
Meccanica del volo - Clicca qui per continuare.
175
Paolo Oliviero Meccanica del volo Dipartimento di Ingegneria Aerospaziale Università degli Studi di Napoli Federico II L = C L S 1 2 ρ o εV nv 2 D = C D S 1 2 ρ o εV nV 2 T d = C t ρ o εn o 2 D 4 L cosθ θ Lsenθ W W g V nv 2 r
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of Meccanica del volo - Clicca qui per continuare.

Paolo Oliviero
Meccanica del volo
Dipartimento di Ingegneria AerospazialeUniversità degli Studi di Napoli Federico II
€
L = CLS12ρoεVnv
2
€
D = CDS12ρoεVnV
2
€
Td = Ctρoεno2D4
€
Lcosθ
€
θ
€
Lsenθ
€
Wsenγ
€
W
€
WgVnv2
r

P. OLIVIERO - Meccanica del volo. Gennaio 2008
2

P. OLIVIERO - Meccanica del volo. Gennaio 2008
3
CAPITOLO 1Richiami di aerodinamica applicata
I movimenti dell’aereo intorno agli assi di riferimento sono:
- Rollio, a destra o a sinistra, intorno all’asse x. E’ comandato dalla deflessioneconiugata degli alettoni, a loro volta azionati dalla rotazione a destra o asinistra della cloche (detta anche volantino o barra);
- Beccheggio, a cabrare o a picchiare, nose up o nose down, intorno all’asse y. E’comandato dalla deflessione in alto o in basso del piano orizzontale di coda(detto anche timone di profondità o equilibratore), a sua volta azionato dallatrazione indietro o dallo spingimento in avanti della cloche;
- Imbardata a destra o a sinistra, intorno all’asse z. E’ comandato dalla deflessionea destra o a sinistra del piano verticale (o piano verticale di coda, o timone didirezione), a sua volta attivato dall’azione del pedale destro o del pedalesinistro (detti anche, nell’insieme, pedaliera).
L’aereo in figura, inizialmente aveva solo il secondo (forse). Gli alettoni nacquerodue anni dopo.
Destra e sinistra, sopra e sotto si riferiscono al punto di vista di un osservatoreesterno (ovvero sugli estremi degli assi) e si assumono positive in un verso (peresempio il levogiro o antiorario) e negative nel verso opposto (destrogiro o orario).
Viceversa, il pilota (vicino all’origine degli assi) vedrà le stesse rotazioni col segnoopposto.
Per esempio la rotazione di beccheggio a cabrare è levogira, vista dall’esterno, masembra destrogira vista dall’interno, guardando nel verso positivo dell’asse y.
Asse d’imbardata (asse z)
Asse di rollio (asse x)
Asse di beccheggio (asse y)

P. OLIVIERO - Meccanica del volo. Gennaio 2008
4
La retta di momento e i centri di pressione
Se si rappresenta l’aereo con la sua ala e questa col profilo di una sua sezionelongitudinale atta a sua volta a rappresentarla, possiamo vedere nello schema chesegue una utile sintesi delle relazioni intercorrenti tra aereo, ala, profilo, corda,direzione di portanza nulla, angoli d’assetto, forza aerodinamica, componenti dellastessa, polari sperimentali degli assetti e delle velocità, polari teoriche degli assetti edelle velocità.
F5
F4
F3
F2
F1
direzione di portanza nulla (dpn)corda
α3 = 8°V3
α4 = 12°
V4
α5 = 16°
V5
fuoco
α2 = 0°V2
α1 = - 4°V1
α5
α4
α3α2α1
x5 x4 x3 x2 x1
25% 50% della corda
Gli esempi numerici assunti per gli angoli d’incidenza sono puramente indicativi.La velocità 1 è parallela alla dpn (incidenza negativa, portanza nulla).La velocità 2 è parallela alla corda (incidenza nulla).
P. OLIVIERO - Meccanica del volo. Gennaio 2008
5
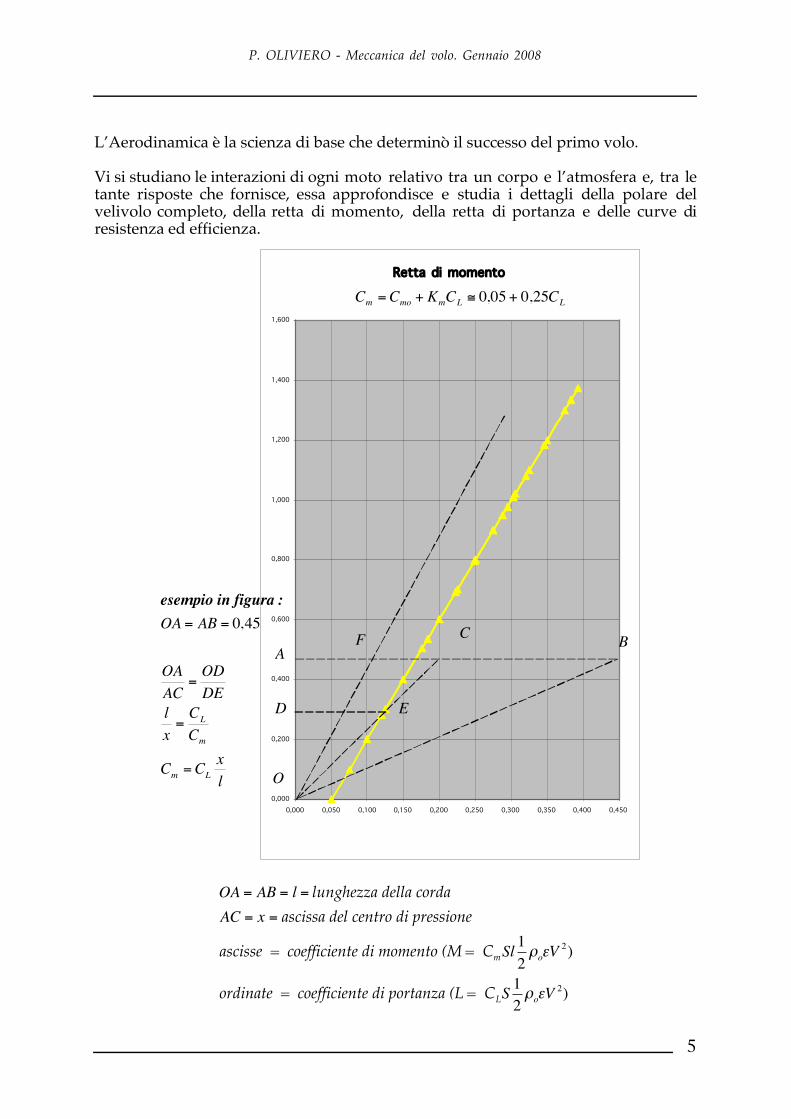
L’Aerodinamica è la scienza di base che determinò il successo del primo volo.
Vi si studiano le interazioni di ogni moto relativo tra un corpo e l’atmosfera e, tra letante risposte che fornisce, essa approfondisce e studia i dettagli della polare delvelivolo completo, della retta di momento, della retta di portanza e delle curve diresistenza ed efficienza.
€
OA = AB = l = lunghezza della cordaAC = x = ascissa del centro di pressione
ascisse = coefficiente di momento (M = CmSl12ρoεV
2)
ordinate = coefficiente di portanza (L = CLS12ρoεV
2)
Retta di momento
0,000
0,200
0,400
0,600
0,800
1,000
1,200
1,400
1,600
0,000 0,050 0,100 0,150 0,200 0,250 0,300 0,350 0,400 0,450
€
esempio in figura :OA = AB = 0,45
OAAC
=ODDE
lx
=CL
Cm
Cm =CLxl O
ABC
D E
€
Cm =Cmo + KmCL ≅ 0,05+ 0,25CL
F

P. OLIVIERO - Meccanica del volo. Gennaio 2008
6
In Meccanica del volo, vi facciamo, ovviamente, ampio riferimento e ci limitiamo aricordare solo alcuni dati essenziali.
La retta di momento (nella figura, il luogo dei punti triangolari) fornisce un semplicemetodo per determinare l’ascissa del centro di pressione in funzione dell’assettoentro un ampio intervallo di valori, nonché il fuoco del profilo (F) e i momentirispetto a punti diversi dal bordo d’attacco:
i segmenti orizzontali intercetti tra l’asse delle ordinate (su cui si assume il bordod’attacco) e la retta di momento, forniscono i
€
Cm rispetto ad A;
quelli tra il raggio vettore parallelo alla retta di portanza (che pertanto individua ilfuoco) e la retta di momento, forniscono i coefficienti rispetto al fuoco (costanti);
quelli tra il generico raggio vettore passante per un assetto (e che interseca la cordanel centro di pressione relativo) e la retta di momento, forniscono i coefficientirispetto ai punti C.
Le polari degli assetti e le polari tecniche
La polare degli assetti è la curva luogo dei coefficienti di portanza e resistenza ai variassetti.
La polare completa è costituita da due curve doppie e distinte: una che contiene gliassetti del volo diritto avanti e rovescio indietro; l’altra quelli del volo rovescio avantie diritto indietro.
Di tali curve riproduciamo qui di seguito un’ampia porzione confrontata conl’analogo “segmento” di polare teorica.
0,0000
0,2000
0,4000
0,6000
0,8000
1,0000
1,2000
1,4000
1,6000
0,0000 0,0500 0,1000 0,1500 0,2000 0,2500 0,3000 0,3500 0,4000
Polare sperimentale Polare teorica

P. OLIVIERO - Meccanica del volo. Gennaio 2008
7
Di tale porzione, è, a sua volta, particolarmente utile prendere in considerazione ilsegmento compreso fra
€
α = −5° (per esempio) e
€
α =18° , corrispondendoquest’intervallo a quello di massimo impiego per le principali normali operazioni.
polare sperimentale
0,000000
0,200000
0,400000
0,600000
0,800000
1,000000
1,200000
1,400000
1,600000
0,0000 0,0100 0,0200 0,0300 0,0400 0,0500 0,0600 0,0700 0,0800 0,0900 0,1000
Di tale “segmento”, è poi possibile considerare una parte ancora più piccola, vale adire quella che si ottiene escludendo gli assetti molto piccoli (dove più agisce ladissimmetria del profilo e, quindi, la formula di Prandtl non è rispondente) e quellivicini allo stallo (dove, anche, la formula di Prandtl non è rispondente).
In tal modo, la curva risulta ulteriormente semplificata e quasi esattamenterappresentabile analiticamente dalla formula di Prandtl:
€
CD = CDo + CDi = CDo +kπλ
CL2
in cui k è un coefficiente adimensionale funzione della distribuzione della
portanza lungo l' apertura alare e λ è l' allungamento alare b2
S
In essa, CDo è il coefficiente di resistenza di penetrazione (attrito + scia + compressibilità) e

P. OLIVIERO - Meccanica del volo. Gennaio 2008
8
€
kπλ
CL2 è il coefficiente di resistenza indotta
€
CDi (dovuto alla deflessione della portanza, asua volta dovuta alla deflessione della velocità apparente, a sua volta dovuta aivortici di estremità).
polare teorica
0,000
0,200
0,400
0,600
0,800
1,000
1,200
1,400
1,600
0,0000 0,0200 0,0400 0,0600 0,0800 0,1000 0,1200 0,1400 0,1600
L’importanza della polare degli assetti, qualunque pezzo di essa si decida diconsiderare, sta nella semplicità con la quale essa genera le cosiddette polari dellevelocità, ovvero le curve della spinta e della potenza necessarie in volo longitudinalsimmetrico, rettilineo, orizzontale, uniforme, in funzione della velocità.
Sotto tali ipotesi, le espressioni della spinta necessaria Tno e della potenza necessariaΠno in volo longitudinal simmetrico, rettilineo, orizzontale, sono, rispettivamentequelle della resistenza aerodinamica e del prodotto della stessa per la velocità:
€
Tno = CDS12ρoεVno
2
Πno = CDS12ρoεVno
3
in cui ρo è la densità dell'aria a quota zero ed
ε la densità relativa ρρo
€
CD = CDo +kCL
2
πλ

P. OLIVIERO - Meccanica del volo. Gennaio 2008
9
e, in entrambi i casi, l’espressione di Vno si ricava dall’equilibrio verticale:
€
W = CLS12ρoεVno
2
per cui le polari tecniche della spinta e della potenza in funzione della velocità sonofornite dalle seguenti relazioni:
€
Tno = CDS12ρoεVno
2 = CDWCL
=WE
Πno = CDS12ρoεVno
3 =WEV =
2ρo
1ε
WSW 1
E 2CL
Vno =2ρo
1ε
WS
1CL
ovvero dai grafici, rispettivamente, di
€
1E
e di
€
1E 2CL
in funzione di
€
1CL
.
Infatti, moltiplicando:-
€
1E
per il peso W, si ottiene Tno ;
-
€
1E 2CL
per il peso W e per il fattore
€
2ρo
1ε
WS
, si ottiene Πno e, infine,
-
€
1CL
per il fattore
€
2ρo
1ε
WS
, si ottiene Vno .
La polare aerodinamica d’equilibrio
Alle espressioni delle forze nelle due direzioni, occorre aggiungere la considerazionedell’equilibrio intorno all’asse laterale passante per il baricentro, ovvero occorregarantire che il momento aerodinamico intorno all’asse di beccheggio sia nullo.
A tale momento contribuiscono, essenzialmente, quello della forza aerodinamicarisultante prodotta dall’ala (in genere picchiante) e quello della forza aerodinamicarisultante prodotta dall’equilibratore di coda (in genere cabrante), mediante unaopportuna deflessione del piano orizzontale per ogni assetto dell’ala.
L’ipotesi più semplice atta a risolvere il problema è quello di riferirsi, per il calcolo deicoefficienti in gioco, alla cosiddetta polare degli assetti d’equilibrio.
Si tratta di questo.Note le polari degli assetti dell’aereo in esame, valide per diversi angoli di deflessionedel piano orizzontale di coda, si prende, su ciascuna di esse, l’unico punto per il qualel’equilibrio alla rotazione è assicurato dalla deflessione in base alla quale si è ricavatal’intera polare.
P. OLIVIERO - Meccanica del volo. Gennaio 2008
10
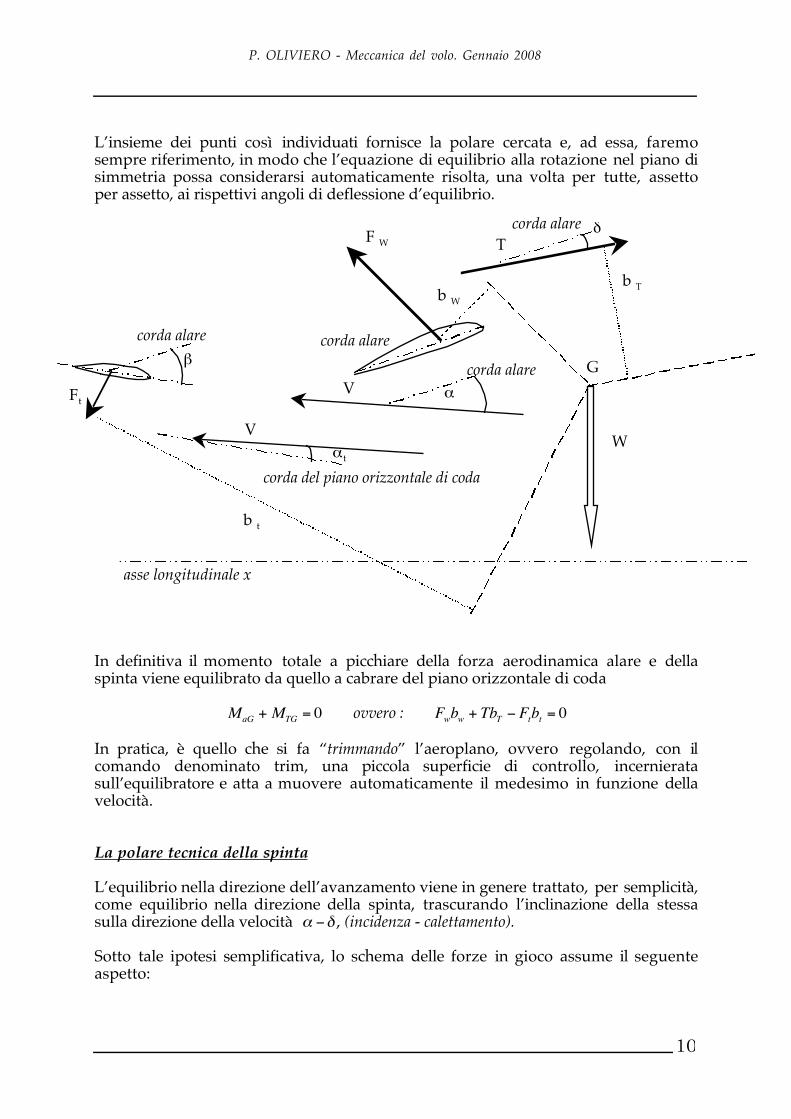
L’insieme dei punti così individuati fornisce la polare cercata e, ad essa, faremosempre riferimento, in modo che l’equazione di equilibrio alla rotazione nel piano disimmetria possa considerarsi automaticamente risolta, una volta per tutte, assettoper assetto, ai rispettivi angoli di deflessione d’equilibrio.
In definitiva il momento totale a picchiare della forza aerodinamica alare e dellaspinta viene equilibrato da quello a cabrare del piano orizzontale di coda
€
MaG + MTG = 0 ovvero : Fwbw + TbT − Ftbt = 0
In pratica, è quello che si fa “trimmando” l’aeroplano, ovvero regolando, con ilcomando denominato trim, una piccola superficie di controllo, incernieratasull’equilibratore e atta a muovere automaticamente il medesimo in funzione dellavelocità.
La polare tecnica della spinta
L’equilibrio nella direzione dell’avanzamento viene in genere trattato, per semplicità,come equilibrio nella direzione della spinta, trascurando l’inclinazione della stessasulla direzione della velocità
€
α −δ , (incidenza - calettamento).
Sotto tale ipotesi semplificativa, lo schema delle forze in gioco assume il seguenteaspetto:
V α
GFt
V
T
b t
b W
b T
W
corda del piano orizzontale di coda
corda alare
αt
δ
β
corda alare
asse longitudinale x
corda alare
corda alareF W

P. OLIVIERO - Meccanica del volo. Gennaio 2008
11
Trasportandole tutte nel baricentro e supponendo i rispettivi momenti di trasportoequilibrati mediante adeguato trimmaggio dell’aeroplano, lo schema diventa:
€
T cos(α −δ) = DL + Tsen(α −δ) =WMTG
= MaG
che, in base alle ipotesi fatte, piccoli angoli (a − d)
polare aerodinamica d'equilibrio
cos(a − d) = 1 sen(a − d) = 0MTG
= MaGdiventano:
T = DL =W
ovvero :T = CDS
12ρoεVno
2
CLS12ρoεVno
2 =W
In cui,
€
T è la spinta dell’elica, deputata a vincere la resistenza aerodinamicacomplessiva dell’aeroplano
€
CDS12ρoεVno
2 , ovvero la spinta necessaria; e
€
Vno è la velocità
necessaria dell’aeroplano, deputata a produrre la portanza
€
CLS12ρoεVno
2 , ovvero laforza che sostiene aerodinamicamente il peso
€
W .
G
L
D T
W
PORTANZA
SPINTA
PESO
RESISTENZA

P. OLIVIERO - Meccanica del volo. Gennaio 2008
12
Il grafico di
€
Tno in funzione di
€
Vno è denominata polare delle velocità di spinta ed ha ilseguente andamento:
€
T =WE
Vno =2ρo
1ε
WS
1CL
Come si vede è possibile disegnare una polare delle velocità di spinta per ogni quota(le curve si spostano a destra all’aumentare di z, ovvero al diminuire di ε e la famigliadi curve che ne discende ha le seguenti caratteristiche.
Intanto, è facile individuare su tutte il punto di spinta necessaria minima, fornito, perqualunque quota, dall’espressione:
€
Tmin =WEMAX
Tutte le polari hanno, infatti, la comune tangente orizzontale a tale ordinata, nelpunto di efficienza massima.
Si vedono poi i punti di stallo alle varie quote, ovvero i punti in cui le polari hanno letangenti verticali, per cui i rispettivi valori di velocità sono quelli di minimo alle variequote e sono, ovviamente, crescenti col crescere delle medesime.
0,00
50,00
100,00
150,00
200,00
250,00
0,00 50,00 100,00 150,00 200,00 250,00 300,00

P. OLIVIERO - Meccanica del volo. Gennaio 2008
13
€
Vno min =Vmin =Vstallo =2ρo
1ε
WS
1CLMAX
Il fattore di aumento all’aumentare della quota,
€
1ε
, rappresenta, nel contempo, il
cosiddetto rapporto di omotetia tra le curve in esame.
Il centro d’omotetia è, nel caso in parola, la direzione delle ascisse, ovvero il puntoimproprio dell’asse delle velocità.
Sulla polare degli assetti d’equilibrio, i medesimi punti sono i seguenti:
polare sperimentale
0,000000
0,200000
0,400000
0,600000
0,800000
1,000000
1,200000
1,400000
1,600000
0,0000 0,0100 0,0200 0,0300 0,0400 0,0500 0,0600 0,0700 0,0800 0,0900 0,1000
e, ovviamente, non dipendono dalla quota.
In particolare il punto d’efficienza massima è quello per il quale la tangente allapolare passa per l’origine degli assi, ovvero, quello per il quale tangente e raggiovettore coincidono.
Infatti la condizione di massima efficienza, si determina, analiticamente, cercando lacondizione di differenziale nullo della rispettiva funzione.
€
EMAX =CL
CD
MAX
⇔ d CLCD−1( ) = 0 ⇔
dCL
dCD
=CL
CD
€
CLMAX
€
CDmin
€
EMAX
€
CLMAX

P. OLIVIERO - Meccanica del volo. Gennaio 2008
14
Mentre i punti di
€
CLMAX e di
€
CDmin si individuano tracciando le tangenti alla polare
parallele, rispettivamente, alle ascisse e alle ordinate.
€
CLMAX ⇔dCL
dCD
= 0 CDmin ⇔dCL
dCD
= 90°
Al diminuire del peso, ciascuna curva di quota costante, si sposta verso il basso everso sinistra, proporzionalmente ai fattori
€
W e
€
W .
La polare tecnica della potenza
L’equilibrio visto nella direzione della spinta, fornisce anche quello in termini dipotenza (prodotto della spinta per la velocità).
Infatti, moltiplicando primo e secondo membro della prima equazione per
€
V , ilsistema diventa:
€
TVno =WEVno ⇔ Πno =
WE
2ρo
1ε
WS
1CL
Πno =2ρo
1ε
WSW 1
E 2CL
Vno =2ρo
1ε
WS
1CL
Il grafico di
€
Πno in funzione di
€
Vno è denominato polare delle velocità di potenza ed ha ilseguente andamento:
0
10.000
20.000
30.000
40.000
50.000
60.000
0,00 50,00 100,00 150,00 200,00 250,00 300,00

P. OLIVIERO - Meccanica del volo. Gennaio 2008
15
I punti di velocità minima si individuano sulle polari delle velocità di potenzatirando le consuete tangenti verticali, mentre i punti di minima spinta si trovano tuttiallineati con l’origine degli assi sulla tangente comune a tutte le curve.
Oltre agli assetti notevoli, sono da osservare gli allineamenti dei medesimi.
Così, i punti di minima velocità, di minima spinta e di minima potenza. Inparticolare, questi ultimi si trovano in una posizione intermedia tra i primi due e,precisamente, in corrispondenza dell’assetto di
€
E 2CL( )MAX .Ovvero, sulla polare, nel punto in cui la tangente ha una pendenza pari ai due terzi diquella del raggio vettore.
€
E 2CL( )MAX =CL3
CD2
MAX
⇔ d CL3CD
−2( ) = 0 ⇔ 3CL2CD
−2dCL − 2CL3CD
−3dCD ⇔dCL
dCD
=23CL
CD
0,00
20,00
40,00
60,00
80,00
100,00
120,00
140,00
160,00
0,00 10,00 20,00 30,00 40,00 50,00 60,00 70,00 80,00
polare delle velocità di spinta
0,00
1.000,00
2.000,00
3.000,00
4.000,00
5.000,00
6.000,00
7.000,00
8.000,00
9.000,00
10.000,00
0,00 10,00 20,00 30,00 40,00 50,00 60,00 70,00 80,00
polare delle velocità di potenza

P. OLIVIERO - Meccanica del volo. Gennaio 2008
16
Al diminuire del peso, ciascuna curva di quota costante, si sposta verso il basso everso sinistra, proporzionalmente ai fattori
€
W W e
€
W .
polare sperimentale
0,000000
0,200000
0,400000
0,600000
0,800000
1,000000
1,200000
1,400000
1,600000
0,0000 0,0100 0,0200 0,0300 0,0400 0,0500 0,0600 0,0700 0,0800 0,0900 0,1000
Le polari teoriche
La porzione di polare sperimentale rappresentabile analiticamente, come abbiamogià ricordato, dalla formula di Prandtl:
€
CD = CDo +kCL
2
πλ
fornisce le polari tecniche di spinta e di potenza determinate, parimenti per via analiticacome segue.
€
T = CDS12ρoεVno
2 = CDo +kCL
2
πλ
S12ρoεVno
2
CLS12ρoεVno
2 =W
Separando la spinta necessaria per vincere la resistenza di penetrazione (che risultaproporzionale al quadrato della velocità), da quella necessaria per vincere la resistenza
€
dCL
dCD
=23CL
CD

P. OLIVIERO - Meccanica del volo. Gennaio 2008
17
indotta, ovvero, (come si usa dire), per produrre la portanza (che risulta invece,inversamente proporzionale al quadrato della velocità), abbiamo:
€
T = CDoS12ρoεVno
2 +kCL
2
πλS 12ρoεVno
2 = CDoS12ρoεVno
2 +kW 2
πλ S 12ρoεVno
2
2 S12ρoεVno
2
T = CDoS12ρoεVno
2 +kW 2
πλS 12ρoε
1Vno2
T = AVno2 +
BVno2 Π = TV = AVno
3 +BVno
Con ovvio significato per le costanti “di comodità” A e B.
Riproducendo insieme, in opportuna scala, i due grafici di spinta e di potenza, sinotano:
- l’allineamento dei punti di minima spinta sui due grafici, ovvero di tangenteorizzontale sul grafico di spinta e di tangente passante per l’origine su quellodi potenza; detti punti delle polari sperimentali sono inoltre allineati con quellod’intersezione delle curve teoriche di resistenza di penetrazione e di resistenzaindotta;
€
T = Tmin allorchè dT = 0 ovvero allorchè AVno2 =
BVno2
€
CDiEMAX=kCLEMAX
2
πλ= CDo ⇒ CLEMAX
=πλCDo
k⇒ CDEMAX
= 2CDo
0,000
10,000
20,000
30,000
40,000
50,000
60,000
70,000
80,000
90,000
0,000 10,000 20,000 30,000 40,000 50,000 60,000
Spinta di penetrazione Spinta di indotta Spinta totale

P. OLIVIERO - Meccanica del volo. Gennaio 2008
18
€
EMAX =12
πλkCDo
- l’allineamento dei punti di minima potenza (tangente orizzontale sul grafico dipotenza); detti punti delle polari sperimentali sono inoltre allineati con quelli,delle curve teoriche di resistenza di penetrazione e di resistenza indotta, in cuila potenza necessaria per vincere la resistenza di penetrazione è 1/3 di quellanecessaria per la resistenza indotta e, quindi 1/4 della totale.
€
Π =Πmin allorchè dΠ = 0 ovvero allorchè BVno
= 3AVno3
€
CDiE2CL
MAX
=kCL
E2CL
MAX
2
πλ= 3CDo ⇒ CL
E2CL
MAX
= 3 πλCDo
k= 3CLEMAX
⇒ CDE2CL
MAX
= 4CDo = 2CDEMAX
EE 2CL( )MAX
=32EMAX
0
1.000
2.000
3.000
4.000
5.000
6.000
0 10 20 30 40 50 60 70
Potenza di penetrazione Potenza di indotta Potenza totale
0,000
50,000
100,000
150,000
200,000
250,000
300,000
350,000
400,000
0 10 20 30 40 50 60 70
Spinta di penetrazione Spinta di indotta Spinta totale

P. OLIVIERO - Meccanica del volo. Gennaio 2008
19
La velocità indicata
La dipendenza delle polari delle velocità dalla quota, attraverso l’influenza del fattore
€
1ε
, può sparire dall’asse delle ascisse, assumendo come variabile indipendente dei
grafici non più la velocità vera V (o TAS) (fornita dai computer di bordo in formadigitale), bensì la cosiddetta velocità indicata Vi (o IAS), (ovvero il valore dellavelocità indicata dagli anemometri in forma analogica, in uso su tutti gli aeroplani,che è uguale alla TAS solo al SL, mentre, in quota, corrisponde a TAS sempre piùelevate, man mano che diminuisce la densità dell’aria).
Gli anemometri analogici sono infatti sensibili alla pressione dinamica
€
12ρoεV
2 eriportano, al crescere di questa, la corrispondente velocità al livello del mare, mentre,a parità di indicazione fornita dall’ago, la velocità vera di volo, capace di esercitare inaria rarefatta la stessa pressione dinamica, diventa sempre più elevata.
Ne consegue che, al crescere della quota, IAS e TAS sono correlate come segue:
€
12ρoεTAS
2 =12ρoIAS
2 TAS = IAS 1ε
mentre densità relativa e quota sono correlate (formule dell’aria tipo), come segue:
€
ε = 1− λDALTTSL
gλR1
−1
= 1−0, 0065K/m( )DALT
288,15K
4,25832
= 1− 0,0226 DALT1.000m
4,25832
In detta relazione, la quota viene denominata DALT = Density Altitude, (come dire:altitudine corrispondente a tale densità), la quale coincide con la più nota PALT =Pressure Altitude (altitudine corrispondente a tale pressione), nella misura in cui ladistribuzione delle temperature in quota, ipotizzata dal modello dell’aria tipo, siapprossima a quella reale.
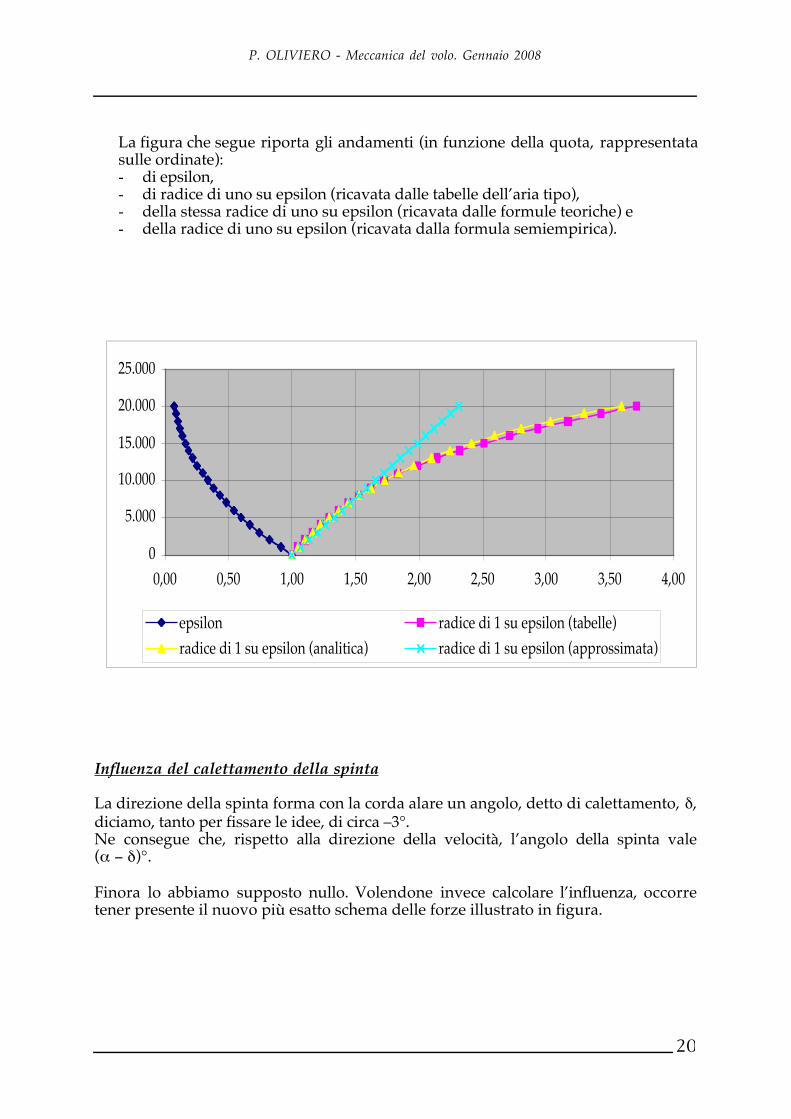
Esiste una formula semiempirica, abbastanza rispondente fino ai 10.000 metri diquota, grazie alla quale è possibile determinare direttamente l’andamentoapprossimato della radice di uno su ipsilon
€
1ε
= 1+ 0,02 z( feet)1.000
P. OLIVIERO - Meccanica del volo. Gennaio 2008
20
La figura che segue riporta gli andamenti (in funzione della quota, rappresentatasulle ordinate):- di epsilon,- di radice di uno su epsilon (ricavata dalle tabelle dell’aria tipo),- della stessa radice di uno su epsilon (ricavata dalle formule teoriche) e- della radice di uno su epsilon (ricavata dalla formula semiempirica).
Influenza del calettamento della spinta
La direzione della spinta forma con la corda alare un angolo, detto di calettamento, δ,diciamo, tanto per fissare le idee, di circa –3°.Ne consegue che, rispetto alla direzione della velocità, l’angolo della spinta vale(α − δ)°.
Finora lo abbiamo supposto nullo. Volendone invece calcolare l’influenza, occorretener presente il nuovo più esatto schema delle forze illustrato in figura.
0
5.000
10.000
15.000
20.000
25.000
0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50 4,00
epsilon radice di 1 su epsilon (tabelle)radice di 1 su epsilon (analitica) radice di 1 su epsilon (approssimata)

