
Surgical versus non-surgical interventions for adolescents with idiopathic scoliosis: Full Review
Upload
independentCategory
view
1download
0
Original article/Article original
Lateral steps reveal adaptive biomechanical strategies
in adolescent idiopathic scoliosis
Le pas lateral revelateur de strategies biomecaniques
dans la scoliose idiopathique de l’adolescence
A.-V. Bruyneel a,*, P. Chavet a,*, G. Bollini b, P. Allard c, E. Berton a, S. Mesure a
a UMR 6152 CNRS, laboratoire mouvement et perception, universite de la Mediterranee, 163, avenue de Luminy, C.P. 910,
13288 Marseille cedex 9, Franceb Service de chirurgie orthopedique infantile, hopital CHRU La Timone, boulevard Jean-Moulin,
13385 Marseille, cedex 5, Francec Departement de kinesiologie, universite de Montreal, 2100, boulevard Edouard-Montpetit, bureau 7207,
C.P. 6128, succursale centre-ville, Montreal, Quebec H3C 3J7, Canada
Received 6 February 2008; accepted 21 May 2008
Abstract
Introduction. – Adolescent idiopathic scoliosis (characterized by a morphological deformation of the trunk) prompts the development of new
postural control strategies. This adaptation has an influence on the dynamics of motor behaviour. The present study analysed ground reaction forces
during lateral stepping in order to highlight the dynamic consequences of idiopathic scoliosis.
Material and methods. – Ten adolescents suffering from idiopathic scoliosis with right thoracic curvature (Cobb angle �158) and 15 healthy
adolescents participated in the study. We used two force platforms to record ground reaction forces for the right and left legs during large and small
lateral steps (LSs).
Results. – Our results revealed intergroup and interlimb differences for both types of step. For small LSs, right-side (i.e. convexity side) initiation
induced a significant increase in the ground reaction force impulse during the postural phase for the scoliotic group, when compared with the
control group. For large LSs, left-side (i.e. concavity side) initiation induced a significant increase in ground reaction force impulse during the
landing phase only. Patients always displayed slower dynamic behaviour than healthy controls. For both stepping sides, the asymmetry index (AI)
was higher in the scoliotic group than in the control group (0.2 � AI � 85 in the scoliotic group versus 0.1 < AI > 24.4 in the control group).
Furthermore, the scoliotic group showed a significant increase in the variability of the dynamic parameters (> 8%).
Conclusion. – In scoliotic subjects, lateral stepping prompts specific dynamic behaviour affecting both limbs, in order to maintain balance during
movement despite spinal deformation. This stepping task could be used in future studies to identify specific motor strategies.
# 2008 Elsevier Masson SAS. All rights reserved.
http://france.elsevier.com/direct/ANNRMP/
Disponible en ligne sur www.sciencedirect.com
Annales de readaptation et de medecine physique 51 (2008) 630–641
Resume
Objectif. – La modification morphologique du tronc de la scoliose idiopathique provoque une redistribution des masses qui sous-tend l’existence
de nouvelles strategies dynamiques lors de la regulation posturale. Notre etude visait a analyser les determinants biomecaniques de la regulation
posturale lors de la realisation d’un pas lateral en fonction de la deformation rachidienne inherente a cette pathologie.
Materiels et methode. – Dix adolescentes presentant une scoliose thoracique droite (angle de Cobb � 158) et 15 adolescentes participaient a cette
etude. Deux plateformes de force ont enregistre les forces de reactions du sol lors de la realisation de pas lateraux pour chaque membre inferieur
(deux amplitudes testees : petit et grand pas).
Resultats. – Lorsque le petit pas lateral etait realise du cote de la convexite scoliotique, les patients se distinguaient des sujets temoins par une
augmentation significative de l’impulsion pour les trois composantes de la force de reaction (Fx, Fy, Fz) a la phase posturale. Lors du long pas
* Auteur correspondant.
E-mail address: [email protected] (A.V. Bruyneel).
0168-6054/$ – see front matter # 2008 Elsevier Masson SAS. All rights reserved.
doi:10.1016/j.annrmp.2008.05.004

A.-V. Bruyneel et al. / Annales de readaptation et de medecine physique 51 (2008) 630–641 631
lateral dans la direction de la concavite scoliotique, c’etait la phase de reception qui presentait une augmentation significative des impulsions. Les
patients se demarquaient des temoins par un retard dans la gestion des forces. Nous avons etabli un indice d’asymetrie different entre les deux
populations quel que soit le cote d’initiation (0,2 � IA � 85 sujets scoliotiques versus 0,1 < IA > 24,4 sujets temoins). En outre, la variabilite des
parametres dynamiques augmentait de maniere significative pour les patients scoliotiques (> 8 %).
Conclusion. – Nos resultats suggerent que la courbure scoliotique entraıne des strategies dynamiques adaptatives se traduisant par des asymetries
importantes du controle postural.
# 2008 Elsevier Masson SAS. All rights reserved.
Keywords: Dynamics; Idiopathic scoliosis; Lateral step; Adaptive strategies
Mots cles : Dynamique ; Scoliose idiopathique ; Pas lateral ; Strategies adaptatives
1. English version
1.1. Introduction
According to Champain [5], 2 to 4% of teenagers aged
between 10 and 16 suffer from adolescent idiopathic scoliosis
(AIS). Although the origin of this pathology is still unclear,
several studies have identified genetic aspects [13] and
endocrinal [8], histological [15] and neurophysiological factors
[24]. Even though 67% of AIS patients suffer from vestibular
disorders, no correlation was found between severity of the
latter and the amplitude of scoliotic curvature [25]. Moreover,
the visual system could be involved in the appearance of
scoliosis, as this pathology appears to be six times more
frequent in partially sighted children. The direction of spinal
convexity is linked to labyrinthine [14] and ocular [21]
predominance. In terms of spatial perception (including
awareness of the body posture), Cheung et al. [9] reported
that the angle between horizontal and vertical subjective
perception increases as a function of the Cobb angle. This
suggests that scoliotic patients organise and stabilize their
postural behaviour on the basis of a biased spatial reference.
These various perceptive disorders necessitate the functional
implementation of adaptive postural control strategies. Obser-
vation of patients (both seeking to maintain static balance and
performing a movement) should help identify these adaptive
strategies.
In the standing position, scoliotic patients show both a
higher amplitude of postural oscillation [22] and excursion of
the centre of pressure (COP) [7–20]. The spinal deformation
modifies the relationship between the different body segments
(spinal column and limbs) and prompts reorganisation of
postural information and implementation of new strategies
for maintaining postural stability [19]. These authors thus
demonstrated that scoliotic subjects show a greater sway area
for both the COP and the centre of mass, combined with a
significant greater difference between the respective displace-
ments of these two parameters. Given that postural balance is
affected by the curvature pattern [14], female subjects
presenting non-compensated curvature are less stable than
those presenting double curvature. Moreover, young ectomor-
phic females (willowy girls with a thin skeleton and slim
muscles) presenting a single scoliotic curvature show greater
COP displacements than female subjects with endomorphic or
mesomorphic somatotypes do [1]. In terms of the dynamic
control of movement, gait studies indicate that spinal
deformation causes postural disturbances. Characteristic
ground reaction force (GRF) data reveals asymmetric gait in
all movement phases [10–23]. Furthermore, an increase in GRF
variability (mainly in the mediolateral and anteroposterior
axes) has been reported [16].
In AIS patients, morphological modifications of the trunk
have a major impact on motor production parameters. Indeed,
single-curve scoliosis involves the reorganisation of body
segment masses [19]; whereas the leg on the convexity side
bears extra weight, the leg on the concavity side bears
insufficient weight. This change in mass distribution leads to
motor production that is better suited to this asymmetrical
situation [17]. Given that scoliosis is a pathology which
progresses in all three spatial dimensions, a movement
produced in a direction other than the anteroposterior axis
should amplify the dynamic effects of the scoliotic curvature
and therefore reveal patient-specific dynamic strategies. Step
initiation has already been used as an investigative protocol in
pathologies such as gonarthrosis [2]. The main advantage of
this simple movement is its ease of reproduction in the frontal
axis.
The present study sought to assess the dynamic characte-
ristics of postural control during production of a LS in patients
suffering from right thoracic AIS. It also aimed at identifying
the adaptive dynamic behaviour applied at the onset of
movement (i.e. the effect of side) and as a function of the
amplitude of the step (i.e. the effect of amplitude).
1.2. Materials and methods
Twenty-five young female subjects participated in the study
and formed a 15-subject control group (CG) and a 10-subject
scoliotic group (SG). Recruitment of the control group was
performed in several high schools. Recruitment of the scoliotic
group was performed in the paediatric orthopaedic surgery
department at Timone Hospital in Marseilles, France, under the
supervision of an orthopaedic surgeon with extensive expe-
rience of assessing the progression of scoliotic conditions.
