, pp. 153-63, Feb. 2008.

[27] A. Dinh, “Heart Activity Monitoring on Smartphone,” in International Conference on
Biomedical Engineering and Technology, 2011, vol. 11, pp. 45-49.
[28] J. A. Fraile, J. Bajo, J. M. Corchado, A. Abraham, and S. Member, “Applying Wearable
Solutions in Dependent Environments,” IEEE Transactions On Information Technology In
Biomedicine, vol. 14, no. 6, pp. 1-9, 2010.
[29] L. K. Au, W. H. Wu, M. a. Batalin, D. H. McIntire, and W. J. Kaiser, “MicroLEAP: Energy-
aware Wireless Sensor Platform for Biomedical Sensing Applications,” 2007 IEEE
Biomedical Circuits and Systems Conference, pp. 158-162, Nov. 2007.
[30] B. P. L. Lo, S. Thiemjarus, and R. King, “BODY SENSOR NETWORK – A WIRELESS SENSOR
PLATFORM FOR PERVASIVE HEALTHCARE MONITORING,” in 3rd International Conference
on Pervasive Computing, 2005, pp. 77-80.
[31] S.-hui Toh, H.-jae Lee, and K.-hoon Do, “Development of Efficient Query Processor in Cell
Phone for Sensor Data Processing Over a WSN,” in International Conference on Machine
Learning and Computing, 2009, vol. 3, pp. 284-288.
[32] R. V. P. D, F. Drive, and M. View, “A Pervasive Computing Platform for Wearable Sensors,”
in 42nd Hawaii International Conference on System Sciences, 2009, pp. 1-7.
[33] J. Antonio, C. Ramón, F. T. Medina, F. Andrés, and C. Herías, “Tecnologías en la inteligencia
ambiental,” in Jornadas en Automática. Universidad de Almería, 2006.
[34] L. E. Villa Rodríguez and J. D. Lemos Duque, “Desarrollo de un Holter digital con grabación
de eventos y software de visualización,” Revista Ingeniería Biomédica EIA, pp. 13-21, 2010.
[35] J. Gallego, D. Lemos, G. a Meneses, and A. M. Hernandez, “Development of a wearable
vital signs monitor for healthcare.,” in Annual International Conference of the IEEE
Engineering in Medicine and Biology Society. IEEE Engineering in Medicine and Biology
Society. Conference, 2010, vol. 2010, pp. 6401-4.
[36] G. Meneses and J. D. Lemos, “Integrating Indendent Wearable Sensor Units into a
Reconfigurable Platform for Biomedical Signal Monitoring,” in XVIII International Congress
of Electronic, Electrical and Systems Engineering - INTERCON, 2011, pp. 1-6.
[37] Camntech, “The Actiheart User Manual,” 2010.
[38] Carefusion, “Oxycon Mobile Specifications,” 2005.
[39] Actigraph, “GT3X Specifications.” *Online+. Available: http://www.theactigraph.com/wp-
content/uploads/GT3X-Specs.pdf. [Accessed: 22-Jul-2012].

[40] A. Milenkovid, C. Otto, and E. Jovanov, “Wireless sensor networks for personal health
monitoring: Issues and an implementation,” Computer Communications, vol. 29, no. 13–
14, pp. 2521–2533, Aug. 2006.
[41] P. Leijdekkers and V. Gay, “Personal Heart Monitoring and Rehabilitation System using
Smart Phones,” in International Conference on Mobile Business. June 2006, pp. 1–7.
[42] P. Kuryloski, A. Giani, R. Giannantonio, K. Gilani, R. Gravina, V. Sepp, P. Yan, A. Y. Yang, J.
Hyttinen, S. Sastry, S. Wicker, and R. Bajcsy, “DexterNet : An Open Platform for
Heterogeneous Body Sensor Networks and Its Applications ∗,” in BSN ’09 Proceedings of
the 2009 Sixth International Workshop on Wearable and Implantable Body Sensor
Networks, 2009, pp. 92–97.
[43] K. Lorincz, B. Chen, G. W. Challen, A. R. Chowdhury, S. Patel, P. Bonato, and M. Welsh,
“Mercury : A Wearable Sensor Network Platform for High-Fidelity Motion Analysis,” in
Proceedings of the 7th ACM Conference on Embedded Networked Sensor Systems, 2009,
pp. 183–196.
