Measuring dynamic efficiency of highway maintenance operations
11
Measuring dynamic efficiency of highway maintenance operations Saeideh Fallah-Fini a,n , Konstantinos Triantis b,1 , Hazhir Rahmandad c,2 , Jesus M. de la Garza d,3 a Industrial and Manufacturing Engineering Department, California State Polytechnic University, Pomona, 3801 W Temple Ave, Pomona, CA, USA b Grado Department of Industrial & Systems Engineering, System Performance Laboratory, Virginia Tech Northern Virginia Center, 7054 Haycock Road, Falls Church, VA, USA c Grado Department of Industrial & Systems Engineering, Virginia Tech Northern Virginia Center, 7054 Haycock Road, Falls Church, VA, USA d Via Department of Civil and Environmental Engineering, Center for Highway Asset Management Programs (CHAMPS), Virginia Tech, Blacksburg, VA, USA article info Article history: Received 18 June 2013 Accepted 3 July 2014 Available online 15 July 2014 Keywords: Dynamic efficiency Inter-temporal dependence Road maintenance Budget allocation abstract In this paper we discuss a dynamic efficiency measurement model for evaluating the performance of highway maintenance policies where the inter-temporal dependencies between consumption of inputs (i.e., maintenance budget) and realization of outputs (i.e., improvement in road condition) are explicitly captured. We build on a micro representation of pavement deterioration and renewal processes and study the impact of the allocation of scarce maintenance budgets over time. We provide a measure of efficiency that contrasts the optimized budget allocations to the actual ones. The developed model is then applied to an empirical dataset of pavement condition and maintenance expenditures over the years 2002 to 2008 corresponding to seventeen miles of interstate highway that lay in one of the counties in the state of Virginia, USA. The policies that were found through optimization showed that road authorities should give higher priorities to preventive maintenance than corrective maintenance. In essence, by applying preventive maintenance, the road authorities can effectively decrease the need for future corrective maintenance while spending less overall. & 2014 Elsevier Ltd. All rights reserved. 1. Introduction 1.1. Background and objectives The objective of this paper is to provide a dynamic efficiency measurement model for evaluating the performance of highway maintenance policies where the inter-temporal dependencies between consumption of inputs (i.e., maintenance budget) and realization of outputs (i.e., improvement in road condition) are explicitly captured. The developed model is then applied to an empirical dataset of pavement condition and maintenance expen- ditures over the years 2002 to 2008 corresponding to seventeen miles of interstate highway that lay in one of the counties in the state of Virginia, USA. The motivation for conducting this study stems in part from the importance of improving effectiveness of highway maintenance policies in the context of rapidly deterior- ating highway networks [1] and major budgetary restrictions. However, a key prerequisite for the successful “improvement” of the performance of maintenance policies is the successful “measurement” of their performance. Several studies exist in the literature that focus on the measurement of the performance of highway maintenance operations in Ontario, Canada [2–4], New Zealand [5,6], and Virginia, USA [7–12]. All these studies focus on applying Data Envelopment Analysis (DEA) models for selected measures of outcomes (e.g., improvement in road condi- tion) as outputs, and maintenance expenditures and environmen- tal conditions as inputs. DEA models [13] use non-parametric methods as well as input/output data to construct a piecewise- linear function that acts as a benchmark for measuring the relative efficiency of a set of similar decision making units and have been widely used in various domains such as banking [14,15], agricul- ture [16,17], and healthcare [18], among others. Another common characteristic of the above mentioned studies [2–12] is that they assume that there is no time interdependence between the utilization of inputs (i.e., maintenance expenditures) and realiza- tion of outputs (i.e., improvement in road condition) in a highway network over consecutive periods. Instead, it is assumed that inputs in a specific period are fully used for producing outputs in Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/omega Omega http://dx.doi.org/10.1016/j.omega.2014.07.001 0305-0483/& 2014 Elsevier Ltd. All rights reserved. n Corresponding author. Tel.: þ1 909 869 4087; fax: þ1 909 869 2564. E-mail addresses: sfallahfi[email protected] (S. Fallah-Fini), [email protected] (K. Triantis), [email protected] (H. Rahmandad), [email protected] (J.M. de la Garza). 1 Tel.: þ(001) 703 538 8446. 2 Tel.: þ(001) 703 538 8434. 3 Tel.: þ(001) 540 231 5789. Omega 50 (2015) 18–28
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of Measuring dynamic efficiency of highway maintenance operations

Measuring dynamic efficiency of highway maintenance operations
Saeideh Fallah-Fini a,n, Konstantinos Triantis b,1, Hazhir Rahmandad c,2,Jesus M. de la Garza d,3
a Industrial and Manufacturing Engineering Department, California State Polytechnic University, Pomona, 3801 W Temple Ave, Pomona, CA, USAb Grado Department of Industrial & Systems Engineering, System Performance Laboratory, Virginia Tech Northern Virginia Center,7054 Haycock Road, Falls Church, VA, USAc Grado Department of Industrial & Systems Engineering, Virginia Tech Northern Virginia Center, 7054 Haycock Road, Falls Church, VA, USAd Via Department of Civil and Environmental Engineering, Center for Highway Asset Management Programs (CHAMPS), Virginia Tech, Blacksburg, VA, USA
a r t i c l e i n f o
Article history:Received 18 June 2013Accepted 3 July 2014Available online 15 July 2014
Keywords:Dynamic efficiencyInter-temporal dependenceRoad maintenanceBudget allocation
a b s t r a c t
In this paper we discuss a dynamic efficiency measurement model for evaluating the performance ofhighway maintenance policies where the inter-temporal dependencies between consumption of inputs(i.e., maintenance budget) and realization of outputs (i.e., improvement in road condition) are explicitlycaptured. We build on a micro representation of pavement deterioration and renewal processes andstudy the impact of the allocation of scarce maintenance budgets over time. We provide a measure ofefficiency that contrasts the optimized budget allocations to the actual ones. The developed model isthen applied to an empirical dataset of pavement condition and maintenance expenditures over theyears 2002 to 2008 corresponding to seventeen miles of interstate highway that lay in one of thecounties in the state of Virginia, USA. The policies that were found through optimization showed thatroad authorities should give higher priorities to preventive maintenance than corrective maintenance.In essence, by applying preventive maintenance, the road authorities can effectively decrease the needfor future corrective maintenance while spending less overall.
& 2014 Elsevier Ltd. All rights reserved.
1. Introduction
1.1. Background and objectives
The objective of this paper is to provide a dynamic efficiencymeasurement model for evaluating the performance of highwaymaintenance policies where the inter-temporal dependenciesbetween consumption of inputs (i.e., maintenance budget) andrealization of outputs (i.e., improvement in road condition) areexplicitly captured. The developed model is then applied to anempirical dataset of pavement condition and maintenance expen-ditures over the years 2002 to 2008 corresponding to seventeenmiles of interstate highway that lay in one of the counties in thestate of Virginia, USA. The motivation for conducting this studystems in part from the importance of improving effectiveness of
highway maintenance policies in the context of rapidly deterior-ating highway networks [1] and major budgetary restrictions.