Only right-side thoracic scolioses were selected, with an
ectomorphic morphology as a dominant characteristic (90% of
subjects). This homogenous selection enabled better assess-
ment of the influence of morphological modifications on
movement (i.e. biomechanical aspects). Moreover, single-curve
thoracic AIS amplifies the specific features of pathological
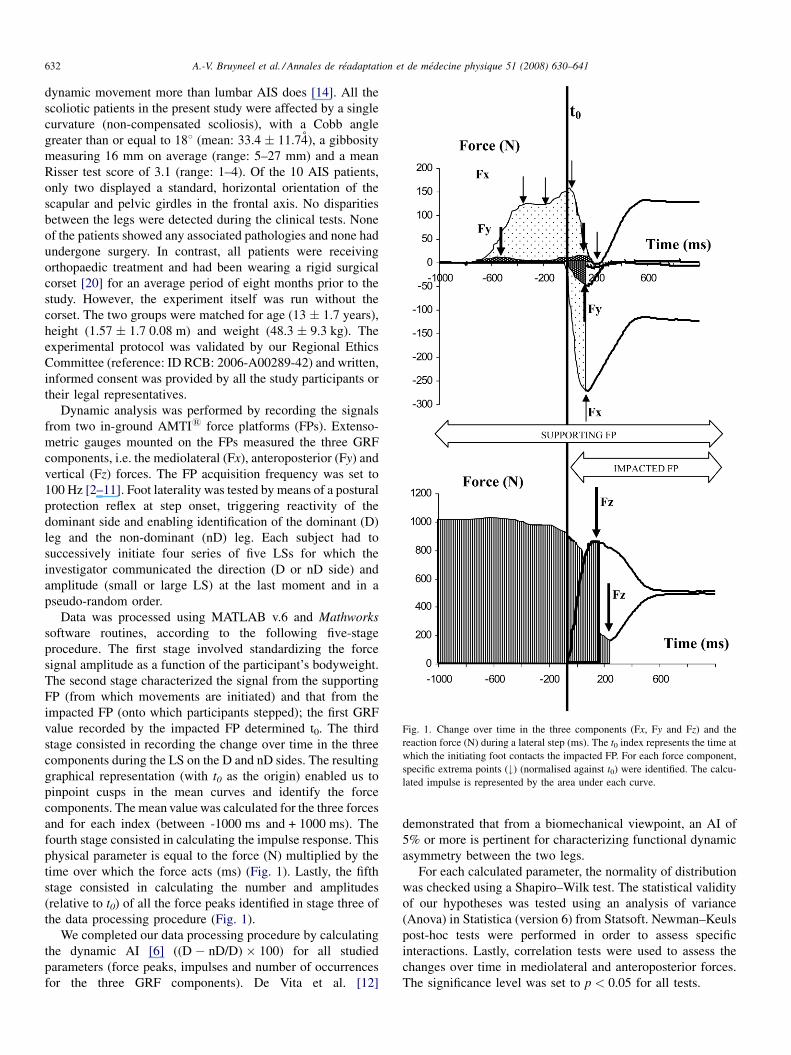
Fig. 1. Change over time in the three components (Fx, Fy and Fz) and the
reaction force (N) during a lateral step (ms). The t0 index represents the time at
which the initiating foot contacts the impacted FP. For each force component,
specific extrema points (#) (normalised against t0) were identified. The calcu-
lated impulse is represented by the area under each curve.
A.-V. Bruyneel et al. / Annales de readaptation et de medecine physique 51 (2008) 630–641632
dynamic movement more than lumbar AIS does [14]. All the
scoliotic patients in the present study were affected by a single
curvature (non-compensated scoliosis), with a Cobb angle
greater than or equal to 188 (mean: 33.4 � 11.74), a gibbosity
measuring 16 mm on average (range: 5–27 mm) and a mean
Risser test score of 3.1 (range: 1–4). Of the 10 AIS patients,
only two displayed a standard, horizontal orientation of the
scapular and pelvic girdles in the frontal axis. No disparities
between the legs were detected during the clinical tests. None
of the patients showed any associated pathologies and none had
undergone surgery. In contrast, all patients were receiving
orthopaedic treatment and had been wearing a rigid surgical
corset [20] for an average period of eight months prior to the
study. However, the experiment itself was run without the
corset. The two groups were matched for age (13 � 1.7 years),
height (1.57 � 1.7 0.08 m) and weight (48.3 � 9.3 kg). The
experimental protocol was validated by our Regional Ethics
Committee (reference: ID RCB: 2006-A00289-42) and written,
informed consent was provided by all the study participants or
their legal representatives.
Dynamic analysis was performed by recording the signals
from two in-ground AMTI1 force platforms (FPs). Extenso-
metric gauges mounted on the FPs measured the three GRF
components, i.e. the mediolateral (Fx), anteroposterior (Fy) and
vertical (Fz) forces. The FP acquisition frequency was set to
100 Hz [2–11]. Foot laterality was tested by means of a postural
protection reflex at step onset, triggering reactivity of the
dominant side and enabling identification of the dominant (D)
leg and the non-dominant (nD) leg. Each subject had to
successively initiate four series of five LSs for which the
investigator communicated the direction (D or nD side) and
amplitude (small or large LS) at the last moment and in a
pseudo-random order.
Data was processed using MATLAB v.6 and Mathworks
software routines, according to the following five-stage
procedure. The first stage involved standardizing the force
signal amplitude as a function of the participant’s bodyweight.
The second stage characterized the signal from the supporting
FP (from which movements are initiated) and that from the
impacted FP (onto which participants stepped); the first GRF
value recorded by the impacted FP determined t0. The third
stage consisted in recording the change over time in the three
components during the LS on the D and nD sides. The resulting
graphical representation (with t0 as the origin) enabled us to
pinpoint cusps in the mean curves and identify the force
components. The mean value was calculated for the three forces
and for each index (between -1000 ms and + 1000 ms). The
fourth stage consisted in calculating the impulse response. This
physical parameter is equal to the force (N) multiplied by the
time over which the force acts (ms) (Fig. 1). Lastly, the fifth
stage consisted in calculating the number and amplitudes
(relative to t0) of all the force peaks identified in stage three of
the data processing procedure (Fig. 1).
We completed our data processing procedure by calculating
the dynamic AI [6] ((D � nD/D) � 100) for all studied
parameters (force peaks, impulses and number of occurrences
for the three GRF components). De Vita et al. [12]
demonstrated that from a biomechanical viewpoint, an AI of
5% or more is pertinent for characterizing functional dynamic
asymmetry between the two legs.
For each calculated parameter, the normality of distribution
was checked using a Shapiro–Wilk test. The statistical validity
of our hypotheses was tested using an analysis of variance
(Anova) in Statistica (version 6) from Statsoft. Newman–Keuls
post-hoc tests were performed in order to assess specific
interactions. Lastly, correlation tests were used to assess the
changes over time in mediolateral and anteroposterior forces.
The significance level was set to p < 0.05 for all tests.
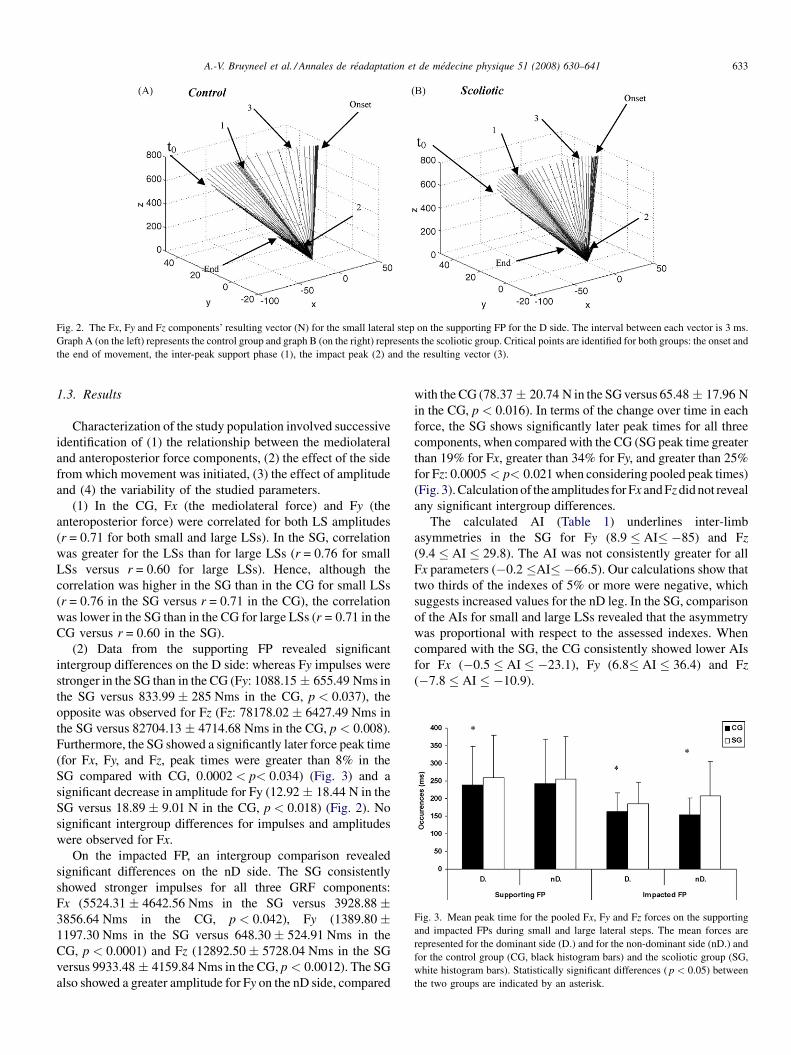
Fig. 2. The Fx, Fy and Fz components’ resulting vector (N) for the small lateral step on the supporting FP for the D side. The interval between each vector is 3 ms.
Graph A (on the left) represents the control group and graph B (on the right) represents the scoliotic group. Critical points are identified for both groups: the onset and
the end of movement, the inter-peak support phase (1), the impact peak (2) and the resulting vector (3).
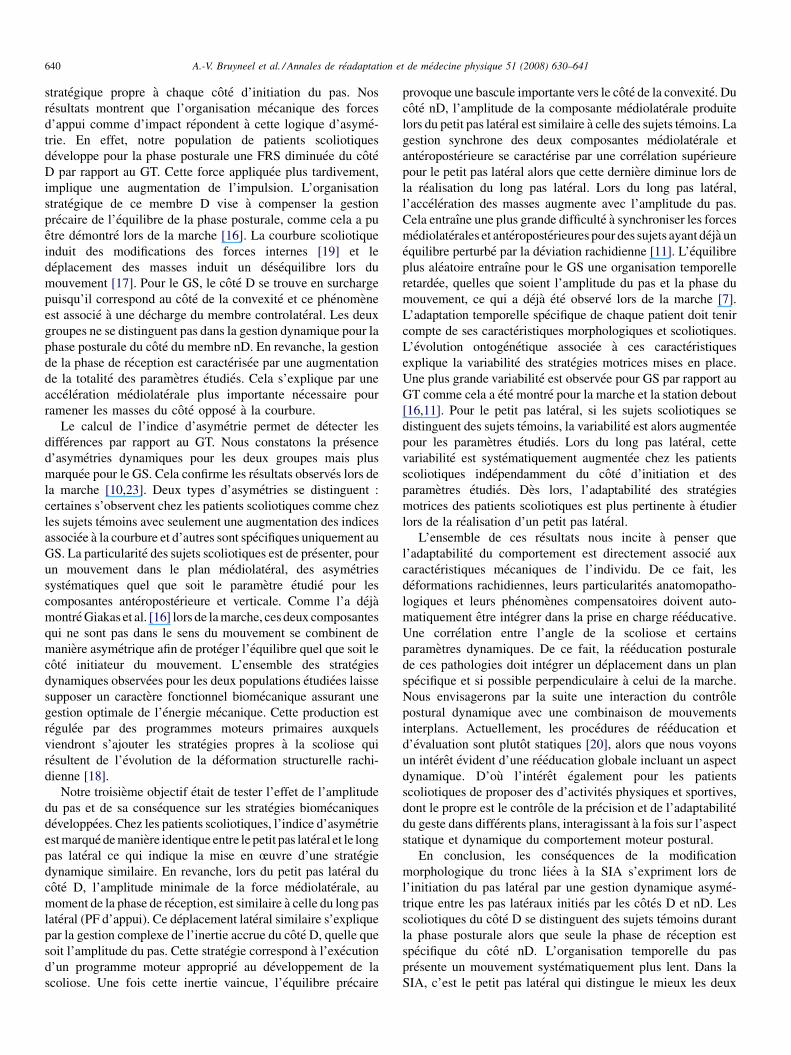
Fig. 3. Mean peak time for the pooled Fx, Fy and Fz forces on the supporting
and impacted FPs during small and large lateral steps. The mean forces are
represented for the dominant side (D.) and for the non-dominant side (nD.) and
for the control group (CG, black histogram bars) and the scoliotic group (SG,
white histogram bars). Statistically significant differences ( p < 0.05) between
the two groups are indicated by an asterisk.
