
Mod Sys 2008
441
Федеральное агентство по образованию Томский государственный университет систем управления и радиоэлектроники Г.. Н Решетникова МОДЕЛИРОВАНИЕ СИСТЕМ Учебное пособие , Издание второе переработанное и дополненное - Рекомендовано учебно методическим объединением вузов , Российской федерации по образованию в области радиотехники , электроники биомедицинской техники и автоматизации в качестве учебного пособия для студентов высших , 220201 учебных заведений обучающихся по специальности « » Управление и информатика в технических системах Томск 2007 Created with novaPDF Printer (www.novaPDF.com)
Transcript of Mod Sys 2008

11
Федеральное агентство по образованию
Томский государственный университет систем управления и радиоэлектроники
Г. . Н Решетникова
МОДЕЛИРОВАНИЕ СИСТЕМ
Учебное пособие
,Издание второе переработанное и дополненное
- Рекомендовано учебно методическим объединением вузов ,Российской федерации по образованию в области радиотехники
, электроники биомедицинской техники и автоматизации в качестве учебного пособия для студентов высших
, 220201учебных заведений обучающихся по специальности« »Управление и информатика в технических системах
Томск2007
Created with novaPDF Printer (www.novaPDF.com)

2 . . .Г Н Решетникова Моделирование систем
УДК 681.51.015.26(075.8)ББК 22.181 73я
47Р
:Рецензенты кафедра оптимизации систем управления
. . - , . ., - . Томск политехн ун та зав каф д р техн наук профессор . . В А Силич;
- . . . - д р техн наук профессор Томск гос ун та . . В И Смагин
. .Решетникова Г Н47Р Моделирование систем : . / . . учеб пособие Г Н Решетникова ;
, . . - Федеральное агентство по образованию Томск гос ун т систем. . — 2- ., . . — упр и радиоэлектроники е изд перераб и доп Томск :
. . - . , 2007. — 441 .Томск гос ун т систем упр и радиоэлектроники сISBN 978-5-86889-364-3
, Даны основные понятия моделирования систем выделены отдельные виды: , , , , -моделирования математическое физическое статистическое имитационное аг
.регативное Рассмотрены численные методы и методы проектирования следящих систем
. адаптивного управления для многомерных стохастических моделей Приведены ,примеры построения математических моделей и описание программных средств
.используемых для моделирования Во второе издание включены контрольные вопросы для самопроверки знаний
, , и дополнительные примеры в приложении приведены задачи которые могут , -служить основой компьютерного практикума и описания математических моде
лей различных объектов для индивидуальных заданий по моделированию систем.управления
, « -Для студентов вузов обучающихся по специальности Информатика и управ », -ление в технических системах также может быть полезно специалистам в обла
.сти моделирования сложных систем
УДК 681.51.015.26(075.8)ББК 22.181 73я
Первое издание учебного пособия является победителемIII Общероссийского конкурса учебных изданий
« »для высших учебных заведений Университетская книга « »в номинации Лучшее учебное издание по точным наукам
. ., 2005Решетникова Г Н . ., 2007,Решетникова Г Н с изменениями . . - .Томск гос ун т систем упр
, 2007и радиоэлектроникиISBN 978-5-86889-364-3
Created with novaPDF Printer (www.novaPDF.com)

3
Оглавление
Предисловие .................................................................................. 8Введение ..................................................................................... 101. ОСНОВНЫЕПОНЯТИЯ МОДЕЛИРОВАНИЯ СИСТЕМ ................... 12
1.1. Модель ............................................................................. 131.1.1. Свойства моделей ...................................................... 131.1.2. Классификации моделей ............................................. 151.1.3. Основное определение модели ...................................... 17
1.2. Система ............................................................................ 171.2.1. « »Историческое развитие понятия система .................... 181.2.2. « »Модель черного ящика ............................................ 191.2.3. Модель состава системы .............................................. 201.2.4. Модель структуры системы ......................................... 211.2.5. Структурная схема системы ........................................ 251.2.6. Классификации систем ............................................... 251.2.7. Основные понятия и определения ................................. 291.2.8. Анализ и синтез систем .............................................. 311.2.9. Основные системные принципы .................................... 33
1.3. Моделирование................................................................... 341.3.1. Классификация методов представления систем ............... 341.3.2. Методы формализованного представления систем ............ 351.3.3. Методы неформализованного представления систем ......... 361.3.4. Классификация видов моделирования ........................... 38
1.4. Контрольные вопросы .......................................................... 402. МАТЕМАТИЧЕСКОЕМОДЕЛИРОВАНИЕ ..................................... 42
2.1. Цели и задачи математического моделирования ....................... 422.2. Этапы построения математических моделей ............................ 432.3. Основные характеристики математических моделей ................. 442.4. Классификация математических моделей ................................ 482.5. Формы представления математических моделей ....................... 48
2.5.1. - Непрерывно детерминированные модели ........................ 482.5.2. - Дискретно детерминированные модели .......................... 502.5.3. - Дискретно вероятностные модели ................................. 532.5.4. - Непрерывно вероятностные модели .............................. 54
2.6. Методы упрощения математических моделей ........................... 552.7. Контрольные вопросы ......................................................... 57
3. ЭЛЕМЕНТЫТЕОРИИПОДОБИЯ ................................................ 583.1. Использование теории подобия при физическом
моделировании ................................................................... 583.1.1. Анализ размерностей ................................................. 593.1.2. Физическое моделирование ......................................... 61
3.2. Математическое подобие ...................................................... 633.3. Элементы статистической теории подобия ............................... 653.4. Контрольные вопросы ......................................................... 68
Created with novaPDF Printer (www.novaPDF.com)

4 . . .Г Н Решетникова Моделирование систем
4. СТАТИСТИЧЕСКОЕМОДЕЛИРОВАНИЕ ...................................... 694.1. Методы имитации случайных элементов на ЭВМ ..................... 69
4.1.1. Принципы моделирования случайных элементов ............ 704.1.2. Типы датчиков базовых случайных величин ................. 724.1.3. Методы построения программных датчиков .................. 73
4.2. Моделирование случайных величин ...................................... 754.2.1. Моделирование дискретных случайных величин ............ 754.2.2. Моделирование непрерывных случайных величин .......... 774.2.3. Моделирование случайных процессов ........................... 80
4.3. -МетодыМонте Карло ......................................................... 814.3.1. - Простейший метод Монте Карло вычисления
интегралов .............................................................. 824.3.2. -Геометрический метод Монте Карло ............................. 87
4.4. Контрольные вопросы ........................................................ 935. ИМИТАЦИОННОЕМОДЕЛИРОВАНИЕ ....................................... 96
5.1. Принципы построения имитационных моделей ....................... 975.2. Организация процесса моделирования ................................... 985.3. Способы имитации ............................................................ 1015.4. Этапы имитационного моделирования .................................. 1025.5. Планирование имитационных экспериментов ........................ 105
5.5.1. Стратегическое планирование имитационногоэксперимента .......................................................... 106
5.5.2. Тактическое планирование имитационногоэксперимента .......................................................... 108
5.6. Обработка и анализ результатов моделирования .................... 1095.6.1. Оценка качества имитационной модели ....................... 1105.6.2. Подбор параметров распределений ............................. 1135.6.3. Оценка влияния и взаимосвязи факторов ..................... 116
5.7. Достоинства и недостатки имитационного моделирования ....... 1205.8. Контрольные вопросы ....................................................... 121
6. АГРЕГАТИВНОЕМОДЕЛИРОВАНИЕ ......................................... 1236.1. Основные характеристики агрегативной модели ..................... 1236.2. Математическое описание процесса функционирования
агрегата .......................................................................... 1256.3. Пример агрегативного моделирования .................................. 1286.4. Контрольные вопросы ....................................................... 129
7. ЧИСЛЕННЫЕМЕТОДЫМОДЕЛИРОВАНИЯ .............................. 1307.1. Элементы теории погрешности ............................................ 131
7.1.1. Основные определения .............................................. 1317.1.2. Запись чисел в ЭВМ ................................................. 1327.1.3. Верные знаки приближенного числа ........................... 1327.1.4. Классификация погрешностей .................................... 1347.1.5. Погрешность функции многих переменных .................. 135
7.2. Приближение данных ........................................................ 1377.2.1. Интерполирование .................................................... 1377.2.2. -Сплайн функции ...................................................... 155
Created with novaPDF Printer (www.novaPDF.com)

5Содержание
7.2.3. Аппроксимация данных методом наименьшихквадратов ................................................................ 162
7.3. Численное дифференцирование ............................................ 1727.4. Численное интегрирование ................................................. 178
7.4.1. Интерполяционные квадратурные формулы .................. 1787.4.2. Квадратурные формулы наивысшей алгебраической
. степени точности Квадратурные формулы Гаусса .......... 1807.4.3. Метод Рунге оценки погрешности формул
— Ньютона Котеса ................................................... 1837.4.4. Квадратурные формулы наивысшей алгебраической
. степени точности Квадратурные формулы Гаусса .......... 1857.5. Решение нелинейных уравнений и систем ............................. 196
7.5.1. Решение нелинейных уравнений ................................. 1977.5.2. Метод Лобачевского при решении алгебраических
уравнений ............................................................... 2077.5.3. Решение систем нелинейных уравнений ........................ 213
7.6. Решение задач матричной алгебры ...................................... 2207.6.1. Некоторые понятия матричной алгебры ...................... 2217.6.2. Обусловленность систем и матриц ............................... 2247.6.3. Метод Гаусса ........................................................... 2287.6.4. Метод отражений ..................................................... 2327.6.5. Метод квадратного корня .......................................... 2387.6.6. Итерационные методы решения систем линейных
алгебраических уравнений ........................................ 2417.6.7. Метод Данилевского при решении полной проблемы
. собственных значений Построение канонической формы Фробениуса ................................................... 248
7.6.8. Метод Фаддеева ....................................................... 2537.6.9. Метод вращений ...................................................... 255
7.7. Решение обыкновенных дифференциальных уравнений и систем .......................................................................... 260
7.7.1. Методы Эйлера и Рунге— Кутта при решении задачи Коши для дифференциального уравнения первого порядка ...................................................... 261
7.7.2. Правило Рунге ........................................................ 2637.7.3. Методы Эйлера и Рунге— Кутта при решении
задачи Коши для систем дифференциальныхуравнений ............................................................... 267
7.7.4. Решение задачи Коши для систем линейных дифференциальных уравнений ................................... 269
7.7.5. Методы Адамса при решении задачи Коши для обыкновенных дифференциальных уравнений ......... 270
7.7.6. Метод сеток решения линейных краевых задач ............ 2747.7.7. Метод коллокации решения краевых задач .................. 277
7.8. Контрольные вопросы ....................................................... 281
Created with novaPDF Printer (www.novaPDF.com)

6 . . .Г Н Решетникова Моделирование систем
8. МОДЕЛИРОВАНИЕ СИСТЕМУПРАВЛЕНИЯ ............................... 2888.1. Описание систем в пространстве состояний ........................... 2888.2. Аналитическое конструирование оптимальных регуляторов ..... 291
8.2.1. Оптимальное управление при минимизации классического квадратичного функционала .................. 293
8.2.2. Оптимальное управление при минимизации функционала обобщенной работы ............................... 295
8.2.3. Оптимальное управление при минимизации локального квадратичного критерия ........................................... 298
8.2.4. Синтез следящей системы управления ......................... 2998.3. Моделирование систем оптимального управления ................... 300
8.3.1. Основные понятия цифровых систем управления .......... 3018.3.2. Моделирование поведения управляемого объекта .......... 3028.3.3. Синтез оптимального управления ............................... 305
8.4. Моделирование систем управления при случайных внешних воздействиях ....................................................... 314
8.4.1. Моделирование поведения объекта при наличии внешнихвозмущений ............................................................ 314
8.4.2. Описание математической модели измерительногокомплекса ............................................................... 316
8.4.3. Оценивание состояния модели объекта ......................... 3168.4.4. Синтез управляющих воздействий по оценкам
состояния ................................................................ 3208.5. Синтез адаптивной следящей системы ................................... 325
8.5.1. Основные понятия адаптивных систем управления ......... 3268.5.2. Одновременное оценивание состояния и параметров
модели объекта ........................................................ 3278.6. Учет ограничений и запаздываний по управлению .................. 3378.7. Общая схема синтеза адаптивных систем управления .............. 3388.8. Примеры моделирования адаптивных систем управления ......... 340
8.8.1. Моделирование адаптивной системы управления боковым движением самолета ..................................... 340
8.8.2. Моделирование адаптивной системы управления судном при изменении курса ................................................. 345
8.8.3. Моделирование адаптивной системы управления смесительным баком .................................................. 351
8.8.4. Моделирование адаптивной системы управленияпоставками .............................................................. 356
8.9. Контрольные вопросы ........................................................ 3599. ПРИМЕРЫПОСТРОЕНИЯ МАТЕМАТИЧЕСКИХМОДЕЛЕЙ .......... 362
9.1. Построение математических моделей прямолинейного и вращательного движения ................................................. 362
9.1.1. Математическая модель прямолинейного движения ....... 3629.1.2. Математическая модель вращательного движения ......... 364
Created with novaPDF Printer (www.novaPDF.com)

7
9.2. Макроэкономическая модель динамики фондов производственного накопления и потребления ....................... 364
9.3. , Построение математических моделей производства хранения и сбыта товара повседневного спроса .................................... 366
9.4. Построение математической модели вертикального движенияракеты ............................................................................ 369
10. ПРОГРАММНЫЕСРЕДСТВА МОДЕЛИРОВАНИЯ ...................... 37110.1. Языки программирования ................................................ 371
10.1.1. FortranЯзык ....................................................... 37110.1.2. Язык С ............................................................... 37210.1.3. ++Язык С ........................................................... 37310.1.4. Pascal Object PascalЯзыки и .................................. 375
10.2. Системы разработки программного обеспечения .................. 37510.2.1. Microsoft Visual C++ MFCи ................................... 37510.2.2. Borland Delphi...................................................... 37610.2.3. Borland C++Builder ............................................... 376
10.3. Специализированные математические пакеты ..................... 37610.3.1. MapleСистема ...................................................... 37710.3.2. MathematicaСистема ............................................. 37810.3.3. MatLABСистема ................................................... 37910.3.4. MathCADСистема ................................................. 38010.3.5. STATISTICAСистема ............................................. 38110.3.6. EXCELСистема .................................................... 381
Литература ................................................................................. 382 1.Приложение Задачи ................................................................. 384 2.Приложение Варианты исходных данных к задачам ..................... 406 3.Приложение Описание математических моделей
для моделирования систем управления ..................... 430
Содержание
Created with novaPDF Printer (www.novaPDF.com)

8 . . .Г Н Решетникова Моделирование систем
Предисловие
, Понятие системы настолько широко что может быть применено . -практически к любой сфере человеческой деятельности Соответствен
, -но и моделирование систем как инструмент анализа и синтеза реаль , , -ных объектов процессов явлений не ограничивается рамками отдель . ной специальности Поэтому в первых главах учебного пособия основное
:внимание уделено общеметодологическим аспектам моделирования, , определениям классификации описанию отдельных типов и видов
-моделей и их соотнесению с теми или иными классами реальных объек . -тов и процессов В учебное пособие также включены главы по числен , ным методам моделирования и моделированию систем управления что
позволит освоить методы решения различных задач на компьютере и , -спроектировать систему управления для объекта или процесса мате
.матические модели которых заданы в пространстве состояний -Несмотря на наличие большого количества научной и учебной ли
, , , тературы посвященной с одной стороны проблемам общей теории, , , -систем и с другой стороны достаточно частным прикладным вопро
, - -сам моделирования существует дефицит учебно методического обес, печения интегрирующего общие и частные аспекты моделирования
. -систем независимо от природы и происхождения последних В настоя -щем учебном пособии сделана попытка такой интеграции с определен , -ным акцентом в сторону моделирования систем управления продикто
, ванным как потребностями конкретной специальности так и научными .интересами автора , Учебное пособие предназначено для студентов вузов обучающихся
« -по специальности Информатика и управление в технических систе» -мах и полностью соответствует требованиям государственного образо
. , -вательного стандарта Оно может быть полезным для студентов обуча - -ющихся по другим инженерно техническим и экономическим специ
, , альностям а также для специалистов желающих познакомиться .с методами компьютерного моделирования
-Второе издание дополнено контрольными вопросами для самопро , верки знаний примерами по численным методам моделирования
. , -и моделированию систем управления Кроме того добавлено приложе, , -ние где приведены задачи и варианты исходных данных к ним кото , -рые могут служить основой компьютерного практикума а также опи
-сания математических моделей различных объектов для индивидуаль .ных заданий по моделированию систем управления « »,В основе пособия лежат учебные курсы Моделирование систем
« », « », «Моделирование систем управления Численные методы Пакеты », -прикладных программ читаемые автором студентам Томского госу дарственного университета систем управления и радиоэлектроники
Created with novaPDF Printer (www.novaPDF.com)

9
( ) -ТУСУРа и факультета прикладной математики и кибернетики Том ( ). , ского государственного университета ФПМК ТГУ Кроме того при
-написании учебного пособия был использован опыт автора в разработ .ке реальных систем управления
В последней главе учебного пособия приводится краткое описание , , -программных средств как инструментальных так и специализиро
, ванных математических пакетов наиболее часто используемых для. -моделирования Эта глава написана в соавторстве с Борисовым Серге
, -ем Ивановичем старшим преподавателем кафедры компьютерных си ( ) .стем в управлении и проектировании КСУП ТУСУРа
, -При подготовке примеров и задач включенных в настоящее посо, бие принимали непосредственное участие студенты ФПМК ТГУ и
.КСУП ТУСУРа
Автор
Предисловие
Created with novaPDF Printer (www.novaPDF.com)

10 . . .Г Н Решетникова Моделирование систем
Введение
- -Переживаемый в настоящее время этап научно технического про , -гресса является этапом информатизации который характеризуется рас
, -ширением внедрения информационно вычислительных систем созда ,нием и развитием методов автоматического управления в технике
, , . -экономике медицине биологии и других видов деятельности В со ,временной теории автоматического управления доминирует подход
-предусматривающий концепцию совмещенного синтеза систем управ, -ления как самый приемлемый для реализации на управляющих ком
. , пьютерах Наиболее перспективными методами позволяющими решать , , -задачи совмещенного синтеза являются методы основанные на опти
, мизации квадратичных критериев а использование прогнозирующих , моделей и скользящего интервала времени позволяет существенно
.расширить возможности синтеза адаптивного управления -В учебном пособии рассматриваются методы синтеза систем управ ления для решения задач слежения для многомерных стохастических
, -моделей объектов функционирующих в условиях неполной информа . , -ции о состоянии объекта и его параметрах Заметим что задача слеже . ния является одной из основных в теории управления Такие задачи
возникают при переводе технологического процесса из одного режима , .в другой управлении подвижными объектами для маневрирования
Типичным примером задачи слежения является задача прецизионного -слежения антенны радиолокатора за летящим объектом при воздей
ствии на антенну ветровых возмущений и непредвиденных маневрах. -цели Единственным способом решения таких задач является имита
, -ционное моделирование при котором возникает необходимость в чис . -ленных методах В связи с этим рассмотрены численные методы реше
, ния некоторых задач при этом более подробно рассмотрены методы , -приближения данных решения задач матричной алгебры и обыкно
, -венных дифференциальных уравнений и систем которые используют .ся при моделировании систем управления
, Развитие науки техники и общества в целом настоятельно требует использования все более сложных математических моделей изучаемых
. , явлений и процессов При решении задач связанных с повышением , ,эффективности производства управлением различными объектами
- обнаружением радио и гидролокационных сигналов на фоне помех ., , и др все чаще приходится иметь дело с объектами математические
-модели которых описываются динамическими стохастическими систе, , , -мами где возмущения или помехи действующие на объект рас
. , -сматриваются как случайные величины Кроме того в реальной ситуа ции информация о состоянии объекта чаще всего бывает неполной
. и искаженной случайными ошибками В связи с этим все большую
Created with novaPDF Printer (www.novaPDF.com)

11
актуальность приобретают вопросы статистического моделирования как .универсального средства представления большинства сложных систем
Так как со временем происходит усложнение как рассматриваемых , , объектов и процессов так и их математических моделей то все чаще
-единственным методом их исследования становится имитационное мо. , делирование Это означает что важное значение приобретают вопросы
, -стратегического и тактического планирования а также анализа и об .работки данных имитационных экспериментов
« Учебный материал в пособии построен по принципам от общего » « ». -к частному и от простого к сложному Поэтому вначале описывает , -ся историческое становление основных понятий определений и клас
, , сификаций определяются типы моделей используемые для описания , объектов и процессов которым поставлены в соответствие конкретные
. -виды моделирования Вопросы моделирования систем управления рас сматриваются путем постепенного добавления и усложнения методов
: и алгоритмов от оптимального управления для детерминированных моделей до адаптивных следящих систем для стохастических моделей
. , при неполном измерении с ошибками Кроме того все рассмотренные , -методы доведены до непосредственно реализуемых алгоритмов что де
.лает возможным организацию компьютерного практикума
Введение
Created with novaPDF Printer (www.novaPDF.com)

12 . . .Г Н Решетникова Моделирование систем
1. ОСНОВНЫЕ ПОНЯТИЯ МОДЕЛИРОВАНИЯ СИСТЕМ
Подход к объектам исследования как к системам выражает одну . -из главных особенностей современной науки Идея построения тео
, , -рии применимой к системам любой природы была выдвинута авст . . рийским биологом Л фон Берталанфи Один из путей реализации этой
,идеи Берталанфи видел в определении структурных сходств законов , установленных в различных дисциплинах их обобщении и выведении .общесистемных закономерностей
. Вначале теорию систем активно развивали философы Однако -философская терминология не всегда легко применима к практиче
, ской деятельности поэтому потребности практики одновременно со ,становлением теории систем привели к возникновению направления
названного исследованием операций. -При постановке и исследовании слож ных проблем проектирования и управления широкое распространение
получил термин системотехника. В связи с неточным переводом этот -термин стал использоваться в основном в приложениях системных ме
, тодов к техническим направлениям а для других направлений был предложен термин системология. ,В настоящее время в дисциплинах , -связанных с исследованием и проектированием сложных систем ис пользуются термины системные исследования , , и значительно реже -сис
темный подход. Наиболее конструктивным из направлений системных исследований считается системный анализ, 1948 появившийся в году
. -в связи с задачами военного управления В отличие от других направ , лений системных исследований в системном анализе предлагается -ме
тодика проведения системных исследований и осуществляется работа , . . , .с целями т е их формулирование исследование и структуризация
, Таким образом системный анализ — -это методология исследования целе направленных систем. , При этом разработка методики выбор методов
-и приемов выполнения базируются на использовании понятий и зако .номерностей теории систем
-Необходимость использования системного анализа объясняется сле :дующими основными причинами
( , -большинство традиционных научных дисциплин биология хи, . .) мия физика и т д в качестве предмета исследования рассматривают
— , -систему совокупность элементов находящихся в отношениях и свя ;зях друг с другом и представляющих собой единое целое
Created with novaPDF Printer (www.novaPDF.com)
13
-внедрение вычислительной техники и средств автоматизации при , , -вело к тому что главными объектами научного исследования техни
-ческого проектирования и конструирования оказались сложные дина .мические системы
1.1. Модель
Первоначально моделью -называли некоторое вспомогательное сред, , . ство объект который в определенной ситуации заменял другой При ,этом далеко не сразу была понята универсальность законов природы
, . . , -всеобщность моделирования т е не просто возможность но и необхо .димость представления любых знаний в виде моделей
, -В ХХ веке понятие модели становится более общим охватываю , . -щим как реальные так и идеальные модели При этом понятие абст
рактной модели вышло за пределы математических моделей и стало . относиться к любым знаниям и представлениям о мире Споры вокруг
.такого широкого толкования понятия модели продолжаются и поныне , -Таким образом сначала в сфере научных дисциплин информационно
, , , го кибернетического системного направления а затем и в других ,областях науки модель стала осознаваться как нечто универсальное
, . . хотя и реализуемое различными способами т е -модель есть способ су ществования знаний.
1.1.1. Свойства моделей
, Для того чтобы модель отвечала своему назначению недостаточно . ,взять готовую или создать новую Необходимо существование условий
, -обеспечивающих функционирование модели отсутствие таких усло . , —вий лишает ее модельных свойств Например программа для ЭВМ , , это машинная модель алгоритма программисты знают что малейшее
-рассогласование в программе с языком машины полностью обесцени . , -вает ее Таким образом для реализации модельных свойств необходи
, , мо чтобы модель была согласована со средой в которой ей предстоит, , функционировать входила в эту среду не как чуждый элемент а как
. -естественная часть Такое свойство согласованности с культурной сре дой обозначают термином ингерентность ( . от анг inherent — -внутрен, , , -ний собственный накрепко связанный существующий как неотъем
).лемая часть Между моделью и отображаемой ею реальностью существуют как
, .соответствия так и различия, , , Мир частью которого мы являемся бесконечен как бесконечен
, и любой объект не только в пространстве и времени но и в связях . -с другими объектами Но ограничены как наши собственные ресур
( , , сы число нервных клеток время которое мы можем затратить на
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

14 . . .Г Н Решетникова Моделирование систем
- . .), , решение какой то задачи и т д так и внешние ресурсы которые мы -можем вовлечь в конкретный процесс практической или теоретиче
. , ской деятельности Таким образом необходимо познавать бесконечный , мир конечными средствами и способ преодоления этого противоречия
. -состоит в построении моделей При этом необходимо обязательно учи, тывать чем отличаются модели и реальные объекты и в каком смысле
.и до какой степени можно отождествлять модель с оригиналом — Главные различия между моделью и действительностью это
, конечность упрощенность и приближенность .модели Модель конечна, :так как
;она отображает оригинал лишь в конечном числе отношений .ресурсы моделирования конечны
Модель всегда упрощенно . отображает оригинал Упрощенность . характеризует качественные различия модели и оригинала Причины :упрощенности состоят в следующем
;сама конечность моделей делает их упрощенность неизбежной , -модель отображает только главные наиболее существенные свой ( , -ства в исследуемом явлении идеальный газ математический маят, . .);ник абсолютно черное тело и т д ( , -ограничены средства оперирования с моделью например ресур
).сы ЭВМ Модель всегда приближенно ( ) -приблизительно отображает действи
. -тельность Приближенность модели характеризует количественные раз ( , — -личия между моделью и оригиналом например карта страны при
).ближенная модель страны , Таким образом различие между моделью и оригиналом вызвано
, тем что мы можем отображать реальность лишь в конечном числе, . -отношений конечными средствами В результате упрощение и при
. ближенность модели необходимы и неизбежны Различие само по себе , : , .не может быть ни большим ни маленьким оно либо есть либо его нет
, , , -Величину меру степень приемлемости различия можно ввести толь .ко соотнеся их с целью моделирования
Соответствие модели оригиналу связано с понятием адекватности. модели Модель, ,с помощью которой успешно достигаетсяпоставленная цель
называется адекватной этой цели. -В ряде случаев удается ввести некото , . . рую меру адекватности модели т е указать способ сравнения двух
. моделей по степени успешности достижения цели Если такой способ , приводит к количественно выражаемой мере адекватности то можно
ставить задачи об идентификации ( -модели нахождении в заданном клас ), се моделей наиболее адекватной об исследовании чувствительности и устойчивости ( моделей зависимости меры адекватности модели от ее
), точности об адаптации ( -моделей подстройке параметров модели с це ) . .лью повышения адекватности и т д
Created with novaPDF Printer (www.novaPDF.com)

15
Поскольку различия между моделью и реальностью неизбежны , , ,и неустранимы существует предел истинности правильности знаний
. , -сконцентрированных в моделях Об истинности правильности или лож , ности модели самой по себе говорить бессмысленно так как только
в практическом соотнесении модели с отображаемой ею реальностью . , -выявляется степень истинности модели Изменение условий в кото
, : рых ведется сравнение весьма существенно влияет на результат именно- , « -из за этого возможно существование двух противоречивых но одина
» ( ково истинных моделей одного объекта волновая и корпускулярная , модели света или электрона различны противоположны и истинны ).каждая в своих условиях
1.1.2. Классификации моделей
. Существуют различные классификации моделей Так как всякая , -деятельность направлена на достижение определенной цели то и мо
- , , -дель отображает не сам по себе объект оригинал а то что соответству . ет поставленной цели Это позволяет все разнообразное множество
— . -моделей разделить на основные типы по типам целей Поэтому мо , -дели можно разделить на познавательные и прагматические что соот
.ветствует делению целей на теоретические и практические Познавательные -модели являются формой организации и представ
, .ления знаний средством соединения новых и существующих знаний Поэтому при обнаружении расхождения между моделью и реальностью решается задача устранения этого расхождения с помощью изменения
. , модели Таким образом познавательная деятельность ориентирована .в основном на приближение модели к отображаемой реальности
Прагматические , модели являются средством управления средством , -организации практических действий способом представления образ
, . . цово правильных действий или их результата т е являются рабочим . -представлением целей Поэтому использование прагматических моде
лей состоит в изменении реальности для приближения ее к модели при . , -обнаружении расхождения между ними Таким образом прагматиче
, ,ские модели носят нормативный характер играют роль стандарта, « » , .образца под которые подгоняются и деятельность и ее результат
-Примерами прагматических моделей могут служить планы и програм , . .мы действий алгоритмы и т д
Основное различие между познавательными и прагматическими , -моделями состоит в том что познавательные модели отражают суще, — , -ствующее а прагматические не существующее но желаемое и воз
можно осуществимое. -Другим принципом классификации целей моделирования мо
. жет служить деление моделей на статические и динамические -Статическими , называются модели описывающие взаимосвязи между
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

16 . . .Г Н Решетникова Моделирование систем
, . параметрами характеризующими объект в одно и то же время -Динамическими , -называются модели отображающие процесс изменения состоя
.ния объекта во времени , ,При построении моделей сознательно создаваемых человеком
.используются средства сознания и окружающего материального мира ( )В соответствии с этим модели делятся на абстрактные идеальные ( ).и материальные реальные
Абстрактные , -модели являются идеальными конструкциями пост , . , -роенными средствами мышления сознания Очевидно что к абстракт
. -ным моделям относятся все языковые конструкции Но так как нео ,днозначность естественного языка мешает в некоторых видах практики
( ) , -то были созданы более точные профессиональные языки которые за .вершаются формализованным языком математики, , -Модели создаваемые из реальных объектов и процессов назы
ваются реальными или физическими. -Чтобы некоторая материальная кон , . . - струкция могла быть отображением т е замещала в каком то смысле, оригинал между оригиналом и моделью должно быть установлено отношение похожести подобия. -Существуют разные способы установле
.ния такого подобия Прямое подобие устанавливается в результате цепочки физических
. -взаимодействий в процессе создания модели Примерами таких ото , -бражений являются фотографии масштабированные модели самоле
, , , , . .тов кораблей макеты зданий куклы выкройки и т д Косвенное подобие -между оригиналом и моделью объективно суще
ствует в природе и обнаруживается в виде совпадения или достаточной . , близости их абстрактных моделей Например подопытные животные
— , — у медиков аналоги человеческого организма автопилот аналог, летчика электрический ток может моделировать транспортные потоки
. информации в сетях связи Наиболее известным примером является , -электромеханическая аналогия так как некоторые закономерности элек
-трических и механических процессов описываются одинаковыми урав, нениями различие состоит лишь в разной физической интерпретации
, . , переменных входящих в эти уравнения Роль моделей обладающих , .косвенным подобием оригиналу очень велика
Условное подобие . -устанавливается в результате соглашения Приме ( ), -рами условного подобия служат деньги модель стоимости удостове ( ), -рения личности официальная модель владельца географические кар
( ) . . ты модели местности и т д С моделями условного подобия приходится , иметь дело очень часто так как они являются способом материального
, , воплощения абстрактных моделей вещественной формой в которой ,абстрактные модели могут передаваться от одного человека к другому
. храниться до момента их использования Это достигается с помощью , -соглашения о том какое состояние реального объекта ставится в соот
. ветствие данному элементу абстрактной модели Такое соглашение
Created with novaPDF Printer (www.novaPDF.com)

17
принимает вид совокупности правил построения моделей условного .подобия и пользования ими
, В некотором смысле промежуточное посредническое положение , — занимают реальные модели имеющие абстрактное содержание -зна
ковые . . -модели Это специфические модели условного подобия Напри, , , , -мер теория связи теория информации радиотехника теория управ
, ления и ряд других наук имеют дело с такими моделями которые получили название сигналов. -В этих науках правила построения и спо
, , -собы использования сигналов названные кодом кодированием и де, . , -кодированием сами стали предметом исследований В науках изуча
, ющих создание и использование этих моделей самим человеком у , -моделей условного подобия имеется своя специфика специальные ме
— тоды исследования и название знаки. Возникшая в связи с этим область знаний получила название семиотики. -Семиотика изучает зна
, ки не в отдельности а как входящие в знаковые системы. -Языкозна, , , , , -ние картография криптография графология нумизматика информа .тика занимаются исследованием моделей условного подобияСуществуют ,и другие классификации моделей -например по харак , . .теру используемого материала по цвету и т д
1.1.3. Основное определение модели
, -Поскольку модель является целевым отображением отсюда следу . ет множественность моделей одного и того же объекта Для разных
, -целей обычно требуются разные модели поэтому различия в определе . -ниях модели неизбежны На настоящий момент наиболее полное опре
. .деление модели дали Ф И . .Перегудов и Ф П . Тарасенко Модель есть отображение абстрактное или реальное; статическое или динамическое; -ин
герентное; конечное, упрощенное, приближенное; имеющее, -наряду с безуслов-но истинным, - условно ложное и ложное содержание; -проявляющееся и развиваю
щееся в процессе его создания и практического использования. Это громоздкое : определение можно заменить его кратким эквивалентом модель есть
системное отображение оригинала.
1.2. Система
Термин система , -используют в тех случаях когда хотят охарактери зовать исследуемый или проектируемый объект или процесс как нечто
, , , -целое сложное о котором невозможно сразу дать представление изоб . разив графически или описав математическим выражением Описание
, системы является моделью данной системы поэтому границы между « » « » .понятиями модель и система являются условными
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

18 . . .Г Н Решетникова Моделирование систем
1.2.1. Историческ «ое развитие понятия сист »ема
, -Существует несколько десятков определений системы которые из , менялись по мере развития теории систем не только по форме но и по
. содержанию В первых определениях в той или иной форме говорилось , — о том что система это элементы ( , ) части компоненты и связи ( -отно
) . , . шения между ними Так Л фон Бенталанфи определил систему как , совокупность элементов находящихся в определенных отношениях друг
. с другом и со средой Позднее для уточнения элементов и связей в определения включаются свойства. Затем в определении системы
появляется понятие цель; — , — вначале в неявном виде потом в виде , , , -конечного результата системообразующего критерия функции а по
. -зднее и с явным упоминанием о цели В некоторых определениях уточ — няются условия целеобразования среда, интервал времени, . . -т е пери
, . ,од в рамках которого будут существовать система и ее цели Так . . в определении В Н Сагатовского система определяется как конечное
, -множество функциональных элементов и отношений между ними вы -деленное из среды в соответствии с определенной целью в рамках оп
ределенного временного интервала. -Далее в определение системы на чинают включать наблюдателя — , лицо представляющее объект или .процесс в виде системы при исследовании или принятии решения , -Первое определение системы в которое в явном виде включен наблю, . . : датель дал Ю И Черняк система есть отражение в сознании субъекта
( , ) -исследователя наблюдателя свойств объекта и их отношений в реше , .нии задачи исследования познания
.Любая деятельность человека носит целенаправленный характер, , Цели которые ставит перед собой человек редко достижимы только
, за счет его собственных возможностей или внешних сил имеющихся . у него в данный момент Появляется проблемная ситуация. -Проблем
: -ность существующего положения осознается поэтапно от смутного ощу, « - », , -щения что что то не так к осознанию потребности затем к выявле
, , . нию проблемы и наконец к формулировке цели Цель— этосубъективный образ ( абстрактная модель) несуществующего, -но желаемого состояния сре
ды, которое решило бы возникшую проблему. -Вся последующая деятель, , -ность способствующая решению этой проблемы направлена на дости . , жение поставленной цели Это действия направленные на отбор из
, окружающей среды объектов свойства которых можно использовать , для достижения цели и на объединение этих объектов надлежащим
, . . , .образом т е это работа по созданию того что называется системой , Таким образом система есть средство достижения цели.
-Многие авторы развивали определение системы до различной сте . — , ,пени формализации Определение это языковая модель системы и
, , ,следовательно разная языковая среда в силу ингерентности модели ( также обусловливает видоизменение определений уже только поэтому
Created with novaPDF Printer (www.novaPDF.com)

19
, , отличаются например философское и математическое определения).системы
, Таким образом при проведении системного анализа необходимо -прежде всего отобразить ситуацию с помощью как можно более полно
, , -го определения системы а затем выделив наиболее существенные ком, « » , -поненты сформулировать рабочее определение которое может уточ
, .няться расширяться или сужаться в зависимости от хода анализа
1.2.2. « »Модель черного ящика
Приведенное выше определение системы ничего не говорит о ее . внутреннем устройстве Поэтому систему можно изобразить в виде
« », , непрозрачного ящика выделенного из окружающей среды где -среда — совокупность всех объектов, изменение свойств которых влияет насистему, и тех, чьи свойства меняются при взаимодействии с системой.
, Таким образом уже эта максимально простая модель отражает важные : свойства системы целостность и обособленность от среды. -Но хотя си
, , -стема обособлена выделена из среды она не является полностью изо, — лированной так как достигнутая цель это запланированные заранее
. изменения в окружающей среде Таким образом система связана со , средой и с помощью этих связей воздействует на среду эти связи
называются выходами . , системы Кроме того так как система является , , -средством достижения цели то должны существовать и связи обеспе . -чивающие ее использование и воздействие на нее Эти связи называ
ются входами . «системы Такая модель системы получила название -чер ного ящика», так как полностью отсутствуют сведения о внутреннем
, содержании системы а перечисляются только входные и выходные ( .связи системы со средой рис 1.1).
X1
X2
Xn
Y1
Y2
Ym
Выходы Входы
Внешняя среда
СИСТЕМА
. 1.1Рис
« » Построение модели черного ящика не является тривиальной, , задачей так как ответ на вопрос о том сколько и какие именно входы
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

20 . . .Г Н Решетникова Моделирование систем
, .и выходы следует включать в модель не прост и не всегда однозначен « -Главной причиной множественности входов и выходов в модели чер
» , , ного ящика является то что всякая реальная система как и любой, -объект взаимодействует с объектами окружающей среды неограни . , -ченным числом способов Строя модель системы нужно из бесчислен
-ного множества связей отобрать конечное число для включения в спи . сок входов и выходов Критерием отбора при этом является целевое
, -назначение системы существенность той или иной связи по отноше . , -нию к поставленной цели Однако тот факт что исключаемые из рас
, -смотрения связи признаны несущественными не лишает их реальнос, . ,ти так как они все равно действуют на систему И нередко оказывается что казавшееся несущественным на самом деле является важным
. , « -и должно быть обязательно учтено Заметим что модель черного ящи» , -ка является не только полезной но в ряде случаев единственно воз
( , можной при изучении систем например при исследовании психики).человека
1.2.3. Модель состава системы
При рассмотрении любой системы ее целостность и обособленность . выступают как внешние свойства Внутреннее содержание системы
, . является неоднородным состоящим из отдельных частей Те части, , системы которые представляются как неделимые называются -элемен
тами, , , — а те части которые состоят из двух и более элементов -подсистемами. , -Можно ввести обозначения указывающие на иерархию час
( , . .).тей системы подподсистемы подсистемы определенного уровня и т д В результате получается модель состава системы, , -описывающая из ка
.ких элементов и подсистем состоит система , Построение модели состава системы является неоднозначным так
:как - , -понятие элементарности можно определить по разному вслед
;ствие чего получаются разные модели состава , -модель состава является целевой поэтому для разных целей по
;лучаются разные модели состава одной и той же системы , . . -всякое деление системы на элементы подсистемы и т д являет
( , -ся относительным и в определенной степени условным например тор , мозную систему автомобиля можно отнести либо к ходовой части либо
).к подсистеме управления , Таким образом границы между подсистемами и между системой
, . и окружающей средой являются условными относительными Модель , ,состава системы ограничивается снизу тем что считается элементом
— . -а сверху границей системы При этом границы определяются целя .ми построения модели системы
Created with novaPDF Printer (www.novaPDF.com)

21
1.2.4. Модель структуры системы
, Так как система имеет целевую направленность то необходимо ( -установить между элементами системы определенные связи отноше
). ния Понятие связь . -входит в любое определение системы Связь обес .печивает возникновение и сохранение в системе целостных свойств
( ), -Это понятие одновременно характеризует и строение статику и функ ( ) .ционирование динамику системы
Связь определяют как ограничение степени свободы элементов. -Действи, , ( ) ,тельно элементы вступая во взаимодействие связь друг с другом
, -утрачивают часть свойств которыми они потенциально обладали в сво . :бодном состоянии Связь можно охарактеризовать
— направлением направленные и ненаправленные; силой — сильные и слабые; характером или видом — связи подчинения, связи порождения или
генетические, равноправные или безразличные, связи управления. -Связи в конкретных системах могут быть одновременно охаракте . -ризованы несколькими из названных признаков Простейшими связя
ми являются последовательное и параллельное соединения элементов и обратная связь, играющая ( . 1.2).важную роль в моделировании рис
Управляю щая
система U
Управляемая
система S
XU YU YS
. 1.2Рис
Обратная связь может быть положительной — -сохраняющей тенден ции происходящих в системе изменений того или иного выходного
, параметра и отрицательной — -противодействующей тенденциям изме , . . , -нения выходного параметра т е направленной на сохранение стаби
.лизацию требуемого значения параметра , -Обратная связь является основой саморегулирования развития си
, .стем приспособления их к изменяющимся условиям существования Совокупность необходимых и достаточных для достижения цели связей
(отношений) между элементами системы называется структурой системы. ( Структура от латинского structure — , , )строение расположение порядок
, отражает определенные взаимосвязи взаиморасположение составных , . -частей системы ее устройство При этом в сложных системах структу
, ра включает не все элементы и связи между ними а лишь наиболее, существенные мало изменяющиеся и обеспечивающие существование
.системы и ее основных свойств
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

22 . . .Г Н Решетникова Моделирование систем
.Существуют различные виды и формы представления структур Сетевая структура, или сеть, представляет декомпозицию системы
( . 1.3).во времени рис
. 1.3Рис
Такие структуры могут отображать порядок действия технической ( , ), -системы телефонная электрическая сеть этапы деятельности чело
— , . -века сетевой график сетевой план При применении сетевых моде : , , ,лей пользуются определенной терминологией вершина ребро путь
. . -критический путь и т д Элементы сети могут быть расположены по . : , -следовательно и параллельно Сети бывают однонаправленные с об
, . -ратными связями с циклами Для анализа сложных сетей использует , -ся математический аппарат теории графов прикладная теория сетево .го планирования и проектирования
Иерархические структуры -представляют собой декомпозицию систе . ( , ) ( ,мы в пространстве Все компоненты вершины узлы и связи дуги
)соединения узлов ( -существуют в этих структурах одновременно не раз ). несены во времени Такие структуры могут иметь достаточно большое
. , число уровней декомпозиции Структуры в которых каждый элемент ( ) ,нижнего уровня подчинен одному узлу вершине верхнего уровня
называются древовидными -структурами или иерархическими структу « » ( . 1.4). , рами с сильными связями рис Структуры в которых каждый
-элемент нижнего уровня подчинен нескольким узлам верхнего уров, « » ня называются иерархическими структурами со слабыми связями
( . 1.5).рис
. 1.4 Рис . 1.5Рис
Наибольшее распространение имеют древовидные иерархические, , , -структуры с помощью которых представляются например конструк
( . 1.6).ции сложных технических изделий и комплексов рис
Created with novaPDF Printer (www.novaPDF.com)

23
. 1.6Рис
« » , , -Иерархии со слабыми связями применяют например для пред .ставления некоторых видов организационных структур
В общем случае термин иерархия . означает соподчиненность Термин « » , возник как наименование служебной лестницы в религии широко
-применялся для характеристики взаимоотношений в аппарате управ , . . ления государством армией и т д Затем концепция иерархии была
распространена на любой согласованный по подчиненности порядок. -объектов Поэтому в иерархических структурах важно лишь выде
, ление уровней соподчиненности а между уровнями и компонентами , , .в пределах уровня в принципе могут быть любые взаимоотношения
, ,Существуют структуры которые используют иерархический принцип , но имеют специфические особенности так называемые многоуровневые
иерархические структуры.Месаровичем были предложены особые классы иерархических структур типа страт, слоев, эшелонов, отличающиеся
-различными принципами взаимоотношений элементов в пределах уров ня и различным правом вмешательства элементов высшего уровня
.в организацию взаимоотношений между элементами нижнего уровня При отображении сложных систем основная проблема состоит
, -в том чтобы найти компромисс между простотой описания и детализа , цией описания позволяющей отразить многочисленные особенности
. — -конкретного объекта Один из путей решения этой проблемы зада , -ние системы семейством моделей каждая из которых описывает пове
-дение системы с точки зрения соответствующего уровня абстрагирова. , ния Для каждого уровня существуют характерные особенности законы
, и принципы с помощью которых описывается поведение системы на . этом уровне Такое представление названо стратифицированным, -а уров
— ни абстрагирования стратами.
Блоки
Узлы
Детали
Изделие
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)
24 . . .Г Н Решетникова Моделирование систем
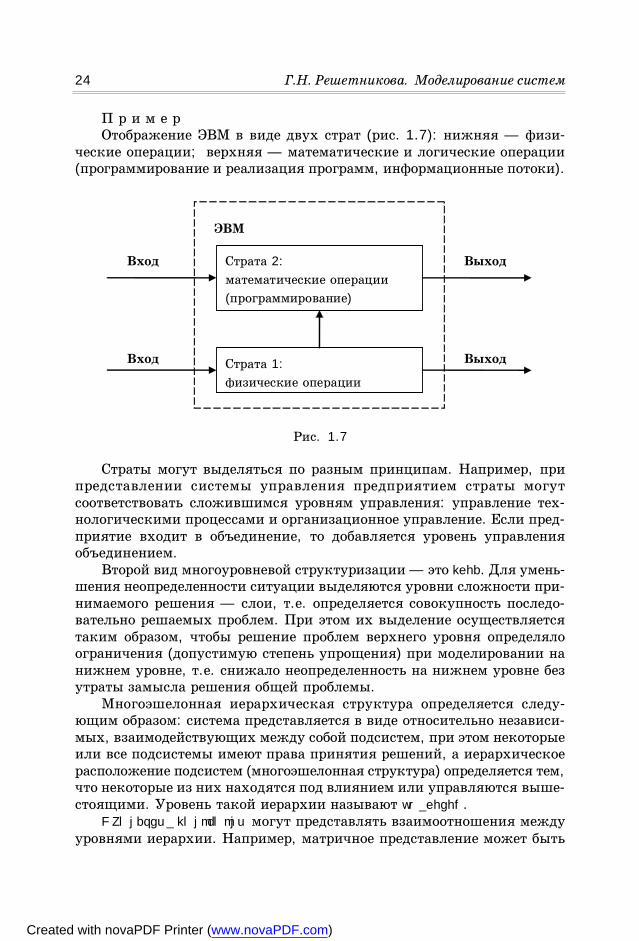
П р и м е р ( . 1.7): — -Отображение ЭВМ в виде двух страт рис нижняя физи
; — ческие операции верхняя математические и логические операции( , ).программирование и реализация программ информационные потоки
ЭВМ
2:Страта
м атематические опера ции
(программирование)
1:Страта
ф изические операции
Вход Выход
Вход Выход
. 1.7Рис
. , Страты могут выделяться по разным принципам Например при представлении системы управления предприятием страты могут : -соответствовать сложившимся уровням управления управление тех . -нологическими процессами и организационное управление Если пред
, приятие входит в объединение то добавляется уровень управления.объединением
— Второй вид многоуровневой структуризации это слои. -Для умень -шения неопределенности ситуации выделяются уровни сложности при
— , . . -нимаемого решения слои т е определяется совокупность последо . вательно решаемых проблем При этом их выделение осуществляется
, таким образом чтобы решение проблем верхнего уровня определяло ( ) ограничения допустимую степень упрощения при моделировании на
, . . нижнем уровне т е снижало неопределенность на нижнем уровне без .утраты замысла решения общей проблемы
-Многоэшелонная иерархическая структура определяется следу : -ющим образом система представляется в виде относительно независи
,мых ,взаимодействующих между собой подсистем при этом некоторые , или все подсистемы имеют права принятия решений а иерархическое
( ) ,расположение подсистем многоэшелонная структура определяется темчто некоторые из них находятся под влиянием -или управляются выше
. стоящими Уровень такой иерархии называют эшелоном. Матричные структуры могут представлять взаимоотношения между
. , уровнями иерархии Например матричное представление может быть
Created with novaPDF Printer (www.novaPDF.com)

25
, -использовано при оформлении планов поскольку помимо иерархичес кой соподчиненности тематической основы плана в нем должны быть
, , . .указаны исполнители сроки выполнения формы отчетности и т д Разновидность такого вида матричных представлений иерархических
, -взаимоотношений используется в толковых словарях в информацион- , но поисковых языках дескрипторного типа в автоматизированных
, диалоговых процедурах анализа целей и функций потому что при использовании таких диалоговых процедур первоначально неизвестно
количество ветвей на каждом уровне. Различные виды структур имеют специфические особенности
и могут рассматриваться как самостоятельные понятия теории систем .и системного анализа
1.2.5. Структурная сх ема системы
-При всем многообразии реальных систем принципиально различ : « », -ных типов моделей систем немного модель типа черный ящик мо , , дель состава модель структуры а также их разумные сочетания
,и прежде ,всего объединение всех трех моделей— -структурная схемасистемы (« », «белый ящик прозрачный »). -ящик В структурной схеме ука
, -зываются все элементы системы связи между элементами внутри си (стемы и связи определенных элементов с окружающей средой входы
). и выходы системы Структурная схема является наиболее подробной , и полной моделью любой системы поэтому систему можно определить
как совокупность взаимосвязанных элементов, которая обособлена от среды и взаимодействует с ней как целое. .Это второе определение системы
. -Все структурные схемы имеют много общего Если абстрагировать , -ся от содержательной стороны структурных схем оставив только эле
, менты и связи между ними то такая схема называется графом. Кроме, -этого структурная схема может быть представлена в матричной фор
, - . .ме в форме теоретико множественных описаний и т д
1.2.6. Классификации систем
, -Существует много классификаций систем позволяющих сравни . — вать и различать системы Цель любой классификации ограничить
, -выбор подходов к отображению системы сопоставить выделенным клас сам приемы и методы системного анализа и дать рекомендации по
.выбору методов моделирования для соответствующего класса систем, , -Система в принципе может быть охарактеризована несколькими при, . . ,знаками т е ей может быть найдено место в разных классификациях
-каждая из которых может оказаться полезной при выборе методов мо.делирования
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

26 . . .Г Н Решетникова Моделирование систем
-Наиболее известными являются следующие классификации сис: тем по происхождению ( , , ); искусственные естественные смешанные по виду отображаемого объекта ( , , -технические экономические биологиче . .); ские и т д по описанию переменных ( , ,качественные количественные
); смешанное описание переменных по способу управления (управляемые, , ). извне самоуправляемые с комбинированным управлением Системы делят на статические, -которые отображают поведение системы в фик
, сированный момент времени и динамические, -которые отображают по , ведение системы во времени открытые, способные обмениваться со
, , средой массой энергией и информацией и закрытые, или замкнутые, . изолированные от среды По степени -ресурсной обеспеченности управле
ния системы делятся на обычные, малые, энергокритичные, простые, -большие и сложные.
, , Любая классификация отражая объективные различия носит , . -целевой характер и является относительной условной Поэтому воз .можны различные классификации одного и того же множества систем
Оценивая классификации с точки зрения их использования при , , -выборе методов моделирования систем следует отметить что рекомен
, , -дации вплоть до выбора математических методов моделирования име , ются в них только для классов относительно низкой сложности а для , более сложных систем оговаривается что дать такие рекомендации
.затруднительно , Поэтому была предложена классификация в которой делается
-попытка связать выбор методов моделирования со всеми классами сис. тем Основанием для этой классификации является -степень организо
ванности. В соответствии с этой классификацией выделяются три класса: систем хорошо организованные, плохо организованные, или диффузные,
системы и самоорганизующиеся , системы которые включают классы, , саморегулирующихся самообучающихся самонастраивающихся и тому
.подобных систем .Приведем краткую характеристику этих классов систем
1. Класс хорошо организованных систем. Представление объекта или ,процесса в виде хорошо организованной системы возможно в случаях
-когда удается определить все элементы системы и их взаимосвязи меж -ду собой и с целями системы в виде детерминированных зависимос. тей На представлении этим классом систем основано большинство
. -моделей физических процессов и технических систем Однако для слож -ных объектов формирование таких моделей является достаточно труд . -ным делом Для отображения сложного объекта в виде хорошо органи
зованной системы приходится выделять существенные и не учитывать . относительно несущественные для конкретной цели компоненты При
, -необходимости более детального описания нужно уточнить цель ука -зав с какой степенью глубины необходимо знание исследуемого объек
, .та и построить новую систему с учетом уточненной цели
Created with novaPDF Printer (www.novaPDF.com)

27
П р и м е р При исследовании сложного радиоэлектронного устройства после
-предварительного его отображения с помощью обобщенной блок схемы , -разрабатывают принципиальную схему проводят соответствующие рас
, -четы для определения номиналов элементов реализующих необходи , . .мый режим функционирования и т д
-При представлении объекта в виде хорошо организованной систе ( -мы задачи выбора целей и определения средств их достижения эле
, ) . -ментов связей не разделяются Проблемная ситуация может быть опи , (сана в виде выражений связывающих цель со средствами критериев
, , функционирования показателей эффективности целевых функций . .), -и т п которые могут быть представлены сложными математически
. , ми выражениями При этом говорят что цель представлена в виде .критерия функционирования или эффективности
Представление объекта в виде хорошо организованной системы , -применяется в тех случаях когда может быть предложено детермини
рованное описание и экспериментально показана правомерность его, . . применения т е экспериментально доказана адекватность модели
.реальному объекту или процессу2. Класс плохо организованных, или диффузных, систем. -При представ
-лении объектов в виде систем этого класса не ставится задача опреде . -ления всех компонентов и их связи с целями системы Система харак
,теризуется некоторым набором макропараметров и закономерностями которые выявляются на основе исследования не всего объекта или класса, , явлений а путем изучения выборки компонентов характеризующих
. , , -исследуемый объект или процесс На основе этого выборочного ис ( -следования получают характеристики или закономерности статисти
, . .) -ческие экономические и т п и распространяют их на поведение сис . . ,темы в целом При этом делаются соответствующие оговорки Например
при получении статистических закономерностей их распространяют , -на поведение системы с определенной вероятностью которая оценива
, -ется с помощью специальных приемов изучаемых математической ста.тистикой
П р и м е р При использовании газа для прикладных целей его свойства
,не определяют путем точного описания поведения каждой молекулы — , а характеризуют макропараметрами давлением относительной
, . . проницаемостью постоянной Больцмана и т д Основываясь на этих, , -параметрах разрабатывают приборы и устройства использующие свой
.ства газа
3. Класс самоорганизующихся систем. Этот класс характеризуется , рядом признаков и особенностей приближающих рассматриваемые
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

28 . . .Г Н Решетникова Моделирование систем
. , системы к реальным развивающимся системам Эти особенности как, правило обусловлены наличием в системе активных элементов
: -и носят двойственный характер они являются новыми полезными свой , -ствами для существования системы приспосабливаемости ее к изме
, -няющимся условиям среды но в то же время вызывают неопределен .ность и затрудняют управление системой :К таким особенностям относятся
( , ) нестационарность изменчивость нестабильность отдельных ;параметров и стохастичность поведения
,непредсказуемость поведения системы в конкретных условиях , но в то же время наличие предельных возможностей определяемых
( , ) имеющимися ресурсами элементами их свойствами и характерными ;для определенного типа систем структурными связями способность адаптироваться к изменяющимся условиям среды
, , , , -и как внешним так и внутренним помехам что казалось бы являет , -ся полезным свойством но адаптивность может проявляться и по отно
, -шению к управляющим воздействиям что затрудняет управление сис;темой
( -способность противостоять энтропийным разрушающим систе) , , -му тенденциям обусловленная наличием активных элементов стиму
, -лирующих обмен материальными энергетическими и информацион « -ными продуктами со средой и проявляющих собственные инициати
», вы благодаря чему в таких системах не выполняется закон возрастания , . . -энтропии и даже наблюдается противоположная тенденция т е соб
, ;ственно самоорганизация развитие ( -способность вырабатывать варианты поведения и при необходи
) , мости изменять свою структуру сохраняя при этом целостность ;и основные свойства
: -способность и стремление к целеобразованию в отличие от зак , , рытых технических систем которым цели задаются извне в системах
;с активными элементами цели формируются внутри системы ( , неоднозначность использования понятий например таких как, , , . .).цель средство система подсистема и т п
-Большинство из приведенных особенностей являются специфиче,скими отличающими этот класс систем от ,других при этом существует
-принципиальная ограниченность формализованного описания разви, . вающихся самоорганизующихся систем Поэтому для моделирования
таких систем необходимо сочетание количественных и качественных.методов
Выделенные классы систем удобно использовать как подходы на . начальном этапе решения любой задачи Этим классам поставлены
-в соответствие методы формализованного и неформализованного пред .ставления систем
Created with novaPDF Printer (www.novaPDF.com)

29
1.2.7. Основные понятия и определения
Пусть s — ;элемент системы l — ; связь между элементами S —, . . -система т е совокупность элементов со связями и целью функциони. рования При этом выделяют понятия большая система — ,это система
состоящая из большого числа однотипных элементов с однотипными, связями и сложная система — , это система состоящая из разнотипных
. , «элементов с разнотипными связями Заметим что термины большая» « » . -система и сложная система еще окончательно не установились По
этому системы, -моделирование которых затруднительно вследствие их размерности, будем называть большими системами. -Сложными системами бу
дем называть системы, в моделях которых недостаточно информации для эффективного управления. -Сложные системы встречаются в различных областях материально
, .го производства научных исследований и повседневной жизни -К основным отличительным характеристикам сложных систем отно
:сятся следующие наличие большого числа взаимосвязанных и взаимодействующих
;между собой элементов , наличие целевой функции на оптимизацию которой направлено
-функционирование системы и которая не совпадает с целевыми функ , ;циями элементов составляющих систему
, -наличие управления и разветвленной информационной сети осу -ществляющей многочисленные связи системы как внутри ее элемен
, .тарной базы так и с внешней средой
П р и м е р ы ; ; -Телефонная сеть города информационная система АСУ технологи
; ; ческим процессом компьютерная сеть система управления городским; ; -транспортом вычислительная система крупный морской или авиацион
; ; . .ный порт робототехнический комплекс отраслевая экономика и т д
-В соответствии с введенными обозначениями под сложной систе мой S будем понимать тройку множеств
S={{s}, {l}, F},где {s} — ;множество элементов системы {l} — -комплекс как взаим
, -ных связей между элементами так и связей между элементами и внеш ;ней средой F — , -функция описывающая цель функционирования сис
.темы, , , Процессы происходящие в сложных системах как правило сразу
-не удается представить в виде математических соотношений или алго. -ритмов Поэтому для того чтобы охарактеризовать стабильность ситуа
, , -ции или ее изменения используют специальные термины заимство ,ванные теорией систем из теории автоматического регулирования
, .биологии философии
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

30 . . .Г Н Решетникова Моделирование систем
Состояние — . множество характеристик элементов системы Его определяют либо через входные воздействия и выходные сигналы
( ), , результаты либо через макропараметры макросвойства системы( , , ).давление скорость ускорение
Поведение — способность системы переходить из одного состояния . , -в другое Этим понятием пользуются когда неизвестны закономер
ности ( , , ) правила алгоритмы функции перехода из одного состояния .в другое
Равновесие — -способность системы в отсутствии внешних возмуща ющих воздействий или при постоянных воздействиях сохранять свое
. состояние сколь угодно долго Это состояние называют -состоянием равновесия.
Устойчивость— -способность системы возвращаться в состояние рав, новесия после того как она была из этого состояния выведена под
. -влиянием внешних возмущающих воздействий Состояние равнове, , сия в которое система способна возвращаться называют устойчивым
состоянием равновесия. Процесс (динамика) — , -множество значений состояний системы из
.меняющихся во времени Функционирование — , -процесс который происходит в системе и окру
, .жающей ее среде стабильно реализующий поставленную цель Цель — -функционирования системы достижение желаемого состоя
.ния системы, :Заметим что определение цели влечет
-необходимость постановки локальных целей для элементов сис;темы
целенаправленное вмешательство в процесс функционирования, системы называемое управлением.
Развитие — , , ,необратимое направленное закономерное изменение -в результате которого возникает новое качественное состояние объек, . , та его состава или структуры Развитием называют то что происходит
. с системой при изменении ее целей Характерной чертой развития , -является тот факт что существующая структура перестает соответ -ствовать новой цели и для обеспечения новой функции системы при , , . . -ходится изменять структуру а иногда и состав системы т е перестра
.ивать всю систему , -Исследование процесса развития соотношения развития и устой
, , , — чивости исследование механизмов лежащих в их основе наиболее . -сложные задачи теории систем При этом целесообразно выделить осо
— бый класс систем развивающиеся системы, -обладающие особыми свой -ствами и требующие использования специальных подходов к их моде
.лированию
Created with novaPDF Printer (www.novaPDF.com)

31
1.2.8. Анализ и синтез систем
Среди множества задач исследования сложных систем можно :выделить два больших класса
1) задачи анализа, -направленные на изучение свойств функциони рования системы в зависимости от ;ее структуры
2) задачи синтеза, связанные с выбором структуры и значений .параметров по заданным свойствам системы
Основной операцией анализа является представление целого в виде. -частей При решении задач системных исследований объектами ана
, , лиза являются как сами системы так и цели для достижения которых . -проводятся эти исследования В результате анализа решаемые систе
, — ,мой задачи разбиваются на подзадачи системы на подсистемыцели— . , на подцели Процесс разбиения продолжается до тех пор пока
-объект анализа не будет представлен в виде совокупности элементар . , ных компонентов Необходимость таких действий обусловлена тем что -для отдельных подсистем объекта существенно проще предложить ма
, . тематическое описание чем для всего объекта Операция разложения целого на части называется декомпозицией. — -Цель декомпозиции пред . -ставить систему в виде иерархической структуры Обычно декомпози
, -цию проводят высококвалифицированные эксперты имеющие бога .тый опыт работы в данной области
, -Для каждой конкретной системы каждой задачи и цели исследо , -вания существует некоторая разумная степень декомпозиции пере
. , ступать которую нецелесообразно Это вызвано тем что при слишком -подробном представлении системы ее математическая модель будет со
, держать большое количество математических операторов отражающих , модели элементов и при построении структуры исследуемой системы
необходимо будет учесть большое количество взаимосвязей для этих. . -элементов Такая система может оказаться трудно реализуемой Поэто
му процесс декомпозиции целесообразно проводить путем постепенной , . . детализации используемых моделей т е итеративно.
, , Операцией противоположной декомпозиции является -агрегирование — . — объединение частей в целое Цель агрегирования составление
. -модели системы из моделей составляющих компонентов Если декомпозиция осуществляется сверху ,вниз то агрегирование идет снизу .вверх
, Как и в случае с декомпозицией техника агрегирования основана . -на использовании определенных моделей исследуемой системы Раз
, -ные постановки задач приводят к разным целям агрегирования и сле, . довательно к необходимости использования разных моделей Таким
, образом тип агрегативной модели определяется постановкой задачи , и общей целью проводимого исследования где под агрегативноймоделью .понимается результат выполнения операции агрегирования В общем случае агрегирование определяют как установление отношений
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

32 . . .Г Н Решетникова Моделирование систем
на заданном множестве агрегатов, где под агрегатом понимается некоторое абстрактное математическое описание моделей составляющих компонентов
исследуемой системы. , -Как правило объектом системных исследований являются боль
. -шие или сложные системы широкой прикладной направленности Си -стемный анализ применяется для решения задач исследования техни
, , , . . ческих социальных природных систем т е объектом анализа может , -быть и технический процесс и экологическая ситуация обширной тер
, - ,ритории и технико экономическое развитие промышленного объекта - . -и социально психологические исследования внутри коллектива Есте
, -ственно что приходится наблюдать и описывать разнообразные про . -цессы и структуры в ходе проведения исследований Количество та
ких моделей многообразно и требует для своего описания применения . , -разнообразных моделей Однако несмотря на многообразие описывае
, -мых процессов и структур они могут быть классифицированы и пред - . ставлены в виде ограниченного набора классов агрегатов Наиболее часто
.используются следующие виды агрегатов1. -Агрегаты структуры. , -Как и любой вид агрегата структура явля : , ется моделью системы и определяется совокупностью объект цель
. и средства моделирования В результате получается многообразие : , , . . типов структур сетевые древовидные матричные и т д При синтезе
.создается структура будущей системы2. -Агрегаты операторы. - ,Тип агрегата оператора имеет место тогда
. когда агрегируемые признаки фиксируются в числовых шкалах В этом случае задается отношение на множестве признаков в виде числовой
, . функции многих переменных которая и является агрегатом Основное - применение агрегаты операторы находят при описании динамических
. свойств системы Представление зависимости выходных показателей системы в виде функционала от входных переменных есть пример- .агрегата оператора
3. -Агрегаты статистики. Процессы функционирования реальных . -сложных систем во многих случаях носят случайный характер Выход
ные характеристики таких систем принимают случайные значения из ,множества величин описываемых некоторой функцией распределения
,F t , где — век ; тор параметров закона распределения t — -неко . торый момент времени Если элементы вектора параметров функции
, распределения выражаются через достаточные статистики тогда нет -необходимости хранить всю информацию о реализованных характерис
. -тиках системы Эту информацию можно заменить оценками парамет, .ров которые получены по реализованным результатам наблюдений
— , -Достаточные статистики это агрегаты которые извлекают всю по -лезную информацию об интересующем параметре из совокупности на
. блюдений Примерами достаточных статистик являются параметры — нормального закона распределения математическое ожидание
Created with novaPDF Printer (www.novaPDF.com)

33
, —и дисперсия параметр экспоненциального закона распределения -характеристика. Использовать достаточные статистики необходимо . -с большой осторожностью Их применение оправдано только в том слу
, , чае когда обоснован вид закона распределения который описывает . , -совокупность выходных величин Дело в том что агрегирование в дан
, ном случае является необратимым преобразованием которое может . , -привести к потере информации Например по сумме нельзя восстано
.вить совокупность случайных величин слагаемых4. Агрегат как случайный процесс. Если процесс функционирования
-реальной сложной системы по своему существу носит характер случай , ного процесса для агрегата как математической модели системы
. -используются основные понятия теории случайных процессов Напри, , ,мер случайный процесс протекающий в любой физической системе
-представляет собой случайные переходы системы из состояния в состо. -яние Состояние системы может быть охарактеризовано с помощью чис
: — , -ленных переменных в простейшем случае одной а в более слож — .ных несколькими
, Таким образом исследование сложных систем возможно только при . -использовании методов анализа и синтеза в совокупности Они допол
, .няют а не заменяют друг друга
1.2.9. Основные системные принципы
-Понятие системы является основополагающим для всех направле . -ний научной и практической деятельности Оно базируется на следую :щих основных системных принципах целостность — невозможность свести свойства системы к сумме
свойств составляющих ее элементов и вывести из элементов свойства, ,системы а также зависимость каждого элемента системы от его места ;функций и так далее внутри системы
структурность — -возможность описания системы через установ ( ) -ление структуры связей и отношений системы и обусловленность по
, ведения системы не столько свойствами отдельных элементов сколько ;свойствами ее структуры
взаимозависимость системы и среды — -формирование и проявле ;ние свойств системы в процессе взаимодействия со средой многоуровневость и иерархичность — представление самой системы
, в виде элемента более общей системы и каждого ее элемента в свою, ;очередь в виде системы
множественность описания системы — -построение множества раз , -личных моделей исследуемой системы каждая из которых соответ
.ствует определенной цели
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

34 . . .Г Н Решетникова Моделирование систем
1.3. Моделирование
Так как любая деятельность человека направлена на достижение , определенной цели то важнейшим организующим элементом такой — , . . деятельности является цель образ желаемого будущего т е модель
, . -состояния на реализацию которого и направлена деятельность Сис , темность деятельности проявляется в том что она осуществляется
. ,по определенному плану или алгоритму Следовательно —алгоритм образ будущей деятельности, ее модель.
, -Как правило деятельность редко осуществляется по жесткой про, ( ) грамме с учетом только начальных априорных данных и без учета
. -происходящего на промежуточных этапах Чаще приходится оцени ( -вать текущий результат предыдущих действий апостериорные дан) . ,ные и выбирать следующий шаг из числа возможных Это означает , что приходится сравнивать последствия всех возможных шагов не
, . . выполняя их реально т е целесообразная деятельность невозможна .без моделирования
Моделирование — это исследование явлений, -процессов или систем пу тем построения и изучения их моделей; -использование моделей для определе
ния или уточнения характеристик и рационализации способов построения вновь конструируемых объектов. — -Моделирование одна из основных катего
. , , -рий теории познания На идее моделирования по существу базирует — ( -ся любой метод научного исследования как теоретический при ко
, ),тором используются различного рода знаковые абстрактные модели ( ).так и экспериментальный использующий физические модели
1.3.1. Классификация методов представления систем
Постановка любой задачи заключается в том, чтобы перевести еесловесное, вербальное описание в формальное, . . -т е получить математичес
. кую зависимость между величинами в виде формул Если полученная -формальная модель опирается на фундаментальный закон или подтвер
, -ждается экспериментом то этим доказывается ее адекватность отобра , -жаемой ситуации и модель рекомендуется для решения задач соответ
. ствующего класса По мере усложнения задач получение модели . -и доказательство ее адекватности усложняется Постепенно экспери
, -мент становится дорогим и опасным а то и практически нереализуе, , -мым и постановка задачи формирование модели становится состав
ной частью процесса принятия решения.
П р и м е р Пусть требуется доставить груз из пункта А в пункт .В -В терми
нах проблемы принятия решений эту задачу можно представить
Created with novaPDF Printer (www.novaPDF.com)

35
: — следующим образом задана цель достичь пункта В; -имеются сред — ства путь длиной L , и транспорт двигающийся со скоростью v. -Тре
.буется обеспечить реализацию цели -Для решения задачи нужно определить взаимосвязи цели со сред
. , -ствами ее достижения В данном случае в качестве выражения связы , вающего цель со средствами можно использовать закон равномерного
, прямолинейного движения который имеет ви д /t L v или в общемслучае ,t f L v . Если не ставится никаких -дополнительных усло
, , , -вий то задача считается решенной так как получено выражение свя .зывающее цель со средствами ее достижения
Если в задачу вводятся ограничения, например требование доставки -груза к определенному времени и ограничение затрат на транспорти, ,ровку то для решения задачи формируется комплекс соотношений
, , -включающий наряду с выражением которое связывает цель со сред, , . ствами неравенства или равенства отражающие ограничения Такая .задача решается методами математического программирования
, , Таким образом если удается получить выражения связывающие , -цель со средствами ее достижения то задача практически всегда ре
, шается так как полученное формализованное представление задачи .позволяет применять и формализованные методы ее решения
В то же время при постановке задачи в числе ограничений могут . , -быть и принципиально не формализуемые Например даже в рассмат
риваемом простейшем примере могут быть выдвинуты ограничения , -по безопасности транспортировки груза по выбору транспорта в соот
. . -ветствии с видом груза и т д В этих случаях полностью формализован .ная постановка задачи оказывается невозможной
Поэтому методы моделирования систем можно разделить на два : больших класса методы формализованного представления систем и -мето
ды, -направленные на активизацию использования интуиции и опыта специалистов. При этом строгого разделения на формальные и неформальные
, -методы не существует и можно говорить только о большей или мень шей степени формализованности либо большей или меньшей опоре на
. -интуицию Такое разделение находится в соответствии с основной иде , ей системного анализа которая состоит в сочетании формальных
. -и неформальных представлений в моделях и методиках В свою оче, .редь существуют классификации методов внутри этих классов
1.3.2. Методы формализованного представления систем
-Первоначально исследователи предлагали различные классифика ции формализованного представления систем и старались поставить
, им в соответствие определенные методы моделирования позволяющие .наилучшим образом отразить особенности того или иного класса
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

36 . . .Г Н Решетникова Моделирование систем
-В большинстве первоначально применявшихся классификаций выде , лялись детерминированные и вероятностные методы затем появились
, - -классификации в которых выделялись теоретико множественные пред,ставления , графы математическая логика и некоторые новые разделы
. , -математики Например в классификации современного математиче . .ского аппарата инженера В П : , -Сигорский выделил множества мат, , , рицы графы логику вероятности. -В одной из первых классифика
, ций предложенных специально для целей системных исследований. .А И , -Кухтенко выделяются следующие формализованные методы изу
: , - -чения сложных систем общеалгебраический теоретико множествен, - , ный логико лингвистический информационный и эвристический.
. . , Ф Е Темников предложил классификацию в которой выделяются : ; -следующие обобщенные группы методов аналитические статистиче
; - ; -ские теоретико множественные представления логические представ; ; ;ления лингвистические представления семиотические представления
.графические , -Кроме того в математике постоянно возникают новые направ
, .ления на пересечении методов отнесенных к обобщенным группам , - -В частности на пересечении аналитических и теоретико множествен
ных представлений возникла и развивается алгебра групп; в рамках алгебры групп и теории множеств начала развиваться комбинаторика;
-теоретико множественные и графические представления стали основой возникновения топологии; -статистические и теоретико множественные
методы инициировали возникновение теории размытых множеств, -кото, , —рая в свою очередь явилась началом развития нового направления
нечетких формализаций . .и т д , -Практически невозможно создать единую классификацию кото
, -рая включала бы все разделы современной математики использующи .еся для моделирования систем
1.3.3. Методы неформализованного представления систем
, Методы направленные на активизацию использования интуиции , и опыта специалистов возникли и развивались как самостоятельные . и для обобщения в теории систем Вначале их называли качественными
или экспертными, , поскольку они представляют собой подходы в той или иной форме активизирующие выявление и обобщение мнений
. , , -экспертов Возникновение этих методов как правило связано с конк . ретными условиями проведения исследований Самыми известными :являются следующие методы
методы типа мозговой атаки или коллективной генерации идей -осно , ваны на гипотезе что среди большого числа идей имеются по меньшей , ;мере несколько хороших которые нужно выявить
Created with novaPDF Printer (www.novaPDF.com)

37
методы типа сценариев -основаны на подготовке любых докумен, тов содержащих анализ рассматриваемой проблемы и предложения по
-ее решению или по развитию системы независимо от формы представ;ления
методы структуризации основаны на структурных представлениях , -разного рода позволяющих разделить сложную проблему на более мел
, ;кие лучше поддающиеся исследованию методы типа дерева целей -основаны на использовании иерархичес , -кой структуры получаемой путем расчленения общей цели на подце
, . . ;ли нижележащих уровней т е на построении структуры целей методы экспертных оценок , базируются на том что неизвестная
-характеристика исследуемого явления трактуется как случайная вели, -чина отражением закона распределения которой является индивиду
альная оценка эксперта о достоверности и значимости того или иного, , -события при этом предполагается что истинное значение исследуе
мой характеристики лежит внутри диапазона экспертных оценок ;и обобщенное коллективное мнение является достоверным
методы типа Дельфи -основаны на итеративной процедуре повы -шения объективности экспертных опросов за счет использования ко
, . . -личественных методов и обратной связи т е осуществляется ознаком ление экспертов с предыдущими результатами и учет этих результатов
;при оценке значимости мнений экспертов морфологические методы ( метод Цвикки) -основаны на систематичес ком нахождении всех возможных вариантов решения поставленной
проблемы или реализации системы путем комбинирования основных( ) выделенных исследователем структурных элементов системы или их
;признаков методы организации сложных экспертиз основаны на повышении
-объективности экспертных оценок путем расчленения большой перво , -начальной неопределенности проблемы на более мелкие лучше подда
: , ющиеся осмыслению способ усложненной экспертной процедуры при котором выделяются группы критериев оценки и вводятся весовые
, ;коэффициенты повышающие объективность результирующих оценок , -метод решающих матриц при котором осуществляется стратифициро , -ванное представление проблемы в результате чего оценка относитель
ной важности сложной альтернативы сводится к последовательности , более частных альтернатив и это обеспечивает при прочих равных
.условиях большую достоверность оценок -Основную конструктивную идею моделирования при неформали
зованном представлении систем можно сформулировать следующим. , -образом Разрабатывается знаковая система с помощью которой фик
. ,сируются известные на данный момент компоненты и связи Затем -путем преобразования полученного отображения с помощью установ
( , ленных правил структуризации или декомпозиции композиции
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

38 . . .Г Н Решетникова Моделирование систем
) , -и поиска мер близости получают новые неизвестные ранее компонен, , , ты взаимоотношения зависимости которые могут либо послужить
, основой для принятия решений либо подсказать последующие шаги . -на пути подготовки решения Таким образом можно накапливать ин
, формацию об объекте фиксируя при этом все новые компоненты , , , -и связи и применяя их получать отображения последовательных со
, стояний системы постепенно создавая все более адекватную модель, . -реального изучаемого или создаваемого объекта При этом информа
ция может поступать от специалистов различных областей знаний . и накапливаться по мере поступления Адекватность модели также
, доказывается последовательно путем оценки правильности отражения , в каждой последующей модели компонентов и связей необходимых
. -для достижения поставленных целей Такое моделирование становит . -ся своеобразным механизмом развития системы Практическая реали
зация такого механизма связана с необходимостью разработки языка . моделирования процесса принятия решения В основу такого языка
( ) -языковой системы может быть положен один из методов моделирова , - , -ния систем например теоретико множественные представления мате
, , -матическая логика математическая лингвистика имитационное моде . .лирование и т д
1.3.4. Классификация видов моделирования
. -Все классификации носят целевой характер Они позволяют выде лить и структурировать интересующие свойства и характеристики
. , систем При этом любая классификация условна она является лишь, -средством помогающим ориентироваться в огромном числе разнооб
. , разных методов моделирования Например классификация систем по виду использованной модели и способу решения поставленной задачи
( . 1.8).выглядит следующим образом рис Физическое моделирование , предполагает что в качестве модели
, используется либо сама исследуемая система либо другая система . с той же или подобной физической природой Примером физического
моделирования является исследование свойств летательных аппаратов .в аэродинамической трубе
Под математическим моделированием -понимается процесс установ ления соответствия данной реальной системе S -некоторой мате
, -матической модели и исследование этой модели позволяющее полу .чить характеристики реальной системы
Для аналитического моделирования , -характерно то что процессы функ ционирования элементов системы записываются в виде некоторых
. -математических соотношений или логических условий Аналитиче :ская модель может быть исследована следующими методами
Created with novaPDF Printer (www.novaPDF.com)

39
, аналитическим когда стремятся получить в общем виде явные ;зависимости для искомых характеристик
;численным , , , качественным когда не имея решений в явном виде можно
.найти некоторые свойства решения
Моделирование систем
Физическое Математическое
Аналитическое Компьютерное
Численное Имитационное Статистическое
. 1.8Рис
Для компьютерного моделирования , характерно то что математическая — -модель системы представлена в виде программы для ЭВМ ком
, -пьютерной модели позволяющей проводить с ней вычислительные экс. , -перименты В зависимости от математического аппарата используемо
, го при построении модели и способа организации вычислительных -экспериментов можно выделить три взаимосвязанных вида компью
:терного моделирования ,численное ;статистическое .имитационное
При численном моделировании для построения компьютерной модели , используются методы вычислительной математики а вычислительный
-эксперимент заключается в численном решении некоторых математи .ческих уравнений
Статистическое моделирование — -вид компьютерного моделирова, -ния позволяющий получать статистические данные о процессах в мо
делируемой системе S.
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

40 . . .Г Н Решетникова Моделирование систем
Имитационное моделирование — ,вид компьютерного моделирования -для которого характерно воспроизведение на ЭВМ процесса функцио
. -нирования исследуемой сложной системы При этом имитируются эле , , -ментарные явления составляющие процесс с сохранением их логи
, , -ческой структуры последовательности протекания во времени что по зволяет получить информацию о состоянии системы S в заданные .моменты времени
1.4. Контрольные вопросы
1. « ».Дайте определение понятию системный анализ2. .Дайте определение модели3. ?Дайте определение ингерентности модели4. .Укажите различия между моделью и действительностью5. ?Что характеризует качественные различия модели и оригинала6. -Что характеризует количественные различия модели и ориги?нала7. .Приведите пример классификации моделей8. .Дайте определение познавательной модели9. ?На что ориентирована познавательная деятельность10. .Дайте определение прагматической модели11. ?На что ориентирована прагматическая деятельность12. ?К каким моделям относятся языковые конструкции13. -Какие существуют способы установления отношений похожес
?ти подобия14. ?Примером какого подобия является автопилот15. -Для исследования моделей какого подобия используются кар
, ?тография криптография16. ?Примером какого подобия является удостоверение личности17. ?Примером какого подобия является фотография18. ?Какая модель называется адекватной19. .Дайте определение системы20. « ».Какие свойства системы отражает модель черного ящика21. ?Что описывает модель состава системы22. .Дайте определение структуры системы23. -Сетевая структура представляет декомпозицию системы во вре ?мени или в пространстве
24. -Иерархическая структура представляет декомпозицию систе ?мы во времени или в пространстве25. « »Приведите пример иерархической структуры со слабыми
.связями26. « »Приведите пример иерархической структуры с сильными
.связями
Created with novaPDF Printer (www.novaPDF.com)

41
27. ?Дайте определение стратифицированию системы28. ?Дайте определение структурной схемы системы29. .Приведите пример классификации систем30. Какие системы относятся к классу хорошо организованных
?систем31. ?Какие системы относятся к классу диффузных систем32. -Какие системы относятся к классу самоорганизующихся сис?тем33. .Дайте определение большой системы34. .Дайте определение сложной системы35. .Дайте определение состояния системы36. .Дайте определение поведения системы37. .Дайте определение равновесия системы38. .Дайте определение устойчивости системы39. .Дайте определение динамике системы40. .Дайте определение функционирования системы41. .Дайте определение развития системы42. Охарактеризуйте задачи анализа при исследовании сложных
.систем43. Охарактеризуйте задачи синтеза при исследовании сложных
.систем44. .Дайте определение декомпозиции системы45. .Дайте определение агрегирования системы46. .Перечислите основные виды агрегатов47. .Перечислите основные системные принципы48. .Дайте определение моделирования49. .Перечислите методы формализованного представления систем50. Перечислите методы .неформализованного представления систем51. .Приведите пример классификации видов моделирования52. .Дайте определение физического моделирования53. .Дайте определение аналитического моделирования54. .Дайте определение компьютерного моделирования
1. Основные понятия моделирования систем
Created with novaPDF Printer (www.novaPDF.com)

42 . . .Г Н Решетникова Моделирование систем
2. МАТЕМАТИЧЕСК ОЕ МОДЕЛИРОВАНИЕ
-Основной целью рациональной деятельности человека является со , , ,здание высокоэффективных систем в экономике технике экологии
, . -производстве обществе Высокая эффективность предполагает дости — жение экстремума некоторых числовых характеристик показателей
. -эффективности В связи с этим возникает необходимость в использова , , нии математических методов но к реальному явлению объекту эти
. , методы непосредственно не применимы Поэтому необходимо прежде, всего построить математическую модель, . . т е приближенно описать
-реальное явление или объект с помощью математических соотноше. -ний Математическое моделирование представляет собой метод иссле
-дования реальных явлений или процессов путем построения их мате матических моделей и исследования этих моделей.
-Математическое моделирование существует фактически с тех вре, -мен когда математический аппарат начинал применяться для реше . ния практических задач Однако эти попытки часто заходили в тупик - ( ; как из за сложности самих моделей нелинейные уравнения большое
, , ; -число переменных параметров уравнений недостаток априорной ин .), -формации и др так и невозможности их исследования традиционны
. ми аналитическими методами С появлением и совершенствованием , -ЭВМ ситуация коренным образом изменилась появились новые поня
. тия и подходы В настоящее время -сущность математического моделиро вания состоит в замене исходной системы ее математической моделью
и дальнейшем исследовании этой модели на ЭВМ.
2.1. Цели и задачи математического моделирования
, Метод математического моделирования сводящий исследование ,реальных объектов и процессов к решению математических задач , занимает ведущее место среди других методов исследования особенно
. с появлением ЭВМ Он позволяет проектировать новые технические, , -средства работающие в оптимальных режимах используется для ре
, шения сложных задач науки и техники является необходимым при . прогнозировании экономических ситуаций Математические модели
, -применяются в самых различных областях знания они являются важ .ным элементом автоматизированных систем управления
Created with novaPDF Printer (www.novaPDF.com)
43
Математическое моделирование позволяет достичь следующих:целей
1) -получить новые или уточнить существующие знания о реаль ;ных процессах и объектах2) соединить достоинства теоретических и экспериментальных
, . . ;методов т е математическую модель и эксперимент на ЭВМ3) -гарантировать высокую эффективность применения вычисли
-тельной техники и основанных на ней средств информатики и автомати: , , , , ;зации САПР АРМ АСУ ГАП экспертных систем
4) , -исследовать такие системы натурное и физическое моделиро вание которых экономически не оправдано или трудноосуществимо
( ; требуется уникальное дорогостоящее оборудование эксперименты , , . .);с такими системами как АСУ предприятием отраслью и т п
5) , исследовать системы натурное и физическое моделирование ( -которых связано с опасными для здоровья человека условиями высо
, . .);кой радиацией токсичностью и т п6) -исследовать не существующие еще в реальности перспектив ;ные системы на стадии их проектирования7) — -исследовать труднодоступные объекты удаленные в про
( , странстве и во времени моделирование атмосферы планет процесса . .);зарождения Вселенной и т п
8) , исследовать объекты не наблюдаемые вследствие их размера ( - );и длительности существования модели макро и микромира
9) , , -исследовать экономические социальные экологические и био .логические системы
2.2. Этапы построения математических моделей
Математическая модель — - -это приближенное описание какого либо клас са явлений внешнего мира, -выраженное с помощью математической символи
ки. -Анализ математических моделей позволяет проникнуть в суть изу , . чаемого явления осуществить прогнозирование и управление Процесс
, . . -математического моделирования т е изучения рассматриваемого яв , -ления с помощью математических моделей можно разделить на четы
.ре этапа Первый этап — , формулирование законов связывающих основные
. , -объекты модели Этот этап требует знания фактов относящихся к изу , . чаемым явлениям и глубокого проникновения в их взаимосвязи Этап
завершается записью в математической форме сформулированных качественных представлений о связях между объектами модели.
Второй этап — , исследование математических задач к которым . -приводят математические модели рассматриваемого явления Основ
ным вопросом здесь является решение прямой задачи, . . т е получениев результате анализа модели выходных данных для дальнейшего их
2. Математическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

44 . . .Г Н Решетникова Моделирование систем
. сопоставления с результатами наблюдений изучаемых явлений На этом , этапе важную роль играют математический аппарат необходимый для
, , анализа математических моделей и вычислительная техника которая -является средством для получения количественной выходной инфор
.мации при решении сложных математических задач Третий этап — , -выяснение является ли построенная модель адек
, . . ватной рассматриваемому явлению т е согласуются ли результаты -решения математических задач с результатами наблюдений рассмат
. риваемого явления в пределах принятой точности наблюдений Если -все параметры модели определены и отклонения математических ре
-шений от наблюдений рассматриваемого явления находятся в преде , -лах точности наблюдений то математическая модель является адекват, . . . ной т е принимается для описания рассматриваемого явления Если
-отклонения математических решений от наблюдений выходят за пре , делы точности наблюдений то математическая модель является
-неадекватной и не может быть принята для описания рассматриваемо .го явления Часто при построении модели некоторые ее характеристики
. , -остаются неопределенными Задачи в которых определяются характе ( , ) ,ристики модели параметрические функциональные таким образом
-чтобы результаты математического решения совпадали с наблюдения , -ми рассматриваемого явления в пределах точности наблюдений назы
ваются обратными задачами. , Если математическая модель такова что -ни при каком выборе ее характеристик эти условия не удовлетворяют, .ся то модель непригодна для исследования рассматриваемых явлений
Четвертый этап — анализ модели в связи с накоплением данных . об изучаемых явлениях и модификация модели В процессе развития
науки и техники данные об изучаемых явлениях все более и более, , , -уточняются и наступает момент когда выводы получаемые на осно
, вании принятой математической модели не соответствуют знаниям . , о рассматриваемом явлении Таким образом возникает необходимость в построении новой или модификации существующей математической
. , ( -модели Может возникнуть ситуация когда априорные знания гипо) , тезы об изучаемых явлениях оказались неверными и тогда требуется
.пересмотреть существующие знания и выдвинуть новые гипотезы
2.3. Основные характеристики математических моделей
Пусть 0,t T — временной интервал моделирования системы S( ), интервал модельного времени где 0t — время начала моделирования( достаточно часто полагают 0 0t ); —Т -время окончания моделирова
; ния 0,t t T — .текущее значение модельного времени
Created with novaPDF Printer (www.novaPDF.com)

45
Построение математической модели системы S -начинается с опре , -деления параметров и переменных характеризующих процесс функ
.ционирования системы Параметры системы 1 2, , , m — ,это характеристики системы
остающиеся постоянными на всем интервале моделирования 0,t T . Если значения i определены на некотором множестве , . .т е
1
... m
m
R
,
, .то говорят что имеется параметрическое семейство систем — -Множество переменных разбивается на два подмножества зави
.симых и независимых переменных К независимым .переменным относятся следующие характеристики
1. (Входные воздействия сигналы) 11 2, ,..., nu u u . Входные воздействия
в момент 0[ , ]t t T характеризуютс я вектором
1
1
1( )
( ) ... .
( )
n
n
u t
u u t U Ru t
Среди { }iu могут быть управляющие , воздействия например
11 2 1 1, , , , ,nu u u n n а остальные 1 1n n — воздействия -неуправляющие.
2. Воздействия внешней среды21 2, , , nv v v . Среди них могут быть
контролируемые и неконтролируемые, наблюдаемые и ненаблюдаемые, -де терминированные и случайные воздействия. В момент 0,t t T -они ха
рактеризуются вектором
2
2
1
( )
( )
( ) ... .n
n t
v t
v v t V Rv
3. Переменные, характеризующие состояние системы 31 2, , , nx x x .
В отличие от i , состояния ix ,характеризуют свойства системы . изменяющиеся во времени Состояние системы в момент 0,t t T -опи
сывается вектором
3
3
1( )
( ) ...
( )
n
n
x tx x t X R
x t
,
2. Математическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

46 . . .Г Н Решетникова Моделирование систем
где Х— пространство состояний, или фазовое пространство системы( множество возможных значений вектора х). Если 1 2 ...t t —
, моменты изменения состояния системы то последовательность
1 2( ), ( ),...x t x t называется фазовой траекторией .системы К зависимым .переменным относятся следующие характеристики
1. Выходные характеристики (сигналы) системы 41 2, , , ny y y , -опре
деляемые в момент 0,t t T вектором
4
4
1( )
( ) ...
( )
n
n
y t
y y t Y Ry t
.
-Связи между зависимыми и независимыми переменными изобра . 2.1.жены на рис
S ( )t
y(t)
v (t)
и(t)
. 2.1Рис
2. Показатели эффективностифункционирования системы 1 2, , , ,k ( . . -которые характеризуют степень достижения системой ее цели т е ха
) рактеризуют качество функционирования системы и в момент 0,t t T образуют вектор
1( )
( ) ... .
( )
k
k
tt W R
t
-Показатели эффективности представляются в виде некоторых функционалов
0( ( ), ( ), ( ), ( ), , ), [ , ], 1, .i i u t v t x t y t t t t T i k , При наличии в системе случайных факторов например случайных
воздействий внешней ,среды значения i -являются также случайны . ми и поэтому не могут служить показателями эффективности В этих
случаях в качестве показателей эффективности используют средниез начения iW , определяемые соотношениями
Created with novaPDF Printer (www.novaPDF.com)

47
, 1, ,i iW M i k где M{ } — .символ математического ожидания
Процесс функционирования системы во времени описывается -опе раторными соотношениями, -заданными аналитически или алгоритми
, , -чески для состояний выходных характеристик и показателей эффек тивности системы
( ) ( )1
( ) ( ) ( )2
( ) ( ) ( ) ( )3
( ) ( , , , );
( ) ( , , , , );
( ) ( , , , , ),
t t
t t t
t t t t
x t F u v t
y t F u v x t
t F u v x y t
(2.1)
где tu обозначает реализацию процесса u(t) [0,на отрезке t], -анало гично обозначим , .t tx y Через 1 2 3( ), ( ), ( )F F F -обозначены соответ
, -ствующие операторы описывающие динамику зависимых и независи .мых переменных и показателей эффективности
(2.1) Зависимости называются законами функционирования системы S; зависимость 0( ), [ , ]y y t t t T , называется выходной траекторией -сис
, темы а зависимость 0( ), [ , ]x x t t t T , — фазовой траекторией. В выборе переменных x(t), характеризующих состояние системы
в момент времени 0,t t T , , -обычно имеется произвол который ис , (2.1) -пользуется так чтобы упростить закон функционирования и при
вести его к виду(0) ( ) ( )
( )1
( )2
( ) ( , , , , ),
( ) ( , ),
( ) ( , ),
t t
t
t
x t F x u v t
y t G x t
t G x t
(2.2)
где 1 2( ), ( ), ( )F G G — ;некоторые операторы (0)x — -начальное состо ; яние системы 0,t t T .
(2.2) (2.1) :Закон отличается от следующими особенностями состояние системы S в момент времени t зависит от начального
состояния системы (0)x ; выходные характеристики и показатели эффективности системы
в момент времени t зависят от состояний ( )tx .и текущего времени , Таким образом -математической моделью системы является множе
ство переменных , , , , ,u v x y вместе с законом функционирования (2.1) (2.2).в виде или
2. Математическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

48 . . .Г Н Решетникова Моделирование систем
2.4. Классификация математических моделей
(2.1), (2.2) -Операторные соотношения в могут быть заданы анали, . . -тически т е с помощью функциональных соотношений или логиче
, . ских условий или алгоритмически В зависимости от способа задания закона функционирования математические модели делятся на -аналити
ческие и алгоритмические., Заметим что время t может рассматриваться и как непрерывная
переменная 0,t t T , и к ак дискретная
, 0,1,..., , / ,t j j N N T где — . шаг дискретизации В соответствии с этим имеем -непрерывные и дискретные . математические модели Если математическая модель
, не содержит случайных элементов то имеем детерминированную ,модель — в противном случае вероятностную .модель
, Таким образом по признакам непрерывности и стохастичности :можно выделить четыре обширных класса математических моделей
-непрерывно детерминированные ;модели -дискретно детерминированные;-непрерывно вероятностные и -дискретно вероятностные.
2.5. Формы представления математических моделей
2.5.1. - Непрерывно детерминированные модели
В этих моделях время 0,t T -полагается непрерывной перемен, . -ной а случайными факторами в системе пренебрегают Основной ма
, тематический аппарат используемый при построении и исследовании- , — -непрерывно детерминированных моделей это теория дифференци
. -альных и интегральных уравнений Рассмотрим особенности непре- рывно детерминированного моделирования на примерах использования
.дифференциальных уравнений
П р и м е р Пусть система S описывает электрический колебательный контур
: с двумя параметрами емкостью 1 и индуктивностью 21/ . -Состоя ние этой системы в момент t будем характеризовать величиной заряда
конденсатора x(t), -которая измеряется прибором с некоторой погреш ностью ( ) [ , ]v t . , , Тогда как известно из физики математическая модель такой системы будет иметь вид
2
2 21
( ) 1( ) ( ), ( ) ( ) ( )
x tx t u t y t x t v t
t
, (2.3)
Created with novaPDF Printer (www.novaPDF.com)

49
где u(t) — внешнее детерминированное электрическое воздействие на. контур Если ( ) 0, (0) cos( )u t x A , -то решение однородного уравне
(2.3) ния имеет вид
1 2
1( ) cosx t A t
,
где А — ,амплитуда — .фаза колебаний
- При построении непрерывно детерминированных моделей систем -автоматического управления приходится использовать дифференциаль
.ные уравнения высших порядков
П р и м е рПусть S — ,одноканальная система автоматического управления
. 2.2.структура которой представлена на рис
. 2.2Рис
Объект управления описывается дифференциальным уравнениемk- го порядка
( ) ( ) ( ) ( ),..., , ( ), ,..., , ( ), , 0
k l
k lx t x t z t z t
x t z t tt tt t
, (2.4)
где ( ) — (некоторая функция от k+l+m+3) ;переменных x(t) — -со , стояние объекта управления измеряемое с некоторой — -погрешнос
:тью в канале измерения
( ) ( ) ( ), ( ) ,y t x t v t v t (2.5)z(t) — , воздействующий на объект управления сигнал формируемый
управляющей системой по заданному алгоритму( ) ( ( ), ( ))z t u t y t . (2.6)
(2.4)–(2.6) - -Соотношения определяют непрерывно детерминирован .ную модель
(2.4)Нередко используется частный случай — -линейное дифферен , циальное уравнение коэффициенты которого являются параметрами
мо :дели
Управляющаясистема
u t( )
u t( ) z t( ) x t( ) y t( )Объект
управленияКанал
измерений
2. Математическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

50 . . .Г Н Решетникова Моделирование систем
1 1 2 2( ) ( ) ( )
... ( ) ... ( ) 0k l
k k k k lk lx t x t z t
x t z ttt t
.
(2.7)
( , -В прикладных задачах переноса излучения например при расче ) - -те ядерных реакторов при построении непрерывно детерминирован
ной модели приходится использовать дифференциальные уравнения .в частных производных и интегральные уравнения
2.5.2. - Дискретно детерминированные модели
- , -В отличие от непрерывно детерминированных в этих моделях время t :является дискретной переменной t j , где — -шаг дискре
;тизации 0,1,2,...j — .дискретное время , Основной математический аппарат используемый при построении
- , — -дискретно детерминированных моделей это теория разностных урав , -нений и аппарат дискретной математики в частности теория конеч
.ных автоматов — , -Разностное уравнение это уравнение содержащее конечные раз
ности искомой функции
1 1, ,..., , , ,..., , , 0j j j n j j j mx x x u u u j , (2.8)
где ( ), ( )j jx x j u u j — соответственно состояние системы и внешнее воздействие в дискретный момент времени j.
, - (2.8)Отметим что дискретно детерминированные модели в виде -часто возникают как промежуточные при исследовании непрерывно
, детерминированных моделей на ЭВМ когда аналитическое решение -дифференциального уравнения получить не удается и приходится при
.менять разностные схемы
П р и м е р Рассмотрим x(t) — (2.3),величину заряда конденсатора из i(t) —
величину силы тока в дискретные моменты време ни t j . -Для раз ностного приближения величины i(t) воспользуемся формулой
1j j
jx x
i
.
Дискретную аппроксимацию уравнения2
2
( ) ( )i t x tt t
осуществим
:двумя следующими способами2
1 1 12 2
2( ) j j j j ji i x x xx tdt
; (2.9)
Created with novaPDF Printer (www.novaPDF.com)

51
21 2 1
2 2
2( ) j j j j ji i x x xx tdt
. (2.10)
(2.3) -Тогда однородную часть математической модели можно опи (2.9) (2.10).сать двумя разностными уравнениями в соответствии с и
Тогда
2
1 11 2
2 0;j j jx x x
(2.11)
2
2 11 2
2 1 0j j jx x x
. (2.12)
Решая разностные уравнения при заданных начальных значениях
0 1,x x и 1x , получим фазовые траектории { }, 1,2,...jx j . Анализ устойчивости разностных уравнений позволяет , -заключить что ампли
(2.12)туда колебаний фазовой траектории при использовании уравнения , возрастает со скоростью сравнимой с ростом функции
/ 22
1 21 ,
j что не соответствует предположению об ограниченности амплитуды
(2.3). -непрерывной модели Поэтому можно сделать вывод о неадекват (2.12) (2.3).ности разностного уравнения аппроксимируемой модели
(2.11) (2.3). -Разностное уравнение является адекватным модели Следо, вательно исследование устойчивости разностных схем необходимо при
.аппроксимации непрерывных моделей дискретными
- -Другой математический аппарат для построения дискретно детер .минированных моделей представляет теория конечных автоматов
Конечный автомат — это математическая модель дискретной системы S, которая под действием входных сигналов u U -вырабатывает выход
ные сигналы y Y и может иметь некоторые изменяемые внутренние состояния x X ; при этом , ,U Y X — ко .нечные множества
Конечный автомат S :характеризуется шестью элементами входным алфавитом U; выходным алфавитом Y; внутренним алфавитом состояний X; начальным состоянием 0 ;x X функцией переходов , : ;x x u XU X функцией выходов , : .y x u XU Y
Процесс функционирования конечного автомата S -состоит в следу.ющем На j- м такте 0,1,j , -на вход автомата находящегося в со
стоянии jx X , поступает входной сигнал ju U , на который автомат
2. Математическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

52 . . .Г Н Решетникова Моделирование систем
реагирует переходом на (j+1)- м такте в состояние 1jx X и выдачей выходного сигнала jy Y .
, Например конечный автоматМили -описывается следующими рекур :рентными соотношениями
1 0( , ), (0) ,
( , ), 0,1,....j j j
j j j
x x u x x
y x u j
(2.13)
. 2.3 , На рис изображен граф описывающий булевский автомат Милис 0 0x и алфавитами U = Y = {0, 1}, Х = {0, 1, 2}. Вершины графа
, — -соответствуют внутренним состояниям автомата а дуги соответству . ющим переходам Каждая дуга из x в x п (омечается парой , и у), где
, и у — , входной и выходной сигналы при которых осуществляется переход из x в x .
0
(0,0) (0,1) (0,0)
(1,1)
(1,1)
1 2
(1,0)
. 2.3Рис
, -Отметим что конечные автоматы являются адекватной математи , , -ческой моделью элементов и узлов ЭВМ устройств контроля регули, .рования управления систем коммутации в технике передачи данных
- -Современное развитие дискретно детерминированных моделей на шло отражение в теории сетей Петри. -Математический формализм это
го аппарата моделирования основывается на теории комплектов, -обоб . щающей теорию множеств Комплект, , подобно множеству есть набор элементов из некоторой области X, , -отличие лишь в том что допуска
ется присутствие в Х .одного и того же элемента несколько раз
Created with novaPDF Printer (www.novaPDF.com)

53
2.5.3. - Дискретно вероятностные модели
- -Главное отличие дискретно вероятностных моделей от дискретно . -детерминированных заключается в учете случайных элементов Ос
, -новной математический аппарат используемый при построении и ис - , — следовании дискретно вероятностных моделей это теория разностных
.стохастических уравнений и теория вероятностных автоматов Разностное стохастическое уравнение — , это уравнение которое
содержит случайные параметры ( ) -или и случайные входные воздей ствия ju .
Пусть на вероятностном пространстве ( , F, Р) -определены слу чайный вектор параметров
0
1
m
m
R
и случайная последовательность входных воздействий 0 1 2, , ,..., .u u u U Нелинейное разностное стохастическое уравнение имеет вид
1 1( , ,..., , , ,... , , ) 0j j j n j j j lx x x u u u j , (2.14)
где 0 1 1, 1,...; , ,..., nj n n x x x — -заданные начальные состояния сис; темы ( ) — заданная функция п + l +т + 3 .переменных
Решением этого уравнения является определенная на ( , F, Р) случайная последовательность состояний моделируемой системы
2 3, ,...п пx х Х . Если ( ) линейна по ,j jx u , (2.14) то п римет вид
10 0
, 1, 2,...,n l
i j i k n j k ji k
x u u j п п (2.15)
где 0 1( ,..., )Tn l — вектор m n + l + 2 . параметров Уравнение(2.15) -в математической статистике известно как уравнение авторег
(рессии и скользящего среднего порядка п, l). (2.15)Частными случаями (являются модель авторегрессии АР п) порядка :п
0
0n
i j i ji
x u ,
(и модель СС l) скользящего среднего порядка l:
10
.l
j i ji
x u
П р и м е р- Дискретно вероятностная модель электрического колебательного
, контура находящегося под влиянием случайных внешних воздействий{ }ju , имеет вид
2. Математическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