However, a key prerequisite for the successful “improvement”of the performance of maintenance policies is the successful“measurement” of their performance. Several studies exist inthe literature that focus on the measurement of the performanceof highway maintenance operations in Ontario, Canada [2–4],New Zealand [5,6], and Virginia, USA [7–12]. All these studiesfocus on applying Data Envelopment Analysis (DEA) models forselected measures of outcomes (e.g., improvement in road condi-tion) as outputs, and maintenance expenditures and environmen-tal conditions as inputs. DEA models [13] use non-parametricmethods as well as input/output data to construct a piecewise-linear function that acts as a benchmark for measuring the relativeefficiency of a set of similar decision making units and have beenwidely used in various domains such as banking [14,15], agricul-ture [16,17], and healthcare [18], among others. Another commoncharacteristic of the above mentioned studies [2–12] is that theyassume that there is no time interdependence between theutilization of inputs (i.e., maintenance expenditures) and realiza-tion of outputs (i.e., improvement in road condition) in a highwaynetwork over consecutive periods. Instead, it is assumed thatinputs in a specific period are fully used for producing outputs in
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/omega
Omega
http://dx.doi.org/10.1016/j.omega.2014.07.0010305-0483/& 2014 Elsevier Ltd. All rights reserved.
n Corresponding author. Tel.: þ1 909 869 4087; fax: þ1 909 869 2564.E-mail addresses: [email protected] (S. Fallah-Fini),
[email protected] (K. Triantis), [email protected] (H. Rahmandad),[email protected] (J.M. de la Garza).
1 Tel.: þ(001) 703 538 8446.2 Tel.: þ(001) 703 538 8434.3 Tel.: þ(001) 540 231 5789.
Omega 50 (2015) 18–28

the same period. However, in most real world applications, the effectsof input consumption as well as the managerial/engineering decisionsin one period will typically extend over several consecutive periods.This is the case for highway maintenance operations, when theutilization of the maintenance budget and treatments that areperformed in a road section in a specific year directly affect the roadcondition and the required maintenance operations in subsequentyears.
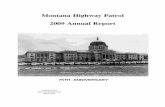
For a better understanding, Fig. 1 illustrates a schematic view ofthe road condition evolution over time. Assume that part of thehighway network (represented by C) at period t is affected/deteriorated by a set of deterioration factors such as precipitation,traffic load, etc. Based on the condition of the road, appropriatemaintenance operations are performed and the road evolves to anew condition at the end of period t. The new road condition isused as an input at the start of period tþ1 when road section Cgoes under a similar transformation process. In other words, themaintenance treatments during period t affect the road conditionat the end of period t which is the starting point for period tþ1.Thus, the required maintenance operations during period tþ1(and consequently the road condition at the end of period tþ1)depend on the maintenance operations/inputs that have beenperformed/used in a stream of previous periods.
In such a setting, any “static” efficiency measurement frame-work that ignores the inter-temporal effects of inputs and man-agerial decisions for future streams of outputs (i.e., future roadconditions) is likely to be biased and/or unrealistic. The premise ofthis research is that successful evaluation and improvement of theperformance of road maintenance practices requires a long-termperspective that takes into account the dynamics of road dete-rioration and maintenance.
As a result, the objective of this paper is to consider theshortcomings of previous studies by (i) realizing and acknowl-edging the presence of time interdependencies between inputsand outputs in the context of highway maintenance; and (ii)developing a dynamic efficiency measurement model of highwaymaintenance operations where we assume a nonlinear feedbacksystem taking into account uncontrollable environmental factors(e.g., climate) and operational conditions (e.g., traffic load) alongwith controllable factors (e.g., budget allocation decisions).
1.2. The dynamics of highway maintenance operations
Fallah-Fini, Triantis, and Johnson [19] review the non-parametricdynamic efficiency literature and classify dynamic models accordingto five factors: (i) production delays (lagged outputs); (ii) inventories;(iii) capital or generally quasi-fixed factors; (iv) adjustment time andcosts; and (v) incremental improvement and learning models. Themodels that capture adjustment cost/time typically assume that aproduction unit cannot instantly change the levels of quasi-fixed
inputs (such as capital, labor, etc.) to their optimal values withoutincurring some costs of adjustment (typically in the form of forgoneoutputs). However investment in quasi-fixed inputs leads to expansionof future capacity and output. Thus, a trade-off occurs between currentproduction and expansion for future production.
The dynamics of road deterioration and renewal processes (dueto investment in maintenance operations) over time resembles thedynamics associated with investment in quasi-fixed factors in thepresence of an “adjustment cost”. The fact is that road authoritiesare responsible for planning and performing (either by using in-house crews or outsourcing) the required maintenance operationson the highway network in their administrative area in each year.The highway network under control of a road authority is dividedinto several road sections and the required maintenance opera-tions are defined for each one of these sections. Due to limitedbudget, a decision to invest in maintenance operations for eachroad section takes the budget away from maintaining other roadsections. This can potentially lead to worsening of the overallcondition of the rest of the road sections. This situation can betreated as forgone output (cost of adjustment) associated withmaintenance (investment) of road sections that have been main-tained. However, since the maintained road sections will start withbetter conditions in the next period, we may experience an overallbetter condition of the whole road network in subsequent periods.Thus, a trade-off occurs between worsening the condition of someof the road sections at period t and improving the overallcondition of the highway network in the future.
Different policies used for the allocation of the limited main-tenance budget among road sections over time lead to differentcondition paths (adjustment paths) for the road sections andconsequently, for the highway network under analysis. A questionlegitimately arises. What is the overall cost or value associated withfollowing an optimum adjustment path (i.e., following an optimizedbudget allocation/investment policy) in comparison with the non-optimized ones? The dynamic performance measurement modelprovided in this paper assumes a long term perspective andmeasures the performance of road authorities with respect to theiradjustment path (i.e., budget allocation policies for maintaining thehighway network in their administrative area over time).
The remainder of this paper is organized as follows. Section 2provides the methodology whereas Section 3 discusses theempirical results. Section 4 discusses insights and provides futureresearch directions.
2. Methodology
We define a complete or partial highway network (composed ofseveral road sections) as the system under analysis. The state of thissystem is defined by the “condition” of the highway network and iscaptured by an index called CCI (Critical Condition Index). The CCIrepresents the frequency and severity of different types of distress thatexist in a road. Changes in the state of the system are partiallyendogenous, i.e. in response to the former state of the system. Wedivide the exogenous sources of change in the state of the system intofactors that are controlled by organizational decision makers (e.g.,budget allocation decisions) and those factors that are not controlledby the decision makers (e.g., environmental conditions, budget con-straints). Let the vector xðtÞ represent the state/condition of the systemat time t. Then the dynamics of change in the state of the systemfollow a set of differential equations defined by the function f ðUÞas defined by Eq. (1).
_xðtÞ ¼ f ðxðtÞ; IðtÞ;uðtÞÞ ð1Þwhere the dot over x denotes the derivative of x with respect to time,IðtÞ represents the vector of exogenous inputs not controlled by
Ct
Traffict
Loadt
Climate tetc.
Inputs(Deterioration
factors)
Road Condition t-1
Intermediate Output t
Road Condition tCt+1
Traffict+1
Loadt+1
Climate t+1
etc.
Road Condition t+1
Budgett+1Budget tInputs
Fig. 1. Schematic view of the road condition evolution over time.
S. Fallah-Fini et al. / Omega 50 (2015) 18–28 19

system's decision makers whereas uðtÞ represents the decision inputs.In our problem, the maintenance decisions define the allocation of thelimited budget among road sections based on their required main-tenance operations and priorities. The maintenance decisions affecthow the road condition evolves over time. The space of feasible valuesfor the decision variables can be represented by the feasible set U.The function f ðU Þcaptures the dynamics of the system and repre-sents the structure of the physical, informational and organizationalprocesses governing the evolution of the system.
