
Machine Learning for Electronic Design Automation: A Survey
46
40 Machine Learning for Electronic Design Automation: A Survey GUYUE HUANG, JINGBO HU, YIFAN HE, JIALONG LIU, MINGYUAN MA, ZHAOYANG SHEN, JUEJIAN WU, YUANFAN XU, HENGRUI ZHANG, KAI ZHONG, and XUEFEI NING, Tsinghua University, China YUZHE MA, HAOYU YANG, and BEI YU, Chinese University of Hong Kong, Hong Kong SAR HUAZHONG YANG and YU WANG, Tsinghua University, China With the down-scaling of CMOS technology, the design complexity of very large-scale integrated is increas- ing. Although the application of machine learning (ML) techniques in electronic design automation (EDA) can trace its history back to the 1990s, the recent breakthrough of ML and the increasing complexity of EDA tasks have aroused more interest in incorporating ML to solve EDA tasks. In this article, we present a com- prehensive review of existing ML for EDA studies, organized following the EDA hierarchy. CCS Concepts: • Hardware → Electronic design automation;• Computing methodologies → Ma- chine learning; Additional Key Words and Phrases: Electronic design automation, machine learning, neural networks ACM Reference format: Guyue Huang, Jingbo Hu, Yifan He, Jialong Liu, Mingyuan Ma, Zhaoyang Shen, Juejian Wu, Yuanfan Xu, Hengrui Zhang, Kai Zhong, Xuefei Ning, Yuzhe Ma, Haoyu Yang, Bei Yu, Huazhong Yang, and Yu Wang. 2021. Machine Learning for Electronic Design Automation: A Survey. ACM Trans. Des. Autom. Electron. Syst. 26, 5, Article 40 (May 2021), 46 pages. https://doi.org/10.1145/3451179 1 INTRODUCTION As one of the most important fields in applied computer/electronic engineering, Electronic De- sign Automation (EDA) has a long history and is still under heavy development incorporating Guyue Huang, Jingbo Hu, Yifan He, Jialong Liu, Mingyuan Ma, Zhaoyang Shen, Juejian Wu, Yuanfan Xu, Hengrui Zhang, and Kai Zhong are ordered alphabetically. This work was partly supported by National Natural Science Foundation of China (Grants No. U19B2019, No. 61832007, and No. 61621091), and the Research Grants Council of Hong Kong SAR (Grant No. CUHK14209420). Authors’ addresses: G. Huang, J. Hu, Y. He, J. Liu, M. Ma, Z. Shen, J. Wu, Y. Xu, H. Zhang, K. Zhong, and X. Ning, Tsinghua University, China; emails: [email protected], [email protected], [email protected], [email protected], [email protected], [email protected], xuyf20@mails. tsinghua.edu.cn, [email protected], [email protected], [email protected]; Y. Ma, H. Yang, and B. Yu, Chinese University of Hong Kong, Hong Kong SAR; emails: [email protected], [email protected], [email protected]; H. Yang and Y. Wang, Tsinghua University, China; emails: [email protected], [email protected]. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, or republish, to post on servers or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from [email protected]. © 2021 Association for Computing Machinery. 1084-4309/2021/05-ART40 $15.00 https://doi.org/10.1145/3451179 ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.
-
Upload
khangminh22 -
Category
Documents
-
view
4 -
download
0
Transcript of Machine Learning for Electronic Design Automation: A Survey

40
Machine Learning for Electronic Design Automation:
A Survey
GUYUE HUANG, JINGBO HU, YIFAN HE, JIALONG LIU, MINGYUAN MA,
ZHAOYANG SHEN, JUEJIAN WU, YUANFAN XU, HENGRUI ZHANG, KAI ZHONG, and
XUEFEI NING, Tsinghua University, China
YUZHE MA, HAOYU YANG, and BEI YU, Chinese University of Hong Kong, Hong Kong SAR
HUAZHONG YANG and YU WANG, Tsinghua University, China
With the down-scaling of CMOS technology, the design complexity of very large-scale integrated is increas-
ing. Although the application of machine learning (ML) techniques in electronic design automation (EDA)
can trace its history back to the 1990s, the recent breakthrough of ML and the increasing complexity of EDA
tasks have aroused more interest in incorporating ML to solve EDA tasks. In this article, we present a com-
prehensive review of existing ML for EDA studies, organized following the EDA hierarchy.
CCS Concepts: • Hardware → Electronic design automation; • Computing methodologies → Ma-
chine learning;
Additional Key Words and Phrases: Electronic design automation, machine learning, neural networks
ACM Reference format:
Guyue Huang, Jingbo Hu, Yifan He, Jialong Liu, Mingyuan Ma, Zhaoyang Shen, Juejian Wu, Yuanfan Xu,
Hengrui Zhang, Kai Zhong, Xuefei Ning, Yuzhe Ma, Haoyu Yang, Bei Yu, Huazhong Yang, and Yu Wang.
2021. Machine Learning for Electronic Design Automation: A Survey. ACM Trans. Des. Autom. Electron. Syst.
26, 5, Article 40 (May 2021), 46 pages.
https://doi.org/10.1145/3451179
1 INTRODUCTION
As one of the most important fields in applied computer/electronic engineering, Electronic De-
sign Automation (EDA) has a long history and is still under heavy development incorporating
Guyue Huang, Jingbo Hu, Yifan He, Jialong Liu, Mingyuan Ma, Zhaoyang Shen, Juejian Wu, Yuanfan Xu, Hengrui Zhang,
and Kai Zhong are ordered alphabetically.
This work was partly supported by National Natural Science Foundation of China (Grants No. U19B2019, No. 61832007,
and No. 61621091), and the Research Grants Council of Hong Kong SAR (Grant No. CUHK14209420).
Authors’ addresses: G. Huang, J. Hu, Y. He, J. Liu, M. Ma, Z. Shen, J. Wu, Y. Xu, H. Zhang, K. Zhong, and X. Ning,
Tsinghua University, China; emails: [email protected], [email protected], [email protected],
[email protected], [email protected], [email protected], xuyf20@mails.
tsinghua.edu.cn, [email protected], [email protected], [email protected];
Y. Ma, H. Yang, and B. Yu, Chinese University of Hong Kong, Hong Kong SAR; emails: [email protected],
[email protected], [email protected]; H. Yang and Y. Wang, Tsinghua University, China; emails:
[email protected], [email protected].
Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee
provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and
the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored.
Abstracting with credit is permitted. To copy otherwise, or republish, to post on servers or to redistribute to lists, requires
prior specific permission and/or a fee. Request permissions from [email protected].
© 2021 Association for Computing Machinery.
1084-4309/2021/05-ART40 $15.00
https://doi.org/10.1145/3451179
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:2 G. Huang et al.
cutting-edge algorithms and technologies. In recent years, with the development of semiconduc-tor technology, the scale of integrated circuit (IC) has grown exponentially, challenging thescalability and reliability of the circuit design flow. Therefore, EDA algorithms and software are re-quired to be more effective and efficient to deal with extremely large search space with low latency.
Machine learning (ML) is taking an important role in our lives these days, which has beenwidely used in many scenarios. ML methods, including traditional and deep-learning algorithms,achieve amazing performance in solving classification, detection, and design space explorationproblems. Additionally, ML methods show great potential to generate high-quality solutionsfor many NP-complete (NPC) problems, which are common in the EDA field, while tradi-tional methods lead to huge time and resource consumption to solve these problems. Traditionalmethods usually solve every problem from the beginning, with a lack of knowledge accumu-lation. Instead, ML algorithms focus on extracting high-level features or patterns that can bereused in other related or similar situations, avoiding repeated complicated analysis. Therefore,applying machine learning methods is a promising direction to accelerate the solving of EDAproblems.
In recent years, ML for EDA is becoming one of the trending topics, and a lot of studies that useML to improve EDA methods have been proposed, which cover almost all the stages in the chipdesign flow, including design space reduction and exploration, logic synthesis, placement, rout-ing, testing, verification, manufacturing, .and so on. These ML-based methods have demonstratedimpressive improvement compared with traditional methods.
We observe that most work collected in this survey can be grouped into four types: decision
making in traditional methods, performance prediction, black-box optimization, and automated de-
sign, ordered by decreasing manual efforts and expert experiences in the design procedure, or anincreasing degree of automation. The opportunity of ML in EDA starts from decision making in
traditional methods, where an ML model is trained to select among available tool chains, algo-rithms, or hyper-parameters, to replace empirical choice or brute-force search. ML is also used forperformance prediction, where a model is trained from a database of previously implemented de-signs to predict the quality of new designs, helping engineers to evaluate new designs without thetime-consuming synthesis procedure. Even more automated, EDA tools utilized the workflow ofblack-box optimization, where the entire procedure of design space exploration (DSE) is guidedby a predictive ML model and a sampling strategy supported by ML theories. Recent advancesin Deep Learning (DL), especially Reinforcement Learning (RL) techniques have stimulatedseveral studies that fully automate some complex design tasks with extremely large design space,where predictors and policies are learned, performed, and adjusted in an online form, showing apromising future of Artificial Intelligence (AI)-assisted automated design.
This survey gives a comprehensive review of some recent important studies applying ML tosolve some EDA important problems. The review of these studies is organized according to theircorresponding stages in the EDA flow. Although the study on ML for EDA can trace back to thelast century, most of the works included in this survey are in recent five years. The rest of thissurvey is organized as follows. In Section 2, we introduce the background of both EDA and ML.From Section 3 to Section 5, we introduce the studies that focus on different stages of the EDA flow,i.e., high-level synthesis, logic synthesis and physical design (placement and routing), and masksynthesis, respectively. In Section 6, analog design methods with ML are reviewed. ML-poweredtesting and verification methods are discussed in Section 7. Then, in Section 8, other highly relatedstudies are discussed, including ML for SAT solver and the acceleration of EDA with deep-learningengine. The discussion of various studies from the ML perspective is given in Section 9, which iscomplementary to the main organization of this article. Finally, Section 10 concludes the existingML methods for EDA and highlights future trends in this field.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:3
Fig. 1. Modern chip design flow.
2 BACKGROUND
2.1 Electronic Design Automation
Electronic design automation is one of the most important fields in electronic engineering. Inthe past few decades, it has been witnessed that the flow of chip design became more and morestandardized and complicated. A modern chip design flow is shown in Figure 1.
High-level synthesis (HLS) provides automatic conversion from C/C++/SystemC-based spec-ifications to hardware description languages (HDL). HLS makes hardware design much moreconvenient by allowing the designer to use high-level descriptions for a hardware system. How-ever, when facing a large-scale system, HLS often takes a long time to finish the synthesis. Con-sequently, efficient DSE strategy is crucial in HLS [74, 95, 107, 112, 180].
Logic synthesis converts the behavioral level description to the gate level description, which isone of the most important problems in EDA. Logic synthesis implements the specific logic func-tions by generating a combination of gates selected in a given cell library, and optimizes the designfor different optimization goals. Logic synthesis is a complicated process that usually cannot besolved optimally, and hence the heuristic algorithms are widely used in this stage, which includelots of ML methods [48, 56, 115, 167].
Based on the netlist obtained from synthesis, floorplanning and placement aim to assign thenetlist components to specific locations on the chip layout. Better placement assignment impliesthe potential of better chip area utilization, timing performance, and routability. Routing is oneof the essential steps in very large-scale integrated (VLSI) physical design flow based on theplacement assignment. Routing assigns the wires to connect the components on the chip. At thesame time, routing needs to satisfy the requirements of timing performance and total wirelength
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:4 G. Huang et al.
without violating the design rules. The placement and routing are strongly coupled. Thus it iscrucial to consider the routing performance even in the placement stage, and many ML-basedrouting-aware methods are proposed to improve the performance of physical design [6, 27, 89,106, 150, 154].
Fabrication is a complicated process containing multiple steps, which has a high cost in termsof time and resources. Mask synthesis is one of the main steps in the fabrication process, wherelithography simulation is leveraged to reduce the probability of fabrication failure. Mask opti-mization and lithography simulation are still challenging problems. Recently, various ML-basedmethods are applied in the lithography simulation and mask synthesis [20, 43, 159, 163, 165].
To ensure the correctness of a design, we need to perform design verification before manufac-turing. In general, verification is conducted after each stage of the EDA flow, and the test set designis one of the major problems. Traditional random or automated test set generation methods arefar away from optimal, therefore, there exist many studies that apply ML methods to optimize testset generation for verification [24, 33, 38, 47, 49, 57, 69, 135, 145, 146].
After the chip design flow is finished, manufacturing testing needs to be carried out. The chipsneed to go through various tests to verify their functionality and reliability. The coverage andthe efficiency are two main optimization goals of the testing stage. Generally speaking, a largetest set (i.e., a large number of test points) leads to higher coverage at the cost of high resourceconsumption. To address the high cost of the testing process, studies have focused on applying MLtechniques for test set optimization [100, 120, 140, 141] and test complexity reduction [5, 34, 142].
Thanks to decades of efforts from both academia and industry, the chip design flow is well-developed. However, with the huge increase in the scale of integrated circuits, more efficient andeffective methods need to be incorporated to reduce the design cost. Recent advancements in ma-chine learning have provided a far-reaching data-driven perspective for problem-solving. In thissurvey, we review recent learning-based approaches for each stage in the EDA flow and also dis-cuss the ML for EDA studies from the machine learning perspective.
2.2 Machine Learning
Machine learning is a class of algorithms that automatically extract information from datasetsor prior knowledge. Such a data-driven approach is a supplement to analytical models that arewidely used in the EDA domain. In general, ML-based solutions can be categorized accordingto their learning paradigms: supervised learning, unsupervised learning, active learning,and reinforcement learning. The difference between supervised and unsupervised learning iswhether or not the input data is labeled. With supervised or unsupervised learning, ML mod-els are trained on static data sets offline and then deployed for online inputs without refine-ment. With active learning, ML models subjectively choose samples from input space to obtainground truth and refine themselves during the searching process. With reinforcement learning,ML models interact with the environment by taking actions and getting rewards, with the goalof maximizing the total reward. These paradigms all have been shown to be applied to the EDAproblems.
As for the model construction, conventional machine learning models have been extensivelystudied for the EDA problems, especially for physical design [66, 178]. Linear regression, random
forest (RF) [91] and artificial neural networks (ANN) [55] are classical regression models. Sup-
port vector machine (SVM) [12] is a powerful classification algorithm especially suitable fortasks with a small size of training set. Other common classification models include K-Nearest-
Neighbor (KNN) algorithm [39] and RF. These models can be combined with ensemble or boost-ing techniques to build more expressive models. For example, XGBoost [23] is a gradient boostingframework frequently used in the EDA problems.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:5
Thanks to large public datasets, algorithm breakthrough, and improvements in computationplatforms, there have been efforts of applying DL for EDA. In particular, popular models in recentEDA studies include convolutional neural network (CNN) [37, 111], recurrent neural net-
works (RNN) [83, 148], generative adversarial network (GAN) [165], deep reinforcement
learning (DRL) [113, 147], and graph neural networks (GNN) [147, 168]. CNN models are com-posed of convolutional layers and other basic blocks such as non-linear activation functions anddown-sample pooling functions. While CNN is suitable for feature extraction on grid structuredata like 2D image, RNN is good at processing sequential data such as text or audio. GNN is pro-posed for data organized as graphs. GAN trains jointly a generative network and a discriminativenetwork, which compete against each other to eventually generate high quality fake samples. DRLis a class of algorithms that incorporated deep learning into the reinforcement learning paradigm,where an agent learns a strategy from the rewards acquired with previous actions to determinethe next action. DRL has achieved great success in complicated tasks with large decision space(e.g., Go game [138]).
3 HIGH LEVEL SYNTHESIS
HLS tools provide automatic conversion from C/C++/SystemC-based specification to hardwaredescription languages like Verilog or VHDL. HLS tools developed in industry and academia [1, 2,15] have greatly improved productivity in customized hardware design. High-quality HLS designsrequire appropriate pragmas in the high-level source code related to parallelism, scheduling andresource usage, and careful choices of synthesis configurations in post-Register-Transfer-Level
(RTL) stage. Tuning these pragmas and configurations is a non-trivial task, and the long synthesistime for each design (hours from the source code to the final bitstream) prohibits exhaustive DSE.
ML techniques have been applied to improve HLS tools from the following three aspects: fastand accurate result estimation [30, 37, 108, 109, 143, 164, 172], refining conventional DSE algo-rithms [74, 107, 149], and reforming DSE as an active-learning problem [94, 95, 112, 180]. In ad-dition to achieving good results on individual problems, previous studies have also introducednew generalizable techniques about feature engineering [30, 108, 109, 164, 172], selection and cus-tomization of ML models [143], and design space sampling and searching strategies [95, 112, 180].
This section is organized as follows. Section 3.1 introduces recent studies on employing ML forresult estimation, often in a static way. Section 3.2 introduces recent studies on adopting ML inDSE workflow, either to improve conventional methods or in the form of active learning.
3.1 Machine Learning for Result Estimation
The reports from HLS tools provide important guidance for tuning the high-level directives. How-ever, acquiring accurate result estimation in an early stage is difficult due to complex optimizationsin the physical synthesis, imposing a trade-off between accuracy (waiting for post-synthesis re-sults) and efficiency (evaluating in the HLS stage). ML can be used to improve the accuracy ofHLS reports through learning from real design benchmarks. In Section 3.1.1, we introduce pre-vious work on predicting the timing, resource usage, and operation delay of an HLS design. InSection 3.1.2, we describe two types of research about cross-platform performance prediction.
3.1.1 Estimation of Timing, Resource Usage, and Operation Delay. The overall workflow of tim-ing and resource usage prediction is concluded in Figure 2. This workflow is first proposed by Daiet al. [30] and augmented by Makrani et al. [108] and Ferianc et al. [37]. The main methodology isto train an ML model that takes HLS reports as input and outputs a more accurate implementationreport without conducting the time-consuming post-implementation. The workflow proposed byDai et al. [30] can be divided into two steps: data processing and training estimation models.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:6 G. Huang et al.
Fig. 2. FPGA tool flow with HLS, highlighting ML-based result predictor (reproduced from Reference [30]).
Table 1. Categories of Selected Features and Descriptions [30, 108]
Category Brief DescriptionClock periods Target clock period; achieved clock period and its uncertainty.Resources Utilization and availability of LUT, FF, DSP, and BRAM.Logic Ops Bitwidth/resource statistics of operations.Arithmetic Ops Bitwidth/resource statistics of arithmetic operations.Memory Number of memory words/banks/bits; resource usage for memory.Multiplexer Resource usage for multiplexers; multiplexer input size/bitwidth.
Step 1: Data Processing. To enable ML for HLS estimation, we need a dataset for trainingand testing. The HLS and implementation reports are usually collected across individual designsby running each design through the complete C-to-bitstream flow, for various clock periods andtargeting different FPGA devices. After that, one can extract features from the HLS reports asinputs and features from implementation reports as outputs. Besides, to overcome the effect ofcolinearity and reduce the dimension of the data, previous studies often apply feature selectiontechniques to systematically remove unimportant features. The most commonly used features aresummarized in Table 1.
Step 2: Training Estimation Models. After constructing the dataset, regression models aretrained to estimate post-implementation resource usages and clock periods. Frequently used met-rics to report the estimation error include relative absolute error (RAE) and relative root-mean-
squared error (RMSE). For both metrics, lower is better. RAE is defined in Equation (1), wherey is a vector of values predicted by the model, y is a vector of actual ground truth values in thetesting set, and y denotes the mean value of y:
RAE =|y − y ||y − y | . (1)
Relative RMSE is given by Equation (2), where N is the number of samples, and yi and yi arethe predicted and actual values of a sample, respectively:
Relative RMSE =
√√√1
N
N∑i=1
(yi − yi
yi)2 × 100%. (2)
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.
Machine Learning for Electronic Design Automation: A Survey 40:7
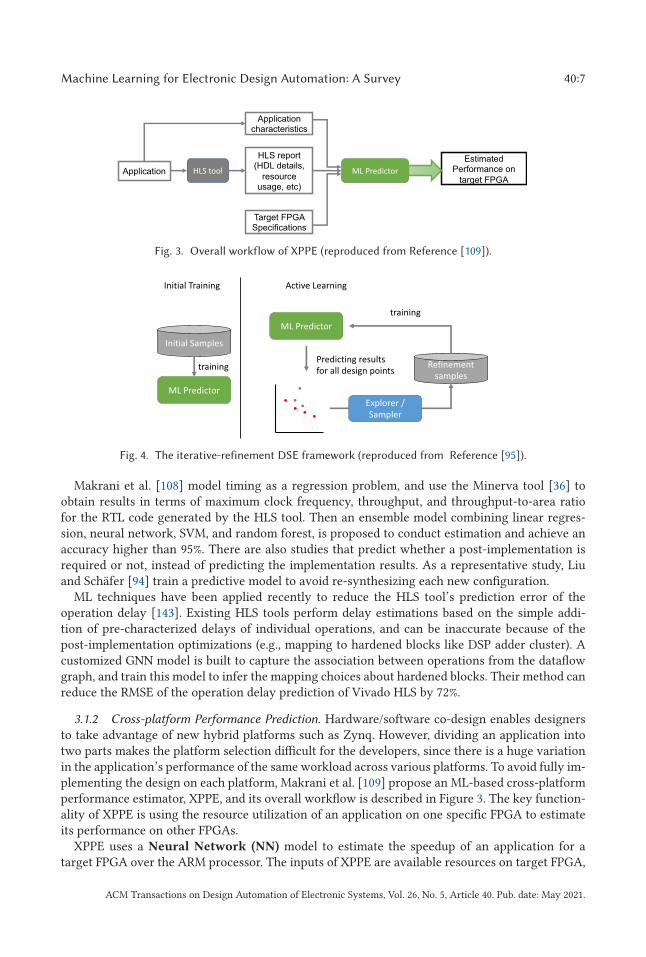
Fig. 3. Overall workflow of XPPE (reproduced from Reference [109]).