54 . . .Г Н Решетникова Моделирование систем
2
1 1 21 2 2
2 1 0,
, 2,3,...,
j j j j
j j j
x x x u
y x u j
где ошибка измерения ju пред -ставляется в виде стационарной слу чайной последовательности с нулевым математическим ожиданием
и дисперсией 2 .
- -Другой математический аппарат построения дискретно вероятност ных моделей сложных систем представляет теория вероятностных
. автоматов Вероятностный автомат, определенны й на ( , F, Р), есть , конечный автомат в котором функция переходов ( , , ),x x u ,
и функция выхода ( , , )y x u ,являются случайными функциями .имеющими некоторые вероятностные распределения
2.5.4. - Непрерывно вероятностные модели
- -При построении и исследовании непрерывно вероятностных моде -лей используются теория стохастических дифференциальных уравне .ний и теория массового обслуживания
Стохастическое дифференциальное уравнение ( ) в форме Ито имеет вид
, , ,dx t a t x t dt b t x t d t (2.16)
где x(t) — , случайный процесс определяющий состояние системы в момент времени t; ( )t — -стандартный винеровский случайный про
;цесс ( ), ( )a b — .коэффициенты переноса и диффузии соответственно При некоторых условиях гладкости на коэффициенты ( ), ( )a b -реше -ние этого стохастического дифференциального уравнения является мар
. -ковским диффузионным процессом Распределение вероятностей про . -цесса удовлетворяет уравнениям Колмогорова Такая непрерывно
-вероятностная модель часто используется при моделировании стохас , - .тических систем управления процессов тепло и массообмена Теория массового обслуживания -применяется для построения матема , :тических моделей таких сложных систем для которых характерно
наличие потока многих заявок на выполнение определенных ( );операций заявок на обслуживание
( ).наличие многократно повторяемых операций выходной поток -Теория массового обслуживания разрабатывает и исследует мате -матические модели различных по своей природе процессов функцио
, , нирования экономических производственных технических и других, : -систем например поставок сырья и комплектующих изделий пред
; ; -приятию поступления заданий на ЭВМ от удаленных терминалов вы . . зовов на телефонных станциях и т д При этом для функционирования
Created with novaPDF Printer (www.novaPDF.com)

55
: -таких систем характерна стохастичность случайность моментов време . .ни появления заявок на обслуживание и т д
Сложная система S, -описываемая как система массового обслужи, вания состоит из 1L вз -аимосвязанных и взаимодействующих эле- ментов приборов обслуживан ия 1, , LП П . Прибор обслуживания iП состоит из накопителя заявок iH , -в котором могут одновременно нахо
дитьс я il заявок 0 i il m , и канала iK обсл ;уживания заявок 0i im m — емкость накопителя iH , . . т е ч исло мест в очереди для ожидания начала обслуживания в канале , 1, .iK i L -На каж дый элемент прибора iП ; поступают потоки событий в накопитель
iH — поток заявок iv , на канал iK — поток обслуживания iu . Поток заявок iv представляет последовательность времени между
мо -ментами появления заявок на входе и образует подмножество неуп . равляемых переменных По ток iu пре дставляет собой последоват -ель
-ность интервалов времени между моментами начала и окончания обслу .живания заявок и образует подмножество управляемых переменных
, Заявки обслуженные канало м iK , , и заявки покинувшие прибор iП ( , - -по различным причинам не обслуженными например из за конечнос
т и im ), образуют выходной поток iy — -последовательность интерва лов времени между моментами выхода з ; аявок это и есть выходной
.сигнал системы массового обслуживания Процесс функционирования прибора iП можно представить
как процесс изменения состояний его элементов во времени2( )i ix x t X R , где 1( )ix t — ч , -исло заявок находящихся в на
копителе в момент времени t; 2( )ix t — с -остояние канала обслуживани я iK ( 2 ( ) 0ix t , , если канал свободен 2( ) 1ix t , ).если канал занят
Приборы обслуживани я , ,i LП П связаны и взаимодействуют между с . обой Если каналы iK различных приборов обслуживания
соеди , -нены параллельно то имеет место многоканальное обслужива. ние Если же п риборы iП ил и их параллельные блоки соединены
, .последовательно то имеет место многофазное обслуживание
2.6. Методы упрощения математических моделей
,Почти все реальные объекты и процессы чрезвычайно сложны , -и их описание включает в себя бесконечное число элементов пере
, , , . . менных параметров соотношений ограничений и т д Поэтому при построении моделей объектов и процессов приходится отбрасывать
, большую часть реальных характеристик и оставлять только те которые .воссоздают идеализированный вариант исследуемого объекта
Все модели являются либо упрощенными представлениями реального, . , мира либо абстракциями Сходство модели с объектом который она
, . отображает называется степенью изоморфизма Для того чтобы быть
2. Математическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

56 . . .Г Н Решетникова Моделирование систем
изоморфной ( . . ), т е идентичной или сходной по форме модель должна :удовлетворять двум условиям
1) должно существовать взаимно однозначное соответствие между ;элементами модели и элементами представляемого объекта
2) должны существовать точные соотношения или взаимодействия .между элементами
, -Степень изоморфизма модели относительна и большинство моде лей скорее гомоморфны, . . -т е существует сходство по форме при разли , -чии основных структур причем имеет место лишь поверхностное по
.добие между различными группами элементов модели и объекта Гомоморфные модели являются результатом упрощения и абстракции.
Для разработки идеализированной гомоморфной модели обычно разбивают систему на подсистемы или элементы для их анализа
. -и интерпретации Такой способ действий зависит от наличия подсис , тем или элементов которые в первом приближении не зависят друг от
. -друга или достаточно просто взаимодействуют между собой Напри, -мер для анализа работы автомашины можно проанализировать после
, , , -довательно работу двигателя коробки передач привод систему под . . вески и т д С такого рода анализом при построении модели близко , связан процесс упрощения реальной системы где под упрощением
понимается пренебрежение несущественными деталями или принятие . , -предположений о более простых соотношениях Например часто пред
, -полагается что между переменными имеет место линейная зависи , -мость вместо существующей нелинейной газы считаются идеальны
, — , — . .ми давление адиабатическим проводимость однородной и т д При построении моделей систем управления также прибегают
. , к упрощению Так переменные считаются либо детерминированными , -при чрезвычайно упрощенной трактовке реальности либо стохасти
, -ческими которые описываются известными вероятностными функци . , ями распределения Достаточно часто предполагается что зависимость
, между переменными носит линейный характер а параметры модели , , -объекта являются точно заданными несмотря на то что эти допуще
. ния не совсем правомерны Такие предположения часто используются .для построения математических моделей систем управления
Другим аспектом анализа является абстракция ( от латинскогоabstractio — ) — отвлечение форма познания, -основанная на мысленном выде
-лении существенных свойств и связей предмета и отвлечении от других час тных его свойств и связей. Абстракция является результатом процесса
абстрагирования. :Основными типами абстракции являются
изолирующая абстракция — вычленение исследуемого явления из ;некоторой целостности
обобщающая абстракция — ;описание обобщенной картины явлений идеализация — замещение реального явления идеализированной
.схемой
Created with novaPDF Printer (www.novaPDF.com)
57
— , Большинство моделей это абстракции в том смысле что они стремятся представить качества и поведение моделируемого объекта
, -в форме или способом отличающимся от их действительной реали.зации
-После анализа и моделирования частей и элементов системы при , . . -ступают к их объединению в единое целое т е путем синтеза констру
. -ируют некоторое приближение к реальной ситуации При этом необхо, димо чтобы используемые для синтеза части были выбраны корректно
.и корректно установлено их взаимодействие , , ,Если эти условия соблюдены то процессы анализа абстракции
, упрощения и синтеза в итоге приведут к созданию модели которая аппроксимирует . поведение исследуемой реальной системы При этом
, необходимо учитывать что модель является только приближением( ),аппроксимацией .поэтому она будет себя вести не как реальный объект
2.7. Контрольные вопросы
1. .Дайте определение математической модели2. ?Что такое математическое моделирование3. .Перечислите этапы построения математических моделей4. ?Какие переменные модели относятся к независимым5. ?Какие переменные модели относятся к зависимым6. ?Как определяются законы функционирования системы7. .Приведите классификацию математических моделей8. - .Дайте определение непрерывно детерминированных моделей9. - .Приведите пример непрерывно детерминированной модели10. - .Дайте определение дискретно детерминированных моделей11. - .Приведите пример дискретно детерминированной модели12. - .Дайте определение непрерывно вероятностных моделей13. - .Приведите пример непрерывно вероятностной модели14. - .Дайте определение дискретно вероятностных моделей15. - .Приведите пример дискретно вероятностной модели16. -В чем заключается главное отличие дискретно вероятностных
- ?моделей от дискретно детерминированных17. -В чем заключается главное отличие непрерывно вероятностных
- ?моделей от непрерывно детерминированных18. - -В чем заключается главное отличие непрерывно детерминиро
- ?ванных моделей от дискретно детерминированных19. ?Какая модель называется изоморфной20. ?Какая модель называется гомоморфной21. ?В чем заключаются упрощения модели22. .Дайте определение абстракции23. .Перечислите основные типы абстракции
2. Математическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

58 . . .Г Н Решетникова Моделирование систем
3. ЭЛЕМЕНТЫ ТЕОРИИ ПОДОБИЯ
Исследование систем с помощью моделей может быть обосновано , только в том случае когда модель адекватно описывает процессы
, . и явления происходящие в системах В основе доказательства степени соответствия модели и объекта лежит теория подобия. Моделирование , -представляет собой процесс проведения исследований объекта кото
-рый базируется на подобии модели и объекта и включает в себя постро , ение модели ее изучение и перенос полученных результатов на объект
. , , -исследования При этом под моделью понимается объект явление про, , , ,цесс система знаковое образование математическое выражение
.которые находятся в отношении подобия к исследуемому объекту -Математическое моделирование использует подобие между вели
, , чинами входящими в математические выражения описывающие . поведение изучаемого объекта Физическое моделирование использует
, .подобие между объектом и моделью имеющей физическую природу -Основой физического или математического экспериментального иссле , дования являются методы теории подобия которые применяются как
, -при постановке экспериментов так и при обработке данных о резуль .татах этих экспериментов
3.1. Использование теории подобия при физическом моделировании
При физическом моделировании модель воспроизводит изучаемый . -процесс с сохранением его физической природы Преимущества физи ческого моделирования перед натурным экспериментом заключаются
, в том что условия моделирования могут значительно отличаться от, , условий свойственных исследуемому объекту или процессу так как
, нет необходимости сохранять размеры сооружений скорости течения , . .жидкостей и газов нагрузки на элементы конструкций и т д
Научной основой моделирования с использованием физических моделей является теория подобия — -учение об исследовании физических яв
лений, основанное на понятии о физическом подобии. Два физических явленияподобны, если по численным значениям характеристик одного можно получить
численные значения характеристик другого явления простым пересчетом, -ана логично переходу от одной системы единиц измерения к другой. Для всякой
совокупности подобных явлений все соответствующие безразмерные ( )характеристики безразмерные комбинации из размерных величин
Created with novaPDF Printer (www.novaPDF.com)

59
. — имеют одинаковое численное значение Верно и обратное если все соответствующие безразмерные характеристики двух явлений одинаковы, то
эти явления физически подобны.
3.1.1. Анализ размерностей
Метод установления связи между существенными для изучаемого явления физическими величинами, -основанный на рассмотрении размерностей этих ве
личин, называется анализом размерностей. -В этом методе рассматривают -ся проблемы установления соответствия различных систем единиц из
, мерения вопросы о выборе первичных величин и соответствующих им , -опытных единиц измерения образование вторичных величин измере
, .ния для величин определяемых через первичные . Существуют различные системы единиц измерения Это система
, , - ; СГС в которой первичны сантиметр грамм масса и секунда система, , - ; МКГСС в которой первичны метр килограмм сила и секунда система
, , - , , , -СИ в которой первичны метр килограмм масса секунда ампер кель, . вин кандела и др Выражение производной единицы измерения через
основные называется формулой размерности, которая записывается через символы первичных единиц измерения и имеет вид степенных
.одночленов, -Например в системе СГС формулы размерности содержат три ар
: гумента единицу длины L, единицу времени T и единицу массы M. -На основании определения силы через массу и ускорение формула раз
мерности силы K имеет вид
22
MLK MLT
T .
В системе СГС формулы для любой величины N , -механической теп ловой или электромагнитной природы имеют вид
l t mN LT M , (3.1) где показатели степеней l, t, m — некоторые целые или дробные
, действительные числа которые называются показателями размерности или размерностью величины N. , -При этом считают что размерность пер
, вичной величины в отношении себя равна единице а в отношении — .любой другой первичной величины нулю
-Формулы размерности позволяют определить масштабные множи тели для пересчета соответствующих характеристик при изменении
. величин первичных единиц измерения Если вместо заданных единиц измерения длины L, времени T и массы M -перейти к новым едини
, цам измерения меньшим для длины в , раз для времени в раз и для массы в , раз то новая единиц а измерения для величины N (3.1) с размерностью по формуле будет меньше первоначальной
3. Элементы теории подобия
Created with novaPDF Printer (www.novaPDF.com)

60 . . .Г Н Решетникова Моделирование систем
в l t m . раз Если 0l t m , то чи сленное значение величины , -не зависит от выбора масштабов для первоначальных единиц и следо
, вательно такая величина будет безразмерной. , , -Физические закономерности вообще говоря не зависят от выбо
. -ра системы единиц измерения Это обстоятельство обусловливает осо , бую структуру функций и функционалов выражающих с помощью
, -размерных величин физические закономерности не зависимые от сис . темы единиц измерения Эта специальная структура функциональных
соотношений устанавливается -теоремой, -согласно которой всякое со , -отношение между размерными характеристиками имеющими физи
, ческий смысл представляет собой соотношение между отвлеченными -безразмерными комбинациями из размерных определяемых и опреде
. -ляющих величин Причем среди этих величин должны быть и размер , -ные физические постоянные имеющие существенное значение в рас
.сматриваемых явлениях , Таким образом необходимо ввести систему определяющих -парамет
, -ров постоянных или переменных вытекающую из постановки выделя емого класса задач и характеризующую полностью для данной среды
. каждую отдельно взятую задачу Определяющие параметры — -это величины, характеризующие каждый отдельный эксперимент, которые являются
-необходимыми и достаточными для повторения и сравнения различных экспериментов. В число определяющих параметров необходимо включать
-независимые переменные типа координат точек пространства и време, , ни физические параметры типа коэффициента упругости вязкости
. . и т п В случае физического подобия критерии подобия могут быть , -получены без математического описания объектов на основании ана
лиза размерностей и - .теоремы -Если рассматриваемая задача сформулирована как математи
, . .ческая т е
1 2( , ,..., ),na f a a a (3.2)
где a — ,искомая величина 1 2, ,..., na a a — ,определяющие параметры — , то определяющие параметры это все исходные данные которые нужно
(3.2). знать для вычисления функции В зависимости от постановки задачи число параметров n .может быть конечным или бесконечным Обычно для рассматриваемого класса задач можно ограничиваться
, случаями когда n , , . конечно и вообще говоря невелико Параметры
1 2, ,..., na a a , -составляются из величин входящих в основные уравне, .ния граничные условия и начальные данные
Выводы анализа размерностей получаются на основании - -теоре (3.2), мы о существовании соотношения вида которое выполняется для
определяемой величины a и определяющих величин 1 2, ,..., na a a -в лю .бой системе единиц измерения
Created with novaPDF Printer (www.novaPDF.com)

61
(3.2) Система аргументов в соотношении должна в смысле теории . , размерностей обладать полнотой Это значит что если величина a
, отлична от нуля или бесконечности то существуют числа 1 2, , , n , такие что размерности величины a и комбинаций 1 2
1 2, , , nna a a
. одинаковы На основании этого и - (3.2) -теоремы соотношение прини мает вид
1 21 2
1 2
( , ,... ),n
n kn
ag
a a a
где 1 2, ,... n k — ( -степенные безразмерные одночлены аналогич ные 3,14...), образованные из 1 2, ,..., na a a , причем k n . Число
k равно числу параметров с независимыми размерностями среди
1 2, ,..., na a a . Основная практическая польза применения анализа размерностей
и - -теоремы состоит в установлении возможности перенесения резуль , , , -татов опыта проведенного в одних условиях в другие условия в кото
. , , рых опыт не проводился Например по опытам с водой движущейся , по трубе с фиксированным диаметром можно автоматически давать
, нужные ответы о движении воды в трубах той же формы но других, , . . -размеров о движении в трубах нефти воздуха и т п Однако для воз можности перенесения результатов данного опыта на другие опыты
-необходимо обеспечивать одинаковые значения безразмерных парамет. -ров Значения некоторых из этих величин легко обеспечиваются гео
, -метрическими условиями постановки опытов значения других пара - .метров связаны с физико механическими условиями проведения опытов
3.1.2. Физическ ое моделирование
Анализ размерностей и теория подобия тесно связаны между собой . -и положены в основу экспериментов с моделями В таких эксперимен
-тах осуществляются замены изучения некоторого физического явле -ния изучением аналогичного явления на модели меньшего или боль ( ).шего масштаба обычно в специальных лабораторных условиях
, -После установления системы параметров определяющих выделен , .ный класс явлений устанавливаются условия подобия двух явлений
Пусть установлено n , независимых параметров некоторые из которых . -являются безразмерными Пусть размерности определяющих парамет
ров и физических постоянных выражены через размерности k из этих параметров с независимыми размерностями k n . Тогда из n величин
можно записать только n–k ,независимых безразмерных комбинаций . составленных из определяющих параметров Среди всех безразмерных
— -величин всегда можно указать некоторую базу систему безразмер , .ных величин которые определяют собой все остальные
3. Элементы теории подобия
Created with novaPDF Printer (www.novaPDF.com)

62 . . .Г Н Решетникова Моделирование систем
, -Для подобия двух явлений необходимо и достаточно чтобы числен , ные значения безразмерных комбинаций составленных из полного
, , -перечня определяющих параметров образующих базу были одинако . выми в этих двух явлениях Условия постоянства базы отвлеченных
, , -параметров составленных из заданных величин определяющих рас , сматриваемое явление называются критериями подобия., Например в гидродинамике важнейшими критериями подобия
:являются , -число Рейнольдса характеризующее соотношение между инер
ционными силами и силами вязко :стиv l
R
;
, число Фруда характеризующее соотно -шение между инерцион
ными силами и силами тяжести:2v
Frg l
;
, :число Маха учитывающее сжимаемость газаv
Ma
.
:Здесь приняты следующие обозначения — ,плотность v —,скорость l — , линейный размер — динамичес кий коэффициент,вязкости g — ,ускорение силы тяжести a — .скорость звука
П р и м е р В задаче об установившемся обтекании тела несжимаемой вязкой
, жидкостью все безразмерные величины характеризующие движение , : в целом определяются тремя параметрами углами , (направление
) поступательной скорости тела относительно его поверхности и числомРейнольдса R. ( ) -Условия физического подобия критерии подобия пред
ставляются соотношениями
const, const, const.Pvd
R
, Таким образом при моделировании результаты опытов с моделью -можно переносить на физические явления только при одинаковых зна
чениях , и R. Первые два условия всегда легко осуществить на, — , , практике третье труднее особенно в тех случаях когда модель
. меньше обтекаемого тела Поэтому для сохранения величины числа ,Рейнольдса необходимо либо увеличивать скорость обтекаемого потока
, что обычно практически не осуществимо либо существенно изменять . -плотность и вязкость жидкости На практике эти обстоятельства при
водят к большим затруднениям при изучении аэродинамического, , -сопротивления например продувка самолетов в натуральную величи
.ну в аэродинамических трубах При моделировании движения тел в газе с большими скоростями
необходимо иметь одинаковые значения числа Маха на модели и в, натуре а при моделировании плавания кораблей по воде необходимо
Created with novaPDF Printer (www.novaPDF.com)

63
-обеспечивать равенство для натуры и модели чисел Фруда и Рей.нольдса
, С помощью моделирования можно изучать явления протекающие , -в течение длительного или очень короткого периода так как на моде
.лях подобные явления могут продолжаться несколько часов или дней -Физическое моделирование имеет ограниченную сферу примене
. -ния Более широкими возможностями обладает математическое моде.лирование
3.2. Математическ ое подобие
Математическое подобие (аналогия) — -это сходство по количествен , -ным признакам имеющим математическое выражение в виде некото . рых уравнений Математические аналоги — , это объекты описываемые
, сходственными уравнениями которые получаются приравниванием , . . , -нулю сходственных функций т е функций одинакового вида отлича
-ющихся только аргументами и отличными от нуля постоянными коэф, фициентами например 1 10 11 11 12sin( )z a x a x и 2 20 21 21 22sin( )z a x a x . Сходственные переменные — , -переменные входящие под знаки сходст
венных функций одинаковым образом ( 1z и 2z , 11x и 21x , 12x и 22x ). , :Два объекта подобны если -они имеют сходственные математические описания в форме урав
нений вида
( , , , , ) 0, 1,2,..., 1,2,..., 1,2,...,i j s sF z x a t D i j s (3.3)
где ss
dD
dt ;
сходственные переменные ( 1 2 1 2 1 2, ,и и иi i s sz z x x t t ) связаны — :постоянными коэффициентами подобия константами подобия
1 1 21
2 2 2 1, ,
i s
i s sz x t
i s s
x t DzC C C
z x t D . (3.4)
(3.4) , -При условиях соответствующие сходственные уравнения фун кции и переменные называются подобными. Благодаря константам
, , -подобия результаты полученные для одного объекта могут быть транс .формированы в соответствующие результаты для подобного объекта — (3.3) (3.4).Необходимое условие подобия совместность уравнений и (3.4) -Константы подобия связаны определенными уравнениями кон
. (3.3) -стант Для их вывода сходственные уравнения приводятся к без размерной форме
( , , , , ) 1 0i j s sz x a t D (3.5)
и произведения степеней , , , ,i j s sz x a t D о -бъединяются в безраз мерные степенные комплексы вида
3. Элементы теории подобия
Created with novaPDF Printer (www.novaPDF.com)

64 . . .Г Н Решетникова Моделирование систем
,i r s r s rrr j s sia z x t D
называемые критериями подобия. В результате безразмерные функции( ) п редставляются безразмерными критериальными функциями
( ) ( , , , , ),r i j s sz x a t D (3.5) а безразмерная форма уравнения представляется критериальнымуравнением
( ) 1 0.r :В случае подобия сходственные критерии равны
1 2 ,r r что записывается символически в виде r idem (idem — ).неизменно
Уравнения констант подобия имеют вид
1 1
2 21.i r s r s rr
i s
r jz x t
r j
aC C C
a
(3.6)
(3.6) -Уравнения системы должны быть совместными и независи. , мыми Если они несовместны то подобие невозможно ни при каких
. (3.6) -значениях констант Зависимые уравнения из системы необходи . мо исключить Число независимых уравнений равно числу m -независи
мых критериев подобия r , которое определяет - . -теорема Согласно - , теореме зависимость связывающая n k m переменных , и постоянных размерных величин среди которых k величин обладают
, -независимыми размерностями может быть преобразована в зависи мость межд у m n k независимыми безразмерными степенными
комплексами n .величин
П р и м е р Пусть модели объектов описываются уравнениями
1 1 11 1 12 1
2 2 21 2 22 2
0;
0,
D z a z a xD z a z a x
где
1 21 2; .
d dD D
dt dt
, -Необходимо привести эти уравнения к безразмерной форме на, пример вида
1 1 11 1
12 1 12 1
2 2 21 2
22 2 22 2
1 0;
1 0
D z a za x a xD z a za x a x
Created with novaPDF Printer (www.novaPDF.com)

65
и получить критериальные уравнения
11 12 21 221 0; 1 0, где
1 1 11 1 2 2 21 211 12 21 22
1 12 1 1 12 1 2 22 2 2 22 2; ; ; .
D z a z D z a zt a x t a x t a x t a x
Тогда уравнения констант будут иметь вид
22 11 2211 12
21 12 22 21 121, 1,z z
x t x
a C a a Ca C C a a C
(3.7)
где
1 1 1 2
2 2 2 1; ; .z x t
z x t DC C C
z x t D
, Одна из констант может быть выбрана произвольно две другие (3.7).однозначно определяются из уравнений
:Частными случаями математического подобия являются — ;геометрическое подобие геометрических образов — , временное подобие функций времени при котором временная
, константа показывает в каком отношении находятся такие параметры, , . .функций как период временная задержка и т д
3.3. Элементы статистическ ой т еории подобия
, В общем случае параметры исследуемых систем процессов или . явлений могут представлять собой случайные величины Поэтому
необходимо применять основные положения теории подобия с учетом , -стохастического характера процессов и явлений происходящих в объек
. , тах Принципы подобия в стохастическом смысле основаны на том что , -сравниваемые параметры являются случайными величинами а крите
— .рии подобия функциями этих случайных величин Пусть имеется соотношение вида
1 2 ,m (3.8)
где 1
2, 1, ,i
ii
xi m
x — , статистики критериев сформированные для
каждой группы одноименных параметро ;в 1ix — п -араметры систе- ;мы оригинала 2ix — .параметры модели
В стохастической постановке принято считать, -что две системы подобны, когда функции распределения параметров, -характеризующих эти системы, равны, а статистика критерия подобия находится в пределах границ
доверительного интервала. -Способ получения численного значения статистик критерия по
. добия состоит в следующем Пусть случайные параметры 1ix -име ют плотность распределения 1 1( )i if x , параметры 2ix имеют плотность
3. Элементы теории подобия
Created with novaPDF Printer (www.novaPDF.com)

66 . . .Г Н Решетникова Моделирование систем
распределения 2 2( ), 1, .i if x i m Тогда в терминах задачи проверки статистических гипотез нулевая гипотеза 0H ,будет состоять в том
чт о 1 1 2 2( ) ( )i i i if x f x дл . -я всех одноименных параметров Альтернатив , ная гипотеза заключается в том чт о 1 1 2 2( ) ( )i i i if x f x . Для критерия
, , подобия можно записать что сравниваемые системы подобны если ,n b . Здесь ,n b — соответственно нижн яя и верхняя границы
, доверительного интервала для критерия подобия определяемые .с некоторым уровнем значимости
Для определения численного значения статистики критерия при справедливости гипотезы 0H необходимо по известным плотностям
распределения случайных величин 1ix и 2ix определить плотности
распределения 1 1( )i if x и 2 2( ), 1,i if x i m , от этих плотностей перейти к плотности распределения величины , -а затем вычислить выбороч
ное значение статистики и границы доверительного интервала ,n b .
(3.8)Так как в 1
2, 1, ,i
ii
xi m
x -то сравнению подлежат парамет
ры одного типа и множество величин i пред ставляет собой набор . - -независимых случайных величин Тогда объект оригинал и модель на
, -ходятся в отношении подобия если они подобны по каждому опреде . -ляющему параметру Теперь задача сводится к определению довери
тельного интервала по каждому критерию подобия i с о дним и тем же . уровнем значимости Если такие интервалы найдены и для каждого критерия выполняются усло вия ,n b , то объекты можно считать
. подобными Если хотя бы по одному критерию условие подобия , . -не выполняется то оснований считать объекты подобными нет Заме
, -тим что часть анализируемых параметров может иметь детерминиро , ванный характер и подобие по этим параметрам определяется путем - -деления параметров объекта оригинала на соответствующие парамет
. (3.8), -ры модели В этом случае размерность задачи требующей анали , -за с использованием аппарата случайных функций существенно по
.нижается Плотность распределения величины определяется следующим
. образом Имеем 1
2
i
i
xx
— выборочное ,значение статистики критерия
,определенное по результатам испытаний системы оригинала и модели( )
iF k — функция распределения величины i . -Не нарушая общно
, , сти опустим индекс в записи для функции распределения так как аналогичные выкладки будут иметь место для любых параметров
, . системы имеющих характер случайных величин Выражение для функции распределения имеет вид
Created with novaPDF Printer (www.novaPDF.com)

67
1
2
( ) .x
F k P k P kx
Так как случайные величины 1x и 2x , -независимы то их совмест
ная плотность распределения равна произведению плотностей этих
, величин а вероятность соотношени я 1
2
xk
x в ыражается интегралом
, от совместной плотности по области определенной неравенствами
2 1 20,x x x k :
21 2
1 20
( ) ( ) ( )xx x k
F k f y f z dydz
. (3.9)
, Будем считать что функция ( )F k , . . -дифференцируема т е суще
ствует плотность ( )f k . Точные доверительные границы определяются из соотношений
0 00
( / ) , ( / ) ,n
b
f k H dk f k H dk
(3.10)
где — . (3.10) -уровень значимости В неизвестными величинами яв ляются значения границ доверительного интервал а ,n b , отн -оситель
. -но которых необходимо решить эти интегральные уравнения Опреде (3.9), лив функцию распределения статистики критерия можно
-ограничиться вычислением приближенных границ доверительного ин. -тервала Для этого необходимо получить плотность распределения ста тистики критерия , вычислив математическое ожидание
( )m kf k dk
и среднее квадратическое отклонение статистики критерия
2 2 2( )k f k dk m
,
где — область определения критерия . В общем случае область
определения критерия 0, . -Определив математическое ожида , -ние и среднее квадратическое отклонение можно вычислить прибли
женные границы доверительного интервала по формулам
, ,n bm t m t
где t — к , -вантиль распределения Стьюдента определенный для уров ня значимости .
3. Элементы теории подобия
Created with novaPDF Printer (www.novaPDF.com)

68 . . .Г Н Решетникова Моделирование систем
- -Проверка гипотезы о подобии объекта оригинала и модели прини , -мается на основании сравнения оценок полученных при функциони
- . ровании объекта оригинала и исследовании модели При этом так как -оценки определяются путем обработки выборки случайных чисел огра
, ,ниченного объема то они сами являются случайными величинами имеющими плотность распределе ния ( )xf t .
, -Таким образом проверяя по каждой группе одноименных парамет , ров гипотезу о их подобии можно сделать вывод о подобии системы
.оригинала и модели
3.4. Контрольные вопросы
1. ?В чем заключается сущность физического моделирования2. .Приведите пример физического подобия3. ,Как называется учение об исследовании физических явлений
?основанное на понятии о физическом подобии4. Как называется метод установления связи между физическими
?величинами5. Как называется выражение производной единицы измерения ?через основные единицы измерения
6. , -Как называются величины характеризующие каждый отдель , ный эксперимент которые являются необходимыми и достаточными ?для повторения и сравнения различных экспериментов7. .Приведите примеры критериев подобия8. К каким параметрам относятся координаты точек пространства
?и времени9. -К каким параметрам относятся коэффициенты вязкости и упру
?гости10. , -Согласно какой теореме всякое соотношение между размерны
, , ми характеристиками имеющими физический смысл представляет -собой сотношение между отвлеченными безразмерными комбинация
?ми из размерных определяемых и определяющих величин11. -Как называются условия о постоянстве базы отвлеченных пара
, , -метров составленных из заданных величин определяющих рассмат ?риваемое явление
12. .Дайте определение математическому подобию13. ?Какие два объекта являются математически подобными14. .Приведите пример математического подобия15. .Приведите пример геометрического подобия16. ?Когда стохастические системы являются подобными17. .Приведите пример стохастического подобия
Created with novaPDF Printer (www.novaPDF.com)

69
4. СТАТИСТИЧЕСК ОЕ МОДЕЛИРОВАНИЕ
Под статистическим моделированием понимается воспроизведениес помощью ЭВМ функционирования вероятностной модели некоторого объекта.
Цель моделирования такого рода состоит в оценивании с его помощью . средних характеристик модели Обычно это математическое ожидание, , .величин характеризующих систему их дисперсии и ковариации
-Статистическое моделирование является неотъемлемой и органич , - , -ной составляющей моделирования систем в силу во первых случай , - ,ного характера многих реальных явлений и процессов и во вторых
( )неизбежности рандомизации искусственного внесения случайности . моделируемых систем Рандомизация служит эффективным средством
, уменьшения количества существенных и зависимых и независимых , , -факторов модели подлежащих измерению наблюдению и исследова
, нию за счет возможности учета и описания части таких факторов« », . . .в среднем т е путем их статистического представления
;Методы статистического моделирования весьма многочисленны , -здесь будут обсуждаться только те из них которые представляют наи
-больший интерес с точки зрения практического применения к рас .сматриваемым вопросам
4.1. Методы имитации случайных элементов на ЭВМ
-Функционирование реальных объектов и процессов обычно осу . ществляется под влиянием случайных факторов При моделировании
случайные факторы рассматриваются либо как случайные входные( ) , -управляющие сигналы либо как неконтролируемые воздействия внеш
.ней среды -Примерами таких случайных факторов являются случайные ин
тервалы времени между поступлениями заданий в вычислительную, , ; -систему деталей на производственный участок вызовов в АТС вре
-мя обработки и передачи информации в системах передачи информа . .ции и т д
Created with novaPDF Printer (www.novaPDF.com)

70 . . .Г Н Решетникова Моделирование систем
4.1.1. Принципы моделирования случайных элементов
Моделирование на ЭВМ случайного элемента подчиняется двум :основным принципам
1) -сходство между случайным элементом оригиналом -и его моделью ( ) -состоит в совпадении близости вероятностных законов рас
;пределения или числовых характеристик2) всякий случайный элемент (определяется конструир )уется , -как некоторая функция от простейших случайных элементов так на
.зываемых базовых случайных величин Простейшим для моделирования на ЭВМ случайным экспериментом
, является эксперимент заключающийся в бросании точки наудачу
в промежуток 0,1 . Р -езультатом этого эксперимента является коор . дината точки Математической моделью такого эксперимента является
вероятностное пространство , ,F P , где 0,1 — пространство ( элементарных событий элементарное событ ие заключается
, в том что координата брошенной точки равна ); F — - ,алгебра порожденная интервалами и з ; P — , -вероятностная мера определен
(ная для событий подмножеств) A F и с ,овпадающая с мерой Лебега
так что для события : 0,A x ( ) { 0, } , 0,1 .P A P x x x
Базовой случайной величиной ( )БСВ на , ,F P бу дем называть непрерывную случайную величину
( ) ,
равномерно распределенную на полуинтервал е 0,1 . Функция распределения БСВ имеет вид
0, 0,
( ) { } , 0 1,
1, 1,
xF x P x x x
x
а плотность распределения определяется формулой
1, 0 1,
( )0, 0 ,1 .
xp x
x
Обозначим закон распределения как 0,1R . ( ) -Математическое ожидание БСВ первый начальный момент опре
:деляется следующим образом
12
M ,
( )а дисперсия второй центральный момент
Created with novaPDF Printer (www.novaPDF.com)

71
2 2 1( )
12D M .
-Наряду с простейшим экспериментом будем рассматривать состав , ной случайный эксперимент получающийся в результате r-кратного
1r не . -зависимого повторения простейших экспериментов Резуль татом составного случайного эксперимента является последовательность
из r независимых БСВ 1, , r , таких что
( ) , 1, ,i i i i r 1( , , ) rr ,
где i — , координата точки брошенной наудачу в 0,1 в i-м -про .стейшем эксперименте
Совместная плотность распределения вероятност ей 1, , r
1, , 1
1, 0,1 , 1, ,( , , )
0, .в противном случаеr
ir
x i rp x x
Согласно второму принципу моделирования случайных элементов любой случайный элемент -представляется для некоторого натураль
ного r в виде функции ( )f от r :независимых БСВ
1( , , )rf . , Таким образом задача моделирования произвольного случайного
элемента :разбивается на две подзадачи1) моделирование на ЭВМ независимых БСВ 1, , r ( 1);блок Б2) нахождение функции ( )f , такой чтобы случайный элеме нт *
-обладал требуемым вероятностным законом распределения и числовы ( 2).ми характеристиками блок Б
( . 4.1).Поэтому моделирующий алгоритм состоит из двух блоков рис
. 4.1Рис
Для определения одного и того же случайного элемента может -быть предложено несколько вариантов функциональных преобразова
. , ний Обычно предпочтение отдается варианту требующему меньших . -вычислительных затрат Для этого используется понятие коэффициен
.та использования БСВ Коэффициентом использования БСВ k , -называется величина обрат
ная числу r , -базовых случайных величин используемых для модели рования одной реализации случайного элемента :
1, 0 1.k k
r
1Б 2Б
1,...r
*
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

72 . . .Г Н Решетникова Моделирование систем
Величина k является мерой вычислительных затрат на моделирование . Чем меньше k, . тем больше затраты Целесообразно выбирать
такую функци ю ( )f , для которой k .принимает наибольшее значение, -Очевидно чтобы моделировать на ЭВМ случайные элементы с за
, -данным вероятностным законом распределения необходимо уметь мо . делировать БСВ Так как БСВ -является абсолютно непрерывной слу
, чайной величиной а на ЭВМ приходится иметь дело с дискретными , -случайными величинами то моделирование БСВ основано на аппрок
симации непрерывной случайной величины дискретной случайнойвеличи ной .
4.1.2. Т ипы датчик ов базовых случайных величин
Датчик базовой случайной величины — , это устройство позволяющее по запросу получать реализацию a -или несколько независимых реали
заций 1, , ra a базовой случайной величины . Реализации 1, , ra a .иногда называют случайными числами
:Существуют три типа датчиков базовой случайной величины1) ;табличный2) ;физический3) .программный
Табличный датчик — , это таблица случайных чисел представляющая собой экспериментально полученную выборку реализации равномерно
распределенной в интервале 0,1 слу . чайной величины Применение , табличных датчиков при моделировании на ЭВМ ограничено так как , -достаточно часто используются миллионы случайных чисел а это тре
.бует большого объема оперативной памяти для хранения таблицы Физический датчик — ,это специальное радиоэлектронное устройство
, являющееся приставкой к ЭВМ выходной сигнал которой имитирует . -значение базовой случайной величины Устройство состоит из источ
( , « »ника флуктуационного шума например флуктуационно шумящей), радиолампы значение которого в произвольный момент времени
является случайной величиной 0 с плотностью ( )p y , и нелинейногопреобразователя
,
где / — дробная часть числа относительно 0
([] — ). целая часть числа Полага я , -достаточно малой величиной мож но получить базовую случайную величину .
:Физический датчик обладает следующими недостатками1) -невозможность повторения некоторой ранее полученной реали
зации a (пос кольку 0P a );
Created with novaPDF Printer (www.novaPDF.com)

73
2) , наличие схемной нестабильности приводящей к необходимости .контроля работы датчика при очередном его использовании
-По этим причинам на современных компьютерах физические дат .чики используются крайне редко
Программный датчик — , это программа служащая для определения , . . -на ЭВМ реализаций БСВ т е для получения последовательности псев
дослучайных ч исел 1 2, ,a a . Тер « » -мин псевдослучайные числа исполь :зуется по следующим причинам
1) , -по происхождению эти числа не случайные так как они получа ;ются согласно заданному детерминированному закону
2) -по вероятностным характеристикам эти числа похожи на реали .зации независимых БСВ
4.1.3. Мет оды построения программных датчиков
, -Рассмотрим основные методы и алгоритмы используемые при по .строении программных датчиков БСВ
1. Мультипликативный конгруэнтный метод ( метод вычетов). -Соглас но этому методу псевдослучайная последовательность вычисляется по
:рекуррентным формулам
1, ( )mod , 1,2, ,ii i i
aa a a M i
(4.1)
где 0, ,M a — пар ( аметры программного датчика натуральные чис ):ла
— , множитель M — мод ,уль 0 1, , 1a — ;стартовое значениеоперация ( )mody z M означает вычет числа z по модулю М, . .т е
zy z
.
(4.1) :Из следует последовательность ia , а значит и ia , вс « -егда зацикливает
», . ., ся т е начиная с некоторого номе ра 0i , , образуется цикл который ;повторяется бесконечное число раз
период последовательности 1T ( если 0ia , то 0i ja
для любого 1j ).
Параметры , , iM a вы .бираются из условия максимума периода Период Т можно определить аналитически методами теории чисел или
.с помощью численных экспериментов на ЭВМ
П р и м е р RANDU Для типового программного датчика параметры , , iM a
и Т :имеют следующие значения
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

74 . . .Г Н Решетникова Моделирование систем
16- для разрядной ЭВМ
0259, 32768, 259, / 4 8192;M a T M 32- для разрядной ЭВМ
065539, 2147483648, 65539, / 4 536870912.M a T M
2. Метод, использующий линейные смешанные формулы. В этом методе псевдослучайная последовательность вычисляется рекуррентно по так
, (4.1):называемой линейной смешанной формуле обобщающей
1 1, ( )mod , 1,2, .ii i i p i p
aa a a a c M i
:Параметры датчика р — ; порядок 1 2 1 0, , , ,p pa a a a — -старто
; вые значения 1, , p — ;множители c — ;приращение М — .модуль Период датчика 1pT M , . . т е растет с увеличением М и р.
3. Метод, . использующий нелинейные рекуррентныеформулы -Псевдослу -чайная последовательность генерируется с помощью квадратичного ре
куррентного соотношения
21 1, ( ( ) ) mod , 1,2, .i
i i i ia
a a a a c M iM
(4.2)
Параметры 0, , ,a M ц -елесообразно выбирать с помощью следую : щего утверждения если 2 , 2qM q , то наибольший период
maxT M п (4.2) ,оследовательности достигается тогда и только тогдакогда , с — , нечетные — , четное причем
( )mod 4 ( 1)mod 4 .4. Метод Макларена — Марсальи. Метод основан на комбинировании двух . простейших программных датчиков БСВ Пусть , ,i ib c
i 0,1,2,..., — ,псевдослучайные последовательности порождаемые 1 2 -независимо работающими программными датчиками Д и Д соответ
ств ; енно (0), , ( 1)V V V K — в спомогательная таблица K .чисел Вначале V- таблица заполняется K членами последовательност и ib :
( ) , 0, 1.jV j b j K Через ia будем обозначать комбинированную псевдослучайную
. последовательность Член ia является результатом последовательностиопераций
, ( ), ( ) , 0,1,2, .i i i Ks c K a V s V s b i , 2 Таким образом Д осуществляет случайный выбор из V-таблицы
, 1. -и случайное заполнение числами порожденными Д Этот метод по зволяет ослабить зависимость между члена ми ia -и получить неверо
, ятно большие периоды если периоды 1 2,T T последовательностей ib ,
ic — .взаимно простые числа
Created with novaPDF Printer (www.novaPDF.com)

75
5. Метод, -основанный на свойстве воспроизводимости равномерного закона. Пусть 1 2, , , 0,1N — независимые равномерно распределенные
; случайные величины N — . натуральное число Если -определить слу чайные величины
1 , ( )mod1N N N N N N , то случайная величин а N -имеет стандартное равномерное распреде
ление 0,1R .
4.2. Моделирование случайных величин
4.2.1. Моделирование дискретных случайных величин
-Моделированием случайной величины принято называть процесс получе ния на ЭВМ последовательности выборочных значений случайной величины
с заданным законом распределения.1. Моделирование дискретной случайной величины. Пусть — -диск
, ретная случайная величина принимающая N -возможных значе ний 0 1 1... Nc c c с заданными вероятностями 0 1 1, ,..., Np p p -со
. ответственно Алгоритм моделирования реализации случайной
величины : состоит в следующем вычисляется вспомогательныйвектор
0 1 1 0 0 1 0 1 2( , ,..., ) ( , ,..., ... ,1)N Nq q q q p p p p p p ; моделируется с помощью датчика БСВ реализация a -базовой случай
ной величины ; , принимается решение о том что реализацие й является x, определяемое по правилу
1 1, ( 0), 0, 1.еслиi i ix c q a q q i N Для того чтобы построить последовательность из n -реализаций слу чайной величины ( случайную выборку объема n), достаточно
повторить данный алгоритм n , -раз перед каждым повторением алго ритма меняя стартовое число 0a в . -датчике БСВ Коэффициент исполь
зования БСВ 1k .2. Моделирование полной группы случайных событий. -Система подмно
жест в 0 1 1, ,..., NY Y Y F называется полной группой случайных событийна ( , , )F P , :если
1
0
N
ii
Y
— ;происходит хотя бы одно событие из группы
i jY Y для i j — совместное наступление двух и более
;событий из группы невозможно
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

76 . . .Г Н Решетникова Моделирование систем
( ) 0, 0, 1iP Y i N , — все события группы имеют ненулевые.вероятности
П р и м е р В случайном эксперименте по бросанию монеты полную группу
:образуют два события 0Y — , выпадение орла 1Y — .выпадение решки
Для моделирования полной группы случайных событий может быть .применен алгоритм моделирования дискретной случайной величины
, Действительно обозначи : м ( ), 0, 1,i ip P Y i N — вероятность i-го ; события из группы — , -дискретная случайная величина принимаю
щая значения 0,1,...,N — 1 с вероятностями 0 1 1, ,..., Np p p -соответственно ( — , -номер события из полной группы наступающего в слу
). чайном эксперименте Тогда задача моделирования случайного события сводится к задаче моделирования случайной величи ны .
3. Моделирование однородной цепи Маркова. Пусть 0 1, ,..., n — -одно
, . . родная цепь Маркова т е последовательность дискретных случайных величин со значениями из множества 0 1 1 0 1 1{ , ,..., } ( ... )N Nc c c c c c
, :и распределением вероятностей которое определяется вектором вероятностей начального состояни я 0 1 1( , ,..., )N ,
г де1
01
{ } 0, 1N
i i ii
P c
;
матрицей вероятностей одношаговых переходов ( ),ijP p
, 0, 1,i j N где1
10
{ / } 0, 0, 1, 1.N
ij t j t i ijj
p P c c t n p
:Определим вспомогательные вектор и матрицу
0
( ), ;j
j j kk
q q q
0
( ), , , 0, 1.j
ij ij ikk
Q q q p i j N
Так как 0 1, ,..., n
— , дискретные случайные величины то для -моделирования каждой из них применяется приведенный выше алго
-ритм моделирования дискретной случайной величины при использо . вании соответствующего вектора вероятностей Пуст ь 0 1, ,..., na a a —
, реализации БСВ имитирующие случайную выборку из 0,1R . Моде- лирование последовательности 0 1, ,..., n
осуществляется :в два этапа1) моделировани е 0
, , где принимается решение что реализацией
0 является 0 ix c , . . т е цепь Маркова в начальный момент 0t
находится в состоянии номер 0 i , если
1 0 1( 0), {0,1,..., 1}i iq a q q i N ;
Created with novaPDF Printer (www.novaPDF.com)

77
2) моделирование 1 2, ,..., n , при этом для моделирования 1
используется 0 - - я вектор строка
0 0,0 , 1( ,..., )Nq q матрицы Q -и прини
, мается решение что реализацией 1 является 1 1x c , если 1( )i
0 0 0, 1 1 , , 1( 0), 0, 1i iq a q q i N .
, Аналогично используя строку ,0 , 1( ,..., )k k Nq q матрицы Q, -полу
чаем реализацию случайной величины , 1, .k k n
4.2.2. Моделирование непрерывных случайных величин
При построении имитационных моделей сложных систем часто возникают задачи моделирования на ЭВМ непрерывной случайной
величины с заданной плотностью распределения вероятностей1
0( ),f x x R . -В некоторых случаях для решения данных задач удает ся применить метод обратной функции.
Определим функцию распределени я :
0 0( ) ( ) ,x
F x f y dy
(4.3)
. которую будем предполагать строго монотонно возрастающей Через1
0 ( )x F y ; обозначим обратную функцию она находится при решенииуравнения
( )F x y . (4.4)
Теорема. Если — , БСВ определенная н а , ,F P , то случайнаявеличина
10 ( )F (4.5)
имеет заданную плотность распределения 0 ( )f . -Моделирующий алгоритм метода обратной функции состоит в сле
:дующем1) нахождение функции распределе ния 0 ( )F x -по заданной плотно сти распределения 0 ( )f x (4.3);согласно2) нахождение обратной функции 1
0F -путем решения относительно x (4.4);уравнения
3) моделирование реализации БСВ и вычисление реализации случайной величи ны по ф (4.5).ормуле
Коэффициент использования БСВ 1k .
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

78 . . .Г Н Решетникова Моделирование систем
П р и м е р ы
1. Пусть 0 ( )f x — плотность равномерного распределения R[a,b], . .т е
0
1, [ , ],если
( )0, [ , ].если
x a bf x b a
x a b
(4.3), (4.4)Согласно
0
0, ,если
( ) , [ , ],если
1, .если
x ax a
F x x a bb a
x b
( ) , [0,1).x b a y a y R Моделирован ие осу ществляется по формуле
( ) ,b a a где — .БСВ
2. Пусть 0 ( )f x — плотность экспоненциального распределения, . .т е
0( ) , 0.xf x xе (4.3), (4.4) По формулам получаем
0( ) 1 , 0,xF x xе 1
0 ( ) (1/ )ln(1 ).x F y Моделировани е с плотностью распределения 0 ( )f x -осуществля ется по формуле
1 ln(1 ), где — . БСВ Так как и –1 , -одинаково распределены то экви
:валентным моделирующим алгоритмом является следующий1ln( ), { }.M
Поскольку 10 ( )F x анал , -итически не вычисляется то метод обрат
ной функции непос .редственно применить нельзя
3. Пусть 0 ( )f x — плотность стандартного нормального распределенияN(0,1)
2
20
1( )
2
x
f x e
.
( ) -Функция распределения функция Лапласа описывается интегра лом вероятностей
Created with novaPDF Printer (www.novaPDF.com)
79
2
20
1( ) .
2
tx
F x dtе
, Известно что 0 0( ) 1 ( )F x F x . Если — , БСВ то — -стандарт , ная нормально распределенная величина равна
10
10
1( ), 1,если
21
(1 ), 0 .если2
F
F
Можно аппроксимироват ь 10 ( )F x , , например если
11
2 , то
10 2
2,30753 0,27061( ) ,
1 0,99229 0,04481F
где 2ln( ) . Погрешность аппроксимации не превосходит 33 10 .
-Для моделирования стандартной нормально распределенной слу чайной величины 0,1N д остаточно часто используется -метод сум
мирования. Согласно центральной предельной теореме, есл и 1 2, ,..., n — последовательность взаимно независимых одинаково распределенных
случайных велич ин 2{ } , { } , 1,i iM a D i n , то -функция рас пределения нормированной суммы
1
n
ii
n
n a
n
стремится к функции стандартного нормального распределенияN(0,1). При этом вид ( ), 1, ,
ip x i n значения не .имеет Тогда если
1 2, ,..., n — ,реализации БСВ . . т е1 1
{ } , { } , 1, ,2 12i iM D i n то
1
12.
2
n
n ii
nn
Для моделирования часто используетс я 12n . Тогда величину
12
1
6ii
-можно использовать в качестве стандартной нормально распреде . ленной случайной величины Нормально распределенная случайная
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

80 . . .Г Н Решетникова Моделирование систем
величина , для которой 2{ } , { }M D , -моделируется следую :щим образом
,где — .стандартная нормально распределенная случайная величина
4. Пусть 1 2( , ,..., )Tnx x x x — . -случайный вектор Рассмотрим мо -делирующий алгоритм для нормальных случайных векторов с характе
ристиками
{ } , {( ) ( )} , , 1, ,Ti i i i j j ijM M R i j n
где R — ковариационная матрица n-го поряд ;ка ij — с -имвол Кроне;кера
1, ,если
0, .еслиiji ji j
:Моделирующий алгоритм состоит в следующем 1) моделирование случайного вект ора 1 2( , ,..., )Tn , где
, 1, ,i i n — независимые стандартны е нормальные случайные;величины
2) построение компонентов вект ора по правилу
, 1, .i i ii iR i n
4.2.3. Моделирование случайных процессов
-В задачах имитационного и статистического моделирования дина мических сложных систем часто возникает необходимость реализации
на ЭВМ случайного процесс а 1( , ) , , 0,t t R t T , определенного на вероятностном пространст ве ( , , )F P и временном
промежутке 0,T . Пусть 0 — заданный шаг дискретизации;времени ; , 0,T t m m , где t — ; дискретное время t —
« », . . дискретный белый шум т е последовательность независимых , в совокупности гауссовских случайных величин распределенных по
стандартному нормальному закону 0,1 . -При этом последовательность 0 2, , , ,
принято называть временным рядом. Простейшей моделью случайного проце сса t
, ч асто встречающейся , на практике является гауссовский временной ряд с трендом
( )t tf t , (4.6)где f(t) — ,детерминированная действительная функция времени
называемая трендом; 0 — -среднеквадратическое отклонение слу . чайной ошибки Если ( ) constf t , (4.6) -временной ряд является неста
. ционарным Имитация временного ряда t л егко осуществляется по
Created with novaPDF Printer (www.novaPDF.com)

81
(4.6); формуле при этом последовательность независимых случайных .величин реализуется рассмотренными ранее методами
(4.6) Обобщением модели временного ряда t яв ляется модель
( ) ,t tf t где t
— -гауссовский стационарный временной ряд с нулевым мате матическим ожидани ем 0tM и ковариационной функцией
( )t tM R
.
4.3. -Методы Монте Карло
« » -Понятие статистическое моделирование тесно связано с поняти «ем -метод Монте Карло» — , это метод решения задач использующий
. случайные величины Точнее под - -методом Монте Карло понимается сово купность приемов, -позволяющих получать решения математических или фи
зических задач при помощи случайных многократных испытаний. На практике ,случайные испытания заменяются результатами некоторых вычислений
.производимых над случайными числами « - » , -Название метод Монте Карло для методов систематически ис , 1949пользующих случайные величины появилось в . г Создателями
.этого метода считают американских математиков Дж Неймана и.С . « - » -Улама Само название Монте Карло происходит от названия горо - , -да Монте Карло Княжества Монако знаменитого своим игорным до
. , мом Дело в том что одним из простейших механических приборов .для получения случайных величин является рулетка
- :Методом Монте Карло можно решать следующие задачи1) , моделировать любой процесс на протекание которого влияют
;случайные факторы2) , -для многих математических задач не связанных с какими либо
, ,случайностями можно искусственно придумать вероятностную модель .позволяющую решать эти задачи
, - -Таким образом метод Монте Карло является универсальным мето . - дом решения математических задач Метод Монте Карло используется , для решения систем линейных и нелинейных уравнений решения
, -дифференциальных и интегральных уравнений вычисления интегра , лов высокой кратности решения уравнений в частных производных
. .и т д - Эффективное применение метода Монте Карло стало возможным
, -после появления ЭВМ так как для получения достаточно точной оцен ки искомой величины требуется произвести вычисления для большого
. , - -объема числовых данных Это объясняется тем что метод Монте Кар -ло использует различные предельные соотношения теории вероятнос — .тей законы больших чисел и предельные теоремы
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

82 . . .Г Н Решетникова Моделирование систем
Рассмотрим задачу вычисления кратных интегралов методами- . Монте Карло Для вычисления таких интегралов существуют -кубатур
ные формулы, , но они являются очень громоздкими а для интегралов . -кратности выше третьей вообще неприменимыми Рассмотрим два про
- , стейших варианта метода Монте Карло которые легко реализуются .на ЭВМ
Пусть требуется вычислить интеграл
1 1( ,..., ) .n nVI f x x dx dx (4.7)
- , Суть методов Монте Карло заключается в том что для вычисления (4.7) интеграла строится последовате льность 1 2, , , ,nI I I -для кото
рой справедливо
lim 1,nn
P I I
(4.8)
где P — ; вероятность события nI — -приближенное значение интег, рала вычисленное на n-м ;шаге >0 — задан .ная точность
4.3.1. -Простейший метод Монте Карло вычисления интегралов
- -Сначала рассмотрим применение методов Монте Карло к вычисле нию однократного интеграла
,b
a
I f x dx (4.9)
где f(x) задана на ,a b . -Выберем произвольную плотность распреде ления ( )p x случайной величины . Плотность ( )p x определена на
интервал е ,a b , причем 0p и ( ) 1.b
a
p x dx Введем новую случайную величину , связанную со случайной
величин ой формулой
fp
.
Математическое ожидание случайной величины равно
.
b b
a a
f xM p x dx f x dx I
p x
, (4.9), -Таким образом можно вычислить значение интеграла вы числив математическое ожидание случайной величины . -Для вычис
лени я { }M . воспользуемся методами математической статистики Пусть
1 2, , , N — N реализаций случайной величины . Тогда п -ри доста точно большом значении N имеем
Created with novaPDF Printer (www.novaPDF.com)

83
1
( )1( )
Nj
jj
fI M
N p
. (4.10)
- При реализации метода Монте Карло в качестве ( )p x обычно -ис
пользуют равномерное распределение
1, [ , ];
( )0, [ , ].
x a bp x b a
x a b
(4.11)
Для того чтобы получить реализации равномерно распределенной
на [ , ]a b случайной величины , -достаточно иметь реализации случай
ной величины , равномерно распределенной на [0,1] . Тогда
( )a b a , (4.11), и учитывая получим
1
( )N
jj
b aI f
N
. (4.12)
, (4.9) -Аналогичный результат получится если интеграл путем за
мены переменной ( )x a b a t перевести в интервал [0,1] . Тогда
1
10
( ) ( ) ( ) ( ) ,b N
jja
b aI f x dx b a f a b a t dt f a b a
N
где 1 2, ,..., N — реализации , -случайной величины равномерно рас
пределенной на интервале [0,1] . . -Рассмотрим вычисление многократного интеграла Пусть требует
ся вычислить интеграл
1 1... ( ,..., ) ...n nV
I f x x dx dx , (4.13)
где область V определяется неравенствами
1 1 1
1 1 1 1
;
( ,..., ) ( ,..., ) , 2, .i i i i i i i
a x b
a x x x x x b i n
(4.14)
(4.13) (4.14) -При вычислении интеграла область с помощью линей ной замены переменных
( ) , 1,i i i i ix a b a t i n , заключается в n- . (4.13) мерный единичный куб Тогда интеграл примет
вид
1 1 1 1( )...( ) ... ( ,..., ) ...n n n nV
I b a b a f t t dt dt
, (4.15)
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)
84 . . .Г Н Решетникова Моделирование систем
где 1 1( )...( )n nb a b a — ;якобиан преобразования
1 1 1 1 1( ,..., ) ( ) ,..., ( )n n n n nf t t f a b a t a b a t ;
область V определяется неравенствами
1
1 1 1 1
0 1;
0 ( ,..., ) ( ,..., ) 1, 2, .i i i i i
t
t t t t t i n (4.16)
Здесь
1 1( ,..., )i it t
1 1 1 1 1 1 1 11
( ( ) ,..., ( ) )i i i i i ii i
a b a t a b a t ab a
;
1 1( ,..., )i it t
1 1 1 1 1 1 1 11
( ( ) ,..., ( ) )i i i i i ii i
a b a t a b a t ab a
,
2, .i n (4.13) Интеграл можно записать в виде
1 1( )...( )n nI b a b a I , (4.17)где
nnV
dtdtttfI ...),...,(... 11
. (4.18)
- (4.18) Метод Монте Карло вычисления интеграла заключается
. в следующем Задается совокупность точек ( ) ( )1( ,..., ), 1, ,k k
k nM k N -координаты которых являются независимыми случайными величина
, [0,1], ми равномерно распределенными на интервале и полагается
( ), ;если( )
0, .если
k kk
k
f M M Vf M
M V
Тогда
* *
1
1( )
N
kk
I f MN
.
, -Как правило необходимо вычислить значение интеграла с задан ной точностью , , при этом понятно что значения и N -взаимосвяза
: ны точность вычисления достигается при определенном значенииN. Рассмотрим два подхода к определению значения N, -которые обес
печивают требуемую точность вычисления .
Created with novaPDF Printer (www.novaPDF.com)

85
Пусть требуется вычислить интегралы1
0
( )I f x dx (4.19)
или
1 1... ( ,..., ) ...n nI f x x dx dx , (4.20)
где область заключена в n- .мерный единичный куб Первый подход « »:связан с использованием правила трех сигм
1
1 ( )( ) 3 0,997
N
kk
D MP I f M
N N
, (4.21)
где ( ), 1, ,k kM M k N — , точки используемые для вычисления (4.19), интеграла координаты которых равномерно распределены на
[0,1], интервале или ( ) ( )1( ,..., ), 1, ,k k
k nM M k N — , -точки исполь
(4.20), -зуемые для вычисления интеграла координатами которых явля [0,1] ;ются независимые равномерно распределенные на величины
D(M) — , :дисперсия вычисляемая следующим образом
2 2
1
1( ) ( )
N
kk
D M f M IN
; (4.22)
I — :значение интеграла
1
1( )
N
kk
I f MN
. (4.23)
(4.21) , , ,Формула означает что с вероятностью близкой к единице (4.19) (4.20) -абсолютная погрешность вычисления интегралов и не пре
восходит величины 3 ( ) /D M N . , -Отсюда следует что необходимо зада
вать число N , таким образом чтобы для требуемой точности было справедливо неравенство
( )3
D MN
. (4.24)
Для определения значения N можно использовать итерационный. , , алгоритм Например можно сначала задать число точек равн ое 0N ,
а затем увеличивать его по формуле 1 , 1,2, ,k k NN N H k пока
(4.24), не выполнится неравенство где 1NH — некоторое заданное . (4.22), (4.23) -целое число При этом значения функций в суммах необ
, .ходимо добавлять не пересчитывая все заново
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

86 . . .Г Н Решетникова Моделирование систем
Второй подход определения значения N .состоит в следующем, Известно что если заданы 0 и 0 1 , то с вероятностью
имеют место неравенства
12
22
0
( ) ,t
N f t I dt
(4.19), когда вычисляется интеграл и
2
21 12
( , , ) ,n nt
N f t t I dt dt
(4.20), когда вычисляется интеграл если
1
1( )
N
kk
I f MN
.
Здесь t определяется по -из таблицы значений интеграла вероятно стей и для 0,997 значение 3t .
, Тогда задавая 0N , вычисляют сначала значения
0
00 1
1( )
N
N kk
I f MN
;0
0 0
2 2
0 1
1( ) ( )
N
N k Nk
D f M IN
,
и очередное значение 1N вычисляется по формуле
00 2
1 2
21 4
.ND
NN t
Если 1 0N N , то увеличивают число случайных точек до 1N и вычисляют
1NI и1ND . . и т д Дл -я прекращения вычислений необхо
димо выполнение условия
1k kN N . -Для уменьшения объема вычислений можно воспользоваться сле
:дующими рекуррентными формулами
1
11 1
1( )
k k
k k
N N
N k N jk j
I N I f MN
;
1
1
2 2 2 2
1 1
1( )
k k
k k k k
N N
N k N k N j Nk j
D N D N I f M IN
.
Created with novaPDF Printer (www.novaPDF.com)

87
4.3.2. -Геометрический метод Монте Карло
Пусть при вычислении интеграла
( )b
a
I f x dx (4.25)
для подынтегральной функции f(x) [на интервале a,b] выполняетсяусловие
( )c f x d . Введем новую функцию
( )( )
f x cx
d c
,
значения которой лежат в интервале [0,1] . Тогда
( ) ( ) ( ) ( )b b
a a
f x dx d c x dx c b a .
, Затем выполнив замену переменной ( )x a b a t , получим1
0
( ) ( )( ) ( ( ) ) ( )b
a
I f x dx d c b a a b a t dt c b a . (4.26)
, Таким образом необходимо вычислить интеграл1
0
( ( ) )I a b a t dt ,
а затем получить значение исходного интеграла I (4.26).согласно
Для реализации метода генерируется N точек ( ) ( ), ,k kkM
1,k N , где ( ) ( ),k k — , -независимые случайные величины равномер
но распределенные на интервале [0,1] . Если для совокупности двух
случайных величин ( ) ( ),k k , окажется что
( ) ( )( ( ) )k ka b a , . то событие считается неблагоприятным Если
( ) ( )( ( ) )k ka b a , , то событие считается благоприятным так как в этом случае точка
( ) ( ),k kkM ( . 4.2).попадает в заштрихованную область рис
Пусть из N точек v . попали в заштрихованную область Частота
попадан ияN
б удет приблизительно равна площади заштрихованной
, . .области т е
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

88 . . .Г Н Решетникова Моделирование систем
1
0
( ( ) )I a b a t dtN
. (4.27)
(4.27) Окончательно значение интеграла определяется согласно (4.26) (4.27).выражению с учетом формулы
. 4.2Рис
Пусть требуется вычислить интеграл
1 1... ( ,..., ) ...n nV
I f x x dx dx , (4.28)
где область интегрирования V (4.14). определяется неравенствами При
, этом требуется чтобы для подынтегральной функции 1( ,..., )nf x x -в об ласти V выполнялось условие
1( ,..., )nc f x x d . (4.29) Сделаем замену переменных
( ) , 1,i i i i ix a b a t i n ,
с помощью которых область V преобразуется в область V -и заклю чается в n- . (4.28) мерный единичный куб Тогда интеграл запишется
в виде
1 1 1 1( )...( ) ... ( ,..., ) ...n n n nV
I b a b a f t t dt dt
, (4.30)
где
1 1 1 1 1( ,..., ) ( ( ) ,..., ( ) )n n n n nf t t f a b a t a b a t ,
а область V (4.16).определяется неравенствами Введем новые функции
11
( ,..., )( ,..., ) n
nf t t c
f t td c
и
11
1
1, ( ,..., ) ,если( ,..., )
0, ( ,..., ) .если
nn
n
M t t Vf t t
M t t V
( )к
( )k
y
x0
1
1
M ,k kk
( ( ) )y a b a t
Created with novaPDF Printer (www.novaPDF.com)

89
Тогда
1 1 1 1( )...( ) ... ( ,..., ) ...n n n nV
I b a b a c f t t dt dt
1 1( ) ... ( ,..., ) ...n nV
d c f t t dt dt . (4.31)
(4.31) Для вычисления интегралов в генерируется N точек
( ) ( ) ( )1 ,..., , , 1, ,k k k
k nM k N где ( ) ( ) ( )1 ,..., ,k k k
n — -независимые слу , [0,1]. чайные величины равномерно распределенные на интервале Для первого интегра ла 1 соот , ветствует числу благоприятных событий если
:выполняются неравенства
( )1
( ) ( ) ( ) ( ) ( )1 1 1 1
0 1;
( ,..., ) ( ,..., ), 2, ,
k
k k k k kii i i n
(4.32)
а 2 -соответствует числу благоприятных событий для второго интегра, (4.32) ла если выполняются неравенства и
( )( ) ( )1 ,...,kk k
nf . (4.33)
(4.31) Тогда согласно значение интеграла будет равно
1 21 1( )...( ) ( )n nI b a b a c d c
N N
. (4.34)
- , -Как и в простейшем методе Монте Карло здесь точность вычисле ния интеграла и число испытаний N .взаимосвязаны
Рассмотрим два подхода к определению значения N, -которые обес печивают требуемую точность вычисления . Пусть требуется вычислить интегралы
1
0
( )I f x dx (4.35)
или
1 1... ( ,..., ) ... ,n nI f x x dx dx (4.36)
где область заключена в n- , мерный единичный куб и для значений подынтегральных функций выполняются неравенства
0 ( ) 1, [0,1]f x x ;
1 10 ( ,..., ) 1, ( ,..., )n nf x x M x x . Первый подход связан с использованием неравенства Чебышева
11
2P I
N N
, (4.37)
где 0 — , малая величина обычно 0,01 . Ф (4.37) -ормула означа, ет что с вероятностью 1 погрешность вычисления интегралов
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

90 . . .Г Н Решетникова Моделирование систем
- -с помощью геометрического метода Монте Карло приблизительно рав
на1
2 N, при этом значение N можно определить из неравенства
1
2 N
. (4.38)
Второй подход , -связан с утверждением что для заданных значе ний 0 и 0 1 с вероятностью имеет место неравенство
,IN
есл и 22
(1 )I IN t
, ,где , как и ранее t опр еделяется по -из табли
. цы значений интеграла вероятностей Тогда для определения N -ис . пользуется следующий алгоритм Задается некоторое знач ение 0N ,
вычисляется интегр ал0NI и полагается
0 0 21 2
(1 ).
N NI IN t
Если 1 0N N , то добавляют 1 0N N , точек вычисляют значение
1NI , и так до тех , пор пока для некоторого значения k не выполнитсянеравенство
1k kN N .
П р и м е рТребуется вычислить интеграл
5 3
22
3 cos( )
2
x xI dx
x
с точностью 0,01 - .методами Монте Карло1. -Простейший метод Монте Карло
Сделаем замену переменных 2 3x t , где [0,1]t . Тогда
1 3
20
3 (2 3 ) cos(2 3 )3
(2 3 ) 2
t tI dt
t
.
-При вычислении интеграла с использованием первого способа оп ределения N : получаются следующие результаты I 4,04565, N1930,
а при использовании второго способа определения N получаетсяI 4,04139, N2112.
Created with novaPDF Printer (www.novaPDF.com)

91
2. -Геометрический метод Монте Карло Подынтегральная функция
3
2
3 cos( )( )
2
x xf x
x
на интервале [2,5] принимает минимальное значение (5) 1,244c f
и максимальное значение 1,4d . Введем новую функцию
( )( )
f x cx
d c
и сделаем замену переменных 2 3x t . Тогда
1
0
0,468 (2 3 ) 4,2I t dt ,
-и при вычислении интеграла с использованием первого способа опре деления N : получаются следующие результаты I 4,04171, N250000,
а при использовании второго способа определения N I 4,04186,N1106530.
, - Заметим что геометрический метод Монте Карло всегда требует , , ,значительно большего числа испытаний чем простейший кроме того
, практика вычислений показала что нет пре имущества в применении того или иного способа определения числа испытаний N.
П р и м е рТребуется вычислить интеграл
( , )V
I f x y dxdy с точностью 0,01 - методами Монте Карло от функции
( , ) sin( )f x y x x y . Область V :определяется неравенствами
1 3; ( ) ( ),x x y x где
( ) 1,5cos( 2,2);x x ( ) 2 sin( 1).x x 1. -Простейший метод Монте Карло
Так как 1,5 ( ) ( ) 2x y x для [1,3]x , то с по -мощью за мены переменн ых 1 2 ; 1,5 3,5x t y z , область V преобразуется
в облас ть V , кот :орая определяется неравенствами 0 1; 0 ( ) ( ) 1t t z t ,
где(1 2 ) 1,5
( ) ;3,5t
t (1 2 ) 1,5( )
3,5t
t .
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

92 . . .Г Н Решетникова Моделирование систем
При этом область V -оказывается заключенной в единичный квад ( . 4.3). . 4.3 -рат рис На рис сплошной линией изображен график функ ции ( )x , — а пунктирной ( )x .
Тогда исходный интеграл преобразуется к виду
7 ( , ) 7V
I f t z dtdz I
,
где
( , ) (1 2 ; 1,5 3,5 )f t z f t z ;
( , )V
I f t z dtdz
.
. 4.4 , ,На рис изображена область заключенная в прямоугольник
объем которой равен I .
Используя первый подход к определению N, получаем значениеинтеграла I 6,245, при этом N 101900.
2. -Геометрический метод Монте Карло Для функции f(x,y) в области V выполняется неравенство
3 ( , ) 3f x y . , , -Исходный интеграл как и в простейшем случае при водится к виду
7 ( , )V
I f t z dtdz
.
:Затем вводятся новые функции
( , ) 3 (1 2 ; 1,5 3,5 ) 3( , )
6 6f t z f t z
f t z
;
1, ( ) ( );если( , )
0, ,в противном случае
t z tf t z
и интеграл записывается в виде
0 0.5 10
0.5
1
)
x
1
0,5
00 0,5 1
. 4.3Рис
2
0
–2 5 10 15
5 10 15 2000
. 4.4Рис
Created with novaPDF Printer (www.novaPDF.com)

93
1 27 6 ( , ) 3 ( , ) 42 21V V
I f t z dtdz f t z dtdz I I
,
где
1 2( , ) ; ( , )V V
I f t z dtdz I f t z dtdz
.
. 4.5, 4.6, , На рис изображены области заключенные в куб объем
которых равен 1I и 2I .соответственно
. 4.5Рис . 4.6Рис
- Согласно геометрическому методу Монте Карло интеграл I -вычис :ляется следующим образом
1 27 6 3IN N
.
Согласно первому подходу для определения N -используется неравенство
1
2 N
,
где 0,01 . , Откуда получаем что наименьшее значение N, -удовлет , воряющее этому неравенству N 250000. Значение интеграла I 6,200,
при эт ом 1 13619 , а 2 189452 .
4.4. Контрольные вопросы
1. .Дайте определение статистического моделирования2. ?Какова цель статистического моделирования3. -Сформулируйте основные принципы моделирования на ЭВМ слу
.чайного элемента4. ( ).Дайте определение базовой случайной величины БСВ5. .Приведите функцию распределения БСВ6. .Приведите функцию плотности распределения БСВ
0,6
0,8
0,4
0,2
0,6
0,8
0,4
0,2
05
5
10 15 200 5 10 15 20
00
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)

94 . . .Г Н Решетникова Моделирование систем
7. ?Как определяется математическое ожидание БСВ8. ?Как определяется дисперсия БСВ9. , -Перечислите подзадачи на которые разбивается задача модели
.рования произвольного случайного элемента10. -Дайте определение коэффициента использования базовой слу
?чайной величины11. ?На чем основано моделирование базовой случайной величины12. .Дайте определение датчика базовой случайной величины13. .Перечислите типы датчиков базовой случайной величины14. .Дайте определение табличного датчика БСВ15. .Дайте определение физического датчика БСВ16. .Дайте определение программного датчика БСВ17.Приведите примеры .методов построения программных датчиков18. Как осуществляется моделирование дискретной случайной
?величины19. Как осуществляется моделирование полной группы случайных
?событий20. ?Как осуществляется моделирование однородной цепи Маркова21. В чем состоит метод обратной функции при моделировании
?непрерывной случайной величины22. -Запишите функцию плотности распределения случайной вели
,чины [равномерно распределенной на a,b].23. , -Запишите функцию распределения случайной величины рав
[номерно распределенной на a,b].24. , -Как осуществляется моделирование случайной величины рав
[номерно распределенной на a,b]?25. -Запишите функцию плотности распределения экспоненциаль
.но распределенной случайной величины26. -Запишите функцию распределения экспоненциально распреде
.ленной случайной величины27. -Как осуществляется моделирование экспоненциально распре
?деленной случайной величины28. -Запишите функцию плотности распределения для стандартно
.го нормального распределения29. -Запишите функцию распределения для стандартного нормаль .ного распределения30. -Как осуществляется моделирование стандартной нормально рас
?пределенной случайной величины31. Как осуществляется моделирование нормально распределенной
-случайной величины с заданными математическим ожиданием и дис?персией
32. , Как осуществляется моделирование вектора компонентами которого являются нормально распределенные случайные величины
?с заданными характеристиками
Created with novaPDF Printer (www.novaPDF.com)

95
33. ?Как осуществляется моделирование случайных процессов34. .Приведите пример простейшего случайного процесса35. - .Дайте определение методам Монте Карло36. Приведите формулу вычисления интегра ла ( )
b
a
I f x dx пр -ос - .тейшим методом Монте Карло
37. Как оценить погрешность вычисления интеграла в простейшем - ?методе Монте Карло
38. Приведите формулу вычисления интеграл а ( )b
a
I f x dx , где
0 ( ) 1f x , - .геометрическим методом Монте Карло39. -Как оценить погрешность вычисления интеграла в геометри
- ?ческом методе Монте Карло
4. Статистическое моделирование
Created with novaPDF Printer (www.novaPDF.com)
96 . . .Г Н Решетникова Моделирование систем
5. ИМИТ АЦИОННОЕ МОДЕЛИРОВАНИЕ
Управление в современном мире становится все более трудным. , ,делом Это объясняется усложнением самих объектов и следовательно
. , -усложнением их моделей Система объединяющая все объекты и свя , . зи между ними является сложной системой Изменение одной из
характеристик такой системы может привести к изменениям или . создать потребность в изменениях в других частях системы В связи
, с этим появилась одна из методологий системного анализа которая . призвана помочь осмыслить последствия таких изменений Это -имита
ционное моделирование (имитировать — , значит вообразить постичь суть, ). явления не прибегая к экспериментам на реальном объекте Согласно
. ,Р Шеннону имитационное моделирование есть процесс конструирования -модели реальной системы и постановка экспериментов на этой модели с це
лью либо понять поведение системы, либо оценить ( в рамках ограничений, накладываемых некоторым критерием или совокупностью критериев) -различ
, ные стратегии обеспечивающие функционирование данной системы. — -Имитационное моделирование наиболее мощный и универсаль
, ный метод исследования и оценки эффективности систем поведение . -которых зависит от воздействия случайных факторов К таким систе
, ,мам можно отнести и летательный аппарат и популяцию животных , и предприятие работающее в условиях слаборегулируемых рыночных
. -отношений В основе имитационного моделирования лежит статисти ( - ), -ческий эксперимент метод Монте Карло реализация которого невоз . можна без применения средств вычислительной техники Поэтому , ,любая имитационная модель представляет собой в конечном счете
.более или менее сложный программный продукт -Имитационное моделирование является экспериментальной и при
, :кладной методологией имеющей следующие цели ;описание поведения систем , -построение теорий и гипотез которые могут объяснить наблюда ;емое поведение , . . , -прогнозирование поведения систем т е тех воздействий кото -рые могут быть вызваны изменениями в самой системе или изменени .ями способов ее функционирования , В отличие от большинства технических методов которые могут ,быть классифицированы в соответствии с научными дисциплинами
( , -в которые они уходят своими корнями например с физикой или хи),мией имитационное моделирование применимо .к любой отрасли науки
Created with novaPDF Printer (www.novaPDF.com)

97
5.1. Принципы построения имитационных моделей
Имитационной моделью сложной системы S называются программы , -или алгоритмы позволяющие имитировать на ЭВМ поведение отдель ных элементов системы S и связей между ними в течение заданного
. времени моделирования Эксперименты с имитационной моделью на ЭВМ называются имитационными (вычислительными) экспериментами.
-Все имитационные модели функционируют как модели типа чер . , ного ящика Это означает что они обеспечивают выдачу выходного
, -сигнала системы если на ее взаимодействующие подсистемы поступа . ет входной сигнал Поэтому для получения необходимой информации
или результатов необходимо осуществлять прогон -имитационных моде. лей Имитационные модели не способны формировать свое собственное
, -решение в том виде в каком это имеет место в аналитических моде, лях а могут лишь служить в качестве средства для анализа поведения
, . -системы в условиях определенных экспериментатором Следователь, , но имитационное моделирование не теория а методология решения
.проблем , Прежде чем начать разработку имитационной модели необходимо
, , понять что собой представляют структурные элементы из которых . -она состоит Несмотря на то что математическая или физическая струк , тура модели чаще всего является очень сложной основы ее построения
. -достаточно просты В общем виде структуру модели можно предста вить математически в виде
( , ),Z F X Yгде 1( ,..., )
z
TnZ z z — ; результат действия модели 1( ,..., )
x
TnX x x —
, ; параметры и переменные которыми можно управлять 1( ,..., )y
TnY y y —
, ;параметры и переменные которыми нельзя управлять F — -функцио нальная зависимость X и Y.
Почти каждая модель представляет собой некоторую комбинацию :следующих составляющих
( , ), . . ,элементов подсистем компонентов т е тех составных частей ;которые при объединении образуют систему
— ;переменных двух типов входных и выходных ;параметров , -функциональных зависимостей описывающих поведение пере
;менных и параметров , ограничений устанавливающих пределы изменения значений
;переменных .целевой функции или функции критерия
: -Существуют два типа целей имитационного моделирования при . обретение и сохранение Цели сохранения связаны с сохранением или
- ( , . .)поддержанием каких либо ресурсов временных энергетических и т д
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

98 . . .Г Н Решетникова Моделирование систем
( , , . .).или состояний уровня производства скорости направления и т д Цели приобретения ( ,связаны с приобретением новых ресурсов прибыли
. .) , -заказчиков и т д или достижением определенных состояний к кото ( рым стремится организация или ее руководитель захват части рынка
. .). и т д Выражение для целевой функции должно быть однозначным , -определением целей и задач с которыми должны соразмеряться при
. нимаемые решения Согласно словарю Вебстера критерий — это мерило, , оценки правило или вид проверки при помощи которых составляется
- . правильное суждение о чем либо Функция критерия обычно является , составной частью модели и весь процесс работы с моделью направлен
.на оптимизацию или удовлетворение заданного критерия Процесс создания модели исследуемой системы может быть лучше
. -всего определен как интуитивное искусство Основой успешной мето — -дики моделирования является тщательная отработка модели посте
. пенное продвижение от простой модели ко все более сложной -Искусст во моделирования состоит в способности анализировать проблему, выделять из нее путем абстракции существенные черты, выбирать и должным образом
модифицировать основные предположения, характеризующие систему, а затем отрабатывать и совершенствовать модель до тех пор, пока она не станет
давать полезные для практики результаты.
5.2. Организация процесса моделирования
-При разработке имитационных моделей сложных систем прихо :дится учитывать две особенности функционирования ЭВМ
1) сложная система S, , ,как правило состоит из многих элементов . -и все элементы системы функционируют одновременно Однако в боль
-шинстве современных ЭВМ параллельное выполнение нескольких про, , -грамм имитирующих поведение отдельных элементов системы невоз;можно
2) — , поскольку имитационные модели это программы для ЭВМ то , -они должны оперировать с конечным множеством данных и следова
, тельно имитировать поведение системы S не во все моменты времени 0,t T а лиш , -ь в некоторые моменты времени составляющие конеч .ное множество
( ) -Чтобы обеспечить имитацию параллельных одновременных собы тий системы S , -на конечном множестве моментов времени в имитаци
онной модели используется специальная переменная t, называемая -сис темным модельным временем или просто модельным временем.
M одельное время t ,следует отличать от других типов времени , используемых при имитационном моделировании систем таких как
pt — реальное время функционирования системы S; эt — машинное , -время имитации отражающее затраты ресурса времени ЭВМ на органи .зацию имитационного моделирования
Created with novaPDF Printer (www.novaPDF.com)

99
Существуют два способа формирования конечного множества , -моментов времени моделирования известных как принципы органи
зации изменения модельного времени «t» «и x». Принцип «t» заключается в изменении модельного времени
с фиксированным шагом t. В соответствии с принципом «t» -изме нение модельного времени t ,происходит через промежутки времени
равные t, . .т е t в течение времени моделирования T принимает конечное множество значений {0, , 2 , ..., }t t t T . При этом, событиям попадающим в интервал постоянства модельного времени
( 1) , , 0, ,r r t r t r в ими тационной модели присваивается один и тот же момент наступления t r t . Выбор величины t
-существенно влияет как на быстродействие имитационного моделиро, вания так и на точность аппроксимации сложной системы S -ими
, :тационной моделью при этом если t , -мало то выполняется много лишних вычислений состо , яний системы в моменты когда состояние , не меняется за счет этого
возрастает эt ;выполнения имитационного моделирования даже при сравнительно малом значении t -моменты наступле , , -ния событий в системе а следовательно и моменты изменения сос
тояния системы не совпадают с моментами наступления событий , , в имитационной модели поэтому фазовая траектория построенная , с помощью имитационной модели не совпадает с фазовой траекторией
системы S. Принцип «x» заключается в изменении модельного времени при
скачкообразном изменении вектора состояния x(t) системы S на некоторую величину x 0x . Для моментов времени t и -з мно
жества [0, ]T , сформированного по принципу «x» , справедливо
( 0) ( ) ,x t x t x t .
Для моментов време ни [0, ],t T не входящих во множество , ( ).вектор состояний изменяется непрерывно либо остается неизменным
, Заметим что скачкообразные изменения состояния системы S -проис , -ходят при наступлении особых событий таких как поступление управ
, -ляющих сигналов и внешних воздействий выдача выходных сигна . .лов и т п
Пусть сложная система S состоит из N элементов (1), , NA A , , . .поведение которых предполагается моделировать т е
(1) ( ), , .NS A А
Для каждого элемента ( ) , 1, ,iA S i N существует локальное модельное время ( ) 0, .it T Поведение элемента iA S в течение -интервала моделирования определяется некоторой последователь
ностью действий
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

100 . . .Г Н Решетникова Моделирование систем
( ) ( ) ( ) ( )1 2, , , , , 1, ,
i
i i i iijMg g g g G j M
где G — множество всевозможных действий для элементов S. -На множестве G выделим подмножество действий D G , дл я выполнения
которых в имитационной модели требуется некоторое ненулевое . модельное время Обозначим такие действия( ) ( ) ( )1 , , , , 1, , , 1, ,
i
i i ii i ijmd d d D G j m m M i N
, а интервалы модельного времени затрачиваемые на выполнение этих
, действий соответстве нно ( ) ( )1 ,..., .
i
i im Последовательность ( ) , 1, ,i
ij j m достаточно часто является последовательностью случайных величин
с заданными законами распределени я ( ) , 1,ijL i N .
Действия ( )ijd D приводят к наступлению в системе S особых
событий ( )ijA . События ( )i
jС , к которым приводят действия ( )ijg ,
не входящие в D, . . , -т е не требующие затрат модельного времени счи таются неособыми.
Момент локального модельного времени наступления событи я ( )ijА
для iA S определяется по формуле( ) ( ), 1, , 1, ,i i
ij jt t j M i N где ( )i
j ч аще всего имитируется на ЭВМ в соответствии с заданным законом распределен ия ( )i
jL ; t — текущее значение модельного.времени
Состояние системы S в момент времени 0t ,T -определяется век тором состояния .nx t RХ Состояния системы в моменты ( )i
jt наступления особых событий называются особыми состояниями, -а состо
яние x(0) — начальным состоянием .системы В соответствии с принципом «x» изменение модельного времени
, ,происходит в моменты наступления событий или что то же самое , , -в моменты особых состояний а фазовая траектория построенная с по
, мощью имитационного моделирования будет совпадать на множестве 0,T с фазовой траекторией системы S.
П р и м е р Применением принципов «t» «и x» в системах автоматического
.управления является квантование сигналов по времени и по уровню
На практике отдается предпочтение принципу «x». «Принцип t» :используется лишь в случаях
1) когда события ( )ijА , таковы что ( ) ( )
1 consti ij jt t -на всем ин
, , тервале моделирования и следовательно можно подобрать значениеt , -изменения модельного времени обеспечивающее минимальную по
( );грешность аппроксимации например для разностных уравнений
Created with novaPDF Printer (www.novaPDF.com)

101
2) , . -событий очень много и они появляются группами В этом слу
чае за счет групповой обработки событи й ( )ijА , по -павших внутрь оче
редного шага изменения t, удается уменьшить затраты машинного.времени
В большинстве случаев событи я ( )ijА нас тупают через случайные
интервалы времени ( )ij . -Поэтому способ задания шага до следующе
( ) -го события экономичнее в смысле затрат машинного времени и точ ( ) нее в смысле точности аппроксимации фазовой траектории способа
.фиксированного изменения модельного времени
5.3. Способы имитации
Под способом имитации системы (1) (2) ( ), ,..., NS A A A понимается способ формирования фазовой траектории системы, . . т е способ изменения
вектора состояния x(t) системы S. -Возможны три способа изменения x(t):
1) в моменты наступления событий ( )ijА ;
2) в результате действи й ( )ijd , на выполнение которых требуются
затраты модельного времени ( )ij , при этом пара ( ) ( ),i i
j jd -называется (i,j)-й активностью системы S;
3) в результате выполнения хронологической последовательности , событий и действий называемой процессом.
, В зависимости от того какой из способов формирования фазовой , :траектории используется различают следующие способы имитации, , , -событийный основанный на просмотре активностей процессный тран
.зактный и агрегатный -Сформулируем условия применения способов имитации для моде
лирования системы (1) (2) ( ), ,..., NS A A A . Событийный способ :заключается в следующем
1) множество особых событий разбивается на небольшое число Lтипов
(1) ( ) ( )
1
, , , 1, , 1, , ;N
L ii ij
iA A j m i N L mА
2) -для каждого типа событий определяется последовательность дей, ствий приводящая к изменению состояния системы S;
3) определяются условия перехода от одного события к другому ;для всех типов событий4) интервалы времени между последовательными наступлениями
событий являются случайными величинами с известными законами .распределения вероятностей
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

102 . . .Г Н Решетникова Моделирование систем
Способ, основанный на просмотре активностей, -заключается в следу:ющем
1) все действия для элемента ( )iA системы S -являются различ ;ными и приводят к наступлению различных событий
2) каждое действи е ( )ijd характеризуется набором условий его
;выполнения3) времена выполнения дейс твий ( )i
j я -вляются случайными вели .чинами с известным законом распределения вероятностей
Моделирующий алгоритм, , -основанный на просмотре активностей реа , -лизует просмотр всех наборов условий а также обрабатывает активно
сти ( ) ( ),i ij jd , у , . . -словия для которых выполняются т е моделирует вре
.мя выполнения соответствующего действия и реализует само действие Данный способ требует значительных затрат машинного времени для . -проверки многих условий Его целесообразно применять в тех случа
, .ях когда время выполнения действий зависит от состояния системы Процессный способ -сочетает в себе черты событийного способа и спо
, . , соба основанного на просмотре активностей Он применяется когда
поведение элементов ( )iA системы S -может быть описано фиксиро ванными для некоторого класса систем последовательностями событий
, и действий так называемыми процессами. -Для его реализации исполь — -зуются специализированные системы моделирования языки моде
, -лирования или пакеты прикладных программ обладающие специаль , ,ными средствами например операторами языка моделирования
. , удобными для описания данных процессов Однако поскольку набор , , , подобных стандартных средств как правило ограничен этот способ
, .является менее гибким чем событийный Транзактный способ -имитации сформировался в результате разви
-тия процессного способа для моделирования систем массового обслу.живания
Агрегатный способ основывается на использовании агрегативных.моделей
5.4. Этапы имитационного моделирования
Процесс имитационного моделирования сложной системы S можно :условно разделить на три последовательно выполняемых этапа
1) ( ) построение математической концептуальной модел и S ;2) -разработка моделирующего алгоритма и построение имитацион ной мод ели S ;3) исследование системы S с помощью модели S , т. . -е проведе , -ние имитационных экспериментов обработка и интерпретация резуль
.татов
Created with novaPDF Printer (www.novaPDF.com)

103
-Процесс имитационного моделирования не является строго посту. , -пательным Между этапами существует обратная связь обеспечиваю
, щая уточнение корректировку и учет дополнительной информации .при разработке и использовании имитационной модели
.Дадим краткую характеристику каждому из этапов
1Этап . -На основании изучения содержательного описания системы S, , составленного в терминах предметной области осуществляется
переход к математической модели S , которая представляет собой упрощенное математическое или алгоритмическое описание системы S.
Построение моде ли S вк , , -лючает в свою очередь пять взаимосвя :занных этапов
1) ;постановка задачи и формулировка целей исследования2) анализ системы S, . . ( ) т е разбиение декомпозиция системы на
, элементы допускающие удобное математическое или алгоритмическое ;описание и определение связей между элементами
3) , определение параметров переменных и пространства состояний системы S (характ еристик , , , ,v u y x ) и установление областей
, , ,V U Y, X ;изменения для каждой характеристики4) ,выбор показателей эффективности функционирования модели
. . т е вектора ;5) построение концептуальной модели S системы S и проверка
, . . -ее адекватности т е использование математических моделей непре- , - , -рывно детерминированного непрерывно вероятностного дискретно
, - детерминированного дискретно вероятностного типов и проверка, .гипотез предположений и математических соотношений
2Этап . -На данном этапе осуществляется переход от концептуаль ной модели S к моделирующему алгоритму и имитационной модели
S . Этот перех :од осуществляется также в пять основных этапов1) , -выбор способа имитации а также вычислительных и программ ;ных средств реализации имитационной модели2) ;построение логической схемы моделирующего алгоритма3) , -алгоритмизация математических моделей описывающих пове
, дение элементов системы и связей между ними в рамках выбранного ;способа имитации
4) — -разработка имитационной модели программирование модели ;рующего алгоритма
5) , отладка тестирование и проверка адекватности имитационной.модели
3Этап . Использование имитационной модели осуществляется :в три этапа
1) ;планирование имитационных экспериментов2) ;проведение имитационных экспериментов3) , .обработка анализ и интерпретация результатов моделирования
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

104 . . .Г Н Решетникова Моделирование систем
Пусть моделируемая на интерва ле 0,T система S характеризуется вектором параметров mR , причем значениями этого вектора в
. , имитационной модели можно управлять Кроме того система S -харак теризуется вектором показателей эффективности функционирования
на интервале 0, 0,t T
1(0, )
(0, ) ...
(0, )
k
k
tt R
t
.
В результате имитационного моделирования системы S -при задан ных значениях вектора и T :получают1) фазовую траекторию системы S
( ) ,x t X t ,где 0,T — конечное множество моментов изменения модельного
, «времени получаемое по принципам x» «и t», причем 0, T ;2) значения показателей эффективнос ти ( , )t -для каждого интер вала модельного времени (0, ), ,t t и -для всего интервала модели
:рования в целом( ) ( , )T .
-Имитационные модели могут использоваться для решения различ .ных задач исследования сложных систем
1Задача Оценивание значений показателей эффективности ( ), .
2Задача Оценивание функциональной зависимости ( ) от .
3Задача Сравнение эффективности функционирования системы S -для раз
личных значений параметров , , .
4Задача Оптимизация системы S на множестве , . . -т е решение следую
:щей задачи ( ) maxR ( min) или по , где ( )R — некоторый ( -критерий оптимальности обобщенный скалярный показатель эффек) тивности для системы S.
Значения параметров 1, , m в ходе имитационного эксперимента . -могут задаваться неоднозначно Выбор тех или иных значений опреде . ляется целью имитационного эксперимента Существуют различные
, способы организации имитационных экспериментов позволяющие , получать выборки значений показателей эффективности которые .обладают заданными свойствами
Created with novaPDF Printer (www.novaPDF.com)

105
Процесс задания значений , способа формирования выборки значений показателей эффективности ( )W , -обеспечивающих эффек
, тивное решение задач исследования сложной системы называется -пла нированием имитационных экспериментов. , 1–4 Таким образом для решения задач необходим этап планирования
, . . 3.имитационного эксперимента т е этап Имитационный эксперимент с моделью систем ы S , в результате
которого для заданных значений и T имитиру -ется фазовая тра , ектория и вычисляются показатели эффективности называется -прого
ном .имитационной модели В результате одного прогона имитационной модели S получаем одну реализацию показателя эффективнос ти (1)( ), . По одной
случайной реализации показателя эффективности нельзя судить об эффективности функционирования системы S. -Поэтому на третьем эта
пе для заданных значений и T осуществляется 1n прогонов , -имитационной модели в результате которых получается случайная вы
борка значений показателей эффективности(1) ( )( ), , ( ),n ,
где ( ) ( )i — значение показателя эффективности функционированиясистемы S для i- ,го 1, ,i n п .рогона имитационной модели
Для оценивания эффективности функционирования системы по
случайной выборке ( )( )i , 1, ,i n не , -обходим этап обработки ана , . .лиза и интерпретации результатов имитационного моделирования т е
. третий этап На данном этапе используются методы статистического .анализа данных
5.5. Планирование имитационных экспериментов
Планирование имитационных экспериментов преследует две :основные цели
1) -сокращение общего числа экспериментов при соблюдении тре ;бований к достоверности и точности их результатов
2) .повышение информативности каждого эксперимента -Поиск плана эксперимента производится в так называемом фак
. торном пространстве Факторное пространство — -это множество вне , шних и внутренних параметров модели значения которых можно
контролировать в процессе подготовки и проведения имитационных. ,экспериментов Поскольку факторы могут носить как количественный
, так и качественный характер то значения факторов обычно называютуровнями. -Если при проведении эксперимента уровни факторов мож
, но изменять то эксперимент называется активным, -в противном слу — чае пассивным.
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

106 . . .Г Н Решетникова Моделирование систем
, -Каждый из факторов имеет верхний и нижний уровни располо . женные симметрично относительно некоторого нулевого уровня Точка
, в факторном пространстве соответствующая нулевым уровням всех, факторов называется центром плана. Интервалом варьирования фактора
называется некоторое число j, -прибавление которого к нулевому уров , — . , ню дает верхний уровень а вычитание нижний Как правило план
( ) -эксперимента строится относительно одного основного выходного ска лярного параметра Y, который называется наблюдаемой переменной. -Если моделирование используется как инструмент принятия ре
, шений то в роли наблюдаемой переменной выступает показатель. , эффективности При этом предполагается что значение наблюдаемой
, , переменной полученное в ходе эксперимента складывается из двух:составляющих
( ) ( )y f x e x ,где f(x) — функция отклика ( );неслучайная функция факторов e(x) —
( );ошибка эксперимента случайная величина x — точка в факторном ( ). ,пространстве определенное сочетание уровней факторов Очевидно
что y , является случайной переменной так как зависит от случайнойвеличины e(x).
Дисперси я yD наблю даемой переменной характеризует точность измерений и называется дисперсией воспроизводимости эксперимента. Она
равна дисперсии ошибки экспериме : нта y eD D . -Эксперимент назы вается идеальным, если 0yD .
-Существует два основных варианта постановки задачи планирова .ния имитационного эксперимента1. , Из всех допустимых необходимо выбрать такой план который
-позволил бы получить наиболее достоверное значение функции отклика f(x) .при фиксированном числе экспериментов
2. , Выбрать такой допустимый план при котором статистическая оценка функции отклика может быть получена с заданной точностью
.при минимальном числе экспериментов Решение задачи планирования в первой постановке называется
стратегическим планированием эксперимента, — во второй тактическимпланированием.
5.5.1. Стратегическ ое планирование имитационного эксперимента
Целью методов стратегического планирования является получение максимального объема информации об исследуемой системе в каждом
, , эксперименте или что то же самое определение сочетаний уровней , внешних и внутренних факторов при которых может быть получена наиболее полная и достоверная информация о поведении исследуемой.системы
Created with novaPDF Printer (www.novaPDF.com)

107
При стратегическом планировании эксперимента должны быть :решены две основные задачи
1) ;идентификация факторов2) .выбор уровней факторов
Под идентификацией факторов понимают их ранжирование -по степе . -ням влияния на значение наблюдаемой переменной При этом все фак : торы делятся на две группы первичные — , факторы которые являются
, предметом исследования и вторичные — факторы, -которые не являют , .ся предметом исследования но влиянием которых нельзя пренебречьВыбор уровней факторов -производится с учетом двух противоречи :вых требований1) уровни фактора должны заполнять весь возможный диапазон
;его изменения2) -общее количество уровней по всем факторам не должно приво .дить к чрезмерному объему моделирования
, -Поиск компромиссного решения удовлетворяющего этим требова , -ниям и является задачей стратегического планирования экспери
.мента, Эксперимент в котором реализуются все возможные сочетания
, уровней факторов называется полным факторным экспериментом. Еслиil — число уровней i-го , -фактора то общее число различных комби
наций уровней для k :факторов определяется следующим образом
1 2 ... kN l l l . Если число уровней для всех факторов одинаково и равно l, то kN l .
-Для полного факторного эксперимента требуются большие времен , -ные затраты на подготовку и проведение что является его недостат. -ком Поэтому полный факторный эксперимент целесообразно исполь
, зовать только в том случае если рассматривается взаимное влияние .всех факторов в исследуемой системе
, -Если предполагается что факторы не оказывают взаимного влия , ния или им пренебрегают то проводят -частичный факторный экспери
мент. Наиболее часто используются следующие методы построения .планов в частичном факторном эксперименте
1. Рандомизированный план. -Сочетание уровней для каждого экспе .римента задается случайным образом
2. Планы с ограничение м на рандомизацию ( -неполноблочный сбалансиро ванный план, латинские квадраты). , Используются в том случае когда .полная рандомизация невозможна
3. Эксперимент с изменением факторов по одному. Один из факторов« » пробегает все l , уровней а остальные k–1 -факторов поддержива
. ются постоянными Такой план обеспечивает исследование влияния . каждого фактора в отдельности Он требует всего 1 2 ... kN l l l
.экспериментов
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

108 . . .Г Н Решетникова Моделирование систем
4. Дробный факторный эксперимент. , -Используется в том случае ког , . . да реализуются не все сочетания уровней факторов т е из программы
,полного факторного эксперимента исключаются уровни факторов .априорно незначимо влияющие на поведение модели
5. Симплексные планы. -Насыщенные планы с минимально возмож ( ).ным числом экспериментов сочетаний уровней и факторов
5.5.2. Тактическ ое планирование имитационного эксперимента
-Так как имитационное моделирование является чаще всего статис , тическим экспериментом то при его проведении необходимо не только , « »получать достоверные результаты но и обеспечивать его измерение
. с заданной точностью Точность оценки наблюдаемой переменной . -характеризуется ее дисперсией В связи с этим основу методов такти
ческого планирования экспериментов составляют так называемые .методы понижения дисперсии
( ), -Объем испытаний число экспериментов необходимых для полу , чения оценок наблюдаемой переменной с заданной точностью зависит
:от следующих факторов1) вида распределения наблюдаемой переменной y;2) ;коррелированности между собой элементов выборки3) -наличия и длительности переходного режима функционирова .ния моделируемой системы
-При отсутствии перечисленной информации имеется единствен -ный способ повышения точности оценок истинных значений наблюда — емой переменной многократное повторение прогонов -модели для каж , дого сочетания уровней факторов выбранного на этапе стратегического
. планирования экспериментов Такой подход получил название -форми рования простой случайной выборки. В этом случае общее число прогонов модели равно пcN N , где cN — число сочетаний уровней факторов по
, стратегическому планированию пN — -число прогонов модели для каж , .дого сочетания вычисленное при тактическом планировании
Основной подход к определению необходимого объема испытаний . -состоит в следующем Если случайные значения наблюдаемой пере -менной не коррелированны и их распределения не изменяются от про
, -гона к прогону то выборочное среднее можно считать нормально рас. пределенным В этом случае число про гонов пN , необходимых для
, того чтобы истинное среднее y лежало в интервале y b -с вероятнос тью (1 ) , :определяется следующим образом
2
п 2yZ D
Nb
, (5.1)
Created with novaPDF Printer (www.novaPDF.com)

109
где Z — -значение нормированного нормального распределения при за
данном уровне значимости 2
; yD — ; дисперсия b — доверительный.интервал Если значение дисперсии yD ,до начала эксперимента неизвестно
то выполняется пробная серия из L прогонов и вычисляется на ее основе выборочная дисперсия
2
1
1( )
1
L
y i Li
D y yL
,
где Ly — выборочное среднее по результатам L . прогонов Полученное значение yD (5.1) подставляется в и определяется предварительная
оценка числа прогонов пN . , -Если наблюдаемая переменная является вектором то оценку необ -ходимого числа прогонов необходимо определять отдельно для каждо
. го компонента Наибольшее из полученных значений принимается в качестве числа прогонов пN .
, -Основной недостаток методов планирования основанных на ис , -пользовании простой случайной выборки состоит в медленной сходи
мости выборочных средних к истинным средним с ростом объемавыборки пN ( пропорционально значению пN ). -Это приводит к необ
, -ходимости использования методов уменьшения ошибок не приводя щих к увеличени ю пN . Такие методы называются методами понижения
дисперсии. :Они делятся на три группы1) активные, -предусматривающие формирование выборки специ
;альным образом2) пассивные, , -применяемые после того как выборка уже сформи
;рована3) косвенные, -в которых для получения оценок наблюдаемой пере
.менной используются значения некоторых вспомогательных величин
5.6. Обработка и анализ результатов моделирования
, -Решения принимаемые по результатам имитационного моделиро, вания могут быть конструктивными только при выполнении двух
:условий1) -полученные результаты обладают требуемой точностью и досто
;верностью2) исследователь способен правильно интерпретировать полученные
, .результаты и знает каким способом они могут быть использованы
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

