diseño e implementación de una plataforma - RICABIB
146
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of diseño e implementación de una plataforma - RICABIB

TESIS CARRERA DE MAESTRÍA EN INGENIERÍA
DISEÑO E IMPLEMENTACIÓN DE UNA PLATAFORMAELECTRÓNICA DE MONITOREO Y CONTROL PARA
UN MÓDULO LÁSER SINTONIZABLE
Marvin Cristhiano Bustillos BarcayaMaestrando
Mgtr. Gustavo Fabián RinaldeDirector
Dr. Laureano A. Bulus RossiniCo-director
Miembros del JuradoDr. Axel Bruchhausen (Instituto Balseiro)
Ing. Celso Flury (Instituto Balseiro)Dra. Sonia Cotes (INVAP)
Mayo de 2019
Centro Atómico Bariloche
Instituto Balseiro
Universidad Nacional de Cuyo
Comisión Nacional de Energía Atómica
Argentina


Dedicado a mi familia y amigos


Glosario
etalon interferómetro Fabry-Perot constituido por una placa con dos supercies re-
ectantes. 18
nesse parámetro que indica cuan angostos son los modos de un resonador y por tanto
su calidad. 28
sobreimpulso Cantidad máxima en la cual una respuesta transitoria excede de la
respuesta del estado uniforme. 21
v


Lista de siglas y acrónimos
ASE Amplied Spontaneous Emission. 99
CMRR Common Mode Rejection Ratio. 47
CNC Computer Numerical Control. 78
DBR Distributed Bragg Reector. 1
DFB Distributed FeedBack. 12
DFT Discrete Fourier Transform. 85
FWHM Full Width at Half Maximum. 30
HMI Human Machine Interface. 115
ITU International Telecommunication Union. 14
LASER Light Amplication by Stimulated Emission of Radiation. 2
MMI Multi Mode Interference. 16
OSA Optical Specter Analyzer. 80
PCB Printed Circuit Board. 77
PWM Pulse Width Modulation. 59
SMSR Side Mode Suppression Ratio. 17
SOA Semiconductor Optical Amplier. 17
TEC Thermoelectric Cooler. 18
TIA Transimpedance Amplier. 52
WDM Wavelength Division Multiplexing. 1
vii


Lista de símbolos
αr Coeciente de pérdida por unidad de longitud. 7
∆ν Ancho de linea. 4
δν Ancho de los modos del resonador. 7
E1 Nivel de energía fundamental. 4
E2 Nivel de energía excitado. 4
ess error de estado estacionario. 64
γ Coeciente de ganancia del medio amplicador por unidad de longitud. 5
h Constante de Planck. 4
Mp Sobreimpulso porcentual respecto al valor de estado estacionario. 64
N Diferencia de las densidades de átomos en los niveles de energía excitado y funda-
mental. 5
N1 Densidad de átomos con nivel de energía fundamental. 5
N2 Densidad de átomos con nivel de energía excitado. 5
ν Frecuencia del fotón. 4
ν0 Frecuencia de resonancia. 5
νB Separación entre los máximos de reectancia. 23
νF Separación entre modos del resonador. 7
σ Sección ecaz de interacción de un átomo. 4
tp Tiempo pico en el que la respuesta alcanza el máximo. 64
ix

x Lista de símbolos
tr Tiempo de subida en el que la respuesta pasa del 10% al 90%. 64
ts Tiempo de establecimiento (criterio del 2%). 64

Índice de contenidos
Glosario v
Lista de siglas y acrónimos vii
Lista de símbolos ix
Índice de contenidos xi
Índice de guras xv
Índice de tablas xix
Resumen xxi
Abstract xxiii
1. Introducción 1
1.1. Láser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2. Principio de operación del Láser . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1. Niveles de energía y la interacción de fotones con átomos . . . . 3
1.2.2. Amplicación Láser . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.3. Bombeo de energía . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.4. Saturación del medio amplicador . . . . . . . . . . . . . . . . . 6
1.2.5. El resonador óptico, realimentación y pérdidas . . . . . . . . . . 7
1.2.6. Condiciones necesarias para la oscilación láser . . . . . . . . . . 7
1.3. Características de la salida láser . . . . . . . . . . . . . . . . . . . . . . 8
1.3.1. Potencia de salida . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3.2. Distribución espectral . . . . . . . . . . . . . . . . . . . . . . . 8
1.4. Tipos de láseres y Aplicaciones . . . . . . . . . . . . . . . . . . . . . . 9
1.4.1. Láseres de estado sólido . . . . . . . . . . . . . . . . . . . . . . 9
1.4.2. Láseres gaseosos . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4.3. Láseres líquidos . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4.4. Láseres de semiconductores . . . . . . . . . . . . . . . . . . . . 10
xi

xii Índice de contenidos
1.4.4.1. Láseres con realimentación distribuida . . . . . . . . . 11
1.4.4.2. Láseres con cavidad acoplada . . . . . . . . . . . . . . 11
1.4.4.3. Láseres de emisión supercial con cavidad vertical . . . 11
1.4.5. Aplicaciones típicas de los láseres . . . . . . . . . . . . . . . . . 11
1.5. Láseres sintonizables . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.5.1. Ajuste de longitud de onda . . . . . . . . . . . . . . . . . . . . . 12
1.5.1.1. Cambio de índice de refracción inducido por la inyección
de portadores . . . . . . . . . . . . . . . . . . . . . . . 13
1.5.2. Características particulares de los láseres sintonizables . . . . . 13
1.5.3. Láseres tipo DBR . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5.4. Incremento del rango de ajuste . . . . . . . . . . . . . . . . . . 15
1.6. Láser tipo Y-branch . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.7. Descripción del proyecto . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.8. Requerimientos del proyecto . . . . . . . . . . . . . . . . . . . . . . . . 19
2. Modelo del láser sintonizable 23
2.1. Reectores de Bragg . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2. Modos de la cavidad y sección de ajuste de fase . . . . . . . . . . . . . 26
2.3. Medio activo, SOA y ujo de salida del láser . . . . . . . . . . . . . . . 30
2.3.1. Flujo de salida . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.3.2. SOA externo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.3.3. Fotodiodos y Etalon . . . . . . . . . . . . . . . . . . . . . . . . 35
2.4. Ajuste de longitud de onda . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.4.1. Agotamiento de estados de energía . . . . . . . . . . . . . . . . 37
2.4.2. Reducción de la banda prohibida . . . . . . . . . . . . . . . . . 37
2.4.3. Absorción de portadores libres . . . . . . . . . . . . . . . . . . . 38
2.4.4. Relación entre la corriente aplicada y la densidad de portadores
inyectados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.4.5. Comparación entre los resultados medidos y calculados . . . . . 39
2.5. Mapa de longitud de onda . . . . . . . . . . . . . . . . . . . . . . . . . 40
3. Diseño de los circuitos y controladores 45
3.1. Diseño de los circuitos . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.1.1. Fuentes de corriente . . . . . . . . . . . . . . . . . . . . . . . . 46
3.1.1.1. Selección de la fuente de corriente . . . . . . . . . . . . 46
3.1.1.2. Diseño . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.1.1.3. Simulación . . . . . . . . . . . . . . . . . . . . . . . . 49
3.1.2. Amplicadores de transimpedancia . . . . . . . . . . . . . . . . 51
3.1.2.1. Selección del circuito para los fotodiodos . . . . . . . . 52
Índice de contenidos xiii
3.1.2.2. Diseño . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.1.2.3. Simulación . . . . . . . . . . . . . . . . . . . . . . . . 54
3.1.3. Amplicadores de los termistores . . . . . . . . . . . . . . . . . 55
3.1.3.1. Selección del circuito amplicador para los termistores 56
3.1.3.2. Diseño . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.1.3.3. Simulación . . . . . . . . . . . . . . . . . . . . . . . . 59
3.1.4. Circuito de manejo del TEC . . . . . . . . . . . . . . . . . . . . 59
3.1.4.1. Diseño . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.1.4.2. Simulación . . . . . . . . . . . . . . . . . . . . . . . . 60
3.2. Diseño de los controladores . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.2.1. Control de temperatura . . . . . . . . . . . . . . . . . . . . . . 61
3.2.1.1. Modelo del TEC . . . . . . . . . . . . . . . . . . . . . 61
3.2.1.2. Diseño del controlador de temperatura . . . . . . . . . 64
3.2.2. Control de potencia del láser . . . . . . . . . . . . . . . . . . . . 67
3.2.2.1. Modelo de la planta . . . . . . . . . . . . . . . . . . . 68
3.2.2.2. Diseño del controlador de potencia . . . . . . . . . . . 68
3.2.3. Control de longitud de onda del láser . . . . . . . . . . . . . . . 70
3.2.3.1. Modelo de la planta . . . . . . . . . . . . . . . . . . . 71
3.2.3.2. Diseño del controlador de longitud de onda . . . . . . 72
4. Implementación y validación 77
4.1. Implementación de los circuitos . . . . . . . . . . . . . . . . . . . . . . 77
4.2. Implementación de los controladores . . . . . . . . . . . . . . . . . . . 79
4.2.1. Controladores de temperatura y potencia . . . . . . . . . . . . . 79
4.2.2. Controlador de longitud de onda . . . . . . . . . . . . . . . . . 80
4.3. Validación de los circuitos . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.3.1. Fuentes de corriente . . . . . . . . . . . . . . . . . . . . . . . . 85
4.3.2. Amplicadores de transimpedancia . . . . . . . . . . . . . . . . 86
4.3.3. Amplicador de los termistores . . . . . . . . . . . . . . . . . . 87
4.3.4. Circuito de manejo del TEC . . . . . . . . . . . . . . . . . . . . 88
4.4. Validación de los controladores . . . . . . . . . . . . . . . . . . . . . . . 88
4.4.1. Controlador de temperatura . . . . . . . . . . . . . . . . . . . . 89
4.4.2. Controlador de potencia . . . . . . . . . . . . . . . . . . . . . . 90
4.4.3. Controlador de longitud de onda . . . . . . . . . . . . . . . . . 91
5. Conclusiones y trabajo a futuro 97
5.1. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.2. Trabajo a futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98

xiv Índice de contenidos
A. PCB de los circuitos utilizados 101
A.1. PCB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
A.1.1. Encapsulado del láser . . . . . . . . . . . . . . . . . . . . . . . . 101
A.1.2. Fuente de corriente . . . . . . . . . . . . . . . . . . . . . . . . . 102
A.1.3. Amplicadores de transimpedancia . . . . . . . . . . . . . . . . 102
A.1.4. Circuito de manejo del TEC . . . . . . . . . . . . . . . . . . . . 103
A.1.5. Amplicadores para los termistores . . . . . . . . . . . . . . . . 103
A.1.6. Placa madre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
A.2. Esquemáticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
A.2.1. Fuente de corriente . . . . . . . . . . . . . . . . . . . . . . . . . 105
A.2.2. Amplicadores de transimpedancia . . . . . . . . . . . . . . . . 106
A.2.3. Circuito de manejo del TEC . . . . . . . . . . . . . . . . . . . . 107
A.2.4. Amplicador de los termistores . . . . . . . . . . . . . . . . . . 108
A.2.5. Placa madre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
B. Placa de simulación de carga del láser 111
C. Interfaz para la comunicación con el microcontrolador 115
Agradecimientos 117
Bibliografía 119

Índice de guras
1.1. Esquema de funcionamiento del láser. . . . . . . . . . . . . . . . . . . . 2
1.2. Ganancia y desfase del medio amplicador. Arriba: ganancia del medio
amplicador. Abajo: desfase en el medio amplicador. . . . . . . . . . . 6
1.3. Evolución del ujo de fotones a la salida del láser. (a) La ganancia no está
saturada por lo que todos los modos con ganancia neta comienza a crecer.
(b) la ganancia empieza a disminuir y los modos laterales comienzan a
perder potencia. (c) en equilibrio, solo un modo sobrevive. . . . . . . . 9
1.4. Esquema básico de distintos láseres de semiconductores. (a) Láser con
realimentación distribuida. (b) Láser con cavidad acoplada. (c) Láser de
emisión supercial con cavidad vertical. . . . . . . . . . . . . . . . . . . 11
1.5. Esquema de una red de Bragg de N capas. . . . . . . . . . . . . . . . . 15
1.6. Esquema de un láser tipo DBR. . . . . . . . . . . . . . . . . . . . . . . 15
1.7. Esquema de un láser tipo DBR con dos reectores de Bragg. . . . . . . 16
1.8. Esquema del láser tipo Y-branch. . . . . . . . . . . . . . . . . . . . . . 16
1.9. Láser sintonizable Finisar S7500. . . . . . . . . . . . . . . . . . . . . . 17
1.10. Esquema del encapsulado que contiene al láser Y-branch. . . . . . . . . 18
1.11. Esquema de la plataforma electrónica de control. . . . . . . . . . . . . 18
2.1. Espectro de reectancia de la red de Bragg. . . . . . . . . . . . . . . . 26
2.2. Espectro de reectancia combinada de la red de Bragg. . . . . . . . . . 27
2.3. Intensidad espectral de luz en la cavidad. . . . . . . . . . . . . . . . . . 29
2.4. Coeciente de ganancia espectral en el medio activo para una corriente
aplicada de 98 mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.5. Evolución de la densidad de ujo dentro de la cavidad cuando se aplica
una corriente de 98 mA al medio activo. . . . . . . . . . . . . . . . . . . 33
2.6. (a) Reectancia combinada de las redes de Bragg. (b) Comparación del
coeciente de ganancia con el coeciente de pérdidas en estado estacio-
nario. (c) Potencia de salida del láser en estado estacionario. . . . . . . 34
2.7. Transmitancia espectral normalizada del etalon. . . . . . . . . . . . . . 36
2.8. Cambio de índice de refracción en función de la densidad de portadores. 38
xv

xvi Índice de guras
2.9. Cambio de índice de refracción en función de la corriente aplicada, com-
paración medición y resultados calculados. . . . . . . . . . . . . . . . . 40
2.10. Mapa de longitud de onda (en nm) en función de las corrientes en los
reectores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.11. Vista en perspectiva del mapa de longitud de onda. . . . . . . . . . . . 42
2.12. Mapa de frecuencia en escala potencial. . . . . . . . . . . . . . . . . . . 43
3.1. Esquema de una fuente de corriente usando el amplicador diferencial
INA152. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.2. Esquema de la fuente de corriente y el monitor de corriente. . . . . . . 49
3.3. Barrido de tensión de entrada en la fuente de corriente del SOA. . . . . 50
3.4. Barrido de la tensión de alimentación en la fuente de corriente cuando
la corriente de carga es la máxima(200 mA). . . . . . . . . . . . . . . . 50
3.5. Barrido de la frecuencia de la señal de entrada de la fuente de corriente. 51
3.6. Simulación de la fuente de corriente y el monitor de corriente en conjun-
to. (a) Barrido de la tensión de entrada, (b) Barrido de la frecuencia. . 52
3.7. Amplicador de transimpedancia utilizando el circuito integrado OPA380. 53
3.8. Esquema de simulación del circuito amplicador de transimpedancia. . 55
3.9. Simulación del amplicador de transimpedancia. (a) Barrido de la co-
rriente del fotodiodo. (b) Barrido de la frecuencia de la fuente de exci-
tación del amplicador de transimpedancia. . . . . . . . . . . . . . . . 55
3.10. Esquema del circuito de medición de los termistores. . . . . . . . . . . . 57
3.11. Esquema del circuito generador de la tensión de referencia. . . . . . . . 58
3.12. (a) Esquema del circuito de medición de los termistores.(b) Barrido de
la temperatura del termistor. . . . . . . . . . . . . . . . . . . . . . . . . 59
3.13. Esquema del circuito de manejo del TEC. . . . . . . . . . . . . . . . . 60
3.14. (a) Simulación de un transitorio en la entrada del TEC. (b) vista mag-
nicada de la simulación. . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.15. Esquema del lazo de control para el ajuste de temperatura. . . . . . . . 62
3.16. Respuesta del láser sintonizable a una entrada escalón en el TEC. . . . 62
3.17. Comparación de la respuesta al escalón de la medición y la obtenida del
modelo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.18. Respuesta de la planta y el controlador a lazo cerrado ante una entrada
tipo escalón. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.19. Esquema del lazo de control para el ajuste de potencia. . . . . . . . . . 67
3.20. Respuesta de la planta y el controlador de potencia a lazo cerrado ante
una entrada de tipo escalón en la referencia. . . . . . . . . . . . . . . . 70
3.21. Esquema de la planta para el ajuste de longitud de onda. . . . . . . . . 72
3.22. Algoritmo de seguimiento de máximo: Perturbar y observar. . . . . . . 73

Índice de guras xvii
3.23. Resultados del control de longitud de onda cuando existe un cambio de
canal en la referencia. (a) Evolución de la tensión del TÍA. (b) Evolución
de la frecuencia de emisión del láser. (c) Evolución de la frecuencia de
emisión magnicada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.1. Modelo 3D de los circuitos implementados. . . . . . . . . . . . . . . . . 77
4.2. Implementación de los circuitos. (a) PCB después de haber nalizado el
proceso de fresado. (b) PCB durante la soldadura de componentes. (c)
Ensamblado de todos las placas en la placa madre y prueba de funcio-
namiento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.3. Longitud de onda de uno de los modos de resonancia del etalon en fun-
ción de la temperatura de operación. . . . . . . . . . . . . . . . . . . . 81
4.4. Longitud de onda de emisión del láser en función de la temperatura de
operación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.5. Mapa de longitud de onda. (a) Obtenido del láser sintonizable. (b) Ob-
tenido del modelo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.6. Diagrama de Bode de la fuente de corriente. Comparación medición y
simulación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
4.7. Diagrama de Bode de la placa de los amplicadores de transimpedancia.
Comparación medición y simulación. . . . . . . . . . . . . . . . . . . . 87
4.8. Diagrama de Bode de los amplicadores para los termistores. Compara-
ción medición y simulación. . . . . . . . . . . . . . . . . . . . . . . . . 88
4.9. (a) Respuesta del circuito de manejo del TEC ante un escalón en la
entrada PWM. (b) Imagen magnicada de la gura (a) para observar
con mayor claridad el rizo de la señal. . . . . . . . . . . . . . . . . . . . 89
4.10. Respuesta del controlador de temperatura ante una entrada tipo escalón
en la referencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.11. Respuesta del controlador de potencia a una entrada tipo escalón en la
entrada de referencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.12. Tensión del TIA del fotodiodo del etalon ante el barrido de la corriente
de fase. Comparación con ajuste y sin ajuste de los reectores. . . . . . 92
4.13. Espectro de potencia correspondiente a la sintonización del canal 21 de
la banda C. (a) Espectro completo de toda la banda C. (b) Espectro
magnicado en la zona próxima al modo de emisión. . . . . . . . . . . . 93
4.14. Barrido de canales de la banda C. a) Longitud de onda en función del
canal. b) Diferencia entre el valor de longitud de onda medido y el cal-
culado y la banda de error del instrumento. . . . . . . . . . . . . . . . . 94
4.15. Respuesta de la tensión del fotodiodo del etalon ante un cambio en el
canal sintonizado. Comparación entre la simulación y la medición. . . . 95

xviii Índice de guras
A.1. PCB del encapsulado del láser. . . . . . . . . . . . . . . . . . . . . . . 101
A.2. PCB de la fuente de corriente. . . . . . . . . . . . . . . . . . . . . . . . 102
A.3. PCB de los amplicadores de transimpedancia. . . . . . . . . . . . . . 102
A.4. PCB del circuito de manejo del TEC. Arriba: capa superior de la placa.
Abajo: capa inferior de la placa. . . . . . . . . . . . . . . . . . . . . . . 103
A.5. PCB de los amplicadores para los termistores. . . . . . . . . . . . . . 103
A.6. PCB de la placa madre. Arriba: capa superior de la placa. Abajo: capa
inferior de la placa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
A.7. Esquemático de la fuente de corriente. . . . . . . . . . . . . . . . . . . 105
A.8. Esquemático del TIA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
A.9. Esquemático del circuito de manejo del TEC. . . . . . . . . . . . . . . 107
A.10.Esquemático del amplicador de los termistores. . . . . . . . . . . . . . 108
A.11.Esquemático de la placa madre. . . . . . . . . . . . . . . . . . . . . . . 109
B.1. Impedancia de la entrada del SOA. Comparación medición en el láser y
simulación con un diodo en serie a una resistencia. . . . . . . . . . . . . 112
B.2. Impedancia de la entrada de ganancia del medio activo. Comparación
medición en el láser y simulación con un diodo en serie a una resistencia. 112
B.3. Impedancia de la entrada de los reectores. Comparación medición en
el láser y simulación con un diodo en serie a una resistencia. . . . . . . 113
B.4. Impedancia de la entrada de la sección de fase. Comparación medición
en el láser y simulación con dos diodos en serie. . . . . . . . . . . . . . 113
C.1. Pantallas del display. (a) Pantalla principal. (b) Pantalla de congura-
ción. (c) Pantalla de visualización de variables. . . . . . . . . . . . . . . 115
C.2. Interface de comunicación con el microcontrolador. . . . . . . . . . . . 116
Índice de tablas
1.1. Rangos de operación de las fuentes de corriente. . . . . . . . . . . . . . 20
1.2. Requerimientos del TEC. . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.1. Valores calculados de resistencia para las distintas fuentes. . . . . . . . 48
4.1. Información de la respuesta al escalón. Comparación de la simulación y
la medición. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.2. Información de la respuesta al escalón. Comparación de la simulación y
la medición. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
xix


Resumen
En esta tesis se presenta el proceso de diseño e implementación de una platafor-
ma electrónica de control, para un láser sintonizable tipo Y-branch. Dicho láser es
frecuentemente usado en comunicaciones ópticas, especícamente en aplicaciones de
multiplexación por división de longitud de onda(WDM). El trabajo incluye: el diseño,
simulación, implementación y validación de todos los circuitos electrónicos y controla-
dores necesarios para el funcionamiento del láser sintonizable.
En el primer capítulo se presenta el marco teórico necesario para el desarrollo del
proyecto, haciendo énfasis en los láseres sintonizables, sus características de funcio-
namiento y sus aplicaciones. Se presentan además las principales características del
proyecto y se establecen los requerimientos de diseño del mismo.
El segundo capítulo está dedicado al modelado del láser sintonizable. Los resultados
esperados del modelo permitieron utilizarlo en el proceso de diseño y simulación de los
controladores de longitud de onda, potencia y temperatura, produciendo las salidas
de corriente esperadas ante la aplicación de determinadas entradas. Otro resultado del
modelo fue el mapa de frecuencias, que permitió el diseño del controlador de longitud de
onda del láser. En el modelado, se analizó cada componente del láser de forma individual
y se acoplaron las ecuaciones de cada componente en una ecuación global que se resolvió
numéricamente. Finalmente, el capítulo incluye el análisis del cambio de índice de
refracción inducido por inyección de portadores en materiales semiconductores, dicho
fenómeno es muy importante en el funcionamiento del láser y por ende en su modelado.
En el tercer capítulo se presenta el diseño y simulación de todos los circuitos necesa-
rios para el manejo del láser. Los circuitos más importantes de la plataforma de control
incluyen fuentes de corriente, amplicadores de transimpedancia, amplicadores de
señal para termistores y un puente H para el manejo del refrigerante termoeléctrico
incluido en el láser. En este capítulo también se detalla el diseño y simulación de los
controladores del láser. Para el diseño de los controladores de potencia y longitud de
onda del láser se utilizó el modelo del láser estudiado en el capítulo 2 y los modelos de
los circuitos que manejan el láser, mientras que para el controlador de temperatura fue
necesario obtener un modelo en base a mediciones realizadas en el láser.
Finalmente, en el capítulo 4 se detalla la implementación, tanto de los circuitos
necesarios para el manejo del láser como de los algoritmos de control diseñados en el
xxi

xxii Resumen
capítulo 3. También se presenta la validación de los mencionados circuitos y controla-
dores, se comprueba su correcto funcionamiento y si satisfacen o no los requerimientos
de diseño.
Palabras clave: LÁSER SINTONIZABLE, WDM, CONTROL, Y-BRANCH

Abstract
This thesis presents the design and implementation of a control system for a Y-
Branch tunable laser which is intended for optical networks applications such as WDM.
The document covers the design, simulation, implementation and validation of all the
circuits and controllers needed for the laser operation.
The rst chapter is an introduction to tunable lasers. The operation principle, char-
acteristics and applications are discussed. It is also presented the project description
and requirements.
Chapter two deals with the modelling of the tunable laser. This model will be
important for the development of control algorithms for temperature, and power. The
model is also useful to nd a frequency map which is necessary for wavelength control.
The model considers each laser component separately and then combines their equa-
tions and solve them numerically. The nal point of the model is the analysis of the
carrier induced refractive index change which is essential to relate the applied current
with the wavelength change.
The design and simulation are presented in chapter three. The principal circuits
considered are the current source, transimpedance amplier, thermistor measurement
circuit and TEC driver. The controllers considered include temperature, power and
wavelength control.
Finally, chapter four shows the implementation and validation of all the circuits
and controllers considered in chapter three with a focus on controller performance.
Keywords: TUNABLE LÁSER, WDM, CONTROL, Y-BRANCH
xxiii


Capítulo 1
Introducción
Los láseres existen en una gran variedad de materiales y tamaños. Estos tienen una
amplia gama de aplicaciones en distintas áreas que van desde estadística de fotones en
el ámbito cientíco hasta procesamiento de materiales en el ámbito industrial.
En comunicaciones ópticas los láseres son utilizados como fuentes de luz. Los láseres
de semiconductores tienen preferencia en esta aplicación ya que proveen ventajas tales
como tamaño compacto, alta eciencia, conabilidad, intervalo de longitud de onda
apropiado y área de emisión reducida [1].
Los láseres de semiconductores sintonizables, por su parte, son componentes clave
en los sistemas de comunicaciones ópticas modernos que utilizan multiplexación por
división de longitud de onda (WDM, Wavelength Division Multiplexing) [2]. Los siste-
mas de comunicación coherente también presentan otra aplicación importante para los
láseres sintonizables. Dichos sistemas satisfacen la creciente demanda de velocidad de
transferencia de datos [3, 4].
Entre los láseres sintonizables para comunicaciones opticas destacan los basados
en reectores de Bragg distribuidos (DBR, Distributed Bragg Reector). Estos tienen
un tamaño compacto, alta estabilidad mecánica y son fáciles de integrar con otros
componentes ópticos [5].
Teniendo en cuenta la importancia de los láseres sintonizables y en particular los
basados en láseres DBR, se describe en esta tesis el desarrollo de una plataforma
de control para un láser sintonizable tipo Y-Branch especicado para comunicaciones
ópticas. El desarrollo de dicha plataforma pone énfasis en la obtención de tiempos de
ajuste de longitud de onda menores a los obtenidos por equipos comerciales. El láser a
controlar también tiene como futura aplicación el uso en un laboratorio de óptica por
lo que se desea que posea características de manejo no tan limitadas como ocurre en
equipos comerciales [6].
En este capítulo introductorio se presenta un breve marco teórico, necesario para
el desarrollo del proyecto. Los principales temas a tratar incluyen: el principio de fun-
1

2 Introducción
cionamiento y características de un láser, tipos y aplicaciones de los láseres (haciendo
énfasis en el láser a controlar), etc. Se presenta también una descripción general del
proyecto, los componentes necesarios para el manejo y control del láser y se establecen
los requerimientos de diseño.
1.1. Láser
LASER es el acrónimo de una de las características más importantes de este disposi-
tivo [7], la amplicación de luz estimulada por radiación. Esencialmente, un láser es un
oscilador óptico conformado por un amplicador resonante cuya salida es realimentada
a la entrada [8]. El funcionamiento de un láser requiere de los siguientes elementos
un medio amplicador,
un sistema de realimentación,
un mecanismo de selección de frecuencia y
un esquema para obtener luz a la salida del resonador.
En la gura 1.1 se muestra el esquema básico de un láser. El medio amplicador,
comúnmente llamado medio activo, consiste en un conjunto de átomos o moléculas [9]
que pueden emitir un fotón mediante la estimulación de otro fotón.
Medio activo(átomos)
EspejoR=100%
EspejoR=80%
Bombeo de energía
Realimentacióny oscilación
Salida del Láser
Figura 1.1: Esquema de funcionamiento del láser.
El fotón emitido posee las mismas características que el fotón estimulante, esto
implica que el medio activo proporciona una ganancia óptica. El medio activo será
capaz de producir emisión estimulada siempre y cuando exista un bombeo de energía
que lo excite. Dicho bombeo puede realizarse de distintas maneras dependiendo del

1.2 Principio de operación del Láser 3
material que constituye el medio activo, por ejemplo, los materiales semiconductores
son excitados mediante la inyección de portadores resultantes de la aplicación de una
diferencia de potencial.
El sistema de realimentación se obtiene utilizando un resonador óptico que consiste,
usualmente, en un arreglo de espejos que rodean al medio activo. La luz producida se
reeja en los espejos de manera repetida, logrando de esta forma más amplicación con
cada paso a través del medio activo. La amplicación de la luz no continúa de manera
indenida, puesto que, eventualmente el medio activo llegará a un punto de saturación
en el cual la ganancia disminuye. Una condición estable se alcanza cuando la ganancia
(reducida debido a la saturación) iguala a las pérdidas en el resonador [8].
La ganancia provista por el medio activo es dependiente de la frecuencia, es decir
que ciertas frecuencias obtendrán una mayor ganancia. De manera similar, el resonador
óptico solo puede sustentar un conjunto de frecuencias denidas. Tanto la dependencia
espectral de la ganancia como el conjunto de frecuencias del resonador óptico consti-
tuyen el mecanismo de selección de frecuencia del láser. La frecuencia o frecuencias de
emisión del láser serán entonces aquellas que puedan existir en el resonador óptico y
que además concuerden con la frecuencia que recibe mayor ganancia del medio.
Finalmente, la salida del láser se obtiene haciendo uno de los espejos del resona-
dor parcialmente transmisor; esto permitirá que parte de la luz existente dentro del
resonador escape y pueda ser utilizada.
Los láseres existen en un sin n de formas y encuentran uso en un amplio ran-
go de aplicaciones. En las siguientes secciones de este capítulo se profundizará en el
principio de funcionamiento del láser, los tipos de láseres más usados y sus respectivas
aplicaciones.
1.2. Principio de operación del Láser
1.2.1. Niveles de energía y la interacción de fotones con átomos
Para comprender el funcionamiento de un láser se deben revisar conceptos previos
tales como los niveles de energía de átomos, moléculas y sólidos; la interacción entre
fotones y átomos es también un conocimiento previo necesario.
Los constituyentes de la materia satisfacen las leyes de la mecánica cuántica y es
esta la que dene los niveles de energía de los átomos, moléculas y sólidos. En el caso
de los átomos, los niveles de energía están denidos por las interacciones entre los
electrones y el núcleo. En el caso de moléculas, los niveles de energía dependen no
solo de las interacciones ocurrentes entre los átomos individuales sino también de las
interacciones interatómicas que mantiene la molécula unida. Los niveles de energía de
sólidos son determinados por las interacciones de átomos individuales así como por las

4 Introducción
interacciones asociadas a átomos vecinos; la unión de los átomos en un sólido causa que
los niveles de energía de los átomos individuales se conviertan en bandas de energía
debido a la interacción de átomos vecinos [8].
Los átomos pueden sufrir transiciones ascendentes o descendentes entre sus nive-
les de energía. Durante estas transiciones, el átomo puede emitir o absorber fotones,
conservando la energía en el proceso. Las interacciones entre átomos y fotones que son
de interés en la operación de láseres ocurren cuando la energía del fotón es igual a la
diferencia de los niveles de energía entre los que ocurre la transición, es decir cuando
hν = E2 − E1, (1.1)
donde h es la constante de Planck, ν es la frecuencia del fotón y E1 y E2 son la energía
de los niveles entre los que ocurre la transición. Los tipos de interacción que pueden
ocurrir son: absorción, emisión espontánea y emisión estimulada.
La absorción puede ocurrir cuando un átomo que se encuentra en el nivel de energía
fundamental absorbe un fotón, esto genera una transición del átomo hacia un nivel de
energía superior. Este proceso es inducido ya que requiere de la existencia de un fotón
con energía igual a la de transición para su ocurrencia. Es importante notar que la
probabilidad de absorción aumenta con el número de fotones existentes en el modo
apropiado.
La emisión espontánea puede ocurrir cuando un átomo se encuentra en un nivel de
energía superior al fundamental (nivel de energía más bajo). El átomo decae mediante
la emisión de un fotón de energía igual a la diferencia de energía entre los niveles de
la transición. En contraste con las interacciones inducidas por fotones (absorción y
emisión estimulada), la probabilidad de emisión espontánea es independiente de los
fotones existentes.
La emisión estimulada es el tercer tipo de interacción y ocurre cuando un fotón
induce la emisión de otro fotón en un átomo que se encuentra en un nivel de energía
superior al fundamental. El fotón emitido es una copia del fotón causante de la tran-
sición, es decir, que tiene la misma energía, dirección y polarización. La probabilidad
de emisión estimulada, al igual que la de absorción, aumenta con el número de fotones
existentes en el modo apropiado.
Otros conceptos importantes en la interacción de átomos con la radiación son la
sección ecaz de interacción σ y el ancho de línea de la interacción ∆ν. La sección
ecaz de transición caracteriza la interacción del átomo con la radiación, es decir, dene
la magnitud relativa de interacción con fotones de una dada frecuencia. El ancho de
línea de la interacción es el ancho de la función que describe la forma espectral de la
sección ecaz de interacción.

1.2 Principio de operación del Láser 5
1.2.2. Amplicación Láser
Los procesos de interacción de átomos y fotones descritos anteriormente son la base
de la amplicación Láser. Un átomo cualquiera que se encuentra en el estado de energía
más bajo puede absorber un fotón y pasar a un nivel de energía superior, por ende este
proceso genera una atenuación en la densidad de ujo de fotones. En caso de que el
átomo se encuentre en un nivel de energía superior, entonces un fotón puede inducir
al átomo a emitir un fotón clon, estos a su vez inducen la emisión de subsecuentes
fotones, por tanto la emisión estimulada genera amplicación de la densidad de ujo
de fotones. El tercer tipo de interacción (emisión espontánea) es responsable del ruido
del amplicador, ya que genera fotones con polarización y dirección aleatoria.
La ganancia de un medio dependerá de la densidad de átomos existentes en los
distintos niveles de energía. Si denimos N1 y N2 como la densidad de átomos con
nivel de energía fundamental y excitado respectivamente, entonces la ganancia del
medio es función de la diferencia entre las densidades de átomos N ,
N = N2 −N1. (1.2)
Si N es positivo entonces existe un mayor número de átomos en el nivel excitado por lo
que la emisión estimulada dominará sobre la absorción, por tanto el medio se comporta
como un amplicador. Si N es negativo la absorción es la que dominará y el medio se
comporta como absorbente o atenuador; nalmente si N es cero entonces el medio es
transparente al ujo de fotones.
El coeciente de ganancia por unidad de longitud de un amplicador láser (γ)
depende de la frecuencia de la luz incidente. La dependencia espectral de la ganancia
se debe a que la amplicación láser está basada en los procesos de interacción de
átomos y fotones (emisión y absorción) y estos tienen una forma de línea centrada en
la frecuencia de resonancia ν0 con cierto ancho ∆ν. Por tanto, un amplicador láser es
un dispositivo resonante, con frecuencia de resonancia y ancho de banda determinada
por la transición atómica [8].
La ganancia de un medio está asociada con un corrimiento de fase, el cual es cau-
sado por el medio dispersivo generado por la dependencia espectral de la ganancia.
El corrimiento de fase está relacionado con la ganancia mediante la transformada de
Hilbert, por lo que si se conoce la ganancia del medio, se puede determinar el corri-
miento de fase que este producirá. En la gura 1.2 se muestra la ganancia y el desfase
típico de un medio amplicador, la ganancia tiene forma lorentziana, está centrada en
la frecuencia ν0 y tiene ancho de línea ∆ν.

