Integrated micro-and miniscale electromechanical systems ...
18
Rochester Institute of Technology RIT Scholar Works Articles 2002 Integrated micro-and miniscale electromechanical systems with permanent-magnet servo-motors and VLSI drivers–controllers Sergey Lyshevski Alexander Nazarov John Boggs Follow this and additional works at: hp://scholarworks.rit.edu/article is Article is brought to you for free and open access by RIT Scholar Works. It has been accepted for inclusion in Articles by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected]. Recommended Citation Mechatronics, Vol. 12, No. 6, pp. 1115-1131
-
Upload
khangminh22 -
Category
Documents
-
view
5 -
download
0
Transcript of Integrated micro-and miniscale electromechanical systems ...

Rochester Institute of TechnologyRIT Scholar Works
Articles
2002
Integrated micro-and miniscale electromechanicalsystems with permanent-magnet servo-motors andVLSI drivers–controllersSergey Lyshevski
Alexander Nazarov
John Boggs
Follow this and additional works at: http://scholarworks.rit.edu/article
This Article is brought to you for free and open access by RIT Scholar Works. It has been accepted for inclusion in Articles by an authorizedadministrator of RIT Scholar Works. For more information, please contact [email protected].
Recommended CitationMechatronics, Vol. 12, No. 6, pp. 1115-1131

Integrated micro- and miniscaleelectromechanical systems with
permanent-magnet servo-motors andVLSI drivers–controllers
Sergey Edward Lyshevski *, Alexander Nazarov, John Boggs
Department of Electrical and Computer Engineering, Purdue University at Indianapolis,
723 West Michigan Street, Room SL160, Indianapolis, IN 46202-5132, USA
Abstract
The current trends in development and deployment of advanced micro- and miniscale
electromechanical systems (MEMS) have facilitated the unified fundamental, applied, and
experimental research activities in the analysis and design of state-of-the-art motion devices
(rotational and translational electromechanical motion devices), integrated circuits (ICs), and
controllers. The objectives of this paper are to design, develop, and compare different control
algorithms for high-performance MEMS with permanent-magnet rotational servo-motors
controlled by ICs (VLSI driver–controller is fabricated using CMOS technology). The prob-
lems to be solved are very challenging because a number of long-standing issues in design,
hardware integration, control, nonlinear analysis, and robustness have to be solved. The major
emphases of this paper are the analysis and design of robust servo-systems, as well as the
comparison of the dynamic performance of closed-loop MEMS with different control algo-
rithms. We synthesize, verify, and test proportional–integral, integral with state feedback
extension, relay, and sliding mode controllers. It is illustrated that the sliding mode control
laws drive the states and tracking error to the switching surface and maintain (keep) the states
and tracking error within this nonlinear switching surface in spite of different references,
disturbances, parameter variations, and uncertainties. That is, robust tracking, desired accu-
racy, and disturbance attenuation are achieved. We report the experimental setup which was
built to perform the advanced studies of high-performance MEMS. The testbed was built to
integrate permanent-magnet microscale servo-motor and ICs (driver–controller).
� 2002 Published by Elsevier Science Ltd.
Mechatronics 12 (2002) 1115–1131
*Corresponding author. Tel.: +1-317-278-1960; fax: +1-317-274-4493.
E-mail address: [email protected] (S.E. Lyshevski).
0957-4158/02/$ - see front matter � 2002 Published by Elsevier Science Ltd.
PII: S0957-4158 (02 )00017-X

