
Supervisory Control of Uncertain Linear Time-Varying Systems
Upload
independentCategory
view
1download
0
INTERNATIONAL JOURNAL OF ROBUST AND NONLINEAR CONTROLInt. J. Robust Nonlinear Control 2009; 19:377–393Published online 17 April 2008 in Wiley InterScience (www.interscience.wiley.com). DOI: 10.1002/rnc.1314
Delay-distribution-dependent robust stability of uncertain systemswith time-varying delay
Dong Yue1,∗,†, Engang Tian1,2,‡, Yijun Zhang1,2 and Chen Peng1
1Institute of Information and Control Engineering, Nanjing Normal University, Nanjing,People’s Republic of China
2College of Information Sciences and Technology, Donghua University, Shanghai, People’s Republic of China
SUMMARY
By employing the information of the probability distribution of the time delay, this paper investigates theproblem of robust stability for uncertain systems with time-varying delay satisfying some probabilisticproperties. Different from the common assumptions on the time delay in the existing literatures, it isassumed in this paper that the delay is random and its probability distribution is known a priori. Interms of the probability distribution of the delay, a new type of system model with stochastic parametermatrices is proposed. Based on the new system model, sufficient conditions for the exponential meansquare stability of the original system are derived by using the Lyapunov functional method and the linearmatrix inequality (LMI) technique. The derived criteria, which are expressed in terms of a set of LMIs,are delay-distribution-dependent, that is, the solvability of the criteria depends on not only the variationrange of the delay but also the probability distribution of it. Finally, three numerical examples are givento illustrate the feasibility and effectiveness of the proposed method. Copyright q 2008 John Wiley &Sons, Ltd.
Received 10 April 2007; Revised 3 October 2007; Accepted 31 January 2008
KEY WORDS: delay-distribution-dependent stability; probability distribution; Lyapunov functional;random time-varying delay
1. INTRODUCTION
In the past several decades, considerable attention has been paid to the study of stability androbust stability of continuous time-delay systems (CTDS) [1–7], in the existing references, much
∗Correspondence to: Dong Yue, Institute of Information and Control Engineering, Nanjing Normal University,78 Bancang Street, 210042, Nanjing, People’s Republic of China.
†E-mail: [email protected]‡E-mail: [email protected]
Contract/grant sponsor: National Natural Science Foundation of China High Technology Project of Jiangsu Province;contract/grant numbers: 60774060, 60704024, BG2006042
Copyright q 2008 John Wiley & Sons, Ltd.

378 D. YUE ET AL.
effort has been given for the study of the CTDS with slow time-varying delay [1, 2, 5–8] or fasttime-varying delay [9–12]. For the slow time-varying delay case, the delay is assumed to bedifferentiable and its derivative is bounded by a number less than 1. For the fast time-varyingdelay case, the information of the variation range of the delay can only be obtained without anyinterval variation structure. Generally speaking, the results for the slow time-varying delay case areoften less conservative than those for the fast time-varying delay case. Obviously, under the sameanalysis method, knowing more information on the time delay can improve the derived results,especially for the corresponding delay-dependent results.
In many real systems, such as the networked control systems [12–15], the assumption on the slowtime-varying delay is often hard to be satisfied. In this case, the commonly used method is to viewthe delay as fast time varying [12, 15]. However, since the interval variation information of the delayis neglected, the above treatment may lead to a conservative result. Actually, in a networked controlsystem, the network-induced delay often appears as some probabilistic properties and its probabilitydistribution can be measured by the statistical method. In [16], the open source package NS2 underUnix was used to simulate a networked control system over IP networks. The variation distributionof the network-induced delay from the sensor to the controller is, respectively, shown in Figure 1and Table I. From Table I, it can be seen that some statistical characters of the network-induceddelay can be observed, for example, the probability of the delay taking values in the lower intervalis large and long delay happens with a low probability. In this case, the possible value of the delaycould be very large though the probability of the delay taking such a large value is usually small.As the possible value of the delay can be very large with a low probability, it may be outside theallowable variation range given in the traditional methods [1, 4–8, 14, 17]. Therefore, a challenging
0 10 20 30 40 500
0.02
0.04
0.06
0.08
0.1
t (ms)
size
of τ
(t)
(s)
0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.110
20
40
60
size of the delay (s)
num
ber
of th
e de
lay
in s
ome
in
terv
als
(tot
al 2
50)
Figure 1. The network-induced delay and its probability distribution.
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