Fig. 4. The iterative-refinement DSE framework (reproduced from Reference [95]).
Makrani et al. [108] model timing as a regression problem, and use the Minerva tool [36] toobtain results in terms of maximum clock frequency, throughput, and throughput-to-area ratiofor the RTL code generated by the HLS tool. Then an ensemble model combining linear regres-sion, neural network, SVM, and random forest, is proposed to conduct estimation and achieve anaccuracy higher than 95%. There are also studies that predict whether a post-implementation isrequired or not, instead of predicting the implementation results. As a representative study, Liuand Schäfer [94] train a predictive model to avoid re-synthesizing each new configuration.
ML techniques have been applied recently to reduce the HLS tool’s prediction error of theoperation delay [143]. Existing HLS tools perform delay estimations based on the simple addi-tion of pre-characterized delays of individual operations, and can be inaccurate because of thepost-implementation optimizations (e.g., mapping to hardened blocks like DSP adder cluster). Acustomized GNN model is built to capture the association between operations from the dataflowgraph, and train this model to infer the mapping choices about hardened blocks. Their method canreduce the RMSE of the operation delay prediction of Vivado HLS by 72%.
3.1.2 Cross-platform Performance Prediction. Hardware/software co-design enables designersto take advantage of new hybrid platforms such as Zynq. However, dividing an application intotwo parts makes the platform selection difficult for the developers, since there is a huge variationin the application’s performance of the same workload across various platforms. To avoid fully im-plementing the design on each platform, Makrani et al. [109] propose an ML-based cross-platformperformance estimator, XPPE, and its overall workflow is described in Figure 3. The key function-ality of XPPE is using the resource utilization of an application on one specific FPGA to estimateits performance on other FPGAs.
XPPE uses a Neural Network (NN) model to estimate the speedup of an application for atarget FPGA over the ARM processor. The inputs of XPPE are available resources on target FPGA,
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:8 G. Huang et al.
Fig. 5. Overview of the STAGE algorithm (reproduced from Reference [74]).
resource utilization report from HLS Vivado tool (extracted features, similar to the features inTable 1), and application’s characteristics. The output is the speedup estimation on the target FPGAover an ARM A-9 processor. This method is similar to Dai et al. [30] and Makrani et al. [108]in that they all take the features in HLS reports as input and aim to avoid the time-consumingpost-implementation. The main difference is that the input and output features in XPPE are fromdifferent platforms. The relative RMSE between the predictions and the real measurements is usedto evaluate the accuracy of the estimator. The proposed architecture can achieve a relative meansquare error of 5.1% and the speedup is more than 0.98×.
Like XPPE, O’Neal et al. [116] also propose an ML-based cross-platform estimator, namedHLSPredict. There are two differences. First, HLSPredict only takes workloads (the applicationsin XPPE) as inputs instead of the combination of HLS reports, application’s characteristics andspecification of target FPGA devices. Second, the target platform of HLSPredict must be the sameas the platform in the training stage. In general, HLSPredict aims to rapidly estimate performanceon a specific FPGA by direct execution of a workload on a commercially available off-the-shelf hostCPU, but XPPE aims to accurately predict the speedup of different target platforms. For optimized
workloads, HLSPredict achieves a relative absolute percentage error (APE = | y−y
y|) of 9.08% and a
43.78× runtime speedup compared with FPGA synthesis and direct execution.
3.2 Machine Learning for Design Space Exploration in HLS
In the previous subsection, we describe how ML models are used to predict the quality of results.Another application of ML in HLS is to assist DSE. The tunable synthesis options in HLS, providedin the form of pragmas, span a very large design space. Most often, the task of DSE is to find thePareto Frontier Curve, on which every point is not fully dominated by any other points under allthe metrics.
Classical search algorithms have been applied in HLS DSE, such as Simulated Annealing (SA)
and Genetic Algorithm (GA). But these algorithms are unable to learn from the database ofpreviously explored designs. Many previous studies use an ML predictive model to guide the DSE.The models are trained on the synthesis results of explored design points, and used to predictthe quality of new designs (See more discussions on this active learning workflow in Section 9.1).Typical studies are elaborated in Section 3.2.1. There is also a thread of work that involves learning-based methods to improve the inefficient or sensitive part of the classical search algorithms, aselaborated in Section 3.2.2. Some work included in this subsection focuses on system-level DSErather than HLS design [74], or general active learning theories [180].
3.2.1 Active Learning. The four papers visited in this part utilize the active learning approachto perform DSE for HLS, and use predictive ML models to surrogate actual synthesis when eval-uating a design. Liu and Schäfer [94] propose a design space explorer that selects new designs to
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:9
implement through an active learning approach. Transductive experimental design (TED) [95]focuses on seeking the samples that describe the design space accurately. Pareto active learn-
ing (PAL) in Reference [180] is proposed to sample designs that the learner cannot clearlyclassify. Instead of focusing on how accurately the model describes the design space, adaptive
threshold non-pareto elimination (ATNE) [112] estimates the inaccuracy of the learner andachieves better performance than TED and PAL.
Liu and Schäfer [94] propose a dedicated explorer to search for Pareto-optimal HLS designs forFPGAs. The explorer iteratively selects potential Pareto-optimal designs to synthesize and verify.The selection is based on a set of important features, which are adjusted during the exploration.The proposed method runs 6.5× faster than an exhaustive search, and runs 3.0× faster than arestricted search method but finds results with higher quality.
The basic idea of TED [95] is to select representative as well as the hard-to-predict samples fromthe design space, instead of the random sample used in previous work. The target is to maximizethe accuracy of the predictive model with the fewest training samples. The authors formulate theproblem of finding the best sampling strategy as follows: TED assumes that the overall numberof knob settings is n(|K | = n), from which we want to select a training set K such that |K | =m.Minimizing the prediction error H (k ) − H (k ) for all k ∈ K is equivalent to the following problem:
maxK
T [KK T (KK T + μI )−1KK T ] s .t . K ⊂ K , |K | =m,
whereT [·] is the matrix trace operator and μ > 0. The authors interpret their solution as samplingfrom a set K that span a linear space, to retain most of the information of K [95].
PAL [180] is proposed for general active learning scenarios and is demonstrated by a sortingnetwork synthesis DSE problem in the paper. It uses Gaussian Process (GP) to predict Pareto-optimal points in design space. The models predict the objective functions to identify points thatare Pareto-optimal with high probabilities. A point x that has not been sampled is predicted as
f (x ) = μ (x ) and σ (x ) is interpreted as the uncertainty of the prediction, which can be captured bythe hyperrectangle,
Qμ,σ ,β (x ) ={y : μ (x ) − β1/2σ (x ) � y � μ (x ) + β1/2σ (x )
},
where β is a scaling parameter to be chosen. PAL focuses on accurately predicting points near thePareto frontier, instead of the whole design space. In every iteration, the algorithm classifies sam-ples into three groups: Pareto-optimal, Non-Pareto-optimal, and uncertain ones. The next designpoint to evaluate is the one with the largest uncertainty, which intuitively has more informationto improve the model. The training process is terminated when there are no uncertain points. Thepoints classified as Pareto-optimal are then returned.
ATNE [112] utilizes RF to aid the DSE process. This work uses a Pareto identification thresholdthat adapts to the estimated inaccuracy of the RF regressor and eliminates the non-Pareto-optimaldesigns incrementally. Instead of focusing on improving the accuracy of the learner, ATNE focuseson estimating and minimizing the risk of losing “good” designs due to learning inaccuracy.
3.2.2 Machine Learning for Improving Other Optimization Algorithms. In this part, we summa-rize three studies that use ML techniques to improve classical optimization algorithms.
STAGE [74] is proposed for DSE of many-core systems. The motivating observation of STAGEis that the performance of simulated annealing is highly sensitive to the starting point of thesearch process. The authors build an ML model to learn which parts of the design space should befocused on, eliminating the times of futile exploration [13]. The proposed strategy is divided intotwo stages. The first stage (local search) performs a normal local search, guided by a cost functionbased on the designer’s goals. The second stage (meta search) tries to use the search trajectories
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.
40:10 G. Huang et al.
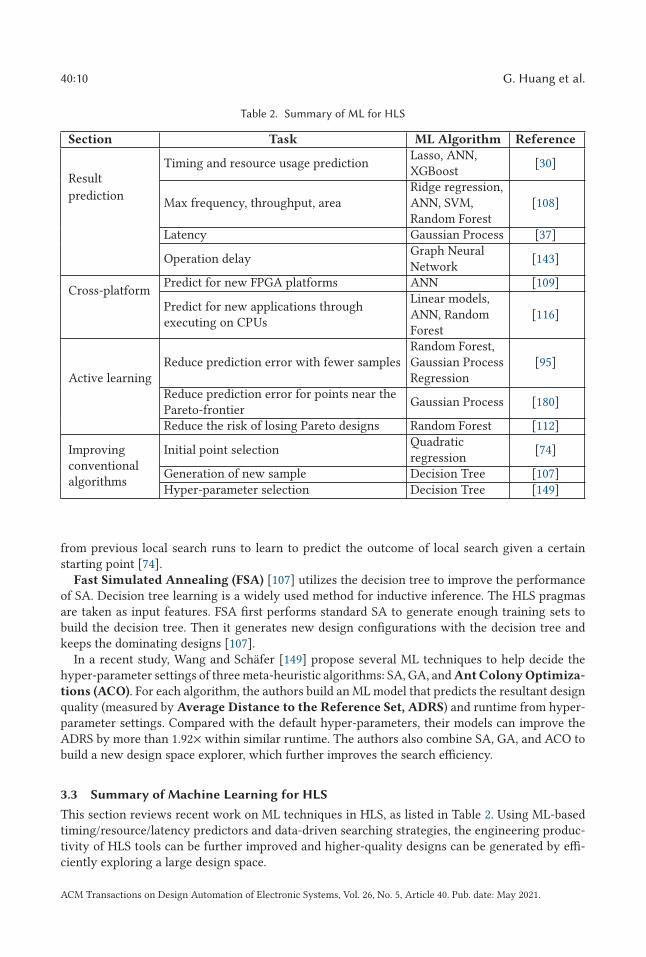
Table 2. Summary of ML for HLS
Section Task ML Algorithm Reference
Result
prediction
Timing and resource usage predictionLasso, ANN,XGBoost
[30]
Max frequency, throughput, areaRidge regression,ANN, SVM,Random Forest
[108]
Latency Gaussian Process [37]
Operation delayGraph NeuralNetwork
[143]
Cross-platformPredict for new FPGA platforms ANN [109]
Predict for new applications throughexecuting on CPUs
Linear models,ANN, RandomForest
[116]
Active learningReduce prediction error with fewer samples
Random Forest,Gaussian ProcessRegression
[95]
Reduce prediction error for points near thePareto-frontier
Gaussian Process [180]
Reduce the risk of losing Pareto designs Random Forest [112]
Improvingconventionalalgorithms
Initial point selectionQuadraticregression
[74]
Generation of new sample Decision Tree [107]Hyper-parameter selection Decision Tree [149]
from previous local search runs to learn to predict the outcome of local search given a certainstarting point [74].
Fast Simulated Annealing (FSA) [107] utilizes the decision tree to improve the performanceof SA. Decision tree learning is a widely used method for inductive inference. The HLS pragmasare taken as input features. FSA first performs standard SA to generate enough training sets tobuild the decision tree. Then it generates new design configurations with the decision tree andkeeps the dominating designs [107].
In a recent study, Wang and Schäfer [149] propose several ML techniques to help decide thehyper-parameter settings of three meta-heuristic algorithms: SA, GA, and Ant Colony Optimiza-
tions (ACO). For each algorithm, the authors build an ML model that predicts the resultant designquality (measured by Average Distance to the Reference Set, ADRS) and runtime from hyper-parameter settings. Compared with the default hyper-parameters, their models can improve theADRS by more than 1.92× within similar runtime. The authors also combine SA, GA, and ACO tobuild a new design space explorer, which further improves the search efficiency.
3.3 Summary of Machine Learning for HLS
This section reviews recent work on ML techniques in HLS, as listed in Table 2. Using ML-basedtiming/resource/latency predictors and data-driven searching strategies, the engineering produc-tivity of HLS tools can be further improved and higher-quality designs can be generated by effi-ciently exploring a large design space.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:11
We believe the following practice can help promote future research of ML in HLS:
• Public benchmark for DSE problems. The researches about result estimation are all eval-uated on public benchmarks of HLS applications, such as Rosetta [174], MachSuite [127],and so on. However, DSE researches are often evaluated on a few applications, because thecost of synthesizing a large design space for each application is heavy. Building a bench-mark that collects different implementations of each application can help fairly evaluateDSE algorithms.
• Customized ML models. Most of the previous studies use off-the-shelf ML models. Combin-ing universal ML algorithms with domain knowledge can potentially improve the perfor-mance of the model. For example, Ustun et al. [143] customize a standard GNN model tohandle the specific delay prediction problem, which brings extra benefit in model accuracy.
4 LOGIC SYNTHESIS AND PHYSICAL DESIGN
In the logic synthesis and physical design stage, there are many key sub-problems that can benefitfrom the power of ML models, including lithography hotspot detection, path classification, con-gestion prediction, placement guide, fast timing analysis, logic synthesis scheduling, and so on. Inthis section, we organize the review of studies by their targeting problems.
4.1 Logic Synthesis
Logic synthesis is an optimization problem with complicated constraints, which requires accu-rate solutions. Consequently, using ML algorithms to directly generate logic synthesis solutionsis difficult. However, there are some studies using ML algorithms to schedule existing traditionaloptimization strategies. For logic synthesis, LSOracle [115] relies on DNN to dynamically decidewhich optimizer should be applied to different parts of the circuit. The framework exploits twooptimizers, and-inverter graph (AIG) and majority-inverter graph (MIG), and applies k-waypartitioning on circuit directed acyclic graph (DAG).
There are many logic transformations in current synthesis tools such as ABC [14]. To select anappropriate synthesis flow, Yu et al. [167] formulate a multi-class classification problem and designa CNN to map a synthesis flow to quality of results (QoR) levels. The prediction on unlabeledflows are then used to select the optimal synthesis flow. The CNN takes the one-hot encoding ofsynthesis flows as inputs and outputs the possibilities of the input flow belonging to different QoRmetric levels.
Reinforcement learning is also employed for logic synthesis in References [48, 56]. A transfor-mation between two DAGs with the same I/O behaviors is modeled as an action. In Reference[48], GCN is utilized as a policy function to obtain the probabilities for every action. Reference[56] employs advantage actor critic agent (A2C) to search the optimal solution.
4.2 Placement and Routing Prediction
4.2.1 Traditional Placers Enhancement. While previous fast placers can conduct random logicplacement efficiently with good performances, researchers find that their placement of data pathlogic is suboptimal. PADE [150] proposes a placement process with automatic data path extractionand evaluation, in which the placement of data path logic is conducted separately from randomlogic. PADE is a force-directed global placer, which applies SVM and NN to extract and evaluatethe data path patterns with high dimensional data such as netlist symmetrical structures, initialplacement hints, and relative area. The extracted data path is mapped to bit stack structure anduses SAPT [151] (a placer placed on SimPL [73]) to optimize separately from random logic.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:12 G. Huang et al.
4.2.2 Routing Information Prediction. The basic requirements of routing design rules must beconsidered in the placement stage. However, it is difficult to predict routing information in theplacement stage accurately and fast, and researchers recently employ machine learning to solvethis. RouteNet [154] is the first work to employ CNN for design rule checking (DRC) hotspot de-tection. The input features of a customized fully convolutional network (FCN) include the out-puts of rectangular uniform wire density (RUDY), a pre-routing congestion estimator. An 18-layer ResNet is also employed to predict design rule violation (DRV) count. A recent work [89]abstracts the pins and macros density in placement results into image data, and utilizes a pixel-wise loss function to optimize an encoder-decoder model (an extension of U-Net architecture). Thenetwork output is a heat-map, which represents the location where detailed routing congestionmay occur. PROS [21] takes advantages of fully convolution networks to predict routing conges-tion from global placement results. The framework is demonstrated efficient on industrial netlists.Pui et al. [124] explore the possibilities using ML methods to predict routing congestion in Ultra-Scale FPGAs. Alawieh et al. [6] transfer the routing congestion problem in large-scale FPGAs toan image-to-image problem, and then uses conditional GAN to solve it. In addition, there are somestudies that only predict the number of congestions instead of the location of congestion [27, 106].Maarouf et al. [106] use models like linear regression, RF and MLP to learn how to use featuresfrom earlier stages to produce more accurate congestion prediction, so that the placement strat-egy can be adjusted. Qi et al. [125] predict the detailed routing congestion using nonparametricregression algorithm, multivariate adaptive regression splines (MARS) with the global infor-mation as inputs. Another study [18] takes the netlist, clock period, utilization, aspect ratio andBEOL stack as inputs and utilizes MARS and SVM to predict the routability of a placement. Thisstudy also predicts Pareto frontiers of utilization, number of metal layers, and aspect ratio. Refer-ence [99] demonstrates the potential of embedding ML-based routing congestion estimator intoglobal placement stage. Recently, Liang et al. [90] build a routing-free crosstalk prediction modelby adopting several ML algorithms such as regression, NN, GraphSAGE, and GraphAttention. Theproposed framework can identify nets with large crosstalk noise before the routing step, whichallows us to modify the placement results to reduce crosstalk in advance.
There is also a need to estimate the final wirelength, timing performance, circuit area, powerconsumption, clock and other parameters in the early stage. Such prediction task can be modeledas a regression task and commonly used ML models include SVM, Boosting, RF, MARS, and soon. Jeong et al. [63] learn a model with MARS to predict performance from a given set of cir-cuit configurations, with NoC router, a specific functional circuit and a specific business tool. InReference [60], the researchers introduce linear discriminant analysis (LDA) algorithm to findseven combined features for the best representation, and then a KNN-like approach is adoptedto combine the prediction results of ANN, SVM, LASSO, and other machine learning models. Inthis way, Hyun et al. [60] improve the wirelength prediction given by the virtual placement androuting in the synthesis. Cheng et al. [27] predict the final circuit performance in the macro place-ment stage, and Li and Franzon [82] predict the circuit performance in the global routing stage,including congestion number, hold slack, area and power.
For sign-off timing analysis, Barboza et al. [8] use random forest to give the sign-off timingslack from hand-crafted features. Another research [67] works on sign-off timing analysis anduse linear regression to fit the static timing analysis (STA) model, thus reduce the frequencythat the incremental static timing analysis (iSTA) tool need to be called. Han et al. [52]propose SI for Free, a regression method to predict expensive signal integrity (SI) mode sign-offtiming results by using cheap non-SI mode sign-off timing analysis. [68] propose golden timer
extension (GTX), a framework to reduce mismatches between different sign-off timing analysistools to obtain neither optimistic nor pessimistic results.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:13
Lu et al. [102] employ GAN and RL for clock tree prediction. Flip flop distribution, clock netdistribution, and trial routing results serve as input images. For feature extraction, GAN-CTSadopts transfer learning from a pre-trained ResNet-50 on the ImageNet dataset by adding fully
connected (FC) layers. A conditional GAN is utilized to optimize the clock tree synthesis, ofwhich the generator is supervised by the regression model. An RL-based policy gradient algorithmis leveraged for the clock tree synthesis optimization.
4.2.3 Placement Decision Making. As the preliminary step of the placement, floorplanning aimsto roughly determine the geometric relationship among circuit modules and to estimate the costof the design. He et al. [53] explore the possibility of acquiring local search heuristics through alearning mechanism. More specifically, an agent has been trained using a novel deep Q-learningalgorithm to perform a walk in the search space by selecting a candidate neighbor solution at eachstep, while avoiding introducing too much prior human knowledge during the search. Google [113]recently models chip placement as a sequential decision making problem and trains an RL policyto make placement decisions. During each episode, the RL agent lays the macro in order. Afterarranging macros, it utilizes the force-directed method for standard cell placement. GCN is adoptedin this work to embed information related to macro features and the adjacency matrix of the netlist.Besides, FC layers are used to embed metadata. After the embedding of the macros, the graph andthe metadata, another FC layer is applied for reward prediction. Such embedding is also fed into adeconvolution CNN model, called PolicyNet, to output the mask representing the current macroplacement. The policy is optimized with RL to maximize the reward, which is the weighted averageof wirelength and congestion.