1. Introduction
In many applications, e.g., avionics, medicine, robotics and telecommunication,microscale drives and servos are required and will be widely used. It was reported in[5,9] that superior high torque density high-speed microtransducers can be devisedand fabricated using the surface micromachining technology. Microtransducers(microscale motion devices which can be used as actuators and sensors) with di-ameter 1–2 mm were designed and fabricated. The angular velocity is up to 100 000rad/s and the electromagnetic torque is in the lN-m range. These microtransducersmust be integrated with microelectronics and sensors in order to regulate motiondevices. In fact, micro- and miniscale permanent-magnet servo-motors with VLSIdrivers–controllers are widely used in high-performance mechatronic and electro-mechanical systems because these motors and drivers are simple, efficient, affordable,and reliable. Excellent dynamic characteristics, high accuracy precision and ex-panded operating envelopes can be achieved by using robust controllers augmentedwith pulse-width-modulated amplifiers––MOSFETs four quadrant power stage tocontrol the average applied voltage supplied to the motor windings. High-perfor-mance VLSI drivers with embedded controllers (capable to implement advancedcontrol algorithms) are the current trends in design of high-performance MEMS[2,5].
Many difficulties and unsolved problems in design and development of MEMShave prompted research to improve closed-loop system performance, hardwareflexibility and usability. New trends in motion control of MEMS have fosteredsynthesis and deployment of sophisticated algorithms. Innovative inroads in analysisand design of high-performance MEMS are taking place. However, an unifiedanalysis and design theory has not been developed yet, and this paper reports in-novative concepts. Micro- and miniscale electromechanical motion devices can beregulated using VLSI drivers–controllers fabricated using CMOS technology [5]. Theaverage voltage, applied to the armature winding, is regulated by changing the dutyratio which varies between þ1 and �1. That is, the control signal is bounded. Inaddition, the motor parameters are varying. For example, the armature resistanceand inductance, the back emf (torque ) constant, and the moment of inertia vary dueto the temperature and load changes.
To approach and solve the motion control problem, this paper uses a completemodel of MEMS integrating lumped-parameters mathematical models of micro- andminiscale permanent-magnet servo-motors and ICs. While this research has beenpursued extensively from modeling perspectives, there exist challenging unsolvedproblems in analysis and design. In particular, different constrained control algo-rithms must be designed, analyzed, verified, and tested. These advanced controllersare needed to guarantee stability, precise tracking, accuracy, disturbance attenua-tion, specified steady-state and dynamic behavior, etc. We design and examine dif-ferent control laws. It is illustrated that nonlinear controllers must be synthesizedand deployed in high-performance MEMS. This paper highlights a specific appli-cation of the nonlinear analysis and control theory, and the bounded controllers aresynthesized. The capabilities of the designed MEMS are thoroughly studied and
1116 S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131

illustrated. Our goal is to integrate the current leading-edge engineering and tech-nology developments and apply most promising fundamental research for high-performance micro- and miniscale rotational electromechanical motion devices, ICs,and sensors with ultimate objective to design superior MEMS. From theoreticalstandpoints, this paper solves modeling, identification, and motion control problemsfor integrated MEMS which include actuators, sensors, and ICs with controller.By using an explicit representation of nonlinear dynamics, fundamental problemsin analysis and control are approached and solved to ensure a spectrum of perfor-mance objectives imposed on MEMS. The results reported are the attractive mean toenhance the hardware capability and flexibility, integrate advanced analysis andcontrol, reduce system sensitivity to parameter variations, design robust controlalgorithms which guarantee stability, reduce system complexity, etc. By using thereported innovative inroads in nonlinear analysis and control, MEMS servos anddrives are designed.
2. Modeling of MEMS
The problems of modeling and control of MEMS are very important in manyapplications. A mathematical model is a mathematical description (in the form offunctions or equations) of electromechanical systems which integrate electrome-chanical motion devices (actuators and sensors), ICs and other components. Thepurpose of the model development is to understand, comprehend and utilize differentphenomena and effects. The analysis of the end-to-end behavior and efficiency,modeling, optimization, simulation and other important design steps are performed.The starting point is the mathematical model development. The process of mathe-matical modeling and model development is given below.
The first step is to formulate the modeling problem:
• examine and analyze the integrated MEMS using a multi-level and systematic-level hierarchy concept. That is, develop multi-level input–output subsystem(components) pairs, e.g., actuator––ICs (power stage)––controller, sensor––ICs(input/output microelectronics)––controller, etc.;
• comprehend the structure, device, and system configurations;• gather the data and information;• develop input–output variable pairs, identify the independent and dependent con-
trol, disturbance, output, reference (command), state and performance variables,as well as events;
• making assumptions simplify the problem to make the studied system mathemat-ically tractable (mathematical models, which are the idealization of physical phe-nomena, are never absolutely accurate, and even high-fidelity mathematicalmodels simplify the reality to allow the designer to perform the thorough analysisand accurate predictions of the system performance).
The second step is to derive equations that relate the variables and events:
S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131 1117

