High-resolution relaxation scheme for the two-dimensional Riemann problems in gas dynamics
17
High-Resolution Relaxation Scheme for the Two- Dimensional Riemann Problems in Gas Dynamics Mohammed Seaı ¨d Fachbereich Mathematik, TU Darmstadt, 64289 Darmstadt, Germany Received 30 June 2003; accepted 18 April 2005 Published online in Wiley InterScience (www.interscience.wiley.com). DOI 10.1002/num.20101 We present a new relaxation method for the numerical approximation of the two-dimensional Riemann problems in gas dynamics. The novel feature of the technique proposed here is that it does not require either a Riemann solver or a characteristics decomposition. The high resolution of the method is achieved by using a third-order reconstruction for the space discretization and a third-order TVD Runge-Kutta scheme for the time integration. Numerical experiments, using several configurations of Riemann problems in gas dynamics, are included to confirm the high resolution of the new relaxation scheme. © 2005 Wiley Periodicals, Inc. Numer Methods Partial Differential Eq 21: 000 – 000, 2005 Keywords: relaxation methods; higher order reconstructions; Runge-Kutta schemes; Riemann problems of gas dynamics I. INTRODUCTION Relaxation models for hyperbolic systems of conservation laws have initially been introduced in [1]. The models consist on replacing the original conservation law by a semilinear hyperbolic system with linear characteristic variables and a relaxation source term that rapidly takes the relaxation variable to the flux function when the relaxation time becomes small [1–3]. The main advantages of relaxation models are the semilinear construction of the approximating system and a special time implicit-explicit splitting for the relaxation term. The first advantage allows us to solve the system numerically without introducing Riemann solvers and the second avoids the solution of nonlinear system of algebraic equations. The relaxation schemes was firstly proposed in [1], where the authors consider a first-order upwind method and a second-order MUSCL method for the space discretization, together with a second-order TVD Runge-Kutta splitting for the time integration. In fact, relaxation schemes are a combination of nonoscillatory upwind space discretization and a TVD implicit-explicit time integration of the resulting semi-discrete system (see for instance [1, 3]). The fully discrete Correspondence to: Mohammed Seaı ¨d, Fachbereich Mathematik, TU Darmstadt, 64289 Darmstadt, Germany (e-mail: [email protected]) © 2005 Wiley Periodicals, Inc.
-
Upload
wwwgrupolpa -
Category
Documents
-
view
2 -
download
0
Transcript of High-resolution relaxation scheme for the two-dimensional Riemann problems in gas dynamics

High-Resolution Relaxation Scheme for the Two-Dimensional Riemann Problems in Gas DynamicsMohammed SeaıdFachbereich Mathematik, TU Darmstadt, 64289 Darmstadt, Germany
Received 30 June 2003; accepted 18 April 2005Published online in Wiley InterScience (www.interscience.wiley.com).DOI 10.1002/num.20101
We present a new relaxation method for the numerical approximation of the two-dimensional Riemannproblems in gas dynamics. The novel feature of the technique proposed here is that it does not requireeither a Riemann solver or a characteristics decomposition. The high resolution of the method is achievedby using a third-order reconstruction for the space discretization and a third-order TVD Runge-Kuttascheme for the time integration. Numerical experiments, using several configurations of Riemann problemsin gas dynamics, are included to confirm the high resolution of the new relaxation scheme. © 2005 WileyPeriodicals, Inc. Numer Methods Partial Differential Eq 21: 000–000, 2005
Keywords: relaxation methods; higher order reconstructions; Runge-Kutta schemes; Riemann problems ofgas dynamics
I. INTRODUCTION
Relaxation models for hyperbolic systems of conservation laws have initially been introducedin [1]. The models consist on replacing the original conservation law by a semilinear hyperbolicsystem with linear characteristic variables and a relaxation source term that rapidly takes therelaxation variable to the flux function when the relaxation time becomes small [1–3]. The mainadvantages of relaxation models are the semilinear construction of the approximating systemand a special time implicit-explicit splitting for the relaxation term. The first advantage allowsus to solve the system numerically without introducing Riemann solvers and the second avoidsthe solution of nonlinear system of algebraic equations.
The relaxation schemes was firstly proposed in [1], where the authors consider a first-orderupwind method and a second-order MUSCL method for the space discretization, together witha second-order TVD Runge-Kutta splitting for the time integration. In fact, relaxation schemesare a combination of nonoscillatory upwind space discretization and a TVD implicit-explicittime integration of the resulting semi-discrete system (see for instance [1, 3]). The fully discrete
Correspondence to: Mohammed Seaıd, Fachbereich Mathematik, TU Darmstadt, 64289 Darmstadt, Germany (e-mail:[email protected])
© 2005 Wiley Periodicals, Inc.