4.3 Power Deliver Network Synthesis and IR Drop Predictions
Power delivery network (PDN) design is a complex iterative optimization task, which stronglyinfluences the performance, area and cost of a chip. To reduce the design time, recent studieshave paid attention to ML-based IR drop estimation, a time-consuming sub-task. Previous workusually adopts simulator-based IR analysis, which is challenged by the increasing complexity ofchip design. IR drop can be divided into two categories: static and dynamic. Static IR drop is mainlycaused by voltage deviation of the metal wires in the power grid, while dynamic IR drop is led bythe switching behaviors and localized fluctuating currents. In IncPIRD [54], the authors employXGBoost to conduct incremental prediction of static IR drop problem, which is to predict IR valuechanges caused by the modification of the floorplan. For dynamic IR drop estimation, Xie et al.[155] aim to predict the IR values of different locations and models IR drop estimation problem as aregression task. This work introduces a “maximum CNN” algorithm to solve the problem. Besides,PowerNet is designed to be transferable to new designs, while most previous studies train modelsfor specific designs. A recent work [173] proposes an electromigration-induced IR drop analysisframework based on conditional GAN. The framework regards the time and selected electricalfeatures as input images and outputs the voltage map. Another recent work [28] focuses on PDNsynthesis in floorplan and placement stages. This paper designs a library of stitchable templatesto represent the power grid in different layers. In the training phase, SA is adopted to choose atemplate. In the inference phase, MLP and CNN are used to choose the template for floorplanand placement stages, respectively. Cao et al. [16] use hybrid surrogate modeling (HSM) thatcombines SVM, ANN, and MARS to predict the bump inductance that represents the quality of thepower delivery network.
4.4 Design Challenges for 3D Integration
3D integration is gaining more attention as a promising approach to further improve the integra-tion density. It has been widely applied in memory fabrication by stacking memory over logic.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:14 G. Huang et al.
Different from the 2D design, 3D integration introduces die-to-die variation, which does notexist in 2D modeling. The data or clock path may cross different dies in through-silicon via
(TSV)-based 3D IC. Therefore, the conventional variation modeling methods, such as on-chip
variation (OCV), advanced OCV (AOCV), parametric OCV (POCV), are not able to accuratelycapture the path delay [131]. Samal et al. [131] use MARS to model the path delay variation in 3DICs.
3D integration also brings challenges to the design optimization due to the expanded designspace and the overhead of design evaluation. To tackle these challenges, several studies [31, 122,131] have utilized design space exploration methods based on machine learning to facilitate 3Dintegration optimization.
The state-of-the-art 3D placement methods [75, 121] perform bin-based tier partitioning on 2Dplacement and routing design. However, the bin-based partitioning can cause significant qualitydegradation to the 3D design because of the unawareness of the design hierarchy and technology.Considering the graph-like nature of the VLSI circuits, Lu et al. [103] proposed a GNN-based un-
supervised framework for tier partitioning (TP-GNN). TP-GNN first performs the hierarchy-aware edge contraction to acquire the clique-based graph where nodes within the same hierarchycan be contracted into supernodes. Moreover, the hierarchy and the timing information is includedin the initial feature of each node before GNN training. Then the unsupervised GNN learning canbe applied to general 3D design. After the GNN training, the weighted k-means clustering is per-formed on the clique-based graph for the tier assignment based on the learned representation. Theproposed TP-GNN framework is validated on experiments of RISC-V-based multi-core system andNETCARD from ISPD 2012 benchmark. The experiment results indicate 7.7% better wirelength,27.4% higher effective frequency and 20.3% performance improvement.
4.5 Other Predictions
For other parameters, Chan et al. [17] adopt HSM to predict the embedded memory timing failureduring initial floorplan design. Bian et al. [11] work on aging effect prediction for high-dimensionalcorrelated on-chip variations using random forest.
4.6 Summary of Machine Learning for Logic Synthesis and Physical Design
We summarize recent studies on ML for logic synthesis and physical design in Table 3. For logicsynthesis, researchers focus on predicting and evaluating the optimal synthesis flows. Currently,these studies optimize the synthesis flow based on the primitives of existing tools. In the future, weexpect to see more advanced algorithms for logic synthesis be explored, and more metrics can beformulated to evaluate the results of logic synthesis. Besides, applying machine learning to logicsynthesis for emerging technologies is also an interesting direction.
In the physical design stage, recent studies mainly aim to improve the efficiency and accuracy bypredicting the related information that traditionally needs further simulation. A popular practiceis to formulate the EDA task as a computer vision (CV) task. In the future, we expect to see morestudies that incorporate advanced techniques (e.g., neural architecture search, automatic featuregeneration, unsupervised learning) to achieve better routing and placement results.
5 LITHOGRAPHY AND MASK SYNTHESIS
Lithography is a key step in semiconductor manufacturing, which turns the designed circuit andlayout into real objects. Two popular research directions are lithography hotspot detection andmask optimization. To improve yield, lithography hotspot detection is introduced after the physicalimplementation flow to identify process-sensitive patterns prior to the manufacturing. The com-plete optical simulation is always time-consuming, so it is necessary to analyze the routed layout
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:15
Table 3. Summary of ML for Logic Synthesis and Physical Design
Section Task ML Algorithm Reference
Logic Synthesis
To decide which optimizer (AIG/MIG)should be utilized for different circuits.
DNN [115]
To classify the optimal synthesis flows. CNN [167]To generate the optimal synthesis flows. GCN, RL [48]To generate the optimal synthesis flows. RL [56]
PlacementTo train, predict, and evaluate potentialdatapaths.
SVM, NN [150]
To make placement decisions. GCN, RL [113]
Routing
To detect DRC hotspot and DRV count. CNN [154]
To predict routing congestion.CNN [89]GAN [6]ML [106]MARS [125]
To predict routability of a given placement. MARS, SVM [18]To model on-chip router performance. MARS [63]To predict wirelength. LDA, KNN [60]To predict the circuit performance afterplacement stage.
ML [27]
To predict detailed routing result afterglobal routing.
ML [82]
To model sign-off timing analysis.RF [8]LR [67]
To predict and optimize the clock tree. GCN, CNN, RL [102]
Power DeliverNetworkSynthesis andIR DropPredictions
To predict incremental static IR drop. XGBoost [54]To predict dynamic IR drop by regressing. CNN [155]To predict electromigration-induced IRdrop.
GAN [173]
To choose the power grid template. MLP, CNN [28]
To predict bump inductance.SVM, ANN,MARS
[16]
3D Integration
To advance the tier partition. GNN [103]To model the path delay variation. MARS [131]
To optimize 3D designs.Local Search [31]BO [122]
OtherTo predict the embedded memory timingfailure.
ML [17]
To predict aging effect. RF [11]
by machine learning to reduce lithography hotspots in the early stages. Mask optimization tries tocompensate diffraction information loss of design patterns such that the remaining pattern afterlithography is as close to the design patterns as possible. Mask optimization plays an importantrole in VLSI design and fabrication flow, which is a very complicated optimization problem withhigh verification costs caused by expensive lithography simulation. Unlike the hotspot detectionstudies in Section 5.1 that take placement and routing stages into consideration, mask optimization
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:16 G. Huang et al.
Fig. 6. Region-based hotspot detection promises better performance (reproduced from Reference [22]).
focuses only on the lithography process, ensuring that the fabricated chip matches the designedlayout. Optical proximity correction (OPC) and sub-resolution assist feature (SRAF)
insertion are two main methods to optimize the mask and improve the printability of the targetpattern.
5.1 Lithography Hotspot Detection
For lithography hotspot detection, Ding et al. [32] uses SVM for hotspot detection and small neuralnetwork for routing path prediction on each grid. To achieve better feature representation, Yanget al. [162] introduces feature tensor extraction, which is aware of the spatial relations of layoutpatterns. This work develops a batch-biased learning algorithm, which provides better trade-offsbetween accuracy and false alarms. Besides, there are also attempts to check inter-layer failureswith deep-learning solutions. A representative solution is proposed by Yang et al. [161]. Theyemploy an adaptive squish layout representation for efficient metal-to-via failure check. Differentlayout-friendly neural network architectures are also investigated these include vanilla VGG [160],shallow CNN [162] and binary ResNet [65].
With the increased chip complexity, traditional deep-learning/machine learning-based solutionsare facing challenges from both runtime and detection accuracy. Chen et al. [22] recently proposean end-to-end trainable object detection model for large scale hotspot detection. The frameworktakes the input of a full/large-scale layout design and localizes the area that hotspots might oc-cur (see Figure 6). In Reference [44], an attention-based CNN with inception-based backbone isdeveloped for better feature embeddings.
5.2 Machine Learning for Optical Proximity Correction
For OPC, inverse lithography technique (ILT) and model-based OPC are two representativemask optimization methodologies, and each of which has its own advantages and disadvantages.Yang et al. [163] propose a heterogeneous OPC framework that assists mask layout optimization,where a deterministic ML model is built to choose the appropriate one from multiple OPC solutionsfor a given design, as shown in Figure 7.
With the improvement of semiconductor technology and the scaling down of ICs, traditionalOPC methodologies are becoming more and more complicated and time-consuming. Yang et al.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:17
Fig. 7. A heterogeneous OPC framework (reproduced from Reference [163]).
Fig. 8. The training flow of (a) GAN-OPC and (b) ILT-Guided Pre-training (reproduced from Reference [159]).
[159] propose a new OPC method based on GAN. A Generator (G) is used to generate the maskpattern from the target pattern, and a discriminator (D) is used to estimate the quality of thegenerated mask. GAN-OPC can avoid complicated computation in ILT-based OPC, but it facesthe problem that the algorithm is hard to converge. To deal with this problem, ILT-guided pre-training is proposed. In the pre-training stage, the D network is replaced with the ILT convolutionmodel, and only the G network is trained. After pre-training, the ILT model that has huge costis removed, and the whole GAN is trained. The training flow of GAN-OPC and ILT-guided pre-training is shown in Figure 8. The experimental results show that the GAN-based methodologycan accelerate ILT-based OPC significantly and generate more accurate mask patterns.
Traditional ILT-based OPC methods are costly and result in highly complex masks where manyrectangular variable-shaped-beam (VSB) shots exist. To solve this problem, Jiang et al. [64] pro-pose an ML-based OPC algorithm named neural-ILT, which uses a neural network to replace thecostly ILT process. The loss function is specially designed to reduce the mask complexity, whichgives punishment to complicated output mask patterns. In addition, for fast litho-simulation, aCUDA-based accelerator is proposed as well, which can save 96% simulation time. The experimen-tal results show that neural-ILT achieves a 70× speedup and 0.43× mask complexity comparedwith traditional ILT methods.
Recently, Chen et al. [20] propose DAMO, an end-to-end OPC framework to tackle the full-chipscale. The lithography simulator and mask generator share the same deep conditional GAN
(DCGAN), which is dedicatedly designed and can provide a competitively high resolution. Theproposed DCGAN adopts UNet++ [176] backbone and adds residual blocks at the bottleneck ofUNet++. To further apply DAMO on full-chip layouts, a coarse-to-fine window splitting algorithmis proposed. First, it locates the regions of high via density and then runs KMeans++ algorithm oneach cluster containing the via pattern to find the best splitting window. Results on ISPD 2019full-chip layout show that DAMO outperforms state-of-the-art OPC solutions in bothacademia [43] and an industrial toolkit.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:18 G. Huang et al.
Fig. 9. Dictionary learning-based feature extraction (reproduced from Reference [43]).
Fig. 10. The LithoGAN framework (reproduced from Reference [165]).
5.3 Machine Learning for SRAF Insertion
Several studies have investigated ML-aided SRAF insertion techniques. Xu et al. [158] proposean SRAF insertion framework based on ML techniques. Geng et al. [43] propose a frameworkwith a better feature extraction strategy. Figure 9 shows the feature extraction stage. After theirconcentric circle area sampling (CCAS) method, high-dimension features xt are mapped intoa discriminative low-dimension features yt through dictionary training by multiplication of anatom matrix D. The atom matrix is the dictionary consists of representative atoms of the originalfeatures. Then, the sparse codesyt are used as the input of a machine learning model, more specif-ically, a logistic regression model that outputs a probability map indicating whether SRAF shouldbe inserted at each grid. Then, the authors formulate and solve the SRAF insertion problem as aninteger linear programming based on the probability grid and various SRAF design rules.
5.4 Machine Learning for Lithography Simulation
There are also studies that focus on fast simulation of the tedious lithography process. Traditionallithography simulation contains multiple steps, such as optical model building, resist model build-ing, and resist pattern generation. LithoGAN [165] proposes an end-to-end lithography modelingmethod by using GAN, of which the framework is shown in Figure 10. Specifically, a conditionalGAN is trained to map the mask pattern to a resist pattern. However, due to the characteristicof GAN, the generated shape pattern is good, while the position of the pattern is not precise. Totackle this problem, LithoGAN adopts a conditional GAN for shape modeling and a CNN for cen-ter prediction. The experimental results show that LithoGAN can predict the resist pattern withhigh accuracy, and this algorithm can reduce the lithography simulation time for several orders ofmagnitude. Reference [20] is also equipped with a machine learning-based lithography simulatorthat can output via contours accurately to assist via-oriented OPC.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:19
Table 4. Summary of ML for Lithography and Mask Optimization
Task Work ML Algorithm References
LithographyHotspotDetection
To detect single layer layout lithographyhotspots.
SVM, NN [32]
To detect multilayer layout lithography
hotspots.
CNN [65, 160, 162]CNN [161]
To fast detect large scale lithography
hotspots.
CNN [22]Attention [44]
OPC
Heterogeneous OPC CNN [163]GAN-OPC GAN [159]Neural ILT CNN [64]DAMO DCGAN [20]
SRAF
insertion
ML-based SRAF generationDecision Tree,Regression
[158]
SRAF insertionDictionarylearning
[43]
Litho-
simulation
LithoGAN CGAN, CNN [165]DAMO DCGAN [20]
5.5 Summary
This section reviews ML techniques used in the design for manufacturability stage that includelithography hotspot detection, mask optimization and lithography modeling. Related studies aresummarized in Table 4.
6 ANALOG DESIGN
Despite the promotion of digital circuits, the analog counterpart is still irreplaceable in applicationslike nature signal processing, high speed I/O and drive electronics [126]. Unlike digital circuitdesign, analog design demands lots of manual work and expert knowledge, which often makes itthe bottleneck of the job. For example, the analog/digital converter and Radio Frequency (RF)1
transceiver only occupy a small fraction of area but cost the majority of design efforts in a typicalmixed-signal System-on-Chip (SoC), compared to other digital processors [129].
The reason for the discrepancy can be summarized as follows: (1) Analog circuits have a largerdesign space in terms of device size and topology than digital circuits. Sophisticated efforts arerequired to achieve satisfactory results. (2) The specifications of analog design are variable fordifferent applications. It is difficult to construct a uniform framework to evaluate and optimizedifferent analog designs. (3) Analog signals are more susceptible to noise and process-voltage-temperature variations, which cost additional efforts in validation and verification.
6.1 The Design Flow of Analog Circuits
Gielen and Rutenbar [45] provide the design flow followed by most analog designers. As shown inFigure 11, it includes both top-down design steps from system level to device-level optimizationsand bottom-up layout synthesis and verification. In the top-down flow, designers choose propertopology, which satisfies system specifications in the circuit level. Then device sizes are optimized
1With a slight abuse of acronym, RF stands for both Random Forest and Radio Frequency. The meaning should be clear
from the context.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:20 G. Huang et al.
Fig. 11. Hierarchical levels of analog design flow (reproduced from Reference [129]).
in the device level. The topology design and device sizing constitute the pre-layout design. Af-ter the schematic is well-designed, designers draw the layout of the circuit. Then they extractparasitics from the layout and simulate the circuit with parasitics. This is known as post-layoutsimulations. If the post-layout simulation fails to satisfy the specifications, then designers need toresize the parameters and repeat the process again. This process can go for many iterations beforethe layout is done [136].
Although analog design automation has improved significantly over the past few decades, au-tomatic tools cannot replace manual work in the design flow [10] yet. Recently, researchers aretrying to introduce machine learning techniques to solve analog design problems. Their attemptsrange from topology selection at the circuit level to device sizing at the device level as well as theanalog layout in the physical level.
6.2 Machine Learning for Circuit Topology Design Automation
Typically, topology design is the first step of analog circuits design, followed by the determinationof device sizes and parameters. The process is time-consuming, and unsuitable topology will leadto redesign from the very beginning. Traditionally, topology design relies on the knowledge andexperiences of expert designers. As the scale and demand of analog circuits are increasing, CADtools are urgently needed by engineers. Despite this, automation tools for topology design are stillmuch less explored due to its high degree of freedom.
Researchers have attempted to use ML methods to speed up the design process. Some re-searchers [111, 117, 137] deal with topology selection problem, selecting the most suitable topologyfrom several available candidate. Li et al. [83] focus on extracting well-known building blocks incircuit topology. Recently, Rotman and Wolf [130] use RNN and hypernetwork to generate two-port circuit topology.
6.2.1 Topology Selection. For common-used circuit functional units, like amplifiers, designersmay not need to design from the beginning. Instead, it is possible to choose from a fixed set ofavailable alternatives. It is a much more simple problem than designing from scratch. Early in1996, Orzáez et al. [117], Silgado et al. [137] put forward a fuzzy-logic-based topology selection toolcalled FASY. They use fuzzy logic to describe relationships between specifications (e.g., DC gain)and alternatives and use backpropagation to train the optimizer. More recent research [111] uses
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:21
CNN as the classifier. They train CNN with circuit specifications as the inputs and the topologyindexes as the labels.
The main problem with the topology selection methods is that the data collection and the train-ing procedure are time-consuming. Therefore, topology selection is efficient only when repetitivedesigns are needed such that a trained model can be reused.
6.2.2 Topological Feature Extraction. One challenge of topology design automation is to makealgorithms learn the complex relationships between components. To make these relationshipsmore understandable, researchers focus on defining and extracting features from circuit topology.Li et al. [83] present algorithms for both supervised feature extraction and unsupervised learningof new connections between known building blocks. The algorithms are also designed to find hier-archical structures, isolate generic templates (patterns), and recognize overlaps among structures.Symmetry constraint are one of the most essential topological features in circuits. Liu et al. [96]propose a spectral analysis method to detect system symmetry with graph similarity. With a graphrepresentation of circuits, their method is capable of handling passive devices as well. Kunal et al.[77] propose a GNN-based methodology for automated generation of symmetry constraints. It canhierarchically detect symmetry constraints in multiple levels and works well in a variety of circuitdesigns.
6.2.3 Topology Generation. The aforementioned studies do not directly generate a topology. Arecent study [130] makes the first attempt to generate circuit topology for given specifications.Their focus is limited to two-port circuits. They utilize an RNN and Hypernetwork to solve thetopology generation problem and report better performance than the traditional methods whenthe inductor circuit length n ≥ 4.
6.3 Machine Learning for Device Sizing Automation
6.3.1 Reinforcement Learning-based Device Sizing. The problem of device sizing can be formu-lated as follows:
arg minx
∑x
qc (x ),
s.t. fh (x ) ≥ yh , (3)
where x ∈ Rn denotes the design parameters, including the size of each transistors, capacitors andresistors. y ∈ Rm denotes the specifications, including the rigid targets yh ∈ Rm1 such as band-widths, DC gains or phase margins and the optimization targets yo ∈ Rm2 such as power or area.The simulator f is defined as the map from parameters to specifications. To normalize the contri-bution of different specifications, the objective function is defined as qc (x ) = fo (x )/yo .
Based on this optimization model, Wang et al. [148] apply the reinforcement learning techniqueto deal with device sizing problems. Figure 12 illustrates the proposed reinforcement learningframework. At each environment step, the observations from the simulator are fed to the agent.A reward is calculated by the value network based on current performance. Then, the agent re-sponds with an action to update the device sizes. Because the transistors are both affected by theirlocal status (e.g., transconductance дm , drain current Ids , etc.) and the global status (DC operatingpoints) of the circuit, the optimization of each transistor is not independent. To promote learningperformance and efficiency, the authors use a multi-step environment, where the agent receivesboth the local status of the corresponding transistor and the global status.
Although the device sizing problem is automated by the reinforcement learning approach, thetraining process depends heavily on efficient simulation tools. However, current simulation toolscan only satisfy the need for schematic simulations. As for post-layout simulation that requires
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:22 G. Huang et al.
Fig. 12. The framework of reinforcement learning for device sizing (reproduced from Reference [148]).
parasitic extraction, the time of each training iteration increases significantly. To reduce the sim-ulation overhead, Settaluri et al. [134] introduce transfer learning techniques into reinforcementlearning. In the proposed approach, the agent is trained by schematic simulations and validated bypost-layout simulations. The authors show that, with some additional iterations on deployment,the proposed approach can bring 9.4× acceleration compared to previous approaches.
