Modeling of Power Spectral Density using Correlated Double ...
147
1 Modeling of Power Spectral Density using Correlated Double Ring Channel Model with OFDM for High Mobility User on Vehicular Network Anggun Fitrian Isnawati 1 , Jans Hendry 2 , Wahyu Pamungkas 3 , Titiek Suryani 4 1,2,3 Fakultas Teknik Telekomunikasi dan Elektro Institut Teknologi Telkom Purwokerto, Indonesia 4 Department of Electrical Engineering, Faculty of Electrical Technology Institut Teknologi Sepuluh Nopember, Surabaya, Indonesia [email protected], [email protected], [email protected], [email protected] Abstract— Channel modeling using the correlated double ring concept on Vehicular Network communications systems has been developed previously. However, no such model has been incorporated into the OFDM multi-carrier system to simulate the effect of the transmitter and receiver velocity on the received signal quality. User velocity on the transmitter and receiver side produces a Doppler effect that damages the signal orthogonality on OFDM. In addition, the speed of the transmitter and receiver also affect the Power Spectral Density of the received signal. This paper used the Correlated Double Ring channel modeling to simulate the transmitter and receiver movement against the Power Spectral Density parameter with non-moving scatterers. The IFFT output of the OFDM transmitter b is consonant with the Channel Impulse Response (CIR) of the channel modeling output and coupled with the AWGN noise. Simulation is done by dividing the movement of sender and receiver into 3-speed regions, i.e. low speed, medium and high speed. Simulation results show the faster movement of the sender and receiver cause Doppler Shift larger and make the value of power spectral density parameters become getting muffled. Keywords—Doppler, OFDM, Power Spectral Density, Channel Impulse Response, Correlated Double Ring. I. INTRODUCTION Modeling mobile user movement between the transmitter and the recipient (mobile to mobile) has been widely used in wireless-based communications systems. One paper that dealt with this model used urban and suburban areas. The modeling used the probability density function (PDF) parameter of the received signal envelope, spatial correlation function, and power spectral density (PSD) of complex envelope signals on the receiving end. The result of this model shows that the channel will act as a symmetrical Narrow-band Gaussian Process on its spectrum [1]. Furthermore, the same authors developed the modeling with different parameter statistical properties, i.e., level crossing rate (LCR), automatic fade duration (AFD), PDF of random (FM), power spectrum from random FM, and the expected number of crossings of the random phase and random FM of the channel. The results show that the LCR value increases with the parameter ( ) 2 2 1 1 / V V + and the AFD value decreases with the same parameter factor [2]. One of the channel modeling used to model radio communication channels, especially the frequency nonselective Rayleigh fading channels, is Jake's model. Furthermore, Xiao Chengsan developed Rician fading channel modeling with a stochastic sinusoid zero-mean pattern under LOS conditions. This modeling differs from the previous modeling which assumes that the signal received in the Rician Fading Channel condition always has a non-zero-mean stochastic sinusoid pattern [3]. Furthermore, the same author also developed Rician Fading Channel with the pattern of a pre-chosen angle of arrival and a random initial phase. The results show that the parameters of the autocorrelation function, PDF from the signal envelope and LCR approximate the theoretical value even though the sum of the sinusoidal signal is infinite [4]. The mobile transmitter and receiver movement concerning the number of surrounding reflecting factors also developed by [5]. The transmitter and receiver regions were modeled like a ring that correlates with each other. The correlation modeled in the paper was the scatterer correlation of the same number and characteristics between the transmitter and receiver. The parameters of the autocorrelation function and PDF were based on the number of reflections on the transmitter and receiver side with
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of Modeling of Power Spectral Density using Correlated Double ...

1
Modeling of Power Spectral Density using
Correlated Double Ring Channel Model with
OFDM for High Mobility User on Vehicular
Network
Anggun Fitrian Isnawati1, Jans Hendry2, Wahyu Pamungkas3, Titiek Suryani4 1,2,3 Fakultas Teknik Telekomunikasi dan Elektro
Institut Teknologi Telkom
Purwokerto, Indonesia 4Department of Electrical Engineering, Faculty of Electrical Technology
Institut Teknologi Sepuluh Nopember,
Surabaya, Indonesia
[email protected], [email protected], [email protected], [email protected]
Abstract— Channel modeling using the correlated
double ring concept on Vehicular Network
communications systems has been developed previously.
However, no such model has been incorporated into the
OFDM multi-carrier system to simulate the effect of the
transmitter and receiver velocity on the received signal
quality. User velocity on the transmitter and receiver
side produces a Doppler effect that damages the signal
orthogonality on OFDM. In addition, the speed of the
transmitter and receiver also affect the Power Spectral
Density of the received signal. This paper used the
Correlated Double Ring channel modeling to simulate
the transmitter and receiver movement against the
Power Spectral Density parameter with non-moving
scatterers. The IFFT output of the OFDM transmitter b
is consonant with the Channel Impulse Response (CIR)
of the channel modeling output and coupled with the
AWGN noise. Simulation is done by dividing the
movement of sender and receiver into 3-speed regions,
i.e. low speed, medium and high speed. Simulation
results show the faster movement of the sender and
receiver cause Doppler Shift larger and make the value
of power spectral density parameters become getting
muffled.
Keywords—Doppler, OFDM, Power Spectral Density,
Channel Impulse Response, Correlated Double Ring.
I. INTRODUCTION
Modeling mobile user movement between the transmitter and the recipient (mobile to mobile) has been widely used in wireless-based communications systems. One paper that dealt with this model used urban and suburban areas. The modeling used the probability density function (PDF) parameter of the received signal envelope, spatial correlation function, and power spectral density (PSD) of complex envelope signals on the receiving end. The result of this model shows that the channel will act as a symmetrical Narrow-band Gaussian Process on its spectrum [1].
Furthermore, the same authors developed the modeling with different parameter statistical properties, i.e., level crossing rate (LCR), automatic fade duration (AFD), PDF of random (FM), power spectrum from random FM, and the expected number of crossings of the random phase and random FM of the channel. The results show that the LCR value
increases with the parameter ( )2
2 11 /V V+ and the
AFD value decreases with the same parameter factor [2].
One of the channel modeling used to model radio communication channels, especially the frequency nonselective Rayleigh fading channels, is Jake's model. Furthermore, Xiao Chengsan developed Rician fading channel modeling with a stochastic sinusoid zero-mean pattern under LOS conditions. This modeling differs from the previous modeling which assumes that the signal received in the Rician Fading Channel condition always has a non-zero-mean stochastic sinusoid pattern [3]. Furthermore, the same author also developed Rician Fading Channel with the pattern of a pre-chosen angle of arrival and a random initial phase. The results show that the parameters of the autocorrelation function, PDF from the signal envelope and LCR approximate the theoretical value even though the sum of the sinusoidal signal is infinite [4].
The mobile transmitter and receiver movement concerning the number of surrounding reflecting factors also developed by [5]. The transmitter and receiver regions were modeled like a ring that correlates with each other. The correlation modeled in the paper was the scatterer correlation of the same number and characteristics between the transmitter and receiver. The parameters of the autocorrelation function and PDF were based on the number of reflections on the transmitter and receiver side with

2
unequal Rician Factor (K) values were used, these parameters were also used in validation and accuracy test. However, the simulated transmitter and receiver movement in the paper only accommodated for slow user movement resulting in a small Doppler effect.
The same author developed further modeling by testing the validity and accuracy of the system through different statistical parameters. High order statistic parameters such as level crossing rate and automatic fade duration (AFD) were used to test the validity and accuracy of correlated double ring modeling. In addition, the validity test was done in the single ring on the transmitter side only or the recipient only with results that could approach the theoretical values [6].
The correlated double ring channel for V2V applications is then developed by adding a moving scatter. The simulation results show different ACF parameters for near and far scattering with the transmitter and receiver [7]. Nevertheless, this modeling has not been developed further to be combined with multi-carrier. Afterwards, this double ring channel modeling is combined with a layered ellipse model to illustrate the bounced signal paths [8]. Real traffic density is used to simulate vehicle movement and Doppler effects. Next, Power Spectral Density parameter is determined to know the effect of Inter-Carrier Interference (ICI) due to the dynamic Doppler spectrum on OFDM. The phenomenon of ICI is overcome by Phase Rotated Aided (PRA) method compared with the previous method that is Pre Coding Based Cancelation (PBC).
This paper used the correlated double ring modeling applied to the vehicular network with a high transmitter and receiver mobility and the static surrounding reflective object. To authors’ best knowledge, the use of correlated double ring channel modeling combined with multi-carrier OFDM has never been done before. The high transmitter and receiver mobility generates a large Doppler effect that may affect the orthogonality of the carrier signal used in multi-carrier OFDM. The Doppler effect validity test on a high transmitter and receiver mobility using correlated double ring channel with result approaching the theoretical values [9]. The same author also validates the Rayleigh and Rician distribution conditions at low speeds up to high speed with valid results. The OFDM parameters used to conform to the IEEE 802.11p specification as a technology standard for vehicle ad-hoc network (VANET). Furthermore, the channel impulse response parameter is determined by assuming the ring diameter on the transmitter and receiver to be very small compared to the distance between the transmitter and receiver. At the receiving end, for various transmitter and receiver velocities, the spectral density power parameter is determined to see the effect of velocity on the power density values.
The next sections of this paper will be divided as follows. Chapter II discusses the channel modeling characteristics using the correlated double ring, Chapter III contains the concept of combining the
channel with OFDM, Chapter IV presents the results and analysis, and Chapter V presents the conclusions.
II. SYSTEM MODEL
Channel modeling in this study used the correlated double ring combined with OFDM. The correlated double ring channel modeling is usually applied to a single carrier, but this study applied it to a multi-carrier system to accommodate multi-user condition. The correlated double ring model for high mobility user communications on the vehicular network can be described as follows:
N
Scatterers
M
ScatterersScattering paths
LOSTX RX
V1 V2
ᶱ ψ
Figure 1. Model of V2V communication using correlated double
ring channel
Figure 1 shows the mobile-to-mobile
communication system where the transmitter and
receiver move at the velocity of V1 and V2. There are
N and M scatters spread surrounding the transmitter
and the receiver. Parameter n shows the angle of V1
and the path of the n-th scattering, with n = 1, 2, 3…,
N. Meanwhile, m is the angle of arrival between V2
and the m-th scattering path, with m = 1, 2, 3…, M.
The n and m are assumed to be independent and
uniformly distributed in the range of [-π,π). The LOS
component gives the high correlation between the
transmitter and the receiver. Therefore, the cellular-to-
cellular scattering channel model is named the
Correlated Double Ring channel model.
LOS
shift
ᶱdiff
ᶱsend
V1 V2 V2
TX RX
LOSᶱ31diff
θ'
V1
-V2
TX
V3
Figure 2. Definition of the angle parameters
Figure 2 displays the relative velocity of a transmitter
V3 after the receiver’s speed is reduced to zero. As
can be seen in Figure 2, ' is the angle between V3
and the LOS component. The V3 relative velocity can

3
be derived using geometry and trigonometry as
follows:
( )( ) ( )( )2 2
3 1 2 1.cos .sindiff diffV V V V = − + (1)
'
31send diff = + (2)
2 2 21 1 3 2
31
1 3
cos2 .
diff
V V V
V V − + −
= (3)
V1 and V2 are the respective transmitters and receiver
velocity at M2M. diff
the parameter is the angle
between V1 and V2 vectors; send is the angle
between the V1 vector and the LOS component;
31diff is the angle between V3 and V1 vector.
Therefore, the LOS component can be formulated as
follows:
( )( )( )'3 0exp 2 cosLOS K j f t = +
(4)
K is the ratio of the specular power to the scattering
power while 0 is the initial phase that is equally
distributed at [-π, π).
Initially, in the implementation of correlated double ring scattering model, Rayleigh fading channel in M2M is calculated based on the following formula:
( ) ( ) ( )( )( ),
1 2
, 1
1exp 2 cos 2 cos
N M
n m nm
n m
Y t j f t f tNM
=
= + +
(5) 11
vf
= and 2
2
vf
= are the maximum Doppler
frequencies generated from the Tx and Rx mobility, N and M are the numbers of scatterers surrounding Tx
and Rx, nm is the independent random phase that is
uniformly distributed in the range of [-π, π), with
2
4
nn
n
N
− +=
(6)
and
( )2 2
4
m
m
m
M
− +=
(7)
With n and m are independent and uniformly
distributed in the range of [-π,π). The antenna is assumed to be an omnidirectional antenna with isotropic scattering. Due to the total independent path of NM, then the total Doppler frequency in the receiver is the total Doppler frequency induced by Tx and Rx mobility on each path. The complex autocorrelation method can be formulated as follows.
( )( ) ( )0 1 0 22 2
2YY
J f J fR
=
(8)
0 (.)J is the zero-order Bessel function. The
Rayleigh equation and the LOS component are used to formulate the Rician fading channel method as follows.
( )( ) ( )( )( )'
1 0exp 2 cos
1
Y t K j f tZ t
K
+ +=
+ (9)
III. CORRELATED DOUBLE RING CHANNEL MODEL
WITH MULTI-CARRIER OFDM
A. OFDM
Orthogonal frequency division multiplexing (OFDM) is a special technique of multi-carrier modulation which is transmitted through several subcarriers with low symbol rate. Bandwidth efficiency is obtained by overlapping subcarrier and utilizing the orthogonality properties between subcarriers. Orthogonality between subcarriers will not cause interference problems because the frequency of each subcarrier is harmonic. OFDM is built using multiple subcarriers which are obtained by generating some oscillator frequency. Generation of the oscillator in a great quantity to realize an OFDM will cause complexity in hardware implementation. Therefore, to simplify the problem, the FFT/IFFT technology is added to the OFDM communication system.
Serial to
Parallel
(S/P)
Modulation IFFT
Cyclic
Prefix
(CP)
Parallel to
Serial
(P/S)
Noise
Correlated
Double
Ring
Channel
Serial to
Parallel
(S/P)
Remove
Cyclic
Prefix
(CP)
FFTDe-
modulation
Parallel to
Serial
(P/S)
Input
Output
Figure 3. OFDM using correlated double ring channel model
The use of correlated double ring channel model on OFDM is intended to accommodate the user's mobility on both the transmitter and receiver and the presence of a scatterer factor. Figure 3 shows the use of correlated double ring on OFDM for vehicular communication. The type of modulation used in this simulation is QPSK with 4 subcarriers and 256 bits of transmitted data. This signal is then transformed in the time domain using IFFT and adding some bits as Cyclic Prefix. When the signal mix with the channel it will be exposed to a disturbance noise AWGN.
In multi-carrier OFDM, the IFFT output signal
that will be integrated is:
( ) ( )1
0exp 2
Nkk
s t X j k ft=
== −
(10)
with N is the number of IFFT nodes, Xk is the symbol
data, and f is frequency.
4
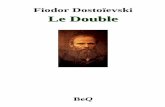
B. Channel Impulse Response
If the complex envelope value Z(t) in Equation (9) is elaborated to the real and imaginary parts, then the resulting equation is as follows:
( ) ( ) ( )Z t x t jy t= + (11)
with x(t) is the real part while y (t) is the imaginary
part. The absolute value of the complex envelope can
be calculated using the following equation:
2 2( ) ( ) ( ) ( )R t Z t x t y t= = + (12)
Meanwhile, the phase angle is:
1 ( )tan
( )t
y t
x t − =
(13)
Therefore, the real, imaginary, and absolute parts
can be expressed as follows:
( )( ) Re ( ) ( )cos tx t Z t R t = = (14)
( )( ) Im ( ) ( )sin ty t Z t R t = = (15)
( ) ( ). tjZ t R t e
= (16)
Determining the channel impulse response value
for the above channel condition can be done using the
following equation:
( ) ( )1
, ( ) . k
Nj
k
k
h k R t e
=
= − (17)
The obtained channel impulse response values
are used to determine the received signal value after
the signal is convoluted with s(t) as the output of
IFFT OFDM as follows:
*( ) ( ) ( ) ( )G t s t R t n t= + (18)
with n(t) is the AWGN noise added to the
channel. Power spectral density of received signal
G(t) can be calculated as follows:
221
( ) lim ( )2
T j ftx TT
S f E G t e dtT
−
−→
=
(19)
IV. SIMULATION RESULTS
Predetermined parameters in this study are shown
in Table 1 as follows: Table 1. Simulation Parameters
Parameters Value
Carrier Frequency 5.8 GHz
Number of Scatterers 3
Intial Phase 0°
K 2.5
Bandwidth 40 MHz
Sampling Frequency 100 Hz
Transmitted Data 64 bit
Modulation QPSK
No of Sub Carriers 4
The simulation results were focused on the velocity change and the effect on power spectral
density (PSD) of the transmitted signal. The study was classified into three user’s velocity scheme, i.e., low, medium, and high velocity as depicted in Table 2. The angle of the direction of V1 and V2 is set 10º. This classification of speed is adopted from [10] to represent the condition of urban and suburban driving behavior in busy hours and less traffic jam.
Table 2. The study schemes based on the user velocity
Scheme Type Velocity (km/hour) 1 Low 5 10 15
2 Medium 30 40 50
3 High 60 80 100
The simulation results of the three schemes are displayed in Figures 4 – 6.
Figure 4 depicts the PSD of a signal transmitted in the low-velocity scheme. As can be seen in Figure 4, the 5 km/hour velocity had the highest PSD compared with 10 km/hour and 15 km/hour velocity, with the number reached 3.31 dB/Hz. As frequency increased until 13 Mhz, the PSD of 10 km/hour decreased linearly until -18 dB/Hz then slowly increased in frequency 15 MHz. Meanwhile, the other two schemes keep decreasing in PSD as the frequency increased.
Figure 4. PSD of signals transmitted in the low-velocity
Meanwhile, Figure 5 displays the PSD of a signal transmitted in the medium-velocity scheme. As shown in Figure 5, the 30 km/hour velocity had the highest PSD compared with 40 km/hour and 50 km/hour velocity, with the number reached -0.1655 dB/Hz. All the schemes velocity decreases when the frequency higher, and for the scheme velocity 30 km/hour and 50 km/hour are slowly increasing starts from frequency 13 MHz.

5
Figure 5. PSD of signals transmitted in the medium velocity
Figure 6 shows the PSD of a signal transmitted in the high-velocity scheme. As can be seen in Figure 6, the 60 km/hour velocity had the highest PSD compared with 80 km/hour and 1000 km/hour velocity, approximately -3.448 dB/Hz. All of the schemes of velocity tend to decrease in PSD when the frequency is getting higher until reach one point of frequency and go back up. Scheme velocity 60 km/hour and 80 km/hour tend to go back up frequency 15 MHz, and another scheme tends to raise in PSD when reaching frequency 11 MHz.
Figure 6. PSD of signals transmitted in the high velocity
The implementation of the correlated double ring in this study was related to the varied velocity schemes. The results obtained in each velocity scheme are displayed in Table 3.
Table 3. The comparison of PSD based on user’s velocity
Scheme Type Velocity (km/hour)
PSD (dB/Hz)
1 Low 5 3.31
2 Medium 30 -0.1655
3 High 60 -3.448
Table 3 shows that as the user’s velocity increased, the generated PSD was decreased or damped. This is caused by the higher Doppler effects that occur.
Figure 7. PSD of the signals transmitted on the three schemes
The results are displayed in the graphic form as can be seen in Figure 7, which compares the PSD of signals transmitted on the three schemes. The results show that the low-velocity scheme, represented by the 20 km/hour velocity had the highest PSD compared to the medium (60 km/hour) and high (100 km/hour) velocity schemes.
V. CONCLUSIONS
The correlated double ring channel modeling on the vehicular network communication system has been described and integrated with multi-carrier OFDM for a various transmitter and receiver velocity. The power spectral density shows valid results for three velocity schemes, which was low, medium, and high velocity. The results show that the user’s velocity is inversely proportional to the PSD value because the users with high velocity will receive higher Doppler effects than the users with low velocity.
FUTURE WORK
In this stage, the channel model used in V2V communication was determined. In the future, Power Spectral Density as the result of this study will be used further to determine the performance parameters which are SNR (signal to noise ratio), BER (bit error rate), and channel capacity. Furthermore, providing a solution to the substandard performance, for example, noise or interference mitigation, Doppler effects, and beamforming are also becoming our concern.
REFERENCES
[1] C. Channel, “A Statistical Model of Mobile-to-Mobile
Land,” vol. V, no. 1, pp. 2–7, 1986.
[2] A. S. Akki, “Statistical Properties of Mobile-to-Mobile
Land Communication Channels Vff ;,” vol. 43, no. 4, pp.
826–831, 1994.
[3] C. Xiao, Y. R. Zheng, and N. C. Beaulieu, “Statistical
simulation models for Rayleigh and Rician fading,”
Commun. 2003. ICC ’03. IEEE Int. Conf., vol. 5, pp.
3524–3529, 2003.
[4] C. Xiao and Y. R. Zheng, “A Statistical Simulation
Model for Mobile Radio Fading Channels,” 2003.
[5] L. Wang and Y. Cheng, “A Statistical Mobile-to-Mobile
Rician Fading Channel Model,” Veh. Technol. Conf., vol.
00, no. c, pp. 63–67, 2005.
[6] L.-C. Wang, W.-C. Liu, and Y.-H. Cheng, “Statistical
Analysis of a Mobile-to-Mobile Rician Fading Channel
Model,” IEEE Trans. Veh. Technol., vol. 58, no. 1, pp.
32–38, 2009.

6
[7] S. Yoo, “An improved temporal correlation model for
vehicle-to-vehicle channels with moving scatterers,” in
2016 URSI Asia-Pacific Radio Science Conference,
2016, p. 2.
[8] X. Cheng, Q. Yao, M. Wen, C. X. Wang, L. Y. Song,
and B. L. Jiao, “Wideband channel modeling and
intercarrier interference cancellation for Vehicle-to-
Vehicle communication systems,” IEEE J. Sel. Areas
Commun., vol. 31, no. 9, pp. 434–448, 2013.
[9] W. Pamungkas and T. Suryani, “Correlated Double Ring
Channel Model at High Speed Environment in Vehicle to
Vehicle Communications,” Int. Conf. Inf. Commun.
Technol., pp. 600–605, 2018.
[10] W. Alasmary and W. Zhuang, “Ad Hoc Networks
Mobility impact in IEEE 802 . 11p infrastructureless
vehicular networks,” Ad Hoc Networks, vol. 10, no. 2,
pp. 222–230, 2012.
7
Clustering and Classification of Twitter
Indonesian Text Status to Capture Corruption
Commission Performance Opinion
Aviv Yuniar Rahman1, Istiadi1, Feddy Wanditya Setiawan2, April Lia Hananto3,4 1Department of Informatics Engineering, Universitas Widyagama, Malang, Indonesia
2Department of Automotive Mechanical Technology, Politeknik Hasnur, Barito Kuala, Indonesia 3Faculty of Computing, Universiti Teknologi Malaysia, Skudai Johor, Malaysia
4Faculty of Technology and Computer Science, Universitas Buana Perjuangan, Karawang, Indonesia
[email protected], [email protected], [email protected], [email protected]
Abstract—Indonesia's corruption commission laws on
corruption every period of government are evaluated to
support a better eradication of corruption. The revision of
the law for corruption eradication committees is based
solely on the input of the legislature. The community is
not given space to provide input for revision of the anti-
corruption commission law. Therefore, We propose
performance measurement for corruption eradication
committees using twitter text status with K-Means based
and Support Vector Machine (SVM). So the opinions of
the public on the twitter text status can be used for input
to the legislature in the measurement of performance.
Twitter status text data used in the performance
measurement of corruption binding commissions in the
case of new building KPK as much as 19880. The method
used to measure performance is K-Means and Support
Vector Machine (SVM). Accuracy results obtained by K-
Means by 87% support and 13% reject the new building.
The best SVM classification accuracy is 91.93% at 90:10
split ratio. So the corruption commission is still
performing well and revision of legislation is not required
based on K-Means and SVM measurement results in the
case of twitter status of new building.
Keywords—measurement; eradication of corruption;
twitter text; k-means; svm
I. INTRODUCTION
KPK are urgently needed in the State of Indonesia
[1][2][3]. since corruption cases found after the 1998
reforms are numerous [3]. KPK was founded on
demands for reform in 2003 and its supporting legislation [4][5] was established. Every turn of the
government period, KPK laws had changed [6].
Evaluations were made to produce better performance
of KPK [6]. Over time, much of the performance of
KPK has been weakened [7]. due to reform of KPK
based on input only from the House of Representatives,
government, social institutions and the political
interests of a group [8].
Every corruption case found by the KPK will be
publicly announced [9][10][11]. Many people are
responding through social media accounts like Twitter
[12][13][14]. Opinions of people are diverse, some are
supportive and some are counter on Twitter statuses
[15][16][17]. This research uses the case of opinion of
new building of KPK. Daily Twitter status data multiply
with public opinion about corruption [18]. For
clustering and classification of the Twitter text statuses
requires a method [19][20][21][22]. Therefore, we propose K-Means and Support Vector Machine (SVM).
K-Means is used to categorize Twitter text status data
automatically [23][24][25]. While SVM is used for the
classification of Twitter text [26][27][28].
The results of K-means clustering are used to measure
the performance of KPK based on public opinion on
Twitter. So the clustering results are used for
classification training data. This research uses SVM to
classify Twitter's status sentiments against the topic of a
new building of KPK.
II. RELATED WORKS
This section describes the research that has been
achieved in previous research. Related research contains
an explanation of KPK and methods used to process
twitter text status data to resolve this research problem.
A. Corruption Eradication Commission (KPK)
The country of Iraq has a major challenge to
corruption. Law enforcement officers try to solve this
problem, but the result is less than the maximum. Information technology is present to overcome the
problem of corruption with Open Government Data
notation. The proposed system for government policy on
data becomes more transparent to the public thereby
reducing corruption in the Iraqi state [29].

8
Figure 1: The performance measurement system of KPK
B. Twitter Text Clustering
Twitter text sentiment analysis is faster using
clustering because the results obtained maximum
without the need to create training data first with K-
means optimization [19]. Twitter text status
sentiments are often encountered every day on
Twitter. Topics covered vary according to current
issues. The result of sentiment on a particular topic
is positive or negative [23]. In addition, clustering
twitter has the advantage to connect tweets based on
polarity and subjectivity [30]. Tweet clustering can be used for geotagging information [31].
C. Twitter Text Classification
The classification of Twitter text status is
required for identification, extraction,
characterization and filtration the system on data
that has not been processed [32]. The methods
usually proposed for the classification of Twitter
text status are Naive Bayes, Support Vector
Machine (SVM), and Maximum Entropy (MaxEnt)
to improve the most important classification
accuracy in text feature selection [21]. In addition, there is a method for detecting Twitter status topics
based on a score matrix. This method is called a
dynamic matrix to reduce faster computation time
[22].
III. RESEARCH METHODOLOGY
Figure 1 is a picture of the performance
measurement system of KPK proposed in this study.
The system has eight sections consisting of Twitter
Status Data, Tokenization, Stopword, Stemming, Weighting Words, K-means, SVM and Evaluation.
Each part of the system will be described in
subsequent chapters.
A. Twitter Status Data
Twitter statuses were taken from the process of adding
data on the scraperwiki page. Twitter status data contains
the theme of the corruption eradication commission.
Collecting Data was done by entering the keyword of new
building of corruption eradication commission. The data
obtained as much as 19880 twitter status.
B. Tokenization
Tokenization is the process used to cut the status of
Twitter into every word. The result of the tokenization
process is stored in the array. Tokenization is used for subsequent pre-processing.
C. Stopword
Stopword is used to remove word features that are
considered not to affect clustering or classification results
on Twitter statuses. The dictionary used for the stopword
process is referring to the lucene library. The omitted word
feature consists of a subject or a conjunctive word.
D. Stemming
Stemming is part of pre-processing to take the word base
on Twitter statuses. The related word is considered not to affect clustering results or better classification. In addition
to this, stemming is used to minimize the number of word
features used. So when using stemming process pre-
processing time is faster.
E. Word Weighting
Word weighting is a major part of the proposed system.
Word weighting is used to convert words into numeric
form. The method used to convert text to numerical form
in this research is the term (tf) of the word i in document j
as in Eq.1, term Invers Document Frequency (tf-IDF) in Eq.2, Term Frequency Inverse Document Frequency (TF-
IDF) on Eq.3. Parameter |D| is the total amount of the
document file. For parameter |d:Wiɛd| in the inverse
document frequency is the number where the document
(term/word) Wi appears.
Word
Weighting
K-means Evaluation SVM
Status Data
Pre-
Processing
Tokenization
Stopword
Stemming

9
Table 1
The result of cluster testing of twitter status
Weighting
Method
Twitter Data Without Pre-Processing
Full Data Cluster
SSE 0 1
tf 19880
(100%)
570
( 3%)
19310
( 97%)
67347.43
tfIDF 19880
(100%)
570
( 3%)
19310
( 97%)
67347.43
TFIDF 19880
(100%)
17249
( 87%)
2631
( 13%)
34934.03
Table 2
The result of cluster testing of twitter status with stopword
Weighting
Method
Twitter Data Through Stop Word
Full Data Cluster
SSE 0 1
tf 19880
(100%)
570
( 3%)
19310
( 97%)
56279.60
tfIDF 19880
(100%)
570
( 3%)
19310
( 97%)
56279.60
TFIDF 19880
(100%)
1027
( 5%)
18853
( 95%)
30027.43
jiji Wotf = ()
|:|
||log
dwd
DtftfIDF
i
jiji
= ()
|:|
||log
dwd
D
tf
tftfIDF
ii ji
ji
ji
= ()
F. K-means
K-means is used for the clustering process of this
system because of the data status of Twitter mined a
number of 19880. This much data requires the process
of grouping status to support or refuse in the case of a
new building of KPK. Eq.4 is the K-means equation used for clustering. Parameter K is a clustered output
symbol, fxn is centroid center, fyn is a word feature of
Twitter text status. K-means clustering results into
clusters 0 and cluster 1. Clustering results require
interpretation with the help of humans containing
support or rejection of new buildings. K-means result
data is used for training data on SVM process.
22
22
2
11 ..min nn fyfxfyfxfyfxK −++−+−=
()
G. SVM SVM is used for the Twitter text classification process
that consists of supporting or rejecting a new building.
SVM is part of the supervised learning process. SVM
works by using data training and testing. Training data is
taken from K-means. Data testing with a ratio of 10-
90% of the 19880 total data tested.
Table 3
The result of cluster testing of twitter status with stop word and
stemming
Weighting
Method
Twitter Data Through Stop Word and Stemming
Full Data Cluster
SSE 0 1
tf 19880
(100%)
570
( 3%)
19310
( 97%)
45424.95
tfIDF 19880
(100%)
570
( 3%)
19310
( 97%)
45424.95
TFIDF 19880
(100%)
1198
( 6%)
18682
(94%)
23900.54
Table 4
The result of manual evaluation
Twitter Data with Manual Evaluation
Full Data Cluster
Rejected Supported
19880
(100%)
3269
( 16.44%)
16611
( 83.56 %)
Eq.5. is an SVM equation that has parameters Eq.5 is an
SVM equation that has parameters for optimization,
K( iX , jX )= ( ) ( )ji XX is a linear kernel and b
is a constant.
( ) ( ) bXXxf ji += )( ()
H. Evaluation
Evaluations used to measure the performance of the
corruption eradication commission consist of Error Sum
of Squares (SSE) and accuracy. SSE is used to measure
performance in the clustering process of twitter status
using K-means. While the classification of Twitter text
using accuracy. Eq.6 is an equation for measuring the
performance results of clustering based on K-means.
Eq.7 is used for evaluation of SVM-based Twitter
classification accuracy.
=
−=n
i
ni xxSSE1
2)( ()
iiii
iii
FNFPTNTP
TNTPAc
+++
+= ()
SSE has parameter xi called observation value, while
xn is mean. The output of accuracy (Ac) with parameters TP, TN, FP, and FN. TP is true positive value of
supporting new building, while TN is true negative
value from rejecting new building. For FP is the false
positive value of supporting the new building, whereas
FN is the false negative value of rejecting the new
building.

10
Figure 2: The result of the classification of Twitter status using the
weighting method tf
IV. RESULT AND DISCUSSION
Table 1 is the result of cluster testing of Twitter text
status without pre-processing. Twitter text statuses
were tested with three weighting methods consisting
of tf, tfIDF and TFIDF. The number of Twitter Text
statuses tested in this table 1 is 19880 tweets. Twitter
text statuses were grouped as much as two, which
consists of supporting and rejecting new building of
KPK automatically. The result of grouping Twitter
text status consists of 0 and 1. To interpret the support
or reject twitter statuses required manual interpretation. For number 0 after reading is rejected
new building, while number 1 is supporting new
building for method of weighting tf and tfIDF. While
the interpretation of TFIDF levers method is the
opposite, the number 1 is to support the new building,
while the number 0 is to reject the new building. The
evaluation applied to test this system used SSE. The
result of the evaluation that has the largest SSE on the
tf and IDF weighting method is 67347.43, while the
smallest SSE when using TFIDF method is 34934.03.
The next Twitter text statuses test is with pre-
processing stop word in Table 2. Twitter text statuses via stop word process were tested by three weighting
methods consisting of tf, tfIDF and TFIDF. The
number of Twitter text statuses tested with the stop
word process as much as 19880 tweet. Twitter text
statuses were grouped as much as two that consists of
supporting and rejecting new buildings. The test
results shown in Table 2, the numbers 0 and number 1
are the result of automatic grouping, which consists of
supporting new or rejected buildings. The result of the
manual interpretation by reading for the number 0 is
to reject the new building, while the number 1 is in favor of the new building. The result of evaluation
using SSE shows that the method of weighting tf and
tfIDF is bigger than TFIDF. The value of tf and tfIDF
is 56279.60, while the TFIDF value is 30027.43.
Twitter text statuses were tested with pre-processed
stopword and stemming in Table 3. The weighting
method for testing clustering of Twitter text statuses
consists of tf, tfIDF, and TFIDF. Clustering consists
of supportive status of new or rejected buildings. The results from Table 2 show the numbers 0 and 1. For
the number 0 is the Twitter text statuses that rejected
the new building,
Figure 3: The result of the classification of Twitter status using the
weighting method tfIDF
while the number 1 is in favor of the new building.
The amount of data used in this third test is 19880
tweets. The smallest SSE result when using the
TFIDF weighting method is 23900.54, while the
largest SSE result when using the tf and tfIDF method
is 45424.95. The clustering result using pre-
processing stop word and stemming is better than pre-processing only using stop word or without using pre-
processing.
Clustering test results on Twitter text statuses in
Table 1, Table 2 and Table 3 is to measure the
performance of KPK policy by unsupervised learning.
Table 1 results show the percentage of supporting new
KPK’s building is 87% -97%, while those who refuse
new building is 6% -13%. For the results of Table 2 it
is apparent that the public tends to support the new
KPK’s building of 95% -97%, while those who reject
the new building are 3% -5%. Furthermore, for the
results of Table 3 shows that Twitter text statuses to support the new KPK’s building of 94% -97%, while
those who refused the new building of 3% -6%.
Opinion evaluation of Twitter text statuses with
manual way is by reading per tweet. The results of
manual evaluation in Table 4 shows that Twitter
statuses supported the new KPK’s building amounted
to 83.56%, while those who rejected the new building
amounted to 16.44%. The result of manual evaluation
on clustering process of Twitter statuses opinion
shows that Table 1 is closer to the result of manual
evaluation, but for the smallest SSE value in Table 3 with TFIDF weighting method.
Clustering results of Twitter text statuses are used
for training data in the classification process using

11
SVM. The classification of Twitter text status using a
comparison of split ratio training with testing of
(10:90)% to (90:10)%. Classification testing of
Twitter text statuses in Figure 2 is with Twitter
statuses without pre-processing, Twitter text statuses via pre-processing stop word, twitter text statuses via
pre-processing stop word and stemming. The result of
Twitter text classification accuracy shows that when
comparison of training with testing at 90:10 split ratio,
maximum accuracy result is 91.30% without going
through pre-processing.
Figure 4: The result of the classification of Twitter status using the
weighting method TFIDF
Testing text classification of Twitter through pre-
processing stop word has seen maximum of 91.37% at 90:10 split ratio. Testing of subsequent Twitter text
classification was via pre-processing stop word and
stemming. Maximum accuracy results of 91.25%
through pre-processing stop word and stemming at
50:50 split ratio.
Twitter text statuses were further tested by tfIDF
weighting method with variations of twitter text
statuses without pre-processing, Twitter text status via
stop word, and Twitter text status via stop word and
stemming. Twitter text statuses were tested with split
ratio training variation compared with testing from 10:90 to 90:10. The result of classification testing of
twitter text statuses with variation without pre-
processing is seen in split ratio training compared to
90:10 testing, 90.60% accuracy. The next attempt to
classify the text of Twitter with pre-processing
variation was via stop word with split ratio training
compared to testing is 90:10 to 10:90. The results of
testing the classification of Twitter text statuses with
variations of pre-processing through the stop word
appeared a maximum accuracy of 90.73 at 90:10 split
ratios. For testing the next classification of Twitter statuses were with variations of pre-processing stop
word and stemming. The results of testing the
classification of Twitter statuses with split ratio
training compared to testing of 90:10 to 10:90
appeared optimum accuracy of 91.93% at 90:10 split
ratio through pre-processing stop word and stemming.
The test result of the tfIDF weighting method can be
seen in Figure 3.
The next Twitter statuses classification test used
TFIDF weighting method with variations of Twitter text status without pre-processing, Twitter text status
via stop word and Twitter text statuses via stop word
and stemming. The experimental variations as in the
previous classification tests on Figure 2 and Figure 3
are with the ratio of split ratio training and testing of
90:10 to 10:90. The results of accuracy testing
classification of Twitter text statuses with variations
without pre-processing of 91.53% at 90:10 split ratios.
The result of maximum accuracy of subsequent
Twitter text classification with variation of pre-
processing stop word is 91.53% at 90:10 split ratios.
For Twitter text classification with variations of pre-processing stop word and stemming 91.33% at 60:40
split ratios. The result of comparison of text
classification of Twitter with three variations
consisting of Twitter statuses without pre-processing,
Twitter statuses through pre-processing via stop word,
Twitter statuses through pre-processing stop word and
stemming is on Figure 4.
The results of the classification of Twitter text status
on the opinion of the KPK’s new building can be seen
in Figure 2, Figure 3 and Figure 4 with variations of
pre-processing. The result of classification of Twitter text statuses using tf weighting method with pre-
processing variation shows that the classification of
the best Twitter text statuses when using variation of
pre-processing stop word is 91.37% at 90:10 split
ratios. To classify the text of Twitter using tfIDF
weighting method with pre-processing variation can
be seen that the accuracy of maximal twitter text
classification in pre-processing stop word and
stemming is 91.93% at 90:10 split ratios while for
testing the classification of Twitter text using TFIDF
weighting method the maximum accuracy without
pre-processing or pre-processing stop word is 91.53% at 90:10 split ratio.
V. CONCLUSION AND FURTHER WORKS
Measuring the performance of KPK using Twitter
statuses clustering with the tf weighting method and without pre-processing is closer to manual results. The percentage of Twitter's clustering statuses uses K-means with the tf drainage method of 87% -97% for supporting the KPK’s new building, while those who refuse the new building are 3% -6%.
The smallest SSE values use the TFIDF levers method with pre-processing stop word and stemming. From the clustering percentage of Twitter statuses can be seen that the performance of KPK is still better and the revision of the KPK’s law is not necessary based

12
on the opinion of Twitter statuses that supports the new building.
Classification of Twitter status using SVM with training data from the clustering results looks maximum accuracy. The result of classification of text status of Twitter using tfIDF weighting method shows that the accuracy reaches 91.93% with split ratio training compared to testing of 90:10. The result of Twitter text classification accuracy used tfIDF weighting with pre-processing stop word and stemming.
SSE values to measure the performance of KPK need to be lowered again so that the results of clustering accuracy with the results manually be better. To improve the performance of clustering requires research by different clustering methods and replace the metric on K-means such as Mahalanobis or Minkowski so that K-means measurement performance is more maximum than the previous metric.
ACKNOWLEDGMENT
The authors would like to thank the scrapper wiki
who have provided data mining facilities for Twitter text status for free. Secondly, the author would like to
thank LPPM Universitas Widyagama Malang for
PERINTIS grant. Not forgetting we say thank you to
friend from the University of Buana Perjuangan
Karawang for this research collaboration. from the
Department of Info
matn Systesitas Buana Perjuangan Karawang for
hiREFERENCES
[1] A. Education, “Peranan Komisi Pemberantasan Korupsi
( KPK ) dalam Mendesain Kelembagaan Pendidikan
Antikorupsi,” vol. 9, 2016.
[2] T. International, “Peranan komisi pemberantasan korupsi
(kpk) sebagai lembaga anti korupsi di indonesia,” vol.
18, no. 1, pp. 84–96, 2011.
[3] D. A. N. Regulasi, “POLITIK HUKUM
PEMBERANTASAN KORUPSI DI ERA
REFORMASI ; KONSEP,” vol. 16, no. 1, pp. 2805–
2834, 2015.
[4] “UNDANG-UNDANG REPUBLIK INDONESIA
NOMOR 30 TAHUN 2002 TENTANG KOMISI
PEMBERANTASAN TINDAK PIDANA KORUPSI
UNDANG-UNDANG REPUBLIK INDONESIA
NOMOR 30 TAHUN 2002 TENTANG KOMISI
PEMBERANTASAN TINDAK PIDANA KORUPSI.
Presiden Republik Indonesia,” 2002.
[5] “EKSISTENSI KOMISI PEMBERANTASAN
KORUPSI (KPK) SEBAGAI LEMBAGA NEGARA
PENUNJANG DALAM SISTEM
KETATANEGARAAN INDONESIA Oleh: Fitria.”
[6] R. Online, E. Martianawulansari, P. Tindak, and P.
Korupsi, “Politik hukum perubahan kedua uu kpk,” no.
April, 2016.
[7] “POLITIK HUKUM PERUBAHAN KEDUA UU KPK
No Title,” 2016.
[8] D. P. D. D. A. N. Dprd, “DEGRADASI
KEWENANGAN LEGISLASI BADAN LEGISLASI
DPR RIPASCA REVISI UU NO 27 TAHUN 2009
TENTANG MPR ,” vol. 1, no. 1, pp. 11–16, 2016.
[9] T. T. P. Non-conviction, S. Anakan, and R. Di, “Nomor
1, Maret 2017,” 2017.
[10] K. Korupsi and G. Halomoan, “Upaya komisi
pemberantasan korupsi dalam menangani kasus korupsi
gayus halomoan p tambunan ,” no. September 2013.
[11] R. Nazriyah, “Kewenangan Komisi Pemberantasan
Korupsi dalam Penyidikan Kasus Simolator SIM (
Kapolri VS KPK ),” vol. 19, no. 4, pp. 586–606, 2012.
[12] H. Chen and D. Zimbra, “AI and Opinion Mining,”
2010.
[13] F. Ren, S. Member, and Y. Wu, “Predicting User-Topic
Opinions in Twitter with Social and Topical Context,”
vol. 4, no. 4, pp. 412–424, 2014.
[14] T. K. Das, D. P. Acharjya, and M. R. Patra, “Opinion
Mining about a Product by Analyzing Public Tweets in
Twitter,” pp. 3–6, 2014.
[15] P. Barnaghi, J. G. Breslin, I. D. A. B. Park, and L.
Dangan, “Opinion Mining and Sentiment Polarity on
Twitter and Correlation Between Events and Sentiment,”
2016.
[16] R. Fernandes, “Analysis of Product Twitter Data though
Opinion Mining,” 2016.
[17] V. R. Prasetyo, “Rating Of Indonesian Sinetron Based
On Public Opinion In Twitter Using Cosine Similarity,”
2016.
[18] K. Kpk, D. A. N. Kepolisian, and R. Indonesia, “Opini
publik di media sosial twitter konflik politik antara
komisi pemberantasan korupsi (kpk) dan kepolisian
republik indonesia (polri),” 2017.
[19] H. Suresh, “An Unsupervised Fuzzy Clustering Method
for Twitter Sentiment Analysis,” pp. 80–85, 2016.
[20] X. Dai, M. Bikdash, and B. Meyer, “From Social Media
to Public Health Surveillance : Word Embedding based
Clustering Method for Twitter Classification,” no. Table
I, 2017.
[21] N. Chamansingh and P. Hosein, “P ( clt ) P ( c ) P ( c ) P
( tlc ) jp ( t ),” no. February 2012, 2016.
[22] D. Milioris, “Towards Dynamic Classification
Completeness in Twitter,” pp. 1098–1102, 2016.
[23] A. Alsayat, “Social Media Analysis using Optimized K-
Means Clustering,” 2016.
[24] S. K. Jain, “Using Mahout for clustering similar Twitter
Users,” pp. 29–33, 2014.
[25] K. Nur, I. Najahaty, L. Hidayati, H. Murfi, and S.
Nurrohmah, “Combination of Singular Value
Decomposition and K-means Clustering Methods for
Topic Detection on Twitter,” pp. 123–128, 2015.
[26] B. M. Jadav and M. E. Scholar, “Sentiment Analysis
using Support Vector Machine based on Feature
Selection and Semantic Analysis,” vol. 146, no. 13, pp.
26–30, 2016.
[27] R. Bouchlaghem, A. Elkhelifi, and R. Faiz, “SVM based
approach for opinion classification in Arabic written
tweets,” pp. 1–4, 2016.
[28] I. Dilrukshi and K. De Zoysa, “Twitter News
Classification : Theoretical and Practical comparison of
SVM against Naive Bayes Algorithms,” no. December,
p. 2013, 2013.
[29] M. N. Al-ajwad and L. Carr, “An Open Public E-
Procurement Solution to Tackle Corruption in Iraq.”
[30] S. Ahuja, “Clustering and Sentiment Analysis on Twitter
Data,” pp. 1–5, 2017.
[31] N. Garg and R. Rani, “k-means Clustering,” pp. 670–
675, 2017.
[32] A. K. Soni and I. I. N. H. Eading, “Multi-Lingual
Sentiment Analysis of twitter data by using classification
algorithms.”

13
Microstrip Patch Antenna with Double-Fed for
Anti Collision System
N. Ab Wahab, N. N. Naim, S. Subahir, Z. Ismail Khan, M. N. Hushim Applied Electromagnetic Research Center
Faculty of Electrical Engineering
Universiti Teknologi MARA
Shah Alam, Selangor, Malaysia
[email protected], [email protected]
Abstract—A single element rectangular microstrip
patch antenna topology is presented. Based on this
topology, the performance of the rectangular patch
antenna is investigated using different microstrip
feeding techniques which are inset-fed and double-
fed. These antennas are designed at 10 GHz on
microstrip FR-4 substrate, with dielectric constant Ԑr
= 4.3, tan 𝛿 = 0.012 and thickness of h =1.6mm. The
responses are compared in terms of return loss, gain,
directivity and efficiency. The results show that the
antenna with doubled-fed achieved best performance
in terms of return loss, gain, directivity and
efficiency. To prove the concept, the rectangular
patch antenna with double-fed antenna is fabricated
and measured. The measured return loss of this
antenna attenuated more than 40dB, achieved gain of
6.363 dBi, directivity of 8.023 dBi with efficiency of
68.23%. Based on this finding, this rectangular patch
double-fed antenna can be considered as suitable to
be applied in anti-collision safety system of vehicle
besides enriching the antenna bank.
Index Terms—Anti-collision system; Double-fed;
FR-4; Inset-fed, microstrip; Patch antenna
I. INTRODUCTION
An anti-collision system is a vehicle security system
intended to reduce the seriousness of an impact. It is otherwise called a pre-crash system or forward
crash cautioning system. It utilizes radar (all-
climate) and some of the time laser and camera
(utilizing picture acknowledgment) to recognize a
fast approaching accident. Numerous investigations
and improvements have been conducted to address
society's issues in terms of security for vehicles.
These include the inhabitant insurance system such
as airbags, created and acquainted all together
which ultimately reduced occupant wounds of the
vehicle that encounter with accidents, making huge commitments to wellbeing[1]. To further enhance
the security system of a vehicle, anti-collision
system is introduced. This system is basically a
programmed-stopping-mechanism that works under
basic conditions. However, it is difficult to build a
system that able to function in a speedy manner
when dealing with a moving vehicle especially in
shocking crises[2-3].
In order to overcome this problem, Radar
technology has been suggested. This is due to the
fact that the radar system embraced a few detecting
and handling techniques for deciding the position
and speed of the vehicles ahead[4]. Normally car
producers are exceptionally hesitant to change the
state of the vehicles to install any sensors, so
designers are obliged to design systems that can
housed the system in the available existing space of
the car's front grille. With this constraint, flexible
and compact size devices is crucial without sacrificing the specification of the anti-collision
system of vehicle [4].
Antenna, as one of the main component to act as
a sensor is an imperative part in the field of remote
correspondences. It has become as the spine and the
main impetus behind the current advances in remote
correspondence innovation of radar system. The
antenna can be built using well known technologies
and designs such as microstrip antennas, parabolic
reflectors, and collapsed dipole reception
apparatuses with each sort having their own particular properties and application. [5]. In terms of
costing, microstrip antenna is the most popular
technology for its low cost, robustness and
reliability. Microstrip antenna can be considered as
a set up kind of antenna that is unquestionably
utilized by designers around the world, particularly
when application required low profile reception
apparatus. There is numerous type of microstrip
substrates, and one has to make proper plan in
choosing the reasonable dielectric substrate with
proper thickness and loss tangent. The dielectric
constants are usually in the range of 2.2≤ Ԑr ≤12. The ones that are most desirable for antenna
performance are thick substrate whose dielectric
constant is in lower end because they provide better
performance compared to thin substrate[6].
Other than microstrip substrate, the shape of the
antenna also influenced the performance of antenna
itself. Most of the popular shapes are ring, patch,
elliptic to name a few but patch antenna is the most
popular due to its simplicity in design. The patch
antenna can be in rectangular, square or circular
shapes with different type of feeding depending on

14
the desired characteristics and applications. The
feeding technique can be divided into two classes
which are contacting feed and non-contacting feed.
The feeding role is very important in the case of
efficient operation of antenna, to improve the antenna input impedance. In the contacting feed
method, it is commonly used in Microstrip Feed and
Coaxial Feed where the patch is directly being fed
with RF power using contacting element [8-11].
In this paper, a single element rectangular
microstrip patch antenna topology is proposed.
Based on this topology, three antenna designs using
different technique of feeding are investigated.
These antennas are designed at 10 GHz to suit for
anti-collision application system. Based on three
different techniques of feeding method, the antennas
are simulated and the performances are evaluated in terms of return loss, gain, directivity and efficiency.
It is found that, the microstrip rectangular patch
antenna with double-fed technique gives the best
performance of high gain, directivity and efficiency.
Hence, this antenna may be suitable for vehicle anti-
collision system. To proof the concept, this antenna
is fabricated using microstrip substrate on FR-4
substrate with dielectric constant Ԑr = 4.3, tan 𝛿 =
0.012 and thickness of h =1.6 mm. Even though the
dielectric of the substrate is low, it is sufficient for the purpose of this investigation to build an antenna
that radiates in directional manner having small
angular width that is suitable for anti-collision
system of vehicle.
II. ANTENNA DESIGN
The design of the antenna is based on rectangular
patch antenna. To suit for the application in anti-
collision system, the size of the microstrip patch
antenna should be compact and light. Hence, the
height or thickness of the dielectric substrate must
be small. Therefore, for realization, microstrip
technology is used. FR-4 substrate is chosen as a material which is well known as suitable material
for antenna; given dielectric constant with
permittivity of Ԑr = 4.3, tan 𝛿 = 0.012 and thickness
of h =1.6 mm. The antenna is designed using CST
Microwave Studio software. The specification of
the antenna should be high in gain and radiate more
directional or forward in order to achieve high
signal strength, which is very crucial in anti-
collision system. For validation of concept, the best
antenna performance is fabricated and the prototype
of the antenna is tested to measure its performance.
For reflection coefficient or return loss, , of the
antenna is tested by using VNA while gain,
directivity and radiation pattern are tested in a
Chamber Room.
Figure. 1 Chamber Room to measure the performance of the
antenna.
A. Microstrip antenna characteristic calculation
The single element rectangular patch antenna is
designed based on the well-known parameters. To
calculate the dimensions of the antenna, the width,
wp, and length, lp are obtained by using Equations (1) and (2). The transmitting edge , patch width
is normally kept to such an extent that it exists in
the range of for proficient
radiation[9].
Thus, the width of patch is calculated by using this
following formula:
Width of patch, wp is defined as,
(1)
The effective dielectric constant is calculated by the formula below:
(2)
The genuine length of patch, is computed
utilizing the accompanying formula:
(3)
(4)
As stated in theory, the distance between the edge
of patch and substrate must be more than in order
to avoid the signal to radiate more to ground. Thus, the length of substrate, and the width of substrate,
been computed by using these formulas:
(5)
(6)
While the width of the quarter-wave line is obtained by [7][10]:
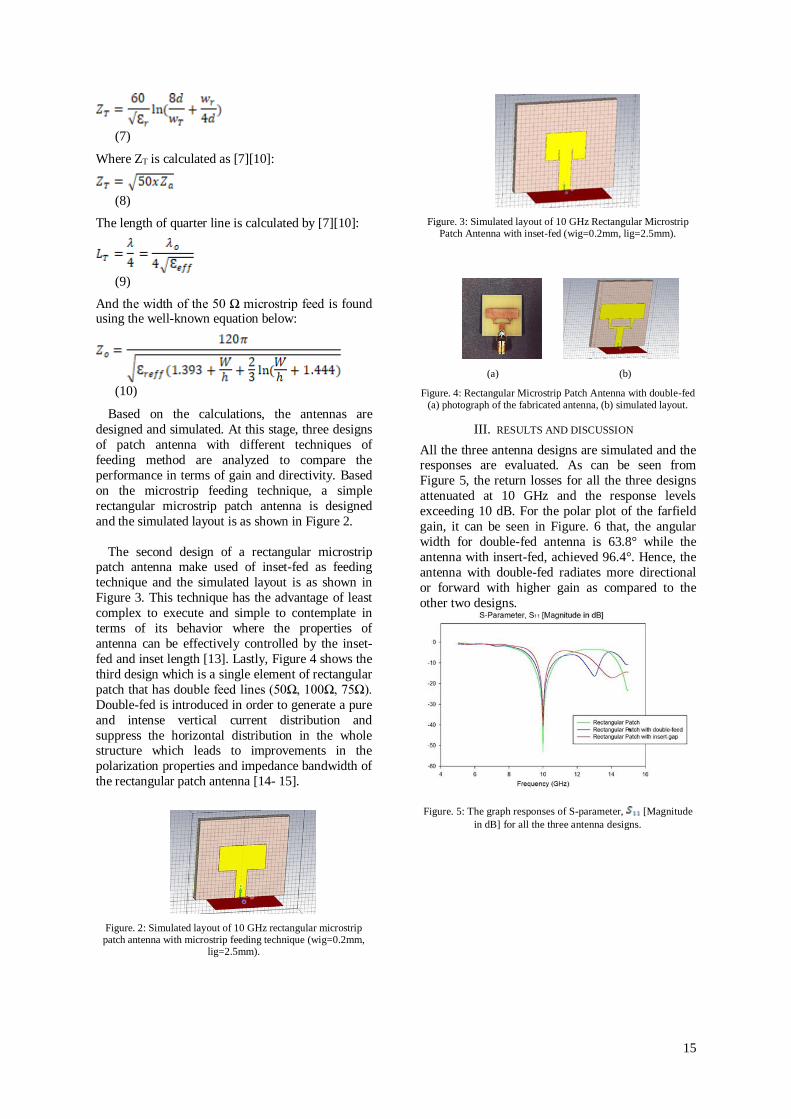
15
(7)
Where ZT is calculated as [7][10]:
(8)
The length of quarter line is calculated by [7][10]:
(9)
And the width of the 50 Ω microstrip feed is found using the well-known equation below:
(10)
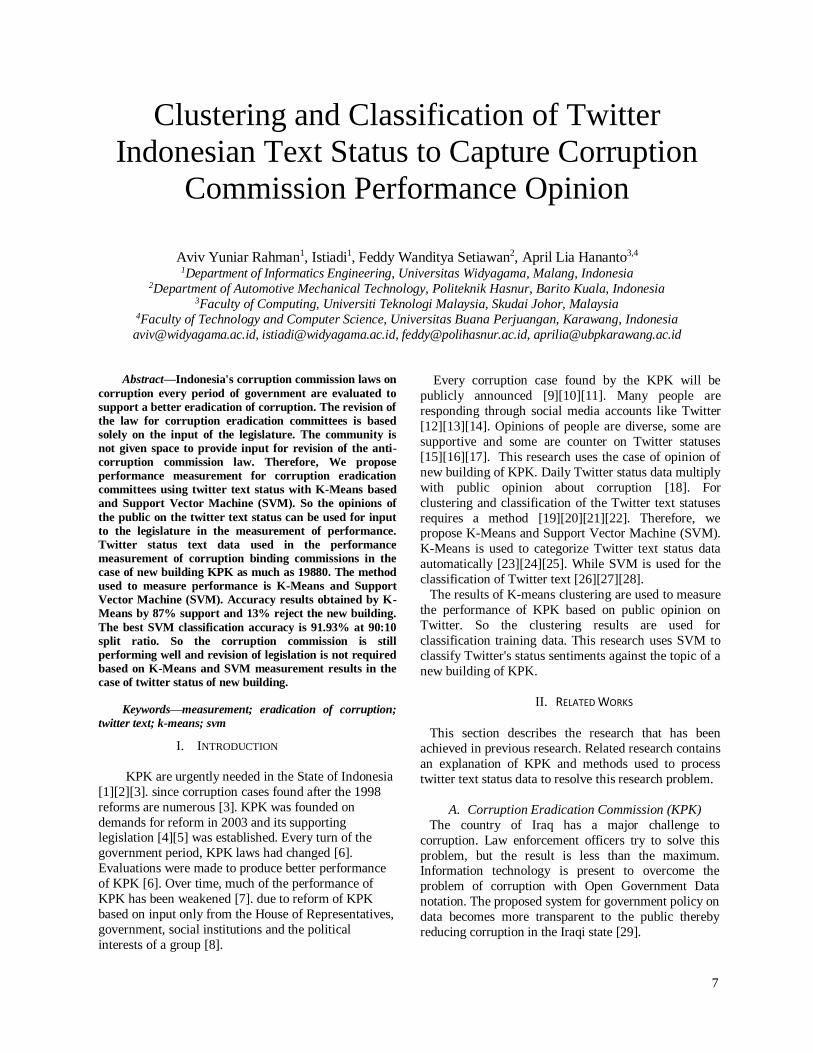
Based on the calculations, the antennas are
designed and simulated. At this stage, three designs
of patch antenna with different techniques of
feeding method are analyzed to compare the
performance in terms of gain and directivity. Based
on the microstrip feeding technique, a simple
rectangular microstrip patch antenna is designed
and the simulated layout is as shown in Figure 2.
The second design of a rectangular microstrip patch antenna make used of inset-fed as feeding
technique and the simulated layout is as shown in
Figure 3. This technique has the advantage of least
complex to execute and simple to contemplate in
terms of its behavior where the properties of
antenna can be effectively controlled by the inset-
fed and inset length [13]. Lastly, Figure 4 shows the
third design which is a single element of rectangular
patch that has double feed lines (50Ω, 100Ω, 75Ω).
Double-fed is introduced in order to generate a pure
and intense vertical current distribution and
suppress the horizontal distribution in the whole structure which leads to improvements in the
polarization properties and impedance bandwidth of
the rectangular patch antenna [14- 15].
Figure. 2: Simulated layout of 10 GHz rectangular microstrip patch antenna with microstrip feeding technique (wig=0.2mm,
lig=2.5mm).
Figure. 3: Simulated layout of 10 GHz Rectangular Microstrip Patch Antenna with inset-fed (wig=0.2mm, lig=2.5mm).
(a) (b)
Figure. 4: Rectangular Microstrip Patch Antenna with double-fed (a) photograph of the fabricated antenna, (b) simulated layout.
III. RESULTS AND DISCUSSION
All the three antenna designs are simulated and the responses are evaluated. As can be seen from
Figure 5, the return losses for all the three designs
attenuated at 10 GHz and the response levels
exceeding 10 dB. For the polar plot of the farfield
gain, it can be seen in Figure. 6 that, the angular
width for double-fed antenna is 63.8° while the
antenna with insert-fed, achieved 96.4°. Hence, the
antenna with double-fed radiates more directional
or forward with higher gain as compared to the
other two designs.
Figure. 5: The graph responses of S-parameter, [Magnitude
in dB] for all the three antenna designs.

16
(a)
(b)
Figure 6: The polar plot of farfield gain abs (Phi=0); (a)
Rectangular Microstrip Patch with insert-fed (b) Rectangular
Microstrip Patch with double-fed
Table 1
Simulated Results for the Antenna Designs
Parameter
Rectangular
Microstrip
Patch
Rectangular
Microstrip
Patch with
Inset-gap
Rectangular
Microstrip
Patch with
Double-feed
S-parameter,
S11 (dB)
53.0184 40.1853 40.7033
Gain (dBi) 3.216 3.839 6.363
Directivity
(dBi)
5.997 6.716 8.023
Antenna
efficiency (%)
52.7% 51.55% 68.23%
Table 1 tabulated the simulated performance for
all the three designs. It shows that all the three
designs achieved antenna’s requirement in terms of return loss. The rectangular microstrip patch
antenna with double-fed achieved the best
performance compared to the other two designs in
terms of gain, directivity and efficiency. Based on
these findings, the Rectangular Microstrip Patch
antenna with double-fed is chosen and to prove the
concept this antenna is fabricated and measured.
The measurement results are compared with
simulated results for validation.
A. Measurement Process
Figure. 7: The graph of S-parameter, [Magnitude in dB] of
the proposed Rectangular Microstrip Patch antenna with double-
fed
Figure. 8: The Normalized Polar Plot of Farfield Gain Abs
(Phi=0) of the proposed Rectangular Microstrip Patch antenna
with double-fed.
(a) (b) (c)
Figure. 9: The 3D Plot of Farfield Gain Rectangular Microstrip
Patch antenna with double-fed
During measurement process, the fabricated
Rectangular Microstrip Patch antenna with double-
fed was tested inside the chamber lab to measure its performances. The results are compared with
simulated in terms of return loss, gain, directivity
and efficiency. As can be seen in Figure 7, the
measured return loss is slightly shifted from 10
GHz to 9.8 GHz. The attenuation level shows more
than 10 dB.
While Figure 8 shows the polar plot of farfield
gain abs (Phi=0) after been normalized and Figure
9 shows the plot of farfield gain in 3D pattern in
three perspectives; (a) up view, (b) down view and
(c) front view. From these views, it can be seen that
the radiation of the antenna is directional and forward as simulated.