system is referred to as a relaxing system, whereas that of the limiting system, as the relaxationrate tends to zero, is called relaxed scheme. For systems of conservation laws, these schemesoffer a very attractive alternative for standard integration schemes; consult [1] for numericalillustrations.
Riemann problems of gas dynamics remain challenging for numerical solution, even thoughgreat progress has been made in the development of modern shock capturing methods forinviscid flows or systems of conservation laws in the last decades. In two-dimensional domainsthese problems offer a variety of flow structures formed by shocks, rarefactions, slip lines, andcontacts, which need to be resolved accurately in applications and often cause severe numericaldifficulties. In Riemann problems for two-dimensional gas dynamics, the initial states areconstant in each quadrant that only one elementary wave, a one-dimensional shock, a one-dimensional rarefaction, or a two-dimensional slip line appears at each interface connecting twoneighboring quadrants. In [4] the total number of genuinely different configurations for poly-tropic gas is 15. The authors in [5] add four more configurations by considering both negativeand positive slips, and then the total number of the Riemann problems of gas dynamics becomes19. These problems have been numerically solved in [6] using a second- and third-order centralschemes. It is worth mentioning that the authors in ([6], p 589) claimed that WeightedEssentially Non-Oscillatory (WENO) reconstruction might result in spurious oscillations orextra smearing of discontinuities. As we will see, these disadvantages do not occur in ournumerical results.
High-order accurate methods are important in scientific computations because they offer ameans to obtain accurate solutions with less work that may be required for methods of loweraccuracy. In this article, following the same ideas, we first extend the relaxation schemes of [1]to higher order by combining a third-order Central Weighted Essentially Non-Oscillatory(CWENO) reconstruction and a third-order TVD implicit-explicit Runge-Kutta scheme. Then,we use the resulting scheme to compute the solutions for some of the 19 configurations ofRiemann problems in gas dynamics. The results obtained demonstrate good shock resolutionwith high accuracy in smooth regions and without any nonphysical oscillations near the shockareas. From a practical point of view, the performance of our relaxation scheme is very attractivebecause the computed solutions remain stable and highly accurate even on coarse grids withoutsolving Riemann problems or requiring special front tracking techniques.
The present article is organized as follows. Section 2 is concerned with the formulation of ourhigh-resolution relaxation scheme. In section 3 we recall the Riemann problems of gas dynamicsused to test our scheme. Computational results are given in section 4. Section 5 contains theconclusions.
II. HIGH-RESOLUTION RELAXATION METHOD
To motivate our discussion we consider the two-dimensional system of hyperbolic conservationlaws,
Ut � F�U�x � G�U�y � 0, t � 0, �x, y� � �2,
U �t � 0, x, y� � U0�x, y�, (2.1)
where U(t, x, y) � �N, F(U) � �N, and G(U) � �N are nonlinear flux functions. U0 � �N isgiven initial data. We assume that the Jacobian �F/�U and �G/�U are diagonalizable with realeigenvalues {�1, . . . , �N} and {�1, . . . , �N}, respectively.
2 SEAID

