
Medium-Voltage Multilevel Converters—State of the Art, Challenges, and Requirements in Industrial...
16
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010 2581 Medium-Voltage Multilevel Converters—State of the Art, Challenges, and Requirements in Industrial Applications Haitham Abu-Rub, Senior Member, IEEE, Joachim Holtz, Fellow, IEEE, Jose Rodriguez, Senior Member, IEEE, and Ge Baoming Abstract—This paper gives an overview of medium-voltage (MV) multilevel converters with a focus on achieving minimum harmonic distortion and high efficiency at low switching frequency operation. Increasing the power rating by minimizing switching frequency while still maintaining reasonable power quality is an important requirement and a persistent challenge for the indus- try. Existing solutions are discussed and analyzed based on their topologies, limitations, and control techniques. As a preferred op- tion for future research and application, an inverter configuration based on three-level building blocks to generate five-level voltage waveforms is suggested. This paper shows that such an inverter may be operated at a very low switching frequency to achieve minimum ON-state and dynamic device losses for highly efficient MV drive applications while maintaining low harmonic distortion. Index Terms—Dual multilevel inverter (MLI), low switching frequency, medium-voltage drives, multilevel inverters, neutral- point-clamped inverter, synchronous optimal PWM. I. I NTRODUCTION T HE ever-rising demand for electrical energy and depleting fossil fuel reserves are compelling reasons to use existing resources more efficiently. New highly efficient power elec- tronic technologies and proper control strategies are therefore needed to reduce energy waste and to improve power quality. There is a great potential for improving energy efficiency in electric motor driven systems. Medium-voltage (MV) drives have found widespread appli- cations in various industries, such as in the oil and gas sectors, production plants, and process industries. Only 3% of the currently installed MV motors are controlled by variable-speed drives [1]. Thus, there is a tremendous scope for introducing efficient adjustable speed drives in industrial applications. The installation of properly controlled MV variable-speed drives reduces energy losses and total drive cost, and it improves Manuscript received March 10, 2009; revised December 6, 2009; accepted December 19, 2009. Date of publication April 12, 2010; date of current version July 14, 2010. H. Abu-Rub is with Texas A&M University at Qatar, Doha 23874, Qatar (e-mail: [email protected]). J. Holtz is with the Electrical Machines and Drives Laboratory, University of Wuppertal, 42097 Wuppertal, Germany (e-mail: [email protected]). J. Rodriguez is with the Universidad Técnica Federico Santa María, Valparaíso 110, Chile (e-mail: [email protected]). G. Baoming is with the School of Electrical Engineering, Beijing Jiaotong University, Beijing 100044, China (e-mail: [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TIE.2010.2043039 power quality [1]. The design of controlled MV drives is faced with a number of challenges that relate to the topologies and control of line- and motor-side converters, as well as power semiconductor switching devices [1]. High quality of voltage and current waveforms both at the input and output terminals is important, particularly with MV drives. The waveforms are affected by the following factors: 1) the topology used; 2) the application; 3) the control algo- rithm; 4) the size of the filter; and 5) the choice of switching frequency [1]–[3]. As the switching losses of MV semiconduc- tor devices make up a major portion of the device losses, their reduction allows the maximum output power to be increased. On the other hand, a reduction in switching frequency in- creases the harmonic distortion of the line and motor side waveforms. This gray area needs careful consideration for efficient drives systems. Inverters with multilevel (ML) output voltages have the ability to deliver waveforms with a better harmonic spectrum and limit the motor-winding insulation stress. However, the increasing number of switching devices tends to reduce the overall reliability and efficiency of the power converter. On the other hand, an inverter with a low number of output levels would need a large and expensive LC output filter to reduce the motor-winding insulation stress [6]–[10]. Thus, the challenge is to reduce waveform distortions when a low switching frequency is used, to ensure high power quality, and to allow fast dynamic responses at very low switching fre- quencies. Such goals may be achieved by constructing the five- level structure from three-level (3L) inverter building blocks and using an optimal control approach, as illustrated in the later part of this paper. ML converters (MLCs) were invented with the specific aim of overcoming the voltage limit capability of semiconductor devices [11]–[22]. These converters offer numerous advantages compared with the two-level (2L) converter counterpart [1], [19], [20], [23], [24]. The features include good power quality, low switching losses, high voltage capability, and low dV /dt [25]–[28]. These properties and the advancement in semi- conductor technology make MLCs attractive for high-power applications [1], [3], [5], [6], [10], [19], [20], [23], [24], [26], [29]–[61]. The following three topologies have emerged as standard products for industrial MV drives: 1) the 3L neutral-point-clamped voltage source converter (3L-NPC VSC) [4]–[6], [20], [23], [24], [40], [43], [52], [62]–[67]; 2) the four-level flying capacitor voltage source converter (4L-FLC 0278-0046/$26.00 © 2010 IEEE
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of Medium-Voltage Multilevel Converters—State of the Art, Challenges, and Requirements in Industrial...

IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010 2581
Medium-Voltage Multilevel Converters—State of theArt, Challenges, and Requirements in
Industrial ApplicationsHaitham Abu-Rub, Senior Member, IEEE, Joachim Holtz, Fellow, IEEE,
Jose Rodriguez, Senior Member, IEEE, and Ge Baoming
Abstract—This paper gives an overview of medium-voltage(MV) multilevel converters with a focus on achieving minimumharmonic distortion and high efficiency at low switching frequencyoperation. Increasing the power rating by minimizing switchingfrequency while still maintaining reasonable power quality is animportant requirement and a persistent challenge for the indus-try. Existing solutions are discussed and analyzed based on theirtopologies, limitations, and control techniques. As a preferred op-tion for future research and application, an inverter configurationbased on three-level building blocks to generate five-level voltagewaveforms is suggested. This paper shows that such an invertermay be operated at a very low switching frequency to achieveminimum ON-state and dynamic device losses for highly efficientMV drive applications while maintaining low harmonic distortion.
Index Terms—Dual multilevel inverter (MLI), low switchingfrequency, medium-voltage drives, multilevel inverters, neutral-point-clamped inverter, synchronous optimal PWM.
I. INTRODUCTION
THE ever-rising demand for electrical energy and depletingfossil fuel reserves are compelling reasons to use existing
resources more efficiently. New highly efficient power elec-tronic technologies and proper control strategies are thereforeneeded to reduce energy waste and to improve power quality.There is a great potential for improving energy efficiency inelectric motor driven systems.
Medium-voltage (MV) drives have found widespread appli-cations in various industries, such as in the oil and gas sectors,production plants, and process industries. Only 3% of thecurrently installed MV motors are controlled by variable-speeddrives [1]. Thus, there is a tremendous scope for introducingefficient adjustable speed drives in industrial applications. Theinstallation of properly controlled MV variable-speed drivesreduces energy losses and total drive cost, and it improves
Manuscript received March 10, 2009; revised December 6, 2009; acceptedDecember 19, 2009. Date of publication April 12, 2010; date of current versionJuly 14, 2010.
H. Abu-Rub is with Texas A&M University at Qatar, Doha 23874, Qatar(e-mail: [email protected]).
J. Holtz is with the Electrical Machines and Drives Laboratory, University ofWuppertal, 42097 Wuppertal, Germany (e-mail: [email protected]).
J. Rodriguez is with the Universidad Técnica Federico Santa María,Valparaíso 110, Chile (e-mail: [email protected]).
G. Baoming is with the School of Electrical Engineering, Beijing JiaotongUniversity, Beijing 100044, China (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TIE.2010.2043039
power quality [1]. The design of controlled MV drives is facedwith a number of challenges that relate to the topologies andcontrol of line- and motor-side converters, as well as powersemiconductor switching devices [1].
High quality of voltage and current waveforms both at theinput and output terminals is important, particularly with MVdrives. The waveforms are affected by the following factors:1) the topology used; 2) the application; 3) the control algo-rithm; 4) the size of the filter; and 5) the choice of switchingfrequency [1]–[3]. As the switching losses of MV semiconduc-tor devices make up a major portion of the device losses, theirreduction allows the maximum output power to be increased.
On the other hand, a reduction in switching frequency in-creases the harmonic distortion of the line and motor sidewaveforms. This gray area needs careful consideration forefficient drives systems. Inverters with multilevel (ML) outputvoltages have the ability to deliver waveforms with a betterharmonic spectrum and limit the motor-winding insulationstress. However, the increasing number of switching devicestends to reduce the overall reliability and efficiency of the powerconverter. On the other hand, an inverter with a low numberof output levels would need a large and expensive LC outputfilter to reduce the motor-winding insulation stress [6]–[10].Thus, the challenge is to reduce waveform distortions when alow switching frequency is used, to ensure high power quality,and to allow fast dynamic responses at very low switching fre-quencies. Such goals may be achieved by constructing the five-level structure from three-level (3L) inverter building blocksand using an optimal control approach, as illustrated in the laterpart of this paper.
ML converters (MLCs) were invented with the specific aimof overcoming the voltage limit capability of semiconductordevices [11]–[22]. These converters offer numerous advantagescompared with the two-level (2L) converter counterpart [1],[19], [20], [23], [24]. The features include good power quality,low switching losses, high voltage capability, and low dV/dt[25]–[28]. These properties and the advancement in semi-conductor technology make MLCs attractive for high-powerapplications [1], [3], [5], [6], [10], [19], [20], [23], [24], [26],[29]–[61]. The following three topologies have emergedas standard products for industrial MV drives: 1) the 3Lneutral-point-clamped voltage source converter (3L-NPC VSC)[4]–[6], [20], [23], [24], [40], [43], [52], [62]–[67]; 2) thefour-level flying capacitor voltage source converter (4L-FLC
0278-0046/$26.00 © 2010 IEEE

2582 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010
VSC) [5], [6], [23], [24], [66]; and 3) the series-connectedH-bridge voltage source converter (SCHB VSC) [19], [30],[33], [34], [42], [59], [67]. A hybrid asymmetric MLC can beoperated at a low or a high switching frequency for high- orlow-voltage applications [19]. However, the need for a complexinput transformer remains, and the control system would be toocomplex due to its structure [5], [10], [68].
It is evident from the literature review that the ML conceptwill be a prominent choice for MV power electronic systemsin the future [19]. The 3L-NPC converter has the highestconverter efficiency among the available solutions [6], [69]and is the preferred choice in many industrial MV applications[4], [24], [65].
An important issue with the NPC is the voltage unbalanceof the dc-link capacitors. This occurs when one of the phasesis connected to the neutral point [70]–[74]. Voltage balancingshould be controlled by the converter itself [23], [25]–[27],[65], [71], [75]–[81]. The unbalancing is addressed and miti-gated in [65] for steady-state and dynamics conditions withoutpenalizing the switching frequency.
Recently, much effort has been made to improve the per-formance of MLCs by the following methods: 1) harmonicelimination using recalculated switching functions [23], [82]–[84] and harmonic mitigation to fulfill specific grid guidelines[82], [83], [85]; 2) development of new MLC topologies [86];and 3) new control strategies [2], [19], [23], [87], [89]–[92].
Since the inception of m-level pulsewidth modulated (PWM)voltage source converters (VSCs), various modulation strate-gies have been developed and discussed [2], [3], [19], [20], [23],[29], [42], [50], [65], [93]–[108]. Low switching frequencymethods are preferred as they reduce the switching losses.
The ML selective harmonic elimination (SHE) and the space-vector modulation (SVM) methods may operate at low switch-ing frequencies [43], [101], [104], [106], [110]–[112]. Othertechniques like direct torque control, hysteresis current control,predictive current control, and even intensive computationaltechniques like artificial intelligence-based methods are utilizedand reported in the literature [19], [25], [82], [113]–[122]. ForML inverter (MLI) topologies used in MV applications, themodulation strategies take into account the requirements of thelow switching frequencies of inverters and the need for neutral-point potential control [23], [123]–[127]. It is worthwhile toconsider optimum modulation techniques that permit a reduc-tion in the switching frequency without impairing the distortion[2], [128], [129]. Synchronous optimum pulsewidth modulationis used for the control of the MLI to achieve this goal.
On the other hand, recent advances have improved the stateof technology in power semiconductor devices. The preferredpower switches for industrial applications are insulated gatebipolar transistors (IGBTs), integrated gate commutated thyris-tors (IGCTs), and gate turn-off thyristors (GTOs).
The maximum voltage blocking capability of modern powersemiconductor devices is around 6.5 kV [113], [130]. Thisdictates the practical limit for the operating voltage of the in-verter and the drive motor in high-power variable-speed drives.With regard to the 2L voltage source inverter topology and themaximum ON-state current (600 A) of currently available MVIGBT devices [B3], the maximum apparent power obtainable is
less than 1 MV · A. IGCT devices can handle higher currents,but only at lower blocking voltages [130].
To overcome the limits of semiconductor voltage and currentratings, series and/or parallel connections of devices are beingused [115]–[119], [131]. Additional measures are then requiredto balance the voltage sharing at the series connection and thecurrent sharing at the parallel connection. These circuits resultin additional losses and also require a power derating. Thesolution discussed in this paper refers to a dual 3L invertertopology. It doubles the power limit and avoids the problems as-sociated with parallel or series connected devices. The resultingoutput voltage inherently exhibits a low harmonic content. Theharmonics can be further reduced by applying adequate controlstrategies.
Accordingly, the objectives of this paper are listed asfollows.
1) To review MLCs for MV high-power applications with afocus on low switching frequency.