17
Table 2
Comparison Between Measurement and Simulation Results
Parameter Simulation Measurement
S-parameter,
(dB)
40.703 33.931
Gain (dBi) 6.36 6.66
Directivity (dBi) 8.02 8.74
Antenna
efficiency (%)
68.23% 61.94%
Finally, all the measured results for Rectangular
Microstrip Patch antenna with double-fed are
summarized and tabulated in Table 2. The
measurement results are compared with simulation
results to validate the concept. The results proved
that this proposed design achieved high gain,
improve directivity and antenna’s efficiency as
compared to the other two antenna designs, meeting the requirement for anti-collision safety
system.
IV. CONCLUSION
The aims of this project is to study and
investigate the suitable antenna design that can be
used as an object sensing for vehicle anti-collision
system. Three single element of rectangular patch
antennas with different technique of feeding
methods were investigated. The performances of the
antennas were compared and it was found that the
rectangular patch antenna with double-fed performed the best in terms of gain, directivity and
efficiency. For validation, this antenna was
fabricated and measured using microstrip
technology. The results were measured and were
found agreeable with simulations. The results of the
rectangular patch antenna with double-fed showed
that, the measured return loss attenuated more than
40dB, with gain of 6.363 dBi, directivity of 8.023
dBi and efficiency of 68.23%. With this simple
design and concept, this antenna should be fairly
easy to be mass-produced owing to their simplicity and compatibility. In addition, this antenna is also
easy to fabricate and compact in size. Besides
enriching the antenna bank, the design can be
considered as suitable to be applied in anti-collision
safety system of vehicle.
ACKNOWLEDGMENT
This work was supported by the Ministry of
Education Malaysia, under Niche Research Grant
Scheme (NRGS) [600-RMI/NRGS 5/3 (3/2013)]
and the Faculty of Electrical Engineering, Universiti
Teknologi MARA (UiTM), Shah Alam, Malaysia.
REFERENCES
[1] S. Tokoro, K. Kuroda, T. Nagao, T. Kawasaki, and T.
Yamamoto, “Pre-Crash Sensor for Pre-Crash Safety,” Esv,
pp. 1–6, 2003.
[2] T. Shinde, “Car Anti-Collision and Intercommunication
System using Communication Protocol,” vol. 2, no. 6, pp.
187–191, 2013.
[3] Taieba Taher, R. U. Ahmed, M. A. Haider, Swapnil. Das,
M. N.Yasmin, Nurasdul Mamun,"Accident Prevention
Smart Zone Sensing System," IEEE Region 10
Humanitarian Technology Conference (R10-HTC), 2017.
[4] F. Baselice, G. Ferraioli, S. Lukin, G. Matuozzo, V.
Pascazio, and G. Schirinzi, “A New Methodology for 3D
Target Detection in Automotive Radar Applications,”
Sensors, vol. 16, no. 5, p. 614, 2016.
[5] A. Majumder, “Rectangular microstrip patch antenna
using coaxial probe feeding technique to operate in S-
band,” Int. J. Eng. Trends Technol., vol. 4, no. April, pp.
1206–1210, 2013.
[6] Y. S. H. Khraisat, “Design of 4 elements rectangular
microstrip patch antenna with high gain for 2.4 GHz
applications,” Mod. Appl. Sci., vol. 6, no. 1, pp. 68–74,
2012.
[7] A. De, C. K. Chosh, and A. K. Bhattacherjee, “Design and
Performance Analysis of Microstrip Patch Array Antennas
with different configurations,” Int. J. Futur. Gener.
Commun. Netw., vol. 9, no. 3, pp. 97–110, 2016.
[8] D. Shashi Kumar and S. Suganthi,"Performance Analysis
of Optimized Corporate-fed Microstrip Array for ISM
Band Applications," IEEE WiSPNET 2017.
[9] A. Arora, A. Khemchandani, Y. Rawat, S. Singhai, and G.
Chaitanya, “Comparative study of different feeding
techniques for rectangular microstrip patch antenna,” Int.
J. Innov. Res. Electr. Electron. Instrum. Control Eng., vol.
3, no. 5, pp. 32–35, 2015.
[10] Manotosh Biswas, Mausumi Sen,” Design and
Development of Coax-Fed Electromagnetically Coupled
Stacked Rectangular Patch Antenna for Broad Band
Application,” Progress In Electromagnetics Research B,
vol. 79, 21–44, 2017.
[11] A. Verma, O. P. Singh, and G. R. Mishra, “Analysis of
Feeding Mechanism in Microstrip Patch Antenna,” Int. J.
Res. Eng. Technol., vol. 3, no. 4, pp. 786–792, 2014.
[12] Wong, K. L, Wu, C. H, Su, S. S. W, “Ultrawide-Band
Square Planar Metal-Plate Monopole Antenna with
Trident-Shaped Feeding Strip” IEEE, vol. 53, no. 4, 2005.
[13] V. Samarthay, S. Pundir and B. Lal, “Designing and
Optimization of Inset Fed Rectangular Microstrip Patch
Antenna (RMPA) for Varying Inset Gap and Inset
Length,” Int. J. Eng. Vol. 7, no. 9, pp. 1007-1013, 2014.
[14] H. Eriffi, A. Baghdad and A. Badri, “Design and
Simulation of Microstrip Patch Array Antenna with High
Directivity for 10 GHz Applications” Fac. Sc and. Tech.
Morocco, 2010.
[15] E. A. Daviu, M. C. Febres, M. F. Bataller and A.V.
Nogueira, “Wideband double-fed planar monopoles
antennas” IEE, vol. 39, no. 23, 2003.
18
OpenCL-Based FPGA Implementation of Plant
Identification Application Noel B. Linsangan1, Rodrigo S. Pangantihon, Jr.2
1School of Electrical, Electronics and Computer Engineering, Mapua University, Manila, Philippines
2College of Engineering Education, Computer Engineering Program, University of Mindanao, Davao City,
Philippines [email protected]
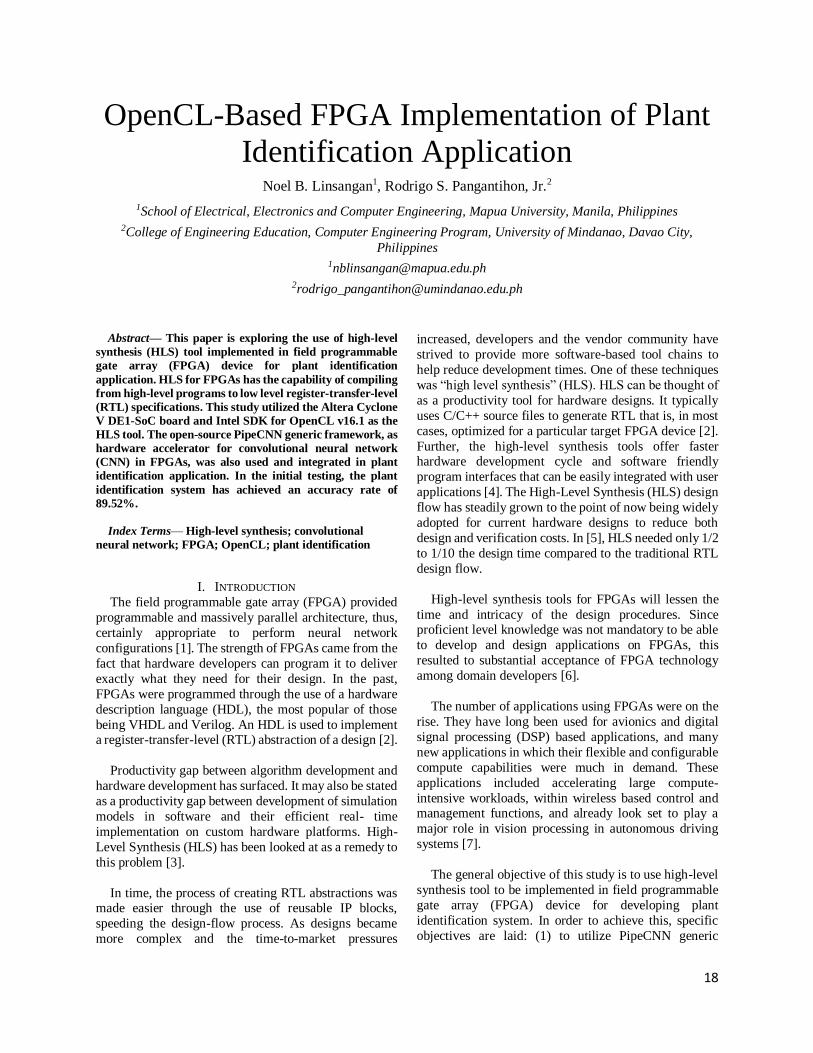
Abstract— This paper is exploring the use of high-level
synthesis (HLS) tool implemented in field programmable
gate array (FPGA) device for plant identification
application. HLS for FPGAs has the capability of compiling
from high-level programs to low level register-transfer-level
(RTL) specifications. This study utilized the Altera Cyclone
V DE1-SoC board and Intel SDK for OpenCL v16.1 as the
HLS tool. The open-source PipeCNN generic framework, as
hardware accelerator for convolutional neural network
(CNN) in FPGAs, was also used and integrated in plant
identification application. In the initial testing, the plant
identification system has achieved an accuracy rate of
89.52%.
Index Terms— High-level synthesis; convolutional
neural network; FPGA; OpenCL; plant identification
I. INTRODUCTION
The field programmable gate array (FPGA) provided
programmable and massively parallel architecture, thus,
certainly appropriate to perform neural network
configurations [1]. The strength of FPGAs came from the
fact that hardware developers can program it to deliver
exactly what they need for their design. In the past,
FPGAs were programmed through the use of a hardware
description language (HDL), the most popular of those
being VHDL and Verilog. An HDL is used to implement a register-transfer-level (RTL) abstraction of a design [2].
Productivity gap between algorithm development and
hardware development has surfaced. It may also be stated
as a productivity gap between development of simulation
models in software and their efficient real- time
implementation on custom hardware platforms. High-
Level Synthesis (HLS) has been looked at as a remedy to
this problem [3].
In time, the process of creating RTL abstractions was made easier through the use of reusable IP blocks,
speeding the design-flow process. As designs became
more complex and the time-to-market pressures
increased, developers and the vendor community have
strived to provide more software-based tool chains to
help reduce development times. One of these techniques
was “high level synthesis” (HLS). HLS can be thought of
as a productivity tool for hardware designs. It typically
uses C/C++ source files to generate RTL that is, in most
cases, optimized for a particular target FPGA device [2].
Further, the high-level synthesis tools offer faster hardware development cycle and software friendly
program interfaces that can be easily integrated with user
applications [4]. The High-Level Synthesis (HLS) design
flow has steadily grown to the point of now being widely
adopted for current hardware designs to reduce both
design and verification costs. In [5], HLS needed only 1/2
to 1/10 the design time compared to the traditional RTL
design flow.
High-level synthesis tools for FPGAs will lessen the
time and intricacy of the design procedures. Since proficient level knowledge was not mandatory to be able
to develop and design applications on FPGAs, this
resulted to substantial acceptance of FPGA technology
among domain developers [6].
The number of applications using FPGAs were on the
rise. They have long been used for avionics and digital
signal processing (DSP) based applications, and many
new applications in which their flexible and configurable
compute capabilities were much in demand. These
applications included accelerating large compute-
intensive workloads, within wireless based control and management functions, and already look set to play a
major role in vision processing in autonomous driving
systems [7].
The general objective of this study is to use high-level
synthesis tool to be implemented in field programmable
gate array (FPGA) device for developing plant
identification system. In order to achieve this, specific
objectives are laid: (1) to utilize PipeCNN generic
19
framework which is open-source and OpenCL-based
hardware accelerator; (2) to integrate the framework in
plant identification application; and (3) to make use of
FPGA device Altera Cyclone V DE1-SoC board.
Recently, researchers started to investigate on plant
classification and identification. Authors of [8] were able
to come up with a prototype using Raspberry Pi which
can identify plants through veins of plant leaf making use
of Support Vector Machine (SVM) and Scale Invariant
Feature Transform (SIFT) algorithms achieving an
accuracy rate of 84.29%. Another study of [9], a Bi-
dimensional empirical mode decomposition with gray-
scale morphology processing method for leaves images
segmentation has been presented to extract the leaves
venation, and compared with the Gabor filter, Canny
filter, Canny operator, and Sobel operator. Also, [10] proposed plant identification system based on combining
leaf vein and shape features for plant classification and
experimental results of the proposed system showed
detection precision of 97%.
The researchers proposed this study to improve the
process of identifying plants with higher accuracy
through innovative technologies. Implementing image
processing algorithms on reconfigurable hardware
minimizes the time-to-market cost, enables rapid
prototyping of complex algorithms and simplifies debugging and verification [11].
II. MATERIALS AND METHODS
Presented in this section were the materials, software
and hardware resources needed, the conceptual
framework, the methods and procedures taken to attain
the objectives of this study.
A. List of Materials
To complete this study, the following hardware and
software resources are being used:
1) Altera FPGA OpenCL SDK: In this study, Intel
FPGA SDK for OpenCL version 16.1 was used as the
HLS tool to accelerate the application by targeting
Cyclone V FPGA board. OpenCL allowed the
researcher to use a C or C++ based programming
language for developing kernel code for FPGAs. It
provided a vendor extension, an I/O, and a Host Channel API to stream data into a kernel directly from
a streaming I/O interface such as 10 Gb Ethernet [2].
The OpenCL-based FPGA accelerator development
flow is shown in Fig. 1.
Figure 1: OpenCL-based FPGA design flow for CNN accelerator [1]
In the framework, an FPGA board (as OpenCL
device) was connected with a desktop CPU (as OpenCL
host) through a high speed PCIe slot forming a
heterogenous computing system. An OpenCL code,
which defined multiple parallel compute units (CUs) in
the form of kernel functions, was compiled and synthesized to run on the FPGA accelerator. On the host
side, a C/C++ code runs on the CPU, providing vendor
specific application programming interface (API) to
communicate with the kernels implemented on the FPGA
accelerator. This work used the Altera OpenCL SDK
toolset for compiling, implementing and profiling the
OpenCL codes on FPGAs [1].
2) Altera DE1-SoC FPGA Cyclone V Board: The
DE1-SoC Cyclone V FPGA board of Altera was used as
the primary hardware in this study. This device is an
FPGA board from Terasic [12].
3) PipeCNN: Being openly accessible, PipeCNN
framework was utilized in this study since it is an
efficient OpenCL-based hardware accelerator for
implementing convolutional neural network [1].
4) Caffe: In this study, Caffe was used in training the
data. CAFFE, short for Convolutional Architecture for
Fast Feature Embedding, is a deep learning framework,
originally developed at UC Berkeley. It is open source,
under a BSD license. It is written in C++, with a Python
interface. Caffe supports many different types of deep
learning architectures geared towards image
classification and image segmentation. [13].
5) Ubuntu: The system is running on desktop
computer installed with Linux Ubuntu 16.04 since
necessary compilations are done easily in linux
operating system.
B. Conceptual Framework
Fig. 2 illustrated the conceptual framework of the
system. The CNN transformed the original image layer
by layer from the original pixel values to the final class

20
scores. The input of the system is a leaf image which will
be analyzed and processed to come up with the desired
result which is the identity of the plant. The leaf veins of
a sampled plant leaf served as the main data of the system
for the implementation of convolution neural network in FPGA device using PipeCNN generic framework.
The input image of plant leaf contained the pixel
values of the raw image bearing three color channels R,
G, B. In Fig. 3, the processing stages of the convolutional
neural network layer of the input image is shown. The
convolution layer performed computation of the output
of neurons that were being connected to the input local
regions. A dot product of their respective weights and a
certain region in which they were joined was then
computed. Then, the elementwise activation function was
conducted by the rectified linear unit layer. Likewise, the pooling layer performed downsampling operation which
reduced the sampling rate for spatial dimensions, such as
width and height. Fully-connected layer computed the
plant class scores and classification of the plant shall be
based on the computed scores.
Figure 2: Conceptual Framework
A. Methods and Procedures
The following procedures were taken to complete the
study:
1. Specimen collection: A corpus of two hundred fifty
leaf images were collected from fifty different Philippine
plant species. For each specie, five (5) leaf images were
collected. The letters from A to E were appended to the
species name to differentiate various images of the same
species. For example, Durian A, Durian B, Durian C,
Durian D and Durian E were the five different leaves collected from the Durian tree. From each specie, one
image will be considered as the query image and the other
four images shall be kept as reference images.
Figure 3: Convolution Neural Network Layer
2. Preparing the Data Before Training: Before
training the network using the gathered data, the
collected images were converted into the format that the
networks can read. For the data conversion, LMDB
format was chosen. Two files called train.txt and text.txt
were created. These files tell the network where to look
for each image and its corresponding class. After
converting data into LMDB format, the mean image was
created. Fig. 4 showed samples of leaf dataset used in this study.
Figure 4: Sample Local Leaf Dataset
3. Training the data: After preparing the images of plant
leaves, training of the network was made possible in
Caffe. Necessary tools were provided by Caffe in
creating the local dataset. The goal of the training phase
was to learn the network's weights. Two elements were
needed to train the artificial neural network, namely:
training data and loss function. The training data was composed of plant leaf images and the corresponding
plant name labels while the loss function measured the
inaccuracy of predictions. Training set was used to

21
estimate and pre-select promising model and filter out
bad models.
4. Installing necessary applications: Before starting to
use PipeCNN, there was a need to install Altera OpenCL
SDK toolset on a Linux desktop computer, on which a
supported FPGA board was also correctly installed. The
Intel SoC FPGA Embedded Development Suite (EDS) must also be installed. It contained development tools,
utility programs, run-time software, and application
examples to enable embedded development on the SoC
hardware platform [14].
5. Testing and Validation Phase: Captured leaf images
were inputted into the system to test the performance.
Validation was used to authenticate the final network
model specification.
III. RESULTS AND DISCUSSION
Presented in this section were the discussion on the
gathering, collection, and analysis of data, as well as the
findings and results of the study.
A. Data Gathering and Collection
The training and testing of data was done using a locally created dataset consisting of plants endemic in the
Philippines, specifically in Davao City. The Agri-Expo
Community in SM Ecoland, Davao City allowed the
researcher to perform image gathering and classification
process of the needed samples.
The test sample used per plant for the training set was
5 leaves. Fifty plant species were used for local dataset,
49 known leaves and 1 unknown. Two hundred images
were used for training and 50 images were used for
testing, for a total of 250 images. The images were
captured using white background.
Table 1 showed the Confusion Matrix reflecting the
output of the functionality test using the DE1-SoC
Cyclone V FPGA board through the implementation of
convolution neural network. Twenty-one (21) plants
were being sampled and given codes P1 to P20 for plant
classification while the PU code was a given sample of
an unknown plant. Plant leaves were subjected for testing in the system five (5) times. From the gathered data, some
deviations in the prediction surfaced due to factors that
may affect the quality of the input images. Using data in
Table 1, the accuracy of the system was determined by
making use of Equation 1 and the error rate was
calculated using Equation 2 [15]. The system has
achieved an accuracy rate of 89.52% and error rate of
10.48%.
Accuracy = (TP+TN
TP+TN+FN+FP) X 100
(1)
Error = (FP+FN
TP+TN+FN+FP) X 100
(2)
Where:
TP = number of correct prediction that an instance is
positive
FP = number of incorrect prediction that an instance is
positive
FN= number of incorrect prediction that an instance is negative
TN = number of correct prediction than an instance is
negative.

22
Table I
Results and Confusion Matrix
Actual/
PredictedP1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 P12 P13 P14 P15 P16 P17 P18 P19 P20 PU
P1 3 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
P2 0 5 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
P3 0 1 4 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
P4 0 0 0 5 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
P5 0 0 0 0 5 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
P6 0 0 0 0 0 5 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
P7 0 0 0 0 0 0 4 1 0 0 0 0 0 0 0 0 0 0 0 0 0
P8 0 0 0 0 0 0 0 5 0 0 0 0 0 0 0 0 0 0 0 0 0
P9 0 0 0 0 0 0 0 0 4 0 1 0 0 0 0 0 0 0 0 0 0
P10 0 0 0 0 0 0 0 0 0 5 0 0 0 0 0 0 0 0 0 0 0
P11 0 0 0 0 0 0 1 0 1 0 3 0 0 0 0 0 0 0 0 0 0
P12 0 1 0 0 1 0 0 0 0 0 0 3 0 0 0 0 0 0 0 0 0
P13 0 0 0 0 0 0 0 0 0 0 0 0 5 0 0 0 0 0 0 0 0
P14 0 0 0 0 0 0 0 0 0 0 0 0 0 4 1 0 0 0 0 0 0
P15 0 0 0 0 0 0 0 0 0 0 0 0 0 0 5 0 0 0 0 0 0
P16 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 5 0 0 0 0 0
P17 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 5 0 0 0 0
P18 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 5 0 0 0
P19 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 5 0 0
P20 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 4 0
PU 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 5
B. Actual Hardware Components Setup
Fig. 5 showed the demonstration setup of the
hardware components. The Altera FPGA Cyclone
V DE1-SoC board was interfaced to the host
computer through USB ports. Likewise, the
minicom terminal installed in the computer has
provided avenue to access the FPGA device. The
kernel codes in OpenCL were being compiled
through Intel SDK for OpenCL version 16.1. The plant leaf images from SD card were loaded by the
host programs. Then, these input images were
forwarded to the hardware accelerator to perform
computationally-intensive image processing of
plant leaves. The convolution neural network was
implemented by the system and final class score
was generated.
Figure 5: Setup of the system
C. Sample Test Result
Shown in Fig. 6 was a sample test result of a
sampled plant leaf. The FPGA board is accessed
through minicom terminal. The board has micro
SD card installed which contained the program
and images to be tested. The system has identified
the sampled plant leaf as Piper nigrum (scientific name), or Black Pepper (English name) or
Paminta (Philippine common name). The testing
has a total kernel runtime of 154.403 ms.

23
Figure 6: Sample Test of Plant Leaf
D. System Flow Summary
Generated from the log report of FPGA board was the flow summary report of the system. It has generated
logic utilization of 83% (26,724 / 32,070). The total
registers used were 64, 218 and total pins utilized was
23%. The total block memory bits consumed was 54%.
Also, the total PLLs was 33%, DLLs was 25% and DSP
Blocks was 83%.
IV. CONCLUSIONS AND FUTURE WORKS
After conducting the study, a plant identifier
application was developed using high-level synthesis
(HLS) tool implemented in field programmable gate
array (FPGA) device. PipeCNN opensource framework
was successfully utilized and played significant role as
hardware accelerator for performing convolutional
neural network. The Altera Cyclone V DE1-SoC board
was used. The system has achieved an accuracy rate of
89.52%. High level synthesis provided by the Intel SDK
for OpenCL is instrumental for substantial speedups of
convolution neural network and image processing when compared to other computing practices. The Intel SDK
for OpenCL has afforded this study the needed tools to
take a compute-intensive processing of plant leaf
classification.
The FPGA device used is consisting of 85K logic
elements (LE) only which somehow constrained the
resources of the system. For future works in image
processing projects using FPGA, DE10-nano and DE5-
net are worthy to be considered since these boards have
higher resource capacity.
REFERENCES
[1] Dong Wang, Ke Xu and Diankun Jiang (2017). PipeCNN: An
OpenCL-Based open-source FPGA accelerator for convolution
neural networks. 2017 International Conference on Field
Programmable Technology (ICFPT), Melbourne, VIC,
Australia.
[2] Tom Hill (2015). Myths About High-Level-Synthesis
Techniques for Programming FPGAs.
[3] Aydın Emre Güzel et. al (2016). Using High-Level Synthesis for
Rapid Design of Video Processing Pipes. 2016 IEEE East-West
Design & Test Symposium (EWDTS).
[4] U. Aydonat, S. O’Connell, D. Capalija, A.C. Ling and G.R.
Chiu, “An OpenCL Deep Learning Accelerator on Arria 10” in
Proc. ACM/SIGDA International Symposium on Field-
Programmable Gate Arrays (FPGA ’17), 2017.
[5] Qiang Zhu & Masato Tatsuoka (2016). High Quality IP Design
using High-Level Synthesis Design Flow. 2016 21st Asia and
South Pacific Design Automation Conference (ASP-DAC).
[6] Ian Janik, Qing Tang & Mohammed Khalid (2015). An overview
of Altera SDK for OpenCL: A user perspective. 2015 IEEE 28th
Canadian Conference on Electrical and Computer Engineering
(CCECE), 3-6 May 2015, Halifax, NS, Canada.
[7] Razvan Nane et. al (2016). A Survey and Evaluation of FPGA
High-Level Synthesis Tools. IEEE transactions on computer-
aided design of integrated circuits and systems, vol. 35, no. 10,
October 2016.
[8] Selda, J., Ellera, R., Cajayon II, L. and Linsangan, N. (2017).
Plant identification by image processing of leaf veins. 2017
International Conference on Imaging, Signal Processing and
Communication (ICISPC 2017), July 26–28, 2017, Penang,
Malaysia.
[9] Wenshuang Yin, Changcheng Xiang, Liming Tang and Shiqiang
Chen (2015). Venation extraction of leaf image by bi-
dimensional empirical mode decomposition and morphology.
2015 IEEE Advanced Information Technology, Electronic and
Automation Control Conference (IAEAC).
[10] Heba F. Eid, Aboul Ella Hassanien and Tai-Hoon Kim (2015).
Leaf plant identification system based on hidden naive bays
classifier. 4th International Conference on Advanced
Information Technology and Sensor Application (AITS), IEEE,
At Harbin, China.
[11] Muthukumar Venkatesan and Daggu Venkateshwar Rao (2004).
Hardware Acceleration of Edge Detection Algorithm on FPGAs.
[12] Altera (2015). DE1-SoC.
[13] Jia, Yangqing and Shelhamer, Evan and Donahue, Jeff and
Karayev, Sergey and Long, Jonathan and Girshick, Ross and
Guadarrama, Sergio and Darrell, Trevor (2014). Caffe:
Convolutional Architecture for Fast Feature Embedding. 2014
Proceedings of the 22nd ACM international conference on
Multimedia, pages 675-678.
[14] Hamid Mahmoodi, Arturo Montoya et. al (2012). Hands-on
teaching of embedded systems design using FPGA-Based tPad
development kit. 2012 2nd Interdisciplinary Engineering Design
Education Conference (IEDEC), 19 March 2012, Santa Clara,
CA, USA
[15] Thomas G. Dietterich (1998). Special issue on applications of
machine learning and the knowledge discovery process. Journal
Machine Learning archive, Kluwer Academic Publishers
Norwell, MA, USA, Volume 30 Issue 2-3, Feb./March, 1998,
ISSN:0885-6125.

24
A-Eye: An Intrusive Load Monitoring System
for Appliance Classification Jobenilita R. Cuñado1 and Noel B. Linsangan2
Department of Engineering Education, Computer Engineering Program, University of Mindanao, Tagum City
School of Electrical, Electronics and Computer Engineering, Mapua University, Manila, Philippines [email protected]
Abstract— Interest in power consumption management
has grown over time with the limitation of energy resources.
The need for a load identification infrastructure is central
to energy usage management applications, with control over
devices only possible if a means by which devices can be
identified is available. This study is aimed to develop an
individual appliance meter with appliance classification
capability based on time-dependent power consumption
features drawn and with remote access facility. An
individual appliance meter is developed and is used to
create a library of load signatures, with an appliance
classification capability and a provision for remote access
based on time-dependent power features drawn by an
appliance, from power-up to its steady state. An increase in
classification accuracy is achieved and the load library
derived from this work can be used in other ILM
endeavours. Results showed accuracy of 92%, hence, the
appliance classification infrastructure developed can be
useful in energy management applications to reduce
wastage in energy usage.
Index Terms— Intrusive Load Monitoring, smart meter,
Raspberry Pi, appliance classification, power signature
I. INTRODUCTION
With ever increasing demands but with limited
available resources, mitigation of energy wastage is a
societal need.
One of the answers to this need is through load
monitoring, through which, awareness among consumers
can be heightened and thereby propel them to conserve.
To date, meters are commercially available for monitoring of electricity consumption. However, this
type of monitoring devices cannot isolate an individual
appliance with their lack of appliance identification
capability. The researcher proposed to develop a device
using an intrusive load monitoring system. With its
capability to identify a plugged appliance, remote access
can be made possible.
Appliance load monitoring (ALM) intends to sense
electric consumption. ALM has been divided in two
approaches: Intrusive Load Monitoring (ILM) and Non-
Intrusive Load Monitoring (NILM); the former utilizes
sensors and wireless technologies to detect every single
appliance while the latter discerned devices based from
the data acquired from a single point of measurement [1].
Present works on ILM have been focused on approaches
on appliance classification alone. A study by Paradiso et al proposed artificial neural network approach [2].
Reinhardt et al offered another solution using time series
pattern matching [3]. Both Reddy et al [4] and Ridi et al
[5], on the other hand, presented the use of machine
learning to process signals from appliances.
Identification of power waveforms has been proposed by
Ito [6]. Moreover, a work by Lee et al focused on the
development of signal rocessing techniques for load
identification [7]. Ganu et al has developed an actual load
monitoring device: SocketWatch [8]. This device detects
appliance malfunctions by learning behavioural model of appliances using unsupervised learning techniques. It
solely focused on energy leakage monitoring and has no
communication infrastructure for intervention. Other
researchers explored high frequency and low-frequency
measurements. Reinhardt et al sampled current flow of
appliances at a rate of 1.6 kHz [9]. Fitta et al proposed to
recognize switch-on and –off events from signatures
sampled at 6.4 kHz [10] while Englert et al sampled the
power consumption of a connected device at 96 kHz
sampling rate [11]. However, since high-frequency
sampling is resource demanding, Abbas [12] and
Zufferey et al [13] sampled electric consumptions every 10 seconds with promising results.
Though ILM has been a point-of-interest of researches
and many approaches have come forward as a result, the
availability of commercial metering device with an
appliance classification capability is not yet prevalent.
Also, the availability of public ILM datasets is very
limited, with very limited appliance types, which
significantly affects the reported performance of
scientific works. Moreover, ILM systems have not been
implemented in the Philippines. With the limited availability of smart plugs with load identification

25
capability, remote load monitoring and access are still
seen wanting intervention.
In an attempt to address these needs, the researcher
endeavoured to develop an individual appliance metering device which can be used to 1) create a library of
appliance load signatures; 2) classify appliances based on
their power signatures using a supervised learning
technique; and, 3) access appliances remotely.
The limitations in resources and increasing demand for
energy justify the need of intelligent load monitoring
devices. The development of a load identification
infrastructure will contribute to energy conservation
innovations from which the society, in general, can
benefit. Also, with the availability of a metering device
which can be used to capture load power signatures, ILM
libraries can be expanded to include additional appliance class of various models to significantly increase the
identification accuracy of ALM-related scientific works.
This study was conducted with the purpose of
developing a metering device for appliance
classification. The appliances being considered are those
common appliances for the ten identified offices of UM
Tagum College and are also assumed to be in good
working conditions. They are classified into five types:
computer set, printer, laptop (via charger), electric fan
and cellular phone (via charger). The researcher considers the sampling period from the time an appliance
is switched on until its steady state.
II. METHODOLOGY
A. System Design
Figure 1: System Block Diagram
Figure 1 showed the block diagram of the system. The
smart meter was placed between the home outlet and the appliance. The meter’s internal structure was comprised
of latches, potential and current transformers, Analog-to-
Digital Converter and Raspberry Pi. The power and
current transformers were necessary to step down actual
values to match parameters of digital circuitries. After
voltage and current levels were stepped down, the ADC
performed conversion. The Raspberry Pi was used as the
main processor of the smart meter with its low cost and
reliability, making it well-suited for wireless sensor
network monitoring system [14]. The Raspberry Pi
sampled data received from ADC and used these samples
for feature extraction and appliance classification. As a
microcomputer, the PI had its own Ethernet and WIFI
ports which make communication to network possible;
thereby, providing information views and control using mobile device. The mobile device sent signal for a user
to turn off the plugged appliance through the Raspberry
Pi, which responded by providing trigger to the latches to
accomplish the required function.
B. System Flow
The whole system, as shown in Figure 2, was
constructed with the objectives to develop a metering
device with appliance classification capabilities, store
data for load library of power signatures and provide remote access and intervention.
1) Data Acquisition: Data acquisition necessary for
classification had to be done first by stepping down
current and voltage levels. Once they were stepped down,
the analog signals must be converted to digitalized ones
before the Raspberry Pi can take samples. For this study,
the researchers were able to sample two thousand
samples per appliance at a rate of 100 samples per
second. The sampling period covered the time the
plugged appliance was turned on until its steady state.
The Raspberry Pi was programmed using Python language to read current and voltage levels while
computing the time difference of their zero crossings.
The difference of current and voltage crossings was
necessary to accurately measure the power factor which
was a vital factor for classification. Once these were
done, electrical quantities considered as parameters for
power signatures were derived. These parameters include
real power (P), peak current (IPEAK), RMS current
(IRMS), and the power factor (PF).

26
Figure 2: System Flowchart
2) Appliance Classification: Appliance was
identified and classified using their power signatures.
This was done using the k-Nearest Neighbors algorithm.
The algorithm worked by comparing the data to the
training set and then returning the class label [15]. This training set was in the classification model, an appended
library of appliance power signatures. The load library of
appliance power signatures to be used for classification
was local to the meter. This load library was a collection
of records from data sets of seventy five plug loads from
five appliance classes, fifteen of each class, including
computer set, electric fan, laptop (via charger), printer,
and mobile phone (via charger).
3) Remote Access and Intervention: After an
appliance was classified, the result is communicated to a
network i.e. stored to a cloud where the user can also view the results. Using a mobile device, the user can
install an Android-based application to remotely control
the switching on or off of a plugged appliance.
C. Hardware Configuration
The value of the line voltage from the distribution lines
varied depending on diverse load consumption
conditions. As such, actual line voltage values were
measured at different times in a day, especially
considering peak and off-peak power usage hours, to
determine the maximum possible voltage that the meter
will capture to ensure that the circuitry remains safe even with voltage fluctuations. The maximum possible input
voltage to the meter, based on several observations is
approximately 230 V. This value had to be stepped down
to 2.048 V, the selected GAIN setting for the selected
ADC input channels that will capture the voltage value to
be digitized. A voltage divider circuit was used, shown in
Figure 1, with R1 and R2 values computed to achieve the
required ratio.
Figure 3: Voltage Divider Circuit
With a 230V input and R1 and R2 being 4.2MΩ and
2.2kΩ, respectively, the maximum possible RMS voltage
output (VOUT) of the circuit is 1.31979 V, which still has
a safety net of 0.7282 V in case the line voltage will go
beyond 230 V.
For current sensing, ACS712, a fully integrated, hall effect-based linear current sensor IC, was used. The
output voltage of the current sensor can reach up to 5V
depending on the input voltage and the current drawn by
a load. The output voltage of the current sensor that was
equivalent to zero current (no load) is ½ of the input
voltage, e.g. for a 5 V input, a 2.5 V output is equivalent
to zero current. An increment of 100mV was added to the
output of the current sensor for every ampere of current
drawn.
The ADS1115 was used for analog-to-digital conversion. The ADS1115 has four input channels.
Channels 0 and 2 capture the output of the current sensor
while the outputs of the voltage divider circuit were
captured by Channels 1 and 3. The selected GAIN setting
for the channels that captured the sensed current was 2/3
to read voltages ranging from -6.144 V to +6.144 V to
accommodate the maximum possible voltage output of
the current sensor which was 5 V. The ADS1115 was set
to perform conversions at 860 samples per second. With
its 16-bit precision, the voltage and current steps were

27
0.0000625 V and 0.001875 V, respectively, based on the
selected GAIN settings. The ADS1115 communicated
the outputs of conversion to the Raspberry Pi via the I2C
interface, with the default address, 0x48, selected.
Python was used to program the Raspberry Pi to
perform its three major tasks: data acquisition, feature
extraction and appliance classification. The Raspberry Pi
was configured as master and the ADS1115 as slave.
III. RESULTS AND DISCUSSIONS
After the data were collected, the required power
features were extracted. Table I showed the comparison of the approximate maximum appliance power
consumption at start-up against at steady state of the five
appliances gathered by the developed meter.
Table I
Comparison of Appliance Power Consumption at Start-up and at
Steady State
Appliance
Class
Power Consumption (Max) Steady State to
Peak Current
Ratio Start-Up Steady State
Computer Set 106 W 94 W 0.88679
Electric Fan 86 W 83 W 0.96512
Laptop 188 W 107 W 0.56915
Mobile Phone 20 W 21 W 1.05
Printer 865 W 13 W 0.01503
It can be observed that the printer drew a much bigger
current during start-up compared to the other appliances
under study; however, during steady state the power
consumption remarkably dropped and became the lowest
from among the five appliances. The steady state to peak
current ratio based on the results was unique for each
appliance class.
Table II
Comparisons of Power Feature Sets of Electric Fan at Different
Settings
Fan
Speed
Setting
Real
Power
(Steady
State)
Peak IRMS
Mean
IRMS
(Steady
State)
Power
Factor
Slow 61.317184 0.322175 0.265562 0.9999915
Medium 64.967736 0.340074 0.280146 0.9999917
Fast 66.209614 0.371893 0.286842 0.9999938
The power consumption of the electric fan was
specifically investigated. Table II showed the
comparison of power feature sets of an electric fan at
different speed settings. It can be observed that power
consumption was highest at the maximum setting.
However, it is worth noting that at the maximum setting
the electric fan was most efficient with the power factor
closest to unity.
Table III
Power Feature Sets of Electric Fan at Maximum Speed Setting
Trial
Real
Power
(Steady
State)
Peak
IRMS
Mean
IRMS
(Steady
State)
Power
Factor
1 68.818094 0.360624 0.295592 0.99999127
2 58.562131 0.353995 0.258469 0.99999252
3 71.741695 0.372556 0.308121 0.99999283
4 75.783824 0.382500 0.325821 0.99999264
5 66.209614 0.371893 0.286842 0.9999938
To investigate more the behaviour of the electric fan,
five trials were conducted for the maximum fan speed
setting to determine the consistency of the gathered data.
Table III showed that in the second trial the gathered
feature set was closer to the feature set of the fan at the
lowest setting as can be observed in Table II. Also, each
trial generated results which, when compared to the
results of the other trials, were not equivalent for the same
setting.
Table IV
Comparison of Power Feature Sets of Mobile Phones of the
Same Brand but of Different Models
Model
Real Power
(Steady
State)
Peak IRMS Mean
IRMS
(Stead
y
State)
Power
Factor
Samsung
Keystone 3
15.584834 0.070931 0.0678
15
0.9999
9884
Samsung
Galaxy J1
Mini
17.289824 0.086178 0.0746
43
0.9999
9873
Samsung S6 18.184310 0.092144 0.0792
18
0.9999
8673
The data shown in Table IV were gathered while the
phone was charging. It can be observed that the power
drawn by the different models of the same brand of
mobile phone were different yet comparable.
The accuracy of the readings was verified using
commercial meters. The readings were approximately
equivalent, with the difference attributed to precision.
After the training set was prepared, the kNN classifier
was tested on the data set and the estimated error rate was
0%, with k = 3.
Actual testing revealed an overall accuracy of 92%,
based on Equation 1 as shown in Table V. Three
appliances, in all instances, were correctly classified. The printer was incorrectly classified when the classification
process was initiated and the printer was not turned on

28
immediately, significantly affecting the extracted
features of the testing data.
Accuracy = (TP+TN
TP+TN+FN+FP) X 100
(1)
Where: TP = number of correct prediction that an
instance is positive
TN = number of correct prediction than an
instance is negative
FP = number of incorrect prediction that an
instance is positive
FN = number of incorrect prediction that an
instance is negative
Table V
Confusion Matrix
Predicted/
Actual
Computer
Set
Electric
Fan
Laptop Mobile
Phone
Printer Unknown
Appliance
Computer
Set 15
Electric
Fan 15
Laptop 1 14
Mobile
Phone 15
Printer 1 14
Unknown
Appliance 2 1 1 11
IV. CONCLUSIONS AND FUTURE WORKS
This study was aimed to develop an individual
appliance meter with appliance classification capability
based on time-dependent power consumption features
drawn and with remote access facility. The developed
meter can be used to create a library of load signatures,
classify appliances based on their power signatures using a supervised learning technique, and access an appliance
remotely. With the limited ILM datasets, there are still
so much to explore considering different appliance
categories and different types of measurements that can
result to an increase in classification accuracy. The load
library derived from this work can be used to expand the
ILM datasets which can be used by other researchers.
Results showed accuracy of 92%, hence, the appliance
classification infrastructure developed can be useful in
energy management applications to reduce wastage in
energy usage.
Future works should consider the effects of varied load
conditions. Also, the load library has to be further
populated to include other appliance classes of different
brands and models to enhance the classification range and accuracy of the system.
REFERENCES
[1] A. Ridi, C. Gisler, and J. Hennebert, “A Survey on Intrusive
Load Monitoring for Appliance Recognition,” IEEE, 2014.
[2] F. Paradiso, F. Paganelli, A. Luchetta, D. Giuli, and P.
Castrogiovanni, “ANN-Based Appliance Recognition from
Low-frequency Energy Monitoring Data,” IEEE, 2013.
[3] A. Reinhardt, D. Christin, and S. Kanhere, “Predicting the Power
Consumption of Electric Appliances through Time Series Pattern
Matching,” in Proceedings of the 5th ACM Workshop on
Embedded Systems for Energy-Efficient Buildings (BuildSys),
pp. 1-2, ACM Press, Nov. 2013.
[4] R.S. Reddy, N. Keesara, V. Pudi, and V. Garg, “Plug load
identification in Educational Buildings Using Machine Learning
Algorithms,” in Proc. BS2015: 14th Conference of International
Building Performance Simulation Association, 2015.
[5] A. Ridi, C. Gisler, and J. Hennebert, “Automatic Identification
of Electrical Appliances Using Smart Plugs,” IEEE, 2013.
[6] M. Ito, R. Uda, S. Ichimura, K. Tago, T. Hoshi, and Y.
Matsushita, “A Method of Appliance Detection Based on
Features of Power Waveform,” IEEE, 2004.
[7] W.K. Lee, G.S.K. Fung, H.Y. Lam, F.H.Y. Chan, and M.
Lucente, “Exploration on Load Signatures,” in Proc. of
International Conference on Electrical Engineering, 2004.
[8] T. Ganu, D. Rahayu, D. Seetharam, R. Kunnath, A.P. Kumar, V.
Arya, S. Husain, and S. Kalyanaraman, “Socketwatch: An
Autonomous Appliance Monitoring System,” IEEE, 2014.
[9] A. Reinhardt, D. Burkhardt, M. Zaheer, and R. Steinmetz,
“Electric Appliance Classification Based on Distributed High
Resolution Current Sensing,” IEEE, 2012.
[10] M. Fitta, S. Biza, M. Lehtonen, T. Nieminen, and G. Jacucci,
“Exploring Techniques for Monitoring Electric Power
Consumption in Households,” in Proceedings of the 4th
International Conference on Mobile Ubiquitous Computing,
Systems, Services and Technologies (UbiComm), 2010, pp. 471–
477.
[11] F. Englert, S. Kobler, A. Reinhardt, and R. Steinmetz, “How to
Auto-Configure Your Smart Home? High-Resolution Power
Measurements to the Rescue,” ACM, 2013.
[12] D. Zufferey, C. Gisler, O.A. Khaled, and J. Hennebert, “Machine
Learning Approaches for Electric Appliance Classification,”
IEEE, 2012.
[13] F.K. Zaidi Adeel Abbas and P. Palensky, “Load Recognition for
Automated Demand Response in Microgrids,” in Proceedings of
the 36th IEEE Annual Conference on Industrial Electronics
Society (IECON), 2010, pp. 2442–2447.
[14] C.N. Cabaccan, F.R.G. Cruz, and I.C. Agulto, “Wireless Sensor
Network for Agricultural Environment Using Raspberry Pi
Based Sensor Nodes,” IEEE, 2017.
[15] P. Harrington, Machine Learning in Action, New York: Manning
Publications Co., 2012

29
Price Calculator of Dry-Fermented Cacao Beans
Using k-NN Algorithm Randy E. Angelia1, Noel B. Linsangan2
1College of Engineering Education, Computer Engineering Program, University of Mindanao, Davao City 2School of Electrical, Electronics and Computer Engineering, Mapua University
Manila, Philippines [email protected]
Abstract— From a basic economic point of view, good
quality harvests were mostly entwined to high market value
but some conventional methodologies on trading somehow
deprived either the traders or the farmers of the real value
of the goods due to erroneous practices and at some point,
subjective decision making. Knowing these issues at hand
the proponents were inspired to propose a solution of
automating the calculation of fermented cacao beans based
on its fermentation quality using digital image processing.
Three hundred cross cut cacao beans were pre-classified by
a qualified human cacao quality assurance officer and
visually characterized them based on color features and
classified as well-fermented, under-fermented and over-
fermented. RGB features of pre-identified beans were
extracted and enlisted as part of the classifier data sets. The
created device sampled the cross-cut beans for visual
analysis through image capturing and classification via its
image processing chamber. The image feature extraction
was done through processes such as grayscaling,
thresholding and outlining of regions of interest.
Classification was done on the generated RGB features of
each object and using k-Nearest Neighbour prediction
techniques the classification of each beans was attained.
Using the standard price matrix multiplier of cacao traders
along with the base price data, trading price of cacao beans
was determined. Initial data revealed a 97.5 percent overall
accuracy in determining the quality of cacao beans which
basically led to true positive fermented cacao beans price
appraisal.
Index Terms— beans price appraisal, cacao beans, image
processing, k-NN Algorithm, confusion matrix.
I. INTRODUCTION
As world’s population continues to grow, food
security is always put into balance. As a nation, the
higher production in agricultural products the better for
the economy since not all nations has the capacity to
produce food. Theobroma cacao generally known as
cacao, the raw material for making chocolate, cocoa
powder, cocoa liquor and many more is experiencing
shortage in terms of supply with respect to the world’s
demand. The global demand for cacao has tripled from
1970 to 2000 from nearly 900 thousand tons to 3 million
tons in year 2000. United States of America and
European countries like Germany, France and United
Kingdom ware the front runner in cacao consumptions
[1]. Such development is a big opportunity to cacao
farmers to improve yields and quality. However, in the
Philippines, a country known to produce great quality of
cacao due to its appropriate weather conditions; only
25% of the total domestic demand has been produce
yearly [2]. Things like industry support, upgrading of
knowledge in modern cacao farming, availability of
technology and government support programs were some of the obvious reasons such low production. Philippine
scenario was not far from Ghana, Africa where targeted
yields and quality were constantly not been reached
yearly due to lack of government support though 4
percent of its Gross Domestic Product (GDP) came from
cacao production [3]. Another interesting part in cacao
industry was the quality of beans since compared to other
crops, after harvest procedures lowering the moisture
content was the only requirement in order to preserve and
to market such as corn, rice, coffee, copra, etc. Cacao
beans needed to be fermented for the acid build-up which was necessary to generate aroma to the chocolates [4].
During trading, prices differed according to its quality
wherein the prime indicator was the fermentation quality.
Grading procedure of fermented cacao beans was based
on the percent of slaty or under-fermented, over-
fermented and the presence of foreign objects. Test
involved counting of cacao beans, cutting in lengthwise
and examining by visual inspection [5]. This method of
inspection turned to be erroneous and somehow
subjective due to different standard of every human
examiners. Integration of modern technology is likely
applicable in this kind of challenges like image processing techniques that analyse ordinary photographs
through its color and images features [6]. Several studies
in image processing intended for agricultural products
were recorded using different approaches appropriate to
different scenarios. Classification of rice grains using
neural network to extract the characteristics of rice grains

30
using thirteen morphological features, six color features,
and fifteen texture features were recorded with high
acceptable rate [7]. Artificial Neural Network or ANN
was also implemented in classifying green coffee beans
transformation model using the Bayes classifier algorithm with a remarkable 100 percent accuracy in
classifying four classifications of beans [8]. ANN was
also implemented in cacao beans classification in
Indonesia [9]. A prominent name in image classification
was k-Nearest Neighbor’s Algorithm or k-NN because of
its simplicity and accuracy in analysis [10]. Numerous
implementations of k-NN algorithm produced
remarkable results, one example was for skin disease
identification system using Gray-Level Co-Occurrence
Matrix as its feature extraction while k-NN as its
classifier [11]. Also, k-NN was implemented in
identifying and quality of rice grains with gained positive accuracy result [12]. Features extraction was another
essential part in image processing since there is nothing
to be classified if extraction of image features or
information does not occur. Red, Green and Blue or RGB
feature extraction is one of the most used since every
image has visible RGB differences [13]. This type of
processing is implemented in India in colour feature
extraction of different fruits [14]. In Iran, identification
of bean varieties was done according to color features
using ANN which yielded extremely high results [15].
This study focused only in determining prices of cacao
beans based on its fermentation quality through image
processing. For the realization of the study, the
construction of hardware and development of software
was necessary to process the image captured.
Specifically, the researchers shall develop an image
capturing chamber for gathering cross-cut cacao images,
classify cacao beans images to well, under and over
fermented and lastly, generate the buying price of cacao
beans.
Quality food is the main importance of the study. The integration of modern technology to agricultural
application will hopefully give cacao famers particularly
in the Mindanao area fair market price for their produce.
This study will also serve as reference for future
researchers of cacao beans. The success of the study may
enhance farmers’ outputs that may lead to positive impact
to the economy.
The study is limited only in classifying well, under and
over fermented cacao beans and disregards other possible
classifications. It only considers cacao varieties common to Mindanao specifically in Davao region. All samples,
training data and standards considered are based on the
standards of Auro Chocolates.
II. METHODOLOGY
The following steps were implemented to realize the
objectives of this study. The first step was the review of
related literatures. Various study in image analyses were
read especially those studies that were implemented in
agriculture. Conventional and modern way cacao
farming methodologies were studied in order to
formulate accurate solutions to the identified gap.
Activities like post-harvest processes such as
fermentation, drying and even proper storage were
observed including trading procedures. With the help of
cacao farming guides, the researchers were able to craft
the conceptual framework of the study as shown in Fig. 1. As presented in the figure, the required inputs to the
system were the parameters such as dry-fermented bean
images and the price matrix multiplier from the identified
cacao buyer.
The images will undergo several processes like,
binarization, gray-scaling and thresholding followed by
the image classification using image classifier, and
analytics in identifying the price multiplier of cacao
beans in kilogram. The expected output would be the
accurate pricing of cacao beans according to its fermentation quality.
Figure 1: Conceptual Framework
In order to produce the fair price of the fermented
cacao beans, the creation of image chamber was necessary. This chamber contained the camera for image
capturing and fluorescents lamps installed strategically
for equal illumination during the image capturing of the
subject beans. The image chamber is a sealed chamber
to control the luminance inside. The chamber has the
capacity to take forty cacao beans at a time with an
average size of 1.2 to 1.8 centimetres in width and 2.3 to
3.0 centimetres in length. The camera that captured
images was directly connected to the computer with
developed application program. The design of the
graphic user interface of the system was shown in Fig. 8.
And was written in Visual Basic.Net. Python programming and OpenCV libraries were for the pre-
processing and image prediction.
*Beans
Images
* Price
multiplie
r
*Pre-processing
*Feature
Extraction
*Image Prediction
* Price
computation
Identifie
d price
of cacao
beans
Input Process Output

31
Testing procedures were done to determine if the
created system was working according to its identified
functions. Creation of data sets using the pre-classified
samples containing the Red, Green and Blue or RGB characteristics were added to the data bank of the
classifier which will be used later as the basis in
predicting the quality of the beans. RGB features are
usually in three 8-bits numerical value of the images that
represent the density of the three colors. The system is
now ready for actual use. For data gathering, samples of
100 grams per sack of dry-fermented cacao beans of
approximately 80-120 beans were randomly picked from
the sack, cut into half then loaded to the imaging chamber
for the image capturing and classification. The results of
the classification together with the use of Table I, the
application program shall compute for the fair market price of the beans. Confusion matrix was used in
analysing the accuracy of the identification of the beans
quality.
As mentioned earlier, the development of the graphic
user interface or GUI was done using VB.NET while Python programming and OpenCV was used for the
application program. Image analysis procedures started
with the extraction of the RGB feature of the beans as
shown in Figure 2. Original image would have to
undergo a pre-processing to prepare the image for classification. The first step of image feature extraction
pre-processing was to convert the original RGB image to
grayscale. The second pre-processing step was the image
thresholding. In this step, two thresholding methods were
applied: Otsu’s method and the binary inverse method.
The Otsu method was used to determine the threshold
value that would be used to compare the pixels in the
images. The threshold value extracted from the Otsu
method would be was used for the binary inverse method
which would then compare the threshold value to the
pixels in the image.
Figure 2: Image analysis process flow
After pre-processing, the classification process
followed by getting the corresponding features of the
images. The classification process started by marking the
Region of Interest or ROI fitting each object within a bounding rectangle. The average Red, Green Blue values
of each bounded bean is extracted and underwent k-NN
classification using the classification of the 5 nearest
neighbours.
Table I
Price Multiplier
Number of
beans every
100 grams
Percentage of
Over-
fermented
Percentage of
Under-
fermented
Price
Multiplier
80 beans 3% 19% 1.54
80 beans 3% 40% 1.47
80 beans 6% 19% 1.35
80beans 6% 40% 1.29
81-90 beans 2% 18% 1.47
81-90 beans 2% 37% 1.40
81-90 beans 6% 18% 1.29
81-90 beans 6% 37% 1.23
91-100 beans 2% 16% 1.44
91-100 beans 2% 34% 1.37
91-100 beans 5% 16% 1.26
91-100 beans 5% 34% 1.20
101-110 beans 5% 30% 1.00
111-120 beans 4% 28% 0.90
Marking of the
Region of Interest
(ROI)
Extraction of RGB
Features
Beans
Classification
Image
Classification
Image Feature
Extraction
RGB to Grayscale
Conversion
Image
Thresholding
Object Tracking
Display the Price
of Cacao Beans Pre-Processing

32
Table I showed the price of multiplier in buying
cacao beans. The pricing of cacao beans shall depend
upon its quality based on size and fermentation quality results. Price of cacao beans varies according to size
which means the bigger the cacao beans the higher the
price. Also, the lower the number of over and under
fermented beans in a sample resonate to higher
multiplier. To determine the buying price, the price
multiplier will be multiplied to the base price. The base
price usually varies according to the economic demands
of the goods. Table 1 will serve as the lookup table for
the price multiplier.
Beans that exceeded the acceptable percentages of
under and over fermented were considered as rejected beans by high end buyers and available to other buyers
for other end products like cocoa powder, low-quality
chocolate bars and others.
The accuracy of the whole system will be
computed based on the actual prediction of the system
versus the predicted classification and being computed as
shown in Equation 1.
𝐴𝑐𝑐 = 𝑇𝑃 + 𝑇𝑁
𝑇𝑃 + 𝑇𝑁 + 𝐹𝑃 + 𝐹𝑁
Where: Acc = accuracy
TP = number of correct prediction that an instance is positive
FP = number of incorrect prediction that an
instance is positive
FN = number of incorrect prediction that an
instance is negative
TN = number of correct prediction than an
instance is negative.
III. RESULTS AND DISCUSSION
Figures 3-5 showed the image feature extraction
results of the study. As mentioned in the methodology,
the classification process followed the standard
classification procedure of the industry where sampled
beans were cut into halves then arranged in the image
chamber for image capturing. Figure 3 exhibited the
original image taken inside the chamber before grayscale
conversion and thresholding occurred.
Figure 3: Original Image
Figure 4 showed the grayscaling results of the
subjects. The conversion of images from RGB to
grayscale was applied for easy thresholding and
determination of boundaries needed in the next procedure.
Figure 4: RGB to Grayscale Image
Figure 5 showed the image thresholding results of the
subjects. Thresholding was necessary in determining the
background to the objects from the subject images. This
segmentation procedure turned the object color into
white while the background into black. The thresholding
procedure was implemented using Otsu technique and
inverse binary method. Results from such procedure were preparatory in tracing the region of interest of the image.
(1)

33
Figure 5: Image Thresholding
After the required pre-processing procedures were
completed, the image undergone object tracking or
contour finding of the images. This can be done by
finding the region of interest or ROI of each object as
shown in Figure 6. Defining the ROI was considered with
bounding rectangle, important step in determining the
average RGB values of the image in classifying since
only those within the bounded area will be subjected to
analysis.
Figure 6: Tracing of ROI
After defining the ROI of the images, the original
image was loaded back to identify the average values of
red, green and blue colors with values ranging from 0-
127 in decimal as shown Figure 7. These values served
as inputs to the k-NN where data sets were also loaded.
The classifier located the 5 nearest neighbours based on its RGB values together with its individual
classifications. The greatest number of classifications out
of the 5 nearest neighbours will be the classification of
the particular sample.
From Figure 7, the images inside the green rectangles
were the regions of interest of the images where RGB values were extracted. The marking written such as over,
under and well were the results of the classification.
Figure 7: Classification Result
Table II showed the result of the test conducted with
120 beans using confusion matrix. The device correctly
classified all 40 well fermented beans, 38 of the 40 under
fermented beans were classified correctly while for the
third classification, 39 out of 40 were correctly classified
as over fermented. Using Equation 1, the accuracy of the
device was 97.5%. Before the beans were subjected to the classification prediction by the device, they were already
manually classified by an expert human cacao classifier.
Forty (40) beans were classified as well-fermented,
another 40 were classified as under-fermented and the
last set of 40 were classified as over-fermented.
Table II
Data Analysis Results
Predicted/
Actual
Well
Fermented
Under
Fermented
Over
Fermented
Well Fermented 40 2 1
Under
Fermented 38
Over Fermented 39
Figure 8 showed the sample screenshot of the application
created to calculate the price of the fermented cacao
beans. Price multiplier in the figure was a value used as

34
a multiplier to the base price of the cacao to get the beans’
buying price. Base price was the suggested price of the
beans per kilogram and a user-input information. The
basis of these values were presented Table 1 in in Section
II. Table 1 serve as the lookup table for identifying the price multiplier and base price of the fermented cacao
beans. In this particular trial, the software detected 78
well fermented beans, 1 over fermented bean and 1 under
fermented bean which yielded to less than 2 percentage
respectively in the last two categories. Therefore, with
the base price of 120.00 pesos per kilogram, the buying
price is calculated by multiplying the base price to the
price multiplier of 1.54 that resulted to 184.40 pesos per
kilo
Figure 8: Graphic User Interface Screenshot
IV. CONCLUSIONS AND FUTURE WORKS
Based on the data gathered the study was successful
in creating a system that has the ability to calculate the
price cacao beans. Also, the system was successful in
classifying accurately cacao beans according to its
fermentation quality through image analysis. The results
of the comparison of actual and predicted data using the
confusion matrix yielded 97.5% accuracy, justifying the
correctness of the methods adopted.
For the future endeavours of the study, the inclusion
of damage beans such as germinated, moldy and wet
beans are highly recommended as well as the ability of the system to detect the variety of the beans since a lot
new cacao variety were being recorded in the Philippines
with ample of unique color and size characteristics. The
use of other image classifying techniques like artificial
neural network classifier and other image feature
extraction methods are highly recommended since this
study was solely relying on the RGB of the images.
REFERENCES
[1] (2017) Cacao Industry Development Association of Mindanao
Inc. Website [Online]. Available: http://www.cidami.org.
[2] (2017) Bureau of Agricultural Statistics website [Online].
Available: http://www.psa.ph.
[3] W. Quarmine, “Incentives for Cacao Beans Production in Ghana:
Does Quality Matter?” NJAS-Wageningen Journal of Life
Sciences, pp 7-14, Sep. 2012.
[4] I. Ganeswari, K, Bariah and A. Sim, “Effect of Different
Approaches on the Microbiological and Physicochemical
Changes during Cocoa Bean Fermentation”, International Food
Research Journal, pp 70-7, 2015.
[5] (2017) International Cocoa Organization website [Online].
Available: www.icco.org.
[6] I. Young, J. Gerbrands, and L.van Vliet, Fundamentals of Image
Processing,Delft University of Technology, 2007.
[7] C. Silva and U. Sonnadara, “Classification of Rice Grains Using
Neural Networks”, Technical Sessions Institute of Physics, pp 9-
14, 2013.
[8] Emanuelle Morais de Oliveira et.al, “A Computer Vision System
for Coffee Beans Classification Based on Computational
Intelligence Techniques”, Journal of Food Engineering 2016,
pp. 22-27,2016.
[9] W. Astika, M. Solahudin, A.Kurniawan, and Y. Walandari,
“Determination of Cocoa Beans Quality with Image Processing
and Artificial Neural Network,” AFITA International
Conference,2010.
[10] I.Moise, E. Pournaras, and D. Helbing. (2017) ETH Zurich page.
[Online]. Available: http://www.ethz.ch.
[11] J. Aglibut, N. Linsangan, L. Alonzo, M. Coching, and J Torres,
“Skin Disease Identification System using Gray Level Co-
occurrence Matrix”, International Conference on Computer and
Automation Engineering, pp. 136-140, 2017.
[12] V. Kolkure, and B. Shaikh, “Identification and Quality Testing
of Rice Grains Using Image Processing and Neural Network”,
International Journal of Recent Trends in Engineering and
Reaserch, volume 3, pp. 130-135, 2016.
[13] R. Chary, R. Lakshmi, and K. Sunitha, “Feature Extraction
Methods for Color Image Similarity”, Advanced Computing: An
International Journal, 2012.
[14] A. Vyas, B. Talati, and S. Naik, “Color Feature Extraction
techniques of Fruits: A Survey”, International Journal of
Computer Application, 2013.
[15] A. Nasirahmadi, and N. Behroozi-Khazaei, “Identification of
Beans Varieties According to Color Features Using Artificial
Neural Network” Spanish Journal of Agricultural Research, pp
670-677, 2013

35
Performance of (15, 11) Linear Block Code with
SCM Transmission over MMF at Low-
Frequency Passbands
Jaruwat Patmanee and Surachet Kanprachar Department of Electrical and Computer Engineering
Faculty of Engineering, Naresuan University
Phitsanulok, Thailand.
Abstract— Low-frequency passbands of multimode
fibers have been shown recently to be possible channels to
convey many subcarrier signals so that the total data rate
can be increased comparing to the data rate obtained
solely from the 3-dB modal bandwidth of the fiber. The
challenge in using these passbands is that they are
frequency-selective with many nulls; thus, putting a
subcarrier signal in the vicinity of these nulls can result in
errors at the receiving end. In this paper, to overcome such
problem, a (15, 11) linear block code has been adopted.
Using subcarrier multiplexing (SCM) technique, 4 low-
frequency passbands and the 3-dB band of the multimode
fiber are used as channels for transmitting a high data-rate
signal. From the simulation result, with 1-km multimode
fibers, it is shown that the data rate of 396 Mbps, which is
almost twice the data rate obtained from the 3-dB modal
bandwidth, is achieved with a bit-error-rate (BER) lower
than 10-9. It is shown that applying the (15, 11) linear block
code with SCM technique, the low-frequency passbands of
multimode fibers can be used in increasing the data rate
effectively, which can be applied in practice without
replacing the fiber.
Index Terms — Bit-error-rate; Linear block code; Low-
frequency passbands; Multimode fibers; Subcarrier
Multiplexing.
I. INTRODUCTION
The frequency response of multimode fibers at the
frequency higher than the 3-dB modal band of the fiber has been studied and used as channels in transmitting
signals. To use such high frequency region of
multimode fibers effectively, a technique called
Orthogonal Frequency Division Multiplexing or OFDM
has been adopted [1 – 4]. This technique is related to
subcarrier multiplexing (SCM) technique at which a
high data rate signal is divided into many low data rate
signals and these signals are sent by modulating to
different subcarrier frequencies. This technique was
adopted in order to reduce the effects of frequency-
selective nature of the high frequency region of
multimode fibers. Additionally, to overcome such
nature of the channels, forward-error-correcting codes can be used in order to undo what channels do to the
signals. Linear block codes are one possible family of
forward-error-correcting technique used in practice.
These error-correcting codes have been used in wireless
communications with a problem of Rayleigh and Rician
fading channels [5, 6]. These kinds of channels in
wireless applications are similar to what has been shown
in multimode fibers at the high frequency region; that is,
there are many possible passbands with many deep
nulls.
The frequency response of the multimode fiber at
frequency higher than the 3-dB modal band has been studied. It has shown [7] that at the low-frequency
region, defined as the frequency at which just above the
3-dB modal band of the fiber, there are many possible
passbands and the peak frequencies of these passbands
are somewhat predictable. The formulae for predicting
the peak frequencies has been given and tested. These
passbands at low-frequency were also used as channels
in transmitting a high data rate signal via SCM
technique [8, 9]. It was shown that a BER lower than
10-6 has been achieved with a data rate of 500 Mbps,
which is 2.5 times larger than the data rate obtained from the 3-dB modal bandwidth. Noted that the length
of the multimode fiber chosen is 1 km. However, it is
seen that the BER of 10-6 is quite large to be used in
practice, especially in Optical fiber transmission, hence,
a (7, 4) linear block code was adopted [10] in order to
lessen the obtained BER. It was shown that a BER
lower than 10-8 with a data rate of 392 Mbps is obtained.
This achieved BER is lower than the case without using
a linear block code. Thus, it is seen that applying a
linear block code to the SCM multimode fiber
transmission can help reducing the BER of the system.
To further reduce the obtained BER while keeping
the total data rate at least identical to that from [10], in
this paper, another linear block code is adopted; that is,
(15, 11) linear block code. Similar to the code in [10],