6 Introducción
o
Figura 1.2: Ganancia y desfase del medio amplicador. Arriba: ganancia del medio amplica-dor. Abajo: desfase en el medio amplicador.
1.2.3. Bombeo de energía
Como se mencionó anteriormente, la amplicación láser es posible cuando la den-
sidad de átomos en el nivel superior o excitado E2 es mayor a la del nivel inferior o
fundamental E1, es decir cuando N2 > N1. En equilibrio térmico, el nivel inferior es
usualmente el más poblado, por lo que se requiere lograr una inversión de población
para obtener amplicación láser.
La inversión de población se logra mediante el bombeo de energía al medio. Esta
energía elevará átomos del nivel de energía inferior al nivel de energía excitado, logran-
do así el incremento de la densidad de átomos en el nivel excitado y la consiguiente
inversión de población. Dependiendo del tipo de láser, existen distintas maneras de pro-
veer energía al medio para lograr la inversión de población, algunas de ellas incluyen
energía en forma de electricidad, de luz, mediante reacciones químicas o por procesos
nucleares.
1.2.4. Saturación del medio amplicador
El coeciente de ganancia de un medio amplicador depende de la diferencia de
población entre niveles de energía atómicos N . La diferencia de población N a su vez
1.2 Principio de operación del Láser 7
depende del nivel de bombeo y la tasa de transición entre niveles, la cual es dependiente
de la densidad de ujo de fotones. Por lo anterior, está claro que el coeciente de
ganancia de un medio amplicador depende de la densidad de ujo que lo atraviesa y
es esta dependencia la que causa la saturación en la ganancia del medio. El coeciente
de ganancia es función decreciente de la densidad de ujo de fotones [8], por lo que
la ganancia disminuye cuando el ujo se incrementa más allá de un cierto valor de
saturación. Cuando la densidad de ujo de fotones entrante es muy grande la ganancia
del medio tiende a uno, es decir, que el medio no amplica y se obtiene a la salida del
medio la densidad de ujo de fotones inicial más un pequeño aumento constante.
1.2.5. El resonador óptico, realimentación y pérdidas
El resonador óptico provee la realimentación necesaria para el funcionamiento del
láser y usualmente es una cavidad Fabry-Pérot que consiste en un medio rodeado
por dos espejos. Las pérdidas o atenuación en el resonador óptico se originan por la
absorción y el scattering de la luz en el medio activo y por las pérdidas de luz en los
espejos del resonador. La pérdida de ida y vuelta en el resonador se dene como la
pérdida en los dos espejos más la atenuación que la luz experimenta al recorrer dos
veces la longitud de la cavidad. Un parámetro importante del resonador es el coeciente
de pérdidas por unidad de longitud αr, el cual incluye las pérdidas en los espejos y las
pérdidas en el medio. El resonador mantiene modos de oscilación con frecuencias que
corresponden a un desfase de ida y vuelta múltiplo de 2π, estos se denominan modos de
oscilación del resonador o simplemente modos del resonador, se encuentran espaciados
por una frecuencia νF y poseen un cierto ancho δν.
1.2.6. Condiciones necesarias para la oscilación láser
Existe dos condiciones necesarias para que la oscilación láser puede sustentarse, la
condición de ganancia que determina el mínimo bombeo de energía y la condición de
fase que determina la frecuencia o frecuencias a las cuales ocurrirá la oscilación.
La primera condición requiere que la ganancia en el medio sea superior a las pérdidas
del resonador, es decir γ(ν) > αr. Dado que la ganancia es proporcional a la diferencia
de poblaciones N y esta, a su vez, depende de la tasa de bombeo, entonces existe
una tasa de bombeo umbral a partir de la cual la ganancia es superior a las pérdidas
y comienza la oscilación láser. La dependencia que el coeciente de ganancia tiene
con la frecuencia causa que el umbral de oscilación sea también dependiente de la
frecuencia. Existe un mínimo en el umbral de oscilación correspondiente al pico de
ganancia ubicado en la frecuencia ν0, es decir que la oscilación láser es más fácilmente
alcanzada por el modo o frecuencia de la cavidad más próximo al pico de resonancia
del medio activo.

8 Introducción
La segunda condición requiere que el desfase de una onda que completa una vuelta
en el resonador sea múltiplo de 2π. Los modos que satisfacen esta condición son los
modos del resonador óptico y sus frecuencias centrales determinan las frecuencias a las
cuales la oscilación láser puede ocurrir.
1.3. Características de la salida láser
1.3.1. Potencia de salida
Cuando el bombeo a un láser genera una diferencia de población N superior al
umbral, el medio activo proporciona una ganancia superior a las pérdidas en el reso-
nador y la oscilación láser comienza. A medida que la densidad de ujo de fotones se
incrementa la ganancia disminuye debido a la saturación, eventualmente se llega a un
punto de equilibrio en el que la ganancia iguala a las pérdidas. Una vez superado el
umbral de oscilación láser, la densidad de ujo de fotones es proporcional a la tasa de
bombeo. Este ujo de fotones interno determinará el ujo de fotones a la salida del
láser, el cual es simplemente el ujo de fotones que logra atravesar el espejo de salida y
su magnitud dependerá de la transmitancia de dicho espejo. Por lo anterior, se puede
denir la potencia de salida del láser como,
Pout = hνφTA, (1.3)
donde hν es la energía de un fotón, φ es la densidad de ujo de fotones interno, T es
la transmitancia del espejo de salida y A es el área que atraviesa el ujo de salida.
La eciencia de salida es un parámetro importante del láser y se dene como la
relación entre las pérdidas debido al espejo de salida y las pérdidas totales de la cavidad
(pérdidas de los espejos más pérdidas en el medio activo). Otro parámetro importante
es la eciencia total, denida como la relación entre la potencia de salida del láser y la
potencia entregada al láser mediante bombeo.
1.3.2. Distribución espectral
La distribución espectral de la salida del láser depende tanto de la ganancia espectral
del ujo de fotones en el medio activo como de los modos del resonador. La condición
de ganancia establece que la oscilación láser ocurre cuando las ganancias superan a las
pérdidas y puesto que la ganancia tiene forma de línea lorentziana entonces existirá una
banda de frecuencia, centrada en la frecuencia de resonancia, que superará las pérdidas.
Por lo tanto cualquier modo del resonador dentro de esa banda de frecuencia podrá
generar oscilación láser. Por otro lado, la condición de fase requiere que la frecuencia
de oscilación concuerde con las frecuencias de los modos del resonador óptico. De la

1.4 Tipos de láseres y Aplicaciones 9
unión de las anteriores condiciones, se obtiene un número de posibles frecuencias de
oscilación o modos del láser, estos tienen un ancho de línea similar al de los modos del
resonador, es decir δν .
En operación, los modos del resonador para los cuales la ganancia es superior a la
pérdida comienzan a incrementar su densidad de ujo de fotones, siendo los modos más
próximos a la frecuencia de resonancia del medio ν0 los más amplicados debido a una
mayor ganancia (gura 1.3a). Eventualmente los modos más próximos a la frecuencia
de resonancia causan una reducción uniforme en la ganancia debido a la saturación
del medio, lo que implica que los modos más alejados ya no cumplirán la condición de
ganancia y perderán potencia (gura 1.3b). Finalmente, solo un modo sobrevive (dos
en el caso de ser simétrico), este modo tiene la frecuencia más próxima a la frecuencia
de resonancia y es el único con una potencia estable en contraste con los otros modos
que mantienen una potencia ínma (gura 1.3c). Los dos modos que rodean al modo
principal se denominan modos adyacentes y usualmente poseen una potencia suciente
para ser distinguibles del piso de ruido.
ϕ
υ
αrγο
γ
υ
(a)
ϕ
υ
γoγα r
γ
υ
(b)
ϕ
υ
γoγα r
γ
υ
(c)
Figura 1.3: Evolución del ujo de fotones a la salida del láser. (a) La ganancia no está saturadapor lo que todos los modos con ganancia neta comienza a crecer. (b) la ganancia empieza adisminuir y los modos laterales comienzan a perder potencia. (c) en equilibrio, solo un modosobrevive.
1.4. Tipos de láseres y Aplicaciones
El fenómeno de amplicación láser ocurre en una gran variedad de materiales, que
incluyen sólidos, líquidos y gases [8]; a continuación se explica con un poco más de
detalle las características de los distintos tipos de láseres.
1.4.1. Láseres de estado sólido
Los láseres de estado sólido usualmente consisten en un medio dieléctrico transpa-
rente al cual se le han implantado impurezas de algún material activo [10]. Elementos
de transición pertenecientes a las tierras raras son usualmente seleccionados como im-
purezas y son estas impurezas las que generan la amplicación láser. Los láseres de

10 Introducción
estado sólido tienen un espectro de absorción considerablemente ensanchado, por lo
que el bombeo de energía es usualmente logrado por medios ópticos (por ejemplo me-
diante un diodo láser [8]). Entre los láseres de estado sólido más destacados están los
láseres de rubí, Neodimio-YAG, titanio-zaro y láseres de bra óptica.
1.4.2. Láseres gaseosos
En láseres gaseosos los niveles de energía son nos en comparación a los sólidos,
por esta razón se utiliza bombeo eléctrico en lugar de óptico para la excitación del
medio [11]. En general este tipo de láseres consiste en un tubo de descarga (en donde
se introduce el gas) rodeado por dos reectores que conforman el resonador. Ejemplos
de láseres gaseosos son helio-neón, argón, CO2, nitrógeno, etc.
1.4.3. Láseres líquidos
Los láseres líquidos se componen de una molécula activa en una solución de alcohol
etílico o metílico, glicerina, agua u otro disolvente. Estos láseres fueron de gran impor-
tancia en el pasado debido al gran rango de longitudes de onda en el que pueden ser
ajustados.
1.4.4. Láseres de semiconductores
Los láseres de semiconductores conforman actualmente uno de los grupos más im-
portantes debido al gran rango de aplicaciones en los que son usados, además de que
sirven como fuentes de bombeo para láseres de estado sólido. Entre las ventajas de
esta tecnología se puede destacar su reducido tamaño, su gran eciencia para convertir
energía eléctrica en luz, la posibilidad de emisión en un amplio intervalo de longitudes
de onda y la facilidad para realizar modulación directa [11].
El medio activo de los láseres de semiconductores consiste, frecuentemente, en una
combinación de elementos del grupo III de la tabla periódica (Por ejemplo Al, Ga, In)
y elementos del grupo V (N, P, As, Sb); el rango de longitudes de onda alcanzables
por estas combinaciones varía entre 630 nm y 1600 nm. Algunos ejemplos de láseres de
semiconductores son GaAs, AlGaAs, InGaAs y InGaAsP.
Una característica fundamental en los láseres de semiconductores es la de poseer un
ancho espectral no, es decir, que en la salida predomine un solo modo longitudinal.
Esto se puede conseguir mediante distintos esquemas, algunos de ellos se describen a
continuación.

1.4 Tipos de láseres y Aplicaciones 11
1.4.4.1. Láseres con realimentación distribuida
En láseres convencionales la realimentación se encuentra concentrada en los reecto-
res, en cambio, en láseres con realimentación distribuida (gura 1.4a) la realimentación
se logra mediante una red distribuida en toda la cavidad. La red logra la selección del
modo único por medio de refracción de Bragg.
1.4.4.2. Láseres con cavidad acoplada
En este tipo de láseres (gura 1.4b) la selectividad del modo longitudinal se logra
mediante el acople de una cavidad externa a una de las caras del láser. La cavidad
externa realimenta parte de la luz de vuelta al láser, dicha realimentación está en fase
solo para ciertos modos de la cavidad por lo que los demás serán atenuados.
1.4.4.3. Láseres de emisión supercial con cavidad vertical
En este tipo de láseres (gura 1.4c) la cavidad es extremadamente pequeña, lo que
causa que el espaciamiento entre modos de la cavidad sea mucho mayor al ancho de la
ganancia del medio, por tanto se obtiene operación en un solo modo longitudinal.
Tipo P
Luz de salidaTipo N
Medio activoRed de Bragg
(a)
Tipo P
Tipo N
Red de Bragg
Luz de salida
Medio Activo
(b)
Reflector de BraggTipo N
Medio activo (multiquantum well)
Reflector de BraggTipo P
Luz de salida
(c)
Figura 1.4: Esquema básico de distintos láseres de semiconductores. (a) Láser con realimen-tación distribuida. (b) Láser con cavidad acoplada. (c) Láser de emisión supercial con cavidadvertical.
1.4.5. Aplicaciones típicas de los láseres
Los láseres son utilizados en diferentes áreas y en un sin n de aplicaciones que van
desde aplicaciones médicas hasta militares. En el ámbito cientíco, por ejemplo, se pue-
de mencionar la detección de ondas gravitacionales, estadística de fotones, separación
de isótopos, etc. En la industria destacan aplicaciones en el procesamiento de mate-
riales tales como soldado y perforación, rastreo, seguimiento ambiental, mediciones de
precisión, etc.

12 Introducción
En comunicaciones ópticas se utilizan como fuentes de luz para la transmisión de
información a través de bra óptica. Una de las principales aplicaciones de láseres
de semiconductores en el área de las comunicaciones ópticas es la multiplexación por
división de longitud de onda. Esta tecnología consiste en la transmisión simultánea
de múltiples señales con distintas longitudes de onda, lo que permite mayores tasas
de transmisión. El uso de WDM requiere de láseres con un reducido ancho de línea
y con la capacidad de ser ajustados en un gran rango de longitudes de onda. Estos
requerimientos son cumplidos con el uso de láseres sintonizables, tecnología que se
explica con mayor detalle en la siguiente sección.
1.5. Láseres sintonizables
Los láseres sintonizables poseen la característica de tener longitud de onda ajustable.
Dicho ajuste se consigue de distintas maneras en diversos tipos de láseres. Los láseres
sintonizables tienen un gran rango de aplicaciones dependiendo al material del que
están construidos [12]. Entre los distintos tipos de láseres sintonizables, el tipo de láser
de interés para este trabajo son los láseres de semiconductores sintonizables, ya que
este es el tipo de láser que se pretende controlar.
Los láseres de semiconductores sintonizables tienen un gran uso en telecomunicacio-
nes, particularmente en WDM y en transmisión coherente, donde la longitud de onda
de la señal transmitida debe ser igual a la del oscilador local [13]. La mayoría de láse-
res de semiconductores sintonizable están formados por un conjunto de secciones con
diferentes funciones. Secciones típicas son el medio activo, uno o más ltros ajustables
y una sección de corrimiento de fase para lograr un ajuste continuo.
Los láseres en los que el ajuste de longitud de onda se realiza en el exterior de la ca-
vidad se denominan láseres de semiconductores de cavidad acoplada o cavidad externa.
En estos láseres el ajuste de longitud de onda se realiza mediante redes de difracción
externas, las cuales poseen un máximo de reectividad para ciertas longitudes de onda
y que pueden ser ajustadas mediante el cambio del ángulo de la red de difracción.
En el caso en el que el ajuste de longitud de onda se realizara en el interior de la
cavidad, se tiene dos principales estructuras: láseres de realimentación distribuida(DFB,
Distributed FeedBack) y láseres tipo reector de Bragg distribuido. Los láseres DBR
poseen usualmente mayor rango de ajuste que los láseres DFB.
1.5.1. Ajuste de longitud de onda
Los láseres de cavidad externa o acoplada requieren usualmente un mecanismo
electromagnético para modicar el ángulo de las redes de interferencia externas lo que
causa el cambio de longitud de onda deseado. Para láseres que poseen la sección de
1.5 Láseres sintonizables 13
ajuste en el interior de la cavidad, se requiere el cambio del índice de refracción de
dicha sección. Este cambio puede obtenerse de tres maneras: mediante la inyección de
portadores, aplicando una diferencia de potencial o modicando la temperatura; de los
anteriores métodos el más usado es la inyección de portadores puesto que este produce
el mayor cambio de índice de refracción. Por su importancia el método de inyección de
portadores será explicado con mayor detalle en la siguiente sección.
1.5.1.1. Cambio de índice de refracción inducido por la inyección de por-
tadores
En materiales semiconductores, el cambio de índice de refracción se debe a ciertos
fenómenos causados por la inyección de portadores. El llenado de banda, fenómeno por
el cual los niveles de energía próximos a la banda de conducción se saturan por lo que
los portadores necesitan una energía superior a la de la banda prohibida para realizar
un transición de la banda de valencia a la de conducción. La saturación de niveles de
energía causa una reducción en el coeciente de absorción.
El siguiente fenómeno es el encogimiento de la banda prohibida. En este, la gran
densidad de portadores en niveles de energía próximos a la banda prohibida produce un
gas de partículas en interacción, lo que a su vez reduce el ancho de la banda prohibida,
como resultado el coeciente de absorción se incrementa.
La absorción de portadores libres es el tercer fenómeno que modica el índice de
refracción. Un portador libre absorbe un fotón y pasa a un nivel de energía superior
dentro de la misma banda. El resultado es la reducción del coeciente de absorción.
Todos los efectos considerados anteriormente (causados por la inyección de porta-
dores) contribuyen al cambio en el coeciente de absorción; el coeciente de absorción
es proporcional a la parte imaginaria del índice de refracción y este se relaciona con su
parte real mediante las relaciones de Kramers-Kronig. El resultado nal es el cambio
del índice de refracción (parte real) debido a la inyección de portadores [13].
1.5.2. Características particulares de los láseres sintonizables
El rango de ajuste es una de las principales características de los láseres sintoni-
zables. El rango de ajuste depende del tipo de ajuste realizado, los tipos de ajustes
pueden dividirse en: continuo, discontinuo y cuasi-continuo.
El ajuste continuo es usualmente limitado a pequeños intervalos y se lo realiza
mediante el cambio del desfase en un viaje de ida y vuelta dentro de la cavidad. El
rango de ajuste continuo para el láser que se pretende controlar en este trabajo es de
aproximadamente 100 GHz y está relacionado con la separación entre los modos de la
cavidad.

14 Introducción
El ajuste discontinuo se logra cambiando la frecuencia de pérdida mínima dentro
de la cavidad, lo cual genera saltos discretos entre los modos de la cavidad. Este tipo
de ajuste permite abarcar grandes rangos de hasta más de 100 nm [13].
Finalmente, el ajuste cuasi-continuo se logra al combinar rangos de ajuste continuo
que se superponen, para esto es necesario combinar el ajuste continuo y discontinuo
por lo que el control de longitud de onda resultante es bastante complejo ya que se
deben modicar al menos dos parámetros de control.
La precisión de ajuste es otro parámetro importante en láseres sintonizables. Si
consideramos los sistemas WDM, la Unión Internacional de Telecomunicaciones (ITU,
Internactional Telecommunication Union) recomienda un espaciamiento entre canales
de 50 GHz o 100 GHz, con una precisión de 10% de la separación entre canales [13].
Otras características importantes en los láseres sintonizables incluyen la relación
de supresión de modo adyacente (denido como la relación entre la potencia del modo
dominante y la potencia del modo adyacente más fuerte), la potencia de salida y el
ancho de línea.
1.5.3. Láseres tipo DBR
Los láseres tipo DBR corresponden a uno de los diseños más comunes para operar
en modo único (cuando un solo modo de la cavidad es emitido). Como se mencionó
anteriormente los láseres tipo DBR están formados por tres secciones integradas lon-
gitudinalmente: la región activa, la sección de ajuste de fase y un ltro ajustable que
es básicamente una red de Bragg.
Una red de Bragg consiste en un arreglo multicapa de N segmentos. Cada capa
está formada por la combinación de dos materiales dieléctricos con distinto índice de
refracción y distinto tamaño. La red de Bragg genera una selectividad de frecuencia, es
decir, que la reectancia espectral de la red posee máximos para ciertas frecuencias que
satisfacen la condición de Bragg. La condición de Bragg depende de los parámetros de la
red, es decir, de los índices de refracción y los tamaños de los materiales que conforman
cada capa, por tanto, se puede modicar la selectividad en frecuencia de la red de
Bragg mediante la modicación de los parámetros de ésta. En la gura 1.5 se muestra
el esquema de una red de Bragg de N capas, formado por dos materiales con índices
de refracción n1 y n2 y tamaños d1 y d2.
La red de Bragg puede obtenerse mediante la modicación periódica del espesor de
la guía de onda en la sección correspondiente del láser DBR; esta modicación cambia
el índice de refracción efectivo y por ende genera el arreglo intercalado de dos materiales
con índices de refracción distinto.
En la gura 1.6 se muestra el esquema básico de un láser DBR. El reector de Bragg
permite cambiar la frecuencia de pérdida mínima por lo que es responsable del ajuste

1.5 Láseres sintonizables 15
discontinuo. La sección de ajuste de fase se utiliza para modicar el desfase de la luz
dentro de la cavidad y por tanto permite el ajuste continuo. La sección activa es donde
ocurre la amplicación de luz y la cara frontal o reector frontal permite la salida de
luz hacia el exterior de la cavidad.
d1
n1 n2
d2
1 2 N
.......
Figura 1.5: Esquema de una red de Bragg de N capas.
Medio activo
Ajuste de fase Reflector frontal
Reflector de Bragg Luz de salida
Figura 1.6: Esquema de un láser tipo DBR.
1.5.4. Incremento del rango de ajuste
El rango de ajuste de un láser tipo DBR puede alcanzar valores de entre 1 y 2 THz,
lo cual es relativamente pequeño en comparación con el ancho de ganancia del medio
activo (10 THz), es por esta razón que se necesitan métodos para extender el rango de
ajuste de láseres DBR.
El primer método usado para la extensión del rango de ajuste está basado en el
efecto Vernier. El efecto Vernier consiste en la superposición de dos escalas graduadas.
Dichas escalas tienen graduaciones distintas por lo que al superponerlas solo una marca
se alinea perfectamente en las dos escalas. En un láser DBR se puede aprovechar el
efecto Vernier mediante el uso de dos reectores de Bragg, cada uno con un espectro
de reectancia en forma de peine (con máximos periódicos) y con separación diferente
entre máximos, por lo que la pérdida mínima en la cavidad corresponderá a la alineación
de dos máximos en los reectores.

16 Introducción
En la gura 1.7 se muestra el esquema de láser con dos reectores de Bragg nece-
sarios para obtener el efecto Vernier. Cuando se ajusta solo un reector, se obtienen
saltos grandes en la frecuencia ya que se van alineando distintos máximos de reec-
tancia. Para obtener ajustes más nos se deben modicar ambos reectores al mismo
tiempo. Finalmente, el ajuste continuo se logra a través de la sección de ajuste de fase.
Con el uso del efecto Vernier se pueden extender los rangos de ajuste para aprovechar
todo el ancho de ganancia proporcionado por el medio activo.
Medio activo
Ajuste de fase Reflector de bragg #2
Reflector de bragg #1 Luz de salida
Figura 1.7: Esquema de un láser tipo DBR con dos reectores de Bragg.
1.6. Láser tipo Y-branch
El láser tipo Y-branch se basa en un láser DBR y utiliza el efecto Vernier para el
incremento del rango de ajuste, en la gura 1.8 se muestra el esquema básico de este
tipo de láser.
El láser posee dos reectores de Bragg necesarios para lograr el efecto Vernier. Si
comparamos el láser Y-branch con el láser DBR mostrado en la gura 1.7 se observa
que ambos reectores se encuentran en la parte posterior de la cavidad en lugar de los
extremos de esta, además es necesario un acoplador de interferencia multimodo (MMI,
Multi Mode Interference) para combinar los espectros de reectancia de ambas redes
de Bragg. Los demás componentes, la sección de ajuste de fase y el medio activo son
esencialmente los mismos que en el láser DBR con reectores en los extremos.
Medio activo
Ajuste de fase
MMI
Reflector frontal
Reflector derecho
Reflector izquierdo
Luz de salida
Figura 1.8: Esquema del láser tipo Y-branch.
El principio de operación es el mismo que el descrito en la sección anterior, es decir,
el efecto Vernier. Sin embargo el hecho de utilizar los dos reectores en un solo lado de la

1.7 Descripción del proyecto 17
cavidad presenta dos ventajas importantes. La primera está relacionada a la variación
de potencia de salida del láser. En el láser DBR con reectores en los extremos de la
cavidad, la luz debe atravesar la red de Bragg para salir de la cavidad, en este proceso
la absorción de portadores libres causa una variación en la potencia de salida cuando
se está ajustando el láser; en cambio en el láser tipo Y-branch la luz no sufre de este
problema ya que no debe atravesar un reector de Bragg para salir de la cavidad [14].
La segunda ventaja del láser tipo Y-branch afecta otro parámetro importante de los
láseres sintonizables, la relación de supresión de modo adyacente (SMSR, Side Mode
Suppression Ratio). En el láser DBR con reectores en los extremos los espectros de
reectividad de estos se multiplican, en cambio en el láser Y-branch los espectros de
reectividad se suman. Si comparásemos los dos tipos de combinaciones de espectros
de reectividad se notaría que en la suma, la supresión de los modos adyacentes es
mayor en comparación a la multiplicación [14].
1.7. Descripción del proyecto
El principal objetivo de este trabajo es el diseño e implementación de una plata-
forma electrónica para el control de potencia, temperatura y longitud de onda de un
láser sintonizable tipo Y-branch marca Finisar modelo 7500 (gura 1.9). Este láser
será utilizado, en un futuro, para WDM y otros experimentos en un laboratorio de
telecomunicaciones.
En la gura 1.10 se muestra el esquema básico del encapsulado que contiene al
láser. El láser tipo Y-branch es el mismo que se presentó en secciones anteriores, pero
se adicionan otros componentes necesarios para el control del mismo. Se adiciona un
amplicador óptico de semiconductor(SOA, Semiconductor Optical Amplier) el cual
permite modicar la potencia de salida del láser y se utiliza para que el control de
potencia del láser y de longitud de onda sean independientes.
Figura 1.9: Láser sintonizable Finisar S7500.

18 Introducción
La luz a la salida del láser atraviesa un divisor de haz que extrae una pequeña
parte hacia un fotodiodo de referencia para el control de potencia del láser y otra parte
a través de un etalon (ltro óptico) hacia un fotodiodo para el control de longitud
de onda. El encapsulado del láser posee también dos termistores para la medición
de temperatura y un refrigerante termoeléctrico (TEC,Thermoelectric Cooler) para el
control de temperatura.
Medio activo
Ajuste de fase
MMI
Reflector frontal
Reflector derecho
Reflector izquierdo
SOA
PD et.
PD ref.etalon
Divisor de haz
termistor TEC
Luz de salida
Encapsulado del láser sintonizable
Figura 1.10: Esquema del encapsulado que contiene al láser Y-branch.
De la gura 1.10 se puede determinar las interfaces de entrada y salida del encapsu-
lado del láser sintonizable. El láser propiamente dicho posee cinco entradas de corriente
para su control, estas son: SOA, ganancia del medio activo, sección de ajuste de fase
y dos entradas para el control de los reectores de Bragg. El láser posee también dos
entradas del refrigerante termoeléctrico. Una corriente aplicada al TEC con un cierto
sentido incrementa la temperatura, mientras que una corriente en el sentido opuesto la
disminuye. El encapsulado tiene cuatro salidas, dos salidas de los fotodiodos que serán
utilizados para el control de longitud de onda y de potencia del láser y dos salidas de
los termistores que serán usados para el control de temperatura.
Considerando todas las salidas y entradas del láser sintonizable se propone el es-
quema mostrado en la gura 1.11 para la plataforma electrónica de control.
Conversor D/A
Conversor A/D
I GananciaI SOAI FaseI Ref. Der.I Ref. Izq.
Amp. PDrefAmp. PDet
Amp. THlasAmp. THet
Control TEC
LáserFinisar 7500
µC
5
4
5
4
Figura 1.11: Esquema de la plataforma electrónica de control.
Se propone utilizar un microcontrolador (µC bloque azul) que será encargado del
manejo y control del láser sintonizable. El bloque rojo representa el circuito necesa-

1.8 Requerimientos del proyecto 19
rio para el manejo del TEC. Para las salidas del láser, tanto los fotodiodos como los
termistores, es necesario el uso de amplicadores que acondicionen la señal y conver-
tidores analógico digital para la interfaz con el microcontrolador. Para las entradas de
control del láser es necesario emplear cinco fuentes de corriente y un convertidor digital
analógico para la interfaz con el microcontrolador.
Considerando el esquema del láser a controlar, los componentes de la plataforma de
electrónica de control y el objetivo principal del trabajo, se presentan a continuación
los pasos necesarios para completar el proyecto.
Modelado del láser: considerando las ecuaciones espectrales de reectancia de las
redes de Bragg, intensidad de luz en el resonador y ganancia del medio activo se
pretende obtener el espectro de potencia del láser y las salidas de los fotodiodos
de este cuando se aplican ciertas condiciones de entrada.
Diseño del hardware: incluye todos los circuitos necesarios para el control del
láser, es decir, las fuentes de corriente para las entradas del láser, amplicadores
para las salidas, circuito de control del TEC, convertidores A/D, convertidores
D/A y el microcontrolador.
Diseño de los algoritmos de control: uso del modelo de funcionamiento del láser y
los modelos de los circuitos para diseñar el controlador de temperatura, potencia
y longitud de onda.
Implementación y validación del hardware necesario para el manejo del láser y
del controlador.
Los pasos listados anteriormente se desarrollarán en los capítulos posteriores. En la
siguiente sección se establecen los requerimientos a cumplir para los diversos compo-
nentes del proyecto.
1.8. Requerimientos del proyecto
El modelo de simulación del láser deberá ser capaz de reproducir el espectro de
potencia de salida y la evolución temporal del mismo, también la corriente de los
fotodiodos que se utilizarán en el diseño del controlador del láser. Otras características
como el ancho de línea y el SMSR no son esenciales para el control del láser. Por lo tanto,
considerando la complejidad que su consideración introduce, se opta por desestimar su
inclusión en el modelo.
Para el diseño del hardware es necesario denir los rangos de operación de los
distintos circuitos. Los datos de rango superior y valor límite de operación de todas las
interfaces del láser se obtuvieron de la hoja de datos del fabricante [15].
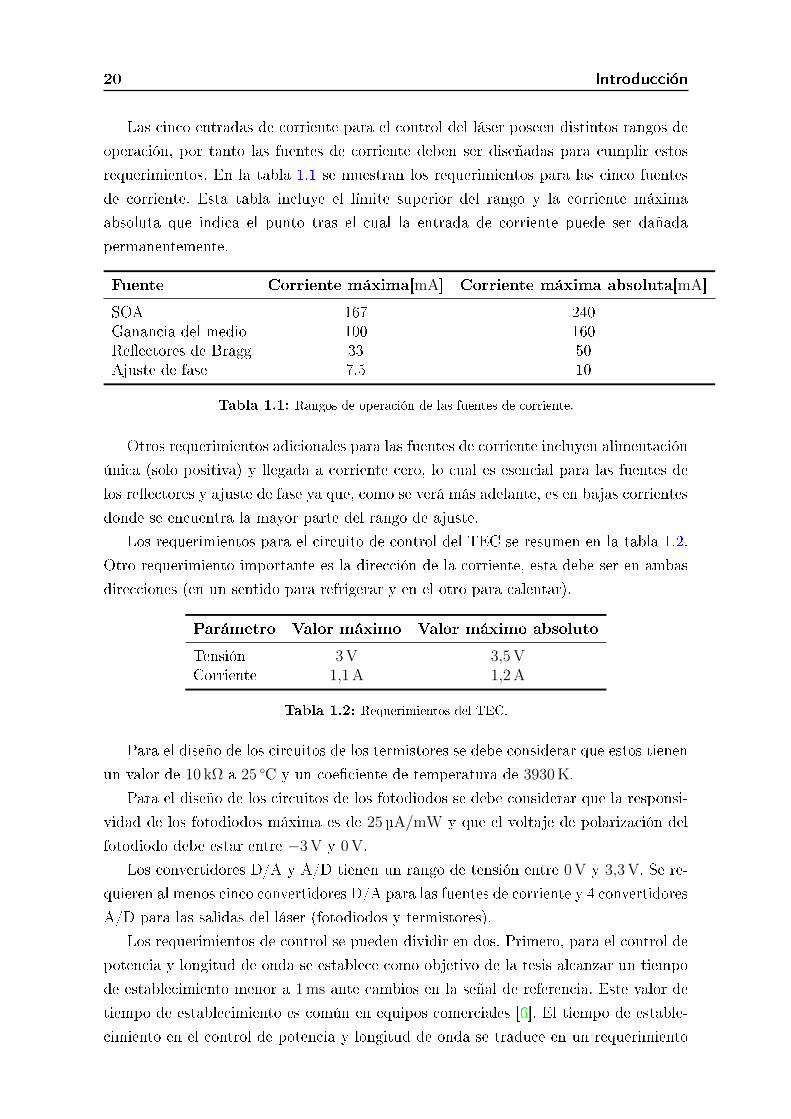
20 Introducción
Las cinco entradas de corriente para el control del láser poseen distintos rangos de
operación, por tanto las fuentes de corriente deben ser diseñadas para cumplir estos
requerimientos. En la tabla 1.1 se muestran los requerimientos para las cinco fuentes
de corriente. Esta tabla incluye el límite superior del rango y la corriente máxima
absoluta que indica el punto tras el cual la entrada de corriente puede ser dañada
permanentemente.
Fuente Corriente máxima[mA] Corriente máxima absoluta[mA]
SOA 167 240Ganancia del medio 100 160Reectores de Bragg 33 50Ajuste de fase 7.5 10
Tabla 1.1: Rangos de operación de las fuentes de corriente.
Otros requerimientos adicionales para las fuentes de corriente incluyen alimentación
única (solo positiva) y llegada a corriente cero, lo cual es esencial para las fuentes de
los reectores y ajuste de fase ya que, como se verá más adelante, es en bajas corrientes
donde se encuentra la mayor parte del rango de ajuste.
Los requerimientos para el circuito de control del TEC se resumen en la tabla 1.2.
Otro requerimiento importante es la dirección de la corriente, esta debe ser en ambas
direcciones (en un sentido para refrigerar y en el otro para calentar).
Parámetro Valor máximo Valor máximo absoluto
Tensión 3 V 3,5 VCorriente 1,1 A 1,2 A
Tabla 1.2: Requerimientos del TEC.
Para el diseño de los circuitos de los termistores se debe considerar que estos tienen
un valor de 10 kΩ a 25 C y un coeciente de temperatura de 3930 K.
Para el diseño de los circuitos de los fotodiodos se debe considerar que la responsi-
vidad de los fotodiodos máxima es de 25 µA/mW y que el voltaje de polarización del
fotodiodo debe estar entre −3 V y 0 V.
Los convertidores D/A y A/D tienen un rango de tensión entre 0 V y 3,3 V. Se re-
quieren al menos cinco convertidores D/A para las fuentes de corriente y 4 convertidores
A/D para las salidas del láser (fotodiodos y termistores).
Los requerimientos de control se pueden dividir en dos. Primero, para el control de
potencia y longitud de onda se establece como objetivo de la tesis alcanzar un tiempo
de establecimiento menor a 1 ms ante cambios en la señal de referencia. Este valor de
tiempo de establecimiento es común en equipos comerciales [6]. El tiempo de estable-
cimiento en el control de potencia y longitud de onda se traduce en un requerimiento

1.8 Requerimientos del proyecto 21
para los circuitos, ya que estos deben responder lo sucientemente rápido para alcan-
zar dicho tiempo de establecimiento. Se considera que para cumplir el requerimiento
de tiempo de establecimiento la respuesta en frecuencia de todos los circuitos debe ser
al menos 100 veces más rápida, es decir, que la plataforma de control debe operar a
al menos 100 kHz. En cuanto al sobreimpulso máximo, este no es un requerimiento
fundamental pero se lo limita de todas formas a menos del 10 %.
En cuanto al control de temperatura, puesto que este no es un parámetro que
se necesita modicar constantemente, se establecieron requerimientos de tiempo de
respuesta menos exigentes en comparación al control de potencia y longitud de onda.
Se requiere un tiempo de establecimiento menor a 10 s y un sobreimpulso máximo
menor a 20 %.


