SIWES (IT) REPORT ON SUBSOIL INVESTIGATION (GEOTECHNICAL ASSESSMENT)
Upload
shimaneuniversityCategory
view
1download
0
Physics and Chemistry of the Earth 35 (2010) 149–161
Contents lists available at ScienceDirect
Physics and Chemistry of the Earth
journal homepage: www.elsevier .com/locate /pce
Landslide simulation by a geotechnical model combined with a modelfor apparent friction change
Fawu Wang a,*, Kyoji Sassa b,1
a Department of Geoscience, Shimane University, Matsue, Shimane 690-8504, Japan; Formerly, Research Centre on Landslides, Disaster Prevention Research Institute,Kyoto University, Japanb International Consortium on Landslides, Uji Campus of Kyoto University, Gokasho, Uji, Kyoto 611-0011, Japan
a r t i c l e i n f o a b s t r a c t
Article history:Received 7 November 2008Received in revised form 18 June 2009Accepted 4 July 2009Available online 20 May 2010
Keywords:LandslideModelingSimulationGeotechnical modelApparent frictionCase study
1474-7065/$ - see front matter � 2009 Published bydoi:10.1016/j.pce.2009.07.006
* Corresponding author. Tel./fax: +81 852 32 9878.E-mail addresses: [email protected] (F
Sassa).1 Tel.: +81 774 38 4834; fax: +81 774 32 5597.
In 1988, Dr. Kyoji Sassa proposed a geotechnical model [Sassa, K., 1988. Geotechnical model for themotion of landslides. In: Proceedings, 5th International Symposium on Landslides, vol. 1, pp. 37–56] tosimulate landslide motion and to establish a theoretical framework for landslide simulation. In 2002,based on the experimental results of using a ring-shear apparatus for simulation of landslide motion,Wang and Sassa proposed a model for apparent friction coefficient change (which is a key parameterof landslide motion) that can be combined with Sassa’s original geotechnical model. As presented inthe model for apparent friction coefficient change, a landslide is considered as a two-layer structure,i.e., a debris layer and a sliding zone. During landsliding, the thickness of the debris layer changes, whileshear resistance changes in the sliding zone. In this paper, after a brief introduction of the two models, aparametric study is presented to show the differing importance of each parameter. Also included is a pre-sentation of three case studies: The 1995 Fei Tsui Road landslide, and the 1995 Shum Wan landslide, bothin Hong Kong, and the 1903 Frank slide in Alberta, Canada to show the advantage of combining the twomodels.
� 2009 Published by Elsevier Ltd.
1. Introduction
As a natural phenomenon, landslides in many cases, cause tra-gic consequences, including untold numbers of deaths and injuries,and massive economic losses. In recent years especially, with res-idential and industrial developments expanding onto unstable hill-side areas under the pressures of growing populations, losses dueto landslides are apparently growing. Prediction of potential land-slide occurrence affecting an area becomes more and more impor-tant for the mitigation and in many cases, the prevention oflandslide disasters.
Landslide motion prediction is considered to be a composite ofvarious analytical approaches. Its development is based on theunderstanding of the mechanism of landslide motion. Hungr(1995) classified the available simulation models for landslide mo-tion into two categories: lumped mass models idealizing the land-slide motion as a single point (Perla et al., 1980; Hutchinson, 1986),and models based on continuum mechanics (Sassa, 1988). Thefriction of the sliding surface is the most important factor in both
Elsevier Ltd.
. Wang), [email protected] (K.
categories of models. The most famous lumped mass model, per-haps the first model to interpret landslide motion is the ‘‘sled mod-el”, which was originally proposed by Heim (1932). In this model, itis assumed that all energy loss during landslide motion is causedby friction.
Sassa (1985) put forth the idea that the apparent friction angleis chiefly a combination of the real internal friction angle /m andthe pore pressure u during landslide motion. He suggested thatthe approximate apparent friction angle /a should be expressedby Eq. (1).
tan /a �r� u
rtan /m ð1Þ
where, /a = apparent friction angle; /m = internal friction angle dur-ing landslide motion; r = normal stress; u = pore pressure. The rea-son for the qualifier, ‘‘approximate” is because the cause of frictionis not only friction, but other causes such as energy loss due to col-lision and viscosity, may be somewhat critical.
Based on the concept of the apparent friction angle, Sassa(1988) proposed a quasi-3D frictional geotechnical model for land-slide motion. Two motion equations were deduced from the equi-librium of forces acting on a soil column, and a continuumequation was deduced from fluid dynamics. By means of fixing aframed area for landslide motion, the motion of the sliding masswas estimated.

Fig. 2. The mesh used in the differential calculation. The discharges at the x and they directions and thickness for the target mesh are also shown.
150 F. Wang, K. Sassa / Physics and Chemistry of the Earth 35 (2010) 149–161
After the development of undrained ring-shear apparatus tosimulate long distance landslide motion at the Disaster PreventionResearch Institute, Kyoto University, some new findings were ob-tained. Based on the updated knowledge, Wang and Sassa (2002)proposed a model for apparent friction coefficient change duringlandslide motion.