ROBUST STABILITY OF UNCERTAIN SYSTEMS 379
Table I. The probability of the delay appearing in the lower interval.
Interval [0,0.04] [0,0.05] [0,0.06] [0,0.07]Probability 0.6096 0.8725 0.9442 0.9721
issue for this case is how to obtain some criteria that can employ the information of probabilitydistribution of the delay and offer a larger allowable variation range of the delay.
In this paper, we are concerned with the robust stability of the uncertain systems with time-varying delay satisfying some probabilistic properties. Different from the common assumptions onthe time delay in the existing literatures, it is assumed in this paper that the probability distributionof the delay appearing in some intervals can be observed and modeled as a function of thestochastic variable satisfying Bernoulli random binary distribution. In terms of the linear matrixinequality (LMI) approach, sufficient conditions for the exponential mean-square stability of thetime-delay system are derived. It should be noted that the solvability of the derived conditionsdepends on not only the size of the delay but also the probability of the delay appearing in someintervals. Three numerical examples are finally given to show the applicability of the proposedmethod.
Notation: Rn denotes the n-dimensional Euclidean space, Rn×m is the set of real n×m matrices,I is the identity matrix of appropriate dimensions, ‖·‖ stands for the Euclidean vector norm orspectral norm as appropriate and R+ denotes the set of positive real numbers. The notation X>0(respectively, X�0), for X ∈Rn×n , means that matrix X is a real symmetric positive definite(respectively, positive semi-definite). For a real matrix B and two real symmetric matrices A and
C of appropriate dimensions,[AB
∗C
]denotes a real symmetric matrix, where ∗ denotes the entries
implied by symmetry. E{·} denotes the expectation.
2. SYSTEM MODEL DESCRIPTION
The system with time-varying delay and parameter uncertainties can be described as
x(t) = (A+�A(t))x(t)+(Ad +�Ad(t))x(t−�(t)) (1)
x(t) = �(t), t ∈[−�2,0] (2)
where �(t) is the initial function of the state, x(t)∈Rn is the state vector, A and Ad are knownmatrices of compatible dimensions, and �A(t) and �Ad(t) are time-varying parameter uncertain-ties, which are assumed to satisfy
[�A(t) �Ad(t)]=HF(t)[E1 E2] (3)
where H,E1 and E2 are known constant real matrices with appropriate dimensions and F(t) isan unknown time-varying matrix with Lebesgue measurable elements bounded by FT(t)F(t)�I.�(t)∈[0,�2] is the time-varying delay with an upper bound of �2. In this paper, �(t) changesrandomly and for a constant �1∈[0,�2], the probability of �(t)∈[0,�1) and �(t)∈[�1,�2] can beknown.
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

380 D. YUE ET AL.
Define two sets
�1 = {t :�(t)∈[0,�1)} (4)
�2 = {t :�(t)∈[�1,�2]} (5)
Obviously, �1∪�2= R+ and �1∩�2=� (empty set). Furthermore, define two functions as
�1(t) =⎧⎨⎩
�(t) for t ∈�1
�12
for t ∈�2(6)
�2(t) ={
�(t) for t ∈�2
�1 for t ∈�1(7)
From the definitions of �1 and �2, it can be seen that t ∈�1 means the event �(t)∈[0,�1) occursand t ∈�2 means the event �(t)∈[�1,�2] occurs. Therefore, we can define a stochastic variable�(t) as
�(t)={1, t ∈�1
0, t ∈�2(8)
Assumption 1�(t) is a Bernoulli distributed sequence with
Prob{�(t)=1}=E{�(t)}=�0, Prob{�(t)=0}=1−E{�(t)}=1−�0
where 0��0�1 is a constant.
Remark 1The introduction of �(t) is motivated by [18–21], where the Bernoulli distributed sequence �(t)is used to describe the missing measurements of the systems. Different from [18–21], �(t) is usedin this paper to indicate the time-varying delay appearing in different intervals; in this manner, theprobability distribution of the delay can be employed in the systems.
Remark 2From Assumption 1, it can be shown that E{�(t)−�0}=0 and E{(�(t)−�0)
2}=�0(1−�0). Fromthe definition of �(t), under Assumption 1, we have Prob{�(t)∈[0,�1)}=Prob{�(t)=1}=�0 andProb{�(t)∈[�1,�2]}=Prob{�(t)=0}=1−�0. Therefore, �0 and 1−�0, respectively, denote theprobabilities of �(t) taking values in [0,�1) and [�1,�2].
By using the new functions �i (t) (i=1,2) and �(t), system (1)–(2) can be rewritten as
x(t) = (A+�A(t))x(t)+�(t)(Ad +�Ad(t))x(t−�1(t))
+(1−�(t))(Ad +�Ad(t))x(t−�2(t)) (9)
x(t) = �(t), t ∈[−�2,0] (10)
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

