
Matrius, determinants i sistemes d'equacions lineals FonamentsMate atics de l'Enginyeria I
54
M.1 Matrius, determinants i sistemes d’equacions lineals Fonaments Matem` atics de l’Enginyeria I N´ uria Par´ es, Francesc Pozo, Yolanda Vidal
Transcript of Matrius, determinants i sistemes d'equacions lineals FonamentsMate atics de l'Enginyeria I
M.1
Matrius, determinants i sistemesd’equacions lineals
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.2
Matrius: definicions. Operacions itransformacions elementals. Propietats.
◦ Tipus de matrius
◦ Operacions amb matrius
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.3
Matrius
Definicio 1 (matriu). Anomenem matriu de realsA de dimensio m× n a un conjunt d’elements de Ramb una disposicio del tipus (m files i n columnes):
A =
a11 a12 · · · a1n
a21 a22 · · · a2n
......
. . ....
am1 am2 · · · amn
,
aij ∈ R, i = 1, . . . ,m, j = 1, . . . , n.
El conjunt de totes les matrius amb elements en R dem files i n columnes el denotem per Mm×n(R)
Nota 1. Una matriu de m files i n columnes tambees pot representar per
A = (aij)i = 1, . . . , m
j = 1, . . . , n.
El subındexs de cadascun dels elements indiquen laposicio del nombre dins la matriu. El primer indica
la fila i el segon la columna.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal

MATRIUS I SISTEMES: matrius M.4
Exercici Proposat 1. Escriu la matriu A = (aij)d’ordre 3×2 on aij = 2i + j. De la mateixa maneraescriu les matrius: B = (bij) d’ordre 4×3 i bij = i
j ,C = (cij) d’ordre 2×4 i cij = (−1)i + (−1)j iD = (dij) d’ordre 3×3 on dij = ji.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.5
Tipus de matrius
Definicio 2 (igualtat de matrius). Diem que duesmatrius A = (aij) i B = (bij) son iguals si
aij = bij , ∀ i, j. ex.
1 2
3 4
6=
1 2
3 5
Nota 2. Es evident que perque dues matrius siguiniguals han de tenir el mateix numero de files i elmateix numero de columnes.Definicio 3 (vector columna). Una matriu quenomes te una columna com
x1
x2
...
xn
ex.
1
5
3
s’anomena vector columna i te dimensio n× 1.Definicio 4 (vector fila). Una matriu que nomes teuna fila com
(x1 x2 · · · xn
)ex.
(5 9
)
s’anomena vector fila i te dimensio 1× n.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.6
Definicio 5 (matriu quadrada). Una matriuquadrada es una matriu on el numero de files esigual al numero de columnes (m = n). A vegadesaquesta matriu s’anomena matriu d’ordre n.
Definicio 6 (diagonal principal i traca). S’anomenadiagonal principal d’una matriu quadrada alselements de la diagonal, es a dir, aii, i = 1 . . . n. Lasuma dels elements de la diagonal principals’anomena traca:
tr(A) = a11 + a22 + . . . + ann =n∑
i=1
aii.
ex.
A =
1 2 0 −1
3 −2 5 10
20 0 4 1
1 1 0 3
tr(A) = 1 + (−2) + 4 + 3 = 6.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.7
Definicio 7 (matriu diagonal). Una matriuA = (aij) es diagonal si es quadrada i
aij = 0 quan i 6= j. ex.
1 0 0
0 4 0
0 0 −1
Nota 3. A vegades es pot escriure la matriudiagonal com
diag(a11, a22, . . . , ann). ex. diag(1, 4,−1)
Definicio 8 (matriu identitat). La matriuidentitat o matriu unitat I es una matriudiagonal on els elements de la diagonal principal sontots 1,
aii = 1. ex.
1 0 0
0 1 0
0 0 1
Definicio 9 (matriu zero). La matriu zero esaquella que te tots els elements iguals a zero.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.8
Definicio 10 (matriu triangular inferior). Unamatriu quadrada s’anomena triangular inferior sitots els elements que es troben per sobre de ladiagonal principal son zero.
aij = 0, j > i ex.
1 0 0
4 5 0
2 5 1
Definicio 11 (matriu triangular superior). Unamatriu quadrada s’anomena triangular superior sitots els elements que es troben per sota de la diagonalprincipal son zero.
aij = 0, j < i ex.
1 3 0
0 5 6
0 0 2
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.9
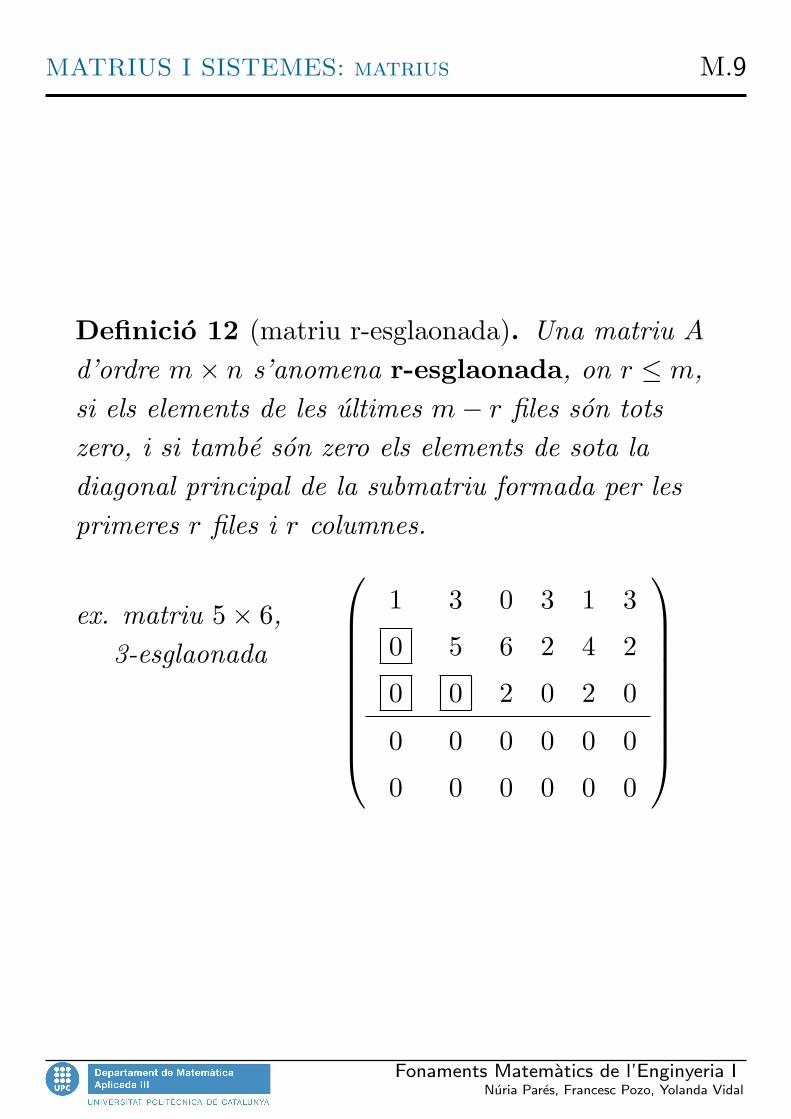
Definicio 12 (matriu r-esglaonada). Una matriu A
d’ordre m× n s’anomena r-esglaonada, on r ≤ m,si els elements de les ultimes m− r files son totszero, i si tambe son zero els elements de sota ladiagonal principal de la submatriu formada per lesprimeres r files i r columnes.
ex. matriu 5× 6,3-esglaonada
1 3 0 3 1 3
0 5 6 2 4 2
0 0 2 0 2 0
0 0 0 0 0 0
0 0 0 0 0 0
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.10
Definicio 13 (matriu simetrica). Una matriuquadrada A = (aij) es simetrica si
aij = aji. ex.
11 12 13 14
12 22 23 24
13 23 33 34
14 24 34 44
Definicio 14 (matriu antisimetrica). Una matriuquadrada A = (aij) es antisimetrica si
aij = −aji. ex.
0 12 13 14
−12 0 23 24
−13 −23 0 34
−14 −24 −34 0
Nota 4. Els elements de la diagonal principal detota matriu antisimetrica son zero: aii = 0, ja queaii = −aii =⇒ 2aii = 0 =⇒ aii = 0.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.11
Definicio 15 (transposada). La matriutransposada d’una matriu A es la matriu queobtenim en canviar les files per les columnes. Si unamatriu es de dimensio m× n, la seva transposada esde dimensio n×m, i es representara per At. Mesconcretament, si A = (aij), aleshores
At = (aji).
ex.
A =
1 0 2
3 1 0
0 4 5
2 8 1
, At =
1 3 0 2
0 1 4 8
2 0 5 1
Nota 5. Si transposem dues vegades una matriuobtenim la mateixa matriu: (At)t = A.
ex.
A =
1 0
3 1
0 4
, At =
1 3 0
0 1 4
, (At)t =
1 0
3 1
0 4
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal

MATRIUS I SISTEMES: matrius M.12
Operacions amb matrius
A l’espai de les matrius reals d’ordre m× n,Mm×n(R), es defineixen tres operacions:
• suma de matrius
• producte d’una matriu per un nombre
• producte de matrius
Suma de matrius
Definicio 16 (suma). Siguin A = (aij) i B = (bij)dues matrius m× n. La suma A + B de les duesmatrius es la matriu m× n,
A + B = (aij + bij).
ex.0BB@
1 2 0
0 −3 1
2 4 0
1CCA+
0BB@
2 0 1
0 4 2
0 −3 8
1CCA =
=
0BB@
1 + 2 2 + 0 0 + 1
0 + 0 −3 + 4 1− 2
2 + 0 0 + (−3) 4 + 8
1CCA =
0BB@
3 2 1
0 1 3
2 −3 12
1CCA
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.13
Propietat 1. La suma de matrius te les seguentspropietats:
(A+) Propietat associativa:(A + B) + C = A + (B + C)
(C+) Propietat commutativa: A + B=B + A
(EN+) Existencia d’element neutre de la suma:0 + A = A
0 0
0 0
+
6 3
2 1
=
6 3
2 1
(EO+) Existencia de la matriu oposada: A + (−A) = 0 6 3
2 1
+
−6 −3
−2 −1
=
0 0
0 0
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.14
Producte per un escalar
Definicio 17. Sigui A = (aij) una matriu dedimensio m× n, i c ∈ R. Aleshores el producte de c
per la matriu A es
cA = (caij).
ex.
4
1 2 0
0 −3 1
2 4 0
=
4 8 0
0 −12 4
8 16 0
Propietat 2. Les propietats del producte d’unescalar per una matriu son:
(a) c(A + B) = cA + cB , (c + d)A = cA + dA
(b) (cd)A = c(dA)
(c) 1A = A , 0A = 0m×n
on A i B son matrius de dimensio m× n i c, d ∈ R.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.15
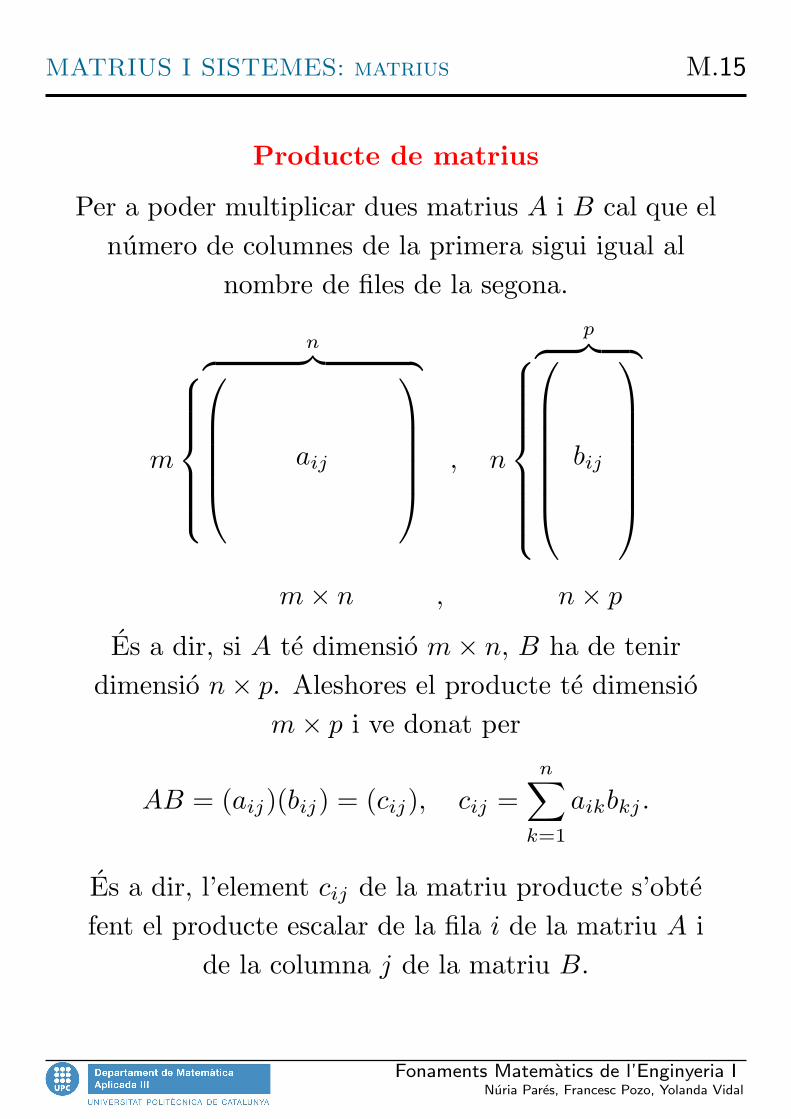
Producte de matrius
Per a poder multiplicar dues matrius A i B cal que elnumero de columnes de la primera sigui igual al
nombre de files de la segona.
m
n︷ ︸︸ ︷
aij
, n
p︷ ︸︸ ︷
bij
m× n , n× p
Es a dir, si A te dimensio m× n, B ha de tenirdimensio n× p. Aleshores el producte te dimensio
m× p i ve donat per
AB = (aij)(bij) = (cij), cij =n∑
k=1
aikbkj .