In defining the system efficiency, we are interested in compar-ing the actual road condition adjustment path (state of the system)to a benchmark that represents the expected road conditionadjustment path under an optimal budget allocation strategy overtime. To construct the benchmark, let the function gðU Þ capturesthe payoff stream given the state of the system at time t, (i.e.,gðxðtÞÞ). In the highway maintenance context, the main objectivesof the road authorities are to improve the condition of thehighway network and maximize drivers' utilities while minimiz-ing the costs. Thus, as an example, the payoff function could bedefined as the drivers’ utilities at any point of time as a function ofthe condition of the road network state (xðtÞ) minus the main-tenance costs. Then, starting from an arbitrary state, x0, at time t0,the infinite horizon optimal adjustment path for the road condi-tion (represented by fxnðtÞ; 8 tg) can be constructed by followingthe optimal maintenance decisions (represented by funðtÞ; 8 tg)obtained from solving the following optimization problem:
Vðx0Þ ¼ maxuðtÞAU
EOver IðtÞR t ¼ 1t ¼ t0
e� rtgðxðtÞÞdt� �
s:t: _xðtÞ ¼ f ðxðtÞ; IðtÞ;uðtÞÞxðt0Þ ¼ x0 given ð2Þ
where r is the discount rate and Vðx0Þ is the value functionassociated with state x0. Vðx0Þ represents the sum of the dis-counted payoff associated with the adjustment of the state of thesystem, starting from state x0 and following the optimal controlpolicy (budget allocation decision) funðtÞ; 8 tg. The expectationfunction (E) is taken over the distribution of possible exogenousinputs not controlled by decision makers (IðtÞ) and potentiallyallows us to capture the variations in adjustment path due toenvironmental random factors. However, to simplify this treat-ment we assume a deterministic system and remove the expecta-tion term in the rest of the paper.
To compare the benchmark with the actual (observed) adjust-ment path, an equivalent representation of the actual road conditionadjustment path will be formulated. We have data associated withthe road condition (state of the system) and the actual (observed)maintenance decisions undertaken by a road authority over timeinterval ðt0; tnÞ. Then the term
R t ¼ tnt ¼ t0
e� rtgðxðtÞÞdt captures the sumof the discounted payoff functions corresponding to the actual(observed) adjustment path fxðtÞ; tAðt0; tnÞg for which the historicaldata is available. The observed sum of discounted payoffs on theactual adjustment path for a given time interval compared with theoptimal adjustment path (i.e.,
R t ¼ tnt ¼ t0
e� rtgðxnðtÞÞdt) provides a criticalpiece of information. However, this comparison alone is restrictive inthat it makes the implicit assumption that the system reaches asteady state at the end of this predefined time horizon tn, i.e. there isno difference in the values of the two end states achieved in practiceor following an optimal path (i.e., xðtnÞ and xnðtnÞ).
This is a restrictive assumption made by several studies in thedynamic efficiency literature, such as the dynamic network DEAmodels developed by Färe and Grosskopf [20], Nemoto and Goto[21], or Tonea and Tsutsui [22,23]. However, given the dynamics ofroad deterioration and renewal processes, we face a system thatmay never truly reach a steady state. For example a manager mayperform very well by postponing maintenance actions savingcosts, while handing the road in dismal conditions to the next
year. Avoiding these scenarios requires the consideration of aninfinite time horizon. Dynamic DEA models by Sengupta e.g.,[24,25] are among the models in the dynamic efficiency literaturethat allow for an infinite time horizon when evaluating theadjustment path associated with quasi-fixed inputs (such ascapital assets). Allowing for an infinite time horizon in the contextof highway maintenance implies that we not only need to evaluatehow the state of the system (i.e., road condition) has evolved overthe time horizon under analysis (i.e.,
R t ¼ tnt ¼ t0
e� rtgðxðtÞÞdt), but alsohow the state of the system at the end of the time horizon (i.e.,time tn) is going to affect the opportunities for the future evolutionof the road condition (after time tn).
To capture this element, we consider the value functionassociated with the state of the system at time tn (i.e., VðxðtnÞÞ).VðxðtnÞÞ captures the sum of the discounted payoff function whenthe system starts from the state xðtnÞ and follows the optimalmaintenance decisions funðtÞ; t4tng afterward. In sum, the valueassociated with the actual (observed) adjustment path (repre-sented by Wðx0Þ) can be constructed as:
Wðx0Þ ¼Z t ¼ tn
t ¼ t0e� rtgðxðtÞÞdtþVðxðtnÞÞ ð3Þ
where VðxðtnÞÞ is obtained by solving an optimization problemsimilar to the one represented by Eq. (2) starting at time tnconsidering the state xðtnÞ. The main insight associated withEq. (3) is that defining an appropriate measure of performanceof road authorities requires not only evaluating how they haveperformed during a specific time horizon (available from thehistorical data), but also how the state of the system at the endof the time horizon is going to affect its evolution in the future.
The final step is to develop the measure of dynamic efficiencyby comparing the values associated with the actual and theoptimal adjustment paths, provided in Eqs. (2) and (3), respec-tively. Using the historical data associated with the road condition,maintenance expenditure, and deterioration factors associatedwith the highway network under analysis over the time intervalðt0; tnÞ, we can construct the measure of dynamic efficiency of thecorresponding road authority as the ratio of the values associatedwith the actual (observed) and optimal adjustment paths as:
Ef f ðx0Þ ¼Wðx0ÞV ðx0Þ
ð4Þ
Note that the value function associated with the optimaladjustment path (i.e., Vðx0Þ) is greater than or equal to the valueassociated with the actual development path (i.e., Wðx0Þ). Thus,the efficiency measure presented in Eq. (4) is a measure betweenzero and one, where the efficiency score one means 100% efficient.In this conceptualization an efficient production unit representsone that follows an optimal control policy over an infinite horizonproduction.
3. Empirical results
We have an empirical dataset of pavement condition, trafficload, climate condition, and maintenance expenditures forapproximately 17 miles (divided into 14 road sections) of Inter-state highway maintained by the Virginia Department of Trans-portation (VDOT) over the years 2002 to 2008. The dataset alsocontains the timing and the type of maintenance operationsperformed on each of the road sections over the time horizonunder analysis. In this section we aim to apply the modeldeveloped in Section 2 to the available empirical dataset andevaluate the performance of road maintenance policies.
The most challenging step to achieve this objective is model-ing/capturing the dynamics of the road deterioration and renewal
S. Fallah-Fini et al. / Omega 50 (2015) 18–2820

processes shown by Eq. (1). We assume that the main sources ofinefficiency are the engineering and managerial decisions thatprevent production units (road authorities) from achieving themaximum improvement in the road condition using maintenanceexpenditures constrained by the available budget. Analyzing thecauses of inefficiency in such a setting requires formal modeling ofthe transformation process inside the “black box” of the produc-tion unit [26]. In these situations, engineering approaches, inparticular, System Dynamics (SD) techniques provide the possibi-lity for modeling the dynamics of the production/transformationprocess and for the explicit representation of the physical, engi-neering and economic relationships that are lost in traditionalblack box approaches in efficiency analysis.
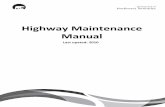
Consequently, to capture the dynamics of the road conditionpresented in Eq. (1), we build a micro-level (road section) SystemDynamics model of highway deterioration and maintenance pro-cesses. In our model the units under analysis are defined as roadsections. By modeling multiple road sections, analysis of network-level (macro-level) metrics is also possible. As Fig. 2 shows, at ahigh level, the deterioration and maintenance dynamics can becaptured in two major feedback loops [27]. Traffic load, climatecondition, and other environmental factors lead to the deteriora-tion of road condition over time. However, as illustrated by thebalancing loop “Maintenance Fix”, performed maintenance opera-tions aim to improve the condition of the road towards its desiredlevel. On the other hand, as the reinforcing loop “AcceleratedDeterioration” illustrates, budget shortfall leads to deferred main-tenance [28] and further deterioration of pavement conditions.In developing a SD model of road dynamics, the first step is tobuild a reasonable model that quantifies the road deteriorationprocess and validate it with empirical data. Next, the model shouldbe expanded by adding the dynamics associated with budgetallocation and renewal processes. Our approach to tackle thesechallenges is discussed in next sections.
3.1. Capturing the dynamics of road deterioration
The pavement deterioration module of the SD model capturesdistress generation and propagation of road sections. This moduleis a critical component of the simulation model, since the condi-tion of the road sections are used as the main input to themaintenance decision-making process and will impact the recom-mended maintenance policies.