• define and specify the basic laws (Ampere, Kirchhoff, Lagrange, Maxwell, andNewton) to be used to obtain the equations of motion: models of electrical, elec-tronic, and mechanical subsystems and devices can be found and augmented toderive a mathematical model of the MEMS using defined variables and events;
• derive mathematical models in the form of differential and difference equations.
The third step is the simulation, analysis, and validation:
• analytically and/or numerically solve differential, difference and hybrid equations;• using information variables (which can be directly measured or observed), synthe-
size the fitting (regret/mismatch) functional;• verify the results through the heterogeneous data-intensive comparison using
model and experimental input-state-output mapping sets, calculate the fittingfunctional and minimize this functional refining mathematical models (revisingdifferential and difference equations as well as adjusting their coefficient basedupon the evidence data);
• examine the analytical and numerical data against new experimental data and ev-idence.
If the matching with the desired accuracy is not guaranteed, the mathematicalmodel must be refined, and the designer must start the cycle again.
Electromagnetic theory and classical mechanics form the basis for the develop-ment of mathematical models. In particular, MEMS can be modeled using Max-well’s equations and torsional–mechanical equations of motion [5,9]. However, fromcontrol perspectives the mathematical models as given by ordinary differentialequations can be used.
Control of the motor angular velocity xr is achieved by changing the armaturevoltage ua using pulse-width-modulation switching. Fig. 1 shows the micro- orminiscale permanent-magnet motor with a high-frequency switching four-quadrantIC controller–driver (e.g., the monolithic 30 V/1A MC33030 ICs controller–driver isfabricated in the plastic package, 648 case).
The applied voltage to the armature winding ua is controlled by the IC driver, andthe output voltage ua is regulated changing the duty ratio dD by IC controller. Ingeneral, the duty ratio is a function of the switching frequency, turn on and turn offtime [2]. For four-quadrant IC power stage, dD 2 ½�1 1�. The settling time of theVLSI drivers–controllers is nanoseconds, while the transient behavior of micro- andminiscale servo-motors in the microseconds range. Thus, the ICs mathematicalmodel to describe transient dynamics can be simplified. Applying the Lagrangeequations of motion, the following mathematical model is developed to modelMEMS with permanent-magnet micromotors and VLSI drivers–controllers [1,2].
duadt
¼ � 1
TIC
ua þkICTIC
dD;
diadt
¼ 1
La
ua �raLa
ia �kaLa
xr;
1118 S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131

dxr
dt¼ kaJia �
BmJ
xr �1
JTL;
dhr
dt¼ xr: ð1Þ
Here, ua and ia are the armature voltage and current; xr and hr are the rotor angularvelocity and displacement; dD is the duty ratio (control variable); TL is the loadtorque; kIC and TIC are the coefficient and time constant of the ICs; ra and La are thearmature resistance and inductance; ka is the back emf (torque) constant; Bm is theviscous friction coefficient; J is the moment of inertia.
From (1), in the state-space form we have
_xxðtÞ ¼ Axþ Bu; ð2Þduadtdiadtdxr
dtdhr
dt
266666666664
377777777775¼
� 1
TIC
0 0 0
1
La
� raLa
� kaLa
0
0kaJ
�BmJ
0
0 0 1 0
2666666664
3777777775
uaiaxr
hr
2664
3775þ
kICTIC
0
0
0
2666664
3777775dD �
0
01
J0
2666664
3777775TL:
In servo-systems, the angular or liner displacements are the outputs. Hence, theoutput equation is
yðtÞ ¼ kgearhrðtÞ; ð3Þ
where kgear is the kinematics gear coefficient.
Fig. 1. MEMS: permanent-magnet motor and IC controller–driver.
S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131 1119