36
with this kind of block code, only one-bit errors can be
corrected. A high data rate signal is transmitted over
many low-frequency passbands and the 3-dB modal
band of the multimode fiber. Two different kinds of bit
allocation in the transmission will be studied. The received signals and the obtained BERs will be studied.
The organization of this paper is done as follow. In
Section I, the importance of the research and the review
of the related work are described. The low-frequency
passbands of multimode fibers and linear block code
will be given in Section II. And, in Section III, the SCM
with multimode fiber transmission system used in the
work and the bit allocation in linear block code are
shown. The obtained results in terms of BER are given
and discussed in Section IV. Finally, in Section V, the
work done in this paper is summarized.
II. LOW-FREQUENCY PASSBANDS AND LINEAR BLOCK
CODES
A. Low-Frequency Passbands
As described previously, the frequency response of
multimode fibers at the frequency higher that the 3-dB
modal band is frequency-selective; that is, there are
many possible passbands available. The peak amplitude
of these passbands is lower than that of the zeroth-
frequency of the multimode fiber; that is, attenuation is
introduced. Also, the peak frequencies seem to be
random in general. Hence, to make use of these passbands in SCM signal transmission, it is possible that
one of the subcarrier signals can be significantly
degraded if such signal is located at the null or in the
vicinity of the null. The whole BER obtained will then
be high and not be able to make use in practice.
However, at the frequency next to the 3-dB modal
band, the characteristics of these passbands are fairly
predictable, especially, the peak frequencies. Examples
of 3 magnitude responses of multimode fiber are shown
in Figure 1.
Figure 1: Magnitude response of three diffent multimode fibers: each
with 100 guided modes, average delay of 5 s, and delay deviation of
2.5 ns.
From Figure 1, it is seen that the 3-dB modal
bandwidth of these 3 multimode fiber responses is 200
MHz. At the frequency higher than 200 MHz, there are
many possible passbands with approximately 10-dB
attenuated from the zeroth-frequency. These passbands have been analyzed and shown to be somewhat
predictive [7], especially, at the first two passbands. The
3-dB modal band and the next 6 passbands (that is, the
passbands at low-frequency region between 0.2 to 1.6
GHz) have been shown to be promising in transmitting
a high data-rate signal. It should be noted that the
bandwidth of each possible passband is identical to that
of the 3-dB modal band; for this case, is 200 MHz.
B. Linear Block Codes
Forward-error-correction code or FEC is one
important technique used in digital communication systems. It is used generally for correcting the errors
done by the channel to the signal without requesting a
retransmission from the sender. Linear block codes are
one important family of FEC used in practice. The
ability of correcting error is done by adding parity check
bits to the original bits [11 – 12]. The original bits are
divided into blocks of k bits (that is, m0, m1, to mk-1) as
shown in (1) by a vector m. Also, the encoded n bits,
which include the original k bits and (n – k) parity bits,
are determined by multiplying between the vector m
and the generator matrix, G, as shown by (2).
0 1 1km m m −=m (1)
0,0 0,1 0, 1
1,0 1,1 1, 1
1,0 1,1 1, 1
n
n
k k k n
g g g
g g g
g g g
−
−
− − − −
= =
c mG m(2)
Considering (2), it is seen that linear block codes are
generally defined by two parameters; that is, n and k, or
called (n, k) linear block code. There are many possible
kinds of linear block codes. One important code is the
code at which one error can be corrected at the receiving
end. Possible codes are (7, 4), (15, 11), (31, 26), and so
on. For (15, 11) linear block code, the generator matrix,
G, can be determined from a generator polynomial [11] shown in (3).
( ) 4 1g x x x= + +
(3)
After applying (15, 11) code to a set of 11 original
input bits (that is, m1, m2, …, m10), 15 encoded bits are
generated. These bits are described in Figure 2. It is
seen that there are 4 parity bits added shown by p1, p2,

37
p3, and p4. Additionally, the output bits as seen in the
figure is arranged systematically; that is, the parity bits
are located in front of the original input bits. Once the
decoding process has been done at the receiving end and
if there is no error found, these 4 parity bits can then be disregarded easily.
m0 m1 m2 m3 m4 m5 m6 m7 m8 m9 m10
(15, 11) Encoder
m0 m1 m2 m3 m4 m5 m6 m7 m8 m9 m10p1 p2 p3 p4
Figure 2: Diagram for original and encoded bits for (15, 11) linear
block code.
III. SCM TRANSMISSION OVER MULTIMODE FIBER
WITH (15, 11) LINEAR BLOCK CODE
To utilize the passbands of multimode fibers, an SCM
transmission system is adopted here in order to separate
a high data-rate signal into many lower data-rate signals
(also called subcarrier signals) and transmit these
signals via different subcarrier frequencies. These
subcarrier frequencies are selected at the peak
frequencies of the low-frequency passbands studied in
[7] with some adjustments. All subcarrier signals are
combined and transformed into an optical signal so that it can be transmitted over a multimode fiber. At the
receiving end, the received optical signal is transformed
back into an electrical signal and demodulated via
different subcarrier frequencies as used at the
transmitting end.
Considering the low-frequency passbands, it has been
shown [10] that the 3rd low-frequency passband is not
suitable for being used in SCM transmission since it
varies drastically from fiber to fiber. Additionally, the
4th low-frequency passband is not quite suitable for
transmitting a subcarrier signal; hence, in this work, only the 3-dB modal band (called passband#0) and 4
passbands (called passband#1, #2, #5, and #6) of
multimode fibers are used in SCM transmission. The
peak frequencies of the 4 passbands are at 300, 528,
1,311, and 1,572 MHz, respectively.
To be able to correct one error at any original block
of 11 bits, 4 parity bits are added to the block, resulting
in a total block of 15 bits; that is, the (15, 11) linear
block code. In this work, two different bit allocations
for these 15 bits are defined as shown in Figure 3. It
should be noted that the number of encoded bits transmitted via the 3-dB modal band is twice the
number of encoded bits transmitted via a passband since
the bandwidth of the 3-dB modal band and that of a
passband are identical. Hence, in Figure 3, two bits are
assigned to passband#0.
Passband No.
#0 #0 #2 #5 #6#1
m0 m1p1 p2 p3 p4
m2 m3 m4 m5 m6 m7
m8 m9 m10 p1 p2 p3
m0 m1 m2 m3 m4p4
m5 m6 m7 m8 m9 m10
Passband No.
#0 #0 #2 #5 #6#1
m0 m1p1 p2 p3 p4
m2 m3 m4 m5 m6 m7
m8 m9 m10
m0 m1p1 p2 p3 p4
m2 m3 m4 m5 m6 m7
m8 m9 m10
(a) Type I (b) Type II
Figure 3: Two types of bit-allocation for (15, 11) linear block code
to be transmitted via different passbands: (a) Type I and (b) Type II.
From Figure 3, two blocks of encoded bits (that is,
totally 30 bits) are assigned to passband#0, 1, 2, 5, and
6, respectively. For Type I bit-allocation shown in Figure 3(a), it is seen that the encoded bits are assigned
to all slots without leaving any slots vacant. The bit-
allocation pattern is repeated every two blocks of
encoded bits. With this type of bit-allocation, the
bandwidth of each passband can be fully utilized; thus,
the total transmitted data rate is high. Considering Type
II bit-allocation, as shown in Figure 3(b), it is seen that
there are 3 slots for passbands#2, 5, and 6 unoccupied
by any encoded bits since all 15 encoded bits is already
assigned. The next block of encoded bits is assigned
using the same bit-allocation pattern. For this type of
bit-allocation, the transmitted data rate is slightly lower than that of Type I bit-allocation because of those 3
unoccupied slots.
To determine the bit-error-rate or BER of each
received subcarrier signal, Q-parameter [13] is adopted
and shown in (4).
( )1 0
1 0
sub subBER K K Q
−= =
+
(4)
Where 1 and 0 are the averages for the received bit
1 and
bit 0, respectively
1 and 0 are the standard deviations of the
received
bit 1 and bit 0, respectively
and K(x) is the probability of a zero-mean unit-variance Gaussian random variable exceeding x.
From (4), it is seen that the BER of each subcarrier
signal or BERsub,i can be determined once all 4 related
parameters are known. This can be done by getting the
data from the received signal at the particular ith
subcarrier. The probability of bit error for a particular

38
bit transmitted over the ith subcarrier will then identical
to BERsub,i.
Considering Type I bit-allocation, it is seen that there
are two different patterns in transmitting the encoded
bits (15 bits) as seen in Figure 3(a); that is, Pattern-1 (shown by the blue letters) and Pattern-2 (shown by the
red letters). The probability of no error in transmitting a
15-bit block over the multimode fiber is the average
between the probabilities of no error from these two
patterns; that is,
( ) ( )
15 15
1,Pattern-1 1,Pattern-2
Type I
1 1
no error2
i j
i j
p p
P= =
− + −
=
(5)
where pi is the probability of bit error the the ith bit
in the 15-bit block transmitted,
pj is the probability of bit error the the jth bit
in the 15-bit block transmitted.
Similarly, the probability of having 1-bit error in
transmitting a 15-bit block over the multimode fiber is
determined by
2
Type I Pattern-1
11-bit error 1-bit error
2 kk
P P=
= (6)
where
( )1515
Pattern- 1 1,Pattern-
1-bit error 1 i jkj i i j
k
P p p= =
= −
(7)
Keeping in mind that now a (15, 11) linear block
code is applied and any one-bit error in a 15-bit
transmitted block can be corrected; hence, from (5) to
(7), the system BER of Type-I bit-allocation (BERType I)
can then be determined by
Type I Type I
Type I
1 Prob no error Prob 1-bit error
15BER
− −=
(8)
It is seen from (8) that the probability of wrong
decision in a received block (of 15 bits) is the
complement of the combined probabilities of no error
and 1-bit error. Dividing this block error rate by 15, the
system BER can then be obtained. Noted that a similar
calculation can be done in order to obtain the system
BER for Type II bit-allocation with a less complexity since in Type II bit-allocation, there is only one pattern
in transmitting the encoded bits over the multimode
fiber.
IV. RESULTS AND DISCUSSION
In this section, the resulting BER for different cases
are given. The comparison and discussion from these
cases are also given. In order to obtain a general
performance of the proposed system; that is, the (15, 11)
linear block code SCM transmission system over the
multimode fiber using its low-frequency passbands, the
BER is averaged from the BERs achieved from 10 different realizations of multimode fibers. The
frequency response of these multimode fibers is
determined from the multimode fiber with 100 guided
modes, an average group delay of 5 s, and a delay
deviation of 2.5 ns.
A. BER of Type I bit allocation: for different data
rates
Considering Figure 3(a) and the information shown in
Figure 1 about the available bandwidth of the 3-dB
modal band and the passbands, it can be estimated that
the highest data rate transmitted over the 3-dB modal
band and 4 low-frequency passbands is 200 + 4×100 =
600 Mbps; thus, resulting in a real data rate of 440
Mbps. The average BER from sending this amount of
data rate over multimode fibers via SCM transmission
with the 3-dB modal band and the passbands#1, 2, 5,
and 6 is shown in Figure 4. Also, the obtained BERs
from other values of the data rate are given.
Figure 4: Average BER of Type I bit allocation: for different data
rates. It is seen from Figure 4 that with a total data rate of
440 Mbps (shown by black dash line with circle
markers), the average BER becomes approximately
constant at 10-8 as the received optical power is larger
than -15 dBm. This value of BER is quite high and
might not be suited for being used in practice. To lessen
the achieved BER, the data rate transmitted over each
channels should be reduced. This means that the total
data rate transmitted must also be reduced. In Figure 4,
other two average BERs for data rates of 418 Mbps and
396 Mbps are displayed. It is seen that for the 418-Mbps data rate transmission (shown by the dotted green line

39
with diamond markers), the average BER is lower than
that of the 440-Mbps data rate transmission. However,
this average BER is still slightly larger than 10-9 in some
value of the received optical signal power. To get a
better (or lower BER) BER, the case of transmitting 396 Mbps of data rate (shown by red solid line with star
markers) is considered. It is seen that for this particular
case, the obtained BER is lower than 10-9.
B. BER of Type I bit allocation: for different drop-
off passband
From Figure 4, it is seen that the average BER lower than 10-9 is obtained for the case of 396-Mbps data rate
transmission. This performance is achieved from the
case of not using passbands#3 and 4, at which the
carrier frequencies are at 789 and 1,050 MHz,
respectively. One might wonder whether about the
performance if passband#4 is selected instead of the
other passbands. Noted that passband#3 is not chosen
since it has been shown [9] that it is strongly fluctuated
from fiber to fiber. Using such passband in the SCM
transmission can severely degrade the whole system
performance. In this part, the average BER will be studied for the case of using the 3-dB modal band,
passband#1, and the other 3 passbands selecting from
passbands#2, 4, 5, and 6. The performance in terms of
the average BER is shown in Figure 5.
Figure 5: Average BER of Type I bit-allocation: for different drop-off
passband.
It is seen from Figure 5 that dropping passband#2
(shown by the dash black line with black-filled circle
markers) or 6 (shown by the dash pink line with pink
circle markers) seems to give us a high BER. At a high received optical power (that is, higher than -20 dBm),
the obtained BER from these two cases is varying
between 10-10 and 10-7, which should not be used in the
SCM transmission since it is not guarantee to have the
obtained BER to be lower than 10-9, which is the
preferred BER used in practice. Considering the cases
of dropping passband#4 and 5 (that is, shown by the
solid red line with star markers and the dotted green line
with diamond markers, respectively), it is seen that the
BERs from these two cases are better than the previous
two. Also, comparing between the case of dropping
passband#4 and the case of dropping passband#5, it is
clearly seen that dropping passband#4 gives a better
performance; that is, a lower BER on average. From this figure, it is confirmed then that dropping passband#4 is
suitable for being adopted in the SCM transmission over
the low-frequency passbands of multimode fibers. In the
next sub-section, the case of dropping passband#4 will
be further studied by using different types of bit-
allocation.
C. BER Comparisons: Type I and Type II bit
allocations
Considering the average BER from Figure 4 for the
case of transmitting a 396-Mbps signal, it is seen that
the BER is lower than 10-9 and slightly larger than 10-10.
This achieved BER is from Type I bit-allocation, at
which, the data rate transmitted over all 4 passbands are
identical as seen from Figure 3(a). Since the variation of
the passbands from fiber to fiber is quite large as the
frequency increases, to lessen this effect to the whole
system performance, Type II bit-allocation (as shown in Figure 3(b)) is considered. With this type of bit-
allocation, it is seen that the data rates transmitted over
passbands#2, 5, and 6 are identical and are 2/3 of the
data rate transmitted over passband#1; that is, the
subcarrier signal bandwidth occupied by these
subcarrier signals is reduced. This then results in less
effect from these higher passbands to the system
performance. The obtained average BERs for these two
types of bit-allocation with (15, 11) linear block code
are shown in Figure 6. Also, the obtained BER from the
case of using (7, 4) linear block code [10] is given in the
figure.
Figure 6: Average BER: for different types of linear block code and
bit-allocation. From Figure 6, using (15, 11) linear block code, there
are two cases shown; that is, the case of using Type I
bit-allocation (shown by the solid red line with star

40
markers) and the case of using Type II bit-allocation
(shown by the dash pink line with pink circle markers).
It is seen that the average obtained BER from both cases
is lower than 10-9 as the received optical power is larger
than -20 dBm). Additionally, the superiority, in terms of BER, is delivered from the case of using Type II bit-
allocation at which the average BER of lower than 10-10
is obtained. Noted that with this case, the total data rate
transmitted is reduced to 363 Mbps, which is
approximately 1.8 times the data rate that can be
transmitted if only the 3-dB modal band is adopted.
Comparing these two cases with the case of using (7,
4) linear block code (shown by the dash blue line with
triangle markers) [10], it is seen that the average BER
obtained from the proposed (15, 11) linear block code
(for both cases of bit-allocation) is superior. More
importantly, the (15, 11) linear block code system gives approximately 7 dB coding gain at the BER of 10-9
comparing to the (7, 4) linear block code system.
V. CONCLUSION
In this work, a (15, 11) linear block code is adopted in
order to combat with the frequency selective nature of
the low-frequency passbands of multimode fibers. A
high data rate signal is sent through a multimode fiber
with SCM transmission using the fiber’s 3-dB modal
band and other 4 low-frequency passbands. It is shown
that an average BER of lower than 10-9 is obtained with
a data rate of 396 Mbps, which is approximately twice the data rate offered by using the 3-dB modal band only.
Additionally, with a careful bit- allocation, an average
BER of lower than 10-10 is obtained with a data rate of
363 Mbps, which is approximately 1.8 times the data
rate achieved from the 3-dB modal band of the
multimode fiber. A significant coding gain is also
achieved with the proposed (15, 11) linear block code
SCM system when compared to the previous work using
(7, 4) linear block code.
ACKNOWLEDGMENT
This work was supported by Naresuan University, Phitsanulok, Thailand.
REFERENCES
[1] Giacoumidis, E., et al., “Experimental and Theoretical Investigations of Intensity-Modulation and Direct-Detection Optical Fast-OFDM over MMF-Links,” IEEE Photonics Tech. Letters 24(1), 52-54 (2012).
[2] Hugues-Salas, E., et al., “Adaptability-enabled record-high and robust capacity-versus-reach performance of real-time dual-band optical OFDM signals over various OM1/OM2 MMF systems [invited],” IEEE/OSA Journal of Optical Communications and Networking 5(10), A1-A11 (2013).
[3] Rahim, A., et al., “16-channel O-OFDM demultiplexer in silicon photonics,” Proc. Optical
Fiber Communications Conference and Exhibition (OFC), 1-3 (2014).
[4] Tsai, C.T., et al., “Multi-Mode VCSEL Chip with High-Indium-Density InGaAs/AlGaAs Quantum-Well Pairs for QAM-OFDM in Multi-Mode Fiber,” IEEE Journal of Quantum of Electronics 53(4), (2017).
[5] Sidhu K. K. and Kaur G., “Performance Evaluation of Multilevel Linear Block Codes on Rayleigh Fading Channel,” 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), 2192-2196 (2016).
[6] Kamala, P. R. and Satyanarayana R. V. S., “Optimal Linear Block Code Modeling and Performance Analysis over Various Channels for use in Wireless Communications,” 2016 International Conference on Emerging Trends in Engineering, Technology and Science (ICETETS), 1-6 (2016).
[7] Patmanee, J. and Kanprachar, S., “Analysis of the Multimode Fiber at Low-Frequency Passband Region,” Journal of Telecommunication, Electronic and Computer Engineering 9(2-6), 37-41 (2017).
[8] Patmanee, J., Pinthong, C. and Kanprachar, S., “Performance of Subcarrier Multiplexing Transmission over Multimode Fiber at Low-Frequency Passbands,” Proc. The 8th Annual International Conference on Information and Communication Technology for Embedded Systems (IC-ICTES2017), 160-164 (2017).
[9] Patmanee, J., Pinthong, C. and Kanprachar, S., “BER Performance of Multimode Fiber Low-Frequency Passbands in Subcarrier Multiplexing Transmission,” The 3rd International Conference on Photonics Solutions (ICPS2017).
[10] Patmanee, J., Pinthong, C. and Kanprachar, S., “Performance of Linear Block Code with Subcarrier Multiplexing System on a Multimode Fiber using Low Frequency Passbands,” The 1st International Conference on Photonics Solutions (ECTI-NCON2018), 74-79 (2018).
[11] Lin, S. and Costello D. J., [Error Control Coding], Peason Prentice Hall, United States of America, 66-95 (2004).
[12] Proakis J. G. and Salehi M., [Digital Communication], McGraw-Hill, United States of America, 400-482 (2008).
[13] Keiser, G., [Optical Fiber Communications], McGraw Hill, United States of America, 285-286 (2004).

41
Nevanlinna’s Algortihm in Designing A
Robust Controller For Precision Motion
Control of A Ladder-Secondary Double-Sided
Linear Induction Drive
Mochammad Rusli1 ,2 , I. N. G. Wardana2 , Rudy Yuwowno1, Sigit Kusmaryanto
1,
Moch Agus Choiron2 and Muhammad Aziz Muslim 1
1 Electrical Engineering Dept. Faculty of Engineering Brawijaya University Malang INDONESIA
2Mechanical Engineering Dept. Faculty of Engineering Brawijaya University Malang INDONESIA
Abstract: The Nevanlinna’s algorithm for matching
solution on calculation of Robust controller in a double-
sided linear induction motor (DLIM) with ladder
secondary member are presented. The ferro magnetic-
core secondary consists of copper bars as ladder
conductive lines and as end connector-rings Equations
of two-dimensional magnetic-flux-density distribution in
the secondary and the airgap are derived. Formulas for
resistance and reactance of the ladder secondary and
the thrust of DLIM are obtained. The end effect caused
by the open-end of the airgap is taken into account. For
specific purpose, the matching solution will be
implemented in calculating of digital robust controller
for a double-sided linear induction motors to achieve
precise position tracking. A nonlinear transformation
with decouple modification is proposed to facilitate
controller design. In addition, the very unique end effect
of the linear induction motor is also considered and is
well taken care of in step of the controller design. Also,
the computer simulations is conducted to demonstrate
the performance of some various controller design. The
control algorithm of vector control will be also
implemented in the closed loop system.
Keywords—Double-Sided Linear Induction Motor,
2DOF Robust Controller.
I. INTRODUCTION
A design of a control system is aimed for providing solutions on two kind of problems: reference tracking problem and disturbance rejection. Those problems are commonly based on the corresponding Sensitivity and Comple-mentary Sensitivity - closed loop system. The disturbance rejection problem is solved by a feedforward control staregies (unknown disturbances can only be decreased by the use of feedforward tartegies). The other side for the reference tracking problem and stability are referred to an closed-loop perfromance. Usually both controllers is solved easily by separated
methods. However for disturbance in kind of cogging force (periodical disturbance) which is shown low frequancy caharsteristic is difficult to calculate both controllers separately. Therefore both controllers can be solved simulataneous and more advantageously startegies with the use of a Two Degree of Freedom (2-DOF) control configuration [1].
Several researches have taken more attention in designing controllers for such a robust controller. Those are shown in the literature from a wide spectrum of approaches[2], [3]. However eventhough the robust configurations provide more advantages compared to the nomal configuration, a robust controller design algorithm of the reference tracking problem in related to the influence of plant model uncertainty and cogging force as disturbance has not been completely conducted This is the main reason of this research for implementing nevanllinna’s algorithm for ronust-controller design using matching concept.
Currently, precision motion control especially in automated mechanical systems, such as machining processes tool, often need high-speed/ high-accuracy linear motions. These linear precision motions are drived by rotary motors with linear transmission mechanisms such as conversion gears and lead screw. Such mechanical transmissions not only significantly decrease linear motion speed and dynamic response, but also introduce backlash,large frictional and inertial loads, and structural flexibility. Therefore the direct drive linear motors can be as alternative device for linear motion, which eliminate the use of mechanical transmissions, and also provide a better performance for widespread use in high-speed/high-accuracy positioning systems [4]. Linear induction motors (LIMs) are widely used in many industrial applications, including transportation, conveyor systems, actuators, material handling,

42
pumping of liquid metal, sliding door closers, etc., with satisfactory performance.
The double-sided linear induction motor (DLIM) with squirrel-cage secondary produces thrust by means of an interaction between the primary field and the eddy currents induced in the secondary bars. A single-sided linear induction motor with a squirrel-cage reaction rail has been tested by Eastham and Katz [5]. The thrust forces indicate that the cage-rail single-sided linear induction motor performance is similar to that traditionally associated with the conventional squirrel-cage induction motor with frequency- ndependent rotor resistance. The DSLIM have beeen designed and manufactured by Author [5],[6],[7],[8] and [9.
The control startegies for controlling a precision linear induction motor is not new. However the robust-controller using Nevanlinna’s algortihm for matching solution and the cogging forces as disturbance for a ladder secondary double sided linear induction motor have not still be done. The constribution of this reasearch is design Robust controller algorithm using matching consept for a ladder secondary double-sided linear induction motor.
II. PROBLEM FORMULATION
A three-phases double-sided linear induction motors is considered in this research. The secondary part of motor consist of some bars, which are arranged in ladder form. In orde to achieve the high performance conditions, the mathematical model for simulation is inserted by most nonlinear effects like friction and ripple forces. According to type of signal-shape, the ripple force can be divided into two shape: periodical and non-periodical signals. This paper focuses only to the periodic ripple force – cogging forces. In the derivation of the model, the current dynamics is neglected in comparison to the mechanical dynamics due to the much faster electric response. The mathematical model of the system can be described by the following equations 1.
FyM −= ..
(1a)
drf FFFF ++=
(1b)
where y represents the position load, M is the
mass of the load plus the all of windings. is the
input voltage to the motor, F is the normalized effects of uncertain components that can be figured out as nonlinearities such as friction
fF , ripple forces rF ,
and external disturbances dF might be clasified as
disturbance components. The one of ripple force is cogging force. The cogging force equation is commonly derived using the “tooth overlap” technique. Without considering fringing effects, the energy loss due to cogging is:
2
7)(
.10.2
.2...93.2
p
tmtmsmtusumps
cg
NDIF
−=
(2)
where: su and tu are the moving part slot
and tooth width respectively; sm and tm are
the stationary part slot and tooth widths respectively; Is is the rms current in one stator
slot; p is the slot pitch; Dp is the depth of the
primary core; Nm is the number of coil-turns per phase and g is the actual air-gap length.
12
3 4 5
1 2 3 4 5 6
umm NN −
2
Mechanical Degree
pu
tu su
dmovable part
Stationary part tmsm
pm
Figure 1 Schematic of overlap process
Acording to equation (2) cogging force is
proportional to current source and opposite to the airgap length (g). Commonly, designers assume that the air gap length, dimensions and current source are constant. So the magnitude of cogging force is not changed while the moving parts moves. However, as it moves, there are reluctance magnetic in the ar gap is varied. The problem is finding the algortihm of controller design with considering the cogging force as disturbance.
III. MATHEMATICAL MODEL OF DSLIM
Mathematical model of DSLIM have been described on previous paper by author[5,6,7]. The model of DSLIM proposed in this paper having 9 ladder-bars and 10 winding slots in moving part. The designed and manufactured DSLIM is shown by figure 3. The physical design of this motor has been conducted by author [8,9,10,11]. This DSLIM have two kind of magnetic circuit: moving and stationary part. There are two moving part and one statinonary part. The coils are placed on slots of moving parts. The three-phases of AC signals are flowed into coils with paralel configuration betweem both part of moving parts.

43
Figure 2 Physical DSLIM
The simulation of dynamic equation describing a DSLIM in the reference frame u , moving with
any velocity k have the below equations that have
been conducted in laboratory of control system – Brawijaya University Malang Indonesia. The dynamic equaton are shown by equation 3-5.
12
'
1
'
11 ++−=
kurssussu
u Kdt
d
ukrssss Kdt
d12
'
1
'
11 ++−=
ukusrsursu K
dt
d21
'
2
'2 )( −++−=
ukrrsrs Kdt
d22
'
1
'2 ++−=
(3)
)(2
321122
2
−= uu
s
rs
X
KF
(4)
( )dt
dxFF
mdt
dext =−=
;
1
(5)
Where:
gs
sXX
R
X
R
+==
1
11
gr
rXX
R
X
R
+==
2
22
rs
rs
gKK
XX
X−=−= 11
2
r
g
r
s
g
sX
XK
X
XK == ;
)( 1
1'
g
ss
XX
R
+==
)( 2
2'
g
rr
XX
R
+==
The force equation that is shown by equation 5 for
one degree of freedom D=0 and K=0, and
extFFtf −=)( . The coeficients
,,,, ''
rsrs KK and gX in equation 3 can be
obtained by parameter identification of a DSLIM during starting and braking.
The closed loop position control system used for the simulation verification in this paper is handled by a Closed Vector Control Scheme configured in the Commercial Digital servo controller. Maintaining a constant maximum force in Linear Induction Motor in induction motors involves monitoring the linear speed of the motor, controlling the three phase current, and keeping the magnetizing current vector at a maximum. This produces the Magneto-motive Force (MMF) that is always at a 90 degree angle to the magnetizing current vector.
The movement of the DSLIM can be controlled easily by using the standard control process concept employed in common rotary induction motors, which involves adjusting the three phase currents. By controlling the current flowing into the coils of the moving part of the DSLIM, the continuous linear
movement of the moving part is produced. If is
defined as the angle between the stationary part and the magnetizing current vector, so the three phase current flowing into the stator coils can be described by d-q coordination do you mean in d-q coordinates
qdj jiiei +=− .
(6)
In equation 6, di and qi are the direct and
quadrature currents respectively. The details of relationship between current in moving part and magnetizing current are shown in figure 3. Based on figure 3the direct and quadrature component of stator current can be obtained by The park-transformation,

44
Stator axis
Rotor axis
)(tim
1
m
)(tis
di
qi
Figure 3 Field Coordinate Systems
Based on figure 3 the direct and quadrature
component of stator current can be obtained by The park-transformation,
cosRe sj
sd ieii == −
(6)
sin. sj
sq ieiimi == −
(7)
The relationship between controlling variables – stator and rotor current to torque of motors can be written in the vector form:
( ) ( ) *)(.sinsin* j
RsmRs eiiIKiiK ==
(8) Where:
03
2MK = ; 0M → the coefficient of mutual
inductivity inductance.
In order to obtain high dynamic performance of the three pahses DSLIM, the same strategy as with the DC motor seems appropiate. The magnetizing current
)(timR should be maintained at maximum value and
limited below base speed by saturation of the iron core, while useful thrust should be controlled the quafrature current.
Inverse of d-q
Coordinate
Transformation
Phase
Transformation
d-q Coordinate
System
Transformation
Inverse of
Phase
Transformation
Converter
supported by
Current Control
Dynamic of
Linear
Induction
Motor
2si
3si
sai
sbi
sqi
sdi
1si
)(2 refsi
)(3 refsi
)(1 refsi)(refsai
)(refsbi
)(refsqi
)(refsdiController
Algorithms
Set-up Signals
)(tFth
)();();)()((.
txttta
(max)thF (max)
gnalsFeedbackSi
Converter
Dynamic LIM in field
Coordinate System
Algorithm
Controllers
12 3
4 5 6 Output Variables
This diagram blocks neglected for controller design purposes
Figure 4 Vector Controlling Cocept for DSLIM
IV. DECOUPLING PROCESS
Decoupling process has aim to separate process of coupling diagram block, so the diagram block can be analyzed easily. Principally, the decoupling algorithm can be illustrated as controller paars
22211211 ,,, RRRR , so that coupling diagram block
can be divided into two direction-path of diagram blocks. Figure 5 shows the decoupling process.
For simplicity, diagram block shown in figure 5 is
simbolised into a simple capital letters. Figure 6 shows the modification of diagram block in figure 5.
Based on the diagam block shown in figure 6, the
some value controllers are 22211211 ,,, RRRR must
be calcultaed, so the coupling diagram block can be divided into two loop structures. It is aimed to separte two path of sontrol into two path of systems.
In order to 4R-controllers can cancel coupling-factor in block diagram, each R-controller should be defined in certain values that it lead to a zero-transfer function in between direct path of block diagram. Figure 9 shows detail calculation of 4R-Controllers.
SR1
SR1
11R
12R
21R
22R
1
1
+STs1e
2e
12G
21G
1
1
+STs
1xisq =
2xisd =
11R
12R
21R
22R
1e
2e
22B
22B
12G
21G
11G
22G
1xisq =
2xisd =
1RG
2RG
11G
22G
1e
2e
1xisq =
2xisd =
)( 2112221122
2211111
GGGGB
GGGR R
+=
)( 1221112222
2211222
GGGGB
GGGR R
+=
22
11
`2121 R
G
GR −=
22
11
`2112 R
G
GR =
Figure 5 Decoupling Process
Figure 6 Diagram Block Modification
Figure 7 Un-coupled Diagram Blocks

45
V. MATCHING AND NEVANLINNA PICK PROBLEM
The model matching problem in this case is finding a stabile transfer function C(s) as controller, so that difference between real plant and model is as minimum as possible. The finding of minimum difference is required a NORM mathematic process. The mathematical expression of this problem is to make minimum the equation :
min
− CTT 21 =
(9)
where the minimum is taken over all stable Cs. 1T
describes a proposed model and 2T is controlled
system which are a DSLIM and its driver. To solve this problem, it is required some theoritical mathemetics that is intrapolated from several input output data of a function with some requirement. The one method that can be used is the nevalinna Pick Problem.
The Nevanlinna pick problem is the one method for intrapolation cases. This method is aimed for
finding a function G in c space – stand for the space
of stable, proper, complex rational function. It must be satisfying two condition:
,1
G and
(10)
nibaG ii ,......1,)( ==
(11)
The latter equation expalins that G is to interpolate
the value ib at the point ia or a function of G have to
pass through poimts ( ii ba , ). The constraint of this
algorithm is important: G have to be stable, proper and
satisfy 1G .
For controller-design using matching concept, the closed loop control system should be arranged in suitable closed loop appropiate system. Plant (controlled system) is considered in a uncertainty structures. Uncertainty means the plant-mathematics is combined with the This structures consist of some whighting functions and nominal plant. The reel plant is described by nominal plant with error model which is represented by weighting function.
Based on the mathematical model of DSLIM with
Decoupling process, the algorithm of Nevanlinna-Matching problem consist two procedures:
Nevanlinna Pick procedure and controller design
procedure.
For Nevalinna Pick Problem are:
1. Arrangement of data-data ia and bi into a
matrix is called the PICK matrix. Those
parameters come from zeros of 2T in
0Re s - ,.....1: nizi = and
parameter b is calculated in satisfying
)(1 ii zTb = , and form the matrices:
+=
ji zzA
1;
+=
ji
ji
zz
bbB
2. Calculate opt as sqaure root of largest
eigenvalue 2/12/1 −− BAA .
3. Define G(s) use the nevallinna Pick Problem
(NP) by arrange the following table:
iz ............ nz
............. .............. ...............
1bopt ............ noptb
4. Check pick matrix is Hermitian matrix, if it
is not, the problem is unsolvable.
5. Set controllers as:
)(
)()()(
2
1
sT
sGsTsC
opt−=
VI. CONTROLLER DESIGN BY NEVALLINNA PICK
PROBLEM
Speed controller design of DSLIM is based on the
uncertainty plant or portubated plant )(sPg . The one
factor in designing speed controller is directed to
guarantie the robust stability. Also to achieve the
robust performance. The both objectives can be
formulated into NORM-equation, which is shown by
equation 9.
2 2
1 2S T
+
(9)
Problem formulation can be defined as finding robust controller , so closed loop system achieve internally stabil and fullfill the inequality equation, which s shown by equation 10.
( )gP s ( )nP s
2 ( )s
0
1( )s

46
2 2
1 2 1S T
+
(10)
The problem equation is shown by equation 9 can not be solved, so that equation should be modified into the circle equation [6]. The problem equation is changed into:
2 2
1 2
1
2S T
+
(11)
Figure 7: Closed loop system with uncertainty plant
Equation 11 can be solved if it is provided some
assumtions: (a) Nominal-Plant have to be strictly proper and stabil; (b) there are no imajiner-poles and have no zero in the imajiner axes. Equation 12 provide the formulation of plat-factorizations.
; 1; , , ,n
NP NX MY N M X Y
M= + =
(12)
So the real plant )(sPg is:
( ) ;g
X MQP s Q
Y NQ
+=
− (13)
Based on the equation 13, sensitivity and system
equation can be written into:
( )S M Y NQ= −
(14)
( )T N X MQ= +
(15)
If both equation 13 and 14 are subtited into equation
10, the problem formulation is defined in equation 16.
2 2
1 2 1 2
1
2R R Q S S Q
+ + +
(16)
For simplicity of equation, it is defined some
parameters. Equation 17 and 18 show those
parameters.
1 1 1 2R MY S NX = =
(17)
1 1 2 2R MN S MN = = −
(18)
Equation 16 can not be solved by matching model
approximation. In order for finding a soltion of
matching model, the unequality equation shown by
equation 16 should be replaced by kuadratic equation
is shown by equation 19.
2 2
1 2 3
1
2U U Q U
− +
(19)
The nominal plant is
( )( )/
( ) ;1 1
T mn
e m
K BP s
sT sT=
+ +
(20)
With :
0,48; 0,53; 0,17; 0,83T m e mK B T T= = = =
It is obtained the equation:
2
0,91( ) ;
0,14 1nP s
S S=
+ +
(21)
And:
2
2,5(0,33 1)( )
0,1 1
Ss
S
+=
+ ; 1( )
1
as
s =
+
(22)
Based on the three above equations, Model-
matching equation is:
2 2 2
3 4 2 2
0,681 6,25
0,681 6,941 (6,25 )
a S aU
S S a
+=
− + + (23)
Determination of a-value is obtained by calculating
Norm-of 3U , the next step is doing
factorization. For this case, factorization terms are
N=P;M=1;X=0;Y=1. The parameters can be defined
as:
11
aR
S=
+ ;
2
0,91
( 1)(0,17 1)(0,83 1)
aR
S S S=
+ + + (24)
Figure 8 Closed Loop System with
Uncertainty Plant

47
Figure 9 Controlled Systems with Damping Ratio Variations
1 2
2,275(0,33 1)0;
(0,1 1)(0,17 1)(0,83 1)
SS S
S S S
+= = −
+ + + (25)
By using value of a=0,7, it will be obtained the
equation:
4 2
8 6 4 2
0,0057 0,062 0,456
0,0002 0,027 0,755 1,728 1
S S
S S S S
− +
− + − + (26)
Based the equation 28, can be achieved spectral equation:
)1)(20,1)(96,5)(85,9(
34,59785,8)(
2
++++
++=
ssss
sssFsf
(27)
With the equation 27, U-fuction can be obtained in
some beow eauations:
)34,598,8)(183,0)(117,0)(1(
)20,1)(96,5)(85,9(91,02
2
12121
sssss
sssa
F
SSRRU
sf+++++
+−+−+−=
+=
(28)
)34,598,8)(183,0)(117,0)(1(
)34,598,8)(183,0)(117,0(2
2
2sssss
ssssU
+++++
+−+−+−=
(29)
74,694,6681,0
43,680,3341,024
24
4+−
+−=
ss
ssU
(30)
)44,1)(34,598,8)(183,0)(117,0)(1(
)0427,1)(0427,1)(96,5)(85,9(91,02
2
1++++++
+−−−=
ssssss
ssssaT
(31)
)44,1)(183,0)(117,0)(1)(20,1)(96,5)(85,9(
)34,598,8)(0427,1)(0427,1)(96,5)(88,5(14,0 2
2+++++++
+−+−−−=
sssssss
ssssssT
(32)
−
−
−
−
−−
=
010100000
001010000
8,5238,402,11001000
000010100
000001010
0008,528,402,11001
8,52008,40002,1110
08,52008,40002,111
008,520038,408,5238,404,22
cL
−
−
−−
−
−
=
008,520008,5200
1038,4000008,520
012,11000008,52
100008,5238,4000
0101038,40038,400
001012,110038,40
0001002,1108,52
00001012,1138,40
000001014,22
0L
(33)
With the both matrixes – equation 37 and 38,
crobust controller can be calculated by model
matching approximation. The controller is:
(34)
778,06,34,455,324,1
56,01,332,034,2)(
234
23
++++
+++=
SSSS
SSSsPg
2
0,91( ) ;
0,14 1nP s
S S=
+ +
setting)(0
aktual)(
0
qsi
Beban motor
Figure 8 Designed closed Loop System
VII. RESULTS AND ANALYSIS
Mathematical model of plant – controlled system was assumed that it has variety of damping ratio values. The observation of controlled system response aimed to evaluate magnitude of overshoot of linear speed variable if motor currents is changed. Fig. 10 shows that response of controlled system is widely varied.
sss
ss
sss
sssPg
++
++=
++
++=
23
2
041,000015,0
1847,0014,046,1
)1004,0)(1037,0(
)1017,0)(183,0(46,1)(

48
Fig. 11 and 12 show that the actual linear speed
response follows the speed reference trajectory accurately. It illlustrates also that the results of Matching 2-DOF controllers has been compared to response with only one DOF controller. Furthermore, it reaches the desired final linear speeed at the specified settling time. The inset of the figure shows a close up view of the tracking with a linear speed resolution of 2 mm/s per division. The speed curve in Fig. 11 shows that the actual motion trajectory follows very well with the desired motion profile. From both Figs. 11 and 12, we observe that the achievable error speed reaches 0.01% for 2-DOF structure and 2.2% for 1-DOF structure. The evaluate of closed loop system using 2DOF controllers, investigations has been conducted for set-point of exponential signals. Fig 12 shows response system for 2-DOF and 1-DOF structure for exponential set-point. It illustrate that the 1-DOF structure generate more error linear speed than using the 2-DOF structure by matching solution method. The 2-DOF precision linear speed for setpoint exponential is less than 1-DOF structure. The erroe-transient of trayectory for 2-DOF is 0.002%, for 2-Dof 2.12%.
VIII. CONCLUSION
In this paper, a precision linear speed control using Matching solution strucutre with combination with cacscade controller have been successfully implemented for a Ladder-Secondary Double-Sided Linear Induction drive applications. High precision motion performance has been verificated by MATLAB-simulation. Design-algorithm guarantee the existence of the variety of parameter model (Robustness performance). Furthermore, it is illustrated that the desired matching scheme, in which the feedforward controller is calculated using directly trajectory information only, provided several implementation advantages such as less on-line computation time, reduced effect of measurement noise, a separation of robust control design from parameter adaptation, and a faster adaptation rate in implementation. The results shown that the system provided a good tracking and steady state performance for both sinusoidal and exponential variation of set-point. Even though the damping ratio parameter of model have been changed from 0.9 to 1.5, the closed loop system show a stable condition and have good performance.
Figure 11 Exponential Responses
IX. ACKNOWLEDGMENTS
The authors would like to thank to High Educational Directorate Of the National Education Ministerium of Republic of Indonesia for financial support for this project.
X. REFERENCES
[1] Kittaya Somsai and Thanatchai Kulwo-rawanichpong, itus
Voraphonpiput, Design of Decoupling Current Control with
Symmetrical Optimum Method for D-TATCOM, IEEE,
2012.
[2] V. M. Alfaro, R. Vilanova, O. Arrieta, A Single-Parameter
Robust Tuning Approach for Two-Degree-of-Freedom PID Controllers, Proceedings of the European Control Conference
2009 • Budapest, Hungary, August 23–26, 2009
[3] Fayez F .M. EL-Sousymplementation Of 2DOF I-PD Controller For inndirect Field Orientation Control Induction
Machine and System, ISIE 2001, Pusan, KOREA, 2001.
[4] Ming-Chang Chou and Chang-Ming Liaw, Development of
Robust Current 2-DOF Controllers for a Permanent Magnet Synchronous Motor Drive With Reaction Wheel Load, IEEE
TRANSACTIONS ON POWER ELECTRONICS, VOL. 24,
NO. 5, MAY 2009
[5] Mochammad Rusli, Christopher Cook, Design of Geometric
Parameters of A Double-Sided LIM with ladder Secondary (DSLIM) and a Consideration for Reducing Cogging Force,
ARPN Journal of Engineering and applied Sciences, Vol. 10,
2015
[6] Mochammad Rusli, I.N.G. Wardana, Mochammad Agus
Choiron, Muhammad Aziz Muslim, Design, manufacture and Finite Element Analysis of a small Double-sided Linear
Induction Motor, advanced Sceince Letters, Vol. 23, May
2017.
[7] Mochammad Rusli, An Analytical Method for Prediction of
Cogging Forces in Linear Induction Motor, The eight’s
LDIA, Edhoven, Netherland, 2011.
[8] Mochammad Rusli, Zero Cogging Force in Linear Induction
Motor by Shifting the one side of Double-sided Linear
Induction Motor, EECCIS,2012.
[9] Mochammad Rusli, Moch Agus Choiron, Muhammad Aziz
Muslim, I.N.G. Wardana, The Effect of Ladder-Bar Shape Variation for A Ladder-Secondary Double-Sided Linear
Induction Motor (LSDSLIM) Design to Cogging Force and Useful Thrust Performances, Journal of Telecommunication, Electronic and Computer Engineering (JTEC), 2018.
[10] M. Caruso, G. Cipriani, V. Di Dio, R. Miceli and C. Spataro, “ Speed control of double-sided linear induction motor for automated manufacturing systems, IEEE International Energy Conference (ENERGYCON), pp 33-38 2014.
[11] G. Agnelio, M. Caruso, V. Di Dio, R. Miceli, C. Nevoloso, C. Spataro, “ Speed control of tubular linear induction motor for industry automated application”,
Figure 10 Sinusoidal Responses
49
renewable Energy Research and Applications (ICRERA) 2016 IEEE International Conference on pp. 1196-1201, 2016.
[12] M. S. Manna, S. Marwaha, A. Marwaha, N. Garg and S. Singh, “ Computations of Electromagnetic forces and fields in double-sided linear induction motors (Dlim) using Finite Element method”, In 3rd Int. Conf. On Advances in Recent Technologies in Communication and Computing, pp 96-100, 2011
50
Design of combined separate ground system protection for
wind energy power plant
Muhammad Galvanir Noor1,2,a ) Muhammad Bachtiar Nappu1, 2, b) and Ardiaty Arief 1, 2,c )
1Centre for Research and Development on Energy and Electricity, Hasanuddin University, Makassar 90245,
Indonesia.
2Electricity Market and Power System Research Group, Dept. of Electrical Engineering, Faculty of Engineering,
Hasanuddin University, Gowa 92119, Indonesia.
a)Corresponding author: [email protected]
b) [email protected] c) [email protected]
Abstract. This paper presents a combined-protection of earth system that can be applied for wind energy power plants. The proposed prototype design is a combination of the ferrite ring technique, surge arrester models as well as voltage
surge protector impacts to dampen tension more effectively by building a dedicated line with a separate model. The proposed model is 100 meters width with a depth of 2 meters from the soil which is based on IEC-61643-12 study. Transmission line approach model is used to obtain a description of the behavior of lightning occurring in the soil. The simulation results show the proposed design can be applied effectively.
Keywords—wind energy power plant; wind turbine; transmission line; voltage surge protection; surge arrester; system grounding, ground potential rise.
INTRODUCTION
Wind energy is a renewable energy that is ideal for reducing the use of fossil fuels in electricity generation,
which plays a very important role in life in this modern era [1]. One of the problems faced by this renewable energy generation is a natural phenomenon that cannot be predicted such as lightning strikes. By considering the condition
of wind energy power plants (WEPPs) that are usually located up in the mountains, high earth resistance and an
open location that makes it very vulnerable to be hit by direct lightning strike and may further cause system’s
instability and potential load shedding in some areas[2]. In addition, if the system is currently working on its
stability limit, more attention should be given to avoid potential transmission congestion [3-7].
Generally, when wind turbine is hit by a direct transient current which passes through each part of the turbine, it
propagates throughout the equipment with a high voltage and current capacity. These events can aggravate the
energy distribution system and causing total damage to WEPP equipment [8]. Therefore it is necessary to design a
superior protection. Another problem that arises is when the high current passes through the blade and tower. Voltages and currents
accumulated beneath the feet of the wind turbine (WT) tower propagate in a direction and can infect other adjacent WTs. Induction produced by lightning with a very large capacity leads to an increase in the soil potential that can trigger a backflow. This situation can be worsen since the surge arrester (SA) that is earthed around the WT can operate in a reverse direction. To avoid this, the protection system should be designed effectively by prioritizing the separate ground, dampening the voltage surge protector (VSP) feedback as well as the proper use of the arrester model. In the literature, many authors have been discussing the risk of direct strikes on WEPPs and evaluation of grounding system [9][10][11]. In this research the transient behavior with the incorporation of various methods of transmission line (TL) approach, ferrite ring, pincetti model and VSP is assumed. The purpose of this research is to design the combination of ferrite ring, pinceti model, VSP to reduce equipment failure due to direct strike of lightning, dampen over voltage and limit backflow with separate grounding method.

51
WT 2 WT 1
Transformator
Lightning
Inductive Loop
100 m
WT 2 WT 1
Transformator
Lightning
Inductive Loop
Transient
current
a b
Protect
equipment
c
PROBLEM FORMULATIONS
This simulation is performed one wind generator distributed on the final substation shown in Fig. 1, with a
ground value of 10 Ω and 100 Ω and WEPP placements are assumed in mountainous and rocky locations. All
WEPP is connected with a 6.6 kV / 66 kV grid transformer [12], with SAs inserted between the primary and
secondary sides. Fig. 2 shows a specially constructed (proposed) route method to remove more voltage when a direct
strike occurs by lightning. This method is proposed because of the magnitude of the light current at lightning which
can induce a large induction of the WEPP grounding system beneath the foot of the tower.
(a)
(b)
FIGURE 1. (a). The lightning direct strike lightning causes more stress on the basic foundation of WEPP (b). implementation of separated land from WT [13]
As an approach to strengthen the lightning phenomenon protection in the case of strikes, for the first case usually
more tension can be absorbed without much damage, in the second case after the occurrence of an over-voltage
strike which is reversed due to the integrated grounding system around the WT and the more discharged high
voltage this can be expressed in the equation.
(1)
Voltage Surge Protector For WEPP (VSP)
This equipment is used as part of WEPP protection, for additional special grounding combinations that is
proposed as protection methods. Usually this tool is used to provide installation protection on high buildings.
Because its ability to work like a breaker circuit (CB), hence this tool serves as an over voltage breaker when there
is a lightning strike [14]. The performance of VSP can be seen in Fig 2.
FIGURE 2. VSP working system. (a) before transient overvoltage (b) during overvoltage (c) after overvoltage.
The Arrester Model
The arrester’s selection to be used is based on its maximum operating voltage which can be seen in the electrical data of the ABB [15]. Is expected to work continuously to protect the transformer from over voltage [16].
The modified pinceti et.al model of the IEEE is employed in the form of an equivalent circuit consists of 2 non-
linear resistances A0 and A1, separated by 2 inductances arranged in series with L1 and L0 [17]. A parallel resistance
is added as a function of avoiding numerical errors in circuit system, where R is 1 MΩ [12,18]. To calculate the
value of L1 and L0, we use this following equations.
(2)

52
ΔRV0(t) V1(t)
Δl
ΔL
ΔG/2 ΔC/2 ΔG/2 ΔC/2
I0(t)
k(t)
X=0 X=1
(3)
Where is Vn is the arrester voltage on kV, Ur1/T2 is the residual voltage at 10 kA and fast front current surge (1/T2µ).
Ur8/20µs is the residual voltage at 10 kA current surge with 8/20µs time referring to Ur8/20 selected based on
electrical data of ABB [15].
WEPP Grounding Model System
The main basis of the WEPP grounding system consist of conductors buried in the ground with a very strong
concrete foundation. The outline of the conductor is connected to the electrical system in WEPP as the grounding
system [19]. The simplified transmission line (TL) approach used is shown in Fig 3.
FIGURE 3. Equivalent circuit of the each conductor segment of Δl length.
Where ΔR is horizontal resistance in unit, ΔL is horizontal the inductance in unit, ΔG and ΔC is the conductance
with capacitance in per-unit. The distributions of parameter are based on the state of the location and space. More
details of the expression of the distributed parameters can be seen in [9][20] and the cable parameters are referring
[21].
RESULTS AND DISCUSSIONS
This study compares the simulations result between the conventional design and the proposed design method.
The simulated response is a 51 kA direct lightning strike hit the transformer between WT 1 and WT 2, then
observing the ground potential response after the strike by assuming the soil resistance of 10 Ω and 100 Ω.
The simulation result showed a very significant difference by using the combination of protection, as can be seen
in Fig. 4 and Fig. 5. Fig. 4 shows the simulation result using the conventional design with a combination of
protection, which only use SA and VSP. The voltage on the recorded equipment system for WT 1 reaches up to 170
kV and for WT 2 reaches to 4.5 kV. With earthing-centered at the foot of the tower, the potential value of soil
caused by lightning recorded reaches 2.1 MV at 100 Ω and 650 kV soil resistance values at soil resistance value 10
Ω. This may trigger a backflow for the grounding case between WT protections in one segment.
(a) (b) FIGURE 4. (a) lightning strike reaction to turbine control equipment (b) ground potential rises stricken around WEPP
Fig. 5 shows the recorded over voltage on WT 1 that reaches to only 1.1 kV and for WT 2 to 670 V. The soil potential drops from 2.1 MV to 128 V in case of soil resistance value of 100 Ω and 170 kV to 15 V at resistance 10 Ω. The results achieved are based on the combination of protection capabilities consisting of ferrite, VSP, SA's and separate grounding systems. The interesting result is that the failure of each protection to cover each other and serve according to the capabilities of each separate earth system is expected as the main point to overcome the effects of backflow caused by lightning. Further research can be done in improving system’s stability with this protection systems combination, such as assessing the voltage drop in the system [22-23] and voltage stability enhancement with reactive power compensators [24-25].

53
(f ile Exa_55.pl4; x-v ar t) v :X0001A v :X0021A
0 10 20 30 40 50[us]
300
400
500
600
700
800
900
1000
1100
[V]
(f ile Exa_55.pl4; x-v ar t) v :XX0568-
0 10 20 30 40 50[us]
-40
-10
20
50
80
110
140
[V]
100 ohm
(f ile Exa_55.pl4; x-v ar t) v :XX0604-
0 1 2 3 4 5 6 7 8[us]-25
-20
-15
-10
-5
0
5
10
15
[V]
10 ohm
(a) (b) FIGURE 5. (a) lightning strike reaction to WT’s control equipment by using protection combination (b) Respons GPR
using a combination of protection
CONCLUSIONS
This combination of protection is designed to protect all existing equipment in WEPP against overcurrent
voltage and current well as the lightning reverse currents from soil. The proposed soil resistance role leads to a soil
resistivity response and refers to a high voltage wave peak increase with some fluctuations in the grounding system
that may cause transient radiation effects to some nearby point. Restricting this separate earth path in line with VSP
based on equation 1 can reduce the 99% radiation effects of transients. Other planned protection such as ferrite rings
and SAs can reduce the voltage and current by about 98%. With this combination technique the performance of the
protection is not emphasized on the SA's alone, but rather centered to a more effective transient disposal line.
ACKNOWLEDGMENTS
M.B.Nappu and A.Arief gratefully thank the Indonesia Ministry of Research, Technology and Higher Education
for providing the research grant and their support in this work.
REFERENCES
[1] E. Shulzhenko, M. Krapp, M. Rock, S. Thern, and J. Birkl, “Investigation of lightning parameters occurring
on offshore wind farms,” 2017 Int. Symp. Light. Prot. XIV SIPDA 2017, no. October, pp. 169–175, 2017.
[2] A. Arief, Z. Y. Dong, M. B. Nappu, and M. Gallagher, Under voltage load shedding in power systems with
wind turbine-driven doubly fed induction generators, vol. 96. 2013.
[3] M. B. Nappu, R. C. Bansal, and T. K. Saha, “Market power implication on congested power system: A case
study of financial withheld strategy,” Int. J. Electr. Power Energy Syst., vol. 47, pp. 408–415, 2013.
[4] M. Bachtiar Nappu, A. Arief, and R. C. Bansal, “Transmission management for congested power system: A
review of concepts, technical challenges and development of a new methodology,” Renew. Sustain. Energy
Rev., vol. 38, pp. 572–580, 2014.
[5] M. B. Nappu and A. Arief, “Network Losses-based Economic Redispatch for Optimal Energy Pricing in a
Congested Power System,” Energy Procedia, vol. 100, pp. 311–314, 2016.
[6] M. B. Nappu, “LMP-lossless for congested power system based on DC-OPF,” Proceeding - 2014 Makassar Int. Conf. Electr. Eng. Informatics, MICEEI 2014, vol. pp. 194-19, no. Makassar International conference,
pp. 194–199, 2014.
[7] M. B. Nappu and A. Arief, “Economic redispatch considering transmission congestion for optimal energy
price in a deregulated power system,” in 2015 International Conference on Electrical Engineering and
Informatics (ICEEI), 2015, pp. 573–578.
[8] S. Abdullah, N. Mohamad Nor, N. Agbor, M. Reffin, and M. Othman, “Influence of remote earth and
impulse polarity on earthing systems by field measurement,” IET Sci. Meas. Technol., vol. 12, no. 3, pp.
308–313, 2018.
[9] O. Kherif, S. Chiheb, M. Teguar, and A. Mekhaldi, On the Analysis of Lightning Response of Interconnected
Wind Turbine Grounding Systems. 2017.
[10] B. Nekhoul, B. Harrat, L. Boufenneche, M. Chouki, D. Poljak, and K. Kerroum, A simplified apporoach to the study of electromagnetic transients generated by lightning stroke in power network. 2014.
[11] Y. Yasuda, N. Uno, H. Kobayashi, and T. Funabashi, “Surge Analysis on Wind Farm When Winter
Lightning Strikes,” IEEE Trans. Energy Convers., vol. 23, no. 1, pp. 257–262, 2008.

54
[12] A. M. Abd-Elhady, N. A. Sabiha, and M. A. Izzularab, “Overvoltage investigation of wind farm under
lightning strokes,” IET Conf. Renew. Power Gener. (RPG 2011), pp. P40–P40, 2011.
[13] J. C. Das, Transients in Electrical Systems, Analysis, Recognition and mitigation. 2010.
[14] “Protection against lightning effects,” in POWER GUIDE 2009 / BOOK 07, 2009, p. 40.
[15] “surge Arrester,Data Sheet,” Www.abb.com/arresteronline. [16] Joint CIRED/CIGRE Working Group 05, “Lightning protection of distribution networks. Part II:
Application to MV networks,” 14th Int. Conf. Exhib. Electr. Distrib. Birmingham, U.K, vol. 199, 1997.
[17] M. C. Magro, M. Giannettoni, and P. Pinceti, “Validation of ZnO surge arresters model for overvoltage
studies,” IEEE Trans. Power Deliv., vol. 19, no. 4, pp. 1692–1695, 2004.
[18] M. Abdullah, M. ALI, and A. Said, Towards an Accurate Modeling of Frequency-dependent Wind Farm
Components under Transient Conditions, vol. 9. 2014.
[19] N. Malcolm and R. Aggarwal, “Analysis of transient overvoltage phenomena due to direct lightning strikes
on wind turbine blade,” in 2014 IEEE PES General Meeting | Conference & Exposition, 2014, pp. 1–5.
[20] E. D. Sunde, “Earth Conduction Effets in Transmission Systems, Bell Telephone, Laboratories
incorporated,” New York, 1968.
[21] X. Li et al., “Lightning transient characteristics of cable power collection system in wind power plants,” IET
Renew. Power Gener., vol. 9, no. 8, pp. 1025–1032, 2015. [22] A. Arief and M. B. Nappu, “Voltage drop simulation at Southern Sulawesi power system considering
composite load model,” in 2016 3rd International Conference on Information Technology, Computer, and
Electrical Engineering (ICITACEE), 2016, pp. 169–172.
[23] A. Said, M. N. Ali, and M. A. Abd-Allah, “A novel lightning protection technique of wind turbine
components,” J. Eng., no. December, 2015.
[24] A. Arief, Antamil, and M. B. Nappu, “An Analytical Method for Optimal Capacitors Placement from the
Inversed Reduced Jacobian Matrix,” Energy Procedia, vol. 100, pp. 307–310, 2016.
[25] A. Arief, M. B. Nappu, and A. Antamil, Analytical Method for Reactive Power Compensators Allocation,
vol. 9. 2018.