Es a dir, l’element cij de la matriu producte s’obtefent el producte escalar de la fila i de la matriu A i
de la columna j de la matriu B.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.16
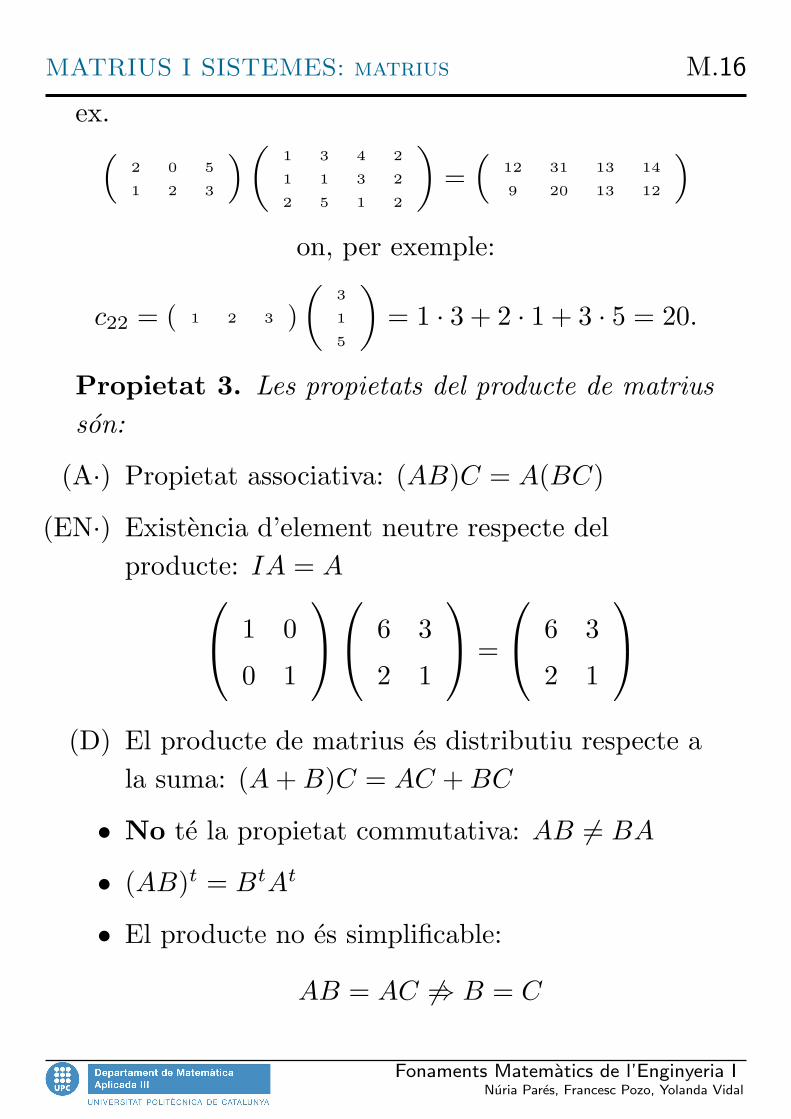
ex.(
2 0 5
1 2 3
) (1 3 4 2
1 1 3 2
2 5 1 2
)=
(12 31 13 14
9 20 13 12
)
on, per exemple:
c22 = ( 1 2 3 )(
3
1
5
)= 1 · 3 + 2 · 1 + 3 · 5 = 20.
Propietat 3. Les propietats del producte de matriusson:
(A·) Propietat associativa: (AB)C = A(BC)
(EN·) Existencia d’element neutre respecte delproducte: IA = A
1 0
0 1
6 3
2 1
=
6 3
2 1
(D) El producte de matrius es distributiu respecte ala suma: (A + B)C = AC + BC
• No te la propietat commutativa: AB 6= BA
• (AB)t = BtAt
• El producte no es simplificable:
AB = AC 6⇒ B = C
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: matrius M.17
Exercici Proposat 2. Comproveu en un casparticular que (AB)t = BtAt.
Exercici Proposat 3. Trobeu tres matrius A,B i C
de manera que AB = AC pero que B 6= C.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: rang M.18
Rang d’una matriu. Matrius invertibles;aplicacions.
◦ Calcul del rang pel metode de Gauss
◦ Matrius invertibles
◦ Calcul de la matriu inversa mitjancant elmetode de Gauss
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: rang M.19
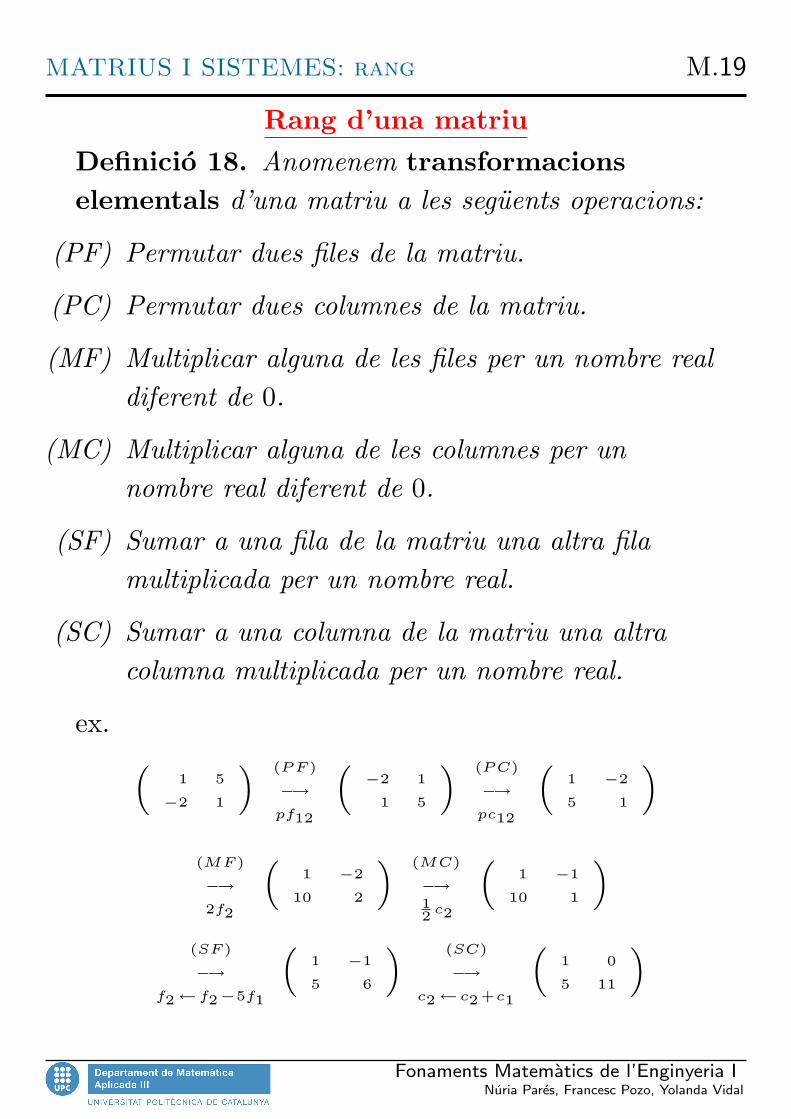
Rang d’una matriu
Definicio 18. Anomenem transformacionselementals d’una matriu a les seguents operacions:
(PF) Permutar dues files de la matriu.
(PC) Permutar dues columnes de la matriu.
(MF) Multiplicar alguna de les files per un nombre realdiferent de 0.
(MC) Multiplicar alguna de les columnes per unnombre real diferent de 0.
(SF) Sumar a una fila de la matriu una altra filamultiplicada per un nombre real.
(SC) Sumar a una columna de la matriu una altracolumna multiplicada per un nombre real.
ex.(
1 5
−2 1
) (P F )
−→pf12
(−2 1
1 5
) (P C)
−→pc12
(1 −2
5 1
)
(MF )
−→2f2
(1 −2
10 2
) (MC)
−→12 c2
(1 −1
10 1
)
(SF )
−→f2←f2−5f1
(1 −1
5 6
) (SC)
−→c2←c2+c1
(1 0
5 11
)
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: rang M.20
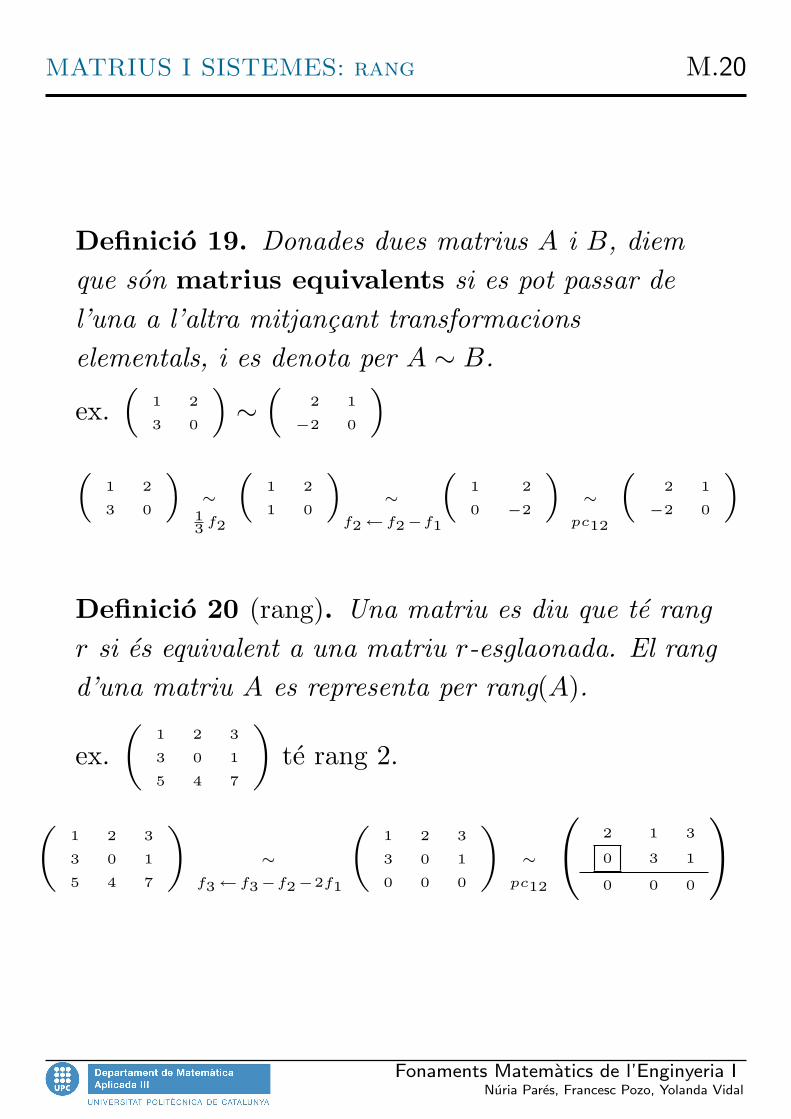
Definicio 19. Donades dues matrius A i B, diemque son matrius equivalents si es pot passar del’una a l’altra mitjancant transformacionselementals, i es denota per A ∼ B.
ex.(
1 2
3 0
)∼
(2 1
−2 0
)
(1 2
3 0
)∼
13 f2
(1 2
1 0
)∼
f2←f2−f1
(1 2
0 −2
)∼
pc12
(2 1
−2 0
)
Definicio 20 (rang). Una matriu es diu que te rangr si es equivalent a una matriu r-esglaonada. El rangd’una matriu A es representa per rang(A).
ex.(
1 2 3
3 0 1
5 4 7
)te rang 2.
(1 2 3
3 0 1
5 4 7
)∼
f3←f3−f2−2f1
(1 2 3
3 0 1
0 0 0
)∼
pc12
(2 1 3
0 3 1
0 0 0
)
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: rang M.21
Propietat 4. Les propietats del rang son:
(a) El rang d’una matriu es, com a maxim, el menornombre de files o columnes.
(b) El rang d’una matriu i el de la seva transposadaes el mateix.