[44] A. Wood, G. Virone, T. Doan, Q. Cao, L. Selavo, Y. Wu, L. Fang, Z. He, S. Lin, and J.
Stankovic, “ALARM-NET : Wireless Sensor Networks for Assisted-Living and Residential
Monitoring,” 2006.
[45] A. Burns, B. R. Greene, M. J. McGrath, T. J. O’Shea, B. Kuris, S. M. Ayer, F. Stroiescu, and V.
Cionca, “SHIMMERTM – A Wireless Sensor Platform for Noninvasive Biomedical Research,”
IEEE Sensors Journal, vol. 10, no. 9, pp. 1527–1534, Sep. 2010.
[46] V. Shnayder, B. Chen, K. Lorincz, T. R. F. F. Jones, and M. Welsh, “Sensor networks for
medical care,” ACM Press, New York, New York, USA, 2005.
[47] C. Decker, A. Krohn, M. Beigl, and T. Zimmer, “The particle computer system,” in IPSN
2005. Fourth International Symposium on Information Processing in Sensor Networks,
2005., pp. 443–448.
[48] M. Beigl, T. O. Teco, and H. Gellersen, “Smart-Its : An Embedded Platform for Smart
Objects,” in Smart Objects Conference (SOC 2003), 2003.
[49] J. Beutel, “Fast-prototyping Using the BTnode Platform,” in Conference on Design,
automation and test in Europe DATE’06, 2006, no. 5005, pp. 977–982.
[50] A. Singh, “Performance Analysis and Optimization of the NIDES Localization Algorithm for
Large Scale Wireless Sensor Networks,” Eindhoven University of Technology, 2011.
[51] L. Esigetel, P. De Valvins, E. P. H. Telecom, S. Paris, and R. C. Fourier, “ENVIRONNEMENT
MULTIMODAL POUR LA TELEVIGILANCE MEDICAL À DOMICILE EMUTEM,” in Congrès
SFTAG 2009 : 1er Congrès de la Société Française des Technologies pour l’Autonomie et de
Gérontechnologie, 2009, vol. 3, no. 1, pp. 18–20.

[52] H. C. Ávila, J. D. S.- López, and E. J. García, “SMGI : Sistema de comunicación RIS 802 . 15 . 4
-WEB para monitorización de signos vitales,” in PAN AMERICAN HEALTH CARE EXCHANGES
- PAHCE CONFERENCE, 2011, pp. 183–188.
[53] S. Led, J. D. Trigo, J. Escayola, and L. Serrano, “INTENSA: Sistema de monitorización de
pacientes con insuficiencia cardíaca basado en el estándar ISO/IEEE11073,” in Actas del
XXVII Congreso Anual de la Sociedad Española de Ingeniería Biomédica - CASEIB, 2009, pp.
709–712.
[54] N. Oliver and F. Flores-Mangas, “HealthGear: A Real-time Wearable System for Monitoring
and Analyzing Physiological Signals,” Redmond, 2005.
[55] W. Wu, J. Cao, Y. Zheng, and Y.-P. Zheng, “WAITER: A Wearable Personal Healthcare and
Emergency Aid System,” in Sixth Annual IEEE International Conference on Pervasive
Computing and Communications (PerCom), 2008, pp. 680–685.
[49] P. H. Chou, “Eco: Ultra-Wearable and Expandable Wireless Sensor Platform,” in
International Workshop on Wearable and Implantable Body Sensor Networks (BSN’06),
2006, pp. 162–165.
[57] A. Astaras, M. Arvanitidou, I. Chouvarda, V. Kilintzis, V. Koutkias, E. M. Sanchez, G. Stalidis,
A. Triantafyllidis, and N. Maglaveras, “An integrated biomedical telemetry system for sleep
monitoring employing a portable body area network of sensors (SENSATION).,” in
Conference proceedings : ... Annual International Conference of the IEEE Engineering in
Medicine and Biology Society. IEEE Engineering in Medicine and Biology Society.
Conference, 2008, vol. 2008, pp. 5254–7.
[58] S. Toh, H. Lee, and K. Do, “Development of Efficient Query Processor in Cell Phone for
Sensor Data Processing Over a WSN,” in International Conference on Machine Learning
and Computing, 2009, vol. 3, pp. 284–288.
[59] R. R. Fletcher, K. Dobson, M. S. Goodwin, H. Eydgahi, O. Wilder-Smith, D. Fernholz, Y.