Following their previous work [148], the authors utilize GCN to enhance the transferability ofreinforcement learning methods [147]. Unlike traditional multi-layer agents, the GCN-based agentextracts topology information from circuit netlists. In a GCN layer, each transistor is representedby a hidden neuron calculated by aggregating feature vectors from its neighbors. Specifically, thecalculation can be written as
H (l+1) = σ (D−1/2AD−1/2)H (l )W (l ), (4)
where A is the adjacency matrix A of the circuit topology plus the identity matrix IN . Dii =∑Ai j
is a diagonal matrix. And H (l+1) is the hidden features of the lth layer. The weight matrix W (l )
is a trainable matrix updated by Deep Deterministic Policy Gradient (DDPG) [92]. Becausedifferent circuits with the same function have similar design principles (e.g., two-stage and three-stage amplifier). The weight matrix trained for one circuit can be reused by another circuit. Besidesthe topologies transferring, the GCN-based RL agent is able to port existing designs from onetechnology node to another by sharing the weight matrices.
6.3.2 Artificial Neural Network-based Device Sizing. Rosa et al. [129] propose a data augmenta-tion method to increase the generalization ability of the trained ML model. Specifically, the originaltraining set T is replaced by augmented set T ′ = T ∪T1 ∪T2... ∪Tk . For each Ti , the relationshipbetween its sample x ′i and original sample xi is formulated as follows:
x ′i = xi + (γ
M
M∑j=1
x j )ΔΓ, (5)
whereγ ∈ [0, 1] is a hyper-parameter used to adjust the mean value. And Δ and Γ denote a diagonalmatrix composed by random value of [0,1] and value in −1, 1, respectively. For speci to maximizelike DC gain, Γi takes value −1. Conversely, it takes value 1 for speci to minimize, like power orarea. As a result, K copies with worse specifications are generated for each sample xi . The modelstrained on the augmented dataset are more robust.
Besides the augmentation method, this article proposes to use a three-layer MLP modelto conduct regression and classification. Given circuit performances as the input, the modeloutputs circuit information as two parts: (1) the size of devices in multiple topologies; (2) the
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:23
Table 5. Comparison of Different Device Sizing Methods
ML AlgorithmSimulation
tools
Nums of simulation
(Two-Stage OP)Reference
Reinforcement learning Commercial tools 1e4 [148]Genetic algorithm DNN 1e2 [51]Reinforcementlearning+Transfer learning
Commercial tools 1e4/10 (training/deployment) [134]
Reinforcementlearning+GCN
Commercial tools1e4/100
(training/deployment)[147]
ANN Commercial tools 1e4/1 (training/deployment) [129]Genetic algorithm SVM 1e2 [119]
classification of different topologies. The device sizing problem is solved by regression, whilethe topology selection is solved by classification. Compared to the simple regression models, theregression-and-classification model obtains the best performance.
6.3.3 Machine Learning-based Prediction Methods. As mentioned above, the time cost by simu-lation is the main overhead of training models, especially for post-layout simulation. To speed upthe training process, Hakhamaneshi et al. [51] and Pan et al. [119] use DNN and SVM to predictthe simulator. Hakhamaneshi et al. [51] use the device information of two circuits as the input ofthe DNN predictor. The model outputs the relative superiority of the two circuits on each spec-ification instead of the absolute values. Because the prediction problem is non-convex and evenill-posed, and the training data is also limited by computational resources. Learning to compare(predict the superiority) is a relatively easy task compared to directly fitting each specification.Besides, enumerating each pair of circuit designs enlarge the training set by N
2 ×, where N denotesthe number of circuit designs.
6.3.4 Comparison and Discussion on Device Sizing. Table 5 lists introduced methods and theirperformance. The widely studied two-stage operational amplifier (OPA) is adopted as an ex-ample for comparison. Instead of performance, sample efficiency is used as the criterion, becausetwo-stage OPA is a relatively simple design and different algorithms can achieve comparable circuitperformance. It is shown that machine learning algorithms require more simulations on the train-ing phase than traditional genetic methods. But only a few iterations of inference are needed whendeploying the model. Thus, ML-based methods have more potential in large scale applications atthe cost of increased training costs. However, genetic algorithms combined with ML-based predic-tor is a popular solution to reduce the number of needed simulations. Note that different learningalgorithms have been adequately verified on simple designs like two-stage OPA. However, design-ing complicated circuits is still challenging.
6.4 Machine Learning for Analog Layout
Analog layout is a hard problem, because the parasitics in the layout have a significant impact oncircuit performances. This leads to a performance difference between pre-layout and post-layoutsimulations. Meanwhile, the relation between layout and performance is complex. Traditionally,circuit designers estimate parasitics according to their experience, leading to a long design timeand potentials for inaccuracies [128]. Therefore, automated analog layout has drawn attentionfrom researchers. Recently, the development of machine learning algorithms promotes researchon this problem. All the studies introduced below are summarized in Table 6.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:24 G. Huang et al.
Table 6. Summary of ML for Analog Layout
Section Task ML Algorithm Reference
Pre-layout
Preparation
circuit hierarchy generation GCN [76]
parasitics estimationGNN [128]Random Forest [136]
Layout
Generation
well generation GAN [156]closed-loop layout synthesis Bayesian Optimization [98]routing VAE [177]
Post-layer
Evaluation
electromagnetic propertiesestimation
GNN [168]
performance predictionSVM, random forest, NN [84]CNN [97]GNN [85]
Xu et al. [156] use GAN to guide the layout generation. The network learns and mimics de-signers’ behavior from manual layouts. Experiments show that generated wells have comparablepost-layout circuit performance with manual designs on the op-amp circuit. Kunal et al. [76] traina GCN to partition circuit hierarchy. The network takes circuit netlist as input and outputs circuithierarchy. With postprocessing, the framework reaches 100% accuracy in 275 test cases. Zhanget al. [168] introduce a GNN to estimate Electromagnetic (EM) properties of distributed circuits.And they inversely use the model to design circuits with targeted EM properties. Zhu et al. [177]propose a fully automated routing framework based on the variational autoencoder (VAE) algo-rithm. Wu et al. [152] design a knowledge-based methodology. They compare the targeted circuitwith legacy designs to find the best match. Meanwhile, they expand the legacy database whennew circuits are designed. Liu et al. [98] put forward a closed-loop design framework. They use amulti-objective Bayesian optimization method to explore circuit layout and use simulation resultsas the feedback.
To close the gap between pre-layout and post-layout simulations, some researchers attempt toestimate parasitics before layout. Ren et al. [128] use GNN to predict net parasitic capacity and de-vice parameters based on the circuit schematic. Shook et al. [136] define several net features anduse a random forest to regress net parasitic resistance and capacity. They also model the multi-port net with a star topology to simplify the circuits. Experiments show that with estimated para-sitics, the error between pre-layout and post-layout circuit simulation reduces from 37% to 8% onaverage.
Typically, post-layout simulations with SPICE-like simulators are time-consuming. So manyresearchers focus on layout performance prediction with ML algorithms. Li et al. [84] compare theprediction accuracy of three classical ML algorithms: SVM, random forest, and nerual network.They also combine the performance prediction algorithms with simulated annealing to fulfill anautomated layout framework. Liu et al. [97] propose a 3D CNN for circuit inputs. First, circuitsare converted to 2D images. Then a third coordinate channel is added to the image to form 3Dinputs. Li et al. [85] propose a customized GNN for performance prediction. They report a higheraccuracy than the CNN-based method [97].
6.5 Conclusion of Analog Design
The power of machine learning algorithms has been demonstrated extensively for analogdevice sizing, topology design and layout problems. Compared to previous optimization-based
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:25
algorithms, machine learning methods require fewer simulation rounds but achieve higher qualitydesigns. However, existing methods cannot replace human experts yet in the analog design flow.One obstacle is that the models are learned from a limited dataset and have limited flexibility.Most researchers train and test their method on typical circuits like OTAs. A generalizable modeldesigned for a variety of circuits is desired in the future study. Another challenge is that the vastspace of system-level design has not been studied. The potential of machine learning in analogdesign may be further exploited in the future.
7 VERIFICATION AND TESTING
Verification and testing of a circuit are complicated and expensive processes due to the coveragerequirements and the high complexity. Verification is conducted in each stage of the EDA flow toensure that the designed chip has correct functions. However, testing is necessary for a fabricatedchip. Note that from many perspectives, verification and testing share common ideas and strate-gies, meanwhile face similar challenges. For instance, with the diversity of applications and thecomplexity of the design, traditional formal/specification verification and testing may no longermeet various demands.
For the coverage requirements, a circuit or system can be very complex and may have manydifferent functions corresponding to different input data. To verify a system with low cost, the testset design should be compact and avoid containing “repeated” or “useless” situations with coveringenough combinations of inputs to ensure reliability. Therefore, a well-selected test set and a properstrategy are crucial to the fast and correct verification. Traditionally, for test set design, randomgeneration algorithms and Automated Test Pattern Generation (ATPG) are usually used inthe verification stage and the testing stage, respectively. And their designs are always far fromthe optimal solution. Therefore, it is intuitive to optimize the verification process by reducing theredundancy of the test set.
High complexity of chip testing/verification is another problem. For example, in the analog/RFsystem design, it is expensive and time-consuming to test the performance accurately or to verifythe SPICE netlist formally. Predicting accurate results with low precision test results derived fromcheap testing methods is a promising solution to this problem.
To meet the coverage requirements and reduce complexity, more and more ML algorithms areapplied in the verification and testing process, to make fast analog/RF system testing, build sim-plified estimation model, infer and predict the verification results, optimize sample strategies, andeven generate high quality test benches. These methodologies can be divided into two categories:(1) Machine learning for test set redundancy reduction, which is applied in both verification andtesting stage; (2) Machine learning for complexity reduction, which is applied in chip testing,verification, and diagnosis.
7.1 Machine Learning for Test Set Redundancy Reduction
Coverage is the primary concern when designing a test set in verification and testing problems.However, the definition of “coverage” is different in different problems. For example, for digitaldesign, the test set is supposed to cover as many states of the finite-state machine (FSM) orinput situations as possible. For analog/RF design, since the input is continuous and the systemcan be very sensitive to environmental disturbance, a sampling strategy that can cover most inputvalues and working situations is needed. As for the test of semiconductor technology, a test pointis a design that needs to be synthesized or fabricated, and the test set needs to cover the wholetechnology library. We will introduce these problems and corresponding studies based on MLtechniques.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:26 G. Huang et al.
7.1.1 Test Set Redundancy Reduction for Digital Design Verification. The verification of a digitaldesign will be carried out in each stage of the EDA flow, in which the verification space of adigital design under test (DUT) usually includes a huge number of situations. Thus, manuallydesigning the test set requires rich expertise and is not scalable. Originally, the test set is usuallygenerated by a biased random test generator with some constraints [62], which can be configuredby setting a series of directives. Later on, Coverage-Directed test Generation (CDG) techniqueshave been explored to optimize the test set generation process. The basic idea of CDG is to simulate,monitor, and evaluate the coverage contribution of different combinations of input and initial state.And then, the derived results are used to guide the generation of the test set. There are manyCDG works that are based on various ML algorithms such as Bayesian Network [38], MarkovModel [145], Genetic Algorithm [49, 135], rule learning [33, 57, 69], SVM [24, 47], and NN [146].We refer the readers to Reference [62] for a more detailed survey on related papers before 2012.Note that although the word “test” is mentioned frequently in this field, these works mainly aimat aiding the verification process.
GA can be applied in CDG problems. Shen et al. [135] combine the biased random test genera-tion with GA. First, a constraint model is described and encoded, then a set of constraint modelswith different configurations is sent into the simulator to evaluate the coverage performance. GAmethod is used to search for a better configuration with higher coverage. Habibi et al. [49] proposea high-level hardware modeling methodology to get a better description of FSM states and use GAto find a proper configuration of the test generator.
Beyond the traditional search strategies, more studies incorporated ML-based models to guidethe search process. Chen et al. [24] use a one-class SVM for novel test detection. They assumethat novel test instances are more useful and could cover more specific corners, and a one-classSVM is used to find these novel instances. Guzey et al. [47] conduct the functional test selection byusing unsupervised Support Vector Analysis. The basic idea is to cluster all the input operationsinto several groups (e.g., AND operation, other logic operation, and all other operations). Then,one can select the relevant test subsets for specific functional verification. A recent study [146]focuses on clustering input instructions and adopts an ANN-based method to decide whether asingle input instruction should be verified.
Probabilistic models are also adopted to model the DUT behavior or the test generator. Fine andZiv [38] propose a CDG method by building a Bayesian Network between the test generator direc-tives and coverage variables. To model the influence of input, some hidden layers are added to thenetwork with expert domain knowledge to help explain the relationship. The Bayesian Networkis dynamic and can be adjusted according to stimuli results to get a more precise model. Then,we can change the directives to achieve better coverage by running inference on the BayesianNetwork. Markov model is a special case of Bayesian Network, and Wagner et al. [145] propose aMarkov model for more efficient microprocessor verification. The proposed Markov model showsthe transfer probability of different types of instructions. Activity monitors are used for coverageestimation, and the results are used for the adjustment of the Markov model. The learned Markovmodel is used as the test generator to achieve better coverage performance.
To extract more interpretable and compact knowledge from previous verification experiences,rule learning techniques also play a role in CDG problems. Katz et al. [69] apply a decision tree forrule learning of microarchitecture behaviors. Eder et al. [33] adopt the inductive logic program-ming method to discover instruction rules, which can be directly used as the directives for furthertest generation. Hsieh et al. [57] propose to discover a subgroup of states that differentiate thefailing test cases from the success test cases. All these methods aim at extracting the internal rulesof the verification problem. With the extracted rules, one can generate better test instances eithermanually or automatically.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:27
Fig. 13. The framework of Reference [120] (reproduced from Reference [120]).
7.1.2 Test Set Redundancy Reduction for Analog/RF Design Testing. The Analog/RF system test-ing can be divided into two aspects, including device-level testing and circuit-level testing. Thecurrent practice for testing an Analog/RF system is specification testing [142]. This method needsto measure the parameters of the circuit directly. The device will be continuously switched to var-ious test configurations during its operation, resulting in a long setup and establishment time. Ineach test configuration, measurements are performed multiple times and averaged to reduce ther-mal noise and crosstalk. Moreover, this complex process needs to be repeated in various modesof operation, such as temperature, voltage level, and output load. Therefore, despite the highlyaccurate measurement, the overall test process is extremely costly. However, specification testingrequires the use of automatic test equipment (ATE), and the cost of this equipment is also veryhigh.
A direction to solve these problems is to identify and eliminate the information redundancyin the test set by machine learning, and make a pass/fail decision only depending on a subset ofit [140, 141]. In the specification test, each performance parameter may have redundant informa-tion. However, this information needs advanced statistical methods to obtain. ML can help findthe complex association in the specification test, to reduce the types and times of the test set, andfinally complete the result inference with high quality. A multi-objective genetic algorithm is ap-plied for feature selection of the test set, which is used to extract subsets and build the predictionmodel based on a binary classifier to determine whether the equipment is qualified [141]. Theclassifier can be constructed by kNN or Ontogenic Neural Network (ONN). Taking the powerset as an example, the results show that a relatively small number of non-RF specification tests(i.e., digital, DC, and low frequency) can correctly predict a large proportion of pass/fail tags. Theexperimental results also show that adding some RF specification tests can further improve theprediction error.
Pan et al. [120] propose a low-cost characterization method for IC technologies. They assumethe devices on different dies have similar characteristics, and it is possible to use part of testsamples to predict the detailed data. The framework of this work is shown in Figure 13. A smallnumber of samples are tested, and several features are extracted from the test results. Then, thefeatures are used to fit a regression model, with which one can infer the performance curveand predict test results of other samples. In the experiment, the authors use 267 data samplesto predict 3241 data points with 0.3% average error, which reaches a 14× speedup in the testprocess.
7.1.3 Test Set Redundancy Reduction for Semiconductor Technology Testing. Sometimes theproblem is to test a new semiconductor technology rather than a specific design. In this situation,a test instance is a synthesized or fabricated chip design, and building a test set can be extremelyexpensive. This problem is a little different from the testing problems mentioned before, but the
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:28 G. Huang et al.
Fig. 14. The flow of proposed method in Reference [100] (reproduced from Reference [100]).
idea of reducing the test set redundancy is still working. If we can predict the test set quality andselect good parts in advance, then the cost can be reduced significantly. Liu et al. [100] focus onoptimizing the test set design via ML, of which the proposed flow is shown in Figure 14. In a tra-ditional testing flow, every possible configuration in a logic library is synthesized, which causeshuge time and energy consumption. To alleviate the problem, this work uses RF models to predictwhether a test datum is “unique” and “testable” with several features (e.g., the number of nets,fanout, and max logic depth). “Unique” means that the test data has a different logical structurecompared to other test data, and “testable” means that this test data can cover a great numberof IP fault. The experimental results show that this work can achieve over 11× synthesis timereduction.
7.2 Machine Learning for Test and Diagnosis Complexity Reduction
7.2.1 Test Complexity Reduction for Digital Design. Recently, GCNs are used to solve the ob-servation point insertion problem for the testing stage [104]. Inserting an observation point be-tween the output of module 1 and the input of module 2 will make the test results of mod-ule 1 observable and the test inputs of module 2 controllable. Ma et al. [104] propose to useGCN to insert fewer test observation points while maximizing the fault coverage. More specif-ically, the netlist is first mapped to a directed graph, in which nodes represent modules, andedges represent wires. Then, the nodes are labeled as easy-to-observe or difficult-to-observe,and a GCN classifier is trained. Compared with commercial test tools, this method based onGCN can reduce the observation points by 11% under similar fault coverage, and reduce thetest pattern count by 6%. Note that compared with other studies discussed before, observationpoint insertion reduces the test complexity in a different way, by decoupling the test of differentmodules.
7.2.2 Verification Diagnosis Complexity Reduction for Digital Design. During the verificationprocess, a complicated diagnosis is needed whenever a bug is detected. However, this diagno-sis process might be redundant sometimes, since there are lots of similar bugs caused by thesame hardware problem, and one situation can be analyzed repeatedly. To alleviate this prob-lem, Mammo et al. [110] propose an automatic hardware diagnosis method named BugMD, whichcan classify different bugs and localize their corresponding module. With this framework, theemerging bugs can be analyzed without a complicated diagnosis process. First, the instructionwindows containing bugs are encoded to input feature vectors based on the mismatch betweenDUT and a golden instruction set simulator, then the feature vectors are sent to a classifier forfurther triaging and localizing, where the ML algorithm can be a decision tree, RF, SVM, or NN.To produce sufficient training data, a synthetic bug injection framework is proposed, which is re-alized by randomly change the functionality of several modules. The experimental results provethe feasibility of BugMD with over 90% top-3 localization accuracy.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:29
Fig. 15. Active learning for circuits testing (reproduced from Reference [58]).
7.2.3 Verification and Test Complexity Reduction for Analog/RF Design. With increasing systemcomplexity and rising demand for robustness, Analog/RF signal verification has become a keybottleneck [19], which makes failure detection and design verification very challenging.
A feasible way to reduce the cost of Analog/RF system verification is to use low-cost test equip-ment to obtain simple results. Then ML models can be used to map from simple results to complexresults obtained by specification testing [5, 34]. The basic assumption is that the training set reflectsthe statistical mechanisms of the manufacturing process, thus the learned mapping can generalizefor new device instances. Nevertheless, the ML model might fail to capture the correct mappingfor some devices, since the actual mapping is complex and is not a one-to-one mapping. Thus, atwo-tier test method combining machine learning and specification testing is proposed to improvethe accuracy of results [142]. During the process, the equipment is first tested by low-cost machinelearning-based testing, and the reliability of the results is evaluated. If it is considered insufficient,then the more expensive specification testing is conducted. An ONN is designed to identify theambiguous regions, and forward the devices to the specification testing. This two-tier approachachieves a trade-off between accuracy and cost.
Although formal verifications can provide guarantees for the specifications under check, theyare only feasible for small analog blocks with idealistic models and fail for practical usage on largedetailed SPICE circuit netlist. Therefore, machine learning is applied to aid the verification process.HFMV [58] combines a machine learning model with formal verification: When there is insuffi-cient confidence in the test results of the machine learning model, formal verification is performed.HFMV proposes a probabilistic machine learning model to check whether there is enough confi-dence to meet the target specification. As shown in Figure 15, HFMV relies on two active learningapproaches to improve the performance of the ML model, including (1) max variance learning toreduce model uncertainty and (2) formally guided active learning, to discover rare failure regions.Their results show that HFMV can detect rare failures.
7.3 Summary of ML for Verification and Testing
There are mainly two ways of accelerating the verification and testing process: (1) reducing the testset redundancy and (2) reducing the complexity of the testing, verification and diagnosis process.To reduce the test set redundancy or to optimize the generation of test instances, coverage-directedtest generation has been studied for a long time, which can be aided by lots of ML algorithms. Re-cently, test set redundancy reduction of analog/RF design or even the test of semiconductor tech-nology have raised a lot of attention, and more ML methods are applied to solve these problems.As for reducing the verification and test complexity, there are studies that adopt low-cost tests foranalog/RF design, and some other studies that focus on fast bug classification and localization. Therelated works on ML for verification and testing problems are summarized in Table 7.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:30 G. Huang et al.