Using differential and output Eqs. (2) and (3), one obtains the block diagram ofthe open-loop MEMS as documented in Fig. 2.
In MEMS drives, the output is the angular velocity. Thus, one has the followingoutput equation
yðtÞ ¼ kgearxrðtÞ:
3. Identification of MEMS
Consider the identification problem for a linear single-input/single-output MEMSas described by the following difference equation in state-space form
xðiÞ ¼ Fmxði� 1Þ þ Gmuði� 1Þ:
This equation is found by discretizing differential Eq. (2) using procedure docu-mented in [10]. Our goal is to identify the unknown matrices Fm 2 Rkk and Gm 2Rk1 of the difference equation found. The least-squares estimation is used to obtainthe vector of estimated parameters p in Fm and Gm [10]. One identifies the unknownparameters
pn ¼ ðUTmnUmnÞ�1UT
mnxmðiÞ¼^
WnxmðiÞusing the measured data
xmðiÞ ¼ Up; xm 2 Rnk1:
Here, U is the regression matrix; xmðiÞ is the vector of measured states.Taking note of (k þ 1) measurements, the measurement vector is described as
xmði; kÞ ¼ Uxfm þ Uugm;
where
xmði; kÞ ¼x1ði; kÞ
..
.
xnði; kÞ
264
375; x1ði; kÞ ¼
x1ðiþ 1Þ...
x1ðiþ kÞ
264
375; xnði; kÞ ¼
xnðiþ 1Þ...
xnðiþ kÞ
264
375
Fig. 2. Block diagram of MEMS.
1120 S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131

Ux ¼Ux1 � � � 0
..
. ... ..
.
0 � � � Uxn
264
375 2 Rnknn; Uu ¼
Uu1 � � � 0
..
. ... ..
.
0 � � � Uun
264
375 2 Rnknl
Ux1 ¼ Uxn ¼ ½x1ði; k � 1Þ � � � xnði; k � 1Þ� 2 Rkn;
Uu1 ¼ Uun ¼ ½u1ði; k � 1Þ � � � ulði; k � 1Þ� 2 Rkl;
fm ¼ ½f1 � � � fn�T 2 Rnn1; f1 ¼ ½F11 � � � F1n�T; fn ¼ ½Fn1 � � � Fnn�T;gm ¼ ½g1 � � � gn�T 2 Rnl1; g1 ¼ ½G11 � � �G1l�T; gn ¼ ½Gn1 � � �Gnl�T:
Thus, the unknown parameters are found as
p1 ¼ W1f1g1
� �2 RðnþlÞ1; � � � ; pn ¼ Wn
fngn
� �2 RðnþlÞ1; W1 ¼ Wn:
4. Control of MEMS
4.1. Proportional–integral control
In [2,3,10], the bounded control laws are synthesized in the nonlinear propor-tional–integral form. In particular,
uðtÞ ¼ satþ1�1 e;
Zedt
�
¼ satþ1�1
X1
j¼0
kpje2jþ12bþ1
proportional
0BB@ þ
Xr
j¼0
kij1
se
2jþ12lþ1
integral
1CCA; �16 u6 þ 1; ð4Þ
where kpj and kij are the proportional and integral feedback gains; 1, b, r and l arethe nonnegative integers assigned by the designer to attain the specified stabilitymargins, tracking, accuracy, and disturbance attenuation.
Letting 1 ¼ b ¼ r ¼ l ¼ 0, the liner controller is
uðtÞ ¼ satþ1�1 kp0eðtÞ
þ ki0
ZeðtÞdt
�; �16 u6 þ 1: ð5Þ
The tracking error, used in (4), is expressed as eðtÞ ¼ rðtÞ � yðtÞ ¼ hreferenceðtÞ�kgearhrðtÞ.
For MEMS drives we have eðtÞ ¼ rðtÞ � yðtÞ ¼ xreferenceðtÞ � kgearxrðtÞ.
4.2. Tracking integral control
Tracking integral control algorithms can be designed.Augmenting the MEMS dynamics (2) _xxðtÞ ¼ Axþ Bu with the exogeneous sys-
tem _xxrefðtÞ ¼ rðtÞ � yðtÞ ¼ hreferenceðtÞ � kgearhrðtÞ or _xxrefðtÞ ¼ rðtÞ � yðtÞ ¼ xreferenceðtÞ�kgearxrðtÞ, one has the following state-space differential equation
S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131 1121