110 . . .Г Н Решетникова Моделирование систем
5.6.1. Оценка качества имитационной модели
-Оценка качества модели является завершающим этапом ее разра :ботки и преследует две цели
1) ;проверить соответствие модели ее назначению2) -оценить достоверность и статистические характеристики резуль, татов получаемых при проведении экспериментов с использованием
.построенной модели При аналитическом моделировании достоверность результатов
:определяется двумя основными факторами1) , корректным выбором математического аппарата используемого ;для описания исследуемой системы2) , .погрешностями методов используемых для решения задач
При имитационном моделировании на достоверность результатов , влияет целый ряд дополнительных факторов основными из которых
:являются1) , -моделирование случайных факторов основанное на использова , « »нии датчиков случайных чисел которые могут вносить искажения
;в поведение модели2) ;наличие нестационарного режима работы модели3) , -несогласованность погрешностей методов используемых в рам ;ках одной модели4) ;зависимость результатов моделирования от плана эксперимента5) ;необходимость синхронизации отдельных компонентов модели6) наличие модели рабочей нагрузки ( ,моделей внешних воздействий
оказывающих влияние на эффективность применения данной системы ), , в рамках проводимого эксперимента качество которой зависит в свою
, .очередь от тех же факторов , -Качество имитационной модели характеризуется тем в какой сте
пени она обладает целевыми свойствами: ; адекватностью ;устойчивостью.чувствительностью
Адекватность — степень соответствия модели реальному объекту , . , или процессу для которых она строится При этом поскольку модель
, , строится как правило для исследования определенного подмножества , , -свойств объекта можно считать что под адекватностью модели пони
. -мается ее соответствие целям моделирования Одним из наиболее рас пространенных способов проверки такого соответствия является
, -использование методов математической статистики а именно провер . ки гипотез на основе некоторых статистических критериев При этом
, следует иметь в виду что статистические критерии не могут доказать , -ни одной гипотезы они могут лишь указать на отсутствие опровер
. -жения Процедура оценки адекватности модели основана на срав нении измерений на реальной системе и результатов экспериментов
. на модели и может проводиться различными способами Наиболее
Created with novaPDF Printer (www.novaPDF.com)

111
: -распространенными из них являются следующие по средним значе ; -ниям откликов модели и системы по дисперсиям отклонений откли
; -ков модели от среднего значения откликов системы по максимально му значению относительных отклонений откликов модели от откликов
.системы
П р и м е р -Рассмотрим процедуру проверки гипотезы о близости среднего зна
чения наблюдаемой переменной Y -среднему значению отклика реаль ной системы Y .
В результате ON опытов на реальной системе получают множество ( )значений выборку Y . Выполнив MN эк , -спериментов на модели так
же получают множества значений наблюдаемой переменной Y. Затем -вычисляются оценки математического ожидания и дисперсии откли
, ков модели и системы после чего выдвигается гипотеза о близости средних значений величин Y и Y ( ). -в статистическом смысле Осно
вой для проверки гипотезы является t-статистика ( -распределениеСтьюдента). , , -Ее значение вычисленное по результатам испытаний сравни
вается с критическим значением крt , . -взятым из таблицы Если выпол няется неравенство крt t , то ги .потеза принимается
, -Заметим что статистические методы применимы только в том слу, .чае если оценивается адекватность модели существующей системе -Для проектируемой системы в качестве эталонного объекта использу . -ется концептуальная модель Тогда проверка адекватности програм- , -мно реализованной модели заключается в проверке того насколько кор
.ректно она отражает концептуальную модель Устойчивостьмодели — это способность сохранять адекватность при
исследовании эффективности системы на всем возможном диапазоне , рабочей нагрузки а также при внесении изменений в конфигурацию. -системы Устойчивость результатов моделирования может быть оце
, нена методами математической статистики при этом проверяется , -гипотеза относительно свойств некоторого множества элементов назы
ваемого генеральной совокупностью, -оценивая свойства некоторого под (множества генеральной совокупности выборки). -В генеральной сово
, купности обычно интересует некоторый признак который обусловлен случайностью и может иметь качественный или количественный
. характер При этом устойчивость результатов моделирования можно , . -рассматривать как признак подлежащий оценке Для проверки гипо
тезы об устойчивости результатов может быть использован критерийВилкоксона, , который служит для проверки того относятся ли две
, . . выборки к одной и той же генеральной совокупности т е обладают .ли они одним и тем же статистическим признаком
При статистической оценке устойчивости модели соответствующаягипотеза Н : может быть сформулирована следующим образом при
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

112 . . .Г Н Решетникова Моделирование систем
( ) изменении входной рабочей нагрузки или структуры имитационной -модели закон распределения результатов моделирования остается не
. изменным Проверку указанной гипотезы Н -проводят для двух выборок 1( ,..., )nX x x и 1( ,..., )mY y y , -полученных для различных зна
. чений рабочей нагрузки При этом относительно законов распределенияX и Y . никаких предположений не делается Значения обеих выборок
. -упорядочиваются вместе по возрастанию Затем анализируется взаим ное расположе ние ix и jy . В случае j iy x го , -ворят что пара значе
ний (x,y) .образует инверсию
П р и м е р Если пр и 3n m п -осле упорядочивания получилась последова тельность значений 1 1 3 2 2 3, , , , ,y x y x y x , то получаются следующие: инверсии 1 1 2 1 2 3 3 1 3 2 3 3( , ), ( , ), ( , ), ( , ), ( , ), ( , )x y x y x y x y x y x y .
Подсчитывается полное число инверсий U. ,Если гипотеза вернато U -не должно сильно отклоняться от своего математического ожидания М:
2n m
M .
, От гипотезы отказываются если крU M U (значение крU ).определяется по таблице для заданного уровня значимости
Оценку чувствительности -модели к изменению параметров рабо чей нагрузки и внутренних параметров самой системы проводят по
каждому параметр у kX в отде . , -льности Основана она на том что обыч . -но диапазон возможных изменений параметра известен Одна из наи
более простых и распространенных процедур оценивания параметров .состоит в следующем
1. Вычисляется величина относительного среднего приращенияпараметра kX :
max min
max min
2( )100%k k
kk k
X XX
X X .
2. Проводится пара модельных экспериментов при значениях
maxkX , minkX -и средних фиксированных значениях остальных па. раметров Определяются значения отклика модели
1 max( )k kY f X и
2 min( )k kY f X .3. -Вычисляется относительное приращение наблюдаемой пере
менной kY :
1 2
1 2
2100%
k kk
k k
Y YY
Y Y
.
В результате для k-го параметра получается пара значений( , )k kX Y , характеризующая чувствительность модели по этому
Created with novaPDF Printer (www.novaPDF.com)

113
. параметру Аналогично формируются пары для остальных параметров, модели которые образуют множество пар { ( , )k kX Y } д -ля всех значе
ний k., , Данные полученные при оценке чувствительности модели могут
, , :быть использованы в частности при планировании экспериментов , большее внимание должно уделяться тем параметрам по которым
.модель является более чувствительной ,Если в результате проведенной оценки качества модели оказалось
, -что ее целевые свойства неудовлетворительны то необходимо выпол нить ее калибровку, . . т е коррекцию с целью приведения в соответствие
. , ,предъявляемым требованиям Процедура калибровки как правило , .состоит из трех шагов каждый из которых является итеративным
1. Сравнение выходных распределений. — Цель оценка адекватности. , модели Критерии сравнения могут быть различны в частности может
-использоваться величина разности между средними значениями от . -кликов модели и системы Установление различий на этом шаге осно
( ,вано на внесении глобальных изменений введении новых процессов . .).изменении типов событий и т д
2. Балансировка модели. — Основная задача оценка устойчивости . , ,и чувствительности модели В результате производятся как правило
( локальные изменения изменение некоторых законов распределения . .).моделируемых случайных величин и т д
3. Оптимизация модели. — Цель обеспечение требуемой точности, -результатов которая может достигаться улучшением качества датчи
, , -ков случайных чисел снижением влияния переходного режима при .менением специальных методов понижения дисперсии
5.6.2. Подбор параметров распределений
При имитационном моделировании подбор законов распределений , выполняется на основе статистических данных полученных в ходе. -эксперимента В основе такой процедуры лежит проверка статистичес
.ких гипотез Статистическая гипотеза — -это утверждение относительно значе
ний одного или более параметров распределения некоторой величины . или относительно самой формы распределения Обычно выбирают две
: —исходные гипотезы основную 0H — и альтернативную ей 1H . Статистическая проверка гипотезы — , -это процедура выяснения сле
дует ли принять основную гипотезу 0H . или отвергнуть ее Обычно выбирают некоторое значение , которое называется -уровнем значимо
сти. Для выбранного значения опр -еделяется так называемая кри тическая область ,В удовлетворяющая условию
0| вернаP Z B H ,
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

114 . . .Г Н Решетникова Моделирование систем
где Z — , критерий представляющий собой некоторую функцию от -выборки из генеральной совокупности некоторой случайной величи
. , , ны Проверка гипотезы состоит в том что производится выборка на основании которой вычисляется z — частное значение критерия Z.
Если z B , то от гипотезы 0H отка , зываются в противном случае, -говорят что полученные наблюдения не противоречат принятой гипо
. тезе При этом вид самого закона распределения достаточно часто определяется с помощью гистограммы относительных частот.
-Для наиболее часто используемых статистических гипотез разрабо , таны критерии позволяющие проводить их проверку с наибольшей
.достоверностьюt-критерий -служит для проверки гипотезы о равенстве средних зна
чений нормально распределенных случайных величин x и y -в пред, ( ), -положении что дисперсии их равны но неизвестны при этом срав
ниваемые выборки из генеральной совокупности величин x и y могут иметь разный объем 1 2n n . В качестве критерия используют величину
21 2 1 2
1 1 1 21 2
( )
x y
n n n nx yT
n nn D n D
,
где ,x y — ;значения математического ожидания ,x yD D — дисперсии случайных величин x и y.
Величина T подчиняется t- распределению Стьюдента, -а критиче ское значение крt для t- критерия определяется -по таблице для выб
ранного значения и числа степеней свободы 1 2 2k n n . Если вычисленное значение T удовлетворяет неравенству крT t , -то гипо
тезу 0H .отвергают, « -Заметим что по отношению к предположению о нормальной рас
» пределенности величин x и y t- . критерий не очень чувствителен Его , можно применять если распределения случайных величин не имеют
.нескольких вершин и не слишком асимметричныF-критерий служит для проверки гипотезы о равенстве дисперсий
xD и yD при , условии что x и y . распределены нормально Гипотезы , такого рода имеют большое значение в технике так как дисперсия
, -есть мера таких характеристик как погрешности измерительных при, , боров точность технологических процессов точность наведения при
. .стрельбе и т д -В качестве контрольной величины используется отношение дис
перси й /x yF D D ( или /y xF D D — боль шая дисперсия должна ). быть в числителе Величина F подчиняется F-распределению Фишера
с 1 2( , )m m степенями свободы 1 1 2 2( 1, 1)m n m n . . Проверка гипотезы состоит в следующем Для величины / 2a
и величин 1 2,m m по таблице F- распределения выбирают значение
1 2, ,a m mF . Если F, , вычисленное по выборке больше этого критического
Created with novaPDF Printer (www.novaPDF.com)

115
, -значения то гипотеза должна быть отклонена с вероятностью ошибки .
Критерии согласия — , ,это критерии с помощью которых проверяют -удовлетворяет ли рассматриваемая случайная величина данному зако
.ну распределения Рассмотрим проверку гипотезы 0H ,о том что 0( ) ( )yF y F y , где
( )yF y — истинное распределение случайной величины y; 0 ( )F y — .гипотетическое распределение
Критерий Пирсона 2 . -Проверка гипотезы производится следую .щим образом
1. Область значений случайной величины y -произвольно разбива ется на k ( ).непересекающихся множеств классов2. В результате n экспериментов формируется выборка 1( ,..., )ny y .3. Вычисляется величина
2 :
22
1
ki
ii
nn
nP
,
где 2in — число значений y, попавших в класс i; iP — -теоретиче
ская вероятность ( для 0 ( )F y ) п опадания значения y в класс i.
4. По таблице2 - распределений находят критическое значение
20
для уровня значимости и 1m k . степеней свободы Если2 2
0 , .то гипотеза отвергается
–Критерий Колмогорова Смирнова. Проверка гипотезы производится .следующим образом
1. Выборку 1( ,..., )ny y -упорядочивают по возрастанию и строят сле :дующую эмпирическую функцию распределения
1
1
0, ,
( ) / , , 1, 1,
1, .y i i
n
y y
F y i n y y y i ny y
2. По значениям этой функции вычисляется величина
0( ) ( )max yy
F y F y
.
3. Гипотеза 0 0: ( ) ( )yH F y F y , отвергается еслиn , г -де вели
чина выбирается из таблицы по уровню значимости .
П р и м е р Пусть имеется выборка 1 2( , ,..., )nx x x случайной величины X
объема n. Вычислим оценки среднего значения и дисперсии
2 2
1 1
1 1, ( )
1
n n
i ii i
m x s x mn n
.
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

116 . . .Г Н Решетникова Моделирование систем
Тогда гипотеза о нормальности случайной величины X -соответству , ет тому что ее функция распределения имеет вид
0 ( )x m
F xs
,
где2
2( )
21
2
x mxsx m
e dxs s
.
. Далее обычно поступают следующим образом Задают значение и из таблицы выбирают соответствующее значени е (например
0,05, 1,36 ). На одних осях строят графики функций
0 0 0, ,y x F x y x F x y x F x
гдеn . -Затем на этом же графике строят эмпирическую функ
цию распределения yF x . -Если график эмпирической функции рас пределения нигде не выходит за пределы полосы 0F x , то можно принимать гипотезу 0H , . . , т е считать что опытн -ые данные не проти
, -воречат тому что функция распределения исследуемой случайной ве личины равна 0F x . Если график yF x - -где нибудь выйдет за преде
, лы этой полосы то гипотеза 0H от .вергается
5.6.3. Оценка влияния и взаимосвязи факторов
, Как правило количественная оценка степени влияния того или (иного фактора на значение наблюдаемой переменной показателя
) , -эффективности вызывает значительную сложность особенно при на . личии взаимного влияния факторов Наиболее простой и доступный способ решения этой проблемы состоит в использовании результатов .оценки чувствительности модели
Однофакторный дисперсионный анализ. -Его суть сводится к опреде -лению влияния на результат моделирования одного выбранного фак
.тора -Формально постановка задачи однофакторного дисперсионного ана
. лиза состоит в следующем Пусть интересующий фактор x имеет l. -уровней Для каждого из них получена выборка значений наблюдае
мой переменно й : (1), (2),..., ( ), 1,j j jy y y y l j n , n — о .бъем выборки
Необходимо проверить гипотезу 0H о равенстве средних значений, . . выборок т е о независимости значений y от значений исследуемого
фактора x. Уравнение однофакторного дисперсионного анализа имеетвид
ij i ijy m a e ,
Created with novaPDF Printer (www.novaPDF.com)

117
где ijy — j-е значение y в i-й ; серии экспериментов m — ге -нераль ное среднее случайной величины y ( . . -т е среднее значение наблюдае , « »); мой переменной обусловленное ее сущностью ia — неизвестный
, параметр отражающий влияние фактора x (« »эффект i-го значенияфактора x); ije — ошибка измерения y.
Для проверки гипотезы 0H используют F- -критерий и перехо дят от проверки значимости различий средних к проверке значимости
: ( -различий двух дисперсий генеральной обусловленной погрешностя ) —ми измерений 0D ( и факторной обусловленной изменением
фактора x) — xD . Значение F- критерия вычисляется как отношение
0/xD D или 0 / xD D ( -в числителе должна стоять большая из диспер). сий Критическое значение крF находят по таблице F- -распределе ний для заданно го уровня значимости и числа степеней свободы
1 1 2 21, 1)m n m n . Если крF F , то гипотезу 0H , . .отвергают т е (различия являются значимым фактор x влияет на значения y).
Многофакторный дисперсионный анализ позволяет оценивать влияние , . .на наблюдаемую переменную произвольного числа факторов т е
, ,позволяет выбрать из группы факторов участвующих в эксперименте, .те которые действительно влияют на его результат
П р и м е р -Рассмотрим методику проведения многофакторного дисперсионно
,го анализа применительно к частичному факторному эксперименту .проводимому в соответствии с латинским планом
Пусть в эксперименте рассматриваются один первичный фактор , и два вторичных каждый из которых имеет n , . . уровней т е объем
испытаний равен 2N n . Обозначим через ijky результат эксперимента , при условии что фактор a находится на уровне i, фактор b — на
уровне j, фактор c — на уровне k. , Множество значений которые может принимать упорядоченная тройка (i,j,k), обозначим через L.
-В этом случае уравнение дисперсионного анализа выглядит следу :ющим образом
ijk i j k ijky m a b g e ,где m — генеральное среднее случайной величины y; , ,i j ka b g —
(« » ).неизвестные параметры эффекты соответствующих факторов -Решение задачи дисперсионного анализа заключается в проверке ги
потез о независимости результатов измерений от факторов a,b,g:
: 0, 1, ;
: 0, 1, ;
; 0, 1, .
i
j
k
Ha a i n
Hb b j n
Hg g k n
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

118 . . .Г Н Решетникова Моделирование систем
Оценки параметров , , ,i j km a b g находят по методу наименьших :квадратов из условия минимума функционала
2( )ijk i j kL
Ss y m a b g .
Затем по каждому фактору вычисляется F- .статистика ВеличинаF есть мера потерь при принятии гипотезы 0H . Чем больше F, тем
, . хуже модель отвергающая влияние соответствующего фактора Таким, образом если крF F , ;то гипотеза отвергается крF оп ределяется по .таблице для заданного уровня значимости
, Заметим что дисперсионный анализ может использоваться для , , -оценки влияния факторов имеющих как количественный так и каче
, ственный характер поскольку в уравнении дисперсионного анализа , « ». , фигурируют не сами факторы а их эффекты В том случае если все
, факторы носят количественный характер взаимосвязь между ними и наблюдаемой переменной может быть описана с помощью уравнения
.регрессии Корреляционный и регрессионный анализ. , Два близких метода которые
обычно используются совместно для исследования взаимосвязи между .двумя или более непрерывными переменными
-Методы корреляционного анализа позволяют делать статистичес . кие выводы о степени зависимости между переменными Величина
-линейной зависимости одной переменной от другой измеряется по средством простого коэффициента корреляции, -величина зависимости од
— ной переменной от нескольких посредством -множественного коэффи циента корреляции. В корреляционном анализе используется также понятие частного коэффициента корреляции, -который измеряет линей
-ную взаимосвязь между двумя переменными без учета влияния дру .гих переменных
П р и м е р , . . -Рассмотрим простой корреляционный анализ т е метод определе
ния взаимосвязи между двумя переменными x и y. -Независимо от способа получения выборки имеется два предвари
тельных шага для определения существования и степени зависимостимежду x и y. Первый шаг заключается в графическом отображенииточе к ( , )i ix y ( 1,i n , n — о ) бъем испытаний на плоскости (x,y), . .т е в построении диаграммы рассеяния. ,Анализируя диаграмму рассеяния
, можно решить допустимо ли предположение о линейной зависимости между x и y, . . т е о неравенстве нулю коэффициента корреляци и xyr .
, Если предполагается что 0xyr , -то вычисляется его точное зна. чение Чем больше по абсолютному значению величина xyr , -тем силь
. нее линейная зависимость между переменными При 1xyr имеет
Created with novaPDF Printer (www.novaPDF.com)

119
место функциональная линейная зависимость между x и y вида
0 1y b b x , причем если 1xyr , то говорят о положительной, . . корреляции т е большие значения одной переменной соответствуют
; большим значениям другой при 1xyr имеет место отрицательная; корреляция при 0 1xyr -вероятна либо линейная корреляция с рас
, .сеянием либо нелинейная корреляция
, -Заметим что при анализе результатов имитационного моделирова , -ния необходимо иметь в виду что если даже удалось установить тес , -ную взаимосвязь между двумя переменными это еще не является пря - . ,мым доказательством их причинно следственной связи Возможно , , , -имеет место стохастическая зависимость обусловленная например кор
, -релированностью последовательностей псевдослучайных чисел исполь .зуемых в имитационной модели
-Поэтому результаты корреляционного анализа целесообразно уточ, , нить проведя регрессионный анализ который позволяет решать две
:задачи1) устанавливать наличие возможной причинной связи между
;переменными2) предсказывать значения зависимой переменной по значениям
, , независимых переменных что особенно важно в тех случаях когда .прямые измерения зависимой переменной затруднительны , Если предполагается что есть линейная зависимость между x и y,
то она может быть описана уравнением вида
0 1 , 1, ,i i iy b b x e i n которое называется простой линейной регрессией y по x. Величины 0 1,b b
, являются неизвестными параметрами а ie — случайными ошибками.испытаний
— -Цель регрессионного анализа найти наилучшие в статистичес ком смысле оценки параметров 0b и 1b , . .т е 0b и 1b . Тогда можно
найти оценку переменной y при ix x : 0 1 iiy b b x . -Разница меж
ду наблюдаемым и оцененным значением y при ix x , . .т е i i id y y ,
называется отклонением (остатком). Величины отклонений могут быть , использованы для проверки адекватности полученной модели для чего
строятся график и ( )d f y или ( )d f x , -и по их виду делается предва .рительное заключение о степени адекватности регрессионной модели
В случае нескольких независимых переменных имеет место -множе ственная линейная регрессия
0 1 1 ... k ky b b x b x e и для отыскания оценок , 1,ib i k , и спользуется метод наименьших
.квадратов
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

120 . . .Г Н Решетникова Моделирование систем
В случае нелинейной регрессии для построения регрессионной , -модели также используется метод наименьших квадратов но для отыс
кания оцено к , 0, ,jb j k с ,троится система нелинейных уравнений .которая решается итерационным методом
Замечание Эффективное использование процедур статистического анализа
-экспериментальных данных возможно только при наличии соответству .ющих инструментальных средств
5.7. Достоинства и недостатки имитационного моделирования
Имитационное моделирование имеет следующие отличительные:особенности
1) при создании имитационных моделей сложных систем законы , -функционирования всей системы в целом могут быть неизвестны дос
, -таточно знания алгоритмов описывающих поведение отдельных эле ;ментов системы и связей между ними
2) -в имитационной модели связи между параметрами и характе , -ристиками системы выявляются а значения исследуемых характерис
.тик определяются в ходе имитационного эксперимента на ЭВМ Областью применения имитационного моделирования является
, широкий класс систем практически любой сложности используется , -оно в случаях когда в силу сложности аналитической модели ее прак
.тическое использование невозможно :Имитационное моделирование обладает следующими достоинствами
это часто единственно возможный метод исследования систем в ;силу их сложности возможность исследования системы на различных уровнях ее
, ;детализации определяемых целью исследования возможность исследования динамики взаимодействия элементов
;системы во времени и пространстве параметров системы возможность оценивания характеристик системы в определенные
.моменты времени :Недостатки имитационного моделирования
, дороговизна разработка хорошей имитационной модели часто ;требует больших временных затрат
-результаты имитационного моделирования обладают меньшей сте пенью общности по сравнению с аналитическим моделированием и не
позволяют выявить общие закономерности функционирования классов;систем
-не существует надежных методов оценки адекватности имитаци .онных моделей
Created with novaPDF Printer (www.novaPDF.com)

121
5.8. Контрольные вопросы
1. .Дайте определение имитационного моделирования2. .Перечислите цели имитационного моделирования3. Каковы отличия имитационного моделирования от других видов
.моделирования4. .Дайте определение имитационной модели5. Охарактеризуйте .тип функционирования имитационной модели6. -Охарактеризуйте цели сохранения в имитационном моделирова .нии и приведите примеры7. -Охарактеризуйте цели приобретения в имитационном моделиро
.вании и приведите примеры8. , -Перечислите особенности функционировния ЭВМ которые не
.обходимо учитывать при разработке имитационных моделей9. В чем заключается при «нцип t »?10. На что влияет выбор велич ины t?11. , Совпадает или нет фазовая траектория построенная с помощью
, имитационного моделирования основанного на принципе « t », -с фа ?зовой траекторией системы
12. В чем заключается принцип «x»?13. На что влияет выбор величин ы x?14. , Совпадает или нет фазовая траектория построенная с помощью
, имитационного моделирования основанного на принципе « x », -с фа ?зовой траекторией системы
15. ?Дайте определение способа имитации системы16. .Перечислите способы имитации17. .Охарактеризуйте событийный способ имитации18. , Охарактеризуйте способ имитации основанный на просмотре
.активностей19. .Охарактеризуйте процессный способ имитации20. Перечислите этапы имитационного моделирования сложной
.системы21. .Охарактеризуйте первый этап имитационного моделирования22. .Охарактеризуйте второй этап имитационного моделирования23. .Охарактеризуйте третий этап имитационного моделирования24. -Для каких задач исследования сложных систем может исполь
?зоваться имитационное моделирование25. -Перечислите основные цели планирования имитационных экс
.периментов26. .Дайте определение факторного пространства27. ?Какие эксперименты называются активными28. ?Какие эксперименты называюся пассивными29. -Какие задачи решаются при стратегическом планировании ими
?тационных экспериментов
5. Имитационное моделирование
Created with novaPDF Printer (www.novaPDF.com)

122 . . .Г Н Решетникова Моделирование систем
30. -Какие задачи решаются при тактическом планировании ими ?тационных экспериментов
31. ?Что такое идентификация факторов32. ?Как осуществляется выбор уровней факторов33. -Перечислите методы построения планов в частичном фактор .ном эксперименте34. , От каких факторов зависит объем испытаний необходимых для
?получения оценок с заданной точностью35. В чем состоит основной подход к определению необходимого
?числа испытаний36. ?На какие группы делятся методы понижения дисперсии37. -Какие факторы влияют на достоверность результатов имитаци
?онного моделирования38. ?Какая модель является адекватной39. ?Какая модель является устойчивой40. ?Как определяется чувствительность модели41. ?Дайте определение статистической гипотезы42. Для проверки какой гипотезы используется t- ?критерий43. Для проверки какой гипотезы используется F- ?критерий44. ?Дайте определение критерия согласия45. ?Как осуществляется проверка критерия Пирсона46. — -Как осуществляется проверка критерия Колмогорова Смир?нова47. ?В чем суть однофакторного дисперсионного анализа48. ?В чем суть многофакторного дисперсионного анализа49. ?В чем суть корреляционного анализа50. ?В чем суть регрессионного анализа51. .Перечислите достоинства имитационного моделирования52. .Перечислите недостатки имитационного моделирования
Created with novaPDF Printer (www.novaPDF.com)
123
6. АГРЕГА ТИВНОЕ МОДЕЛИРОВАНИЕ
-Существует подход к построению математических моделей слож , -ных систем позволяющий облегчить процесс разработки и использова . ния имитационных моделей исследуемых систем Этот подход получил
название агрегативного моделирования (A-моделирования). Сущность A- . моделирования состоит в следующем При построении (агрегативной модели A- ) -модели сложная система разбивается на ко
( ). -нечное число взаимосвязанных элементов подсистем Если некото , , -рые из полученных подсистем оказываются в свою очередь достаточ
, , но сложными то процесс их разделения продолжается до тех пор пока , не будут выделены элементы допускающие стандартное математическое
, описание называемое агрегатом. , Таким образом -под агрегатом понима ется некоторое абстрактное математическое описание моделей различного
типа ( , , , ).детерминированных вероятностных непрерывных дискретных Представление математических моделей сложных систем в виде
A- моделей позволяет за счет использования одной и той же формы -описания моделей различных типов унифицировать процесс построе
-ния имитационной модели и процесс обработки результатов имитаци , онного моделирования для сложной системы состоящей из большого
.числа разнотипных элементов
П р и м е рА- — , ,модели АСУ АСУ предприятием АСУ крупным аэропортом .АСУ нефтеперерабатывающим комплексом
6.1. Основные характеристики агрегативной модели
Описание A- .модели включает следующие характеристики1. ( )Вектор управляющих сигналов входных воздействий
1nu u t U R ,
поступающих в случайные моменты времени 1 2t t . В общемслучае 1 2( ), ( ),u t u t — случайная последовател .ьность
2. Вектор параметровmR ,
от которого могут зависеть состояния x или их вероятностные.характеристики
Created with novaPDF Printer (www.novaPDF.com)
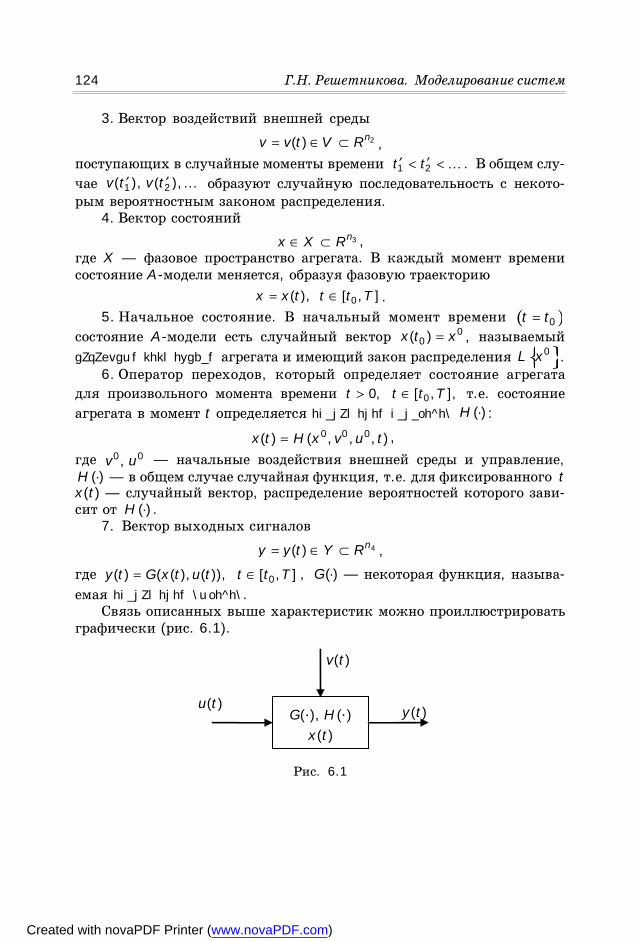
124 . . .Г Н Решетникова Моделирование систем
3. Вектор воздействий внешней среды2( ) nv v t V R ,
поступающих в случайные моменты времени 1 2t t . -В общем слу чае 1 2( ), ( ),v t v t образуют случайную послед -овательность с некото .рым вероятностным законом распределения4. Вектор состояний
3nx X R ,где X — . фазовое пространство агрегата В каждый момент времени
состояние A- , модели меняется образуя фазовую траекторию
0( ), [ , ]x x t t t T .5. . Начальное состояние В начальный момент в ремени 0t t
состояние A- модели есть случайный вектор 00( )x t x , называемый
начальным состоянием агрегата и имеющий закон распределе ния 0L x .6. , Оператор переходов который определяет состояние агрегата для произвольного момента времени 00, [ , ],t t t T . . т е состояние
агрегата в момент t определяется оператором переходов ( )H :
0 0 0( ) ( , , , )x t H x v u t ,
где 0 0,v u — ,начальные воздействия внешней среды и управление( )H — , . . в общем случае случайная функция т е для фиксированного t
x(t) — , -случайный вектор распределение вероятностей которого зави сит от ( )H .7. Вектор выходных сигналов
4( ) ny y t Y R ,
где 0( ) ( ( ), ( )), [ , ]y t G x t u t t t T , ( )G — , -некоторая функция называ емая оператором выходов.
Связь описанных выше характеристик можно проиллюстрировать ( . 6.1).графически рис
G( ), H( ) x(t)
y(t) u(t)
v(t)
. 6.1Рис
Created with novaPDF Printer (www.novaPDF.com)

125
6.2. Математическ ое описание процесса функционирования агрегата
, Будем предполагать что за конечный интервал времени на агрегатA , -поступает конечное число воздействий внешней среды управляю
. щих сигналов и выдается конечное число выходных сигналов При . -этом происходит изменение состояния агрегата Множество всех воз
можных состояний агрегата будем разделять на подмножества особых .состояний и неособых состояний
, Принято говорить что A в момент времени 0[ , ]t t T находится в особом состоянии ( )x t X , если t — -либо момент поступления воз
действия внешней среды ( )v t V , -либо момент поступления управ ляющего сигнала ( )u t U , либо момент выдачи выходного сигнала
( )y t Y . Все остальные состояния A называются неос обыми состояниями. Пусть ( )x t , 0[ , ],t t T — ; некоторое особое состояние ,Su v — последние перед моментом времени t -управляющий сигнал и воз
, действие внешней среды ( , )Su U v V .Обозначим
0
( 0) lim ( )x t x t
,
. .т е ( 0)x t — сколь угодно близкий к t .будущий момент времени В процессе функционирования агрегата происходят изменения его
, -состояния в соответствии с законом функционирования определяе мым оператором ( )H . -В моменты наступления особых состояний фун кция ( )H , . . изменяется скачкообразно т е функция ( )H имее -т разры
. вы Во временных интервалах между моментами наступления особых состояний функц ия ( )H .является непрерывной
Пусть 0[ , ]t t T — -момент наступления одного из особых состоя. ний Тогда в момент времени (t+0) состояние агрегата определяется
:следующим образом
1
2
3
4
( ( ), , ), ,если момент поступления
( ( ), , ), ,если момент поступления
( 0) ( ( ), , ), если момент одновременного
, ,поступления
( ( ), , ), .если момент выдачи
S
S
H x t v u t v
H x t v u t u
x t H x t v u tv u
H x t v u t y
(6.1)
Пусть t t — -момент наступления следующего особого состоя. ния В интервале между особыми состояниями функция ( )H является
непрерывной по t, . .т е
6. Агрегативное моделирование
Created with novaPDF Printer (www.novaPDF.com)

126 . . .Г Н Решетникова Моделирование систем
0( ) ( ( 0), , , ), ( 0, )Sx t H x t v u t t t t , (6.2)
где , Sv u — последние перед моментом времени t управляющий .сигнал и воздействие внешней среды
Операторы 0 1 2 3 4, , , ,H H H H H -в общем случае являются слу -чайными и определяются некоторыми законами распределения веро.ятностей
Выделим в фазовом пространстве X -семейство критических облас. тей Критическая область yX X для y Y — -это область в простран
стве X, -при попадании фазовой траектории агрегата в которую выда ется выходной сигнал y. Условие попадания фазовой траектории в yX
в момент времени 0[ , ]t T имеет вид
( ) yx X , ( ) yx X , 0 . (6.3)
При этом выходной сигнал определяется выражением
( ) ( ( ), )Sy y G x u ,
где Su — последний перед моментом .управляющий сигнал Опишем процесс функционирования A на интервале времени
0[ , ]t T .Пусть1) в начальный момент времени 0 0t :задано начальное состояние 0x , начальное воздействие внешней среды 0v , ( )начальное управляющее воздействие управление 0u ;2) в случайные моменты времени 1 1 1 0,t t t t T в агрегат
:поступило соответственно первое воздействие внешней среды 1
1v v t V , первое управляющее воздействие 1
1u u t U , произошла выдача выходного сигнала 1
1y y t Y . Рассмотрим иллюстрацию моментов перехода агрегата в особые
( . 6.2).состояния рис Моменты времени 1 1 1, ,t t t делят интервал моделирования [0, ]t
, -на фрагменты определяющие поведение агрегата в интервалах времени (0, ), ( , ), ( , ).t t t t t
1. -Фрагмент Закон функционирования агрегата определяется фор (6.2)мулой
0 0 00 1( ) ( , , , ), (0, )x t H x v u t t t
.и является непрерывным
Created with novaPDF Printer (www.novaPDF.com)

127
T 0 1t 1t 1t
Фраг мент 1 …
x0, u0, v0 y1 v1 u1
Фраг мент 2 Фраг мент 3
. 6.2Рис
В момен т 1 :t если 1 1t t , то поступает воздействие внешней среды 1v и -агре
( -гат попадает в особое состояние изменение состояния происходит скач), , (6.1),кообразно при этом закон функционирования агрегата согласно
описывается выражением1 0
1 1 1( 0) ( ( ), , )x t H x t v u ;
если 1 1t t , . . т е в агрегат одновременно поступают 1 1, ,иv u то закон функционирования агрегата описывается выражением
1 11 3 1( 0) ( ( ), , )x t H x t v u
3и имеет место фрагмент . 2. -Фрагмент Закон функционирования агрегата определяется фор
мулой1 0
0 1 1 1( ) ( ( ), , , ), ( , ),x t H x t v u t t t t .и является непрерывным
В момент 1t : если 1 1t t , то поступает управляющий сигнал 1u и состояние
агрегата изменяется скачком по закону1 1
1 2 1( 0) ( ( ), , )x t H x t v u ;
если 1 1t t , . . -т е в агрегат в один и тот же момент времени по ступает управляющий сигнал 1u , а фазовая траектория x(t) попадает
в критическое подмножество 1yX (выполн (6.3)), яется условие тогда состояние агрегата изменяется в данный момент дважды по закону
1 1 1 11 4 1 4 2 1( 0) ( ( 0), , ) ( ( ( ), , ),x t H x t v u H H x t v u
при этом выдается выходной сигнал1 1 1
1 1 1( ( ), , , ), ( , )y G x t v u t t t t , и имеет место 4фрагмент , который наступит после 3фрагмента при
моделировании для 1t t . 3. -Фрагмент Функционирование агрегата описывается непре
(6.2), . .рывным законом т е1 1
0 1 1 1( ) ( ( ), , , ), ( , ).x t H x t v u t t t t
6. Агрегативное моделирование
Created with novaPDF Printer (www.novaPDF.com)

128 . . .Г Н Решетникова Моделирование систем
В момен т 1t фаз овая траектория x(t) попадает в критическуюобласть 1y
X , . .т е (6.3), , выполняется условие следовательно состояние (6.4).агрегата изменяется скачкообразно и выдается сигнал
-Таким же образом процесс функционирования агрегата про -должается далее до достижения момента завершения времени мо
делирования Т.
6.3. Пример агрегативного моделирования
Рассмотрим систему S, описывающую производственный участок , -обработки деталей который состоит из четырех обрабатывающих цент
( ) . ров ОЦ и предназначен для обработки деталей двух типов Процесс , обработки состоит из двух последовательных операций выполняемых
:для деталей 1- — 1, 2, 3;го типа на ОЦ 2- — го типа на ОЦ
1, 2, 4.
1, 2, 3; 1, 2, 4 Последовательности определяют технологические 1- 2- . -маршруты обработки деталей го и го типов При каждом ОЦ имеет
. -ся одно место для временного хранения детали Интервалы поступле , -ния и выполнения операций а также тип детали являются случайны
.ми величинами с заданными законами распределения , Для того чтобы записать математическую модель системы введем
:обозначенияv — : тип детали 1 11 , 2 1 ;P v p P v p — , интервал между поступлениями деталей ;M
k — время выполнения k-й , операции ;k kM Законы распределения v, , k изв .естны
A — модель системы S, 5 ( . 6.3).состоит из агрегатов рис
. 6.3Рис
Агрегат 0A :реализует следующие действия моделирует интервалы поступления деталей в S со средним
;и заданным законом распределения .моделирует последовательность типов деталей
A0 A1 A2
A4
A3
u0
v0 y y u u
y1
y2
y0
y0
Created with novaPDF Printer (www.novaPDF.com)

129
Характеристика описания 0A :1) вектор состояний
10
2
( )( ) , [0, ],
( )
x tx t X t T
x t
где 1( ) 1,2x t — ;тип детали 2 ( )x t — время в момент [0, ]t T , -остав шееся до поступления детали в S;
2) вектор параметров
1 1
2;
p 3) 0, 0;v u 4) выходной сигнал
( ) 1,2y y t , .характеризует тип детали
Агрегат , 1, 4,kA k -моделирует обработку деталей на ОЦ и име :ет следующие характеристики
1) вектор состояний в момен т [0, ]t T
1
2
3
( )
( ) ( ) ,
( )
x tx t x t X
x t
где 1( ) 0,1,2x t — ;состояние ОЦ 2( ) 0,1x t — -состояние накопи ;теля при ОЦ 3 ( )x t — время до окончания о ;бработки детали2) вектор параметров
1 1
2 2;
3) 0,v управляющий сигнал u для , 1, 4,kA k с овпадает с выходным сигналом из 1kA и ;представляет собой тип детали
4) выходные сигналы y для 3 4,A A р авны .нулю
6.4. Контрольные вопросы
1. ?Дайте определение агрегативного моделирования2. - ?Что такое А модель3. .Дайте определение агрегата4. - .Перечислите характеристики А модели5. ?Какая область в фазовом пространстве называется критической6. .Опишите процесс функционирования агрегата7. .Приведите пример агрегативного моделирования
6. Агрегативное моделирование
Created with novaPDF Printer (www.novaPDF.com)

130 . . .Г Н Решетникова Моделирование систем
7. ЧИСЛЕННЫЕ МЕТО ДЫ МОДЕЛИРОВАНИЯ
-Для настоящего времени характерно применение математики прак . тически во всех сферах деятельности человека Это во многом связано
. с быстрым развитием средств вычислительной техники Расширение -возможностей приложения математики обусловило математизацию раз
: , , , , -личных разделов науки химии экономики биологии геологии пси, , . -хологии медицины конкретных разделов техники и др Процесс ма
тематизации состоит в построении математических моделей процессов . -и явлений и разработке методов их исследования В физике или меха
, , нике например построения математических моделей для описания -различных явлений природы и изучения этих моделей с целью объяс
нения старых или предсказания новых эффектов явлений являются. традиционными Современные успехи в решении таких важных для
,общества проблем , , ,как атомные космические экономические вряд ли -были бы возможны без применения вычислительной техники и чис
. -ленных методов Быстрое проникновение математики во многие обла , , , сти знания в частности объясняется тем что математические модели
, и методы их исследования применимы ко многим явлениям сходным . , -по своей формальной структуре Часто математическая модель описы
- , -вающая какое либо явление появляется при изучении других явле -ний или при абстрактных математических построениях задолго до кон
.кретного рассмотрения данного явления ,Математические модели реальных объектов и процессов являются
, . -как правило достаточно сложными Поэтому моделирование необходи мо осуществлять с помощью ЭВМ с использованием вычислительных
.алгоритмов , -К вычислительным алгоритмам которые используются для моде
, :лирования предъявляются следующие основные требования1) — реализуемость возможность решения задачи за допустимое
;время2) — экономичность получение решения за минимальное время
;среди эквивалентных по точности алгоритмов3) , возможность распознавания ошибок приводящих к аварийным
;остановам ЭВМ в процессе вычисления4) , -сходимость итерационных алгоритмов применяемых для реше ;ния конкретных задач5) — -вычислительная устойчивость отсутствие накопления сум
.марной погрешности за счет влияния погрешности округления
Created with novaPDF Printer (www.novaPDF.com)

131
Все численные методы моделирования можно разделить на группы : ,в соответствии с характером решаемых задач приближение данных
, решение нелинейных уравнений и систем решение задач матричной, , алгебры численное интегрирование и дифференцирование решение
, -обыкновенных дифференциальных уравнений и систем решение урав . . нений математической физики и т д Практически для каждой задачи
. существует несколько численных методов ее решения Выбор метода .определяется конкретной задачей и условиями ее реализации
7.1. Элементы теории погрешности
, Результаты вычислений особенно большого объема что характерно , .для моделирования реальных процессов всегда являются неточными , -Это вызвано накоплением различного рода погрешностей влияние ко
.торых необходимо учитывать :Основными источниками погрешностей являются
1) , исходные данные которые для вычислений часто берутся из, эксперимента а каждый эксперимент дает результат с ограниченной
;точностью2) , -использование иррациональных величин которые в ЭВМ пред
;ставляются приближенно3) , -применение итерационных методов решения задач дающих толь
;ко приближенные результаты4) -необходимость округления результатов при умножении и деле.нии
7.1.1. Основные определения
Обозначим точные значения некоторых величин че рез *,x , *y , *z ,…, а соответствующие им приближенные значения через x, y, z, … .
Абсолютной погрешностью величины x называется модуль разности :между точным и приближенным значением этой величины
*x x x .
Предельной абсолютной погрешностью xA величины x называется наименьшая из верхних границ x , кото ,рая может быть найдена
исходя из способа получения числа x. Относительной погрешностью величины x называется отношение
-абсолютной погрешности к абсолютному значению приближенной величины x:
xx x
.
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)
132 . . .Г Н Решетникова Моделирование систем
Предельной относительной погрешн остью x величины x называется отношение предельной абсолютной погрешности xA -к абсолютному зна
чению величины x:
| |х
хAx
.
7.1.2. Запись чисел в ЭВМ
-При записи чисел в ЭВМ применяется двоичная система счисле , ния с плавающей запятой согласно которой любое число z -представ
ляется в виде
1
2 2n
p kk
kz
,
где p — п (орядок числа 0p p ); n — ; длина разрядной сетки 1 1 . Типичные значения параметров 0p и n: 0 64, 35.p n -В десятич
ной системе счисления порядок и чи -сло знаков определяются равенствами
0 64 19 35 102 2 7 10 ; 2 2 0,3 10 .p n
При вводе точного значения числ а x в ЭВ М обычно его округляют и приближенно записывают в виде
1
2 2 .n
p kk
kx x
-Абсолютная погрешность такой записи числа не превышает едини цы последнего разряд а в x , то есть
2p nx x x ,
при этом относительная погрешность числа равна
1
22
2 2
p nnx
x np k
kk
x
.
7.1.3. Верные знаки приближенного числа
. Приближенные числа принято записывать с верными знаками Если — (основание системы счисления 2, 3, 8, 10, 16),обычно равно
то число может быть представлено в виде
1 11 2 ... ...m m m n
nx ,
где 1 0 .
Created with novaPDF Printer (www.novaPDF.com)

133
, , Заметим что так как обычно точное значение числа неизвестно то , « »учитываются предельные погрешности при этом слово предельная
.опускается Приближенное число x имеет n верных знаков, если для абсолютной
погрешности справедливо неравенство1m n
xA . , Для десятичной системы счисления если 0,5 , , говорят что
число x имеет n верных знаков в узком смысле, а если 1,0 , -то гово, рят что число x имеет n верных знаков в широком смысле. Если число
имеет n , верных знаков то цифр ы 1 2, ,...,n n называются -сомнительными.
, Относительная погрешность числа содержащего n ,верных знаков определяется соотношением
1 11 1
111 2 1...
m n m nn n
x m m m
.
-На практике обычно используется понятие числа с верными знака . , ми в узком смысле Тогда можно сказать что абсолютная погрешность
-числа с верными знаками равна половине последнего правильного раз. , -ряда Отметим также что при записи числа с верными знаками необ
.ходимо пользоваться правилами округления чисел
П р и м е р -Записать с верными знаками в узком смысле приближенное значе
ние числа x, :если известна его абсолютная погрешность
0,009665212; 0,0000031xx A . Запишем число x в виде
3 4 59 10 6 10 6 10 ...x .Тогда 3m . , Кроме того представим значение Ax в виде
50,31 10xA . Н еравенство для определения значения n, -которое ха , рактеризует число верных знаков примет вид
5 3 10,31 10 0,5 10 n .
Так как 0,31 0,5 , то верным будет неравенство 5 3 110 10 n . , Таким образом получили неравенство для степеней с одинаковыми
, . -основаниями большими единицы В этом случае можно записать нера венство относительно показателей степене й 5 3 1n , -из которо
го получим 3n . Минимальное значение n 3 -характеризует количе ство верных знаков в числе x. Число x имеет три верных знака
и с учетом правил округления его можно записать в виде x 0,00967. Округление вносит погрешность в число x, поэтому в промежуточных
.вычислениях оставляют одну или две сомнительные цифры
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

134 . . .Г Н Решетникова Моделирование систем
, , Заметим что если наприм , ер 50,7 10xA , -то значение погреш ности необходимо представить в виде 40,07 10xA для то , го чтобы
выполнялось неравенство 0,07 0,5 и можно было бы продолжить . приведенные выше рассуждения В этом случае n 2, и число x будет
.иметь два верных знака
7.1.4. Классификация погрешностей
-В вычислительной математике большинство задач может быть за писано в виде
y A(x), где y и x принадлежат пространс твам 1R и 2R ; A(x) — некоторая
. заданная функция Задача состоит либо в отыскании y по заданному x, либо в отыскании x по заданному y. , Основным методом при помощи
,которого в вычислительной математике решают поставленные задачи является замена пространс тв 1R , 2R и функции A -некоторыми други
ми пространства ми 1R , 2R и функцией A , п ри этом замена должна , -быть сделана таким образом чтобы решение аппроксимирующей за
дачи
( ),y A xгд е 1x R , 2y R , было - -в каком то смысле близким к точному реше
, .нию исходной задачи и его можно было бы практически отыскать За счет погрешности исходных данных и округления фактически
решенной является задача
( )y A x . -При этом полная погрешность решения задачи может быть записа
на в виде
( ) ( )y y y y y y . , —Первая скобка характеризует погрешность метода а вторая
, погрешность возникающую за счет неточности исходных данных , и округления которая называется вычислительной погрешностью.
, -Таким образом полная погрешность результатов вычислений склады .вается из вычислительной погрешности и погрешности метода
Общепринятой является следующая классификация погрешностей.1. Неустранимая погрешность H — , -это погрешность обусловлен ная неточностью исходных данных и несоответствием математической
.модели реальному процессу2. Погрешность метода М -возникает при замене исходной матема
. тической задачи на аппроксимирующую задачу Необходимость такой , замены обусловлена тем что часто исходную задачу точно невозможно - .решить из за ограниченных памяти и быстродействия ЭВМ
Created with novaPDF Printer (www.novaPDF.com)

135
3. Погрешность округления ОК -обусловлена ограниченной разряд , . -ной сеткой используемой при представлении чисел в ЭВМ Округле , ние данных производится также при их вводе в ЭВМ выполнении
.арифметических операций и выводе данных4. Полнаяпогрешность П обусловлена всеми перечисленными выше
. факторами На практике полную погрешность вычисляют как сумму неустранимой погрешности и погрешности метода
H MП . -Для вычислительно устойчивых алгоритмов влиянием погрешнос
.ти округления обычно пренебрегают При решении реальных задач нет смысла применять численные методы с погрешностью мето да М , -существенно меньшей чем значе
ние неустранимой погрешности H . Э , то означает что погрешность .метода должна быть согласована с неустранимой погрешностью
7.1.5. Погрешность функции многих переменных
-Рассмотрим зависимость абсолютной и относительной погрешнос . тей функции от соответствующих погрешностей ее аргументов При -этом функцию можно рассматривать как модель вычислительного про.цесса
Пусть 1 2( , ,..., )ny f x x x — заданная функция n аргументов 1 2, ,x x..., nx , по значениям которых требуется определить y. Будем пре -дпо
, :лагать что1) функци я 1 2( , ,..., )nf x x x не -прерывно дифференцируема в облас
;ти определения своих аргументов2) величину yA н ;еобходимо вычислить с небольшой точностью3) -погрешности аргументов настолько меньше значений соответ
, .ствующих аргументов что в сумме ими можно пренебречь По определению имеем
* * *1 2 1 2
1 21
( , ,..., ) ( , ,..., )
( , ,..., ) ,i i
y n n
n
x n xi
f x x x f x x x
f
где 1 2( , ,..., )n — , некоторая точка отрезка соединяющего
* * * *1 2( , ,..., )nx x x x и 1 2( , ,..., )nx x x x , а ( )
ixf — ч астная производная
функции f по ix в точке , 1,i n . П оследнее соотношение получено . согласно формуле конечных приращений Учитывая предположение
, относительно малости погрешностей аргументов заменим ( )ixf на ( )
ixf x и получим
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

136 . . .Г Н Решетникова Моделирование систем
1
( )i i
n
y x xi
f x
и 1
( )i i
n
y x xi
A f x A
. (7.1)
-Относительные погрешности функции будут определяться следую :щим образом
1 1
1 1
( ) ( );
( ) ( )
( ) ( ).
( ) ( )
i i
i i
i i
i i
n nx i x
y x xi i
n nx i x
y x xi i
f x x f x
f x f x
f x x f xA
f x f x
(7.2)
П р и м е р ы1. :Сложение
1
n
kk
y x
; 1
k
n
y xk
A A
; 1
k
nk
y xk
xy
.
2. :Вычитание
1 2y x x ; 1 2y x xA A A ;
1 2
1 2y x x
x xy y
.
-Абсолютная погрешность операции вычитания равна сумме абсо . , лютных погрешностей уменьшаемого и вычитаемого Отметим что
относительная погрешность при вычитании близких чисел может быть , очень большой поэтому при написании программ необходимо избегать
. -операций вычитания близких чисел В этом случае целесообразно пре , -образовать выражение таким образом чтобы операция вычитания близ
. , -ких чисел исключалась Например использование в программе форму лы 3 3( )z r a r при малом a п риведет к увеличению относительной
, -погрешности результата а если эту формулу записать в преобразован ном виде 2 2 33 3z r a ra a , то такого увеличения относительной
.погрешности уже не будет3. :Взвешенное суммирование
1 1 1
; ;k k
n n nk k
k k y k x y xk k k
xy x A A
y
.
4. :Умножение
1 21 1
; ;k k
n n
n y x y xkk k
yy x x x A A
x .
5. :Деление
1 2 1 2
112 2
2 2 2
1, ( 0); ; .y x x y x x
xxy x A A A
x x x
Created with novaPDF Printer (www.novaPDF.com)

137
6. :Возведение в степень1( 0); ;m m
y x y xy x x A mx A m .
, , Так как погрешности суммируются то может произойти так что через достаточно большое число операций погрешности станут столь
, . большими что полностью исказят результаты вычислений В связи , -с этим необходимо всегда учитывать влияние погрешностей возника
.ющих при моделированииВеличины
1
1
( ,..., )( ,..., ) , 1, ,ii x n
i n
x f x xS x x i n
y
называются чувствительностями. Они определяют степень влияния погрешности i- .го аргумента на погрешность результата
П р и м е р Рассмотрим задачу вычисления функции
arcsin( )y x . Чувствительность для этой функции определяется по формуле
2( )
1 arcsin( )
xS x
x x
.
Если значение x 1, находится вблизи то чувствительность будет, , — , . . -высокой а значит исходная задача неустойчива т е малые откло
.нения исходных данных приводят к большим отклонениям результата
7.2. Приближение данных
-При моделировании систем достаточно часто приходится осуще , , ствлять приближение данных заданных таблично непрерывными
. , , функциями Такие задачи возникают например при моделировании (систем управления для нестационарных моделей объектов моделей
, -движения самолета на взлете и посадке движения судна при измене . .). , нии курса и т д Основными методами которые используются для
, ,построения приближающих функций являются интерполирование- , .сплайн функции аппроксимация методом наименьших квадратов
7.2.1. Интерполирование
Пу сть задана таблица значений неизвестной функции ( )y f x в точках 0 1 0 1, , , ( , )n nx x x x x x , -и необходимо определить зна
чение этой функции в некоторой точке x, не совпадающей с , 0,ix i n . Это типичная постановка задач интерполяции (если 0 nx x x ) или
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

138 . . .Г Н Решетникова Моделирование систем
экстраполяции ( если 0x x или nx x ). Точки 0 1, ,..., nx x x -называют ся узлами интерполирования, x — точкой интерполирования.
В математике под интерполированием -понимается задача нахожде - -ния неизвестного значения какой либо величины по нескольким изве
, , стным ее значениям и может быть по нескольким значениям других связанных с нею велич ( , ). -ин например ее производных Без допол нительных предположений о функции ( )y f x эта задача является
, неопределенной и за f(x) мож , но принять любое число если только x .неявляетсяоднимизузловтаблицы
, Предположим что рассматривается множество F функций f,об . ладающих некоторыми свойствами Рассмотрим семейство функций 0 1( , , ,..., )n nx , определенных на интервале [a,b], содержащем
, все узлы интерполирования и зависящих от параметров , 0,i i n . , Будем полагать что
0 1( ) ( , , , , ).n nf x x
Относительно функций n :известны следующие предположения1) функции известны при всяких 0,n -и определены на отрез
[ке a,b] для любых значений параметров 0 1, , , n ;2) с увеличением n семейство функций n расши ;ряется3) при всяком n функции семейства n -обладают теми же свой
, ствами что и функции F;4) для всякой функции f F и л юбого числа 0 существует
такое n и такие значения параметров * * *0 1, , , n , что при всех
,x a b выполняется неравенство
* * *0 1( ) ( , , , , )n nf x x
(э [то условие обеспечивает возможность равномерного на a,b] сколь угодно точного приближения любой функции f F с п -омощью функ
ций из последовательности семейств n , -при этом семейство функ ций n называется полным для множества F);5) параметры , 0, ,i i n -выбираются из условия совпадения функ
ций f и n в узлах , 0,ix i n . Это приводит к системе уравнений
0 1( ) ( , , , , ), 0, .i n i nf x x i n (7.3)
Если n — нелинейная функция относительно параметров 0 1, , , n , (7.3) то система будет нелинейной и ее решение может быть
. только приближенным Поэтому чаще всего задают функцию n -ли нейной относительно параметров 0 1, , , n , то есть в виде
0 1 0 0 1 1( , , , , ) ( ) ( ) ( )n n n nx u x u x u x ,
Created with novaPDF Printer (www.novaPDF.com)

139
где ( )iu x , 0,i n , — линейно независимые координатные ,функции определенные на [a,b]. При этом сис (7.3) тема примет вид
0 0 0 0 0
0 0
( ) ... ( ) ( );
..........................................
( ) ... ( ) ( ).
n n
n n n n n
u x u x f x
u x u x f x
(7.4)
(7.4) ,Система имеет единственное решение тогда и только тогда когда ее определитель
0 0 0
0
( ) ( )
0
( ) ( )
n
n n n
u x u x
u x u x
. (7.5)
Последовательности функций ( ), 0, ,iu x i n -для которых опреде (7.5) литель отличен от нуля при всяких несовпадающих значениях
, , 0,ix a b i n , называются последовательностями Чебышева. Часто в качестве функций n -используются алгебраические мно
гочлены
0 1( ) nn nP x x x . (7.6)
(7.4) Система в этом случае имеет вид
0 1 0 0 0
0 1
... ( );
...
... ( ),
nn
nn n n n
x x f x
x x f x
(7.7)
а ее определитель является определителем Вандермонда
0 0
1 1
1
1,
1
n
n
nn n
x x
x x
x x
к оторый отличен от нуля для любых несовпадающих узлов , 0,ix i n . , (7.7) , -Таким образом система имеет единственное решение и интерпо
лирование функции f(x) по ее значениям в узлах , 0,ix i n , -с помо щью многочлена ( )nP x всегда в . ,озможно и единственно Кроме того
, [согласно теореме Вейерштрасса если отрезок a,b] -конечный и замк нутый и функция f(x) непрерывна на нем вместе с производными
первых m , порядков то для всякого 0 существует алгебраическиймногочл ен ( )nP x некоторой степени n, для которого при любых ,x a b
выполняются неравенства
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

140 . . .Г Н Решетникова Моделирование систем
( ) ( )( ) ( ) , 0,i inf x P x i m .
, Таким образом если удачно расположить узлы на [a,b], то можно получить достаточно хорошие результаты при вычислении значений
функции f(x) и ее производных в любой точке отрезка [a,b]. (7.7) . Решим систему по правилу Крамера Тогда
0
( ) , 0,n
ijii j
jf x i n
,
где i — , определитель полученный из заменой i-го -столбца столб ;цом свободных членов ij — алгебраическое дополнение для j-го -эле
мента в i при разложении по элементам i-го .столбцаН айденные таким образом параметры 0 1, , , n подставим
(7.6), в приведем подобные относительно ( ), 0,jf x j n , и получим
0
( ) ( ) ( ),n
n j jj
P x f x x
где ( ), 0, ,j x j n — алгебраические многочлены n- . -й степени Учи
тывая условие совпадения f(x) и ( )nP x в узлах интерполирования, 0,ix i n , получим
0, ,( )
1, .j ii j
xi j
Т ,аким образом ( )j x есть многочлен n-й , степени равной нулю в n точках 0 1 1, , , , ,j j nx x x x , , , и следовательно представимый в виде
0 1 1( ) ( ) ( )( ) ( )j j j j nx c x x x x x x x x .Константу jc определим из условия
( ) 1j jx .
Тогда
0 1 1
1( ) ( )( ) ( )j
j j j j j j nc
x x x x x x x x
и
0 1 1
0 1 1
( ) ( )( ) ( )( )
( ) ( )( ) ( )j j n
jj j j j j j n
x x x x x x x xx
x x x x x x x x
.
Таким образ , , ом получим функцию которая называется -интерполя ционным многочленом Лагранжа и обозначаетс я ( )nL x :
0 1 1
0 1 10
( ) ( )( ) ( )( ) ( )
( ) ( )( ) ( )
nj j n
n jj j j j j j nj
x x x x x x x xL x f x
x x x x x x x x
.
Created with novaPDF Printer (www.novaPDF.com)

141
Обозначим через ( )n x многочлен (n+1)-й степени вида
0 1( ) ( )( ) ( )n nx x x x x x x . Тогда многочлен Лагранжа запишется в виде
0
( )( ) ( )
( ) ( )
nn
n jj n jj
xL x f x
x x x
.
-Для вычислений на ЭВМ удобнее использовать многочлен Лагран жа в виде
00
( )( ) ( )
( )
n ni
n ji j iji j
x xL x f x
x x
.
П р и м е р , Вычислим значение функции заданной таблицей, , ( ), 0,3i ix f x i ,
в точке x 0,354 . -с помощью многочлена Лагранжа Определим абсо , лютную и относительную погрешности результата ес ли ( )if x заданы
с верными знаками, а ix — т .очно
i 0 1 2 3
ix –1 –0,424 0,521 1
( )if x –0,416 0,117 –0,494 –1,325
Для наглядности запишем формулу Лагранжа в виде3
30
( ) ( ) ( ),Фj jj
L x f x x
где3
0
( )( )Ф
( )i
jj ii
i j
x xx
x x
.
:При непосредственном вычислении получаем
j 0 1 2 3
( )Фj x –0,048 0,188 0,988 –1,129
:и значение многочлена Лагранжа вычисляется следующим образом
3 ( ) 0, 416 ( 0,048) 0,188 0,117
0,988 ( 0,494) 0,129 ( 1,325) 0,276.
L x
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

142 . . .Г Н Решетникова Моделирование систем
Формула для определения абсолютной погрешности многочленаЛагран жа
3( )L xA относительно погрешностей функции ( )if xA -определя (7.1). ется в соответствии с Так как величины ( )if x заданы с верными
, знаками то 3( ) 0,5 10 , 0,3.
if f xA A i Тогда
3
34
( )0
( ) 6,769 10L x f jj
A A x
.
Относительная погрешнос ть3 ( )L x м -ногочлена Лагранжа вычисля
ется по определению
3
3
4( )
( )3
6,769 100,002.
( ) 0,276L x
L x
A
L x
Неравенство для определения верных знаков в 3 ( )L x имеет вид
2 1 10,06769 10 0,5 10 n ,
, откуда следует что значение 3 ( )L x .имеет два верных знака
, Чем больше узлов используется для интерполирования тем точнее многочлен Лагранж а ( )nL x определяет значение интерполируемой
функции в точке x. -Но с увеличением числа узлов увеличивается вы .числительная погрешность -На практике поступают следующим обра
: зом выбирают n узлов и вычисля ют ( )nL x , , -затем добавляют узел вы числяют 1( )nL x и сравнивают значения ( )nL x и 1( )nL x , и так до тех
, пор пока для некоторого k- го значения ( )n kL x и 1( )n kL x -не совпа . дут в пределах требуемой точности вычислений При этом каждый раз .все вычисления необходимо повторять заново
Если требуется вычислить только значение интерполяционного многочлена Лагранжа в заданной точке x, то удобнее использовать схему
Эйткена, .которая имеет следующий вид
i ix ( )if x 1, ( )i iL x 2, 1, ( )i i iL x ... 0,1,2, , ( )nL x
0 0x 0( )f x
1 1x 1( )f x 0,1( )L x
2 2x 2( )f x 1,2( )L x 0,1,2( )L x ...
... ... ... ... ... ... ...
n nx ( )nf x 1, ( )n nL x 2, 1, ( )n n nL x ... 0,1,2, , ( )nL x
В столб це 1, ( )i iL x з аписываются значения в точке x многочленов :Лагранжа первой степени по двум соседним узлам
Created with novaPDF Printer (www.novaPDF.com)

143
1 1
1,1
( )
( )( ) , 1, .
i i
i ii i
i i
f x x xf x x x
L x i nx x
-В следующем столбце записываются значения многочленов Лаг , , -ранжа второй степени при этом используются значения вычислен
:ные в предыдущем столбце
2, 1 2
1,2, 1,
2
( )
( )( ) , 2, .
i i i
i i ii i i
i i
L x x x
L x x xL x i n
x x
, Наконец в последнем столбце записывается значение многочлена
Лагранжа n- й степени
0,1,2,... 1 0
1,2,3,...,0,1,2,...,
0
( )
( )( ) .
n
n nn
n
L x x x
L x x xL x
x x
, -Достоинство схемы Эйткена состоит в том что можно не использо
, -вать сразу все узлы интерполирования а начинать вычисления с бли жайших к точке x , -узлов а затем добавлять новые в порядке их уда ленности от точки x. В этом случае используются все предыдущие
.вычисления без пересчета
П р и м е р , Вычислим значение функции заданной таблицей , ( ), 0,3i ix f x i ,
в точке x 0,354 . -по схеме Эйткена Определим абсолютную и относи , тельную погрешности результата если ( )if x з -аданы с верными знака
,ми а ix — .точно
i 0 1 2 3
ix –1 –0,424 0,521 1
( )if x –0,416 0,117 –0,494 –1,325
:Путем непосредственных вычислений получаем схему Эйткена
i xi ( )if x 1, ( )i iL x 2, 1, ( )i i iL x 0,1,2, ,3( )L x
0 –1 –0,4161 –0,424 0,117 –0,4942 –0,204 –1,325 0,837 –0,3863 1 –0,204 –0,352 –0,287 –0,276
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

144 . . .Г Н Решетникова Моделирование систем
Для определения абсолютной погрешности необходимо построить, :схему подобную схеме Эйткена
i xi fA1, ( )i iL xA
2, 1, ( )i i iL xA 0,1,2,3 ( )L xA
0 –1 30,5 10
1 –0,424 30,5 10 0,002
2 0,521 30,5 10 45 10 46,483 10
3 1 30,5 10 48,486 10 46,905 10 46,769 10
Погрешность ( )if x равна 3( ) 0,5 10 ,
if f xA A 0,3.i
:Вычисления в таблице осуществляются следующим образом
1,
1( )
1, 1,2,3
i i
i iL x f
i i
x x x xA A i
x x
;
2, 1 1,
2, 1,
( ) ( ) 2( )
2, 2,3i i i i
i i i
L x i L x iL x
i i
A x x A x xA i
x x
;
0,1,2 1,2,3
0,1,2,3
( ) 3 ( ) 0( )
3 0
L x L zL x
A x x A x xA
x x
.
, -Значения абсолютных погрешностей вычисленных по интерполя , .ционной формуле Лагранжа и схеме Эйткена получаются равными
-Интерполяция многочленом Лагранжа имеет существенный недо: -статок при увеличении числа узлов все вычисления повторяют за
. -ново От этого недостатка избавлен другой интерполяционный много — .член многочлен Ньютона
:Введем следующие обозначения разностными отношениями первого порядка назовем величины
11
1
( ) ( )( , ) i i
i ii i
f x f xf x x
x x
;
разностными отношениями второго порядка —
1 2 11 2
2
( , ) ( , )( , , ) i i i i
i i ii i
f x x f x xf x x x
x x
. ., и т д и разностными отношениями k-го порядка —
1 11
( , , ) ( , , )( , , , ) i i k i i k
i i i ki k i
f x x f x xf x x x
x x
.
Created with novaPDF Printer (www.novaPDF.com)

145
Разностные отношения являются симметрическими функциями :своих аргументов
0 10 1 10
( )( , ,..., )
( )...( )( )...( )
nj
nj j j j j j nj
f xf x x x
x x x x x x x x
.
З апишем многочлен Лагранжа ( )nL x следу :ющим образом
0 1 0 1( ) ( ) [ ( ) ( )] ... [ ( ) ( )].n n nL x L x L x L x L x L x (7.8)
Разность 1( ) ( )k kL x L x есть многочлен k- , й степени равный нулю
в точках , 0, 1ix i k , , и следов , ательно представимый в виде
1 0 1( ) ( ) ( ) ( )k k k kL x L x c x x x x ,
где констант а kc определяется при kx x . , , Тогда учитывая что( ) ( )k k kL x f x , получим
0 1
10 1 1 1
0 1 1 10
0 1
00 1 10
( )( ) ( )
( ) ( )( ) ( )( )
( ) ( )( ) ( )
( ) ( )
( )( , , ).
( ) ( )( ) ( )
kk
k k kk
k k j k j k kj
j j j j j j kj
k k kk
jk
j j j j j j kj
f xс
x x x x
x x x x x x x xf x
x x x x x x x x
x x x xf x
f x xx x x x x x x x
:Таким образом
1 0 1 0( ) ( ) ( ) ( ) ( , , )k k k kL x L x x x x x f x x .
Подставляя полученные выражен (7.8) ия в для 1,k n , получим интерполяционный многочлен Ньютона
0 0 0 1 0 1 0 1 2
0 1 0 1
( ) ( ) ( ) ( , ) ( )( ) ( , , )
... ( )...( ) ( , ,..., ).n
n n
P x f x x x f x x x x x x f x x xx x x x f x x x
, Несмотря на более сложное строение многочлен Ньютона удобнее , , -для вычислений чем многочлен Лагранжа так как позволяет не фик
, ,сировать заранее число узлов а подключать новые узлы до тех пор .пока не будет достигнута требуемая точность вычислений
П р и м е р , Вычислим значение функции заданной табл ицей , ( ), 0,3i ix f x i ,
в точке x 0,354 c . -помощью многочлена Ньютона Определим абсолют , ную и относительную погрешности результата если значени я ( )if x
, заданы с верными знаками а ix — .точно
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

146 . . .Г Н Решетникова Моделирование систем
i 0 1 2 3
ix –1 –0,424 0,521 1
( )if x –0,416 0,117 –0,494 –1,325
C :оставим таблицу разностных отношений
i ix ( )if x 1( , )i if x x 2 1( , , )i i if x x x 0 1 2 3( , , , )f x x x x0 –1 –0,4161 –0,424 0,117 0,4252 0,521 –0,494 –0,647 –1,0333 1 –1,325 –1,735 –0,764 0,135
Разностные отношения первого порядка вычисляются по формуле
11
1
( ) ( )( , ) , 1,2,3i i
i ii i
f x f xf x x i
x x
;
—второго
1 2 12 1
2
( , ) ( , )( , , ) , 2,3i i i i
i i ii i
f x x f x xf x x x i
x x
;
—третьего
1 2 3 0 1 20 1 2 3
3 0
( , , ) ( , , )( , , , )
f x x x f x x xf x x x x
x x
.
:Значение многочлена Ньютона вычисляется следующим образом
3 ( ) 0, 416 ( 1) 0, 425 ( 1) ( 0,424) ( 1,033)P x x x x ( 1) ( 0,425) ( 0,521) 0,135 0,276x x x .
Для получения абсолютной погрешности значени я 3( )P x -необходи , -мо составить таблицу для погрешностей разностных отношений учи
, тывая ч то 3( ) 0,5 10
if f xA A .
i xi fA1( , )i if x xA
2, 1( , )i i if x x xA0 1 2 3( , , , )f x x x xA
0 –1 30,5 10
1 –0,424 30,5 10 0,002
2 0,521 30,5 10 0,001 0,002
3 1 30,5 10 0,002 0,002 0,002
Created with novaPDF Printer (www.novaPDF.com)
147
:Вычисления в таблице осуществляются следующим образом
1( , )1
2, 1,2,3
i i
ff x x
i i
AA i
x x
;
1 2 1
2, 1
( , ) ( , )( , )
2, 2,3i i i i
i i i
f x x f x xf x x x
i i
A AA i
x x
;
1 2 3 0 1 2
0 1 2 3
( , , ) ( , , )( , , , )
3 0
f x x x f x x xf x x x x
A AA
x x
.
Тогда
3 0 1 0 1 2( ) 0 ( , ) 0 1 ( , , )P x f f x x f x x xA A x x A x x x x A
0 1 2 30 1 2 ( , , , ) 0,005.f x x x xx x x x x x A
Относительная погрешност ь3( )P x для -многочлена Ньютона вычис
ляется по определению
3
3
( )( )
3
0,0050,018
( ) 0,276P x
P x
A
P x .
Неравенство для определения верных зна ков в 3 ( )P x имеет вид2 1 10,5 10 0,5 10 n ,
, откуда следует что значение 3 ( )P x .имеет два верных знака
Величина остатка или погрешности интерполирования
( ) ( ) ( )nR x f x P x
завис ит от свойств функции f, выбора узлов , 0,kx k n , -и от поло жения точки x [на a,b]. Формула Лагранжа для R(x) имеет вид
( 1)( )( ) ( )
( 1) !
n
nf
R x xn
,
где — [некоторая точка отрезка a,b]. Если обозначить
( 1)1
[ , ]sup ( )n
nx a b
M f x
,
то
1( ) ( )
( 1) !n
nM
R x xn
. (7.9)
При этом точность экстраполирования практически всегда хуже .точности интерполирования
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

148 . . .Г Н Решетникова Моделирование систем
(7.9) , Для того чтобы погрешность в была наименьшей необходимо , выбрать узлы интерполирования таким образом чтобы значение
[ , ]sup ( )n
x a bx
. было минимальным Для этого можно воспользоваться -мно
гочленами Чебышева
( ) cos arccos( )nT t n t . :Многочлены Чебышева обладают следующими свойствами
1) -являются алгебраическими многочленами соответствующей сте, пени так как 1 2( ) 1, ( )T x T x x , -а для построения многочленов бо
лее высокой степени можно воспользоваться рекуррентной формулой
1 1( ) 2 ( ) ( )n n nT x xT x T x ;
2) коэффициент при старшей степени x в ( )nT x равен 12n ;3) области определения и изме -нения многочленов Чебышева рав
[–1,1];ны
4) многочлен ( )nT x имеет n [–1,1], -корней на которые располага ются в точках
(2 1)cos , 0, 1
2kk
x k nn ;
5) многочлен ( )nT x (достигает n+1)- , й экстремум равный 1 , на[–1,1] в точках
cos , 0,kk
x k nn ;
6) многочлен ( )nT x является четным или нечетным в зависимостиот n, так как
( ) ( 1) ( )nn nT x T x ;
7) многочлены Чебышева ортогональны с весом2
1( )
1p x
x
на
[–1,1], так как
1
1
, 0,
( ) ( ) ( ) , 0,20, ;
n m
n m
p x T x T x dx n m
n m
8) графическое представление многочленов Чебышева совпадает , , , с проекциями синусов нанесенных на цилиндр например графики
1, 2, 3 10 . 7.1;многочленов Чебышева и порядков приведены на рис
Created with novaPDF Printer (www.novaPDF.com)

149
1 1
0 0x x
1 1
T x1( )1 1
T x2( )
1 1
0 0x x
1 1
T x3( )1 1
T x4( )
. 7.1Рис
9) многочлены Чебышева являются наименее отклоняющимися , от нуля так как
1[ 1,1]
1sup ( ) ,
2n n
xT x
пр , и этом справедливо утверждение что какой бы другой многочлен( )nP x степени n , , со старшим коэффициентом равным единице мы ни
:взяли
1[ 1,1]
1sup ( )
2n n
xP x
.
, Таким образом для того чтобы значение [ 1,1]
sup ( )nx
x
-было наи, меньшим необходимо в качестве функции
0 1( ) ( )( )... n nx x x x x x x
при 1, 1a b взять приведенный многочлен Чебышева 11
( )2
nnT x ,
то есть в каче стве узлов интерполирования взять корни многочленаЧебышева
(2 1)cos , 0, .
2 2ii
x i nn
Тогда для оценки погрешности будет верно неравенство
1( )2 ( 1) !
nnM
R xn
.
Если интерполирование производится на произвольном интервале[a,b], то значения [ 1,1]ix с пом ощью линейного преобразования
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

150 . . .Г Н Решетникова Моделирование систем
1( ) , 0, ,
2i it b a x b a i n [можно перевести в интервал a,b] и для оценки погрешности будет
верно неравенство1
12 1
( )( )
2 ( 1) !
nnn
M b aR x
n
.
Достаточно часто при интерполировании приходится иметь дело . с равноотстоящими узлами Тогда полагают
0 0; ; ; ; 0, .n ib a
x a x b h x x ih i nn
В этом случае интерполяционные формулы можно значительно, упростить если ввести понятие конечных разностей.
Конечной разностью k-го порядка называется величина1 1
1 , 1,2, ,k k ki i iy y y k
где
0( ); , 0, .i i i iy f x y y i n , Так как узлы лежащие вблизи точки интерполирования x, -ока , , , зывают большее влияние на результат чем узлы лежащие дальше то
-для уменьшения погрешности при построении интерполяционной фор , -мулы целесообразно привлекать сначала ближний узел а затем осталь
ные в порядке их удаленности от точки x. -При этом абсолютные вели чины слагаемых будут уменьшаться с увеличением их порядкового
, , -номера и начиная с некоторого слагаемого выйдут за пределы требуе . -мой точности В соответствии с этим построим конкретные интерполя
.ционные формулы
Формула Ньютона для интерполирования вперед
Пусть точка x [находится ближе к левому концу отрезка a,b] или . слева от него Для построения интерполяционной формулы Ньютона за
0x принимается ближайший к x , узел интерполирования а затем узлы :привлекаются в следующем порядке
0 0 0 0, , 2 , ,x x h x h x nh ,
, , при этом если это возможно за 0x -выбирается лежащий слева от точки x , . узел чтобы не попасть в ситуацию экстраполирования Тогда
многочлен Ньютона запишется в виде
0 0 0 0
0 0 0 0 0
0 0 0 0 0 0
( ) ( ) ( ) ( , )
( )( ) ( , , 2 )
( )( ) ( ( 1) ) ( , , , ).
nP x f x x x f x x h
x x x x h f x x h x h
x x x x h x x n h f x x h x nh
Created with novaPDF Printer (www.novaPDF.com)

151
Если ввести новую переменную 0x xt
h
, то
10 0 0( )( ) ( ) ( 1) ( ),ix x x x h x x ih h t t t i
, и учитывая что
00 0 0( , , , )
!
i
iy
f x x h x ihi h ,
получим
2 31 0 0 0 0 0
0
( 1) ( 1)( 2)( )
1! 2 ! 3 !( 1) ( 1)
.!
n
t t t t t tN x th y y y y
t t t ny
n
Эта формула называется формулой Ньютона для интерполированиявперед.
Формула Ньютона для интерполирования назад
Пусть точка x [находится ближе к правому концу отрезка a,b] или . -справа от него За первый узел для построения интерполяционной фор
мулы примем ближайший к x узел интерполирования и обозначим его nx . , , -При этом если возможно следует избегать ситуации экстра
. полирования Далее узлы для построения интерполяционной формулы :следует привлекать в следующем порядке
, , 2 , , .n n n nx x h x h x nh
Введем новую переменную nx xt
h
. Тогд , -а преобразовывая ана
, логично предыдущему получим формулу Ньютона для интерполированияназад
22 1 2
33 0
( 1)( )
1! 2 !( 1)( 2) ( 1) ( 1)
... .3 ! !
n n n n
nn
t t tN x th y y y
t t t t t t ny y
n
Интерполяционные формулы Гаусса
Если точка интерполирования x находится в середине отрезка [a,b] вблизи узла kx , , причем правее его то есть kx x , то для построения
-интерполяционной формулы узлы привлекаются в следующем по:рядке
, , , ..., , .k k k k kx x h x h x ih x ih
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

152 . . .Г Н Решетникова Моделирование систем
Тогда после введения новой переменной kx xt
h
-и соответству
ющих преобразований получается формула Гаусса для интерполированиявперед, которая имеет вид
2 22 3
1 1 1
2 2 2 22 1
1
2 2 2 22
( 1) ( 1 )( )
1! 2 ! 3 !
( 1 ) ( ( 1) )(2 1) !
( 1 ) ( ( 1) )( ).
(2 ) !
k k k k k
ik i
ik i
t t t t tG x th y y y y
t t t iy
i
t t t i t iy
i
Если точка x находится вблизи узла kx , причем kx x , т о для -построения интерполяционной формулы узлы привлекаются в следую
:щем порядке
, , , ..., , ,k k k k kx x h x h x ih x ih
и после введения переменной kx xt
h
-и соответствующих преобра
зований получим формулу Гаусса для интерполирования назад
2 22 3
2 1 1 2
2 2 2 22 1
2 2 2 22
( 1) ( 1 )( ) ...
1! 2! 3 !
( 1 ) ( ( 1) )(2 1)!
( 1 ) ( ( 1) )( ).
(2 ) !
k k k k k
ik i
ik i
t t t t tG x th y y y y
t t t iy
i
t t t i t iy
i
Если функция f(x) , достаточно гладкая то разности , 1,2,...jiy j ,
убывают с ростом j и для некоторого j .они практически равны нулю -Но так как с ростом порядка разностей растет погрешность их вычис
, -ления то привлечение таких разностей для построения интерполяци . онной формулы может существенно исказить результат Существует
,следующее правило определения максимального порядка разностей которые ведут себя правильно, -то есть не вносят дополнительной по
.грешности в значение интерполяционного многочлена Пусть значени я , 0,iy i n , заданы с абсолютной погрешностью .
Так как конечные разности определяются по формуле1 0
1 , 0,1,2,..., , 0,j j ji i i i iy y y j y y i n
, то абсолютная погрешность разностей первого порядка р авна 2 , -вто
— рого порядка 4 , …, s-го — порядка 2s . , Тогда если одновременно выполняются неравенства
Created with novaPDF Printer (www.novaPDF.com)

153
1 1max 2 ; max 2 ,j j j ji i
i iy y
, ,то максимальный порядок разностей которые ведут себя правильноравен j. Разности (j+1)-го , -порядка уже меньше погрешности поэто
-му их использование приведет к искажению результата и при построе .нии интерполяционной формулы они отбрасываются
П р и м е р Вычислить в точках x , значения функции заданной на интервале
[1;1,5] с шагом h 0,1. -При вычислениях использовать только пра , ,вильные конечные разности считая что значения , 0,5iy i , заданы
.с верными знаками .Построим таблицу конечных разностей следующего вида
ix iy 1iy
2iy
3iy
4iy
5iy
0x 0y
1,0 –1,000
1y
1x 1y 0,1440
2y
1,1 –0,8561
1y 0,085
0
3y
2x 2y 0,2291
2y –0,013
0
4y
1,2 –0,6272
1y 0,072
1
3y –0,008
0
5y
3x 3y 0,3012
2y –0,021
1
4y 0,002
1,3 –0,3253
1y 0,052
2
3y –0,006
4x 4y 0,3533
2y –0,026
1,4 0,0274
1y –0,004
5x 5y 0,378
1,5 0,405
30,5 10 0,001 0,002 0,004 0,008 0,016
-Для удобства в таблице под именем переменной приведены ее кон .кретные значения
Так как значения , 0,5iy i , за , даны с верными знаками то их абсолютная погрешност ь 30,5 10yA . В посл едней строке таблицы -приведены погрешности для значений функции и конечных разно
. стей Погрешность для разности пятого порядка больше значения , — самой разности поэтому разности пятого порядка неправильные
.и в вычислениях использоваться не должны
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

154 . . .Г Н Решетникова Моделирование систем
1. x 1,02. Так как x , находится вблизи начала таблицы то используется формула Ньютона для интерполирования вперед и за
начальную точку берет ся 0x . Тогда
0 0,2
x xt
h;
1 0( 1) ( 1)( 2)
( ) 1 0,144 0,085 ( 0,013)2 6
t t t t tN x th t
( 1)( 2)( 3)( 0,008) 0,9784.
24t t t t
2. x 1,098. Точка x находится в начале таблицы вблизи точки 1x , -поэтому используется формула Ньютона для интерполирования впе
, , , -ред а для того чтобы избежать ситуации экстраполирования за на чальную точку беретс я 0x . Тогда
0 0,98
x xt
h и 1 0( ) 0,8597N x th .
3. x 1,54. Так как x , -находится вблизи конца таблицы то исполь зуется формула Ньютона для интерполирования назад и за начальную точку бер ется 5x . Тогда
5 0,4x x
th
;
2 5( 1) ( 1)( 2)
( ) 0,405 0,378 0,025 ( 0.026)2 6
t t t t tN x th t
( 1)( 2)( 3)( 0,006) 0,5518
24t t t t .
4. x 1,34. Так как x , -находится вблизи середины таблицы причем 3x x , то используется формула Гаусса для интерполирования
вперед и за начальную точку берется 3x . Тогда
3 0,4x x
th
;
1 3( 1) ( 1)( 2)
( ) 0,325 0,301 0,052 ( 0,021)2 6
t t t t tG x th t
( 1)( 2)( 3)( 0,006) 0,2119
24t t t t .
5. x 1,27. Так как x , -находится вблизи середины таблицы при чем 3x x , то используется формула Гаусса для интерполирования
назад и за начальную точку берется 3x . Тогда
3 0,3x x
th
;
Created with novaPDF Printer (www.novaPDF.com)

155
2 3( 1) ( 1)( 2)
( ) 0,325 0,353 0,052 ( 0,026)2 6
t t t t tG x th t
( 1)( 2)( 3)( 0,006) 0,4176
24t t t t .
7.2.2. -Сплайн функции
[Пусть на отрезке a,b] задано разбиени е 0 1 2a x x x nx b , в узлах которого известны значения достаточно гладкой
функции y f(x): ( ), 0,i iy f x i n . [Узлы разбиения делят отрезок a,b]на n отрезко в 0 1 1 2 1, , , , , , .n nx x x x x x
Сплайном называется составная функция P(x), которая вместе с производными нескольких порядков непрерывна на всем отрезке
[a,b], а на каждом частичном отрезке 1,i ix x в отдельности является составляющей функцией
0 0( ) ( , ,..., , ,..., ), 1,i n nP x F i x x y y i n .
, Рассмотрим частный случай когда функции ( )iP x являются алгебраическими многочленами вида
( )1
0
( ) ( ) , 1, ,N
i ki ik
kP x x x i n
где ( )ik — , коэффициенты определяемые для каждого частичного
.отрезка Максимальная по всем частичным отрезкам степень многочлена
называется степенью сплайна, а разность между степенью сплайна [и порядком наивысшей непрерывной на a,b] — производной -дефек
том сплайна. -Среди существующих сплайнов наиболее широкое распростране
, , .ние получили линейные параболические кубические сплайны Рассмотрим алгоритмы построения коэффициентов перечисленных
.сплайнов
Линейный сплайн
Сплайн P(x) состоит из линейных многочленов вида
1 1( ) ( ), , , 1,i i i i i iP x a b x x x x x i n . (7.10)
Параметры сплайна ,i ia b , 1,i n , -определим из условия непрерывности P(x) на [a,b] и требования совпадения значений сплайна с функцией f(x) в узловых точках
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

156 . . .Г Н Решетникова Моделирование систем
1( ) ( ), 0, 1;i i i iP x P x i n (7.11)
( ) , 0,i i iP x y i n . (7.12)Обозначим 1i i ih x x . -Тогда для каждого из многочленов мож
но записать
( ) , 0, ;i i i i i iP x a b h y i n
1 1( ) , 1,i i i iP x a y i n , (7.10) и для определения коэффициентов линейного сплайна получимуравнения
1, 1,i ia y i n ;
1 , 1, .i ii
i
y yb i n
h
П р и м е р
Для значений , , 0,4i ix y i ,
i 0 1 2 3 4
ix 1 2,5 3,5 5,5 6
iy 0,9108 0,7237 –0,2004 –0,5184 –0,0848
.построим линейный сплайн Коэффициенты сплайна имеют следующие значения
i 1 2 3 4
ia 0,9108 0,7237 –0,2004 –0,5184
ib –0,1247 –0,9241 –0,159 0,8671
. 7.2 , На рис в виде точек приведены заданные значения линейный ( ), сплайн ломаная линия а также для сравнения график функции
( ) sin( ) 0,1 ln(1 )f x x x , з -начения которой являются исходными дан .ными для построения сплайна
f x( )
x1 2 3 4 5 6
y
1
0,5
0
0,5
1
. 7.2Рис
Created with novaPDF Printer (www.novaPDF.com)

157
Параболический сплайн
Сплайн P(x) , состоит из парабол то есть многочлен ( )iP x имеет вид
21 1
1
( ) ( ) ( ) ,
, , 1, .
i i i i i i
i i
P x a b x x c x x
x x x i n
-Для определения коэффициентов сплайна дополнительно к усло
(7.11), (7.12) -виям потребуем непрерывности первой производной сплай [на на интервале a,b], то есть
1( ) ( ), 1, 1i i i iP x P x i n . (7.13)
Обозначив 1, 1,i i ih x x i n , , , и учитывая что
1( ) 2 ( )i i i iP x b c x x , (7.11), (7.12) (7.13) в соответствии с формулами и получим
1i ia y ; (7.14)2
i i i i i ia b h c h y ; (7.15)
1 2i i i ib b c h . (7.16)
Тогда коэффициенты , 1,ia i n , (7.14),определяются согласно (7.15) а можно записать в виде
1 , 1,i ii i i
i
y yb h c i n
h
. (7.17)
Если теперь запишем выражения для ib и 1ib в (7.17)виде (7.16), и подставим их в то получим
1 1 , 1, 1i i i i ic h c h g i n , (7.18)где
11
1
( ), 1, 1i ii i
ii i
y yy yg i n
h h
.
, (7.14), (7.17) (7.18) Таким образом уравнения и образуют систему (3из n–1) уравнений для определения 3n .коэффициентов сплайна
,Недостающее уравнение получается из дополнительного условия которое накладывается на значение производной сплайна на конце
[интервала a,b], в виде
( ) 0nP x или
2 0n n nb c h . (7.19)
(7.19) Если подставить в выражение для nb (7.17), из то формулу(7.19) можно переписать в виде
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

158 . . .Г Н Решетникова Моделирование систем
n n nc h g ,
где 1n nn
n
y yg
h .
Тогда
nn
n
gc
h ; (7.20)
1 1 , 1,1i i ii
i
g c hc i n
h . (7.21)
, Таким образом параметры параболического сплайна вычисляются : -в следующем порядке сначала в обратном порядке вычисляются коэффициенты , ,1ic i n , (7.20), (7.21), по затем , 1,ib i n , (7.16)по
(7.17), или а затем , 1,ia i n , (7.14).по
П р и м е р
Для значений , , 0,4i ix y i ,
i 0 1 2 3 4
ix 1 2,5 3,5 5,5 6
iy 0,9108 0,7237 –0,2004 –0,5184 –0,0848
.построим параболический сплайн :Коэффициенты сплайна имеют следующие значения
i 1 2 3 4ai 0,9108 0,7237 –0,2004 –0,5184bi –0,4533 0,2039 –2,0521 1,7341ci 0,219 –1,128 0,9466 –1,7341
. 7.3 , -На рис приведены в виде точек заданные значения параболи , , , ческий сплайн а также для сравнения график функции ( ) sin( )f x x
0,1 ln(1 )x , значения которой являются исходными данными для .построения сплайна
f x( )
1 2 3 4 5 6x
1
0,5
0
0,5
11,5
y
. 7.3Рис
Created with novaPDF Printer (www.novaPDF.com)

159
Кубический сплайн
Сплайн P(x) состоит из гипербол вида2 3
1 1 1
1
( ) ( ) ( ) ( ) ,
[ , ], 1, .
i i i i i i i i
i i
P x a b x x c x x d x x
x x x i n
Для определения параметров сплайна потребуем дополнительно
(7.11), (7.12), (7.13) -к выполнения условия непрерывности второй производной
1( ) ( ), 1, 1i i i iP x P x i n . (7.22) Первая и вторая производные отдельных многочленов сплайна
соответственно равны
21 1( ) 2 ( ) 3 ( ) ;i i i i i iP x b c x x d x x
1( ) 2 6 ( )i i i iP x c d x x .
, Тогда обозначив 1,i i ih x x получим
1 1( ) , 1,i i i iP x a y i n ; (7.23)2 3( ) , 1,i i i i i i i i i iP x a b h c h d h y i n ; (7.24)
21 2 3 , 1, 1i i i i i ib b c h d h i n ; (7.25)
1 3 , 1, 1i i i ic c d h i n . (7.26) (7.13) (7.22).Последние два уравнения получены из и (7.23)–(7.26) Уравнения составляют систему из (4n–2) уравнений
для определения 4n . -параметров сплайна Для получения двух недо стающих уравнений потребуем выполнения дополнительных условий
[на концах интервала a,b]:
0( ) 0P x ; (7.27)
( ) 0nP x . (7.28) (7.27) Тогда из следует
1 0с , (7.29) (7.28) а из получим
1 3 0n n n nd hс с .
(7.26) Из уравнения выразим id :
1 , 1,3
i ii
i
c cd i n
h , (7.30)
(7.24), (7.23), и подставляя его в с учетом получим
1 1( 2 ), 1,
3i i i i i
ii
y y h c cb i n
h
. (7.31)
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

160 . . .Г Н Решетникова Моделирование систем
Если выражения для 1,i ib b и id (7.25), подставить в то получим
1 1 1 2 12( )i i i i i i i ih c h h c h c g , (7.32)где
1 11
13 , 1, 1i i i i
ii i
y y y yg i n
h h
.
(7.32) Уравнения образуют систему из n–1 -уравнений относитель но неизвестных 2 3, , , nc c c . -Эта система является системой с трехдиа
гональной матрицей вида
1 2 2
2 2 3
3
1 1
2( ) 0 0
2 0 0
0 0 0
0 0 2n n n
h h hh h h
h
h h h
и вектором свободных членов 2 3, ,...,T
ng g g , где Т — -символ тран
.спонирования Решение таких систем осуществляется методом прогонки, согласно
которому решение представляют в виде
1 1 2 1, 1,1i i i i i nс с , (7.33)
где 1 1,i i — . -неизвестные коэффициенты Чтобы получить выраже , ния для этих коэффициентов запишем формулы для определения 1ic
и ic (7.33) , согласно и подст (7.32), -авив их в сравним полученное вы (7.33). , -ражение с При сравнении получим что выражения для опреде
ления неизвестных коэффициентов 1 1,i i будут иметь вид
11
1
11
1
;2( )
, 1, 1.2( )
ii
i i i i
i i ii
i i i i
hh h h
g hi n
h h h
(7.34)
, (7.29), При этом учитывая полагают 1 10, 0 . , Таким образом порядок вычисления коэффициентов кубического
: сплайна следующий сначала определяют коэффициенты ic , 2,i n , , для чего необходимо осуществляя прямой ход метода прогонки
(7.34), по формулам найти значени я 1 1, , 1, 1i i i n , при
1 10, 0 , , , а затем обратным ходом считая 1 0,nc -по форму
(7.33) ле вычислить 1 2, , ,n nc c c . , (7.29),При этом согласно 1 0.c Остальные коэффициенты сплайна определяются по следующим
форму :лам ia — (7.23), id — (7.30), ib — (7.31), 1,i n .
Created with novaPDF Printer (www.novaPDF.com)

161
П р и м е р
Для значений , , 0,4i ix y i :
i 1 2 3 4 5
ix 1 2,5 3,5 5,5 6
iy 0,9108 0,7237 –0,2004 –0,5184 –0,0848
.построим кубический сплайн :Коэффициенты сплайна имеют следующие значения
i 1 2 3 4ai 0,9108 0,7237 –0,2004 –0,5184bi 0,146 –0,6661 –0,8988 0,7030ci 0 –0,5414 0,3088 0,4921di –0,1203 0,2834 0,0306 –0,3281
. 7.4 , -На рис приведены в виде точек заданные значения кубиче
, ский сплайн а также для сравнения график ф ункции ( ) sin( )f x x
0,1 ln(1 )x , значения которой являлись ис ходными данными для .построения сплайна
x
y
f x( )
1 2 3 4 5 6
1
0,5
0
0,5
1
. 7.4Рис
:Полиномиальные сплайны имеют ряд существенных недостатков1) при увеличении степени составных многочленов вычисление их
- -коэффициентов значительно усложняется из за увеличения числа урав ( );нений условий непрерывности функций и их производных
2) требуется достаточно большой объем памяти для храненияинформации о сплайне (значений , , 0,i ix y i n , и коэффициентов
).сплайнов -От этих недостатков в значительной мере избавлен другой вид сплай
, нов который основан на базисных функциях и называется В-сплайном.
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

162 . . .Г Н Решетникова Моделирование систем
7.2.3. Аппроксимация данных методом наименьших квадратов
Пусть jx — , узлы исходной таблицы данных а ( ), 0,jf x j n , — -значения экспериментальных данных или некоторой неизвестной функ
. ции в узловых точках Введем непрерывную функцию ( )x -для ап проксимации дискретных значений ( )jf x и обозначим
( ) ( ), 0,j j jx f x j n ,
отклонения в узлах jx . -Тогда сумма квадратов отклонений аппрок симирующей функции ( )x от неи звестной функции f(x) в узловых
точка х jx , 0,j n , з апишется в виде
22
0 0
( ) ( )n n
j j jj j
Q x f x
.
Метод построения аппроксимирующей функци и ( )x из условия минимума суммы квадратов отклонений Q называется -методомнаимень
ших квадратов ( ).МНК Наиболее часто аппроксимирующую функцию ( )x задают в виде
0 0 1 1( ) ( ) ( ) ( )m mx c x c x c x ,( )где i x , 0,i m , m n , — линейно независимые базисные ;функции
0, , mс с — неиз , вестные коэффициенты определяемые из условияминимума Q, . . т е из условий равенства нулю частных производных
0 00
2 ( ) ( ) ( ) ( ) 0,
0, .
n
j m m j j k jk j
Qc x c x f x x
c
k m
, -Таким образом получаем систему линейных алгебраических урав нений вид а Ac b для определения коэффициентов kc , 0,k m . Эта
система называется системой нормальных . уравнений Матрица системы имеет вид
0 0 0
0
, ,
, ,
m
m m m
A
и называется матрицей Грама. Элементами матрицы Грама являются скалярные произведения
базисных функций
0
( , ) ( ) ( ), , 0, .n
i k i j k jj
x x i k m
(7.35)
Created with novaPDF Printer (www.novaPDF.com)

163
Вектор свободных членов системы нормальных уравнений имеетвид
0 1( , ),( , ), ,( , )T
mb f f f , элементами этого вектора являются скалярные произведения
0
( , ) ( ) ( ), 0, .n
k k j jj
f x f x k m
:Матрица Грама обладает следующими основными свойствами
1) , она симметрична что позволяет сократить объем вычислений ;при заполнении матрицы2) , -матрица является положительно определенной поэтому при ре
шении системы нормальных уравнений методом исключения Гаусса , -можно отказаться от процедуры выбора главного элемента а использо
;вать в качестве ведущего диагональный элемент3) , определитель матрицы Грама отличен от нуля если в качестве
базиса выбраны линейно независимые функции ( ), 0,k x k m . , Для аппроксимации экспериментальных данных определенных
с погрешностью , в каждой узловой точке сначала функцию ( )x -задают в виде линейной комбинации из одной или двух базисных функ
, ций и если после определения коэффициентов kc ок ,ажется что/Q n, то расширяют базис добавлением новых функций ( )k x до тех, пор пока не выполнится условие /Q n .
Выбор конкретных базисных функций зависит от таких свойств аппроксимируемой функции f(x), , -как периодичность экспоненциаль
, , ный или логарифмический характер свойства симметрии наличие . .асимптотики и т д
Аппроксимация алгебраическими полиномами
Пусть аппроксимирующая функция задана в виде алгебраического полинома степени m:
0 1( ) mmx c c x c x (7.36)
или
0 1( ) 1, ( ) ,..., ( ) mmx x x x x .
Степень полинома m выбирают обычно меньше n. -Аппроксимирую -щая кривая в этом случае не проходит через экспериментальные точ
, . . « » -ки т е экспериментальные данные сглаживаются с помощью функции ( )x . Если взять m n , то ( )x с овпадает с многочленом
, -Лагранжа аппроксимирующая кривая пройдет через все эксперимен тальные точки и 0Q . -Это обстоятельство часто используется для от
, .ладки и тестирования программ реализующих алгоритмы МНК
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

164 . . .Г Н Решетникова Моделирование систем
Матрица A системы нормальных уравнений и вектор свободных членов для функции ( )x (7.36) -вида записываются следующим обра
:зом
2
0 0 0
2 3 1
0 0 0 0
1 2 2
0 0 0 0
1n n n
mj j j
j j j
n n n nm
j j j jj j j j
n n n nm m m mj j j j
j j j j
n x x x
x x x xA
x x x x
;
2
0 0 0 0
, , , , .
Tn n n n
mj j j j j j j
j j j jb f x x f x x f x x f x
Для решения систем уравнений с матрицей Грама разработаны методысингулярного разложения. Если же 4m , то такие системы можно .решать и более простым методом исключения Гаусса
Система нормальных уравнений обычно бывает плохо обусловленной( ). -способной накапливать погрешности Это приводит к дополнитель
: ( -ным сложностям при реализации МНК вычисление с двойной рас) , . . -ширенной точностью введение весовых коэффициентов и т д Весо
, ,вые коэффициенты выбираются из различных соображений напримерполагают
1( )j
jw
f x , 0,j n .
Такой выбор весовых коэффициентов называется -методом статистического взвешивания.
Вэтомслучае
2
0
( ) ( )n
j j jj
Q w x f x
и скалярные произведения в матрице A и векторе b -будут соответ
ственно иметь вид
0
0
( , ) ( ) ( );
( , ) ( ) ( ).
n
i k j i j k jj
n
k j k j jj
w x x
f w x f x
Created with novaPDF Printer (www.novaPDF.com)

165
П р и м е р
Для значений , , 0,6i ix y i ,
i 0 1 2 3 4 5 6
ix –1 –0,7 –0,25 2 0,85 1,5 2
iy 0,323 0,986 1,328 0,834 1,086 1,621 1,912
п остроим аппроксимирующий полином третьей степени вида2 3
0 1 2 3( )x c c x c x c x . Коэффициенты аппроксимирующего полино ма , 0,3ic i , о -пре
деляются решением системы нормальных уравнений Ac b -где мат рица Грама A и вектор свободных членов b соответственно равны
7 2,6 8,565 10,639 8,09
2,6 8,565 10,639 22,83 6,00; .
8,565 10,639 22,83 38,869 13,329
10,639 22,83 38,869 76,886 20,759
A b
Вектор с решения системы имеет вид
1,144; 0,1; 0,329; 0,248 .Tc . 7.5 , На рис точками изображены заданные значения а сплошной — .линией аппроксимирующий полином
1 2 312 0
0
2
4
2
. 7.5Рис
Аппроксимация ортогональными полиномами
-Лучшие по точности результаты при аппроксимации можно полу, чить если использовать в качестве базисных функций ( )i x к -лас
сические ортогональные полиномы , , , Чебышева Лежандра Лагерра Якоби .и др
, -Полиномы называются ортогональными если существует некото [рый интервал a,b], на котором
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

166 . . .Г Н Решетникова Моделирование систем
( ) ( ) ( ) 0,b
i ka
p x x x dx i k , (7.37)
где p(x) — .весовая функция В случае большого количества узлов jx [на a,b] зн -ачения интегра
(7.37) лов будут близки к дискретным скалярным произведениям вида(7.35), -так как интегрирование можно приближенно заменить сумми
. рованием В этом случае недиагональные элементы матрицы Грама , -будут небольшими по абсолютной величине что уменьшает погреш .ность решения системы нормальных уравнений
Для наиболее гладкого представления экспериментальных данных( ) с минимальным числом и амплитудой выбросов в качестве базисныхфункций ( )k x выбирают ортогональные полиномы Чебышева ( )kT x ,
[–1,1] которые определены и ортогональны на интервале с весовой
функцией2
1( )
1p x
x
.
-Для задания полиномов Чебышева используется рекуррентная формула
1 1( ) 2 ( ) ( )k k kT x xT x T x ,где 0 ( ) 1T x ; 1( )T x x .
Так как в многочленах Чебышева коэффициент при старшихстепенях x равен 2k , -это не всегда удобно при оценке вклада в апп
роксимирующую функцию ( )x старших степеней x -по величине коэффициентов kс . В этом случ ае полиномы Чебышева можно ввести по
, другой рекуррентной формуле позволяющей построить приведенные :многочлены Чебышева
1 11
( ) ( ) ( )4k k kT x xT x T x
,
где0( ) 1T x ;
1( )T x x .
Полиномы ( )kT x [–1,1] ортогональны на интервале с такой же , весовой функцией что и ( )kT x .
, [–1,1], Весовую функцию равную единице на интервале имеют , -полиномы Лежандра которые определяются по следующей рекуррент
:ной формуле
1 11
( ) (2 1) ( ) ( )1k k kL x k x L x k L x
k ,
где 0 ( ) 1L x ; 1( )L x x .
Created with novaPDF Printer (www.novaPDF.com)