P. OLIVIERO - Meccanica del volo. Gennaio 2008
21
€
T *cos(α −δ) = CDS12ρ0εV *
2
W = CLS12ρ0εV *
2 + T * sen(α −δ)
T* =CD
cos(α −δ)S 12ρ0εV *
2
W = CLS12ρ0εV *
2 +CD
cos(α −δ)S 12ρ0εV *
2 sen(α −δ)
€
T* =CD
cos(α −δ)S 12ρ0εV *
2
W = CL + CDtg(α −δ)( )S 12ρ0εV *
2
T* = CDS12ρ0εV *
2 1cos(α −δ)
W = CLS12ρ0εV *
2 1+tg(α −δ)
E
€
T* = CDS12ρ0εV *
2 1/cos(α −δ)( )
V *2 =2W
ρ0εSCL
11+ tg(α −δ) /E( )
€
T* = CDS12ρ0ε
2Wρ0εSCL
11+ tg(α −δ) /E( )
1/cos(α −δ)( )
V *2 =2W
ρ0εSCL
11+ tg(α −δ) /E( )
F
V
α
Tδ
asse longitudinale x
corda alare
corda alareα − δ
T* sen(α− δ)
T* cos(α− δ)
L
W
D
F
T*

P. OLIVIERO - Meccanica del volo. Gennaio 2008
22
€
T* = T 1/cos(α −δ)1+ tg(α −δ) /E( )
V* =V 1/ 1+ tg(α −δ) /E( )
E, ponendo:
€
a = 1/ 1+ tg(α −δ) /E( )b =1/cos(α −δ)
si ottengono le espressioni di T* e V* da quelle di T e V moltiplicando queste per ifattori di correzione, rispettivamente, a2b e a:
€
T* = a2bTV* = aV
0,00
50,00
100,00
150,00
200,00
250,00
300,00
350,00
400,00
450,00
0 1.000 2.000 3.000 4.000 5.000 6.000 7.000 8.000 9.000 10.000
Polare della spinta Polare della potenza (diviso 10.000)

P. OLIVIERO - Meccanica del volo. Gennaio 2008
23
0
50
100
150
200
250
300
350
400
450
0,00 20,00 40,00 60,00 80,00 100,00 120,00
T(V) trascurando l'angolo di spinta T(V) tenendo conto dell'angolo di spinta (*)
0,985
0,990
0,995
1,000
1,005
1,010
1,015
1,020
1,025
1,030
0,00 20,00 40,00 60,00 80,00 100,00 120,00
fattore a = V*/V fattore aab = T*/T

P. OLIVIERO - Meccanica del volo. Gennaio 2008
24

P. OLIVIERO - Meccanica del volo. Gennaio 2008
25
CAPITOLO 2L’atmosfera tipo internazionale
Le equazioni che descrivono il modello internazionale di aria tipo sono:
€
l' equazione del gradiente termicoT = TSL − λPALT[ ]
€
l' equazione di statop = ρR1T = ρR1 TSL − λPALT[ ] ⇒ dp = R1Tdρ
dp = R1 TSL − λPALT[ ]dρ
€
l' equazione di Stevinodp = −ρgdPALT ⇒ R1Tdρ = −ρgdPALT
−R1Tdρρg
= dPALT dρρ
= −gR1T
dPALT

P. OLIVIERO - Meccanica del volo. Gennaio 2008
26
€
in cui le costanti R1 e λ sono, rispettivamente, pari a
R1 =pρT
=1.013,25mb
1,225 kgm3 288,15K
=101.325Nm−2
352,8K kgm3
= 2,872mbm3
K kg= 287,2 Nm
K kg= 287,2 Joule
K kg
λ = 0,0065K /m
€
dρρ
= −gdPALTR1T
⇒ lnρ = −gPALTR1T
+ cost ⇒ lnρSL = cost
ln ρρSL
= −gPALTR1T
⇒ ε =ρρSL
= e−gPALTR1T
Dall’equazione del gradiente termico, si ricava subito l’espressione fondamentale delrapporto T
TSL (temperatura relativa):
€
TTSL
= 1− λPALTTSL
Dalle altre due, si ricavano le espressioni fondamentali della pressione relativa e delladensità relativa p
pSL e
€
ρρSL
:
€
ppSL
= 1− λPALTTSL
1λR1
' ρρSL
= 1− λPALTTSL
1λR1
' −1
Infatti, per quanto attiene la pressione relativa:
€
dpp
=−ρgdPALT
ρR1T⇒
dpp
=gd TSL − λPALT[ ]λR1 TSL − λPALT[ ]
ln p =gλR1
ln TSL − λPALT[ ] + cost = ln TSL − λPALT[ ]gλR1 + cost
ln pSL = ln TSL[ ]gλR1 + cost ⇒
ppSL
= 1− λPALTTSL
gλR1
mentre, per quanto attiene la densità relativa:
€
p = ρR1T = ρR1 TSL − λPALT[ ]pSL = ρSLR1TSL
ppSL
=ρρSL
1− λPALTTSL
⇒
ρρSL
= 1− λPALTTSL
gλR1
−1

P. OLIVIERO - Meccanica del volo. Gennaio 2008
27
La quota indicata é la PALT, data l’ipotesi che si é in aria tipo.
In aria vera, invece, la quota corrispondente a un dato valore di densità può esserediversa da quella dell’aria tipo e si chiama DALT , ovvero: quota corrispondente a taledensità vera.
Per esempio “in aria calda” la densità é minore e, pertanto, la quota densità émaggiore della quota pressione, perché in aria tipo, e quindi a temperatura standard,é più in alto che si ha tale minore densità.
Una prova di salita fino alla corrispondente PALT minore fornirebbe tempi di salitaminori, ma non veri, o, meglio, non confrontabili con quelli di altri giorni o altriluoghi di sperimentazione.
La definizione di un’aria tipo di riferimento rende confrontabili i risultati di proveeseguite in condizioni diverse. Mediante opportuna “riduzione” alle condizioni tipo.
In definitiva, l’essere la temperatura in aria vera diversa da quella tipo, impedisce diusare le formule viste per calcolare la densità, la quale si dovrà determinaredall’equazione di stato:
ρ =pR1T
Pertanto:dalla quota di volo PALT( ) , si ricava la pressione in base alla formula fondamentaledel rapporto delle pressioni;
dalla temperatura alla quota di volo, si ricava la densità in base all’equazione di stato;
dalla densità così determinata, si ricava la quota densità DALT( ) , in base alla formulafondamentale del rapporto delle densità.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
28
Le diverse formulazioni dell’equazione di stato
Una trasformazione a pressione p costante é retta dall'equazione di Gay Lussac:
v p T( ) = v p T0( )αT
Una a temperatura costante, dalla legge di Boyle:
pv p T0( ) = p0v p0 T0( )
Ne discende, per una trasformazione di stato a pressione e temperatura varianti,l'equazione di stato:
€
pv = pv p T( ) = pv p T0( )αT = p0v p0 T0( )αT = p0v0αT = R1Tpv = R1T p = ρR1T
In definitiva, esprimendo la massa M in funzione, rispettivamente,
- di volume e densità,- di volume e peso,- di numero e massa delle singole molecole,- di numero e massa delle moli di molecole,
si ha la tabella che segue e che espone un formulario riassuntivo, che ricapitola leprincipali relazioni utili sull’argomento (in particolare quella tra R1 e R1
' ).
VOLUME SPECIFICO MASSA DENSITA'
(massa specifica)EQUAZIONE DI STATOformulazioni in funzione
del volume specifico, della massa, della densitàCOSTANTI
espressioni e denominazioni
costante particolare massica
costante particolare barica
costante universale molecolare(Boltzman)
costante universale molare
ρ =MV
=1v
ρ =MV
=1
v 'g=γg
ρ =MV
=m nV
=m′ ′ v
ρ =MV
=m n V
=m ′ ′ ′ v
v =VM
=1ρ
v ' =V
Mg=1ρg
=1γ
′ ′ v =Vn
=V
M m=
mρ
′ ′ ′ v =Vn
=V
M m =
m ρ
M =Vv
= Vρ
M =Mgg
=V′ v g
=γ Vg
M = n m
M = n m
pv = R1T
p ′ v = R1' T
p ′ ′ v = KBT
p ′ ′ ′ v = RT
p = ρR1T
p = γ R1' T = gρR 1
' T
p =ρK BT
m
p =ρRT
m
pV = M R1T
pV = MgR1
gT = WR 1
'T
pV = n mR1T = nK BT
pV = n m R1T = n RT
R1 =p0v 0
T0= α p0v0
R1' =
R 1
g=
p0v 0gT0
=α p0v0
g
K B = R1m =m p0v0
T0= αmp0v 0
R = R 1m =m p 0v0
T0=α m p0v0

P. OLIVIERO - Meccanica del volo. Gennaio 2008
29
Il coefficiente di riduzione della potenza in quota
La formula del coefficiente di riduzione in quota, definito come segue,
€
Qz x
Qsl x
=ψz =ppSL
TSLT
assume la seguente espressione operativa in funzione della densità relativa:
€
ρρSL
= 1− λPALTTSL
4,25832
ppSL
= 1− λPALTTSL
5,25832
=ρρSL
5,258324,25832
= ε1,234
TTSL
= 1− λPALTTSL
=
ρρSL
14,25832
= ε0,2348
€
ψz =
ppSLTTSL
=
ρρSL
1,234
ρρSL
0,2348=
ρρSL
1,234−0,117
= ε1,117

P. OLIVIERO - Meccanica del volo. Gennaio 2008
30

P. OLIVIERO - Meccanica del volo. Gennaio 2008
31
CAPITOLO 3Il volo librato
Prestazioni senza motore
In caso di piantata motore, oppure in caso di volo con gli alianti, l’aereo può volaresolo in discesa. Il che non significa che non riesca a salire rispetto alla terra, se lavelocità ascensionale del vento compensa e supera quella discendente sua propriarispetto all’aria calma. Il volo a spinta nulla, viene comunque denominato volo librato.
Quello che non può proprio fare, quando è privo di motopropulsione, è decollare inorizzontale e salire da solo alla quota operativa, ma, se ci è, comunque, arrivato, adetta quota operativa, può benissimo scendere da essa ed evoluire come più gliaggrada, per diletto o per la necessità di trovare un punto idoneo all’atterraggio.
Il volo senza motore non ha nulla a che fare, cioè, con lo stallo o con qualsiasi altracondizione di “non volo”, ovvero di impossibile o precaria condizione di controllo.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
32
La quota alla quale inizia il volo senza motore è, per gli alianti, quella alla quale unidoneo velivolo trainatore lo ha portato. Ciò facendo, l’aliante si è rifornito di unacerta quantità di energia potenziale e, con detta provvista, affronta la sua più o menolunga attività di volo, in piena sicurezza.
Le forze in gioco e le loro componenti, nella direzione della velocità (ovvero dellatraiettoria) e in quella ad essa perpendicolare, assumono la disposizione e leespressioni che seguono:
Lo schema si può leggere come segue: appena viene lasciato in quota e a una certavelocità, l’aliante è subito soggetto al suo stesso peso e alla forza aerodinamicarisultante, in equilibrio tra loro:
€
Peso = Forza aeodinamica risultante
W = CS 12ρoεV
2
L’inclinazione della forza aerodinamica risultante, rispetto alla direzione dellaperpendicolare al vettore velocità, è fornita, sul piano della polare, dalla pendenza delraggio vettore relativo all’assetto istantaneo dell’aereo in esame.
Tale pendenza, o angolo di pendenza del raggio vettore γ, è misurata infatti comesegue:
€
tgγ =CD
CL
=1E
€
VnL
€
Wsenγ
€
Wsenγ
€
W cosγ
€
γ
€
γ
€
D = CDS12ρoεVnL
2
€
L = CLS12ρoεVnL
2
€
F = CS 12ρoεVnL
2
€
W
orizzontale
traiettoria
corda
€
α

P. OLIVIERO - Meccanica del volo. Gennaio 2008
33
e coincide, stante l’ipotesi d’equilibrio, con la omonima, γ, pendenza della traiettoria:
€
tgγ =WsenγW cosγ
Dal canto suo, il valore della corrispondente velocità necessaria per la suppostacondizione d’equilibrio risulta, poi:
€
Peso = Forza aerodinamica risultante
W = CS12ρoεVnL
2
VnL =2ρo
1ε
WS
1C
in cui
€
C = CL2 + CD
2
è il coefficiente della forza aerodinamica risultante.
Equazioni d’equilibrio
Naturalmente, agli stessi risultati si perviene considerando il sistema delle dueequazioni d’equilibrio in base alle ipotesi fatte:volo longitudinal simmetrico, rettilineo, uniforme, in discesa, senza motore,con riferimento ai coefficienti aerodinamici della polare d’equilibrio.
€
Wsenγ = CDS12ρoεVnL
2
W cosγ = CLS12ρoεVnL
2
La pendenza della traiettoria si ricava infatti dividendo membro a membro le dueequazioni,mentre l’espressione della velocità necessaria in volo librato si ricava quadrando esommando e poi facendo la radice quadrata.
€
tgγ =1E
⇐WsenγW cosγ
=CDS
12ρoεVnL
2
CLS12ρoεVnL
2
VnL =2ρo
1ε
WS
1C
⇐ W = CL2 + CD
2 S12ρoεVnL
2

P. OLIVIERO - Meccanica del volo. Gennaio 2008
34
La polare aerodinamica d’equilibrio in volo librato
La polare di un aliante, rispetto a quella di un aereo a motore, è caratterizzata,(grazie, soprattutto, al maggior valore dell’allungamento alare degli alianti), daelevatissimi valori dell’efficienza.
L’ordine di grandezza dell’efficienza massima di un aliante moderno supera anchele 5 decine (contro l’efficienza massima di un aereo convenzionale, che è circa 16).
determinano, pertanto, sul piano odografo, i seguenti:
V1 - massima velocità sulla traiettoria
€
=VCmin =VnL MAX;
V2 - velocità di minima pendenza della traiettoria
€
=VEMAX=Vγ min ;
V3 - velocità di minima velocità verticale di discesa
€
=V(E 2CL )MAX=Vvd min
;V4 - minima velocità sulla traiettoria
€
=VCMAX=VnL min
;
Inoltre, a parte quello di massima efficienza (che, però è un punto doppio, cioè ditangenza), ognuno di detti punti è abbinato al secondo punto d’intersezione del suoraggio vettore con la polare.
Risulta naturale e comodo disegnare lapolare aerodinamica d’equilibrio delnostro aliante (v. figura a lato) ruotata di90° (v. figura che segue). In tal modo lecoordinate polari dei vari punticaratteristici sono immediatamente visibilicome quelle dei vettori velocità in volovero.
I quattro punti caratteristici tracciati,mentre si riferiscono, sul piano dellapolare, ai seguenti assetti, procedendo dalpiù piccolo al più grande:
€
α1 - assetto di minimo coefficiente di forzaaerodinamica risultante, ovvero di
€
Cmin
;
€
α2 - assetto di massima efficienza, ovvero dispinta necessaria minima
€
CEMAX;
€
α3 - assetto di minima potenza, ovvero dipotenza necessaria minima
€
CE 2CL( )
MAX
;
€
α4 - assetto di massimo coefficiente di forzaaerodinamica risultante, ovvero di
€
CMAX
;
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
0,00 0,05 0,10 0,15 0,20
Polare sperimentalePolare teorica
€
α1
€
α2€
α3€
α4

P. OLIVIERO - Meccanica del volo. Gennaio 2008
35
In altre parole, per ogni pendenza della traiettoria, si ha un raggio vettore e, perogni raggio vettore, si hanno due assetti possibili.
Ovvero, numerando gli 8 punti caratteristici in ordine crescente di angolo di assetto:
- assetto di “sprofondamento”, C8 , a quasi 90° di pendenza, coniugatoall’assetto di C1 = Cmin ;
- assetto di C2 , sul raggio vettore di pendenza uguale a quella di minimavelocità sulla traiettoria, coniugato quindi all’assetto C7 = CMAX ;
- assetto di C3 , sul raggio di pendenza uguale a quella di minima velocitàverticale, coniugato quindi all’assetto di C6 = CΠ min ;
- assetto di minima pendenza, punto doppio C4 coniugato con se stesso, ovverocon l’assetto C5 = CΤ min , di minima spinta necessaria;
Gli otto punti così definiti (sette, considerando che uno è doppio), permettono così dideterminarne altrettanti sul piano dell’odografa e, precisamente:
- 1 e 8 = prima pendenza, sulla quale troviamo
€
VnL MAX, di piccolo assetto e
grandissima pendenza (poco meno di 90°), e la corrispondente velocità, moltopiù piccola, di uguale grandissima pendenza, ma ad altresì grande assetto(caduta piatta, sprofondamento);
- 2 e 7 = seconda pendenza (quella di massimo coefficiente di forzaaerodinamica risultante), sulla quale troviamo
€
VnL min (corrispondente a C7 =
€
C8
€
C4 = C5 = CEMAX
€
C3
€
C2
€
C1 = Cmin
€
C6 = CE 2CL( )MAX
€
C3 = CE 2CL( )MAX
€
C7 = CMAX

P. OLIVIERO - Meccanica del volo. Gennaio 2008
36
CMAX, ) e la corrispondente velocità, molto più grande, di piccolo assetto(corrispondente a C2 );
- 3 e 6 = terza pendenza (quella di minima potenza), sulla quale troviamo
€
vd min,
di grande assetto (corrispondente a C6 = CΠ min ), e la corrispondente, moltopiù grande, di piccolo assetto (corrispondente a C3 );
- 4 e 5 = quarta pendenza (quella di massima efficienza ovvero minima spinta,punto doppio), (corrispondente a C4 = C5 = CΤ min ), sulla quale troviamo
€
γmin
.
Unendo questi otto punti, tracceremo l’odografa del volo librato, vale a dire la curvaluogo dei secondi estremi dei vettori velocità corrispondenti.
L’ultimo grafico mostra, per esempio, con la massima evidenza, che gli assetti dimaggior uso sono quelli che si affollano al vertice dell’odografa e, pertanto, che è inquell’intorno l’assetto da scegliere per una condotta profittevole in ogni caso.
In particolare, un aliante avente un maggior valore di EMAX avrà pendenze minimepiù piccole e, quindi, raggi d’azione più ampi e uno di maggior valore di (E2CL)MAX ,avrà velocità verticali minime più piccole e quindi tempi di azione più lunghi.
€
V4 =V5 =VEMAX=Vγmin
€
V6 =V2 =VEMAX=Vγmin
€
V6 =VE 2CL( )MAX
=Vvdmin
€
V6 =V2 =VEMAX=Vγmin€
V7 =VCMAX=VNLmin
€
V6 =V2 =VEMAX=Vγmin
€
V8 =VC8
€
V6 =V2 =VEMAX=Vγmin
€
V1 =VCmin =VnLMAX
€
V2 =VC2
€
V6 =V2 =VEMAX=Vγmin€
V3 =VC3
€
V6 =V2 =VEMAX=Vγmin

P. OLIVIERO - Meccanica del volo. Gennaio 2008
37
La coincidenza del punto di minore velocità verticale di discesa con quello diminima potenza necessaria si spiega facilmente alla luce dell’interpretazioneenergetica della quota disponibile: l’energia potenziale è, per un aliante, l’unicarisorsa disponibile e, quindi, da consumare con la minore velocità possibile.
Analiticamente, il semplice concetto esposto è nella definizione stessa dellaprestazione.
€
vd =Vsenγ =2ρo
1ε
WS
1CCD
C≅
2ρo
1ε
WS
1E 2CL
vdmin ≅2ρo
1ε
WS
1E 2CL( )MAX
L’odografa ovvero la polare delle velocità in volo librato
In definitiva, l’odografa, ovvero la polare delle velocità in volo librato, ha una forma chericorda bene quella della polare delle velocità e potenze in volo orizzontale, puressendoci precise differenze, dovute soprattutto al fatto che, la prima, è un graficocostruito da coordinate polari e, la seconda, è invece costruita da coordinatecartesiane.
Una delle più frequenti utilizzazioni della curva riguarda le previsioni di sfruttamentodelle correnti d’aria.
E’ ben noto, che, a preoccupare l’aliantista, non è la possibilità di incontrare unaperturbazione atmosferica, bensì, semmai, quella di non incontrarne nessuna.
Il vento gioca, infatti, un ruolo determinante nell’attività di volo con l’aliante.
Velocità dell’aliante,rispetto all’aria Velocità del vento, e
dell’aliante con esso,rispetto alla terra
Velocità risultante,rispetto alla terra

P. OLIVIERO - Meccanica del volo. Gennaio 2008
38
Quando l’aliante lo incontra (quasi sempre, perché lo è andato, letteralmente, acercare), la sua velocità di discesa rispetto all’aria deve essere sommatavettorialmente a quella del vento rispetto alla terra, perché esso lo trascina con sé e,pertanto, la velocità del vento diventa anche velocità dell’aliante.
In definitiva la velocità risultante dell’aliante rispetto al suolo è determinata dallavelocità relativa dell’aliante rispetto all’aria VnL dovuta alla gravità sommata allavelocità di trascinamento vv dell’aria rispetto al suolo dovuta al vento.
La costruzione, semplicissima, porta alla ovvia traslazione dell’odografa, ma risultaancora più pratica come indicato qui di seguito, effettuando invece una traslazioneuguale e contraria degli assi di riferimento.
Velocità dell’aliante, rispetto all’aria
Velocità risultante, rispetto alla terraTraslazione degli assiuguale e contraria alvettore vento

P. OLIVIERO - Meccanica del volo. Gennaio 2008
39
E’ chiaro infine, che l’intervallo di assetti utili si restringe al segmento AB, entro ilquale il vento dell’esempio consente addirittura il volo orizzontale e quello in salita.
e che, al contrario, in caso di vento con componente a scendere, la situazione è deltutto diversa e da evitare attentamente, dato che la naturale tendenza a scendere diogni velivolo senza motore, ne risulta amplificata.
VnL- vv
V A B
VnL
- vv V

P. OLIVIERO - Meccanica del volo. Gennaio 2008
40
Formulario essenziale
€
VnL =2ρo
1ε
WS
1C
⇐ W = CS12ρoεVnL
2
VnL =2ρo
1ε
WS
cosγCL
⇐ W cosγ = CLS12ρoεVnL
2
Vno =2ρo
1ε
WS
1CL
⇐ W = CLS12ρoεVno
2
VnL = Vno cosγ CL = Ccosγ
tgγ =senγcosγ
=1E
CD = Csenγ = CLtgγ
r (raggio di sicurezza) =z
tgγ= zE
VnLγmun=
2ρo
1ε
WS
1CE MAX
VnLvdmin=
2ρo
1ε
WS
1C
E 2CL( ) MAX
VnLmin=
2ρo
1ε
WS
1C
MAX
VnL MAX=
2ρo
1ε
WS
1C
min

P. OLIVIERO - Meccanica del volo. Gennaio 2008
41
CAPITOLO 4
L’elica e la teoria alare
Teoria alare
Il riepilogo sintetico dei fondamentali principi di funzionamento dell’aereo nel suocomplesso ci ha portato alla rappresentazione delle polari arodinamiche e delle polaritecniche utili, in meccanica del volo, per determinare le caratteristiche necessarie,ovvero “richieste” nei vari casi.
Allo scopo, ora, di determinare quelle disponibili, ovvero “offerte” dal sistemamotopropulsivo imbarcato, cominciamo col riepilogo dei fondamentali principi difunzionamento dell’elica nel suo complesso.
La teoria più semplice per farlo è quella basata sull’esame di un piccolo elemento dipala, il quale, per la sua limitata estensione in senso radiale, può essere riguardato,appunto, come un elemento di ala, da cui: teoria alare.
La sezione del piccolo elemento di pala in esame ha infatti la forma di un profiloalare, la cui traiettoria risulta dalla combinazione del moto rotatorio dell’elica intornoal suo asse e di quello di avanzamento nella direzione (all’incirca) dell’asse stesso.
V/n avanzo per giroα
πd
φβ
F
U = nπd
V
W
C
Tnp
npa
corda
dpn
D
L
V/n - p = regresso
pa = passoaerodinamico
p = passo

P. OLIVIERO - Meccanica del volo. Gennaio 2008
42
Il primo movimento (quello rotatorio intorno all’asse), svolto nel piano, è dato dallacirconferenza di raggio r “rettificata” e misurata, ovviamente dal prodotto πd.
Nell’unità di tempo, l’elica compie un certo numero di giri, n, per cui il percorsorettificato di cui innanzi diventa nπd e tale è appunto la sua velocità periferica U.
Il secondo movimento (quello all’incirca parallelo all’asse), è dato direttamentedall’avanzamento dell’aereo e dell’elica con esso in un giro ed è misurato dalrapporto V/n. Tale avanzamento è denominato, appunto, avanzo per giro erappresenta, in somma sintesi, con la sua differenza dal passo dell’elica, la differenzadi funzionamento che c’è tra elica e vite.
Nell’unità di tempo, V misura la velocità di avanzamento dell’elica ed è appunto talevettore che deve essere sommato al precedente, per fornire la velocità risultante Wdell’elemento di pala.
Abbiamo dunque:
πd = 2πr = lunghezza percorsa dal profilo alare dell’elica in 1 giro (in metri);πdn = 2πnr = lunghezza percorsa dal profilo alare dell’elica in n giri (in metri);
radiante = rad = ampiezza dell’angolo unitario (360°/2π = 57,296°);2π = ampiezza dell’angolo giro (in radianti); ovvero numero dei radianti in 1 giro;2πn = numero dei radianti in n giri, ovvero nell’unità di tempo;
grado = ° = ampiezza dell’angolo unitario (360°/360 = 1°);360 ° = ampiezza dell’angolo giro (in gradi), ovvero numero dei gradi in 1 giro;n360 ° = numero dei gradi in n giri, ovvero nell’unità di tempo;
Ne consegue che, se la velocità di rotazione è di n giri nell’unità di tempo:
◆ nπd = velocità periferica (in metri al secondo, U);◆ 2πn = velocità angolare (in rad al secondo, Ω);◆ 360n = velocità angolare (in gradi al secondo, Ω).
L’avanzamento dell’elica nell’unità di tempo è invece rappresentata, sempre nelpiano del profilo alare della generica sezione d, dal vettore V della velocità dell’aereo.
Ricordando ora che:
p = passo geometrico = avanzamento geometrico del profilo alare in un giro, nel suoavvitamento apparente nell’aria, riferito alla corda assimilata al filetto della vite emisurato in m/giri;
pa = passo aerodinamico = avanzamento geometrico del profilo alare in un giro, nelsuo avvitamento apparente nell’aria, riferito alla dpn (direzione di portanza nulla)assimilata al filetto della vite e misurato in m/giri;
V = avanzamento effettivo del profilo alare in un secondo, ovvero in n giri emisurato in m/s;

P. OLIVIERO - Meccanica del volo. Gennaio 2008
43
V/n = avanzamento effettivo del profilo alare in un giro (avanzo per giro) e misuratoin m/giri;
V/n – p = avanzo per giro – passo = avanzo effettivo – avanzo apparente = regressodell’elica e misurato in m/giri.
Ne consegue che, nell’ipotesi che la velocità di rotazione è di n giri nell’unità ditempo, risulta, rispettivamente, che:
◆ np = avanzamento nominale geometrico (in metri al secondo);◆ npa = avanzamento nominale aerodinamico (in metri al secondo);◆ V = avanzamento effettivo aerodinamico (in metri al secondo).
Il rapporto di funzionamento γ = V / nD influenza inversamente l’incidenzarisultante e, con essa, la forza aerodinamica dalla medesima generata.
Infatti, posti:
β = np / nπd = p / πd = pendenza della corda sul disco di rotazione;α = pendenza della corda sulla velocità risultante (incidenza risultante);
€
ϕ = β − α = V/nπd = pendenza della velocità risultante sul disco di rotazione;
ne consegue che:
◆ incidenza risultante
€
α = β −ϕ =pπd
−Vnπd
= f ( VnD) = f (γ)
◆ velocità risultante
€
W = n2π 2d2 +V 2 = nπd 1+ ( Vnπd
)2
Le espressioni della spinta fornita e della coppia assorbita dall’elica, in funzione di γ sono:
€
T = Ct γ( )ρoεn2D4
Q = Cq γ( )ρoεn2D5
Infatti, definiti i rapporti di similitudine di due eliche geometricamente ecinematicamente simili come segue:
€
d1d2
=D1D2
l1∂r1l2∂r2
=D12
D22
V1n1πd1
=V2n2πd2
W1
W2
=
n1πd1 1+ ( V1n1πd1
)2
n2πd2 1+ ( V2n2πd2
)2=n1D1n2D2

P. OLIVIERO - Meccanica del volo. Gennaio 2008
44
Per ogni
γ =V1n1D1
=V2n2D2
si ha che:
€
∂F1∂F2
=ρ1l1∂r1W1
2
ρ2l2∂r2W22 =
ρ1n12D1
4
ρ2n22D2
4
T1T2
=ρ1n1
2D14
ρ2n22D2
4 ⇒T1
ρ1n12D1
4 =T2
ρ2n22D2
4 = Ct ⇒ T = Ct γ( )ρoεn2D4
Q1Q2
=ρ1n1
2D15
ρ2n22D2
5 ⇒Q1
ρ1n12D1
5 =Q2
ρ2n22D2
5 = Cq ⇒ Q = Cq γ( )ρoεn2D5
La potenza (kpms-1) assorbita dall’elica risulta così esprimibile a mezzo del prodottocoppia (in kpm) per velocità angolare (in radianti al secondo):
€
Πa =QΩ = Cqρoεn2D52πn = 2πCqρoεn
3D5 = ξρoεn3D5
La potenza (kpms-1) fornita dall’elica risulta a sua volta esprimibile mediante laseguente formula del prodotto spinta (in kp) per velocità (in ms-1):
€
Πd = TV = Ct γ( )ρoεn2D4V
per cui, in definitiva, le espressioni del rendimento risultano:
€
η =Πd
Πa
=TVQΩ
=Ct γ( )ρoεn2D4V2πCq γ( )ρoεn3D5 =
Ct γ( )V2πCq γ( )nD
=Ct γ( )2πCq γ( )
γ =Ct γ( )ξ γ( )
γ
Teoria della quantità di moto
Le espressioni della spinta fornita dall’elica e del rendimento di propulsione dellastessa, possono anche essere assumere altre forme: quelle a cui si pervieneriferendosi alle espressioni energetiche in funzione della variazione di quantità dimoto impressa all’aria (pari a quella ricevuta dalla stessa per reazione).
Si tratta di considerare che una certa massa d’aria M entra nel disco dell’elica allavelocità di avanzamento (o velocità a monte) V e ne esce alla velocità a valle U (danon confondere con la velocità periferica dell’elica e che abbiamo anche chiamato Usolo per rispetto di alcune abitudini), per cui:
€
T = M(U −V ) η =TV
TV +12M(U −V )2
=2
2 +U −VV
=2
1+UV