2) To discuss a solution for an 8-kV transformerless drivesystem using ML technology. Eliminating the transformerwill reduce cost, space, weight, and associated losses.
3) To suggest a high-efficiency low-harmonic-drive topol-ogy. This may be achieved by a) a low load current levelresulting from increased voltage (this is common for allMLIs) and b) the low harmonic content of a five-leveloutput voltage waveform generated by optimal PWMtechniques. This allows the system to be operated at aswitching frequency as low as 100 Hz.
Thus, this paper presents a comprehensive survey of theexisting power electronic converter solutions for MV driveapplications and also suggests the future direction of research.
II. MLCs
A. Preliminary Remarks
The output power of the inverter can be increased by usingseries–parallel connected power switching devices. However,additional measures are then required to balance the current/voltage sharing between the devices. It is to be noted that thevoltage is preferably increased at the motor terminals ratherthan the current. This results in higher drive efficiency dueto reduced current. A higher voltage is achieved by seriesconnection of the power devices [2], [132]. Nevertheless, bal-anced voltage distribution across the devices, particularly underdynamic conditions, must be ensured by providing snubbercircuits [131]. These lead to additional losses and subsequentpower derating. A simple way to establish a series connection ofpower devices without derating is with the 3L inverter topology[2], [21], [22].
MLCs offer significant advantages compared with the 2Lconverters [1], [19], such as better harmonic performanceand higher power capabilities. These distinct advantages makeMLCs very attractive to industries for different applications[31]–[36]. Nowadays, researchers are striving to improve MLCperformances by using the following techniques [6], [23], [69]:1) control simplification [87], [88] and optimization algorithmsto enhance the total harmonic distortion (THD) performance
ABU-RUB et al.: MEDIUM-VOLTAGE MULTILEVEL CONVERTERS 2583
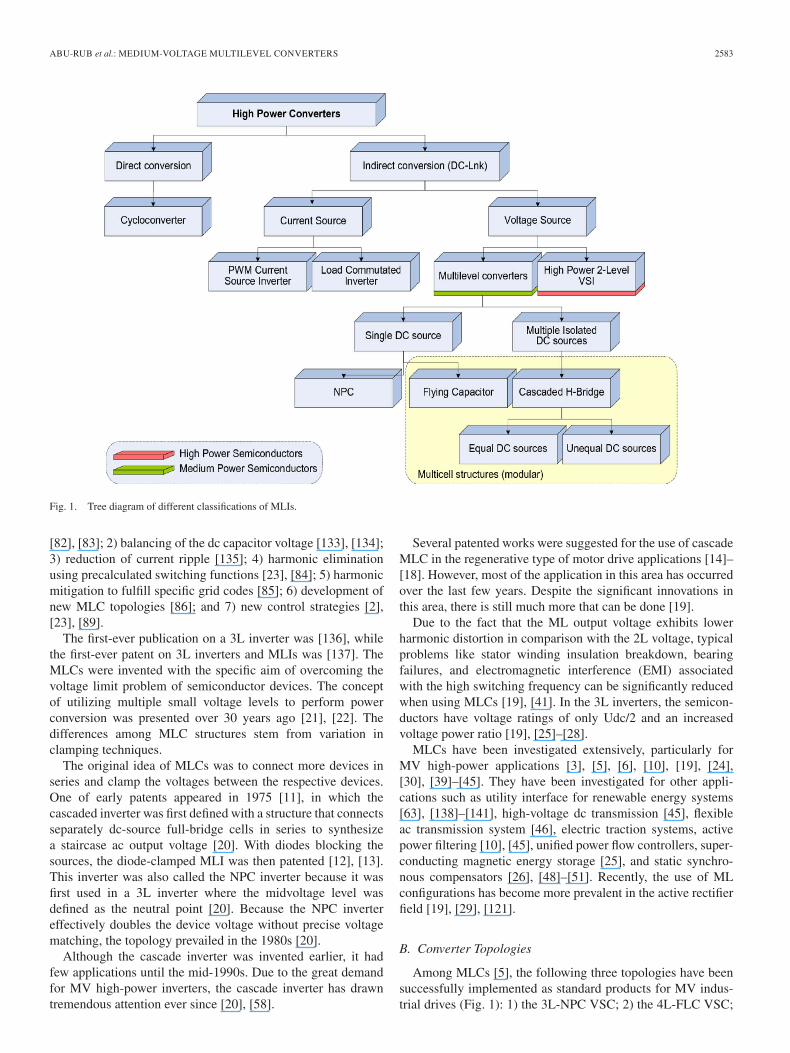
Fig. 1. Tree diagram of different classifications of MLIs.
[82], [83]; 2) balancing of the dc capacitor voltage [133], [134];3) reduction of current ripple [135]; 4) harmonic eliminationusing precalculated switching functions [23], [84]; 5) harmonicmitigation to fulfill specific grid codes [85]; 6) development ofnew MLC topologies [86]; and 7) new control strategies [2],[23], [89].
The first-ever publication on a 3L inverter was [136], whilethe first-ever patent on 3L inverters and MLIs was [137]. TheMLCs were invented with the specific aim of overcoming thevoltage limit problem of semiconductor devices. The conceptof utilizing multiple small voltage levels to perform powerconversion was presented over 30 years ago [21], [22]. Thedifferences among MLC structures stem from variation inclamping techniques.
The original idea of MLCs was to connect more devices inseries and clamp the voltages between the respective devices.One of early patents appeared in 1975 [11], in which thecascaded inverter was first defined with a structure that connectsseparately dc-source full-bridge cells in series to synthesizea staircase ac output voltage [20]. With diodes blocking thesources, the diode-clamped MLI was then patented [12], [13].This inverter was also called the NPC inverter because it wasfirst used in a 3L inverter where the midvoltage level wasdefined as the neutral point [20]. Because the NPC invertereffectively doubles the device voltage without precise voltagematching, the topology prevailed in the 1980s [20].
Although the cascade inverter was invented earlier, it hadfew applications until the mid-1990s. Due to the great demandfor MV high-power inverters, the cascade inverter has drawntremendous attention ever since [20], [58].
Several patented works were suggested for the use of cascadeMLC in the regenerative type of motor drive applications [14]–[18]. However, most of the application in this area has occurredover the last few years. Despite the significant innovations inthis area, there is still much more that can be done [19].
Due to the fact that the ML output voltage exhibits lowerharmonic distortion in comparison with the 2L voltage, typicalproblems like stator winding insulation breakdown, bearingfailures, and electromagnetic interference (EMI) associatedwith the high switching frequency can be significantly reducedwhen using MLCs [19], [41]. In the 3L inverters, the semicon-ductors have voltage ratings of only Udc/2 and an increasedvoltage power ratio [19], [25]–[28].
MLCs have been investigated extensively, particularly forMV high-power applications [3], [5], [6], [10], [19], [24],[30], [39]–[45]. They have been investigated for other appli-cations such as utility interface for renewable energy systems[63], [138]–[141], high-voltage dc transmission [45], flexibleac transmission system [46], electric traction systems, activepower filtering [10], [45], unified power flow controllers, super-conducting magnetic energy storage [25], and static synchro-nous compensators [26], [48]–[51]. Recently, the use of MLconfigurations has become more prevalent in the active rectifierfield [19], [29], [121].
B. Converter Topologies
Among MLCs [5], the following three topologies have beensuccessfully implemented as standard products for MV indus-trial drives (Fig. 1): 1) the 3L-NPC VSC; 2) the 4L-FLC VSC;

2584 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010
Fig. 2. Three-level inverter. (a) Circuit diagram. (b) Symbolic representation.
TABLE IMARKET OVERVIEW OF INDUSTRIAL MV DRIVES
and 3) the SCHB VSC [30], [42], [66]. These configurations arefurther elaborated in the following sections.
1) NPC VSC: For NPC inverter topology [22], [62] themidpoint potential of a capacitive voltage divider in the dc linkis used to stabilize the voltage distribution between devices withthe help of clamping diodes, e.g., D1 and D2 in Fig. 2. Thetopology adds the zero level to the output voltage waveformand, thus, also serves to reduce its harmonic content. The 3Linverter topology permits operation at double voltage, whichalso doubles the maximum output power. Furthermore, thecapacitors can be precharged as a group [5], [20], [24], [43].
The concept can be extended to any number of levels byincreasing the number of capacitors and diodes. However, dueto capacitor voltage balancing issues, the NPC inverter imple-mentation has been mostly limited to the 3L inverter [65], [142].
This type of inverter is widely used in MV applicationsand is one of the most commonly applied topologies [4], [5],[24], [65] (see Table I). It characterizes a relatively small dc-link capacitor, a simple power circuit topology, a low com-ponent count, and straightforward protection and modulationschemes [38]. Therefore, the 3L-NPC VSC is a competitivetopology for a large variety of low and medium switchingfrequency applications. Additionally, the 3L-NPC VSC has thehighest converter efficiency among the available solutions forindustry [6].
The NPC has found an important market in more conven-tional high-power ac motor drive applications like conveyors,pumps, fans, and mills, among others, which offer solutionsfor industries including the oil and gas, metal, power, mining,water, marine, and chemical industries [23], [38], [144].
Because all of the phases share a common dc bus, the ca-pacitance requirements of the converter are minimized. For thisreason, a back-to-back topology is possible. This configurationfor regenerative applications has also been a major benefit,for example, in regenerative conveyors for the mining industry[145] or grid interfacing of renewable energy sources like windpower [63], [64].
Although this topology has a simple circuit, usually, it needsa large inductive capacitive output filter to operate standardmotors [5].
2) Capacitor-Clamped Inverter (Flying Capacitor): An-other popular voltage source MLI uses the flying capacitortopology [143]. This topology offers the advantages of MLCs.However, the needs to balance the capacitors’ voltages andprecharge the capacitors at the start time, in addition to a largernumber of capacitors, are the disadvantages of this topology.The high capacitance values and stored energies of the flyingcapacitors limit the use of 3L- and 4L-FLC to high switchingfrequency applications. Table II highlights some typical char-acteristics of this type of converter [69].
In the FLC, the load current charges every capacitor; hence,the respective capacitor voltages change. The resulting changesmust be maintained within permissible limits. Thus, the re-quired capacitance increases approximately in inverse propor-tion to the switching frequency. This makes the FLC topologyimpractical at very low switching frequencies. Therefore, thestored energy of the flying capacitors and the dimension of theLC inverter output filter is increased by a factor of about 10(for 3L-FLC) and 20 (for 4L-FLC) in comparison to 3L-NPC[69]. The high cost of flying capacitors at low and medium

ABU-RUB et al.: MEDIUM-VOLTAGE MULTILEVEL CONVERTERS 2585
TABLE IICARRIER FREQUENCIES AND CONVERTER EFFICIENCIES OF SELECTED MLIs [69]
switching frequencies is the reason that the FLC topology is notcompetitive in applications that only require low and mediumswitching frequencies (≥ 1500–1800 Hz) [69]. Nevertheless,the symmetrical switches loss distribution and the resultinghigh first carrier band frequency of the converter voltage makethis topology attractive for some applications such as high-speed drives and test benches [6], [23], [24], [69].
In these applications, the 3L-FLC VSC is an interestingalternative to the 4L-FLC VSC due to the reduced cost of flyingcapacitors. At lower frequencies and high converter efficiency,neither topology is competitive compared to the 3L-NPC VSCand the 5L-SCHB VSC [5], [6].
3) Series-Connected H-bridge Inverter: The seriesH-bridge inverter appeared in mid 1970s [11], and severalrecent works were registered [7], [8], [30]. Since this topologyconsists of series power conversion cells, the voltage and powerlevel may easily be scaled [19]. However, a disadvantage is thelarge number of required isolated power supplies. However,the cells can be supplied by phase-shifted transformers (anexpensive solution) in order to provide high power quality atthe utility side [19], [30].
The 5L-SCHB VSC requires the lowest switch power ratingand stored energy of the LC filter. Compared to the 3L-NPCVSC, the installed switch power and the stored energy aresignificantly reduced (even up to 80%) [6], [56]. However,a complicated grid transformer, increased dc-link capacitancecompared to the 3L-NPC, and the high number of semiconduc-tor devices are its drawbacks [5]. The absence of a commondc voltage bus is an additional disadvantage of the 5L-SCHBVSC [5].
The cascaded H-bridge VSC has been applied for high-powerand power-quality industrial requirements due to its seriesexpansion capability [23]. This topology has also been used foractive filter and reactive power compensation [20], [24], [54]–[56], electric vehicles [146], photovoltaic power conversion[139]–[141], uninterruptible power supplies (UPSs) [147], andmagnetic resonance imaging [23], etc.
A hybrid asymmetric MLC is constructed by combiningthe SCHB with the NPC topologies [5]. Such a combinationproduces more output voltage levels with the same number ofcomponents as a symmetric MLC [5]. Although an H-bridgecell and a leg of the NPC converter provide the same outputvoltage levels, the hybrid asymmetric ML topology requires asmaller number of separate dc sources and H-bridge cells forthe same output voltage levels [5], [10].
This topology can be operated with different switching fre-quencies and for different applications. However, the need for
Fig. 3. Four-level inverter with flying capacitors and voltage dividers.
a complex input transformer remains and its control is compli-cated, therefore, it is not commercially offered [10], [68]. Thisis also true for the 9L-SCHB, although it is a good topology formanifold MV drives, e.g., high-speed drives [5], [69].
