GANZHEITLICHE ASTRONOMISCHE NAVIGATION
196
1 GANZHEITLICHE ASTRONOMISCHE NAVIGATION VON WOLFGANG KÖSLING DAS LICHT Wenn die Sonne im letzten Augenblick des Tages für uns sichtbar ist, hat sie nicht nur ihre Farbe so wunderbar verändert, dass der Mansch unweigerlich zu ihr hinsieht und mehr Zeit für diesen Anblick verwendet, als wie er es zu einer anderen Tageszeit tut. Auch der Himmel am Horizont, dort wo die Sonne wegtauchen wird, hat gleichsam einen anderen Anstrich bekommen, Wir fühlen uns hingezogen zu jenem all abendlichen Schauspiel und bewundern die Großartigkeit der Natur in ihrer gesamten Pracht und Schönheit. Wir ziehen den Glanz und die Ruhe ein und erwarten den Sog vom Übergang dieser terrakosmischen Symphonie in die Harmonie unseres Geistes. Aber nicht nur diese Lichterscheinung vermag den Menschen zu bannen. Denken wir an eine eiskalte Winternacht, in der sogar unsere Hochatmosphäre mit Eiskristallen durchsetzt ist. In solch einer Winternacht ohne Bewölkung, in der der Mond sein volles Angesicht zeigt, kennen wir die diffuse weißhelle Lichtscheibe, die dann den Mond umgibt. Heute wundem wir uns nicht mehr über diese Eigenheiten der Natur. Wir wissen, dass die optische Physik dahintersteckt. Das Geheimnis heißt Reflexion, Brechung, Streuung und Beugung des Lichtes. Die Richtungsänderung eines schräg auftreffenden Lichtstrahles an der Grenzfläche zweier lichtdurchlässiger optischer Medien wird als Brechung oder Refraktion des Lichtes bezeichnet. Die Ausbreitungsgeschwindigkeit der Lichtwellen wird sich verlangsamen, wenn die Lichtwellen von ein Medium mit kleiner Dichte in ein Medium mit größerer Dichte übergehen. Die Änderung der Ausbreitungsgeschwindigkeit bewirkt gleichzeitig eine Änderung der Richtung der Lichtwellen. Die Grenzfläche zweier in ihrer Dichte unterschiedlichen Medien sei eine Waagerechte. Die errichtete Senkrechte auf dieser Waagerechten sei das Einfallslot. Tritt ein Lichtstrahl schräg aus einem dünnen Medium in ein dickeres Medium ein, wird der Lichtstrahl nach dem Einfallslot hin gebrochen. Tritt ein schräger Lichtstrahl jedoch von einen dicken Medium in ein dünneres Medium ein, so wird die Brechung des Lichtstrahls vom Einfallslot weggebrochen. Die Brechung erfolgt immer so, dass der einfallende Lichtstrahl, das Einfallslot und der gebrochene Strahl in einer Ebene liegen. Trifft ein Lichtstrahl auf die Grenzfläche eines Medium, wird ein geringer Teil des Lichtstrahles reflektiert. Der gebrochene Lichtstrahl ist deshalb etwas schwächer, als der einfallende Lichtstrahl. Willebord Snellius (1580-1626) hat das Brechungsgesetz entdeckt und so formuliert:
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of GANZHEITLICHE ASTRONOMISCHE NAVIGATION

1
GANZHEITLICHE ASTRONOMISCHE
NAVIGATION VON WOLFGANG KÖSLING
DAS LICHT
Wenn die Sonne im letzten Augenblick des Tages für uns sichtbar ist, hat sie nicht nur ihre Farbe so
wunderbar verändert, dass der Mansch unweigerlich zu ihr hinsieht und mehr Zeit für diesen Anblick
verwendet, als wie er es zu einer anderen Tageszeit tut. Auch der Himmel am Horizont, dort wo die
Sonne wegtauchen wird, hat gleichsam einen anderen Anstrich bekommen, Wir fühlen uns hingezogen
zu jenem all abendlichen Schauspiel und bewundern die Großartigkeit der Natur in ihrer gesamten
Pracht und Schönheit. Wir ziehen den Glanz und die Ruhe ein und erwarten den Sog vom Übergang
dieser terrakosmischen Symphonie in die Harmonie unseres Geistes.
Aber nicht nur diese Lichterscheinung vermag den Menschen zu bannen. Denken wir an eine
eiskalte Winternacht, in der sogar unsere Hochatmosphäre mit Eiskristallen durchsetzt ist. In solch
einer Winternacht ohne Bewölkung, in der der Mond sein volles Angesicht zeigt, kennen wir die diffuse
weißhelle Lichtscheibe, die dann den Mond umgibt.
Heute wundem wir uns nicht mehr über diese Eigenheiten der Natur. Wir wissen, dass die
optische Physik dahintersteckt. Das Geheimnis heißt Reflexion, Brechung, Streuung und Beugung des
Lichtes.
Die Richtungsänderung eines schräg auftreffenden Lichtstrahles an der Grenzfläche zweier
lichtdurchlässiger optischer Medien wird als Brechung oder Refraktion des Lichtes bezeichnet. Die
Ausbreitungsgeschwindigkeit der Lichtwellen wird sich verlangsamen, wenn die Lichtwellen von ein
Medium mit kleiner Dichte in ein Medium mit größerer Dichte übergehen. Die Änderung der
Ausbreitungsgeschwindigkeit bewirkt gleichzeitig eine Änderung der Richtung der Lichtwellen. Die
Grenzfläche zweier in ihrer Dichte unterschiedlichen Medien sei eine Waagerechte. Die errichtete
Senkrechte auf dieser Waagerechten sei das Einfallslot. Tritt ein Lichtstrahl schräg aus einem dünnen
Medium in ein dickeres Medium ein, wird der Lichtstrahl nach dem Einfallslot hin gebrochen. Tritt ein
schräger Lichtstrahl jedoch von einen dicken Medium in ein dünneres Medium ein, so wird die
Brechung des Lichtstrahls vom Einfallslot weggebrochen. Die Brechung erfolgt immer so, dass der
einfallende Lichtstrahl, das Einfallslot und der gebrochene Strahl in einer Ebene liegen. Trifft ein
Lichtstrahl auf die Grenzfläche eines Medium, wird ein geringer Teil des Lichtstrahles reflektiert. Der
gebrochene Lichtstrahl ist deshalb etwas schwächer, als der einfallende Lichtstrahl. Willebord Snellius
(1580-1626) hat das Brechungsgesetz entdeckt und so formuliert:

2
nc
c
β
α==
2
1
sin
sin Lichtes des esetzBrechungsg
Der Zahlenwert des Brechungsverhältnisses c1 : c2 wird als Brechungszahl n bezeichnet. So zum Beispiel
beträgt n für den Übergang gelben Lichtes von Luft zu Glas rund 3:2= 1,5, da c/Luft rund 300 000 km/s
und c/Glas rund 200 000 km/s betragen. Hier die Brechungszahlen einiger Stoffe gegen Luft
Wasserstoff 0.99985 Luft gegen Vakuum 1,00029
Sauerstoff 0,99996 Vakuum gegen Luft 0.99971
Luft 1 Eis 1,31
Kohlendioxyd 1,00016 Wasser 1,3332
Diese Angaben beziehen sich auf die Farbe des Natriumlichts, und zwar auf die D-Linie des Spektrums
mit der Wellenlänge 589 nm
Auch die Farbe des Lichtes spielt bei der Berechnung der Brechungszahl eine Rolle, da die
Ausbreitungsgeschwindigkeit für jede Lichtwellenlänge (Frequenz) in einem Medium verschieden ist.
Im Vakuum pflanzt sich das Licht unabhängig von seiner Schwingungszahl und Farbe gleich schnell fort.
Bewegt sich das Licht jedoch in einem Medium, so nimmt die Geschwindigkeit mit steigender
Schwingungszahl, also von Rot über Gelb, Grün, Blau bis Violett hin, ab. (Bei der Beugung des Lichtes
ist der Einfluss der Wellenlänge gerade umgekehrt.) Da das weiße Licht ein Gemisch vieler
Wellenlängen ist, kann es mit Hilfe eines Prismas in seine einzelnen Wellenlängen zerlegt werden
(Dispersion). Es entsteht ein Farbspektrum. Hat der einfallende Lichtstrahl einen Winkel von 90°
(parallel der Waagerechten), wird er nicht mehr gebrochen. Er läuft dann an der Grenzfläche der
beiden Linien entlang. Dieser Winkel wird deshalb auch als Grenzwinkel bezeichnet. Wenn dieser
Grenzwinkel überschritten wird, erfolgt ein sprunghafter Übergang zur Reflektion des Lichtes. Der
Lichtstrahl wird in das dichtere Medium hinein reflektiert (Totalreflektion). So ist z. B. das Feuer in den
Diamanten (Brechungszahl gegenüber Luft 2,4173 bei gelben Na-D Licht) auf eine vielfache
Totalreflektion zurückzuführen. Hat jedoch der einfallende Lichtstrahl einen Winkel von 0° (parallel
der Senkrechten), ist der Brechungswinkel gleich dem Einfallswinkel. Treffen Lichtwellen auf die Kante
eines Objektes auf, werden sie gebeugt. Diese Beugung ist möglich, weil jeder Punkt, der von der
Lichtwelle erfasst wird, gleichzeitig ein neuer Ausgangspunkt einer neuen Welle ist (Huygenssches
Prinzip). Hinter dem Hindernis überlagern sich dann die so neu entstandenen Wellen und es kommt
zur Interferenz, rotes Licht wird stärker gebeugt als violettes Licht. Bei mehrfarbigem Licht entsteht
ein Beugungsspektrum. Stellen wir einen Stab schräg zur Wasseroberfläche ins Wasser, so finden wir
die Brechungsgesetze bestätigt. Der Stab bekommt an der Wasseroberfläche einen Knick zum
Einfallslot hin. Würden wir uns jetzt auf den Grund dieses Gewässers befinden und am Stab entlang

3
schauen, würden wir feststellen, dass der Stab an unserem Auge gehoben erscheint.
Beobachten wir nun den Lichtstrahl eines Gestirns am Himmel, erscheint uns dieses Gestirn ebenfalls
höher, als es in Wirklichkeit ist. Diese Erscheinung wird astronomische Refraktion (R) genannt. Mit
abnehmender Höhe gewinnt das Medium Erdatmosphäre immer mehr an Dichte. Der Lichtstrahl eines
Gestirns wird immer und immer mehr gebrochen. Sein Brechungswinkel ist kleiner als sein
Einfallswinkel. Messen wir nun die Höhe eines Gestirns wird die gemessene Höhe deshalb größer sein,
als die tatsächliche Höhe. Das Vorzeichen der Berichtung auf Grund der Refraktion wird deshalb immer
ein negatives (-) sein müssen.
Je geringer die Gestirnshöhe ist, umso größer ist seine Refraktion. Für Gestirne, die sich im Zenit
befinden, ist der Wert der Refraktion gleich Null.
In der Nähe der Erdoberfläche besteht die Atmosphäre aus einem Gemisch von Gasen. Die
Hauptbestandteile dieses Gemisches sind Stickstoff (78 %) und Sauerstoff (21 %). Der verbleibende
Rest von l % setzt sich aus Edelgasen (Argon mit 0,93 %), Wasserstoff, Ozon und Kohlendioxid
zusammen. Der Sauerstoffanteil der Luft erweist sich in Bodennähe als recht konstant, während er in
größeren Höhen leichten Schwankungen unterworfen ist. Als wichtigste Beimengung der Luft tritt der
Wasserdampf auf, der in stark wechselnder Menge besonders in den unteren Luftschichten vorhanden
ist (Anteil ca. 4 Volumenprozent). Weitere Beimengungen sind verschiedene feste und gasförmige
Bestandteile, die zusammenfassend als Aerosole bezeichnet werden. Gewisse Beimengen der Luft
erlangen eine elektrische Aufladung (Ionen). Innerhalb unserer Atmosphäre bestehen vertikale
Aufwärts- und Abwärtsbewegungen. Die Luftbestandteile setzen sich deshalb nicht der Schwere nach
ab, sondern unterliegen einer dauernden Mischung. Obwohl die Mischungsverhältnisse der Luft bis in
große Höhen konstant bleiben, nimmt die absolute Menge des in einer Volumeneinheit vorhandenen
Luftgemisches mit wachsender Höhe ständig ab. Diese Abnahme der Luftdichte und des Luftdrucks
führt zu einem Übergang in den interstellaren Raum in Höhen von 2000 bis 3000 km.
Aussagen über das Verhalten der Atmosphäre in großen Höhen geben uns optische und elektrische
Erscheinungen. So kann man aus dem Ablauf der Dämmerungsphasen, nach Sonnenuntergang bzw.
vor Sonnenaufgang bestimmte Rückschlüsse auf die Trübungsverhältnisse innerhalb der Atmosphäre
ziehen. Diese unterschiedlichen Trübungsverhältnisse, die durch den Einfluss von Klima und Wetter
entstehen, beeinflussen die Extinktion (Schwächung einer Strahlung) und die Zerstreuung des Lichtes.
Das einfallende Sternenlicht muss somit erst diesen atmosphärischen Filter durchdringen, ehe es zum
Auge des Beobachters gelangt.
Mehrere messbare Erscheinungen weisen darauf hin, wie weit die Erdatmosphäre tatsächlich in den
Kosmos reicht. So werden in Hohen um die 80 km in größeren Breiten - über 45°- leuchtende
Nachtwolken beobachtet. Die Herkunft dieser Wolken ist bis heute nicht restlos geklärt. Während man
annimmt, diese Wolken verdanken ihrer Entstehung dem Vorhandensein von terrestrischen bzw.
kosmischen Staubes, gilt auch die Ansicht, dass diese Wolken Eiswolken seien, die durch den
Wasserdampfausstoß von aktiven Vulkanen entstanden sind. Auch erhalten wir weitere Hinweise auf
das Vorhandensein der Atmosphäre in großen Höhen durch die Leuchterscheinungen, die mit dem
Eindringen von Sternschnuppen und Meteoren in die Erdatmosphäre verbunden sind. Bei den
Sternschnuppen beginnt der Leuchtvorgang in etwa 120 km und endet bei etwa 80 km Höhe. Größere
Meteore leuchten schon in einer Entfernung von ca. 150 km auf und erlöschen dann bei einer Hohe

4
von 50 km. Auch die durch Meteore verursachten Leuchtschweife (bei Nacht) bzw. Rauchstreifen (am
Tag) lassen auf Luftbewegungen bis zu 150 km Höhe schließen. Die Erscheinung des Polarlichtes wurde
von Hohen um die 80 km bis zu Höhen um die 100 km, in einzelnen Fällen auch bis zu Hohen um die
1000 km festgestellt. Die meisten Beobachtungen des Polarlichtes beziehen sich jedoch auf Höhen von
100 bis 120 km. Die Intensität und Häufigkeit der Polarlichter nimmt äquatorwärts ab, jedoch wurden
auch schon bis nach Indien hinein Polarlichter beobachtet. Da das Polarlicht durch Ionisierung von
Luftmolekülen hervorgerufen wird, liegt die Tatsache auf der Hand, dass dort wo Polarlichter
beobachtet werden, auch noch Atmosphäre vorhanden sein muss.
Die Atmosphäre unserer Erde ist in verschiedenen Stockwerten gegliedert. Der Übergang von
einem Stockwerk zum anderen ist kein unbedingt fließender, da die verschiedenen Stockwerke auch
unterschiedliche Eigenschaften aufweisen. Die Übergangsschichten zwischen den Stockwerken sind
von geringer Mächtigkeit im Vergleich zu der Mächtigkeit der Stockwerke selbst. Unterstes Stockwerk
ist die Troposphäre. Es ist die Mischungszone oder auch Wetterzone genannt, in der der gesamte
Wasserdampfgehalt der Atmosphäre vorhanden ist. Die Temperatur in diesem Stockwerk nimmt mit
wachsender Höhe im Mittel um ca. 5 bis 6 Grad je 1000 Meter ab. Der Luftdruck im unteren Bereich
der Troposphäre beträgt im Mittel um die 1013 mbar. Innerhalb der Troposphäre nimmt er jedoch um
die 225 mbar ab (gemäßigte Klimazone). In den oberen Schichten der Troposphäre hört die
Temperaturabnahme auf. Diese obere Schicht wird deshalb als Tropopause bezeichnet. Es tritt
Isothermie (Isotherme / griech. /-Verbindungslinien zwischen Orten gleicher Temperatur), das heißt
eine gleichbleibende Temperatur ein, die in höheren Lagen (25 - 30 km) in eine Temperaturerhöhung
umschlägt. Abhängig von der geographischen Breite erreicht die Troposphäre eine Höhe am Äquator
um die 8 km und an den Polen um die 17 km. In den gemäßigten Breiten beträgt die Höhe ca. 12 km.
Entsprechend dem Höhenunterschied weist dann die Tropopause auch eine verschiedene Temperatur
auf, so an den Polen um die -45°C, am Äquator um die -80°C und in den gemäßigten Breiten um die -
50°C bis -60°C. Die Tropopause führt dazu noch jahreszeitliche Änderungen bezüglich ihrer Höhenlage
aus. Im Allgemeinen liegt sie im Winter und im Frühjahr am tiefsten, während sie im Sommer bzw. im
Herbst ihre größte Höhe erreicht.
An die Tropopause schließt sich die Stratosphäre (Schichtenzone) an. In diesem Stockwerk
verschwinden die vertikalen Luftbewegungen. Die Obergrenze der Stratosphäre wird bei etwa 50 km
angenommen. Diese Obergrenze ist auch gleichzeitig die Obergrenze der Ozonschicht. Innerhalb der
Stratosphäre liegt bei ca. 25 bis 30 km die Untergrenze der Ozonschicht. An dieser Untergrenze schlägt
die an der Tropopause einsetzende Isothermie in eine Temperaturerhöhung als Folge der
Ozonkonzentration um, die ihren Maximalwert mit von +20 bis +50°C in einer Höhenlage um die 50
km erreicht. Die also oberhalb der Stratosphäre eingebettete Ozonschicht, die den Hauptteil der von
der Sonne kommenden UV-Strahlung absorbiert, ist durch diese Absorption der verantwortliche Faktor
für die Einleitung der Temperaturerhöhung in dieser Schicht. Angemerkt werden muss noch, dass die
Ozonkonzentration in höheren Breiten jahreszeitlichen Schwankungen unterliegt. So finden wir ein
Frühjahrsmaximum und ein Herbstminimum. Die Ozonschicht ist nicht nur für die
Temperaturverteilung in der Stratosphäre, sondern auch für die Verteilung der Strahlung an der
Erdoberfläche (UV-Sperre) wichtig. Nach der Stratosphäre folgt als nächstes Stockwerk bis zu einer
Höhe von 80 km die Mesosphäre. Zwischen der Stratosphäre und der Mesosphäre liegt die
Stratopause. Die Mesosphäre wird nach oben durch die Mesopause begrenzt. Die Temperatur nimmt
innerhalb der Mesopause wieder ab, so dass im Grenzbereich der Mesopause die Temperatur ca. -50°C

5
beträgt. Der Luftdruck beträgt hier 0,01 mbar. Oberhalb der Mesopause nimmt die Temperatur wieder
zu. Dieser Bereich umfasst die Höhen der Atmosphäre von 80 km bis 1000 km und nennt sich
Thermosphäre. Die Dichte des Luftgemisches ist hier sehr gering, weshalb die Werte der dort
anzutreffenden Temperatur nicht unmittelbar mit den Temperaturwerten niedriger Stockwerke
vergleichbar sind. Hervorgerufen durch die Absorption der Wellenstrahlung der Sonne (Sonnenlicht)
durch das Gasgemisch und durch Zusammenstöße der Gasmoleküle mit Teilchen der
Korpuskularstrahlung (Strahlen aus elektrisch geladenen Teilchen -Dualismus des Lichtes /
Korpuskulartheorie) bilden sich in der Thermosphäre ionisierte Schichten (Ionosphäre). Es kommt zur
Ausbildung eines ionisierten Gases, welches sich aus Ionen, neutralen Molekülen der Luft, Elektronen
und Lichtquanten zusammensetzt und als Plasma (griech.) bezeichnet wird. Dieses Plasma zeigt
physikalische Eigenschaften, die vom normalen Gaszustand abweichen. Es wird daher als vierter
Aggregatzustand der Materie bezeichnet (Aggregatzustände: l. fester, 2. flüssiger und 3. gasförmiger
Zustand der Materie). Die unterste Schicht der Ionosphäre reicht noch bis in die Mesosphäre hinein,
Hauptanteil an der Ausbildung der Ionosphäre haben die von der Sonne kommenden UV-Strahlen.
Nach der Thermosphäre folgt in etwa 1000 km Hohe die Exosphäre, auch Dissipationssphäre genannt.
Dieses Stockwerk kennzeichnet sich durch das Vorhandensein eines Gürtels intensiver
Röntgenstrahlung (Van-Allen-Gürtel) in etwa 2000 km Höhe. Mit zunehmender Höhe nimmt hier der
Anteil der Elektronen und der positiven Ionen ab. Anders ausgedrückt mit dem langsamen Abnehmen
der Exosphäre erhöht sich die Elektronenkonzentration, so dass an der Grenze der Atmosphäre
Elektronenkonzentrationen bis zu einigen hundert Elektronen pro Kubikzentimeter auftreten. Die
Exosphäre geht in den Höhen von 2000 km bis 3000 km in den interstellaren Raum fließend über, denn
hier ist der Anteil des Gasgemisches schon so niedrig, dass es in keinem Verhältnis mehr zu der
Elektronenkonzentration steht. Hier ist auch die Grenze unserer Atmosphäre überhaupt zu finden.
Insgesamt wird die Atmosphäre durch die Schwerkraft der Erde an die Erde gebunden, in den unteren
Schichten nimmt die Atmosphäre teil an der Rotationsbewegung der Erde.
Will man nun die Brechungswerte des Lichtes für jedes einzelne Stockwerk berechnen, so muss man
wissen, welche Dichteverhältnisse man in jedem Teil der Atmosphäre antrifft. Um nun wiederum die
Dichte zu berechnen, macht es sich notwendig den genauen Stoff zu kennen für den die Dichte gilt,
denn nur so kann die Brechungszahl n bestimmt werden. Aber nicht nur die Kenntnis des Stoffes ist
notwendig. Die Temperatur im Stoff selbst und der Druck auf diesen Stoff macht hier wiederum den
Wert der Dichte veränderlich. Man wird sicherlich zustimmen, dass es unmöglich ist, für jeden x-
beliebigen Zeitpunkt einer Gestirnsbeobachtung alle diese Werte verfügbar zu haben. Das wäre eine
unüberschaubare Flut von Messwerten, für die eine genauso unüberschaubare Anzahl von Sensoren
zur Verfügung stehen müsste. Diesem Problem kann man nur beikommen, wenn man mit
Kompromissen arbeitet. Eine Vereinfachung ist notwendig, die so gestaltet ist, dass die daraus
resultierende Messwertungenauigkeit noch in Grenzen bleibt. Zur Vereinfachung dieses Sachverhaltes
denkt man sich die Atmosphäre aus sehr vielen beliebig dünnen Kugelschalen zusammengesetzt.
Innerhalb einer Kugelschale wird die Dichte der Luft als konstant angenommen. In der obersten
Kugelschale sei die Dichte mit dem Wert Null definiert. Beobachten wir nun das Licht eines im Zenit
stehenden Gestirns, so fallt dessen Licht parallel mit dem Einfallslot und senkrecht stehend auf die
Grenzen der Kugelschalen ein. Diesen Zustand nehmen wir für alle größeren Höhen (also kleine
Zenitdistanzen) an. Entsprechend der Dichte jedes Mediums ist eine unterschiedliche
Lichtgeschwindigkeit gegeben. Nach dem Brechungsgesetz des Snellius gilt:

6
1
11
2
1
2
1
1
0
1
0
sin
sin
sin
sin
sin
sin
n
n
n
n
c
c
z
z
c
c
z
z
c
c
z
z
−− =
=
=
z0 ist dabei die Zenitdistanz, die über dem scheinbaren Horizont zu messen sein würde, wenn keine
Erdatmosphäre vorhanden wäre
zn ist die scheinbare Zenitdistanz, die unter dem Einfluss der Erdatmosphäre gemessen wird.
Alle obigen Gleichungen miteinander multipliziert, ergibt die mathematische Beziehung
0
00
sin
sinn
c
c
z
z
nn
==
Definiert man die mittleren meteorologischen Verhältnisse am Beobachtungsort mit einem Luftdruck
(Ld) von 1013 hPa und mit einer Temperatur(t) von +10°C, so errechnet sich n0 zu 1,00287. Da wir
jedoch nicht den Zenitabstand des Gestirns, sondern dessen Komplementwinkel, die Höhe messen,
gilt für die zu messenden Höhen:
90° – zn = h' h' ist die Höhe über dem scheinbaren Horizont, wobei die Kt
beachtet wurde. (Kt Kimmtiefe / siehe weitere Ausführungen)
90° – z0 = hs hs ist die scheinbare Höhe als Winkel über dem scheinbaren
Horizont und der Geraden Auge – Gestirn. Als scheinbarer
Horizont wird die sichtbare Kimm bezeichnet, die zum wahren
Horizont wird, bezieht man diese auf den Erdmittelpunkt.
wahre Höhe eines
Gestirns über dem
sichtbaren Horizont
beobachtete Höhe
eines Gestirns über
dem sichtbaren

7
Daraus folgt:
cos h': cos hs = n0
z0 – zn = hs – h' = R R ist die Refraktion
Die Refraktion ist somit der Winkel, um den das Gestirn infolge der astronomischen Strahlenbrechung
gehoben erscheint. Setzt man nun hs = h’ – R, so ergibt sich
cos (h’ – R) cos h' = n0
cos h' cos R + sin h' sin R = n0 cos h'
sin h’ sin R = cos h' (n0 – cos R)
sin R = cot h' (n0 – cos R).
R ist ein sehr kleiner Winkel, so dass man cos R = l setzen kann. Somit benutzt man die
Näherungsformel
sin R = R arc l" = R ( π : 648 000)
R = 0,000287 x (648 000 : π) cot h'
R = 59,198" cot h'
Aus der Formel sin R = cot h' (n0 – cos R) ist ersichtlich, dass die Refraktion nur vom absoluten
Brechungsverhältnis der Luft am Erdboden gegen das Vakuum abhängig ist. Die höheren Luftschichten
haben keinen Einfluss mehr auf die Refraktion.
Die Näherungsformel R = 59,198“ x cot h’ gilt natürlich nur für große Höhen bei mittleren
meteorologischen Verhältnissen am Beobachtungsort. Man kann sie anwenden, wenn die
Messgenauigkeit nicht größer +/- 0,1’ sein soll und die gemessenen Höhen über 22° liegen. Diese
Verallgemeinerung der Brechungstheorie des Lichtes in der Erdatmosphäre führt natürlich bei
kleineren Höhen zu weit komplizierteren Formeln. Für den praktischen Gebrauch stehen dem
genauerem Beobachter Refraktionstafeln zur Verfügung (siehe Anhang). Sie geben die mittleren Werte
für die Strahlenbrechung in der Regel für einen Luftdruck von 1013 hPa (mbar) und einer Temperatur
von + 10°C an. Nimmt die Luftdichte auf Grund eines steigenden Luftdruckes und einer abnehmenden
Temperatur zu, vergrößert sich der Wert der Refraktion. Entgegengesetzt verringert sich die Dichte der
Luft, wenn die Temperatur zunimmt und der Luftdruck fällt. In beiden Fällen sind Ergänzungstafeln
vorhanden, die die Werte der mittleren Refraktion zu den Werten korrigieren, wie sie für den
Beobachtungsort gelten.
Es bleibt feststellbar, dass die Schwankungen des Dampfdruckes in der Atmosphäre sich auch bei
kleinsten Höhen nicht mehr auf die Refraktion auswirken, wenn die Genauigkeitsforderung nicht unter

8
6" liegen. Zur Berechnung der Refraktion für Höhen über 7° kann deshalb auch die nach dem
ADMIRALTY MANUAL OF NAVIGATION aufgestellte mathematische Beziehung
R(in") = 58,29 cot h (in°) – 0,067 cot3 h (in°)
genutzt werden. Biese Formel ist für einen Luftdruck von 101325 Pa und einer Temperatur von + 10°C
berechnet und lässt ebenfalls eine Genauigkeitsforderung bis zu +/- 0,1’ zu. Auch hier wurde der
Einfluss der Temperatur- und Luftdruckänderung auf die Refraktion außer Acht gelassen. Es ist jedoch
möglich für bestimmte Höhenbereiche und für nicht extreme atmosphärische Verhältnisse
Näherungsformeln für diese Veränderlichkeit anzuwenden.
0Rt273
Ld0,00278R
+
=
R = ((0,00278 x Ld): (273 + t)) x (cot h – 0,067 cot3 h)
R = ((0,0000463 x Ld) : (273 + T)) x (58,29 cot h – 0,067 cot3 h)
Aber nicht nur das Licht selbst, vom Gestirn kommend und unsere Erde erreichend, sorgt für eine
Verfälschung der Höhe des Gestirns über den Horizont. Es ist der Standort unseres Beobachtungsortes,
welcher selbst für einige andere Korrekturwerte sorgt. Das astronomische Grunddreieck ist mit seinen
Bezugssystemen –das System des wahren Horizontes und das System des Himmelsäquators- ist immer
auf den Erdmittelpunkt fixiert. Wir müssen deshalb unsere Beobachtungsdaten, die Höhe (h) auf den
wahren Horizont, dessen Ebene nicht unseren Beobachtungsort, sondern den Erdmittelpunkt
schneidet, beziehen. Auch gibt die Betrachtung eines Gestirns- hier Messung des Höhenwinkels- einige
andere Werte wieder, als die tatsächlichen. Denn es besteht ein visueller Unterschied, ob wir ein
Gestirn von der Äquatorposition oder von den Polpositionen der Erde aus einmessen. Auch ist es bei
der Sonne und auch beim Mond nicht möglich, den jeweiligen Mittelpunkt unmittelbar zu messen.
Man misst hier immer den Ober- bzw. Unterrand des Gestirns. Alle diese Ursachen machen zusammen
beachtliche Fehler aus und müssen korrigiert, d. h. beschickt werden. Es ergibt sich eine
Gesamtbeschickung der gemessenen Höhe zur wahren beobachteten Höhe, die durch folgende
astronomische Beziehung zum Ausdruck kommt.
hr = h’ - Kt - R + P +/- r.
h R Ld t Ro
° “ Pa °C “
Ld ...Luftdruck am Barometer
in pa oder mbar
t .…..Temperatur der Luft in °C
R0 …..mittlere Refraktion bei
Ld 101325 Pa und
t = + 10°C
hb ... beobachtete Höhe unter Beachtung aller Beschickungswerte
h’ ... scheinbare oder abgelesene Höhe am Sextant
Kt ... Kimmtiefe R ... Refraktion P ...... Parallaxe
r ... scheinbare Gestirnsradius bei Sonne, Mond und Planet,
veränderlich aufgrund der tatsächlichen Entfernung des Gestirns
von der Erde

9
Für die Beschickung der gemessenen Höhe zur beobachteten Höhe sei an dieser Stelle die
mathematische Beziehung, so wie sie bei der Rechneranwendung benutzt werden kann,
vorweggenommen. Es ist die Formel:
rKAKAt
LdtAhKA
HPKAKAt
LDtAhKAhb
−+
−+−
+−+
−+−=
)cot067,0cot29,58()273(60
278,0)37,0799,1(cos
)cot067,0cot29,58()273(60
278,0)37,0779,1(
3
3
Ah Augenhöhe des Beobachters in Meter
Δt Temperaturdifferenz zwischen Wasser und Luft in Kelvin
Ld Luftdruck in mmbar bzw. hPa
t Lufttemperatur
HP Horizontalparallaxe
Die einzelnen Glieder dieser Formel sind selbstverständlich entsprechender geforderten Beschickung
für die entsprechenden Gestirne zu berücksichtigen. So ist Gestirnsradius nur für Mond und Sonne
nötig. Auch wird bei großen Winkeln der Unterschied zwischen Wasser- und Lufttemperatur nicht
mehr ausschlaggebend sein. Wie wir bereits wissen beschreibt sich die Ebene des Horizontes
rechtwinklig zur Lotrichtung zum Erdmittelpunkt. Mit einer Wasserwaage sind wir in der Lage den
scheinbaren Horizont festzustellen, während der wahre Horizont die parallele verschobene Ebene des
scheinbaren Horizonts in den Erdmittelmittelpunkt darstellt. Wir wissen auch je höher sich die
Beobachtungshöhe über dem idealisierten Meeresspiegel erhebt, je größer wird die sichtbare Fläche
der scheinbaren Horizontebene mit dem Navigationssystem S’ im Mittelpunkt dieser Ebene. So wie
sich die Entfernung der Sichtweite vergrößert, vertieft sich auch die Kimm (K) um den als Kimmtiefe
(Kt) bezeichneten Mittelwert. Die Entfernung des Sichtbereiches und die Kimmtiefe hängen somit auf
das Engste mit der Augeshöhe über der idealisierten Erdoberfläche eines Referenzellipsoides
zusammen.
Wie wir bereits aus dem Abschnitt DAS NAVIGATIONSSYSTEM S’ wissen beschreibt sich die Ebene des
Horizontes rechtwinklig zur Lotrichtung zum Erdmittelpunkt. Mit einer Wasserwaage sind wir in der
Lage den scheinbaren Horizont festzustellen, während der wahre Horizont die parallele verschobene
Ebene des scheinbaren Horizonts in den Erdmittelmittelpunkt darstellt. Wir wissen auch je höher sich
die Beobachtungshöhe über dem idealisierten Meeresspiegel erhebt, je größer wird die sichtbare
Fläche der scheinbaren Horizontebene mit dem Navigationssystem S’ im Mittelpunkt dieser Ebene. So
wie sich die Entfernung der Sichtweite vergrößert, vertieft sich auch die Kimm (K) um den als Kimmtiefe
(Kt) bezeichneten Mittelwert. Die Entfernung des Sichtbereiches und die Kimmtiefe hängen somit auf
das Engste mit der Augeshöhe über der idealisierten Erdoberfläche eines Referenzellipsoides
zusammen. Die Kimmtiefe ist es, die für die Berechnung von Gestirnspositionen im wahren und
scheinbaren Auf- oder Untergang den Zeitpunkt der Beobachtung wesentlich beeinflusst. Für eine
Längenbestimmung bei gegebener Breite kann die Beobachtung eines Gestirns im wahren Auf- oder
Untergang nur genutzt werden, wenn der Beobachtungszeitpunkt des scheinbaren Auf- oder
Untergangs auf den wahren reproduziert wird. Da der Standort des Beobachters(Augenhöhe) sich

10
immer über der Kimm befindet, durchläuft ein von der Kimm kommender Lichtstrahl, Luftschichten,
dessen Dichte entsprechend dem Weg des Lichtes von der Kimmlinie bis zum Auge des Beobachters
abnehmen. Ein solcher Lichtstrahl wird auf Grund der Brechungsgesetze somit von Einfallslot
weggebrochen. Diese Lichtstrahlkurve, die der Erde ihre konkave Seite zeigt, wird im Unterschied zur
Refraktion als terrestrische Strahlenbrechung bezeichnet und hat nichts mit dem direkt einfallendem
Licht eines Gestirns zu tun. Diese terrestrische Strahlenbrechung bewirkt, dass der Wert der Kimmtiefe
etwas kleiner ausfällt, als der theoretische nach der Erdkrümmung berechnete. Hier spielt auch der
Unterschied zwischen der Wasser- und der Lufttemperatur eine Rolle. Schon bei Temperaturgleichheit
zwischen dem Wasser und Luft wird die Kimmtiefe im Mittel etwa um 1/13 ihres Betrages verringert.
Unter Beachtung des mittleren Wertes für die Kimmtiefe erhält man dann die mathematische
Beziehung AhKt 779,1)(' = .
Im Gegensatz zur Refraktion hat der Wert der Kimmtiefe immer ein negatives (-) Vorzeichen. Durch
Subtraktion der Kt von der gemessenen Gestirnshöhe (h) erhält man die scheinbare Höhe (h’). Auch
hier sind besonders für Seefahrer Tabellen entwickelt worden, die durch Nachschlagen das Rechnen
erleichtern. Wenn starke Unterschiede zwischen der Luft- und der Wassertemperatur vorhanden sind
und auch wenn bei Windstille eine genügende Durchmischung der Luft fehlt, kommt es zu extremen
Schwankungen der Kimmtiefe, die dann erheblich von dem Wert der mittleren Kimmtiefe abweichen
kann. Ist das Wasser kälter als die Luft, wird der Wert der Kimmtiefe kleiner sein als der mittlere Wert.
Im umgekehrten Fall, wenn das Wasser wärmer, als die Luft ist, wird der Wert größer sein, als der
mittlere Wert der Kimmtiefe. Während im ersten Fall der Unterschied der Dichte der Luft nach oben
hin vergrößert wird - die Krümmung des Lichtstrahls von der Kimm zum Auge nimmt dann zu-, wird im
zweiten Fall die Luft von unten her erwärmt, was den Dichteunterschied der einzelnen Luftschichten
verringert - die Krümmung des Lichtstrahls von der Kimm zum Auge nimmt ab-.
Bei normalen hydrometeorologischen Verhältnissen wird diese Abweichung vom mittleren Wert der
Kimmtiefe jedoch nicht mehr als l’ betragen. Gleichwohl sind auch hier Korrekturtafeln vorhanden, die
es gestatten, dieser Beschickung Rechnung zu tragen (Tafeln befinden sich im Anhang dieses Buches).
Um den beobachteten Wert der Höhe eines Gestirns über dem Horizont auf seine wahre Höhe zu
beschicken, haben wir bisher die Erscheinung der Kimmtiefe und Refraktion untersucht. In der Natur
gibt es aber noch eine andere Erscheinung. Diese wird als Parallaxe bezeichnet und ist eine
Erscheinung rein optischer Natur. Wenn wir uns einen Gegenstand in einer gegebenen Entfernung
betrachten, liefert uns das Auge ein Abbild dieses Gegenstandes. Jedoch besitzt der Mensch, wie alle
Tiere der Welt auch, zwei Augen. Betrachten wir also einen Gegenstand vermittels unserer Augen, so
erscheint es uninteressant, welches Auge wir für die Betrachtung verwenden. Das Bild ändert sich
nicht. Nähern wir uns jedoch diesem Gegenstand derart, dass der Abstand Auge-Gegenstand nur noch
ca. 30 cm betragt, stellen wir fest, indem wir im Wechselspiel ein Auge offenhalten und das andere
schließen, dass sich die Position des Gegenstandes verschiebt. Schließen wir das rechte Auge und
öffnen wir zur gleichen Zeit das linke Auge, wird der Gegenstand seine Position nach rechts
verschieben. Im umgekehrten Fall ist es natürlich umgekehrt. Diese Erscheinung wird als Parallaxe (P)
bezeichnet.
Bezogen auf die Himmelskörper ergibt sich genauso ein Unterschied der Position, wie dies bei
Betrachtung unseres Gegenstands mit wechselnden Augen passiert. Steht ein Himmelskörper z. B. auf
der Verlängerung der Ebene des Erdäquators und beobachten ihn wir auch von dort, so stellt sich seine

11
Position anders dar, als wenn wir diesen Körper vom Standort des Erdpols aus beobachten. Hier
entspricht der Standort am Südpol dem linken und der Standort am Äquator dem rechten Auge.
Die Parallaxe eines Himmelskörpers ist somit der Winkel, um den sich durch die
perspektivische Wirkung die Himmelskörper am Himmel verschieben, wenn man ihn von zwei
Punkten der Erde aus betrachtet, die genau einen Erdradius voneinander entfernt sind.
Für die genaue Untersuchung dieser Erscheinung; eignet sich besonders der Mond. Er besitzt
eine relativ geringe Entfernung zur Erde und hat einen großen Durchmesser. Seine Entfernung auf
Grund seiner elliptischen Bahn ändert sich in Bezug auf die Erde ständig. Wollen wir also an Hand des
Mondes die Erscheinung der Parallaxe genauer untersuchen.
Da die Parallaxe jedes Weltkörpers immer ebenso groß ist, wie der Radius der Erde, vom
Standpunkt des betreffenden Weltkörpers ausgesehen, lassen sich verschiedene Rückschlüsse, auch
betreffs der wirklichen Entfernung der Himmelskörper ziehen.
Die Erde vom Mond aus betrachtet, muss doppelt so groß erscheinen, wie der Wert ihrer Parallaxe.
Der Beweis dieser Aussage lässt sich an folgender Darstellung ablesen.
An Hand eines Beispiels soll die Berechnung des Parallaxenwinkels nachvollzogen werden (siehe obige
Zeichnung).
Gestirn: Mond Datum: 04. Mrz. 2001 Uhrzeit: 11-43-40 (UT-1)
GrtMond = 148° 03’ 24“ δMond = 0° 00’ 00“ N/S
Die Mondposition befindet sich demnach auf λ = 148° 03’ 24“ W; φ = 0° (Äquator)
Die Höhe des Mondes soll zunächst mit 0° 00,0’ gegeben sein. Weiter nehmen wir an, dass wir uns auf
gleicher Länge der Mondposition befinden. Eine Höhe von 0° bedeutet eine Distanz zur Mondposition
von 90° oder in Seemeilen (90° x 60’=) 5400 sm. Da 5400 sm eine Viertel des Umfangs der als Kugel
a c γ
β Äquator
A B
C
A...Erdmittelpunkt α....geographische Breite φ
B...Gestirnsmittelpunkt β parallaktischer Winkel am Gestirn
C...Beobachtungsort γ 90° Der Beobachter sieht Auf- und
Untergang
α
b
c
scheinbarer Horizont
Parallaxe
12
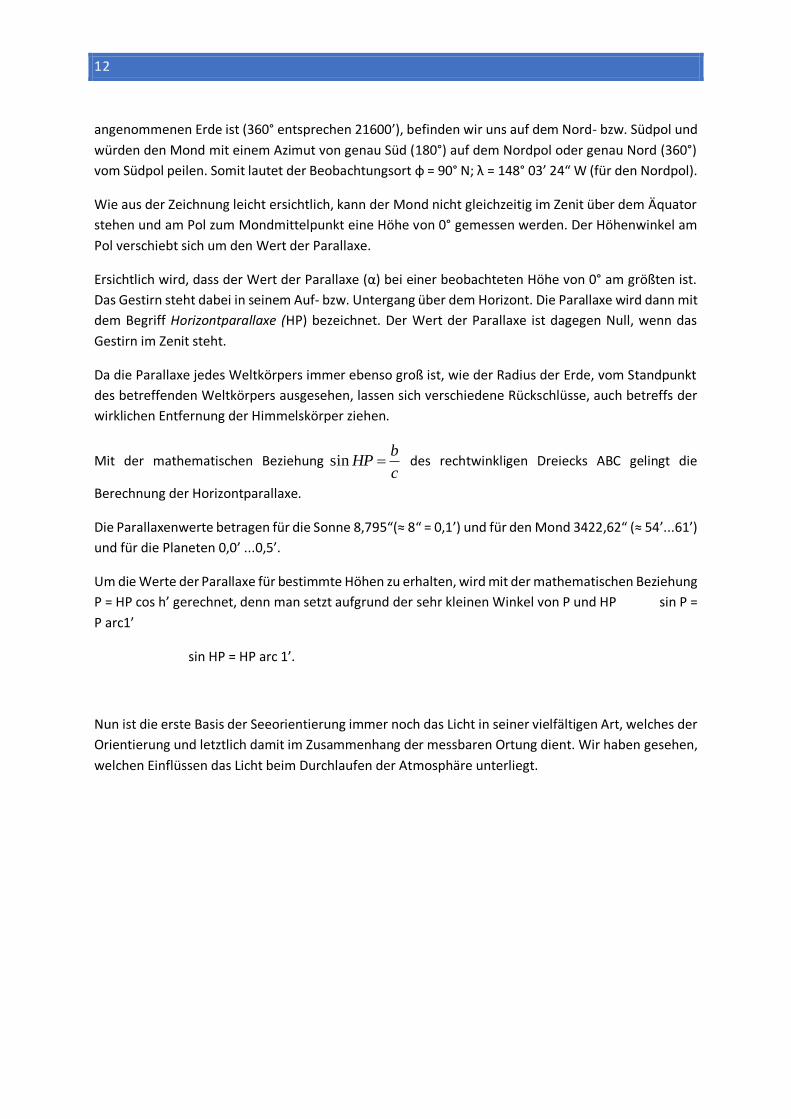
angenommenen Erde ist (360° entsprechen 21600’), befinden wir uns auf dem Nord- bzw. Südpol und
würden den Mond mit einem Azimut von genau Süd (180°) auf dem Nordpol oder genau Nord (360°)
vom Südpol peilen. Somit lautet der Beobachtungsort φ = 90° N; λ = 148° 03’ 24“ W (für den Nordpol).
Wie aus der Zeichnung leicht ersichtlich, kann der Mond nicht gleichzeitig im Zenit über dem Äquator
stehen und am Pol zum Mondmittelpunkt eine Höhe von 0° gemessen werden. Der Höhenwinkel am
Pol verschiebt sich um den Wert der Parallaxe.
Ersichtlich wird, dass der Wert der Parallaxe (α) bei einer beobachteten Höhe von 0° am größten ist.
Das Gestirn steht dabei in seinem Auf- bzw. Untergang über dem Horizont. Die Parallaxe wird dann mit
dem Begriff Horizontparallaxe (HP) bezeichnet. Der Wert der Parallaxe ist dagegen Null, wenn das
Gestirn im Zenit steht.
Da die Parallaxe jedes Weltkörpers immer ebenso groß ist, wie der Radius der Erde, vom Standpunkt
des betreffenden Weltkörpers ausgesehen, lassen sich verschiedene Rückschlüsse, auch betreffs der
wirklichen Entfernung der Himmelskörper ziehen.
Mit der mathematischen Beziehungc
bHP =sin des rechtwinkligen Dreiecks ABC gelingt die
Berechnung der Horizontparallaxe.
Die Parallaxenwerte betragen für die Sonne 8,795“(≈ 8“ = 0,1’) und für den Mond 3422,62“ (≈ 54’...61’)
und für die Planeten 0,0’ ...0,5’.
Um die Werte der Parallaxe für bestimmte Höhen zu erhalten, wird mit der mathematischen Beziehung
P = HP cos h’ gerechnet, denn man setzt aufgrund der sehr kleinen Winkel von P und HP sin P =
P arc1’
sin HP = HP arc 1’.
Nun ist die erste Basis der Seeorientierung immer noch das Licht in seiner vielfältigen Art, welches der
Orientierung und letztlich damit im Zusammenhang der messbaren Ortung dient. Wir haben gesehen,
welchen Einflüssen das Licht beim Durchlaufen der Atmosphäre unterliegt.

