
IMPROVE DELAY USING POINT OF INTEREST IN MOBILE COVERAGE WIRELESS SENSOR NETWORK
38
1 PRE-DISSERTATION ON IMPROVE DELAY USING POINT OF INTEREST IN MOBILE COVERAGE WIRELESS SENSOR NETWORK Submitted in partial fulfillment of the Requirement for the award of the degree Of MASTER OF TECHNOLOGY IN ECE Wireless Communication By Adusumalli mallikharjuna Rao Under The Esteemed guidance of MR. Koushik Barman School of Electrical & Electronics Engineering Lovely Professional University Punjab APRIL 2015
-
Upload
lovely-professional-university -
Category
Documents
-
view
4 -
download
0
Transcript of IMPROVE DELAY USING POINT OF INTEREST IN MOBILE COVERAGE WIRELESS SENSOR NETWORK
1
PRE-DISSERTATION
ON
IMPROVE DELAY USING POINT OF INTEREST IN MOBILE COVERAGE WIRELESS
SENSOR NETWORK
Submitted in partial fulfillment of the
Requirement for the award of the degree
Of
MASTER OF TECHNOLOGY
IN
ECE
Wireless Communication
By
Adusumalli mallikharjuna Rao
Under The Esteemed guidance of
MR. Koushik Barman
School of Electrical & Electronics Engineering
Lovely Professional University
Punjab
APRIL 2015
2
CERTIFICATE
This is to certify that the Thesis titled “IMPROVE DELAY USING POINT OF INTEREST IN
MOBILE COVERAGE WIRELESS SENSOR NETWORK ” that is being submitted by
“ADUSUMALLI MALLIKARJUNA RAO” is in partial fulfillment of the requirements for the award
of MASTER OF TECHNOLOGY DEGREE (WIRELESS COMMUNICATION ), is a record of
bona fied work done under my/our guidance. The content of this thesis, in full or in parts, have neither
taken from any other source nor have been submitted to any other Institute or university for award of and
degree or diploma and the same is certified.
MR. Koushik Barman
ASSISTANT PROFESSOR
(LOVELY PROFESSIONAL UNIVERSITY)
Objective of the Thesis is satisfactory /unsatisfactory
EXAMINER I EXAMINER II
3
ACKNOWLEDGEMENT
I would like to thank LOVELY PROFESSIONAL UNIVERSITY for giving me opportunity to use
their resource and work in such a challenging environment. I am grateful to the individuals whom
contributed their valuable time towards my thesis.
I wish to express my sincere and heart full gratitude to my guide “MR. Koushik Barman” Assistant
professor, who guides me to take up this thesis in sync with global trends in scientific approach.
I would also like to extend my gratitude to my friends and family who always encouraged and
supported me in this thesis work.
Last but not the least; I would like to thank all the staff members of department of Electronics &
Electrical Engineering who have been very patient and co-operative with us.
ADUSUMALLI MALLIKHARJUNA RAO
Reg. No. 11407829
4
CANDIDATES DECLARATION
I, ADUSUMALLI MALLIKHARJUNA RAO student of MASTER OF TECHNOLOGY
(WIRELESS COMMUNICATION) under Department of ELECTRONIC & COMMUNICATION
ENGINEERING of LOVELY PROFESSIONAL UNIVERSITY, Punjab, hereby declare that all the
information furnished in this pre dissertation reports based on my own intensive research and is genuine.
This pre dissertation does, to the best of my knowledge, contain part of my work which has been
submitted for the award of my degree either of this university without proper citation.
Date:
ADUSUMALLI MALLIKHARJUA RAO
Registration No. 11410097
5
TABLE OF CONTENTS
1.1 SENSOR NODE 5
1.2 PRINCIPLE OF WIRELESS SENSOR NETWORK 5
CHAPTER 2 WIRELESS SENSOR NETWORKS WORK 07
2.1 HOW WIRELESS SENSOR NETWORKS WORKS 07
2.2 TYPES OF SENSOR NETWORKS 08
2.3 BASE STATION DESIGN 10
2.4.1 HARDWARE 11
2.4.2 SOFTWARE 11
2.5 COMMUNICATION 12
2.6.1 SPECIAL FEATURES OF WIRELESS SENSOR NETWORKs 13
2.6.2 DIFFRENT TYPES OF NODES 13
2.6.3 WIRELESS SENSOR NETWORK COVERAGE
2.6.4. COVERAGE TYPE 13
2.6.5 DEPLOYMENT 14
2.6.6 Next Generation Wireless Sensor Nodes 16
2.6.7 Point of interest 16
2.6.8 POI COLLECTIONS 17
2.6.9 APPLICATIONS 17
6
2.7 WIRELESS SENSOR NETWORK APPLICTION 18
2.8 DESIGN ISSUES & CHALLENGS 19
2.9 CHARACTERISTIC REQUIREMENTS FOR WSNC WSNs 19
2.10 FOURTH GENERATION WIRELESS TECHNOLOGIES 20
2.10.1 THE COMMUNICATION PUZZLE 20
2.10.2 THE SCOPE OF VARIOUS WIRELESS TECHNOLOGIES 21
CHAPTER 3 TITLE AND ITS SPECIFICANCE 22
CHAPTER 4 REVIEW OF LITERATURE 23
CHAPTER 5 RESEARCH OBJECTIVE 28
CONCLUSION 29
CHAPTER 6 REFERENCES 30
7
LIST OF FIGURES
Figure No Name of the figure Page no.
1.1 Accessing wsn through inter net 2
1.2 Architecture of wireless sensor network 3
2.1 Sensor node system 7
2.3 Base station design 10
2.4 Model Component Flow 12
2.10 FOURTH GENERATION WIRELESS TECHNOLOGIES 20
2.10.2 THE SCOPE OF VARIOUS WIRELESS TECHNOLOGIES 21
ABSTRACT
8
Wireless sensor networks have been used for many delay-sensitive applications, e.g., emergency
response and plant automation. In such networks, delay measurement is important for a number
of reasons, e.g., real-time control of the networked system, and abnormal delay detection
We prove the sniffer placement problem develop two algorithms to solve it. Using a combination
of small-scale tested experiments and large scale simulation, we demonstrate that our
architecture leads to accurate delay monitoring and is effective in detecting abnormal delays, and
furthermore, the number of sniffers required by algorithms is close to the minimum required
value
In some mobile wireless sensor network applications, it is not necessary to
monitor the entire field all the time, and only a number of critical points or points of
interest need to be monitored periodically. In this paper, we address the improving-
delay POIs coverage in mobile wireless sensor network. problem with cost restriction,
which is how to schedule the limited number of mobile sensors monitoring to improving
the service delay of POIs. Study two scenarios of the problem. In the first scenario, the
start positions of mobile sensors are determined in advance, we propose the SSR
algorithm to address this problem. In the second scenario, without pre-defined start
positions, we propose two algorithms, the TSP-S and the SSNOR. By the
comprehensive simulations, we evaluate the performance of the proposed algorithms.
The simulation results show the efficiency of our algorithms. this techniques applying
delay improving life time .one sensor to anther sensors connoting passing data
without delay

9
CHAPTER 1
INTRODUCTION
A wireless sensor network is a collection of nodes organized into a cooperative network. Each
node consists of processing capability may contain multiple types of memory have an RF
transceiver, have a power source (e.g., batteries and solar cells), and accommodate various
sensors.
Typically, a wireless sensor node (or simply sensor node) consists of sensing, computing,
communication, actuation, and power components. These components are integrated on a single
or multiple boards, and packaged in a few cubic inches. With state-of-the-art, low-power circuit
and networking technologies, a sensor node powered by 2 AA batteries can last for up to three
years with a 1% low duty cycle working mode. A WSN usually consists of tens to thousands of
such nodes that communicate through wireless channels for information sharing and cooperative
processing. WSNs can be deployed on a global scale for environmental monitoring and habitat
study, over a battle filed for military surveillance and reconnaissance, in emergent environments
for search and rescue, in factories for condition based maintenance, in buildings for
infrastructure health monitoring, in homes to realize smart homes, or even in bodies for patient
monitoring
After the initial deployment, sensor nodes are re-possible for self-organizing an appropriate
network infrastructure, often with multi-hop connections between sensor nodes. The onboard
sensors then start collecting acoustic, seismic, infrared or magnetic information about the
environment, using either continuous or event driven working modes. Location and positioning
information can also be obtained through the global positioning system (GPS) or local
positioning algorithms. This information can be gathered from across the network and
appropriately processed to construct a global view of the monitoring phenomena or objects. The
basic philosophy behind WSNs is that, while the capability of each individual sensor node is
limited, the aggregate power of the entire network is scent for the required mission.