Other interesting and competitive topology is discussed in[32] and [47]. By combining the basic NPC and half-bridgeprinciples, a five-level topology was proposed; where eachphase of the inverter consists of two 3L-NPC half-bridgesconnected in series. One arm is connected to the output terminaland the other is connected to the neutral point. The half bridgesare supplied by isolated dc sources, which are often composedof multipulse diode rectifiers [47]. The topology was namedNPC/H-bridge inverter.
4) Selection of Inverter Type and Level Number: To achievehigher voltage ratings, the number of series connected devicescan be increased by an extension of the aforementioned prin-ciple of voltage clamping [22]. Such ML topologies requiremultiple capacitive voltage dividers in the dc-link circuit [148].The steady-state voltages of the individual capacitors tend todrift away from their balanced values [65], [142]. Other thanwith the 3L inverter topology, there are no means to exertcontrol on the capacitor voltages using redundant switchingstates. Hence, NPC ML topologies with more than three voltagelevels are not attractive for industrial applications.
A better approach to MLCs with more than three levels is theflying capacitor principle because the number of levels does notinfluence the balance of capacitor voltages [66], [149]. Fig. 3shows the example of a four-level inverter. The full dc-linkvoltage Ud can be stepwise reduced to lower voltage levels byone of the capacitors, i.e., C1 or C2, in series with the respectivemotor terminal. An undesired effect is that the motor currentchanges the voltage of the respective capacitor.

2586 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010
Fig. 4. Parallel operation of two 3L inverters.
The capacitance values must be large enough to keep thesechanges to a minimum. It is, in fact, the ampere-seconds thatproduce the effect, to which the durations of the PWM pulsescontribute. Hence, the size of the capacitors increases as theswitching frequency reduces. The topology is therefore notsuitable when optimal pulsewidth modulation that operates ata low switching frequency is employed. On the other hand, theTHD improves as the number of levels increases [150].
Considering the THD, a significant difference between the2L inverter and the MLI can be observed. However, as thenumber of levels becomes large, the change in THD is small.The output filter size has a similar pattern between levels andTHD [19], [150]. The main disadvantage of increasing thenumber of levels is the large number of power supplies andsemiconductor devices required and the complicated controlassociated with it. In addition, the cost of the converters andthe complexity of the balancing algorithms rise sharply.
It is evident and reasonable that the selection of a 3L inverteris a compromise in terms of cost, complexity, and power quality.The existing challenge is to get very low THD with a lowswitching frequency and a minimum number of levels. Thesuggested dual inverters arrangement with synchronous optimalmodulation and back to back topology, are supposed to ensurealmost sinusoidal input and output current waveforms with avery low switching frequency and a smaller filter size.
5) Increasing Power Rating—The Suggested Solution: Thetechnical and economic constraints associated with ML topolo-gies suggest combining complete three-phase inverters basedon the proven 3L topology. The parallel connection of two 3Linverters, shown in Fig. 4 [151], again doubles the maximumoutput power by doubling the maximum output current. Giventhe maximum ratings of available power devices, e.g., 6.5 kVand 600 A, such topology would deliver 4.16 kV and 480 Arms at the motor terminals.
To achieve greater efficiency of the drive system, a seriesconnection of two 3L inverters would be preferred. Such anarrangement is shown in Fig. 5 [151]. The inverters are fedfrom the same dc-link circuit. Their output voltages are addedat the phase windings of the motor. These exhibit very lowimpedance for the zero sequence component of the voltage sum.An inductor having a high zero sequence impedance and lowimpedance for the revolving components is therefore added.The dual 3L inverter topology in Fig. 6 is the preferred solutionfor very-high-power MV inverter drives. Their arrangement in aseries connection permits operation at double input voltage and,thus, enables the direct supply from the 8 kV utility withouta transformer. The approach avoids the drawbacks of a directconnection, in series or in parallel, of power semiconductor
Fig. 5. Operation in series connection of two 3L inverters.
Fig. 6. Maximum rms current versus switching frequency with the funda-mental frequency f1 as a parameter; EUPEC 6.5-kV 600-A possible operatingpoints at carrier modulation and optimal modulation are marked by circles.
devices. The system is characterized by lower voltage harmon-ics and smaller filter size.
Recently, the double 3L inverter was proposed for high-power motor drives [115]–[119], [151]. The concept is to feedthe standard induction machine in the “open winding connec-tion” [118] with two NPC 3L inverters. The idea was appliedin the direct self control. The motor voltage is the sum oftwo 3L inverters, which means that the dc voltage in each 3Linverter reduces to half when compared with the topology ofone single 3L inverter. Therefore, a double-3L-inverter-basedvariable frequency drive system needs switches with a lowervoltage rating. With the same number of power switches, it hasno voltage balancing problem.
The suggested dual 3L inverter configuration in Fig. 6 isclassified as a five-level inverter. Its output voltage waveforminherently exhibits a low harmonic content. The harmonicscan be further reduced by applying synchronous optimumpulsewidth modulation [151].
III. MLI CONTROL TECHNIQUES
A. General Description
Since the inception of ML PWM VSCs [107], [136], variousmodulation strategies have been developed [2], [3], [19], [20],[29], [96]–[104], [152]. In general, low switching frequencymethods are preferred for high-power applications due to thereduction of switching losses, while the better output powerquality and higher bandwidth of high switching frequency al-gorithms are more suitable for high dynamic range applications[23]. Nevertheless, low switching frequency and high dynamicbandwidth may be achieved in fast dynamic control of MVdrives [153].
A very popular method in industrial applications is the clas-sic carrier-based sinusoidal PWM that uses the phase-shifting

ABU-RUB et al.: MEDIUM-VOLTAGE MULTILEVEL CONVERTERS 2587
technique to reduce the harmonics in the load voltage [3], [42],[93], [100], [105], [106]. Other methods with low switchingfrequency include the ML SHE and the SVM [43], [101],[104], [109].
The method of triangular carrier switching control is wellknown for the closed-loop control of 2L inverters [155]–[157].There has been a recent trend to generalize it for MLIs [155]–[157]. The SVM technique offers the flexibility to select opti-mal PWM switching patterns [154], and it accomplishes dc sidecapacitor voltage balancing [20], [65]. However, as the numberof levels increases, the complexity of calculations grows drasti-cally; thus, fast calculations have generally been achieved at thecost of poor accuracy [20]. Recently, this problem has nearlybeen solved by adopting new SVM strategies [23].
Other techniques like direct torque control, hysteresis currentcontrol, and predictive control are also used for MLIs [19], [25],[114], [116]–[122], [157], [158].
Predictive control can be applied successfully to control anNPC inverter without using linear controllers or PWM modu-lators [114]. This is a new approach that offers possibilities toinclude advanced control strategies.
A behavior of the load current is predicted in the next sam-pling interval for all voltage vectors generated by the inverter[157], [158]. The actual current of the load and the capacitorvoltages are measured to perform the prediction. Additionally,the value of the capacitor voltages can be predicted for differentswitching vectors [157], [158].
This control strategy needs more research effort for verylow switching frequency applications while maintaining ac-ceptable THD.
The other approach is to use mathematical programmingmethods, such as gradient-based methods [38] or genetic al-gorithms [82], [122], to solve a set of nonlinear transcendentalequations with a certain cost function that involves many localoptima. Particle swarm optimization is also used, which is apopulation-based, self-adaptive search optimization technique[115]. These methods suffer from the use of long computationalsteps, convergence to local optima, and sensitivity to the scaleof the problem [82], [115], [122].
For MLI topology in MV application, the modulation strate-gies must take into account the requirements of the low switch-ing frequencies and the need for neutral-point potential control.
The design of the 3L space-vector pulsewidth modulation(SVPWM) sequences is a different approach compared to the2L SVPWM techniques. In the 3L structure, there are redun-dancies in space vectors. Zero vectors are no more the commonfor all the regions of a space vector, while dc bus balancing hasto be maintained [123].
Although the work on 3L SVPWM is very active [23],[123], most of the research is focused on such issues likesimplifying the algorithm [124], implementation aspects [125],[126], reducing switching losses [3], neutral-point balancing[71]–[74], reducing common-mode voltage (CMV) [127], etc.
Voltage Unbalance of NPC VSCs: The NPC topology showsdc-link voltage unbalance, depending on the modulation in-dex, dynamic behavior, and load conditions. These produce avoltage difference between both capacitors, shifting the neutralpoint and causing undesirable distortion at the converter output
[23], [65], [70]–[75], [81]. Conditions worsen when the drive issubjected to intervals of high dynamic operation [23]. Frequentchanges of the modulation index lead to multiple neutral-pointpotential errors within a limited time span [23]. Since theneutral-point potential error decays only slowly by virtue of thenatural balancing mechanism, the errors may accumulate up tothe extreme of an overvoltage condition [23]. The control isactivated when the neutral-point potential exceeds the limits ofa tolerance band [23], [26], [27], [75], [76].
Due to voltage balancing issues, the NPC inverter implemen-tation has been mostly limited to 3L [19]. Three-level invertershave an intrinsic natural balancing mechanism that makes theaverage neutral-point potential error tend to a zero value [76].The balancing mechanism thus ensures the gradual eliminationof the error at steady-state operation. Industrial applicationsrequire long-term stability of the neutral-point voltage, ratherthan the elimination of the low-frequency dc voltage ripple[23], [25]–[27].
A variety of strategies have been introduced to solve thisproblem [23], [71], [76], [77]. Most of methods have disadvan-tages in terms of the maximum usable modulation index or anincrease of the inverter switching losses [23] Capacitor voltagesmust be stabilized by appropriate control, which should alsobalance the neutral-point potential without affecting the outputvoltage [23], [71], [77]–[80].
The back-to-back connection of an ML rectifier with anMLI allows a balance of the dc-link voltages and offers thepower factor correction on the utility side [20], [133]. Addi-tional voltage balancing circuits, such as a dc chopper, may beused [20].
Harmonic distortion of the load currents can be minimizedwhen synchronous optimal pulsewidth modulation (SOPWM)is used in the upper modulation range, and carrier modulationis used in the lower range. This permits operation at a verylow switching frequency. However, the on-time durations ofthe switching states then increase, which entails higher valuesof the neutral-point potential error, particularly during transientoperation [65]. A technique for fast elimination of the neutral-point potential error exploits the existence of two redundantsubbridges in 3L-NPC inverters [65].
The problem of balance in the capacitor voltages, originallyconsidered as a drawback of this topology, is solved for 3L-NPC using redundant states [65], [158], [160], [161] withoutcompromising performance characteristics. In [161], a simpleSVPWM for operating a 3L-NPC inverter at higher modulationindexes, including an overmodulation region with neutral-pointbalancing, was proposed. Their proposed scheme works wellfor different loads.
B. Optimal Modulation
Choosing the modulation strategy of a PWM inverter is atradeoff between switching frequency and harmonic distortion.Particularly, the MV power devices contribute to considerableswitching losses of the total device losses. Fig. 6 shows that areduction of the switching frequency from 800 to 200 Hz morethan doubles the maximum inverter current and the inverteroutput power [113]. It is therefore worthwhile to consider

2588 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010
optimum modulation techniques that permit a reduction ofthe switching frequency without deteriorating the distortion.The experimental results in Fig. 8, taken from a 3L inverter,demonstrate the advantage of optimum PWM [151].
The dual 3L inverter configuration in Fig. 6 works as a five-level inverter [151]. Its output voltage waveform inherentlyexhibits a low harmonic content. The harmonics can be furtherreduced by applying SOPWM. The definition of pulse patternsthat synchronized with the fundamental frequency reducesthe conventionally continuous Fourier spectrum to a discretespectrum. Such elimination of harmonic components reducesthe THD as a first step. The subsequent optimization of thepulse patterns is done off-line, which requires that steady-stateoperation be assumed [128]. The optimization is then not validfor transient conditions. Consequently, high overcurrents aregenerated at changes of the pulse patterns [129], [163]. Toinhibit such transients, the method of trajectory tracking controlwas developed [164]. It forces the stator current to follow anoptimal target trajectory, being derived from the pulse patternactually in use.
It is a disadvantage, though, that the signal delays within thecontrol loop increase as the switching frequency reduces. Thecontrol bandwidth then decreases and dynamic decoupling be-tween torque and flux becomes less effective. Operating at a lowswitching frequency also increases the THD. Hence, the useof optimal PWM techniques seems appropriate [153]. OptimalPWM techniques are widely explained in [2], [3], [92], [98],[100], [129], [151], [153], [161], and [162]. In Section III-C,the SOPWM technique will be described, and appropriate re-sults showing its advantages for a low switching frequency willbe given.
C. SOPWM
Given the requirements for quality and efficiency in high-power drive systems, as well as the limitations of switchinglosses, low switching frequency and minimized THD are de-sirable. An optimization of the pulse sequences is possibleunder the steady-state conditions. The approach implies thatthe switching frequency and the fundamental frequency aresynchronized [2], [128].
Restricting the switching frequency to multiples of the fun-damental frequency permits the pulse pattern to be optimizedwithin a fundamental period for minimum harmonic distortion.The optimization is performed off-line for every steady-stateoperating point.
Fig. 7 shows the principle of the SOPWM technique. Anoptimal pattern is retrieved from a memory, depending onthe commanded magnitude of the voltage reference vectoru∗. A modulator generates the switching sequences for thethree phases with the commanded fundamental frequency asadditional input. The performance improvement compared withcarrier modulation was illustrated in previous figure [92], [153].