13
DIE ZEIT
„Die Zeit ist kein empirischer Begriff, der irgend von einer Erfahrung abgezogen worden. Denn das
Zugleichsein oder Aufeinanderfolgen würde selbst nicht in die Wahrnehmung kommen, wenn die
Vorstellung der Zeit nicht a priori zum Grunde läge. Nur unter der Voraussetzung kann man sich
vorstellen, dass einiges zu einer und derselben Zeit (zugleich) oder in verschiedenen Zeiten
(nacheinander) sei.“
Immanuel Kant (1724-1804) aus „Kritik der reinen Vernunft“
Zeit existiert nach Kant somit nicht für sich, sondern nur in Zusammenhang mit dem Wahrnehmenden.
Heißt das etwa Zeit existiert nur dann, wenn sie wahrgenommen wird? Hier eine andere Definition.
Die Zeit ist - ebenso wie der Raum - eine objektiv reale Existenzform der Materie. Alle Vorgänge in
Natur und Gesellschaft sind von einer bestimmten Zeitdauer und folgen in bestimmter Weise
aufeinander. Der Ablauf der Zeit hängt nicht vom persönlichen Erleben des Einzelnen ab, sondern ist
bestimmt durch objektive Gesetzmäßigkeit des Vorganges. Man kann die kausal miteinander
verbundenen Prozesse in ihrer Reihenfolge nicht umkehren. Deshalb ist auch der Ablauf der Zeit nicht
umkehrbar, sondern erfolgt nur in der Richtung von der Vergangenheit zur Zukunft.
Somit hängt der Zeitbegriff auf engste mit den Begriffen Raum und Materie zusammen. Die Zeit
existiert außerhalb des menschlichen Bewusstseins und davon unabhängig. Den absoluten Zeitbegriff
(Newton) kann es nicht geben (siehe Einstein’sche Relativitätstheorie ).
Obwohl sich bei der Betrachtung des Zeitbegriffes philosophische Ansichten mit denen der
Naturwissenschaftler kreuzen, wollen wir den Zeitbegriff mehr von der naturwissenschaftlichen Seite
her beleuchten. Aber eines lässt sich nicht ohne das andere definieren. Bleiben wir bei der
letztgenannten Definition und fügen wir dieser neueren wissenschaftlichen Ansicht noch eine ältere
hinzu:
„Wir erfassen die Zeit nur, wenn wir erkennbare Bewegungen haben. Wir messen jedoch nicht nur die
Bewegung durch die Zeit, sondern auch die Zeit durch die Bewegung, da beide einander definieren“
Aristoteles
Die beiden letzten Definitionen, auf philosophische Ansichten begründet und wissenschaftlich
untermauert, mögen es sein, die uns von nun an begleiten sollen. Wollen wir nicht so sehr die Frage
stellen, wie der Zeitbegriff noch philosophischer oder auch wissenschaftlicher zu beantworten wäre.
Wollen wir lieber der Frage nachgehen, wie wir uns den Zeitbegriff am besten praktisch nutzbar
machen können. Folgen wir den Worten des Physikers und Philosophen, Professor Ernst Mach aus
Wien, der Ende des letzten Jahrhunderts Newtons Darstellung vom absoluten Zeitbegriff verwarf und
als Wegbereiter A. Einsteins feststellte, in dem er Newtons absoluten Raum- und Zeitbegriff als
»Begriffsungetüm“ bezeichnete: „Wo ist denn die ideale Uhr die entscheiden könnte, ob die Zeit
absolut und gleichförmig fließt? Man kann nur geeignete Uhren bauen, nach denen eine ,Standardzeit’
definiert wird.“

14
Die Suche nach der absoluten Uhr war also erfolglos. Aber die Suche nach den geeigneten
Messverfahren, den besten Messtechniken nachzugehen, ist für unsere praktischen Bedürfnisse der
Navigation schon erfolgreicher.
Blättern Sie doch mal in einer renommierten astronomischen Zeitschrift und betrachten Sie die Bilder
von italienischen Sonnenuhren. Alte Meister binden hier die Zeit mit einem Bild. Das Bild ist fest mit
der Erde verbunden und die Zeit bewegt sich. Sie haben den wandernden Schatten der Sonne mit der
Erde verknüpft. Dieses Schauspiel ins Materielle zu übertragen heißt ein Instrument bauen, um die Zeit
zu messen. Als wenn dieses nicht schon längst passiert ist und heutzutage zum normalen Alltag gehört.
Eine Sonnenuhr bauen. Warum?
Weil eine Sonnenuhr das gesamte Universum auf einer waagerechten Steinplatte oder sonst wie
vereinigen kann. Und genau diese Philosophie ist Urträger menschlicher Ideen. Die menschliche Art ist
es sich selbst zu befriedigen, in der Gier nach Offenbarung. Wozu wohl sonst gibt es Menschen auf der
Erde? Einer muss ja die Welt erforschen, oder?
So haben schlaue Vorfahren schon lange das Konstruktionsgeheimnis der Sonnenzeitmesser gekannt.
Sie haben in ihren Vorgärten oder an ihren Häuserwänden die Existenzformen der Materie in Raum
und Zeit erblickt und ahnten: Das eine existiert nicht, ohne das andere!
Alle Bewegungen materieller Körper können nur relativ zu anderer bewegter Materie aufgefasst
werden. So ist das Intervall zwischen zwei Ereignissen, welches allgemein Zeit genannt wird, nichts
weiter als die relative Geschwindigkeit der Uhren, mit denen die Zeit gemessen wird. Für die Zeit gilt
es eine Zeiteinheit zu kennen, die unveränderlich ist und jederzeit reproduzierbar sein muss.
Als Ernst Mach aus Wien Ende des letzten Jahrhunderts Newtons „Begriffsungetüm“ des absoluten
Zeitbegriffs verwarf, so hat er den Zeitbegriff außerhalb des menschlichen Bewusstseins und davon
unabhängig bewiesen. Wir messen also nicht nur die Bewegungen durch die Zeit, sondern auch die
Zeit durch die Bewegungen.
Orientierung ist Raumsinn und Orientierung ist Zeitsinn. Die Zeit im Raum, unserer Umwelt also,
mathematisch zu erfassen und ausdrücken zu können, ist Grundbedingung der Wiederauffindbarkeit
von mathematisch definierten Zeitpunkten.
Wenn sich der Sonnenschatten der Sonnenuhr auf der großen Platte bewegt, so ist das
veranschaulicht, was sich gegenseitig definiert. Zeit durch Raum und Raum durch Zeit.
Die Menschen haben sich angewöhnt, die Zeit nach dem Laufe der Sonne oder des Mondes zu messen.
Die Sonne ist das stärkste Symbol aller menschlichen Kulturen. Ungezählte Mythen kreisen um diesen,
unseren Heimatstern. Und so verwundern es uns auch nicht, - denn wer will wohl abstreiten- dass die
Sonne das Leben auf der Erde regelt.
Als sich im Laufe von 10 Jahrhunderten in Mittelamerika, die hohe Kultur der Maya entwickelte, die
untrennbar mit einem hohen Stand astronomischer Kenntnisse verbunden war, so hat sich auch
gleichzeitig eine vollkommende Kalender- und Zeitrechnung entwickelt. Im 9. Jahrhundert ging diese
Kultur ihrem Ende entgegen. Als die spanischen Eroberer ab 1524 das Land im heutigen südöstlichen
Mexiko und Guatemala eroberten, verschwanden durch Verbrennung bzw. Vernichtung der Conquista

15
zahlreiche Zeitdokumente dieser Kultur. So sind von den tausenden Schriften nur noch drei erhalten
geblieben. Eins dieser Kodexe befindet sich Madrid, ein zweites in Dresden und ein drittes in Paris.
Obwohl diese Schriften bis heute noch nicht vollständig entziffert werden konnten, liefern uns doch
diese und andere Zeugnisse ein recht eindrucksvolles Bild jener vergangenen Kultur. Leistungen auf
geistigem Gebiet überraschen mit dem Wissen um die Zeit. Die vielen Altäre und Steinsäulen
markieren bestimmte Zeitabläufe und Zeitdaten. Sie sind gleichzeitig Kalender und Geschichtsbuch in
einem. Bei den Mayas standen nicht nur die Tage unter dem Einfluss der Götter, Die Tage selbst waren
göttlich. Die Tage werden durch die Handlungen der Götter hervorgerufen und der Mensch ist
gehalten, dieses göttliche Handeln aufzudecken. Jeder Tag stand unter der Aufsicht eines Gottes, der
von Sonnenaufgang bis Sonnenuntergang herrschte. Daneben herrschte noch ein weiterer Gott. Seine
Herrschaft belief sich auch von Sonnenuntergang, jedoch nicht bis zum Sonnenaufgang, sondern bis
zum Sonnenuntergang des folgenden Tages. Somit herrschte jeden Tag ein anderer Gott mit niemals
den gleichen Gott zusammen, außer wenn nach bestimmten Tagen wieder die gleiche
Götterkonstellation zusammenfiel. Natürlich war die Sonne selbst und der Mond auch Gottheiten, die
regelmäßig beobachtet werden mussten. Aus der Konstellation der Tage, dabei den Einfluss der
verschiedenen Gottheiten Rechnung tragend, mischte sich nun noch die Konstellation von Sonne und
Mond hinzu. Die verschiedenen Stellungen der Gottheiten (Gestirne) regelten das Leben und
verpflichtete zur Einhaltung bestimmter Kulte und Riten. Hinzu kam noch die Beobachtung der Venus.
Mit Hilfe dieses Planeten wurde der Mayakalender zusätzlich korrigiert.
Die Maya übten sich in einem besonderen Ballspiel. Dieses Ballspiel, wobei der Ball mit den Hüften
bzw. mit den Schultern weiter gereicht wird, war für die Maya kein sportliches Spiel als solches.
Vielmehr war es Nachahmung. Sollte es doch den Kampf der Gestirne am Himmel verdeutlichen. Das
Ballspiel war somit ein göttliches Spiel, zahlreichen Mayagenerationen ist es zu danken, wenn dieser
Kulturkreis einen Kalender erstellen konnte, der seinesgleichen an Genauigkeit sucht. So legt der
Dresdener Mayakodex Themen der Astronomie und Astrologie offen. Man findet Angaben zu
Sonnenfinsternissen genauso, wie Tafeln über die Bewegung der Venus. So sind für einen Zeitraum
von 33 Jahren 69 Angaben über den Zeitpunkt von Sonnenfinsternissen zu finden. Dieser Kodex wurde
wahrscheinlich um 1200 u. Z. gezeichnet und stellt eine Neuausgabe eines in früheren Zeiten
geschaffenen Werkes da. Die Mayakultur, sowie die Kultur der Azteken vertraten die Auffassung, dass
die Welt zu einem plötzlichen Ende kommen würde. Übermächtige Götter (Gestirnsstellungen)
würden dieses Ende bewirken. Ein solcher Zeitpunkt könnte nach einem Schaltjahr bzw. nach Ablauf
einer Periode von 52 Jahren nahen. Um dieser sternlosen Zeit zu entgehen, wurden zu den genannten
Zeitfolgen strenge religiöse Opfer dargebracht und rituelle Handlungen durchgeführt. Auch die
Sonnenfinsternisse strahlten, genauso wie der Aufgang der Venus als Morgenstern etwas Bedrohliches
aus. War doch gerade die Sonne der mächtigste Gott. Wenn sie im Westen unterging, wanderte sie als
Jaguar durch die Unterwelt, um am anderen Tag im Osten wieder aufzugehen. Rechtzeitige
Vorhersagen über den Beginn der Sonnenfinsternisse waren deshalb notwendig, um rechtzeitig die
rituellen Handlungen einleiten zu können. Das irdische Weltbild wurde durch das göttliche geformt.
Im Zentrum der Welt standen die Mayas. Ihr Land war vom Meer umgeben, von dem man in fünf
Himmelsrichtungen blicken konnte. Die fünfte Himmelrichtung war die Mitte der Erde und das Herz
des Himmels zugleich. Jede Himmelsrichtung hatte ihre Symbolik in einer entsprechenden Farbe.
Während für den Osten die rote Farbe verbindlich war, stellte sich der Westen in einer schwarzen
Farbe vor. Der Norden wurde durch die weiße Farbe und der Süden durch die gelbe Farbe
16
gekennzeichnet. Jede Farbe hatte ihre eigene Charakteristik. So stand weiß für den Schnee, das Eis
und die Kälte und galt als Symbol der Reinheit.
Die Welt wurde in drei horizontale Ebenen eingeteilt. So gab es die Überwelt, aus Erdoberfläche und
den Himmel und die Unterwelt.
Beachtlich ist auch das ausgeklügelte System der Rechenkunst. Das Rechnen mit der Null und der
Gebrauch eines der Bruchrechnung ähnliches System zeigten hier Ansätze einer guten Mathematik.
Die Ziffern wurden in vertikaler Reihenfolge geschrieben. Als Methode schriftliche Aufzeichnungen
anzufertigen, kannten die Maya die entwickelte Bilderschrift. Für jeden Gedanken kam ein bestimmtes
Symbol in Frage. Dieses System war einer heutigen Schrift sehr ähnlich. So trägt die berühmte
Hieroglyphentreppe von Copan 2200 eingemeißelte Zeichen. Für die Entschlüsselung ist
selbstverständlich das Verstehen der Mayakultur Voraussetzung, denn die Schriftzeichen sind
zusammengesetzte Zeichen und haben immer ein Hauptzeichen mit verschiedenen Affixen, Zudem
kommt noch, dass gleiche Schriftzeichen eine unterschiedliche Farbe aufweisen. In erster Linie bezeugt
der Inhalt dieser Schriftzeichen der Treppe von Copan neben der Sammlung des astronomischen
Wissenstandes, die Darstellung des geschichtlichen Zeitablaufes, wobei die Namen und Einflüsse der
Götter für jeden Zeitabschnitt beschrieben sind.
Natürlich standen die Maya mit ihrer Kultur nicht allein. Gegenseitige Einflüsse zwischen dem Leben
der angrenzenden Völker (Zapoteken, Azteken usw.) und den Mayas waren auch hier vorhanden.
Wichtige Zentren der Maya waren die Orte Palenque, Chichten Itza und Copan.
Kehren wir unseren Blick zur anderen Seite der Erdkugel und begeben wir uns zwischen den Euphrat
und dem Tigres. Hier zwischen diesen beiden Flüssen befand sich vor 5000 Jahren die Hochkultur der
Sumerer, eine Kultur, welche die älteste ist, die sich in Mesopotamien nachweisen lässt. Die unter der
Herrschaft von Priesterfürsten gegliederten Stadtstaaten entstanden im 4-Jahrhundert v. Chr. Mit
einer Keilschrift beschriebene Tontafeln geben uns Zeugnis, dass dieser Kulturkreis auch über eine
Kalenderrechnung verfügte. Notwendig machte sich ein Kalender aus ganz praktischen Erwägungen.
Mesopotamien war ein Land von riesigen Sümpfen, Feuchtgebieten und Wüsten. Die Sumerer
machten das Land urbar. Legten ein System von Bewässerungskanälen und Deichen an und nutzten es
so für die Landwirtschaft. Koordiniertes Arbeiten war nicht nur für den Bau von Be- und
Entwässerungsanlagen notwendig. Kunstvolle Tempel und Städte entstanden und regelten das
gesellschaftliche Leben. Ein Zeitplan zur Bestimmung der Aussaat, der Ernte und der Gestaltung von
kulturellen und rituellen Höhepunkten war notwendig. Und so entstand ein Kalender, der auf den
Mond ausgerichtet war. Sicherlich wurden auch hier Korrekturen angebracht, denn das aus 12
Monaten zu je 30 Tagen bestehende Jahr musste bald im Widerspruch zu den tatsächlichen
Beobachtungen des Mondes stehen. Es sind nämlich 12,3 Monate nötig, um ein Sonnenjahr von 365,25
Tagen zu erhalten. Man kann die babylonische Kultur als Nachfolgekultur der Sumerer bezeichnen.
Die Babylonier nun machten den auf den Mond bezogenen Monat flexibel. Sie ließen manchmal einen
Tag weg, manchmal rechneten sie auch mit den Monat zu 30 Tagen. Alle drei Jahre schoben sie dann
einen dreizehnten Monat ein. So korrigierten sie die Zeit ständig, indem sie die gemachten
Gestirnsbeobachtungen mit der Vorausberechnung verglichen. 15 Jahrhunderte lang wurde dieses
Korrekturschema beibehalten. Bis schließlich um ca. 500 v. u. Z. der Zusammenhang zwischen Sonnen-
und Mondbewegung erkannt wurde und der Kalender auch nach der Sonne korrigiert wurde. Die
Griechen richteten sich nachfolgend auch nach dem babylonischen Kalendersystem, das jedoch

17
gebietsabhängig leicht abgeändert wurde. Aber nicht nur die Sumerer und die Babylonier waren es,
die auf Grund ihrer gesellschaftlichen Struktur einen Kalender nötig hatten. Als man in Ägypten eine
vor 2000 Jahren v. u. Z. geschaffene Elfenbeintafeln im Grabmal von Abydos fand, war hier ein Zeugnis
aus der Ersten Ägyptischen Dynastie entdeckt. Weitere Entdeckungen aus der Zeit des Mittleren
Ägyptischen Reichs (2050 bis 1700 v.u.Z.) und aus der Zeit des Neuen Ägyptischen Reiches (1560 bis
1080 v. u. Z.) z. B. des Originalsargdeckels des Königsgrabs Ramses IV. (um 1155 v.u.Z.) zeigen uns hier
eindeutige Belege für das Vorhandensein einer entwickelten Astronomie und Kalenderrechnung.
Anschaulichtes Beispiel ist wohl das Deckengemälde des Grabes von Senmut aus der Zeit der
altägyptischen Königin Hatschepsut um 1480 v.u.Z. Wir haben es dem ägyptischen Totenkult zu
danken, wenn wir heute zahlreiche Zeugnisse dieser Hochkultur vorfinden. So war es der Stern Sothis
(Sirius, Sternbild Großer Hund), der mit seinem ersten Auf gang das neue Jahr brachte und gleichzeitig
als Verkünder des Beginns der sehnsüchtig erwarteten Nilüberschwemmungen galt. Denn von den
Nilüberschwemmungen hing im starken Maße das Leben der meist bäuerlich orientierten ägyptischen
Bevölkerung ab. Während ursprünglich der ägyptische Kalender, genauso wie der babylonische
Kalender ein Jahr zu 12 Monaten und ein Monat zu 30 Tagen umfasste, wurden bald fünf zusätzliche
Tage am Monatsende einführt, um den Unterschied zur Beobachtung zu korrigieren. Dennoch
wanderte der Jahresanfang, gekennzeichnet durch den heliaktischen Aufgangs des Sirius durch das
Jahr. Erst mit der Einführung eines sechsten Tages nach einem Verlauf von vier Jahren im Jahr 2038
v.u.Z. gelang der Ausgleich und der Sirius begann das Jahr immer zur gleichen Zeit einzuläuten. Aber
nicht nur der Mond und die Sonne dienten der Beobachtung zur Zeitzählung. Vielmehr wurden auch
die Sterne dazu verwendet. Heliaktische Auf- und Untergänge, - das Erscheinen bestimmter Sterne am
Horizont kurz vor Sonnenauf- oder Sonnenuntergang- sind bevorzugte Rechenansätze dafür. So ist es
erwiesen, dass auch australische Ureinwohnerstämme den richtigen Zeitpunkt zur Termitenjagd
festlegten, indem sie die Position des hellen Sterns Arktur (Sternbild Bootes) beobachteten. Auch stand
eine bestimmte Position der Wega (Sternbild Leier) für den Beginn die Eier des Laubenwallnisters zu
suchen. Immer wieder begegnet man den Plejaden, wenn es um den Beginn oder das Ende bestimmter
jahreszeitlichen Verrichtungen geht. So begannen die nordwestbrasilianischen Tukano-Indianer des
Feldfruchtanbaus mit dem Zeitpunkt, als die Plejaden nicht mehr über den Horizont kamen. Die
Griechen richteten Beginn und Ende ihrer Mittelmeerschifffahrt nach den Plejaden aus und die
Polynesier kannten die Plejaden unter dem Begriff Mataliki
Der zentralafrikanische Stamm der Bakongo spricht den Plejaden als den „Wächtern, die den Regen
beaufsichtigen“ Aber nicht nur die Plejaden waren geeignete Beobachtungsobjekte. Die Bedeutung
des Sirius für die ägyptische Kalenderrechnung haben wir schon erwähnt. Die Buschmänner in
Südafrika schleuderten brennende Fackeln zum Himmel, um die Wintersterne Sirius und Kanopus zu
beschwören, noch höher aufzusteigen, damit endlich der Winter zu Ende geht. Es war Sache der
Medizinmänner, der Schamanen oder der Priester hier in die Lage versetzt zu sein, Auskünfte über den
Saat - oder Ente beginn, der Schifffahrtsperiode, des Einhaltens von rituellen Handlungen usw. geben
zu können. Hier ist der Anfang der Astronomie, die selbstverständlich mit der Astrologie verwoben ist,
zu suchen. Als der schwedische Historiker Martin Persson Nilsson (1874 bis 1967) sich mit den Kenyah-
Stämmen auf Borneo beschäftigt, schrieb er folgenden Text nieder: „Die Festsetzung der Saatzeit ist
so wichtig, dass jedes Dorf diese Aufgabe einem Mann anvertraut, dessen einzige Beschäftigung es ist,
die Zeichen zu beobachten. Er braucht selbst keinen Reis anzubauen, da er seinen Bedarf von den
anderen Dorfbewohnern erhält. Das Verfahren ist geheim, und seinem Rat wird immer Folge geleistet.“
Aus der Notwendigkeit der gesellschaftlichen Arbeitsteilung heraus war der Beginn der

18
Astronomie/Astrologie geboren. Wie sehr der Glaube, die Mythen, und die Rituale eingewoben sind,
in den praktischen Bedürfnissen, dafür sei die Astronomie der Beweis. Waren es anfangs die Gestirne
und der Mond, so gibt es zahlreiche Ereignisse, wie der Jahresablauf nach der Sonne gestaltet worden
ist. Alljährlich erreicht die Sonne den höchsten Punkt ihrer scheinbaren Bahn. Sie beginnt dann auf der
Ekliptik wieder äquatorwärts zu wandern. Dieser Zeitpunkt, als Sonnenwende bezeichnet, war nicht
nur den Hochkulturen in Ägypten, Babylonien, Indien, China oder Arabien bekannt, vielmehr sind auch
Beispiele vorhanden, die nicht den Einfluss dieser Hochkulturen unterstanden. Besten präsentiert sich
diese Entwicklung am Beispiel der Druiden. Die Druiden sind ein Orden aus der Bronzezeit im heutigen
England. Unter dem Einfluss der dortigen Stammesfürsten von Wessex stehend, haben sie ein Bauwerk
erschaffen, dass heute noch viele Schaulustige anzieht, wenn um die Betrachtung der Sonnenwende
geht. Gemeint ist das bekannte Bauwerk in der Ebene von Salisbury in Mittelengland. Hier erhebt sich
in Form gewaltiger Steinbauten ein Monument gewaltigen Ausmaßes, dass vor ca. 4000 Jahren gelegt
wurde.
Diese dort stehenden Steinblöcke sind nun nicht wahllos, einem bestimmten Einfluss einer dort
existierenden Götterwelt Rechnung tragend, dorthin gesetzt worden. Es war nicht nur ein Hinzufügen
von Steinen, wie es gerade der Zeitgeist bzw. der Riten Kult erforderte. Man hat entdeckt, dass das
Setzen dieser großen Steinböcke schon einem System unterlag, welches wohl gewollt war. Als 200
dieser Blöcke hinsichtlich ihrer Aufstellung vermessen hat, gelang der Nachweis, dass diese nach dem
Lehrsatz des Pythagoras angeordnet stehen. Diese Lehrsätze waren zumindest den Menschen der
Steinzeit unbekannt. Dennoch unterliegt dieses Bauwerk Konstruktionseigenschaften. Das Geheimnis
ist: Hier wurde die Natur einfach nachgebaut. Das Anlegen dieses Monument war vorausberechnete
Absicht, die Konstruktionsart, die mit der alithische Elle verwirklicht wurde, ergab sich durch die
Beobachtung der kosmischen Natur. Man muss auch hervorheben, dass nicht nur das Monument
Stonehenge die einzigen Zeitzeugen solcher Bauwerke darstellen. Vielmehr sind auch Bauwerke
unweit von Güstrow (Norddeutschland) entdeckt worden, die in vielen Beziehungen denen von
Stonehege ähnlich sind. Die Vermutung ist offen, dass es wahrscheinlich im germanischen-
angelsächsischen für Gebiet noch weiterer Monumente gleichartigerer Art gab. Leider kann Geschichte
dieses nicht mehr nachvollziehen.
Die drei Steinkreise, die unweit von Güstrow gefunden worden sind, beschreiben einen Steinkreise aus
je neun Steinen von l,2 Meter Höhe. Die Verbindungslinie zweier dieser Kreise liegt in der Nord-
Südrichtung. Verbindet man drei bevorzugte Orte dieser Kreise ergibt sich, dass diese den nach dem
Aufgangs - und Untergangspunkt des Mondes orientiert sind. Diese Linien wurden aber nicht
willkürlich gewählt. Es sind genau die Linien, die der Mond während seines Auf- bzw. Unterganges
einnimmt, wenn der Mond seine größten Extremen (+/- 29°) - Auf- und Untergang- bzw. seine kleinsten
Extreme (+/- 19°) zeigt. Es hat sich weiter gezeigt, dass diese Linien nur l° von den berechneten
Azimuten für die Zeit 1800 v.u.Z. abweichen.
Der Hauptteil der Anlage besteht aus fünf Trilithen (l) von 7 m Höhe, die jeweils paarweise überdacht
sind und von einem Steinkreis umgeben werden, die wiederum aus überdachten Steinsäulen besteht.
Jede der 30 Säulen dieses sogenannten Sarsenkreises (2) ist 5 m hoch. Der Sarsenkreis entstand
ca.1600 v.u.Z., während die weiter innen liegenden Kreise ca. 150 Jahre älter sind. Die weiter innen
liegenden Kreise, die aus sogenannten Blausteinen bestehen, sind gleich alt mit dem kreisförmigen
Wal l(4), der die gesamte Anlage umschließt. Vor der Öffnung des Walls befindet sich eine angelegte
Straße (5), die in nordöstlicher Richtung verläuft. Der Wall verläuft noch ca. 500 m entlang dieser

19
Straße. Der innere Wall wird von 56 Löchern (6), ehemaligen Feuerstellen, abgeschlossen, die ca. l m
tief sind. Innerhalb des inneren Kreises sind vier Punkte (I bis IV) markiert, die ein gleichschenkliges
Viereck bilden Der Kreuzungspunkt dieses Vierecks ist der Mittelpunkt der gesamten Anlage. Auf der
schon bezeichneten Straße befindet sich 79 m vom Mittelpunkt entfernt, ein Stein (7), der als
Heelstone bezeichnet wird. Gräben (8) deren Endpunkt kleine Hügel bilden, umziehen die Anlage.
Zahlreiche Wissenschaftler bemühten sich, das Rätsel um die Steinbauten von Stonehenge zu klären.
Als der englische Astrophysiker erstmals im Jahre 1906 Sir Joseph Nonnan Lokkyer vermittels
astronomisch - geodätischer Vermessungen Gewissheit über das Geheimnis um Stonehenge erlangen
wollte, stellte er fest, dass die Vorzugsrichtung der gesamten Anlage vom Mittelpunkt zum Heelstone
(Fersenstein) mit der Nordrichtung einen Winkel von 51,23° bildet. Diese Richtung entspricht genau
der Richtung, in der die Sonne zum Zeitpunkt der Sommersonnenwende aufgeht. Auch ließen sich die
Punkte finden, die mit dem Sonnenuntergang zur Sommersonnenwende und mit dem Auf- und
Untergang der Sonne zum Zeitpunkt der Wintersonnenwende zusammen liegen.
Allen Völkern, für die die Erforschung des Himmels für eine Kalenderberechnung gesellschaftlich
notwendig war, ist gemeinsam, dass sie nicht nur die Bewegung der Fixsterne beobachteten, sondern
auch dass sie indem sie die Sonnenbahn beobachteten, die Sonnenbahn mit Ihrer Sommer- und
Winterwende kannten. Ob wir nun die Anlage von Stonehege oder die Anlage auf der Insel Tongatapu
auf Tonga betrachten, immer ergibt sich jenes gleiche Bild, dass von der Beobachtung der Tag- und
Nachtgleichen bzw. von den Zeitpunkten der Sommer- und Wintersonnenwende ausgegangen wird.
So war man, unabhängig von den Hochkulturen jener Zeit, schon veranlasst, astronomische
Beobachtungen zu betreiben und auszuwerten, so wie sie das Zusammenleben und die Existenz der
jeweiligen Gesellschaftsordnung forderten. Und wiederum erkennen wir, dass eine mystische Welt im
Glauben an die Gestirne, indem sie als Gottheiten geehrt wurden, abhängig sind von den Bedürfnissen,
die das Leben selbst fordert.
Aber wenn wir auf die Anfänge der Kalenderrechnung schauen, so haben wir noch nicht definiert,
woher unsere heutige Kalenderrechnung eigentlich kommt.
Wir stellen fest, dass die europäische Zeitzählung auf den Einfluss verschiedener Religionen
zurückgeht. Sicher stand hier die Vermischung germanischer Kulte mit römischen religiösen
Anschauungen Pate. Daneben ist die römische Kultur natürlich vom Einfluss der hellenistischen Epoche
geformt. So entstand z. B. die Formierung der Monate und Wochentage. Während der Monat Mai
wahrscheinlich auf die Götter Janus oder Mars zurückgeht, erinnern die Wochentage auch an
germanische Gottheiten. Der Sonntag entspringt der lateinischen Bezeichnung „dies solis“, Sonne,
während der Montag für den Mond steht (lat. dies lunae). Der Dienstag wurde nach dem germanischen
Gott Tyr (Tyr, althochdeutsch Ziu, verwandt mit dem griechischen Gott Zeus), dem Gott des
germanischen Rechts benannt. Für den Mittwoch ist keine weitere Bezeichnung bekannt, nur dass er
die Mitte der Woche festlegt. Donar, der germanische Kriegsgott, steht für den Donnerstag und der
Freitag ist der germanischen Göttin der Liebe, Freya, geweiht. Schließlich ist es noch der Samstag, der
auf den hebräischen Sabbat zurückgeht.
Nun geht unser Kalender, der nun in der Welt maßgebendes Element ist, auf die Römische
Zeiteinteilung zurück. Der römische Kalender jedoch beruhte auf den ägyptischen Kalender. Als 238
v.u.Z. Ägypten von der Dynastie der Ptolemäer beherrscht wurde, schlug der Monarch Ptolemäus III.
20
Euergetes ( Wohltäter; um 280 bis 221 v.u.Z.) vor, das Sothis - Jahr der Ägypter nach einem Zeitraum
von vier vergangenen Jahren durch Einfügung eines sechsten Tages (29.Februar) zu ergänzen. Jedoch
fasste diese Verordnung keinen Fuß, denn über 25 Jahrhunderte kam die ägyptische Priesterschaft
ohne diese Einfügung aus. Erst als Ägypten unter römischer Vorherrschaft stand, war es der
Staatsmann und Feldherr Galius Julius Cäsar (100 bis 44 v. Chr.) der diesen Tag einzufügen befahl und
damit der ägyptischen Kalenderreform die Anpassung an die astronomischen Beobachtungen
gestattete. Nun war es aber nicht Cäsar selbst, der das Wissen und die Idee hatte, den altägyptischen
Kalender zu verbessern. Obwohl die Einfügung eines zusätzlichen Tages alle vier Jahre verfügt war,
brauchte es noch einiger Zeit, ehe der Kalender durchgesetzt war. Der eigentliche römische Kalender
fußte auf die Zählung von 355 Tage für ein Jahr. Die Kluft zwischen den römischen Kalender und der
realen Beobachtung betrug über zwei Monate. Erst auf Rat des griechisch-ägyptischen Astronoms
Sosigenes wurde das Jahr 46 v .Chr. das entscheidende Jahr für eine Kalenderreform. So hatte das Jahr
46 v. Chr 445 Tage, indem 23 Tage an den Februar angehängt wurden. Weitere 67 Tage wurden
zwischen den Monaten November und Dezember eingeschoben. Dieses „Jahr der Verwirrung“ war die
eigentliche Reform des ägyptisch-römischen Kalenders, denn nun stimmte der Kalender mit den
Jahreszeiten wieder überein und sollte von nun an unter Einfügung eines zusätzlichen Tages nach
einem Zeitraum von vier Jahren (Schaltjahr) auch so bleiben. Der julianische Kalender war geboren.
16 Jahrhunderte vergingen und der julianische Kalender hatte immer noch Bestand, obwohl das
römische Reich längst nicht mehr existierte. Nun muss man jedoch feststellen, dass der christliche
Kalender, als unmittelbar übernommener römischer Kalender Eigentümlichkeiten aufzeigt, die mit der
römischen Kalenderzählung nicht im Einklang stehen. Die christliche Religion hervorgegangen aus dem
jüdischen Kulturkreis, hatte bestimmte heilige Rituale dem jüdischen Kalender entnommen. Der
jüdische Kalender hatte jedoch die babylonische Mond-Sonnen-Zeitrechnung zur Grundlage. Das
Weihnachtsfest und die Heiligentage waren festgelegte Tage nach dem jüdischen Kalender, daneben
kamen noch bewegliche Feste hinzu. So fällt das Osterfest mit dem Passahfest der Juden zusammen.
Schließlich wurde das Osterfest auf dem 325 n.Chr. stattfindenden Konzil zu Nicäa auf den ersten
Sonntag nach dem ersten Vollmond folgend auf den 21. März (Frühjahrs-Äquinoktium) festgelegt.
Auch die Festlegung der Sieben-Tage-Woche rührt von der altjüdischen Glaubensauffassung her. Diese
Wocheneinteilung ist nun eine auf Glaubensrituale eingefügte künstliche Erscheinung, die nichts mit
der Mond- oder Sonnenbeobachtung gemein hat. So scheint es nur ein relativ kleiner Kulturkreis zu
sein, der das Jahr in Bezug auf Wochentage definiert Die Polynesier z.B. kannten keine Wochentage,
denn ihre Zeiteinteilung war rein astronomisch. Doch auch der julianische Kalender war nicht
fehlerfrei. Obwohl alle vier Jahre ein Schaltjahr eingefügt war (29. Februar), stellte man fest, dass alle
128 Jahre ein Tag gewonnen wurde. Im 16. Jahrhundert ging der julianische Kalender schon um 13
Tage vor der Sonne her. Während dem einfachen Volk wohl dieses Vorgehen nicht auffiel, so fiel doch
diese Ungenauigkeit der christlichen Kirche sehr wohl auf, die kirchlichen Feste fielen auf die falsche
Jahreszeit.
Als 1582 der Papst Gregor XIII. (1502 bis 1582) seine neue Kalenderreform verkündete, brach die
katholische Kirche einmalig ein Dogma und passte die Zeit den astronomischen Beobachtungen an.
Auf Rat des italienischen Physikers und Astronomen Alois Lillus (um 1510 bis um 1579) und des
deutschen Mathematikers, dem Jesuiten Christopf Clavius (1537 bis 1612) wurde nun das Jahr um 10
Tage verkürzt. Im Verlaufe von vier Jahrhunderten wurde dann das Schaltjahr fallen gelassen. Danach
ging die als gregorianische Kalender, bezeichnete Zählweise der Jahre so genau, dass innerhalb von
3323 Jahren erst ein Tag Unterschied zur astronomischen Beobachtung aufkommt. Während

21
folgerichtig die zu diesem Zeitpunkt europäischen regierten katholischen Länder diese Korrektur sofort
annahmen, war es nicht verwunderlich, wenn die gerade reformierten evangelischen Länder auf
dieses, wie es schien katholische „Dogma“ nicht reagierten. Über kurz oder lang schlossen sich die
evangelisch regierten Länder aus wirtschaftlichen und anderen Erwägungen aber doch dem neuen
logischen System an. England zum Beispiel kam dieser neuen Reform erst 1752 nach, der alte
julianische Kalender ging zu diesem Zeitpunkt dem Gregorianischen schon um 11 Tage voraus. Zuletzt
war es das orthodoxe Russland, welches auf Grund seines Bruchs durch die orthodoxe Kirche mit Rom,
geschehen schon vor der Reformation in Mitteleuropa, sich dem neuen Kalender anpasste. Hier war
es nicht die Kirche selbst, die diese Reform einleitete, sondern es war das Ergebnis der sozialistischen
Oktoberrevolution, die mit dem alten Staat und der Kirche brach und demzufolge die neue
Kalenderzählung einführte. Im Jahre 1918 ließ die russische Oktoberrevolution einfach 13 Tage
ausfallen und der Kalender stimmte mit dem europäischen überein.
Natürlich verfügten auch die Araber über eine Kalenderrechnung. Es war der Mond-Sonne-Kalender,
der hier immer wieder korrigiert wurde. Als der zweite Kalif in der Nachfolge Mohammeds, Kalif Omar
I. (592 bis 644, Kalif seit 634) aus irgendeinem heute nicht mehr nachzuvollziehenden Grund diesen
Sonne-Mond-Kalender abschaffte, wurde gleichzeitig ein nur nach dem Mond ausgerichteter Kalender
eingeführt. Die religiösen islamischen Feste verschieben sich somit durch das ganze Jahr hindurch.
Heute ist dieser Kalender für den Islam immer noch bindend, die staatlichen Angelegenheiten werden
jedoch nach dem westlichen Kalender geregelt.
Der Kalender (lat. calendae, der erste Tag im Monat) Ist somit eine Einteilung der Zeit durch
Zusammenfassung von Vielfachen des Sonnentages. Die natürlichen germanischen Zeiteinheiten
Monat und Jahr sind nicht ganzzahlige Vielfache des Sonnentages, daher ergeben sich unterschiedliche
Möglichkeiten für die Zeiteinteilung. Das Jahr ist die Zeitspanne, die die Erde für einen Umlauf um die
Sonne benötigt. Dieses astronomische Sonnenjahr lässt sich an Hand von verschiedenen
Bezugspunkten bestimmen. Man unterscheidet das sidirische Jahr mit dem Zeitraum zweier
nachfolgender Durchgange der Sonne durch denselben Punkt der Ekliptik (beliebiger Stern). Es beträgt
365d 6h 9 min 9s; das tropische Jahr mit dem Zeitraum zwischen zwei aufeinanderfolgenden
Durchgängen der Sonne durch den Frühlingspunkt. Es beträgt 365d 5h 48min 46s und das anomalische
Jahr mit dem Zeitraum zwischen zwei aufeinander folgenden Durchgängen der Sonne durch den
sonnennächsten Punkt der Erdbahn.
Für die Kalenderrechnung wird das tropische Jahr verwendet.
Der Julianische Kalender zählt sich zu 1461,0000 Tagen in vier Jahre, während vier tropische Jahre
1460,9688 Tage zählen. Demzufolge muss das Julianische Jahr mit 365 Tagen und 6 Stunden zu kurz
sein. 6 Stunden machen in vier Jahren einen Tag aus. Deshalb schaltet man jede vier Jahre einen
zusätzlichen Tag, den 29 Februar ein.
Der Gregorianische Kalender berücksichtigt nun den sich auftuenden Rest von 11min und 14s. Indem
dieser Rest durch 24 Stunden geteilt wird, ergeben sich 128,189911 Jahre. Das heißt, es müssen 128
Jahre vergehen und der julianische Kalender geht dem gregorianischen Kalender um einen Tag voraus.
Der Gregorianische Kalender behebt diesen Fehler, indem man nachfolgender Regel verfährt: Alle
Jahre, deren Jahreszahl durch 4 ohne einen Rest teilbar ist, sind Schaltjahre. Hier wird der 29. Februar
eingefügt. Aber alle vollen Jahrhunderte, bei denen die Jahreszahl nicht ohne Rest durch 400 teilbar
22
ist, sind keine Schaltjahre, sondern Gemeinjahre. So sind 1800, 1900, 2100 Gemeinjahre. 1988, 1992,
1996, 2000, 2004, 2008, 2012, 2016 usw. sind Schaltjahre. Es dauern 400 tropische Jahre 146096,88
Tage.
Es dauern 400 Gregorianische Kalenderjahre 146097,00 Tage. Der kleine verbleibende Rest kann für
die nächsten Jahrtausende vernachlässigt werden.
Für die Astronomie gilt das sogenannte Julianische Datum. Dieses Datum ist zur Berechnung der
Epherimiden (scheinbare Gestirnsörter) von entscheidender Bedeutung. Er unterscheidet sich
dadurch, dass er von einem willkürlich festgesetzten Tag die vergangenen und die kommenden Tage
durchgängig zählt. Der festgelegte Tag ist der 01.01.4713 vor unserer Zeitrechnung. Nach dieser
Zählung entspricht
nach dem gregorianischen Kalender das julianische Datum
01.09.1980 2444484 Tage
01.01.1990 2447893 Tage
01.01.2300 2451545 Tage
(Genaue Angaben und Tabellen zur Berechnung des Julianischen Datums befinden sich im Abhang
dieses Buches.)
Der jüdische Kalender zählt sich nach dem gebundenen Mondjahr. Das freie Mondjahr umfasst 12
Monate zu abwechselnd 29 und 30 Tage. Das sind 354 Sonnentage. Es ist somit 11 Tage kürzer als ein
Sonnenjahr. Der Jahresbeginn durchlauft alle Jahreszeiten. Fügt man alle drei Jahre nun einen Monat
von 30 Tagen ein, so ergeben sich für einen Zeitraum von drei Jahren 1092 Tage, aus (354 Tage x 3
Jahre) + 30 Tage = 1092 Tage. Drei tropische Jahre sind jedoch 1095,7266 Tage. Der jüdische Kalender
bleibt somit dem tropischen Kalender um 3,7266 Tage, das ist 1,2422 Tage jährlich zurück.
Der ägyptische Kalender gliederte sich ursprünglich nach den Erfordernissen der Landwirtschaft. Er
umfasste 12 Monate zu 30 Tagen und fünf zusätzliche Tage am Jahresende. Somit zählte es sich zu 365
Sonnentagen. Es gab drei Jahreszeiten. So die Monate der Überschwemmung, die Monate des
Wachstums und die Monate der Hitzezeit. Der ägyptische Kalender blieb somit den tropischen Jahr um
einen viertel Tag zurück, in vier Jahren um einen Tag. Der heliaktische Aufgang des Sirius wanderte
somit durch das Jahr. Erst im Jahr 238 v.u.Z. wurden alle vier Jahre statt fünf sechs Tage zusätzlich
gerechnet. Der ägyptische Kalender stimmte dann mit dem Sonnenjahr überein.
Der babylonische Kalender rechnete ab dem 2. Jahrhundert v.u.Z. mit dem sogenannten
Lunisolarjahr mit 12 oder 13 Monaten Dauer. Das Jahr begann zum Zeitpunkt der Tag- und
Nachtgleiche, wobei jedoch der Jahresanfang auf Grund der wechselnden Jahreslänge von 13 bzw. 12
Monaten schwanken musste. Dieses Lunisolarjahr hatte einen Zyklus von 19 Jahre. 12 Jahre. Davon
hatten je 12 Monate, während die restlichen 7 Jahre mit je 13 Monaten berechnet wurden. Diese
Einteilung beruhe auf die Grundlage, dass 235 synodische Monate recht genau 19 tropischen Jahren
gleichkamen. Eine geringe Abweichung von 124,7 min machte auch diesen Kalender recht genau. Die
Korrekturen wurden jedoch nicht mit der Rechnung (12 x 12) + ( 7 x 13) = 235 Tage ausgeglichen,

23
sondern durch Beobachtungen des Aufgang bestimmter Sterne ausgeführt. Die Sterne wanderte auf
drei Wegen, dem „Enlil“, dem „Anu“ und dem „Ea“ - Weg. Bezugskreis dieser Wege war der Äquator.
Im Frühling und im Herbst wanderte die Sonne im Anu - Weg , das ist Breite bzw. Sonnendeklination
von 15° nördlich bis 15° südlich des (Himmels)äquators. Im Sommer wanderte sie dann im Enlilweg,
das ist der Weg nördlicher als 15°Nord des Himmelsäquators. Schließlich wanderte die Sonne dann im
Winter im Eaweg. Dieser Bereich verlief südlicher als 15°Süd des Himmelsäquators. Den Babyloniern
war also bekannt, dass sich die Sonne während des Jahres auf einer gegen den Äquator geneigten Bahn
bewegt.
Der Kalender der Azteken glich der Kalenderführung anderer mittelamerikanischer Völker. Dieser
Kalender bestand aus einen riesigen Stein. Der Sonnengott, in die Mitte des Steins gesetzt, umgeben
vier in Katastrophen untergegangene Sonnen. Als nächster Kreis folgt eine Darstellung aus 20 Feldern.
Je ein Feld stellt ein Tag dar. Mit fünf Punkte werden weitere fünf Tage angedeutet. Es sind fünf Tage
der Menschenopfer für den Sonnengott. Damit hat dieser Kalender 18 Monate zu je 20 Tagen zuzüglich
fünf weiteren Tagen, gleich 365 Tage.
Der Maya-Kalender, ebenso mit den Kalendern anderer mittelamerikanischer Kulturen verwandt,
höher entwickelt, als der z. B. aztekische Kalender. So wurde die Zeitrechnung durch die
Vervielfältigung von 20 erweitert. Die Maya rechneten
23 x 18 Tage = 360 Tage = l tun
20 x 360 Tage = 7.200 Tage = l katun
20 x 7200 Tage = 144.000 Tage = l baktun (usw.)
Da ein tun jedoch nur mit 360 Tagen veranschlagt war, musste, wenn lange Zeiträume zurückgerechnet
werden sollten, jeweils noch kleiner Korrekturbetrag hinzugefügt werden. Hier beginnt das Einmalige
dieser Kalenderrechnung. Die Maya kannten die Korrektur, die sie anzubringen hatten, denn
Nachrechnungen ergaben, dass die berechneten Daten tatsächlich des Sonnenjahr zu 365 Tagen
ausdrückten. So erhielten sie das rechte Maß eines Zeitabschnitts, indem sie dem Doppelcharakter der
durch zwei Götter vertretenen Tage aufrechneten. Einmal wurde die Zählung der Tage nach den
herrschenden Gott eines tuns von 20 Tagen und daneben des anderen herrschenden Gottes des Katuns
von 360 Tagen vorgenommen. Unter Berücksichtigung der Stellungen von Mond, Venus und anderen
Planeten ergab sich dann der Korrekturwert. Nach der einen Art der Mayakalender , dem sogenannten
Tzolkin, waren es 260 Tage, aufgegliedert in 13 Monaten zu je 20 Tagen, die das Jahr zählte und nach
dem anderen Kalender zählte das Jahr 18 Monate zu ebenfalls 20 Tagen, zu denen aber noch fünf
zusätzliche Tage hinzugefügt wurden. So kam man dann auf die 365 Tage für das Jahr. Schaltjahre
wurden dann eingefügt, wenn der Rechnungsstand nicht mehr mit dem astronomischen beobachteten
Stand übereinstimmte. So bestand jeder Tag aus einen Doppelnamen, der genau den Gott eines tuns
und den Gott eines katuns enthielt und dessen Zusammentreffen sich erst nach einer Zeitspanne von
52 Jahren wiederholte. Mit Hilfe von genauen Venusbeobachtungen, die über Jahrhunderte
durchgeführt worden sind, wurde der Kalender korrigiert. Es ergab sich z. B. für eine berechnetet
Zeitspanne von 481 Jahren nur eine Abweichung von 0,08 Tage, das sind 1h 55min und 12s zum
heutigen astronomischen Jahr. Der Mayakalender zog alle drei großen astronomischen Bewegungen
heran: die tägliche Erdrotation, den Mondumlauf und das Sonnenjahr. Unbestreitbar ist hier eine
24
kulturelle Leistung sichtbar, die Geschichte einmalig ist und erst heute mit modernen Methoden der
Kalenderberechnung wiederholbar geworden ist.
Nun gab es neben den hier aufgezeigten Kalendertypen auch noch die des indischen und chinesischen
Kulturkreises. Der chinesische Kalender des Liu Hsin teilt sich als ein „Drei – Zyklen – Kalender“. Das
alte China verwendete einen ähnlichen Kalender, wie die Babylonier. Sie benutzten das Lunisolarjahr
und einen 19jährigen Zeitzyklus. Auch hier wurde der Himmel ständig beobachtet.
Der indische Kalender zeichnet sich durch den Umgang mit großen Zeiträumen aus. 360 Jahre
wurden zu einen Jahr der Götter zusammengefasst. 1200 dieser Götterjahre ergaben dann das Große
Jahr. 1000 Große Jahre sind einem großen Tag, dem Tag des Brahma, gleichzusetzen. Danach sollte
eine genauso lange Nacht folgen. Unter Zuhilfenahme des Jahres zu 365,25 Tagen wäre ein Brama -
Tag dann 1,57788 Tage bzw. 4.320.000.000 Jahre lang. Diesem Brama - Tag sollte dann eine ebenso
lange Nacht folgen.
Der polynesische Kalender war ein rein auf die Monatsphasen ausgerichteter Kalender. Es bleibt
jedoch anzunehmen, dass das Kennen der Tag- und Nachtgleichen bzw. der Zeitpunkte der
Sonnenwenden auch den Kalender in irgendeiner Form beeinflusst hat. Das Jahr selbst benannte sich
Tau und nahm Bezug auf den Anbau der Yamswurzel. So haben auch sicherlich die Zeichen des
Himmels den Beginn, den Verlauf bzw. das Ende bestimmter Handlungen dieser Ureinwohner
richtungsweisende Zeichen gesetzt.
Bezeichnend für fast alle Kalendersysteme ist immer wieder, dass der Einfluss der Tag- und
Nachtgleichen bzw. der Winter- und Sommersonnenwende beachtet wurde. Oder drücken wir es
anders aus: Ob nun mit der Anlage von Stonehenge oder dem Trilithon auf der Insel Tongatapu, immer
wieder haben die Völker vermittels geeigneter Anlagen die Auf- und Untergänge der Gestirne zum
Zeitpunkt der Tag- und Nachtgleichen bzw. zum Zeitpunkt der Sonnenwende festgehalten. Nun
unterteilt sich das Jahr nicht nur in Tage, sondern auch in Stunden(h), Minuten (min) und Sekunden(s).
Blicken wir noch einmal nach Ägypten in die Zeit im Jahr 2000 v.u.Z. und betrachten wir uns die
Inschriften die in dieser Zeit hergestellten Sargdeckel der Könige. Uns wird auffallen, dass dort
Inschriften zu finden sind, die in Listen von Sternbildern ihren Ausdruck finden. Solche Listen werden
als Dekane bezeichnet um geben den Zeitpunkt wieder, wann die Sterne erste Mal über den Horizont
kommen. Genau an 36 Sternen bzw. Sternbildern ist hier aufgezeigt, wie danach die Bestimmung der
Jahreszeit berechnet werden konnte. Auch besaßen die ägyptischen Astronomenpriester so die
Möglichkeit mit Hilfe verschiedenen Stellungen der entsprechenden Dekane am Himmel die
Nachstunde zu bestimmen. Die Dekane liegen alle südlich der Ekliptik in einem Gürtel. Vom ersten
Aufgang eines Dekans bis zum ersten Aufgang des folgenden Dekans vergehen genau 10 Tage. Das Jahr
konnte man so in 36 Wochen zu je 10 Tagen gliedern. Weil nun gleichermaßen innerhalb einer Nacht
12 Dekane aufgehen, ließ sich die Nacht in 12 Teile (12 Sternstunden) teilen. So kam die Stunde auf.
Diese Einteilung des Himmels nach Dekanen ist auch sehr bald bei den Babyloniern zu finden. Sie
stellten übrigens auch als erstes fest, dass der Abendstern und der Morgenstern ein identischer Stern,
die Venus ist. Die Venusbeobachtungen wurden mit so einer Feinheit und Genauigkeit ausgeführt, dass
sogar die Zeitfolgen des Aufgang am Abend- bzw. am Morgenhimmel bekannt waren. Um diese
Gesetzmäßigkeit zu finden, hat man z. B. eine Beobachtungsreihe für einen langen Zeitraum erstellt.
Schon die Sumerer kannte eine Tageseinteilung. Da das sumerische Jahr aus 12 Monaten zu je 30 Tagen

25
bestand, so rechneten sie diese Teilung weiter auf und teilten den Tag in 12 danna. (vergleichbar mit
Stunden) zu je 30 ges (vergleichbar mit Minuten). Ein danna bestand somit aus 2 Stunden zu 30 ges,
gleich je ges 4 min.
1 Jahr 12 Monate
1 Monat 30 Tage
1 Tag 12 danna
1 danna 30 ges
1 danna entsprechen 2 Stunden = 120 Minuten
1 ges entsprechen 4 Minuten
aus: 1 Tag = 12 danna = 24 Std.
30 ges x 12 danna = 360 ges 60 Min. x 24 Std. = 1440 Min.
360 ges = 1440 Min.
min 4ges 360
min 14401 ==ges
Besonders auffallend ist die Errechnung der Zahl 360, die heute noch für den Vollkreis 360° steht und
die Basis der nautischen Längenberechnung bzw. der astronomischen Zeitrechnung ist. In diesem
Zusammenhang müssen nochmals die Babylonier erwähnt werden. Bekannter Weise haben die
Babylonier große Teile der Kultur der Sumerer übernommen und weiterentwickelt.