55
CMOS Design of a Low Voltage AC-DC
Switched-Mode Power Supply for Energy
Harvesting Applications
Malcolm.Kwok, Roderick.Yap Department of Electronics and Communications Engineering, De La Salle University
Manila, Philippines
Abstract— A design of a low voltage AC-DC Switched-
Mode Power Supply (SMPS) using 0.35um CMOS
technology is presented in this paper. The objective of this
research is to simulate the conversion and regulation of the
small AC power from low-voltage microgenerators. While
a standard 0.35um CMOS is typically operated with 3.3 V,
this paper proposes a low voltage design operating with AC
input as low as 1.3 Vpk. Using a digital pulse frequency
modulation (DPFM) control for the SMPS, a regulated
output of 3V and 3 mA load is achieved. Key elements in the
AC-DC SMPS are the CMOS rectifier, formed by a
negative voltage converter (NVC) and an active diode, and
the DPFM booster circuit operating up to 40 kHz. The chip
reaches a maximum of 87% efficiency at 3 mA load. The
chip performance is evaluated across the five corner
libraries of the standard 0.35um CMOS.
Index Terms— AC-DC power conversion; Boost-
converter; Energy harvesting; Low voltage
I. INTRODUCTION
The Internet of Things (IoT) is an emerging technology
that will greatly change our lifestyle in the years to come.
In this technology, smartphones, appliances, sensors, and biomedical devices belong to a wireless network and
communicate with each other using a small amount of
power in the microwatt to milliwatt range. In the
progression of recent years, it was observed that the
energy density of batteries developed in a relatively slow
rate compared to the development of computing and
semiconductor technologies, implying the need to
migrate to different forms of energy. Various ambient
energy sources have been explored, such as energy from
direct sunlight, thermoelectrics, and vibration [1].
Among these, vibrations from piezoelectric [2] [3] [4] [5] [6] and electromagnetic microgenerators [7] [8] have
been widely researched today as they produce high
energy density. These sources have been observed to
produce low AC voltages and varying output power
depending on the material, construction, and size of the
microgenerator. To store the power from the
microgenerator, the storage element usually comes in the
form of a supercapacitor or battery, which is charged
using a DC voltage. The energy harvesting circuit then
needs to be AC-DC converter.
The first problem that needs to be solved in energy
harvesting from vibration microgenerators is the low
voltage that it produces. To increase its voltage, a voltage multiplier can be used. However, voltage multipliers
require more diodes or specifically-timed CMOS
circuitry, more capacitors, and have poor line regulation.
On the other hand, AC-DC conversion can be
implemented through a two-stage system consisting of a
rectifier and a DC-DC converter. With the typical full-
wave bridge rectifiers, the disadvantage, on the other
hand, is the relatively large voltage drop of the pn-
junction diodes or even Schottky diodes. Additionally,
the second problem of AC-DC converters for the low
voltage and low power AC sources is the power
efficiency of the overall system. While maintaining good regulation, the system has to minimize on power losses.
In this research, a proposed solution to the
aforementioned problems is to design an efficient AC-
DC SMPS, which considers the low power loads in
energy harvesting systems and the low voltage AC input,
using a standard 0.35um CMOS process.
II. LITERATURE REVIEW
In this chapter, existing low power AC-DC converters,
rectifiers, and DC-DC converters are reviewed.
A. Low power AC-DC converters
For piezoelectric sources, [5] has made an extensive
research regarding the modeling of the piezoelectric
transducer and proposed a novel inductor sharing
architecture. For piezoelectric sources, the research
showed that it can be modeled as an AC current source in

56
parallel with a parasitic capacitance and resistance. The
parasitic capacitance was showed to greatly affect the
overall efficiency of the system, as the charging and
discharging of the parasitic capacitance limits the transfer
of the charge to the storage capacitor. It is for this reason that [5] proposed a switch-only rectifier, wherein a
switch is placed in parallel with the piezoelectric
transducer which conducts shortly at the zero-crossings
of the AC current to instantly discharge the parasitic
capacitance, making the voltage across the parasitic
capacitance equal to zero as it starts to be charged again
in the negative half-cycle. The research further improved
this scheme by proposing a bias-flip architecture,
wherein an inductor is in series with the same switch, but
the operation is now improved because the inductor
effectively “flips” the voltage at the zero-crossings of the
AC current to maximize the power stored at the storage capacitor. This is the same inductor used in the booster
stage, highlighting the circuit’s component-saving
feature.
On the other hand, [8] proposed a dual-polarity boost
converter with split-capacitor topology. This topology
removes the rectifier block, as it has a boost converter for
the positive half-cycle and another boost converter for the
negative half-cycle. The output voltage is regulated
through the use of PI controller, which changes the duty
cycle of the system.
B. Rectifiers
To maximize the voltage harvested low voltage AC
sources, [2] [6] [9] proposed some new rectifier
topologies. [2] and [6] proposed a negative voltage
converter (NVC) with active diode topology, which was
also adapted for this research. An active diode was
composed of a comparator and a PMOS. It was used to block the current from the storage capacitor whenever its
voltage is higher than the output of the NVC. On the other
hand, [9] proposed an active cross-coupled rectifier
although unlike the NVC with active diode, it requires
two PMOS, and two active switches comprised of a
comparator and an NMOS.
C. DC-DC Converters
For DC-DC converters, topologies featuring low
power modes, particularly PFM topologies were
reviewed. [10] presented a “burst-mode” PFM circuit,
boosting a 1.5 V source to power a 2.7 – 5.1 V LED load
operating around 20 mA. In its operation, a feedback
comparator set at the target voltage enables and disables
the clock generator, which oscillates through the use of a
hysteretic comparator and a capacitor that charges and
discharges. This circuit was able to achieve an 88%
efficiency. [11] presents a dual-mode digital pulse width modulation (DPWM) and digital pulse frequency
modulation (DPFM) control applied to a buck converter.
The DPWM is formed through programmable delay
cells, and a multiplexer, while the DPFM was made with
the DPWM, more programmable delay cells, and SR flip-
flops. The advantage of the dual-mode control is the
increased efficiency across a wide range of loads. Their
work resulted to quiescent currents as low as 3 uA for the DPFM mode, while 4.5 uA/MHz was the quiescent
current for DPWM.
III. THEORY
A. Block Diagram
Fig. 1 shows the block diagram of the entire system. Enclosed within the polygon are the components to be implemented in 0.35 um CMOS, which include the CMOS rectifier, the DPFM control circuit, and the switching power transistor for the boost converter. In the system’s operation, the CMOS rectifier
Fig. 1 Block Diagram of the Low Voltage AC-DC SMPS
Fig. 2 Negative Voltage Converter with Active Diode Rectifier [2] [6]
rectifies the low AC voltage Vin and converts it into a pulsating DC voltage Vdd filtered and stored in Cin. Vdd is then used to power supply of the booster circuit, and is the input to be boosted to a regulated output Vout of 3 V.
B. Rectifier
In the design of the rectifier, this research made use of
the NVC with active diode architecture [2] [6] as shown
in Fig. 2. This architecture cross couples the NMOS and
PMOS. During the positive half cycle where vacp has a
positive voltage relative to vacn, MP1 and MN2 allow
current to pass through. On the other hand, at the negative
half cycle, MP2 and MN1 are active. Due to the reversible
current characteristic of MOSFETs, it is necessary to
place a diode after the NVC to block the backflow
current. In this case, an active diode comprised of a
comparator and a PMOS is used. At start-up, the gate of MP_main is low, therefore allowing current to pass
through from the NVC. After a while, Cin increases to an

57
operational amount of voltage for the low voltage
comparator. When the NVC output is greater than the
stored voltage across Cin, the comparator outputs a low
and MP_main allows current to pass through it. When the
NVC output is lower than the voltage across Cin, the comparator outputs a high, blocking the backflow current
coming from the capacitor. The inverters added to the
architecture shown in Fig. 2 are simply to drive the gate
of MP_main using the output of the comparator.
C. Op Amp / Comparator
The op amp or comparator used for the low voltage bandgap reference, the feedback comparator, and the
active diode is based on the NMOS Differential Pair
Folded Cascode 2-Stage Differential Amplifier. For low
voltage power supply, [10] presents a resistor-less op
amp / comparator topology, as shown in Fig. 3. The
minimum supply voltage of this op amp / comparator is
1.2 V.
Fig. 3 Low Voltage Opamp / Comparator [10]
D. DC-DC Boost Converter
Fig. 4 shows the block diagram of the DC-DC booster
circuit. In operation, the feedback resistors will return a
voltage proportional to the output. When the output
voltage is less than 3 V, the fed back voltage is less than
the reference voltage vref produced by the low voltage
bandgap generator. The feedback comparator will output
a high en, which enables boosting by the DPFM modulator. The comparator output en is also the active
low input to the preset of the down counter, which starts
at fpf=11, the minimum regulation state, and counts
down to 00, the maximum regulation state. These states
are the frequency control bits fpf that vary the off time of
the DPFM modulator’s output boosting signal boost. As
long as the output voltage is not achieved, the down
counter counts down with each clock signal from the
DPFM modulator. When the output voltage is above 3 V,
the feedback comparator outputs a low en, which disables
the boosting signal of the DPFM modulator, and presets the down counter to 11. When the output voltage drops
again, the cycle repeats.
For low power loads, discontinuous conduction mode
(DCM) is preferred. The downside of using DCM is in its
design, as it uses a more complex formula for the
modulation index M, which is the voltage gain of the
circuit.
𝑀(𝐷, 𝐾) =1+√1+4𝐷2/𝐾
2 (1)
𝐾𝑐𝑟𝑖𝑡(𝐷) = 𝐷(1 − 𝐷)2 (2)
𝐾 =2𝐿
𝑅𝑇𝑠 (3)
Operating in DCM requires K to be less than Kcrit,
where D is the duty cycle, L is the inductance, R is the load resistance, and Ts is the switching period. Table 1
shows the design specifications of the boost converter.
Fig. 4 DC-DC Boost Converter Block Diagram
TABLE 1. BOOST CONVERTER DESIGN SPECIFICATIONS
Design Variable Variable Name Value
Output Voltage V 3 V
Minimum Input Voltage Vg 1.3 V
Schottky Diode drop Vd 0.25 V (+0.1
V allowance)
Minimum Resistance
(Maximum Output
Current)
R
(I)
1 kΩ
(3 mA)
Maximum Duty Cycle D 40%
Inductance L 820 uH
Using (1) (2) and (3) and the design specifications in
Table 1, an absolute minimum for Ts is 11.4 us or
maximum of 87 kHz.
E. DPFM Modulator / Clock Generator
The DPFM modulator, which also acts as the clock of
the whole system, is presented in Fig. 5. It is inspired by
the DPFM/DPWM Modulator racing ring [11].

58
Fig. 5 DPFM Modulator / Clock Generator
In this architecture, the constant on time is caused by the buffer, while the variable off time is controlled by the
two frequency control bits fpf connected to the delayed
inverter. The SR latches in this architecture are NOR-
based, and the ~Q pin is avoided for correct and simpler
timing of the modulator. The only input to this module is
the fpf, while the only output is t_on which is also the
clock pulse. This t_on, together with the enable en from
the feedback comparator, are inputs to an AND gate, of
which the output is the boosting signal to the power
transistor. The oscillation is generated as follows:
1. When all the latches are reset (Q=0), the t_off node sets the 3rd latch which outputs to the node buf_in.
2. buf_in sets the 1st latch, producing the positive edge
of the clock pulse t on. t on also sets the output of the
2nd latch, t_off (and disables the set for buf_in).
3. After on time, the buffer outputs buf_out, which is
the delayed positive edge of buf_in earlier, resetting
t_on. This consequently resets buf_in.
4. After the off time determined by the fpf, the delayed
inverter output inv_out resets t_off, which
consequently (disables the reset of the 3rd latch
and_out) sets buf_in once again for another cycle.
Delay Cells
To introduce delays, the DPFM Modulator makes use
of the BUFFER and Delayed_INV blocks. Fig. 6 shows
the schematic of a programmable delay cell.
BUFFER uses a similar architecture, but does not have
inputs as it produces a fixed on time. On the other hand,
Delayed_INV makes use of digital frequency control bits
fpf. It can be seen that there are three biases for the current
source / mirror. The longest off time is achieved when
fpf=11, since only MPB and MNB are biasing the current
mirror. The fastest switching period is produced with fpf=00, because more current passes through MNB, as it
mirrors a proportional amount of current to MNST. The
sizing here is critical, as the off time is linearly varied
with the saturating current as determined by the
MOSFET current equation in saturation.
Fig. 6 Programmable Delay Cell of Delayed Inverter [11]
IV. TESTING AND ANALYSIS
In the characterization of the circuits, LTSpice was
used as a simulator. For the DPFM, it was characterized through measuring the produced on and off time under
different frequency control inputs. Its power
consumption is also measured. The entire AC-DC SMPS
was characterized under different input voltages, varying
resistive loads, and their corresponding power efficiency,
which is simply the ratio of its output power to the input
power, given by the equation
𝑃𝑒𝑓𝑓 =∫ 𝑉𝑜𝑢𝑡(𝑡)∗𝐼𝑜𝑢𝑡(𝑡)𝑡1+𝑇𝑡1
∫ 𝑉𝑖𝑛(𝑡)∗𝐼𝑖𝑛(𝑡)𝑡1+𝑇𝑡1
(4)
where Vout(t) and Iout(t) is the instantaneous output
voltage and current and Vin(t) and Iin(t) is the
instantaneous input voltage and current evaluated across a period of time T.
V. RESULTS AND DISCUSSIONS
A. DPFM
TABLE 2. RESULTANT DUTY CYCLE AS A FUNCTION OF THE
FREQUENCY CONTROL INPUT OF THE DPFM
Frequency Control Bits (fpf) Duty Cycle (%)
11 15
10 26
01 35
00 42
Table 2 shows the output duty cycle of the DPFM depending on the frequency control input. Varying the
Vdd from 1.3 to 2 V across the five corner libraries, the
output duty cycle is consistent with its corresponding
frequency control input fpf.
For the power consumption of the DPFM at its
maximum regulation state fpf=00, Fig. 7 shows the
power consumption across corner libraries as the power
supply voltage Vdd is increased. The circuit quickly

59
increases its power consumption at higher power supply
voltages, which causes a decrease in the overall circuit
efficiency, especially at the ff corner library.
Fig. 7 Power consumption of the DPFM at maximum regulation state
as the power supply voltage is increased across process corners
B. AC-DC SMPS
Fig. 8 shows a steady-state simulation of the AC-DC.
From the simulation, it can be observed that output is
regulated at 3 V through the operation described by the
enabling and disabling by en of the boosting signal boost
and the changing of frequency control bits fpf_1 and
fpf_0.
Fig. 8 LTSpice steady-state simulation result of the AC-DC SMPS
displaying the change of frequency control input and the pulse width
Fig. 9 Load Regulation of the AC-DC SMPS
As shown in Fig. 9 illustrating the load regulation of
the AC-DC SMPS, it can be observed that the output
voltage is held close to the 3 V for inputs from 1.3 to 2
Vpk with a load range of up to 3 mA. However, beyond
3 mA, the 1.3 Vpk input struggles to maintain a 3 V
output beyond 3 mA.
On the other hand, Fig. 10 displays the power
efficiency trend of the AC-DC SMPS as the load is increased. With loads below 1 mA, the efficiency of the
circuit quickly drops. Nevertheless, it is notable that the
1.5 Vpk input maintains an efficiency above 80% even
with a 0.5 mA load.
Fig. 10 Efficiency of the AC-DC SMPS
Fig. 11 Full-Chip Layout of the AC-DC SMPS
The full-chip layout and its IO pads is implemented in
Tanner Tools and is illustrated in Fig. 11. It has the
dimensions 2028 um x 715 um.
VI. CONCLUSION
This research designed, simulated, and characterized a
low voltage AC-DC SMPS with a DPFM control. Layout
implementation was done through Tanner Tools, while
simulations were performed using LTSpice. At typical
conditions (Vin = 1.5 Vpk, Iout= 3 mA), a power
efficiency of 87% can be achieved. The circuit can
operate as low as 1.3 Vpk, but it struggles in sustaining a
3 V output beyond a 3 mA load. In rectifying the AC
input, a NVC with active diode topology was used as a
rectifier, and it had a minimal voltage drop and power consumption. From the designs to the simulations, the
DPFM operating up to 40 kHz proved to be an
architecture with a controllable behavior even in low
voltage supply. The digital control to the DPFM provided
by the feedback comparator, the bandgap reference, and

60
the down counter was able to regulate the output at the 3
V target. For future researches on AC-DC SMPS with
low power applications, it is recommended that the
DPFM architecture be further optimized and be utilized
together with popular control algorithms like digital PID control and fuzzy logic to decrease the output ripple
voltage, without compromising much on the quiescent
power consumption. A higher frequency using the same
architecture may also be used to reduce the output ripple
from this research. The actual experimentation of an AC-
DC SMPS with piezoelectric and electromagnetic
microgenerators is also a recommended as a future
directive of this research.
ACKNOWLEDGEMENT
This research is fully funded by the Engineering
Research and Development for Technology (ERDT) led
by the Department of Science and Technology (DOST)
of the Philippines.
REFERENCES
[1] J. A. Paradiso and T. Starner, "Energy scavenging for mobile
and wireless electronics," IEEE Pervasive Computing, pp. 18-
27, 2005.
[2] C. Peters, O. Kessling, F. Henrici, M. Ortmanns and Y. Manoli,
"CMOS Integrated Highly Efficient Full Wave Rectifier," in
2007 IEEE International Symposium on Circuits and Systems,
2007.
[3] R. Radzuan, M. A. A. Raop, M. K. M. Salleh, M. K. Hamzah
and R. A. Zawawi, "The designs of low power AC-DC
converter for power electronics system applications," in 2012
International Symposium on Computer Applications and
Industrial Electronics (ISCAIE), 2012.
[4] M. A. Rongi, M. K. M. Salleh, E. Noorsal, R. Radzuan and A.
K. Halim, "CMOS bridge rectifier boost converter with internal
ASIC DPWM," in 2016 IEEE Asia-Pacific Conference on
Applied Electromagnetics (APACE), 2016.
[5] Y. K. Ramadass and A. P. Chandrakasan, "An Efficient
Piezoelectric Energy Harvesting Interface Circuit Using a Bias-
Flip Rectifier and Shared Inductor," IEEE Journal of Solid-
State Circuits, vol. 45, no. 1, pp. 189-204, 2010.
[6] Q. Li, J. Wang and Y. Inoue, "A Two-stage CMOS Integrated
Highly Efficient Rectifier for Vibration Energy Harvesting
Applications," Journal of International Council on Electrical
Engineering, 2014.
[7] R. Dayal, S. Dwari and L. Parsa, "Design and Implementation
of a Direct AC-DC Boost Converter for Low-Voltage Energy
Harvesting," IEEE Transactions on Industrial Electronics, vol.
58, no. 6, pp. 2387-2396, 2011.
[8] X. Cao, W. Chiang, Y. King and Y. Lee, "Electromagnetic
Energy Harvesting Circuit With Feedforward and Feedback
DC-DC PWM Boost Converter for Vibration Power Generator
System," IEEE Transactions on Power Electronics, vol. 22, no.
2, pp. 679-685, 2007.
[9] Y. Sun, I. Y. Lee, C. J. Jeong, S. K. Han and S. G. Lee, "An
comparator based active rectifier for vibration energy
harvesting systems," in 13th International Conference on
Advanced Communication Technology (ICACT2011), 2011.
[10] R. Yap, A Low Voltage Dynamic Power Saving Pulse
Frequency Modulated Boost Converter Design for Driving a
White LED, 2009.
[11] N. Rahman, A. Parayandeh, K. Wang and A. Prodic,
"Multimode digital SMPS controller IC for low-power
management," in 2006 IEEE International Symposium on
Circuits and Systems, 2006.
[12] P. Allen and D. Holberg, CMOS Analog Circuit Design, Third
Edition, Oxford University Press, 2011.
61
A System Dynamics Simulation Model to
Increase Paddy Productivity and Rice
Production
E.Suryani1, R.A. Hendrawan1, I. Muhandhis2, L.P. Dewi3, A.S. Nisafani1 , and Damanhuri4 1Information Systems, Institut Teknologi Sepuluh Nopember, Kampus ITS Sukolilo - Surabaya 60111
2Informatics, Universitas Wijaya Putra, Surabaya, Indonesia. 3Informatics Department, Petra Christian University, Surabaya, Indonesia, 60236
4Agricultural Cultivation, Universitas Brawijaya, Malang, Indonesia
Abstract— Currently, rice production growth continues
to decline due to destruction of irrigation networks,
conversion of agricultural land to non-agricultural sectors,
declining soil fertility, poor quality of paddy seeds, and
traditional cultivation so that the results depend on natural
factors. Therefore, in this research we proposed a system
dynamics simulation model to analyze the productivity and
production of paddy fields based on the existing condition
as well as to develop several scenarios to increase rice
productivity and production through the use of superior
seeds, the implementation of Jajar Legowo planting system,
balanced fertilization, irrigation improvements, integrated
nutrient as well as integrated pest management. As a
method used to develop the model, we utilized system
dynamics because it has some advantages such as the ability
to analyze a complex system behavior as a feedback process
of reinforcing and balancing loops and provides some
qualitative and quantitative analysis in a computer
program. From the scenario results, it was found that that
the productivity of irrigated rice land could be increased
from 6.5 tons to 9.2 tons / ha. The productivity of non-
irrigated rice field could be increased from 3.6 tons to 6.3
tons / ha and productivity in dry land area could be
increased from 4.8 tons to 7.2 tons / ha. With the increasing
productivity of all type areas, rice production in East Java
is projected would be increased to be 14.4 M tons in 2035.
Index Terms— Productivity; System Dynamics;
Simulation; Model; Scenarios.
I. INTRODUCTION
Rice is one of main commodities of food crops that have
an important and strategic role in food security.
Currently, paddy productivity is around 5-6 tons/ha [1].
Several problems related to rice production include [1]:
conversion of agricultural land, limited agricultural
facilities and infrastructure, business inefficiency. Based
on the Master Plan for the Development of Food Crops
and Horticultural Areas of East Java in 2015 - 2019 [2],
there are some basic problems in the development of food
crops for rice commodities: 1) the lack of ownership of
agricultural land (0.39 hectares), 2) the declining
carrying capacity of natural resources, 3) the lack of
optimal agricultural infrastructure, 4) the loss of yield
still high enough and low competitiveness to imported
products.
The slow growth of rice production in East Java needs to get priority to be addressed immediately. The slow
production is due to the decreasing of harvested area until
2005 and stagnant growth of productivity. In the period
of 1998-2008, the effect of productivity on rice
production is greater than the impact of harvested area
[3]. Increased productivity per unit area is still possible
to do. From the interviews with farmer groups in Malang
district, the application of balanced fertilizer, paddy
productivity can achieve 11 tons/ ha, while the average
production was around 5-6 tons/ ha [4].
This paper is organized as follows. Section 2 provides the literature review and Section 3 presents the research
objectives and methodology. Section 4 describes the
model development. Results and discussion are provided
in Section 5. Finally, in Section 6, conclusion and further
research are presented.
II. LITERATURE REVIEW
The section demonstrates several literature reviews
that have some contributions to the model development
such as harvested area of paddy, land productivity, and
rice production.
A. Harvested Area of Paddy
The area of harvest in East Java is getting bigger
(although with the growth tends to stagnate) in contrast
to land area. This can happen because the area of harvest is influenced by land area and planting intensity. The
decreasing of land area and the increasing of harvested
62
area show that the intensity of planting is more dominant
in the development of harvested area [3].
B. Paddy Land Productivity
Agricultural intensification is an effort to increase food production by expanding planting areas and
intensification of agriculture through the use of superior
seeds, proper fertilizer application and the provision of
effective and efficient irrigation water, so that
productivity can increase [3].
Although in the period of 1998 - 2008 the source of
production growth came from productivity, it is still
possible to increase productivity because the average
productivity is still low, 5.4 tons / ha and the growth tends
to stagnate [5]. According to Irawan et al. [6], the
phenomenon of soil fertility degradation has occurred in
paddy field which is cultivated for rice farming intensively for a long time.
C. Rice Production
East Java is the largest contributor province of rice
production in Indonesia that is equal to 31.27% [7]. East
Java needs to increase rice production for the
achievement of self-sufficiency in food [8]. In 2017,
production in East Java fell by 3.73% due to the decline
in rice productivity which resulted in a decline in national
rice productivity to 5.1 tons per ha or a decrease of 1.55%
compared to 2016 with productivity of 5.2 tons per ha [9]. In addition to its role in increasing production and
productivity, the availability of quality seeds can also
improve the welfare of farmers [1].
Some previous studies have used descriptive statistical
methods that do not consider the time frame and cannot
predict productivity and production in the future with the
inputs change. In this study, we proposed a system
dynamics method that enable us to analyze the
productivity and production throughout the planning time
as well as to predict rice productivity and production in
the future with the inputs change of strategy undertaken.
III. RESEARCH OBJECTIVES AND METHODOLOGY
Based on the research background, we formulate the
research objectives as follows:
1. Analyzing the productivity of paddy fields
2. Conducting analysis on rice production
3. Increasing rice productivity and production through
land intensification
To achieve the research objectives, we utilized system
dynamics framework as a method to develop a simulation model. System dynamics is a framework that can deal
with several complex systems with nonlinear feedback
characteristics [10]. This framework has several
following steps [10]:
1. Problem Articulation: it consists of problem
definition, determination of key variables and time
horizon.
2. Dynamic Hypothesis Formulation: it consists of
hypothesis, causal loop diagram, and stock flow
diagram. 3. Simulation Model Formulation: it includes parameter
estimation and behavioral relationships formulation.
4. Model Validation: it consists of model testing.
5. Design and Evaluation of Policies for Improvement:
scenario development is conducted to design several
policies.
The algorithm of our proposed work can be seen in Fig.1.
Figure 1: The algorithm of our proposed work
The advantages of system dynamics simulation model is
its ability to present and to demonstrate the system
behavior through several scenarios. From the scenario,
we can analyze several different situations to formulate a policy [11].
IV. MODEL DEVELOPMENT
This section demonstrates the model development
which consists of problem articulation, causal loop
diagram development, stock and flow diagram and model
formulation, model validation, as well as scenario
development.
A. Problem Articulation
Climate change has a significant impact on the cultivation of rice crops, because rice cultivation has a
strong dependence on climatic elements, especially
rainfall and temperature [12]. La Nina has an impact on
the occurrence of potential rainfall that lies along
Indonesia, Malaysia, and also northern Australia [13].
East Java is the largest contributor to rice production in
Indonesia [8]. Some factors that influence rice production
are as follows: temperature [13], the application of Jajar
Legowo planting system technology [14], water
availability [15], pest and disease attacks [16], fertilizer
[15,17], soil nutrient [18].
B. Causal Loop Diagram Development
Causal loop diagram is developed as the basic
framework in developing system dynamics simulation
models. Fig. 2 illustrates the causal loop diagram of
productivity and rice production. As we can see from Fig.

63
2, there are several factors that affect paddy productivity,
those are the availability of water, temperature, rainfall,
seed quality, pest and disease, cropping system, and soil
nutrient. Rice production depends on productivity,
harvested area, rendement, and after harvest handling.
Figure 2: Causal Loop Diagram of Paddy Productivity and Production
C. Stock and Flow Diagram and Model Formulation
From the causal loop diagram (CLD) developed at the
beginning of the model development, the CLD is
converted into a stock flow diagram (SFD). SFD is a
technique that represents a precise quantitative specification of all systems of its components and their
interrelation [19].
C1. Harvested Area
In rice farming there are three types of harvest area that
is irrigated harvest area, non-irrigated harvested area, and
dry land harvest area. The model structure in these three
types of harvested area is almost the same, the difference
lies in the cropping intensity on irrigated rice fields are
affected by the availability of water. Harvested area is
affected by land area and planting intensity. The area of paddy land is affected by land expansion and land
conversion into residential or industrial areas. Model
formulation of harvested area can be seen in Eq. (1) as
follows:
Rice Area = Initial Rice Area +
∫ 𝑒𝑥𝑝𝑎𝑛𝑠𝑖𝑜𝑛 𝑓𝑎𝑐𝑡𝑜𝑟 − 𝑐𝑜𝑛𝑣𝑒𝑟𝑠𝑖𝑜𝑛 𝑓𝑎𝑐𝑡𝑜𝑟
(1)
C2. Rice Productivity
The productivity of rice in irrigated rice area is
influenced by several factors such as the availability of water, rainfall, temperature, seed quality, planting
methods, soil nutrients, soil fertility, and pest and disease,
as seen in Fig. 3.
Figure 1: Stock and Flow Diagram for Paddy Productivity
Model formulation of rice productivity of irrigated rice
area can be seen in Eq. (2):
Productivity of Irrigated Rice Area = Initial Productivity
+ ∫ 𝑟𝑎𝑡𝑒 𝑖𝑛 𝑝𝑟𝑜𝑑𝑢𝑐𝑡𝑖𝑣𝑖𝑡𝑦 − 𝑟𝑎𝑡𝑒 𝑜𝑢𝑡 𝑝𝑟𝑜𝑑𝑢𝑐𝑡𝑖𝑣𝑖𝑡𝑦
(2)
C3. Productivity of Non-Irrigated Rice Area
The structure of productivity model is similar with the
irrigated rice field. The difference lies in the formulation
of the impact of water availability on non-irrigated rice
area.
C4. Productivity of Dry Land Area.
The structure of productivity model is similar with the
irrigated rice field. The only difference lies in the
formulation of the impact of water availability on dry
land.
C5. Production Total rice production is determined by rice production
in irrigated rice, non-irrigated rice, and dry rice areas.
D. Model Validation
Model validation is required to checked the model
accuracy and constitutes a very important step in system
dynamics simulation model development. In this process,
we utilized historical data during the time horizon
starting from the year 2000 to 2017. We consider the time
frame based on the data availability and system behavior.
Barlas (1996) explained that a model will be valid if the error rate is less than 5% and the error variance is less
than 30% [20]. We validate some variables that have
significant contribution to rice productivity and

64
production such as harvested area, productivity, and
production of irrigated land. The formulations of the
error rate and error variance are defined in Eq. 3-4.
Error Rate = ⌈S− A⌉
A
(3)
Error Variance = ⌈Ss−Sa⌉
Sa
(4)
Where:
= the average rate of simulation
= the average rate of data
A= Data at time t
S = Simulation Result at time t
𝑆𝑠= the standard deviation of simulation
𝑆𝑎= the standard deviation of data
Error rate of some variables of harvested area,
productivity, and production of irrigated land are as
follows:
Error rate of “harvested area of irrigated land”
=[ 1522660.74 − 1535028.91]
1535028.91= 0.008
Error rate of “productivity of irrigated land”
=[ 6.02 − 6.10]
6.10= 0.014
Error rate of “paddy production of irrigated land”
=[ 9218901.86 − 9414509.60 ]
9414509.60= 0.0208
Error variance of some variables of harvested area, productivity, and production of irrigated land are as
follows:
Error variance of “harvested area of irrigated land”
=[ 214589.35 − 191501.63 ]
191501.63= 0.121
Error variance of “productivity of irrigated land”
=[ 0.27 − 0.35 ]
0.35= 0.213
Error variance of “paddy production of irrigated land”
=[ 1712758.19 − 1595120.95]
1595120.95= 0.073
Based on the above calculation, all the error rates are
less than 5% and error of variances are less than 30%
which means that our model is valid.
E. Scenarios Development Scenario is a strategic planning method that aims to
analyze and project the potential developments of a
certain system in the future [21]. We may utilize a valid
model to develop several scenarios by modifying the
model structure and parameter. Simulation models built
with the system dynamics framework can provide a
reliable forecast and can develop several scenarios as a
basis for decision making [22]. It provides a framework
for developing several long-term strategies for testing
future alternatives [23]. In this study we have developed
several scenarios to improve rice productivity and
production for irrigated land, non-irrigated land as well
as dry land areas to increase rice production.
E1. Increasing Productivity of Irrigated Land Area
This scenario was developed to increase the
productivity of irrigated land area through the use of
superior seeds, the implementation of Jajar Legowo
planting system, and balanced fertilization. It is expected
that with the application of superior seeds, the productivity will increase and the pest attack can be
reduced by 10-20% [24]. The application of Jajar
Legowo planting system provides an opportunity to
maintain without disturbing the plants [14]. With the
target of productivity increase of 3.5 tons/ha, fertilizer
application should use 2 tons of manure [18]. For K
fertilization it is necessary to add 5 tons of fresh straw per
hectare to reduce the fertilizer dose by 50% [18].
E2. Increasing Productivity of Non-Irrigated Land
Area
Total irrigated rice land in 2010 reached 7.23 M ha. From the total area, as much as 230,000 ha of irrigated
land is damaged [25] and caused the irrigated land areas
turned into rain fed area. To increase the productivity of
non-irrigated land area, some of the strategies required
are similar to irrigated rice land, such as the use of
superior seeds, balanced fertilization, Jajar Legowo
implementation, and irrigation improvements.
E3. Increasing Productivity of Dry Land Area
Based on research conducted by Widyantoro and Toha,
(2010), some recommended strategies to boost dry land
productivity are: the use of high quality seed, the
implementation of Jajar Legowo, integrated nutrient
management, as well as integrated pest and disease [26].

65
E4. Increasing the Production
With the increasing productivity in each type of land
area, the overall production is also increasing as total
production is the summation of Production of Irrigated
Land, Non-Irrigated land and Dry Land as shown in Eq.
5.
Total production = Production of Irrigated Land +
Production of Non-Irrigated Land + Production of Dry
Land (5)
V. RESULTS AND DISCUSSION
In this section we demonstrates results and discussion
for harvested area, productivity of irrigated land area,
productivity of non-irrigated land area, productivity of
dry land area, production based on the existing condition,
and several scenarios results to increase land productivity
and production.
A. Productivity of Irrigated Land Area
Productivity of irrigated land area continues to increase, so that in 2017 productivity reached 6.6 tons /
ha. This productivity value although increased over time,
but still below the potential of 11 tons / ha.
B. Productivity of Non-Irrigated Land Area
Land productivity of non-irrigated land area also
continues to increase slightly so that in 2017 reached 3.65
tons / ha, however
this value was still far below the productivity of irrigated land that has reached 6.6 tons / ha.
C. Productivity of Dry Land Area
The productivity of dry land area also continues to
increase slightly, so that in 2017 reached 4.84 tons / ha,
however this value is still far below the productivity of
irrigated land that has reached 6.6 tons / ha.
D. Production Rice production also increased by 3.6% / year, so that
in 2017 the production reached 14.2 Million tons.
E. Scenarios
By implementing several strategies discussed in
scenario development, the productivity of irrigated rice
land could be increased up to 9.2 tons/ha as seen in Fig.4,
non-irrigated land productivity could be increased to 6.3 tons / ha and the productivity in dry land area could be
increased up to 7.2 tons/ha. Rice production is projected
would be increased, so that by the year 2035, the
projected rice production in East Java is projected to be
14.5 M tons.
Figure 4. Productivity Improvement of Irrigated Land
VI. CONCLUSION AND FURTHER RESEARCH
This research is designed to analyze and improve rice
productivity and production through several scenarios
development. To achieve the research objectives, we
utilized system dynamics due to several advantages such as the availability of functions and facilities to analyze a
complex system behavior as a feedback process of
reinforcing and balancing loops as well as provides
qualitative and quantitative analysis in a computer
program.
Several models based on the existing condition have
been developed to analyze the existing condition of
productivity and production. We may utilize a valid
model to develop several scenarios by modifying the
model structures and parameters.
The productivity of irrigated rice land could be
increased from 6.5 tons to 9.2 tons / ha. The productivity of non-irrigated rice field could be increased from 3.6
tons to 6.3 tons / ha and the productivity in dry land area
could be increased from 4.8 tons to 7.2 tons / ha. With the
increasing productivity in all type areas, rice production
in East Java is projected would be increased to be 14.5 M
tons in 2035. Further research is required to analyze and
increase the value of rice supply chain by considering the
internal and external factors that influence the rice supply
chain.
ACKNOWLEDGMENT
This research is supported by Directorate of Research
and Community Service of RistekDikti, Institut
Teknologi Sepuluh Nopember (ITS), ITS Research
Center, Enterprise Systems Laboratory, Information
Systems Department, Department of Agriculture in East
Java, as well as Faculty of Information and
Communication Technology of ITS.
Nomenclature
CLD causal loop diagram
SFD stock and flow diagram

66
REFERENCES
[1] Dinas Pertanian dan Ketahanan Pangan Provinsi Jawa Timur,
“Performance Report of Agricultural Service of East Java in
2014 (Laporan Kinerja Dinas Pertanian Provinsi Jawa Timur
Tahun 2014),” Pemerintah Provinsi Jawa Timur, 2015.
[2] Dinas Pertanian dan Ketahanan Pangan Provinsi Jawa Timur,
“Strategic Issues and Policy Direction: Master Plan for the
Development of Food Crops and Horticultural Areas of East Java
in 2015 - 2019 (Isu Strategis dan Arah Kebijakan: Master Plan
Pengembangan Kawasan Tanaman Pangan dan Hortikultura Jawa
Timur Tahun 2015 – 2019),” unpublished.
[3] F. Hasan, " The Role of Harvested Area and Productivity on Food
Plant Growth in East Java (Peran Luas Panen Dan Produktivitas
Terhadap Pertumbuhan Produksi Tanaman Pangan di Jawa
Timur," Embryo, vol. 7 no.1, pp. 3–8, 2010.
[4] W. Sudana, S.Sudiono, Sujatmo, “Rice Behavior in East Java
(Perilaku Perberasan di Jawa Timur),” Jurnal Soca. vol 2 no.2,
2002.
[5] M. Maulana, “The Role of Land, Intensity of Cultivation, and
Productivity as a Source of Rice Growth in Indonesia in 1980-
2001 (Peranan Luas Lahan, Intensitas Pertanaman, dan
Produktivitas Sebagai Sumber Pertumbuhan Padi Sawah
di Indonesia 1980-2001,”Jurnal Agro Ekonomi,vol 22 no.1, pp.
74-95, 2004.
[6] B. Irawan, B. Winarso, I. Sadikin, G.S. Hardono, Factor Analysis
Causes Slowing Production of Main Plant Commodities (Analisis
Faktor Penyebab Perlambatan Produksi Komoditas Tanaman
Utama.: Pusat Penelitian dan Pengembangan Sosial
Ekonomi Pertanian, Bogor, 2003.
[7] Bulog, “Java is a National Rice Mill (Jawa Masih Jadi Lumbung
Padi Nasional)“ news, okezone.com, 2012. Available at
https://economy.okezone.com/read/2012/07/04/320/658712/jawa
-masih-jadi-lumbung-padi-nasional.
[8] M. Ishaq, A.T. Rumiati, E.O. Permatasari, "Analysis of Factors
Affecting Paddy Production in East Java Province with
Semiparametric Spline Regression Method (Analisis Faktor-
Faktor yang mempengaruhi Produksi Padi di Provinsi Jawa Timur
menggunakan Regresi Semiparametrik Spline),” Jurnal Sains dan
Seni ITS, vol. 5 no. 2, pp. 420-425, 2016.
[9] CNBC, “Price of Rice and Unhusked Rice Rise Due to Weaken
Rice Production (Harga Beras dan Gabah Naik Akibat Produksi
Padi Melemah),” news, 2018. Available at
https://www.cnbcindonesia.com/news/20180110141538-4-
1118/harga-beras-dan-gabah-naik-akibat-produksi-padi-
melemah
[10] J. D. Sterman, Business Dynamics: Systems Thinking and
Modeling for a Complex World, McGraw-Hill Education, Boston,
Massachusetts, 2004.
[11] M. Kljajić1, A. Škraba, and Č. Rozman, “Methodology of system
dynamics for decision support in agriculture,” Agricultura vol. 9,
pp. 7-16, 2012.
[12] I. Yasin, I., M. Ma'shum, Y. Abawi, and L. Hadiawaty, “The use
of Early Summer Rain through Flowcast and Strategy
Development of Land Rice Cultivation of Rainwater in Lombok
Island (Penggunaan Flowcast untuk menentukan Awal Musim
Hujan dan Menyusun Strategi Tanam di Lahan Sawah Tadah
Hujan di Pulau Lombok),” in Proc. Seminar Nasional
Peningkatan Pendapatan Petani melalui Penerapan Teknologi
Tepat Guna. BPTP NTB, 2002.
[13] Ruminta, "Analysis of the decrease of rice production due to
climate change in Bandung Regency, West Java (Analisis
penurunan produksi tanaman padi akibat perubahan iklim di
Kabupaten Bandung Jawa Barat)," Jurnal Kultivasi vol. 15, no. 1,
pp. 37–45, 2016.
[14] S. Abdulrachman, M.J. Mejaya, N. Agustiani, I. Gunawan, P.
Sasmita and A. Guswara Besar, Legowo Planting System (Sistem
Tanam Legowo), Badan Penelitian dan Pengembangan Pertanian
Kementerian Pertanian, Sukamandi, 2013.
[15] W.E. Putra, and A. Ishak,”The effect of Production Factors on
Wetland Rice Productivity in Bengkulu City (Case Study in
Semarang Village, Sungai Serut Sub-district) (Pengaruh Faktor-
Faktor Produksi Terhadap Produktivitas Padi Sawah Di Kota
Bengkulu (Studi Kasus Di Kelurahan Semarang, Kecamatan
Sungai Serut))” Litbang Pertanian Bengkulu, unpublished.
[16] A.Z. Siregar, “Plant Rice Pests (Hama-hama Tanaman Padi,”
article, 2007. Available at
http://library.usu.ac.id/download/fp/07004376.pdf
[17] C. Rahma,” Still Want to Use Chemical Fertilizer? Check out the
danger (Masih Mau Pakai Pupuk Kimia? Yuk Intip Bahayanya),”
article, 2014. Available at
http://library.usu.ac.id/download/fp/07004376.pdf
[18] Kementrian Pertanian, References on the Recommendation of
Fertilizer N, P and K on Specific Wetland Location Per District
(Acuan Penetapan Rekomendasi Pupuk N, P dan K Pada Lahan
Sawah Spesifik Lokasi Per Kecamantan), Kementerian Pertanian,
Jakarta 2007.
[19] Transentis Consulting,” Step-By-Step Tutorials: Introduction to
System Dynamics: Stock and Flow Diagrams,” articles, 2018.
Available at https://www.transentis.com/step-by-step-
tutorials/introduction-to-system-dynamics/stock-and-flow-
diagrams/
[20] Y. Barlas “Formal aspects of model validity and validation in
system dynamics,” System Dynamics Review, vol. 12 no. 3, pp.
183-210, 1996.
[21] A. Brose, a. Fugenschuh, P. Gausemeier, I. Vierhaus, and G.
Seliger. “A System Dynamic Enhancement for the Scenario
Technique,” Technical Report, 2014.
[22] E. Suryani, S.Y. Chou,and C.H. Chen, “Dynamic simulation
model of air cargo demand forecast and terminal capacity
planning,” Simulation Modelling Practice and Theory 28, pp. 27-
41, 2012.
[23] Federal Highway Administration, “Scenario Planning Trends and
Transitions,” Webinar, 2013.
[24] Badan Litband Pertanian, “Superior Rice Varieties Agricultural
Research Agency (Varietas Padi Unggulan Badan Litbang
Pertanian),” in Tabloid Sinar Tani Edisi 25-31 no. 3341, Jakarta.
2012.
[25] Kementrian Pekerjaan Umum., “Support Ministry of Public
Works Against Achieving Self-Sufficiency (Dukungan
Kementrian Pekerjaan Umum Terhadap Pencapaian Swasembada
Berkelanjutan),” Jakarta: Kementrian Pekerjaan Umum, 2013.
[26] Widyantoro, and H.M. Toha, "Optimization of Rainfed Rice
Paddy Management through Integrated Crop Management
Approach (Optimalisasi Pengelolaan Padi Sawah Tadah Hujan
melalui Pendekatan Pengelolaan Tanaman Terpadu),” in
Prosiding Pekan Serealia Nasional, pp. 648-657, 2010.

67
Microstrip Patch Wearable
Antenna for body Centric
Wireless Communication
Muhammad Fauzan bin Fisal, Ahmad
Rashidy Razali, Alhan Farhanah Abd
Rahim, Rosfariza Radzali, Emilia
Noorsal,Mohd Syazwan Osman, Aslina
Abu Bakar Faculty of Electrical Engineering
Unversiti Teknologi MARA (Pulau
Pinang) Malaysia
13500 Permatang Pauh, Pulau
Pinang, Malaysia. e-mail:
Abstract—This paper introduces an investigation on
microstrip patch antenna designed with copper radiating
patch and Polydimethylsiloxane as a substrate. Highly
conductive copper is embedded in flexible and durable
PDMS elastomer. The antenna is constructed to be
wearable for application in body-centric wireless
communication (BCWCs). The designed antenna is aimed
to be operated at 2.4 GHz Industrial, Scientific, and
Medical (ISM) band. The radiation pattern and return loss
result are simulated using Computer Simulation
Technology (CST) Microwave Studio. The return loss was
shifted to a resonance frequency when the antenna is laid
flat. However when the antenna is bent at 30 degree the
resonance frequency is at the desired frequency of 2.4 GHz
and thus imitates the real condition as the antenna will be
worn on human’s arm.
Index Terms – Microstrip Patch, Poydimethylsiloxane
(PDMS), body centric.
I. INTRODUCTION
In recent years, textile electronics have been acknowledged and earned a high demand in technology growth due to its many variable purposes in application[1]. Antenna is one of the most crucial element in wireless communication. It can be implemented in many ways for wireless communication such as mobile communication, medical and textile. The microstrip patch antenna is great option for wireless communication due to its fundamental properties such as small size, light weight, low cost, ease of installation with other RF equipment or component[2].
The common microstrip patch antennas resonates at single frequency and functioning in small frequency range and thus, able to transmit or receive electromagnetic wave for a single wireless communication application. The drawbacks of this type of antenna is its narrow bandwidth and low gain[3]. To overcome this problem, cutout were inserted on both
side of the patch in order to obtain 2.4 GHz resonant frequency, while cut-off the unwanted frequency as well as improving the bandwidth[4].
Wearable antenna demand the capability to operate under different mode of structural deformation while being applied to clothing. The traditional antennas are fabricated by printing or etching conductor patterns on solid substrates, where it has the probability of failure function accordingly once subjected to mechanical deformation such as stretching, bending and twisting. One of the major analysis in antennas for BCWCs application is wearable, fabric-based antennas. These textile material antennas are identified to be sensitive to environment such as humidity and temperature. Their performance could also be affected significantly or maybe fail to function under specific situation. Even though there are a lot of other polymer materials such as Liquid Crystal Polymers (LCP), Polyetherimide (PEI) or Polyethyleneterephalate (PET)[1], PDMS also known as one of the substrate that is commonly used as a substrate material for flexible antennas. PDMS is a silicon-based elastomer, known for its characteristic such as chemically inert, thermally stable, permeable to gases, easy to handle, and exhibit isotropic and homogenous properties. The initial form of the PDMS which is fluid allows the substrate to be manipulated during the fabrication process[5]. Furthermore, the liquid state of the PDMS also allow the substrate thickness to be manipulated and there is probability of the antenna to be immersed inside the substrate[6]. There are many samples of wearable antennas introduced in the research [7-10]. In this paper, a microstrip patch antenna with inset-fed were inserted on both sides of the patch element based on polymer being proposed with good conducting element metal, copper. This paper will

68
focus on parametric study and material capability to produce the best performance of the microstrip patch antenna with inset-fed prototype. All the simulation results obtained were measured using CST software and the prototype results were measured by using Vector Network Analyzer.
II. ANTENNA DESIGN
In this section, the antenna design of a microstrip patch with inset-fed has been introduced. The radiating patch element and the ground plane uses copper. The substrate for this antenna will be PDMS elastomer. The dielectric substrate will isolate the radiating patch from the ground plane. The antenna operates at Industrial Scientific and Medical (ISM) band where the operating frequency must be around 2.45 GHz. The proposed antenna constructed with it radiating plate alienated from substrate by layers of PDMS.
A. Simulation Using CST
First, Computer Simulation Technology (CST) Studio
provides a 3D electromagnetics simulation that deals
with precise, effective computational solutions for
electromagnetics design and analysis for this project. To
obtain the specific dimension, numerical analysis is
important for prior before performing the antenna
fabrication. The dimension are the first to be considered
and calculated using formula that will be discussed in
the next section. The numerical analysis will involve several stages which are creating the ground plane,
creating the substrates layer and creating the radiating
patch element and perform the antenna analysis using
CST. Once the dimension of the antenna had been
determined as required according to the specification,
the next step that need to be perform is molding and
fabrication process. Lastly, the antenna that had been
fabricated will be measure using Vector Network
Analyzer (VNA) and the results will be compared with
simulation results.
Figure 1. The dimension of copper microstrip patch
antenna on PDMS substrate with optimized dimension.
Figure 1 shows the geometry of copper
microstrip patch antenna on PDMS substrate. The
dimension of this antenna was optimized. Some adjustment were made to the calculation in order to
achieve optimized performance. The amount of
fringing fields produce are affected by the geometry of
the patch and the height of the substrate[11].
B. Substrates
The relative permittivity of PDMS is 2.7 with none inclusion with magnitude tangent beneath constant conductivity, tan δ =0.02 with waveguide method [5]. Silgard-184 kit was used for the PDMS, where it will be in liquid states initially then will become solid when proper polymerized was added. In order to get a good harden condition, the polymerization method will lasts one day and could be speed up by adding curing agent. The proposed design will use 1.5mm as the thickness of the substrates showed the frequency references stated was 2.4261 GHz but the increase in thickness will affect the bandwidth, return loss, gain, directivity and frequency reference.
C. Conductive Material
In this paper, the conductive material proposed
are copper due to its characteristic which is high conductivity in microwave application. This material
will also be used as the ground plane with the
thickness of 0.5mm. Effectiveness of antenna
matching by inset feed method can be achieved with
50Ω by varying the inset feed length.
Figure 2. Cross section of the antenna
Figure 2 shows the cross section of the microstrip patch antenna. The copper radiating patch (at the top) and ground plane (at the bottom) have the same thickness which is 0.5mm. The thickness of the substrate layer (at the middle), PDMS is 1.5mm. The thickness is optimized in order to achieve the best

69
performance for the antenna.
Table 1. ANTENNA SIMULATION PARAMETERS
Parameter
Dimension
(mm)
Patch Length, Lp 36
Patch Width, Wp 44
Patch Height, Hp 0.5
Ground Length, Lg 43
Ground Width, Wg 53
Ground Height, Hg 0.5
Substrate Length, Ls 43
Substrate Width, Ws 53
Substrate Height, Hs 1.5
Inset Feed Length,
Yo
4.67
Inset Feed Width, Xo 3
Feed Width, Wf 1.4
Feed Length, Lf 8.17
D. Design Equation To determine the dimension of the antenna, the
resonant frequency, fres need to be decided. The resonant frequency is a width’s function W, the patch element’s length L and the substrate’s thickness, h. The formula for computing the is
(1)
Where
c = speed of light L = microstrip patch’s length
εreff = microstrip patch’s relative permittivity
The aim of the resonant frequency is 2.45 GHz. The current research on PDMS dielectric properties
disclosed the relative permittivity of 2.7 to 3.0 [12].
The planned antenna was designed with relative
permittivity of 2.7.
A width of practical patch, W, for effective
radiator to obtain a high radiation efficiency is
calculated using
(2)
Where
W= microstrip patch’s width fres = resonant frequency
εr = microstrip patch’s relative permittivity
and the patch antenna actual length, L is calculated by
(3)
Where
ΔL= microstrip patch’s extended length
fres = resonant frequency
εreff = microstrip patch’s relative permittivity
The effective relative permittivity εreff and the microstrip
patch’s extended lentgh, ΔL can be determined by using
(4)
(5)
Where h is the substrate’s height. Equation (5) shows a
possible estimated of normalized length extension ΔL,
which is a function of effective dielectric constant and
the width-to-height ration (W/h). The microstrip patch antenna seems to be bigger electrically than its physical
measurement due to the fringing fields at patch corner.
The copper patch layer and ground plane
thickness is 0.5 mm. The radiating patch element is
isolated from the ground plane by a layer of PDMS
substrate with thickness of 1.5 mm. Inset-fed were
inserted on both edges of the radiating patch elements
to obtain 2.45 GHz resonant frequency. The inset
slot dimension and the microstrip line’s width, Wf
were correct using CST to achieve optical
performance.
III. ANTENNA DESIGN
The efficiency of the PDMS antenna was analyzed
through simulation and measurement where copper act
as radiating patch and ground plane.
A. Return Loss or Reflection Coefficient
The simulated S11 result of the antennas were found to be good in agreement. The antennas were found to have a measured of return loss of -15dB as shown in Figure 3. But the bandwidth is too narrow to

70
contain the 2.45 GHz ISM band.
Figure 3. Return loss comparison of microstrip patch antenna
Figure 3 shows the comparison result of microstrip patch antenna return loss using MATLAB. The red graph represent the simulation result while the blue graph represent the measured result. The return loss for the simulation is 15dB and the frequency references stated 2.42 GHz. Whereas the return loss for the measured is 14.54dB at the resonance frequency of 2.38 GHz. The difference in the result is due to the dimension of the patch which is slightly different from the simulation due to some fabrication imperfection.
B. S11 During Bending
Figure 4. Return loss comparison during bending
Figure 4 shows the return loss comparison during bending at 30 degree. , the measure return loss falls nearly 2.4 GHz and has a better return loss compared to the simlation. The
fabricated antenna was bent on the arm during measurement, while in the simulation, the antenna was bent n lies on a cylinder imitate the tissue of human body. The wearable antenna have shown that when the antenna having a contact with human body, the performance of the antenna will be improved. That is the explanation why the antenna measured has better return loss compared to the simulation. To avoid the antenna from crack, it only able to be bend to 30°. For both simulation and measurement. max angle of 30° was used for bending.
C. Radiation Pattern
Figure 4. Simulated radiation pattern of microstrip patch antenna
Figure 5. 3D simulation of radiation pattern of the microstrip patch antenna

71
Figure 6. Measured radiation pattern of the fabricated microstrip patch antenna.
Figure 4 and figure 5 shows the microstrip patch antenna’s radiation pattern. The major lobe have the highest power density of 6.15dB with magnitude of 6.0°. The measured radiation pattern is as shown in Figure 6. It has the highest density of 6.0 dB and magnitude of 270°. Both of the result shows the result of omnidirectional radiation pattern.
IV. CONCLUSION
A 2.45 GHz inset-fed rectangular patch wearable
antenna integrate with copper radiating patch and
ground plane while PDMS elastomer substrate is
presented in this paper. The fabricated antenna has
shown a good near field and far field radiation pattern. The measured result of the return loss is 14.54dB and
resonates at 2.4 GHz. The return loss when bent on the
human arm is better compared to the simulation as the
antenna is affected by the human presence.
V. ACKNOWLEDGEMENT
The authors acknowledge the financial support from
Universiti Teknologi MARA and Ministry of Higher
Education Malaysia under Grant No: 600-RMI/FRGS
5/3(14/2015) entitled “Wearable Flexible Polymer Based
Antenna Design Incorporates Highly Conductive
Radiating Element for Body Centric Wireless
Communication”.
REFERENCES
[1] C.-P. Lin, C.-H. Chang, Y. Cheng, and C. F. Jou, "Development of a flexible SU-8/PDMS-based antenna," IEEE Antennas and wireless propagation letters, vol. 10, pp. 1108-1111, 2011.
[2] D. Sanchez-Hernandez and I. D. Robertson, "Analysis and design of a dual-band circularly polarized microstrip patch antenna," IEEE Transactions on Antennas and Propagation,
vol. 43, pp. 201-205, 1995. [3] S. Tripathi, S. R. Patre, S. Singh, and S. Singh,
"Triple-band microstrip patch antenna with improved gain," in Emerging Trends in Electrical Electronics & Sustainable Energy Systems (ICETEESES), International Conference on, 2016, pp. 106-110.
[4] M. A. Murad, A. A. Bakar, A. R. Razali, M. A. I. M. Hasli, and M. F. A. J. Khan, "Bending Effects on Wearable Antenna with Silver Nanowires and Polydimethylsiloxane," in Advanced Computer and Communication Engineering Technology, ed: Springer, 2016, pp. 771-781.
[5] J. Trajkovikj, J.-F. Zürcher, and A. K. Skrivervik, "PDMS, a robust casing for flexible W-BAN antennas
EurAAP corner]," IEEE Antennas and
Propagation Magazine, vol. 55, pp. 287-297, 2013.
[6] E. Apaydin, "Microfabrication Techniques for Printing on PDMS Elastomers for Antenna and Biomedical Applications," Ohio State University, 2009.
[7] I. Locher, M. Klemm, T. Kirstein, and G. Trster, "Design and characterization of purely textile patch antennas," IEEE Transactions on advanced packaging, vol. 29, pp. 777-788, 2006.
[8] C. Hertleer, H. Rogier, L. Vallozzi, and L. Van Langenhove, "A textile antenna for off-body communication integrated into protective clothing for firefighters," IEEE Transactions on Antennas and Propagation, vol. 57, pp. 919-925, 2009.
[9] N. Chahat, M. Zhadobov, and R. Sauleau, "Wearable textile patch antenna for BAN at 60 GHz," in Antennas and Propagation (EuCAP), 2013 7th European Conference on, 2013, pp. 217-219.
[10] P. J. Soh, G. Vandenbosch, X. Chen, P.-S. Kildal, S. L. Ooi, and H. Aliakbarian, "Wearable textile antennas' efficiency characterization using a reverberation chamber," in Antennas and Propagation (APSURSI), 2011 IEEE International Symposium on, 2011, pp. 810-813.
[11] C. A. Balanis, "Antenna Theory: Analysis and Design” Third edition John Wiley & Sons," Inc. ISBN 0-471-60639-1, p. 28, 2005.
[12] G. J. Hayes, J.-H. So, A. Qusba, M. D. Dickey, and G. Lazzi, "Flexible liquid metal alloy (EGaIn) microstrip patch antenna," IEEE Transactions on Antennas and Propagation, vol. 60, pp. 2151-2156, 2012.

72
Comparison of Modification of Key Matrices
Cryptography Algorithm Playfair Cipher
and Linear Feedback Shift Register (LFSR)
in Data Security
April Lia Hananto1,2, Bayu Priyatna2, Ahmad Fauzi2, Aviv Yuniar Rahman3 1Faculty of Computing, Universiti Teknologi Malaysia, Skudai Johor, Malaysia
2Faculty of Technology and Computer Science, Universitas Buana Perjuangan, Karawang, Indonesia 3Department of Informatics Engineering, Universitas Widyagama, Malang, Indonesia
[email protected], [email protected], [email protected],
Abstract— Playfair cipher is a classic encryption method
that is difficult to manually manipulate but apart from the
advantages found in Playfair cipher there are also many
shortcomings, can be solved by using the information
frequency of occurrence bigram, cannot enter lowercase
letters, numbers and special characters at the time of
encryption. This study modifies the key matrix of Playfair
cryptography algorithms and combines with the Linear
Feedback Shift Register (LFSR) algorithm, by changing
the size of the 13x13 key matrix the Playfair cipher is able
to insert characters as many as 196 characters consisting
of capital letters, lowercase letters. The result of
calculation by avalanche effect method got average value
45,59% at Playfair cipher done by modification of matrix
key 13x13 and combined with generator LFSR, 36,12% at
Playfair cipher key matrix 10x10 combined with LFSR,
32,41% at Playfair classic 5x5 combined with LFSR. That
the Playfair cipher that has been modified and combined
with the LFSR generator is stronger than the previous
Playfair cipher. The results of testing the complexity of
encryption time and decryption of these three methods are
still relatively fast.
Keywords: LFSR, playfair cipher, modification,
cryptography, encryption, description
I. INTRODUCTION
Using Data will be important if it produces useful
information for a person or an institution or company, in
general, important information will always generate high-value validation in accordance with the principle
of the information itself that is reliable and authenticity
of the source. It does not rule out that very important
and high-value information can be targeted by
criminals, who deliberately want to exploit the
weaknesses of both conventional and modern systems
such as theft and data destruction. The techniques that
can be used to maintain the contents of a data is very
diverse one of them is by using cryptography techniques
(Cryptography). Cryptography itself comes from the Greek word "cryptós" which means secret, while
"gráphein" means writing, so if combined into "secret
writing". Currently, cryptography is often used in many
ways, especially to maintain information security such
as confidentiality/privacy, data integrity, authentication
and nonrepudiation used for authentication (Simbolon,
2016).
Examples of cryptographic techniques used both
classical and modern, such as Vigenere, Playfair, AES,
RSA and many others. According to Bhat [1], the
results of a comparison analysis between AES, RSA and
Playfair Cipher cryptography, that Playfair Cipher excels in securing data efficiently and unambiguously.
According to Mahyudin [2], Playfair Cipher should be
used to disguise important messages needed quickly.
Then [3], Playfair Cipher is a classic encryption
method that is difficult to manually analyze. An
important component of the Playfair algorithm is the
cipher table used for encrypting and decrypting the
default table introduced by Playfair is a table that has a
matrix of size (5x5) containing the capital letters of AZ
by omitting the letter J. Although the text security on
the Playfair cipher algorithm this is very difficult to analyze, it can still be solved by using the information
frequency of occurrence bigram.
In addition to these problems [4], the classic Playfair
cipher algorithm still has a number of weaknesses such
as not being able to enter lowercase letters, numbers and

73
special characters while encrypting. The resultant
ciphertext of the Playfair algorithm is easily solved
when a cryptanalysis knows the ciphertext and its cipher
table, although cryptanalysis only knows its ciphertext
without knowing that the cryptanalyst chipper table can guess the bigram by meaningful letters from a word [5].
Although by modifying the contents of the squares key
by simply shifting according to the number of columns,
then actually the key is repeated every 5 times. Thus
this will result in a gap in conducting cryptanalysis [6].
Looking at these problem factors, the authors are
interested in modifying the key matrix of the Playfair
cryptography algorithm and combining it with other cryptographic algorithms, then comparing some
modified algorithms.
Figure 2.1: Sample Key Matrix [9].
Encryption 1
Using the Playfair Modified Matrix table
(13 x 13)
Key 1
Data / File (Plain Text 1)
Data/File (Cipher Text 1)
Encryption 2
8-bit LFSR Key Formation
Key 2
Data/File (Cipher text 2)
Description 2
8-bit LFSR Key Formation
Key 1
Data/File (Cipher Text 1)
Description 1
Key 2
Data/File (Plain Text 1)
Using the Playfair Modified Matrix table
(13 x 13)
Figure 3.1: Flow of Data Security System
II. THEORETICAL BASIS
A. Cryptography
Cryptography in Greek is divided into two terms
namely "cryptós" which has a secret meaning, while
"gráphein" means writing, of the two terms combined
into "secret writing" [7]. The beginning of cryptography is the science and art of keeping the message
confidential by encoding into meaningless forms. Then
along with the development of cryptography is no
longer limited to encrypt messages, but also provides a
security aspect against attacks from password readings.
Therefore, the idea of cryptography turns into science as
well as art to maintain message security [8].
B. Playfair Cipher Cryptography
Playfair Cipher is asymmetric substitution key substitution. Techniques used in conventional Playfair
ciphers split plaintext into sets of two characters each
known as digraphs. Namely is composed of the alphabet

74
as identification. The Playfair password algorithm is
formed using the 5 × 5 matrices of 25 letters created as
shown in Figure
2.1. The key matrix required for the encryption and
description process is built by placing letters of the
keyword without repetition from left to right and from
top to bottom in the matrix, and then the remaining
matrix complete with the remaining alphabets in
alphabetical order. And change the letter "J" to "I" if it
is on plaintext [9].
C. Playfair Cipher Encryption Algorithm
Before performing the encryption process, the
plaintext to be encrypted is set first as follows
[10]:
1. All characters and spaces that do not belong to
the alphabet must be removed first from
plaintext (if any).
2. If there is a letter J on the plaintext do the
changes with the letter I.
3. Plaintext into the original message done arrangement according to the letter pair
(bigram).
4. When there is a pair of the same letter then do
change one letter of the letter pair with the letter
Z or X insert
Figure 3.2: Playfair 13x13 Matrix
Figure 3.3: Key Formation Process
it by using the letter X because the letter X is
very minimal in the same bigram, unlike the
letter Z, for example, is the word FUZZY.
5. If the letters on the plaintext have an odd number
then select an additional letter then add at the end of the plaintext. Additional letters can be selected
for example the letter Z or X.
D. Algorithm Description Playfair Cipher
Here is the stage of the Playfair cipher algorithm:
1. If there are two letters located on the same key row then each letter is changed using the letters
on the left.
2. If there are two letters located on the same
column then each letter is changed with the letter
above it.
3. If two letters are not on the same row and
column, change them to the letter in the first line
intersection with the two-letter columns. Then
next the second letter is changed using letters at
the fourth vertex of the rectangle formed from
the letters used [3].
E. Linear Feedback Shift Register (LFSR)
LFSR is a register that shifts with a certain amount,
the output is selected and added modulo 2. Also fed back to the input register at each clock cycle. LFSR
itself consists of N storage elements called stages. An
N-stage LFSR is characterized by an N × N matrix,
called TSR. The format and size of the TSR are based
on the feedback stage dependence. Furthermore, the
state is a linear function of the previous state [10].
Figure 3.4: Establishment of LFSR Keys

75
III. SYSTEM DESIGN
The research methodology used in this research is
engineering, Theoretical Computer Science where the
researcher uses a cryptographic technique with modification method of Playfair algorithm table using
13x13 matrix and combining it with Linear Feedback
Shift Register (LFSR) 8 bits. The process flow of the
systematic process from this research is poured in
Figure 3.1 as follows :
A. Playfair 13x13 Matrix
The establishment of a 13 x 13 Playfair matrix table
of keys entered, in the formation of keys consisting of
letters, numbers, and symbols Suppose the key example
"IM @ Ululu5". The first step is a key consisting of
numbers, letters or symbols should not have more than
one appearance if there is such thing then remove the
numbers, letters or symbols that have in common. So
the key of "AkuM @ Ululu5" becomes "AkuM @ Ul5".
In Figure 3.2 is a matrix formed from the key "AkuM @
U15":
B. Linear Feedback Shift Register (LFSR)
The step in the data encryption method using linear
feedback Shift Register (LFSR) 8 bits, is the formation of the key matrix. Here is an illustration of the key
formation process of LFSR key
In the illustration Figure, 3.3 illustrates the stage or
process flow in key formation with 8 bit LFSR. Where
b1, b2, .... b8 represent an input bit b1 xor b8 then b8 is
shifted and placed in the output bit. Here are the results
of the LFSR key building process :
In the Figure 3.4 table enter initial input 10011001
then the resulting output is 10011001 then the next
output is 00010001 and so on until (n). Then the resulting output compiles into a matrix of size (2 × n)
where length (n) is based on the length of the row
contained in ciphertexts which have been generated
from the 1st encryption process, using Playfair cipher.
Figure 4.1: Main Interface Application and Encryption
Figure 4.2: Interface Description

76
IV. RESULT AND DISCUSSION
A. Construction User Interface
The built application user interface can be seen in
Figure 4.1 and Figure 4.2 :
B. The results of the 13x13 Playfair Cipher Matrix
Cryptography Test and merged with LFSR
In the test of ciphertexts, randomness is done as
much as 30 experiments with different sample
parameters that are based on the size of the file, the length of ciphertext characters and the same key.
Results obtained from experiments using the application
is calculated using the Avalanche Effect method with
the formula : 𝐴𝑣𝑎𝑙𝑎𝑛𝑐ℎ𝑒 𝐸𝑓𝑓𝑒𝑐𝑡
=number of bit changes
the total number of chip load bit x 100% (4.1)
Where Where the number of bit changes obtained
from the results of XOR calculation between plaintext
with
ciphertext first converted into binner number, then to
prove that the modification of Playfair algorithm with
13x13 key matrix and combined with LFSR have a
higher value of ciphertext randomness, then made a
comparison with the previous method. Here is the result
of the comparison of ciphertext randomness test can be
seen in Table 4.1 :
C. Time Complexity Testing
In this time complexity testing was done 30 times
experiment with different sample parameters that are
based on the size of the file and the length of the
character ciphertext. This time complexity testing is
obtained from the application during the encryption
process and description. After that do the average
calculation time of encryption and description. Here is
the result of time complexity test between Playfair 13x3
key matrix and merged with LFSR, Playfair classic
matrix lock 5x5 and Playfair 10x10 key matrix can be
seen in Figure 4.3, Figure 4.4, Figure 4.5 and Figure 4.6
:
Table 4.1
Comparison of Ciphertext Randomness Test Results
No Data Plaintext
length (bit)
Avalanche Effect
Playfair 5x5 & LFSR Playfair 10x10 & LFSR Playfair 13x13 & LFSR
1 Experiment 1 112 26.79 31.25 40.18
2 Experiment 2 472 30.93 35.17 41.31
3 Experiment 3 943 28.74 33.19 45.07
4 Experiment 4 1247 29.35 34.64 41.06
5 Experiment 5 1.961 29.73 35.90 46.51
6 Experiment 6 2.232 32.21 32.39 39.87
7 Experiment 7 3.480 31.75 33.33 45.34
8 Experiment 8 3.680 31.30 36.88 47.31
9 Experiment 9 4.224 32.15 36.65 44.96
10 Experiment 10 5.320 32.05 33.59 45.15
11 Experiment 11 5.904 32.57 36.26 46.93
12 Experiment 12 6.816 32.42 31.41 45.77
13 Experiment 13 7.872 31.40 35.71 41.92
14 Experiment 14 8.376 31.40 33.82 45.01
15 Experiment 15 18.696 31.61 33.62 45.97
16 Experiment 16 10.840 39.18 30.50 38.81
17 Experiment 17 16.480 40.18 29.78 43.62
19 Experiment 19 31.592 38.17 30.82 44.94
20 Experiment 20 19.440 38.11 30.95 39.61
21 Experiment 21 33.472 38.18 29.24 40.14
22 Experiment 22 35.896 37.09 30.74 39.96
23 Experiment 23 25.592 36.42 31.06 44.40
24 Experiment 24 38.600 36.67 30.33 44.80
25 Experiment 25 58.256 37.72 35.09 44.48
26 Experiment 26 70.112 37.25 39.91 40.10
27 Experiment 27 95.880 37.21 39.32 44.73
28 Experiment 28 121.648 37.21 39.35 39.49
29 Experiment 29 138.880 37.80 39.76 44.15
30 Experiment 30 141.368 37.37 40.26 44.63
Avalanche Effect Average Score 32.41 36.12 45.59
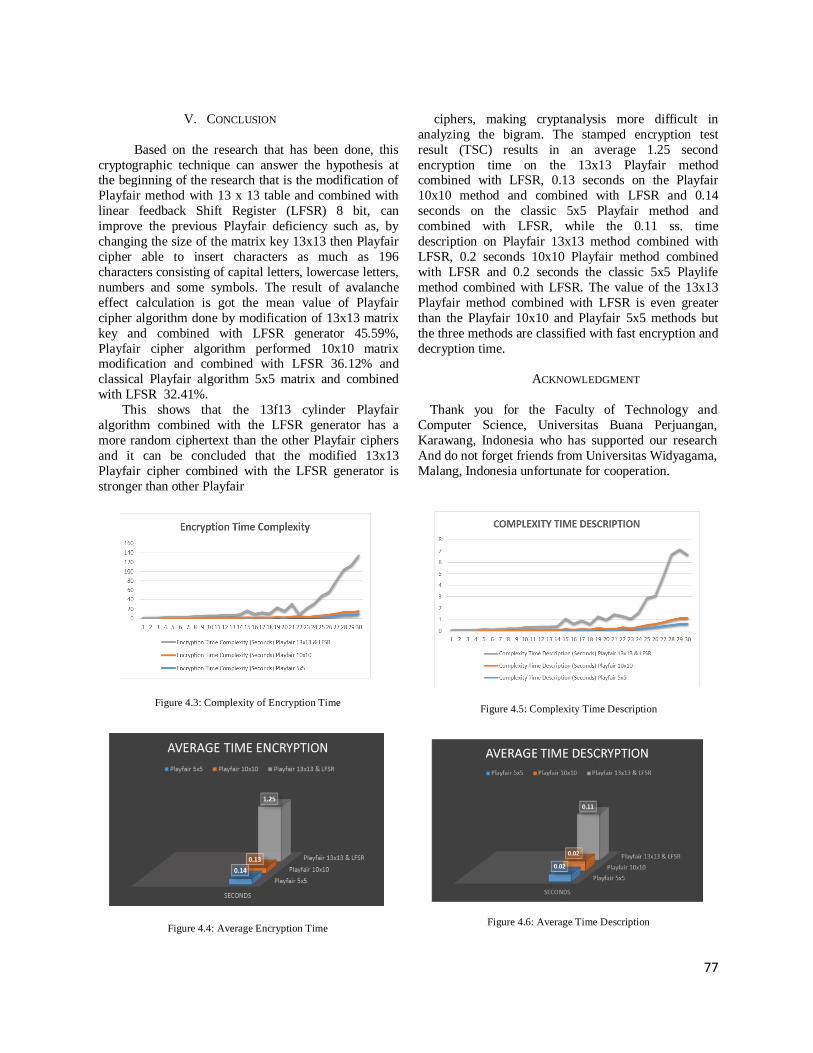
77
V. CONCLUSION
Based on the research that has been done, this
cryptographic technique can answer the hypothesis at the beginning of the research that is the modification of
Playfair method with 13 x 13 table and combined with
linear feedback Shift Register (LFSR) 8 bit, can
improve the previous Playfair deficiency such as, by
changing the size of the matrix key 13x13 then Playfair
cipher able to insert characters as much as 196
characters consisting of capital letters, lowercase letters,
numbers and some symbols. The result of avalanche
effect calculation is got the mean value of Playfair
cipher algorithm done by modification of 13x13 matrix
key and combined with LFSR generator 45.59%,
Playfair cipher algorithm performed 10x10 matrix modification and combined with LFSR 36.12% and
classical Playfair algorithm 5x5 matrix and combined
with LFSR 32.41%.
This shows that the 13f13 cylinder Playfair
algorithm combined with the LFSR generator has a
more random ciphertext than the other Playfair ciphers
and it can be concluded that the modified 13x13
Playfair cipher combined with the LFSR generator is
stronger than other Playfair
ciphers, making cryptanalysis more difficult in
analyzing the bigram. The stamped encryption test
result (TSC) results in an average 1.25 second
encryption time on the 13x13 Playfair method combined with LFSR, 0.13 seconds on the Playfair
10x10 method and combined with LFSR and 0.14
seconds on the classic 5x5 Playfair method and
combined with LFSR, while the 0.11 ss. time
description on Playfair 13x13 method combined with
LFSR, 0.2 seconds 10x10 Playfair method combined
with LFSR and 0.2 seconds the classic 5x5 Playlife
method combined with LFSR. The value of the 13x13
Playfair method combined with LFSR is even greater
than the Playfair 10x10 and Playfair 5x5 methods but
the three methods are classified with fast encryption and
decryption time.
ACKNOWLEDGMENT
Thank you for the Faculty of Technology and
Computer Science, Universitas Buana Perjuangan,
Karawang, Indonesia who has supported our research
And do not forget friends from Universitas Widyagama,
Malang, Indonesia unfortunate for cooperation.
Figure 4.3: Complexity of Encryption Time
Figure 4.4: Average Encryption Time
Figure 4.5: Complexity Time Description
Figure 4.6: Average Time Description
78
REFERENCES
[1] K. Bhat, D. Mahto, and D. K. Yadav, “Vantages of Adaptive Multidimensional Playfair Cipher
over AES-256 and RSA-2048,” vol. 8, no. 5, pp.
2015–2018, 2017.
[2] K. Bhat, D. Mahto, and D. K. Yadav, “A NOVEL
APPROACH TO INFORMATION SECURITY
USING FOUR DIMENSIONAL ( 4D )
PLAYFAIR CIPHER FUSED WITH LINEAR,”
vol. 8, no. 1, pp. 15–32, 2017.
[3] E. H. Nurkifli, “MODIFIKASI ALGORITMA
PLAYFAIR DAN MENGGABUNGKAN
DENGAN LINEAR FEEDBACK SHIFT
REGISTER ( LFSR ),” vol. 2014, no. Sentika, 2014.
[4] H. Tunga and S. Mukherjee, “A New
Modified Playfair Algorithm Based On
Frequency Analysis,” vol. 2, no. 1, 2012.
[5] J. Choudhary, “A generalized version of play
fair cipher,” vol. 2, no. Vi, pp. 176–179,
2013.
[6] E. Andriana, “Algoritma Enkripsi Playfair
Cipher,” no. May, pp. 0–5, 2016.
[7] D. Mardhatillah, “Universitas sumatera
utara,” 2017. [8] G. H. Ekaputri, “Super-Playfair , Sebuah
Algoritma Varian Playfair Cipher dan Super
Enkripsi.”
[9] T. Nafis, M. Sadiq, and N. Siddiqui,
“Addendum of Playfair Cipher in Hindi,”
vol. 10, no. 5, pp. 977–983, 2017.
[10] I. Pomeranz, “LF SR -Based Generation of
Multicycle Tests,” vol. 70, no. c, pp. 1–5,
2016.