Deterioration factors such as traffic load and climate conditionsthat represent the operational and environmental conditions,respectively, are the main sources for the occurrence of varioustypes of distresses on road sections. Generation and propagation ofdistresses when they are not maintained lead to deterioration ofquality of road sections. Thus, the key stock (or state variable) inthis module is “Road Quality”, where road quality represents thecondition of the road with respect to the severity and frequency ofpavement distresses. The value of the “Road Quality” stockchanges between zero and one, where higher values representbetter road condition. The level of road quality stock is depletedeach year due to the deterioration of road condition and is restoredby performing maintenance operations. In real world, road qualityis represented with an index called CCI or “Critical ConditionIndex”. The value of the CCI changes between zero and 100, wherevalue 100 represents a road in perfect condition.
Based on literature on pavement engineering [29], we modelroad deterioration as the result of three main deteriorating factors,namely, (1) the factors capturing the effects of operational andenvironmental condition (such as traffic load and climate condi-tion); (2) the factors capturing the effect of aging of pavement[30,31]; and (3) the factors capturing the effect of road quality ondeterioration rate (in presence of deferred maintenance opera-tions). To capture the deterioration in road condition due topresence of traffic load and climate conditions, we utilize theMechanistic–Empirical (ME) models [29] from the pavementengineering literature. Given a specific climate condition, MEmodels determine the “allowable number of load cycles”, i.e., thenumber of load cycles a pavement can bear before a specificpercentage of the pavement area experiences distress. Then the“damage ratio”, which is the ratio of the “actual” to the “allowable”number of load cycles, shows the damage corresponding to aspecific condition (e.g., traffic load). The actual number of loadcycles can be calculated by considering the availability of trafficand vehicle classification data for each road section. See Fallah-Fini, Triantis, and de la Garza [8] for details about calculating theactual number of load cycles. Calculating the allowable number ofload cycles requires detailed knowledge of road construction andmaterial, not typically available for older roads. Consequently, inthis SD model, the “allowable” number of load cycles is treated asan unknown parameter and is estimated through calibration(Section 3.2). In this study, it is assumed that the deteriorationin quality of road sections (due to generation of distresses) isproportional to the damage ratio.
Moreover, pavements are generally designed for a specificoperational (or service) life. The American Association of StateHighway and Transportation Officials' Guide for Design of Pave-ment Structures considers an expected pavement life of thirtyyears in its pavement design procedures [32]. When the servicelife of pavements ends, road sections usually go under a majorreconstruction process and new pavements are put in place. Dueto the presence of continuous deterioration factors, pavements aremaintained at several points during their service life to be restoredto a better condition. However, as pavements get closer to the endof their service life, they deteriorate at a much faster rate, due towear and tear of the underlying structures. Consequently, as theremaining service life decreases, the rate of deterioration (i.e., thedepletion rates from the road quality stock) increases. In this paperwe assume that the service life (maximum life) for the pavementsof the road sections under analysis is thirty years. Moreover, giventhe history of the maintenance and reconstruction operationsperformed on the road sections under analysis, it was assumedthat on average ten years have elapsed since the construction ofthe pavements of the road sections. Thus, all the road sectionsunder analysis are at age ten at the start of the simulation. In ourSD model, we define the relationship between the age of the
Load anddeterioration factors
Highwaydeterioration rate
Desiredmaintenance budget
Budget allocated tomaintenance operations
Highwayimprovement rate
Area of the highwayunder distress
+
+
-+ B1
Delay inmaintenance
+
R1Maintenance
budget shortfall
+
+
Desired highwaycondition
Availablemaintenance budget
+ +
-
Maintenance Fix
AcceleratedDeterioration
+
Fig. 2. The highway deterioration and maintenance causal loop diagram [27].
S. Fallah-Fini et al. / Omega 50 (2015) 18–28 21

pavement and the multiplier that captures this effect as powerrelationship such that as the age of the pavement increases, thedeterioration rate increases. As shown by Eq. (5), when a road isnewly constructed (i.e., age¼0), the multiplier takes value 1. Thus,aging has no effect on deterioration rate. However, as age of theroad increases, the multiplier takes higher values which leads tofaster deterioration of the road due to aging. The parameter β41in Eq. (5) is estimated during the calibration process (Section 3.2).
Multiplier capturing the effect of aging of pavement
on deterioration rate
¼ 1þðAge of pavement=Service lifeÞβ ð5Þ
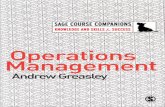
Lastly, according to the input from maintenance engineers andthe literature [29], roads that are deteriorated will face a fasterdeterioration rate in future if they are not maintained. This is anexpected behavior given the traditional deterioration curves forflexible pavements [32] as shown in Fig. 3, implying that roadcondition (quality) deteriorates with faster rate over time as roadcondition gets worse. The physical process behind this accelera-tion involves the formation of small cracks and fatigue points,which open up the road to additional pressure mechanisms (e.g.water freezing inside cracks).
To capture the effect of road quality on the deterioration rate ofthe road, we use a power function as shown by Eq. (6). Themultiplier we have defined takes value of 1 if road condition is inperfect quality (i.e., Road Quality¼1). This implies that deteriora-tion rate is not accelerated when road is in great quality. As roadquality deteriorates (i.e., the level of road quality stock gets closeto zero), the multiplier gets larger values and causes fasterdeterioration in road condition. We let the calibration processestimate the value of the parameters δ and α, which affects the
strength of this relationship in the highway network underanalysis.
Multiplier capturing the effect of pavement condition
on deterioration rate¼ 1þðαð1�Road QualityÞδÞ ð6ÞIn sum, the deterioration rate (the outflow of the road quality
stock) is the result of multiplying the factors that capture the effectof load (damage ratio), the effect of aging (Eq. (5)), and the effect ofbad road quality due to deferred maintenance (Eq. (6)) ondeterioration rate. These factors are also multiplied by a multiplierto capture the effect of other factors (e.g., the quality of roadfoundation, etc.) that have not been considered explicitly in themodel. This other-factors multiplier parameter is also estimatedthrough calibration. The interplay among these concepts isdepicted in Fig. 4, where the simplified structure of the pavementdeterioration module, its main variables, inputs and outputsare presented. The exogenous inputs coming from exogenoustime series data are bold and underlined and the parametersthat are estimated by the calibration process (Section 3.2) are boldand italic.
Since road quality in real world is represented by CCI (by VDOTspecifically), in the last step we translate the road quality capturedin our model to CCI. To do so, we defined CCI as the result ofmultiplying the value of Road Quality stock (changing between0 and 1) by 100. However, exploring the real data as well as theconvention for calculating CCI in the real world showed that CCIdoes not go below 52 as road condition gets worse. Thus, wedefined the function for mapping the value of the road qualitystock to CCI as below:
CCI¼Maximum ð52; Road Quality� 100Þ ð7ÞOverall, the model, while simple, is rooted in the physical
processes that regulate road quality dynamics. A state (stock)variable (Road Quality) is the key concept of interest. That isincreased by different maintenance activities, and reducedthrough deterioration. The deterioration rate is a function of theload cycles the road is subjected to, the effect of aging, as well astwo endogenous feedbacks. First, the lower the current quality, theless room for further deterioration there is, thus creating abalancing feedback loop. Second, the impact of road quality ondeterioration creates a reinforcing feedback mechanism thatreflects the knock on effects of defects and fatigue created dueto quality problems on further deterioration risk.
3.2. Model calibration
In this section, a model-based calibration method [33] is usedfor estimating appropriate values for unknown parameters of the
Time
Pavement Condition
Very Good
Very Poor
Fig. 3. Pavement deterioration curve for flexible pavement.