26
Als Wurzel unserer europäischen Stunde gilt das ägyptische Stundensystem. Das ägyptische Wort für
Stunde ist zugleich das Wort für „Aufgabe des Priesters“. Die ägyptischen Priester waren auch
gleichzeitig als „Stundenwächter“ bzw. „Sternbeobachter“ zu sehen. Die Bedeutung dieser Worte
hängt mit den ägyptischen Begriff für die Stunde eng zusammen. Die Tagesstunden hingen vom
Voranschreiten des Sonnengottes Ra am Taghimmel ab. Die Tagstunden wurden von l bis 10 gezählt,
wobei noch jeweils eine Stunde für die Morgen- und Abenddämmerung hinzukam. Zusammen mit den
Nachtstunden hatte der Tag somit 24 Stunden. Natürlich mussten entsprechend der Länge des
Sonnentages auch die Tagstunden ungleich lang ausfallen. Eine Vereinfachung dieser Zeiteinteilung
ergab sich gleichlaufend mit Aufkommen der mechanischen Uhren (Klepsydren, Wasseruhren), die die
Sonnenuhren nach und nach ablösten. Als erste Kultur führte der mittelalterliche Islam eine
Stundeneinteilung ein, in der die Stunden gleichlang waren. Jedoch sollte noch lange Zeit vergelten,
bis auch Europa und dadurch die übrige Welt ihr Zeitmaß in gleich langen Stunden einteilte.
Uns ist .heute klar, dass in früheren Zeitepochen die praktische Bedeutung der Zeit für das tägliche
Leben nicht in einer präzisen Zeitformulierung lag. Dafür bestand auch keine gesellschaftliche
Notwendigkeit. Heute hängt das tägliche Leben von der Minutenorientierung ab. Fahrpläne der Bahn,
des Flugverkehrs bedürfen heute dieser Notwendigkeit. Sogar die Sekunde ist heute entscheidend,
wenn wir an Nachrichtenkommunikation oder computergesteuerte Systeme denken Und noch kleiner
wird das Zeitmaß, wenn es um die Auswertung elektromagnetischer Wellenimpulse in der GPS Ortung
oder der Radartechnik geht. Hier genügt nicht einmal mehr die Länge einer Zeitsekunde. Das Leben in
früheren Zeiten bedurfte dieser genauen Zeiteinteilung nicht. Hier genügte die Einteilung nach
Angaben Abend, Morgen, Mittag usw. Der Gebrauch der Stunden und kleinerer Einteilungen (Minuten)
war den Astronomen und Zeitrechnern vorbehalten. Beispielsweise wurde noch im alten Rom mit den
Angaben ante meridiem (vor dem Mittag) und post meridiem (nach dem Mittag) der Tag geteilt. Der
Morgen wurde durch das Wort mane und der Abend durch das Wort suprema dies ausgedrückt. Diese
grobe Zeiteinteilung regelte hinreichend die römischen Belange.
Doch es begab sich, da schlug ein Donnerblitz ins mittelalterliche Wissen ein. Kopernikus stellt
das Weltbild auf den Kopf und die Sonne steht still. Es dreht sich die Erde und alle Planeten. Keplers
kosmische Symphonie erklingt und der Mensch ist geheißen, einem gleich großen Kepler zu folgen.
Newton erscheint und nennt die Quelle dieses sich drehenden, pulsierenden und evolutionierenden
Kosmos’. Schach Matt dem König der starren Welt, Europa wacht auf und schaut sich um in der Welt.
Europas Macht geht nach Übersee und treibt große Kriege durch die Welt und weiter noch als Platons
philosophische Idee reicht der Geist der Europäer, der alles überrennt und überholt, um sich zu finden
in heutiger Zeit. Die Aufklärung schickt seine Vorkämpfer hinaus. James Cook entdeckt die Welt und
Daniel Defoe schreibt „Robinson Crusoe“.
Die Erde besteht zu sieben Teilen aus Wasser und zu drei Teilen aus Land. Das Land besteht aus großen
Inseln, die sich Kontinente nennen. Ein Kontinent heißt Amerika. Hier leben Menschen, die von
anderen Menschen den Namen Indianer erhielten. Diese Namensgebung war eine historische
Verwechslung, weil man im 15. Jahrhundert die Welt nicht kannte. Menschen, die zum ersten Mal von
dem Kontinent Europa kommend, ihren Fuß auf diesen anderen Kontinent setzten, dachten sie wären
in Indien gelandet. Nachdem die europäischen Menschen den indianischen Menschen erfolgreich ihr
Land weggenommen hatten, bauten sie Städte und nannten sich selbst Amerikaner. Eine dieser Städte
heißt Washington. In Washington gibt es irgendwo einen Bergabhang, Auf diesem Bergabhang
befindet sich ein kleines, fensterloses, quadratisches Häuschen. In diesem Häuschen befindet sich ein

27
Teleskop, das genau senkrecht nach oben ausgerichtet ist. Dieses Gerät wird als Photografic Zenith
Tube (fotografisches Zenitteleskop), abgekürzt PTZ bezeichnet. Es gehört dem United States Naval
Observatory. Aufgabe des PTZ ist es, die Positionen der Zenitsterne zu fotografieren und damit die
Dauer einer Erdrotation festzustellen. In Verbindung mit einer Kontrolluhr erfolgt so der Vergleich der
mittleren Sonnenzeit mit der wahren Sternzeit. Die Kontrolluhr wird durch die gleichmäßigen
Schwingungen des Cäsiumatoms gesteuert und nennt sich Atomuhr.
Man misst einfach die Dauer von 9192631770 Perioden der Strahlung, die dem Übergang zwischen
den beiden Hyperfeinstrukturniveaus des Grundzustandes des Atoms Caesium 133 entspricht und die
gleichmäßige Zeitsekunde ist definiert. So einfach ist es heutzutage, sich über eine Standardzeit zu
einigen. Ganz nebenbei vollzieht die Erde ihre Bewegungen um die Sonne. Die jährliche Bewegung um
die Sonne (Revolution), die tägliche Bewegung um ihre Achse (Rotation), die Präzession und die
Nutation. Denn die eigentliche Zeitmessung ist eine astronomische und beruht auf die Bewegung der
Erde und der damit verbundenen scheinbaren Bewegung der Gestirne. Wozu braucht man sonst wohl
die Kontrolle der Atomzeit nach den Sternen?
Denn die Sonne bewegt sich mit ungleichförmiger Geschwindigkeit auf der Ekliptik und ist für eine
gleichmäßige Zeitmessung nicht geeignet. Man bedient sich deshalb zur Zeitmessung einer mittleren
Sonne, die mit einer mittleren Geschwindigkeit im Äquator durchläuft. Der Zeitwinkel der Sonne ist
somit der sphärische Winkel am Pol vom unteren Meridian bis zum Stundenkreis der Sonne. Es
entsteht die Zeitgleichung.
Zur Zeitmessung sind zwei Bezugspunkte notwendig. Zum Ersten ist es der Greenwicher Meridian
(Nullmeridian) oder ein anderer benannter Ortsmeridian. Zum Zweiten ist es der Frühlingspunkt oder
ein ausgewählter Fixstern. Der Frühlingspunkt (), als ein festgelegter rechnerischer Punkt am
Fixsternhimmel, ist an der Himmelskugel nicht sichtbar. Er liegt auf dem Kreuzungspunkt der Erdbahn
mit dem Himmelsäquator.(Frühlingsanfang) Zur Zeitmessung wird deshalb ein sichtbarer Fixstern
bevorzugt, wobei der Abstand des ausgewählten Fixsternes zum Frühlingspunkt hinzugefügt wird.
Es wird nun genau die Zeit gemessen, die der Nullmeridian aufgrund der Achsendrehung der Erde
benötigt, um an den im Raum feststehenden Frühlingspunkt oder an einen ausgewählten Fixstern
vorbeizukommen. Dieser Vorgang wird als Durchgang bezeichnet. So bezeichnet man die Zeitspanne
eines Tages durch zwei nachfolgende Durchgänge des Nullmeridians durch den Frühlingspunkt
(Fixstern). Hierbei vergeht eine Zeit von 24h 00 min 00s. Diese Zeitmessung wird als Sterntag
bezeichnet. Durch den Begriff Kulmination wird der Ort eines Gestirns (Sonne, Mond, Planet, Fixstern)
in Bezug auf den Horizont bezeichnet, zu einem Zeitpunkt bei dem es am höchsten über einen
Beobachtungsort auf der Erde steht. Ein Tag ist somit die Zeitspanne zweier Kulminationen des
Frühlingspunktes oder eines Fixsterne von einem Beobachtungsort der Erde aus. Bezieht sich die
Zeitmessung auf einen Fixstern, so wird diese Zeitmessung als Sterntag bezeichnet. Die Astronomie
richtet sich nach dieser Zeitmessung.
1 Sterntag = 24h Sternzeit = 23h 56 min 4,1s Sonnenzeit
1.Sonnentag = 24h Sonnenzeit = 24h 3 min 56,6s Sternzeit
Seit alters her regelt sich die Zeitmessung in der menschlichen Gesellschaft jedoch nach der Sonne. Ein
Sonnentag entspricht der Zeitspanne zwischen zwei Kulminationen der Sonne. Da das Tagesdatum um
28
Mitternacht wechselt, ist die Sonnenkulmination nicht auf den Nullmeridian, sondern auf dem
einhundertachsigsten Längengrad bezogen. Der Längengrad 180° wird deshalb auch als Datumsgrenze
bezeichnet. Bezieht man die Zeitmessung auf die Sonne, so muss beachtet werden, dass sich die Erde
erstens in 24 Std. einmal um sich selbst dreht (Rotation) und gleichzeitig im Laufe eines Jahres auf einer
Ellipsenbahn einmal um die Sonne läuft (Revolution). Betrachtet man die Erde als stillstehend, so kann
man von der scheinbaren täglichen und von der scheinbaren jährlichen Bewegung der Sonne um die
Erde sprechen. Die Sonne führt also eine scheinbare Doppelbewegung aus, die beachtet werden muss.
Würde die Sonne keine scheinbare jährliche Bewegung haben, würde die Zeitmessung bezogen auf die
Sonne mit der Zeitmessung bezogen auf den Frühlingspunkt übereinstimmen. Der Sterntag wäre gleich
lang dem Sonnentag. Jedoch summiert sich die scheinbare jährliche Bewegung der Sonne mit der
scheinbar täglichen Bewegung der Sonne. Und tatsächlich fällt ein Sonnentag um 3 min 56s länger aus,
als ein Sterntag. Er ist 24h 03 min 56s lang. Die Zeitspanne dieser scheinbaren Gesamtbewegung der
Sonne wird als wahre Sonnenzeit bezeichnet.
Ein weiteres Merkmal der scheinbaren Bewegung der Sonne ist die verschiedene Geschwindigkeit der
Erdkugel auf ihrer Jahresbahn um die Sonne Die Erde umläuft mal schneller, mal langsamer die Sonne.
Diese Veränderlich bewirkt unterschiedliche Zeitlängen eines Tages. Mit einer gleichförmig gehenden
Uhr gemessen bedeutet dies, dass der Sonnentag mal etwas kürzer und mal etwas länger wird. Um
diese Besonderheit auszugleichen, hat man den mittleren Sonnentag eingeführt. Hierbei handelt es
sich um eine gedachte Sonne, die für einen scheinbaren täglichen Umlauf um die Erde 24h 03 min 56s
benötigt.
Für das praktische Leben und zur Berechnung von Kalendern ist es jedoch von Vorteil eine Sonnenzeit
zu haben, die sich glatt rechnet. Man hat deshalb den mittleren Sonnentag gleich 24h 00 min 00s
gesetzt. Der Sterntag wird dadurch etwas kürzer. Er beträgt demzufolge nur noch 23h 56 min 04s.
Viermal im Jahr stimmt die mittlere Sonnenzeit mit der wahren Sonnenzeit überein. Der Unterschied
zwischen wahrer und mittlerer Sonnenzeit findet in der Zeitgleichung ihren Ausdruck.
Zeitgleichung = wahre Zeit − mittlere Zeit
Die Zeitgleichung kann ein positives (+), wie auch ein negatives (−) Vorzeichen haben
Die Erde dreht sich in 24 Stunden von Westen nach Osten um ihre Achse. Sieht man von oben
(nördlicher Himmelspol) auf die Erde herab, erfolgt die Rotation gegen den Uhrzeigersinn. Die
scheinbare Bewegung der Gestirne ,auch der Sonne verläuft als Widerspiegelung der Erdrotation somit
von Ost über Süd nach West, also im Uhrzeigersinn. Alle Orte, die auf demselben Meridian liegen,
haben dieselbe Ortszeit. Der Umfang der Erde ist mit 360° bestimmt. Es ergibt sich das Verhältnis:
360° 00’ 00“ zu 24h 00 min 00s
15° 00’ 00“ zu 1h 00 min 00s
1° 00’ 00“ zu 0h 04 min 00s
29
0° 30’ 00“ zu 0h 02 min 00s
0° 15’ 00“ zu 0h 01 min 00s
0° 01’ 00“ zu 0h 00 min 04s
0° 00’ 30“ zu 0h 00 min 02s
0° 00’ 15“ zu 0h 00 min 01 s
Der Zeitunterschied von Meridian zu Meridian beträgt je Längengrad 4 min. Ein Zeitunterschied von 1
Stunde sind deshalb 15° Längenunterschied (360° : 24h = 15°). Der Ortsunterschied zweier Orte
errechnet sich aus dem Produkt: Unterschied der geographischen Längen beider Orte (in °) mal 4 min
Als mittlere Ortszeit (MOZ) wird die für den Längengrad eines bestimmten Ortes geltende mittlere
Sonnenzeit bezeichnet. Als wahre Ortszeit (WOZ) wird die für den Längengrad eines bestimmten Ortes
geltende wahre Sonnenzeit bezeichnet. Der Unterschied zwischen MOZ und WOZ ist die Zeitgleichung
(e). Die Zeit, die auf 0° Länge herrscht, wird als Weltzeit bezeichnet. Da dieser Längengrad durch die
alte Sternwarte von Greenwich verläuft, wird diese Zeit auch als Greenwich Mean Time (GMT) bzw. als
Greenwicher Zeit bezeichnet.
Die Rundfunksender senden nach dieser Atomzeit ihre internationalen Zeitzeichen Diese Atomuhrzeit
wird als Universal Time-Coordinated (UTC) bezeichnet. Zwischen der GMT und UTC bestehen geringe
Unterschiede, die auf die ungleichförmige Erdrotation usw. gegenüber der sehr gleichmäßigen
laufenden Atomzeit zurückzuführen sind. Dieser Unterschied, der nie größer als 0,3s ist, wird an der
Atomuhr korrigiert. Es ergibt sich die Zeit Universal Time 1 (UT1). Auf Grundlage der UT1 sind alle
nautischen Jahrbücher aufgebaut
Die Erdoberfläche ist in 24 durch Längengrade begrenzte Zeitzonen von je 15° Längenunterschied so
eingeteilt, dass der Längengrad von Greenwich die Zone 0 halbiert, der Längengrad 15° östlich von
Greenwich die 1 und zuletzt der Längengrad 15° westlich von Greenwich die Zone 23 halbiert. Die
Ortszeit des in der Mitte einer Zone verlaufenden Längengrades ist für diese Zone gültige Zonenzeit.
Diese Zonenzeiten rechnen vom Nullmeridian, der durch Greenwich (bei London) geht, nach Ost (+)
oder West (−). Die Grenzen der Zonen und die Zonenzeiten werden nur auf dem offenen Meer und in
unbewohnten Gebieten eingehalten. In bewohnten Gebieten sind die Grenzen der Zeitzonen nach
politischen, wirtschaftlichen, verkehrstechnischen, topographischen und anderen Gesichtspunkten
gezogen, und die in den Zonen gebräuchlichen Zeiten stimmen aufgrund mancherlei Erwägungen
oftmals nicht mit den Zonen überein. So hat die GUS (Sowjetunion) 1930 in ihren 11 Zeitzonen die
Dekret Zeit eingeführt, welche der Zonenzeit um 1 Stunde voraus ist. Die Dekret Zeit der Zone 2 ist
besonders bemerkenswert. Sie wird nach in der Zone 2 liegenden russischen Hauptstadt Moskauer
Zeit (MOSKZ) genannt und wird im Eisenbahnfahrplänen und im Nachrichtenverkehr im gesamten
Russland verwendet.
Der Zeitunterschied ist die Differenz zwischen der MOZ und der GMT (UT1).

30
Es gilt: ZU = MOZ − UT1
Da der Meridian von Greenwich für die geographische Länge und den Zeitunterschied
Bezugskoordinate ist, ergibt sich die Folgerung:
Der Zeitunterschied (ZU) entspricht der geographischen Länge des Ortes, für den die MOZ angegeben
ist. das heißt:
Für die Umwandlung der geographischen Länge in Zeitunterschied (i° in iZ) gilt nach den o.g.
Entsprechungen
Zeit/h x 15° = Grad/° Grad/° : 15° = Zeit/h
Zeit/min x 15’ = Grad/’ Grad/’ : 15’ = Zeit/min
Zeit/s x 15“ = Grad/“ Grad/“ : 15“ = Zeit/s
Die 12. Zeitzone liegt der 0. Zeitzone gegenüber und hat die Länge 180° als mittleren Meridian. Dieser
Meridian ist die eigentliche Datumsgrenze. Beim Überschreiten gilt:
Von Ost nach West, halte das Datum fest. (das aktuelle Datum wird wiederholt)
Von West nach Ost, lasse das Datum los. (das folgende Datum wird ausgelassen).

31
DAS RUHENDE INERTIALSYSTEM DES RAUMES
Orientierung ist Raumsinn und Orientierung ist Zeitsinn. Diesen Raum, unsere Umwelt, mathematisch
zu erfassen und ausdrücken zu können, ist Grundbedingung der Wiederauffindbarkeit von
mathematisch definierten Raumpunkten.
Im Universum ist kein Punkt vor dem anderen ausgezeichnet. Es herrscht Homogenität, auch ist keine
Richtung vor einer anderen ausgezeichnet. Es herrscht Isotropie. So existiert keine ausgezeichnete
Stellung und demzufolge kein Mittelpunkt im Universum. Demzufolge kann völlig gleichberechtigt der
Ursprung eines Inertiales S mit seinem Koordinatensystem x, y, z in den Mittelpunkt einer Galaxie, der
Sonne, der Erde, des Mondes, eines Schiffes oder in irgendeinen anderen Körpers bzw. in einen frei
gewählten Fixpunkts gelegt werden. Werden beispielsweise zwei gleichberechtigte Bezugssysteme S
und S‘ errichtet und wird die Umrechnung der jeweiligen Koordinatenmaßstäbe der
Koordinatensysteme S und S‘ durch entsprechende Umrechnungskoeffizienten realisiert oder wird
einfacherer Weise ein gleiches Koordinatensystem mit gleichem Maßstabsmodus für S und S‘ benutzt,
kann S mit S‘ verknüpft werden. Denn ein System S‘, das sich mit der Geschwindigkeit v gleichförmig
gegen das Inertialsystem S bewegt, bildet ebenfalls ein gleichwertiges Inertialsystem.
Um zu errechnen, wo man sich befindet, benötigt man zwei entscheidende Voraussetzungen: ein
Bezugssystem S mit den räumlichen Koordinaten x, y, z und ein Bezugssystems für die Zeit. Ausgehend
vom Einstein’schen Relativitätsprinzip, wonach es unmöglich ist, aufgrund irgendeiner physikalischen
Erscheinung ein absolutes Bezugssystem zu bestimmen, kann es auch für die Seenavigation kein
absolutes Bezugssystem S geben. Versuche einen absoluten Zeitbezug im Kosmos zu finden, mussten
wie der Versuch eines absoluten Raumbezuges an der dieser Einstein’schen Relativitätstheorie
scheitern. Genauso wie es keinen absoluten Raumbezug gibt, existiert auch kein absolutes Zeitsystem,
denn das Problem der Zeit- oder Raumdefinition ist der Umstand, dass die Zeit und der Raum eine
Existenzform der Materie ist.
Da ein wirklich festliegendes, unverändertes und kräftefreies Inertialsystem nicht existent ist, wird ein
theoretisch kräftefreies bewegungsloses Kugel inertial angenommen, d. h. es wird die Existenz einer
absoluten Zeit und die eines absoluten Raumes still vorausgesetzt. Dazu ist es erste Voraussetzung ein
für alle Systeme gleiches Zeitmaßes zu vereinbaren. Das einheitliche Raummaß und das einheitliche
Zeitmaß ist somit Grundvoraussetzung der mathematischen Erfassbarkeit von Raum- und Zeitpunkten.
Die physikalische Zeitdefinition legt die Zeiteinheit als ein periodisch ablaufender Vorgang fest, der mit
physikalischen Mitteln überwacht werden kann. Die Astronomie definiert die Zeiteinheit Tag als Dauer
einer Umdrehung der Erde um ihre Achse, bezogen auf den →Meridiandurchgang der Sonne oder des
Frühlingspunktes. Die Erde rotiert je Sterntag um 360°, je Stunde um 15°, je Minute um 0,25° (15’). Da
jedoch die Erdrotation nicht völlig gleichförmig verläuft, macht sich die Einführung einer gleichmäßigen
Zeitmessung an Hand eines reproduzierbaren und messbaren Vorgangs notwendig. Bis 1956 wurde die
Länge einer Sekunde als 86400. Teil des mittleren Sonnentages festgelegt. Infolge der
Rotationsschwankungen der Erde weist die so definierte Zeitsekunde jedoch Schwankungen im
Bereich von 10-8s auf. Deshalb die Zeitmessung statt auf die →Rotation der Erde auf die →Revolution
der Erde in einem Jahr bezogen. Als Ephemeridenzeit galt, dass die Länge einer Sekunde der
31.556.925,9747. Teil des tropischen Jahres für 1900 ist. Im Jahr 1967 wurde nun die Atomsekunde als

32
die Dauer von 9 192 631 770 Perioden der Strahlung, die dem Übergang zwischen beiden
Hyperfeinstrukturniveaus des Grundzustandes des Atoms Cäsium 133 entspricht, manifestiert und
1972 international den Zeitsignalen zugrunde gelegt.
Das kaliumähnliche Element Cäsium (Cs) hat die Ordnungszahl 55 im Periodensystem der chemischen
Elemente. Seine relative Atommasse beträgt 132,91. Seine Strahlungsperiode lässt die beste
Annäherung an die astronomisch definierte Sekunde als der 31.556.925,9747. Teil des tropischen
Jahres für 1900 zu. Die Abweichungen sind minimal gehalten. Sie übersteigen keine 0,7 s, denn bei
Bedarf wird eine positive oder negative Schaltsekunde bei der letzten Sekunde des 31. Dezember oder
(und) des 30. Juni eingefügt.
In Bezug zu dem als absolut anzusehendes Inertial S steht das relativ zu S sich bewegende System S‘,
welches entsprechend der Modifizierung noch näher zu definieren sein wird. Da sich die Seenavigation
mit der Bewegung eines Schiffes auf einer Wasserfläche der Erde von einem Abfahrtsort A zu einem
Bestimmungsort B beschäftigt, ist es der gegeben Praxis nach sinnvoll die Erde als absolutes (ruhendes)
Inertialsystem des Raumes zu bestimmen. Durch ein einheitliches Raummaß ist die Notwendigkeit
erfüllt, ein oder mehrere Inertialsysteme gegenseitig in eine gleiche Beziehung setzen zu können – das
Inertialsystem S (z. B. Erde) zu S‘ (z. B. Schiff), oder zu S‘‘ (z. B. Flugzeug) oder zu S‘‘‘ (z. B. Sonne) oder
S‘‘‘‘ (Fixstern) usw. – . Dieses einheitliche Raummaß wird in erster Näherung durch Anwendung des
ruhenden Kugelinertials der Erde realisiert. Wegen der Erdrotation, der Bahnbewegung der Erde um
die Sonne und der Bewegung des gesamten Sonnensystems im Milchstraßensystem bildet die Erde
jedoch kein ideal ruhendes System. Das bedeutet, da ein festliegendes, unverändertes Inertialsystem
im Kosmos nicht existent ist, dass die tatsächlichen Bewegungen der Erde (im Planetensystem um die
Sonne - im Einzelnen die Revolution, die Rotation, Präzession und die Nutation) und erst recht die
Auswirkungen dieser Bewegungen (Kräfte und Scheinkräfte) auf das theoretisch als unveränderlich
und fest angenommene Inertialsystem Erde bekannt sein müssen. Das Schiff kann nur dann als Inertial
S’ zu verstehen sein, solange keine Trägheitskräfte auf diesem wirken. Nur wenn eine geradlinige
gleichförmige Bewegung des Schiffes vorliegt, gilt es als Inertial. Das dies nie der Fall ist, muss das
Objekt Schiff als ein „Navigationssystem“ verstanden werden, welches sich im angenommenen
Inertialsystem Erde in Bezug auf die Erdoberfläche mit seinen Größen x’, y’, z’ bewegt. Die räumlichen
Koordinaten x, y, z auf der Erde sind somit fest mit der Erdoberfläche verbundene Koordinaten. Die
Koordinaten x’, y’, z’ sind mit dem Schiff fest verbunden, bewegen sich jedoch in Bezug auf die festen
x, y, z Koordinaten der Erde. Soll das räumliche Koordinatensystem der Erde wirklich als absolut gelten,
muss die Bewegung des Inertialsystems Erde als Teil des Planetensystems um die Sonne im kosmischen
Raum mit einem im Kosmos befindlichen Inertialsystem vergleichbar gemacht werden. Es besteht
somit die Veranlassung das Navigationssystem Schiff, das Inertialsystem Erde und das Inertialsystem
Fixpunkt Kosmos gegenseitig in gleiche Beziehungen zu setzen.
Grundlage eines ruhenden Kugelkoordinatensystems sind die Achse und die Grundebene, sowie ein
Leitpunkt auf dem Grundkreis. Mit diesem Kugelinertial ist ein Raumkoordinatensystem definiert, dass
auf die Kugel und dessen Oberfläche anwendbar ist. Alle anderen Inertialsysteme müssen auf dieses
Kugelkoordinatensystem übertragbar sein.

33
Als Kugeloberfläche gilt der geometrische Ort aller Punkte des Raumes, die von einem festen Punkt M
den gleichen Abstand r haben. In Anwendung eines rechtwinkligen räumlichen Koordinatensystems,
welches um die Kugel gelegt wurde, wobei M der Koordinatenursprung ist, erhält man als Gleichung
für die Kugeloberfläche r2 = x2 + y2 + z2. M...............Kugelmittelpunkt
r.................Radius
Im folgendem sei ein Kugelinertial betrachtet, dessen Ursprung in einem frei gewählten Fixpunkt im
Kosmos liegt.
Das Inertialsystem S mit kartesischen und Kugelkoordinatensystem
z
x
M‘ des Inertial S‘ im
Koordinatensystem eines Kugel
– Inertials S
0°; 0°
Leitpunkt L
= 0°
= 0°
y Bildpunkt des Inertials S‘ in
der x y - Ebene von S
M
M‘

34
Die xy-Ebene spannt den Grundkreis des Inertials S auf, und die z-Achse durchstößt die Fläche
senkrecht stehend auf dem Grundkreis. Die positive x-Achse liegt im Schnittpunkt der
Grundkreisebene und einem ausgezeichneten senkrecht auf der Grundkreisebene stehendem
Großkreis. Die Ebenen der Kleinkreise bilden sich parallel zum Grundkreis.
Die Entfernung (r) zwischen M und M‘ bildet den Radius der nicht im Durchmesser definierten Kugel.
Durch das Vorhandensein einer gedachten Kugeloberfläche mit einem gegebenen Radius ist es
möglich, statt mit den Funktionswerten x, y, z mit den Koordinaten der Kugeloberfläche zu arbeiten.
Durch diese Kugelummantelung der →kartesischen Raumkoordinaten ist so ein Koordinatensystem
gestaltet, das die Größe des Abstandswinkels () von der Grundkreisebene bzw. des Richtungswinkels
() auf der Grundkreisebene durch jeweils einen Kugelkreisbogen definiert und im Bogenmaß angibt.
Als Winkelmaßstab wird das Grad (°) verwandt.
y
PS
Leitpunkt
y
z
x
090°
000°
-090°
000°
y
z‘
x‘
S‘
M‘
Navigationssystem S‘
in Bezug auf das
Inertial S
M
A
y‘
PN
Abstandswinkel
Grundkreis
r
z
x Richtungswinkel
Leitpunkt
y
x
z
180°
270°
000°
090 Zählrichtung

35
Für den Richtungswinkel () gilt der Wertebereich − .
Die Koordinatenbögen stellen krummlinige Gaußsche Koordinaten der Kugeloberfläche dar. In jedem
Kugelpunkt (P) schneiden sich so genau eine senkrecht auf dem Grundkreis stehende Großkreisebene
und eine parallel dem Grundkreis befindliche Kleinkreisebene. An den Schnittpunkten der senkrecht
auf dem Grundkreis stehenden Großkreise Punkten geht die z - Achse hindurch. Dort kann sich somit
kein Richtungswinkel ergeben ( = 90°).
Ein beliebiger Punkt auf der Kugeloberfläche ist dann durch folgenden Ortsvektor erfassbar:
Wird die Verbindungsstrecke zwischen dem Ursprung S und dem Ursprung S‘ aus der Nullrichtung um
den festbleibenden Ausgangspunkt von S herausgedreht, so beträgt der 360-Teil einer Volldrehung 1
Grad (1°). Geschieht diese Drehung entgegengesetzt dem Uhrzeigersinn, so ist der mathematisch
positive Drehsinn definiert. Geschieht diese Drehung im Uhrzeigersinn, so werden entsprechende
negative Maßzahlen angeben.
Beschreibt ein sich im gleichbleibenden Abstand r von S mit einer Geschwindigkeit v in Bewegung
befindliche Inertial S‘ in einer Zeitspanne t einen Großkreisbogen auf der Kugeloberfläche S mit der
Länge b, so ist das Verhältnis b/r → das Bogenmaß des Winkels . Die Bogenlänge b erhält genau wie
der Winkel im Bogenmaß je nach der Drehrichtung ein positives oder negatives Vorzeichen. Diese
Bogenlänge b ist als Quotient zweier Längen eine dimensionslose reelle Zahl, die der Einheit Radiant
(rad) zugeordnet wird. (1 rad = 1m/1m). Zwischen dem Gradmaß und dem Bogenmaß des Winkels
gilt
(in °) = (in rad) • 180°/ bzw.
(in rad) = (in °) • /180°
Da zur Ortung S‘ in Bezug auf S oder umgekehrt der Abstandswinkel und der Richtungswinkel nötig ist,
wird das definierte Bogenmaß sowohl für die Abstandskoordinate (Winkel ) und als auch für die
Richtungskoordinate (Winkel ) eingeführt.
Die Bewegung eines Inertialsystem S‘ bezüglich eines Inertialsystem S oder umgekehrt definiert sich in
einer Bewegung in Raum und Zeit. Die Ortsveränderung von S oder S‘ wird mittels geeigneter
Ortungsmessmittel sowohl im Raum, als auch in der Zeit ermittelt und findet in der mathematischen
Form V= S / t ihren Ausdruck.
cos cos
x (, ) = sin cos
sin
22
−Für den Abstandswinkel () gilt der Wertebereich
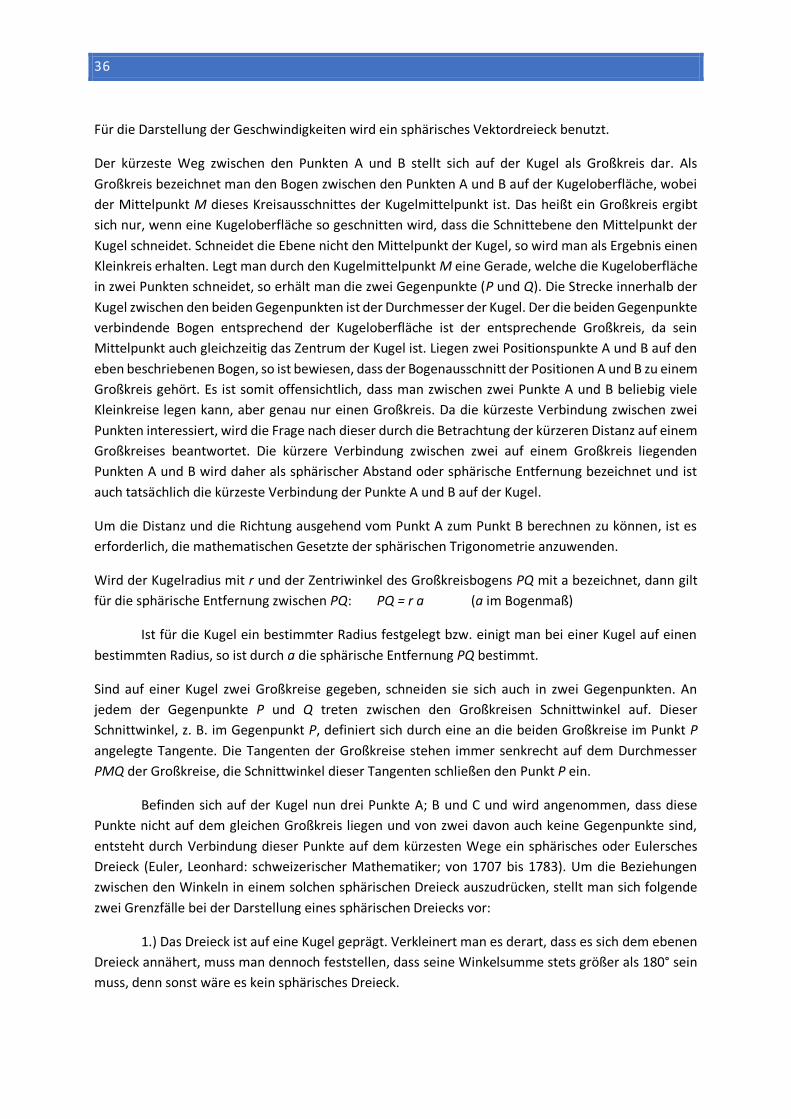
36
Für die Darstellung der Geschwindigkeiten wird ein sphärisches Vektordreieck benutzt.
Der kürzeste Weg zwischen den Punkten A und B stellt sich auf der Kugel als Großkreis dar. Als
Großkreis bezeichnet man den Bogen zwischen den Punkten A und B auf der Kugeloberfläche, wobei
der Mittelpunkt M dieses Kreisausschnittes der Kugelmittelpunkt ist. Das heißt ein Großkreis ergibt
sich nur, wenn eine Kugeloberfläche so geschnitten wird, dass die Schnittebene den Mittelpunkt der
Kugel schneidet. Schneidet die Ebene nicht den Mittelpunkt der Kugel, so wird man als Ergebnis einen
Kleinkreis erhalten. Legt man durch den Kugelmittelpunkt M eine Gerade, welche die Kugeloberfläche
in zwei Punkten schneidet, so erhält man die zwei Gegenpunkte (P und Q). Die Strecke innerhalb der
Kugel zwischen den beiden Gegenpunkten ist der Durchmesser der Kugel. Der die beiden Gegenpunkte
verbindende Bogen entsprechend der Kugeloberfläche ist der entsprechende Großkreis, da sein
Mittelpunkt auch gleichzeitig das Zentrum der Kugel ist. Liegen zwei Positionspunkte A und B auf den
eben beschriebenen Bogen, so ist bewiesen, dass der Bogenausschnitt der Positionen A und B zu einem
Großkreis gehört. Es ist somit offensichtlich, dass man zwischen zwei Punkte A und B beliebig viele
Kleinkreise legen kann, aber genau nur einen Großkreis. Da die kürzeste Verbindung zwischen zwei
Punkten interessiert, wird die Frage nach dieser durch die Betrachtung der kürzeren Distanz auf einem
Großkreises beantwortet. Die kürzere Verbindung zwischen zwei auf einem Großkreis liegenden
Punkten A und B wird daher als sphärischer Abstand oder sphärische Entfernung bezeichnet und ist
auch tatsächlich die kürzeste Verbindung der Punkte A und B auf der Kugel.
Um die Distanz und die Richtung ausgehend vom Punkt A zum Punkt B berechnen zu können, ist es
erforderlich, die mathematischen Gesetzte der sphärischen Trigonometrie anzuwenden.
Wird der Kugelradius mit r und der Zentriwinkel des Großkreisbogens PQ mit a bezeichnet, dann gilt
für die sphärische Entfernung zwischen PQ: PQ = r a (a im Bogenmaß)
Ist für die Kugel ein bestimmter Radius festgelegt bzw. einigt man bei einer Kugel auf einen
bestimmten Radius, so ist durch a die sphärische Entfernung PQ bestimmt.
Sind auf einer Kugel zwei Großkreise gegeben, schneiden sie sich auch in zwei Gegenpunkten. An
jedem der Gegenpunkte P und Q treten zwischen den Großkreisen Schnittwinkel auf. Dieser
Schnittwinkel, z. B. im Gegenpunkt P, definiert sich durch eine an die beiden Großkreise im Punkt P
angelegte Tangente. Die Tangenten der Großkreise stehen immer senkrecht auf dem Durchmesser
PMQ der Großkreise, die Schnittwinkel dieser Tangenten schließen den Punkt P ein.
Befinden sich auf der Kugel nun drei Punkte A; B und C und wird angenommen, dass diese
Punkte nicht auf dem gleichen Großkreis liegen und von zwei davon auch keine Gegenpunkte sind,
entsteht durch Verbindung dieser Punkte auf dem kürzesten Wege ein sphärisches oder Eulersches
Dreieck (Euler, Leonhard: schweizerischer Mathematiker; von 1707 bis 1783). Um die Beziehungen
zwischen den Winkeln in einem solchen sphärischen Dreieck auszudrücken, stellt man sich folgende
zwei Grenzfälle bei der Darstellung eines sphärischen Dreiecks vor:
1.) Das Dreieck ist auf eine Kugel geprägt. Verkleinert man es derart, dass es sich dem ebenen
Dreieck annähert, muss man dennoch feststellen, dass seine Winkelsumme stets größer als 180° sein
muss, denn sonst wäre es kein sphärisches Dreieck.

37
2.) Vergrößert man andererseits das sphärische Dreieck solange bis sich eine Halbkugel bildet,
so tritt dreimal (in den Punkten A; B; C) ein Winkel von 180° auf. Ein ebenes Dreieck wäre als Linie
zusammengefallen.
Die obere Grenze für die Winkelsumme im sphärischen Dreieck ist somit gefunden, sie kann
maximal 3 x 180° = 540° betragen. Somit gilt im sphärischen Dreieck die Relation:
180° + + 540°
Die Beziehung + + = 180° der ebenen Trigonometrie, wonach durch zwei bekannte Winkel bereits
der dritte Winkel definiert ist, findet in der sphärischen Trigonometrie somit keine Anwendung mehr.
Es folgt aus Kenntnis zweier Winkel nicht sofort der dritte, sondern es müssen alle drei Winkel
berechnet werden. Während in der ebene Trigonometrie nur vier Fälle zur Berechnung eines Dreiecks
bekannt sind, müssen in der sphärischen Trigonometrie sechs Fälle gerechnet werden, wobei hier drei
gegebene Stücke vorhanden sein müssen.
Entsprechend der Herleitung gelten die mathematischen Beziehungen der Seiten und Winkel
in →rechtwinkligen sphärischen Dreiecken.
sin = sin c sin (1)
cos = cos a sin (2)
cos c = cos a cos b (3)
sin b = sin c sin (4)
cos = cos b sin (5)
cos c = cot cot (6)
cos = cot c tan b (7)
cos = cot c tan (8)
Setzt man in (1) für sin c und sin die aus (4) und (5) und (4) für sin c und sin die aus (1) und (2)
folgenden Ausdrücke ein, ergibt sich
sin = cot tan b (9)
und sin b = cot tan a (10)
Ordnet man die Stücke eines sphärischen Dreiecks entsprechend ihrer Reihenfolge auf einem Kreis an,
lässt dann den rechten Winkel fort und ersetzt man jetzt die Katheten durch die Komplimente, so hat
man die Möglichkeit gefunden, die mathematischen Beziehungen (1) bis (10) zu reproduzieren. Es ist
dann feststellbar:

38
Im rechtwinkligem sphärischen Dreieck ist der Kosinus eines Stückes gleich dem Produkt der
Sinusse der gegenüberliegenden bzw. dem Produkt der Kotangenten der benachbarten Stücke.
(Nepersche Regel). Analog zur ebenen Trigonometrie kann nun die Berechnung von allgemein
sphärischen Dreiecken erfolgen. Mit Hilfe der →Neperschen Regel, des Sinussatzes, des
Seitenkosinussatzes und des Winkelkosinussatzes ist man in der Lage sämtliche allgemeinen
sphärischen Dreiecke berechnen, sofern drei Stücke eines solchen Dreiecks gegeben sind. Es sind hier
sechs Fälle der Berechnung für die Navigation ausgewählt.
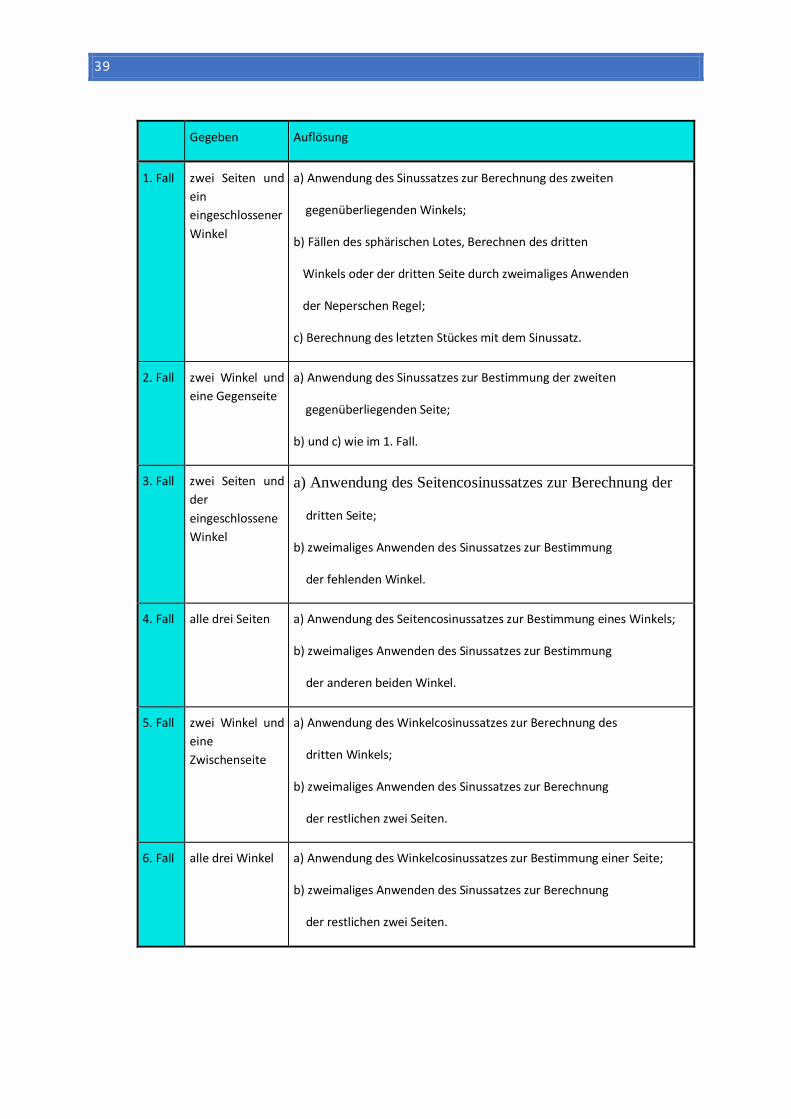
39
Gegeben Auflösung
1. Fall zwei Seiten und
ein
eingeschlossener
Winkel
a) Anwendung des Sinussatzes zur Berechnung des zweiten
gegenüberliegenden Winkels;
b) Fällen des sphärischen Lotes, Berechnen des dritten
Winkels oder der dritten Seite durch zweimaliges Anwenden
der Neperschen Regel;
c) Berechnung des letzten Stückes mit dem Sinussatz.
2. Fall zwei Winkel und
eine Gegenseite
a) Anwendung des Sinussatzes zur Bestimmung der zweiten
gegenüberliegenden Seite;
b) und c) wie im 1. Fall.
3. Fall zwei Seiten und
der
eingeschlossene
Winkel
a) Anwendung des Seitencosinussatzes zur Berechnung der
dritten Seite;
b) zweimaliges Anwenden des Sinussatzes zur Bestimmung
der fehlenden Winkel.
4. Fall alle drei Seiten a) Anwendung des Seitencosinussatzes zur Bestimmung eines Winkels;
b) zweimaliges Anwenden des Sinussatzes zur Bestimmung
der anderen beiden Winkel.
5. Fall zwei Winkel und
eine
Zwischenseite
a) Anwendung des Winkelcosinussatzes zur Berechnung des
dritten Winkels;
b) zweimaliges Anwenden des Sinussatzes zur Berechnung
der restlichen zwei Seiten.
6. Fall alle drei Winkel a) Anwendung des Winkelcosinussatzes zur Bestimmung einer Seite;
b) zweimaliges Anwenden des Sinussatzes zur Berechnung
der restlichen zwei Seiten.
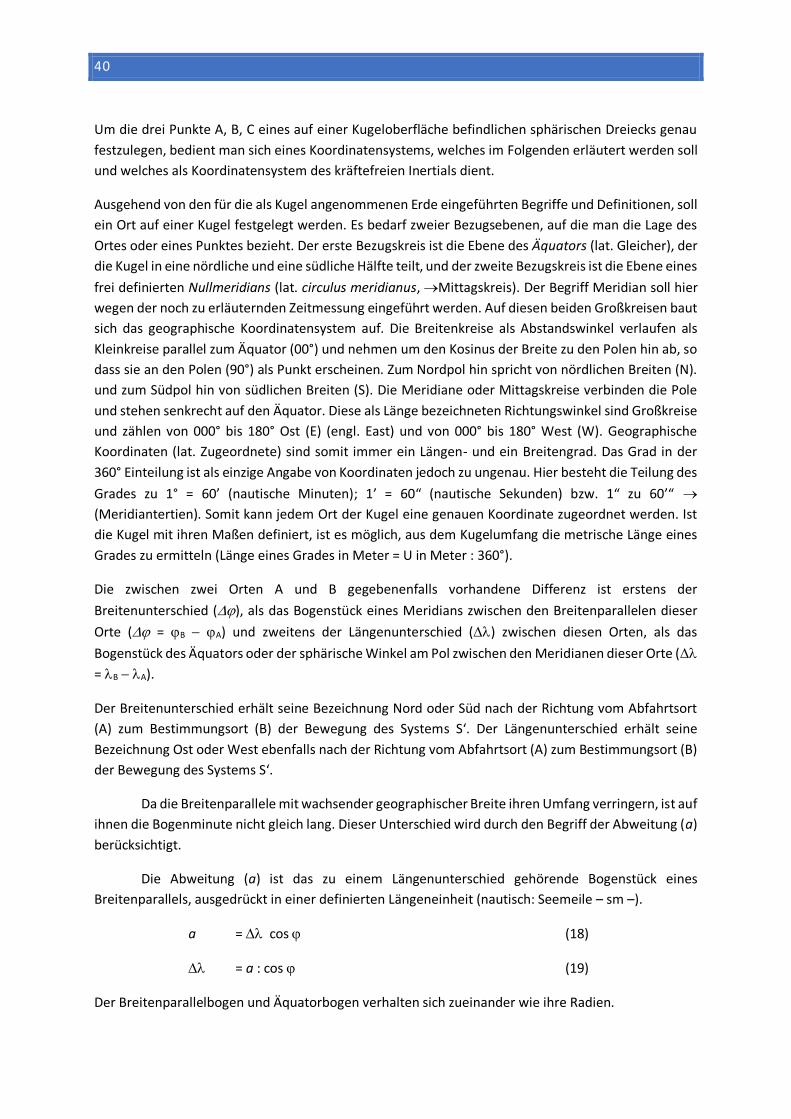
40
Um die drei Punkte A, B, C eines auf einer Kugeloberfläche befindlichen sphärischen Dreiecks genau
festzulegen, bedient man sich eines Koordinatensystems, welches im Folgenden erläutert werden soll
und welches als Koordinatensystem des kräftefreien Inertials dient.
Ausgehend von den für die als Kugel angenommenen Erde eingeführten Begriffe und Definitionen, soll
ein Ort auf einer Kugel festgelegt werden. Es bedarf zweier Bezugsebenen, auf die man die Lage des
Ortes oder eines Punktes bezieht. Der erste Bezugskreis ist die Ebene des Äquators (lat. Gleicher), der
die Kugel in eine nördliche und eine südliche Hälfte teilt, und der zweite Bezugskreis ist die Ebene eines
frei definierten Nullmeridians (lat. circulus meridianus, →Mittagskreis). Der Begriff Meridian soll hier
wegen der noch zu erläuternden Zeitmessung eingeführt werden. Auf diesen beiden Großkreisen baut
sich das geographische Koordinatensystem auf. Die Breitenkreise als Abstandswinkel verlaufen als
Kleinkreise parallel zum Äquator (00°) und nehmen um den Kosinus der Breite zu den Polen hin ab, so
dass sie an den Polen (90°) als Punkt erscheinen. Zum Nordpol hin spricht von nördlichen Breiten (N).
und zum Südpol hin von südlichen Breiten (S). Die Meridiane oder Mittagskreise verbinden die Pole
und stehen senkrecht auf den Äquator. Diese als Länge bezeichneten Richtungswinkel sind Großkreise
und zählen von 000° bis 180° Ost (E) (engl. East) und von 000° bis 180° West (W). Geographische
Koordinaten (lat. Zugeordnete) sind somit immer ein Längen- und ein Breitengrad. Das Grad in der
360° Einteilung ist als einzige Angabe von Koordinaten jedoch zu ungenau. Hier besteht die Teilung des
Grades zu 1° = 60’ (nautische Minuten); 1’ = 60“ (nautische Sekunden) bzw. 1“ zu 60’“ →
(Meridiantertien). Somit kann jedem Ort der Kugel eine genauen Koordinate zugeordnet werden. Ist
die Kugel mit ihren Maßen definiert, ist es möglich, aus dem Kugelumfang die metrische Länge eines
Grades zu ermitteln (Länge eines Grades in Meter = U in Meter : 360°).
Die zwischen zwei Orten A und B gegebenenfalls vorhandene Differenz ist erstens der
Breitenunterschied (), als das Bogenstück eines Meridians zwischen den Breitenparallelen dieser
Orte ( = B − A) und zweitens der Längenunterschied () zwischen diesen Orten, als das
Bogenstück des Äquators oder der sphärische Winkel am Pol zwischen den Meridianen dieser Orte (
= B − A).
Der Breitenunterschied erhält seine Bezeichnung Nord oder Süd nach der Richtung vom Abfahrtsort
(A) zum Bestimmungsort (B) der Bewegung des Systems S‘. Der Längenunterschied erhält seine
Bezeichnung Ost oder West ebenfalls nach der Richtung vom Abfahrtsort (A) zum Bestimmungsort (B)
der Bewegung des Systems S‘.
Da die Breitenparallele mit wachsender geographischer Breite ihren Umfang verringern, ist auf
ihnen die Bogenminute nicht gleich lang. Dieser Unterschied wird durch den Begriff der Abweitung (a)
berücksichtigt.
Die Abweitung (a) ist das zu einem Längenunterschied gehörende Bogenstück eines
Breitenparallels, ausgedrückt in einer definierten Längeneinheit (nautisch: Seemeile – sm –).
a = cos (18)
= a : cos (19)
Der Breitenparallelbogen und Äquatorbogen verhalten sich zueinander wie ihre Radien.

41
Die in geographischen Koordinaten ausgedrückten Punkte eines beliebigen sphärischen Dreiecks A, B,
C nehmen im Koordinatensystem der Kugel folgende Entsprechungen ein
Punkt A Abfahrtsort in den Koordinaten A; A des Koordinatesystems
Punkt B Bestimmungsort in den Koordinaten B; B des Koordinatesystems
Punkt C Nord- oder Südpol des Koordinatesystems
und bilden das nautische Grunddreieck.
Als Winkel im nautischen Grunddreieck bilden sich:
Winkel Richtungswinkel des Großkreises zwischen Strecke AB und Strecke AC
Winkel Richtungswinkel des Großkreises zwischen Strecke BA und Strecke BC
Winkel Winkel des Längen- oder Zeitunterschieds zwischen Strecke CA und Strecke CB
Als Seiten im nautischen Grunddreieck bilden sich:
Seite a (90° - B) Strecke CB auf dem Meridian B
Seite b (90° - A) Strecke CA auf dem Meridian A
Seite c Großkreisdistanz zwischen A und B
Als Loxodrome bezeichnet man die Linie, die alle Meridiane unter gleichem Winkel schneidet. Wird
eine Linie mit konstanter Richtungszahl auf die Kugel gezeichnet, entsteht eine Loxodrome. Somit sind
Loxodromen sphärische Kurven, deren Tangenten mit der Nord-Südrichtung in jedem ihrer Punkte
einen konstanten Winkel einschließen. Eine loxodromische Linie wird den Nord- oder Südpol auf einer
Spiralkurve umlaufend erreichen. Dieser Kurvenbogen ist kein Großkreis, denn ein Großkreis schneidet
die Meridiane nicht unter einem konstanten Winkel. Der Großkreis, als die kürzeste Verbindung
zwischen zwei Orten auf der Kugel wird dagegen als Orthodrome bezeichnet. Sie schneidet auf einer
winkeltreuen Karte → (Mercartorprojektion) die Meridiane unter einem sich ständig ändernden
Winkel. Konstruiert man ein Abbild der Kugel als stereographische Normalprojektion, bei der die
Meridiane als Geradenbüschel von einem Pol ausgehen, so stellt das Bild der loxodromen Verbindung
zweier Punkte eine logarithmische Spirale dar. Wegen der Winkeltreue ist das Bild der Loxodromen
eine Kurve, die die Geraden des Büschels unter einem festen Winkel schneidet. Dies leistet nur eine
logarithmische Spirale. Wenn eine Karte nun so verzerrt wird, dass die Meridiane parallel in einem
gleichen Abstand zu einander stehen, während die Abstände der Breitenparallele ständig wachsen, um
die Abweitung auszugleichen, wird sich die Loxodrome als Gerade darstellen, die die Meridiane unter

42
gleichen Winkel schneidet. Das logarithmische Verhalten der Loxodrome bleibt davon natürlich
unberührt.
Auf Grundlage des Kugelkoordinateninertials sind die Achse und die Grundebene, sowie ein Leitpunkt
auf dem Grundkreis definiert. Für die sphärische Trigonometrie in Verbindung mit der Astronomie sind
derzeit verschiedene sphärische Referenzkoordinatensysteme in Gebrauch, die sich wie folgt
definieren:
➢ Äquatorsystem geozentrisch
➢ Ekliptikalsystem heliozentrisch
➢ Galaktisches System geozentrisch
r =
r =
3
0 Achse
• Die Archimedische oder
Logarithmische Spirale im
Polarkoordinatensystem.

43
Für die Seenavigation hat das ruhende Äquatorsystem als Inertial die entscheidende Bedeutung.
Begriff Definition geographisches
Koordinatensystem ruhendes Äquatorsystem
rotierendes
Äquatorsystem
Achse Gerade durch den
Kugelmittelpunkt
Erdachse vom Nordpol
zum Südpol
Himmelsachse vom Nord-
zum Südpol des Himmels
Himmelsachse vom
Nord- zum Südpol
des Himmels
Grundebene
Ebene durch den
Kugelmittelpunkt,
senkrecht zur
Achse
Äquatorebene Äquatorebene Äquatorebene
Grundkreis Umfang der
Grundebene Erdäquator Himmeläquator Himmeläquator
Pole
Schnittpunkte der
Achse mit der
Kugeloberfläche
Nord- und Südpol der
Erde
Himmelsnordpol und
Himmelssüdpol
Himmelsnordpol
und Himmelssüdpol
Mittelpunkt Kugelmittelpunkt Erdmittelpunkt Erdmittelpunkt Erdmittelpunk
Koordinate
Winkel mit dem
Scheitel im
Kugelmittelpunkt
Winkel am
Erdmittelpunkt
Winkel am
Beobachtungsort, auf den
Erdmittelpunkt bezogen
Winkel am
Erdmittelpunkt
Abstands-
Winkel
erste Koordinate,
Abstand von der
Grundebene
Winkel AMS
geographische Breite
() Deklination () Deklination ()
Richtungs-
Winkel
zweite Koordinate,
gemessen auf der
Grundebene von
einem Leitpunkt
aus.
geographische Länge
() Stundenwinkel (t)
Rektaszension ()
oder Sternenwinkel
()
Leitpunkt
Schnittpunkt des
Meridians von
Greenwich mit dem
Erdäquator
Schnittpunkt des
Himmeläquators mit dem
Meridian
Frühlingspunkt ()

44
So setzt das Kugelinertial eine geozentrische Betrachtung des Kosmos voraus. Da jedoch die
Bezugssysteme im Kosmos als völlig gleichwertig gelten, kann unvoreingenommen, diese Betrachtung
gelten. Hier jedoch wird es notwendig sein, die Bewegung der Relativität zu verstehen.