79
Overview and Practical Use of Web APIs for
Improving User Experience
P.Filip and L.Čegan University of Pardubice
Abstract—How websites are perceived by a user is called
user experience (UX). UX is not exactly measurable because
it is influenced by many factors. However, one of the
measurable constituents is page-loading speed, which is
part of the usability factor. Companies such as Google or
Facebook bring new technologies and frameworks for
better and faster web applications such PWA and APIs.
This paper introduce new and current web APIs that can
help to improve user experience. A real-life experiment with
interfaces is introduced. This showed results of utilization
of APIs for lazy loading of contents such as media files.
Index Terms—User Experience; Web API; Web
Browser; Web Performance.
I. INTRODUCTION
Every year, the worldwide number of Internet users is
growing. Actually more than 50% of the world
population use the Internet [1]. Due to this trend, for
thousands of companies, the Internet has become the
main sales channel. They offer services and products via
web pages, and their revenues are influenced by UX of
the website. One of the many parts of UX is “page speed”. The page
speed is also influenced by many factors. From the
technical point of view elements such as connection type,
transfer protocols, total size of a web pages, count of
HTTP requests, performance of a target devices, web-
server performance and others can be considered [2, 3].
According to the statistics, the median web page has a
sum of transferred data of around 1500 KB [4]. Loading
on mobile devices is crucial. Time to load and parse a
HTML document takes 7 seconds and after 17 seconds,
all resources are downloaded [5].
Long loading time is the reasons why more and more emphasis is placed on web page performance and its
optimization. Resource compression, caches usage,
resource loading optimization and usage of protocols
such as HTTP2, SPDY or QUIC [6, 9], are all factors
which can lead to improvement. The consequence of the
aforementioned was that page speed become a crucial
part of the ranking factor for Google search [10].
A few years ago, PWA (progressive web application)
was introduced as a new way to create cross-platform
mobile web applications. It combines the best features of
native applications with the characteristics of web
applications [11, 12].
In the next sections are described selected APIs, which
are followed by an experiment, which uses the mentioned
APIs for improving web page loading speed. The paper
finishes with a discussion.
II. WEB APIS
In this section, new and current web APIs for improving
of web performance are introduced. Each API has
described practical use cases, which can help to increase
UX.
A. Network Information API
This API provides information about connection such
as connection type (e.g., ‘wifi’, ‘cellular’, ‘ethernet’, etc),
bandwidth estimate (Mb/s), estimate of the average
round-trip time (ms) and other information. The network
quality is based on the before mentioned properties and it
is defined by the following strings: slow-2g, 2g, 3g or 4g.
This kind of network quality is called ‘effective
connection type’ (ECP), but it is not a connection type,
but rather, how the user perceive resource loading [13, 14]. For example, a fast WiFi connection is usually 4g. A
more detailed explanation of the ECPs is described in the
following table 1.
Table 1
Effective Connection Type Explanation [13]
ECT Minimum
RTT(ms)
Maximum
(Kbps)
downlink
Explanation
slow-
2g 2000 50
The network is suited for
small transfers only such
as text-only pages.
2g 1400 70 The network is suited for
transfers of small images.
3g 270 700
The network is suited for
transfers of large assets
such as high resolution
80
images, audio, and SD
video.
4g 0 ∞ The network is suited for
HD video, real-time video,
etc.
According to the knowledge of the user’s ECT, loading
media data types (images, videos, other data streams) can
be improved. For example, instead of serving an image
in full HD resolution, a low resolution image can replace it. Next, the cellular connection type has to be also
considered, because users do not have unlimited data.
Max Böck [15], in his article described a
proof-of-concept implementation of a connection-aware
component, which served appropriate quality image or
video, according to the ECT.
B. Broadcast Channel API
This interface allows communication between
browsing contexts such as windows, tabs and frames
within the same website. It can be considered as a publish-subscribe message bus [16, 17].
In figure 1, a typical data flow is shown. In context of
real use cases, it can be the following scenario:
1. the user log in,
2. tab 1 post message to the broadcast channel,
3. tab 2 receive message and show information to
the user
The same scenario is used on Github.com. The main
point of this API is the possibility of escalating
application events through the message bus within the
browsing context. Due to this, it is possible to react to
events in the different tabs or windows, and therefore the
application can stay in a visual consistent state.
C. Intersection Observer API
“The Intersection Observer API provides a way to
asynchronously observe changes in the intersection of a
target element with an ancestor element or with a top-
level document's viewport” [18].
In general, main practical use cases for usage of the
API are tasks where information about intersection of
elements and viewport is needed. Examples include tasks
such as lazy loading of a content and infinite scrolling
[19].
D. Performance APIs Two of the most useful APIs are Navigation Timing
API [20] and Resource Timing API [21, 22]. They are
essential for measurement of page speed. Page speed
includes two factors – getting data from a server (domain
lookup, connection establishment, request and response)
and their processing. In case of the HTML page, it goes
about loading, parsing and rendering. Based on the
information, it is possible to calculate the duration of
each operation and find bottlenecks [23].
E. Battery status API
The battery status interface provides information about the battery status of the hosting device. The API provides
information such as battery level, charging state,
charging and discharging time [24, 25]. With the
knowledge of the information about battery status, a
developer can design more power-efficient application
tasks. To be more specific, it means loading a CSS
without animations and skip long-running background
JavaScript tasks such as synchronizations. This approach
will save the battery and user can use the device for a
longer time.
F. Payment Request API
Payment request API is another crucial interface for
e-commerce, which speeds up the final step of orders.
The interface provides a unified and easier way how a
customer can pay online [26, 27]. Figure 2 shows a form
for payment. The next aim of this API, is to make dealing
with integration of payment methods easier.
G. Browser Compatibility
The above-mentioned APIs are relatively new and it
means they are not implemented in all browsers. In the
Figure
1: Use Case for Broadcast Channel
Figure 2 :Example of Unified Payment Form

81
following tables, supporting of implementation each
APIs for each major browser is marked.
Table 2
Overview of Compatibility of APIs on Desktop Browsers [28]
Desktop environment
Network Information
Broadcast Channel
Battery Status
Payment Request
Intersection Observer
Navigation Timing
Resource Timing
Table 3
Overview of Compatibility of APIs on Mobile Browsers [28]
Mobile environment
Network Information
Broadcast Channel
Battery Status
Payment Request
Intersection Observer
Navigation Timing
Resource Timing
III. EXPERIMENT
For the purposes of the experiment, which
demonstrates three strategies for content loading, three
web pages were created. Every page contains nine images, which are placed to one column. Every image has
different resolution and size. The images have another
three copies with different lower resolution and quality.
• First page use strategy “no lazy loading”, which
requests all nine full resolution images
immediately after DOM is loaded.
• Second page use Intersection Observer API for
lazy loading and page requests only for images
that are intersected with the viewport. In the test
cases, two images are loaded.
• Third page combines Intersection Observer API
with Network Information API. According to the ECT, an image with a suitable resolution is
requested.
Every test was repeated and final values represent an
attempt average when measured values were stabilized.
Time of domContentLoadedEventStart and
domComplete events was established as performance
metrics.
• domContentLoadedEventStart – event is fired
when HTML document is loaded and parsed.
Images can be still loading at that moment.
• domComplete – event is fired when the whole
page is loaded. It includes CSS and images.
For greater information value, the measured times are
shown without network delays. Testing configuration
was as follows: Dell E5470 (i5-6200), Debian 9.5, local
Apache web server 2.4.25 and Google Chrome 68.0.3440.75. The web browser was running in developer
mode and desktop mode, with disabled cache and the
transfer protocol was HTTP/1.1. For simulation of type
network such as 4g, 3g and 2g, default presets were used.
For testing purpose of slow-2g ECT, a custom preset was
created. The pages include JavaScript code (based on
performance interface) for capturing and sending (via
AJAX) gathered information to a PHP script, which
writes data to a file. Source codes and measured data are
placed in a public git repository:
https://github.com/petrfilip/.
Table 4
Results of the Experiments
No Lazy
loading Observer
Observer
and ECT
Requests 14 7
Data
transfered 5.9 MB 2 MB
4g = 2MB
3g = 126 KB
2g = 48 KB
slow-2g = 10
KB
4g (in ms)
domContentL
oaded 368 240 196
domComplete 955 642 591
3g (in ms)
domContentL
oaded 833 696 660
domComplete 33444 12565 1877
2g (in ms)
domContentL
oaded 2294 2156 2162
domComplete 123037 45659 5136
slow-2g (in ms)
domContentL
oaded 3165 2617 2606
domComplete 1128628 27084 6159
As was expected, the combination of lazy loading and
information about the network (ECT) achieved the best
page loading performance (see table 4). However, in case
of the scenario with applied ECT, image quality
decreased and it can be perceived as decreasing of UX.
It is more like a placeholder, which can be replaced
during the user staying with an image in higher
resolution. When the applied ECT was equal to slow-2g, images with an average size 3 KB were requested.
Consideration about the quality and resolution of images
depends on the nature of the web and the user’s
requirements. For websites, where the text content is
essential, and images are only for illustration, it can be an
acceptable approach.

82
IV. DISCUSSION
At the beginning of the paper, the current state of web
applications was mentioned. It included a new PWA
approach which takes the best from the current web environment and native applications.
Next, an overview of the web APIs which can be used
for improving of UX, is provided. As the most important
API, Network Information API can be considered, which
provides data about user connection such as ECT. It
brings new opportunities for web developers who can
care more about their web users who do not have a stable
and quality Internet connection, and provide them with a
faster website, which increases UX.
In the experiment, how effectively Intersection
Observer API can be used for lazy loading was shown. In
addition, there are many more opportunities, such as combination of a data from Battery Status API. For
improving of performance, we need to begin with
empirical measurements. For this, APIs, which gather
information about page loading and its resources, are
prepared. According to this measurement, it is possible to
improve the situation. The problem of the UX, is that
there is not only one metric which fits to all use cases;
and the page loading speed is only one factor which
influences the level of user satisfaction.
For faster payment on e-commerce websites Request
Payment API is available, which provides a unified checkout process. In addition, after the payment, the state
of the application has to be consistent, which can be done
through the Broadcast Channel API.
Web applications are still evolving and it brings new
challenges for all participants of the web development
environment. Involved people need to watch how trends
are changing which includes learning modern
technologies, frameworks and patterns.
ACKNOWLEDGMENT
The work has been supported by the Funds of University of Pardubice, Czech Republic. This support is
very gratefully acknowledged.
REFERENCES
[1] StatCounter, “Mobile Browser Market Share Worldwide”,
online: http://gs.statcounter.com/browser-market-
share/mobile/worldwide [2] Scott W. H. Young, “Speed Matters: Performance Enhancements
for Library Websites”, in Weave, vol. 1 , 2016, DOI :
10.3998/weave.12535642.0001.401, online:
https://quod.lib.umich.edu/
w/weave/12535642.0001.401?view=text;rgn=main [3] J. Avery, “Watching your (image) weight”, 2017, online:
https://responsivedesign.is/articles/watching-your-image-weight/ [4] HTTP Archive, “State of the Web | 2018_07_01”, 2018, online:
https://httparchive.org/reports/state-of-the-
web?start=2018_07_01 [5] HTTP Archive, “Loading speed | 2018_07_01”, 2018, online:
https://httparchive.org/reports/loading-speed?start=2018_07_01
[6] J. Alakuijala, R. Obryk, O. Stoliarchuk, Z. Szabadka, L.
Vandevenne, J. Wassenberg, “Guetzli: Perceptually Guided JPEG
Encoder”, 2017, online: https://arxiv.org/pdf/1703.04421.pdf [7] H. Leventić, K. Nenadić, I. Galić and Č. Livada, "Compression
parameters tuning for automatic image optimization in web
applications," in 2016 International Symposium ELMAR, Zadar,
2016, pp. 181-184. DOI: 10.1109/ELMAR.2016.7731782, 2016 [8] Y. Liu, Y. Ma, X. Liu and G. Huang, “Can HTTP/2 Really Help
Web Performance on Smartphones?,” in 2016 IEEE International
Conference on Services Computing (SCC), San Francisco, CA,
2016, pp. 219-226. doi: 10.1109/SCC.2016.36 [9] C. Gaetano, L. D. Cicco, S. Mascolo, “HTTP over UDP: an
experimental investigation of QUIC.” in SAC, 2015, online:
https://c3lab.poliba.it/images/3/3b/QUIC_SAC15.pdf [10] Z. Wang, D. Phan, “Using page speed in mobile search ranking”
in Webmaster Central Blog, 2018, online:
https://webmasters.googleblog.com/2018/01/using-page-speed-
in-mobile-search.html [11] A. Osmani, “Getting started with Progressive Web Apps”, 2015,
online: https://addyosmani.com/blog/getting-started-with-
progressive-web-apps/ [12] A. Biørn-Hansen, T. A. Majchrzak, T. Grønli. "Progressive web
apps: The possible web-native unifier for mobile development."
in Proceedings of the 13th International Conference on Web
Information Systems and Technologies (WEBIST), 2017, online:
http://www.scitepress.org/Papers/2017/63537/63537.pdf [13] Web Incubator Community Group, “Network Information API”,
2018, online: https://wicg.github.io/netinfo/ [14] Mozilla, “NetworkInformation”, in MDN Web Docs, 2017,
online: https://developer.mozilla.org/en-
US/docs/Web/API/NetworkInformation [15] M. Böck, “Connection-Aware Components”, in MXB, 2018,
online: https://mxb.at/blog/connection-aware-components/ [16] Mozzila, “Broadcast Channel API”, in MDM Web Docs, 2018,
online: https://developer.mozilla.org/en-
US/docs/Web/API/Broadcast_Channel _API [17] E. Bidelman, “BroadcastChannel API: A Message Bus for the
Web”, 2016, online:
https://developers.google.com/web/updates/2016/09/
broadcastchannel [18] Mozzila, “Intersection Observer API”, in MDM Web Docs, 2018,
online: https://developer.mozilla.org/en-US/docs/Web/API/
Intersection_Observer_API [19] Web Platform Working Group, “Intersection Observer”, 2018,
online: https://w3c.github.io/IntersectionObserver/ [20] Web Performance Working Group, “Navigation Timing”, 2012,
online: https://www.w3.org/TR/navigation-timing/ [21] Web Performance Working Group, “Resource Timing Level 1”,
2017, online: https://www.w3.org/TR/resource-timing/ [22] Mozilla, “Using the Resource Timing API”, 2018, online:
https://developer.mozilla.org/en-US/docs/Web/API/
Resource_Timing_API/Using_the_Resource_Timing_API [23] I. Grigorik, “Critical Rendering Path”, online:
https://developers.google.com/web/fundamentals/performance/cr
itical-rendering-path/ [24] Device and Sensors Working Group, “Battery Status API”, 2018,
online: https://www.w3.org/TR/battery-status/ [25] Mozilla, “Battery Status API”, 2017, online:
https://developer.mozilla.org/en-
US/docs/Web/API/Battery_Status_API [26] Web Payments Working Group, “Payment Request API” , 2018,
online: https://www.w3.org/TR/payment-request/ [27] E. Kitamura, D. Gash, Z. Koch, “Introducing the Payment
Request API”, 2018, online:
https://developers.google.com/web/fundamentals/payments/ [28] A. Deveria, “Can I use... Support tables for HTML5, CSS3, etc”,
2018, online: https://caniuse.com/

83
Online Posture Strategy on Irregular Terrain for
“T-FLoW” Humanoid Robot
R. Dimas Pristovani1, Dewanto. Sanggar2, Pramadihanto. Dadet3 EEPIS Robotics Research Center (ER2C)
1Electronics Engineering Department, 2Mechatronics Engineering Department, 3Computers Engineering
Department,
Electronics Engineering Polytechnic Institute of Surabaya (EEPIS) / Politeknik Elektronika Negeri Surabaya
(PENS)
St. Raya ITS, Keputih, Sukolilo, Surabaya, Indonesia, 60111
Abstract—Human has several natural behaviors when
they are walking or just stand up. The one of the behavior
is adaptive posture of legs including ankle placement during
stand up in uneven area (irregular terrain with certain
angle). This paper describes the implementation of adaptive
posture of human into T-FLoW humanoid robot during
stand up in the irregular terrain with certain angle. The
strategy to finish this implementation is how to arrange the
legs posture of the robot to avoid the falling state caused by
angle changes. The inverse kinematics analysis is used to
arrange the legs part based on global position reference.
This kinematics analysis makes the process of calculation is
in the cartesian space. The strategy control is built based on
the dynamics system approach by using quasi dynamics
system with single body zero moment point analysis. The
result of dynamics analysis is position vector of zero
moment point. To maintain the posture of the robot
(kinematics input), the PI controller is used to arrange the
compensation of the cartesian data input of kinematics
analysis. From the experimental result, the T-FLoW
humanoid robot successfully complete the task but still has
some limitations.
Index Terms— inverse kinematics; quasi dynamics
system; online posture stabilization; robot in irregular
terrain; PI controller.
I. INTRODUCTION
A lot of humanoid robots were made to adapt one or
several human behaviors. This condition was happened
because the human behaviors are an ideal characteristic
for all system of bipedal or humanoid system. The most basic behavior which adapted by humanoid robot is stand
up posture models. When human in the stand-up
condition, a lot of posture models are happened in there.
More specifics are when human stand up in the uneven
area, they will naturally adapt and change their stand-up
behavior based on the environment. If the human stands
up in irregular terrain with certain angle, the human will
adapt the legs height and ankle joint rotation based on the
direction vector between irregular terrain angle and
human direction (Figure 1). This paper describes about the process to solve a main
problem that is caused by irregular terrain which is
falling condition of the robot. From several researches in
the reference [2-12], they are using several methods to
solve the main problems such as dynamic dynamics
control model, dynamic statics control model, direct
control to kinematics, artificial intelligent, and lookup
table. This research is proposing a combination between
2 steps of analysis to solve the main problem which are
using geometry analysis for 1st step and analysis of
dynamics system approach by using quasi dynamics system with single body zero moment point analysis for
2nd step. The plant is joint in the legs part. To simplify it,
the inverse kinematics analysis is used to covering the
angle control of each joint in legs part. Because of it, the
calculation in this system is using cartesian space data (x,
y, z-Axis).
Figure 1: Human behavior in the legs part during stand up on the
irregular terrain with certain angle with (A) right, (B) left, (C)
backward, and (D) forward of human direction.
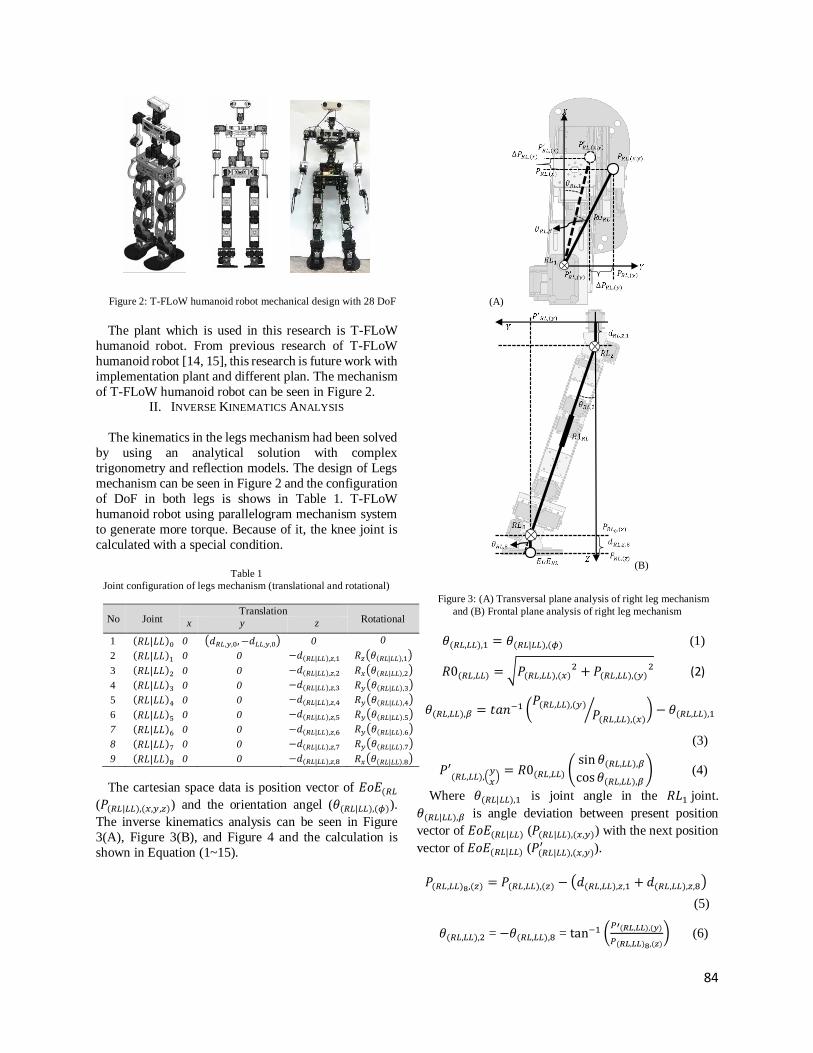
84
Figure 2: T-FLoW humanoid robot mechanical design with 28 DoF
The plant which is used in this research is T-FLoW
humanoid robot. From previous research of T-FLoW
humanoid robot [14, 15], this research is future work with
implementation plant and different plan. The mechanism
of T-FLoW humanoid robot can be seen in Figure 2. II. INVERSE KINEMATICS ANALYSIS
The kinematics in the legs mechanism had been solved
by using an analytical solution with complex
trigonometry and reflection models. The design of Legs
mechanism can be seen in Figure 2 and the configuration
of DoF in both legs is shows in Table 1. T-FLoW
humanoid robot using parallelogram mechanism system
to generate more torque. Because of it, the knee joint is
calculated with a special condition.
Table 1
Joint configuration of legs mechanism (translational and rotational)
No Joint Translation
Rotational x y z
1 (𝑅𝐿|𝐿𝐿)0 0 (𝑑𝑅𝐿,𝑦,0, −𝑑𝐿𝐿,𝑦,0) 0 0
2 (𝑅𝐿|𝐿𝐿)1 0 0 −𝑑(𝑅𝐿|𝐿𝐿),𝑧,1 𝑅𝑧(𝜃(𝑅𝐿|𝐿𝐿),1)
3 (𝑅𝐿|𝐿𝐿)2 0 0 −𝑑(𝑅𝐿|𝐿𝐿),𝑧,2 𝑅𝑥(𝜃(𝑅𝐿|𝐿𝐿),2)
4 (𝑅𝐿|𝐿𝐿)3 0 0 −𝑑(𝑅𝐿|𝐿𝐿),𝑧,3 𝑅𝑦(𝜃(𝑅𝐿|𝐿𝐿),3)
5 (𝑅𝐿|𝐿𝐿)4 0 0 −𝑑(𝑅𝐿|𝐿𝐿),𝑧,4 𝑅𝑦(𝜃(𝑅𝐿|𝐿𝐿),4)
6 (𝑅𝐿|𝐿𝐿)5 0 0 −𝑑(𝑅𝐿|𝐿𝐿),𝑧,5 𝑅𝑦(𝜃(𝑅𝐿|𝐿𝐿).5)
7 (𝑅𝐿|𝐿𝐿)6 0 0 −𝑑(𝑅𝐿|𝐿𝐿),𝑧,6 𝑅𝑦(𝜃(𝑅𝐿|𝐿𝐿).6)
8 (𝑅𝐿|𝐿𝐿)7 0 0 −𝑑(𝑅𝐿|𝐿𝐿),𝑧,7 𝑅𝑦(𝜃(𝑅𝐿|𝐿𝐿).7)
9 (𝑅𝐿|𝐿𝐿)8 0 0 −𝑑(𝑅𝐿|𝐿𝐿),𝑧,8 𝑅𝑥(𝜃(𝑅𝐿|𝐿𝐿).8)
The cartesian space data is position vector of 𝐸𝑜𝐸(𝑅𝐿
(𝑃(𝑅𝐿|𝐿𝐿),(𝑥,𝑦,𝑧)) and the orientation angel (𝜃(𝑅𝐿|𝐿𝐿),(𝜙)).
The inverse kinematics analysis can be seen in Figure
3(A), Figure 3(B), and Figure 4 and the calculation is
shown in Equation (1~15).
(A)
(B)
Figure 3: (A) Transversal plane analysis of right leg mechanism
and (B) Frontal plane analysis of right leg mechanism
𝜃(𝑅𝐿,𝐿𝐿),1 = 𝜃(𝑅𝐿|𝐿𝐿),(𝜙) (1)
𝑅0(𝑅𝐿,𝐿𝐿) = √𝑃(𝑅𝐿,𝐿𝐿),(𝑥)2 + 𝑃(𝑅𝐿,𝐿𝐿),(𝑦)
2 (2)
𝜃(𝑅𝐿,𝐿𝐿),𝛽 = 𝑡𝑎𝑛−1 (𝑃(𝑅𝐿,𝐿𝐿),(𝑦)
𝑃(𝑅𝐿,𝐿𝐿),(𝑥)⁄ ) − 𝜃(𝑅𝐿,𝐿𝐿),1
(3)
𝑃′(𝑅𝐿,𝐿𝐿),(
𝑦𝑥
)= 𝑅0(𝑅𝐿,𝐿𝐿) (
sin 𝜃(𝑅𝐿,𝐿𝐿),𝛽
cos 𝜃(𝑅𝐿,𝐿𝐿),𝛽) (4)
Where 𝜃(𝑅𝐿|𝐿𝐿),1 is joint angle in the 𝑅𝐿1 joint.
𝜃(𝑅𝐿|𝐿𝐿),𝛽 is angle deviation between present position
vector of 𝐸𝑜𝐸(𝑅𝐿|𝐿𝐿) (𝑃(𝑅𝐿|𝐿𝐿),(𝑥,𝑦)) with the next position
vector of 𝐸𝑜𝐸(𝑅𝐿|𝐿𝐿) (𝑃(𝑅𝐿|𝐿𝐿),(𝑥,𝑦)′ ).
𝑃(𝑅𝐿,𝐿𝐿)8,(𝑧) = 𝑃(𝑅𝐿,𝐿𝐿),(𝑧) − (𝑑(𝑅𝐿,𝐿𝐿),𝑧,1 + 𝑑(𝑅𝐿,𝐿𝐿),𝑧,8)
(5)
𝜃(𝑅𝐿,𝐿𝐿),2 = −𝜃(𝑅𝐿,𝐿𝐿),8 = tan−1 (𝑃′(𝑅𝐿,𝐿𝐿),(𝑦)
𝑃(𝑅𝐿,𝐿𝐿)8,(𝑧)) (6)

85
𝑅1(𝑅𝐿,𝐿𝐿) = √𝑃′(𝑅𝐿,𝐿𝐿),(𝑦)2
+ 𝑃(𝑅𝐿,𝐿𝐿)8,(𝑧)2 (7)
Where 𝑃(𝑅𝐿|𝐿𝐿)8,(−𝑧) is new height for inverse
kinematics calculation. 𝜃(𝑅𝐿|𝐿𝐿),8 is reflection of
𝜃(𝑅𝐿|𝐿𝐿),2. 𝑅1𝑅𝐿is resultant that occurs because existence
of 𝑃𝑅𝐿6 ,(−𝑧)and 𝑃′(𝑅𝐿,𝐿𝐿),(𝑦).
Figure 4: Sagittal plane analysis of right leg mechanism with
simplification from parallel mechanism into serial mechanism
∆𝑅1(𝑅𝐿,𝐿𝐿) = 𝑅1(𝑅𝐿,𝐿𝐿) − (𝑑(𝑅𝐿,𝐿𝐿),𝑧,2 + 𝑑(𝑅𝐿,𝐿𝐿),𝑧,4
+ 𝑑(𝑅𝐿,𝐿𝐿),𝑧,6 + 𝑑(𝑅𝐿,𝐿𝐿),𝑧,7) (8)
𝑅2(𝑅𝐿,𝐿𝐿) = √𝑃′(𝑅𝐿,𝐿𝐿),(𝑥)2
+ ∆𝑅1(𝑅𝐿,𝐿𝐿)2 (9)
𝜃(𝑅𝐿,𝐿𝐿),𝛾𝑐 =
𝑐𝑜𝑠−1 ((𝑑(𝑅𝐿,𝐿𝐿),𝑧,3)
2+ (𝑑(𝑅𝐿,𝐿𝐿),𝑧,5)
2− 𝑅2(𝑅𝐿,𝐿𝐿)
2
2 𝑑(𝑅𝐿,𝐿𝐿),𝑧,3𝑑(𝑅𝐿,𝐿𝐿),𝑧,5
) (10)
𝜃(𝑅𝐿,𝐿𝐿),𝛾𝑎 = 𝑡𝑎𝑛−1 (𝑃′(𝑅𝐿,𝐿𝐿),(𝑥)
∆𝑅1(𝑅𝐿,𝐿𝐿)
) (11)
𝜃(𝑅𝐿,𝐿𝐿),𝛾𝑏 =
𝑡𝑎𝑛−1 (𝑑(𝑅𝐿,𝐿𝐿),𝑧,3 𝑠𝑖𝑛 𝜃(𝑅𝐿,𝐿𝐿),𝛾𝑐
(𝑑(𝑅𝐿,𝐿𝐿),𝑧,3) + (𝑑(𝑅𝐿,𝐿𝐿),𝑧,5 𝑐𝑜𝑠 𝜃(𝑅𝐿,𝐿𝐿),𝛾𝑐))
(12)
𝜃(𝑅𝐿,𝐿𝐿),3 = −𝜃(𝑅𝐿,𝐿𝐿),4 = (𝜃(𝑅𝐿,𝐿𝐿),𝛾𝑎 + 𝜃(𝑅𝐿,𝐿𝐿),𝛾𝑏) (13)
𝜃(𝑅𝐿,𝐿𝐿),5 = −𝜃(𝑅𝐿,𝐿𝐿),6 = 0 − ((180 − 𝜃(𝑅𝐿,𝐿𝐿),𝛾𝑐) −
𝜃(𝑅𝐿,𝐿𝐿),3) (14)
𝜃(𝑅𝐿,𝐿𝐿),7 = 0 (15)
Where 𝜃(𝑅𝐿|𝐿𝐿),4 is reflection of 𝜃(𝑅𝐿|𝐿𝐿),3. 𝜃(𝑅𝐿|𝐿𝐿),6 is
reflection of 𝜃(𝑅𝐿|𝐿𝐿),6. 𝜃(𝑅𝐿|𝐿𝐿),7 is joint angle in the
joint 𝑅𝐿7 (ankle pitch angle) and has default value as much as 0 degree.
III. QUASI DYNAMICS ANALYSIS
In the humanoid robot, the dynamics system analysis
is approached by using zero moment point analysis. Because of that, the dynamics analysis became a quasi-
dynamics analysis.
A. Classic Zero Moment Point (Multi-Body)
The general concept of ZMP is analyzing non-vertical
force and momentum when momentum (𝑀𝐴) and the
action force (𝐹𝐴) is equal with zero because it is damped
by momentum (𝑀𝐵) and reaction force (𝐹𝐵) (action force
and momentum = reaction force and momentum / 3rd newton’s law) [13]. This concept was published in
January 1968 by Miomir Vukobratović [1].
Figure 5: Condition Type of zero moment point (ZMP)
The ZMP has 3 conditions based on the event which is
ZMP equal with center of pressure (CoP), ZMP inside
support polygon (SP), and ZMP outside SP as seen in
Figure 5. The main calculation of classic ZMP is
explained in Equation (18).
(𝑥,𝑦,𝑧) = 𝐶𝑜𝑀,(𝑥,𝑦,𝑧) = 𝑚𝑡𝑜𝑡𝐶𝑜𝑀,(𝑥,𝑦,𝑧) (16)
ℒ(𝑥,𝑦,𝑧) = ℒ𝐶𝑜𝑀,(𝑥,𝑦,𝑧) = 𝑃𝐶𝑜𝑀,(𝑥,𝑦,𝑧) × 𝑚𝑡𝑜𝑡𝐶𝑜𝑀,(𝑥,𝑦,𝑧)
(17)
𝑃𝑧𝑚𝑝,(𝑥,𝑦) = 𝑃𝐶𝑜𝑀,(𝑥,𝑦)𝑚𝑡𝑜𝑡𝑔𝑧 + 𝑃𝑧𝑚𝑝,𝑧(𝑥,𝑦) − ℒ(𝑦,𝑥)
𝑚𝑡𝑜𝑡𝑔𝑧 + 𝑧
(18)
B. Simplified Zero Moment Point (Single-Body)
The calculation of classic ZMP is derived by using
Single Linear Inverted Pendulum Model (SLIPM)
approach [16]. The calculation of simplified ZMP is
explained in Equation (19).
𝑃𝑧𝑚𝑝,(𝑥,𝑦) = 𝑃𝐶𝑜𝑀,(𝑥,𝑦) −𝑃𝐶𝑜𝑀,𝑧
𝑔𝑧𝐶𝑜𝑀,(𝑥,𝑦) (19)
In the simplified model, the linear acceleration in Z
axis is equal to zero (𝑃𝐶𝑜𝑀,𝑧 = 0). Each component in
vertical composition (Z axis) such as angular velocity,
linier velocity, angular acceleration and linier

86
acceleration is removed.
IV. ONLINE POSTURE STRATEGY
Online Posture Strategy (OPS) is strategy which is
used to solve the problems caused by irregular terrain.
OPS are divided into 2 part which are OPS – legs position
correction and OPS – position of center of mass (COM)
correction. The output from those OPS control is
combined and controlled in the PI controller to generate
a simple trajectory for IK of legs. The process of control
system is shown in Figure 6.
Figure 6: Subdivision of Zero Moment Point (ZMP)
A. OPS - Legs Position Correction (LPC)
OPS – Legs Position Correction (LPC) is used to
calculate the differences between position vector of CoM
in normal condition with position vector of CoM after
influenced with angle caused by irregular terrain. This
strategy is the first step to solve the main problem caused
by irregular terrain which is falling condition because
position vector of ZMP is outside SP.
Figure 7: Process during OPS - LPC (A) Angle direction similar
with roll angle (Y axis), (B) angle direction similar with pitch angle
(X axis)
OPS – LPC are divided into 2 conditions based on robot direction with angle of irregular terrain. The 1st
condition is when the angle direction of irregular terrain
is similar with roll angle of the robot (Y axis) (Figure
7(A)) and the 2nd condition is when the angle direction of
irregular terrain is similar with pitch angle of the robot
(X axis) (Figure 7(B)). The 1st and 2nd condition are
explained in the Equation (20) and Equation (21).
𝑃(
𝑅𝐿𝐿𝐿
),(𝑧)
𝐿𝑃𝐶 = (−𝑑𝑅𝐿,𝑦 sin−1 ∅(𝐷𝑒𝑠−𝑅𝑒𝑓),(𝑟)
𝑑𝐿𝐿,𝑦 sin−1 ∅(𝐷𝑒𝑠−𝑅𝑒𝑓),(𝑟)
) (20)
𝑃(
𝑅𝐿𝐿𝐿
),(𝑥)
𝐿𝑃𝐶 = 𝑃𝐶𝑜𝑀,(𝑧) sin−1 ∅(𝐷𝑒𝑠−𝑅𝑒𝑓),(𝑝) (21)
𝑃(
𝑅𝐿𝐿𝐿
),(𝑦)
𝐿𝑃𝐶 = 0 | Normal Condition (22)
𝑃𝐹𝐶,(
𝑅𝐿𝐿𝐿
),(𝑥𝑦𝑧
)= 𝑃
(𝑅𝐿𝐿𝐿
),(𝑥𝑦𝑧
)+ 𝑃
(𝑅𝐿𝐿𝐿
),(𝑥𝑦𝑧
)
𝐿𝑃𝐶 (23)
B. OPS – Position of CoM Correction (PCC)
OPS – Position of CoM Correction (PCC) is used to
calculate the differences between position vector of CoM after normalized with OPS – LCC with position vector of
CoM after calculated by using ZMP calculation. This
strategy is the second step to solve the main problem
caused by irregular terrain.
Figure 8: Process during OPS - PCC (A) Angle direction similar
with roll angle (Y axis), (B) angle direction similar with pitch angle
(X axis)
Similar with OPS – LPC, OPS – PCC are divided into
2 conditions based on robot direction with angle of
irregular terrain. Similar with condition in OPS – LPC
above. The 1st (Figure 8(A)) and 2nd (Figure 8(B)) condition is explained in the Equation (24) and Equation
(25).
𝑃(
𝑅𝐿𝐿𝐿
),(𝑦)
𝑃𝐶𝐶 = 𝑃𝑧𝑚𝑝,(𝑦) + 𝑃𝐹𝐶,(
𝑅𝐿𝐿𝐿
),(𝑦) (24)
𝑃(
𝑅𝐿𝐿𝐿
),(𝑥)
𝑃𝐶𝐶 = 𝑃𝑧𝑚𝑝,(𝑥) + 𝑃𝐹𝐶,(
𝑅𝐿𝐿𝐿
),(𝑥) (25)
𝑃(
𝑅𝐿𝐿𝐿
),(𝑧)
𝑃𝐶𝐶 = 0 | Normal Condition (26)
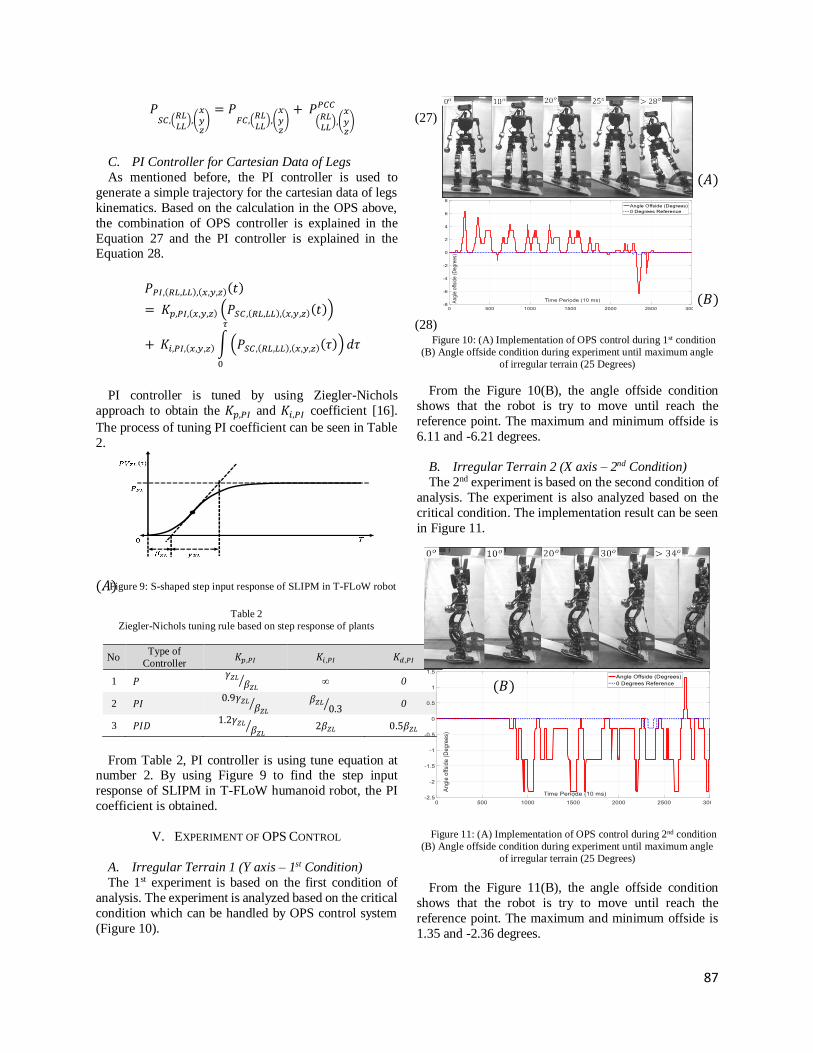
87
𝑃𝑆𝐶,(
𝑅𝐿𝐿𝐿
),(𝑥𝑦𝑧
)= 𝑃
𝐹𝐶,(𝑅𝐿𝐿𝐿
),(𝑥𝑦𝑧
)+ 𝑃
(𝑅𝐿𝐿𝐿
),(𝑥𝑦𝑧
)
𝑃𝐶𝐶 (27)
C. PI Controller for Cartesian Data of Legs
As mentioned before, the PI controller is used to
generate a simple trajectory for the cartesian data of legs
kinematics. Based on the calculation in the OPS above,
the combination of OPS controller is explained in the
Equation 27 and the PI controller is explained in the Equation 28.
𝑃𝑃𝐼,(𝑅𝐿,𝐿𝐿),(𝑥,𝑦,𝑧)(𝑡)
= 𝐾𝑝,𝑃𝐼,(𝑥,𝑦,𝑧) (𝑃𝑆𝐶,(𝑅𝐿,𝐿𝐿),(𝑥,𝑦,𝑧)(𝑡))
+ 𝐾𝑖,𝑃𝐼,(𝑥,𝑦,𝑧) ∫ (𝑃𝑆𝐶,(𝑅𝐿,𝐿𝐿),(𝑥,𝑦,𝑧)(𝜏)) 𝑑𝜏
𝜏
0
(28)
PI controller is tuned by using Ziegler-Nichols
approach to obtain the 𝐾𝑝,𝑃𝐼 and 𝐾𝑖,𝑃𝐼 coefficient [16].
The process of tuning PI coefficient can be seen in Table
2.
Figure 9: S-shaped step input response of SLIPM in T-FLoW robot
Table 2
Ziegler-Nichols tuning rule based on step response of plants
No Type of
Controller 𝐾𝑝,𝑃𝐼 𝐾𝑖 ,𝑃𝐼 𝐾𝑑,𝑃𝐼
1 𝑃 𝛾𝑍𝐿
𝛽𝑍𝐿⁄ ∞ 0
2 𝑃𝐼 0.9𝛾𝑍𝐿
𝛽𝑍𝐿⁄ 𝛽𝑍𝐿
0.3⁄ 0
3 𝑃𝐼𝐷 1.2𝛾𝑍𝐿
𝛽𝑍𝐿⁄ 2𝛽𝑍𝐿 0.5𝛽𝑍𝐿
From Table 2, PI controller is using tune equation at number 2. By using Figure 9 to find the step input
response of SLIPM in T-FLoW humanoid robot, the PI
coefficient is obtained.
V. EXPERIMENT OF OPS CONTROL
A. Irregular Terrain 1 (Y axis – 1st Condition)
The 1st experiment is based on the first condition of
analysis. The experiment is analyzed based on the critical
condition which can be handled by OPS control system
(Figure 10).
Figure 10: (A) Implementation of OPS control during 1st condition
(B) Angle offside condition during experiment until maximum angle
of irregular terrain (25 Degrees)
From the Figure 10(B), the angle offside condition
shows that the robot is try to move until reach the
reference point. The maximum and minimum offside is
6.11 and -6.21 degrees.
B. Irregular Terrain 2 (X axis – 2nd Condition)
The 2nd experiment is based on the second condition of
analysis. The experiment is also analyzed based on the
critical condition. The implementation result can be seen
in Figure 11.
Figure 11: (A) Implementation of OPS control during 2nd condition
(B) Angle offside condition during experiment until maximum angle
of irregular terrain (25 Degrees)
From the Figure 11(B), the angle offside condition
shows that the robot is try to move until reach the
reference point. The maximum and minimum offside is
1.35 and -2.36 degrees.
(𝐴)
(𝐵)
(𝐴)
(𝐵)

88
C. Irregular Terrain 3 (Combination X axis and Y
axis)
The 3rd experiment is based on the combination of 1st
and 2nd condition. The critical condition which can be
handled by OPS control system can be seen in Figure 12.
Figure 12: Implementation of OPS control during combination
condition
VI. CONCLUSION
The main problem which shows in this paper research
is falling condition of T-FLoW humanoid robot caused
by irregular terrain. During the 1st condition, OPS
controller is successfully handled the maximum and
minimum angle of irregular terrain from 28 degrees until
–28 degrees. During the 2nd condition, the maximum and
minimum angle of irregular terrain is from 34 degrees
until –32 degrees. During combination condition (1st and
2nd condition), the maximum and minimum angle of
irregular terrain is from 26 degrees until –24 degrees.
ACKNOWLEDGMENT
Gratefulness to Ministry of Research, Technology and
Higher Education of the Republic of Indonesia for
financial support and EEPIS Robotics Research Center
(ER2C) laboratory.
REFERENCES
[1] Vukobratović, Borovac, “Zero-Moment Point - Thirty Five Years
of Its Life”, Int. J. Humanoid Robotics, Vol. 1 No. 1, pp. 161–
162, 2004
[2] Changjiu Zhou, Pik Kong Yue, Jun Ni, Shan-Ben Chan,
“Dynamically Stable Gait Planning for a Humanoid Robot to
Climb Sloping Surface”, In Proc. the 2004 IEEE Conference on
Robotics, Automation and Mechatronics, Singapore, 2004, PP.
341–346.
[3] Zhibin Li, Nikos G. Tsagarakis, and Darwin G. Caldwell,
“Stabilizing Humanoids on Slopes Using Terrain Inclination
Estimation”, In Proc. 2013 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), Tokyo, Japan, 2013, pp.
4124–4129.
[4] Amir Massah B, Arman Sharifi K, Yaser Salehinia, Farid Najafi,
“Open Loop Walking on Different Slopes for NAO Humanoid
Robot”, In International Symposium on Robotics and Intelligent
Sensors 2012 (IRIS 2012), Procedia Engineering, Vol. 41, pp.
296–304, 2012.
[5] Edoardo Farnioli, Marco Gabiccini, Antonio Bicchi, “Optimal
Contact Force Distribution for Compliant Humanoid Robots in
Whole-Body Loco-Manipulation Tasks”, In Proc. 2015 IEEE
International Conference on Robotics and Automation (ICRA),
Seattle, Washington, 2015, pp. 5675–5681.
[6] Kitti Suwanratchatamanee,Student, Mitsuharu Matsumoto, and
Shuji Hashimoto, “Haptic Sensing Foot System for Humanoid
Robot and Ground Recognition With One-Leg Balance”, In IEEE
Transactions On Industrial Electronics, Vol. 58, No. 8, pp. 3174–
3186, 2009,
[7] Fariz Ali, Ahmad Zaki Hj. Shukor, Muhammad Fahmi Miskon,
Mohd Khairi Mohamed Nor and Sani Irwan Md Salim, “3-D
Biped Robot Walking along Slope with Dual Length Linear
Inverted Pendulum Method (DLLIPM)”, In International Journal
of Advanced Robotic Systems, Vol 10, No 11, pp. 1–12, 2013.
[8] Luis Sentis, Josh Petersen, and Roland Philippsen, “Experiments
with Balancing on Irregular Terrains using the Dreamer Mobile
Humanoid Robot”, In Proc. Robotics: Science and Systems,
Sydney, NSW, Australia, 2012.
[9] K. Nagasaka, M. Inaba, H. Inoue, “Dynamic Walking Pattern
Generation for Humanoid Robot based on Optimal Gradient
Method”, In Proc. of the IEEE International Conference on
Systems, Man and Cybemetics, 1999, pp. 908–913.
[10] Jung-Shik Kong, Eung-Hyuk Lee, Bo-Hee Lee, and Jin-Geol
Kim, “Study on the Real-Time Walking Control of a Humanoid
Robot Using Fuzzy Algorithm”, In International Journal of
Control, Automation, and Systems, Vol. 6, No. 4, pp. 551–558,
2008.
[11] Kensuke Harada, Mitsuharu Morisawa, Shin-ichiro Nakaoka,
Kenji Kaneko, and Shuuji Kajita, “Kinodynamic Planning for
Humanoid Robots Walking on Uneven Terrain”, In Journal of
Robotics and Mechatronics, Vol. 21, No. 3, pp. 311–316, 2009
[12] Seung-Joon Yi, Byoung-Tak Zhang, and Daniel D. Lee, “Online
Learning of Uneven Terrain for Humanoid Bipedal Walking”, In
Proceedings of the Twenty-Fourth AAAI Conference on Artificial
Intelligence (AAAI-10), 2010, pp. 1639–1644.
[13] R. Dimas Pristovani, W. M. Rindo, B. Eko Henfri, Kh. Achmad
S, and Pramadihanto. D, “Basic walking trajectory analysis in
FLoW ROBOT”, In Proc. 2016 International Electronics
Symposium (IES), Bali, Indonesia, 2016, pp 333–338.
[14] R. Dimas Pristovani, Ajir, B. Eko Henfri, K. Achmad Subhan, D.
Raden Sanggar, and Pramadihanto. Dadet, “Implementation of
direct pass strategy during moving ball for “T-FLoW” Humanoid
Robot”, in Proc. 2017 2nd International Conferences on
Information Technology, Information Systems and Electrical
Engineering (2nd ICITISEE), Yogyakarta, Indonesia, 2017, pp.
223–228.
[15] R. Dimas Pristovani, B. Eko Henfri, D. Raden Sanggar, and
Pramadihanto. Dadet, “Walking Strategy Model based on Zero
Moment Point with Single Inverted Pendulum Approach in “T-
FLoW” Humanoid Robot”, in Proc. 2017 2nd International
Conferences on Information Technology, Information Systems
and Electrical Engineering (2nd ICITISEE), Yogyakarta,
Indonesia, 2017, pp. 217–222.
[16] R. Dimas Pristovani, D. Raden Sanggar, and Pramadihanto. Dadet
“Implementation of Push Recovery Strategy using Triple Linear
Inverted Pendulum Model in “T-FloW” Humanoid Robot”, in
IOP Journal of Physics: Conference Series, vol. 1007, pp. 1–13,
2018.

89
A Logic Scoring of Preference Algorithm for
Quality Performance Evaluation of Moodle and
Wordpress Aaron Don M. Africa
Department of Electronics and Communications Engineering
De La Salle University, Manila
2401 Taft Ave Manila 1004, Philippines
Abstract— Moodle and Wordpress are the most
commonly used Open Source applications. Moodle is
used for education purposes while Wordpress to create
websites. These programs are open source software
meaning they are free to download and their source code
are freely available and can be modified by anyone.
Logic Scoring of Preference is a multi-criteria decision
making process with theoretical foundations in advance
optimization techniques and continuous logic. This
research proposes a standard method to evaluate the two
programs using the Logic Scoring of Preference
Algorithm. Focus will be will be given on the criteria of
Performance Efficiency and Reliability to follow the
International Standard ISO/IEC 25010:2011. If these
programs are designed to follow the International
Standard their optimization will improve.
Index Terms—Information Technology; Open Source
Software; Moodle; Wordpress; Logic Scoring of
Preference.
I. INTRODUCTION
Ever since the dawn of the internet, programmers have
been creating web applications [1]. One category of
Applications are Open Source Web Applications [2].
In these types of Applications, the source code is freely
available [3]. This means that programmers has access
to it so they can modify the program to their liking [4].
Moodle and Wordpress are Open Source Web
Applications [5]. Moodle is used for creating
educational Websites [6] while Wordpress [7] is used for creating different types of Web content. These
programs have communities that develops them. One
problem is creating a standard for the different types
of programmers that does the contribution [8].
A good reference is the ISO/IEC 25010:2011. This
ISO Standard is about Systems and Software
Engineering quality [9]. This research creates an
algorithm that incorporates the ISO/IEC 25010:2011
to the Logic Scoring of Preference [10] to create a way of checking the quality of Open Source Web
Applications. Focus was given to the two parameters
of the ISO standard that is Performance Efficiency and
Reliability [11]. Rough Set Theory can be used to find
the missing components of the two parameters if it
existed [12,13]. The Fuzzy Logic Algorithm can also
be applied if there are uncertain parameters [14,15]. In
performing the test via quality requirement tree the
Neural Network algorithm can be applied [16,17].
Spatial Algorithm can also be applied in making the
tree [18]. An algorithm was developed to test these
parameters. This research can aid programmers in
optimizing Moodle and Wordpress because it adheres
to the ISO/IEC 25010:2011 standard.
II. METHODOLOGY
A. Performance Efficiency
In this research it is the performance of the Open
Source web application is in terms of speed. The speed
of the data transfer is measured using website
monitoring service applications. This software is used
to determine the speed of the web download. In this
test the elementary criteria are a multi-variable
criterion. The formula that will be used is [19]:
100*) )(X / ) 0.8X 0.4X- (X ( X 1321=
Where Xn represents the number of pages that
satisfies the range given in the download time. The download time references are X1 4 Mbps and above,

90
X2 3-3.999 Mbps and X3 is 2.999 Mbps and below.
The percentages 0.4 and 0.8 was suggested as a metric.
B. Reliability
In this research Reliability defines the links found
that lead to broken links or destination URLs that are
not present. Reliability can be computed by using a
link checker tool. This tool will be used to determine
the broken links and the total number of links. The
formula used to determine this is:
100) * TL) / ((BL - 100 = X
In the equation:
TL = number of total site links
BL = number of broken links found by the
link checker tool.
III. DATA AND RESULTS
A. Performance Efficiency
To test the Performance Efficiency the software
Pingdom [20] was used.
Figure 1: Website of Pingdom
Figure 1 shows the Website of Pingdom. The free
version was used to conduct the test.
Figure 2: Performance insights for the test server of
Moodle and Wordpress
The program Pingdom can give the performance
insights of the server. Figure 2 shows the Performance
insights for the test server of Moodle and Wordpress.
Test can also be done from different servers around the
globe. For this test the server in San Jose United States was used.
The formula:
100*) )(X / ) 0.8X 0.4X- (X ( X 1321=
was used to conduct the test. The speed used as a
reference is X1 4 Mbps and above, X2 3-3.999 Mbps
and X3 is 2.999 Mbps and below.
For Moodle:
100*) ) (310 / ) 0.8(5) 0.4(11)- (310 ( X = =
98.4%
For Wordpress:
100*) ) (390 / ) 0.8(15) 0.4(21)- (390 ( X = =
94.76 %
B. Reliability
The test for Reliability was done for and Moodle
and Wordpress. The software W3C Link Checker [21]
was used to test the result. The speed of the connection
will greatly affect the transfer [22].