P. OLIVIERO - Meccanica del volo. Gennaio 2008
45
che si leggono osservando che, all’aumentare di (U – V), aumenta la spinta, ma cala ilrendimento, per cui è necessario accontentarsi di un buon compromesso riducendo ivalori di (U – V) per tenere alto η, ma aumentando M per contrastare la perdita di T,ma senza poter troppo agire su V.
Per razzo e turboreattore, il compromesso analogo è invece tra U/V piccoli pertenere alto η, e V grandi per aumentare M e contrastare la perdita di T, tenendopresente che il valore di U è imposto da ragioni termodinamiche intorno a valori dicirca 2.000 ms-1 per il razzo e di circa 600 ms-1 per il turboreattore.
Razzo:
€
T = M *U η =TV
TV +1/2M * (U −V )2=
2U /V1+ (U /V )2
Turboreattore:
€
T = M + M *( )U −MV η =TV
TV +1/2 M + M *( )(U −V )2≅
21+U /V
Teoria di Froude
Nel caso del rotore dell’elicottero, lo schema di riferimento è:
€
T = M U −V( ) = 2Mvi
Πspesa =12M U 2 −V 2( ) =
12M U −V( ) U +V( ) = M U +V( )vi
Πutile = TV = M U −V( )V = 2MVvi
Π persa =12M U −V( )2 = M U −V( )
U −V( )2
= Tvi
€
Πspesa =Πutile +Π persa = M U −V( )V +12M U −V( )2 =
M UV −V 2 +12U 2 +
12V 2 −UV
=12M U 2 −V 2( )
€
η =Πutile
Πspesa
=M U −V( )V
MU −V( ) U +V( )
2
=V
U +V2
=V
V +U −V2
=V
V + vi=
TVTV + Tvi
=Πutile
Πutile +Π perso
M = ρAV1 = ρA Vo + vi( )
€
V =Vo
€
V1 =Vo + vi
€
U =V2 =V1 + vi =Vo + 2vi
€
vi =U −V2

P. OLIVIERO - Meccanica del volo. Gennaio 2008
46
Potenza disponibile: la quota di potenza disponibile che arriva al rotore per fornirglila coppia necessaria ad equilibrare quella resistente è circa l’82% di quella sviluppatadal motore e da computare ai fini del consumo e delle autonomie, perchè circa il 18%si perde per muovere il ruotino di coda (circa 10%) e gli organi accessori e dellatrasmissione (circa 8%).
Potenza necessaria: la potenza resa così disponibile al mozzo del rotore, viene daquesto spesa per equilibrare la coppia resistente alla rotazione incontrata dalle pale ela resistenza complessiva all’avanzamento incontrata dall’elicottero.
Nell’elicottero, la potenza necessaria si divide in tre quote a ciascuna delle qualicontribuiscono, in massima parte, i seguenti meccanismi:
- potenza indotta – essenzialmente quella necessaria per produrre la spintarotorica;
- potenza di profilo – essenzialmente quella necessaria per vincere la resistenzaalla rotazione che incontrano le pale;
- potenza di fusoliera – essenzialmente quella necessaria per vincere laresistenza all’avanzamento dell’elicottero.
La potenza indotta, nel caso dell’aereo ad ala fissa, è fornita dal prodotto
€
Lvi in cui:
€
L = CLS12ρoεV
2 e
€
vi =α iV =kCL
πλV
sono entrambi funzioni di
€
CL e V
€
Π i =kCL
2
πλS 12ρoεV
3 = CLS12ρoεV
2 kCL
πλV = Lα iV = Lvi (ala fissa)
Nella formula della resistenza indotta, “il prezzo della portanza”, entrambi i fattori,portanza e velocità indotta, discendono dalla stessa velocità, l’unica in questione:quella d’avanzamento, e di essa sono funzioni.
Viceversa, nel caso dell’elicottero, le velocità in questione sono due: quellad’avanzamento dell’elicottero e quella di rotazione del rotore.
La potenza indotta è sempre fornita dal prodotto
€
Lvi , ma, in detto prodotto, L = W e
€
vi =V1 −V , non sono funzioni degli stessi
€
CL e V , perché la portanza vienegenerata da un’ala rotante in cui, tra le velocità coinvolte, compare anche Ω , e V puòanche non esserci (volo stazionario), per cui la teoria di Froude, valida per le eliche e irotori (e non per le ali), risolve il problema, ma, in un certo senso, è meno“generosa” della teoria alare, che, valida per le ali, si applica anche ai profili dellesezioni delle eliche e delle pale.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
47
Possiamo dunque, anzi dobbiamo porre L = W a prescindere dalla circostanza diavere o no velocità sufficiente:
ci pensa infatti il rotore a fornire spinta rotorica in quantità sufficiente, in modo dareggere il peso e vincere la resistenza alla rotazione anche in hovering, e, infatti,fornisce sia la portanza che la spinta.
Allo stesso tempo, la velocità indotta non dipende dalla sola velocità d’avanzamento(cioè non è nulla quando questa è nulla), bensì è sì funzione di questa,
ma al modo di Froude
€
vi =V1 −V (Froude)
(esiste anche in caso di volo stazionario, V = 0),
e non più al modo di Prandtl
€
vi =α iV =kCL
πλV (Prandtl)
(è nulla se V è nulla).
In definitiva, le espressioni della potenza indotta, per l’elicottero e per l’aereo, sono:
€
Π i = Lvi =W V1 −V( ) (elicottero)
€
Π i = Lvi =W kCL
πλV =
kWπλ
CLV =kWπλ
W
S 12ρoεV
2
V =
kW 2
πλS 12ρoε
1V
(aereo)
In entrambi i casi, essa diminuisce all’aumentare di V, ma, rispettivamente, come
€
(Vi −V ) e come
€
1V
.
La potenza di penetrazione dell’aereo ad ala fissa (attrito + scia), nel casodell’elicottero si sdoppia, perchè c’è quella incontrata dal rotore, potenza di profilo, equella incontrata da tutto il velivolo potenza di fusoliera.
La prima, la potenza di profilo, è espressa dalla solita formula di tutte le forzeaerodinamiche in cui W è la velocità risultante della pala (avanzamento + periferica).
€
Π p = CDpS12ρoεW
3
La seconda, la potenza di fusoliera, è espressa dalla solita formula di tutte le forzeaerodinamiche in cui V è solo la velocità d’avanzamento dell’elicottero.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
48
€
Π f = CDf S12ρoεV
3
Stadi di funzionamento.
Al crescere del rapporto di funzionamento γ, α diminuisce e la forza aerodinamicarisultante diminuisce, arretra e ruota verso il bordo d’uscita spostandosi dalledirezioni comprese nel secondo quadrante (90-180) a quelle comprese nel terzo e nelquarto.
Le sue componenti nelle direzioni, rispettivamente, dell’asse di rotazione e del pianodi rotazione diventano, corrispondentemente:
◆ T sempre più piccola, nulla e, poi, frenante;◆ Q sempre più piccola, nulla (un po’ dopo T) e, poi, motrice.
L’elica passa pertanto per i seguenti stadi di funzionamento, ove il parametrosottolineato è quello che determina gli altri e caratterizza lo stadio:
1
1,2,82,3,4,5,6
3
4
5
6,7
7
8
F
U = nπd
V
W
corda
V
V
U = nπd
nπd
W

P. OLIVIERO - Meccanica del volo. Gennaio 2008
49
1- punto fisso: V = 0, Ω > 0, γ = 0, Ct > 0, C q > 0, η = 0.2- propulsiva: V > 0, Ω > 0, γ > 0, Ct > 0, C q > 0, η > 0.3- spinta nulla: V > 0, Ω > 0, γ > 0, Ct = 0, C q > 0, η = 0.4- frenante in avanti: V > 0, Ω > 0, γ > 0, Ct < 0, C q > 0, η < 0.5- autoruotante: V > 0, Ω > 0, γ > 0, Ct < 0, C q = 0, η∗ = 1 / η = 0.6- mulinello: V > 0, Ω > 0, γ > 0, Ct < 0, C q < 0, η∗ = 1 / η > 0.7- bloccata: V > 0, Ω = 0, γ∗ = ∞, Ct < 0, C q < 0, η∗ = 1 / η = 08- frenante indietro: V < 0, Ω > 0, γ < 0, Ct > 0, C q > 0, η < 0.
€
η =Ctγ2πCq
η* =1η
=2πCq
Ctγ
Gli schemi delle velocità in gioco per ogni stadio di funzionamento e quelli delle forzeaerodinamiche rispettivamente nascenti sono rappresentati qui di seguito, ma, pernon affollare eccessivamente il disegno, quando possibile, sono raggruppati per tipo.
Va senza dire che, nell’ambito di ciascun “tipo”, uno stadio differirà dall’altro per irispettivi effettivi valori dei vettori in gioco.
Per esempio,
- quanto alle velocità, gli stadi di funzionamento 2, 3, 4, 5, 6 hanno sia la velocitàdi avanzamento che quella periferica; il primo stadio (elica a punto fisso) ha V= 0; il settimo (elica bloccata) ha Ω = 0; l’ottavo (elica frenante indietro) ha V <0;
-0,400
-0,200
0,000
0,200
0,400
0,600
0,800
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
12
3
4 5
67
8

P. OLIVIERO - Meccanica del volo. Gennaio 2008
50
- mentre, quanto alle forze, gli stadi 1, 2, 8 hanno sia spinta che coppiastandard, cioè spinta propulsiva e coppia frenante; il terzo (elica a spinta nulla)ha solo coppia frenante; il quarto (elica frenante in avanti) ha sia spintafrenante che coppia frenante; il quinto (elica autoruotante) non ha coppiafrenante e la spinta è frenante; gli stadi 6 (mulinello) e 7 (elica bloccata) hannoentrambi coppia motrice e spinta frenante.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
51
CAPITOLO 5La motopropulsione
Motoelica e turboreattore.
I sistemi di motopropulsione base della Meccanica del volo sono:
- il gruppo motore-elica;- il gruppo turbina-compressore.
Il primo viene in genere indicato come motoelica. Il secondo come turboreattore.Entrambi si basano sul principio di azione e reazione: azione di accelerare una certaquantità d’aria (portata massica) verso dietro; reazione che questa esercita sul velivoloverso avanti.
Le motoeliche derivano dall’accoppiamento di un motore alternativo e di una elica.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
52
I turboreattori derivano dall’accoppiamento di un motore a turbina e di uncompressore, ma esistono anche esempi di altri abbinamenti: motore alternativo ecompressore (il motoreattore Campini degli anni ‘40), motore a turbina ecompressore con elica convenzionale (turboeliche), motore a turbina e compressorecon ventola intubata (turbofan), motore a turbina e compressore con elica ascimitarra (propfan, unductedfan).
I motori alternativi aeronautici sono in genere: superdimensionati, supercompressi,alleggeriti, normali o di quota.
Le eliche aeree sono: convenzionali (passo fisso, passo variabile a giri costanti, 2, 3 o4 pale), intubate (calettamento fisso o basculante), a scimitarra (8 , 10 pale).
Le turbine aeronautiche sono:
- ad azione (espansione statorica ad alta pressione nel primo stadio),
- a reazione (espansione rotorica a bassa pressione negli stadi successivi).
I compressori sono di due tipi:
- radiali (caratterizzati da piccola spinta, basso rendimento, piccolo rapporto dicompressione [5:1], grande ingombro frontale relativo alla girante, ma piccolocosto e grande robustezza),
- assiali (caratterizzati da grandi spinte, migliori rendimenti, elevati rapporti dicompressione [20:1], ingombro frontale minimo, ma maggiori costi emaggiori problemi di robustezza).
I compressori assiali possono essere:
- di bassa pressione (caratterizzati da stadi anteriori, in lega leggera, collegatialla turbina di bassa pressione e all’eventuale fan, numero di giri crescenteautomaticamente con la quota),
- di alta pressione (caratterizzati da stadi posteriori, in acciaio legato, collegatialla turbina di alta pressione, rotanti a numero di giri elevato e comandato).

P. OLIVIERO - Meccanica del volo. Gennaio 2008
53
Il ciclo Otto del motore alternativo e il ciclo Brayton del turboreattore.
Un buon sistema per ricapitolare e confrontare le caratteristiche salienti dei duemotopropulsori in esame é quello di riferirsi ai rispettivi cicli teorici e fare sugli stessialcune semplici considerazioni.
Intanto c’é da ricordare che mentre il primo, il ciclo Otto del motore alternativo,rappresenta solo la produzione di potenza, il secondo, il ciclo Brayton delturboreattore, si riferisce all’intero processo di produzione della spinta utile.
Nel primo caso infatti, il ciclo é limitato al funzionamento del motore, il quale erogapotenza e coppia e, poi, muovendo il propulsore (l’elica) fornisce la spinta, mentre,nel secondo caso, il ciclo si estende all’intero motopropulsore il quale forniscedirettamente la spinta.
Nel primo caso inoltre, tutte le fasi si svolgono nei cilindri, mentre, nel secondo caso,ogni fase si svolge in una diversa sede (presa d’aria, compressore, camere dicombustione, turbina, ugello di scarico).
Nella motoelica cioé, l’organo propulsore (l’elica) fa solo da propulsore e nonpartecipa al ciclo dell’organo motore, mentre, nel turboreattore, l’organo propulsore(il compressore), oltre a fare da propulsore (soffiando 45 parti d’aria su 60 in turbina),partecipa direttamente al ciclo (inviando le altre 15 in camera di combustione) e,altrettanto fà l’organo motore (la turbina), che, oltre a partecipare al ciclo (muovendoil compressore ed espandendo la miscela proveniente dalle camere di combustione el’aria proveniente dal medesimo), fornisce direttamente la propulsione, insiemeall’ugello di scarico (eiettando il tutto nello stesso).
La motoelica é dunque un motopropulsore “a reazione indiretta”: produce la spintacon l’elica mediante regolazione della potenza del motore.
La sua regolazione avviene infatti con i comandi di MAP (manifold pressure,pressione di alimentazione) e RPM (rounds per minute, giri al minuto), per cui, alcrescere della velocità, se i parametri di regolazione (MAP e RPM) restano costanti, lapotenza erogata resta costante, mentre la spinta disponibile effettiva diminuisce (T =Πd / V).
Viceversa, il turboreattore é un motopropulsore “a reazione diretta”: produce la spintamediante regolazione diretta della stessa.
La sua regolazione avviene infatti con il comando di RPM, per cui, al crescere dellavelocità, se il parametro di regolazione (RPM) resta costante, la spinta fornita restacostante, mentre la potenza che, corrispondentemente, aumenta (Πd = T V) non puòconsiderarsi “del motopropulsore”, perché non è misurabile a prescindere dal moto,anche a punto fisso, come quella della motoelica.
La rappresentazione grafica dei ricordati cicli teorici riassume molte delleconsiderazioni che precedono.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
54
Schema ciclo Otto (p v)
0,00
0,20
0,40
0,60
0,80
1,00
1,20
0,00 0,20 0,40 0,60 0,80 1,00 1,20
Schema ciclo Brayton (p v)
0,00
0,20
0,40
0,60
0,80
1,00
1,20
0,00 0,20 0,40 0,60 0,80 1,00 1,20
In definitiva, il funzionamento del turbocompressore a semplice flusso é il seguente:
Il compressore, come l’elica della motoelica, agisce su una massa d’aria M e la gettaindietro; la reazione di tale massa rappresenta la spinta.
Il compressore, però, fa anche un’altra cosa, comprime la massa d’aria che getta. Peril turboreattore a semplice flusso, l’azione é su 60 parti, in massa, di aria per ogniparte del combustibile che brucia nelle camere di combustione.
Di tali 60 parti, 15 vanno nelle camere di combustione e poi in turbina e 45direttamente in turbina dopo aver lambito, raffreddandole, le camere dicombustione.
Combustione a v costante
compressione
accensione
espansione
Scarico avolumecostanteAspirazione a p costante
Combustione a pcostante Espansione
in turbinaEspansione nell’ugello di scarico
Compressionenella presa d’aria
Compressionenel compressore
Senza cilindro, niente espansione niente lavoro Senza turbina, l’espansione potrebbe avvenire tutta nell’ugellodi scarico, ma occorrerebbe un altro motore per il compressore
L’espansione che fornisce la spinta è fatta dall’elica L’espansione che fornisce la spinta è fatta dal turbocompressore
Presa d’ariaCompressoreCamere dicombustioneTurbinaUgello
d’uscita

P. OLIVIERO - Meccanica del volo. Gennaio 2008
55
La turbina riceve così 16 parti di miscela combusta e 45 di aria ambiente, tuttecompresse con un rapporto di circa 20:1. Il gas arriva nella turbina compresso,espande ed espandendo, muove la turbina (che, a sua volta, muove il compressore)dopo di che, effluisce attraverso l’ugello di scarico, dove completa l’espansione el’accelerazione lasciando l’aereo a velocità U.
L’espressione della spinta è pertanto:
€
T = M(U −V ) + M∗U ≅ M(U −V )
In cui M è la portata massica di aria e M* quella del combustibile, pari a circa 1/60della prima.
Talvolta, si cerca di ridurre U, a parità di spinta ottenuta, aumentando M.
E’ quello che avviene nel turboreattore a doppio flusso. In esso le parti di aria“lavorate” sono 120, invece di 60.
Di queste, 60 vanno al compressore e seguono il ciclo appena descritto e 60 vannodirettamente allo scarico riducendo U (e, quindi, rumore e consumo) e aumentandoM in modo da avere uguale spinta.
Le curve di calibrazione del motore alternativo.
Il gruppo motore alternativo – elica fornisce dunque la spinta necessaria al volo, dicui abbiamo trovato le espressioni analitiche nel primo capitolo, producendo unaspinta disponibile uguale e contraria che garantisce il necessario equilibrio delle forzenella direzione del moto.
Un tipico motore alternativo per uso aeronautico è caratterizzato dalle seguenticurve di funzionamento:
P. OLIVIERO - Meccanica del volo. Gennaio 2008
56
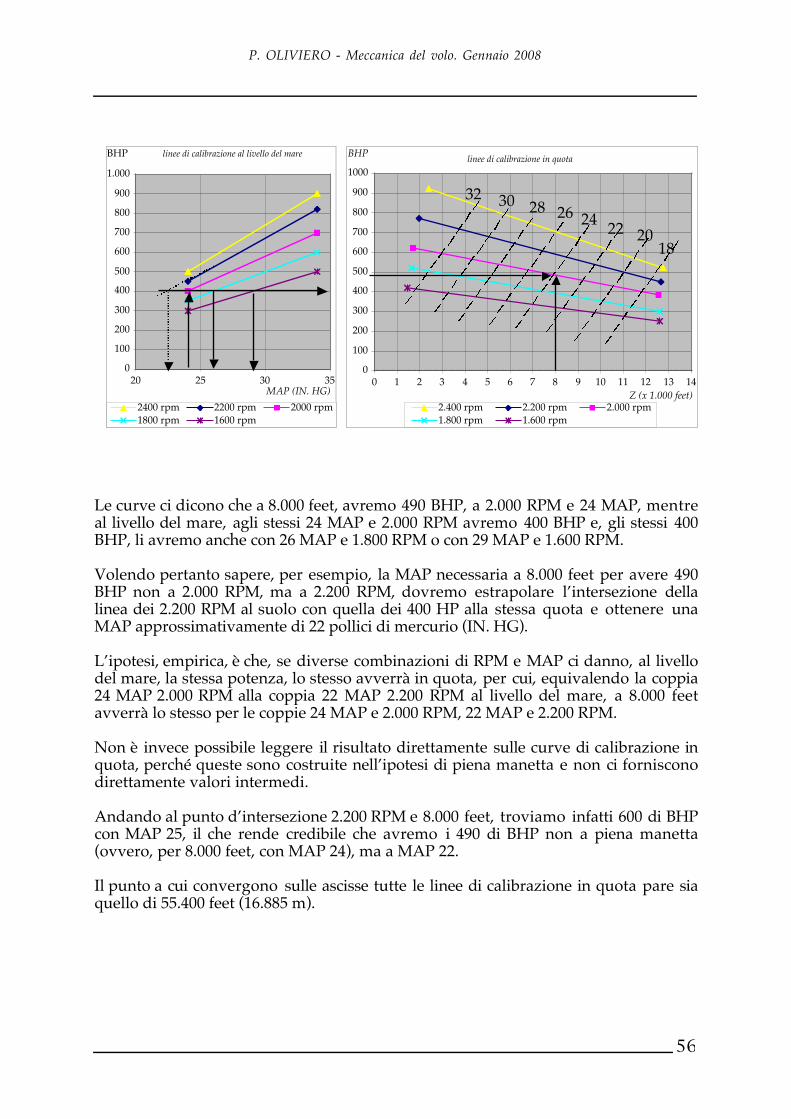
Le curve ci dicono che a 8.000 feet, avremo 490 BHP, a 2.000 RPM e 24 MAP, mentreal livello del mare, agli stessi 24 MAP e 2.000 RPM avremo 400 BHP e, gli stessi 400BHP, li avremo anche con 26 MAP e 1.800 RPM o con 29 MAP e 1.600 RPM.
Volendo pertanto sapere, per esempio, la MAP necessaria a 8.000 feet per avere 490BHP non a 2.000 RPM, ma a 2.200 RPM, dovremo estrapolare l’intersezione dellalinea dei 2.200 RPM al suolo con quella dei 400 HP alla stessa quota e ottenere unaMAP approssimativamente di 22 pollici di mercurio (IN. HG).
L’ipotesi, empirica, è che, se diverse combinazioni di RPM e MAP ci danno, al livellodel mare, la stessa potenza, lo stesso avverrà in quota, per cui, equivalendo la coppia24 MAP 2.000 RPM alla coppia 22 MAP 2.200 RPM al livello del mare, a 8.000 feetavverrà lo stesso per le coppie 24 MAP e 2.000 RPM, 22 MAP e 2.200 RPM.
Non è invece possibile leggere il risultato direttamente sulle curve di calibrazione inquota, perché queste sono costruite nell’ipotesi di piena manetta e non ci fornisconodirettamente valori intermedi.
Andando al punto d’intersezione 2.200 RPM e 8.000 feet, troviamo infatti 600 di BHPcon MAP 25, il che rende credibile che avremo i 490 di BHP non a piena manetta(ovvero, per 8.000 feet, con MAP 24), ma a MAP 22.
Il punto a cui convergono sulle ascisse tutte le linee di calibrazione in quota pare siaquello di 55.400 feet (16.885 m).
linee di calibrazione al livello del mare
0
100
200
300
400
500
600
700
800
900
1.000
20 25 30 35MAP (IN. HG)
BHP
2400 rpm 2200 rpm 2000 rpm1800 rpm 1600 rpm
linee di calibrazione in quota
0
100
200
300
400
500
600
700
800
900
1000
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14Z (x 1.000 feet)
BHP
2.400 rpm 2.200 rpm 2.000 rpm1.800 rpm 1.600 rpm
2026
2228
2430
18
32

P. OLIVIERO - Meccanica del volo. Gennaio 2008
57
CAPITOLO 6
Motoelica a passo fisso
La motoelica a passo fisso; primo regime (n variabile, ammissione costante).
L’elica a passo fisso, come vedremo, funziona col massimo rendimento solo a unpreciso valore del rapporto di funzionamento.
Un grafico semplice da interpretare e usare nel calcolo delle prestazioni è quello dellapotenza in funzione della quota, esprimibile come segue:
€
Πa = 2πnϕxψzQo =ϕxψzΠao
in cui:

P. OLIVIERO - Meccanica del volo. Gennaio 2008
58
€
ψz
€
ϕx =Qzx
Qzmax
ψz =Qzmax
Qomax
ϕxψz =Qzx
Qzmax
Qzmax
Qomax
=Qzx
Qomax
Qzx =ϕxψzQomax Πa = 2πnQzx = 2πnϕxψzQomax =ϕxψzΠao
I due fattori qui introdotti si chiamano, rispettivamente, grado d’ammissione (rapportotra coppia sviluppata con il rateo di manetta “x” e coppia massima, entrambe misuratealla generica quota “z”) e coefficiente di riduzione in quota (rapporto tra la coppiaall’albero alla generica quota z rispetto a quella del livello del mare, entrambemisurate per un generico rateo di manetta “x”).
L’andamento di
€
ψz è funzione di
€
ε , come vedremo, è dato dalla formula:
€
ψz = ε1,117
Resta inteso, da tutto quanto già esposto, che la coppia motrice fornita dal motore, adeterminati e costanti valori di quota e rateo di manetta, è costante, per cui lapotenza all’albero erogata risulta funzione del solo numero di giri.
Tale valore di “n” discende, a sua volta, dall’equilibrio tra coppia motrice fornita dalmotore
€
ϕxψzQo e coppia resistente opposta dall’elica
€
Cqρoεn2D5 :
€
ϕxψzQo = Cqρoεn2D5
da cui:
€
n =1ρo
ψz
εϕx
Qo
D5
1Cq
0
5.000
10.000
15.000
20.000
25.000
0,00 0,20 0,40 0,60 0,80 1,00 1,20
epsilon coefficiente di riduzione in quota
z
€
ψz ε

P. OLIVIERO - Meccanica del volo. Gennaio 2008
59
I coefficienti di Renard
€
Ct Cq η , che compaiono nelle formule di cui innanzi, sono
riportati nei grafici seguenti in funzione del rapporto di funzionamento
€
γ =VnD
.
Allo stesso modo si determinano le espressioni di
€
Πa , di
€
Πd , di
€
V e di
€
Td .
€
Πa = 2π 1ρo
ψz
εϕx
Qo
D51Cq
ϕxψzQo = 2π 1ρo
ψz3
εϕx
3 Qo3
D5
1Cq
€
Πd =ηΠa = 2π 1ρo
ψz3
εϕx
3 Qo3
D5
η2
Cq
€
V = γnD =1ρo
ψz
εϕx
Qo
D3
γ 2
Cq
€
Td = Ctρoεn2D4 = Ctρoε
1ρo
ψz
εϕx
Qo
D51Cq
D4 = ϕxψzQo
D
Ct
Cq
In definitiva, come nel caso delle caratteristiche necessarie, le caratteristiche disponibili siriconducono alle curve di alcune funzioni dei coefficienti in gioco, moltiplicando glistessi per vari fattori, funzioni, a loro volta, del grado d’ammissione, del coefficientedi riduzione in quota, della densità relativa, della coppia massima al livello del mare,del diametro dell’elica, della densità dell’aria al livello del mare e di pi greco.
Precisamente, le curve di
€
Πa , di
€
Πd e di
€
Td in funzione di
€
V vengono fornite dai
grafici, rispettivamente di
€
1Cq
, η2
Cq
, Ct
Cq
in funzione di
€
γ 2
Cq
e sono riportate
nel paragrafo seguente.
Le curve di Renard e derivate.
I coefficienti di Renard, riportati nei grafici seguenti per una tipica elica aeronautica apasso fisso, sono forniti dalle espressioni ivi evidenziate.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
60
€
T = Ctρoεn2D4
Q = Cqρoεn2D5
V = γnD 2πCq = ξ
η =Πd
Πa
=TVQΩ
=Ctρoεn
2D4γnD2πCqρoεn
3D5 =Ctρoεn
3D5
ξρoεn3D5 γ =
Ct
ξγ
€
η =Ct
ξγ Ct = ξη
1γ
ξ =Ct
ηγ Cq =
12π
Ct
ηγ
Da tali grafici è possibile costruire quelli delle caratteristiche disponibili in funzionedella velocità, assumendo il numero di giri crescente da zero al valore massimoconsentito dalle prove d’omologazione no.
Scegliendo opportunamente le scale, le tre curve possono essere disegnate su un solopiano cartesiano come segue.
-0,020
0,000
0,020
0,040
0,060
0,080
0,100
0,120
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
0,000
0,001
0,002
0,003
0,004
0,005
0,006
0,007
0,008
0,009
0,010
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
€
Ct =2πCqη
γ
€
η =Ct
2πCq
γ €
Cq =γCt
2πη
€
η =Ct
2πCq
γ
-0,400
-0,200
0,000
0,200
0,400
0,600
0,800
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
€
η =Ct
2πCq
γ
€
γ =2πCqη
Ct
€
η =Ct
2πCq
γ

P. OLIVIERO - Meccanica del volo. Gennaio 2008
61
Uno schema riepilogativo semplificato può essere il seguente:
€
V = Bγ 1Cq
n = N 1Cq
Πa = C 1Cq
Πd = Cη 1Cq
Td = A Ct
Cq
in cui:
€
B = ND =1ρo
ψz
εϕx
Qo
D3 N =1ρo
ψz
εϕx
Qo
D5ψz
ε= ε0,0585
€
C = 2πNϕxψzQo = 2π 1ρo
ψz3
εϕx3 Qo
3
D5 A =ϕxψzQo
Dψz3
ε= ε1,1755
I grafici della spinta e della potenza disponibili in funzione della velocità possonoessere riportati adimensionalizzandoli rispetto ai rispettivi valori massimi comesegue, tenendo presente l’essenziale limitazione per il numero di giri, evidenziata conuna linea che passa per il rapporto n/no = 1.
€
no = N 1Cqo
Cqo =Nno
2
Nelle costanti A, B, C, N sono contenuti, oltre a fattori ritenibili, sotto varie ipotesi,costanti, anche quelli che dipendono dalla quota.
Prendiamo in esame, per esempio, la costante N.
-0,1
-0,1
0,0
0,1
0,1
0,2
0,0 0,2 0,4 0,6 0,8 1,0 1,2
RENDIMENTO (diviso 10) TRAZIONE COPPIA (per 10)
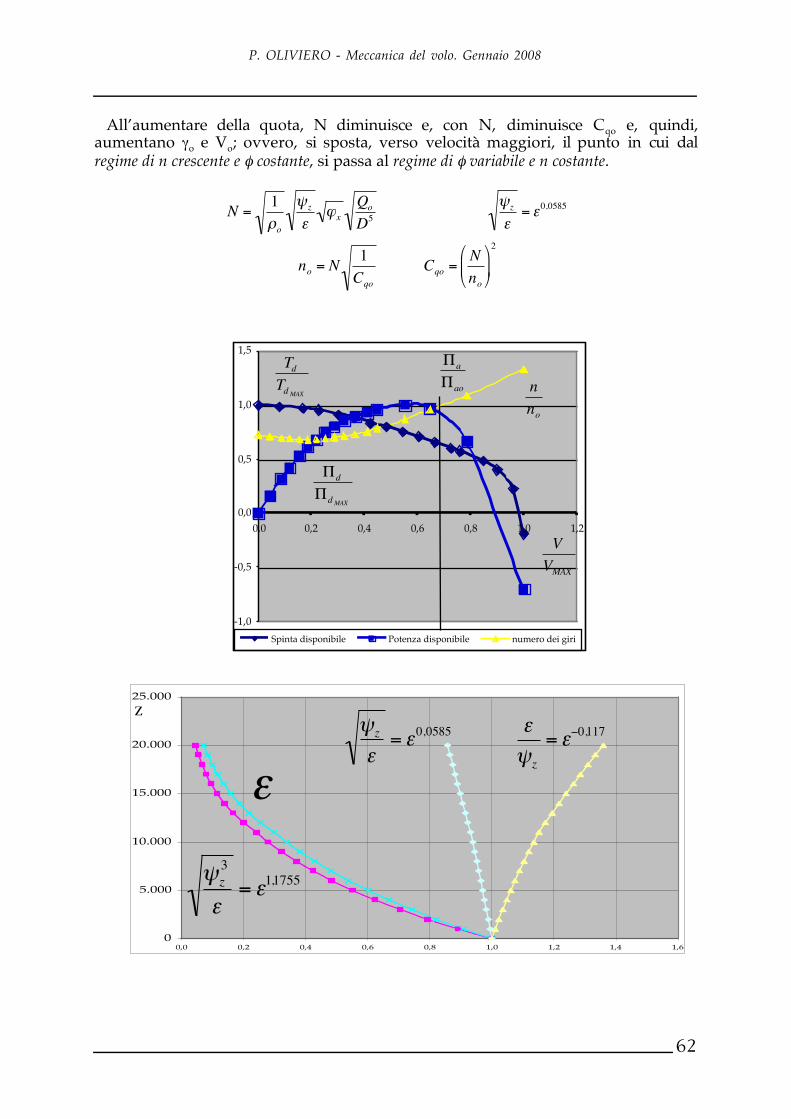
P. OLIVIERO - Meccanica del volo. Gennaio 2008
62
All’aumentare della quota, N diminuisce e, con N, diminuisce Cqo e, quindi,aumentano γo e Vo; ovvero, si sposta, verso velocità maggiori, il punto in cui dalregime di n crescente e φ costante, si passa al regime di φ variabile e n costante.
€
N =1ρo
ψz
εϕx
Qo
D5ψz
ε= ε0,0585
no = N 1Cqo
Cqo =Nno
2
€
Πd
Πd MAX
-1,0
-0,5
0,0
0,5
1,0
1,5
0,0 0,2 0,4 0,6 0,8 1,0 1,2
Spinta disponibile Potenza disponibile numero dei giri€
VVMAX
€
Πa
Πao
€
nno
€
TdTdMAX
€
Πd
Πd MAX
0
5.000
10.000
15.000
20.000
25.000
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6
€
ψz
ε= ε0,0585
€
ψz3
ε= ε1,1755
€
ε€
εψz
= ε−0,117z