45
DIE SIMULATION DES KOSMISCHEN INERTIAL
Wird für ein Referenzsystem die Erde als mathematisches Modell simuliert, so muss dieses Modell als
Nachbildung verstanden werden, dass die für die untersuchte Problematik wesentlichen Eigenschaften
des kräftefreies Inertial besitzt. Es ist jedoch tatsächlich unmöglich, die Erde völlig kräftefrei zu
rechnen. Nur durch Beschränkung und Vereinfachung auf die wesentlichen Eigenschaften des Systems
Navigation ermöglicht die Simulation eines ruhenden Inertials mit vertretbaren Aufwand. Nur nach
dem Prinzip: nicht so genau, wie möglich, sondern nur so genau wie notwendig, kann ein für den
Navigationsgebrauch ruhendes Refenzinertial entstehen.
Das Simulationsmodell muss den Grundprozess der Navigation insofern berücksichtigen, als dass der
Bahnführungsprozess und der Kollisionsverhütungsprozess als zeitabhängige Größen erfasst werden,
die sich gleichzeitig in die Nautik als Schiffsführungsprozess insgesamt eingliedern.
So bleibt vorerst zu erfassen, welche Kräfte und Scheinkräfte auf die Erde wirken und wie diese Kräfte
das System S‘, das Navigationssystem S‘ beeinflussen.
Seit Kepler wissen wir, dass die Ellipse maßgebend für die Bahn eines Planeten, so auch der
Erde ist. Das Wesen der Ellipse ergibt sich aus dem Kegelschnitt. Die Grundebene des Kegels ist der
Kreis. Die Verbindung der Kegelspitze mit dem Kegelmittelpunkt (M des Grundkreises) ergibt die
Kegelachse. Schneidet man den Kegel nun schief zu seiner Achse, so bezeichnet sich die gewonnene
Schnittfläche als Ellipse.
Johannes Kepler berief sich in der Definition einer Ellipse auf der „Messekunst des Archimed“, in die
Ellipse folgendermaßen definiert ist:
„Nimm zwei Stifte, stecke sie auf ein Reizbrett in zwei Punkten beliebig weit auseinander, dann
nimm einen Faden, schlage ihn um die Stifte und knüpfe ihn zusammen, so dass die Schlinge länger
wird, wie die Entfernung der beiden Punkte zueinander. Nun setze einen Schreibstift hinein, ziehe mit
derselben den Faden also herum, so wird der Schreibstift eine Ellipse aufmalen.“
Die Bewegungen der Planeten erfolgen nach den Keplerschen Gesetzen. Sie bilden die Grundlage zur
Berechnung der Planetenbahnen sowie anderer das Zentrum, hier der Sonne, umkreisender
Himmelskörper. Die Keplerschen Gesetze lauten:
1) Der Radiusvektor (Sonnenmittelpunkt- Planetenmittelpunkt) überstreicht in gleichen Zeiten gleiche
Flächen.
2) Der Bahnverlauf der Himmelskörper (Planeten) um das Zentrum (Sonne) ist ellipsenförmig. Das
Zentrum ist dabei ein Brennpunkt, der allen Planetenbahnen gemeinsam ist.
3) Die Quadrate der (siderischen) Umlaufzeiten T der Himmelskörper (Planeten) verhalten sich wie die
dritten Potenzen der großen Halbachsen ihrer Ellipsenbahnen um das Zentrum. Die große
Halbachse ist die mittlere Entfernung der Himmelskörper (Planeten) vom Zentrum (Sonne)
während seines Umlaufs.

46
Wenn wir die Planeten mit ihren Monden und der Sonne im Sonnensystem betrachten, so gilt die
Sonne als ruhendes oder absolutes Bezugssystem gegenüber den sie umkreisenden Himmelskörpern.
Jedoch können wir auch die Erde oder einen anderen Planeten oder auch einen der zahlreichen im
Planetensystem vorhandenen Monde als ruhendes Bezugssystem annehmen. Je nach Wahl des
Bezugssystems zeichnet sich der Bahnverlauf der Himmelskörper in der absoluten bzw. relativen
Bewegung. Beziehen wir die Bewegung der Erde auf die Sonne, erkennen wir die absolute Bahn der
Erde um die Sonne. In einer umgekehrten Betrachtung wird die Sonne, die Erde somit als ruhend
angenommen, eine relative Bahn zeichnen. Um die absoluten Bahnen der Himmelskörper zu erhalten,
muss man wissen, auf welches Bezugssystem man den entsprechenden Himmelskörper zu beziehen
hat. Bezieht man die Bahn des Erdmondes auf die Sonne, wird ein relativer Bahnverlauf die Folge sein.
Wird die Mondbewegung jedoch auf die Erde bezogen, entsteht der absolute Bahnverlauf des Mondes.
Älterer Anschauung nach scheint im Universum somit eine aufsteigende Ordnung der Bezugssysteme
zu bestehen. Dabei fügen sich, als ein Teil der kleinsten Bausteine, die Monde als unterste Ebene ein,
gefolgt von den Planeten, den Sonnen und den Zentren der Galaxien. Eine solche aufsteigende
Ordnung geht wahrscheinlich ins Unendliche, wenn wir von der Betrachtungsweise der dritten
Dimension ausgehen.
Heute muss man selbstverständlich die Annahme einer höheren Ordnung über eine andere ablehnen.
Das mechanistische Weltbild nach Newton ist nicht dazu geeignet, das ganze Universum als ein
einheitliches System von funktionellen Beziehungen, als Netzwerk sozusagen, zu erfassen. Alle Teile
des Universums sind nicht nur von den physikalischen Beziehungen her gleichberechtigt, denn ein
System greift ins andere beeinflussend ein und unzählbare Wechselwirkungen, Rückkopplungen usw.
entstehen. Eine höhere Systemstruktur, die sich auf eine untere Struktur aufbaut, ist aufgrund des
dynamischen Verhaltens aller Teile im Kosmos zueinander nur in einer mechanisierten
Betrachtungsweise zu erkennen.

47
Hauptcharakteristika der Planeten unseres Sonnensystems
Planet mittlerer heliozentrischer
Abstand
(große
Halbachse
der
Umlaufbahn
in AE)
Exzentrizität Neigung
der
Umlaufbahn
gegen die
Ekliptik
siderische Umlauf-
Periode
in
Erdjahren
Rotations-
Periode
in
Erdtagen (d)
oder
Stunden (h)
MERKUR
0,387 0,206 7,0° 0,24 58,6d
Venus 0,723 0,007 3,4° 0,62 243d
Erde 1,000(1) 0,017 0° 1,00(2) 23,9h
Mars 1,524 0,093 1,8° 1,88 24,6h
Jupiter 5,203 0,048 1,3° 11,86 9,9h
Saturn 9,539 0,056 2,5° 29,46 10,2h
Uranus 19,182 0,047 0,8° 84,01 24h +/- 4h
Neptun 30,058 0,009 1,8° 164,8 17,8h
Pluto 39,439 0,250 17,2° 247,7 6,4h
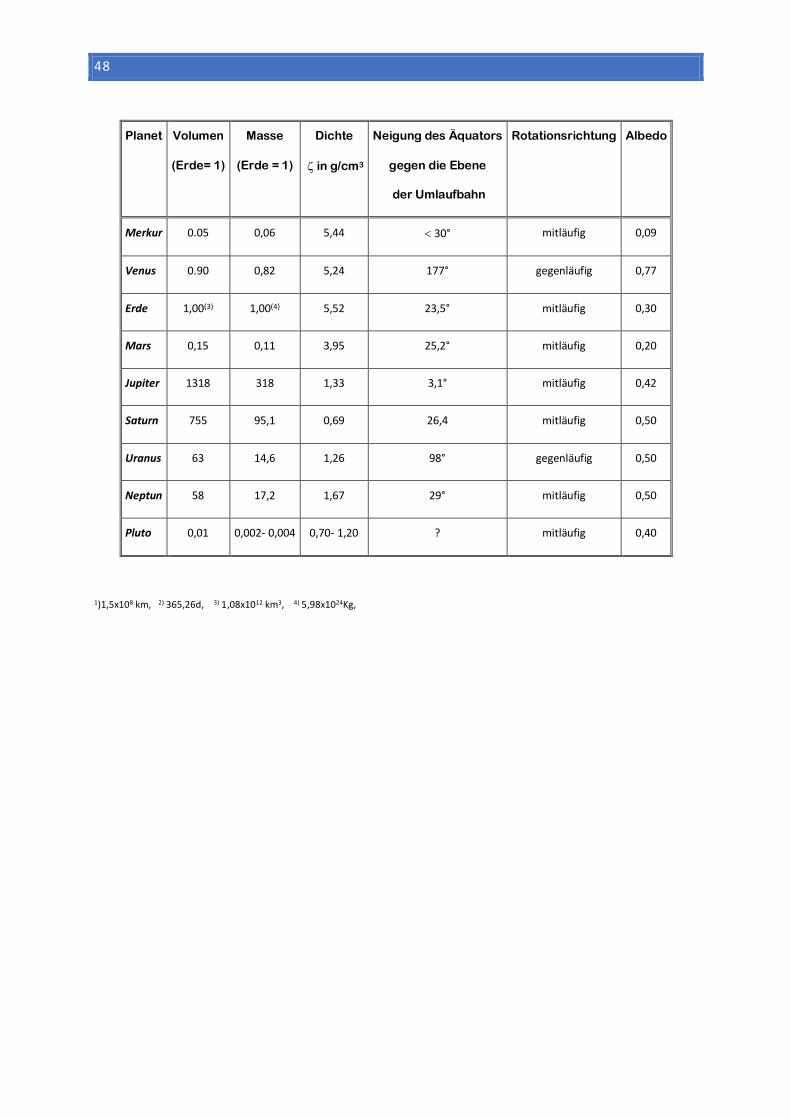
48
Planet Volumen
(Erde= 1)
Masse
(Erde = 1)
Dichte
in g/cm3
Neigung des Äquators
gegen die Ebene
der Umlaufbahn
Rotationsrichtung Albedo
Merkur 0.05 0,06 5,44 30° mitläufig 0,09
Venus 0.90 0,82 5,24 177° gegenläufig 0,77
Erde 1,00(3) 1,00(4) 5,52 23,5° mitläufig 0,30
Mars 0,15 0,11 3,95 25,2° mitläufig 0,20
Jupiter 1318 318 1,33 3,1° mitläufig 0,42
Saturn 755 95,1 0,69 26,4 mitläufig 0,50
Uranus 63 14,6 1,26 98° gegenläufig 0,50
Neptun 58 17,2 1,67 29° mitläufig 0,50
Pluto 0,01 0,002- 0,004 0,70- 1,20 ? mitläufig 0,40
1)1,5x108 km, 2) 365,26d, 3) 1,08x1012 km3, 4) 5,98x1024Kg,

49
Die Planeten mit ihren Monden
MERKUR JUPITER SATURN URANUS
keinen I Io I Mimas I Arie
II Europa II Enceladus II Umbriel
VENUS III Ganymed III Tethys III Titania
keinen IV Kallisto IV Dione IV Oberon
V Amalthea V Rhea V Miranda
ERDE VI Himalia VI Titani
Mond VII Elara VII Hyperion NEPTUN
VIII Pasiphae VIII Japetus I Triton
MARS IX Sinope IX II Nereide
Phobos X Lysithea X Epimetheus
Deimos XI Carme XI Janus PLUTO
XII Ananke VI Titan Charon
XIII Leda XIII Telesto
XIV Adrasthea XIV Calypso
XV Thebe XV Prometheus
XVI Metis XVII Pandora
XVII Atlas
Die Planeten Merkur und Venus werden als innere Planeten bezeichnet, weil sie sich zwischen der
Sonne und der Erde befinden, Folglich werden die Planeten Mars, Jupiter, Saturn, Uranus, Neptun und
Pluto als äußere Planeten bezeichnet. Die Keplersche Ellipsenbahn muss als eine Idealbahn eines
Planeten angesehen werden. Die Bahnen weichen von dieser Idealbahn ab, da durch andere Planeten
auf Grund der Gravitation Störungen entstehen, diese untereinander ausüben. Die unterschiedliche
Wirkung, welche die Gravitation auf die Planeten ausüben, hängt von der relativen Lage ab, welche die
Planeten im Laufe der Zeit einnehmen.
Von der Konjunktion spricht man, wenn die Planeten und die Sonne von der Erde aus in
gleicher Richtung stehen, dabei unterscheidet man bei den inneren Planeten Merkur und Venus die
obere und untere Konjunktion. So spricht man von der oberen Konjunktion, wenn die inneren Planeten
in der Reihenfolge Erde - Sonne - Planet, und von der unteren Konjunktion, wenn die Reihenfolge Erde
- Planet - Sonne erkennbar sind. Dagegen spricht man bei den äußeren Planeten von der Opposition,
wenn sich die Erde zwischen Sonne und Planet befindet. Eine Opposition kann nur bei den äußeren
Planeten beobachtet werden. Die Quadratur tritt auf, wenn zwischen der Sonne und den Planeten,
von der Erde aus gesehen, ein Winkel von 90° beobachtet werden kann. Zum Zeitpunkt der
Konjunktion ist der Planet dann unsichtbar. Während der nachfolgenden Wochen und Monate
erscheint der Planet am Morgenhimmel, zuerst kurz von Sonnenaufgang und dann immer früher, bis

50
die Aufgangszeit auf Mitternacht und danach in die Abendstunden fällt. Zum Zeitpunkt der Opposition
geht der Planet abends auf und unter. Er ist über die ganze Nacht, und würde das Sonnenlicht ihn nicht
überblenden, auch den ganzen Tag lang sichtbar. Am Abend sieht man den Planeten am besten, da er
dann der Sonne am nächsten steht. In den nachfolgenden Wochen und Monaten geht er nachmittags
auf und ist deshalb bei Sonnenuntergang bereits am Himmel. Die Untergangszeit rückt demzufolge
immer mehr an Mitternacht und später in die Abendstunden, bis er wieder in Konjunktion geht. Die
Planeten, außer Uranus, Neptun und Pluto sind mit bloßem Auge sehr gut erkennbar, da sie alle im
Unterschied zu den Fixsternen, dessen Sternenlicht funkelt, ein sehr ruhiges Licht ausstrahlen. Auch ist
ein räumlicher Abstand zwischen den Fixsternen und den Planeten erkennbar. Alle Planeten bewegen
sich in der Tierkreiszone. Die Bewegung ist gleichläufig mit der Erde. Wir beobachten aber die
Planetenbewegung als keine gleichmäßige und in einer Richtung zu den Fixsternen verlaufende
Bewegung. Wegen der relativen Betrachtungsweise von der sich bewegenden Erde aus sind die
Planetenbewegungen mal recht - und mal rückläufig. Sie bewegen sich mal von Ost nach West und
auch umgekehrt am Himmel Alle rechtläufigen Bewegungen kennzeichnen sich als mitlaufend zur
Bewegung der Himmelskugel und deshalb auch der Fixsterne, während sich die rückläufigen Bewegung
entgegen der Drehbewegung der Himmelskugel vollziehen. So beginnt die rückläufige Bewegung der
äußeren Planeten vor ihrer Opposition. Als eine relative Bewegungskomponente versteht man hier die
Revolution (Erdbewegung um die Sonne) und die Rotation (Erdbewegung um die eigene Achse). Die
zweite Bewegungskomponente ist die absolute Bewegungsform der Planeten um die Sonne, wobei die
Sonne als ruhend angenommen wird. Erst wenn Himmelskörper so weit weg stehen, dass der
Erdbahndurchmesser im Verhältnis zur Entfernung der Himmelskörper gegen Null geht, d. h. die
Bewegung der Erde um die Sonne kann vernachlässigt werden, kann die relative oder scheinbare Bahn
als absolute oder wahre Bahn verstanden werden. Zur Definition dieser Entfernungen sind Strecken
von Lichtjahren erforderlich. Wenn z. B. der Bahnradius eines beliebigen Himmelskörpers mit einem
Meter definiert ist und ein Punkt dazu die Entfernung von z. B. eine Million Meter hat, würde ein
Beobachter auf diesem Punkt den Bahnradius eines beliebigen Himmelskörpers nicht bemerken
können. Ihm würde dieser Körper als für sich feststehend erscheinen. In wie weit sich diese Entfernung
praktisch erfassen lässt, sei mit der Beschreibung der Parallaxe angekündigt. In der wahren Bewegung
um die Sonne bewegen sich alle Planeten entgegengesetzt des Uhrzeigersinns, wenn man das System
vom nördlichen Punkt des Himmeläquatorsystems um die Sonne (oben) betrachtet. Wir müssen nun
lernen, alle Planeten in relativer Bewegung zu verstehen, wenn wir sie am Himmel erkennen und
beobachten wollen.
Wenden wir zur Berechnung der Umlaufbahnen nun die Keplerschen Gesetze an, werden wir
überrascht feststellen, dass diese Berechnungen von den tatsächlichen Bahnen abweichen werden.
Verantwortlich für diese Abweichungen sind sogenannte Störungen, die andere Himmelskörper auf
diese für die Berechnung angezogene Bahn ausüben. Um statt den genäherten Orten, die möglichst
genauen Örter (Ephemeriden) der Planeten zu erhalten, müssen wir die Störungen kennen, die diese
Abweichungen verursachen. Eine der Größen dieser Störungen liegt in der gegenseitigen
Anziehungskraft der Planeten untereinander begründet. Die Stärke dieser Anziehungskraft hängt von
der relativen Lage ab, welche die Planeten zueinander einnehmen. Sie ist somit einer zeitlichen
Änderung unterworfen. So ist z. B. bei der Umlaufbahn des Merkur eine zusätzliche Störung
vorhanden, die sich in seiner Periheldrehung äußert. In 100 Jahren weicht Merkur 42“ von seiner Bahn
ab. Dieser Effekt ist mit der allgemeinen Relativitätstheorie erklärbar, jedoch noch nicht hinreichend
bewiesen. Die Bewegung der Planeten wird ausdrücklich durch die im Sonnensystem herrschende
51
Gravitation bestimmt, die an einem Ort im Universum vorherrscht. Dabei muss man feststellen, dass
die großen Halbachsen und folglich auch die Umlaufperioden der Planeten um die Sonne unverändert
bleiben. Auch sind die Exzentrizitäten und die Bahnneigungen der äußeren Planeten starken
Beschränkungen unterworfen. Man muss das gesamte Sonnensystem mit all seinen Körpern und
Kräften als dynamisches System ansehen, wobei sich die Planeten in der Gesamtheit dieser Dynamik
einordnen. Diese Dynamik äußert sich z. B. darin, dass alle Planeten einen Umlaufsinn besitzen, der
mit der Rotationsrichtung der Sonne übereinstimmt. Auch besitzen die Planeten gegenüber dem
Sonnenäquator eine geringe Neigung (Tierkreiszone) sowie nur kleine Exzentrizitäten, die fast der
Kreisbahn ähneln. Nur Merkur, auf Grund der geringen Entfernung zur Sonne, und Pluto bilden eine
Ausnahme. Die Anordnung der Planeten wurde von Kepler mit Hilfe der Harmonie in der Musik erklärt.
Diese Abstandsregel ist heute unter dem Namen Titius - Bodesche Reihe bekannt und drückt das
Gesetz aus, welches das Verhältnis der großen Halbachsen trotz wachsenden Abstand von der Sonne
für konstant definiert. Die Halbsachsen errechnen sich nach a = 0,1 (3 x 2n) AE. Für den Merkur ergibt
sich n = unendlich, für die Venus n = 0, für die Erde n = 1 usw. Für den Asteroidengürtel gilt n = 3. Der
Asteroidengürtel wurde in früherer Zeit als einen zerstörten Planeten vermutet. Heute sind
Erkenntnisse aktuell, die diesen Gürtel als einen nicht entstandenen Planeten darstellen. Dieser Gürtel,
ein Relikt aus der Entstehungszeit des Sonnensystems, beinhaltet eine nicht genau bekannte Zahl von
Asteroiden. Er befindet ich zwischen den Planeten Mars und Jupiter. Leider lässt sich das Gesetz von
den Planetenabständen nicht mehr auf die entfernten Planeten Neptun und Pluto anwenden. Diese
Erscheinung muss als eine Folge der Dynamik des Sonnensystems verstanden werden.
Eine weiterer Beweis für das dynamische Verhalten im Sonnensystem findet man, wenn man
die Verteilung des Bahnimpulses betrachtet. So ist die Verteilung des spezifischen Bahnimpulses im
Sonnensystem proportional der Quadratwurzel des Bahnradius r der Planeten vorhanden. Diese
Erkenntnis ist charakteristisch für das gesamte Sonnensystem. Auch ist das Verhältnis der Masse eines
Planeten zu seiner Rotationsgeschwindigkeit eine weitere Abhängigkeit. Je größer die Masse eines
Planeten ist, umso größer ist auch seine Rotationsgeschwindigkeit. Wenn man das Trägheitsmoment,
bezogen auf die Rotationsachse eines Planeten mit C kennzeichnet, drückt sich der Drehimpuls pro
Planet (Masseneinheit) mit j = C r aus. Der spezifische Drehimpuls j eines Planeten entspricht hier
etwa dem Prozentsatz von j = m 5/6. Dieses dynamische Verhalten entspricht außerordentlich dem
harmonischen Verhalten, welches mit den klassischen Gesetzen der Physik erst beschreibbar wird.
Kepler hat die Harmonie mit den Tönen der Musik erfasst. Newton hat als Dirigent dieser Symphonie
des Kosmos’ die Gravitation entdeckt. Einstein hat diese Symphonie neu dirigiert und einige andere
nicht hörbare Tonarten dabei entdeckt. So wie das menschliche Ohr nur einen Teil der in der Natur
vorherrschenden Töne erfassen kann, hat der menschliche Geist bislang auch nur einen Teil der
symphonischen Tondarstellung des Universums erkannt. Sicher werden hier noch viele Geheimnisse
der Aufklärung bedürfen. So ist heute noch nicht sicher, ob es sich bei der Periheldrehung des Merkur
um einen tatsächlichen Wert handelt oder ob dieser Effekt möglicherweise nur scheinbar durch das
Quadrulmoment, einer Polarisierung des Sonnenlichtes durch den Merkur, vorhanden ist und
innerhalb der Fehlergrößen der derzeitigen Messungen liegt.
Die Gesamtmasse aller Planeten des Sonnensystems ist mit 1/750 der Sonnenmasse bekannt.
Die gesamte Kraft des Drehimpulses der Sonne wirkt sich zu 98 % auf die Planeten aus. Die
Planetenmonde haben daran kaum einen Anteil. Vergleicht man die Größenverhältnisse der Planeten
und der Sonne mit den irdischen Objekten, so erkennt man die absolute Abhängigkeit der Planeten
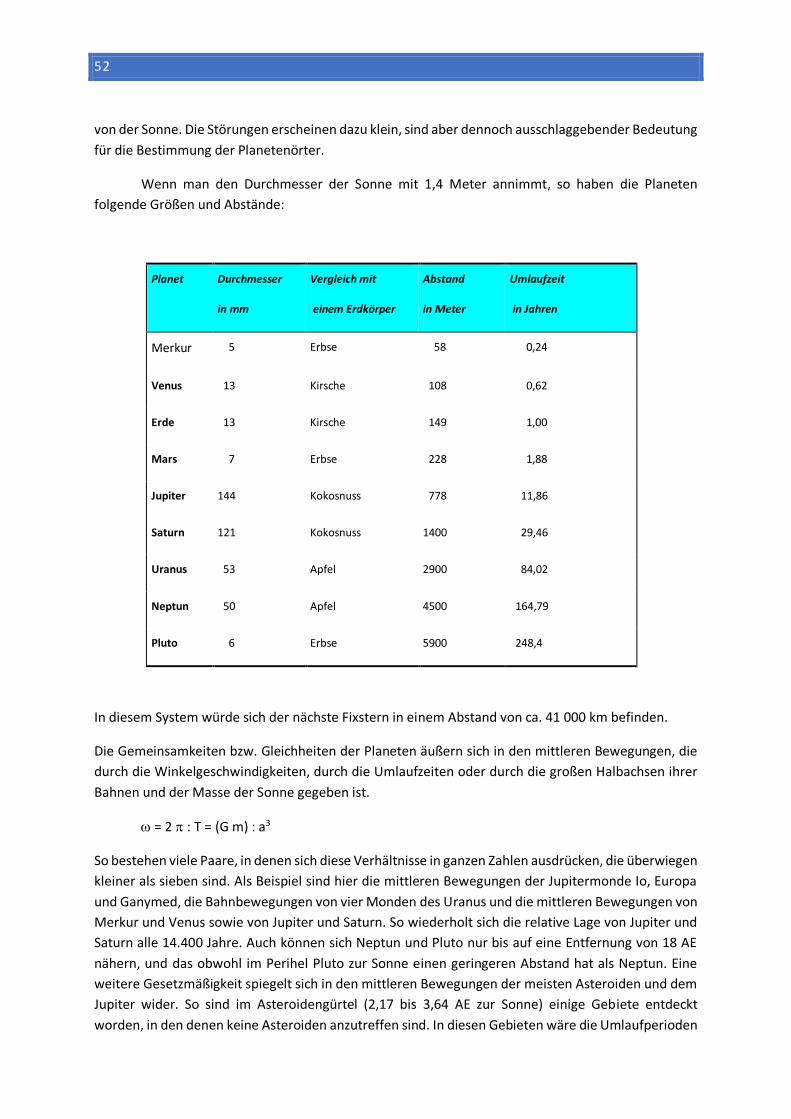
52
von der Sonne. Die Störungen erscheinen dazu klein, sind aber dennoch ausschlaggebender Bedeutung
für die Bestimmung der Planetenörter.
Wenn man den Durchmesser der Sonne mit 1,4 Meter annimmt, so haben die Planeten
folgende Größen und Abstände:
Planet Durchmesser
in mm
Vergleich mit
einem Erdkörper
Abstand
in Meter
Umlaufzeit
in Jahren
Merkur 5 Erbse 58 0,24
Venus 13 Kirsche 108 0,62
Erde 13 Kirsche 149 1,00
Mars 7 Erbse 228 1,88
Jupiter 144 Kokosnuss 778 11,86
Saturn 121 Kokosnuss 1400 29,46
Uranus 53 Apfel 2900 84,02
Neptun 50 Apfel 4500 164,79
Pluto 6 Erbse 5900 248,4
In diesem System würde sich der nächste Fixstern in einem Abstand von ca. 41 000 km befinden.
Die Gemeinsamkeiten bzw. Gleichheiten der Planeten äußern sich in den mittleren Bewegungen, die
durch die Winkelgeschwindigkeiten, durch die Umlaufzeiten oder durch die großen Halbachsen ihrer
Bahnen und der Masse der Sonne gegeben ist.
= 2 : T = (G m) : a3
So bestehen viele Paare, in denen sich diese Verhältnisse in ganzen Zahlen ausdrücken, die überwiegen
kleiner als sieben sind. Als Beispiel sind hier die mittleren Bewegungen der Jupitermonde Io, Europa
und Ganymed, die Bahnbewegungen von vier Monden des Uranus und die mittleren Bewegungen von
Merkur und Venus sowie von Jupiter und Saturn. So wiederholt sich die relative Lage von Jupiter und
Saturn alle 14.400 Jahre. Auch können sich Neptun und Pluto nur bis auf eine Entfernung von 18 AE
nähern, und das obwohl im Perihel Pluto zur Sonne einen geringeren Abstand hat als Neptun. Eine
weitere Gesetzmäßigkeit spiegelt sich in den mittleren Bewegungen der meisten Asteroiden und dem
Jupiter wider. So sind im Asteroidengürtel (2,17 bis 3,64 AE zur Sonne) einige Gebiete entdeckt
worden, in den denen keine Asteroiden anzutreffen sind. In diesen Gebieten wäre die Umlaufperioden

53
ein ganzzahliges Vielfaches der Umlaufzeit des Jupiters. Auch muss angemerkt werden, dass sich die
Monde der Planeten zu den Planeten genauso verhalten, wie die Planeten zur Sonne. In Bezug auf das
Verhältnis der Gesamtmasse aller Monde ist das Verhältnis zur Masse der Planeten größenförmig
gleich den Verhältnis der Planetenmasse zur Sonnenmasse. Es ergibt sich somit die Feststellung., dass
alle Bewegungen im Sonnensystem synchron ablaufen. Als Hauptursache für diesen synchronen Ablauf
gilt eine Kraft, die sich als Gezeitenkraft bezeichnet. Man hat die Erkenntnis gewonnen, dass dieser
Kraftmechanismus auf die Umwandlung der Energie der gravitativen Störungen in den
Himmelskörpern in Wärmeenergie zurück zu führen ist. Die Umwandlung ergibt sich in Folge der ideal
elastischen Himmelskörper und entspricht dem Unterschied zwischen einem nicht oder nur zu einem
gewissen Teil elastischen Körper und einem ideal elastischen Körper. Ursache wiederum für diese
physikalische Tatsache sind Schwingungsabläufe, die auf Grund der verschiedenen elastischen
Eigenschaften von Körpern auch eine verschiedene Dämpfung von Schwingungen veranlassen. Ohne,
dass hier auf die Ursachen des Entstehens dieser Gezeitenreibung in einem Himmelskörper näher
eingegangen werden soll, soll doch ein Ergebnis dieser Erscheinung genannt werden. Durch die
Wirkung der Reibung, Gravitationsenergie in Wärmeenergie, in einem Planeten werden die großen
Halbachsen der Monde der Planeten ständig vergrößert. Beim Erdmond sind es drei cm pro Jahr. Da
jedoch in Wechselwirkung der Gravitation auch die Drehimpulse der Monde sich untereinander
gegenseitig beeinflussen, werden die Umlaufperioden der Monde untereinander gekoppelt und es
entstehen Kommensurabilitäten (lat. Gleichheiten, mit einem Maß messbar). ihrer mittleren
Bewegungen. Gleiches lässt sich nun auch die Planeten in Bezug auf die Sonne annehmen.
Verallgemeinert gesagt, liegt hier auch die Begründungen für die elliptischen Bahnen der
Himmelskörper um ihr Zentrum.
Aber nicht nur die Zeit muss betrachtet werden, sondern auch das Verhältnis der Zeit im Raum. Hier
spielt das Licht als Beobachtungsobjekt zur astronomischen Orientierung eine erste Rolle.
Das Licht der Sonne bewegt sich mit 299 792 458 Metern in der Sekunde und benötigt acht Minuten,
um von der 149 600 000 km weit entfernten Sonne zu uns auf die Erde zu gelangen. So sehen wir die
Vergangenheit der Sonne, aber niemals ihren Zustand im jeweiligen Augenblick. Diese Vergangenheit
ist nur 8 Minuten alt. Aber wir empfangen auch Licht von Sternen, welches Millionen von Jahren
unterwegs war. Dies ist eine echte Rückschau in die Vergangenheit des Universums., eine Rückschau
in die Zeit.
Wir können den Urknall erkennen, den A. Einstein schon 1916 in den Grundzügen formuliert hatte und
denen weitere Theorien über das expandierend Weltall folgten. Heute mag niemand mehr daran
zweifeln, dass sich vor ca. 11 bis 15 Milliarden Lichtjahre das Weltall urplötzlich ausbreitete. Aber diese
Ausbreitung war keine Ausbreitung der Materie schlechthin, vielmehr breitet sich der Raum mit den
darin befindlichen Formen der Materie selbst aus.
Wir werden später noch sehen, inwieweit die Lichtgeschwindigkeit und die Bewegung der Erde um die
Sonne (Revolution) etwas mit der Orientierung des Menschen auf dem Meer zu tun hat.
Vorweggenommen sei der Umstand, dass durch die Revolution der Erde die Sichtweise auf einen Stern
beeinflusst wird. Dieser Einfluss wird als Aberration des Lichtes bezeichnet und muss bei der
Berechnung der Sternenörter an der scheinbaren Himmelskugel beachtet werden.

54
So wird augenscheinlich, welche komplizierten Bewegungsabläufen im Kosmos, der Erde
eingeschlossen, berücksichtigt und mathematisch erfassbar gemacht werden müssen, um ein
ruhendes Inertial theoretisch zu schaffen und die Erde dadurch als Inertial S völlig kräftefrei und
stillstehend vorauszusetzen. Zuerst macht es erforderlich, die Gesetze eines in Rotation versetzten
homogenen Drehkörpers zu verstehen. An Hand eines physikalischen symmetrischen Kreisels, der drei
Freiheitsgrade aufweist und dessen Trägheitsellipsoid bezüglich des Stützpunktes
rotationssymmetrisch ist, formulieren sich die Gesetze, die besagen, dass ein kräftefreier Kreisel die
Lage seiner Drehimpulsachse im Raum unverändert beibehält, solange keine äußeren Kräfte auf diese
Achse wirken. Einer Parallelverschiebung setzt ein Kreisel wegen dieser Beharrlichkeit keinen
Widerstand entgegen. Versucht jedoch eine äußere Kraft die Rotationsachse des rotierenden Kräfte
freien Kreisels zu kippen, so weicht diese aus. Die so entstehenden Nickbewegungen werden als
Präzessionsbewegungen bezeichnet.
Aus dem Trägheitsmoment und der Winkelgeschwindigkeit entsteht als erstes Produkt dieser
physikalischen Funktionen der Drall des Kreisels.
L = J x w L Drall
J Winkelgeschwindigkeit
w Trägheitsmoment
Der Drall und die Winkelgeschwindigkeit lassen sich als Vektoren darstellen, wobei die Vektorrichtung
des Dralls der Vektorrichtung der Winkelgeschwindigkeit entspricht. Die Vektorrichtung der
Drehbewegung ist vergleichbar mit der Vorausbewegung einer rechts gedrehten Schraube. Das
Trägheitsmoment des Kreisels bleibt konstant. Nur der Drall ändert sich proportional zur
Winkelgeschwindigkeit. Nach der physikalischen Beziehung
F = m x a F Kraft
M Masse
a Beschleunigung
für die lineare Bewegung gilt angewandt auf die Rotationsbewegung des Kreisels, dass ein an einem
Kreisel mit dem Trägheitsmoment angreifendes Moment eine Winkelbeschleunigung bewirkt.
M =J x dv/ dt M angreifendes Moment
J Trägheitsmoment
dv/ dt Winkelbeschleunigung
Dieses Moment bewirkt die Drallveränderung am Kreisel.
DL/dt = M
Ein angreifendes Moment an einem Kreisel besitzt zwei Komponenten. Die erste Komponente weist
parallel zum Drall, während die zweite senkrecht darauf steht. Die parallele Komponente bewirkt
lediglich eine Veränderung des Dralls durch Beschleunigung oder Verlangsamung der
Kreiselrotationsgeschwindigkeit, die zweite Komponente hingegen bewirkt die Änderung der

55
Drallrichtung. Das trifft zu , wenn der Drehpunkt eines auf der Spitze stehendes Kreisels nicht senkrecht
über dem Kreiselschwerpunkt liegt.
Die z-Achse, auch als Symmetrie -, Dreh- oder Hauptachse bezeichnet, bewirkt die Rotation des
Kreisels. Die x-Achse ist die innere Dreh- oder Knotenachse. Sie bewirkt die Veränderung der Höhe des
Kreisels. Die senkrecht auf der x-Achse stehende y-Achse bewirkt die Veränderung des Azimuts. Diese
Achse wird auch äußere Drehachse oder Schwungachse genannt.
Der Kreiselpol „H“ ist das Ende der z-Achse vom dem die Bewegung des Kreisels entgegen dem
Uhrzeigersinn beobachtet wird. Ein Kreisel weist entsprechend seiner x, y, und z Achse drei
Freiheitsgrade auf. Wirken keine äußeren Kräfte, wie Reibung und Schwerkraft auf einem der drei
Freiheitsgrade, bleibt der Drehimpuls konstant. In einem geschlossenen System ist M=0 , daraus folgt
L = konstant. Ein kräftefreier Kreisel hält damit seine Lage im Raum unverändert bei. Ein um seine
Figurenachse (F) mit gleichförmiger Geschwindigkeit sich drehender Kreisel dreht mit gleichem
Drehsinn auch um die raumstabile Drehimpulsachse (D) und beschreibt dabei einen Kegelmantel, der
sich Nutationskegel nennt. Dabei wandert die weder im Raum, noch im Rotationskörper feste
Momentenachse (M) um die Drehimpulsachse und beschreibt den Mantel, der sich Sparkegel nennt.
Gleichzeitig beschreiben die aufeinanderfolgenden Lagen der Achse (M) bezüglich der Figurenachse
(F) den Polkegel des Kreisels. Die dabei zu beobachtenden Nippbewegungen des Kreisels werden als
Nutation bezeichnet (nutare: lat. schwanken, nicken). Die Drehimpulsachse, die Figurenachse und die
Momentenachse liegen dabei ständig in einer Ebene, die um die Drehimpulsachse rotiert. Dadurch
wird einer Parallelverschiebung keinen Widerstand entgegengesetzt. Bei ständiger Einwirkung einer
angreifenden Kraft (F) auf die Figurenachse außerhalb des Kreiselschwerpunktes entsteht die typische
Ausweichbewegung der Drehimpulsachse. Diese Ausweichbewegung wird als Präzession (wP)
bezeichnet.
wp = M : D = M : J
Ein rotierender kräftefreier Kreisel sucht somit seine Drehachse so einzustellen, dass sie mit der im
aufgezwungenen Drehung, d. h. der Richtung des äußeren Drehmomentes den kleinsten Winkel bildet
und beide Drehungen gleichsinnig werden. Mit anderen Worten: Die am Schwerpunkt angreifende
Kraft (F) bewirkt die Erzeugung eines Moments (M), dessen Betrag sich aus Produkt der Kraft und der
angreifenden Richtung der Kraft ergibt. Aus dem angreifenden Moment wird eine fortwährende
Kreiselpol
„H“ Y
X
Z
56
Änderung der Richtung des Dralls und damit der Kreiselachse eingeleitet. Greift die Kraft (F) horizontal
an, erfolgt die Präzession vertikal. Greift die Kraft vertikal an, erfolgt die Präzession horizontal. Die
Präzession ist umso größer., je größer das angreifenden Moment ist, jedoch ist sie dem Kreiseldrall
umgekehrt proportional. Den Zusammenhang liefert die Vektorgleichung M = L x wp.
Die Präzession des Kreisel erfolgt unverzüglich, denn bei M = 0, ist auch wp = 0.
Die Präzessionsbewegung des Kreisels wird durch die Nutationbewegung überlagert, die sich bei
Einwirkung des äußeren Drehmomentes durch ergeben, dass die resultierende Drehimpulsachse und
die Figurenachse nicht mehr zusammenfallen. Fallen beim Kreisel der Masseschwerpunkt (S) und der
Stützpunkt (O) nicht zusammen, spricht man von einem „schweren Kreisel“. Stützpunktbewegung und
Drehbewegung erfolgen nur dann unabhängig voneinander, wenn keine Beschleunigung auf den
Kreisel einwirkt.
Da sich die Erde im Gravitationsfeld der Sonne befindet und die Erde als Kreisel ein ungleichförmiges
bewegtes System darstellt, ist die Beschleunigungsfreiheit in Sinne von drei freien Freiheitsgraden
nicht gegeben. Nach F = m x a wirken somit Gravitationskräfte auf den Schwerpunkt der Erde ein. Die
Richtungen dieser Kräfte, die nicht in Richtung der Verbindung 0 – S verlaufen, bewirken ein äußeres
Drehmoment und zwingen die Erde zur Präzession. Wirken die Gravitationskräfte jedoch nur für eine
differenziert kurze Zeit, d. h. der Betrag der auf die Erde einwirkenden Gravitationskraft ist ab- und
zunehmender Art, so entsteht zusätzlich oder an Stelle der Präzession die Nutationsbewegung der
Erde. Da die Gesamtheit der einwirkenden Gravitation auf die Erde zum Hauptteil von der Sonne
ausgeht, jedoch auch entsprechend ihrer Entfernung und der relativen Lage zueinander der Mond und
die anderen erdnahen Planeten ihren gravitativen Einfluss zeigen, wirken auf den Äquatorwulst der
Erde ständig wechselnde Gravitationskräfte ein, die ihren Ausdruck in der Präzessions- und
Nutationsbewegung der Erde haben. Die Präzessionsbewegung der Erde beträgt im Jahr 50,4“. Davon
entfallen 30“ auf den Mond und 20“ (wechselnd) auf die Sonne. Ein kleiner nicht konstanter Rest wird
von den Planeten hervorgerufen. Die Weltachse beschreibt einen Kegelmantel mit einem Winkel von
23° 27“ um den fest im Raum stehenden Pol des Kugelinertials (Pol der Ekliptik). Die Umlaufrichtung
ist der Erddrehung entgegensetzt und erfolgt im Uhrzeigersinn und ist somit eine rückläufige
Bewegung. Die Umlaufzeit der Weltachse beträgt für den 360° Winkelbogen 25.700 Jahre und
bezeichnet sich als Platonisches Jahr. Da der Herbst- und Frühlingspunkt diese Bewegungen rückläufige
Bewegung mitmachen, verschiebt sich der Frühlingspunkt bzw. der Herbstpunkt jährlich im Mittel von
50,4“ rückläufig auf der Ekliptik gegenüber der Position des Vorjahres. Die Präzesionsbewegung kann
jährlich um 18“ aufgrund der Nutation abweichen. Somit wirkt die Präzessionsbewegung der jährlichen
Bewegung der Erde um die Sonne entgegen.
Wird die tägliche Drehung der Erde vom →nördlichen Pol des Kugelinertials betrachtet, so ist
feststellbar, dass die Rotation der Erde um die Erdachse entgegen dem Uhrzeigersinn verläuft. Die
Erddrehung erfolgt also von West nach Ost. Da die Erde um sich selbst rotiert, kann sie nicht
kugelförmig sein. In ihrer dynamischen Gesamtheit unterliegt sie hauptsächlich der Zentrifugalkraft
und der Gravitationskraft. Mit Hilfe des Äquatorumfangs der Erde kann die Winkelgeschwindigkeit der
Erde berechnet werden. Die Äquatorumfang umfasst 40075,180 km. Aus dem Verhältnis 24 Stunden
oder 360° : 40075180 Meter ergibt sich:

57
24 Stunden 360° 40075180 Meter
1 Stunde 15° 1669799,2 m
Das sind 16697, 992 km/h Rotationsgeschwindigkeit eines festen Bahnpunktes auf dem Erdäquators.
Wird das Kugelinertial mit dem geographischen Koordinatensystem auf einen Punkt der
Erdumlaufbahn projekziert und die Erde in dieses Inertial gelegt, so ist die Schiefe der Ekliptik
erkennbar.
Insgesamt muss also für die Simulation eines Inertial Modells in Bezug auf die Erde
1. Die jährliche Bewegung der Erde um die Sonne (Revolution)
2. Die tägliche Bewegung der Erde um ihre Achse (Rotation)
3. Die Bewegung der Erdachse um den Pol der Ekliptik (Präzession und mit Einfluss
der Nutation)
beachtet werden.

58
Das Modell des Kugelinertials erhält die Bezeichnung Stundenwinkel- oder Äquatorsystem, wobei die
Erde im diesem System als unbeweglich und fest im Raum stehend gedacht ist. Alle Bewegungen der
Himmelskörper projekzieren sich als relative Bewegungen. Die Festlegung der Bahnpunkte anderer
Systeme in Bezug auf dieses Stundenwinkelsystem basiert auf die Ortung von Abstands- und
Richtungswinkeln des Horizontsystems.
Die Himmelsachse ist die Verlängerung der Erdachse und wird durch den nördlichen und den südlichen
Himmelspol begrenzt. Der obere Pol ist der Himmelspol an der unendlich großen Himmelskugel über
dem Betrachter. Der Himmeläquator liegt in der Ebene des Erdäquators. Die Stundenkreise führen, so
wie die Meridiane im geographischen Koordinatensystem von Pol zu Pol, während die
Deklinationskreise, gleich den Breitenkreisen der Erde, parallel zum Äquator verlaufen. Die
Himmelskugel dreht sich innerhalb von 23h 56 min 4s einmal um die Erde. Die Stundenwinkel (t)
werden von 000° beginnend im Uhrzeigersinn bis 360° gezählt, denn die Erde dreht sich aus dem
Weltall betrachtet von West nach Ost. Demzufolge führt die scheinbare Himmelskugel, da die Erde als
feststehend betrachtet wird eine Drehung von Ost nach West aus. Alle Gestirne, die auf- und
untergehen, gehen im Osten auf und im Westen unter. Somit wächst der Stundenwinkel im gleichen
Sinne wie die Zeit. Die Zählung des Stundenwinkels erfolgt entgegen der halbkreisigen Zählweise der
geographischen Länge vollkreisig im Uhrzeigersinn. Auf die Ebene des Himmelsäquators wird die 360°-
teilige Kompassrose aufgelegt. Die 0° Marke entspricht dem 12 Uhr Kreis, analog dem Null- oder
Greenwicher Meridian, (Süd oder Mittagskreis) die 90° Marke entspricht dem 18 Uhr Kreis (West oder
Abend), die 180° Marke entspricht dem 24 Uhr kreis (Nord oder Mitternacht) und die 270° Marke
entspricht dem 6 Uhr Kreis (Ost oder Morgen). Dieser Stundenwinkel kann somit sowohl in Grad- als
auch im Stundenmaß angeben werden. Für Berechnungen ist es jedoch vorteilhafter den
Stundenwinkel in Gradmaß anzugeben. Um den Standort des Beobachters mit in das
Stundenwinkelsystem einbeziehen zu können, wird die Länge des Beobachtungsstandortes in den
vollkreiszähleigen Stundenwinkel umgerechnet. Der Stundenwinkel (t), auch als Greenwicher
Stundenwinkel (Grt) bezeichnet, wird zum Stundenwinkel eines Beobachtungsortes oder zum
Ortstundenwinkel (OSW), indem wir die östliche Länge des Beobachtungsortes zum Grt addieren bzw.
indem wir die westliche Länge unseres Beobachtungsortes vom Grt subtrahieren. Dieser errechnete
Wert ist dann der OSW, der in eine halbkreisige Zählweise umzurechnen ist. Ist der OSW kleiner als
180°, wird er als westlicher Stundenwinkel (tw) bezeichnet. Ist er dagegen größer als 180°, erhält er die
Bezeichnung östlicher Stundenwinkel (tö). Diese Umrechnung deckt sich dann mit den Richtungs- bzw.
Zeitmarken im Stundenwinkelsystems.
Ein erster Fehler tritt auf, wenn die Erde als Kugel angenommen wird. Schon die 1736 durchgeführte
Gradmessung, auf das 1615 entwickelte Triangulationsverfahren von Snellius zurückgreifend, ließ die
elliptische Form der Erde erkennen. Die an den Erdpolen abgeplattete Erde ist mathematisch gesehen
ein Rotationsellipsoid. Die Schwierigkeit besteht nun darin, die Erdoberfläche auch wirklichkeitsgetreu
abbilden zu können. Um die Lagebeziehungen zwischen allen Orten auf der Erde zueinander zu
ermitteln, müssen genaue Kenntnisse über wirkliche Form und Größe der Erde vorliegen. Mit den
optisch ermittelten, triangulierten Landesnetzkarten ließ sich nur eine Genauigkeit von +/- 8 mm auf
10 km Strecke, bei Höhenvermessungen sogar +/- 4mm auf 1km Länge erreichen. Diese Fehler
brachten mit sich, dass 100 km weit entfernte Punkte infolge der Erdkrümmung schon 784 m tiefer
lagen. Genaue Messungen wurden durch die →terrestrische Refraktion verfälscht, so dass diese Fehler
nicht beseitigt werden konnten. Konstruiert man eine Fläche, auf der die Schwerkraft der Erde überall

59
senkrecht steht, ergibt sich die ideale Oberfläche der Erde. Der so gefundene theoretisch formulierte
Körper wird seit 1873 als Geoid bezeichnet und stimmt in etwa mit dem ungestörten Meeresspiegel
überein. Ein Vergleich der für einzelne Gebiete geschaffenen Referenzellipsoide konnte bis in die
sechziger Jahre des 20 Jahrhunderts nur bis zu einer Genauigkeit von +/- 100m erfolgen. Konnte die
Lage der Berghöhen und der Meerestiefen auf Ellipsoid Grundlage nur ungefähr ermitteln werden,
mussten diese auf die theoretische Fläche des Geoids bezogen werden, um überhaupt Angaben
machen zu können. So betrugen die Abweichungen (Undulationen) zwischen Erdellipsoid und Geoid 1
bis 2 Bogensekunden und bringen Messungenauigkeiten von 5 bis 15 m mit sich.
Eine genaue Erfassung des Erdkörpers, welche die →terrestrische Refraktion ausschließt, ist erst mit
der heutigen Satellitentechnik aus dem erdnahen Kosmos heraus für die gesamte Erdoberfläche
gegeben, kann jedoch aufgrund der ungleichen Dichte und Form der Erdkruste nicht als gesamtes,
sondern nur in Teilen als tatsächliches Modell vereinheitlicht werden.
Verlauf der Oberflächen von Geoid (blau), Rotationsellipsoid (rot) und physischer Erdform (grün)
Die beste Approximierung des Geoids erfolgt durch ein an den Erdpolen abgeplattetes Ellipsoid, der so
konstruiert ist, dass das Zentrum des Erdellipsoids gleichzeitig der Massemittelpunkt der Erde ist und
das Volumen dieses Erdellipsoids dem Volumen der Erde entspricht. Die physische Erdachse soll dabei
mit der ellipsoiden Achse zusammenfallen. Die Gesetze der Ellipse gestatten genauere
Koordinatenberechnungen, als dies durch die mathematischen Beziehungen für die Kugel gegeben ist.
So gilt für die Berechnung der numerischen Exzentrizität einer Ellipse mit der halben Hauptachse a
(Äquatorradius) und der halben Nebenachse b (halbe Erdachse) die Beziehung: =−a b
a
2 2
.
Die Differenz zur Kugel wird durch die lineare Abplattung ' = −a b und die numerische Abplattung
=−a b
a ausgedrückt. Analog dazu muss zwischen der linearen Exzentrizität e a b' = −2 2
und
der numerischen Exzentrizität ea b
a=
−2 2
2 unterschieden werden.
Zwischen e und a besteht die Beziehung: e2 = 2 .
Nun tritt an der Oberfläche eines ellipsoiden Körpers der Umstand auf, dass diese verschieden
gekrümmt ist. So ist eine meridionale Krümmung und eine Querkrümmung als
Krümmungshauptrichtung benannt.