167
Интервал 0, nx x , где заданы узлы таблицы данных jx , -перево
[–1,1], дится в интервал где определены и ортогональны полиномы Чебышева и Лежандра с помощью линейного преобразования
0
02 1
n
x xz
x x
.
П р и м е р
Для значений , , 0,6i ix y i ,
i 0 1 2 3 4 5 6
ix –1 –0,7 –0,25 0,2 0,85 1,5 2
iy 0,323 0,986 1,328 0,834 1,086 1,621 1,912
построим аппроксимирующую функцию вида
0 0 1 1 2 2 3 3( ) ( ) ( ) ( ) ( )x c T x c T x c T x c T x ,
где 0 1 2 3( ), ( ), ( ), ( )T x T x T x T x — :ортогональные полиномы Чебышева
0( ) 1T x ,
1( )T x x ,2
2( ) 2 1T x x ,3
3( ) 4 3T x x x . Так как полиномы Чебышева определены на интерв але [ 1,1] , то
интервал 0 6[ , ]x x , где заданы точки , 0,6ix i , -переведем в интер вал 1,1 с помощью линейного преобразования
0
6 02 1.
x xz
x x
Тогда векто р 1; 0,7; 0,25;0,2;0,85;1,5;2Tx преобразует ся в
вектор 1; 0,8; 0,5; 0,2;0,233;0,667;1
Tz , матрица A и вектор b системы нормальных уравнений примут вид
6 6 6 620 0 1 0 2 0 3
0 0 0 0
6 6 6 62
1 0 1 1 2 1 30 0 0 0
6 6 6 62
2 0 2 1 2 2 30 0 0 0
6 6 6 62
3 0 3 1 3 2 30 0 0 0
i i i i i i ii i i i
i i i i i i ii i i i
i i i i i i ii i i i
i i i i i i ii i i i
z z z z z z zT T T T T T T
z z z z z z zT T T T T T T
A
z z z z z z zT T T T T T T
z z z z z z zT T T T T T T
;
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

168 . . .Г Н Решетникова Моделирование систем
6 6 6 6
0 1 2 30 0 0 0
( ), ( ), ( ), ( ) ,T
i i i i i i i ii i i i
b yT z yT z yT z yT z
и в данном случае
7 0,6 0,142 0,456 8,09
0,6 3,429 0,072 0,41 1,303; .
0,142 0,072 3,981 0,255 0,068
0,456 0,41 0,255 4,532 1,712
A b
Вектор с решения системы Ac b получается равным
1,191; 0,565; 0,049; 0,21 .Tc
Так как аппроксимирующий полином определен на интервале[ 1,1] , , то неоходимо сделать обратное преобразование переводящее
интервал [ 1,1] в интервал 0 6[ , ]x x , -которое осуществляется следую :щим образом
6 0 6 00 6; 1,1 ; , .
2 2
x x x xx z z x x x
, Таким образом если 0 0 1 1 2 2 3 3( ) ( ) ( ) ( ) ( )z c T z c T z c T z c T z —
аппроксимирующая функция на интервале [ 1,1] , то ( )x
6 0 6 0
2 2x x x x
z
— аппроксимирующая функция на интервале
0 6[ , ]x x . Графическое изображение функции ( )x -практически совпа дает с изображением аппроксимирующего полинома третьей степени
. 7.5.на рис
Аппроксимация ортогональными полиномами дискретной переменной
Если построить систему базисных функций ( )k x т ,аким образом -чтобы обращались в нуль скалярные произведения на дискретном мно , жестве узловых точек то матрица Грама будет диагональной и можно
. -избежать численного решения системы нормальных уравнений В за висимости от распределения погрешности исходных данных можно -построить ортогональные полиномы дискретной переменной с соответ
ствующими дискретными весовыми функциям и ( )jp x , 0,j n . Из классических ортогональных полиномов дискретной переменной -извест ны полиномы Хана, Мейкснера, Кравчука, Шарлье.
Created with novaPDF Printer (www.novaPDF.com)

169
Рассмотрим алгоритм построения полиномов Чебышева ( )kt x -диск , ретной переменной которые являются частным случаем полиномов Хана
.с единичной весовой функциейПолагаем
0 ( ) 1,t x
1 11( )t x x a , и неизвестный коэффициент 11a -определим из условия ортогональности 0 ( )t x и 1( )t x , то есть
0 1( ( ), ( )) 0t x t x или
11 11 110 0 0 0
1 ( ) 1 ( 1)n n n n
j j jj j j j
x a x a x a n
.
Отсюда
110
11
n
jj
a xn
.
Полином второй степени также представляется в общем виде с неопределенными коэффициентами 21a и 20a :
22 21 20( )t x x a x a .
Коэффициенты 21a и 20a найдем из условия ортогональности полиномов 0 1 2, ,t x t x t x , то есть 0 2, 0t t ; 1 2, 0t t . .и т д
Для полиномов Чебышева дискретной переменной существует -двух слойная рекуррентная , формула по которой можно вычислить полином
, любой степени зная 0t x и 1t x :
1 1 1 1( ) ( ) ( )k k k k kt x x a t b t x ,где
2 2
0 01 1
2 21
0 0
( ) ( )
; .
( ) ( )
n n
j k j k jj j
k kn n
k j k jj j
x t x t x
a bt x t x
Аппроксимирующая функция ( )x , ,определяется как и ранее
, в виде линейной комбинации базисных функций в качестве которых задаются полиномы Чебышева дискретной переменной ( )kt x :
0
( ) ( )m
k kk
x c t x
.
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

170 . . .Г Н Решетникова Моделирование систем
, , -Тогда так как матрица Грама является диагональной то коэффициенты kc в (x) определяются как частное от деления правых частей
-получающейся системы нормальных уравнений на диагональные эле , менты матрицы Грама то есть
0
2
0
( ) ( )
( )
n
j k jj
k n
k jj
f x t x
сt x
.
П р и м е р
Для значений , , 0,6i ix y i ,
i 0 1 2 3 4 5 6
ix –1 –0,7 –0,25 2 0,85 1,5 2
iy 0,323 0,986 1,328 0,834 1,086 1,621 1,912
Построим аппроксимирующую функцию вида
0 0 1 1 2 2 3 3( ) ( ) ( ) ( ) ( )x c t x c t x c t x c t x ,
где 0 1 2 3( ), ( ), ( ), ( )t x t x t x t x — -ортогональные полиномы Чебышева диск , :ретной переменной которые строятся следующим образом
0( ) 1t x ;
6
1 1 10
1( ) ; ;
7 ii
t x x a a x
6 62 21 1
0 02 2 1 2 0 2 26 6
2 21 0
0 0
( ) ( )
( ) ( ) ( ) ( ); ; ;
( ) ( )
i i ii i
i ii i
x t x t xt x x a t x b t x a b
t x t x
6 62 22 2
0 03 3 2 3 1 3 36 6
2 22 1
0 0
( ) ( )
( ) ( ) ( ) ( ); ; .
( ) ( )
i i ii i
i ii i
x t x t xt x x a t x b t x a b
t x t x
Матрица A и вектор b системы нормальных уравнений имеют вид
Created with novaPDF Printer (www.novaPDF.com)

171
6 6 6 620 0 1 0 2 0 3
0 0 0 0
6 6 6 62
1 0 1 1 2 1 30 0 0 0
6 6 6 62
2 0 1 0 2 3 00 0 0 0
3 0
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) (
i i i i i i ii i i i
i i i i i i ii i i i
i i i i i i ii i i i
i
t x t x t x t x t x t x t x
t x t x t x t x t x t x t x
A
t x t x t x t x t x t x t x
t x t
6 6 6 6
22 0 2 0 3
0 0 0 0
;
) ( ) ( ) ( ) ( ) ( )i i i i i ii i i i
x t x t x t x t x t x
6 6 6 6
0 1 2 30 0 0 0
( ), ( ), ( ), ( )T
i i i i i i i ii i i i
b y t x y t x y t x y t x
:и в данном случае равны
7 0 0 0 8,09
0 7,599 0 0 2,995; .
0 0 5,032 0 0,164
0 0 0 3,153 0,783
A b
Вектор с решения системы Ac b получился равным
1,156; 0,394; 0,033; 0,248 .Tc , Заметим что в этом случае можно не строить систему нормальных
, -уравнений а сразу вычислить коэффициенты аппроксимирующей функ:ции
6
00
0 620
0
( )
( )
i ii
ii
y t xc
t x
;
6
10
1 621
0
( )
( )
i ii
ii
y t xc
t x
;
6
20
2 622
0
( )
( )
i ii
ii
y t xc
t x
;
6
30
3 623
0
( )
( )
i ii
ii
y t xc
t x
.
Графическое изображение функции ( )x практически совпадает , -с изображением аппроксимирующего полинома третьей степени при
. 7.5веденным на рис
, -Заметим что если для улучшения качества аппроксимации увели , чивают число базисных функций то в этом случае нет необходимости
пересчитывать коэффициенты kc , -определенные с меньшим значением m.
На практике достаточно часто при обработке экспериментальных -данных можно ограничиться построением линейной аппроксимирую
(щей функции линии регрессии), то есть
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

172 . . .Г Н Решетникова Моделирование систем
( )x a bx . Для коэффициентов a и b из общего алгоритма МНК получаются
выражения
a f bx ; 1
2
1
( )( )
( )
n
j jj
n
jj
x x f f
bx x
,
где
1
1 n
jj
x xn
;1
1 n
jj
f fn
.
Погрешность вычисления коэффициентов a и b определяется поформулам
2
1 2
2
1
( )1
2( )
n
n
jjn
jj
f f
b T bn
x x
;
2 2
1
1( )
n
jj
a b x x xn
,
гдеn
T — коэффициент Стьюдента для n -измерений и уровня значи
мости .
7.3. Численное дифференцирование
К численному дифференцированию приходится прибегать в том, случае когда функция f(x), ,для которой нужно найти производную задана таблично или функциональная зависимость f(x) имеет очень
. -сложное аналитическое выражение В первом случае методы диффе , ренциального исчисления просто неприменимы а во втором случае их .использование вызывает значительные трудности
Пусть требуется найти значение производной функции ( )f x -в не
которой точке x по таблице значений этой функции в уз лах , 0, .jx j n , ,Основная идея используемая при численном дифференцировании
, заключается в том что функция f(x) заменяется аппроксимирующейфункцией
( ) ( ) ( )n nf x P x r x ,
Created with novaPDF Printer (www.novaPDF.com)

173
где ( )nP x — ; аппроксимирующая функция ( )nr x — -погрешность апп. роксимации Дифференцируя k ( , раз в предположении что ( )f x и ( )nP x
имеют производные k- ), го порядка получим( ) ( )( ) ( ) ( )k k
n nf x P x r x . При расчетах значений производных в случае неравноотстоящих
.узлов можно использовать формулу Лагранжа Тогда ( ) ( )n nP x L x ,и при вычислении первой производной в точке x, не совпадающей с узлами , 0, ,jx j n получаем формулу
20 0
( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
n nj j
nj jj j j j
f x f xf x L x x x
x x x x x x
.
Если же вычислению подлежит значение производной в уз ле jx , то можно воспользоваться формулой
0
( )( ) 1( ) ( ) ( ) ( )
( ) ( ) 2 ( )
njk
n j jj k k jk
k j
xf xf x L x x f x
x x x x
,
-где второе слагаемое получено из предыдущей формулы с использова .нием правила Лопиталя
Более удобным является использование в качестве ( )nP x -интерпо . -ляционного многочлена Ньютона При этом для построения многочле
на Ньютона в качестве первой точки привлекается ближайший к x, узел а затем остальные добавляются в порядке их удаленности от
точки x.
Так как за приближенное значение ( )( )kf x принимается ( )( )knP x ,
то погрешность дифференцирования есть ( )( )knr x . При замене f(x) ин-
, терполяционным многочленом предполагается что остаточный член( )nr x , , мал но из этого вовсе не следует что мало ( )( )k
nr x , т ак как . производные от малой функции могут быть весьма велики На самом
, -деле практика показывает что при таком способе вычисления производны х ( )( )kf x по , лучается достаточно большая погрешность особенно
.при вычислении производных высших порядков
П р и м е р Для функци и 2( ) 3 sin( )f x x по значениям , ( ), 0,3i ix f x i , -вы числить первую и вторую производные в точке x 0,25.
i 0 1 2 3
ix 0 0,124 0,321 0,4
( )if x 0 0,046 0,309 0,478
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

174 . . .Г Н Решетникова Моделирование систем
, Если воспользоваться многочленом Лагранжа то
3 3
3 20 0
( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )j j
j jj j j j
f x f xf x L x x x
x x x x x x,
и для x 0,25 получается 3 ( ) 1, 496L x . Для второй производной справедлива формула
3 3
20 0
3
30
( ) ( )( ) ( ) ( ) 2 ( )
( ) ( ) ( ) ( )
( )2 ( ) ,
( ) ( )
j jn
j jj j j j
j
j j j
f x f xf x L x x x
x x x x x x
f xx
x x x
и для x 0,25 получается 3 ( ) 5,906L x . -Вычислим производные в этой же точке с помощью интерполяци
. онного многочлена Ньютона Так как ближайшим узлом к точке xявляется 2x , то для построения формулы Ньютона узлы привлекаются : в следующем порядке 2 1 3 0, , ,x x x x . Тог -да формула Ньютона запишет ся в виде
3 2 2 2 1 2 1 2 1 3
2 1 3 2 1 3 0
( ) ( ) ( ) ( , ) ( )( ) ( , , )
( )( )( ) ( , , , ).
P x f x x x f x x x x x x f x x x
x x x x x x f x x x x
-Учитывая свойство симметричности разностных отношений и обозначи в ( ), 1,3i ix x i , эту формулу можно переписать в виде
3 2 2 1 2 1 2 1 2 3 1 2 3 0 1 2 3( ) ( ) ( , ) ( , , ) ( , , , )P x f x f x x f x x x f x x x x ., , Таблица содержащая разностные отношения имеет следующий
:вид
i ix ( )if x 1( , )i if x x 1 2( , , )i i if x x x 0 1 2 3( , , , )f x x x x0 0 01 0,124 0,046 0,3722 0,321 0,309 1,332 2,9913 0,4 0,478 2,144 2,941 –0,125
Тогда
3 1 2 1 2 1 2 3
1 2 1 3 2 3 0 1 2 3
( ) ( ) ( , ) ( ) ( , , )
( ) ( , , , ).
f x P x f x x f x x x
f x x x x
В данном случае можно построить для 3 ( )P x ,формулы первого , второго и третьего порядков точности в зависимости от того сколько
.слагаемых используется при вычислении значения производной Для x 0,25 -получаются следующие формулы и значения произ
:водной
Created with novaPDF Printer (www.novaPDF.com)

175
3 1 2( ) ( , ) 1,332P x f x x ;
3 1 2 1 2 1 2 3( ) ( , ) ( ) ( , , ) 1, 494P x f x x f x x x ;
3 1 2 1 2 1 2 3
1 2 1 3 2 3 0 1 2 3
( ) ( , ) ( ) ( , , )
( ) ( , , , ) 1,496.
P x f x x f x x x
f x x x x
Для второй производной при использовании многочлена Ньютона справедлива формула
3 1 2 3 1 2 3 0 1 2 3( ) ( ) 2[ ( , , ) ( ) ( , , , )]f x P x f x x x f x x x x ,
при этом ( )f x (можно вычислять как по первому слагаемому первый ), ( ), порядок точности так и по обоим второй порядок точности и для
x 0,25 -получаются следующие формулы и значения второй произ:водной
3 1 2 3( ) 2 ( , , ) 5,883P x f x x x ;
3 1 2 3 1 2 3 0 1 2 3( ) 2[ ( , , ) ( ) ( , , , )] 5,906P x f x x x f x x x x . Для сравнения приведем вычислительные формулы и значения
производных в точке x 0,25 для функции f (x):2( ) 6 cos( ) 1,497f x x x ;
2 2( ) 12 sin( ) 6 cos( ) 5,801f x x x x .
, Если табличные значения являются равноотстоящими то есть ix
0 ;x ih 0( ) / ; ( ); 0, ,n i ih x x n y f x i n то для вычисления -зна -чений производных выбирается интерполяционный многочлен в зави
симости от положения точки x .относительно табличных значений Если точка x , -находится в начале таблицы то используется форму
ла Ньютона для интерполирования впере д 1 0( )N x th , -и для вычисле :ния первой и второй производных получаются формулы
2 320 0
0 1 0 0
43 20
1( ) ( ) (2 1) (3 6 2)
2 ! 3 !
(4 18 22 6) ... ;4 !
y yf x th N x th y t t t
h
yt t t
0 1 0
42 3 20
0 02
( ) ( )
1( 1) (6 18 11) ... ,
12
f x th N x th
yy y t t t
h
где 0 .x x
th
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

176 . . .Г Н Решетникова Моделирование систем
Если точка x , -находится в конце таблицы то для интерполирова ния используется формула Ньютона для интерполирования назад
2( )nN x th , и дл -я вычисления первой и второй производных получа :ются формулы
2 322 3
2 1
43 24
1( ) ( ) (2 1) (3 6 2)
2 ! 3 !
(4 18 22 6) ... ;4!
n nn n n
n
y yf x th N x th y t t t
h
yt t t
2
42 3 24
2 32
( ) ( )
1( 1) (6 18 11) ... ,
12
n n
nn n
f x th N x th
yy y t t t
h
где nx xt
h
.
, Заметим что при построении форм ул 1 0( )N x th и 2 ( )nN x th , в качестве 0x и nx выбираются ближайш ие к x ,табличные значения .но при этом стараются избегать ситуации экстраполирования
Если точка x находится в середине таблицы вбли зи kx , то для -интерполирования используются формулы Гаусса для интерполирова
ния впер ед 1( )kG x th или назад 2( )kG x th . Причем если kx x , то используется формула Гаусса для интерполирования вперед 1( )kG x th ,
и выражения для первых и вторых производных примут вид
2 321 1
1
43 22
1( ) ( ) (2 1) (3 1)
2! 3 !
(4 6 2 2) ... ;4 !
k kk k k
k
y yf x th G x th y t t
h
yt t t
1
42 3 22
1 12
( ) ( )
1(6 6 1) ... ,
12
k k
kk k
f x th G x th
yy y t t t
h
а если kx x , то используется формула Гаусса для интерполирования назад 2( )kG x th , и выражения для первых и вторых производных
примут вид
Created with novaPDF Printer (www.novaPDF.com)

177
2 321 2
2 1
43 22
1( ) ( ) (2 1) (3 1)
2 ! 3 !
(4 6 2 2) ... ;4 !
k kk k k
k
y yf x th G x th y t t
h
yt t t
2
42 3 22
1 22
( ) ( )
1(6 6 1) ... ,
12
k k
kk k
f x th G x th
yy y t t t
h
где kx xt
h
.
, -В зависимости от того сколько слагаемых используется для вы , , числения производных получаются формулы первого второго и так
.далее порядков точности Достаточно часто для вычисления значения первой производной
в точке x, лежащей вблизи табличной точки kx , используются -сле :дующие формулы
1
1
21 1
( ) ( );
( ) ( );
( ) ( ),2
k kk
k kk
k kk
y yf x O h
hy y
f x O hh
y yf x O h
h
(7.38)
где 2( ), ( )O h O h , применяются для обозначения выражений имеющих , порядок малости превышающий величины h и 2h со .ответственно , (7.38) -Несмотря на то что с помощью последней формулы из получает
, ся более точный результат использовать эту формулу для вычисления , -первой производной нужно с большой осторожностью так как доста
.точно часто это приводит к потере устойчивости решения , Для вычисления второй производной в случае если точка x -нахо
дится вблизи табличной точки kx , :используется следующая формула
21 12
2( ) ( )k k k
ky y y
f x O hh
. (7.39)
Несложно получить выражения для вычисления производных и . , более высоких порядков Кроме того можно использовать и другие
, ,подходы для вычисления производных функций заданных таблично например метод неопределенных коэффициентов.
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

178 . . .Г Н Решетникова Моделирование систем
, Заметим что замена производных разностными отношениями типа(7.38) (7.39) -и часто используется при моделировании задач математи
.ческой физики
7.4. Численное интегрирование
-Задачи вычисления интегралов встречаются в различных предмет , , , , .ных областях таких как физика техника медицина экономика и др
-Примером интегрирования в экономике может служить задача вычис -ления общего количества востребованного товара за определенный пе
риод времени [0, ]T . в зависимости от интенсивности спроса В этом случае решением задачи является интеграл
0
( ) ( )T
S T s t dt ,
где s(t) — интенсивность спроса в момент времени t., , ,Известно что для некоторых функций заданных аналитически
, невозможно вычислить определенный интеграл используя понятие. , -первообразной Кроме того достаточно часто требуется вычислить зна
, . чение интеграла от функции заданной таблицей значений Все эти .задачи можно решить с помощью численных методов
7.4.1. Общая интерполяционная квадратура
Будем рассматривать задачу вычисления интеграла при помощи . -некоторого числа значений интегрируемой функции Достоинство это
.го метода состоит в простоте и универсальности [Пусть a,b] -есть любой конечный или бесконечный отрезок число
вой оси и требуется найти приближенное значение интеграла
( )b
a
I F x dx
по значениям функции F(x) в точках , 0,ix i n . -Многие правила чис ленного интегрирования основаны на замене интегрируемой функции
F(x) [на всем отрезке a,b] -или на его частях на более простую функ, цию близкую к F(x), легко интегрируемую точно и принимающую
в точках , 0,ix i n , , те же значения что и F(x). В качестве такой функции достаточно часто используют алгебраический многочлен или
рациональную функцию. В том случае если интегрируемая функция F(x) , -является достаточно гладкой то можно хорошо приблизить ее много
членом невысокой степени или несложной . рациональной функцией Если же сама функция F(x) ,имеет особенности то это -затруднит такое при
Created with novaPDF Printer (www.novaPDF.com)
179
. ближение или сделает его вообще невозможным В этом случае заранее . освобождаются от этих особенностей путем их выделения Для этого
функцию F(x) :представляют в виде произведения двух функций( ) ( ) ( )F x p x f x ,
где p(x) , имеет те же особенности что и F(x), и называется весовойфункцией, или весом, а f(x) . -является достаточно гладкой функцией Тог
да задача заключается в вычислении интеграла вида
( ) ( )b
a
I p x f x dx . (7.40)
, -При этом используются правила вычисления интегралов предназ , наченные для численного интегрирования функций имеющих те же
, особенности что и весовая функция p(x). Поэтому при вычислении (7.40) интеграла функция p(x) ,считается фиксированной функцией
а f(x) — [любой достаточно гладкой функцией на a,b].Пусть f(x) — , [достаточно гладкая функция а интервал a,b] — -ко
. нечный и замкнутый Правило вычисления интеграла будем задавать в виде
0
( ) ( ) ( ) ( )b n
k k nka
p x f x dx A f x R f
. (7.41)
Такое правило называется методоммеханических квадратур, — сумма к -вад ратурной суммой; kA , 0,k n , — квадратурными коэффициентами; kx ,
0,k n , — квадратурными узлами.Функцию f(x) можно приблизить интерполяционным многочленом
, Лагранжа который строится по заданным значени ям ( )if x , 0,i n ,т о есть
( ) n nf x L x r x ,где
0
nn
n kk n kk
xL x f x
x x x
;
1
1 !
n
n nf
r x xn
;
0 1( ) ( )( ) ( )n nx x x x x x x ;
— [некоторая точка интервала a,b].Тогда
0
( ) ( ) ( )b b b n
n n k k nka a a
p x f x dx p x L x dx p x r x dx A f x R f
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

180 . . .Г Н Решетникова Моделирование систем
и
( )
bn
kk n ka
xA p x dx
x x x
; (7.42)
( 1)( )
( )( 1) !
bn
n na
fR f p x x dx
n
.
, -Квадратурное правило коэффициенты которого вычисляются со (7.42), гласно называется интерполяционным. Оно является точным для
всех алгебраических многочленов степени не выше n. Поэтому -сте пень точности интерполяционного квадратурного правила равна n.
7.4.2. — Квадратурные формулы Ньютона Котеса
Частным случаем интерполяционного квадратурного правила — . -является квадратурное правило Ньютона Котеса Это правило ис
, пользуется в том случае когда f(x) — достаточно гладкая функцияи узлы , 0,kx k n , — .равноотстоящие В этом случае считают весовую
функцию ( ) 1p x и квад (7.41) ратурное правило записывают в виде
0
( ).b n
nk k n
ka
f x dx b a B f x R f
(7.43)
Коэффициенты nkB (7.43), в учитывая выражение для kA (7.42)
и ( )nR f , :вычисляются по формулам
0
2( 1)
0
1 1;
! !
( ) ( ) ( 1) ( ) .( 1) !
n k nn kk
nnn
n
t t t nAB dt
b a nk n k t k
hR f f t t t n dt
n
Коэффициенты nkB им :еют следующие конкретные значения
000; 1;n B
1 10 1
11; ;
2n B B
2 2 20 2 1
1 42; ; ;
6 6n B B B
3 3 3 30 3 1 2
1 33; ;
8 8n B B B B
. .и т дКоэффициенты n
kB вычислены до 20n . Они я -вляются рациональ :ными числами и обладают следующими свойствами
Created with novaPDF Printer (www.novaPDF.com)

181
1)0
1n
nk
kB
при каждом n, , (7.43)в чем легко убедиться если в
положить ( ) 1f x ;2) n n
j n jB B ;3) при 8n и для всех 10n среди k
nB -встречаются отрицатель, ные причем абсолютные величины n
kB быстро растут с ростом n. Последнее свойство коэффициентов n
kB я вляется существенным -при определении погрешности вычисления интеграла с помощью квад
. , ратурной суммы Так если значения подынтегральной фун кции kf x ,0,k n , известны с абсолютной погрешностью , то неустранимая
(7.43) -погрешность вычисления интеграла в может быть оценена величиной
0
,n
nk
kb a B
при этом значения0
nnk
kB
при увеличении n . -быстро растут Напри
, мер при 20n эт 560. -а сумма равна Поэтому при больших значениях n незначительные погрешности в значениях функц ий kf x ,
0,k n , м -огут привести к большой погрешности в квадратурной сум (7.43). — ме В связи с этим формулы Ньютона Котеса используются
только при малых значениях n. -Для уменьшения погрешности резуль [тата отрезок a,b] разбивают на m . интервалов К каждому интервалу
-применяют квадратурную формулу с малым числом узлов и результа . — ты суммируют Погрешность метода для формулы Ньютона Котеса
можно представить в виде ,pb a C a b , где ,C a b — -медленно из
[меняющаяся функция на a,b]. , -Погрешность той же формулы приме
ненной к отрезку длиныb am
, есть ,pb aC a b
m
. -Тогда после сум
мирования погрешность результата примет вид 1
,p
p
b aC a b
m
. Таким
, образом в результате разбиения интервала интегрирования на m частей погрешность результата уменьшится в 1pm .раз, [Заметим что если средняя точка интервала a,b] является узлом
, -квадратурного правила то алгебраическая точность правила увеличи , -вается на единицу то есть правило становится точным для многочле
нов степени n+1. — Приведем конкретные формулы Ньютона Котеса для n 0,1,2,
. которые используются чаще всего При этом приведем сразу о -боб щенные формулы, [полученные делением интервала a,b] на m частей
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

182 . . .Г Н Решетникова Моделирование систем
. , и суммированием результатов Кроме того для записи обобщенных квадратурных формул будем использовать следующие обознач -е
н :ия ( ),i if f x 0,i n ; ;b a
hm — некоторая точка интервала
[а,b]; обnR f — погрешность выч .исления интеграла
(Квадратурные формулы прямоугольников n = 0)
[На интервале a,b] -необходимо выбрать одну любую точку в каче . -стве узла квадратурного правила Обычно выбирают среднюю или край :ние точки и в соответствии с этим получают следующие формулы1) формула левых прямоугольников:
0 1 1( )b
ma
b af x dx f f f
m ;
2об0 лев
( )( ) ( )
2b a
R f fm
;
2) формула правых прямоугольников:
1 2( )b
ma
b af x dx f f f
m ;
2
об0 пр
( )( ) ( )
2b a
R f fm
;
3) формула средних прямоугольников:
3 2 1( )2 2 2
b
a
b a h h mf x dx f a f a f a hm ;
3об0 ср 2
( )( ) ( )
24
b aR f f
m .
(Квадратурная формула трапеций n = 1)
0 1 2 1( ) 2( )2
b
m ma
b af x dx f f f f f
m ;
3
1 2
( )( ) ( ).
12об b a
R f fm
Created with novaPDF Printer (www.novaPDF.com)

183
(Квадратурная формула Симпсона n = 2)
0 1 3 1
2 4 2
( ) [ 4( ... )3
2( ... )];
b
m ma
m
b af x dx f f f f fm
f f f
5об2 4
( ) ( )180
b aR f f
m .
При использовании квадратурной формулы Симпсона значение m .должно быть четным
7.4.3. Метод Рунге оценки погрешности формул — Ньютона Котеса
, Говорят что квадратурная формула имеет порядок точности p, если погрешность квадратурной формулы на всем отрезке интегрирования
есть величина порядка малости p (по отношению к шагу расстоянию ).между узлами
П р и м е р Погрешность квадратурной формулы Симпсона можно записать
в виде4
(4)2
( )( ) ( )
180об b a h
R f f
.
, Поэтому формула Симпсона имеет четвертый порядок точности то есть4p .
— Рассмотренные формулы Ньютона Котеса можно упорядочить :в порядке убывания точности следующим образом
1) — формула Симпсона четвертый порядок точ (ности 4p );2) — формула средних прямоугольников второй порядок точности
( 2p );3) — формула трапеций второй порядок точности ( 2p ), -но по
грешность этой формулы вдвое превосходит погрешность формулы ;средних прямоугольников
4) ( ) — -формулы левых и правых крайних прямоугольников пер вый порядок точности ( 1p ).
Чаще всего требуется вычислить значение интеграла с заданной точностью . При этом погрешность квадратурной формулы зависит от
числа узлов m , , -в квадратурной сумме или что то же самое от величи
ны ша гаb a
hm .
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

184 . . .Г Н Решетникова Моделирование систем
Если обозначить( 1)
1[ , ]
max ( )nn
x a bM f x
,
-то для определения точности квадратурной формулы можно воспользо ваться априорной оценкой
10( ) ( )...( )
( 1) !
bn
n na
MR f x x x x dx
n
,
из которой определяется величина шага h или число узлов m.
П р и м е р Для формулы Симпсона из неравенства
44 ( )
180M b a h
, -следует что для достижения точности квадратурной формулы необхо димо выполнение неравенства
4
4
180( )
hb a M
.
- -На практике этой формулой воспользоваться сложно из за трудно , стей оценки четвертой производной поэтому обычно используют -апос
териорные , , оценки например ( )метод Рунге принцип двойного счета . . -Суть метода Рунге состоит в следующем Пусть требуется вычис
лить интеграл
( )b
a
I f x dx .
- — , -Воспользовавшись какой либо формулой Ньютона Котеса полу чим значение интеграл а hI с ш агом h. Тогда
( )( )hhI I R f .
Погрешно сть ( )( )hR f мож но представить в виде( ) ( ) ( )h p pR f Ch O h ,
где C — ; некоторая константа p — порядок точности квадратурнойформулы; pCh — ; главный член погрешности ( )pO h — -величина бо
, лее высокого порядка малости чем ph . Если ин теграл вычислить с шагом h/2, , то учитывая незначительное изменение константы C,
можно записать( / 2)
/ 2 / 2( ) ( / 2) (( / 2) )h p ph hI I R f I C h O h .
, Приравнивая значения интегралов вычисленных с шагом h и h/2, , и отбрасывая малые величины получим
Created with novaPDF Printer (www.novaPDF.com)

185
/ 2
( / 2) (1 2 )
h hp p
I IC
h
и / 2
/ 2 1 2
h hh p
I II I
.
, Таким образом для того чтобы вычислить интеграл с точностью , то есть чтобы для некоторого шага h выполнялось неравенство
/ 2hI I , необходимо выполнение неравенства
/ 2
2 1
h hp
I I
.
П р и м е р Так как для формулы Симпсона 4p , -то строится последователь
-ность значений интегралов путем деления пополам некоторого началь , , ного шага до тех пор пока не выполнится неравенство
/ 2
15h hI I
.
, Заметим что при реализации алгоритмов вычисления интегралов — -по формулам Ньютона Котеса нет необходимости каждый раз вы
,числять заново значения подынтегральной функции в узловых точках -достаточно вычислять значения во вновь появляющихся за счет умень
.шения шага узлах
7.4.4. Квадратурные формулы наивысшей алгебраической степени точности
,Если вопрос о точности вычисления интеграла стоит очень остро , -то можно воспользоваться другими квадратурными формулами в част
ности -квадратурными формулами наивысшей алгебраической степени точности, которая равна 2n–1.
Пусть в квадратурном правиле
1
( ) ( ) ( )b n
k kka
p x f x dx A f x
(7.44)
[a,b] -есть любой конечный или бесконечный отрезок и весовая функция p(x) , такова что ее произведение на любую неотрицательнуюстепень x [абсолютно интегрируемо на a,b]:
( )b
i
a
p x x dx .
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

186 . . .Г Н Решетникова Моделирование систем
, Кроме того будем считать функцию p(x) ,не эквивалентной нулю то есть
( ) 0b
a
p x dx .
(7.44) Квадратурное правило при фиксированном значении n -содержи 2т n параметров , , 1,k kx A k n , и выб , рать их можно так чтобы
(7.44) -равенство выполнялось точно для всех алгебраических много членов степени не выше 2n–1 , , -или что равносильно чтобы выполня
лись равенства
1
( ) , 0,2 1.b n
iik k
ka
p x x dx A x i n
(7.45)
(7.45) Равенства образуют систему из 2n уравнений относительно2n неизвестных , , 1,k kx A k n , но , в силу того что данная система
, .является нелинейной ее решение весьма затруднительно , -Введем многочлен корнями которого являются узлы квадратурно
:го правила
1 2( ) ( )( )...( )nx x x x x x x . (7.44) -Для определения параметров квадратурного правила доказа
.ны следующие теоремы
Теорема 1. (7.44) -Для того чтобы квадратурное правило было точ ным для всех алгебраических многочленов степени не выше 2n–1,
, :необходимо и достаточно чтобы выполнялись следующие условия1) (7.44) , правило было интерполяционным то есть коэффициенты
kA определялись по формулам
( )( )
( ) ( )
b
kk ka
xA p x dx
x x x
; (7.46)
2) многочлен ( )x [был ортогонален на a,b] по весу p(x) к -о вся кому многочлену Q(x) , степени меньшей n:
( ) ( ) ( ) 0b
a
p x x Q x dx .
Теорема 2. Если весовая функция p(x) [не меняет знак на a,b], то существует при этом единственный многочлен
1 2( ) ( )( ) ( )nx x x x x x x ,ортог [ональный на a,b] по весу p(x) ко всякому многочлену Q(x) -сте
, пени меньшей n.
Created with novaPDF Printer (www.novaPDF.com)

187
Теорема 3. Если весовая функция p(x) [не меняет знак на a,b] и многочлен ( )x [ортогонален на a,b] по весу p(x) ко всякомумногочлену Q(x) , степени меньшей n, то все корни многочлена ( )xд , [ействительные различные и лежат внутри a,b].
Теорема 4. Если весовая функция p(x) [не меняет знак на a,b], то ни при каком выборе kx и kA рав (7.44) -енство не может быть вер
ным для всех многочленов степени 2n.
Теорема 5. Если ( ) 0p x (7.44) и квадратурное правило верно для 2всех многочленов степени n–2, то все коэффициенты kA в нем -поло
.жительны
Теорема 6. Если p(x) [сохраняет знак на a,b] и f(x) -имеет непре 2рывную производную порядка n [на a,b], то существует такая точка
[ , ]a b , что для остатка
1
( ) ( ) ( ) ( )b n
n k kka
R f p x f x dx A f x
квадратурного правила наивысшей алгебраической степени точности
верно равенство
(2 ) 21( ) ( ) ( ) ( )
(2 ) !
bn
na
R f f p x x dxn
.
Приведенные теоремы доказывают справедливость следующего: утверждения если весовая функция p(x) [сохраняет знак на a,b],
(7.44), то квадратурное правило верное для всех многочленов степени не выше 2n–1, существует при всех n и является единственным для
каждого n. При этом для знакопостоянной весовой функции p(x) -сте пень точности 2n–1 . ,является наивысшей возможной Таким образом
для конкретной весовой функции p(x) -существует единственный мно гочлен ( )x , -корни которого являются узлами квадратурного прави
, (7.46) .ла а выражение определяет коэффициенты этого правила Рассмотрим частные случаи квадратурного правила наивысшей алгебраической степени точности
Интегралы вида ( )b
a
f t dt
[Пусть a,b] — . произвольный конечный отрезок Тогда с помощью линейной замены переменной
2 2b a b a
t x ,
где [ , ], [ 1,1]t a b x , интеграл и соответствующая квадратурная формула преобразуются к виду
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

188 . . .Г Н Решетникова Моделирование систем
1
11
( ) .2 2 2 2 2 2
b n
k kka
b a b a b a b a b a b af t dt f x dx A f x
, Поэтому будем считать что исходный интеграл приведен к виду1
1
( )I f x dx
.
, [–1,1] Систему многочленов ортогональную на с весом ( ) 1p x , образуют многочлены Лежандра:
21( ) ( 1) ;
2 !
nn
n n nd
P x xn dx
0 ( ) 1;P x
1( ) ;P x x2
23 1
( ) ;2
xP x
3
35 3
( ) ;2
x xP x
...
1 11
( ) (2 1) ( ) ( ) .1n n nP x n xP x nP x
n
Соответствующая квадратурная формула называется -формулой Гаусса и имеет вид
1
11
( ) ( ) ( )n
k k nk
f x dx A f x R f
,
где коэффициенты , 1, ,kA k n :вычисляются следующим образом
2 2
2
[1 ] [ ( )]k
k n k
Ax P x
,
, а погрешность в предположении что f(x) -имеет непрерывную произ 2водную порядка n [–1,1], на равна
2 1 4
(2 )3
2 ( !)( ) ( ), [ 1,1]
(2 1) (2 ) !
nn
nn
R f fn n
.
Узлы , 1, ,kx k n -должны располагаться в корнях многочле на Лежандра степени n, -для них нет общей формулы и они задают . . 7.1 ся в виде таблиц В табл приведены значения узлов kx
и коэффициентов kA квадратурной формулы Гаусса для значений1,5n .
Created with novaPDF Printer (www.novaPDF.com)

189
7.1Таблица Коэффициенты и узлы квадратурной формулы Гаусса
n , 1,kA k n , 1,kx k n
n 1 1A = 2,0000000 1x = +0,0000000
n 2 1A = 1,0000000 1x = –0,5773502
2A = 1,0000000 2x = +0,5773502
n 3 1A = 0,5555555 1x = –0,7745966
2A = 0,8888888 2x = +0,0000000
3A = 0,5555555 3x = +0,7745966
n 4 1A = 0,3478548 1x = –0,8611363
2A = 0,6521451 2x = –0,3399810
3A = 0,6521451 3x = +0,3399810
4A = 0,3478548 4x = +0,8611363
n 5 1A = 0,2369268 1x = –0,9061798
2A = 0,4786286 2x = –0,5384693
3A = 0,5688888 3x = +0,0000000
4A = 0,4786286 4x = +0,5384693
5A = 0,2369268 5x = +0,9061798
Замечание Можно уточнить значение интеграла до заданной точности -дву
.мя способами1. Ув . еличить количество табличных узлов Однако это затруднит
, -организацию вычислений так как обычно заранее не известно необ -ходимое количество узлов для вычисления интеграла с заданной точ
.ностью2. Делить интервал интегрирования на m , -равных частей вычис -лять интеграл на каждом частичном отрезке по одним и тем же таблич ным значениям , , 1,k kx A k n , . и суммировать результаты В этом
случае используется только n , табличных узлов а значение интеграла вычисляется по mn .узлам
, Действительно1
2n
kk
A
при любом n, -то сумма коэффициен
[–1тов равна длине интервала ,1], что доказывается подстановкой
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

190 . . .Г Н Решетникова Моделирование систем
в квадратурную формулу функц ии ( ) 1f x . , Таким образом значение, интеграла равное площади под кривой ( )y f x н [–1,1],а интервале заменяется суммой площадей n прямоугольников с основаниям и kA и
высотами ( ), 1,kf x k n . [–1,1] , Если интервал поделить на две части на каждой из которых
, -вычислить значение интеграла и полученные результаты просумми, ровать то получим
0 1
1 0
1 1
( ) ( )
1 31 1 .
2 2 2 2
n nk k k k
k k
I f t dt f t dt
A k A kf f
, При этом значение интеграла равное площади под кривой ( )y f x [–1,1], 2на интервале заменяется суммой площадей n -прямоугольни
ков с основани ями , 1,2kA
k n . Вы -сота каждого прямоугольника рав
, -на значениям подынтегральной функции в точках получаемых пере водом значени й [ 1,1], 1,kx k n , в [–1,0] [0,1]. интервалы и Далее
[–1,1] 3 , -интервал делится на части что приводит к вычислению значе 3ния интеграла с помощью суммы n прямоугольников с основаниями
, 1,3kA
k n , на ка . [–1,1] ждом интервале И так делим интервал до
, -тех пор пока модуль разности значений интегралов при двух последо [–1,1] -вательных делениях интервала на равные части не станет мень
ше заданной точности , . . т е пока для некоторого числа делений m не выполнится неравенство
1m mI I ,
где 1,m mI I — , -значения интеграла полученные путем деления интер [–1,1] вала на m и m+1 .равных частей соответственно
При такой реализации метода Гаусса используются только n -таб личных значений , , 1,k kx A k n , а интеграл вычисляется по mn
, узлам причем значение n .может быть небольшим Квадратурная формула Гаусса для вычисления интеграла путем
деления интервала интегрирования на m равных частей имеет вид
1 1
( ) ( 2 1)2 2
b m n
k ki ka
b a b aI f x dx A f a x i
m m .
Created with novaPDF Printer (www.novaPDF.com)

191
П р и м е р Вычислим методом Гаусса интеграл
5
21
5
1
teI dt
t
.
С помощью замены переменной3 2t x
интеграл и соответствующая квадратурная формула преобразуются к виду
1 3 23 2
2 211
52 2
4 12 10 4 12 10
kxx n
kk k k
e eI dx A
x x x x.
Если вычислять интеграл при 5n , -используя узлы и коэффици енты квадратурной формулы , , 1, ,k kx A k n . 7.1, из табл то получим
6,9998716I . Вычисляя интеграл при тех же значениях , ,k kx A1, ,k n [1,5] (путем деления интервала на две части m 2), получим
7,0000535I , а при m 3 — 7,0000555I .
Интегралы вида ( ( () ) )b
a
b t t a f t dt
[Пусть a,b] — , -конечный отрезок на котором задана весовая функция ( ) ( ) ( )p t b t t a , где 1, 1 . Интеграл
( ) ( ) ( )b
a
b t t a f t dt [–1,1] переводится в интервал линейной заменой переменной
2 2b a b a
t x ,
где [ , ], [ 1,1]t a b x . Тогда
1 1
1
( ) ( ) ( ) (1 ) (1 )2 2 2
b
a
b a b a b ab t t a f t dt x x f x dx
1
1
.2 2 2
n
k kk
b a b a b aA f x
, В связи с этим будем предполагать что интеграл задан в виде
1
1
(1 ) (1 ) ( )I x x f x dx
.
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

192 . . .Г Н Решетникова Моделирование систем
[–1,1], -Ортогональной системой многочленов на отрезке соответ ствующей ве су ( ) (1 ) (1 ) , 1, 1p x x x , является система
многочленов Якоби ( , )( )nP x . По , -этому в квадратурной формуле имею 2щей наивысшую алгебраическую степень точности n–1, узлы kx ,1,k n , должны совпадать с корнями многочлена Якоби степен и n.
Рассмотрим частные случаи квадратурных формул с якобиевым.весом
1. При 0,5 весовая функция имеет вид
2
1( )
1p x
x
.
Соответствующие многочлены Якоби ( 0,5; 0,5)nP только постоянным
множителем отличаются от многочленов Чебышева первого рода
( ) cos arccos( )nT x n x .
Узлы квадратурного правила kx , 1,k n , располагаются в корнях многочлена Чебыш ева ( )nT x и вычис :ляются следующим образом
(2 1)cos , 1,
2kk
x k nn ,
квадратурные коэффициенты равны1
21
( )
1 ( ) ( )
nk
k k k
T xA dx
x x x T x
и для всех 1, ,k n :получаются одинаковыми
, 1, .kA k nn
-Квадратурное правило наивысшей алгебраической степени точнос
ти с весо м2
1( )
1p x
x
имеет вид
1
2 11
( ) 2 1cos ( ),
21
n
nk
f x kdx f R f
n nx
где погрешность ( )nR f , в предположении что f (x) имеет непрерывную 2производную порядка n [–1,1], на определяется выражением
(2 )2
2( ) ( ).
2 (2 ) !n
n nR f fn
Created with novaPDF Printer (www.novaPDF.com)

193
П р и м е р Вычислим интеграл
5
21
1 5.
(5 )( 1) 1
teI dt
t t t
С помощью замены переменнойt3+2x
интеграл и соответствующая квадратурная формула преобразуются к виду
1 3 23 2
2 22 11
1 5 5,
4 12 10 4 12 101
kxx n
k k k
e eI dx
nx x x xx
где(2 1)
cos , 1,2k
kx k n
n .
Для n 5 получается I 5,8516063.
2. При 0,5 весовая функция будет иметь вид 2( ) 1p x x . Соответствующие многочлены Якоби (0,5;0,5)
nP -только постоянным мно жителем отличаются от многочленов Чебышева второго рода
2
sin( 1) arccos( )
1n
n xU x
x
.
Узлы квадратурного прави ла , 1, ,kx k n располагаются в корнях многочлена Чебышева ( )nU x и в :ычисляются следующим образом
cos , 1,1k
kx k n
n
,
квадратурные коэффициенты , 1, ,kA k n равны
2sin1 1k
kA
n n
.
-Квадратурное правило наивысшей алгебраической степени точно
сти с весо м 2( ) 1p x x имеет вид
12 2
11
1 ( ) sin cos ( ).1 1 1
n
nk
k kx f x dx f R f
n n n
Погрешность ( )nR f определяется выражением
(2 )
2
( )( ) , [ 1,1]
(2 ) !2
n
n nf
R fn
.
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

194 . . .Г Н Решетникова Моделирование систем
П р и м е р Вычислим интеграл
5
21
5(5 )( 1)
1
teI t t dt
t
.
С помощью замены переменной3 2t x
интеграл и соответствующая квадратурная формула преобразуются к виду
1 3 23 22 2
2 211
5 4 54 1 sin
1 14 12 10 4 12 10
kxx n
k k k
e k eI x dx
n nx x x x,
где cos , 1,1k
kx k n
n
.
Для 5n получается 10,631753I .
3. При 0,5, 0,5 весовая функция будет иметь вид
1( )
1x
p xx
. Соответствующие многочлены Якоби имеют вид
(0,5; 0,5)2 2
2 1sin arccos
(2 ) ! 2arccos2 ( !) sin
2
n n
n xn
Pxn
.
Узлы квадрату рного правила , 1, ,kx k n располагаются в корнях многочлена (0,5; 0,5)
nP и :вычисляются следующим образом
2cos , 1,
2 1kk
x k nn
,
квадратурные коэффициенты , 1, ,kA k n равны
24sin
2 1 2 1kk
An n
.
Квадратурное правило наивысшей алгебраической степени -точно
сти с весом1
( )1
xp x
x
имеет вид
12
11
1 4 2( ) sin cos ( )
1 2 1 2 1 2 1
n
nk
x k kf x dx f R f
x n n n
.
Created with novaPDF Printer (www.novaPDF.com)

195
Погрешность ( )nR f определяется выражением
(2 )2
( ) ( ), [ 1,1]2 (2 ) !
nn n
R f fn
.
П р и м е р Вычислим интеграл
5
21
5 51 1
tt eI dt
t t
.
С помощью замены переменной3 2t x
интеграл и соответствующая квадратурная формула преобразуются к виду
1 3 23 22
2 211
1 5 8 52 sin
1 2 1 2 14 12 10 4 12 10
kxx n
k k k
x e k eI dx
x n nx x x x,
где2
cos , 1,2 1k
kx k n
n
.
Дл я 5n получается 2,2296633I .
Замечание Если пределы интегрирования являются параметрами весовой, функции то нельзя увеличить точность вычисления интеграла путем
. ,деления интервала интегрирования на равные части Действительно рассмотрим интеграл
5
21
5(5 1)( 1)
1
xeI x dx
x
,
где ( ) (5 )( 1)p x x x , а2
5( )
1
xef x
x
.
, Точность вычисления интеграла можно увеличить если увеличить количество узлов n, при этом можно воспользоваться неравенством
1n nI I . . 7.6 -На рис приведены графики под
ынтегральной функции p(x)f(x): сплошная линия соответствует графику на интервале
[1,5], — -а пунктирные графикам на интер [1,3], [3,5].валах , Из графиков видно что площадь под
кривой ( ) ( )y p x f x [1,5] на интервале не. 7.6Рис
6
4
2
01 2 3 4 5
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

196 . . .Г Н Решетникова Моделирование систем
будет равна сумме площадей под кривыми (3 )( 1) ( )y x x f x и
(5 )( 3) ( ),y x x f x [1,3] [3,5] -заданными на интервалах и соответ
.ственно -В справочной литературе можно найти квадратурные формулы наи
-высшей алгебраической степени точности и для других весовых функ, , -ций как для конечного так и бесконечного интервала интегриро
.вания
7.5. Решение нелинейных уравнений и систем
-Во многих инженерных и научных задачах возникает необходи мость решения уравнений или систем вида
1 2( , , ,..., ) 0kF x p p p , (7.47)
где F — заданная функция либо вектор функция 1 2( , ,..., )TnF F F F ;x — неизвестная переменная либо вектор 1 2( , ,..., )nx x x x ; 1 2, ,...,p p
kp — . , параметры задачи Как правило при моделирован ии возникает . необходимость определения решения в зависимости от параметров При
, этом каждому фиксированному набору параметров в соответствии , -с физическим смыслом конкретной задачи соответствует либо конеч
, .ное либо бесконечное множество решений, , -Так например в электродинамике при математическом моделиро
-вании электромагнитных волновых колебательных процессов в лини ях передачи и резонаторах получают так называемое дисперсионное
(7.47). уравнение вида В этом случае параметрами 1 2, ,..., kp p p -явля , -ются частота колебаний геометрические параметры системы и вклю, -чений пространственное распределение диэлектрической и магнит
. . ной проницаемостей в электродинамической структуре и т д В качественеизвестного x могут быть выбраны коэффициенты распространения -и затухания электромагнитных волн в линиях передачи либо собствен
. -ные частоты и добротности колебательной системы Бесконечное мно -жество решений дисперсионного уравнения будет соответствовать бес
( ) конечному числу собственных типов волн колебаний в исследуемой.системе
, Например при финансовых расчетах необходимость в решении -нелинейных уравнений возникает при определении внутренней нор
( мы доходности инвестиционных проектов процентной ставк и bq , при , -которой капитализация регулярно получаемого дохода дает сумму рав
). -ную инвестициям Если инвестиции и доходы задаются в виде едино , го потока платежей т о bq определяется как положительный корень
уравнения
1
0n
tt
tR
,
Created with novaPDF Printer (www.novaPDF.com)

197
где 1(1 )bq — множитель дисконтирования по искомой ставке
bq ; n — ; общий срок реализации проекта tR — , поток платежей при этом 0tR , соответствует инвестициям а 0tR — .доходам
Только для простейших нелинейных уравнений и систем удается . -найти решение в аналитическом виде В большинстве случаев прихо (7.47) .дится решать уравнения и системы вида численными методами
7.5.1. Решение нелинейных уравнений
Пусть дано уравнение
( ) 0f x , (7.48) где функция f(x) определена и непрерывна на некотором конечном [или бесконечном интервале a,b]. Значе ние x , при котором ( ) 0f x ,
называется корнем уравнения (7.48), или нулем функции f(x). , (7.48) Будем предполагать что уравнение имеет лишь -изолирован
ные корни, . . т е такие корни x , для ,которых существует окрестность .не содержащая других корней этого уравнения
(7.48) :Численное решение уравнения обычно проводят в два этапа1) — отделение корней определение таких интервалов изменения
переменной x, ;где находится только один корень2) определение корня уравнения с заданной точностью .
, . . Для отделения корней т е для определения отрезк а , , -содер , -жащего только один корень полезна следующая теорема математичес
.кого анализа
Теорема. Если непрерывная функция f(x) -принимает значения раз ных знаков на концах отрезка , , . . т е ( ) ( ) 0f f , то внутри этого
отрезка содержится по крайней мере один корень уравнения ( ) 0f x ,. . т е найдется хотя бы одно число ,x , такое что *( ) 0f x .Корень x , будет единственным если производная ( )f x существует .и сохраняет постоянный знак внутри этого отрезка
Для определения начального приближения 0x -для реализации ите рационных методов нахождения корней или для определения корня уравнения с невысокой точностью можно использовать следующие
.методы
Табличный метод
Сначала определяются знаки функции f(x) в граничных точках [интервала a,b], затем определяют знаки функции f(x) -в ряде промежу
точных точек этого интервала 1 2, ,..., n , вы бор которых учитывает
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)
198 . . .Г Н Решетникова Моделирование систем
особенности функции f(x). , Если окажется что для некоторой пары
точек 1,k k выполняется неравенство
1( ) ( ) 0k kf f , то в силу приведенной выше теоремы в интервал е 1,k k имеется
хотя бы один корень уравнения ( ) 0f x . Затем нуж но тем или иным , . способом убедиться является ли корень единственным После чего в качестве начального значения 0x -можно взять любую точку интерва
ла 1,k k .
Метод половинного деления
[В методе половинного деления интервал a,b], на концах которогофункция f(x) , имеет значения разных знаков делят пополам и из двух
полученных интервало в , , ,2 2
a b a ba b
, -выбирают тот на кон
цах которого f(x) . имеет значения разных знаков Затем делят пополам . . выбранный интервал и т д Деление интервалов продолжается до тех
, пор пока длина последнего интервала не станет меньше заданногозначения . Число делений интервала k определяется формулой
ln
ln2
b a
k
,
и в качестве 0x м ожно взять любую точку последнего выбранного.интервала
Метод пропорциональных частей
, Этот метод применяют если функция f(x) [на концах a,b] -прини , мает значения разных знаков кроме тог ,о ( )f x и ( )f x сохраняют
[постоянные знаки на a,b]. В этом методе за точку деления отрезка[a,b] берут точку
1( )
( ),( ) ( )
f аx a b a
f b f а
которая является нулем функции
1( ) ( ) ( ) ( )x a
f x f f b fа аb a .
Эта функция является линейным приближением функции f(x) на[a,b], а 1x — это точка пересечения функцией 1( )f x . -оси абсцисс За
тем рассматривают отрезки 1,a x и 1,x b , и выбирают тот на концах которого функция f(x) . -имеет разные знаки На выбранном отрезке стро
ят функцию 2( )f x . . и находят нуль этой функции и т д Если требуется
Created with novaPDF Printer (www.novaPDF.com)

199
найти корень уравнения с невысокой точностью , -то деление отрез , -ков продолжается до тех пор пока длина очередного выбранного отрез
ка не будет меньше или не выполнится неравенство( )if x ,
где ix — . очередная точка деления отрезка на два Эти же критерии можно использовать и для определения начального приближения 0х .
Графический метод
Начальное приближение 0х м -ожно определить графически как точ ку пересечения функцией ( )y f x . оси абсцисс Если f(x) — сложная
, функция то f(x) представляется в виде разности двух функц ий 1( )x и 2( )x :
1 2( ) ( ) ( )f x x x , .каждую из которых можно достаточно просто изобразить графически
Тогда за 0х принимают абсциссу точки пересечения функци й 1( )y x и 2( )y x .
-Самыми распространенными методами решения нелинейных урав .нений являются методы простых итераций и Ньютона
Метод простых итераций
Сначала требуется привести заданное уравнен ие ( ) 0f x к к -ано нической форме
( )xх , -причем для одного уравнения можно построить несколько канониче
.ских форм
П р и м е р Пусть исходное уравнение имеет вид
cos( ) ln( ) 0x x x .
Функции ( )x кан -онических форм для этого уравнения будут сле:дующими
1
2
3
( ) ln( ) cos( );
( ) arccos(ln( ) );
( ) exp(cos( ) ).
x x x
x x xx x x
Итерационное правило метода простых итераций имеет вид
1 ( ), 0,1,...n nx x n . (7.49) ( . 7.7). Геометрически это правило означает следующее рис Точное
решение *х является точкой пересечения кривой ( )y x -с биссектрисой y x . За приближение 1nx берет , ся точка значение которой
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

200 . . .Г Н Решетникова Моделирование систем
равно ( )nx . Эт : о значение получается следующим образом на кр -ивой ( )y x отмечается точка с координатами ( , ( ))n nx x и -проводит
, .ся прямая параллельная оси абсцисс до пересечения с биссектрисой, — , Учитывая что биссектриса это множество точек равноудаленных
, от осей опускают перпендикуляр на ось абсцисс и находят точку 1пx .
y
x
y x
y x( )
x
(x , xn n( ))
xn xn+1
. 7.7Рис
Для проверки сходимости метода простых итераций используются .следующие теоремы
Теорема. :Пусть выполняются условия
1) функция ( )x определена на отрезке 0 0[ , ]x x ;2) -непрерывна там и удовлетворяет условию Липшица с коэф
фициентом q, , . . меньшим единицы т е для любых то чек 1,z2 0 0[ , ]z x x
1 2 1 2( ) ( ) , 0 1z z q z z q ;
3) для начального значения 0x верно неравенство
0 0( )x x m ;
4) для чисел ,q и m выполнено требование
1m
q
.
:Тогда1) уравне ние ( )x x на отрезке 0 0[ , ]x x имеет ре ;шение2) итерационная последовательность приближений , 1,2,...,пх п
, может быть построена принадлежит отрезку 0 0[ , ]x x и является, . .сходящейся т е lim n
nx x
, при этом x является реше -нием урав
нения ( )x x ;
Created with novaPDF Printer (www.novaPDF.com)

201
3) д ля пх выполняется неравенство
1n
nm
x x qq
,
.которое характеризует скорость сходимости метода простых итераций
Теорема ( ). о единственности решения Уравнение ( )x x -на вся , ком множестве точек на котором для ( )x выполняе тся неравенство
1 2 1 2 1 2( ) ( ) ,z z z z z z , .может иметь не более одного решения
При практическом применении метода простых итераций часто .проверяют достаточные условия сходимости итерационного процесса
Теорема. Пусть фун кция ( )x определена и дифференцируема на отрезке , , причем все .ее значения принадлежат этому отрезку
Тогда если существует q , такое что
( ) 1x q для всех ,x , :то1) (7.49) итерационный метод сходится независимо от начального
приближения 0 ,x ;
2) предельное значение lim nn
x x
-является единственным кор
нем уравнения ( )x x на отрезке , .
Замечания1. , -Благодаря тому что метод простых итераций сходится при лю бом выборе начального пр иближения 0 ,x , -он является самоисп
, . . , равляющимся т е отдельная ошибка в вычислениях не выводящая за пределы , , , не повлияет на конечный результат так как ошибочное значение можно рассматривать как новое начальное приближение 0x .
2. Зависимость погрешности 1n на (n+1)-м -шаге от погрешности n на n- м шаге выражаетс я соотношением
1 ( )n nx ,
, -поэтому говорят что метод простых итераций сходится почти со скоро стью геометрической прогрессии со знаменателем
,max ( )x
q x
.
3. , . . -Метод простых итераций является одношаговым т е для реали зации итерационного процесса достаточно одного приближения 0х .
4. Для каждого уравнения можно построить каноническую форму для которой будут выполняться условия сходимости метода простых
. итераций Для этого представим функцию ( )x в виде
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

202 . . .Г Н Решетникова Моделирование систем
( ) ( )x x f x ,
где параметр н , ужно определить таким образом чтобы выполнялосьусловие
,max ( ) 1x
x q
.
:Введем следующие обозначения
,max ( ) ,x
M f x
,
min ( )x
m f x
.
Тогда параметр :можно определить следующим образом
1) 01
sign ( )f xM
, при этом 0 ( ) 1x ;
2) 02
sing ( )f xM
, при этом 1 ( ) 1x .
, Действительно так как ( ) 1 ( )x f x , то в первом случае
1 1m
qM
, — а во втором2
1 1m
qM
.
-В методе простых итераций поведение последовательности прибли жений 1 2, , nx x x зависит от величины и знака производной ( )x на
интервале [ , ] : 0если 1, -то итерационная последовательность сходится и яв
;ляется монотонной –1если 0, то итерационная последовательность сходится
;и является немонотонной если 1, -то итерационная последовательность расходится и яв
;ляется монотонной если 1, то итерационная последовательность расходится
.и является немонотонной . Существуют видоизменения метода простых итераций Наиболее
, , -известными увеличивающими скорость сходимости являются следу :ющие методы
1) метод секущих ( ):правило линейной интерполяции
1 11
1 1
( ) ( ), 1,2,...
( ) ( )п п п п
пп п п п
x х х хx п
х х х х
;
2) метод Стеффенсена:
2
1[ ( )] ( )
, 0,1,...[ ( )] 2 ( )п п п
пп п п
x х хx п
х х х
.
Created with novaPDF Printer (www.novaPDF.com)

203
П р и м е р Найти ре шение x уравнения ( ) 2 ln( ) 2 5 0f x x x -с точно
стью 50,5 10 . Начальное приближение 0x -определим графичес, ки для чего исходное уравнение представим в ви де 1 2( ) ( ) 0x x , где 1 2( ) 2 ln( ); ( ) 2 5x x x x , и найдем точку пересечения
кривых 2 ln( ); 2 5y x y x -на ин тервале [0,01;4] . . 7.8На рис
изображены графики функций 2 ln( )y x и 2 5y x .
-В качестве начального прибли жения возьмем точк у 0 1,9x ; -зна чение , определяющее отрезок
0 0[ ; ]x x , возьмем равным0,5 . , Тогда отрезок -где ищет
, ся точное решение будет равен
[1,4;2,4]. Для исходного уравнения можно построить две канонические
:формы1) 2,5
1( ) xx x e ;2) 2( ) 2,5 ln( )x x x .
Проверим условия сходимости метода простых итераций для обеих :канонических форм
1) функции 1( )x и 2( )x о пределены на отрезке [1,4;2,4] ;2) проверку выполнения условий Липшица заменим проверкой
выполнения неравенств
[1,4;2,4]max ( ) 1, 1,2i i
xx q i
.
Получим2,5
1( ) ;xx e 1 1,822q ;
2( ) 2,5 ln( );x x 2 0,526q . Так как 1 1q , то -итерационный процесс для первой канониче
. ской формы будет расходящимся Для второй канонической формы
2 1q . и итерационный процесс будет сходящимся Для этой формы
0 2 0( ) 0,045m x x и2
0,151
mq
.
, Заметим что невыполнение только последнего условия влияет на .изменение скорости сходимости итерационного процесса
-Методом простых итераций для второй канонической формы полу чены следующие результаты: x 1,872648; n 16, где n -характери
зует число итераций до достижения неравенства
. 7.8Рис
1 2 30 410
0
5
5
y x 2ln
y x 2 + 5
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

204 . . .Г Н Решетникова Моделирование систем
1 , 0, 1k kx x k n .
Методом секущих для 2( )x x : получается x 1,872647; n 4,
:а методом Стеффенсена x 1,872647; n 3. Можно построить каноническую форму вида
3( ) (2ln( ) 2 5)x x x x x ,
где 01
sign[ ( )]f xM
, [1,4;2,4]max ( )
xM f x
. Тогда
[1,4;2,5]3
min ( )
1 0,174xf x
qM
.и итерационный процесс для этой формы будет сходящимся
Метод Ньютона
-Метод Ньютона применим к решению широкого класса нелиней . , -ных уравнений Идея этого метода заключается в том что он позволя
-ет решение нелинейного уравнения свести к решению последователь .ности линейных задач
Пусть требуется найти точное решение х уравнения ( ) 0f х при заданном начальном приближении 0х . Итерационн -ое правило Нью тона имеет вид
1( )
, 0,1,....( )п
n nп
f хx x п
f х
( . 7.9): -Геометрически метод Ньютона означает следующее рис точ ное решение х является точкой пересечения кривой ( )y f х с осью
. абсцисс За очередное приближение 1nx -принимается точка пересе чения касательной к кривой ( )y f х в точке ( , ( ))n nx f x с о -сью абс
ц .исс
x
y x ) f(
xn+1x*
y
xn
( ( ))x ,f xn n
y f x x x ( )( )n n
( ( ))x ,f xn n+1 +1
xn+2
. 7.9Рис
Created with novaPDF Printer (www.novaPDF.com)

205
-Для проверки сходимости метода Ньютона используются следую .щие теоремы
Теорема. :Пусть выполнены условия1) функция f(x) -определена и дважды непрерывно дифференциру ема на отрезк е 0 0[ , ]x x , при этом ( )f x K дл я всех x на этом
;отрезке
2) 0( ) 0f x и0
1( )
Bf x
;
3) 0
0
( )( )
f xf x
;
4) для , ,B K соблюдено условие12
h BK ;
5) верно неравенство 1 1 2hh
.
:Тогда
1) последовательность 1( )
, 0,1,...,( )
nn n
n
f xx x n
f x
может быть
, . .построена и является сходящейся т е lim nn
x x
;
2) предельное значение х ес ть решение уравнения ( ) 0f х ;3) верна оценка скорости сходимости
n nx x t t ,
где nt — ньютонова последовательность приближений
1( )( )
nn n
n
P tt t
P t
к меньшему корню *t уравнения
21 1( ) 0
2P t Kt t
B B ,
построенная при 0 0t .
Теорема. -При соблюдении условий предыдущей теоремы о сходи мости метода Ньютона для разности nx x верна оценка
2 11
1(2 )
2
n
n nx x h .
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

206 . . .Г Н Решетникова Моделирование систем
-При практическом использовании метода Ньютона часто проверя , -ют достаточные условия сходимости определяемые следующей тео
.ремой
Теорема. Если f(x) , -определена дважды дифференцируема в ин тервале [ , ] -и принимает значения разных знаков на концах интер
вала [ , ] , причем ( )f х и ( )f х -отличны от нуля и сохраняют посто янные знаки на [ , ] , , то исходя из начального приближения 0 [ , ]x ,
удовлетворяющего неравенству
0 0( ) ( ) 0f x f x ,
можно вычислить методом Ньютона единственный корень *x -уравне
ния ( ) 0f x .с любой степенью точности
Замечание Зависимость погрешности 1n на (n+1)- м шаге от погрешности n
на n-м шаге в методе Ньютона выражаетс я соотношением
21
1 ( )2 ( )
n nf xf x
,
, -поэтому говорят что сходимость метода Ньютона является почти квад.ратичной
, Наиболее известными видоизменениями метода Ньютона которые , :уменьшают объем вычислений являются следующие
1) метод секущих
1 11
1
( ) ( ), 1,2,...
( ) ( )п п п п
пп п
x f fх х хx п
f fх х
;
2) видоизменение с постоянным значением производной
10
( ), 0,1,2,...
( )п
nпf х
x x пf х
.
П р и м е р Найти решение x уравнения ( ) 2 ln( ) 2 5 0f x x x -с точно
стью 50,5 10 . Из предыдущего примера 0 1,9x ; 0,5 , -отре
, , зок где идет поиск решения раве н [1,4;2,4] . -Проверим выполнение условий сходимости итерационного прави
:ла Ньютона1) функция ( )f x -определена и дважды непрерывно дифференци
руема на [1,4;2,4] , так ка к2
2 2( ) 2, ( )f x f x
x x , причем
Created with novaPDF Printer (www.novaPDF.com)

207
2[1,4;2,4]
2max 0,347
xK
x ;
2) 0( ) 3,053 0f x и0
11,805
( )B
f x
;
3) 0
0
( )0,0274
( )f xf x
;
4)1
0,003142
h BK ;
5)1 1 2
0,0281 0,5h
h .
У словия сходимости метода Ньютона выполнены и с его помощью получены следующие результат : ы x 1,872647; n 3, где n -характе
ризует число итераций до достижения неравенства
1 , 0, 1k kx x k n .
: Методом секущих получены следующие результаты x 1,872647;n 4, -при использовании видоизменения с постоянным значением про
, , -изводной получены результаты совпадающие с результатами полу .ченными методом секущих
7.5.2. Метод Лобачевского при решении алгебраических уравнений
-Особое место среди нелинейных уравнений занимают алгебраиче , ские уравнения или полиномы n-й , -степени которые можно предста вить в виде
10 1( ) ... 0n п
пP x a x a x a . (7.50) -Для нахождения корней алгебраического уравнения можно исполь
, , - , -зовать методы простых итераций и Ньютона но во первых эти мето ,ды предназначены для отыскания действительных простых корней
, - , ,и во вторых даже если нужно найти только действительные корни , -необходимо для каждого корня указать интервалы содержащие изоли
, .рованные корни и определить начальные приближения -Для нахождения корней полиномов существует метод Лобачевско
. го Он не требует определения начальных приближений для корней (7.50). -и позволяет одновременно находить все корни полинома Недо
, -статком этого метода является то что при вычислениях приходит , ся иметь дело с числами которые сильно различаются по порядкам
.величин
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

208 . . .Г Н Решетникова Моделирование систем
(7.50)Пусть коэффициенты полинома 0 1, , ... , na a a являются , действительными числами а корни пронумерованы в следующем
:порядке
1 2 ... nx x x . (7.51)
В основании метода Лобачевского лежат следующие соотношения ( -между корнями и коэффициентами алгебраического уравнения равен
):ства Виетта
11 2
0
21 2 1 3 1
0
31 2 3 2 1
0
1 2 30
... ;
... ;
... ;
...
... ( 1) .
n
n n
n n n
n nn
ax x x
aa
x x x x x xaa
x x x x x xa
ax x x x
a
(7.52)
, Будем говорить что корни , 1,ix i n , -сильно разделены в смыс , ле отношения их модулей если модуль предыдущего корня во много :раз больше модуля последующего корня
11, 1, 1i
i
xi n
x . (7.53)
, Рассмотрим случай когда все корни являются действительными .и различными
(7.53), (7.52)Если выполняются соотношения то равенства Виетта . , (7.52) -значительно упрощаются Так первое уравнение в можно запи
сать в виде
2 11
1 1 01 ... nxx a
xx x a
,
(7.53), -и так как для корней выполняется соотношение то все отноше, , , ния стоящие в скобках будут величинами пренебрежимо малыми
, . в сравнении с единицей и ими можно пренебречь Тогда получим
11
0
ax
a .
Created with novaPDF Printer (www.novaPDF.com)

209
Аналогичное преобразование можно проделать и для остальных . (7.52) равенств Виетта Тогда можно заменить следующей системой
, -приближенных равенств верных лишь в принятой точности вычис:лений
11
0
21 2
0
31 2 3
0
1 20
;
;
;
...
... ( 1) .n nn
ax
aa
x xa
ax x x
a
ax x x
a
(7.54)
(7.54) , Тогда из следует что
31 21 2 3
0 1 2 1, , , ... , n
nn
a aa ax x x x
a a a a . (7.55)
, Таким образом найти сильно разделенные действительные корни . -алгебраического уравнения достаточно просто Поэтому решение урав
(7.50) . нения необходимо начинать с разделения корней Для этого можно воспользоваться процессом квадрирования, -то есть построением последо
, вательности таких полиномов у которых корни последующего равны . квадратам соответствующих корней предыдущего Это равносильно
вычислению коэффициентов для последовательности полиномов по :следующим рекуррентным формулам
2( 1) ( )0 0
2( 1) ( ) ( ) ( )1 1 0 2
2( 1) ( ) ( ) ( ) ( ) ( )2 2 1 3 0 4
2( 1) ( )
;
2 ;
2 2 ;
...
.
k k
k k k k
k k k k k k
k kn n
a a
a a a a
a a a a a a
a a
, -Процесс квадрирования можно прекратить если в пределах при нятой точности выполняются соотношения
2( 1) ( ) , 0, .k ki ia a i n
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

210 . . .Г Н Решетникова Моделирование систем
Тогда для полинома( ) ( ) ( ) 1 ( )
0 1( ) ...k k n k n knP x a x a x a , (7.56)
, , -в силу разделенности его корней выполняются соотношения анало (7.55), гичные а модули приближенных значений корней исходного
(7.50) :уравнения можно определить из следующих равенств( ) ( ) ( )1 2
1 2( ) ( ) ( )0 1 1
, , ... , ,k k k
m m m nnk k k
n
a a ax x x
a a a
где 2km , при этом знаки корней определяются подстановкой .в исходное уравнение
П р и м е р
Найдем корни полинома 3 2( ) 3 1P x x x x . -С помощью про .цесса квадрирования получим следующую таблицу коэффициентов
k ( )0ka ( )
1ka ( )
2ka ( )
3ka
0 1 3 –1 –11 1 11 7 12 1 107 27 1
3 1 41,139 10 515 1
4 1 81,998 10 52,424 10 1
5 1 161,686 10 105,852 10 1
, , Из таблицы видно что квадраты всех коэффициентов стоящих , -в предыдущих строках стремятся к соответствующим коэффициен
, . , -там расположенным в последующих строках Следовательно все кор .ни полинома являются вещественнымиПолагаем 5, 2kk m и мод ули корней определяем следующим
:образом1
( ) ( )1 1
1 ( ) ( )0 0
3,214k k m
mk k
a ax
a a
;
1( ) ( )2 2
2 ( ) ( )1 1
0,675k k m
mk k
a ax
a a
;
Created with novaPDF Printer (www.novaPDF.com)

211
1( ) ( )3 3
3 ( ) ( )2 2
0,461k k m
mk k
a ax
a a
.
:Знаки корней определяются подстановкой в исходное уравнение1( ) 59,991;P x 15
1( ) 5,329 10 ;P x 7
2( ) 4,59 10 ;P x 2( ) 0,735;P x 3( ) 0,726;P x 7
3( ) 2,218 10 .P x , Таким образом полином ( )P x :имеет следующие корни
1 2 33,214; 0,674; 0, 461x x x . Для более точного вычисления корней -необходимо выполнить боль
.ше шагов в процессе квадрирования
, Если уравнение имеет комплексные корни то они будут попарно, .сопряжены так как все коэффициенты уравнения действительные
, Пусть наприме ,р 2x и 3x — .пара комплексно сопряженных корней Эти корни можно представить в виде
2 3,i ix re x re . Так как 2 3 2 cos( )m m mx x r m и 2
2 3m m mx x r , то д ля уравнения
(7.56), , -полученного после квадрирования будут справедливы следую :щие приближенные равенства
( )1
1 ( )0
( )2
1 ( )0
( )2 3
1 ( )0
( )2 4
1 4 ( )0
( )2
1 ( )0
;
2 cos( ) ;
;
;
...
... ( 1) .
km
k
km m
k
km m
k
km m m
k
km m m n n
n k
ax
a
ax r m
a
ax r
a
ax r x
a
ax r x
a
(7.57)
Тогда модуль комплексных корней можно определить из третьего (7.57)соотношения в
( )2 3
( )1
km
k
ar
a ,
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

212 . . .Г Н Решетникова Моделирование систем
-а для определения аргумента можно воспользоваться первым соотно (7.52), шением Виетта в которое в данном случае будет иметь вид
11 4
02 cos( ) ... n
ax r x x
a .
Отсюда определяется значение cos( ) , а sin( ) 1 cos( ) .
П р и м е р Найдем корни полином а 3 2( ) 2 2P x x x . С помощью процесса
.квадрирования получим следующую таблицу коэффициентов
k ( )0ka ( )
1ka ( )
2ka ( )
3ka
0 1 2 0 21 1 4 –8 42 1 32 32 163 1 960 0 256
4 1 59,216 10 54,915 10 46,554 10
5 1 118,493 10 111,208 10 94,295 10
, Из таблицы видно что в процессе квадрирования коэффициенты( )2 , 1,2,...,ka k . , меняют знак Следовательно корни полинома 2 3,x x
- , являются комплексно сопряженными а 1x — . вещественным Корни : пронумерованы следующим образом 1 2 3x x x .
Полага ем 5, 2kk m и вычисляем корень 1x :
1( ) ( )1 1
1 ( ) ( )0 0
141 1
2,359;
26,265; 8,882 10 .
k k mm
k k
a ax
a a
P x P x
Таким образом, 1 2,359x . Модуль - комплексно сопряженных корней вычисляется следующим
:образом1
( ) ( ) 23 32( ) ( )1 1
0,921;k k m
mk k
a ar
a a
.
Обозначим 2 3(cos( ) sin( )), (cos( ) sin( ))x r i x r i и з -апи шем первое соотношение Виетта для исходного уравнения
2,359 2 0,921cos( ) 2 .
Created with novaPDF Printer (www.novaPDF.com)

213
Тогда
22 2,359cos( ) 0,195; sin( ) 1 0,195 0,981
2 0,921
и 2 30,18 0,903 , 0,18 0,903x i x i . -Точность вычисления комплек сных корней определяется подстановкой
15 142( ) 6,217 10 3,375 10P x i ;
15 143( ) 6,217 10 3,375 10P x i .
, Таким образом нахождение корней алгебраического уравнения .методом Лобачевского осуществляется в несколько этапов
1. , -Разделение корней путем квадрирования при этом по поведе , , нию коэффициентов получаемых в процессе квадрирования делается
, :вывод о том какими являются корни уравнения если все коэффициенты стремятся к квадратам соответствующих
, -коэффициентов полученных на предыдущем шаге процесса квадриро, ;вания то все корни действительные и различные
- -если какой то коэффициент меняет знак в процессе квадрирова, ,ния то это указывает на наличие комплексно сопряженных корней
-причем номер этого коэффициента указывает на первый из таких кор.ней2. , -Вычисление значений корней по формулам которые соответ
.ствуют сделанным выводам о виде корней
7.5.3. Решение систем нелинейных уравнений
Пусть требуется найти решение 1 2, ,..., nx x x системы нелинейных:уравнений
1 1 2
2 1 2
1 2
( , ,..., ) 0;
( , ,..., ) 0;
..........................
( , ,..., ) 0.
n
n
n n
f x x x
f x x x
f x x x
(7.58)
:Введем следующие обозначения
1 1( ,..., ) ; ( ) ( ( ),..., ( ))T Tn nx x x f x f x f x .
(7.58) Тогда система запишется в виде( ) 0f х . (7.59)
Для решения систем нелинейных уравнений используются методы , -простых итераций и Ньютона которые являются естественным рас
пространением этих методов для решения уравнений на многомерный.случай
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

214 . . .Г Н Решетникова Моделирование систем
С начала задаются начальное приближени е 00 01 ,...,
Tnx x x -и об
, ласть в которой ищется точное решение * * *1 ,...,
Tnx x x , а зате -м про
веряются условия сходимости итерационнах метод . ов При этом, необходимо чтобы n- мерное пространство было метрическим, то есть
в n- мерное числовое пространство необходимо ввести метрику. -В одно
мерном числовом пространстве естественной метрикой ( , )x y -являет ся абсолютное значение разности между числами x и y, которое равно
, длине отрезка соединяющего точки x и y, то есть ( , )x y x y .
Множество X называется метрическим пространством, если каждой
(паре элементов x,y) из X соответствует число ( , )x y , -которое назы вают расстоянием между x и y и которое удовлетворяет -аксиомам мет
рики:1) аксиома различи — я ( , ) 0x y , если x y , и ( , ) 0x y , если
x y ;2) — аксиома симметрии ( , ) ( , )x y y x ;3) — аксиома треугольника ( , ) ( , ) ( , )x z x y y z .
, Говорят что последовательность ( )( ) ( )1( ,..., ) , 1,2,...,kk k T
nx x x k
сходится к x , если ( ) *( , ) 0k
kx x
.
В n- мерном числовом пространстве нет единственной естественной метрики и в разных задачах приходится в зависимости от условий
. и преследуемых целей пользоваться разными метриками Наиболее :часто в практике моделирования используются следующие метрики
1) кубическая, или m- :метрика
1,( , ) maxm i i
i nx y x y
;
2) октаэдрическая, или s- :метрика
1
( , )n
s i ii
x y x y
;
3) cферическая, или l- :метрика
2 2
1
( , ) ( )n
l i ii
x y x y
.
(7.59) -Для решения системы методом простых итераций ее необхо димо привести к канонической форме
( )x x ,
где 1( ) ( ( ),..., ( ))Tnx x x .
Created with novaPDF Printer (www.novaPDF.com)

215
Итерационное правило метода простых итераций записывается в виде
( 1) ( )( ), 0,1,... .k kx x k . Для сходимости метода простых итераций должны выполняться , -условия следующей теоремы формулировка которой приведена в тер
.минах кубической метрики
Теорема. :Пусть выполняются условия
1) функци и 1, , , 1, ,ni x x i n -определены и непрерывно диф
ференцируемы в области(0)
1,max | |i ii n
x x
;
2) удовлетворяют там неравенствам
1, 1
( )max max 1
ni
xi n jj
xq
x
;
3) для начального приближени я (0)x вы полняется условие 0 0
1,max ;i ii n
mx x
4) для чисел ,q и m соблюдается неравенство
1m
q
.
:Тогда1) систе ма ( )x x в заданной области имеет решение x
1( , , )nx x , к которому сходится итерационная последовательность приближений ( )kx ;
2) скорость сходимости итерационной последовательности может быть охарактеризована неравенством
( )*
1,max
1k k
i ii n
mx x q
q
.
П р и м е р
Найти с точностью 40,5 10 :решение системы
1 2 11 2
1 2 22 1
, sin 2 2 0;
, 1cos 3 0,7 0.
x x xf x
x x xf x
. -Начальное приближение определим графически Для этого урав
, нения системы запишем в виде функций задающих зависимость 2x от 1x :
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

216 . . .Г Н Решетникова Моделирование систем
1
2 2 12 sin( )
; arccos(0,7 3 ) 12
xx x x ,
и построим графики этих функций для
1 [ 1;1]x ( . 7.10).рис -Точка пересечения графиков прини
мается за начальное приближени е (0)x (0,2;0,7) , , и область в которой ищется
, -решение системы определяется следую :щим образом
(0) (0) (0) (0)1 1 2 2{[ , ]; [ , ]} {[ 0,3;0,7];[0,2;1,2]}x x x x ,
где 1 2 0,5. Область , задается таким образом чтобы функции 1 1 2( , )f x x
и 2 1 2( , )f x x в этой области были непрерывно дифференцируем .ыми -Для заданной системы уравнений можно записать две канониче
.ские формы :Первая каноническая форма
1 1 1 2 2
2 2 1 2 1
( , ) arcsin(2 2 );
( , ) arccos(0,7 3 ) 1
x x x xx x x x
:и вторая каноническая форма
21 1 1 2
12 2 1 2
0,7 cos( 1)( , ) ;
32 sin( )
( , ) .2
xx x x
xx x x
-Проверим выполнение условий сходимости метода простых итера.ций
Для первой каноническойформы
Функции 1 2( , ), 1,2,i x x i -должны быть определены и непре
рывно дифференцируемы в области . :Но
1 1 2
1
( , )0;
x xx
1 1 222 2 2
( , ) 2;
4 4 3
x xx x x
2 1 221 1 1
( , ) 3;
0, 42 9 0,51
x xx x x
2 1 2
2
( , )0,
x xx
и подкоренные выражения в области принимают отрицательные. значения В связи с этим первую каноническую форму рассматривать
.не будем
2
1
0
–1–1 0 1
. 7.10Рис
x2
x1
x x2 1 arccos(0,7 3 ) 1
x22 sin( ) x1
2
Created with novaPDF Printer (www.novaPDF.com)

217
Для второй каноническойформы1. Функци и 1 2( , ), 1,2,i x x i оп -ределены и непрерывно диффе
ренцируемы в области . :Действительно
1 1 2
1
( , )0;
x xx
1 1 2 2
2
( , ) sin( 1);
3x x xx
2 1 2 1
1
( , ) cos( );
2x x xx
2 1 2
2
( , )0.
x xx
2. :Справедливы неравенства
1 2
1 1 2 1 1 21
, 1 2
( , ) ( , )max 0,333;
x x
x x x xq
x x
1 2
2 1 2 2 1 22
, 1 2
( , ) ( , )max 0,5
x x
x x x xq
x x
и 1 2max( , ) 0,5 1q q q .
3. Для начального приближения (0) (0) (0)1 2( , ) (0,2;0,7)T Tx x x
:выполняются условия(0) (0) (0)
1 11 1 2
(0) (0) (0)2 22 1 2
| ( , ) | 0,076;
| ( , ) | 0,201
x x x m
x x x m
и 1 2max( , ) 0,201m m m .4. Соблюдается неравенство
0,2010,402 0,5
1 1 0,5m
q
.
, -Так как все условия теоремы выполнены то метод простых итера , ций сходится и при выполнении условия
( 1) ( ) ( 1) ( )1 1 2 2max , , 0,1,...k k k kx x x x k ,
получается (10) (10)1 21 20,32249; 0,84155x x x x .
-Проверка точности полученного решения осуществляется подста :новкой в исходную систему уравнений
(10) (10) 5 (10) (10) 51 21 2 1 2( , ) 3,326 10 ; ( , ) 1,894 10f x x f x x .
,Если система нелинейных уравнений решается методом Ньютона :то итерационное правило записывается следующим образом
( 1) ( ) ( ) 1 ( )[ ( )] ( ), 0,1,...k k k kx x f x f x k ,
где ( ) 1[ ( )]kf x — обратная матрица к матрице Якоби вида
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

218 . . .Г Н Решетникова Моделирование систем
1 1 1
1 2
2 2 2
1 2
1 2
...
...( )
... ... ... ...
...
n
n
n n n
n
f x f x f x
x x x
f x f x f xf x x x x
f x f x f xx x x
.
-Условия сходимости метода Ньютона приведены в следующей тео, .реме сформулированной в терминах кубической метрики
.Теорема :Пусть выполняются условия
1) функции ( ), 1,if x i n , -определены и дважды непрерывно диф
ференцируемы в области(0)
1,max | |i ii n
x x
,
-при этом для вторых производных в этой области выполнено неравенство
2
1, , 1
( )max max
ni
xi n jj
f xK
x x
;
2) значения (0)(0) (0)1( ,..., )Tnx x x образуют приближенное решение
(7.58)системы и для них выполняется условие(0)
1,max | ( ) |ii n
f x
;
3) матрица Якоби ( )f x имеет в точке (0)x определитель D (0)[ ( )] 0D f x , и если jD — алгебраическое дополнение элемента
(0) (0)1 2( , )jf x x
x
, то верна оценка
1, 1
1max
n
jn j
D BD
;
4) для чисел , ,B K выполняется условие
2 12
h B K ;
5) для верно неравенство
Created with novaPDF Printer (www.novaPDF.com)

219
1 1 2hB
h
.
:Тогда
1) (7.58) система уравнений имеет решение *1( ,..., )Tnx x x ;
2) последовательность ньютоновских приближений ( )kx ( ) ( )1( , , )k k T
nx x , может быть построена принадлежит рассматриваемой области и сходится к решению ( )x ;
3) скорость сходимости оценивается неравенством( )* *
1,max k
i i ki n
x x t t
,
где * 1 1 2ht B
h
— есть меньший корень квадратного уравнения
21 1( ) 0
2P t Kt t
B и kt — последовательные приближения к нему
, по методу Ньютона построенные при 0 0t .
П р и м е р
Найдем с точностью 40,5 10 :решение системы
1 2 11 2
1 2 22 1
, sin 2 2 0;
, 1cos 3 0,7 0.
x x xf x
x x xf x
Как и в предыдущем примере полагаем (0) (0,2;0,7)Tx ; 0,5 ;(0) (0) (0) (0)1 1 2 2{[ , ]; [ , ]} {[ 0,3;0,7]; [0,2;1,2]}x x x x .
.Проверим выполнение условий сходимости метода Ньютона1. Так как первые производные
1 1 21
1
( , )cos( );
f x xx
x
1 1 2
2
( , )2;
f x xx
2 1 2
1
( , )3;
f x xx
2 1 22
2
( , )sin( 1),
f x xx
x
вторые производные
21 1 2
121
( , )sin( );
f x xx
x
21 1 2
1 2
( , )0;
f x xx x
21 1 2
22
( , )0
f x xx
;
22 1 2
21
( , )0;
f x xx
22 1 2
1 2
( , )0;
f x xx x
22 1 2
222
( , )cos( 1)
f x xx
x
,
то функ ции 1 2( , ), 1,2if x x i , оп -ределены и дважды непрерывно диф ференцируемы в област и и
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

220 . . .Г Н Решетникова Моделирование систем
21 1 2
121
( , )max 0,62879;x
f x xK
x
22 1 2
222
( , )max 0,5885x
f x xK
x
;
1 2max( , ) 0,62879K K K .
2. (0) (0)1 11 2( , ) 0, 401;f x x (0) (0)
2 21 2( , ) 0,229;f x x
1 2max( , ) 0,401 .
3. (0) 0,98 2( )
3 0,992f x
; (0)( 6,972D D f x ;
1 21 1
(0,992 3) 0,578; (2 0,98) 0,431;6,972 6,972
B B
1 2max( , ) 0,578B B B .
4. 2 3 18,424 10
2h B K .
5.1 1 2
0,233 0,5h
Bh
.
, -Так как все условия теоремы выполнены то метод Ньютона схо, дится и при выполнении условия
( 1) ( ) ( 1) ( )1 1 2 2max , , 0,1,...k k k kx x x x k ,
получается (3) (3)1 21 20,32248; 0,84154x x x x .
-Проверка точности полученного решения осуществляется подста , новкой в исходную систему уравнений и в данном случае величины
(3) (3)1 21( , ),f x x (3) (3)
2 21( , )f x x , меньше чем 1510 .
7.6. Решение задач матричной алгебры
-В матричной алгебре рассматриваются четыре класса основных за: , -дач решение систем линейных алгебраических уравнений вычисле , , -ние определителей нахождение обратных матриц определение соб
. ственных значений и собственных векторов матриц Все эти задачи имеют важное прикладное значение при моделировании в различных
. , -областях науки и техники Кроме того задачи матричной алгебры яв -ляются вспомогательными при реализации многих алгоритмов вычис
, , -лительной математики математической физики обработки результа .тов экспериментальных исследований
Created with novaPDF Printer (www.novaPDF.com)

221
7.6.1. Некоторые понятия матричной алгебры
Пусть 1( , , )T nnx x x R — вектор n- ,мерного пространства
,( ) n ni jA a R — ма трица порядка n.
Одним из важных понятий матричной алгебры является понятие .нормы векторов и матриц
Нормой вектора x , называется действительное число обозначаемоеx , уд :овлетворяющее условиям
1) 0x , если 0x и 0 0 ;
2) c x c x при лю бом числовом множителе c;
3) x y x y . ,Из такого определения нормы вектора непосредственно следует
что x y x y ., Говорят что последовательность векторов ( )kx сходит -ся к векто
ру x , по норме есл и ( )lim 0k
kx x
.
, Вводить норму вектора можно различными способами но при этом 1–3 .должны выполняться условия определения нормы
Наиболее часто используются следующие определения нормы.вектора
1. Первая (кубическая) норма:
I 1,max ii n
x x .
, Множество векторов вещественного пространства для которых
I1x .заполняет единичный куб
2. Вторая (октаэдрическая) норма:
II
1
n
ii
x x .
, Множество векторов вещественного пространства для которых
II1x , заполняет n- ( ).мерный аналог октаэдра восьмиугольника
3. Третья ( , сферическая или евклидова) норма:
2
III1
( , )n
ii
x x x x .
. , Это длина вектора Совокупность векторов для кот орыхIII
1x , .заполняет шар единичного радиуса
Скалярное произведение векторов 1( , , )Tnx x x и 1( , , )Tny y y вводится по формуле
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

222 . . .Г Н Решетникова Моделирование систем
1
( , )n
i ii
x y y x ,
гд е iy — значение, комплексно сопряженное iy , 1,i n . -Норма вектора может быть определена многими способами в зави
, -симости от условий задачи и целей исследования но при всяком опре ,делении она должна удовлетворять трем вышеприведенным условиям .которые являются аксиомами нормы
Нормой матрицыA называют число A , :удовлетворяющее условиям
1) 0A , если 0A и 0 0 ;
2) c A c A для вся кого числового множителя c;
3) A B A B ;
4) A B A B .
Для нормы матрицы верно неравенство
.A B A B
В большинстве случаев приходится одновременно рассматривать , , матрицы и векторы потому их нормы рационально вводить так чтобы
- они были в какой то мере согласованными. , Обычно говорят что норма A матрицы согласована с нормой вектора, -если для всякого векто
ра x размерности n выполняется неравенство
Ax A x . (7.60)
.Среди согласованных норм матрицы часто выбирают наименьшую , -Так как случай нулевого вектора интереса не имеет то неравен
(7.60) ство можно записать в виде Ay A , где xy
x , . . т е 1y .
, Последнее означает что согласованная норма матрицы должна быть верхней границей норм векторов Ay , при условии что 1y . Н -аи -меньшей согласованной нормой будет точная верхняя граница множе
ства значе ний Ay при 1y :
1maxx
A Ax
.
, Эта норма называется нормой матрицы подчиненной .норме вектора -Наиболее распространенными подчиненными нормами матриц явля
.ются следующие определения норм матриц1. Первая (кубическая) норма:
,I 1, 1
maxn
i ji n j
A a .
Created with novaPDF Printer (www.novaPDF.com)

223
2. Вторая (октаэдрическая) норма:
,II 1, 1
maxn
i jj n i
A a .
3. Третья ( , сферическая или евклидова) норма:
2, 1III
, 1
n
i ji j
A a ,
где 1 — н аибольшее по модулю собственное значение матрицы*A A , где *A — , матрица сопряженная A.
-Важным понятием матричной алгебры является понятие собствен . ного значения матрицы Собственным значением ( или -характеристичес
ким числом) квадратной матрицы A называется такое число , что для некоторого ненулевого вектора x имеет место равенство
Ax x . (7.61)Вектор x, , удовлетворяющий этому равенству называется -собствен ным вектором матрицы A, соответствующим ( или принадлежащим) -соб
ственному значению . В -се собственные векторы матрицы определе .ны с точностью до числового множителя
(7.61) Перепишем систему в виде( ) 0A I x , (7.62)
где I — .единичная матрица соответствующей размерности Условием существования для однородной системы ненулевого
:решения является равенство нулю ее определителя
1,1 1,2 1,
2,1 2,2 2,
,1 ,2 ,
0.
n
n
n n n n
a a aa a a
A I
a a a
Это уравнение обычно называют вековым, или характеристическим,уравнением матрицы A.
Левая часть векового уравнения1
1( 1) ( )n n nnA I p p
называется характеристическим многочленом матрицы A. Многочлен1
1( ) n nnP p p ,
отличающийся от характеристического многочлена мно жителем ( 1)n , называется собственным многочленом матрицы A. -Собственные значе
. -ния матрицы являются корнями собственного многочлена Совокуп ность всех собственных значений 1 2, , , n матрицы A, -где каж
, дое собственное значение выписано столько раз какова его кратность ,как корня собственного многочлена называется спектром матрицы .А
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

224 . . .Г Н Решетникова Моделирование систем
Собственными вектора ми ix матрицы A являются нетривиальные (7.62), решения однородной системы в которой вместо подставлены
собственные значения i , 1,i n . -Нахождение всех собственных значений и соответствующих соб
ственных векторов матрицы называется решением -полной проблемы соб ственных значений, — -нахождение части собственных значений реше
нием частичной проблемы собственных значений. -Полезно знать следующие соотношения между элементами матри
цы А :и ее собственными значениями
1 2 Sp trn A A ; 1 2 detn A , (7.63)
где SpA ( trили A) обозначает след матрицы, который равен сумме ее диагональных элементо ; в det A — . (7.63),определитель матрицы Из
, , в частности следует что матрица A имеет хотя бы одно собственное, , ,значение равное нулю если определитель этой матрицы равен нулю
. . т е если она особенная.
7.6.2. Обусловленность систем и матриц
Важное значение при решении задач матричной алгебры имеет понятие обусловленности систем и матриц.
Пусть — , погрешность исходных данных а — погрешность . -решения системы линейных алгебраических уравнений Оценим за
висимость погрешности решения от погрешности исходных данныхнеравенством
k . (7.64)Число k -характеризует зависимость максимально возможных оши , , бок решения от ошибок исходных данных задачи зная его можно
-разумно выбрать допустимую порешность метода и необходимую точ . , ность проведения вычислений Действительно если исходные данные
известны с погрешностью , то нецелесообразно искать решение , задачи с точностью намного превосходящей k .
Если k « », , не очень велико то будем говорить что система хорошообусловлена, если k « » — велико то система плохо обусловлена. (7.64)Из
, -следует что в плохо обусловленной системе малым погрешностям ис .ходных данных отвечают большие погрешности в решении
Пусть система линейных алгебраических уравнений задана в видеAx f , (7.65)
где A — .невырожденная вещественная матрицаОбозначим A ;матрицу f — -вектор малых погрешностей эле
ментов матрицы A и вектора свободных членов f; x — -вектор погреш . ностей решения Тогда для относительной погрешнос -ти решения спра :ведлива следующая оценка
Created with novaPDF Printer (www.novaPDF.com)

225
1
n
x f Ax f A
,
где 1 и n — макси мальное и минимальное собственные значенияматрицы *A A . Таким образом, (7.65) -обусловленность системы зави
сит от величины отн ошения1
n
.
Замечание Если матрица A , -симметрическая то собственные значения мат
рицы *A A равны квадратам собственных значений матрицы А, . .т е
1 1
n n
,
где 1, n — со ответственно максимальное и минимальное собственные значения матрицы A.
Пусть — велич ина невязки ( результат подстановки найденного ), . .решения в исходную систему т е
Ax f . (7.66)
(7.66) Если переписать в виде
Ax f ,
, , то если система плохо обусловлена малым может соответствовать . большая погрешность в решении Таким образом, -оценка точности ре
шения системы по невязкам применима только к хорошо -обусловлен . ным системам В то же время проверка точности определения обратной
. , матрицы не зависит от ее обусловленности Действительно если 1A — приближенное значение обратной к A , -матрицы тогда невязка реше
ния задачи обращения матрицы равна1AA I
и1
1
A
A
,
где 1 1 1A A A — .погрешность вычисления обратной матрицы Из геометрической интерпретации решения системы линейных
, алгебраических уравнений где рассматривается решение системы как точка пересечения гиперплоскостей 0, 1,i i iL A x f i n , -следу
, ет что если
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

226 . . .Г Н Решетникова Моделирование систем
1
detn
ii
A A
,
; то система хорошо обусловлена если
1 1det
n
ii
A
A
,
. то система плохо обусловлена Здесь iA — век , тор являющийся i-й- вектор строкой матрицы A. Для проверки обусловленности системы и матрицы A -можно ис
пользовать число обусловленности матрицы A
1A A . (7.67)
(7.67) , Из следует что если матрица A , близка к особенной точисло будет велико и матрица A , будет плохо обусловленной если , мало то матрица A . , -будет хорошо обусловленной Как правило сис
-тема с плохо обусловленной матрицей будет плохо обусловленной сис .темой и наоборот
Значение числа зависит от выбора нормы матрицы A. ЕслиA — ,вещественная матрица и используется третье определение нормыто
1 1III III III n
A A
.
-Ввиду важности понятия обусловленности систем и матриц приве .дем численный пример
П р и м е р Рассмотрим систему
Ax f ,
где
5 7 6 5
7 10 8 7
6 8 16 9
5 7 9 10
A ;
23
32
39
31
f
.
: Точное решение системы * 1; 1; 1; 1 Tx .
Created with novaPDF Printer (www.novaPDF.com)

227
О братная матрица системы равна
1
12,065 8,097 0,548 0,129
8,097 5,645 6,323 0,194
0,548 6,323 0,101 0,097
0,129 0,194 0,097 0,258
A
.
Если внести погрешность 1 0,01 только в один элемент 1,1aматрицы A, то значение обратной матрицы будет равно
1 1
10,766 7,225 0,489 0,115
7,225 5,06 0,283 0,184
0,489 0,283 0,159 0,096
0,115 0,184 0,096 0,258
A A
.
Решение системы также изменится и будет равно
1 1( ) 0,892; 1,072; 1,005; 0,995TA A f .
Если внести погрешность 2 0,01 ,в вектор свободных членов. . т е 2 2 2 223 ; 32 ; 39 ; 31
Tf f , то решение системы :будет следующим
1( ) 1,206; 0,861; 0,991; 1,002 TA f f .
Собственные значения матрицы A : 5,468; 0,057; 3,08; 32,398,равны а отношение максимального собственного значения к минимальному
568,386. есть Число обусловленности матрицы A, -вычисленное по тре , 580.тьей норме приблизительно равно
, -Таким образом обусловленность системы и обусловленность зада , : чи отыскания обратной матрицы тесно связаны а именно из хорошей
-обусловленности системы следует хорошая обусловленность задачи отыс , , -кания обратной матрицы и наоборот из плохой обусловленности сис
-темы следует плохая обусловленность задачи отыскания обратной матрицы.
MathCAD, Приведенные результаты получены в системе которая 15 , . . -осуществляет все вычисления с знаками после запятой т е по
.грешность округления не оказала влияния на результат , -Если система является плохо обусловленной то необходимо осуще
, , -ствлять ее решение специальными методами например методами ре, -гуляризации которые предназначены для решения плохо обусловлен
.ных систем
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

228 . . .Г Н Решетникова Моделирование систем
7.6.3. Мет од Гаусса
-Достаточно часто для решения систем с действительными элемен тами используется метод Гаусса ( метод исключения неизвестных). -Этот метод осуществляет приведение исходной системы к эквивалент
(ной системе с правой треугольной матрицей -схема единственного деления) (или с диагональной матрицей схема оптимального исключения). При
, -этом не требуется заранее определять имеет ли решение данная сис.тема
. Рассмотрим схему единственного деления Систему Ax f -пред ставим в виде
1,1 1 1,2 2 1, 1
2,1 1 2,2 2 2, 2
,1 1 ,2 2 ,
... ;
... ;
.......................................
... .
n n
n n
n n n n n n
a x a x a x f
a x a x a x f
a x a x a x f
, -Будем считать выбор порядка преобразования в котором исключа , . - ются неизвестные произвольным Выберем какое либо уравнение
. , -и неизвестное в этом уравнении Единственное условие которое долж , , но быть выполнено при этом выборе состоит в том что коэффициент . -при выбранном неизвестном должен быть отличным от нуля Пере
, , ,ставляя если необходимо уравнения и меняя местами неизвестные , , можно считать что выбрано первое уравнение неизвестное 1x , и при
этом 1,1 0a . Разделив выбранное уравнение на 1,1a , приве дем его квиду
1 1,2 2 1, 1... n nx b x b x q , (7.68)где
1, 11, 1
1,1 1,1, 2, ; .j
ja f
b j n qa a
Исключим 1x . -из остальных уравнений системы Для этого умно (7.68) жим последовательно на 2,1 3,1 ,1, ,..., па а а и вычтем из остальных
. уравнений системы Преобразованные уравнения будут иметь вид
2,2.1 2 2,3.1 3 2, .1 2.1
,2.1 2 ,3.1 3 , .1 .1
;
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
,
n n
n n n n n n
a x a x a x f
a x a x a x f
(7.69)
где , .1 , 1, ,1 .1 ,1 1, , 2, ;i j i j j i i i ia a b a i j n f f a q . , . .К полученной системе применим такое же преобразование т е
, ,выберем уравнение и неизвестное с коэффициентом отличным от нуля , приведем этот коэффициент к единице исключим неизвестное из
, -прочих уравнений и так до тех пор пока такие преобразования воз.можны
Created with novaPDF Printer (www.novaPDF.com)