Capítulo 2
Modelo del láser sintonizable
En este capítulo se desarrolla un modelo del láser el cual es utilizado posteriormente
para diseñar el controlador del mismo. Tal como se explicó en el capítulo anterior, el
resultado esperado del modelo es el espectro de potencia de salida del láser, así como
las corrientes de los fotodiodos utilizados para el control del láser. El modelo incluye
las ecuaciones espectrales de reectancia, intensidad de luz y ganancia de los distintos
componentes del láser sintonizable que se pretende controlar. Estos componentes in-
cluyen: los reectores de Bragg, la cavidad o resonador, la sección de ajuste de fase y
el medio activo. También se consideran elementos externos al láser propiamente dicho,
es decir, el SOA que amplica la luz a la salida del láser, el etalon que sirve como ltro
de frecuencia y los fotodiodos que producen las corrientes necesarias para el control del
láser.
Otra parte importante en el modelo del láser es la forma en la que se logra el ajuste
de longitud de onda. Para ello se estudia la relación entre las corrientes aplicadas al
láser y el cambio de longitud de onda producido en la sección de ajuste de fase y en
los reectores de Bragg.
Finalmente, el capítulo concluye con la construcción de un mapa de las frecuencias
de salida alcanzables por el láser, para ello se realiza un barrido de corrientes en las
secciones que determinan la frecuencia de emisión del láser, es decir los reectores de
Bragg.
2.1. Reectores de Bragg
El láser a controlar posee dos reectores de Bragg, ambos situados en la parte
posterior de la cavidad. Cada reector posee un espectro de reectancia, en los cuales
existen máximos periódicos, con una separación denida como νB o frecuencia de
Bragg.
Cada reector se modela como un red de Bragg de N segmentos, cada uno de los
23

24 Modelo del láser sintonizable
cuales está formado por dos materiales dieléctricos. Para el análisis de la red de Bragg
se utiliza la teoría de matrices de transferencia de onda, que asigna a cada elemento
óptico una matriz de transferencia y permite calcular la matriz de transferencia de un
elemento multicapa como un simple producto de las matrices de transferencia de los
elementos que la componen [8]. Usando teoría de matrices de transferencia se denen
todos los segmentos de la red de Bragg como idénticos, cada uno con una matriz de
transferencia de la función de onda expresada por la siguiente relación,
M0 =
[1t∗
rt
r∗
t∗1t
], (2.1)
donde |t|2 y |r|2 son la intensidad de transmitancia y reectancia respectivamente.
La matriz de transferencia de onda de toda la red de Bragg se calcula utilizando el
producto de las matrices de los segmentos individuales, es decir
M = MN0 . (2.2)
Teniendo en cuenta que la matriz es unimodular [8], entonces se cumple
MN0 = ΨNM0 −ΨN−1I, (2.3)
donde I es la matriz identidad y ΨN es una matriz denida como
ΨN =sin(NΦ)
sin(Φ). (2.4)
En la anterior Φ se dene como
Φ = arc cos
(Re
(1
t
)). (2.5)
Si se resuelve la ecuación 2.3 se puede obtener las relaciones entre las transmitancias y
reectancias de un dado segmento con la de la red de Bragg completa(N segmentos); si
se resuelve dichas relaciones nalmente se puede obtener la intensidad de reectancia
de la red de Bragg de N segmentos, como se muestra en la siguiente ecuación.
RN =Ψ2
1−RΨ +RΨ2. (2.6)
De la anterior ecuación se puede deducir que para obtener la intensidad de reectancia
de la red solo se necesita conocer la intensidad de reectancia de un segmento de la red
y Ψ. Como Ψ depende de Φ y este a su vez depende de la parte real de la inversa de
la transmitancia de un segemento, entonces es necesario encontrar esta transmitancia

2.1 Reectores de Bragg 25
para resolver la ecuación 2.6. Si se utilizan las ecuaciones de Fresnel se puede encontrar
la parte real de la inversa de la transmitancia [8]:
Re
(1
t
)=
(n1 + n2)2
4n1n2
cos
(πν
νB
)− (n1 − n2)2
4n1n2
cos
(ζπν
νB
), (2.7)
donde ζ se dene como:
ζ =n1d1 − n2d2
n1d1 + n2d2
, (2.8)
n1 y n2 son los índices de refracción de los dos materiales que forman un segmento,
d1 y d2 son los espesores de los dos materiales dieléctricos que forman un segmento,
ν es la frecuencia y νB es la frecuencia de Bragg la cual determina la separación
entre máximos de reectancia. La frecuencia de Bragg se puede encontrar utilizando la
siguiente relación:
νB =c0
2(n1d1 + n2d2), (2.9)
donde c0 es la velocidad de la luz en el vacío. La ecuación 2.7 depende de la frecuencia,
razón por la cual la reectancia denida en la ecuación 2.6 también depende de la
frecuencia y es denominada reectancia espectral de la red de Bragg.
Uno de los parámetros más importante de la red de Bragg es la separación νB
entre máximos de reectancia; el cambio de la separación entre máximos es parte del
mecanismo de ajuste de longitud de onda del láser. La ecuación 2.9 establece que la
separación entre máximos puede ser modicada mediante el cambio del tamaño de la
red de Bragg o mediante el cambio de índice de refracción.
Las ecuaciones 2.4-2.9 son sucientes para obtener la reectancia espectral de los
reectores de Bragg, aunque primero se debe denir los parámetros necesarios para
resolver dichas ecuaciones. Los parámetros se obtienen mediante iteración, partiendo
de datos obtenidos de [14] y [15]. Son necesarios los índices de refracción de los dos
materiales que componen la red de Bragg. Estos materiales son el arseniuro fosfuro de
indio y galio InGaAsP y el fosfuro de indio InP con índices de refracción n1 = 3, 54 y
n2 = 3,16 respectivamente. El tamaño de los materiales que componen cada segmento
de la red miden aproximadamente d1 = 64,87 µm y d2 = 15 µm. Además, la red está
formada por diez segmentos por lo que la longitud total de la red de Bragg es de
aproximadamente 648 µm. Finalmente la separación entre máximos de reectancia es
de aproximadamente νB = 700 GHz. Con los datos y ecuaciones anteriores se simula la
reectancia espectral de uno de los reectores de Bragg.
En la Figura 2.1 se muestra la reectancia espectral de la red de Bragg en el rango
de operación del láser(191 THz − 198 THz); es notable los máximos de reectancia
periódicos, con una separación de aproximadamente 700 GHz.
La combinación de las reectancias espectrales de las dos redes de Bragg se rea-

26 Modelo del láser sintonizable
liza mediante el acoplador MMI. Este produce la suma de las reectancias usando la
relación:
R =
(√Rleft +
√Rright
)2
4. (2.10)
1 9 1 1 9 2 1 9 3 1 9 4 1 9 5 1 9 6 1 9 70 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
Refle
ctanc
ia
F r e c u e n c i a [ T H z ]Figura 2.1: Espectro de reectancia de la red de Bragg.
El láser sintonizable utiliza el principio de Vernier para la selección de longitud de
onda y por esta razón que la separación entre picos de reectancia de ambas redes de
Bragg es ligeramente distinta. El efecto Vernier permite realizar grandes cambios de
frecuencia con pequeños cambios en la separación entre máximos de las reectancias
espectrales. Los cambios en la separación de máximos se obtienen mediante el cambio
del índice de refracción de la red de Bragg y este, a su vez, puede ser modicado con
la aplicación de una corriente a la sección adecuada. Por esta razón se estudiará, más
adelante en este capítulo, la relación entre la corriente aplicada y el cambio de índice
de refracción en un material semiconductor.
La gura 2.2 muestra la reectancia espectral de ambos reectores y la combina-
ción de los mismos permitiendo apreciar más claramente el principio Vernier (solo un
máximo alineado en ambos reectores).
2.2. Modos de la cavidad y sección de ajuste de fase
El láser sintonizable posee una cavidad o resonador que alberga al medio activo,
estando el mismo limitado por un reector frontal y por la combinación de reectores

2.2 Modos de la cavidad y sección de ajuste de fase 27
de Bragg en el otro extremo (tal como se mostró en la gura 1.8).
1 9 1 1 9 2 1 9 3 1 9 4 1 9 5 1 9 6 1 9 70 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0 C o m b i n a c i ó n
Refle
ctanc
ia
F r e c u e n c i a [ T H z ]
1 9 1 1 9 2 1 9 3 1 9 4 1 9 5 1 9 6 1 9 70 . 00 . 20 . 40 . 60 . 81 . 01 . 2 R e f l e c t o r d e r e c h o
r e f l e c t o r i z q u i e r d o
Refle
ctanc
ia
F r e c u e n c i a [ T H z ]
Figura 2.2: Espectro de reectancia combinada de la red de Bragg.
Los modos de la cavidad se pueden determinar calculando la intensidad espectral
de luz dentro de la misma. El resonador actúa como un ltro que reduce el contenido
espectral de luz a solo un conjunto de frecuencias que satisfacen la siguiente condición:
φ = 2nπ, (2.11)
donde φ es el desfase que sufre la luz en un viaje de ida y vuelta dentro del resonador.
La intensidad espectral de luz dentro del resonador se puede deducir usando el siguiente
análisis. Si consideramos una onda de luz inicial U0 dentro del resonador, esta onda
está relacionada a la onda después de un viaje de ida y vuelta U1 mediante la siguiente
relación.
U1 = U0|r|ejφ = hU0, (2.12)
donde |r|2 es la atenuación que sufre la luz en un viaje de ida y vuelta en el resonador.
De la ecuación 2.12 se puede deducir que la onda resultante dentro del resonador
estará formada por una superposición innita de ondas desfasadas en φ y con una

28 Modelo del láser sintonizable
cierta atenuación, es decir:
U = U0 + U1 + U2..... = U0(1 + h+ h2 + ....). (2.13)
La serie anterior converge en
U =U0
1− h. (2.14)
Usando 2.12 y 2.14 se puede calcular la intensidad espectral de la siguiente manera.
I = |U |2 =I0
1 + |r|2 − 2|r|cos(φ). (2.15)
Si expresamos la anterior ecuación en función de la intensidad máxima y de la nesse1
F de la cavidad se obtiene:
I =Imax
1 +(
2Fπ
)2 sin2
(φ
2
), (2.16)
siendo la nesse de la cavidad el parámetro que determina el ancho de los modos y por
ende de la calidad de la cavidad (modos más angostos mejor cavidad).
En la ecuación 2.16 el desfase introducido se dene como,
φ =4πνd
c= 2π
ν
νF, (2.17)
donde νF es el rango espectral libre o las frecuencias a las cuales la intensidad de luz
es máxima. Esta se puede expresar como:
νF =c0
2n1d, (2.18)
con c0 la velocidad de la luz en el vacío, n1 el índice de refracción del medio que compone
el resonador y d el tamaño de la cavidad.
El otro parámetro importante para el cálculo de la intensidad espectral es la ate-
nuación que sufre la luz en un viaje de ida vuelta. La atenuación |r|2 está relacionada
con las pérdidas en el resonador. Estas pérdidas se deben a los reectores (ya que su
reectancia no es 100 %) y a la atenuación en el medio que compone el resonador. La
atenuación se calcula como:
|r|2 = R1R2e−2αsd = e−2αrd, (2.19)
donde R1 y R2 son las reectancias de los dos de los espejos que limitan la cavidad y
1La nesse es la relación entre 2π y el ancho FWHM de los modos de la cavidad, por lo que es unamedida de cuan delgados son estos modos.
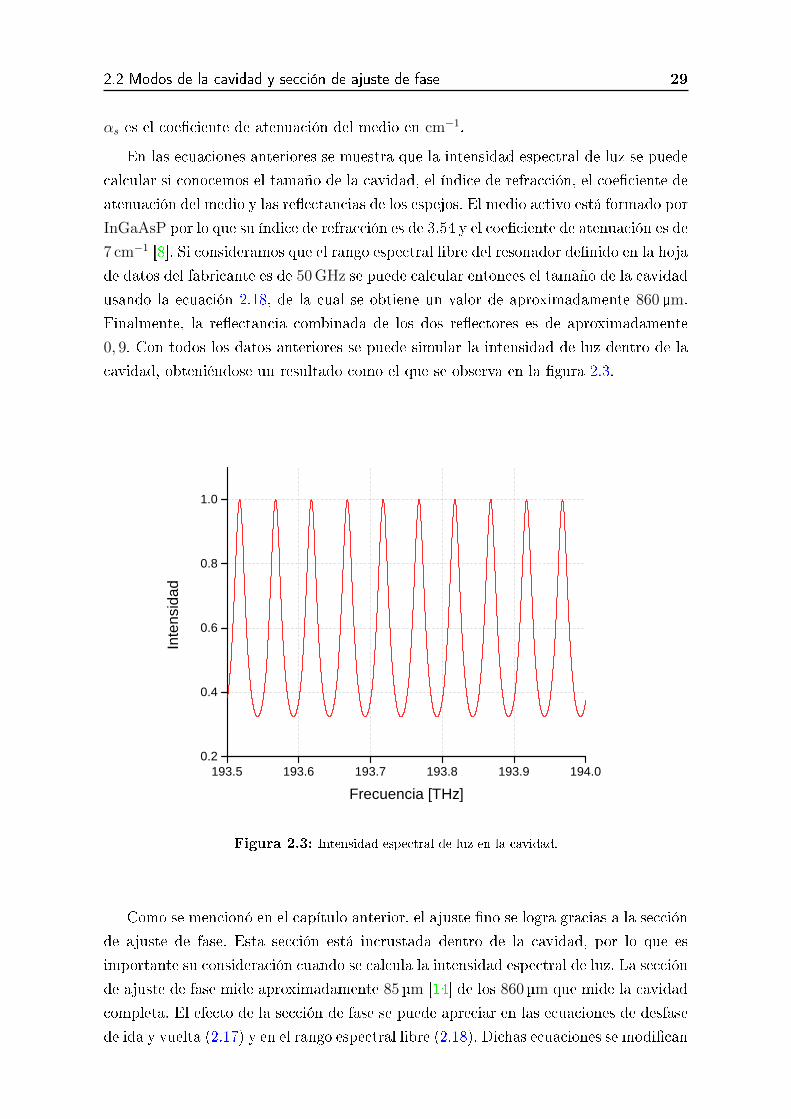
2.2 Modos de la cavidad y sección de ajuste de fase 29
αs es el coeciente de atenuación del medio en cm−1.
En las ecuaciones anteriores se muestra que la intensidad espectral de luz se puede
calcular si conocemos el tamaño de la cavidad, el índice de refracción, el coeciente de
atenuación del medio y las reectancias de los espejos. El medio activo está formado por
InGaAsP por lo que su índice de refracción es de 3.54 y el coeciente de atenuación es de
7 cm−1 [8]. Si consideramos que el rango espectral libre del resonador denido en la hoja
de datos del fabricante es de 50 GHz se puede calcular entonces el tamaño de la cavidad
usando la ecuación 2.18, de la cual se obtiene un valor de aproximadamente 860 µm.
Finalmente, la reectancia combinada de los dos reectores es de aproximadamente
0, 9. Con todos los datos anteriores se puede simular la intensidad de luz dentro de la
cavidad, obteniéndose un resultado como el que se observa en la gura 2.3.
1 9 3 . 5 1 9 3 . 6 1 9 3 . 7 1 9 3 . 8 1 9 3 . 9 1 9 4 . 00 . 2
0 . 4
0 . 6
0 . 8
1 . 0
Inten
sidad
F r e c u e n c i a [ T H z ]
Figura 2.3: Intensidad espectral de luz en la cavidad.
Como se mencionó en el capítulo anterior, el ajuste no se logra gracias a la sección
de ajuste de fase. Esta sección está incrustada dentro de la cavidad, por lo que es
importante su consideración cuando se calcula la intensidad espectral de luz. La sección
de ajuste de fase mide aproximadamente 85 µm [14] de los 860 µm que mide la cavidad
completa. El efecto de la sección de fase se puede apreciar en las ecuaciones de desfase
de ida y vuelta (2.17) y en el rango espectral libre (2.18). Dichas ecuaciones se modican
30 Modelo del láser sintonizable
de la siguiente manera:
φ =4πν(n1(d− dph) + nphdph)
c0
= 2πν
νF, (2.20)
νF =c0
2(n1(d− dph) + nphdph), (2.21)
donde dph y nph son la longitud y el índice de refracción de la sección de ajuste de fase
respectivamente.
La sección de ajuste de fase permite el ajuste no de frecuencia mediante el corri-
miento de los modos de la cavidad. En las ecuaciones 2.20 y 2.21 se muestra que el
rango espectral libre puede ser modicado (lo que produce el corrimiento de los modos
de la cavidad) mediante el cambio del índice de refracción de la sección de ajuste de
fase, aplicando una corriente.
2.3. Medio activo, SOA y ujo de salida del láser
El medio activo proporciona la amplicación de luz necesaria para la operación del
láser. Con el o objetivo de simplicar el modelo se considera que la ganancia tiene forma
de línea Lorentziana, es decir que el coeciente de ganancia por unidad de longitud del
medio satisface la siguiente función [8],
γ(ν) = γ(ν0)
(∆ν2
)2
(ν − ν0)2 +(
∆ν2
)2 , (2.22)
donde ν0 es la frecuencia central de la ganancia, ∆ν es el ancho a la altura me-
dia(FWHM,Full Width at Half Maximum) de la ganancia y γ(ν0) es la ganancia máxi-
ma.
El coeciente de ganancia depende del material que forma el medio activo. El
InGaAsP posee un coeciente de ganancia con ancho FWHM de 10 THz y está centrado
alrededor de la banda C de comunicaciones [8]. La frecuencia exacta del centro puede
ser seleccionada modicando la proporción de los elementos que componen el medio
activo, por lo que es posible ajustar el centro del coeciente de ganancia de manera
que este concuerde con el centro de la banda C (193,7 THz).
El valor máximo del coeciente de ganancia es aproximadamente proporcional a
la densidad de portadores inyectados y esta a su vez es proporcional a la corriente
aplicada, por lo que el máximo de ganancia puede ser expresado como:
γ(ν0) ≈ α
(i
it
αr + α
α− 1
), (2.23)

2.3 Medio activo, SOA y ujo de salida del láser 31
donde i es la corriente aplicada, it es la corriente umbral más allá de la cual exis-
te amplicación en el medio, α es el coeciente de absorción en el medio en equilibrio
térmico y αr son las pérdidas en el resonador. El láser posee una estructura Multiquan-
tum Well, para este tipo de conguraciones la corriente umbral es próxima a 15 mA,
además el coeciente de absorción tiene un valor próximo a 600 cm−1 [8]. Usando los
valores anteriores y para una corriente aplicada de 98 mA (corriente máxima del láser)
se obtuvo el coeciente de ganancia en función de la frecuencia (gura 2.4).
1 9 1 1 9 2 1 9 3 1 9 4 1 9 5 1 9 6 1 9 75 0 0 0
6 0 0 0
7 0 0 0
8 0 0 0
9 0 0 0
1 0 0 0 0
Gana
ncia
[1/cm
]
F r e c u e n c i a [ T H z ]
Figura 2.4: Coeciente de ganancia espectral en el medio activo para una corriente aplicadade 98mA.
2.3.1. Flujo de salida
Como se explicó en el capítulo anterior, cuando el coeciente de ganancia del medio
activo supera las pérdidas en la cavidad, comienza la oscilación láser. El ujo de fotones
inicial se incrementa hasta que el medio satura y la ganancia disminuye. Eventualmente
se alcanza un estado estacionario en el que la ganancia es igual a las pérdidas. La den-
sidad de ujo de fotones de un haz de luz que atraviesa un medio activo se incrementa
de acuerdo a la siguiente relación:
dϕ
dz= γ(ν)ϕ. (2.24)

32 Modelo del láser sintonizable
Para que la ecuación 2.24 represente la densidad de ujo de fotones dentro de la cavidad
es necesario considerar las pérdidas y la saturación del medio activo, para ello se realizan
los cambios pertinentes. La primera modicación resulta de considerar las pérdidas
introducidas por el resonador, es decir, las pérdidas de los reectores y la atenuación
del medio.
αr = αs +1
2dln
(1
R1(ν)R2(ν)
). (2.25)
La ecuación 2.25 son las pérdidas en la cavidad e incluye la atenuación del medio αs y
las reectancias espectrales de los espejos del láser R1(ν) y R2(ν). La reectancia R1(ν)
corresponde a los reectores de Bragg y fue denida en la ecuación 2.10. La reectancia
R2(ν) corresponde al reector frontal y es en esta en donde se considera los modos del
resonador de la siguiente manera,
R2(ν) = RIN(ν), (2.26)
donde R es la reectancia del espejo frontal e IN(ν) es la intensidad espectral de luz
dentro de la cavidad denida en la ecuación 2.16.
La segunda modicación de la ecuación 2.24 implica considerar la saturación del
medio activo. La saturación del medio causa la reducción del coeciente de ganancia
de la siguiente manera:
γ(ν) = γ0(ν)1
1 + ϕϕs(ν)
. (2.27)
ϕs es la densidad de ujo de saturación y representa la densidad de ujo a la cual la
ganancia disminuye a la mitad de su valor inicial; a medida que la densidad de ujo
se incrementa más allá del ujo de saturación, la ganancia comienza a disminuir de su
valor inicial. El ujo de saturación depende de la densidad de portadores inyectados y
por ende de la corriente aplicada al medio activo, por lo que a mayor corriente aplicada,
mayor es el ujo de saturación y mayor es la potencia de salida. La densidad de ujo
de saturación puede ser calculada utilizando la siguiente ecuación:
ϕs(ν) =2i
eV γ0(ν), (2.28)
donde i es la corriente aplicada al medio activo, e es la carga del electrón y V es el
volumen del medio activo.
Con los dos cambios detallados anteriormente, se modica la ecuación 2.24 de la
siguiente manera:dϕ
dz=
(γ0(ν)
1 + ϕϕs(ν)
− αr(ν)
)ϕ. (2.29)
La ecuación 2.29 describe la evolución de la densidad de ujo respecto a la distancia
recorrida dentro de la cavidad. Resulta importante mencionar que se puede relacionar

2.3 Medio activo, SOA y ujo de salida del láser 33
la distancia recorrida dentro de la cavidad con el tiempo mediante la velocidad de la
luz. La ecuación 2.29 se resolvió de manera numérica y a continuación se muestran
algunos resultados importantes.
En la gura 2.5 se muestra la evolución temporal de la densidad de ujo de fotones
dentro de la cavidad; es notable el crecimiento exponencial del ujo al comienzo de la
operación y como este llega al estado estacionario cuando el coeciente de ganancia
iguala a las pérdidas de la cavidad.
0 . 0 0 0 . 0 5 0 . 1 0 0 . 1 5 0 . 2 00
2 x 1 0 2 5
4 x 1 0 2 5
6 x 1 0 2 5
8 x 1 0 2 5
1 x 1 0 2 6
Flujo
[F/cm
^2s]
T i e m p o [ n s ]
Figura 2.5: Evolución de la densidad de ujo dentro de la cavidad cuando se aplica unacorriente de 98mA al medio activo.
La gura 2.6c muestra la distribución espectral de la potencia de salida del láser
y se observa que el modo emitido se encuentra próximo a 194 THz. En la gura 2.6a
se muestra la reectancia espectral combinada de los reectores de Bragg en donde el
pico de reectancia determina la frecuencia de pérdida mínima en la cavidad. En la
gura 2.6b se observa la comparación entre las pérdidas de la cavidad y el coeciente
de ganancia; puesto que la gura muestra el estado estacionario se cumple entonces que
las pérdidas son iguales a la ganancia solo para un modo de la cavidad. La potencia de
salida fue calculada usando el ujo de fotones y con la siguiente relación:
Pout =hν(1−R)ϕA
2, (2.30)
donde h es la contante de Planck, R es la reectancia del espejo frontal y A es el área

34 Modelo del láser sintonizable
de emisión.
2.3.2. SOA externo
Como se mencionó en la sección 1.7, el encapsulado del láser sintonizable posee
un SOA que es utilizado para modicar la potencia de salida del láser. EL SOA se
encuentra fuera de la cavidad del láser por lo que permite modicar la potencia sin
cambiar la longitud de onda. Esta característica permite independizar el control de
potencia del control de longitud de onda.
1 9 1 1 9 2 1 9 3 1 9 4 1 9 5 1 9 6 1 9 70 . 00 . 20 . 40 . 60 . 81 . 0
( c )
( b )
Refle
ctanc
ia R e f l e c t a n c i a( a )
1 9 1 1 9 2 1 9 3 1 9 4 1 9 5 1 9 6 1 9 7
2 04 06 08 0
1 0 0
Gana
ncia[
1/cm] P é r d i d a s
G a n a n c i a
1 9 1 1 9 2 1 9 3 1 9 4 1 9 5 1 9 6 1 9 70
2
4
6
Pout
[mW]
F r e c u e n c i a [ T H z ]
P o u t
Figura 2.6: (a) Reectancia combinada de las redes de Bragg. (b) Comparación del coecientede ganancia con el coeciente de pérdidas en estado estacionario. (c) Potencia de salida del láseren estado estacionario.
El SOA funciona de manera similar al medio activo ya que ambos son medios
amplicadores formados por el mismo material, por esta razón, se modeló el SOA
como un medio con coeciente de ganancia espectral con forma de línea lorentziana,
centrado en la banda C y con ancho FWHM de 10 THz. La ganancia pico satisface la

2.3 Medio activo, SOA y ujo de salida del láser 35
misma relación que la ganancia del medio activo, es decir:
γSOA(ν0) ≈ α
(iSOAiT− 1
), (2.31)
donde iSOA es la corriente aplicada al SOA y α e iT son las mismas que fueron usadas
para calcular la ganancia pico del medio activo.
Para encontrar la potencia a la salida del SOA se puede usar la ecuación 2.24 que
describe la evolución del ujo de fotones en función de la distancia recorrida por la luz;
si se resuelve dicha ecuación se obtiene:
ϕ = ϕ0eγz. (2.32)
Finalmente, se puede relacionar el ujo de fotones con la potencia de salida utilizando
la ecuación de Planck, con lo que se obtiene una relación entre la potencia a la salida
del láser y la potencia a la salida del SOA expresada por:
Pout = eγSOAdSOAPlas, (2.33)
donde Pout es la potencia espectral a la salida del SOA, Plas es la potencia espectral a
la salida del láser y dSOA es el tamaño del SOA
2.3.3. Fotodiodos y Etalon
Para completar el modelo del láser es necesario incluir el comportamiento de los
fotodiodos encargados de producir una corriente de salida proporcional a la potencia
de salida del láser y a la potencia de salida del etalon. Dichas corrientes serán usadas
para el control de potencia y longitud de onda del láser.
Los fotodiodos están caracterizados por una responsividad R medida en W/A, que
se aproxima utilizando los valores de la hoja de datos del láser sintonizable [15]. Esta
responsividad relaciona la corriente entregada por el fotodiodo con la potencia óptica
recibida por el mismo como:
Ifotodiodo = RPoptica. (2.34)
El etalon o interferómetro Fabrey-Perot es un dispositivo óptico compuesto por dos
placas paralelas que puede ser utilizado como ltro óptico. Su transmitancia posee una
distribución espectral con máximos en determinadas frecuencias de resonancia, estas
se denominan modos de resonancia del etalon o simplemente modos del etalon. En
nuestro caso, el etalon posee máximos de transmitancia con una separación de 50 GHz
que concuerdan con los canales de la banda C [16]. La transmitancia espectral del

36 Modelo del láser sintonizable
etalon se dene en [8] como:
T (ν) =Tmax
1 +(
2Fet
π
)2 sin2
(πν
νFet
), (2.35)
donde Tmax es la transmitancia máxima y es aproximadamente uno para el láser en
estudio, Fet es la nesse del etalon y nalmente νFet es la separación entre máximos de
transmitancia. Todos los datos necesarios para calcular la transmitancia espectral se
encuentran en [15] y [16].
En la gura 2.7 se muestra en la transmitancia espectral simulada (normalizada)
en donde se puede observar que la separación entre máximos es de 50 GHz y que los
centros de estos concuerdan con los canales de la banda C.
1 9 4 . 0 0 1 9 4 . 0 5 1 9 4 . 1 0 1 9 4 . 1 5 1 9 4 . 2 00 . 2
0 . 4
0 . 6
0 . 8
1 . 0
Trans
mitan
cia
F r e c u e n c i a [ T H z ]
Figura 2.7: Transmitancia espectral normalizada del etalon.
2.4. Ajuste de longitud de onda
Las simulaciones mostradas en la sección anterior se obtienen, aplicando una de-
terminada función de entrada a las distintas secciones del láser. Por ejemplo, para el
caso de los reectores de Bragg y la sección de ajuste de fase dicha entrada se corres-
ponde a un cambio en el índice de refracción. Sin embargo, el láser funciona al aplicar

2.4 Ajuste de longitud de onda 37
una corriente a las distintas secciones, razón por la cual es necesario encontrar la re-
lación entre la corriente aplicada y el cambio de índice de refracción producido en la
sección de interés. En [13] y [17] se describen los fenómenos que causan el cambio de
índice de refracción cuando se inyecta una determinada densidad de portadores en ma-
teriales semiconductores. A continuación se describen brevemente los fenómenos más
importantes.
2.4.1. Agotamiento de estados de energía
En semiconductores dopados se observa un efecto por el cual el la absorción dismi-
nuye para fotones con energía ligeramente superior a la de la separación entre banda
de valencia y conducción (banda prohibida). Este fenómeno es causado por el agota-
miento de estados de energía libres en las proximidades del límite entre la banda de
conducción y la banda prohibida. Como resultado, electrones de la banda de valencia
necesitan una energía superior a la de la banda prohibida para pasar a la banda de
conducción y por tanto, disminuye el coeciente de absorción. Se puede demostrar que
el cambio de índice de refracción ∆n está relacionado con el cambio de coeciente de
absorción como:
∆n(N,P,E) = 2c~∫ ∞
0
∆α(N,P,E ′)
E ′2 − E2dE ′, (2.36)
donde N y P son las densidades de electrones y huecos respectivamente, E es la energía
del fotón y ∆α es el cambio en el coeciente de absorción. La integral anterior se resuelve
numéricamente y se obtiene los resultados mostrados en la gura 2.8. En esta se observa
que el cambio de índice de refracción es negativo y aproximadamente proporcional a la
densidad de portadores inyectados cuando esta es menor a 1× 1019.
2.4.2. Reducción de la banda prohibida
La principal causa de este efecto es la alta concentración de electrones en el fondo de
la banda de conducción. Si la concentración es lo sucientemente grande, las funciones
de onda de los electrones se superponen, formando un gas de partículas que interac-
túan entre si. Los electrones se repelen debido a las fuerzas de Coulomb y electrones
del mismo spin evitan unos a otros por razones estadísticas. El resultado total es la
reducción de la energía de la banda de conducción y el incremento de la energía de la
banda de valencia, con la correspondiente reducción de la banda prohibida. El cambio
en la energía de la banda prohibida produce un cambio en el coeciente de absorción
y el consiguiente cambio en el índice de refracción por lo que se puede utilizar la ecua-
ción 2.36 para caracterizarlo. Los resultados se muestran en la gura 2.8 en donde se
observa como el cambio de índice de refracción ocurre a partir de una determinada
concentración crítica y tiene signo positivo.

38 Modelo del láser sintonizable
2.4.3. Absorción de portadores libres
Un portador libre puede absorber un fotón y pasar a niveles de energía superior
dentro de la misma banda. Estos saltos intrabanda pueden ser modelados de modo que
el cambio del índice de refracción es proporcional a la concentración de portadores y
al cuadrado de la longitud de onda del fotón.
∆n = −(
e2λ2
8π2c2ε0n
)(N
me
+P
mh
), (2.37)
donde e es la carga del electrón, λ es la longitud de onda del fotón, c la velocidad de
la luz, ε0 la permeabilidad en el vacío, N y P son la densidad de electrones y huecos
respectivamente y me y mh las masas efectivas de los electrones y huecos respectiva-
mente.
0 2x1019 4x1019 6x1019 8x1019 1x1020
-0.6
-0.4
-0.2
0.0
n
N[cm-3]
BandFilling BandGap Shrinkage Free Carrier Absortion Total
Figura 2.8: Cambio de índice de refracción en función de la densidad de portadores.
La gura 2.8 muestra que para el efecto de absorción de portadores libres, el cambio
de índice de refracción varía proporcionalmente con la densidad de portadores. Es
prudente recordar que el cambio de índice debido a los efectos de agotamiento de
estados de energía y absorción de portadores libres es negativo, mientras que el cambio
producido por reducción de la banda prohibida es positivo. Por tanto, el cambio de
índice combinado es negativo excepto por una pequeña región alrededor de 1× 1017.

2.4 Ajuste de longitud de onda 39
2.4.4. Relación entre la corriente aplicada y la densidad de por-
tadores inyectados
Hasta ahora se logró obtener una relación entre la densidad de portadores y el cam-
bio de índice de refracción. El paso siguiente es obtener una relación entre la corriente
aplicada al semiconductor y la densidad de portadores existentes en el mismo. Dicha
relación puede encontrarse mediante la resolución de las ecuaciones de transporte de
electrones y huecos en el material. De [18] y [19] se obtiene la siguiente relación entre
la densidad de portadores y la tasa de recombinación como:
R(N) = AN +BN2 + CN3, (2.38)
donde N es la densidad de portadores, A, B y C son constantes correspondientes a tres
mecanismos de recombinación que contribuyen a la tasa de recombinación total R(N).
Estos tres mecanismos son: recombinación debido a impurezas (A), recombinación ra-
diativa (B) y recombinación Auger (C). De los tres mecanismos, la recombinación por
impurezas y la recombinación Auger son despreciables en comparación a la recombina-
ción radiativa [19], por lo que se puede despreciar dichos términos de la ecuación 2.38.
Entonces, en estado estacionario la tasa de recombinación total es proporcional a la
corriente aplicada y se calcula como:
R =i
e l S, (2.39)
donde i es la corriente aplicada, e es la carga del electrón, S es la supercie de circulación
del ujo de corriente y l es la zona de vaciamiento del semiconductor.
Con las consideraciones anteriores se puede obtener la relación entre la corriente
aplicada y la densidad de portadores en el semiconductor como:
i =B N2
e l S. (2.40)
La constante B depende del material semiconductor y se obtiene de [18].
2.4.5. Comparación entre los resultados medidos y calculados
En pos de vericar de manera temprana si la teoría empleada se condice con el
comportamiento esperado se decide medir el cambio de índice de refracción en el láser.
Para ello se varía la corriente de uno de los reectores y se almacena el cambio en
la longitud de onda del modo de emisión del láser. Puesto que es posible relacionar
la longitud de onda con el cambio de índice de refracción utilizando las ecuaciones
descritas en el modelado de los reectores de Bragg, se obtiene el cambio de índice

40 Modelo del láser sintonizable
de refracción en función de la corriente aplicada. La medición realizada se compara
con los resultados teóricos de cambio de índice de refracción en función de la corriente
aplicada.
La gura 2.9 Muestra una buena aproximación entre el resultado teórico y el medido
en el láser. Las pequeñas diferencias pueden ser atribuidas a dos causas. Primero, el
cambio de índice de refracción con la densidad de portadores causado por 2.4.1, 2.4.2
y 2.4.3 varía considerablemente con la proporción de los componentes del material
semiconductor cuaternario (InGaAsP). La curva calculada fue encontrada usando una
proporción obtenida de [17] y que es habitual en dispositivos como el láser utilizado,
sin embargo, no se posee información acerca de la proporción exacta.
Segundo, las componentes descartadas en la ecuación (2.38) también tienen una
contribución (en menor medida) a la ligera discrepancia observada en la gura 2.9.
Como conclusión, se puede decir que el grado de aproximación entre los valores
calculados y los datos medidos es suciente para considerar valido el modelo usado, al
menos en el rango de operación.
0 10 20 30 400.000
0.005
0.010
0.015
0.020
0.025
-n
i [mA]
Calculado Medido
Figura 2.9: Cambio de índice de refracción en función de la corriente aplicada, comparaciónmedición y resultados calculados.
2.5. Mapa de longitud de onda
Como punto nal del modelado del láser se realiza la evaluación de la respuesta
del mismo ante un barrido en las entradas de control de longitud de onda, es decir
los reectores de Bragg. El objetivo de dicho barrido es el de obtener un mapa de

2.5 Mapa de longitud de onda 41
las longitudes de onda de emisión alcanzables en función de las corrientes aplicadas a
los reectores de Bragg; también es deseable la comparación del mencionado mapa de
frecuencias con el provisto por el fabricante [16].
Para obtener el mapa de frecuencias el barrido se realiza mediante la variación de
las corrientes del reector izquierdo y derecho entre 0 mA y 33 mA (máxima corriente
para ambos reectores). El barrido no se realiza de forma lineal, sino cuadrático, ya que
la relación entre la corriente aplicada y el cambio de longitud de onda se corresponde
aproximadamente a esta forma.
En la gura 2.10 se muestra la longitud de onda del modo del láser que domina en
función de las corrientes aplicadas a los reectores. Se observa la formación de bandas
diagonales que corresponden a la alineación de un pico de reectividad en particular,
es decir que el salto de longitud de onda entre bandas diagonales contiguas es de apro-
ximadamente 700 GHz correspondiente a la separación entre picos de reectividad. En
cada banda diagonal existe una subdivisión en regiones las cuales corresponden a un
modo de la cavidad en particular, por lo que el salto de frecuencia entre regiones con-
tiguas dentro de una banda diagonal es de aproximadamente 50 GHz correspondiente
a la separación entre modos de la cavidad.
0 5 1 0 1 5 2 0 2 5 3 00
5
1 0
1 5
2 0
2 5
3 0Lo
ngitu
d de o
nda [
nm]
R e f l e c t o r d e r e c h o [ m A ]
Refle
ctor iz
quier
do[m
A]
1 5 2 0
1 5 2 5
1 5 3 0
1 5 3 5
1 5 4 0
1 5 4 5
1 5 5 0
1 5 5 5
1 5 6 0
1 5 6 5
1 5 7 0
Figura 2.10: Mapa de longitud de onda (en nm) en función de las corrientes en los reectores.
La gura 2.11 es una vista en perspectiva del mapa de longitudes de onda y clarica
la naturaleza discreta del ajuste de longitud de onda que provee los reectores de Bragg
(saltos de 50 GHz). Se observan claramente los grandes saltos de longitud de onda entre
bandas diagonales y los pequeños saltos entre regiones contiguas dentro de una banda.