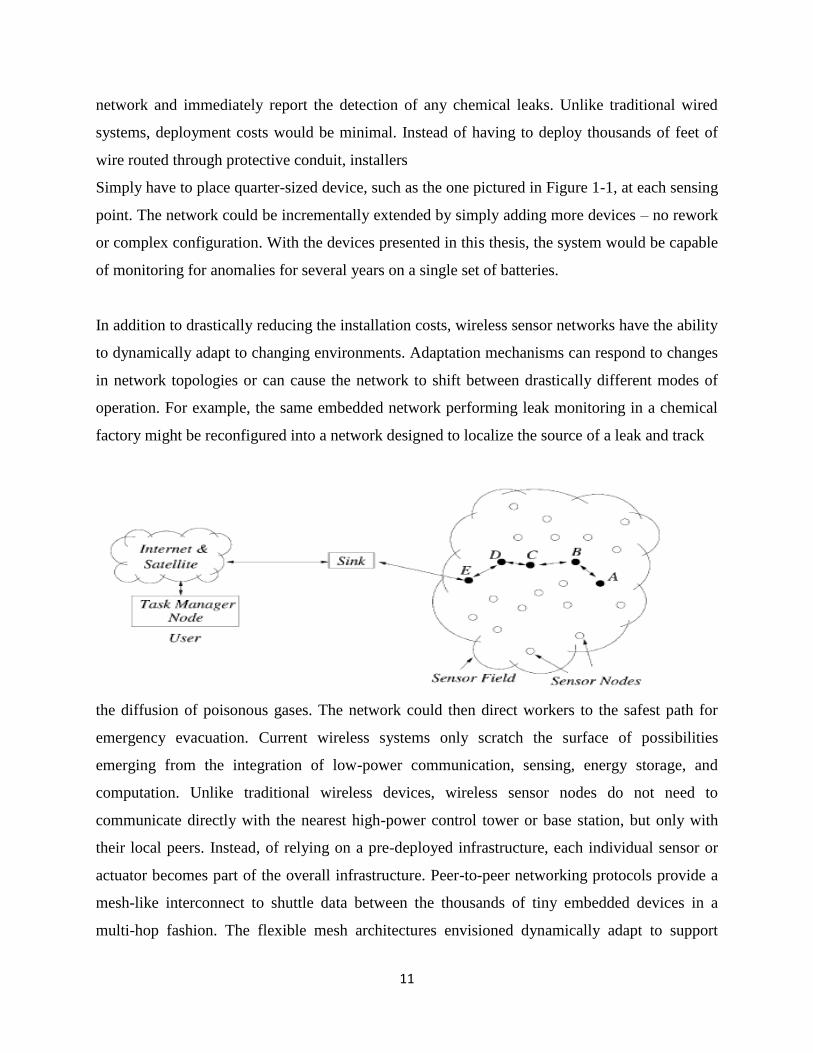
In a typical scenario, users can retrieve information of interest from a WSN by injecting queries
and gathering results from the so-called base stations (or sink nodes), which behave as an

10
interface between users and the network. In this way, WSNs can be considered as a distributed
data base. It is also envisioned that sensor networks will ultimately be connected to the Internet,
through which global information sharing becomes feasible.
Emerging field of wireless sensor networks combines sensing, computation, and communication
into a single tiny device. Through advanced mesh networking protocols, these devices form a sea
of connectivity that extends the reach of cyberspace out into the physical world. As water flows
to fill every room of a submerged ship, the mesh networking connectivity will seek out and
exploit any possible communication path by hopping data from node to node in search of its
destination. While the capabilities of any single device are minimal, the composition of hundreds
of devices offers radical new technological possibilities.
The power of wireless sensor networks lies in the ability to deploy large numbers of tiny nodes
that assemble and configure themselves. Usage scenarios for these devices range from real-time
tracking, to monitoring of environmental conditions, to ubiquitous computing environments, to
in situ monitoring of the health of structures or equipment. While often referred to as wireless
sensor networks, they can also control actuators that extend control from cyberspace into the
physical world.
The most straightforward application of wireless sensor network technology is to monitor remote
environments for low frequency data trends. For example, a chemical plant could be easily
monitored for leaks by hundreds of sensors that automatically form a wireless interconnection
11
network and immediately report the detection of any chemical leaks. Unlike traditional wired
systems, deployment costs would be minimal. Instead of having to deploy thousands of feet of
wire routed through protective conduit, installers
Simply have to place quarter-sized device, such as the one pictured in Figure 1-1, at each sensing
point. The network could be incrementally extended by simply adding more devices – no rework
or complex configuration. With the devices presented in this thesis, the system would be capable
of monitoring for anomalies for several years on a single set of batteries.
In addition to drastically reducing the installation costs, wireless sensor networks have the ability
to dynamically adapt to changing environments. Adaptation mechanisms can respond to changes
in network topologies or can cause the network to shift between drastically different modes of
operation. For example, the same embedded network performing leak monitoring in a chemical
factory might be reconfigured into a network designed to localize the source of a leak and track
the diffusion of poisonous gases. The network could then direct workers to the safest path for
emergency evacuation. Current wireless systems only scratch the surface of possibilities
emerging from the integration of low-power communication, sensing, energy storage, and
computation. Unlike traditional wireless devices, wireless sensor nodes do not need to
communicate directly with the nearest high-power control tower or base station, but only with
their local peers. Instead, of relying on a pre-deployed infrastructure, each individual sensor or
actuator becomes part of the overall infrastructure. Peer-to-peer networking protocols provide a
mesh-like interconnect to shuttle data between the thousands of tiny embedded devices in a
multi-hop fashion. The flexible mesh architectures envisioned dynamically adapt to support

12
introduction of new nodes or expand to cover a larger geographic region. Additionally, the
system can automatically adapt to compensate for node failures.
The vision of mesh networking is based on strength in numbers. Unlike cell phone systems that
deny service when too many phones are active in a small area, the interconnection of a wireless
sensor network only grows stronger as nodes are added. As long as there is sufficient density, a
single network of nodes can grow to cover limitless area. With each node having a
communication range of 50 meters and costing less that $1 a sensor network that encircled the
equator of the earth will cost less than $1MAn example network is shown in Figure 1-2. It
depicts a precision agriculture deployment an active area of application research. Hundreds of
node scattered throughout a field assemble together, establish a routing topology, and transmit
data back to a collection point. The application demands for robust, scalable, low-cost and easy
to deploy networks are perfectly met by a wireless sensor network. If one of the nodes should
fail, a new topology would be selected and the overall network would continue to deliver data. If
more nodes are placed in the field, they only create more potential routing opportunities.
1.1 SENSOR NODE COMPONENTS
• Processing Unit
13
• Transceiver Unit
• Power Unit
• Sensing Unit
• Location Finding System (optional)
• Power Generator (optional)
• Mobilizes (optional)
1.2 PRINCIPLE OF WIRELESS SENSOR NETWORK
Wireless sensor networks are a subset of wireless networking applications, which focus on
enabling connectivity without, the need, generally, of wires to connect to the sensors and
actuators (Gutierrez et al. 2004). Due to the length of the name „wireless sensor and actuator
networks‟‟ or „„wireless sensor and control networks‟‟, most people have adopted the shorter
„„wireless sensor networks‟‟ instead. In any case, it is important to remember that the design of
this type of network is meant to collect information from wireless sensors and send control
commands to actuators attached to the wireless network.
Sensor and actuator networks have existed for decades. Computer based control systems are a
typical hardwired sensor and actuator network. As shown in Fig. 2.1, sensors and actuators are
connected with a central computer or control terminal via a data bus system or other networks
and implement control and monitoring functions. This type of hardwired sensor network is
simple and reliable, and often seen in industrial control such as process control and
manufacturing production control. Because of the involvement of large amount of cabling in the
installation, wired sensor networks are hard to extend. The installation cost of hardwired sensor
networks is high, which takes in the form of cabling, labor, material, testing, and verification.
Furthermore, cables require connectors that can become loose, lost, misconnected, or even break.
This problem is commonly known as the last meter connectivity problem and is called this due to
the analogous problem in a wide area network.