Since the optimization is only valid at steady state, undesiredtransients are encountered whenever the operating conditionschange. The pulse pattern actually in use is then replaced byanother pattern. Consequently, the volt-seconds of the resultingharmonic voltage component, which are required to be zero in
Fig. 7. Synchronous optimal modulation; signal flow graph.
Fig. 8. Measured waveforms of the current and the output potential, both ofphase a, of a 3L inverter operated at 200 Hz switching frequency, fundamentalfrequency f1 = 33.5 Hz. (a) Controlled by SVM. (b) Controlled by synchro-nous optimal modulation [65].
the average, assume a nonzero value. This creates a dynamicmodulation error, which leads to high overcurrents, and theinverter may trip [92], [153].
Therefore, modifications of the precalculated pulse patternsare required in real time. The method of stator flux trajec-tory tracking minimizes the deviations of the estimated sta-tor flux linkage vector from an optimal reference trajectorythrough closed loop control. The optimal trajectory is recon-structed from the pulse pattern actually in use [2], [65], [92],[151], [153].
Employing SOPWM techniques allows the PWM inverterof MV drives to be operated at a very low switching fre-quency. Fig. 8 presents measured waveforms for a 3L-NPCinverter operating at 200 Hz switching frequency, while Fig. 9presents measured waveforms for a dual NPC inverter (fromFig. 6) operating at 90 Hz switching frequency. The benefit isthat a given inverter produces higher fundamental power [2],[151], [153].

ABU-RUB et al.: MEDIUM-VOLTAGE MULTILEVEL CONVERTERS 2589
Fig. 9. Measured waveforms of the current and the output potential of adual MLI with 90 Hz switching frequency operated at fundamental frequencyf1 = 20 Hz and controlled by synchronous optimal modulation (pulse numberN = 9, modulation index m = 0.4).
D. Stator Flux Trajectory Control
Conventional control methods, for current or torque, thatare established for carrier-based modulation tend to interferewith the optimal pulse sequence under transient conditions. TheTHD are likely to be worse than with nonoptimal modulation.A way to maintain the current space vector on the respective op-timal trajectory is through closed-loop control of the harmoniccurrent. The concept of current trajectory control has been suc-cessfully implemented [161]. It requires fast identification ofthe motor’s total leakage inductance as the operation conditionsvary to obtain an exact agreement between the precalculatedoptimized current trajectory and the measured current values.
Current trajectory tracking forces the stator current vector tofollow an optimal trajectory [129], [161]. The target trajectoryis derived from the pulse pattern actually in use. The majordisadvantage of this method is that the stator current trajectorydepends on the parameters of the motor, specifically on theleakage inductance and the transient stator time constant. Inaddition, changing load conditions have been found to influencethe current trajectory [161]. This has led to including an esti-mation and adaptation algorithm to track machine parametersand to access the influence of change in operating conditions[129]. The trajectory of the stator flux linkage vector insteadof stator current can be better used as a tracking target. Thisapproach eliminates the dependency on machine parametersand undesired transients in any operation that are not steadystate [2], [153].
Neglecting the minor influence of the stator resistance, statorflux trajectory tracking is more robust to parameter variationsthan the current trajectory tracking scheme [2]. The flux trajec-tory is also independent of the machine’s load conditions.
E. Power Factor Correction
High power factor is a requirement for electrical equipment.Therefore, harmonic-free current rectifiers capable of operatingeven at unity power factor are required as grid interfaces formany drives applications [150]. This is essential for the MVdrive due to its high power rating.
The rectifier design is an essential issue in meeting the har-monic requirements of the utility. This may have a significant
impact on the whole drive system. Therefore, it is importantthat the rectifier is an active converter, providing harmonicmitigation and almost unity power factor for the whole loadrange. It is possible that the solution makes it possible for activedamping of system oscillations or transients in addition to theregenerative capability.
F. Regeneration Mode
The main applications [141] that require regenerative ca-pability and high dynamic performance include some systemdrives, energy storage systems and UPSs, grid interface fordistributed generation sources such as wind turbines and micro-turbines, and flexible ac transmission systems controllers [19],[80], [141], [163]–[166]. For these applications, power conver-sion can be well executed with PWM back-to-back converters[141]. This consists of identical grid- and load-side invertersconnected through a common dc link [141]. The inverters mayemploy the 3L-NPC topology for high-power applications dueto its simpler structure and control [80], [141], [163].
The use of a 3L active front end (AFE) at the input side of a3L-NPC inverter has become a very popular solution for high-power regenerative loads [20]. This allows for regeneration withreduced THD and operation with high power factor or anyactive–reactive power combination [20], [163].
The back-to-back connection of NPC converters is utilizedto allow balancing of the dc-link capacitor voltages under alloperating points [20], [133], [167]. Such a connection makes itpossible to draw almost sinusoidal currents from the supply,to control the input power factor, and to regenerate energyback to the supply [20], [166]. Additionally, the back-to-backtopology allows the dc-link voltage to vary within certain limits,to further reduce of current ripple and losses, particularly duringmachine operation at lower speeds [20], [167].
A regenerative rectifier is an inverter working with reversepower flow controlling the dc voltage (or current) [20], [163],[168]. All the voltage source rectifiers can be implemented with3L converters. The control strategy is the same and may relyon developing low switching frequency SHE PWM, which isbetter suited anyway for AFE than minimum distortion PWM.Synchronous optimal modulation and SHE require a trajectorytracking scheme to avoid excessive transients.
The back-to-back converters are nearly twice the cost of asingle converter due to having almost twice number of compo-nents [150]. The advantages of having almost sinusoidal inputcurrents and unity power factor and allowing for regenerationoffset the extra costs of the converter [150].
IV. CHALLENGES AND REQUIREMENTS FOR INDUSTRIAL
APPLICATIONS OF MLCs
A. Power Quality and LC Resonance Suppression
Voltage and current harmonics in power systems have be-come a challenging problem. The diode rectifier draws dis-torted line currents, which result in numerous problems such asnuisance tripping of computer-controlled industrial processes,transformer overheating, equipment failure, and computerdata loss [1].

2590 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010
Several standards have imposed limits on higher harmonicsthat are injected into the grid, such as IEEE 519-1999, IEC1000-3-2 International Standard, 1995, and IEC 61000-3-2International Standard, 2000. Current power electronics re-search tends to comply with these standards.
The LC line side resonant circuit is used for current har-monic reduction or power factor compensation [1]. The usedcapacitors form an LC resonant circuit with the line inductanceof the system [1]. Since the supply at the MV level has verylow impedance, the lightly damped LC resonances may causeundesired oscillations or overvoltages, which may destroy thepower switches or other components in the rectifier circuits[1]. Undesired oscillations or overvoltages must be avoided byproper design and control.
B. Inverter Switching Frequency
The wide use of high switching frequency devices in powerconverters is responsible for rapid voltages and current tran-sitions. This leads to several serious problems, such as gen-eration of common-mode (CM) currents, EMI, shaft voltagesand bearing currents in induction motor drives (most MV drivetopologies use this type of motor), and deterioration of motorand transformer insulation [1].
The distribution of semiconductor losses is a crucial issue.The losses in the most stressed device highly limit the switchingfrequency and the output power [2], [3]. The most critical oper-ating points of the 3L-NPC VSI are at maximum and minimummodulation depth, and at a power factor around 1 and −1[3]. When applying conventional continuous modulation meth-ods for those cases, one group of devices reaches maximumjunction temperature, while others stay cooler [3]. Unbalanceddistributions of junction temperatures depend on the types ofcontinuous or discontinuous modulation methods [3]. To solvethese problems, researchers should make additional effort andexpect extra costs [170].
Minimization of switching losses leads to a reduction ofoperating costs and an increase in the thermal limits of thedevices [1]. The physical size and cost of the drive can alsobe reduced due to the reduced thermal requirements for theswitching devices [1].
Since the switching losses of MV semiconductor devicescontribute the greatest portion of the total device losses, areduction in switching frequency permits an increase in themaximum output power [1]. On the other hand, the reduction ofswitching frequency generally causes an increase in harmonicdistortion of the line and motor side waveforms of the drive.Thus, an optimum solution is sought.
The challenge is to minimize the waveform distortion whileusing a very low switching frequency (even below 100 Hz). Anoptimum PWM method may be advantageous in achieving thisgoal, which is an important trend for research.
C. Motor Side Converter Challenges
The steep switching transients of the power switches at highcommutation voltages generate high switching losses and poorharmonic spectrum, thus producing additional losses in the
machine [5]. Further problems are created by overvoltages incables and machines, and bearing currents due to the steepswitching transients [1], [4], [5].
The disadvantages of variable-speed drives are the additionalharmonic losses, high insulation stress of the machine windingsdue to steep dV/dt, and increased overvoltages at the machinewindings if long cables are used [171].
Fast switching of the semiconductor devices results in highdV/dt at the rising and falling edges of the inverter outputwaveforms [1].
In the NPC, the dV/dt would still depend on the switchingcharacteristics of the power devices, and it could still be an issueif no output filter is used [1].
The design of the filters should guarantee a THD less than 5%of the phase voltage, according to the standard IEEE 519-1999[6]. Filters also permit a reduction of the switching frequency[6]. An active damping should be proposed to solve the problemof drive stability and to suppress the LC resonance [9].
D. CMV
The switching action of the rectifier and inverter results inthe generation of zero-sequence voltage, known as CMV, whichappears at the motor terminals. This important parameter needsspecial consideration when designing the motor [1], [171].
For the MLC, the CM voltages are similar to those of a 2Lbridge configuration, but on the inverter side, they are of alower magnitude [1], [171], [172]. This is because the switchingsteps in an NPC are based on the half dc bus voltage, resultingin a lower voltage step [1]. Therefore, this topic is still beingresearched, and several contributions have been appeared [23],[169], [173]–[175].
An effective solution of the aforementioned problems mightbe reached mainly by offering a very low switching frequencydrive system with very low harmonic content. In addition, adual inverter-fed open-end winding induction motor drive withtwo dc power supplies to eliminate CMV and maintain dc-linkcapacitor voltage balancing was presented in [176]–[179]. Sucha topology is formed by cascading a 3L-NPC inverter with twoconventional 2L inverters [177]–[179].
The recommended five-level inverter topology proposed inthis paper (Fig. 5) offers a simpler power-bus structure andneeds less diodes compared to the traditional five-level NPCinverter [151], [178].
E. Use of Inverter Output Filters
Technical literature provides a very large number of methodsfor reducing the disturbances generated at the output of thePWM inverters. The most common approach is by using filtersbased on simple passive components (LC filters) [180]–[184].The LC filter has the advantage of reducing the differentialmode, the CM voltages, and the overvoltages at the motorterminals when long cables are used [175], [180]–[184].
A further topology of the CM mitigation solution, based onactive circuits, has been proposed in [169]. The drawbacks ofsuch schemes are usually an increase in output voltage THDand/or increased switching losses. Additionally, the CM voltage

ABU-RUB et al.: MEDIUM-VOLTAGE MULTILEVEL CONVERTERS 2591
is not sufficiently reduced, so the motor would still requireincreased neutral-to-ground insulation [171].
The present trend is to make it possible to use minimalLC filters, or even to eliminate the need for them, by en-suring low harmonic voltage waveforms while maintaining alow switching frequency. Using intelligent IGBT gate drivesreduces dv/dt and switching losses [185].
Furthermore, the control strategy should actively damp even-tual filter oscillations and allow fast dynamic operation withswitching frequencies down to 100 Hz.
F. Transformerless Solution
Transformerless solutions are very beneficial for MV driveapplications and attractive for research and application [43],[141], [167]. Future research should be focused on developingoptimal control for such topologies.
An isolation transformer represents 30%–50% of a total drivesize and 50%–70% of the system’s weight [186], [187]. Inaddition to soaring raw material costs, an isolation transformeradds to total drive costs with extra cabling, cooling, engineeringtime, concrete pad construction, and overall installation [186],[187]. Complex multiwinding transformers mitigate harmonicsthrough phase shifting [186], [187].
A 1-MV · A transformer generates a big amount of heatenergy (up to 6800 Btu/h) and requires a significant amount ofair conditioning, particularly if used in a hot environment [186],[187]. Thus, the transformerless solutions result in substantialenergy savings. This is important in many applications such asutility distribution systems and high-voltage vehicle drives [43].
Solutions for transformerless MV drives are expected to mit-igate CMV and produce essentially sinusoidal output waveformand limited dv/dt (10 V/μs) [186], [187].
To mitigate CMV isolation transformers have been used,either by grounding the neutral point of the dc link or bygrounding the neutral of the motor or the Y point of the outputfilter through a special network [186], [187]. Although suchtransformers protect the motor from CMV, the high level ofCMV stress that would be imposed on the motor is also imposedon the transformer and cable insulation [186], [187]. Thisrequires extra transformer and cable insulation, which is a veryexpensive approach. In a tranformerless drive, the integrated dcchoke is used to block the CMV and mitigate motor neutral toground voltage [186], [187]. The result is a drive capable ofusing standard motor and cable insulation without an isolationtransformer [186], [187].
V. CONCLUSION
This paper has presented topologies and control solutionsof MV MLCs with an emphasis on low switching frequencyapplications. The technical and economic factors suggest theuse of the 3L-NPC inverter topology for industrial applications,particularly for the low switching frequency range. Challengesand requirements imposed by MV converters were discussed atlength, and novel solutions were suggested for future researchand applications.