ROBUST STABILITY OF UNCERTAIN SYSTEMS 381
which can further be expressed as
x(t) = (A+�A(t))x(t)+�0(Ad +�Ad(t))x(t−�1(t))
+(1−�0)(Ad +�Ad(t))x(t−�2(t))
+(�(t)−�0)((Ad +�Ad(t))x(t−�1(t))
−(Ad +�Ad(t))x(t−�2(t))) (11)
x(t) = �(t), t ∈[−�2,0] (12)
Remark 3When �(t)≡1, that is, for all t ∈ R+, �(t)∈[0,�1), system (11)–(12) reduces to the common time-delay systems investigated in [1, 4–8, 14, 17]. When �(t)≡0, that is, for all t ∈ R+, �(t)∈[�1,�2],system (11)–(12) reduces to the interval time-delay system investigated in [9–12].
Before giving the main result, we need the following definitions and lemma.
Definition 1System (11)–(12) is said to be exponentially stable in the mean square sense (ESMSS), if thereexist constants �>0 and �>0 such that for t�0
E{‖x(t)‖2}��e−�t sup−2�2�s,v�0
E{‖�(s)‖2+‖�(v)‖2} (13)
Definition 2For a given function V :Cb
F0([−�2,0], Rn)×S, its infinitesimal operator L is defined as
LV (xt )= lim�→0+
1
�[E(V (xt+�)|xt )−V (xt )] (14)
Lemma 1For matrices P>0, M and N with appropriate dimensions, F(t) with ‖F(t)‖�1, and scalar �>0,one has the following
(1) (MF(t)N )TP+P(MF(t)N )��−1PMMTP+�NTN(2) If P−1−�−1MMT>0, then
(A+MF(t)N )TP(A+MF(t)N )�AT(P−1−�−1MMT)−1A+�NTN
3. MAIN RESULTS
Firstly, consider system (11)–(12) with �A(t)=0 and �Ad(t)=0, i.e.
x(t) = Ax(t)+�0Adx(t−�1(t))+(1−�0)Adx(t−�2(t))
+(�(t)−�0)(Adx(t−�1(t))−Adx(t−�2(t))) (15)
The following result can be obtained for system (15).
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

382 D. YUE ET AL.
Theorem 1System (15) is ESMSS if there exist matrices P>0, Q>0, Ri>0 (i=1,2,3) and matrices Ni , Mi ,Vi (i=1,2) of appropriate dimensions such that the following LMI holds
�=
⎡⎢⎢⎢⎢⎣
�11 ∗ ∗ ∗�21 �22 ∗ ∗�31 0 �22 ∗�41 0 0 �22
⎤⎥⎥⎥⎥⎦<0 (16)
where
�11 =
⎡⎢⎢⎢⎢⎢⎣
�1 ∗ ∗ ∗N2−NT
1 +�0ATd P −N2−NT
2 ∗ ∗0 0 M1+MT
1 −Q ∗(1−�0)A
Td P+V2−V T
1 0 M2−MT1 �2
⎤⎥⎥⎥⎥⎥⎦
�21 =
⎡⎢⎢⎣
√�1N
T1
√�1N
T2 0 0
0 0√
�2−�1MT1
√�2−�1M
T2√
�2VT1 0 0
√�2V
T2
⎤⎥⎥⎦
�31 =
⎡⎢⎢⎣
√�1R1A
√�1�0R1Ad 0
√�1(1−�0)R1Ad√
�2−�1R2A√
�2−�1�0R2Ad 0√
�2−�1(1−�0)R2Ad√�2R3A
√�2�0R3Ad 0
√�2(1−�0)R3Ad
⎤⎥⎥⎦
�41 =
⎡⎢⎢⎣0
√�1�0(1−�0)R1Ad 0 −√
�1�0(1−�0)R1Ad 0
0√
(�2−�1)�0(1−�0)R2Ad 0 −√(�2−�1)�0(1−�0)R2Ad 0
0√
�2�0(1−�0)R3Ad 0 −√�2�0(1−�0)R3Ad 0
⎤⎥⎥⎦
�22 = diag(−R1 −R2 −R3)
�1 = PA+ATP+Q+N1+NT1 +V1+V T
1
�2 = −M2−MT2 −V2−V T
2
ProofThe Lyapunov–Krasovskii functional candidate is chosen as
V (xt )=V1(xt )+V2(xt )+V3(xt ) (17)
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