The use of large number of hardwired sensors networked to a system brings considerable
complexity to the system, including cabling deployment, power supply, and configuration,
making it impossible in many cases such as forest monitoring and battlefield surveillance. Recent
14
Integrated Circuit (IC) and Micro Electro Mechanical System (MEMS) have matured to the point
where they enable the integration of wireless communications, sensors and signal processing
together in a single low-cost package, named as a
sensor node Such a sensor node is equipped with data processing and communication
capabilities. A set of such sensor nodes forms a wireless sensor network. It is now feasible to
deploy ultra-small sensor nodes in many kinds of areas to collect information. The sensing
circuitry measures ambient condition related to the environment around the sensor and
transforms them into measurable signals. After necessary processing, the signals are sent to a
pre-defined destination via a radio transmitter. All of these operations are powered by batteries to
ease deployment, since a traditional power supply (i.e. mains power) may not be available. This
type of wireless solutions for sensor networks combines flexible connectivity with ease of
installation. The scope of sensors determines the range of Applications of wireless sensor
networks. There are many types of wireless sensors depending upon the type of sensing required.
CHAPTER 2
WIRELESS SENSOR NETWORKS WORK
15
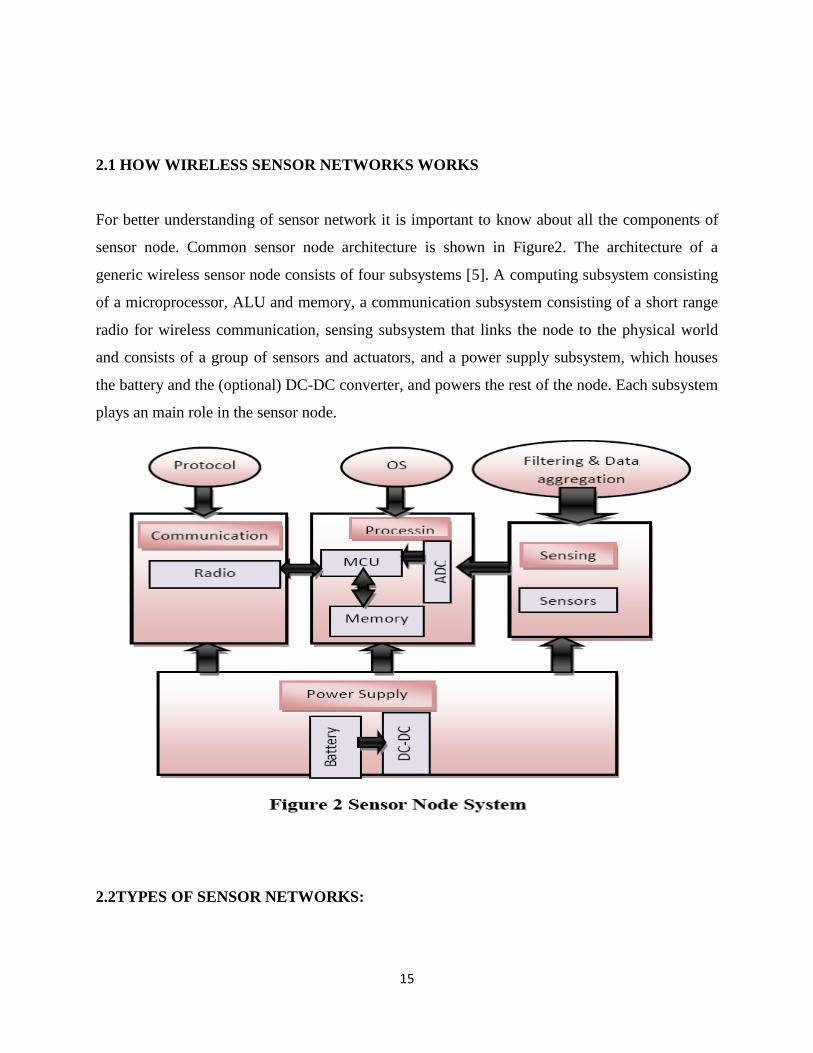
2.1 HOW WIRELESS SENSOR NETWORKS WORKS
For better understanding of sensor network it is important to know about all the components of
sensor node. Common sensor node architecture is shown in Figure2. The architecture of a
generic wireless sensor node consists of four subsystems [5]. A computing subsystem consisting
of a microprocessor, ALU and memory, a communication subsystem consisting of a short range
radio for wireless communication, sensing subsystem that links the node to the physical world
and consists of a group of sensors and actuators, and a power supply subsystem, which houses
the battery and the (optional) DC-DC converter, and powers the rest of the node. Each subsystem
plays an main role in the sensor node.
2.2TYPES OF SENSOR NETWORKS:
16
Wireless sensor networks are deployed on land, underground, and underwater. A sensor network
faces different challenges and constraints according to the environment in the sensor network
deployed. There are five types of the wireless sensor network as discussed by Jennifer et at.[4].
Terrestrial Wireless sensor network.
Underground Wireless sensor network.
Underwater Wireless sensor network.
Multi-media Wireless sensor network.
Mobile Wireless sensor network.
an ad hoc or in a pre-planned manner. In ad hoc deployment, sensor nodes can be dropped from a
plane and randomly placed into the target area. In pre-planned deployment, there is grid
placement, optimal placement, 2-d and 3-d placement models. In a terrestrial WSN, reliable
communication in a dense environment is very essential. Sensor nodes must be able to
successfully communicate with the base station in terrestrial
WSN, while battery power is a limited. In any case, it is essential for sensor nodes to
conserve energy. Energy of sensor nodes can be conserved with multi-hop optimal routing, short
transmission range, in-network data aggregation, reducing data redundancy, minimizing delay
and using low duty-cycle operations in terrestrial WSN .Underground WSNs in which sensor
node covered underground, basically it used for detect used to monitor underground situation.
And sink node are used for transmit information to the sensor node to the base station. This
wireless senor network is more costly as compare to terrestrial WSN in terms of equipment,
deployment, and maintenance. Underground sensor nodes are expensive because proper
components must be used for reliable communication through soil, rocks, water, and other
mineral contents. The underground environment makes wireless communication a challenge due
to signal losses and high levels of attenuation. An underground WSN requires careful planning
energy and cost considerations during deployment to increase network lifetime. Underwater
WSNs consist of a number of sensor nodes and vehicles deployed underwater. Unlike terrestrial
WSNs, underwater sensor nodes are more costly and less dense. Independent underwater
vehicles are used for searching or gathering data from sensor nodes. Sensor nodes communicate
via acoustic waves in underwater WSN. Acoustic communication is a challenge in underwater
17
due to limited bandwidth, long propagation delay, and signal fading problem. Underwater WSNs
consist of a number of sensor nodes and vehicles deployed underwater. Unlike terrestrial WSNs,
underwater sensor nodes are more costly and less dense. Independent underwater vehicles are
used for searching or gathering data from sensor nodes. Sensor nodes communicate via acoustic
waves in underwater WSN. Acoustic communication is a challenge in underwater due to limited
bandwidth, long propagation delay, and signals fading problem. And also node failure. Sensor
node in wireless sensor network has a capability to take a harsh ocean environment condition.
Sensor node have limited battery power which cannot be recharges and replace. For energy
conservation, underwater WSNs involve developing efficient underwater communication and
networking techniques. Multi-media WSNs are used to monitoring and tracking of events in the
form of multimedia. Multi-media WSNs consist of a number of low cost sensor nodes equipped
with cameras and microphones. These sensor nodes communicate with each other for data
retrieval, process, correlation, and compression over a wireless connection. Multimedia sensor
nodes are deployed in a pre-planned manner into the atmosphere for coverage guarantee. High
bandwidth demand, high energy consumption, quality of service (QoS) condition, data
processing and compressing techniques and cross-layer design are challenges in multi-media
WSNs. Multimedia content such as video stream needs high bandwidth in order to content to be
delivered. Therefore, energy consumption is high for high data rate. High bandwidth and low
energy consumption transmission techniques have to be developed. QoS is difficult to preserve
in a multi-media WSNs due to variable
delay and variable channel capacity. It is essential to get a certain level of QoS for reliable
content delivery. In-network processing, filtering, and compression of contents can significantly
improve network performance by filtering and extracting redundant information and merging
contents. Similarly, cross-layer interaction between the layers can improve the processing and
the delivery process. Mobile WSNs is a collection of sensor nodes that can move on their own
and interact with the physical environment. Mobile nodes have the ability of sensing, computing,
and communication like static nodes. A key difference is mobile nodes have the ability to change
the position and organize itself in the network. A mobile WSNs can start with some initial
deployment and nodes can then spread out to gather information. A mobile node can
communicate to another mobile node when they are within the range of each other and transfer
gathered information. Another key difference is data distribution. In mobile WSNs, data can be
18
distributed using dynamic routing while fixed routing or flooding is used in static WSNs. Sensor
nodes deployment, localization, self-organization, navigation and control, coverage, energy,
maintenance, and data process are challenges in mobile WSNs. Mobile WSNs applications
include environment monitoring, target tracking, search and rescue, and real-time monitoring of
hazardous material etc. Mobile sensor nodes can achieve a higher degree of coverage and
connectivity compared to static sensor nodes.