91
Figure 3: Screenshot of W3C Link Checker Tool
Figure 3 shows the Screenshot of the W3C Link
Checker Tool
Figure 4: Broken links of the test server
Figure 5 : Parse Code of the test server
The W3C Link Checker Tool is useful in finding the
broken links of the test servers for Moodle and
Program as shown in figures 4 and 5. These data are placed in a database Information Systems
configuration [23]. Custom Database can also be used
[24].
The equation:
100) * TL) / ((BL - 100 = X
Was used to compute for the performance Efficiency.
For Moodle there are a total of 310 links where 4 are
broken based on the test. Plugging it in the equation
we have:
100) * 310) / ((4 - 100 = X = 98.7%
For Worpress there are 390 Links and a total of 8 was
broken. The result is:
100) * 390) / ((8 - 100 = X = 97.94%
IV. CONCLUSION AND RECOMMENDATIONS
This paper presented a new algorithm that can be
used to evaluate Moodle and Wordpress. Focus was
given on the parameter Performance Efficiency and
Reliability. A test website was created to do the
assessment. For measuring the Performance
Efficiency, the software Pingdom was used. This
program is a free to use website to know the speed of web pages. This software was used to know the speed
of the pages and if it satisfies the required speed. For

92
this test the result was 98.4 % for Moodle and 94.76%
for Wordpress.
In the test for reliability the W3C validator was
used. The W3C Validator is a free website used for checking broken links of target web pages. The result
was 98.7 % for Moodle and 97.94 % for Wordpress.
The test developed was to make it compatible with the
International Standard ISO/IEC 25010:2011.
The test was only performed in a test server. To
further improve the results, it is recommended to use a
commercial webserver. Increasing the specifications
of the webserver will greatly improve the speed and
performance of the system.
REFERENCES
[1] Z. Hemel, D. Groewenegen, L. Kats, and E. Visser, “Static
consistency checking of Web applications with Web DSL, ”
Journals of Symbolic Computation, vol. 46 no. 2 pp. 150-182,
2011.
[2] N. Swain, K. Latu, S. Kristensen, N. Jones, E. Nelson, D.
Ames, and G. Williams, “A review of open source software
solutions for developing water resources web applications, ”
Environmental Modelling and Software, vol. 67 no. 1 pp. 108-
117, 2015.
[3] E. Gomez-Garcia, J. Azevado, and F. Perez-Rodriguez, “A
compiled project and open-source code to generate web-based
forest modelling simulators, ” Computer and Electronics in
Agriculture, vol. 147 no. 1 pp. 1-5, 2018.
[4] P. Gleeson, A. Davinson, R. Silver, and G. Ascoli, “A
Commitment to Open Source in Neuroscience, ” Neuron, vol.
96 no. 5 pp. 964-965, 2017.
[5] R. Phunsuk, C. Viriyavejakul, and T. Ratanaolarn,
“Development of a problem-based learning model via a virtual
learning environment, ” Kasetsart Journal of Social Sciences,
vol. 38 no. 3 pp. 297-306, 2017.
[6] Moodle. https://www.moodle.org/. 2018.
[7] Wordpress. https://www.wordpress.com/. 2018.
[8] D. Mason, “Data Programming for Non-programmers,”
Procedia Computer Science, vol. 21 no. 1 pp. 68-74, 2013.
[9] ISO/IEC 25010:2011.
https://www.iso.org/standard/35733.html 2011
[10] J. Dujmovic, “LSP method and its use for evaluation of Java
IDEs,” International Journal of Approximate Reasoning, vol.
41 no. 1 pp. 3-22, 2006.
[11] ISO/IEC 25010:2011 en 2011.
https://www.iso.org/obp/ui/#iso:std:iso-iec:25010:ed-1:v1:en
2011.
[12] A. Africa, and M. Cabatuan, “A Rough Set Based Data Model
for Breast Cancer Mammographic Mass Diagnostics, ”
International Journal of Biomedical Engineering and
Technology, vol. 18 no. 4 pp. 359-369, 2015.
[13] A. Africa, “A Rough Set-Based Expert System for diagnosing
information system communication networks,” International
Journal of Information and Communication Technology, vol.
11 no. 4 pp. 496-512, 2017.
[14] A. Africa, “A Rough Set Based Solar Powered Flood Water
Purification System with a Fuzzy Logic Model,” ARPN
Journal of Engineering and Applied Sciences, vol. 12 no. 3 pp.
638-647, 2017.
[15] A. Africa, “A Mathematical Fuzzy Logic Control Systems
Model Using Rough Set Theory for Robot Applications,”
Journal of Telecommunication, Electronic and Computer
Engineering, vol. 9 no. 2-8 pp. 7-11, 2017.
[16] S. Brucal, A. Africa, and E. Dadios “Female Voice
Recognition using Artificial Neural Networks and MATLAB
Voicebox Toolbox,” Journal of Telecommunication,
Electronic and Computer Engineering, vol. 10 no. 1-4 pp. 133-
138, 2018.
[17] A. Africa, and J. Velasco, “Development of a Urine Strip
Analyzer using Artificial Neural Network using an Android
Phone,” ARPN Journal of Engineering and Applied Sciences,
vol. 12 no. 6 pp. 1706-1712, 2017.
[18] P. Loresco, and A. Africa, “ECG Print-out Features Extraction
Using Spatial-Oriented Image Processing Techniques,”
Journal of Telecommunication, Electronic and Computer
Engineering, vol. 10 no. 1-5 pp. 15-20, 2018.
[19] A. Africa, “A Logic Scoring of Preference Algorithm using
ISO/IEC 25010:2011 for Open Source Web Applications
Moodle and Wordpress,” ARPN Journal of Engineering and
Applied Sciences, vol. 13 no. 15, 2018.
[20] Pingdom. https://www.pingdom.com/. 2018.
[21] W3C Link Checker. https://validator.w3.org/. 2018
[22] A. Africa, and A. Mesina, J. Izon, and B. Quitevis,
“Development of a Novel Android Controlled USB File
Transfer Hub,” Journal of Telecommunication, Electronic and
Computer Engineering, vol. 9 no. 2-8 pp. 1-5, 2017.
[23] A. Africa, S. Bautista, F. Lardizabal, J. Patron, and A. Santos,
“Minimizing Passenger Congestion in Train Stations through
Radio Frequency Identification (RFID) coupled with Database
Monitoring System,” ARPN Journal of Engineering and
Applied Sciences, vol. 12 no. 9 pp. 2863-2869, 2017.
[24] A. Africa, J. Aguilar, C. Lim Jr., P. Pacheco, and S. Rodrin,
“Automated Aquaculture System that Regulates Ph,
Temperature and Ammonia,” 9th International Conference on
Humanoid, Nanotechnology, Information Technology,
Communication and Control, Environment, and Management
(HNICEM), 2017.
93
Microcontroller-based Blood Agglutination
Detector and Coagulation Analyzer Gel Ann S. Divino, Patricia Mae M. Manuel, Dejeannie Gayle B. Tieng, Roderick Yap
De La Salle University
Manila, Philippines
Abstract— Blood typing involves categorizing a person’s
blood into a group according to antigens present in it. Blood
coagulation, on the other hand, is the subsequent dissolution
of blood to repair injured tissues. An abnormal coagulation
time could lead to bruising and excessive bleeding. Current
testing methods for blood typing and coagulation are
inconvenient. In this study, a microcontroller-based device
that is able to determine a person’s blood type and
coagulation time is constructed. This is implemented using
a simple photodiode light sensor and LED circuit. For blood
typing, the device mixes two separate drops of blood on a
glass slide with two different reagents, which triggers an
agglutination reaction that is detected by the photodiode
and LED circuit. The microcontroller then analyzes the
result and classifies the blood sample into one of four types
(A, B, AB, and O). For coagulation analysis, the photodiode
and LED circuit detects the appearance of a light, yellowish
serum at the top of a blood sample in a test tube, which
indicates that the blood has already coagulated. The device
is low-cost, automated, accessible, and portable, making it
advantageous for efficient and accurate on-site blood
testing.
Index Terms— –Blood Agglutination, Blood
Coagulation, Photodiode Spectrophotometry;
I. INTRODUCTION
A lot of studies have been conducted to pave the way
for biomedical applications through electronics. One study from Chua (2014) shows a method of non-invasive
glucose level measurement using a LED pair sensor
which eliminates the pain of everyday pricking [1]. Dy
Perez (2016), on the other hand, used ISFET as the active
component for a glucose sensor, which is integrated into
a WiFi module for easy visibility and management for the
doctors [2]. Nakamachi (2010) designed an automatic
operated blood sampling system to satisfy accurate and
quick blood collection and blood glucose measurement.
They adopted near infrared light transmitting scheme as
a human blood vessel visualization methodology [3].
Blood comprises of the ABO and Rh(D) systems.
Classifications of blood types can be determined by the
presence or absence of certain antigens. The chemical
reaction of blood if an antigen is mixed and is used for blood grouping is called Agglutination [4]. Agglutination
has two different types of antigens which are type A and
type B [5]. A person should know his or her blood type
because it is needed for emergencies, calamities and
transfusions because not all blood types are compatible
with each other.
On the other hand, coagulation, also known as clotting, is the process wherein blood changes from a liquid to
form a clot [6]. It also measures the ability of the blood
of a person to clot and the amount of time to do so. The
normal coagulation time range is from 2-15 minutes and
normal activity means normal clotting function while low
activity of coagulation factor means impaired clotting
ability that can lead to the detections of different types of
diseases.
Over the past few years, studies were made regarding
Blood Agglutination and Blood Coagulation. Razo
(2003) did a study that involved using image processing
to be able to detect blood agglutination [7]. To overcome
the tedious and laborious operation, Chang (2014) used
microfluidic chips for blood typing. This allows the
operation sequence to be conducted automatically
through the manipulation of micro fluids [8]. In order for
microfluidic devices to be used in remote, rural or in
private clinics, they should be cheap, low power
consuming and easy to operate. This implies that such
devices are essential in the health care departments. Zia (2016) developed a device that is capable of providing
point-of-care diagnostics for various medical test by
providing a platform to run microfluidic lab-on-disc [9].
Fernandes (2015) used of the concept of
spectrophotometry to be able to determine the blood type
of a person [10] while Li (2009) conducted a study about
measuring the coagulation time of a person using too the concept of spectrophotometry [11]. Spectrophotometry
can be defined as the measure of the different intensities
of light in the different spectrums. Another
spectrophometric approach to blood typing was
conducted by Anthony (2005) in which a discrete array

94
of LED/IRED and photodiode pairs are used as sensors
to determine red blood cell agglutination [12].
Despite the prior studies that were made, both blood
agglutination and coagulation in many laboratories are
still carried out using manual procedure and thus human
error is possible. The result of a patient can also take time
to be released because of personnel or equipment
availability. Laboratories may not also be accessible to
everyone especially in remote areas and in times of
calamites. The main objective of this study is to construct
a microcontroller-based device that is able to detect
agglutination in a patient’s blood sample as well as
analyze its coagulation process using the concept of spectrophotometry to be able to help solve the problems
mentioned above.
Fig. 1 System Block Diagram
II. DESIGN CONSIDERATION
A. Block Diagram
The block diagram of the prototype for blood coagulation
analyzer and agglutination detector is seen on Fig. 1. The
user first turns on the prototype and selects from three switches namely switch A, B and C. Switch A is for
coagulation, switch B is for agglutination while switch C
is for both. When the user chooses switch A, the LEDs
for coagulation illuminates the blood sample from the test
tube. The photodiode also reads a voltage reading which
is also converted to a current value through the use of a
current to voltage converter. The current to voltage
converter is connected to a low pass filter to eliminate
noise and erratic readings. As blood coagulates, the
voltage value reading of the photodiode increases. The
output of the low pass filter is then connected to the
microcontroller to analyze and output the results. When
the user chooses switch B, the syringe plunger, which is driven by a stepper motor, will drop reagents A and B.
Motors A and B will then turn on one at a time and these
motors will be used to stir the blood samples with
reagents and this blood sample is then illuminated by the
LEDs by which these LEDs is powered by the
microcontroller. The LEDs also illuminate the
photodiode at the same time and the photodiode obtains
a voltage reading which is then converted to current with
the use of a current to voltage converter. These are also
connected to low pass filter circuit to eliminate noise and
erratic results. The output of the low pass filter is
connected to the microcontroller to analyze and output the results. When the user chooses Switch C, the
prototype performs both agglutination and coagulation
separately, coagulation being first.
Fig. 2. Current to Voltage Converter
Fig. 3. Illumination Circuit
B. Sensor Circuit
In order to implement the sensor circuit, a current to
voltage converter as seen in Fig. 2 is used to convert the intensity of light into a voltage value. A photodiode
conducts current when light is applied to the junction.
The operational amplifier is LM741 and a commercial

95
photodiode is used for this circuit. For the illumination
circuit as seen in Fig. 3, the light source is based on three
LEDs for higher light intensity.
Fig. 4. Setup for Coagulation
For agglutination, the light source is a common cathode
tricolor LED. The specific wavelengths are 650 nm, 536
nm and 475 nm. The colors of these LEDs are red, green
and blue, respectively. The specified wavelengths were chosen to maximize the spectral differences between
agglutinated and non-agglutinated samples for blood
typing. There are values obtained for each color that
lights up for comparison in agglutination.
For blood coagulation as seen on Fig. 4, having a high
intensity source will produce accurate results due to
clearer opacity so four super bright white LEDs are used.
The circuit is the same for agglutination and coagulation, only the LEDs differ. Tricolor LEDs are not used in
coagulation because the comparison of values for the
color does not apply wherein time here is an important
factor.
Both the circuits of agglutination and coagulation
method need proper alignment of the LEDs with respect
to the photodiode circuit. This is to produce higher light
absorption and the samples should be in proper place.
The placement of blood on the glass slide is important for
all the samples so that the photodiode read the samples in the correct position. For coagulation, the height of the
blood on the test tube is maintained for all the samples
because the circuits of photodiode and LEDs are aligned.
C. Low Pass Filters
A low pass filter circuit is used to filter signals with
frequency lower than a certain cut-off frequency. The input voltage for the circuit seen on Fig. 5 is from the
output of current to voltage circuit of the photodiode
while the output voltage is to the microcontroller.
Without the low pass filter, the microcontroller does not
read the correct output values from the photodiode circuit
and produces erratic values. When the output of
photodiode circuit is connected to a low pass filter then
to the microcontroller, it produces a more stable and
accurate values. It is used for conditioning signals prior
to analog-to-digital conversion.
Fig. 5. Low Pass Filter Circuit
Fig. 6. Plunger Setup
D. Syringe Plunger Set Up
For the reagent dropping, a syringe plunger circuit is
developed. The plunger circuit has a 3 mL syringe loaded
with reagent operated by a stepper motor. The actual
setup is seen on Fig. 6. The stepper motor is connected to a bearing block coupler and threaded rods to push the
syringe. If the syringe is pushed, the reagent will drop to
the sample. The blocks for the plunger setup are made up
of black acrylic plastic designed by the group.
E. Conveyor Belt
In the automation of the reagent dropper and stirrer for
agglutination, a conveyor belt is implemented to hold the
glass slide with blood samples. The gears are driven by a
DC motor and the driver is L293D that provides
bidirectional operation for the motor. The design is seen
on Fig. 7. It is made up of rubber silicon to avoid slipping
of the glass slide and the gears are made up of acrylic
plastic.

96
Fig. 7. Conveyor Belt
F. Reagent Mixer
After the dropping of reagent from the plunger circuit,
the blood sample is mixed with reagent by simply stirring the sample slowly. The reagent mixer seen on Fig. 8
should be slow but accurate to avoid spilling of the
samples. An improvised mixer is made using rubber. The
mixer should be soft so that the glass slides will still slip
through. The setup for the mixer is equipped with
magnets for convenient placement.
Fig. 8. Reagent Mixer
Fig. 9. Coagulated Blood Sample
III. DATA AND RESULTS
A. Coagulation
Twenty samples were gathered for coagulation and
agglutination testing with each of the ABO blood group
present. When the test tube is placed on the prototype, the
program starts to count with a 24-second delay and the
recorded output voltage is the initial voltage. For every 12 seconds, the output voltage is checked if it is higher
than the initial voltage with voltage difference (Vd) of
0.012 V. When the serum is present as seen on Fig. 9,
there is a change in the color of the blood and it suddenly
becomes clear so there is a change in the light absorbance
of the photodiode. The photodiode should be able to read a higher voltage value because the serum is seen and
more light would be able to penetrate. The result from
laboratory testing is used as the ideal value. The voltage
difference is determined through a series of testing
wherein the trend of the values are observed. If the
voltage difference (Vd) reaches 0.012 V, the timer will
then stop and record the total time. The results are seen
on Table 1. In the table, Vi(V) and Vf(V) are the output
voltages for the initial and final values. ADCi and ADCf
are the initial and final ADC values read by the
microcontroller. CT(min) is the coagulation time
obtained from the prototype while CTL(min) is the coagulation time via slide method from the laboratory
tests and is usually used by medical technologists. Lastly,
the %E is the percentage error of the data.
For coagulation, to be able to output accurate readings,
the blood sample quantity should not exceed 1.0-1.2ml
and should not be lower than 0.9ml. If the blood sample
exceeds 1.2ml or is lower than 0.9 ml, the height of the
serum when it separates from the blood will be different
if the blood sample height is higher or lower, thus the
photodiode will still be able to read a different value. In order for an exact blood measurement to be obtained, a guide while placing the blood into the test tube will be
followed.
B. Agglutination
In Table 2, the threshold voltage for reagent A is shown
while Table 3 is for reagent B. The threshold values were
determined by using 2 blood samples for each blood type.
The ideal results are seen on the left of Fig. 10. This was done for all three LED colors and two reagents. The right
picture from Fig. 10 shows the results obtained through
the prototype in which it does dropping and mixing of
reagents automatically.
Fig. 10. Blood Typing
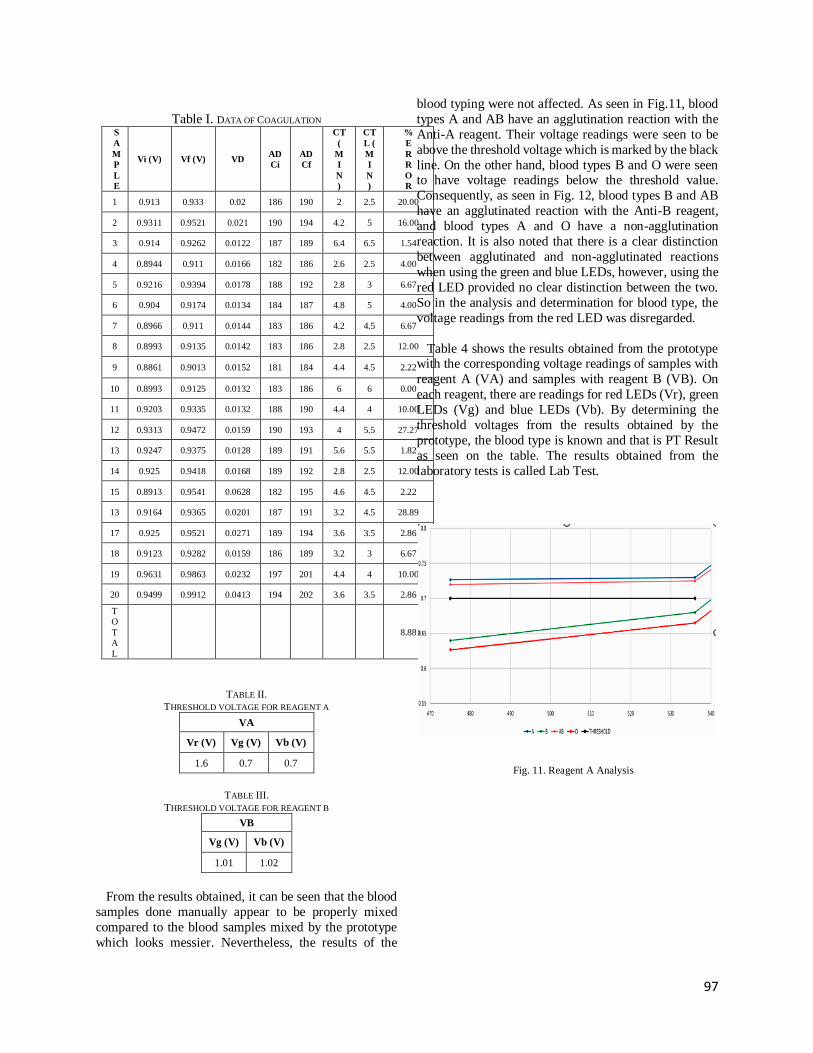
97
Table I. DATA OF COAGULATION S
A
M
P
L
E
Vi (V) Vf (V) VD AD
Ci
AD
Cf
CT
(
M
I
N
)
CT
L (
M
I
N
)
%
E
R
R
O
R
1 0.913 0.933 0.02 186 190 2 2.5 20.00
2 0.9311 0.9521 0.021 190 194 4.2 5 16.00
3 0.914 0.9262 0.0122 187 189 6.4 6.5 1.54
4 0.8944 0.911 0.0166 182 186 2.6 2.5 4.00
5 0.9216 0.9394 0.0178 188 192 2.8 3 6.67
6 0.904 0.9174 0.0134 184 187 4.8 5 4.00
7 0.8966 0.911 0.0144 183 186 4.2 4.5 6.67
8 0.8993 0.9135 0.0142 183 186 2.8 2.5 12.00
9 0.8861 0.9013 0.0152 181 184 4.4 4.5 2.22
10 0.8993 0.9125 0.0132 183 186 6 6 0.00
11 0.9203 0.9335 0.0132 188 190 4.4 4 10.00
12 0.9313 0.9472 0.0159 190 193 4 5.5 27.27
13 0.9247 0.9375 0.0128 189 191 5.6 5.5 1.82
14 0.925 0.9418 0.0168 189 192 2.8 2.5 12.00
15 0.8913 0.9541 0.0628 182 195 4.6 4.5 2.22
13 0.9164 0.9365 0.0201 187 191 3.2 4.5 28.89
17 0.925 0.9521 0.0271 189 194 3.6 3.5 2.86
18 0.9123 0.9282 0.0159 186 189 3.2 3 6.67
19 0.9631 0.9863 0.0232 197 201 4.4 4 10.00
20 0.9499 0.9912 0.0413 194 202 3.6 3.5 2.86
T
O
T
A
L
8.88
TABLE II.
THRESHOLD VOLTAGE FOR REAGENT A
VA
Vr (V) Vg (V) Vb (V)
1.6 0.7 0.7
TABLE III.
THRESHOLD VOLTAGE FOR REAGENT B
VB
Vg (V) Vb (V)
1.01 1.02
From the results obtained, it can be seen that the blood
samples done manually appear to be properly mixed
compared to the blood samples mixed by the prototype
which looks messier. Nevertheless, the results of the
blood typing were not affected. As seen in Fig.11, blood
types A and AB have an agglutination reaction with the
Anti-A reagent. Their voltage readings were seen to be
above the threshold voltage which is marked by the black
line. On the other hand, blood types B and O were seen to have voltage readings below the threshold value.
Consequently, as seen in Fig. 12, blood types B and AB
have an agglutinated reaction with the Anti-B reagent,
and blood types A and O have a non-agglutination
reaction. It is also noted that there is a clear distinction
between agglutinated and non-agglutinated reactions
when using the green and blue LEDs, however, using the
red LED provided no clear distinction between the two.
So in the analysis and determination for blood type, the
voltage readings from the red LED was disregarded.
Table 4 shows the results obtained from the prototype with the corresponding voltage readings of samples with
reagent A (VA) and samples with reagent B (VB). On
each reagent, there are readings for red LEDs (Vr), green
LEDs (Vg) and blue LEDs (Vb). By determining the
threshold voltages from the results obtained by the
prototype, the blood type is known and that is PT Result
as seen on the table. The results obtained from the
laboratory tests is called Lab Test.
Fig. 11. Reagent A Analysis

98
Fig. 12. Reagent B Analysis
For agglutination, for the prototype to be able to read
the voltage values accurately, the blood drops and
reagent drops should be dropped in the proper positions
and thus, a guide is made in the glass slide. The blood and
reagent should also be mixed well by the reagent dropper.
Having the blood drops and reagents drop dropped in
different parts of the glass resulted to different readings and also, if not stirred properly by the reagent stirrer will
thus also produce different voltage readings and output a
blood type that is not accurate. The glass slide should also
be placed exactly above the photodiode and for this to
happen, a small acrylic was utilized to block the glass
slide from exceeding the photodiode’s exact location. If
the glass slide exceeds the exact location of the
photodiode, the photodiode will then read a different
voltage reading that will also output a different blood
type.
Table IV: Results of Agglutination
Sample VA VB PT
Resul
t
Lab
Tes
t Vr Vg Vb Vr Vg Vb
1 1.6
3
0.6
6
0.6
3
1.8
4
0.9
9
0.9
8 O O
2 1.5
9
0.7
2
0.7
2
1.8
1
1.0
2
1.0
3 AB AB
3 1.6
2
0.6
8
0.6
5
1.8
1
0.9
9
0.9
8 O O
4 1.6
3
0.6
5
0.6
1
1.8
8
0.9
5
0.9
2 O O
5 1.6
8
0.6
9
0.6
6
1.9
1
1.0
5
1.0
6 B B
6 1.5
6
0.7
1 0.7
1.8
2
0.9
9
0.9
8 A A
7 1.5
8
0.7
3
0.7
2
1.7
5
1.0
1
1.0
2 AB AB
8 1.7
4
0.6
8
0.6
4
1.9
8
1.0
3
1.0
5 B B
9 1.5
6
0.6
8
0.6
3
1.8
7
0.9
9
0.9
8 O O
10 1.6
7
0.6
8
0.6
6
1.8
9
1.0
3
1.0
5 B B
11 1.6
5
0.6
8
0.6
4
1.8
4
1.0
1
1.0
2 B B
12 1.6
4
0.6
4 0.6
1.9
2
0.9
5
0.9
2 O O
13 1.8
1
0.7
6
0.7
6
1.8
3
0.9
9
0.9
7 A A
14 1.6
1
0.7
2
0.7
2
1.8
2
0.9
9
0.9
7 A A
15 1.5
6
0.6
7
0.6
4
1.8
3
0.9
9
0.9
9 O O
16 1.6
1
0.6
7
0.6
3
1.8
3
0.9
9
0.9
8 O O
17 1.7
4
0.6
9
0.6
5
1.8
5
1.0
1
1.0
5 B B
18 1.6
5
0.6
9
0.6
7
1.8
9
1.0
4
1.0
6 B B
19 1.5
8
0.6
6
0.6
4
1.8
7
0.9
6
0.9
2 O O
20 1.6 0.6
8
0.6
2
1.8
2
0.9
9
0.9
8 O O
%ERRO
R 0
IV. CONCLUSION
In this paper, an automated microcontroller-based device
is designed to determine a person’s blood type and
coagulation time using the concept of spectrophotometry.
The blood type of a person is determined by mixing Anti-
A and Anti-B reagents to two separate blood samples and
detecting an agglutination reaction in either sample. The dropping of these reagents and the consequent mixing
with the blood sample were achieved using a stepper
motor plunger system and two dc motors, respectively.
Agglutination was detected using a sensor circuit
consisting of a photodiode connected to a current to
voltage converter, and an illumination circuit consisting
of three RGB LEDs. The microcontroller was then able
to analyze and display the results on an LCD screen.
The coagulation time measured in this prototype started
from inserting the blood sample into the device until the
presence of a serum was detected. The presence of this serum was successfully detected using the same sensor
circuit, and an illumination circuit consisting of four
white LEDs. The microcontroller was able to measure the
time, interpret it as either normal or abnormal, and output
the results on an LCD screen. Additionally, three
functions were made available to the user in which they
may choose among Agglutination Detection,
Coagulation Analysis, or both. The prototype was
constructed in an 8.5x11x8.5-inch acrylic casing, and
was powered using an AC power source.
REFERENCES
[1] C. Chua, I. Gonzales, E. Manzano and M. Manzano, "Design and
Fabrication of a Non-Invasive Blood Glucometer Using Paired
Photo-Emitter and Detector Near-Infrared LEDs", DLSU Research
Congress 2014, 2014.
[2] J. Dy Perez, W. Misa, P. Tan, R. Yap and J. Robles, "A wireless
blood sugar monitoring system using ion-sensitive Field Effect
Transistor - IEEE Region 10 Conference (TENCON) , 2016.
[3] E. Nakamachi, “Development of automatic operated blood
sampling system for portable type Self-Monitoring Blood Glucose

99
device” - Annual International Conference of the IEEE
Engineering in Medicine and Biology, 2010. pp. 335-338
[4] H. Ashiba, M. Fujimaki, K. Awasu, M. Fu, Y. Ohki, T. Tanaka, and
M. Makishima, “Hemagglutination detection for blood typing
based on waveguide-mode sensors.,” Sensing and Bio-Sensing
Research, n.d.
[5]"Blood Types", Redcrossblood.org. [Online]. Available:
https://www.redcrossblood.org/donate-blood/how-to-
donate/types-of-blood-donations/blood-types.html. [Accessed: 21-
Aug- 2018].
[6]"Blood Clots", Hematology.org. [Online]. Available:
http://www.hematology.org/Patients/Clots/. [Accessed: 16- Feb-
2016].
[7] R. Razo, V. Recto, D. Regullano, and M. Salvador, “A portable
electronic blood typing device,” Master’s thesis, De La Salle
University, 2003.
[8] Y. Chang, W. Hong-Shong Chang, and Y. Lin “Detection of RBC
agglutination in blood typing test using integrated Light-Eye-
Technology (iLeyeT)” , IEEE International Symposium on
Bioelectronics and Bioinformatics (IEEE ISBB 2014), 2014, pp 1-
4
[9] A. Zia, M. Ali, M. Zeb, U. Shafiq, S. Fida, and N. Ahmed,
“Development of microfluidic lab-on-disc based portable blood
testing point-of-care diagnostic device”. IEEE EMBS Conference
on Biomedical Engineering and Sciences (IECBES), 2016, pp
142-145
[10] J. Fernandes, S.Pimenta, F. Soares, G, Minas, “A complete blood
typing device for automatic agglutination detection based on
absorption spectrophotometry,” IEEE transactions on
instrumentation and measurement, 2015. Pp. 112-119
[11] B. Li, S. Ong, and V. Pollard, “Microcontroller-based human blood
coagulation and erythrocyte sedimentation rate analyzer,”
Master’s thesis, De La Salle University, 2009.
[12] S. Anthony and M. Ramasubramanian, "Visible/Near-Infrared
Spectrophotometric Blood Typing Sensor for Automated Near-
Patient Testing“- IEEE Engineering in Medicine and Biology
27th Annual Conference, 2005, pp 1980-1983
100
Embedded System Based
Reconfigurable General Controller Board
for Home Automation System
Ismail1, Agung Nugroho Jati2, Fairuz Azmi3 1,2,3School of Electrical Engineering, Telkom University
Bandung, Indonesia
Abstract— In this research, an embedded system
based controller board is made to control electrical
appliances, such as lights, air conditioners, TVs, and
others, automatically according to the user
configuration. The configuration example is to switch
on lights for a certain clock range or when a light sensor
detects dark condition. The controller board consists of
a microcontroller, RTC, Wi-Fi module, Bluetooth
module, eight input ports for sensors, and eight output
ports for switching on and off home electrical
appliances. This research is implemented on a home
model that has been prepared according to the test
requirements. The controller board can be configured
by using a desktop application which is connected via
Bluetooth at the maximum distance of 4.8 meters
without obstacles. The controller board is designed to
be able to connect to a Wi-Fi network at the maximum
distance of 18 meters to send the I/O status to the
server for monitoring purpose. The findings indicated
that the controller board is 100% configurable and
work according to the configuration. It can also send
the I/O status to the server with 100% data accuracy.
Index Terms—Controller board; Embedded system;
Home automation system.
I. INTRODUCTION
Home automation system is a system that
integrates and controls home electrical appliances
such as lights, TVs, fans, air conditioners, etc. The
home automation system provides convenience,
energy efficiency, and comfort. Currently, the home automation system is growing rapidly and supported
by the number of companies engaged in this field
such as Control4, Crestron, Dynalite, and others.
Generally, a home automation systems consist of
sensors, a controller as the brain of the system, and
actuators such as relay, motor, or solenoid, and
usually focus on a single function or a single home
condition, such as door locking system [1], smoke
and fire alarm [2], or automation of lights only, so for
the other home conditions, the system or the
controller must be redesigned or reprogrammed. The
development of embedded system technology allows
a controller to support general home conditions,
which means that the controller is not required to be
redesigned or reprogrammed to support a new home
condition, but simply configured using a desktop
application.
A controller board is an electronic board based on microcontroller or microprocessor which is
programmed to control another systems or devices. A
controller board typically consists of a controller unit
and I/O unit. The controller unit may be
microcontroller based such as PIC family [3, 4, 5],
ATMEL [6, 7, 8], MCS51 [9], microprocessor based
as ARM [10, 11], or FPGA based. The advantages of
using FPGA are flexibility, accuracy, cost-
effectiveness, and rapid development [12]. The I/O
unit can be made to be onboard with the controller
unit [3, 13] or separated [4, 6, 7]. Some separated
ones use the other microcontroller in the I/O unit so they can work independently and flexibly [6]. In the
output unit is usually installed drivers to amplify the
current from microcontroller such as IC ULN2003
and IC L293D. The IC ULN2003 is used to amplify
the trigger current on relays [4, 7], while the IC
L293D is used to gain the current of DC motors [7].
In the input unit is usually installed op-amps
(operational amplifier) as IC LM358N to amplify the
voltage of sensors for maximum reading in the
microcontroller [4]. There are also use comparators
as IC LM339 to compare the voltage of a sensor with a threshold voltage, so the signal that are read by the
microcontroller is HIGH or LOW [3].
II. SYSTEM DESIGN
Overall system design is shown in Fig. 1 and the
focus of this research is the controller board.

101
Figure 1: Overall system diagram
The controller board is connected to the desktop application via Bluetooth. In the desktop application,
there are some configuration for the controller board,
for example is to switch on an output port for a
certain clock range or switch on when an input port
(sensor) is detected HIGH signal. It is also connected
to the server in internet via Wi-Fi network to send
I/O status. The I/O status can be monitored via the
mobile application.
A. Hardware Design
The controller board is based on microcontroller with eight input ports, eight output ports, a Real-
Time Clock, a Wi-Fi module, a Bluetooth module,
and four LED indicators. Fig. 2 shows the block
diagram of the hardware design.
Figure 2: Controller board diagram
1) The microcontroller is used as the brain,
process and control unit. It will be operated at
5-volt DC and 16 MHz clock. 2) Eight input ports that can read digital signal up
to 5-volt DC and are connected to the
microcontroller pin directly. 3) Eight output ports, relays, which is controlled
by a driver. The driver itself is controlled by
the microcontroller. 4) RTC to provide a real-time clock data. It is
connected to the microcontroller via I2C communication.
5) Wi-Fi module to connect the controller board
to a Wi-Fi network. It is connected to the
microcontroller via serial UART
communication. 6) Bluetooth module to connect the controller
board to the desktop application. It is
connected to the microcontroller via serial
UART communication. 7) Four LED indicators to indicate the working
status of the controller board: powering,
working, configuring, and Wi-Fi connection
status.
B. Operating System Design
There are two main process of this operating
system design, they are main program and Bluetooth
reception interruption. The main program starts with
initialization of ports and modules, then check each
input port signal and activate relay based on the
configuration, and then send the I/O status to the
server. The Bluetooth reception interruption starts with selection of port to be configured, then parse the
configuration data, and store them to the EEPROM of
the microcontroller. These two are shown in the flow
process in Fig. 3.
Figure 3: Flow process of operating system
III. REALIZATION AND IMPLEMENTATION
The controller board consists of two PCBs, main
board and I/O board that are shown in Fig. 4.
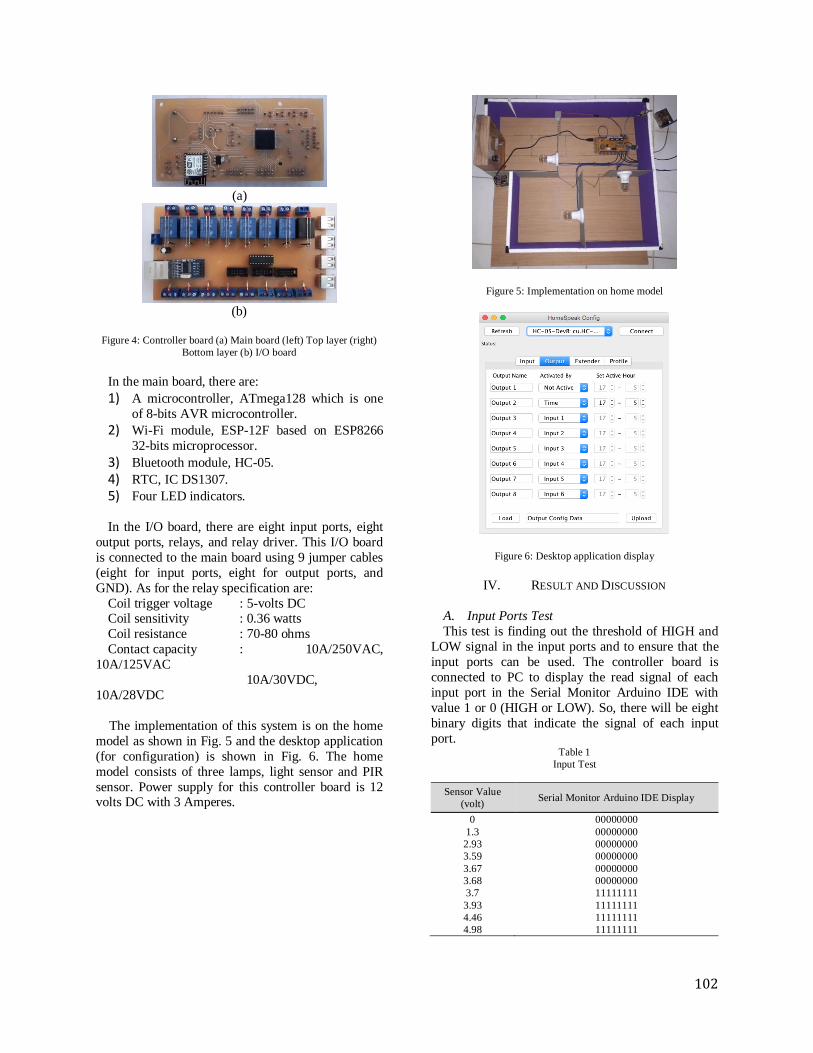
102
(a)
(b)
Figure 4: Controller board (a) Main board (left) Top layer (right)
Bottom layer (b) I/O board
In the main board, there are:
1) A microcontroller, ATmega128 which is one
of 8-bits AVR microcontroller. 2) Wi-Fi module, ESP-12F based on ESP8266
32-bits microprocessor. 3) Bluetooth module, HC-05. 4) RTC, IC DS1307. 5) Four LED indicators.
In the I/O board, there are eight input ports, eight
output ports, relays, and relay driver. This I/O board
is connected to the main board using 9 jumper cables
(eight for input ports, eight for output ports, and
GND). As for the relay specification are:
Coil trigger voltage : 5-volts DC Coil sensitivity : 0.36 watts
Coil resistance : 70-80 ohms
Contact capacity : 10A/250VAC,
10A/125VAC
10A/30VDC,
10A/28VDC
The implementation of this system is on the home
model as shown in Fig. 5 and the desktop application
(for configuration) is shown in Fig. 6. The home
model consists of three lamps, light sensor and PIR
sensor. Power supply for this controller board is 12 volts DC with 3 Amperes.
Figure 5: Implementation on home model
Figure 6: Desktop application display
IV. RESULT AND DISCUSSION
A. Input Ports Test
This test is finding out the threshold of HIGH and
LOW signal in the input ports and to ensure that the
input ports can be used. The controller board is
connected to PC to display the read signal of each
input port in the Serial Monitor Arduino IDE with
value 1 or 0 (HIGH or LOW). So, there will be eight
binary digits that indicate the signal of each input
port. Table 1
Input Test
Sensor Value
(volt) Serial Monitor Arduino IDE Display
0 00000000
1.3 00000000
2.93 00000000
3.59 00000000
3.67 00000000
3.68 00000000
3.7 11111111
3.93 11111111
4.46 11111111
4.98 11111111

103
Based on the Table 1, it can be ascertained that the
input port can be used well and the microcontroller
can read the sensor values and process them. The
conclusion is LOW signal that are read are in range
0-3.68 volts, while HIGH signal that are read are in range 3.7-4.98 volt.
B. Output Ports Test
In this test, the controller board is programmed to
activated all relays to ensure that all relays can be
triggered to active. There is an LED in each output
port to indicates that the relay is active or not. A
voltage measuring in the relay coil is also done to
ensure that the relay is triggered.
Table 2
Input Test
Port
No.
First Test Second Test
Program
LED Indicator,
Coil Voltage
(volt)
Program
LED Indicator,
Coil Voltage
(volt)
1 ON On, 4.07 ON On, 4.13
2 ON On, 4.05 OFF Off, 0
3 ON On, 4.04 ON On, 4.12
4 ON On, 4.04 OFF Off, 0
5 ON On, 4.04 ON On, 4.12
6 ON On, 4.03 OFF Off, 0
7 ON On, 4.03 ON On, 4.12
8 ON On, 4.03 OFF Off, 0
Table 2 shows that all the relays can be controlled.
The average voltage of relay coil when all relays are
activated is 4.04 volts, while when a half number of
relays are activated is 4.12 volts.
C. HC-05 Bluetooth Module Test
This test is for finding out the maximum distance
of the connection between Bluetooth module and PC.
At any distance, the connection and data request are done to test data transmission at that distance. Time
between data request until data is displayed in PC is
also measured.
Table 3
Connection and Data Transmission Test of Bluetooth Module
Distance
(m)
Without Obstacles With Obstacles (Wall
and Door)
Connection Response
Time (s) Connection
Response
Time (s)
1.2 Connected 0.48 Connected 0.61
2.4 Connected 0.86 Connected 0.79
3.6 Connected 1.46 -
4.8 Connected 0.99 -
6.0 Connected - -
7.2 Not Connected - -
8.1 Not Connected - -
Table 3 shows that the Bluetooth module, HC-05,
can be connected well at the maximum distance of
4.8 meters without obstacles and 2.4 meters with
obstacles. At distance of 6 meters can be connected
but no data transmission.
D. Configuration Data Transmission Test
In this test, the microcontroller is programmed to receive a string, the configuration data, then parse
and display them in the Serial Monitor Arduino IDE.
Table 4
Configuration Data Transmission Test
Test
No. Configuration Data Sent
Serial Monitor Arduino
IDE
1 “setinp;11110000” setinp
11110000
2
“setout;2,17,5,0;2,17,5,1;
1,17,18,0; 1,18,5,0;
0,17,5,0;0,17,5,0;
0,17,5,0;0,17,5,0”
setout
2,17,5,0
2,17,5,1
1,17,18,0
1,18,5,0
0,17,5,0
0,17,5,0
0,17,5,0
0,17,5,0
Result that is shown in Table 4 is the Bluetooth
module successfully receive all configuration data
sent and parse them with 100% data accuracy. By this test, can be conclude that the controller board is
ready to be configurable using desktop application
via Bluetooth communication. The configuration data
itself are stored in the microcontroller EEPROM, so
that the configuration data will not be lost even if the
power supply is turned off.
E. ESP-12F Wi-Fi Module Test
This test is for finding out the maximum distance
of the connection between Wi-Fi module and Wi-Fi
network (in this case using smartphone Hotspot). At any distance, the connection is checked.
Table 5
Connection Test of Wi-Fi Module
Distance
(m)
Connection
Without Obstacles With Obstacles (Wall
and Door)
1.2 Connected Connected
2.4 Connected Connected
3.6 Connected Connected
4.8 Connected Connected
6.0 Connected Connected
7.2 Connected Connected
8.4 Connected Connected
18.0 Connected Connected
24.0 Not Connected Not Connected

104
Table 5 shows that the Wi-Fi module, ESP-12F,
can be connected well at the maximum distance of
18 meters with or without obstacles.
F. I/O Status Sending Test
In this test, the microcontroller is programmed to get status of each input and output ports, then make
them as a string, then send them to the server using
HTTP GET protocol.
Table 6
I/O Status Sending Test
Test
No. Microcontroller Data Stored Data in Server
1
time: 2018-7-11+1:9:19
id: HS0001
data: 0000000000010000
time: 2018-07-11 01:09:19
id: HS0001
data: 0000000000010000
2
time: 2018-7-11+1:16:48
id: HS0001
data: 1100000011010000
time: 2018-07-11 01:16:48
id: HS0001
data: 1100000011010000
3
time: 2018-7-11+1:21:19
id: HS0001
data: 0000000000010000
time: 2018-07-11 01:21:19
id: HS0001
data: 0000000000010000
4
time: 2018-7-11+3:3:48
id: HS0001
data: 0000000000010000
time: 2018-07-11 03:03:48
id: HS0001
data: 0000000000010000
5
time: 2018-7-11+9:18:52
id: HS0001
data: 0000000000000000
time: 2018-07-11 09:18:52
id: HS0001
data: 0000000000000000
Result that is shown in Table 6 is the Wi-Fi module
successfully receive send all the I/O status to the
server with 100% data accuracy. This I/O status are
stored in database server for monitoring purpose via
mobile application. V. CONCLUSION
Based on the design, implementation, and test, the
conclusion is the controller board can be made based
on embedded system technology. It can read digital
signal from each input port in range 0-3.68 volts for
LOW and 3.7-4.98 for HIGH and also can control all
relays in output port well. It can be configured using
a desktop application via Bluetooth at maximum
distance of 4.8 meters. It also can send the I/O status
to the server via Wi-Fi network at maximum distance
of 18 meters with 100% data accuracy.
VI. REFERENCES
[1] Y. T. Park, P. Sthapit and J.-Y. Pyun, "Smart Digital Door Lock for
the Home Automation," in IEEE Region 10 Conference, 2009.
[2] I. Kaur, "Microcontroller Based Home Automation System with
Security," International Journal of Advanced Computer Science and
Applications, vol. I, no. 6, pp. 60-65, 2010.
[3] S. Mohyuddin, Z. Anwar and M. M. Ashraf, "A Programmable Logic
Controller Based Power Factor Controller for Single Phase Induction
Motor," International Journal of Engineering Science and
Computing, pp. 4688-4690, 2017.
[4] P. Visconti, P. Constantini and G. Cavalera, "Design of
electronic programmable board with user-friendly touch
screen interface for management and control of thermosolar
plant parameters," in International Conference on
Environment and Electrical Engineering, 2015.
[5] M. Bharani, S. Elango, S. M. Ramesh and R. Preetilatha, "An
Embedded System Based Smart Sensor Interface for
Monitoring Industries using Real Time Operating System
(RTOS)," International Journal of Advanced Information and
Communication Technology, pp. 496-498, 2014.
[6] M. E. Rida, F. Liu and Y. Jadi, "Design Mini-PLC based on
ATxmega256A3U-AU Microcontroller," in International
Conference on Information Science, Electronics and
Electrical Engineering, 2014.
[7] M. Avhad, V. Divekar, H. Golatkar and S. Joshi,
"Microcontroller based Automation system using Industry
standard SCADA," in Annual IEEE India Conference, 2013.
[8] S. Anwaarullah and S. V. Altaf, "RTOS based Home
Automation System using Android," International Journal of
Advanced Trends in Computer Science and Engineering, pp.
480-484, 2013.
[9] W. HuiJiao, Z. Wang and H. Jie, "An Embedded
Environmental Control System Based on Small RTOS," in
IEEE International Conference on Intelligent Computing and
Integrated Systems, 2011.
[10] S. S. Pawar and P. C. Bhaskar, "Design and Development of
ARM based Real-Time Industry Automation System using
GSM," International Research Journal of Engineering and
Technology, pp. 800-805, 2015.
[11] S. Pinto, J. Pereira, D. Oliveira, F. Alves, E. Qaralleh, M.
Ekpanyapong, J. Cabral and A. Tavares, "Porting SLOTH
System to FreeRTOS running on ARM Cortex-M3," in
International Symposium on Industrial Electronics, 2014.
[12] D. Gawali and V. K. Sharma, "FPGA Based Micro-PLC
Design Approach," in International Conference on Advances
in Computing, Control, and Telecommunication
Technologies, 2009.
[13] J.-H. Su, C.-S. Lee and W.-C. Wu, "The Design and
Implementation of a Low-cost and Programmable Home
Automation Module," IEEE Transactions on Consumer
Electronics, pp. 1239-1244, 2006.
[14] V. N, H. K. S, N. M. S, R. Umesh and S. A. A. Kumar, "A
Low Cost Home Automation System Using Wi-Fi Based
Wireless Sensor Network Incorporating Internet of Things
(IoT)," in International Advance Computing Conference,
2017.

105
Development of Synthesizable VHDL Library
Modules for a Small Scale Convolutional
Neural Network with Weight Quantization
using K-Means Clustering
Roderick Yap, Lawrence Materum Department of Electronics and Communications Engineering, De La Salle University
Manila, Philippines
Abstract— Convolutional Neural Network (CNN) has
evolved as a very popular tool in the field of artificial
intelligence. In many instances, CNN is implemented using
the software approach. Hardware approach of
implementation likewise, has made use of Field
Programmable Gate Array (FPGA), in many applications,
equipped with embedded processors in it. In many cases,
CNN is used in applications that normally involve large
volume of data. In this paper, a set of synthesizable VHDL
library modules is designed. The modules developed can be
used as one possible guide for building a small scale CNN
for a small set of input data. The goal is to implement the
CNN and allow it to train by itself. The system will use
fixed point binary numbers. A synthesizable hardware
model of a programmable K-means clustering is also
designed for CNN weights quantization. The K-Means
clustering can be used for various values of K with
maximum of K in this paper set at 36. As part of
experimentation, the CNN module and the K-means
clustering module were integrated and the results were
evaluated.
Index Terms— Convolutional Neural Network; K-Means
Clustering; Hardware Model; VHDL Library Modules
I. INTRODUCTION
CNN is a popular tool used for many image recognition
applications. A lot has been done on its various forms of
implementation and application. One research focused
on automatic HDL code generation for CNN in Verilog
[1]. In [2] FPGA based CNN using the Caffe framework
was implemented. In [3], CNN was used for processing
moving images. The system was able to perform super
resolution on up to 1920x1080 pixels in no less than 48
frames per second with a latency of less than 1 ms. Use
of Open Computer Language (Open CL) was highlighted in [4] for an FPGA based CNN with emphasis on CNN
acceleration. An FPGA based CNN was developed in
[5]. The paper proposed a faster method for computing
hyperbolic tangent activation function.
A lot of researches Clustering has also been published.
One paper focused on fast determination of cluster center
and including fast determination of optimal density
radius [6]. Pattern recognition involving binary sketch
template image is another area that has found application
for clustering [7]. In [8], collaborative clustering, which
focused on several clustering method done in parallel was proposed. Other applications on clustering that have
found publication included SAR image segmentation [9],
multi task clustering [10] and even on bioinformatics
[11].
When CNN and clustering are combined in one
research, deep neural network can be one application. In
[12], the concept of deep compression was introduced. In this paper, the weights of a neural network can be
quantized using K-means clustering. With quantization,
the system enforced weight sharing. With weight sharing,
the system can save memory resources as this will reduce
the number of memory spaces for holding of unique
weight values. In addition, the system also proposed the
elimination of weights which are too insignificant due to
its very low value.
Hardware Description Language (HDL) is a popular
entry tool for digital IC design. Two popular HDLs
widely used are Verilog and VHDL. With HDL, large
digital system design can be carried by mere coding using
HDL. However, the success of coding largely depends on
the synthesizability of the code. In synthesis, the code is
translated to a hardware equivalence based on a library
prescribed by the user. The target library can be an FPGA
based library or for mass production, a standard cell
based library.

106
II. THEORETICAL CONSIDERATION
In CNN, the input data, e.g. pixel information from an
image, is processed in several stages with an intention to
reach a target output set by the designer. Figure 1 shows one possible scenario. The input data is first convolved
with the filter weights. The number of filters is decided
by the designer. The initial filter weight values can be
randomly assigned. After convolution, user applies
activation function. One option is to apply ReLU to the
data. ReLU is used to convert all negative values
obtained from convolution to zero. Another option is to
apply Pooling. The goal of pooling is to reduce the data
size in case it gets too big. One possible effect of pooling
is to get the maximum value only from a spatial area
within the input data. This spatial area can be defined by
the user. Some other popular activation function includes Sigmoid and Tanh.
Fig. 1: A Possible Data Flow for CNN
The outputs of the activation function enter the fully
connected layer block as its inputs. In the Fully
Connected Layer block are layers of neurons. The user
decides on how many layers are needed based on his
requirements. The first layer would normally be the
inputs. As for example, let there be 4 neurons in the
second layer. Every input will form a connection to every
neuron of the second layer. If there are 4 inputs, then
there would be 16 connections. Every connection carries a numerical weight with it. Quantifying this block is a
series of “Sum Of Product” (SOP) terms for every layer.
The result of the SOP expression is then fed to another
activation. The outputs from the fully connected layer
are then compared to a set of target values. If the output
is not yet equal to the target, then back propagation
procedure is carried out. A back-propagation procedure
is applied to update the weight values of the fully
connected. A back-propagation procedure is likewise
applied to update the filter weights. And then, the next
iteration is executed. The iteration is executed repeatedly
until the desired outputs are achieved.
Fig. 2: Flowchart for K-Means Clustering
K-means clustering is a form of unsupervised
learning. With K-means clustering, a set of data can be
classified into K groups. Figure 2 shows the behavioral
flow of K-means clustering algorithm [13]. At first, the user specifies into how many groups does he wish to
classify a given set of data. A random search for the
initial centroid values is then carried out. The number of
centroid values corresponds to the value of K. Each
member of the given set of data will have its Euclidean
distance from each centroid computed. The member is
then classified to belong to the group of the centroid that
provided the minimum Euclidean distance value. After
one iteration, all members belonging to the same centroid
form 1 group. A new set of centroid values will then be
computed for every group. The new value is based on the
average of all members comprising the group. And the iteration continues until all the centroid values have
converged and have stopped changing for successive
iterations.
III. SIGNIFICANCE AND LIMITS OF THE STUDY
The design highlighted in this paper explores to a
certain degree the concept of parallelism. Because
VHDL supports parallelism, by allowing several data to
be updated in just 1 clock cycle, parallel updating of a
number of variables is adopted in the design. The advantage of parallel computation is faster processing
time to reach the target output. Both CNN and K-means
clustering use a lot of variables; and these variables are
constantly updated for every iteration. Instead of
updating each variable one at a time, parallel
computation will obviously allow faster processing time,
hence, faster convergence to the set target. However,
the drawback of parallel computation is larger circuit
size. The synthesizable VHDL code done in this research
can pave the way for standard cell-based Application
Specific Integrated Circuit (ASIC) design in the future.
Alternatively, on the part of FPGA implementation, if one FPGA is not large enough to contain the entire

107
circuit, one can look at partitioning it into several sub
blocks for several interconnected FPGAs for
implementation.
IV. DESIGN CONSIDERATION FOR CNN
The hardware model design of the entire system is
divided into 2 main circuit blocks namely the
Convolutional Neural Network block and the K-Means
clustering block. In designing the hardware model of the
CNN block, figure 1 serves as basis for the structural
modeling. In doing the Register Transfer Level hardware
model, a python code was first written for the CNN. It
was important to have a working python code to ensure
that the mathematical procedure adopted for the
hardware model will work effectively.
A. The Convolution Block
The input image adopted for the design is a 4x4 matrix.
Let A represent the 4 x 4 matrix. Three pieces of 3x3 filter
matrix are used for this design. Each filter weight is
represented as 10 bits signed number. Of the 10 bits, 7
bits are allotted for the fractional part. Let the 3 filters be
represented by B, C and D respectively. B, C and D
accept the filter weight inputs. For this design each filter
will convolve with the input image using single stride. As
for example, convolving B with the image A, equation
(1) represents a sample output, E1. Matrix B then moves down to continue the convolution process until the entire
matrix A has been covered. Similar approach is done for
matrix C and D. After the convolution procedure, the
system would have produced 12 outputs, E1 to E12
E1 = A(0,0) * B(0,0) + A(0, 1)* B(0,1) + A(0,2) * B(0,2) +
A(1,0) * B(1,0) + A(1,1) * B(1,1) + A(1,2) * B(1,2) + A(2,0) *B(2,0) + A(2, 1) * B(2,1) + A(2,2) * B(2,2) + bias (1)
In hardware modeling the convolutional block, one can
normally rely on the multiplier and adder circuits that are
readily synthesizable. Use of operators * and + in VHDL
are synthesizable. In this research, the image used is a
black and white image that can be represented as 1 or 0
for every pixel. Instead of using a multiplier,
multiplexers which are more component saving can be
used to replace the multiplier. Figure 3 shows the circuit
representation for one multiplication operation. With
multiplexers used, the only mathematical operation left
for the convolutional block is addition. Looking at (1) and (2), there are still too many addition operations
carried out at a time. This can lead to too much hardware
consumption. One way to reduce the number of adders
needed is to divide the entire convolution procedure into
several states using Finite State Machines (FSM). The
reader has the option to limit the operation to 1 just adder
per state or he can add a few more additions. Limiting to
just 1 addition has a draw back of increasing the latency
i.e. it will take several clock cycles before the entire
operation is completed. Figure 4 shows the abstract view
of the Convolutional block. Clk and res represent the
clock and reset input which are normally found in any sequential circuit. Start, when asserted high will begin
the convolution. Change, when asserted high, will
replace the filter weights values inside the block with
those coming from the inputs. The output signal, Finish
asserts high for one clock cycle when the convolution
operation is completed.
Fig. 3: Multiplication Replaced with Mutliplexing
Fig.4: Convolution Block Abstract View
B. The Sigmoid Block
In this design, the activation function adopted right
after the convolution operation is the sigmoid function.
Equation (2) shows the mathematical expression [14]. Hardware modeling of the sigmoid function has several
options. In carrying out the exponential part of the
formula, one can use the Maclaurin’s series [15].
Another option is to use Coordinate Rotation Digital
Computer (CORDIC) specifically the hyperbolic
trigonometric function [16]. Still a 3rd option is to use
lookup table. Lookup table could be memory intensive,
but it is the easiest approach. One advantage of using
lookup table is the faster time to obtain the answer. In
the best case, the answers are readily available in just 1
clock cycle. Using CORDIC would normally take
considerable number of clock pulses since this method is based on repeated iteration. Using Maclaurin’s series on
the other hand would involve a number of
multiplications, addition and division operations. In this
paper, look up table using VHDL function declaration is
adopted for the sigmoid function.
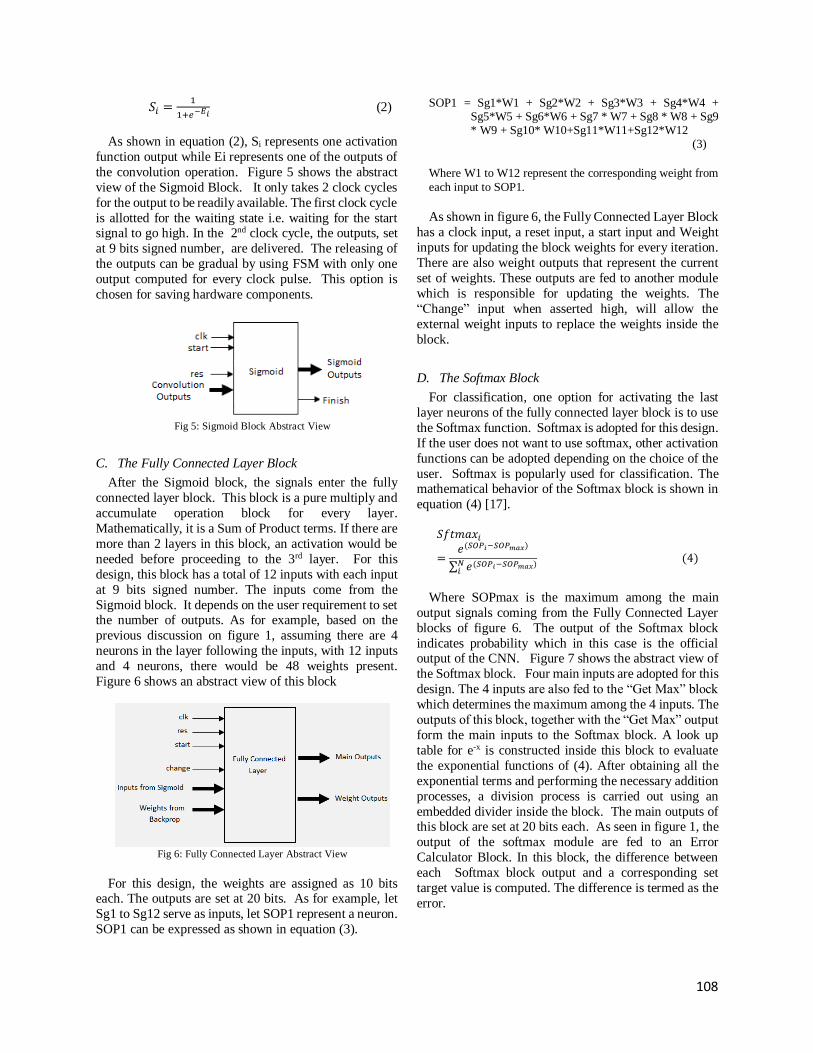
108
𝑆𝑖 =1
1+𝑒−𝐸𝑖 (2)
As shown in equation (2), Si represents one activation
function output while Ei represents one of the outputs of
the convolution operation. Figure 5 shows the abstract
view of the Sigmoid Block. It only takes 2 clock cycles
for the output to be readily available. The first clock cycle
is allotted for the waiting state i.e. waiting for the start signal to go high. In the 2nd clock cycle, the outputs, set
at 9 bits signed number, are delivered. The releasing of
the outputs can be gradual by using FSM with only one
output computed for every clock pulse. This option is
chosen for saving hardware components.
Fig 5: Sigmoid Block Abstract View
C. The Fully Connected Layer Block
After the Sigmoid block, the signals enter the fully
connected layer block. This block is a pure multiply and
accumulate operation block for every layer.
Mathematically, it is a Sum of Product terms. If there are
more than 2 layers in this block, an activation would be
needed before proceeding to the 3rd layer. For this
design, this block has a total of 12 inputs with each input
at 9 bits signed number. The inputs come from the
Sigmoid block. It depends on the user requirement to set the number of outputs. As for example, based on the
previous discussion on figure 1, assuming there are 4
neurons in the layer following the inputs, with 12 inputs
and 4 neurons, there would be 48 weights present.
Figure 6 shows an abstract view of this block
Fig 6: Fully Connected Layer Abstract View
For this design, the weights are assigned as 10 bits each. The outputs are set at 20 bits. As for example, let
Sg1 to Sg12 serve as inputs, let SOP1 represent a neuron.
SOP1 can be expressed as shown in equation (3).
SOP1 = Sg1*W1 + Sg2*W2 + Sg3*W3 + Sg4*W4 + Sg5*W5 + Sg6*W6 + Sg7 * W7 + Sg8 * W8 + Sg9 * W9 + Sg10* W10+Sg11*W11+Sg12*W12
(3)
Where W1 to W12 represent the corresponding weight from
each input to SOP1.
As shown in figure 6, the Fully Connected Layer Block
has a clock input, a reset input, a start input and Weight
inputs for updating the block weights for every iteration.
There are also weight outputs that represent the current
set of weights. These outputs are fed to another module
which is responsible for updating the weights. The
“Change” input when asserted high, will allow the
external weight inputs to replace the weights inside the
block.
D. The Softmax Block
For classification, one option for activating the last
layer neurons of the fully connected layer block is to use
the Softmax function. Softmax is adopted for this design.
If the user does not want to use softmax, other activation
functions can be adopted depending on the choice of the
user. Softmax is popularly used for classification. The mathematical behavior of the Softmax block is shown in
equation (4) [17].
𝑆𝑓𝑡𝑚𝑎𝑥𝑖
=𝑒(𝑆𝑂𝑃𝑖−𝑆𝑂𝑃𝑚𝑎𝑥)
∑ 𝑒(𝑆𝑂𝑃𝑖−𝑆𝑂𝑃𝑚𝑎𝑥)𝑁𝑖
(4)
Where SOPmax is the maximum among the main
output signals coming from the Fully Connected Layer
blocks of figure 6. The output of the Softmax block
indicates probability which in this case is the official output of the CNN. Figure 7 shows the abstract view of
the Softmax block. Four main inputs are adopted for this
design. The 4 inputs are also fed to the “Get Max” block
which determines the maximum among the 4 inputs. The
outputs of this block, together with the “Get Max” output
form the main inputs to the Softmax block. A look up
table for e-x is constructed inside this block to evaluate
the exponential functions of (4). After obtaining all the
exponential terms and performing the necessary addition
processes, a division process is carried out using an
embedded divider inside the block. The main outputs of this block are set at 20 bits each. As seen in figure 1, the
output of the softmax module are fed to an Error
Calculator Block. In this block, the difference between
each Softmax block output and a corresponding set
target value is computed. The difference is termed as the
error.
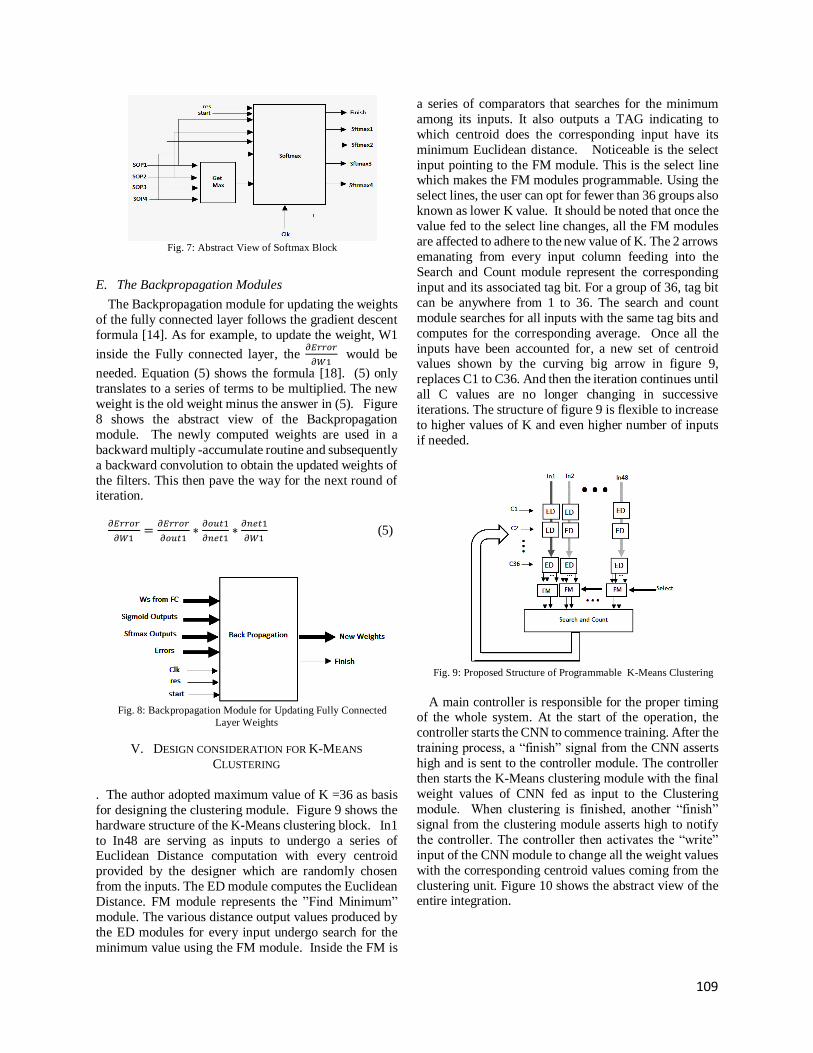
109
Fig. 7: Abstract View of Softmax Block
E. The Backpropagation Modules
The Backpropagation module for updating the weights
of the fully connected layer follows the gradient descent
formula [14]. As for example, to update the weight, W1
inside the Fully connected layer, the 𝜕𝐸𝑟𝑟𝑜𝑟
𝜕𝑊1 would be
needed. Equation (5) shows the formula [18]. (5) only
translates to a series of terms to be multiplied. The new
weight is the old weight minus the answer in (5). Figure
8 shows the abstract view of the Backpropagation
module. The newly computed weights are used in a
backward multiply -accumulate routine and subsequently
a backward convolution to obtain the updated weights of
the filters. This then pave the way for the next round of iteration.
𝜕𝐸𝑟𝑟𝑜𝑟
𝜕𝑊1=
𝜕𝐸𝑟𝑟𝑜𝑟
𝜕𝑜𝑢𝑡1∗
𝜕𝑜𝑢𝑡1
𝜕𝑛𝑒𝑡1∗
𝜕𝑛𝑒𝑡1
𝜕𝑊1 (5)
Fig. 8: Backpropagation Module for Updating Fully Connected
Layer Weights
V. DESIGN CONSIDERATION FOR K-MEANS
CLUSTERING
. The author adopted maximum value of K =36 as basis
for designing the clustering module. Figure 9 shows the
hardware structure of the K-Means clustering block. In1
to In48 are serving as inputs to undergo a series of Euclidean Distance computation with every centroid
provided by the designer which are randomly chosen
from the inputs. The ED module computes the Euclidean
Distance. FM module represents the ”Find Minimum”
module. The various distance output values produced by
the ED modules for every input undergo search for the
minimum value using the FM module. Inside the FM is
a series of comparators that searches for the minimum
among its inputs. It also outputs a TAG indicating to
which centroid does the corresponding input have its
minimum Euclidean distance. Noticeable is the select
input pointing to the FM module. This is the select line which makes the FM modules programmable. Using the
select lines, the user can opt for fewer than 36 groups also
known as lower K value. It should be noted that once the
value fed to the select line changes, all the FM modules
are affected to adhere to the new value of K. The 2 arrows
emanating from every input column feeding into the
Search and Count module represent the corresponding
input and its associated tag bit. For a group of 36, tag bit
can be anywhere from 1 to 36. The search and count
module searches for all inputs with the same tag bits and
computes for the corresponding average. Once all the
inputs have been accounted for, a new set of centroid values shown by the curving big arrow in figure 9,
replaces C1 to C36. And then the iteration continues until
all C values are no longer changing in successive
iterations. The structure of figure 9 is flexible to increase
to higher values of K and even higher number of inputs
if needed.
Fig. 9: Proposed Structure of Programmable K-Means Clustering
A main controller is responsible for the proper timing of the whole system. At the start of the operation, the
controller starts the CNN to commence training. After the
training process, a “finish” signal from the CNN asserts
high and is sent to the controller module. The controller
then starts the K-Means clustering module with the final
weight values of CNN fed as input to the Clustering
module. When clustering is finished, another “finish”
signal from the clustering module asserts high to notify
the controller. The controller then activates the “write”
input of the CNN module to change all the weight values
with the corresponding centroid values coming from the
clustering unit. Figure 10 shows the abstract view of the entire integration.