This paper will introduce an improvement on Sassa’s geotechni-cal model by combining it with the model for apparent frictioncoefficient change. The supporting documentation is presentedby the inclusion of a parametric study, together with the presenta-tion of three case studies.
2. The principles of the two models
The following are the principles of Sassa’s geotechnical model(1988) and Wang and Sassa’s (2002) model for apparent frictioncoefficient change.
2.1. Sassa’s geotechnical model for landslide motion (1988)
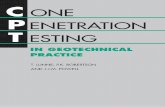
Sassa (1988) proposed a geotechnical model for landslide mo-tion based on the kinemetric principle of block motion and thecontinuity principle of the behavior of material during landslidemotion process. Fig. 1 illustrates a moving landslide and a columncontained within it, and the forces acting on the column. The forcesare: gravity of the sliding mass, W; the supporting force from theground on the sliding mass, N; the shear resisting force, R; andthe earth pressures acting on the column sides, Px and Py.
The fundamental equations include two equations of motion(Eqs. (2) and (3)) in x and y directions, respectively, in a rectangularcoordinate system, and an equation of continuity (Eq. (4)). Theequations of motion (Eqs. (2) and (3)) are derived from Newton’ssecond law. The items on the left correspond to acceleration, andare expressed as the change of discharge with time. The items onthe right correspond to the forces acting on the column. The firstitem is gravity, the second is earth pressure, and the third item isthe shear resisting force at the bottom. The equation of continuitykeeps the volume of the sliding mass constant. Because there is nodischarge in the z axis (vertical direction), the thickness change inthe vertical direction can be obtained from the discharge change inthe x and y directions.
Fig. 1. Geotechnical model for landslide motion (left) and forces acting on a sliding masssupporting force N, shear resisting force R, and earth pressures Px and Py.
@M@tþ @
@xðuMÞ þ @
@yðvMÞ
¼ ghtan aqþ 1
� kgh@h@x
� g
ðqþ 1Þ1=2 �u
ðu2 þ v2 þw2Þ1=2 fhcðqþ 1Þ þ h tan /ag ð2Þ
@N@tþ @
@xðuNÞ þ @
@yðvNÞ
¼ ghtan bqþ 1
� kgh@h@y
� g
ðqþ 1Þ1=2 �v
ðu2 þ v2 þw2Þ1=2 fhcðqþ 1Þ þ h tan /ag ð3Þ
@h@tþ @M@xþ @N@y¼ 0 ð4Þ
where h: thickness of the sliding mass; u, v, w: velocity in x, y, and zdirection; M, N: discharge in x and y direction per unit width,respectively, (M = uh, N = vh); k: lateral earth pressure coefficient;
column (right). The mesh size at x–y plane is Dx� Dy. The forces includes gravity W,

F. Wang, K. Sassa / Physics and Chemistry of the Earth 35 (2010) 149–161 151
tan /a: apparent friction coefficient of soil in the sliding zone; hc:cohesion head (defined as cohesion c = qghc, it is zero after slidingfor a long distance; q: density of the sliding mass); tan a, tan b:inclination of the intersection between the original slope surface
Fig. 3. Illustration of the two-layer structure of landslide mass. The upper one is alongitudinal section along the sliding direction, and the lower one is a cross section.Comparing the sliding mass, the thickness of the sliding zone can be ignored.
Fig. 4. Effective stress paths of four undrained ring-shear tests with different initialnormal stresses on the Osaka formation sandy soils. The void ratios afterconsolidation for the four tests are the same as 0.71 (Okada et al., 2000). Whenthe steady state was reached, all of the stress paths came to the same point, whichmeans that the shear resistance is independent of the initial normal stress.
Fig. 5. Model for apparent friction coefficient changing during landslide motion(Wang and Sassa, 2002). After slope failure, the shear resistance will decrease to asteady state value, as the landslide is accelerating. Then, the normal stress willdecrease during the landslide motion, and result in an increasing apparent frictionangle, which will cause the landslide motion to stop.
and the xz plane and yz plane, respectively; q ¼ tan2 aþ tan2 b;w ¼ �ðu tan aþ v tan bÞ.
Through the finite difference calculating process, the distribu-tion of the thickness of the sliding mass at each time interval canbe obtained for each mesh. By means of Eqs. (3) and (4), the dis-charges M and N in the x and y directions can be calculated. Whenthey are substituted in Eq. (4), the thickness change can be ob-tained. Fig. 2 shows the meshes surrounding the target mesh forwhich the thickness change can be derived.
In the above model, the apparent friction angle /a in themoving area must be measured directly by the geotechnical testof a sample taken from the site, or must be estimated from thefriction angle and estimated pore water pressure using Eq. (1). InSassa (1988), the value was estimated by the constant volumedirect shear and the drained ring-shear test, because it wasimpossible to get a true value for this parameter. After the un-drained ring-shear apparatus was developed (Sassa, 1994), /a
is obtained from Eq. (5), and the whole process becomesreasonable.
tan /a ¼Measured shear strength at steady state : sss
Initial total normal stress : r0ð5Þ
2.2. Model for apparent friction change during landslide motion
For the purpose of improving Sassa’s model as a tool for land-slide motion prediction, an accompanying model for apparent fric-
Table 1Suggestion range for Bss .