_xxRðtÞ ¼ ARxR þ BRuþ NRr; y ¼ hx;
where
xR ¼ xxref
� �2 R5
is the augmented state vector;
AR ¼ A 0�h 0
� �2 R55;
BR ¼ B0
� �2 R51
and
NR ¼ 01
� �2 R51
are the matrices of coefficients.The quadratic performance functional is
J ¼ 1
2
Z tf
t0
xTRQxR
�þ uTGu
�dt;
where Q 2 R55 is the positive semi-definite constant-coefficient matrix; G 2 R1 is thepositive weighting coefficient.
Making use of the quadratic performance functional, one finds the control lawusing the first-order necessary condition for optimality. We have
u ¼ �G�1BTR
oVoxR
¼ �G�1 B0
� �ToVoxR
:
The solution of the Hamilton–Jacobi–Bellman equation
� oVot
¼ 1
2xTRQxR þ oV
oxR
�T
AxR � 1
2
oVoxR
�T
BRG�1BTR
oVoxR
is satisfied by the quadratic return function V ¼ 12xTRKxR. Here, K 2 R55 is the
symmetric matrix which must be found by solving the nonlinear differential equation
� _KK ¼ Qþ ATRK þ KTAR � KTBRG�1BT
RK; Kðtf Þ ¼ Kf :
The controller is given as
u ¼ �G�1BTRKxR ¼ �G�1 B
0
� �TKxR:
From _xxrefðtÞ ¼ eðtÞ, one has xrefðtÞ ¼ReðtÞdt.
Therefore, we obtain the integral control law
uðtÞ ¼ �G�1 B0
� �TK
xðtÞReðtÞdt
� �:
1122 S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131

In this control algorithm, the error vector is used in addition to the state feedback. Itwas illustrated that the duty ratio is bounded, and �16 u6 1.
Let us approximate the saturation characteristic by the hyperbolic tangent. Then,applying the procedure given in [4,10], to analytically design a constrained con-troller, one minimizes the nonquadratic functional
J ¼Z tf
t0
xTRQxR
þ G
Ztan�1 udu
�dt;
and the constrained controller is found as
uðtÞ ¼ � tanh G�1 B0
� �TK
xðtÞReðtÞdt
� � !
� �satþ1�1 G�1 B
0
� �TK
xðtÞReðtÞdt
� � !; �16 u6 1:
4.3. Relay (time-optimal) control
Using the method reported in [10], we minimize the following performancefunctional
J ¼ 1
2
Z tf
t0
xTRQxR dt:
The Hamilton–Jacobi equation is
� oVot
¼ min�16 u6 1
1
2xTRQxR
�þ oVoxR
T
ARxRð þ BRuÞ�:
Hence, one finds the control law as
u ¼ �sgn BTR
oVoxR
�; �16 u6 1:
This relay-type control, which theoretically guarantee minimum-time dynamics,cannot be implemented in practice due to the chattering phenomenon. Therefore,relay-type control laws with dead zone are commonly used. The dead zone is definedusing the circuitry topology and armature inductance.
4.4. Sliding mode control
Hard- and soft-switching sliding mode control algorithms are synthesized in[6,10], and it is shown that the variable structure theory can be straightforwardlyapplied to design high-performance MEMS. The smooth sliding manifold is
S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131 1123