60
Während der Krümmungshalbmesser einer Kugel wegen der Kugelsymmetrie überall gleich ist, ändert
sich der Meridiankrümmungshalbmesser (M) mit der geographischen Breite. Der Erdellipsoid ist an
den Polen flach und in der Äquatorgegend am stärksten gekrümmt. Das kommt in der Werten der
Abplattung zur Geltung.
Die z-Achse im geographischen Koordinatensystem ist der Erdradius der volumengleichen Kugel,
jedoch mit der praktischen Einschränkung, dass die metrischen Angaben von Wasserständen oder von
Höhen und Tiefenwerten des Wassers oder anderer Objekte entsprechend dem verzeichneten
Seekartennull entsprechen und somit nicht auf den Erdmittelpunkt, sondern auf den Meeresgrund
oder auf das Kartenniveau einer Seekarte bezogen sind. (Siehe Seevermessung und Gebrauch von
Seekarten)
Großkreis mit der
sphärischen Distanz d
und der
Nordpol
Äquator
Greenwicher
Südpol
Leitpunkt
Richtung der Erdrotation
geogr. Ort A
= 54°20,5’N
geogr. Ort B
= 51°56,9’S
A
B
C Darstellung eines Großkreises auf
dem Erdellipsoid

61
DIE GRÖßE DER ERDE NACH DEM INTERNATIONALEN REFERENZELLIPSOID
Erdradius äquatorial........................... a = 6378,168 km
Erdradius polar................................... b = 6356,777 km
Abplattung......................................... c = (a − b) : a = 1 : 297
1° in Länge......................................... 111,418 km cos − 0,094 km cos 3
1° in Breite......................................... 111,137 km − 0,562 km cos 2
Radius der volumengleichen Kugel…. 6371,221 km
Volumen............................................ 1083,320 109 km3
Oberfläche.......................................... 510,101 106 km2
Soll der Krümmungshalbmesser berechnet werden, so muss der Radius des entsprechenden Punktes
auf der Ellipsenoberfläche als Kreispunkt gesehen werden. Für den Krümmungshalbmesser der
Meridianellipse M gilt: Ma e
e
=−
−
( )
( sin )
1
1
2
2
2
3
und für den Querkrümmungshalbmesser N gilt:
Na
e
=
−( sin )1 2 2
1
2
Die Berechnung ergibt entsprechend der unterschiedlichen Krümmung auch unterschiedliche lange
Radiusstücke, die alle lotrecht zur Ellipsenoberfläche stehen. Die Krümmungshalbmesser M und N
stehen senkrecht aufeinander, womit die Krümmungen auf dem Ellipsenkörper erfasst sind. M steht
senkrecht auf seinem entsprechenden Meridianstück, und N steht senkrecht zu der Meridianrichtung
vom M. Das Verhältnis von N und M ist eins. wenn der Körper eine Kugel ist. An den Erdpolen ist
dieses Verhältnis eins. Wird ein ausgewähltes Gebiet der Erde berechnet, so wird mit dem mittleren
Krümmungshalbmesser R gerechnet. Um R zu erhalten, gilt: R MN= . Entsprechend den
verschiedenen Referenzellipsoiden der Gebiete der Erde gelten nun auch verschiedene
Krümmungshalbmesser.

62
Meridiankrümmungshalbmesser und Querkrümmungshalbmesser
Die Meridiane auf der als Kugel angenommenen Erde werden hier zu Halbellipsen, während sich die
Form der Breitenparallele nicht ändert. Entsprechend der Richtung des Radius des
Krümmungshalbmessers gehen die Lotrechten nicht mehr durch den Erdmittelpunkt, sondern
schneiden die Erdrotationsachse unterhalb oder oberhalb des Äquators. Demzufolge definiert sich die
geozentrische Länge analog der geographischen Länge, für die Definition der geozentrischen Breite ’
kommt eine Differenz, die sich in der Breitenreduktion r = − ’ ausdrückt, zum Tragen. Diese wird in
Bogensekunden durch die Formel rarc
= sin
"
2
1 bestimmt. Wird die Länge einer Seemeile anstatt auf
die Erdkugel auf das gültige Erdellipsoid bezogen, errechnet sich die Länge einer Bogenminute in
Anwendung der Bogenmaßgleichung auf dem elliptischen Meridian 1’ zu: 11 1
1
2
2 2
3
2
'( ) '
( sin )
=−
−
a e arc
e
=
1852 − 9,4 cos 2.
Insgesamt ergeben sich folgende Werte für das internationale Referenzellepisoid:
1° in Länge 111,418 km cos − 0,094 km cos 3
1° in Breite 111,137 km − 0,562 km cos 2
Da die Länge einer Bogenminute somit auf einem Erdellipsoid nicht einheitlich sein kann, an den Polen
beträgt sie ca. 1842,9 m und am Äquator ca. 1861,6 m, wird die Seemeile entsprechender
internationaler Vereinbarung mit 1852 m angewandt.
M b
a
Äquator
N b
a
Äquator

63
Benutzt man als Näherung für das Geoid das internationale Rotationsellipsoid nach HAYFORD (bekannt
unter ED-50), so gilt
a = 6378388, 000 m
b = 6356911, 946 m
a − b = 1 .
b 297,00
während als Radius der Erdkugel 6371,221 km aus dem ED-50 heraus berechnet sind. Es ist somit
zwischen geographischer Breite und geozentrischer Breite ‘ zu unterscheiden. Aus einem
ausgewählten Meridianausschnitt (siehe Bild) ergibt sich, dass die Richtung der Normalen in einem
Punkt P (x, y) des Ellipsoids wie folgt aus den Gleichungen der Normalen an eine Ellipse berechnet
werden kann, wenn und laufende Koordinaten sind.
,22 ya
y
xb
x −=
−
,)(2
2
yb
a
x
yx +−=
.tan2
2
x
y
b
a=
Ferner ergibt sich aus dem Bild „Meridianausschnitt“
tan ‘ = y : x
Für = 0° (Äquator) und = +/− 90° (Pole) ist ‘ = .
Die maximale Abweichung für die Bereichsmitte ‘ = 45° kann folgendermaßen abgeschätzt werden:
a : b = 1,0033784,

64
a2 : b2 = 1,0067682.
Der mit ‘ = 45° vergleichbare Winkel ergibt sich dann zu
tan = (a2 : b2) tan 45 = 1,0067682
= 45° 11’ 36“.
Einer Bogenminute auf dem elliptischen Meridian des Internationalen Ellipsoids (ED-50) entspricht
demzufolge am Äquator ein Bogenstück der Länge von 1842,8 m und von 1861,5 m an den Polen. Da
die Länge einer Seemeile auf der dem Ellipsoid (ED-50) zugeordneten Kugel gleich 1852,2 m beträgt
und die 1928 vom Internationalen Hydrographischen Büro in Paris vorgeschlagene Länge 1852 m ist,
beträgt die maximale Abweichung vom Standard 0,5 %.
Bei der Bewegung eines Fahrzeuges mit konstanter Geschwindigkeit vom Äquator zum Pol verläuft die
Normale zur Plattformebene also nur am Äquator und am Pol durch den Erdmittelpunkt. In allen
Positionen des Fahrzeugs auf der Nordhalbkugel durchstößt sie die Erdachse in Punkten, die südlich
der Äquatorebene liegen. Bei Fahrzeugpositionen auf der Südhalbkugel ergäben sich Durchstoßpunkte
der Erdachse auf der Nordhalbkugel. Die Breiteparallele haben auf dem Ellipsoid unterschiedliche
Abstände.
Da der Radius eines Breitenparallels auf der Kugel durch
r = R cos
bestimmt wird, ist noch die Abweichung für das Ellipsoid zu ermitteln. Vergleiche des Radius der
Erdkugel mit den Halbachsen a bzw. b des Erdellipsoids ergeben, dass die Abweichung der
zugeordneten Längenminuten maximal etwa 0,2 % ausmacht.
Ein zweiter Fehler tritt durch das dynamische Verhalten des Systems Erde auf. So muss das
System Erde als ein dynamisches System verstanden werden, welches sich ständig fern vom
Gleichgewicht befindet. Das System Erde ist einem ständigen Zufluss von kosmischer Materie und
Energie ausgesetzt. Dieser Zufluss gewährleistet erst die Gesamtheit der Funktion der Erde als
kosmischen Organismus. Das dynamische Verhalten der Erde zur Aufrechterhaltung des inneren
Systemgleichgewichtes, dessen Struktur nur durch nichtlinearen Gleichungen erfassbar wird, machen
die Beschreibung von Bestandteilen des System Erde kompliziert und verlangen ein abstraktes
mathematisches Modell, welches nicht aus dem Sonnensystem und dem Kosmos als ganzes System zu
trennen ist. Das Formulieren einer hydrostatischen Gleichgewichtsfigur unterliegt ständiger Dynamik.
Diese Erscheinungen dieser Dynamik des Systems müssen somit berücksichtigt werden, wenn die
Änderung des Massemittelpunkt der Erde definiert und mit dem Erdellipsoid übereinstimmen soll.
Dabei muss die Änderung der Neigung der physische Rotationsachse muss ermittelt und mit der
geometrischen verglichen werden können. Ferner muss das Volumen des Erdellipsoids gleich dem
Volumen der Erde sein. Die gedachte Rotationsachse der Erde durchstößt die Erde im Nord- und
Südpol. Der Mathematiker Euler bewies jedoch, dass die Rotationsachse einer rotierenden starren

65
Kugel nicht notwendiger Weise starr mit dem Rotationskörper verbunden bleiben muss, sondern dass
die Polpunkte um eine mittleren Lage kreisen. Er errechnete für die Erde, dass hier eine theoretische
Polverlagerung mit einer Periode von 305 Tagen erfolgen kann. In den achtziger Jahren des 19.
Jahrhunderts griff nun der deutsche Astronom Friedrich Küstner (1856 bis 1936) dieses Problem erneut
auf. Er fand mittels genauer Messungen am Meridiankreis diese periodischen kleinen Schwankungen
bestätigt. Als ein wenig später der amerikanische Astronom Seth Carlo Chandler (1846 bis 1913) die
Breitenmessungen der englischen Greenwicher Sternwarte sorgfältig analysierte, fand er, dass diese
periodischen Schwankungen in einem Rhythmus von 435 Tagen mit einem Mittelwert von ca. 0,3“
auftraten (Chandlersche Periode). Der zu Anfang des 20 Jahrhunderts sich organisierte
Internationale Breitendienst stellte schließlich für den Zeitraum von 1900 bis 1912 einen
im Durchmesser von 20 Meter großen Kreis fest, in dem innerhalb dieses Kreises die Polschwankungen
mit ca. 0,3“ stattfinden. Da Euler in seinen theoretischen Berechnungen von einer starren Erde
ausgegangen ist, musste sein ermittelter Periodenwert mit 305 Tagen kleiner ausfallen, als der
wirkliche Wert von 435 Tagen. Werden die von Euler formulierten Berechnungsgrundlagen nun für
rotierende elastische Körper angewandt, so kann aus dem Vergleich zwischen der theoretischen
Berechnung eines starren rotierenden Körpers im Vergleich mit den ermittelten Messungen auf den
Grad der Elastizität eines rotierenden Körpers geschlossen werden.
So wird durch Massenverlagerung auf und in der Erde bzw. in der Erdatmosphäre, hervorgerufen u. a.
durch Verschiebung von Erdschollen, wechselnde Schnee- und Eisverhältnisse in der Polargegend oder
durch Verlagerung von Luftmassen der Erdachse nicht nur der Masseschwerpunkt der Erde ständig
verlagert, sondern auch die Erdachse.
Durch diese Schwankungen wird nicht nur das geographische Gradnetz um den Betrag der
Schwankungen verschoben, sondern es verändert sich auch fortlaufend das Trägheitsmoment der
Erde. Welche Berücksichtigung diese Gesetzmäßigkeiten in dem System Navigation erfahren muss,
werden später noch sehen.
Erst durch exakte Messmethoden wurde es der astronomischen Forschung möglich, die Grundlagen
für eine Bestimmung der Konstanten der →Präzession, →Nutation und →Aberration und den exakten
Wert der Schiefe der Ekliptik zu bestimmen. Es ist das Verdienst des Mathematikers Friedrich Wilhelm
Bessel (1784 – 1846) hier neue mathematische Wege zu ergründet zu haben. So hat die Nutation eine
Periode von 18,5 Jahren und die Präzession eine Periode von 25.800 Jahren (Platonisches Jahr). Neben
diesen regelmäßigen Schwankungen verringert sich die Rotationsgeschwindigkeit kontinuierlich durch
die Gezeitenreibung.
Ein dritter Fehler wird durch das Wirken der Scheinkräfte sichtbar. Physikalisch stellt die Erde
einen Kreisel dar. Als der französische Physiker Le´on Foucault (1819 bis 1868) 1851 ein langes Pendel
im Innern der Kuppel des Pariser Pantheons aufhing und in Schwingungen versetzte, zeigte sich dass
diese Schwingungen nicht dauern in einer Ebene verliefen, sondern sich im Uhrzeigersinn drehten. Die
Ursache liegt in der entgegen dem Uhrzeigersinn sich drehenden Erde von West nach Ost. Die Erde
dreht sich sozusagen unter dem bewegendem Pendel hinweg und zwar in einem Sterntag um volle
360°. Während diese Erscheinung am Äquator nicht auftritt, erfolgt sie an den Erdpolen umso
schneller. Am Südpol wurde diese Bewegung entgegen dem Uhrzeigersinn erfolgen. Diese nach den
Gesetzen der Mechanik auftretenden Kräfte bezeichnen sich als Scheinkräfte. Sie bewirken die
Bahnablenkung eines auf der Erdoberfläche bewegten Körper auf der Nordhalbkugel nach rechts, auf

66
der Südhalbkugel nach links und wurden nach ihrem Entdecker dem französischen Mathematiker
Gaspard Gustave Coriolis (1792 bis 1843) als Coriolis-Kraft benannt. Am augenscheinlichsten wird diese
Kraft, wenn die Passatwinde betrachtet werden. Da am Äquator der Erde die Luftmassen durch die
senkrecht einfallende Sonneneinstrahlung besonders stark erwärmt werden, erfolgt eine Abnahme
der Dichte dieser Luftmassen und sie steigen nach oben. Diese aufsteigenden Luftmassen halten nun
einen andauernden Zirkulationsprozess in Gang, denn während die erwärmte Luft nach oben steigt,
fließt aus den nördlichen und südlichen kälteren Gebieten kühlere Luft nach. Die dadurch
entstehenden zwei Wirbelringe in der unteren Atmosphäre sind →Steuerzentren, die die Erde in den
Tropen umschlingen und dessen am Erdboden befindliche zum Äquator hinströmende Winde sich
Passate nennen. Bei stillstehender Erde kämen diese Passatwinde genau aus nördlicher bzw. südlicher
Richtung. Durch die Rotationsgeschwindigkeit der Erde, die ihren größten Wert am Äquator mit ca.
900 kn. erreicht und die nach Osten gerichtet ist, kommen die nördlich bzw. südlich und somit
senkrecht auf den Äquator fallenden Luftmassen nicht dort an, wo sie bei stillstehender Erde hätten
eintreffen müssen. Die Erde dreht sich unter den Luftmassen hinweg. Die Luftmassen haben
demzufolge eine etwas geringerer Ostgeschwindigkeit und bleiben nach Westen zurück. Aus
Nordwinden werden so die Nordostpassate und aus Südwinden werden Südostpassate. Aber auch
andere meteorologische Erscheinungen werden erst verständlich, wenn die Betrachtung der
Erdrotation in das Gesamtbild einbezogen wird. So bilden sich in höheren Breiten im Laufe der
Wetterentwicklung Tiefdruck- und Hochdruckgebiete. Würde die Erde nicht rotieren, würde am
Erdboden Luft von außen in das Zentrum eines Tiefdruckgebietes nachströmen. Durch die Erdrotation
wird auf der Nordhalbkugel jedoch die von Norden einströmende Luft nach Westen abgelenkt und die
von Süden einströmende Luft (wegen der größeren Ostgeschwindigkeit) nach Osten. So bilden sich
Windsysteme aus, die auf der nördlichen Halbkugel entgegengesetzt und auf der südlichen im
Uhrzeigersinn um das Zentrum eines Tiefs kreisen. Ursächlich für diese Scheinkräfte ist das von Newton
definierte →Trägheitsgesetz. So kann die Erde kein Inertial darstellen, indem das Trägheitsgesetz
neben dem Gravitationsgesetz alle mechanischen Bewegungen zu deuten erlaubt.
Letztlich wirkt noch ein vierter Fehler, der sich als Gegenkraft der Schwerkraft der Erde ergibt.
So hat der Franzose Jean Richter (1630 bis 1696) ebenfalls mit einem Pendel experimentiert. Nach dem
Newtonschen Gravitationsgesetz nimmt die Schwerkraft um das Quadrat der Entfernung vom
Gravitationszentrum ab. Auf Grund der abgeplatteten Form der Erde wird ein Pendel am Pol somit eine
andere Schwingungsperiode besitzen als am Äquator. Und so stellte J. Richter mittels eines
gleichlangen Pendels eine unterschiedliche Schwingungsperiode zwischen den Orten Cayenne, ein Ort
auf dem Äquator Südamerikas und Paris fest, der besagt, dass die Pendelbewegung am Äquator
langsamer ist, als am Pol. Wäre die Erde kreisrund, so müsste die Schwingungsperiode eines Pendels
überall auf der Oberfläche der als ideale Kugel angenommenen Erde gleich schnell erfolgen. Dieser
Unterschied wird nun noch durch die Zentrifugalkraft der rotierenden Erde verstärkt. Diese Scheinkraft
wirkt der Anziehungskraft entgegen und ist am Äquator gleich Null, hat jedoch ihren größten Wert an
den Erdpolen.
So ist erstens die Schwerkraft aufgrund ellipsoiden Form des Erdkörpers an dessen Oberfläche nicht
gleichstark (Mittelwert 980,62 cm s-2). Sie erreicht an den Polen ihren größten und am Äquator ihren
kleinsten Wert. Zweiten wirkt die Zentrifugalbeschleunigung dagegen, die an Polen gleich Null und am
Äquator einen Wert von 3,3915 cm s-2 besitzt.

67
Drittens besteht ein ständiger Wechsel des gemeinsamen Masseschwerpunktes Erde – Mond, der im
Bereich des physischen Erdkörpers liegt und ständig für eine Verlagerung des Gravitationsfeldes der
Erde sorgt, da die Anziehungskraft gegen die Anziehungskraft der Erde wirkt (→ Gezeiten). Alle diese
Kräfte zeichnen sich nun durch ein stark dynamisches Verhalten aus, welches als Gesamtbild zwar zu
erfassen, aber im Einzelnen nicht zu differenzieren ist. So unterliegt die Erde ständigen
Beschleunigungskräften, die es nicht zulassen, die Erde als Inertial zu betrachten. Es wird nur möglich,
unter Ausschluss von Verfeinerungen das Simulationsmodel eines Erdinertials theoretisch
anzunehmen, wenn die Hauptkräfte der Beschleunigungen herausgerechnet werden und
verschiedene Erdellipsoide unter Verwendung eines weltweiten geodätischen Systems vereinheitlicht
wird (→ WGS 84).

68
DAS NAVIGATIONSSYSTEM S‘ (SCHIFF)
Für das Inertial S‘ kann jeder Körper oder jeder Fixpunkt angenommen werden. Für die Seenavigation
wird das Schiff zu einem Inertial, wenn im System keine Beschleunigungen auftreten.
Das Inertial Schiff (S‘) kennzeichnet sich in seinen drei Achsen als Inertial ohne Trägheitskräfte. Als
einziger Bezug zum ruhenden Kugelinertial (S) wird der Einfluss der Gravitation der Erde (System S) still
akzeptiert. Als Idealfall eines solchen Zustands kann ein Schiff auf Helling betrachtet werden. Ein im
Hafen festgemachtes Schiff kann hier nur unter den Bedingungen der Sollausrüstung (NRT) und
Ladungszustand (BRT) als Idealfall angesehen werden. Da sich das Schiff als physikalischer
Schwimmkörper definiert, müssen die Eigenschaften der Schwimmfähigkeit als auch der Stabilität
eines solchen Schwimmkörpers in die Systembetrachtung des Systems Schiff einfließen. Die Fähigkeit
eines Schiffes mit einem Teil seines wasserverdrängenden Volumens über Wasser zu bleiben, gewährt
die Sicherheit des Schiffes nicht zu sinken. Während die Schwimmfähigkeit die Sicherheit eines Schiffes
gegen Sinken darstellt, ist die Stabilität eines Schiffes die Sicherheit gegen Kentern. Ausgehend vom
Archimedischen Gesetz ist das Gewicht des Schiffes gleich dem Gewicht des Wassers, dass es
verdrängt. So ist die Verdrängungskraft eines Schiffes auch gleich seiner Auftriebskraft, wobei für die
Ermittlung der Auftriebskraft die Elemente der Erdbeschleunigung und der Dichte des Mediums
Wasser berücksichtigt werden müssen. Somit darf die lotrechte Definition der x’ – Achse des Systems
S’ gleich der x – Achse des Systems S nicht unbeachtet bleiben, sondern muss als Element der
Achsenberechnung von x’ mit einfließen und ist hinsichtlich der Orientierung und Fortbewegung auf
den Meeren der Erde mittels Schiffe also ein ganz logische Konsequenz.
z‘
y‘
x‘
M‘
Inertialsystem
S‘

69
Die Konstruktionslinie der Kiellinie des Schiffes stellt die y’ – Achse dar. Wird diese im Winkel von 90°
auf der Lotrechten ausgerichtet, ist die z’ – Achse des Systems S’ gegeben. Die x’ – Achse definiert sich
als Schiffsquerachse, die auf dem waagerechten Schiffsdrehpunkt der y’ – Achse senkrecht steht. Die
Ausrichtung der z’ – Achse auf der Lotrichtung der x – Achse des Inertials S stellt die erste Verknüpfung
der Systeme S und S’ dar. Angesicht der Tatsache, dass aus rein schiffbaulichen Erwägungen diese
Verknüpfung unverzichtbar ist, soll sie an dieser Stelle erwähnt werden. Der gemeinsame Schnittpunkt
der drei Achsen soll gleichzeitig der Gewichtsschwerpunkt des Schiffes sein.
Durch die Einwirkungen von Trägheitskräften aus dem System S’ selbst heraus bzw. von außen treten
die Drehwinkel entsprechend der Lageänderung gegenüber der Ruhelage des Systems S’ auf. Das
Inertial S’ kann damit nicht mehr als Inertial gelten, sondern soll dann als Navigationssystem S’
bezeichnet werden. Ist S‘ ein Schiff, so formuliert sich als Ursprung des Systems S‘ die Schnittpunkte
aller drei Achsen x’, y’ z’. Die Drehwinkel z’, x’, y’ bekommen einen Wert ungleich Null, wenn das
System S’ aus seiner Ruhelage gebracht wird. Es gelten die Begriffe:
Winkel x’ für den Rollwinkel in Bezug auf die Ruhelage S’;
Winkel y‘ für den Gierwinkel in Bezug auf die Ruhelage S’;
Winkel z‘ für den Stampfwinkel in Bezug auf die Ruhelage S’.
Entsprechend der Dreidimensionalität der Körper kann außer bei parallelem Verschub auf einer, zwei
oder drei Achsen ein Drehwinkel sich nur ändern, wenn sich auch ein anderer Winkel ändert.
Demzufolge ergeben sich feste Drehachsen für die verschiedenen Drehwinkel.
Winkel: Gieren feste z‘ Achse: Bewegung der y‘ und der x‘ Achse.
Winkel: Rollen feste y‘ Achse: Bewegung der x‘ und der z‘ Achse.
Winkel: Stampen feste x‘ Achse: Bewegung der y‘ und der x‘ Achse.
Selbstverständlich können alle drei Bewegungen gleichzeitig auftreten.
x‘
x’ 0°
y’
y’ 0° z’ 0°
z‘
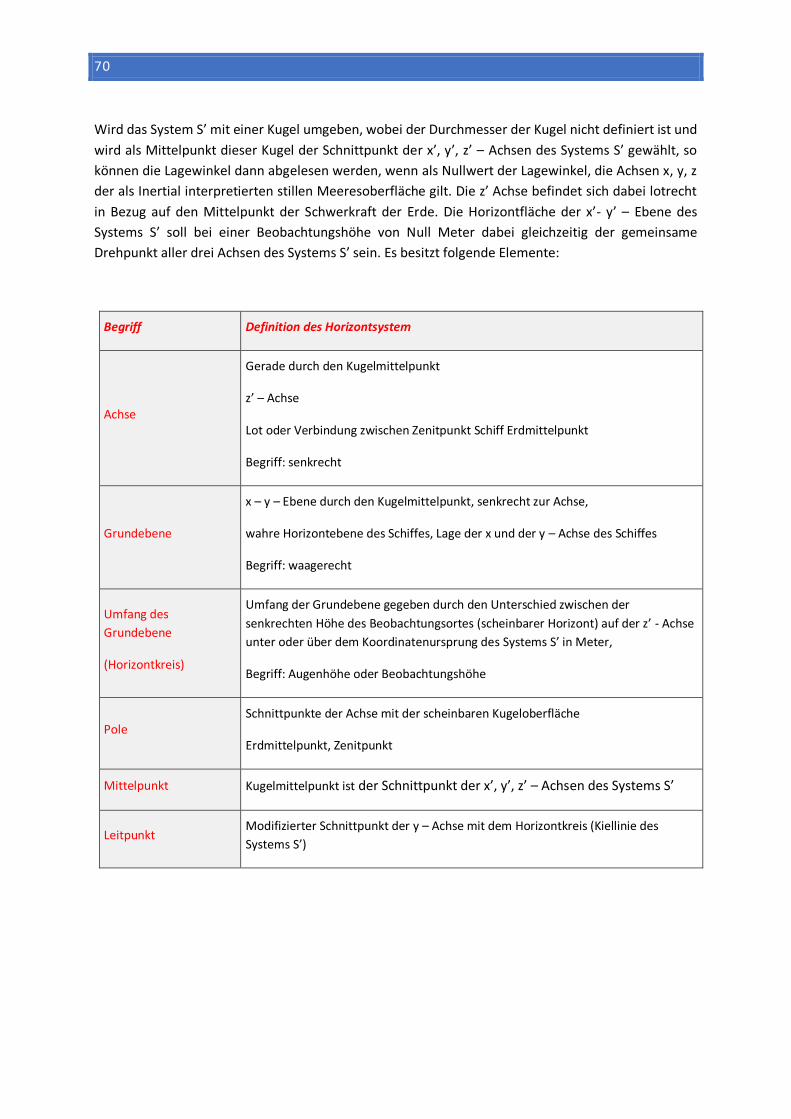
70
Wird das System S’ mit einer Kugel umgeben, wobei der Durchmesser der Kugel nicht definiert ist und
wird als Mittelpunkt dieser Kugel der Schnittpunkt der x’, y’, z’ – Achsen des Systems S’ gewählt, so
können die Lagewinkel dann abgelesen werden, wenn als Nullwert der Lagewinkel, die Achsen x, y, z
der als Inertial interpretierten stillen Meeresoberfläche gilt. Die z’ Achse befindet sich dabei lotrecht
in Bezug auf den Mittelpunkt der Schwerkraft der Erde. Die Horizontfläche der x’- y’ – Ebene des
Systems S’ soll bei einer Beobachtungshöhe von Null Meter dabei gleichzeitig der gemeinsame
Drehpunkt aller drei Achsen des Systems S’ sein. Es besitzt folgende Elemente:
Begriff Definition des Horizontsystem
Achse
Gerade durch den Kugelmittelpunkt
z’ – Achse
Lot oder Verbindung zwischen Zenitpunkt Schiff Erdmittelpunkt
Begriff: senkrecht
Grundebene
x – y – Ebene durch den Kugelmittelpunkt, senkrecht zur Achse,
wahre Horizontebene des Schiffes, Lage der x und der y – Achse des Schiffes
Begriff: waagerecht
Umfang des
Grundebene
(Horizontkreis)
Umfang der Grundebene gegeben durch den Unterschied zwischen der
senkrechten Höhe des Beobachtungsortes (scheinbarer Horizont) auf der z’ - Achse
unter oder über dem Koordinatenursprung des Systems S’ in Meter,
Begriff: Augenhöhe oder Beobachtungshöhe
Pole Schnittpunkte der Achse mit der scheinbaren Kugeloberfläche
Erdmittelpunkt, Zenitpunkt
Mittelpunkt Kugelmittelpunkt ist der Schnittpunkt der x’, y’, z’ – Achsen des Systems S’
Leitpunkt Modifizierter Schnittpunkt der y – Achse mit dem Horizontkreis (Kiellinie des
Systems S’)

71
Die Koordinaten des Systems definieren sich dann wie folgt:
Koordinate Definition der Koordinaten im Horizontsystem
Richtung
Koordinate des Polarkoordinatensystems, Gierwinkel oder Peilwinkel in Grad, eventuell auch in
Minuten, Sekunden gemessen auf der Grundebene von einem Leitpunkt (Schnittpunkt der y’
Achse mit den Horizontkreis des scheinbaren Horizonts, Schiffsvorausmarke) aus durch
Anwendung der 360° Vollkreisteilung im Uhrzeigersinn von 000° voraus über 090° querab Stb,
über 180° achteraus, über 270° querab Bb bis 360° voraus. (Schiffspeilung) oder durch
Anwendung der Halbkreisteilung von 000° voraus über jeweils 90° Stb oder Bb bis 180°
achteraus (Schiffseitenpeilung)
Abstand
Koordinate des Polarkoordinatensystems, Abstand oder Distanz auf der Grundebene in
nautischen Minuten (Seemeilen) –Überwasserortung- oder in Meter (Unterwasserortung),
wenn der Höhenwinkel 000° beträgt, oder auf dem Peilstrahl gemessen vom Nullpunkt des
Systems bis zum Ortungsobjekt.
Höhe
Koordinate des Polarkoordinatensystems. Befindet sich das Ortungsobjekt genau auf der
Wasseroberfläche ist der Höhenwinkel 000° Ist es unter der Wasseroberfläche hat der Winkel
einen negativen Wert ungleich Null (Tiefenwinkel), oberhalb der Wasseroberfläche wird ein
positiver Höhenwinkel ungleich Null gewonnen.
Definiert sich der Horizontkreis in erster Näherung als eine das Navigationssystem S’ umgebene Ebene,
so besteht zwischen Höhenwinkel und Abstand eine mathematische Beziehung, die am Beispiel der
Standliniengewinnung mit dem Sextant erläutert werden soll.
In der Küstennavigation wird mit dem Sextant ein Verfahren der Abstandgewinnung zu Objekten,
dessen Höhe bekannt ist, angewandt.
Dieses terrestrische Verfahren der vertikalen Winkelmessung basiert auf der mathematischen
Beziehung, dass sich in einem rechtwinkligen Dreieck ABC die Entfernung entsprechend einem
Vertikalwinkel aus der Formel e = h cot berechnen lässt.
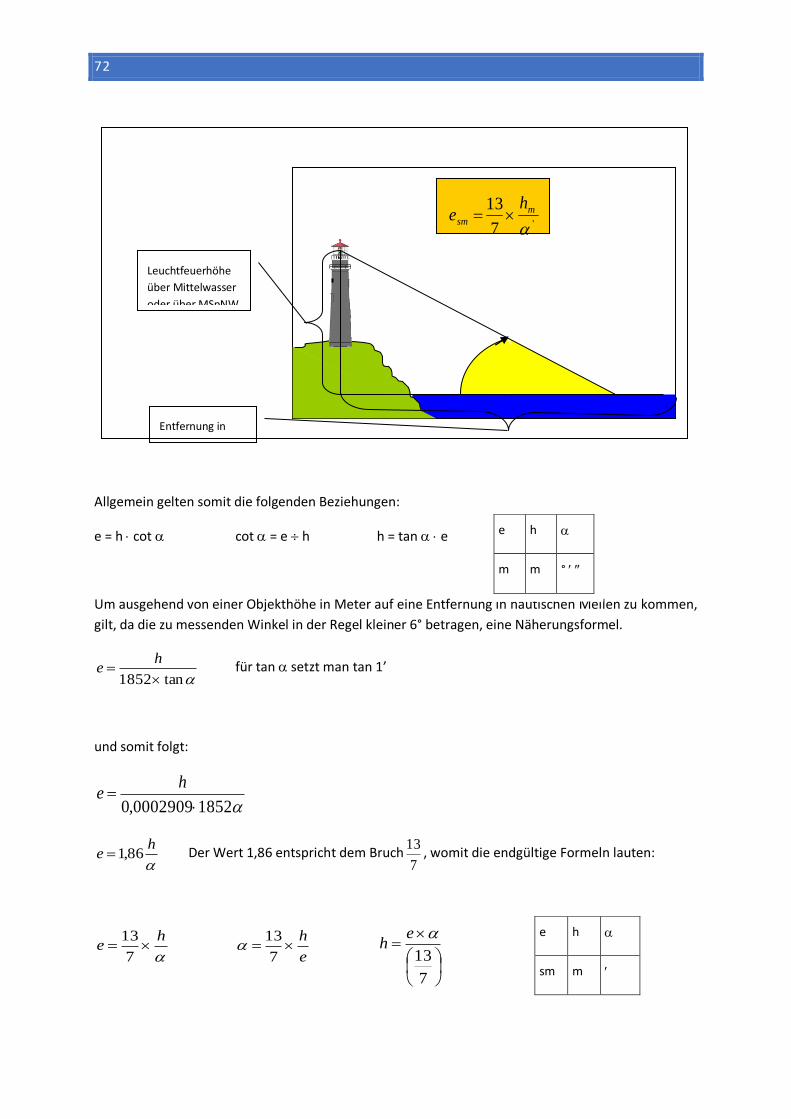
72
Allgemein gelten somit die folgenden Beziehungen:
e = h cot cot = e h h = tan e
Um ausgehend von einer Objekthöhe in Meter auf eine Entfernung in nautischen Meilen zu kommen,
gilt, da die zu messenden Winkel in der Regel kleiner 6° betragen, eine Näherungsformel.
tan1852=
he für tan setzt man tan 1’
und somit folgt:
18520002909,0 =
he
he 86,1= Der Wert 1,86 entspricht dem Bruch
7
13, womit die endgültige Formeln lauten:
he =
7
13
e
h=
7
13
=
7
13
eh
Leuchtfeuerhöhe
über Mittelwasser
oder über MSpNW
Entfernung in
Seemeilen
'7
13
m
sm
he =
e h
m m °
e h
sm m

73
In zweiter Näherung muss die Ebene der das Schiff umgeben Horizontfläche als Kugel und in dritter
Näherung als Ausschnitt des Erdellipsoids betrachtet werden. Für die zweite Näherung gelten die
mathematischen Beziehungen eines sphärischen Dreiecks, während für die Auflösung des wahren
Kursdreiecks in Bezug auf das Erdellipsoid noch kompliziertere Formeln notwendig sind (siehe
Abschnitt Kartographie).
Nun ist der Horizont keine real existierende Linie am Ende der Begrenzung des Gesichtsfeldes eines
Beobachters, sondern nur eine scheinbare Linie, die jedoch bei guter Sicht sehr real sichtbar ist. Die
Begrenzung, die Himmel und Erde abzugrenzen scheint, wird als Kimm oder sichtbarer Horizont
bezeichnet und durch das Vorhandensein der Erdkrümmung hervorgerufen und durch die Augenhöhe
des Beobachters über der Kugeloberfläche ausgedehnt oder verkleinert. Obwohl die Kimm maßgeblich
durch die Krümmung der Meeres- bzw. Erdoberfläche definiert wird, muss sie eindeutig dem
Navigationssystem und nicht dem Kugelinertial zugeordnet werden. Denn erst das Vorhandensein
eines Beobachters auf einen Navigationsobjekt macht es aus, wodurch die Horizontlinie gerechtfertigt
wird. Streng genommen ist die Kimm eine Abstandsortungsstandlinie, da sie einen Kleinkreis um das
Navigationsobjekt beschreibt. Der Mittelpunkt dieser Kreisstandlinie ist das Navigationsobjekt selbst,
so dass die Bewegung dieser scheinbaren Kreisstandlinie von der Bewegung des Navigationsobjektes
in seinem Koordinatensystem x’, y’ z’ und von der Bewegung des Navigationsobjektes auf der Fläche
des Referenzinertials abhängig ist. Hier werden folgenden Beziehungen sichtbar. Je größer die
Augenhöhe des Beobachters, desto größer wird der Teil der Erdoberfläche (des Meeres), der durch
den Beobachter überblickt werden kann. Mit wachsender Augenhöhe entfernt sich aber nicht nur
diese Kimmlinie vom Beobachtungsort, sondern es wächst auch gleichzeitig der Winkel zwischen
sichtbaren Horizont und der Verbindungslinie zwischen Auge und Kimmlinie (siehe nachfolgendes
Bild). Diese Erscheinung wird als Kimmtiefe bezeichnet und nach den folgenden mathematischen
Beziehungen definiert.
Die Navigationsplattform S‘ ist mit den Achsen x‘, y‘, z‘ auf ihrer z‘ - Achse durch die Höhe des
Beobachtungsortes (Bh) gegenüber der Horizontebene verschoben. Dadurch verursacht die so
entstandene Kimmtiefe einen Neigungsfehler der x‘, y‘ – Ebene in Richtung der Ortungsstandlinie,
wenn als Bezug für die Messung die Kimmlinie bzw. ein mit der Erdoberfläche fest verbundenes Objekt
vertikal geortet wird. Solche gemessenen Entfernungsstandlinien müssen somit um den mit negativem
Wert (−) der Kimmtiefe (Kt) beschickt werden.
Diese Beobachtungshöhe ist genau der Ort der z’ Achse auf oder im Navigationssystem, vom dem aus
die Ortung der Standlinie erfolgt. Der Ort kann sowohl der Sensor einer Antenne, eines Echolotes sowie
auch das Auge des messenden Beobachters (Ah) sein.

74
Bild links Bild rechts
Wie in linken Bild dargestellt, ist der Unterschied der Beobachtungshöhe (-tiefe) als Unterschied (Bh)
auf der z’ – Achse zwischen Koordinatenursprung und Beobachtungsstandort auf den System S’ (Schiff)
dargestellt. Dieser Unterschied kann bei entsprechender Größe des Schiffes beachtliche Werte
annehmen. Bild rechts stellt diesen Unterschied bei Kränkung des Schiffes (hier Rollen) dar. Diese
Verschiebungen entstehen selbstverständlich auch auf allen anderen Achsen des Schiffes (Rollen,
Stampfen Gieren). Es kommt auf die geforderte Genauigkeit bzw. auf die Ortungsmethode an, ob
dieser Unterschied beachtet werden muss oder vernachlässigt werden kann.
Wird das Schiff als im Ruhe befindlich definiert, bei dem keine Lagewinkel auftreten bzw. werden die
auftretende Lagewinkel vernachlässigt, so ergibt sich für das System S’ umgeben Horizontsystem die
nachfolgende Darstellung:
Augenhöhe
in Meter
z’ = 0°
Antennenhöhe
in Meter
Sensortiefe in
Meter
z’ 0°
z‘
y‘
x‘
S‘
Inertialsystem
S‘(Schiff)
Zenit
Scheinbarer Vorrauslinie, Kiellinie
Richtung
Erdmittelpunkt
Querablinie
Ortungspunkt
Höhenkoordinate
Richtungskoordinate
in Grad
Abstandskoordinate
in Seemeilen

75
In erster Annahme wird das Navigationssystem S’ (Schiff) als ein fest im Raum stehendes System
betrachtet. Diese relative Betrachtungsweise wird genutzt, um sich in Bezug auf S bewegende und
stationäre Ortungs- bzw. Navigationsobjekte sofort hinsichtlich der Lage zum eigenen Schiff
(Passierabstände, Passierzeitpunkte) zu erhalten. Sie gestattet aber nicht die Position in Bezug auf S
(geographische Lage und Koordinaten) zu ermitteln. In zweiter Annahme befindet sich
selbstverständlich durch die Parameter von Beschleunigung und Verlangsamung (Kurs und Fahrt des
Schiffes) das Navigationssystem in Bezug auf S in Bewegung. Die hier entsprechenden
Systemverknüpfungen werden im Abschnitt -Prozess der Beziehungen zwischen S und S’- abgehandelt.
Diese in einfacher Weise dargestellte Hierarchie der Personenstruktur widerspiegelt die Struktur der
Gesellschaft nach historischen Vorbild. Praktische Entscheidungsgewalt in kritischen Momenten und
in Gefahrensituationen machen scheinbar diese Struktur notwendig und haben das Recht der
absolutistischen Gewalt (Herrscherstruktur) verewigt. Und tatsächlich ist es notwendig, dass bei
plötzlicher Gefahr sofortiges schnelles Handeln erforderlich wird, Entscheidungsgewalt kann dann
keine Diskussion mehr einschließen, sondern muss augenblicklich und sofort verfügbar und sein. Die
Durchführbarkeit von Handlungen hängt somit immer noch allein vom Kapitän und dessen gesetzlich
verankerter Machtbefugnis ab. Missbrauch schaltet das Gesetz aus. Jedoch die Hierarchie der Macht
bleibt unberührt. Es stellt sich die Frage, ob dieses Modell heute in Zeiten von Demokratie und dem
Gleichheitsgedanken aufgeklärter Menschen noch so erforderlich ist.
achteraus
voraus
Darstellung der
Schiffspeilung
Grün 078°
Gelb 282°

76
DER PROZESS DER BEZIEHUNGEN ZWISCHEN NAVIGATIONSSYSTEM UND INERTIALSYSTEM
Eine erste Forderung, die zu erfüllen ist, wenn von der Funktion eines Navigationssystems gesprochen
wird, ergibt sich in der Herstellung eines Bezugs zu einem Inertialsystem. Der Bezug zum Kugelinertial
wurde das Definieren von Richtungen und Distanzen als die voraussetzenden zwei Elemente des
Schiffsweges überhaupt erfüllt. Während die Einhaltung einer Richtung vom Abfahrtort zum
Bestimmungsort ohne eine Zeitinterpretation auskommt, spielen Entfernungen erst dann eine Rolle,
wenn dazu ein Zeitbezug herangeführt ist. Die auf Erfahrungswerte aufbauende über Jahrtausende
alte Seefahrt nahm sehr wohl auf beide Elemente des Schiffsweg ihren Bezug. Die Richtungen wurden
nach terrestrischen Fixpunkten und den Gestirnen und anderen naturtypischen Erscheinungen und die
Distanzen nach Tagen eingeschätzt oder an Hand von Erfahrungswerten verglichen. Der Prozess der
Verknüpfung zwischen dem Navigationsobjekt Schiff und dem angenommenen Kugelinertial
Meeresoberfläche vollzog sich als Denkprozess des Schiffsführers. Die ersten Festlegungen von
Orientierungsrichtungen prägten sich nach den einfallenden Richtungen dem für das Segeln so
notwendigen Wind. Die Einteilung des Horizontkreises durch zwei rechtwinklig zueinander stehenden
Querachsen in die vier Grundrichtungen Nord (N), Ost (E), Süd (S) und West (W) ist schon durch Homer
beschrieben:
Unter sich kämpfen der Ost und der Süd und brausende Westwind,
Auch hellluftiger Nord, der gewaltige Wogen daher wälzt.
Die Hauptachse ist dabei vor Einführung des Magnetkompasses in die Nautik in der Ost -Westrichtung
zu suchen, während die Nord - Südrichtung eine untergeordnete Rolle spielte. Diese Ausrichtung hatte
ihren Grund im scheinbaren Lauf der Sonne um die Erde. Die Sonne im Osten aufgehend, teilte die
Erde in eine Tag- und in eine Nachtseite. So ist die Bezeichnung „Ost" eng mit dem Begriff
„Orientierung" verbunden. Der Aufgangspunkt der Sonne am Osthorizont bildete die Basis zur
Festlegung der anderen drei Himmelsrichtungen. Nun war es ein Leichtes durch Mitteln der vier
Richtungen weitere Himmelsrichtungen zu veranschaulichen. So finden wir das Wort Euronotus in der
griechischen Antike. Dieses aus Euros (Ost) und Norus (Süd) zusammengesetzte antike Wort lässt klar
erkennen, dass der Ost - Westrichtung bei der Bezeichnung der Zwischenrichtung Ost - Süd, (heute
Südost) der Vorrang eingeräumt wurde. Erst später, durch die Erweiterung der Kenntnisse um die
Kugelgestalt der Erde und dem damit verbundenen Verlauf der Meridiane in die Nord -Südrichtung
und gleichzeitig durch die Beobachtung der ungefähr nach Norden ausgerichteten Anzeige der
Magnetnadel sahen sich die Seefahrer veranlasst, der Nordsüdrichtung als grundlegende
Hauptrichtung den Vorzug zu geben. In der antiken Welt schaltete man also vier Zwischenrichtungen
in die Hauptrichtungen ein, die dann nochmals um vier Richtungen erweitert wurden. So hatte der
antike Seemann nunmehr 12 Windstriche verfügbar. Man hat somit die 8 Windrichtungen nicht einfach
verdoppelt, wie es die Kompassrosen des späten Mittelalters zeigen, sondern man hat nur 4 weitere
Winde hinzugefügt und den 360° Horizontbogen gleichmäßig auf 12 Richtungen aufgeteilt. So ergaben
sich also 12 Bögen zu je 30°. Heute noch können wir an Hand des Sprachgebrauches der
Windrichtungen dieses System nachvollziehen. Während der Ausdruck „West" den Richtungsstrahl
bezeichnet, der auf den eindeutigen Westpunkt am Horizonts weist, charakterisiert der Ausdruck „im
Westen" die Weltgegend nach dem zwölfteiligen System, somit den 30° Ausschnitt des westlichen
Horizontbogens mit der Bezeichnung „Westen". Hauptsächlich war jedoch auch neben dieser

77
Zwölfteilung die wesentlich einfachere Achtteilung des Horizontes in Gebrauch. Dass sich dieses
System der zwölfteiligen Horizontbezeichnung noch bis über die Zeit Karl des Großen (747 bis 814) im
europäischen Raum erhalten hat, zeigt im Bibliotheka rerum Germanicum Band 4 der Herausgeber,
Jaffe, P. im Kap. 29 „Einhardi vita Caroli Magni" Berlin 1867. Hier lesen wir:[l]
Item venos duodecim propriis appellationibus insignivit; cum prius non
amplius quam vix quattuor ventorum vocabula possent inveniri. - Ventis vero
hoc modo nomina imposuit, ut Subsolanum vocaret Ostronivint, Eurum
Ostsundroni, Euroaustrum Sundostroni, Austrum Sundroni, Austroafricum
Sundwestroni, Africum Westsundroni, Zefyrum Westroni, Chorum Westnordroni,
Circium Nordwestroni, Septemtrionem Nordroni, Aquilonem Nordostroni,
Vulturnum Ostnordroni. Einhard berichtet hier wie Karl der Große die 12 Windrichtungen
bezeichnet hat. Auch hier beginnt die Zählung im Ostpunkt.
Heutige
Bezeichnung
Deutsche Bezeichnungen in der Zeit
Karl des Großen
Ost Subsolanum vocaret Ostronivint
Ost Süd Eurum Ostsundroni
Süd Ost Euroaustrum Sundostroni
Süd Austrum Sundroni
Süd West Austroafricum Sundwestroni
West Süd Africum Westsundroni
West Zefyrum Westroni
West Nord Chorum Westnordroni
Nord West Circium Nordwestroni
Nord Septemtrionem Nordroni
Nord Ost Aquilonem Nordostroni
Ost Nord Vulturnum Ostnordroni
Richtungsbezeichnungen im zwölfteiligen Horizontsystem
Breusing nimmt an, dass diese Einteilung in 12 Bereiche auf den Umstand zurückgeht, dass der
Horizont durch den Meridian (Nord, Süd), den Äquator (Ost, West), die beiden Wendekreise (Westsüd,
Westnord, Ostsüd, Ostnord) und die beiden Polarkreise (Südwest, Nordwest, Südost, Nordost) in 12
Punkten geschnitten wird und somit auf den scheinbaren jährlichen Sonnenumlauf zurückgeht. Auch
wird ein Kreis mit der Zirkelweite des Kreisradius in sechs gleiche Teile zerlegt. Ein weiterer Bezug wird
deutlich, wenn die zweimal 12 Stunden Teilungen eines Tages beachtet werden. Hier muss jedoch
angemerkt werden, dass die antike Zeitzählung den Tag nicht in 24 gleiche Stundeanteile teilte,
sondern dass die 12 Tagstunden gegenüber den 12 Nachtstunden der verschieden langen Tag- und
Nachtperioden entsprechend der Jahreszeiten mal kürzer oder länger sein konnten. Deutlich wird auf

78
jeden Fall, dass die Richtungsbestimmung, wie auch die Zeitdefinition mit der täglichen und jährlichen
scheinbaren Sonnenbahn um die Erde verknüpft worden ist. Schon die Begriffe Orient für Morgenland
(Asien, Arabien usw.) und Okzident für das Abendland (Europa) bergen diese Verbindung in sich. Eine
durch Zweiteilung der vier Grundrichtungen (Nord, Süd, Ost und West) erreichte Erweiterung in acht
gleichberechtigte Hauptrichtungen ist durch die Italiener des frühen Mittelalters und bald auch bei
allen romanischen Völkern zu finden.
Die acht Hauptwinde nach der
romanischen Bezeichnungsweise
Die vier Haupt- und die
vier Nebenwinde nach der
nordische Bezeichnungsweise
Tramontana Nord
Greco Nordost
Levante Ost
Scirocco Südost
Ostro Süd
Libeccio Südwest
Ponente West
Maestro Nordwest
Entsprechend der Herkunftsrichtung wurden den Winden acht eigene süditalienisch landschaftliche
Namen zugeteilt, wobei eine weitere Zweiteilung der Hauptwinde dann zum Gebrauch weiterer acht
Richtungen führte, welche als halbe Winde bezeichnet wurden. Diese acht halben Winde erhielten ihre
Namen aus den Wortverbindungen der acht Hauptwinde. (Grego - Tramontana usw.) Die weitere
Zweiteilung des halben Windes ergab den Viertelwind. Die Benennung geschah in Bezug auf den vollen
Wind, neben den diese lagen, so z. B. ergaben sich nach der französischen Benennung: Tramontana -
Grego für N 1/4 NE; Grego - Tramontana für NE 1/4 N; usw. Während durch das romanische
Übergewicht der Seefahrt langsam die romanische Zweiteilung des Winkels die Dreiteilung des Winkels
auch bei den nordischen Völkern Europas ersetze, so ergab sich doch ein Unterschied in der Form
dieser Zweiteilung. Die nordischen Seefahrer übernahmen zwar die Zweiteilung des Winkels, legten
dieser Teilung jedoch nur die Hauptrichtungen Nord, Ost, Süd, und West zugrunde. Die Benennung der
Zwischenrichtungen wurden dann aus der Zusammensetzung der Bezeichnungen der Hauptrichtungen
gebildet und bedeutete praktisch eine Umsetzung der Bezeichnungen vom zwölfteiligen
Horizontsystems auf das nun sechszehnteilige System (siehe obige Tabelle).
Das Prinzip dieser Umsetzung gestattete den nordischen Völkern der Strichrose noch 16 weitere
Richtungen hinzu zufügen, was bei der romanischen Teilung der Rose aufgrund der begrifflichen
Gestaltung der Viertelwinde nur umständlich möglich war. Auch sprachen die nordischen Völker nicht
von „Winden“, sondern vom „Strich“ (engl. Point) als erstmalig vom Wind unabhängige nautisch
definierte Maßeinheit einer für damalige Verhältnisse sehr genauen Richtungsanzeige. Diese
Richtungsanzeige wurde dann auf die Rose der Magnetkompasse übertragen. Die Zählweise dieser
Stricheinteilung vollzieht sich nach Form des folgenden Beispiels, l 1/2 Strich ergeben die Bezeichnung
NzO 1/2 0 oder N l 1/2 0, wobei 11,25° einem Strich und somit 90° acht Strich entsprechen. Diese
Einteilung der Kompassrose war noch bis Anfang des 20. Jahrhunderts in der Seefahrt gebräuchlich.