ROBUST STABILITY OF UNCERTAIN SYSTEMS 383
where
V1(xt ) = xT(t)Px(t)
V2(xt ) =∫ t
t−�1xT(s)Qx(s)ds
V3(xt ) =∫ t
t−�1
∫ t
sxT(v)R1 x(v)dv ds+
∫ t−�1
t−�2
∫ t
sxT(v)R2 x(v)dv ds
+∫ t
t−�2
∫ t
sxT(v)R3 x(v)dv ds
Using the infinitesimal operator (14), we obtain
LV1(xt ) = 2xT(t)P(Ax(t)+�0Adx(t−�1(t))
+(1−�0)Adx(t−�2(t))) (18)
LV2(xt ) = xT(t)Qx(t)−xT(t−�1)Qx(t−�1) (19)
LV3(xt ) = xT(t)(�1R1+(�2−�1)R2+�2R3)x(t)
−∫ t
t−�1xT(s)R1 x(s)ds−
∫ t−�1
t−�2xT(s)R2 x(s)ds
−∫ t
t−�2xT(s)R3 x(s)ds (20)
Employing the free matrix method [2], we have
2�T(t)N
[x(t)−x(t−�1(t))−
∫ t
t−�1(t)x(s)ds
]= 0 (21)
2�T(t)M
[x(t−�1)−x(t−�2(t))−
∫ t−�1
t−�2(t)x(s)ds
]= 0 (22)
2�T(t)V
[x(t)−x(t−�2(t))−
∫ t
t−�2(t)x(s)ds
]= 0 (23)
where
�T(t) = [xT(t) xT(t−�1(t)) xT(t−�1) xT(t−�2(t))]
NT = [NT1 NT
2 0 0], MT=[0 0 MT1 MT
2 ]
V T = [V T1 0 0 V T
2 ]
(24)
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

384 D. YUE ET AL.
From (17)–(23), we obtain
LV (t) = 2xT(t)P(Ax(t)+�0Adx(t−�1(t))+(1−�0)Adx(t−�2(t)))
+xT(t)Qx(t)−xT(t−�1)Qx(t−�1)
+xT(t)(�1R1+(�2−�1)R2+�2R3)x(t)
−∫ t
t−�1xT(s)R1 x(s)ds−
∫ t−�1
t−�2xT(s)R2 x(s)ds−
∫ t
t−�2xT(s)R3 x(s)ds
+2�T(t)N
[x(t)−x(t−�1(t))−
∫ t
t−�1(t)x(s)ds
]
+2�T(t)M
[x(t−�1)−x(t−�2(t))−
∫ t−�1
t−�2(t)x(s)ds
]
+2�T(t)V
[x(t)−x(t−�2(t))−
∫ t
t−�2(t)x(s)ds
](25)
It can be shown from (15) that
xT(t)R j x(t) = �T(t)ATR jA�(t)+(�(t)−�0)2�T(t)AT
d R jAd�(t)
+2(�(t)−�0)�T(t)ATR jAd�(t), j =1,2,3 (26)
where
A= [A 0 �0Ad (1−�0)Ad ]Ad = [0 Ad 0 −Ad ]
Note that
−2�T(t)N∫ t
t−�1(t)x(s)ds � �1�
T(t)N R−11 NT�(t)+
∫ t
t−�1xT(s)R1 x(s)ds (27)
−2�T(t)M∫ t−�1
t−�2(t)x(s)ds � (�2−�1)�
T(t)MR−12 MT�(t)+
∫ t−�1
t−�2xT(s)R2 x(s)ds (28)
−2�T(t)V∫ t
t−�2(t)x(s)ds � �2�
T(t)V R−13 V T�(t)+
∫ t
t−�2xT(s)R3 x(s)ds (29)
Substituting (26)–(29) into (25) and taking expectation on both sides of (25), we obtain
E{LV (xt )} �E{�T(t)[�11+�1ATR1A+(�2−�1)A
TR2A+�2ATR3A
+�0(1−�0)(�1ATd R1Ad +(�2−�1)A
Td R2Ad +�2A
Td R3Ad)
+�1N R−11 NT+(�2−�1)MR−1
2 MT+�2V R−13 V T]�(t)} (30)
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