The relaxation system proposed in [1] and used henceforth for designing a relaxation schemereads
Ut � Vx � Wy � 0,
Vt � AUx � �1
��V � F�U��,
Wt � BUy � �1
��W � G�U��, (2.2)
where V � �N and W � �N are relaxation variables; A � diag{A1, . . . , AN} and B �diag{B1, . . . , BN} are positive diagonal matrices; and � is the relaxation time. The relaxationsystem (2.2) has a typical semilinear structure with the two linear characteristic variables
V �A U and W �B U. (2.3)
In the zero relaxation limit � 3 0, we recover the original system (2.1) provided the subchar-acteristic condition [1–3],
�k2
Ak�
�k2
Bk 1, @k � 1, . . . , N (2.4)
holds in (2.2). If we set V � F(U) and W � G(U), then the first equation of (2.2) reduces tothe original conservation law (2.1). To design a relaxation scheme for the system (2.2), it isconvenient to treat the spatial discretization and the time discretization separately using themethod of lines.
A. Non-oscillatory Reconstruction for Space Discretization
Let us consider the spatial cells Ii, j � [xi�(1/2), xi�(1/2)] � [yj�(1/2), yj�(1/2)] with uniform sizes�x and �y, and centered at (xi � i�x, yj � j�y). We use the notations Ui�(1/2), j(t) � U(t, xi�(1/2),yj), Ui, j�(1/2)(t) � U(t, xi, yj�(1/2)) and
Ui,j�t� �1
�x
1
�y �xi��1/2�
xi��1/2� �yj��1/2�
yj��1/2�
U�t, x, y�dxdy,
to denote the point-values and the approximate cell-average of the function U at (t, xi�(1/2), yj),(t, xi, yj�(1/2)), and (t, xi, yj), respectively. Then, the space discretization of (2.2) is
dUi,j
dt�
Vi��1/2�,j � Vi��1/2�,j
�x�
Wi,j��1/2� � Wi,j��1/2�
�y� 0,
dVi,j
dt� A
Ui��1/2�,j � Ui��1/2�,j
�x� �
1
��Vi,j � F�U�i,j�,
HIGH-RESOLUTION RELAXATION SCHEME 3

dWi,j
dt� B
Ui,j��1/2� � Ui,j��1/2�
�y� �
1
��Wi,j � G�U�i,j�. (2.5)
The kth component of the approximate solution is reconstructed by a piecewise-polynomialinterpolant over the grid points as
Uk�x, y, t� � �i,j
�i,j�x, y; U��i,j�x, y�, (2.6)
where �i, j’s are the characteristic functions in the cell Ii, j. The polynomials �i, j are defined inIi, j and reconstructed “dimension by dimension” as
�i,j�x, y; U� � �i�x, y; U� � �j�x, y; U�.
For simplicity in presentation, the subscript k will be omitted in (2.6). The degree of thepolynomials �i and �j is determined by the required order of accuracy of the method. In thisarticle we consider the third-order CWENO reconstruction, which is also the compact centralscheme reconstruction [7]. In the following we formulate the x-direction polynomial �i(x, y; U);the formulation of �j(x, y; U) can be done analogously. Hence
�i�x, y; U� � �LPL�x, y� � �RPR�x, y� � �CPC�x, y�,
where the polynomials Pl(x, y), l � {L, R, C} are defined as
PL�x, y� �Ui,j
2�
Ui,j � Ui�1,j
�x�x � xi�, PR�x, y� �
Ui,j
2�
Ui�1,j � Ui,j
�x�x � xi�,
PC�x, y� �Ui,j
2�
1
12�Ui�1,j � 2Ui,j � Ui�1,j� �
1
12�Ui,j�1 � 2Ui,j � Ui,j�1�
�Ui�1,j � Ui�1,j
2��x��x � xi� �
�Ui�1,j � 2Ui,j � Ui�1,j�
��x�2 �x � xi�2.
The weights �l, l � {L, R, C} are given by
�l � l
¥m m
, l, m�L, R, C, l�cl
���ISl�2 , cL�cR�
1
4, cC�
1
2.
(2.7)
Note that the normalizing factor ¥m m is used here to guarantee ¥l �l � 1. The smoothnessindicators ISl are given by
ISL � �Ui,j � Ui�1,j�2, ISR � �Ui�1,j � Ui,j�
2,
ISC �13
3�Ui�1,j � 2Ui,j � Ui�1,j�
2 �1
4�Ui�1,j � Ui�1,j�
2.
4 SEAID