79
Erst zwischen den beiden Weltkriegen wurde diese durch die 360 Gradeinteilung der Kompassrose
ersetzt. Am Augenscheinlichten wird heute noch die Einteilung der Topplicht- und Seitenlichtsektoren
der Positionslaternen, die einen Sektor von 112,5° von voraus zu jeder Schiffseite bescheinen und
damit 10 Strichen entsprechen oder wenn wir an die Methoden der terrestrischen
Standortbestimmung der Vier - Strich - Peilung erinnert werden, wo einmal ein terrestrischer Fixpunkt
in 45° ( 4 Strich) und das andere Mal in 90° (8 Strich) gepeilt wird. So war durch den Aufgangspunkt der
Sonne am Osthorizont ein Bezug hergestellt, der vor Einführung des Magnetkompasses in die Nautik
am Tag und ohne Küstensicht der einzige war, den die Natur mit hinreichender Genauigkeit bot. Ein
Bezug für die Nacht bot sich auf der nördlichen Halbkugel in der Orientierung nach dem Nordstern.
Wie wir später noch sehen werden, war der astronomische Zufall einen hellen Fixpunkt in der
unmittelbaren Nähe des nördlichen Pols an der sich drehenden Himmelskugel zu haben, nicht nur
prägend für die Methodik der ersten europäischen Navigation, sondern für die Navigation aller
seefahrenden Völker, die aufgrund ihrer geographischen Lage den Nordstern sehen konnten. Die erste
analytische Verknüpfung eines Navigationssystems mit dem Kugelinertial wurde durch die Einführung
des Magnetkompasses realisiert. Hier wurde praktisch das in seinen Richtungen Nord, Ost, Süd und
West gegebene Horizontsystem des Beobachters an das ruhende Äquatorsystem der Erde gefesselt, in
dem der Kompass die Himmelsrichtungen theoretisch auf den Ortmeridian bezog. Mit anderen
Worten: Die Meridianrichtung Nord Süd des Inertials wurde auf das Navigationssystem übertragen.
Welche Schwierigkeiten dabei im Laufe der Jahrhunderte durch diese Art der „magnetischen
Meridianinstallation“ bewältigt werden mussten, beschreibt die Geschichte des Magnetkompasses.
Die seefahrenden Nationen nutzen praktisch ein Gerät, dessen physikalisches Verhalten zwar durch
Beobachten erkannt, jedoch dessen Wirkungsprinzip anfangs vollkommen unbekannt war. Auch nach
Kenntnis der magnetischen Gesetze vollzog sich das Bewältigen der Fehlerbestimmung und dessen
Korrektur als sehr schwierig. Das Vorhandensein und die Wirkung der magnetischen Erdpole konnte
ohne eine geographische Erweiterung des Weltbildes nicht ermittelt werden. Anderseits konnten aber
nur allein gestützt auf das richtungsbestimmenden Moment des Magnetkompasssystems keine weiten
Fernreisen zu unbekannten Küsten durchgeführt werden. Zum Steuern einer Richtung wurde der
missweisende Kurs benutzt, der erheblich vom rechtweisenden Kurs abweichen konnte.
Fernbezügliche Seepositionen oder vorher unbekannte Fixpunkte an fremder Küste mussten folglich
falsch interpretiert werden. Erst im Zusammenwirken der Richtungsbestimmung nach dem
Magnetkompass mit den Verfahren der autonomen Breitenbestimmung nach den Höhen des
Nordsterns bzw. später nach Meridianhöhen der Sonne und durch Anwendung der Koppelnavigation
auf Seekarten unter Berücksichtigung der geschätzten oder geloggten Schiffsgeschwindigkeit gelang
zuerst das Erkennen der Missweisung und wenn auch erheblich später dessen Berechnung. Der Grund
für diese Unvollkommenheit lag in der Unkenntnisse der Quelle der physikalischen Erscheinung des
Erdmagnetismus. Vorstellungen von einem im Norden liegendem großen Eisenberg prägten die
geographische Weltansicht des elften und zwölften Jahrhunderts. Wollte der mittelalterliche Pilot nun
die Genauigkeit des Magnetkompasses kontrollieren, bediente er sich der Peilung zum Polarstern. Hier
musste der Pilot die Azimutabweichungen kennen, die der Polarstern vom Pol hatte. Erst in genauer
Kenntnis dieser Abweichung gelang die Bestimmung der Missweisung des Kompasses. Doch für
Azimutkontrollen ist zumindest annähernd die Kenntnis der geographischen Breite notwendig.
Dennoch ist der Vorteil unverkennbar, dass mit Schaffung dieser praktischen Möglichkeit überhaupt
erst einmal ein Richtungsbezug in die Seefahrt eingeführt war, der auch ohne das Vorhandensein von
klaren Sichtverhältnissen funktionierte. Wenn zwischen zwei Orten der missweisende Kurs bekannt
ist, kann dieser bei schlechter Sicht mit hinreichender Genauigkeit erreicht werden, da die jährliche

80
Änderung der magnetischen Missweisung verhältnismäßig gering ausfällt. Um jedoch die magnetische
Kompassanzeige für ein Seenavigationssystem tauglich zu machen, musste dieser wirklich an das
Kugelinertial Erde gefesselt werden. Mit anderen Worten funktioniert der Magnetkompass nur wenn
das Navigationsobjekt sich wirklich frei um die fest geprägte Kompassrose drehen konnte. Um die
Messung des Gierwinkels (x' MgK -x mwK.) zu erreichen, wurde der Landkompass zum Seekompass
weiterentwickelt. Im Unterschied zum Landkompass, bei dem die Horizontbezeichnungen auf dem
Kompasskörper selbst beschriftet sind, wird beim Seekompass die richtungszeigende
Horizonteinteilung als Rose auf der missweisend zeigenden Nadel befestigt.
Landkompass Seekompass
Die Kompassrose wird frei um die auf den missweisenden Die Kompassrose ist auf Stabmagnete befestigt,
Meridian stehende Magnetnadel bewegt. so dass die Rose auf den magnetische Meridian
justiert ist.
Diese Konstruktionsart ist die erste wesentliche Voraussetzung der Fesselung der Magnetkompassrose
an den missweisenden Nordsüdmeridian. Die zweite wesentliche Voraussetzung wurde durch das
Prinzip der Kardanischen Aufhängung geschaffen. Zwei den Kompasskessel umgebene Ringe, die durch
jeweils zwei um 90° versetzte Gelenke miteinander verbunden sind, bewirken die Fesselung des im
inneren Ring befestigten Kompasskessels an die x, y, z Ebene und somit an die lotrechte z – Achse des
Kugelinertial. Hier wird die Wirkung der Gravitation der Erde genutzt, um die Aufhängung von
Gegenständen in der Waagerechte zu ermöglichen.
Kardanische Aufhängung eines Kompasses
Kompassrose
Lager
Lager

81
So haben wir es Flavio Gioja, einem aus Positano in der Nähe der Stadt Amalfi stammenden
Süditaliener, zu verdanken, dass der Magnetkompass seit (ca.) dem Jahre 1302 seine Rose auf der
Nadel trägt, während Cardanus wohl zwar nicht der unmittelbare Erfinder seiner nach ihm benannten
Aufhängung ist, wohl aber derjenige, der diese zuerst erwähnt hat. Nun geschah die Kontrolle der
Missweisung vornehmlich nach der Peilung zum Nordstern. Aus der Abhandlung zum Thema der
Präzession wissen wir, dass diese ein westliches Vorrücken des Frühlingspunktes um 50,27" in einem
Jahr bewirkt. So ändern sich die scheinbaren Örter der Fixsterne mit der Zeit. Der Polarstern ist so im
Laufe der Jahrtausende immer weiter an den Himmelsnordpol gerückt. Heute beträgt seine
Abweichung höchsten 70’. Steht der Nordstern rechts oder links vom Pol, so ist sein größtes Azimut
ablesbar. Folgende Tabelle gibt einen Überblick über die Änderung des Azimuts und der Deklination
von Polaris für Hamburg jeweils am 01. 01. eines Jahrhunderts, ( = 53° 33’ N; = 10° 00’ E)
Jahrhundert Deklination
des Nordsterns
Größtes Azimut
des Nordsterns
10. Jhdt. 83° 48' N 10,4°
11. Jhdt. 84° 21’ N 9,4°
12. Jhdt. 85° 54’ N 8,5°
13. Jhdt. 85° 28’ N 7.5°
14. Jhdt. 86° 01’ N 6,6°
15. Jhdt. 86° 34’ N 5,7°
16. Jhdt. 87° 09’ N 4,8°
17. Jhdt. 87° 41' N 3,8°
18. Jhdt. 88° 14’ N 2,9°
19. Jhdt. 88° 46,6’ N 2,0°
20. Jhdt. 89° 16,5’ N 1,2°
21. Jhdt. 89° 38,1’ N 1,1°
Die Tabelle zeigt deutlich, dass Polaris aufgrund dieser Auswirkungen im Verlaufe der Jahrhunderte
immer dichter an den Pol herangerückt ist. Erst das Bekanntsein dieser Tatsache und die Kenntnis der
genauen Breite machten die Berechnungen dieser Ausgangswerte damit die Kontrolle des
Magnetkompasses möglich.

82
Da die Bestimmung des Azimutes mittels astronomischer Tafel noch gänzlich unbekannt war, half man
sich durch Beobachtung der den Nordstern umgeben Sterne. So wurden im Mittelalter aus reiner
Beobachtung Regeln in Form einer menschlich aussehenden Polfigur hergeleitet, die es gestattete, den
Durchgang von Polaris durch den Meridian vorherzusagen und zu peilen.
So heißt es: „Steht der Nordstern in gerader N-S Linie zum Pol, stehen die Wächter im Nordosten, so
steht der Nordstern in gerader Richtung 3 ¼° unterhalb des Pols und zu dieser Zeit kannst du die
Abweichung deiner Magnetnadel feststellen". Als Wächtersterne werden die Sterne Kochab und
Pherkad im Sternbild „Kleiner Bär" bezeichnet.
Eine andere Erscheinung ist die stetige Abnahme der horizontalen Komponente des Magnetfeldes der
Erde. Die Werte der Missweisungen haben sich im Laufe der letzten Jahrhunderte verringert. Heute
finden wir an den Nord- und Ostseeküsten nur noch sehr geringe missweisende Werte. So zeigt die
Geschichte der Einführung des Magnetkompasses in die west- und nordeuropäische Nautik den ersten
erfolgreichen Versuch die Meridianlinie des Kugelinertial auf das Navigationssystem „Schiff' zu
beziehen Zu nennen sind an dieser Stelle die hervorragenden Beiträge u. a. des Naturforschers und
Wissenschaftlers Alexander von Humboldt (1769 bis 1859), des Direktors der Bremer
Steuermannsschule Arthur Breusing (1818 bis 1892) oder auch des Kapitäns Albert Schück (1833 bis
1918), die in makelloser Kleinarbeit den historischen Weg des Magnetkompasses nachzuvollziehen
suchten. Der Anfang des Weges dieser Erfindung ist in China suchen. Hier wurde die Magnetnadel
schon 1100 vor Beginn der Zeitrechnung zur Zeit der Tscheu -Dynastie zur Landorientierung genutzt.
Auf die frei schwimmende Magnetnadel wurde eine kleine Figur aufgesetzt, dessen Hand nach Süden
wies. Das gesamte Gerät fse – nan (Andeuter des Südens) bezeichnet, wurde in einem „Magnetwagen“
untergebracht und auch noch unter Anbringung von Verbesserungen (Aufhängung der Nadel an einem
seidenen Faden) bis ins 15. Jahrhundert hinein an Land benutzt. Unter der Tsin — Dynastie im 4
Jahrhundert u.Z. besuchten mit einem Magnetweiser ausgestattete chinesische Schiffe indische Häfen
und die Ostküste von Afrika. Es kann somit davon ausgegangen werden, dass der Magnetweiser schon
im 4 Jahrhundert u.Z. unter den arabischen und persischen Seefahren bekannt war. Obwohl die
während der Regierungszeit des Marcus Aurelius durchgeführten Reisen der Römer über Tunkin nach
China im 2. Jahrhundert u.Z. auf eine erste Verbindung zu China verweisen, bezeugen die Quellen doch
erst das 12 Jahrhundert u.Z. für die Übertragung des Magnetweisers in die europäischen Seefahrt des
Mittelmeeres. Entweder muss der Kompass eine rasante Beschleunigung seiner Verbreitung in Europa
Polaris
Kochab Pherkab
Stellung des Sternbildes „Kleiner Bär"
mit seinen Wächtersterne
im 15. Jahrhundert.
„Polaris" steht genau Nord,
wenn „Kochab" und „Pherkab"
Himmels-

83
erfahren haben oder er war, was eher der historischen Wahrscheinlichkeit entspricht, schon vor dem
12 Jahrhundert zumindest im Mittelmeerraum als Kursweiser bekannt, denn Anfang des 13.
Jahrhundert benutzen ihn nicht nur die Katalanen für ihre Fahrten zu den nordschottischen Inseln oder
zu der Westküste des tropischen Afrikas, sondern auch die Normannen auf ihren Fahrten zu den
Azoren, den Bracir - Inseln des Pizzigano usw. Schließlich beschreibt Vincenz van Beauvais im Jahre
1254 in seinem Naturspiegel das südliche und nördliche Ende der Magnetnadel mit den arabischen
Begriffen „zohron" und „aphon", ein Hinweis auf die Verbreitung der Nadel in Europa und in der
arabischen Welt. Gleichzeitig bestätigten diese Begriffe aber auch die schon erahnte arabische
Vermittlerrolle bei der Weitergabe der Bussole an die Europäer. Der Vorteil des Magnetkompasses
besteht zweifelsfrei in seiner Handhabung. Der Bezug zur Meridianlinie ist nach heute einfacher
Herausrechnung der magnetischen Missweisung sofort verfügbar.
Magnetkugelkompass für die Magnetkompassstand auf einem
Sportschifffahrt Seeschiff
Die Missweisung hat somit in einem Jahrhundert um ca. 12° abgenommen.
Jahr Mw
1875 − 17,5°
1900 − 15,0°
1925 − 11,0°
1950 − 7,0°
1975 − 5,5°

84
Der arktische Magnetpol wandert gegenwärtig um rund 7,5 km nach
Norden.
1831 hat der britische Naturforscher J. C. Ross die Position des arktischen magnetischen Hauptpols auf
der Position = 70° 15’ N; = 96° 45’ W verlässlich festgestellt. 1964 wurde durch kanadische Forscher
erneut die Position des Magnetpoles vermessen. Die ermittelten Koordinaten = 75° 30’ N; = 100°
30’ W bestätigten die stete Westdrift des Pols.
Wie umständlich das Herausrechnen der Missweisung noch bis zur Mitte des 19. Jahrhunderts
gestaltet war, kann mit Hilfe historischer Belege nachvollzogen werden. 1847 schreibt der Holländer
Pilaar im Band I S.192 seiner „Handleiting tot de Sturrmanskunst“: „ Die Rose des Kompasses ist bei uns meistens um den Mittelpunkt herum beweglich, um dadurch den Norden
der Rose mit dem wahren Norden in Übereinstimmung zu bringen. Dies wird
dadurch erreicht, dass man die Rose derart verschiebt, dass sie um ebenso
viel nach Osten und Westen den Norden der Rose weist, als die östliche und
westliche Abweichung beträgt.“
Dieses Verfahren hat natürlich einige Konsequenzen hinsichtlich der Genauigkeit des Kompasses. Gilt
der Wert der Verschiebung der Rose auf der Nadel doch nur für eine Seegegend und nicht universell
für die gesamte Fahrt und wird er’s recht dann problematisch, wenn z. B. ein auf östliche Ablenkung
justierter Kompass den Einfluss westlicher Ablenkung unterliegt. Die Beweglichkeit der Rose und damit
die verbundene Möglichkeit ständiger Nachjustierung setzten selbstverständlich die Kenntnis über die
Größe der entsprechenden Missweisung voraus. Während die vorherrschende Meinung vertreten
wird, Kolumbus sei der Entdecker der Missweisung überhaupt, so muss angemerkt werden, dass er sie
tatsächlich auf seiner ersten Fahrt nach Amerika im Jahr 1492 beobachtet hat. Aber ob es Kolumbus
war, der dieses Problem als Erster überhaupt entdeckte, gilt neuzeitlichen Forschungen zufolge, als
nicht gesichert. Vielmehr muss angenommen werden, dass Kolumbus die örtliche Verschiedenheit im
Atlantik feststellte. Gefundene Sonnenkompasse (Sonnenuhr mit Magnetnadel) mit eingravierter
östlicher Ablenkung aus den Jahren 1451 und 1456 belegen dieses Argument, dass zumindest an Land
die Kenntnis des Vorhandenseins der Missweisung in den verschiedenen Gegenden bekannt war.
Gerhard Mercartor beschrieb in einem Brief, 1546 an den Bischoff Granvella gerichtet, das Wesen der
magnetischen Missweisung, die im Wesentlichen mit den heutigen Erkenntnissen übereinstimmt.
Doch diese wissenschaftliche Erklärung der Deklination konnte sich in der seemännischen Praxis nicht
durchsetzen. Obwohl die wissenschaftlichen Erkenntnisse im Jahr 1539 durch Georg Joachim von
Lauchen (nach seiner Heimat gewöhnlich Rheticus genannt) unabhängig von Mercartor in einer
„Chorographie“ über die Herstellung von Schiffskompassen auch hier bereits formuliert waren, blieb
die Methode der festen Verschiebung der Rose auf der Magnetnadel uneingeschränkt erhalten. Eine
gute Übersicht über den Gebrauch der Magnetkompasse und den Ausgleich der magnetischen
Abweichung liefert uns der Engländer Robert Norman. In seinem Buch „The Newe Attractiue“, das
1581 zusammen mit einer Ergänzung „A Discourse of the Variation of the Compasse“ von William
Borough erschienen ist, wird die Verschiebung der Nadel als ganz gewöhnliche Praxis der
Instrumentenbauer beschrieben. Die Kompassbauer kannten zu jener Zeit die wissenschaftlichen
Zusammenhänge also nicht. In der Mitte des 16. Jahrhunderts wurde mit den unterschiedlichsten
Verschiebewinkeln gearbeitet. Die Magnetkompasse waren so immer auf den Ort ihrer Herstellung
geprägt. So existierten im 16. Jahrhundert die Kompasse mit folgenden Abweichungen:
2000 − 2,0°

85
Ort oder Gegend Abweichung
Levante (Sizilien, Genua, Venedig),
Mittelmeer Meridionalkompass*, keine Abweichung
gesamte südliche und westliche Ostsee
(Danzig, Sund von Dänemark), Belgien
(Flandern)
¾ bis 1 Strich östliche Abweichung
Östliche Ostsee bis Russland 2/3 Strich östliche Abweichung
St. Nicholas, Russland 1 ½ Strich östliche Abweichung
Sevilla, Lissabon, La Rochelle, Bordeaux,
Rouen, ganz England ½ Strich östliche Abweichung
*Meridionalkompasse sind Kompasse, bei der sich die Nadel, ein oval förmiger gebogener Drahtring,
direkt unter dem Süd- oder Nordpunkt des Kompasses befindet.
Wie aus der Quelle erkennbar, beträgt die Abweichung für die westliche Ostsee im 16. Jahrhundert ¾
bis 1 Strich östlich, das sind ca. 8° bis 11° östliche Missweisung gegenüber den heutigen Werten von
0° bis 0,5°. Auch zeigen die Werte eine Abnahme der Stärke der Deklination von Osten nach Westen.
Aufgrund dieser Tatsache nahm man lange Zeit an, der sogenannte natürliche Anfangsmeridian der
Längenzählung (0°) verlaufe durch die Insel St. Michael auf den Azoren, denn die damaligen
Beobachtungen zeigten auf den Azoren die keine Ablenkung. Diesen Umstand der „stetigen“ Ost- West
– Abnahme der Stärke der Missweisung für eine Längenberechnung zu nutzen, war ein kühner
Gedanke, der sich jedoch aufgrund des wirklichen Verlaufs der Linien gleicher Ortsmissweisung
unmöglich durchsetzen konnte. Insgesamt muss dennoch festgestellt bleiben, dass schon allein die
Nutzung der magnetischen Richtkraft in Form eines Seekompasses eine ungeahnte Verbesserung der
Seenavigation bedeuten musste. Auch wenn lange Zeit durch unbekannte bzw. ungenaue
Missweisungen ein Bezug zum astronomischen Nordrichtung fehlen musste, so ist die Bedeutung nicht
zu unterschätzen überhaupt erst einmal bei dunkler Nacht oder in offener und stürmischer See einen
unabhängigen Richtungsbezug zu haben. So wurde auf der missweisenden Loxodrome gesteuert, der
sich, wenn die Beschickungsfehler bekannt waren, durchaus der rechtweisenden Loxodrome anglich.
Besser noch, als über keine Verknüpfung zum Kugelinertial Erde, und damit über keinen Gierwinkel
(Kurs) zu verfügen.
Aber es existiert noch eine andere Form der richtungssuchenden Orientierung. Diese, obgleich
schwieriger zu handhaben, dennoch einen hervorragenden Platz einzunehmen gebührt. Dieser Platz
wurde für diese Form zwar nicht durch die Europäer reserviert, denn diese stützten sich in der
Orientierung auf ihren Großen Geographischen Entdeckungen hauptsächlich auf den zuvor im
Mittelmeerraum eingeführten Magnetkompass. Es handelt sich dabei um die Festlegung von

86
Orientierungsregeln nach den Sternen. Diese Regeln bestanden vor allem in der Verknüpfung von
geographischen Fixpunkten (Häfen, Inseln) mit dem scheinbaren Lauf der Sterne. Die arabische
Navigation kannte einen Sternenkompass, dessen Richtungen sich nach den Auf- und
Untergangspunkten der verschiedensten Sterne bezeichnete. Auch in der polynesischen Navigation
kennzeichnet der polynesische Begriff „Kaveinga" (Sternenweg) ein System der Richtungsfestlegung
nach den über bestimmte Inseln ziehenden Sternen. So hatten die Tonganer den Himmel in drei Teile
geteilt, die sie Fanakanga nannten Es gab einen südlichen, einen mittleren und einen nördlichen Teil
der Himmelskugel. Jeder Teil hatte seine besonders auffälligen Sternbilder. Im südlichen Teil war es
7ö/ö, das Kreuz des Südens und Lua a Tangana, das Sternbild der Zwillinge Castor und Pollux, während
im mittleren Teil das Sternbild Mataliki, die Plejaden und Matamemea^ der Mars vorherrschend
waren. Die Hawaiianer unterschieden zwischen Hokupaa (Fixsternen) und Hokuhele (Planeten). Die
Venus hieß Mamamalo wenn sie als Morgenstern und Naholoholo, wenn sie als Abendstern sichtbar
war. Auf anderen Inseln hieß die Venus auch Taurua. Die Plejaden hießen Mata Riki (kleine Augen), auf
manchen Inseln auch die „sieben kleinen Schwestern". Das Kreuz des Südens hieß Taua, der Orion Uru
Merenore, der Mars Fetia Uru „flammender Stern". Von den Gilbert-Inseln ist bekannt, dass dessen
Astronomen mit Hilfe der Plejaden jeden zehnten Tag einen bestimmten Standort an Land festlegten.
Mit Hilfe von Altares wurde dann die herbstliche Tag- und Nachtgleiche fixiert. Für die Durchführung
der Beobachtungen wurden Plattformen angewandt, dessen nach oben spitz zulaufende Steinfiguren
eine Höhe von 0,6 m bis 3,7 m hatten. Das Ritual dieser morgendlichen Beobachtung, das te kauti sollte
Kraft für die Liebe und für den Krieg verleihen. Auch befinden sich auf den Gilbert-Inseln zwei große
Steinkomplexe. Die eine Plattform liegt am Nordrand des Butaritari-Atolls. Sie stellt ein steinernes
Kanu mit einer Länge von 18 m dar und ist so aufgestellt, dass ein Sternenpfad zu den 264 km
entfernten nordwärts liegenden Marschall-Inseln erkennbar ist. Die zweite Plattform befindet sich im
Südteil der Gilbert-Insel. Er wird Te Atibu ni Borau genannt. Als E. V. Ward 1946 diese Plattform
untersuchte fand er dreizehn Korallenplatten unverändert vor. Er konnte dieser Anordnung noch
weitere vier Platten hinzufügen. Aus der bestehenden Anordnung dieser Steinplatten in Dreiergruppen
konnte man die Richtung zu den verschiedenen Inseln ablesen.
Die Wikinger benutzten einen sogenannten Sonnenkompass in Form einer gezackten Holzscheibe.
Doch dazu später.
Über sieben Jahrhunderte nun war der Magnetkompass Hauptorientierungsinstrument der
europäischen und der mit einigen Ausnahmen globalen Hochseefahrt. Als 1789 der italienische Arzt
und Naturforscher L. Galvanie (1737 bis 1798) die Elektrizität in tierischen Präparaten
(Froschschenkelversuch) entdeckte und auch als der italienische Physiker A. Volta (1745 bis 1827) im
Jahr 1796 seinen „Fundamentalversuch" anstellte, der den Beweis erbrachte, dass aus der
„Berührung" zweier Metalle Elektrizität entsteht, war nur eingeleitet, was sich als gesellschaftliche
Forderung mit dem Aufkommen des kapitalistischen Zeitalters formulierte. Die kapitalistische
Produktionsweise forderte ungeheure Mengen von Energie. Zuerst war es der Dampf, dann, als der
wissenschaftliche Zweig der Elektrizitätslehre geboren war, die Elektrizität. 1893 schließlich gelang es
dem kroatischen Physiker und Elektrotechniker die nach ihm benannten hochgespannten und
hochfrequenten Ströme zu erzeugen. Der Weg aus Brennstoffen mechanische Energie und aus dieser
elektrische Energie mittels Stromgeneratoren zu erzeugen, zu transportieren und letztendlich auch zu
speichern, fand selbstverständlich auch den Einzug in der Seefahrt. Augenscheinlich wird diese
navigatorische Nutzung der elektromagnetischen Gesetze für die Entwicklung des Kreiselkompasses.

87
Schon die Förderung der Entwicklung dieses Kreiselsystems, ist auch bezeichnend für alle folgenden
Entwicklungen weiterer technischer Navigations- und Ortungssysteme und schon daran erkennbar,
dass immer diese Systeme zuerst militärisch eingesetzt wurden. Die frühkapitalistische
Zielorientierung prägte die Seefahrt als Sicherungsfaktor zur Erhaltung und zum Ausbau der
wirtschaftlichen und damit auch der politischen Macht. Damit verbunden sind auch die militärisch
geprägten technischen Entwicklungen in der Seefahrt, die immer erst einen späteren Eingang in den
zivilen Bereich der Seefahrt gefunden haben. So wurde auch der Kreiselkompass zuerst militärisch
genutzt. Erst als alle anderen frühkapitalistisch orientierten Staaten mit einem Geltungsanspruch zur
See diese Entwicklung nach vollzogen hatten, es somit keinen erkennbaren militärischer Vorteil mehr
gab, wurde das System für die zivile Nutzung eingeführt. Nun gelingt das technische Kreiselprinzip nur
auf der Grundlage des umgekehrten Wegs. Aus dem Stromnetz des Schiffes wird die elektrische
Energie in mechanische Energie zurückverwandelt. Ein mit einer homogenen Metallmasse umgebener
Rotor wird durch elektrischen Strom in 20.000 Umdrehungen pro Minute versetzt. Nun machte der
französische Physiker Leon Foucault (1819 bis 1868) seinen Pendelversuch, erforschte also Erdrotation
und Kreiselbewegungen und benutzte dazu auch den ersten sich frei bewegenden Kreisel. Aber
schließlich gelang es erst ab 1908 einen für die Navigation brauchbaren Kursanzeiger auf dem
Wirkungsprinzip von Kreiselgesetzen zu entwickeln. Als 1908 bei der Vorbereitung einer
Tauchbootfahrt zum Nordpol Dr. Anschütz-Kämpe (1872 bis 1931) auf das Problem der Navigation in
geschlossenen stählernen Behältern (Unterseeboote) stieß, war die Foucaultsche Idee neu geboren.
Es musste ein richtungsweisendes System erdacht werden, dass in einem solchen Fahrzeug den Kurs
anzeigen konnte. In Zusammenarbeit mit dem bekannten Techniker Dr. Schuler begann Anschütz die
Erforschung von Kreiseln. Bedingt durch die Kreiselgesetze und durch dessen technische Umsetzung in
Form eines Kreiselkompasses wurde nun ein Richtungssystem entwickelt, dass seinen Erfolg nur dem
industriellen sowie wissenschaftlich - technischen Entwicklungsstand einer kapitalistischen
orientierten Gesellschaft verdankte. Die Grundlagen des technischen Kreisels unterscheiden den
richtungshaltenden und den richtungssuchenden Kreisel. Aus den Kreiselgesetzen ergibt sich, dass der
Kreisel das Bestreben hat, eine einmal eingenommene Lage im Raum beizubehalten. Dieses Bestreben
ist kein stabiles Gleichgewicht, sondern ein Beharrungsvermögen. Die Kreiselachse verbleibt solange
in ihrer augenblicklichen Lage, solange keine äußeren Kräfte auftreten und dauerhaft auf sie einwirken.
Ist sie aber einmal aus ihrer Lage hergebracht, kehrt sie nicht wieder die in alte Lage zurück, sondern
behält ihre neue Lage im Raum bei. Ein Kreisel mit drei uneingeschränkten Freiheitsgraden würde also
die Lage im Raum beibehalten auch wenn das Navigationsobjekt sich bewegt. So ein
richtungshaltender Kreisel findet Anwendung zur Stabilisierung von Waffen- Antennen- und anderen
Systemen und kann zur Steuerung z. B. von Raketen und Torpedos dienen. Zunächst wurde ein
Einkreiselkompass gebaut, d.h., das nordweisende System bestand aus einem Kreisel, dem Rotor eines
Drehstrommotors mit horizontaler Achse. Die Drehzahl betrug - wie heute noch - 20000 U/min. Er
hatte den Nachteil, dass infolge der ungünstigen Masseverteilung beim Schlingern des Schilfes ein
Schlingerfehler auftrat. Die Firma Anschütz und die nach den amerikanischen Elektroingenieurs und
Erfinders Eimer Ambrose Sperry, (1860-1930) benannte Firma Sperry Gyroscope Co., New York
entwickelten deshalb Kreisel-Kompasse mit drei Kreiseln, von denen zwei mechanisch so miteinander
gekoppelt sind, dass ihr resultierender Drallvektor mit der N-Richtung der Kompassrose
zusammenfällt. Die Drallachse des dritten Kreisels wird durch Fesselungsfedern in der N-Richtung der
Rose gehalten. Durch diese Verteilung der Kreisel wurde der Schlingerfehler aufgehoben. Da der
kräftefreie Kreisel raumstabil ist, und somit zum Koordinatensystem der Erde eine relative Bewegung
ausführt, auch treten durch die Reibung weitete äußere Kräfte auf, ist dieser Kreisel für eine

88
dauerhafte Kursmessung nicht geeignet. Ursache für die relative Bewegung des kräftefreien Kreisels in
Bezug auf das geographische Koordinatensystem ist die Eigenrotation der Erde. Um den Kreisel für
eine Kursmessung tauglich zu machen, wurde dieser an den Erdmeridian gefesselt. Das technische
Gelingen dieser Fesselung an Meridian ist erst das besondere Merkmal von sogenannten „schweren
Kreiseln", bei dem ein Freiheitsgrad eingeschränkt ist. Auf „schweren“ Kreiseln wird die immer
senkrecht stehende Gravitation der Erde, die der Richtung der z-Achse des ruhenden Kugelinertials
gleichkommt, genutzt. Dabei befinden sich die Kreiselrotoren in einer Schwimmkugel (Kreiselkugel).
Diese Schwimmkugel wird nun durch ein unter ihr befindliches Gewicht gezwungen, sich lotrecht auf
die z-Achse auszurichten. Sobald sich die Horizontalachse des Kreisels aus ihrer Ebene heraus
schwingen will, wird diese aufgrund der Erdanziehung veranlasst, dies nicht zu tun und in der
Horizontalen zu verbleiben. Die Kreiselkugel besteht in der Hauptachse aus zwei Kreiseln und dem
Flüssigkeitsdämpfer. Nur mit Hilfe des Flüssigkeitsdämpfers verwandeln sich ungedämpften
Schwingungen in gedämpfte Schwingungen, wodurch sich die Kreiselkugel in den Meridian schneller
einschwingen kann. Dabei liegt die N-S-Achse der Kreiselkugel in der Ebenen des Erdmeridians, wenn
der Kreiselkompass auf einem ruhenden Schiff arbeitet. Die Kreisel sind miteinander durch ein
Gestänge und mit der Kreiselkugel über Federn verbunden. Die Kreiselachsen befinden sich in einer
Ebene, die parallel zur Äquatorebene der Kreiselkugel liegt, und haben zwei Richtungen. Während eine
Richtung in der Nordostlinie liegt, liegt die andere Richtung in der Nordwestlinie der Kreiselkugel. Die
entstehenden Kreiseldralle kann man in Komponenten in Bezug auf die Nord-Süd- und Ost-West-Achse
der Kreiselkugel zerlegen. Die Komponenten der Dralle in Bezug auf die Ost-West-Achse sind einander
entgegen gerichtet und haben keinen Einfluss auf die Orientierung der Kreiselkugel im Azimut. Sie
stabilisieren die Kreiselkugel nur in Bezug auf die Nord-Süd-Achse. Die Komponenten der Dralle in
Bezug auf die Nord-Süd-Achse bewirkten die Kreiselkugel stabil im Raum zu halten. Aber infolge der
Erddrehung und des eigenen Pendelmomentes beginnt die Kreiselkugel zu präzessieren und beschreibt
elliptische ungedämpfte Schwingungen um den Erdmeridian. Gegen die Horizontalebene ist die N-S-
Achse so geneigt, dass das dabei entstehende Pendelmoment mg a sin 0 (in Bezug auf die Ost-West-
Achse) eine Präzession der Nord-Süd-Achse hervorruft, deren Geschwindigkeit in Wert und Richtung
der Vertikalkomponente der Umdrehungsgeschwindigkeit der Meridianebene des
Beobachtungspunktes gleich ist. Der Pendeleffekt entsteht durch die Schwerebeschleunigung der
Erde, wobei die Schwerkraft der Erde durch Herausnahme des Gewichtsschwerpunktes aus dem
Aufhängungspunkt der Kreiselkugel wirken kann. Aufgrund des zweiten Kreiselgesetzes schwingt der
Kreisel in den Meridian ein. Durch die Erdanziehung (F), einer senkrecht angreifenden Kraft also,
weicht der Kreisel horizontal aus. Es entsteht das Pendelmoment und der Kreisel ist an den Meridian
gefesselt. Er schwingt in den Meridian ein. Dieses Einschwingen erfolgt durch ungedämpfte Schwingen
und würde ca. 14 Tage dauern. Um dieses Einschwingen zu verkürzen, wird das Pendelmoment mit
Hilfe der Dämpfungseinrichtung abgeschwächt, so dass das Einschwingen nur noch 4 bis 6 Stunden
dauert. Die technische Entwicklung des Kreiselkompasses wurde im Deutschland so beschleunigt, dass
bereits 1912 Kreiselkompassanlagen im großen Stil in der kaiserlichen deutschen Marine betrieben
wurden. 1917 baute der Amerikaner Harry Z. Tanner den ersten, später von der Firma Sperry
hergestellten Zweikreisel-Kompass (Sperry-Kompass). Man war nun unabhängig vom
Magnetkompass, zudem war eine Fernübertragung von Richtungswinkels garantiert. So wurden noch
während des ersten Weltkrieges schon erste Kompassanlagen, Wendeanzeiger und im Ansatz auch
Selbststeueranlagen zuerst in der Fliegerei, aber auch an Bord von Kriegsschiffen eingesetzt. 1920 fahr
dann auch der erste Passagierdampfer mit einem Kreiselkompass zur See und 1927 schließlich baute
die Firma Anschütz ebenfalls einen Kreiselkompass mit zwei T-förmig zueinander angeordneten

89
Kreiseln. Heute befinden sich weltweit modifizierte Entwicklungen von Kreiselkursmesssystemen aus
den USA, Russland und Japan im bewährten Einsatz von Seeschiffen. In diesen Anlagen befinden sich
die beiden Kreisel in einer Kreiselkugel; diese schwimmt zur reibungsfreien Lagerung in einem
Kompasskessel, der mit einem Wasser-Glyzerin-Gemisch, durch einen Elektrolyten leitend gemacht,
gefüllt ist. Die Kreiselkugel trägt die 360°-Teilung und ist von einer in der Tragplatte (Deckplatte des
Kompasskessels) drehbar gelagerten Hüllkugel umgeben; die Zentrierung beider Kugeln wird mit Hilfe
einer oder zweier Blasspulen erreicht. Der Drehstrom zum Antrieb der Kreisel und der Wechselstrom
für die Blasspule werden über die Hüllkugel, der zwischen Hüll- und Kreiselkugel liegenden leitenden
Tragflüssigkeit der Kreiselkugel zugeführt. Ändert das Schiff den Kurs, so dreht sich der Kompasskessel
mit, da er mit dem Fahrzeug fest verbunden ist. Auch die Hüllkugel dreht sich zunächst mit, so dass
ihre Orientierung zur Kreiselkugel um den Kursänderungswinkel abweicht, der elektrisch gemessen
und durch einen Nachdrehmotor automatisch ausgeglichen wird. Auf jede Bewegung auf der Erdkugel,
also auch auf die Achsen des Kreisels im Kreiselkompass, wirkt die Corioliskraft als ablenkende Kraft,
die als Folge der Erdrotation in Erscheinung tritt. Diese Kraft wirkt senkrecht zur vorgegeben
Bewegungsrichtung eines Körpers, und zwar auf der Nordhalbkugel nach rechts, auf der Südhalbkugel
nach links. Dabei wird jedem bewegten Teilchen eine Beschleunigung (Coriolis-Beschleunigung) erteilt,
die von der Winkelgeschwindigkeit der Erde, der geographischen Breite und der Geschwindigkeit des
bewegten Teilchen (hier. das Schiff) abhängig ist Es ergibt sich als
Coriolis-Beschleunigung = 2 x w x sin (φ x v) (5),
wobei w die Winkelgeschwindigkeit der Erde, (φ die geographische Breie und v die Geschwindigkeit
des bewegten Teilchens (Schiffsgeschwindigkeit) ist. Die ablenkende Kraft der Erdrotation wirkt
senkrecht zu einer gegeben Bewegungsrichtung; sie vermag als Scheinkraft keine Arbeit zu leisten. Als
Folge ergibt sich für die Berechnung des Fahrtfehlers, dass jede horizontale Bewegungsrichtung (Kurs)
auf der Nordhalbkugel nach rechts, auf der Südhalbkugel nach links abgelenkt wird; die Ablenkung
wächst mit der geographischen Breite und mit der Geschwindigkeit des Navigationsobjektes (Schiff).
Mit Hilfe des Äquatorumfangs der Erde kann die Winkelgeschwindigkeit der Erde berechnet werden.
Die Winkelgeschwindigkeit beträgt, wie oben erläutert, 901,62 sm/h oder ~15°, da der Äquatorumfang
40 075,18 km, (21638,87 sm), umfasst. Dabei muss jedoch beachtet werden, dass diese
Winkelgeschwindigkeit nur für die geographische Breite 00°, also für den Äquator der Erde gilt. Für
andere Breiten gilt der mathematische Umstand, dass die Breitenparallelen in Richtung auf die Pole
mit dem Kosinus der geographischen Breite abnehmen. Die mathematische Beziehung (5) trägt diesem
mathematischen Prinzip Rechnung, denn es gilt für die Berechnung des Umfang eines
Breitenparalleles:
U = 2 r x cos (p x ?t (6) r sei der Radius
des betreffenden Breitenparalleles , so gilt U = 2rx7c (7)
Setzt man nun in die Formeln (6) und (7) die Werte der Winkelgeschwindigkeit der Erde ein, so gilt: w'
= w x cos φ
und man erhält die Winkelgeschwindigkeit der betreffenden Breite. Sie beträgt für

90
Auf dem fahrenden Schiff greifen dann Kräfte an der Drallachse der Kreisel an, deren Vektor bei Fahrt
voraus stets nach Backbord gerichtet und der Meridiankomponente der Fahrt proportional ist. Die
Resultierende dieser beiden Vektoren bestimmt die vom Kreiselkompass angezeigte Nordrichtung, die
von der geografischen Nordrichtung abweicht. Diese Abweichung ist der Fahrtfehler, der sich aus der
geografischen Breite des Schiffsortes und den Bewegungselementen des Schiffes (Geschwindigkeit
und Kurs) berechnen lässt. Wenn sich der Kreiselkompass auf einem ruhenden Schiff befindet, stellt
sich die Kreiselkugel also unter dem Einfluss des Pendeleffektes und der 24stündigen Erddrehung mit
ihrer Nord-Süd-Achse in die Ebene der wahren Nordrichtung ein. Bei einem fahrenden Schiff mit den
Elementen des Kurses (KrK) und der Geschwindigkeit (v) ist die Summe der linearen Geschwindigkeiten
der Schiffsbewegung in Bezug auf den Erdmittelpunkt durch den Vektor Vs bestimmt. In allen Fällen,
in denen der Schiffskurs (KrK) nicht gleich 090° und 270° ist, stellt der Vektor Vg die geometrische
Summe folgender beider Vektoren dar:
1.) die lineare Geschwindigkeit Vs des Punktes auf der Erde, in dem sich im gegeben Moment das Schiff
befindet und
2.) die Fahrtgeschwindigkeit v des Schiffes
Dabei bildet der Vektor v, (aus Vs = Ve + v) mit dem gleichzeitig parallel laufenden zweiten Vektor v.
den Winkel 8. Beim Kurs 90° bzw. 270° stellt der Vektor Vs eine algebraische Summe Vs = Ve v dar und
fallt in seiner Richtung mit dem zweiten parallel laufenden Vektor Ve zusammen. Deswegen wirkt sich
eine Betragsänderung der Summe der Schiffsgeschwindigkeiten bei Fahrt nach Westen bzw. nach
Osten nur auf den Betrag des Richtmomentes der Kreiselkugel aus: Bei Bewegung des Schiffes nach
Osten ist das Richtmoment kleiner vs = ve - v. Bei Bewegung des Schiffes nach Westen ist das
Richtmoment größer vs = ve + v. Die scheinbare Nordrichtung Ns (Drehbewegung des Schiffes um den
Erdmittelpunkt) und folglich auch der Pol P(vs) (dabei entstehendes Wiederherstellungsmoment), zu
dem die Kreiselkugel präzessiert, weicht vom Pol P(ve) -Erddrehung- um denselben Winkel δ ab.
Infolgedessen weicht auch der Wert des Schiffskurses, den der Kompass anzeigt (KrK), vom wahren
Wert des Kurses (rwK) ebenfalls um den Winkel δ ab. (Still vorausgesetzt dabei sei, dass der
Aufstellungsfehler des Kreiseskompasses, das KrA, gleich Null ist.) Da die Ursache für die Ablenkung
der Kreiselkugel aus der wahren Nordrichtung die Fahrtgeschwindigkeit des Schiffes ist, wird die
beschriebene Erscheinung mit Fahrtfehler und der Winkel δ mit Fahrtfehlerkompensation bezeichnet.
Der Wert des Fahrtfehlers kann ausgerechnet und mit Hilfe des am Kreiselkompass befindlichen
Deltagerätes kompensiert werden. Dazu wird das Dreieck ACD mit dem Winkel δ eingeführt.
Breite w 0° 900,0 kn 15° 869,3 kn 30° 779,4 kn 45° 636,4 kn 60° 450,0 kn 75° 232,9 kn 90° 0,0 kn

91
KrK v v
KrK v
AD
CD
(kn)0(kn)
kn
sincos
costan
+==
V0 ist die Umdrehung eines Bahnpunktes auf der Erdoberfläche ~ 900 sm/h oder 15°/h
Wie aus der Formel ersichtlich, hängt die Größe des Fahrtfehlers von der Fahrtgeschwindigkeit des
Schiffes (v), der geographischen Breite (φ) und dem Schiffskurs (KrK) ab. Bei gegebener (konstanter)
Breite und der Fahrtgeschwindigkeit des Schiffes ist er nur vom Wert des Kurses abhängig (cos KrK und
sin KrK), d. h. er hat halbkreisförmigen Charakter. Deswegen wurde der Konstruktion der
mechanischen Einrichtung des Deltagerätes am Kreiselkompass eine Scheibe zugrunde gelegt, die so
angeordnet ist, dass sie von der Drehachse der Hüllkugel weg längs der Mittschiffsrichtung des Schiffes
verschoben werden kann. Da der Fahrtfehler universell für alle Kreiselkompassanlagen gültig ist, kann
er nach einer Tabelle korrigiert oder mit Hilfe eines kurz vor dem zweiten „Weltkrieg entwickelten
Gerätes automatisch kompensiert werden. Beschleunigungsfehler treten bei Geschwindigkeits- und
Richtungsänderungen des Schiffes auf. Diese werden nach einem Satz von Schuler unwirksam, wenn
die Schwingungsdauer des Kreiselkompasssystems gleich 84,4 min gemacht wird. Dennoch wird durch
die Wirkung von Beschleunigungskräften bei Kurs- und Fahrtänderungen des Schiffes eine
Manöverbeschleunigung und bei Wirkung Beschleunigungskräften bei Seegang eine
Seegangsbeschleunigung hervorgerufen Weiter kann ein Anzeige- oder Aufstellungsfehler auftreten,
der Kreisel-Aufstellungsfehler, kurz das Kreisel-A genannt. Es ist ortsunabhängig konstant mit gleichem
Vorzeichen, wird in längeren Zeitabständen durch Peilen von Gestirnen o. a. Objekten mit bekanntem
Azimut bestimmt, durch Verdrehen des Kompasskessels bzw. -gehäuses kompensiert und kann dann
an einer Skale abgelesen werden. Der Aufstellungsfehler ist Null, wenn der äußere Peilring am
Peilkompass (000°-180° Linie) mit der Mittschiffslinie übereinstimmt. Die Anzeige des
Mutterkreiselkompasses kann elektrisch durch Drehmelder auf verschiedene (bei Anlagen mit
Übertragungsverstärkern bis über 30) Tochter- oder Fernkompasse, z. B. auf dem Peildeck und in den
Brückennocks (Peiltöchter), im Kartenhaus, in der Selbststeueranlage und im Koppeltisch (Kurstöchter)
übertragen werden; ferner lässt sich das Radargerät zur Nordstabilisierung über Drehmelder mit dem
Mutterkompass verbinden. Das Kr-A kann sich deshalb auch in einem Übertragungsfehler vom
Mutterkreisel zu den Töchtern. Vor dem Auslaufen ist deshalb ein Kompassvergleich zwischen dem
Mutterkompass und den Töchtern (auch Tochter am Funkpeiler und am Radargerät) durchzuführen.
Eine Fernanzeige gibt es auch bei manchen besonderen Magnetkompassen. Steht der
Magnetkompass. auf dem Peildeck, so wird seine Anzeige mittels eines Spiegelsystems oder
fotoelektrisch im Ruderhaus sichtbar gemacht (Reflektions- bzw. Projektionskompass). Der
Mutterkreiselkompass wird häufig in einem schlingerarmen Raum mittschiffs im Schiffsrumpf
untergebracht. Moderne luftgekühlte Zweikreiselkompasse, wie die der Firma Anschütz und Plath
(Deutschland) sowie die der britischen Finnen Brown und Sperry, können aber auch auf der Brücke
aufgestellt werden. Viele Kreiselkompasse übertragen zur Kontrolle des gesteuerten Kurses mittels
eines Drehmeldergebers den Kurswinkel ständig auf einen Kursschreiber (Tochter-Kompass), der ihn
in Verbindung mit einer Uhr unabhängig von der Geschwindigkeit des Schiffes auf einem Papierstreifen
aufzeichnet. Die Anzeigegenauigkeit heutiger Kreisel-Kompasse liegt etwa bei =1= 1°, bei sehr guten
Geräten sogar darunter. Die notwendige Voraussetzung dafür ist jedoch der Gebrauch von elektrischer

92
Energie. Ein Ausfall der autonomen Stromversorgung an Bord von Seeschiffen, vor allen hervorgerufen
durch Notsituationen, bedeutet auf modernen Schiffen eine erhebliche Einschränkung im Prozess der
Schiffsführung hinnehmen zu müssen. So wird heute noch durch den Einbau eines Magnetkompasses
versucht, diese Einschränkung auszugleichen. Wir konnten also sehen, wie die technische Entwicklung
mit der Einführung des Kreiselkompasses auf Navigationsobjekten ein weiteres System integrierte, um
die Ebene der Erdoberfläche als Bezug zur Messung von Gierwinkeln (Kurswinkel) zu nutzen. Mit
Kenntnis der Kreiselgesetze wurde unter Fesselung an die Gravitation der Erde somit ein Prinzip
verwirklicht, dass weitgehend die Kreiselkugel zu einem Inertial macht, wenn die Systemfehler in
annehmbaren Genauigkeitsgrenzen herausgerechnet werden. Das Kreiselsystem kann unter
Beachtung der Korrekturen der Beschleunigungs- und Fahrtfehler als streng lineares System gelten,
indem keine Beschleunigungen bzw. Scheinkräfte auftreten sollen. Während richtungshaltende Kreisel
zur Gewinnung von Lagewinkel verwendet werden, war es in der technischen mechanischen
Entwicklung nicht mehr weit, ein wirkliches Inertialsystem an Bord einzuführen. Da es unter
Berücksichtigung der zweimaligen Integration der gemessenen Beschleunigung möglich ist, eine
Ortbestimmung durchzuführen, wenn als Ausgangsbedingungen der Anfangsort (Position A in
geographischer Länge und Breite) die Anfangsgeschwindigkeit (die auch den Wert „Null" annehmen
kann) bekannt sind, wird eine Methodik der Navigation in die Seefahrt eingeführt, die sich unter dem
Begriff „Trägheitsnavigation" vereinigt.
Die Errichtung von Kursmesssystemen auf Navigationsobjekten muss somit als eine erste Verknüpfung
des Navigationssystem S9 mit dem Inertialsystem S verstanden werden. Es liegt hier die Verknüpfung
der x - y Ebene des ruhenden Kugelinertials mit der x' - y' - Ebene des Navigationsobjektes vor. Die
Bezugsebene ist die auf der Kugeloberfläche liegende Meridianlinie, die nun als Referenzlinie der
azimutalen und horizontorientierten Verbindungslinie zwischen dem Nord- und dem Südpunkt der
Erdoberfläche dient. Das astronomische Stundenwinkelsystem des Systems S ist somit mit dem
Horizontsystem des Systems S1 verknüpft. Diese Verknüpfung allein lässt aber noch keine
Koordinatenbestimmung bezüglich S zu, sondern sagt nur etwas zwischen der Beziehung S und y auf
der Meridianbezugslinie aus. Diese Beziehung gestaltet sich in der Richtung zwischen einem
Abfahrtsort (A) und einem Bestimmungsort (B), wobei die Richtungen auf der Kugeloberfläche von S
mit der Richtungsanzeige von S' übereinstimmen soll. Diese Beziehung des Winkelbezuges zwischen
dem Meridian und der Kielrichtung eines Schiffes gilt als Kursbezug und muss als relativer
Navigationsprozess bezüglich dem Navigationssystem S' verstanden werden und ist eine relative
Beziehung. Somit drückt sich der Kurswinkel a als Richtungswinkel der Verbindung der Orte A und B
und dem Meridian auf der Oberfläche des Kugelinertials aus, der in analytischer Form an den
Kursmesssystemen der Navigationssysteme S' anliegt. Der Kompass ist somit ein Instrument der
Messung von Richtungswinkeln. Die Genauigkeit der Messung lässt bezüglich dem Meridian nur Werte
bis 0,25° zu. Wird jedoch das Grad auf die angenommene Kugeloberfläche der Erde als Längenmaß
ausgedrückt, so stellt das Unvermögen genauere Messdaten als kleiner 0,25° über Kompassanlagen zu
gewinnen, eine Einschränkung gegenüber berechneter Richtungswinkel auf dem Großkreis dar. Wir
werden später in der Betrachtung der Rolle der Azimutberechnungen zu Gestirnen noch sehen, mit
welcher anderen Methodik verfahren wird, um dieses Unvermögen der Messung von Richtungswinkel
kleiner 0,25° auszugleichen. Eine zweite Beziehung ergibt sich, wenn die z - Achse des Kugelinertials
mit der z’ — Achse des Navigationssystems verknüpft wird. Hier ist die Tiefenmessung oder auch
Tiefenortung gemeint. Wir haben bereits gesehen, wie kompliziert sich die Berechnungen eines Geoids
gestalten, um die Erdoberfläche allumfassend beschreiben zu können. Das Geoid soll die Grundlage