A.-V. Bruyneel et al. / Annales de readaptation et de medecine physique 51 (2008) 630–641 633
1.3. Results
Characterization of the study population involved successive
identification of (1) the relationship between the mediolateral
and anteroposterior force components, (2) the effect of the side
from which movement was initiated, (3) the effect of amplitude
and (4) the variability of the studied parameters.
(1) In the CG, Fx (the mediolateral force) and Fy (the
anteroposterior force) were correlated for both LS amplitudes
(r = 0.71 for both small and large LSs). In the SG, correlation
was greater for the LSs than for large LSs (r = 0.76 for small
LSs versus r = 0.60 for large LSs). Hence, although the
correlation was higher in the SG than in the CG for small LSs
(r = 0.76 in the SG versus r = 0.71 in the CG), the correlation
was lower in the SG than in the CG for large LSs (r = 0.71 in the
CG versus r = 0.60 in the SG).
(2) Data from the supporting FP revealed significant
intergroup differences on the D side: whereas Fy impulses were
stronger in the SG than in the CG (Fy: 1088.15 � 655.49 Nms in
the SG versus 833.99� 285 Nms in the CG, p < 0.037), the
opposite was observed for Fz (Fz: 78178.02 � 6427.49 Nms in
the SG versus 82704.13 � 4714.68 Nms in the CG, p < 0.008).
Furthermore, the SG showed a significantly later force peak time
(for Fx, Fy, and Fz, peak times were greater than 8% in the
SG compared with CG, 0.0002 < p< 0.034) (Fig. 3) and a
significant decrease in amplitude for Fy (12.92 � 18.44 N in the
SG versus 18.89� 9.01 N in the CG, p < 0.018) (Fig. 2). No
significant intergroup differences for impulses and amplitudes
were observed for Fx.
On the impacted FP, an intergroup comparison revealed
significant differences on the nD side. The SG consistently
showed stronger impulses for all three GRF components:
Fx (5524.31 � 4642.56 Nms in the SG versus 3928.88 �3856.64 Nms in the CG, p < 0.042), Fy (1389.80�1197.30 Nms in the SG versus 648.30� 524.91 Nms in the
CG, p < 0.0001) and Fz (12892.50� 5728.04 Nms in the SG
versus 9933.48 � 4159.84 Nms in the CG, p < 0.0012). The SG
also showed a greater amplitude for Fy on the nD side, compared
with the CG (78.37 � 20.74 N in the SG versus 65.48 � 17.96 N
in the CG, p < 0.016). In terms of the change over time in each
force, the SG shows significantly later peak times for all three
components, when compared with the CG (SG peak time greater
than 19% for Fx, greater than 34% for Fy, and greater than 25%
for Fz: 0.0005 < p< 0.021 when considering pooled peak times)
(Fig. 3). Calculation of the amplitudes for Fx and Fz did not reveal
any significant intergroup differences.
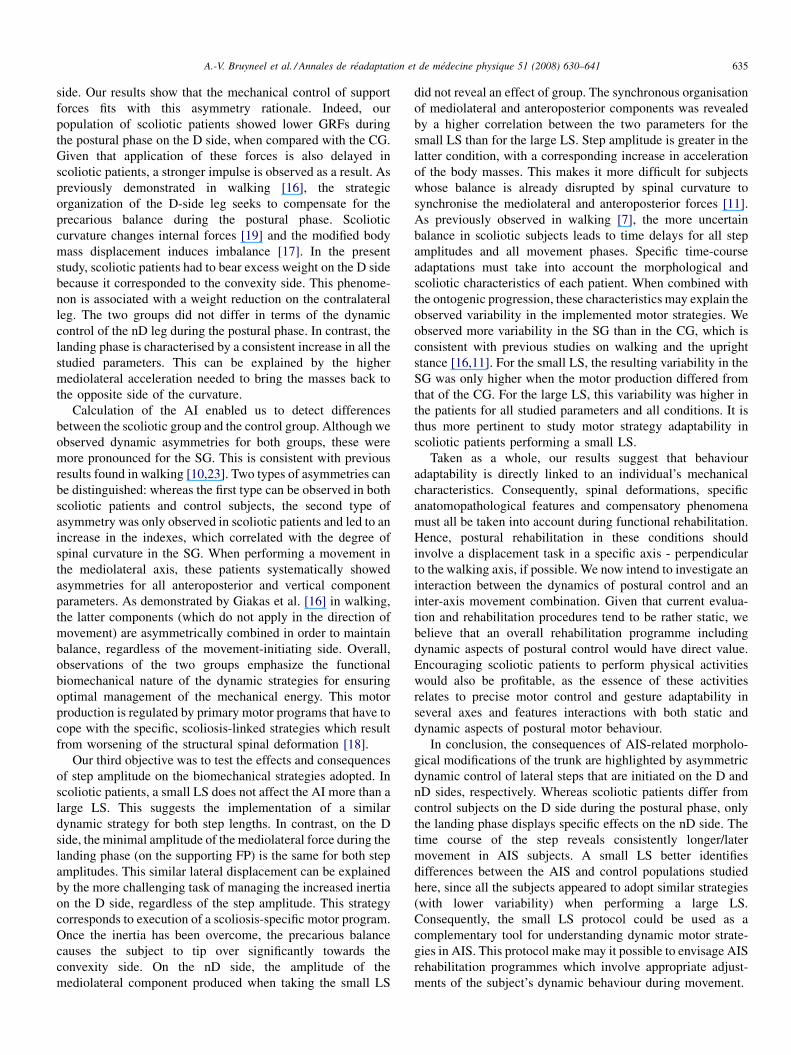
The calculated AI (Table 1) underlines inter-limb
asymmetries in the SG for Fy (8.9 � AI� �85) and Fz
(9.4 � AI � 29.8). The AI was not consistently greater for all
Fx parameters (�0.2 �AI� �66.5). Our calculations show that
two thirds of the indexes of 5% or more were negative, which
suggests increased values for the nD leg. In the SG, comparison
of the AIs for small and large LSs revealed that the asymmetry
was proportional with respect to the assessed indexes. When
compared with the SG, the CG consistently showed lower AIs
for Fx (�0.5 � AI � �23.1), Fy (6.8� AI � 36.4) and Fz
(�7.8 � AI � �10.9).
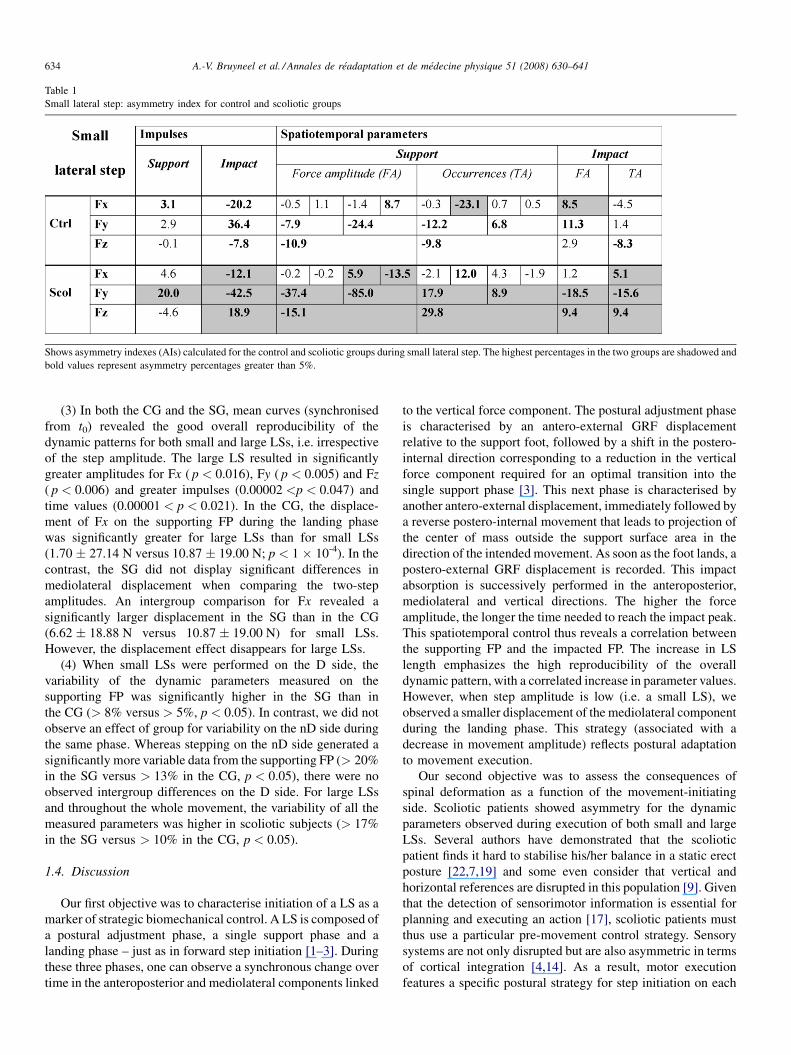
Table 1
Small lateral step: asymmetry index for control and scoliotic groups
Shows asymmetry indexes (AIs) calculated for the control and scoliotic groups during small lateral step. The highest percentages in the two groups are shadowed and
bold values represent asymmetry percentages greater than 5%.