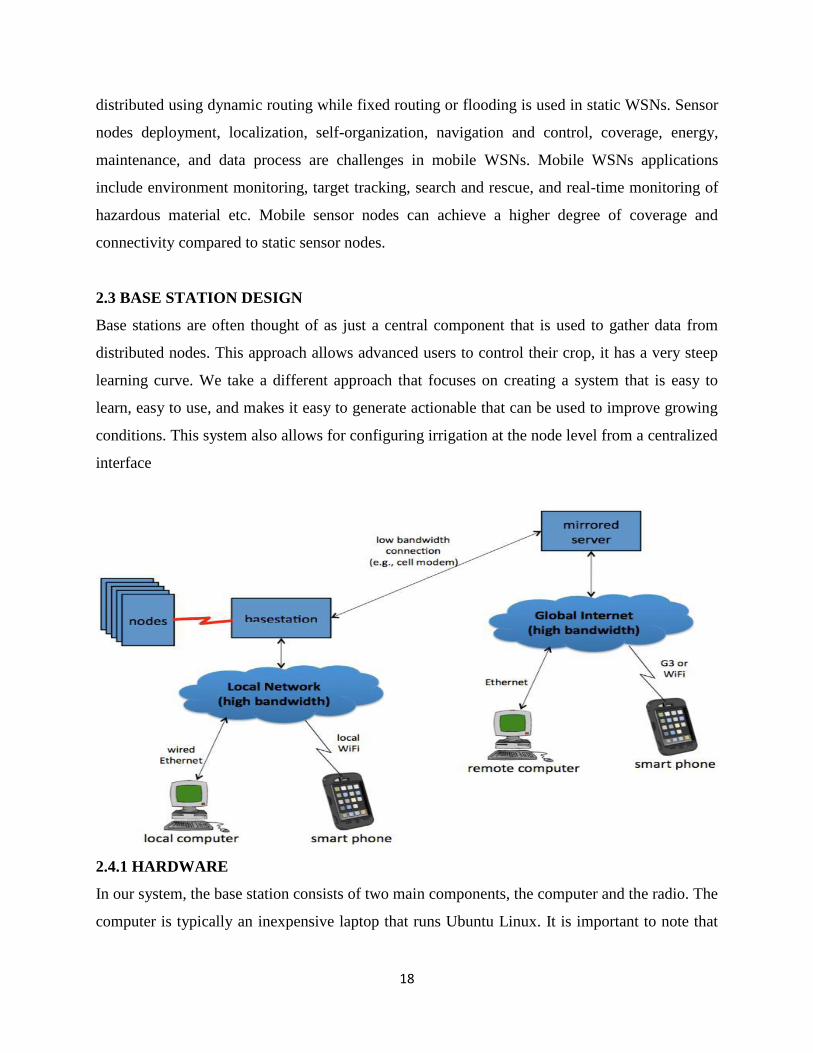
2.3 BASE STATION DESIGN
Base stations are often thought of as just a central component that is used to gather data from
distributed nodes. This approach allows advanced users to control their crop, it has a very steep
learning curve. We take a different approach that focuses on creating a system that is easy to
learn, easy to use, and makes it easy to generate actionable that can be used to improve growing
conditions. This system also allows for configuring irrigation at the node level from a centralized
interface
2.4.1 HARDWARE
In our system, the base station consists of two main components, the computer and the radio. The
computer is typically an inexpensive laptop that runs Ubuntu Linux. It is important to note that
19
while most systems are using laptops with relatively small memory requirement the easiest way
to improve system performance is by upgrading to a faster computer. This system supports
several radio modules including the Digi DigiMesh 900 MHz and 2.4 GHz modules and the Digi
XSC radio operating at 900MHz. For most cases the Digi XSC radio is utilized for its simplicity
as well as for the 900 MHz operating frequency which has better range and better foliage
penetration characteristics. The other radios provide features such as multi hop networking and
alternate operating frequencies. It should be noted that prior work (Valada et al. 2011) has
developed and implemented a multi-hop networking algorithm optimized for WSN‟s that can be
used with the Digi XSC radios.
2.4.2 SOFTWARE
The base station software system has four of miner components: the database, the base module,
the user interface, and the Grower Tools module. The glue for the entire system is the SQLite3
database. SQLite3 was chosen for the fast read times associated with a file based database.
Database efficiency is very important since users need to query large amounts of data (for
example to create a chart). Many database optimization methods are not effective for this
application. All of the data is stored in its raw form and conversions are applied as users access
the data.
The base module is responsible for all node communications. This module gets data from the
nodes and inserts it into the database followed by sending any newly modified node parameters
to the node. The base module is written in Perl which provides a full scripting language to help
parse data from the nodes.
The next component is the user interface. The user interface is designed using the Ruby on Rails
(RoR) web framework. This RoR framework provides direct database access and allows for an
object oriented approach to the data. For example to get data from the database a call such as
“Data .last. convert” will return the most recent data entry and convert it from raw units to proper
units. Another benefit to RoR is that the entire interface is a web site and is commonly
configured for remote access.
The last module is for running Grower Tools. Grower Tools are derived data products that
require processing; some of these tools include Vapor Pressure Deficit, Dew Point, and water use
predictions made using plant specific physiological models. The Growing Tools are handled by a
Ruby utility called Rake. A conventional RoR application is event driven and responds to user
20
actions such as mouse clicks and keyboard commands. Rake allows for scripting while having
full access to the methods defined in the RoR application. The Growing Tool application runs
every five minutes to check if any Growing Tool needs to be run as each tool has its own run
frequency. The reason for checking this every five minutes is to reduce the load on the database.
The Growing Tool interface is modular and allows for the easy introduction of new Growing
Tools. Each tool consists of a database record with the input and output units of the model
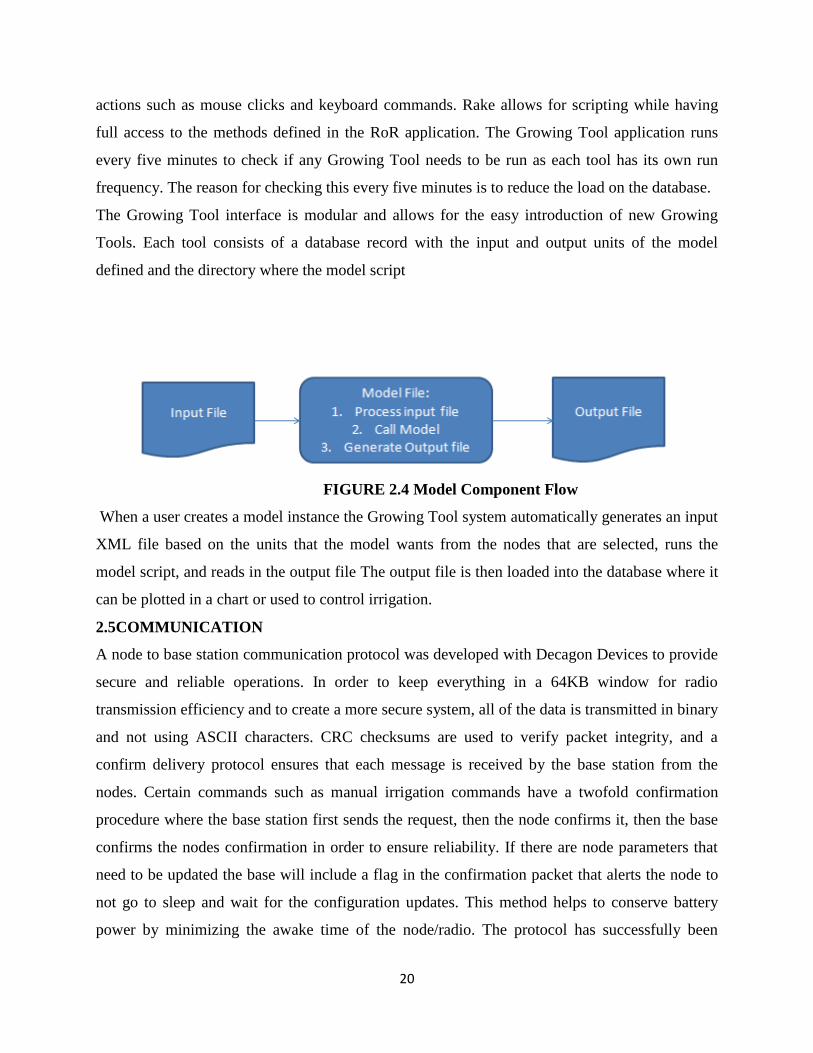
defined and the directory where the model script
FIGURE 2.4 Model Component Flow
When a user creates a model instance the Growing Tool system automatically generates an input
XML file based on the units that the model wants from the nodes that are selected, runs the
model script, and reads in the output file The output file is then loaded into the database where it
can be plotted in a chart or used to control irrigation.