M ¼ ðt; x; eÞ 2 RP 0f X E tðt; x; eÞj ¼ 0g
¼\mj¼1
ðt; x; eÞ 2 RP 0
� X E tjðt; x; eÞ
�� ¼ 0�:
The time-varying linear and nonlinear switching surfaces are
tðt; x; eÞ ¼ KtxðtÞ KteðtÞ½ � xðtÞeðtÞ
� �¼ KtxðtÞxðtÞ þ KteðtÞeðtÞ ¼ 0;
and tðt; x; eÞ ¼ Ktxeðt; x; eÞ ¼ 0:The soft-switching control law is found as
uðt; x; eÞ ¼ �G/ðtÞ; G > 0;
where /ð�Þ is the continuous real-analytic differentiable function, e.g., tanh anderf.
5. Control of a servo-MEMS
We study the mini-servo system with the following parameters [8]:kIC ¼ 30, TIC ¼ 0:0001 s, rað�Þ 2 ½2:7T¼20 �C 3:7T¼140 �C� X, La ¼ 0:004 H,kað�Þ 2 ½0:11T¼20 �C 0:094T¼140 �C� V s/rad (Nm/A); J ¼ 0:0001 kgm2,Bm ¼ 0:00008 Nm s/rad and kgear ¼ 0:1.The duty ratio is bounded as �1; i.e., �16 dD 6 þ 1.Our goal is to design and verify different control algorithms, and four control laws
are synthesized.
5.1. Proportional–integral controller
Using the procedure reported in section 4.1, the following bounded proportional–integral controller is designed
u ¼ satþ1�1 0:6e
þ 0:03
Zedt�:
Employing the conventional notations, one has rðtÞ ¼ hreferenceðtÞ and yðtÞ ¼ kgearhrðtÞ.It must be emphasized that the proportional–integral controller synthesized is
bounded. The analysis of the transient behavior must be performed. Fig. 3 depictsthe evolution of the state variables and the MEMS output yðtÞ. The reference inputwas assigned to be rðtÞ ¼ 2. The settling time is 0.3 s, and for the worst-case per-formance (if the temperature is 140 �C), the overshoot for yðtÞ is 15%.
5.2. Tracking integral controller
To design a tracking integral control law, the procedure reported in section 4.2 isapplied.
Assigning q11 ¼ 0:0001, q22 ¼ 0:007, q33 ¼ 0:00001, q44 ¼ 0:01, q55 ¼ 4 108 andG ¼ 0:0001, the following controller is found
1124 S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131

u ¼ satþ1�1
� 3:1ua � 19:9ia � 1:3xr � 31:6hr þ 2818:8
Zedt�:
Fig. 4 illustrates the transient dynamics of the closed-loop MEMS.
Fig. 3. System dynamics with proportional–integral control law.
S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131 1125

5.3. Relay controller
We synthesize the relay controller with dead zone. Using the method documentedin section 4.3, one obtains
u ¼ sgnð�0:001ua � 0:0001ia � 0:00085xr � 0:0002hr þ 1:5eÞjDead zone� 0:035:
The MEMS transients are documented in Fig. 5. For rðtÞ ¼ 2, the settling time is0.12 s and the overshoot for yðtÞ is 6% for the rated MEMS parameters (the tem-perature is 20 �C). Using the MEMS parameters which correspond to the worst-case
Fig. 4. System dynamics with tracking integral control law.
1126 S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131

performance (the temperature is 140 �C), the overshoot for yðtÞ is 13%, and thesettling time is 0.15 s.
5.4. Sliding mode controller with soft switching
Using the variable structure design concept, the synthesis of a sliding modecontroller is performed. The nonlinear switching surface is designed as
k1ua þ k2ia þ k3xr þ k4hr þ k5eþ k6e13 ¼ 0:
Fig. 5. System dynamics with relay-type control law.
S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131 1127