Model predictive control is a relatively new approach ofpower electronic converter control that will have significantimpact in the electrical energy conversion process for thecoming decades. Nevertheless, this control strategy needs moreresearch effort for very low switching frequency applicationswith acceptable THD. Until achieving this goal, MPC cannotbe used in the MV industrial applications.
This paper has discussed transformerless solution, whichis very beneficial for MV drive applications. Future researchshould be focused on developing optimal control for suchtopologies. This paper has shown that high efficiency of MVdrives may be achieved by the following: 1) a low load currentlevel resulting from a high input voltage; 2) a low harmoniccontent through an ML output voltage waveform; and 3) ap-plying synchronous optimum pulsewidth techniques for lowharmonic distortion. It was shown that by using SOPWM,the MLI system may operate at less than 100 Hz switchingfrequency with acceptable performance. The approach leadsto minimizing both ON-state and dynamic device losses, thusenhancing the drive efficiency. This is an important trend forfuture research and for industrial applications.
ACKNOWLEDGMENT
The authors would like to thank Dr. A. Iqbal for the help inpreparing the final paper.
REFERENCES
[1] B. Wu, High-Power Converters and AC Drives. New York: IEEEPress/Wiley Interscience, 2006.
[2] J. Holtz and N. Oikonomou, “Synchronous optimal pulsewidth modula-tion and stator flux trajectory control for medium voltage drives,” IEEETrans. Ind. Appl., vol. 43, no. 2, pp. 600–608, Mar./Apr. 2007.
[3] T. Brückner and D. Holmes, “Optimal pulse-width modulation for three-level inverters,” IEEE Trans. Power Electron., vol. 20, no. 1, pp. 82–89,Jan. 2005.
[4] S. Bernet, “Recent developments of high power converters for industryand traction applications,” IEEE Trans. Power Electron., vol. 15, no. 6,pp. 1102–1117, Nov. 2000.
[5] S. S. Fazel, “Investigation and comparison of multi-level converters formedium voltage applications,” Ph.D. dissertation, Technische Univer-sität Berlin, Berlin, Germany, 2007.
[6] D. Krug, S. Bernet, S. S. Fazel, K. Jalili, and M. Malinowski, “Com-parison of 2.3-kV medium-voltage multilevel converters for industrialmedium-voltage drives,” IEEE Trans. Ind. Electron., vol. 54, no. 6,pp. 2979–2992, Dec. 2007.
[7] J. K. Steinke, “Use of an LC filter to achieve a motor-friendly per-formance of the PWM voltage source inverter,” IEEE Trans. EnergyConvers., vol. 14, no. 3, pp. 649–654, Sep. 1999.
[8] S. Pöhler, A. Mertens, and R. Sommer, “Optimization of output filtersfor inverter fed drives,” in Proc. IEEE Annu. Conf. Ind. Electron. Soc.,Paris, France, 2006, pp. 1082–1088.
[9] J. D. Ma, B. Wu, and S. Rizzo, “Active damping control of PWM CSIhigh power induction motor drives,” in Proc. IEEE Power Electron. Spec.Conf., 2000, pp. 61–66.
[10] M. Veenstra and A. Rufer, “Control of a hybrid asymmetric multilevelinverter for competitive medium-voltage industrial drives,” IEEE Trans.Ind. Appl., vol. 41, no. 2, pp. 655–664, Mar./Apr. 2005.
[11] R. H. Baker and L. H. Bannister, “Electric power converter,” U.S. Patent3 867 643, Feb. 18, 1975.
[12] R. H. Baker, “Switching circuit,” U.S. Patent 4 210 826, Jul. 1, 1980.[13] R. H. Baker, “Bridge converter circuit,” U.S. Patent 4 270 163,
May 26, 1981.[14] P. W. Hammond, “Four-quadrant AC–AC drive and method,” U.S. Patent
6 166 513, Dec. 26, 2000.[15] M. F. Aiello, P. W. Hammond, and M. Rastogi, “Modular multi-level
adjustable supply with series connected active inputs,” U.S. Patent6 236 580, May 22, 2001.

2592 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010
[16] M. F. Aiello, P. W. Hammond, and M. Rastogi, “Modular multi-leveladjustable supply with parallel connected active inputs,” U.S. Patent6 301 130, Oct. 9, 2001.
[17] J. P. Lavieville, P. Carrere, and T. Meynard, “Electronic circuit for con-verting electrical energy and a power supply installation making usethereof,” U.S. Patent 5 668 711, Sep. 16, 1997.
[18] T. Meynard, J.-P. Lavieville, P. Carrere, J. Gonzalez, and O. Bethoux,“Electronic circuit for converting electrical energy,” U.S. Patent5 706 188, Jan. 6, 1998.
[19] K. Corzine, “Operation and Design of Multilevel Inverters,” Developedfor the Office of Naval Research, Dec. 2003, Rev. Jun. 2005
[20] J. Rodriguez, J.-S. Lai, and F. Z. Peng, “Multilevel inverters: A surveyof topologies, controls, and applications,” IEEE Trans. Ind. Electron.,vol. 49, no. 4, pp. 724–738, Aug. 2002.
[21] J. Holtz, “Self-commutated three-phase inverters with staircase voltagewaveforms for high-power applications at low switching frequency,”Siemens Res. Dev. Rep., vol. 6, no. 3, pp. 164–171, 1977.
[22] A. Nabae, I. Takahashi, and H. Akagi, “A new neutral-point clampedPWM inverter,” IEEE Trans. Ind. Appl., vol. IA-17, no. 5, pp. 518–523,Sep./Oct. 1981.
[23] L. G. Franquelo, J. L. Rodriguez, J. Leon, S. Kouro, R. Portillo, andM. A. Prats, “The age of multilevel converters arrives,” IEEE Ind. Elec-tron. Mag., vol. 2, no. 2, pp. 28–39, Jun. 2008.
[24] J.-S. Lai and F. Z. Peng, “Multilevel converters—A new breed ofpower converters,” IEEE Trans. Ind. Appl., vol. 32, no. 3, pp. 509–517,May 1996.
[25] J. D. Barros and J. F. Silva, “Optimal predictive control of three-phaseNPC multilevel converter for power quality applications,” IEEE Trans.Ind. Electron., vol. 55, no. 10, pp. 3670–3681, Oct. 2008.
[26] L. Lin, Y. Zou, Z. Wang, and H. Jin, “Modeling and control of neutralpoint voltage balancing problem in three-level NPC PWM inverters,” inProc. 36th IEEE PESC, Recife, Brazil, Jun. 2005, pp. 861–866.
[27] O. Ojo and S. Konduru, “A discontinuous carrier-based PWM modu-lation method for the control of neutral point voltage of three phasethree-level diode clamped converters,” in Proc. 36th IEEE Annu. PowerElectron. Spec. Conf., Recife, Brazil, 2005, pp. 1652–1658.
[28] D. Xu and B. Wu, “Multilevel current source inverters with phase-shiftedtrapezoidal PWM,” in Proc. 36th IEEE Annu. Power Electron. Spec.Conf., Recife, Brazil, 2005, pp. 2540–2546.
[29] D. G. Holmes and T. A. Lipo, Pulse With Modulation for PowerConverters. New York: Wiley, 2003.
[30] P. W. Hammond, “Medium voltage PWM drive and method,” U.S. Patent5 625 545, Apr. 29, 1997.
[31] K. Yamanaka, K. Yamada, A. Kumagae, and T. Terada, “Three-levelneutral point clamping type inverter circuit,” U.S. Patent 6 226 192,May 1, 2001.
[32] J. P. Lyons, V. Vlatkovic, P. M. Espelange, A. A. M. Esser, andF. F. Want, “Five level high power motor drive converter and controlsystem,” U.S. Patent 6 058 031, May 2, 2000.
[33] G. A. Duba, E. S. Thaxton, and J. Walter, “Modular static power con-verter connected in a multi-level, multi-phase, multi-circuit configura-tion,” U.S. Patent 5 933 339, Aug. 3, 1999.
[34] Y. Khersonsky, “Step switched PWM sine generator,” U.S. Patent6 556 461, Apr. 29, 2003.
[35] S. Bernet, T. Bruckner, and P. Stiemer, “Three-point converter andmethod for its operation,” U.S. Patent 6 219 265, Apr. 17, 2001.
[36] P. Steimer, “Operating a power electronic circuit arrangement havingmultiple power converters,” U.S. Patent 6 009 002, Dec. 28, 1999.
[37] M. D. Manjrekar, P. K. Steimer, and T. A. Lipo, “Hybrid multilevelconversion system: A competitive solution for high power applications,”IEEE Trans. Ind. Appl., vol. 36, no. 3, pp. 834–841, May/Jun. 2000.
[38] S. Bernet, “State of the art and developments of medium voltageconverters—An overview,” Prz. Elektrotech. (Elect. Rev.), vol. 82, no. 5,pp. 1–10, May 2006.
[39] F. Peng, “A generalized multilevel inverter topology with self volt-age balancing,” IEEE Trans. Ind. Appl., vol. 37, no. 2, pp. 611–618,Mar./Apr. 2001.
[40] T. Meynard, H. Foch, F. Forest, C. Turpin, F. Richardeau, L. Delmas,G. Gateau, and E. Lefeuvre, “Multicell converters: Derived topologies,”IEEE Trans. Ind. Electron., vol. 49, no. 5, pp. 978–987, Oct. 2002.
[41] A. Muetze and A. Binder, “Experimental evaluation of mitigationtechniques for bearing currents in inverter-supplied drive-systems—Investigations on induction motors up to 500 kW,” in Proc. 4th IEMDC,Madison, WI, Jun. 1–4, 2003, vol. 3, pp. 1859–1865.
[42] P. W. Hammond, “A new approach to enhance power quality for mediumvoltage AC drives,” IEEE Trans. Ind. Appl., vol. 33, no. 1, pp. 202–208,Jan./Feb. 1997.
[43] L. M. Tolbert, F. Z. Peng, and T. G. Habetler, “Multilevel converters forlarge electric drives,” IEEE Trans. Ind. Appl., vol. 35, no. 1, pp. 36–44,Jan./Feb. 1999.
[44] M. F. Escalante, J. C. Vannier, and A. Arzande, “Flying capacitor multi-level inverters and DTC motor drive applications,” IEEE Trans. Ind.Electron., vol. 49, no. 4, pp. 809–815, Aug. 2002.
[45] A.-C. Rufer, “An aid in the teaching of multilevel inverters for highpower applications,” in Proc. 26th IEEE Power Electron. Spec. Conf.,1995, vol. 1, pp. 347–352.
[46] L. M. Tolbert, F. Z. Peng, and T. G. Habetler, “A multilevel converter-based universal power conditioner,” IEEE Trans. Ind. Appl., vol. 36,no. 2, pp. 596–603, Mar./Apr. 2000.
[47] Z. Cheng and B. Wu, “A novel switching sequence design for five-levelNPC/H-bridge inverters with improved output voltage spectrum andminimized device switching frequency,” IEEE Trans. Power Electron.,vol. 22, no. 6, pp. 2138–2145, Nov. 2007.
[48] J. I. Leon, S. Vazquez, S. Kouro, L. G. Franquelo, J. M. Carrasco,and J. Rodriguez, “Unidimensional modulation technique for cascadedmultilevel convert,” IEEE Trans. Ind. Electron., vol. 56, no. 8, pp. 2981–2986, Aug. 2009.
[49] Y. Liu, A. Q. Huang, W. Song, S. Bhattacharya, and G. Tan, “Small-signal model-based control strategy for balancing individual DC capac-itor voltages in cascade multilevel inverter-based STATCOM,” IEEETrans. Ind. Electron., vol. 56, no. 6, pp. 2259–2269, Jun. 2009.
[50] O. Lopez, J. Alvarez, J. Doval-Gandoy, F. D. Freijedo, A. Nogueiras,A. Lago, and C. M. Penalver, “Comparison of the FPGA implementationof two multilevel space vector PWM algorithms,” IEEE Trans. Ind.Electron., vol. 55, no. 4, pp. 1537–1547, Apr. 2008.
[51] C. Hochgraf, R. Lasseter, D. Divan, and T. A. Lipo, “Comparison ofmultilevel inverters for static VAr compensation,” in Conf. Rec. 29thIEEE IAS Annu. Meeting, 1994, pp. 921–928.
[52] M. Fracchia, T. Ghiara, M. Marchesoni, and M. Mazzucchelli, “Opti-mized modulation techniques for the generalized N-level converter,” inProc. IEEE Power Electron. Spec. Conf., 1992, vol. 2, pp. 1205–1213.
[53] S. Mukherjee and G. Poddar, “Series-connected three-level invertertopology for medium-voltage squirrel-cage motor drive applications,”IEEE Trans. Ind. Appl., vol. 46, no. 1, pp. 179–186, Jan./Feb. 2010.
[54] Z. Du, L. M. Tolbert, J. N. Chiasson, B. Ozpineci, H. Li, andA. Q. Huang, “Hybrid cascaded H-bridges multilevel motor drive controlfor electric vehicles,” in Proc. 37th IEEE Power Electron. Spec. Conf.,Jun. 2006, pp. 1–6.
[55] S. Sirisukprasert, Z. Xu, B. Zhang, J. S. Lai, and A. Q. Huang, “A high-frequency 1.5 MVA H-bridge building block for cascaded multilevelconverters using emitter turn-off thyrister,” in Proc. IEEE Appl. PowerElectron. Conf., 2002, pp. 27–32.