P. OLIVIERO - Meccanica del volo. Gennaio 2008
63
La motoelica a passo fisso; secondo regime (n costante, ammissione variabile).
L’equazione d’equilibrio tra coppia motrice fornita dal motore e coppia resistenteopposta dall’elica, allorché il numero di giri raggiunge quello massimod’omologazione, impone, volendo aumentare ulteriormente il rapporto difunzionamento, la riduzione del grado d’ammissione.
Infatti, l’elica a passo fisso dispone di un'unica curva di coppia; ne consegue che,aumentando gamma, la coppia resistente non può non diminuire, per cui, se non siriduce quella motrice, il motore, incontrando meno resistenza, va “fuori giri”.
€
ϕxψzQo = Cqρoεno2D5
La regolazione dell’equilibrio intorno all’asse di rotazione avviene dunque medianteintervento sul grado d’ammissione
€
ϕx =ρoεno
2D5
ψzQo
Cq
1,6170 1,1755 1,1170 MQ 1,0000 0,7500 0,5400 0,5000 0,3750 0,1700 0,0585 0,117/3 -0,1170 -0,1250 -0,3333 -0,5000
0
2.000
4.000
6.000
8.000
10.000
12.000
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8 2,0

P. OLIVIERO - Meccanica del volo. Gennaio 2008
64
anzicchè, automaticamente, mediante l’aumento del numero di giri, come nella nellaprima fase (ammissione costante, giri variabili).
Allo stesso modo si determinano le espressioni di
€
Πa , di
€
Πd , di
€
V e di
€
Td .
€
Πa = 2πnoϕxψzQo = 2πnoρoεno
2D5
ψzQo
CqψzQo = 2πρoεno3D5Cq
€
Πd =ηΠa = 2πρoεno3D5ηCq
€
V = noDγ
€
Td = ρoεno2D4( )Ct
Nel regime in esame dunque, le curve di
€
Πa , di
€
Πd e di
€
Td in funzione di
€
Vvengono fornite dai grafici, rispettivamente di
€
Cq , ηCq , Ct in funzione di
€
γ esono riportate qui di seguito.
Lo schema riepilogativo semplificato di secondo regime (n = no) può essere,analogamente a quello valido in primo regime (n < no), il seguente:
€
V = bγ ϕx = fCq Πa = cCq Πd = cηCq Td = aCt
in cui:
€
b = noD f =ρoεno
2D5
ψzQo
=DaψzQo
εψz
= ε−0,117
c = 2πρoεno3D5 = 2πnoDa a = ρoεno
2D4

P. OLIVIERO - Meccanica del volo. Gennaio 2008
65
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 0,2 0,4 0,6 0,8 1,0
0,0
20.000,0
40.000,0
60.000,0
80.000,0
100.000,0
120.000,0
140.000,0
160.000,0
0,0 0,2 0,4 0,6 0,8 1,00,0
10.000,0
20.000,0
30.000,0
40.000,0
50.000,0
60.000,0
70.000,0
80.000,0
90.000,0
100.000,0
0,0 0,2 0,4 0,6 0,8 1,0
0,0
500,0
1.000,0
1.500,0
2.000,0
2.500,0
3.000,0
3.500,0
0,0 0,2 0,4 0,6 0,8 1,0
-1.000,0
-500,0
0,0
500,0
1.000,0
1.500,0
2.000,0
2.500,0
3.000,0
3.500,0
0,0 0,2 0,4 0,6 0,8 1,0
0,0
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0
90,0
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
0,0
50.000,0
100.000,0
150.000,0
200.000,0
250.000,0
0,0 0,2 0,4 0,6 0,8 1,0 -80.000,0
-60.000,0
-40.000,0
-20.000,0
0,0
20.000,0
40.000,0
60.000,0
80.000,0
100.000,0
120.000,0
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
Le 4 curve caratteristiche, in primo regime, al livello del mare (bianche) e a 10.000 m di quota
Le 4 curve caratteristiche in secondo regime al livello del mare (bianche) e a 10.000 m di quota
€
Td = ρoεno2D4( )Ct = aCt
€
Td = ϕxψzQo
D
Ct
Cq
= A Ct
Cq
€
n =1ρo
ψz
εϕx
Qo
D5
1Cq
= N 1Cq
€
Πa = 2π 1ρo
ψz3
εϕx
3 Qo3
D5
1Cq
= C 1Cq
€
Πd =η 2π 1ρo
ψz3
εϕx
3 Qo3
D5
1Cq
= C η2
Cq
€
ϕx =ρoεno
2D5
ψzQo
Cq = fCq
€
Πa = 2πρoεno3D5( )Cq = cCq
€
Πd =η 2πρoεno3D5( )Cq = cηCq
z
z
zz
z
zz
z

P. OLIVIERO - Meccanica del volo. Gennaio 2008
66

P. OLIVIERO - Meccanica del volo. Gennaio 2008
67
CAPITOLO 7Motoelica a passo variabile
La motoelica a passo variabile (n costante, ammissione costante).
Se l’elica è provvista di passo variabile, è possibile mantenere contemporaneamentecostanti, nell’equazione d’equilibrio tra coppia motrice e coppia resistente, gradod’ammissione, numero di giri e coefficiente di coppia.
Sotto le dette ipotesi, l’equilibrio tra coppia motrice fornita dal motore e coppiaresistente opposta dall’elica si scrive:
€
ϕxψzQo = Cqoρoεno2D5
essendo possibile che sia, contemporaneamente, e con minime regolazioni dimanetta, a parità di n, o minime variazioni (automatiche) di n, a parità diammissione,
€
n = no e Cq = Cqo
Le espressioni di
€
Πa , di
€
Πd , di
€
V e di
€
Td diventano:
€
Πa =Πao = 2πnoϕxψzQo( ) = 2πCqoρoεno3D5( )
€
Πd =ηΠa =ηΠao = 2πnoϕxψzQo( )η = 2πCqoρoεno3D5( )η
€
V = noD( )γ
€
Td = ρoεno2D4( )Ct
In definitiva, le curve di
€
Πa , di
€
Πd e di
€
Td in funzione di
€
V , (ricavate dai grafici,rispettivamente di
€
Cq = Cqo , η , Ct in funzione di
€
γ , riportati qui di seguito),forniscono le curve successive.
Pistone per laregolazione del passo
Ghiera per laregolazione del passo
Cilindro dell’olio per laregolazione del passo
Valvole di afflusso edeflusso dell’olio per laregolazione del passo
Pala

P. OLIVIERO - Meccanica del volo. Gennaio 2008
68
-0,040
-0,020
0,000
0,020
0,040
0,060
0,080
0,100
0,120
0,140
0,160
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8
Ct1 Ct2 Ct3 Ct4 Ct5
0,000
0,005
0,010
0,015
0,020
0,025
0,030
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8Cq1 Cq2 Cq3 Cq4 Cq5
-1,000
-0,800
-0,600
-0,400
-0,200
0,000
0,200
0,400
0,600
0,800
1,000
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8
eta1 eta2 eta3 eta4 eta5
€
Ct
€
Cq
€
η
€
γ
€
γ
€
γ

P. OLIVIERO - Meccanica del volo. Gennaio 2008
69
Possiamo così, facilmente, ridurre le infinite curve, di un’elica a passo variabile involo a giri costanti, alle sue tre curve risultanti, cosiddette d’equilibrio, perché luoghidi punti aventi, appunto, adeguati requisiti d’equilibrio, per ogni valore delcoefficiente di coppia scelto come costante, dei corrispondenti valori di
€
η e Ct alvariare di
€
γ .
0,000
0,020
0,040
0,060
0,080
0,100
0,120
0,140
0,160
0,180
0,200
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8
0,000
0,010
0,020
0,030
0,040
0,050
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8
0,000
0,100
0,200
0,300
0,400
0,500
0,600
0,700
0,800
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8
€
Ct
€
Cq
€
η
€
γ
€
γ
€
γ
€
γ
P. OLIVIERO - Meccanica del volo. Gennaio 2008
70
Da notare che, una volta assunto
€
Cq = Cqo costante, al variare di
€
γ , è il passo avariare in modo da mantenere automaticamente costante il numero di giri (ildispositivo è infatti basato, ingegneristicamente, su valvole fluidiche che si aprono e sichiudono sotto l’azione della forza centrifuga proveniente dal numero di giri) e, le curve di
€
Ct e η seguono gli andamenti dei luoghi dei punti costruiti con la semplicecostruzione grafica spiegata nella figura.
In altre parole, mentre con una motoelica a passo fisso, la massima potenzad’omologazione può essere ottenuta solo al valore di velocità (ovvero del rapportodi funzionamento), al quale il motore può andare al numero di giri d’omologazione,e questo è unico (il punto di separazione tra primo e secondo regime), con una motoelica apasso variabile, la massima potenza d’omologazione si ottiene in tutto un ampiointervallo di valori della velocità (ovvero del rapporto di funzionamento), perché,entro l’intero detto intervallo, ci pensa la variazione di passo a mantenere costante ilcoefficiente di coppia.
Il motore di quota
La potenza all’albero fornita da una motoelica a passo variabile può dunque esserecostante. Si può infatti, regolare la pressione d’alimentazione senza preoccuparsi didarne troppo poca e, quindi, rinunciare inutilmente a grosse frazioni di potenza utile,né troppa e, quindi, rischiare di superare eccessivamente il numero di giri massimoconsentito. Corrispondentemente, quella disponibile lo è altrettanto, entro un ampiointervallo di velocità, perché altrettanto fa il rendimento a passo variabile, ovvero lacurva d’equilibrio del rendimento.
Ne consegue che l’unica perdita di potenza discende dall’aumento di quota operativa,perché, a parità di alimentazione, la pressione d’alimentazione diminuisceall’aumentare della quota in base alla legge di cui innanzi.
€
ψz =Πaz
Πao
= ε1,117
Tale diminuzione di potenza, pur essendo l’unica (a parte quelle dovute alle normalidissipazioni energetiche del funzionamento), è estremamente gravosa, perchécostringe a impiegare un motore troppo potente e pesante rispetto ai normali ratei dipotenza che risultano, alla fine, effettivamente disponibili in quota.
La soluzione pratica del problema si ottiene in due modi: o si alleggerisce un grandemotore, impedendogli poi di funzionare a pieno regime al di sotto di una certaquota; o si sovralimenta un piccolo motore mediante compressione della miscela viavia crescente fino a detta quota di riferimento e poi totale. Detta quota assume cosìun ruolo caratteristico di ogni motore e si chiama quota di ristabilimento.
E’ chiaro che entrambi i sistemi di “parzializzazione” dell’alimentazione al di sottodella quota di ristabilimento, devono essere automatici e garantire la necessariaregolazione del flusso, a partire dal livello del mare, in modo da ristabilire lecondizioni di piena ammissione in modo crescente al crescere della quota e, in misuraintera, solo alla quota di ristabilimento (da cui, ovviamente, il nome) e oltre.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
71
Ne consegue, un benefico effetto collaterale in termini di rendimento generale delsistema, perché la parzializzazione sempre minore dell’alimentazione e ladiminuzione sempre maggiore di temperatura ambiente col crescere della quota,lavorano entrambe a favore della resa energetica, per cui, in definitiva, il graficoassume l’andamento che segue.
L’andamento qualitativo qui disegnato trova riscontro ed esatta interpretazione nellecurve di calibrazione a suo tempo presentate.
La particolare disponibilità di potenza del motore di quota rende del tuttoimproponibile il suo accoppiamento con un’elica a passo fisso.
Infatti, mentre l’elica a passo variabile può utilizzare appieno l’aumento di potenzadisponibile che si ottiene salendo di quota dal livello del mare alla quota diristabilimento, perché può utilizzarlo opponendogli la maggiore coppia assorbitadall’elica con un passo maggiore, l’elica a passo fisso non ha modo di utilizzarlo e,anzi, ricevendo più potenza di quanta può assorbirne, va in fuori giri, per cuil’equilibrio deve essere ristabilito riducendo il grado d’ammissione e rinunciando deltutto alla migliore resa energetica del motore.
In altre parole, l’equazione d’equilibrio tra coppia motrice e coppia resistente, aivalori di massima potenza all’albero:
0
2.000
4.000
6.000
8.000
10.000
12.000
0,0 0,2 0,4 0,6 0,8 1,0 1,2
Motore normale
Motore di quota
Densità relativa
Quota di ristabilimento
z

P. OLIVIERO - Meccanica del volo. Gennaio 2008
72
€
ϕxψzQo = Cqoρoεno2D5
mostra che l’aumento di
€
ψz ottenibile col motore di quota può tranquillamenteavvenire aumentando
€
Cqo , se l’elica è a passo variabile, senza variare né
€
no , né
€
ϕx ;mentre, se l’elica è a passo fisso, l’aumento di
€
ψz , richiede o un impossibile aumentodi
€
Cqo , o un deleterio aumento di
€
no , o una inevitabile riduzione di
€
ϕx .
0
2.000
4.000
6.000
8.000
10.000
12.000
14.000
16.000
18.000
20.000
0,0 0,2 0,4 0,6 0,8 1,0
€
z
€
ψz
ε= ε0,117
0
2.000
4.000
6.000
8.000
10.000
12.000
14.000
16.000
18.000
20.000
0,0 0,2 0,4 0,6 0,8 1,0
€
ψz
ε= ε0,117
€
ε
€
ψz
ε
MQ
€
ψz
€
ψz( )MQ
0
50.000
100.000
150.000
200.000
250.000
0 20 40 60 80 100 120sea level quota di ristabilimento 10.000 m
€
Πd
€
V

P. OLIVIERO - Meccanica del volo. Gennaio 2008
73
CAPITOLO 8Turboreattore e turboelica
Il turboreattore
Le curve caratteristiche del turboreattore, che, come abbiamo già detto, è unmotopropulsore a reazione diretta capace di fornire spinta mediante la diretta azionedella turbina e del compressore sulla massa d’aria espulsa, sono quelle della spinta infunzione del numero di giri, della velocità e della quota.
L’espressione della spinta, infatti, trascurando M* , che è circa 1/60 di M , si scrive:
€
T = M + M *( )U −MV ≅ M(U −V )
Un espressione semplice della spinta in funzione della velocità, dell’ammissione edella quota, è la seguente
€
T = k(V )ϕxψzTTso

P. OLIVIERO - Meccanica del volo. Gennaio 2008
74
I fattori per cui occorre moltiplicare la spinta statica al livello del mare
€
Tso hanno gliandamenti che seguono.
- 1)
€
ϕx : il grado d’ammissione determina il numero di giri, da cui dipendedirettamente il rapporto di compressione;
La legge di potenza, che regola l’aumento della spinta con il numero di giri, ci dice,per esempio, che, per avere metà della spinta statica a punto fisso, bisogna aspettareche i giri superino l’80% , per cui i normali valori di funzionamento si hanno solo pernumeri di giri superiori al 90%, mentre, fino a oltre il 30%, il turboreattore è del tuttoinefficace a fornire spinta.
0
5.000
10.000
15.000
20.000
25.000
30.000
35.000
0 5.000 10.000 15.000 20.000 25.000 30.000 35.000 40.000 45.000 50.000
€
n€
T
0%
20%
40%
60%
80%
100%
120%
0% 20% 40% 60% 80% 100%
€
nno€
TTso

P. OLIVIERO - Meccanica del volo. Gennaio 2008
75
- 2)
€
K(V ) : il fattore della velocità di volo, dipende, direttamente, dalladifferenza (U-V), dato che U è praticamente una costante (circa 600 m/s), e,indirettamente, dalla portata massica M, dato che la portata della presa d’ariadipende, a sua volta, da V;
L’andamento della curva mostra che, dopo una diminuzione iniziale di circa il 15%,collegata all’aumento della velocità e al prevalere iniziale del fattore (U-V), la spintaaumenta ai valori iniziali e li supera, per l’aumento della portata massica M e ilprevalere del medesimo ai maggiori valori della velocità.
0
5.000
10.000
15.000
20.000
25.000
30.000
35.000
0 50 100 150 200 250 300 350 400 450 500
0%
20%
40%
60%
80%
100%
120%
0% 20% 40% 60% 80% 100%
€
V€
T
€
VVMAX
€
TTso

P. OLIVIERO - Meccanica del volo. Gennaio 2008
76
- 3)
€
ψzT : il coefficiente di riduzione in quota, da cui dipende direttamente M, è,come per la potenza all’albero nel caso della motoelica, una legge di potenzadella densità relativa.
In quanto a quest’ultima dipendenza, c’è da dire che la diminuzione di temperaturacon la quota influenza positivamente la diminuzione di spinta con la quota, che,infatti, risulta minore della densità relativa, secondo la legge di potenza
€
ψzT = ε0,75
anche al di sopra della tropopausa, dove la costanza della temperatura produceeffetti diversi, ma praticamente inavvertibili a causa dei valori estremamente ridottidella densità relativa.
In definitiva, l’espressione di T può così essere semplificata:
€
T = K(V )ϕxψzTTso ≅ K(V )ψzTTso
0
4.000
8.000
12.000
16.000
20.000
0,00 0,20 0,40 0,60 0,80 1,00 1,20
€
ψzT = ε0,75
€
ε
Z

P. OLIVIERO - Meccanica del volo. Gennaio 2008
77
dove il grado d’ammissione regola direttamente il numero di giri, ma può essereconsiderato praticamente costante e uguale all’unità.
L’espressione, invece, della potenza si scrive facendo semplicemente il prodotto TV efornisce pertanto un grafico crescente, col crescere di V, con pendenza mediaproporzionale a T e con una leggera inflessione sotto la detta linea media dipendenza, proveniente dal corrispondente avvallamento della curva di spinta.
Partendo dai valori così definiti della potenza disponibile del turboreattore, si puòinfine calcolare la cosiddetta potenza equivalente all’albero dell’ipotetica motoelica chefosse capace di fornire la stessa spinta utile, sulla base della definizione del cosiddettorendimento convenzionale della medesima, assunto costante e uguale a 0,8:
€
Πae =TV0,8
0
2.000.000
4.000.000
6.000.000
8.000.000
10.000.000
12.000.000
14.000.000
0 50 100 150 200 250 300 350 400 450 500
€
Πd = TV
€
V
0
2.000.000
4.000.000
6.000.000
8.000.000
10.000.000
12.000.000
14.000.000
16.000.000
18.000.000
0 50 100 150 200 250 300 350 400 450 500
€
Πae =TV0,8
€
V
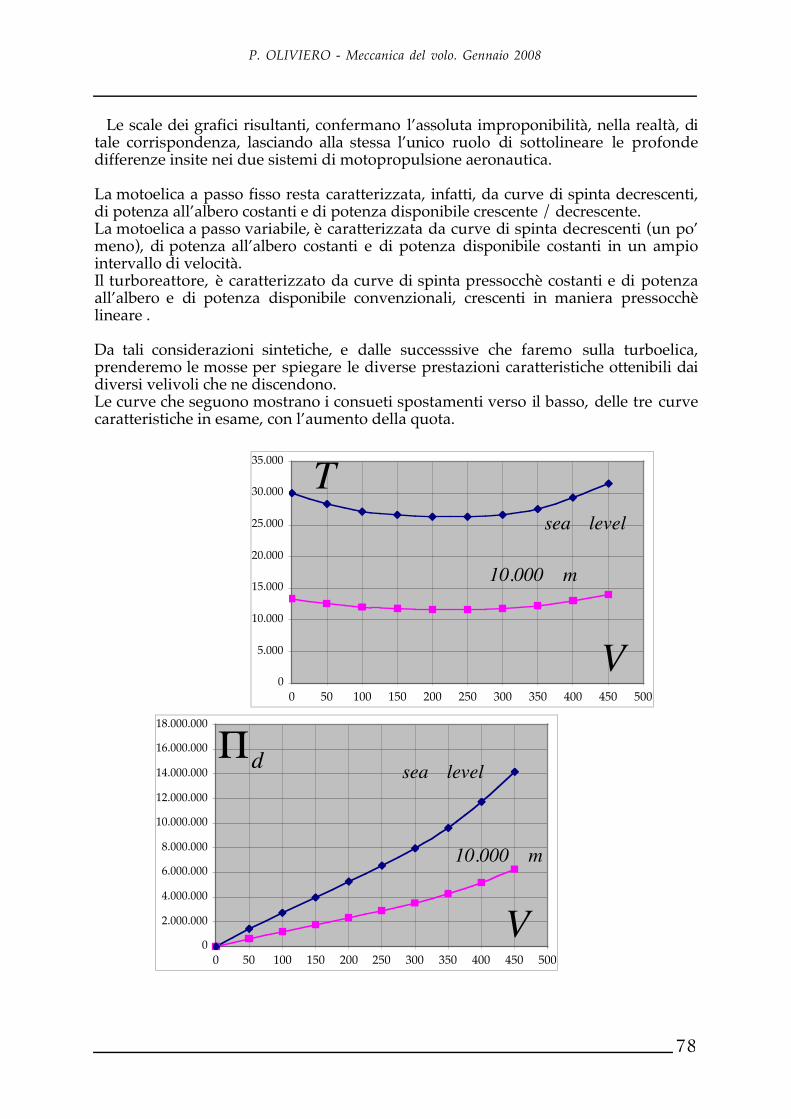
P. OLIVIERO - Meccanica del volo. Gennaio 2008
78
Le scale dei grafici risultanti, confermano l’assoluta improponibilità, nella realtà, ditale corrispondenza, lasciando alla stessa l’unico ruolo di sottolineare le profondedifferenze insite nei due sistemi di motopropulsione aeronautica.
La motoelica a passo fisso resta caratterizzata, infatti, da curve di spinta decrescenti,di potenza all’albero costanti e di potenza disponibile crescente / decrescente.La motoelica a passo variabile, è caratterizzata da curve di spinta decrescenti (un po’meno), di potenza all’albero costanti e di potenza disponibile costanti in un ampiointervallo di velocità.Il turboreattore, è caratterizzato da curve di spinta pressocchè costanti e di potenzaall’albero e di potenza disponibile convenzionali, crescenti in maniera pressocchèlineare .
Da tali considerazioni sintetiche, e dalle successsive che faremo sulla turboelica,prenderemo le mosse per spiegare le diverse prestazioni caratteristiche ottenibili daidiversi velivoli che ne discendono.Le curve che seguono mostrano i consueti spostamenti verso il basso, delle tre curvecaratteristiche in esame, con l’aumento della quota.
0
5.000
10.000
15.000
20.000
25.000
30.000
35.000
0 50 100 150 200 250 300 350 400 450 500
€
T
€
V€
sea level
€
10.000 m
0
2.000.000
4.000.000
6.000.000
8.000.000
10.000.000
12.000.000
14.000.000
16.000.000
18.000.000
0 50 100 150 200 250 300 350 400 450 500
€
Πd
€
V
€
sea level
€
10.000 m

P. OLIVIERO - Meccanica del volo. Gennaio 2008
79
La turboelica
La turboelica è un motopropulsore aeronautico costituito da un turboreattore in cuila turbina, oltre a muovere il compressore e a dare spinta insieme al medesimo inmodo diretto, muove anche un’elica e produce in tal modo altra spinta in modo indiretto.E’definibile pertanto come motopropulsore a reazione mista.
I due collegamenti possono essere realizzati con uno o con due alberi coassiali. Nelprimo caso, la turbina è unica a più stadi. Nel secondo caso, si hanno in genere dueturbine distinte e coassiali, che muovono i due assi separatamente.
In ogni caso, il motopropulsore può essere visto come un generatore di potenza ocome un generatore di spinta. Nel primo caso, la potenza totale del gruppo turbina-elica-compressore (TE) è data dalla somma di quella effettiva del gruppo turbina-elica(ME) e di quella equivalente del gruppo turbina-compressore (TR). Nel secondo casola spinta totale è data da quella effettiva del gruppo turbina-compressore (TR) e diquella altresì effettiva del gruppo turbina-elica (ME)
€
ΠaTE=ΠaME
+TdTRV0,8
TdTE = TdME + TdTR
mentre la potenza disponibile è, in ogni caso, data dall’espressione:
€
ΠdTE=ηΠaME
+ TdTRV ≠ηΠaTE=ηΠaME
+ηTdTRV0,8
0
2.000.000
4.000.000
6.000.000
8.000.000
10.000.000
12.000.000
14.000.000
16.000.000
18.000.000
0 50 100 150 200 250 300 350 400 450 500
€
Πae
€
V
€
sea level
€
10.000 m

P. OLIVIERO - Meccanica del volo. Gennaio 2008
80
Turboelica mono asse e turboelica a doppio asse
La turboelica con un solo asse di rotazione è caratterizzata dal fatto che nonraggiunge utili livelli del rapporto di compressione, se non ad elevati numeri di giri.
Ne consegue, che, ai bassi numeri di giri, non solo non è efficace, come al solito, ilcompressore, ma, anche l’elica, non può esprimere la consueta curva piatta dellepotenze e non fornisce spinta, perché deve essere messa a passo nullo, per evitareche opponga coppia resistente al gruppo, ostacolandone l’aumento del numero digiri.Questa caratteristica della turboelica monoasse richiede pertanto, necessariamente,l’impiego dell’elica a passo variabile, che, invece, non è indispensabile per quella adue assi.
In questa, infatti, il gruppo turbina-elica può fornire spinta fin dall’inizio. Per cui lacurva non parte dall’origine, bensì dal valore dovuto al gruppo ME, per poi cresceresecondo il consueto andamento del gruppo TR, divenuto intanto quellopreponderante.
€
nno
€
nno
€
TdTETdTEMAX
0%
20%
40%
60%
80%
100%
120%
0% 20% 40% 60% 80% 100%turboelica monoasse turboelica a doppio asse
0%
20%
40%
60%
80%
100%
120%
0% 20% 40% 60% 80% 100%turboelica monoasse turboelica a doppio asse
€
ΠaTEΠaTEMAX
€
TdTd MAX
€
nno

P. OLIVIERO - Meccanica del volo. Gennaio 2008
81
La curva della potenza all’albero, coerentemente con le osservazioni appena fatte, ècrescente all’incirca come quella della spinta fornita dal gruppo TR, nel caso della TEmonoasse, mentre cresce rapidamente fino al valore fornito dal gruppo ME, nel casodella TE a doppio asse.Le curve, invece, in funzione della velocità risultano confrontabili con quelle dellamotoelica, ma migliorate rispetto alle stesse grazie alla presenza del gruppo TR.
Pertanto, quelle della spinta diminuiscono un po’ meno, mentre quelle della potenzaall’albero e quelle della potenza disponibile aumentano leggermente.
0%
20%
40%
60%
80%
100%
0% 20% 40% 60% 80% 100%sea level 10.000 m
€
VV
MAX
€
TdTd MAX
0%
20%
40%
60%
80%
100%
120%
0% 20% 40% 60% 80% 100%sea level 10.000 m
€
VV
MAX
€
ΠaΠa MAX

P. OLIVIERO - Meccanica del volo. Gennaio 2008
82
Anche l’andamento in funzione della quota, della potenza equivalente dellaturboelica, è, per gli stessi motivi, intermedio tra quello della spinta disponibile delturboreattore e quello della potenza all’albero della motoelica.
€
ΠaeTE=ΠaME
+TdTRV0,8
=ψzTEΠaMAX
La legge in genere adottata è:
€
z
0
4.000
8.000
12.000
16.000
20.000
0,00 0,20 0,40 0,60 0,80 1,00 1,20
€
ψzTE= ε0,88
€
ε1,117€
ε0,75
€
ε
0%
20%
40%
60%
80%
100%
120%
0% 20% 40% 60% 80% 100% 120%
sea level 10.000
€
ΠdΠd MAX
€
VV
MAX

P. OLIVIERO - Meccanica del volo. Gennaio 2008
83
CAPITOLO 9Il volo orizzontale
Le ipotesi base per studiare le prestazioni di un aereo in volo longitudinal simmetrico,rettilineo, uniforme, in orizzontale, a motore, con riferimento ai coefficienti aerodinamici dellapolare d’equilibrio, sono, oltre a quelle appena espresse, di definizione, quelleoperative di quota costante, peso costante, spinta orizzontale.
I consumi di combustibile comportano, in realtà, grosse variazioni del peso, se siconsidera un lungo periodo di volo. Si arriva anche a consumi specifici di 80 kp dicombustibile all’ora per 400 HP di potenza impegnata o Kp di spinta erogata, tanto èvero che il rapporto carico di combustibile su peso totale alla partenza può arrivareanche al 50% per un grosso aereo di linea da 6.000 Km di autonomia.
Costituiscono tuttavia, procedure standard per il calcolo delle prestazioni, supporreche il mantenimento dell’equilibrio fra le forze in gioco sia assicurato mediantevariazione continua della velocità a parità d’assetto, o variazione continua dell’assettoa parità di velocità.
Calcoleremo pertanto le prestazioni istantanee, ovvero a peso costante, esupporremo di correggere poi i risultati, in base alla procedura seguita nella condottadel volo. Il metodo consente infatti, di effettuare calcoli sufficientemente precisi e,soprattutto, di immediata verifica in termini di ordini di grandezza, sempre utili eusati, anche quando si dispone di comodi computer dedicati.
Le forze in gioco e le loro componenti, nella direzione della velocità (ovvero dellatraiettoria orizzontale) e nella verticale (ad essa perpendicolare), assumono, nel casoin esame, la disposizione e le espressioni che seguono:
€
Vno =2ρo
1ε
WS
1CL
€
L = CLS12ρoεVno
2
€
W
orizzontale traiettoria
corda
€
α€
D = CDS12ρoεVno
2
€
Td = K(V )ψzTϕxTso