42 Modelo del láser sintonizable
La gura 2.12 muestra el mismo mapa mostrado en la gura 2.10, con dos cambios;
el primero es que se graca la frecuencia en lugar de la longitud de onda y el segundo es
que la gráca está en escala potencial. El uso de una escala potencial permite observar
bandas diagonales paralelas así como apreciar con mayor detalle los modos obtenidos
cuando la corriente de los reectores es próxima a cero. Esas dos ventajas serán muy
útiles en el diseño del controlador de longitud de onda.
Figura 2.11: Vista en perspectiva del mapa de longitud de onda.

2.5 Mapa de longitud de onda 43
0 . 0 0 . 9 3 . 7 8 . 3 1 4 . 7 2 2 . 9 3 3 . 00 . 0
0 . 9
3 . 7
8 . 3
1 4 . 7
2 2 . 9
3 3 . 0
Frecu
encia
[THz
]
R e f l e c t o r d e r e c h o [ m A ]
Refle
ctor iz
quier
do[m
A]1 9 1 . 0
1 9 2 . 0
1 9 3 . 0
1 9 4 . 0
1 9 5 . 0
1 9 6 . 0
1 9 7 . 0
Figura 2.12: Mapa de frecuencia en escala potencial.
El comportamiento del láser es reproducido de manera aceptable por el modelo.
Este será utilizado en los capítulos posteriores para el diseño y simulación de los con-
troladores de longitud de onda y potencia.


Capítulo 3
Diseño de los circuitos y controladores
En este capítulo se describen los pasos realizados durante el diseño y simulación
de los circuitos necesarios para el manejo del láser sintonizable. Para el diseño de los
circuitos se siguen los requerimientos establecidos en la sección 1.8. Se detalla el diseño
y simulación de los circuitos más importantes, estos son: las fuentes de corriente, los
amplicadores de transimpedancia, el acondicionamiento de señal de los termistores y
el circuito de manejo del TEC.
Se detalla también el diseño y simulación de los controladores del láser, estos son:
el controlador de temperatura, el controlador de longitud de onda y el controlador de
potencia de salida. Al igual que con los circuitos, el diseño se basa en los requerimientos
establecidos en la sección 1.8.
3.1. Diseño de los circuitos
Para el diseño e implementación de los circuitos se opta por una solución modular,
es decir, la fabricación de placas independientes para los distintos circuitos: placa de
corriente, placa de los amplicadores de transimpedancia, etc. Las placas están acopla-
das de forma vertical en una placa madre encargada de la interconexión de todos los
circuitos. Se elige dicho esquema por todas las ventajas que ofrece en comparación a
una sola placa para todo el proyecto; tales ventajas se enumeran a continuación.
Reduce el tamaño del diseño, ya que las placas individuales estarán acopladas de
forma vertical, lo cual reduce el área de implementación.
Permite la prueba de cada circuito de forma independiente, sin necesidad de tener
el proyecto completo.
Permite una fácil reposición en caso de falla de un circuito.
Facilita la interoperatividad del proyecto, es decir, en caso de adquirir otro láser
45

46 Diseño de los circuitos y controladores
con requerimientos de corriente distintos solo se debe cambiar las placas relevantes
para su funcionamiento.
Facilita la fabricación de las placas; una placa de gran tamaño es difícil de fabricar
ya sea utilizando un método químico o una fresadora CNC.
3.1.1. Fuentes de corriente
Los rangos de operación de las cinco fuentes de corriente son distintos tal como se
mostró en la tabla 1.1. Por tanto, es necesario diseñar una fuente de corriente ajustable
que permita la modicación de la corriente máxima permisible. Las fuentes de corriente
son manejadas por un microcontrolador a través de convertidores D/A, por lo que
estas resultan en amplicadores de transconductancia (entrada de tensión y salida de
corriente). Otra característica fundamental es la posibilidad de proveer corrientes del
orden de las decenas de micro amperios, ya que algunas entradas del láser tienen gran
parte del rango de operación próximo al límite inferior. En cuanto a la frecuencia de
operación de las fuentes, esta debe ser lo sucientemente rápida para satisfacer los
requerimientos de tiempo de establecimiento denidos en la sección 1.8, es decir una
frecuencia de operación mayor a 100 kHz. Es importante también que la salida de la
fuente de corriente sea independiente de la tensión de alimentación, ya que de esta
forma se permite mayor libertad en la selección de fuentes de alimentación. Respecto a
la complejidad y facilidad de implementación, es deseable un diseño tan simple como sea
posible sin sacricar el desempeño. Como requerimiento nal se establece un monitor de
corriente, que se utiliza para medir la corriente entregada por la fuente y producir una
tensión analógica proporcional; el monitor de corriente no es esencial para el control del
láser, sin embargo es deseable en el proceso de desarrollo disponer de dichas variables.
3.1.1.1. Selección de la fuente de corriente
Se considera diversas opciones para diseñar las fuentes de corrientes. A continuación
se detallan algunas de ellas incluyendo el esquema seleccionado .
La primera opción es una fuente de corriente incorporada en un circuito integrado
como por ejemplo el LT3092 [20]. Esta es una fuente de corriente ajustable con rango
de operación entre 0,5 mA y 100 mA. La principal ventaja de esta opción es la facilidad
de implementación ya que integra los componentes necesarios para el funcionamiento
de la fuente en un solo encapsulado. Sin embargo, no fue posible encontrar un circuito
integrado similar al LT3092 que permita obtener los rangos de operación requeridos.
La siguiente opción consiste en circuitos basados en reguladores de tensión, como
por ejemplo el LT3086 [21]. El principal problema de esta opción es la complejidad y
gran número de componentes necesarios para su funcionamiento, por lo que se descarta
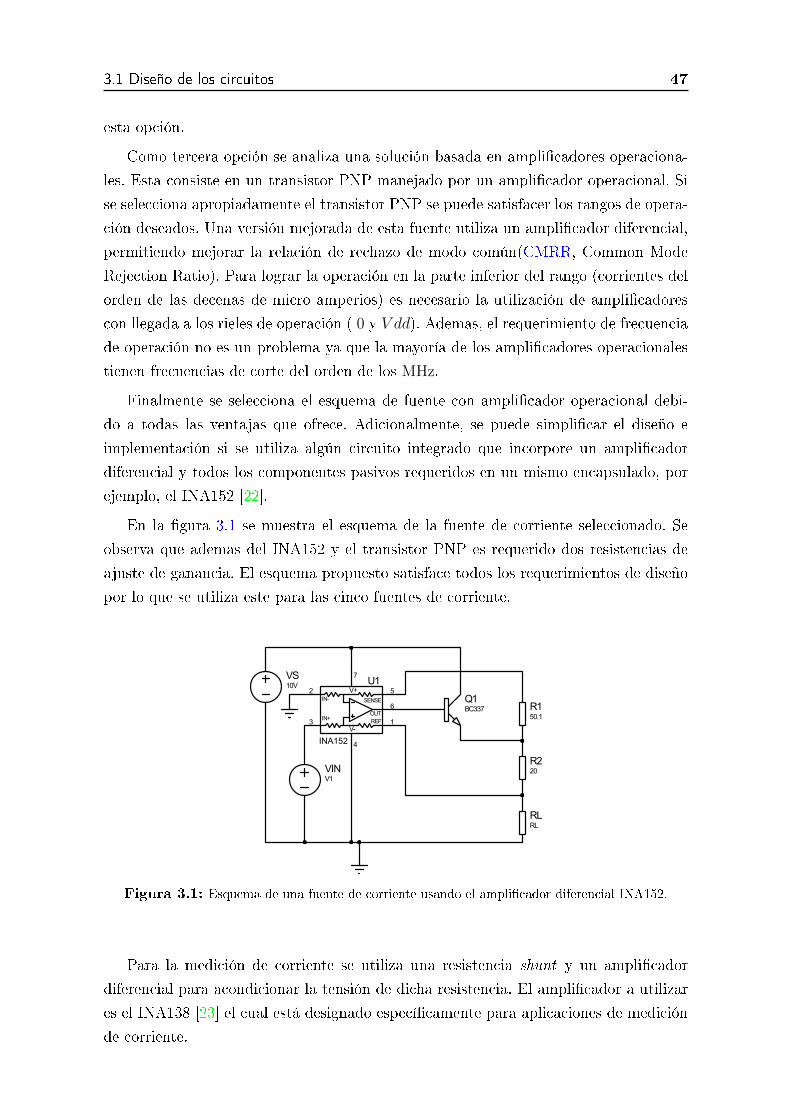
3.1 Diseño de los circuitos 47
esta opción.
Como tercera opción se analiza una solución basada en amplicadores operaciona-
les. Esta consiste en un transistor PNP manejado por un amplicador operacional. Si
se selecciona apropiadamente el transistor PNP se puede satisfacer los rangos de opera-
ción deseados. Una versión mejorada de esta fuente utiliza un amplicador diferencial,
permitiendo mejorar la relación de rechazo de modo común(CMRR, Common Mode
Rejection Ratio). Para lograr la operación en la parte inferior del rango (corrientes del
orden de las decenas de micro amperios) es necesario la utilización de amplicadores
con llegada a los rieles de operación ( 0 y V dd). Ademas, el requerimiento de frecuencia
de operación no es un problema ya que la mayoría de los amplicadores operacionales
tienen frecuencias de corte del orden de los MHz.
Finalmente se selecciona el esquema de fuente con amplicador operacional debi-
do a todas las ventajas que ofrece. Adicionalmente, se puede simplicar el diseño e
implementación si se utiliza algún circuito integrado que incorpore un amplicador
diferencial y todos los componentes pasivos requeridos en un mismo encapsulado, por
ejemplo, el INA152 [22].
En la gura 3.1 se muestra el esquema de la fuente de corriente seleccionado. Se
observa que ademas del INA152 y el transistor PNP es requerido dos resistencias de
ajuste de ganancia. El esquema propuesto satisface todos los requerimientos de diseño
por lo que se utiliza este para las cinco fuentes de corriente.
V+
V-
IN-
IN+OUTREF
SENSE
2
3
6
5
1
7
4
U1
INA152
R150.1
R220
RLRL
VINV1
VS10V
Q1BC337
Figura 3.1: Esquema de una fuente de corriente usando el amplicador diferencial INA152.
Para la medición de corriente se utiliza una resistencia shunt y un amplicador
diferencial para acondicionar la tensión de dicha resistencia. El amplicador a utilizar
es el INA138 [23] el cual está designado especícamente para aplicaciones de medición
de corriente.

48 Diseño de los circuitos y controladores
3.1.1.2. Diseño
El diseño de la fuente de corriente consiste en el cálculo de los valores de los com-
ponentes de ajuste. En el esquema de la gura 3.1 se muestra que se necesitan solo
dos resistencias para el ajuste de la corriente máxima, es decir, para denir el rango
de operación. En la hoja del fabricante del INA152 se presentan las ecuaciones para
calcular las resistencias de ajuste. A continuación se muestran dichas ecuaciones:
R2 =1
ILVin+−Vin−
− 140000
(3.1)
R1 = R2, (3.2)
donde R1 y R2 son las resistencias de ajuste, IL es la corriente máxima en la carga
y Vin+ − Vin− es la máxima diferencia de potencial aplicada a la entrada del ampli-
cador operacional. De las dos ecuaciones anteriores se concluye que para calcular la
resistencia de ajuste de cada fuente de corriente es necesario los datos de máxima co-
rriente y tensión aplicada a la entrada. La tensión aplicada esta determinada por los
convertidores D/A y en todos los casos tiene un valor máximo de 3,3 V. La corriente
máxima varía para las distintas fuentes, por lo que cada fuente de corriente tendrá una
resistencia de ajuste distinta.
Para el monitor de corriente es necesario determinar la resistencia de shunt y la
ganancia que debe tener el INA138. En general la resistencia de shunt debe ser lo su-
cientemente pequeña para que no afecte el funcionamiento de la fuente de corriente
y lo sucientemente grande para que la tensión de la resistencia no necesite una am-
plicación exagerada (a mayor amplicación menor es la frecuencia de operación del
INA138). Mediante simulaciones que se describen a continuación, se determina que una
ganancia de aproximadamente 100 veces permite un balance óptimo entre frecuencia
de operación y valor de la resistencia de shunt. Finalmente, la tensión máxima que el
monitor debe proveer al convertidor A/D es de 3,3 V (tensión de referencia del A/D),
con este dato y con los datos de ganancia óptima y corriente máxima se obtiene el valor
de las resistencias de shunt de cada fuente de corriente. En la tabla 3.1 se resumen los
valores calculados de los componentes para las distintas fuentes de corriente.
Fuente Resistencia de ajuste [Ω] Resistencia shunt [Ω]
SOA 15 0,22Medio activo 27 0,22Reectores de Bragg 82 0,56Ajuste de fase 390 2,2
Tabla 3.1: Valores calculados de resistencia para las distintas fuentes.

3.1 Diseño de los circuitos 49
En la gura 3.2 se muestra el esquema completo del circuito. Este incluye la fuente
de corriente, el monitor de corriente y un buer a la salida. Dicho buer proporciona
parte de la amplicación que el monitor de corriente debe proveer y de este modo
obtener una frecuencia de operación óptima.
3.1.1.3. Simulación
Para la simulación de este y los demás circuitos se utiliza el programa TINA de
Texas Instruments. Se seleccionó esta herramienta ya que contiene el modelo de simu-
lación de la mayoría de los circuitos integrados utilizados (muchos de ellos de Texas
Instruments). Se presenta a continuación las simulaciones de una de las fuentes de
corriente.
Vout
-
++
3
2
6
74
U4 OPA350
R7
330
R6 20k
+
Vin
C1
470p
R5 100
Vin
+V
in-
V+
GN
D
Out
3
4
5
2
1
U2 INA138
R3
5.6k
R4
220m
T1 BC337
RL
11.6
4 *
R1
15R
2 15
+
+
-
Ref
Sense
3
2
74
6
5
1
U1 INA152
+
Vs 7
Figura 3.2: Esquema de la fuente de corriente y el monitor de corriente.
La primera simulación consiste en realizar un barrido de la tensión de entrada y
registrar la corriente de salida. En la gura 3.3a se muestra la simulación del barrido
de tensión de entrada en la fuente de corriente del SOA. Se observa una relación lineal
en la mayor parte del rango de operación. La gura 3.3b es una imagen magnicada
de la gura 3.3a en la zona inferior del rango de operación. Se observa una respuesta
adecuada en el rango de las decenas de micro amperios. Ademas, la transconductancia
gm se corresponde a lo esperado de la etapa diseño.
La siguiente simulación consiste en un barrido en tensión de alimentación de la
fuente y el registro de la corriente de carga. Esta simulación se lleva a cabo para
determinar la mínima tensión de alimentación que la fuente requiere cuando esta opera
en la condición más desfavorable, es decir, la máxima corriente en la carga.

50 Diseño de los circuitos y controladores
0 1 2 30
5 0
1 0 0
1 5 0
2 0 0Co
rriente
en la
carga
[mA]
T e n s i ó n d e e n t r a d a [ V ]
(a)
0 . 0 0 . 2 0 . 4 0 . 6 0 . 8 1 . 0- 1 0
0
1 0
2 0
3 0
4 0
5 0
Corrie
nte en
la ca
rga[uA
]
T e n s i ó n d e e n t r a d a [ m V ]
(b)
Figura 3.3: Barrido de tensión de entrada en la fuente de corriente del SOA.
En la gura 3.4 se muestra el resultado de la simulación del barrido de tensión de
alimentación. Se observa que tensiones de alimentación muy bajas impiden alcanzar la
máxima corriente en la carga. De la simulación anterior se determina que la tensión de
alimentación de las fuentes de corriente debe ser mayor a 7 V por lo que, dejando un
margen de guarda, se decide jar el valor de dicha tensión en 9 V.
4 5 6 7 81 0 0
1 2 5
1 5 0
1 7 5
2 0 0
Corrie
nte en
la ca
rga[m
A]
T e n s i ó n d e a l i m e n t a c i ó n [ V ]
Figura 3.4: Barrido de la tensión de alimentación en la fuente de corriente cuando la corrientede carga es la máxima(200mA).
Una prueba importante a realizar es el análisis de la respuesta en frecuencia del
circuito pues es necesario para determinar la frecuencia de corte f−3 dB (frecuencia a la
cual la ganancia de tensión disminuye al 70,7 %). Para esta simulación se utiliza una
señal sinusoidal en la entrada de la fuente y se realiza un barrido de su frecuencia.

3.1 Diseño de los circuitos 51
En la gura 3.5 se observa la respuesta en frecuencia de la fuente de corriente, es
decir, la ganancia (VLoad/Vin) en función de la frecuencia de la señal de entrada. De
la gráca se estima una frecuencia de corte de aproximadamente 380 kHz siendo este
valor superior al valor establecido en los requerimientos de diseño.
La simulación nal incluye la fuente de corriente y el monitor de corriente trabajan-
do en conjunto. Se realiza un barrido de la tensión de entrada de la fuente de corriente y
se registra la tensión de salida del monitor de corriente comprobándose que la ganancia
del sistema en conjunto es de aproximadamente 0 dB. También se obtiene la respuesta
en frecuencia del circuito completo, siendo previsible una reducción en la frecuencia de
corte debido a las etapas introducidas por el monitor de corriente (monitor shunt y
buer de salida).
En la gura 3.6 se muestra la simulación del circuito completo que incluye la fuente
de corriente y el monitor de corriente. El barrido de la tensión de entrada se muestra en
la gura 3.6a. La respuesta en frecuencia se ilustra en la gura 3.6b. En esta se observa
una reducción de la frecuencia de corte desde 380 kHz (cuando solo se considera la
fuente de corriente) a 220 kHz (cuando se considera también el monitor de corriente).
Sin embargo, cabe aclarar que la reducción de la frecuencia de operación debido al
monitor de corriente no afecta el control del láser, ya que en este caso no es necesario
la medición de corriente.
1 0 0 1 0 1 1 0 2 1 0 3 1 0 4 1 0 5 1 0 6- 1 2
- 1 0
- 8
- 6
- 4
- 2
0
F - 3 d B ( 3 8 0 k H z ; - 5 , 1 d B )
Gana
ncia[
dB]
F r e c u e n c i a [ H z ]Figura 3.5: Barrido de la frecuencia de la señal de entrada de la fuente de corriente.
3.1.2. Amplicadores de transimpedancia
El láser sintonizable posee dos fotodiodos (de referencia y del etalon) utilizados
para el control de potencia y longitud de onda respectivamente. Estos producen una

52 Diseño de los circuitos y controladores
corriente proporcional a la potencia del láser (referencia) y a la potencia de salida
del etalon. Para el funcionamiento de la plataforma de control del láser es necesario
un circuito que produzca una tensión analógica proporcional a la corriente producida
por los fotodiodos. Esta tensión es posteriormente registrada por el microcontrolador
a través del convertidor A/D y utilizada en los algoritmos de control del láser.
0 1 2 30
1
2
3
Tens
ión m
onito
r[V]
T e n s i ó n d e e n t r a d a [ V ](a)
1 0 0 1 0 1 1 0 2 1 0 3 1 0 4 1 0 5 1 0 6- 3 0
- 2 0
- 1 0
0
F - 3 d B ( 2 2 0 k H z ; - 2 , 8 8 d B )Ga
nanc
ia[dB
]
F r e c u e n c i a [ H z ](b)
Figura 3.6: Simulación de la fuente de corriente y el monitor de corriente en conjunto. (a)Barrido de la tensión de entrada, (b) Barrido de la frecuencia.
El circuito requerido se conecta al microcontrolador mediante el convertidor A/D,
por tanto, debe proveer una tensión analógica máxima de 3,3 V cuando la corriente
del fotodiodo es la máxima. La corriente máxima de los fotodiodos se puede calcular
sabiendo que la responsividad de estos es de 25 µA/mW y que la máxima potencia
entregada por el láser es de 13 dBm o 19,95 mW [15]. Con los datos anteriores se
calcula que la corriente máxima de los fotodiodos es de aproximadamente 498 µW.
3.1.2.1. Selección del circuito para los fotodiodos
La principal función del circuito para los fotodiodos es la de convertir la corriente
en una tensión proporcional. La forma más fácil de realizar esta conversión es usando
una resistencia que produzca una tensión proporcional a la corriente que la atraviesa.
Si bien se puede utilizar una resistencia para obtener la tensión proporcional existen
ciertas desventajas, por ejemplo, la baja tensión producida por la resistencia implica
una baja sensibilidad. El incremento de la sensibilidad requiere del incremento del valor
de la resistencia, sin embargo, esto causa la reducción de la frecuencia de operación [1].
El uso de una resistencia requiere de un compromiso entre sensibilidad y frecuencia de
operación razón por la cual se descarta esta opción.
La siguiente opción analizada consiste en usar un amplicador operacional en con-
guración de amplicador de transimpedancia (TIA, Transimpedance Amplier). Las
ventajas que presenta este esquema son la gran sensibilidad obtenida y una elevada

3.1 Diseño de los circuitos 53
frecuencia de operación. Por estas razones los amplicadores de transimpedancia son
muy utilizados como circuitos receptores en comunicaciones ópticas.
Por sus ventajas se selecciona el amplicador de transimpedancia para la medición
de las corrientes de los fotodiodos. En particular, se propone el circuito integrado
OPA380 [24], el cual es una versión mejorada de un amplicador de transimpedancia y
está especicado para el uso en comunicaciones ópticas de alta velocidad. En la gura
3.7 se muestra el esquema interno del circuito integrado OPA380 así como los elementos
necesarios para su funcionamiento.
1MΩ
RF
100kΩ
+5V
7
2
3
4
6
OPA380
67pF
75pF
−5V
RP(Resistorde bajadaopcional)V
OUT(0V to 4.4V)
Fotodiodo
CF
Figura 3.7: Amplicador de transimpedancia utilizando el circuito integrado OPA380.
3.1.2.2. Diseño
Para el diseño es necesario calcular la resistencia de realimentación RF la cual a
su vez determina la ganancia del amplicador. El cálculo de la ganancia se realiza
utilizando los datos de corriente máxima del fotodiodo y la tensión máxima de salida
correspondiente a dicha corriente. Se utiliza la siguiente relación para el cálculo de la
resistencia de realimentación:
RF =VoutIPmax
, (3.3)
donde Vout es la tensión máxima de salida del amplicador de transimpedancia y tiene
un valor de 3,3 V. IPmax es la corriente máxima del fotodiodo y toma un valor de
498 µA. Con los datos anteriores se obtiene una resistencia RF de 6,63 kΩ, siendo el
valor comercial más próximo de 6,8 kΩ.

54 Diseño de los circuitos y controladores
En la hoja de datos del OPA380 se recomienda el uso de un condensador en paralelo
a la resistencia de realimentación. El propósito de este es limitar el ancho de banda
y consiguientemente el ruido de alta frecuencia. Para el cálculo del condensador de
realimentación CF es necesario denir una frecuencia de corte. Se considera que una
frecuencia de corte diez veces mayor a la establecida en los requerimientos provee
un buen margen de error y limita considerablemente el ruido de alta frecuencia. Se
selecciona una frecuencia de corte 1,3 MHz. Otro parámetro importante en el cálculo
del condensador CF es la capacitancia parásita debido a la resistencia de realimentación
Cstray. Para resistencias de montaje supercial se considera un valor estándar de 0,2 pF.
Se utiliza la relación recomendada en la hoja de datos para hallar la capacitancia CF :
f−3db =1
2πRF (CF + Cstray). (3.4)
A partir de la relación anterior se obtiene una capacitancia de 18 pF.
La consideración nal en el diseño es la manera en la que está conectado el fotodiodo.
En el esquema de la gura 3.7 se observa que el fotodiodo tiene el ánodo conectado
a tierra. Sin embargo, los fotodiodos del láser sintonizable poseen un esquema en el
cual el cátodo se encuentra conectado a tierra. Por esta razón se deben hacer pequeñas
modicaciones al circuito del amplicador de transimpedancia, eligiéndose un esquema
de amplicador de transimpedancia sumador. Esta decisión implica añadir una fuente
de tensión negativa en una de las entradas del TIA. Para obtener la tensión negativa
se utiliza el circuito integrado LM7705 [25] que proporciona una tensión constante de
−0,232 V a partir de una tensión positiva de 5 V.
En la gura 3.8 se muestra el esquema del circuito de transimpedancia con todas las
consideraciones descritas anteriormente. En el esquema se consideran las capacitancias
parásitas del fotodiodo y de la resistencia de realimentación. El fotodiodo es represen-
tado por una fuente de corriente y el circuito integrado generador de tensión negativa
es representado por una fuente de tensión. Un aspecto importante a considerar es que
la tensión de salida disminuye cuando la corriente del fotodiodo incrementa debido a
la conexión del cátodo del fotodiodo a tierra. Por lo tanto, cuando la corriente sea cero
se tendrá la máxima tensión de salida y cuando la corriente sea máxima se tendrá 0 V
a la salida del amplicador. La ganancia negativa del amplicador de transimpedancia
se corrige posteriormente en la lógica del microcontrolador.
3.1.2.3. Simulación
Se realizan dos simulaciones con el n de encontrar la corriente y la frecuencia
máxima de operación: un barrido de la corriente del fotodiodo y un barrido de la
frecuencia de la fuente de entrada al amplicador de transimpedancia.

3.1 Diseño de los circuitos 55
+
VS1
R2
Cpd
Cs t r a y
Cs
1u
CF
Ipd
RF
+
-
+3
2
74
6U1 OPA380
C1
R1
+
Vs
Figura 3.8: Esquema de simulación del circuito amplicador de transimpedancia.
En la gura 3.9a se muestra la simulación del barrido de la corriente del fotodiodo.
En la misma se aprecia la linealidad de la respuesta y la ganancia negativa. En la gura
3.9b se presenta la respuesta en frecuencia del circuito. De esta se puede estimar una
frecuencia de corte (−3 dB) de aproximadamente 1,13 MHz.
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 00
1
2
3
Tens
ión de
salida
[V]
C o r r i e n t e d e l f o t o d i o d o [ u A ](a)
1 0 0 1 0 1 1 0 2 1 0 3 1 0 4 1 0 5 1 0 6 1 0 7- 3 0
- 2 0
- 1 0
0
F - 3 d B ( 1 , 1 3 M H z ; - 3 d B )
Gana
ncia[
dB]
F r e c u e n c i a [ H z ](b)
Figura 3.9: Simulación del amplicador de transimpedancia. (a) Barrido de la corriente delfotodiodo. (b) Barrido de la frecuencia de la fuente de excitación del amplicador de transimpe-dancia.
3.1.3. Amplicadores de los termistores
El control de temperatura es fundamental para la correcta operación del láser sin-
tonizable. Tanto el medio activo como los componentes de control de longitud de onda

56 Diseño de los circuitos y controladores
(reectores de Bragg y sección de ajuste de fase) son dependientes de la temperatura.
La calibración del etalon también depende de la temperatura ya que es necesario el
ajuste de la misma para mover inicialmente los modos del etalon de manera de que
coincidan con los canales de la banda C.
Para el control de temperatura el encapsulado del láser posee un termistor, por lo
que es necesario un circuito capaz de acondicionar la señal proveniente de este. En el
diseño de dicho circuito se deben considerar las características de los termistores. Estas
son encontradas en la hoja de datos del láser [15] y se enumeran a continuación:
Resistencia de 10 kΩ a 25 C.
Índice de sensibilidad de 3900 K.
Otro requerimiento del circuito es la máxima tensión de salida. Para ello, y al igual
que en los casos anteriores, se considera la máxima tensión admisible por el convertidor
A/D. No se establece ningún requerimiento de tiempo de respuesta del circuito debido a
que la variación de temperatura es relativamente lenta en comparación a la frecuencia de
operación del sistema en conjunto(100 kHz). Finalmente, se establece una temperatura
de operación nominal próxima a 25 C puesto que esta temperatura es la recomendada
en la hoja de datos. La temperatura de operación no debe ser menor a 15 C o mayor a
35 C ya que de esta manera se mantiene al láser en un rango de temperatura apropiado.
3.1.3.1. Selección del circuito amplicador para los termistores
Existen diversas formas de medir la resistencia del termistor. Algunas de las posibles
soluciones se detallan a continuación:
La primera opción que se analiza es el uso de un amplicador operacional y una
fuente de tensión de referencia. La principal ventaja de este esquema es la simplicidad
de implementación y el reducido número de componentes (Amplicador operacional,
fuente de referencia y resistencia de precisión). La mayor desventaja de este esquema
es su elevado error, al menos en comparación a las siguientes opciones.
Otro esquema bastante utilizado en la medición de termistores es el puente de
Wheatstone. Este consiste en un arreglo de cuatro resistencias (en donde una de ellas
es el termistor) y una fuente de excitación. Las ventajas del puente de Wheatstone son
su sensibilidad y posibilidad de realizar una medición diferencial. Entre las desventajas
podemos mencionar la necesidad de tres resistencias de precisión y la necesidad de
contar con un buer de salida.
La opción nal consiste en el uso de un circuito integrado optimizado para la me-
dición de termistores, por ejemplo, el INA330 [26]. Este integrado es un amplicador
de señal de termistor diseñado especícamente para control de temperatura en aplica-

3.1 Diseño de los circuitos 57
ciones de redes ópticas. Las ventajas de usar el INA330 son su bajo error de medición
(±0,009 C) en comparación a las opciones anteriores y su fácil implementación.
Teniendo en cuenta las características de las soluciones mencionadas anteriormente
se selecciona el INA330 debido a que combina las ventajas de las dos primeras opciones.
La gura 3.10 muestra el circuito de medición de los termistores así como el esquema
interno del INA330.
9 5
4
V+
V2VEXCITE
1V V1
6
Enable High = OnLow = Off
8
7
I1
I2
RSET
10kΩRG
200kΩThermistor
RTHERM = 10kΩCFILTER
500pF
IO = I1 – I2
VO
VADJUST = +2.5V
Figura 3.10: Esquema del circuito de medición de los termistores.
3.1.3.2. Diseño
El diseño del circuito consiste en determinar el valor de los siguientes componentes:
la resistencia de ajuste Ra, la resistencia de ganancia Rg y el condensador de ltrado
Cf . También es necesario denir las tensiones de ajuste Vad y de excitación Vex.
Para el diseño es necesario los valores de resistencia del termistor en los límites del
rango de operación, es decir, en 15 C y 35 C. Estos valores se encuentran utilizando
la siguiente relación:
Rth = R0 exp
(β
T− β
T0
), (3.5)
donde R0 y T0 son la resistencia y la temperatura del termistor respectivamente y β es
el índice de sensibilidad del termistor con un valor de 3900K [27]. Después de resolver
la ecuación 3.5 en los límites del rango de temperatura se obtiene: Rth(15 C) = 15,8 kΩ
y Rth(35 C) = 6,52 kΩ.
Posteriormente se determina los valores de resistencia y capacidad eléctrica de los
componentes del circuito. Para ello se utiliza la relación provista en la hoja de datos
del INA330 [26]:
Vout = Vad + VexRg
(1
Rth
− 1
Rs
). (3.6)

58 Diseño de los circuitos y controladores
Se dene que la resistencia de ajuste sea igual al valor nominal de la resistencia del
termistor, es decir, Ra = R0 = 10 kΩ. Para simplicar la implementación del circuito
se establece que las tensiones de referencia sean iguales, es decir, Vad = Vex.
En el cálculo de la resistencia Rg se utiliza el límite inferior del rango de operación,
por lo que T = 15 C, Vout = 0 V y Rth = 15,8 kΩ. Con los datos anteriores y utilizando
la ecuación 3.6 se obtiene que Rg = 27,24 kΩ siendo el valor comercial más próximo de
Rg = 27 kΩ.
El valor de la tensión de referencia se calcula utilizando a ecuación 3.6 en el límite
superior del rango de temperatura, por lo que T = 35 C, Rth = 6,52 kΩ y Vout = 3 V.
Para estos valores se obtiene una tensión de referencia de 1,223 V. Para generar la
tensión de referencia se utiliza una fuente ajustable, por ejemplo, el circuito integrado
TL4051 [28]. En la gura 3.11 se muestra dicho circuito. Se necesitan, además, calcular
las tres resistencias para obtener la tensión de referencia deseada. Siguiendo los consejos
presentados en la hoja de datos del TL4051 se calculan las tres resistencias necesarias,
resultando: R1 = 9935 Ω, R2 = 65 Ωy Rs = 1500 Ω.
RS
TL4051x (Adj)
VS
R1
R2
V = V (1 + R2/R1)Z REF
+
VREF
-
Figura 3.11: Esquema del circuito generador de la tensión de referencia.
Finalmente la capacidad del condensador de ltrado se obtiene utilizando la relación
recomendada en la hoja de datos del TL4051:
Cf =1
2πRg(1,6 kHz). (3.7)
El valor de capacidad calculado es de 3,68 nF siendo el valor comercial más próximo
de 3,3 nF.
En la gura 3.12a se muestra esquema del circuito de medición de los termistores.

3.1 Diseño de los circuitos 59
3.1.3.3. Simulación
La simulación consiste en hacer un barrido de la temperatura del termistor. En la
gura 3.12b se muestra el resultado del barrido realizado. En el mismo se observa la
no linealidad de la relación entre la temperatura y la tensión de salida. Este efecto,
esperable para un termistor de este tipo, puede ser corregido posteriormente con el
microcontrolador.
Cre
f
+Vdd
Cf
Cvs
NTC
The
rmis
tor
Rg
Rs
+
Vad
+Vex
INA330Vo
Vadj
V+ en
Vex
Rth
Rs
GN
D
U1 INA330
Rout
Cout
(a)
1 0 1 5 2 0 2 5 3 0 3 5 4 00
1
2
3
Tens
ión de
salida
[V]
T e m p e r a t u r a [ º C ](b)
Figura 3.12: (a) Esquema del circuito de medición de los termistores.(b) Barrido de la tem-peratura del termistor.
3.1.4. Circuito de manejo del TEC
Como se menciona en la descripción del láser sintonizable utilizado, el mismo regula
su temperatura mediante un refrigerante termoeléctrico integrado (ver características
en la tabla 1.2). Para el manejo del TEC es necesario un circuito que regule la corriente
suministrada.
Entre las opciones para el circuito de manejo del TEC se puede mencionar:
Circuitos con amplicadores operacionales de alta corriente.
Puentes H con transistores MOSFET.
La primera opción tiene como ventaja la simplicidad del esquema. La segunda opción
posee una eciencia mayor, sin embargo, requiere del uso de PWM (Pulse Width Mo-
dulation) para regular la corriente lo cual puede producir ruido en el circuito. Después
de analizar ambas opciones se selecciona la segunda debido a su alta eciencia y fácil
implementación. Si bien existe el problema del ruido, este se puede solucionar median-
te el uso de ltros adecuadamente diseñados. El integrado seleccionado (DRV592 [29])
consistente en un puente H de alta eciencia y designado especícamente para el ma-
nejo de TEC y láseres. Este integrado utiliza PWM para el control de la corriente, es
bidireccional y puede manejar corrientes máximas de hasta 3 A.

60 Diseño de los circuitos y controladores
3.1.4.1. Diseño
Para el diseño del circuito se sigue el esquema presentado en la hoja de datos del
DRV592. En la gura 3.13 se muestra dicho esquema.
1 F
AVDD
AGND (Connect to PowerPAD)
FAULT1
FAULT0
IN+
IN–IN–
PV
DD
PV
DD
PV
DD
PV
DD
OU
T–
OU
T–
OU
T–
OU
T–
OUT–
PGND
PGND
PGND
PGND
PGND
PGND
OUT+
OU
T+
OU
T+
OU
T+
OU
T+
PV
DD
PV
DD
PV
DD
PV
DD
Shutdown Control
10 F
VDD
10 H
10 F
10 H
10 F1 F
To TEC or LaserDiode Anode
To TEC or LaserDiode Cathode
1 F
HI-ZTo HI-Z Control
To Fault Monitor
PWM Input 1
PWM Input 2
SHUTDOWN
Figura 3.13: Esquema del circuito de manejo del TEC.
El DRV592 es controlado por dos entradas PWM, permitiendo que la circulación
de corriente en el TEC sea bidireccional. De esta forma es posible controlar tanto
incrementos como decrementos de temperatura utilizando el mismo circuito. Además,
el circuito tiene dos salidas, cada una con un ltro pasivo tipo LC. El diseño consiste
en el cálculo de dicho ltro. Para ello se utiliza la siguiente relación:
f0 =1
2π√LC
, (3.8)
donde L y C son los valores de inductancia y de capacidad del ltro respectivamente
y f0 es la frecuencia de resonancia. Los valores de inductancia y capacidad se calculan
teniendo en cuenta que la frecuencia de entrada PWM debe ser al menos una década
mayor a la frecuencia de resonancia. Se establece la frecuencia de PWM en 300 kHz , el
valor del inductor en 10 µH y el del condensador en 470 µF. Todos los anteriores valores
producen una frecuencia de resonancia de 2,32 kHz, satisfaciendo el requerimiento de
diseño.
3.1.4.2. Simulación
En la simulación del TEC solo se considera el funcionamiento del ltro LC. Para ello
se aplica un transitorio a una de las entradas PWM y se registra la tensión de salida del
ltro. En la gura 3.14a se muestra la respuesta del ltro ante el transitorio aplicado.
Se observa un sobreimpulso considerable, sin embargo, este se encuentra dentro de los
rangos de operación por lo que no presenta un problema en la aplicación.