Kuboyama, E. B. Hedman, M.-Z. Poh, and R. W. Picard, “iCalm: wearable sensor and
network architecture for wirelessly communicating and logging autonomic activity.,” IEEE
transactions on information technology in biomedicine : a publication of the IEEE
Engineering in Medicine and Biology Society, vol. 14, no. 2, pp. 215–23, Mar. 2010.
[60] N. Hamza, F. Touati, and L. Khriji, “Wireless Biomedical System Design Based on ZigBee
Technology for Autonomous Healthcare,” in International Conference On Communication,
Computer And Power (ICCCP’09), 2009, pp. 183–188.
[61] Z. H. Tee, L. M. Ang, K. P. Seng, J. H. Kong, R. Lo, and M. Y. Khor, “Web-Based Caregiver
Monitoring System for Assisting Visually Impaired People,” in Proceedings of the
International MultiConference of Engineers and Computer Scientists, 2009, vol. I.

[62] M. Sung, C. Marci, and A. Pentland, “Wearable feedback systems for rehabilitation,”
Journal of neuroengineering and rehabilitation, vol. 2, p. 17, Jan. 2005.
[63] T. Choudhury, J. Hightower, A. Lamarca, L. Legrand, A. Rahimi, A. Rea, B. Hemingway, K.
Koscher, J. A. Landay, J. Lester, and D. Wyatt, “The Mobile Sensing Platform: An embedded
Activity Recognition system,” IEEE Pervasive Computing, vol. 7, no. 2, pp. 32–41, 2008.
[64] F. Buttussi and L. Chittaro, “MOPET: a context-aware and user-adaptive wearable system
for fitness training,” Artificial intelligence in medicine, vol. 42, no. 2, pp. 153–63, Feb. 2008.
[65] A. Grauballe, G. P. Perrucci, and F. H. P. Fitzek, “Opensensor - An open wireless sensor
platform,” in MobiMedia - 4th International Mobile Multimedia Communications
Conference, 2008.
[66] A. Saeed, M. Faezipour, M. Nourani, S. Banerjee, G. Lee, G. Gupta, and L. Tamil, “A Scalable
Wireless Body Area Network for Bio-Telemetry,” Journal of Information Processing
Systems, vol. 5, no. 2, pp. 77–86, Jun. 2009.
[67] E. Sardini and M. Serpelloni, “Instrumented wearable belt for wireless health monitoring,”
Procedia Engineering, vol. 5, pp. 580–583, Jan. 2010.
[68] L. K. Simone, N. Sundarrajan, X. Luo, Y. Jia, and D. G. Kamper, “A low cost instrumented
glove for extended monitoring and functional hand assessment.,” Journal of neuroscience
methods, vol. 160, no. 2, pp. 335–48, Mar. 2007.
[69] C. Sha, R. Wang, H. Huang, and L. Sun, “A type of healthcare system based on intelligent
wireless sensor networks,” The Journal of China Universities of Posts and
Telecommunications, vol. 17, no. July, pp. 30–39, Jul. 2010.
[70] P. Augustyniak, “Wearable wireless heart rate monitor for continuous long-term variability
studies.,” Journal of electrocardiology, vol. 44, no. 2, pp. 195–200, 2011.
[71] Y.-D. Lee and W.-Y. Chung, “Wireless sensor network based wearable smart shirt for
ubiquitous health and activity monitoring,” Sensors and Actuators B: Chemical, vol. 140,
no. 2, pp. 390–395, Jul. 2009.
[72] J. Choi, B. Ahmed, and R. Gutierrez-Osuna, “Ambulatory Stress Monitoring with Minimally-
Invasive Wearable Sensors,” 2010.
[73] S. Afghani, M. Ali, and S. Safdar, “Smart Vest For Monitoring And Support Of Medical
Staff,” International Journal of Engineering Sciences & Emerging Technologies, vol. 2, no. 1,
pp. 59–70, 2012.

[74] Z. Li and G. Zhang, “A Physical Activities Healthcare System Based on Wireless Sensing
Technology,” in RTCSA ’07 Proceedings of the 13th IEEE International Conference on
Embedded and Real-Time Computing Systems and Applications, 2007, pp. 369–376.