Road QualityRoad
Deterioration RateRestoration rate due tomaintenance
Vehicle classificationprofiles
Traffic data
Load factorsActual number of loadcycles imposed to the road
Allowable numberof load cycles
Damage Ratio
Effect of road qualityon deterioration rate
Multiplier
Effect of aging of pavementon deterioration rate
BetaAlpha Delta
Critical ConditionIndex
Age of pavement
Fig. 4. Simplified structure of the pavement deterioration module.
S. Fallah-Fini et al. / Omega 50 (2015) 18–2822

SD model. The units under analysis in this model are defined asroad sections. By modeling multiple road sections, analysis ofcondition of highway network is also possible. Table 1 shows theroad condition data over the years 2002 to 2008 for the fourteenroad sections in 17 miles of the highway network under analysisafter some data cleaning. These data points are used for thecalibration process. The cells that are bold, underlined, and italicshow the years in which preventive, corrective, and restorativemaintenance operations have been performed on the road sectionsunder analysis, respectively. Preventive maintenance (PM) pre-serves the existing pavement integrity and reduces the rate ofdeterioration. Corrective maintenance (CM) maintains the char-acteristics and structural integrity of an existing pavement forcontinued serviceability. Restorative maintenance (RM) refers tonew surface layers that restore the pavement structure to a levelsimilar to the original condition of the pavement [34,35]. Themaintenance operations in the calibration runs happen exogen-ously according to the data provided in Table 1. As the empiricaldata shows, after performing maintenance operations on roadsections under analysis, the condition of the road sections havegone back to perfect condition in the next year. To mimic the realworld scenarios, when a maintenance operation is performed(according to the schedule observed in Table 1) in the calibration,the level of “Road Quality” is also restored to its maximumpossible values which, consequently, lead to maximum possibleCCI (i.e., CCI¼100). Note that in real world, we may also observescenarios in which the road condition is not restored to perfectcondition after performing a maintenance operation (for example
if we do not perform the right maintenance operation given thelevel of deterioration of the road).
The objective of the calibration process is to estimate the valuesof the unknown parameters that capture the deterioration rate ofroad sections (i.e., the rate of depletion of the Road Quality stock)in the SD model so that the CCI of the simulated road sectionsfollow the CCI data provided in Table 1. Thus, an error term isdefined for each road section as the difference between the roadsection’s CCI obtained from the model and the corresponding CCIavailable from the Table 1. The payoff function of the calibrationprocess (that needs to be minimized) is then defined as theweighted sum of fourteen squared error terms corresponding tothe fourteen road sections. Error terms are weighted proportionalto the inverse of the standard deviation of the error terms, whichleads to maximum likelihood estimates for the estimated para-meters assuming normally distributed errors [36]. All simulationsand calibration were conducted in Vensim™ [37] software usingEuler integration method with time step 0.0625 year (resultsshowed no sensitivity to smaller time steps). Modified Powellconjugate search [38] was used for calibration. Calibration wasrestarted multiple times from different points of parameter spaceto increase confidence in finding the global peak in the numericaloptimization.
As an example, Fig. 5 shows the comparison of CCI dataobtained from the Table 1 and from the SD model for the roadsection “1” and “12”.
The unknown parameters of the model have been estimated sothat the model mimics the deterioration process that happened in
Table 1Road condition data over the fiscal years 2002–2008 for road sections in the network under analysis.
DataSimulation
Road Section 1
DataSimulation
Road Section 12
Fig. 5. Comparing the CCI obtained from the real data and the model after calibration for the road section “1” and “12”.
S. Fallah-Fini et al. / Omega 50 (2015) 18–28 23

the highway network under analysis. Table 2 shows the estimatedvalues for model parameters obtained from calibration process. Allparameters are found to take realistic values. The allowable loadcycles, approximately at 100 million, is comparable with therelevant load cycles used in highway design. The estimates showa modest increase in deterioration with age (Beta¼1.42) and afaster deterioration rate with reduced quality (Delta¼2), leadingto a notable reinforcing loop, where allowing the road section togo into a low-quality region leads to more significant costs ofdeterioration.
3.3. Capturing the dynamics of budget allocation and maintenanceoperations
This section couples the calibrated “road deterioration” module(described in Sections 3.1 and 3.2) with the “maintenance budgetallocation (renewal process)” module to capture the dynamics ofallocation of the limited available budget among various main-tenance operations given the condition of road sections. Bycoupling the road deterioration and renewal process modules wehave a comprehensive SD model that can capture the dynamics ofchange in the state of road sections (and highway network) aspresented by Eq. (1).
In practice, the decision on the type of required maintenanceoperations for each road section depends on the condition andtherefore the quality of the road section. If the distresses presenton a road section are not severe, preventive maintenance (PM) canpreserve the existing pavement integrity and decrease the rate ofdeterioration. However, as the severity of distresses on a roadsection increases, corrective maintenance (CM) or restorativemaintenance (RM) are the suitable actions to take depending onthe level of deterioration of road sections. Corresponding to eachmaintenance operation, there is a level of restoration in roadquality. However, if the performed maintenance operation is notthe most appropriate given the level of deterioration of the road,we will see a lesser impact on the road quality, meaning the roadcondition will be improved, but not restored to a perfect condition.Based on the experts’ inputs and the data available in Table 1, weimplemented the following rule to account for such effect: If thePM operation is performed when CCI is above 80, then the roadquality is restored to a perfect condition. If CM operation isperformed when CCI is above 50, then road quality is restored toa perfect condition. If RM operation is performed, road quality isalways restored to a perfect condition irrespective of the initialroad condition. However, if the model decides to perform theseoperations under different scenarios (e.g., performing PM whenthe CCI of a road section is 60), then the level of improvement inthe road condition will be proportional to the quality of road.Under this situation, road quality will be improved but not to theperfect condition.
Thus, one needs to define several thresholds on the quality/condition of road sections to decide about the timing and thetype of maintenance operation that are required to restore the
condition of road sections. In our model, we define three thresh-olds named TR1, TR2, and TR3, such that if road quality is greaterthan TR1, the decision is to “do nothing”; if road quality is betweenTR1 and TR2, then the decision is to perform PM; if road quality isbetween TR2 and TR3, the decision is to perform CM; and if roadquality is less than TR3, the decision is to perform RM. In practicethese thresholds are usually defined by maintenance managersand maintenance engineers based on rules of thumb that haveevolved over the years.
Given the cost per lane-mile associated with each maintenanceoperation, the total budget required for performing each one ofpreventive, corrective, and restorative maintenance operations onthe highway network are obtained. However, given the limitedavailable maintenance budget, not all road sections can be main-tained in each year. Thus, road authorities should decide on theallocation of the limited network-level budget among competingmaintenance operations based on their priorities. Obviously,different priorities for PM, CM, and RM can potentially lead todifferent scenarios for allocation of the limited available budgetamong the maintenance operations and the corresponding roadsections.
To model the budget allocation process among maintenanceoperations, we use the “Allocate Available” function of Vensim™
[37]. This function takes three arguments, namely, the network-level available budget, the total budget required for performing thePM, CM, and RM operations required by road sections, and thepriority profiles associated with each of these maintenance opera-tions. The priority profile is represented by a normal distributioncurve with a given mean (priority) and standard deviation (width),where the area under the curve represents the demand (requiredbudget to perform the specific type of maintenance). Fallah-Finiet al. [27] provide a comprehensive example regarding applicationof the Allocate Available function in the highway maintenancebudget allocation context. An important advantage of the AllocateAvailable function is that it allows for the overlap among thepriorities of these maintenance operations. Thus, road authoritiescan share the maintenance budget among PM, CM, and RM, asopposed to performing the maintenance operation with the high-est priority first and then satisfying operations with lower priority.
Based on the process described above, there are two importantsets of factors affecting the outcome of budget allocation process.The first set is related to the thresholds (TR1, TR2, and TR3) used todecide on the type of maintenance operations required by eachroad section. The second set relates to the priorities associatedwith PM, CM, and RM operations. The set of all these factors formthe “maintenance policy” associated with a road authority.