229
.В результате придем к одной из двух ситуаций1. После n шагов преобразований получим систему вида
1 1,2 2 1,3 3 1, 1
2 2,3 3 1, 2
... ;
... ;
. . . . . . . . . . . . . . . . . . .
.
n n
n n
n n
x b x b x b x q
x b x b x q
x q
(7.70)
-Решение полученной системы осуществляется снизу вверх следу :ющим образом
1
,
;
, 1,1.
n ni
i i i j jj n
x q
x q b x i n
(7.71)
2. После шага преобразований m n сист ема приняла вид
1 1,2 2 1,3 3 1, 1
, 1 1 ,
1.
.
... ;
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
... ;
0 ;
. . . . . . . . .
0 .
n n
m m m m m n n m
m m
n m
x b x b x b x q
x b x b x q
f
f
Тогда если среди элементов 1. .,...,m m n mf f ,есть отличные от нуля (7.69) ; то система не имеет решения если все . 0,j mf 1,j m n , (то система имеет бесчисленное множество решений неизвестные
1,...,m nx x , могут принимать любые значения а 1,..., mx x -выражают ).ся через них
(7.70) Приведение системы к виду называется прямым ходом методаГаусса, (7.71) — а нахождение ее решения обратным. , Заметим что
на каждом шаге прямого хода метода Гаусса выбираются уравнение , . и неизвестное подлежащие исключению из прочих уравнений Это
-равносильно выбору коэффициента для очередного шага преобразова. ний Этот коэффициент называется ведущим, -и он должен быть отлич . ным от нуля Во избежание большой потери точности рекомендуется
, -осуществлять такую перестановку уравнений чтобы ведущий коэффи циент являлся либо максимальным по модулю коэффициентом во всей
, системе либо максимальным по модулю коэффициентом в выбранном. уравнении Такая процедура называется -методом Гаусса с выбором глав
ного элемента. Метод Гаусса применим к вычислению определителей и обратных
. , матриц Так значение определителя матрицы A равно произведению :ведущих коэффициентов
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

230 . . .Г Н Решетникова Моделирование систем
1,1 2,2.1 , . 1det ,n n nA a a a а вычисление обратной матрицы осуществляется одновременнымрешением n :систем
( ) , 1,kkAx e k n , (7.72)
где ke — е ( , , диничный вектор вектор у которого все элементы кромеk- , , го равны нулю а k-й равен единиц );е ( )kx — k-й столбец матрицы
1A . Невозможность вычисления обратной мат -рицы проявляется в не - (7.72).возможности решения какой либо системы из
П р и м е р -Методом Гаусса решим систему линейных алгебраических уравне
ний Ax f, найдем обратную матрицу 1A и вычислим определитель матрицы A. -Будем одновременно решать систему и вычислять обратную матри
, -цу так как преобразования осуществляются с одной и той же матри цей A. .Все вычисления приведем в следующей таблице
N шага A f 1e 2e 3e0 3 2 3 7 1 0 0
–1 –3 1 4 0 1 02 1 –1 –1 0 0 1
1 123
173
13
0 0
073
2193
13
1 0
013
–3173
23
0 1
2 123
173
13
0 0
0 167
197
17
37
0
0 0237
467
57
17
1
3 123
173
13
0 0
0 167
197
17
37
0
0 0 1 2523
123
723
Created with novaPDF Printer (www.novaPDF.com)

231
, Система уравнений полученная с помощью прямого хода метода, , , Гаусса и ее решение полученное с помощью обратного хода имеют
вид
1 2 3
2 3
3
2 73 3
6 19 ;7 7
2
x x x
x x
x
3
2 3
1
2
19 121 .7 7
7 22 1
3 3
x
x x
x
: Проверка правильности решения 7; 4; 1T TAx f .
, -Для определения обратной матрицы решаются три системы каж .дая из которых дает соответствующий столбец обратной матрицы
1. 1 2 3
2 3
3
2 13 3
6 1;
7 7523
x x x
x x
x
3
2
1
523
1 30 1.
7 161 231 5 2 23 23 69 23
x
x
x
2. 1 2 3
2 3
3
20
36 3
;7 7
123
x x x
x x
x
3
2
1
123
3 6 9 .7 161 231 18 523 69 23
x
x
x
3. 1 2 3
2 3
3
20
36
;07
723
x x x
x x
x
3
2
1
7236 .23
7 4 1123 23 23
x
x
x
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

232 . . .Г Н Решетникова Моделирование систем
:Таким образом
1
2 5 1123 23 231 9 6
.23 23 235 1 723 23 23
A
:Проверка правильности вычисления обратной матрицы
1
2 5 1123 23 233 2 3 1 0 01 9 6
1 3 1 0 1 0 .23 23 23
2 1 1 0 0 15 1 723 23 23
A A
Вычисление определителя матрицы A -методом Гаусса с понижени :ем порядка выглядит следующим образом
21 1
733 2 3 27 3det 1 3 1 3 0 2 3
1332 1 1 1 30 3
3
61
7 7 2373 3 23.233 3 7
07
A
, -Число обусловленности исходной системы вычисленное по тре , 5,029.тьей норме равно
7.6.4. Мет од отражений
Если матрица A системы линейных алгебраических уравненийAx f -является произвольной невырожденной матрицей с комплекс
, ными элементами то для ее решения используется метод отражений. .Приведем некоторые формулы
Если a i — , комплексное число то a i — , -число ком плексно сопряженное a,
Created with novaPDF Printer (www.novaPDF.com)
233
2 2cos sin ; ; arg arctga r i r a
.
Если y — n- - ,мерный вектор столбец с комплексными элементамит о y — в - , -ектор столбец элементы которого комплексно сопряжены со
ответствующим элементам вект ора y; Ty — - , вектор строка элементы которой совпадают с соответствующими элементами вектора y; y —
- , -вектор строка все элементы которой являются комплексно сопряже ными соответствующим элементам векто ра y, . . т е Ty y . Скалярное
:произведение векторов определяется следующим образом
1
( , )n
Ti i
ix y x y y x y x
.
Метод отражений основан на представлении матрицы A в виде . -произведения унитарной и правой треугольной матриц Матрица на
зывается унитарной, -если ее произведение на свою сопряженную мат , рицу равно единичной и сопряженной, если она получена в результате
транспонирования исходной матрицы и комплексного сопряжения всех. -элементов В данном случае унитарная матрица образуется как произ
, ведение нескольких квадратных матриц так называемых матриц. -отражения Матрицы получили такое название благодаря преобразо
ванию векторного пространства по правилу отражения векторов от .заданной плоскости
. Рассмотрим правило построения таких матриц Пусть Q — -некото . рая заданная плоскость Пуст ь 0z x y — п , роизвольный вектор где
вектор x , -обладает тем свойством что скалярное произведение векторо в ( , ) 0x ; — - , вектор столбец единичной длины ортогональный Q;y ; — . произвольное число Вектор 1z , -полученный как резуль
тат отражения вектора 0z от Q, имеет вид 1z x y . -Матрицу отраже, ния переводящую 0z в 1z , обозначим V, . . т е 0 1Vz z , -и она опреде
ляется формулой
2V I ,
где I — ; единичная матрица — , вектор сопряженный к ., Проверим действительно ли матрица V -осуществляет преобразова
ни е 0 1Vz z :
0 0 0 0( 2 ) 2 ( ) 2 2Vz I z z x y z x
0 12 2z x x z ,
так как ( , ) 0; ( , )x x ., Проверим является ли матрица V :унитарной
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

234 . . .Г Н Решетникова Моделирование систем
( 2 )( 2 ) 2 2 4VV I I I
4 4 ( , , ) 4 4I I I ., Рассмотрим как с помощью матрицы V перевести произвольный
вектор s в заданный вектор I , . . единичной длины т е как определить матрицу V, чтобы имело место равенство
Vs l . Последнее равенство можно переписать в виде
2( , )s s l
или ( )s l , где1
2( , )s
. Подставив это выражение для
, в предыдущее равенство получим2( , ( )) ( )s s l s l s l
или2[2 ( , ) 1]( ) 0s s l s l .
Выбер ем так , -им образом чтобы выражение в квадратных скоб . ках обратилось в нуль Тогда
2 12( , )s s l
,
где чис ло . , подлежит выбору Определим его таким образом чтобы выполнялось неравенство ( , ) 0s s l .
Тогда( , ) ( , ) ( , )s s l s s s l ,
где — , число комплексно сопряженное к . Положим ( , )s s .Тогда
2 2 arg arg ,
2 arg arg ,
, , ,
, .
i i s l
i s l
s s l s l e s l e
s l e
, Из последнего равенства следует ч то ( , ) 0s s l , если
arg arg( , ) 1i s le , д ля чего достаточно положить arg arg( , )s l ,и ли arg arg( , )s l .
Окончательно получим2( , ) ( , )s s l s l ;
2
2
1
2 ( , )s l
.
, Таким образом для того чтобы матрица 2V I -удовлетворя ла услов ию Vs l , где s и l — , -заданные векторы необходимо поло
жить
Created with novaPDF Printer (www.novaPDF.com)

235
2
1 1( ); ;
2( , ) 2 ( , )
( , ), arg arg( , ) .
s ls s l s l
s s s l
, Теперь рассмотрим как произвольную неособенную комплексную матрицу A порядка n представить в виде произведения унитарной
.и правой треугольной матриц На первом шаге построим матри цу 1V , взяв векто : ры s
1,1 2,1 ,1( , ,..., ) ,Tna a a (1,0,...,0)Tl и вычислив , , . Умножив
матрицу A слева на 1V , получим матрицу (1)A вида
(1) (1) (1)1,1 1,2 1,
(1) (1)(1) 2,2 2,
1
(1),2 ,
...
0 ....
... ...
0 ...
n
n
n n n
a a a
a aA V A
a a
На второмшаге построим матрицу 2V по векторам (1) (1)2,2 ,2(0, ,..., )Tns a a ,
(0,1,0,...,0)Tl , и выполнив умножение слева (1)A на 2V , получим матрицу (2)A вида
(2) (2) (2) (2)1,1 1,2 1,3 1,
(2) (2) (2)2,2 2,3 2,
(2) (1) (2) (2)2 2 1 3,3 3,
(2) (2),,3
...
0 ...
0 0
... ...
0 0 ...
n
n
n
n nn
a a a a
a a a
A V A V V A a a
a a
.
, (Таким образом на n – 1)- м шаге получим матрицу ( 1)nA вида
( 1) ( 1) ( 1) ( 1)1,1 1,2 1, 1 1,
( 1) ( 1) ( 1)2,2 2, 1 2,
( 1)1 2 1
( 1) ( 1)1, 1 1,
( 1),
...
0 ...
.... ... ... ... ...
0 0 ...
0 0 ... 0
n n n nn n
n n nn n
nn n
n nn n n n
nn n
a a a a
a a a
A V V V A
a a
a
.
Обозначим ( 1)nA VA , где 1 2 1n nV V V V — -произведение мат . риц отражения Тогда ( 1)nA V A дает пред ставление матрицы A
.в виде произведения унитарной матрицы на правую треугольную
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

236 . . .Г Н Решетникова Моделирование систем
Рассмотрим теперь решение систем ы Ax f .
Введем расширенную матрицу системы (0) (0)(0)0 1 1... n nA a a a ,
где (0)1, 2, ,... , 1, ,
Tk k n kka a a a k n (0)
1na f . -Будем преобразо вывать ее по правилу
1 1 , 0, 2k k kA V A k n ,
или ( 1) ( )1 , 1, 1k k
i k ia V a i n , или ( 1) ( ) ( )2( , ) ,k k k
i i ia a a
1, 1i n . .В результате получим систему с правой треугольной матрицей
Алгоритм метода отражений для решения систе мы Ax f будет.следующим
1. Для построения матрицы (1)A ве кторы s и l -полагаются рав:ными
(0) (0) (0) (0)1 1,1 2,1 1,... , 1 0 ... 0
T Tns a a a a l .
Тогда в матрице (1)A вектор (1)1a буд ет иметь вид
(1) (1)1 1,1 0 ... 0
Ta a , а остальные (1), 2, 1ia i n , будут векторами
.общего вида2. , Предположим что построена матри ца kA , у которой
( ), 0, , 1,ki ja i j j k .
Тогда при построении матрицы 1kV векторы s и l полагаются
:равными ( ) ( )1, 1 , 10,...,0, ,..., ,
Tk kk k n ks a a в векторе l (k+1)- й элемент
, — равен единице а остальные . нулю Тогда столбцы матрицы
1 1k k kA V A бу :дут обладать следующим свойством( 1), 0, , 1, 1ki ja i j j k .
3. (После n–1)- го шага будет построена матрица 1nA , первые n . столбцов которой образуют правую треугольную матрицу При этом
система Ax f примет вид
( 1) ( 1) ( 1) ( 1)1 21,1 1,2 1, 1, 1
( 1) ( 1) ( 1)22,2 2, 2, 1
( 1)( 1), , 1
...
...
......................
n n n nnn n
n n nnn n
nnn n n n n
a x a x a x a
a x a x a
a x a
.
4. :Решение полученной системы осуществляется снизу вверх
( 1) ( 1), 1 ,( 1)
1, 1( 1) ( 1), ,
; , 1,1.
nn n
jk n k jnj kn n
n kn nn n k k
a a xa
x x k na a
Created with novaPDF Printer (www.novaPDF.com)

237
Невозможность выполнения очередного шага связана с равенством нулю очередного вектора s. В этом случае система не будет иметь
.решения
П р и м е р Найдем решение системы Ax f , где
1 2 4 5 7 4 16 38
8 2 1 ; 17 25 .
3 1 2 3 1 25
i i i iA i i i f i
i i i i
Пусть 0A — , расширенная матрица первые три столбца которой совпадают с соответствующими столбцами матрицы A, —а четвертый
с вектором f. Для реализации алгоритма метода отражений необходимо сделать
.два шага1. 1 2 ; 8 ; 3 , 1; 0; 0T Ts i i i l .
( , ) 8,944; ( , ) 1 2 ;
arg( , ) arctg(2) 1,107; arg 1,107 2,034;
8,944 cos( 2,034) sin( 2,034) 4 8 ;
0,071; 0,354 0,707 ; 0,566 0,071 ; 0,212 0,071 ;
T
T
s s s l l s i
s l
i i
i i i
1 2 ;V I
(1)1 0
4 8 2,75 0,25 1,25 3,5 12,25 41,25
0 2,15 4,95 6,8 2,95 32,05 4,45 .
0 0,6 3,3 1,15 3,15 15,6 9,9
i i i iA V A i i i
i i i
2. 0; 2,15 4,95 ; 0,6 3,3 , 0; 1; 0T Ts i i l .
2
( , ) 6,354; ( , ) 2,15 4,95 ;
4,95arg( , ) arctg 1,161; arg 1,161 1,981;
2,12
6,354 cos( 1,981) sin( 1,981) ; 2,531 5,828 ;
0,082; 0; 0,383 0,882 ; 0,049 0,27 ;
2 ;
T
T
s s s l l s i
s l
i i
i i
V I
(2) (1)2
4 8 2,75 0,25 1,25 3,5 12,25 41,25
0 2,531 5,828 5,988 4,263 34,048 3,185 .
0 0 2,873 1,977 2,688 14,551
A V A
i i i ii i i
i i
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

238 . . .Г Н Решетникова Моделирование систем
Представим матриц у (2)A в в , иде системы решая которую снизу, вверх получим
3 2 13 3 ; 1 1 ; 2 2 .x i x i x i , -Число обусловленности исходной системы вычисленное по тре
, 6,958.тьей норме равно
7.6.5. Мет од квадратног о корня
Пусть матрица A системы Ax f , . .является эрмитовой т е A A , , , , 1,i j j ia a i j n . А лгоритм метода квадратного корня заключается , в том что матрицу A системы представляют в виде произведения
:диагональной и треугольных матриц
A S DS , (7.73)где
1,1 1,2 1, 1,1
2,2 2, 2,2
, ,
... 0 ... 0
0 ... 0 ... 0; .
... ... ... ... ... ... ... ...
0 0 0 0 0 ...
n
n
n n n n
s s s ds s d
S D
s d
И (7.73) , сходя из уравнения и учитывая что матрица A ,эрмитова
получим ( 1)2
n n независимых уравнений для определения ( 1)2
n nn
неизвестных элементов матриц S и D. Таким образом, -имеется бес численное множество возможностей представить матрицу A в виде
произведения матриц ,S D и S. Будем строить такое представление матрицы A, при котором все диагональные элементы матрицы S -ста
.нут вещественны и положительны (7.73) , , -Запишем матричное равенство поэлементно причем учиты
, вая что матрица A , , -эрмитова запишем равенства для элементов сто . -ящих на главной диагонали и выше ее Уравнения при равенстве эле, , ментов стоящих выше главной диагонали имеют вид
1, 1,1 1, 2, 2,2 2, , , , ,... , ,i j i j i i i i i j i js d s s d s s d s a i j (7.74)
—а при равенстве диагональных элементов
2 2 21, 1,1 2, 2,2 , , ,... ,i i i i i i i is d s d s d a i j . (7.75)
(7.74), (7.75) Из будем построчно определять элементы матриц Sи D. (7.75) Из уравнения при 1i j получим
21,1 1,1 1,1s d a .
Created with novaPDF Printer (www.novaPDF.com)

239
, Тогда полагая 1,1 1,1sign( )d a , элемент 1,1s бу дет определяться :следующим образом
1,1 1,1s a ,
(7.74) и из уравнения при 2,j n -получим остальные элементы пер :вой строки
1,1,
1,1 1,1
jj
as
d s .
(7.75) Затем из уравнения при 2i j получим
2 21,2 1,1 2,2 2,2 2,2s d s d a .
Полагая2
2,2 2,2 1,2 1,1sign( ),d a s d найдем элементы второй строки матрицы S:
2, 1,2 1,1 1,2,
2,2 2,2
, 3, .j jj
a s d ss j n
d s
, Таким образом вычисление элементов матриц S и D -осуществля :ется построчно по следующим формулам
1,1,1 1,1 1,1 1,1 1,
1,1 1,1
1 12 2, , , , , , , ,
1 1
1
, , , ,1
,, ,
sign( ); ; , 2, ,
sign( ); , 1,
, ; 1; 2,..., .
jj
i i
i i i i p i p p i i i i p i p pp p
i
i j p i p p p jp
i ji i i i
ad a s a s j n
d s
d a s d s a s d i
a s d s
s i j j i i nd s
(7.76) Затем решение системы *S DSx f .осуществляется в два этапа
1. Решается система By f , где B S D — л -евая треугольная мат рица с элементами , , , 1, , :i jb i j n i j
1
,11
11,1 ,
, , 2, .
k
k k p pp
kk k
f b yf
y y k nb b
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

240 . . .Г Н Решетникова Моделирование систем
2. Решается система Sx y с правой треугольной матрицей S:
,1
, ,, , 1,1.
n
k k p pp kn
n kn n k k
y s xy
x x k ns s
П р и м е р Решим систему линейных алгебраических уравн ений Ax f -с эр
, митовой матрицей где
3 1 0,5
2 2 2 ;
1 0,5 2 2 2
i iA i i
i i
0,5
2 .
7 4,5
if i
i
Необходимо матрицу системы представить в ви де A BS , гдеB S D , а затем последовательно решить две систем -ы с треугольны
: ми матрицами By f и Sx y . -Вычисляя построчно элементы мат риц S и D, получим
1,732 0,577 0,577 0,289 1 0 0
0 1,291 1,678 1,807 ; 0 1 0 .
0 0 2,913 0 0 1
i iS i D
2 2,1 111 2
1,1 2,2
3 3,1 1 3,2 23
3,3
0,289 ; 1,678 0,775 ;
2,915.
f b yfy i y i
b b
f b y b yy
b
2 2,3 3 1 1,3 3 1,2 233 2 1
3,3 2,2 1,11; 2 ; 1
y s x y s x s xyx x i x
s s s
.
Если матрица A , системы вещественная и симметрическая тогда :ее можно разложить в произведение двух матриц
TA S S ,где S — . (7.76) -правая треугольная матрица При этом формулы упро
стятся и будут иметь вид
11, 2
1,1 1,1 1, , , ,1,1 1
1
, , ,1
,,
; ; 2, ; , 1;
, , 1, .
ij
j i i i i p ip
i
i j p i p jp
i ji i
as a s j n s a s i
s
a s s
s i j j i ns
Created with novaPDF Printer (www.novaPDF.com)

241
, Заметим что элементы матрицы S -будут вещественными и по ложительными только для положительно определенной матрицы A.
В противном случае среди элементов матрицы S -могут быть комплек.сные
П р и м е р Решим систему линейных алгебраических уравнен ий Ax f с си -м
, метрической матрицей где
3 1 0,5 5,5
1 2 0,5 ; 4,5 .
0,5 0,5 2 2,5
A f
Необходимо матрицу системы представить в виде TA S S , -а за :тем последовательно решить две системы с треугольными матрицами
TS y f и Sx y . Вычисляя построчно элементы матрицы S, получим
1,732 0,577 0,289
0 1,291 0,516
0 0 1,533
Si
.
2 1,2 111 2
1,1 2,2
3 1,3 1 2,3 23
3,3
3,175; 2,066;
1,533 .
f s yfy y
s s
f s y s yy i
s
2 2,3 3 1 1,3 3 1,2 233 2 1
3,3 2,2 1,11; 2; 1
y s x y s x s xyx x x
s s s
.
-Метод квадратного корня эффективен при решении систем с поло . -жительно определенной эрмитовой матрицей Такие задачи возника
, , -ют как правило при минимизации положительно определенных квад .ратичных форм
7.6.6. Итерационные методы решения систем линейных алгебраических уравнений
-Эти методы дают решение системы в виде предела последователь , -ности некоторых векторов построение которых осуществляется посред , .ством единообразного процесса называемого процессом итераций
В современной литературе описано большое количество итерационных, . , -методов основанных на различных принципах Как правило вычис
лительные схемы таких методов просты и удобны для реализации на. -ЭВМ Однако каждый итерационный процесс имеет свою ограничен , :ную область применения так как
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

242 . . .Г Н Решетникова Моделирование систем
1) процесс итераций может оказаться расходящимся для данной;системы
2) сходимость процесса итераций для данной системы может быть , -настолько медленной что практически невозможно достичь удовлетво .рительной близости к точному решению за приемлемое время Пусть дана система линейных алгебраических уравнений
Ax f (7.77) с неособенной матрицей A. Точное решение системы x -является пре
делом последовательности векторов 0 1, ,..., ,...kx x x , -которые стро :ятся по рекуррентным формулам
1 1k k k kx x H f Ax (7.78)
или 1k k k kx C x z , (7.79)
где ,k kH C — ; последовательности матриц kz — -последовательно
,сть векторов 0,1,...k . При этом для линейных систем в качестве
начального приближени я 0x -можно взять любой вектор соответствую .щей размерности
, (7.78) (7.79),Итерационные процессы протекающие по формулам и , обладают тем свойством что для каждого из них точное реш ение x
. , -является неподвижной точкой Это значит что если за начальное приближен ие 0x взято x , -то все последующие приближения будут так
же равны x . Простейшими среди итерационных процессов являются, стационарные в которых матрицы ,k kH C (7.78) (7.79) -в и не зави
сят от номера шага k.
Метод последовательных приближений
-Под процессом последовательных приближений понимается следу . (7.77) ющий итерационный процесс Система уравнений записывается
в виде,x Bx g
где B I A ; I — ;единичная матрица соответствующего порядкаg f . Последовательные приближения вычисляются по формуле
1k kx Bx g . (7.80) Сходимость метода последовательных приближений определяется
.следующими двумя теоремами
Теорема. Для сходимости метода последовательных приближений(7.80) , -необходимо и достаточно чтобы все собственные значения матрицы B .были по модулю меньше единицы
Created with novaPDF Printer (www.novaPDF.com)

243
Теорема. Для сходимости метода последовательных приближений, - достаточно чтобы какая либо норма матрицы B .была меньше единицы
П р и м е р
Найдем с точностью 40,5 10 -решение системы уравнений ме :тодом последовательных приближений
1 2 3
1 2 3
1 2 3
3 0,5 5,5,
2 0,5 4,5,
0,5 0,5 2 2,5.
x x xx x xx x x
.
Для метода последовательных приближений систему представим в виде
x Bx g ,
где , .B I A g f Тогда
1 0 0 3 1 0,5 2 1 0,5 5,5
0 1 0 1 2 0,5 1 1 0,5 ; 4,5 .
0 0 1 0,5 0,5 2 0,5 0,5 3 2,5
B g
Собственные значения матрицы B : равны 1 2,623;
2 30,516; 3,139; кубическая норма матрицы B равна 4I
B .
, . Следовательно метод последовательных приближений расходится На. 7.11 , -рис приведены графики иллюстрирующие поведение итераци
онной последовательнос ти ( ), 0,5kx k , при 0 1; 0; 1 Tx , где , — -сплошная линия соответствует первой компоненте пунктирная вто
, — .рой а штрихпунктирная третьей
600
400
200
0
2000 1 2 3 4 5
. 7.11Рис
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

244 . . .Г Н Решетникова Моделирование систем
( )Метод простых итераций метод Якоби
(7.77) Запишем систему в развернутом виде
1,1 1 1,2 2 1, 1
2,1 1 2,2 2 2, 2
,1 1 ,2 2 ,
;
;
. . . . . . . . . . . . . . . . . . . . . . . . .
.
n n
n n
n n n n n n
a x a x a x f
a x a x a x f
a x a x a x f
(7.81)
-Поделив каждое уравнение этой системы на соответствующий диа , гональный элемент матрицы системы получим
1,2 1, 11 2
1,1 1,1 1,1
2,1 2, 21 2
2,2 2,2 2,2
,1 ,21 2
, , ,
... ;
... ;
. . . . . . . . . . . . . . . . . . . . . . . . . . .
...
nn
nn
n n nn
n n n n n n
a a fx x x
a a a
a a fx x x
a a a
a a fx x x
a a a
или в матричной формеx Bx g , (7.82)
где
1,2 1,
1,1 1,1
2,1 2,
2,2 2,2
,1 ,2
, ,
0 ...
0 ...
... ... ... ...
... 0
n
n
n n
n n n n
a a
a a
a a
a aB
a a
a a
;
1
1,1
2
2,2
,
...
n
n n
fa
fag
fa
.
(7.81) (7.82) -Преобразование исходной системы в систему равно сильно матричному преобразованию
1 1;B I D A g D f ,
где 1,1 ,diag , , n nD a a — , -диагональная матрица на диагонали кото
рой находятся элементы 1,1 2,2 ,, ,..., n na a a и
Created with novaPDF Printer (www.novaPDF.com)
245
1,1
12,2
,
10 ... 0
10 ... 0
... ... ... ...
10 0 ...
n n
a
aD
a
.
На основании приведенных выше теорем для сходимости метода , простых итераций необходимо и достаточно чтобы все собственные значения матрицы 1B I D A были по модулю меньше единицы
, , или что то же самое чтобы корни уравнения
1,1 1,2 1,
2,1 2,2 2,
,1 ,2 ,
...
...0
... ... ... ...
...
n
n
n n n n
a t a aa a t a
A D tD
a a a t
.были по модулю меньше единицы , Достаточным условием сходимости является требование чтобы
любая норма матрицы B .была меньше единицы
П р и м е р
Найдем с точностью 40,5 10 -решение системы уравнений ме :тодом простых итераций
1 2 3
1 2 3
1 2 3
3 0,5 5,5,
2 0,5 4,5,
0,5 0,5 2 2,5.
x x xx x xx x x
Для метода простых итераций систему представим в виде
x Bx g ,
где 1 11,1 2,2 3,3; ; diag , , diag 3;2; 2B I D A g D f D a a a .
Тогда
0 0,333 0,167
0,5 0 0,25
0,25 0,25 0
B
;1,833
2,25
1,25
g
.
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

246 . . .Г Н Решетникова Моделирование систем
Собственные значения матрицы B :равны 1 0,406; 2 0,203 ++ 0,248i; 3 0,203 0,248 ;i кубическая норма матрицы B равна
0,75I
B . , Следовательно метод простых . итераций сходится На. 7.12 , -рис приведены графики иллюстрирующие поведение итераци
онной последовательно сти ( ), 0,5kx k , пр и (0) 1; 0; 1Tx , где
, — -сплошная линия соответствует первой компоненте пунктирная вто, — .рой штрихпунктирная третьей
0 2 42
0
2
4
. 7.12Рис
Решение системы с точностью -получается при выполнении условия
( 1) ( )( 1) ( )
1,3max k kk k
i iI ix x x x
,
где 14k и * (14) 1; 2; 2Tx x .
Метод Зейделя
(7.77)Пусть система представлена в виде,x Bx g (7.83)
где B I A ; g f .Одношаговый циклический ,процесс ,называемый методом Зейделя
, отличается от процесса последовательных приближений тем что привычислении k-го приближения для i-й компоненты учитываются
вычисленные ранее k-е приближения для компонент 1 1,...,k k
ix x . , Таким образом вычисления ведутся по формулам
11
, ,1
, 1,i n
k k ki i j j i j j i
j j ix b x b x g i n
. (7.84)
(7.83) Представим систему в матричном виде
,x M N x g
Created with novaPDF Printer (www.novaPDF.com)

247
где
1,1 1,2 1, 1 1,
2,1 2,2 2, 1 2,
,1 ,2 , 1 ,
0 0 ... 0 0 ...
0 ... 0 0 0 ...; .
... ... ... ... ... ... ... ... ... ...
... 0 0 0 ... 0
n n
n n
n n n n n n
b b b bb b b b
M N
b b b b
(7.84) -Тогда итерационное правило можно представить в матрич ной форме в виде
1k k kx Mx Nx g или
11 1( ) ( ) .k kx I M Nx I M g
, Для сходимости метода Зейделя необходимо и достаточно чтобы все собственные значения матрицы 1I M N б -ыли по модулю мень , , ше единицы или что то же самое чтобы корни уравнения
1,1 1,2 1, 1 1,
2,1 2,2 2, 1 2,
,1 ,2 , 1 ,
...
...0
... ... ... ... ...
...
n n
n n
n n n n n n
b t b b bb t b t b b
N I M t
b t b t b t b t
. были по модулю меньше единицы Достаточное условие сходимости , состоит в том чтобы первая или вторая норма матрицы B -были мень
.ше единицы
П р и м е р
Найдем с точностью 40,5 10 -решение системы уравнений ме тодом Зейделя
1 2 3
1 2 3
1 2 3
3 0,5 5,5,
2 0,5 4,5,
0,5 0,5 2 2,5.
x x xx x xx x x
Для метода Зейделя заданную систему сначала представим в видеx Bx g , где
2 1 0,5 5,5
1 1 0,5 ; 4,5
0,5 0,5 3 2,5
B I A g f
,
а затем полученную систему x Bx g представим в виде x
( )M N x g , где
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

248 . . .Г Н Решетникова Моделирование систем
0 0 0 2 1 0,5
1 0 0 ; 0 1 0,5
0,5 0,5 0 0 0 3
M N
.
-Тогда итерационное правило метода Зейделя можно записать сле :дующим образом
( ) ( ) ( 1)k k kx Mx Nx g или ( ) 1 ( 1) 1( ) ( )k kx I M Nx I M g . Собственные значения матрицы
1
2 1 0,5
( ) 2 0 1
2 0,5 3,75
I M N
: равны 1 20,926 0,9 ; 0,926 0,9 ;i i 3 3,601 ; кубическая
норма матрицы B равна 4I
B . , -Следовательно метод Зейделя расхо
. . 7.13 , дится На рис приведены графики иллюстрирующие поведение
итерационной последовательности ( ), 0,5kx k , пр и (0) 1; 0; 1Tx ,
гд , —е сплошная линия соответствует первой компоненте пунктирная, — .второй штрихпунктирная третьей
2000
1000
0
10000 2 4
. 7.13Рис
7.6.7. Метод Данилевского при решении .полной проблемы собственных значений
Построение канонической формы Фробениуса
Метод Данилевского решения полной проблемы собственных , значений основан на том что преобразование подобия не изменяет
. характеристического многочлена матрицы Целью преобразования подобия является приведение исходной матрицы A к -канонической фор
ме Фробениуса
Created with novaPDF Printer (www.novaPDF.com)

249
1
2
1
0 0 ... 0
1 0 ... 0
0 1 ... 0
... ... ... ... ...
0 0 ... 1
n
n
n
ppp
p
,
по виду которой можно достаточно просто построить ее собственныймногочлен
11( ) ...n n
nP p p , так как коэффициенты собственного многочлена являются элементами
.последнего столбца матрицы Фробениуса Для получения матрицы Фробениуса строится последовательность
матриц (1) (2) ( 1), ,...., nA A A :по следующему правилу( ) 1 ( 1) , 1, 1,i i
i iA S A S i n где каждая последующая мат рица ( )iA получается из предыдущей ( 1)iA
преобразованием подобия с помощью матрицы iS :
( 1)1,
( 1)2,
( 1)3,
( 1),
0 0 ... 0
1 0 ... 0
.0 1 ... 0
... ... ... ... ...
0 0 ... 1
in
in
ii n
in n
a
a
S a
a
Обратная к iS матрица имеет вид
( 1)2,( 1)1,
( 1)3,( 1)1,
1
( 1),
( 1)1,
( 1)1,
1 0 ... 0
0 1 ... 0
,... ... ... ... ...
0 0 ... 1
10 0 ... 0
in
in
in
in
i
in nin
in
a
a
a
aS
a
a
a
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

250 . . .Г Н Решетникова Моделирование систем
где ( 1), , 1,ij na j n , — элементы последнего столбца матрицы ( 1)iA
и (0)A A . Тогда если все элементы ( )1, 0, 0, 2j
na j n (регулярныйслучай), то матрица
( 1)1,
( 1)2,
( 1) ( 1)3,
( 1),
0 0 ... 0
1 0 ... 0
0 1 ... 0
... ... ... ... ...
0 0 ... 1
nn
nn
n nn
nn n
a
a
A a
a
(7.85)
.будет иметь форму Фробениуса Если при построении матрицы ( 1)jA элемент ( )
1, 0jna , то имеем
нерегулярный случай, так как ( )jA им еет вид
( ) ( ) ( ) ( )1,1 1,2 1, 1 1,
( ) ( ) ( ) ( )1,1 1,2 1, 1 1,
( ) ( ) ( ) ( ),,1 ,2 , 1( )
( ) ( )1,1 1,2
... 0 ... 0
... ... ... ... ... ... ... ...
... 0 ... 0
... 0 ... 0
...
j j j jn j n
j j j jn j n j n j n j n j n
j j j jn j nn j n j n j n jj
j jn j n j n
a a a a
a a a a
a a a aA
a a a
( ) ( )
1, 1 1,
( ) ( ) ( ) ( )2,1 2,2 2, 1 2,
( ) ( ) ( ) ( ),,1 ,2 , 1
1 ... 0
... 0 ... 0
... ... ... ... ... ... ... ...
... 0 ... 1
j jj n j n j n
j j j jn j n j n j n j n j n
j j j jn nn n n n j
a
a a a a
a a a a
.
.В этом случае возможны две ситуации1. Среди элементов ( ) ( ) ( )
,2, 3,, ,...,j j jn j nn na a a , -имеется хотя бы один отлич
, ,ный от нуля например ( ), 0, 2,j
k na k n j . Тогда можно прийти
, к регулярному случаю если в матрице ( )jA поменять местами первую и k-ю . строки и столбцы Такое преобразование матрицы ( )jA будет
, , , , , -подобным и кроме того столбцы уже имеющие нужный вид не из.меняются
2. Все элементы ( ), 0, 2,j
k na k n j , . . т е матрица ( )jA имеет -блоч ный вид
( )
1
0,j
j
BA C
где 1j — кв адратная матрица порядка j+1, имеющая каноническую ;форму Фробениуса B — квадратная матрица порядка 1n j ; 0 —
Created with novaPDF Printer (www.novaPDF.com)

251
. -нулевая матрица Тогда на основании теоремы Лапласа можно запи:сать
( )1 1 1 ,j
n j j jA I B I I
. . т е характеристический многочлен матрицы 1j явля ется делителем характеристического многочлена матрицы A. -Для отыскания характе
ристического многочлена матрицы A -нужно найти характеристичес кий многочлен матрицы B, что можно сделать путем приведения
матрицы B .к форме Фробениуса , Таким образом построив собственный многочлен матрицы A, можно
найти собственные значен ия 1 2, ,..., n это , -й матрицы которые явля .ются корнями ее собственного многочлена
Если удалось привести A (7.85), к виду то собственный вектор ( )ixматрицы A будет равен
( ) ( ),i ix Sy (7.86)где 1 2 1nS S S S — , произведение матриц преобразования а ( )iy
( ) ( ) ( )1 2( , ,..., )i i i T
ny y y — собственный век (7.85), -тор матрицы соот ветствующий собственному значению i , компоненты которого
( ) ( ) ( )1 2, ,...,i i i
ny y y :определяются следующим образом( )
( )11
( ) 21 22
( ) 1 21 11
1;
;
;
. . . . . . . . . . . . . . . . . . . .
... ,
ini
ini
i in
i n ni i n
y
y p
y p p
y p p
где ( 1)1, , 1,n
j n j np a j n .
Если не удалось привести матрицу A (7.85), -к виду то для отыска ния собственных векторов необходимо решить системы линейных
алгебраических уравнений( ) ( ), 1, ,i i
iAx x i n где ( ) ( )( )
1( ,..., )i ii Tnx x x . Так как собственные векторы определяются
с , -точностью до постоянного множителя то одну из компонент вектора ( )ix мож .но приравнять некоторому числу
П р и м е р ы
1. 1 2 1
2 1 0
1 0 2
A
.
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

252 . . .Г Н Решетникова Моделирование систем
Согласно методу Данилевского каноническая форма Фробениуса для матрицы A получается за два шага и имеет вид
0 0 9
1 0 6
0 1 2
,
поэтому собственный многочлен матрицы A запишется следующим:образом
3 2( ) 2 6 9P . -Собственные значения матрицы как корни собственного многочле
на равны: 1 2 32,303; 1,303; 3 . Соб -ственные векторы мат рицы Фробениуса можно записать в общем виде как функцию от 2( ) 2 6; 2; 1
Ty . Т огда собственные векторы ( )ix -матри
цы A, соответствующие собственным значениям , 1,3i i , -опреде
: ляются следующим образом ( ) ( )iix Sy , где
1 3 12
0 2 4
2 5 13
S
есть . матрица преобразования Собственные векторы ( )ix , -пронормиро , :ванные путем деления на свою последнюю компоненту равны
(1) 4,303; 6,606; 1 ;Tx
(2) 0,697; 6,606; 1 ;Tx
(3) 1; 0,5; 1 .Tx
2.
1 2 3
2 3 4
3 4 5
A
.
После первого шага метода Данилевского получается матрица
(1)
0 0 0
1 0 6
0 1 9
A
,
которую можно представить в блочном виде
(1)
2
0BA
C
,
гд е 0B ; 2 — , матрица второго порядка имеющая каноническую форму Фробениуса
Created with novaPDF Printer (www.novaPDF.com)

253
20 6
1 9
.
Тогда собственный многочлен матрицы A -равен произведению соб ственных многочленов мат риц B и 2 , . . т е
2( ) ( ) ( )BP P P , где
2
2Ф( ) , ( ) 9 6BP P . Так , -им образом собственные числа мат
рицы A , равны корням этих многочленов . . т е 1 20; 0,623; 3 9,623 .
Собственные век торы ( )ix матрицы A, -соответствующие собствен ным значениям , 1,3i i , -определяются решением систем линей ных алгебраических уравнений ( )( ) 0, 1,3i
iA x i , -в которых мож но положить ( )
3 1ix , так как собственные вектор ы определяются .с точностью до постоянного множителяТогда
(1) (2) (3)1 1,525 0,525
2 ; 0,262 ; 0,762 .
1 1 1
x x x
7.6.8. Метод Фаддеева
Для заданной матрицы A порядка n :строится таблица значений
1 1 1 1 1 1
22 1 2 2 2 2
11 2 1 1 1 1
1
; ; ;
; ; ;2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
; ; ;1
; ; ,
nn n n n n n
nn n n n n n
A A SpA q B A q ISpA
A AB q B A q I
SpAA AB q B A q I
nSpA
A AB q B A q In
где iSpA — след матрицы iA ; I — единичная матрица порядка n.С :праведливы следующие утверждения1) i iq p , где ip — -коэффициенты собственного многочлена мат
рицы A: 11( ) ...n n
nP p p ;2) nB — ;нулевая матрица
3) если матрица A , неособенная то 1 1n
n
BA
q .
, Заметим что матрица A , будет особенной если по крайней мере . одно ее собственное значение равно нулю В этом случае коэффициент
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)
254 . . .Г Н Решетникова Моделирование систем
n np q со бственного многочлена матрицы A должен быть равным.нулю
Если все собственные значения 1 2, ,..., n матрицы A ,различны то для вычисления собственных векторов можно построить матрицу
1 2 31 2 2 1( ) ...n n n
n nQ I B B B B ,
и все столбцы матри цы ( ), 1, ,iQ i n б удут являться собственными векторами матрицы A, соответствующими собственному зна чению i .
Так как собственные векторы определены с точностью до постоянного, множителя то все столбцы матриц ы ( ), 1, ,iQ i n -нужно пронорми
, , ровать одним и тем же способом например разделить все элементы . каждого столбца на свой последний элемент При этом матрицы
( ), 1, ,iQ i n буд . ут состоять из одинаковых столбцов В связи с этим при вычислении матри ц ( ), 1, ,iQ i n -можно ограничиться вычисле .нием одного столбца каждой матрицы
Метод Фаддеева достаточно часто используется для нахождения обратной матриц ы 1A . -Причем в сравнении с методом Гаусса алго
.ритм нахождения обратной матрицы реализуется значительно проще
П р и м е р Найдем собственные значения и собственные векторы матрицы
1 2 3
2 3 4
3 4 5
A
.
Строя последовательн ость , , , 1,3i i iA q B i , -получим коэффи циенты собственного многочлен : а 1 2 33, 42, 24p p p .
Собственные значения матрицы A, -как корни собственного многочлен а 3 2( ) 3 42 24P , равны
1 2 34,762; 0,603; 8,364. , Так как все собственные значения различны то для построения
собственных векторов строим многочлен2
1 2( )Q I B B . Собственные векторы ( )ix , -соответствующие собственным значе
ниям , 1,3i i , пронормиро -ванные путем деления на свой послед , :ний элемент получились равными
(1)1 1( ) 0,441; 2,771; 1 ;
Tx Q
(2)1 2( ) 1,937; 0,052; 1 ;
Tx Q
(3)1 3( ) 0,528; 0,445; 1 ,x Q
Created with novaPDF Printer (www.novaPDF.com)

255
г де 1( )iQ — первые столбцы матриц ( ), 1,iQ i n ( -все столбцы мат риц ( ), 1, ,iQ i n будут одинаковыми для каждого i).
Обратная матриц а 1A получилась равной
1 2
3
1,292 0,083 0,708
0,083 0,167 0,083
0,708 0,083 0,292
BA
q
.
7.6.9. Метод вращений
Метод вращений является одним из самых эффективных методов решения полной проблемы собственных значений для эрмитовых
. -и симметрических матриц Особая привлекательность этого метода со , стоит в том что при его использовании не возникает необходимость
.в построении и нахождении корней собственного многочлена , -Основой метода служит известная теорема из алгебры утверждаю
, щая что если A — , эрмитовая матрица то существует такая унитарная матрица V, что преобразование подобия с этой матрицей приводит A
к диагональному виду1V AV .
Т -ак как преобразование подобия не изменяет характеристического мно
, гочлена матрицы то матрица -состоит из собственных значений мат рицы A. , -Кроме того так как для унитарной матрицы выполнется усло
вие V V I , то 1V V , и преобразование подобия можно переписать в вид е V AV . Это рав -енство не может быть использовано для вы
числения элементов матри ц V и , так как оно представляет собойсистем у 2n уравнений с 2n n (неизвестными 2n элементов матрицыV и n элементов матрицы ). Однако имеется возможность трактовать
задачу приведения матрицы A -к диагональному виду как приближен .ную в следующем смысле
Строится последовательность матриц(0) (1) (2) ( ), , , ..., ,...,kA A A A A
в которой каждая последующая матрица получается из предыдущей , -при помощи элементарного шага состоящего в преобразовании подо .бия предыдущей матрицы посредством некоторой унитарной матрицы Так как конечной целью является диагонализация матрицы A, -то мат
, рицы преобразования должны быть выбраны таким образом чтобы выполнялось условие
2 ( 1) 2 ( )( ) ( )k kt A t A ,
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

256 . . .Г Н Решетникова Моделирование систем
где2( )2 ( )
,, 1
( )n
mml j
l jl j
t A a
,
. . -т е сумма квадратов модулей всех недиагональных элементов матри цы A.
Случай симметрических матриц
Для таких матриц A -в качестве матриц преобразования выбира ются ортогональные матрицы вращения , ( )l jV вида
,
1 0
1 0
( )cos sin
( ) .
( )sin cos
0 1
0 1
( ) ( )
l j
lV
j
l j
, Матрица называется ортогональной если обратная к ней совпадает .с транспонированной
Рассмотрим такой способ выбора матри ц , ( )l jV , -который обес -печивает максимальную скорость сходимости процесса диагонали
зации матрицы A. Пусть построена последовательность матриц(0) (1) (2) ( ), , ,..., kA A A A A . Для построения матрицы ( 1)kA найдем
в матрице ( )kA максимальный по модулю недиагональный элемент( ),k
l ja . Так как исходная матрица A си , мметрическая то и все остальные, , -матрицы полученные с помощью преобразования подобия будут сим
, метрическими поэтому в матр ице ( )kA будем искать максимальный по модулю наддиагональный элемент ( )
,k
l ja , для которого l < j. -Зная зна чения l и j для элемента ( )
,k
l ja , построим матрицу преобразования( )
, ( )kl jV . Значение параметра ( )k будем -находить из условия равен
ства нулю у матрицы( 1) ( ) ( ) ( )
, ,( ) ( )k T k k kl j l jA V A V
элемент а ( 1),k
l ja .
Created with novaPDF Printer (www.novaPDF.com)

257
Обозначим
( ) ( ) ( ), ( )k k kl jB A V .
Матрица ( )kB будет иметь отличными от матрицы ( )kA -только эле менты l и j , столбцов для которых верны равенства
( ) ( ) ( )( ) ( ),, , cos sin ;k k kk kjl lb a a
( ) ( ) ( )( ) ( ), ,, sin cos , 1,k k kk kj jlb a a n .
Матрица ( 1)kA будет отличаться от матрицы ( )kB -только элемента ми l- й и j- , й строк которые определяются равенствами
( 1) ( ) ( )( ) ( ),, , cos sin ;k k kk k
jl la b b
( 1) ( ) ( )( ) ( ), ,, sin cos , 1,k k kk kj jla b b n .
Элемент ( 1),k
l ja определяется выражением
( 1) ( ) ( )( ) ( ) ( ), , ,
( ) ( )( ) ( ) ( ),,
( ) ( ) ( )( ) ( ), ,,
sin cos cos
sin cos sin
1sin2 cos2 .
2
k k kk k kl j l l l j
k kk k kj jj l
k k kk kj j j jl l
a a a
a a
a a a
, Приравнивая его нулю получаем соотношение для ( )k( ),( ) ( )
( ) ( ),,
2tg2 ,
4
kl jk k
k kj jl l
a
a a
.
Случай эрмитовых матриц
-В этом случае в качестве матриц преобразования выбираются уни тарные матр ицы , ( , )l jV вида
,
1 0
1 0
( )cos sin
( , ) .
( )sin cos
0 1
0 1
( ) ( )
i
l ji
leV
je
l j
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

258 . . .Г Н Решетникова Моделирование систем
Пусть в матри це ( )kA максимальным по модулю наддиагональным
элементом является ( ), ,kl ja l < j. Построим матрицу ( ) ( )
, ,k kl jV -и зна
чения ( ) ( ),k k определим таким , образом чтобы в матрице
( 1) ( ) ( ) ( ) ( ) ( ), ,, ,k k k k k kl j l jA V A V
элемент ( 1),k
l ja стал . , -равным нулю Проводя преобразования аналогич , ные случаю симметричной матрицы получаем
( ),( )( ) ( ) ( )
, ( ) ( ),,
2arg , tg2 ;
4
kl jkk k k
l j k kj jl l
aa
a a
.
-В силу введенных обозначений сходимость метода вращений озна, чает что
2 ( )lim ( ) 0.k
kt A
, Действительно в силу выбора элемент а ( ),k
l ja
2( )2 ( ),( ) ( 1) kkl jt A n n a и
2 ( )2( ),
( )( 1)
kk
l jt A
an n
.
Тогда
2 ( )
2( )2 ( 1) 2 ( ) 2 ( ) 2 ( ),
22
( 1)
kkk k k k
l j
t At A t A a t A qt A
n n
,
где2
1( 1)
qn n
и 0 1q , так как 2n — порядок матриц ы A.
Тогда из цепочки неравенств
2 (1) 2 (0) ;t A qt A
2 (2) 2 (1) 2 2 (0) ;t A qt A q t A …
2 ( ) 2 ( 1) 2 (0)... ,k k kt A qt A q t A
, учитывая что 2 (0)( ) constt A и 0 1q , , следует что 2 ( )lim 0.k
kt A
, ,Это означает что итерационный процесс метода вращений сходится , причем сходится с максимальной скоростью так ка к (0)
,l ja — -максим альный по модулю недиагональный элемент матрицы (0)A .
, Таким образом если требуется определить собственные значения матрицы A с заданной точностью , -то итерационный процесс мето
, да вращений продолжают до тех пор пока для некоторого k -не вы полнится неравенст во 2 ( )kt A . В этом случае матрица A станет
Created with novaPDF Printer (www.novaPDF.com)

259
. практически диагональной Тогда в качестве собственных значений матрицы A берут диагональные элементы матри цы ( )kA , . .т е
( ), , 1,k
l l la l n . Собственные вектор ы ( )lx , со -ответствующие собственным значе
ниям , 1,l l n , .определяют следующим образомМатри ца 1 2diag , ,..., n (диа -гональная матрица с перечис
) ленными элементами главной диагонали и ее собственные векторы являются единичными векторами ,le -так как в этом случае выполня
ются равенст ва , 1,l l le l n . , Тогда учитывая что V AV , -за
пишем l l lV AVe e , и умножая это равенство слева на V, будем иметь
l l lAVe Ve или ( ) ( )l llAx x , где ( )l
lx Ve .
, Таким образом если собственными значениями l матрицы A с точностью являются диагональные элементы матрицы ( )kA , ,тообозначая
0 0 1 1
(0) ( 1), ,k k
kl j l jV V V
или
0 0 1 1
(0) (0) ( 1) ( 1), ,, ,
k k
k kl j l jV V V
,
, получим что собственными вектор ами ( )lx яв ляются соответствующие столбцы матрицы преобразования V.
П р и м е р ы1. Найдем собственные значения и собственные векторы матрицы
1 2 1
2 3 2
1 2 4
A
с точностью 40,5 10 .
Неравенст во 2 ( )( )kt A достигается при 5k , -и собственные зна чения матрицы A, равные диагональным элементам матрицы (5)A ,
п олучились равны : ми 1 2 30,249; 6,351; 1,898 . -Собствен , ные векторы как соответствующие столбцы матрицы преобразования
V, :равны
(1) (2) (3)0,832 0,362 0,42
0,551 ; 0,628 ; 0,52 .
0,064 0,688 0,772
x x x
2. Найдем собственные значения и собственные векторы матрицы
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

260 . . .Г Н Решетникова Моделирование систем
1 1 1 2
1 3 2 2
1 2 2 2 4
i iA i i
i i
с точность ю 40,5 10 .Неравенство 2 ( )( )kt A достигается при 5k , -и собственные зна
чения матрицы A, равные диагональным элементам матрицы (5)A , : получились равными 1 2 30,19; 4,307; 6,117 . Со -бствен
, ные векторы как соответствующие столбцы матрицы преобразованияV, :равны
(1) (2)
(3)
0,869 0,243 0,049
0,252 0,094 ; 0,913 0,021 ;
0,311 0,275 0,184 0,267
0,257 0,342
0,248 0,181 .
0,85 0,017
ix i x i
i i
ix i
i
7.7. Решение обыкновенных дифференциальных уравнений и систем
, -Среди задач с которыми приходится иметь дело при моделирова, -нии значительную часть составляют различные задачи для обыкно
. венных дифференциальных уравнений Такие задачи возникают как , непосредственно при моделировании многих реальных процессов так
-и в качестве промежуточных при решении более сложных математи . , , -ческих задач При этом как правило точное решение рассматривае
. мой задачи не удается выразить через элементарные функции Доля, -задач решаемых в явном виде в случае обыкновенных дифференци
, . альных уравнений ничтожно мала Обычно приходится прибегать . -к помощи приближенных методов решения подобных задач Такие ме
, -тоды в зависимости от того ищется ли приближенное решение в ана , литическом виде или в виде таблицы значений разделяют на -аналити
ческие и численные. Конкретный вид метода существенно зависит от . типа решаемой задачи В случае обыкновенных дифференциальных
, -уравнений в зависимости от того ставятся ли дополнительные усло вия в одной или в нескольких точках отрезка изменения независимой
, переменной задачи обычно подразделяют на одноточечные ( -задачи с на чальными условиями, или задачи Коши) и многоточечные. -Среди многото
чечных задач наиболее часто в прикладных вопросах встречаются так
Created with novaPDF Printer (www.novaPDF.com)

261
называемые , граничные или , краевые задачи, -когда дополнительные усло . вия ставятся на концах рассматриваемого отрезка При этом нередко
, , -решение многоточечных и в частности граничных задач сводят к ре .шению задач с начальными условиями
7.7.1. Методы Эйлера и Рунге — Кутта при решении задачи Коши для дифференциального уравнения первого порядка
Задача Коши для дифференциального уравнения первого порядка
,y x f x y x (7.87) состоит в нахождении функции y(x), -удовлетворяющей этому уравне
нию при начальном условии 0 0y x y . При численном решении этой задачи обычно задают некоторый шаг h и находят решение в точках
1 2, ,..., nx x x , где 0ix x i h , 0,i n , 0nx xh
n
.
Обозначим разность между точными значениями функции ( )y x в двух соседних точках через
0 0 0( ) ( ) ( )y x y x h y x -и представим приближенно эту же разность в виде некоторой линей
ной комбинации
0 1 1 0 0 2 2 0 0 0 0, , ,r ry p K x y p K x y p K x y , (7.88)где
1 0 0 0 0
2 0 0 0 2 0 2,1 1 0 0
0 0 0 0 ,1 1 0 0 , 1 1 0 0
( , ) ( , );
( , ) ( , , );
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
( , ) ( , ( , ) ... ( , )).r r r r r r
K x y h f x y
K x y h f x h y K x y
K x y h f x h y K x y K x y
Коэффициенты ,, , , 1, , 1, 1j j j ip j r i r , будем задавать таким, образом чтобы разложение 0( )y x в ряд Тейлора по степеням h -и ли
нейная комбинация 0y совпадали до возмож -но более высоких степеней h при произвольной функции ( , )f x y и произвольном шаге h.
Введем функцию
0 0 1 0 0 0 0( ) ( ) ( ) [ ( , ) ... ( , )]r r rh y x h y x p K x y p K x y . (7.89) Разложение функции ( )r h в ряд Тейлора в окрестности 0h
будет иметь вид
12 1 1(0) (0) (0)
( ) (0) ... ( ),1! 2 ! ( 1) !
mm mr r r
r rh h h h O hm
(7.90)
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

262 . . .Г Н Решетникова Моделирование систем
где 1( )mO h — , ,величина имеющая более высокий порядок малости
чем 1mh . Коэффициенты ,, , , 1, , 1, 1j j j ip j r i r , задают таким, образом чтобы функция r h :обладала следующими свойствами
( ) ( 1)(0) (0) ... (0) 0, (0) 0s sr r r r
(7.91)
при возможно больших s для любых h и f(x,y).
Формула Эйлера
(7.88) Если в положить 1r , то получим
0 1 1 0 0( , )y p K x y . (7.92)Тогда
0 0 1 0 0
0 1 0 0
0
( ) ( ) ( ) ( , );
( ) ( ) ( , );
( ) ( ),
r
r
r
h y x h y x p h f x y
h y x h p f x y
h y x h
и при 0h получим
0 1 0 0
0
(0) 0;
(0) ( ) ( , );
(0) ( ).
r
r
r
y x p f x y
y x
При этом 1(0) 0 , тогда и только тогда когд а 1 1p , а 1(0) 0( )y x , , . вообще говоря в нуль не обращается Т огда приближенное
решение в точке 1x с (7.92) огласно будет определяться следующим:образом
1 0 0 0( , ).y y h f x y Формула Эйлера -для определения решения в произвольной точке бу
дет иметь вид
1 ( , ), 0,i i i iy y h f x y i n ,
где iy — приближенное решение в точке ix .
Формула Рунге — Кутта
Существует несколько формул Рунге— -Кутта для решения диффе , -ренциального уравнения первого порядка которые получены при раз
личных значениях r >1. Наиболее распространенной является -форму ла Рунге — Кутта при 4r , :которая имеет следующий вид
( ) ( ) ( ) ( )1 1 2 3 4
12 2
6i i i i
i iy y K K K K ,
Created with novaPDF Printer (www.novaPDF.com)

263
где
( )1
( )( ) 12
( )( ) 23
( ) ( )4 3
( , );
, ;2 2
, ;2 2
,
ii i
ii
i i
ii
i i
i ii i
K h f x y
KhK h f x y
KhK h f x y
K h f x h y K
и ( ) ( , ),ij j i iK K x y 1,4j .
Методы Эйлера и Рунге— -Кутта можно использовать и для моде .лирования в неравноотстоящих точках
7.7.2. Правило Рунге
Функция ( )r h (7.89) : -в имеет следующий смысл это разность меж -ду точным и приближенным приращениями решения дифференциаль
ного уравнения в точке 0x . , (7.90) (7.92), Тогда учитывая и можно -записать уравнение для погрешности решения в точке следующим об
:разом
( 1)
1 1(0)( )
( 1) !,
ss sr
r h h O hs
где( 1)
1 (0)( 1) !
ss rh
s
— . главный член погрешности Если главный член
погрешности можно записать в виде ( ) mC x h , , то говорят что порядок погрешности метода равен m. На практике в качестве погрешности
приближенного решения берут главный член погрешности
( ) ( ) mrR x C x h .
, ,Число шагов которые необходимо сделать до произвольной точки обратно пропорционально шагу h, . . т е (1/ )N O h , и погрешность в
произвольной точке x будет иметь смысл произведения погрешности на шаге ( )r h на число шагов N, . .т е ( )r h N .
, Таким образом рассмотренные методы имеют порядок погрешности на шаге, равный s+1, а порядок погрешности метода — s. Для метода
Эйлера 1s , -а для метода Рунге Кутта 4s . Т , -аким образом при мо делировании методом Эйлера результаты получаются с погрешностью
порядк а h, - — а методом Рунге Кутта с погрешностью порядка 4h . - -Оценка погрешности методов Эйлера и Рунге Кутта затруднитель
. , на Грубую оценку погрешности можно получить используя правилоРунге.
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

264 . . .Г Н Решетникова Моделирование систем
Пусть ( )iy x — точное решение в точке ( ); hi ix y — приближенное
решение в точке ix , найденное с шагом h; (2 )hiy — приближенное
решение в точ ке ix , най 2денное с шагом h, -и пусть погрешность при ближенного решения определяется формулой
( ) ( ) sr i iR x C x h .
:Тогда справедливы следующие равенства( )( ) ( )h s
i i iy x y C x h ;(2 )( ) ( )(2 )h s
i i iy x y C x h . , Приравнивая правые части этих равенств получим
( ) (2 ) ( ) (2 )
( )(2 ) (2 1)
h h h hi i i i
i s s s sy y y y
C xh h h
и( ) (2 )
( )2 1
h hi i
r i sy y
R x
.
, Таким образом оценка погрешности вычислений по формулам — Эйлера и Рунге Кутта на интервал е 0[ , ]nx x с помощью правила
:Рунге определяется следующим образом :для метода Эйлера
( ) (2 )1
1,( ) max | |;h h
i ii n
R x y y
— :для метода Рунге Кутта( ) (2 )
41,
( ) max15
h hi i
i n
y yR x
.
, Кроме того для контроля правильности выбора шага h -рекомен дуется вычислять величину
( ) ( )2 3( ) ( )1,1 2
max .i i
i ii n
K K
K K
П р и м е р :Введем следующие макропараметры экономики
Y — ;валовой продуктk — ( );основные фонды капиталl — .трудовые ресурсы
Основное соотношение макроэкономики имеет видY F(k,l),
где функция ( )F , -определяющая зависимость произведенного продук , та от капитала и трудовых ресурсов называется производственной
.функцией
Created with novaPDF Printer (www.novaPDF.com)

265
ПустьY I C ,
где I — ; инвестиции C — .потребление Если ввести параметр 0 1s , то
,, ,1 1Y sY Y sF Fk l k ls s где
,I sF k l , ,1C F k ls и s — ; 1норма накопления s — .норма потребления
Если const, 0l ,параметр амортизации основных фондов который характеризует процент убыли основных фондов за единицу, -времени то динамика односекторной экономики определяется уравне
нием
0 0( ) ( ( ), ) ( ); ( ) ,k t sF k t l k t k t k
где const 0; 0; 0 1l s .1. , -Решим методом Эйлера дифференциальное уравнение описы
[0,вающее динамику односекторной экономики на интервале T], гдеT 1 , году с шагом h, , -равным одному месяцу при использовании про
— изводственной функции Кобба Дугласа
( ) ( )( ), ( )F Ak t l tk t l t с параметрами 2; 0,25; 1 ; const 10A l . -Для моде
лирования возьмем 0,35s , , что соответствует ситуации когда норма накопления меньше нормы потреб , ления и 0,2 . Оц -еним погреш
.ность полученного решения по правилу Рунге , -Формула Эйлера моделирующая динамику односекторной эконо
— -мики при использовании производственной функции Кобба Дугла, са имеет вид
0 01 , ,h h hhii i tk k hf k kk
где ;f sAk l kk 1
; 0, ;12
h i N N 12.
, -При моделировании получены данные характеризующие величи ну капитала в односекторной экономике в конце каждого месяца
(в течение года i ):указывает на порядковый номер месяца
i 1 2 3 4 5 6 hik 10,567 11,140 11,721 12,309 12,903 13,503
i 7 8 9 10 11 12 hik 14,109 14,721 15,339 15,963 16,592 17,226
-Для оценивания погрешности по правилу Рунге осуществим моде
лирование с шагом 2h
с помощью выражения
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

266 . . .Г Н Решетникова Моделирование систем
/ 2 / 2 / 2/ 201 0, , 1,2 .
2h h hh
ii i
hk k f k k i Nk
Оценка погрешности метода Эйлера определяется следующим:образом
/ 2Эйлера 21,
max 0,025.hhi ii N
R k k
. 7.14 -На рис сплошная линия характери
, зует решение полученное с шагом 2h
, -а точ
— ки с шагом h.2. Решим то же самое дифференциальное
— . -уравнение методом Рунге Кутта Форму — , -лы Рунге Кутта моделирующие динами c ку односекторной экономики шагом h при
использовании производственной функции- , Кобба Дугласа имеют вид
( ) ( ) ( ) ( )1 1 2 3 4
12 2 ;
2i i i ih h
iik k K K K K
( )1
( )( ) 12
( )( ) 23
( ) ( )4 3
;
;2
;2
;
0, .
i hi
ii h
i
ii h
i
i ihi
K hf k
KK hf k
KK hf k
K hf k K
i N
Полученные значе ния , 0,hik i N , отлич аются во втором знаке
, после запятой от соответствующих значений полученных методом.Эйлера
Для оценивани -я погрешности по правилу Рунге осуществим моде
лирование с шагом2h
для / 2 , 0,2hik i N . -Оценка погрешности мето
— да Рунге Кутта определ яется с :ледующим образом
/ 292
Рунге Кутта1,
max 1,097 1015
hhi i
i N
k kR
.
, Заметим что погрешность метода Эйлера имеет поряд ок ( )O h , —а метода Рунге — Кутта 4( )O h . , В связи с этим необходимо по
, возможности задавать знач ение 1h .
. 7.14Рис
0 10 20
20
10
Created with novaPDF Printer (www.novaPDF.com)

267
7.7.3. Методы Эйлера и Рунге — Кутта при решении задачи Коши для систем дифференциальных
уравнений
.Ограничимся для сокращения записи системой двух уравнений :Задача Коши для решения системы из двух уравнений
1 1 1 2
2 2 1 2
( ) ( , ( ), ( ));
( ) ( , ( ), ( ))
y x f x y x y xy x f x y x y x
(7.93)
состоит в определении на интерва ле 0[ , ]nx x ре ,шения этой системы :удовлетворяющего условиям
(0);1 0 1( )y x y (0)
2 0 2( )y x y .
(7.93) Формулы Эйлера решения задачи Коши для системы имеютвид
( 1) ( ) ( ) ( )11 1 1 2
( 1) ( ) ( ) ( )22 2 1 2
( , , );
( , , ),
i i i ii
i i i ii
y y h f x y y
y y h f x y y
где 1i ih x x ; ( )1iy , ( )
2iy — приближенные решения в точке ,iх
0,i n . Формулы Рунге— (7.93)Кутта решения задачи Коши для системы
имеют вид
( 1) ( ) ( ) ( ) ( ) ( )1 1 1 2 3 4
( 1) ( ) ( ) ( ) ( ) ( )2 2 1 2 3 4
12 2 ;
61
2 2 ,6
i i i i i i
i i i i i i
y y K K K K
y y L L L L
где( ) ( ) ( )
11 1 2
( ) ( ) ( )21 1 2
( ) ( )( ) ( ) ( )1 1
12 1 2
( ) ( )( ) ( ) ( )1 1
22 1 2
( ) ( )( ) ( ) ( )2 2
13 1 2
( ) (23 1
( , , );
( , , );
( , , );2 2 2
( , , );2 2 2
( , , );2 2 2
( ,2
i i ii
i i ii
i ii i i
i
i ii i i
i
i ii i i
i
ii
K h f x y y
L h f x y y
K LhK h f x y y
K LhL h f x y y
K LhK h f x y y
hL h f x y
( ) ( )
) ( )2 22
( ) ( ) ( ) ( ) ( )14 1 3 2 3
( ) ( ) ( ) ( ) ( )24 1 3 2 3
, );2 2
( , , );
( , , ).
i ii i
i i i i ii
i i i i ii
K Ly
K h f x h y K y L
L h f x h y K y L
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

268 . . .Г Н Решетникова Моделирование систем
П р и м е р , -Рассмотрим математическую модель описывающую динамику про
. :дукции газовой отрасли на рынке Пустьz(t) — , , объем газа представленного на рынке млн м3;v(t) — , объем газа у потребителя млн м3.
, -Дифференциальные уравнения описывающие изменения перемен ных z(t) и v(t), :имеют вид
1 0 0
2 0 0
( ) ( ) ( ) ( ); ( ) ;
( ) ( ) ( ); ( ) ,
z t k z t s t u t z t z
v t k v t s t v t v
где 1k — , ( ) -коэффициент характеризующий потери утечку газа на рын; ке 2k — к , ;оэффициент характеризующий скорость потребления
u(t) — ( , темп добычи газа количество в единицу времени м3); s(t) — , темп продаж который будем описывать функцией
( )( ) 1 ( ).
( )c v t
s t ne z tP t
Здесь n — , -коэффициент характеризующий скорость продажи про
; дукции P(t) — , потенциальный спрос млн м3; c — 1 цена м3 .газа -Требуется найти решение задачи Коши для системы обыкновен
-ных дифференциальных уравнений при следующих начальных и по :стоянных значениях
1 20,001; 1,35; ( ) 5,75; 2,5; 2,15;k k u t n c
0 0( ) 100; 55; 20.P t z v
— Будем искать решение задачи методами Эйлера и Рунге Кутта на интерв але 0[ , ]t T , где T рав но одному году с шагом h, -равным одно , му месяцу то ес ть 1, 1, 12.T h N
. 7.15 , -На рис сплошная линия соответствует решению полученно , — — , -му методом Эйлера а точки методом Рунге Кутта причем верх , —ний график иллюстрирует динамику газа на рынке а нижний
.у потребителя
60
40
20
00 2 4 6 8 100 12
. 7.15Рис
Created with novaPDF Printer (www.novaPDF.com)

269
, , —Заметим что решения полученные методами Эйлера и Рунге, , -Кутта различаются за счет погрешности метода зависящей от вели чины 1h .
7.7.4. Решение задачи Коши для систем линейных дифференциальных уравнений
-Задача Коши для системы линейных дифференциальных уравне, , ний записанной в матричной форме имеет вид
(0)0( ) ( ) ( ) ( ); ( )y t A t y t B t y t y , (7.94)
где (0) (0) (0) (0)1 2 1 2( ) ( ( ), ( ),..., ( )) ; ( , ,..., ) ;T T
n ny t y t y t y t y y y y ( )A t — -мат рица размерности n n ; ( )B t — вектор с n .элементами
-Системы такого вида обычно используются в теории автоматичес -кого управления для моделирования поведения объекта в простран .стве состояний (7.94) — В силу линейности системы методы Эйлера и Рунге Кутта
значительно упрощаются и принимают вид разностных уравнений(0)( 1) ( ) ( ) ( ); (0)y k A k y k B k y y .
При этом для формулы Эйлера
( ) ( );kA k I tA t ( ) ( ),kB k t B t (7.95) — а для формулы Рунге Кутта
4 4 1
1 1( ) ( ); ( ) ( ).
! ( 1) !
iii i
k k ki i
ttA k I A t B k A t B t
i i (7.96)
(7.95), (7.96)В k соответствует моменту времени 0 ,kt t k t гд е 1 , 0, 1;k kt t t k n I — ед иничная матрица соответствующего
.порядка
П р и м е р Уравнение динамики фондов накопления и потребления можно
( . . 9.2)записать в виде см подразд
( ) ( ) ( )x t Ax t Bu t
и при 1 20,0054; 16,5 ; 23,5; 0,0025b b u ;
3 1,4240,061 7,691 10;
10 0,0054A B
15 Получим состояния фондов в каждый год на протяжении лет
пр и 0( ) 23; 13Tx t .
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

270 . . .Г Н Решетникова Моделирование систем
Моделирование осуществляется с помощью разностных уравнений
0( 1) ( ) ; (0) ( ),x k Ax k Bu x x t
где 1t ; 0,k N ; 15N . , Если используется для моделирования метод Эйлера то
; ,A I tA B tB — , если используется метод Рунге Кутта то
14 4
1 1
;! ( 1) !
i i i i
i i
t A t A BA I B
i i
.
Так как погрешность метода Эйлера имеет порядок ( )O t , а метода
— —Рунге Кутта 4( )O t и погрешности увеличиваются от шага к, -шагу то в конечный момент времени моделирования при использова
55,278, нии метода Эйлера для фонда накопления получается а метода — — 56,759. 7.16 Рунге Кутта На рис сплошная линия показывает
, -динамику фонда накопления при использовании метода Эйлера а точ — — .ки метода Рунге Кутта
60
40
205 100 15
. 7.16РисЗамечание
Для того чтобы воспользоваться методами Рунге— Кутта и Эйлера , для решения дифференциальных уравнений и систем содержащих
производные высших порядков относительно искомых функций путем , -введения новых переменных переходят к системе обыкновенных диф
.ференциальных уравнений
7.7.5. Методы Адамса при решении задачи Коши для обыкновенныхдифференциальных уравнений
Методы Эйлера и Рунге— Кутта являются одношаговыми, так как при вычислении решения в последующей точк -е они используют ин
. формацию о решении только в одной предыдущей точке Существуют, -методы которые позволяют часть полученной информации использо
. вать повторно на нескольких шагах вычислительного процесса Это
Created with novaPDF Printer (www.novaPDF.com)

271
так называемые многошаговые . методы При этом иногда оказывается « » -целесообразным привлекать также информацию с забеганием впе
.ред -Рассмотрим решение задачи Коши для дифференциального урав
(7.87).нения первого порядка:Пусть
1) узлы являются равноотстоящим :и 1 , 0, 1i ix x h i n ;2) для нахождения решения в т очке 1ix -требуется знание при
ближенного решения в ( 1)k предыдущих точках 1, ,...,i i i kx x x .Точки 0 1, ,..., kx x x образуют начальный отрезок. -Решение на началь , , ном отрезке может быть найдено например методами Рунге— Кутта .или Эйлера
Пусть известно решение в точках 0 1, ,..., kx x x и требуется найти решение в точке 1kx . Проинтегрируем исходное уравнение ( , )y f x y
на отрезк е 1,k kx x :
1 1
( , )k k
k k
x x
x x
y dx f x y dx
.
Тогда
1
1( ) ( ) ( , )k
k
x
k kx
y x y x f x y dx
. (7.97)
Для подынтегральной функции ( , )f x y -построим интерполяци онный многочлен ( )nP x (7.97). и подставим его в Так как значение
интерполяционного многочлена вычисляется на отрезке 1,k kx x , то -в качестве такого многочлена выберем формулу Ньютона для интерпо
, , лирования назад и в зависимости от того какая точка привлекается , первой при построении интерполяционного многочлена получаются
.различные формулы для решения дифференциального уравнения Если вмес то функции ( , )f x y (7.97) в подставить ( )nP x , точные значения ( )iy x заменить на приближенные iy и ,проинтегрировать
то получим формулы Адамса. Наиболее распространенными являются формулы Адамса для 4.n
Экстраполяционная формула Адамса
Если для построения интерполяционного многочлена 4( )P x используются значения функции ( , )f x y в узлах 1 4, ,...,k k kx x x , то
24 1 1 2 2
44 4
( 1)( ) ( , ( )) ( , ( )) ( , ( )) ...
1! 2 !( 1) 2 ( 3)
( , ( )).4 !
k k k k k k
k k
t t tP x f x y x f x y x f x y x
t t t tf x y x
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

272 . . .Г Н Решетникова Моделирование систем
Тогда для вычисления решения дифференциального уравнения(7.87) в точке 1kx п олучим экстраполяционнуюформулу Адамса, которая
имеет вид
1 1 2 355 59 3724k k k k k kh
y y f f f f .
Здесь ( , ), , 3j j jf f x y j k k .
Интерполяционная формула Адамса
Если для построения интерполяционного много члена 4( )P x -исполь зуются значения функции ( , )f x y в узлах 1 3, ,...,k k kx x x , то
24 1 1 1 1
43 3
( 1)( ) ( , ( )) ( , ( )) ( , ( )) ...
1! 2 !( 1) 2 ( 3)
( , ( ))4 !
k k k k k k
k k
t t tP x f x y x f x y x f x y x
t t t tf x y x
(7.87)и для вычисления решения дифференциального уравнения
в точке 1kx получим интерполяционную формулу Адамса, которая имеетвид
1 1 1 29 19 524k k k k k kh
y y f f f f . (7.98)
, (7.98) Заметим что интерполяционная формула представляет собой уравнение относительно 1ky , так как 1 1 1( , )k k kf f x y . Одним
-из методов решения этого уравнения является метод последователь :ных приближений
( 1) ( ) ( )1 21 19 19 5
24i i i
k k kk k kh
y y f f f f ,
где ( ) ( )11 1( , )i i
kk kf f x y ; начальное значение (0)1ky задает , ,ся например
с помощью экстраполяционной формулы А ,дамса 0,1,2,... .i Методы Адамса дают результат с погрешностью порядка 4h . -Прак
тическая оценка погрешности приближенного решения может быть .получена с помощью правила Рунге
П р и м е р [0,Найдем на интервале T], где T 1 , году с шагом h, равным
, , -одному месяцу решение дифференциального уравнения описываю щего динамику односекторной экономики
0 0( ) ( ( ), ) ( ); ( )k t sF k t l k t k t k ,
Created with novaPDF Printer (www.novaPDF.com)

273
где 0,35s ; 0,2 ; ( ) ( )( ), ( )F Ak t l tk t l t — производственная
— функция Кобба Дугласа с параметрам и 2;A 0,25; 1 ; const 10l . Решение будем искать метод : -ами Адамса сначала реше , -ние в точке определим по экстраполяционной формуле а затем уточ . -ним по интерполяционной Оценим погрешность полученного реше .ния по правилу Рунге
:Введем следующие обозначения
;f sAk l kk 1
; 0, ; 12.12
h i N N
:Решение в каждой точке определяется по двум формулам
(0)1 1 2 3
01 1 21
55 59 37 ;24
9 19 ( ) 5 ( ) ( ) ,24
h h h h hhi ii i i i
hh h h h hi ii i ii
hk f f f fk k k kk
hk k f f k f k f kk
« », . . при этом начальный отрезок т е значени я 1 2 3, ,h h hk k k , будем
— .определять методом Рунге Кутта , -При моделировании получены следующие данные характеризую
щие величину капитала в односекторной экономике в конце каждого (месяца в течение года i ).указывает на порядковый номер месяца
i 1 2 3 4 5 6 hik 10,57 11,148 11,732 12,323 12,921 13,526
i 7 8 9 10 11 12 hik 14,136 14,752 15,374 16,001 16,634 17,272
-Для того чтобы оценить погрешность полученного решения по пра , [0,вилу Рунге выполним вычисления на том же интервале T] с шагом
h, равным половине меся ца124
h , . . т е получим значения / 2 ,h
ik
0,24i . Так как методы Адамса имеют погрешность порядка 4h , то
оце :нка погрешности определяется следующим образом
/ 242
Адамса1,
max 2,062 1015
hhi i
i N
k kR
.
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

274 . . .Г Н Решетникова Моделирование систем
7.7.6. Метод сеток решения линейных краевых задач
Наряду с задачами Коши для обыкновенных дифференциальных -уравнений достаточно часто рассматриваются также граничные зада
. , -чи В этих задачах дополнительные условия которым должно удовлет , , ворять решение задаются в виде уравнений содержащих комбинации
, значений решения и его производных взятых в нескольких точках [рассматриваемого отрезка a,b]. Простейшими среди граничных задач
являются краевые задачи, -когда дополнительные условия задаются толь [ко на концах отрезка a,b]. -Если дифференциальное уравнение и урав
, , -нения определяющие дополнительные условия являются линейны, ми то граничная задача называется линейной.
[Пусть на отрезке a,b] -задана линейная краевая задача для диффе ренциального уравнения
( ) ( ) ( ) ( )L y y p x y q x y f x (7.99) с условиями
0 1
0 1
( ) ( ) ( ) ;
( ) ( ) ( ) ,a
b
l y y a y b A
l y y a y b B
(7.100)
где ( ), ( ), ( )a bL y l y l y — .линейные операторы Метод сеток (7.99), (7.100) для решения краевой задачи состоит
.в следующем1. На отрезке [a,b] выбирается некоторая система точек kx . -Сово
купность этих точек называется сеткой, а точки kx — узламисетки. Достаточно часто используют равномерную сетку узлов, когда
; , 0, ,kb a
x a kh h k nn n — .заданное целое число
2. (7.99), (7.100) , -Краевая задача на множестве узлов принадлежа , щих сетке заменяется некоторой сеточной задачей, то есть некоторыми
соотношениями между приближенными значениями решения в узлах.сетки
3. - . Сеточная задача решается каким либо численным методом Это позволяет найти приближенные значения решения краевой задачи
.в узлах сетки Метод сеток является одним из наиболее универсальных методов
, -решения как обыкновенных дифференциальных уравнений так и урав . нений в частных производных Рассмотрим этот метод в применении
-к решению линейных краевых задач для дифференциальных уравне .ний второго порядка
Пусть линейная краевая задача задана в виде( ) ( ) ( ) ( );A x y B x y C x y f x (7.101)
( ) ; ( )y a y b . (7.102)
Created with novaPDF Printer (www.novaPDF.com)
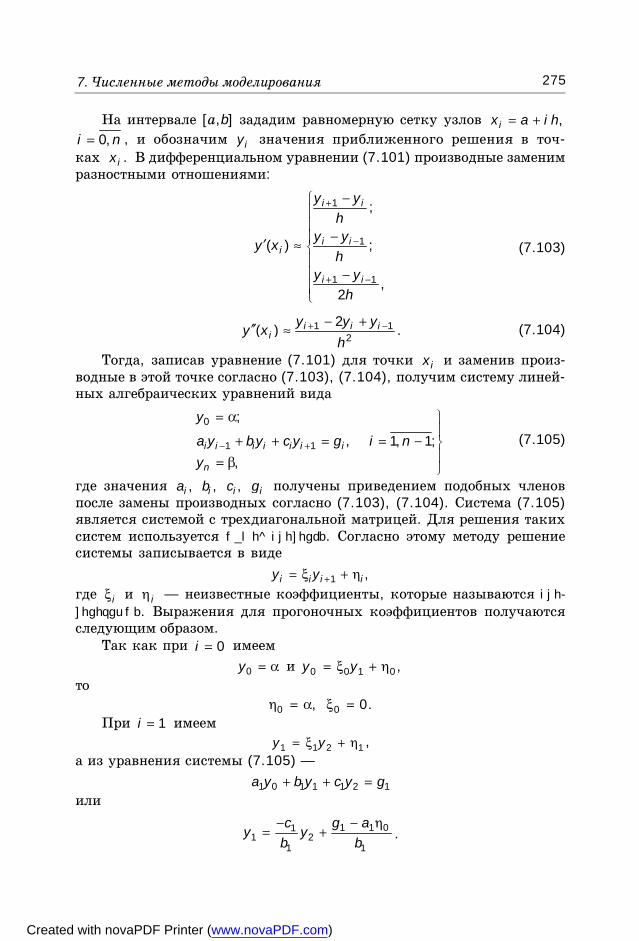
275
На интервале [а,b] зададим равномерную сетку узлов ,ix a i h 0,i n , и обозначим iy зн -ачения приближенного решения в точ
ках ix . (7.101) В дифференциальном уравнении производные заменим :разностными отношениями
1
1
1 1
;
( ) ;
,2
i i
i ii
i i
y yh
y yy x
hy y
h
(7.103)
1 12
2( ) .i i i
iy y y
y xh
(7.104)
, (7.101) Тогда записав уравнение для точки ix -и заменив произ (7.103), (7.104), -водные в этой точке согласно получим систему линей
ных алгебраических уравнений вида
0
1 1
;
, 1, 1;
,i i i i i i i
n
y
a y by c y g i ny
(7.105)
где значения , , ,i i i ia b c g получены приведением подобных членов (7.103), (7.104). (7.105)после замены производных согласно Система
. является системой с трехдиагональной матрицей Для решения таких систем используется метод прогонки. Согласно этому методу решение
системы записывается в виде
1 ,i i i iy y гд е i и i — , неизвестные коэффициенты которые называются -прогоночными. Выражения для прогоночных коэффициентов получаются
.следующим образом Так как пр и 0i имеем
0y и 0 0 1 0,y y то
0 0, 0. При 1i имеем
1 1 2 1y y , (7.105) —а из уравнения системы
1 0 1 1 1 2 1a y b y c y g или
1 1 011 2
1 1
g acy y
b b
.
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

276 . . .Г Н Решетникова Моделирование систем
Записав аналогично предыдущему выражения для i 2, получим :рекуррентные соотношения для прогоночных коэффициентов
1;i
ii i i
ca b
1
1,i i i
ii i i
g aa b
1, 1i n .
(7.105) -Решение системы находится в обратном порядке следую :щим образом
1 1 1
0
;
, , 1,...,2;
.
n
i i i i
y
y y i n n
y
(7.101), (7.102) -Для того чтобы получить решение задачи в анали , тической форме необходимо по значениям 0 1, ,..., ny y y -построить при
.ближающую функцию
П р и м е р Найти решение уравнения
( ) ( ) ( ) ( )A x y B x y C x y F x на отрезке [0,1;0,8] , удовлетворяющее краевым условиям
(0,1) 0,7; (0,8) 1,37y y ,где
( ) 2cos(0,1 ) 1A x x ;2( ) 0,5 0,7B x x x ;
2( ) ln(3 )C x x ;
0,2( ) 4 0,5F x x x .
На отрезке [0,1;0,8] строится сетка с узлами
0 0 7; 0,7; 0,1; 0,1; 0,8.ix x ih i h x x Для построения сеточной задачи исходное уравнение записывается
в точке ix , :а производные заменяются разностными отношениями
1 1 12
2( ) ; ( )i i i i i
i iy y y y y
y x y xhh
.
Т огда сеточная задача запишется в виде
0
1 1
7
0,7;
, 1,6;
1,37;i i i i i i i
y
a y by c y g i
y
где
2 2 2
( ) 2 ( ) ( ) ( ) ( ); ( ); ; ( )i i i i i
i i i i i iA x A x B x A x B x
a b C x c g F xh hh h h
.
Created with novaPDF Printer (www.novaPDF.com)

277
. -Сеточная задача решается методом прогонки Прогоночные коэф фициенты равны
i 0 1 2 3 4 5 6
i 0 0,506 0,674 0,759 0,809 0,843 0,867
i 0,7 0,338 0,212 0,144 0,1 0,068 0,042
и сеточная задача имеет решение
i 0 1 2 3 4 5 6 7
iy 0,7 0,752 0,818 0,898 0,994 1,104 1,23 1,37
7.7.7. Метод коллокации решения краевых задач
При решении задач физики и механики искомое решение иногда . более выгодно находить в аналитическом виде Часто в таких случаях
, -не преследуют цель получить решение с большой точностью а ограни , чиваются отысканием функции точно удовлетворяющей граничным , -условиям и некоторым соотношениям связанным с заданным диффе
. ,ренциальным уравнением Эти соотношения строятся таким образом , , чтобы функция удовлетворяющая им удовлетворяла приближенно
-с необходимой точностью также и заданному дифференциальному урав. -нению При этом эти соотношения в различных методах строятся по
.разному Решение краевой задачи
( ) ( ) ( ) ( ) ( );
( ) ;
( )a
b
L y A x y B x y C x y F xl y
l y
(7.106)
[на отрезке a,b] ищется в виде
01
( ) ( ) ( )n
n i ii
y x x c x
, (7.107)
где конечная система базисных функци й ( ) , 0,i x i n , заданных [на a,b], , выбирается так чтобы фун кция 0 ( )x у -довлетворяла неодно
родным краевым условиям
0 0( ) ; ( ) ,a bl l (7.108)
а функции ( )i x удовлетворяли бы однородным краевым условиям
( ) ( ) 0, 1, .a i b il l i n (7.109)
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

278 . . .Г Н Решетникова Моделирование систем
(7.107) , Подставляя в дифференциальное уравнение получимневязку
1 01
( , ,..., ) ( )n
n i ii
R x c c L c L f x
.
, Потребуем чтобы невяз ка 1( , ,..., )nR x c c о -бращалась в нуль на не которой системе точе к 1, , nx x [отрезка a,b], называемых точками -кол
локации, -причем число таких точек должно равняться числу коэффици ентов ic (7.107). в выражении Тогда для определения значений 1, , nc c
получим систему уравнений
1 1
2 1
1
( , ,..., ) 0;
( , ,..., ) 0;
( , ,..., ) 0,
n
n
n n
R x c c
R x c c
R x c c
(7.110)
определитель которой имеет вид
1 1 2 1 1
1 2
( ( )) ( ( )) ... ( ( ))
...
( ( )) ( ( )) ... ( ( ))
n
n n n n
L x L x L x
DL x L x L x
.
(7.110) , Система имеет единственное решение если 0D , в связи с этим функции ( ( )), 1,iL x i n , должны составлять -систему Чебышева.
Для достижения хорошего качества приближения ( )ny x -к точно му решению ( )y x функции 0 1( ), ( ),..., ( )nx x x должны -удовлетво
:рять следующим условиям1) ;быть линейно независимыми2) при непрерывных функция х ( ), ( ), ( ), ( )A x B x C x F x -непрерыв
[ными на a,b] должны быть и функц ии 0 1( ), ( ),..., ( )nx x x вм есте со ;своими производными до второго порядка включительно
3) для того чтобы ( )nL y x могли сколь угодно точно приближатьзначения ( )L y x , система функций 0 1( ), ( ),..., ( )nx x x до лжна быть
.полной в классе дважды непрерывно дифференцируемых функций, (7.106) -Заметим что для решения краевой задачи в качестве функ
ци й 0( ),x 1( ),..., ( )nx x , , -можно выбрать например следующие функции:
1) 0 ( )x e dx , где e и d за , -даются таким образом чтобы выпол (7.108);нялись неоднородные краевые условия
2) 21 2( ) ( )( ), ( ) ( ) ( ), ... ,x x a x b x x a x b ( ) ( )nn x x a
( )x b , к -оторые будут удовлетворять однородным краевым услови (7.109).ям
Created with novaPDF Printer (www.novaPDF.com)

279
(7.106)Существуют и другие методы решения граничной задачи (7.107), , .в виде например методы Галеркина наименьших квадратов
.Однако метод коллокации приводит к более простым вычислениям
П р и м е р Найти решение уравнения
( ) ( ) ( ) ( )A x y B x y C x y F x
на отрезке [0,1;0,8] , удовлетворяющее краевым условиям
(0,1) 0,7; (0,8) 1,37y y ,где
( ) 2cos(0,1 ) 1A x x ;2( ) 0,5 0,7B x x x ;
2( ) ln(3 )C x x ;
0,2( ) 4 0,5F x x x . Решение задачи ищется в виде
3
01
( ) ( ) ( )i ii
y x x c x
.
Функция 0( )x должна удовлетворять неоднородным краевым:условиям
0 0(0,1) 0,7; (0,8) 1,37 .
Для этого функцию 0( )x задаем в виде 0( )x e dx , а значения коэффициентов e и d определяем из решения системы
0,1 0,7;
0,8 1,37.
e de d
Отсюда получаем 0,604; 0,957e d и 0 0( ) 0,957; ( ) 0x x .
Функции ( )i x до -лжны быть линейно независимыми и удовлетво рять однородным краевым условиям
(0,1) 0; (0,8) 0; 1,3i i i .
Зададим функции ( )i x :в виде
1( ) ( 0,1)( 0,8)x x x ;
22 ( ) 0,1 0,8 ;x x x
33 ( ) 0,1 0,8 ,x x x
при этом
1 1( ) 2 0,9; ( ) 2;x x x 2
2 2( ) 3 2 0,17; ( ) 6 2;x x x x x
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

280 . . .Г Н Решетникова Моделирование систем
3 2 23 3( ) 4 3,3 0,54 0,025; ( ) 12 6,6 0,54x x x x x x x .
Точки коллокации зададим следующим : и 1 0,1;x 2 0,45;x 3 0,8x .
Уравнение для невязки в точке , 1,3jx j , будет иметь вид
1 2 3 0 0 0( , , , ) ( ) ( ) ( ) ( ) ( ) ( )j j j j j j jR x c c c A x x B x x C x x 3
1
[ ( ) ( ) ( ) ( ) ( ) ( )] ( )i j i j j i j j i j ji
c A x x B x x C x x F x
,
а система уравнений для определения коэффициентов функции y(x), ,полученная из условия равенства нулю невязок в точках коллокации
:запишется следующим образомMc N ,
где M — матрица с элементами
, ( ) ( ) ( ) ( ) ( ) ( )i j i j i i j i i j iM A x x B x x C x x ;
N — - вектор столбец с элементами
0 0 0( ) ( ) ( ) ( ) ( ) ( ) ( )i i i i i i i iN F x A x x B x x C x x ;
1 2 3( , , ) , , 1,3Tc c c c i j . :Окончательно получилось
5,468 4,2 0 3,384 0,721
6,139 2,01 0,079 ; 4,706 ; 0,133 .
7,205 9,235 9,398 5,324 0,118
M N c
. 7.17 На рис сплошной линией изображен график функции y(x),
— , а точками решение этой же задачи найденное методом сеток .в предыдущем примере
0,40,2 0,6 0,80,2
1
1,5
. 7.17Рис
Created with novaPDF Printer (www.novaPDF.com)

281
7.8. Контрольные вопросы
Элементы теории погрешности
1. ?Какие существуют оценки точности приближенного числа2. , Чему равна относительная погрешность числа записанного
, в двоичной системе если число разрядов равно n — и порядок p?3. ?Чем обусловлена погрешность метода4. ?Чем обусловлена неустранимая погрешность5. ?Чем обусловлена погрешность округления6. , Как определяется погрешность числа заданного с n верными
?знаками в узком смысле7. Записать число 0,17572x c -верными знаками в узком смыс
, ле если оно задано с погрешностью 0,00068xA .8. Записать число 0,00966552x c верными знаками в узком
, смысле если оно задано с погрешность ю 0,000043xA .9. Чему равна абсолютная погрешность в узком смысле числа
5,4563, ?заданного с верными знаками10. Записать числ о 7,09712x c ве -рными знаками в узком смыс
, ле если оно задано с погрешностью 0,000345xA .11. Как опреде лить абсолютную погрешность функции
1( ,..., )ny f x x , если , 1, ,ixA i n — абсол -ютные погрешности аргу
?ментов12. Как опре делить относительную погрешность функции
1( ,..., )ny f x x , если , 1, ,ix i n — отно -сительные погрешности аргу
?ментов13. -Так как относительная погрешность функции многих перемен , ?ных зависит от чувствительностей что определяют чувствительности14. Как определяются абсолютная и относительная погрешности
?разности двух чисел15. Что необходимо предпринимать при вычитании двух близких
?чисел16. Как определяются абсолютная и относительная погрешности
?произведения17. Как определяются абсолютная и относительная погрешности
?частного18. Как определяются абсолютная и относительная погрешности
?возведения в степень19. Как определяются абсолютная и относительная погрешности ?при взвешенном суммировании
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

282 . . .Г Н Решетникова Моделирование систем
Приближение данных
1. ?Что такое интерполирование2. ?Что такое экстраполирование3. ?Какими свойствами обладают последовательности Чебышева4. .Запишите многочлен Лагранжа5. -Чем обусловлена возможность и единственность построения мно
?гочлена Лагранжа6. -Проходит ли многочлен Лагранжа через узлы интерполирова?ния7. ?Какими недостатками обладает многочлен Лагранжа8. ?Зачем нужна и какой вид имеет схема Эйткена9. Запишите выражения для определения разностных отношений
1- , 2- ,…, го го k- .го порядков10. .Запишите интерполяционный многочлен Ньютона11. -Запишите формулу Лагранжа для погрешности интерполиро
.вания12. .Запишите многочлен Чебышева13. .Перечислите свойства многочленов Чебышева14. Каким образом можно использовать многочлены Чебышева при
?интерполировании15. Запишите выражения для определения конечных разностей
1- , 2- ,…, го го k- .го порядков16. Запишите формулу Ньютона для интерполирования вперед
.и сформулируйте условия ее применения17. Запишите формулу Ньютона для интерполирования назад
.и сформулируйте условия ее применения18. -Запишите формулу Гаусса для интерполирования вперед и сфор
.мулируйте условия ее применения19. -Запишите формулу Гаусса для интерполирования назад и сфор
.мулируйте условия ее применения20. , Как определить максимальный порядок разностей которые ведут ?себя правильно21. Дайте определение ,сплайна ,степени сплайна .дефекта сплайна22. Запишите формулу линейного сплайна и перечислите условия .для определения его коэффициентов23. Запишите формулу параболического сплайна и перечислите
.условия для определения его коэффициентов24. -Запишите формулу кубического сплайна и перечислите усло .вия для определения его коэффициентов25. .Дайте определение методу наименьших квадратов26. .Перечислите свойства матрицы Грама27. -Приведите алгоритм аппроксимации с помощью алгебраиче .ских полиномов
Created with novaPDF Printer (www.novaPDF.com)

283
28. -Приведите алгоритм аппроксимации с помощью ортогональ .ных полиномов29. -Приведите алгоритм аппроксимации с помощью ортогональ .ных полиномов дискретной переменной30. Проходит ли аппроксимирующая функция через заданные
?точки
Численное дифференцирование
1. -Какова идея построения формул численного дифференцирова?ния2. Запишите формулу вычисления первой производной в точке x
.с помощью многочлена Лагранжа3. Запишите формулу вычисления производной в точке x -по не
равноотстоящим узла м 0 1 5, ,...,x x x , если x лежит вблизи 0x , с -помо .щью многочлена Ньютона4. Запишите формулу вычисления производной в точке x по
неравноотстоящим узл ам 0 1 5, ,...,x x x , если x лежит вблизи 5x .5. Запишите формулу вычисления производной в точке x по
неравноотстоящим узлам 0 1 5, ,...,x x x , если x лежит вблизи 2x , -при чем 2x x .6. Запишите формулу вычисления производной в точке x по
неравноотстоящим узлам 0 1 5, ,...,x x x , если x лежит вблизи 2x , -при чем 2x x .7. -Как вычисляются производные высших порядков по неравноот
?стоящим узлам8. Как определяется порядок точности вычисления производных ?при использовании многочлена Ньютона9. Запишите фо рмулу вычисления производной в точке x -по рав
ноотстоящим узлам , 0,5,ix i если x лежит вблизи 0x .10. Запишите формулу вычисления производной в точке x -по рав
ноотстоящим узлам , 0,5,ix i если x лежит вблизи 5x .11. Запишите формулу вычисления производной в точке x -по рав
ноотстоящим узлам , 0,5,ix i если x лежит вблизи 2x , причем 2x x .12. Запишите формулу вычисления производной в точке x -по рав
ноотстоящим узлам , 0,5,ix i если x лежит вблизи 2x , причем 2x x .13. Как вычисляются производные -высших порядков по равно
?отстоящим узлам
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

284 . . .Г Н Решетникова Моделирование систем
Численное интегрирование
1. .Запишите общий вид квадратурной формулы2. ?Как определяется интерполяционная квадратурная формула3. -Запишите выражение для погрешности интерполяционной квад
.ратурной формулы4. -Как определяется алгебраическая степень точности квадратур ?ного правила5. -Какова алгебраическая точность общей интерполяционной квад
, ратурной формулы если число квадратурных узлов равно n?6. Приведите общий вид квадратурной формулы Ньютона— .Котеса7. — .Перечислите свойства формулы Ньютона Котеса8. -Чему равен порядок алгебраической точности квадратурной фор
— , мулы Ньютона Котеса если число квадратурных узлов n — ?четное9. Чему равен порядок алгебраической точности квадратурной
— , формулы Ньютона Котеса если число квадратурных узлов n —?нечетное
10. .Выведите формулу левых прямоугольников11. Чему равен порядок алгебраической точности формулы левых
?прямоугольников12. .Выведите формулу правых прямоугольников13. Чему равен порядок алгебраической точности формулы правых
?прямоугольников14. .Выведите формулу средних прямоугольников15. -Чему равен порядок алгебраической точности формулы сред ?них прямоугольников16. .Выведите формулу трапеций17. -Чему равен порядок алгебраической точности формулы трапе?ций18. .Выведите формулу Симпсона19. -Чему равен порядок алгебраической точности формулы Симп?сона20. ?Чему равна наивысшая алгебраическая степень точности21. -Как определяются коэффициенты и узлы в квадратурной фор ?муле наивысшей алгебраической степени точности
22. Какими свойствами обладает многочле н ( )x в квадратурной ?формуле наивысшей алгебраической степени точности
23. -Как определяется погрешность в квадратурной формуле наи ?высшей алгебраической степени точности
24. Как вычислить ин теграл ( )b
a
I f x dx -с помощью квадратурно
го правила наивысшей алгебраической сте ?пени точности
Created with novaPDF Printer (www.novaPDF.com)

285
Решение нелинейных уравнений и систем
1. Дайте определения корня уравнения f (x) 0 и нуля функцииf (x).
2. ?Какой корень уравнения называется изолированным3. -Перечислите этапы численного решения нелинейных уравне.ний4. .Запишите алгоритм табличного метода для отделения корней5. Запишите алгоритм метода половинного деления для отделения
.корней6. -Запишите алгоритм метода пропорциональных частей для отде
.ления корней7. .Опишите графические методы отделения корней8. .Приведите итерационную формулу метода простых итераций9. .Каковы условия сходимости метода простых итераций10. -Дайте геометрическую интерпретацию метода простых итера ций дл я ( ) 1x .11. -Дайте геометрическую интерпретацию метода простых итера ций дл я ( ) 1x .12. Как построить сходящуюся каноническую форму для метода
?простых итераций13. -Запишите итерационную формулу метода секущих как видо
.изменение метода простых итераций14. .Запишите итерационную формулу метода Стеффенсена15. .Запишите итерационную формулу метода Ньютона16. ?Каковы условия сходимости метода Ньютона17. .Дайте геометрическую интерпретацию метода Ньютона18. -На чем основан метод Лобачевского нахождения корней поли
?номов19. Зачем используется и каков алгоритм процесса квадрирования
?в методе Лобачевского20. -Как определяются корни полинома методом Лобачевского в слу ?чае вещественных корней21. -Как определяются корни полинома методом Лобачевского в слу - ?чае пары комплексно сопряженных корней22. ?Какое пространство называется метрическим23. .Перечислите аксиомы метрики24. -Приведите вычислительные формулы для трех основных мет.рик25. Приведите итерационную формулу метода простых итераций .для решения систем нелинейных уравнений26. Каковы условия сходимости метода простых итераций для
?решения систем нелинейных уравнений
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

286 . . .Г Н Решетникова Моделирование систем
27. -Приведите итерационную формулу метода Ньютона для реше .ния систем нелинейных уравнений28. -Каковы условия сходимости метода Ньютона для решения сис ?тем нелинейных уравнений
Решение задач матричной алгебры
1. .Дайте определение нормы вектора2. ( ) ?Как вычисляется первая кубическая норма вектора3. ( ) ?Как вычисляется вторая октаэдрическая норма вектора4. ( ) ?Как вычисляется третья евклидова норма вектора5. .Дайте определение нормы матрицы6. ( ) ?Как вычисляется первая кубическая норма матрицы7. ( ) ?Как вычисляется вторая октаэдрическая норма матрицы8. ( ) ?Как вычисляется третья евклидова норма матрицы9. .Дайте определения собственных значений и векторов матриц10. Дайте определение « »плохой и « » -хорошой обусловленной сис.темы
11. Как вычисляется число обусловленности матрицы A.12. .Какова идея метода единственного деления Гаусса13. , -Дайте определение симметрической транспонированной и эр
.митовой матриц14. Какова идея метода отражений для решения систем линейных
?алгебраических уравнений15. На чем основан метод квадратного корня решения систем
?линейных алгебраических уравнений16. Приведите итерационную формулу и условия сходимости
.метода последовательных приближений17. Приведите итерационную формулу и условия сходимости
.метода простых итераций18. Приведите итерационную формулу и условия сходимости
.метода Зейделя19. Как записывается каноническая форма Фробениуса матрицы
?и каковы ее свойства20. ?На чем основан метод Данилевского21. -Как вычисляются собственные значения матрицы методом Да
?нилевского22. -Как вычисляются собственные векторы матрицы методом Да
?нилевского23. ?Как вычисляется обратная матрица методом Фаддеева24. Как вычисляются собственные значения и векторы матрицы
?методом Фаддеева25. , , Дайте определение симметрической эрмитовой унитарной
.и ортогональной матриц
Created with novaPDF Printer (www.novaPDF.com)
287
26. -Как вычисляются собственные значения симметрической мат ?рицы методом вращений
27. Как вычисляются собственные значения эрмитовой матрицы ?методом вращений
28. -Как вычисляются собственные векторы матрицы в методе вра?щений
Решение обыкновенных дифференциальных уравнений и систем
1. -Сформулируйте задачу Коши для обыкновенных дифференци .альных уравнений
2. -Как решается задача Коши для обыкновенных дифференциаль ?ных уравнений методом Эйлера3. -Как решается задача Коши для обыкновенных дифференциаль ных уравнений методом Рунге— ?Кутта4. Как оценивается погрешность методов Эйлера и Рунге— Кутта
?по правилу Рунге5. -Как решается задача Коши для систем обыкновенных диффе
?ренциальных уравнений методом Эйлера6. -Как решается задача Коши для систем обыкновенных диффе
ренциальных уравнений методом Рунге— ?Кутта7. -Как решается задача Коши для линейных систем обыкновен ?ных дифференциальных уравнений методом Эйлера8. -Как решается задача Коши для линейных систем обыкновен ных дифференциальных уравнений методом Рунге— ?Кутта9. ?Какова идея получения экстраполяционной формулы Адамса10. ?Какова идея получения интерполяционной формулы Адамса11. -Какова идея метода сеток решения краевых задач для линей ?ных дифференциальных уравнений второго порядка12. -В каком виде ищется решение краевой задачи методом колло
?каций
7. Численные методы моделирования
Created with novaPDF Printer (www.novaPDF.com)