[56] F. Z. Peng, J. S. Lai, J. W. McKeever, and J. A. VanCoevering, “Multi-level voltage-source inverter with separate dc sources for static VArgeneration,” IEEE Trans. Ind. Appl., vol. 32, no. 5, pp. 1130–1138,Sep./Oct. 1996.
[57] F. Z. Peng, J. W. McKeever, and D. J. Adams, “A power line conditionerusing cascade multilevel inverters for distribution systems,” IEEE Trans.Ind. Appl., vol. 34, no. 6, pp. 1293–1298, Nov./Dec. 1998.
[58] F. Z. Peng and J. S. Lai, “Multilevel cascade voltage-source inverter withseparate DC sources,” U.S. Patent 5 642 275, Jun. 24, 1997.
[59] K. Corzine and Y. Familiant, “A new cascaded multilevel H-bridgedrive,” IEEE Trans. Power Electron., vol. 17, no. 1, pp. 125–131,Jan. 2002.
[60] M. Carpita, M. Marchesoni, M. Pellerin, and D. Moser, “Multilevelconverter for traction applications: Small-scale prototype tests results,”IEEE Trans. Ind. Electron., vol. 55, no. 5, pp. 2203–2212, May 2008.
[61] M. Malinowski, S. Stynski, W. Kolomyjski, and M. P. Kazmierkowski,“Control of three-level PWM converter applied to variable-speed-typeturbines,” IEEE Trans. Ind. Electron., vol. 56, no. 1, pp. 69–77,Jan. 2009.
[62] A. Nabae, I. Takahashi, and H. Akagi, “A new neutral-point clampedPWM inverter,” in Conf. Rec. IEEE Ind. Appl. Soc. Annu. Meeting,Sep./Oct. 1980, pp. 761–766.
[63] S. Alepuz, S. Busquets-Monge, J. Bordonau, J. Gago, D. Gonzalez,and J. Balcells, “Interfacing renewable energy sources to the utility gridusing a three-level inverter,” IEEE Trans. Ind. Electron., vol. 53, no. 5,pp. 1504–1511, Oct. 2006.
[64] R. C. Portillo, M. M. Prats, J. I. Leon, J. A. Sanchez, J. M. Carrasco,E. Galvan, and L. G. Franquelo, “Modeling strategy for back-to-backthree-level converters applied to high-power wind turbines,” IEEE Trans.Ind. Electron., vol. 53, no. 5, pp. 1483–1491, Oct. 2006.
[65] J. Holtz and N. Oikonomou, “Neutral point potential balancing al-gorithm at low modulation index for three-level inverter medium

ABU-RUB et al.: MEDIUM-VOLTAGE MULTILEVEL CONVERTERS 2593
voltage drives,” IEEE Trans. Ind. Appl., vol. 43, no. 3, pp. 761–768,May/Jun. 2007.
[66] G. Beinhold, R. Jacob, and M. Nahrstaedt, “A new range of mediumvoltage multilevel inverter drives with floating capacitor technology,” inProc. EPE, Graz, Austria, 2001, [CD-ROM].
[67] S. G. Song, F. S. Kang, and S.-J. Park, “Cascaded multilevel inverteremploying three-phase transformers and single dc input,” IEEE Trans.Ind. Electron., vol. 56, no. 6, pp. 2005–2014, Jun. 2009.
[68] M. Manjrekar and T. Lipo, “A hybrid multilevel inverter topology fordrive applications,” in Proc. IEEE Appl. Power Electron. Conf., 1998,vol. 2, pp. 523–529.
[69] S. Fazel, S. Bernet, D. Krug, and K. Jalili, “Design and comparisonof 4-kV neutral-point-clamped, flying-capacitor, and series-connectedH-bridge multilevel converters,” IEEE Trans. Ind. Electron., vol. 43,no. 4, pp. 1032–1040, Jul./Aug. 2007.
[70] H. P. Krug, T. Kume, and M. Swarmy, “Neutral point clamped three-level general purpose inverter—Features, benefits and applications,” inProc. 35th IEEE Annu. Power Electron. Spec. Conf., Aachen, Germany,Jun. 20–25, 2004, pp. 323–328.
[71] N. Celanovic and D. Borojevic, “A comprehensive study of neutral pointvoltage balancing problem in three level neutral point clamped voltagesource PWM inverters,” IEEE Trans. Power Electron., vol. 15, no. 2,pp. 242–249, Mar. 2002.
[72] K. Yamanaka, A. M. Hava, H. Kirino, Y. Tanaka, N. Koga, andT. Kume, “A novel neutral point potential stabilization technique usingthe information of output current polarities and voltage vector,” IEEETrans. Ind. Appl., vol. 38, no. 6, pp. 1572–1580, Nov./Dec. 2002.
[73] M. Botao, L. Congwei, Z. Yang, and L. Fahai, “New SVPWM controlscheme for three-phase diode clamping multilevel inverter with balanceddc voltages,” in Proc. IEEE Conf. Ind. Electron. Soc., 2002, vol. 1,pp. 903–907.
[74] S. Busquets-Monge, S. Somavilla, J. Bordonau, and D. Boroyevich,“A novel modulation for the comprehensive neutral-point balancing inthe three level NPC inverter with minimum output switching-frequencyripple,” in Proc. IEEE Power Electron. Spec. Conf., 2004, vol. 6,pp. 4226–4232.
[75] G. P. Adam, S. J. Finney, A. M. Massoud, and B. W. Williams, “Ca-pacitor balance issues of the diode-clamped multilevel inverter operatedin a quasi two-state mode,” IEEE Trans. Ind. Electron., vol. 55, no. 8,pp. 3088–3099, Aug. 2008.
[76] H. Mouton, “Natural balancing of three-level neutral point clampedPWM inverter,” IEEE Trans. Ind. Electron., vol. 49, no. 5, pp. 1017–1025, Oct. 2002.
[77] S. Ogasawara and H. Akagi, “Analysis of variation of neutralpoint potential in neutral-point-clamped voltage source PWMinverters,” in Conf. Rec. IEEE Ind. Appl. Soc. Annu. Meeting, 1993,pp. 965–970.
[78] J. Pou, R. Pindado, D. Boroyevich, and P. Rodríguez, “Evaluation ofthe low-frequency neutral-point voltage oscillations in the three-levelinverter,” IEEE Trans. Ind. Electron., vol. 52, no. 6, pp. 1582–1588,Dec. 2005.
[79] J. Pou, D. Boroyevich, and R. Pindado, “New feedforward space-vectorPWM method to obtain balanced AC output voltages in a three-levelneutral-point-clamped converter,” IEEE Trans. Ind. Electron., vol. 49,no. 5, pp. 1026–1034, Oct. 2002.
[80] F. Wang, “Coordinated control of regenerative three-level neutral pointclamped pulsewidth-modulated voltage source inverters,” IEEE Ind.Appl. Mag., vol. 10, no. 4, pp. 51–58, Jul./Aug. 2004.
[81] L. Ben-Brahim, “A discontinuous PWM method for balancing the neu-tral point voltage in three-level inverter-fed variable frequency drives(VFDs),” IEEE Trans. Energy Convers., vol. 23, no. 4, pp. 1057–1063,Dec. 2008.
[82] Z. Du, L. M. Tolbert, J. N. Chiasson, and B. Ozpineci, “Reducedswitching-frequency active harmonic elimination for multilevel con-verters,” IEEE Trans. Ind. Electron., vol. 55, no. 4, pp. 1761–1770,Apr. 2008.
[83] B. P. McGrath, D. G. Holmes, and T. Meynard, “Reduced PWM har-monic distortion for multilevel inverters operating over a wide modula-tion range,” IEEE Trans. Power Electron., vol. 21, no. 4, pp. 941–949,Jul. 2006.
[84] Z. Du, L. M. Tolbert, and J. N. Chiasson, “Active harmonic eliminationfor multilevel converters,” IEEE Trans. Power Electron., vol. 21, no. 2,pp. 459–469, Mar. 2006.
[85] L. G. Franquelo, J. Napoles, R. C. P. Guisado, J. I. Leon, and M. Aguirre,“A flexible selective harmonic mitigation technique to meet grid codes inthree level PWM converters,” IEEE Trans. Ind. Electron., vol. 54, no. 6,pp. 3022–3029, Dec. 2007.
[86] C. Rech and J. R. Pinheiro, “Hybrid multilevel converters: Unified analy-sis and design considerations,” IEEE Trans. Ind. Electron., vol. 54, no. 2,pp. 1092–1104, Apr. 2007.
[87] A. BenAbdelghani, C. A. Martins, X. Roboam, and T. A. Meynard,“Use of extra degrees of freedom in multilevel drives,” IEEE Trans. Ind.Electron., vol. 49, no. 5, pp. 965–977, Oct. 2002.
[88] Z. Pan, F. Z. Peng, K. A. Corzine, V. R. Stefanovic, J. M. Leuthen,and S. Gataric, “Voltage balancing control of diode-clamped multilevelrectifier/inverter systems,” IEEE Trans. Ind. Appl., vol. 41, no. 6,pp. 1698–1706, Nov. 2005.
[89] L. Yacoubi, K. Al-Haddad, L.-A. Dessaint, and F. Fnaiech, “Linear andnonlinear control techniques for a three-phase three-level NPC boostrectifier,” IEEE Trans. Ind. Electron., vol. 53, no. 6, pp. 1908–1918,Dec. 2006.
[90] P. Lezana, C. A. Silva, J. Rodriguez, and M. A. Perez, “Zero-steady-state-error input-current controller for regenerative multilevel convertersbased on single-phase cells,” IEEE Trans. Ind. Electron., vol. 54, no. 2,pp. 733–740, Apr. 2007.
[91] E. Cengelci, S. U. Sulistijo, B. O. Woo, P. Enjeti, R. Teodorescu, andF. Blaabjerg, “A new medium voltage PWM inverter topology for ad-justable speed drives,” in Conf. Rec. IEEE IAS Annu. Meeting, St. Louis,MO, Oct. 1998, pp. 1416–1423.
[92] J. Holtz and N. Oikonomou, “Estimation of the fundamental current inlow switching frequency high-dynamic medium voltage drives,” IEEETrans. Ind. Appl., vol. 44, no. 5, pp. 1597–1605, Sep./Oct. 2008.
[93] L. Tolbert and T. G. Habetler, “Novel multilevel inverter carrier-basedPWM method,” IEEE Trans. Ind. Appl., vol. 35, no. 5, pp. 1098–1107,Sep./Oct. 1999.
[94] J. I. Leon, S. Vazquez, R. Portillo, L. G. Franquelo, J. M. Carrasco,P. W. Wheeler, and A. J. Watson, “Three-dimensional feedforwardspace vector modulation applied to multilevel diode-clamped convert-ers,” IEEE Trans. Ind. Electron., vol. 56, no. 1, pp. 101–109, Jan. 2009.
[95] Y. Liu, H. Hong, and A. Q. Huang, “Real-time calculation of switch-ing angles minimizing THD for multilevel inverters with step mod-ulation,” IEEE Trans. Ind. Electron., vol. 56, no. 2, pp. 285–293,Feb. 2009.
[96] C. Sourkounis and A. Al-Diab, “A comprehensive analysis and com-parison between multilevel space-vector modulation and multilevelcarrier-based PWM,” in Proc. EPE-PEMC, Poznan, Poland, 2008,pp. 1710–1715.
[97] A. M. Hava, R. J. Kerkman, and T. A. Lipo, “Simple analytical andgraphical methods for carrier-based PWM-VSI drives,” IEEE Trans.Power Electron., vol. 14, no. 1, pp. 49–61, Jan. 1999.
[98] J. K. Steinke, “Switching frequency optimal PWM control of a three-level inverter,” IEEE Trans. Power Electron., vol. 7, no. 3, pp. 487–496,Jul. 1992.
[99] K. Zhou and D. Wang, “Relationship between space-vector modulationand three-phase carrier-based PWM: A comprehensive analysis,” IEEETrans. Ind. Electron., vol. 49, no. 1, pp. 186–196, Feb. 2002.
[100] J. Sun, S. Beineke, and H. Grotstollen, “Optimal PWM based on real-time solution of harmonic elimination equations,” IEEE Trans. PowerElectron., vol. 11, no. 4, pp. 612–621, Jul. 1996.
[101] G. Carrara, S. Gardella, M. Marchesoni, R. Salutari, and G. Sciutto,“A new multilevel PWM method: A theoretical analysis,” IEEE Trans.Power Electron., vol. 7, no. 3, pp. 497–505, Jul. 1992.
[102] R. S. Bowes and D. Holliday, “Optimal regular-sampled PWM invertercontrol techniques,” IEEE Trans. Ind. Electron., vol. 54, no. 3, pp. 1547–1559, Jun. 2007.
[103] J. Holtz, “Pulsewidth modulation for electronic power converters,” Proc.IEEE, vol. 82, no. 8, pp. 1194–1214, Aug. 1994.
[104] J. Rodríguez, L. Morán, P. Correa, and C. Silva, “A vector controltechnique for medium-voltage multilevel inverters,” IEEE Trans. Ind.Electron., vol. 49, no. 4, pp. 882–888, Aug. 2002.