In the next section, we describe how the optimization moduleof Vensim™ [37] can be used in our SD model to construct andsolve the optimization problem presented by Eq. (2), and conse-quently, find the optimum maintenance policy (i.e., optimumbudget allocation and maintenance decisions represented by thedecision parameters described in the previous paragraph). Ven-sim's optimization engine searches through the space of para-meter values (policy parameters) looking for configurations thatmaximize the objective function. After defining the policy para-meters that need to be optimized as well as the payoff function,Vensim uses an efficient Powell Conjugate Search algorithm forsearching through the parameter space looking for the largestcumulative payoff. To avoid getting stuck on an inefficient localoptima, this process is restarted many (about hundred thousands)of times using different starting points on the parameter space.There are no limits on the numbers of policy parameters to searchover. The optimummaintenance policy aims to save on the costs ofmaintenance by maintaining an optimum balance between per-forming required maintenance operations (loop B1 of Fig. 2) anddelaying maintenance that may cause accelerated deterioration
Table 2Parameters associated with equations described inSection 3.1(estimated through calibration).
Parameter EstimatedValue
Allowable number of loadcycles
1eþ008
Beta (β) 1.42Alpha (α) 8.6Delta (δ) 2Other-factors multiplier 1.2
S. Fallah-Fini et al. / Omega 50 (2015) 18–2824

(loop R1). Documented models with instructions for replication ofresults are available4 online and have been prepared according tominimum reporting standards for simulation based research [39].
3.4. Developing the measure of dynamic efficiency
Our next step is to use the SD model described in Sections3.1 through 3.3 and develop the benchmark road conditionadjustment path. The benchmark in our problem basically repre-sents the adjustment path of the road condition (i.e., state of thesystem) if road authorities follow an optimal maintenance policy(budget allocation decisions) over time. We then compare thebenchmark (optimal road condition adjustment path) with the“actual” or observed road condition adjustment path to definethe measure of dynamic efficiency.
3.4.1. Calculating the value function Wðx0ÞAs the first step we construct the value associated with the actual
(observed) adjustment path (i.e., Wðx0Þ) represented by Eq. (3). Thefirst component of this equation (i.e.,
R t ¼ tnt ¼ t0
e� rtgðxðtÞÞdt) calculatesthe discounted payoff function (utility function) corresponding to theactual (observed) development path fxðtÞ; tAðt0; tnÞg for which thehistorical data is available. The utility function in our model repre-sents drivers' satisfaction and is defined as a function of the roadcondition or the CCI. Since the CCI varies between 0 and 100, lowroad quality represented by low CCI leads to low utility. However, ourinterviews with highway engineers suggest that drivers' utility doesnot scale linearly with the CCI (and thus the road quality) measure.This is largely because CCI is defined so that it is most sensitive at itsupper range. In fact, the low values of CCI (quality slightly above 0.5)are significantly lower than most drivers accept, and will result inlower traffic. At very low levels, incremental improvements in CCIwill improve drivers’ utility at very small increments, while highervalues of CCI have larger marginal returns in improvement. Wetherefore use a “utility multiplier” as a function of road quality (andconsequently of the CCI) so that we can capture this nonlinearity inour model, using Eq. (8). Data on drivers' satisfaction with differentroad qualities can help improve the qualitatively derived functionalform we use here.
Utility Multiplier¼ ½�3ð0:5�Road QualityÞ�3 ð8ÞLastly, to take into account the utility function associated with
the whole highway network under analysis, we calculate theweighted average of utility function of all road sections wherethe weight factor is percentage of highway network lane-milesthat lays in each road section. In sum, Eq. (9) shows the payoff (orutility) function we have used in our model.
Utility function of highway network ðtÞ¼ ∑
road section iA f1;…;NgUtility MultiplieriðtÞCCIiðtÞ n lanemiles of road sectioni
Total lanemiles
ð9Þwhere CCIiðtÞ is represented by the data in Table 1. Using thediscounted rate r¼0.05, the value associated with observed roadcondition adjustment path is calculated as
R t ¼ 7t ¼ 0 e� rtgðCCIðtÞÞdt.
As the next step, we need to calculate VðCCIðt8ÞÞ, which is the valuefunction associated with starting from the road condition at year2008 and then following an optimum budget allocation decisionafterward till the end of service life time of pavement (i.e., thirteenyears of simulation). Calculating VðCCIðt8ÞÞ requires running theoptimization problem presented in Eq. (2).
For the optimization problem, we need to first predict thetraffic load and vehicle classifications in the last thirteen years.Looking at the historical data associated with traffic and vehicleclassifications over the years 2002 till 2012 showed that thesevalues did not change much over time. Thus, we use the samevalues for 2008 through 2020. Second, we need to estimate themaintenance budget for the next thirteen years. To do so, we usedthe real-world data and experts’ inputs and estimated the costassociated with maintaining one lane-mile of interstate highwayat year 2002 using PM, CM, and RM as $20,000, $75,000, and$140,000, respectively. Next, we inflated these unit costs by 6%yearly to obtain the unit costs associated with maintenanceoperations in each year of the simulation. Also, we calculated theaverage lane-miles that have been maintained over years 2002 to2008 and it was about five lane-miles. So, assuming that the samenumber of lane-miles will be maintained in future years, wecalculated the total budget allocated for maintaining the roads inyear 2008 onwards using the estimated unit costs for maintainingPM, CM, and RM.
Using the estimated available maintenance budget as well asthe estimated traffic and vehicle classification data for years 2008–2020, we run the optimization problem presented in Eq. (2) tocalculate VðCCIðt8ÞÞ, which is the value function associated withstarting from the road condition at year 2008 and then followingan optimum budget allocation decision afterward till the end ofservice life time of pavement. Table 3 shows the optimummaintenance operations performed for each road section overyears 2008–2020 where we start from actual (observed) conditionin year 2008. The cells that are bold and underlined showpreventive and corrective maintenance operations, respectively.The cells that are highlighted in grey show the cases in which onlya proportion of required budget has been allocated due to limitedresources. Table 4 shows the optimal maintenance policy (i.e.,priorities of PM, CM, and RM operations as well as thresholds forperforming such operations) associated with VðCCIðt8ÞÞ. As you cansee from both Tables 3 and 4, the restorative maintenance (RM)has lowest priority than corrective and preventive maintenance.Moreover, there is an overlap in the PM and CM priority profiles,meaning authorities need to share the budget between PM andCM, rather than satisfying PM first and then allocating leftoverresources to CM.
3.4.2. Calculating the value function Vðx0ÞAt this step the value function associated with the benchmark,
i.e., Vðx0Þ, is calculated. This value function captures the dis-counted payoff functions associated with evolution of the roadcondition starting from road condition at year 2002 and followingthe optimal control policy till the end of service life of pavement.Table 5 shows the optimal maintenance policy (i.e., priorities ofPM, CM, and RM operations as well as thresholds for performingsuch operations) associated with VðCCIðt0ÞÞ. Table 6 shows theoptimum maintenance operations performed for each road sectionover years 2002–2020. The cells that are bold show preventivemaintenance and the cells that are italic show restorative main-tenance. The cells that are highlighted in grey show the cases inwhich only a portion of the required budget has been allocated.As you can see from Tables 5 and 6, restorative maintenance (RM)has higher priority than corrective and preventive maintenance.Moreover, preventive maintenance (PM) has higher priority thancorrective maintenance.