P. OLIVIERO - Meccanica del volo. Gennaio 2008
84
Lo schema si può leggere come segue: trascurando l’inclinazione della spinta, lavelocità si stabilizza, in un certo istante, allorché la spinta eguaglia la resistenzaaerodinamica e, la portanza corrispondente a detta velocità, eguaglia il peso totale inquell’istante. Ovvero, rispettivamente, per turboreattore, motoelica a passo variabilein olo e per motoelica in genere (dall’espressione della potenza disponibile diviso V):
€
W = CLS12ρoεVno
2
K(V )ψzTϕxTso = CDS12ρoεVno
2
W = CLS12ρoεVno
2
Ctρoεno2D4 = CDS
12ρoεVno
2
W = CLS12ρoεVno
2
η(γ)ϕxψzΠao
V= CDS
12ρoεVno
2
Turboreattore
Le equazioni d’equilibrio in termini delle spinte sono direttamente utilizzabili nel casodel turboreattore, che, come abbiamo visto, è un motopropulsore aeronautico areazione diretta, che produce direttamente la spinta.
Confrontando le curve delle spinte, necessaria e disponibile, in funzione della velocitànecessaria in volo orizzontale, trovate nei capitoli precedenti, si vede anchegraficamente che il punto d’equilibrio, può essere raggiunto, per ciascuna quota e perciascun grado d’ammissione, o a piccolo assetto e grande velocità (regime stabile), oa grande assetto e piccola velocità (regime instabile), determinandosi in genere uncerto intervallo di velocità possibili, definito dai due punti d’intersezione che ingenere hanno le dette curve.
In particolare, possiamo definire la velocità minima aerodinamica, la velocità minimameccanica e la velocità massima per ogni
€
ϕx.
€
W = CLS12ρoεVno
2 ⇒ Vnomin=Vs =
2ρo
1ε
WS
1CLmax
K(V )ϕxψzTTso = CDVminS 12ρoεVmin
2 ⇒ Vnomin T=Vmin =
2K(V )ϕx
ρo
ψzT
εTsoS
1CDVmin
K(V )ϕxψzTTso = CDOS 12ρoεVnoMAX
2 ⇒ VnoMAX=VMAX =
2K(V )ϕx
ρo
ψzT
εTsoS
1CDO
La quota alla quale, con grado d’ammissione
€
ϕx, la velocità di stallo coincide con lavelocità minima meccanica, si determina come segue.
€
K(V )ϕxψzTTso =W
ECLMAX
=WEm
⇒ ψzTstallo=
WK(V )ϕxTsoEm
La quota, infine, alla quale, con grado d’ammissione
€
ϕx, la velocità minima meccanicacoincide con la velocità massima (quota di tangenza), si determina come segue.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
85
€
K(V )ϕxψzTTso =WEMAX
⇒ ψzTtangenza=
WK(V )ϕxTsoEMAX
La quota di tangenza ora definita è dunque quella alla quale la curva della spintadisponibile è tangente a quella della spinta necessaria, per cui esiste un solo assetto alquale si realizza l’equilibrio orizzontale. Tale assetto è quello di spinta minima,perché la spinta disponibile del turboreattore ha quel tipico andamento costante conleggero avvallamento a circa metà dell’intervallo delle velocità, per cui è certamentenel punto di minima spinta necessaria che si verifica la condizione.
Ogni scostamento da tale condizione di volo, porta l’aereo o a velocità maggiori eassetti minori o a velocità minori e assetti maggiori, per entrambe le quali nuovecondizioni di volo, la spinta necessaria è maggiore di quella disponibile, per cuil’aereo dovrà inevitabilmente consumare la sua energia di posizione e scendere.
Alle quote immediatamente inferiori a quella di tangenza, i punti di intersezionetornano ad essere distinti e, quindi, a determinare un più o meno ampio intervallo divelocità possibili.
Motoelica
Nel caso, invece, della motoelica, che, come abbiamo visto, è un motopropulsoreaeronautico a reazione indiretta, che produce potenza e, poi, da questa, la spinta,dobbiamo primariamente confrontare le curve delle potenze, necessaria edisponibile, in funzione della velocità necessaria in volo orizzontale, trovate neicapitoli precedenti.
Anche in tal caso, si vede anche graficamente che il punto d’equilibrio, può essereraggiunto, per ciascuna quota e per ciascun grado d’ammissione, o a piccolo assetto egrande velocità (regime stabile), o a grande assetto e piccola velocità (regimeinstabile), determinandosi in genere un certo intervallo di velocità possibili, definitodai due punti d’intersezione che in genere hanno anche le dette curve.
In particolare, possiamo definire, anche per la motoelica, la velocità minimaaerodinamica, la velocità minima meccanica e la velocità massima per ogni
€
ϕx.
€
W = CLS12ρoεVno
2 ⇒ Vnomin=Vs =
2ρo
1ε
WS
1CLmax
η γ( )ϕxψzΠao = CDVminS 12ρoεVmin
3 ⇒ VnominΠ=Vmin =
2ηϕx
ρo3
ψz
ε3
Πao
S3
1CDVmin
3
η γ( )ϕxψzΠao = CDoS 12ρoεVnoMAX
3 ⇒ VnoMAX=VMAX =
2ηϕx
ρo3
ψz
ε3
Πao
S3
1CDo
3

P. OLIVIERO - Meccanica del volo. Gennaio 2008
86
La quota alla quale, con grado d’ammissione
€
ϕx, la velocità di stallo coincide con lavelocità minima meccanica, si determina come segue.
€
η γ( )ϕxψzΠao =WEm
Vmin =2ρo
1ε
WS
WEm2CLmax
⇒ ψz ε( )stallo=
1ηϕxΠao
2ρo
WS
WEm2CLmax
La quota, infine, alla quale, con grado d’ammissione
€
ϕx, la velocità minima meccanicacoincide con la velocità massima (quota di tangenza), si determina facilmente, nel casodi motoelica a passo variabile e giri costanti, come segue.
€
η γ( )ϕxψzΠao =2ρo
1ε
WS
WE 2CL( )max
⇒ ψz ε( )tangenza=
1ηϕxΠao
2ρo
WS
WE 2CL( )max
La quota di tangenza ora definita per la motoelica è dunque, analogamente al casodel turboreattore, quella alla quale la curva della potenza disponibile è tangente aquella della potenza necessaria, per cui esiste un solo assetto al quale si realizzal’equilibrio orizzontale. Tale assetto è quello di potenza minima, perché la potenzadisponibile della motoelica a passo variabile in volo ha quel tipico andamentocostante con leggero rigonfiamento a circa metà dell’intervallo delle velocità, per cuiè certamente nel punto di minima potenza necessaria che si verifica la condizione.
Ogni scostamento da tale condizione di volo, porta la motoelica, analogamente alcaso del turboreattore, o a velocità maggiori e assetti minori o a velocità minori eassetti maggiori, per entrambe le quali nuove condizioni di volo, la potenzanecessaria è maggiore di quella disponibile, per cui l’aereo dovrà inevitabilmenteconsumare la sua energia di posizione e scendere.
Alle quote immediatamente inferiori a quella di tangenza, i punti di intersezionetornano ad essere, come già detto nel caso precedente, distinti e, quindi, adeterminare un più o meno ampio intervallo di velocità possibili.
Velocità massima
Esaminiamo ora le espressioni appena trovate della velocità massima per ogni
€
ϕx.
€
VMAXTR=
2K(V )ϕx
ρo
ψzT
εTsoS
1CDO
VMAX ME=
2ηϕx
ρo3
ψz
ε3
Πao
S3
1CDo
3
Le predette espressioni, tutte relative alle velocità vere TAS, sono funzioni dellaquota come indicato dalle rispettive funzioni di epsilon.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
87
Per avere gli andamenti delle corrispondenti velocità indicate IAS, basteràmoltiplicare le dette funzioni per la radice di epsilon.
€
IAS =TAS ε
Si ottengono così le seguenti espressioni dei fattori da cui dipende la velocitàmassima in funzione della quota:
Per il turboreattore
€
TASTR ≈ψzT
ε=
ε0,75
ε= ε−0,125 IASTR ≈ ε
ψzT
ε= ε0,375
Per la motoelica e per la motoelica a passo variabile in volo oltre la quota diristabilimento
€
TASME ≈ψz
ε3 =
ε1,117
ε3 = ε0,04 IASME ≈ ε
ψz
ε3 = ε0,54
Per la motoelica a passo variabile in volo fino alla quota di ristabilimento
€
TASMEZr≈
ψz
ε3 =
1ε
3 = ε−0,33 IASMEZr ≈ ε1ε
3 = ε0,17
Gli attesi valori della velocità massima sono in parte contrastati, all’aumentare dellaquota,
- dall’aumento del numero di Mach, per il concomitante diminuire della velocitàdel suono,
- dall’aumento dell’incidenza necessaria, per il diminuire della densità,- dall’abbassarsi della soglia di Mach critico e il più facile raggiungimento della
stessa, per il combinato disposto dei due fatti precedenti.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
88
€
0
5.000
10.000
15.000
20.000
25.000
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8 2,0 2,2 2,4 2,6
€
TASMAX TRε−0,125
€
TASMAX ME ε0,04
€
TASMAX MEz r
ε−0,33
€
IASMAX TRε0,375
€
IASMAX ME ε0,54
€
IASMAX MEzr
ε0,17

P. OLIVIERO - Meccanica del volo. Gennaio 2008
89
CAPITOLO 10Il volo in salita
Il volo longitudinal simmetrico, rettilineo, uniforme, in salita, a motore, con riferimento aicoefficienti aerodinamici della polare d’equilibrio, supponendo peso costante, calettamentodella spinta nullo e densità dell’aria costante, è rappresentabile come segue.
Le equazioni d’equilibrio si scrivono:
€
W cosγ = CLS12ρoεVns
2
Td = CDS12ρoεVns
2 +Wsenγ
€
Vns =Vno cosγ
€
γ
€
vs =Vnssenγ
€
vo =Vns cosγ =Vno cos3 / 2 γ
€
L = CLS12ρoεVns
2
orizzontale
traiettoriacorda
€
α€
D = CDS12ρoεVns
2
€
Td = K(V )ψzTϕxTso
€
Wsenγ
€
Wsenγ
€
W cosγ
€
γ
€
Wsenγ
€
Wsenγ
€
F = CS 12ρoεVns
2
€
W

P. OLIVIERO - Meccanica del volo. Gennaio 2008
90
La “semplificazione” di considerare inizialmente
€
ε costante verrà successivamentericonsiderata introducendo l’ipotesi di salita a velocità indicata costante o a numero diMach costante al variare della quota.
In tal modo, si calcolerà l’effetto della diminuzione della densità, mediantel’introduzione nel sistema, delle forze d’inerzia prodotte dalle rispettive variazioni divelocità corrispondenti.
Dalla figura si evince, intanto, che il peso dell’aereo, nel volo in salita, è retto, in parte,dalla spinta dei motori e, in parte, dalla portanza.
Ne risulta che la velocità necessaria in salita è (come nel caso del volo librato, ma peropposti motivi) minore che in volo orizzontale:
€
Vns =2ρo
1ε
WS
1CL
cosγ =Vno cosγ
mentre, la spinta necessaria in salita risulta maggiore che in volo orizzontale:
€
Tns = CDS12ρoεVns
2 +Wsenγ = CDS12ρoεVno
2 cosγ +Wsenγ = Tno cosγ +Wsenγ
Analogamente, anche la potenza necessaria in salita risulta maggiore che in voloorizzontale:
€
Πns = TnsVns = CDS12ρoεVns
3 +WVnssenγ = CDS12ρoεVno
3 cos3 / 2 γ +Wvs
= TnoVno cos3 / 2 γ +Wvs =Πno cos
3 / 2 γ +Wvs
In termini di forza, la spinta in più necessaria in salita serve dunque per reggere lacomponente
€
Wsenγ del peso ed è tanto più grande quanto maggiore è la pendenzadella traiettoria
€
γ , mentre, in termini energetici, la potenza in più necessaria in salitaserve per incrementare l’energia di posizione dell’aereo ed è tanto più grande quantomaggiore è la velocità verticale di salita
€
vs .
I valori di
€
γ e di
€
vs corrispondono, in definitiva alle differenze tra i valori dellepotenze disponibili e quelli delle potenze necessarie in volo orizzontale a pari velocitànel modo seguente:
€
Πd −Πno cos3 / 2 γ =Wvs ⇒ vs =
Πd −Πno cos3 / 2 γ
W≅Πd −Πno
W
Td −Tno cosγ =Wsenγ ⇒ senγ =Td −Tno cosγ
W≅Td −TnoW

P. OLIVIERO - Meccanica del volo. Gennaio 2008
91
Quota di tangenza
Alla quota di tangenza, come prima definita, è dunque possibile il solo voloorizzontale, le curve delle caratteristiche disponibili sono tangenti a quelle dellecaratteristiche necessarie ripettivamente corrispondenti, un solo assetto di voloconsente l’equilibrio delle forze e delle potenze, la salita è impossibile e la massimavelocità variometrica è nulla.
Si ritrova così l’indice di quota della motoelica
€
E 2CL( )max dalla condizione
€
vsMAX ≅Πd −Πno( )MAX
W= 0 e l’indice di quota del turboreattore
€
Emax dalla condizione
€
senγMAX
≅Td −Tno( )
MAX
W= 0 .
€
η γ( )ψzΠao =2ρo
1ε
WSW 1
E 2CL( )max⇒ ψz ε( )
tangenza=
2ρoη
2WS
WΠao
1E 2CL( )max
K V( )ψzTTso =WEmax
⇒ ψzT( )tangenza =1
K V( )WTso
1Emax
Le quote di tangenza sono pertanto, tanto più elevate, quanto più piccoli sono ifattori
€
ψz ε( )tangenza e ψzT( )tangenza , ovvero, quanto più piccoli sono, per la
motoelica, l’inverso dell’indice di quota, ovvero il fattore
€
1E 2CL( )max
, il carico alare
€
WS
e il carico per cavallo
€
WΠao
, mentre, per il turboreattore, l’inverso dell’indice di quota,
ovvero il fattore
€
1Emax
, e l’inverso del rapporto spinta peso, ovvero il fattore
€
WTso

P. OLIVIERO - Meccanica del volo. Gennaio 2008
92
La condizione di
€
vsMAX ≅Πd −Πno( )MAX
W= 0 , che si verifica , per definizione, alla quota di
tangenza, implica che il tempo necessario per salire fino ad essa è infinito, per cui, sisuol dire che, alla difficoltà di permanervi (nell’ipotesi di esservi in qualche modoarrivati), si aggiunge, ed è in pratica prevalente, la ovvia considerazione che essa èdel tutto teorica, per cui si definisce quota di tangenza pratica, quella alla quale l’aereoha ancora una velocità di salita di mezzo metro al secondo (30 metri al minuto, 1.800metri all’ora).
In tal caso, anche l’intervallo di velocità possibili non è nullo e gli assetti di volopossibili non si riducono all’unico improbabile valore del punto di tangenza.
€
vs =dzdt
⇒ dt =dzvs
⇒ tmin =1
vsMAX0
zt∫ dz
Nel grafico delle prestazioni, viene inserito, tra le altre curve, anche quella chefornisce i tempi necessari per salire alle varie quote.
Ovviamente, detta curva tende asintoticamente alla parallela alle ascisse passante perla quota di tangenza teorica.
Motoelica a passo fisso
Se confrontiamo per esempio il grafico della spinta disponibile fornita dalla motoelicaa passo fisso, con la polare delle velocità di spinta, visualizziamo con estremachiarezza le diverse condizioni di volo possibile ai vari valori di velocità, grado diammissione, quota, assetto e peso.
L’intervallo AB tra velocità di stallo e velocità massima in orizzontale individua ildominio delle possibili condizioni di volo in salita.
I segmenti intercetti, assetto per assetto, tra le curve caratteristiche, misurano infatti ipossibili valori di
€
senγ per unità di peso e per i valori di quota e grado d’ammissioneai quali si riferiscono le curve stesse.
Un minor grado d’ammissione produce un abbassamento della curva di
€
Td e, quindi,minori valori possibili per le pendenze delle traiettorie percorribili ai vari assetti.
Una maggior quota, produce anch’essa un abbassamento della curva di
€
Td e unospostamento a destra della curva di
€
Tno , per cui si ottengono minori pendenze ediversi valori delle velocità necessarie. Aumenta la velocità di stallo (perchédiminuisce la densità), e diminuisce la velocità massima (perché il coefficiente diriduzione in quota diminuisce più di quanto diminuisca la densità).

P. OLIVIERO - Meccanica del volo. Gennaio 2008
93
La maggiore pendenza possibile della traiettoria si ha all’assetto in cui è massimo ilsupero di
€
Td rispetto a
€
Tno , il che avviene, in genere, per la motoelica a passo fisso, adassetti maggiori (e velocità minori) di quello di efficienza massima. Un buonriferimento grafico si riconosce nell’andamento pressocchè pianeggiante della curvadella spinta necessaria intorno a tale assetto e dall’andamento crescente a sinistra(assetti maggiori e velocità minori) della curva della spinta disponibile.
Tale assetto di volo, che consente la maggior pendenza della traiettoria, si chiamaassetto di salita ripida.
Le curve, invece, delle potenze disponibili mostrano l’andamento crescente a destra,per cui l’assetto di salita rapida è in genere minore (e la velocità quindi maggiore) diquello di minima potenza.
In definitiva, è possibile definire, come intervallo di riferimento, l’intervallo di velocità(e di assetto), ai confini del quale capitano, in genere, gli assetti di salita ripida (asinistra) e di salita rapida (a destra) per una motoelica a passo fisso, è compreso tra lecondizioni di spinta minima e di potenza minima, come è facile intuire datol’andamento “pianeggiante” delle caratterisitche necessarie nel suo intorno.
spinte elica passo fisso
Intervallo di riferimento epf
€
senγMAX
A B
Td
Tn

P. OLIVIERO - Meccanica del volo. Gennaio 2008
94
Motoelica a passo variabile
Nel caso della motoelica a passo variabile, l’intervallo di riferimento si restringe a unpolo di riferimento, perché, all’andamento “pianeggiante” delle caratterisitchenecessarie nel suo intorno, si abbina quello, quasi altrettanto “pianeggiante”, dellapotenza disponibile, per cui il punto di potenza minima individua con sufficienteapprossimazione l’assetto a cavallo de quale si hanno le due prestazioni in esame.
potenze elica passo fisso
Intervallo di riferimento epf
€
vs MAX
A B
ΠdΠn
spinte elica passovariabile
Polo di riferimento epv
€
senγMAX
A B
Td
Tn

P. OLIVIERO - Meccanica del volo. Gennaio 2008
95
Più precisamente, per l’assetto di salita rapida, potremo riferirci ai puntiimmediatamente a destra di detto polo, mentre per quello di salita ripida, potremoriferirci ai punti immediatamente a sinistra di esso.
Turboreattore
Nel caso del turboreattore, la curva di riferimento è quella della spinta disponibile,che ha, infatti, l’andamento più idoneo a dare indicazioni di facile utilizzo.
All’andamento “pianeggiante” delle caratteristiche necessarie nell’intorno deirispettivi punti di minimo, si possono abbinare quello quasi altrettanto“pianeggiante” della spinta disponibile e quello vistosamente crescente della curvadella potenza disponibile.
Ne risulta, anche per il turboreattore, un polo di riferimento, quello di spinta minima, e,proprio su di esso, l’assetto di salita ripida, mentre, quello di salita rapida si troverà tra ipunti, come sempre, più veloci, ovvero a destra di esso.
potenze elica passovariabile
Polo di riferimento epv
€
vs MAX
A B
ΠdΠn

P. OLIVIERO - Meccanica del volo. Gennaio 2008
96
spinte turboreattore
Polo di riferimento TR
€
senγMAX
A B
Td
Tn
potenze turboreattore
Polo di riferimento TR
€
vs MAX
A B
Πd
Πn

P. OLIVIERO - Meccanica del volo. Gennaio 2008
97
Turboelica
Nel caso della turboelica, la situazione è, più o meno, quella della motoelica a passofisso.
All’andamento “pianeggiante” delle caratteristiche necessarie, non si può abbinareun analogo comportamento né nel caso della spinta, né in quello della potenzadisponibile.
Ne risulta, anche per la turboelica, un intervallo di riferimento, ai confini del quale sicollocano l’assetto di salita ripida, a sinistra, e quello di salita rapida, a destra.
potenze turboelica
€
vs MAX
Intervallo di riferimento TE
A B
Πd
Πn
Intervallo di riferimento TE
spinte turboelica
€
senγMAX
A B
Td
Tn
Intervallo di riferimento TE

P. OLIVIERO - Meccanica del volo. Gennaio 2008
98
Le prestazioni base degli aeroplani
Ricapitolando, le prestazioni base degli aeroplani fin qui esaminate sono:
In volo librato- 1- pendenza minima in volo librato,
€
γmin
;- 2- minima velocità variometrica in volo librato, ovvero velocità verticale minima
in volo librato,
€
vd min ;
- 3- velocità di minima pendenza in volo librato, ovvero velocità di discesa lieve,
€
Vγ min ;- 4- velocità di minima discesa in volo librato, ovvero velocità di minima
velocità verticale di discesa, ovvero velocità di discesa lenta,
€
Vvdmin ;
In volo orizzontale- 1- velocità minima aerodinamica, ovvero velocità di stallo,
€
Vs ;- 2- velocità minima, ovvero velocità minima meccanica,
€
Vmin ;- 3- velocità massima,
€
VMAX , in volo orizzontale, rispettivamente per MEpf,MEpv, TR, TE.
In salita- 1- pendenza massima ,
€
γMAX , in salita, rispettivamente per MEpf, MEpv, TR,TE.
- 2- massima velocità variometrica in salita, ovvero velocità di massima salitaverticale, rispettivamente per MEpf, MEpv, TR, TE,
€
vs MAX ;- 3- velocità di massima pendenza, ovvero velocità di salita ripida,
rispettivamente per MEpf, MEpv, TR, TE,
€
Vmγ ;- 4- velocità di massima salita ovvero di massima velocità variometrica, ovvero
velocità di salita rapida, rispettivamente per MEpf, MEpv, TR, TE,
€
Vms ;- 5- quota di tangenza, rispettivamente per MEpf, MEpv, TR, TE,
€
zt .
€
Vs ,
€
Vmγ ,
€
Vms , aumentano all’aumentare della quota come
€
1ε
;
€
Vmin ,
€
VMAX
, variano all’aumentare della quota, se TAS, come
€
ψzT
εo ψz
ε3 o 1
ε3 ; ovvero, se IAS, come
€
ψzT o εψz
ε3 o ε
1ε
3 ;
€
γMAX
, diminuisce all’aumentare della quota come
€
ΔT( )MAXW
;
€
vs MAX , diminuisce all’aumentare della quota come
€
ΔΠ( )MAXW
;
€
zt , aumenta all’aumentare dell’indice di quota
€
E 2CL( )MAX o EMAX ;

P. OLIVIERO - Meccanica del volo. Gennaio 2008
99
Odografa del volo in salita
La rappresentazione grafica dei vettori velocità necessarie in salita, analogamente aquella delle velocità necessarie in volo librato, riproduce, in coordinate polari, i varivalori d’angolo di rampa e di velocità sulla traiettoria in funzione degli assetti(rappresentati parametricamente sulla curva, come già visto per: polareaerodinamica, polari tecniche, odografa del volo librato).
Come di consueto, si individuano su detta curva almeno quattro punti caratteristici e,di questi, si vedono graficamente le rispettive componenti, come segue.
1 – Assetto di stallo. Specie in caso di piena ammissione, può aversi supero di“motore” (potenza o spinta disponibili), rispetto alla corrispondente “richiesta”necessaria per il volo orizzontale, per cui l’aereo salirà con i parametri indicati alpunto iniziale della curva.
2 – Salita ripida. La massima pendenza della traiettoria viene determinata,graficamente, dal raggio vettore tangente all’odografa del volo in salita (punto 2).
3 – Salita rapida. La massima velocità variometrica viene determinata, graficamente,dalla tangente orizzontale all’odografa del volo in salita (punto 3).
4 – Velocità massima. La massima velocità sulla traiettoria viene determinata,graficamente, dalla intersezione dell’odografa del volo in salita con l’asse delle ascissee si riferisce alla condizione di rampa nulla, ovvero volo orizzontale (punto 4).
spinte elica passo variabile
12 3
4€
Td
€
Tn
€
Vno
€
Vmin Vγ MAX Vvs MAXVMAX

P. OLIVIERO - Meccanica del volo. Gennaio 2008
100
odografa del volo in salita
1
2
3
4
€
γMAX
€
vs MAX
€
Vns

P. OLIVIERO - Meccanica del volo. Gennaio 2008
101
Formulario essenziale
€
TASs =Vs =Vnomin=
2ρo
WS
1CLmax
ε
−0,5
TASmin ME=Vmin ME
=VnominΠ=
2ηρo
3Πao
S3
1CDVmin
3
ψz
ε3 =
2ηρo
3Πao
S3
1CDVmin
3
ε0,04
TASmin TR =Vmin TR =Vnomin T=
2K(V )ρo
TsoS
1CDVmin
ψzT
ε=
2K(V )ρo
TsoS
1CDVmin
ε
−0,125
TASmin ME ψz =1=Vmin ME ψz =1
=2ηρo
3Πao
S3
1CDo
3
ψz
ε3 =
2ηρo
3Πao
S3
1CDVmin
3
ε
−0,33
TASmγ =Vmγ =2ρo
WS
1CLsenγMAX
ε
−0,5
TASms =Vms =2ρo
WS
1CLvsMAX
ε−0,5
TASMAX ME=
2ηρo
3Πao
S3
1CDo
3
ψz
ε3 =
2ηρo
3Πao
S3
1CDo
3
ε0,04
TASMAXTR=
2K(V )ρo
TsoS
1CDO
ψzT
ε=
2K(V )ρo
TsoS
1CDO
ε
−0,125
TASMAXψz =1=
2ηρo
3Πao
S3
1CDo
3
ψz
ε3 =
2ηρo
3Πao
S3
1CDo
3
ε
−0,33

P. OLIVIERO - Meccanica del volo. Gennaio 2008
102
€
IASs =Vs ε =Vnominε =
2ρo
WS
1CLmax
IASmin ME=Vmin ME ε =VnominΠ
ε =2ηρo
3Πao
S3
1CDVmin
3
ε0,54
IASmin TR =Vmin TR ε =Vnomin Tε =
2K(V )ρo
TsoS
1CDVmin
ε0,375
IASmin ME ψz =1=Vmin ME ψz =1
ε =2ηρo
3Πao
S3
1CDVmin
3
ε0,17
IASmγ =Vmγ ε =2ρo
WS
1CLsenγMAX
IASms =Vms ε =2ρo
WS
1CLvsMAX
IASMAX ME= TASMAX ME
ε =2ηρo
3Πao
S3
1CDo
3
ε0,54
IASMAXTR= TASMAXTR
ε =2K(V )ρo
TsoS
1CDO
ε0,375
IASMAXψz =1= TASMAXψz =1
ε =2ηρo
3Πao
S3
1CDo
3
ε0,17

P. OLIVIERO - Meccanica del volo. Gennaio 2008
103
€
ψzTstallo=
WK(V )
1Tso
1Em
ψz ε( )stallo
=2
ρoη2
WS
WΠao
1Em2CLmax
ztTR = zsenγ MAX = 0 ψzT tangenza=
WK(V )
1Tso
1EMAX
ztME = zvsMAX = 0 ψz ε( )tangenza
=2
ρoη2
WS
WΠao
1E 2CL( )max
vsMAX ≅ΔΠMAX
Wtmin =
1vsMAX0
zt∫ dz
senγMAX ≅ΔTMAXW

P. OLIVIERO - Meccanica del volo. Gennaio 2008
104

P. OLIVIERO - Meccanica del volo. Gennaio 2008
105
CAPITOLO 11
Correzione per energia cinetica
Il volo in salita a velocità non costante introduce nell’equazione del moto il termineinerziale e l’equazione stessa assume la forma che segue.
€
T = D+Wsenγ +WgdVdt
TV = DV +WV senγ + WgV dVdt
T − D( )V =Wvs +WvsVgdVdz
Ep + Ec =Wggz + 1
2WgV 2
d Ep + Ec( )dt
= Wvs +WvsVgdVdz
Si vede cioé, in modo molto semplice e diretto, che il supero di spinta disponibile insalita fornisce un lavoro nell’unità di tempo misurabile, in due modi equivalenti,ovvero:
€
L = CLS12ρoεVns
2
orizzontale
traiettoriacorda
€
α€
D = CDS12ρoεVns
2
€
Td = K(V )ψzTϕxTso
€
Wsenγ
€
Wsenγ
€
W cosγ
€
γ
€
Wsenγ
€
Wsenγ
€
F = CS 12ρoεVns
2
€
W
€
WgdVdt

P. OLIVIERO - Meccanica del volo. Gennaio 2008
106
- dal prodotto del supero di spinta per la velocità sulla traiettoria, ovvero- dal differenziale dell’energia totale nell’unità di tempo.
L’espressione a secondo membro delle due forme dell’equazione di equilibriofornisce il cosiddetto fattore di correzione per energia cinetica, nel senso che iltermine dato dal prodotto del peso per la velocità verticale di salita, ovvero, lavariazione di energia potenziale è da correggere moltiplicandolo per il fattore
f =1 + VgdVdz
per tener conto della variazione di energia cinetica.
Il problema dell’inerzia si traduce pertanto nella valutazione di detto fattore e,soprattutto, nel controllo del medesimo a mezzo dell’assegnazione di un’opportunalegge di variazione della velocità sulla traiettoria.
Imponendo, per esempio, le seguenti condotte di volo:- velocità indicata costante sulla traiettoria, oppure- numero di Mach costante sulla traiettoria,
si ottengono due procedure di salita rispettivamente,- con velocità sulla traiettoria crescente (inerzia frenante), ovvero- con velocità sulla traiettoria decrescente (inerzia propulsiva),
e, soprattutto, secondo leggi, in entrambi i casi, ottenibili senza alcuna difficoltà siaanaliticamente che tecnicamente.
Salita a velocità indicata costante
Il fattore di correzione per energia cinetica risulta esprimibile, salendo a velocitàindicata costante, come segue.
€
f =1+VgdVdz
=1+
Vi
εg
d Vi
εdz
=1+Vi2
gε−1/ 2
dε−1/ 2
dz
ovvero, ricordando l’espressione di
€
ε =ρρSL
,
€
ε =ρρSL
= 1− λPALTTSL
1λR1
' −1
=TTSL
4,25832TTSL
= ε1
4,25832

P. OLIVIERO - Meccanica del volo. Gennaio 2008
107
f =1 +Vi2
gε −1/ 2
dε−1 / 2
dz=1 +
Vi2
gε −1/ 2 −
12ε−3 / 2
dεdz
= 1− Vi2
2gε −2
dεdz
=
= 1 − Vi2
2gε −2
d TTSL
4,25832
dz= 1 − Vi
2
2gε −2 4,25832 T
TSL
3,25832 dTTSLdz
=
= 1 − Vi2
2gε −2 4,25832ε
3,258324,25832
d 1 − λ zTSL
dz=1 − Vi
2
2gε −2 4,25832ε
3,258324,25832 −
λTSL
=
= 1 − Vi2
2gε −2 4,25832ε
3,258324,25832 −
0, 0065288
=1 + 0,0000049Vi
2ε−1, 235
e, quindi, in caso di salita a velocità indicata costante, f può essere solo maggiore di 1 ed è
adimensionale come il rapporto
€
λVi2
gTSL=
kelvin ⋅m−1( ) ⋅ m2s−2( )ms−2( ) ⋅ kelvin
=1 .
Salita a numero di Mach costante
Salendo, invece, a numero di Mach costante, lo schema di riferimento diventa ilseguente:
€
L = CLS12ρoεVns
2
orizzontale
traiettoria
corda
€
α€
D = CDS12ρoεVns
2
€
Td = K(V )ψzTϕxTso
€
Wsenγ
€
Wsenγ
€
W cosγ
€
γ
€
Wsenγ
€
Wsenγ
€
F = CS 12ρoεVns
2
€
W
€
WgdVdt

P. OLIVIERO - Meccanica del volo. Gennaio 2008
108
l’equazione di riferimento diventa:
€
T +WgdVdt
= D+Wsenγ
e il fattore di correzione per energia cinetica risulta esprimibile, come segue:
f =1 + VgdVdz
=1 + MagdMadz
= 1 + M2
2gda2
dz
ovvero, ricordando l’espressione dl numero di Mach,
M =Va=
VγR1T
a2 = γR1T R1 = 287m2s−2
k
f =1 + M2
2gda2
dz= 1+ M2
2gdγR1Tdz
= 1+ M2γR12g
d TSL − λz( )dz
=
= 1 + M2γR12g
−λ( ) =1 − 0,00651,42g287M2 =1 − 0,133M2
e, quindi, in caso di salita a M costante, f può essere minore di 1, nullo o anche minore di 0 ed
è adimensionale come il rapporto
€
λR1g
=
kelvin ⋅m−1( ) ⋅ m2s−2kelvin−1( )ms−2
=1 .
Analisi delle due procedure
E’ intanto del tutto evidente che, mentre l’energia potenziale, in salita, non può cheaumentare per l’aumento di z, quella cinetica aumenterà o diminuirà a seconda che lavelocità sulla traiettoria aumenterà o diminuirà.
Nel primo caso (aumento di Ec ; accelerazione) vs diminuirà (f maggiore di 1); nelsecondo, (diminuzione di Ec ; decelerazione) vs aumenterà (f minore di 1, nullo o minoredi 0).
vs =TV − DVWf
In discesa, avverrà il contrario: un’inerzia propulsiva comporterà discesa a velocitàverticale maggiore; un’inerzia frenante comporterà discesa a velocità verticaleminore.Infatti, aumenti di energia cinetica (velocità sulla traiettoria crescenti) comportanominori aumenti (in salita) e maggiori diminuzioni (in discesa) di energia potenzialenell’unità di tempo e, viceversa, diminuzioni di energia cinetica (velocità sullatraiettoria decrescenti) consentono maggiori aumenti (in salita) e minori diminuzioni