Using the Lyapunov stability theory, the feedback gains are found [6,9,10], and acontrol law with soft switching is
u ¼ tanh13ð�0:001ua � 0:01ia � 0:17xr � 0:0002hr þ 23eþ 600e
13Þ:
Fig. 6 illustrates the dynamics of the closed-loop system with the sliding controller.The settling time is 0.1 s with no overshoot. For the worst-case performance (the
Fig. 6. Dynamics with sliding mode control law.
1128 S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131
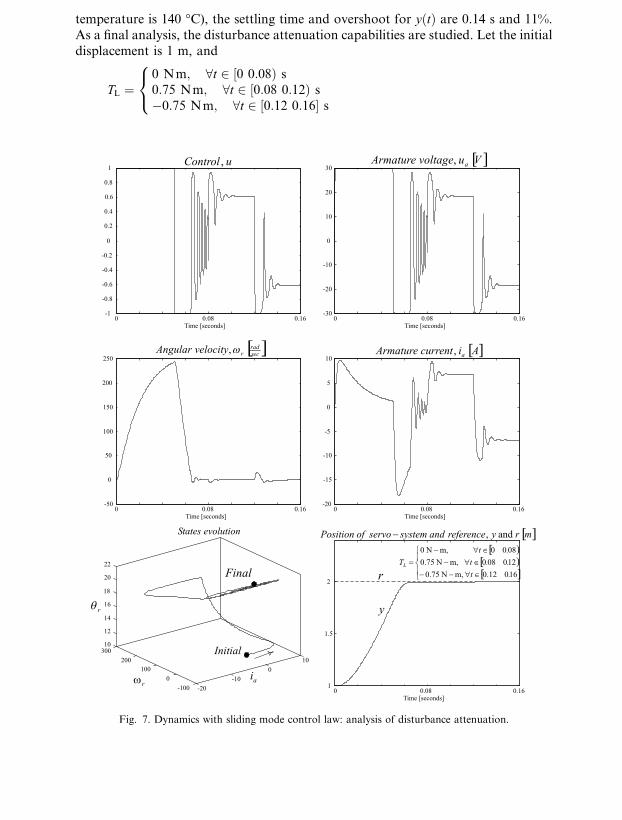
temperature is 140 �C), the settling time and overshoot for yðtÞ are 0.14 s and 11%.As a final analysis, the disturbance attenuation capabilities are studied. Let the initialdisplacement is 1 m, and
TL ¼0 Nm; 8t 2 ½0 0:08Þ s0:75 Nm; 8t 2 ½0:08 0:12Þ s�0:75 Nm; 8t 2 ½0:12 0:16� s
8<:
Fig. 7. Dynamics with sliding mode control law: analysis of disturbance attenuation.
S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131 1129