(c) Dues matrius equivalents tenen el mateix rang,per tant, si a una matriu li fem unatransformacio elemental, el rang es conserva.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: rang M.22
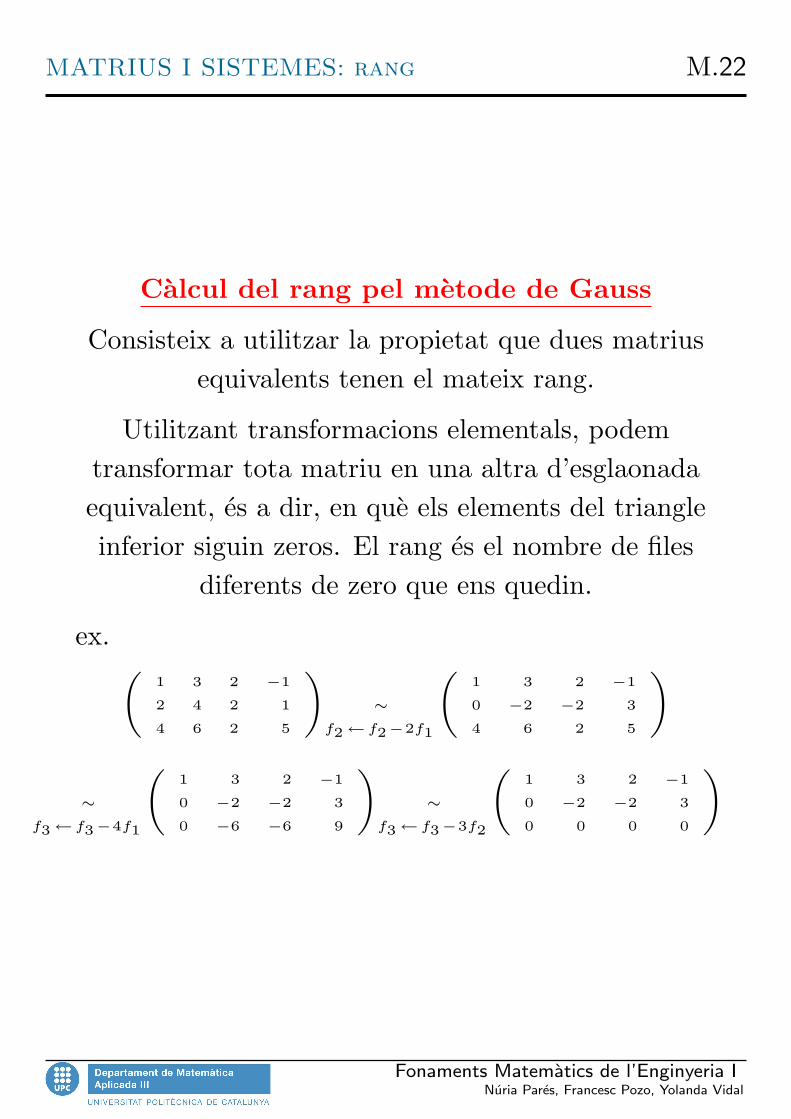
Calcul del rang pel metode de Gauss
Consisteix a utilitzar la propietat que dues matriusequivalents tenen el mateix rang.
Utilitzant transformacions elementals, podemtransformar tota matriu en una altra d’esglaonadaequivalent, es a dir, en que els elements del triangleinferior siguin zeros. El rang es el nombre de files
diferents de zero que ens quedin.
ex.(
1 3 2 −1
2 4 2 1
4 6 2 5
)∼
f2←f2−2f1
(1 3 2 −1
0 −2 −2 3
4 6 2 5
)
∼f3←f3−4f1
(1 3 2 −1
0 −2 −2 3
0 −6 −6 9
)∼
f3←f3−3f2
(1 3 2 −1
0 −2 −2 3
0 0 0 0
)
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: rang M.23
Exercici Proposat 4. Calcular mitjancant elmetode de Gauss el rang de les seguents matrius:
(−1 0 1
3 2 1
1 −1 2
),
(1 1 1
0 1 1
3 0 −6
),
(2 4 0 7
1 3 1 8
1 0 −2 −9
),
1 2 5
1 −3 −6
−6 −2 −8
0 5 11
2 −1 −1
Exercici Proposat 5. Determinar els valors d’apels quals rang(A) 6= 3, on:
A =(
1 a 1
a + 1 1 −a
2 1 −1
)
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: rang M.24
Matrius invertibles
Definicio 21. Una matriu A es invertible si esquadrada i el seu rang es maxim. La seva inversa es,doncs, A−1, i es aquella matriu tal que
AA−1 = A−1A = I.
Les matrius invertibles tambe es poden anomenarregulars o no singulars.
Propietat 5. Les propietats de la matriu inversason:
Si A,B ∈Mn×n(R) son regulars,
(a) (A−1)−1 = A
(b) (λ ·A)−1 = 1λ ·A−1, λ 6= 0
(c) (A ·B)−1 = B−1 ·A−1
(d) (At)−1 = (A−1)t
Exercici Proposat 6. Usant la definicio de matriuinversa, vegeu que son certes les propietats (a), (b) i(c) de matriu inversa.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: rang M.25
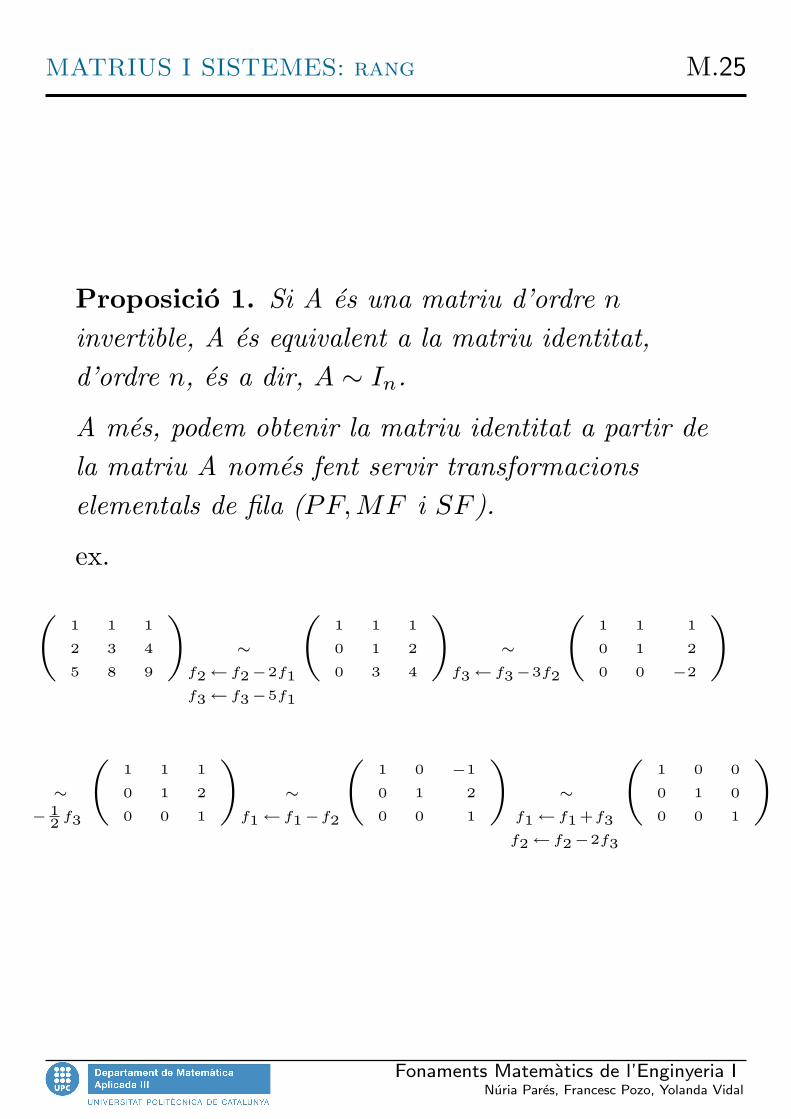
Proposicio 1. Si A es una matriu d’ordre n
invertible, A es equivalent a la matriu identitat,d’ordre n, es a dir, A ∼ In.
A mes, podem obtenir la matriu identitat a partir dela matriu A nomes fent servir transformacionselementals de fila (PF,MF i SF ).
ex.
(1 1 1
2 3 4
5 8 9
)∼
f2←f2−2f1f3←f3−5f1
(1 1 1
0 1 2
0 3 4
)∼
f3←f3−3f2
(1 1 1
0 1 2
0 0 −2
)
∼− 1
2 f3
(1 1 1
0 1 2
0 0 1
)∼
f1←f1−f2
(1 0 −1
0 1 2
0 0 1
)∼
f1←f1+f3f2←f2−2f3
(1 0 0
0 1 0
0 0 1
)
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: rang M.26
Calcul de la matriu inversa mitjancantel metode de Gauss
Si A es invertible d’ordre n, podem obtenir la matriuIn considerant nomes transformacions elementalsde fila. Llavors, A−1 es calcula aplicant operacions
elementals de fila sobre la matriu (A|In), fins aobtenir (In|A−1).
( A | In ) ∼ . . .
PF,MF, CF
∼ ( In | A−1 )
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: rang M.27
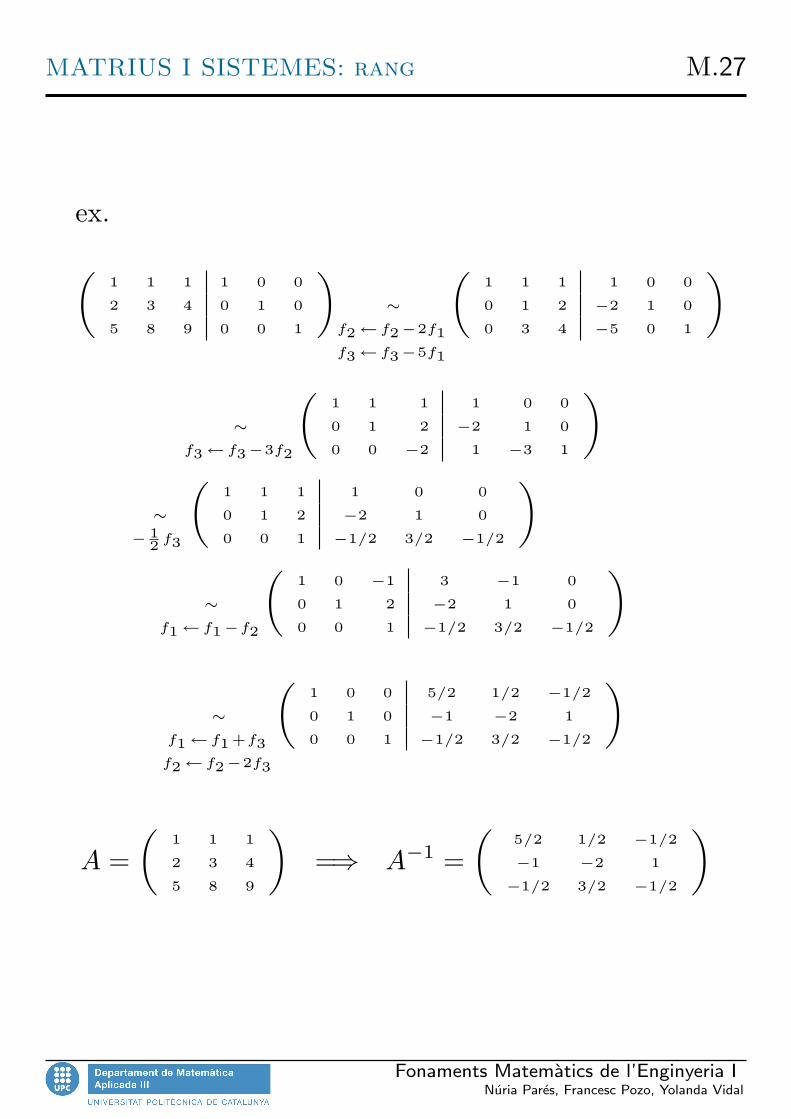
ex.