P. OLIVIERO - Meccanica del volo. Gennaio 2008
109
(in discesa) di energia potenziale sempre nell’unità di tempo (in assoluto, i livelli dienergia potenziale sono legati ai livelli z della quota in definitiva raggiunta).
La descrittiva che precede traduce in parole il semplicissimo principio diconservazione dell’energia totale, la cui interpretazione è sempre utile rileggere everificare.
Nel paragrafo seguente viene spiegata, per esempio, un’altra osservazione chediscende da quanto innanzi.
Inerzia propulsiva in salita a numero di Mach costante.
Dalle formule si evince che la variazione di energia totale è nulla per M = 2,74.
Ciò significa che, per detto valore del numero di Mach, il guadagno d’energiapotenziale in salita, nell’unità di tempo, avviene tutto a spese della simultaneadiminuzione d’energia cinetica per il rallentamento connesso alla salita a quelnumero di Mach costante.
Per salite a Mach maggiori, il rallentamento è più rapido di quello che bilancia ilsimultaneo aumento di energia potenziale, per cui il pilota si trova a disporre di unaeccesso di spinta inerziale che deve addirittura contrastare col motore.
Per salite a Mach minori, il rallentamento è più lento di quello che bilancia l’aumentodi energia potenziale, per cui il pilota deve integrare la spinta inerziale dandomotore.
In conclusione:- per Mach < 2,74, la spinta necessaria in salita è maggiore di quella necessaria in
orizzontale, ma meno che a velocità costante (l’inerzia collabora un po’);- per Mach = 2,74, è uguale a quella necessaria in orizzontale (l’inerzia collabora
nella misura esatta che serve);- per Mach > 2,74, diventa addirittura minore di quella necessaria in orizzontale
(l’inerzia collabora più di quanto serva).
Naturalmente, il rallentamento prodotto dalla salita a Mach costante è limitato, peresempio, dalla quota di tangenza o dall’impossibilità di mantenere il numero di Machcostante allorché sopraggiunge un’insufficiente o nulla diminuzione della velocità delsuono (11.000 metri di quota).
Raggiunto e, ovviamente, in prossimità del raggiungimento, di uno di tali limiti,l’aereo può, tuttavia, “delfinare” in modo da riguadagnare, nella discesa, un po’d’energia cinetica e quindi tornare a salire, sempre senza dare motore e mantenendoMach costante.
Al contrario, la salita a velocità indicata costante comporta velocità vera crescente(inerzia frenante) e, quindi, la spinta necessaria in salita è maggiore di quellanecessaria in orizzontale e maggiore che a velocità effettiva costante, perché deve

P. OLIVIERO - Meccanica del volo. Gennaio 2008
110
equilibrare resistenza, salita e inerzia e, tutte e tre le forze relative, risultanofrenanti
€
D+Wsenγ +WgdVdt
.
In definitiva: crescendo la quota, diminuiscono densità e velocità del suono.
Pertanto, a numero di Mach costante, V diminuisce e l’inerzia è propulsiva, mentre, avelocità indicata costante, V aumenta e l’inerzia è frenante.
Peso apparente
Il fattore di correzione per energia cinetica f può essere interpretato come fattoremoltiplicativo del peso vero. Infatti, in caso di inerzia resistente, risulta maggioredell’unità, mentre in caso di inerzia propulsiva, minore.
La formula in cui si legge meglio tale meccanica è quella della velocità verticale disalita che, in assenza d’inerzia è proporzionale al supero di potenza per unità di pesovero, mentre, in presenza di inerzia, è proporzionale al supero di potenza, per unitàdi peso apparente Wf , risultando rispettivamente minore (si spende, accelerando,parte dell’energia disponibile) o maggiore (si libera, rallentando, ulteriore energiadisponibile).
vs =TV − DVWf
Ruoli della pendenza, dell’inerzia e del peso vero sul peso apparente
€
L = CLS12ρoεVns
2
orizzontale
traiettoria
€
D = CDS12ρoεVns
2
€
Td = K(V )ψzTϕxTso
€
W cosγ
€
γ
€
Wsenγ
€
Wsenγ
€
W
€
WgdVdt

P. OLIVIERO - Meccanica del volo. Gennaio 2008
111
La componente del peso sulla traiettoria è un aggravamento del carico resistente insalita, mentre lo alleggerisce in discesa.
L’inerzia frenante (volo accelerato) è un aggravamento del carico resistente sia insalita che in discesa.
€
T = D+Wsenγ +WgdVdt
T +Wsenγ = D+WgdVdt
L’inerzia propulsiva (volo decelerato) è un alleggerimento del carico resistente sia insalita che in discesa.
€
T +WgdVdt
= D+Wsenγ T +WgdVdt
+Wsenγ = D
€
T +Wsenγ = D+WgdVdt
T −D( )V = −Wvd +WvdVgdVdz
T −D( )V = −Wvd 1−VgdVdz
€
Ep + Ec =Wz +12WgV 2
d Ep + Ec( )dt
= −Wvd +WvdVgdVdz
d Ep + Ec( )dt
= −Wvd 1−VgdVdz
€
f = − 1−WgdVdz
vd =
T −D( )VfW
€
f = 1+VgdVdz
>1 nella salita accelerata f = − 1− V
gdVdz
>1 nella discesa decelerata
f = 1+VgdVdz
<1 nella salita decelerata f = − 1− V
gdVdz
<1 nella discesa accelerata
Analisi dimensionale
€
λ = 0,0065 ⋅ kelvin ⋅m−1 R1 = 287 ⋅m2s−2kelvin−1
R1' =
R1g
= 29,266m2s−2kelvin−1
ms−2= 29,266 1
kelvin ⋅m−1
1λR1
' =gλR1
= 5,25832 kelvin ⋅m−1
kelvin ⋅m−1 = 5,25832

P. OLIVIERO - Meccanica del volo. Gennaio 2008
112
Esempi numerici
Valori del coefficiente di correzione per energia cinetica f
Corrispondenti valori “corretti” della velocità variometrica (vs = 10 ms-1)
Corrispondenti valori della velocità vera in ms-1
Corrispondenti valori della velocità vera in kmh-1
Corrispondenti valori della velocità vera in kts
1,000 0,500 0,250 1,000 0,500 0,250100,000 1,049 1,115 1,271 0,700 0,935 0,935 0,935150,000 1,110 1,260 1,611 2,742 0,000 0,000 0,000200,000 1,196 1,461 2,086 4,000 -1,128 -1,128 -1,128€
Vi
€
ε
€
M
€
ε
1,000 0,500 0,250 1,000 0,500 0,250100,000 9,533 8,966 7,865 0,700 10,697 10,697 10,697150,000 9,007 7,940 6,208 2,742 == == ==200,000 8,361 6,843 4,794 4,000 -8,865 -8,865 -8,865€
Vi
€
ε
€
M
€
ε
1,000 0,500 0,250 340,290 313,650 295,070100,000 100,000 141,421 200,000 0,700 238,203 219,555 206,549150,000 150,000 212,132 300,000 2,742 933,075 860,028 809,082200,000 200,000 282,843 400,000 4,000 1.361,160 1.254,600 1.180,280€
Vi
€
ε
€
M
€
a
1,000 0,500 0,250 340,290 313,650 295,070100,000 360,000 509,117 720,000 0,700 857,531 790,398 743,576150,000 540,000 763,675 1.080,000 2,742 3.359,071 3.096,102 2.912,695200,000 720,000 1.018,234 1.440,000 4,000 4.900,176 4.516,560 4.249,008€
Vi
€
ε
€
M
€
a
1,000 0,500 0,250 340,290 313,650 295,070100,000 192,308 271,964 384,615 0,700 458,083 422,221 397,210150,000 288,462 407,946 576,923 2,742 1.794,375 1.653,901 1.555,927200,000 384,615 543,928 769,231 4,000 2.617,615 2.412,692 2.269,769€
Vi
€
ε
€
M
€
a

P. OLIVIERO - Meccanica del volo. Gennaio 2008
113
CAPITOLO 12La virata corretta di regime
Le equazioni d’equilibrio che definiscono e assicurano la cosiddetta virata corretta diregime, sono:
€
secondo l'asse xw T -D = 0
secondo l'asse yw Lsenθ − WgVnv
2
r= 0
secondo l'asse zw W - Lcosθ = 0
ovvero
€
T =CDS12 ρoεVnv
2
CLS12 ρoεVnv
2senθ =WgVnv
2
rCLS
12 ρoεVnv
2 cosθ =W
L’azione che produce la curvatura della traiettoria nel piano orizzontale èl’inclinazione laterale dell’aereo. Con essa, infatti, la portanza esercita l’azionecentripeta, misurata dalla sua componente
€
Lsenθ , a cui corrisponde subito la
reazione della forza centrifuga
€
WgVnv
2
r.
L’altra componente della portanza,
€
Lcosθ , regge il peso.
€
L = CLS12ρoεVnv
2
€
D = CDS12ρoεVnV
2
€
Td = Ctρoεno2D4
€
Lcosθ
€
θ
€
Lsenθ
€
Wsenγ
€
W
€
WgVnv2
r

P. OLIVIERO - Meccanica del volo. Gennaio 2008
114
Ne consegue che:
€
Tnv =Tnocosθ
Vnv =Vno
cosθ
⇒ Πnv =Πno
cos32 θ
r =2W /Sgρoε
1CLsenθ
⇒ rmin =2W /Sgρoε
1CLsenθ( )MAX
L’eliminazione della velocità, nella seconda equazione d’equilibrio, discende dal fattoche essa influenza allo stesso modo forza centrifuga e forza centripeta.
La variabile che, al contrario, è presente ovunque, è l’inclinazione laterale
€
θ .
Da essa dipendono infatti, il raggio di virata; la spinta, la potenza e la velocitànecessarie; e, quindi, le polari della velocità.
Durante una virata corretta di regime, restano costanti: la quota, la velocità (inmodulo), l’assetto, l’inclinazione laterale (bank).
potenze elica passo variabilevirate a Θ crescenti
-20%
0%
20%
40%
60%
80%
100%
120%
140%
160%
0% 20% 40% 60% 80% 100% 120% 140%

P. OLIVIERO - Meccanica del volo. Gennaio 2008
115
Equilibrio delle forze e dei momenti
Le forze si fanno equilibrio come già indicato, nelle tre direzioni.
I momenti si fanno equilibrio come segue:- il momento di rollio indotto, quello dovuto al supero di portanza dell’ala
esterna (più veloce), viene compensato da un momento uguale e contrariogenerato dall’adeguata azione degli alettoni;
- il momento d’imbardata inversa, quello dovuto al supero di resistenza dellastessa ala per lo stesso motivo, viene compensato da un momento uguale econtrario generato dall’adeguata azione degli alettoni e del timone didirezione;
- il momento giroscopico, ovvero quello dovuto alle masse rotanti (elica ogiranti), viene compensato da un momento uguale e contrario generatodall’adeguata azione del timone di profondità;
Infatti:il primo, il cui verso è concorde con quello della virata (virata a sinistra, rollio indottoa sinistra e viceversa), può facilmente essere contrastato dall’automatica azione deglialettoni;il secondo, il cui verso è discorde con quello della virata (virata a sinistra, imbardataindotta a destra e viceversa), viene affidato all’azione precedente e a quella dellapedaliera;il terzo, il cui verso è in ritardo di 90° rispetto a quello della virata (versi concordidella virata e delle giranti, beccheggio a picchiare; versi discordi, beccheggio acabrare), deve essere previsto in modo da essere pronti a sostenere o abbassare laprua secondo il caso.
Limiti di virata a parità di quota e di quota a parità di virata.
Esiste una quota massima per ogni virata e una virata massima per ogni quota.
E’ infatti evidente, anche dai grafici, che, per ogni quota, l’inclinazione massima nonpuò mai superare quella alla quale le curve diventano tangenti, per effettodell’aumento dell’angolo di bank.
Viceversa, per ogni inclinazione laterale dell’aereo, la quota non può mai essere piùalta di quella alla quale le curve diventano tangenti, per effetto della diminuzionedella densità.
versi di rotazione delle giranti e versi delle virate,concordi
Effetto apicchiare
Effetto acabrare
versi di rotazione delle giranti e versi delle virate,discordi

P. OLIVIERO - Meccanica del volo. Gennaio 2008
116
Si potrebbe pertanto definire una quota di tangenza in virata, in relazione a unminimo di manovrabilità residua di virata, oltre che, come abbiamo visto, in volorettilineo in relazione a un minimo di velocità variometrica residua, come è piùcomune fare.
Raggio di virata
L’espressione trovata per il raggio di virata
€
r =1g2ρo
1εWS
1CLsenθ
=1gVno2 1senθ
mostra che il valor minimo di tale prestazione cresce al crescere della quota e siottiene, comunque, all’assetto per cui è minimo il fattore
€
1CLsenθ
.
Come raggio minimo di virata, dobbiamo assumere pertanto il valore al livello delmare e all’assetto (diverso da quello di portanza massima) al quale è massimo ilprodotto
€
CLsenθ .
€
rmin =1g2ρo
1εWS
1CLsenθ( )MAX
La definizione di raggio limite virtuale stabilisce, invece, un valore non soloinsormontabile, bensì anche irraggiungibile, perché si basa sull’ipotesi impraticabiledi virata a coltello
€
θ = 90° senθ =1 rlimite =1g2ρo
1εWS
1CLMAX
Il raggio minimo di virata in quota è, infine, la prestazione contenenteimplicitamente il modo di determinare la quota massima a cui è possibile effettuareancora una virata di dato raggio
€
rminε =1g2ρo
1εWS
1CLsenθ( )MAX
ε =1g2ρo
WS
1CLsenθ( )MAX
1rminε
Coefficiente di contingenza
Il coefficiente di contingenza in virata può essere espresso in una delle seguentiforme, le quali discendono tutte dalla sua definizione come rapporto tra la portanzacontingente in virata e quella in volo orizzontale, ovvero, tra peso apparente e pesovero.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
117
€
CLS12 ρoεVv
2( ) = W 2 + WgVv
2
r
2
CLS12 ρoεVo
2( ) = W
n =CLS
12 ρoεVv
2( )CLS
12 ρoεVo
2( )=
W 2 + WgVv
2
r
2
W=
Vv
Vo
=1cosθ
1+Vv
4
g2r2= 1+
Ω4r2
g2
ag
Il fattore di carico contingente prodotto da una manovra di virata corretta di regime,può dunque essere misurato in funzione dei seguenti parametri:
- inclinazione laterale;- rapporto velocità necessaria in virata su velocità necessaria in orizzontale;
- velocità angolare in virata
€
Vv
r=Ω
- numero di g, ovvero rapporto
€
ag
.
Al concetto di peso apparente, corrisponde quello di verticale apparente.
La dizione trova riscontro sia nella definizione dalla quale discende, sia nellasensazione effettiva di verticale apparente che si ha in volo durante una viratacorretta. In tal caso ci si sente infatti più pesanti, ma non si avvertono spinte laterali ela posizione centrata della pallina del virosbandometro, conferma tale impressione,specie in assenza di riferimenti visivi esterni.
Entrare in nube, senza adeguato addestramento alla navigazione strumentale, puòinfatti facilmente portare a uscirne piuttosto malconci e disorientati.
Inclinazione corretta, scivolata e derapata
L’inclinazione corretta di una virata corretta si determina facilmente come segue:
€
CLS12 ρoεVv
2senθ =WgVv
2
r
CLS12 ρoεVv
2 cosθ =W
⇒ tanθ =Vv
2
gr
Se l’inclinazione laterale non è, invece, quella corretta, la virata sarà o derapata oscivolata.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
118
Nel primo caso, virata con derapata, un’inclinazione minore di quella corretta,produce, a parità degli altri fattori, una maggiore componente verticale dellaportanza e una minore componente orizzontale: l’aereo guadagna quota e procedesu una traiettoria a curvatura decrescente (raggio crescente e quota crescente).
Nel secondo caso, virata con scivolata, una inclinazione maggiore di quella corretta,produce, a parità degli altri fattori, una minore componente verticale della portanzae una maggiore componente orizzontale: l’aereo perde quota e procede su unatraiettoria a curvatura crescente (raggio decrescente e quota decrescente).
In entrambi i casi, si parla di virata non corretta, non orizzontale e di raggio noncostante.
Supero diportanzaorizzontale
Inclinazionelaterale
€
θmaggiore di quellacorretta : sc ivolata
€
W
€
L = CLS12ρoεVv
2Deficit diportanzaverticale
€
WgVv2
r
€
θ
Supero diportanzaverticale
Deficit diportanzaorizzontale
Inclinazionelaterale
€
θ minoredi quella corretta:d e rapa ta
€
L = CLS12ρoεVv
2
€
W
€
WgVv2
r
€
WgVv2
r
€
θ

P. OLIVIERO - Meccanica del volo. Gennaio 2008
119
Raggio minimo di virata
In relazione alle formule della virata
€
Tnv =Tnocosθ
Vnv =Vno
cosθ
⇒ Πnv =Πno
cos32 θ
r =2W /Sgρoε
1CLsenθ
⇒ rmin =2W /Sgρoε
1CLsenθ( )MAX
possiamo intanto osservare che la presenza delle funzioni trigonometrichedell’inclinazione laterale dell’aereo, a denominatore in tutte le espressioni, produce laovvia considerazione che, per inclinazione laterale di 90° (cosiddetta virata a coltello),i valori necessari di spinta, velocità e potenza crescono all’infinito, e, quindi, diventa,come abbiamo già rilevato, irraggiungibile, il raggio limite che ne discende.
L’ipotesi infatti corrisponde a quella di volo col piano alare verticale e, quindi, con ilvettore portanza orizzontale. In tali condizioni l’aereo non ha, in genere, forzealternative capaci di reggere il peso.
Volendo proprio ipotizzare un caso in cui sarebbe possibile tale manovra,occorrerebbe pensare a vettori spinta orientabili (e, oggi, diventa sempre piùfrequente la disponibilità di aerei in cui la cosa è effettivamente diventata possibile).In caso contrario. L’unica possibilità (virtuale) resta quella di accontentarsi dei breviistanti delle fasi transitorie: occorre sempre qualche istante perché “il sistema siaccorga” che ….non c’è più la portanza!
In pratica, il minimo raggio di curvatura per la virata corretta di regime si realizzaallorché risulta massimo non il solo coefficiente di portanza, né il solo senθ, bensì ilprodotto CL senθ.
€
rmin =2W /Sgρoε
1CLsenθ( )MAX
Le curve polari utili per lo studio della virata in base a dati valori di quota e gradod’ammissione sono le seguenti.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
120
In esse, la potenza necessaria in funzione della velocità, all’aumentaredell’inclinazione laterale, si spostano verso destra e verso l’alto, come èrappresentato in figura ed espresso dalle relative formule.
€
Πnv =Πno
cosθ32
Vnv =Vno
cosθ12
potenze elica passo variabilevirate a Θ crescenti
ingrandimento della zona"raggio minimo"
30%
35%
40%
45%
50%
55%
30% 40% 50% 60% 70% 80%
potenze elica passo variabilevirate a Θ crescenti
-20%
0%
20%
40%
60%
80%
100%
120%
140%
160%
0% 20% 40% 60% 80% 100% 120% 140%
1
2
34
5 67
4
5
6
7

P. OLIVIERO - Meccanica del volo. Gennaio 2008
121
Si può supporre la curva 1 riferita al volo rettilineo orizzontale, la 2 alla viratacorretta di piccolo θ, la curva 3 alla virata standard di 15°, la 4 a quella di inclinazionelaterale massima compatibile con l’assetto di portanza massima, la 5 alla virata diraggio minimo ovvero di massimo prodotto CL sen θ, e la 6 a quella che possiamochiamare virata di tangenza. La 7 è irrealizzabile in orizzontale, in base alle ipotesi diquota e grado di ammissione della figura.La curva che segue rappresenta invece la funzione
€
1CLsenθ
(θ) .
Su di essa si distinguono:
- il tratto AB, per una maggiore pendenza media, che discende dal fatto che,inizialmente, all’aumentare di θ, il coefficiente di portanza è sempre
€
CL = CLMAX;
- il tratto BC, per una minore pendenza media, dovuta al fatto che, mentre θcontinua ad aumentare, CL comincia a diminuire, ma di poco;
- il tratto CD, per l’inversione dell’andamento, perché il diminuire di CL rispettoall’aumentare di θ diventa prevalente;
- il tratto DE, per essere il luogo dei punti d’intersezione della curve di potenza dallato dei più piccoli assetti;
- il punto B, corrisponde all’intersezione della curva di potenza disponibile conquella di potenza necessaria all’assetto di CL max , limite di assetto;
- il punto C, corrisponde al valor massimo del prodotto CL sen θ , raggio minimo divirata;
- il punto D, corrisponde al punto in cui le curve di potenza sono tangenti; è lavirata di tangenza, limite di potenza;
A
E
0,00
2,00
4,00
6,00
8,00
10,00
12,00
14,00
16,00
18,00
20,00
0,00 20,00 40,00 60,00 80,00
BC D G
F
A
E
€
1CLsenθ
€
θ

P. OLIVIERO - Meccanica del volo. Gennaio 2008
122
- il punto F di θ max ovvero (sen θ) max ovvero (cos θ)min ovvero nmax , fornisce lamassima inclinazione laterale per motivi di robustezza dell’aereo, o resistenzafisica degli equipaggi o confortevolezza dei passeggeri; è la virata di massimocoefficiente di contingenza, limite di carico;
- il punto G di θ = 90°, ovvero sen θ = 1 ovvero
€
1CLsenθ
=1
CLMAX
fornisce la
condizione di raggio minimo ideale; è la virata cosiddetta a coltello, raggio limite.
I limiti evidenziati corrispondono alle formule già illustrate:
CL <CLmax
nv =1
cosθ =Vnv2
Vno2 =
TnvTno
=Π nvΠno
23
< nmax
Π nv < Πd Tnv <Td
Nella figura, i segmenti verticali intercetti tra le due curve AD e DE non sono tracciatie rappresentano i luoghi dei punti corrispondenti a virate di uguale inclinazionelaterale θ, ma di diversi raggi di curvatura.Tali segmenti rettilinei corrispondono ai segmenti delle curve di potenza necessaria,alle varie inclinazioni laterali θ, intercetti dalla curva di potenza disponibile e possonoessere adottati regolando l’alimentazione.
Analogamente, i segmenti orizzontali intercetti tra le stesse due curve AD e DE sonoluoghi di punti corrispondenti a virate di uguale raggio di curvatura, ma diverseinclinazioni laterali.
Limitazioni incrociate
I limiti di potenza (o spinta) e di carico possono essere rappresentatisimultaneamente, ottenendo più significative indicazioni per la progettazione e lacondotta del volo, secondo i parametri di confortevolezza, sicurezza e resistenzastrutturale da rispettare.
€
TdTnomin
< nmax ⇒ψztTsoW /Emax
< nmax ⇒ ψztTsoW
Emax < nmax
Πd
Πnomin
< nmax32 ⇒
ηψzΠao
W 1ε
2ρo
WS
1E 2CL( )max
< nmax32 ⇒
ηψz ερo2Πao
WE 2CL( )
max
W /S< nmax
32
Quando il limite da rispettare discende dalla necessaria confortevolezza del volo(aerei commerciali e dell’aviazione generale), il parametro massimo va posto ugualea 2,5.Quando il volo è di categoria semiacrobatica, esso diventa 4,4.Per i velivoli acrobatici e i caccia, si supera 7,33.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
123
Indice di manovrabilità
Il valor massimo della velocità angolare in virata corretta, a massima ammissione,viene denominato indice di manovrabilità in virata.
Per la motoelica:
€
CDS12ρoεVnv
3 =ηψzΠao r =2W /S
gρoεCLsenθ
e, quindi:
€
Ωme =Vnv
r=
ηψzΠao
CDS12ρoε
3
2W /SgρoεCLsenθ
=ηψzΠao gρoεCLsenθ[ ]3
CDS12ρoε 2W /S[ ]3
3=
ηψzg3 Πao /S( )ρo2ε2ECL
2sen3θ4 W /S[ ]3
3
Per il turboreattore:
CDS12 ρ oεVnv
2 = kψ zt Tso r =2W / S
gρ oεCL senθ
e, quindi:
Ω tr =Vnvr
=
kψ zt TsoCDS
12ρoε
2W / SgρoεCL senθ
=kψ zt Tso gρoεCL senθ[ ]2
CDS12ρoε 2W / S[ ]2
=kψ zt g
2 Tso / S( )ρ oεECL sen2 θ2 W / S[ ]2
I valori massimi di Ω si hanno dunque, rispettivamente:
- per la motoelica, quando è massimo il prodotto
€
ECL2sen3θ
- per il turboreattore, quando è massimo il prodotto
€
ECLsen2θ
ovvero, nell’ipotesi di θ limitato da n, agli assetti, rispettivamente, di
€
ECL2( )MAX e di
€
ECL( )MAX .
Tali assetti sono riconoscibili, sulla polare, nel tratto compreso tra l’assetto di minimapotenza e quello di stallo, ovvero, rispettivamente per la motoelica e il turboreattore,laddove:
€
d ECL2( )
dCD
= 0 ⇒d CL
3CD−1( )
dCD
= 0 ⇒dCL
dCD
=13CL
CD
d ECL( )dCD
= 0 ⇒d CL
2CD−1( )
dCD
= 0 ⇒dCL
dCD
=12CL
CD

P. OLIVIERO - Meccanica del volo. Gennaio 2008
124
Come di consueto la prestazione del turboreattore, che si ottimizza all’assetto di
€
ECL( )MAX corrisponde all’assetto più veloce dei due, laddove, infatti, la pendenzadella tangente è la metà di quella del raggio vettore.
Un po’ più su, laddove la pendenza della tangente è un terzo di quella del raggiovettore, si ha l’assetto di
€
ΩMAX per la motoelica e, alla sommità della curva, lapendenza si riduce a zero.
Virata piatta
In assenza di inclinazione laterale, la virata risulta fortemente squilibrata epochissimo efficiente, perché la forza centripeta che è possibile azionare al fine dicurvare la traiettoria è data dalla somma di due forze molto meno efficienti dellacomponente orizzontale della portanza.
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
0,00 0,05 0,10 0,15 0,20
€
dCL
dCD
=13CL
CD
€
dCL
dCD
=12CL
CD
€
ΩMAXturboreattore
€
ΩMAXmotoelica

P. OLIVIERO - Meccanica del volo. Gennaio 2008
125
Queste forze sono:- la componente centripeta della spinta e- la forza laterale (yaw).
L’assetto necessario per equilibrare in tal modo la forza centripeta risulta fortementederapato e il raggio di curvatura viene, in definitiva, penalizzato, rispetto a quellodella virata corretta, in modo tale da escludere qualsiasi praticità alla manovra, che,infatti, non viene, di regola, mai eseguita.
€
Tsenδ + CyS12ρoεVv
2 =WgVv2
rθ = 0
⇒ rθ = 0 =
WgVv2
Tsenδ + CyS12ρoεVv
2=
Wg
TsenδVv2 + CyS
12ρoε
≅W
CyS12gρoε
CyS12ρoεVv
2 ≅Wg
Vv2
rminθ = 0
⇒ rminθ = 0 ≅2W /Sgρoε
1Cy( )max
CLsenθ( )max S12ρoεVv
2 =Wg
Vv2
rminθ ≠0⇒ rminθ ≠0 =
2W /Sgρoε
1CLsenθ( )max
⇒rminθ = 0
rminθ ≠0=CLsenθ( )maxCy( )max
≅10
€
δ
€
Tsenδ + CyS12ρoεVv
2
€
WgVv2
rθ = 0
€
D = CDS12ρoεVv
2
€
T cosδ

P. OLIVIERO - Meccanica del volo. Gennaio 2008
126

P. OLIVIERO - Meccanica del volo. Gennaio 2008
127
CAPITOLO 13Il decollo
Gli assetti di decollo
I velivoli convenzionali si distinguono da quelli a spinta orientabile soprattutto indecollo.Nel primo caso si parla di decollo da pista; nel secondo, di involo in aria.
Il primo si divide in tre fasi:- la corsa al suolo, per accelerare da 0 (in testata pista) a Vd (velocità di distacco o
di decollo);- la rotazione, per sollevarsi dalla quota della pista a quella degli ostacoli ammessi
dalle norme (15 m o 50 feet);- la salita, alla quota di retrazione degli ipersostentatori.
Il secondo si divide in quattro fasi:- il distacco verticale, in gettosostentazione, per portarsi all’altezza d’involo;- la transizione, da gettosostentazione ad aerosostentazione, per accelerare da 0
(in hovering ovvero volo stazionario) a Vd (velocità d’involo);- la rotazione, al raggiungimento della velocità Vd, per portarsi dalla quota di
hovering a quella d’inizio della traiettoria rettilinea di salita;- la salita, alla quota di retrazione degli ipersostentatori.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
128
Tra le due procedure tipo appena schematizzate, esistono poi le diverse procedureintermedie, rappresentate da corse di decollo via via più brevi all’aumentare dellagettosostentazione possibile.
La velocità al distacco, Vd , è quella alla quale la portanza è sufficiente a reggere ilpeso all’assetto CLd di distacco (o di decollo).
CLdS12ρoεVd
2 =W
Risulta, in tal modo, possibile, con un piccolo aumento d’incidenza (da CLd a Clt)generare il supero di portanza, a parità di velocità, necessario per reggere il maggiorpeso apparente che la massa del velivolo viene ad esprimere, allorché,all’accelerazione di gravità, si aggiunge quella dovuta all’inerzia verticale, peraccelerare la componente verticale della velocità da 0 a vs.
€
CLtS12ρoεVd
2 =W (1+ Δn)
L’assetto CLt di transizione, e la velocità di distacco Vd , restano pertanto definiticome segue:
€
CLtS12ρoεVd
2 =W (1+ Δn)
CLdS12ρoεVd
2 =W
CLmaxS12ρoεVmin
2 =W
CLt
CLd
= (1+ Δn) ⇒ CLt = (1+ Δn)CLd = ko2CLd =
ko2
k 2CLmax
CLdVd2
CLmaxVmin2 =1 ⇒ Vd
2 =CLmax
CLd
Vmin2 = k 2Vmin
2 ⇒ CLd =CLmax
k 2
ovvero, in definitiva:
€
CLd =CLmax
k 2Vd = k Vmin CLt = (1+ Δn)CLd
Il fattore k è, oltre che una ovvia esigenza fisica, una misura tecnica del livello disicurezza da adottare in questa delicata fase transitoria del volo, in cui tutto congiuracontro il normale svolgimento delle operazioni. Il valore medio di tale fattore èfissato dalle norme tra 1,5 e 2.
Il peso W o il peso apparente W(1+Δn) possono essere sostenuti in parte dalla spintae in parte dalla portanza. La frazione di aerosostentazione si chiama, in genere, α ; quelladi gettosostentazione (1-α).