ROBUST STABILITY OF UNCERTAIN SYSTEMS 385
By Schur complements, it is easy to see that condition (16) can lead to negativeness of theright-hand side of (30). Therefore, we have
E{LV (xt )}�−E{‖x(t)‖2+‖x(t)‖2} (31)
where =min{�}. Define a new function as
W (xt )=e�t V (xt ) (32)
Its infinitesimal operator L is given by
LW (xt )=�e�t V (xt )+e�tLV (xt ) (33)
Then, we can obtain from (33) that
E{W (xt )}−E{W (x0)}=∫ t
0[�e�sE{V (xs)}ds+e�sE{LV (xs)}]ds (34)
Note that
E{�e�t V (xt )+e�tLV (xt )}
�E
{e�t
[(�max(P)+��1max(Q)−)sup
t>0‖x(t)‖2+(�−)sup
t>0‖x(t)‖2
]}(35)
where =�21max(R1)+(�2−�1)2max(R2)+�22max(R3). Choose � small enough such that
�max(P)+��1max(Q)− < 0 (36)
�− < 0 (37)
Combining (33) and (34) and (36) and (37), we have
e�tE{V (xt )} �E{V (x0)}� (max(P)+�1max(Q)) sup
−2�2�s�0E{‖�(s)‖2}
+ sup−2�2�s�0
E{‖�(s)‖2} (38)
which can further be rewritten as
E{V (xt )}�� sup−2�2�s,v�0
E{‖�(s)‖2+‖�(v)‖2}e−�t (39)
where �=max{(max(P)+�1max(Q)),}. As V (xt )�min(P)xT(t)x(t), it can be shown from(39) that for t�0
E{xT(t)x(t)}��e−�t sup−2�2�s,v�0
E{‖�(s)‖2+‖�(v)‖2} (40)
where �=�/min(P). Recalling Definition 1, the proof can be completed. �
By using the method in Theorem 1 and commonly used method for the analysis of the parameteruncertainties, we can obtain the following result.
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

386 D. YUE ET AL.
Theorem 2System (11)–(12) is ESMSS if there exist scalars �i>0 (i=1,2,3,4,5,6,7) and matrices P>0,Q>0, Ri>0 (i=1,2,3) and matrices Ni , Mi , Vi (i=1,2) of appropriate dimensions such thatthe following LMI holds⎡
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
�11+� ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗�21 �22 ∗ ∗ ∗ ∗ ∗ ∗ ∗�31 0 −�1 I ∗ ∗ ∗ ∗ ∗ ∗�41 0 0 �44 ∗ ∗ ∗ ∗ ∗�51 0 0 0 �55 ∗ ∗ ∗ ∗�61 0 0 0 0 �66 ∗ ∗ ∗�71 0 0 0 0 0 �77 ∗ ∗�81 0 0 0 0 0 0 �88 ∗�91 0 0 0 0 0 0 0 �99
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
<0 (41)
where
� =
⎡⎢⎢⎢⎢⎣
�11 ∗ ∗ ∗�21 �22 ∗ ∗0 0 0 ∗
�41 �42 0 �44
⎤⎥⎥⎥⎥⎦
�11 = (�1+�1�2+(�2−�1)�3+�2�4)ET1 E1
�21 = (�1+�1�2+(�2−�1)�3+�2�4)�0ET2 E1
�22 = (�1+�1�2+(�2−�1)�3+�2�4)�0ET2 E2
+�0(1−�0)(�1�5+(�2−�1)�6+�2�7)ET2 E2
�41 = (�1+�1�2+(�2−�1)�3+�2�4)(1−�0)ET2 E1
�42 = (�1+�1�2+(�2−�1)�3+�2�4)�0(1−�0)ET2 E2
−�0(1−�0)(�1�5+(�2−�1)�6+�2�7)ET2 E2
�44 = (�1+�1�2+(�2−�1)�3+�2�4)(1−�0)2ET
2 E2
+�0(1−�0)(�1�5+(�2−�1)�6+�2�7)ET2 E2
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

ROBUST STABILITY OF UNCERTAIN SYSTEMS 387
�31 = [HTP 0 0 0]
�41 =[√
�1R1A√
�1�0R1Ad 0√
�1(1−�0)R1Ad
0 0 0 0
]
�51 =[√
�2−�1R2A√
�2−�1�0R2Ad 0√
�2−�1(1−�0)R2Ad
0 0 0 0
]
�61 =[√
�2R3A√
�2�0R3Ad 0√
�2(1−�0)R3Ad
0 0 0 0
]
�44 =[ −R1 ∗HTR1 −�2 I
], �55=
[ −R2 ∗HTR2 −�3 I
], �66=
[ −R3 ∗HTR3 −�4 I
]
�71 =[0
√�1�0(1−�0)R1Ad 0 −√
�1�0(1−�0)R1Ad
0 0 0 0
]
�81 =[0
√(�2−�1)�0(1−�0)R2Ad 0 −√
(�2−�1)�0(1−�0)R2Ad
0 0 0 0
]
�91 =[0
√�2�0(1−�0)R3Ad 0 −√
�2�0(1−�0)R3Ad
0 0 0 0
]
�77 =[ −R1 ∗HTR1 −�5 I
], �88=
[ −R2 ∗HTR2 −�6 I
], �99=
[ −R3 ∗HTR3 −�7 I
]
�11,�21 and �22 are as defined in Theorem 1.
Remark 4From Theorems 1 and 2, it can be seen that the feasibility of LMIs (16) and (41) depends onnot only �1 and �2 but also the probability distribution of the delay taking values in the interval.Therefore, more information of the time delay is involved in (16) and (41), which may lead to alarger allowable upper bound of the time delay.
Remark 5As an application of the proposed method, we consider the following system connected over awireless network:
x(t)= Ax(t)+Bu(t) (42)
Suppose that a linear controller u(t)=Kx(t) is designed, where K is feedback gain that can bedesigned by various methods. Considering the effect of the network conditions, similar to the
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