Table 7. Summary of ML for Verification and Testing
Section Task ML Algorithm Reference
Test SetRedundancyReduction
Digital Design
Statistical Model [38], [145]Search Methods [135], [49]Rule Learning [57], [69], [33]
CNN, SVM, et al.[24], [47],
[146]GCN [104]
Analog/RF DesignKNN, ONN [141]Regression [120]
Semiconductor Technology CNN [100]TestComplexityReduction
Digital Design SVM, MLP, CNN, et al. [110]
Analog/RF DesignONN [142]Active Learning [58]
8 OTHER RELATED STUDIES
8.1 Power Prediction
Power estimation is necessary in electronic system design, which can be carried out at differentlevels according to application scenarios. In general, there is a tradeoff between the power esti-mation accuracy and simulation method complexity. For example, the gate-level estimation cangenerate a cycle-by-cycle power track with high accuracy but has a huge time consumption. Incontrast, high-level simulation can only provide less accurate evaluation, but requires less specificknowledge and computing complexity at the same time. Nevertheless, it is possible for ML meth-ods to make accurate and detailed power prediction only with high-level evaluation, which showssignificant benefits for fast chip design and verification.
Lee and Gerstlauer [81] propose a multi-level power modeling method, which only uses high-level C/C++ behavior description and some hardware information to obtain power model at dif-ferent granularities. The derived power model granularity depends on how much information wehave about the hardware design, i.e., black, grey, or white box modeling. For each modeling prob-lem, an evaluation flow is designed, and several regression algorithms are applied. The proposedflow achieves a significant speedup compared with traditional RTL-level or gate-level simulationwithin 10% error.
Kim et al. [72] propose an RTL-level power prediction framework named SIMMANI with signalclustering and power model regression. All the signals are encoded according to the toggle patternsobserved in a specific window, which are then clustered and selected. The regression model takesthe selected signals as the input, and outputs the power estimation result.
Besides traditional regression methods, other ML methods also show great potential in powerpredicting problems. PRIMAL [175] is an RTL power estimation framework based on several MLmethods, including Principal Component Analysis (PCA), MLP and CNN. In PRIMAL, the tog-gle patterns of registers are first encoded into 1D or 2D features and then processed by various MLalgorithms. The trained model can evaluate the power track for new workloads that are very dif-ferent from the training set. To enhance the local information, a graph-based partitioning methodis leveraged for the mapping strategy from registers to feature pixels. PRIMAL can achieve a 50×speedup than gate-level power estimation flow with an average error below 5%.
PRIMAL is a promising solution to RTL power prediction. However, there exist transferabilityproblems with this solution in that a power model can only describe a specific system design.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:31
That is to say, we have to train a new model for a new design. To solve this problem, a GNN-based framework named GRANNITE is proposed by Zhang et al. [169]. Different from PRIMAL,GRANNITE takes the gate-level netlist into consideration to build a GNN. GRANNITE shows goodtransferability among different designs by utilizing more hardware details. Note that this workstill conducts an RTL-level power prediction, since the gate-level netlist is only used for the graphgeneration, and no gate-level power estimation is involved. Compared to a traditional probabilisticswitching activity estimation, GRANNITE achieves a speed up of two orders of magnitude onaverage, and the average relative error is within 5.5%.
8.2 Machine Learning for SAT Solver
SAT plays an important role in circuit design and verification, error diagnosis, model detection offinite state machines, FPGA routing, logic synthesis and mapping, register allocation, timing, andso on. Researchers contribute to improving the efficiency of the search engine in SAT solvers anddesign various strategies and heuristics. Recently, with the advancement of NNs in representationlearning and solving optimization problems, there have been increasing interests in generatingand solving SAT formula with NNs.
The performance of the conflict-driven Davis Putnam style SAT solver largely depends on thequality of restart strategies. Haim and Walsh [50] successfully apply a supervised learning methodto design LMPick, a restart strategy selector. Among various heuristics, branching heuristics [40,46, 88, 114] attract lots of attention for its great performance. Multi-class SVM is applied in Ref-erence [139] to tune parameters of heuristics, according to the features of both input and outputclauses. SATzilla [157] integrates several solvers and builds an empirical hardness model for solverselection. Some work [42, 61, 71] evolve heuristics through genetic algorithms by combining ex-isting primitives, with the latter two aiming at specializing the created heuristics to particularproblem classes. There have also been other approaches utilizing reinforcement learning to dis-cover variable selection heuristics [41, 79, 86, 87, 88].
Recently, NNs have found their applications in solving SAT. Palm et al. [118] introduce therecurrent relational network to solve relational inference, e.g., Sudoku. Evans et al. [35] presentan NN architecture that can learn to predict whether one propositional formula entails anotherby randomly sampling and evaluating candidate assignments. There have also been several recentpapers showing that various neural network architectures can learn good heuristics for NP-hardcombinatorial optimization problems [9, 70, 144]. Selsam et al. [133] propose to train a GNN (calledNeuroSAT) to classify SAT problems as satisfiable or unsatisfiable. Selsam and Bjørner [132] alsouse a simplified NeuroSAT to guide the search process of an existing solver.
In recent studies, a common practice is to use GNN for feature extraction and reinforcementlearning for learning the policy. Lederman et al. [80] learn improved heuristics to solve quantifiedBoolean formulas via reinforcement learning while using GNN for formula encoding. Yolcu andPóczos [166] also use RL to learn local search heuristics with a GNN serving as the policy networkfor variable selection. Besides GNN, RNN can also be employed for formula or DAG embedding.Lately, Amizadeh et al. [7] propose Circuit-SAT to solve SAT problems, employing gated recurrentunits that can implement sequential propagation of DAG-structured data. The training procedureworks in the exploration and exploitation manner, which is similar to the reinforcement learningparadigm.
8.3 Acceleration with Deep-learning Engine
EDA tools typically involve solving large-scale optimization problems with heavy numerical com-putation, especially at the physical design stage, and extensive work is devoted to acceleratingthese solvers with modern parallel computing hardware like multicore CPUs or GPUs [26, 29,
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.
40:32 G. Huang et al.
101]. Many recent studies have explored GPU’s opportunity in EDA problems [59, 93, 170, 171].Still, developing good GPU implementation of EDA algorithms is challenging.
Lin et al. [93] leverage the mature deep-learning engines to build a GPU-accelerated placementframework called DREAMPlace Advancement in ML has encouraged the development of softwareframeworks and tool-kits which decouple algorithmic description from system implementation(e.g., interaction with GPUs, optimizing low-level operator code) to help develop ML models pro-ductively [3, 123]. The key insight of this article is that the analytical placement problem is anal-ogous to the training of a NN model. They both involve optimizing some parameters (i.e., celllocations in placement, weights in NN) to minimize a cost function (i.e., wirelength in placement,cross-entropy loss in NN). With hand-optimized key operators integrated in DL training frame-work PyTorch, DREAMPlace demonstrates over 40× speedup against CPU-based multi-threadedtools [26, 101]. The tool claims to be extensible to new solvers by simply adding algorithmic de-scription in high-level languages like Python.
8.4 Auto-tuning Design Flow
With the increasing complexity of chip design, massive choices and parameters of the synthesistools make up huge design space. To improve the efficiency of tuning, recent studies employ moreadvanced learning-based algorithms. In Reference [179], some complete parameter settings areselected and then gradually adapted during synthesis to achieve optimal results. Kwon et al. [78]propose the first recommender system based on the collaborative filtering algorithm. The systemconsists of two modules: the offline learning module and the online recommendation module. Theoffline learning module is to predict QoR given macro specification, parameter configuration, costfunction and iterative synthesis output. The online recommendation module generates several op-timal settings. A recent study [153] also employs a tree-based XGBoost model for efficient tuning.Besides, this paper also designs a clustering technique that leverages prior knowledge and an ap-proximate sampling strategy to balance exploration and exploitation. In Reference [4], a deep RLframework that adopts unsupervised GNN to generate features is developed to automatically tunethe placement tool parameters.
9 DISCUSSION FROM THE MACHINE LEARNING PERSPECTIVE
In this section, we revisit some aforementioned research studies from an ML-applicationperspective.
9.1 The Functionality of ML
Section 2.2 introduces the major ML models and algorithms used in EDA problems. Based on thefunctionality of ML in the EDA workflow, we can group most researches into four categories:decision making in traditional methods, performance prediction, black-box optimization, and au-tomated design.
Decision making in traditional methods. The configurations of EDA tools, including the choice ofalgorithm or hyper-parameters, have a strong impact on the efficiency of the procedure and qualityof the outcome. This class of researches utilizes ML models to replace brute-force or empiricalmethods when deciding configurations. ML has been used to select among available tool-chainsfor logic synthesis [115, 167], mask synthesis [163], and topology selection in analog design [111,117, 137]. ML has also been exploited to select hyper-parameters for non-ML algorithms such asSimulated Annealing, Genetic Algorithm, and so on (refer to Section 3.2.2).
Performance prediction. This type of tasks mainly use supervised or unsupervised learningalgorithms. Classification, regression and generative models are trained by former cases in real
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:33
production to estimate QoR rapidly, to assist engineers to drop unqualified designs withouttime-consuming simulation or synthesis.
ML-based performance prediction is a very common type of ML application. Typical applica-tions of this type include congestion prediction in placement and routing and hotspot detection inmanufacturability estimation (Table 8). The most commonly used models are Linear Regression,Random Forests, XGBoost, and prevailing CNNs.
Black-box optimization. This type of tasks mainly use active learning. Many tasks in EDA areDSE, i.e., searching for an optimal (single- or multi-objective) design point in a design space. Lever-aging ML in these problems usually yields black-box optimization, which means that the searchfor optimum is guided by a surrogate ML model, not an explicit analytical model or hill-climbingtechniques. The ML model learns from previously explored design points and guides the searchdirection by making predictions on new design points. Different from the first category, the MLmodel is trained in an active-learning process rather than on a static dataset, and the inputs areusually a set of configurable parameters rather than results from other design stages.
Black-box optimization is widely used for DSE in many EDA problems. Related ML theories andhow to combine with the EDA domain knowledge are extensively studied in literature. Typicalapplications of this type include tuning HLS-level parameters and physical parameters of 3D inte-gration (see Table 8). The key techniques are to find an underlying surrogate model and a searchstrategy to sample new design points. Options of the surrogate model include GP, along with allthe models used in performance prediction [105, 112]. Search strategies are usually heuristics fromdomain knowledge, including uniformly random exploration [95], exploring the most uncertaindesigns [180], exploring and eliminating the worst designs [112], and so on.
Automated design. Some studies leverage AI to automate design tasks that rely heavily on humanefforts. Typical applications are placement [113] and analog device sizing [134, 147, 148]. At firstlook it is similar to black-box optimization, but we highlight the differences as follows:
• The design space can be larger and more complex, for example in placement, the locationsof all the cells.
• Instead of searching in the decision space, there exists a trainable decision-making pol-
icy that outputs the decisions, which is usually learned with RL techniques.
More complicated algorithms with large volumes of parameters, such as deep reinforcementlearning, are used in these problems. This stream of researches show the potential to fully automateIC design.
Table 8 summarizes representative work of each category and typical model settings in termsof algorithm, input, and output.
9.2 Data Preparation
The volume and quality of the dataset are essential to model performance. Almost all studies wereview make some discussions on leveraging EDA domain knowledge to engineer a large, fair, andclean dataset.
Raw data collection. Raw features and ground truth/labels are two types of data needed byML models. Raw feature extraction is often a problem-specific design, but there are some sharedheuristics. Some studies treat the layout as images and leverage image processing algorithms [32,89, 154]. Some choose geometric or graph-based features from the netlist [150]. Some usetraditional algorithms to generate features [6, 67, 106, 154]. Quite a lot of studies choose featuresmanually [6, 11, 16, 17, 27, 82, 115]. To some extent, manual feature selection lacks a theoreticalguarantee or practical guidance for other problems. The labels or ground truth are acquiredthrough time-consuming simulation or synthesis. This also drives researchers to improve data
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:34 G. Huang et al.
Table 8. Overview of ML Functionality in EDA Tasks
ML FunctionalityTask / DesignStage
ML Algorithm Input Output Section
Decision making in
traditional methods
HLS Design spaceexploration
Decision Tree,quadraticregression, etc.
Hardware directives(pragmas) in HLSdesign
Quality ofhyper-parameters,e.g., initial state,terminationconditions
Section 3.2.2
Logic synthesis DNN RTL descriptionsChoice of theworkflow andoptimizer
Section 4.1
Mask synthesis CNN Layout imagesChoice ofoptimizationmethods
[163] in Section 5.1
Analog topologydesign
CNN, Fuzzy logic,etc.
Analogspecifications
Best topologyselection
Section 6.2.1
Performance
prediction
HLS
Linear Regression,SVM, RandomForest, XGBoost,etc.
HLS Report,workloadcharacteristics,hardwarecharacteristics
Resource usage,timing, etc.
Section 3.1
Placement androuting
SVM, CNN, GAN,MARS, RandomForest etc.
Features fromnetlist or layoutimage
Wire-length,routing congestion,etc.
Section 4.2
Physicalimplementation(lithographyhotspot detection,IR drop prediction,power estimation,etc.)
SVM, CNN,XGBoost, GAN, etc.
RTL and gate-leveldescriptions,technologylibraries, physicalimplementationconfigurations
Existence oflithographyhotspots, IR drop,path delayvariation, etc
Section 5.1–4.5, 5.4,8.1
Verification
KNN, OntogenicNeural Network(ONN), GCN, rulelearning, SVM, CNN
Subset of testspecifications orlow-costspecifications
boolean pass/failprediction
Section 7
Device sizing ANN Device parameterPossibility ofconstraintsatisfaction
Section 6.3
ML FunctionalityTask / DesignStage
ML AlgorithmTuningparameters
OptimizationObjective
References
Black-box
optimization
HLS Design SpaceExploration
Random Forest,Gaussian Process,Ensemble models,etc.
Hardware directives(pragmas) in HLSdesign
Quality-of-Results,including latency,area, etc.
Section 3.2.1
3D IntegrationGaussian Process,Neural Network
Physical designconfigurations
Clock skew, thermalperformance, etc.
Section 4.4
Automated design
Logic synthesis RL, GCNGate-level DAG fora logic function
Area, latency, etc. Section 4.1
Placement RL, GCNMacro placementposition
Wire-length,congestion, etc.
[113] inSection 4.2.3
Mask synthesis
GAN, CNN,Decision Tree,dictionary learning,etc.
RTL and gate-leveldescription, layoutimages
Generated opticalproximitycorrection (OPC)and sub-resolutionassist feature(SRAF)
Section 5.1–5.3
Device sizingRL, GCN, DNN,SVM
Device parametersSatisfaction ofdesign constraints
Section 6.3
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:35
efficiency by carefully architecting their models and preprocessing input features, or usesemi-supervised techniques [25] to expand the dataset.
Feature preprocessing. Standard practices like feature normalization and edge data removal arecommonly used in the preprocessing stage. Some studies also use dimension reduction techniqueslike PCA and LDA to further adjust input features [60].
9.3 Domain Transfer
There have been consistent efforts to make ML-based solutions more adaptive to domain shift,to save training from scratch for every new task. Some researches propose ML models that takespecifications of the new application domain and predict results in the new domain based on resultsacquired in original domain. This idea is used in cross-platform performance estimation of FPGAdesign instances [109, 116]. It would be more exciting to train AI agents to adapt to new taskwithout preliminary information of the new domain, and recent studies show that RL might bea promising approach. RL models pre-trained on one task is able to perform nicely on new tasksafter a fine-tune training on the new domain [113, 134, 147], which costs much less time thantraining from scratch and sometimes lead to even better results.
10 CONCLUSION AND FUTURE WORK
It is promising to apply machine learning techniques in accelerating EDA tasks. In this way, theEDA tools can learn from previous experiences and solve the problem at hand more efficiently.So far machine learning techniques have found their applications in almost all stages of the EDAhierarchy. In this article, we have provided a comprehensive review of the literature from both theEDA and the ML perspectives.
Although remarkable progress has been made in the field, we are looking forward to morestudies on applying ML for EDA tasks from the following aspects.
• Towards full-fledged ML-powered EDA tools. In many tasks (e.g., analog/RF testing, physicaldesign), the performance of purely using machine learning models is still difficult to meetthe industrial needs. Therefore, smart combination of machine learning and the traditionalmethod is of great importance. Current machine learning aided EDA methods may be stillrestricted to less flexible design spaces, or aim at solving a simplified problem. New modelsand algorithms are desired to be developed to make the ML models more useful in realapplications.
• Application of new ML techniques. Very recently, some new machine learning models andmethodologies (e.g., point cloud and GCN) and machine learning techniques (e.g., domainadaptation and reinforcement learning) begin to find their application in the EDA field. Weexpect to see a broader application of these techniques in the near future.
• Trusted Machine Learning. While ML holds the promise of delivering valuable insights andknowledge into the EDA flow, broad adoption of ML will rely heavily on the ability to trusttheir predictions/outputs. For instance, our trust in technology is based on our understand-ing of how it works and our assessment of its safety and reliability. To trust a decision madeby an algorithm or a machine learning model, circuit designers or EDA tool users needto know that it is reliable and fair, and that it will cause no harm. We expect to see moreresearch along this line making our automatic tool trusted.
REFERENCES
[1] Altera. 2017. Intel HLS Compiler. Retrieved from https://www.altera.com/.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.
40:36 G. Huang et al.
[2] Xilinx. 2017. Xilinx Vivado HLS. Retrieved from https://www.xilinx.com/.
[3] Martín Abadi, Paul Barham, Jianmin Chen, Zhifeng Chen, Andy Davis, Jeffrey Dean, Matthieu Devin, Sanjay Ghe-
mawat, Geoffrey Irving, Michael Isard, Manjunath Kudlur, Josh Levenberg, Rajat Monga, Sherry Moore, Derek Gor-
don Murray, Benoit Steiner, Paul A. Tucker, Vijay Vasudevan, Pete Warden, Martin Wicke, Yuan Yu, and Xiaoqiang
Zheng. 2016. TensorFlow: A system for large-scale machine learning. In Proceedings of the USENIX Symposium on
Operating Systems Design and Implementation (OSDI’16), Kimberly Keeton and Timothy Roscoe (Eds.). USENIX Asso-
ciation, 265–283. Retrieved from https://www.usenix.org/conference/osdi16/technical-sessions/presentation/abadi.
[4] Anthony Agnesina, Kyungwook Chang, and Sung Kyu Lim. 2020. VLSI placement parameter optimization using
deep reinforcement learning. In Proceedings of the IEEE/ACM International Conference on Computer-Aided Design
(ICCAD’20). IEEE, 1–9. https://ieeexplore.ieee.org/document/9256814
[5] Selim Sermet Akbay and Abhijit Chatterjee. 2005. Built-in test of RF components using mapped feature extraction
sensors. In Proceedings of the IEEE VLSI Test Symposium (VTS’05). IEEE Computer Society, 243–248. DOI:https://doi.
org/10.1109/VTS.2005.33
[6] Mohamed Baker Alawieh, Wuxi Li, Yibo Lin, Love Singhal, Mahesh A. Iyer, and David Z. Pan. 2020. High-definition
routing congestion prediction for large-scale FPGAs. In Proceedings of the IEEE/ACM Asia and South Pacific Design
Automation Conference (ASPDAC’20). IEEE, 26–31. DOI:https://doi.org/10.1109/ASP-DAC47756.2020.9045178
[7] Saeed Amizadeh, Sergiy Matusevych, and Markus Weimer. 2019. Learning to solve circuit-SAT: An unsupervised
differentiable approach. In Proceedings of the International Conference on Learning Representations (ICLR’19). Open-
Review.net. Retrieved from https://openreview.net/forum?id=BJxgz2R9t7.
[8] Erick Carvajal Barboza, Nishchal Shukla, Yiran Chen, and Jiang Hu. 2019. Machine learning-based pre-routing tim-
ing prediction with reduced pessimism. In Proceedings of the ACM/IEEE Design Automation Conference (DAC’19).
ACM, 106. DOI:https://doi.org/10.1145/3316781.3317857
[9] Irwan Bello, Hieu Pham, Quoc V. Le, Mohammad Norouzi, and Samy Bengio. 2017. Neural combinatorial optimiza-
tion with reinforcement learning. In Proceedings of the International Conference on Learning Representations (ICLR’17).
OpenReview.net. Retrieved from https://openreview.net/forum?id=Bk9mxlSFx.
[10] E. Berkcan and F. Yassa. 1990. Towards mixed analog/digital design automation: A review. In Proceedings of the IEEE
International Symposium on Circuits and Systems (ISCAS’90).
[11] Song Bian, Michihiro Shintani, Masayuki Hiromoto, and Takashi Sato. 2017. LSTA: Learning-based static timing
analysis for high-dimensional correlated on-chip variations. In Proceedings of the ACM/IEEE Design Automation
Conference (DAC’17). ACM, 66:1–66:6. DOI:https://doi.org/10.1145/3061639.3062280
[12] Bernhard E. Boser, Isabelle Guyon, and Vladimir Vapnik. 1992. A training algorithm for optimal margin classifiers.
In Proceedings of the Conference on Learning Theory, David Haussler (Ed.). ACM, 144–152. DOI:https://doi.org/10.
1145/130385.130401
[13] Justin A. Boyan and Andrew W. Moore. 2000. Learning evaluation functions to improve optimization by local search.