Lastly, the efficiency score associated with performance of roadauthorities in allocation of the limited budget can be calculated asEf f ðx0Þ ¼ ðWðx0Þ=Vðx0ÞÞ ¼ ðð6270:3þ17822Þ=28992Þ ¼ 0:83, wherethe value 6270.3 is the discounted payoff corresponding to theactual (observed) road condition adjustment path over years
4 Supplementary materials available at: http://broncoscholar.library.csupomona.edu/handle/10211.3/122358
S. Fallah-Fini et al. / Omega 50 (2015) 18–28 25

2002–2008 for which the historical data is available. This measureof dynamic efficiency means that maintenance decisions for theallocation of the limited budget among road sections in need ofmaintenance if changed to replicate the optimal strategy of Table 5would generate a larger present value of the road authorities'utility.
Given that production units (decision making units) underanalysis in our study are road authorities, the observed efficiencyscore can help us pinpoint some potential sources of inefficiency.One important source of inefficiency is related to the maintenancepolicies employed by road authorities, more specifically the
priority of PM, CM, and RM as well as the thresholds used fordeciding on the type of maintenance operation. Interviewingmaintenance managers and engineers revealed that in the currentpractice, road sections in need of CM are given higher priority thanPM while allocating the limited budget. However, the policies thatwere found through optimization pointed to alternative prioritieswhere PM is preferred over CM. Lastly, there might be alternativedecision-making structures that can provide improvement oppor-tunities, for example, the thresholds used to decide which roadsegments are in need of maintenance operations as well as thetype of maintenance operations.
4. Conclusions
Given the highly deteriorated road system, major budgetaryrestrictions as well as the significant growth in traffic, there hasbeen a tremendous interest in improving the performance of roadmaintenance practices. The existence of a reliable and compre-hensive performance measurement system can help road autho-rities assess the effectiveness and efficiency associated withcurrent maintenance practices as well as with the developmentof new policies.
Most of the efficiency measures that have been developed inthe literature for evaluating performance of highway maintenanceoperations use “static” efficiency measurement frameworks thatignore the inter-temporal effects of inputs and budget allocationdecisions for future streams of road conditions (i.e., outputs).In this paper, we take a long-term perspective and overcome theshortcomings of previous studies. We acknowledge the presenceof time interdependencies between inputs and outputs in thecontext of highway maintenance. Next, we develop a dynamicefficiency measurement model for evaluating performance ofhighway maintenance operations where the inter-temporaldependences between inputs and outputs are explicitly captured.This measure of dynamic efficiency is representative of resourceallocation behavior such that a production unit (e.g., road author-ity in our problem) cannot shift production from one time periodto another and generate a larger present value of the productionunit's utility summed over all time periods of operation. We thenapply this framework to an empirical dataset of pavement
Table 3The Optimum Maintenance Operations for 2008–2020 (Starting from the Actual Condition Observed in 2008) Note: The two columns under each year in Table 3 show theroad condition at the start and end of the corresponding year.
Table 4The optimum maintenance policy associated withVðCCIðt8ÞÞ.
Maintenance PolicyParameter
EstimatedValues
Value Function VðCCIðt8ÞÞ 17,822Priority of PM 6Priority of CM 5.4Priority of RM 3.04Threshold for Do Nothing(TR1)
0.89
Threshold for PM (TR2) 0.68Threshold for CM (TR3) 0.33
Table 5The Optimum Maintenance Policy Associated withVðCCIðt0ÞÞ.
Maintenance PolicyParameter
EstimatedValues
Value Function VðCCIðt0ÞÞ 28,992Priority of PM 6Priority of CM 4Priority of RM 8.5Threshold for Do Nothing(TR1)
0.9
Threshold for PM (TR2) 0.7Threshold for CM (TR3) 0.31
S. Fallah-Fini et al. / Omega 50 (2015) 18–2826

condition and maintenance expenditures over the years 2002–2008 corresponding to seventeen miles of interstate highway (I-81) that lay in one of the counties in the state of Virginia.
This paper contributes to the body of knowledge in highwaymaintenance domain by (i) recognizing the presence of inter-temporal dependencies between the utilization of inputs (i.e., themaintenance budget and maintenance decisions) and the realiza-tion of outputs (i.e., improvement in the road condition); and (ii)developing a measure of performance for highway maintenanceoperations while taking into account the inter-temporal depen-dence between inputs and outputs. This paper also contributes tothe literature of dynamic efficiency by (i) introducing highwaymaintenance as an interesting application domain for studiesrelated to dynamic efficiency where there is a time-inter-dependence between input utilization and output realization overconsecutive periods; (ii) by discussing how an engineeringapproach [40] can be used to develop a dynamic frontier thatcan be used as a benchmark for measuring the performance of aproduction unit or decision making unit (DMU). Prior research hasonly used estimation approaches (parametric or non-parametric)to develop a benchmark that takes into account the intrinsictemporal dependency between input and output levels. This paperalso contributes to the body of knowledge in system dynamics(SD) by (i) introducing system dynamics as an appropriateapproach for formal modeling of the transformation process insidea production unit and obtaining a better understanding of thesources of efficiency differences; (ii) introducing new conceptsfrom the performance measurement field into the systemdynamics literature; and (iii) coupling system dynamic modelingwith calibration and optimization to develop an appropriatebenchmark for evaluating the performance of the production units(road authorities) under analysis.
Our study also has some limitations. First, the sample empiricaldataset used in this paper only represents 17 miles of the highwaynetwork (fourteen road sections) over six years. With a morecomprehensive dataset over a longer period of time we can developbetter estimates of the key equations and their corresponding para-meters estimated through the calibration process. Moreover, having alarger empirical dataset would enable us to verify our simulationmodel by using some of the data that has not been used in thecalibration process and verify if our model generates a behavior similarto the one observed in the data, given the level of traffic load andclimate conditions present at those road sections (obtained from theempirical data). Furthermore, the utility multiplier we use in this studyis grounded in our qualitative impressions from our interviews, but
not estimated empirically. Improvements in this measure are usefuland can come from surveys of drivers’ preferences for different roadqualities, calculation of comfort, speed, and repair costs for differentroad qualities, or drivers' revealed preferences based on their selectionof alternative roads with different quality levels. Another limitation ofour model is that it may not be applicable across all states, since somestates use a different concept and associated metric, such as theInternational Roughness Index (IRI), to rate the condition of thepavement. Hence, our model would need to be structurally modifiedbefore it can be used with pavement performance concepts andassociated metrics that are different from the CCI. However, our modelcan be used in any other highway network that uses the CCI forevaluating the condition of the road sections. Due to differences inweather and traffic load, in those applications one should firstcalibrate our model with the empirical data associated with thehighway network under analysis to fine-tune the values of modelparameters accordingly. After calibration, our model can be used tofind the optimum maintenance policies and develop measure ofefficiency for the highway network. In scenarios where we need toanalyze a larger highway network in which, for example, differentcounties may experience different climate conditions and/or trafficloads, we can still use our model. In such situations, we first usecalibration to estimate different model parameters for different partsof the highway network given their climate conditions and trafficloads. After this step, we could run the optimization model over thelarger highway network and find the policies that lead to maximumutility over the whole highway network. However, in practice, most ofthe maintenance decisions and policies are made locally at the countylevel. Thus, we believe that choosing a county as the unit underanalysis is closer to what happens in the real world.
In our setting, and given the institutional constraints on thepolicies that managers could pursue, we solved the value functionproblem using direct optimization. More generally, one can use(approximate) dynamic programming or optimal control algo-rithms [41] to find the value of different states where differentstates and inputs and outputs are inter-temporally dependent.Moreover, another extension of the current paper is to expand thesystem dynamics model by evaluating different analytical formu-lations that capture the road deterioration process (the equationsrelated to effects of aging, road quality, etc. on the road deteriora-tion) or the translation of road quality into the CCI measure topresent a more comprehensive/realistic model of road deteriora-tion and renewal processes. Such expansion would be possibleconditioned to the availability of larger empirical datasets, corre-sponding to larger highway networks over longer periods of time.