The constant � in (2.7) guarantees that the denominator does not vanish and is empirically takento be 10�6. We can now discretize the characteristic variables (2.3) as follows:
�V �Ak U �i��1/2�,j � �i�xi��1/2�, yj; V �A U�,
�W �Bk U �i,j��1/2� � �j�xi, yj��1/2�; W �B U�. (2.8)
Once again U, V, W, Ak, and Bk are the kth (k � 1, . . . , N ) components of U, V, W, A, and B,respectively. Solving (2.8) for the unknowns Ui�(1/2), j, Vi�(1/2), j, Ui, j�(1/2), and Wi, j�(1/2) gives
Ui��1/2�,j �1
2�Ak
��i�xi��1/2�, yj; V � �A U� � �i�1�xi��1/2�, yj; V � �A U��,
Vi��1/2�,j �1
2��i�xi��1/2�, yj; V � �A U� � �i�1�xi��1/2�, yj; V � �A U��;
Ui,j��1/2� �1
2�Bk
��j�xi, yj��1/2�; W � �B U� � �j�1�xi, yj��1/2�; W � �B U��,
Wi,j��1/2� �1
2��j�xi, yj��1/2�; W � �B U� � �j�1�xi, yj��1/2�; W � �B U��.
Therefore, we obtain the following expressions for the numerical fluxes in (2.5):
Ui��1/2�,j �Ui,j � Ui�1,j
2�
Vi�1,j � Vi,j
2�Ak
��i,j
x,� � �i�1,jx,�
4�Ak
,
Vi��1/2�,j �Vi,j � Vi�1,j
2� �Ak
Ui�1,j � Ui,j
2�
�i,jx,� � �i�1,j
x,�
4;
Ui,j��1/2� �Ui,j � Ui,j�1
2�
Wi,j�1 � Wi,j
2�Bk
��i,j
y,� � �i,j�1y,�
4�Bk
,
Wi,j��1/2� �Wi,j � Wi�1,j
2� �Bk
Ui,j�1 � Ui,j
2�
�i,jy,� � �i,j�1
y,�
4,
where �i, jx,� and �i, j
y,� are the slopes of V � A U and W � B U on the cell Ii, j, respectively.They are defined by
�i,jx,� � �L
���V �Ak U �i,j � �V �Ak U �i�1,j� � �R���V �Ak U �i�1,j � �V �Ak U �i,j�
��C
�
2��V �Ak U �i�1,j � �V �Ak U �i�1,j� �
�C�
3��V �Ak U �i�1,j � 2�V �Ak U �i,j
� �V �Ak U �i�1,j� ��C
�
6��V �Ak U �i,j�1 � 2�V �Ak U �i,j � �V �Ak U �i,j�1�,
HIGH-RESOLUTION RELAXATION SCHEME 5

�i,jy,� � �L
���W �Bk U �i,j � �W �Bk U �i,j�1� � �R���W �Bk U �i,j�1 � �W �Bk U �i,j�
��C
�
2��W �Bk U �i,j�1 � �W �Bk U �i,j�1� �
�C�
3��W �Bk U �i,j�1 � 2�W �Bk U �i,j
� �W �Bk U �i,j�1� ��C
�
6��W �Bk U �i�1,j � 2�W �Bk U �i,j � �W �Bk U �i�1,j�.
The weight parameters �L�, �R
�, and �C� for �i, j
x,� are given by
�l� �
l�
¥m m� , l, m � L, R, C, l
� �cl
�� � ISl��2 , cL � cR �
1
4, cC �
1
2,
ISL� � ��V �Ak U �i,j � �V �Ak U �i�1,j�
2,
ISR� � ��V �Ak U �i�1,j � �V �Ak U �i,j�
2,
ISC� �
13
3��V �Ak U �i�1,j � 2�V �Ak U �i,j � �V �Ak U �i�1,j�
2
�1
4��V �Ak U �i�1,j � �V �Ak U �i�1,j�
2.
The corresponding weight parameters for �i, jy,� are obtained by changing V � Ak U to W �
Bk U in the above formulas and differentiating respect to the y-direction. We would like topoint out that in this higher-order scheme we approximate F(U)i, j and G(U)i, j in (2.5) using thefourth-order Simpson quadrature rule as opposed to the Midpoint Rule which was used in thefirst- and second-order reconstructions in [1]. Thus,
F�U�i,j �1
6�F�Ui��1/2�,j� � 4F�Ui,j� � F�Ui��1/2�,j�� �
1
6�F�Ui,j��1/2�� � 4F�Ui,j� � F�Ui,j��1/2���,
with the reconstruction given above is used:
Ui��,j � �LPL�xi��, yj� � �RPR�xi��, yj� � �CPC�xi��, yj�, � � �1
2, 0,
1
2,
with the corresponding weights, �L, �R, �C of the polynomials defined accordingly. The fluxfunction G(U)i, j is approximated in a similar manner.
B. TVD Runge-Kutta Methods for Time Integration
The semi-discrete system (2.5) can be written as a system of ordinary differential equations
dYdt
� ��Y� �1
���Y�, (2.9)
where the time-dependent vector functions:
6 SEAID