3.2 Diseño de los controladores 61
Un parámetro muy importante del ltro es el rizo de la tensión de salida. Para
estimar este parámetro, se muestra en la gura 3.14b la imagen magnicada de la
gura 3.14a. El rizo estimado de la simulación es de aproximadamente 12 mVpp, es
decir, 0,4 % de la tensión de salida cuando esta se encuentra en el máximo (3 V).
0 2 4 6 8 1 0 1 2- 3
- 2
- 1
0
1
2
3
Tens
ión de
salida
[V]
t i e m p o [ s ](a)
5 6 7 8 9 1 0- 1 0
- 5
0
5
1 0
Tens
ión de
salida
[mV]
t i e m p o [ s ](b)
Figura 3.14: (a) Simulación de un transitorio en la entrada del TEC. (b) vista magnicada dela simulación.
Considerando los resultados del diseño y simulacion de los distintos circuitos, se
puede concluir que en todos los casos se alcanzaron los requerimientos establecidos al
comienzo de la sección de los respectivos circuitos.
3.2. Diseño de los controladores
3.2.1. Control de temperatura
Si bien el control de longitud de onda y potencia del láser son los principales ob-
jetivos de este proyecto, el control de temperatura es fundamental para la correcta
operación del láser. Tanto la longitud de onda como la potencia óptica dependen de
la temperatura, por lo que la estabilidad de la temperatura es un requerimiento in-
dispensable para el control de estas variables. El control de temperatura del láser se
realiza con un lazo de control que, mediante el TEC (actuador) y el termistor (sensor)
permite modicar y mantener estable una temperatura predenida. En la gura 3.15
se muestra el lazo de control descrito anteriormente.
3.2.1.1. Modelo del TEC
El primer paso para controlar la temperatura es modelar la planta. La respuesta
de la planta es la combinación de las respuestas del TEC, del láser y del termistor. El
modelo de la planta es simplemente la función de transferencia de la misma. Para la

62 Diseño de los circuitos y controladores
obtención de dicha función de transferencia se aplica una entrada escalón al TEC y se
registran los cambios de temperatura del termistor.
PLANTA
Circuito demanejo del TEC
Amplificador deltermistor
I_TEC Termistor
LaserDZTemperaturade referencia
Figura 3.15: Esquema del lazo de control para el ajuste de temperatura.
Los materiales que se utilizan para la obtención del modelo de la planta son:
Láser sintonizable: Este incluye el TEC y los termistores.
Fuente de tensión DC: Utilizada para generar la entrada tipo escalón.
Multímetro de banco: Utilizado para registrar el valor del termistor.
Las conguraciones para la adquisición de datos son las siguientes: Se congura la
fuente DC de manera de obtener una temperatura constante de 15 C. A continuación
se incrementa el valor de la fuente de tensión de manera de que la temperatura aumente
hasta alcanzar un valor de 35 C. Se registran los valores de resistencia de los termistores
para su posterior análisis. En la gura 3.16 se muestra la respuesta de la temperatura
del láser medida con el termistor ante la entrada de tipo escalón aplicada al TEC.
0 2 0 4 0 6 0 8 0 1 0 01 5
2 0
2 5
3 0
3 5
Temp
eratur
a[°C]
t i e m p o [ s ]Figura 3.16: Respuesta del láser sintonizable a una entrada escalón en el TEC.
Una vez obtenida la respuesta al escalón se procede a la estimación de la función de
transferencia. Como punto de partida se realiza una estimación utilizando MATLAB

3.2 Diseño de los controladores 63
que, mediante un algoritmo de mínimos cuadrados, estima una función de transferencia.
La bibliografía revisada [30] sugiere funciones de transferencia de primer orden para
sistemas térmicos sencillos, por lo que se asume dicho orden en la primera estimación.
Los resultados obtenidos son bastante satisfactorios para validar dicha suposición, es
decir, una buena aproximación entre la respuesta al escalón medido y la obtenida del
modelo.
Una función de transferencia de primer orden puede ser expresada de la siguiente
manera:
G(s) =K
τs+ 1, (3.9)
donde K es una constante de proporcionalidad, τ es la constante de tiempo del sistema
y se dene como el tiempo en el que la respuesta ha alcanzado el 63,2 %) del valor de
estado estacionario y s es un numero complejo resultante del análisis en el plano s.
Con la primera estimación se procede a iterar hasta obtener una buena aproximación
(mayor a 85 %) entre la respuesta al escalón medida y la obtenida de la función de
transferencia estimada. Después del proceso de iteración se obtiene la siguiente función
de transferencia:
G(s) =0,3844
4s+ 1. (3.10)
En la gura 3.17 se observa la comparación entre la respuesta al escalón medida en
el láser y la obtenida mediante la función de transferencia estimada. Se observa una
buena aproximación atribuyendo las pequeñas diferencias a polos de alta frecuencia no
contemplados en la función de transferencia de primer orden utilizada.
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 01 5
2 0
2 5
3 0
3 5
Temp
eratur
a[°C]
t i e m p o [ s ]
M e d i c i ó n M o d e l o ( 3 . 1 0 )
Figura 3.17: Comparación de la respuesta al escalón de la medición y la obtenida del modelo.

64 Diseño de los circuitos y controladores
3.2.1.2. Diseño del controlador de temperatura
El diseño del controlador de temperatura se realiza en pasos de tiempo discreto
debido a que este será implementado en un microcontrolador digital. El método que se
utiliza para el diseño es el de lugar de raíces discreto ya que la planta a controlar es
relativamente simple (primer orden) [31]. El tiempo de muestreo se selecciona usando el
criterio que exige tener mas de diez periodos de muestreo durante el tiempo de subida
tr de la planta a lazo cerrado [32]. Usando dicho criterio se establece un periodo de
muestreo de 100 ms. Los requerimientos para el controlador se enumeran a continuación:
Tiempo de establecimiento ts menor a 10 s.
Sobreimpulso Mp menor al 20 %.
Error de estado estacionario ess nulo para entradas del tipo escalón.
Otros parámetros de control como el tiempo pico tp y el tiempo de subida no forman
parte de los requerimientos, sin embargo, es deseable contar con ellos en la evaluación
del controlador.
El primer paso para el diseño es encontrar la función de transferencia discreta
mediante el uso de la transformada Z [32]. La función discreta puede expresarse como:
G(z) =1
z − 1Z G(s) . (3.11)
Con la ecuación anterior se obtiene la siguiente función de transferencia discreta:
G(z) =9,49× 10−3
z + 0,9753. (3.12)
La función de transferencia del controlador tiene la siguiente forma :
D(z) = kz − zzz − zp
, (3.13)
donde zz es la posición en el plano Z del cero del controlador y zp es la posición del
polo del controlador. La posición del polo se determina utilizando el requerimiento de
error de estado estacionario eSS. Para esto se utiliza la ecuación siguiente:
ess = lımz→1
(1− z−1)R(z)1
1 +G(z)D(z)= 0, (3.14)
donde R(z) es la entrada aplicada y puede expresarse como:
R(z) =1
1− z−1. (3.15)

3.2 Diseño de los controladores 65
Si substituimos 3.12, 3.13 y 3.15 en 3.14 y resolvemos la ecuación se obtiene que el
error de estado estacionario es:
ess = lımz→1
(z − zp)(z − 0,9753)
(z − zp)(z − 0,9753) + k(z − zz). (3.16)
Analizando 3.16 se puede concluir que el error de estado estacionario será cero solo si
el polo del controlador se encuentra en z = 1.
Para determinar la posición del cero del controlador se utiliza los requerimientos de
sobreimpulso y tiempo de establecimiento. Con ellos se puede determinar la posición
deseada de los polos a lazo cerrado. La posición de los polos a lazo cerrado se puede
expresar como:
Sd = −ξWn ± iWn
√1− ξ2, (3.17)
donde Sd es la posición de los polos en el plano S, Wn es la frecuencia natural y ξ es el
coeciente de amortiguamiento. Los parámetros de la posición de los polos se relacio-
nan con los requerimientos de sobreimpulso y tiempo de establecimiento mediante las
siguientes ecuaciones:
Ts =4
ξWn
, (3.18)
Mp = e(ξ/√
1−ξ2)π. (3.19)
Evaluando las ecuaciones anteriores se obtiene un coeciente de amortiguamiento de
ξ = 0,8 y una frecuencia natural de Wn = 0,5 rad/s. Por lo tanto, la posición deseada
de los polos es Sd = −0,4± 0,3i.
Una vez encontrada la posición deseada los polos en el plano S es necesario ma-
pearlos al plano Z, para ello usamos la relación:
Zd = eSDT , (3.20)
donde T es el periodo de muestreo. La posición deseada de los polos en el plano Z es
entonces Zd = 0,9604± 0,0288i.
Para determinar la posición del cero del controlador se utiliza la condición de ángulo
del método de lugar de raíces y se considera la posición deseada de los polos como punto
de prueba: ∑αp −
∑αz = 180, (3.21)
donde αp es el ángulo formado entre el punto de prueba y los polos a lazo abierto y αzes el ángulo formado entre el punto de prueba y los ceros a lazo abierto. Los polos a lazo
abierto incluyen el polo de la planta y el polo del controlador. El cero a lazo abierto
corresponde al del controlador de temperatura. La posición del cero del controlador
resulta zz = 0,9598.

66 Diseño de los circuitos y controladores
Finalmente, se calcula el valor de la constante K del controlador utilizando la con-
dición de magnitud del método de lugar de raíces. Se estima el valor de esta constante
en k = 8,59. Con todos los cálculos realizados anteriormente se obtiene la función de
transferencia del controlador como:
D(z) = 8,59z − 0,9598
z − 1. (3.22)
Utilizando la función de transferencia de la planta y la del controlador se realiza una
simulación de la respuesta ante un cambio en la temperatura de referencia. El escalón
de temperatura ocurre entre 15 C y 35 C. En la gura 3.18 se observan los resultados
obtenidos para el controlador de temperatura en función de los parámetros calculados
previamente. En dicha gura se pueden estimar los parámetros más importantes de la
respuesta al escalón, estos son:
Tiempo de establecimiento ts de 8 s.
Sobreimpulso Mp de 5,26 %.
Error de estado estacionario ess nulo ante entrada tipo escalón.
De los resultados obtenidos se puede concluir que se cumple con los requerimientos
de diseño mencionados al comienzo de esta sección. Por tanto, se da por concluido el
diseño del controlador de temperatura y se comienza con el el diseño del control de
potencia óptica de salida del láser sintonizable.
0 2 4 6 8 1 0 1 2 1 41 5
2 0
2 5
3 0
3 5
Temp
eratur
a[°C]
t i e m p o [ s ]Figura 3.18: Respuesta de la planta y el controlador a lazo cerrado ante una entrada tipoescalón.

3.2 Diseño de los controladores 67
3.2.2. Control de potencia del láser
El control de potencia del láser permite tanto el ajuste de la potencia óptica de salida
como la corrección de esta ante perturbaciones causadas, por ejemplo, por el control
de longitud de onda. Estas perturbaciones se deben a que la ganancia del medio no es
constante para todas las longitudes de onda, siendo máxima en el centro de la banda
C y disminuyendo a medida que se aleja de esta.
El láser posee dos entradas que modican la potencia de salida. La primera es la
corriente aplicada al medio activo y que permite el funcionamiento del láser. La segunda
es la corriente del SOA que se encuentra a la salida del láser. La entrada utilizada para
el control de potencia es la del SOA ya que de esta forma se desacopla el control
de potencia del control de longitud de onda, pues como se mencionó anteriormente,
cambios en la ganancia del medio activo producen cambios en la longitud de onda de
emisión. El hecho de utilizar solo el amplicador óptico para el control de potencia
disminuye el rango de ajuste sa aproximadamente 4 dB, es decir, la potencia puede ser
ajustada entre 9 dBm y 13 dBm.
Para el control de potencia es necesario su medición. Esta se realiza utilizando el
fotodiodo de referencia el cual genera una corriente proporcional a la potencia de salida
del láser. La corriente producida por el fotodiodo es convertida en una tensión mediante
el amplicador de transimpedancia y registrada por el microcontrolador a través del
convertidor A/D.
En la gura 3.19 se muestra el esquema de la planta a controlar. Esta incluye la
función de transferencia del microcontrolador, la función de transferencia de la fuen-
te de corriente, el modelo del láser y la función de transferencia del amplicador de
transimpedancia. Puede observarse que la fuente de corriente está conectada a la entra-
da del SOA y que la salida del fotodiodo de referencia está conectada al amplicador
de transimpedancia.
PLANTA
Fuente de corriente TIA
i_gain
i_soa
i_lref
i_rref
i_ph
Ip_ref
Ip_et
Laser
MicrocontroladorDZPotenciade referencia
Figura 3.19: Esquema del lazo de control para el ajuste de potencia.

68 Diseño de los circuitos y controladores
3.2.2.1. Modelo de la planta
La construcción del modelo de la planta consiste en determinar la función de tras-
ferencia de los componentes mostrados en la gura 3.19. Los más importantes son
la fuente de corriente y el amplicador de transimpedancia, ya que sus tiempos de
respuesta dominan en la respuesta global.
Tanto la fuente de corriente como el amplicador de transimpedancia fueron simu-
lados en la sección 3.1. El programa de simulación usado (TINA) permite exportar la
respuesta en frecuencia del circuito, es decir, el diagrama de Bode. Con los datos de la
respuesta en frecuencia se obtiene la función de transferencia haciendo una estimación
mediante MATLAB. Las funciones de transferencia continuas son las siguientes:
GFC(s) =2,34 · 1019
s3 + 2,34 · 107s2 + 1,89 · 1014s+ 3,51 · 1020, (3.23)
GTIA(s) =9,2 · 1017
s2 + 2,38 · 107s+ 1,89 · 1014 + 3,51 · 1020, (3.24)
donde GFC(s) y GTIA(s) son las funciones de transferencia de la fuente de corriente y
del TIA, respectivamente.
De acuerdo a mediciones realizadas sobre la plataforma de desarrollo utilizada, el
tiempo que le toma al microcontrolador ejecutar todas las instrucciones necesarias es
comparable al periodo de muestreo por lo que la función de transferencia del microcon-
trolador puede ser modelada como un retardo de un periodo. La función de transferencia
discreta del microcontrolador puede expresarse como:
Gµc(z) =1
z. (3.25)
Finalmente, el tiempo de respuesta del láser es al menos tres órdenes de magnitud
mas pequeño que el tiempo de respuesta de los circuitos (fuente de corriente y TIA),
por esta razón su función de transferencia puede ser representada como una ganancia
k. La función de transferencia del láser se expresa como:
Glas(s) = k. (3.26)
3.2.2.2. Diseño del controlador de potencia
El controlador de potencia debe ser discreto ya que su implementación se realiza
en un microcontrolador digital. En el diseño del controlador de potencia así como en el
de longitud de onda se utiliza el criterio descrito en la sección 3.2.1.2 para la selección
del periodo de muestreo. El periodo de muestreo T del sistema se establece en 10 µs.
Los requerimientos de diseño a alcanzar son los siguientes:

3.2 Diseño de los controladores 69
Tiempo de establecimiento menor a 1 ms.
Sobreimpulso menor al 10 %.
Error de estado estacionario nulo ante una entrada tipo escalón en la referencia.
El primer paso en el diseño es encontrar la función de transferencia discreta de la
planta mediante la transformada Z. Para ello se aplica dicha transformada a las fun-
ciones de transferencia continuas que conforman la planta. La función de transferencia
de la planta puede ser expresada como el producto de la función de transferencia del
microcontrolador (que ya es discreta) y la transformada Z de las demás funciones de
transferencia continuas, es decir:
G(z) = Gµc(z)1
z − 1Z GFC(s)Glaser(s)GTIA(s) (3.27)
Después de resolver la ecuación anterior se determina que la función de transferencia
discreta es simplemente un retardo de dos periodos de muestreo. Esto se debe a que
los tiempos de respuesta de las funciones de transferencia continuas (circuitos y láser)
son pequeños en comparación al intervalo de muestreo. La función de transferencia
encontrada es:
G(z) =0,9788
z2. (3.28)
Una vez obtenida la función de transferencia discreta de la planta se procede al
diseño del controlador de potencia de manera análoga a la descrita en la sección 3.2.1.2.
La función de transferencia del controlador de potencia es:
D(z) = 0,279z − 0,5
z − 1. (3.29)
El polo del controlador en z = 1 es necesario para obtener el error de estado
estacionario nulo cuando la entrada de referencia es un escalón. El cero de la función
de transferencia del controlador se selecciona de manera de satisfacer el requerimiento
de tiempo de establecimiento.
En la gura 3.20 se muestra la respuesta del sistema a lazo cerrado cuando se aplica
una entrada de tipo escalón en la potencia de referencia.
A partir de la curva de la gura 3.20 se puede estimar que el tiempo de estableci-
miento es de aproximadamente 0,21 milisegundos, que el sobreimpulso es cero y que el
error de estado estacionario ante una entrada escalón es nulo. Considerando la infor-
mación anterior se puede aseverar que se cumplen con los requerimientos planteados
anteriormente.

70 Diseño de los circuitos y controladores
0 . 0 0 . 1 0 . 2 0 . 3 0 . 44
6
8
1 0
1 2
1 4
1 6
Poten
cia[m
W]
t i e m p o [ m s ]Figura 3.20: Respuesta de la planta y el controlador de potencia a lazo cerrado ante unaentrada de tipo escalón en la referencia.
3.2.3. Control de longitud de onda del láser
El control de longitud de onda permite cambiar la salida del láser entre valores
discretos correspondientes a los canales de la banda C (especicados en el documento
de la ITU [33]).
El ajuste de longitud de onda es bastante complejo pues requiere la combinación
de un ajuste continuo (mediante la sección de fase) y un ajuste discontinuo (mediante
los reectores de Bragg). Dichos ajustes fueron detallados en la sección 1.5.2 y son
resumidos de la siguiente manera:
El ajuste discontinuo de longitud de onda se realiza aplicando una intensidad de
corriente a los reectores de Bragg. Esto produce un espectro de reectancia con un
máximo que concuerda con la longitud de onda en la que emite el láser. El ajuste
discontinuo permite grandes cambios en la longitud de onda con saltos de 50 GHz
correspondiente a la separación entre los modos de la cavidad.
El ajuste continuo o ajuste no se realiza mediante la aplicación de una intensidad
de corriente a la sección de fase. Esto permite el corrimiento de los modos de la cavidad
logrando un cambio de longitud de onda continuo en un rango de 50 GHz.
Debido a la compleja relación entre las tres entradas de ajuste y la longitud de onda
es común utilizar algoritmos de control basados en tablas de referencia, especialmente
para los reectores de Bragg. Por esta razón se propone un control de longitud de onda
mediante la combinación de tablas de referencia para los reectores de Bragg y un lazo
de control para la sección de fase.

3.2 Diseño de los controladores 71
El ajuste continuo de longitud de onda requiere del uso del etalon (descrito en la
sección 2.3.3). El funcionamiento del etalon puede resumirse de la siguiente manera:
El etalon posee un peine de frecuencias similar a los modos de la cavidad (espacia-
miento entre modos de 50 GHz). Estos pueden ser desplazados (mediante cambios de
temperatura) para que concuerden con las frecuencias de los canales de la banda C.
El fotodiodo del etalon produce una corriente máxima cuando la frecuencia de emisión
del láser concuerda con uno de los modos del etalon. Por lo tanto, es posible utilizar
la salida del fotodiodo del etalon para mantener alineada la frecuencia de emisión del
láser con uno de los modos del etalon y consecuentemente con un canal de la banda C.
Después de revisar el funcionamiento del ajuste de longitud de onda se propone el
siguiente algoritmo de control:
1. Ajustar la corriente de los dos reectores de Bragg (mediante una tabla) de
manera de que el pico de reectancia esté lo más próximo posible a la longitud
de onda del canal deseado.
2. Ajustar la sección de fase mediante un lazo de control hasta lograr que la longitud
de onda de emisión del láser sea igual a la del canal deseado. En este proceso se
debe modicar tanto la sección de fase como el pico de reectancia (reectores
de Bragg) de manera de que la alineación entre el pico de reectancia y el modo
de la cavidad emitido se mantenga constante.
Un aspecto muy importante en el ajuste continuo de longitud de onda es la ali-
neación entre el pico de reectancia y el modo de la cavidad emitido. Esta alineación
debe conservarse siempre ya que, de otro modo, la existencia de modos adyacentes en
la salida del láser sería un problema. Por ejemplo, se puede producir interferencia entre
dos canales adyacentes.
3.2.3.1. Modelo de la planta
En la gura 3.21 se muestra el esquema de la planta propuesto. Los componentes
son: el microcontrolador, las tres fuentes de corriente (dos para los reectores y una
para la sección de fase), el láser y el amplicador de transimpedancia del fotodiodo
del etalon. Dentro del bloque del microcontrolador se muestran los dos algoritmos que
serán implementados, estos son: el de ajuste de reectores de Bragg y el de ajuste de
la sección de fase.
Las funciones de transferencia de las fuentes de corriente, láser, microcontrolador
y amplicador de transimpedancia son las mismas que fueron utilizadas en la sección
3.2.2.

72 Diseño de los circuitos y controladores
PLANTA
Fuente de corriente Lref
i_gain
i_soa
i_lref
i_rref
i_ph
Ip_ref
Ip_et
Laser
Longitud de ondade referencia
TIA etFuente de corriente Rref
Fuente de corriente Ph
referencia
I_ph
I_lref
I_rref
tabla de canales
Tia_et I_ph
controlador deajuste fase
Figura 3.21: Esquema de la planta para el ajuste de longitud de onda.
3.2.3.2. Diseño del controlador de longitud de onda
El controlador de longitud de onda está conformado por dos algoritmos principa-
les. El primero es utilizado para determinar las corrientes de los reectores de Bragg
cuando ocurre un cambio en el canal seleccionado (ajuste grueso). El segundo realiza
un seguimiento del máximo de la corriente del fotodiodo del etalon (ajuste no). A
continuación se detallan dichos algoritmos.
Para el primer algoritmo es necesario elaborar la tabla de corrientes de los reec-
tores de Bragg correspondientes a los canales de la banda C. En la recomendación se
especica que para aplicaciones WDM los canales de la banda C tienen un espacia-
miento variable entre 12,5 GHz y 100 GHz [33]. Para el láser sintonizable se especica
en su hoja de datos que su aplicación está pensada para una separación entre canales
de 50 GHz y un rango de frecuencias entre 191,7 THz y 196,1 THz [15]. Con las conside-
raciones anteriores se realiza el barrido de las corrientes de los reectores de Bragg de
manera de obtener el mapa de frecuencia que posteriormente es utilizado para elaborar
la tabla de canales.
Algunas consideraciones especiales para realizar el barrido de reectores se detallan
a continuación:
El salto mínimo en el barrido de corriente debe ser lo sucientemente pequeño
para obtener información de todos los modos de la cavidad.
El incremento de corriente en el barrido no presenta un comportamiento del tipo
lineal ya que la relación entre la corriente y el cambio de longitud de onda es
potencial.
Con las consideraciones anteriores se realiza un barrido de las corrientes de los reetores
de Bragg entre 0 mA y 33 mA (límite superior de corriente de los reectores). El barrido
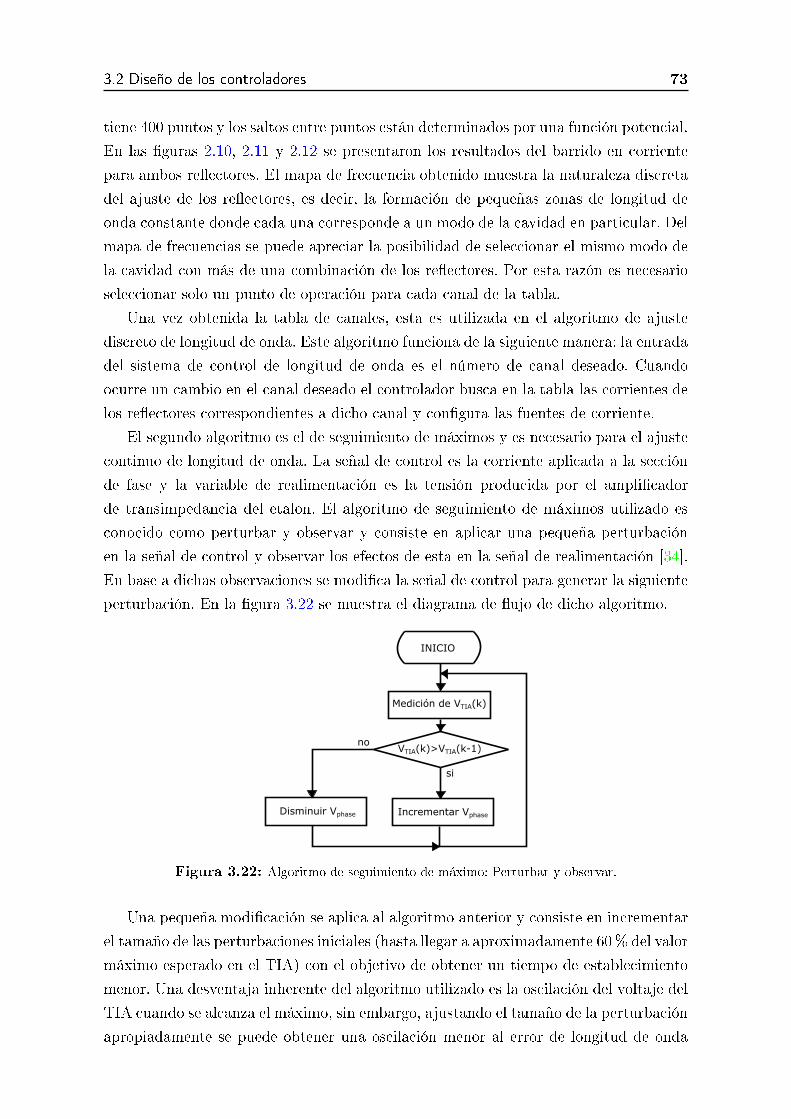
3.2 Diseño de los controladores 73
tiene 400 puntos y los saltos entre puntos están determinados por una función potencial.
En las guras 2.10, 2.11 y 2.12 se presentaron los resultados del barrido en corriente
para ambos reectores. El mapa de frecuencia obtenido muestra la naturaleza discreta
del ajuste de los reectores, es decir, la formación de pequeñas zonas de longitud de
onda constante donde cada una corresponde a un modo de la cavidad en particular. Del
mapa de frecuencias se puede apreciar la posibilidad de seleccionar el mismo modo de
la cavidad con más de una combinación de los reectores. Por esta razón es necesario
seleccionar solo un punto de operación para cada canal de la tabla.
Una vez obtenida la tabla de canales, esta es utilizada en el algoritmo de ajuste
discreto de longitud de onda. Este algoritmo funciona de la siguiente manera: la entrada
del sistema de control de longitud de onda es el número de canal deseado. Cuando
ocurre un cambio en el canal deseado el controlador busca en la tabla las corrientes de
los reectores correspondientes a dicho canal y congura las fuentes de corriente.
El segundo algoritmo es el de seguimiento de máximos y es necesario para el ajuste
continuo de longitud de onda. La señal de control es la corriente aplicada a la sección
de fase y la variable de realimentación es la tensión producida por el amplicador
de transimpedancia del etalon. El algoritmo de seguimiento de máximos utilizado es
conocido como perturbar y observar y consiste en aplicar una pequeña perturbación
en la señal de control y observar los efectos de esta en la señal de realimentación [34].
En base a dichas observaciones se modica la señal de control para generar la siguiente
perturbación. En la gura 3.22 se muestra el diagrama de ujo de dicho algoritmo.
INICIO
Medición de VTIA(k)
VTIA(k)>VTIA(k-1)
Incrementar VphaseDisminuir Vphase
si
no
Figura 3.22: Algoritmo de seguimiento de máximo: Perturbar y observar.
Una pequeña modicación se aplica al algoritmo anterior y consiste en incrementar
el tamaño de las perturbaciones iniciales (hasta llegar a aproximadamente 60% del valor
máximo esperado en el TIA) con el objetivo de obtener un tiempo de establecimiento
menor. Una desventaja inherente del algoritmo utilizado es la oscilación del voltaje del
TIA cuando se alcanza el máximo, sin embargo, ajustando el tamaño de la perturbación
apropiadamente se puede obtener una oscilación menor al error de longitud de onda
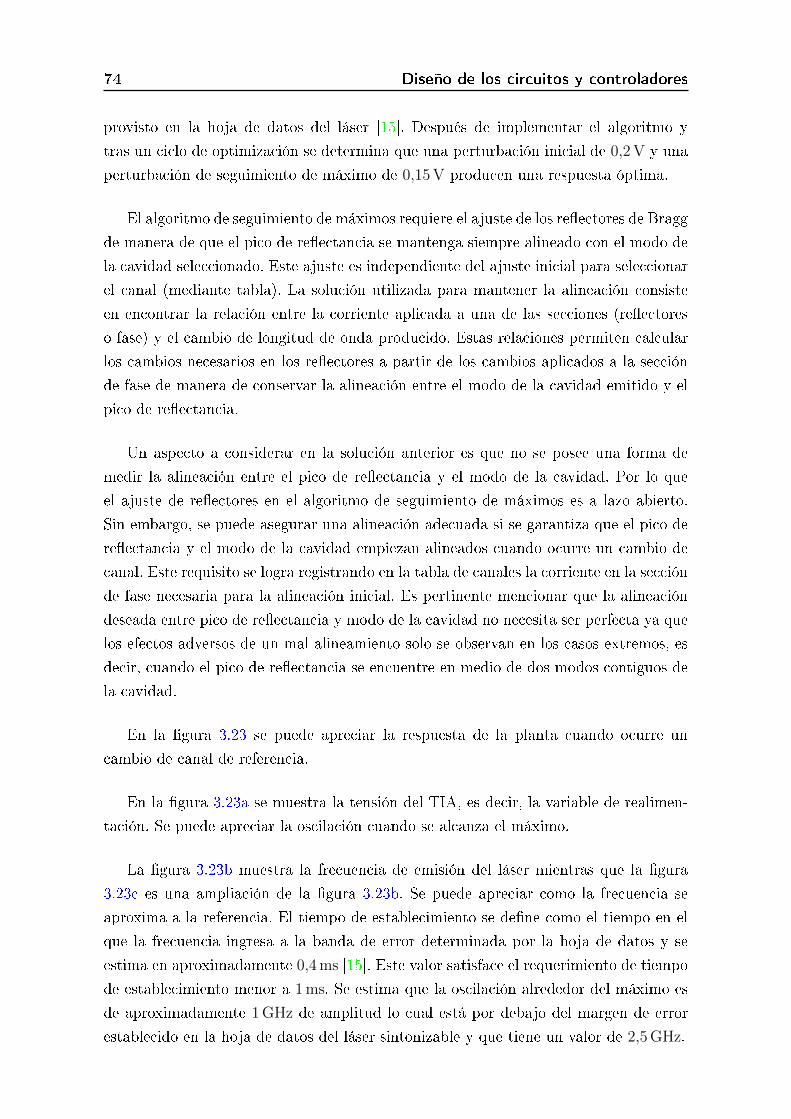
74 Diseño de los circuitos y controladores
provisto en la hoja de datos del láser [15]. Después de implementar el algoritmo y
tras un ciclo de optimización se determina que una perturbación inicial de 0,2 V y una
perturbación de seguimiento de máximo de 0,15 V producen una respuesta óptima.
El algoritmo de seguimiento de máximos requiere el ajuste de los reectores de Bragg
de manera de que el pico de reectancia se mantenga siempre alineado con el modo de
la cavidad seleccionado. Este ajuste es independiente del ajuste inicial para seleccionar
el canal (mediante tabla). La solución utilizada para mantener la alineación consiste
en encontrar la relación entre la corriente aplicada a una de las secciones (reectores
o fase) y el cambio de longitud de onda producido. Estas relaciones permiten calcular
los cambios necesarios en los reectores a partir de los cambios aplicados a la sección
de fase de manera de conservar la alineación entre el modo de la cavidad emitido y el
pico de reectancia.
Un aspecto a considerar en la solución anterior es que no se posee una forma de
medir la alineación entre el pico de reectancia y el modo de la cavidad. Por lo que
el ajuste de reectores en el algoritmo de seguimiento de máximos es a lazo abierto.
Sin embargo, se puede asegurar una alineación adecuada si se garantiza que el pico de
reectancia y el modo de la cavidad empiezan alineados cuando ocurre un cambio de
canal. Este requisito se logra registrando en la tabla de canales la corriente en la sección
de fase necesaria para la alineación inicial. Es pertinente mencionar que la alineación
deseada entre pico de reectancia y modo de la cavidad no necesita ser perfecta ya que
los efectos adversos de un mal alineamiento solo se observan en los casos extremos, es
decir, cuando el pico de reectancia se encuentre en medio de dos modos contiguos de
la cavidad.
En la gura 3.23 se puede apreciar la respuesta de la planta cuando ocurre un
cambio de canal de referencia.
En la gura 3.23a se muestra la tensión del TIA, es decir, la variable de realimen-
tación. Se puede apreciar la oscilación cuando se alcanza el máximo.
La gura 3.23b muestra la frecuencia de emisión del láser mientras que la gura
3.23c es una ampliación de la gura 3.23b. Se puede apreciar como la frecuencia se
aproxima a la referencia. El tiempo de establecimiento se dene como el tiempo en el
que la frecuencia ingresa a la banda de error determinada por la hoja de datos y se
estima en aproximadamente 0,4 ms [15]. Este valor satisface el requerimiento de tiempo
de establecimiento menor a 1 ms. Se estima que la oscilación alrededor del máximo es
de aproximadamente 1 GHz de amplitud lo cual está por debajo del margen de error
establecido en la hoja de datos del láser sintonizable y que tiene un valor de 2,5 GHz.

3.2 Diseño de los controladores 75
0 . 0 0 . 1 0 . 2 0 . 3 0 . 4 0 . 5 0 . 60 . 51 . 01 . 52 . 02 . 5
0 . 0 0 . 1 0 . 2 0 . 3 0 . 4 0 . 5 0 . 61 9 1 . 51 9 2 . 01 9 2 . 51 9 3 . 01 9 3 . 51 9 4 . 0
0 . 0 0 . 1 0 . 2 0 . 3 0 . 4 0 . 5 0 . 61 9 3 . 7 2 51 9 3 . 7 5 01 9 3 . 7 7 51 9 3 . 8 0 0
V TIA[V]
t i e m p o [ m s ]
( c )
( b ) F r e c u e n c i a R e f e r e n c i a
Frecu
encia
[THz]
t i e m p o [ m s ]
( a )
F r e c u e n c i a R e f e r e n c i a
Frecu
encia
[THz]
t i e m p o [ m s ]Figura 3.23: Resultados del control de longitud de onda cuando existe un cambio de canal enla referencia. (a) Evolución de la tensión del TÍA. (b) Evolución de la frecuencia de emisión delláser. (c) Evolución de la frecuencia de emisión magnicada.
Los resultados obtenidos del diseño y simulación tanto de los circuitos como de
los controladores son satisfactorios, se cumple en todos los casos los requerimientos de
diseño. Estos resultados serán implementados y validados en el siguiente capítulo.


Capítulo 4
Implementación y validación
En este capítulo se describe brevemente la implementación y validación de los circui-
tos y los controladores diseñados previamente. Se evalúa el funcionamiento, se verica
el cumplimiento de los requerimientos de diseño y se compara los resultados de las
simulaciones con los obtenidos en las mediciones.
4.1. Implementación de los circuitos
El primer paso en la implementación de los circuitos es el diseño de las placas(PCB,
Printed Circuit Board). Para ello se utiliza un software apropiado y se realizan las placas
de todos los circuitos que componen el proyecto. En el apéndice A se muestran los
esquemáticos y las placas que fueron diseñados. Un aspecto importante en el diseño de
las placas es la disposición espacial de estas. Debido a la implementación vertical existe
la posibilidad de colisión entre los circuitos. Para evitar tales colisiones se desarrolla un
modelo 3D que permita visualizar y corregir los acercamientos entre placas en el espacio
de implementación. La gura muestra el modelo 3D de los circuitos implementados.
Figura 4.1: Modelo 3D de los circuitos implementados.
77

78 Implementación y validación
Una vez terminado el diseño, se fabrican los circuitos utilizando una fresadora de
control numérico por computadora (CNC, Computer Numerical Control). Después de
tener los PCB fabricados se procede a soldar los componentes, conectores y cables.
Finalmente se ensamblan todas las placas independientes en la placa madre.
En la gura 4.2 se presenta el proceso de implementación en sus distintas etapas.
La gura 4.2a muestra el resultado del fresado para el circuito del amplicador de
transimpedancia. La gura 4.2b muestra el proceso de soldado de los componentes
de la placa de manejo del TEC. Finalmente, en la gura 4.2c se muestra todos los
subcircuitos ensamblados en la placa madre.
(a) (b)
(c)
Figura 4.2: Implementación de los circuitos. (a) PCB después de haber nalizado el procesode fresado. (b) PCB durante la soldadura de componentes. (c) Ensamblado de todos las placasen la placa madre y prueba de funcionamiento.