388 D. YUE ET AL.
method in [15], the closed-loop system of (42) can be expressed as
x(t)= Ax(t)+BK x(ikh), t ∈[ikh+�k, ik+1h+�k+1) (43)
Define �(t)= t−ikh for t ∈[ikh+�k, ik+1h+�k+1). Then (43) can be rewritten as
x(t)= Ax(t)+BK x(t−�(t)) (44)
As the employed network is wireless, {�k}∞1 and {(ik+1−ik)}∞1 change randomly. Therefore, �(t) isalso random. Suppose the probability of �(t) taking values in some intervals can be known by usingan experimental method and match Assumption 1, for a given K , the exponential mean-squarestability of system (44) can be solved by using Theorem 1.
4. NUMERICAL EXAMPLES
Example 1Consider a feedback control system
x(t)=[0 1
0 −0.1
]x(t)+
[0
0.1
]u(t) (45)
which assumes that the sensor, controller and actuator are connected by a common network medium.For a given linear controller u(t)=[−3.75 −11.5]x(t), the upper bounds of the transmission delayfor guaranteeing the stability of the system by the methods in [12, 13, 15, 22] are, respectively,4.5×10−4 [13], 0.7805 [22], 0.8695 [15] and 0.9412 [12]. By using Theorem 1, we can obtainthe computation results for different values of �1 and �0, see Table II.
It can be found from Table II that, when the probability distribution of the time delay can beobserved, using Theorem 1 can lead to a larger allowable upper bound of the delay than that usingonly the variation range of the delay.
Example 2Consider system (16) with parameter matrices
A=[−2 0
0 −0.9
], Ad =
[−1.0 0
−1.0 −1.0
]
Table II. Allowable upper bound of �2 for different �1 and �0.
�1
�0 0.1 0.3 0.5 0.7 0.8
0.3 1.04 1.04 1.02 0.99 0.970.5 1.22 1.18 1.10 1.02 0.990.7 1.57 1.43 1.27 1.10 1.030.9 2.67 2.24 1.67 1.20 1.050.99 7.63 2.54 1.52 1.09 0.95
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

ROBUST STABILITY OF UNCERTAIN SYSTEMS 389
Table III. Allowable upper bound of �2 in Example 1.
�1
�0 0.1 0.3 0.5 0.7 1.0 1.18 1.4
0.5 1.42 1.46 1.48 1.54 1.66 1.70 1.530.7 1.83 1.84 1.87 1.90 1.81 1.41 —0.9 3.16 3.16 3.12 2.92 1.94 — —0.99 9.99 9.79 9.12 7.83 1.99 — —
0 0.5 1 1.5
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
3.2
Variation of τ1
Var
iatio
n of
τ2
β0=0.5
β0=0.7
β0=0.9
Figure 2. Variation trends of �2 for different �0.
Using Theorem 1, the allowable upper bounds of the time delay for different �0 and �1 are givenin Table III.
The variation trends of the allowable upper bound of �2 for different �0 and �1 are shown inFigure 2.
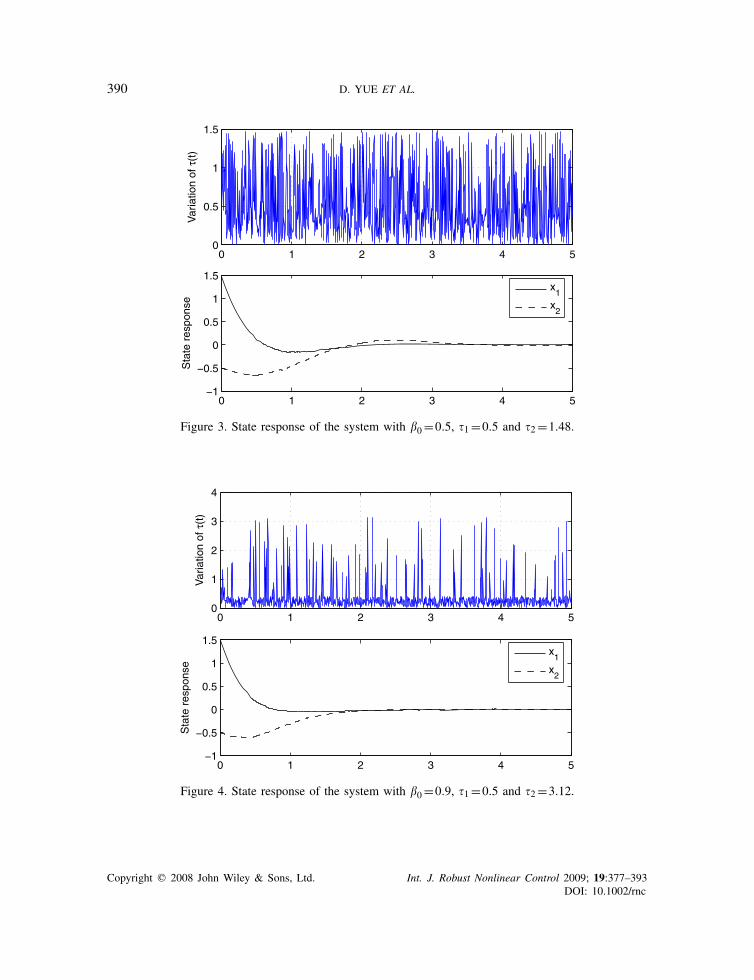
From Table III and Figure 2, it can be seen that, when the probability distribution of the timedelay is known a priori, the upper bound of the delay can be larger than 1.011 [10] and 1.34[23], which are up to now the best results obtained by the traditional methods [10, 23–27]. Forthe given initial condition �(t)=[1.5,−0.5], Figures 3–5, respectively, show the state responsefor the different cases.
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc
390 D. YUE ET AL.
0 1 2 3 4 50
0.5
1
1.5
Var
iatio
n of
τ(t
)
0 1 2 3 4 5
0
0.5
1
1.5
Sta
te r
espo
nse
x1
x2
Figure 3. State response of the system with �0=0.5, �1=0.5 and �2=1.48.
0 1 2 3 4 50
1
2
3
4
Var
iatio
n of
τ(t
)
0 1 2 3 4 5
0
0.5
1
1.5
Sta
te r
espo
nse
x1
x2
Figure 4. State response of the system with �0=0.9, �1=0.5 and �2=3.12.
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