110
Figure 10: Integrating the CNN and K-Means Clustering
VI. DATA AND RESULTS
In implementing a CNN, there are many possibilities as
to the number of filters used, size of filters adopted and
even on the choice of the activation function. Even the
number of layers inside the fully connected block can
vary depending on the need of the user. A simple small
size integration of the different modules developed was
done in this paper to see how the system works. A test
image (4 x4) was fed to the convolution block. A python
code was also tested for the given image. Figure 11 shows
the sample image as input. The image is adopted as black
and white. The yellow is assigned a value of 1 while the
violet is assigned a value of 0. Figure 12 shows the 3
filters structure after around 10000 iterations of the
python code. The 3 filters, as seen in the figures have
adopted to the pattern of the input image. The brighter
the color, the higher is the corresponding value of the cell
in the filter.
The VHDL bit-level code was then simulated using the
same image of figure 10. The result obtained after around
1 million clock cycles are shown Table I-1 to I-3. The
result of the VHDL simulation appeared similar to the
python code simulation result. The binary results from
the VHDL simulation were manually converted to
decimal. In testing the effect of clustering, the authors
have made some observations on weight values relation
to the output. A total of 48 weights were fed to the
clustering module. Table II shows the result of the CNN
performance with clustering. The target outputs when
training the CNN was 100%, 0%, 0% 0%. It shows that
even with great reduction in number of unique weight
values, the performance of the CNN is still more than
satisfactory. Tables III and IV show the synthesis result
for the CNN and Clustering respectively.
Fig. 11: The Sample Image Trained
Fig 12: The 3 Filters after the training
Table I -1 Filter B Results in VHDL
0.95 0.95 1.46
0 0 1.01
0 0 1.01
Table I -2 Filter C Results in VHDL
1.17 1.17 1.67
0 0 0.97
0 0 0.97
Table I -3 Filter D Results in VHDL
1.06 1.06 1.51
0 0 0.98
0 0 0.98
Table II. Result for Clustering Weights
Clustering Outputs
24 groups 98%, 0.09% 0.34% , 0.58%
15 groups 98% , 0.09%, 0.39%, 0.68%
5 groups 98%, 0.19%, 0.43%, 0.58%

111
Table III: CNN Module Synthesis Result
MAC (Multiply -accumulate) 77
Multipliers 115
Adder / Subtractor 113
Registers 3633
Comparators 7
Table IV: Clustering Module Synthesis Result
ROM 36
Multipliers 36
Adders / Subtractors
(minimum)
1736
Registers (minimum) 441
Comparators (minimum) 3408
VII. CONCLUSION
In this paper, a set of library modules written in VHDL
for CNN and K-means Clustering were presented.
Integrating the modules for a simple CNN training
proved to be working when compared to a python code.
The training was carried out using solely the library
modules developed. Exponential mathematical functions
were implemented using lookup tables. K-means
clustering proved effective for weight quantization. The
timing for the entire system’s operation was implemented
using a controller module which acts like a director to the
system. Although only a small scale is adopted for this
design, the algorithm used is flexible enough to increase
to higher data sizes
ACKNOWLEDGEMENT
The authors wish to thank Engineering Research and
Development for Technology (ERDT) led by the
Department of Science and Technology (DOST) -Science and Education Institute (SEI), Philippines for the
funding provided in this research.
REFERENCES
[1] Z. Liu, Y. Dou, J. Jiang, and J. Xu, “Automatic code generation
of convolutional neural networks in FPGA implementation,” in 2016 International Conference on Field-Programmable
Technology (FPT) [8], pp. 61–68
[2] R. DiCecco, G. Lacey, J. Vasiljevic, P. Chow, G. Taylor, and S.
Areibi, “Caffeinated FPGAs:FPGA framework for convolutional neural networks,” in 2016 International Conference on Field-
Programmable Technology (FPT) [9], pp. 265–268.
[3] T. Manabe, Y. Shibata, and K. Oguri, “FPGA implementation of a real-time super-resolution system using a convolutional neural
network,” in 2016 International Conference on Field-Programmable Technology (FPT) [10], pp. 249–252.
[4] Z. Wang, F. Qiao, Z. Liu, Y. Shan, X. Zhou, L. Luo, and H. Yang,
“Optimizing convolutional neural network on FPGA under
heterogeneous computing framework with opencl,” in 2016 IEEE
Region 10 Conference (TENCON) [5], pp. 3433–3438
[5] S. Ghaffari and S. Sharifian, “FPGA-based convolutional neural network accelerator design using high level synthesize,” in 2016
2nd International Conference of Signal Processing and Intelligent
Systems (ICSPIS) [6], pp. 1–6.
[6] C. Jinyin, L. Xiang, Z. Haibing, and B. Xintong, “A novel cluster
center fast determination clustering algorithm,” Applied Soft
Computing, vol. 57, pp. 539 – 555, 2017. [7] X. Mei, “Object clustering by k-means algorithm with binary
sketch templates,” in 2016 International Conference on Progress in Informatics and Computing (PIC) [49], pp. 360–363.
[8] A. Cornujols, C. Wemmert, P. Ganarski, and Y. Bennani, “Collaborative clustering: Why,when, what and how,”
Information Fusion, vol. 39, pp. 81 – 95, 2018.
[9] T.Xing, Q.Hu, J.Li and G. Wang, “Refined SAR Image Segmentation Algorithm Based on K-means Clustering”, 2016
CIE International Conference on Radar, Oct., 2016
[10] ] A. Sokhandan, P. Adibi, and M. Sajadi, “Multitask fuzzy bregman co- clustering approach for clustering data with
multisource features,” Neurocomputing, vol. 247, pp. 102 – 114,
2017.
[11] L.V. Bijuraj, “Clustering and its Applications”, Proceedings of
National Conference on New Horizon in IT (NCNHIT), 2013
[12] H. M. .W. D. Song Han, “Deep compression: Compressing deep
neural networks with pruning, trained quantization and huffman
coding,” https://arxiv.org/pdf/1510.00149.pdf, 2016 .
[13] K. Teknomo, “K-Means Clustering Tutorial”,
http://people.revoledu.com/kardi/tutorial/kMean/Algorithm.htm
[14] Tariq Rashid, “Make Your Own Neural Network” .
[15] Weisstein, Eric W. "Maclaurin Series." From MathWorld--A Wolfram Web
Resource. http://mathworld.wolfram.com/MaclaurinSeries.html
[16] A. Dulay, R.Yap, L.Materum, “Hardware Modelling of a PLC Multipath Channel Transfer Function”, Journal of
Telecommunications, Electronics and Compter Engineering, Vol
9, No. 2-7, 2017
[17] How to implement the Softmax function in Python
[Available Online:]https://stackoverflow.com/questions/34968722/how-to-
implement-the-softmax-function-in-python
[18] M. Mazur, “A step by step backpropagation example,”[Available Online:] https://mattmazur.com/2015/03/17/a-step-by-step-
backpropagation-example/

112
Cooperative Spectrum Sensing with Obstacles
on both Sensing and Reporting Channels
Abdul Haris Junus Ontowirjo1, Wirawan2, Adi Soeprijanto3 1,2,3Department of Electrical Engineering, Faculty of Electrical Technology
Institut Teknologi Sepuluh Nopember,
Surabaya, Indonesia 1Jurusan Teknik Elektro, Fakultas Teknik
Universitas Sam Ratulangi Manado, Indonesia
[email protected], [email protected], [email protected]
Abstract- The performance of cooperative spectrum
sensing is investigated over channels with obstacles on
both sensing and reporting channels. With weighted sum
at the fusion center, the detection and false alarm
probabilities are derived. Our analysis is validated by
numerical and simulation results.
Index of Terms-About; Cooperative Spectrum Sensing;
False Alarm; Obsctacles; Receiver Operating
Characteristic; Probability of Detection.
I. INTRODUCTION
Cooperative Spectrum Sensing is a technology that
can be used to overcome the effects of multipath fading on the side of the environmental performance in the
detection of the cognitive radio network. On the other
hand, the lack of availability of frequency spectrum
allocation is currently the most important issue for a
wireless communication system when setting placement
in static frequency allocation makes the frequency
spectrum becomes inefficient [1,2]. Cognitive Radio has
become the latest phenomenon to be able to overcome
the lack of spectrum allocation along with the user
settings. Spectrum Sensing is one of the important
functions for technology users Cognitive Radio (CR) to detect the presence of the Primary User (PU) and
exploit the unused frequency spectrum without causing
interference to PU [3,4].
Today's wireless communication systems have grown
rapidly and had a very large number of users. The
number of users using the frequency spectrum
allocation has been set for the communication system.
Wireless communication system environments are
experiencing the phenomenon of multipath fading due
to obstructions (obstacles) has resulted in the
distribution of the received signal will be Rayleigh,
while the absence of a barrier in wireless
communication systems resulted in the distribution of
the received signal into nature Rician. The study
discusses the effects of multipath fading channels
affected has been done before. Assuming the channel is
with Nakagami fading, has submitted a method for
exploiting the spectrum by Secondary User (SU)
allocated to PU when not being used [3]. SU will
continue to monitor the channels to decide whether to
use or not. To determine priorities for the use of the
spectrum allocation from use by PU and SU,
predetermined parameter limit SNR. Paper discusses other channel modeling and
parameter limit to determine the allocation of spectrum
that can be used by SU. In this paper, the channel is
assumed to be Nakagami and Rician and made a two-
level parameter limits [5-7]. Both of these parameters
limit use logic 2 ratios and 1 ratio that produces better
incorporation mechanism on the channel with nature
Nakagami and Rician distribution. When all the
parameters are set optimally, the result of a reduction in
the energy used in a trade between detection
performance and excessive use of spectrum.
II. CHANNEL AND SYSTEM MODELS
In this paper discussed cognitive radio network
described by Figure 1, with a number of L cognitive
relays (named SU1, SU2,..., SUL). In the first phase, all
relays observe cognitive user primary signal. In the
second phase of each cognitive relay amplifies and
forward the received signal to the fusion center. We
assume relays communication channels between
cognitive fusion center and independently of one
another. In the free channels, the fusion center receives
signals that are free of cognitive relays. The fusion center is a combination of the selection combiner and
energy detector that compares the output signal
combiner selection and a predetermined threshold λ.

113
A. Single Cognitive Relay Network
We review the single-cognitive relay network. In this
case, we have three nodes, PU, SU, and Fusion Center
(FC). SU continuously monitors the signals received
from the PU, as embodied in the Figure 1:
Fig.1 Cooperative Spectrum Sensing with Obstacles
1
0
:
:
s sk k
k sk
h x n w n Hy n
w n H
+=
(1)
1
0
:
:
r rk k k k
k r s rk k k k
g h y n w n Hz n
g h w n w n H
+=
+
(2)
( )
1
0
1
0
1
0
:
:
:
:
:
:
r s s rg h h x n w n w nk k k k kk r s rg h w n w nk k k k
r s r s rg h h x n g h w n w nk kk k k k kr s rg h w n w nk k k k
k k
k
Hz n
H
H
H
Hh x n w n
Hw n
+ +
+
+ +
+
=
=
+=
(3)
Fusion Center (FC) consists of Diversity Combining
(DC) and Detector. While the other parameters of its
belonging signals are x[n], the signal transmitted by PU
(unknown deterministic with the power of 𝐸𝑠), 𝑦𝑘[𝑛], the signal received by 𝑆𝑈𝑘, 𝑧𝑘[𝑛] the signal received by
the FC from 𝑆𝑈𝑘. For parameters that belong to the
channels ares
hk which is a sensing channel gain between
PU and SUk, r
hk is reporting channel gain between 𝑆𝑈𝑘
and FC,s
wk a noise in sensing channels between PU and
𝑆𝑈𝑘, r
wk a noise in reporting channel between 𝑆𝑈𝑘 and
FC.
For the parameter on the relay, gk an amplification
factor of 𝑆𝑈𝑘, and 𝐸𝑟 is the power budget of 𝑆𝑈𝑘.
Parameters related to the Cooperative quantities are
r sk k k kh g h h= which is the equivalent channel gain
between PU and FC through Suk and
r sk k k kw n g h w n= which is the effective noise
between PU and FC through suk. The value of n is
determined by 1,2, ..., 𝜏𝑠𝑓𝑠. The signal received by 𝑆𝑈𝑘 at time t, denoted as
𝑦𝑘[𝑛], is given by:
( )sk ky n h x n= (4)
θ reflects the PU activities that will be worth 1 in the
presence of PU and is 0 for other possibilities. Thus the
above formula can be written as:
1
0
:
:
s sh x n w nk k
k sw nk
Hy n
H
+=
(5)
Where x[n] is the signal emitted from power PU with
𝐸𝑠,s
hk is flat fading channel sensing gain (between PU
and 𝑆𝑈𝑘), and sw nk is AWGN at SU with variance
0sN , Let gk be the amplification factor at the cognitive
relay. Thus, the received signal at the decision maker
(ie, the fusion center), denoted kz n , is given by:
r rk k k k k
r s s rk k k k k
r s r s rk k k k k k k
k k
z n h g y n w n
h g h x n w n w n
g h h x n g h w n w n
h x n w n
= +
= + +
= + +
= +
(6)
where rkh is the reporting channel gain between the
relay and the fusion center, and rkw n is the AWGN at
the FC. Furthermore, s rk k k kh g h h= and
r s rk k k k kw n g h w n w n= + can be interpreted as the
equivalent channel gain between the primary user and
the fusion center and the effective noise at the fusion
center, respectively.
1) Amplification Factor
In amplify-and-forward (AF) relay communications,
it can be assumed that the relay node has its own power
budget Er, and the amplification factor is designed
accordingly. First, the received signal power is
normalized, and then it is amplified by 𝐸𝑟. The CSI
requirement depends on the AF relaying strategy, in the

114
which two types of relays have been Introduced in the
literature [8-9].
Non-coherent power coefficient meaning that the
relay has knowledge of the average fading power of the
channel between the primary user and itself, ie,
2skE h
, And uses it to constrain its average to
transmit power. Therefore, 𝑔𝑘 is given as:
2
0
rk
ss k
Eg
N E E h
=
+
For Coherent power coefficient meaning the relay has
knowledge of the instantaneous CSI of the channel
between the primary user and itself, ie,skh , And uses it
to constrain its average to transmit power. Therefore, 𝑔𝑘
is given as:
2
0
rk
ss k
Eg
N E h
=
+
An advantage of the non-coherent power coefficient
over the coherent one is in its less overhead Because it
does not need the instantaneous CSI, the which requires
training and channel estimation at the relay. In this
research, we use the noncoherent coefficient power
roommates is also called as fixed gain relays. The
amplification factor 𝑔𝑘 can also be written as
( ) ( )2
0/k r kg E C N= where
2
01 /sk s kC E E h N
= +
which is a constant.
( )0, 0,s rk kw w CN N (7)
With such an assumption, the SNR of the received
signal from the primary user for the k-th secondary user
can be denoted as 𝛾𝑘 with its mean k , The distribution
of the which is subject to the PDF 𝑓𝛾𝑘(𝛾𝑘). The k-th
secondary user measures the normalized energy
statistics of the signal it has received as Ek, the which
has a central chi-square distribution under the hypothesis H0 as inactive primary user and non-central
chi-square distribution with a center parameter 2γk
under the hypothesis H1 as the primary active user.
( )
2 : 0222 2 : 1
X Hu
kX
u Hk
E
(8)
For Rayleigh fading channels, the local SNR of
secondary users is subject to an exponential distribution
given by:
1( ) exp , 0k
k k
k k
f
−=
( (9)
For Rician fading channels, each user's local
secondary SNR is subject to a weighted non-central chi-
square distribution with two degrees of freedom given
by:
( )( ) ( )
0
1 11exp 2 , 0
k k k k kkk k k
k k k
K K KKf K I
+ + + = − −
(10)
where Kk is the Rician factor for the k-th channel. In
this article, we concentrate on energy detection due to
its ability to detect PU without prior information. Based
on the energy detection, the test statistic of the k-th SU
received signal energy on the channel can be expressed
as
2
1
1 s sf
k k
ns s
Z z nf
=
=
(11)
For a large 𝜏𝑠𝑓𝑠, Zk can be approximated as the
following Gaussian distribution according to the central
limit theorem:
( ) ( )
2
0 0 0
2
0 0 1
1, :
11 , 1 2 :
s s
k
k k
s s
N N Hf
Z
N N Hf
+ +
(12)
B. Multiple Cognitive Relay Network
A multiple-cognitive relay network is shown in Fig.
1. We have L cognitive relays between the primary user
and the fusion center, andskh ,
rkh denote the sensing
channel gains from the primary user to the k-th relay
cognitive SUk and the reporting channel gains from the
k-th relay cognitive SUk to the fusion center
respectively. All cognitive relays the user's primary
receive signals through independent fading channels
simultaneously. Each cognitive relay, let say SUk relay
amplifies the received primary signal by an
amplification factor kg given as ( )20/k k kg E C N= ,
Where 𝐸𝑘 is the power budget at the relay 𝑆𝑈𝑘,

115
2
01 /sk s kC E E h N
= +
, and N0 is the AWGN
power at the relay SUk and forwards to the fusion center
over mutually orthogonal channels. We apply a
weighted sum fusion rule as:
1
L
k k
k
Z Z=
=
(13)
where k is the number of SUS assigned to cooperate
to sense the PU channel. Without loss of generality, we
assume that2
1
1L
k
K
=
= Then Z is Gaussian distributed
as:
( ) ( )
2
0 0 0
2 2
0 0 11 1
1,
11 , 1 2
s s
L L
k k k kk ks s
N N Hf
Z
N N Hf
= =
+ +
(14)
If we choose the decision threshold as λ, the
probabilities of false alarm and detection are given by:
0 1
0
L
kkf s s
NP Q f
N
=
− =
(15)
( )
( )
0 1
2
0 1
1
1 2
L
k kkd s s
L
k kk
NP Q f
N
=
=
− + =
+
(16)
where Q (.) is the complementary distribution
function of the standard Gaussian.
( )21
exp22 x
tQ x dt
= −
(17)
III. SIMULATION RESULTS
Figure 2 is generated from the formula (15) with the
parameters of the sampling frequency and the sampling
period are normalized. The simulation results show the
relationship between the probability of a false alarm with threshold limit values in dB. The simulated signal
parameters will be compared to the condition of Noise
by 0 dB and 2 dB. False alarm probability value will be
drastically reduced the threshold limit of 5-10 dB noise
value by 0 dB. The same thing applies to the value of 2
dB noise that would decrease the value of its probability
of false alarm in the range of 10-20 dB. At the threshold limit value of 10 dB occurs largest difference in value
between the probability of a false alarm noise value of 0
dB and 2 dB for the threshold limit value of 20-50 dB
false alarm probability value is the same for both noises.
Fig. 2 Probability of False Alarm
Figure 3 shows the results of simulation in the form
of analysis of the relationship between the probability of
detection as mentioned in the formula (16) with a
threshold parameter ranges between 0-50 dB. The value
of the sampling frequency with the period of
normalization and weighting parameters do
1
1L
k
K
=
= ,
Noise parameter values are included for comparison
results on this simulation was set at N0 = 0 dB and N0 =
2 dB. The simulation results show that the threshold
value range between 10-35 dB decreases the probability
of detection value quite dramatically with N0 = 0 dB
values are always greater than N0 = 2 dB. If the limit of detection probability value used is 0.3 dB then the
threshold value for N0 = 0 dB that can be used is 25 dB
and for N0 = 2 dB generating threshold value of 30 dB.

116
Fig 3. Probability of Detection
Fig 4. Receiver Operating Characteristic
The simulation results of multiple cognitive two-hop
relay network with noise AWGN channel affected by 0
and 2 dB presented in Figure 4. Parameter receiver
operating characteristic (ROC) shows the true positive
rate (TPR) and false positive rate (FPR) in the range of
the threshold value have been determined. The
simulation results show the 0 dB noise conditions on
threshold probability of false alarm = 0 has the best
detection probability value nearly ideal. This will decrease when the value rises to 2 dB noise where only
able to approach the ideal conditions on the value of 𝑃𝑓
greater than 0.7.
IV. CONCLUSION
Cooperative spectrum sensing performance with
obstacles is studied. A set of results for average
detection probability and false alarm probability and
related receivers operating characteristics are derived. The secondary users i.e. the cognitive relays use of
independent channels to be forwarded signal to the
fusion center. The results of numerical simulations and
analytical results show sufficient closeness.
REFERENCES
[1] S. Haykin. "Cognitive radio: brain-empowered,"
vol. 23, no. 2, pp. 201-220, 2005.
[2] IC Surveys. "A survey of spectrum sensing
algorithms for cognitive radio applications," vol. 11, no. 1, pp. 116-130, 2009.
[3] O. El Bashir and M. Abdel-hafez. "Opportunistic
spectrum access using collaborative sensing in
Nakagami- m with real fading channel parameters,"
pp. 472-476, 2011.
[4] IM Sharifi, S. Alirezaee, and R. Heydari. "A double
detection threshold energy cooperative spectrum
sensing scheme over Nakagami and Rician fading
channels."
[5] S. Atapattu, C. Tellambura, and H. Jiang. “Energy
detection based cooperative spectrum sensing in
cognitive radio networks”. IEEE Transactions on Wireless Communications, 10(4):12321241, April
2011.
[6] O. El Bashir and M. Abdel-Hafez. “Opportunistic
spectrum access using collaborative sensing in
Nakagami-m fading channel with real fading
parameter”. In 2011 7th International Wireless
Communications and Mobile Computing
Conference, pages 472476, July 2011.
[7] M. O. Hasna and M. S. Alouini. “A performance
study of dual-hop transmissions with xed gain
relays”. IEEE Transactions on Wireless Communications, 3(6):19631968, Nov 2004.
[8] J. N. Laneman, D. N. C. Tse, and G. W. Wornell.
“Cooperative diversity in wireless networks:
Eficient protocols and outage behavior”. IEEE
Transactions on Information Theory,
50(12):30623080, Dec 2004.
[9] Y. C. Liang, Y. Zeng, E. C. Y. Peh, and A. T.
Hoang. “Sensing-throughputt radio for cognitive
radio networks”. IEEE Transactions on Wireless
Communications, 7(4):13261337, April 2008

117
Violation of Uniform Partner Ranking
Condition in Two-way Flow Strict Nash
Networks
Banchongsan Charoensook Department of International Business, Keimyung University, Republic of Korea
Abstract– The paper of [1] extends the results of the
original model of two-way flow information sharing network
of [2], given that a condition called Uniform Partner Ranking
is satisfied. In this technical report, we study what happen to
these results when this condition is violated. By providing
some examples, we conclude that a certain degree of agent
homogeneity needs to exist in order that the results of [1]
remains satisfied.
Index Terms– Agent Heterogeneity; Information
Network; Network Formation; Strict Nash Network
I. INTRODUCTION
Nonrival information refers to information that agents are willing to share with one another without concerns that
by so doing their benefits may decline. Such information
is that of product prices, users’ reviews, hotels’ phone
numbers and the like. It traverses through social networks
from one agent to another. How rapid such information
reaches agents depends largely on network structure,
which shows how they are located in the network. This
raises the question of how a network structure can be
predicted.
A game-theoretic model of network formation
assumes that networks are formed based upon self-interest agents who choose to establish costly
connections or links with each other in order to exchange
some benefits (eg., his private information) . The well-
cited two-way flow model of [2] envisages a situation in
which each agent pays for all information that he wishes
to acquire by solely bears the cost of link establishment
used for communication, given that he promises to share
his own private piece of information with others. Since
this model assumes that all agents are identical, there has
been literature that extends this model by allowing the
existence of agent heterogeneity. Specifically for agent heterogeneity in link formation cost, the paper of [1]
generalizes the results of [2], [3] and [4]. Importantly, the
generalization of [1] is achieved through imposing a
condition called Uniform Partner Ranking on the
characteristics of the structure of link establishment cost
in order that the shapes of Strict Nash networks can be
predicted.
Apparently, an unanswered question in this literature
is how a strict Nash network can be predicted when such
a restriction is completely removed. In this technical
report, we contribute to the literature by providing a
partial answer to this question. It achieves this goal by
studying what happen when the aforementioned
condition - Uniform Partner Ranking - is violated.
Specifically, we provide some examples that show that (i) the results of [1] can still hold even if the Uniform
Partner Ranking condition, UPR henceforth, is violated,
(ii) only partial results still hold, and (iii) even partial
results do not hold. Through these examples we conclude
that a certain degree of agent homogeneity needs to exist
in order that the results of [1] remain to hold.
An introduction to related literature is given as
follows. The literature in game-theoretic model of
network formation is invented by two papers - [5] and
[2]. These two papers are quite different in terms of basic
assumptions on the nature of benefits that each agent
possesses. On one hand, [5] assumes the benefits that each agent possess may not necessarily be nonrival.
Therefore, a link is formed and the benefits are shared
only if both agents agree. On the other hand, the model
of network formation of [2] assumes that each agent
owns a piece of information that is non-rival. He can
independently chooses to establish a link with any other
agent in the network by bearing a link establishment cost
on his own. In this paper, Nash and Strict Nash
equilibrium in pure strategies are adopted to predict the
appearance of equilibrium networks which are called
Nash networks and Strict Nash networks, SNNs henceforth, respectively. An important assumption is that
link establishment cost is assumed to be identical across
all agents. Thus, agent homogeneity is assumed in [2].
See [6] and [7] for more literature review on network
formation.
Several works in the literature extend this BG model
to cases at which link formation cost is heterogeneous

118
across agents. How this heterogeneity is imposed,
though, varies among existing literature. A paper that is
of our concern is that of [1] since it establishes a result
that generalizes the results of [2], [3], and [4]. This
generalization assumes that link formation cost satisfies the UPR condition. Intuitively this condition requires that
agents may pay different levels of link formation cost, yet
each of them has the same ranking in terms of partner
preference. This condition results in the fact that every
non-empty component of an SNN has at most one agent
who receives more than one link. A question that follows
is what happen to shape of SNN when this UPR condition
is violated. Our technical report, therefore, contributes to
the literature by seeking to answer this question.
This technical report proceeds as follows. In the next
two sections, model specifications and the definition of
SNN as an equilibrium prediction criterion are introduced. We then proceed to the main results section
by giving examples of SNNs that violate the Uniform
Partner Ranking condition. Finally, in the conclusion
section we discuss on insights from these examples.
II. THE MODEL
A. Basic Setting
𝑁 = 1, . . . , 𝑛 denotes the set of all agents in the
network. For any agent 𝑖 ∈ 𝑁, i establishes a link with
another agent j by paying the link formation cost 𝑐𝑖,𝑗. The
incentive of 𝑖 is to acquire the information of 𝑗. Note that
𝑐𝑖,𝑗 depends on both the identity of 𝑖 and𝑗. This is where
agent heterogeneity is introduced in our model.
Whenever a link to 𝑗 is established by 𝑖, we say that 𝑖 is a link sender and 𝑗 is a link receiver. Alternatively, it is
said that 𝑖 accesses 𝑗.
Strategies of agents and network representation.
Let 𝑔𝑖,𝑗 = 1 represents the fact that 𝑖 accesses 𝑗 and
𝑔𝑖,𝑗 = 0 represents the fact that 𝑖 does not access 𝑗. A
strategy of 𝑖, represented by 𝑔𝑖, is 𝑔𝑖 =𝑔𝑖,1, . . . , 𝑔𝑖,𝑖−1. . . 𝑔𝑖,𝑛. A strategy profile is, therefore,
𝑔 = (𝑔1, . . . , 𝑔𝑛). Since all links constitute the network, g
refers to both a strategy profile and a network.
Graphically we let an agent 𝑖 be presented by a node 𝑖. An arrow from node 𝑖 to node 𝑗 then represents the fact
that i accesses 𝑗.
Structure of information flow. Information flow is
two-way in the sense that if 𝑖 has an inlet to the
information j then j also has an inlet to the information of
𝑖. 𝑖 has an inlet to the information of 𝑗 whenever a chain
between i and 𝑗 exists. Formally, let 𝑖𝑗 = 𝑚𝑎𝑥𝑔𝑖𝑗 , 𝑔𝑗𝑖.
A chain between 𝑖 and 𝑗 in a network g or 𝑖,𝑗(𝑔) is then
defined as a sequence 𝑖,𝑗1, 𝑗1𝑗2
, . . . , 𝑗𝑚𝑗 such that each
element in this sequence is 1. If a chain between 𝑖 and 𝑗
exists, we say that to 𝑖 observes 𝑗. A path from 𝑖 to 𝑗 or
𝑃𝑖,𝑗(𝑔) is defined in a similar manner as 𝑖 to j except that
link sponsorship matters. That is, a path from 𝑖 to 𝑗 is a
sequence 𝑔𝑖,𝑗1, 𝑔𝑗1𝑗2
, . . . , 𝑔𝑗𝑚𝑗 such that each element in
this sequence is 1.
Network decay, minimality and connectedness. A
natural question that arises is whether information decays
as it traverses through multiple links. In this technical
report, we assume that the decay is completely absent,
which is also assumed in [1], [3], [4], and [2]. This implies that different chains between the same pair of
agents alway provide the same informational benefits.
Hence, an agent has no incentive to establish a link to
another agent if a chain to that agent already exists.
Consequently in equilibrium there exists at most one path
between a pair of agents. A network that has this feature
is called minimal network. In addition, if there is exactly
one path between any pair of agents, a network is said to
be minimally connected. Individual’s payoff. Let 𝑁𝑑(𝑖; ) and 𝑁(𝑖; ) be the
set of all agents that 𝑖 accesses and observes
respectively. Let 𝑉𝑖,𝑗 be the value of information of 𝑗
that 𝑖 receives. Then, the payoff of 𝑖 in a minimal
network 𝑔 is defined as: Π𝑖(𝑔) = ∑𝑗∈𝑁(𝑖;𝑔) 𝑉𝑖,𝑗 − ∑𝑗∈𝑁𝑑(𝑖;𝑔) 𝑐𝑖,𝑗
Graph-theoretic notations. Consider a network 𝑔. A
network is connected if 𝑖 observes 𝑗 for for all 𝑖, 𝑗 ∈ 𝑁
and 𝑖 ≠ 𝑗. A subnetwork 𝑔′ is a subset of a network 𝑔,
ie., 𝑔′ ⊂ 𝑔. A component of a network is a subnetwork
that is maximally connected. That is, 𝑖 observes 𝑗 if and
only if 𝑖 and 𝑗 belong to the same component. A network
is said to be minimal if every chain between 𝑖 and 𝑗 is
unique. An agent who observes no other agent is said to
be isolated. If all agents in the network are isolated, the
network is said to be an empty network. 𝑩𝒊 and branching networks. The definitions of these
terms are borrowed from [4]. A branching network is a
minimally connected such that there is a unique agent 𝑖 who receives no link and every other agent receives
exactly one link. That is, a branching network rooted at 𝑖 is a minimally connected network such that |𝐼𝑖(𝑔)| = 0
and |𝐼𝑗(𝑔)| = 1 for all 𝑗 ≠ 𝑖 and 𝑗 ∈ 𝑁, where 𝐼𝑖(𝑔) and
𝑂𝑖(𝑔) denote the set of agents who access 𝑖 and the set of
agents who are accessed by 𝑖 respectively. To define 𝐵𝑖 network, we first introduce the following
notations. Let 𝑄𝑁′ = 𝑁′ ∪ 𝑗 ∈ 𝑁|apathfromi𝑡𝑜j𝑒𝑥𝑖𝑠𝑡.
A point contrabasis of a network 𝑔, 𝐵(𝑔), is a minimal
set of players such that 𝑄𝐵(𝑔) = 𝑁. 𝑄𝐵(𝑔) carries the
intuition that there is a set of agents that can be used to
reach all other agents through the existence of a path from
an agent in this set to an agent outside this set. An 𝑖-point
contrabasis, 𝐵𝑖(𝑔), is a point contrabasis of 𝑔 such that
all players 𝑗 ∈ 𝐵𝑖(𝑔) accesses 𝑖. Finally, A network 𝑔 is
a 𝐵𝑖-network if |𝐼𝑖(𝑔)| ≥ 2, |𝐼𝑗(𝑔)| < 2 for all 𝑗 ≠ 𝑖, and

119
𝐼𝑖(𝑔) = 𝐵𝑖(𝑔).
B. The Definition of Nash Network
Consider a network 𝑔. Let 𝑔−𝑖 be the set of all links in
𝑔 that 𝑖 does not establish. Put differently, a union of 𝑔−𝑖
and 𝑔𝑖 is precisely the network 𝑔.
Definition 1 (Best response) A strategy 𝑔𝑖 is a best
response of 𝑖 to 𝑔−𝑖 if Π𝑖(𝑖; 𝑔𝑖 ⊕ 𝑔−𝑖) ≥ Π𝑖(𝑖; 𝑔𝑖′ ⊕ 𝑔−𝑖) for all gi′ ∈ Gi
Definition 2 (Nash network) A network 𝑔 is a Nash
network if 𝑔𝑖 is a best response to 𝑔−𝑖 for every agent
𝑖 ∈ 𝑁.
Moreover, if the inequality is strict for all i ∈ N ,
Nash network is a Strict Nash Network.
C. Cost Structure and the Uniform Partner Ranking
Condition
A cost structure 𝒞 is defined as a collection of all link
formation costs 𝒞 = 𝑐𝑖,𝑗 : 𝑖, 𝑗 ∈ 𝑁, 𝑖 ≠ 𝑗. Similarly a
value structure 𝒱 is defined as a collection of values of
information 𝒱 = 𝑉𝑖,𝑗 : 𝑖, 𝑗 ∈ 𝑁, 𝑖 ≠ 𝑗. We use these
definition to define the following two terms, which are
borrowed from [1].
Definition 3 (Better Partner) Consider a set 𝑋 ⊂ 𝑁
and agents 𝑗, 𝑘 ∈ 𝑋, 𝑗 is at least as good a partner as 𝑘
with respect to the set 𝑋 if 𝑐𝑖,𝑗 ≤ 𝑐𝑖,𝑘 for any 𝑖 ∈ 𝑋, 𝑖 ≠
𝑗 ≠ 𝑘. Moreover, if the inequality is strict then 𝑗 is said
to be a better partner than 𝑘 with respect to the set 𝑋.
Definition 4 (Uniform Partner Ranking) A cost
structure 𝒞 is said to satisfy Uniform Partner Ranking
condition if for any distinct pair 𝑗, 𝑘 ∈ 𝑁 it holds true that
𝑗 is at least as good a partner as 𝑘 or 𝑘 is at least as a
good a partner as 𝑗 with respect to the set 𝑁.
Definition 5 (Common Best Partner) An agent 𝑖∗ is
said to be Common Best Partner if 𝑖∗ is at least as good
a partner as 𝑖′ with respect to the set 𝑁, where 𝑖′ ≠ 𝑖∗.
III. MAIN ANALYSES
In this section, we analyze what happen to the shapes of
SNNs when the UPR condition in [?] is violated. To do so we first restate the results of [1] below. Proposition 1 ([1], Proposition 1, p. 25) Let 𝒞 satisfy
Uniform Partner Ranking Condition, 𝑉𝑖,𝑗 flow freely, and
the payoff function satisfy Equation 1, then every non-
empty component in SNN is a branching or 𝐵𝑖∗.
Conversely, given that the payoff satisfies Equation 2, a
network of which each non-empty component is a
branching or 𝐵𝑖 network can be supported as SNN by a
pair of 𝒱 and 𝒞, where 𝒞 satisfies Uniform Partner
Ranking Condition. That is, if UPR holds then SNN consists of non-empty
components that are either branching or 𝐵𝑖∗. In what
follows, we divide our analyses as to what happen when
UPR is violated into three cases: (i) UPR is violated but
the result of [1] that every non-empty component in SNN
is a branching or 𝐵𝑖∗ still holds, (ii) UPR is violated and
the result of [1] disappears in the sense that none of non-
empty components of SNN are either branching or 𝐵𝑖∗, and (iii) UPR is violated but the result of [1] only partially
holds in the sense that only some non-empty components
of are either branching or 𝐵𝑖∗.
A. Case 1: UPR is violated but the results of [1] still
hold
Table 1: Cost structure for Example 1
Figure 1: Example 1
Example 1 Let 𝑉𝑖,𝑗 = 1 for all 𝑖, 𝑗 ∈ 𝑁 and 𝑖 ≠ 𝑗. Let
the cost structure be represented by the above table,
where each row represents an agent 𝑖, each column
represents an agent 𝑗, and each number in the table
represents the cost 𝑐𝑖,𝑗 . This cost structure divides agents
into two groups, where agents 1 to 7 belong to group I
and agents 8 to 10 belongs to group II. Accordingly, the table is divided into four quadrants at agent 7. Observe
further that link formation costs between agents from the
same group are at most 0.6, while the link formation costs
between agents across groups are set at 20. Hence,
accessing an agent from the other group is never a best
response. This cost structure, therefore, is reminiscent of
the insider-outsider model of [3]. A major difference,
though, is that in this example link formation cost 𝑐𝑖,𝑗 is
not identical among agents in the same group. It is straightforward to show that this cost structure violates UPR, yet every non-empty SNNs consists of non-
empty components that are either branching or 𝐵𝑖. To
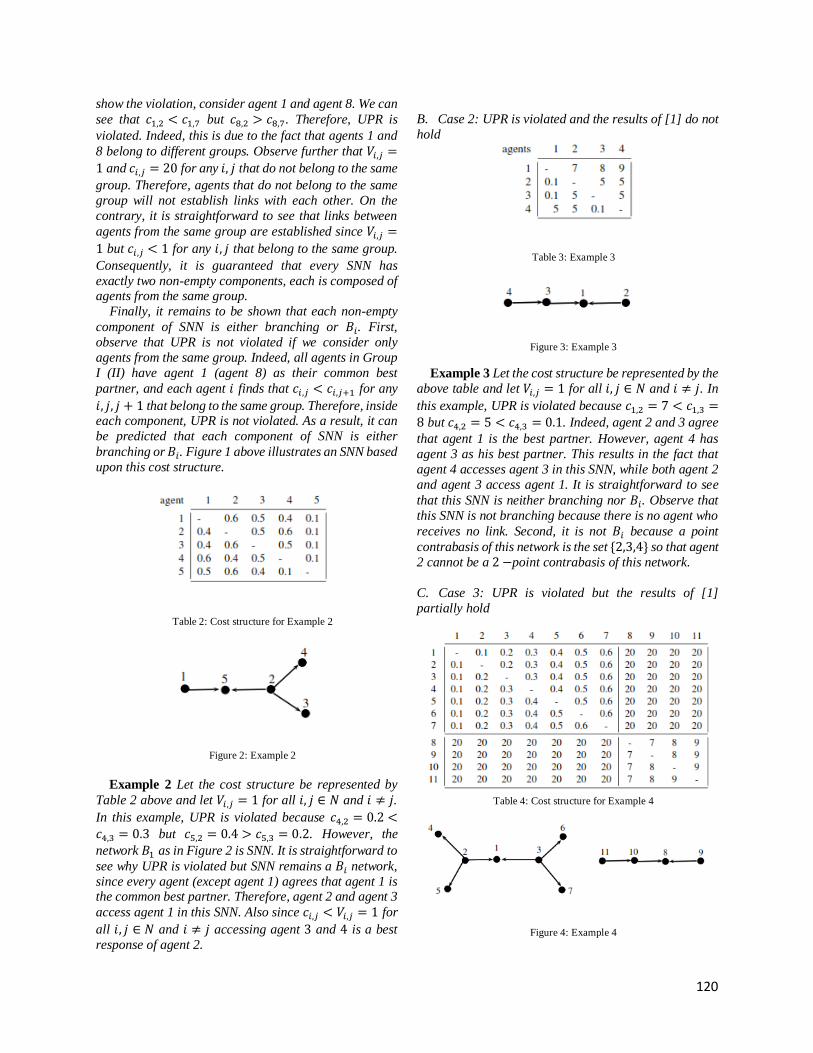
120
show the violation, consider agent 1 and agent 8. We can
see that 𝑐1,2 < 𝑐1,7 but 𝑐8,2 > 𝑐8,7. Therefore, UPR is
violated. Indeed, this is due to the fact that agents 1 and
8 belong to different groups. Observe further that 𝑉𝑖,𝑗 =
1 and 𝑐𝑖,𝑗 = 20 for any 𝑖, 𝑗 that do not belong to the same
group. Therefore, agents that do not belong to the same
group will not establish links with each other. On the
contrary, it is straightforward to see that links between
agents from the same group are established since 𝑉𝑖,𝑗 =
1 but 𝑐𝑖,𝑗 < 1 for any 𝑖, 𝑗 that belong to the same group.
Consequently, it is guaranteed that every SNN has
exactly two non-empty components, each is composed of agents from the same group. Finally, it remains to be shown that each non-empty
component of SNN is either branching or 𝐵𝑖. First,
observe that UPR is not violated if we consider only
agents from the same group. Indeed, all agents in Group
I (II) have agent 1 (agent 8) as their common best
partner, and each agent 𝑖 finds that 𝑐𝑖,𝑗 < 𝑐𝑖,𝑗+1 for any
𝑖, 𝑗, 𝑗 + 1 that belong to the same group. Therefore, inside each component, UPR is not violated. As a result, it can
be predicted that each component of SNN is either
branching or 𝐵𝑖. Figure 1 above illustrates an SNN based
upon this cost structure.
Table 2: Cost structure for Example 2
Figure 2: Example 2
Example 2 Let the cost structure be represented by
Table 2 above and let 𝑉𝑖,𝑗 = 1 for all 𝑖, 𝑗 ∈ 𝑁 and 𝑖 ≠ 𝑗.
In this example, UPR is violated because 𝑐4,2 = 0.2 <𝑐4,3 = 0.3 but 𝑐5,2 = 0.4 > 𝑐5,3 = 0.2. However, the
network 𝐵1 as in Figure 2 is SNN. It is straightforward to
see why UPR is violated but SNN remains a 𝐵𝑖 network,
since every agent (except agent 1) agrees that agent 1 is the common best partner. Therefore, agent 2 and agent 3
access agent 1 in this SNN. Also since 𝑐𝑖,𝑗 < 𝑉𝑖,𝑗 = 1 for
all 𝑖, 𝑗 ∈ 𝑁 and 𝑖 ≠ 𝑗 accessing agent 3 and 4 is a best
response of agent 2.
B. Case 2: UPR is violated and the results of [1] do not
hold
Table 3: Example 3
Figure 3: Example 3
Example 3 Let the cost structure be represented by the
above table and let 𝑉𝑖,𝑗 = 1 for all 𝑖, 𝑗 ∈ 𝑁 and 𝑖 ≠ 𝑗. In
this example, UPR is violated because 𝑐1,2 = 7 < 𝑐1,3 =8 but 𝑐4,2 = 5 < 𝑐4,3 = 0.1. Indeed, agent 2 and 3 agree
that agent 1 is the best partner. However, agent 4 has
agent 3 as his best partner. This results in the fact that
agent 4 accesses agent 3 in this SNN, while both agent 2
and agent 3 access agent 1. It is straightforward to see
that this SNN is neither branching nor 𝐵𝑖. Observe that
this SNN is not branching because there is no agent who
receives no link. Second, it is not 𝐵𝑖 because a point
contrabasis of this network is the set 2,3,4 so that agent
2 cannot be a 2 −point contrabasis of this network.
C. Case 3: UPR is violated but the results of [1]
partially hold
Table 4: Cost structure for Example 4
Figure 4: Example 4

121
Example 4 The cost structure of this example is simply
a combination of Example 1 and Example 3. Observe that
the link formation costs of agent 1 to agent 7 is identical
to that of example 1 and that the link formation costs of agent 8 to agent 11 is identical to that of example 3 (agent
1 to agent 4 in Example 3). We therefore divide agents
into two groups, where agent 1 to agent 7 belong to the
group I and agent 8 to agent 11 belong to group II.
Observe further that link formation cost 𝑐𝑖,𝑗 is set to be
20 if 𝑖 and 𝑗 belong to different groups. Similar to
Example 1, we have an SNN that consists of two non-
empty components, each is composed of agents from the
same group. Moreover, the shape of each component is precisely that of Example 1 and Example 3.
Consequently, we have an SNN such that one of its
components is 𝐵𝑖 and the other is neither branching or
𝐵𝑖. This entails that UPR is violated and the results of [?]
hold only partially.
IV. DISCUSSION AND CONCLUSION
This technical report shows various effects of the
violation of UPR condition on Strict Nash networks. We
summarize these effects below
1. If it can be predicted that SNN consists of multiple
components and which agents belong to which
components, then the shape of each component depends
merely on the cost structure pertaining to agents in that
component. This insight can be seen from Example 1 and
Example 4. 2. Consequently even if UPR is violated when
considering the cost structure of all agents, the result of
[1] - each component of minimal SNN being 𝐵𝑖 or
branching - still holds. This is possible if UPR is satisfied
when considering the cost structure pertaining to agents
in each component. Such possibility is illustrated by
Example 1. 3. Alternatively it is also possible that this result of [1]
holds partially in the sense that only some components of
minimal SNN - but not all - are 𝐵𝑖 or branching, if the cost structure pertaining to agents in each of these
components satisfies UPR while the violation of UPR
emerges in other components. This possibility is
illustrated by Example 4. 4. Whenever UPR is violated when considering the
cost structure pertaining to agents in the same
component, there are cases in which the component
remains 𝐵𝑖 or branching as well as cases in which the
component is neither 𝐵𝑖 or branching. These cases are
illustrated by Example 2 and Example 3 respectively We further provide an important observation from
point (3) and point (4) above as follows. First, note that
although Example 2 and Example 3 UPR is violated, only
SNN in Example 3 remains 𝐵𝑖 while SNN in Example 2
is neither 𝐵𝑖 nor branching. What explain this difference?
In Example 2, all agents (except agent 1) agree that agent
1 is their best common partner. However, this form of
agreement between agents does not exist in Example 3, where agent 4 does not agree with agent 2 and agent 3
that agent 1 is the best partner. Therefore, we conclude
that some forms of preferential agreement among agents
inside the component are required in order that the results
of [1] - a component of SNN guaranteed to be branching
or 𝐵𝑖 - continue to hold. Indeed, a similar analogy applies to point 1 and 2
above. Since the satisfaction of UPR in a component
requires that all agents in the component agree on which
agent is superior as a partner than which in terms of link
formation cost, the same interpretation emerges: some forms of agreement among agents inside the component
are required in order that the results of the results of [1] -
a component of SNN being branching or 𝐵𝑖 - continue to
hold. Finally, these examples raise a question of what a
necessary and sufficient condition for a component of
SNN to be branching or 𝐵𝑖 is. We leave this question as
a research to be explored in the future.
ACKNOWLEDGMENT
This research is sponsored by a Keimyung University
Outstanding Research Grant. I thank my research
assistant – Kwon Yun Heon – for his excellent assistance,
which helps save the time for conducting this research.
REFERENCES
[1] Bala, V. and Goyal, S. (2000). A noncooperative model of
network formation. Econometrica, 68(5):1181–1229.
[2] Billand, P., Bravard, C., and Sarangi, S. (2011). Strict nash
networks and partner heterogeneity. International Journal of
Game Theory, 40(3):515–525.
[3] Charoensook, B. (2015). On the Interaction between Player
Heterogeneity and Partner Heterogeneity in Two-way Flow Strict
Nash Networks. Journal of Economic Theory and Econometrics,
26(3).
[4] Galeotti, A., Goyal, S., and Kamphorst, J. (2006). Network
formation with heterogeneous players. Game and Economic
Behavior, 54(2):353–372.
[5] Goyal, S. (2012). Connections: an introduction to the economics
of networks. Princeton University Press.
[6] Jackson, M. O. and Wolinsky, A. (1996). A strategic model of
social and economic networks. Journal of Economic Theory,
71(1):44–74.
[7] Vannetelbosch, V. and Mauleon, A. (2016). Network formation
games. In Bramoullè, Y., Galeotti, A., and Rogers, B., editors,
The Oxford Handbook of the Economics of Networks. Oxford
University Press.

122
Design of Collision Prevention based on Wall
Following Mechanism on Multi-Robot System
Joao Amaral de Fatima Pereira, Agung Nugroho Jati, Randy Erfa Saputra School of Electrical Engineering, Telkom University
Indonesia
Abstract— Wall following mechanism is mostly used for
finding a way out in the maze or room on the single robot
cases, but in this paper, it will be demonstrated a multi-
robot system by applying collision avoidance based on wall
following mechanism to solve an unknown maze. Fuzzy
logic will be implemented on right wall following
algorithm to avoid the collision while the robots are in a
maze, and at the same time robots will recognize which are
the wall of maze, junctions, and other robot. Based on the
results, shown that the robots could recognize the
junctions, wall and other robots. Based on the result of all
testing, robots might solve the complicated maze for 2 until
5 minutes, with 86% of solution without any collision.
Index Terms— Collision Prevention, Fuzzy logic; Multi-
Robot; Maze Solver; Tremaux’s Algorithm.
I. INTRODUCTION
Collision avoidance is a fundamental problem in
robotics. Problems are generally defined in the context
of autonomous mobile robots which navigate in
environments with barriers and/or other mobile entities,
where robots use continuous sensing and action cycles.
Solving a maze with more than 2 robots, such a serious
problem that we need to concern because collision
avoidance may occur during the robots are running inside it. Robots have a goal it is to reach the endpoint,
then probably collision will happen if the robots face the
wall of a maze or with another robot. In this problem,
we found out that ebbed an algorithm for each robot is
the key to avoiding those problems. And there are a lot
of algorithms have used to solve the maze easily, like
flood fill[1], tremaux's algorithm, wall followers[12],
random mouse[2] algorithm, dead-end filling maze-
routing algorithm and etc. but most of those algorithms
have already implemented in mobile robot, and it
worked very well. Here, we will use one of those algorithms for solving a maze faster and no collisions
happened while the robots are searching for a goal.
As we all know maze is a common unknown arena,
needs to find its short way to solve the maze. And in
this paper will tell you about using one of the mazes
solving algorithm, take a good decision when the robots
facing the arena and find the short path, during the
seeking of the shortest path, there are no collisions
occurred between robots and arena or with another
Robots.
A single robot may use those algorithms to solve a
maze, instead of it multi-robot also has an occasion to
use those algorithms, but the differences in time to reach
the goal or end-point[10]. A single robot solves a maze fast, but multi-robot will make it faster with the same
algorithm. Regarding to this problem of maze solving, a
necessary and applicable algorithm is needed, and we
prefer using wall follower algorithm. Wall follower has
2 types, those are Right Wall Follower(RWF) and Left
wall follower(LWF) it depends on application of both
algorithm, Left Wall follower(LWF) is the most one
used, but in this research, we chose Right Wall Follower
(RWF).
Basically, ultrasonic and IR sensors are mostly used
to apply the wall follower algorithm, right here we are
used 4 ultrasonic sensors, as it demonstrated using Right Wall Follower means ultrasonic sensors are located in
each side instead of back side[3][5]. An ultrasonic
sensor will be located in the front side, 2 ultrasonic
sensors in the right side, each ultrasonic are located in
front and back of right sides of a robot, and the other
one is in the left sides of the robot. The combination of
that ultrasonic sensors is able to respond as quickest
when the robots are in the junction, corridor or in the
dead-end.
To apply the right wall follower algorithm,
actually fuzzy logic is allowed to work on it, take the range on a measurement of each ultrasonic sensors are
keys to implementing the fuzzy logic in right wall
follower.
The algorithm which will be used in this paper is right
wall follower algorithm, and inside of the RWF
actually, there is the implementation of fuzzy logic
applied. To use those algorithms, we need to embed it in
sensors as everyone one knows, it would be possible
using the camera, IR sensors, ultrasonic sensors and
others. After all of this, because we're implemented

123
these algorithms on Robots using Arduino, we chose the
ultrasonic sensors as a parameter for writing and
embedding the algorithms.
This paper is organized as follows: Section I will
show the introduction, backgrounds, and problems about this research. Then, section II discusses about
other related researches used as references in this
research. In the section III, shown the conducted method
and configuration of this research while section IV
shown the results and analysis. The last section is a
conclusion of the research.
II. RELATED WORKS
There are many algorithms can be used to solve the
maze such as random mouse, wall follower, and flood
fill algorithms[2][13]. The wall follower algorithm mostly is used when the arena or place the robots face
are unknown and only have one purpose to reach the
end point. The end point basically is set by giving a
sign. On the other hand, the flood fill algorithm is
commonly used when the position of end point is
recognized by the robot through some identification and
from that sign robot must be find the shortest path[2].
Flood Fill Algorithm is one of the most efficient
algorithms to be used[1][2]. This algorithm may solve
complex and difficult maze without having any
troubles/collisions by receiving the value of all cells in a maze, which those values shows the steps from any cell
to reach the end point. At the same time, mostly this
algorithm is used by count the every passed grid and the
next grid, means that solving the maze by recording the
number of grid.
Pulse Width Modulation “PWM” is a simple method
by controlling analog values through the digital signal
by changing or modulating the pulse width. This is a
well applicable algorithm using electricity[1][14]. By
tuning an analog device with a pulse wave changes
between HIGH with “5V” and LOW with "0V" at a fast
rate the device will behave as it getting a steady voltage somewhere between 0V and 5V. Figure-1 shows an
example of a PWM with a duty cycle of 0% - 100&,
which gives a voltage value of for 0V until 5V. The
term of duty cycle explains the amount of time in the
period that the pulse is on or HIGH and off or LOW. It
will be specified as a percentage of the full period of
time . 0% duty cycle means that the PWM wave is off
or LOW and 100% means waves is fully on or
HIGH[1].
Figure 1: PWM of 0% - 100% duty cycle [1]
Table 1
Right And Left Wall Following Routes
The wall following algorithm is one of the simplest
and most used algorithm to solve a maze. The robot will
heading any direction to reach the end point by
following the right side of wall or it might be left
wall[12][4][14]. Robot will recognize any junction by
the value of the input sensors, and robot will sense the open wall also by detecting using sensors. And the robot
will follow the priority wall. By consider the wall as a
main key to reach the end point, the robot doesn’t need
to find the shortest path to reach the end point. From fig.
2 bellow it shows how wall follower algorithm works
for both right and left side, it depends of how we prefer
which one is better and useable to solve and unknown
maze.
From all those related works we take the Right Wall
Follower algorithm as the main part, but inside of the
Right Wall Follower algorithm itself, there an existence of PWM that will actually controlling the wheel to
explore and shows how fuzzy logic works[3][6][9].
Briefly, Right Wall Follower Algorithm used
can be seen in the following pseudocode:

124
Pseudocode above shows the decision making of
robot to follow the wall, by receiving the data from the
input value of 4 ultrasonic sensors where located in
every Robot.
III. SYSTEM IMPLEMENTATION
Before we describe for further about algorithms, first
we need to know where those mentioned sensors placed
in robot, then it would be easier to understand better the
algorithm.
Figure 2: Implementation of Robots
Figure 3: Design Scheme of Robot
Right wall Follower as an algorithm is used to avoid
collision between robots and walls[11], but inside of it,
we need to add some system to let this RWF algorithm
working better. Fuzzy logic will be established, to make
the RWF algorithm works and keep making a good
decision and knows where the robot is located. The
algorithm for robot will be different depends on the
location of the robot, it means that when the robots are in corridor or junction will certainly check all the time.
In figure 4 below shows us how robots taking the
decision when they are in the corridor.
For the RWF Algorithm will combine with PWM
controlling. But those algorithms are combined using
the Fuzzy logic. Fig 4 demonstrates that the RWF is
working with the PWM and controlled by the inputs of
data decided by fuzzy logic[6].
Flowchart bellow will show, how we implement the
Right Wall Follower algorithm on Multi-Robot. And
this flowchart also shows the certain value of ultrasonic
to make any decision for robot such follow the wall, turn left, turn right or turn around. The purposes of this
flowchart is to find the end point by implementing the
Right wall follower algorithm, and at the same time
there are no collisions for robots and maze, also with
other robots.
Before this algorithm works, it took some decision
making to run it, like what sensors will do if the data
they have from the inputs, and how it works. Fuzzy
logic implementation led the robot to make its own
decision to run the designing algorithm[7][12]. As the
flow-chart demonstrated that, there are only 3 ultrasonic used to show how RWF work. The table below has
shown that the inputs of every three sensors will tell the
While not Reach Goal
If frontside is open
If Right1 > 10
Turn_Right Slowly
If Right2 > 10
Turn_Left Slowly
Else if right1 is open then
Turn _right
Else if left side is open then
Turn_left
Else
Turn_around
Loop

125
motors by controlling using PWM. Actually, using
PWM to controlling the motor such a good
implementation, because PWM would be worked well if
a microcontroller received the data from more than 2
sensors.
Figure 4: Flow-chart for Right Wall Follower Algorithm for Multi-
Robot
In the next table, shown how the turn left slowly and
turn right slowly work and the combination of PWM for
two motors making a decision, while the Right Wall
Follower algorithm is running, but no collision
happened.
Table 2
Motor Rotation Speed based on Distance from Wall
Front
sensor
Right1
sensor
Right2
sensor Left motor Right motor
X > 10 X > 10 X > 10 *PWM=110 *PWM=90
X > 10 X < 10 X > 10 *PWM=60 *PWM=90
X > 10 X > 10 X < 10 *PWM=90 *PWM=60
X > 10 X < 10 X < 10 *PWM=90 *PWM=110
X < 10 X > 10 X > 10 *PWM=0 *PWM=0
X < 10 X < 10 X > 10 *PWM=0 *PWM=0
X < 10 X > 10 X < 10 *PWM=0 *PWM=0
X < 10 X < 10 X < 10 *PWM=0 *PWM=0
Beside of Right Wall Follower algorithm as you see in TABEL II, at the same time there is an existence of
another algorithm to recognize the junctions[13]. In this
paper describes that the robot will consider another
robot as a junction, but the decision making of each
robot for maze solving actually different. When the
robot is facing the others are different, those differences
are the embedded of the delay and PWM of turning
around. For the delay, every robot has 10 seconds
bigger from another when they are in the junctions[8].
In the table below, also will be demonstrated, when
the robot will make a decision to choose the paths. Paths here are mentioned to the heading points of a robot, turn
left, turn right, turn around or moving forward.
Table 3
Decision Making For Motors
Direction Left Sensor Right
Sensor
Front
Sensor
TURN LEFT X > 15 X < 15 X < 10
TURN RIGHT X < 15 X > 15 X < 10
TURN AROUND X < 15 X < 15 X < 10
Table 4
Heading Directions Of Motors
Direction Left Motor Right Motor
TURN LEFT Backward Forward
TURN RIGHT Forward Backward
TURN AROUND Forward Backward
The table 3 shows that every robot’s direction
depends on its input of ultrasonic sensors. On the other
side, fig 6 shows how both motors work after robot
make a decision of the heading direction. And the next
table will show you the implementation of PWM for the
Direction of the robot.