4.2 Implementación de los controladores 79
4.2. Implementación de los controladores
4.2.1. Controladores de temperatura y potencia
Los controladores de temperatura y potencia son controladores clásicos en tiempo
discreto y se pueden implementar utilizando el procedimiento descrito en bibliografía
especica sobre sistemas de control discreto [31].
Se empieza la implementación partiendo de la función de transferencia de los con-
troladores D(z) (encontradas en la sección 3.2). Esta se puede relacionar con el error
y la señal de control de la siguiente manera:
D(z) =U(z)
E(z), (4.1)
donde U(z) es la señal obtenida a la salida del controlador y E(z) es el error o señal
de entrada del controlador.
La función de transferencia del controlador puede ser expresada en forma genérica
como:
D(z) =b0 + b1z
−1 + ...+ bmz−m
1 + a1z−1 + ..+ anz−n. (4.2)
Combinando 4.1 y 4.2, expresando el resultado en términos de ecuaciones en dife-
rencia y despejando u(k) se obtiene la siguiente expresión:
u(k) = b0e(k) + b1e(k − 1) + ...+ bme(k −m)− (a1u(k − 1) + ..+ anu(k − n)) , (4.3)
donde u(k) y e(k) son la señal de salida del controlador y el error en pasos de tiempo
discreto kT con periodo de muestreo T y con k tomando valores enteros mayores o
iguales a cero.
La ecuación 4.3 permite calcular el valor de la salida del controlador en base a valores
actuales y pasados del error y valores pasados de la salida del controlador. La principal
ventaja de la ecuación 4.3 es que puede ser implementada en un microcontrolador
de manera directa. Utilizando las funciones de transferencia de los controladores y la
ecuación 4.3 se calculan las ecuaciones de los controladores que serán implementadas.
Para el controlador de temperatura se obtiene:
u(k) = 8, 59e(k)− 8, 24e(k − 1) + u(k − 1). (4.4)
Para el controlador de potencia se obtiene:
u(k) = 0, 279e(k)− 0,1395e(k − 1) + u(k − 1). (4.5)

80 Implementación y validación
4.2.2. Controlador de longitud de onda
El control de longitud de onda es relativamente más complejo que el control de
potencia y temperatura. Este requiere el uso una tabla y un algoritmo de seguimiento de
máximo de transmitancia del etalon. En la implementación del controlador de longitud
de onda es necesario la medición del espectro de salida del láser. Para ello se utiliza un
analizador de espectro óptico (OSA, Optical Specter Analyzer) marca Anritsu, modelo
MS2690 y que tiene una resolución de longitud de onda de 0,07 nm. El procedimiento
de implementación se detalla a continuación.
El primer paso en la implementación del controlador de longitud de onda es la
calibración de la temperatura de operación. Los modos de resonancia del etalon (usados
para el ajuste no) son dependientes de la temperatura, por lo que se requiere el ajuste
de esta para lograr que la longitud de onda de los modos de resonancia del etalon estén
alineadas con los canales de la banda C.
Para calibrar la temperatura es necesario una relación entre la posición de los
modos de resonancia del etalon y la temperatura. Dicha relación se obtiene mediante
un barrido discreto de temperatura, estimando en cada punto la longitud de onda de
uno de los modos de resonancia del etalon. Para modicar la temperatura de operación
se ajusta la temperatura deseada en el controlador de temperatura. Para estimar la
longitud de onda en cada punto de temperatura se realiza un barrido de la corriente
de fase (manteniendo jos los reectores de Bragg) y se registra la longitud de onda de
emisión del láser así como la corriente del fotodiodo del etalon. La longitud de onda
correspondiente a la máxima corriente del fotodiodo concuerda con el centro de uno de
los modos de resonancia del etalon.
En la gura 4.3 se observa la longitud de onda de uno de los modos de resonancia del
etalon en función de la temperatura de operación. También se muestra las longitudes
de onda de los canales de la banda C. Resulta evidente que más de una temperatura
de operación es posible ya que la única condición requerida es que algún modo de
resonancia del etalon coincida con algún canal de la banda C.
Se selecciona la temperatura de 22,9 C para la operación del láser debido a que esta
permite una operación próxima al valor central del intervalo de temperatura permitido
(25 C) y un consumo de corriente del TEC moderado.
Otra relación concerniente a la temperatura y que puede ser útil en la implementa-
ción es el cambio de longitud de onda de emisión ante cambios de temperatura. Dicha
relación puede ser necesaria para realizar correcciones en las corrientes de los reecto-
res en caso de modicarse la temperatura de operación. El procedimiento para obtener
esta relación consiste en mantener ja las corrientes de ambos reectores y de la sección
de fase, mientras se realiza un barrido discreto de la temperatura de operación y, al
mismo tiempo, se registra la longitud de onda emitida.

4.2 Implementación de los controladores 81
1 4 1 6 1 8 2 0 2 2 2 4 2 6 2 8 3 0 3 2
1 5 6 2 . 5
1 5 6 3 . 0
1 5 6 3 . 5
1 5 6 4 . 0
1 5 6 4 . 5
M e d i c i ó n A j u s t e C a n a l e s d e l a b a n d a C
Long
itud d
e ond
a[nm]
T e m p e r a t u r a [ º C ]Figura 4.3: Longitud de onda de uno de los modos de resonancia del etalon en función de latemperatura de operación.
En la gura 4.4 se muestra la longitud de onda de emisión del láser en función de la
temperatura de operación en donde se observa una relación predominantemente lineal.
1 4 1 6 1 8 2 0 2 2 2 4 2 6 2 8 3 0 3 21 5 6 2 . 5
1 5 6 3 . 0
1 5 6 3 . 5
1 5 6 4 . 0
1 5 6 4 . 5
m e d i c i ó n a j u s t e
Long
itud d
e ond
a[nm]
T e m p e r a t u r a [ º C ]Figura 4.4: Longitud de onda de emisión del láser en función de la temperatura de operación.
Se realiza un ajuste de la medición donde se encuentra la siguiente relación:
∆λ = 0,12173∆T. (4.6)
La ecuación anterior puede ser utilizada para corregir los cambios de longitud de onda

82 Implementación y validación
debido a cambios de la temperatura de operación.
Posteriormente al proceso de calibración en temperatura, se obtiene el mapa de
longitudes de onda de emisión del láser para encontrar la tabla de canales de la banda
C (ver sección 3.2.3.2). Obtener el mapa de longitudes de onda requiere un barrido
en corriente de los reectores de Bragg. Dicho barrido sigue una función potencial y
consiste en 81 puntos por cada reector, es decir, que se obtiene una matriz de 812
mediciones. Se elige 81 puntos por reector ya que este es un valor que permite obtener
una resolución del mapa aceptable con un tiempo total de medición moderado. Las
conguraciones para la medición de longitud de onda utilizando el OSA se detallan a
continuación.
La temperatura de operación se ajusta en 22,9 C (etalon sintonizado en la banda
C).
La corriente de la sección de fase se mantiene ja en 0 mA
Se varía las corrientes de ambos reectores entre 0 mA y 33 mA
Las corrientes del SOA y del medio activo se mantienen en 80 mA (potencia de
salida de aproximadamente 10 mW).
El mapa de longitudes de onda obtenido se muestra en la gura 4.5.
En la gura 4.5 se compara el resultado del barrido obtenido de la medición y el
obtenido mediante el modelo. Se observa una buena similitud entre ambos, especial-
mente en las bandas diagonales centrales (que son utilizadas para obtener la tabla).
El procedimiento de obtención de la tabla consiste en seleccionar valores de las zonas
formadas en el mapa. Cada zona corresponde a un canal de la banda C y es deseable
seleccionar un punto en el centro de la zona ya que garantiza una buena supresión de
modo adyacente.
Una vez obtenida la tabla, se procede a su implementación en el microcontrolador
junto con el algoritmo de seguimiento de máximo de transmitancia del etalon (Figura
3.22). Para evitar el problema de oscilación de estado estacionario resultante del al-
goritmo de seguimiento de máximo de transmitancia del etalon se incluye una banda
de error. Cuando la salida del TIA del etalon ingresa a la banda de error se detiene el
funcionamiento del ajuste continuo de longitud de onda.
Finalmente, se implementa la función de ajuste de las corrientes de los reectores
para mantener alineado el pico de reectancia con el modo del resonador emitido. Este
ajuste es fundamental, ya que de no hacerlo, la supresión de modos adyacentes no sería
tan efectiva. Otro problema resultante de la mala alineación es la posibilidad de un
cambio abrupto en el modo de emisión. Dicho cambio causaría el seguimiento de un
máximo de transmitancia del etalon erróneo, por tanto, la longitud de onda no sería

4.2 Implementación de los controladores 83
0 5 1 0 1 5 2 0 2 5 3 00
5
1 0
1 5
2 0
2 5
3 0
Long
itud d
e ond
a[nm]
R e f l e c t o r d e r e c h o [ m A ]
Refle
ctor iz
quier
do[m
A]1 5 2 01 5 2 51 5 3 01 5 3 51 5 4 01 5 4 51 5 5 01 5 5 51 5 6 01 5 6 51 5 7 0
(a)
0 5 1 0 1 5 2 0 2 5 3 00
5
1 0
1 5
2 0
2 5
3 0Lo
ngitu
d de o
nda [
nm]
R e f l e c t o r d e r e c h o [ m A ]
Refle
ctor iz
quier
do[m
A]
1 5 2 0
1 5 2 5
1 5 3 0
1 5 3 5
1 5 4 0
1 5 4 5
1 5 5 0
1 5 5 5
1 5 6 0
1 5 6 5
1 5 7 0
(b)
Figura 4.5: Mapa de longitud de onda. (a) Obtenido del láser sintonizable. (b) Obtenido delmodelo.

84 Implementación y validación
la esperada. Como se describió en la sección 3.2.3.2, la manera de ajustar la corriente
de los reectores implica conocer la relación entre el cambio de longitud de onda y el
cambio de corriente aplicada a la sección pertinente. Dicha relación tiene la forma:
∆λ = a∆ib, (4.7)
donde a y b son números reales.
La implementación de la ecuación anterior resulta sencilla en el modelo, sin em-
bargo, este no es el caso para la implementación en el microcontrolador. El problema
se encuentra en la cantidad de procesamiento que requiere la ecuación, lo que causa
un tiempo de calculo del microcontrolador mayor al periodo de muestreo. La solu-
ción hallada fue aproximar la relación potencial por una función lineal. Esta solución
proporciona resultados aceptables y permite reducir el tiempo de operación considera-
blemente. Sin embargo cabe mencionar que a pesar de todas las mejoras implementadas
en pos de reducir el tiempo de operación, resulta necesario disminuir la frecuencia de
muestreo del controlador de longitud de onda y por tato del controlador de potencia
de 100 kHz a 75 kHz (valor que todavía cumple con el criterio de selección del periodo
de muestreo descrito en la sección 3.2.1.2). Este cambio, como se verá más adelante,
no perjudica los resultados obtenidos dado que en el proceso de modelado y diseño se
sobrecumplieron las metas de funcionamiento propuestas.
4.3. Validación de los circuitos
Con el objetivo de proteger al láser de cualquier error de manipulación u operación
fuera de los límites de seguridad, se utiliza una placa de simulación de impedancia
del láser para realizar la validación de los circuitos. En el apéndice B se detalla la
implementación de dicha placa. Durante la validación, tanto de los circuitos como de
los controladores, es necesaria también una interfaz que permita la comunicación con
el microcontrolador. En el apéndice C se muestra las dos interfaces utilizadas.
Para la validación de los circuitos se realizan pruebas del funcionamiento, poniendo
especial énfasis en la respuesta en frecuencia de los mismos. Los circuitos más impor-
tantes son los utilizados para el control de potencia y longitud de onda, es decir, las
fuentes de corriente y los amplicadores de transimpedancia. En el caso del circuito
de manejo del TEC la respuesta en frecuencia no es un parámetro tan relevante como
sí lo es la estabilidad de la tensión aplicada al mismo. Finalmente, en el circuito de
medición de los termistores se comprueba que la ganancia del amplicador cumple con
lo esperado.

4.3 Validación de los circuitos 85
4.3.1. Fuentes de corriente
Para la validación de las fuentes de corriente y de los demás circuitos en secciones
posteriores se utilizan los elementos mencionados a continuación:
El circuito a validar. En este caso la fuente de corriente.
Fuente de alimentación marca Keithley, modelo 2230-30-1. Esta es una fuente
DC de 3 canales.
Un generador de señales marca Keysight, modelo 33500B para generar un pulso
tipo chirp (barrido en frecuencia). Este es un generador de señales arbitrarias de
dos salidas y frecuencia máxima 35 MHz.
Un osciloscopio digital marca Tektronix, modelo MSO2024B para capturar la
respuesta en frecuencia. Este es un osciloscopio de 16 canales, 200 MHz y 1 Gs/s.
Después de realizar las conexiones correspondientes se aplica una entrada tipo chirp
a la fuente de corriente. Esta entrada consiste en una señal sinusoidal con frecuencia
variable entre 100 Hz y 1 MHz. Simultáneamente, se registra el voltaje de salida de la
fuente de corriente y se realiza el análisis descrito a continuación para encontrar la
respuesta en frecuencia del circuito.
La respuesta en frecuencia de la fuente de corriente implementada y en general de
cualquier medición (de la cual se posea el registro de la entrada y salida) puede ser
encontrada utilizando la siguiente ecuación [32]:
DFT (y)
DFT (u)= |G| ejφ, (4.8)
donde DFT (Discrete Fourier Transform) es la transformada de Fourier discreta, y es
la salida en el dominio del tiempo, u es la entrada en el dominio del tiempo, |G| es lamagnitud de la función de transferencia y φ es la fase de la función de transferencia.
El procedimiento consiste en:
Aplicar la transformada de Fourier discreta a la entrada y a la salida.
Realizar el cociente entre estas dos para nalmente encontrar la magnitud y fase
de la función de transferencia.
Utilizar los resultados para realizar el Diagrama de Bode del circuito en cuestión.
En la gura 4.6 se muestra la comparación del diagrama de Bode de la fuente de
corriente (medición y simulación). Se observa que tanto la medición como la simulación
tienen una ganancia en bajas frecuencias y una pendiente de reducción de ganancia si-
milares. La frecuencia de corte estimada es de 220 kHz para la simulación y 140 kHz

86 Implementación y validación
para la medición. La reducción de la frecuencia de corte del circuito implementado
respecto al simulado puede atribuirse a tolerancias de los componentes utilizados, es-
pecialmente en aquellos que son críticos para la respuesta en frecuencia. Otra causa
que contribuye a la reducción de la frecuencia de corte está relacionada con las re-
sistencias y capacitancias parásitas formadas en las pistas de conexión. A pesar de la
reducción en la frecuencia de corte de la fuente de corriente, esta todavía cumple con
los requerimientos de frecuencia mínima de operación de 100 kHz.
1 0 0 1 0 1 1 0 2 1 0 3 1 0 4 1 0 5 1 0 6- 1 5 0
- 1 0 0
- 5 0
0
s i m u l a d o m e d i d o
Fase
[º]
F r e c u e n c i a [ H z ]
1 0 0 1 0 1 1 0 2 1 0 3 1 0 4 1 0 5 1 0 6- 9
- 6
- 3
0
s i m u l a d o F - 3 d B ( - 2 . 9 9 d B ; 2 2 0 k H z ) m e d i d o F - 3 d B ( - 2 . 9 9 d B ; 1 4 0 k H z )Ga
nanc
ia[dB
]
F r e c u e n c i a [ H z ]
Figura 4.6: Diagrama de Bode de la fuente de corriente. Comparación medición y simulación.
4.3.2. Amplicadores de transimpedancia
Los amplicadores de transimpedancia son una parte fundamental del lazo de con-
trol tanto para el control de potencia como para el de longitud de onda. Por esta razón,
es importante vericar que la respuesta en frecuencia satisface los requerimientos de di-
seño. Para las validación del TIA se utilizan los instrumentos y las ecuaciones descritos
en la sección 4.3.1. Se muestran los resultados en la gura 4.7.
En el diagrama de Bode del TIA se observa una buena concordancia entre la simu-
lación y la medición, es decir, ganancias en bajas frecuencias y pendientes de ganancia
similares. La frecuencia de corte estimada es de 1,13 MHz para la simulación y apro-
ximadamente 820 kHz para la medición. Al igual que las fuentes de corriente, los TIA
también presentan una reducción de la frecuencia de corte real respecto del valor ob-
tenido en la simulación. Dicha reducción se atribuye a tolerancias en los componentes
además de las capacitancias y resistencias parásitas en las pistas de conexión. Sin
embargo, la mayor contribución se debe a la tolerancia de la capacitancia de realimen-

4.3 Validación de los circuitos 87
tación (±10 % del valor nominal) ya que esta determina la frecuencia de corte del TIA.
La frecuencia de corte alcanzada por el TIA satisface con creces los requerimientos de
diseño (frecuencia de operación de 100 kHz).
1 0 0 1 0 1 1 0 2 1 0 3 1 0 4 1 0 5 1 0 6 1 0 70
5 0
1 0 0
1 5 0
s i m u l a d o m e d i d o
Fase
[º]
F r e c u e n c i a [ H z ]
1 0 0 1 0 1 1 0 2 1 0 3 1 0 4 1 0 5 1 0 6 1 0 7- 2 0
- 1 5
- 1 0
- 5
0
s i m u l a d o F - 3 d B ( - 3 d B ; 1 , 1 3 M H z ) m e d i d o F - 3 d B ( - 3 d B ; 8 2 0 k H z )Ga
nanc
ia[dB
]
F r e c u e n c i a [ H z ]
Figura 4.7: Diagrama de Bode de la placa de los amplicadores de transimpedancia. Compa-ración medición y simulación.
4.3.3. Amplicador de los termistores
El amplicador de los termistores permite medir la temperatura de operación del lá-
ser. Si bien la temperatura tiene una respuesta relativamente lenta, es deseable obtener
la respuesta en frecuencia del amplicador de los termistores. Para ello se aplica la mis-
ma metodología utilizada en los circuitos anteriores, es decir, el uso de la transformada
discreta de Fourier.
En la gura 4.8 se muestra el diagrama de Bode obtenido en la simulación y en la
medición del circuito implementado en donde se observa una buena concordancia entre
ambos. La frecuencia de corte estimada es de 1,8 kHz tanto en la medición como en
la simulación. La razón por la cual los resultados de simulación concuerdan mejor con
los medidos en comparación con los circuitos anteriores (fuente de corriente y TIA)
puede deberse a que la frecuencia de corte es mucho menor, por lo tanto, los efectos
de capacitancias y resistencias parásitas en las pistas de conexión tienen una menor
relevancia.

88 Implementación y validación
4.3.4. Circuito de manejo del TEC
El circuito de manejo del TEC participa en el lazo de control de temperatura. El
circuito recibe una entrada tipo PWM del microcontrolador y proporciona al TEC una
tensión entre 0 V y 3 V. Debido a que la entrada es de tipo PWM no se puede realizar
el mismo procedimiento de validación usado con los circuitos anteriores . En cambio,
se opta por obtener la respuesta del circuito ante una entrada tipo escalón, es decir,
un cambio de la señal PWM de 0 % a 100 %. Otro factor importante a considerar en
la evaluación de este circuito es el rizo del voltaje de salida.
1 0 1 1 0 2 1 0 3 1 0 48 0
1 0 01 2 01 4 01 6 01 8 0
s i m u l a d o m e d i d o
Fase
[º]
F r e c u e n c i a [ H z ]
1 0 1 1 0 2 1 0 3 1 0 4- 5
0
5
1 0
1 5
s i m u l a d o F - 3 d B ( 9 d B ; 1 , 8 k H z ) m e d i d o F - 3 d B ( 9 d B ; 1 , 8 k H z )Ga
nanc
ia[dB
]
F r e c u e n c i a [ H z ]
Figura 4.8: Diagrama de Bode de los amplicadores para los termistores. Comparación medi-ción y simulación.
En la gura 4.9a se muestra la respuesta al escalón aplicado al circuito de manejo
del TEC. De esta se estima un tiempo de establecimiento de aproximadamente 0,5 ms.
En la gura 4.9b se muestra una imagen magnicada de la respuesta al escalón. Allí
se aprecia fácilmente el rizo de la señal en estado estacionario. El rizo estimado es
de aproximadamente 80 mV, es decir, un 2,67 % del valor de la señal. Algunas de
las causas que incrementan la amplitud del rizo incluyen el ruido introducido por el
microcontrolador (debido a la generación de la señal PWM).
4.4. Validación de los controladores
Para la validación de los controladores se verica el cumplimiento de los requeri-
mientos de diseño, siendo el tiempo de establecimiento el más importante. La validación

4.4 Validación de los controladores 89
consiste en la aplicación en una entrada de tipo escalón en la señal de referencia y la
evaluación de la respuesta obtenida. Se registra el tiempo de establecimiento y sobre-
impulso de la respuesta obtenida para cada controlador.
0 . 9 4 5 0 . 9 4 6 0 . 9 4 7 0 . 9 4 8 0 . 9 4 9 0 . 9 5 02 . 9 83 . 0 03 . 0 23 . 0 43 . 0 63 . 0 83 . 1 0
P W M i n V o u t
Volta
je[V]
t i e m p o [ m s ]
0 . 0 0 . 1 0 . 2 0 . 3 0 . 4 0 . 5 0 . 6 0 . 7 0 . 8 0 . 9 1 . 00
1
2
3
4
( b )
P W M i n V o u t
Volta
je[V]
t i e m p o [ m s ]
( a )
Figura 4.9: (a) Respuesta del circuito de manejo del TEC ante un escalón en la entrada PWM.(b) Imagen magnicada de la gura (a) para observar con mayor claridad el rizo de la señal.
4.4.1. Controlador de temperatura
Para la validación del controlador de temperatura se utilizan los materiales e ins-
trumentos descritos en la sección 4.3.1. A continuación se describe el procedimiento de
validación.
Se aplica una entrada escalón en la referencia de temperatura entre 15 C y 35 C.
Se captura la respuesta del láser ante dicha entrada utilizando el osciloscopio y
se exporta los datos para su posterior análisis.
En la gura 4.10 se muestra el resultado de la respuesta al escalón de la medición
y de la simulación. En la misma se observa que tanto la simulación como la medición
tienen respuestas similares. Para comparar ambas respuestas se muestra en la tabla 4.1
los parámetros más importantes.
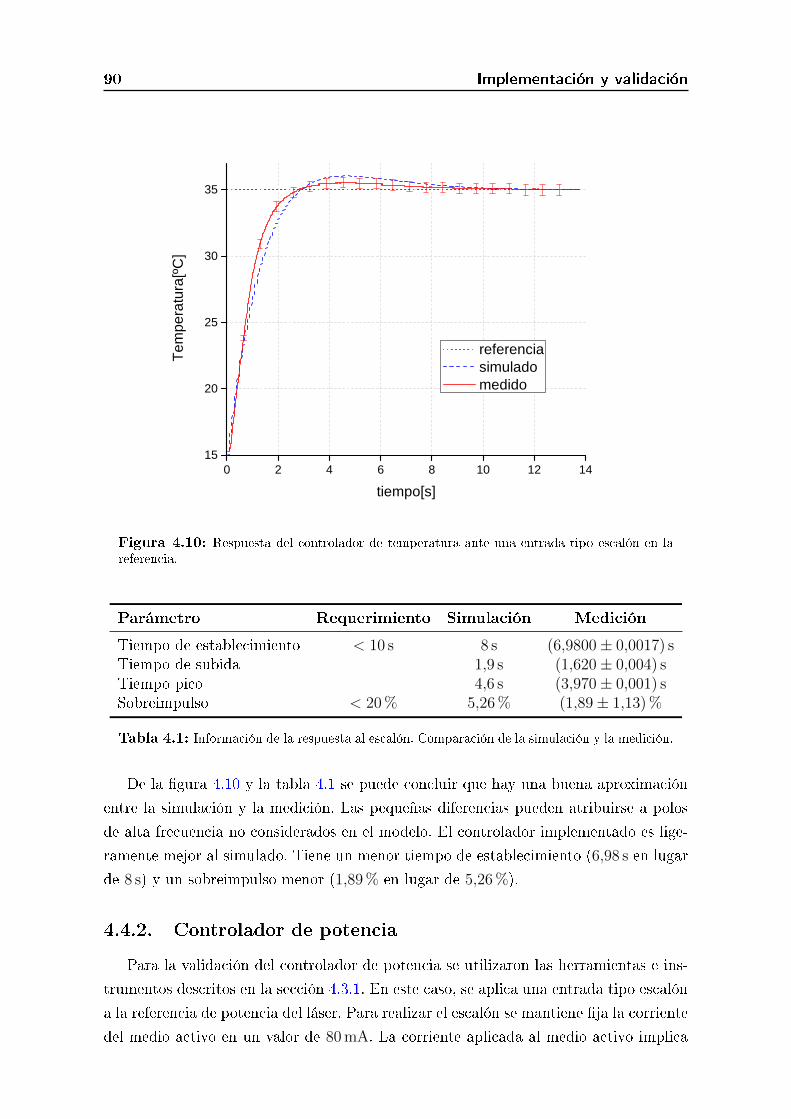
90 Implementación y validación
0 2 4 6 8 1 0 1 2 1 41 5
2 0
2 5
3 0
3 5Te
mpera
tura[º
C]
t i e m p o [ s ]
r e f e r e n c i a s i m u l a d o m e d i d o
Figura 4.10: Respuesta del controlador de temperatura ante una entrada tipo escalón en lareferencia.
Parámetro Requerimiento Simulación Medición
Tiempo de establecimiento < 10 s 8 s (6,9800± 0,0017) sTiempo de subida 1,9 s (1,620± 0,004) sTiempo pico 4,6 s (3,970± 0,001) sSobreimpulso < 20 % 5,26 % (1,89± 1,13) %
Tabla 4.1: Información de la respuesta al escalón. Comparación de la simulación y la medición.
De la gura 4.10 y la tabla 4.1 se puede concluir que hay una buena aproximación
entre la simulación y la medición. Las pequeñas diferencias pueden atribuirse a polos
de alta frecuencia no considerados en el modelo. El controlador implementado es lige-
ramente mejor al simulado. Tiene un menor tiempo de establecimiento (6,98 s en lugar
de 8 s) y un sobreimpulso menor (1,89 % en lugar de 5,26 %).
4.4.2. Controlador de potencia
Para la validación del controlador de potencia se utilizaron las herramientas e ins-
trumentos descritos en la sección 4.3.1. En este caso, se aplica una entrada tipo escalón
a la referencia de potencia del láser. Para realizar el escalón se mantiene ja la corriente
del medio activo en un valor de 80 mA. La corriente aplicada al medio activo implica

4.4 Validación de los controladores 91
que la potencia de salida mínima es de aproximadamente 6 mW, por tanto, el escalón
de potencia ocurre entre dicha potencia y un valor nal de 14,7 mW.
En la gura 4.11 se muestra la comparación de la respuesta al escalón medido y
simulado en donde se observa una buena aproximación.
0 . 0 0 . 1 0 . 2 0 . 3 0 . 44
6
8
1 0
1 2
1 4
1 6
Poten
cia[m
W]
t i e m p o [ s ]
r e f e r e n c i a s i m u l a d o m e d i d o
Figura 4.11: Respuesta del controlador de potencia a una entrada tipo escalón en la entradade referencia.
En la tabla 4.2 se muestran los resultados obtenidos de la respuesta al escalón de
potencia. El tiempo de establecimiento mide aproximadamente 210 µs en la simulación
y 200 µs en la medición, satisfaciendo el requerimiento de tiempo de establecimiento.
Parámetro Requerimiento Simulación Medición
Tiempo de establecimiento <1 ms 210 µs (200,0± 0,5) µsTiempo de subida 120 µs (90,00± 0,22) µsTiempo pico 400 µs (230,00± 0,58) µsSobreimpulso <10 % 0 % (0,0± 2,3) %
Tabla 4.2: Información de la respuesta al escalón. Comparación de la simulación y la medición.
4.4.3. Controlador de longitud de onda
Para validar el controlador de longitud de onda se utilizan las herramientas e ins-
trumentos descritos en la sección 4.3.1. Adicionalmente, es necesario el analizador de
espectro óptico detallado en la sección 4.2.2.

92 Implementación y validación
Se realizan distintas pruebas para vericar el correcto funcionamiento del láser y el
cumplimiento de los requerimientos de diseño. Las características evaluadas incluyen la
alineación entre el pico de reectancia y el modo de emisión, el espectro de salida del
láser, la correcta sintonización de los canales y el tiempo de respuesta del controlador.
Para vericar la alineación entre el pico de reectancia y el modo de la cavidad
emitido se realizan dos barridos de la corriente de fase. En el primer caso solo se
cambia la corriente de fase, por lo que se debería evidenciar la falta de alineación. En
el segundo barrido se modican tanto la corriente de fase como la de los reectores,
por lo que se debería mantener la alineación deseada.
Cuando se realiza el barrido de la corriente de fase ocurre un ajuste continuo de
la longitud de onda de emisión. Esto produce una variación en la tensión del TIA del
etalon de manera análoga a la función de transmitancia del etalon. Por lo tanto, los
máximos de la tensión del TIA del etalon concuerdan con los máximos de transmitancia
del etalon.
En la gura 4.12 se muestra la tensión del TIA del fotodiodo del etalon como
resultado del barrido de la corriente de fase.
En el caso del barrido sin ajuste de reectores se aprecia un salto abrupto en
aproximadamente 32 ms del tiempo de medición. Dicho salto corresponde a un cambio
del modo de emisión debido a la falta de alineación entre el modo de la cavidad emitido
y el pico de reectancia.
En cambio, en el barrido con ajuste de reectores se observa que no existe ningún
salto abrupto, indicando que no existe un cambio del modo de la cavidad emitido, por
tanto, se mantiene la alineación deseada.
0 1 2 3 4 5 60 . 0
0 . 5
1 . 0
1 . 5
2 . 0
Tens
ión[V]
C o r r i e n t e [ m A ]
C o n a j u s t e d e R e f l e c t o r e s S i n a j u s t e d e r e f l e c t o r e s
Figura 4.12: Tensión del TIA del fotodiodo del etalon ante el barrido de la corriente de fase.Comparación con ajuste y sin ajuste de los reectores.
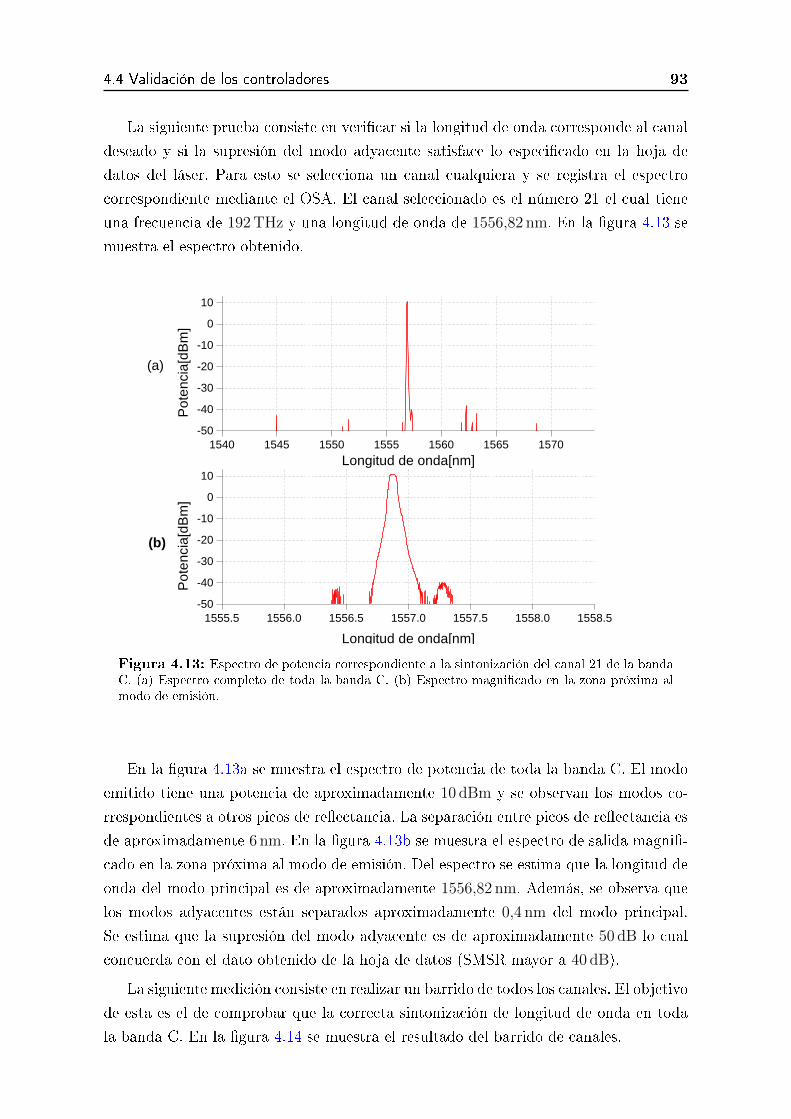
4.4 Validación de los controladores 93
La siguiente prueba consiste en vericar si la longitud de onda corresponde al canal
deseado y si la supresión del modo adyacente satisface lo especicado en la hoja de
datos del láser. Para esto se selecciona un canal cualquiera y se registra el espectro
correspondiente mediante el OSA. El canal seleccionado es el número 21 el cual tiene
una frecuencia de 192 THz y una longitud de onda de 1556,82 nm. En la gura 4.13 se
muestra el espectro obtenido.
1 5 5 5 . 5 1 5 5 6 . 0 1 5 5 6 . 5 1 5 5 7 . 0 1 5 5 7 . 5 1 5 5 8 . 0 1 5 5 8 . 5- 5 0- 4 0- 3 0- 2 0- 1 0
01 0
Poten
cia[dB
m]
L o n g i t u d d e o n d a [ n m ]
( a )
( b )
1 5 4 0 1 5 4 5 1 5 5 0 1 5 5 5 1 5 6 0 1 5 6 5 1 5 7 0- 5 0- 4 0- 3 0- 2 0- 1 0
01 0
Poten
cia[dB
m]
L o n g i t u d d e o n d a [ n m ]
Figura 4.13: Espectro de potencia correspondiente a la sintonización del canal 21 de la bandaC. (a) Espectro completo de toda la banda C. (b) Espectro magnicado en la zona próxima almodo de emisión.
En la gura 4.13a se muestra el espectro de potencia de toda la banda C. El modo
emitido tiene una potencia de aproximadamente 10 dBm y se observan los modos co-
rrespondientes a otros picos de reectancia. La separación entre picos de reectancia es
de aproximadamente 6 nm. En la gura 4.13b se muestra el espectro de salida magni-
cado en la zona próxima al modo de emisión. Del espectro se estima que la longitud de
onda del modo principal es de aproximadamente 1556,82 nm. Además, se observa que
los modos adyacentes están separados aproximadamente 0,4 nm del modo principal.
Se estima que la supresión del modo adyacente es de aproximadamente 50 dB lo cual
concuerda con el dato obtenido de la hoja de datos (SMSR mayor a 40 dB).
La siguiente medición consiste en realizar un barrido de todos los canales. El objetivo
de esta es el de comprobar que la correcta sintonización de longitud de onda en toda
la banda C. En la gura 4.14 se muestra el resultado del barrido de canales.