Y � �Ui,j
Vi,j
Wi,j
�,
��Y� � ��
Vi��1/2�,j � Vi��1/2�,j
�x�
Wi,j��1/2� � Wi,j��1/2�
�y
�AUi��1/2�,j � Ui��1/2�,j
�x
�BUi,j��1/2� � Ui,j��1/2�
�y
�, ��Y� � � 0Vi,j � F�U�i,j
Wi,j � G�U�i,j
�.
When �3 0, the equations (2.9) become highly stiff and any explicit treatment of the right-handside in (2.9) requires extremely small time stepsizes. This fact might restrict any long-termcomputation in (2.2). On the other hand, integrating the equations (2.9) by an implicit scheme,either linear or nonlinear algebraic equations have to be solved at every time step of thecomputational process. To find solutions of such systems is computationally very demanding. Inthis article we consider an alternative approach based on implicit-explicit (IMEX) Runge-Kuttasplitting. The nonstiff stage of the splitting for � is treated by an explicit Runge-Kutta scheme,while the stiff stage for � is approximated by a diagonally implicit Runge-Kutta (DIRK)scheme. Compare [8] and [9] for more details.
Let �t be the time step and Yn denote the approximate solution at t � n�t. The implemen-tation of the IMEX algorithm to solve (2.9) can be carried out in the following steps:
1. For l � 1, . . . , s,a. Evaluate K*l as: K*l � Yn � �t ¥m�1
l�1 alm�(Km) � (�t/�) ¥m�1l�1 alm�(Km).
b. Solve for Kl: Kl � K*l � (�t/�)all�(Kl).2. Update Yn�1 as: Yn�1 � Yn � �t ¥l�1
s bl�(Kl) � (�t/�) ¥l�1s bl�(Kl).
The s � s matrices A � (alm), alm � 0 for m � l and A � (alm) are chosen such that the resultingscheme is explicit in �, and implicit in �. The s-vectors b and b are the canonical coefficientsthat characterize the IMEX s-stage Runge-Kutta scheme [9]. They can be given by the standarddouble tableau in Butcher notation,
c A
bT
c A
bT
Here, c and c are s-vectors used in nonautonomous cases. Note that, using the above relaxationscheme neither linear algebraic equation nor nonlinear source terms can arise. In addition, sincethe source terms are treated implicitly and the advection terms are treated explicitly, thehigh-order relaxation scheme is stable independently of �, so the choice of �t is based only onthe usual CFL condition:
CFL � max1kN
��t
h, Ak
�t
�x, Bk
�t
�y� 1, (2.10)
where h denotes the maximum cell size, h � max(�x, �y).
HIGH-RESOLUTION RELAXATION SCHEME 7

In this article we use the third-order IMEX scheme proposed in [8], the associated doubletableau can be represented as
0 0 0 0� � 0 0
1 � � � � 1 2 � 2� 0
0 12
12
0 0 0 0� 0 � 0
1 � � 0 1 � 2� �
0 12
12
where � � (3 � 3)/6. Other IMEX schemes of third- and higher-order are also discussed in[10]. It is clear that, at the limit (� 3 0) the time integration procedure tends to a TVD timeintegration scheme of the limit equations based on the explicit scheme given by the left table.
Remark. i. The characteristic speeds Ak and Bk in (2.2) can be chosen based on roughestimates of eigenvalues �k and �k of �F/�U and �G/�U, respectively. Other choice is tocalculate A and B locally at every cell as
Ai��1/2�,j � max��i��1/2�,j� �, ��i��1/2�,j
� �, Bi,j��1/2� � max��i,j��1/2�� �, ��i,j��1/2�
� �, (2.11)
where �i�(1/2), j� and �i�(1/2), j
� are the values of �k at the cell boundary point between cells Ii, j andIi�1, j, (xi�(1/2), yj), are denoted as
�i��1/2�,j� � �i�1,j�xi��1/2�, yj; ��, �i��1/2�,j
� � �i,j�xi��1/2�, yj; ��,
�i,j��1/2�� � �i,j�1�xi, yj��1/2�; ��, �i,j��1/2�
� � �i,j�xi, yj��1/2�; ��.
A global choice is simply to take the maximum over the grid points in (2.11).
Ak � Bk � maxi,j
�Ai��1/2�,j, Bi,j��1/2��, k � 1, . . . , N. (2.12)
It is worth saying that, larger Ak and Bk values usually add more numerical dissipation.ii. Note that the relaxation rate � can be viewed as a viscosity coefficient in (2.2) such that
more numerical diffusion is added for larger value of �. For small �, numerical results obtainedby relaxing (� �� 1) and relaxed (� � 0) schemes are essentially the same.
III. THE RIEMANN PROBLEMS OF GAS DYNAMICS
The Euler equations for an ideal gas in two dimensions are given by the system (2.1) with
U � ���u�vE�, F�U� � �
�u�u2 � p
�uvu�E � p�
�, G�U� � ��v�uv
�v2 � pv �E � p�
�, (3.1)
where � is the density, u is the x-velocity, v is the y-velocity, E � �e � 12
�(u2 � v2) is the totalenergy, e is the internal energy of the gas, p � (� � 1)�e is the pressure, and � is the ratio of
8 SEAID