Table 6The Optimum Maintenance Operations for 2002–2020 (Starting from the Actual Condition of 2002) Note: The two columns under each year in Table 6 show the roadcondition at the start and end of the corresponding year.
S. Fallah-Fini et al. / Omega 50 (2015) 18–28 27

Acknowledgments
The work described in this paper was funded in part by NSFGrant #CMMI-0726789. K. Triantis: This paper is based in part onwork supported by the National Science Foundation, while work-ing at the Foundation. The opinions, findings, conclusions andrecommendations expressed in this paper are those of the authorsand do not necessarily reflect the views of the National ScienceFoundation.
References
[1] ASCE, 2013 Reportcard for America's Infrastructure. American Society of CivilEngineers, 2013.
[2] Cook WD, Kazakov A, Roll Y. A DEA model for measuring the relative efficiencyof highway maintenance patrols. INFOR 1990;28(2) (131–124).
[3] Cook WD, Kazakov A, Roll Y. On the measurement and monitoring of relativeefficiency of highway maintenance patrols. In: Charnes A, Cooper W, LewinAY, Seiford LM, editors. Data envelopment analysis: theory, methodology andapplications. Boston: Kluwer Academic Publishers; 1994. p. 195–210.
[4] Kazakov A, Cook WD, Roll Y. Measurement of highway maintenance patrolefficiency: model and factors. Transportation Research Record 1989;1216(1216):39–45.
[5] Rouse P, Chiu T. Towards optimal life cycle management in a road main-tenance setting using DEA. European Journal of Operational Research2008;196(2):672–81.
[6] Rouse P, Putterill M, Ryan D. Towards a general managerial framework forperformance measurement: a comprehensive highway maintenance applica-tion. Journal of Productivity Analysis 1997;8:127–49.
[7] de la Garza JM, Fallah-Fini S, Triantis K. Efficiency measurement of highwaymaintenance strategies using data envelopment analysis. In: Proceedings ofthe 2009 NSF engineering research and innovation conference. Hawaii, USA;2009.
[8] Fallah-Fini, S., Triantis, K., and de la Garza, J.M. Performance measurement ofhighway maintenance operation using data envelopment analysis: Environ-mental considerations. In: Proceedings of the 2009 IIE Annual ConferenceMiami, FL; 2009.
[9] Fallah-Fini S, Triantis K, de la Garza JM, Seaver WL. Measuring the efficiency ofhighway maintenance contracting strategies: a bootstrapped non-parametricmeta-frontier approach. European Journal of Operational Research2012;219:134–45.
[10] Ozbek EM, de la Garza JM, Triantis K. Data and modeling issues faced duringthe efficiency measurement of road maintenance using data envelopmentanalysis. ASCE Journal of Infrastructure Systems 2010;16(1):21–30.
[11] Ozbek EM, de la Garza JM, Triantis K. Efficiency measurement of bridgemaintenance using data envelopment analysis. ASCE Journal of InfrastructureSystems 2010;16(1):31–9.
[12] Ozbek ME, de la Garza JM, Triantis K. Data envelopment analysis as a decisionmaking tool for the transportation professionals. Journal of TransportationEngineering 2009;135(11):822–31.
[13] Charnes A, Cooper WW, Rhodes E. Measuring the efficiency of decisionmaking units. European Journal of Operational Research 1978;2(4):429–44.
[14] Matthews K. Risk management and managerial efficiency in Chinese banks:A network DEA framework. Omega 2013;41(2):207–15.
[15] Wanga K, Huangb W, Wuc J, Liud Y-N. Efficiency measures of the Chinesecommercial banking system using an additive two-stage DEA. Omega2014:2–544 2014:2–5.
[16] André FJ, Herrero I, Riesgo L. A modified DEA model to estimate theimportance of objectives with an application to agricultural economics.Omega 2010;38(5):371–82.
[17] Odeck J. Statistical precision of DEA and Malmquist indices: a bootstrapapplication to Norwegian grain producers. Omega 2009;37(5):1007–17.
[18] Chang S-J, Hsiao H-C, Huang L-H, Chang H. Taiwan quality indicator projectand hospital productivity growth. Omega 2011;39(1):14–22.
[19] Fallah-Fini S, Triantis K, Johnson A. Dynamic efficiency measurement: state-of-the-art. Journal of Productivity Analysis 2014;41(1):51–67.
[20] Färe R, Grosskopf S. Network DEA. Socio-Economic Planning Science2000;34:35–49.
[21] Nemoto J, Goto M. Measurement of dynamic efficiency in production:an application of data envelopment analysis to Japanese electric utilities.Journal of Productivity Analysis 2003;19:191–210.
[22] Tonea K, Tsutsui M. Dynamic DEA: A slacks-based measure approach. Omega2010;38:145–56.
[23] Tonea K, Tsutsui M. Dynamic DEA with network structure: a slacks-basedmeasure approach. Omega 2014;42(1):124–31.
[24] Sengupta JK. Evaluating dynamic efficiency by optimal control. InternationalJournal of Systems Science 1994;25(8):1337–53.
[25] Sengupta JK. A dynamic efficiency model using data envelopment analysis.International Journal of Production Economics 1999;62:209–18.
[26] Forsund, FR. Dynamic efficiency measures. Department of economics, Uni-versity of Oslo. Working Paper2010: p.
[27] Fallah-Fini S, Rahmandad H, Triantis K, de la Garza JM. Optimizing highwaymaintenance operations: dynamic considerations. System Dynamcis Review,Special Issue: System Dynamics and Transportation 2010;26(3):216–38.
[28] Chasey AD, de la Garza JM, Drew DR. Using simulation to understand theimpact of deferred maintenance. Computer-Aided Civil and InfrastructureEngineering 2002;17:269–79.
[29] Huang Y. Pavement analysis and design. Upper Saddle River. NJ: Pearson/Prentice Hall; 2004.
[30] Herold M, Roberts D. Spectral characteristics of asphalt road aging anddeterioration: implications for remote-sensing applications. Applied Optics2005;44:20.
[31] Odoki JB, Keral HGR. Highway development and management model (HDM-4): Analytical framework and model description. In the highway developmentand maintenance series: the World Bank Group; 2008.
[32] AASHTO, Guide for Design of Pavement Structures. American association ofstate highway and transportation. (with 1998 Supplement). 4th Edition.Atlanta,GA: AASHTO Publications; 1993.
[33] Oliva R. Model calibration as a testing strategy for system dynamics models2003;151:552–68European Journal of Operational Research 2003;151:552–68.
[34] K. Kim, A transportation planning model for state highway management: adecision support system methodology to achieve sustainable development,1998, Ph.D. Dissertation, Virginia Polytechnic Institute and State University,Blacksburg, VA.
[35] Smith R, Nazarian S. Defining pavement maintenance and distress precursorsfor pavement maintenance measurement, maintenance of pavements, lanemarkings, and road sides. Transportation Research Record: Journal of theTransportation Research Board 1992;1334:16–8.
[36] Greene W. Econometric analysis. Upper Saddle River, New Jersey: PrenticeHall; 2002.
[37] Vensim, Ventana Systems, Inc. Harward, MA, 2014.[38] Press WH, Teukolsky SA, Vetterling WT, Flannery BP. Numerical recipes in C:
the art of scientific computing. Cambridge, UK: Cambridge University Press;1992.
[39] Rahmandad H, Sterman JD. Reporting guidelines for simulation-basedresearch in social sciences. System Dynamics Review 2012;28(4):396–411.
[40] Triantis K. Engineering applications of data envelopment analysis. In: CooperWW, Seiford LM, Zhu J, editors. Handbook on data envelopment analysis.Boston: Kluwer Academic Publishers; 2011.
[41] Bertsekas DP. Dynamic Programming and Optimal Control, II. Athena Scien-tific; 2012.
S. Fallah-Fini et al. / Omega 50 (2015) 18–2828