2.5COMMUNICATION
A node to base station communication protocol was developed with Decagon Devices to provide
secure and reliable operations. In order to keep everything in a 64KB window for radio
transmission efficiency and to create a more secure system, all of the data is transmitted in binary
and not using ASCII characters. CRC checksums are used to verify packet integrity, and a
confirm delivery protocol ensures that each message is received by the base station from the
nodes. Certain commands such as manual irrigation commands have a twofold confirmation
procedure where the base station first sends the request, then the node confirms it, then the base
confirms the nodes confirmation in order to ensure reliability. If there are node parameters that
need to be updated the base will include a flag in the confirmation packet that alerts the node to
not go to sleep and wait for the configuration updates. This method helps to conserve battery
power by minimizing the awake time of the node/radio. The protocol has successfully been
21
implemented and tested on both commercially available Decagon wireless data loggers and
CMU research WSN nodes.
2.6.1 SPECIAL FEATURES OF WIRELESS SENSOR NETWORKs
This section discusses some unique features of WSNs, which need to be taken into account when
designing management architectures in WSNs
2.6.2 DIFFRENT TYPES OF NODES
In the wireless sensor network are three types of sensor nodes: the normal nodes is responsible
for collecting information or sensor data. Sensor nodes have resource constraint. That‟s why
sensor node have not storing capability for storing large amount of information or sensor data. It
may take simply data processing if necessary; sink nodes responsible for receiving, storing, and
processing (e.g. aggregation) data from normal nodes; and gateway nodes that connect sink
nodes to external entities called observers. In addition, actuators can also be introduced to control
or actuate on a monitored region in Wireless sensor networks
2.6.3 WIRELESS SENSOR NETWORK COVERAGE
There are several factors that must be considered when developing a plan for coverage in a
sensor networks. Many of these will be dependent upon the particular application that is being
addressed. The capabilities of the sensor nodes that are being used must also be considered. Most
Researchers focus on a single deployment model but there are papers that attempt to develop a
more general algorithm that can be used in many types of deployment.
2.6.4. COVERAGE TYPE
The first step in deploying a wireless sensor network is determining what it is exactly that you
are attempting to monitor. Typically you would monitor an entire area, watch a set of targets, or
look for a breach among a barrier. Coverage of an entire area otherwise known as full or blanket
coverage means that every single point within the field of interest is within the sensing range of
at least one sensor node. Ideally you would like to deploy the minimum number of sensor nodes
within a field in order to achieve blanket coverage. This problem was addressed in where the
author proposes placing the nodes in a construct called an r-strip such that each sensor is located
distance away from the neighboring sensor where r is the radius of the sensing area. The strips
can be then placed in an overlapping formation such that blanket coverage is achieved. The
22
biggest problem with this solution is that it is impractical to try to deploy sensors in such a
formation
Target coverage refers to observing a fixed number of targets. This type of coverage has obvious
military applications such as those covered in .The authors in this paper did extensive tests to not
only detect targets, but to classify and track them. The authors in and attempt to maintain target
coverage while conserving energy. The authors in discuss both blanket and target coverage in
terms of energy efficiency.
Barrier coverage refers to the detection of movement across a barrier of sensors. This problem
was defined as the maximal breach path in [9]. The authors in this study quantify the
improvement in coverage when additional sensors are added to a network. Other papers such as
focus on algorithms in barrier coverage. A variation of barrier coverage known as sweep
coverage is also discussed in .Sweep coverage can be thought of as a moving barrier problem.
2.6.5 DEPLOYMENT
A sensor network deployment can usually be categorized as either a dense deployment or a
sparse deployment. A dense deployment has a relatively high number of sensor nodes in the
given field of interest while a sparse deployment would have fewer nodes. The dense
deployment model is used in situations where it is very important for every event to be detected
or when it is important to have multiple sensors cover an area. Sparse deployments may be used
when the cost of the sensors make a dense deployment prohibitive or when you want to achieve
maximum coverage using the bare minimum number of sensors.
In most of the work studying coverage it is assumed that the sensor nodes are static, they stay in
the same place once they are deployed. Newer sensor nodes have the ability to relocate after they
are deployed, these are known as mobile nodes. The algorithm in has each sensor node
determining the location it needs to move to in order to provide maximum coverage. The authors
perform several experiments to determine how well the network covers the area and the
deployment time of the algorithm. The key weakness in this algorithm is that each node must be
within the sensing range of another node in order to determine the optimal location it needs to
move to, if a node is not seen by any other nodes then that node cannot determine its relative

23
location. In the deployment algorithm of each node will communicate with its neighbors and tell
them to move away until they are at a distance which maximizes coverage while maintaining
connectivity. The simulations run by the authors show a very high degree of coverage can be
obtained within minutes of deployment. Actual sensors may not perform as well if they are not
able to calculate the distance of their neighbors with the same precision as the nodes in the
simulation. The method introduced in aims to maximize coverage while minimizing sensor
movement. The simulations run by the authors show the method does achieve excellent coverage
with low amounts of movement but it does require a complex algorithm be run which may tax
the sensor nodes. The authors in design three separate deployment protocols that provide a high
level of coverage with minimal movement in a short time. The simulations show that the
protocols hold up with a limited amount of sensors but there are questions about how scalable the
protocols are with larger numbers of sensors.
Sensor network nodes are deployed in an area by either placing them in predetermined locations
or having the nodes randomly located. Dropping sensors from a plane would be an example of
random placement. It is easier to develop a coverage scheme for deterministic placement of
sensor nodes than for random placement. However in many deployments, it is either impractical
or impossible to deploy sensor nodes in a deterministic way. Examples of deterministic and
random placement is of a deterministic placement. A more sophisticated deterministic
deployment method is given in. The authors propose to arrange the sensors in a diamond pattern
which would correspond with a Verona polygon. The pattern achieves four way connectivity
from each of the nodes with full coverage when the communication range divided by the sensing
range is greater than the square root of two. The authors are able to mathematically prove the
validity of their pattern, however the pattern is not practical for actual deployment. It assumes
that the sensing and communication ranges of every node are a perfect circle as well as the
ability to place the sensors in exact locations. Random
Order to relocate to the optimal location. Most research with random deployments of sensor
nodes regards the ability to maintain coverage while minimizing the amount of energy expended.
This will be covered more closely in another part of the paper. Deployments of sensor nodes are
usually dense deployments as well since it is necessary to deploy additional sensors in order to
24
achieve coverage if the sensor nodes are stationary. Networks with mobile sensors usually start
out with a random deployment and utilize the mobility property.
2.6.6 Next Generation Wireless Sensor Nodes
In 1996, the Low Power Wireless Integrated Micro sensors (LWIMs) were produced by UCLA and the
Rockwell Science Center. By using commercial, low cost CMOS fabrication, LWIMs demonstrated the
ability to integrate multiple sensors, electronic interfaces, control, and communication on a single device.
LWIM supported over 100 Kbps wireless communications at a range of 10 meters using a 1 mW
transmitter.