A.-V. Bruyneel et al. / Annales de readaptation et de medecine physique 51 (2008) 630–641634
(3) In both the CG and the SG, mean curves (synchronised
from t0) revealed the good overall reproducibility of the
dynamic patterns for both small and large LSs, i.e. irrespective
of the step amplitude. The large LS resulted in significantly
greater amplitudes for Fx ( p < 0.016), Fy ( p < 0.005) and Fz
( p < 0.006) and greater impulses (0.00002 <p < 0.047) and
time values (0.00001 < p < 0.021). In the CG, the displace-
ment of Fx on the supporting FP during the landing phase
was significantly greater for large LSs than for small LSs
(1.70 � 27.14 N versus 10.87 � 19.00 N; p < 1 � 10-4). In the
contrast, the SG did not display significant differences in
mediolateral displacement when comparing the two-step
amplitudes. An intergroup comparison for Fx revealed a
significantly larger displacement in the SG than in the CG
(6.62 � 18.88 N versus 10.87 � 19.00 N) for small LSs.
However, the displacement effect disappears for large LSs.
(4) When small LSs were performed on the D side, the
variability of the dynamic parameters measured on the
supporting FP was significantly higher in the SG than in
the CG (> 8% versus > 5%, p < 0.05). In contrast, we did not
observe an effect of group for variability on the nD side during
the same phase. Whereas stepping on the nD side generated a
significantly more variable data from the supporting FP (> 20%
in the SG versus > 13% in the CG, p < 0.05), there were no
observed intergroup differences on the D side. For large LSs
and throughout the whole movement, the variability of all the
measured parameters was higher in scoliotic subjects (> 17%
in the SG versus > 10% in the CG, p < 0.05).
1.4. Discussion
Our first objective was to characterise initiation of a LS as a
marker of strategic biomechanical control. A LS is composed of
a postural adjustment phase, a single support phase and a
landing phase – just as in forward step initiation [1–3]. During
these three phases, one can observe a synchronous change over
time in the anteroposterior and mediolateral components linked
to the vertical force component. The postural adjustment phase
is characterised by an antero-external GRF displacement
relative to the support foot, followed by a shift in the postero-
internal direction corresponding to a reduction in the vertical
force component required for an optimal transition into the
single support phase [3]. This next phase is characterised by
another antero-external displacement, immediately followed by
a reverse postero-internal movement that leads to projection of
the center of mass outside the support surface area in the
direction of the intended movement. As soon as the foot lands, a
postero-external GRF displacement is recorded. This impact
absorption is successively performed in the anteroposterior,
mediolateral and vertical directions. The higher the force
amplitude, the longer the time needed to reach the impact peak.
This spatiotemporal control thus reveals a correlation between
the supporting FP and the impacted FP. The increase in LS
length emphasizes the high reproducibility of the overall
dynamic pattern, with a correlated increase in parameter values.
However, when step amplitude is low (i.e. a small LS), we
observed a smaller displacement of the mediolateral component
during the landing phase. This strategy (associated with a
decrease in movement amplitude) reflects postural adaptation
to movement execution.
Our second objective was to assess the consequences of
spinal deformation as a function of the movement-initiating
side. Scoliotic patients showed asymmetry for the dynamic
parameters observed during execution of both small and large
LSs. Several authors have demonstrated that the scoliotic
patient finds it hard to stabilise his/her balance in a static erect
posture [22,7,19] and some even consider that vertical and
horizontal references are disrupted in this population [9]. Given
that the detection of sensorimotor information is essential for
planning and executing an action [17], scoliotic patients must
thus use a particular pre-movement control strategy. Sensory
systems are not only disrupted but are also asymmetric in terms
of cortical integration [4,14]. As a result, motor execution
features a specific postural strategy for step initiation on each
A.-V. Bruyneel et al. / Annales de readaptation et de medecine physique 51 (2008) 630–641 635
side. Our results show that the mechanical control of support
forces fits with this asymmetry rationale. Indeed, our
population of scoliotic patients showed lower GRFs during
the postural phase on the D side, when compared with the CG.
Given that application of these forces is also delayed in
scoliotic patients, a stronger impulse is observed as a result. As
previously demonstrated in walking [16], the strategic
organization of the D-side leg seeks to compensate for the
precarious balance during the postural phase. Scoliotic
curvature changes internal forces [19] and the modified body
mass displacement induces imbalance [17]. In the present
study, scoliotic patients had to bear excess weight on the D side
because it corresponded to the convexity side. This phenome-
non is associated with a weight reduction on the contralateral
leg. The two groups did not differ in terms of the dynamic
control of the nD leg during the postural phase. In contrast, the
landing phase is characterised by a consistent increase in all the
studied parameters. This can be explained by the higher
mediolateral acceleration needed to bring the masses back to
the opposite side of the curvature.
Calculation of the AI enabled us to detect differences
between the scoliotic group and the control group. Although we
observed dynamic asymmetries for both groups, these were
more pronounced for the SG. This is consistent with previous
results found in walking [10,23]. Two types of asymmetries can
be distinguished: whereas the first type can be observed in both
scoliotic patients and control subjects, the second type of
asymmetry was only observed in scoliotic patients and led to an
increase in the indexes, which correlated with the degree of
spinal curvature in the SG. When performing a movement in
the mediolateral axis, these patients systematically showed
asymmetries for all anteroposterior and vertical component
parameters. As demonstrated by Giakas et al. [16] in walking,
the latter components (which do not apply in the direction of
movement) are asymmetrically combined in order to maintain
balance, regardless of the movement-initiating side. Overall,
observations of the two groups emphasize the functional
biomechanical nature of the dynamic strategies for ensuring
optimal management of the mechanical energy. This motor
production is regulated by primary motor programs that have to
cope with the specific, scoliosis-linked strategies which result
from worsening of the structural spinal deformation [18].
Our third objective was to test the effects and consequences
of step amplitude on the biomechanical strategies adopted. In
scoliotic patients, a small LS does not affect the AI more than a
large LS. This suggests the implementation of a similar
dynamic strategy for both step lengths. In contrast, on the D
side, the minimal amplitude of the mediolateral force during the
landing phase (on the supporting FP) is the same for both step
amplitudes. This similar lateral displacement can be explained
by the more challenging task of managing the increased inertia
on the D side, regardless of the step amplitude. This strategy
corresponds to execution of a scoliosis-specific motor program.
Once the inertia has been overcome, the precarious balance
causes the subject to tip over significantly towards the
convexity side. On the nD side, the amplitude of the
mediolateral component produced when taking the small LS
did not reveal an effect of group. The synchronous organisation
of mediolateral and anteroposterior components was revealed
by a higher correlation between the two parameters for the
small LS than for the large LS. Step amplitude is greater in the
latter condition, with a corresponding increase in acceleration
of the body masses. This makes it more difficult for subjects
whose balance is already disrupted by spinal curvature to
synchronise the mediolateral and anteroposterior forces [11].
As previously observed in walking [7], the more uncertain
balance in scoliotic subjects leads to time delays for all step
amplitudes and all movement phases. Specific time-course
adaptations must take into account the morphological and
scoliotic characteristics of each patient. When combined with
the ontogenic progression, these characteristics may explain the
observed variability in the implemented motor strategies. We
observed more variability in the SG than in the CG, which is
consistent with previous studies on walking and the upright
stance [16,11]. For the small LS, the resulting variability in the
SG was only higher when the motor production differed from
that of the CG. For the large LS, this variability was higher in
the patients for all studied parameters and all conditions. It is
thus more pertinent to study motor strategy adaptability in
scoliotic patients performing a small LS.
Taken as a whole, our results suggest that behaviour
adaptability is directly linked to an individual’s mechanical
characteristics. Consequently, spinal deformations, specific
anatomopathological features and compensatory phenomena
must all be taken into account during functional rehabilitation.
Hence, postural rehabilitation in these conditions should
involve a displacement task in a specific axis - perpendicular
to the walking axis, if possible. We now intend to investigate an
interaction between the dynamics of postural control and an
inter-axis movement combination. Given that current evalua-
tion and rehabilitation procedures tend to be rather static, we
believe that an overall rehabilitation programme including
dynamic aspects of postural control would have direct value.
Encouraging scoliotic patients to perform physical activities
would also be profitable, as the essence of these activities
relates to precise motor control and gesture adaptability in
several axes and features interactions with both static and
dynamic aspects of postural motor behaviour.
In conclusion, the consequences of AIS-related morpholo-
gical modifications of the trunk are highlighted by asymmetric
dynamic control of lateral steps that are initiated on the D and
nD sides, respectively. Whereas scoliotic patients differ from
control subjects on the D side during the postural phase, only
the landing phase displays specific effects on the nD side. The
time course of the step reveals consistently longer/later
movement in AIS subjects. A small LS better identifies
differences between the AIS and control populations studied
here, since all the subjects appeared to adopt similar strategies
(with lower variability) when performing a large LS.
Consequently, the small LS protocol could be used as a
complementary tool for understanding dynamic motor strate-
gies in AIS. This protocol make may it possible to envisage AIS
rehabilitation programmes which involve appropriate adjust-
ments of the subject’s dynamic behaviour during movement.

A.-V. Bruyneel et al. / Annales de readaptation et de medecine physique 51 (2008) 630–641636
2. Version francaise
2.1. Introduction
Selon Champain [5], la prevalence de la scoliose idiopa-
thique de l’adolescent (SIA) est de 2 a 4 % entre dix et 16 ans.