Type andBss
Description
A-type Unsaturated sliding mass movingon unsaturated soil layerBss = 0.0–0.1
B-type Sliding mass moving on fully saturatedsoil layer or saturatedsliding mass moving on impermeablelayer (e.g. concrete channel)
Bss = 0.9–1.0
C-type Saturated sliding mass moving onunsaturated and permeable layer(unsaturated sandy layer)
Bss = 0.1–0.9
Fig. 6. Change of the apparent friction coefficient with thickness of sliding massand Bss . Three types of saturated conditions along the traveling path of the slidingmass are shown. When the thickness of the sliding mass becomes smaller than thecritical thickness, the effective residual friction coefficient is used for the apparentfriction coefficient.

152 F. Wang, K. Sassa / Physics and Chemistry of the Earth 35 (2010) 149–161
tion coefficient change during landslide motion was proposed byWang and Sassa (2002). The following is the basic idea and thebackground for this model.
Fig. 7. Dimension of the slope before landslide motion. The contour lines representthe thickness of the original sliding mass. The contour difference is 1 m, and themaximum thickness at the center is 12.9 m.
Fig. 8. Time series result of simulation on a simple case at k = 0.3, sss = 20 kPa. The
It is assumed that the sliding mass is composed of two layers:one, a relatively coherent slide debris layer moving on the second,a thin sliding zone (Fig. 3). This idea is similar to Hungr’s model.For the upper debris layer, the thickness will change during land-slide motion. It is a common phenomenon that the thickness oflandslide mass becomes thinner during landslide motion, and fi-nally, the landslide stops and becomes a deposit. According tothe model, when the normal stress acting on the sliding zone de-creases, it will result in the corresponding increase of the apparentfriction coefficient. This will cause an automatic cessation of land-slide movement, if the shear resistance is constant during landslidemotion.
The sliding zone can liquefy or not during the landslide mo-tion, depending on its structure, saturated condition, graincrushing susceptibility, etc. A basic assumption is that it willreach the steady state after sliding for a certain distance. Thisphenomenon is well observed in our current research using un-drained ring-shear apparatus (Zhang and Sassa, 1996; Sassa,1998; Okada et al., 2000). Zhang and Sassa (1996) found that,for the soil with the same initial void ratio under the undrainedshearing for a long shearing distance, the shear resistances be-come the same value, without any relationship to their initialnormal stress. Fig. 4 is a typical test result for this phenomenonobtained by Okada et al. (2000). Using sandy soils of the Osakaformation from Hyogo Prefecture, Japan, shear rate controlledundrained ring-shear tests were conducted with different initialnormal effective stresses. Finally, all of the stress paths go tothe same steady state point, which means the shear resistanceat the steady state was independent of initial normal stress.In some soils, the steady state value did not reach the same va-lue. However, many cases had a similar trend, more or less. Wemodeled the steady state shear resistance as an independent va-lue of initial normal stress interpreting that there is a certaineffective normal stress under which no further grain crushingwill occur. Fig. 5 is the model, and Eqs. (6)–(8) are the mainequations used.
thickness of the sliding mass was enlarged three times for clear presentation.

Fig. 9. Parametric study results with the combination of the two models on an ellipsoid slope. The thickness of the sliding mass was enlarged three times for clearpresentation. (a) 3D image at the stopped state; (b) longitudinal section at the stopped state with the equivalent coefficient of friction H/L; and (c) 2D image of the finaldeposition.
F. Wang, K. Sassa / Physics and Chemistry of the Earth 35 (2010) 149–161 153
sssðh;BssÞ ¼ sss þ ðrðhÞ tan /0r � sssÞð1� BssÞ ð6Þ
rðhÞ ¼ qgh cos2 h ð7Þ
tan /a ¼sssðh;BssÞ
rðhÞ ð8Þ
where sss is the shear resistance of the soil in the sliding zone at thesteady state. /0r is the effective residual friction angle. The two shearstrength parameters can be easily measured in the laboratory byring-shear apparatus. Bss is the accumulation possibility of excesspore pressure. It is an empirical index used to quantify the different

Fig 9. (continued)
154 F. Wang, K. Sassa / Physics and Chemistry of the Earth 35 (2010) 149–161
conditions of the traveling path of a sliding mass during actual land-sliding. It is mainly affected by the properties of the soils in the slid-ing zone, the existing situation of groundwater, drainage conditions,etc. There are two extreme cases: when Bss = 0, it represents a com-pletely dry condition; while when Bss = 1, it means a fully saturatedand undrained condition. A suggested range of value is presented inTable 1. In the equation, sss(h,Bss) is the shear resistance of the slidingzone when the thickness of the sliding mass is h and the accumula-tion possibility of excess pore pressure at that location is Bss. Theattribute is the total normal stress when the thickness of the slidingmass is h. As a result, the apparent friction angle mobilized duringlandslide motion /a can be obtained by Eq. (8) and adopted in themotion equations indicated by Eqs. (2) and (3).