288 . . . Г Н Решетникова Моделирование систем
8. МОДЕЛИР ОВАНИЕ СИС ТЕМ УПРАВЛЕНИЯ
В современной теории автоматического управления доминирует . -концепция совмещенного синтеза следящих систем Наиболее пер
, -спективными методами решения таких задач являются методы осно , -ванные на оптимизации квадратичных критериев а использование про
гнозирующих моделей и скользящего интервала времени позволяет .существенно расширить возможности синтеза адаптивных систем
-Рассмотрим методы синтеза систем управления при решении за , -дач слежения для многомерных стохастических моделей объектов функ
ционирующих в условиях неполной информации о состоянии объекта . и его параметров При этом проектирование систем управления будем
-осуществлять путем постепенного добавления и усложнения использу : -емых методов и алгоритмов от оптимального управления для детерми
-нированных моделей до адаптивных следящих систем для стохасти ческих моделей при неполном измерении с ошибками.
-В связи со сложностью рассматриваемых задач единственным спо .собом их решения является имитационное моделирование
8.1. Описание систем в пространствесостояний
-Описание систем во временной области лежит в основе современ . ной теории управления Временная область — , это область в которой
-поведение системы рассматривается как функция переменной време ни t. -Анализ и синтез систем управления во временной области осно
. ваны на понятии состояния системы Состояние системы — -это совокуп , ность таких переменных знание которых наряду с входными функциями
, , и уравнениями описывающими динамику системы позволяет определить ее будущее состояние и выходную переменную. Для динамической системы ее
состояние описывается набором переменных состояни я 1 2( ), ( ),x t x t..., ( )nx t . , Это такие переменные которые определяют буду -щее поведе
, -ние системы если известны ее текущее состояние и все внешние воз. , , -действия Например для системы структурная схема которой изобра
. 8.1, жена на рис переменны е 1 2( ), ( ), ..., ( )nx t x t x t имеют следующий: смысл если в момент времен и 0t и звестны начальные значени я 1 0 ,x t
2 0 0( ),..., ( )nx t x t и входные сигналы 1( ),..., ( )mU t U t для 0t t , то этой , информации достаточно чтобы определить будущие значения всех . ,переменных состояния и выходных переменных Таким образом
Created with novaPDF Printer (www.novaPDF.com)

289
, -переменные состояния описывают поведение систем в будущем если извест , ны текущее состояние внешние воздействия и урав нения динамики системы.
Входные
данные Выходные данные
Система 1( )U t
( )mU t
1( )y t
( )ly t
. 8.1Рис
П р и м е р « — » -Рассмотрим механическую систему масса пружина с затуха
, . 8.2.нием изображенную на рис
М
( )U t
k
y(x)
. 8.2Рис
, ,Дифференциальное уравнение описывающее поведение системы обычно записывается в виде
2
2
( ) ( )( ) ( )
d y t dy tM b ky t U t
dtdt . (8.1)
, ,Число переменных состояния выбираемых для описания системы , должно быть по возможности минимальным чтобы среди них не было
. -излишних Для данной системы вполне достаточно иметь две перемен — :ные состояния положение и скорость движения массы
1
2
( ) ( );
( )( ) .
x t y tdy t
x tdt
(8.1) С учетом переменных состояния уравнение примет вид
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)
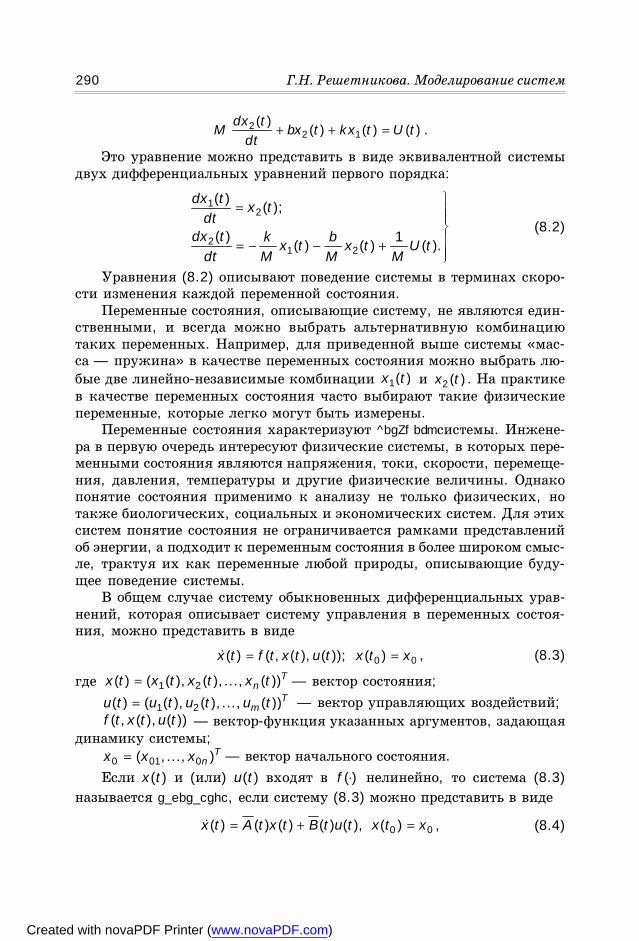
290 . . . Г Н Решетникова Моделирование систем
22 1
( )( ) ( ) ( )
dx tM bx t kx t U t
dt .
Это уравнение можно представить в виде эквивалентной системы :двух дифференциальных уравнений первого порядка
12
21 2
( )( );
( ) 1( ) ( ) ( ).
dx tx t
dtdx t k b
x t x t U tdt M M M
(8.2)
(8.2) -Уравнения описывают поведение системы в терминах скоро .сти изменения каждой переменной состояния
, , -Переменные состояния описывающие систему не являются един, ственными и всегда можно выбрать альтернативную комбинацию
. , « -таких переменных Например для приведенной выше системы мас — » -са пружина в качестве переменных состояния можно выбрать лю
- бые две линейно независимые комбинации 1( )x t и 2 ( )x t . На практике в качестве переменных состояния часто выбирают такие физические
, .переменные которые легко могут быть измерены Переменные состояния характеризуют динамику . -системы Инжене
, -ра в первую очередь интересуют физические системы в которых пере , , , -менными состояния являются напряжения токи скорости перемеще
, , . ния давления температуры и другие физические величины Однако , понятие состояния применимо к анализу не только физических но
, . также биологических социальных и экономических систем Для этих систем понятие состояния не ограничивается рамками представлений
, -об энергии а подходит к переменным состояния в более широком смыс, , -ле трактуя их как переменные любой природы описывающие буду
.щее поведение системы -В общем случае систему обыкновенных дифференциальных урав, -нений которая описывает систему управления в переменных состоя
, ния можно представить в виде
0 0( ) ( , ( ), ( )); ( )x t f t x t u t x t x , (8.3)
где 1 2( ) ( ( ), ( ),..., ( ))Tnx t x t x t x t — ;вектор состояния
1 2( ) ( ( ), ( ),..., ( ))Tmu t u t u t u t — вект ;ор управляющих воздействий( , ( ), ( ))f t x t u t — - , вектор функция указанных аргументов задающая
;динамику системы
0 01 0( ,..., )Tnx x x — .вектор начального состояния
Если x(t) ( ) и или u(t) входят в ( )f , (8.3)нелинейно то система называется нелинейной, (8.3) если систему можно представить в виде
0 0( ) ( ) ( ) ( ) ( ), ( )x t A t x t B t u t x t x , (8.4)
Created with novaPDF Printer (www.novaPDF.com)

291
где ( )A t — м -атрица динамических свойств модели объекта размерно сти n n ; ( )B t — -матрица влияния управляющих воздействий раз
мерности n m , то такая система называется линейной. Если элементыматриц ы ( )A t ( ) и или ( )B t , (8.5) -зависят от времени то система явля
ется нестационарной, если ни один из элементов матри ц ( )A t и ( )B t не , (8.4) зависит от времени то система является стационарной. -Если сис
, тема управления является нелинейной то достаточно часто ее -линеаризуют (8.4).и представляют в виде
, Заметим что систему управления в переменных состояния можно :представить и в дискретной форме
0( 1) ( , ( ), ( )); (0)x k f k x k u k x x , (8.5)
где 1( ) ( ( ),..., ( ))Tnx k x k x k — вектор состояния на k- ;м такте
1( ) ( ( ),..., ( ))Tmu k u k u k — ;вектор управляющих воздействий( , ( ), ( ))f k x k u k — - , -вектор функция дискретных аргументов задаю
щая динамику системы на k- ;м такте
01 0(0) ( ,..., )Tnx x x — .вектор начального состояния (8.3) (8.5) -Аналогично система может быть нелинейной и линей
, ной представимой в виде
0( 1) ( ) ( ) ( ) ( ); (0)x k A k x k B k u k x x . (8.6)
, (8.5), (8.6) ,Кроме того системы могут быть как стационарными .так и нестационарными
, , -В дальнейшем будем считать что математическая модель описы , (8.4) (8.6).вающая поведение управляемого объекта задана в виде или
-Использование линейных систем для описания моделей объектов обус , ловлено тем что идеи и методы линейной теории автоматического
управления с соответствующими оговорками широко используются . , -и для других моделей объектов управления Кроме того математиче
.ский аппарат матричной алгебры достаточно легко реализуется на ЭВМ
8.2. Аналитическое конструирование оптимальных регуляторов
— -Синтез систем управления одна из важнейших технических за. , дач Целью синтеза является создание системы которая удовлетворяла
. бы требуемым показателям качества Качество системы управления , , , можно охарактеризовать например интегральными оценками и тогда -синтез системы управления должен быть основан на минимизации оцен
ки качества. , -Системы управления в которых обеспечивается минимум со , ответствующей оценки качества называются оптимальными системами
управления.
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

292 . . . Г Н Решетникова Моделирование систем
-Свойства оптимального управления в значительной мере опреде . ляются выбранным критерием оптимизации Для методов синтеза
, управления объектами динамические свойства которых заданы , в пространстве состояний наиболее удобными являются интегральные
. показатели качества При этом конкретная форма показателя качества . тесно связана с методом синтеза В общем случае такие показатели
описываются функционалами вида
0 0
1 2( ( ), ) ( ( ), ) ( ( ), )T T
zt t
J V x T T Q x t t dt Q u t t dt , (8.7)
определенными на всех возможных траекториях x(t) -в рассматри ваемом пространстве состояний д ля вс ех 0,t t T , где 1 2( ), ( )Q Q —
, -заданные функции указанных аргументов удовлетворяющие некото . (8.7) рым условиям Первое слагаемое в является терминальнымчленом
. -функционала Оно определяет вклад в функционал конечного состоя ния x(T). -При этом рассматривается задача со свободным правым кон, цом когда отсутствует требование прохождения вектора состояния через заданную точку в момент T. (8.7) -Второе слагаемое в представля
-ет собой интегральную оценку качества переходного процесса объек та управления на интервал е 0,t T . — Третье слагаемое интегральная
« » оценка расходов сигнала управления на интервале 0,t T . -Если функ
ции 1 2, ,zV Q Q , являются положительно определенными а -их един , -ственные нулевые значения соответствуют состоянию объекта требуе
, мому по условию решаемой задачи то оптимальность синтезируемого -управления можно понимать в смысле достижения минимума функци
(8.7).онала (8.7)Положительная определенность подынтегральных функций в
-допускает использование для разработки конкретных критериев опти мизации широкого класса ф ункций 1Q и 2Q . В то же время практика , решения задач управления динамическими объектами показывает что
в большинстве случаев требования к качеству переходных процессов могут быть заданы квадратичной формой функ ции 1( ( ), )Q x t t :
11
( ( ), ) ( ) ( )2
TQ x t t x t Cx t ,
где C — .неотрицательно определенная весовая матрица , -Среди методов автоматического управления объектами математи
-ческие модели которых в пространстве состояний описываются линей , -ными нестационарными дифференциальными уравнениями выделя
ется метод аналитического конструирования оптимальныхрегуляторов ( ), - АКОР так как линейно квадратичная задача является
, единственной при которой решение получается в общем виде в форме .обратной связи
Created with novaPDF Printer (www.novaPDF.com)

293
« » Термин аналитическое конструирование регуляторов был введен. . ,А М Летовым и означает синтез оптимальных систем управления
, . . -основанный на минимизации функционала т е на решении вариаци . онной задачи Практически одновременно эта же задача была решена
. . -Р Калманом Метод аналитического конструирования позволяет в ана -литическом виде определять структуру и параметры системы управ
, ления достаточно полно учитывая при этом технические требования .к качеству функционирования объекта
, -Полнота общего решения обусловливается условиями налагаемы -ми на динамические свойства управляемого объекта и структуру опти
, мизируемого критерия отражающего предъявляемые к управлению. :требования Эти условия состоят в следующем
1) , , -уравнение описывающее движение объекта должно быть ли ;нейным относительно вектора управляющих воздействий
2) -область возможных значений управлений должна быть незамк;нутой
3) -все возможные переходные функции объекта управления долж -ны быть непрерывно дифференцируемыми в рассматриваемом простран ;стве состояний4) -минимизируемый функционал должен быть квадратичным от
носительно вектора управления
21
( ( ), ) ( ) ( )2
TQ u t t u t Du t ,
где D — , -некоторая положительно определенная матрица характери « » .зующая свободу выбора управления
8.2.1. Оптимальное управление при минимизации классического квадратичного функционала
— -Согласно методу аналитического конструирования Летова Кал (8.4), -мана оптимальное управление объектом минимизирующее квад
ратичный функционал
0
1 1( ) ( ) ( ) ( ) ( ) ( )
2 2
TT T T
t
J x T Ex T x t Cx t u t Du t dt , (8.8)
имеет вид
1( ) ( )T
T Vu t D B t
x
,
где функци я ( ( ), )V V x t t является решением нелинейного уравнения в частных производных
11 1( ) ( ) ( ) ( ) ( ) ( )
2 2
TT TV V V V
A x B D B x Cxt x x x
(8.9)
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

294 . . . Г Н Решетникова Моделирование систем
при граничном условии
1( ) ( ) ( )
2TV T x T Ex T . (8.10)
(8.8) В E — .заданная положительно определенная матрица (8.9), (8.10) Решение задачи ищется в виде квадратичной формы
1( ) ( ) ( )
2TV x t S t x t ,
где S(t) — . симметрическая матрица Тогда1( ) ( ) ( ) ( )Tu t D B t S t x t ,
а матрица S(t) является решением нелинейного дифференциального уравнения Риккати с переменными коэффициентами
1( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )T TS S A A S S B D B S C (8.11) при граничном условии
( )S T E . (8.12) , -Таким образом при синтезе оптимального управления методом ана
— -литического конструирования Летова Калмана необходимо для каж дого момент а 0,t t T форм -ирования управляющих воздействий ре (8.11) (8.12). шать в обратном времени уравнение при условии Теория
-решения матричного уравнения Риккати достаточно хорошо разработа. на Однако при практическом применении необходимость решения
-в обратном времени матричного дифференциального уравнения Рикка -ти делает затруднительным использование этого метода синтеза в про
- -цессе функционирования объекта из за больших затрат времени на по . , лучение результата Кроме того для нестационарных систем редко -удается указать обоснованные требования к состоянию объекта в фик
сированный момент T, . . -т е обоснованно назначить квадратичную фор му 0,5 ( ) ( )Tx T Ex T . (8.8)Поэтому чаще всего рассматривают функционал
в виде
0
1[ ( ) ( ) ( ) ( )]
2
TT T
t
J x t Cx t u t Du t dt . (8.13)
(8.12)При этом граничное условие для решения уравнения Риккати принимает вид
( ) 0S T .
(8.4) В случае стационарной модели ( ) , ( )A t A B t B -оптималь , ное управление обеспечивающее минимум функционала
0
1[ ( ) ( ) ( ) ( )]
2T T
t
J x t Cx t u t Du t dt
,
Created with novaPDF Printer (www.novaPDF.com)

295
имеет вид1( ) ( ) ( )u t D B t Sx t ,
где S — , -положительно определенная матрица удовлетворяющая мат ричному алгебраическому уравнению Риккати
1 0T TA S SA SBD B S C . -Решение алгебраического уравнения Риккати заменяется опреде
-лением с заданной точностью установившегося решения дифференци ального уравнения Риккати
1T TS A S SA SBD B S C .при нулевом начальном условии
, Синтез управляющих воздействий который осуществляется , -в реальном времени в процессе функционирования объекта называет ся совмещенным синтезом. -В этом случае большое значение имеет вре
, менная задержка вызванная затратами времени на формированиеуправ . ляющего сигнала Время формирования управления при АКОРеЛетова— : -Калмана зависит от двух факторов величины интервала оп
тимизации 0,t T , -и времени которое затрачивается на решение урав . -нения Риккати Целенаправленное изменение каждой из этих вели
-чин приводит к уменьшению вычислительной задержки при формиро .вании управляющего сигнала
8.2.2. Оптимальное управление при минимизации функционала обобщенной работы
« » . . -Термин критерий обобщенной работы был введен А А Красов. ским Минимизируемый функционал обобщенной работы задается
в виде
0
оп оп
1( ) ( )
2
1,
2
T
TT T T
t
J x T Ex T
x t Cx t u t Du t u t Du t dt
(8.14)
где опu — , -оптимальное управление доставляющее минимум функцио (8.14), налу которое имеет вид
1оп( ) ( ) ( )
TT V
u t u t D B tx
, (8.15)
а ( , )V V x t -является решением линейного уравнения в частных производных
1( ) ( ) ( ) ( )
2TV V
A x x C xt x
(8.16)
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

296 . . . Г Н Решетникова Моделирование систем
при граничном условии1
( ) ( ) ( )2
TV T x T E x T . (8.17)
(8.16)–(8.17) Если искать решение задачи в виде квадратичнойформы
1( ) ( ) ( )
2TV x t L t x t ,
то1
оп( ) ( ) ( ) ( ) ( )Tu t u t D B t L t x t , где L(t) -является решением линейного матричного дифференциально
го уравнения Ляпунова
( ) ( ) ( ) ( ) ( ) ;
( ) .
TL L A A L CL T E
Вычислительные затраты при решении уравнения Ляпунова в силу его линейности значительно сокращаются по сравнению с решением
. , -уравнения Риккати Недостатком этого метода является то что управ (8.15) « » -ление является оптимальным при свободном движении объек
, . . та т е при 0u . Пр , -и этом понятно что поведение объекта при нуле ( ) вом управлении нулевом положении органов управления может очень
-сильно отличаться от управляемого поведения на интервале оптимиза , ции и приводить систему в область пространства состояний далекую
.от реально достигаемой , « » Лучшие результаты можно получить если свободным считать
-поведение объекта при фиксированном положении органов управле. ния При этом задача управления формулируется как -управление скоро
стью перемещения регулирующих органов, -а модель объекта представляет ся в виде
0 0
0 0
( ) ( ) ( ) ( ) ( ), ( ) ;
( ) ( ), ( ) ,
x t A t x t B t u t x t xu t v t u t u
(8.18)
где u(t) — , вектор положения органов управления а ( )v t — вектор, -управления характеризующий скорость перемещения органов управ
.ления, (8.18) Заметим что можно записать в традиционной форме как
, -задачу управления положением органов управления если ввести рас ширенный вектор состояни я ( , )Tx x u . То (8.18) гда запишется в виде
0 0( ) ( ) ( ) ( ) ( ), ( )x t A t x t B t v t x t x , (8.19) где ( )A t и ( )B t — блочные матрицы вида
0( ) ( )( ) ; ( )
0 0 m
A t B tA t B t
I
. (8.20)
Created with novaPDF Printer (www.novaPDF.com)

297
0 — ;Здесь нулевые матрицы соответствующих размерностей mI — единичная матрица порядка m. , -Кроме того учитывая сложность определения терминального сла
, (8.19) гаемого функционал обобщенной работы для системы запишем в виде
0
1 1оп оп1
( ) ( ) ( ) ( ) ( ) ( )2
TT T T
t
J x t Cx t v t D v t v t D v t dt , (8.21)
где С — (весовая матрица порядка n+m), которая имеет блочный вид
2
0
0
CС
D
, (8.22)
а управлени е оп ( )v t :определяется следующим образом
1 11 1оп( )
T TT V V
v t D B Dx u
. (8.23)
Здесь 2,DС — ; неотрицательно определенные весовые матрицы 1D —положи .тельно определенная весовая матрица
(8.18)Минимизируемый функционал обобщенной работы для модели запишется в виде
0
2 1 1оп оп1
,2
TT T T T
t
J x t Cx t u t D u t v t D v t v t D v t dt (8.24)
, « » а модель описывающая свободное движение объекта на интервале, оптимизации которую будем называть прогнозирующей моделью, есть
0 0
0 0
( ) ( ) ( ) ( ) ( ), ( ) ;
( ) 0, ( ) ,M M M M
M M
x A x B u x t xu u t u
(8.25)
где M .указывает на принадлежность прогнозирующей моделиТогда
11оп( ) ( ) ,
TVv t v t D
u
где функция , ,V V t x t u t удовлетворяет уравнению
21
( ) ( ) ( ) ( ) , ( ) 02
T TМ М М МV x Cx u D u V T
. (8.26)
, (8.26) Заметим что справедливо на траектории движения модели(8.25).
(8.26) Распишем в полную производную функции V:
21
( ) ( ) ( ) ( ) ( )2
T TM M M M M
M
V Vx x C x u D u
x
(8.27)
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

298 . . . Г Н Решетникова Моделирование систем
и обозначим
1 2;T T
M M
V VW W
x u
(8.28)
— n- мерный и m- - .мерный векторы столбцы соответственно (8.25) Тогда на траектории движения модели полные производные
для 1W и 2W бу :дут равны
1 11
2 22
;
.
MM
MM
W WW x
xW W
W xx
(8.27) Если продифференцировать последовательно по Mx , Mu (8.25), , и подставить уравнения для модели то с учетом обозначений
(8.28), :получим систему обыкновенных дифференциальных уравнений
1 1 1
2 1 2 2
( ) ( ) ( ) ( ), ( ) 0;
( ) ( ) ( ) ( ), ( ) 0.
TM
TM
W A W C x W T
W B W D u W T
(8.29)
(8.29) , Решая систему в обратном времени найдем управление в момент t, :которое будет равно
11 2оп( ) ( ) ( ).v t v t D W t
8.2.3. Оптимальное управление при минимизации локального квадратичного критерия
-Будем формировать управляющие воздействия по текущей инфор . -мации об объекте При этом минимизируемый функционал можно пред ставить в виде
1( ) ( 1) ( 1) ( ) ( )
2T TJ k x k C x k u k D u k , (8.30)
где C — , неотрицательно определенная а D — -положительно опреде ;ленная весовые матрицы k -соответствует дискретному моменту вре
мен и kt , мо -дель объекта можно описать системой линейных разно стных уравнений
0( 1) ( ) ( ) ( ) ( ), (0)x k A k x k B k u k x x . (8.31)
Управление u(k) -будем определять из условия минимума функци (8.30), . .онала т е
( )0
( )J ku k
.
Created with novaPDF Printer (www.novaPDF.com)

299
(8.30) (8.31) ( -Запишем функционал для модели для простоты запи си аргумент k ):временно опустим
1[( ) ( ) ]
21
[ ].2
T T
T T T T T T T T T
J Ax Bu C Ax Bu u D u
x A C Ax x A CBu u B CAx u B C Bu u Du
-Воспользовавшись правилами дифференцирования билинейной формы Tx Ay , . .т е
;T T
T T Tx Ay x Ayy A x A
x y
,
где x, y — - ;векторы столбцы A — -матрица соответствующего поряд, ка получим
0T T T T TJx A C B u B C B u D
u
и
0T TB CB D u B C Ax .
, Тогда управление полученное на основе минимума функционала(8.30), имеет вид
1( ) ( ) ( ) ( ) ( ) ( )T Tu k B k CB k D B k C A k x k
.
8.2.4. Синтез следящей системы управления
-Ранее рассматривались задачи формирования управляющих воз, действий когда целью управления являлось приведение системы
. , в нулевое состояние Существует большой круг задач где выдвигается требование достижения объектом некоторого заданного состоян ия ( )zx t
с последующим удержанием состояния объекта в малой окрестности( )zx t , .причем задача оптимизации остается нетерминальной
, , -Имеются вообще говоря две возможности формализации требова :ний к динамике переходных процессов управляемого движения1) ( )zx t формируется почти мгновенно по результатам анализа
;решения навигационной задачи или положения органов управления2) , -используется эталонная модель движения объекта возбуждае мая сигналами навигационного комплекса или датчиками органов
.управления -В первом случае все требования сводятся к соответствующему под
, — бору параметров функционала во втором параметры функционала -подбираются из условия обеспечения наилучшего слежения за этало
.ном
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

300 . . . Г Н Решетникова Моделирование систем
, Будем считать что ( )zx t — , вектор компоненты которого заданы .в каждый момент времени функционирования системы управления (8.13) (8.24) -В этом случае минимизируемые функционалы и запишут ся с помощью вектора рассогласования ( ) ( )zx t x t , (8.30) —а
( 1) ( )zx k x k . -Управление при минимизации классического квадратичного функ
ционала
0
1[( ( ) ( )) ( ( ) ( )) ( ) ( )]
2
TT T
z zt
J x t x t C x t x t u t Du t dt (8.32)
(8.4) для модели объекта запишется в виде
1( ) ( ) ( ) ( ) ( )Tzu t D B t S t x t x t .
Для функционала обобщенной работы
0
2 1 o 1п оп
1( ( ) ( )) ( ( ) ( ))
2
( ) ( ) ( ) ( ) ( ) ( )
TT
z zt
T T T
J x t x t C x t x t
u t D u t v t D v t v t D v t dt
(8.33)
(8.18) для модели объекта получим1
1 2( ) ( )v t D W t и
1 1 1
2 1 2 2
( ) ( ) ( ) ( ( ) ( )), ( ) 0;
( ) ( ) ( ) ( ), ( ) 0.
Tz
T
W A W C x x W T
W B W D u W T
(8.34)
- При формировании локально оптимального управления на основе минимизации функционала
1( ) ( ( 1) ( )) ( ( 1) ( )) ( ) ( )
2T T
z z kJ k x k x k C x k x t u k Du k (8.35)
(8.31) для модели объекта получим
1( ) ( ( ) ( ) ) ( ) ( ) ( ) ( )T Tz ku k B k C B k D B k C A k x k x t .
8.3. Моделирование систем оптимального управления
- Развитие цифровых информационно измерительных комплексов , привело к тому что все чаще управление объектом в процессе его
. функционирования осуществляется с помощью компьютера При этом -центр тяжести процесса проектирования системы управления прихо .дится на алгоритмическое и программное обеспечение
Created with novaPDF Printer (www.novaPDF.com)
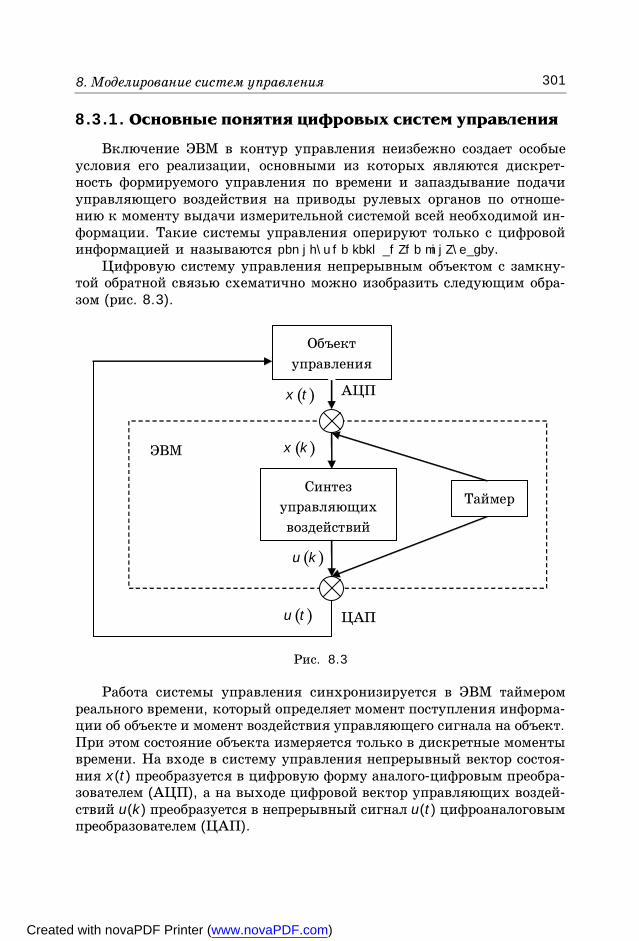
301
8.3.1. Основные понятия цифровых систем управления
Включение ЭВМ в контур управления неизбежно создает особые , -условия его реализации основными из которых являются дискрет
ность формируемого управления по времени и запаздывание подачи -управляющего воздействия на приводы рулевых органов по отноше
-нию к моменту выдачи измерительной системой всей необходимой ин. формации Такие системы управления оперируют только с цифровой
информацией и называются цифровыми системами управления. -Цифровую систему управления непрерывным объектом с замкну
-той обратной связью схематично можно изобразить следующим обра ( . 8.3).зом рис
ЦАПП
АЦПП
u k
x k
x t
Объектуправления
Синтезуправ ляющихвоздействий
Таймер
u t
ЭВМ
. 8.3Рис
Работа системы управления синхронизируется в ЭВМ таймером , -реального времени который определяет момент поступления информа
.ции об объекте и момент воздействия управляющего сигнала на объект При этом состояние объекта измеряется только в дискретные моменты
. -времени На входе в систему управления непрерывный вектор состоя ния x(t) - -преобразуется в цифровую форму аналого цифровым преобра
( ), -зователем АЦП а на выходе цифровой вектор управляющих воздей ствий u(k) преобразуется в непрерывный сигнал u(t) цифроаналоговым
( ).преобразователем ЦАП
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

302 . . . Г Н Решетникова Моделирование систем
, -Момент времени в который происходит преобразование непрерыв , ной информации в дискретную называется моментом квантования -уп
равляющего воздействия и обозначается k. Промежуток времени1k kt t t между двумя моментами квантования называется -перио
дом квантования. — -Квантование неизбежный процесс в цифровых системах управ
, . -ления обусловленный дискретной природой самих ЭВМ Будем пола, -гать что для управления исходным непрерывным объектом использу , - ется цифровая система формирующая кусочно постоянный вектор
управления u(k) , с моментом и периодом квантования совпадающим .с моментом и периодом поступления в ЭВМ информации об объекте
При этом непрерывность управляющего сигнала при воздействии на объект достигается путем сохранения его постоянной величины между
. , формированиями Таким образом управление принадлежит к классу- кусочно постоянных непрерывных слева функций с фиксированным периодом квантовани я t . Если t дос , -таточно мало то цифровая сис
, -тема управления функционирует почти как непрерывная так как по . тери информации за счет квантования будут незначительными Но
слишком малое врем я t мо -жет оказаться недостаточным для форми , -рования управляющего сигнала так как реализация систем управле
ния в реальных условиях движения объекта характеризуется большой, -сложностью при этом формирование управляющих воздействий долж
, но осуществляться за время пренебрежительно малое в сравнении со .скоростью изменения внешней среды и самого объекта
8.3.2. Моделирование поведения управляемого объекта
При проведении имитационных экспериментов для определения -качества синтезируемого управления необходимо моделировать пове
. , дение управляемого объекта Будем предполагать что поведение объекта описывается системой обыкновенных линейных дифференциальных
уравнений вида
0 0, ( )x t A t x t B t u t x t x . (8.36) , -Моделирование будем осуществлять в предположении что шаг дис
кретизации t с -овпадает с периодом квантования управляющего сиг, нала а момент дискретизации k — -с моментом приложения управляю . -щих воздействий Причем управление является кусочно постоянным
, на каждом интервале выдачи управляющих воздействий то есть
1,k k ku t u t t t t .
-Тогда можно ограничиться описанием поведения объекта в момен (8.36)ты квантования и записать дискретный аналог для системы
в виде
Created with novaPDF Printer (www.novaPDF.com)

303
1
1 1
1 0 0
,
, , ( )k
k
k k k kAt
kAt
x t t t x t
t B u d x t x
, (8.37)
где 1,k kA t t — -фундаментальная матрица решений соответству
.ющей однородной системы По свойству фундаментальной матрицы
11,
k k kA t t tk kA t t e . (8.38)
, Согласно свойству матричной экспоненты и учитывая что 1k kt t t , (8.38) можно представить в виде ряда
1
1
,!
i ik
k k nAi
t A tt t I
i
, (8.39)
гд е nI — единичная матрица порядка n., (8.37) -Тогда вычислив интеграл в по формуле левых прямоуголь
, (8.36) ников дискретную систему можно записать в разностной форме :следующим образом
01 , (0)x k A k x k B k u k x x ,где
1 !
i ik
ni
t A tA k I
i
; (8.40)
1
1 1 !
i ik k
i
t A t B tB k
i
; (8.41)
k соответствует моменту времени 0kt t k t . (8.39) -Представление матричной экспоненты в виде ряда позволя
-ет достаточно легко регулировать точность построения соответствую , -щей дискретной системы которую можно определять точностью вы
-числения фундаментальной матрицы для следующей стационарной сис:темы
0 0 0; ( )x t A x t x t x . Дискретный аналог этой системы имеет вид
01 ; (0)x k A x k x x ,где
1 !
i i
ni
t AA I
i
. (8.42)
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

304 . . . Г Н Решетникова Моделирование систем
Если обозначить через NA сумму N (8.42), первых членов ряда томатриц а NA аппроксимирует A с погрешностью порядка NO t . При
этом число слагаемых в NA (можно задавать заранее вычисление ) -с фиксированной точностью или определять автоматически с помо
щью соотношения
1N N
N
A A
A
,
где , , выбирается например из условия обеспечения максимальной .точности вычислений на ЭВМ конкретного типа Если модель объекта задана в виде
0 0
0 0
, ( ) ;
( ) ( ), ( ) ,
x t A t x t B t u t x t x
u t v t u t u
(8.43)
где u(t) — , вектор положения органов управления а v(t) — вектор, (8.43) -управления то дискретная система для получается при введе
нии расширенного вектора состояния ,Tx x u (8.43) и записи в виде
системы с блочными матрицами
0 0, ( )x A t x t B t v t x t x ,
где ,A t B t (8.20), определяются согласно а 0 0 0,Tx x u .
(8.43) Тогда система разностных уравнений для примет вид
1 0
0
1 , (0) ;
( 1) ( ) ( ), (0) ,
x k A k x k B k u k B k v k x x
u k u k tv k u u
где A(k) и B(k) (8.40) (8.41), определяются согласно и а
2
12 1 !
i ik k
i
t A t B tB k
i
.
Полученные соотношения для определения матриц дискретной . , -системы являются общими Так если при вычислении матриц отбро
, сить все слагаемые порядок малости которых превышае т 4O t , то -полученные соотношения будут соответствовать моделированию пове
— . дения управляемого объекта методом Рунге Кутта Если отбросить, слагаемые имеющие порядок малости вы ше O t , то моделирование
.будет осуществляться методом Эйлера При малом значении t дл я моделирования часто используется
. -метод Эйлера В этом случае получаются достаточно простые соотноше :ния для вычисления матриц дискретной системы
1; ( ) ( ); ( ) 0,n k kA k I tA t B k tB t B k (8.43) и система разностных уравнений для примет вид
Created with novaPDF Printer (www.novaPDF.com)

305
0
0
1 , (0) ;
( 1) ( ) ( ), (0) .
x k A k x k B k u k x x
u k u k tv k u u
-Моделирование поведения объекта в случае нестационарной моде
( , ) ли например моделирование самолета на взлете можно осуществлять . -следующим образом На траектории движения объекта задаются зна
, чения матриц или элементов этих матриц характеризующих модель объекта в некоторые моменты времени iT , 1, Ri N . Нестационарная
модель в каждый момент времен и 0[ , ]t t T строится по заданным, : -характеристикам используя методы приближения данных интерпо
, - , лирование сплайн функции аппроксимацию по методу наименьших . .квадратов и т д
8.3.3. Синтез оптимального управления
Рассмотрим совмещенный синтез цифрового управления на основе (8.32), -оптимизации критериев классического квадратичного обобщен
(8.33) (8.35) -ной работы и локального при слежении за заданным состоянием zx t . , -При этом если решается задача стабилизации то полага
ем 0zx t . , , :Кроме того будем предполагать что
1) все временные переменные кратн ы t ;2) -моменты и периоды квантования одинаковы для всех коорди ;нат объекта3) цифровая система формирует вектор управления с моментом
, и периодом квантования которые совпадают с моментом и периодом ;поступления информации об объекте
4) - -управления являются кусочно постоянными функциями на каж дом интервале выдачи управляющих воздействий
u t u k , 1k kt t t .
Пусть в управляющем компьютере модель объекта представлена в виде
01 , (0)x k A k x k B k u k x x (8.44)
или
0
0
1 , (0) ;
( 1) ( ) ( ), (0) ,
x k A k x k B k u k x x
u k u k tv k u u
(8.45)
где
n kA k I tA t ; kB k tB t . (8.46) Форма представления модели объекта зависит от решаемой задачи: -управления управление положением органов управления или управ
.ление скоростью отклонения органов управления
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

306 . . . Г Н Решетникова Моделирование систем
Синтез управляющих воздействий в процессе функционирования .объекта накладывает определенные ограничения на его реализацию
, -Основным ограничением является то что при формировании управле ния в моме нт 0[ , ]t t T изве стна информация о поведении объекта
— .в предыдущие моменты времени и неизвестна в последующие В связи с этим будем рассматривать алгоритмы синтеза управляющих
, воздействий учитывающие эти ограничения и предназначенные для .совмещенного синтеза
Синтез управляющих воздействий по классическому квадратичному критерию
(8.44) , ,Если модель объекта является стационарной то управление формируемое на k- ( м такте в момен т 0kt t k t ) на о -снове миними
(8.32), зации функционала имеет вид1( ) ( ( ) ( ))T
d z ku k D B S x k x t , где матрица S , является решением уравнения Риккати которое путем
:замены переменной можно записать в прямом времени1( ) ( ) ( ) ( ) ( ) ;
(0) 0.
T TS t A S t S t A S t BD B S t CS
(8.47)
(8.47)При этом можно искать установившееся решение уравнения :по следующему итерационному алгоритму
1( 1) ( ) ( ) ( ) ( ) ( ) ;
(0) 0,
T Td dS i A S i S i A S i BD B S i S i C
S
(8.48)
, и при выполнении условия
( 1) ( )
( 1)
S i S i
S i
,
полагать ( 1)S S i . Здесь dD tD ; dC tC ; — -заданная точ . , (8.48)ность решения уравнения Риккати Заметим что уравнение
, записано с помощью матриц дискретной системы которая получена .из непрерывной методом Эйлера
(8.44) , Если модель объекта является нестационарной то запишем минимизируемый функционал с использованием -скользящего интерва
ла оптимизации, то есть
1( ) [( ( ) ( )) ( ( ) ( )) ( ) ( )]
2
k p
k
t l tT T
k z k z kt
J t x t x t C x t x t u t Du t dt
,
и поведение объекта на скользящем интервале оптимизации
,k k pt t l t будем описывать стационарной системой вида
Created with novaPDF Printer (www.novaPDF.com)

307
1 , ( ) ( );
, 1,..., 1,M M М
p
x j A k x j B k u j x j k x k
j k k k l
.которая является прогнозирующей моделью , Тогда управление формируемое на k- , м такте запишется в виде
1d k z ku k D B k S x k x t ,
где kS — , решение уравнения Риккати которое в силу описания модели объекта на интервале оптимизации с помощью стационарной
прогнозирующей модели можно записать в прямом времени и решать :итерационным методом
1
( 1) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) , (0) 0.
T
Td d
S i A k S i S i A k
S i B k D B k S i S i C S
При этом матрица kS :определяется следующим образом
1, ;если
1
, .в противном случае
k
p
S i S iS i
S iS
S l
П р и м е р
Поведение объекта на интервале 0[ , ]t T -описывается системой обык новенных дифференциальных уравнений вида
0 0( ) ( ) ( ); ( )x t Ax t Bu t x t x ,
где 0 00 1 0 10
0; 10; ; ; .0, 4 1,4 1,3 1
t T A B x
Моделирование поведения управляемого объекта осуществляется с помощью разностного уравнения
0( 1) ( ) ( ); (0) ,x k Ax k Bu k x x
где ; ;A I tA B tB I — ;единичная матрица второго порядка
дискрет k соответствует моменту време ни 0kt t k t ; 0,1t ;
0,k N ; 0 100T t
Nt
.
Управление определяется из условия минимума квадратичногофункционала
0
01
( , ) [ ( ) ( ) ( ) ( )]2
TT T
t
J t T x t Cx t u t Du t dt
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

308 . . . Г Н Решетникова Моделирование систем
и имеет вид1( ) ( )T
du k D B Sx k , где C, D — , весовые матрицы функционала равные
1,5 0
0 1,7C
; D 1;
S — , матрица являющаяся решением уравнения Риккати с точностью30,1 10 , которое осуществляется по итерационной формуле
11 0, 0T T
i i i i d i i dS A S S A S BD B S S C S ; 0 0S ,
и при выполнении условия
1i i I
i I
S S
S
матрица S полагается равной 1iS . -Здесь используются следующие обо
: значения I — ; первая норма матрицы ;d dC tC D tD .
Получено следующее значение матрицы S:
2,295 0,734
0,734 0,772S
.
. 8.4 На рис приведены графики переходных процессов 1 2( ) ( ), ( )
Tx k x k x k и управлений u(k), -причем жирная линия изобра .жает управляющие воздействия
. 8.4Рис
Синтез управляющих воздействий по квадратичному критерию обобщенной работы
(8.45) -Для модели объекта функционал обобщенной работы запи шем для скользящего интервала оптимизации ,k k pt t l t :
10
0
–10 0 20 40 60 80 100
Created with novaPDF Printer (www.novaPDF.com)

309
2 1 1оп оп
1( ) [( ( ) ( )) ( ( ) ( ))
2
( ) ( ) ( ) ( ) ( ) ( )] ,
k p
k
t l tT
k z k z kt
T T T
J t x t x t C x t x t
u t D u t v t D v t v t D v t dt
(8.49)
и будем описывать поведение объекта на интервале оптимизации , с помощью стационарной прогнозирующей модели характеризующей
« » свободное движение объек та ( ) 0v t :
( 1) ( ) ( ) ( ) ( ); ( ) ( );
, 1,..., 1.M M M
p
x j A k x j B k u k x j k x k
j k k k l
(8.50)
Тогда управление будет иметь вид
11 2v k D W k ,
где 2W k определяется решением в обратном времени системы (8.34) обыкновенных дифференциальных уравнений на интервале
оптимизации ,k k pt t l t . Так как решение этой системы зависит от значений состояния прогнозирующей модели на интервале,k k pt t l t , то , (8.50),сначала решая в прямом времени уравнение
определяется состояние прогнозирующей модели в конечный момент интервала оптимизации M px k l , а затем 2 ( )W k находится -реше
нием в обратном времени системы разностных уравнений вида
1 1
1
2 2 1
2 2
( ( 1)) 2 ( ) ( ) ( )
( ) ( ), ( ) ( );
( ( 1)) ( ) ( )
( ( ) ), ( ) 0;
( ( 1)) ( ) ( ) ( )
( ), ( )
M p M p M p
M p M p
Tp p
M p z k p
Tp p p
p
x k l j x k l j A k x k l j
B k u k x k l x k l
W k l j A k W k l j
tC x k l j x t W k l
W k l j W k l j B k W k l j
tD u k W k l
0;
0, 1,pj l
(8.51)
где первое уравнение описывает движение прогнозирующей модели(8.50) .в обратном времени
П р и м е р Поведение объекта на интервале 0[ , ]t T -описывается системой обык
новенных дифференциальных уравнений вида
0 0
0 0
( ) ( ) ( ); ( ) ;
( ) ( ); ( ) ,
x t Ax t Bu t x t x
u t v t u t u
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

310 . . . Г Н Решетникова Моделирование систем
где 0 0 00 1 0 10
0; 10; ; ; ; 0.0,4 1,4 1,3 1
t T A B x u
Моделирование поведения управляемого объекта осуществляется ;с помощью разностных уравнений
0( 1) ( ) ( ); (0) ,x k Ax k Bu k x x
0( 1) ( ) ( ); (0) ,u k u k tv k u u
где ; ;A I tA B tB I — ;единичная матрица второго порядкадискре т k соответствует моменту времени 0kt t k t ; 0,1t ;
0,k N ; 0 100T t
Nt
.
Управление v(k) определяется из условия минимума функционала обобщенной работы
2 1 11
( ) [ ( ) ( ) ( ) ( ) ( ) ( ) ( )]2
k p
k
t l tT T T T
k оп опt
J t x t Cx t u t D u t v t D v t v D v t dt
,
гд е 15pl t t — ;длина скользящего интервала оптимизацииC, 1 2,D D — ве , совые матрицы функционала равные
1,5 0;
0 1,7C
1 1;D 2 1D .
. 8.5 На рис приведены графики переходных процессов 1 2( ) ( ), ( )
Tx k x k x k и u(k), причем жирная линия изображает u(k).
. 8.5Рис
10
5
0
–50 20 40 60 80 100
Created with novaPDF Printer (www.novaPDF.com)

311
Синтез управляющих воздействий по локальному квадратичному критерию
(8.44) -Для модели объекта локальный квадратичный критерий за :пишется следующим образом
1( ) [( ( 1) ( )) ( ( 1) ( )) ( ) ( )].
2T T
z z kJ k x k x k C x k x t u k Du k (8.52)
, -Управление формируемое на основе минимизации этого крите, рия имеет вид
1( ) ( ( ) ( ) ) ( ) ( ) ( ) ( )T Tz ku k B k C B k D B k C A k x k x t .
-Качество функционирования системы управления зависит от весо , -вых матриц рассматриваемых критериев определение которых осуще
-ствляется на этапе предварительного проектирования путем коррек ции элементов весовых матриц и анализа получаемых при этом
.переходных процессов и управлений Для выбора весовых матриц C и D (8.52) локального критерия можно
, воспользоваться методом случайного поиска или назначить их исходя - -из каких либо конструктивных соображений с учетом свойств управ
. .ляемого объекта Достаточно хорошо работает следующая методика (8.44) Запишем для систему вида
01 ; (0) ,x k Ax k Bu k x x
где A , B — , некоторые постоянные матрицы например 0A A ; 0B B . -Используя принцип равного вклада максимальных отклоне
, ний выбираются весовые матрицы для суммарного критерия
1 10
1 1T T
kx k C x k u k D u k
, -в предположении что требования к качеству функционирования сис
темы управления для всех k -задаются в виде неравенств для компо :нентов векторов состояния и управления
maxiix k x , 1,i n ;
maxiiu k u , 1,i m .
Тогда полагают
1
2 21 max maxdiag , ,
nC x x ;
1
2 21 max maxdiag , ,
mD u u ,
где diag — диагональная матрица соответствующей размерности . с указанными элементами на главной диагонали Весовые матрицы C и D :локального критерия полагаются равными
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

312 . . . Г Н Решетникова Моделирование систем
1
1 1T T T TC A CA A CB B CB D B CA C
; (8.53)
1D D . (8.53) -Алгебраическое уравнение Риккати можно решить по итера
ционной схеме1
1 1
( 1) [ ( ) ( ) ( ( ) ) ( )
( )] ( ), (0) ,
T T T TC i A C i A A C i B B C i B D B C i AC C i C i C C
(8.54)
где t ; — п , ,араметр который подбирается таким образом (8.54) . чтобы уравнение было сходящимся При выполнении условия
1
1
C i C i
C i
матриц а C полагается равной 1C i .
П р и м е р Поведение объекта описывается системой разностных уравнений
вида
0( 1) ( ) ( ); (0) ,x k Ax k Bu k x x
где 0,k N ; N 100; 01 0,1 0 10
; ; .0,04 0,86 0,13 1
A B x
, -Эта разностная система совпадает с системой полученной при дис кретизации с шагом 0,1t непрерывной системы из предыдущих
.примеров Управление u(k) определяется из условия минимума локального
квадратичного функционала
1 11
( ) ( 1) ( 1) ( ) ( )2
T TJ k x k C x k u k D u k и имеет вид
1( ) ( ) ( )T Tu k B CB D B CAx k ,
где 1 1,C D — , весовые матрицы функционала равные
1 11,5 0
; 1,0 1,7
C D
а матрица C является решением уравнения Риккати с точностью
30,1 10 , которое осуществляется по итерационной формуле
11
1
( 1) ( ) ( ) ( ( ) ) ( ) ( ) ( ),
(0) .
T T T TC i A C i A A C i B B C i B D B C i A C C i t C i
C C
Created with novaPDF Printer (www.novaPDF.com)

313
При выполнения условия
( 1) ( )
( 1)I
I
C i C i
C i
матрица C полагается равной ( 1)C i , а 1D D . Получилось
23,969 7,976
7,976 8,766C
.
. 8.6 На рис приведены графики переходных процессов ( )x k 1 2( ) ( ), ( ) Tx k x k x k и уп равлений u(k), причем жирная линия изображает
.управляющие воздействия
. 8.6Рис
Структурная схема совмещенного синтеза цифрового управления . 8.7.объектом представлена на рис
u t
u k
x k
x t
Объект
Формирова ниеуправления
ЭВМ
. 8.7Рис
10
0
–100 50 100
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

314 . . . Г Н Решетникова Моделирование систем
8.4. Моделирование систем управления при случайных внешних воздействиях
-При синтезе управляющих воздействий в реальных условиях ин ,формация о состоянии объекта поступает с измерительного комплекса
,который достаточно часто содержит неполную информацию об объекте . , искаженную ошибками измерений Кроме того при описании модели
. -объекта необходимо учитывать влияние внешних возмущений В свя -зи с этим будем рассматривать алгоритмы синтеза управляющих воз
, .действий учитывающие условия их реализации
8.4.1. Моделирование поведения объекта при наличии внешних возмущений
, -Будем предполагать что внешние возмущения являются аддитив -ными и описываются вектором гауссовских шумов с заданной матри
цей влияния F t . Тогда модель объекта можно записать в виде
0 0; ( ) ,x t A t x t B t u t F t q t x t x (8.55)гд е q(t) — 1l -мерн -ый вектор гауссовских шумов с заданными характеристиками
M q t q t ;
TM q t q t q q Q t t ,
где t — - ; дельта функция Дирака F t — матрица влияния внешних возмущений размерности 1n l .
-Для моделирования поведения объекта строится разностный ана (8.55) -лог уравнения с помощью фундаментальных матриц соответству
, ющей однородной системы и в предположении что q(t) является- кусочно постоянной функцией
1, .k k kq t q t t t t , (8.55), Тогда разностное уравнение соответствующее имеет вид
01 , (0) ,x k A k x k B k u k F k q k x x (8.56)где A(k), B(k) и F(k) :вычисляются следующим образом
1 !
i ik
ni
t A tA k I
i
; (8. 57)
1
1 1 !
i ik k
i
t A t B tB k
i
; (8.58)
Created with novaPDF Printer (www.novaPDF.com)

315
1
1 1 !
i ik k
i
t A t F tF k
i
. (8.59)
(8.56)В q(k) — , последовательность гауссовских величин при этом
kM q k q k q t ;
TkjM q k q k q j q j Q k ;
1 1k k
k k
t tT
kt t
Q k M q t q t q q dtd Q t t
,
где kj — .символ Кронекера Для того чтобы внешние возмущения q(t) и q(k) имели одни
, и те же статистические характеристики матрицу F(k) представим в виде
1 1
1 1 !
i ik k
i
t A t F tF k t
i
. (8.60)
, Если для моделирования используется метод Эйлера то
kF k tF t ,
- (8.60) а при использовании метода Рунге Кутта в в сумме остаются .только четыре слагаемых
Если рассматривается задача управления скоростью отклонения , органов управления то есть
0 0
0 0
, ( ) ;
( ) ( ), ( ) ,
x t A t x t B t u t F t q t x t x
u t v t u t u
(8.61)
то эквивалентная дискретная система имеет вид
1 0
0
1 ( ) , (0) ;
( 1) ( ) ( ), (0) ,
x k A k x k B k u k B k v k F k q k x x
u k u k tv k u u
где A(k), B(k) и F(k) (8.57), (8.58), (8.60), вычисляются согласно а
2
12 1 !
i ik k
i
t A t B tB k
i
.
Если для построения дискретной системы используется метод, (8.61) Эйлера то имеет вид
0
0
1 , (0) ;
( 1) ( ) ( ), (0) .
x k A k x k B k u k F k q k x x
u k u k tv k u u
(8.62)
-При использовании метода Эйлера для построения дискретных си (8.56) (8.62) стем и матрицы A(k), B(k) и F(k) имеют вид
; ( ) ( ); ( ) ( ).n k k kA k I tA t B k tB t F k tF t
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

316 . . . Г Н Решетникова Моделирование систем
8.4.2. Описание математическ ой модели измерительного комплекса
-Использование компьютеров для формирования управляющих воз , действий приводит к тому что измерения поступают в дискретные моменты времен и 1 2, ,t t , - -а управления являются кусочно постоян
ными непрерывными слева функциями на каждом интервале выдачи , управляющих воздействий то есть 1 1; ;k k k ku t u k t t t t t t .
, Будем предполагать что математическая модель измерительного комплекса имеет вид
y k Hx k r k ,где y(k) — l- ; мерный вектор измерений H — -матрица канала измере
ний размерности l n , состо , -ящая из нулей и единиц нулевые столб -цы которой соответствуют неизмеряемым компонентам вектора состоя; ния r(k) — дискретный гауссовский шум с характеристиками
{ ( )} 0; ;TkjM r k M r k r j R
x(k) — состояние преобразованной в дискретную форму непрерывной, .системы описывающей модель объекта
8.4.3. Оценивание состояния модели объекта
-В реальных условиях управление объектом реализуется по ре , -зультатам измерений при этом все измерения осуществляются с по
, , , грешностью и кроме того в модели объекта могут существовать , . компоненты вектора состояния недоступные измерению Поэтому для
-формирования управляющих воздействий необходимо оценивать век . тор состояния Так как информация о модели объекта поступает
, с измерительного комплекса в дискретные моменты времени то будем строить оцен ку x k вектора состояния x(k) по результатам текущих
измерений y(k). -Основные подходы к построению оценок векторов состояния состо
. , ят в следующем Предположим что для некоторой системы состояниеx(k) , -недоступно непосредственному измерению а получены последо
вательные измерения 1 , 2 , ,y y y j . Обозначим оценку x(k), -по , лученную на основе этих измерений через /x k j и определим ее как
n- - мерную вектор функцию измерений ( / ) , 1,kx k j y i i j .
Задача построения оценки для состояния x(k) представляет собой задачу определения функции k не -которым рациональным и обосно .ванным способом
Created with novaPDF Printer (www.novaPDF.com)

317
Если k > j, то задача построения оценки называется -задачей предсказания, если k j , то такая задача называется задачей фильтрации,если k < j, то получаем задачу сглаживания или интерполяции.
Рассмотрим функцию ошибки оценки
( / ) ( / )x k j x k x k j
и обозначим через ( / )L L x k j функцию потерь, или штрафов. Эта :функция должна обладать следующими свойствами
1) ;быть скалярной функцией2) L(0) 0;3) ;быть неубывающей функцией расстояния от начала координат4) .быть симметричной относительно нуляФункция L, , обладающая такими свойствами называется -допусти
мой функцией потерь. Определим критерий качества оценивания как среднее значение
:функции потерь
( / ) ( / )J x k j M L x k j .
, Говорят что оценка ( / )x k j , минимизирующая ( / )J x k j , -явля ется наилучшей, или оптимальной. , Заметим что оптимальная оценка
, минимизирует среднее значение функции потерь то есть является -оп тимальной в среднем.
Пусть
[ ( / )] ( / ) ( / )TL x k j x k j x k j . Соответствующий этой функции потерь критерий качества оценки
называется среднеквадратической ошибкой, так как { ( / ) ( / )}TM x k j x k j .есть среднее значение квадрата евклидовой меры вектора ошибки
-Для построения оценки вектора состояния используются различ . ные подходы Рассмотрим рекуррентный алгоритм статистической
, -обработки типа фильтра Калмана осуществляющий оценивание состо .яния по результатам текущих измерений
Пусть математические модели объекта и канала измерений имеютвид
0( 1) ( ) ( ) ( ) ( ) ( ) ( ), (0) ;x k A k x k B k u k F k q k x x (8.63)
( ) ( ) ( ),y k Hx k r k (8.64)где q(k) и r(k) — -независимые гауссовские последовательности с ха
:рактеристиками
{ ( )} ( ), {( ( ) ( ))( ( ) ( )) } ;
{ ( )} 0, { ( ) ( )} ;
{ ( ) ( )} 0.
Tkj
Tkj
T
M q k q k M q k q k q j q j Q
M r k M r k r j R
M q k r j
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

318 . . . Г Н Решетникова Моделирование систем
, , Кроме того предполагается что априорное распределение вектора0x :является гауссовским
00 0 0 0 0 0{ } ; {( )( ) }TxM x x M x x x x P ,
где0xP — дисперсионная матрица ошибок оценивания начального
.состояния , -Обозначим оценку фильтрации полученную по результатам изме
рений (1), (2),..., ( )y y y k , через ( )x k . П ри принятых предположениях -задача оптимальной фильтрации может быть сформулирована следую
. щим образом Располагая последовательностью векторов измерений(1), (2),..., ( )y y y k , м (8.63),оделью которых является система уравнений
(8.64), требуется определить оценк у ( )x k вектора состояния x(k), -удов летворяющую требованиям несмещенности
{ ( )} { ( )}M x k M x k (8.65) .при минимальной дисперсии ошибок оценки
Пусть ( ) ( ) ( )k x k x k — , ошибка оценки а ( ) { ( ) ( )}TP k M k k — .дисперсионная матрица ошибки оценки
Тогда критерий оптимальности запишется в виде
( ) { ( ) ( )} {tr( ( ) ( ))} tr( ( ))T TJ k M k k M k k P k , (8.66)
где tr ( ) .обозначает след матрицы
Будем строить оптимальную оценку ( 1)x k -по текущему измере нию y(k+1) в виде
( 1) ( / 1) ( )[ ( 1) ( / 1)],x k x k k K k y k Hx k k (8.67) где вектор
0( / 1) ( ) ( ) ( ) ( ) ( ) ( ), (0)x k k A k x k B k u k F k q k x x (8.68)
является экстраполированной оценкой вектора состояния x(k+1);K(k) — .матрица коэффициентов усиления фильтра
, -Таким образом задача построения оптимальной оценки дискрет (8.63) ной системы сводится к задаче определения такой матрицы K(k), при которой оц енка ( 1)x k уд (8.65) -овлетворяет условиям при огра
(8.63)–(8.64), (8.67)–(8.68) -ничениях и обеспечивает минимум крите (8.66).рия
, (8.67) ,Заметим что выражение объединяет множество фильтров ,различающихся законом изменения матриц коэффициентов усиления
.и характеризует рекуррентную форму выработки оценок состояния Получим уравнение для вектора ошибки оце нки ( 1)k . Д -ля это
(8.67) (8.68) (8.63) (8.64).го подставим в выражение и вычтем с учетом В дальнейшем для сокращения записи опустим аргумент k , -везде кро , ме векторов ошибок и дисперсионных матриц тогда
Created with novaPDF Printer (www.novaPDF.com)

319
( 1) ( ) ( )( ) ( ) ( )Tk A KHA k A KHA I KH Fq KH I Fq Kr и дисперсионная матрица ошибки оценки ( 1)k будет равна
( 1) ( ) ( )( )
( ) ( ) ,
T
T T T
P k A KHA P k A KHA
KH I FQF KH I KRK
(8.69) где I — .единичная матрица соответствующего порядка
(8.66) -В соответствии с критерием оптимальности матрица усиле ния фильтра K определяется из условия
( ) tr ( 1)0
dJ k d P kdK dK
или
2 ( ) 2 ( ) 2
2 2 0.
T T T T T T
T T
AP k A H KHAP k A H FQF H
KHFQF H KR
, ,Из последнего равенства после приведения подобных членов
получается
( ( ) ) ( ( ) )T T T T T TKH AP k A FQF H KR AP k A FQF H . (8.70) Обозначим через
( 1/ ) ( ) T TP k k AP k A FQF (8.71) . -прогноз дисперсионной матрицы на один шаг вперед Тогда выраже
(8.70) (8.71) ние с учетом примет вид
( 1/ ) ( 1/ )T TKHP k k H KR P k k H , и для определения матрицы K получается выражение
1( 1 / ) ( ( 1/ ) )T TK P k k H HP k k H R . (8.72) Выражение для дисперсионной матрицы P(k+1) ,можно упростить
(8.69) (8.72) (8.71). если в подставить и учесть Тогда получим
( 1) ( ) ( 1/ )P k I KH P k k .
, Таким образом построение оцен ки ( 1)x k п о р -езультатам изме рений y(k+1) осуществляется с помощью следующего рекуррентного
:алгоритма
0
0
1
1 ( 1/ ) [ ( 1) ( 1 / )];
( 1 / ) ( ) ( ) ( ) ( ) ( ) ( ), (0) ;
( ) ( 1 / ) [ ( 1 / ) ] ;
( 1 / ) ( ) ( ) ( ) ( ) ( );
( 1) [ ( ) ] ( 1 / );
(0) .
T T
T T
x
x k x k k K k y k Hx k k
x k k A k x k B k u k F k q k x x
K k P k k H HP k k H R
P k k A k P k A k F k QF k
P k I K k H P k kP P
(8.73)
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

320 . . . Г Н Решетникова Моделирование систем
8.4.4. Синтез управляющих воздействий по оценкам состояния
-Для классического критерия оптимальности и критерия обобщен ной работы доказаны теоремы разделения, согласно которым для
, -линейного управляемого объекта математическая модель которого опи (8.55) (8.61), -сывается уравнениями типа или при линейном наблюде
-нии с аддитивным белым гауссовским шумом минимизация математи ческого ожидания функционалов приводит , к системе состоящей из (8.73) , фильтра Калмана и алгоритма управления структура которого ,совпадает с законом оптимального управления -построенным для детер
.минированной полностью известной модели объекта , (8.55), -Таким образом управление для модели объекта синтезируе
мое на основе минимизации математического ожидания классического , -квадратичного функционала будет формироваться по оценкам состоя
, ния то есть вместо значений вектора состояния x(k) -в соответст вующих формулах будет использоваться его оценка ( )x k . Аналогичная -ситуация складывается при формировании управления на основе ми
-нимизации математического ожидания функционала обобщенной рабо (8.49). ты В этом случае оценка состояния ( )x k -заменит вектор состоя , ния в уравнении прогнозирующей модели в которой будем использовать
постоянные внешние возмущени я ( )q k , р -авные математическому ожи -данию шума в модели объекта в начальный момент интервала оптими:зации
( 1) ( ) ( ) ( ) ( ) ( ) ( );
( ) ( ), , 1,..., 1.
M M
M p
x j A k x j B k u k F k q k
x j k x k j k k k l
Постоянные внешние возмущения ( )q k должны учитываться и в, -уравнении описывающем движение прогнозирующей модели в обрат
, (8.51) ном времени то есть первое уравнение в системе должно иметьвид
( ( 1)) 2 ( )
( ) ( ) ( ) ( ) ( ) ( );
( ) ( ).
M p M p
M p
M p M p
x k l j x k l j
A k x k l j B k u k F k q k
x k l x k l
При формировании управления для модели объекта вида
01 ; (0)x k A k x k B k u k F k q k x x (8.74) :запишем математическое ожидание для локального критерия
11 1
2T T
z k z kJ k M x k x t C x k x t u k Du k .
(8.75)
Created with novaPDF Printer (www.novaPDF.com)
321
Для того чтобы найти оптимальное управление по критерию(8.75), , запишем значение этого критерия учитывая уравнение для
(8.74) модели объекта и свойства операции tr ( ) ( для сокращения записи аргумент k ):опустим
1( ) [ ( )
2
( ) ( )].
T T T T
T T Tz z
J k M q F CFq u B CB D u
Ax Fq x CBu u B C Ax Fq x
Оптимальное управление определим из условия
( )( ) ( ) 0T T
zJ k
B CB D u B C Ax Fq xu
.
Тогда получим1( ) ( ( ) ( ) ) ( ) [ ( ) ( ) ( ) ( ) ( )]T T
z ku k B k CB k D B k C A k x k F k q k x t .
П р и м е р ыУп равления формируются по оценке состо яния ( )x k , -определяе (8.73). -мой с помощью фильтра Калмана Математическая модель изме
рительного комплекса имеет вид( ) ( ) ( )y k Hx k r k ,
где
1 0
0 1H
есть , матрица канала измерений характеризующая в данном случае ; полное измерение вектора состояния r(k) — ,вектор погрешностей -которые описываются последовательностью гауссовских шумов с нуле
вым средним и дисперсией
0,32 0
0 0,35R
.
Оценивание вектора состояния фильтром Калмана осуществляется :при следующих начальных значениях
0
7 1 0(0) ;
1,3 0 1xx P
.
1. Поведение объекта на интервале 0[ , ]t T описывается системой обыкновенных дифференциальных уравнений вида
0 0( ) ( ) ( ) ( ), ( )x t Ax t Bu t Fq t x t x ,
где 0
0
0; 10;
0 1 0 0,51 0 10; ; ; ;
0, 4 1,4 1,3 0 0,55 1
t T
A B F x
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

322 . . . Г Н Решетникова Моделирование систем
q(t) — , вектор внешних возмущений который является нормальным
(гауссовским шумом ( ) 0, ( )q t Q t I — -единичная матрица соответ ).ствующего порядка
Моделирование поведения управляемого объекта осуществляется с помощью разностного уравнения
( 1) ( ) ( ) ( ), (0)x k Ax k Bu k Fq k x x ; 0(0)x x ,
где ; ; ; ( )A I tA B tB F tF q k — -последовательность га ; -уссовских шумов с нулевым средним и единичной дисперсией диск
рет k соответствует моменту вр емени 0 ; 0,1;kt t k t t 0, ;k N0 100
T tN
t
.
Управление определяется из условия минимума математического ожидания квадратичного функционала
0
01
( , ) ( ) ( ) ( ) ( )2
TT T
t
J t T M x t Cx t u t Du t dt
и имеет вид1( ) ( )T
du k D B Sx k ,
где C, D — весовые матрицы функцион ; ала dD tD ; S — решение уравнения Риккати с точность ю 30,1 10 :
1,5 0 2,295 0,734; 1;
0 1,7 0,734 0,772C D S
.
. 8.8 На рис приведены графики переходных процес сов ( )x k 1 2( ) ( ), ( )
Tx k x k x k , их оценок 1 2( ) ( ), ( )T
x k x k x k и управлений u(k), причем жирная линия изображает управляющие воздействия u(k), -тон
— кая состоя ния x(k), — а пунктирная оценки состояния ( )x k .
. 8.8Рис
10
5
0
–5
–100 20 40 60 80 100
Created with novaPDF Printer (www.novaPDF.com)
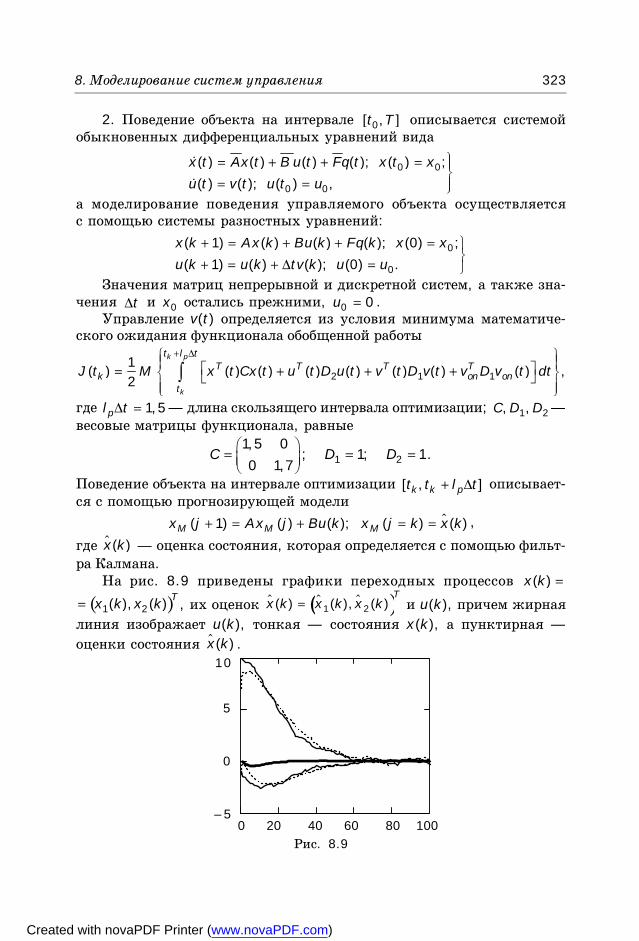
323
2. Поведение объекта на интервале 0[ , ]t T описывается системой обыкновенных дифференциальных уравнений вида
0 0
0 0
( ) ( ) ( ) ( ); ( ) ;
( ) ( ); ( ) ,
x t Ax t B u t Fq t x t x
u t v t u t u
а моделирование поведения управляемого объекта осуществляется :с помощью системы разностных уравнений
0
0
( 1) ( ) ( ) ( ); (0) ;
( 1) ( ) ( ); (0) .
x k Ax k Bu k Fq k x x
u k u k tv k u u
, -Значения матриц непрерывной и дискретной систем а также зна чения t и 0x , остались прежними 0 0u .
Управление v(t) -определяется из условия минимума математиче ского ожидания функционала обобщенной работы
2 1 11
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ,2
k p
k
t l tT T T T
k on ont
J t M x t Cx t u t D u t v t D v t v D v t dt
где 1,5pl t — ; длина скользящего интервала оптимизации 1 2, ,C D D — , весовые матрицы функционала равные
1 21,5 0
; 1; 1.0 1,7
C D D
Поведение объекта на интервале оптимизаци и [ , ]k k pt t l t оп -исывает
ся с помощью прогнозирующей модели( 1) ( ) ( ); ( ) ( )M M Mx j Ax j Bu k x j k x k ,
гд е ( )x k — , -оценка состояния которая определяется с помощью фильт ра Калмана.
. 8.9 На рис приведены графики переходных процесс ов ( )x k
1 2( ) ( ), ( )Tx k x k x k , их оценок 1 2( ) ( ), ( )
Tx k x k x k и u(k), причем жирная
линия изображает u(k), — тонкая состояния x(k), —а пунктирная оценки состояни я ( )x k .
. 8.9Рис
10
5
0
–50 20 40 60 80 100
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)
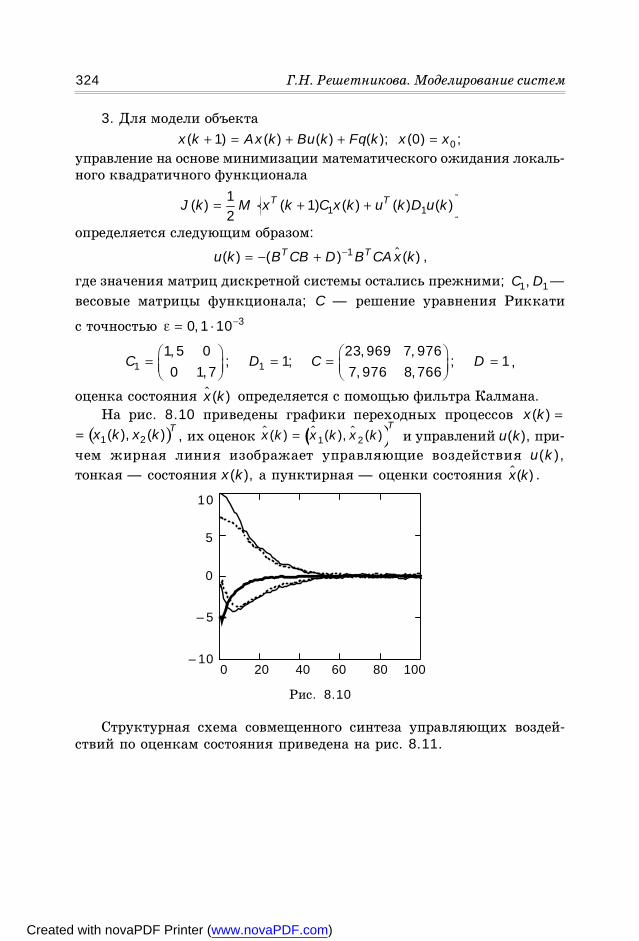
324 . . . Г Н Решетникова Моделирование систем
3. Для модели объекта
0( 1) ( ) ( ) ( ); (0) ;x k Ax k Bu k Fq k x x -управление на основе минимизации математического ожидания локаль
ного квадратичного функционала
1 11
( ) ( 1) ( ) ( ) ( )2
T TJ k M x k C x k u k D u k
:определяется следующим образом1( ) ( ) ( )T Tu k B CB D B CAx k ,
; где значения матриц дискретной системы остались прежними 1 1,C D — ; весовые матрицы функционала C — решение уравнения Риккати
с точностью 30,1 10
1 11,5 0 23,969 7,976
; 1; ; 10 1,7 7,976 8,766
C D C D
,
оценка состояни я ( )x k оп .ределяется с помощью фильтра Калмана . 8.10 На рис приведены графики переходных процессо в ( )x k
1 2( ) ( ), ( ) Tx k x k x k , их оценок 1 2( ) ( ), ( )T
x k x k x k и управлений u(k), п -ри чем жирная линия изображает управляющие воздействия u(k),
— тонкая состояния x(k), — а пунктирная оценки состоян ия ( )x k .
. 8.10Рис
-Структурная схема совмещенного синтеза управляющих воздей . 8.11.ствий по оценкам состояния приведена на рис
10
5
0
–5
–100 20 40 60 80 100
Created with novaPDF Printer (www.novaPDF.com)
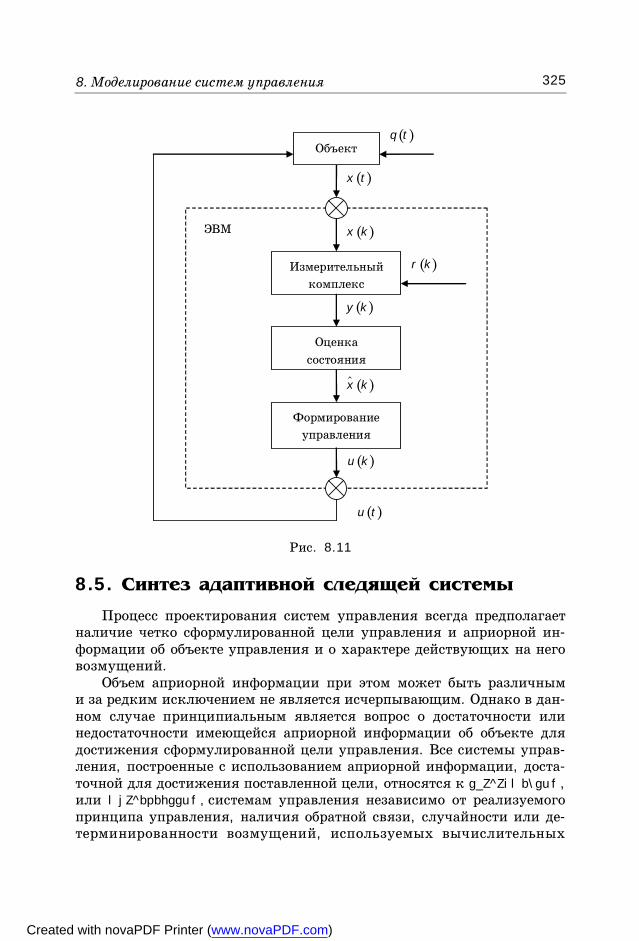
325
u k
x k
y k
r k
x k
Измеритель ныйкомплекс
Оценка
состояния
Формированиеуправления
q t
x t
u t
ЭВМ
Объект
. 8.11Рис
8.5. Синтез адаптивной следящей системы
Процесс проектирования систем управления всегда предполагает -наличие четко сформулированной цели управления и априорной ин
формации об объекте управления и о характере действующих на него.возмущений
Объем априорной информации при этом может быть различным . -и за редким исключением не является исчерпывающим Однако в дан
ном случае принципиальным является вопрос о достаточности или недостаточности имеющейся априорной информации об объекте для
. -достижения сформулированной цели управления Все системы управ, , -ления построенные с использованием априорной информации доста , точной для достижения поставленной цели относятся к неадаптивным,
или ,традиционным системам управления независимо от реализуемого , , -принципа управления наличия обратной связи случайности или де
, терминированности возмущений используемых вычислительных
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

326 . . . Г Н Решетникова Моделирование систем
. . средств и т д Если же объем располагаемой априорной информации -о свойствах объекта не может обеспечить достижения сформулирован
, ной цели управления то речь идет об адаптивных -системах управле.ния
Существует достаточно много вариантов различных определений . -адаптивных систем Но основной смысл при этом остается неизмен
. . . -ным Одним из наиболее известных является определение Я З Цып: кина -под адаптивными системами управления будем понимать такие систе
, , , мы которые используя информацию о внешних воздействиях условиях работы , -и выходных величинах изменяют структуру или параметры регулятора с це
лью обеспечения оптимального или заданного функционирования управляемой системы при изменяющихся условиях ее работы.
, . .Достаточно известным является определение данное В Н -Буко: вым , -адаптивными называются такие системы управления которые пред
-назначены для функционирования в условиях априорной неопределенности и ко торые в процессе функционирования автоматически приспосабливаются
к непредвиденным изменениям свойств объекта управления и внешней среды. , -Если изменяется структура регулятора то адаптивная система уп равления называется самоорганизующейся, -если структура остается не, , -изменной но изменяются параметры регулятора то система управле
ния называется самонастраивающейся с параметрической адаптацией.
8.5.1. Основные понятия адаптивных системуправления
Наиболее существенными являются следующие признаки деления .принципов адаптации
1. :По уровню априорной неопределенности) , -а параметрическая адаптация при которой априорная неопреде
( -ленность заключается в недостаточном знании параметров коэффици) ;ентов управляемого объекта) , -б непараметрическая адаптация при которой априорная неопре
- .деленность не связана непосредственно с какими либо параметрами -В обоих случаях неопределенность уменьшается на основе последо
-вательных наблюдений входных и выходных данных в процессе уп.равления
2. :По организации процесса адаптации) , -а поисковые для которых характерны процессы итеративного дви
;жения к достижению требуемого качества управления) , -б беспоисковые основанные на использовании некоторых необхо
.димых или достаточных условий требуемого качества управления -У систем поисковой адаптации формируются специальными уст
ройствами детерминированные или случайные пробные сигналы или создаются условия для возбуждения в объекте незатухающих
Created with novaPDF Printer (www.novaPDF.com)

327
, . колебаний которые используются как поисковые Наличие пробных , движений является основным недостатком поисковой адаптации так
-как они не всегда допустимы по условиям функционирования объ.екта3. :По целям организации адаптации) , -а системы со специальными свойствами в результате функцио
-нирования которых управляемый процесс приобретает некоторые обя ( , - -зательные свойства устойчивость чувствительность к каким либо воз , мущениям или ошибкам априорной информации заданное расположение
. .);корней характеристического уравнения и т д) , -б оптимальные системы обеспечивающие минимизацию некото
, .рых функционалов отражающих качество управляемого движения -Наиболее перспективными для создания цифровых систем управ
-ления являются оптимальные беспоисковые системы с параметриче , -ской адаптацией в которых на основе полученной в процессе функци
онирования объекта информации о самом объекте и возмущающих воздействиях осуществляется автоматическая настройка параметров
. « », -модели объекта При этом используется принцип разделения со гласно которому формирование адаптивного управления состоит из трех:этапов
1) , выбор алгоритма управления в предположении что параметры ( );модели объекта известны точно оптимальное управление
2) ( ) оценивание неизвестных параметров идентификация модели;объекта
3) формирование адаптивного управления посредством замены .точных значений параметров на их оценки
8.5.2. Одновременное оценивание состояния и параметров модели объекта
Для синтеза управлений в реальных условиях функционирования , объекта необходимо учитывать как влияние внешних возмущений так
.и наличие переменных во времени неизвестных параметров Пусть для формирования управляющих воздействий используется
математическая модель объекта в виде
0
1 , , ;
(0) ,
x k A k k x k B k k u k F k q k
x x
(8.76)
где k — N-мер ный вектор переменных во времени неизвестных. , параметров При этом предполагается что элементы матриц A и B
линейно зависят от компонентов вект ора , что -соответствует дискре , тизации по методу Эйлера и априорные распределения векторов
начальных условий (0) и 0x я :вляются гауссовскими
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

328 . . . Г Н Решетникова Моделирование систем
0
0
0 0 0
0 0 0 0 0 0
{ (0)} , {( (0) )( (0) ) } ;
{ } , {( )( ) } .
T
Tx
M M P
M x x M x x x x P
Здесь 0
P и0xP — к овариационные матрицы ошибок начальных
.условий векторов параметров и состояния модели объекта При совмещенном синтезе требуется одновременно оценивать
, состояние и параметры системы описывающей поведение объекта . -в моменты квантования Это обычно осуществляется с помощью рекур
рентного алгоритма статистической обработки типа фильтра Калмана . -по результатам текущих измерений При этом оценивается обобщен
, -ный вектор формально объединяющий векторы состояния и парамет. ров Такой подход сопровождается резким возрастанием трудоемкости
.вычислений ( ) Алгоритмы оценивания параметров идентификация в реальном
, ,масштабе времени используемые в адаптивных системах управления, , -строятся как правило на основе гипотезы квазистационарности ха
, рактеристик объекта управления то е сть 0 . В соответствии с этой , гипотезой оцениваемые параметры или постоянны во времени или
, -изменяются с незначительной скоростью пренебрежение которой прак , тически не ухудшает оценок получаемых на ограниченном временном
.интервале наблюдения , -Таким образом можно записать дискретную модель изменения па
раметров в виде
0( 1) ( ); (0)k k . Измерительный комплекс
( 1) ( 1) ( 1)y k Hx k r k .является общим для состояния и параметров модели объекта
:Действительно
( 1) ( , ( )) ( ) ( , ( )) ( ) ( ) ( ) ( 1)
( ( ), ( )) ( ) ( ( ), ( )) ( ),
y k HA k k x k HB k k u k HF k q k r kH x k u k k Hf x k u k q k
где матрица размерности n N -и вектор столбец f с n -эле (8.76) -ментами получаются в результате представления системы следу
:ющим образом
1 , ,x k x k u k k f x k u k F k q k .
-Канал измерений вектора параметров можно приближенно пред ставить в виде
( 1) ( ( ), ( )) ( ) ( ( ), ( )) ( )y k H x k u k k Hf x k u k q k .
Будем строить оценку вектора параметров ( 1)k по текущему измерению y(k+1) в виде
Created with novaPDF Printer (www.novaPDF.com)

329
( 1) ( ) ( )[ ( 1) ( ( ), ( )) ( ) ( ( ), ( ))]k k L k y k H x k u k k Hf x k u k ,
где L(k) — , коэффициент усиления фильтра выражение для которого , можно получить аналогично тому как был получен коэффициент
усиления K(k) фильтра для оценки состояни я ( 1)x k . , Таким образом оценивание состояния объекта и идентификацию
-его параметров можно осуществлять с помощью двух параллельно ра . ботающих дискретных фильтров Калмана Рекуррентный алгоритм для
:оценки состояния будет иметь следующий вид
0
1
( 1) ( 1/ ) ( )[ ( 1) ( 1 / )];
( 1/ ) ( , ( )) ( ) ( , ( )) ( )
( ) ( ), (0) ;
( ) ( 1/ ) [ ( 1/ ) ] ;
( 1 / ) ( , ( )) ( ) ( , ( )) ( ) ( );
( 1) [ ( ) ] ( 1/
T Tx x
T Tx x
x n x
x k x k k K k y k Hx k k
x k k A k k x k B k k u k
F k q k x x
K k P k k H HP k k H R
P k k A k k P k A k k F k QF k
P k I K k H P k
0
);
(0) .x x
k
P P
(8.77)
-Идентификацию параметров будем осуществлять с помощью сле :дующего фильтра Калмана
0
0
1
( 1) ( ) ( )[ ( 1) ( ( ), ( )) ( )
( ( ), ( ))], (0) ;
( ) ( ) ( ( ), ( )) ;
( ) ( ( ), ( )) ( ) ( ( ), ( ))
( ) ( ) ;
( 1) [ ( ) ( ( ), ( ))] ( );
(0) .
T T
T T
T T
N
k k L k y k H x k u k k
Hf x k u k
L k P k x k u k H M
M k H x k u k P k x k u k H
HF k QF k H R
P k I L k H x k u k P k
P P
(8.78)
При постановке задачи идентификации параметров в большинстве , случаев подразумевается что приближение оценок параметро в к их
истинным значениям обеспечивает приближение формиру емого на основе оценок оптимального управления к искомому оптимальному
. -управлению для реального объекта Такое предположение подкрепля -ется теоремой разделения для предельной точности оценивания пара
. -метров и состояния объекта Однако для случая ограниченной точно -сти оценивания параметров эта теорема не дает конструктивных реко
мендаций по организации совместного оценивания и оптимизации
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

330 . . . Г Н Решетникова Моделирование систем
. -управления В то же время опыт моделирования процессов адаптивно го управления показывает не очень сильную связь между точностью
оценок и к . -ачеством поведения управляемого объекта Поэтому не ,обходимо использовать следующий подход к текущей идентификации
, — -выполняемой при адаптивном управлении идентификацию пара , -метров осуществлять таким образом чтобы в первую очередь достигал
ся достаточно высокий уровень качества управления поведением объекта — и в меньшей степени точность идентификации параметров объекта
.как таковая Структурная схема синтеза адаптивного управления представлена
. 8.12.на рис
u k
( )k
( )r k
( )q t
( )x t
( )y k
( )x k
Объект
Измерение
Формирова ниеуправления
Идентифика цияпараметров
Оцениваниесостояния
ЭВМ
( )u t
( )x k
. 8.12Рис
Created with novaPDF Printer (www.novaPDF.com)

331
П р и м е р ы1. В модели объекта
0 0( ) ( ) ( ) ( ); ( )x t Ax t Bu t Fq t x t x ,где
2,1 2,2
0 1A B
a a
,
неизвестные параметры составляют векто р 1 2 3, ,T
1 2 3 2,1 2,2 2, , , ,TT a a b .
Моделирование осуществляется с помощью дискретной модели
0( 1) ( ) ( ) ( ); (0) ,x k Ax k Bu k Fq k x x где ; ; ; 0,1A I tA B tB F tF t . Мат рицы A и B
линейно зависят от компонент векто ра сл :едующим образом
31 2
01( ) ; ( )
1
tA B
tt t
.
Математическая модель измерительного комплекса имеет вид( ) ( ) ( )y k Hx k r k ,
где H — , единичная матрица что соответствует полному измерению ; вектора состояния r(k) — вектор последовательностей гауссовских величин с нулевым средним и дисперсией
0,32 0
0 0,35R
.
, -Адаптивное управление формируемое на основе минимизации ма тематического ожидания классического квадратичного функционала
0
01
( , ) ( ) ( ) ( ) ( )2
TT T
t
J t T M x t Cx t u t Du t dt ,
имеет вид 1( ) ( ( )) ( )T
du k D B k Sx k ,
гд е dD tD ; ( ), ( )x k k — , -оценки состояния и параметров определя
(8.77), (8.78). емые с помощью фильтров Калмана Матрица ( ( ), ( ))x k u k и вектор ( ( ), ( ))f x k u k (8.78) в для заданного вектора параметров
:определяются следующим образом
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

332 . . . Г Н Решетникова Моделирование систем
1 2
1 2
2
0 0 0( ( ), ( )) ;
( ) ( ) ( )
( ) ( )( ( ), ( )) .
( )
x k u ktx k tx k tu k
x k tx kf x k u k
x k
, Моделирование осуществлялось для модели где матр ицы , ,A B F и векторы x(0), имеют вид
0 1 0 0,51 0; ; ;
0, 4 1,4 1,3 0 0,55
(0) ; ( 0, 4; 1,4;1,3)10; 1 T T
A B F
x
:при следующих априорных данных
0 0
0,5 1 0 07 1 0
(0) ; ; (0) 1,7 ; 0 1 01,3 0 1
1,5 0 0 1xx P P
и
1,5 0 2,295 0,734; 1;
0 1,7 0,734 0,772C D S
.
. 8.13 На рис приведены графики переходных процессов ( )x k
1 2( ) ( ), ( )Tx k x k x k , их оценок 1 2( ) ( ), ( )
Tx k x k x k и управлений u(k), -при
чем жирная линия изображает управляющие воздействия u(k), -тон — кая состояния x(k), — пунктирная оценки состояни я ( )x k .
. 8.13Рис
10
5
0
–5
–100 20 40 60 80 100
Created with novaPDF Printer (www.novaPDF.com)

333
. 8.14 На рис приведены в порядке следования графики оценокпараметров
1 2 3( ), ( ), ( )k k k и и ( ).х точных значений жирная линия
0 50 1000 50 100
3
2
1
0
0 50 1000
1
2
. 8.14Рис
2. В модели объекта
0 0
0 0
( ) ( ) ( ) ( ); ( ) ;
( ) ( ); ( ) ,
x t Ax t B u t Fq t x t x
u t v t u t u
где
2,1 2,2
0 1, ,A B
a a
;
2
0,B
b
неизвестным параметром является 2b . Моделирование осуществляется с помощью дискретной модели
0
0
( 1) ( ) ( ) ( ); (0) ;
( 1) ( ) ( ); (0) ,
x k Ax k Bu k Fq k x x
u k u k tv k u u
где элементы матрицы B линейно зависят от :следующим образом
0( ) .B
t
В математической модели измерительного комплекс а 1 0H , что соответствует измерению только первой компоненты вектора
0
–0,5
–1
–1,5
0
–1
–2
–3
2
1
0
0 50 1000 50 100
0 50 100
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

334 . . . Г Н Решетникова Моделирование систем
,состояния r(k) — последовательность гауссовских величин с нулевым средним и дисперсие й 0,32R .
, Адаптивное управление формируемое на основе минимизации математического ожидания функционала обобщенной работы
2 1 11
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ,2
k p
k
t l tT T T T
k оп опt
J t M x t Cx t u t D u t v t D v t v D v t dt
имеет вид1
1 2( ) ( ),v k D W k
где 2( )W k :является решением в обратном времени системы
1 1
1
2 2 1 2
2
( ( 1)) 2 ( ) ( ) ( ( )) ( ),
( ) ( );
( ( 1)) ( ) ( ),
( ) ;0;0
( ( 1)) ( ) ( ( )) ( ) ( ),
( ) 0;
0,
M p M p M p
M p pM
Tp p M p
Tp
Tp p p
p
x k l j x k l j Ax k l j B k u k
x k l x k l
W k l j A W k l j tCx k l j
W k l
W k l j W k l j B k W k l j tD u k
W k l
j l
1,p
а ( )M px k l -в первом уравнении определяется с помощью прогнозиру
ющей модели ( 1) ( ) ( ( )) ( ); ( ) ( ); , 1,M M M px j Ax j B k u k x j k x k j k k l
описывающей поведение объекта на интервале оптимизации
[ , ]k k pt t l t .
Вектор ( )x k и значение ( )k -являются оценками состояния и пара, (8.77), (8.78).метра которые определяются с помощью фильтров Калмана
Матри ца ( ( ), ( ))x k u k и вектор ( ( ), ( ))f x k u k (8.78) -в находятся следую :щим образом
1 2
2,1 2,21 2 2
( ) ( )0( ( ), ( )) ; ( ( ), ( )) .
( ) ( ) ( ) ( )
x k tx kx k u k f x k u k
tu k ta x k x k ta x k
, Моделирование осуществлялось для модели где матрицы , ,A B F ,векто р x(0) и параметр имеют вид
Created with novaPDF Printer (www.novaPDF.com)

335
0 1 0 0,51 0 10; ; ; (0) ; 1,3,
0,4 1,4 1,3 0 0,55 1A B F x
:при следующих априорных данных
0 0
7 1 0(0) ; ; (0) 1,1; 1;
1,3 0 1xx P P
и
1 21,5 0
; 1; 1; 15.0 1,7 pC D D l
. 8.15 На рис приведены графики переходных процессов ( )x k
1 2( ) ( ), ( ) Tx k x k x k , их оценок 1 2( ) ( ), ( )T
x k x k x k и управлений u(k), -при чем жирная линия изображает управляющие воздействия u(k), тонкая
— состояния x(k), — а пунктирная оценки с остояния ( )x k . .На рис 8.16
приведен график оценок параметра ( )k ( -и его точное значение жир ).ная линия
, Заметим что в данном случае параметр .не оценивается3. В модели объекта
0( 1) ( ) ( ) ( ); (0) ,x k Ax k Bu k Fq k x x где
2,1 2,2 2
1 0; ,
1
tA B
ta ta tb
неизвестные параметры составляют вектор 1 2 2,1 2,2, ,TT a a
и матрица A линейно зависит от компонент вектора следующим:образом
1 2
1( ) .
1
tA
t t
8. Моделирование систем управления
0 50 100
10
5
0
–5
1,6
1,4
1,2
10 20 40 60 80 100 0 50 100
. 8.15 . 8.16Рис Рис
Created with novaPDF Printer (www.novaPDF.com)

336 . . . Г Н Решетникова Моделирование систем
В математической модели измерительного комплекса 0 1H ,. . , т е измеряется только вторая компонента вектора состояния r(k) —
-последовательность гауссовских величин с нулевым средним и дисперси ей 0,35R .
, Адаптивное управление формируемое на основе минимизации математического ожидания локального квадратичного функционала
1 11
( ) ( 1) ( ) ( ) ( )2
T TJ k M x k C x k u k D u k ,
имеет вид 1( ) ( ) ( ( )) ( )T Tu k B CB D B CA k x k ,
гд е ( )x k , ( )k — , -оценки состояния и параметров определяемые с по
(8.77), (8.78). мощью фильтров Калмана Матрица ( ( ), ( ))x k u k и вектор( ( ), ( ))f x k u k (8.78) в :определяются следующим образом
1 2
1 2 22
0 0 ( ) ( )( ( ), ( )) ; ( ( ), ( )) .
( ) ( ) ( ) ( )
x k t x kx k u k f x k u k
t x k t x k x k tb u k
, Моделирование осуществлялось для модели где матри цы , ,A B F и векторы (0),x имеют вид
0 1 0 0,51 0 10 0,4; ; ; (0) ;
0,4 1,4 1,3 0 0,55 1 1,4A B F x
:при следующих априорных данных
0 0
7 1 0 0,5 1 0(0) ; ; (0) ; ,
1,3 0 1 1,7 0 1xx P P
и
1 11,5 0 23,969 7,976
; 1;0 1,7 7,976 8,766
C D D C
.
. 8.17 На рис приведены графики переходных процес сов ( )x k 1 2( ) ( ), ( ) Tx k x k x k , их оценок 1 2( ) ( ), ( )
Tx k x k x k и управлений u(k),
причем жирная линия изображает управляющие воздействия u(k), -тон — кая состояния x(k), — а пунктирная оценки состояни я ( )x k .
Created with novaPDF Printer (www.novaPDF.com)

337
. 8.17Рис
. 8.18 На рис приведены в порядке следования графики оценокпараметр ов
1 2( ), ( )k k и их то ( ).чных значений жирная линия
0
0.5
2
0
2
. 8.18Рис
8.6. Учет ограничений и запаздываний по управлению
При синтезе управлений на величину управляющего воздействия . -обычно накладываются ограничения Достаточно часто эти ограниче
ния накладываются в форме неравенств
min ( ) max , 1,i i iU u k U i m ,где min , maxi iU U — . , -заданные величины Например для автопило
та в самолете min , maxi iU U определены по условию безопасности.полета
10
5
0
–50 20 40 60 80 100
0,5
0
–0,5
–10 50 100
2
0
–20 50 100
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

338 . . . Г Н Решетникова Моделирование систем
, , :Тогда учитывая ограничения будем полагать
min , ( ) min ;если
( ) ( ), min ( ) max ;если
max , ( ) max .если
i i i
i i i i i
i i i
U u k Uu k u k U u k U
U u k U
Включение ЭВМ в контур управления неизбежно создает особые , -условия его реализации одним из основных условий является запаз -дывание подачи управляющего сигнала на рулевые органы по отноше
-нию к моменту выдачи измерительной системой информации об объек. , те Кроме того запаздывание вызван о затратами времени на расчет
оценок ( )x k и ( )k и формирование управляющего сигнала ( )u k . Управление с учетом запаздывания будем задавать уравнением
( ) ( ), 1,i i zu k u k l i m ,
где zl t — .время запаздывания
8.7. Общая схема синтеза адаптивных систем управления
Проектирование любой системы управления должно осуществляться . -с учетом конкретных условий ее применения В данном случае рас
сматривается проектирование системы адаптивного управления для , . . , -совмещенного синтеза т е для ситуации когда управление форми
. -руется в процессе функционирования объекта Здесь большое значе , -ние приобретают алгоритмы и способы позволяющие уменьшить вы
, -числительную задержку вызванную затратами времени на формиро . — вание управления Один из таких способов введение дискретности
, решения задач оценивания состояния идентификации параметров и формирования управляющих воздейств , . . ий т е оц ид упр, ,k k k . При этом
оц ид упр, ,k k k k k k и оц упр ид упр,k k k k . Тогда общая схема ( . 8.19).синтеза адаптивного управления будет иметь следующий вид рис
, -При этом предполагается что моменты и периоды квантования одина ковы для всех координат объекта и система управления формирует
, -управляющее воздействие с моментом и периодом квантования кото рые совпадают с моментом и периодом поступления информации об
. , , -объекте Кроме того учет запаздывания осуществляется на время кратное t .
Created with novaPDF Printer (www.novaPDF.com)

339
Таймер упрk
Таймер
иденk
Таймер
оцk
( )u kt)
u k
( )k
( )x k
( )y k
( )x k ( )r k
( )q t
( )x t Модель объекта
Канал измерений
Формирова ниеуправления
Идентифика цияпараметров
Оценка состояния
ЭВМ
Учет ограниче нийи запаздывания
Таймер k
( )u t
. 8.19Рис
Рассмотренные алгоритмы синтеза адаптивного управления все еще ,требуют достаточно высокой производительности управляющих ЭВМ
-что ограничивает их применение в реальном времени функционирова . .ния объекта Известны два подхода к преодолению этих трудностей
, Первый подход связан с построением для системы описывающей , движение объекта системы пониженного порядка и использованием
централизованной . структуры управления При этом исходная система
Объект
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

340 . . . Г Н Решетникова Моделирование систем
, , заменяется при синтезе другой меньшего порядка которая отражает . -лишь некоторые существенные особенности исходной системы При
-менение такой схемы управления приводит к субоптимальному функ -ционированию реального объекта и является эффективным для сла
, босвязанных систем или систем имеющих быстрые и медленные.составляющие
Второй подход связан с разбиением системы управления на ряд, . -подсистем каждая из которых имеет меньшую размерность Это при
водит к построению распределенной децентрализованной или -иерархичес кой децентрализованной . -структуры управления В последнем случае ис
, пользуются обычно два основных вида структур управления основанных . на многослойной и многоуровневой декомпозиции При таком подходе
-трудоемким является построение структуры децентрализованного уп, .равления что требует достаточно сложной программной реализации
, -Следует отметить что существенное сокращение времени синтеза дос .тигается в основном при параллельных вычислениях
8.8. Примеры моделирования адаптивных систем управления
8.8.1. Моделирование адаптивной системы управления боковым движением самолета
, -Математическая модель описывающая боковое движение само L-1011лета * , относительно номинальной траектории задана в виде
0 0( ) ( ) ( ) ( ); ( )x t Ax t B u t Fq t x t x , где компоненты векторов состояния
1 2 3 4( ) ( ( ), ( ), ( ), ( )) ( , , , )T Tx yx t x t x t x t x t
и управления
1 2( ) ( ( ), ( )) ( , )T Tн эu t u t u t
( . 8.20):модели объекта имеют следующий смысл рис — , ;отклонение угла крена рад
x — , / ;отклонение угловой скорости крена рад с
y — , / ;отклонение угловой скорости рыскания рад с — , ;отклонение угла скольжения рад
н — скорость изменения угла отклонения руля ,направления / ;рад с
э — , / .скорость изменения угла отклонения элеронов рад с
* Rooney R.H., Shapiro E.Y. The use modal control to minimize errors in theanalytical reconstruction of flight control sensor signals // Proc. IEEE Nat, Aerospaceand Electron. Conf. NAECON 1982. Dayton, Ohio, 1982. New York, 1982, 4.№
Created with novaPDF Printer (www.novaPDF.com)