[105] Y. Liang and C. O. Nwankpa, “A new type of STATCOM based oncascading voltage-source inverters with phase-shifted unipolar SPWM,”IEEE Trans. Ind. Appl., vol. 35, no. 5, pp. 1118–1123, Sep./Oct. 1999.
[106] W. Hill and C. Harbourt, “Performance of medium voltage multi-level inverters,” in Conf. Rec. IEEE IAS Annu. Meeting, Phoenix, AZ,Oct. 3–7, 1999, pp. 1186–1192.
[107] P. Bhagwat and V. Stefanovic, “Generalized structure of a multilevelPWM inverter,” IEEE Trans. Ind. Appl., vol. IA-19, no. 6, pp. 1057–1069, Nov. 1983.
[108] O. Lopez, J. Alvarez, J. Doval-Gandoy, and F. D. Freijedo, “Multilevelmultiphase space vector PWM algorithm,” IEEE Trans. Ind. Electron.,vol. 55, no. 5, pp. 1933–1942, May 2008.
[109] L. Li, D. Czarkowski, Y. Liu, and P. Pillay, “Multilevel se-lective harmonic elimination PWM technique in series-connected

2594 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010
voltage inverters,” IEEE Trans. Ind. Appl., vol. 36, no. 1, pp. 160–170,Jan./Feb. 2000.
[110] V. G. Agelidis, A. I. Balouktsis, and C. Cossar, “On attaining the multiplesolutions of selective harmonic elimination PWM three-level waveformsthrough function minimization,” IEEE Trans. Ind. Electron., vol. 55,no. 3, pp. 996–1004, Mar. 2008.
[111] J. Pontt, J. Rodriguez, J. San Martin, R. Aguilera, R. Bernal, andP. Newman, “Resonance mitigation and dynamical behavior of systemswith harmonic filters for improving reliability in mining plants,” in Conf.Rec. IEEE Ind. Appl. Soc. Annu. Meeting, 2006, pp. 1298–1302.
[112] J. Pontt, J. Rodriguez, P. Newman, A. Liendo, and J. Holtz, “Network-friendly low switching frequency high-power three-level PWM rectifier,”IEEE Trans. Ind. Electron., vol. 56, no. 4, pp. 1254–1262, Apr. 2009.
[113] EUPEC Product Information on IGBTs. [Online]. Available: http://www.infineon.com/cgi-bin/ifx/portal/ep/channelView.do?channelId=-78588&channelPag e =%2Fep%2Fchannel%2FproductOverview.jsp&pageTypeId=17099
[114] S. Kouro, P. Cortes, R. Vargas, U. Ammann, and J. Rodriguez, “Industrialelectronics model predictive control—A simple and powerful method tocontrol power converters,” IEEE Trans. Ind. Electron., vol. 56, no. 6,pp. 1826–1838, Jun. 2009.
[115] H. Lou, C. Mao, J. Lu, D. Wang, and L. Chen, “Double three-levelinverter based variable frequency drive with minimal total harmonicdistortion using particle swarm optimization,” in Advanced IntelligentComputing Theories and Applications With Aspects of Theoretical andMethodological Issues, ICIC. Berlin, Germany: Springer-Verlag, 2007,pp. 461–472.
[116] M. Janssen and A. Steimel, “Direct self-control with minimum torqueripple and high dynamics for a double three-level GTO inverter drive,”IEEE Trans. Ind. Electron., vol. 49, no. 5, pp. 1065–1071, Oct. 2002.
[117] X. Q. Wu and A. Steimel, “Direct self control of induction machines fedby a double three level inverter,” IEEE Trans. Ind. Electron., vol. 44,no. 4, pp. 519–527, Aug. 1997.
[118] H. Stemmler and P. Guggenbach, “Configurations of high power volt-age source inverter drives,” in Proc. 5th Eur. Conf. Power Electron.,Brighton, U.K., 1993, pp. 7–14.
[119] M. Depenbrock and S. Ditteney, “Spannungsverhältnisse bei gekoppel-ten Drehstromwechselrichtern,” Elektrotech. Zeitschrift etz-a, vol. 97,no. 11, pp. 668–671, 1976.
[120] M. Kazmierkowski and L. Malesani, “Current control techniques forthree-phase voltage source PWM converters: A survey,” IEEE Trans.Power Electron., vol. 45, no. 4, pp. 691–703, Oct. 1998.
[121] P. Zanchetta, D. B. Gerry, V. G. Monopoli, J. C. Clare, and P. W. Wheeler,“Predictive current control for multilevel active rectifiers with reducedswitching frequency,” IEEE Trans. Ind. Electron., vol. 55, no. 1, pp. 163–172, Jan. 2008.
[122] A. I. Maswood and S. Wei, “Genetic-algorithm-based solution in PWMconverter switching,” Proc. Inst. Elect. Eng.—Electr. Power Appl.,vol. 152, no. 3, pp. 473–478, May 2005.
[123] A. Beig, G. Narayanan, and V. T. Ranganathan, “Modified SVPWMalgorithm for three level VSI with synchronized and symmetricalwaveforms,” IEEE Trans. Ind. Electron., vol. 54, no. 1, pp. 486–494,Feb. 2007.
[124] J. H. Seo, C. H. Choi, and D. S. Hyun, “A new simplified space-vectorPWM method for three level inverters,” IEEE Trans. Power Electron.,vol. 16, no. 4, pp. 545–550, Jul. 2001.
[125] S. Wei, B. Wu, and Q. Wang, “An improved space vector PWM controlalgorithm for multilevel inverters,” in Proc. Int. Power Electron. MotionControl Conf., Aug. 14–16, 2004, vol. 3, pp. 1124–1129.
[126] C. Wang, B. K. Bose, V. Oleschuk, S. Mondal, and J. O. P. Pinto,“Neural-network-based space-vector PWM of a three level invertercovering overmodulation region and performance evaluation on induc-tion motor drive,” in Proc. IEEE Annu. Conf. Ind. Electron. Soc., 2003,vol. 1, pp. 1–6.
[127] H. Zhang, A. Von Jouanne, S. Dai, A. K. Wallace, and F. Wang, “Multi-level inverter modulation schemes to eliminate common-mode voltages,”IEEE Trans. Ind. Appl., vol. 36, no. 6, pp. 1645–1653, Nov./Dec. 2000.
[128] G. S. Buja, “Optimum output waveforms in PWM inverters,” IEEETrans. Ind. Appl., vol. IA-16, no. 6, pp. 830–836, Nov./Dec. 1980.
[129] J. Holtz and B. Beyer, “Fast current trajectory control based on synchro-nous optimal pulsewidth modulation,” IEEE Trans. Ind. Appl., vol. 31,no. 5, pp. 1110–1120, Sep./Oct. 1995.
[130] ABB Product Information on IGCTs. [Online]. Available: http://www.abb.de/Product/seitp325/13dc0112de7b238bc12572ad0026be64.aspx?productLanguage=ge&country=AE
[131] A. Nagel, S. Bernet, P. K. Steimer, and O. Apeldoorn, “A 24-MVAinverter using IGCT series connection for medium voltage applications,”
in Conf. Rec. IEEE Ind. Appl. Soc. Annu. Meeting, Chicago, IL, 2001,pp. 867–870.
[132] J. Rodriguez, S. Bernet, B. Wu, J. Pontt, and S. Kouro, “Multi-level voltage-source-converter topologies for industrial medium-voltagedrives,” IEEE Trans. Ind. Electron., vol. 54, no. 6, pp. 2930–2945,Dec. 2007.
[133] M. Marchesoni and P. Tenca, “Diode-clamped multilevel converters: Apracticable way to balance dc-link voltages,” IEEE Trans. Ind. Electron.,vol. 49, no. 4, pp. 752–765, Aug. 2002.
[134] K. A. Corzine and X. Kou, “Capacitor voltage balancing in full binarycombination schema flying capacitor multilevel inverters,” IEEE PowerElectron. Lett., vol. 1, no. 1, pp. 2–5, Mar. 2003.
[135] A. Bendre and G. Venkataramanan, “Neutral current ripple minimizationin a three-level rectifier,” IEEE Trans. Ind. Appl., vol. 42, no. 2, pp. 582–590, Mar./Apr. 2006.
[136] J. Holtz and H.-P. Wurm, “A new type of voltage fed inverter for themegawatt range,” Elektr. Bahnen, vol. 80, pp. 214–221, 1982.
[137] J. Holtz, “Self-controlled inverter,” Patent DE 23 39 034, granted inGermany and Japan, January 5, 1983.
[138] L. M. Tolbert and F. Z. Peng, “Multilevel converters as a utility interfacefor renewable energy systems,” in Proc. IEEE Power Eng. Soc. SummerMeeting, 2000, vol. 2, pp. 1271–1274.
[139] S. Daher, J. Schmid, and F. L. M. Antunes, “Multilevel inverter topolo-gies for stand-alone PV systems,” IEEE Trans. Ind. Electron., vol. 55,no. 7, pp. 2703–2712, Jul. 2008.
[140] E. Villanueva, P. Correa, J. Rodriguez, and M. Pacas, “Control of asingle-phase cascaded H-bridge multilevel inverter for grid-connectedphotovoltaic system,” IEEE Trans. Ind. Electron., vol. 56, no. 11,pp. 4399–4406, Nov. 2009.
[141] R. Gonzalez, E. Gubia, J. Lopez, and L. Marroyo, “Transformerlesssingle-phase multilevel-based photovoltaic inverter,” IEEE Trans. Ind.Electron., vol. 55, no. 7, pp. 2694–2702, Jul. 2008.
[142] P. N. Enjeti and R. Jakkli, “Optimal power control strategies for neutralpoint clamped (NPC) inverter topology,” IEEE Trans. Ind. Appl., vol. 28,no. 3, pp. 558–566, May/Jun. 1992.
[143] T. A. Meynard, M. Fadel, and N. Aouda, “Modeling of multilevelconverters,” IEEE Trans. Ind. Electron., vol. 44, no. 3, pp. 356–364,Jun. 1997.
[144] R. D. Klug and N. Klaassen, “High power medium voltage drives: Inno-vations, portfolio, trends,” in Proc. EPE, Dresden, Germany, 2005.
[145] A. Urschitz, E. Prem, J. Malzon-Jessen, and T. M. Maloney, “The powerof electronic power management,” in Proc. 5th IEEE Int. Conf. Ind.Informat., 2007, vol. 2, pp. 1221–1226.
[146] L. A. Tolbert, F. Z. Peng, T. Cunnyngham, and J. N. Chiasson, “Chargebalance control schemes for cascade multilevel converter in hybrid elec-tric vehicles,” IEEE Trans. Ind. Electron., vol. 49, no. 5, pp. 1058–1064,Oct. 2002.
[147] C.-C. Hua, C.-W. Wu, and C.-W. Chuang, “Control of low-distortion27-level cascade inverter with three H-bridge inverter modules,” in Proc.IEEE Int. Conf. Ind. Technol., Dec. 2006, pp. 277–282.
[148] P. Bartholomeüs and P. Le Moigne, “Switching behaviour of a general-ized diode-clamped converter,” in Proc. EPE, Graz, Austria, 2001.
[149] P. Carrere, T. Meynard, and J. P. Lavieville, “4000 V–300 A eight levelIGBT inverter leg,” in Proc. EPE, Sevilla, Spain, 1995, pp. 106–111.
[150] C. M. Bingham, D. A. Stone, and M. P. Foster, “A back to back multilevelconverter for driving low inductance brushless AC machines,” in Proc.EPE, Aalborg, Denmark, 2007, pp. 1–9.
[151] J. Holtz and N. Oikonomou, “Optimal control of a dual three-level in-verter system for medium-voltage drives,” in Conf. Rec. IEEE Ind. Appl.Soc. Annu. Meeting, Orlando, FL, Oct. 8–12, 2008. [Online]. Available:http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=4659092
[152] J. Zaragoza, J. Pou, S. Ceballos, E. Robles, P. Ibanez, and J. L. Villate, “Acomprehensive study of a hybrid modulation technique for the neutral-point-clamped converter,” IEEE Trans. Ind. Electron., vol. 56, no. 2,pp. 294–304, Feb. 2009.
[153] J. Holtz and N. Oikonomou, “Fast dynamic control of medium voltagedrives operating at very low switching frequency—An overview,” IEEETrans. Ind. Appl., vol. 55, no. 3, pp. 1005–1013, Mar. 2008.
[154] R. Gupta, A. Ghosh, and A. Joshi, “Switching characterization ofcascaded multilevel-inverter-controlled systems,” IEEE Trans. Ind. Elec-tron., vol. 55, no. 3, pp. 1047–1058, Mar. 2008.
[155] M. P. Kazmierkowski and L. Malesani, “Current control techniques forthree-phase voltage-source PWM converters: A survey,” IEEE Trans.Ind. Electron., vol. 45, no. 5, pp. 691–703, Oct. 1998.
[156] A. K. Gupta and A. M. Khambadkone, “A space vector PWM schemefor multilevel inverters based on two-level space vector PWM,” IEEETrans. Ind. Electron., vol. 53, no. 5, pp. 1631–1639, Oct. 2006.
ABU-RUB et al.: MEDIUM-VOLTAGE MULTILEVEL CONVERTERS 2595
[157] R. Vargas, P. Cortes, U. Ammann, J. Rodriguez, and J. Pontt, “Predictivecontrol of a three-phase neutral-point clamped inverter,” IEEE Trans.Ind. Electron., vol. 54, no. 5, pp. 2697–2705, Oct. 2007.