J. Mach. Learn. Res. 1 (2000), 77–112. Retrieved from http://jmlr.org/papers/v1/boyan00a.html.
[14] Robert K. Brayton and Alan Mishchenko. 2010. ABC: An academic industrial-strength verification tool. In Proceed-
ings of the International Conference on Computer-Aided Verification (CAV’10) (Lecture Notes in Computer Science),
Tayssir Touili, Byron Cook, and Paul B. Jackson (Eds.), Vol. 6174. Springer, 24–40. DOI:https://doi.org/10.1007/978-
3-642-14295-6_5
[15] Andrew Canis, Jongsok Choi, Mark Aldham, Victor Zhang, Ahmed Kammoona, Tomasz S. Czajkowski, Stephen
Dean Brown, and Jason Helge Anderson. 2013. LegUp: An open-source high-level synthesis tool for FPGA-based
processor/accelerator systems. ACM Trans. Embed. Comput. 13, 2 (2013), 24:1–24:27. DOI:https://doi.org/10.1145/
2514740
[16] Yi Cao, Andrew B. Kahng, Joseph Li, Abinash Roy, Vaishnav Srinivas, and Bangqi Xu. 2019. Learning-based pre-
diction of package power delivery network quality. In Proceedings of the IEEE/ACM Asia and South Pacific Design
Automation Conference (ASPDAC’19), Toshiyuki Shibuya (Ed.). ACM, 160–166. DOI:https://doi.org/10.1145/3287624.
3287689
[17] Wei-Ting Jonas Chan, Kun Young Chung, Andrew B. Kahng, Nancy D. MacDonald, and Siddhartha Nath. 2016.
Learning-based prediction of embedded memory timing failures during initial floorplan design. In Proceedings of the
IEEE/ACM Asia and South Pacific Design Automation Conference (ASPDAC’16). IEEE, 178–185. DOI:https://doi.org/
10.1109/ASPDAC.2016.7428008
[18] Wei-Ting Jonas Chan, Yang Du, Andrew B. Kahng, Siddhartha Nath, and Kambiz Samadi. 2016. BEOL stack-aware
routability prediction from placement using data mining techniques. In Proceedings of the IEEE International Confer-
ence on Computer Design (ICCD’16). IEEE Computer Society, 41–48. DOI:https://doi.org/10.1109/ICCD.2016.7753259
[19] Henry Chang and Kenneth S. Kundert. 2007. Verification of complex analog and RF IC designs. Proc. IEEE 95, 3
(2007), 622–639. DOI:https://doi.org/10.1109/JPROC.2006.889384
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:37
[20] Guojin Chen, Wanli Chen, Yuzhe Ma, Haoyu Yang, and Bei Yu. 2020. DAMO: Deep agile mask optimization for full
chip scale. In Proceedings of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD’20). Article
19, 9 pages. DOI:https://doi.org/10.1145/3400302.3415705
[21] Jingsong Chen, Jian Kuang, Guowei Zhao, Dennis J.-H. Huang, and Evangeline F. Y. Young. 2020. PROS: A plug-in
for routability optimization applied in the state-of-the-art commercial EDA tool using deep learning. In Proceedings
of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD’20). 1–8.
[22] Ran Chen, Wei Zhong, Haoyu Yang, Hao Geng, Xuan Zeng, and Bei Yu. 2019. Faster region-based hotspot detection.
In Proceedings of the ACM/IEEE Design Automation Conference (DAC’19). ACM, 146. DOI:https://doi.org/10.1145/
3316781.3317824
[23] Tianqi Chen and Carlos Guestrin. 2016. XGBoost: A scalable tree boosting system. In Proceedings of the ACM In-
ternational Conference on Knowledge Discovery and Data Mining (KDD’16). ACM, 785–794. DOI:https://doi.org/10.
1145/2939672.2939785
[24] Wen Chen, Nik Sumikawa, Li-C. Wang, Jayanta Bhadra, Xiushan Feng, and Magdy S. Abadir. 2012. Novel test de-
tection to improve simulation efficiency—A commercial experiment. In Proceedings of the IEEE/ACM International
Conference on Computer-Aided Design (ICCAD’12), Alan J. Hu (Ed.). ACM, 101–108. DOI:https://doi.org/10.1145/
2429384.2429404
[25] Ying Chen, Yibo Lin, Tianyang Gai, Yajuan Su, Yayi Wei, and David Z. Pan. 2020. Semisupervised hotspot detection
with self-paced multitask learning. IEEE Trans. Comput.-Aided Design Integr. Circ. Syst. 39, 7 (2020), 1511–1523.
DOI:https://doi.org/10.1109/TCAD.2019.2912948
[26] Chung-Kuan Cheng, Andrew B. Kahng, Ilgweon Kang, and Lutong Wang. 2019. RePlAce: Advancing solution quality
and routability validation in global placement. IEEE Trans. Comput.-Aided Design Integr. Circ. Syst. 38, 9 (2019), 1717–
1730. DOI:https://doi.org/10.1109/TCAD.2018.2859220
[27] Wei-Kai Cheng, Yu yin Guo, and Chih-Shuan Wu. 2018. Evaluation of routability-driven macro placement with
machine-learning technique. In Proceedings of the International Symposium on Next Generation Electronics. 1–3.
[28] Vidya A. Chhabria, Andrew B. Kahng, Minsoo Kim, Uday Mallappa, Sachin S. Sapatnekar, and Bangqi Xu. 2020.
Template-based PDN synthesis in floorplan and placement using classifier and CNN techniques. In Proceedings of
the IEEE/ACM Asia and South Pacific Design Automation Conference (ASPDAC’20). IEEE, 44–49. DOI:https://doi.org/
10.1109/ASP-DAC47756.2020.9045303
[29] Jason Cong and Yi Zou. 2009. Parallel multi-level analytical global placement on graphics processing units. In Pro-
ceedings of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD’09), Jaijeet S. Roychowdhury
(Ed.). ACM, 681–688. DOI:https://doi.org/10.1145/1687399.1687525
[30] Steve Dai, Yuan Zhou, Hang Zhang, Ecenur Ustun, Evangeline F. Y. Young, and Zhiru Zhang. 2018. Fast and ac-
curate estimation of quality of results in high-level synthesis with machine learning. In Proceedings of the IEEE
International Symposium on Field-Programmable Custom Computing Machines (FCCM’18). IEEE Computer Society,
129–132. DOI:https://doi.org/10.1109/FCCM.2018.00029
[31] Sourav Das, Janardhan Rao Doppa, Daehyun Kim, Partha Pratim Pande, and Krishnendu Chakrabarty. 2015. Opti-
mizing 3D NoC design for energy efficiency: A machine learning approach. In Proceedings of the IEEE/ACM Inter-
national Conference on Computer-Aided Design (ICCAD’15), Diana Marculescu and Frank Liu (Eds.). IEEE, 705–712.
DOI:https://doi.org/10.1109/ICCAD.2015.7372639
[32] Duo Ding, Jhih-Rong Gao, Kun Yuan, and David Z. Pan. 2011. AENEID: A generic lithography-friendly detailed
router based on post-RET data learning and hotspot detection. In Proceedings of the ACM/IEEE Design Automation
Conference (DAC’11), Leon Stok, Nikil D. Dutt, and Soha Hassoun (Eds.). ACM, 795–800. DOI:https://doi.org/10.1145/
2024724.2024902
[33] Kerstin Eder, Peter A. Flach, and Hsiou-Wen Hsueh. 2006. Towards automating simulation-based design verification
using ILP. In Proceedings of the International Conference on Inductive Logic Programming (Lecture Notes in Computer
Science), Stephen Muggleton, Ramón P. Otero, and Alireza Tamaddoni-Nezhad (Eds.), Vol. 4455. Springer, 154–168.
DOI:https://doi.org/10.1007/978-3-540-73847-3_20
[34] Sofiane Ellouz, Patrice Gamand, Christophe Kelma, Bertrand Vandewiele, and Bruno Allard. 2006. Combining in-
ternal probing with artificial neural networks for optimal RFIC testing. In Proceedings of the IEEE International Test
Conference (ITC’06), Scott Davidson and Anne Gattiker (Eds.). IEEE Computer Society, 1–9. DOI:https://doi.org/10.
1109/TEST.2006.297705
[35] Richard Evans, David Saxton, David Amos, Pushmeet Kohli, and Edward Grefenstette. 2018. Can neural networks
understand logical entailment? In Proceedings of the International Conference on Learning Representations (ICLR’18).
OpenReview.net. Retrieved from https://openreview.net/forum?id=SkZxCk-0Z.
[36] Farnoud Farahmand, Ahmed Ferozpuri, William Diehl, and Kris Gaj. 2017. Minerva: Automated hardware optimiza-
tion tool. In Proceedings of the International Conference on Reconfigurable Computing and FPGAs (ReConFig’17). IEEE,
1–8. DOI:https://doi.org/10.1109/RECONFIG.2017.8279804
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:38 G. Huang et al.
[37] Martin Ferianc, Hongxiang Fan, Ringo S. W. Chu, Jakub Stano, and Wayne Luk. 2020. Improving performance esti-
mation for FPGA-based accelerators for convolutional neural networks. In Proceedings of the International Sympo-
sium on Applied Reconfigurable Computing (ARC’20) (Lecture Notes in Computer Science), Vol. 12083. Springer, 3–13.
DOI:https://doi.org/10.1007/978-3-030-44534-8_1
[38] Shai Fine and Avi Ziv. 2003. Coverage directed test generation for functional verification using bayesian networks. In
Proceedings of the ACM/IEEE Design Automation Conference (DAC’03). ACM, 286–291. DOI:https://doi.org/10.1145/
775832.775907
[39] Evelyn Fix. 1951. Discriminatory Analysis: Nonparametric Discrimination, Consistency Properties. USAF School of
Aviation Medicine.
[40] Alex Flint and Matthew B. Blaschko. 2012. Perceptron learning of SAT. In Proceedings of the Annual Conference on
Neural Information Processing Systems (NIPS’12), Peter L. Bartlett, Fernando C. N. Pereira, Christopher J. C. Burges,
Léon Bottou, and Kilian Q. Weinberger (Eds.). 2780–2788. http://papers.nips.cc/paper/4533-perceptron-learning-of-
sat.
[41] Martin Fränzle, Holger Hermanns, and Tino Teige. 2008. Stochastic satisfiability modulo theory: A novel technique
for the analysis of probabilistic hybrid systems. In Proceedings of the 11th International Workshop on Hybrid Systems:
Computation and Control (HSCC’08) (Lecture Notes in Computer Science), Magnus Egerstedt and Bud Mishra (Eds.),
Vol. 4981. Springer, 172–186. DOI:https://doi.org/10.1007/978-3-540-78929-1_13
[42] Alex S. Fukunaga. 2008. Automated discovery of local search heuristics for satisfiability testing. IEEE Trans. Evolution.
Comput. 16, 1 (2008), 31–61. DOI:https://doi.org/10.1162/evco.2008.16.1.31
[43] Hao Geng, Haoyu Yang, Yuzhe Ma, Joydeep Mitra, and Bei Yu. 2019. SRAF insertion via supervised dictionary learn-
ing. In Proceedings of the IEEE/ACM Asia and South Pacific Design Automation Conference (ASPDAC’19), Toshiyuki
Shibuya (Ed.). ACM, 406–411. DOI:https://doi.org/10.1145/3287624.3287684
[44] Hao Geng, Haoyu Yang, Lu Zhang, Jin Miao, Fan Yang, Xuan Zeng, and Bei Yu. 2020. Hotspot detection via attention-
based deep layout metric learning. In Proceedings of the IEEE/ACM International Conference on Computer-Aided De-
sign (ICCAD’20). IEEE, 1–8. https://ieeexplore.ieee.org/document/9256554.
[45] Georges Gielen and Rob Rutenbar. 2001. Computer-aided design of analog and mixed-signal integrated circuits. Proc.
IEEE 88 (01 2001), 1825–1854. DOI:https://doi.org/10.1109/5.899053
[46] Cristian Grozea and Marius Popescu. 2014. Can machine learning learn a decision oracle for NP problems? A test
on SAT. Fundamenta Informaticae 131, 3-4 (2014), 441–450. DOI:https://doi.org/10.3233/FI-2014-1024
[47] Onur Guzey, Li-C. Wang, Jeremy R. Levitt, and Harry Foster. 2008. Functional test selection based on unsupervised
support vector analysis. In Proceedings of the ACM/IEEE Design Automation Conference (DAC’08), Limor Fix (Ed.).
ACM, 262–267. DOI:https://doi.org/10.1145/1391469.1391536
[48] Winston Haaswijk, Edo Collins, Benoit Seguin, Mathias Soeken, Frédéric Kaplan, Sabine Süsstrunk, and Giovanni De
Micheli. 2018. Deep learning for logic optimization algorithms. In Proceedings of the IEEE International Symposium
on Circuits and Systems (ISCAS’18). IEEE, 1–4. DOI:https://doi.org/10.1109/ISCAS.2018.8351885
[49] Ali Habibi, Sofiène Tahar, Amer Samarah, Donglin Li, and Otmane Aït Mohamed. 2006. Efficient assertion based
verification using TLM. In Proceedings of the IEEE/ACM Design, Automation and Test in Eurpoe (DATE’06), Georges
G. E. Gielen (Ed.). European Design and Automation Association, Leuven, Belgium, 106–111. DOI:https://doi.org/
10.1109/DATE.2006.244005
[50] Shai Haim and Toby Walsh. 2009. Restart strategy selection using machine learning techniques. In Proceedings of the
12th International Conference on Theory and Applications of Satisfiability Testing (SAT’09) (Lecture Notes in Computer
Science), Oliver Kullmann (Ed.), Vol. 5584. Springer, 312–325. DOI:https://doi.org/10.1007/978-3-642-02777-2_30
[51] Kourosh Hakhamaneshi, Nick Werblun, Pieter Abbeel, and Vladimir Stojanovic. 2019. BagNet: Berkeley analog
generator with layout optimizer boosted with deep neural networks. In Proceedings of the IEEE/ACM Interna-
tional Conference on Computer-Aided Design (ICCAD’19), David Z. Pan (Ed.). ACM, 1–8. DOI:https://doi.org/10.1109/
ICCAD45719.2019.8942062
[52] Seung-Soo Han, Andrew B. Kahng, Siddhartha Nath, and Ashok S. Vydyanathan. 2014. A deep learning methodology
to proliferate golden signoff timing. In Proceedings of the IEEE/ACM Design, Automation and Test in Eurpoe (DATE’14),
Gerhard P. Fettweis and Wolfgang Nebel (Eds.). European Design and Automation Association, 1–6. DOI:https:
//doi.org/10.7873/DATE.2014.273
[53] Zhuolun He, Yuzhe Ma, Lu Zhang, Peiyu Liao, Ngai Wong, Bei Yu, and Martin D. F. Wong. 2020. Learn to floor-
plan through acquisition of effective local search heuristics. In Proceedings of the IEEE International Conference on
Computer Design (ICCD’20). IEEE, 324–331.
[54] Chia-Tung Ho and Andrew B. Kahng. 2019. IncPIRD: Fast learning-based prediction of incremental IR drop. In
Proceedings of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD’19), David Z. Pan (Ed.).
ACM, 1–8. DOI:https://doi.org/10.1109/ICCAD45719.2019.8942110
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:39
[55] Kurt Hornik, Maxwell B. Stinchcombe, and Halbert White. 1989. Multilayer feedforward networks are universal
approximators. Neural Netw. 2, 5 (1989), 359–366. DOI:https://doi.org/10.1016/0893-6080(89)90020-8
[56] Abdelrahman Hosny, Soheil Hashemi, Mohamed Shalan, and Sherief Reda. 2020. DRiLLS: Deep reinforcement learn-
ing for logic synthesis. In Proceedings of the IEEE/ACM Asia and South Pacific Design Automation Conference (ASP-
DAC’20). IEEE, 581–586. DOI:https://doi.org/10.1109/ASP-DAC47756.2020.9045559
[57] Kuo-Kai Hsieh, Wen Chen, Li-C. Wang, and Jayanta Bhadra. 2014. On application of data mining in functional
debug. In Proceedings of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD’14), Yao-Wen
Chang (Ed.). IEEE, 670–675. DOI:https://doi.org/10.1109/ICCAD.2014.7001424
[58] Hanbin Hu, Qingran Zheng, Ya Wang, and Peng Li. 2018. HFMV: Hybridizing formal methods and machine learning
for verification of analog and mixed-signal circuits. In Proceedings of the ACM/IEEE Design Automation Conference
(DAC’18). ACM, 95:1–95:6. DOI:https://doi.org/10.1145/3195970.3196059
[59] Tsung-Wei Huang. 2020. A general-purpose parallel and heterogeneous task programming system for VLSI CAD.
In Proceedings of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD’20). IEEE, 1–2. https:
//ieeexplore.ieee.org/document/9256617.
[60] Daijoon Hyun, Yuepeng Fan, and Youngsoo Shin. 2019. Accurate wirelength prediction for placement-aware syn-
thesis through machine learning. In Proceedings of the IEEE/ACM Design, Automation and Test in Eurpoe (DATE’19),
Jürgen Teich and Franco Fummi (Eds.). IEEE, 324–327. DOI:https://doi.org/10.23919/DATE.2019.8715016
[61] Marketa Illetskova, Alex R. Bertels, Joshua M. Tuggle, Adam Harter, Samuel Richter, Daniel R. Tauritz, Samuel A.
Mulder, Denis Bueno, Michelle Leger, and William M. Siever. 2017. Improving performance of CDCL SAT solvers
by automated design of variable selection heuristics. In Proceedings of the IEEE Symposium Series on Computational
Intelligence. 1–8. DOI:https://doi.org/10.1109/SSCI.2017.8280953
[62] Charalambos Ioannides and Kerstin I. Eder. 2012. Coverage-directed test generation automated by machine
learning—A review. ACM Trans. Design Auto. Electr. Syst. 17, 1, Article 7 (Jan. 2012), 21 pages. DOI:https://doi.org/
10.1145/2071356.2071363
[63] Kwangok Jeong, Andrew B. Kahng, Binshan Lin, and Kambiz Samadi. 2010. Accurate machine-learning-based on-
chip router modeling. IEEE Embed. Syst. Lett. 2, 3 (2010), 62–66. DOI:https://doi.org/10.1109/LES.2010.2051413
[64] Bentian Jiang, Lixin Liu, Yuzhe Ma, Hang Zhang, Bei Yu, and Evangeline F. Y. Young. 2020. Neural-ILT: Migrating ILT
to neural networks for mask printability and complexity co-optimization. In Proceedings of the IEEE/ACM Interna-
tional Conference on Computer-Aided Design (ICCAD’20). IEEE, 1–9. https://ieeexplore.ieee.org/document/9256592.
[65] Yiyang Jiang, Fan Yang, Bei Yu, Dian Zhou, and Xuan Zeng. 2020. Efficient layout hotspot detection via binarized
residual neural network ensemble. IEEE Trans. Comput.-Aided Design Integr. Circ. Syst. (2020).
[66] Andrew B. Kahng. 2018. New directions for learning-based IC design tools and methodologies. In Proceedings of the
IEEE/ACM Asia and South Pacific Design Automation Conference (ASPDAC’18), Youngsoo Shin (Ed.). IEEE, 405–410.
DOI:https://doi.org/10.1109/ASPDAC.2018.8297357
[67] Andrew B. Kahng, Seokhyeong Kang, Hyein Lee, Siddhartha Nath, and Jyoti Wadhwani. 2013. Learning-based ap-
proximation of interconnect delay and slew in signoff timing tools. In Proceedings of the ACM Workshop on System
Level Interconnect Prediction (SLIP’13). IEEE Computer Society, 1–8. DOI:https://doi.org/10.1109/SLIP.2013.6681682
[68] Andrew B. Kahng, Mulong Luo, and Siddhartha Nath. 2015. SI for free: Machine learning of interconnect coupling
delay and transition effects. In Proceedings of the ACM Workshop on System Level Interconnect Prediction (SLIP’15).
IEEE Computer Society, 1–8. DOI:https://doi.org/10.1109/SLIP.2015.7171706
[69] Yoav Katz, Michal Rimon, Avi Ziv, and Gai Shaked. 2011. Learning microarchitectural behaviors to improve stimuli
generation quality. In Proceedings of the ACM/IEEE Design Automation Conference (DAC’11), Leon Stok, Nikil D. Dutt,
and Soha Hassoun (Eds.). ACM, 848–853. DOI:https://doi.org/10.1145/2024724.2024914
[70] Elias B. Khalil, Hanjun Dai, Yuyu Zhang, Bistra Dilkina, and Le Song. 2017. Learning combinatorial optimization al-
gorithms over graphs. In Proceedings of the Annual Conference on Neural Information Processing Systems (NIPS’17), Is-
abelle Guyon, Ulrike von Luxburg, Samy Bengio, Hanna M. Wallach, Rob Fergus, S. V. N. Vishwanathan, and Roman
Garnett (Eds.). 6348–6358. Retrieved from http://papers.nips.cc/paper/7214-learning-combinatorial-optimization-
algorithms-over-graphs.
[71] Ashiqur R. KhudaBukhsh, Lin Xu, Holger H. Hoos, and Kevin Leyton-Brown. 2009. SATenstein: Automatically build-
ing local search SAT solvers from components. In Proceedings of the International Joint Conference on Artificial In-
telligence (IJCAI’09), Craig Boutilier (Ed.). 517–524. http://ijcai.org/Proceedings/09/Papers/093.pdf.