Fig. 6 shows the change of apparent friction coefficient with thechange of thickness h of the sliding mass and Bss. Two curves andone horizontal line of a different value for Bss represent the threetypes of landslides (A, B, and C) which cross at ‘‘D” point. For
case-B and case-C, from the left side to the right, the apparent fric-tion coefficient increases with the decrease of the thickness. Theapparent friction coefficient is generally smaller when the valueof is larger. When this value goes beyond the ‘‘D” point to the right,the apparent friction coefficient becomes greater than tan /0r . Thismeans that when the upper debris layer becomes thinner than acritical thickness, hcr (defined by Eq. (9)), suction or cohesion willoccur. In an actual case, it is almost impossible to keep suction inthe sliding zone because of the broken nature of the sliding mass,so we assume that the apparent friction coefficient equals tan /0rwhen h is smaller than hcr.
hcr ¼sss
c cos2 h tan /0rð9Þ
Due to the contribution of IPL-M101 APERITIF Project – ArialPrediction of Earthquake and Rain-Induced Rapid and Long Travel-ing Flow Phenomena – by the Special Coordinating Fund for Pro-

Fig. 10. Site maps for the case study landslides. (a) The 1995 Fei Tsui Road landslideand Shum Wan slide in Hong Kong and (b) the 1903 Frank slide in Canada.
Table 2Mechanical parameters used in the simulation of the 1995 Fei Tsui Road landslide.
For sliding zoneInitial apparent friction coefficient (tan /ia) 0.40Accumulation possibility of excess pore pressure (Bss) 0.90Lateral earth pressure coefficient (k) 0.50Effective residual friction coefficient at sliding zone (tan /0r) 0.70Shear resistance of sliding zone at steady state (sss) 30 kPa
For sliding massUnit weight of sliding mass 20 kN/m3
Cohesion inside sliding mass 0 kPa
F. Wang, K. Sassa / Physics and Chemistry of the Earth 35 (2010) 149–161 155
moting Science and Technology of the Government of Japan (Rep-resentative: K. Sassa) (Sassa, 2004), the simulation program wasprofessionally improved. The program was written in C++ language.Its interface is very similar to MS-Word and is user-friendly. It canbe easily operated in a Windows system. For the input data, it re-quires: (1) topographic data of the slope surface and sliding sur-face, such as a Digital Elevation Model (DEM). These data can bemesh data or control point data by random. If the input data arecontrol point data by random, they will be transferred to mesh databefore simulation, by means of the application of surface fitting,and gridding (Shiono et al., 1988). (2) Mechanical parameters ofthe sliding zone and sliding mass. These parameters described inthe above two models should be prescribed. As a result of simula-tion, text files and jpeg files of thickness for arbitrary steps and vi-deo file can be produced as output. The maximum velocities in thex and y directions are shown in the jpeg files of landslide motionand the average velocities are given in an independent text file.
When the maximum velocities approach to zero, the simulationcalculation will be terminated.
3. Parametric study to confirm the validity of the two models
To confirm the validity of the combination of the two models, aparametric study was conducted, at first on a simple slope. Itsdimensions were as follows: the width was 150 m, the lengthwas 210 m (90 m in slope part, and 120 m in plain part), and theslope angle was 35� (Fig. 7).
The initial sliding mass was set up as a prolate spheroid. Thethree axial dimensions were: 40 m for the shortest axis, 75 m forthe longest axis, and 50 m for the middle-sized axis. The longestaxis dipped to the slope direction, and was inclined 20� downslopefrom horizontal. It should be mentioned that the basic center of thespheroid was located at the surface of the slope, and the lower halfof the spheroid formed the sliding surface. Fig. 7 shows the thick-ness distribution of the initial sliding mass. The volume of the slid-ing mass was 18,185 m3. Fig. 8 shows an example of resultsobtained when k = 0.3, sss = 20 kPa, Bss = 1, effective residual fric-tion coefficient for sliding zone is tan /0r ¼ 0:577 ð/0r ¼ 30�Þ, andthe unit weight of the sliding mass is 20 kN/m3. The maximumvelocities in the x and y directions are shown in the jpeg figureswith the step number and time intervals. Fig. 8 shows the motionprocess of a landslide from acceleration to deceleration, and finally,for the stopped state which can be easily observed.
It should be pointed out that our models aim at modeling thesimulation after slope failure. As a pre-condition, the slope can failfor any reason, as the triggering mechanism is irrelevant. As thefirst step of calculation, an initial value of apparent friction coeffi-cient which is low enough to make the first movement of the slid-ing mass happen, is necessary. In this case, 0.6 was set as the initialvalue for the apparent friction coefficient. This value is only used inthe first step. In the second step, the apparent friction coefficientswere calculated with the model for apparent friction coefficientchange, and the initial value of the apparent friction coefficient(0.6 in this case) was not used again after the calculation in the firststep.