93
für die Festlegung eines mittleren Meeresniveaus und somit die Bezugsfläche des theoretischen
Kugelinertials S liefern. Die Feststellung dieser Werte basiert auf Vermessung von Wassertiefen mit
Hilfe von Lotungen. Die Lotungen müssen mit der geographischen Position gekoppelt sein, sonst sind
sie bezüglich einer Erddarstellung wertlos. Der Verlauf der x-Achse mit dem Anfangspunkt einer
gegebenen geographischen Koordinatenposition auf der Meeresoberfläche wird durch das
Durchstoßen dieser Achse durch den Meeresgrund gekennzeichnet. Die Strecke der x-Achse des
Systems S (Erdradius) gliedert sich somit in die zwei Streckenabschnitte vom Erdmittelpunkt bis
Meeresgrund und vom Meeresgrund bis zur Meeresoberfläche (Meerestiefe). Der Streckenabschnitt
Erdmittepunkt bis Meeresgrund soll nun zur Berechnung des Erdellipsoids als absolute Größe erfasst
werden. Diese absolute Erfassung ist nur möglich, wenn das relative Verhalten des submarinen
Bereiches der Hydrosphäre bekannt ist. Um das Bodenrelief zu erfassen, müssen somit zuerst die
ozeanlogischen Prozesse bekannt sein. Eine Modifizierung des Meeresgrundreliefs ist somit nur über
das Meerwasser und dessen Verhalten durchführbar. Die verschieden Ursachen der Veränderung von
Wassertiefen nicht nur zu kennen, sondern auch zu berechnen, dient also nicht nur der Untersuchung
des dynamischen Verhaltens des Meerwassers, sondern auch der absoluten Erfassung der
Erdoberfläche. Die Grundbedingungen für das dynamische Verhaltens des Meeres werden durch die
Existenz der die Erdkugel beeinflussenden physikalischen Gesetze hervorgerufen. Alle
beeinflussenden Faktoren mit ihren Gesetzmäßigkeiten in und über dem Wasser können als Prozess
der fortlaufenden Wandlung der Naturbedingungen aufgefasst werden. Die Erde ist ein Planet fern
vom Gleichgewicht. Das wechselhafte Einwirken der aus dem Kosmos kommenden Einstrahlung, das
alle Bereiche des Spektrum elektromagnetischer Wellen, einschließlich der von der Sonne
ausgehenden Strahlung umfasst, die ständige vorhandene Eigengravitation der Erde und die
Wirkungen der von anderen Himmelkörpern ausgehenden Gravitationskräften und nicht zuletzt die
Erdrotation bestimmen die ständigen Wechselbeziehungen des Klimas und Wetters einerseits und der
Meeresgezeiten andererseits. Dieses in seiner Gesamtheit zu erfassende Verhalten des Meeres ist
jedoch nur ein Teil, dass im Zusammenhang mit der Erde als Ganzes betrachtet und verstanden werden
muss. Die Erde als integriertes Ganzes, als lebenden Planeten zu betrachten, wird im
wissenschaftlichen Vorstellung als „Gaia - Hypothese" formuliert. Die Matrix gleicht einem strukturell
offenen lebenden System, welches jedoch organisatorisch geschlossen ist und sich durch
Selbstorganisation nach außen in einer ganzheitlichen Harmonie hält. Werden nun in einem noch
folgendem Abschnitt diese Systeme des Wetters, Klimas und der Gezeiten untersucht, so ist zu
verstehen, dass eines vom anderen nicht getrennt betrachtet werden kann. Doch dazu an späterer
Stelle. Die systematische Erforschung des Meeresbodens setzte um die Mitte des 19. Jahrhunderts ein.
Die gesellschaftliche Notwendigkeit nach Kommunikation über die Kontinente hinweg, machten das
Verlegen von transozeanischen Seekabeln notwendig. Die Vorarbeiten für diese Vorhaben verlangten
nach differenzierteren Kenntnissen der Bodenreliefs der Weltmeere. 1854 veröffentlichte der
Amerikaner Maury die erste Tiefenkarte, die den Atlantik zwischen den Breiteparallelen 10°S und 52°
N umfasste. Im gleichen Jahr wurde auch das erste brauchbare Tiefseelot durch den US - Seeoffizier
Brooke gebaut, welches zur Erforschung der Meerestiefen, einer für ein Unterseekabel notwendigen
Trasse zwischen Irland und Neufundland eingesetzt wurde. Auch wenn das Vermessen großer
Meerestiefen nur mit erheblichen technischen Aufwand bewältigt werden kann, so war doch bis in die
Antike zurückgreifend das Vermessen der Küstengewässer ständige Aufgabe der nautisch
interessierten Küstenstaaten der Welt. Hilfsmittel, wie der Peilstock bzw. das Handlot werden heute
noch für die Vermessung von Tiefenbereiche bis 100 m verwendet. Erst mit der Herstellung längerer
Lotleinen und spezieller Lotmaschinen konnten größere Tiefenmessungen bewältigt werden. Zur

94
Zeit der Grossen Geographischen Entdeckungen waren Lotleinen um 200 m bis 400 m in Gebrauch.
Aber erst 1874 gelang dem amerikanischem Schiff „Tuscarora" erstmalig im Nordwest — Pazifik in der
Nähe der Inselgruppen der Marianen und Kurilen Meerestiefen über 8000 m zu vermessen. Und erst
die internationale Zusammenarbeit mehrerer Staaten machten es möglich, eine Tiefenkarte des
gesamten Weltmeeres zu schaffen, die alle wissenschaftlichen Anforderungen erfüllen konnte. So
beschloss der VII. Internationale Geographische Kongress, der 1899 in Berlin stattfand, die Gestaltung
der „General Bathymetric Chart of the Ocean" (GEBCO). 1904 schließlich lag die erste Ausgabe der
GEBCO vor. Mit Hilfe von 18 400 Lotungen wurde sechzehn Blätter im Maßstab l : 10 000 000 und acht
Polblätter im Maßstab l : 3 100 000 angefertigt. In den nachfolgenden Jahres wurde dieses Verzeichnis
immer wieder modifiziert, so dass zwischen 1912 und 1927 eine zweite Auflage mit insgesamt 29 000
Lotungen veröffentlicht werden konnte. Eine dritte Auflage mit insgesamt 370 000 Lotungen wurde in
der Zeit von 1932 bis 1955 herausgegeben. Das Internationale Hydrographische Büro (IHB) in Monaco
zeichnet seitdem für die Herausgabe verantwortlich. Ein entscheidender revolutionärer Fortschritt
wurde mit Einführung des durch Behn im Jahre 1913 entwickelten Echolotes erreicht. Schon nach zehn
Jahren waren die Echolote so verbessert, dass ein erstes Echolotprofil des Nordatlantiks erstellt
werden konnte. Die systematische Tiefenvermessung konnte so auch in größeren Seegebieten in
Angriff genommen werden. 1926 gelang es dem deutschen Kreuzer ,,Emden“ beim Überqueren des
Philippinengrabens eine Wassertiefe auf 10 400 m zu korrigieren. Tiefenmessungen von 10.000 m
waren nun keine Seltenheit mehr. Als dann 1946 das Echolot eine Weiterentwicklung zum
Echographen erfuhr, waren wegen der nun graphischen Darstellungsanalyse neue Möglichkeiten zur
Vermessung eröffnet. Dennoch muss nach wie vor festgestellt werden, dass der Meeresboden der am
wenigsten bekannte Erdraum ist. Obwohl das Meeresrelief hinsichtlich der submarinen Großformen
bekannt ist, liegt eine lückenlose Kartographie der Meeresoberfläche gerade in größeren Tiefen über
1000 m noch nicht vor. Sollte dieses Ziel erreicht werden, so müssten 20 Jahre lang zwanzig
Vermessungsschiffe ständig und zielbewusst eingesetzt werden. Ein am Schiffsboden angebrachter
magnetostriktiver Schwinger sendet in rascher Folge Ultraschallimpulse von 20 bis 30 kHz aus, die vom
Meeresboden oder einem Hindernis reflektiert werden und im ebenfalls am Schiffsboden
angebrachten Empfänger oder in denselben Schwinger (Einschwingerprinzip) zurückgelangen. Die
Schallaufzeit im Meereswasser beträgt 1500 m/s bei 20°C Wassertemperatur und bei einem Salzgehalt
von 20 %. Da die Wassertiefe sich proportional der gemessenen Schalllaufzeit verhält, kann das
Schallimpulssignal in elektrische Spannung umgewandelt werden. Die in einem Anzeigegerät
untergebrachte kreisförmige Meterskale zeigt durch Leuchtblitze die Größe der elektrischen Spannung
und damit die Wassertiefe an. Neben diesen Lichtzeigerlot kann die Anzeige auch digital durch Ziffern
in Meter erfolgen. Soll das Bodenprofil graphisch zur Anzeige gelangen, wird die durch eine
Schreibnadel geführte Spannung elektrochemisch das auf einer Rolle laufende Funkenregisterpapier
an der entsprechenden Stelle schwärzen. Neben den der Navigation dienenden Echoloten mit einem
Messbereich bis 2000 m, wurden auch Vermessungsecholote mit einem Messbereich bis 5000 m
entwickelt. Tiefseeecholote können sogar Wassertiefen bis 12000 Meter erfassen. Für die Vermessung
besonders flach gehender Küstenabschnitte, für Fahrwasser u. ä. kommt die Anwendung von
Flachwasserecholoten bis 30 m Messbereich (Dezimeter Genauigkeit) zur Anwendung. Spezielle für die
Fischerei entwickelte Vertikalecholote mit 20 Messbereichen oder Horizontal - Vertikalecholote,
dessen Schwinger um einen einstellbaren Winkel gekippt und geschwenkt werden kann, dient der
Erfassung von Fischschwärmen bis 2000 m Entfernung und anderen Unterwasserhindernissen. Die als
Fischlupe bezeichnete und an das Echolot angeschlossenen Kathodenstrahlröhre gestattet sogar die
noch genauerer Ortung von Fischschwärmen in Tiefenbereichen von 20 oder 100 Meter. Durch

95
lupenartige Spreizung des Tiefenbereiches werden selbst große Einzelfische und die Art des
Fischschwarmes aufgrund des spezifischen Echos erkennbar. Diese Arten der Echolotanlagen lassen
sich selbstverständlich mit dem Prinzip der Dopplerverschiebung koppeln, so dass auch die Fahrt des
Schiffes über dem Meeresgrund erkennbar wird (siehe Fahrtmessanlagen).
Soll die absolute Meerestiefe erfasst werden, ist von einem Referenznull auszugehen. Dabei muss die
Tiefenbezugsfläche mit der Höhenbezugsfläche identisch sein. In den Seekarten ist dieses nicht der
Fall, weil sich die Höhenangaben meistens auf Normalnull und die Tiefenangaben auf Mittelwasser
oder in Tidengewässern auf das mittlere Springniedrigwasser beziehen. Es kann der internationalen
Kartographie schon wegen den nationalen Besonderheiten der Küstengewässer nicht gelingen, ein
einheitliches Seekartennull einzuführen. Die unterschiedlichen Erdellipsoide können diesen Umstand
nicht Rechnung tragen, wenn auf absolute Genauigkeit nicht verzichtet werden soll. Gelotete Tiefen
sind somit immer entsprechend dem korrespondieren Wasserständen auf Kartennull zu reduzieren.
Weiterhin ist die Genauigkeit des geloteten Tiefenwertes von Lotungsverfahren abhängig. Bei
Lotleinen besteht die Gefahr der Durchkrümmung. Bei Echolotungen ist die Eichung der Geräte auf die
entsprechen Schallausbreitungsbedingungen in einem betreffenden Seegebiet entscheidend für den
Genauigkeitsgewinn. Aufgrund der unterschiedlichen Dichte und Temperatur in unterschiedlichen
Tiefen eines Meeresgebietes wird eine unterschiedliche Laufzeitmessung des Schalls zu beobachten
sein, die durch ein am Gerät einstellten Mittelwert (meistens l 500 m/s) nicht ausgeglichen werden
kann. Ein genaues Ergebnis wird erst durch die entsprechend der Schauausbreitungsbedingungen in
den einzelnen Wasserschichten vorzufindenden Korrekturwerte erreicht. Im Allgemeinen ist jedoch zu
erwarten, dass die Tiefenangaben in den Seekarten bis 10 Meter auf 0,1 Meter, die von 10 bis 50 Meter
auf l Meter genau angeben werden können. Erst bei Wassertiefen über 3000 Meter muss ein
Toleranzwert von 10 bis 20 Meter angesetzt werden. Für Navigationsobjekte, die ausschließlich auf
der Meereswasseroberfläche manövrieren, sind diese Genauigkeitsangaben der Tiefen hinsichtlich der
Navigation in Küstennähe als völlig ausreichend anzusehen. Lediglich bei der Bewältigung von
Aufgaben im Meer bzw. am oder im Meeresgrund werden genauere Tiefenangaben in Bezug auf den
relativen Wasserstand vor Ort gemessen, auf das geltende Seekartenull oder Landeskartennull
reduziert und als spezielle Lotungskarte dargestellt. Somit stellt die durch Messung gewonnene
Wassertiefe eine Vermessung des Abschnitts der z-Achse des Kugelinertials einer geographischen
Position dar. So wurden schon vor Einführung des Echolot Verfahrens für die Zeit der
Küstenvermessungen im 18. und 19. Jahrhundert erstaunliche Messergebnisse erreicht. Die Abbildung
von Lottiefen in Form von Lotreihen auf einer Seekarte ohne Zeitbezug zu verwirklichen, konnte nur
erreicht werden, indem zwei geographische Positionen durch eine Leine verbunden worden sind. Man
führ mit einem Lotboot von einem vermessenden Punkt der Strandlinie in Richtung See und spannte
zwischen den beiden so entstandenen Position eine Leine, die in Abschnitten vermessen war.
Entsprechend den Leinenabschnitten wurden die Lotungen durchgeführt und notiert, um später in die
Seekarte übertragen zu werden. Je häufiger man die Methode anwandte, umso mehr Lotlinien kamen
zustande. So wurde langsam die gesamte Tiefenvermessung an der Küste und im Küstenvorfeld, in und
um Fahrwasserstraßen, Schifffahrtswegen und Meeresengen realisiert. Die Zeitspanne der
Anwendung des Handlotverfahren ist gegenüber der Anwendung des Schallaufzeitverfahren eine sehr
geringe, und dennoch wurden allein mit der Handlotmethode ungeheure große Meeresgebiete
vermessen. Erst in heutiger Zeit haben moderne Schallechoanlagen das Handlot weitgehendst
verdrängt. Erwähnt werden muss noch die auf Erfahrungswerte beruhende Schätzung von
Wassertiefen in Küstennähe. Diese Form der Schätzung von Tiefen trifft vor allen für die

96
Kleinschifffahrt zu, die außerhalb von bezeichneten Fahrwassern in unmittelbarer Nähe flacher
Küstengewässer oder anderer Untiefen manövrieren wollen. An Hand der Sichtigkeit des Meerwasser,
der Wasserfärbung, der sich bildenden Wellenformen auf flachen Gewässern gegenüber tieferen ist
hier eine vorsichtige Schätzung möglich. Um hier weiteres nachzulesen, sei der Abschnitt
„Orientierungsräume der Seenavigation und ihre Eigenschaften"' empfohlen.
Nun ist die Form der Tiefenlotung von Bord aus nur ein Aspekt im Navigationsprozess. Ein anderer ist
das Feststellen der Distanz und der Schiffsgeschwindigkeit von Bord eines Schiffes aus. An dieser Stelle
darf das Wort „Gissung" nicht unerwähnt bleiben. Wenn ein Navigationslehrer namens Brarens 1818
schreibt.' „Das Gissen der gesegelten Distanz nach Pulsschlägen oder Zählen nach dem vorbey
fließenden Wasserschaume und nach über Bord geworfenen Holzstücken ist so manchen Seemanne
durch Übung und Erfahrung zu eigen geworden, daß er selten darin fehlen mag" so muss darauf
verwiesen werden, dass allein die Messung der Schiffsgeschwindigkeit, gleich in welcher Form auch
immer, niemals als „Gissung" zu bezeichnen ist. Hinlängliche Quellen bezeugen das Wort „Gissung" als
das verballhornte englische Wort „to guess". Und tatsächlich ist es auch so, to guess heißt schätzen
und nicht messen. Die Schätzung der Schiffsgeschwindigkeit erfolgte ohne eine Nutzung von
irgendwelchen Messinstrumenten zur Messung der Schiffsgeschwindigkeit allein mit Hilfe der
Erfahrung. Wenn also Brarens die Messung von Schiffsgeschwindigkeiten mittel Pulsschlägen oder an
Hand von Holzstücken (Relingslog) beschreibt, so kann er schon keiner Gissung im eigentlichen Sinne
mehr sprechen. Aber eines bezeugt dieses Wort dennoch. Die Gissung durch analytische
Messverfahren zu ersetzen, war erfolglose Suche über Jahrhunderte. Musste erfolglos sein, solange es
an exakten Zeitmessern fehlte und blieb im Anfang stecken, solange astronomisch gewonnene
Mittagsbreiten mit Fehlern um 15' bis 30'' behaftet blieben. Als schließlich die Logge in Gebrauch
genommen wurden, verschwand die Gissung letztlich gänzlich. Ein erstes Rätsel, ob nur Gissung oder
die Messung der Schiffsgeschwindigkeit durch Logge erfolgte, gibt uns Magellan auf seiner
Weltumsegelung. Auf Seite 155 ^m Rechten Fundament der Seefahrt1' finden wir folgenden Text von
A. Humboldt: "Die erste Anwendung des Loggens finde ich in einer Stelle von Pigafettas Reisejournal
der Magellanschen Weltumseglung, das lange in der Ambrosianischen Bibliothek in Mailand unter den
Handschriften vergraben lag. Es heißt darin im Januar 1521, als Magellan schon in die Südsee gelangt
war: secondo la misura ehe facevamo del viaggio colla catena a poppa, noi percorrevamo da 60 in 70
leghe al giomol2. Was kann diese Vorrichtung der Kette am Hinterteil des Schiffes (catena a poppa),
«deren wir uns auf der ganzen Reise bedienten, um den Weg zu messen«, anderes gewesen sein als
eine unserem Log ähnliche Einrichtung? Der aufgewickelten in Knoten geteilten Loglinie, des
Logbrettes oder Logschiffes und des Halb-Minuten- oder Logglases geschieht keine besondere
Erwähnung; aber dieses Stillschweigen kann nicht verwundern, wenn von einer längst bekannten
Sache geredet wird. Auch in dem Teil des <Trattato di Navigazione> des Cavallere Pigafetta, den
Amoretti im Auszug geliefert hat (freilich nur von 10 Seiten), wird die «catena della poppa» nicht
wieder genannt. Gleichzeitig wiederspricht A. Breusing auf Seite 156: „Humboldt spricht hier die
ursprünglich vom Amoretti, dem Herausgeber des Pigafettaschen Tagebuchs aufgestellte Behauptung,
dass die Catena a poppa unsrer Logge sei, so zuversichtlich nach, dass man nicht geglaubt hat, daran
zweifeln zu dürfen, und doch verhält sich die Sache anders. Die catena a poppa, die wir zu Deutsch am
besten mit „Schleppleine" wiedergeben, dient dazu den Kurs des Schiffes genau zu bestimmen. Der
Kurs aber wurde dazu benutzt die Distanz zu messen." Zweifelsohne kann mit nur einer Kette nicht die
Fahrt eines Schiffes bestimmt werden und so geht der Streit weiter, ob diese Kette nun ein Versuch
der Anwendung einer Logge vorstellt oder nur wirklich eine Kette zur Schätzung der Abtrift war.

97
Zweites Argument trifft hier wohl eher den Kern der Sache, denn wir finden in keiner anderen oder
weiteren Literatur die Anwendung der Logge gegen Anfang des 16. Jahrhunderts. Erst 1574 wird die
Anwendung der Logge von William Boume in seinem Werk „A Regiment for the Sea" erstmals deutlich
erwähnt. Nun soll die erste Erwähnung der Logge nicht bedeuten, dass sie vorher nicht bekannt war.
Wurde doch der Buchdruck schon 1440 von Gutenberg erfunden und die Verbreitung von
erfinderischen Neuigkeiten konnte regelrecht publiziert werden. Aber dennoch ist eine ausführliche
Beschreibung der Loggen vor 1574 nicht auffindbar. Freilich muss darauf verwiesen werden, dass das
entwickelte Instrument aus einem viertelkreisigem Holzscheit und die auf einer Rolle befindliche und
am Scheit befestigte Loggleine nicht das einzige bekannte umgesetzte Verfahren war, die
Geschwindigkeit in Abhängigkeit des Sandlaufes einer Sanduhr zu messen. Vielmehr kam die für die
Messung von Geschwindigkeiten bis ca. 5 sm/h das uns heute unter dem Namen „Relingslog" bekannte
Verfahren zum Tragen, bei dem aus dem Verhältnis der durchlaufenden Zeit zur Schiffslänge die
Geschwindigkeit aus einem am Bug hineingeworfenen Holzstückchen herausgerechnet werden
konnte. Die heutige Anwendung dieser Methode basiert auf den mathematischen Zusammenhang,
dass eine Anzahl gelaufener Meridiantertien auch gleich der Anzahl der Seemeilen pro Stunde ist, wie
folgende Rechnung aufzeigt: Aus dem mittleren Erdradius von 6 376 km auf der als Kugel
angenommenen Erde beträgt mittlere Erdumfang 40.000 km. Die Seemeile wurde 1928 vom
Internationalen Hydrographischen Büro in Paris auf 1.852,0 m festgelegt, so dass nachfolgende
Entsprechung gilt:
40000 km = 360° (Grad)
111,1 km = 1° (Grad)
1852,0 m = 1' (Bogenminute)
30,87 m = l" (Bogensekunde)
0,514 m = l"' (Meridiantertie)
m s3600
m
s60min 60
m 514,0
185218521 ==
=
0,1 sm = 1 kbl aus: 30,87 x 6 = 185,2 m
So gilt für die Schiffsgeschwindigkeit:
1 sm / h (kn) = 1 Mt / s,
da eine Meridiantertie pro Sekunde der 3600 Teil einer Seemeile pro Stunde ist.
Für t
sv = gelten die Geschwindigkeitseinheiten:
s
mt/s mt und
kblkbl ndu
h
smkn ===
minmin/
Beispiel:

98
18 sm/h = 33,336 km/h
0,3 sm/min = 555,6 m/min
0,005 sm/s = 9,26 m/s
0,005 sm/s = 18’’’/s
Diese Anwendung des Relingslogs mag schon vor Erwähnung der ersten Loggeinstrumente weite
Verbreitung in der Seefahrt gefunden haben. Denn an Hand von am Schiffsrumpf vorbei treibenden
Gegenständen auf die Fahrt des Schiffes zuschließen, liegt in der jeder logischen Beobachtung des
Menschen. Ob nun die Relingslogmethode oder die Methode des nach achtem ins Wasser geworfenen
und dort senkrecht stehenden (weil mit Blei beschwert) Holzscheites, die Meridiantertie eignete sich
hervorragend, um aus einer gemessenen Distanz sofort die Schiffsgeschwindigkeit in Seemeilen pro
Stunde zu erhalten. Wird die zwischen Holzscheit und an der achteren Bordwand auf einer Rolle
befindliche Logleine durch Knoten markiert, so muss der Abstand zwischen den Knoten genau so lang
sein, dass die Anzahl der durch die Hand rauschen Knoten sofort die Größe der Schiffsgeschwindigkeit
angibt, wenn das Loggescheit ausgeworfen wird und durch dessen Trägheit mehr oder weniger in der
achteren Kielrichtung zurückbleibt. Benutzt man eine Sanduhr mit einer Sanddurchlaufzeit von genau
14s, müssen die Abstände zwischen den Knoten 7 m betragen (0,5 m = l"'). Als 1802 endlich ein
weiterer Engländer das Patentlog erfand, war die endgültige Einführung der Mechanisierung der
Geschwindigkeitsmessung gelungen. Edward Massey, ein Instrumentenbauer aus Newcastle verband
einen vom Schiff nachgeschleppten Propeller durch eine geklöppelte (und sich daher nicht
aufdrehende) Leine mit einem Zählwerk. Entsprechend der Schiffsgeschwindigkeit verhielt sich der
Propeller in seinem Umdrehungen. Als der Edward Masseys Neffe, Thomas Walker das Zählwerk durch
eine Loggeuhr ersetzte, musste nunmehr das Gerät auch nicht mehr eingeholt werden, um die
gelaufene Distanz abzulesen. Bis Ende des 19 Jahrhunderts war dann auf vielen Segelschiffen das
ebenfalls von Walker entwickelte und von ihm patentierte Harpoon-Ship-Log (Harpunenschiffslog) im
Gebrauch. Diese mechanischen Patent- oder auch Chemikeef-Logge konnten bis Geschwindigkeiten
bis zu 20 kn verwendet werden und hatten einen Unsicherheitsfaktor bis zu 5% der tatsächlichen
Geschwindigkeit durchs Wasser. In allen Fällen der bisher beschrieben Anwendung von Logge wurde
Bezug auf die das Schiff umgebene Wasseroberfläche genommen. Aufgrund der Mechanisierung des
Navigationsprozesses gelang es somit die augenblickliche Geschwindigkeit durch das Wasser mit den
Loggen zu messen. Es gab und gibt jedoch noch eine andere Methode die Geschwindigkeit zu finden.
Diese Methode basiert auf den Gesamtvorgang der Orientierung (Seenavigation) und ist durch seine
Gesamtdauer in Bezug auf die Gesamtzeit des Orientierungsprozesses geprägt. Die Aufeinanderfolge
verschiedener im Gesamtprozess ablaufender Beziehungen ist es, die hier den Ausschlag weiterer
Betrachtung gibt. Erst durch die Einführung des Magnetkompasses in die Seefahrt wurde es möglich
auf Teilstrecken einen festen und bestimmten Kurs einzuhalten, wenn man vom Verfahren des
Kurshaltens nach den Gestirnen einmal absieht. Hatte sich der Seemann vor Einführung des Kompasses
damit begnügen müssen, den abgelaufenen Weg seines Schiffes zu gissen, so konnte er nun die
Richtung beobachten und in Abhängigkeit von der Zeit festhalten. Mit der Einführung des
Magnetkompasses wurde nun die Praxis verwirklicht, auf der Loxodromen zu segeln. Auch wenn die
magnetische Missweisung zuerst wegen mangelnder Kenntnis unbeachtet bleiben musste, bald

99
danach zwar ohne die näheren Ursachen zu kennen, einigermaßen beachtet wurde, so bleibt es doch
die Loxodrome, durch dessen Anwendung die Ortsbestimmung einen ungeahnten Aufschwung erhielt.
Segeln bedeutet, den Zielort nicht immer auf einem geraden Kurs ansteuern zu können. Die
Windrichtung und das Verhalten des Schiffes des Schiffes zum Wind bestimmt den zu steuernden Kurs.
Dem Rechnung tragend, müssen oft wechselnde Kurse zum Zielort gefahren werden, d. h. der
Bestimmungsort wird gegeben falls nur über Umwege erreicht werden können. Der Pilot des Altertums
und des frühen Mittelalters musste es nun verstehen, aus mehreren auf wechselnden Kursen
gesegelten Distanzen die geradlinige Strecke zwischen Abfahrts- und Bestimmungsort zu ermitteln.
Mit dem Steuern nach den Kompass, dem Segeln auf der Loxodromen also, war es nun um ein vieles
leichter diese Aufgabe zu bewältigen. Es entwickelte sich ein Verfahren, welches heute unter der
Bezeichnung „Koppeln" bekannt ist. Verschiedene Kursdistanzstücke konnten nun aneinander gereiht
auf der Seekarte den Schiffsweg darstellen. Auf der loxodromischen Karte von Andrea Bianco (1436)
befindet sich eine Tafel, Toleta de Marteloio genannt. Diese Tafel gibt für eine Distanz von 100 Meilen
an, wie viel Meilen man auf der Loxodromen zum Bestimmungsort bei einem seitlichen Kurs in
Vorrausrichtung (avanco) verliert und wie viel Abweichung man zur Seite (a largo) wieder gut zu
machen hat, um auf den geraden Kurs zu kommen.
Suma de martdmft per intender:
una quarta do vento a largo e avanco
mia 20 98
per 2 38 92
per 3 55 83
per 4 71 71
per 5 83 55
per 6 92 38
per 7 98 20
per8 100 0
Abweichender
Kurswinkel
vom Sollkurs
seitlicher Abstand von der
Sollkurslinie nach einer
Distanz von 100 sm
Distanz auf der Sollkurslinie,
wenn auf dem abweichendem
Kurs 100 sm versegelt wurden
11,25° 19,51 sm 98,01 sm
22,5° 38,27 sm 92,39 sm 33,75° 55,56 sm 83,15 sm 45,0° 70,71 sm 70,71 sm 56,25° 83,15sm 55,56 sm 67.5° 92,39 sm 38,27 sm 78,75° 98,01 sm 19,51 sm 90° 100 sm 0 sm

100
Mit Hilfe dieser Tabelle konnte der Pilot seine Abweichung vom Sollkurs leicht berechnen. Die auf der
trigonometrischen Winkelfunktion basierende Tabelle konnte leicht auch zeichnerisch hergestellt
werden. Ein Viertelkreis sei in 8 Strich (per l bis per 8) graduiert. Sein Radius möge eine hunderter
Einteilung (z. B. 10 cm für 100 sm) aufweisen. Fällt man das Lot des Schnittpunkt des Winkelstrahls
1 Strich = 11,25°
2 Strich = 22,5°
3 Strich = 33,75°
4 Strich = 45,0°
5 Strich =56,25°
6 Strich = 67,5°
7 Strich = 78,75°
8 Strich = 90°
mit dem Kreisbogen auf die senkrecht stehende Grundlinie, so erhält man die Distanz der seitlichen
Versetzung und gleichzeitig die auf die Grundlinie bezogene tatsächliche Distanz.
Zeichnerisch stellt sich diese Tabelle folgendermaßen dar:

101
Mit Hilfe der Winkelfunktion a=c-sin« und b =c- cos a lassen sich die entsprechenden Distanzen
berechnen.
Erkennbar wird hier eine Form der Verknüpfung von Kurs und Distanz, dessen Beziehungen sich
mathematisch mit den ebenen Winkelfunktionen ausdrücken ließen. Mit Hilfe dieses Verfahrens
wurden somit die Navigation auf der Loxodrome bewältigt. Bis zu einer Distanz von 300 sm konnte
dieses Verfahren ohne große Ungenauigkeiten angewandt werden. Dieses Verfahren wurde
erfolgreich mit der damaligen Methode der Ortsbestimmung nach Meridianhöhen der Sonne
verknüpft. Nach Gewinnung zweier Breiten durch die Beobachtung von Zenitdistanzen (astronomische
Höhe) der Sonne an zwei Tagen gab das Etmal Auskunft über die gelaufene Distanz zwischen dem
wahren Mittag des Vortages bis zum wahren Mittag des folgenden Tages. Entsprechend dem
astronomisch beobachteten Breitenunterschied fügte sich nun der gesteuerte Kurswinkel zwischen
diesen beiden gewonnenen Breitengraden ein. Einen Unterschied ergab sich, wenn einerseits durch
Abtrift und Strom der wahre Kurs nicht mit den gesteuerten übereinstimmte oder auch wenn
Missweisungen nicht bekannt waren bzw. wenn andererseits ungenaue astronomische
Meridiandistanzen vorlagen. Hier lag der Unsicherheitsfaktor, wenn trotz der vorhanden Theorie
praktische Navigation ihr Ziel verfehlte, denn eines vom anderen zu unterscheiden, dazu fehlten
anfangs genauere Messinstrumente. So ergab sich durch die Kombination von dem Verfahren der
Breitenbestimmung zu zwei Zeiten mit dem Kurs die Voraussetzung loxodrome Kurse und Distanzen
auf der damals verbreiteten Plattkarte zu kontrollieren. Da die genau gehende Uhr fehlte, wurde das
Etmal aus zwei Kulminationsständen der Sonne berechnet. Die Gleichsetzung der wahren
Kulminationszeiten mit dem 24 Stundentagesrhythmus beachtete natürlich nicht die minutiösen

102
Unterschiede der wahren Kulminationszeiten zur mittleren Sonnenzeit und flössen folglich als Fehler
ein. Auch gaben die verwendeten astronomischen Tafeln an und für sich schon genug Fehlerquellen
her, da die scheinbare Sonnenbahn nicht nach den Keplerschen Gesetzen berechnet werden konnte.
Doch dazu an anderer Stelle. So waren Ungenauigkeiten in der damaligen anfänglichen iberischen
Hochseenavigation von 100 heutigen Seemeilen keine Seltenheit. Der zumindest für kurze Distanzen
(Mittelmeer) gelungene Versuch die loxodromen Kurse in Beziehung zur gelaufenen Distanz zu setzen
und in der durch die Spanier und Portugiesen begründete Hochseenavigation (Atlantik) durch
astronomisch beobachtete Distanzen zu vervollkommnen, stellt hier eine eindeutige Anwendung der
Matrix der Orientierung dar. Das Verhältnis Richtung zur Entfernung und umgekehrt wurde
mathematisch erkannt und begründet und ist von der Einführung von analytischen
(wissenschaftlichen) Vorgehensweisen geprägt. Der Gierwinkel y' der horizontale Ebene des
Navigationssystems erhielt einen Distanzvektor, der durch astronomische Beobachtung gestützt
wurde. Obwohl die Plattkarte nicht die wahre Gestalt der Erde abbilden kann, so wurde dennoch
mittels dieser Karte das Inertial Erde mit dem Inertial Schiff verknüpft. Das Horizontsystem
(Navigationssystem) wurde auf das Äquatorsystem (Inertialsystem) bewusst mathematisch bezogen.
Mit der Einführung der Logge war dann ein weiterer Schritt verwirklicht, den Vektor y" durch
Geschwindigkeitsmessung erstens laufend zu erhalten und zweitens mit den astronomisch
gemessenen Distanzen zu vergleichen. Bezug der Geschwindigkeitsmessung war das Wasser des
Meeres. Ein bewegtes Medium somit, dessen Verhalten in horizontaler Ebene die Messung der
Geschwindigkeiten als Fehlergröße beeinflusste. Da ein direkter Bezug zum Meeresgrund bzw. zu
Küstenpunkten auf Hoher See nicht herzustellen war, blieb es somit einzige Möglichkeit der
Geschwindigkeitsmessung. Auch die nach den hydromechanischen Prinzip und im 20. Jahrhundert in
die Seefahrt eingeführten Staudruckfahrtmessanlagen konnten dieses nicht verändern.
Staudruckloggsysteme wurden hauptsächlich in zwei Varianten eingeführt. Das Bodenlog besteht aus
einem pneumatischen oder mechanischen ausfahrbarem Messrohr mit einer Düse in Fahrtrichtung,
wo der statische und dynamische Druck des Meereswassers wirken. Eine zweite in Schiffsquerrichtung
gerichtete Düse, wo nur der statische Wasserdruck wirksam wird. Beide Düsen sind mit zwei durch
eine Membran getrennte Kammern eines Manometers verbunden, das im Schiffsinnern dicht über
dem Boden eingebaut ist. Die von diesem Manometer gemessene Druckdifferenz beider Druckwerte
wird von einem Fahrt — Weg -Geber elektrisch in den entsprechenden Geschwindigkeitswert
umgewandelt. Aus diesem Geschwindigkeitswert kann gegebenenfalls gleich die Zurückgelegte
Strecke integriert werden. Über einen Fahrt- Weg- Empfänger auf der Brücke oder an anderen dafür
vorgesehen Orten des Schiffes kommt der Weg und die Fahrt des Schiffes zu Anzeige. Die vor der
Einführung der Bodenlogs vorhandenen Stevenlogs, bei dem ein Messrohr im Vorsteven des Schiffes
waagerecht und zweites Düse im Schiffsboden eingebaut worden sind, kamen bald wieder aus dem
Gebrauch, weil das Stevenrohr durch das Stampfen des Schiffes neben dem Ziehen von Luft dadurch
nicht auf einer Wassertiefe gehalten werden konnte. Die Messergebnisse wurden bei Seegang somit
stark verfälscht. Weniger störanfällig als hydrodynamischen Logge arbeiten die elektro- - dynamischen
oder magnetischen Logge. Eine Stabsonde, deren Magnetfeld bei Fahrt durch das Wasser eine
bewegungsproportionale elektrische Feldstärke induziert, misst so die Fahrt durch das Wasser. Die
durch die elektrische Feldstärke hervorgerufene Spannung wird verstärkt und den Mess- und
Anzeigeräten zugeführt. Mit diesem System konnte sowohl die Fahrt voraus als auch zurück gemessen
werden. Die Messungen zeichnen sich durch Aktivität am System S' aus und müssen unter der Struktur
der aktiven Ortungsprinzipien eingeordnet werden. Das Navigationsobjekt selbst ist wie beim
Lotverfahren unabdingbare Voraussetzung zur Gewährleistung der Geschwindigkeitsmessung mit

103
anschließender Integration des Schiffsweges. Wir haben gesehen, dass Fahrtmesssysteme nach ihrer
Bauart und der Art der Messmethode zu unterscheiden sind. Wird dabei von den Fahrtgrößen
ausgegangen, so können die Loggesysteme entsprechend ihrer Messfähigkeit klassifiziert werden.
Hier ist zu unterscheiden, zwischen der Fähigkeit die Fahrt durch Wasser (F. d. W.) und die Fahrt über
Grund (F. ü. G.) oder beide Fahrtgrößen gleichzeitig messen zu können. Eine zweite Klassifizierung
gelingt, wenn die zu messenden Fahrtkomponenten betrachtet werden. Einkomponenten
Fahrtmesssysteme messen nur die Fahrt in Richtung der Schiffslängskomponente, während
Zweikomponenten - Fahrtmesssysteme die Fahrt des Schiffes in Längs- und Querrichtung messen
können. Durch eine entsprechende Messwertanalyse können dann die Driftwinkel a, p und schließlich
y ermittelt werden. Die hydrodynamischen und die elektromagnetischen Fahrtmesssysteme eigenen
sich nur zur Messung der Fahrt durch das Wasser. Diese Systeme gehen zur Ermittlung der
Geschwindigkeit von der am fahrendem Schiff vorbeifließenden Fahrtströmung aus, die bei ruhendem
Gewässer der Eigenfahrt des Schiffes genau genug entspricht. Grenzschichten und Verwirbelungen
des Meereswassers an der Messstelle werden vernachlässigt bzw. finden sich im Anbringen einer
Loggberichtigung (in Prozent) wieder. Den Dopplereffekt bei der Ausbreitung hydroakustischer Wellen
ausnutzend, wurden in den siebziger und achtziger Jahren des 20. Jahrhunderts Fahrtmesssysteme
entwickelt, die zur Messung der Fahrt über Grund in der Lage sind. Infolge der Schalldämpfung können
dabei jedoch nur Wassertiefen im Bereich bis 600 m genutzt werden. Bei größeren Wassertiefen kann
nach wie vor nur die Fahrt durch das Wasser bestimmt werden. Ein im Schiffsboden eingebauter
Sender strahlt unter scharfer Bündelung der Schallkeule (3° bis 6°) einen Sendestrahl im
Ultraschallfrequenzbereich ( f= 100 kHz bis 2 MHz) unter einem Abstrahlwinkel S gegenüber der
Schiffslängsachse nach voraus auf den Meeresboden ab. Aufgrund der nach voraus laufenden
Schiffsbewegung erfährt der Sendestrahl beim Eintritt in das Meerwasser eine erste
Dopplerverschiebung der Frequenz. Der Schall trifft eine Position auf dem Meeresboden. Da im
Ultraschaubereich gesendet wird, stellt der Meeresboden immer eine raue Fläche dar, von der aus
eine diffuse Reflexion der Schallwellen erfolgt. Durch einen ebenfalls im Schiffsboden eingebauten
Empfänger wird ein geringer Teil der gesendeten Strahlen wieder aufgefangen. Der Auftreffpunkt der
gesendeten Schallenergie am Meeresboden wirkt hier also wie ein zweiter Sender geringerer Leistung.
Im Empfänger wird eine zweite Dopplerverschiebung der Frequenz des vom Meeresgrund
eintreffenden Schallstrahls gemessen. Die so durch den Hin- und Rücklauf des Schallstrahl erreichte
zweifache Dopplerverschiebung der Frequenz des Schallstrahls gegenüber dem Sendestrahl entspricht
näherungsweise proportional der Fahrt des Schiffes über Grund. Die fundamentale
^f
Dopplergleichung für die Fahrtmessung auf Schiffes deshalb: F = 2 f, —v Grund •
c
Da die durch die Schallausbreitungsgeschwindigkeit im Meereswasser (c) auftretende
Dopplerverschiebung (F) linear von der Fahrt des Schiffes über Grund (F. ü. G.) abhängig ist, kann die
unter einem Abstrahlwinkel (8) gesendete Schallenergie für eine doppelte Messung (Hin- und Rücklauf
des Schallstrahls) der Dopplerverschiebung genutzt werden. Je größer die Sendefrequenz (/) ist, je
größer ist auch die Empfindlichkeit der Dopplermessung. Dieses Einstrahlverfahren zeigt in der
praktischen Anwendung Fehler auf, die durch die Anwendung eines Zweistrahlverfahrens
(Janusprinzip) weitgehend ausgeglichen werden können. Geht man bei der Realisierung des
Einstrahlverfahrend von der linearen Form der Dopplergleichung aus, so werden Prozesse nicht

104
berücksichtigt, die nichtlinear ablaufen. Dazu gehört insbesondere das quadratische Glied der
Gleichung Formel einfügen Diese Funktion gibt die gesamte Dopplerverschiebung der Frequenz
bezüglich der Sendefrequenz bei der Schallausbreitung auf dem Weg Schiff - Meeresgrund - Schiff
wieder und zeigt unter aufsteigender linearer Berechnung (Glieder höher als 2. Ordnung
vernachlässigt) das Verhalten der Dopplerschiebung. Dieser Linearisierungsfehler besteht neben
Fehler, die infolge der Stampf- und Rollbewegung und des Trimmwinkels des Schiffes entstehen. Hier
wird ein Fehler im Abstrahlwinkel die Folge sein. Auch entsteht ein dynamischer Messfehler aufgrund
der vertikalen Tauchschwingungen des Schiffes, wenn diese der Richtung der Schallausbreitungswellen
entspricht. Diese vertikale Schiffsbewegung wird dann bei der Schallausbreitungsgeschwindigkeit als
Gegenkomponente wirksam. Weitere Fehler zeigen sich in die Schallausbreitungseigenschaften im
Seegebiet (c Meerwasser = 1500 m/s) insgesamt. Die unterschiedlichen Dichten, Salzgehalte,
Temperaturen des Meerwassers in verschieden Tiefen haben jedoch keinen messbaren Einfluss auf
den Dopplereffekt, da durch das Brechungsgesetzt das Verhältnis cos S : c konstant bleibt. Auch bleiben
horizontale Wasserströmungen ohne Einfluss auf den Dopplereffekt. Der Weg des Verlauf eines
Schallstrahls durch das somit inhomogene Medium Wasser muss bei der Geschwindigkeitsmessung
nicht bekannt sein. Das Janusverfahren (dessen Namensgebung dem römischen Gott Janus angelehnt
ist, da dieser mittels einem Doppelgesicht nach vom und hinten sieht), ist nun ein Zweistrahlverfahren,
bei dem die Schallwellen unter gleichem Abstandswinkel in der Schiffslängsachse nach voraus und
zugleich achteraus zum Meeresboden abgestrahlt werden und wieder empfangen werden. Die
achteraus und die voraus gerichteten Schallwellen werden jeweils durch ein hydroakustisches Sende-
und Empfangssystem realisiert. Der Vorteil besteht im Ausgleich des Linearisierungsfehlers, da sich die
(nichtlinearen) quadratischen Glieder in obiger Gleichung durch Differenzierung gegen Null fast
aufheben. Die anderen Fehler sind ebenfalls so gering, dass sie vernachlässigt werden können.
Moderne Zweistrahlfahrtmesssysteme messen die Fahrt über Grund und durch das Wasser. Die
Messung der Fahrt durch das Wasser wird durch Messung der Dopplerschiebung an den im Wasser
sich befindlichen Beimengungen (Schwebeteilchen, Gasbläschen usw.) realisiert. Die
Dopplerverschiebung dieser beiden gleichzeitig empfangenen Messwerte gestattet den Vergleich
zwischen der F. ü. G. und F. d. W. und lässt bei Anwendung eines Zweikomponentendopplerlogs, bei
dem mit dem Janusverfahren die Schiffsgeschwindigkeiten in schiffsquer- und schiffslängsorientierter
Richtung aufgefasst werden, die Analyse und Anzeige der Gesamtdrift nach Richtung und Stärke zu.
Werden Zweikomponentendopplerfahrtmessanlagen mit einem Kursmesssystem und einer digitalen
Uhr koordiniert, kann der Schiffsweg über Grund (nur bei Messung der F. ü. G. möglich) sowohl
analytisch berechnet, als auch graphisch darstellt werden. Diese automatische Koppelortung (Doppler
- Sonar — Navigations- System) kann unter modernen Gesichtspunkten mit der Satellitenortung (GPS)
gekoppelt werden. Die so erhaltenen und durch Satellitennavigation berichtigten
Schiffswegdarstellungen machen jedoch das Vorhandensein eines Rechners zur
Datengesamterfassung und -analyse notwendig und werden als schiffsautonome Systeme bezeichnet,
da sie von den klimatischen und sonstigen Umweltfaktoren unabhängig genau arbeiten können. Eine
Kombination zwischen Richtung und Entfernung in Bezug auf die z" Achse und
Geschwindigkeitsmessung wird durch die Doppler – Sonar – Systeme erreicht.
Werden die Schallschwinger um einen Winkel gekippt, so können im entsprechend gewählten
Richtungsbereich (z. B. Voraus- oder Achterausrichtungen) Unterwasserkontakte nach
Laufzeitmessung und Dopplereffekt geortet und nach Stärke des Echos klassifiziert werden. Mit
gleichzeitiger Anzeige der Wassertiefe wird die Fahrt über Grund angezeigt. Diese Anlagen sind heute

105
so weit entwickelt, das Doppler – Sonar Docking Systeme gute Hilfsmittel für Großschiffe zum
Manövrieren in engen Gewässern und zum Anlegen darstellen- Außer der Wassertiefe und der Fahrt
über Grund wird auch der Gierwinkel, die Größe der Giergeschwindigkeit sowie die Geschwindigkeit
der Annäherung an Kaianlagen usw. angezeigt. So wird heute eine Vielzahl von Echolottypen
entsprechend ihren Verwendungszweck eingesetzt.
An dieser Stelle soll nochmals auf die Bedeutung der Entfernung im Orientierungsprozess eingegangen
werden. Während einige bisherige Auffassungen die Entfernungen als „untergeordnete" abhängige
Komponente von den Richtungen darstellen, gilt dennoch ein gegenseitiges Abhängigkeitsprinzip.
Aufgrund der visuellen Beobachtung von terrestrischen und außerterrestrischen Fixpunkten bzw. der
einführten Kursmessmittel gelingt die Feststellung einer Richtung im direkten Bezug auf das
Navigationsobjekt auch ohne direkter Betrachtung von Entfernungen. Eine Entfernungsangabe mit
direktem Bezug auf das Navigationsobjekt kann jedoch ohne den Richtungsbezug nicht angegeben
werden, wenn auf Ortungsverfahren mit künstlich erzeugten elektromagnetischen oder Schallwellen
von Bord oder Land aus verzichtet wird. Dennoch ist eine gleichberechtigte, wenn auch gegenseitig
abhängige Beziehung zwischen Entfernung und Richtung vorhanden, auch wenn diese nicht sofort
erkennbar wird. So ist aufgrund des orthodromen Verhaltens der Erdoberfläche ohne das
Vorhandensein einer Entfernung die Interpretation der Richtung unmöglich. Ebenfalls kann ohne eine
Richtung auch keine Entfernung definiert werden. Diese gesetzmäßige Matrix im System der
Orientierung wird uns in irgendeiner Form immer wieder begegnen. Augenscheinlich wird dieses
Muster, wie oben beschrieben, bei der Gewinnung von Lotungen. Die als lotrecht definierte Richtung
wird mit der Entfernung zum Meeresgrund verknüpft. Die Frage zu beantworten, in weit es analytisch
immer möglich und notwendig ist, in Bezug auf die x - y - Ebene des Kugelinertials beide Elemente des
Schiffsweges oder die Strecke der Verbindung zweier Positionen mit geeigneten Ortungsverfahren in
Richtung und Entfernung zu erfassen, ist durch das Aufzeigen der Entwicklung der Fahrtmessanlagen
geschehen. Doch zeigt die Geschichte der Navigation vor der Einführung der Logge den gelungenen
Versuch der Verknüpfung der Richtung (Kurs und Peilung) mit der Entfernung. Dabei war das
Feststellen von Richtungen immer stille Voraussetzung Entfernungsangaben zu gewinnen. Erst mit
Einführung von technischen modernen Ortungsverfahren gelang es ohne direktes Messung von
Richtungen, Entfernungen direkt in Bezug auf das Navigationsobjekt zu gewinnen.
Grundvoraussetzung für die Gestaltung der Struktur dieses Prozesses der Beziehungen zwischen
Navigationssystem und Inertialsystem ist jedoch die Verknüpfung über einen definierten Zeitaspekt.
Ohne Einführung eines Zeitbezuges, gleich welche Zeitspanne dieser umfasst, kann es keine direkte
Erfassung von Entfernungen geben. Es wird ein Zeitbezug notwendig, wenn erstens
Entfernungsortungsstandlinien ohne Zuhilfenahme von Richtungen direkt gewonnen und zweitens
gewonnene Entfernungsortungsmesswerte in Verbindung mit geographischer Koordinatendarstellung
auf einem Inertialausschnitt (Seekarte) eingezeichnet werden sollen. Hier mag der Grund für die
irrtümliche Annahme zu suchen sein, das Element der Entfernung als ein dem Element der Richtung
untergeordneten Aspekt zu betrachten. Im sphärischen Dreieck mit der als Schiffsweg bezeichneten c
— Seite kann ein Zeitbezug unerwähnt bleiben. Alle Elemente des Schiffsweges können allein aus dem
sphärischen Verhältnis zwischen Abfahrt- und Bestimmungsort heraus berechnet werden. Kurse und
Peilungen einerseits und Entfernungen andererseits sind hier durch das Verhältnis der Koordinaten
zueinander bestimmt. Ein Zeitbezug wird im Navigationsprozess erst notwendig, wenn Entfernungen

106
ohne Zuhilfenahme von Richtungen ermittelt werden sollen und wenn dabei das Navigationssystem S'
mit dem Inertialsystem S verknüpft werden soll. Andererseits kann ein Zeitbezug nur über ein Inertial
definiert werden. Praktischer Weise wird dieser Bezug über das geographische Kugelinertial
hergestellt. Die mit dem Begriff der Geschwindigkeit dargestellte Bewegungsform eines
Navigationsobjektes S' ist im eigentlichen Sinne die Verknüpfung einer Systemzeit mit dem Schiffsweg.
Philosophisch findet sich das praktische Prinzip der beiden nicht voneinander zu trennenden
Existenzformen von bewegter Materie wieder. Der durch das Kugelinertial definierte Raum der Erd-
bzw. Meeresoberfläche hat das Nebeneinanderbestehen, die Entfernung, die Ausdehnung und die
gegenseitige Lage der auf das Inertial bezogenen Objekte zum Inhalt. Das Feststellen der gegenseitigen
Lage zweier Orte an Hand des Vergleichs von geographischen Koordinaten hat die Bestimmung des
Abfahrtsortes A und Bestimmungsortes B zum Inhalt. Zur Berechnung der Richtung und der Entfernung
zwischen A und B ist allein das geographische Kugelinertial (z. B. Seekarten), nicht aber ein Zeitbezug
zwingend erforderlich. Erfolgt die Darstellung des so ermittelten Schiffswegs als Vektor, wobei der
Vektoranfangspunkt dem Ort A und die Vektorspitze dem Ort B entspricht, so kann diese Darstellung
nur sinnvoll sein, wenn die Länge des Vektor auch gleichzeitig als Zeitbezug interpretiert werden kann.
Der als Prozess aufzufassende gesamte Vorgang der Orientierung (Seenavigation) ist durch seiner
Gesamtdauer und von der Aufeinanderfolge verschiedener im Gesamtprozess ablaufender
Beziehungen geprägt. Die einzelne Zeitdauer der jeweiligen Prozessabschnitte prägen den Begriff der
Geschwindigkeit. Um Prozessabschnitte vergleichbar zu machen, wird die Zeit mit einem Zeitmaß
benötigt. Die Geschwindigkeit eines Navigationsobjektes bestimmt somit die Dauer eines Teilabschnitt
des Navigationsprozesses. Im Unterschied zur Messung von Richtungswinkeln über die
Kursmessanlagen in Bezug auf die x' - Achse muss bei Anwendung von Lotungen von einer
Entfernungsmessung auf der z'- Achse des Navigationsobjektes S' gesprochen werden. Diese
Entfernungsmessung basiert bei Leinenloten auf die Erdanziehungskraft eines mit einer durch Marken
markierte Lotleine verbundenen Gewichtes und bei Echoloten auf die Laufzeitmessung von
Navigationsobjekten gesendeter Schallimpulswellen. An dieser Stelle seinen besonders drei Aspekte
der Struktur des Systems Navigation hervorgehoben. Erstens wird bei der Lotung die Länge der
Lotrechte durch Entfernungsmessung bestimmt und nicht durch Richtungsmessung. Zweitens wird die
auf der z' Achse des Navigationsobjektes zu messenden Strecke in Form einer Entfernung
ausschließlich durch ein auf dem Navigationssystem eingesetztes Verfahren verwirklicht. Es wird die
Form einer aktiven Ortung verwirklicht. Mit anderen Worten: Das an einer Leine auf dem Meeresgrund
durch Erdanziehung herabzulassende Lotgewicht oder der über einen Schwinger zuerst als Primärwelle
gesendete und danach als Sekundärwelle empfangene Schallimpuls macht das Navigationsobjekt
selbst zur unerlässlichen Bedingung der Ortung. Ohne Navigationsobjekt y würde es keine
Wertefeststellung geben. Wassertiefen können nun mal nur gemessen und nicht vorher berechnet
werden. Es können nur gemessene Wassertiefen auf einen anderen Referenzwert umgerechnet bzw.
korrigiert werden (Gezeitenrechnung). Das System S' ist somit erster Bezug der Messung. Anders ist es
mit der Richtung zwischen einem Abfahrtsort A und einem Bestimmungsort B. Der Schiffsweg ist hier
eine Seite des sphärischen Dreiecks der als Inertial angenommen Kugel der Erde. Die notwendigen
Vorausberechnungen der Elemente Distanz (d) und Kurswinkel (rwK) beruhen allein auf das
Koordinatensystem des Kugelinertials. Der Schiffsweg zwischen zwei geographische Koordinaten
besteht somit auch ohne das Vorhandensein des Navigationsobjektes auf dem Schiffsweg. Die
Richtungsmessung über Kompassanlagen muss somit als Vergleich zwischen der Vorausberechnung
und der tatsächlichen Lage des Gierwinkels auf rwN aufgefasst werden und kann als passives Orten
bezeichnen werden. Drittens schließlich ist die Form der Schallmessung eine Ortungsform, bei das