P. OLIVIERO - Meccanica del volo. Gennaio 2008
129
Nel primo caso, avremo:
€
CLtS12ρoεVd
2 =W (α + Δn)
CLdS12ρoεVd
2 =αW
CLmaxS12ρoεVmin
2 =W
CLt
CLd
= (1+Δnα) ⇒ CLt = (1+
Δnα)CLd = k1
2CLd =k12
k 2CLmax
CLdVd2
CLmaxVmin2 =α ⇒ Vd
2 =CLmax
CLd
αVmin2 = k 2αVmin
2 ⇒ CLd =CLmax
k 2
ovvero, in definitiva:
€
CLd =CLmax
k 2Vd = k α Vmin CLt = (1+
Δnα)CLd
Applicando, invece, la suddivisione all’intero peso apparente, avremo:
€
CLtS12ρoεVd
2 =αW (1+ Δn)
CLdS12ρoεVd
2 =αW
CLmaxS12ρoεVmin
2 =W
CLt
CLd
= (1+ Δn) ⇒ CLt = (1+ Δn)CLd = ko2CLd =
ko2
k 2CLmax
CLdVd2
CLmaxVmin2 =α ⇒ Vd
2 =CLmax
CLd
αVmin2 = k 2αVmin
2 ⇒ CLd =CLmax
k 2
ovvero, in definitiva:
€
CLd =CLmax
k 2Vd = k α Vmin CLt = (1+ Δn)CLd

P. OLIVIERO - Meccanica del volo. Gennaio 2008
130
Le equazioni d’equilibrio nella corsa di decollo
Nella prima fase del decollo, le forze in gioco sono in equilibrio come segue:
€
W = CLS12ρoεV
2 + Tsenθ + Fz
T cosθ = CDS12ρoεV
2 +WgdVdt
+ µFz
In altre parole,- il peso è sostenuto dalla portanza (crescente col crescere della velocità), dalla
componente verticale della spinta e dalla reazione della pista (decrescente colcrescere della velocità), mentre
- la componente orizzontale della spinta provvede a equilibrare la resistenzaaerodinamica (crescente col crescere della velocità), l’inerzia frenante dovutaall’accelerazione e l’attrito sulla pista (decrescente col crescere della velocità).
Accelerazione di decollo
Ne consegue che l’espressione di a, l’accelerazione della corsa di decollo, è funzionedella portanza e del calettamento della spinta, come segue.
€
a =dVdt
=gW
T cosθ −CDS12ρoεV
2 + µ CLS12ρoεV
2 + Tsenθ −W
=
=gW
T cosθ + µsenθ( ) −µW + µCL −CD( )S 12ρoεV
2
Le condizioni di massimo forniscono i valori dell’assetto e del calettamento atti agarantire la massima accelerazione.
Derivate prime nulle:
€
∂a∂CL
= 0 ⇒ µ −∂CD
∂CL
= 0 ⇒µ =
2kCL
πλ
µ = tanψ
∂a∂θ
= 0 ⇒ − senθ + µcosθ = 0 ⇒ µ = tanθ
⇒
CL =πλ2k
µ
ψ = arctanµ
θ = arctanµ[ ]θ =ψ

P. OLIVIERO - Meccanica del volo. Gennaio 2008
131
Dalle condizioni sulle derivate prime discendono, dunque, i valori cercatidell’assetto e del calettamento, i quali risultano connessi in modo molto semplice:
θ = ψ
calettamento = pendenza della tangente alla polare
(rispetto all’asse delle ordinate, nel punto relativo all’assetto di massima accelerazione).
Derivate seconde minori di zero con Hessiano maggiore di zero:
€
∂ 2a∂CL
2 < 0 ⇒∂ 2CD
∂CL2 = −
2kπλ
< 0 ∂ 2a∂CL∂θ
= 0
∂ 2adθ 2
< 0 ⇒ − cosθ −µsenθ < 0 ∂ 2a∂θ∂CL
= 0
⇒ Hessiano =
∂ 2a∂CL
2∂ 2a∂CL∂θ
∂ 2a∂θ∂CL
∂ 2adθ 2
> 0
Dalle condizioni sulle derivate seconde non discendono, dunque, particolariindicazioni analitiche e operative, bensì solo conferme e verifiche della giustezzadelle formule adottate e dei risultati ottenuti, dato che tutte le condizioni sonorispettate per ipotesi.
Sostituendo le espressioni trovate, nella formula dell’accelerazione, si ottienel’accelerazione massima istantanea lungo la corsa di decollo.
€
amax =gW
T 11+ tan2θ
+ µtanθ1+ tan2θ
−µW +
∂CD
∂CL
CL −CD
S12ρoεV
2
=gW
T 11+ µ2
+ µµ
1+ µ2
−µW +
∂CD
∂CL
CL −CD
S12ρoεV
2
=gW
T 1+ µ2 −µW +∂CD
∂CL
CL −CD
S12ρoεV
2
Detta prestazione dipende dunque da due contributi:- un termine, indipendente dalla velocità istantanea, che potremmo, pertanto,
chiamare “statico” e che è sempre “positivo”, ovvero favorevole alla corsa didecollo;
- un termine, crescente in valore assoluto al crescere della velocità, che,pertanto, potremmo chiamare “cinetico” e che risulta di segno positivo, nullo onegativo, a seconda che
€
∂CD
∂CL
CL −CD
risulti positivo, nullo o negativo, ovvero a
seconda che l’assetto di massima accelerazione risulti maggiore, uguale ominore a quello di massima efficienza.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
132
Abbiamo infatti, visto che l’assetto di massima accelerazione è quello in cui
ψ = θ = arctg µ
per cui, la sua posizione sulla polare è esattamente determinata in funzionedell’attrito sulla pista e del calettamento della spinta.
Più in dettaglio:
€
amax statica =gW
T 1+ µ2 −µW{ } > 0
amax cinetica =gW
∂CD
∂CL
CL −CD
S12ρoεV
2
>=<0 a seconda che
∂CD
∂CL
CL −CD
>=<0 ovvero ∂CD
∂CL
>=<
CD
CL
ovvero α∂CD
∂CL= µ
>=<αEmax( )
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
0,00 0,05 0,10 0,15 0,20
€
α =αEMAX
€
ψ =ψEMAX
€
µ =∂CD
∂CL
=CD
CL
€
α <αEMAX
€
µ =∂CD
∂CL
<CD
CL
€
α >αEMAX
€
µ =∂CD
∂CL
>CD
CL
€
ψ >ψEMAX
€
ψ <ψEMAX

P. OLIVIERO - Meccanica del volo. Gennaio 2008
133
E’ significativo, ovviamente, che le architetture col ruotino di coda appartengano allastoria dell’aeronautica, come, in generale, le piste di maggior attrito. Un coefficiented’attrito µ più grande comporta infatti, come abbiamo visto, un angolo ψ (pendenzadella tangente rispetto all’asse delle ordinate) più grande, ovvero un assetto più grande,ovvero un contributo positivo anche nel termine cinetico. In altri termini,l’alleggerimento prodotto dalla portanza diventa significativo e il termine cineticofornisce, corrispondentemente, un contributo, all’espressione, significativamentepositivo e particolarmente “apprezzato”, dato il maggior valore della resistenzaall’avanzamento offerto dall’attrito sulla pista.
€
amax =gW
T 1+ µ2 −µW + CL∂CD∂CL
=µ
S 12ρoεV
2 −CD∂CD∂CL
=µ
S 12ρoεV
2
Termine cinetico frenante Termine cinetico nullo Termine cinetico propulsivo
€
α <αEMAX
€
α =αEMAX
€
ψ <ψEMAX
€
ψ =ψEMAX
€
ψ >ψEMAX
€
µ =∂CD
∂CL
<CD
CL
€
µ =∂CD
∂CL
=CD
CL
€
µ =∂CD
∂CL
>CD
CL
€
µCL −CD < 0
€
µCL −CD = 0
€
µCL −CD > 0
€
α >αEMAX
€
CL∂CD∂CL
=µ
<CLEMAX
€
CL∂CD∂CL
=µ
= CLEMAX
€
CL∂CD∂CL
=µ
>CLEMAX

P. OLIVIERO - Meccanica del volo. Gennaio 2008
134
Corsa di decollo
L’accelerazione massima istantanea è dunque funzione della velocità d’avanzamentoistantanea e garantisce il minor tempo necessario per raggiungerla, a prescinderedalla lunghezza del percorso necessario per farlo.
Tale lunghezza risulta tuttavia implicitamente determinata nel modo seguente.
€
a =dVdt
=dsdtdVds
=VdVds
=12dV 2
ds=gW
T cosθ + µsenθ( ) −µW + µCL −CD( )S 12ρoεV
2
dV 2
ds=2gW
µCL −CD( )S 12ρoε
T cosθ + µsenθ( ) −µW
µCL −CD( )S 12ρoε
+V 2
ds =dV 2
2gW
µCL −CD( )S 12ρoε
T cosθ + µsenθ( ) −µW
µCL −CD( )S 12ρoε
+V 2
Da cui:
€
ds =W /S
gρoε µCL −CD( )dV 2
2ρoεS
T cosθ + µsenθ( ) −µW
µCL −CD( )
+V 2
ovvero, integrando tra 0 (inizio corsa) e Vd (inizio rotazione):
€
ds =W /S
gρoε µCL −CD( )dV 2
2ρoεS
T cosθ + µsenθ( ) −µW
µCL −CD( )
+V 20
Vd
∫
€
s =W /S
gρoε µCL −CD( )ln
2ρoεS
T cosθ + µsenθ( ) −µW
µCL −CD( )
+Vd
2
2ρoεS
T cosθ + µsenθ( ) −µW
µCL −CD( )
o, ancora, riducendo e semplificando:
€
s =W /g
Sρoε µCL −CD( )lnT cosθ + µsenθ( ) −µW + µCL −CD( )S 1
2ρoεVd
2
T cosθ + µsenθ( ) −µW
=W /g
µCL −CD( )Sρoεln 1+
µCL −CD( )S 12ρoεVd
2
T cosθ + µsenθ( ) −µW

P. OLIVIERO - Meccanica del volo. Gennaio 2008
135
Sostituendo poi, i valori prima ricavati e definiti della velocità (di distacco o didecollo) e della portanza (nello stesso istante, ovvero all’inizio della rotazione):
€
Vd = k αVmin CLdS 12ρoεVd
2 =W −Tsenθ
S 12ρoεVd
2 =W −Tsenθ
CLd
Sρoε = 2W −TsenθCLd
Vd2 = 2 W −Tsenθ
CLdk αVmin( )
2
si ottiene:
€
s =W /g
µCL −CD( )Sρoεln 1+
µCL −CD( )W −TsenθCLd
T cosθ + µsenθ( ) −µW
Le condizioni di minimo forniscono i valori dell’assetto e del calettamento atti agarantire la minima corsa dall’istante iniziale (V = 0 , inizio corsa) a fine corsa (V = Vd, inizio rotazione), a prescindere dal valore dell’accelerazione e, quindi, dal temponecessario per percorrerla.
Derivate prime nulle:
€
∂s∂CL
= 0 ⇒ µ −∂CD
∂CL
= 0 ⇒µ =
2kCL
πλ
µ = tanψ
∂s∂θ
= 0 ⇒ T −Wsenθ = 0 ⇒ senθ =TW
⇒
CL =πλ2k
µ
ψ = arctanµ
θ = arcsen TW
Dalle condizioni sulle derivate prime discendono, dunque, i valori cercati dell’assettoe del calettamento, i quali però, questa volta non risultano connessi in modosemplice:
€
θ = arcsen TW
ψ = arctanµ
calettamento = funzione del rapporto spinta peso
assetto = funzione del coefficiente d’attrito
Infatti, la formula della corsa di decollo discende da un integrale notevole definito tradue valori esatti della velocità, mentre, quella dell’accelerazione, deriva da unadefinizione istantanea, funzione della velocità (variabile tra detti valori estremi; 0all’inizio della corsa e Vd all’inizio della rotazione).
La condizione di nullo, per la derivata prima rispetto a θ , dell’espressione di s, èpertanto un po’ più complessa, perché la variabile indipendente (θ, appunto)compare sia a numeratore che a denominatore dentro il segno di logaritmo.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
136
Infatti:
€
∂∂θ
1−
µCL −CD( )CLd
W −Tsenθ( )
T cosθ + µsenθ( ) −µW
= 0 ∂
∂θ
T cosθ + µsenθ( ) −µW −µCL −CD( )CLd
W −Tsenθ( )
T cosθ + µsenθ( ) −µW
= 0
€
−Tsenθ + µT cosθ( ) +CD −µCL( )CLd
T cosθ
T cosθ + µTsenθ −µW( ) =
= T cosθ + µTsenθ −µW( ) −CD −µCL( )CLd
W −Tsenθ( )
−Tsenθ + µT cosθ( )
€
−Tsenθ + µT cosθ( ) T cosθ + µTsenθ −µW( ) +CD −µCL( )CLd
T cosθ T cosθ + µTsenθ −µW( ) =
= T cosθ + µTsenθ −µW( ) −Tsenθ + µT cosθ( ) −CD −µCL( )CLd
W −Tsenθ( ) −Tsenθ + µT cosθ( )
€
CD −µCL( )CLd
T cosθ T cosθ + µTsenθ −µW( ) =
−CD −µCL( )CLd
W −Tsenθ( ) −Tsenθ + µT cosθ( )
€
CD −µCL( )CLd
T cosθT cosθ +CD −µCL( )CLd
T cosθµTsenθ −CD −µCL( )CLd
T cosθµW
=
−CD −µCL( )CLd
W +CD −µCL( )CLd
Tsenθ
−Tsenθ + µT cosθ( )
€
CD −µCL( )CLd
T 2 cos2θ +CD −µCL( )CLd
T 2µsenθ cosθ −CD −µCL( )CLd
WTµcosθ =
=CD −µCL( )CLd
WTsenθ −CD −µCL( )CLd
T 2sen2θ −CD −µCL( )CLd
WTµcosθ +CD −µCL( )CLd
T 2µsenθ cosθ
€
T 2 cos2θ + T 2µsenθcosθ −WTµcosθ =WTsenθ −T 2sen2θ −WTµcosθ + T 2µsenθ cosθ
Da cui, in definitiva, la condizione spinta/peso di minima corsa:
€
T cos2θ =Wsenθ −Tsen2θWsenθ = T
θ = arcsen TW

P. OLIVIERO - Meccanica del volo. Gennaio 2008
137
Corsa minima in caso di spinta non orientabile
Nell’ipotesi che l’angolo di spinta non può essere scelto, in quanto il calettamentofisso obbliga a ritenere, per esempio, θ = 0 lungo tutta la corsa, le espressioni utilidiventano le seguenti.
€
s =W /g
Sρoε µCL −CD( )ln
1+
µCL −CD( )CLd
W
T −µW
Ricordando, a questo punto, che, in assenza totale di gettosostentazione, si ha che:
€
CLd =CLmax
k 2Vd = k Vmin CLt = (1+ Δn)CLd
si ottiene:
€
s =Vd2 /2g
k 2µCL −CD( )CLMAX
ln
1+
k 2µCL −CD( )CLMAXTW
−µ
nella quale, al solito, supponendo l’assetto lungo la corsa pari a quello di corsaminima, si ottiene la formula di smin.
€
CD = CD∂CD∂CL
=µ
= CD*
CL = CL∂CD∂CL
=µ
= CL*
€
⇒ smin =Vd2 /2g
k 2µCL
* −CD*( )
CLmax
ln
1+
k 2µCL
* −CD*( )
CLmax
T /W −µ
La formula mostra che la corsa minima diminuisce:
- al diminuire della velocità di decollo (e, quindi, del carico alare) e del valore dimassimo coefficiente di portanza (a parità di k); quest’ultimo effetto si ottiene conipersostentatore di minor peggioramento quanto al coefficiente di resistenza(15° di deflessione, ovvero “prima tacca”, come suol dirsi);
- all’aumentare del rapporto spinta peso T/W.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
138
Corsa minima in caso di forza aerodinamica trascurabile lungo la corsa
Nell’ipotesi “limite” che, lungo la corsa di decollo, la forza aerodinamica possaritenersi trascurabile rispetto alle altre, le equazioni d’equilibrio si semplificano comesegue e forniscono:
€
W = FzWgdVdt
= T −µFz
Da cui:
€
a =dVdt
=gW
T −µW{ }
€
WgdVdt
ds = T −µW{ }ds
WgVdV = T −µW{ }ds
12WgdV 2 = T −µW{ }ds
12Wg
dV 20
Vd∫ = T −µW{ } ds0
s∫
12WgVd2 = T −µW{ }s
Espressione che può anche scriversi, direttamente, dall’equilibrio tra energia cineticae lavoro.
Da essa si ricava:
€
s =
12WgVd2
T −µW{ }=
12Vd2
gTW
−µ
=k 2Vmin
2
2g TW
−µ
=
k 2 WCLmax
Sρoε
g TW
−µ
=k 2W /S
CLmaxρoεg T /W −µ{ }
ritrovando, in modo abbreviato approssimato, che s diminuisce:- al diminuire del carico alare;- all’aumentare del coefficiente di portanza massima;- all’aumentare della densità relativa;- all’aumentare del rapporto spinta peso.
Per le motoeliche si può scrivere:

P. OLIVIERO - Meccanica del volo. Gennaio 2008
139
€
ηψzΠao = TV = TdVd
T = mTd =ηψzΠao
Vd
e, quindi:
€
s =k 2W /S
CLmaxρoεg
mηψzΠao
WVd
−µ
in cui m è un coefficiente, maggiore dell’unità, introdotto per tener conto delladiminuzione della spinta all’aumentare di V dal punto fisso alla velocità di decollo e Tè il valor medio della spinta tra Tso e Td.
Calcolo grafico della corsa di decollo
Dei fattori che influenzano la lunghezza della corsa di decollo, la velocità di distaccorappresenta quello più significativo.
Per tener conto, tuttavia, anche di quelli di minor peso relativo, è possibile ricorrereal seguente metodo grafico, grazie al quale non è necessario assumere valori mediapprossimati, in quanto ci si riferisce alle esatte curve delle variabili in gioco infunzione della velocità.
Nella figura, sono rappresentate le curve:
€
A(V ) = µ(V )W (V )
F(V ) = CD* −µ(V )CL
*[ ]S 12 ρoεV2
a(V ) =g
W (V )T(V ) − F(V ) − A(V )[ ]
050100150200250300350400450
0 5 10 15 20 25 30 35 40
µ (V)W(V)
T(V)
€
CD − µCL( )S12ρoεV
2
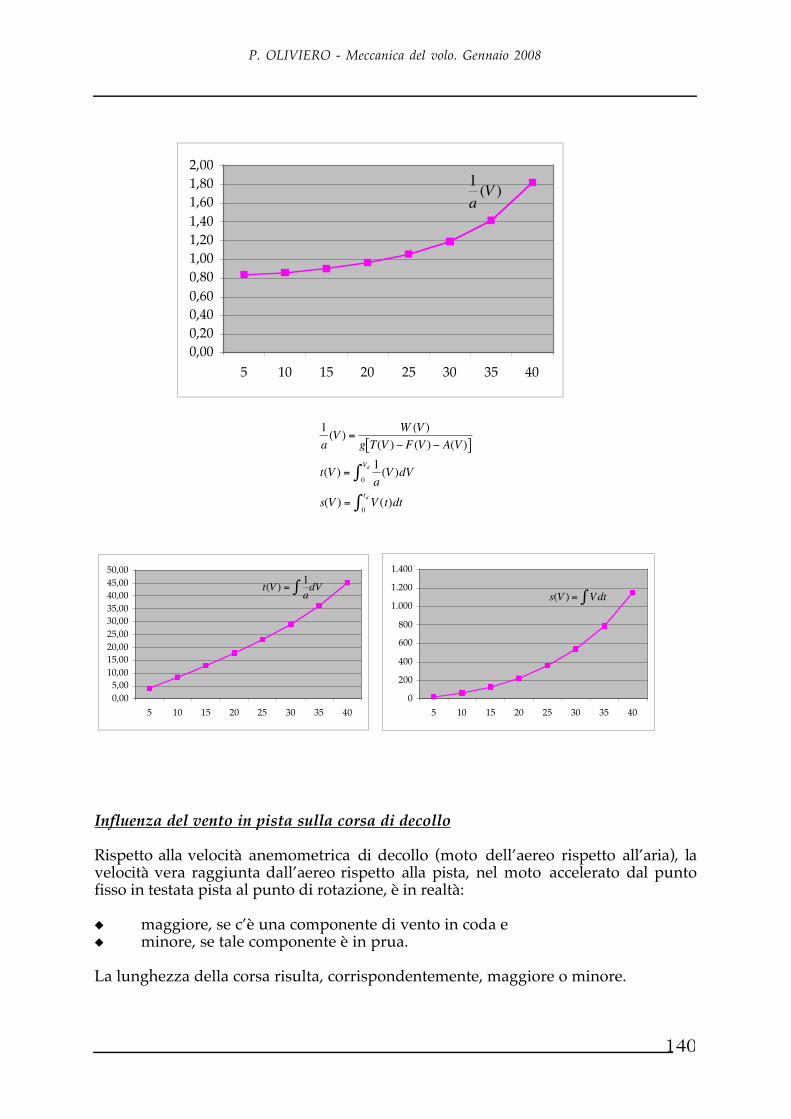
P. OLIVIERO - Meccanica del volo. Gennaio 2008
140
€
1a(V ) =
W (V )g T(V ) − F(V ) − A(V )[ ]
t(V ) =1a(V )dV
0
Vd∫
s(V ) = V (t)dt0
td∫
Influenza del vento in pista sulla corsa di decollo
Rispetto alla velocità anemometrica di decollo (moto dell’aereo rispetto all’aria), lavelocità vera raggiunta dall’aereo rispetto alla pista, nel moto accelerato dal puntofisso in testata pista al punto di rotazione, è in realtà:
◆ maggiore, se c’è una componente di vento in coda e◆ minore, se tale componente è in prua.
La lunghezza della corsa risulta, corrispondentemente, maggiore o minore.
0,005,0010,0015,0020,0025,0030,0035,0040,0045,0050,00
5 10 15 20 25 30 35 40
€
t(V ) =1a∫ dV
0
200
400
600
800
1.000
1.200
1.400
5 10 15 20 25 30 35 40
€
s(V ) = V∫ dt
0,000,200,400,600,801,001,201,401,601,802,00
5 10 15 20 25 30 35 40
€
1a(V )

P. OLIVIERO - Meccanica del volo. Gennaio 2008
141
E’ come se la velocità di decollo dovesse essere rispettivamente maggiore o minoreo, meglio, è come se l’intervallo d’integrazione fosse aumentato o diminuito:
- nel primo caso, vento in coda, da 0 a Vd + v;- nel secondo, vento in prua, da v a Vd, ovvero, più semplicemente,
simmetricamente, da 0 a Vd - v.
Le rispettive corse di decollo risultano così modificate.
€
sv≠0 =Vd ± v( )2
2g TW
−µ
sv= 0 =Vd2
2g TW
−µ
⇒sv≠0sv= 0
=Vd ± v( )2
Vd2 = 1±
vVd
2
nella quale, per quanto attiene il termine con l’alternativa di segno, vale, ovviamente,il segno meno per vento in prua e quello più per vento in coda.
Influenza dell’inclinazione della pista sulla corsa di decollo
Una eventuale inclinazione della pista introduce un diverso ruolo della forza pesonelle equazioni di equilibrio.
Le due componenti Wsenγ, nella direzione della corsa, e Wcosγ, nella direzioneperpendicolare alla corsa, giocano infatti in maniera diversa rispetto alle analoghenell’ipotesi di pista orizzontale, e che sono, rispettivamente: 0 e W.
Di conseguenza:- per γ > 0 (pista in salita), la prima (Wsenγ) risulta opposta alla spinta e la
seconda (Wcosγ) riduce l’attrito;- per γ < 0 (pista in discesa), la prima (Wsenγ) risulta concorde con la spinta e la
seconda (Wcosγ) riduce l’attrito, come in salita;
Le rispettive espressioni dell’accelerazione diventano:
€
a =gW
T mWsenγ −µW cosγ − CD −µCL( )S 12ρoεV
2
nella quale, per quanto attiene il termine con l’alternativa di segno, vale, ovviamente,il segno meno per pista in salita e quello più per pista in discesa.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
142
Analogamente, quanto alla corsa di decollo in salita e in discesa, assumeremo:
€
12WgVd2 = T mWsenγ −µW cosγ{ }s
e, quindi:
€
sγ ≠0 =Vd2
2g TW
m senγ −µcosγ
sγ= 0 =Vd2
2g TW
−µ
⇒sγ ≠0sγ= 0
=
TW
−µ
TW
m senγ −µcosγ
Le equazioni d’equilibrio durante la rotazione
Durante la fase di raccordo dall’istante in cui il velivolo raggiunge la velocità didecollo a quello in cui supera l’ostacolo convenzionale dei 15 metri (50 feet) e inizia lasalita, si fanno le seguenti ipotesi:
- la rotazione dall’assetto di decollo a quello di transizione è istantanea;- la velocità sulla traiettoria é costante;- la traiettoria è un arco di circonferenza, ovvero si assume l’ipotesi di raggio
costante;- la pendenza della traiettoria γ′ aumenta da zero a γ . Si può fare l’ipotesi
semplificativi che γ′ sia sempre abbastanza piccolo da poter assumere γ′= sen γ′= tan γ′.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
143
L’espressione della corsa al suolo durante la traiettoria di transizione è:
st = rsenγ = rh
st / 2=2rhst
⇒ st = 2rh
Le equazioni d’equilibrio quando la pendenza è γ′ (compresa tra 0 e γ), sono:
T cosθ =W sen ′ γ + D
T senθ + L =W cos ′ γ +WgVd2
r
Ne consegue, sostituendo nella seconda di tali equazioni, le espressioni di aero egettosostentazione, nell’ipotesi di sovraccarico tutto aerosostentato:
(1 −α )W + (α + Δn)W =W cos ′ γ +WgVd2
r
(1 + Δn)W = (cos ′ γ +Vd2
gr)W
Δn =Vd2
gr⇒ r =
Vd2
gΔn
Esprimendo infine il fattore di sovraccarico in funzione della costante k1:
1 + Δnα
= k12 ⇒ Δn = α (k1
2 −1)
r =Vd2
gΔn=
Vd2
gα (k12 −1)
=αk2Vmin
2
αg(k12 − 1)
=
k 22ρo
1εWS
1CLmax
g(k12 −1)
=2k2W /S
g(k12 −1)ρoεCLmax
e, quindi, in definitiva:
st = 2rh = 4k2hW /Sg(k1
2 −1)ρoεCLmax

P. OLIVIERO - Meccanica del volo. Gennaio 2008
144

P. OLIVIERO - Meccanica del volo. Gennaio 2008
145
CAPITOLO 14L’atterraggio
Procedura d’avvicinamento e d’atterraggio
L’avvicinamento alla pista e la manovra d’atterraggio avvengono seguendo unaprecisa procedura tecnico operativa, che si può così riassumere:
- autorizzazione della torre di controllo all’avvicinamento;- entrata in sottovento;- autorizzazione al finale;- entrata in curva base;- autorizzazione all’atterraggio;- entrata in finale;- contatto;- primo tratto della corsa di atterraggio ds;- secondo tratto frenato ds’;- pista libera;- autorizzazione al parcheggio;- rullaggio fino al parcheggio.
Lo schema descrive gli ultimi minuti di un qualsiasi volo e viene qui esposto in formaultra sintetica, al solo scopo di introdurre piacevolmente l’ultimo argomento delcorso; il calcolo della corsa d’atterraggio.
I due tratti tipici della corsa d’atterraggio sono:- ds, dall’istante iniziale del “contatto” con la pista (alla velocità di atterraggio
Va) a quello dell’inizio frenata e,- ds’, da detto punto, all’arresto (al termine della corsa al suolo).

P. OLIVIERO - Meccanica del volo. Gennaio 2008
146
In pratica, tuttavia, l’arresto non avviene quasi mai in pista, perché, una volta giuntialla velocità di rullaggio, di solito, si prosegue direttamente sulle bretelledell’aeroporto (le piste di rullaggio, appunto), previa autorizzazione della torre dicontrollo richiesta e ottenuta durante il moto lento di manovra al suolo.
Ciò premesso, vediamo intanto, quali sono le ipotesi in base alle quali calcoleremo leespressioni dei due segmenti della corsa di atterraggio: nel primo, si suppone spintanulla e freni non azionati; nel secondo, si suppone che il pilota agisca, con decisioneprogressiva, su tutti i sistemi frenanti disponibili.
Questi possono essere forniti:- dai propulsori, invertendone la spinta;- dai parafreni di coda;- dalla velatura, azionando ipersostentatori e freni aerodinamici;- dall’attrito, azionando i freni.
Le equazioni del moto in atterraggio sono:
I due segmenti della corsa d’atterraggio possono distinguersi anche in riferimentoagli estremi di integrazione:
- nel primo tratto, ds, ruote libere, spinta nulla, la velocità diminuisce da Va a Vr;
- nel secondo tratto, ds’, freni azionati, reverse se disponibile, la velocitàdiminuisce da Vr a 0.
In detti segmenti, i sistemi delle equazioni d’equilibrio al secondo e al terzo rigo dellatabella di cui innanzi, forniscono le equazioni risolventi, che sono:
WgdVdt
= −µ W −CLaS12ρoεV
2
− CDa S
12ρoεV
2
WgdVdt
= −Ta − µ f W − CLaS12ρoεV
2
− CDaS
12ρ oεV
2
€
un attimo prima del contatto
€
nel primo tratto della corsa
€
nel tratto frenato della corsa
€
equazioni nelladirezione perpendicolare alla pista
€
equazioni nelladirezione della pista
€
W = CLa* S 12ρoεVa
2
€
W = Fz +CLaS12ρoεV
2
€
WgdVdt
= −CDa* S 1
2ρoεVa
2
€
WgdVdt
= −µFz −CDaS12ρoεV
2
€
WgdVdt
= −Ta −µ f Fz −CDaS12ρoεV
2
€
W = Fz +CLaS12ρoεV
2

P. OLIVIERO - Meccanica del volo. Gennaio 2008
147
Risolvendo la seconda rispetto a ds’, otteniamo:
€
W2g
dV 2
d ′ s = −Ta −µ f W −CLaS 1
2ρoεV
2
−CDaS 1
2ρoεV
2
d ′ s =−dV 2
2gW
Ta + µ f W −CLaS 12ρoεV
2
+ CDaS 1
2ρoεV
2
=−dV 2
2g Ta
W+ µ f 1−
CLaS 12ρoεV
2
CLa* S 12ρoεVa
2
+CDaS 1
2ρoεV
2
CLa* S 12ρoεVa
2
€
d ′ s =−dV 2
2g Ta
W+ µ f +
−µ f CLa
CLa* Va
2 +CDa
CLa* Va
2
V 2
per cui, in definitiva, le espressioni di ds’ e ds diventano:
€
d ′ s =−dV 2
2gCDa −µ f CLa
CLa* Va
2
Ta
W+ µ f
CLa* Va
2
CDa −µ f CLa
+ V 2
€
ds =−dV 2
2g CDa −µCLa
CLa* Va
2
µ
CLa* Va
2
CDa −µCLa
+V 2
Integrando la prima, da Va a Vr e la seconda da Vr a 0, si ha:
€
s = dVa
Vr
∫ s+ ds'Vr
0
∫ =
=Va2CLa
*
2g CDa −µCLa( )ln
µVa2CLa
*
CDa −µCLa( )+Va
2
µVa2CLa
*
CDa −µCLa( )+Vr
2
+Va2CLa
*
2g CDa −µ f CLa( )ln
TaW
+ µ f
Va
2CLa*
CDa −µ f CLa( )+Vr
2
TaW
+ µ f
Va
2CLa*
CDa −µ f CLa( )
Tale espressione può ridursi ai minimi termini in modo da essere ancora piùoperativa, con alcune ipotesi semplificative.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
148
1^ ipotesi, µ = µf
€
s =Va2CLa
*
2g CDa −µCLa( )
ln
µVa2CLa
*
CDa −µCLa( )+Va
2
µVa2CLa
*
CDa −µCLa( )+Vr
2
1+Vr2
TaW
+ µ
Va
2CLa*
CDa −µCLa( )
2^ ipotesi, V r = 0
€
s =Va2CLa
*
2g CDa −µCLa( )
ln 1+
CDa −µCLa( )µCLa
*
3^ ipotesi, C La = C* La
€
s =Va2
2g CDa
CLa
−µ
ln CDa
µCLa
In definitiva, la corsa d’atterraggio risulta dunque, tanto più breve, quanto maggiorisono le azioni frenanti e quanto minore è la velocità da frenare.
WgdVdt
= −Ta − µ f W − CLaS12 ρoεV
2
− CDaS
12 ρ oεV
2
La prima azione frenante è quella dell’attrito e questa risulta tanto maggiore quantomaggiore è µf Fz e quindi, quanto maggiore é µf e quanto minore è la portanza.
Di qui:- azione, positiva, dei freni, che portano il coefficiente d’attrito, da circa µ = 0,02
a circa µf = 0,4 e- azione, negativa, degli ipersostentatori, che conviene, infatti, togliere appena
possibile dopo il contatto.
La seconda azione frenante è quella della resistenza aerodinamica alla quale occorreperò chiamare solo il CDa e, questa, solo a mezzo dei freni aerodinamici e deiparafreni, se disponibili, perché assetto e ipersostentatori hanno entrambi l’effettocollaterale di alleggerire le ruote.
La terza azione frenante è quella della spinta negativa, se disponibile, la quale però vaazionata solo se necessario, a contatto sicuramente avvenuto e sempre con lamassima attenzione.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
149
Quanto all’ovvio beneficio della minore velocità al contatto da smaltire, esso vieneutilizzato, in generale, stabilendo, come procedura standard, di dare tutto flap egrande assetto in finale, in modo da arrivare al contatto con la più piccola velocitàcompatibile con la sicurezza e il controllo, salvo a togliere entrambi, appenapossibile, ad atterraggio avvenuto.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
150

P. OLIVIERO - Meccanica del volo. Gennaio 2008
151
CAPITOLO 15Autonomia di distanza della motoelica
Formula teorica approssimata (Breguet)
Per scrivere la formula che fornisce l’autonomia di massima distanza (range) che puòpercorrere una motoelica, basta considerare i tre parametri globali checontribuiscono, ciascuno dal suo canto, a consentirglielo e che sono:
- il consumo specifico del motore
€
c = −dW /dtΠa
, le cui unità di misura sono
€
kps−1
kpms−1
=
1m
;
- il rendimento dell’elica
€
η =TVΠa
le cui unità di misura sono
€
kpms−1
kpms−1
= 1[ ] ;
- l’efficienza dell’aereo
€
E =WVTV
le cui unità di misura sono
€
kpms−1
kpms−1
= 1[ ] ;
L’ottimizzazione del sistema così schematizzato consiste nel fare massimo ilrapporto
€
ηEc
= −TVΠa
WVTV
ΠadtdW
= −WVdtdW
= −WdsdW
;
denominato fattore d’economia del percorso, le cui unità di misura sono
€
kpmkp
= m[ ].