Fig. 9 shows two series of results at the stopped state in order toobserve the effects of shear resistance at steady state and earthpressure coefficient. Fig. 9a is the 3D images; Fig. 9b is a centrallongitudinal section with H/L (equivalent coefficient of friction);and Fig. 9c is the planar distribution of the landslide mass.
From these results, the following tendencies could be observed,which are reasonable from the viewpoint of soil mechanics.
(1) A larger earth pressure coefficient will increase the lateralspreading tendency and make the sliding distanceshorter. This will result in a larger equivalent coefficient offriction.
(2) A larger shear resistance at steady state will decrease thesliding distance of the sliding mass, and result in a largerequivalent coefficient of friction.

Fig. 11. Plots of calculated landslide motion of the 1995 Fei Tsui Road landslide. Water-blue line represents the source area of the landslide, and the red-purple linerepresents the motion boundary of the simulated landslide. The contour interval is 2 m for this case. The thickness of the sliding mass was enlarged three times for clearpresentation.
Fig. 12. Calculated movement velocities of the 1995 Fei Tsui Road landslide in x direction (u) and y direction (v).
156 F. Wang, K. Sassa / Physics and Chemistry of the Earth 35 (2010) 149–161
4. Application to three case studies
With the data supplied by the Review Committee for Bench-marking Exercise on Landslide Runout Analysis, the 2007 Interna-tional Forum on Landslide Disaster Management, Hong Kong(Hungr et al., 2007), we calculated results for three actual landslidecases, in order to compare our simulated results. These cases are:
(1) the 1995 Fei Tsui Road landslide in Hong Kong, (2) the 1995Shum Wan landslide in Hong Kong, and (3) the 1903 Frank slidein Canada. Fig. 10a is the site map for the 1995 Fei Tsui Road land-slide and Shum Wan landslide in Hong Kong, and Fig. 10b is thesite map for the 1903 Frank slide.
According to the requirements of the Review Committee forBenchmarking Exercise (Hungr et al., 2007), the simulation resultsare reported as follows:

Table 3Mechanical parameters used in the simulation of the 1995 Shum Wan landslide.
For sliding zoneInitial apparent friction coefficient (tan /ia) 0.40Accumulation possibility of excess pore pressure (Bss) 0.90Lateral earth pressure coefficient (k) 0.60Effective residual friction coefficient at sliding zone (tan /0r) 0.70Shear resistance of sliding zone at steady state (sss) 23 kPa
For sliding massUnit weight of sliding mass 20 kN/m3
Cohesion inside sliding mass 0 kPa
F. Wang, K. Sassa / Physics and Chemistry of the Earth 35 (2010) 149–161 157
(1) The mechanical parameters input.(2) Detailed plots of the flowing mass during landslide motion
and after it has stopped. For comparison, the actual distribu-tion area of the landslide is added in the last column follow-ing the calculation result.
(3) Movement velocities at various steps.(4) Brief comments for each case study.
Our program could not supply the movement vectors, becausethe finite difference method was used in the calculation.
4.1. Case study of the 1995 Fei Tsui Road landslide
The following is a brief introduction to the Fei Tsui Road Land-slide by the Hong Kong Geotechnical Engineering Office (GEO). The1995 Fei Tsui Road landslide is a planar failure on a cut slope, with14,000 m3 debris sliding on a shallow-dipping, weak, kaolin-rich
Fig. 13. Plots of calculated landslide motion of the 1995 Shum Wan landslide. Water-bluthe motion boundary of the simulated landslide. The contour interval is 2 m for this case
discontinuity within weathered volcanic rock. The GPS coordinatesare: +22.2612611 and�114.2326278. The landslide resulted in onefatality at Fei Tsui Road, Hong Kong. Details of the landslide mech-anism, geological conditions, operating shear strength parametersand groundwater pressure of the failure, and deposition of land-slide debris were presented in a post-failure forensic investigationcarried out by the GEO (2006a).
The landslide debris disintegrated during movement, and hada travel angle of about 24�. The travel angle is the inclination ofthe line connecting the top point of the main scarp to the toeof the landslide deposit. A small travel angle represents highmobility of a landslide. The sliding surface material detachedfrom the slope face of the cut slope and accelerated downwardat an elevation of about 7 m above the ground fronting the slope,i.e., part of the debris, was airborne for a distance before hittingthe ground. The Digital Elevation Model has been built on theGeographic Information System platform based on the 1:1000topographic maps and spot heights. It is uniformly at a 1-m-gridresolution.
Table 2 shows the mechanical parameters used in the simula-tion. To make the slope fail at the first step, the initial value ofapparent friction coefficient tan /ia was assumed as 0.4. Fig. 11shows the plots of the flowing mass during landslide motion andafter it stopped, while the stopping point was defined for all thecases when the average maximum velocity in x and y directions be-come smaller than 0.1 m/s. Fig. 12 shows the average velocities fordifferent steps in the x and y directions.