L’origine de cette pathologie reste encore inconnue mais
plusieurs etudes ont identifie des troubles genetiques [13], des
facteurs endocriniens [8], des facteurs histologiques [15] et des
facteurs neurophysiologiques [24]. Au niveau sensoriel, les
patients presentant une SIA souffrent de troubles vestibulaires
dans 67 % des cas sans toutefois que la gravite de la scoliose
puisse etre associee a l’importance de l’atteinte [25]. De plus, il
semble que le systeme visuel soit implique dans l’apparition de
la scoliose, cette pathologie serait six fois plus frequente chez
les enfants malvoyants [4]. La direction de la convexite
rachidienne est liee a la predominance laterale labyrinthique
[14] et oculaire [21]. Au niveau de la perception spatiale
integrant la prise de conscience du schema corporel, Cheung
et al. [9] precisent que l’angle entre la perception subjective de
l’horizontale et de la verticale est d’autant plus augmente que
l’angle de Cobb de la scoliose est important. Cela suggere que
le patient scoliotique doit organiser et stabiliser son equilibre a
partir d’une reference spatiale faussee. Tous ces troubles
sensitivoperceptifs necessitent la mise en œuvre de strategies
adaptatives du controle postural observables lors du maintien
d’une position statique et dans la realisation d’un mouvement.
En position erigee, les patients scoliotiques presentent une
augmentation de l’amplitude des oscillations posturales [22]
associee a une excursion plus importante du centre de pression
(CP) [7–20]. La deformation rachidienne modifie la relation
entre les differents segments corporels (rachis et membres),
impliquant la reorganisation de l’information par de nouveaux
choix strategiques pour assurer la stabilite [19]. Ces auteurs
montrent ainsi que ces sujets scoliotiques presentent une
augmentation de l’aire d’oscillation du CP et du centre de
masse associee a une augmentation significative de l’ecart entre
le deplacement de ces deux parametres. L’equilibre postural est
affecte par le type de courbure [14], ainsi les filles presentant une
courbure non compensee sont moins stables que celles ayant une
double courbure. En outre, les jeunes filles ectomorphes (filles
longiligne a ossature fine et avec peu de masse musculaire) a
courbure scoliotique unique ont une augmentation du deplace-
ment du CP par rapport a celles presentant un autre morphotype
(endomorphe ou mesomorphe) [1]. Au niveau de l’organisation
dynamique du mouvement, les travaux sur la marche indiquent
que la deformation du rachis provoque des perturbations
posturales qui implique une marche asymetrique entre les deux
membres inferieurs au niveau de la force de reaction du sol (FRS)
dans la totalite des phases du mouvement [10–23]. Par ailleurs,
les auteurs precisent qu’il existe une augmentation de la
variabilite de la FRS, principalement dans les directions
mediolaterale et anteroposterieure [16].
La modification morphologique du tronc dans la SIA influe
sur les parametres dynamiques de la production motrice. En
effet, la scoliose a courbure unique implique une reorganisation
des masses segmentaires [19]. Des lors, du cote de la convexite
de la courbure le membre inferieur est en surcharge et du cote
de la concavite de la courbure le membre est en decharge. Cette
modification de la distribution des masses va impliquer une
production motrice adaptee a cette situation asymetrique [17].
Dans la mesure ou la scoliose est une pathologie qui se
developpe dans les trois plans de l’espace, un mouvement
organise dans une direction autre que anteroposterieure, semble
approprie pour amplifier l’effet dynamique de la courbure
scoliotique et reveler les strategies dynamiques specifiques aux
patients. L’initiation du pas est un paradigme deja utilise pour
analyser certaines pathologies, telles que la gonarthrose [2]. Ce
mouvement simple a l’avantage de pouvoir etre facilement
reproductible dans le plan frontal.
Les objectifs de notre etude sont de definir les caracteristi-
ques dynamiques du controle postural lors de la realisation d’un
pas lateral pour une population de patients presentant une SIA
de type thoracique droite et de caracteriser les comportements
dynamiques adaptatifs de ces sujets lors de l’initiation du
mouvement (effet du cote) et lors de la variation de l’amplitude
de ce mouvement (effet de l’amplitude).
2.2. Materiel et methode
Vingt-cinq jeunes filles participent a cette etude dont un
groupe « temoin » (GT) de 15 filles et un groupe « scoliotique »
(GS) de dix filles. Le recrutement des volontaires est realise
dans plusieurs colleges d’enseignement secondaire. Les sujets
scoliotiques sont recrutes dans un service de chirurgie
orthopedique infantile (CHU Timone-Marseille) par un
chirurgien orthopedique qui evalue la gravite de la pathologie.
Seules des scolioses thoraciques droites sont retenues avec une
dominante de morphologie ectomorphe (90 %). Cette selection
particuliere homogene nous permet de caracteriser l’influence
de la modification morphologique sur le mouvement (aspect
mecanique). Par ailleurs, la SIA thoracique a une seule
courbure majore les particularites du comportement dynamique
par rapport aux SIA de type lombaire [14]. Les patientes
scoliotiques presentent toutes des courbures uniques (scolioses
non compensees) avec un angle de Cobb superieur ou egal a 188(moyenne 33,4 � 11,74), une gibbosite de 16 mm en moyenne
(minimum 5 et maximum 27 mm) et un test de Risser evalue a
3,1 en moyenne (minimum 1 et maximum 4). Sur nos dix jeunes
filles, seules deux ont un equilibre horizontal des ceintures
scapulaire et pelvienne respecte dans le plan frontal. Lors des
tests cliniques, nous n’avons decele aucune inegalite des
membres inferieurs. Ces patientes ne presentent pas de
pathologies associees et n’ont pas eu de traitement chirurgical,
en revanche, pour toutes les patientes, un traitement
orthopedique de type « corset rigide » [20] a ete entrepris
avant notre evaluation (moyenne de la duree du traitement : huit
mois), toutefois, l’experimentation est realisee sans le port de
corset. Les deux groupes sont apparies en age (13 � 1,7 ans),
en taille (1,57 � 0,08 m) et en masse (48,3 � 9,3 kg). Le
protocole experimental a ete valide par le comite de protection
des personnes regional (ID RCB : 2006-A00289-42) et un
accord de consentement a ete signe par les volontaires et leurs
representants legaux.
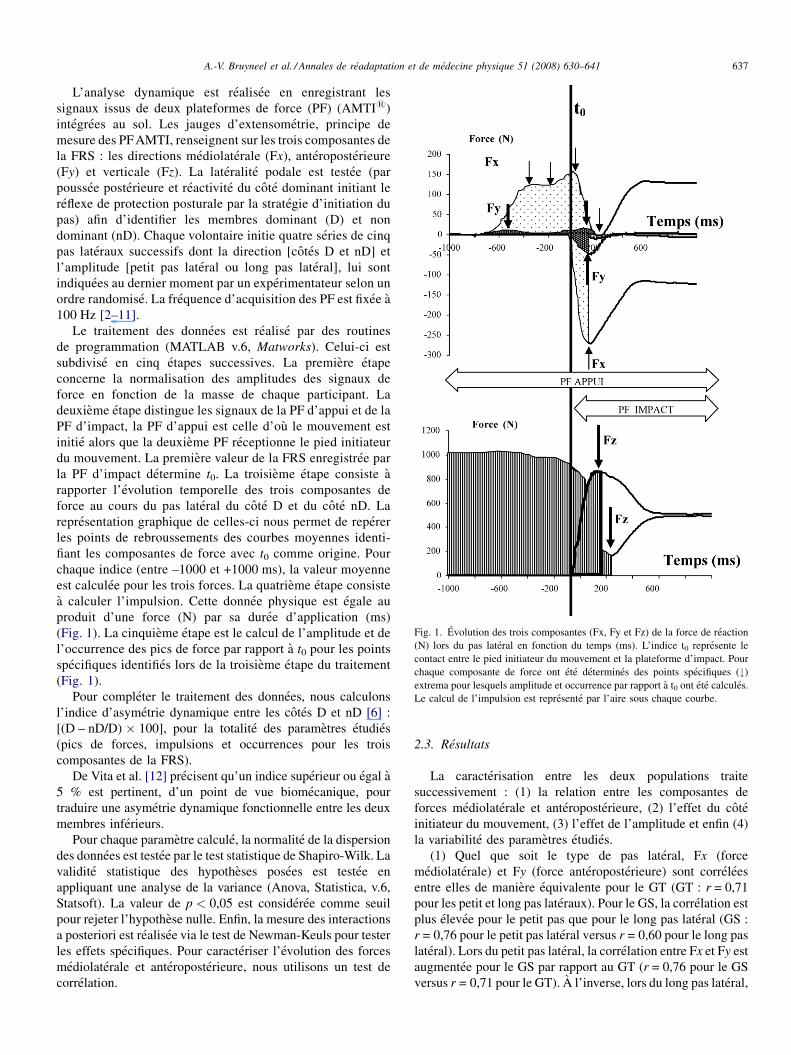
Fig. 1. Evolution des trois composantes (Fx, Fy et Fz) de la force de reaction
(N) lors du pas lateral en fonction du temps (ms). L’indice t0 represente le
contact entre le pied initiateur du mouvement et la plateforme d’impact. Pour
chaque composante de force ont ete determines des points specifiques (#)extrema pour lesquels amplitude et occurrence par rapport a t0 ont ete calcules.
Le calcul de l’impulsion est represente par l’aire sous chaque courbe.