(1 1 1 1 0 0
2 3 4 0 1 0
5 8 9 0 0 1
)∼
f2←f2−2f1f3←f3−5f1
(1 1 1 1 0 0
0 1 2 −2 1 0
0 3 4 −5 0 1
)
∼f3←f3−3f2
(1 1 1 1 0 0
0 1 2 −2 1 0
0 0 −2 1 −3 1
)
∼− 1
2 f3
(1 1 1 1 0 0
0 1 2 −2 1 0
0 0 1 −1/2 3/2 −1/2
)
∼f1←f1−f2
(1 0 −1 3 −1 0
0 1 2 −2 1 0
0 0 1 −1/2 3/2 −1/2
)
∼f1←f1+f3
f2←f2−2f3
(1 0 0 5/2 1/2 −1/2
0 1 0 −1 −2 1
0 0 1 −1/2 3/2 −1/2
)
A =(
1 1 1
2 3 4
5 8 9
)=⇒ A−1 =
(5/2 1/2 −1/2
−1 −2 1
−1/2 3/2 −1/2
)
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: rang M.28
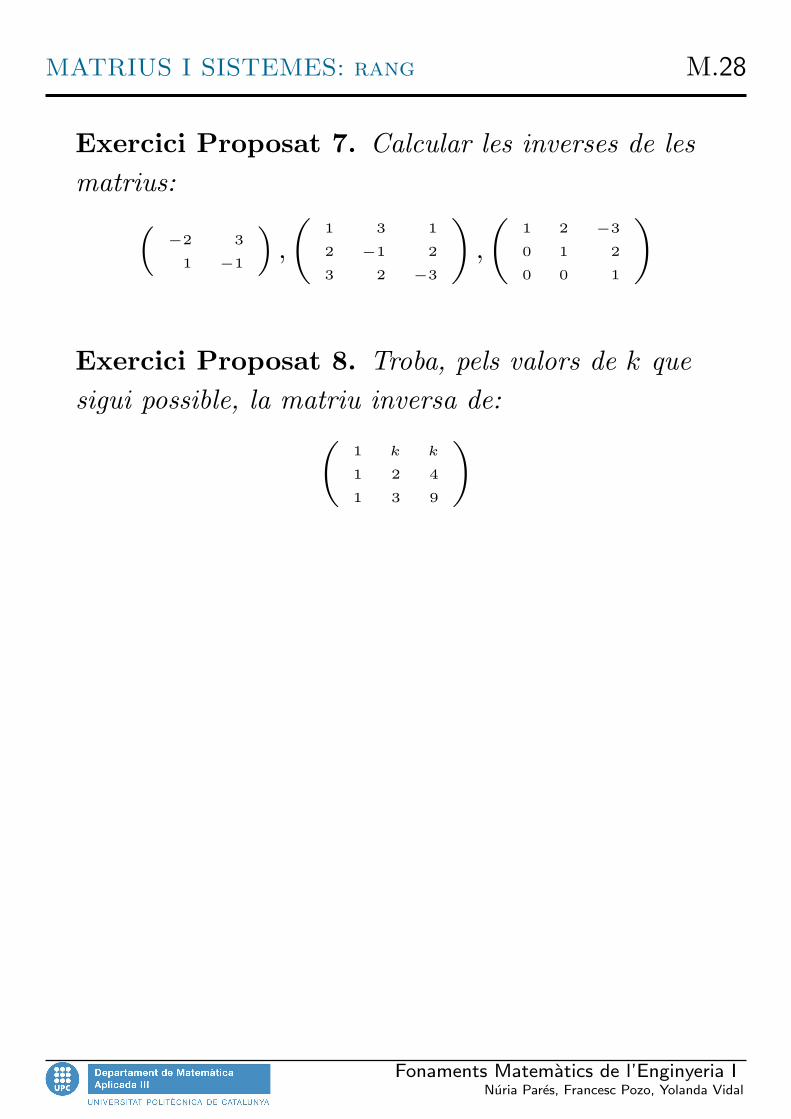
Exercici Proposat 7. Calcular les inverses de lesmatrius:
(−2 3
1 −1
),
(1 3 1
2 −1 2
3 2 −3
),
(1 2 −3
0 1 2
0 0 1
)
Exercici Proposat 8. Troba, pels valors de k quesigui possible, la matriu inversa de:
(1 k k
1 2 4
1 3 9
)
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: determinant M.29
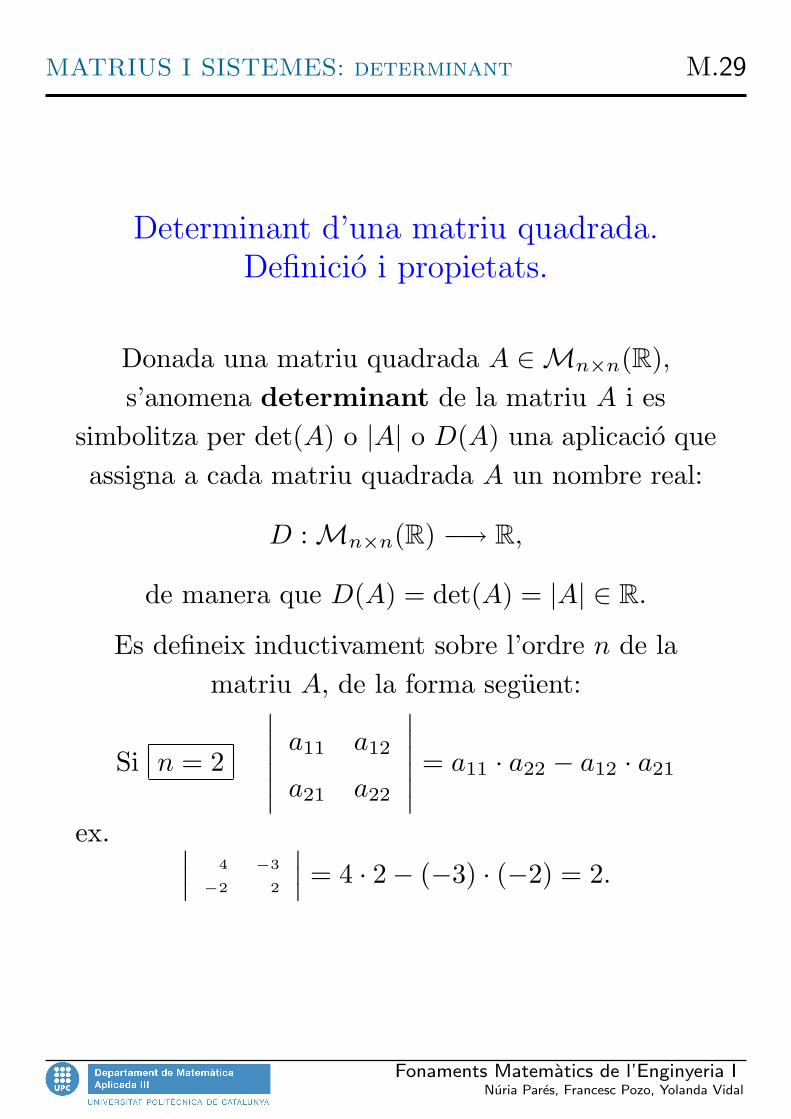
Determinant d’una matriu quadrada.Definicio i propietats.
Donada una matriu quadrada A ∈Mn×n(R),s’anomena determinant de la matriu A i es
simbolitza per det(A) o |A| o D(A) una aplicacio queassigna a cada matriu quadrada A un nombre real:
D : Mn×n(R) −→ R,
de manera que D(A) = det(A) = |A| ∈ R.
Es defineix inductivament sobre l’ordre n de lamatriu A, de la forma seguent:
Si n = 2
∣∣∣∣∣∣a11 a12
a21 a22
∣∣∣∣∣∣= a11 · a22 − a12 · a21
ex. ∣∣∣ 4 −3
−2 2
∣∣∣ = 4 · 2− (−3) · (−2) = 2.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: determinant M.30
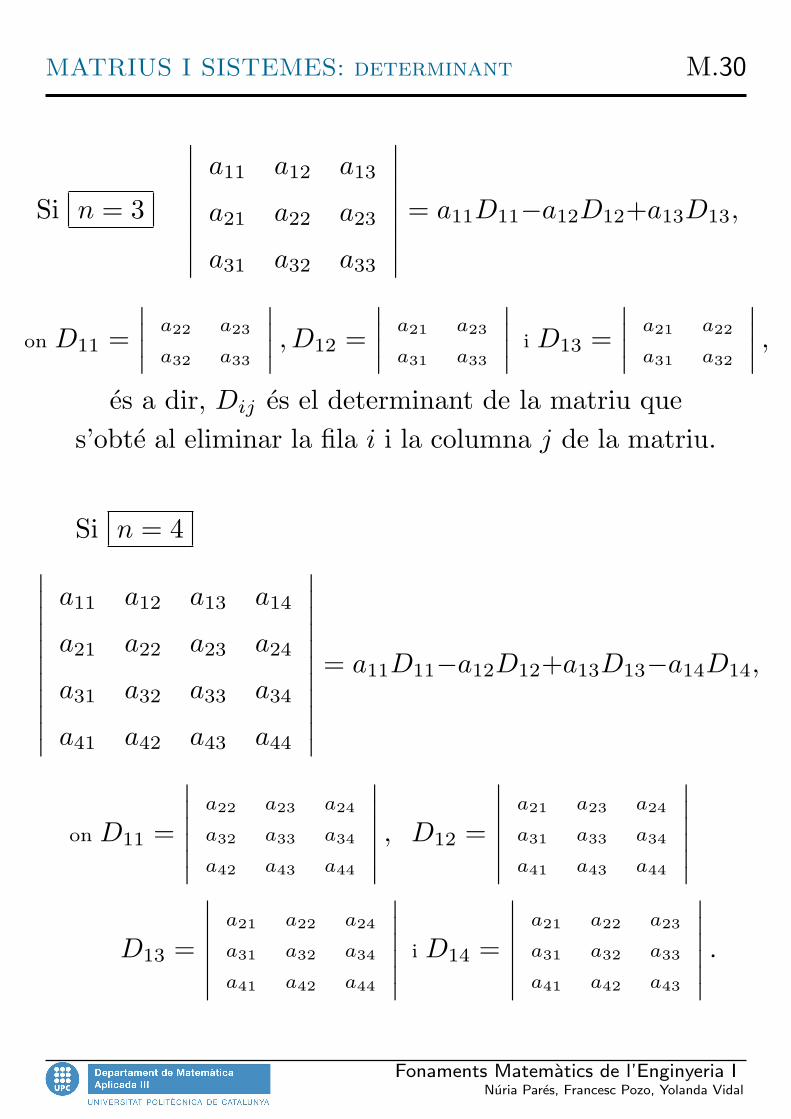
Si n = 3
∣∣∣∣∣∣∣∣
a11 a12 a13
a21 a22 a23
a31 a32 a33
∣∣∣∣∣∣∣∣= a11D11−a12D12+a13D13,
on D11 =∣∣∣∣
a22 a23
a32 a33
∣∣∣∣ , D12 =∣∣∣∣
a21 a23
a31 a33
∣∣∣∣ i D13 =∣∣∣∣
a21 a22
a31 a32
∣∣∣∣ ,
es a dir, Dij es el determinant de la matriu ques’obte al eliminar la fila i i la columna j de la matriu.
Si n = 4∣∣∣∣∣∣∣∣∣∣∣
a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44
∣∣∣∣∣∣∣∣∣∣∣
= a11D11−a12D12+a13D13−a14D14,
on D11 =
∣∣∣∣∣∣a22 a23 a24
a32 a33 a34
a42 a43 a44
∣∣∣∣∣∣, D12 =
∣∣∣∣∣∣a21 a23 a24
a31 a33 a34
a41 a43 a44
∣∣∣∣∣∣
D13 =
∣∣∣∣∣∣a21 a22 a24
a31 a32 a34
a41 a42 a44
∣∣∣∣∣∣i D14 =
∣∣∣∣∣∣a21 a22 a23
a31 a32 a33
a41 a42 a43
∣∣∣∣∣∣.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: determinant M.31
Definicio 22. S’anomena menor complementarid’un element aij d’una matriu quadrada, eldeterminant de la matriu que s’obte d’eliminar la filai i la columna j a la matriu inicial, i se simbolitzaper ∆ij o be per Dij.
Definicio 23. S’anomena adjunt d’un elementaij, i s’expressa per Aij, el menor complementari deaij multiplicat per (−1)i+j.
El determinant d’ordre n es calcula com:∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 · · · a1n
a21 a22 · · · a2n
......