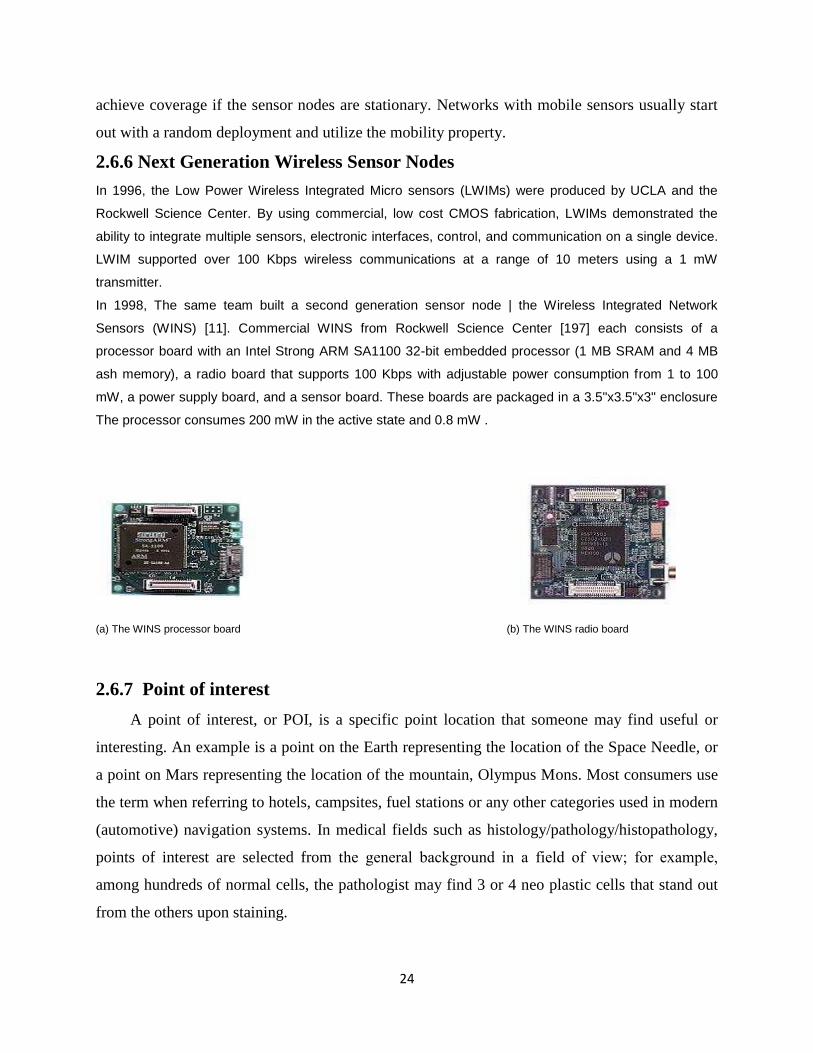
In 1998, The same team built a second generation sensor node | the Wireless Integrated Network
Sensors (WINS) [11]. Commercial WINS from Rockwell Science Center [197] each consists of a
processor board with an Intel Strong ARM SA1100 32-bit embedded processor (1 MB SRAM and 4 MB
ash memory), a radio board that supports 100 Kbps with adjustable power consumption from 1 to 100
mW, a power supply board, and a sensor board. These boards are packaged in a 3.5"x3.5"x3" enclosure
The processor consumes 200 mW in the active state and 0.8 mW .
(a) The WINS processor board (b) The WINS radio board
2.6.7 Point of interest
A point of interest, or POI, is a specific point location that someone may find useful or
interesting. An example is a point on the Earth representing the location of the Space Needle, or
a point on Mars representing the location of the mountain, Olympus Mons. Most consumers use
the term when referring to hotels, campsites, fuel stations or any other categories used in modern
(automotive) navigation systems. In medical fields such as histology/pathology/histopathology,
points of interest are selected from the general background in a field of view; for example,
among hundreds of normal cells, the pathologist may find 3 or 4 neo plastic cells that stand out
from the others upon staining.
25
A region of interest (ROI) and a volume of interest (VOI) are similar in concept, denoting a
region or a volume (which may contain various individual POIs). The term is widely used in
cartography, especially in electronic variants including GIS, and GPS navigation software. In
this context the synonym waypoint is common. A GPS point of interest specifies, at minimum,
the latitude and longitude of the POI, assuming a certain map datum. A name or description for
the POI is usually included, and other information such as altitude or a telephone number may
also be attached. GPS applications typically use icons to represent different categories of POI on
a map graphically.
2.6.8 POI COLLECTIONS
Digital maps for modern GPS devices typically include a basic selection of POI for the map area
However websites exist that specialize in the collection, verification, management and
distribution of POI which end users can load onto their devices to replace or supplement the
existing POI.[3] While some of these websites are generic, and will collect and categorize POI
for any interest, others are more specialized in a particular category (such as speed cameras) or
GPS device (e.g. Tom-tom/Garmin). End users also have the ability to create their own custom
collections
Commercial POI collections, especially those that ship with digital maps, or that are sold on a
subscription basis are usually protected by copyright. However there are also many websites
from which royalty free POI collections can be obtained
2.6.9 APPLICATIONS
The applications for POI are extensive. As GPS enabled devices as well as software applications
that use digital maps become more available, so too the applications for POI are also expanding.
Newer digital cameras for example can automatically tag a photograph using Exit with the GPS
location where a picture was taken; These pictures can then be overlaid as POI on a digital map
or satellite image such as Google Earth. Geo caching applications are built around POI
collections. In Vehicle tracking systems POIs are used to mark destination points and/or offices
26
to that users of GPS tracking software would easily monitor position of vehicles according to
POIs.
2.7 WIRELESS SENSOR NETWORK APPLICTION
Military Applications
• Monitoring friendly forces, equipment, and ammunition
• Battlefield surveillance
• Reconnaissance of opposing forces and terrain
• Targeting
• Battle damage assessment
• Nuclear, biological, and chemical attack detection
Environmental Applications
• Forest fire detection
• Bio-complexity mapping of environment
• Flood detection
• Precision Agriculture
• Air and water pollution
Health Applications
• Tele monitoring of human physiological data
• Tracking and monitoring doctors and patients inside a hospital
• Drug administration in hospitals
27
Home and Office Applications
• Home and office automation
• Smart environment
2.8 DESIGN ISSUES & CHALLENGS
Random deployment autonomous setup & maintenance
Infrastructure-less networks distributed routing
Energy, the major constraint trading off network lifetime for fault tolerance or
accuracy of results
Hardware energy efficiency
Distributed synchronization
Adapting to changes in connectivity
Real-time communication, QoS
Security
2.9 CHARACTERISTIC REQUIREMENTS FOR WSNC WSNs
Scalability
Support large number of nodes
Wide range of densities
Vast or small number of nodes per unit area, very application-dependent
Programmability
Re-programming of nodes in the field might be necessary, improve flexibility
Maintainability
28
WSN has to adapt to changes, self-monitoring, adapt operation
Incorporate possible additional resources, e.g., newly deployed nodes
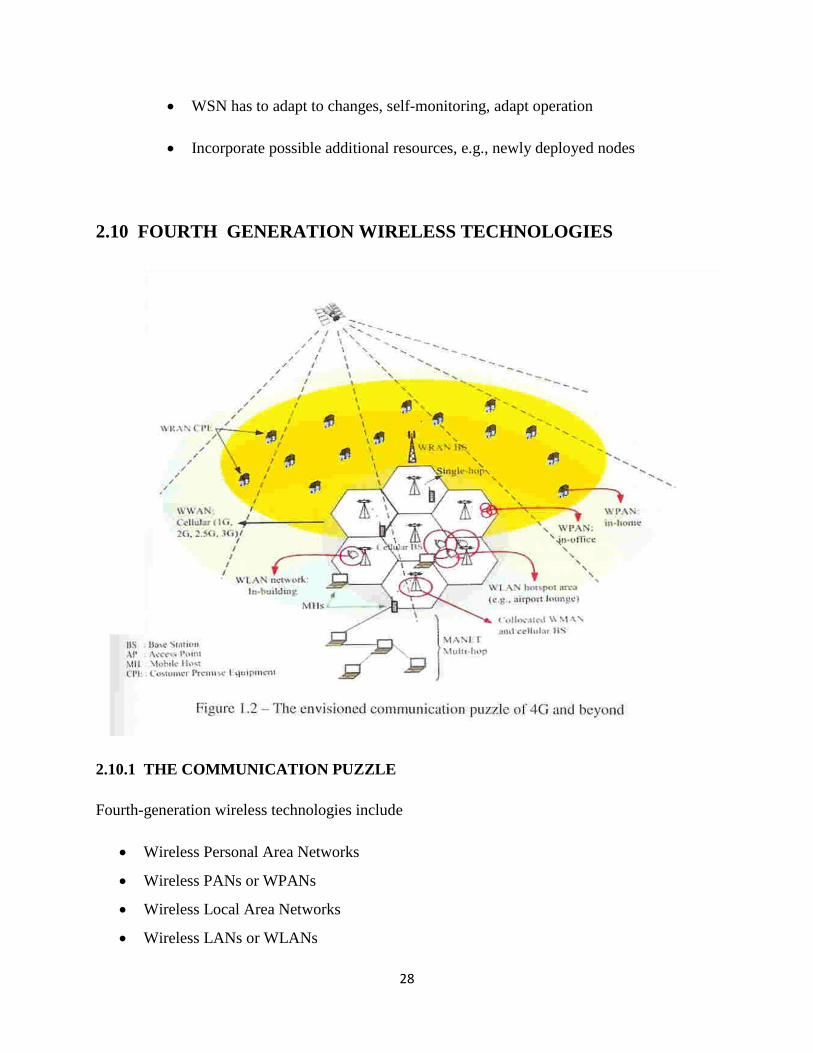
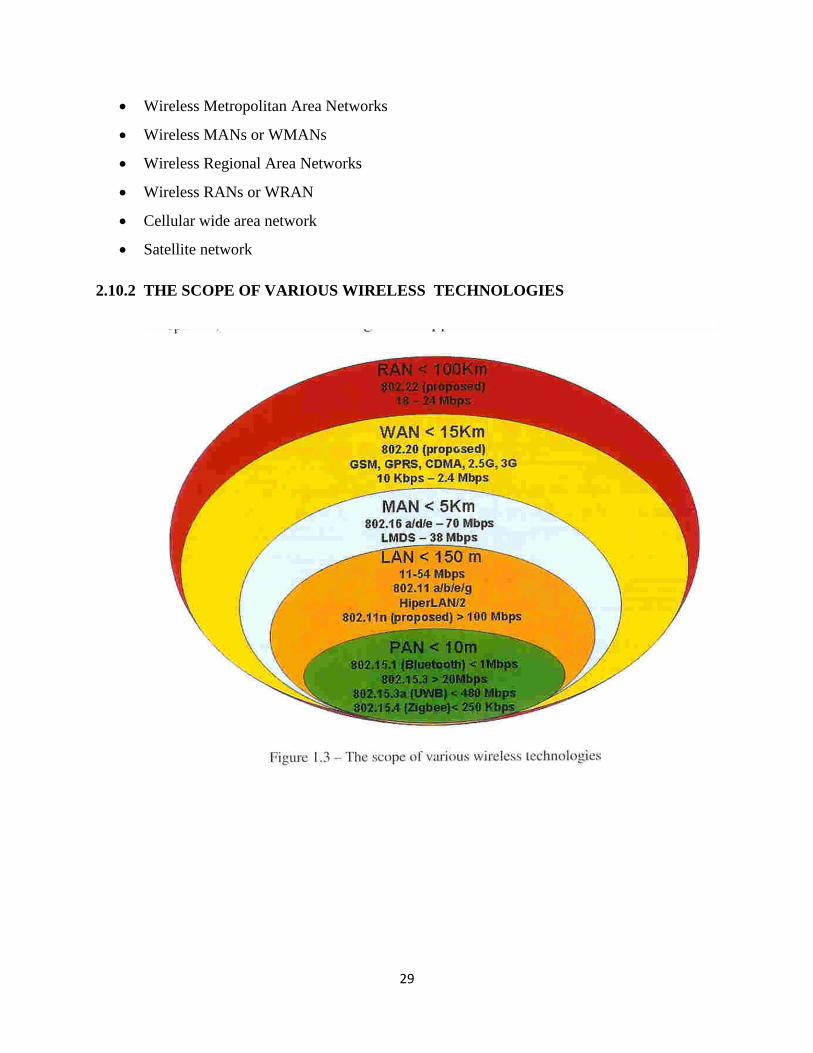
2.10 FOURTH GENERATION WIRELESS TECHNOLOGIES
2.10.1 THE COMMUNICATION PUZZLE
Fourth-generation wireless technologies include
Wireless Personal Area Networks
Wireless PANs or WPANs
Wireless Local Area Networks
Wireless LANs or WLANs
29
Wireless Metropolitan Area Networks
Wireless MANs or WMANs
Wireless Regional Area Networks
Wireless RANs or WRAN
Cellular wide area network
Satellite network
2.10.2 THE SCOPE OF VARIOUS WIRELESS TECHNOLOGIES
30
CHAPTER 3