A.-V. Bruyneel et al. / Annales de readaptation et de medecine physique 51 (2008) 630–641 637
L’analyse dynamique est realisee en enregistrant les
signaux issus de deux plateformes de force (PF) (AMTI1)
integrees au sol. Les jauges d’extensometrie, principe de
mesure des PF AMTI, renseignent sur les trois composantes de
la FRS : les directions mediolaterale (Fx), anteroposterieure
(Fy) et verticale (Fz). La lateralite podale est testee (par
poussee posterieure et reactivite du cote dominant initiant le
reflexe de protection posturale par la strategie d’initiation du
pas) afin d’identifier les membres dominant (D) et non
dominant (nD). Chaque volontaire initie quatre series de cinq
pas lateraux successifs dont la direction [cotes D et nD] et
l’amplitude [petit pas lateral ou long pas lateral], lui sont
indiquees au dernier moment par un experimentateur selon un
ordre randomise. La frequence d’acquisition des PF est fixee a
100 Hz [2–11].
Le traitement des donnees est realise par des routines
de programmation (MATLAB v.6, Matworks). Celui-ci est
subdivise en cinq etapes successives. La premiere etape
concerne la normalisation des amplitudes des signaux de
force en fonction de la masse de chaque participant. La
deuxieme etape distingue les signaux de la PF d’appui et de la
PF d’impact, la PF d’appui est celle d’ou le mouvement est
initie alors que la deuxieme PF receptionne le pied initiateur
du mouvement. La premiere valeur de la FRS enregistree par
la PF d’impact determine t0. La troisieme etape consiste a
rapporter l’evolution temporelle des trois composantes de
force au cours du pas lateral du cote D et du cote nD. La
representation graphique de celles-ci nous permet de reperer
les points de rebroussements des courbes moyennes identi-
fiant les composantes de force avec t0 comme origine. Pour
chaque indice (entre –1000 et +1000 ms), la valeur moyenne
est calculee pour les trois forces. La quatrieme etape consiste
a calculer l’impulsion. Cette donnee physique est egale au
produit d’une force (N) par sa duree d’application (ms)
(Fig. 1). La cinquieme etape est le calcul de l’amplitude et de
l’occurrence des pics de force par rapport a t0 pour les points
specifiques identifies lors de la troisieme etape du traitement
(Fig. 1).
Pour completer le traitement des donnees, nous calculons
l’indice d’asymetrie dynamique entre les cotes D et nD [6] :
[(D – nD/D) � 100], pour la totalite des parametres etudies
(pics de forces, impulsions et occurrences pour les trois
composantes de la FRS).
De Vita et al. [12] precisent qu’un indice superieur ou egal a
5 % est pertinent, d’un point de vue biomecanique, pour
traduire une asymetrie dynamique fonctionnelle entre les deux
membres inferieurs.
Pour chaque parametre calcule, la normalite de la dispersion
des donnees est testee par le test statistique de Shapiro-Wilk. La
validite statistique des hypotheses posees est testee en
appliquant une analyse de la variance (Anova, Statistica, v.6,
Statsoft). La valeur de p < 0,05 est consideree comme seuil
pour rejeter l’hypothese nulle. Enfin, la mesure des interactions
a posteriori est realisee via le test de Newman-Keuls pour tester
les effets specifiques. Pour caracteriser l’evolution des forces
mediolaterale et anteroposterieure, nous utilisons un test de
correlation.
2.3. Resultats
La caracterisation entre les deux populations traite
successivement : (1) la relation entre les composantes de
forces mediolaterale et anteroposterieure, (2) l’effet du cote
initiateur du mouvement, (3) l’effet de l’amplitude et enfin (4)
la variabilite des parametres etudies.
(1) Quel que soit le type de pas lateral, Fx (force
mediolaterale) et Fy (force anteroposterieure) sont correlees
entre elles de maniere equivalente pour le GT (GT : r = 0,71
pour les petit et long pas lateraux). Pour le GS, la correlation est
plus elevee pour le petit pas que pour le long pas lateral (GS :
r = 0,76 pour le petit pas lateral versus r = 0,60 pour le long pas
lateral). Lors du petit pas lateral, la correlation entre Fx et Fy est
augmentee pour le GS par rapport au GT (r = 0,76 pour le GS
versus r = 0,71 pour le GT). A l’inverse, lors du long pas lateral,
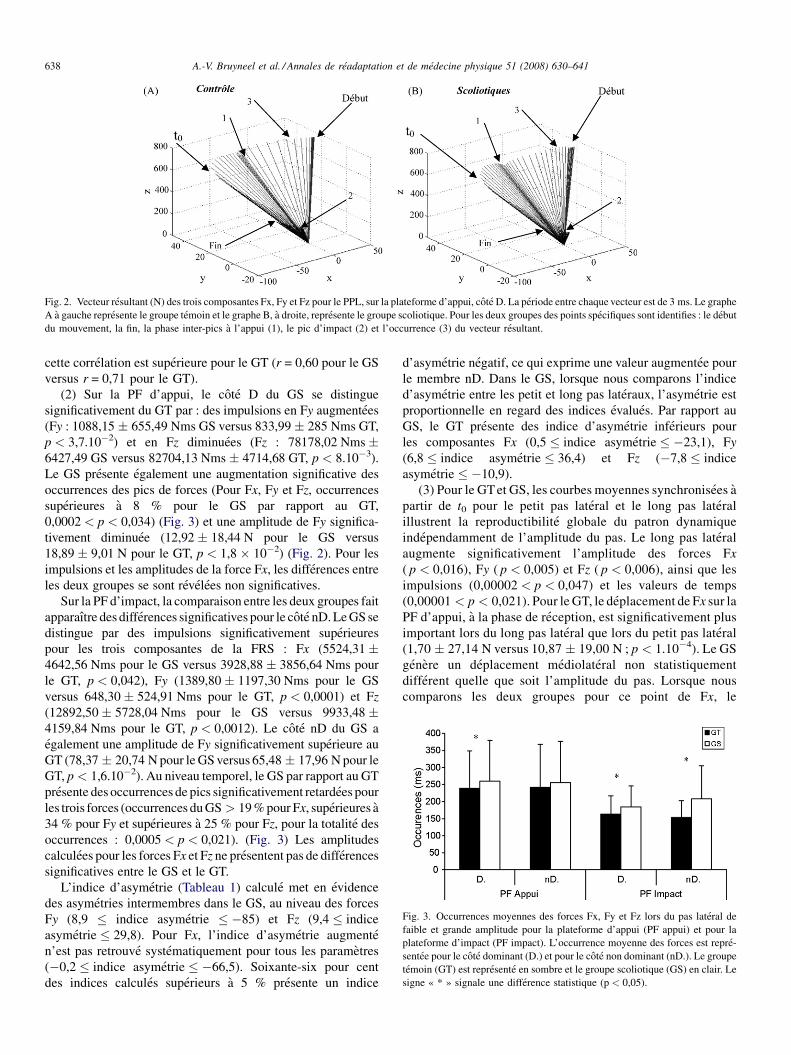
Fig. 2. Vecteur resultant (N) des trois composantes Fx, Fy et Fz pour le PPL, sur la plateforme d’appui, cote D. La periode entre chaque vecteur est de 3 ms. Le graphe
A a gauche represente le groupe temoin et le graphe B, a droite, represente le groupe scoliotique. Pour les deux groupes des points specifiques sont identifies : le debut
du mouvement, la fin, la phase inter-pics a l’appui (1), le pic d’impact (2) et l’occurrence (3) du vecteur resultant.
Fig. 3. Occurrences moyennes des forces Fx, Fy et Fz lors du pas lateral de
faible et grande amplitude pour la plateforme d’appui (PF appui) et pour la
plateforme d’impact (PF impact). L’occurrence moyenne des forces est repre-
sentee pour le cote dominant (D.) et pour le cote non dominant (nD.). Le groupe
temoin (GT) est represente en sombre et le groupe scoliotique (GS) en clair. Le
signe « * » signale une difference statistique (p < 0,05).
A.-V. Bruyneel et al. / Annales de readaptation et de medecine physique 51 (2008) 630–641638
cette correlation est superieure pour le GT (r = 0,60 pour le GS
versus r = 0,71 pour le GT).
(2) Sur la PF d’appui, le cote D du GS se distingue
significativement du GT par : des impulsions en Fy augmentees
(Fy : 1088,15 � 655,49 Nms GS versus 833,99� 285 Nms GT,
p < 3,7.10�2) et en Fz diminuees (Fz : 78178,02 Nms �6427,49 GS versus 82704,13 Nms � 4714,68 GT, p < 8.10�3).
Le GS presente egalement une augmentation significative des
occurrences des pics de forces (Pour Fx, Fy et Fz, occurrences
superieures a 8 % pour le GS par rapport au GT,
0,0002 < p < 0,034) (Fig. 3) et une amplitude de Fy significa-
tivement diminuee (12,92 � 18,44 N pour le GS versus
18,89 � 9,01 N pour le GT, p < 1,8 � 10�2) (Fig. 2). Pour les
impulsions et les amplitudes de la force Fx, les differences entre
les deux groupes se sont revelees non significatives.
Sur la PF d’impact, la comparaison entre les deux groupes fait
apparaıtre des differences significatives pour le cote nD. Le GS se
distingue par des impulsions significativement superieures
pour les trois composantes de la FRS : Fx (5524,31�4642,56 Nms pour le GS versus 3928,88 � 3856,64 Nms pour
le GT, p < 0,042), Fy (1389,80� 1197,30 Nms pour le GS
versus 648,30� 524,91 Nms pour le GT, p < 0,0001) et Fz
(12892,50� 5728,04 Nms pour le GS versus 9933,48 �4159,84 Nms pour le GT, p < 0,0012). Le cote nD du GS a
egalement une amplitude de Fy significativement superieure au
GT (78,37 � 20,74 N pour le GS versus 65,48 � 17,96 N pour le
GT, p < 1,6.10�2). Au niveau temporel, le GS par rapport au GT
presente des occurrences de pics significativement retardees pour
les trois forces (occurrences du GS > 19 % pour Fx, superieures a
34 % pour Fy et superieures a 25 % pour Fz, pour la totalite des
occurrences : 0,0005 < p < 0,021). (Fig. 3) Les amplitudes
calculees pour les forces Fx et Fz ne presentent pas de differences
significatives entre le GS et le GT.
L’indice d’asymetrie (Tableau 1) calcule met en evidence
des asymetries intermembres dans le GS, au niveau des forces
Fy (8,9 � indice asymetrie � �85) et Fz (9,4 � indice
asymetrie � 29,8). Pour Fx, l’indice d’asymetrie augmente
n’est pas retrouve systematiquement pour tous les parametres
(�0,2 � indice asymetrie � �66,5). Soixante-six pour cent
des indices calcules superieurs a 5 % presente un indice
d’asymetrie negatif, ce qui exprime une valeur augmentee pour
le membre nD. Dans le GS, lorsque nous comparons l’indice
d’asymetrie entre les petit et long pas lateraux, l’asymetrie est
proportionnelle en regard des indices evalues. Par rapport au
GS, le GT presente des indice d’asymetrie inferieurs pour
les composantes Fx (0,5 � indice asymetrie � �23,1), Fy
(6,8 � indice asymetrie � 36,4) et Fz (�7,8 � indice
asymetrie � �10,9).