. . ....
an1 an2 · · · ann
∣∣∣∣∣∣∣∣∣∣∣∣
= a11A11+a12A12+· · ·+a1nA1n.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: determinant M.32
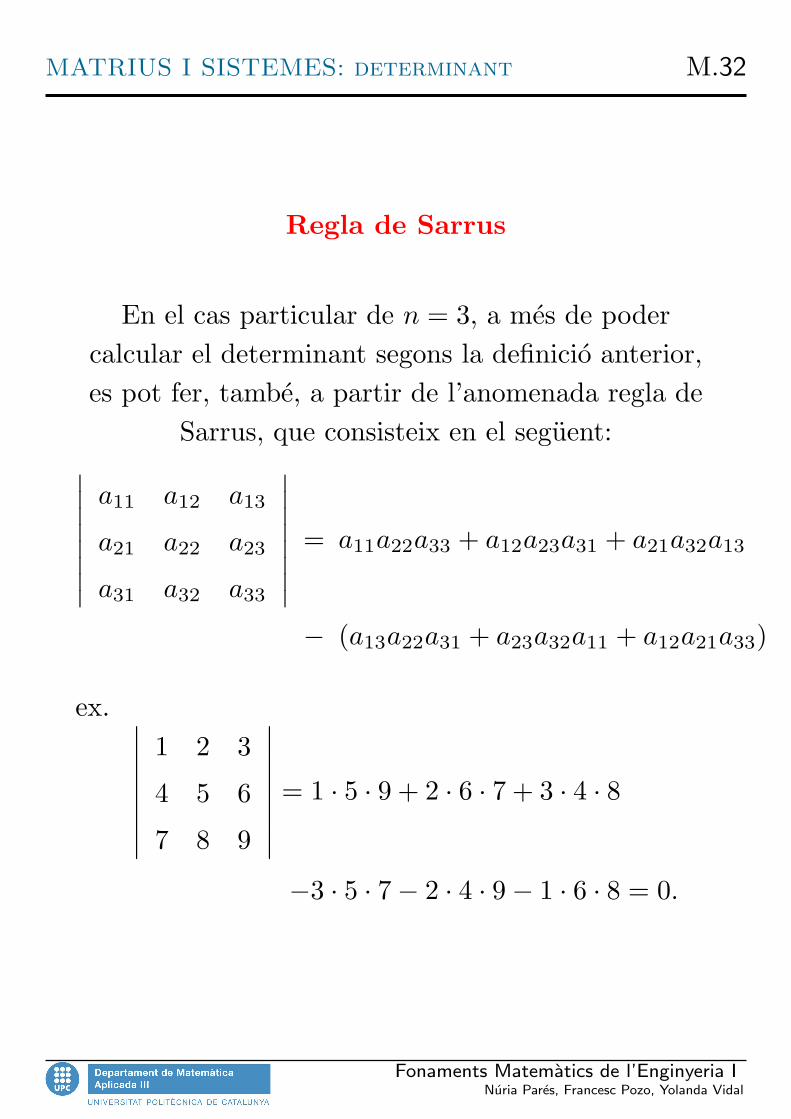
Regla de Sarrus
En el cas particular de n = 3, a mes de podercalcular el determinant segons la definicio anterior,es pot fer, tambe, a partir de l’anomenada regla de
Sarrus, que consisteix en el seguent:∣∣∣∣∣∣∣∣
a11 a12 a13
a21 a22 a23
a31 a32 a33
∣∣∣∣∣∣∣∣= a11a22a33 + a12a23a31 + a21a32a13
− (a13a22a31 + a23a32a11 + a12a21a33)
ex. ∣∣∣∣∣∣∣∣
1 2 3
4 5 6
7 8 9
∣∣∣∣∣∣∣∣= 1 · 5 · 9 + 2 · 6 · 7 + 3 · 4 · 8
−3 · 5 · 7− 2 · 4 · 9− 1 · 6 · 8 = 0.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: determinant M.33
Exercici Proposat 9. Calculeu els determinants deles seguents matrius:
(cos α − sin α
sin α cos α
),
1 1 1
x y z
x2 y2 z2
,
2 1 3 −1
3 1 2 1
1 2 3 1
1 −1 1 −1
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: determinant M.34
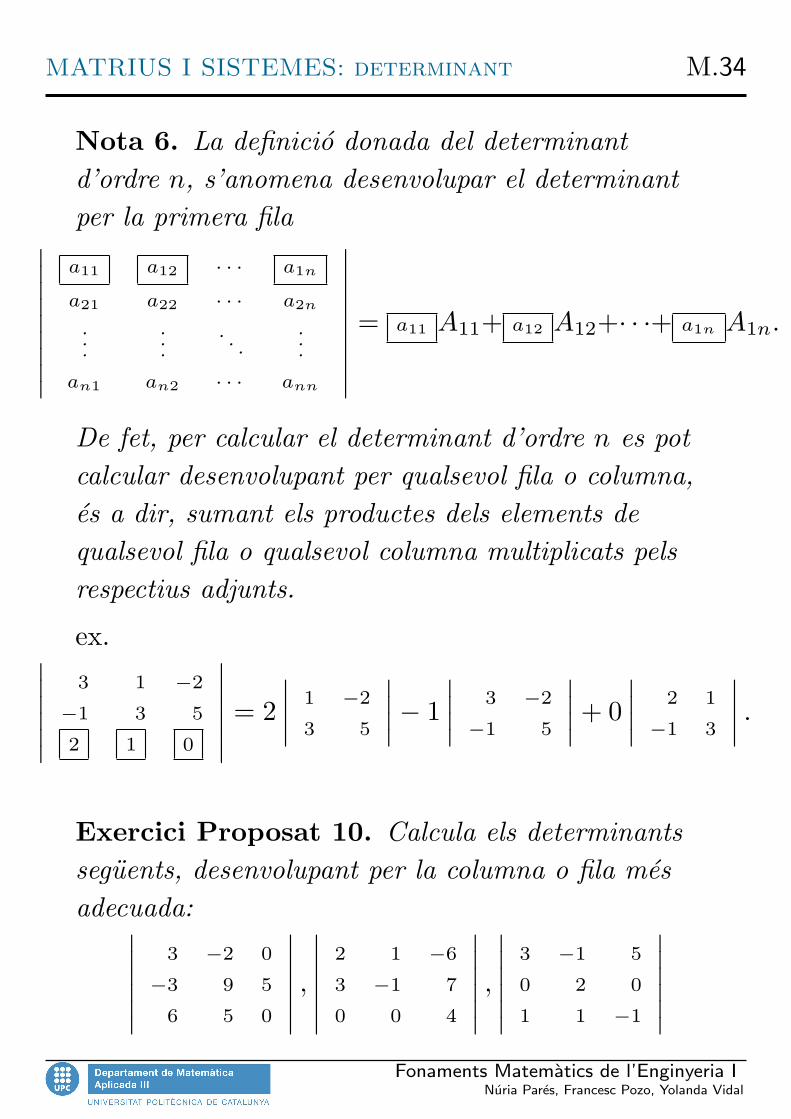
Nota 6. La definicio donada del determinantd’ordre n, s’anomena desenvolupar el determinantper la primera fila
∣∣∣∣∣∣∣∣∣
a11 a12 · · · a1n
a21 a22 · · · a2n
.
.
....
. . ....
an1 an2 · · · ann
∣∣∣∣∣∣∣∣∣= a11 A11+ a12 A12+· · ·+ a1n A1n.
De fet, per calcular el determinant d’ordre n es potcalcular desenvolupant per qualsevol fila o columna,es a dir, sumant els productes dels elements dequalsevol fila o qualsevol columna multiplicats pelsrespectius adjunts.
ex.∣∣∣∣∣∣3 1 −2
−1 3 5
2 1 0
∣∣∣∣∣∣= 2
∣∣∣∣1 −2
3 5
∣∣∣∣− 1∣∣∣∣
3 −2
−1 5
∣∣∣∣ + 0∣∣∣∣
2 1
−1 3
∣∣∣∣ .
Exercici Proposat 10. Calcula els determinantsseguents, desenvolupant per la columna o fila mesadecuada:∣∣∣∣∣∣
3 −2 0
−3 9 5
6 5 0
∣∣∣∣∣∣,
∣∣∣∣∣∣2 1 −6
3 −1 7
0 0 4
∣∣∣∣∣∣,
∣∣∣∣∣∣3 −1 5
0 2 0
1 1 −1
∣∣∣∣∣∣
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: determinant M.35
Propietats dels determinants (I)
(D1) Si en un determinant es canvien dues files o duescolumnes entre si, el determinant canvia de signe.
∣∣∣∣1 2
3 4
∣∣∣∣ = −∣∣∣∣
2 1
4 3
∣∣∣∣ = −∣∣∣∣
3 4
1 2
∣∣∣∣
(D2) Si en un determinant es multipliquen tots elselements d’una fila o columna per una constant,el determinant queda multiplicat per aquestaconstant.∣∣∣∣
2 20
2 5
∣∣∣∣ = 2∣∣∣∣
1 10
2 5
∣∣∣∣ = 2 · 5∣∣∣∣
1 2
2 1
∣∣∣∣
(D3) Si en un determinant, una fila o una columna essuma de dos sumands, el determinant esdescomposa en suma de dos determinants,cadascun d’ells amb un dels sumands en la fila ocolumna corresponent i tenint la resta de files ocolumnes iguals.
∣∣∣∣1 + 3 3
2 + 7 4
∣∣∣∣ =∣∣∣∣
1 3
2 4
∣∣∣∣ +∣∣∣∣
3 3
7 4
∣∣∣∣
(D4) El determinant de la matriu identitat val 1.∣∣∣∣
1 0
0 1
∣∣∣∣ = 1
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: determinant M.36
Propietats dels determinants (II)
(D5) Si tots els elements d’una fila o columna sonnuls, aleshores el determinant val 0.
∣∣∣∣∣∣1 2 0
3 4 0
6 1 0
∣∣∣∣∣∣= 0
(D6) Si en un determinant, una fila o una columna escombinacio lineal d’altres files o columnes (= ala suma d’altres files o columnes multiplicadesper una constant), el determinant es nul.
∣∣∣∣∣∣1 2 2 · 1 + 3 · 23 1 2 · 3 + 3 · 15 2 2 · 5 + 3 · 2
∣∣∣∣∣∣= 0
(D7) El determinant d’una matriu coincideix amb elde la seva transposada, es a dir, |A| = |At|.
∣∣∣∣1 2
3 4
∣∣∣∣ =∣∣∣∣
1 3
2 4
∣∣∣∣
(D8) El determinant d’un producte de matrius es igualal producte dels determinants, |A ·B| = |A| · |B|.
∣∣∣∣(
1 2
3 4
)(3 2
7 1
)∣∣∣∣ =∣∣∣∣
1 2
3 4
∣∣∣∣∣∣∣∣
3 2
7 1
∣∣∣∣
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: determinant M.37
Aplicacions dels determinants
Proposicio 2. Una matriu A es invertible, regular ono singular si i nomes si |A| 6= 0. I en cas de ser
invertible, |A−1| = 1|A| .
• Si A es invertible,
AA−1 = I =⇒ |AA−1| = |I|.
Llavors fent servir les propietats D4 i D8 delsdeterminants,
|A||A−1| = 1 =⇒ |A−1| = 1|A| .
Exercici Proposat 11. Calculeu la inversa de lamatriu
(2 3
1 −1
), i comproveu que |A−1| = 1
|A| .
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: determinant M.38
Definicio 24. S’anomena menor d’ordre k d’unamatriu qualsevol A ∈Mm×n(R) el determinantd’una submatriu quadrada d’ordre k × k de A,prenent k files i k columnes de la matriu A
Definicio 25. Podem definir tambe el rang d’unamatriu A ∈Mm×n(R) com l’ordre del major menorno nul que es pugui obtenir de la matriu A.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: determinant M.39
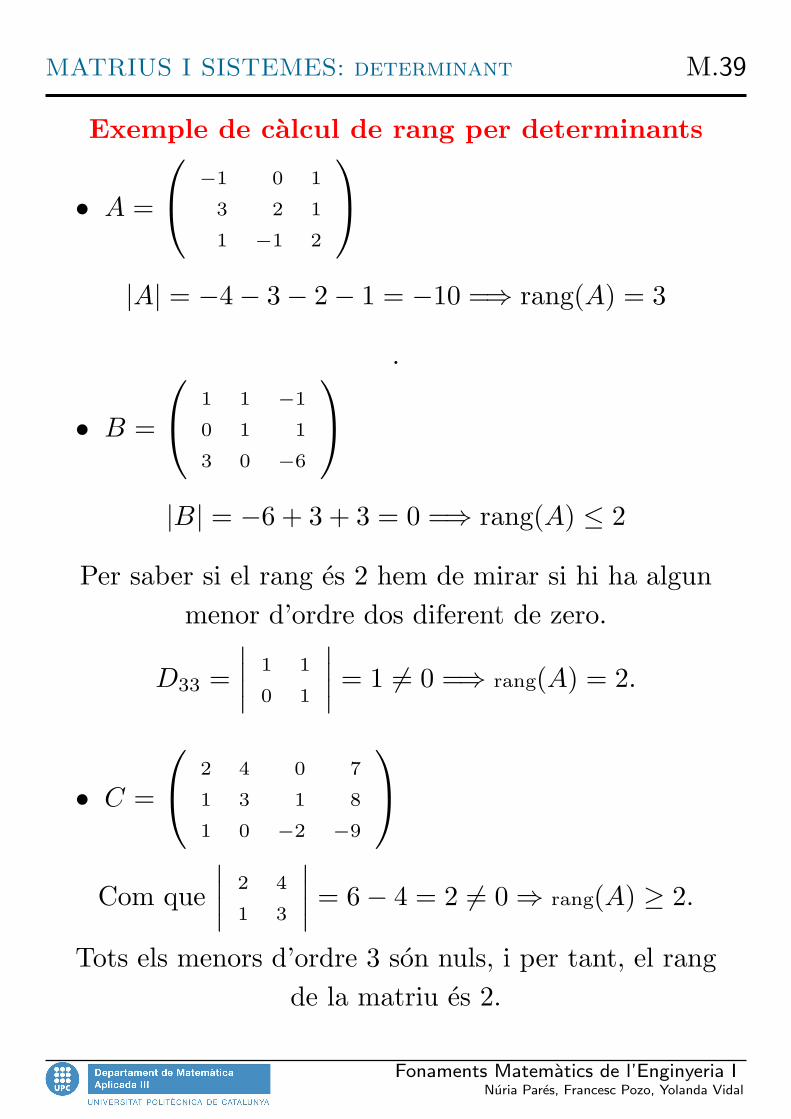
Exemple de calcul de rang per determinants
• A =
−1 0 1
3 2 1
1 −1 2
|A| = −4− 3− 2− 1 = −10 =⇒ rang(A) = 3
.
• B =
1 1 −1
0 1 1
3 0 −6
|B| = −6 + 3 + 3 = 0 =⇒ rang(A) ≤ 2
Per saber si el rang es 2 hem de mirar si hi ha algunmenor d’ordre dos diferent de zero.