[72] Donggyu Kim, Jerry Zhao, Jonathan Bachrach, and Krste Asanovic. 2019. Simmani: Runtime power modeling for
arbitrary RTL with automatic signal selection. In Proceedings of the IEEE/ACM International Symposium on Microar-
chitecture (MICRO’19). ACM, 1050–1062. DOI:https://doi.org/10.1145/3352460.3358322
[73] Myung-Chul Kim, Dongjin Lee, and Igor L. Markov. 2010. SimPL: An effective placement algorithm. In Proceedings
of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD’10), Louis Scheffer, Joel R. Phillips, and
Alan J. Hu (Eds.). IEEE, 649–656. DOI:https://doi.org/10.1109/ICCAD.2010.5654229
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:40 G. Huang et al.
[74] Ryan Gary Kim, Janardhan Rao Doppa, and Partha Pratim Pande. 2018. Machine learning for design space explo-
ration and optimization of manycore systems. In Proceedings of the IEEE/ACM International Conference on Computer-
Aided Design (ICCAD’18), Iris Bahar (Ed.). ACM, 48. DOI:https://doi.org/10.1145/3240765.3243483
[75] Bon Woong Ku, Kyungwook Chang, and Sung Kyu Lim. 2018. Compact-2D: A physical design methodology to build
commercial-quality face-to-face-bonded 3D ICs. In Proceedings of the ACM International Symposium on Physical
Design (ISPD’18), Chris Chu and Ismail Bustany (Eds.). ACM, 90–97. DOI:https://doi.org/10.1145/3177540.3178244
[76] Kishor Kunal, Tonmoy Dhar, Meghna Madhusudan, Jitesh Poojary, Arvind K. Sharma, Wenbin Xu, Steven M.
Burns, Jiang Hu, Ramesh Harjani, and Sachin S. Sapatnekar. 2020. GANA: Graph convolutional network based auto-
mated netlist annotation for analog circuits. In Proceedings of the IEEE/ACM Design, Automation and Test in Eurpoe
(DATE’20). IEEE, 55–60. DOI:https://doi.org/10.23919/DATE48585.2020.9116329
[77] K. Kunal, J. Poojary, T. Dhar, M. Madhusudan, R. Harjani, and S. S. Sapatnekar. [n.d.]. A general approach for
identifying hierarchical symmetry constraints for analog circuit layout. In Proceedings of the IEEE/ACM International
Conference on Computer-Aided Design (ICCAD). 1–8.
[78] Jihye Kwon, Matthew M. Ziegler, and Luca P. Carloni. 2019. A learning-based recommender system for autotuning
design flows of industrial high-performance processors. In Proceedings of the ACM/IEEE Design Automation Confer-
ence (DAC’19). ACM, 218. DOI:https://doi.org/10.1145/3316781.3323919
[79] Michail G. Lagoudakis and Michael L. Littman. 2001. Learning to select branching rules in the DPLL procedure for
satisfiability. Electron. Notes Discret. Math. 9 (2001), 344–359. DOI:https://doi.org/10.1016/S1571-0653(04)00332-4
[80] Gil Lederman, Markus N. Rabe, and Sanjit A. Seshia. 2018. Learning heuristics for automated reasoning through
deep reinforcement learning. Retrieved from http://arxiv.org/abs/1807.08058.
[81] Dongwook Lee and Andreas Gerstlauer. 2018. Learning-based, fine-grain power modeling of system-level hardware
IPs. ACM Trans. Design Auto. Electr. Syst. 23, 3 (2018), 30:1–30:25. DOI:https://doi.org/10.1145/3177865
[82] Bowen Li and Paul D. Franzon. 2016. Machine learning in physical design. In Proceedings of the IEEE Conference on
Electrical Performance of Electronic Packaging and Systems (EPEPS’16). 147–150.
[83] Hao Li, Fanshu Jiao, and Alex Doboli. 2016. Analog circuit topological feature extraction with unsupervised learning
of new sub-structures. In Proceedings of the IEEE/ACM Design, Automation and Test in Eurpoe (DATE’16), Luca Fanucci
and Jürgen Teich (Eds.). IEEE, 1509–1512. http://ieeexplore.ieee.org/document/7459552/
[84] Yaguang Li, Yishuang Lin, Meghna Madhusudan, Arvind K. Sharma, Wenbin Xu, Sachin S. Sapatnekar, Ramesh Har-
jani, and Jiang Hu. 2020. Exploring a machine learning approach to performance driven analog IC placement. In Pro-
ceedings of the IEEE Annual Symposium on VLSI (ISVLSI’20). IEEE, 24–29. DOI:https://doi.org/10.1109/ISVLSI49217.
2020.00015
[85] Yaguang Li, Yishuang Lin, Meghna Madhusudan, Arvind K. Sharma, Wenbin Xu, Sachin S. Sapatnekar, Ramesh
Harjani, and Jiang Hu. 2020. A customized graph neural network model for guiding analog IC placement. In
Proceedings of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD’20). IEEE, 1–9. https:
//ieeexplore.ieee.org/document/9256781.
[86] Jia Liang, V. K. Hari Govind, Pascal Poupart, Krzysztof Czarnecki, and Vijay Ganesh. 2018. An empirical study of
branching heuristics through the lens of global learning rate. In Proceedings of the International Joint Conference on
Artificial Intelligence (IJCAI’18), Jérôme Lang (Ed.). ijcai.org, 5319–5323. DOI:https://doi.org/10.24963/ijcai.2018/745
[87] Jia Hui Liang, Vijay Ganesh, Pascal Poupart, and Krzysztof Czarnecki. 2016. Exponential recency weighted average
branching heuristic for SAT solvers. In Proceedings of the AAAI Conference on Artificial Intelligence, Dale Schuurmans
and Michael P. Wellman (Eds.). AAAI Press, 3434–3440. http://www.aaai.org/ocs/index.php/AAAI/AAAI16/paper/
view/12451.
[88] Jia Hui Liang, Vijay Ganesh, Pascal Poupart, and Krzysztof Czarnecki. 2016. Learning rate based branching heuristic
for SAT solvers. In Proceedings of the 19th International Conference on Theory and Applications of Satisfiability Testing
(SAT’16) (Lecture Notes in Computer Science), Nadia Creignou and Daniel Le Berre (Eds.), Vol. 9710. Springer, 123–140.
DOI:https://doi.org/10.1007/978-3-319-40970-2_9
[89] Rongjian Liang, Hua Xiang, Diwesh Pandey, Lakshmi N. Reddy, Shyam Ramji, Gi-Joon Nam, and Jiang Hu. 2020.
DRC hotspot prediction at sub-10nm process nodes using customized convolutional network. In Proceedings of the
ACM International Symposium on Physical Design (ISPD’20), William Swartz and Jens Lienig (Eds.). ACM, 135–142.
DOI:https://doi.org/10.1145/3372780.3375560
[90] R. Liang, Z. Xie, J. Jung, V. Chauha, Y. Chen, J. Hu, H. Xiang, and G. J. Nam. 2020. Routing-free crosstalk prediction.
In Proceedings of the IEEE/ACM International Conference On Computer Aided Design (ICCAD’20). 1–9.
[91] Andy Liaw, Matthew Wiener, et al. 2002. Classification and regression by randomforest. R News 2, 3 (2002), 18–22.
[92] Timothy P. Lillicrap, Jonathan J. Hunt, Alexander Pritzel, Nicolas Heess, Tom Erez, Yuval Tassa, David Silver, and
Daan Wierstra. 2016. Continuous control with deep reinforcement learning. In Proceedings of the International Con-
ference on Learning Representations (ICLR’16), Yoshua Bengio and Yann LeCun (Eds.). http://arxiv.org/abs/1509.02971.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:41
[93] Yibo Lin, Shounak Dhar, Wuxi Li, Haoxing Ren, Brucek Khailany, and David Z. Pan. 2019. DREAMPlace: Deep learn-
ing toolkit-enabled GPU acceleration for modern VLSI placement. In Proceedings of the ACM/IEEE Design Automation
Conference (DAC’19). ACM, 117. DOI:https://doi.org/10.1145/3316781.3317803
[94] Dong Liu and Benjamin Carrión Schäfer. 2016. Efficient and reliable high-level synthesis design space explorer for
FPGAs. In Proceedings of the IEEE International Conference on Field Programmable Logic and Applications (FPL’16),
Paolo Ienne, Walid A. Najjar, Jason Helge Anderson, Philip Brisk, and Walter Stechele (Eds.). IEEE, 1–8. DOI:https:
//doi.org/10.1109/FPL.2016.7577370
[95] Hung-Yi Liu and Luca P. Carloni. 2013. On learning-based methods for design-space exploration with high-level
synthesis. In Proceedings of the ACM/IEEE Design Automation Conference (DAC’13). ACM, 50:1–50:7. DOI:https://doi.
org/10.1145/2463209.2488795
[96] Mingjie Liu, Wuxi Li, Keren Zhu, Biying Xu, Yibo Lin, Linxiao Shen, Xiyuan Tang, Nan Sun, and David Z. Pan.
[n.d.]. S3DET: Detecting system symmetry constraints for analog circuits with graph similarity. In Proceedings of
the IEEE/ACM Asia and South Pacific Design Automation Conference (ASPDAC). IEEE. DOI:https://doi.org/10.1109/
asp-dac47756.2020.9045109
[97] Mingjie Liu, Keren Zhu, Jiaqi Gu, Linxiao Shen, Xiyuan Tang, Nan Sun, and David Z. Pan. 2020. Towards decrypting
the art of analog layout: Placement quality prediction via transfer learning. In Proceedings of the IEEE/ACM Design,
Automation and Test in Eurpoe (DATE’20). IEEE, 496–501. DOI:https://doi.org/10.23919/DATE48585.2020.9116330
[98] Mingjie Liu, Keren Zhu, Xiyuan Tang, Biying Xu, Wei Shi, Nan Sun, and David Z. Pan. 2020. Closing the design
loop: Bayesian optimization assisted hierarchical analog layout synthesis. In Proceedings of the ACM/IEEE Design
Automation Conference (DAC’20). IEEE, 1–6. DOI:https://doi.org/10.1109/DAC18072.2020.9218621
[99] Siting Liu, Qi Sun, Peiyu Liao, Yibo Lin, and Bei Yu. 2021. Global placement with deep learning-enabled explicit
routability optimization. In Proceedings of the IEEE/ACM Design, Automation and Test in Eurpoe (DATE’21). IEEE.
[100] Zeye Liu, Qicheng Huang, Chenlei Fang, and R. D. (Shawn) Blanton. 2019. Improving test chip design efficiency via
machine learning. In Proceedings of the IEEE International Test Conference (ITC’19). IEEE, 1–10. DOI:https://doi.org/
10.1109/ITC44170.2019.9000131
[101] Jingwei Lu, Pengwen Chen, Chin-Chih Chang, Lu Sha, Dennis Jen-Hsin Huang, Chin-Chi Teng, and Chung-Kuan
Cheng. 2015. ePlace: Electrostatics-based placement using fast fourier transform and Nesterov’s method. ACM Trans.
Design Auto. Electr. Syst. 20, 2 (2015), 17:1–17:34. DOI:https://doi.org/10.1145/2699873
[102] Yi-Chen Lu, Jeehyun Lee, Anthony Agnesina, Kambiz Samadi, and Sung Kyu Lim. 2019. GAN-CTS: A generative ad-
versarial framework for clock tree prediction and optimization. In Proceedings of the IEEE/ACM International Confer-
ence on Computer-Aided Design (ICCAD’19), David Z. Pan (Ed.). ACM, 1–8. DOI:https://doi.org/10.1109/ICCAD45719.
2019.8942063
[103] Yi-Chen Lu, Sai Surya Kiran Pentapati, Lingjun Zhu, Kambiz Samadi, and Sung Kyu Lim. 2020. TP-GNN: A graph
neural network framework for tier partitioning in monolithic 3D ICs. In Proceedings of the ACM/IEEE Design Au-
tomation Conference (DAC’20). IEEE, 1–6. DOI:https://doi.org/10.1109/DAC18072.2020.9218582
[104] Yuzhe Ma, Haoxing Ren, Brucek Khailany, Harbinder Sikka, Lijuan Luo, Karthikeyan Natarajan, and Bei Yu. 2019.
High performance graph convolutional networks with applications in testability analysis. In Proceedings of the
ACM/IEEE Design Automation Conference (DAC’19). ACM, 18. DOI:https://doi.org/10.1145/3316781.3317838
[105] Yuzhe Ma, Subhendu Roy, Jin Miao, Jiamin Chen, and Bei Yu. 2018. Cross-layer optimization for high speed adders:
A Pareto driven machine learning approach. IEEE Trans. Comput.-Aided Design Integr. Circ. Syst. 38, 12 (2018), 2298–
2311.
[106] Dani Maarouf, Abeer Alhyari, Ziad Abuowaimer, Timothy Martin, Andrew Gunter, Gary Gréwal, Shawki Areibi,
and Anthony Vannelli. 2018. Machine-learning based congestion estimation for modern FPGAs. In Proceedings of
the IEEE International Conference on Field Programmable Logic and Applications (FPL’18). IEEE Computer Society,
427–434. DOI:https://doi.org/10.1109/FPL.2018.00079
[107] Anushree Mahapatra and Benjamin Carrion Schafer. 2014. Machine-learning based simulated annealer method for
high level synthesis design space exploration. In Proceedings of the Electronic System Level Synthesis Conference. 1–6.
DOI:https://doi.org/10.1109/ESLsyn.2014.6850383
[108] Hosein Mohammadi Makrani, Farnoud Farahmand, Hossein Sayadi, Sara Bondi, Sai Manoj Pudukotai Dinakarrao,
Houman Homayoun, and Setareh Rafatirad. 2019. Pyramid: Machine learning framework to estimate the optimal
timing and resource usage of a high-level synthesis design. In Proceedings of the IEEE International Conference on
Field Programmable Logic and Applications (FPL’19). IEEE, 397–403. DOI:https://doi.org/10.1109/FPL.2019.00069
[109] Hosein Mohammadi Makrani, Hossein Sayadi, Tinoosh Mohsenin, Setareh Rafatirad, Avesta Sasan, and Houman
Homayoun. 2019. XPPE: Cross-platform performance estimation of hardware accelerators using machine learn-
ing. In Proceedings of the IEEE/ACM Asia and South Pacific Design Automation Conference (ASPDAC’19), Toshiyuki
Shibuya (Ed.). ACM, 727–732. DOI:https://doi.org/10.1145/3287624.3288756
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:42 G. Huang et al.
[110] Biruk Mammo, Milind Furia, Valeria Bertacco, Scott A. Mahlke, and Daya Shanker Khudia. 2016. BugMD: Automatic
mismatch diagnosis for bug triaging. In Proceedings of the IEEE/ACM International Conference on Computer-Aided
Design (ICCAD’16), Frank Liu (Ed.). ACM, 117. DOI:https://doi.org/10.1145/2966986.2967010
[111] Teruki Matsuba, Nobukazu Takai, Masafumi Fukuda, and Yusuke Kubo. 2018. Inference of suitable for required
specification analog circuit topology using deep learning. In Proceedings of the International Symposium on Intelligent
Signal Processing and Communication Systems (ISPACS’18). IEEE, 131–134. DOI:https://doi.org/10.1109/ISPACS.2018.
8923544
[112] Pingfan Meng, Alric Althoff, Quentin Gautier, and Ryan Kastner. 2016. Adaptive threshold non-pareto elimina-
tion: Re-thinking machine learning for system level design space exploration on FPGAs. In Proceedings of the
IEEE/ACM Design, Automation and Test in Eurpoe (DATE’16), Luca Fanucci and Jürgen Teich (Eds.). IEEE, 918–923.
http://ieeexplore.ieee.org/document/7459439/.
[113] Azalia Mirhoseini, Anna Goldie, Mustafa Yazgan, Joe Jiang, Ebrahim M. Songhori, Shen Wang, Young-Joon Lee,
Eric Johnson, Omkar Pathak, Sungmin Bae, Azade Nazi, Jiwoo Pak, Andy Tong, Kavya Srinivasa, William Hang,
Emre Tuncer, Anand Babu, Quoc V. Le, James Laudon, Richard C. Ho, Roger Carpenter, and Jeff Dean. 2020. Chip
placement with deep reinforcement learning. Retrieved from https://arxiv.org/abs/2004.10746.
[114] Matthew W. Moskewicz, Conor F. Madigan, Ying Zhao, Lintao Zhang, and Sharad Malik. 2001. Chaff: Engineering
an efficient SAT solver. In Proceedings of the ACM/IEEE Design Automation Conference (DAC’01). ACM, 530–535.
DOI:https://doi.org/10.1145/378239.379017
[115] Walter Lau Neto, Max Austin, Scott Temple, Luca G. Amarù, Xifan Tang, and Pierre-Emmanuel Gaillardon. 2019.
LSOracle: A logic synthesis framework driven by artificial intelligence: Invited paper. In Proceedings of the IEEE/ACM
International Conference on Computer-Aided Design (ICCAD’19), David Z. Pan (Ed.). ACM, 1–6. DOI:https://doi.org/
10.1109/ICCAD45719.2019.8942145
[116] Kenneth O’Neal, Mitch Liu, Hans Tang, Amin Kalantar, Kennen DeRenard, and Philip Brisk. 2018. HLSPredict:
Cross platform performance prediction for FPGA high-level synthesis. In Proceedings of the IEEE/ACM International
Conference on Computer-Aided Design (ICCAD’18). ACM, 104. DOI:https://doi.org/10.1145/3240765.3264635
[117] Jorge Chávez Orzáez, Antonio Jesús Torralba Silgado, and Leopoldo García Franquelo. 1994. A fuzzy-logic based
tool for topology selection in analog synthesis. In Proceedings of the IEEE International Symposium on Circuits and
Systems (ISCAS’94). IEEE, 367–370. DOI:https://doi.org/10.1109/ISCAS.1994.408873
[118] Rasmus Berg Palm, Ulrich Paquet, and Ole Winther. 2017. Recurrent relational networks for complex relational
reasoning. Retrieved from http://arxiv.org/abs/1711.08028.
[119] Po-Cheng Pan, Chien-Chia Huang, and Hung-Ming Chen. 2019. An efficient learning-based approach for perfor-
mance exploration on analog and RF circuit synthesis. In Proceedings of the ACM/IEEE Design Automation Conference
(DAC’19). ACM, 232. DOI:https://doi.org/10.1145/3316781.3322467
[120] Zhijian Pan, Miao Li, Jian Yao, Hong Lu, Zuochang Ye, Yanfeng Li, and Yan Wang. 2018. Low-cost high-accuracy
variation characterization for nanoscale IC technologies via novel learning-based techniques. In Proceedings of the
IEEE/ACM Design, Automation and Test in Eurpoe (DATE’18), Jan Madsen and Ayse K. Coskun (Eds.). IEEE, 797–802.
DOI:https://doi.org/10.23919/DATE.2018.8342115
[121] Shreepad Panth, Kambiz Samadi, Yang Du, and Sung Kyu Lim. 2017. Shrunk-2D: A physical design methodology
to build commercial-quality monolithic 3D ICs. IEEE Trans. Comput.-Aided Design Integr. Circ. Syst. 36, 10 (2017),
1716–1724. DOI:https://doi.org/10.1109/TCAD.2017.2648839
[122] Sung Joo Park, Bumhee Bae, Joungho Kim, and Madhavan Swaminathan. 2017. Application of machine learning for
optimization of 3D integrated circuits and systems. IEEE Trans. Very Large Scale Integr. Syst. 25, 6 (2017), 1856–1865.
DOI:https://doi.org/10.1109/TVLSI.2017.2656843
[123] Adam Paszke, Sam Gross, Francisco Massa, Adam Lerer, James Bradbury, Gregory Chanan, Trevor Killeen, Zeming
Lin, Natalia Gimelshein, Luca Antiga, Alban Desmaison, Andreas Köpf, Edward Yang, Zachary DeVito, Martin Rai-
son, Alykhan Tejani, Sasank Chilamkurthy, Benoit Steiner, Lu Fang, Junjie Bai, and Soumith Chintala. 2019. PyTorch:
An imperative style, high-performance deep learning library. In Proceedings of the Annual Conference on Neural Infor-
mation Processing Systems (NIPS’19), Hanna M. Wallach, Hugo Larochelle, Alina Beygelzimer, Florence d’Alché-Buc,
Emily B. Fox, and Roman Garnett (Eds.). 8024–8035. http://papers.nips.cc/paper/9015-pytorch-an-imperative-style-
high-performance-deep-learning-library
[124] Chak-Wa Pui, Gengjie Chen, Yuzhe Ma, Evangeline F. Y. Young, and Bei Yu. 2017. Clock-aware ultrascale FPGA
placement with machine learning routability prediction. In Proceedings of the IEEE/ACM International Conference on
Computer-Aided Design (ICCAD’17). IEEE, 929–936.