(3) Pour le GT et GS, les courbes moyennes synchronisees a
partir de t0 pour le petit pas lateral et le long pas lateral
illustrent la reproductibilite globale du patron dynamique
independamment de l’amplitude du pas. Le long pas lateral
augmente significativement l’amplitude des forces Fx
( p < 0,016), Fy ( p < 0,005) et Fz ( p < 0,006), ainsi que les
impulsions (0,00002 < p < 0,047) et les valeurs de temps
(0,00001 < p < 0,021). Pour le GT, le deplacement de Fx sur la
PF d’appui, a la phase de reception, est significativement plus
important lors du long pas lateral que lors du petit pas lateral
(1,70 � 27,14 N versus 10,87 � 19,00 N ; p < 1.10�4). Le GS
genere un deplacement mediolateral non statistiquement
different quelle que soit l’amplitude du pas. Lorsque nous
comparons les deux groupes pour ce point de Fx, le
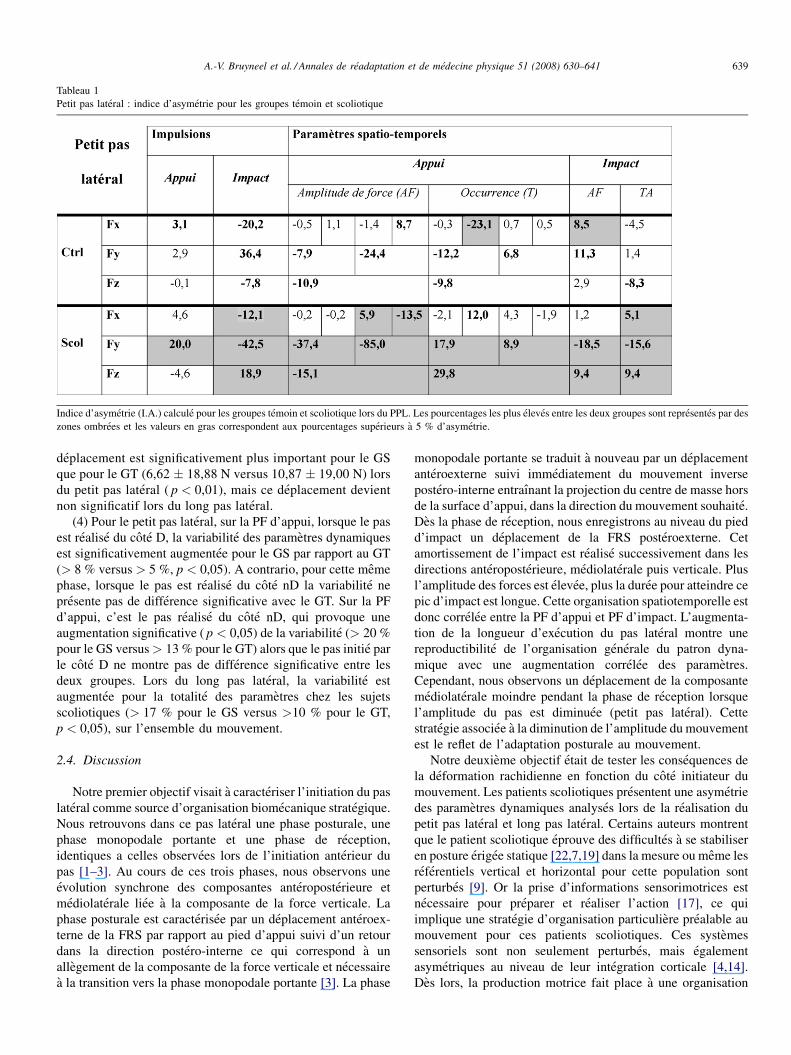
Tableau 1
Petit pas lateral : indice d’asymetrie pour les groupes temoin et scoliotique
Indice d’asymetrie (I.A.) calcule pour les groupes temoin et scoliotique lors du PPL. Les pourcentages les plus eleves entre les deux groupes sont representes par des
zones ombrees et les valeurs en gras correspondent aux pourcentages superieurs a 5 % d’asymetrie.
A.-V. Bruyneel et al. / Annales de readaptation et de medecine physique 51 (2008) 630–641 639
deplacement est significativement plus important pour le GS
que pour le GT (6,62 � 18,88 N versus 10,87 � 19,00 N) lors
du petit pas lateral ( p < 0,01), mais ce deplacement devient
non significatif lors du long pas lateral.
(4) Pour le petit pas lateral, sur la PF d’appui, lorsque le pas
est realise du cote D, la variabilite des parametres dynamiques
est significativement augmentee pour le GS par rapport au GT
(> 8 % versus > 5 %, p < 0,05). A contrario, pour cette meme
phase, lorsque le pas est realise du cote nD la variabilite ne
presente pas de difference significative avec le GT. Sur la PF
d’appui, c’est le pas realise du cote nD, qui provoque une
augmentation significative ( p < 0,05) de la variabilite (> 20 %
pour le GS versus> 13 % pour le GT) alors que le pas initie par
le cote D ne montre pas de difference significative entre les
deux groupes. Lors du long pas lateral, la variabilite est
augmentee pour la totalite des parametres chez les sujets
scoliotiques (> 17 % pour le GS versus >10 % pour le GT,
p < 0,05), sur l’ensemble du mouvement.
2.4. Discussion
Notre premier objectif visait a caracteriser l’initiation du pas
lateral comme source d’organisation biomecanique strategique.
Nous retrouvons dans ce pas lateral une phase posturale, une
phase monopodale portante et une phase de reception,
identiques a celles observees lors de l’initiation anterieur du
pas [1–3]. Au cours de ces trois phases, nous observons une
evolution synchrone des composantes anteroposterieure et
mediolaterale liee a la composante de la force verticale. La
phase posturale est caracterisee par un deplacement anteroex-
terne de la FRS par rapport au pied d’appui suivi d’un retour
dans la direction postero-interne ce qui correspond a un
allegement de la composante de la force verticale et necessaire
a la transition vers la phase monopodale portante [3]. La phase
monopodale portante se traduit a nouveau par un deplacement
anteroexterne suivi immediatement du mouvement inverse
postero-interne entraınant la projection du centre de masse hors
de la surface d’appui, dans la direction du mouvement souhaite.
Des la phase de reception, nous enregistrons au niveau du pied
d’impact un deplacement de la FRS posteroexterne. Cet
amortissement de l’impact est realise successivement dans les
directions anteroposterieure, mediolaterale puis verticale. Plus
l’amplitude des forces est elevee, plus la duree pour atteindre ce
pic d’impact est longue. Cette organisation spatiotemporelle est
donc correlee entre la PF d’appui et PF d’impact. L’augmenta-
tion de la longueur d’execution du pas lateral montre une
reproductibilite de l’organisation generale du patron dyna-
mique avec une augmentation correlee des parametres.
Cependant, nous observons un deplacement de la composante
mediolaterale moindre pendant la phase de reception lorsque
l’amplitude du pas est diminuee (petit pas lateral). Cette
strategie associee a la diminution de l’amplitude du mouvement
est le reflet de l’adaptation posturale au mouvement.
Notre deuxieme objectif etait de tester les consequences de
la deformation rachidienne en fonction du cote initiateur du
mouvement. Les patients scoliotiques presentent une asymetrie
des parametres dynamiques analyses lors de la realisation du
petit pas lateral et long pas lateral. Certains auteurs montrent
que le patient scoliotique eprouve des difficultes a se stabiliser
en posture erigee statique [22,7,19] dans la mesure ou meme les
referentiels vertical et horizontal pour cette population sont
perturbes [9]. Or la prise d’informations sensorimotrices est
necessaire pour preparer et realiser l’action [17], ce qui
implique une strategie d’organisation particuliere prealable au
mouvement pour ces patients scoliotiques. Ces systemes
sensoriels sont non seulement perturbes, mais egalement
asymetriques au niveau de leur integration corticale [4,14].
Des lors, la production motrice fait place a une organisation
A.-V. Bruyneel et al. / Annales de readaptation et de medecine physique 51 (2008) 630–641640
strategique propre a chaque cote d’initiation du pas. Nos
resultats montrent que l’organisation mecanique des forces
d’appui comme d’impact repondent a cette logique d’asyme-
trie. En effet, notre population de patients scoliotiques
developpe pour la phase posturale une FRS diminuee du cote
D par rapport au GT. Cette force appliquee plus tardivement,
implique une augmentation de l’impulsion. L’organisation
strategique de ce membre D vise a compenser la gestion
precaire de l’equilibre de la phase posturale, comme cela a pu
etre demontre lors de la marche [16]. La courbure scoliotique
induit des modifications des forces internes [19] et le
deplacement des masses induit un desequilibre lors du
mouvement [17]. Pour le GS, le cote D se trouve en surcharge
puisqu’il correspond au cote de la convexite et ce phenomene
est associe a une decharge du membre controlateral. Les deux
groupes ne se distinguent pas dans la gestion dynamique pour la
phase posturale du cote du membre nD. En revanche, la gestion
de la phase de reception est caracterisee par une augmentation
de la totalite des parametres etudies. Cela s’explique par une
acceleration mediolaterale plus importante necessaire pour
ramener les masses du cote oppose a la courbure.
Le calcul de l’indice d’asymetrie permet de detecter les
differences par rapport au GT. Nous constatons la presence
d’asymetries dynamiques pour les deux groupes mais plus
marquee pour le GS. Cela confirme les resultats observes lors de
la marche [10,23]. Deux types d’asymetries se distinguent :
certaines s’observent chez les patients scoliotiques comme chez
les sujets temoins avec seulement une augmentation des indices
associee a la courbure et d’autres sont specifiques uniquement au
GS. La particularite des sujets scoliotiques est de presenter, pour
un mouvement dans le plan mediolateral, des asymetries
systematiques quel que soit le parametre etudie pour les
composantes anteroposterieure et verticale. Comme l’a deja
montre Giakas et al. [16] lors de la marche, ces deux composantes
qui ne sont pas dans le sens du mouvement se combinent de
maniere asymetrique afin de proteger l’equilibre quel que soit le
cote initiateur du mouvement. L’ensemble des strategies
dynamiques observees pour les deux populations etudiees laisse
supposer un caractere fonctionnel biomecanique assurant une
gestion optimale de l’energie mecanique. Cette production est
regulee par des programmes moteurs primaires auxquels
viendront s’ajouter les strategies propres a la scoliose qui
resultent de l’evolution de la deformation structurelle rachi-
dienne [18].