specific heats, � � 1.4. The eigenvalues of the Jacobian matrix �F/�U (or �G/�U) are �1 �u � c, �2 � �3 � u, and �4 � u � c (or �1 � v � c, �2 � �3 � v, and �4 � v � c). Theseare the characteristic speeds for one-dimensional gas dynamics and are needed here only for theestimation of relaxation variables. The sound speed c is defined by c2 � �p/�.
The Riemann problems for two-dimensional gas dynamics have been extensively discussedin the literature; we refer the reader to [4, 5] and further references are therein. In [4] the totalnumber of genuinely different configurations for polytropic gas are set to 15. Four moreconfigurations have been added in [5] by considering the positive and negative slips cases. Theseconfigurations have been also studied in [6] using central schemes.
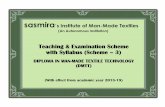
Hence, the Riemann problems we consider in this article consist of the equations (2.1)–(3.1)subject to the initial conditions
�p, �, u, v�T�0, x, y� � �pi, �i, ui, vi�T, i � 1, 2, 3, 4, (3.2)
where i denotes the ith quadrant as in Figure 1.At each interface (l, r) � {(2, 1), (3, 2), (3, 4), (4, 1)} we use the notation Rlr, Rlr, Slr, Slr, Jlr
�
and Jlr� to refer, respectively, to a backward rarefaction wave, a forward rarefaction wave, a
backward shock wave, a forward shock wave, a negative contact discontinuity, and a positivecontact discontinuity.
IV. NUMERICAL RESULTS
In this section, through numerical experiments, we illustrate the performance of the proposedrelaxation method for some configurations in Riemann problems of gas dynamics. The exper-
FIG. 1. Spatial domain with the four quadrants.
HIGH-RESOLUTION RELAXATION SCHEME 9

iments were done on the spatial domain in Figure 1 covered with two regular meshes containing200 � 200 and 400 � 400 grid points, respectively. The relaxation system associated toequations (2.1)–(3.1) is given by the system (2.2), where the matrices A and B in (2.2) wereapproximated using a global estimation of characteristic speeds as,
A1 � A2 � A3 � A4 � max�sup�u � c�, sup�u�, sup�u � c��,
B1 � B2 � B3 � B4 � max�sup�v � c�, sup�v�, sup�v � c��.
In all our computations the relaxation rate � is set to 10�6 and a time step �t � 0.001 is usedin all examples. Following the numbering introduced in [5], for each configuration we display30 equi-distributed contour plots of the density. The following configurations are selected.
Configuration 12.
S21�
J32�
S41�
J34�
.
The initial conditions are as follows:
p2 � 1 �2 � 1 p1 � 0.4 �1 � 0.5313
u2 � 0.7276 v2 � 0 u1 � 0 v1 � 0
p3 � 1 �3 � 0.8 p4 � 1 �4 � 1
u3 � 0 v3 � 0 u4 � 0 v4 � 0.7276.
Our concern in this configuration is to illustrate the influence of relaxation rate � on numericalsolution. To this end, we show in Figure 2 the obtained results for the 200 � 200 grid at t �0.25 using � � 0.1, � � 0.01, � � 0.00001, and � � 0. As can be seen, large values of �introduce more diffusion in the computed solution. By decreasing � the relaxation schemeresolves the shock accurately and preserves the shape of solution in the original conservationlaw. It is clear that our numerical scheme maintains the correct asymptotic limit.
Configuration 11.
S21�
J32�
S41�
J34�
.
The initial conditions are as follows:
p2 � 0.4 �2 � 0.5313 p1 � 1 �1 � 1
u2 � 0.8276 v2 � 0 u1 � 0.1 v1 � 0
p3 � 0.4 �3 � 0.8 p4 � 0.4 �4 � 0.5313
u3 � 0.1 v3 � 0 u4 � 0.1 v4 � 0.7276.
10 SEAID