341
zY
Xx
н
Y
y
zэ
Горизонт
Вид сзади
Заданноенаправлениеполета
Вид сверху
. 8.20Рис
Матрицы A и B соотв :етственно равны
0 1 0 0 0 0
0 1,89 0,39 5,55 0,76 1,6; ;
0 0,034 2,99 2,43 0,95 0,032
0,035 0,0011 0,99 0,21 0,03 0
A B
0 (0,02; 0,01; 0; 0)Tx . Внешние возмущения в модели объекта описываются вектором q(t), -компоненты которого являются нормальными гауссовскими случайны
ми величинами с матрицей влияния
3
4
00,1 10
0 0,35 10
0 0
0 0
F
.
-При формировании управляющих воздействий используется диск , ретная модель полученная методом Эйлера с шагом 0,1t :
0( 1) ( ) ( ) ( ); (0) ,x k Ax k Bu k Fq k x x где
; ; ;A I tA B tB F tF 1 0,1 0 0
0 0,811 0,039 0,555;
0 0,0034 0,701 0,243
0,0035 0,00011 0,099 0,973
A
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)
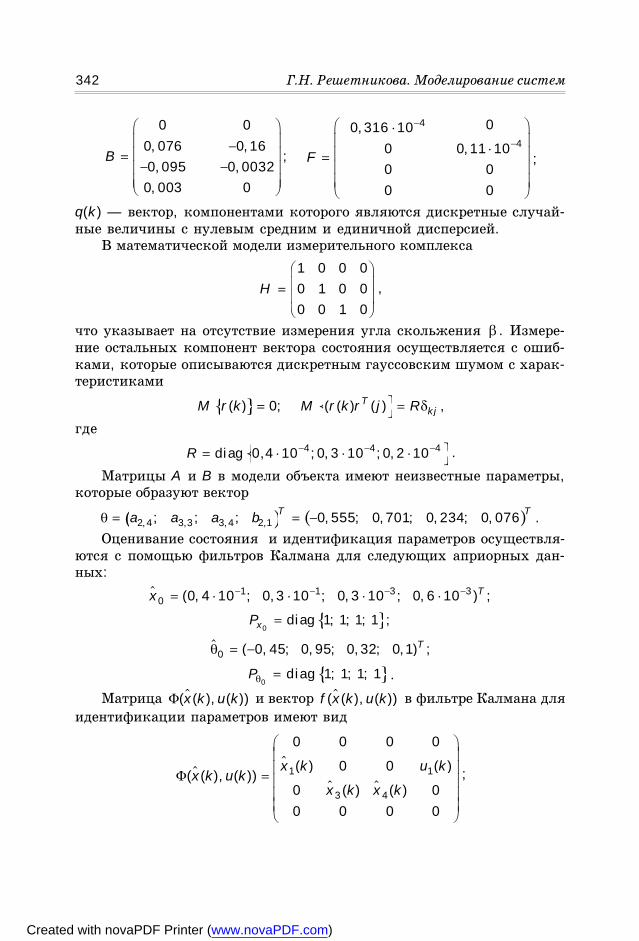
342 . . . Г Н Решетникова Моделирование систем
0 0
0,076 0,16;
0,095 0,0032
0,003 0
B
4
4
00,316 10
0 0,11 10
0 0
0 0
F
;
q(k) — , -вектор компонентами которого являются дискретные случай .ные величины с нулевым средним и единичной дисперсией В м атематической модели измерительного комплекса
1 0 0 0
0 1 0 0
0 0 1 0
H
,
что указывает на отсутствие измерения угла скольжения . -Измере -ние остальных компонент вектора состояния осуществляется с ошиб
, -ками которые описываются дискретным гауссовским шумом с характеристиками
( ) 0;M r k ( ) 0, ( ( ) ( )TkjM r k M r k r j R ,
где
4 4 4diag 0,4 10 ;0,3 10 ;0,2 10R .
Матрицы A и B ,в модели объекта имеют неизвестные параметры которые образуют вектор
2,4 3,3 3,4 2,1; ; ; 0,555; 0,701; 0,234; 0,076 .T Ta a a b -Оценивание состояния и идентификация параметров осуществля
-ются с помощью фильтров Калмана для следующих априорных дан:ных
1 1 3 30 (0, 4 10 ; 0,3 10 ; 0,3 10 ; 0,6 10 ) ;Tx
0
diag 1; 1; 1; 1 ;xP
0 ( 0, 45; 0,95; 0,32; 0,1) ;T
0
diag 1; 1; 1; 1P .
Матрица ( ( ), ( ))x k u k и вектор ( ( ), ( ))f x k u k в фильтре Калмана для идентификации параметров имеют вид
11
3 4
0 0 0 0
( ) 0 0 ( )( ( ), ( ))
0 ( ) ( ) 0
0 0 0 0
x k u kx k u k
x k x k
;
Created with novaPDF Printer (www.novaPDF.com)
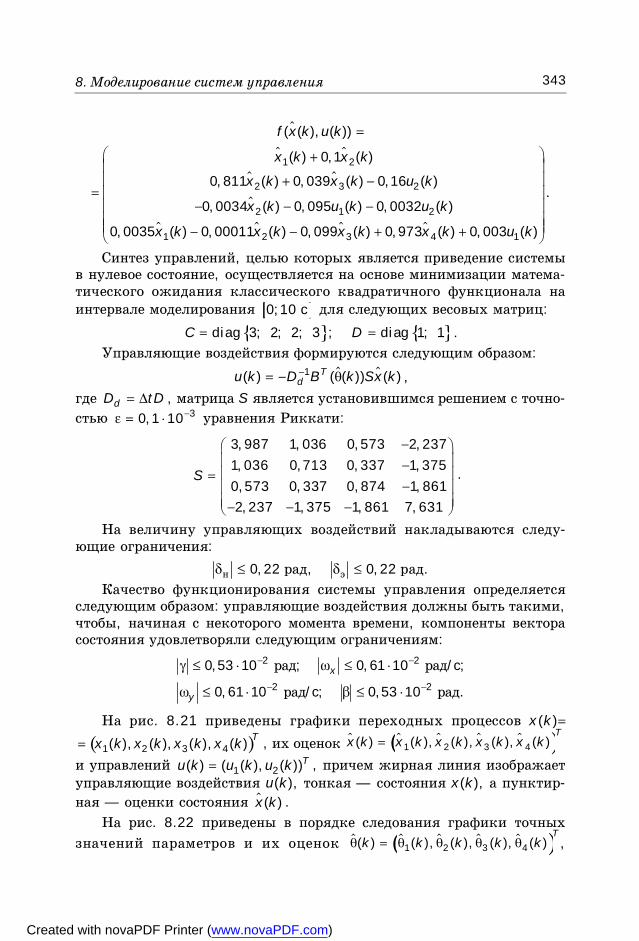
343
1 2
22 3
1 22
11 2 3 4
( ( ), ( ))
( ) 0,1 ( )
0,811 ( ) 0,039 ( ) 0,16 ( ).
0,0034 ( ) 0,095 ( ) 0,0032 ( )
0,0035 ( ) 0,00011 ( ) 0,099 ( ) 0,973 ( ) 0,003 ( )
f x k u k
x k x k
x k x k u k
x k u k u k
x k x k x k x k u k
, Синтез управлений целью которых является приведение системы
, -в нулевое состояние осуществляется на основе минимизации матема тического ожидания классического квадратичного функционала на интервале моделировани я 0;10 c :для следующих весовых матриц
diag 3; 2; 2; 3 ; diag 1; 1C D . :Управляющие воздействия формируются следующим образом
1( ) ( ( )) ( )Tdu k D B k Sx k ,
г де dD tD , матрица S -является установившимся решением с точно стью 30,1 10 уравн :ения Риккати
3,987 1,036 0,573 2,237
1,036 0,713 0,337 1,375
0,573 0,337 0,874 1,861
2,237 1,375 1,861 7,631
S
.
-На величину управляющих воздействий накладываются следу :ющие ограничения
н э0,22 , 0,22 .рад рад Качество функционирования системы управления определяется
: ,следующим образом управляющие воздействия должны быть такими, , чтобы начиная с некоторого момента времени компоненты вектора
:состояния удовлетворяли следующим ограничениям
2 2
2 2
0,53 10 ; 0,61 10 /c;рад рад
0,61 10 /c; 0,53 10 .рад рад
x
y
. 8.21 На рис приведены графики переходных процессов x(k)
1 2 3 4( ), ( ), ( ), ( )Tx k x k x k x k , их оценок 1 2 3 4( ) ( ), ( ), ( ), ( )
Tx k x k x k x k x k
и управлений 1 2( ) ( ( ), ( ))Tu k u k u k , причем жирная линия изображает управляющие воздействия u(k), — тонкая состояния x(k), -а пунктир
— ная оценки состоян ия ( )x k . . 8.22 На рис приведены в порядке следования графики точных
значений параметров и их оценок 1 2 3 4( ) ( ), ( ), ( ), ( )T
k k k k k ,
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

344 . . . Г Н Решетникова Моделирование систем
,причем жирной линией изображены точные значения параметров — .а тонкой их оценки
. 8.21Рис
0 50 100 0 50 1000.2
0.4
0.6
0 50 100 0 50 1000.2
0
0.2
. 8.22Рис
0,2
0,15
0,1
0,05
0
–0,05
–0,10 10 20 30 40 50 60 70 80 90 100
–0,2
–0,4
–0,6
0,6
0,4
0,2
0,6
0,4
0,2
0,2
0
–0,2
0 50 100 0 50 100
0 50 100 0 50 100
Created with novaPDF Printer (www.novaPDF.com)

345
8.8.2. Моделирование адаптивной системы управления судном при изменении курса
«Compas Island»Математическая модель движения судна задана в виде
0 0( ) ( ) ( ) ( ) ( ) ( ) ( ); ( )x t A t x t B t u t F t q t x t x , где компоненты векторов состояния
1 2 3 4( ) ( ), ( ), ( ), ( ) , , v,T Tx t x t x t x t x t
и управления
1 2( ) ( ( ) , ( ))Tu t u t u t ( . 8.23):модели объекта имеют следующий смысл рис
— , ;отклонение угла дрейфа рад — , / ;отклонение угловой скорости дрейфа рад сv — , / ;отклонение скорости движения м с , ;отклонение угла курса рад
1u — , ;отклонение угла перекладки руля рад
2u — от .клонение режима работы главного двигателя
N
v
. 8.23Рис
. 8.23 На рис переменная N .указывает направление на север Внешние возмущения в модели объекта описываются вектором q(t), -компоненты которого являются независимыми нормальными гауссовс
кими величинами с матрицей влияния ( )F t . -Модель объекта является нестационарной и для ее построения за
, , :даны матрицы характеризующие модель для трех моментов времени
. . / . .Соболев Г В Управляемость корабля и автоматизация судовождения Г В
. – . : . –1976. – 477 .Соболев Л Судовождение с
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

346 . . . Г Н Решетникова Моделирование систем
: :
1) 1 10 c ;
1 1
0,007 0,444 0 0 0,0158 0
0,0142 0,167 0 0 0,0084 0( ) , ( )
0 0 0,0353 0 0 0,1
0 1 0 0 0 0
A B
,
2
31
1
0,1 10 0 0
( ) 0 0,17 10 0
0 0 0,1 100 0 0
F
;
2) 2 25 c ;
2 2
0,007 0,444 0 0 0,0184 0
0,0185 0,192 0 0 0,0108 0( ) , ( )
0 0 0,040 0 0 0,087
0 1 0 0 0 0
A B
,
2
32
1
0,1 10 0 0
( ) 0 0,18 10 0
0 0 0,101 100 0 0
F
;
3) 3 60 c ;
3 3
0,007 0,444 0 0 0,021 0
0,0244 0,220 0 0 0,0146 0( ) , ( )
0 0 0,046 0 0 0,076
0 1 0 0 0 0
A B
,
2
33
1
0,1 10 0 0
( ) 0 0,2 10 0
0 0 0,103 100 0 0
F
.
: :
: :
Created with novaPDF Printer (www.novaPDF.com)
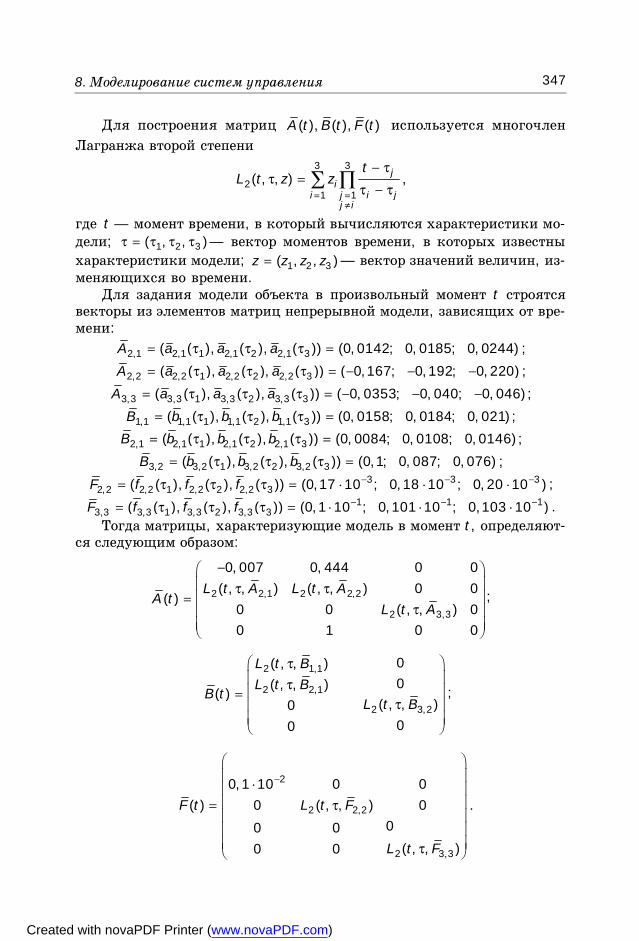
347
Для построения матриц ( ), ( ), ( )A t B t F t используется многочлен Лагранжа второй степени
3 3
21 1
( , , ) ji
i ji jj i
tL t z z
,
где t — , -момент времени в который вычисляются характеристики мо;дели 1 2 3( , , ) — , вектор моментов времени в которых известны
; характеристики модели 1 2 3( , , )z z z z — ве , -ктор значений величин из .меняющихся во времени
Для задания модели объекта в произвольный момент t строятся , -векторы из элементов матриц непрерывной модели зависящих от вре
:мени
2,1 2,1 1 2,1 2 2,1 3( ( ), ( ), ( )) (0,0142; 0,0185; 0,0244)A a a a ;
2,2 2,2 1 2,2 2 2,2 3( ( ), ( ), ( )) ( 0,167; 0,192; 0,220)A a a a ;
3,3 3,3 1 3,3 2 3,3 3( ( ), ( ), ( )) ( 0,0353; 0,040; 0,046)A a a a ;
1,1 1,1 1 1,1 2 1,1 3( ( ), ( ), ( )) (0,0158; 0,0184; 0,021)B b b b ;
2,1 2,1 1 2,1 2 2,1 3( ( ), ( ), ( )) (0,0084; 0,0108; 0,0146)B b b b ;
3,2 3,2 1 3,2 2 3,2 3( ( ), ( ), ( )) (0,1; 0,087; 0,076)B b b b ;3 3 3
2,2 2,2 1 2,2 2 2,2 3( ( ), ( ), ( )) (0,17 10 ; 0,18 10 ; 0,20 10 )F f f f ;1 1 1
3,3 3,3 1 3,3 2 3,3 3( ( ), ( ), ( )) (0,1 10 ; 0,101 10 ; 0,103 10 )F f f f . , Тогда матрицы характеризующие модель в момент t, -определяют
:ся следующим образом
2 2,1 2 2,2
2 3,3
0,007 0,444 0 0
( , , ) ( , , ) 0 0( ) ,
0 0 ( , , ) 0
0 1 0 0
L t A L t AA t
L t A
;
2 1,1
2 2,1
2 3,2
0( , , )0( , , )
( ) ,( , , )0
00
L t BL t B
B tL t B
;
2
2 2,2
2 3,3
0,1 10 0 0
( ) 0 ( , , ) 0
00 0
( , , )0 0
F t L t F
L t F
.
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

348 . . . Г Н Решетникова Моделирование систем
-При формировании управляющих воздействий используется диск , ретная модель полученная методом Эйлера с шагом 0,1t :
0( 1) ( ) ( ) ( ) ( ) ( ) ( ), (0)x k A k x k B k u k F k q k x x ,где
( ) ( ), ( ) ( ), ( ) ( )k k kA k I tA t B k tB t F k tF t ;
0,k N соответствует моменту времени 0 0, [ , ];kt t k t t t T 0 0t ;
60T c ; 0 600T t
Nt
.
В м атематической модели измерительного комплекса матрица H , является единичной что соответствует полному измерению вектора. состояния Ошибки измерений описываются вектором r(k) -дискрет
ных гауссовских шумов с характеристиками
( ) 0, ( ( ) ( )TkjM r k M r k r j R ,
где
4 4 2diag 0,4 10 ; 0,25 10 ; 0,01; 0,5 10R .
Матрицы A(k) и B(k) -в модели объекта имеют неизвестные пара, метры которые образуют векто р 1,2 4,2 3,2( ), ( ), ( )( )
Ta k a k b kk . -Оценивание состояния и идентификация параметров осуществля
-ются с помощью фильтров Калмана для следующих априорных дан:ных
0 (0; 0; 0; 0,15) ;Tx
0diag 1; 1; 1; 1xP ;
0 (0,055; 0,08; 0,012)T ;
0diag 1; 1; 1P .
Матрица ( ( ), ( ))x k u k и вектор ( ( ), ( ))f x k u k в фильтре Калмана для идентификации параметров имеют вид
2
2
2
( ) 0 0
0 0 0( ( ), ( ))
0 0 ( )
0 ( ) 0
x k
x k u ku k
x k
;
1,1 1,1 11
2,1 2,2 2,1 11 2
3,3 3
4
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )( ( ), ( )) .
( ) ( )
( )
a k x k b k u k
a k x k a k x k b k u kf x k u k
a k x k
x k
Created with novaPDF Printer (www.novaPDF.com)

349
-Синтез управлений осуществляется на основе минимизации мате -матического ожидания локального квадратичного функционала на ин
тервале моделирования 0;60 c д :ля следующих весовых матриц4 1 1 5
1
1
diag{0,8 10 ; 0,1 10 ; 0,4 10 ; 0,6537 10 };
diag{1; 1}.
C
D
:Управляющие воздействия формируются следующим образом 1( ) ( ( , ( )) ( , ( )) ) ( , ( )) ( ( , ( )) ( ) ( ))T T
zu k B k k CB k k D B k k C A k k x k x k ,
г де 1D D ; матрица C -является установившимся решением с точно стью 30,1 10 уравнения Риккати
4 4
4 4
3,252 206,427 0 155,703
206,427 2,896 10 0 3,563 10
0 0 0,938 0
155,703 3,563 10 0 7,665 10
C
.
: Решается задача перевода судна на другой курс при начальномсостоянии 0 0;0;0;0,35 Tx тре -буется отследить траекторию заданно
го состояния ( )zx t , для построения которой в момен ты 1 2 3, , -зада :ны следующие векторы
1( ) 0;0;0;0 Tzx ;
2( ) 0;0;0; 0,1 Tzx ;
3( ) 0;0;0; 0,5 Tzx .
Тогда вектор заданного состояния ( )zx t определяется с помощью многочлена Лагранжа 2( , , )zL t следую :щим образом
2( ) 0;0;0; ( , , )T
z zx t L t ,
где 0; 0,1; 0,5z .
. 8.24 На рис точками указаны значения
курса в моменты , 1,3,i i -а сплошной линией— , -курс полученный с помощью мно
.гочлена Лагранжа На величину управляющих воздействий
:накладываются следующие ограничения
1 э0,61 ; 0,01.радu
8. Моделирование систем управления
0,5
0
–0,5
–10 20 40 t,c
. 8.24Рис
Created with novaPDF Printer (www.novaPDF.com)

350 . . . Г Н Решетникова Моделирование систем
0,8
0,6
0,4
0,2
0
–0,2
–0,4
–0,6
–0,8 0 50 100 150 200 250 300 350 400 450 500 550 600
Качество функционирования системы управления определяется : ,следующим образом управляющие воздействия должны быть такими
, , чтобы начиная с некоторого момента времени компоненты вектора :состояния удовлетворяли ограничениям
1
2
0,26 ; 0,174 10 / ;рад рад с
v 0,5 / ; 0,53 10 .м с радz
На ри . 8.25 с приведены графики переходных процессов x(k) 1 2 3 4( ), ( ), ( ), ( )
Tx k x k x k x k , их оценок 1 2 3 4( ) ( ), ( ), ( ), ( )T
x k x k x k x k x k
и управлений 1 2( ) ( ( ), ( ))Tu k u k u k , при чем жирная сплошная линия изображает управляющие воздействия u(k), —жирная пунктирная
, — заданное состояние курса тонкая сплошная состояния x(k), -а тон — кая пунктирная оценки состоян ия ( )x k .
. 8.25Рис
. 8.26 На рис п риведены в порядке следования графики точных
: значений параметров и их оценок 1 2 3( ) ( ), ( ), ( )T
k k k k , причем , —жирной линией изображены точные значения параметров а тонкой
.их оценки
Created with novaPDF Printer (www.novaPDF.com)

351
0 200 400 600 0 200 400 6001
0
1
0 200 400 6000.4
0.2
0
0.2
0.4
. 8.26Рис
8.8.3. Моделирование адаптивной системы управления смесительным баком
, Математическая модель описывающая управление смесительнымбаком*, задана в виде
0 0
0 0
( ) ( ) ( ) ( ); ( ) ;
( ) ( ); ( ) ,
x t Ax t Bu t Fq t x t x
u t v t u t u
где компоненты векторов 1 2 3 4( ) ( ( ), ( ), ( ), ( ))Tx t x t x t x t x t и ( )u t
1 2( ) ( ( ), ( ))Tu t u t u t модели объекта ( . 8.27):имеют следующий смысл рис
1x — , отклонение расхода жидкости м3/ ;с
2x — , /отклонение выходной концентрации кмоль м3;
3 4,x x — пер , еменные моделирующие флуктуации линеаризованной ( );модели гауссовские коррелированные возмущения
1u — , отклонение расхода первого входного потока м3/ ;с
2u — , отклонение расхода второго входного потока м3/ .с
* . / . ,Квакернаак Х Линейные оптимальные системы управления Х Квакернаак. . – . : , 1977. – 650 .Р Сиван М Мир с
0,5
0
–0,5
1
0
–1
0,4
0,2
0
–0,2
–0,4
0 200 400 600 0 200 400 600
0 200 400 600
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

352 . . . Г Н Решетникова Моделирование систем
Выходной поток
Датчикрасхода
Датчик-концен
трации
Блок-управ
ления
x1
x2
u2
u1
u1 u2
Управляемыйклапан
2Входной поток № с постояннойконцентрацией
Входной поток № с постояннойконцентрацией
1
Управляемыйклапан
Мешалка
. 8.27Рис
Матрицы A и B :соответственно равны
0,01 0 0 0
0 0,02 0,01 0,005
0 0 0,025 0
0 0 0 0,02
A
;
1 1
0,25 0,75
0 0
0 0
B
.
Внешние возмущения в модели объекта описываются вектором q(t), -компоненты которого являются нормальными гауссовскими случайны
ми величинами с матрицей влияния
2
2
0 0
0 0
00,35 10
0 0,55 10
F
.
-При формировании управляющих воздействий используется диск , ретная модель полученная методом Эйлера с шагом 0,1t :
0
0
( 1) ( ) ( ) ( ); (0) ,
( 1) ( ) ( ); (0) ,
x k Ax k Bu k Fq k x x
u k u k tv k u u
Created with novaPDF Printer (www.novaPDF.com)

353
где
; ; ;A I tA B tB F tF
0,999 0 0 0
0 0,998 0,001 0,0005
0 0 0,9975 0
0 0 0 0,998
A
;
0,1 0,1
0,025 0,075
0 0
0 0
B
;
3
3
0 0
0 0
01,107 10
0 1,739 10
F
;
q(k) — , -вектор компонентами которого являются дискретные случай .ные величины с нулевым средним и единичной дисперсией В м атематической модели измерительного комплекса матрица H задана в виде
1 0 0 0
0 1 0 0H
;
r(k) — вектор дискретных гауссовских величин с характеристиками
( ) 0, ( ( ) ( )TkjM r k M r k r j R ,
где
6 6diag 10 ; 10R .
Матрица B , -в модели объекта имеет неизвестные параметры кото рые образуют вектор
1 2 2,1 2,2, ( ; ) ( 0,025; 0,075)T T Tb b .
-Оценивание состояния и идентификация параметров осуществля -ются с помощью фильтров Калмана для следующих априорных дан
:ных
0 (0,015; 0; 0; 0)Tx ; 0
diag 1; 1;1; 1xP ;
0 ( 0,02; 0,65)T ;
0diag 1; 1P .
Матрица ( ( ), ( ))x k u k -в фильтре Калмана для идентификации пара метров имеет вид
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

354 . . . Г Н Решетникова Моделирование систем
1 2
0 0
( ) ( )( ( ), ( ))
0 0
0 0
u k u kx k u k
,
а вектор ( ( ), ( ))f x k u k :определяется следующим образом
( ( ), ( )) ( ) ( ( )) ( ) ( ( ), ( )) ( )f x k u k Ax k B k u k x k u k k ,где
1 2
0,1 0,1
( ) ( )( ( )) .
0 0
0 0
k kB k
, Синтез управлений целью которых является приведение системы в состояни е 0,04;0;0;0 T
zx , о -существляется на основе минимиз ации математического ожидания функционала обобщенной работы
на интервале 0, , 4, 0,400, 0,02;0;0;0при Tk k p pt t l t l k x ,
0 0;0 Tu для сл :едующих весовых матриц3 1
1 2diag{0,505; 0,6 10 ; 0 ; 0}; diag{0,35 10 ; 0,31}.C D D -На величину управляющих воздействий накладываются следу
:ющие ограничения3
10 ( ) 1,74 /м сu k ; 320 ( ) 0,58 /м сu k .
Качество функционирования системы управления определяется : ,следующим образом управляющие воздействия должны быть такими
, , чтобы начиная с некоторого момента времени компоненты вектора :состояния удовлетворяли ограничениям
1 2
31 20,04 / ; 0,1 / .м с кмоль сz zx x x x
. 8.28 : На рис приведены следующие графики на первом рисунке
жирной лин ией изображено1z
x , — тонкой 1( )x k , —пунктирной 1( )x k ;
на втором рисунке жирной линией изображено2z
x , — тонкой 2( )x k ,
пунктирной — 2( )x k ; — на третьем 1 2( ), ( )u k u k .
. 8.29 На рис приведены в порядке следования графики точных
значений параметров и их оценок 1 2( ) ( ), ( )T
k k k , -причем жир , — ной линией изображены точные значения параметров а тонкой их
.оценки
Created with novaPDF Printer (www.novaPDF.com)

355
0 200 4000 200 400
0.01
0.005
0
0.005
0
0.005
0.01
0.015
. 8.28Рис
0
0.05
0.1
0.06
0.07
0.08
0.09
. 8.29Рис
0,1
0,05
0
–0,050 200 400
0,09
0,08
0,07
0,060 200 400
0,005
0
–0,005
–0,01
0,015
0,01
0,02
0,01
0 200 400
0 200 400
0,05
0,04
0,03
0,02
0,010 200 400
а б
в
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

356 . . . Г Н Решетникова Моделирование систем
8.8.4. Моделирование адаптивной системы управления поставками
, , Математическая модель описывающая процесс поставок сбыта , и хранения товара может быть записана в виде*
0 0
0 0
( ) ( ) ( ) ( ) ( ) ( ) ( ); ( ) ;
( ) ( ); ( ) ,
x t A t x t B t u t F t q t x t x
u t v t u t u
где компоненты вектора состоян ия ( ) ( ), ( ), ( )Tx t Z t V t W t и -меют сле
:дующий смыслZ(t) — , .;объем товара на рынке рубV(t) — , .;объем товара у потребителя рубW(t) — , .прибыль от реализации товара руб
Переменные u(t) и v(t) . определяют объем и темп поставок Векторq(t) , -описывает действие случайных факторов в модели которые счита
ются нормальными гауссовскими величинами с матрицей влияния ( )F t . Матрицы ( )A t и ( )B t :имеют вид
1
2
3
1( )( ( ) ( )) ( ) ( ) 0
0( ) ( )( ( ) ( )) ( ) ( ) 0 ; ( )
1( )( ( ) ( )) ( ) ( ) 0
Y V Z
Y V Z
Y V Z
n c t t k n c tA t n c t t n c t k B t
cn c t t k cn c tc
,
где 1 2 3, , ,k k k c — , -коэффициенты характеризующие темп потребле, , , ;ния плату за хранение порчу товара величину торговой накрутки
( ),Y t ( ), ( )Z Vt t — , функции описывающие математические модели , потенциального спроса ситуацию на рынке и поведение покупателя
; относительно рассматриваемого товара n(c) — -скорость продажи това, ра которая описывается функци ей 0( ) cn c n e , 0n — -коэффициент по
.купательной способности Для численного моделирования использовались данные о прибыли
и объеме поставок молочной продукции в магазин в течение семи.месяцев
, , -Математические модели описывающие потенциальный спрос си , туацию на рынке и у покупателя строились в виде полиномиальных
, -функций аппроксимирующих исходные данные и учитывающих ха , -рактер поставляемой продукции и объем рынка занимаемого постав:щиком
* . . -Решетникова Г Н Следящая система адаптивного управления с прогнозиру / . . // . – 2006.ющей моделью пониженного порядка Г Н Решетникова Вестник ТГУ
– . 290. – . 241–243. – ISSN 1561-7793.Вып С
Created with novaPDF Printer (www.novaPDF.com)

357
5 4 3 2
5 4 3 2
5 4 3 2
( ) 7,529 10 0,03735 0,06 7,096 1893;
( ) 7,529 10 0,03725 0,062 7,036 1813;
( ) 3,531 10 0,001943 0,012 0,888 42,299.
Y
Z
V
t x x x x
t x x x x
t x x x x
, -Матрица влияния случайных факторов коэффициентов и началь
ных значений в модели задана в виде
( ) diag 30;60;1F t ;
4 51,15; ( ) 0,135 10 ; 0,1 10 ;c n c k 5
1 0,1 10 ;k 4 42 30,3 10 ; 0,7 10k k ;
0 0 0 0 0( ) 0; ( ) ( ); ( ); ( )T
Z V Wu t x t t t t ,
гд е ( )W t — , .функция полученная аппроксимацией данных о прибыли Математическая модель информационной системы задана в виде
y(k) Hx(k) + r(k),
где матрица
1 0 0
0 0 1H
;указывает на отсутствие информации об объеме товара у потребителяr(k) — , погрешности информационной системы которые описываются
дискретными гауссовскими величинами с характеристиками
2 3
0; ;( ) ( ) ( )
diag ;0,5 10 ;0,5 10
TkjM M Rr k r k r j
R
x(k) — , состояние дискретной системы полученной методом Эйлера
при t 1, . . .т е товар поставляется каждый день Неизвестными параметрами в модели являют ся 1k и n(c), которые
образуют вектор
5 41; ( ) 0,1 10 ;0,135 10
TTk n c .
-Оценивание состояния и индентификация параметров осуществля -ются с помощью фильтров Калмана для следующих априорных дан
:ных
0
0
0
1 20
(0) ; diag ;1;1;1
; diag .1;10,1 10 ;0,5 10
x
T
x x P
P
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

358 . . . Г Н Решетникова Моделирование систем
Матрица ( ), ( )x k u k и вектор ( ), ( )f x k u k в фильтре Калмана
для идентификации параметров имеют вид
1 1 2
1 2
1 2
( ) ( )( ) ( ) ( ) ( )
,( ) ( )0 ( ) ( ) ( )( ), ( )
( ) ( )0 ( ) ( ) ( )
Y V Z
Y V Z
Y V Z
k ktx k t x k t k x k
k kt x k t k x kx k u k
k ktc x k tc k x k
1
22 2
3 1 3
( )
( ) ( )( ), ( )
( ) ( )
x k
f x k tk x kx k u k
tk x k x k
.
-Формирование объема поставок осуществляется следящей систе мой управления с использованием функционала обобщенной работы , (7при длине интервала оптимизации равной одной неделе t). Вектор
( )Zx t з 5адает увеличение прибыли на % ,на существующем рынке. . т е имеет вид
( ); ( );1,05 ( )( )T
Z V WZ t t tx t .
Весовые матрицы функционала соответственно равны
2 2 71 2diag 10 ;10 ;0,229 10 ; 0,9.C D D
. 8.30 , -На рис приведены значения наращенной прибыли с помо -щью которой характеризуется качество функционирования сис , темы управления причем сплошная линия указывает значение
, — -желаемой прибыли а пунктирная полученной в результате модели.рования
0 50 100 150 200
. 8.29Рис
-Оценки параметров практически сразу совпадают с точными зна .чениями соответствующих параметров
3000
2000
1000
00 50 100 150 200
Created with novaPDF Printer (www.novaPDF.com)

359
8.9. Контрольные вопросы
1. ?Дайте определение временной области2. ?Дайте определение состояния системы3. , .Дайте определение переменных состояния приведите пример4. Как в общем виде можно представить систему управления
?в пространстве состояний5. , Приведите уравнение описывающее непрерывную нелинейную
-нестационарную детерминированную систему в пространстве состоя.ний6. , Приведите уравнение описывающее непрерывную линейную
нестационарную детерминированную .систему в пространстве состояний7. , Приведите уравнение описывающее дискретную нелинейную
нестационарную детерминированную .систему в пространстве состояний8. , Приведите уравнение описывающее дискретную линейную
-нестационарную детерминированную систему в пространстве состоя.ний9. , Приведите уравнение описывающее непрерывную нелинейную
.стационарную детерминированную систему в пространстве состояний10. , Приведите уравнение описывающее дискретную нелинейную
.стационарную детерминированную систему в пространстве состояний11. , -Приведите уравнение описывающее непрерывную нелиней .ную стационарную стохастическую систему в пространстве состояний12. , Приведите уравнение описывающее непрерывную линейную
.нестационарную стохастическую систему в пространстве состояний13. , Приведите уравнение описывающее дискретную нелинейную
.нестационарную стохастическую систему в пространстве состояний14. , Приведите уравнение описывающее дискретную линейную
.нестационарную стохастическую систему в пространстве состояний15. , -Приведите уравнение описывающее непрерывную нелиней .ную стационарную стохастическую систему в пространстве состояний16. , Приведите уравнение описывающее дискретную линейную
.стационарную стохастическую систему в пространстве состояний17. ?Какие системы управления называются оптимальными18. -Приведите общий вид функционала качества системы управ
.ления19. -Охарактеризуйте метод аналитического конструирования оп
( ).тимальных регуляторов АКОР20. Какими условиями обусловлена полнота общего решения при
?АКОРе21. Как определяется оптимальное управление для классического
?квадратичного функционала22. .Дайте определение совмещенного синтеза
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

360 . . . Г Н Решетникова Моделирование систем
23. Как определяется оптимальное управление для квадратичного ?функционала обобщенной работы
24. -Как формулируется задача управления скоростью перемеще ?ния регулирующих органов25. Как определяется оптимальное управление для квадратичного
-функционала обобщенной работы при управлении скоростью переме ?щения регулирующих органов
26. -Как определяется оптимальное управление на основе миними ?зации локального квадратичного критерия
27. ?Как формируются следящие системы управления28. Какой вид имеют функционал и управление для следящих
— ?систем при АКОРе Летова Калмана29. Какой вид имеют функционал и управление для следящих
-систем при управлении скоростью перемещения регулирующих орга ?нов по критерию обобщенной работы30. Какой вид имеют функционал и управление для следящих
?систем при оптимизации локального квадратичного критерия31. .Дайте определение цифровой системы управления32. Как строится дискретный аналог для непрерывной линейной
?нестационарной детерминированной системы33. -Как осуществляется моделирование линейных систем управ
?ления методом Эйлера34. -Как осуществляется моделирование линейных систем управ
— ?ления методом Рунге Кутта35. Как осуществляется синтез следящей системы оптимального
?управления по классическому квадратичному функционалу36. Как осуществляется синтез следящей системы оптимального
?управления по функционалу обобщенной работы37. Как осуществляется синтез следящей системы оптимального
?управления по локальному квадратичному критерию38. Как осуществляется моделирование стохастической системы
?управления39. Приведите описание стохастической модели измерительного
, .комплекса допускающего неполное измерение40. .Перечислите свойства функции штрафов в задаче фильтрации41. .Дайте определение оптимальной оценке состояния42. , -Приведите выражение характеризующее рекуррентную фор
.му оценок состояния43. Выведите соотношения для фильтра Калмана при оценивании
.состояния44. —Сформулируйте теорему разделения для критериев Летова
.Калмана и Красовского45. Как осуществляется синтез управления по оценкам состояния — ?для критериев Летова Калмана и Красовского
Created with novaPDF Printer (www.novaPDF.com)

361
46. Как осуществляется синтез управления по оценкам состояния ?при минимизации локального критерия47. ?Какие системы управления относятся к неадаптивным48. ?Какие системы управления относятся к адаптивным49. . . .Приведите определение адаптивных систем Я З Цыпкина50. . . .Приведите определение адаптивных систем В Н Букова51. -В чем заключается адаптация по уровню априорной информа?ции52. ?Как различаются системы по организации процесса адаптации53. ?Как различаются системы по целям организации адаптации54. « ».Сформулируйте принцип разделения55. -Какова идея построения фильтров Калмана при одновремен ?ном оценивании состояния и параметров56. ?Как учитываются ограничения по управлению57. ?Как формируется запаздывание по управлению58. Приведите структурную схему синтеза адаптивных систем
.управления
8. Моделирование систем управления
Created with novaPDF Printer (www.novaPDF.com)

362 . . . Г Н Решетникова Моделирование систем
9. ПРИМЕРЫ ПОСТРОЕНИЯМАТЕМА ТИЧЕСКИХ МОДЕЛЕЙ
, -К объектам управления поведение которых описывается обыкно , -венными дифференциальными уравнениями относятся все механичес
, , кие электромеханические объекты а также многие технологические, . процессы подчиняющиеся законам механики и электричества Кроме
, - -того такими уравнениями можно описать и многие макро и микро .экономические процессы
-При проектировании систем управления одной из первых и основ . ных задач является построение математических моделей Качество
,функционирования системы управления существенно зависит от того .насколько адекватной является построенная модель
9.1. Построение математических моделей прямолинейного и вращательного движения
, -Основной закон механики заключается в том что движение твер , дого тела состоит из движения его центра масс которое подчиняется
:второму закону Ньютонаmx F , (9.1)
, -и движения тела вокруг этого центра масс которое описывается уравнением
J M , (9.2)где m — ;масса тела J — ;момент инерции F — , силы действующие
;на тело и приведенные к центру масс M — ;момент сил x — -коорди ;наты центра масс — угл .ы положения тела
9.1.1. Математическая модель прямолинейногодвижения
-Примером прямолинейного движения может служить механичес ( . 9.1).кое колебательное звено рис
Пусть тело G движется вдоль оси координат OX. На тело G -дей :ствуют следующие силы
1) вес
вF mg ,где m — ;масса тела g — ;ускорение силы тяжести
Created with novaPDF Printer (www.novaPDF.com)
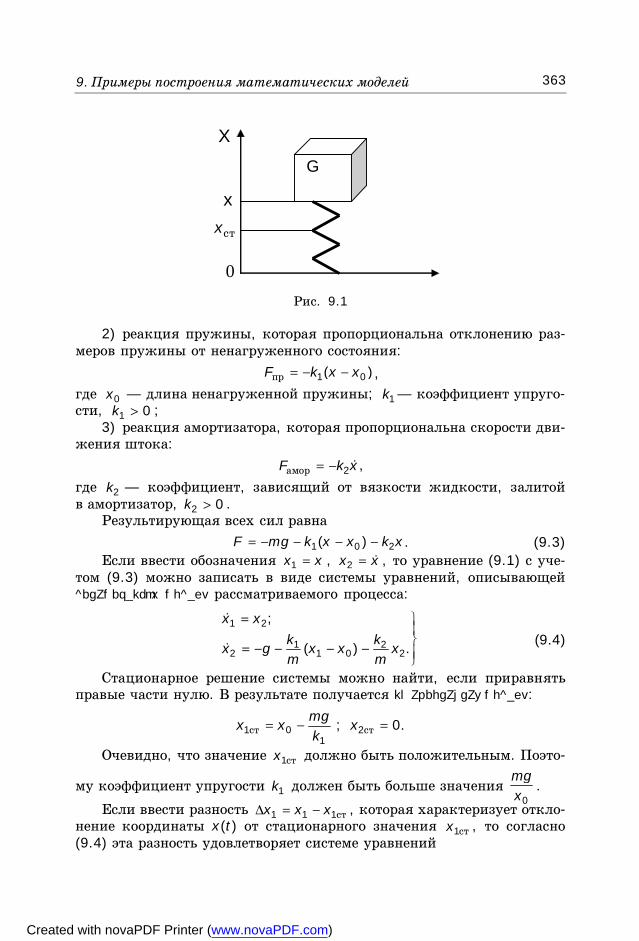
363
X
x
стx
0
G
. 9.1Рис
2) , -реакция пружины которая пропорциональна отклонению раз :меров пружины от ненагруженного состояния
1 0пр ( )F k x x ,где 0x — ;длина ненагруженной пружины 1k — -коэффициент упруго
,сти 1 0k ;3) , -реакция амортизатора которая пропорциональна скорости дви
:жения штока
2аморF k x , где 2k — , , коэффициент зависящий от вязкости жидкости залитой
, в амортизатор 2 0k . Результирующая всех сил равна
1 0 2( )F mg k x x k x . (9.3) Если ввести обозначения 1x x , 2x x , (9.1) -то уравнение с уче
(9.3) , том можно записать в виде системы уравнений описывающей динамическую модель :рассматриваемого процесса
1 2
1 22 1 0 2
;
( ) .
x xk k
x g x x xm m
(9.4)
, Стационарное решение системы можно найти если приравнять . правые части нулю В результате получается стационарная модель:
1 0 2ст ст1
; 0.mg
x x xk
, Очевидно что значение 1стx должн . -о быть положительным Поэто
му коэффициент упругост и 1k должен быть больше значения0
mgx
.
Если ввести разность 1 1 1стx x x , -которая характеризует откло нение координаты x(t) от стационарного значен ия 1стx , то согласно
(9.4) эта разность удовлетворяет системе уравнений
9. Примеры построения математических моделей
Created with novaPDF Printer (www.novaPDF.com)

364 . . . Г Н Решетникова Моделирование систем
1 2
1 22 1 2
;
.
x xk k
x x xm m
(9.5)
(9.5) Система является .моделью прямолинейного движения в отклонениях
9.1.2. Математическая модель вращательного движения
-Многие технологические процессы связаны с вращением механи . -ческих систем Довольно часто задача сводится к необходимости пода
, вать электрический ток нужной силы на вход электродвигателя на валу которого насажана некоторая масса m. -При этом необходимо за
, -давать такую силу тока чтобы обеспечить заданное вращательное дви . -жение массы Примерами таких ситуаций может быть суточное слеже
, ние наземных антенн за спутниками связи равномерное движение . .наматывающих барабанов в бумагоделательных машинах и т п
-Математически вращательное движение массы описывается урав (9.2). нением Если обозначить через 1x угол , а через 2x — угловую скорость , то это уравнение мо жно переписать в виде
1 2 2; .M
x x xx
Момент сил M :складывается из следующих составляющих1) 1k u — , , сила вращения создаваемая электродвигателем на вход
которого поступает ток силой u;2) 2 2k x — с , -ила сухого трения пропорциональная скорости враще ;ния и обратная ей по знаку3) f(t) — .сила внешних нагрузок , В результате уравнения вращательного движения описывающие
, динамическую модель рассматриваемого процесса примут вид
1 2
2 12 2
;
( ).
x xk k f t
x x uJ J J
Здесь 1k и 2k — .некоторые положительные коэффициенты
9.2. Макроэкономическая модель динамики фондов производственного накопления
и потребления
Пусть 1( )x t — ; фонд производственного накопления 2 ( )x t — фонд.потребления
Уравнение баланса имеет вид
1 1 1 2 2( ) ( ) ( )x t b x t b x t ,
Created with novaPDF Printer (www.novaPDF.com)

365
где 1b и 2b — коэффициенты приростной капиталоемкости фондов .накопления и потребления соответственно
Пусть 0( ) tL t L e — -динамика изменения численности населе; ния 0L — ; численность населения в начальный момент времени — .темп роста населения
, -Тогда уравнения характеризующие фонд потребления на душу на , селения и изменение душевого фонда потребления будут соответственно
равны
2 2
0
( ) ( )( )
tx t x te
L t L ;
22 2
0 0
( )( ) ( )
ttx td e
e x t x tdt L L
.
Если в качестве управления использовать скорость роста душевого фонда потребления
2 2( ) ( ) ( )u t x t x t ,то
2 2( ) ( ) ( )x t x t u t . (9.6) (9.6) (9.1), Подставляя в получим
1 1 1 2 2( ) ( ) ( ( ) ( ))x t b x t b x t u t . , -Таким образом динамическая модель изменения фондов накопле
-ния и потребления описывается системой обыкновенных дифференци альных уравнений вида
(0)2 21 1 2 1 0 1
1 1 1
(0)2 2 2 0 2
1( ) ( ) ( ) ( ), ( ) ;
( ) ( ) ( ), ( ) .
b bx t x t x t u t x t x
b b b
x t x t u t x t x
(9.7)
, (9.7) Заметим что модель является линейной по состоянию .и управлению
Если обозначить 1 2( ) ( ), ( )Tx t x t x t ; (0) (0) (0)
1 2,T
x x x , -то систе
(9.7) :ма в матричной форме запишется следующим образом(0)
0( ) ( ) ( ), ( )x t A x t B u t x t x ,где
2 2
1 1 1
1;
0 1
b bb b bA B
.
9. Примеры построения математических моделей
Created with novaPDF Printer (www.novaPDF.com)

366 . . . Г Н Решетникова Моделирование систем
9.3. Построение математических моделей, производства хранения и сбыта товара
повседневного спроса
:Введем следующие обозначенияX — , ;общее количество единиц товара выпущенных предприятиемu — ;темп производстваZ — ;количество товара на рынкеV — ;количество товара у потребителяW — ;доходY — ( , потенциальный спрос полное количество товара способное
мгновенно удовлетворить спрос в условиях отсутствия ажиотажного);спроса
c — , -коэффициент характеризующий превышение цены над себе (стоимостью c > 1, );так как себестоимость считается равной единице
1k — , ;коэффициент характеризующий темп потребления2k — , ;коэффициент характеризующий плату за хранение товара
n(c) — , ,коэффициент характеризующий скорость продажи товара например 1
0( ) cn n eс .отражает распределение по достаткуПараметры Y, 1k , 2k сч . итаются постоянными Величины u и c
, назначаются производителем и могут быть как постоянными так и. переменными Переменные X, Z, V, W — , -функции времени кото
.рые могут изменяться в соответствии с законами рынка :Статическая модель описывает один цикл производства и сбыта
-выработанный за расчетную единицу времени товар поступает на ры , .нок и продается в результате чего получается определенный доход
, , -Статическая модель строится исходя из предположения что в равно весном состоянии система характеризуется двумя соотношениями:баланса
1) ;поступившее на рынок количество товара равно проданному2) , .сколько товара продано столько и потреблено
-Эти соотношения с учетом введенных обозначений запишутся сле : дующим образом за единицу времени прирост товара на рынке
составляет u ; — единиц количество товара на рынке Z ; -единиц у по — требителя V ; единиц в единицу времени продается n(c)(Y–V)Z -еди
, ниц товара где (Y–V) — . текущий спрос При этом скорость продажи . -пропорциональна спросу и количеству товара на рынке Тогда стати
, -ческая модель процесса производства хранения и сбыта товара запи шется в виде
Created with novaPDF Printer (www.novaPDF.com)

367
1
2
( ) ( ) 0;
( ) ( ) 0;
( ) ( ) .
u n c Y V Zn c Y V Z k V
uW cn c Y V Z k Z
c
(9.8)
, Последнее уравнение показывает что доход в единицу времени складывается из выручки от продаж n(c)(Y–V)Z , -единиц товара рас
.ходов на производство и затрат на хранение Динамическая модель . строится следующим образом Так как за
время dt прирост произведенного товара равен u(t)dt, а продаетсяn(c)(Y–V(t))Z(t)dt , -единиц товара то скорость прироста товара на рын
ке равна
( )( ) ( ) ( ( )) ( )
dZ tu t n c Y V t Z t
dt .
Прирост товара у потребителя за время dt -равен количеству про , . . -данного товара минус количество потребленного т е скорость прирос
та товара у потребителя описывается уравнением
1( )
( ) ( ( )) ( ) ( )dV t
n c Y V t Z t k V tdt
.
, , -Таким образом динамическая модель описывающая процесс про, , изводства хранения и сбыта имеет вид
1
2
( )( );
( )( ) ( ) ( ( )) ( );
( )( ) ( ( )) ( ) ( );
( ) ( )( ) ( ( )) ( ) ( ).
dX tu t
dtdZ t
u t n c Y V t Z tdt
dV tn c Y V t Z t k V t
dtdW t u t
cn c Y V t Z t k Z tdt c
(9.9)
, (9.8) Заметим что статическая модель может быть получена из (9.9) (9.9).динамической путем приравнивания нулю правых частей в
-Поэтому статическая модель может рассматриваться как частный слу , .чай динамической отражающей состояние динамического равновесия
(9.9) -Перепишем динамическую модель в терминах теории автома .тического управления
Пусть 1 2 3 4( ) ( ( ), ( ), ( ), ( ))Tx t x t x t x t x t — , вектор состояния где
1( )x t X , 2 ( )x t Z , 3 ( )x t V , 4( )x t W ; u(t) — , -управление задаю . (9.9) -щее темп производства Тогда система запишется следующим об
:разом( ) ( , ( ), ( ))x t f t x t u t , (9.10)
9. Примеры построения математических моделей
Created with novaPDF Printer (www.novaPDF.com)

368 . . . Г Н Решетникова Моделирование систем
где ( , ( ), ( ))f t x t u t — - вектор функция вида
2 2 3
2 2 3 1 3
2 2 3 2 2
( )
( ) ( ) ( ) ( ) ( ) ( )( ( ), ( )) .( ) ( ) ( ) ( ) ( ) ( )
( )( ) ( ) ( ) ( ) ( ) ( )
u tu t n c Yx t n c x t x t
f x t u t n c Yx t n c x t x t k x tu t
cn c Yx t cn c x t x t k x tc
(9.10) Система является -нелинейной нестационарной детерминирован ной моделью , .процесса производства сбыта и хранения товара
Для того чтобы получить линейную , (9.10) систему запишем в виде
н н( ) ( )
( ) ( )( ) ( ) ( )
x x t u u t
f fx t x t u t
x u
или
( ) ( ) ( ) ( ) ( )x t A t x t B t u t , (9.11)
где н( )x t , н( )u t — ( ,номинальные траектория и управление например,характеристики , , -соответствующие плановым расчетным прогнозиру
).емым показателям Учитывая смысл второй и третьей компоненты вектора состояния
, в рассматриваемой модели построим функции иZ Vt t -с помо -щью которых моделируется ситуация на рынке и поведение покупате
. , лей Кроме того построим функцию Y t , кото рая характеризует . -потенциальный спрос Тогда матрицы динамики и влияния управля
ющих воздействий будут иметь вид
1
2
0 0 0 0
0 0( ) ;
0 0
0 0
Y V Z
Y V Z
Y V Z
n c t n c t n c tA t
n c t n c t n c t kcn c t cn c t k cn c t
11 1 0
T
B tc
.
, , Для учета колебаний рынка поведения покупателей погрешности (9.11) линеаризации и так далее добавим в систему вектор гауссовских
шумов q(t) с матрицей влияния ( )F t , к , ,омпоненты которой например .можно определить для конкретного предприятия экспериментально
, ,Тогда математическая модель описывающая процесс производства , сбыта и хранения товара запишется в виде системы -линейных нестаци
онарных стохастических дифференциальных уравнений
( ) ( ) ( ) ( ) ( ) ( ) ( )x t A t x t B t u t F t q t , (9.12)
Created with novaPDF Printer (www.novaPDF.com)

369
где ( ) ( )M q t q t ; ( ) ( ) ( ) ( ) ( ) ( )TM q t q t q t q t Q t t ;
( )t — - функция Дир .ака (9.12) -В терминах теории автоматического управления система сфор
, -мулирована для решения задачи управления положением рулей в дан . ном случае темпом производства Можно решать задачу управления
. -скоростью отклонения рулей В данном случае это будет задача управ , -ления изменением темпа производства математическая модель кото
-рой может быть описана следующей системой линейных нестационар :ных стохастических дифференциальных уравнений
( ) ( ) ( ) ( ) ( ) ( ) ( );
( ) ( ),
x t A t x t B t u t F t q tu t v t
(9.13)
где 3( ) , ,Tx t Z V W R — ве ; ктор состояния u(t) — -темп производ
;ства q(t) — ;вектор внешних возмущений ( )v t — , -управление зада ;ющее изменение темпа производства
1
2
0
( ) 0
0
Y V Z
Y V Z
Y V Z
n c t n c t n c tA t n c t n c t n c t k
cn c t cn c t k cn c t
;
11 0
T
B tс
;
( )F t — м , -атрица соответствующей размерности описывающая влия (9.13).ние случайных факторов в модели
9.4. Построение математическ ой модели вертикального движения ракеты
-Пусть ракета движется вертикально в поле тяготения какой то. планеты На основании законов механики можно записать следующие
:уравнения движения;mx F m c , (9.14)
где m — ; масса ракеты x — ; высота над поверхностью планеты c — ; секундный расход массы за счет горения топлива F — вертикальная
, . составляющая сил действующих на ракету Обозначим
1 2 3; ;x x x x v x m ,где v — . скорость ракеты Пусть оси 1Ox и 2Ox направлены вверх от
. поверхности планеты Управление ракетой осуществляется за счет тяги, двигателя что связано с расходом топлива с, . .т е u c .
(9.14) -С учетом введенных обозначений уравнения можно перепи :сать следующим образом
9. Примеры построения математических моделей
Created with novaPDF Printer (www.novaPDF.com)

370 . . . Г Н Решетникова Моделирование систем
1 2 2 33
( , ); ; .
F x ux x x x u
x
Функция F(x,u) имеет вид
( , ) ( ) sign( )F x u G P u Q v ,
где G mg — (сила тяжести g — );ускорение свободного паденияP(u) — , тяга двигателя которая с точностью до знака есть известнаяфункция u; sign( )v — , 1, знаковая функция равная плюс если 0v , и минус 1, если 0v (скорость v , -отрицательна если ракета опус
);кается Q — , аэродинамическое сопротивление равное
2
1( )2 xv
Q x SC .
Здесь 1( )x — плотность атмосферы на высоте 1x ; S — поперечное сечение ракеты; xC — аэр . одинамический коэффициент Последние две
. -величины можно считать постоянными С учетом введенных обозначе ний выражение для функции F(x,u) м ожно переписать в виде
22
3 1 2( , ) ( ) ( ) sign( )2 xx
F x u gx P u x S C x .
(9.14), Подставляя это выражение в получим математическую :модель движения ракеты
1 2
22
2 1 23 3 3
3
;
( , ) ( )( ) sign ( );
2
.
x
x x
xF x u P ux g x SC x
x x x
x u
(9.15)
(9.15) -Начальные условия для системы зависят от постановки зада .чи управления
, Если решается задача взлета ракеты то начальные условия будут:следующими
1 0 2 0 3 0 0( ) 0; ( ) 0; ( ) ,x t x t x t m
где 0t — ; момент взлета 0 p Тm m m , pm — ; масса тела ракеты Tm —
.начальная масса топлива , Если решается задача посадки ракеты то начальные условия будут
:следующими
1 0 0 2 0 0 3 0 0( ) ; ( ) ; ( ) ,x t h x t v x t m
где 0 0,h v — -расстояние до планеты и скорость ракеты в момент нача ; ла посадки 0 p om m m , om — остаток топлива в момент начала
.посадки
Created with novaPDF Printer (www.novaPDF.com)

371
10.ПРОГРАММНЫЕ СРЕДСТВАМОДЕЛИРОВАНИЯ
-Выделим следующие основные требования к программным систе, :мам предназначенным для моделирования ;наличие математических функций ;точность вычислений ;обработка ошибок ;возможность пополнения библиотек ;система отображения ;система разработки интерфейса .возможности коммуникации с другими программами
, Учитывая вышеперечисленные требования рассмотрим различные — , -системы моделирования как специализированные системы пред
, , -назначенные для математических расчетов так и универсальные ши . -роко применяемые инструментальные системы Рассмотрение программ .ных средств моделирования начнем именно с универсальных систем
, -Прежде чем перейти к описанию систем программирования пост роенных на базе языков C/C++, -следует понять разницу между язы
. — ком программирования и средой разработки Язык это некоторый , . формальный способ описания задачи решаемой машиной Транслятор
языка— , это программа которая переводит текст задачи с заданного . — -языка на язык машины А система программирования это ряд про , -грамм и системных библиотек которые призваны облегчить програм . , -мисту разработку программ В состав систем программирования поми
( ), мо транслятора языка иногда даже нескольких обычно включается , интегрированная среда разработки различные системные библиотеки
. . , и т д Например есть язык С++, -есть множество различных реализа , ций компилятора этого языка в том числе реализация от фирмы
Microsoft, Microsoft Visual и есть система программирования C++, -ко -торая строится на этом компиляторе и большом количестве дополни
.тельных библиотек и инструментальных средств
10.1. Языки программирования
10.1.1. FortranЯзык
Fortran ( . Formula Translation)Язык от англ — -один из первых язы , 1950- . ков программирования появившийся еще в х годах В то время
, ,было разработано множество библиотек в том числе математических
Created with novaPDF Printer (www.novaPDF.com)

372 . . . Г Н Решетникова Моделирование систем
. , ориентированных на этот язык Несмотря на то что язык оказался не , слишком удобным в использовании он довольно прочно занял свою
, нишу для разработки математических программ в первую очередь для. ( -моделирования С тех пор язык претерпел несколько редакций после
— 1995- ), дняя в м году и существует большое множество различных . версий компилятора этого языка Среди современных реализаций для
Microsoft Visual Fortran.персональных компьютеров следует отметить , —Как следует из названия языка основное его предназначение . .перевод формул И с этой работой он справляется достаточно успешно
К недостаткам этого языка следует отнести слабые возможности по , описанию абстрактных типов данных неудобную организацию циклов
.и других языковых конструкций
10.1.2. Язык С
Язык С, 1970- -появившийся в первой половине х годов в лаборато Bell Labs AT&T ( & ), -рии компании Керниган Ритчи является в настоя - щее время де факто стандартом для разработки программ системного
. -назначения малого и среднего размеров В настоящее время реализа ция этого языка есть практически для всех вычислительных систем от
. -микроконтроллеров до сверхбольших вычислительных машин Поня « » , , -тие среднего размера весьма относительно и как правило соответ
10 100 . « -ствует проектам от до тысяч строк исходного текста Под сис» , , , темными понимаются программы предназначенные в основном для
, -нужд операционной системы в том числе и сама операционная систе . -ма является системной программой Однако этот язык вполне подхо , -дит и для разработки прикладных программ связанных с математи
. ческими вычислениями Изюминка языка C — в его относительной , -близости к вычислительной системе что позволяет разрабатывать вы
( , -сокоэффективный код с минимальными накладными расходами а со, ответственно максимальный по скорости выполнения и минимальный
).по расходу памяти Язык C 50 ( , обладает набором из операций как целочисленных так
), 15 . и вещественных распределённых по уровням приоритетов Среди , математических операций языка собраны все операции которые могут
.выполнить центральный процессор и математический сопроцессор , -Часть операций применима как к целым типам данных так и к веще
.ственным , , ,Язык не обладает встроенным понятием модуля но как правило
( - — ) -среда разработки или по другому окружение языка позволяет вве сти это понятие искусственно и использовать как большое количество
, -стандартных библиотек так и свои собственные разработанные биб. , -лиотеки Более того язык не обладает собственными средствами вво
/ , , да вывода все эти средства реализуются внешними библиотеками что
Created with novaPDF Printer (www.novaPDF.com)

373
, -позволяет разрабатывать более гибкий исходный код программ приме -нимый для различного операционного окружения языка и исполняе
.мой программы .Недостатки языка являются обратной стороной его достоинств
К ним можно отнести отсутствие встроенных типов данных высокой ( , « », -степени абстракции например строка часто применимого для орга ), ( -низации диалога с пользователем отсутствие средств диагностики кон
, . .).троль выхода за пределы массива переполнения стека и числа и т д , -Такой контроль можно обеспечить лишь связавшись на низком уров
, , не с операционной системой при условии что операционная система .поддерживает такой контроль
Таким образом язык С -хорошо подходит для разработки низкоуров .невых системных библиотек и для математического моделирования
10.1.3. Язык С++
Язык C++, 1980- разработанный в первой половине х годов как- ( ) объектно ориентированное ОО развитие языка C -Бьярном Страустру
, . пом занимает несколько иную нишу В отличие от языка C, -програм, мы скомпилированные с языка C++, , , обладают как правило немного
.худшей производительностью и большим объёмом исполняемого кода — ( -Основная ниша данного языка разработка больших обычно при) -кладных программных систем сравнительно большой группой разра, / . ботчиков распределённой в пространстве и или времени Основное
— -преимущество данного языка языковая поддержка трех базис : , ных конструкций ОО программирования инкапсуляция полиморфизм
.и наследование Под инкапсуляцией понимается разделение реализации объекта
( ) . , , -модуля и его интерфейса Как правило скрываются данные а в ин . -терфейсе остаются только методы их обработки Поэтому инкапсуля
цию иногда трактуют как объединение данных и методов их обработки . в единой языковой конструкции При решении задач моделирования
.это позволяет создавать типы данных высокой степени абстракции, , , , , . .Такие например как вектора матрицы генераторы фильтры и т д
, ( ) -Фактически любое понятие предметной области ПО можно рассмат ривать как объект с точки зрения ОО программирования и строить
соответствующую ему модель с детерминированным набором свойств . и поведением В языке C++ для поддержки инкапсуляции вводят
« » « », понятия объект и класс который представляет собой обобщенное .описание объекта Язык C++ ,позволяет используя еще одну языковую конструкцию—
наследование, ( ) , создавать обобщенные базовые классы описывая в них . общую составляющую всех дочерних классов Это упрощает процесс
, доработки программ который теперь можно не сводить к переделке
10. Программные средства моделирования
Created with novaPDF Printer (www.novaPDF.com)

374 . . . Г Н Решетникова Моделирование систем
. всего разработанного ранее класса Для изменения набора свойств/ ,и или расширения функциональности можно описать новый класс
.наследованный от созданного ранее Еще одной принципиальной с точки зрения ОО программирования
возможностью языка является полиморфизм. Это понятие определяется -как возможность указания разной семантической нагрузки для конст
. , « -рукций с одинаковым синтаксисом Например пусть есть классы век» « ». « -тор и матрица Оба этих класса имеют метод абсолютное значе» ( , ние со схожим синтаксисом на входе объект на выходе вещественное
), число но принципиально различной внутренней реализацией этих. , методов Тем не менее вполне вероятно что некоторая функция может , -работать с любым типом данных если тот обладает методом вычисле
. ния абсолютного значения Можно разработать такой метод для всех , , -типов данных с которыми будет работать программа но при этом мо
. -жет возникнуть большая степень дублированности кода С другой сто, , -роны можно разработать некоторый базовый класс в котором пере
. числены основные свойства и методы большой группы классов При , -этом часть методов могут быть описаны как виртуальные что позволя
.ет давать этим методам разную реализацию в дочерних классах Еще одной возможностью языка C++ -является возможность описа
ния шаблонов функций и классов— так называемое параметризованное. , , описание Параметром такого описания является как правило тип
, . или набор типов с которым работает данная функция или класс Это ( -позволяет создавать более высокоэффективные по сравнению с насле) .дованием программы , Кроме того язык C++, , один из немногих позволяет перегружать
. ,смысл своих операций для абстрактных типов данных Таким образом ( ), можно получить набор типов классов максимально приближенный к
, « » аналогичным объектам в математике например класс матрица или« ». -вектор Совместное использование всех языковых конструкций по
, зволило создать весьма эффективную но в то же самое время очень (standard template libraryгибкую стандартную библиотеку шаблонов —
STL), включающую все основные способы хранения данных и базовые . алгоритмы обработки этих данных Существует построенная на этой, , MTL (matrix template library — -библиотеке например библиотека биб
), -лиотека шаблонов матрицы которая позволяет достаточно эффектив но обрабатывать матрицы произвольной размерности с произвольным
.типом хранимых данных , К сожалению богатая история развития языка C++ -привела к по
, , -явлению огромного количества разночтений и фактически различ . -ных диалектов этого языка Усилия консорциума разработчиков при , 1998 .вели к тому что в году был утвержден стандарт этого языка
Однако далеко не все существующие компиляторы языка С++ -совмес .тимы с этим стандартом
Created with novaPDF Printer (www.novaPDF.com)

375
10.1.4. Pascal Object PascalЯзыки и
Pascal Процедурный язык был разработан Николаусом Виртом . исключительно как лабораторный язык Этот язык отлично подходил
, -для обучения студентов программированию но не предполагался ис, -пользоваться как серьезный язык для разработки прикладных про
. ( , Borland) грамм Однако некоторые фирмы например смогли сделать . из этого языка серьезную систему разработки Позже Николаус Вирт
Modula, Modula-2, Modula-3 Oberon. разработал языки и язык Лучшие, , -идеи реализованные в этих языках были использованы в коммерчес
Pascal.ких разработках языка Pascal , , -Стандартных операций в языке несколько меньше чем на
, пример в языке C, , но их вполне достаточно для того чтобы покрыть .все основные потребности при разработке математических программ
Pascal , В коммерческих реализациях присутствует понятие модуля что .позволяет разрабатывать различные библиотеки Object Pascal, -Позже был разработан язык который добавил к язы
Pascal - . ку возможности объектно ориентированности Объектная модель Object Pascal , языка беднее чем C++, , -например отсутствует возмож
, -ность перегрузки смысла операций и нет шаблонов что несколько умень .шает применимость данного языка
10.2. Системы разработки программного обеспечения
10.2.1. Microsoft Visual C++ MFCи
Microsoft Visual C++ Microsoftявляется составной частью пакетаVisual Studio. , Micro-Как уже было сказано система разработки ПОsoft Visual C++ базируется на компиляторе языка C++ от фирмыMicrosoft, , , . который к сожалению очень далёк от стандарта языка Тем
Visual не менее C++ - -является де факто стандартом при разработке про Windows, -граммного обеспечения для ОС в том числе и программ моде. лирования Ограниченность персональных компьютеров не позволяет
, , , -решать на них серьезные задачи моделирования что впрочем не ума Visual ляет их роли и роли системы C++ -для разработки программ
.интерфейсов Именно для разработки интерфейсов с пользователем эта система
. программирования предоставляет максимальные возможности Можно MFC, -назвать богатую по возможностям библиотеку есть средства дос
ADO, тупа к базам данных средства по созданию и использованиюActiveX — ATL .компонентов и многое другое
. Однако есть также и масса недостатков Главный недостаток—неполная совместимость компилятора . со стандартом языка Наибольшие
10. Программные средства моделирования
Created with novaPDF Printer (www.novaPDF.com)

376 . . . Г Н Решетникова Моделирование систем
, отличия наблюдаются в реализации шаблонов что не позволяет STL, MTL -эффективно использовать и ряд других известных шаблон
.ных библиотек
10.2.2. Borland Delphi
-В основе этой системы программирования лежит сильно модифи Borland Object Pascal. -цированный фирмой язык Язык изменен на
, Delphi. столько сильно что правильнее его называть языком Первая Windows 3.xверсия этой среды разработки была ориентирована на ОС
-и в то время стала прорывом в области разработок программ с интер .фейсом пользователя
— Основная ниша этой среды разработки разработка клиентских . программ для баз данных Для этого в системе разработки программ
предусмотрены богатые возможности по разработке интерфейса .и несколько различных вариантов доступа к базам данных
10.2.3. Borland C++Builder
-Эта система разработки распространена значительно меньше пре, , -дыдущей однако она имеет ряд принципиальных преимуществ кото
.рые позволяют о ней говорить как о реально используемой платформе , В частности компилятор C++, ,на базе которого построена эта система
. , 5- ,очень близок к стандарту языка Вообще говоря начиная с й версииBorland C++Builder , получил сертификат соответствия стандарту хотя
. -на самом деле небольшие отличия есть Все специализированные сред , , ства языка которых нет в стандарте являются расширениями и не
.противоречат стандарту , -В основу положена та же библиотека которая лежит в основе сис Delphi, , -темы к возможностям которой добавляются возможности прису
щие стандарту языка C++. -К недостаткам следует отнести сравнительно большой объем ис
Visual полняемого кода и несколько худшие по сравнению с C++ -ско .ростные показатели для программ графического интерфейса
10.3. Специализированные математические пакеты
1980- -В х годах возникло и получило бурное развитие новое фунда ментальное научное направление— компьютернаяматематика — -на сты
. ке математики и информатики Первыми серьезными средствами для - -автоматизированного выполнения массовых научно технических рас
. четов были программируемые микрокалькуляторы Предвестниками
Created with novaPDF Printer (www.novaPDF.com)

377
-систем компьютерной математики стали специализированные програм , мы для математических численных расчетов работающие в среде
Microsoft MS-DOS. Eureka, Mercury, Math-Это первые версии системыCAD MatLAB MS-DOS. и под операционную систему Вслед за этим на
основе достижений компьютерной математики появились новейшие , . -программы символьной математики или компьютерной алгебры Сре
ди них особенно большую известность получили системыMathCAD подWindows, Derive, Mathematica Maple. -и Созданные для проведения сим
( ) ,вольных аналитических преобразований математических выражений ,эти системы были в поразительно короткое время доведены до уровня
, -позволяющего резко облегчить а подчас и заменить труд самой почи — - .таемой научной элиты мира математиков теоретиков и аналитиков
-В последнее время появившиеся тенденции к объединению пере , -довых разработчиков математических систем привели к тому что ли
, , Maple, MathCAD, Mathematica,деры в данной области такие какMatLAB, -интегрировались и теперь стоят приблизительно на одной сту
. -пени развития Различия между возможностями этих систем сохрани - -лись лишь в каких то базовых элементах и визуализации программ .ных документов
10.3.1. MapleСистема
Maple Системы компьютерной математики класса были созданы Waterloo Maple -корпорацией как система компьютерной алгебры с рас
. -ширенными возможностями в области символьных вычислений Сис ,тема содержит средства для выполнения быстрых численных расчетов
-лежащих в основе математического моделирования различных явле , .ний окружающего мира систем и устройств различного назначения Все это сочетается с новейшими и весьма эффективными средствами
.визуализации вычисленийMaple — . типичная интегрированная система Она объединяет в , -себе мощный язык программирования редактор для подготовки и ре
, -дактирования документов и программ многооконный пользователь , -ский интерфейс с возможностью работы в диалоговом режиме спра
, вочную систему со множеством примеров ядро алгоритмов и правил , -преобразования математических выражений численный и символь
, , -ный процессоры систему диагностики библиотеки встроенных и до , полнительных функций пакеты функций сторонних производителей
.и поддержку некоторых других языков программирования и программ Ко всем этим средствам имеется полный доступ прямо из системного
. , IBM PC,окна Система реализована на больших ЭВМ ПК классаMacintosh .и др
Maple -Ядро системы используется целым рядом систем компьютер , MatLAB MathCAD.ной математики например и
10. Программные средства моделирования
Created with novaPDF Printer (www.novaPDF.com)

378 . . . Г Н Решетникова Моделирование систем
10.3.2. MathematicaСистема
Mathematica Wolfram Research.Система разработана фирмой — Основная идея разработчиков объединить все известные понятия и
, -методы математики в единую универсальную систему способную функ . ционировать на любой вычислительной платформе Эта система дает ,возможность решать большое количество достаточно сложных задач
, не вдаваясь в тонкости программирования что привело к её широкому , , . .использованию в физике биологии экономике и т д
Mathematica Система состоит из двух частей— , -ядра которое и про , , -водит вычисления выполняя заданные команды и интерфейсного про
, -цессора фактически задающего внешнее оформление и характер взаи . модействия с пользователем и программой Пользователь записывает
— notebookвсе выкладки в основном рабочем документе программы(« »). -записной книжке Внешний вид рабочего документа на экране мо
нитора в большей или меньшей степени зависит от типа платформы(Windows, Macintosh, Unix) -и определяется интерфейсным процессо
.ром для каждой платформыNotebook — , ,полностью интерактивный документ содержащий текст
, , . таблицы графики вычисления и другие элементы Документы могут , -быть представлены на экране с различным качеством исполнения мо
гут включать в себя всевозможные математические или специальные. , -символы Однако всегда внутреннее представление документов с ко
, — торыми работает ядро программы не форматируемый текст в виде (printable) 7- ASCII- . печатаемых битовых символов Это позволяет легко
.переносить документы с одной платформы на другую Mathematica -Язык программирования рассматривается как еди
. -ный универсальный язык программирования и математики Он содер жит уникальную комбинацию математических и вычислительных
. — -обозначений Основная унифицирующая идея языка представле . ние любого объекта в виде символьного выражения Это касается
, , , не только привычных структур данных но и графиков звуков ячеек , -и даже самого документа что позволяет легко дополнять к систе Mathematica ме новые конструкции языка и измененять интерфейс
.программы Язык включает в себя представление широкоизвестных развитых
. методов программирования и добавляет множество новых На языке -программирования можно всегда написать программу в наиболее есте
, Mathematica -ственном виде так как включает в себя множество пара : ; дигм программирования процедурное программирование основанное
(list-based); -на операциях со списками основанное на операциях со стро (string-based); ; - ; -ками функциональное объектно ориентированное про
, (« -граммирование задающее правила преобразования выражений пра »).вила переписывания термов
Created with novaPDF Printer (www.novaPDF.com)

379
-В виде встроенных функций реализовано большое множество вы . Mathematicaсокоинтеллектуальных математических операций В состав
, входят стандартные дополнения включающие в себя подпрограммы( ), -пакеты которые значительно расширяют функциональные возмож
, , -ности системы в таких областях как алгебра аналитические и числен , , , , -ные расчеты графика дискретная математика геометрия теория чи, .сел статистика и др
10.3.3. MatLABСистема
, -Лидером в области численных и матричных расчетов а также реа -лизации техники имитационного и ситуационного моделирования яв
MatLAB .ляется система с ее многочисленными пакетами расширения -Однако в области аналитических вычислений она сильно уступает та
, Maple Mathematica.ким системам как и MatLAB (MATrix LABoratory — )Система Матричная лаборатория Math Works. , -разработана фирмой Это интерактивная система ориен, , , -тированная в первую очередь на обработку массивов данных базиру
. ется на матричных математических операциях Даже одиночное числоMatLAB , -рассматривает как матрицу что позволило существенно по
.высить скорость выполнения вычислений MatLAB -С точки зрения пользователя представляет собой богатей . -шую библиотеку функций Для облегчения поиска библиотека функ
. , ций разбита на разделы Те из функций которые носят более общий , MatLAB.характер и используются наиболее часто входят в состав ядра
, -Те функции которые являются специфическими для конкретной обла, -сти включены в состав соответствующих специализированных разде, MatLAB лов называемых Toolboxes (Инструменты). Каждый из них имеет , . свое собственное название отражающее его предназначение Полная
MatLAB 30 комплектация системы содержит более инструментальных. -приложений В их число входят как достаточно стандартные для мате
, — -матических пакетов средства так и нетрадиционные средства циф , , -ровой обработки изображений идентификации синтеза и моделирова
( , , ния систем управления оптимального робастного с прогнозирующими), , -моделями средства поиска решений на основе нечеткой логики ап
, парат построения и анализа нейронных сетей средства финансового . , -анализа и др Кроме того имеются средства взаимодействия с офисны
Microsoft — MS Word MS Excel.ми продуктами фирмы и MatLAB К несомненным достоинствам системы следует отнести
, -тот факт что она базируется на современных математических подхо, дах имеющих непосредственный выход в практику проектирования
, , .технических систем например таких как теория робастности и др -Особое место среди инструментальных приложений занимает сис
SIMULINK. тема визуального моделирования В определенном смысле
10. Программные средства моделирования
Created with novaPDF Printer (www.novaPDF.com)

380 . . . Г Н Решетникова Моделирование систем
SIMULINK -можно рассматривать как самостоятельный продукт фир Math Works, MatLABмы однако он работает только при наличии ядра
, .и использует многие функции входящие в его составMatLAB - , -является платформно независимой системой так как мо :жет работать под управлением нескольких операционных систем
Windows, UNIX, MacOS. -При этом технология моделирования с помо SIMULINK .щью остается неизменной
10.3.4. MathCADСистема
MathCAD MathSoft. Система разработана фирмой Она существенно MatLAB, Mathematica,отличается от аналогичных прикладных систем
Maple , , -тем что является единственной прикладной системой в кото -рой описания математических задач и их решений задаются с помо , , -щью обычных в математике символов формул и операторов а доку MathCAD .мент выглядит как страницы учебника или научной статьи
MathCAD — ,это популярная система компьютерной математики предназначенная для решения математических задач в самых разных
, . MathCAD -областях науки техники и образования Ранние версии во , обще не имели средств обычного программирования а имели лишь
- -средства визуально ориентированного программирования в виде шаб , -лонов математических операций из которых составлялись математи . -ческие выражения Возможность задания программных модулей по, MathCAD PLUS 6.0. ,явилась начиная с версии Программные модули
, , -в сущности являются функциями описанными с применением про .граммных средств
MathCAD -Последние версии допускают применение внешних рас: , . -ширений электронных книг пакетов расширений и библиотек Вне
. -шние библиотеки чаще всего являются справочниками Пакеты рас ширений и сопровождающие их электронные книги имеют различное
, , -назначение и ориентированы как правило на выполнение узкоспеци . альных вычислений Пакеты расширений предоставляют следующие
: - , -возможности осуществлять вейвлет преобразования анализ времен , , ,ных рядов финансовые расчеты обработку сигналов и изображений
, , -расчеты по прикладной статистике механике дифференциальным урав . . -нениям и т д Существенными дополнениями к системе являются па
, .кеты расширения графических возможностей численных методов MathCAD Word,В возможна интеграция с текстовым процессором
Excel, Axum, -электронными таблицами графической системой паке Visio, SmartSketch LE,том научной и инженерной графики с пакетом
MathCAD -позволяющим включать в состав документов довольно слож , VisSim — ные конструкторские чертежи с пакетом моделирующей
, , программой в которой объекты задаются блоками между которыми .указываются дополнительные связи
Created with novaPDF Printer (www.novaPDF.com)

381
, -Привычный вид математических формул встроенный язык про, граммирования широкие возможности в отображении графической
, -информации представление текстовых комментариев с использовани , Windows, ем любых символов доступных в возможность проводить
— расчеты любой сложности и готовить любые документы все это MathCAD.характеризует систему
10.3.5. STATISTICAСистема
STATISTICA CopyrightПрограммная система разработана фирмойStatSoft. ,Это современный пакет для статистического анализа данных -в котором реализованы все новейшие компьютерные и математи
ческие методы анализа данных— ; описательные статистики анализ ; ; многомерных таблиц многомерная и нелинейная регрессии подгонка; , , , -распределений дискриминантный кластерный факторный диспер
; ; -сионный и ковариационный анализы структурные модели прогнози ; ; рование временных рядов непараметрическая статистика анализы
, - , . . -надежности предпочтений Монте Карло выживаемости и т д Систе STATISTICA — -ма подходит для применения в любой области в мар
, , , , , -кетинге финансах страховании бизнесе промышленности меди .цине и пр
10.3.6. EXCELСистема
EXCEL Табличный процессор входит в самый популярный пакет Microsoft Office. EXCEL — автоматизации офисной деятельности одна
. из самых мощных и гибких систем обработки электронных таблиц Эта , система может работать не только с двумерными но и с трехмерными
.таблицамиEXCEL широко используется для подготовки иллюстрированных
- . -финансово экономических и других документов Этот процессор содер , жит сотни математических и экономических функций что позволяет
.решать множество задач в области естественных и технических наук EXCEL Возможности системы можно использовать для анализа
Microsoft F Pro, Access, Paradox, dBASE, SQLвнешних данных в охServer, , -а также как базы данных сторонних производителей поддер
OLE (Object Linking and Embedding -живающих технологию связы ).вания и внедрения объектов EXCEL -В системе можно создавать макросы и приложения с помо
Visual Basic for Applications (VBA). Visual Basic for Applicationsщью — , это среда разработки приложений на базе программ входящих в пакет
Microsoft Office. Visual Basic forОдно из главных достоинств языкаApplications , EXCEL VBA-заключается в том что созданные средствами
макросы можно без труда использовать в других программах фирмыMicrosoft.
10. Программные средства моделирования
Created with novaPDF Printer (www.novaPDF.com)

382 . . . Г Н Решетникова Моделирование систем
Литература
1. . . -Андреев Ю Н Управление конечномерными линейными объек / . . . – . : , 1976. – 424 .тами Ю Н Андреев М Наука с
2. . . : . / . . -Антонов А В Системный анализ учеб для вузов А В Анто. – . : . ., 2004. – 454 . – ISBN 5-06-004862-4.нов М Высш шк с3. . - / . , . .Браммер К Фильтр Калмана Бьюси К Браммер Г Зиффлинг
– . : , 1982. – 200 .М Наука с4. . . Буков В Н Адаптивные прогнозирующие системы управления
/ . . . – . : , 1987. – 232 .полетом В Н Буков М Наука с5. . . / . . -Бусленко Н П Моделирование сложных систем Н П Буслен
. – . : , 1978. – 400 .ко М Наука с6. . . ( - )Бусленко Н П Метод статистических испытаний Монте Карло
/ . . -и его реализация на цифровых вычислительных машинах Н П Бус, . . . – . : , 1961. – 226 .ленко Ю А Шрейдер М Физматгиз с
7. . . : .Волкова В Н Основы теории систем и системного анализа учеб , « -для студентов вузов обучающихся по специальности Системный ана »/ . . , . . . – . : -лиз и управление В Н Волкова А А Денисов СПб Изд во
, 1997. – 510 . – ISBN 5-7422-0026-9.СПбГТУ с8. . . , -Горский А А Динамическая модель процесса производства хра
/ . . , . . -нения и сбыта товара повседневного спроса А А Горский И Г Кол, . . // . . –пакова Б Я Локшин Изв РАН Теория и системы управления
1998. – 1. – . 144–148. – ISSN 00002-3388.№ С9. . . MATLAB 5.2. -Гультяев А К Имитационное моделирование в сре
Windows : . / . . . – . : де практич пособие А К Гультяев СПб КОРОНА, 1999. – 288 . – ISBN 5-7931-0053-9.принт с
10. . / . , . -Дорф Р Современные системы управления Р Дорф Р Би. . : , 2002.шоп М Лаборатория базовых знаний – 832 .с – ISBN 5-93208-
119-8.11. . . / . . -Ермаков С М Курс статистического моделирования С М Ер
, . . . – . : , 1976. – 320 .маков Г А Михайлов М Наука с12. . . -Красовский А А Универсальные алгоритмы оптимального уп
/ . . , . . ,равления непрерывными процессами А А Красовский В Н Буков. . . – . : , 1977. – 272 .В С Шендрик М Наука с
13. . . . . I / . . , . .Крылов В И Вычислительные методы Т В И Крылов В В, . . . – . : , 1976. – 304 .Бобков П И Монастырный М Наука с
14. . . . . II / . . ,Крылов В И Вычислительные методы Т В И Крылов. . , . . . – . : , 1976. – 400 .В В Бобков П И Монастырный М Наука с
15. . . / . .Крылов В И Приближенное вычисление интегралов В И. – . : , 1967. – 500 .Крылов М Наука с
16. . . / . .Летов А М Аналитическое конструирование регуляторов А М // .Летов Автоматика и телемеханика – . 1.Ч – 1960. – 1.№ – . 436–С
441; . 2.Ч – 1960. – 5.№ – . 561–568; . 3.С Ч – 1960. – 6.№ – . 661–С665; . 4.Ч – 4.№ – . 425–435; . 5.С Ч – 1962. – 11.№ – . 1405–1413.С
Created with novaPDF Printer (www.novaPDF.com)

383
17. . Медич Дж Статистически оптимальные линейные оценки и / . . – . : , 1973. – 440 .управление Дж Медич М Энергия с
18. . / . , . -Острем К Системы управления с ЭВМ К Острем Б Виттен. – . : , 1987. – 480 .марк М Мир с
19. . . : . Параев Ю И Теория оптимального управления учеб пособие/ . . . – : , 2004. – 168 . – ISBN 5-89503-225-7.Ю И Параев Томск НТЛ с
20. . . : . . /Перегудов Ф И Основы системного анализа учебн изд. . , . . . – 2- ., . – : ,Ф П Перегудов Ф П Тарасенко е изд доп Томск НТЛ
1997. – 396 . – ISBN 5-89503-004-1.с21. . . -Решетников М Т Планирование экспериментов и статистичес : . . – : . . - . -кая обработка данных учеб пособие Томск Томск гос ун т сис . , 2000. – 231 . – ISBN 5-86889-068-X.тем упр и радиоэлектроники с22. . . : . / . .Решетникова Г Н Моделирование систем учеб пособие Г Н
. – , . - . . ,Решетникова Томск гос ун т систем упр и радиоэлектроники2005. – 261 . – ISBN 5-86889-229-1.с
23. . . -Решетникова Г Н Синтез и моделирование дискретных адап ( . . 50880000594) / . . //тивных систем гос Регистр № Г Н Решетникова
: . .Алгоритмы и программы информ бюллетень – 1989. – 1. – . 10.№ С24. Решетникова . .Г Н Синтез следящей -системы адаптивного управ
/ . . -ления темпом производства по локальному критерию Г Н Решетни // . – 2004. – . 284. – . 166–168. – ISSNкова Вестник ТГУ Вып С
1561-7793.25. . . / . .Седов Л И Методы подобия и размерности в механике Л И
. – . : , 1987. – 430 .Седов М Наука с26. . . -Смагин В И Синтез следящих систем управления по квадра
/ . . , . . . – : -тичным критериям В И Смагин Ю И Параев Томск Изд во. - , 1996. – 171 . – ISBN 5-7511-0830-2.Том ун та с27. . . : . / . .Советов Б Я Моделирование систем учеб для вузов Б Я
, . . . – 3- ., . . – . : . .,Советов С А Яковлев е изд перераб и доп М Высш шк2001. – 343 . – ISBN 5-06-003860-9.с
28. / .Справочник по теории автоматического управления под ред. . . – . : , 1987. – 712 .А А Красовского М Наука с
29. . . -Харин Ю С Основы имитационного и статистического модели : . / . . , . . , . . .рования учеб пособие Ю С Харин В И Малюгин В П Кирлица
– . : , 1997. – 288 . – ISBN 985-6182-31-X.Мн Дизайн ПРО с30. . : Шеннон Р Имитационное моделирование систем искусство и
/ . . – . : , 1978. – 418 .наука Р Шеннон М Мир с
10. Программные средства моделирования
Created with novaPDF Printer (www.novaPDF.com)

384 . . . Г Н Решетникова Моделирование систем
1. Приложение Задачи
1.1.П Задачи по статистическому моделированию
1Задача
1. Вычислить и нтеграл ( )b
a
I f x dx с точностью 0,01 про -стей
- .шим методом Монте Карло2. Вывести значения интеграла и число точек N, -которое потребо
.валось для его вычисления с заданной точностью 2.1.Варианты исходных данных приведены в П
2Задача
1. Вычислить интег рал ( )b
a
I f x dx с точностью 0,01 ге -ометри
- .ческим методом Монте Карло2. Вывести значения интеграла и число точек N, -которое потребо
.валось для его вычисления с заданной точностью 2.1.Варианты исходных данных приведены в П
3Задача
1. Вычислить интеграл ( , )V
I f x y dxdy с точностью 0,01 -про
- , стейшим методом Монте Карло где область V задается неравенствами
, ( ) ( ).a x b x y x 2. Вывести значения интеграла и число точек N, -которое потребо
.валось для его вычисления с заданной точностью 2.2.Варианты исходных данных приведены в П
4Задача
1. Вычислить интеграл ( , )V
I f x y dxdy с точностью 0,01 -гео
- , метрическим методом Монте Карло где область V -задается неравен
ствами , ( ) ( ).a x b x y x 2. Вывести значения интеграла и число точек N, -которое потребо
.валось для его вычисления с заданной точностью 2.2.Варианты исходных данных приведены в П
Created with novaPDF Printer (www.novaPDF.com)

385
1.2. П Задачи по численным методам моделирования
5Задача1. По таблице значен ий , ( ), 0, 4i i ix y f x i , п -остроить много член Лагранжа и вычислить значение функци и ( )y f x в точке x.
2. -Определить абсолютную и относительную погрешности резуль, тата если значения ix , заданы точно а iy — с погрешностью yA
30,5 10 . 2.3.Варианты исходных данных приведены в П
6Задача1. По таблице знач ений , ( ), 0, 4i i ix y f x i , построить схему
Эйткена и вычислить значение фун кции ( )y f x в точке x.2. -Определить абсолютную и относительную погрешности резуль, тата если значен ия ix , заданы точно а iy — с погрешностью yA
30,5 10 . 2.3.Варианты исходных данных приведены в П
7Задача1. По таблице значе ний , ( ), 0, 4i i ix y f x i , п -остроить много член Ньютона и вычислить значение функции ( )y f x в точке x.
2. -Определить абсолютную и относительную погрешности резуль, тата если значени я ix , заданы точно а iy — с погрешностью yA
30,5 10 . 2.3.Варианты исходных данных приведены в П
8Задача1. По таблице значени й , ( ), 0, 4i i ix y f x i , -построить линей ный сплайн (1)( )P x .2. На одном графике построить изображения заданной функции( )y f x , сплайна (1)( )P x и точек ( , ), 0,4i ix y i .
2.3.Варианты исходных данных приведены в П
9Задача1. По таблице знач ений , ( ), 0, 4i i ix y f x i , -построить параболи
ческий сплайн (2) ( )P x .2. На одном графике построить изображения заданной функции( )y f x , сплайна (2) ( )P x и точек ( , ), 0,4i ix y i .
2.3.Варианты исходных данных приведены в П
1. Приложение Задачи
Created with novaPDF Printer (www.novaPDF.com)

386 . . . Г Н Решетникова Моделирование систем
10Задача1. По таблице значен ий , ( ), 0, 4i i ix y f x i , -построить кубиче ский сплайн (3)( )P x .
2. На одном графике построить изображения заданной функции( )y f x , сплайна (3)( )P x и точек ( , ), 0,4i ix y i .
2.3.Варианты исходных данных приведены в П
11Задача1. По таблице значени й , ( ), 0, 4i i ix y f x i , построить методом
-наименьших квадратов аппроксимирующую функцию в виде алгебра ического полинома 2 3
0 1 2 3( )x c c x c x c x .2. .Вывести матрицу Грама3. Построить на одном графике изображения заданной функции( )y f x , аппроксимирующей функции ( )x и точек ( , ), 0,4i ix y i .
2.3.Варианты исходных данных приведены в П
12Задача1. По таблице значений , ( ), 0, 4i i ix y f x i , построить методом
наименьших квадратов аппроксимирующую функцию с помощью ортогональных полиномов Чебы шева 0 0 1 1 2 2( ) ( ) ( ) ( )x c T x c T x c T x
3 3 ( )c T x .2. .Вывести матрицу Грама3. Построить на одном графике изображения заданной функции( )y f x , аппроксимирующей функции ( )x и точек ( , ), 0,4i ix y i .
2.3.Варианты исходных данных приведены в П
13Задача1. По таблице значени й , ( ), 0, 4i i ix y f x i , построить методом
наименьших квадратов аппроксимирующую функцию с помощью ортогональных полиномов Лежанд ра 0 0 1 1 2 2( ) ( ) ( ) ( )x c L x c L x c L x
3 3( )c L x .2. .Вывести матрицу Грама3. Построить на одном графике изображения заданной функции( )y f x , аппроксимирующей функции ( )x и точек ( , ), 0,4i ix y i .
2.3.Варианты исходных данных приведены в П
14Задача1. По таблице значени й , ( ), 0, 4i i ix y f x i , построить методом
наименьших квадратов аппроксимирующую функцию с помощьюортогональных полиномов Чебышева дискретной переменн ой ( )x
0 0 1 1 2 2 3 3( ) ( ) ( ) ( )c t x c t x c t x c t x .
Created with novaPDF Printer (www.novaPDF.com)

387
2. .Вывести матрицу Грама3. Построить на одном графике изображения заданной функции( )y f x , аппроксимирующей функции ( )x и точек ( , ), 0,4i ix y i .
2.3.Варианты исходных данных приведены в П
15Задача1. Выбрать интерполяционную формулу и вычислит ь значение
функци и ( )y f x в точке 1z по значениям , ( ), 0,10i i ix y f x i , где
ix — ,равноотстоящие узлы принадлежащие интервалу [1,2] . -При вы , -числениях использовать только правильные конечные разности счи
, тая чт о , 0,10iy i , заданы с погрешностью 30,5 10yA .2. -Определить абсолютную и относительную погрешности резуль.тата
2.4.Варианты исходных данных приведены в П
16Задача1. Выбрать интерполяционную формулу и вычислить значение
функции ( )y f x в точке 2z по значениям , ( ), 0,10i i ix y f x i , где
ix — ,равноотстоящие узлы принадлежащие интервалу [1,2] . -При вы , -числениях использовать только правильные конечные разности счи
, тая что , 0,10iy i , заданы с погрешностью 30,5 10yA .2. -Определить абсолютную и относительную погрешности резуль.тата
2.4.Варианты исходных данных приведены в П
17Задача
1. -Выбрать интерполяционную формулу и вычислить значение фун кции ( )y f x в точке 3z по значениям , ( ), 0,10i i ix y f x i , где ix —
,равноотстоящие узлы принадлежащие интервалу [1,2] . -При вычисле , , ниях использовать только правильные конечные разности считая что
, 0,10iy i , заданы с погрешность ю 30,5 10yA .2. -Определить абсолютную и относительную погрешности резуль.тата
2.4.Варианты исходных данных приведены в П
18Задача1. По таблице , ( ), 0, 4i i ix y f x i , вычислить значение первой
производной ( )f x от функции ( )y f x в точке x, -используя интерпо .ляционный многочлен Лагранжа
1. Приложение Задачи
Created with novaPDF Printer (www.novaPDF.com)

388 . . . Г Н Решетникова Моделирование систем
2. Сравнить полученный результат с точным значением первой производной от функции ( )y f x в точке x.
3. , , -Оценить абсолютную погрешность результата считая что значени я iy , заданы с верными знаками а ix — , точно 0,4i .
2.3.Варианты исходных данных приведены в П
19Задача1. По табли це , ( ), 0, 4i i ix y f x i , вычислить значение второй
производной ( )f x от функции ( )y f x в точке x, -используя интерпо .ляционный многочлен Лагранжа
2. -Сравнить полученный результат с точным значением второй про изводной от функции ( )y f x в точке x.
3. , , -Оценить абсолютную погрешность результата считая что зна чения iy , заданы с верными знаками а ix — , точно 0,4i .
2.3.Варианты исходных данных приведены в П
20Задача1. По таблице , ( ), 0, 4i i ix y f x i , вычислить значения первой
производной ( )f x от функции ( )y f x в точке x, -используя интер .поляционный многочлен Ньютона
2. -Сравнить полученные значения с точным значением первой про изводной от функции ( )y f x в точке x.
3. , , -Оценить абсолютную погрешность результатов считая что зна чения iy , заданы с верными знаками а ix — , точно 0,4i .
2.3.Варианты исходных данных приведены в П
21Задача1. По таблиц е , ( ), 0, 4i i ix y f x i , вычислить значения второй
производной ( )f x от функции ( )y f x в точке x, -используя интерпо .ляционный многочлен Ньютона
2. -Сравнить полученные значения с точным значением второй про изводной от функции ( )y f x в точке x.
3. , , -Оценить абсолютную погрешность результатов считая что зна чения iy , заданы с верными знаками а ix — , точно 0,4i .
2.3.Варианты исходных данных приведены в П
22Задача1. -Выбрать интерполяционную формулу и вычислить значение пер вой производно й ( )f x в точке 1z п о таблице равноотстоящих узлов
, , 0,10i ix y i , где ix — ,равноотстоящие узлы -принадлежащие интер валу [1,2] . При -вычислениях использовать только правильные раз
.ности
Created with novaPDF Printer (www.novaPDF.com)

389
2. , , -Оценить абсолютную погрешность результата считая что значен ия iy , заданы с верными знаками а ix — , точно 0,10i .
2.4.Варианты исходных данных приведены в П
23Задача1. -Выбрать интерполяционную формулу и вычислить значение вто рой производн ой ( )f x в точке 1z по таблице равноотстоящих узлов
, ( ), 0,10i i ix y f x i , где ix — ,равноотстоящие узлы -принадлежа щие интер валу [1,2] . При -вычислениях использовать только правиль .ные разности2. , , -Оценить абсолютную погрешность результата считая что зна
чени я iy , заданы с верными знаками а ix — , точно 0,10i . 2.4.Варианты исходных данных приведены в П
24Задача1. -Выбрать интерполяционную формулу и вычислить значение пер
вой производно й ( )f x в точке 2z по таблице равноотстоящих узлов
, ( ), 0,10i i ix y f x i , где ix — ,равноотстоящие узлы -принадлежа щие интер валу [1,2] . -При вычислениях использовать только правиль .ные разности2. , , -Оценить абсолютную погрешность результата считая что зна
чени я iy , заданы с верными знаками а ix — , точно 0,10i . 2.4.Варианты исходных данных приведены в П
25Задача1. -Выбрать интерполяционную формулу и вычислить значение вто рой производной ( )f x в точке 2z по таблице равноотстоящих узлов
, ( ), 0,10i i ix y f x i , где ix — ,равноотстоящие узлы -принадлежа щие интер валу [1,2] . При в -ычислениях использовать только правиль .ные разности2. , , -Оценить абсолютную погрешность результата считая что зна
чени я iy , заданы с верными знаками а ix — , точно 0,10i . 2.4.Варианты исходных данных приведены в П
26Задача1. -Выбрать интерполяционную формулу и вычислить значение пер вой производн ой ( )f x в точке 3z по та блице равноотстоящих узлов
, ( ), 0,10i i ix y f x i , где ix — ,равноотстоящие узлы -принадлежа щие интер валу [1,2] . При вы -числениях использовать только правиль .ные разности
1. Приложение Задачи
Created with novaPDF Printer (www.novaPDF.com)

390 . . . Г Н Решетникова Моделирование систем
2. , , -Оценить абсолютную погрешность результата считая что значени я iy , заданы с верными знаками а ix — , точно 0,10i .
2.4.Варианты исходных данных приведены в П
27Задача1. -Выбрать интерполяционную формулу и вычислить значение вто
рой производно й ( )f x в точке 3z по та блице равноотстоящих узлов, ( ), 0,10i i ix y f x i , где ix — ,равноотстоящие узлы -принадлежа
щие интер валу [1,2] . -При вычислениях использовать только правиль .ные разности2. , , -Оценить абсолютную погрешность результата считая что зна
чения iy , заданы с верными знаками а ix — , точно 0,10i . 2.4.Варианты исходных данных приведены в П
28Задача
1. Вычислит ь ( )b
a
f x dx с точно стью 50,5 10 п о формуле левых
. прямоугольников Процесс вычисления интеграла организовать без -пересчета значений подынтегральной функции в узлах и при исполь
.зовании метода Рунге2. Вывести значение интеграла и число узлов m, -которое потребо
.валось для вычисления интеграла с заданной точностью 2.1.Варианты исходных данных приведены в П
29Задача
1. Вычислить ( )b
a
f x dx с точностью 50,5 10 -по формуле пра
. вых прямоугольников Процесс вычисления интеграла организовать -без пересчета значений подынтегральной функции в узлах и при ис
.пользовании метода Рунге2. Вывести значение интеграла и число узлов m, -которое потребо
.валось для вычисления интеграла с заданной точностью 2.1.Варианты исходных данных приведены в П
30Задача
1. Вычислит ь ( )b
a
f x dx с точностью 50,5 10 по фо -рмуле трапе
. -ций Процесс вычисления интеграла организовать без пересчета значе ний подынтегральной функции в узлах и при использовании метода
.Рунге
Created with novaPDF Printer (www.novaPDF.com)

391
2. Вывести значение интеграла и число узлов m, -которое потребо .валось для вычисления интеграла с заданной точностью
2.1.Варианты исходных данных приведены в П
31Задача
1. Вычис лить ( )b
a
f x dx с точностью 50,5 10 ме -тодом Симпсо
. -на Процесс вычисления интеграла организовать без пересчета значе ний подынтегральной функции в узлах и при использовании метода
.Рунге2. Вывести значение интеграла и число узлов m, -которое потребо
.валось для вычисления интеграла с заданной точностью 2.1.Варианты исходных данных приведены в П
32Задача
1. Вычисли ть ( )b
a
f x dx с точностью 50,5 10 -по формуле сред
.них прямоугольников при использовании метода Рунге2. Вывести значение интеграла и число узлов m, -которое потребо
.валось для вычисления интеграла с заданной точностью 2.1.Варианты исходных данных приведены в П
33Задача
1. Вычислить ( )b
a
I f x dx мето .дом Гаусса
2. -Уточнить значение интеграла путем деления интервала интег рирования на 2,3,...m равны х частей до выполния неравенства
1m mI I , где 50,5 10 .3. Вывести значение интеграла и число узлов m, -которое использо
.валось для вычисления интеграла 2.1.Варианты исходных данных приведены в П
34Задача
1. Вычисли ть( )
( )( )
b
a
f xI dx
b x x a
, задавая n ,таким образом
чтобы выполнялось неравенств о 1n nI I , где 1,n nI I — -значе
, ния интеграла вычисленные с использованием n и n – 1 -узлов соответств , енно 50,5 10 .
1. Приложение Задачи
Created with novaPDF Printer (www.novaPDF.com)

392 . . . Г Н Решетникова Моделирование систем
2. Вывести значение интеграла и число узлов n. 2.1.Варианты исходных данных приведены в П
35Задача
1. Вычисли ть ( )( ) ( )b
a
I b x x a f x dx , зад авая n ,таким образом
чтобы выполнялось неравенств о 1n nI I , где 1,n nI I — -значе
, ния интеграла вычисленные с использованием n и n – 1 -узлов соответствен , но 50,5 10 .
2. Вывести значение интеграла и число узлов n. 2.1.Варианты исходных данных приведены в П
36Задача
1. Вычислит ь ( )b
a
b xI f x dx
x a
, задав ая n , таким образом чтобы
выполнялось неравенст во 1n nI I , где 1,n nI I — значения
, интеграла вычисленные с использованием n и n – 1 -узлов соответственн , о 50,5 10 .
2. Вывести значение интеграла и число узлов n. 2.1.Варианты исходных данных приведены в П
37Задача1. Найти с точность ю 40,5 10 наименьший положительный
корень уравнени я ( ) 0f x м .етодом простых итераций
2. Начальное приближение 0x , определить графически построить , каноническую форму для которой выполняются условия сходимости .итерационной последовательности
3. Вывести приближенное значение ко рня nx и значение n, для которого выполняется условие 1n nx x .
2.5.Варианты исходных данных приведены в П
38Задача1. Найти с точно стью 40,5 10 наименьший положительный
корень уравнения ( ) 0f x -методом секущих как видоизменение мето .да простых итераций
2. Начальное приближен ие 0x о , пределить графически построить , каноническую форму для которой выполняются условия сходимости .итерационной последовательности
Created with novaPDF Printer (www.novaPDF.com)

393
3. Вывести приближенное значение корн я nx и значение n, для которого выполняется условие 1n nx x .
2.5.Варианты исходных данных приведены в П
39Задача1. Найти с точность ю 40,5 10 наименьший положительный
корень уравнения ( ) 0f x методом Стеффенсена как видоизменение .метода простых итераций
2. Начальное приближение 0x , определить графически построить , каноническую форму для которой выполняются условия сходимости .итерационной последовательности
3. Вывести приближенное значение корня nx и значение n, для которого выполняется условие 1n nx x .
2.5.Варианты исходных данных приведены в П
40Задача1. Найти с точнос тью 40,5 10 наименьший положительный
корень уравнения ( ) 0f x м .етодом Ньютона2. Начальное приближение 0x , определить графически проверить
.условия сходимости итерационной последовательности3. Вывести приближенное значение корня nx и значение n, для
которого выполняется условие 1n nx x . 2.5.Варианты исходных данных приведены в П
41Задача1. Найти с точност ью 40,5 10 наименьший положительный
корень уравнен ия ( ) 0f x м етодом секущих как видоизменение .метода Ньютона
2. Начальное приближение 0x , определить графически проверить .условия сходимости итерационной последовательности
3. Вывести приближенное значение корн я nx и значение n, для которого выполняется условие 1n nx x .
2.5.Варианты исходных данных приведены в П
42Задача1. Найти с точность ю 40,5 10 наименьший положительный
корень уравнения ( ) 0f x -с помощью видоизменения методом Ньюто .на с постоянным значением производной
2. Начальное приближение 0x , определить графически проверить .условия сходимости итерационной последовательности
3. Вывести приближенное значение корня nx и значение n, для которого выполняется условие 1n nx x .
2.5.Варианты исходных данных приведены в П
1. Приложение Задачи
Created with novaPDF Printer (www.novaPDF.com)