Notre troisieme objectif etait de tester l’effet de l’amplitude
du pas et de sa consequence sur les strategies biomecaniques
developpees. Chez les patients scoliotiques, l’indice d’asymetrie
est marque de maniere identique entre le petit pas lateral et le long
pas lateral ce qui indique la mise en œuvre d’une strategie
dynamique similaire. En revanche, lors du petit pas lateral du
cote D, l’amplitude minimale de la force mediolaterale, au
moment de la phase de reception, est similaire a celle du long pas
lateral (PF d’appui). Ce deplacement lateral similaire s’explique
par la gestion complexe de l’inertie accrue du cote D, quelle que
soit l’amplitude du pas. Cette strategie correspond a l’execution
d’un programme moteur approprie au developpement de la
scoliose. Une fois cette inertie vaincue, l’equilibre precaire
provoque une bascule importante vers le cote de la convexite. Du
cote nD, l’amplitude de la composante mediolaterale produite
lors du petit pas lateral est similaire a celle des sujets temoins. La
gestion synchrone des deux composantes mediolaterale et
anteroposterieure se caracterise par une correlation superieure
pour le petit pas lateral alors que cette derniere diminue lors de
la realisation du long pas lateral. Lors du long pas lateral,
l’acceleration des masses augmente avec l’amplitude du pas.
Cela entraıne une plus grande difficulte a synchroniser les forces
mediolaterales et anteroposterieures pour des sujets ayant deja un
equilibre perturbe par la deviation rachidienne [11]. L’equilibre
plus aleatoire entraıne pour le GS une organisation temporelle
retardee, quelles que soient l’amplitude du pas et la phase du
mouvement, ce qui a deja ete observe lors de la marche [7].
L’adaptation temporelle specifique de chaque patient doit tenir
compte de ses caracteristiques morphologiques et scoliotiques.
L’evolution ontogenetique associee a ces caracteristiques
explique la variabilite des strategies motrices mises en place.
Une plus grande variabilite est observee pour GS par rapport au
GT comme cela a ete montre pour la marche et la station debout
[16,11]. Pour le petit pas lateral, si les sujets scoliotiques se
distinguent des sujets temoins, la variabilite est alors augmentee
pour les parametres etudies. Lors du long pas lateral, cette
variabilite est systematiquement augmentee chez les patients
scoliotiques independamment du cote d’initiation et des
parametres etudies. Des lors, l’adaptabilite des strategies
motrices des patients scoliotiques est plus pertinente a etudier
lors de la realisation d’un petit pas lateral.
L’ensemble de ces resultats nous incite a penser que
l’adaptabilite du comportement est directement associe aux
caracteristiques mecaniques de l’individu. De ce fait, les
deformations rachidiennes, leurs particularites anatomopatho-
logiques et leurs phenomenes compensatoires doivent auto-
matiquement etre integrer dans la prise en charge reeducative.
Une correlation entre l’angle de la scoliose et certains
parametres dynamiques. De ce fait, la reeducation posturale
de ces pathologies doit integrer un deplacement dans un plan
specifique et si possible perpendiculaire a celui de la marche.
Nous envisagerons par la suite une interaction du controle
postural dynamique avec une combinaison de mouvements
interplans. Actuellement, les procedures de reeducation et
d’evaluation sont plutot statiques [20], alors que nous voyons
un interet evident d’une reeducation globale incluant un aspect
dynamique. D’ou l’interet egalement pour les patients
scoliotiques de proposer des d’activites physiques et sportives,
dont le propre est le controle de la precision et de l’adaptabilite
du geste dans differents plans, interagissant a la fois sur l’aspect
statique et dynamique du comportement moteur postural.
En conclusion, les consequences de la modification
morphologique du tronc liees a la SIA s’expriment lors de
l’initiation du pas lateral par une gestion dynamique asyme-
trique entre les pas lateraux inities par les cotes D et nD. Les
scoliotiques du cote D se distinguent des sujets temoins durant
la phase posturale alors que seule la phase de reception est
specifique du cote nD. L’organisation temporelle du pas
presente un mouvement systematiquement plus lent. Dans la
SIA, c’est le petit pas lateral qui distingue le mieux les deux
A.-V. Bruyneel et al. / Annales de readaptation et de medecine physique 51 (2008) 630–641 641
populations puisque la strategie est similaire au long pas lateral
mais presente moins de variabilite. Des lors, le petit pas lateral
peut etre un outil complementaire a la comprehension des
strategies dynamiques motrices de la SIA. Par ce protocole, il
semble possible d’envisager la reeducation des sujets scolio-
tiques par un ajustement adapte de leur comportement
dynamique lors du mouvement.
References
[1] Allard P, Chavet P, Barbier F, Gatto L, Labelle H, Sadeghi H. Effect of
body morphology on standing balance in adolescent idiopathic scoliosis.
Am J Phys Med Rehab 2004;83(9):689–97.
[2] Atlani L, Viton JM, Mesure S, Delarque A, Massion J. Side-step analysis
in knee arthritis subjects. Med Biol Eng Comp 1997;35:194.
[3] Breniere Y, Do MC. Control of gait initiation. J Mot Behavior 1991;23(4):
235–40.
[4] Catanzariti JF, Salomez E, Bruandet JM, Thevenon A. Visual deficiency
and scoliosis. Spine 2001;1(26):48–52.
[5] Champain N. Recherche des facteurs biomecaniques dans l’aggravation
des scolioses idiopathiques. These de biomecanique ENSAM 2004. Pastel
(Ed.), Paris, 2004; 14–22, online.
[6] Chavet P, Lafortune MA, Gray JR. Asymmetry of lower extremity
responses to external impact loading. Hum Mov Sci 1997;16:391–406.
[7] Chen P, Wang J, Tsuang Y, Liao T, Huang P, Hang Y. The postural stability
control and gait pattern of idiopathic scoliosis adolescent. Clin Biomech
1998;13(1):52–8.
[8] Cheung KM, Wang T, Poon AM, Carl A, Tranmer B, Hu Y, Luk KD,
Leong JC. The effect of pinealectomy on scoliosis development in young
nonhuman primate. Spine 2005;30(18):2009–13.
[9] Cheung J, Sluiter W, Veldhuizen A, Cool J, Van Horn J. Perception of
vertical and horizontal orientation in children with scoliosis. J Orthop Res
2002;20:416–20.
[10] Chockalingam N, Dangerfield P, Rahmatalla A, El Nasri A, Cochrane T.
Assessment of ground reaction force during scoliotic gait. Eur Spine J
2004;22. online.
[11] Chow D, Kwok L, Cheng J, Lao M, Holmes A, Au-Yang A, Yao F, Wong
M. The effect of backpack weight on the standing posture and balance of
schoolgirls with adolescent idiopathic scoliosis and normal controls. Gait
Posture 2006;24(2):173–81.
[12] De Vita P, Bates BT. Intraday reliability of ground reaction force sym-
metry during walking and running. Hum Mov Sci 1988;7:73–85.
[13] Dorfmann H, Dubousset J. Scoliose idiopathique de l’enfant et de l’adulte.
Elsevier (Ed.), Paris, collection EMC reference, 2004; 15–51.
[14] Gauchard G, Lascombes P, Kuhnast M, Perrin P. Influence of different
types of progressive idiopathic scoliosis on static and dynamic postural
control. Spine 2001;26(9):1052–8.
[15] Gaudreault N, Bertrand A, Lariviere C, Deserres S, Rivard C. Assessment
of the paraspinal muscles of subjects presenting an idiopathic scoliosis: an
EMG pilot study. BMC Musculoskelet Disord 2005;6:14.
[16] Giakas G, Baltzopoulos V, Dangerfield P, Dorgan J, Dalmira S. Compar-
ison of gait patterns between healthy and scoliotic patients using time and
frequency domain analysis of ground reaction forces. Spine 1996;21(19):
2235–42.
[17] Massion J. De la posture au mouvement. In: Nougier V, Bianchi JP,
editors. Pratiques sportives et modelisation du geste. Grenoble: Collection
Grenoble Sciences; 1990. p. 195–213.
[18] Mesure S. Posture, equilibre et locomotion : bases neurophysiologiques.
In: Viel E, editor. La marche humaine, la course et le saut. Biomecanique,
explorations, normes et dysfonctionnements. Paris: Masson (Ed.); 2000. p.
69–90.
[19] Nault ML, Allard P, Hinse S, Le Blanc R, Caron O, Labelle H, Sadeghi H.
Relations between standing stability and body posture parameters in
adolescent idiopathic scoliosis. Spine 2002;27(17):1911–7.
[20] Pham VM, Herbaux B, Schill A, Thevenon A. Evaluation du corset de
cheneau dans la scoliose idiopathique de l’adolescent. Annales de mede-
cine physique et readaptation 2007;50(3):125.
[21] Sahlstrand T. An analysis of lateral predominance in adolescent idiopathic
scoliosis with special reference to convexity of the curve. Spine
1980;5(6):512–8.
[22] Sahlstrand T, Ortengren R, Nachemson A. Postural equilibrium in
adolescent idiopathic scoliosis. Acta Orthop Scand 1978;49(4):
354–65.
[23] Schizas C, Kramers de Quervain I, Stussi E, Grob D. Gait asymmetries in
patients with idiopathic scoliosis using vertical forces measurements only.
Eur Spine J 1998;7(2):95–8.
[24] Simoneau M, Richer N, Mercier P, Allard P, Teasdale N. Sensory
deprivation and balance control in idiopathic scoliosis adolescent. Exp
Brain Res 2005;24:1–7.
[25] Wiener-Vacher S, Mazda K. Asymmetric otolith vestibulo-ocular
responses in children with idiopathic scoliosis. J Ped 1998;132(6):
1028–32.
Copyright © 2022 FDOKUMEN




