In Figure 3 we compare the results obtained by our third order relaxation scheme to those obtainedby the second-order relaxing scheme from [1]. In our implementation we used the van Leer’s slopelimiter for the second-order scheme as in [1]. The results in Figure 3 are shown at t � 0.3 for thetwo meshes. Comparing the results in this figure we can see that the third-order relaxing schemeresolves the configuration much better than the second-order scheme with same mesh, comparethe contour lines near the vicinity of contact discontinuities in region [0.3, 0.5] � [0.3, 0.5] ofthe computational domain. The computational work needed for both schemes has also beencompared and the main conclusion is: when comparable resolution is obtained with thethird-order scheme using half the number of grid points than the second-order scheme, the CPUtime needed by the third-order scheme is only about 35% of that needed by the second-orderscheme in this configuration.
Configuration 3.
S21�
S32� S41
�
S34�
.
FIG. 2. Results for the Configuration 12 using different relaxation rates � on 200 � 200 grid.
HIGH-RESOLUTION RELAXATION SCHEME 11

The initial conditions are as follows:
p2 � 0.3 �2 � 0.5323 p1 � 1.5 �1 � 1.5
u2 � 1.206 v2 � 0 u1 � 0 v1 � 0
p3 � 0.029 �3 � 0.138 p4 � 0.3 �4 � 0.5323
u3 � 1.206 v3 � 1.206 u4 � 0 v4 � 1.206.
The results obtained for the two meshes at t � 0.3 are given in Figure 4. Comparing with thesame configuration in [6], good agreement of the solution is seen in the large-scale structure.
Configuration 5.
J21�
J32� J41
�
J34�
.
The initial conditions are as follows:
FIG. 3. Results for the Configuration 11 on 200 � 200 grid (left) and 400 � 400 grid (right).
12 SEAID

p2 � 1 �2 � 2 p1 � 1 �1 � 1
u2 � �0.75 v2 � 0.5 u1 � �0.75 v1 � �0.5
p3 � 1 �3 � 1 p4 � 1 �4 � 3
u3 � 0.75 v3 � 0.5 u4 � 0.75 v4 � �0.5.
The results obtained for the two meshes at t � 0.23 are given in Figure 5. As in the previousconfiguration, the solution has similar resolution as in [4, 5]. The contacts obtained in [6] aresharper.
FIG. 4. Results for the Configuration 3 on 200 � 200 grid (left) and 400 � 400 grid (right).
FIG. 5. Results for the Configuration 5 on 200 � 200 grid (left) and 400 � 400 grid (right).
HIGH-RESOLUTION RELAXATION SCHEME 13

Configuration 7.
R21�
J32�
R41�
J34�
.
The initial conditions are as follows:
p2 � 0.4 �2 � 0.5197 p1 � 1 �1 � 1
u2 � �0.6259 v2 � 0.1 u1 � 0.1 v1 � 0.1
p3 � 0.4 �3 � 0.8 p4 � 0.4 �4 � 0.5197
u3 � 0.1 v3 � 0.1 u4 � 0.1 v4 � �0.6259.
The results obtained for the two meshes at t � 0.25 are given in Figure 6. The contacts arecaptured in agreement with corresponding numerical results in [6].
Configuration 13.
J21�
S32� S41
�
J34�
.
The initial conditions are as follows:
p2 � 1 �2 � 2 p1 � 1 �1 � 1
u2 � 0 v2 � 0.3 u1 � 0 v1 � �0.3
p3 � 0.4 �3 � 1.0625 p4 � 0.4 �4 � 0.5313
u3 � 0 v3 � 0.8145 u4 � 0 v4 � 0.4276.
FIG. 6. Results for the Configuration 7 on 200 � 200 grid (left) and 400 � 400 grid (right).
14 SEAID