This is an easy case for our simulation. The velocity in the ydirection shows acceleration at first and then deceleration. The
e line represents the source area of the landslide, and the red-purple line represents. The thickness of the sliding mass was enlarged three times for clear presentation.

Fig. 14. Calculated movement velocities of the 1995 Shum Wan landslide in the x direction (u) and the y direction (v).
Fig. 15. The Frank Slide in Canada (photo courtesy Prof. D.M. Cruden, University ofAlberta).
158 F. Wang, K. Sassa / Physics and Chemistry of the Earth 35 (2010) 149–161
main landslide motion was about 20 s in length of time. Thereafter,it took about 30 s to stop. All values of the parameters used in thesimulation are reasonable for soils.
4.2. Case study of the 1995 Shum Wan landslide
This open hillside failure, involving 26,000 m3 of ground mate-rials, occurred on a heavily vegetated hillside after a prolongedheavy rainstorm. The GPS coordinates are: +22.2399629 and�114.1668972. Details of the landslide mechanism, geological con-ditions, operating shear strength parameters and groundwaterpressure of the failure, and deposition of landslide debris were re-ported in a post-failure forensic investigation carried out by theHong Kong Geotechnical Engineering Office and the findings aredocumented in GEO (2006b).
The open hillside failure was fast-moving in nature. The land-slide travelled down the densely vegetated hillside with a negligi-ble amount of debris entrainment, continued across the two-laneroad and severely damaged three shipyards and one factory. Itcaused two fatalities and injured five persons. The Digital ElevationModel has been built on the Geographic Information System plat-
form from the published 1:1000 topographic maps and spotheights. It is uniformly at a 5-m-grid resolution.
Table 3 shows the mechanical parameters used in the simula-tion. Fig. 13 shows the plots of the flowing mass during landslidemotion and after it stopped. Fig. 14 shows the average velocitiesfor different steps in the x and y directions.
This is also a simple case. The mechanical parameters were ap-plied for all of the calculation area. The acceleration–deceleration–stoppage process, which continued for 27 s, can be confirmed fromthe velocity change data. This case is a typical type of shallow land-slide moving for a long distance.
4.3. Case study on Frank slide, Canada
The following is a brief introduction of the Frank slide by Froeseet al. (2007). The Frank slide of 1903 was the deadliest landslidedisaster in Canadian history, having destroyed a portion of thetown of Frank with a loss of approximately 70 lives (McConnelland Brock, 1904). The GPS coordinates are: +49.575000 and�114.414000. It was a typical rock avalanche (for classificationsee Hungr et al., 2001), involving approximately 36 million m3 offragmented limestone rock (Cruden and Krahn, 1978). The rock de-tached from the ridge of Turtle Mountain over a front about 700 mwide, disintegrated into fragments, descended the 800 m highslope, crossed talus aprons and glacial drift benches and coveredthe floodplain of the Crowsnest River and the opposite hillside ina deposit about 1.7 km wide, and almost 2 km long (Fig. 15). Thedeposit is approximately 18 m thick, on average. It exhibits well-developed inverse grading, with mean grain sizes ranging fromsandy gravel at the base to boulders several meters in diameterat the surface (Cruden and Hungr, 1986). The debris caused onlyminor damming of the Crowsnest River, indicating that the land-slide eroded some material from the floodplain, but also that themaximum thickness of the deposit does not coincide with its prox-imal sector.
The geometric data is based on a ‘‘bare earth” Digital ElevationModel (DEM) obtained by a LiDAR survey with 1 m resolution interms of elevation, provided by the Province of Alberta GeologicalSurvey (AGS). The data was supplemented by additional surveypoints obtained from AGS. The model was then converted into aGolden Software ‘‘Surfer” grid file with 20 m grid spacing in bothdirections. Through data calculation, the elevations of the slidingsurface and the slope surface of the mountain were obtained. Val-ley elevations have been adjusted to approximately simulate pre-

Fig. 16. Plots of calculated landslide motion of the Frank slide. The thickness of the sliding mass was enlarged three times for clear presentation. The last two illustrations arethe photo and topographic map of the Frank slide, where the deposition area can be used for comparison with the simulation results.
Table 4Mechanical parameters used in the simulation of the Frank slide.
For sliding zoneInitial apparent friction coefficient (tan /ia) 0.50
Accumulation possibility of excess pore pressure (Bss)For the area lower than 1320 m 0.98For the area between 1320 m and 1600 m 0.55For the area higher than 1600 m 0.30
Lateral earth pressure coefficient (k)For the area lower than 1320 m 0.80For the area between 1320 m and 1600 m 0.60For the area higher than 1600 m 0.50
Effective residual friction coefficient at sliding zone (tan /0r) 0.75
Shear resistance of sliding zone at steady state (sss)For the area lower than 1320 ma 17 kPaFor the area higher than 1320 m 80 kPa
For sliding massUnit weight of sliding mass 20 kN/m3
Cohesion inside sliding mass 0 kPa
a The shear resistance at steady state for the area lower than 1320 m was mea-sured by Sassa et al. (1998) with ring-shear apparatus.