[75] A. T. Barth, M. A. Hanson, H. C. P. Jr, and J. Lach, “TEMPO 3 . 1 : A Body Area Sensor
Network Platform for Continuous Movement Assessment,” in Sixth International
Workshop on Wearable and Implantable Body Sensor Networks (BSN 2009), 2009, pp. 71–
76.
[76] D. Tobón and N. Gaviria, “Análisis de métricas de calidad de servicio para la configuración
del protocolo CSMA / CA en redes de sensores inalámbricas de área corporal Analysis of
quality of service metrics for CSMA / CA protocol configuration in wireless body area
networks,” Ingeniería y Desarrollo, vol. 30, no. 1, pp. 101–124, 2012.
[77] C. Ramírez and J. Gómez, “Sistema de telemonitoreo inalámbrico multiparámetro de
neonatos,” Sistema de Gestión de Proyectos Académicos de la Universidad Pontificia
Bolivariana - Kosmos – UPB.
[78] D. Martínez, F. Blanes, J. Simo, A. Crespo, U. A. De Occidente, C. Jamundí, U. P. De
Valencia, and C. D. V. S. N. Valencia, “Redes de Sensores y Actuadores Inalámbricas : Una
Caracterización y Caso de Estudio para Aplicaciones Médicas en Espacios Cerrados,” en
XXIX Jornadas de Automática, 2008.
[79] M. Suarez and C. Cifuentes, “Redes Inalámbricas y Técnicas de Minería Web Aplicadas a un
Modelo de Telemedicina,” in XVII Congreso Argentino de Ciencias de la Computación
CACIC, 2011, pp. 1019–1026.
[80] D. M. Ballesteros, H. Melo, and A. Maya, “Sistema de transmisión inalámbrica de señales
ECG y de temperatura para ambientes hospitalarios (SINHO),” Revista Ingeniería
Biomédica EIA, vol. 4, no. 7, pp. 55–63, 2010.
[81] L. Arias and J. Gómez, “Desarrollo de un sistema de monitoreo inalámbrico para señales
biomédicas,” Revista Politécnica, no. 8, pp. 33–38, 2009.
[82] J. Bustamante, J. Cogollo, and A. Amaya, “Sistema de detección, registro y telemonitoreo
de arritmias cardiacas,” Revista Mexicana de Ingeniería Biomédica, vol. 29, no. 1, pp. 28–
40, 2008.
[83] A. Bonfiglio and D. De Rossi, Wearable Monitoring Systems. New York: Springer, 2011, p.
65..
[84] E. R. C. Dorf, “Neuman, M.R. ‘Biomedical Sensors’,” E. R. C. Dorf, Ed. CRC Press LLC, 2000.
[85] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, “Wireless sensor networks: a
survey,” Computer Networks, vol. 38, no. 4, pp. 393–422, Mar. 2002.

[86] J. P. Lynch, “A Summary Review of Wireless Sensors and Sensor Networks for Structural
Health Monitoring,” The Shock and Vibration Digest, vol. 38, no. 2, pp. 91–128, Mar. 2006.
[87] NCTE, “Storage and Backup,” 2008.
[88] R. Anderson and G. M. Lyons, “Data logging technology in ambulatory medical,”
Physiolgical Measurement, vol. 22, pp. 1–13, 2001.
[89] P. Desnoyers, “Ultra-low power data storage for sensor networks,” in 2006 5th
International Conference on Information Processing in Sensor Networks, 2006, pp. 374–
381.
[90] The National Archives, “Selecting Storage Media for Long Term Preservation,” 2008.
[91] M. A. M. Vieira, C. N. C. Jr, D. Cecílio, and J. M. Mata, “Survey on Wireless Sensor Network
Devices,” in IEEE Conference on Emerging Technologies and Factory Automation, 2003, pp.
537–544.
[92] S. Laboratories, “The Energy Harvesting Tipping Point for Wireless Sensor Applications.”
[93] National Physical Laboratory UK, “State of the art in human powering of devices 1st Energy
Harvesting Research Theme Workshop Available human power sources for energy
harvesting,” 2010.
[94] “Powering Microcontrollers with Scavenged Energy - Energy Harvesting | DigiKey.”
[Online]. Available: http://www.digikey.com/us/en/techzone/energy-
harvesting/resources/articles/powering-microcontrollers-with-scavenged-energy.html.
[Accessed: 09-Oct-2012].
[95] C. Kompis and S. Aliwell, “Energy Harvesting Technologies to Enable Remote and Wireless
Sensing,” 2008.