D33 =∣∣∣∣
1 1
0 1
∣∣∣∣ = 1 6= 0 =⇒ rang(A) = 2.
• C =
2 4 0 7
1 3 1 8
1 0 −2 −9
Com que∣∣∣∣
2 4
1 3
∣∣∣∣ = 6− 4 = 2 6= 0 ⇒ rang(A) ≥ 2.
Tots els menors d’ordre 3 son nuls, i per tant, el rangde la matriu es 2.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.40
Sistemes d’equacions lineals: definicio iresolucio.
◦ Tipus de sistemes
◦ Sistemes equivalents
◦ Matriu d’un sistema d’equacions
◦ Teorema de Rouche-Frobenius
◦ Ressolucio de sistemes pel metode de Gauss
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.41
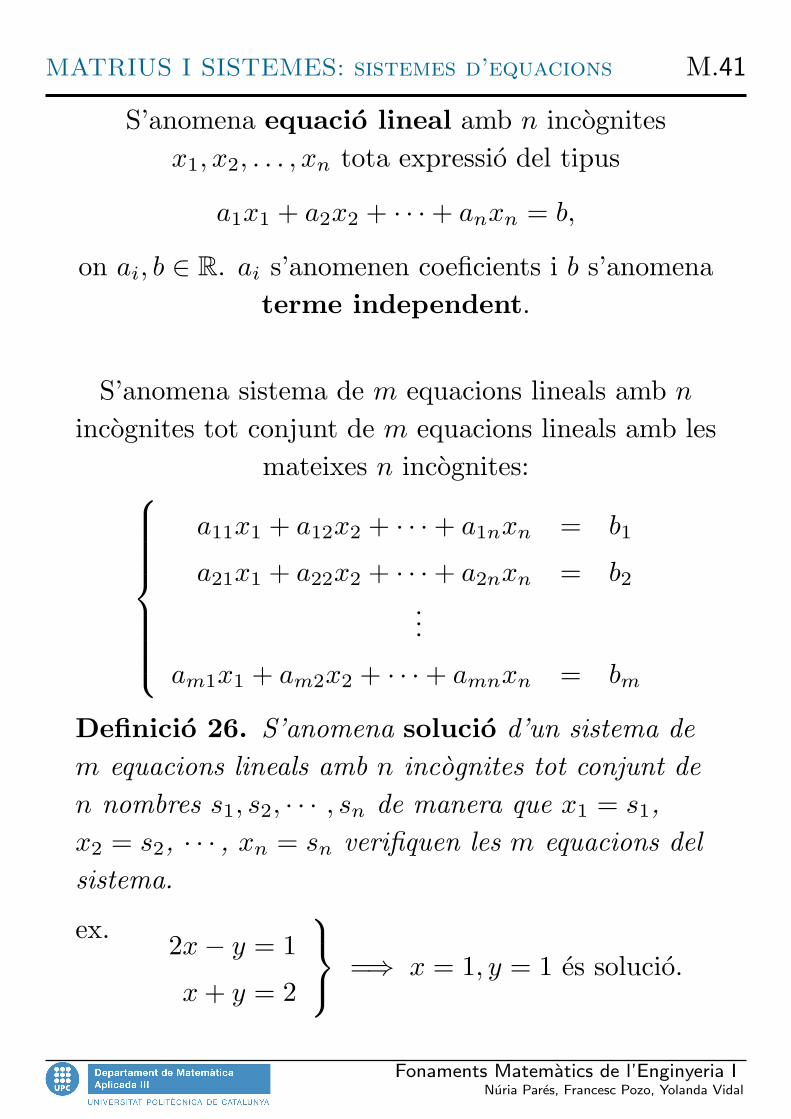
S’anomena equacio lineal amb n incognitesx1, x2, . . . , xn tota expressio del tipus
a1x1 + a2x2 + · · ·+ anxn = b,
on ai, b ∈ R. ai s’anomenen coeficients i b s’anomenaterme independent.
S’anomena sistema de m equacions lineals amb n
incognites tot conjunt de m equacions lineals amb lesmateixes n incognites:
a11x1 + a12x2 + · · ·+ a1nxn = b1
a21x1 + a22x2 + · · ·+ a2nxn = b2
...
am1x1 + am2x2 + · · ·+ amnxn = bm
Definicio 26. S’anomena solucio d’un sistema dem equacions lineals amb n incognites tot conjunt den nombres s1, s2, · · · , sn de manera que x1 = s1,x2 = s2, · · · , xn = sn verifiquen les m equacions delsistema.
ex. 2x− y = 1
x + y = 2
=⇒ x = 1, y = 1 es solucio.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.42
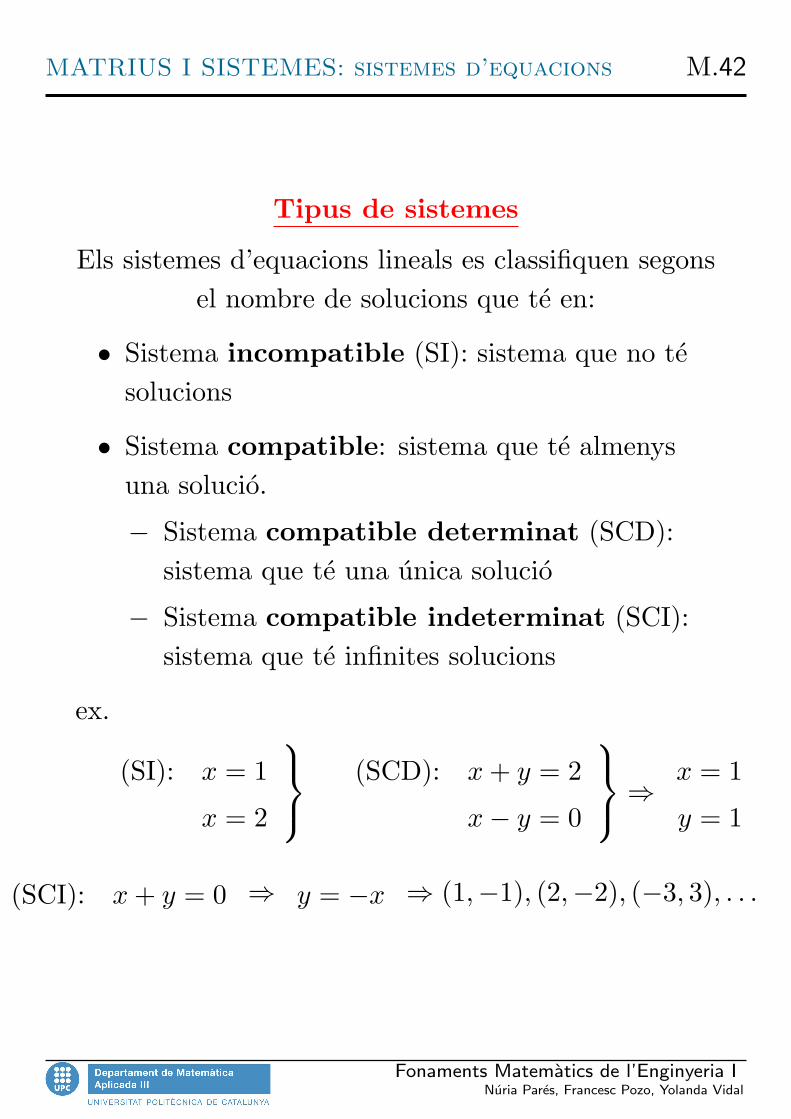
Tipus de sistemes
Els sistemes d’equacions lineals es classifiquen segonsel nombre de solucions que te en:
• Sistema incompatible (SI): sistema que no tesolucions
• Sistema compatible: sistema que te almenysuna solucio.
− Sistema compatible determinat (SCD):sistema que te una unica solucio
− Sistema compatible indeterminat (SCI):sistema que te infinites solucions
ex.
(SI): x = 1
x = 2
(SCD): x + y = 2
x− y = 0
⇒ x = 1
y = 1
(SCI): x + y = 0 ⇒ y = −x ⇒ (1,−1), (2,−2), (−3, 3), . . .
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.43
Sistemes equivalents
Definicio 27. Dos sistemes s’anomenemequivalents si tenen les mateixes solucions.
ex.2x− y = 1
x + y = 2
∼ 4x− 2y = 2
x + y = 2
∼ x = 1
y = 1
Les transformacions elementals que permetenobtenir sistemes equivalents a un de donat son:
(PF) Canviar l’ordre de les equacions.
(MF) Multiplicar o dividir alguna de les equacions perun nombre real diferent de 0.
(SF) Sumar a una equacio del sistema una altramultiplicada per un nombre real.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.44
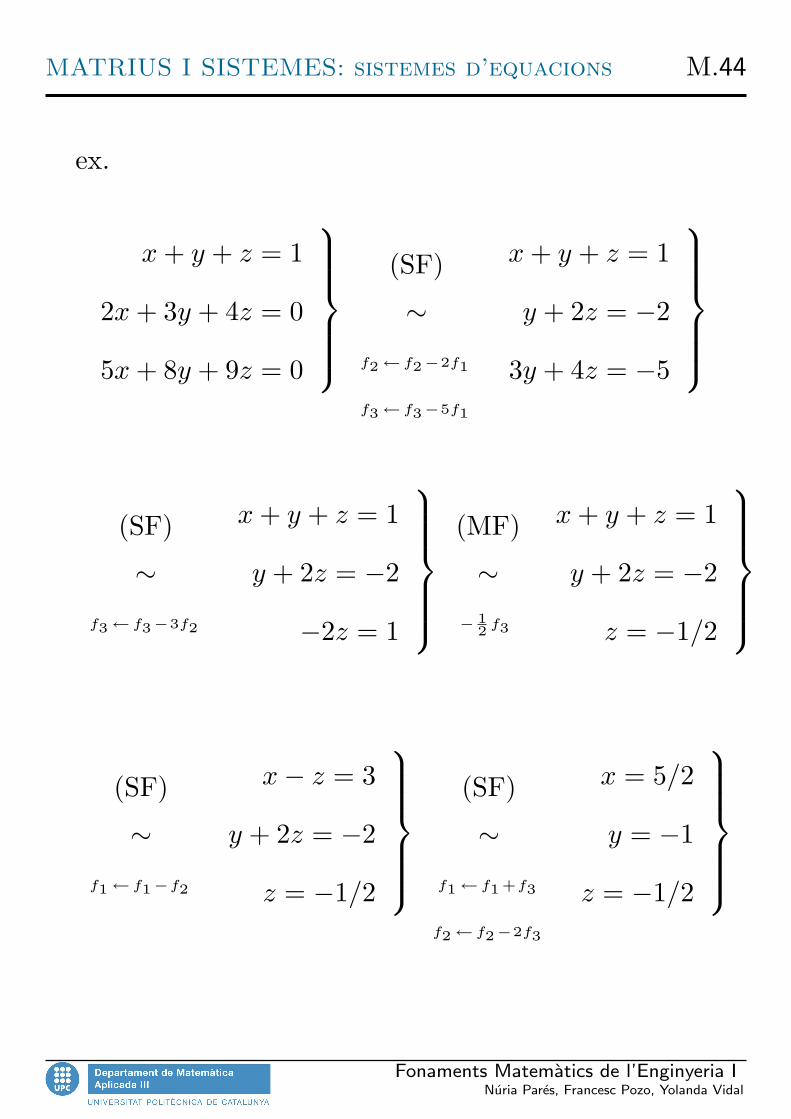
ex.