2 For interpretation of color in Figs. 4, 5, 7–9, 11–14, 16, and 17, the reader isreferred to the web version of this article.
F. Wang, K. Sassa / Physics and Chemistry of the Earth 35 (2010) 149–161 159
slide conditions. Two grids represent the thickness distribution ofthe source area. One is the detached block of solid rock, the otheris expanded in vertical thickness by 20% to account for fragmenta-
tion. A rectified orthophoto of the area at a resolution of 600 dotsper inch was obtained and registered with the DEM.
For the purpose of back-analysis of the 1903 slide, the DEM wasmodified to approximate the pre-1903 conditions, using evidencefrom the literature and the observation that the Crowsnest Riverdid not change course significantly. The pre-slide slope surface inthe source area was reconstructed approximately using historicphotographs. The source volume was adjusted so as to accountfor 20% ‘‘bulking” due to fragmentation during the landslide (afragmented volume of 36 million m3). The DEMs were smoothedusing the Surfer program, to improve numerical efficiency of mod-els. Unfortunately, information regarding movement velocity is notavailable. However, based on eyewitness interviews, McConnelland Brock (1904) conclude that the ‘‘time that elapsed betweenthe first crash and complete rest did not exceed 100 s, and mayhave been somewhat less”.
In the calculation illustrations in Fig. 16, the water-blue linerepresents the source area of the landslide, and the red-purple2
line represents the motion at the boundary of the simulated land-slide. The contour interval is 10 m for this case. On the last illustra-tion in Fig. 16 (a map), the water-blue line shows the source area ofthe slide and deposition area after sliding.

Fig. 17. Calculated movement velocities of the Frank slide in the x direction (u) and the y direction (v).
160 F. Wang, K. Sassa / Physics and Chemistry of the Earth 35 (2010) 149–161
The thickness data which is expanded by 20% were used in thiscalculation. Table 4 shows the mechanical parameters used in thesimulation. Fig. 16 shows the plots of the flowing mass duringlandslide motion and after it stopped. For comparison, the airphoto and a map with boundary lines showing the source area ofthe slide and the deposition area after sliding were overlain witheach other. Fig. 17 shows the average velocities for different stepsin the x and y directions.
Due to the large extent of the study area, a 20 � 20 m mesh wasemployed instead of the usual 10 � 10 m mesh. As shown in Table4, we used different parameters of accumulation possibility for ex-cess pore pressure, and lateral earth pressure coefficient for differ-ent areas at different elevations, which shows different hydro-geological conditions and different landslide motion styles. Thereason is that the areas lower than 1320 m are near a river andthe sliding surface was likely formed within the saturated layer,as the landslide mass scraped the soil layer above the groundwatertable. For the shear resistance of the sliding zone at steady state, atested value of 17 kPa by ring-shear tests on the sample taken fromthis site by Sassa et al. (1998) was used, while 80 kPa was assumedfor the bedrock area. Comparing the distribution area of the slidingmass after it stopped with the actual distribution area of the Frankslide, it can be seen that the simulation result coincided well withthe actual case. The acceleration–deceleration–stoppage processcan be observed from the velocity change of u and v in Fig. 17, inx and y directions, respectively, in which changes show reasonabledistribution.
5. Conclusions
Through the simulation on three different landslides, the fol-lowing conclusions are drawn.
(1) The combination of Sassa’s geotechnical model of landslidemotion and Wang and Sassa’s model for apparent frictioncoefficient change during landslide motion validates thesimulation for landslide motion as being similar to the actualcases.
(2) The combination of the two models uses reasonablemechanical parameters in the simulation and can producereasonable results. This means that this program can alsobe used for prediction of landslide motion, if we canobtain the mechanical parameters related to the landslidemotion.
Because the models used in the landslide motion simulationadopted soil parameters with geotechnical meaning, and most ofthese parameters can be measured or estimated with availablemeasurements and knowledge, it is hopeful that these modelscan be used to predict landslide motion for the purpose of landslidedisaster mitigation, and land-use planning.
As a numerical analysis method, there are some limits in thesemodels. For example, it will be difficult to calculate the simulationwhen the topography has large gaps, and obvious discontinuities,such as cliffs and culverts. Further improvement is necessary fora more perfect and robust simulation tool.
Acknowledgements
This study was carried out with the support from the project,‘‘Areal Prediction of Earthquake and Rain-Induced Rapid andLong-traveling Flow Phenomenon” (APERIF), of the Special Coordi-nating Fund for Promoting Science and Technology of the Ministryof Education, Culture, Sports, Science and Technology of Japan(MEXT). Lynn Highland of US Geological Survey reviewed andmade several valuable suggestions to the first draft of this paper.The authors appreciated three reviewers for their constructingcomments to improve the quality of this paper. Thanks are also gi-ven to the Review Committee for Benchmarking Exercise on Land-slide Debris Runout and Mobility Modelling (Chairs: O. Hungr, N.R.Morgenstern, and H.N. Wong) of the 2007 International Forum onLandslide Disaster Management for supplying the DEM data forcase studies in this paper.