[96] “BatteryTypes: Which Batteries to Use?” *Online+. Available:
http://www.pureenergybattery.com/pdf/batterytypes.pdf. [Accessed: 18-Sep-2012].
[97] E. Florez and M. Adolph, “Batteries for portable ICT devices,” 2010.
[98] J. P. Walters and Z. Liang, “Chapter 17 Wireless Sensor Network Security : A Survey,” in
Security in Distributed, Grid, and Pervasive Computing, Y. Xiao, Ed. CRC Press, 2006, pp. 1–
50.
[99] A. Bonfiglio and D. De Rossi, Wearable Monitoring Systems. New York: Springer, 2011.
[100] IEEE Computer Society, IEEE Standard for Telecommunications and information Local and
metropolitan area networks — Specific requirements Part 15 . 4 : Wireless Medium Access
Control ( MAC ) and Physical Layer ( PHY ) Specifications for Low-Rate Wireless Personal

Area Networks, IEEE Std 802.15.4™-2006(Revision of IEEE Std 802.15.4-2003), September
2006.
[101] Microchip Technology inc., “Microchip MiWi Wireless Protocol,” 2010.
[102] A. García, J. Martínez, J. Lopez, A. Prayati, L. Redondo, Problem Solving for Wireless
Sensor Networks. London: Springer-Verlag, 2008, ch 6.
[103] Ministerio de la Protección Social, Decreto Numero 4725 De 2005 26 Dic 2005. República
de Colombia, 2005.
[104] L. Zuleta and D. Roldán, “Especificaciones Técnicas y Regulación para la Validación en
Colombia de un Desfibrilador Automático Externo,” en VII Congreso de la Sociedad Cubana
de Bioingeniería, 2007.
[105] D. M. W. Jr, “Draft Guidance for Industry and FDA Staff Radio-Frequency Wireless
Technology in Medical Devices.” 2007.
[106] T. G. Mahn, “Wireless Medical Technologies : Navigating Government Regulation in the
New Medical Age,” Washington D.C., 2010.
[90] “Shimmer - Wireless Sensor Platform for Wearable Applications.” *Online+. Available:
http://www.shimmer-research.com/. [Accessed: 04-Feb-2013].
[91] “Imote2 - Crossbow Technology.” *Online+. Available:
http://bullseye.xbow.com:81/Products/productdetails.aspx?sid=253. [Accessed: 04-Feb-
2013].
[92] “BTnodes - A Distributed Environment for Prototyping Ad Hoc Networks : Main - Overview
.” [Online]. Available: http://www.btnode.ethz.ch/. [Accessed: 04-Feb-2013].
[93] “MyriaNed - Devlab.” *Online+. Available: http://www.devlab.nl/myrianed. [Accessed: 04-
Feb-2013].
[94] “Epic: An Open Mote Platform for Application-Driven Design.” *Online+. Available:
http://www.cs.berkeley.edu/~prabal/projects/epic/. [Accessed: 04-Feb-2013].
[95] “Teco: Smart ITS University of Karlsruhe Particle Computer.” *Online]. Available:
http://particle.teco.edu/. [Accessed: 04-Feb-2013].
[96] “SunSPOTWorld .” *Online+. Available: http://www.sunspotworld.com/. [Accessed: 04-Feb-
2013].
[97] “Wireless sensors for Real-Time Activity Recognition.” *Online+. Available:
http://alumni.media.mit.edu/~emunguia/html/mites.htm. [Accessed: 04-Feb-2013].

[98] “CodeBlue: Wireless Sensors for Medical Care | Harvard Sensor Networks Lab.” *Online+.
Available: http://fiji.eecs.harvard.edu/CodeBlue. [Accessed: 04-Feb-2013].
[99] “PowWow: Power Optimized Hardware and Software FrameWork for Wireless Motes.”
[Online]. Available: http://powwow.gforge.inria.fr/. [Accessed: 04-Feb-2013].
[100] “Zolertia.” *Online]. Available: http://zolertia.sourceforge.net/wiki/index.php/Main_Page.
[Accessed: 04-Feb-2013].
[101] “FireFly Real-Time Sensor Networks :: Carnegie Mellon University.” *Online+. Available:
http://www.ece.cmu.edu/firefly/. [Accessed: 04-Feb-2013].