x + y + z = 1
2x + 3y + 4z = 0
5x + 8y + 9z = 0
(SF)
∼f2←f2−2f1
f3←f3−5f1
x + y + z = 1
y + 2z = −2
3y + 4z = −5
(SF)
∼f3←f3−3f2
x + y + z = 1
y + 2z = −2
−2z = 1
(MF)
∼− 1
2 f3
x + y + z = 1
y + 2z = −2
z = −1/2
(SF)
∼f1←f1−f2
x− z = 3
y + 2z = −2
z = −1/2
(SF)
∼f1←f1+f3
f2←f2−2f3
x = 5/2
y = −1
z = −1/2
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.45
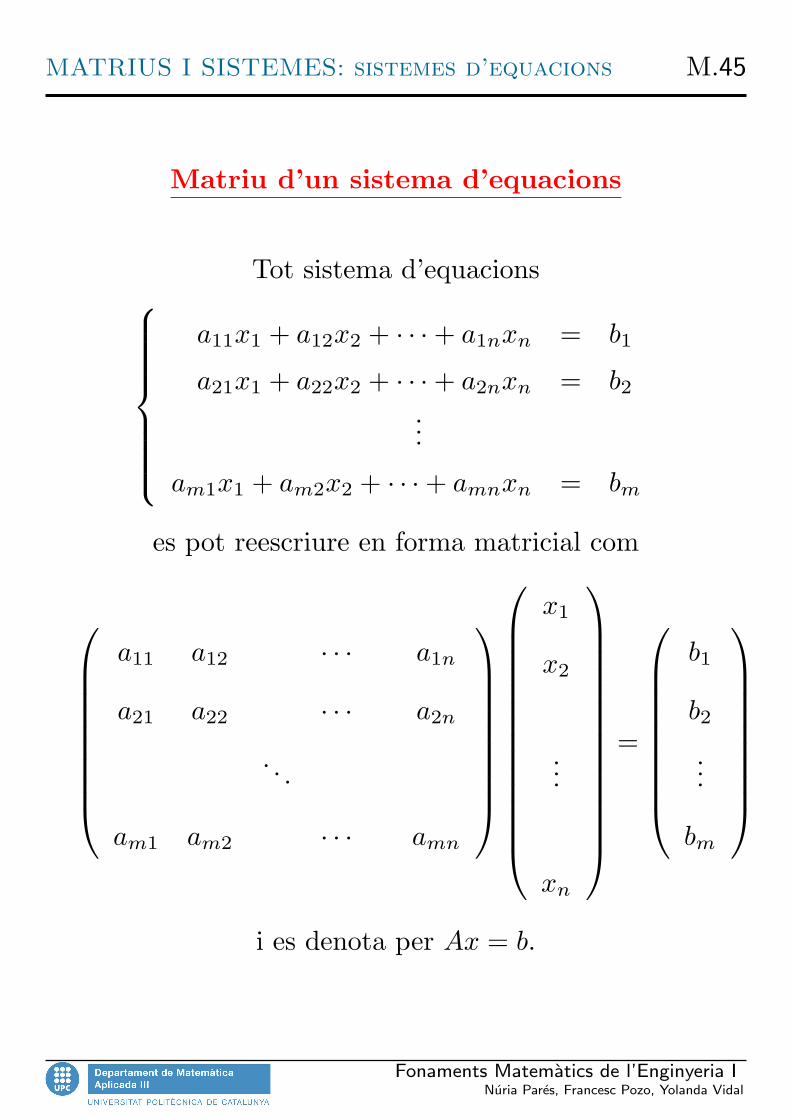
Matriu d’un sistema d’equacions
Tot sistema d’equacions
a11x1 + a12x2 + · · ·+ a1nxn = b1
a21x1 + a22x2 + · · ·+ a2nxn = b2
...
am1x1 + am2x2 + · · ·+ amnxn = bm
es pot reescriure en forma matricial com
a11 a12 · · · a1n
a21 a22 · · · a2n
. . .
am1 am2 · · · amn
x1
x2
...
xn
=
b1
b2
...
bm
i es denota per Ax = b.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.46
Definicio 28. S’anomena matriu d’un sistema lamatriu formada per tots els coeficients de lesincognites i sera una matriu de dimensio m× n quese sol simbolitzar per A.
Definicio 29. S’anomena matriu ampliada lamatriu del sistema si li afegim la columna delstermes independents; aquesta matriu es de dimensiom× (n + 1) i se sol simbolitzar per (A|b).
ex.
2x− y = 1
x + y = 2
A =
2 −1
1 1
, (A|b) =
2 −1 1
1 1 2
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.47
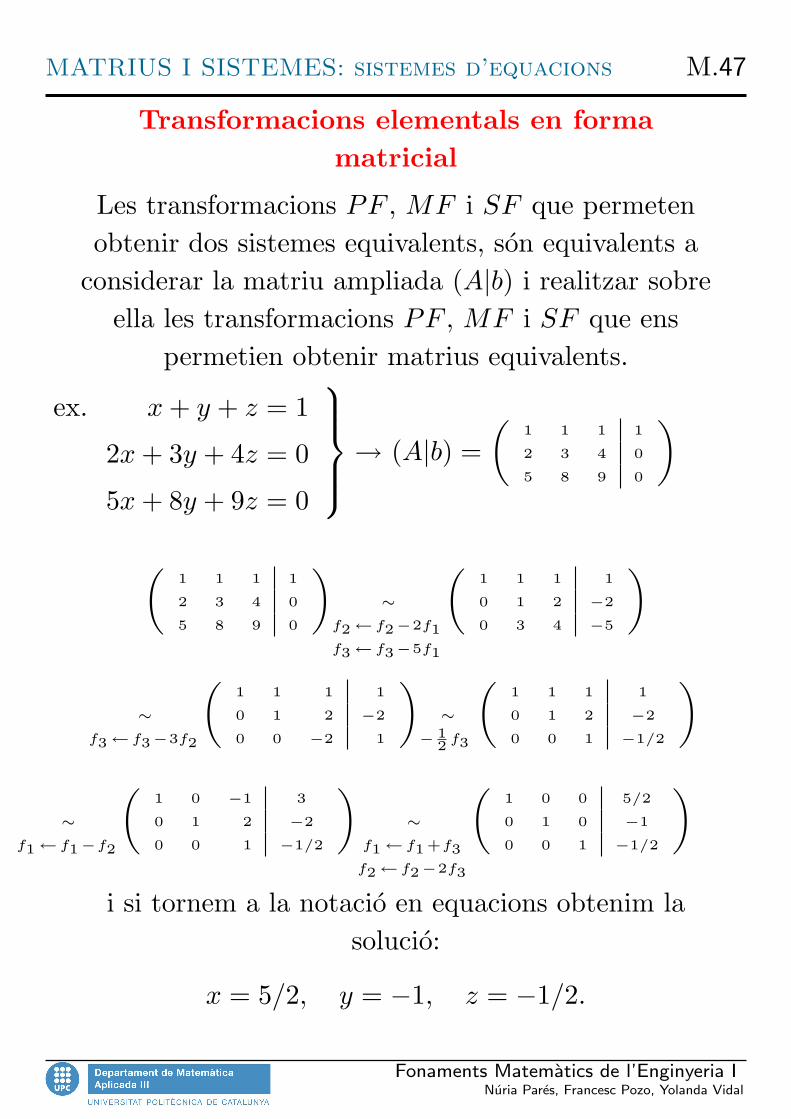
Transformacions elementals en formamatricial
Les transformacions PF , MF i SF que permetenobtenir dos sistemes equivalents, son equivalents a
considerar la matriu ampliada (A|b) i realitzar sobreella les transformacions PF , MF i SF que ens
permetien obtenir matrius equivalents.
ex. x + y + z = 1
2x + 3y + 4z = 0
5x + 8y + 9z = 0
→ (A|b) =
(1 1 1 1
2 3 4 0
5 8 9 0
)
(1 1 1 1
2 3 4 0
5 8 9 0
)∼
f2←f2−2f1f3←f3−5f1
(1 1 1 1
0 1 2 −2
0 3 4 −5
)
∼f3←f3−3f2
(1 1 1 1
0 1 2 −2
0 0 −2 1
)∼
− 12 f3
(1 1 1 1
0 1 2 −2
0 0 1 −1/2
)
∼f1←f1−f2
(1 0 −1 3
0 1 2 −2
0 0 1 −1/2
)∼
f1←f1+f3f2←f2−2f3
(1 0 0 5/2
0 1 0 −1
0 0 1 −1/2
)
i si tornem a la notacio en equacions obtenim lasolucio:
x = 5/2, y = −1, z = −1/2.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.48
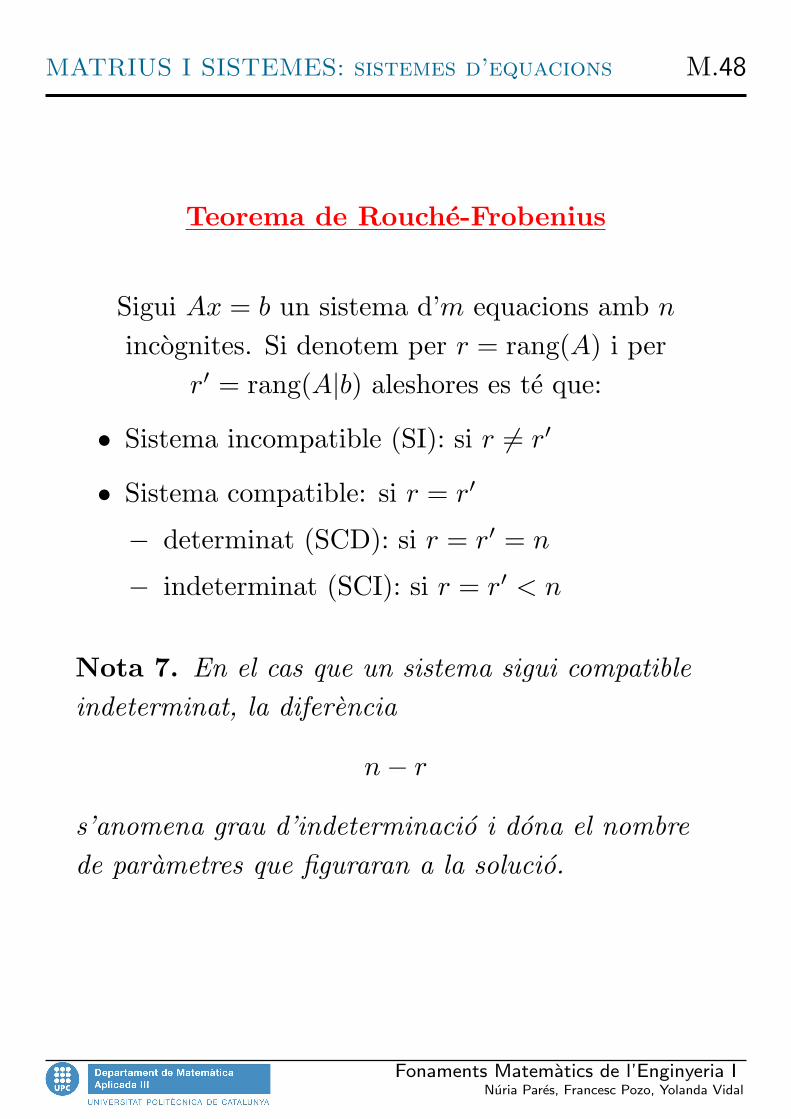
Teorema de Rouche-Frobenius
Sigui Ax = b un sistema d’m equacions amb n
incognites. Si denotem per r = rang(A) i perr′ = rang(A|b) aleshores es te que:
• Sistema incompatible (SI): si r 6= r′
• Sistema compatible: si r = r′
− determinat (SCD): si r = r′ = n
− indeterminat (SCI): si r = r′ < n
Nota 7. En el cas que un sistema sigui compatibleindeterminat, la diferencia
n− r
s’anomena grau d’indeterminacio i dona el nombrede parametres que figuraran a la solucio.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.49
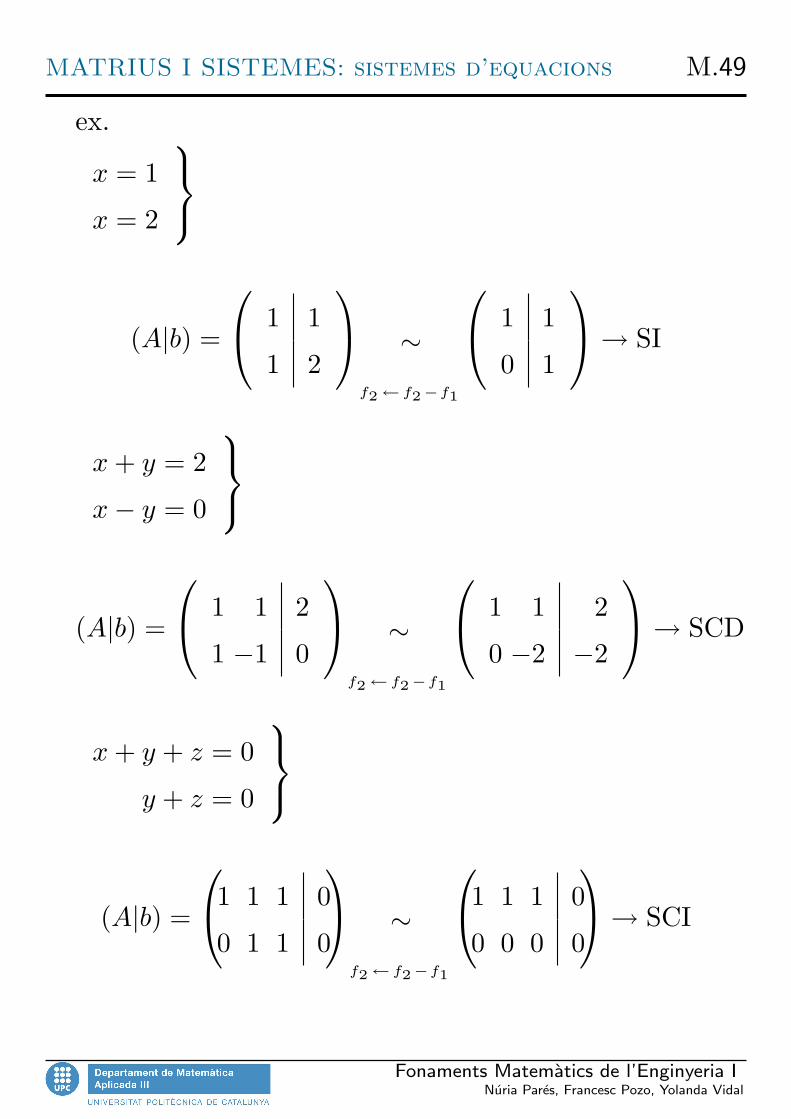
ex.