TITLE AND ITS SPECIFICANCE
My pre dissertation work entitled “IMPROVE DELAY USING POINT OF INTERST
MOBILE COVERAGE IN WIRELESS SENSOR NETWORK”. I chose to work on the
wireless sensor network area as it is has gained worldwide attention in recent years, and there are
some problems related. Interesting research is going on this field and there is a great scope of
improvement.
A wireless sensor network (WSN) consists of a large number of sensor nodes which are
deployed over an area to perform local computations based on information gathered from the
surroundings. Each node in the network is equipped with a battery, but it is almost very difficult
to change or recharge batteries; therefore, the crucial question is: “how to prolong the network
lifetime to such a long time?” Hence, maximizing the lifetime of the network through
minimizing the delay is an important challenge in WSN.
Wireless sensor network is very good area of research because I choosing this area . last 10
years ago communication system very poor foramens .for ex taken voice communication
transmitting very late after then transfer data sum delay .and frequency also rang very less
.present generation fearing without delay and very fast data or voice communication .wireless
sensors network every day different technology implanting .so number of person s interesting
to research wsn .but many scientists applying new thinks delay improve .but not still now not
identifying life delay problems.
31
CHAPTER 4
LITERATURE REVIEW
[1] (Michael J. Neely) Delay Analysis for Maximal Scheduling with Flow Control in Wireless
Networks with Bursty Traffic[2009 ieee]
In this paper author ,analyses the delay in wireless network and delay properties of one-hop networks
with general interference constraints and multiple traffic streams with time-correlated arrivals. Authored
treat the case when arrivals are modulated by independent finite state Markov chains. They show that the
well known maximal scheduling algorithm achieves average delay that grows at most logarithmically in
the largest number of interferers at any link. Further, in the important special case when each Markov
process has at most two states (such as burst ON/OFF sources),they prove that average delay is
independent of the number of nodes and links in the network, and hence is order-optimal. They provide
tight delay bounds in terms of the individual auto-correlation parameters of the traffic sources. These are
perhaps the first order-optimal delay results for controlled queuing networks that explicitly account for
such statistical information. Our analysis treats cases both with and without flow control.
[2] (Milan Erdelj) Multiple Point of Interest Discovery and Coverage with Mobile Wireless
Sensors [2012]
A typical scenario in wireless sensor networks is environment monitoring. the sensors have
be deployed and placed on strategic locations to monitor the area of interest. In cases
monitoring the whole area might be not impotence. Because monitoring some points of interest
increases the sensing performance reduce automatically. The deployment new nodes given the
number of sensors monitor the large area can be increased by a given fixed number of sensors.
When sensors have motion capabilities, monitoring only some Poi‟s instead of the whole area
also allows time dependent coverage
Manley control delay novel approach that integrates all the three aspects in multiple Poi coverage
into one simple distributed sensor nodes deployment. It is based on constant variable speed,
mobile sensor movement concentric circular paths that cover the field of interest. By constantly
moving, sensors nodes execute the environment discovery task, and by adjusting the movement
32
velocity, they satisfy the constraints regarding the target coverage and connectivity with the data
sink after than sensor nodes (in terms of reporting the information regarding the Poi‟s). The
algorithm that runs on all the mobile sensors is distributed and represents the simple technique,
of velocity according to the information available from the sensors in one- hop after nodes
sending data different paths.
[3] ( Azad Sharma) Delay Reduction Technique for Dynamic MANET On-demand
Routing Protocol[ IJ 2013]
Delay analysis section a formula average packet delay identifying from the source to the base station is
obtained. During the delay analysis, the processing delays are assumed to be negligible when compared to
transmission delay sensors to nodes to be deployed randomly. And clusters are assumed to have equal
size. Let N be the total number of sensors divided into Kept clusters. The routing within a set is the
situation where the source sensor has base station next-hop, when the source sensor is located at the end
of the set. The average number of hops is considered one sensor in set Packet delay mainly depends on
the number of hops from the source to the base station. On average can be obtained total network failure
occurs, an extra delay is incurred, which is the time consumed by genetic algorithm in sum time s
reconstructing virtual rings. In section (3) virtual ring reconstruction delay is qualified.
[4 (Abhay Raman)]MINIMIZING DELAY AND MAXIMIZING LIFETIME FOR WIRELESS
SENSOR NETWORKS WITH ANYCAST[2013 ]
This paper derives average delay minimizing techniques for one-hop wireless networks that use
scheduling subject data interference constraints. It is known that maximal scheduling algorithms are using
that time implement next automatically can support throughput within a constant factor of optimality.