[102] G. Meneses and J. D. Lemos, “Implementing IEEE 802. 15.4-based Communications in
Sensor Nodes aimed for Biomedical Signal Monitoring,” in Seventh Colombian Computing
Congress, 2012.
[103] G. Meneses, J. D. Lemos, and ., “Consideraciones de diseño para la integración de dos
métodos no invasivos de medición de la presión arterial en un dispositivo portable,” in V
Latin American Congress on Biomedical Engineering CLAIB 2011, pp. 1–4.
[104] G. Meneses and J. D. Lemos, “Vital Sign and Biomedical Signal Monitoring Portable System
for Home-Based Healthcare,” in Tercer Congreso Internacional de Ingeniería Mecatrónica
2011 UNAB, 2011.
[105] G. Meneses and J. D. Lemos, “Integrating Indendent Wearable Sensor Units into a
Reconfigurable Platform for Biomedical Signal Monitoring,” in XVIII International Congress
of Electronic, Electrical and Systems Engineering - INTERCON, 2011, pp. 1–6.
[106] Microchip Technology inc., “Microchip MiWi Wireless Protocol,” 2010.
[107] Microchip Technology inc., “Microchip MiWi P2P Wireless Protocol,” 2010.
[108] Microchip Technology inc., “Microchip Wireless (MiWi) Application Programming Interface
- MiApp,” 2009.
[109] Microchip Technology, “Microchip Wireless (MiWiTM) Media Access Controller – MiMAC,”
2009.
[110] Microchip Technology inc., “Microchip MiWi PRO Wireless Networking Protocol Stack,”
2011.
[111] IEEE Computer Society, IEEE Standard for Telecommunications and information Local and
metropolitan area networks — Specific requirements Part 15 . 4 : Wireless Medium Access
Control ( MAC ) and Physical Layer ( PHY ) Specifications for Low-Rate Wireless Personal
Area Networks, IEEE Std 802.15.4™-2006(Revision of IEEE Std 802.15.4-2003), September
2006.

[112] Microchip Technology inc., “Development Tools Product Detail Page.” *Online]. Available:
http://www.microchip.com/. [Accessed: 15-Oct-2012].
[113] Microchip Technology, “PIC24FJ128GA010 Family Data Sheet 16-Bit Flash
Microcontrollers,” 2009.
[114] Microchip Technology inc., “PIC24 Microcontroller Family,” 2010.
[115] Microchip Technology inc., “MRF24J40MB Data Sheet,” 2009.
[116] Microchip Technology inc., “Explorer 16 Development Board User ’ s Guide,” 2005.
[117] Microchip Technology inc., “PIC18F2525/2620/4525/4620 Data Sheet Enhanced Flash
Microcontrollers with 10-Bit A / D and nanoWatt Technology,” 2004.
[118] Microchip Technology inc., “PIC18F23K20/24K20/25K20/26K20/
43K20/44K20/45K20/46K20 Data Sheet 28/40/44-Pin Flash Microcontrollers with
nanoWatt XLP Technology,” 2010.
[119] Microchip Technology inc., “ZENA TM Wireless Network Analyzer User ’ s Guide,” 2008.
[120] L. Buechley, “LilyPad Arduino : How an Open Source Hardware Kit is Sparking new
Engineering and Design Communities.” 2005.
[121] L. Buechley, M. Eisenberg, J. Catchen, and A. Crockett, “The LilyPad Arduino : Using
Computational Textiles to Investigate Engagement , Aesthetics , and Diversity in Computer
Science Education,” in CHI 2008 Proceedings Aesthetics, Awareness, and Sketching
Aesthetics, Awareness, and Sketching, 2008, pp. 423–432.
[122] Microchip Technology inc., “PIC18F46K20 Starter Kit C18 LESSONS.” pp. 1–71, 2007.
[123] J. Murphy and Y. Gitman, “Pulse Sensor Getting Started Guide”.
[124] SpectraSymbol, “FlexSensor Datasheet.”
[125] R. Carlos, S. Coyle, B. Corcoran, W. Tomas, and M. Aaron, “Web-based Sensor Streaming
Wearable for Respiratory Monitoring Applications .,” in IEEE Sensors, 2011, no. 07, pp. 3–5.
[126] S. Dulman and P. Havinga, “A Simulation Template for Wireless Sensor Networks.” pp. 1–2,
2003.






