126
Table 5
Speed Motors For Heading Directions
Direction Left Motor Right Motor
Forward Backward Forward Backward
TURN
LEFT PWM=0 PWM=55 PWM=110 PWM=0
TURN
RIGHT PWM=110 PWM=0 PWM=0 PWM=55
TURN
AROUN
D
PWM=110 PWM=0 PWM=0 PWM=55
Robot considers the junction by the inputs data of
three ultrasonic sensors located on front side of the
robot (Front, left and Right1). When those three
ultrasonic detect some several data, they found out the junction. Then, it will automatically choose its own
decision. Flow-chart bellow demonstrates how robot
knows that he's facing the junction.
Before we end this part of discussing the algorithm,
here a picture that shows how the decision making of
the robot in maze arena to avoid the collision between
the maze and another robot.
Figure 5: Flow-Chart For Facing The Junction/other Robot
In fig 7, shown that when the robot in the arena, and if
the inputs of ultrasonic sensors in the front side detect
that it is a junction, and it will automatically turn
around, by the right side. The robot will find the endpoint if three ultrasonic sensors in front sides detects
in a certain distance with the certain timing.
Figure 6: Robots Run in the Environment
(a)

127
(b)
Figure 6: (a) Example of How Robot will Make a Decision, (b) RWF
based Robot’s Movements
IV. DISCUSSION
The movements of each robots depend on the location
of each sensors. Based on the result of the test, found
that the main point in collision prevention on robot
which uses ultrasonic sensors, are value of every
ultrasonic sensors. It can be seen as follows:
(a)
(b)
(c)
Figure 7: (a) Frontside US Sensor (b) Leftside US Sensor (c)
Rightside US Sensor
Based on test shown on the graph, there are error
values arround 5% between distance captured by sensor
and real distance. It was caused by different material
used as wall. Furthermore, it happened because of signal
reflection. Different materials influence the spped of
signal reflection received by robot, so that they defined different value of distance eventough it’s similar in real
condition.
The condition above, can lead to collision of robots or
robot because robot wll make a late and/or wrong
decision caused by invalid distance value from sensor.
To avoid them, all of sensor should be callibrated before
use. Moreover, perfect input value of ultrasonic sensors
will be automatically validated, and rate of collision will
be decrease significanly.
According to the experiment, robots can avoid the
Real distance
Real distance
Real distance
Front US
Left US
Right US

128
collision between them in arround 86% success rate. It
is taken after 10 times experiment in the environment
maze. Besides, robots can prevent to face each other by
defining their range and orientation in the maze.
In addition, communication between robot to share its location based on their sensor values can prevent more
significant to collide. However, there were delay
communication arround 0.75 s can be tolerated. Robot
can communicate in range approximately 2.95 m.
Table 6
Result of Test in Decision Making to Avoid Collision
N
o.
Real
Distance
Robot 1 Robot 2 Decision Result
1 F:9
L:80
R:90
F:9.43
L:88.23
R:95.22
F:9.15
L:81.95
R:95.22
Turn
Right
Turn
Right
Success
2 F:45
L:78
R:19
F:44.24
L:75.33
R:17.02
F:43.13
L:77.06
R:18.55
Move
Forward
Move
Forward
Success
3 F:9
L:50
R:87
F:9.57
L:51.63
R:127.98
F:10.01
L:53.81
R:85.05
Turn
Right
Turn
Right
Success
4 F:10
L:19
R:12
F:10.06
L:19.29
R:12.45
F:14.28
L:20.33
R:14.26
Turn
Arround
Move
Forward
Success
5 F:40
L:25
R:15
F:40.01
L:25.04
R:15.89
F:39.32
L:24.29
R:15.19
Move
Forward
Move
Forward
Success
6 F:8
L:12
R:70
F:9.15
L:4.22
R:63.56
F:9.66
L:9.08
R:0
Turn
Right
Error Failed
7 F:30
L:52
R:12
F:31.11
L:49.39
R:12.44
F:32.02
L:51.45
R:15.12
Turn
Right
Move
Forward
Success
8 F:30
L:10
R:40
F:30.35
L:9.21
R:41.60
F:30.44
L:10.22
R:39.82
Error Turn
Right
Failed
9 F:60
L:70
R:70
F:58.12
L:68.09
R:98.22
F:57.91
L:69.12
R:71.49
Turn
Right
Move
Forward
Success
1
0
F:8
L:15
R:15
F:8.76
L:15.77
R:15.98
F:9.07
L:21.53
R:15.62
Turn
Arround
Turn
Left
Success
V. CONCLUSION
Collision avoidance on multi-robot system is such a
complicated problem which can be solved by mixing
more than one algorithm. In advance, it can be
improved to collision prevention to reduce the
possibility for robots to collide. However, it needs
sensor fusion system, such as combining ultrasonic sensor as range finder and compass to define robot’s
orientation.
Each area have to be marked by the robots by using
values of various sensors in order to determine the well
path of every single robot. To overcome them, fuzzy
logic control can be added to the system, especially in
right wall following mechanism. Right wall following is
used to simplify the movement model of robot system.
Furthermore, communication between robots is
established to share the location of each robot.
On the other hand, some problems are still happened
in the system. It is mostly caused by inaccuray of sensor
values. Somehow, it can make robot moves unproperly.
Since multi-robot system involves more than a robot in
the environment, timing is very considered as an
important parameters. For example, robot can collide
when they face each others if a robot make a late decision to turn arround even another can make a well
decision.
In the next research, it will be added a mapping
system in order to know exact location of the explored
environment. It also can be used to defined the path of
each robot. In advance, it can be developed to coverage
the area.
REFERENCES
[1] Angelo Martinez, Eddie Tunstel1, and Mo Jamshidi “ Fuzzy
Logic Based Collision Avoidance For a Mobile Robot”. CAD
Laboratory for Intelligent and Robotic Systems, 1994.
[2] Reinhard Braunstingl, Pedro Sanz, Jose Manuel Ezkerra “Fuzzy
Logic Wall Following of a Mobile Robot Based on the Concept
of General Perception”. ICAR ‘95, 7th International Conference
on Advanced Robotics, Sant Feliu de Guixols, Spain, PP.367-
376, SEPT., 1995.
[3] I. Gavrilut, V. Tiponut, A. Gacsadi, L. Tepelea" Wall-following
Method for an Autonomous Mobile Robot using Two IR Sensors
"University of Timisoara, B-dul Vasile Parvan No. 2, 300223
Timisoara, Romania.
[4] Reinhard Braunstingl, Jose Manuel Ezkerra, Pedro Sanz “Fuzzy
Logic Wall Following of a Mobile Robot Based on the Concept
of General Perception” ICAR ‘95, 7th international conference
on advanced robotics, sant Feliu De Guixols, Spain, PP.367-376,
SEPT., 1995.
[5] Michael G. Murphy, Ph.D. "Fuzzy Logic Path Planning system
for collision Avoidance by an Autonomous Rover vehichle",
NASA/ASEE Summer Faculty Fellowship Program, 1991.
[6] C.G. Rusu, I.T. Birou “Obstacle Avoidance Fuzzy System for
Mobile Robot with IR Sensors “,10th International Conference
on DEVELOPMENT AND APPLICATION SYSTEMS,
Suceava, Romania, May 27-29, 2010.
[7] David Llorca, Vicente Milanés, Ignacio Parra, Miguel Gavilán,
Iván García Daza, Joshué Pérez Rastelli, M.A. Sotelo, “
Autonomous Pedestrian Collision Avoidance Using a Fuzzy
Steering Controller”, IEEE Transactions on Intelligetn
Transportation System, VOL. 12, No. 2, June 2011.
[8] Akib Islam, Farogh Ahmad, P.Sathya, “ Shortest Distance Maze
Solving Robot”, International Journal of Research in
Engineering and Technology, eISSN: 2319-1163 | pISSN: 2321-
7308.
[9] Marco A. C. Simões, Helder Guimarães Aragão, Victor Souza,
Simon Viegas, “ Using Fuzzy Logic to Build a Heterogeneous
Multiagent System for the Robotics Soccer Problem ” Computer
Architecture and Operating Systems Group(ACSO) State
University of Bahia (UNEB).
[10] Yee Mon Nyein, Nu Nu Win, “Path Finding and Turning with
Maze Solving Robot”, International Journal of Science,
Engineering and Technology Research (IJSETR) Volume 5,
Issue 9, September 2016, ISSN: 2278 – 7798.
[11] Yuan Zhou, Hesuan Hu, Yang Liu, and Zuohua Ding, “Collision
and Deadlock Avoidance in Multirobot Systems: A Distributed
Approach “IEEE Transaction on Systems, man and Cybernetics
Systems. 2017.
[12] Dali Sun, Alexander Kleiner, Bernhard Nebel, “Behavior-based
Multi-Robot Collision Avoidance”, 2014 IEEE International
Conference on Robotics & Automation (ICRA), Hong Kong
Convention and Exhibition Center May 31 - June 7, 2014. Hong
Kong,China.

129
[13] Aulian Miftahul Fathan, Agung Nugroho Jati, Randy Erfa
Saputra, “ Mapping Algorithm Using Ultrasonic And Compass
Sensor On Autonomous Mobile Robot,” ICCEREC, September
2016.
[14] NT AlGhifari, AN Jati, RE Saputra, “Coordination Control for
Simple Autonomous Mobile Robot ”, International Conference
on Instrumentation Control and Automation, pp 93-98, August
2017.
[15] Agung Nugroho Jati, Randy Erfa Saputra, Muhammad Ghozy
Nurcahyadi, Nasyan Taufiq Al Ghifary,“A Multi-Robot System
Coordination Design and Analysis On Wall Follower Robot
Group”, IJECE, Vol 8 (6), Dec 2018.

130
A Robotic Image Sensor System for an
Octocopter Drone
Rainier Jo-Matthew Baring, Yen-Wei Chang, Calvin Leader Tiu, Tung Haang Yen, Alvin Chua Unmanned Aerial Vehicle Research Laboratory, Mechanical Engineering Department,
De La Salle University, Manila, Philippines
Corresponding Author: [email protected]
Abstract-The study focuses on design of a robotic image
sensor system attached on an octocopter drone, which will
be utilize in surveying activities. This is composed of a
3DOF robotic manipulator with camera system. This is to
address the limited camera view of the current
technologies on a drone system. The robotic image sensory
system uses a pro-trinket microcontroller to manipulate its
movements. During pre-set mode, the robotic manipulator
has two positions: retracted and extracted position. The
retracted position activates during storage while the
extracted position actuates during surveying. The
experimental results shows that the new image sensor
system is able to capture images in different viewpoints
that would benefit for the drone user.
Index Terms—sensor; drone, image octocopter
I. INTRODUCTION
There are more and more researches on how to
add a manipulator to an UAV to maximize the usage of
the drone, This also helped achieve a wide variety of
usage in multiple fields. For example, there is the
ARCAS project that is now ongoing in the European
nations. According to Loos (2014), ARCAS project
helps researchers build robotic manipulators for the
UAV that may serve different functions. One of their
current project on ARCAS has the ability to pick up an
object autonomously without the control of the user. On
the commercial side, the most common manipulators
usually seen are the camera manipulators. An example
would be the DJI Phantom series which has a gimbal
manipulator for the camera. This gives the user a more
steady view while recording.
The most concerning of all would be
limitations in angles when taking the shot. Since the
drone camera is usually fixed, it is hard to take photos
that include angles that may be important in cases such
as car chases or bridge surveying. In addition, it cannot
view the scenery on the top side of the multirotor
because components such as the flight controller is
blocking it. An example of this problem would be
surveying a bridge, examining an inaccessible tunnel or
other unreachable places. A possible solution to this is
applying a 360 rotation for the camera around the
structure of the drone or applying a robotic manipulator
to the camera allowing it to rotate around the drone
giving a 360 like view as output.
By creating a manipulator that provides the
octocopter a multidirectional view, it can decrease the
common blind spots that the cameras on the drones
today. With this research, it will be able to benefit for
the users which needs to view an object which is located
somewhere high and at the top of the infrastructure.
Sample of places like these are the top of the lower side
of the bridge, or the high ceiling of a factory which
requires inspection on its structure or safety.
This study will focus on the development of a
new robotic image sensor system for an octocopter
drone. The design of the arm should consider the shape
of the arm, material of the arm and its location for
maximum image capture. The controller should be
light so as not to affect the flight of the octocopter while
having the capability of manipulating the joints.
II. ROBOTIC IMAGE MANIPULATOR DESIGN
To compute for the best dimensions for the
frame of the robotic camera manipulator, the
dimensions of the octocopter must be considered. The
first dimension of the octocopter, Tarot 1000, to be
considered would be the position where the camera
would be placed in between the shafts of the octocopter.
The position must be where least of the camera’s view

131
is covered by the shafts of the octocopter and the
propellers of the octocopter (see Figure 1)
Figure 1. Robotic Image Manipulator camera location
Based from the specification sheet of the
octocopter, the diamter of the octocopter is 287.54mm
thus the radius of the octocopter body is 143.77mm.
The length of the propellers are 400mm. After
measuring the length of the shaft from the center of
octocopter to the propellers which is 445mm, the
length from the tip of the center body of octocopter to
the middle of the rotational area of the propellers is
approximately 190mm.
The second part of the dimension
computation is to know the distance of the octocopter
body to the floor. In considering the octocopter stand,
the length of TL100B05-02 stand must be considered.
The total length of octocopter stand is 400mm as
found in Figure 2.
Fig.
2.
Mea
sur
eme
nt
of
the
Oct
oco
pter
stand
Thus, from the different dimensions collected
from the octocopter parts, the vertical length of the
robotic camera must not exceed 400mm, else it will hit
the floor when it is operating on the ground. The
horizontal length of the manipulator fully extended
must not exceed 443.77mm, that is the sum from the
point where the camera robotic manipulator would be
attached to the optimal location to place the camera.
The camera robotic manipulator would be
divided into three different parts. Link A would be the
part that is designed with a 90 degree angled link.
This would be able to create an extension effect. Link
B will be the part where the arm could retract and
extend 160 degrees by using a servo motor. Link C
would be the part that would rotate 180 degree the
camera. This would provide more vision for the
camera. Figure 3 shows the dimensions of the link C
after considering the restrictions in the design.
Fig. 3. Drawing of Link C
III. MECHANICAL STRESS ANALYSIS
To test if the design for the frame of the
manipulator is feasible, Solidworks’ simulation
software to test the effect of the loads to the
manipulator frame. For Link A, the maximum stress
is 2.894MPA. The force applied to the Link A is
3.5512N. The value of 3.5512N came from the total
weight of the Servo motors A and B, Links B and C
and the weight of GoPro with its case.
Fig. 4. Stress Simulation of Link C

132
For Link B, the maximum stress encountered is
7.183MPa. The load or force applied to the link is
1.5598N. It is consisted of the link C , servo B and
Gopro with its case. In the simulation of Link C (see
Figure 4), the maximum stress experienced by the
Link is 0.651 MPa. The load applied to the link is
1.8149N. The load consists of the weight of Gopro and
Gopro case.
Based from the stress simulation of the three
designed links, its maximum stress is still below the
yield stress of ABS. Thus, the designed links camera
robotic manipulator frame will not break apart when
the loads were attached.
IV. ELECTRONICS AND PROGRAMMING OF THE
ROBOTIC SENSORY SYSTEM
The Hitec HS-311 motor was used to control
the movement of Link B of the manipulator arm. It
has a torque range of 3.0 kg/cm to 3.7 kg/cm
depending on the voltage output. This is more than
the torque required. It is to ensure the safety of the
robotic manipulator for further unforeseen
circumstances. The KST DS113MG is a standard
plastic servo with great performance. It was used to
control the movement of the GoPro Holder or Link C.
It has a torque output of 1.8 kg/cm to 2.2 kg/cm,
depending on the set operating voltage.
The microcontroller used to program the
servomotor is the Pro Trinket 5V. It has been the
chosen microcontroller due to its capacity to calculate
as well as its size that measures only 1.5”x0.7”x0.2”. It
is also cheaper compared to other microcontrollers
due to its size and how the overall built was optimized
to provide the desired performance. It is also easy to
program through the Arduino IDE as well as through
the use of a micro-USB jack for power and USB
uploading. The turnigy 9x was used as the radio
transmitter in this study.
Fig. 5. Flowchart of Robotic Arm Software Control
The program (Figure 5) starts off by stating
the required values and assigning pins of the
microcontroller as either outputs for servo or inputs
for the receiver. It then initializes and determines
whether the robotic arm must be extended or not
based on the positioning of the designated control
knob in the remote controller. Inside the loop that
determines whether the arm is being extended or not,
it contains 2 sub-programs which control the camera
position and the panning position of the overall
octorotor stand.
V. RESULTS
Servomotor Test
This test would test the effect of load on the servo
motor’s angular speed. The first part of the test would
be no load and the second part would be with load.
The servo motors tested would be servo motors A and
B. A stop watch was used to time how long would the
servo motors rotate from its initial position to the
final position.
Fig. 6. Timer used (left) and Setup(right) in the
Servomotor Speed Test

133
A camera would be also used to check is the servo
motor had reached its desired position. The camera
must also be set up the same way as the servo motor
test where the camera must be positioned
perpendicular to the centerline.
Figure. 7. Servomotor A Speed Test
Figure 8 Servomotor B Speed Test
Based from the collected data, for servomotor A,
there is a 18.88% difference in the travel time of a
loaded and an unloaded servo; However, for
servomotor B, there is a 78.61% difference in the time.
This may be due to the processing delay starting from
the receiver to the microcontroller (see Figure 7 and
8).
Camera Test
The camera test would show how many percent
the camera or Gopro’s vision would be covered by the
octocopter’s shaft when the lens is extended and
pointing upward. The test would be separated into
two sections. The first part of the test would be the
GoPro capturing photo without the cover of
octocopter. The second part of the test would be GoPro
capturing photo with the cover of the octocopter.
The first part of the test, the GoPro of the camera
robotic manipulator would be turned at the 180 or
pointing upward position and first capture an image
without the cover of octocopter. A white board would
be placed 800mm above the camera, to minimize the
noise created by the light straight above the GoPro
In the second part of the test, the rest of the
octocopter would be placed above the camera robotic
manipulator. Servo motor C would position the
camera robotic manipulator in the middle of the two
shafts of the octocopter. This is to increase space for
the camera’s lens angle. The same procedure where a
white board would be placed 800mm above the GoPro,
then a picture would be taken afterwards.
Fig. 9. Robotic Image Sensor at the Center of Two
Shafts
Based from the data collected, the difference
between the covered and uncovered by the octocopter
is 14.5833%. This showed that there is a large portion
of area that was covered by the octocopter. However,
the extend arm function still provided a wide portion
of uncovered view for the GoPro, there is still more
than 73.9239% that is uncovered by the octocopter.
This is more efficient than the target of having 40% of
the covered area when the camera manipulator is
attached to the arm.
Flight Test
Before performing the flight test, the initial setup
of the programming the APM 2.6 must be done
through the mission planner. After performing
programming section of the APM 2.6 using the

134
mission planner setup wizard, the accelerometer must
be calibrated.
Next step of calibration would be the radio
calibration. This step of calibration would determine
the control value of each function. After the
calibration, the red line would indicate the maximum
and minimum value of the transmitter. These values
would be then used to program the microcontroller for
the robotic arm
Last part of the calibration would be the compass
attached to the APM 2.6 flight controller. This part of
test would let the controller know the direction of the
octocopter.
After all part were done, the octocopter would be
ready to have its test flight. The flight of the
octocopter was stable, since there were less
unnecessary movement in the flight during the test
flight. The flight controller also has a quick response
to the change of direction coming from the flight
controller. Thus, the calibrations of the mission
planner are essential to achieve a safer flight.
VI. CONCLUSION
The research study was able to design a robotic
image sensor system which provides a multi-
directional view to a rotorcraft unmanned
autonomous vehicle.
In order to design a camera robotic manipulator,
different theoretical factors were considered namely
material properties especially the ultimate and yield
strength of the materials of choice. Through the use of
Solidworks, the best material was chosen given the
restrictions in weight and size of the robotic arm due
to the payload that the rotorcraft can carry. The
design was optimized especially when it comes to its
weight to provide the least strain to the flight of the
rotorcraft.
In order to simulate the manipulator to
understand its behavior, different pre-fabrication
familiarization and testing was done. The servos were
studied with the use of different pre-set programs.
The receiver connection and configuration was also
studied in order to be able to retrieve serial data that
is required for it to allow the transmitter and the
servos to communicate. Lastly, the transmitter
function was altered based on the control
requirements of the manipulator setup up namely the
gear switch, the throttle cut switch and the hover-
throttle knob while still keeping the controller capable
of flying the rotorcraft.
Finally, the whole robotic manipulator was
attached to the Tarot-frame Octorotor powered by the
Ardupilot flight controller. Both octocopter system
and robotic image system setup can be simultaneously
controlled through the Turnigy 9x controller.
ACKNOWLEDGMENT
The authors would like to acknowledge the funding support
of the Department of Science and Technology – PCIEERD. Also, the Mechanical Engineering Department of DLSU for supporting the study
REFERENCES
[1] Airbornedrones long range flight systems with Direct Vision
Feed. (n.d.). Retrieved July 14, 2016, from
http://www.airbornedrones.co/
[2] Aeryon SkyRanger the benchmark for VTOL sUAS – Aeryon
Labs Inc. (n.d.). Retrieved from
https://www.aeryon.com/aeryon-skyranger
[3] Bouabdallah, S., & Siegwart, R. (2007). Full control of a
quadrotor. 2007 IEEE/RSJ International Conference on
Intelligent Robots and Systems. doi:10.1109/iros.2007.4399042
[4] Dollosa, C.M., Gavinio, S., Hermoso, G., Laco, N., Roberto,
L.A. (2013). Implementation of speed and torque control on
quadrotor altitude and attitude stability (Undergraduate Thesis).
De La Salle University, Manila.
[5] Experimental Characterization of the Mechanical Properties of
3D-Printed ABS and Polycarbonate Part. (2016). Retrieved June
22, 2017, from
http://cimar.mae.ufl.edu/rapid_proto/pages/3D%20Printing%20P
aper%20Final%20Manuscript.pdf
[6] Fatan, M., Sefidgari, B. L., & Barenji, A. V. (2013). An adaptive
neuro PID for controlling the altitude of quadcopter robot. 2013
18th International Conference on Methods & Models in
Automation & Robotics (MMAR).
doi:10.1109/mmar.2013.6669989
[7] Gameros, A. (2015, July 20). The Use of Composite Materials in
Unmanned Aerial Vehicles (UAVs). Retrieved July 22, 2016,
from http://www.azom.com/article.aspx?ArticleID=12234
[8] Kelly, H. (2013, May 23). Drones: The future of disaster
response - CNN.com. Retrieved February 04, 2016, from
http://edition.cnn.com/2013/05/23/tech/drones-the-future-of-
disaster-response/index.html
[9] Kucuk, S., & Bingul, Z. (2006). Robot Kinematics: Forward and
Inverse Kinematics. Industrial Robotics: Theory, Modelling and
Control. doi:10.5772/5015
[10] Lippiello, V., & Ruggiero, F. (2012). Cartesian Impedance
Control of a UAV with a Robotic Arm. IFAC Proceedings
Volumes, 45(22), 704-709. doi:10.3182/20120905-3-hr-
2030.00158
[11] Loos, R. (2014, September 18). ARCAS Develops Flying
Robots With Arms | Robotics Today. Retrieved July 14, 2016,
from http://www.roboticstoday.com/news/arcas-flying-robots-
have-arms-3044
[12] Mendoza-Mendoza, J., Sepulveda-Cervantes, G., Aguilar-
Ibanez, C., Mendez, M., Reyes-Larios, M., Matabuena, P., &
Gonzalez-Avila, J. (2015). Air-arm: A new kind of flying
manipulator. 2015 Workshop on Research, Education and

135
Development of Unmanned Aerial Systems (RED-UAS).
doi:10.1109/red-uas.2015.7441018
[13] Pros and Cons of Drone Cameras - Soaring Sky Academy.
(2015, November 25). Retrieved July 04, 2016, from
http://soaringskyacademy.com/drone-cameras/
[14] Radhesh. (2008, May 11). PID Controller Simplified | My
Weblog. Retrieved July 18, 2016, from
https://radhesh.wordpress.com/2008/05/11/pid-controller-
simplified/
[15] Robotshop. (2013). Tarot IRON MAN 1000 Carbon Fiber
Octocopter Frame. Retrieved July 20,2016, from
http://www.robotshop.com/media/files/pdf/user-manual-
tl100b01.pdf
[16] SenseFly's eXom Drone Uses Vision and Ultrasound to Fly
Precisely, Safely - IEEE Spectrum. (2014, November 6).
Retrieved from
http://spectrum.ieee.org/automaton/robotics/drones/sensefly-
exom-drone-vision-and-ultrasonic-sensors
[17] Vanian, J. (2016, July 22). 7-Eleven and Flirtey Delivered a
Sandwich and Slurpees via Drone Fortune. Retrieved July 13,
2016, from http://fortune.com/2016/07/22/7-eleven-drone-
flirtey-slurpee/

136
Design of a Programmable Fixed-Wing
Drone System
Lanz Gaffud, Carlos Guinto, Starl Mallari. Alvin Chua
Unmanned Aerial Vehicle Research Laboratory, Mechanical Engineering Department,
De La Salle University, Manila, Philippines
Corresponding Author: [email protected]
Abstract- The study presents the design, simulation and
testing of a programmable fixed-wing drone system for the
enhancement of teaching and development of fixed-wing
drones. The fixed-wing uses a Pixhawk flight controller to
stabilize flight and provide autonomous features. A
Skywalker Carbon Fiber Tail Version 1880mm serves as
the frame to house the important parts such as the flight
controller, battery, electronic speed controller and RC
receiver for proper flight. An on-line website was
developed to serve as a teaching tool in the different
theories and procedures to operate the fixed- The online
manual was evaluated through the students'
comprehension of the discussion of each experiment using
quizzes and survey. Actual flight test was done to verify
the air worthiness of the fixed wing drone developed.
Index Terms—fixed wing, drone, programmable
I. INTRODUCTION
The use of Unmanned Aerial Vehicles (UAVs) are
becoming more and more apparent in our daily lives. It
has many applications that can make human lives easier. UAVs are classified in two categories, fixed wing and
rotary wing. These categories possess different
advantages and limitations on specific applications of
the drone. The advantages of the rotary winged UAVs
are: the ability to hover; Vertical Takeoff and Landing
(VTOL) and; to maneuver through tight spaces.
However, it only has a low flight duration and slow
speeds around 60 kph compared to fixed wing UAVs
which has a longer flight duration and faster speed
around 80 kph. Although, most fixed wing UAVs need
a runway to take off and land.[1][2].
As the UAVs are now introduced as the new
emerging technology used by many, people are taking
steps to learn how the UAV works, operates and how to
fly it. The programmable fixed wing system will not
only help users learn how to fly the fixed wing UAV but
it will also help them learn the assembly and software
needed by the fixed wing UAV. The training module
will also provide the capabilities and limits of the fixed
wing UAV, so that the users would be able to
understand how they can maximize the use of the UAV.
They will also learn the safety and different measures to avoid any kind of accident when the users are operating
the fixed wing UAV.
This study is about the development of a new
programmable fixed wing drone system with an
autopilot system. The system is composed of a fixed
wing frame, electronic components, programmable
software and website. It uses an online software
management system that allows the user to create online
courses. The website contains the detailed process of
setting up the drone and the autopilot software that will control the drone. Moreover, this online training module
will demonstrate the different capabilities of the fixed
wing drone that was developed. It would also contain
the specifications and parts of the aircraft as well as a
guide on how to calibrate and assemble the drone.
II. METHODOLOGY
This section discusses the methodology used in
conducting the study. Figure 1 shows the flowchart of
the major phases done for the study. The flowchart of
the study consists of four major processes as indicated
in Figure 1:
(1) Development of a fixed wing training module
with autopilot system,

137
(2) setting up an autopilot software to control the
drone,
(3) creating an online training module for the fixed
wing training module developed, and
(4) testing the effectiveness of the developed drone and training materials to university students.
In the development of the fixed wing training
drone with an autopilot system, The researchers chose
the 1880 mm Skywalker Carbon Fiber tail version with
T-tail, 1880 mm wingspan of the aircraft due to its
availability and versatility.
Figure 1. Flowchart of Methodology
For the remote controller, FrSky Taranis X9D
Plus 2.4GHz Transmitter with X8R Receiver was
chosen. It has a good review from actual users, great
range for the flight and has a lot of channels that can be
programmed to do different flight modes available for
the fixed-wing UAV.
After assembling the fixed-wing UAV and
knowing the safety precautions, the operator should
undergo training with the use of a simulator. This will
help the operator have an experience on flying a UAV
before flying an actual UAV. While learning how to fly
the UAV on the simulator, the operator will also learn
how the different parts work, e.g. aileron, rudder and
elevator. Also, after learning how to fly the UAV, the
different fly modes can also be explored. Different fly
modes are circle, loiter, return-to-launch (RTL) and
many other more.
In the set up an autopilot software to control
the drone, the autopilot system uses Ardupilot, This
autopilot features controls over a wide variety of
autonomous systems from rotorcraft, fixed wings and
even submarines. It has versatile features that provide
stability in its application and expandability to new
features. (see Figure 2).
Figure 2. Ardupilot Installation Screen
(http://ardupilot.org/ardupilot)
The creation of the online module shows the capability
of the fixed-wing drone developed. This online module
uses a learning management system that lets users create
their own private website. The training module aims to
provide more knowledge about the fixed wing UAV,
such as parts, flight modes and others, to the users. This
training module will show how to assemble the drone
and how to operate it with and without the autopilot
system. The module will also include the factors behind
on how the aircraft flies. The researchers developed the
following modules:
Module 1: Introduction to Fixed Wing UAV (History
and Difference to other types of UAV), Parts of the
Plane, Flight Dynamics and the Pixhawk
Module 2: Electronic Assembly, Plane Assembly (Part
1 and 2) and Final Assembly
Module 3: Take-off and Landing, Practice, Flight
Proper and Mechanical Trimming
Module 4: Programming with Custom Flight Mode
Figure 3 shows a sample of the on-line module created.

138
Figure 3 Sample of on-line module
Finally, to test the effectiveness of the developed drone
and training materials, several university students were
asked to evaluate it. They would access the training
module provided and learn how to operate the drone. It
is expected that after going through thoroughly to the
training module, they will have more knowledge on
how to assemble, operate and use the autopilot system.
However, it is recommended that the students should
first use a realistic simulator before flying an actual
fixed wing drone. After, the students were asked to
evaluate the training module and which areas of module
needs improvement.
III. RESULTS
This section discusses the results acquired in the
study. The researchers was able to develop the 1880 mm
Skywalker Carbon Fiber tail version with T-tail. (see
Figure 4)
Figure 4 Fixed-Wing Drone
To gather more data from the plane, the researchers
added an air speed sensor. The researchers also
equipped the plane with a fiberglass underside to ensure
rigidity during landing, hinge tape to prolong the life of
the wing flaps and lead weight to provide as
counterweight to level the fixed-wing.
The mission planner was initially used to install the firmware of the drone and calibrate the accelerometer,
radio receiver, rudder arming, and the electronic speed
controller. It’s also used as the ground station
application for Ardupilot and the team used Windows
OS (Operating System) since it’s the only OS that
mission planner can be compatible with. The
researchers setup, configured, and tuned the fixed-wing
drone using mission planner. Since it’s used as the
ground station, it monitored the status of the drone,
recorded telemetry logs, and operated the vehicle in a
first-person view.
There are four servos mounted on the plane. 2
servos are for the ailerons, 1 for the rudder and another
1 for the elevator. It is connected through wires to the
Pixhawk. The servos are connected to the different
channels of the Pixhawk to individually control the
wings. The 2 servos for the ailerons are connected to
channel 1, the servo for the elevator to channel 2 and the
servo for the rudder to channel 4. Figure 5 shows the
fuselage with the buzzer, safety switch and RGB light.
Figure 5. Fuselage Left Wall with Buzzer, Safety
Switch and RGB Light
Online Training Module
The researchers used Wix, a cloud-based web
development platform to create the training module. The
training module consists of a home page where the
plane is featured in a video and an overview on what the
website is all about. It also consists of a safety
operations page where a video of the Civil Aviation
Authority of the Philippines Rules and Regulations on
Drones is featured, as well as a What’s in the kit page to

139
feature the contents of the training kit. The website
consists of 4 modules where experiment 1 introduces
the fixed wing drone to the users. It also discusses the
parts of the plane and its uses as well as the flight
dynamics and the pixhawk. Experiment 2 shows videos made by the group on how to build and assemble a fixed
wing drone. Experiment 3 discusses pre-flight checks,
flight proper, take-off and landing as well as discusses
the concepts of mechanical trimming. Experiment 4
shows a video on how to program the fixed wing drone
using a custom flight mode named OFFSET.
Programming Results
The group developed a new flight mode named
OFFSET. OFFSET is a flight mode that when triggered,
the plane will move at a distance to be specified by the operator and loiter around it. For example, if the offset
parameters is changed so that the plane will move 500
meters going North after being triggered, anytime
during the flight, the OFFSET flight mode can be
triggered and the plane will move to the heading for the
given distance. The operators may change the distance
of offset, direction of offset, home location, loiter radius
and direction of loiter. The Software in the loop (SITL)
implementation of the program is found in Figure 6.
Figure 6 OFFSET SITL Result
Training Module Efficiency Rate
After testing the online training module for the
fixed wing UAV, a survey was conducted through
survey monkey to test the efficiency of the online
training module. This gave direct feedback from the
first users of the training module. Moreover, the quiz
results of the participants were analyzed.
Quiz Results
Thirty students were tasked to go through the
website. The survey was conducted online. After the
activity, each student evaluated the site through an
online survey using Survey Monkey. The survey aims to evaluate the effectiveness of the developed training
module.
Some of the questions that are included in the quiz
are based from the legitimate quizzes given by the
Federal Aviation Administration (FAA), an agency in
the United States Department of Transportation, in-
charge of the regulation and oversight of civil aviation
in the US. The sample questions that were available in
the FAA website are suitable study materials for the
Remote Pilot Certificate and these questions can be
found on all Unmanned Aircraft General tests. The basis of the remaining questions was gotten from Ardupilot,
the developers of Mission Planner, the software used to
calibrate, operate, and control the UAV.
From the thirty respondents that answered, the
results are shown below. The highest score for
Experiment 1 is 14 out of 15 and the lowest score is 10
out of 15.(see Figure 7)
Figure 7. Experiment 1 Results
For Experiment 2, the highest score is 14 out of 15 and the lowest score is 5 out of 15 (see Figure 8).
Figrue 8. Experiment 2 Results

140
For Experiment 3, the highest score is a perfect 10 out
of 10 and the lowest score is 6 out of 10. Finally, for
Experiment 4, the highest score is a perfect 5 out of 5
and the lowest score is 1 out of 5.
The quizzes were helpful for the researchers since
based on these results, we can see what experiment the
students had trouble with and we can therefore improve
and make the online training module better so that they
can understand better the experiments.
Survey Results
A sample of 30 mechanical engineering students
from De La Salle University were selected. The sample
was a combination of the different year levels with no
specific number of participants from each year level.
The students had no or minimal knowledge about the
fixed-wing drone. To evaluate the effectiveness of the
online training module developed, the group designed a
survey through the Kirkpatrick evaluation model. Six
survey questions constructed to gather insights from the
sample together with the quiz in the online training
module. These were made to evaluate the reaction,
learning, behavior and results from the online training
module. From the data gathered from the sample,
63.33% of the sample strongly agrees that the objective
was clearly stated and 56.67% strongly agrees that the
experiments effectively presented the theories and
concepts needed in the experiment (see Figure 9 and
10). On the other hand, 76.67% of the sample think that
the assembly of the fixed-wing is presented in an
organized manner and almost the same percentage,
73.33% strongly agrees that the questions in the quizzes
are relevant to the topic. Moreover, from the 8
participants of the actual training, 100% of the students
were able to build and calibrate the plane in 2 days.
Figure 9. Survey Question 1 Results
Figure 10. Survey Question 2 Results
IV. CONCLUSIONS
This study was able to design a fixed wing
drone system as well as an online training module to be
used for online teaching of a fixed-wing drone. It
contains an introduction to the drone, the parts as well
as basic flight theories. It also contains modules which
users can follow to build and assemble their own fixed-
wing drone. Take off, flight and landing are also
discussed so that the user can be guided on the proper
way to operate a fixed-wing drone. The quizzes on the training module are used to assess if users are able to
differentiate the parts of the drone and know their uses.
It is also used to assess if the users are able to
understand the concepts and theories behind the fixed-
wing drone.
The efficiency of the online module was tested
through quizzes after every module and a survey after
the whole session. The results showed that the
participants gained knowledge and scored high on the
overall quiz. Moreover, the participants rated that the
experiment clearly and efficiently presented the theories and concept regarding the assembly and operation of the
fixed-wing drone.
With all the visual aids attached in the online
training module, it is recommended to make it more
interactive with the users. It is also recommended to
conduct similar research and training module for other
types of UAV systems..
ACKNOWLEDGMENT
The authors would like to acknowledge the funding
support of the Department of Science and Technology
– PCIEERD. Also, the Mechanical Engineering
Department of DLSU for supporting the study.
141
REFERENCES
[1] Airbornedrones long range flight systems with Direct Vision
Feed. (n.d.). Retrieved July 14, 2016, from
http://www.airbornedrones.co/
[2] Advantages of Fixed Wing UAV than Rotary Wing. (n.d.).
Retrieved June 01, 2017, from
http://www.cleverdronemaps.com/advantages-of-fixed-wing-
uav-than-rotary-wing/?lang=en
[3] Chao, Y., & Xiao, L. (2013). Design of UAV Flight Simulation
Software Based on Simulation Training Method. WSEAS
Transaction On Information Science And Applications, 10(2).
Retrieved from
http://www.wseas.org/multimedia/journals/information/2013/57
09-117.pdf
[4] Cook, M. V. (2017). Flight Dynamic Principles. S.l.:
Butterworth-Heinemann LTD.
[5] D. Ito and J. Valasek, ‘‘Robust dynamic inversion controller
design and analysis for the X-38,’’ in Proc. AIAA Guid.,
[6] Fahlstrom, P. G., & Gleason, T. J. (2012). Introduction to UAV
systems. Chichester: Wiley.
[7] Gaum, D. (2009). Agressive flight control techniques for a fixed
wing unmanned aerial vehicle. SUNScholar Research
Repository. Retrieved 9 July 2017, from
http://scholar.sun.ac.za/handle/10019.1/3112
[8] H. B. Duan, Y. X. Yu, and Z. Y. Zhao, ‘‘Parameters
identification of UCAV flight control system based on predator-
prey particle swarm optimization,’’ Sci. China Inf. Sci., vol. 56,
no. 1, pp. 1–12, Jan. 2013
[9] J. Li and H. Duan, ‘‘Simplified brain storm optimization
approach to control parameter optimization in F/A-18 automatic
carrier landing system,’’ Aerosp. Sci. Technol., vol. 42, pp. 187–
195, Apr./Mar. 2015.
[10] Levin, J. M., Nahon, M., & Paranjape, A. A. (2016). Aggressive
Turn-Around Manoeuvres with an Agile Fixed-Wing UAV.
IFAC-PapersOnLine,49(17), 242-247.
doi:10.1016/j.ifacol.2016.09.042
[11] Marianandam, P. A., & Ghose, D. (2014). Vision Based
Alignment to Runway during Approach for Landing of
Fixed wing UAVs. IFAC Proceedings Volumes,47(1),
470-476. doi:10.3182/20140313-3-in-3024.00197
[12] Mberia, H. (2011). Communication Training Module.
International Journal of Humanities and Social Science, 1(20).
[13] Midori, M., Hideo, T., & Kazutoshi, I. (2009). Development of
Skill-Free Manual Control Module for Easy and Safe Flight of
UAV.
[14] National Aeronatucs and Space Administration. (n.d.). General
Thrust Equation. Retrieved from Glenn Research Center -
NASA: https://www.grc.nasa.gov/WWW/k-
12/VirtualAero/BottleRocket/airplane/thrsteq.html
[15] National Aeronautics and Space Administration. (2015, May 5).
The Drag Equation. Retrieved from Glenn Research Center -
NASA: https://www.grc.nasa.gov/www/k-
12/airplane/drageq.html
[16] National Aeronautics and Space Administration. (2015, May 5).
The Lift Equation. Retrieved from Glenn Research Center -
NASA: https://www.grc.nasa.gov/www/k-
12/airplane/lifteq.html

142
Disaster Multi-robot Communication with
MQTT and CoAP Protocol Muhammad Ikrar Yamin1, Son Kuswadi2 and Sritrusta Sukaridhoto3
1 Politeknik Elektronika Negeri Surabaya, Surabaya, Indonesia 2Mechatronics Study Program, Mechanical and Energy Engineering Department, Politeknik Elektronika Negeri
Surabaya, Surabaya, Indonesia 3 Multimedia Creative Department, Politeknik Elektronika Negeri Surabaya, Surabaya,Indonesia.
[email protected], sonk ,[email protected]
Multi-robot can take an important role in a disaster
area to search and rescue victims. It needs good
communication among the robots to perform their tasks
quickly and efficiently. Communication can be used
between the operator and multi-robot or among the
multi-robot themselves. This relates to the queue
message protocol system. In this research, we
implemented the queue message protocol on mesh
topology. As we know, the development of
communication protocol grows fast like the development
of IoT (Internet of Things) Technology. MQTT and
CoAP are among the communication protocols used for
IoT needs. Both protocols were used and implemented
into disaster multi-robot and their performances were
compared. The result shows that MQTT protocol is
easier to be implemented on to disaster multi-robot user
interface on mesh topology than CoAP, and that data
transfer rate, the throughput of MQTT protocol is
higher than CoAP.
Keywords: Disaster; Mesh; Robot; Communication
Protocol; CoAP; MQTT; Internet of Things
I. INTRODUCTION
Indonesia is a country that frequently disasters happen either natural disasters and disasters caused by human neglect. Natural disasters that most often hit Indonesia are the earthquake like the earthquake in Lombok that happens recently in 2018[1]. This cannot be avoided considering that Indonesia is located right above the meeting of three earth plates. The earthquake that occurred in Indonesia several times caused very fatal damage. Not infrequently, these disasters cause the collapse of buildings. Even in large-scale disasters, the ruins that occur can take human casualties. Victims are often difficult to be found because they are trapped in rubble so the SAR (Search And Rescue) Team need a lot of energy and time for to carry out the process of searching for victims.
Using multi-robot is one of the solutions to save time and minimize the risk of the SAR team to search victims trapped in the rubble. Multi-robot that can do many tasks is needed in order to cover all of the disaster area and do the search and rescue task [2]. Multi-robots design with embedded system offers easiness due to its easy operation, lightweight, less power, reliability, real-time and inexpensive cost[3]. In addition, effective communication inter-robot will
bring successful control and cuoordination of group multi-robot[4].
There are many wireless technologies that are used to control the mobile robot remotely like bluetooth, 3G and Wi-Fi. Selection of wireless technologies in physical layer of communication depends on the type of application to be developed considering the following; range, frequency and data rate[5]. In transport layer, an appropriate communication protocol is needed to considered that related to battery usage and one-to-many communication. Development of internet of things concept achieve emergence of lightweight protocol communication like MQTT, CoAP, AMQP, etc that can be applied to constrained devices, especially for robot. Communication between robots will transfer data stream from sensor, actuator, camera, etc
This research implemented MQTT over Wi-Fi Mesh-Networking for remotely control multi-robot and will be compared with CoAP over Wi-Fi Mesh-Networking to know their performance.
II. RELATED WORK
Robot’s design for disaster areas considers many
aspects including field, mechanisms and mobility,
obstacles, missions and more. Some research has been
done to overcome these things by making robots with
wheels that match the uneven terrain[6], robots that
can learn to avoid obstacles with certain
algorithms[7], robots that can maneuver by adaptation
by changing themselves (see Figure 1)[8], remote-
controlled robot and equipped with navigation
capabilities[9], another study about multi-robot
cooperation to rescue disaster victims[10].
Figure 1: Adaptive Morphology-based Design of Multi-
Locomotion Flying and Crawling Robot “PENS-FlyCrawl”

143
A research about light communication protocols
such as MQTT to control the robot and GPS tracking
has also been done by integrating it into the cloud
platform. But the study is only for one robot[11].
There are some papers that have discussed the difference between CoAP and MQTT and compare
the performance between both of them. As been
discussed earlier, CoAP and MQTT use different
transport layer (UDP vs TCP). Previous experiment
shows that MQTT better than CoAP in
communication delay if loss rate of network is 20%
and verse versa CoAP better than MQTT if loss rate is
25%[12].
A study show MQTT faster and more power
efficient than HTTP[13] and another paper shows that
CoAP more power efficient compared to MQTT[14].
MQTT and CoAP also consume low bandwith[15]. Among them is also research to compare
communication protocol MQTT-SN and COAP in
internet network using LAN ethernet cable for
robot.MQTT-SN is a protocol using similar transport
layer with CoAP[16]
Communication connection between the robots in
the disaster area is needed to be maintained and the
loss of the connection also should ibe predicted for
multi-robot control need and to make data
transmission can continue so that mesh network
topology management in multi-robot network is necessary. There is a study of wireless mesh network
implementation between nodes (laptops) using
applications[17].
This paper will discuss the comparison of disaster
multi-robot communication performance in wireless
mesh network using MQTT and CoAP protocol.
III. MULTI-ROBOT COMMUNICATION
A. MQTT AND COAP
MQTT is a publish/subscribe messaging protocol
designed for lightweight M2M communications in
constrained networks [15]. MQTT need a topic to
connect between nodes We can arrange
communication between nodes or robots by arranging
this topic. MQTT offered three kinds of modes which
are called Quality of Service (QoS). They are QoS 0,
1 and 2 based on how MQTT give confirmation
message and guarantee the messages are delivered.
For MQTT, TCP is used for the transport
protocol[16].
CoAP is a lightweight M2M protocol from the
IETF CoRE (Constrained RESTful Environments)
Working Group. CoAP supports both
request/response and resource/observe (a variant of
publish/subscribe) architecture[15]. CoAP was
developed for devices constrained by capabilities and
power. CoAP uses UDP as the underlying transport
layer. CoAP uses Representational State Transfer
(REST) which is a communication model shared with
HTTP. In the standard installation, CoAP supports
two modes, reliable and non-reliable.
Reliability in CoAP is handled by using
Confirmable (CON) messages. For every CON
message sent to the server, this will be replied by Acknowledge (ACK) packages to the client. CoAP
also supports “Piggybacked Response” ACK
message. This means that an ACK can be included in
the response message of another message to further
reduce communication[16].
B. Mesh Network
Wireless mesh networks (WMN) are self-
organized wireless networks in which component
parts (nodes) can all connect to each other via
multiple hops. Each node operates not only as a host
but also as a router, forwarding packets on behalf of
other nodes that may not be within direct wireless
transmission range of their destinations[18].Wireless
mesh network is very flexible and more efficient
energy to cover large area. Wireless mesh network
needs routing protocol to determine route from
transmitter to receiver.Wireless mesh network has two model routing protocol, reactive and proactive routing
protocol.
Batman-adv is one of proactive routing protocol
and uses distance vector mechanism to determine the
best route.It makes Batman-adv has high
mobility[19].
IV. SYSTEM DESIGN
A. Hardware Setup
In this research, we used multi-robot consisting of 3 robots, in which each had their own special task.
This research use multi-robot which consists of 3
robots with their specializations, that is, 1 robot as the
leader and 2 robots as the followers. The multi-robot
will do search and simple rescue to human victims in
the experimental field. All robots can detect fire and
human based on thermal. When one or more robots
found a fire spot in a location, they send signal to the
operator or other robots, then order the robot equipped
with fire extinguisher toward the location to
extinguish the fire. And when they found or detect a human, they will send signal for robot equipped with
water tube toward the victim and giving water
controlled by the operator.
Figure 2 show multi-robot for this research. 2
Followers have arm to complete their tasks.
a) b) c)
Figure 2: (a) Leader; (b) Follower1 (Fire Extinguisher); (c)
Follower2 (WaterProvider)
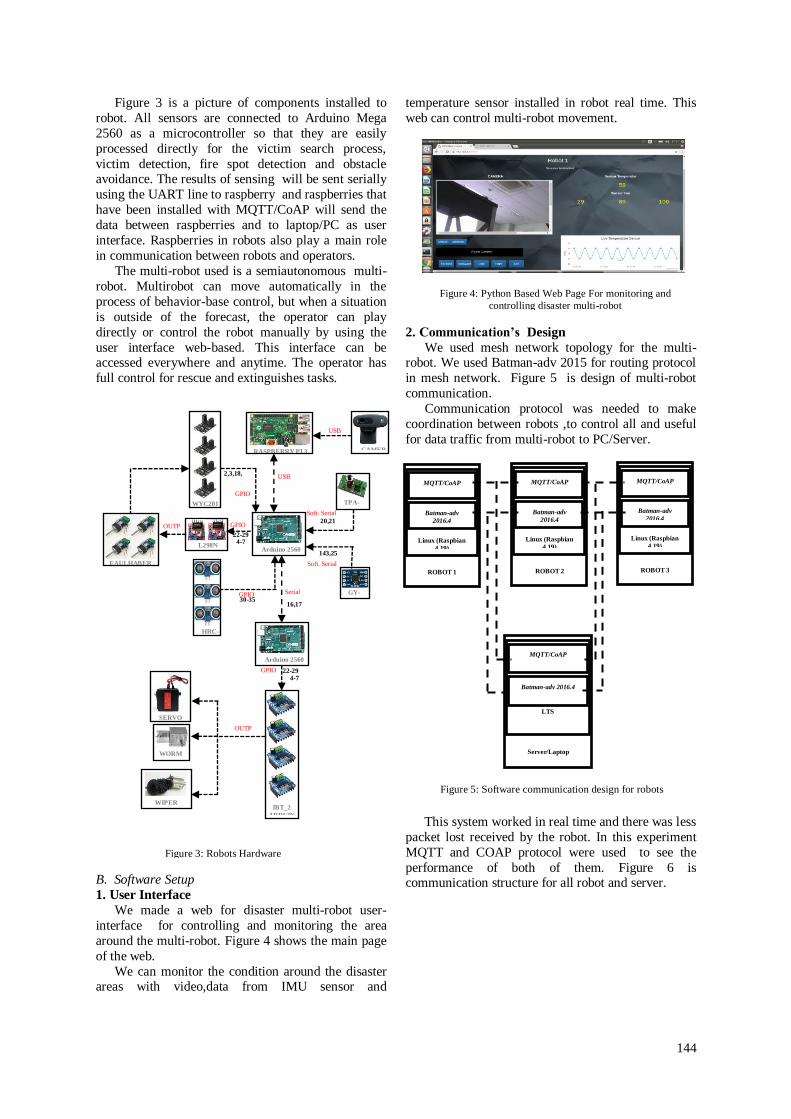
144
Figure 3 is a picture of components installed to
robot. All sensors are connected to Arduino Mega
2560 as a microcontroller so that they are easily
processed directly for the victim search process,
victim detection, fire spot detection and obstacle avoidance. The results of sensing will be sent serially
using the UART line to raspberry and raspberries that
have been installed with MQTT/CoAP will send the
data between raspberries and to laptop/PC as user
interface. Raspberries in robots also play a main role
in communication between robots and operators.
The multi-robot used is a semiautonomous multi-
robot. Multirobot can move automatically in the
process of behavior-base control, but when a situation
is outside of the forecast, the operator can play
directly or control the robot manually by using the
user interface web-based. This interface can be accessed everywhere and anytime. The operator has
full control for rescue and extinguishes tasks.
B. Software Setup
1. User Interface
We made a web for disaster multi-robot user-
interface for controlling and monitoring the area
around the multi-robot. Figure 4 shows the main page
of the web.
We can monitor the condition around the disaster areas with video,data from IMU sensor and
temperature sensor installed in robot real time. This
web can control multi-robot movement.
2. Communication’s Design
We used mesh network topology for the multi-robot. We used Batman-adv 2015 for routing protocol
in mesh network. Figure 5 is design of multi-robot
communication.
Communication protocol was needed to make
coordination between robots ,to control all and useful
for data traffic from multi-robot to PC/Server.
This system worked in real time and there was less
packet lost received by the robot. In this experiment
MQTT and COAP protocol were used to see the
performance of both of them. Figure 6 is communication structure for all robot and server.
Figure 5: Software communication design for robots
Figure 3: Robots Hardware
Figure 4: Python Based Web Page For monitoring and
controlling disaster multi-robot
GPIO
USB
143,25
22-29
TPA-
81
GY-
25
RASPBERRY PI 3
SERVO
MOTOR
CAMER
A
HRC-
04
FAULHABER
MOTOR
WYC201
0
L298N Arduino 2560
WIPER
MOTOR
WORM
GEAR
22-29
USB
GPIO 30-35
OUTP
UT
4-7
2,3,18,
19
GPIO
Soft. Serial
Soft. Serial
20,21
Arduino 2560
Serial
16,17
IBT_2
ARDUIN
O
OUTP
UT
GPIO
4-7
Linux (Raspbian
4.19)
Batman-adv
2016.4
ROBOT 1
MQTT/CoAP
Linux Ubuntu 16.0 4
LTS
Batman-adv 2016.4
Server/Laptop
MQTT/CoAP
Linux (Raspbian
4.19)
Batman-adv
2016.4
ROBOT 2
MQTT/CoAP
Linux (Raspbian
4.19)
Batman-adv
2016.4
ROBOT 3
MQTT/CoAP

145
V. EXPERIMENT RESULT
Personal computer used for this experiment was
Lenovo G40-30 Laptop, which was based on Intel
Celeron N2840 processor unit as the server. Each
robot was equipped with raspberry pi 3 Model B V1.2
as the clients. All devices used wifi module on board
to support wifi mesh network. The server or laptop
would send data to all 3 robots and the performance of
communications protocols could be monitored by
using Wireshark. The experiment environment is
summarized in Table 1.
Parameter Value
Wireless 802.11n
Linux (Robot) Raspbian 4.19
Linux (Server/PC) Ubuntu 16.04 LTS
Batman-Adv 2016.4 version
Wireshark
(Server/PC)
2..9.0 version
Tcpdump
(Raspberry)
4.9.2
Paho-mqtt 1.3.1
CoAPthon 4.0.2
The system needed to be configured to see the
performance of MQTT and Wifi-Mesh. Figure 7-9
shows the design of the system for MQTT Protocol.
In this research, the laptop was used as the broker and
publisher because the user interface was installed in it.
All systems were set with Python-based script. The
arrows show Wifi-Mesh that built for communication.
The server/PC sent 988-byte string data for all robots within 1 hour to see its performance. This
experiment was conducted in stages by sending data
to 1 robot (Figure 7), then to 2 robots(Figure 8), and
finally to 3 robots(Figure 9). It is necessary to
determine the topic to send data with MQTT protocol.
In this research one topic was used because all robots
received the same data. The topic in this case was
“robotmonitoring”. To find out data flow received by
the three robots and all raspberries in robots, tcpdump
software was installed.
For CoAP protocol and mesh-wifi did not require a special configuration same with MQTT
configuration but with change PC/Laptop as server
and robots as clients.
The result of experiment for 1, 2 and 3 robots was
plotted in a graphic for MQTT and CoAP protocol.
Figure 10 shows MQTT and CoAP performance in
this experiment. It can be seen from Figure 10 that for
MQTT protocol, with any numbers of robots, all
robots receive almost same amount of data because
MQTT works on the TCP /IP layer where it cannot
broadcast data in parallel to all clients in same time.
Figure 10: Received data in multi-robot with MQTT and
CoAP protocol
Wate
r
FE
Mesh Network
-WebserverTornado
Framework
-Using websocket to get
data and control all robot
Fire Extinguisher (FE) Water Provider Leader
Cam
Table 1: Experiment environment
Figure 7: MQTT design for 1 robot
Figure 8: MQTT design for 2 robots
PC/Laptop Robot 1 Mesh
Broker/Publisher Subscriber 2 m
Mesh
Robot 1 Robot 2
PC/Laptop Broker/Publisher
Subscriber
Subscriber
2 m
2 m
2 m
PC/Laptop
Mesh
Broker
/Publisher
Subscriber
Subscriber Subscriber
Robot 1
Robot 2 Robot 3
2 m
2 m 2 m
2 m
3.4 m
2 m
Figure 9: MQTT design for 3 robots
Figure 6: Communication Structure among the robots

146
For CoAP, the total received data is greater for
more number of robots. However, the total data that
using the CoAP protocol is fewer than using MQTT.
Comparison on error packet data between MQTT
and CoAP is shown in Figure 11. CoAP has no error data. But it doesn’t mean CoAP better than MQTT in
data accuration. It happen because data transfer rate of
CoAP under MQTT. Error in this case can be caused
by data traffic in MQTT protocol.
Figure 11: Error Packet Data in MQTT and CoAP Protocol
In our experiment, it is easy to use MQTT to send
data to the targeted robots. MQTT uses topics to connect the sender and data receiver. So data
communication lines can be set easily. CoAP needs
combination of GET/PUT method for data
communication. This method must be prepared before
executing in a python script. For integration with web
as GUI (Graphical User Interface), MQTT protocol is
easier than CoAP .
Figure 12: Comparison Data Transfer Rate between MQTT
and CoAP
From Figure 12, data transfer rate for MQTT
protocol is higher than CoAP. Therefore, multi-robot
using MQTT protocol receives more data in 1 hour
than multi-robot using CoAP protocol. This result
shows that the MQTT protocol can be used for real
time communication rather than CoAP. For communication test between robots, we tried
to send data from 1 robot to other while moves with
configuration that shown in Figure 13.
Robot 1 sent 988-bytes of data string to Robot 2
through a laptop as a broker in MQTT configuration
and as a server in CoAP Configuration. Distance
between robots was 1 m and position of laptop was
fixed. 2 robots moved forward together and left
laptop in its position. Figure 14 shows the results of
the experiment.
Figure 14: Comparison of MQTT vs CoAP throughput when 2
robots move
Then, we tried to change distance between robots
with position of a server/broker and 1 robot were
fixed as in Figure 15. And the result is shown in
Figure 16.
Figure 14 and 16 show that the performance of the
MQTT protocol was better in throughput and stable
than CoAP although the multi-robot moved within the
range of distance that we set.
Figure 13: Communication Scheme between 2 robots with MQTT
& CoAP
Server/Lapto
p
Robot 1 Robot 2 5m
Figure 15: Communication Scheme between 2 robots with
different
distance between of them
Figure 16: Comparison of MQTT and CoAP Throughput for
Communication between Robots when 1 robot move
Publisher/Client
Robot 1
Robot 2
Server/Laptop Broker
Subscriber/Client
1m

147
VI. CONCLUSION
This research has compared MQTT and CoAP
communication protocols to remotely control disaster
multi-robot. MQTT Protocol is good for real time communication for Disaster Multi-robot because it
has higher data transfer rate than CoAP in sending
data. Moreover, MQTT is more simple to use for
Disaster Multirobot communication and integrate in
user interface. MQTT has throughput bigger than
CoAP in different distances of Disaster Multi-robot
positions.
REFERENCES [1] “Magnitude 7.0 earthquake hits Lombok.” [Online].
Available:
http://www.thejakartapost.com/multimedia/2018/08/10/magn
itude-7-0-earthquake-hits-lombok.html. [Accessed: 15-Aug-
2018].
[2] H. Kitano, “RoboCup Rescue: A grand challenge for multi-
agent systems,” in Proceedings - 4th International
Conference on MultiAgent Systems, ICMAS 2000, 2000, pp.
5–12.
[3] J. Liu, H. Zhang, B. Fan, G. Wang, and J. Wu, “A Novel
Economical Embedded Multi-mode Intelligent Control
System for Powered Wheelchair,” 2010 Int. Conf. Comput.
Control Ind. Eng., pp. 156–159, 2010.
[4] X. Long, J. Jiang, and K. Xiang, “Towards Multirobot
Communication,” 2004 IEEE Int. Conf. Robot. Biomimetics,
pp. 307–312, 2004.
[5] S. Kahar, R. Sulaiman, A. S. Prabuwono, and N. A. Ahmad,
“A Review of Wireless Technology Usage for Mobile Robot
Controller,” vol. 34, no. Icsem, pp. 7–12, 2012.
[6] T. Sun, X. Xiang, W. Su, H. Wu, and Y. Song, “A
transformable wheel-legged mobile robot: Design, analysis
and experiment,” Rob. Auton. Syst., vol. 98, pp. 30–41, 2017.
[7] A. R. A. Besari, R. Zamri, A. S. Prabuwono, and S.
Kuswadi, “The study on optimal gait for five-legged robot
with reinforcement learning,” Lect. Notes Comput. Sci.
(including Subser. Lect. Notes Artif. Intell. Lect. Notes
Bioinformatics), vol. 5928 LNAI, pp. 1170–1175, 2009.
[8] S. Kuswadi, M. N. Tamara, D. A. Sahanas, G. I. Islami, and
S. Nugroho, “Adaptive morphology-based design of multi-
locomotion flying and crawling robot ‘PENS-FlyCrawl,’”
2016 Int. Conf. Knowl. Creat. Intell. Comput. KCIC 2016,
pp. 80–87, 2017.
[9] B. Doroodgar, Y. Liu, and G. Nejat, “A learning-based semi-
autonomous controller for robotic exploration of unknown
disaster scenes while searching for victims,” IEEE Trans.
Cybern., vol. 44, no. 12, pp. 2719–2732, 2014.
[10] J. S. Jennings, G. Whelan, and W. F. Evans, “Cooperative
search and rescue with a team of mobile robots,” 1997 8th
Int. Conf. Adv. Robot. Proceedings. ICAR’97, pp. 193–200,
1997.
[11] N. Aroon, “Study of using MQTT cloud platform for
remotely control robot and GPS tracking,” 2016 13th Int.
Conf. Electr. Eng. Comput. Telecommun. Inf. Technol. ECTI-
CON 2016, 2016.
[12] D. Thangavel, X. Ma, A. Valera, H. X. Tan, and C. K. Y.
Tan, “Performance evaluation of MQTT and CoAP via a
common middleware,” IEEE ISSNIP 2014 - 2014 IEEE 9th
Int. Conf. Intell. Sensors, Sens. Networks Inf. Process. Conf.
Proc., no. April, pp. 21–24, 2014.
[13] N. Stephen, “Power Profiling: HTTPS Long Polling vs.
MQTT with SSL, on Android,” 2012. .
[14] N. De Caro, W. Colitti, K. Steenhaut, G. Mangino, and G.
Reali, “Comparison of two lightweight protocols for
smartphone-based sensing,” in IEEE SCVT 2013 -
Proceedings of 20th IEEE Symposium on Communications
and Vehicular Technology in the BeNeLux, 2013.
[15] S. Bandyopadhyay and A. Bhattacharyya, “Lightweight
Internet protocols for web enablement of sensors using
constrained gateway devices,” in 2013 International
Conference on Computing, Networking and
Communications, ICNC 2013, 2013, pp. 334–340.
[16] M. H. Amaran, N. A. M. Noh, M. S. Rohmad, and H.
Hashim, “A Comparison of Lightweight Communication
Protocols in Robotic Applications,” Procedia Comput. Sci.,
vol. 76, no. Iris, pp. 400–405, 2015.
[17] H. Yuliandoko, S. Sukaridhoto, U. H. Al Rasyid, and N.
Funabiki, “Performance of Implementation IBR-DTN and
Batman-Adv Routing Protocol in Wireless mesh Networks,”
Emit. Int. J. Eng. Technol., vol. 3, no. 1, 2015.
[18] L. M. Cortés-peña, “Wireless Mesh Network
Implementation,” Comput. Eng., 2007.
[19] Davinder Singh Sandhu and Sukesha Sharma, “Performance
Evaluation of BATMAN, DSR, OLSR Routing Protocols - A
Review,” Int. J. Emerg. Technol. Adv. Eng., vol. 2, no. 1, pp.
184–188, 2012.