P. OLIVIERO - Meccanica del volo. Gennaio 2008
152
Il fattore d’economia del percorso fornisce pertanto la formula del percorso effettuatoper unità di peso del combustibile consumato e per unità di peso dell’aereo, che sichiama percorso specifico:
€
ds = −ηEcdWW
m[ ] ds* =
ds m[ ]
1.000 mkm
=ds
1.000km[ ]
€
c *( ) kph−1
HP
= c( ) kps−1
kpms−1
⋅ 75
kpms−1
HP
⋅ 3.600 sh−1[ ] = 270.000 c[ ] kph
−1
HP
c =
c *270.000
€
dsME
* = −ηEcdWW
1
1,000km[ ] = −270ηE
c *dWW
HPkph−1
⇒ km[ ] =
HPkph−1
dsMAX ME
* = −270 ηEc *
MAX
dWW
L’autonomia si ottiene integrando il percorso specifico, tra gli estremi d’integrazionemisurati alla partenza,
€
Wo , e a destinazione,
€
W1 =Wo −Wc .
€
s = ds0
s
∫ = −ηEc1W
dWWO
W1
∫
sMAX =ηEc
MAX
1W
dW =ηEc
MAX
ln WO
WO −WcW1
WO
∫ =ηEc
MAX
ln 1
1−Wc
Wo
in cui,
€
Wc , è il peso del combustibile adoperato e le unità di misura sono quelle suprecisate:
€
sMAX( ) m[ ] c( ) kps−1
kpms−1
sMAX
*( ) Km[ ] c *( ) kph−1
HP
L’autonomia, misurata in km, e il consumo in kph-1 per HP, saranno:
€
sMAX*( ) km[ ] =
sMAX( ) m[ ]
1.000 mkm
c *( ) kph−1
HP
= c( ) kps−1
kpms−1
⋅ 75
kpms−1
HP
⋅ 3.600 sh−1[ ] = 270.000 c( ) kph
−1
HP
sMAX* =
sMAX1.000
c =c *
270.000
In definitiva, l’autonomia chilometrica risulta data dalla formula seguente:
€
sMAX* =
75 ⋅ 3.6001.000270
1 2 4 3 4
ηEc *
MAX
lg 1
1−Wc
Wo
ln102,3{ = 270 ⋅ 2,3 ηE
c *
MAX
lg 1
1−Wc
Wo
sMAX ME
* = 621 ηEc *
MAX
lg 1
1−Wc
Wo

P. OLIVIERO - Meccanica del volo. Gennaio 2008
153
L’ultima forma appena scritta, dell’espressione dell’autonomia di distanza dellamotoelica, è nota come formula di Breguet in assenza di vento e fornisce l’autonomia inkm, conoscendo il consumo specifico in in kph-1 per HP.
Il grafico su riportato ne illustra l’andamento.
Influenza della diminuzione del peso
La diminuzione di peso dovuta al consumo costringe a ridurre progressivamente sial’assetto, sia la velocità, sia la densità (assetto un po’ minore di quello “ottimo”,velocità minore e quota maggiore), in quanto non è possibile “inseguirla”, riducendouno solo di detti parametri a parità degli altri, perché in tal caso l’entità delladiminuzione necessaria, concentrata su un solo parametro, sarebbe eccessiva.
Infatti, essendo, ad assetto costante,
€
Πn =WEV =
2ρo
1ε
W 3
S1
E 2CL
≅W 3
εV =
2ρo
1ε
WS
1CL
≅Wε
a quota ed assetto costanti, V dovrebbe diminuire come la radice di W, mentre lapotenza necessaria diminuisce come la radice di W al cubo; ciò sarebbe possibileriducendo l’ammissione, ma il consumo peggiorerebbe;
a velocità ed assetto costanti, la quota dovrebbe salire in modo da avere ε decrescentecome W , ma, in tal caso, la potenza necessaria diminuirebbe come W e, pertanto,anche la potenza all’albero dovrebbe diminuire come W e, quindi, come ε , mentresappiamo che diminuisce come la potenza 1,117 di ε ;
0%
5%
10%
15%
20%
25%
30%
35%
0% 10% 20% 30% 40% 50% 60%
€
A = 621 ηEc *
MAX
€
sMAX ME
* = A lg 1
1−Wc
Wo
€
Wc
Wo

P. OLIVIERO - Meccanica del volo. Gennaio 2008
154
a potenza necessaria e assetto costanti, la quota dovrebbe salire in modo da avereε decrescente come il cubo di W ma, in tal caso, a parte che anche la potenzaall’albero dovrebbe essere costante, mentre sappiamo che diminuisce come lapotenza 1,117 di ε , la quota dovrebbe aumentare oltre i limiti di tangenza.
In tutti e tre i casi, inoltre, l’ipotesi di assetto costante richiederebbe che l’elicafunzionasse sempre a rendimento costante, dato che
€
WE
= TdCL
ES 12ρoεV
2 = Ctρoεn2D4 CL
ES 12ρoεV
2 =Ct
γ 2ρoεV
2D2
CL
E
costante
⇔Ct
γ 2
costante
αcostante ⇔ ηcostante
Formula empirica esatta
Per trovare dunque la massima distanza che può percorrere una motoelica, occorreriferirsi ai dati sperimentali esatti e procedere come segue.
€
dsMAX* = −270 ηE
c *
MAX
dWW
= −dWCmin
km[ ] Cmin =c *
270ηE
min
W kpkm
sMAX* = −
dWCmin
kmkp
kp
Wo
W1
∫ =dWCmin
km[ ]W1
Wo
∫
Dall’espressione di s* in funzione del consumo chilometrico Cmin , si desumel’esigenza di tracciare la curva di 1/ Cmin in funzione del peso .
Per farlo, si parte da quelle del consumo chilometrico in funzione della velocità a varipesi e a varie quote.
0%5%10%15%20%25%30%35%40%45%
0% 20% 40% 60% 80% 100% 120%
€
C =c *W270ηE
kpkm
V
W

P. OLIVIERO - Meccanica del volo. Gennaio 2008
155
Si determinano così i minimi di 1/C in funzione del peso ad ogni quota verificandoche, via via che il peso diminuisce, conviene portarsi a quote più elevate dove ilconsumo chilometrico diminuisce e l’autonomia aumenta.
La figura che segue rappresenta graficamente tali concetti e, in essa, l’autonomia èmisurata dall’area sottesa dalla curva inviluppo delle tre ipotesi indicate.
L’assetto di massima autonomia di distanza della motoelica
Nei limiti d’approssimazione prima ricordati, relativi all’impossibilità pratica dimantenere costantemente il consumo specifico (contenuto nel fattore d’economia delpercorso) costante a prescindere dalla diminuzione di peso, l’assetto di massimo rangedella motoelica è dunque, quello di efficienza massima, ovvero di spinta minima.
10%
14%
18%
22%
26%
30%
34%
0% 20% 40% 60% 80% 100% 120%
€
1Cmin
€
Wo peso alla partenza
€
primo cambio di quota
€
secondo cambio di quota
€
W1 =Wo −Wc peso all' arrivo

P. OLIVIERO - Meccanica del volo. Gennaio 2008
156

P. OLIVIERO - Meccanica del volo. Gennaio 2008
157
CAPITOLO 16Autonomia di durata della motoelica
Formula teorica approssimata
Per scrivere la formula che fornisce la massima autonomia di durata (endurance) diuna motoelica, i parametri globali da considerare sono gli stessi utilizzati perl’autonomia di distanza:
- il consumo specifico del motore
€
c = −dW /dtΠa
, le cui unità di misura sono
€
kps−1
kpms−1
=
1m
;
- il rendimento dell’elica
€
η =TVΠa
le cui unità di misura sono
€
kpms−1
kpms−1
= 1[ ] ;
- l’efficienza dell’aereo
€
E =WVTV
le cui unità di misura sono
€
kpms−1
kpms−1
= 1[ ] ;
L’ottimizzazione del sistema così schematizzato consiste, in modo altresì analogo,nel fare massimo lo stesso fattore ηE/c, ma laddove è ancora evidente il prodottoVdt.
€
ηEc
= −TVΠa
WVTV
ΠadtdW
= −WVdtdW
;
Nella formula da ottimizzare, resta dunque, esplicita, la velocità, per cui l’assetto dimassima durata non è più quello di minima spinta necessaria W/E, bensì quello diminima potenza necessaria WV/E.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
158
Infatti:
€
dt = −ηEc1VdWW
kpms−1skpms−1
kpkp
= −
ηEc
ρoεSCL
2WdWW
s[ ] dt*=
dt s[ ]
3.600 sh
=dt3.600
h[ ]
dtMAX ME
* = −18,75 εW W /S
η E 2CL
c *
MAX
dW
L’autonomia si ottiene integrando, tra gli estremi d’integrazione misurati, come perl’autonomia di distanza, alla partenza,
€
Wo , e a destinazione,
€
W1 =Wo −Wc .
€
t = ds0
t
∫ = −ηEc
ρoεSCL
2W −3 / 2dW
WO
W1
∫
tMAX =ρoεS2
η E 2CL
c
MAX
W −3 / 2dWWO
W1
∫ =ρoεS2
η E 2CL
c
MAX
W −1/ 2
−1/2
WO
W1
€
=ρoεS2
η E 2CL
c
MAX
−2( ) W1−1/ 2 −Wo
−1/ 2( ) = 2ρoεSη E 2CL
c
MAX
W1−1/ 2 −W0
−1/ 2( )
=2ρoεSWO
η E 2CL
c
MAX
W1−1/ 2
Wo−1/ 2 −1
=
2ρoεSWO
η E 2CL
c
MAX
1
1−Wc
Wo
−1
Sostituendo nell’espressione trovata i valori di:
€
ρo =18kps2m−4[ ]
c kps−1
kpms−1
=
c * kph−1
HP
270.000
t * h[ ] =t s[ ]3.600
si ottiene la formula finale dell’autonomia di durata massima della motoelica:
€
t*=t
3.600=75 ⋅ 3.6003.600
εS4WO
η E 2CL
c *
MAX
1
1−Wc
Wo
−1
= 37,5 εSWO
η E 2CL
c *
MAX
1
1−Wc
Wo
−1
Il cui andamento, in funzione del rapporto Wc/Wo , al variare del fattore di economiaoraria, è nel grafico che segue.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
159
Influenza delle variabili in gioco
La motoelica fornise dunque la massima prestazione d’autonomia di durata:- al diminuire della quota (ε è al numeratore, nel fattore d’economia);- al diminuire del carico alare alla partenza (ovviamente a parità di rapporto
Wc/Wo);- al crescere del rapporto (E2CL)MAX (a parità di rapporti η/c*), ovvero ai grandi
assetti ai quali si massimizza quel prodotto.
Formula empirica esatta
Analogamente a quanto detto per l’autonomia di distanza in termini di consumochilometrico determinato sperimentalmente, nel caso dell’autonomia di durata siopera in termini di consumo orario, determinato in modo identico e si procede comesegue.
€
dt s[ ] = −ηEc
ρoεSCL
2WdWW
ρo =18kps2m−4[ ]
c kps−1
kpms−1
=
c * kph−1
HP
270.000
dt * h[ ] =dt s[ ]3.600
€
dt*=dt3.600
= −754
εSW
η E 2CL
c *
MAX
dWW
= −dWCmin h
Cmin h =475
c *η E 2CL
MAX
WεSW kp
h
tMAX* = −
dWCmin h
hkpkp
WO
W1
∫ =dWCmin h
h[ ]W1
Wo
∫
0%5%10%15%20%25%30%35%40%45%
0% 10% 20% 30% 40% 50% 60%
€
tMAX* = B 1
1−Wc
Wo
−1
€
Wc
Wo
€
B = 37,5 εWO /S
η E 2CL
c *
MAX

P. OLIVIERO - Meccanica del volo. Gennaio 2008
160
Il procedimento è analogo a quello riassunto per l’autonomia di distanza dellamotoelica.
L’assetto di massima autonomia di durata della motoelica
Nei limiti d’approssimazione prima ricordati, relativi all’impossibilità pratica dimantenere costantemente il consumo orario (contenuto nel fattore d’economia oraria)costante a prescindere dalla diminuzione di peso, l’assetto di massima endurance dellamotoelica è dunque, quello di potenza minima.
Si tratta infatti, di ottimizzare dt e, quindi, in definitiva, a parità di ogni altra variabile,la permanenza in volo per motivi di osservazione, ricognizione, diporto, attesa, conritorno quasi sempre alla stessa base di partenza e, quindi, in ogni caso, a prescinderedalla lunghezza della tratta percorsa.
P. OLIVIERO - Meccanica del volo. Gennaio 2008
161
CAPITOLO 17Autonomia di distanza del turboreattore
Formula teorica approssimata
Per scrivere la formula che fornisce l’autonomia di massima distanza (range) che puòpercorrere un turboreattore, basta considerare due soli parametri globali:
- il consumo specifico del motore
€
k = −dW /dtTd
kps−1
kp
;
- l’efficienza dell’aereo
€
E =WTd
;
L’ottimizzazione del sistema così schematizzato consiste nel fare massimo ilrapporto:
€
Ek
= −WTd
TddW /dt
= −WVdtVdW
= −WdsVdW
;
€
ds = −EkVdWW
m[ ] = −
2ρo
1ε
E 2 /CL
kW /SW
dW
m[ ] ds* =
ds m[ ]
1.000 mkm
=ds
1.000km[ ]
€
k *( ) kph−1
kp
= k( ) kps
−1
kp
⋅ 3.600 sh−1[ ] k =
k *3.600
€
dsMAXTR
* = −14,4 1ε
E 2 /CL
k *
MAX
W /SW
dW
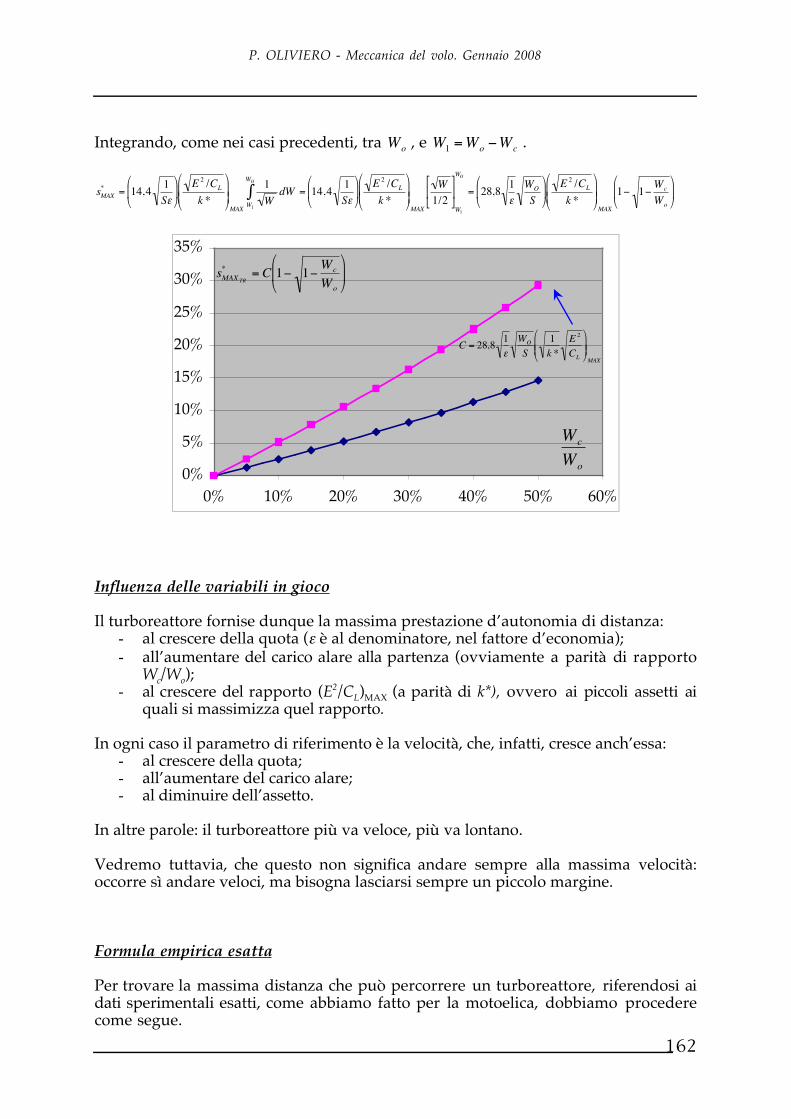
P. OLIVIERO - Meccanica del volo. Gennaio 2008
162
Integrando, come nei casi precedenti, tra
€
Wo , e
€
W1 =Wo −Wc .
€
sMAX* = 14,4 1
Sε
E 2 /CL
k *
MAX
1W
dW = 14,4 1Sε
E 2 /CL
k *
MAX
W1/2
W1
WO
∫W1
WO
= 28,8 1ε
WO
S
E 2 /CL
k *
MAX
1− 1−Wc
Wo
Influenza delle variabili in gioco
Il turboreattore fornise dunque la massima prestazione d’autonomia di distanza:- al crescere della quota (ε è al denominatore, nel fattore d’economia);- all’aumentare del carico alare alla partenza (ovviamente a parità di rapporto
Wc/Wo);- al crescere del rapporto (E2/CL)MAX (a parità di k*), ovvero ai piccoli assetti ai
quali si massimizza quel rapporto.
In ogni caso il parametro di riferimento è la velocità, che, infatti, cresce anch’essa:- al crescere della quota;- all’aumentare del carico alare;- al diminuire dell’assetto.
In altre parole: il turboreattore più va veloce, più va lontano.
Vedremo tuttavia, che questo non significa andare sempre alla massima velocità:occorre sì andare veloci, ma bisogna lasciarsi sempre un piccolo margine.
Formula empirica esatta
Per trovare la massima distanza che può percorrere un turboreattore, riferendosi aidati sperimentali esatti, come abbiamo fatto per la motoelica, dobbiamo procederecome segue.
0%
5%
10%
15%
20%
25%
30%
35%
0% 10% 20% 30% 40% 50% 60%
€
C = 28,8 1ε
WO
S1k *
E 2
CL
MAX
€
sMAXTR
* = C 1− 1−Wc
Wo
€
Wc
Wo

P. OLIVIERO - Meccanica del volo. Gennaio 2008
163
€
dsTR
* = −28,8E 2 /CL
k *W /SW
dW = −dWK
sMAX* = −
dWKmin
kmkp
kp
Wo
W1
∫ =dWKmin
km[ ]W1
Wo
∫
Il procedimento è analogo a quello riassunto per l’autonomia di distanza dellamotoelica.
L’assetto di massima autonomia di distanza del turboreattore
Nei limiti d’approssimazione prima ricordati, relativi all’impossibilità pratica dimantenere costantemente il consumo orario (contenuto nel fattore d’economia delpercorso) costante a prescindere dalla diminuzione di peso, l’assetto di massima rangedel turboreattore è dunque, quello, di grande velocità, definito dal massimorapporto (E2/CL)MAX.
Si tratta infatti, di ottimizzare Vdt e, quindi, in definitiva, a parità di ogni altravariabile, l’assetto individuato è effettivamente molto prossimo a quello di massimavelocità.
Non è possibile essere categorici in questo contesto, perché occorre tener presenteche:
- all’aumentare della velocità, aumenta molto il consumo specifico;- all’aumentare della quota, aumenta molto l’assetto necessario;- all’aumentare della quota e della velocità, aumenta molto il numero di Mach.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
164

P. OLIVIERO - Meccanica del volo. Gennaio 2008
165
CAPITOLO 18Autonomia di durata del turboreattore
Formula teorica approssimata
Per scrivere la formula che fornisce l’autonomia di massima durata (endurance) chepuò percorrere un turboreattore, basta considerare gli stessi due parametri globaliutilizzati per l’autonomia di distanza:
- il consumo specifico del motore
€
k = −dW /dtTd
kps−1
kp
;
- l’efficienza dell’aereo
€
E =WTd
;
L’ottimizzazione del sistema così schematizzato consiste nel fare massimo il solitorapporto:
€
Ek
= −WTd
TddW /dt
= −WdtdW
;
€
dt = −EkdWW
s[ ] dt* =
dt s[ ]
3.600 sh
=dt3.600
h[ ]
€
k *( ) kph−1
kp
= k( ) kps
−1
kp
⋅ 3.600 sh−1[ ] k =
k *3.600
€
dt*= −1k *
E dWW
h[ ]

P. OLIVIERO - Meccanica del volo. Gennaio 2008
166
Integrando, come nei casi precedenti, tra
€
Wo , e
€
W1 =Wo −Wc .
€
t* = dt *0
t
∫ = −Ek *
dWW
WO
W1
∫
tMAX* =
Ek *
MAX
1W
dW =Ek *
MAX
lnW[ ]W1
WO
∫W1
Wo
= 2,3 Ek *
MAX
log 1
1−Wc
Wo
Influenza delle variabili in gioco
Il turboreattore fornise dunque la massima prestazione d’autonomia di durata:- al crescere della quota (k* è al denominatore, nel fattore d’economia e
diminuisce al crescere della quota fino alla tropopausa);- non dipende dal carico alare (ma solo, ovviamente dal rapporto Wc/Wo);- al crescere del rapporto EMAX (a parità di k*), ovvero agli assetti ai quali si
massimizza quel rapporto.
0%
5%
10%
15%
20%
25%
30%
35%
0% 10% 20% 30% 40% 50% 60%
€
D = 2,3 Ek *
MAX
€
tMAXTR
* = Dlog 1
1−Wc
Wo
€
Wc
Wo

P. OLIVIERO - Meccanica del volo. Gennaio 2008
167
Formula empirica esatta
Per trovare la massima durata di volo di un turboreattore, riferendosi ai datisperimentali esatti, come abbiamo fatto per la motoelica, dobbiamo procedere comesegue.
€
dtTR
* = −EKh
1W
=dWK
tMAX* = −
dWKmin h
kmkp
kp
Wo
W1
∫ =dWKmin h
km[ ]W1
Wo
∫
Il procedimento è analogo a quello riassunto per l’autonomia di distanza dellamotoelica.
L’assetto di massima autonomia di durata del turboreattore
Nei limiti d’approssimazione prima ricordati, relativi all’impossibilità pratica dimantenere costantemente il consumo orario (contenuto nel fattore d’economia oraria)costante a prescindere dalla diminuzione di peso, l’assetto di massima endurance delturboreattore è dunque, quello di efficienza massima
Si tratta infatti, di ottimizzare dt e, quindi, in definitiva, a parità di ogni altra variabile,l’assetto individuato è effettivamente molto prossimo a quello di spinta minima.
Non è possibile essere categorici in questo contesto, perché occorre tener presenteche:
- all’aumentare della velocità, aumenta il consumo specifico;- all’aumentare della quota, diminuisce il consumo specifico;- all’aumentare della quota e della velocità, i due effetti in parte si compensano;- altrettanto, al diminuire della quota e della velocità.

P. OLIVIERO - Meccanica del volo. Gennaio 2008
168
Formule e grafico riassuntivi
€
dsMAX ME
* = −270 ηEc *
MAX
dWW
= −dWCmin ME
€
dtMAX ME
* = −18,75 εW W /S
η E 2CL
c *
MAX
dW = −dW
Cmin hME
€
dsMAXTR
* = −14,4 1ε
E 2 /CL
k *
MAX
W /SW
dW = −dWKmin TR
€
dtMAXTR
* = −Ek *
MAX
dWW
= −dW
Kmin hTR
€
sMAX ME
* = 621 ηEc *
MAX
lg 1
1−Wc
Wo
€
tMAX ME
* = 37,5 εWo /S
η E 2CL
c *
MAX
1
1−Wc
Wo
−1
€
sMAXTR
* = 28,8 1ε
WO
SE 2 /CL
k *
MAX
1− 1−Wc
Wo
€
tMAXTR
* = 2,3 Ek *
MAX
log 1
1−Wc
Wo
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
0,00 0,05 0,10 0,15 0,20
€
dCL
dCD
pendenze delle tangenti α
€
CL
CD
pendenze dei raggi vettori β
€
α = 2β
€
α = β
€
α =23β
€
sMAXTR
€
sMAX ME
tMAXTR
€
tMAXME

P. OLIVIERO - Meccanica del volo. Gennaio 2008
169
CAPITOLO 19Influenza del vento sull’autonomia di distanza
Vento a favore. Vento contrario. E’ chiaro che in presenza di vento costante,l’autonomia di distanza dell’aereo risulta modificata, perché, come abbiamo visto nelvolo librato, il movimento rispetto alla terra non coincide più con quello rispettoall’aria.
Se l’aria è calma, non c’è differenza. La velocità dell’aereo è la stessa sia rispettoall’aria (e si studiano le forze aerodinamiche che ne nascono), sia rispetto alla terra (esi calcolano le traiettorie su di essa che si percorrono).
Se l’aria è in movimento, diversa è la velocità dell’aereo rispetto ad essa da quellarispetto alla superficie, perché alla prima (dovuta alla motopropulsione e alla gravità)si aggiunge la seconda (dovuta al trascinamento che l’aereo subisce o gode per ilsemplice fatto di essere immerso nella corrente).
V = Velocitàrelativa dell’aereoin aria calma
v = Velocità ditrascinamentodel l ’aereo
Velocità risultantedell’aereo = Vr
v = Velocitàde l l ’ a r ia
β
δ
€
V cosβ
€
v cosδ

P. OLIVIERO - Meccanica del volo. Gennaio 2008
170
L’angolo che la velocità risultante forma con la velocità relativa, si chiama angolo dideriva β.
L’angolo che la velocità risultante forma con la velocità del vento, si chiama angolodel vento δ.
La direzione della velocità risultante è determinabile solo col calcolo o il riferimento apunti noti sulla superficie terrestre. E’ la direzione di rotta vera.
La direzione della velocità relativa è indicata dalla bussola. E’ la direzione di prua.
La direzione della corrente è visibile solo con la manica a vento o col calcolo o da altrisegni. E’ la direzione del vento.
Le equazioni che forniscono le espressioni utili per le correzioni delle formuledell’autonomia di distanza sono:
€
Vr =V cosβ + v cosδVsenβ = vsen∂
Da esse possiamo ricavare l’espressione della velocità risultante:
€
Vr =V 1− sen2β + v cosδ =V 1− vsenδV
2
+ v cosδ
La funzione sotto radice si può sviluppare in serie di Taylor e porre uguale ai soliprimi termini dello sviluppo, considerando trascurabili i successivi, in base all’ipotesidi rapporto v/V <<1.
Ponendo:
€
1− vsenδV
2
= F vsenδV
2
= F(x)
€
poichè :
F(x) = F(xo) +x − xo1!
F '(xo) +x − xo( )2
2!F ' '(xo) +
x − xo( )3
3!F ' ' '(xo) + ...
si ha :
F(x) = 1− vVsenδ
2
x =vVsenδ
2
xo = 0
F(x) = 1− x F '(x) =12
11− x
F(xo) = 1− xo =1 F '(xo) =12
11− xo
=12

P. OLIVIERO - Meccanica del volo. Gennaio 2008
171
€
da cui, sostituendo e trascurando le potenze superiori a 2 data l©ipotesi di piccolezza del rapporto v/V :
F(x) =1−
vVsenδ
2
1!12
+
vVsenδ
4
2!14−
vVsenδ
6
3!18
+ ...
1− vVsenδ
2
≅1−
vVsenδ
2
1!12
+
vVsenδ
4
2!14
si ottiene, in definitiva:
€
Vr
V= 1− v
Vsenδ
2
+vVcosδ ≅1− 1
2vVsenδ
2
+vVcosδ Vr ≅V −
12vsenδ( )2 + v cosδ
La velocità risultante è cioè fornita dalla somma delle componenti nella direzionerisultante:
- della velocità dell’aereo per il moto relativo all’aria ferma Vcosβ = V(1-sen2β)1/2
e- della velocità dell’aereo per il trascinamento con il vento vcosδ
esprimibili, grazie allo sviluppo in serie di Taylor, in funzione del solo angolo delvento δ.
Detta espressione, scritta in forma di rapportoVr/V, può essere direttamenteutilizzata per correggere le prestazioni funzioni di V, come le autonomie di distanza,moltiplicando, per essa, le rispettive formule. Per esempio:
€
dsMAX ME
* = −270 ηEc *
MAX
dWW
1− 12
vVsenδ
2
+vVcosδ
€
dsMAXTR
* = −14,4 1εS
E 2 /CL
k *
MAX
dWW
1− 12
vVsenδ
2
+vVcosδ
La presenza di V nel fattore correttivo, sposta gli assetti di massima autonomia versovalori un po’ maggiori (più lenti) se il vento è favorevole, oppure più piccoli (piùveloci) se il vento è contario.
Nel primo caso, si usa dire: “l’aereo si adagia nel vento a favore”Nel secondo caso, si dice: “l’aereo si infila nel vento contrario”.
Vv
Vr
δv
δ

P. OLIVIERO - Meccanica del volo. Gennaio 2008
172
Una più evidente spiegazione può ricavarsi dai grafici della potenza e della spinta,perché i rispettivi assetti di migliore autonomia si hanno in corrispondenza dellevelocità risultanti, invece che delle velocità relative.
Altri casi particolari
Vento ininfluente, fattore di correzione =1.
Vento a 90°, fattore di correzione < 1
30%
35%
40%
45%
50%
55%
60%
65%
70%
20% 40% 60% 80% 100%
Velocità di riferimento in assenza divento
Vento in coda= assetto piùlento
Vento in prua =assetto piùveloce
v=Vcosδ
δ = 90° Vr < V
V > Vr
v=2Vcosδ
δ Vr = V
V = Vr

P. OLIVIERO - Meccanica del volo. Gennaio 2008
173
CAPITOLO 20
Esempi di polari teoriche
Velivolo Superficiealare
Allungamentoalare Polare teorica
MAXD
LMAX C
CE
= @ LC
2ft
€
CD0+kCL
2
πλC-150 160 7.0 0.0327+0.0592 2
LC 11.3 @ 0.74C-172 174 7.5 0.0281+0.0552 2
LC 12.7 @ 0.71C-180 174 7.5 0.0246+0.0572 2
LC 13.3 @ 0.66C-182 174 7.5 0.0293+0.0506 2
LC 13.0 @ 0.75C-185 174 7.5 0.0207+0.0494 2
LC 15.6 @ 0.65C-310 175 7.3 0.0263+0.0596 2
LC 12.6 @ 0.66Skyrocket 183 6.7 0.0163+0.0579 2
LC 16.3 @ 0.53Saab 340 450 11.0 0.0285+0.0362 2
LC 15.6 @ 0.89DC 9-30 1001 6.8 0.0211+0.0450 2
LC 16.7 @ 0.50B 707-320 3050 7.1 0.0131+0.0650 2
LC 19.6 @ 0.45A-340 3908 9.5 0.0165+0.0435 2
LC 18.5 @ 0.60B 767 3050 8.0 0.0135+0.0592 2
LC 17.2 @ 0.50C-17 3800 7.2 0.0175+0.0510 2
LC 16.4 @ 0.55Learjet M25 232 5.0 0.0260+0.078 2
LC 10.9 @ 0.58G-II 800 6.0 0.0230+0.057 2
LC 14.0 @ 0.63

P. OLIVIERO - Meccanica del volo. Gennaio 2008
174

P. OLIVIERO - Meccanica del volo. Gennaio 2008
175
INDICE
Parte I
Capitolo 1 Richiami di aerodinamica applicata pag. 3Capitolo 2 L’atmosfera tipo internazionale pag. 25Capitolo 3 Il volo librato pag. 31Capitolo 4 L’elica e la teoria alare pag. 41Capitolo 5 La motopropulsione pag. 51Capitolo 6 Motoelica a passo fisso pag. 57Capitolo 7 Motoelica a passo variabile pag. 67Capitolo 8 Turboreattore e turboelica pag. 73Capitolo 9 Il volo orizzontale pag. 83Capitolo 10 Il volo in salita pag. 89Capitolo 11 Correzione per energia cinetica pag. 105
Parte II
Capitolo 12 La virata coretta di regime pag. 113Capitolo 13 Il decollo pag. 127Capitolo 14 L’atterraggio pag. 145Capitolo 15 Autonomia di distanza della motoelica pag. 151Capitolo 16 Autonomia di durata della motoelica pag. 157Capitolo 17 Autonomia di distanza del turboreattore pag. 161Capitolo 18 Autonomia di durata del turboreattore pag. 163Capitolo 19 Influenza del vento sull’autonomia di distanza pag. 169
APPENDICE
Capitolo 20 Esempi di polari teoriche pag. 173














![La tentazione, il volo e la visione [su André Mage de Fiefmelin]](https://static.fdokumen.com/doc/165x107/632a724cd2eed947620750a4/la-tentazione-il-volo-e-la-visione-su-andre-mage-de-fiefmelin.jpg)