Our analysis shows that this type of scheduling sums amount of delay. In particular, when arrival
processes are modulated by independent Make processes, we show that average delay. most
logarithmically in the number of nodes in the network. We then obtain an improved delay bound
in the important special case when the individual Make sending data with sensors. Have at most
two states (such as data ON/OFF sources). Average delay in this case is shown to be independent
of the network size, and hence is order-optimal.
[5] (Yawei Li1) On Sweep Coverage with Minimum Mobile Sensors[2010]
33
planning problems sensors nodes finding in order to probability of loss , event and applications,
i.e. finding the minimum velocity for covering a set of Poi‟s with one single sensor. and finding
the minimum number of sensors to be deployed if the velocity of each sensor is fixed. The
authors of study the sweep coverage problem, where a set of Poi‟s need to be monitored
periodically. All of these works assume that mobile sensors can be controlled to follow the
planned for improving the coverage,
[6] (Joohwan Kim) On Maximizing the Lifetime of Delay-Sensitive Wireless Sensor
Networks with Anycast
We are minimizing the delay, and user design maximizing the lifetime delay event-driven
wireless sensor networks, for which events occur infrequently. Optimize the any voice data
forwarding for minimizing the expected packet-delivery and next delays from the sensor nodes
to the sink. Based on this result, we are provide a sum different sensor to the joint control
problem with data flow. how to optimally control the system parameters ,user used sum
different delay minimize techniques .to the scheduling protocol and the any cast packet-
forwarding protocol manly maximize the network lifetime. Subject to constraint on the expected
end to end packet-delivery delay, We develop any cast packet-forwarding scheme to reduce the
event-reporting delay and to prolong the lifetime of wireless sensor networks asynchronous
sleep-wake scheduling. Specifically, we study two optimization problems, First, when the wake-
up of the sensor nodes are given, we develop an efficient and distributed algorithm. to minimize
the expected event-reporting delay from all sensor nodes moving to the sink. Second, using a
specific definition of the network lifetime, we study the lifetime-maximization problem to
optimally control the sleep-wake scheduling nodes in order to maximize the network lifetime
subject to a upper limit on the expected end-to-end delay. Our than results coming the proposed
solution data conversion or moving the nodes data solutions there are obstructions in the
coverage area of the wireless sensor network.
[7](Dong Zhao,)Mobile Sensor Scheduling for Timely Sweep Coverage[2012ieee]
34
Poi is to be timely sweep covered by a scheduling area , covered at least once mobile sensors
scheduled within the sensing delay constraint and the collected data is delivered .to the sink
node within the transmission delay constraint, Scheduling is the mobile sensor movement. In
practice different PoIs may have different delay requirements due to various at different event
locations, and the delay requirement for each PoI should be satisfied under.
[6] ( Milan Erdelj )Multiple Point of Interest Discovery and Coverage with Mobile
Wireless Sensors[2012]
We refer to the third phase term connectivity, because we investigate both theoretically and by
simulations the impact of devices mobility on connection times. More precisely, we are
interested in evaluating the performance of both of the communication delay between each node
and the base station. After data efforts have been already produced on Delay mobile Networks
when mobility of nodes is taken into transfer anther nodes. In mobility increases connectivity in
k-hop networks, and significantly improves the network lifetime and the power-delay trade off.
the mobility signals follows sensors nodes the moving different paths , specifically the random
walk mobility model non trivial velocity. we assume that nodes can control their mobility
according to surrounding conditions. Even in authors show the positive impact of mobility on
the determination of delay throughput trade off in . Even in this case, nodes‟ mobility is
restricted to movement around nodes‟ own home-points. In the mobility is controlled and nodes
move from the initial configuration towards a spatial distribution that increases the network‟s,
throughput capacity and decreases the mean-service delay of packets. In these works optimal
nodes do not move further facings not connecting write position sensors
[7] Coverage
The coverage and monitoring of a Poi, area of interest whole sensor field . subject or
(data)covered from both the sensor the community by using different approaches and by
focusing on different aspects .but have the possibility to communicate with each other in wireless
communications do not have a basic importance in achieving the coverage.
35
the area survey coverage path planning algorithms for mobile movement network for
improving. network coverage and general where to implement sensors and techniques node
placement respectively. They propose to classify works according to the improve coverage.
Specifically, full coverage aims at cover completely the field by geographically distributing
sensors ,and the entire field according to same technique in order to continuously monitor the
field .coverage calculation in the number of sensor to deploy passing is achieved, fields at all
times and maximize the lifetime. in algorithm of topology control, by varying the radius of the
sensing range in order to maintain the coverage, of the whole field when the network topology
varies. The last techniques work considers a limited mobility of the nodes, in to passing signals
hole area sensors connecting
Authors use mobility of the nodes in a more extensive way, in fact they propose sensor
deployment and target localization, respectively, by using virtual forces. Our approach also
considers a large use of mobile nodes as the last two cited works, but the main difference is in
the algorithms. Movements, we do not use than data transfer so late forces. in order not to limit
the mobility nodes mechanisms. The second group of works one by one sensors passing the
barrier coverage, which is the formation of a through sensors movements to monitor.
Basically, sweep coverage allows nodes to move on the field, because the requested coverage of
Poi is limited in time. In authors propose a theoretical study to prove that the determination of
the minimum number of required sensors is of an algorithm. solves the sweep coverage problem
In last make work that focuses only on the coverage part.
36
CHAPTER 4
RESEARCH OBJECTIVE
4.1 FUTURE SCOPE:
Wsn is very good research area, Wireless sensor network in future day to day update
technology coming, upcoming sensor sensing very long distance and very fast
transmitting data .present or future coming electronics items must and should using sensors
because working very fast.
Future days wireless sensor playing impotent role communication system. Data signals with
out delay transfer data ,and very fast working
4.2 FUTURE WORK:
we propose a measurement architecture using distributed air sniffers, which provides convenient delay
measurement, and requires no clock synchronization or instrumentation at the sensor nodes. One
challenge in deploying this architecture is how to place the sniffers for efficient delay measurement.
develop two algorithms to solve it. Using a combination of small-scale tested experiments and large-scale
simulation, we demonstrate that our architecture leads to accurate delay monitoring and is effective in
detecting abnormal delays
Future days I doing work compare the delay and mobile sensors. , applying algorithm in
mobile sensors I using different algorithms for ex: I applying delay minimize algorithms
basically I using TSP-S algorithm has better performance than the SSNOR algorithm. It is
because SSNOR algorithm only considers local efficiency. TSP-S algorithm considers global
efficiency.
Using coverage TSP algorithm applying time identifying the Minimum Mobile sensor
problem under the sweep delay changing limitation. because the algorithm remove the longer
edge from the TSP ring when generating the trajectory of each mobile sensor which reduces the
sweep distance and time.

37
CONCLUSION
In this report researching “minimize or improving delay using point of interest mobile coverage in wireless
sensor network”. we study how to schedule the given number of mobile sensors to monitor the POIs
such that the delay of the network is minimized. We discuss two scenarios. In the first scenario, with the
determined start positions of mobile sensors, we propose the SSR algorithm. In the SSR, we generate
trajectories by adding the POI which can make the current delay be minimized. This or using two
algorithms this algorithms working the send one to anther nodes moving dada fast in sources to
destination. Algorithm applying time sensor nodes moving write path and and transforming data with
out delay we are using algorithms improving delay.
38
CHAPTER 5
REFERENCES
[1] (Michael J. Neely) Delay Analysis for Maximal Scheduling with Flow Control in Wireless
Networks with Bursty Traffic[2009 ieee]
[2] (Milan Erdelj) Multiple Point of Interest Discovery and Coverage with Mobile Wireless
Sensors [2012]
[3] ( Azad Sharma) Delay Reduction Technique for Dynamic MANET On-demand Routing
Protocol[ IJ 2013]
[4 (Abhay Raman)]minimize delay and maximizing life time wireless sensor network with any
cast[2013]
[5](Yawei Li1) On Sweep Coverage with Minimum Mobile Sensors[2010]
[6] (Joohwan Kim) On Maximizing the Lifetime of Delay-Sensitive Wireless Sensor Networks
with Anycast
[7](Dong Zhao,)Mobile Sensor Scheduling for Timely Sweep Coverage[2012ieee]
[8] ( Milan Erdelj )Multiple Point of Interest Discovery and Coverage with Mobile Wireless
Sensors[2012]
[9] ( Kiran Maraiya) Application based Study on Wireless Sensor Network[International Journal
of Computer Applications 2011]
[10] Principle of Wireless Sensor Networks [ieee]



