Fig. 7 depicts the MEMS responses, and the disturbance attenuation features areevident analyzing the output dynamics for yðtÞ.
6. Analysis, identification, and design of a MEMS drive
We consider the MEMS drive actuated by a Hitachi minimotor 004A191E (24 V,0.5 A, 1000 rad/s) with ICs controller–driver MC33030 [7]. Experimental results wereperformed. Using the identification algorithm reported in section 3, the parameterswere identified using the MATLAB files given in [10]. The validity of the identifi-cation results was verified measuring the available parameters (e.g., armature re-sistance, inductance, viscous friction and moment of inertia). We have the followingparameters ra ¼ 33 X, La ¼ 0:0013 H, ka ¼ 0:0176 V s/rad (Nm/A), J ¼ 9 10�7
kgm2 and Bm ¼ 3:7 10�7 Nm s/rad.Using the tracking angular velocity error eðtÞ ¼ xreferenceðtÞ � xrðtÞ, the nonlinear
proportional–integral control law was synthesized. We have
u ¼ satþ1�1 12eþ 4:8e3 þ 27
Zedt þ 0:9
Ze3 dt
�:
Experimental validation for different operating conditions and scenarios werestudied to analyze the dynamic performance of the closed-loop MEMS. The ex-perimental results are documented in Fig. 8, and the scale for the angular velocity is100 rad/s per division. The reference angular velocity was assigned to be 615 rad/sand 125 rad/s. For the step speed command, the settling time is 0.055 s. The MEMSdynamics was studied for the sinusoidal command, and the experimental results forthe xrefðtÞ ¼ 125þ 110 sin t are documented in Fig. 8. The analysis of the experi-mental results indicates that the tracking error converges to zero. From the exper-imental data it follows that the desired performance has been achieved, and theangular velocity precisely follows the reference speed assigned.
Fig. 8. Transient dynamics of the MEMS drive for the step and sinusoidal reference speed.
1130 S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131

7. Conclusions
In this paper, we addressed and solved the problems of nonlinear analysis anddesign of high-performance MEMS. The mathematical model was found, and theunknown parameters of differential and difference equations were identified applyingthe reported identification procedure. Different nonlinear control algorithms weredesigned minimizing quadratic and nonquadratic performance functionals as well asusing PID design method. To design sliding mode (variable structure) controllers, wesynthesized the switching surface to guarantee the desired evolution of states andtracking error. The results illustrate that in order to guarantee good performance,stability, robustness, zero steady-state tracking error, and disturbance attenuation,advanced control algorithms should be used. In particular, it was illustrated thatsliding mode soft switching algorithms provide superior performance and thechattering effect is eliminated. Furthermore, superior robustness and expandedstability margins result. The transient dynamics and three-dimensional state evolu-tions were documented for different control laws. The results were compared anddiscussed for MEMS in servo and drive applications. It was illustrated that con-tinuous and discontinuous control algorithms designed guarantee robustness toparameter variations and stability in the full operating envelopes. Experimental re-sults were reported to support the methods documented, software developed, andhardware built.
References
[1] Krause PC, Wasynczuk O. Electromechanical motion devices. New York: McGraw-Hill Book
Company; 1989.
[2] Lyshevski SE. Electromechanical systems, electric machines, and applied mechatronics. Boca Raton,
FL: CRC Press; 1999a.
[3] Lyshevski SE. Nonlinear control of mechatronic systems with permanent-magnet DC motors. Int J
Mech 1999b;9(6):539–52.
[4] Lyshevski SE. Robust control of nonlinear continuous-time systems with parameter uncertainties and
input bounds. Int J Sys Sci 1999c;30(3):247–59.
[5] Lyshevski SE. Nano- and microelectromechanical systems: fundamentals of nano- and microengi-
neering. Boca Raton, FL: CRC Press; 2000a.
[6] Lyshevski SE. Sliding modes and soft switching control in dynamic systems. Proceedings of American
Control Conference, Chicago, IL, 2000b.
[7] Lyshevski SE, Boggs J. Control and identification of mini-mechatronic systems with permanent-
magnet DC motors: educational experiments and introduction to engineering practice. Mechatronics
Forum and International Conference, Atlanta, GA, 2000c.
[8] Lyshevski SE, Nazarov A. The comparison of robust control algorithms in high-performance
mechatronic systems with permanent-magnet servo-motors. Mechatronics Forum and International
Conference, Atlanta, GA, 2000d.
[9] Lyshevski SE. MEMS and NEMS: structures, devices, and systems. Boca Raton, FL: CRC Press;
2001a.
[10] Lyshevski SE. Control systems theory with engineering applications. Boston, MA: Birkh€aauser; 2001b.
S.E. Lyshevski et al. / Mechatronics 12 (2002) 1115–1131 1131