The results obtained for the two meshes at t � 0.3 are given in Figure 7. It is easy to find thatcomparing the same configuration in [6], our relaxation scheme resolves the contacts sharplywithout oscillations.
Configuration 15.
R21�
J32�
S41�
J34�
.
The initial conditions are as follows:
p2 � 0.4 �2 � 0.5197 p1 � 1 �1 � 1
u2 � �0.6259 v2 � �0.3 u1 � 0.1 v1 � �0.3
p3 � 0.4 �3 � 0.8 p4 � 0.4 �4 � 0.5313
u3 � 0.1 v3 � �0.3 u4 � 0.1 v4 � 0.4276.
The results obtained for the two meshes at t � 0.2 are given in Figure 8. Once again, resolutionof contacts is generally in good agreement with the corresponding numerical results in [6].
Configuration 19.
J21�
S32� R41
�
J34�
.
The initial conditions are as follows:
FIG. 7. Results for the Configuration 13 on 200 � 200 grid (left) and 400 � 400 grid (right).
HIGH-RESOLUTION RELAXATION SCHEME 15

p2 � 1 �2 � 2 p1 � 1 �1 � 1
u2 � 0 v2 � �0.3 u1 � 0 v1 � 0.3
p3 � 0.4 �3 � 1.0625 p4 � 0.4 �4 � 0.5197
u3 � 0 v3 � 0.2145 u4 � 0 v4 � �0.4259.
The results obtained for the two meshes at t � 0.3 are given in Figure 9. Our relaxation schemereproduces the large-scale structure of the corresponding numerical results in [4–6].
V. CONCLUSIONS
We have proposed a new relaxation scheme by combining a third-order nonoscillatory recon-struction for the spatial discretization and a third-order TVD Runge-Kutta method for the time
FIG. 8. Results for the Configuration 15 on 200 � 200 grid (left) and 400 � 400 grid (right).
FIG. 9. Results for the Configuration 19 on 200 � 200 grid (left) and 400 � 400 grid (right).
16 SEAID

integration. The resulting scheme is tested for a series of two-dimensional Riemann problemsin gas dynamics that contain shocks, rarefactions waves, and contact discontinuities. Ourrelaxation scheme resolves these problems accurately and captures the shocks without usingeigenvector decompositions or Riemann solvers.
Although the tests shown in this article are gas dynamics problems, the scheme can be easilyapplied to other systems of conservation laws with very small changes in the code. In particular,it is only necessary to supply the flux functions and an estimate of the characteristic speeds.
This article benefited from useful comments and suggestions based on careful reading by thereferees.
References
1. S. Jin and Z. Xin, The relaxation schemes for systems of conservation laws in arbitrary spacedimensions, Comm Pure Appl Math 48 (1995), 235–276.
2. R. Natalini, Convergence to equilibrium for relaxation approximations of conservation laws, CommPure Appl Math 49 (1996), 795–823.
3. C. Lattanzio and D. Serre, Convergence of a relaxation scheme for hyperbolic systems of conservationlaws, Numer Math 88 (2001), 121–134.
4. C. W. Schulz-Rinne, J. P. Collins, and H. M. Glaz, Numerical solution of the Riemann problem fortwo-dimensional gas dynamics, SIAM J Sci Comp 14 (1993), 1394–1414.
5. P. Lax and X. Liu, Solution of two-dimensional Riemann problems of gas dynamics by positiveschemes, SIAM J Sci Comp 19 (1998), 319–340.
6. A. Kurganov and E. Tadmor, Solution of two-dimensional Riemann problems for gas dynamicswithout Riemann problem solvers, Numer Methods for PDEs 18 (2002), 548–608.
7. D. Levy, G. Puppo, and G. Russo, Compact central schemes for multidimensional conservation laws,SIAM J Sci Comp 22 (2000), 656–672.
8. U. Ascher, S. Ruuth, and R. Spiteri, Implicit-explicit Runge-Kutta methods for time-dependent partialdifferential equations, Appl Numer Math 25 (1997), 151–167.
9. L. Pareschi and G. Russo, Implicit-explicit Runge-Kutta schemes for stiff systems of differentialequations, Recent Trends Numer Anal 3 (2000), 269–289.
HIGH-RESOLUTION RELAXATION SCHEME 17