94 Implementación y validación
0 2 0 4 0 6 0 8 01 5 3 0
1 5 3 5
1 5 4 0
1 5 4 5
1 5 5 0
1 5 5 5
1 5 6 0
1 5 6 5
Long
itud d
e ond
a[nm]
N º c a n a l
C a l c u l a d o M e d i d o
(a)
0 2 0 4 0 6 0 8 0- 0 . 3
- 0 . 2
- 0 . 1
0 . 0
0 . 1
0 . 2
0 . 3
E r r o r d e l i n s t r u m e n t o λ m e d i d o - λ c a l c u l a d o
Error[
nm]
N º c a n a l(b)
Figura 4.14: Barrido de canales de la banda C. a) Longitud de onda en función del canal.b) Diferencia entre el valor de longitud de onda medido y el calculado y la banda de error delinstrumento.
En la gura 4.14a se muestra la longitud de onda en función del canal sintonizado.
Se observa una muy buena aproximación entre la medición y los valores calculados. El
error de la medición (debido al instrumento) es muy pequeño para poder ser apreciado
en la gura 4.14a, por lo que se muestra en la gura 4.14b la diferencia entre el valor
medido y el calculado y la banda de error del instrumento (±70 pm). Se aprecia que
la mayor parte de los canales se encuentran dentro de la banda de error y las pocas
excepciones están muy próximas a dicha banda. La dispersión de los puntos de error
es relativamente baja y no está centrada en cero. Esto indica que puede existir un
ligero desfase entre los modos del etalon y los canales de la banda C. Si se corrige ese
problema (mediante recalibración de temperatura) es posible que todos los puntos se
encuentren dentro de la banda de error.
Finalmente se mide el tiempo de respuesta del controlador de longitud de onda.
Para ello se realiza un cambio de canal de referencia y se mide el tiempo de respuesta
de la tensión del TIA del etalon. Se utiliza la tensión del TIA del etalon debido a que

4.4 Validación de los controladores 95
la medición de longitud de onda es muy lenta en comparación al tiempo de respuesta
del láser. El tiempo de medición del OSA es de aproximadamente dos segundos por lo
que seria imposible capturar cambios del orden de los milisegundos. Si bien la tensión
del TIA del etalon no brinda una medición directa de la longitud de onda, permite
determinar la alineación entre la longitud de onda de emisión y la longitud de onda
del canal seleccionado. La tensión del TIA del etalon es máxima cuando se alcanza la
longitud de onda del canal deseado.
En la gura 4.15 se muestra la respuesta de la tensión del TIA del etalon ante un
cambio en el canal sintonizado.
0 . 0 0 . 2 0 . 4 0 . 6 0 . 80 . 0
0 . 5
1 . 0
1 . 5
2 . 0
Tens
ión[V]
t i e m p o [ m s ]
m e d i d o s i m u l a d o
Figura 4.15: Respuesta de la tensión del fotodiodo del etalon ante un cambio en el canalsintonizado. Comparación entre la simulación y la medición.
El tiempo de establecimiento medido es de aproximadamente 200 µs. Este resultado
satisface el requerimiento de diseño de tiempo de establecimiento menor a 1 ms. La
respuesta de la simulación en la gura 4.15 es distinta a la respuesta simulada en la
sección 3.2.3.2 (gura 3.23a) debido a que se aplican (a la simulación) las mejoras del
algoritmo de seguimiento de máximo diseñadas en la sección 4.2.2 .


Capítulo 5
Conclusiones y trabajo a futuro
5.1. Conclusiones
El presente trabajo muestra el diseño e implementación de todos los componen-
tes necesarios para el control de un láser sintonizable tipo Y-branch. Los resultados
obtenidos fueron satisfactorios: la plataforma implementada es capaz de controlar tem-
peratura, potencia y longitud de onda del láser sintonizable tal y como se esperaba del
diseño. Se cumplieron todos los requerimientos de diseño establecidos en la sección 1.8,
siendo el más importante el de tiempo de establecimiento en el control de longitud de
onda y lográndose un valor de tiempo de establecimiento de 200 µs.
El modelo del láser desarrollado en el capítulo 2 produjo los siguientes resultados:
se obtuvo el modelo de simulación, el mapa de frecuencia y la relación entre la corriente
aplicada a un semiconductor (GaAsInP) y el cambio de índice de refracción producido.
Dichos resultados fueron de gran utilidad en el diseño del controlador de longitud de
onda y potencia. Como conclusión nal del modelo se puede decir que este resulta una
buena aproximación al comportamiento del láser controlado, lo suciente para permitir
el diseño de los controladores.
En el capítulo 3 se detalló el diseño de los circuitos necesarios para el manejo del
láser. Se obtuvieron diseños que cumplieron los requerimientos establecidos, siendo los
más importantes, los requerimientos relacionados a la velocidad de respuesta. Para
los circuitos que participan en el control de longitud de onda y potencia (fuentes de
corriente y amplicadores de transimpedancia) se obtuvieron frecuencias de corte su-
periores a la establecida en los requerimientos (100 kHz). En el caso del controlador de
temperatura se obtuvo un tiempo de establecimiento menor a 10 s y un sobreimpulso
menor al 20 %. Dichos valores cumplen con los requerimientos establecidos y permiten
la estabilidad en temperatura necesario para mantener los modos de resonancia del
etalon alineados con los canales de la banda C. En el caso de los controladores de lon-
gitud de onda y potencia se alcanzó un tiempo de establecimiento menor al dispuesto
97

98 Conclusiones y trabajo a futuro
en los requerimientos (1 ms).
En el capítulo 4 se presentaron los resultados del proceso de fabricación de los
circuitos. Se utilizó una fresadora CNC lo cual produjo circuitos con una buena deni-
ción en las pistas de conexión. La implementación de los controladores de potencia y
temperatura fue llevada a cabo siguiendo el diseño detallado en el capítulo 3. Para el
controlador de longitud de onda fueron necesarias pequeñas correcciones con el objetivo
de minimizar el tiempo de procesamiento en el microcontrolador. Dichas optimizaciones
redujeron considerablemente el tiempo de procesamiento, sin embargo, fue necesaria
la reducción de la frecuencia de muestreo de 100 kHz a 75 kHz. Dicha reducción no
impidió alcanzar el requerimiento de tiempo de establecimiento menor a 1 ms.
En el capítulo 4 también se presentó la validación tanto de los circuitos como de
los controladores. La cual generó resultados satisfactorios. En todos los casos se satis-
facieron los requerimientos de diseño. En todos los casos se determinó que existe una
buena aproximación entre las mediciones y las simulaciones. Las pequeñas diferencias
(especialmente en la frecuencia de corte) se atribuyeron a capacitancias y resistencias
parásitas en los circuitos y a tolerancias de los componentes.
La validación de los controladores de potencia, temperatura y longitud de onda fue
también satisfactoria. Se logró cumplir con los tiempos de establecimiento requeridos
y se observó una buena aproximación entre la simulación y la medición. Como punto a
mejorar se puede mencionar la recalibración de la temperatura para lograr una mayor
alineación entre los modos de resonancia del etalon y los canales de la banda C, lo cual
reduciría el error entre la longitud de onda medido y la longitud de onda nominal del
canal.
5.2. Trabajo a futuro
Si bien la plataforma de control implementada cumple con las funciones y requeri-
mientos de tiempo de repuesta establecidos, existe la posibilidad de mejorar su desem-
peño y funcionalidades. Como trabajo futuro se pueden mencionar una gran cantidad
de puntos que abarcan desde el modelo del láser hasta el software de control imple-
mentado.
Concretamente, se puede mejorar el modelo del láser de manera de hacerlo más
representativo. Por ejemplo:
Se puede mejorar el modelo del medio activo de manera que represente más
elmente al esquema Multi Quantum Well utilizado en el láser.
El modelo de los reectores de Bragg también puede ser mejorado de manera que
represente a una red de Bragg modulada en lugar de una red de Bragg constante.

5.2 Trabajo a futuro 99
Se puede considerar el ruido debido a la amplicación de emisión espontánea
(ASE, Amplied Spontaneous Emission) en la ecuación diferencial de ujo de
fotones. Esto permitiría obtener la contribución de dicho ruido en el espectro de
emisión del láser además de la posibilidad de medir el ancho de línea.
En el caso del hardware existen también posibles mejoras y soluciones a problemas
que se encontraron durante el proceso de fabricación de los circuitos. Algunas de ellas
se indican a continuación:
Se podría reducir el numero de componentes de los circuitos permitiendo reducir
el espacio ocupado y el costo de implementación. Para lograr esta mejora se po-
drían eliminar componentes prescindibles, por ejemplo, los monitores de corriente
pueden ser eliminados ya que estos no cumplen ninguna función en el control y
solo están presentes para vericar el valor de las corrientes del láser.
Un problema encontrado en la implementación concierne a los conversores D/A
del microcontrolador. Estos tienen muy mala respuesta en corrientes bajas de 0 µA
a 200 µA, por lo que es recomendable sustituirlos por conversores D/A externos
con la apropiada resolución.
Es posible la reducción del tiempo de establecimiento de los controladores de
potencia y longitud de onda si se mejoran los circuitos que son parte de los
respectivos lazos de control (fuentes de corriente, TIA y microcontrolador).
Los controladores del láser pueden ser mejorados de la siguiente manera:
Parte del control de longitud de onda es realizado mediante una tabla, por lo que
se pueden estudiar métodos de control más sosticados que no requieran de dicha
tabla. De todas formas, esto es imposible de lograr con las variables de estado
actualmente disponibles.
El mapa de longitudes de onda relevado en la sección de implementación puede ser
mejorado si se reduce el tamaño del paso de barrido. Esto genera el incremento
del área de cada zona, lo que a su vez permitiría obtener una mejor tabla de
canales con una supresión de modo adyacente óptima.


Apéndice A
PCB de los circuitos utilizados
Para la implementación de los circuitos se utilizó un software para generar los
archivos requeridos por la fresadora CNC. A continuación se muestran los PCB y los
esquemáticos de todos los circuitos implementados.
A.1. PCB
A.1.1. Encapsulado del láser
Figura A.1: PCB del encapsulado del láser.
101

102 PCB de los circuitos utilizados
A.1.2. Fuente de corriente
Figura A.2: PCB de la fuente de corriente.
A.1.3. Amplicadores de transimpedancia
Figura A.3: PCB de los amplicadores de transimpedancia.

A.1 PCB 103
A.1.4. Circuito de manejo del TEC
(a) (b)
Figura A.4: PCB del circuito de manejo del TEC. Arriba: capa superior de la placa. Abajo:capa inferior de la placa.
A.1.5. Amplicadores para los termistores
Figura A.5: PCB de los amplicadores para los termistores.
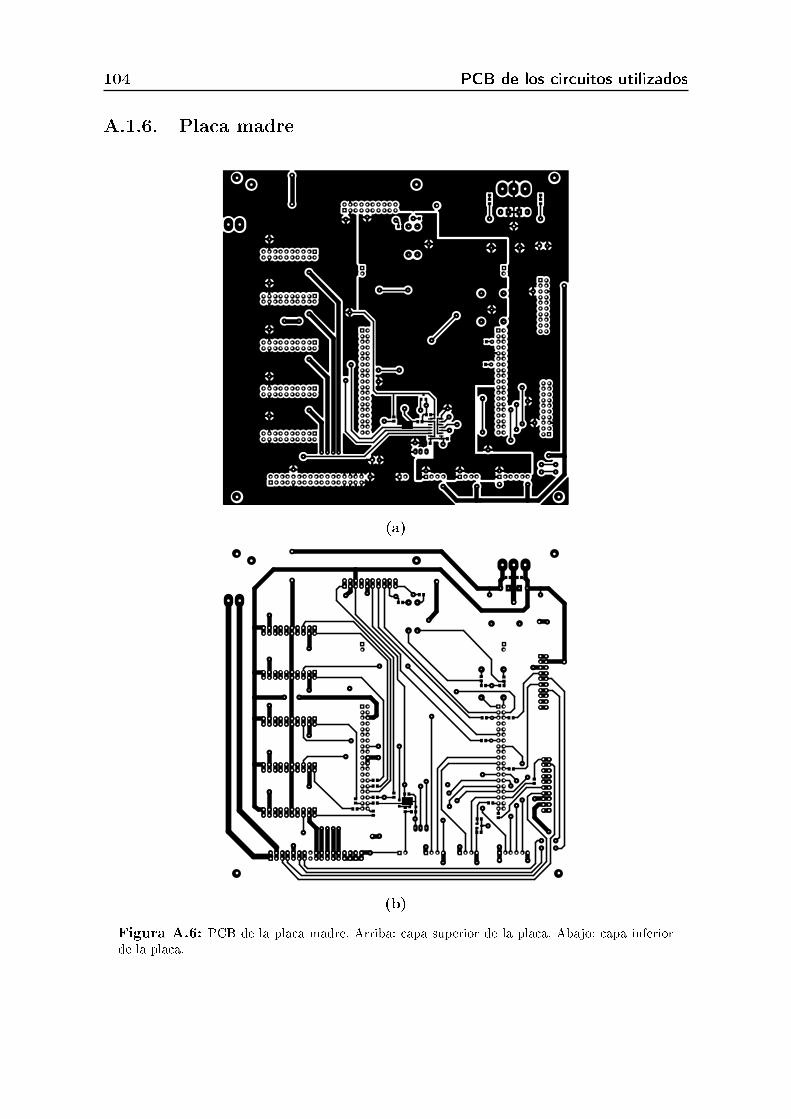
104 PCB de los circuitos utilizados
A.1.6. Placa madre
(a)
(b)
Figura A.6: PCB de la placa madre. Arriba: capa superior de la placa. Abajo: capa inferiorde la placa.

A.2 Esquemáticos 105
A.2. Esquemáticos
A.2.1. Fuente de corriente
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Revi
sion
Size A4
Dat
e:4/
1/20
19Sh
eet
of
File
:C:
\mar
vin\
..\C
urrre
ntSo
urce
.Sch
Doc
Dra
wn
By:
ref
1
Vin
-2
Vin
+3
V- 4
sens
e5
Vo
6
V+7
40kΩ
40kΩ
40kΩ
40kΩ
+-
U1
INA
152
R1 15+ -
Vo
1
GN
D 2
Vin
+3
Vin
-4
V+5
U2
INA
138
Rs 100
AD
C
AD
C
Vs
GN
D
RL 20k
GN
D
GN
D
GN
D
Vs
Rsh2
Rsh2
Rsh1
Rsh1
Fuen
te d
e co
rrie
nte
GN
D
Vs
GN
D
Vs2
Buffe
rBu
ffer
Med
idor
de
corr
ient
eB
uffe
r de
salid
aEn
trada
de
la fu
ente
Rf 9100
R3 150
las+
+8V
las+
+8V
las+
AD
C
DA
C
DA
Ca5 a4 a3 GN
DV
DD
a5 a4 a3 GN
DV
DD
GN
D
Vs2
DA
C
GN
D
GN
DG
ND
Q1
BC33
7
C7 470u
F
+ -V
o6
V- 4
Vin
+3
Vin
-2
V+7
U3
OPA
350
C6 470u
F
C2 0.1u
F
C3 0.1u
F
C4 1uF
C5 0.1u
F
C8 0.1u
F
C1 470p
F
1 2 3 4 5 6 7 8 9 10
11 12 13 14 15 16 17 18 19 20
P1 Hea
der 1
0X2A
Rsh
0.22
R2 15
R4 10k
R5 10k
GN
D
Rin2
1
+8V
Rin1
1
VD
D
PIC101 PIC102 COC
1
PIC201
PIC2
02
COC2
PIC301
PIC3
02
COC3
PIC401
PIC4
02
COC4
PIC501 PIC502 COC
5 PIC601 PIC602
COC6
PIC701 PIC702 COC
7
PIC801 PIC802 COC
8 PIP101
PIP102
PIP103
PIP104
PIP105
PIP106
PIP107
PIP108
PIP109
PIP1010
PIP1011
PIP1012
PIP1013
PIP1014
PIP1015
PIP1016
PIP1017
PIP1018
PIP1019
PIP1020
COP1
PIQ101
PIQ102 PIQ103 COQ1
PIR101 PIR102 COR1
PIR201 PIR202 COR2
PIR301 PIR302 COR3
PIR401 PIR402 COR4
PIR5
01
PIR5
02 COR5
PIRf
01
PIRf
02
CORf
PIRin101 PIRin102 CORin1
PIRin201 PIRin202 CORi
n2
PIRL01
PIRL02
PIRL03
CORL
PIRs
01
PIRs02
CORs
PIRsh01 PIRsh02 CORsh
PIU101
PIU102
PIU103
PIU104
PIU105
PIU106
PIU107 COU
1
PIU201
PIU202
PIU203
PIU204
PIU205 COU
2
PIU302
PIU303
PIU304
PIU306
PIU307 COU
3
PIC102
PIP101
PIP1011
PIRs02 POADC
PIP105
PIP1015
PIRin201 PO08V
PIP106
PIP1016 POa5
PIP107
PIP1017 POa4
PIP108
PIP1018 POa3
PIC101
PIC2
02
PIC3
02
PIC401
PIC501 PIC602 PIC702
PIC801 PIP104
PIP109
PIP1014
PIP1019
PIR301
PIR401
PIR5
02
PIRL01
PIU104 PIU202
PIU304 POGND
PIP1010
PIP1020
PIRin101
POVDD
PIQ101
PIU106
PIQ102 PIR101 PIR202 PIR102
PIU105
PIP102
PIP1012
PIR201
PIU101
POlas0
PIR302 PI
Rf01
PIU302
PIP103
PIP1013
PIR402 PIU103
PODAC PIR5
01
PIU102
PIRf
02
PIRs
01
PIU306
PIRL03
PIC301
PIC4
02
PIC502 PIC601 PIRin202
PIRsh02
PIU107
PIU203
PIU205 PORsh1
PIQ103 PIRsh01
PIU204
PORsh2
PIRL02
PIU201
PIU303
POBu
ffer
PIC201
PIC701 PIC802
PIRin102
PIU307 PO08V
POa3
POa4
POa5
POADC
POBu
ffer
PODAC
POGND PO
las0
PORsh1
PORsh2
POVDD
Figura A.7: Esquemático de la fuente de corriente.

106 PCB de los circuitos utilizados
A.2.2. Amplicadores de transimpedancia
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Revi
sion
Size A4
Dat
e:4/
1/20
19Sh
eet
of
File
:C:
\mar
vin\
..\tia
.Sch
Doc
Dra
wn
By:
Rs 100
out
GN
D
Rin
1
GN
D
VD
DG
ND
VD
DTI
A1
Entra
da d
e la
fuen
te
RF6.
8kGN
D
Rs2
100
out2
GN
D
GN
D
VD
DTI
A2
RF2
6.8kGN
D
out
inout2in2
out
inout2in2
a3a4 a1a2a3a4 a1a2
Vin
GN
DV
inG
ND
Vin
GN
D
Cs47
0pF
Cs2
470p
F
Cvs2
1uF
Cvs
1uF
C2 0.1u
F
+ -V
o6
V- 4
Vin
+3
Vin
-2
V+7
U2
OPA
380
+ -V
o6
V- 4
Vin
+3
Vin
-2
V+7
U1
OPA
380
12345678910
11121314151617181920P1 H
eade
r 10X
2A C1 470u
FCF
1
15pF
R1 470
-0.2
32V
CF2
15pF
R2 470
-0.2
32V
in2
inG
ND
GN
D
CF+
1 Vss 2
SD3
Vdd
4
Vss 5
Vou
t6
Cres
7
CF-
8U
3
LM77
05
GN
D
Cfly
4.7u
F
Cres
22uF
Cout
22uF
C30.
1uF
-0.2
32V
VD
D
12
P2 Hea
der 2
GN
D-0.2
32V
Gen
erad
or d
e te
nsió
n ne
gativ
a
PIC101 PIC102
COC1
PIC201 PIC202 COC
2
PIC301
PIC3
02
COC3
PICF
101
PICF
102
COCF
1 PI
CF20
1 PI
CF20
2 COCF2
PICf
ly01
PI
Cfly
02
COCfly
PICout01 PICout02
COCo
ut
PICres01 PICres02
COCres
PICs01 PICs02
COCs
PICs201 PICs202 COC
s2
PICv
s01
PICv
s02
COCvs
PICv
s201
PI
Cvs2
02
COCv
s2
PIP101
PIP102
PIP103
PIP104
PIP105
PIP106
PIP107
PIP108
PIP109
PIP1010
PIP1011
PIP1012
PIP1013
PIP1014
PIP1015
PIP1016
PIP1017
PIP1018
PIP1019
PIP1020 COP
1
PIP201
PIP202
COP2
PIR101 PIR102 COR1
PIR201 PIR202 COR2
PIRF
01
PIRF02
CORF
PIRF
201
PIRF
202
CORF2
PIRi
n01
PIRi
n02
CORin
PIRs01
PIRs02
CORs
PIRs
201
PIRs
202
CORs2
PIU102
PIU103
PIU104
PIU106
PIU107 COU
1
PIU202
PIU203
PIU204
PIU206
PIU207 COU
2 PIU301 PIU302
PIU303
PIU304
PIU305
PIU306
PIU307
PIU308 COU3
PICF
101
PIP105
PIP1015
PIR102
PIRF
01
PIU102
POin
PICF
102 PIRF02
PIRs01
PIU106
PICF
201
PIP107
PIP1017
PIR202
PIRF
201
PIU202
POin2
PICF
202 PIRF
202
PIRs
201
PIU206
PICf
ly01
PIU301
PICf
ly02
PIU308
PICres01 PIU307
PICs202
PIP106
PIP1016
PIRs
202
POout2
PICs02 PIP104
PIP1014
PIRs02 POout
PIP101
PIP1011
POa1
PIP102
PIP1012
PIRi
n01
POVin
PIC102 PIC201
PIC301
PICout02 PICres02
PICs201 PICs01
PICv
s202
PI
Cvs0
2
PIP103
PIP1013
PIP201
PIU103
PIU104
PIU203
PIU204 PIU302
PIU303
PIU305
POGND
PIP108
PIP1018
POa2
PIP109
PIP1019
POa3
PIP1010
PIP1020
POa4
PICout01
PIP202
PIR101 PIR201
PIU306
PO0002
32V
PIC101 PIC202
PIC3
02
PICv
s201
PI
Cvs0
1
PIRi
n02
PIU107 PIU207
PIU304
PO00
0232
V
POa1
POa2
POa3
POa4
POGND
POin
POin2
POout
POout2
POVin
Figura A.8: Esquemático del TIA.

A.2 Esquemáticos 107
A.2.3. Circuito de manejo del TEC
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Revi
sion
Size A4
Dat
e:4/
1/20
19Sh
eet
of
File
:C:
\mar
vin\
..\te
c.Sch
Doc
Dra
wn
By:
C2 0,1u
F
Rin
1
AG
ND
VD
D
Entra
da d
e al
imen
tación
Men
ejo
del T
EC
C3 1uF
PGN
D
C5 1uF
PGN
D
PGN
D
C6 1uF
DPG
ND
DPV
DD
PVD
D
AV
DD
1
AG
ND
2
HI-Z
3
Faul
t14
Faul
t05
IN+
6
IN-
7
SHU
T8
PVDD9 PVDD10 PVDD11 PVDD12
OUT- 13OUT- 14OUT- 15OUT- 16
OUT- 17
PGN
D18
PGN
D19
PGN
D20
PGN
D21
PGN
D22
PGN
D23
OUT+ 24OUT+ 25
OUT+ 26OUT+ 27OUT+ 28
PVDD29 PVDD30 PVDD31 PVDD32 POW
ER-P
AD
U1
DRV
592
10uH
L110
uHL2
PGN
D
TEC
+TE
C-
F1 F0in
+
in-
shut
C410
uF
Rf1
5.6k
Rf0
5.6k
DPG
ND
DPV
DD
2
Vcc
11
INA
2
INB
3
INA
4
IND
5
OU
TE6
OU
TF7
GN
D1
8
Vcc
216
OU
TA15
OU
TB14
OU
TC13
OU
TD12
INE
11
INF
10
GN
D2
9
U2
ISO
7762
in+
in-
shut F1 F0
DG
ND
VD
D
pwm
+
pwm
-
en
F0_o
ut
F1_o
ut
Ais
lación
gal
vani
ca
sh+
sh-
AG
ND VD
D
APG
ND
+-
Vo
1V
-2
Vin
+3
Vin
-4
V+ 5
U4
OPA
340
APV
DD
AG
ND
VD
D
C9 0.1u
F DPG
ND
C10
0.1u
FD
GN
D
C12
0.1u
FA
GN
D
C13
0.1u
F
AG
ND
Cs 470p
F
Rs 100
R2 10kR1 10k
R3 10k
R4 10k
VD
D1
1
Vin
P2
Vin
N3
GN
D1
4
GN
D2
5
Vou
tN6
Vou
tP7
VD
D2
8
U3
AM
C12
00M
edic
ión
de c
orrie
nte
PGN
DD
PGN
D
PVD
D
Vin
AG
ND
PGN
D
PVDD PGN
D
DPV
DD
C2-2
0,1u
F
Rref
330
VD
D
R1R
210
kCr
ef0.
1uF
AG
ND
1.5
[V]
470n
HL3 47
0nH
L4
C7 470u
FC8 47
0uF
TEC
+TE
C-
12
P3 scre
w te
rmin
al 2
pD2
LED
Rled
282
0
D1
LED
Rled
11k
AG
ND
Re1C2
A 3
U5
LT40
51
C1 470u
F
C1-2
470u
F
VDD
APG
ND
APV
DD
C1-3
470u
F
PGN
D
PVD
D
470n
H
L5
C14
22uF
12345678910
11121314151617181920
P1
Hea
der 1
0X2A
Rsh
0.1
DG
ND
AD
C
DG
ND
F0_o
ut
enF1
_out
pwm
-enpw
m-
F1_o
ut
pwm
+pw
m+
F0_o
utD
GN
DD
GN
D
AG
ND
AD
CA
GN
DV
inV
in
DG
ND
DPG
ND
APG
ND
tp2
tp1
tp3
tp4
tp5
DPG
ND
aux1
aux1
12P4 sc
rew
term
inal
2p
12P2 sc
rew
term
inal
2p
DPV
DD
2
470n
H
L6
DPV
DD
DPV
DD
DPG
ND
DPG
ND
Rled
3
1k
D3
LED
Con
ecto
res
ADC
C? 0.22
uF
APG
ND
sh-sh+
PIC101 PIC102
COC1
PIC10201 PIC10202 COC102
PIC10301 PIC10302
COC103
PIC201 PIC202 COC
2
PIC20201 PIC20202 COC202
PIC3
01
PIC3
02 COC3 PI
C401
PI
C402
COC4
PIC5
01
PIC5
02 COC5
PIC6
01
PIC6
02 COC6
PIC701 PIC702
COC7
PIC801 PIC802
COC8
PIC9
01
PIC9
02 COC9
PIC1
001
PIC1002 COC10
PIC1201
PIC1
202 COC12
PIC1301
PIC1
302 COC13
PIC1401
PIC1
402
COC14
PIC?01 PIC?02 COC
?
PICref01 PICref02 COCref
PICs01 PICs02 COC
s
PID101 PID102
COD1
PID201 PID202
COD2
PID301 PID302
COD3
PIL101 PIL102 COL1
PIL201 PIL202 COL2
PIL3
01
PIL3
02
COL3
PIL4
01
PIL4
02
COL4
PIL5
01
PIL5
02 COL
5
PIL6
01
PIL6
02
COL6
PIP101
PIP102
PIP103
PIP104
PIP105
PIP106
PIP107
PIP108
PIP109
PIP1010
PIP1011
PIP1012
PIP1013
PIP1014
PIP1015
PIP1016
PIP1017
PIP1
018
PIP1
019
PIP1020
COP1
PIP201
PIP202
COP2
PIP301
PIP302
COP3
PIP401
PIP402
COP4
PIR1
01
PIR1
02 COR
1
PIR1R201
PIR1R202
PIR1R203 CO
R1R2
PIR2
01
PIR2
02 COR
2
PIR301 PIR302 COR3
PIR401 PIR402 COR4
PIRf001 PIRf002 CORf0
PIRf101 PIRf102 CORf1
PIRi
n01
PIRin02
CORin
PIRl
ed10
1 PIR
led102
CORled1
PIRled
201
PIRl
ed20
2
CORled2
PIRl
ed30
1 PIR
led302
CORled3
PIRr
ef01
PI
Rref
02
CORref
PIRs
01
PIRs
02 CORs
PIRsh01
PIRs
h02
CORsh
PItp101
COtp1
PItp201
COtp
2
PItp301
COtp
3
PItp401
COtp4
PItp501 COtp5
PIU101
PIU102
PIU103
PIU104
PIU105
PIU106
PIU107
PIU108
PIU109 PIU1010 PIU1011 PIU1012
PIU1013 PIU1014 PIU1015
PIU1016 PIU1017
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024 PIU1025 PIU1026
PIU1027 PIU1028
PIU1029 PIU1030 PIU1031 PIU1032 COU
1
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
PIU2010
PIU2011
PIU2012
PIU2013
PIU201
4
PIU2015
PIU2016
COU2
PIU301
PIU302
PIU303
PIU304 PIU305
PIU306
PIU307
PIU308
COU3
PIU401
PIU402
PIU403
PIU404
PIU405
COU4
PIU501 PIU502
PIU503
COU5
PIC10302
PIC?01
PIL5
01
PIRl
ed30
1
PItp501
PIU304 PIC10301
PIC?02
PID301
PIL6
02
PIU301
PIC1002
PIP105
PIP1015 PItp30
1
PIU208
PODG
ND
PIC6
01
PID201
PIL3
02
PIRf001
PIRf101
PIU101
PIU103
PIC701
PIC1401
PIL201 PI
Rsh0
2
PIU303
POsh0
PIC801
PIC1
402
PIL101
PIP302
POTEC0
PICref01 PIR1R20
1
PIR402
PIRr
ef02
PIU502
PICs01
PIP101
PIP1011
PIRs
02
POADC
PID102
PIRled
102
PID202
PIRl
ed20
2
PID302
PIRled
302
PIL102
PIU1024 PIU1025 PIU1026
PIU1027 PIU1028
PIL202
PIU1013 PIU1014 PIU1015
PIU1016 PIU1017
PIC102 PIC201
PIC1
202
PIC1
302
PICref02
PICs02
PIP102
PIP1012
PIR1R203
PIRl
ed10
1
PItp101
PIU305 PIU402
PIU503
POAGND
PIP103
PIP1013
PIRi
n01
POVin
PIP104
PIP1014
POaux1
PIC10202 PIC20201
PIC3
02
PIC4
02
PIC5
01
PIC702 PIC802
PIL4
02
PIP201
PItp201
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
POPGND
PIC10201 PIC20202
PIC3
01
PIC4
01
PIC5
02
PIL3
01
PIP202
PIU109 PIU1010 PIU1011 PIU1012 PIU1029 PIU1030 PIU1031 PIU1032
POPVDD
PIC6
02
PIC9
01
PIL4
01
PIL5
02
PIP401
PIRled
201
PItp401
PIU102
PIU209
PODP
GND
PIC9
02
PIL6
01
PIP402
PIU2016
PODPVDD
PIR1
01 PIU306
PIR1
02
PIR302 PIU404
PIR1R202
PIU501
PIR2
01 PIU307
PIR2
02
PIR401 PIU403 PIR301
PIRs
01 PIU401
PIRf002
PIU105
PIU2010
POF0 PIRf102
PIU104
PIU2011
POF1
PIP301
PIRsh01
PIU302
POsh0 PO
TEC0
PIU106
PIU201
4
POin0 PIU107
PIU2013
POin0 PIU108
PIU2012
POshut
PIU202
PIP1010
PIP1020
PIU203
POpwm0
PIP109
PIP1
019
PIU204
POpwm0
PIP108
PIP1
018
PIU205
POen
PIP107
PIP1017
PIU206
POF1
0out
PIP106
PIP1016
PIU207
POF0
0out
PIU2015
PIC101 PIC202
PIC1
001
PIC1201
PIC1301
PID101
PIRin02
PIRr
ef01
PIU201
PIU308 PIU405
POVDD
POADC
POAG
ND
POaux1
PODG
ND
PODP
GND
PODP
VDD
POen
POF0
POF00out
POF1
POF10out
POin0
POPGND
POPVDD
POpwm0
POsh0
POsh
ut
POTEC0
POVDD POVin
Figura A.9: Esquemático del circuito de manejo del TEC.

108 PCB de los circuitos utilizados
A.2.4. Amplicador de los termistores
11
22
33
44
DD
CC
BB
AA
Title
Num
ber
Revi
sion
Size A4
Dat
e:4/
1/20
19Sh
eet
of
File
:C:
\mar
vin\
..\th
.Sch
Doc
Dra
wn
By:
Rs 100
Cs 470p
F
out
C2 0,1u
F
Rin
1
GN
D
VD
D
GN
D
Entra
da d
e la
fuen
te
Rthout
a2a3
Rthout
a2a3
Rth2ou
t2
a1a4Rt
h2out2
a1a4
GN
D
Rth
Cvs
0.1u
F GN
D
Rset
10k
Rg 27k
Vre
f
Rref
1500
VD
D GN
D
R1R
210
k
Vref
Cref
0.1u
F
Cf 3.3n
Rs2
100
Cs2
470p
F
out2
GN
D
GN
D
Rth2
Cvs2
0.1u
F GN
D
Rset
210
k
Rg2
27k
Vre
f2
Rref
215
00
VD
D GN
D
R1R
2-2
10k
Vref2
Cref
20.
1uF
Cf2
3.3n
Am
plifi
cado
r del
term
isto
r 1
Am
plifi
cado
r del
term
isto
r 2
Re1C2
A 3
U2
LT40
51
Re1C2
A 3
U4
LT40
51
Rs1
V2
2
V1
3
GN
D4
V+
5en6
Rg7
Vo
8V
+9
Rth
10
U1
INA
330
Rs1
V2
2
V1
3
GN
D4
V+
5en6
Rg7
Vo
8V
+9
Rth
10
U3
INA
330
VD
D
VD
D
Vin
GN
DV
inG
ND
Vin
GN
D
C1 470u
F
12345678910
11121314151617181920P1 H
eade
r 10X
2A
12
P2 Ext-t
her 1 2
P3 Ext-t
her2
PIC101 PIC102 COC1
PIC201 PIC202 COC
2
PICf01 PICf02 COC
f
PICf201 PICf202 COCf2
PICref01 PICref02 COC
ref
PICref201 PICref202 CO
Cref
2
PICs01 PICs02 COC
s
PICs201 PICs202 COC
s2
PICv
s01
PICvs02 COCv
s PICvs201
PICvs202 COCv
s2
PIP101
PIP102
PIP103
PIP104
PIP105
PIP106
PIP107
PIP108
PIP109
PIP1010
PIP1011
PIP1012
PIP1013
PIP1014
PIP1015
PIP1016
PIP1017
PIP1018
PIP1019
PIP1020 COP1
PIP201
PIP202
COP2
PIP301
PIP302 COP3
PIR1R201
PIR1R202
PIR1R203 CO
R1R2
PIR1R20201
PIR1R202
02
PIR1R20203 COR1R202
PIRg01 PIRg02 CORg
PIRg201 PIRg202 CORg
2
PIRin01
PIRi
n02
CORin
PIRref01 PIRref02 CORref
PIRref201 PIRref202 CORr
ef2
PIRs
01
PIRs02
CORs
PIRs
201
PIRs
202
CORs
2
PIRset01 PIRset02 CORset
PIRset201 PIRset202 CORs
et2
PIU101
PIU102
PIU103
PIU104
PIU105 PIU106
PIU107
PIU108
PIU109
PIU1
010
COU1
PIU201 PIU202
PIU203
COU2
PIU301
PIU302
PIU303
PIU304
PIU305 PIU306
PIU307
PIU308
PIU309
PIU3010
COU3
PIU401 PIU402
PIU403
COU4
PICf201 PIRg202
PIU307 PICf202
PICref201 PIR1R20201
PIRg201
PIRref202 PIU302
PIU303
PIU402
POVref2
PICf01 PIRg02
PIU107 PICf02
PICref01 PIR1R20
1
PIRg01
PIRref02 PIU102
PIU103
PIU202
POVr
ef
PICs201
PIP1010
PIP1020
PIRs
202 POout2
PICs01
PIP105
PIP1015
PIRs02 POout
PIP101
PIP1011
POa1
PIP102
PIP1012
PIRin01
POVin
PIC102 PIC201
PICref202 PICref02
PICs202 PICs02
PICvs201
PICv
s01
PIP103
PIP1013
PIP201
PIP302
PIR1R20203 PIR1R20
3
PIRset201 PIRset01
PIU104 PIU203
PIU304 PIU403
POGND
PIP106
PIP1016
POa2
PIP107
PIP1017
POa3
PIP108
PIP1018
POa4
PIP104
PIP1014
PIP202
PIU1
010
PORth PIP109
PIP1019
PIP301
PIU3010
PORth2 PIR1
R20202
PIU401
PIR1R202
PIU201
PIRs
201
PIU308
PIRs
01
PIU108
PIRset202 PIU301
PIRset02 PIU101
PIC101 PIC202
PICvs202
PICvs02
PIRi
n02
PIRref201 PIRref01 PIU105
PIU106 PIU109
PIU305 PIU306
PIU309
POa1
POa2
POa3
POa4
POGND
POout
POout2
PORth
PORth2
POVin
POVref POVref2
Figura A.10: Esquemático del amplicador de los termistores.