ROBUST STABILITY OF UNCERTAIN SYSTEMS 391
0 1 2 3 4 50
2
4
6
8
10
Var
iatio
n of
τ(t
)
0 1 2 3 4 5
0
0.5
1
1.5
Sta
te r
espo
nse
x1
x2
Figure 5. State response of the system with �0=0.99, �1=0.5 and �2=9.12.
Table IV. Allowable upper bound of �2 in Example 2.
�1
�0 0.15 0.20 0.23 0.35 0.45 0.55
0.1 0.34 0.37 0.39 0.46 0.52 0.580.5 0.41 0.40 0.39 0.36 — —0.9 0.80 0.55 0.41 — — —0.99 6.06 3.06 0.62 — — —
Example 3Consider the uncertain time delay system (11) with parameter matrices
A =[−0.5 −2
1 −1
], Ad =
[−0.5 −1
0 0.6
]
H =[1 0
0 1
], E1=E2=
[0.2 0
0 0.2
]
By using Theorem 2 with different �0 and �1, the computation results for the allowable upperbound of �2 are given in Table IV.
This example was also considered by [4], where the upper bound of �(t) with �(t)�1 was0.2420. Using the methods in [10, 28], the allowable upper bounds of the delay are 0.2923 for thefast time-varying delay [10] and 0.3365 for �(t)�1 [28]. From Table IV, it can be seen that when
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