References
Cruden, D.M., Hungr, O., 1986. The debris of the Frank Slide and theories ofrockslide–avalanche mobility. Canadian Journal of Earth Sciences 23, 425–432.
Cruden, D.M., Krahn, J., 1978. Frank Rockslide, Alberta, Canada. In: Voight, B. (Ed.),Rockslides and Avalanches, vol. 1. Elsevier, Amsterdam, pp. 365–392.
Froese, C., Hungr, O., McDougall, S., 2007. The Frank Slide, Alberta, Canada.Documents for the Landslide Runout Analysis Benchmarking Exercise. The 2007International Forum on Landslide Disaster Management, Hong Kong, 10–12December 2007.
Geotechnical Engineering Office, 2006a. Report on the Fei Tsui Road Landslide of 13August 1995, vols. 1 and 2. Geotechnical Engineering Office, Hong Kong, 150 p.(GEO Report No. 188).
Geotechnical Engineering Office, 2006b. Report on the Shum Wan Road Landslideon 13 August 1995, vols. 1 and 2. Geotechnical Engineering Office, Hong Kong,120 p. (GEO Report No. 178).
Heim, A., 1932. In: Skermer, N. (Ed.), Landslide and Human Lives (Bergsturz undMenschenleben). Bi-Tech Publishers, Vancouver.

F. Wang, K. Sassa / Physics and Chemistry of the Earth 35 (2010) 149–161 161
Hungr, O., 1995. A model for the runout analysis of rapid flow slides, debris flows,and avalanches. Canadian Geotechnical Journal 32, 610–625.
Hungr, O., Evans, S.G., Bovis, M., Hutchinson, J.N., 2001. Review of the classificationof landslides of the flow type. Environmental and Engineering Geoscience VII,221–238.
Hungr, O., Morgenstern, N.R., Wong, H.N., 2007. Review of benchmarking exerciseon landslide debris runout and mobility modelling. In: Ho, K., Li, V. (Eds.),Proceedings of the 2007 International Forum on Landslide DisasterManagement, Hong Kong, 10–12 December 2007, vol. II, pp. 755–812.
Hutchinson, J.N., 1986. A sliding-consolidation model for flow slides. CanadianGeotechnical Journal 23 (2), 115–126.
McConnell, R.G., Brock, R.W., 1904. The Great Landslide at Frank, Alberta. AnnualReport for the Year 1902–1903. Department of the Interior, Government ofCanada Sessional Paper 25, pp. 1–17.
Okada, Y., Sassa, K., Fukuoka, H., 2000. Liquefaction and the steady state ofweathered granite sands obtained by undrained ring shear tests: a fundamentalstudy on the mechanism of liquidized landslides. Journal of Natural DisasterScience 22 (2), 75–85.
Perla, R., Cheng, T.T., McCling, D.M., 1980. A two-parameter model of snowavalanche motion. Journal of Glaciology 26, 197–207.
Sassa, K., 1985. The geotechnical classification of landslides. In: Proc. of 4thInternational Conference and Field Workshop on Landslides, pp. 31–40.
Sassa, K., 1988. Geotechnical model for the motion of landslides. In: Proceedings,5th International Symposium on Landslides, vol. 1, pp. 37–56.
Sassa, K., 1994. Development of Ring-shear Apparatus to Simulate Earthquake-induced Landslides. Grant-in-Aid for Scientific Research, Japanese Ministry ofEducation, Culture, Sports, Science and Technology, 106 p. (Project No.03556021, Representative: Kyoji Sassa).
Sassa, K., 1998. Mechanisms of landslide triggered debris flow. In: Sassa, K. (Ed.),Proc. of IUFRO Div. 8 Conference, Environmental Forest Science, KluwerAcademic Publisher, Kyoto, pp. 471–490.
Sassa, K., 2004. Preface. Landslides, vol. 1, No. 3, pp. 169–171 (Theme issue for IPL-M101 ‘‘APERITIF project”).
Sassa, K., Fukuoka, H., Wang, F.W., Evans, S.G., 1998. Sliding surface liquefaction andundrained loading mechanism in rapid landslides in Japan and Canada. In: Proc.8th Int’l IAEG Congress, pp. 1923–1930.
Shiono, K., Masumoto, S., Watatsumi, K., 1988. Contour Map with BASIC, IIApplication. Kyoritsu Press, Japan. 171 p.
Wang, F.W., Sassa, K., 2002. A modified geotechnical simulation model for the arealprediction of landslide motion. In: Proc. 1st European Conf. on Landslides,Prague, pp. 735–740.
Zhang, D., Sassa, K., 1996. A study of the apparent friction angle after failure duringundrained shear of loess soils. Journal of the Japan Society for Erosion ControlEngineering 49 (3), 20–27 (in Japanese with English abstract).
Copyright © 2022 FDOKUMEN