A.2 Esquemáticos 109
A.2.5. Placa madre
11
22
33
44
55
66
DD
CC
BB
AA
Title
Num
ber
Revi
sion
Size A4
Dat
e:4/
1/20
19Sh
eet
of
File
:C:
\mar
vin\
..\M
boar
d.Sc
hDoc
Dra
wn
By:
Man
ejo
del T
EC
Plac
a de
l mic
roco
ntro
lado
r
RTH
et_o
uta2a3
RTH
las_
out
a1a4
AG
ND
VD
D
Am
p. d
e lo
s ter
mis
tore
s
TIA
et_o
ut
TIA
ref_
out
a7a8 a5a6
AG
ND
VD
D
TIA
I1_o
ut
+8V
I1_i
n
a13
a12
a11
VD
D
fuen
te d
el S
OA
+8V
I2_o
ut
I2_i
n
a18
a17
a16
VD
DFuen
te d
el m
edio
act
ivo
I3_o
ut
+8V
I3_i
nPh
ase
a23
a22
a21
VD
D
Fuen
te d
e la
secc
ion
de fa
se
I4_o
ut
+8V
+8V
I4_o
ut
I4_i
n
a28
a27
a26
VD
D
I4_i
n
Fuen
te r
efle
ctor
izq.
a28
a27
a26
VD
D
+8V
I5_o
ut
I5_i
n
a33
a32
a31
VD
D
Fuen
te r
efle
ctor
der
.
a33
a32
a31
VD
D
+8V
I5_o
ut
I5_i
nV
s1
Vo
2
Gnd 3
U1
LM61
Med
icio
n de
tem
pera
tura
C1 100n
FC2 1u
F
AG
ND
Case_temp
VD
D
AG
ND
VD
D
VD
D
AG
ND
DV
DD
1
PD2
LDA
C3
DIN
4
SCLK
5
CS6
FS7
AV
DD
16
REFI
NA
B15
OU
TA14
OU
TB13
OU
TC12
OU
TD11
REFI
NCD
10A
GN
D
9
DG
ND
8
U3
TLV
5614
Rref
330
VD
D
Re1C2
A 3
U2
LT40
51
Cref
0.1u
F
AG
ND
AG
ND
Din
1
SCLK
1
FS
DA
C e
xter
no
RTH
et_o
uta2a3
RTH
las_
out
a1a4
AG
ND
VD
D
TIA
et_o
ut
TIA
ref_
out
a7a8 a5a6
AG
ND
VD
D
I1_o
ut
+8V
I1_i
n
a13
a12
a11
VD
D
+8V
I2_o
ut
I2_i
n
a18
a17
a16
VD
D
I3_o
ut
+8V
I3_i
nPh
ase
a23
a22
a21
VD
D
I4_i
n
Dis
play
123
P12
scre
w te
rmin
al 3
pAG
ND
Alim
enta
ción
USA
RT
AU
XSP
I AU
X
LA
SER
RthL
asRt
hLas
RthE
tRt
hEt
AG
ND
AG
ND
SOA
SOA
LsG
ain
LsG
ain
Phas
ePh
ase
Lref
Lref
Rref
Rref
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
+3V
Ext V
in
Rin
22
VD
D
AG
ND
Ext
AN
Inpu
t
Rad
50
D2
D1
NC1
VD
DG
ND
Out
1In
1O
ut2
In2
NC2
NC3
NC4
NC1
VD
DG
ND
Out
1In
1O
ut2
In2
NC2
NC3
NC4
P5 TIA
NC1
VD
DG
ND
Rth1
Out
1N
C2N
C3N
C4Rt
h2O
ut2
NC1
VD
DG
ND
Rth1
Out
1N
C2N
C3N
C4Rt
h2O
ut2
P4 Ther
mist
or A
mpl
ifier
AD
CA
GN
DV
DD
NC1
DG
ND
F0ou
tF1
out
ENPW
M-
PWM
+
AD
CA
GN
DV
DD
NC1
DG
ND
F0ou
tF1
out
ENPWM
-PW
M+
P3 TEC
driv
er
AD
CLA
SD
AC
GN
D+8 N
C3N
C2N
C1G
ND
VD
D
AD
CLA
SD
AC
GN
D +8N
C3N
C2N
C1G
ND
VD
D
P6 Curr
ent S
ourc
e
AD
CLA
SD
AC
GN
D+8 N
C3N
C2N
C1G
ND
VD
D
AD
CLA
SD
AC
GN
D +8N
C3N
C2N
C1G
ND
VD
D
P7 Curr
ent S
ourc
e
AD
CLA
SD
AC
GN
D+8 N
C3N
C2N
C1G
ND
VD
D
AD
CLA
SD
AC
GN
D +8N
C3N
C2N
C1G
ND
VD
D
P8 Curr
ent S
ourc
e
AD
CLA
SD
AC
GN
D+8 N
C3N
C2N
C1G
ND
VD
D
AD
CLA
SD
AC
GN
D +8N
C3N
C2N
C1G
ND
VD
D
P9 Curr
ent S
ourc
e
AD
CLA
SD
AC
GN
D+8 N
C3N
C2N
C1G
ND
VD
D
AD
CLA
SD
AC
GN
D +8N
C3N
C2N
C1G
ND
VD
D
P10
Curr
ent S
ourc
e
1234P1
1
Hea
der 4
1234
P13
Hea
der 4
123456
P14
Hea
der 6
12
P16
PCB
cone
ccto
r
C347
0uF
C4 0.1u
FD3
LED
R21K
C547
0uF
C6 0.1u
FD4
LED
R31K
+8V
AG
ND
+ -V
o1
V- 2
Vin
+3
Vin
-4
V+5
U4
OPA
340
R1 10k
C7 100n
F AG
ND
a10
a15
a20
a25
a25
a30
a30
a10
a15
a20
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
DG
ND
VD
DV
DD
DG
ND
DG
ND
VD
DTX
2RX
2
TIA
etTI
Aet
TIA
ref
TIA
ref
AG
ND
DG
ND
470n
H
L1
DGND
DG
ND
ITEC
TP1
TP2
TP3
TP4
DG
ND
AG
ND
+8V
VD
D
Cc1
330n
F
Rc1
22k
AG
ND
ITEC
Cb2
330n
F
Rb2
22k
DG
ND
F0_o
utF0
_out
_filt
Ce8
330n
F
Re8
22k
DG
ND
F1_o
utF1
_out
_filt
ITEC
_filt
Ce14
b33
pF
DG
ND
Ce14
33pF
DG
ND
pwm-
pwm-_filt Cd12
b33
pF
DG
ND
Cd12
33pF
DG
ND
pwm+
pwm+_filt
Filtr
os
47uH
Le14
Re14
2.2k
47uH
Le14
BRe
14B
2.2k
47uH
Ld12
Rd12
2.2k
47uH
Ld12
BRd
12B
2.2k
F0_o
ut
AG
ND
ITEC
DG
ND
AG
ND
enen a3
4a3
4
pwm
+_fil
tpw
m+_
filt
pwm
-_fil
tpw
m-_
filt
F1_o
utF0
_out
VD
D
F1_o
ut
VD
D
DG
ND
PC10
PC11
PC12
PD2
VD
DE5
VBO
OT0
GN
DN
CN
CN
CIO
REF
PA13
RESE
TPA
14+3
V3
PA15
+5V
GN
DG
ND
PB7
GN
DPC
13V
INPC
14N
CPC
15PA
0PH
0PA
1PH
1PA
4V
BAT
PB0
PC2
PC1
PC3
PC0
PC9
PC8
PB8
PC6
PB9
PC5
AV
DD
U5V
GN
DN
CPA
5PA
12PA
6PA
11PA
7PB
12PB
6N
CPC
7G
ND
PA9
PB2
PA8
PB1
PB10
PB15
PB4
PB14
PB5
PB13
PB3
AG
ND
PA10
PC4
PA2
NC
PA3
NC
P1P2
Con1
nucl
eo F
446R
E
AG
ND
Rpc2
5.6k
I3_o
utRp
c35.
6kI4
_out
Rpc0
5.6k
I5_o
ut
Rpa0
5.6k
I2_o
utRp
a15.
6kI1
_out
Rpb0
5.6k
ITEC
_filt
Rpc1
5.6k
Ext V
in
Rpc5
5.6k
TIA
et_o
ut
Rpb1
5.6k
TIA
ref_
out
Rpc4
5.6k
RTH
las_
out
RTH
et_o
utRp
a35.
6kRp
a25.
6kCa
se_t
emp
+3V
VD
D
pwm
+pw
m-
DG
ND
DG
ND
DG
ND
DG
ND
DG
ND
DG
ND
Din
1SC
LK1
Din
2D
out2
SCLK
2
SS2
FSenF1
_out
_filt
F0_o
ut_f
ilt
AG
ND
I5_i
n
I3_i
n
I2_i
n
I1_i
n
RX1
TX1
RX2
TX2
RX1
TX1
SS2
Din
2
SCLK
2D
out2
C1U
3
100n
F
C2U
3
100n
F
DG
ND
AG
ND
1234567891011121314151617
1819202122232425262728293031323334P1
5
Hea
der 1
7X2A
Rref
Rref
SOA
SOA
Lref
Lref
LsG
ain
LsG
ain
12
P17
scre
w te
rmin
al 2
p
tec+
tec+
tec-
tec-
tec+ tec-
RthL
asRt
hLas
RthE
tRt
hEt
TIA
etTI
Aet
TIA
ref
TIA
ref
SP1
SP2
SP3
SP4
PIC101 PIC102 COC
1
PIC1
U301
PI
C1U3
02
COC1
U3
PIC201 PIC202 COC
2
PIC2
U301
PIC2
U302
COC2
U3
PIC301 PIC302
COC3
PIC401 PIC402 COC4
PIC501 PIC502
COC5
PIC601 PIC602 COC6
PIC7
01
PIC7
02
COC7
PICb201 PICb202 COCb2
PICc101 PICc102 COCc1
PICd1201 PICd1202 CO
Cd12
PICd12b01 PICd12b02 COCd12b
PICe801 PICe802 COCe8
PICe1401 PICe1402 CO
Ce14
PICe14b01 PICe14b02 CO
Ce14b
PICo
n101
01
PICo
n101
02
PICo
n101
03
PICo
n101
04
PICo
n101
05
PICo
n101
06
PICo
n101
07
PICo
n101
08
PICo
n101
09
PICo
n101
010
PICon101011
PICo
n101
012
PICon101013
PICo
n101
014
PICon101015
PICo
n101
016
PICon101017
PICo
n101
018
PICon101019
PICo
n101
020
PICon101021
PICo
n101
022
PICon101023
PICo
n101
024
PICon101025
PICo
n101
026
PICon101027
PICo
n101
028
PICon101029
PICo
n101
030
PICon101031
PICo
n101
032
PICon101033
PICo
n101
034
PICon101035
PICo
n101
036
PICon101037
PICo
n101
038
PICo
n102
01
PICo
n102
02
PICo
n102
03
PICo
n102
04
PICo
n102
05
PICo
n102
06
PICo
n102
07
PICo
n102
08
PICo
n102
09
PICo
n102
010
PICo
n102
011
PICo
n102
012
PICo
n102
013
PICo
n102
014
PICo
n102
015
PICo
n102
016
PICo
n102
017
PICo
n102
018
PICo
n102
019
PICo
n102
020
PICo
n102
021
PICo
n102
022
PICo
n102
023
PICo
n102
024
PICo
n102
025
PICo
n102
026
PICo
n102
027
PICo
n102
028
PICo
n102
029
PICo
n102
030
PICo
n102
031
PICo
n102
032
PICo
n102
033
PICo
n102
034
PICo
n102
035
PICo
n102
036
PICo
n102
037
PICo
n102
038
COCo
n1
PICref01 PICref02 COCref
PID101 PID102 COD
1
PID201 PID202 COD
2
PID301 PID302
COD3
PID401 PID402
COD4
PIL101
PI
L102
COL
1
PILd
1201
PIL
d1202
COLd
12
PILd12
B01
PILd12
B02
COLd12B
PILe
1401
PILe
1402
CO
Le14
PI
Le14
B01
PILe
14B0
2 CO
Le14
B
PIP301
PIP302
PIP303
PIP304
PIP305
PIP306
PIP307
PIP308
PIP309
PIP3010
PIP3
011
PIP3
012
PIP3
013
PIP3
014
PIP3
015
PIP3
016
PIP3
017
PIP3
018
PIP3
019
PIP3
020 COP
3
PIP401
PIP402
PIP403
PIP404
PIP405
PIP406
PIP407
PIP408
PIP409
PIP4010
PIP4011
PIP4012
PIP4013
PIP4014
PIP4015
PIP4016
PIP4017
PIP4018
PIP4019
PIP4020 COP
4
PIP501
PIP502
PIP503
PIP504
PIP505
PIP506
PIP507
PIP508
PIP509
PIP5010
PIP5011
PIP5012
PIP5013
PIP5014
PIP5015
PIP5016
PIP5017
PIP5018
PIP5019
PIP5020 COP
5
PIP601
PIP602
PIP603
PIP604
PIP605
PIP606
PIP607
PIP608
PIP609
PIP6
010
PIP601
1
PIP601
2
PIP601
3
PIP601
4
PIP601
5
PIP601
6
PIP601
7
PIP601
8
PIP601
9
PIP602
0
COP6
PIP701
PIP702
PIP703
PIP704
PIP705
PIP706
PIP707
PIP708
PIP709
PIP7010
PIP701
1
PIP701
2
PIP701
3
PIP701
4
PIP701
5
PIP701
6
PIP701
7
PIP701
8
PIP701
9
PIP702
0
COP7
PIP801
PIP802
PIP803
PIP804
PIP805
PIP806
PIP807
PIP808
PIP809
PIP8010
PIP8011
PIP8012
PIP8013
PIP8014
PIP8015
PIP8016
PIP8017
PIP8018
PIP8019
PIP8020
COP8
PIP901
PIP902
PIP903
PIP904
PIP905
PIP906
PIP907
PIP908
PIP909
PIP9010
PIP9011
PIP9012
PIP9013
PIP9014
PIP9015
PIP9016
PIP9017
PIP9018
PIP9019
PIP9020
COP9
PIP1
001
PIP1
002
PIP1
003
PIP1
004
PIP1
005
PIP1
006
PIP1
007
PIP1
008
PIP1
009
PIP1
0010
PIP1
0011
PIP1
0012
PIP1
0013
PIP1
0014
PIP1
0015
PIP1
0016
PIP1
0017
PIP1
0018
PIP1
0019
PIP1
0020
COP10
PIP110
1
PIP110
2
PIP110
3
PIP110
4
COP11
PIP1
201
PIP1
202
PIP1
203
COP12
PIP1301
PIP1302
PIP1303
PIP1304
COP13
PIP1401
PIP1402
PIP1403
PIP1404
PIP1405
PIP1406
COP14
PIP1501
PIP1502
PIP1503
PIP1504
PIP1505
PIP1506
PIP1507
PIP1508
PIP1509
PIP1
5010
PIP1
5011
PIP1
5012
PIP1
5013
PIP1
5014
PIP1
5015
PIP1
5016
PIP1
5017
PIP15018
PIP15019
PIP15020
PIP15021
PIP15022
PIP15023
PIP15024
PIP15025
PIP15026
PIP15027
PIP15028
PIP15029
PIP15030
PIP15031
PIP15032
PIP15033
PIP15034 COP15
PIP1601 PIP1602
COP16
PIP1701
PIP1702
COP17
PIR101
PIR102
PIR103 COR
1
PIR2
01
PIR2
02
COR2
PIR3
01
PIR3
02
COR3
PIRad01 PIRad02 CORad
PIRb
201
PIRb
202
CORb2
PIRc
101
PIRc
102
CORc1
PIRd12
01 PIR
d1202
CORd
12
PIRd12
B01
PIRd12
B02
CORd
12B
PIRe
801
PIRe
802
CORe8
PIRe
1401
PI
Re14
02
CORe
14
PIRe
14B0
1 PI
Re14
B02
CORe
14B
PIRi
n01
PIRi
n02
CORin
PIRpa0
01 PIR
pa002
CORp
a0
PIRpa1
01 PIR
pa102
CORp
a1
PIRp
a201
PI
Rpa2
02
CORp
a2
PIRp
a301
PI
Rpa3
02
CORp
a3
PIRpb0
01 PIR
pb002
CORp
b0
PIRpb1
01 PIR
pb102
CORp
b1
PIRpc0
01 PIR
pc002
CORp
c0
PIRpc1
01 PIR
pc102
CORp
c1
PIRp
c201
PI
Rpc2
02
CORp
c2
PIRp
c301
PI
Rpc3
02
CORp
c3
PIRpc4
01 PIR
pc402
CORp
c4
PIRpc5
01 PIR
pc502
CORpc5
PIRref01 PIRref02 CORref
PISP101
COSP1
PISP201
COSP2
PISP301
COSP3
PISP401
COSP4
PITP101
COTP1
PITP201 CO
TP2
PITP301
COTP3
PITP401 C
OTP4
PIU101
PIU102
PIU103
COU1
PIU201 PIU202
PIU203
COU2
PIU301 PIU302
PIU303
PIU304
PIU305
PIU306
PIU307
PIU308 PIU309
PIU3010
PIU3011
PIU301
2
PIU301
3
PIU301
4
PIU301
5
PIU3016
COU3
PIU401
PIU402
PIU403
PIU404
PIU405 COU
4
PIC202
PIRp
a202
PIU102
POCase0temp
PICb202
PICo
n102
013
PIRb
201
POF00out0filt PICc102 PI
Rc10
1
PIRpb0
01
POIT
EC0f
ilt
PICd1202 PILd12
B01
PIRd12
02 PICd12b02
PIP3010
PIP3
020
PIRd12
B02 POpwm00filt
PICe802
PICo
n102
05
PIRe
801
POF10out0filt
PICe1402 PILe14
B01
PIRe
1402
PICe14b02
PIP309
PIP3
019
PIRe
14B0
2 POpwm00filt PI
Con1
0101
PI
Con1
0102
PICo
n101
03
PICo
n101
04
PICo
n101
05
PICo
n101
07
PICo
n101
09
PICo
n101
010
PICon101011
PICo
n101
012
PICon101013
PICo
n101
014
PICon101015
PICon101017
PICo
n101
018
PICon101021
PICon101023
PICo
n101
024
PICon101025
PICo
n101
026
PICon101027
PICo
n101
028 PIR
pa002
PICon101029
PICo
n101
030 PIR
pa102
PICon101031
PICo
n101
032
PIP603
PIP601
3
POI10in
PICon101033
PICo
n101
034 PIR
pb002
PICon101035
PIRp
c202
PI
Con1
0103
6 PIRpc1
01
PICon101037
PIRp
c302
PI
Con1
0103
8 PIRpc0
02
PICo
n102
03
PIP308
PIP3
018
POen
PICo
n102
06 PIRpc5
01
PICo
n102
07
PICo
n102
08
PICo
n102
010
PICo
n102
011
PIP703
PIP701
3
POI20in
PICo
n102
012
PICo
n102
014
PICo
n102
015
PICo
n102
017
PICo
n102
018
PICo
n102
022
PICo
n102
023
PICo
n102
024 PIR
pb101
PICo
n102
027
PIU307
POFS PICo
n102
029
PIU304
PODin1
PICo
n102
030
PICo
n102
031
PIU305
POSCLK1
PICo
n102
034 PIR
pc401
PICo
n102
035
PIRp
a201
PICo
n102
036
PICo
n102
037
PIRp
a301
PICo
n102
038
PICref01
PIR103
PIRref02 PIU202
PIU3010
PIU301
5
PID102 PID201 PI
Rin0
2 PIU403
PICo
n101
016
PID202 PO03V
PID302
PIR2
02
PID402
PIR3
02
PICo
n102
02
PILd
1201
POpwm0 PIL
d1202 PIR
d1201
PILd12
B02
PIRd12
B01
PICo
n102
01
PILe
1401 POpwm0
PILe
1402
PI
Re14
01
PILe
14B0
2 PIRe
14B0
1
PIP304
PIP3
014
POa34
PIP401
PIP4011
POa1
PIP406
PIP4016
POa2
PIP407
PIP4017
POa3
PIP408
PIP4018
POa4
PIP501
PIP5011
POa5
PIP508
PIP5018
POa6
PIP509
PIP5019
POa7
PIP5010
PIP5020
POa8
PIP604
PIP601
4 POa10
PIP606
PIP601
6 POa13
PIP607
PIP601
7 POa12
PIP608
PIP601
8 POa11
PIP702
PIP701
2
PIP1
5012
PIP15029
POLref
PIP704
PIP701
4 POa15
PIP706
PIP701
6 POa18
PIP707
PIP701
7 POa17
PIP708
PIP701
8 POa16
PIP801
PIP8011
PIRp
c201
POI30out
PIP802
PIP8012
PIP1
5011
PIP15028
POPhase
PIP803
PIP8013
PIU301
2
POI30in
PIP804
PIP8014 POa20
PIP806
PIP8016 POa23
PIP807
PIP8017 POa22
PIP808
PIP8018 POa21
PIP901
PIP9011
PIRp
c301
POI40out
PIP902
PIP9012
PIP1
5010
PIP15027
POLsGain
PIP903
PIP9013
PIU301
3
POI40in
PIP904
PIP9014 POa25
PIP906
PIP9016 POa28
PIP907
PIP9017 POa27
PIP908
PIP9018 POa26
PIP1
001
PIP1
0011
PIRpc0
01
POI50out
PIP1
002
PIP1
0012
PIP1509
PIP15026
POSOA
PIP1
003
PIP1
0013
PIU301
4
POI50in
PIP1
004
PIP1
0014
POa30
PIC501 PIC602 PID401
PIP605
PIP601
5 PIP705
PIP701
5 PIP805
PIP8015
PIP905
PIP9015
PIP1
005
PIP1
0015
PIP1
203
PO08V
PIP1
006
PIP1
0016
POa33
PIP1
007
PIP1
0017
POa32
PIP1
008
PIP1
0018
POa31
PIC101
PIC1
U302
PIC201
PIC302 PIC401
PIC502 PIC601
PIC7
02
PICc101
PICo
n102
032
PICref02 PID101
PIL101
PIP302
PIP3
012
PIP403
PIP4013
PIP503
PIP5013
PIP609
PIP601
9 PIP709
PIP701
9 PIP809
PIP8019
PIP909
PIP9019
PIP1
009
PIP1
0019
PIP1
202
PIP1505
PIP1
5014
PIP1
5015
PIP1
5016
PIP1
5017
PIP15022
PIP15031
PIP15032
PIP15033
PIP15034
PIP1601
PIR101
PIR2
01
PIR3
01
PIRad01
PITP301
PITP401
PIU103
PIU203 PIU309
PIU402
POAGND
PICo
n102
021
PIP110
2 POTX1
PICo
n102
033
PIP110
3 PORX1
PIC2
U301
PICb201
PICd1201 PICd12b01
PICe801
PICe1401 PICe14b01
PICo
n101
08
PICon101019
PICo
n101
020
PICo
n101
022
PICo
n102
09
PICo
n102
020
PIL1
02
PIP305
PIP3
015
PIP110
1 PIP1301
PIP1401
PITP101
PITP201
PIU303
PIU306
PIU308
PODGND
PICo
n102
04
PIP1302 PORX2
PICo
n102
019
PIP1303 POTX2
PIC102
PIC1
U301
PIC2
U302
PIC301 PIC402
PIC7
01
PICo
n101
06
PID301
PIP303
PIP3
013
PIP402
PIP4012
PIP502
PIP5012
PIP6
010
PIP602
0 PI
P7010
PIP702
0 PIP8010
PIP8020
PIP9010
PIP9020
PIP1
0010
PI
P100
20
PIP110
4
PIP1
201
PIP1304
PIP1406
PIRref01
PIU101
PIU301 PIU302
PIU3016 PIU405
POVDD
PICo
n102
025
PIP1402 POSCLK2
PICo
n102
028
PIP1403 PODout2
PICo
n102
026
PIP1404 PODin2
PICo
n102
016
PIP1405 POSS2
PIP1501
PIP15018
PIP1701
POtec0
PIP1502
PIP15019
PIP1702
POtec0
PIP409
PIP4019
PIP1503
PIP15020
PORthLas
PIP404
PIP4014
PIP1504
PIP15021
PORthEt
PIP505
PIP5015
PIP1506
PIP15023
POTIAet
PIP507
PIP5017
PIP1507
PIP15024
POTIAref
PIP1508
PIP602
PIP601
2
PIP1
5013
PIP15030
PORref
PIP15025
PIP1602 PIRad02 PIRi
n01
PIR102
PIU201
PIP306
PIP3
016
PIRb
202 POF00out
PIP301
PIP3
011
PIRc
102 POITEC
PIP307
PIP3
017
PIRe
802 POF10out
PIP701
PIP701
1
PIRpa0
01 POI20out
PIP601
PIP601
1
PIRpa1
01 POI10out
PIP405
PIP4015
PIRp
a302
PORT
Het0
out
PIP506
PIP5016
PIRpb1
02 PO
TIAref0out
PIP4010
PIP4020
PIRpc4
02
PORTHlas0out
PIP504
PIP5014
PIRpc5
02
POTIAet0out
PISP101
PISP201
PISP301
PISP401
PIU3011
PIRpc1
02
PIU401
PIU404
POEx
t Vin
PO03V
PO08V
POa1
POa2
POa3
POa4
POa5
POa6
POa7
POa8
POa10
POa11
POa12
POa13
POa15
POa16
POa17
POa18
POa20
POa21
POa22
POa23
POa25
POa26
POa27
POa28
POa30
POa31
POa32
POa33
POa34
POAGND
POCa
se0t
emp
PODGND
PODin1
PODin2
PODout2
POen
POEx
t Vin
POF00out
POF00out0filt
POF10out
POF10out0filt
POFS
POI10in
POI10out
POI20in
POI20out
POI30in
POI30out
POI40in
POI40out
POI50in
POI50out
POITEC
POIT
EC0f
ilt
POLref
POLsGain
POPhase
POpwm0
POpwm00filt
PORref
PORthEt
PORTHet0out
PORthLas
PORT
Hlas0o
ut
PORX1
PORX2
POSCLK1
POSCLK2
POSOA
POSS2
POtec0
POTIAet
POTI
Aet0
out
POTIAref
POTIAref0out
POTX1
POTX2
POVDD
Figura A.11: Esquemático de la placa madre.


Apéndice B
Placa de simulación de carga del láser
La placa de simulación de carga del láser fue diseñada e implementada para realizar
las pruebas iniciales de los circuitos de manejo y control del láser. Las principales
razones para construir dicha placa de simulación son las siguientes:
Vericar la existencia de picos de tensión en el encendido, funcionamiento y apa-
gado de los circuitos (especialmente considerando la alta sensibilidad del láser
ante dichos picos).
Vericar el correcto funcionamiento de los circuitos sin la necesidad de exponer
el láser a cualquier tipo de peligro ya sea por la manipulación del mismo (peligro
de descargas estáticas) u operación fuera del rango especicado por el fabricante.
Para simular la impedancia de las entradas del láser se realiza una medición de las
mismas. Para esto se hace un barrido de corriente en cada una de las cinco entradas del
láser (ganancia, SOA, 2 reectores y fase) y se registra el valor de la tensión en cada
punto. Una vez obtenida la impedancia en función de la corriente aplicada se procede a
buscar una combinación de componentes cuya impedancia sea próxima a la impedancia
medida. En la mayoría de los casos dicha combinación resultó ser un diodo en serie con
una resistencia. A continuación se muestran las curvas de impedancia de cada entrada
del láser. En cada caso se compara la impedancia medida en el láser con la impedancia
obtenida mediante el remplazo por componentes electrónicos (resistencias y diodos).
111

112 Placa de simulación de carga del láser
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0 1 6 00
2 0
4 0
6 0
8 0
1 0 0Im
peda
ncia
[Ω]
C o r r i e n t e [ m A ]
M e d i d o S O A D i o d o + R e s i s t e n c i a
Figura B.1: Impedancia de la entrada del SOA. Comparación medición en el láser y simulacióncon un diodo en serie a una resistencia.
0 2 0 4 0 6 0 8 0 1 0 00
2 0
4 0
6 0
8 0
1 0 0
1 2 0
Impe
danc
ia [Ω
]
C o r r i e n t e [ m A ]
M e d i d o g a n a n c i a D i o d o + R e s i s t e n c i a
Figura B.2: Impedancia de la entrada de ganancia del medio activo. Comparación mediciónen el láser y simulación con un diodo en serie a una resistencia.

113
0 1 0 2 0 3 00
5 0
1 0 0
1 5 0
2 0 0Im
peda
ncia
[Ω]
C o r r i e n t e [ m A ]
M e d i d o r e f l e c t o r e s D i o d o + R e s i s t e n c i a
Figura B.3: Impedancia de la entrada de los reectores. Comparación medición en el láser ysimulación con un diodo en serie a una resistencia.
0 2 4 6 80
2 0 0
4 0 0
6 0 0
8 0 0
1 0 0 0
Impe
danc
ia [Ω
]
C o r r i e n t e [ m A ]
M e d i d o f a s e 2 d i o d o s
Figura B.4: Impedancia de la entrada de la sección de fase. Comparación medición en el lásery simulación con dos diodos en serie.


Apéndice C
Interfaz para la comunicación con el
microcontrolador
El microcontrolador es el encargado de controlar el láser sintonizable, por lo que es
necesario crear una interfaz (HMI, Human Machine Inteface) que permita congurar los
parámetros del láser. Se diseñan dos interfaces HMI para la conguración y monitoreo
del láser. Estas son descritas a continuación.
La primera interfaz es implementada en un display con pantalla táctil. Este permite
visualizar y congurar los parámetros del láser mediante un puerto serie UART. La
gura C.1 muestra las pantallas diseñadas para el display. En la gura C.1a se muestra
la pantalla principal. En esta se visualizan las variables más importantes y se permite el
acceso a las demás pantallas. En la gura C.1b se muestra la pantalla de conguración.
En esta se puede ajustar la potencia y seleccionar el canal de emisión. Finalmente, en
la gura C.1c se muestra la pantalla de visualización de variables.
(a) (b) (c)
Figura C.1: Pantallas del display. (a) Pantalla principal. (b) Pantalla de conguración. (c)Pantalla de visualización de variables.
115

116 Interfaz para la comunicación con el microcontrolador
La segunda interfaz permite la conguración del láser mediante una computadora.
El software se comunica con el microcontrolador a través de un puerto serie virtual
y se utiliza el protocolo modbus para el intercambio de información. Los parámetros
transmitidos hacia la interfaz incluyen las corrientes aplicadas a las distintas secciones
del láser, las temperaturas medidas, las corrientes de los fotodiodos y el estado del
TEC. Los parámetros transmitidos desde la interfaz incluyen la potencia del láser y el
canal de la banda C seleccionado.
En la gura C.2 se ilustra la interfaz gráca diseñada. En la ventana principal se
muestra las variables mas importantes: potencia, temperatura, frecuencia, longitud de
onda y el canal seleccionado. Es también posible la visualización de variables tales
como las corrientes aplicadas al láser y el estado del TEC. Para ello se debe ingresar a
la opción Advanced.
Figura C.2: Interface de comunicación con el microcontrolador.

Agradecimientos
Agradezco a Fabián y Laureano por todo el tiempo y recursos que me brindaron
para lograr que este trabajo se complete.
A Pablo, Leo y Leo por su ayuda en el trabajo.
A mi familia por su apoyo desde la distancia.
Finalmente a FINISAR por el nanciamiento parcial para obtener el láser de semi-
conductor sintonizable.
117


Bibliografía
[1] Agrawal, G. P. Fiber-Optic Communication Systems. 978-0-470-50511-3, 4a edón.
Hoboken, New Jersey, USA: John Whiley & Sons, 2010. 1, 52
[2] Su, G. L., Wu, M. C. Widely tunable semiconductor lasers with three interfero-
metric arms. Optic Express, 25, 2017. 1
[3] Liu, F., Lin, Y., Liu, Y., et. al. Investigation into the phase noise of modulated
grating y-branch lasers. IEEE Journal of Selected Topics in Quantum Electronics,
23, 2017. 1
[4] Matsui, Y., Wesstrom, J. O., Liu, Y., et. al. Narrow linewidth tunable semiconduc-
tor laser. En: Compound Semiconductor Week (CSW) Includes 28th International
Conference on Indium Phosphide and Related Materials (IPRM) and 43rd Inter-
national Symposium on Compound Semiconductors (ISCS). 2016. 1
[5] Han, L., Liang, S., Xu, J., et. al. Dbr laser with over 20-nm wavelength tuning
range. IEEE Photonics Tecnology Letters, 25, 2016. 1
[6] C- band tunable laser with wavelength sweeping. https://www.oequest.com/
getDatasheet/id/10692-10692.pdf. Ultimo acceso a la pagina: 08-04-2019. 1,
20
[7] Milonni, P. W., Eberly, J. H. Laser Physics. 978-0-470-38771-9, 2a edón. Hoboken,
New Jersey, USA: John Whiley & Sons, 2010. 2
[8] Saleh, B. E. A., Teich, M. C. Fundamentals Of Photonics. 978-0-471-35832-9, 2a
edón. Hoboken, New Jersey, USA: John Whiley & Sons, 2007. 2, 3, 4, 5, 7, 9, 10,
24, 25, 29, 30, 31, 36
[9] Siegman, A. E. Lasers. 978-0935702118, revised edón. Mill Valley, California, USA:
University Science Books, 1986. 2
[10] Svelto, O. Principles of Lasers. 0-306-45748-2, 4a edón. New York, USA: Springer,
1998. 9
119

120 Bibliografía
[11] Thyagarajan, K., Ghatak, A. Lasers Fundamentals and applications. 978-1-4419-
6441-7, 2a edón. New York, USA: Springer, 2010. 10
[12] Duarte, F. J. Tunable Lasers Handbook. 0-12-222695-X. California, USA: Acade-
mic Press, Inc., 1995. 12
[13] Dutta, A. K., Dutta, N. K., Fujiwara, M. WDM Technologies:Active Optical
Components. 0-12-225261-6. California, USA: Academic Press, Inc., 2002. 12, 13,
14, 37
[14] Wesstrom, J. O., Hammerfeldt, S., Buus, J., Siljan, R., Laroy, R., De Vries, H.
Design of a widely tunable modulated grating y-branch laser using the additive
vernier eect for improved super-mode selection. En: IEEE 18th International
Semiconductor Laser Conference. 2002. 17, 25, 29
[15] CyOptics. S3500 Tunable Laser Module, 2007. 19, 25, 35, 36, 52, 56, 72, 74
[16] FINISAR. Controlling the S7500 CW Tunable Laser, 2011. 35, 36, 41
[17] Bennett, B., Soref, R., Del Alamo, J. Carrier-induced change in refractive index
of InP, GaAs and InGaAsP. IEEE Journal of Quantum Electronics, 26, 1990. 37,
40
[18] Weber, J. Optimization of the carrier-induced eective index change in InGaAsP
waveguides-application to tunable bragg lters. IEEE Journal of Quantum Elec-
tronics, 30, 1994. 39
[19] Schraud, G., Muller, G., Stoll, L., Wol, U. Simple measurement of carrier induced
refractive-index change in InGaAsP PIN ridge waveguide structures. Electronics
Letters, 27, 1991. 39
[20] Linear Technology. LT3092, 200 mA 2-Terminal Programmable Current Source.
46
[21] Linear Technology. LT3086, 40V, 2.1A Low Dropout Adjustable Linear Regulator
with Monitoring and Cable Drop Compensation. 46
[22] Burn Brown products from Texas Instruments. INA152 Single-Supply DIFFE-
RENCE AMPLIFIER, 2001. 47
[23] Texas Instruments. INA1x8 High-Side Measurement Current Shunt Monitor, 2014.
47
[24] Burn Brown products from Texas Instruments. OPA380, Precision, High-Speed
Transimpedance Amplier, 2003. 53

Bibliografía 121
[25] Linear Technology. LM7705, Low-Noise Negative Bias Generator, 2018. 54
[26] Burn Brown products from Texas Instruments. INA330, THERMISTOR SIGNAL
AMPLIFIER FOR TEMPERATURE CONTROL, 2002. 56, 57
[27] FINISAR. CW Tunable Laser Buttery Package S7500, 2015. 57
[28] Burn Brown products from Texas Instruments. TL4051, PRECISION MICRO-
POWER SHUNT VOLTAGE REFERENCE, 2007. 58
[29] Texas Instruments. DRV592, ±3-A HIGH-EFFICIENCY H-BRIDGE, 2007. 59
[30] Ogata, K. Modern Control Engineering. 0-13-615673-8, 5a edón. Upper Saddler
River, New Jersey, USA: Pearson Education, Inc., 2010. 63
[31] Ogata, K. Dicrete-Time Control Systems. 0-13-328642-8, 2a edón. Englewood
Clis, New Jersey, USA: Prentice-Hall International, Inc., 1995. 64, 79
[32] Franklin, G. F., Powell, J. D., Workman, M. L. Digital Control of Dynamic Sys-
tems. 0-201-33153-5, 3a edón. Menlo Park, California, USA: Addison Wesley Long-
man, Inc., 1998. 64, 85
[33] Union, I. T. Spectral grids for WDM applications: DWDM frequency grid. G.694.1.
ITU, 2012. 70, 72
[34] Sanz Morales, D. Maximum Power Point Tracking Algorithms for Photovoltaic
Applications. Master's thesis, Aalto University, Helsinky, Finlandia, 2010. 73