x = 1
x = 2
(A|b) =
1 1
1 2
∼
f2←f2−f1
1 1
0 1
→ SI
x + y = 2
x− y = 0
(A|b) =
1 1 2
1 −1 0
∼
f2←f2−f1
1 1 2
0 −2 −2
→ SCD
x + y + z = 0
y + z = 0
(A|b) =
1 1 1 0
0 1 1 0
∼
f2←f2−f1
1 1 1 0
0 0 0 0
→ SCI
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.50
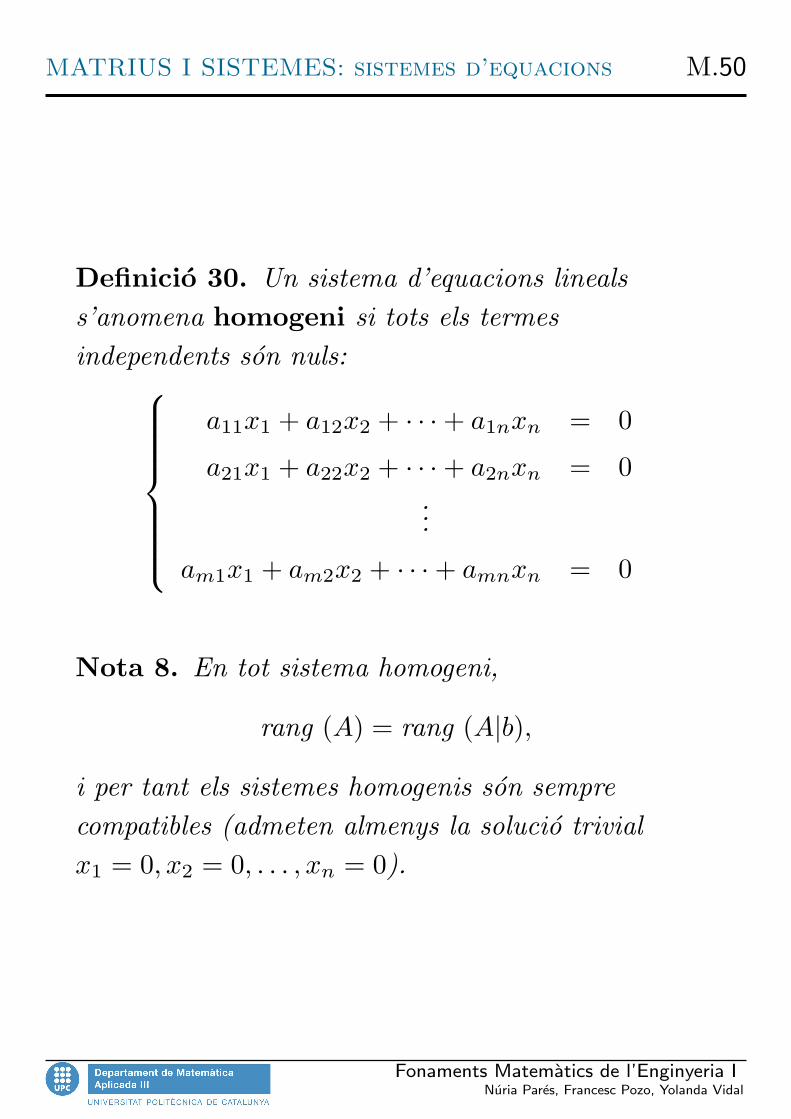
Definicio 30. Un sistema d’equacions linealss’anomena homogeni si tots els termesindependents son nuls:
a11x1 + a12x2 + · · ·+ a1nxn = 0
a21x1 + a22x2 + · · ·+ a2nxn = 0...
am1x1 + am2x2 + · · ·+ amnxn = 0
Nota 8. En tot sistema homogeni,
rang (A) = rang (A|b),
i per tant els sistemes homogenis son semprecompatibles (admeten almenys la solucio trivialx1 = 0, x2 = 0, . . . , xn = 0).
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.51
Ressolucio de sistemes pel metode de Gauss
Regla de Gauss: Es un metode de ressolucio desistemes lineals que es basa en l’obtencio de sistemesequivalents mitjancant l’eliminacio d’incognites, finsarribar a obtenir un sistema amb matriu triangularsuperior. En aquest cas la solucio s’obte a partir del’ultima incognita, per substitucio regressiva a les
files superiors, a partir de la qual s’aniran trobant elsvalors de les altres incognites.
Regla de Gauss-Jordan: Aquesta regla es un casparticular de l’anterior; en lloc d’arribar a un sistemala matriu del qual sigui triangular superior, s’arribaa un sistema amb matriu diagonal, on es mes facil
obtenir de la solucio.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.52
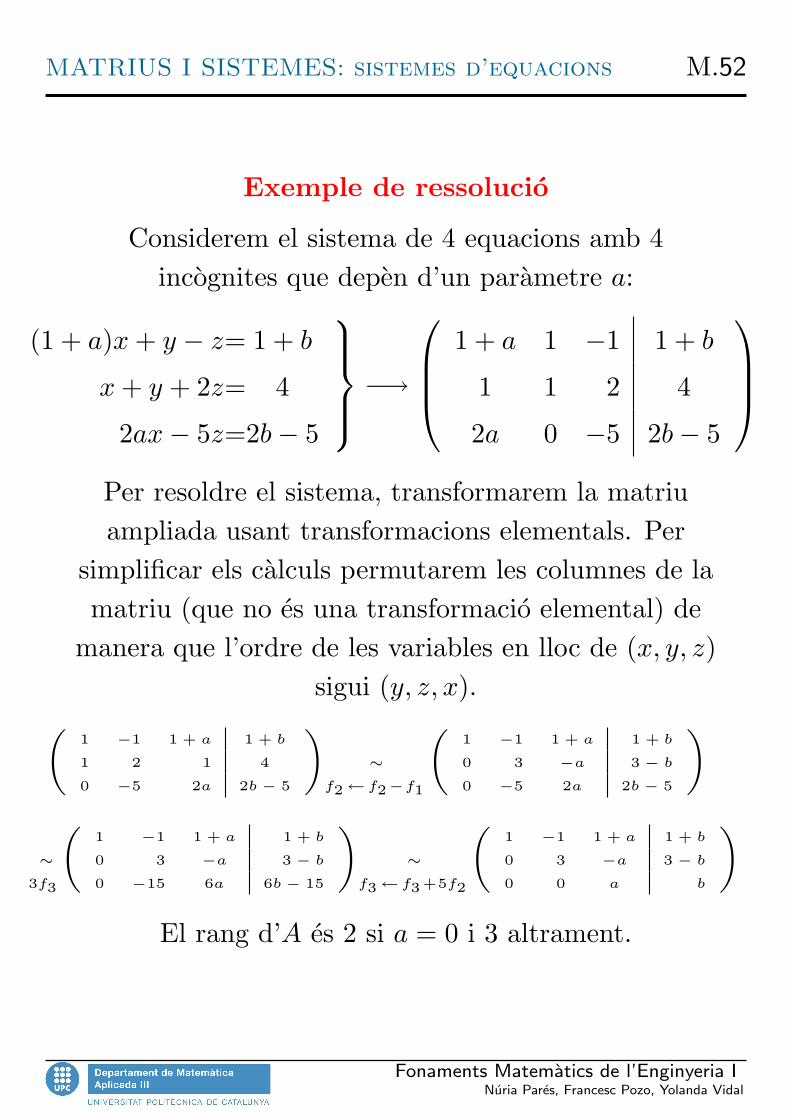
Exemple de ressolucio
Considerem el sistema de 4 equacions amb 4incognites que depen d’un parametre a:
(1 + a)x + y − z= 1 + b
x + y + 2z= 4
2ax− 5z=2b− 5
−→
1 + a 1 −1 1 + b
1 1 2 4
2a 0 −5 2b− 5
Per resoldre el sistema, transformarem la matriuampliada usant transformacions elementals. Per
simplificar els calculs permutarem les columnes de lamatriu (que no es una transformacio elemental) de
manera que l’ordre de les variables en lloc de (x, y, z)sigui (y, z, x).
(1 −1 1 + a 1 + b
1 2 1 4
0 −5 2a 2b − 5
)∼
f2←f2−f1
(1 −1 1 + a 1 + b
0 3 −a 3 − b
0 −5 2a 2b − 5
)
∼3f3
(1 −1 1 + a 1 + b
0 3 −a 3 − b
0 −15 6a 6b − 15
)∼
f3←f3+5f2
(1 −1 1 + a 1 + b
0 3 −a 3 − b
0 0 a b
)
El rang d’A es 2 si a = 0 i 3 altrament.
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal

MATRIUS I SISTEMES: sistemes d’equacions M.53
a = 0 =⇒ rang(A) = 2(
1 −1 1 1 + b
0 3 0 3 − b
0 0 0 b
)=⇒ rang(A|b) =
{2, si b = 0 → SCI
3, si b 6= 0 → SI
Per a = 0, b = 0 les solucions les trobem passant lamatriu ampliada a sistema recordant el canvi d’ordre
en les variables:
y − z + x = 1
3z = 3
→ z = 1
y = 2− x
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal
MATRIUS I SISTEMES: sistemes d’equacions M.54
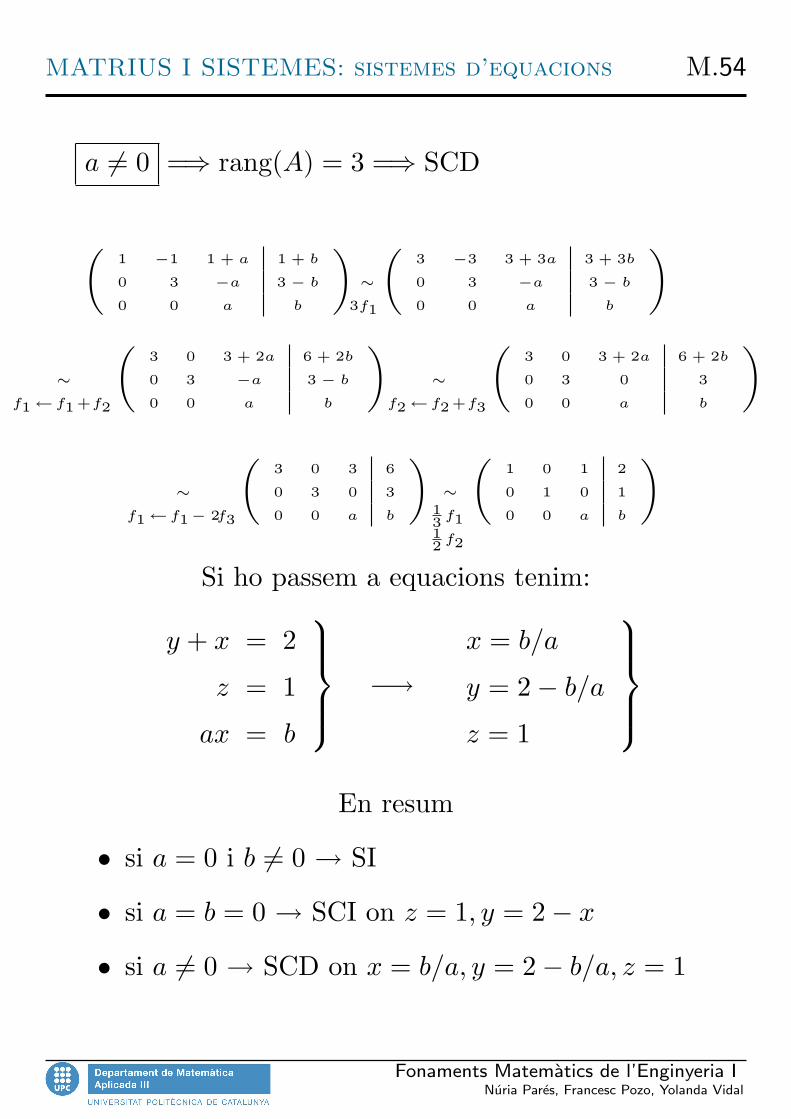
a 6= 0 =⇒ rang(A) = 3 =⇒ SCD
(1 −1 1 + a 1 + b
0 3 −a 3 − b
0 0 a b
)∼
3f1
(3 −3 3 + 3a 3 + 3b
0 3 −a 3 − b
0 0 a b
)
∼f1←f1+f2
(3 0 3 + 2a 6 + 2b
0 3 −a 3 − b
0 0 a b
)∼
f2←f2+f3
(3 0 3 + 2a 6 + 2b
0 3 0 3
0 0 a b
)
∼f1←f1− 2f3
(3 0 3 6
0 3 0 3
0 0 a b
)∼
13 f112 f2
(1 0 1 2
0 1 0 1
0 0 a b
)
Si ho passem a equacions tenim:
y + x = 2
z = 1
ax = b
−→x = b/a
y = 2− b/a
z = 1
En resum
• si a = 0 i b 6= 0 → SI
• si a = b = 0 → SCI on z = 1, y = 2− x
• si a 6= 0 → SCD on x = b/a, y = 2− b/a, z = 1
Fonaments Matematics de l’Enginyeria INuria Pares, Francesc Pozo, Yolanda Vidal




