[125] Zhongdong Qi, Yici Cai, and Qiang Zhou. 2014. Accurate prediction of detailed routing congestion using supervised
data learning. In Proceedings of the IEEE International Conference on Computer Design (ICCD’14). IEEE Computer
Society, 97–103. DOI:https://doi.org/10.1109/ICCD.2014.6974668
[126] Behzad Razavi. 2001. Design of analog CMOS integrated circuits. Tata McGraw-Hill Education.
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

Machine Learning for Electronic Design Automation: A Survey 40:43
[127] Brandon Reagen, Robert Adolf, Yakun Sophia Shao, Gu-Yeon Wei, and David M. Brooks. 2014. MachSuite: Bench-
marks for accelerator design and customized architectures. In Proceedings of the IEEE International Symposium on
Workload Characterization (IISWC’14). IEEE Computer Society, 110–119. DOI:https://doi.org/10.1109/IISWC.2014.
6983050
[128] Haoxing Ren, George F. Kokai, Walker J. Turner, and Ting-Sheng Ku. 2020. ParaGraph: Layout parasitics and device
parameter prediction using graph neural networks. In Proceedings of the ACM/IEEE Design Automation Conference
(DAC’20). IEEE, 1–6. DOI:https://doi.org/10.1109/DAC18072.2020.9218515
[129] Joao P. S. Rosa, Daniel J. D. Guerra, Nuno C. G. Horta, Ricardo M. F. Martins, and Nuno Lourenco. 2020. Using ANNs
to Size Analog Integrated Circuits. Springer, 45–66. DOI:https://doi.org/10.1007/978-3-030-35743-6_4
[130] Michael Rotman and Lior Wolf. 2020. Electric analog circuit design with hypernetworks and a differential simulator.
In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP’20). IEEE, 4157–
4161. DOI:https://doi.org/10.1109/ICASSP40776.2020.9054042
[131] Sandeep Kumar Samal, Guoqing Chen, and Sung Kyu Lim. 2016. Machine learning based variation modeling and
optimization for 3D ICs. J. Info. Commun. Converg. Eng. 14, 4 (2016). DOI:https://doi.org/10.6109/jicce.2016.14.4.258
[132] Daniel Selsam and Nikolaj Bjørner. 2019. NeuroCore: Guiding high-performance SAT solvers with unsat-core pre-
dictions. Retrieved from http://arxiv.org/abs/1903.04671.
[133] Daniel Selsam, Matthew Lamm, Benedikt Bünz, Percy Liang, Leonardo de Moura, and David L. Dill. 2019. Learning
a SAT solver from single-bit supervision. In Proceedings of the International Conference on Learning Representations
(ICLR’19). OpenReview.net. Retrieved from https://openreview.net/forum?id=HJMC_iA5tm.
[134] Keertana Settaluri, Ameer Haj-Ali, Qijing Huang, Kourosh Hakhamaneshi, and Borivoje Nikolic. 2020. AutoCkt:
Deep reinforcement learning of analog circuit designs. In Proceedings of the IEEE/ACM Design, Automation and Test
in Eurpoe (DATE’20). IEEE, 490–495. DOI:https://doi.org/10.23919/DATE48585.2020.9116200
[135] Haihua Shen, Wenli Wei, Yunji Chen, Bowen Chen, and Qi Guo. 2008. Coverage directed test generation: Godson
experience. In Proceedings of the IEEE Asian Test Symposium (ATS’08). IEEE Computer Society, 321–326. DOI:https:
//doi.org/10.1109/ATS.2008.42
[136] Brett Shook, Prateek Bhansali, Chandramouli Kashyap, Chirayu Amin, and Siddhartha Joshi. 2020. MLParest: Ma-
chine learning based parasitic estimation for custom circuit design. In Proceedings of the ACM/IEEE Design Automa-
tion Conference (DAC’20). IEEE, 1–6. DOI:https://doi.org/10.1109/DAC18072.2020.9218495
[137] Antonio Jesús Torralba Silgado, Jorge Chávez Orzáez, and Leopoldo García Franquelo. 1996. FASY: A fuzzy-logic
based tool for analog synthesis. IEEE Trans. Comput.-Aided Design Integr. Circ. Syst. 15, 7 (1996), 705–715. DOI:https:
//doi.org/10.1109/43.503939
[138] David Silver, Julian Schrittwieser, Karen Simonyan, Ioannis Antonoglou, Aja Huang, Arthur Guez, Thomas Hubert,
Lucas Baker, Matthew Lai, Adrian Bolton, Yutian Chen, Timothy P. Lillicrap, Fan Hui, Laurent Sifre, George van den
Driessche, Thore Graepel, and Demis Hassabis. 2017. Mastering the game of go without human knowledge. Nature
550, 7676 (2017), 354–359. DOI:https://doi.org/10.1038/nature24270
[139] Rishabh Singh, Joseph P. Near, Vijay Ganesh, and Martin Rinard. 2009. Avatarsat: An auto-tuning Boolean sat solver.
Technical Report MIT-CSAIL-TR-2009-039. Massachusetts Institute of Technology.
[140] Haralampos-G. D. Stratigopoulos, Petros Drineas, Mustapha Slamani, and Yiorgos Makris. 2007. Non-RF to RF test
correlation using learning machines: A case study. In Proceedings of the IEEE VLSI Test Symposium (VTS’07). IEEE
Computer Society, 9–14. DOI:https://doi.org/10.1109/VTS.2007.41
[141] Haralampos-G. D. Stratigopoulos, Petros Drineas, Mustapha Slamani, and Yiorgos Makris. 2010. RF specification
test compaction using learning machines. IEEE Trans. Very Large Scale Integr. Syst. 18, 6 (2010), 998–1002. DOI:https:
//doi.org/10.1109/TVLSI.2009.2017196
[142] Haralampos-G. D. Stratigopoulos and Yiorgos Makris. 2008. Error moderation in low-cost machine-learning-based
analog/RF testing. IEEE Trans. Comput.-Aided Design Integr. Circ. Syst. 27, 2 (2008), 339–351. DOI:https://doi.org/10.
1109/TCAD.2007.907232
[143] Ecenur Ustun, Chenhui Deng, Debjit Pal, Zhijing Li, and Zhiru Zhang. 2020. Accurate operation delay prediction for
FPGA HLS using graph neural networks. In Proceedings of the IEEE/ACM International Conference on Computer-Aided
Design (ICCAD’20). IEEE, 1–9. https://ieeexplore.ieee.org/document/9256462
[144] Oriol Vinyals, Meire Fortunato, and Navdeep Jaitly. 2015. Pointer networks. In Proceedings of the Annual Con-
ference on Neural Information Processing Systems (NIPS’15), Corinna Cortes, Neil D. Lawrence, Daniel D. Lee,
Masashi Sugiyama, and Roman Garnett (Eds.). 2692–2700. Retrieved from http://papers.nips.cc/paper/5866-pointer-
networks.
[145] Ilya Wagner, Valeria Bertacco, and Todd M. Austin. 2007. Microprocessor verification via feedback-adjusted Markov
models. IEEE Trans. Comput.-Aided Design Integr. Circ. Syst. 26, 6 (2007), 1126–1138. DOI:https://doi.org/10.1109/
TCAD.2006.884494
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.

40:44 G. Huang et al.
[146] Fanchao Wang, Hanbin Zhu, Pranjay Popli, Yao Xiao, Paul Bogdan, and Shahin Nazarian. 2018. Accelerating cov-
erage directed test generation for functional verification: A neural network-based framework. In Proceedings of the
ACM Great Lakes Symposium on VLSI (GLSVLSI’18), Deming Chen, Houman Homayoun, and Baris Taskin (Eds.).
ACM, 207–212. DOI:https://doi.org/10.1145/3194554.3194561
[147] Hanrui Wang, Kuan Wang, Jiacheng Yang, Linxiao Shen, Nan Sun, Hae-Seung Lee, and Song Han. 2020. GCN-RL
circuit designer: Transferable transistor sizing with graph neural networks and reinforcement learning. In Proceed-
ings of the ACM/IEEE Design Automation Conference (DAC’20). IEEE, 1–6. DOI:https://doi.org/10.1109/DAC18072.
2020.9218757
[148] Hanrui Wang, Jiacheng Yang, Hae-Seung Lee, and Song Han. 2018. Learning to design circuits. Retrieved from
http://arxiv.org/abs/1812.02734.
[149] Zi Wang and Benjamin Carrión Schäfer. 2020. Machine leaming to set meta-heuristic specific parameters for high-
level synthesis design space exploration. In Proceedings of the ACM/IEEE Design Automation Conference (DAC’20).
IEEE, 1–6. DOI:https://doi.org/10.1109/DAC18072.2020.9218674
[150] Samuel I. Ward, Duo Ding, and David Z. Pan. 2012. PADE: A high-performance placer with automatic datap-
ath extraction and evaluation through high dimensional data learning. In Proceedings of the ACM/IEEE Design
Automation Conference (DAC’12), Patrick Groeneveld, Donatella Sciuto, and Soha Hassoun (Eds.). ACM, 756–761.
DOI:https://doi.org/10.1145/2228360.2228497
[151] Samuel I. Ward, Myung-Chul Kim, Natarajan Viswanathan, Zhuo Li, Charles J. Alpert, Earl E. Swartzlander Jr., and
David Z. Pan. 2012. Keep it straight: Teaching placement how to better handle designs with datapaths. In Proceedings
of the ACM International Symposium on Physical Design (ISPD’12), Jiang Hu and Cheng-Kok Koh (Eds.). ACM, 79–86.
DOI:https://doi.org/10.1145/2160916.2160935
[152] Po-Hsun Wu, Mark Po-Hung Lin, and Tsung-Yi Ho. 2015. Analog layout synthesis with knowledge mining. In Pro-
ceedings of the European Conference on Circuit Theory and Design (ECCTD’15). IEEE, 1–4. DOI:https://doi.org/10.
1109/ECCTD.2015.7300111
[153] Zhiyao Xie, Guan-Qi Fang, Yu-Hung Huang, Haoxing Ren, Yanqing Zhang, Brucek Khailany, Shao-Yun Fang, Jiang
Hu, Yiran Chen, and Erick Carvajal Barboza. 2020. FIST: A feature-importance sampling and tree-based method for
automatic design flow parameter tuning. In Proceedings of the IEEE/ACM Asia and South Pacific Design Automation
Conference (ASPDAC’20). IEEE, 19–25. DOI:https://doi.org/10.1109/ASP-DAC47756.2020.9045201
[154] Zhiyao Xie, Yu-Hung Huang, Guan-Qi Fang, Haoxing Ren, Shao-Yun Fang, Yiran Chen, and Jiang Hu. 2018.
RouteNet: Routability prediction for mixed-size designs using convolutional neural network. In Proceedings of the
IEEE/ACM International Conference on Computer-Aided Design (ICCAD’18), Iris Bahar (Ed.). ACM, 80. DOI:https:
//doi.org/10.1145/3240765.3240843
[155] Zhiyao Xie, Haoxing Ren, Brucek Khailany, Ye Sheng, Santosh Santosh, Jiang Hu, and Yiran Chen. 2020. Power-
Net: Transferable dynamic IR drop estimation via maximum convolutional neural network. In Proceedings of the
IEEE/ACM Asia and South Pacific Design Automation Conference (ASPDAC’20). IEEE, 13–18. DOI:https://doi.org/10.
1109/ASP-DAC47756.2020.9045574
[156] Biying Xu, Yibo Lin, Xiyuan Tang, Shaolan Li, Linxiao Shen, Nan Sun, and David Z. Pan. 2019. WellGAN: Generative-
adversarial-network-guided well generation for analog/mixed-signal circuit layout. In Proceedings of the ACM/IEEE
Design Automation Conference (DAC’19). ACM, 66. DOI:https://doi.org/10.1145/3316781.3317930
[157] Lin Xu, Frank Hutter, Holger H. Hoos, and Kevin Leyton-Brown. 2011. SATzilla: Portfolio-based algorithm selection
for SAT. Retrieved from http://arxiv.org/abs/1111.2249.
[158] Xiaoqing Xu, Tetsuaki Matsunawa, Shigeki Nojima, Chikaaki Kodama, Toshiya Kotani, and David Z. Pan. 2016. A
machine learning based framework for sub-resolution assist feature generation. In Proceedings of the ACM Interna-
tional Symposium on Physical Design (ISPD’16), Evangeline F. Y. Young and Mustafa Ozdal (Eds.). ACM, 161–168.
DOI:https://doi.org/10.1145/2872334.2872357
[159] Haoyu Yang, Shuhe Li, Yuzhe Ma, Bei Yu, and Evangeline F. Y. Young. 2018. GAN-OPC: Mask optimization with
lithography-guided generative adversarial nets. In Proceedings of the ACM/IEEE Design Automation Conference
(DAC’18). ACM, 131:1–131:6. DOI:https://doi.org/10.1145/3195970.3196056
[160] Haoyu Yang, Luyang Luo, Jing Su, Chenxi Lin, and Bei Yu. 2017. Imbalance aware lithography hotspot detection: A
deep learning approach. J. Micro/Nanolithogr., MEMS, MOEMS 16, 3 (2017), 033504.
[161] Haoyu Yang, Piyush Pathak, Frank Gennari, Ya-Chieh Lai, and Bei Yu. 2019. Detecting multi-layer layout hotspots
with adaptive squish patterns. In Proceedings of the IEEE/ACM Asia and South Pacific Design Automation Conference
(ASPDAC’19), Toshiyuki Shibuya (Ed.). ACM, 299–304. DOI:https://doi.org/10.1145/3287624.3288747
[162] Haoyu Yang, Jing Su, Yi Zou, Bei Yu, and Evangeline F. Y. Young. 2017. Layout hotspot detection with feature tensor
generation and deep biased learning. In Proceedings of the ACM/IEEE Design Automation Conference (DAC’17). ACM,
62:1–62:6. DOI:https://doi.org/10.1145/3061639.3062270
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.
Machine Learning for Electronic Design Automation: A Survey 40:45
[163] Haoyu Yang, Wei Zhong, Yuzhe Ma, Hao Geng, Ran Chen, Wanli Chen, and Bei Yu. 2020. VLSI mask optimization:
From shallow to deep learning. In Proceedings of the IEEE/ACM Asia and South Pacific Design Automation Conference
(ASPDAC’20). IEEE, 434–439. DOI:https://doi.org/10.1109/ASP-DAC47756.2020.9045241
[164] Que Yanghua, Nachiket Kapre, Harnhua Ng, and Kirvy Teo. 2016. Improving classification accuracy of a ma-
chine learning approach for FPGA timing closure. In Proceedings of the IEEE International Symposium on Field-
Programmable Custom Computing Machines (FCCM’16). IEEE Computer Society, 80–83. DOI:https://doi.org/10.1109/
FCCM.2016.28
[165] Wei Ye, Mohamed Baker Alawieh, Yibo Lin, and David Z. Pan. 2019. LithoGAN: End-to-end lithography modeling
with generative adversarial networks. In Proceedings of the ACM/IEEE Design Automation Conference (DAC’19). ACM,
107. DOI:https://doi.org/10.1145/3316781.3317852
[166] Emre Yolcu and Barnabás Póczos. 2019. Learning local search heuristics for boolean satisfiability. In Proceedings
of the Annual Conference on Neural Information Processing Systems (NIPS’19), Hanna M. Wallach, Hugo Larochelle,
Alina Beygelzimer, Florence d’Alché-Buc, Emily B. Fox, and Roman Garnett (Eds.). 7990–8001. Retrieved from http:
//papers.nips.cc/paper/9012-learning-local-search-heuristics-for-boolean-satisfiability.
[167] Cunxi Yu, Houping Xiao, and Giovanni De Micheli. 2018. Developing synthesis flows without human knowledge. In
Proceedings of the ACM/IEEE Design Automation Conference (DAC’18). ACM, 50:1–50:6. DOI:https://doi.org/10.1145/
3195970.3196026
[168] Guo Zhang, Hao He, and Dina Katabi. 2019. Circuit-GNN: Graph neural networks for distributed circuit de-
sign. In Proceedings of the International Conference on Machine Learning (ICML’19) (Proceedings of Machine Learn-
ing Research), Kamalika Chaudhuri and Ruslan Salakhutdinov (Eds.), Vol. 97. PMLR, 7364–7373. Retrieved from
http://proceedings.mlr.press/v97/zhang19e.html.
[169] Yanqing Zhang, Haoxing Ren, and Brucek Khailany. 2020. GRANNITE: Graph neural network inference for trans-
ferable power estimation. In Proceedings of the ACM/IEEE Design Automation Conference (DAC’20). IEEE, 1–6.
DOI:https://doi.org/10.1109/DAC18072.2020.9218643
[170] Yanqing Zhang, Haoxing Ren, and Brucek Khailany. 2020. Opportunities for RTL and gate level simulation using
GPUs (invited talk). In Proceedings of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD’20).
IEEE, 1–5. Retrieved from https://ieeexplore.ieee.org/document/9256526.
[171] Chen Zhao, Zhenya Zhou, and Dake Wu. 2020. Empyrean ALPS-GT: GPU-accelerated analog circuit simulation.
In Proceedings of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD’20). IEEE, 1–3. https:
//ieeexplore.ieee.org/document/9256817.
[172] Jieru Zhao, Tingyuan Liang, Sharad Sinha, and Wei Zhang. 2019. Machine learning based routing congestion predic-
tion in FPGA high-level synthesis. In Proceedings of the IEEE/ACM Design, Automation and Test in Eurpoe (DATE’19),
Jürgen Teich and Franco Fummi (Eds.). IEEE, 1130–1135. DOI:https://doi.org/10.23919/DATE.2019.8714724
[173] Han Zhou, Wentian Jin, and Sheldon X.-D. Tan. 2020. GridNet: Fast data-driven EM-induced IR drop prediction
and localized fixing for on-chip power grid networks. In Proceedings of the IEEE/ACM International Conference on
Computer-Aided Design (ICCAD’20). IEEE, 1–9. https://ieeexplore.ieee.org/document/9256488.
[174] Yuan Zhou, Udit Gupta, Steve Dai, Ritchie Zhao, Nitish Kumar Srivastava, Hanchen Jin, Joseph Featherston, Yi-
Hsiang Lai, Gai Liu, Gustavo Angarita Velasquez, Wenping Wang, and Zhiru Zhang. 2018. Rosetta: A realistic high-
level synthesis benchmark suite for software programmable FPGAs. In Proceedings of the ACM International Sympo-
sium on Field-Programmable Gate Arrays (FPGA’18), Jason Helge Anderson and Kia Bazargan (Eds.). ACM, 269–278.
DOI:https://doi.org/10.1145/3174243.3174255
[175] Yuan Zhou, Haoxing Ren, Yanqing Zhang, Ben Keller, Brucek Khailany, and Zhiru Zhang. 2019. PRIMAL: Power
inference using machine learning. In Proceedings of the ACM/IEEE Design Automation Conference (DAC’19). ACM,
39. DOI:https://doi.org/10.1145/3316781.3317884
[176] Zongwei Zhou, Md Mahfuzur Rahman Siddiquee, Nima Tajbakhsh, and Jianming Liang. 2018. UNet++: A nested
U-net architecture for medical image segmentation. In Proceedings of the International Conference on Medical Image
Computing and Computer-Assisted Intervention (MICCAI’18) (Lecture Notes in Computer Science), Vol. 11045. Springer,
3–11. DOI:https://doi.org/10.1007/978-3-030-00889-5_1
[177] Keren Zhu, Mingjie Liu, Yibo Lin, Biying Xu, Shaolan Li, Xiyuan Tang, Nan Sun, and David Z. Pan. 2019. Ge-
niusRoute: A new analog routing paradigm using generative neural network guidance. In Proceedings of the
IEEE/ACM International Conference on Computer-Aided Design (ICCAD’19), David Z. Pan (Ed.). ACM, 1–8. DOI:https:
//doi.org/10.1109/ICCAD45719.2019.8942164
[178] Cheng Zhuo, Bei Yu, and Di Gao. 2017. Accelerating chip design with machine learning: From pre-Silicon to post-
Silicon. In Proceedings of the IEEE International System-on-Chip Conference (SOCC’17), Massimo Alioto, Hai Helen
Li, Jürgen Becker, Ulf Schlichtmann, and Ramalingam Sridhar (Eds.). IEEE, 227–232. DOI:https://doi.org/10.1109/
SOCC.2017.8226046
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.
40:46 G. Huang et al.
[179] Matthew M. Ziegler, Hung-Yi Liu, and Luca P. Carloni. 2016. Scalable auto-tuning of synthesis parameters for op-
timizing high-performance processors. In Proceedings of the IEEE International Symposium on Low Power Electronics
and Design (ISLPED’16). ACM, 180–185. DOI:https://doi.org/10.1145/2934583.2934620
[180] Marcela Zuluaga, Guillaume Sergent, Andreas Krause, and Markus Püschel. 2013. Active learning for multi-objective
optimization. In Proceedings of the International Conference on Machine Learning (ICML’13) (JMLR Workshop and Con-
ference Proceedings), Vol. 28. JMLR.org, 462–470. Retrieved from http://proceedings.mlr.press/v28/zuluaga13.html.
Received October 2020; revised February 2021; accepted February 2021
ACM Transactions on Design Automation of Electronic Systems, Vol. 26, No. 5, Article 40. Pub. date: May 2021.




