[158] J. Rodriguez, J. Pontt, C. Silva, P. Correa, P. Lezana, P. Cortés, andU. Ammann, “Predictive current control of a voltage source inverter,”IEEE Trans. Ind. Electron., vol. 54, no. 1, pp. 495–503, Feb. 2007.
[159] A. Sapin, P. K. Steimer, and J.-J. Simond, “Modeling, simulation, andtest of a three-level voltage-source inverter with output LC filter anddirect torque control,” IEEE Trans. Ind. Appl., vol. 43, no. 2, pp. 469–475, Mar./Apr. 2007.
[160] A. K. Gupta and A. M. Khambadkone, “A simple space vector PWMscheme to operate a three-level NPC inverter at high modulation indexincluding overmodulation region, with neutral point balancing,” IEEETrans. Ind. Appl., vol. 43, no. 3, pp. 751–760, May/Jun. 2007.
[161] J. Holtz and B. Beyer, “The trajectory tracking approach—A newmethod for minimum distortion PWM in dynamic high-power drives,”IEEE Trans. Ind. Appl., vol. 30, no. 4, pp. 1048–1057, Jul./Aug. 1994.
[162] N. Oikonomou and J. Holtz, “Closed-loop control of medium volt-age drives operated with synchronous optimal pulsewidth modulation,”IEEE Trans. Ind. Appl., vol. 44, no. 1, pp. 115–123, Jan./Feb. 2008.
[163] J. R. Rodríguez, J. W. Dixon, J. R. Espinoza, J. Pontt, and P. Lezana,“PWM regenerative rectifiers: State of the art,” IEEE Trans. Ind. Elec-tron., vol. 52, no. 1, pp. 5–22, Feb. 2005.
[164] J. Rodríguez, J. Pontt, N. Becker, and A. Weinstein, “Regenerative drivesin the megawatt range for high-performance downhill belt conveyors,”IEEE Trans. Ind. Appl., vol. 38, no. 1, pp. 203–210, Jan./Feb. 2002.
[165] M. Koyama, Y. Shimomura, H. Yamaguchi, M. Mukunoki, H. Okayama,and S. Mizoguchi, “Large capacity high efficiency three-level GCTinverter system for steel rolling mill drives,” in Proc. 9th EPE, Graz,Austria, 2001, [CD-ROM].
[166] P. Lezana, J. Rodríguez, and D. A. Oyarzún, “Cascaded multilevel in-verter with regeneration capability and reduced number of switches,”IEEE Trans. Ind. Electron., vol. 55, no. 3, pp. 1059–1066, Mar. 2008.
[167] S. Srianthumrong and H. Akagi, “Medium-voltage transformerlessAC/DC power conversion system consisting of a diode rectifierand a shunt hybrid filter,” in Conf. Rec. IEEE IAS Annu. Meeting, 2002,pp. 78–85.
[168] J. Wilson, “The forced-commutated inverter as a regenerative rectifier,”IEEE Trans. Ind. Appl., vol. IA-14, no. 4, pp. 335–340, Jul. 1978.
[169] M. C. Di Piazza, G. Tinè, and G. Vitale, “An improved active common-mode voltage compensation device for induction motor drives,” IEEETrans. Ind. Electron., vol. 55, no. 4, pp. 1823–1834, Apr. 2008.
[170] T. Brückner and S. Bernet, “Feedforward loss control of three-levelactive NPC converters,” IEEE Trans. Ind. Appl., vol. 43, no. 6, pp. 1588–1596, Nov./Dec. 2007.
[171] S. Wei, N. Zargari, B. Wu, and S. Rizzo, “Comparison and mitigationof common mode voltage in power converter topologies,” in Conf. Rec.IEEE Ind. Appl. Soc. Annu. Meeting, 2004, pp. 1852–1857.
[172] P. Steimer, J. Steinke, H. Gruning, and S. Conner, “A reliable, interface-friendly medium voltage drive based on the robust IGCT and DTC tech-nologies,” in Conf. Rec. IEEE Ind. Appl. Soc. Annu. Meeting, Phoenix,AZ, 1999, pp. 1505–1512.
[173] A. K. Gupta and A. M. Khambadkone, “A space vector modulationscheme to reduce common mode voltage for cascaded multilevel in-verters,” IEEE Trans. Power Electron., vol. 22, no. 5, pp. 1672–1681,Sep. 2007.
[174] P. C. Loh, D. G. Holmes, Y. Fukuta, and T. A. Lipo, “Reduced common-mode modulation strategies for cascaded multilevel inverters,” IEEETrans. Ind. Appl., vol. 39, no. 5, pp. 1386–1395, Sep. 2003.
[175] P. C. Loh, D. G. Holmes, and T. A. Lipo, “Implementation and control ofdistributed PWM cascaded multilevel inverters with minimal harmonicdistortion and common-mode voltage,” IEEE Trans. Power Electron.,vol. 20, no. 1, pp. 90–99, Jan. 2005.
[176] M. R. Baiju, K. K. Mohapatra, R. S. Kanchan, and K. Gopakumar, “Adual two-level inverter scheme with common mode voltage eliminationfor an induction motor drive,” IEEE Trans. Power Electron., vol. 19,no. 3, pp. 794–805, May 2004.
[177] P. N. Tekwani, R. S. Kanchan, and K. Gopakumar, “A dual five-levelinverter-fed induction motor drive with common-mode voltage elimina-tion and dc-link capacitor voltage balancing using only the switching-state redundancy—Part 1,” IEEE Trans. Ind. Electron., vol. 54, no. 5,pp. 2600–2608, Oct. 2007.
[178] P. N. Tekwani, R. S. Kanchan, and K. Gopakumar, “A dual five-levelinverter-fed induction motor drive with common-mode voltage elimina-tion and DC-link capacitor voltage balancing using only the switching-state redundancy—Part 2,” IEEE Trans. Ind. Electron., vol. 54, no. 5,pp. 2609–2617, Oct. 2007.
[179] G. Mondal, K. Gopakumar, P. N. Tekwani, and E. Levi, “A reduced-switch-count five-level inverter with common-mode voltage eliminationfor an open-end winding induction motor drive,” IEEE Trans. Ind. Elec-tron., vol. 54, no. 4, pp. 2344–2351, Aug. 2007.
[180] J. Salomäki, M. Hinkkanen, and J. Luomi, “Cost-effective design ofinv. output filters for AC drives,” in Proc. 33rd Annu. Conf. IEEE Ind.Electron. Soc., 2007, pp. 1220–1226.
[181] M. Kojima, K. Hirabayashi, Y. Kawabata, E. C. Eijogu, and T. Kawabata,“Novel vector control system using deadbeat-controlled PWM inverterwith output LC filter,” IEEE Trans. Ind. Appl., vol. 40, no. 1, pp. 162–169, Jan./Feb. 2004.
[182] J. Guzinski and H. Abu-Rub, “Speed sensorless control of inductionmotors with inverter output filter,” Electr. Power Compon. Syst., vol. 3,no. 2, pp. 337–343, Apr. 2008.
[183] J. Guzinski and H. Abu-Rub, “Nonlinear control of an asynchronousmotor with inverter output LC filter,” in Proc. 2nd Mediterranean CISA,Zarzis, Tunisia, 2009.
[184] J. Salomäki, M. Hinkkanen, and J. Luomi, “Sensorless control of induc-tion motor drives equipped with inverter output filter,” IEEE Trans. Ind.Electron., vol. 53, no. 4, pp. 1188–1197, Aug. 2006.
[185] G. Schmitt, R. Kennel, and J. Holtz, “Voltage gradient limitation ofIGBTs by optimized gate-current profiles,” in Proc. IEEE Power Elec-tron. Spec. Conf., Rhodes, Greece, Jun. 15–19, 2008, pp. 3592–3596.
[186] [Online]. Available: http://www.gotocontrol.com/downLoad/files/oag-wp002_-en-p.pdf
[187] [Online]. Available: http://www.rockwellautomation.com
Haitham Abu-Rub (M’99–SM’07) received theM.Sc. degree in electrical engineering from theGdynia Marine Academy, Gdynia, Poland, in 1990and the Ph.D. degree from the Gdansk University ofTechnology, Gdansk, Poland in 1995.
For eight years, he has been an Assistant Professorand an Associate Professor at Birzeit University,Birzeit, Palestine. For four years, he was Chairmanof the Department of Electrical Engineering, BirzeitUniversity. He is currently an Associate Professorwith Texas A&M University at Qatar, Doha, Qatar.
His main research interests include electrical machine drives and powerelectronics.
Dr. Abu-Rub is the recipient of many prestigious international awards, suchas the American Fulbright Scholarship (at Texas A&M University), the GermanAlexander von Humboldt Fellowship (at the University of Wuppertal), theGerman DAAD Scholarship (at Bochum University), and the British RoyalSociety Scholarship (at Southampton University).
Joachim Holtz (M’87–SM’88–F’93) receivedthe Dipl.-Ing. and the Ph.D. degrees in electricalengineering from the Technical UniversityBraunschweig, Braunschweig, Germany, in 1967and 1969, respectively.
In 1969, he was an Associate Professor and, in1971, a Full Professor and the Head of the Con-trol Engineering Laboratory of the Indian Instituteof Technology, Madras, India. In 1972, he joinedSiemens Research Laboratories, Erlangen, Germany.From 1976 to 1998, he was a Professor and the Head
of the Electrical Machines and Drives Laboratory, University of Wuppertal,Wuppertal, Germany. He is currently a Professor Emeritus and a Consultant.He is the author of, among others, two invited papers published in thePROCEEDINGS OF THE IEEE and 12 invited papers published in other IEEEjournals. He is a coauthor of four books. He is the holder of 31 patents.
Dr. Holtz is a former Editor-in-Chief of the IEEE TRANSACTIONS ON
INDUSTRIAL ELECTRONICS, a Distinguished Lecturer of the IEEE IndustrialApplications Society and the IEEE Industrial Electronics Society, a SeniorAdCom Member of the IEEE Industrial Electronics Society, and a member ofthe Static Power Converter Committee, IEEE Industrial Applications Society.He was the recipient of the IEEE Industrial Electronics Society Dr. EugeneMittelmann Achievement Award, the IEEE Industry Applications SocietyOutstanding Achievement Award, the IEEE Power Electronics Society WilliamE. Newell Award, the IEEE Third Millenium Medal, the Anthony J. HornfeckService Award, and the IEEE Lamme Gold Medal. He is also the recipient of16 Prize Paper Awards.

2596 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 57, NO. 8, AUGUST 2010
Jose Rodriguez (M’81–SM’94) received theEngineer degree from the Universidad TecnicaFederico Santa Maria, Valparaiso, Chile, in 1977 andthe Dr.-Ing. degree from the University of Erlangen,Erlangen, Germany, in 1985, both in electricalengineering.
Since 1977, he has been with the Depart-ment of Electronics Engineering, University TecnicaFederico Santa Maria, where he is currently a Pro-fessor. From 2001 to 2004, he was the Director ofthe Department of Electronics Engineering of the
same university. From 2004 to 2005, he was the Vice Rector of AcademicAffairs and, since 2005, has been the Rector of the same university. Duringhis sabbatical leave in 1996, he was responsible for the Mining Division ofSiemens Corporation, Santiago, Chile. He has extensive consulting experiencein the mining industry, particularly in the application of large drives such ascycloconverter-fed synchronous motors for SAG mills, high-power conveyors,and controlled ac drives for shovels and power-quality issues. He has directedmore than 40 R&D projects in the field of industrial electronics. He is acoauthor of more than 250 journal and conference papers and contributedone book chapter. His research group has been recognized as one of the twoCenters of Excellence in Engineering in Chile from 2005 to 2008. His mainresearch interests include multilevel inverters, new converter topologies, controlof power converters, and adjustable-speed drives.
Dr. Rodriguez has been an active Associate Editor of the IEEE TRANSAC-TIONS ON POWER ELECTRONICS and the IEEE TRANSACTIONS ON INDUS-TRIAL ELECTRONICS since 2002. He has served as a Guest Editor for the IEEETRANSACTIONS ON INDUSTRIAL ELECTRONICS in six instances [SpecialSections on Matrix Converters (2002), Multilevel Inverters (2002), ModernRectifiers (2005), High Power Drives (2007), Predictive Control of PowerConverters and Drives (2008), and Multilevel Inverters (2009)]. He receivedthe Best Paper Award from the IEEE TRANSACTIONS ON INDUSTRIAL
ELECTRONICS in 2007.
Ge Baoming was born in Shanxi, China, in 1971.He received the Ph.D. degree in electrical engi-neering from Zhejiang University, Hangzhou, China,in 2000.
From 2000 to 2002, he was a Postdoctoral Re-searcher in the Department of Electrical Engineering,Tsinghua University, Beijing, China. From 2004 to2005, he was a Visiting Scholar in the Departmentof Electrical and Computer Engineering, Universityof Coimbra, Coimbra, Portugal. From 2007 to 2008,he was a Visiting Professor in the Department of
Electrical and Computer Engineering, Michigan State University, East Lansing.He is currently with the School of Electrical Engineering, Beijing Jiaotong Uni-versity, Beijing, China, as a Professor. His research interests include permanent-magnet synchronous, switched reluctance, and induction motors, real-timecontrol of electrical machines, power electronics systems, and nonlinear controltheories and applications to electric drives.




