392 D. YUE ET AL.
the probability of the time delay taking values is known a priori, the upper bounds of the delayare larger than those given in [4, 10, 28].
5. CONCLUSION
This paper has investigated the robust stability of uncertain time-delay systems when the informa-tion of the probability distribution of the time delay is known a priori. By using the probability ofthe delay appearing in an interval, a new model of the time-delay system with stochastic parametermatrices has been proposed. Based on the new system model, criteria for the exponential meansquare stability of the system have been derived in terms of the LMI technique. Numerical exam-ples have shown the less conservativeness of the proposed method. In the computation results ofthe given examples, it can be found that when the probability distribution of the time delay isknown a priori, the possible values of the delay may be larger than those obtained based on thetraditional methods. It should be pointed out that the method in the present paper can also beextended to the case when the probability of the delay appearing in a series of intervals can beobserved. For this case, a different expression for the probability will be employed. This work willbe left for our future research.
REFERENCES
1. Han QL. On robust stability of neutral systems with time-varying discrete delay and norm-bounded uncertainty.Automatica 2004; 40(6):1087–1092.
2. He Y, Wu M, She JH, Liu GP. Parameter-dependent Lyapunov functional for stability of time-delay systems withpolytopic-type uncertainties. IEEE Transactions on Automatic Control 2004; 49:828–832.
3. Wang Z, Huang B, Unbehauen H. Robust H∞ observer design of linear time-delay systems with parametricuncertainty. Systems and Control Letters 2001; 42:303–312.
4. Wu M, He Y, She JH, Liu GP. Delay-dependent criteria for robust stability of time-varying delay systems.Automatica 2004; 40:1435–1439.
5. Xu S, Lam J. Improved delay-dependent stability criteria for time-delay systems. IEEE Transactions on AutomaticControl 2005; 50(3):384–387.
6. Yue D, Han QL. Delay-dependent exponential stability of stochastic systems with time-varying delay, nonlinearityand Markovian switching. IEEE Transactions on Automatic Control 2005; 50:217–222.
7. Richard JP. Time-delay systems: an overview of some recent advances and open problems. Automatica 2003;39:1667–1694.
8. Gao H, Shi P, Wang J. Parameter-dependent robust stability of uncertain time-delay systems. Journal ofComputational and Applied Mathematics 2007; 206:366–373.
9. Peng C, Tian YC. Delay-dependent robust stability criteria for uncertain systems with interval time-varying delay.Journal of Computational and Applied Mathematics 2007. DOI: 10.1016/j.cam.2007.03.009.
10. Jiang X, Han QL. On H∞ control for linear systems with interval time-varying delay. IEEE Transactions onAutomatic Control 2005; 41:2099–2106.
11. Yue D. Robust stabilization of uncertain systems with unknown input delay. Automatica 2004; 40(2):331–336.12. Yue D, Han QL, Lam J. Network-based robust H∞ control with systems with uncertainty. Automatica 2005;
41:999–1007.13. Zhang W, Branicky MS, Phillips SM. Stability of networked control systems. IEEE Control Systems Magazine
2001; 21:84–99.14. Lam J, Gao H, Wang CH. Stability analysis for continuous systems with two additive time-varying delay
components. Systems and Control Letters 2007; 56:16–24.15. Yue D, Han QL, Peng C. State feedback controller design of networked control systems. IEEE Transactions on
Circuits and Systems—II 2004; 51:640–644.
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc

ROBUST STABILITY OF UNCERTAIN SYSTEMS 393
16. Tian YC, Levy D, Tade MO, Gu TL, Fidge C. Queuing packet in communication networks networked controlsystems. In Proceedings of the 6th World Congress on Intelligent Control and Automation (WCICA’06), Dalian,China, 2006; 210–214.
17. Gao H, Chen TW. New results on stability of discrete-time systems with time-varying state delay. IEEETransactions on Automatic Control 2007; 52:328–334.
18. Wang Z, Ho DWC, Liu X. Variance-constrained filtering for uncertain stochastic systems with missingmeasurements. IEEE Transactions on Automatic Control 2003; 48:1254–1258.
19. Wang Z, Ho DWC, Liu X. Variance-constrained control for uncertain stochastic systems with missing measurement.IEEE Transactions on Systems, Man and Cybernetics—Part A 2005; 35:746–753.
20. Wang Z, Liu Y, Yang F, Liu X. On designing robust controllers under randomly varying sensor delay withvariance constraints. International Journal of General Systems 2006; 35:1–15.
21. Wang Z, Liu Y, Yang F, Ho DWC. Robust H∞ filtering for stochastic time-delay systems with missingmeasurements. IEEE Transactions on Signal Processing 2006; 54(7):2579–2587.
22. Kim DS, Lee YS, Kwon WH, Park HS. Maximum allowable delay bounds of networked control systems. ControlEngineering Practice 2003; 11:1301–1313.
23. He Y, Wang QG, Lin G, Wu M. Delay-range-dependent stability for systems with time-varying delay. Automatica2007; 43:371–376.
24. Li X, de Souza CE. Criteria for robust stability of uncertain linear systems with time-varying state delays. IFAC13th World Congress, vol. 1, San Francisco, CA, 1996; 137–142.
25. Lien CH. Delay-dependent stability criteria for uncertain neutral systems with multiple time-varying delays viaLMI approach. IEE Proceedings: Control Theory and Applications 2005; 152:707–714.
26. Su JH. Further results on the robust stability of linear systems with single time delay. Systems and ControlLetters 1994; 23:375–379.
27. Xu S, Lam J, Zou Y. New results on delay-dependent robust H∞ control for systems with time-varying delays.Automatica 2006; 42:343–348.
28. He Y, Wang QG, Xie LH, Lin C. Further improvement of free-weighting matrices technique for systems withtime-varying delay. IEEE Transactions on Automatic Control 2007; 52:293–299.
Copyright q 2008 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2009; 19:377–393DOI: 10.1002/rnc
Copyright © 2022 FDOKUMEN




