394 . . . Г Н Решетникова Моделирование систем
43Задача Найти методом Лобачевского корни полинома 3 2
0 1( )P x a x a x 2 3 0a x a . В процессе квадрирования сделать максимально в -оз
можное число шаг .ов 2.6.Варианты исходных данных приведены в П
44Задача1. Найти методом простых итераций с точность ю 40,5 10
реше ние системы
1 1 2
2 1 2
( , ) 0,
( , ) 0.
f x x
f x x
2. Начальное приближ ение (0) 0 01 2( , )Tx x x -определить графиче
, ски построить систему канонических уравнени й и проверить условия , -сходимости метода простых итераций используя кубическую мет
.рику3. Вывести приближенное значение кор ня ( ) ( ) ( )
1 2( , )k k k Tx x x и -зна
чение k, для которого выполняется условие ( ) ( 1)
1,2max k k
i ii
x x
.
2.7.Варианты исходных данных приведены в П
45Задача1. Найти методом Ньютона с точн остью 40,5 10 решени -е сис
темы
1 1 2
2 1 2
( , ) 0,
( , ) 0.
f x x
f x x
2. Начальное приближени е (0) 0 01 2( , )Tx x x -определить графиче
, ски проверить условия сходимости метода Ньюто , -на используя куби .ческую метрику
3. Вывести приближенное значение корн я ( ) ( ) ( )1 2( , )k k k Tx x x и зн -а
чение k, для которого выполняется условие ( ) ( 1)
1,2max k k
i ii
x x
.
2.7.Варианты исходных данных приведены в П
46Задача Решить систему линейных алгебраических уравнени й Ax f
методо .м Гаусса 2.8.Варианты исходных данных приведены в П
Created with novaPDF Printer (www.novaPDF.com)

395
47Задача Вычислить обратную матр ицу 1A систе -мы линейных алгебраи
ческих уравнений Ax f .методом Гаусса 2.8.Варианты исходных данных приведены в П
48Задача detВычислить A системы линейных алгебраических уравнений
Ax f ме тодом Гаусса 2.8.Варианты исходных данных приведены в П
49Задача Решить систему линейных алгебраических уравнени й Ax f
.методом отражений 2.9.Варианты исходных данных приведены в П
50Задача Решить систему линейных алгебраических уравнений Ax f
.методом квадратного корня 2.8.Варианты исходных данных приведены в П
51Задача Решить систему линейных алгебраических уравнений Ax f
.методом квадратного корня 2.9.Варианты исходных данных приведены в П
52Задача1. Решить систему линейных алгебраических уравнений Ax f
с точность ю 40,5 10 мет .одом последовательных приближений2. , Проверить условия сходимости метода и вывести если
, метод сходится приближенное решен ие ( ) ( ) ( ) ( ) ( )1 2 3 4( , , , )k k k k k Tx x x x x
и значение k, д ля которого выполняется усло вие ( ) ( 1) .k k
Ix x
Если условия сходимости итерационной последовательности ,не выполняются то « ».вывести текстовую константу Метод расходится
2.8.Варианты исходных данных приведены в П
53Задача1. Решить систему линейных алгебраических уравнений Ax f
с точност ью 40,5 10 мет .одом простых итераций2. , -Проверить условия сходимости метода и вывести если ме , тод сходится приближенное решение ( ) ( ) ( ) ( ) ( )
1 2 3 4( , , , )k k k k k Tx x x x x
и значение k, для которого выполняется услов ие ( ) ( 1) .k k
Ix x
1. Приложение Задачи
Created with novaPDF Printer (www.novaPDF.com)

396 . . . Г Н Решетникова Моделирование систем
3. Если условия сходимости итерационной последовательности ,не выполняются то « ».вывести текстовую константу Метод расходится
2.8.Варианты исходных данных приведены в П
54Задача1. Решить систему линейных алгебраических уравнений Ax f
с точность ю 40,5 10 .методом Зейделя2. , -Проверить условия сходимости метода и вывести если ме , тод сходится приближенное решение ( ) ( ) ( ) ( ) ( )
1 2 3 4( , , , )k k k k k Tx x x x x
и значение k, для которого выполняется услов ие ( ) ( 1) .k k
Ix x
3. Если условия сходимости итерационной последовательности ,не выполняются то « ».вывести текстовую константу Метод расходится
2.8.Варианты исходных данных приведены в П
55Задача1. Найти собственные числа и собственные векторы матрицы A
мет .одом Данилевского2. -Пронормировать собственные векторы путем деления на по
.следнюю компоненту 2.8.Варианты исходных данных приведены в П
56Задача Вычислить обратную матриц у 1A -системы линейных алгебраи
ческих уравнений Ax f .методом Фаддеева 2.8.Варианты исходных данных приведены в П
57Задача1. Найти собственные числа и собственные векторы матриц ы A
методом .Фаддеева2. -Пронормировать собственные векторы путем деления на по
.следнюю компоненту 2.8.Варианты исходных данных приведены в П
58Задача1. Найти с точность ю 40,5 10 -собственные числа и собствен ные векторы матрицы A .методом вращений2. -Пронормировать собственные векторы путем деления на по
.следнюю компоненту 2.8.Варианты исходных данных приведены в П
Created with novaPDF Printer (www.novaPDF.com)

397
59Задача1. Найти с точность ю 40,5 10 собс -твенные числа и собствен ные векторы матрицы A .методом вращений2. Пронормировать собственные -векторы путем деления на по
.следнюю компоненту 2.9.Варианты исходных данных приведены в П
60Задача
1. Решить задачу Коши 0 0( , ), ( )y f x y y x y на интервале 0[ , ]x X с шагом h 0,1 . методом Эйлера Полученные результаты представить
.графически2. .Оценить погрешность решения по правилу Рунге
2.10.Варианты исходных данных приведены в П
61Задача
1. Решить задачу Коши 0 0( , ), ( )y f x y y x y на интервале 0[ , ]x X с шагом h 0,1 - . -методом Рунге Кутта Полученные результаты пред
.ставить графически2. .Оценить погрешность решения по правилу Рунге
2.10.Варианты исходных данных приведены в П
62Задача Решить задачу Коши для системы
(0)1 1 1 2 1 0 1
(0)2 2 1 2 2 0 2
( ) ( , ( ), ( )), ( ) ;
( ) ( , ( ), ( )), ( )
y x f x y x y x y x y
y x f x y x y x y x y
на интервале 0 0[ , 1]x x с шагом h 0,1 ме . тодом Эйлера Полученные .результаты представить графически
2.11.Варианты исходных данных приведены в П
63Задача Решить задачу Коши для системы
(0)1 1 1 2 1 0 1
(0)2 2 1 2 2 0 2
( ) ( , ( ), ( )), ( ) ;
( ) ( , ( ), ( )), ( )
y x f x y x y x y x y
y x f x y x y x y x y
на интервале 0 0[ , 1]x x с шагом h 0,1 - . методом Рунге Кутта -Полу .ченные результаты представить графически
2.11.Варианты исходных данных приведены в П
1. Приложение Задачи
Created with novaPDF Printer (www.novaPDF.com)

398 . . . Г Н Решетникова Моделирование систем
64Задача
Решить задачу Кош и 0 0( , ), ( )y f x y y x y на интервале 0[ , ]x X с шагом h 0,1 : методами Адамса сначала найти ре шение в точке по
, -экстраполяционной формуле Адамса а затем уточнить его по интерпо . -ляционной формуле Адамса Начальный отрезок сформировать мето
— . дом Рунге Кутта .Полученные результаты представить графически 2.10.Варианты исходных данных приведены в П
65Задача Решить краевую задачу
( ) ( ) ( ) ( ); ( ) , ( )A x y B x y C x y F x y a y b методом прогонки на равноме рной се тке , 1, .ix a ih i n -Получен
.ные результаты представить графически 2.12.Варианты исходных данных приведены в П
66Задача Решить краевую задачу
( ) ( ) ( ) ( ); ( ) , ( )A x y B x y C x y F x y a y b
. методом коллокации Функцию решения задать в виде 0( ) ( )y x x
3
1
( ).i ii
c x
.Полученные результаты представить графически
2.12.Варианты исходных данных приведены в П
1.3. П Задачи по моделированию систем управления
67Задача Поведение объекта на интервал е 0[ , ]t T оп исывается системой
0 0( ) ( ) ( ); ( ) ,x t Ax t Bu t x t x
где 0 0; 10t T ; 0
0
10
2,1 2,2 2 2
0 1 0; ; .
xA B x
a a b x
1. Для моделирования построить дискретную систему методом Эйлера с шаг ом 0,1t .
2. Выполнить моделирование свободного поведения объекта( ( ) 0u k ). .Представить графики переходных процессов
3. -Выполнить синтез управляющих воздействий на основе мини мизации классического квадратичного функционала
Created with novaPDF Printer (www.novaPDF.com)

399
0
01
( , ) [ ( ) ( ) ( ) ( )]2
TT T
t
J t T x t Cx t u t Du t dt
при 1,1 2,2;diag C CC ; D 1. -Представить графики переходных про
цесс ов ( )x k и управлений ( )u k . 2.13.Варианты исходных данных приведены в П
68Задача Поведение объекта на интер вале 0[ , ]t T описы вается системой
0 0
0 0
( ) ( ) ( ); ( ) ,
( ) ( ); ( ) ,
x t Ax t Bu t x t x
u t v t u t u
где 0 0; 10t T ; 0
0
10 0
2,1 2,2 2 2
0 1 0; ; ; 0.
xA B x u
a a b x
1. Для моделирования построить дискретную систему методом Эйлера с шагом t 0,1.
2. Выполнить моделирование свободного поведения объекта( ( ) 0v k ). Пред .ставить графики переходных процессов
3. -Выполнить синтез управляющих воздействий на основе мини мизации квадратичного функционала обобщенной работы
2 1 11
( ) [ ( ) ( ) ( ) ( ) ( ) ( ) ( )]2
k p
k
t l tT T T T
k оп опt
J t x t Cx t u t D u t v t D v t v D v t dt
при pl 15 и 1,1 2,2 1 2;diag ; 1; 1C CC D D . -Представить графи
ки переходных процессов ( )x k и значений ( )u k . 2.13.Варианты исходных данных приведены в П
69Задача Поведение объекта на интервал е 0[ , ]t T опис ывается системой
0( 1) ( ) ( ); (0)x k Ax k Bu k x x ,
где 0 0; 10;t T 2,1 2,2 2
1 0; ;
1
tA B
ta ta tb
0
0
10
2;
xx
x
0,1t .1. Выполнить моделирование свободного поведения объекта
( ( ) 0u k ). Пре .дставить графики переходных процессов2. -Выполнить синтез управляющих воздействий на основе мини
мизации локального квадратичного функционала
1. Приложение Задачи
Created with novaPDF Printer (www.novaPDF.com)

400 . . . Г Н Решетникова Моделирование систем
1 11
( ) ( 1) ( 1) ( ) ( )2
T TJ k x k C x k u k D u k
при 1,1 2,21 1;diag ; 1C CC D . Представить графики переходных
процесс ов ( )x k и управлений ( )u k . 2.13.Варианты исходных данных приведены в П
70Задача Поведение объекта на интерв але 0[ , ]t T опи сывается системой
0 0( ) ( ) ( ) ( ); ( ) ,x t Ax t Bu t Fq t x t x
где 0 0; 10;t T 2,1 2,2
0 1;A
a a
2
0;B
b
0,51 0
;0 0,55
F
0 01 20 ; ;Tx xx q(t) — вектор гауссовских шумов с нулевым средним
.и единичной дисперсией1. -Для моделирования построить дискретную систему методом Эй лера с шагом t 0,1.2. -Выполнить синтез управляющих воздействий на основе мини
-мизации математического ожидания классического квадратичного функционала
0
01
( , ) [ ( ) ( ) ( ) ( )]2
TT T
t
J t T M x t Cx t u t Du t dt
при 1,1 2,2;diag ; 1C CC D . по оценкам состояния Математическая
модель измерительного комплекса имеет ви д ( ) ( ) ( )y k Hx k r k , гдеH — ; матрица канала измерений r(k)— -дискретные гауссовские вели
чины с характеристика ми ( ) 0; ( ) ( )TkjM r k M r k r j R . -Оценива
-ние вектора состояния фильтром Калмана осуществляется при следую
: щих начальных значениях 0 0 01 20,7 ;1,3(0) ; diag 1;1T
xx xx P .
Моделирование выполнить для следующих значе ний H и R, -характе :ризующих полноту измерения вектора состояния
1)1 0 0,32 0
;0 1 0 0,35
H R
;
2) 1 0 ; 0,32H R ;
3) 0 1 ; 0,35H R .
Created with novaPDF Printer (www.novaPDF.com)

401
Представить графики переходных процессов ( )x k , их оц енок ( )x k
и управлений ( )u k . 2.13.Варианты исходных данных приведены в П
71Задача
Поведение объекта на интерв але 0[ , ]t T описы вается системой
0 0
0 0
( ) ( ) ( ) ( ); ( ) ,
( ) ( ); ( ) ,
x t Ax t Bu t Fq t x t xu t v t u t u
где 0 0; 10;t T 2,1 2,2
0 1;A
a a
2
0;B
b
0,51 0
0 0,55F
;
0 01 20 ; ;Tx xx 0 0u ; q(t) — ве ктор гауссовских шумов с нулевым
.средним и единичной дисперсией1. Для моделирования построить дискретную систему методом
Эйлера с ш агом t 0,1.2. -Выполнить синтез управляющих воздействий на основе мини
-мизации математического ожидания квадратичного функционала обоб щенной работы
2 1 11
( ) [ ( ) ( ) ( ) ( ) ( ) ( ) ( )]2
k p
k
t l tT T T T
k оп опt
J t M x t Cx t u t D u t v t D v t v D v t dt
при pl 15; 1 2diag ; 1; 11,5;1,7C D D .по оценкам состояния
Математическая модель измерительного компекса имеет вид ( )y k ( ) ( )Hx k r k , где H — ; матрица канала измерений r(k) — д -иск
ретные гауссовские величины с характеристиками ( ) 0;M r k
( ) ( )TkjM r k r j R . Оценивание вектора состояния фильтром
:Калмана осуществляется при следующих начальных значениях 0 0 01 20,7 ;1,3(0) ; diag 1;1
Txx xx P . Моделирование выполнить для
следующих значени й H и R, ха рактеризующих полноту измерения :вектора состояния
1)1 0 0,32 0
;0 1 0 0,35
H R
;
2) 1 0 ; 0,32H R ;
3) 0 1 ; 0,35H R .
1. Приложение Задачи
Created with novaPDF Printer (www.novaPDF.com)

402 . . . Г Н Решетникова Моделирование систем
Представить графики переходных процессов ( )x k , их оц енок ( )x k и значений ( )u k .
2.13.Варианты исходных данных приведены в П
72Задача
Поведение объекта на интервал е 0[ , ]t T описывается системой
0( 1) ( ) ( ) ( ), (0) ,x k Ax k Bu k Fq k x x
где 0 0; 10;t T t 0,1; 2,1 2,2
1;
1
tA
ta ta
2
0;B
tb
0,51 0;
0 0,55F t
0
0
10
2
xx
x
; q(k) — -вектор дискретных гауссов
.ских шумов с нулевым средним и единичной дисперсией -Выполнить синтез управляющих воздействий на основе миними
-зации математического ожидания локального квадратичного функционала
1 11
( ) ( 1) ( ) ( ) ( )2
T TJ k M x k C x k u k D u k
при 1 1diag ; 11,5;1,7C D . по оценкам состояния Математическая модель измерительного комплекса имеет вид ( ) ( ) ( )y k Hx k r k , где
H — ; матрица канала измерений r(k)— -дискретные гауссовские вели чины с характеристикам и ( ) 0;M r k ( ) ( )T
kjM r k r j R . -Оценива -ние вектора состояния фильтром Калмана осуществляется при следую щих начальных значения : х 0 0 01 20,7 ;1,3(0) ; diag 1;1
Txx xx P .
Моделирование выполнить для следующих значен ий H и R, хар -акте :ризующих полноту измерения вектора состояния
1)1 0 0,32 0
; ;0 1 0 0,35
H R
2) 1 0 ; 0,32;H R
3) 0 1 ; 0,35.H R Представить графики переходных процессов ( )x k , их оц енок ( )x k
и управлений ( )u k . 2.13.Варианты исходных данных приведены в П
Created with novaPDF Printer (www.novaPDF.com)

403
73Задача
Поведение объекта на интерва ле 0[ , ]t T опи сывается системой
0 0( ) ( ) ( ) ( ); ( )x t Ax t Bu t Fq t x t x ,
где 0 0; 10;t T 2,1 2,2
0 1;A
a a
2
0;B
b
0,51 0
;0 0,55
F
0 01 20 ; Tx xx ; q(t) — вектор гауссовских шумов с нулевым средним
.и единичной дисперсией1. Для моделирования построить дискретную систему методом
Эйлера с шаго м t 0,1.2. -Выполнить синтез адаптивного управления на основе миними
-зации математического ожидания классического квадратичного функ ционала по оценкам состояния при полном измерении с ошибками
r(k), -которые задаются дискретными гауссовскими величинами с характеристиками
( ) 0; ( ) ( ) ; diag 0,32;0,35TkjM r k M r k r j R R
при 0 01 20,7 ;1,3(0) ;Tx xx
0diag 1;1xP для вектора неизвестных
параметров :и начальных значений
1) 02,1 2,2 2 2,1 2,2 2, , ; (0) 0,7 ;1,3 ;1,3 ; diag 1;1;1 ;
T Ta a b a a b P
2) 02,1 2,2 2,1 2,2, ; (0) 0,7 ;1,3 ; diag 1;1
T Ta a a a P ;
3) 02,1 2 2,1 2, ; (0) 0,7 ;1,3 ; diag 1;1 ;
T Ta b a b P
4) 02,2 2 2,2 2, ; (0) 1,3 ;1,3 ; diag 1;1 ;
T Ta b a b P
5) 02,1 2,1; (0) 0,7 ; 1;a a P
6) 02,2 2,2; (0) 1,3 ; 1;a a P
7) 02 2; (0) 1,3 ; 1.b b P
Представить графики переходных процессов x(k), их оценок ( )x k и у правлений u(k). -На отдельных графиках представить точные значе
.ния параметров и их оценки 2.13.Варианты исходных данных приведены в П
1. Приложение Задачи
Created with novaPDF Printer (www.novaPDF.com)

404 . . . Г Н Решетникова Моделирование систем
74Задача Поведение объекта на интервале 0[ , ]t T описывае тся системой
0 0
0 0
( ) ( ) ( ) ( ); ( ) ,
( ) ( ); ( ) ,
x t Ax t Bu t Fq t x t xu t v t u t u
где 0 0; 10;t T 2,1 2,2
0 1;A
a a
2
0;B
b
0,51 0
;0 0,55
F
0 01 20 ; ;Tx xx 0 0;u q(t) — в ектор гауссовских шумов с нулевым
.средним и единичной дисперсией1. Для моделирования построить дискретную систему методом
Эйлера с шаго м t 0,1.2. -Выполнить синтез управляющих воздействий на основе мини
мизации математического ожидания квадратичного функционала обобщенной работы пр и pl 15 по оце нкам состояния при полном
измерении с ошибками r(k), -которые задаются дискретными гауссов c скими величинами характеристиками
( ) 0;M r k ( ) ( ) ;TkjM r k r j R ;0,32;0,35R diag
при 0 0 01 20,7 ;1,3(0) ; diag 1;1T
xx xx P для вектора неизвестных
параметров :и начальных значений
1) 02,1 2,2 2 2,1 2,2 2, , ; (0) 0,7 ;1,3 ;1,3 ; diag 1;1;1 ;
T Ta a b a a b P
2) 02,1 2,2 2,1 2,2, ; (0) 0,7 ;1,3 ; diag 1;1 ;
T Ta a a a P
3) 02,1 2 2,1 2, ; (0) 0,7 ;1,3 ; diag 1;1 ;
T Ta b a b P
4) 02,2 2 2,2 2, ; (0) 1,3 ;1,3 ; diag 1;1 ;
T Ta b a b P
5) 02,1 2,1; (0) 0,7 ; 1;a a P
6) 02,2 2,2; (0) 1,3 ; 1;a a P
7) 02 2; (0) 1,3 ; 1b b P .
Представить графики переходных процессов x(k), их оценок ( )x k и значений u(k). На отдельных графиках представить точные значения
.параметров и их оценки 2.13.Варианты исходных данных приведены в П
Created with novaPDF Printer (www.novaPDF.com)

405
75Задача Поведение объекта на интервал е 0[ , ]t T описыва ется системой
0( 1) ( ) ( ) ( ); (0)x k Ax k Bu k Fq k x x ,
где 0 0; 10; 0,1;t T t 2,1 2,2
1;
1
tA
ta ta
2
0;B
tb
0,51 0;
0 0,55F t
0
0
10
2
xx
x
; q(k) — -вектор дискретных гауссов
.ских шумов с нулевым средним и единичной дисперсией -Выполнить синтез управляющих воздействий на основе миними
-зации математического ожидания локального квадратичного функцио нала по оценкам состояния при полном измерении с ошибка ми r(k),
-которые задаются дискретными гауссовскими величинами с характеристиками
( ) 0; ( ) ( ) ;TkjM r k M r k r j R diag 0,32;0,35R
при 0 0 01 20,7 ;1,3(0) ; diag 1;1T
xx xx P для вектора неизвестных
параметр ов :и начальных значений
1) 02,1 2,2 2 2,1 2,2 2, , ; (0) 0,7 ;1,3 ;1,3 ; diag 1;1;1 ;
T Ta a b a a b P
2) 02,1 2,2 2,1 2,2, ; (0) 0,7 ;1,3 ; diag 1;1 ;
T Ta a a a P
3) 02,1 2 2,1 2, ; (0) 0,7 ;1,3 ; diag 1;1 ;
T Ta b a b P
4) 02,2 2 2,2 2, ; (0) 1,3 ;1,3 ; diag 1;1 ;
T Ta b a b P
5) 02,1 2,1; (0) 0,7 ; 1;a a P
6) 02,2 2,2; (0) 1,3 ; 1;a a P
7) 02 2; (0) 1,3 ; 1.b b P
Представить графики переходных процессов x(k), их оценок ( )x k и управлений u(k). -На отдельных графиках представить точные значе
.ния параметров и их оценки 2.13.Варианты исходных данных приведены в П
1. Приложение Задачи
Created with novaPDF Printer (www.novaPDF.com)

406 . . . Г Н Решетникова Моделирование систем
2. Приложение Варианты исходных данных к задачам
2.1. П Варианты исходных данных 1–2, 28–36к задачам
№ a b ( )f x № a b ( )f x
1 2 3 2 2 lgx x x 16 02 3 ln cos 1x x
2 2 4 sin 2x 172
3cos 1
lg
xx x
3 1 3 cos lnx x 18 02
2cosx x x
4 1 3 3 lg lnx x 192
4
5cos
1
xx x
52
2 xx x e 202
ln( 1)x x
6 02
sin( )x x 21 1 sin 2 lnx x
7 1 3 2ln x x 22 02 10 cos 4sinx x
82
2
10 cos
1
xx
23 –12 2cos 1x x
92
cos( )x xe 242
ln cosx x
10 02 5 lg cosx x 25 1 2 2cos 1 5 ln x
11 –12 2sin 0,5x x 26 –1 ln 2,5x x
122
2xe 27 –1 2 sin(1 )xe x
13 –1 1 23 ln 2x x 282
2xe
14 1 3 2ln x x 29 –12
cosxe
152
2cos 2 1x 302
ln( )x x x
Created with novaPDF Printer (www.novaPDF.com)
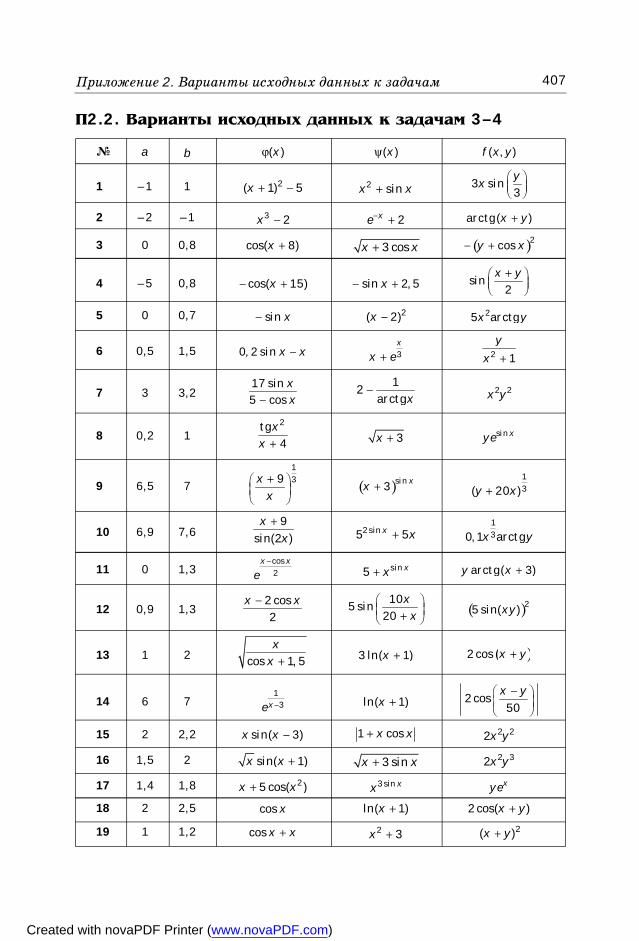
407
2.2. 3–П Варианты исходных данных к задачам 4
№ a b ( )x ( )x ( , )f x y
1 –1 1 2( 1) 5x 2 sinx x
3 sin3y
x
2 –2 –1 3 2x 2xe arctg( )x y
3 0 0,8 cos( 8)x 3 cosx x 2cosy x
4 –5 0,8 cos( 15)x sin 2,5x
sin
2x y
5 0 0,7 sin x 2( 2)x 25 arctgx y
6 0,5 1,5 0,2 sin x x 3x
x e 2 1
yx
7 3 3,217 sin5 cos
xx
12
arctgx 2 2x y
8 0,2 12tg4
xx 3x sinxye
9 6,5 7
139x
x
sin3 xx
13( 20 )y x
10 6,9 7,69
sin(2 )x
x
2sin5 5x x130,1 arctgx y
11 0 1,3cos2
x x
e
sin5 xx arctg( 3)y x
12 0,9 1,32 cos2
x x 105 sin
20xx
25 sin( )xy
13 1 2 cos 1,5x
x 3 ln( 1)x 2cos x y
14 6 713xe ln( 1)x 2cos
50x y
15 2 2,2 sin( 3)x x 1 cosx x 2 22x y
16 1,5 2 sin( 1)x x 3 sinx x 2 32x y
17 1,4 1,8 25cos( )x x 3sinxx xye
18 2 2,5 cos x ln( 1)x 2cos( )x y
19 1 1,2 cos x x 2 3x 2( )x y
2. Приложение Варианты исходных данных к задачам
Created with novaPDF Printer (www.novaPDF.com)

408 . . . Г Н Решетникова Моделирование систем
2.3. П Варианты исходных данных 5–14, 18–21к задачам
1 0,1( ) cos 2 xf x x 3 ( ) sin 5 cosf x x x
0 00,000; 0,000x y 0 00,234; 5,196x y
1 11,750; 1,307x y 1 11,750; 0,093x y
2 23,500; 2,211x y 2 23,500; 5,033x y
3 35,250; 0,927x y 3 35,250; 1,701x y
4 47,000; 0,871x y 4 47,000; 4,426x y 2,555x 4,234x
2 ( ) sin 0,1ln(1 )f x x x 4 2( ) 3cos 0,2f x x x x
0 01,000; 0,911x y 0 00,000; 1,732x y
1 12,250; 0,896x y 1 11,500; 0,931x y
2 23,500; 0,200x y 2 23,600; 1,732x y
3 34,750; 0,824x y 3 34,300; 1,327x y
4 46,000; 0,085x y 4 45,000; 1,289x y 3,781x 5,251x
№ a b ( )x ( )x ( , )f x y
20 6 713xe ln( 1)x 1,5( )x y
21 –1 1 2( 1) 2,5x 2x e 5 arctg( )x y
22 –2 –1 3 20x 2xe
arctg
20x y
23 3 3,217 sin6 cos
xx 5 6arctgx ln( )yx e
24 1 1,3 cos x x 3 5x (2 )x y
25 1 1,5 5 cos x 2(2 1)x
sin10xy
26 6,5 7 lncos xx13(1 5 )x
14(5 40 )x y
27 –2 –11
2 cosx x
2sin20
xx 5sin xy
28 1 1,2 cos x x 2 3x 2( )x y
29 0,1 0,52
sin 2x
x
4 1x 2
1
yx
30 1 23 x
xe
1sinx
x
10 cos xy
Created with novaPDF Printer (www.novaPDF.com)

409
5 2( ) 3 cosf x x x 10 2( ) 5cos 0,2f x x x x
0 00,000; 1,732x y 0 00,000; 2,236x y
1 11,500; 1,231x y 1 11,600; 1,587x y
2 23,600; 2,452x y 2 23,600; 3,481x y
3 34,300; 2,187x y 3 34,300; 3,119x y
4 45,000; 2,289x y 4 45,000; 3,324x y 1,111x 4,005x
6 3( ) sin 0,001f x x x 11 2( ) sin 0,001f x x x
0 00,000; 0,000x y 0 00,000; 0,000x y
1 12,000; 0,901x y 1 11,500; 0,995x y
2 24,000; 0,821x y 2 23,000; 0,132x y
3 36,000; 0,495x y 3 34,500; 0,998x y
4 48,000; 0,477x y 4 46,000; 0,315x y 7,852x 3,053x
7 ( ) sin 3 cos(3 )f x x x 12 ( ) sin 3cosf x x x
0 00,000; 3,000x y 0 01,000; 0,779x y
1 11,250; 1,513x y 1 12,500; 3,002x y
2 22,350; 2,872x y 2 24,000; 1,204x y
3 33,000; 2,592x y 3 35,500; 2,832x y
4 45,500; 2,813x y 4 47,000; 1,605x y 1,963x 5,037x
8 2( ) 5 cosf x x x 13 ( ) cos ln( 1)f x x x
0 04,000; 2,477x y 0 00,000; 1,000x y
1 15,000; 2,324x y 1 11,500; 0,195x y
2 26,000; 3,257x y 2 23,100; 0,332x y
3 37,000; 3,137x y 3 33,700; 0,849x y
4 48,000; 2,847x y 4 44,500; 0,182x y 6,946x 0,137x
9 ( ) 0,2 sin cosf x x x 14 1 3( ) 0,5 10xf x e x
0 00,000; 1,000x y 0 01,000; 10,635x y
1 13,300; 0,956x y 1 10,250; 10,294x y
2 26,700; 0,833x y 2 20,500; 10,54x y
3 38,200; 0,527x y 3 32,000; 8,718x y
4 310,000; 0,730x y 4 43,500; 0,745x y 8,123x 0,011x
2. Приложение Варианты исходных данных к задачам
Created with novaPDF Printer (www.novaPDF.com)

410 . . . Г Н Решетникова Моделирование систем
15 3( ) cos( 1) / 8f x x x 20 3( ) xf x e x x
0 02,000; 0,010x y 0 01,000; 0,368x y
1 12,500; 1,017x y 1 10,250; 0,544x y
2 23,000; 2,721x y 2 20,500; 2,024x y
3 33,500; 5,149x y 3 31,250; 2,787x y
4 44,000; 8,284x y 4 42,000; 1,389x y 3,179x 1,351x
16 ( ) sin 0,5 ln(0,1 )f x x x 21 3( ) cos( 1) 0,2 1f x x x
0 00,000; 0,744x y 0 01,000; 0,200x y
1 11,000; 0,561x y 1 10,250; 0,271x y
2 22,000; 0,985x y 2 20,500; 0,904x y
3 33,000; 0,488x y 3 31,250; 1,238x y
4 44,000; 0,266x y 4 42,000; 0,390x y 1,689x 0,673x
17 ( ) ln( 1,5) cos(1 ) 1f x x x 22 ( ) 2 cosf x x x
0 01,000; 0,723x y 0 00,000; 1,414x y
1 10,250; 0,908x y 1 11,000; 0,936x y
2 20,500; 0,816x y 2 22,000; 0,832x y
3 31,250; 1,043x y 3 33,000; 2,214x y
4 42,000; 1,712x y 4 44,000; 1,601x y 2,357x 2,591x
18 ( ) 2 sin( 1)f x x x 233
( ) sin( 2) 1,2( 1)3x
f x x x
0 01,000; 0,000x y 0 00,000; 1,200x y
1 10,250; 1,423x y 1 10,500; 0,642x y
2 21,500; 1,120x y 2 21,000; 0,280x y
3 32,750; 1,246x y 3 31,500; 0,061x y
4 44,000; 2,349x y 4 42,000; 1,200x y 1,046x 0,853x
19 2( ) sin( 3)f x x x 24 3( ) sin( 2 ) 2 xf x x e
0 00,500; 0,150x y 0 00,000; 0,100x y
1 10,125; 0,000x y 1 11,000; 0,639x y
2 20,750; 0,161x y 2 22,000; 1,493x y
3 31,175; 0,593x y 3 33,000; 2,279x y
4 42,000; 1,918x y 4 44,000; 4,447x y 1,835x 4,142x
Created with novaPDF Printer (www.novaPDF.com)

411
2.4. П Варианты исходных данных 15–17, 22–27к задачам
1 y0 0,322 2 y
0 6,850 3 y
0 –0,417 4 y
0 24,901 5. y
0 0,070
y1 0,284 y
1 5,539 y
1 –0,751 y
1 26,244 y
1 –0,134
y2 0,241 y
2 4,601 y
2 –0,966 y
2 27,541 y
2 –0,343
y3 0,193 y
3 3,902 y
3 –0,972 y
3 28,790 y
3 –0,544
y4 0,135 y
4 3,363 y
4 –0,713 y
4 29,992 y
4 –0,724
y5 0,063 y
5 2,937 y
5 –0,211 y
5 31,144 y
5 –0,870
y6 –0,031 y
6 2,594 y
6 0,396 y
6 32,251 y
6 –0,966
y7 –0,164 y
7 2,313 y
7 0,876 y
7 33,313 y
7 –1,000
y8 –0,369 y
8 2,079 y
8 0,980 y
8 34,334 y
8 –0,962
y9 –0,741 y
9 1,882 y
9 0,592 y
9 35,320 y
9 –0,846
y10 –1,664 y
10 1,715 y
10 –0,146 y
10 36,275 y
10 –0,664
z1 0,98 z
1 1,12 z
1 1,08 z
1 0,88 z
1 0,95
z2 1,56 z
2 1,46 z
2 1,66 z
2 1,66 z
2 1,71
z3 2,12 z
3 1,92 z
3 1,82 z
3 2,04 z
3 2,1
25 ( ) sin 3cos(3 )f x x x 28 ( ) cos(2 ) ln( 1,5)f x x x x
0 05,000; 1,320x y 0 01,000; 0,277x y
1 16,500; 2,172x y 1 10,000; 0,405x y
2 27,400; 3,834x y 2 20,750; 0,864x y
3 38,000; 0,283x y 3 32,000; 0,055x y
4 48,500; 2,001x y 4 42,500; 2,095x y 7,962x 0,750x
26 3( ) cos( 2 ) 2 xf x x e 29 2( ) cos(2 ) sinf x x x x
0 02,000; 0,640x y 0 00,000; 1,000x y
1 10,500; 0,601x y 1 11,500; 2,792x y
2 21,000; 0,145x y 2 23,000; 2,063x y
3 32,500; 1,497x y 3 34,500; 5,301x y
4 44,000; 5,291x y 4 47,000; 6,910x y 0,369x 2,014x
27 2( ) sin(4 ) ln(1 )f x x x x 30 ( ) cos 5 sinf x x x
0 00,000; 0,000x y 0 00,000; 1,000x y
1 10,625; 0,509x y 1 11,250; 5,060x y
2 21,250; 0,034x y 2 22,500; 2,191x y
3 31,875; 1,054x y 3 33,750; 3,678x y
4 42,500; 1,136x y 4 45,000; 4,511x y 0,975x 2,978x
2. Приложение Варианты исходных данных к задачам
Created with novaPDF Printer (www.novaPDF.com)

412 . . . Г Н Решетникова Моделирование систем
6 y0 0,614 9 y
0 0,794 12 y
0 4,860 15 y0 6,492 18 y
0 1,000
y1 0,614 y
1 0,773 y
1 4,462 y1 6,879 y
1 1,215
y2 0,640 y
2 0,723 y
2 3,906 y2 7,340 y
2 1,465
y3 0,685 y
3 0,662 y
3 3,169 y3 7,889 y
3 1,754
y4 0,741 y
4 0,600 y
4 2,222 y4 8,547 y
4 2,088
y5 0,801 y
5 0,543 y
5 1,027 y5 9,339 y
5 2,473
y6 0,856 y
6 0,494 y
6 – 0,475 y
6 10,300 y
6 2,915
y7 0,902 y
7 0,450 y
7 – 2,363 y
7 11,479 y
7 3,423
y8 0,936 y
8 0,412 y
8 – 4,755 y
8 12,939 y
8 4,005
y9 0,956 y
9 0,380 y
9 – 7,829 y
9 14,777 y
9 4,673
y10 0,970 y
10 0,351 y
10 –11,087 y10 17,127 y
10 5,436
z1 0,97 z
1 0,92 z
1 0,98 z1 0,99 z
1 1,03z
2 1,51 z
2 1,77 z
2 1,56 z2 1,62 z
2 1,68z
3 1,82 z
3 2,04 z
3 2,12 z3 2,14 z
3 1,92
7 y0 –2,186 10 y
0 21,779 13 y
0 1,257 16 y0 0,649 19 y
0 7,237
y1 –1,910 y
1 25,505 y
1 1,524 y1 0,757 y
1 7,436
y2 –1,734 y
2 29,577 y
2 1,728 y2 0,881 y
2 7,725
y3 –1,120 y
3 34,017 y
3 1,849 y3 1,027 y
3 8,123
y4 –0,917 y
4 38,852 y
4 1,867 y4 1,197 y
4 8,654
y5 –0,748 y
5 44,109 y
5 1,768 y5 1,401 y
5 9,361
y6 –0,602 y
6 49,822 y
6 1,547 y6 1,648 y
6 10,305
y7 –0,473 y
7 56,027 y
7 1,215 y7 1,951 y
7 11,589
y8 –0,356 y
8 62,768 y
8 0,798 y8 2,329 y
8 13,393
y9 –0,247 y
9 70,091 y
9 0,339 y9 2,807 y
9 16,051
y10 –0,143 y
10 78,052 y
10 –0,104 y10 3,425 y
10 20,277
z1 1,08 z
1 1,03 z
1 0,89 z1 1,18 z
1 0,88z
2 1,67 z2 1,36 z
2 1,76 z2 1,46 z
2 1,76z
3 2,03 z3 2,05 z
3 1,92 z3 1,87 z
3 2,11
8 y0 5,430 11 y
0 10,824 14 y
0 3,981 17 y
0 1,449 20 y0 5,215
y1 5,815 y
1 10,431 y
1 3,837 y
1 1,161 y1 5,658
y2 6,211 y
2 9,918 y
2 3,648 y
2 0,805 y2 6,105
y3 6,620 y
3 9,310 y
3 3,424 y
3 0,396 y3 6,560
y4 7,051 y
4 8,631 y
4 3,175 y
4 –0,045 y
4 7,025
y5 7,509 y
5 7,911 y
5 2,910 y
5 –0,488 y
5 7,504
y6 8,001 y
6 7,173 y
6 2,638 y
6 –0,894 y
6 8,000
y7 8,535 y
7 6,442 y
7 2,369 y
7 –1,225 y
7 8,517
y8 9,119 y
8 5,735 y
8 2,109 y
8 –1,438 y
8 9,059
y9 9,762 y
9 5,068 y
9 1,864 y
9 –1,505 y
9 9,631
y10 10,475 y
10 4,451 y
10 1,637 y
10 –1,411 y10 10,237
z1 0,82 z
1 0,87 z
1 1,18 z
1 1,08 z1 0,95
z2 1,68 z
2 1,68 z
2 1,53 z
2 1,58 z2 1,36
z3 1,92 z
3 2,01 z
3 1,87 z
3 2,03 z3 1,82
Created with novaPDF Printer (www.novaPDF.com)
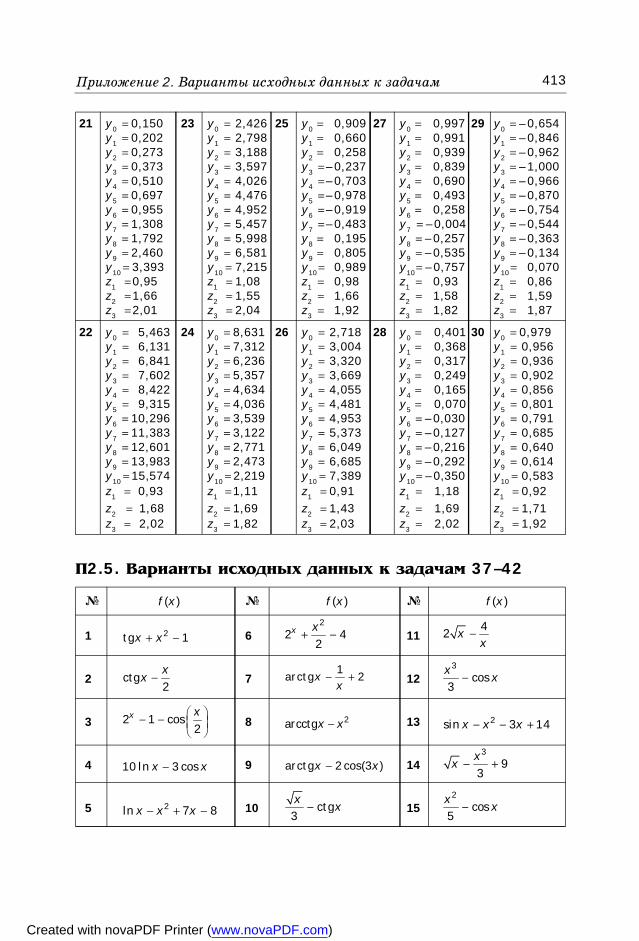
413
2.5. 37–42П Варианты исходных данных к задачам
№ ( )f x № ( )f x № ( )f x
1 2tg 1x x 62
2 42
x x 114
2 xx
2 ctg2x
x 7 1arctg 2x
x 123
cos3x
x
3 2 1 cos2
x x 8 2arcctgx x 13 2sin 3 14x x x
4 10 ln 3 cosx x 9 arctg 2cos(3 )x x 143
93x
x
5 2ln 7 8x x x 10 ctg3x
x 152
cos5x
x
21 y0 0,150 23 y
0 2,426 25 y
0 0,909 27 y0 0,997 29 y
0 –0,654
y1 0,202 y
1 2,798 y
1 0,660 y1 0,991 y
1 –0,846
y2 0,273 y
2 3,188 y
2 0,258 y2 0,939 y
2 –0,962
y3 0,373 y
3 3,597 y
3 –0,237 y
3 0,839 y3 –1,000
y4 0,510 y
4 4,026 y
4 –0,703 y
4 0,690 y4 –0,966
y5 0,697 y
5 4,476 y
5 –0,978 y
5 0,493 y5 –0,870
y6 0,955 y
6 4,952 y
6 –0,919 y
6 0,258 y6 –0,754
y7 1,308 y
7 5,457 y
7 –0,483 y
7 –0,004 y
7 –0,544
y8 1,792 y
8 5,998 y
8 0,195 y8 –0,257 y
8 –0,363
y9 2,460 y
9 6,581 y
9 0,805 y9 –0,535 y
9 –0,134
y10 3,393 y
10 7,215 y
10 0,989 y10 –0,757 y
10 0,070z
1 0,95 z
1 1,08 z
1 0,98 z1 0,93 z
1 0,86z
2 1,66 z
2 1,55 z
2 1,66 z2 1,58 z
2 1,59z
3 2,01 z
3 2,04 z
3 1,92 z3 1,82 z
3 1,87
22 y0 5,463 24 y
0 8,631 26 y
0 2,718 28 y
0 0,401 30 y0 0,979
y1 6,131 y
1 7,312 y
1 3,004 y
1 0,368 y1 0,956
y2 6,841 y
2 6,236 y
2 3,320 y
2 0,317 y2 0,936
y3 7,602 y
3 5,357 y
3 3,669 y
3 0,249 y3 0,902
y4 8,422 y
4 4,634 y
4 4,055 y
4 0,165 y4 0,856
y5 9,315 y
5 4,036 y
5 4,481 y
5 0,070 y5 0,801
y6 10,296 y
6 3,539 y
6 4,953 y
6 –0,030 y
6 0,791
y7 11,383 y
7 3,122 y
7 5,373 y
7 –0,127 y
7 0,685
y8 12,601 y
8 2,771 y
8 6,049 y
8 –0,216 y
8 0,640
y9 13,983 y
9 2,473 y
9 6,685 y
9 –0,292 y
9 0,614
y10 15,574 y
10 2,219 y
10 7,389 y
10 –0,350 y10 0,583
z1 0,93 z
1 1,11 z1 0,91 z
1 1,18 z1 0,92
z2 1,68 z
2 1,69 z
2 1,43 z
2 1,69 z2 1,71
z3 2,02 z
3 1,82 z
3 2,03 z
3 2,02 z3 1,92
2. Приложение Варианты исходных данных к задачам
Created with novaPDF Printer (www.novaPDF.com)

414 . . . Г Н Решетникова Моделирование систем
2.6. 43П Варианты исходных данных к задаче
№ ( )P x № ( )P x
1 3 22 4 1x x x 16 3 21,7 0,3 2 1x x x
2 3 23 1x x x 17 3 23 4,6 0,8x x x
3 3 23 2 3x x x 18 3 22 2 3 4x x x
4 3 22 3 1,5x x x 19 3 21,4 0,4 4x x x
5 3 22,2 2x x x 20 3 20,8 1,3 2,1x x x
6 3 22 0,5 2 1x x x 21 3 23 2 2x x x
7 3 23 4,2 1,1x x x 22 3 22 3,2x x x
8 3 20,6 2,3 1x x x 23 3 21,2 2 1,5 1x x x
9 3 22 1,5 0,4 1x x x 24 3 22,2 2,3 0,5 3x x x
10 3 23 0,3 2 1x x x 25 32 4 1x x
11 3 21,5 1,5 1,5x x x 26 3 20,75 5,1 3,1x x x
12 3 22 3,4 0,3 1x x x 27 3 22,5 3x x
13 3 22,5 0,3 2 1x x x 28 3 22 0,5 2,3 1,4x x x
14 3 23 3,5 1x x 29 3 21,6 3 1,4x x x
15 3 23,1 1,4 2x x x 30 3 23,5 2x x
16 2 2 7x x 21 arcsin 2 2x x 26 2ln 2 5x x
172
7 122x
x x 22 2arccosx x 27 3 /2 13,5x
x
180,1
10 ln 2xx
23 3arcctgx x 28 3 /21arcctg 2
2x x
19 2 5 2x x 244
12x
x 29 3/ 21
12 2
xx
20 2arctg 5x x 25 ln 5cos3x
x 300,9
tg 2xx
Created with novaPDF Printer (www.novaPDF.com)

415
2.7. 44–45П Варианты исходных данных к задачам
№1
2
( , ) 0
( , ) 0
f x y
f x y
№
1
2
( , ) 0
( , ) 0
f x y
f x y
1
sin( 1) 3 1,2
cos 2 2
x yy x 16
cos( 0,5) 2 0,8
sin 2 1,6
y xx y
2cos( 1) 2 1,5
3 cos 3
x yx y
17
sin( 1) 3 1,3
sin( 1) 0,8
y xy x
3sin 2
cos( 1) 3 0,7
x yy x 18
2 cos( 1) 0
sin 3 0,4 0
x yx y
4cos 4 1,5
2 sin( 0,5) 1
x yx y
19
cos( 1) 3 2
sin 2 1
y xx y
5sin( 0,5) 3 1
cos( 2) 2 0
x yy x 20
sin( 1) 1,5
cos( 2) 0,5
y xy x
6
cos( 0,5) 4 0,8
sin 2 1,6
x yy x 21
sin( 1) 0,5
2 cos 2
x yx y
7
sin( 1) 3 0,6
3 sin( 1) 0,8
x yx y 22
cos( 1) 2 1
3 cos 2
x yx y
82 cos( 1) 0
3 sin 0,4 0
y xx y 23
sin 2 1,6
cos( 1) 3 1
x yy x
9
cos( 0,5) 3 2
sin 2 1
x yy x 24
cos 3 1,2
2 sin( 0,5) 2
x yx y
10
sin( 1) 3 1,5
cos( 2) 2 0,5
x yy x 25
sin( 0,5) 2 6 0
cos( 2) 3 0
x yy x
11
sin( 1) 3 1,2
cos 2 2
y xx y 26
cos( 0,5) 3 1
sin 2 2
x yy x
12
cos( 1) 3 1
cos 3
y xy x 27
sin( 1) 2 0,5
3 sin( 1) 1
x yx y
13
sin 2 2
cos( 1) 4 1,5
y xx y 28
sin( 1) 3 1
2 cos 2
y xy x
14
cos 3 1,5
2 sin( 0,5) 1,5
y xy x 29
cos( 2) 3 2
sin 2 1
y xx y
15
sin( 0,5) 3 1
cos( 2) 2 0
y xx y 30
cos( 1) 3 1
sin 2 1,6
x yy x
2. Приложение Варианты исходных данных к задачам
Created with novaPDF Printer (www.novaPDF.com)

. . . Г Н Решетникова Моделирование систем4162.8
.
4
6–4
8,
50
, 5
2–5
8П
Варианты
исходныхданныхкзадачам
№ A
xf
№
Ax
f
16
27
38
49
510
12
34
1,21
0,12
0,18
0,17
0,33
xx
xx
12
34
0,18
0,01
1,21
0,17
3,79
xx
xx
12
34
0,17
0,2
0,17
1,09
2,52
xx
xx
12
34
0,12
0,11
0,01
0,2
0,49
xx
xx
12
34
3,73
0,4
0,19
0,38
3,77
xx
xx
12
34
0,4
2,41
0,41
0,75
6,72
xx
xx
12
34
0,19
0,41
7,21
0,27
0,47
xx
xx
12
34
1,53
0,1
0,19
0,08
3,63
xx
xx
12
34
0,1
1,41
0,31
0,05
4,69
xx
xx
12
34
0,19
0,31
0,81
0,27
2,39
xx
xx
12
34
0,08
0,05
0,27
1,09
1,37
xx
xx
12
34
2,41
0,78
0,14
0,78
9,57
xx
xx
12
34
0,78
7,41
0,27
0,55
8,65
xx
xx
12
34
0,14
0,27
0,55
0,27
1,23
xx
xx
12
34
0,78
0,55
0,27
3,09
7,97
xx
xx
12
34
1,41
0,28
0,14
0,08
3,91
xx
xx
12
34
0,28
1,41
0,27
0,05
1,91
xx
xx
12
34
0,14
0,27
0,85
0,27
2,09
xx
xx
12
34
0,08
0,05
0,27
1,39
5,91
xx
xx
12
34
9,31
0,52
0,48
0,17
1,68
xx
xx
12
34
0,52
5,31
0,11
0,38
3,9
xx
xx
12
34
0,48
0,11
3,41
0,17
4,2
xx
xx
12
34
0,17
0,38
0,17
1,89
7,35
xx
xx
12
34
1,21
0,45
0,17
0,12
3,14
xx
xx
12
34
0,45
1,37
0,11
0,38
3,36
xx
xx
12
34
0,12
0,38
0,17
1,79
4,23
xx
xx
12
34
8,91
0,45
0,7
0,12
15,8
9x
xx
x
12
34
0,45
5,31
0,41
0,58
16,
02
xx
xx
12
34
0,7
0,41
4,32
0,17
4,32
xx
xx
12
34
0,12
0,58
0,17
2,79
4,94
xx
xx
12
34
1,15
0,21
0,48
0,05
0,35
xx
xx
12
34
0,21
1,31
0,12
0,08
1,84
xx
xx
12
34
0,48
0,12
1,31
0,02
2,28
xx
xx
12
34
0,05
0,08
0,02
1,05
1,12
xx
xx
12
34
3,29
0,75
0,31
0,49
5,38
xx
xx
12
34
0,75
5,24
0,98
0,12
0,85
xx
xx
12
34
0,49
0,12
0,32
8,92
26,6
1x
xx
x
12
34
0,38
0,75
0,27
2,09
5,3
xx
xx
12
34
0,17
0,11
1,44
0,17
5,11
xx
xx
12
34
0,31
0,98
4,71
0,32
8,77
xx
xx
Cre
ated
with
nov
aPD
F P
rinte
r (w
ww
.nov
aPD
F.c
om)

2. Приложение Варианты исходных данных к задачам 417
11
16
12
17
13
18
14
19
15
20
12
34
1,75
0,27
0,48
0,22
8,43
xx
xx
12
34
0,27
4,75
0,28
0,98
3,81
xx
xx
12
34
0,48
0,28
3,85
0,42
17,1
8x
xx
x
12
34
0,22
0,98
0,42
3,33
0,21
xx
xx
12
34
1,15
0,27
0,38
0,22
3,13
xx
xx
12
34
0,27
0,85
0,18
0,08
0,97
xx
xx
12
34
0,38
0,18
1,25
0,12
1,62
xx
xx
12
34
0,22
0,08
0,12
1,33
2,15
xx
xx
12
34
2,75
0,59
0,79
0,35
7,88
xx
xx
12
34
0,59
4,85
0,71
0,81
13,
84x
xx
x
12
34
0,79
0,71
3,25
0,32
18,
46
xx
xx
12
34
0,35
0,81
0,32
3,33
3,57
xx
xx
12
34
0,19
0,85
0,21
0,21
1,68
xx
xx
12
34
0,09
0,21
1,25
0,32
0,19
xx
xx
12
34
0,35
0,21
0,32
1,33
0,56
xx
xx
12
34
2,22
0,75
0,42
0,85
13,9
1x
xx
x
12
34
0,75
3,85
0,81
0,21
28,
26
xx
xx
12
34
0,42
0,81
4,25
0,92
10,
34
xx
xx
12
34
0,85
0,21
0,92
3,33
4,02
xx
xx
12
34
1,32
0,15
0,28
0,29
4,21
xx
xx
12
34
0,15
0,85
0,15
0,11
2,54
xx
xx
12
34
0,28
0,15
1,35
0,32
2,62
xx
xx
12
34
0,29
0,11
0,32
0,83
0,62
xx
xx
12
34
1,32
0,75
0,28
0,69
6,3
xx
xx
12
34
0,75
4,85
0,65
0,81
7,56
xx
xx
12
34
0,69
0,81
0,82
3,83
21,
21
xx
xx
12
34
1,28
0,38
0,24
0,12
4,86
xx
xx
12
34
0,38
0,85
0,22
0,11
1,36
xx
xx
12
34
0,24
0,22
1,35
0,32
3,19
xx
xx
12
34
0,12
0,11
0,32
0,83
0,38
xx
xx
12
34
1,28
0,48
0,54
0,32
2,56
xx
xx
12
34
0,48
4,85
0,22
0,41
11,
89
xx
xx
12
34
0,54
0,22
5,25
0,72
0,64
xx
xx
12
34
0,32
0,41
0,72
4,13
12,5
7x
xx
x
12
34
1,22
0,25
0,32
0,15
3,87
xx
xx
12
34
0,25
0,85
0,11
0,21
4.53
xx
xx
12
34
0,32
0,11
1,25
0,32
4,76
xx
xx
12
34
0,15
0,21
0,32
1,33
2,63
xx
xx
,
12
34
1,35
0,19
0,09
0,35
1,38
xx
xx
12
34
0,28
0,65
2,35
0,82
2,41
xx
xx
Cre
ated
with
nov
aPD
F P
rinte
r (w
ww
.nov
aPD
F.c
om)

. . . Г Н Решетникова Моделирование систем418
21
26
22
27
23
28
24
29
25
30
12
34
2,71
0,48
0,44
0,61
4,82
xx
xx
12
34
0,48
2,85
0,25
0,81
9,69
xx
xx
12
34
0,44
0,25
3,35
0,32
9,93
xx
xx
12
34
0,61
081
0,32
4,83
3,50
xx
xx
12
34
0,71
0,48
0,04
0,11
1,09
xx
xx
12
34
0,48
0,85
0,25
0,01
1,06
xx
xx
12
34
0,04
0,25
1,35
0,32
7,03
xx
xx
12
34
0,11
0,01
0,32
0,83
1,06
xx
xx
12
34
1,86
0,34
0,56
0,78
3,46
xx
xx
12
34
0,34
5,85
1,25
0,81
30,0
2x
xx
x
12
34
0,56
1,25
5,35
0,32
10,4
6x
xx
x
12
34
0,78
0,81
0,32
2,83
5,34
xx
xx
12
34
0,86
0,34
0,16
0,28
1,46
xx
xx
12
34
0,34
0,85
0,25
0,21
3,92
xx
xx
12
34
0,16
0,25
1,35
0,32
0,40
xx
xx
12
34
0,28
0,21
0,32
0,83
1,63
xx
xx
12
34
4,31
0,16
0,56
0,78
20,
70
xx
xx
12
34
0,16
2,85
1,25
0,61
1,31
xx
xx
12
34
0,56
1,25
3,35
0,32
7,98
xx
xx
12
34
0,78
0,61
0,32
2,83
10,9
7x
xx
x
12
34
0,98
0,26
0,26
0,38
5,38
xx
xx
12
34
0,26
1,45
0,05
0,81
1,40
xx
xx
12
34
0,26
0,05
1,35
0,12
7,17
xx
xx
12
34
0,38
0,81
0,12
1,13
3,93
xx
xx
12
34
3,98
0,86
0,26
0,58
14,
32
xx
xx
12
34
0,86
2,45
0,55
0,81
12,9
5x
xx
x
12
34
0,26
0,55
4,35
0,72
33,
77
xx
xx
12
34
0,58
0,81
0,72
5,13
15,1
8x
xx
x
12
34
0,78
0,16
0,26
0,08
4,10
xx
xx
12
34
0,16
0,85
0,25
0,31
1,04
xx
xx
12
34
0,26
0,25
1,35
0,32
1,29
xx
xx
12
34
0,08
0,31
0,32
0,83
3,53
xx
xx
12
34
2,78
0,86
0,26
0,08
9,24
xx
xx
12
34
0,86
3,85
1,25
0,61
19,3
8x
xx
x
12
34
0,26
1,25
2,35
0,32
4,81
xx
xx
12
34
0,08
0,61
0,32
1,83
9,23
xx
xx
12
34
1,31
0,16
0,26
0,08
2,94
xx
xx
12
34
0,16
0,85
0,25
0,61
7,68
xx
xx
12
34
0,26
0,25
1,35
0,32
2,57
xx
xx
12
34
0,08
0,61
0,32
0,83
7,30
xx
xx
Cre
ated
with
nov
aPD
F P
rinte
r (w
ww
.nov
aPD
F.c
om)

2. Приложение Варианты исходных данных к задачам 419
2.9
.
4
9, 5
1,
59
ПВарианты
исходныхданныхкзадачам
№№
16
27
38
49
510
12
3
12
3
12
3
(23
)(4
)4
5
(23
)5
(23
)12
7
(4)
(23
)2
10
4
xix
ix
i
ix
xix
i
ix
ix
xi
12
3
12
3
12
3
3(
2)
(24
)15
98
(2
)5
(23
)10
31
(24
)(2
3)
1025
xix
ix
i
ix
xix
i
ix
ix
xi
12
3
12
3
12
3
2(
94
)(
45
)40
17
(94
)6
(1
2)
17
13
(45
)(1
2)
321
4
xix
ix
i
ix
xix
i
ix
ix
xi
12
3
12
3
12
3
(13
)(
42
)31
4
(13
)4
(72
)40
4
(42
)(7
2)
10
xix
ix
i
ix
xix
i
ix
ix
xi
12
3
12
3
12
3
(13
)(4
2)
31
(13
)4
(52
)23
(42
)(5
2)
15
xix
ix
i
ix
xix
i
ix
ix
xi
12
3
12
3
12
3
4(4
2)
(110
)46
63
(42
)(2
4)
12
39
(110
)(2
4)
330
7
xix
ix
i
ix
xix
i
ix
ix
xi
12
3
12
3
12
3
(34
)(1
15
)48
31
(34
)3
(7)
28
13
(11
5)
(7)
47
31
xix
ix
i
ix
xix
i
ix
ix
xi
12
3
12
3
12
3
4(1
4)
(23
)20
8
(14
)8
(54
)23
43
(23
)(5
4)
16
xix
ix
i
ix
xix
i
ix
ix
x
12
3
12
3
12
3
(24
)(5
)26
41
(24
)2
(63
)2
60
(5)
(63
)2
2
xix
ix
i
ix
xix
i
ix
ix
xi
Ax
f
Ax
f
12
3
12
3
12
3
7(1
8)
(14
)11
11
(18
)2
(7
)38
22
(14
)(7
)49
12
xix
ix
i
ix
xix
i
ix
ix
xi
Cre
ated
with
nov
aPD
F P
rinte
r (w
ww
.nov
aPD
F.c
om)

. . . Г Н Решетникова Моделирование систем420
11
16
12
17
13
18
14
19
15
20
12
3
12
3
12
3
(14
)(3
5)
344
(14
)6
40
46
(35
)2
37
53
xix
ix
i
ix
xix
i
ix
ixx
i
12
3
12
3
12
3
6(7
3)
(216
)36
24
(73
)(8
19
)11
15
(216
)(8
19
)6
230
xix
ix
i
ix
xix
i
ix
ix
xi
12
3
12
3
12
3
6(3
4)
(15
)129
5
(34
)3
969
82
(15
)9
30
102
xix
ix
i
ix
xix
i
ix
ixx
i
12
3
12
3
12
3
17
(76
)(4
16
)9
32
(76
)(2
)3
2
(416
)(2
)7
47
xix
ix
i
ix
xix
i
ix
ix
xi
12
3
12
3
12
3
(42
)(3
4)
32
4
(42
)(2
2)
419
(34
)(2
2)
810
xix
ix
i
ix
xix
i
ix
ix
xi
12
3
12
3
12
3
2(1
6)
(9)
110
(16
)10
(24
)6
(9)
(24
)23
14
27
xix
ix
i
ix
xix
ix
ix
xi
12
3
12
3
12
3
2(1
2)
(23
)13
19
(12
)(1
4)
15
9
(23
)(1
4)
227
13
xix
ix
i
ix
xix
i
ix
ix
xi
12
3
12
3
12
3
2(
16
)(2
)29
6
(1
6)
6(5
4)
32
(2)
(54
)2
16
xix
ix
i
ix
xix
i
ix
ix
x
12
3
12
3
12
3
2(3
3)
(24
)24
8
(33
)(8
9)
16
19
(24
)(8
9)
552
39
xix
ix
i
ix
xix
i
ix
ix
xi
12
3
12
3
12
3
(1
4)
(2)
29
6
(1
4)
8(
54
)27
(2)
(5
4)
18
3
xix
ix
i
ix
xix
ix
ix
xi
Cre
ated
with
nov
aPD
F P
rinte
r (w
ww
.nov
aPD
F.c
om)

2. Приложение Варианты исходных данных к задачам 421
21
266
22
27
23
28
24
29
25
30
1
23
42
134
6x
xix
ii
12
32
66
42
xx
xi
ii
12
32
123
42
ixx
xi
i
12
34
15
14
2x
xx
ii
i
12
38
2333
14
53
xx
xi
ii
1
23
72
53
xx
xi
ii
1
23
23
17
34
2x
xx
ii
i
12
32
229
34
73
xx
xi
ii
1
23
64
27
3x
xx
ii
i
12
37
114
35
26
xx
xi
ii
1
23
331
35
33
xx
xi
ii
12
32
62
26
33
xx
xi
ii
12
313
54
23
3x
xx
ii
i
12
35
23
34
22
2x
xx
ii
i
12
36
10
42
23
4x
xx
ii
i
12
32
22
22
12
xx
xi
i
12
32
104
34
12
xx
xi
ii
1
23
3(
72
)7
12
2x
xix
ii
12
34
62
52
xx
xi
i
12
3(
72
)3
10
155
2ix
xx
ii
1
23
242
154
15
612
xx
xi
ii
12
32
45
51
54
2x
xx
ii
i
1
23
107
586
124
2x
xx
ii
i
12
32
10
41
26
6x
xx
ii
i
12
36
16
51
23
8x
xx
ii
i
12
37
66
38
xx
xi
i
12
33
3433
32
36
xx
xi
ii
12
32
593
27
2x
xx
ii
i
12
33
142
253
67
2x
xx
ii
i
12
3(3
3)
(22
)2
414
ix
ix
xi
Cre
ated
with
nov
aPD
F P
rinte
r (w
ww
.nov
aPD
F.c
om)

422 . . . Г Н Решетникова Моделирование систем
2.10.П Варианты исх 60–61,одных данных к задачам 64
№ 0x 0y X ( , )f x y № 0x 0y X ( , )f x y
1 0 0 32
2
1
1
x yx y
16 –1 1 2 2 21 x y
2 0 0 22
1
1 xye 17 –2 0 0 21 2xy y
3 0 –1 2 2 20,5 1y x 18 0 0 3 2 sin( )xe x y
4 1 0 3y
xx
19 –2 –1 1 2 2 cosx xy x
5 1 4 4 2
2
2xy
x
20 –1 0 1 2 2x ye x y
6 1 1 32
lny yx x
21 0 0 3 xyx y e
7 –2 –1 1 2 2
cos
1
y xx y
22 0 0 2 4 sin xy
8 1 2 4
2
2
1 1
2 1
yx
y
23 1 2 4 3 cos 1xy xy
9 0 1 3 2
1
2
xx y
24 –2 3 0 1 sin( )xye
10 0 0 2
sin
1 cos
x xy
x y
25 –1 2 2 1 cos(2 )xye
11 0 0 2
2
21 cos
xxy
26 –2 0 1 1x ye
12 –1 –2 2 xye 27 –2 0 1 1x ye
13 0 1 3 2
1
1
yxy
28 3 3 5 2 2y x x y
x
14 0 0 2sin( )
2 cos
xyy
29 1 1 4 2yy
x
15 1 –0,5 4 2sin
1
xy
30 –5 0 –1 cos sinx y x y
Created with novaPDF Printer (www.novaPDF.com)
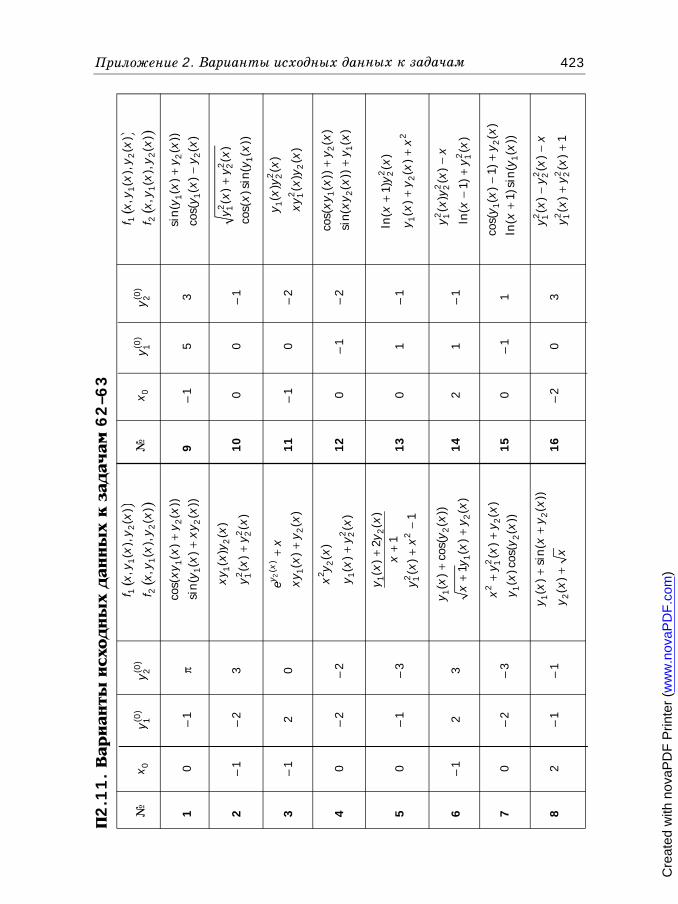
2. Приложение Варианты исходных данных к задачам 423
2.1
1.
62–6
3П
Варианты
исходныхданныхкзадачам
№0x
(0)
1y(0
)2y
11
2
21
2
,(
),(
)
,(
),(
)
fx
yx
yx
fx
yx
yx
№0x
(0)
1y(0
)2y
1
12
21
2
,(
),(
)
,(
),(
)
fx
yx
yx
fx
yx
yx
10
–1
1
12
21
2
()
cos(
()
())
()
sin(
()
())
yx
xyx
yx
yx
yx
xyx
9–1
53
11
2
21
2
()
sin(
()
())
()
cos(
()
()
yx
yx
yx
yx
yx
yx
2–1
–2
31
12
22
21
2
()
()
()
()
()
()
yx
xyx
yx
yx
yx
yx
10
00
–1
22
11
2
21
()
()
()
()
cos(
)sin
((
))
yx
yx
yx
yx
xy
x
3–1
20
2(
)
21
2
()
()
()
()
yx
yx
ex
yx
xyx
yx
11
–1
0–2
21
12
22
12
()
()
()
()
()
()
yx
yx
yx
yx
xyx
yx
40
–2
–2
21
2
22
12
()
()
()
()
()
yx
xy
x
yx
yx
yx
12
0–1
–2
11
2
22
1
()
cos(
())
()
()
sin(
())
()
yx
xyx
yx
yx
xyx
yx
50
–1
–3
12
22
21
()
2(
)(
)1
()
()
1
yx
yx
yx
xy
xy
xx
13
01
–1
21
2
22
12
()
ln(
1)(
)
()
()
()
yx
xy
x
yx
yx
yx
x
6–1
23
11
2
21
2
()
()
cos(
())
()
1(
)(
)
yx
yx
yx
yx
xy
xy
x
14
21
–1
22
11
2
22
1
()
()
()
()
ln(
1)(
)
yx
yx
yx
x
yx
xy
x
70
–2
–3
22
11
2
21
2
()
()
()
()
()c
os(
())
yx
xy
xy
x
yx
yx
yx
15
0–1
11
12
21
()
cos(
()
1)(
)
()
ln(
1)si
n(
())
yx
yx
yx
yx
xy
x
82
–1
–1
11
2
22
()
()
sin(
())
()
()
yx
yx
xy
x
yx
yx
x
16
–2
03
22
11
2
22
21
2
()
()
()
()
()
()
1
yx
yx
yx
x
yx
yx
yx
Cre
ated
with
nov
aPD
F P
rinte
r (w
ww
.nov
aPD
F.c
om)

. . . Г Н Решетникова Моделирование систем424
17
–1
2–2
11
2
21
2
()
()
()
()
ln(
2)(
)(
)
yx
xyx
yx
yx
xy
xy
x
24
–1
–3
01
2
21
12
()
()
()
()
()
()
yx
yx
yx
xy
xy
x
yx
ee
18
13
12
11
2
21
2
()
()
()
()
cos(
()
())
1
yx
yx
yx
yx
yx
yx
25
–3
2–2
32
11
2
22
21
2
()
()
()
()
()
()
yx
yx
xy
x
yx
yx
yx
19
–3
–2
5
22
11
2
22
21
()
()
()
()
()
()
1
yx
yx
yx
x
yx
yx
yx
26
24
–5
11
22
12
()
3(
)
()
()
()
yx
yx
x
yx
yx
yx
20
10
11
12
21
2
()
cos(
())
sin(
())
()
()
()
yx
yx
yx
yx
yx
yx
x
27
00
–1
11
2
21
2
()
()
()
()
2(
)4
()
yx
yx
yx
yx
yx
yx
21
–2
–1
1
21
12
12
()
()
()
()
()
()
2
yx
xyx
xy
x
yx
yx
yx
28
02
4
12
21
2
21
2
()
3(
)1
()
1(
)
()
3co
s((
))2
sin(
())
yx
yx
yx
yx
yx
yx
22
00
01
2
21
2
()
()
()
()
()
23
()
1y
xy
x
xyx
xy
x
yx
e
29
03
2
12 2
22 1
()
()
31
()
()
()
21
()
yx y
x
yx
yx
yx
23
–2
0–2
21
12
21
2
()
()
()
1
()
()
()
yx
yx
yx
yx
xyx
yx
30
14
3
21
21
2 1
12
()
2ln
(1(
))3
cos(
())
ln(1
())
()
2(
)(
)
yx
yx
yx
yx
yx
yx
yx
Cre
ated
with
nov
aPD
F P
rinte
r (w
ww
.nov
aPD
F.c
om)

2. Приложение Варианты исходных данных к задачам 425
2.1
2.
65–6
6П
Варианты
исходныхданныхкзадачам
1
(
)2
cos
0,1
1A
xx
;3
0,6
()
0,7
0,5
Ax
xx
;
5
2
()
0,4
cos
0,5
Ax
xx
;
2(
)0,
50,
7B
xx
x
;
2
()
2si
n0,
31,
2B
xx
;
0,
5(
)co
s;
xB
xe
2(
)ln
3C
xx
;
0,3
1(
)2
;x
Cx
e
(
)2,
3ln
0,3
Cx
x
;
0.2
()
40,
5F
xx
x
;
2
()
10,
7F
xx
x
;
0,5
()
30,
1x
Fx
e
;
0,1;
1,3
ab
; 14
n
;0,
6;1,
7a
b
;
14
n
;0,
6;0,
95
ab
; 11
n
;
()
0,7
ya
;
()
1,37
yb
(
)1,
1y
a
; (
)1,
4y
b
()
0y
a
; (
)0,
6y
b
2(
)0,
7A
xx
;4
1(
)co
s3
Ax
x
;6
2co
s(
)1
2,7
xx
Ax
;
()
cos
0,4
Bx
x
;
2(
)0,
04
xB
xx
e
;
()
2ln
(10,
5)
Bx
x
;
2(
)0,
5C
xx
;
2(
)si
n0,
3C
xx
x
;
()
sin
0,3
Cx
x
;
2
()
0,1
Fx
x
;
()
ln(2
)F
xx
;
2(
)0,
37
cos
Fx
xx
x
;
0,1;
0,8
ab
; 8
n
;0,
4;0,
9a
b
;
10
n
;0,
5;1,
3a
b
;
12
n
;
()
0,36
ya
;
()
0,72
yb
()
0,3
ya
;
()
0,85
yb
(
)0,
4y
a
; (
)1
yb
,
Cre
ated
with
nov
aPD
F P
rinte
r (w
ww
.nov
aPD
F.c
om)

. . . Г Н Решетникова Моделирование систем426
72
()
0,4
20,
5A
xx
x
;10
0
.7(
)1
Ax
x
;
13
2(
)0,
62
Ax
xx
;
0,7
()
Bx
x
;
(
)1,
1co
s0,
5B
xx
;
2(
)0,
50,
3B
xx
x
;2
()
0,95
Cx
x
;2
()
Cx
x
;
0,3
()
2,31
Cx
x
;
2(
)co
sx
Fx
x
;
3(
)1
ln3
Fx
xx
;
()
0,5
sin
0,7
Fx
xx
;
1;1,
5a
b
;
8n
;0,
31;
1,45
ab
; 11
n
;0,
7;1,
3a
b
;
9n
;
()
1,3
ya
;
()
1,1
yb
(
)1,
3y
a
; (
)0,
4y
b
()
0,1
ya
;
()
1y
b
8
0,4
2(
)0,
34
1,5
Ax
x
;
11
/0,
3(
)0,
1x
Ax
e
;
14
(
)2
ln1
;2x
Ax
()
cos
0,7
1,3
Bx
x
;
2(
)2
0,2
Bx
xx
;
2(
)0,
4co
s0,
5B
xx
x
;
()
0,5
1,1
Cx
x
;
0,7
()
(1)
Cx
x
;
0,6
()
0,7
0,5
Cx
xx
;
2(
)ln
20,
7co
sF
xx
x
;
2(
)ln
()
0,3
cos
Fx
xx
;
(
)2
ln1
Fx
x
;
0,5;
1,6
ab
; 15
n
;0,
74;
2,3
ab
; 12
n
;0,
9;1,
5a
b
;
11
n
;
()
0,4
ya
;(
)0,
9y
b
()
0y
a
; (
)1
yb
(
)0,
5y
a
; (
)0,
3y
b
92
()
13
xA
xe
x
;
12
15
0,4
()
lnx
Ax
ex
;
2(
)0,
32
Bx
xx
;
()
2co
s0,
72,
3B
xx
;
2(
)0,
95
0,1
Bx
x
;
2(
)0,
61,
4co
sx
Cx
ex
;
()
0,7
ln2,
75C
xx
;
co
s0,
2(
)3
xC
x
;
3(
)ln
2,7
Fx
x
;
2(
)1,
7x
Fx
ex
;
2(
)si
n0,
3F
xx
;
0,2;
1,7
ab
; 11
n
;0,
5;1,7
ab
; 10
n
;0,
1;0,
7a
b
;
12
n
;
()
1y
a
; (
)0
yb
(
)0
ya
;
()
0,69
yb
(
)0
ya
;
()
0,2
yb
,
2
()
(0,
36)
1,2;
Ax
x
Cre
ated
with
nov
aPD
F P
rinte
r (w
ww
.nov
aPD
F.c
om)

2. Приложение Варианты исходных данных к задачам 427
16
19
()
2A
xx
;
22
2(
)0,
4co
s0,
5A
xx
x
;
2(
)si
n0,
3B
xx
;2
()
0,36
Bx
x
;
2
()
0,5
0,3
Bx
x
;
2(
)4
2co
s1
Cx
x
;
2(
)1
0,7
Cx
x
;
2
()
sin
1,3
Cx
x
;
3(
)2
30,
7F
xx
x
;
(
)ln
2F
xx
;
2(
)0,
37
cos
Fx
xx
x
;
0;1
ab
; 10
n
;0,
6;0,
95
ab
; 9
n
;0,
3;0,
95
ab
; 11
n
;
()
0y
a
; (
)1
yb
(
)0,
5y
a
; (
)0
yb
(
)0,
1y
a
; (
)1,
2y
b
17
20
()
3co
s0,
51
Ax
x
;
23
11
()
xA
xe
x
;
2(
)1,
3ln
Bx
xx
x
;
()
2si
n(1
)1,
7B
xx
;
2(
)2
Bx
xx
;
()
ln(1
2,1
)C
xx
;
2
2(
)1
0,4
Cx
xx
;
0,
3(
)2,
31C
xx
;
()
cos
1F
xx
;
(
)co
s2
Fx
x
;
(
)2
ln1
sin
0,5
Fx
xx
;
1;2
ab
; 10
n
;0,
5;0,
5a
b
;
11
n
;1;
1,5
ab
; 10
n
;
()
1y
a
; (
)2
yb
(
)1
ya
;
()
0,1
yb
(
)0
ya
;
()
0,5
yb
18
21
2
2(
)0,
36
0,2
Ax
xx
;
24
()
2co
s0,
11
Ax
x
;
()
2si
n0,
3B
xx
x
;
()
2ln
13x
Bx
;
2(
)0,
50,
7B
xx
x
;
2(
)co
s1,
74
Cx
x
;
0,4
()
Cx
x
;
2
()
ln1
Cx
x
;
2
()
sin
0,3
Fx
x
;
()
2co
s0,
11
Fx
x
;
()
40,
50,
7F
xx
x
;
0,4;
1,6
ab
; 12
n
;1,
1;2
ab
; 10
n
;0,
1;0,
9307
ab
; 9
n
;
()
0,75
ya
;
()
0,13
yb
(
)0
ya
;
()
1y
b
()
0,7
ya
;
()
0,77786
yb
2(
)0,
24;
Ax
x
()
cos
1,7
;A
xx
x
(
);
0,6x
Ax
Cre
ated
with
nov
aPD
F P
rinte
r (w
ww
.nov
aPD
F.c
om)

. . . Г Н Решетникова Моделирование систем428
25
()
21,
7A
xx
;27
()
sin
2A
xx
;29
2(
)0,
40,
71
Ax
xx
;
2
()
0,7
cos
1B
xx
x
;
(
)1
0,1co
s2
Bx
x
;
2(
)co
s1
Bx
x
;
0,
7(
)2,
70,
3C
xx
;
0
.42
()
1C
xx
;
()
ln2
Cx
x
;
()
sin(0
,41)
Fx
x
;
()
ln1
Fx
x
;
0,5
0,2
()
xF
xe
x
;
0,3;
0,9
ab
; 7
n
;1,
1;1,
6a
b
;
10
n
;0,
2;0,
45
ab
; 11
n
;
()
0,1
ya
;
()
0,3
yb
()
1,4
ya
;
()
0,3
yb
(
)1
ya
;
()
0,1
yb
26
2
()
10,
5A
xx
;28
2(
)1
Ax
x
;
30
0,6
()
0,7
0,5
Ax
xx
;
()
2si
n0,
30,
4B
xx
;
2(
)0,
40,
2B
xx
;
2(
)2
sin
0,3
1,2
Bx
x
;
()
3co
s0,
7C
xx
;
()
2C
xx
;0,
31
()
2x
Cx
e
;
32
()
1F
xx
;
(
)ln
2F
xx
;2
()
10,
7F
xx
x
;
0;0,
4a
b
;
11
n
;0,
3;0,
8a
b
;
10
n
;0,
6;1,
7a
b
;
14
n
;
()
0,3
ya
; (
)0,
3y
b
()
0,2
ya
; (
)0,
2y
b
()
1,1
ya
;
()
1,4
yb
,
Cre
ated
with
nov
aPD
F P
rinte
r (w
ww
.nov
aPD
F.c
om)

429 2. Приложение Варианты исходных данных к задачам
2.13. 67–75П Варианты исходных данных к задачам
№ 2,1a 2,2a 2b 1,1c 2,2c01x
02x
1 –7,1 –0,8 1,5 1,3 2,3 –10 0,2
2 –4,1 –0,3 2,2 4,8 0,3 12,3 1,2
3 –2,8 –0,6 2,1 1,7 0,2 10,5 0,5
4 1,5 –1,8 –2,5 8,5 1,4 –25,5 1
5 –3,7 –0,9 1,5 15 3 –15 4
6 –4,1 –1,1 –1 2,3 1 –11 12
7 –3,2 –0,8 1,1 5 2 15,3 2,1
8 1,2 –0,7 1,1 10 1 10 –3,1
9 1,1 –0,6 2,1 4,5 1 –10,5 0,9
10 1,4 –1,7 3,2 3,8 2 12,8 3,2
11 0,7 –0,6 1,5 4,1 1,4 –10 1,1
12 –0,8 –2,2 –1,4 3,5 1,2 10,7 3
13 0,5 –0,9 –1,9 3,3 1,1 25 4
14 0,9 –3,2 2,1 5,6 2 20 –2
15 1 –0,7 2,2 4,3 2,1 15,6 7
16 1,3 –1,2 1,4 4,7 0,2 –13 0,8
17 0,85 –2,7 2,1 7,6 2,6 –25 1,1
18 1,5 –0,8 1,7 8,5 1,5 15,8 0,7
19 1,15 –0,9 2,2 3,9 2,3 –1 10
20 –0,7 –1,3 –0,6 5,3 1,4 12,7 –3,4
21 –0,4 –1,8 1,3 4,3 1,7 –20,1 –3,5
22 –0,7 –2,1 1,3 1,3 1,2 –13,8 3,1
23 0,92 –3,2 1,9 6,4 1,8 18,6 4,6
24 –0,4 –1,4 1,2 4,9 1,9 –24 5
25 –0,6 –2,1 1 4,1 2,3 17,5 2,1
26 4,1 –2,1 –2,2 10,1 1 11 13
27 –2,8 –0,8 –2,4 1,1 0,5 10 –3,1
28 –2,6 –2,5 –1,1 1,5 1 –19 –5,1
29 –4,6 –2,5 –1,5 1,5 0,5 19 –6,1
30 1,7 –1,5 –1,2 12,5 2,5 25 –16,1
Created with novaPDF Printer (www.novaPDF.com)

430 . . . Г Н Решетникова Моделирование систем
3. Приложение Описание математических моделей
*для моделирования систем управления
3.1. П Математическая модель движения судна
«Compas Island» Линеаризованная модель движения судна имеет [1]вид
0 0( ) ( ) ( ) ( ); ( )x t Ax t Bu t Fq t x t x ,
где компоненты векторов состояния ( ) ( , , v, )Tx t и управления
1 2( ) ( ( ) , ( ))Tu t u t u t ( . 1):имеют следующий смысл рис — , ;отклонение угла дрейфа рад — , / ;отклонение угловой скорости дрейфа рад сv — , / ;отклонение скорости движения м с — , ;отклонение угла курса рад
1u — , ;отклонение угла перекладки руля рад
2u — от .клонение режима работы главного двигателя
N
v
. 1Рис
. 1 На рис переменная N .указывает направление на север Внешние возмущения в модели объекта описываются вектором q(t), -компоненты которого являются независимыми нормальными гауссов
скими величинами с матрицей влиян ия ( )F t .
* Требуемое качество функционирования моделей объектов достигается .варьированием элементов весовых матриц
Created with novaPDF Printer (www.novaPDF.com)

431
Матрицы , ,A B F при скорости v( ) 10 /м сt соответственно равны
0,007 0,4436 0 0
0,0142 0,172 0 0
0 0 0,0356 0
0 1 0 0
A
;
0,0161 0
0,0085 0
0 0,97
0 0
B
;
0,001 0 0
0 0,00017 0;
0 0 0,01
0 0 0
F
вектор начального состояния 0 0;0;0;0,25 Tx . Математическая модель измерительного комплекса
( ) ( ) ( )y k Hx k r k :имеет следующие характеристики H I (I — единичная матрица
); соответствующей размерности r(k) — , -погрешности измерений кото рые описываются вектором дискретных гауссовских величин
( ) 0M r k ; ,( ) ( )Tk jM r k r j R ;
4 4 1 2diag 0,4 10 ;0,25 10 ;0,1 10 ;0,15 10R . -На максимальные отклонения компонент вектора управления на
:кладываются следующие ограничения
20,61 ; 0,01рад u . -Целью управления является переход к концу времени моделирова
ния на кур с 0,2z , . . -рад т е достижение объектом заданного состоян ия 0;0;0; 0,2 T
zx , , -при этом требуется чтобы компоненты векто :ра состояния удовлетворяли следующим ограничениям
1
1
0,26 ; 0,174 10 / c;рад рад
v 0,5 / ; 0,87 10 .м с радz
:Ориентировочные значения весовых матриц равны
3 3 2diag 0,15 10 ;0,33 10 ; 4;0,13 10 ; diag 1;1C D .
3. ...Приложение Описание математических моделей
Created with novaPDF Printer (www.novaPDF.com)

432 . . . Г Н Решетникова Моделирование систем
3.2 П Математические модели продольного движения самолета
Линеаризованная модель -продольного движения самолета относи тельно установившегося горизонтального полета может быть записана
в виде
0 0( ) ( ) ( ) ( ); ( ) ,x t Ax t Bu t Fq t x t x
где компоненты векторов состоян ия ( )x t и управления ( )u t им -еют сле ( . 2):дующий смысл рис
v — , ;отклонение угла тангажа рад — , ;отклонение угла наклона траектории к горизонту рад
z — отк , / ;лонение угловой скорости рад сv — , / ;отклонение скорости полета м сh — , ;отклонение высоты полета м
T — , ;величина характеризующая тягу двигателя
в — уг , .ол отклонения руля высоты рад
h
v
v
. 2Рис
Внешние возмущения в модели объекта описываются вектором q(t), -компоненты которого являются независимыми нормальными гауссовс
кими величинами с матрицей влия ния ( )F t . Математическая модель измерительного комплекса
( ) ( ) ( )y k Hx k r k : имеет следующие характеристики H I (I — -единичная матрица соот
); ветствующей размерности r(k) — , погрешности измерений которые описываются вектором дискретных гауссовских величин
( ) 0M r k ; ,( ) ( )T k jM r k r j R . -Целью управления является приведение системы в нулевое состоя
, -ние при этом на компоненты вектора управления накладываются оп , ределенные ограничения а компоненты вектора состояния должны
.удовлетворять заданным ограничениям
Created with novaPDF Printer (www.novaPDF.com)

433
1Модель [2]
Для векторов состоян ия ( ) ; ; ;v Tzx t v и управления
в( ) ;T
Tu t 5000 при высоте полета м со ск , -оростью соответствую Mщей числу Маха 0,46, матрицы A и B соответс :твенно равны
0 0 1 0
0,62 0,62 0 0,07
3,876 3,876 1,34 0,127
0,25 0,08 0 0,01
A
;
0 0
0 0,11
0 7,478
6,9 0
B
;
матрица влияния шумов в модели объекта имеет вид
0,00015 0,00141
0,04 0,035
0,037 0,00316
0,002 0,00141
F
;
вектор начального состояния 0 0,02;0,02;0,01;0,3 Tx . -Математическая модель измерительного комплекса имеет следую
:щие характеристики
H I ; 5 6 6diag 0,3 10 ;0,8 10 ;0,8 10 ;0,7396 .R
Ограничения на максимальные отклонения компонент векторовx(t) и u(t) :следующие
0,316 ; 0,0316 ; 0,158 / ;рад рад рад сzv
вv 3,16 / ; 0,1; 0,1 .м с радT :Ориентировочные значения весовых матриц равны
2diag 0,1;0,1;0;0,1 10 ;C diag 1;1D .
2Модель [3]
Для векторов состоян ия ( ) ; ; ;v Tzx t v и управления в( )u t
263 / при скорости полета км ч матри цы A и B пр инимают следующие:значения
0,4932 0,000129 1,4168 0
0 0,0507 3,861 32,17
1 0,00117 0,5164 0
1 0 0 0
A
;
1,645
0
0,417
0
B
;
матрица влияния шумов в модели объекта имеет вид
3. ...Приложение Описание математических моделей
Created with novaPDF Printer (www.novaPDF.com)
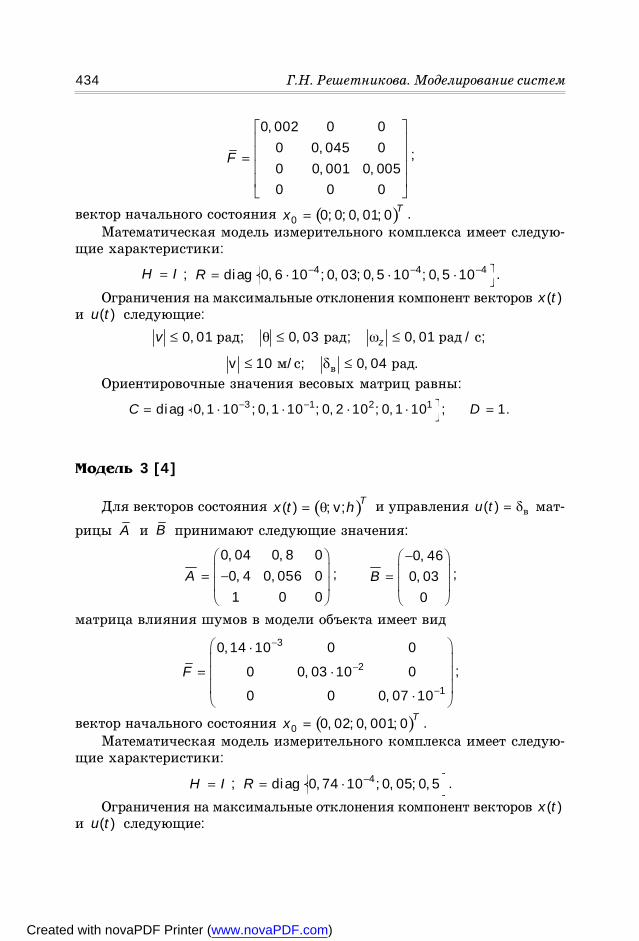
434 . . . Г Н Решетникова Моделирование систем
0,002 0 0
0 0,045 0
0 0,001 0,005
0 0 0
F
;
вектор начального состояния 0 0;0;0,01;0 Tx . -Математическая модель измерительного комплекса имеет следую
:щие характеристики
H I ; 4 4 4diag 0,6 10 ;0,03;0,5 10 ;0,5 10R .
Ограничения на максимальные отклонения компонент векторо в ( )x t и ( )u t :следующие
0,01 ; 0,03 ; 0,01 / ;рад рад рад сzv
вv 10 / ; 0,04 .м с рад :Ориентировочные значения весовых матриц равны
3 1 2 1diag 0,1 10 ;0,1 10 ;0,2 10 ;0,1 10 ; 1.C D
3Модель [4]
Для векторов состояния ( ) ; v;Tx t h и управления в( )u t -мат
риц ы A и B при :нимают следующие значения
0,04 0,8 0
0,4 0,056 0
1 0 0
A
; 0,46
0,03
0
B
;
матрица влияния шумов в модели объекта имеет вид
3
2
1
0,14 10 0 0
0 0,03 10 0
0 0 0,07 10
F
;
вектор начального состоян ия 0 0,02;0,001;0 Tx . -Математическая модель измерительного комплекса имеет следую
:щие характеристики
H I ; 4diag 0,74 10 ;0,05;0,5R .
Ограничения на максимальные отклонения компонент векторов ( )x t и ( )u t :следующие
Created with novaPDF Printer (www.novaPDF.com)
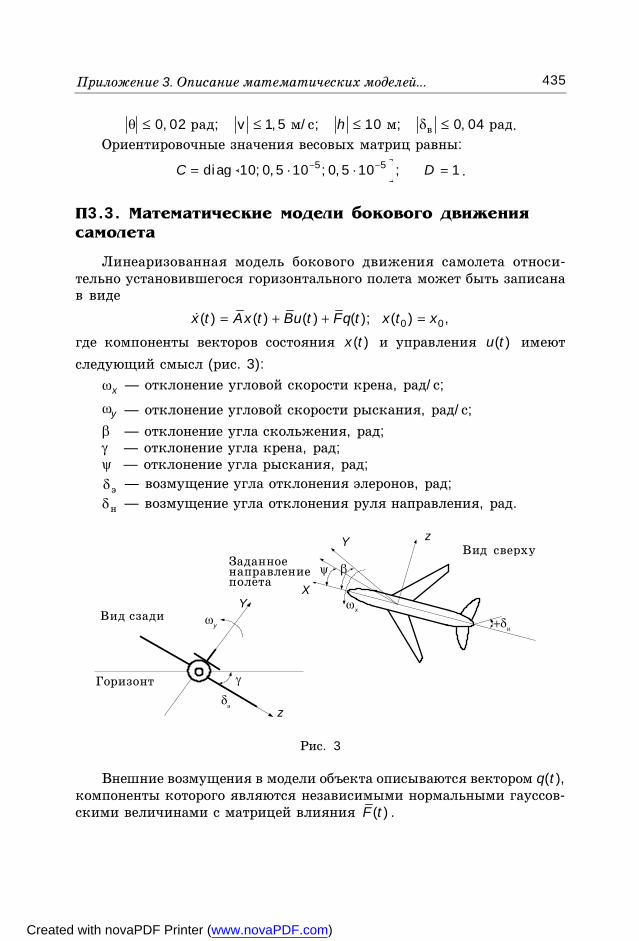
435
в0,02 ; v 1,5 / ; 10 ; 0,04рад м с м радh . :Ориентировочные значения весовых матриц равны
5 5diag 10;0,5 10 ;0,5 10 ; 1C D .
3.3. П Математические модели бокового движениясамолета
Линеаризованная модель бокового движения -самолета относи тельно установившегося горизонтального полета может быть записана
в виде
0 0( ) ( ) ( ) ( ); ( ) ,x t Ax t Bu t Fq t x t x
где компоненты векторов состояния ( )x t и управления ( )u t имеют
( . 3):следующий смысл рис
x — , / ;отклонение угловой скорости крена рад с
y — от , / ;клонение угловой скорости рыскания рад с
— , ;отклонение угла скольжения рад — , ;отклонение угла крена рад — , ;отклонение угла рыскания рад
э — , ;возмущение угла отклонения элеронов рад
н — , .возмущение угла отклонения руля направления рад
zY
Xx
н
Y
y
zэ
Горизонт
Вид сзади
Заданноенаправлениеполета
Вид сверху
. 3Рис
Внешние возмущения в модели объекта описываются вектором q(t), -компоненты которого являются независимыми нормальными гауссов
скими величинами с матрицей влияни я ( )F t .
3. ...Приложение Описание математических моделей
Created with novaPDF Printer (www.novaPDF.com)

436 . . . Г Н Решетникова Моделирование систем
Модель измерительного комплекса
( ) ( ) ( )y k Hx k r k
: имеет следующие характеристики H I (I — единичная матрица
); соответствующей размерности ( )r k — , -погрешности измерений кото рые описываются вектором дискретных гауссовских величин
( ) 0M r k ; ,( ) ( )T k jM r k r j R .
-Целью управления является приведение системы в нулевое состоя, -ние при этом на компоненты вектора управления накладываются оп
, ределенные ограничения а компоненты вектора состояния должны .удовлетворять заданным ограничениям
1Модель [5]
Для векторов состо яния ( ) ; ; ; ;T
z yx t и управления
э в( ) ;Tu t при высоте п 9000 800 / олета м со скоростью км ч мат -ри
цы A и B п :ринимают следующие значения
0 1 0 0 0
0 0,0151 0 0,0121 0,431
0 0 0 1 0
0 0,13 0 0,794 1,217
0 1 0,0438 0 0,0297
A
;
0 0
0,381 0,067
0 0
0,04 1,587
0 0
B
;
матрица влияния шумов в модели объекта имеет вид
0 0
0,002 0,003
0 0
0,0015 0,001
0 0
F
;
вектор начального состояния 0 0;0;0;0,05;0 Tx . :Измерительный комплекс имеет следующие характеристики
4 4 4 4 4
;
diag 0,75 10 ;0,5 10 ;0,5 10 ;0,75 10 ;0,75 10
H I
R
.
Ограничения на максимальные отклонения компонент векторов ( )x t и ( )u t :следующие
0,5 / ; 0,3 / ; 0,01 ; 0,07рад с рад с рад радx y ;
Created with novaPDF Printer (www.novaPDF.com)

437
э н0,01 ; 0,1 ; 0,1 .рад рад рад :Ориентировочные значения весовых матриц равны
diag 11;11;11;11;1,2 ; diag 1;1C D .
2Модель [2]
Для векторов сос тояния ( ) ; ; ;T
x yx t и управления
э в( ) ;Tu t при высоте пол 12000 ета м и числе Маха 1,95M м -ат
ри цы A и B прин :имают следующие значения
2,7 0,63 22,6 0
0,05 0,27 19,8 0
0 1 0,2 0,027
1 0 0 0
A
;
15,2 1,0
1,15 5,1
0 0
0 0
B
;
матрица влияния шумов в модели объекта имеет вид
0,002 0,003
0 0
0 0
0,002 0,001
F
;
вектор начального состояни я 0 0;0;0;0,07 Tx . -Математическая модель измерительного комплекса имеет следую
:щие характеристики
4 4 4 4; diag 0,5 10 ;0,5 10 ;0,75 10 ;0,75 10H I R . Ограничения на максимальные отклонения компонент векторов x(t)
и u(t) :следующие
0,5 / ; 0,3 / ; 0,05 ;рад с рад с радx y
э н0,07 ; 0,1 ; 0,1рад рад рад . :Ориентировочные значения весовых матриц равны
1 2 1 1diag 0,3 10 ;0,1 10 ;0,3 10 ;0,7 10 ; diag 1;1C D .
3Модель [2]
Для векторов состояния ( ) ; ; ;T
x yx t и управления
э в( ) ;Tu t 5при высоте полета 000 м и числе Маха 0,46M м -ат
риц ы A и B п ринимают :следующие значения
3. ...Приложение Описание математических моделей
Created with novaPDF Printer (www.novaPDF.com)

438 . . . Г Н Решетникова Моделирование систем
1,6 0,52 17 0
0,013 0,16 3,2 0
0 1 0,11 0,07
1 0 0 0
A
;
6,8 2,17
0,25 1,5
0 0
0 0
B
;
матрица влияния шумов в модели объекта имеет вид
0,003 0,003
0,001 0
0 0
0,002 0,002
F
;
вектор начального состояни я 0 0;0;0;0,07 Tx . -Математическая модель измерительного комплекса имеет следую
:щие характеристики
5 5 5 5; diag 0,8 10 ;0,6 10 ;0,5 10 ;0,5 10H I R .
Ограничения на максимальные отклонения компонент векторовx(t) и u(t) :следующие
0,5 / ; 0,3 / ; 0,05 ;рад с рад с радx y
э н0,07 ; 0,1 ; 0,1рад рад рад . :Ориентировочные значения весовых матриц равны
3 4 4diag 0,6 10 ;2;0,5 10 ;0,5 10 ; diag 1;1 .C D
.3.4. П Математическая модель парового генератора
Линеаризованная модель парового генератора может быть записана [6]в виде
0 0( ) ( ) ( ) ( ); ( ) ,x t Ax t Bu t Fq t x t x где компоненты векторов состояни я 1 2 3( ) ( ), ( ), ( )
Tx t x t x t x t -и управ
ления 1 2( ) ( ), ( )Tu t u t u t имеют с ( . 4):ледующий смысл рис
1( )x t — , ;давление пара Па
2 ( )x t — , количество воды м3;
3( )x t — , температура C ;
1( )u t — , ;расход топлива кг
2( )u t — , расход воды м3.
Created with novaPDF Printer (www.novaPDF.com)

439
Пар
Печь u1
u2
. 4Рис
Внешние возмущения в модели объекта описываются вектором q(t), -компоненты которого являются независимыми нормальными гауссов
скими величинами с матрицей влияния ( )F t .Матри цы , ,A B F соотв етственно равны
0 0 0,02 0,14 0,01
0 0,01 0 ; ;0 0,17
0,01 0,01 0,01 0,08 0
A B
3
2
2 4
0,379 10 0 0
0 0,2087 10 0 ;
0 0,1581 10 0,316 10
F
вектор начального состояния 0 590;490;290 Tx . Математическая модель измерительного комплекса
( ) ( ) ( )y k Hx k r k :имеет следующие характеристики
1 0 0
0 0 1H
;
( ) 0M r k ; , ;( ) ( )Tk jM Rr k r j
2 6diag 0,689 10 ;0,1 10R .
-Целью управления является приведение системы в заданное состо, яние 600;500;300 T
zx , при -этом на компоненты вектора управле :ния накладываются следующие ограничения
31 20 30 ; 0 30 ,кг мu u
3. ...Приложение Описание математических моделей
Created with novaPDF Printer (www.novaPDF.com)

440 . . . Г Н Решетникова Моделирование систем
а компоненты вектора состояния должны удовлетворять следующим:ограничениям
1 2 3
31 2 30,5 ; 0,5 ; 0,5 .Па м Сz z zx x x x x x
Ориентировочные значения весовых матриц равны
diag 280;100;120 ;C diag 1;1 .D
.3.5. 3П Литература для приложения
1. . . -Соболев Г В Управляемость корабля и автоматизация судовож / . . . – . : , 1976. – 477 .дения Г В Соболев Л Судовождение с
2. . . Красовский А А Система автоматического управления полетом / . . . – . : -и их аналитическое конструирование А А Красовский М На
, 1973. – 558 .ука с3. Rynaski E.G. Flight control synthesis using robust on tysyt observer
/ E.G. Rynaski // « ». – 1983. – 36.ЭИ Авиастроение №4. . . / . . . – . :Летов А М Динамика полета и управление А М Летов М
, 1969. – 360 .Наука с5. . / .Брайсон А Прикладная теория оптимального управления А
, - - . – . : , 1972. – 544 .Брайсон Хо Ю Ши М Мир с6. Gupta M.M. On the multilevel optimization using on-line coordina-
tion / M.M. Gupta, P.N. Nikiforuk // Проблемы управления и теория, 1978. – 4. – . 237–262.информации № С
Created with novaPDF Printer (www.novaPDF.com)

441
Учебное издание
Решетникова Галина Николаевна
МОДЕЛИРОВАНИЕ СИСТЕМ
Учебное пособие
. . Редактор Н С Голикова . . Корректор Е С Юзефович
. . Компьютерная верстка Г В Черновой
24.09.07. 70Подписано в печать Формат .. . . 35,80. 100. 1226.Усл печ л Тираж Заказ
Томский государственный университет .систем управления и радиоэлектроники
634050, , . , 40.Томск пр Ленина. 8 (3822) 533018.Тел
Created with novaPDF Printer (www.novaPDF.com)




