107
Navigationsobjekt aktiv Wellen erzeugen und aussenden muss, um zu einer Messwertgewinnung zu
gelangen. Auf die durch die natürliche Umwelt abgestrahlten Wellen wird bewusst verzichtet.
Während noch beim Magnetkompass auf das in Bezug auf das Navigationsobjekt Schiff autonome
magnetische Feld der Erde, bei Verwirklichung der kreiselgesteuerten Kursanzeige ebenfalls die
autonome Erdgravitation und Erdrotation bzw. bei dem Handlotverfahren die Erdgravitation genutzt
wird, ist Schallaufzeitmessung eine von der Umwelt nicht beeinflusste Methode der Ortung, wenn von
den Einflüssen des Mediums Meerwasser abgesehen wird. Eine anderes Ortungsverfahren, ebenfalls
mit Erfolg und zuerst großen technischen Aufwand in die Navigation eingeführt, ist die Radarortung
auf Grundlage der Laufzeitmessung von elektromagnetischen Wellen.
Das Navigationssystem S" gilt der Bezugspunkt, weil die Lage nach Richtung, Entfernung und gegeben
falls der Höhe der umgebenen anderen Ziele auf dem Radarbildschirm bezüglich des eigenen Schiffes
festgestellt wird. Um nun andere Radarkontakte auswerten zu können, geschieht die Bilddarstellung
auf der Kathodenstrahlröhre des Anzeigegerätes durch ein den Standort umgebenes
Polarkoordinatensystem. Der Radarbildschirm, besser gesagt unser Schiff mit der Radarantenne als
Mittelpunkt unseres Standortes ist der Koordinatenursprung, die Nordrichtung ist die Polachse. Als
Radius dient die Entfernung in Seemeilen (l sm = 1852m) und als Richtungswinkel dient die
Kompasspeilung am Radargerät. Die Entfernung kann zwischen einem Sender und einem aktiven oder
passiven Rückstrahler dann gewonnen und auf einem Bildschirm einer Kathodenstrahlröhre zur
Anzeige gebracht werden, wenn die Rückkehrzeit einer kurzen elektromagnetischen Welle mit hoher
Frequenz, vom Sender ausgestrahlt, gemessen wird. Kombiniert man diese Ausstrahlung mit einer
Richtsende- und -empfangsantenne, wobei die elektromagnetischen Wellen entsprechend horizontal
und vertikal gebündelt als Strahlungskeule erscheinen, gelingt die Anzeige der Richtung. Da der
Bildschirm mit dem Kompass gekoppelt ist, kann sowohl der eigene Kurs (Winkel zwischen der
geographischen Nordrichtung und der Fahrtrichtung des Schiffes, gezählt auf der 360° Kompassrose
im Uhrzeigersinn), als auch die Peilung (Winkel zwischen der geographischen Nordrichtung und der
Verbindung Radarziel - eigenes Schiff) angezeigt werden. Das Radarziel erscheint als Leuchtpunkt auf
dem Bildschirm und kann somit nach Richtung und Entfernung bestimmt werden. Diese Auswertung
der Anzeige bezieht sich im eigentlichen Sinne auf ein Polarkoordinatensystem, wie oben angedeutet.
Im Bildschirmmittelpunkt steht immer das eigene Schiff (System S’), welches scheinbar als ruhend
angenommen wird. Da dieser Mittelpunkt sich nicht bewegt, das eigene Schiff jedoch Fahrt auf einem
bestimmten Kurs macht, werden die Größen Geschwindigkeit und Kursrichtung des eigenen Schiffes
sich vermischen mit den Fahrt- und Richtungsgrößen der das eigene Schiff umgebenen Ziele. Feste
Landpunkte (Inseln oder Landpunkte) und verankerte Objekte (Tonnen oder vor Anker liegende
Fahrzeuge usw.) werden dann die Fahrt und die Richtung des eigenen Schiffes anzeigen, wobei sich die
Richtung entgegengesetzt des eigenen Kurses darstellt. Alle Ziele führen eine relative Bewegung
bezüglich des eigenen Schiffes aus. Diese relative Darstellungsart auf dem Radarbildschirm hat den
Vorteil, dass der Radarnavigator sofort den Passierabstand der Radarkontakte entsprechend der
relativen Bewegung bezüglich des Bildschirmmittelpunktes erkennen und entsprechende Manöver zur
Vermeidung einer Kollision rechtzeitig einleiten kann. Diese Bewegung lässt sich mit Hilfe von Vektoren
zeichnen. Der Länge eines Vektors entspricht dabei der Größe der Geschwindigkeit, das zweite
Vektorargument ist die Richtung selbst. Mittels der Vektorrechnung, der Trennung des eigenen
Geschwindigkeits- und Kursvektors von dem relativen Geschwindigkeits- und Kursvektor, kann der
tatsächliche Geschwindigkeits- und Kursvektor der Zielkontakte in einem bestimmten Zeitintervall (At)

108
ermittelt werden. Verändert man nun den relativen Geschwindigkeits- und Kursvektor so, dass dieser
nie in den Bereich um den Radarmittelpunkt zeigt, sondern in einem festgelegten Abstand am
Radarmittelpunkt vorbei führt, kann man einer Kollision rechtzeitig vorbeugen. Diese Veränderung
lässt sich durch Änderung der eigenen Geschwindigkeit, durch Änderung des eigenen Kurses oder
durch gleichzeitige Änderung beider Größen herbeiführen. Natürlich muss beachtet werden, dass der
Radarpartner gegebenenfalls auch Kurs- und Geschwindigkeitsänderungen durchführen kann, was
selbstverständlich auch zur Änderung der Größen der relativen Bewegung führt. Zwischen dem
eigenen Schiff und einem fremden Schiff wird sich somit immer ein sogenanntes
Geschwindigkeitsdreieck bilden lassen, welches zusammenfassend folgende Argumente besitzt:
• das eigene Schiff mit den Vektorargumenten: eigene Geschwindigkeit und der eigenen Kurs;
• das fremde Schiff mit den Vektorargumenten: fremde Geschwindigkeit und der fremde Kurs;
• relative Bewegung mit den Vektorargumenten: relative Geschwindigkeit und des relativen Kurses.
Mit Hilfe der mathematischen Beziehungen zur Vektorrechnung bzw. auf analytischen Wege kann der
Radarnavigator das Dreieck auflösen. Mittels Ortungen werden dazu in einer bestimmten Zeiteinheit
die Peilungen und die Entfernungen zum Radarpartner festgestellt, um einen relativen Verlauf der
Bahn zu erhalten. Angemerkt sei noch, dass sich das Radarbild, den Anschluss einer Fahrtmessanlage
vorausgesetzt, auch in absoluter Darstellung schalten lässt. Dabei wird die Bewegung aller Ziele, auch
die des eigenen Schiffes in der tatsächlichen Bewegung dargestellt. Das Schiff fahrt praktisch auf dem
Bildschirm mit. Gerät es an den Rand des Radarbildschirmes, springt das gesamte Bild an das andere
Ende des Schirmes zurück. Aufgrund fortschreitender Automatisierung des Bahnführungs- und
Kollisionsverhütungsprozess in der Seefahrt erfassen und errechnen in heutiger Zeit spezielle
Rechneranlagen alle Werte, die der Kollisionsverhütung dienen.
Kimmtiefe
in sm (‘)
B
A
C
r
Bh + r
Erdmittelpunkt (M)
Wahrer Horizont
Scheinbarer Horizont
A‘
Kimmtiefe
minimal = 0° 00‘ 00,01“
min Max

109
Da der Wert der Beobachtungshöhe (Bh) gegenüber dem mittleren Erdradius von 6367000 m sehr klein
ausfällt und somit der Punkt des Dreiecks ABC sehr nah an A‘ gelangt, kann mit den Gesetzen der
ebenen Trigonometrie gearbeitet werden. Die Strecke A’C (e) kann somit dem Winkelbogen am
Erdmittelpunkt gleichgesetzt werden.
Gemäß der mathematischen Funktion
e2 = (r + Bh)2 – r2 wird der Wert der Kimmtiefe errechnet. Es ist zu setzen:
e2 = r2 + 2r Bh + Bh2 – r2
e2 = 2r Bh + Bh2
Somit beträgt die Kimmtiefe bei Bh = 0 m
e = 2r
e1 = 3571,60 m (Erdradius über die Äquatorebene 6378163 m)
e2 = 3565,61 m (Erdradius über von Pol zu Pol: 6356777 m.
e3 = 3569,66 m (Radius der volumengleichen Kugel: 6371221 m)
Da die Länge einer Bogenminute (1‘) auf einem Großkreis der als Kugel angenommenen Erde mit 1852
m festgelegt ist, kann e in nautische Minuten (‘) und somit in Seemeilen ausgedrückt werden.
Kt sm = m
e
1852 Kt1 = 1,929 sm; Kt2 = 1,925 sm Kt3 = 1,927 sm
Es genügt hinreichender Genauigkeit, wenn mit dem e 3 Wert als Mittelwert gerechnet wird.
In der mathematischen Beziehung e2 = 2r Bh + Bh2 ist der Wert (Bh2) gegenüber (2r Bh) sehr klein, so
dass er vernachlässigt werden kann.
Für eine Beobachtungshöhe von 12m ist somit einzusetzen:
Kt sm = 12127424421852
1 oder
Kt sm = 12927,1
Kt sm = − 6,677 sm
Als scheinbare Horizontebene oder sichtbarer Horizont (Kimm) wird somit die Tangentialebene an der
Erdkugel im Standort des Beobachters bezeichnet.
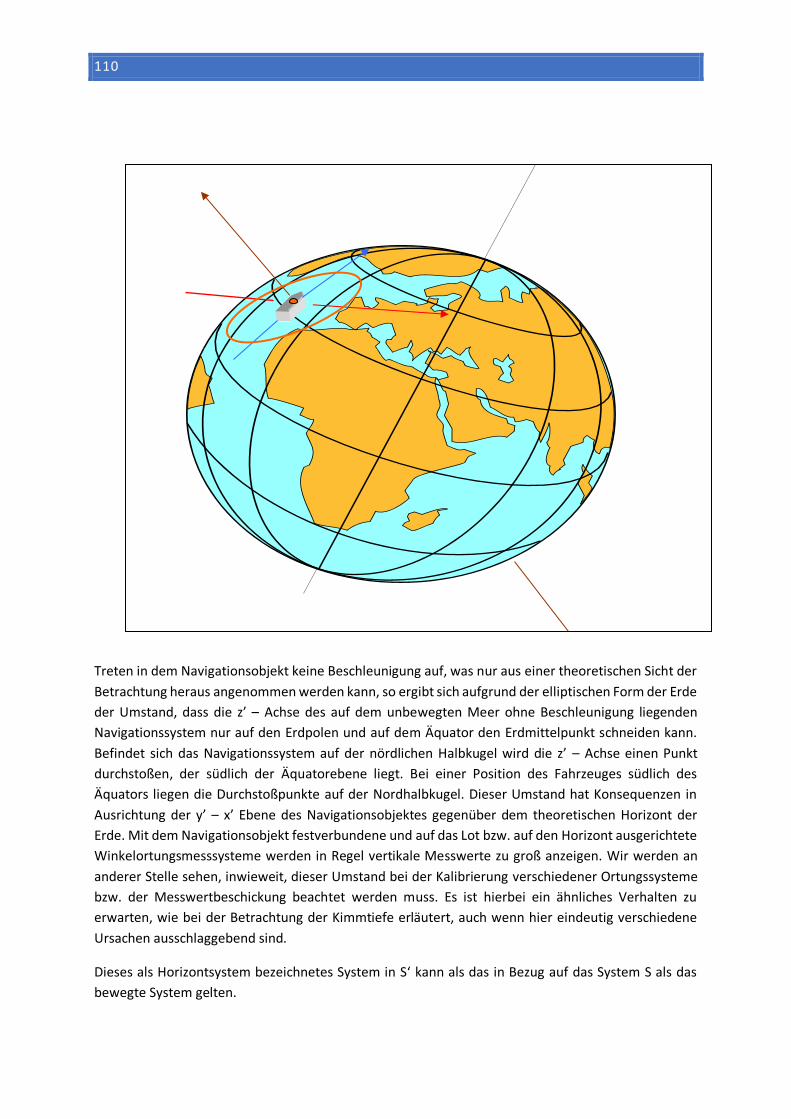
110
Treten in dem Navigationsobjekt keine Beschleunigung auf, was nur aus einer theoretischen Sicht der
Betrachtung heraus angenommen werden kann, so ergibt sich aufgrund der elliptischen Form der Erde
der Umstand, dass die z’ – Achse des auf dem unbewegten Meer ohne Beschleunigung liegenden
Navigationssystem nur auf den Erdpolen und auf dem Äquator den Erdmittelpunkt schneiden kann.
Befindet sich das Navigationssystem auf der nördlichen Halbkugel wird die z’ – Achse einen Punkt
durchstoßen, der südlich der Äquatorebene liegt. Bei einer Position des Fahrzeuges südlich des
Äquators liegen die Durchstoßpunkte auf der Nordhalbkugel. Dieser Umstand hat Konsequenzen in
Ausrichtung der y’ – x’ Ebene des Navigationsobjektes gegenüber dem theoretischen Horizont der
Erde. Mit dem Navigationsobjekt festverbundene und auf das Lot bzw. auf den Horizont ausgerichtete
Winkelortungsmesssysteme werden in Regel vertikale Messwerte zu groß anzeigen. Wir werden an
anderer Stelle sehen, inwieweit, dieser Umstand bei der Kalibrierung verschiedener Ortungssysteme
bzw. der Messwertbeschickung beachtet werden muss. Es ist hierbei ein ähnliches Verhalten zu
erwarten, wie bei der Betrachtung der Kimmtiefe erläutert, auch wenn hier eindeutig verschiedene
Ursachen ausschlaggebend sind.
Dieses als Horizontsystem bezeichnetes System in S‘ kann als das in Bezug auf das System S als das
bewegte System gelten.
z‘ y‘
x‘ M‘

111
ORTUNGSVERFAHREN UND NAVIGATIONSMETHODEN
Die verschiedenen Navigationsverfahren entsprechen immer der Anwendung des nautisch-
sphärischen Grunddreiecks auf die Erdkugel bzw. auf das Erdellipsoid.
Aus der Kenntnis der Struktur dieser Verfahren werden im Einklang mit der geforderten Genauigkeit
die loxodrome und die orthodrome Navigation angewandt. Wenn die Erdkrümmung wegen der
geringen Ausbreitung des betreffenden Navigationsgebietes unberücksichtigt bleiben kann, in der
Regel handelt es sich um abgeschlossene Meeresgebiete in denen die Küstennavigation - ca. 300 sm2
ununterbrochene Meeresfläche - angewandt wird, wie Ostsee und Nordsee, Mittelmeer, Schwarzes
Meer usw., so werden loxodrome Navigationsverfahren Anwendung finden. Das wahre Kursdreieck
wird auf ein loxodromes Dreieck reduziert werden können.
Der Breitenunterschied (Δφ) zweier Orte ist das Bogenstück eines Meridians zwischen den
Breitenparallelen dieser Orte. Der Breitenunterschied erhält seine Bezeichnung Nord oder Süd nach
der Richtung vom Abfahrtsort (A) zum Bestimmungsort (B).
Δφ = φB – φA
Der Längenunterschied (Δλ) zweier Orte ist das Bogenstück des Äquators oder der sphärische Winkel
am Pol zwischen den Meridianen dieser Orte.
Der Längenunterschied erhält seine Bezeichnung Ost oder West nach der Richtung vom Abfahrtsort
(A) zum Bestimmungsort (B).
Δλ = λB – λA
Δφ
Δλ
c b
a C
A
B
α λA
φA
φB
λB
112
Allgemein wird die Länge einer Bogenminute auf einem größten Kreis (Meridiane und Äquator) der
Erdkugel definiert. Es ergibt sich dann die einfache Beziehung, dass sie der 21600. Teil des Erdumfangs
ist. Damit wird beim Fahren auf einem Meridian oder dem Äquator mit jeder Seemeile ein Breiten-
bzw. Längenunterschied von 1’ zurückgelegt.
Auf Grund von in den einzelnen Ländern unterschiedlich durchgeführten hydrographischen
Vermessungen der Erde haben sich auch unterschiedliche Längen für eine Seemeile ergeben.
zum Beispiel: Japan mit 1853,18 m
Dänemark mit 1851,85 m
Portugal mit 1850,00 m
Zur Vereinheitlichung und für Vergleichszwecke wurde deshalb im Jahre 1928 vom Internationalen
Hydrographischen Büro (Sitz in Paris) vorgeschlagen, die Länge einer Seemeile auf 1852,00 m zu setzen.
Da die Breitenparallele mit wachsender geographischer Breite ihren Umfang verringern, ist auf
ihnen die Bogenminute nicht gleichlang. Dieser Unterschied wird durch den Begriff der Abweitung (a)
berücksichtigt.
Die Abweitung (a) ist das zu einem Längenunterschied gehörende Bogenstück eines
Breitenparallels, ausgedrückt in Seemeilen (sm).
Δλ sec φm
oder
Δλ = a cos φm
Der Breitenparallelbogen und Äquatorbogen verhalten sich zueinander wie ihre Radien.
Die Tabelle gibt an, wie viel Seemeilen einem Längenunterschied von 1° (60’) auf einem Breitenparallel
entsprechen.

113
Breitenparallel in Grad 1° Längenunterschied in sm
90° 0,0 sm
80° 10,4 sm
70° 20,5 sm
60° 29,9 sm
50° 38,5 sm
40° 45,8 sm
30° 31,8 sm
20° 56,3 sm
10° 58,9 sm
0° 60,0 sm
Zur Berechnung der loxodromen Stücke eines ebenen Dreieck haben sich zwei Verfahren durchgesetzt.
Es ist einmal die Berechnungsmethode mit der aus den Breitenkoordinaten des Abfahrts- und
Bestimmungsortes gemittelte Breite (φm) und die Methode der ebenfalls aus φA und φB gewonnenen
vergrößerten Breite
BESTECKRECHNUNG NACH MITTELBREITE
2
Δ oder
2Am
BA +=
+=m
a = a a ...........Abweitung
b = Δφ φm ……Mittelbreite
c = d d ...........Distanz in Seemeilen
α = Kurswinkel
Zwischen den Seiten und Winkel des loxodromen Dreiecks bestehen nun die einfachen Beziehungen
der ebenen Trigonometrie
a = c sin α a = d sin α
b = c cos α Δφ = d cos α
c = b sec α d = Δφ sec α
tan α = a ÷ b tan α = a ÷ Δφ

114
Aus diesen Verhältnissen kann entsprechend den gegebenen und gesuchten Komponenten das
loxodromische Dreieck nach Mittelbreite berechnet werden. Der Kurswinkel α kann jedoch nur in
quadrantaler Kurszählung (0° bis 90°) erhalten werden. Entsprechend des Zählsinn der geographischen
Längen – und Breitenunterschiede vom Abfahrtsort zum Bestimmungsort ist jedoch die Zuordnung des
entsprechenden Kursquadranten für den Kurswinkel (0° bis 90°; 90° bis 180°; 180° bis 270° oder
270° bis 360°) leicht möglich. Liegt jedoch der Kurswinkel im einem Bereich zwischen 85° bis 90°, so
sollte mit der Formel d = a cosec α die Distanz genauer ermittelt werden. Die Einführung der
Mittelbreite setzte sich als annähernde Lösungsvariante für relativ kurzes Distanzen durch, da mit der
Mittelbreite genau genug die Abweitung auf verschieden Breiten ausgeglichen werden konnte. Für
größere Distanzen oder für Berechnungen in Polnähe wird die Berechnungsmethode nach der
vergrößerten Breite empfohlen. Soll für größere Distanzen die Nord- Süd Verzerrung der
geographischen Breite (entsprechend der Konstruktion einer Seekarte im Mecartor – Entwurf) mit
berücksichtigt werden, so muss mit dem vergrößertem loxodromen Dreieck gerechnet werden.
Mit der mathematischen Beziehung (Näheres siehe im Abschnitt „Das System der
kartographischen Abbildungsverfahren“)
y = 7915,7045 x lg tan ( /4 + /2 ).
oder
= 7915,7045 x lg tan (45° + /2 )
werden die Meridionalanteile bzw. wird die vergrößerte Breite () berechnet, wobei sich die Tabelle
entsprechend Tafel 1 ergibt (siehe Tafel 1)
Die Größen und die mathematischen Beziehungen seien an dieser Stelle zusammengefasst:
Breitenunterschied Δφ = d cos α
Bestimmungsbreite φB = φA + Δφ
vergrößerter Breitenunterschied ΔΦ = ΦB – ΦA
Längenunterschied Δλ = ΔΦ tan α
Bestimmungslänge λB = λA + Δλ
Kurswinkel tan α =
Distanz d = Δφ sec α
Für Reisedistanzen, bei den die Ozeane zu überqueren sind, treffen die orthodromen
Navigationsverfahren zu. Befinden sich die Ortungsobjekte jedoch selbst über ca. 300 sm vom
Navigationssystem entfernt, müssen für einige Ortungsmethoden (astronomische Navigation,

115
Funknavigation, Sattelitennavigation) die orthodromen Navigationsprinzipien angewandt werden, um
in erster Näherung die Line of Position (LOP) an die Erdkugel oder auch in zweiter Näherung die
Standlinie an das Erdellipsoid anzugleichen. Wird die Erdkugel in erster Näherung mit einem
theoretischen Kugelinertial umgeben, dass gleich der Größe der Erdkugel ist und werden alle dahinter
stehenden Gestirne und künstlichen Himmelskörper auf diese so entstandene scheinbare
Himmelskugel projekziert, so können die scheinbaren Örter der Gestirne mit den geographischen
Koordinaten der Länge () und Breite () erfasst werden. Die Gestirne und künstlichen Himmelskörper
bekommen somit einen Bildpunkt auf der Erdoberfläche. Der Bildpunkt eines Gestirns oder künstlichen
Himmelskörpers definiert sich somit als Gerade, die den Erdmittelpunkt mit dem Gestirn oder
Himmelskörper verbindet. Trägt man den exakten Erdradius nun vom Erdmittelpunkt aus ab, ergibt
sich als Endpunkt (an der Erdoberfläche) der Gestirnsbildpunkt. Betreffs der Gestirne geben die
Nautische Ephemeriden die Gestirnsörter für jeden Zeitpunkt eines Tages und Jahres an. Will man
diese Nautischen Ephemeriden in geographische Koordinaten umrechnen, so ist der Deklinationswert
() gleich der geographischen Breite des Gestirns. Der Greenwicher Stundenwinkel (Grt) eines Gestirns
ist gleich der geographischen Länge. Bei der Umrechnung Grt in muss jedoch beachtet werden, dass
sich der Grt vollkreisig im Uhrzeigersinn zählt, während sich die in halbkreisiger Zählweise zählt. Ist
der Grt kleiner 180°, so entspricht der Greenwicher Stundenwinkel des Gestirns der westlichen Länge,
ist jedoch der Greenwicher Stundenwinkel größer als 180°, so gilt 360° − Grt = östliche Länge.
Beim orthodromen Navigieren (auf Großkreisen) ergibt sich somit die Möglichkeit
Gestirnsbildpunkte zum Ansteuern von Bestimmungsorten zu nutzen. Die nautischen Ephemeriden
eines Gestirns entsprechen den geographischen Koordinaten des Bestimmungsortes B, wenn ein
Gestirn über den Bestimmungsort im Zenit steht. Das Nautische Grunddreieck formuliert sich damit
wie folgt:
A
B
C
α
β
γ
c
b
a

116
Astronomische Koordinaten Geographische Koordinaten
Punkt A Zenit (Z) geographischer Abfahrtsort A
Punkt B Gestirn (G) geographischer Bestimmungsort B
Punkt C Himmelspol (P) geographischer Pol (P)
Winkel Azimut (Az) Kurswinkel () oder rechtweisender Kurs (rwK)
Winkel parallaktischer Winkel(q) parallaktischer Winkel (q)
Winkel Ortsstundenwinkel (t) Längenunterschied ( )
Seite a* Deklination () geographische Breite des Bestimmungsortes (B)
Seite b* geographische Breite () geographische Breite des Abfahrtsortes (A)
Seite c* Höhen (h) sphärische Distanz (d)
* Die Seiten verstehen sich als Komplemente (90° − n)
Berechnet werden können die Argumente:
in der astronomischen Navigation in der Großkreisnavigation
Beobachtungsstandort der Abfahrtsort
Gestirnsbildpunkt der Bestimmungsort
Ortsstundenwinkel Längenunterschied zwischen A und B
Azimut zum Gestirn Kurswinkel zum Ort B
Höhe eines Gestirns Distanz zum Ort B
Es kommt zur Berechnung der fehlenden Winkel und Seiten der 3. Fall zur Berechnung allgemeiner
sphärischer Dreiecke in Betracht. Die sphärische Trigonometrie hat in Anwendung des
Seitencosinussatzes zur Berechnung der fehlenden Winkel und in Anwendung des Sinussatzes zur

117
Berechnung der fehlenden Seiten neben anderen Möglichkeiten folgende Endformeln entwickelt und
angewandt.
Vor Einführung der digitalen Rechentechnik wurde in einem zeitraubenden Verfahren mit den für die
Navigation entwickelten Nautischen Tafeln logarithmisch gerechnet. Der Vollständigkeit halber und für
Nutzer dieser Tafeln soll hier diese Berechnung der Argumente Höhe und Azimut nochmals hergeleitet
sein.
Auch hier wurde, um die Höhe eines beobachteten Gestirns zu erhalten oder um eine Distanz zwischen
zwei geographischen Orten auf einem Großkreis zu erhalten, den Seitenkosinussatz der sphärischen
Trigonometrie angewandt. Ausgehend vom nautischen Grunddreieck, war die Zenitdistanz zu
berechnen, die dann in Höhe umgewandelt wurde, denn es ist z = 90° - h.
In der mathematischen Beziehung
cos z = cos b cos p + sin b sin p cos t
cos z = sin sin + cos cos cos t.
wurde für cos t die Formel cos = 1 - 2 sem gesetzt Diese Funktion gilt gleichzeitig als
Definitionsgleichung für die Funktion Semiversus (sem ).
cos z = sin sin + cos cos (1-2 sem t).
Wegen sin sin + cos cos = cos ( - ) ergibt sich
cos z = cos ( - ) - 2 cos cos sem t).
- ist gleich der Meridian-Zenitdistanz des Gestirns z0.
Ferner ist cos z und cos z0 durch die Semiversusfunktion zu ersetzen.
1 - 2 sem z = 1 - 2 sem z0 - 2 cos cos sem t,
also ist sem z = sem z0 + cos cos sem t.
Das Produkt cos cos sem t ist stets kleiner als 1, da jeder einzelne Faktor kleiner oder höchsten
gleich 1 ist und mindestens einer der Faktoren immer kleiner als 1 ist, auch ist das Produkt stets größer
oder gleich Null, da keiner der Faktoren negativ wird.
Folglich gibt es einen Hilfswinkel y, für den gilt
sem y = cos cos sem t.
Damit lässt sich die Rechnung nach obiger Formel wie folgt durchführen:
Zunächst aus der Beziehung
sem z = sem z0 + cos cos sem t,
118
ersichtlich, dass die auf ihr aufgebaute Höhentafel die Logarithmen der Funktionen cos und sem
sowie die natürlichen Werte der Funktion sem enthalten muss. Wegen der eben angestellten
Überlegung kommt man damit aus, denn man kann den natürlichen Wert lg (cos cos sem t) unter
den natürlichen Werten der Semiversusfunktion finden und benötigt nicht die Tafel der Logarithmen
der Zahlen dazu. Es ist dann
sem z = sem z0 + sem y
Will man die Distanz auf einem Großkreis zwischen zwei bekannten geographischen Orten benutzen,
muss man die Glieder der Semiversusformel
sem z = sem z0 + cos cos sem t
ersetzen durch z0 durch
durch A
durch B
t durch Δλ
die Sermiversusformel für die Distanzberechnung lautet dann:
sem d = sem + cos A cos B sem Δλ.
Die Distanz bzw. Höhenberechnung unter Verwendung der Semiversusformel wurde vielfach noch bis
in den sechziger Jahren des 20. Jahrhunderts angewendet. Heute gibt es Tafelwerke und
Rechenprogramme, die weitgehend die Anwendung der Semiversusformel und die daraus
resultierende logarithmische Berechnung des Ergebnisses ausschließen. Da jedoch die logarithmische
Berechnungsmethode zur Berechnung der astronomischen Höhe bzw. der orthodromen Distanz an
Ausbildungsstätten noch teilweise in Gebrauch ist, soll die logarithmische Rechnung im Anhang dieses
Buches vorgestellt werden. Einfacher ist selbstverständig die Anwendung eines Taschenrechners mit
Winkelfunktionen. Hier können nun folgende Formeln bequem angewandt werden.

119
Zur Berechnung der Winkel:
Azimut oder Kurswinkel
sin /B
cos a/ = ( _________________ + / − tan /A ) x tan h/d
cos /A x sin h/d (1)
Stundenwinkel oder Längenunterschied
sin h/d
cos t/ = ( _________________ + / − tan /B ) x tan /A
cos /B x sin /A (2)
Parallaktischer Winkel
sin /A
cos q = ( __________________ + / − tan h/d ) x tan /B
cos /A sin h/d (3)
Ist /A ungleichnamig mit /B, gilt das positive (+) Vorzeichen;
Ist /A gleichnamig mit /B, gilt das (-) Vorzeichen
Zur Berechnung der Seiten:

120
Höhe oder sphärische Distanz
cos /B x cos t/
sin h/d = ( ___________________ + / −sin /B ) x sin /A
tan /A (4)
90° − h = d° (d in ° x 60’ = d in sm)
Deklination oder Breite des Ortes B
cos /A x cos a/
sin /B= ( ___________________ + / −sin /A ) x sin h/d
tan h/d (5)
Breite oder Breite des Ortes A
cos h/d x cos q
sin /A = ( __________________ + / −sin h/d ) x sin /B
tan /B (6)
Ist /A gleichnamig mit /B, gilt das positive (+) Vorzeichen;
Ist /A ungleichnamig mit /B, gilt das (-) Vorzeichen

121
Mit diesen astronomisch - mathematischen Beziehungen können nun entweder die astronomischen
Argumente oder die Elemente des Großkreises berechnet werden, denn sowohl die
Großkreisnavigation, als auch die astronomische Navigation unterliegen den gleichen sphärischen
mathematischen Gesetzen. Das Berechnen der Argumente gelingt mit einem einfachen
Taschenrechner. Das Nautische Jahrbuch ist zum Berechnen der Gestirnspositionen erforderlich. Zur
Durchführung von astronomischen Beobachtungen sind als weitere Hilfsmittel eine Seekarte, eine Uhr
und ein Sextant notwendig.
Die astronomische Navigation basiert auf dem Prinzip, dass der Sternenhimmel, einschließlich
der Himmelskörper Sonne, Mond und Planeten
1.) zur gleichen Zeit auf verschiedenen Positionen der Erdkugel anders erscheint;
2.) zur verschiedenen Zeit auf gleichen Positionen der Erdkugel anders erscheint;
3.) zur verschiedenen Zeit auf verschiedenen Positionen anders erscheint.
Für die Seefahrt und für die damit verbundene astronomische Navigation trifft in der Regel der dritte
Zustand zu. Während das Schiff in einer Zeitspanne (t) laufend seine Position wechselt, wechseln
auch die Gestirne bezogen auf das geographische Koordinatensystem laufend ihren Bildpunkt auf der
Erdoberfläche.
Wenn als Zeitpunkt die abgelesen Uhrzeit der Gestirnsbeobachtung gilt, so hat die
astronomische Navigation den dritten Zustand zum ersten Zustand reduziert, indem zu einem festen
Beobachtungszeitpunkt die Gestirnskoordinaten ( und t mit Hilfe des Nautischen Jahrbuchs)
festgestellt werden. Nebenbei wird unbewusst sozusagen die vierte Dimension (Zeit) der
philosophischen Rauminterpretation auf eine annehmbare dritte Dimension reduziert, denn der
Sternenhimmel wird zum Zeitpunkt t wie im Stillstand betrachtet. Die astronomische Navigation ist
somit eine Betrachtung der Stillstände zwischen zwei Zeitspannen.
Wenn die Gestirnspositionen im Zeitstillstand als geographische Bildpunktpositionen auf der
als Kugel definierten Erde aufgefasst werden, so kommt ein sphärisches kartesisches
Koordinatensystem mit den Funktionen x und y zur Anwendung.
cot x = cot δ · cos t
xcos
y coscot tAzcot
=
Az cos
ycot hcot =
y = 90° - φ + x (wenn φ und δ gleichnamig)
y = 90° - φ - x (wenn φ und δ ungleichnamig)

122
In Ableitung dieser Funktion sind die mathematischen Beziehungen zur Berechnung der Seiten und
Winkel im sphärischen Dreieck entwickelt (Formel 1 bis 6).
Die Anwendung von mathematisch -sphärischen Beziehungen macht es also möglich, im Stillstand der
Zeit das astronomisch-nautische Grunddreieck auszuwerten., wenn entsprechende
Eingangsargumente vorhanden sind. Jedoch soll an dieser Stelle nicht versäumt werden, einen
anderen Aspekt der Navigation in die sphärischen Gesetzmäßigkeiten des Kugelinertials mit ein zu
beziehen.
Aus der Physik ist bekannt, dass die Ausbreitungsrichtungen aller Formen der für die Orientierung
verwandten Wellen geradlinig, wenn von den üblichen Fehlereinflüssen der Brechung, Streuung und
Absorption abgesehen wird, verlaufen. Nun wird jedoch beobachtet, dass künstlich erzeugte
elektromagnetische Funkwellen nicht geradlinig, sondern dem Großkreis folgen, wenn diese von
einem weit entfernten terrestrischen Sender zu einem zum Navigationssystem S’ gehörendem
Empfänger gelangen. Diese Besonderheit wird durch die Abstrahleigenschaften eines schwingen
Dipols bewusst geschaffen, um die Signalübertragung durch Raum – bzw. Bodenfunkwellen zwischen
terrestrischen Sendestellen und terrestrischen Empfangsstellen zu gewährleisten. Eine Art der
Nutzung der künstlich erzeugten Funkstrahlen liegt im Richtungsempfang von Funkwellen zur
Standlinienbestimmung. Aufgrund der Bedeutung in der Seefahrt sei, obwohl die Peilfunkanlagen
wegen der Einführung des weltweiten Satellitenfunkverkehrs schon so gut wie der Vergangenheit
anhören, dennoch eine kurze Beschreibung einiger Kenngrößen dieses Systems erlaubt. Der Übergang
von der terrestrischen zur extraterrestrischen Funkortung muss die Ausbreitungsgesetze von
Funkwellen im terrestrischen Raum berücksichtigen, da das ausgesendete Satellitenfunksignal auch
hier die Grenzschichten der Atmosphäre durchlaufen muss, um das Navigationssystem Schiff zu
erreichen. Die sich ergebene Funkfehlweisung für Richtfunkempfänger mit Kreuzrahmen kennzeichnet
sich durch die Wirkungsfelder der Wegablenkung, dem Dämmerungs – oder Nachteffekt und der
Funkdeviation. Die Wegablenkung kommt durch Brechung des Funkstahls beim Übergang durch
Schichten unterschiedlicher Leitfähigkeit zustande und wird im Allgemeinen mit Küstenbrechung
bezeichnet und ist besonders ausgeprägt, wenn Funkstrahlen im spitzen Winkel die Küste schneiden.
Werden während der Dämmerung oder der Nacht gleichzeitig Raum- und Bodenwellen empfangen,
kommt es zu einer Überlagerung der Funkwellen. Da Raumwellen den größeren Weg zum Empfangsort
zurücklegen, verfälschen diese Überlagerungen das Empfangssignal.
Bei Entfernungen größer 30 Seemeilen treten jedoch kaum Überlagerungen auf, so dass während der
Nacht gute Peilergebnisse erlangt werden können. Nur durch Anwendung des Impulspeilverfahrens
lassen sich die Signale von Raum- und Bodenwelle trennen und können sogar zur Messung des
unterschiedlichen Laufzeitunterschiedes von Raum – und Bodenwelle und damit zur Gewinnung von
Standlinien (Funknavigationssystem LORAN) genutzt werden. Die Funkdeviation beschreibt dagegen
die Funkstahlablenkung am Ort einer Rahmenempfangsantenne durch Erfassung des Unterschiedes
zwischen der scheinbaren und wahren Funkstrahleinfallsrichtung. Die Entstehung der Funkdeviation
beruht auf den Einfluss der dem Senderfunksignal gleich – oder gegenphasigen Rückstahlfelder der
metallischen Leiter am Schiff und ist entsprechend dem unterschiedlichen Bau der Schiffe und dem
Aufbauort der Funkrahmenempfangsantenne auf dem Schiff von Schiff zu Schiff und von
Schiffsseitenpeilwinkel zu Schiffsseitenpeilwinkel verschieden.

123
Unter der Voraussetzung, dass die Großkreispeilung von Funkstrahlen auf den landseitigen
terrestrischen Festpunkt der empfangenen Standlinie bezogen wird, ist die kürzesten Verbindung
zwischen Sender und Empfänger durch den polwärts gekrümmten Großkreis auf der als Kugel
angenommenen Erdoberfläche definiert. Hier werden somit die gleichen Gesetzmäßigkeiten
angewandt, die für die Definition des Großkreises zwischen den geographischen Koordinaten für die
Orte A und B auf einem Kugelinertial gelten. Der Ort A gilt hier als Senderstandort und kann mit der
Begriffsabkürzung S“ erfasst werden. Der Ort B gilt als Standort des Navigationssystem S’. Um in der
terrestrischen Funkpeilnavigation die orthodromen Richtungen der Funkstandlinien auf das loxodrome
Kursdreieck zu beziehen und in der Mecartorkarte auswertbar zu machen, wurden der Begriff der
Loxodrompeilung eingeführt. Mit Hilfe des Nautischen Grunddreiecks lassen sich jedoch auch die
durch die terrestrische Peilfunknavigation gewonnenen Standlinien für die loxodrome Auswertung und
die Beziehungen zwischen S’ und S“ aufbereiten. Die scheinbar unabhängige Methodik der Gewinnung
von astronomischen Gestirnsstandlinien und terrestrischen Funkstandlinien sind durch die
Gemeinsamkeit ihres Richtungsverlaufs verknüpft und somit nicht mehr scheinbar. Diese
Gemeinsamkeit bezieht sich auf den Großkreisverlauf. Fallen der Standort eines terrestrischen
Funksenders und eines astronomischen Gestirnsbildpunktes auf eine gemeinsame geographische
Position des Kugelinertials, so wird der Verlauf des Gestirnsazimut mit dem Verlauf des Funkstrahls
zum System S’ übereinstimmen. In Reduktion der Auswertung auf das Kugelinertial wird somit auch
ein gleicher Großkreis berührt. Um jedoch diese Gemeinsamkeit zu erläutern, muss jedoch auf eine
besondere Unterscheidung hingewiesen werden, die auf die Gesetze der Ausbreitung von
terrestrischen Funkwellen einerseits und auf die Ausbreitung der Lichtwellen andererseits zurück
greift.
Wir haben gesehen, dass elektromagnetische Wellen sich geradlinig ausbreiten. Durch die
Dipolsendeeigenschaften wurde der technisch terrestrische Funkstrahl faktisch für den Großkreis
zurechtgebogen. Würden die technischen Eigenschaften der Ausstrahlung von Funkwellen nicht
erzwungenermaßen an den Verlauf der Erdkrümmung angepasst worden sein, so würden alle
Funksignale in Richtung der waagerechten angelegten Tangenten an die Erdoberfläche abgestrahlt
werden. Der Bildpunkt eines Gestirns auf der Erdoberfläche basiert auch nur auf eine rechnerisch
sphärische Annahme eines Ortungsprinzips und spiegelt sozusagen eine mathematisch abstrakte
Orientierungsmöglichkeit wieder. Somit ist, um Großkreisrichtungen und – distanzen zu erhalten, die
rechnerische Aufbereitung eines Gestirnsbildpunktes der faktischen Aufbereitung durch einen
terrestrischen Richtfunkstrahl gleichzusetzen. Sicher liegt hier eine unabhängige Entwicklung vor, die
dennoch den bestehenden natürlichen Gesetzen der sphärischen Trigonometrie gefolgt ist. Natürlich
breiten sich die Lichtstrahlen eines Gestirns geradlinig aus. In der sphärischen Navigation interessiert
das eigentliche Gestirn ja auch nur am Rande, wichtig für die Orientierung auf rechnerischer Basis ist
eigentlich nur der Gestirnsbildpunkt auf dem Kugelinertial, der jedoch ohne direkte Beobachtung des
Gestirns nicht gewonnen werden kann.
Das Nautische Grunddreieck ist damit zum kräftigsten Argument, zum wichtigsten Baustein der
modernen Orientierung zur See geworden. Mit Hilfe dieses Nautischen Grunddreiecks wird es möglich,
(um wieder auf das eigentliche Thema zurückzukommen) die Aufgaben der Großkreisnavigation,
eingeschlossen die astronomischen Navigation und die Funknavigation zu bewältigen, die jetzt
zusammenfassend vorgestellt werden sollen.
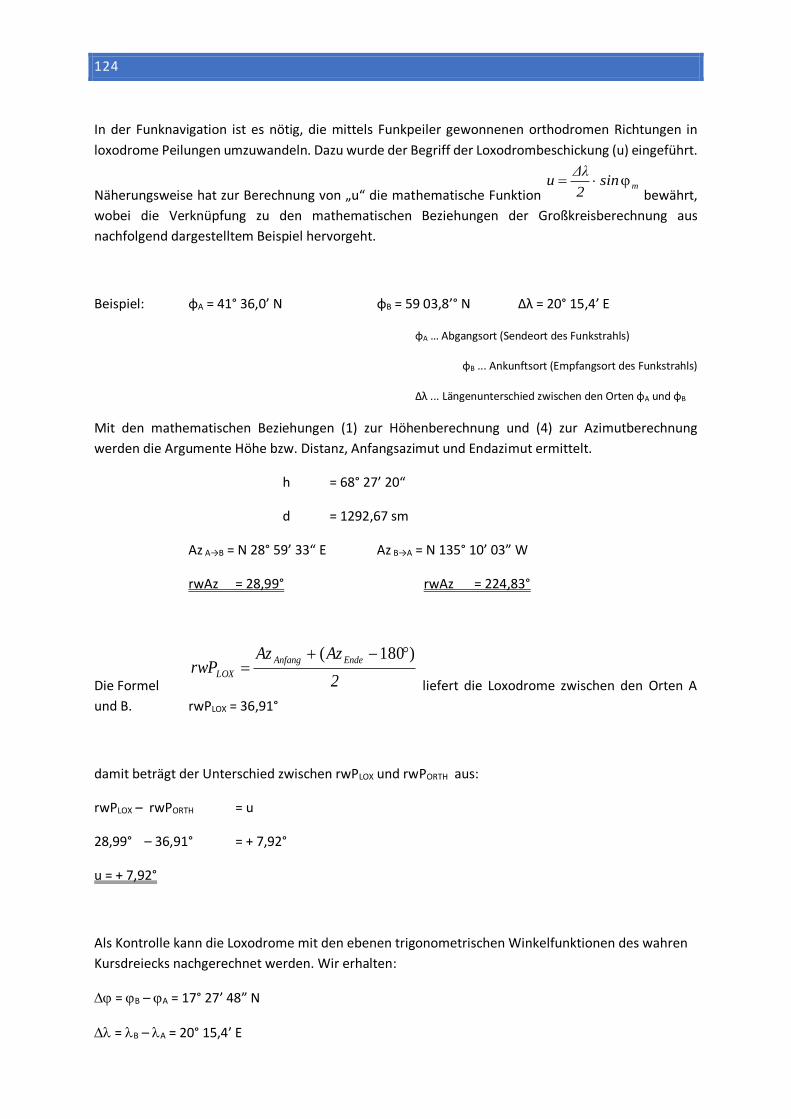
124
In der Funknavigation ist es nötig, die mittels Funkpeiler gewonnenen orthodromen Richtungen in
loxodrome Peilungen umzuwandeln. Dazu wurde der Begriff der Loxodrombeschickung (u) eingeführt.
Näherungsweise hat zur Berechnung von „u“ die mathematische Funktion m sin
2
Δλu =
bewährt,
wobei die Verknüpfung zu den mathematischen Beziehungen der Großkreisberechnung aus
nachfolgend dargestelltem Beispiel hervorgeht.
Beispiel: φA = 41° 36,0’ N φB = 59 03,8’° N Δλ = 20° 15,4’ E
φA … Abgangsort (Sendeort des Funkstrahls)
φB ... Ankunftsort (Empfangsort des Funkstrahls)
Δλ ... Längenunterschied zwischen den Orten φA und φB
Mit den mathematischen Beziehungen (1) zur Höhenberechnung und (4) zur Azimutberechnung
werden die Argumente Höhe bzw. Distanz, Anfangsazimut und Endazimut ermittelt.
h = 68° 27’ 20“
d = 1292,67 sm
Az A→B = N 28° 59’ 33“ E Az B→A = N 135° 10’ 03” W
rwAz = 28,99° rwAz = 224,83°
Die Formel 2
AzAzrwP
EndeAnfang
LOX
)180( −+=
liefert die Loxodrome zwischen den Orten A
und B. rwPLOX = 36,91°
damit beträgt der Unterschied zwischen rwPLOX und rwPORTH aus:
rwPLOX – rwPORTH = u
28,99° – 36,91° = + 7,92°
u = + 7,92°
Als Kontrolle kann die Loxodrome mit den ebenen trigonometrischen Winkelfunktionen des wahren
Kursdreiecks nachgerechnet werden. Wir erhalten:
= B – A = 17° 27’ 48” N
= B – A = 20° 15,4’ E

125
+=
2
Am = 50° 19’ 54” N
a = cos m = 12° 55’ 50”
=
atan
α = 36° 31’ 04” = 36,52°
d = sec = 1303,77 sm
Die Näherungsformel zur Berechnung der Loxodrombeschickung ist aus dem nautischen Grunddreieck
wie folgt entwickelt:
M
M
M
EndeAnfang
EndeAnfang
sin 2
Δλu
uist damit
2
Δλtan sin
2
Δ secutan
und
2
Δλcot cosec
2
Δ cosucot
:folgt es
1802u)Az(180Az
:giltsomit
2
Δλcot
2
Δcos
2
)Az(180Aztan
=
=
=
=+−+
=−+
'9,1950sin2
'4,1520u
=
u = + 7° 47’ 48“ = + 7,8°
Das Ergebnis weicht hier lediglich um 0,12° ab. Somit kann die obige Formel hinreichend genau zur
Berechnung der Loxodrome angewandt werden.

126
In der astronomischen Navigation sollen folgenden Aufgaben bewältigt werden:
1.) Bestimmung von astronomischen Standlinien nach der Höhenmethode.
Dabei wird der Umstand ausgenutzt, dass zu einer Zeit (t) alle Beobachter einen gleichen sphärischen
Abstand von einem Gestirnsbildpunkt haben, wenn sie die gleiche Höhe messen. Für ein ausgewählten
Koppelort wird die Höhe und das Azimut vorausberechnet. Durch Einmessen der Höhe gelingt es die
Abweichung der Standlinie des Beobachtungsortes in Seemeilen vom Koppelort zu berechnen.
2.) Bestimmung der geographischen Breite und geographischen Länge des Beobachtungsortes durch
Beobachtung eines Gestirns im Meridian.
Bei der Kulmination des Gestirns fällt das Nautische Dreieck als eine Linie zusammen. Wenn der
Deklinationswert des Gestirns bekannt ist, kann die geographische Breite des Beobachtungsortes
algebraisch bestimmt werden. So gilt für den oberen Meridian die astronomische Beziehung = z0 +
(z0 ist dabei die Meridian-Zenitdistanz des Gestirns). Die geographische Länge wird durch Zeitvergleich
zwischen der MOZ und der mitgeführten UT1-Zeit gewonnen. Die in Stunden, Minuten und Sekunden
gemessene Zeitdifferenz (t) zwischen der Ortszeit t1 an einem Beobachtungsort und der vom Ort des
durchlaufenden Nullmeridians (hier UT1) mitgeführten Zeit t0 lässt sich durch folgende Formel in nach
Grad zu messende Längendifferenz umsetzen:
° = ¼ (t1 − t0)’
Ist das Ergebnis positiv, liegt der Beobachtungsort östlich des Nullmeridians, andernfalls ist die
Lagebeziehung umgekehrt.
3.) Bestimmung der geographischen Breite nach dem Nordstern (Polaris) bzw. nach einem
Zirkumpolarstern.
Bei der Bestimmung der geographischen Breite nach dem Nordstern wird angenommen, dass der
Nordstern genau im Himmelsnordpol steht. Berichtigungstabellen geben Auskunft über die tägliche
und stündliche Abweichung des Sternes von der Polposition, so dass mit einer Beschickung die
gemessene Höhe zur beobachteten Breite direkt nach der Beziehung
90° − h = umgerechnet werden kann. Wird die geographische Breite nach einem Zirkumpolarstern
bestimmt, so wird der Höhenwinkel h1 und h2 bei zwei Meridiandurchgängen, die knapp 12 Stunden
hintereinander liegen, gemessen. Es gilt die Beziehung: h1 + h2 + − 2 = , daraus folgt die
geographische Breite: = ½ (h1 + h2) . Dieses Messverfahren kann vornehmlich zur Bestimmung der
Abplattung der Erde angewandt werden.

127
4.) Durchführung einer Kompasskontrolle.
Hier wird das berechnete Azimut eines Gestirns mit der Kompasspeilung verglichen. Besonders schnell
erfolgt die Berechnung des Azimuts nach der mathematischen Beziehung
cos a = sec x sin , wenn das Gestirn im wahren Auf- oder Untergang steht.
5.) Berechnung von Auf-, Untergangszeiten und Kulminationszeiten von Gestirnen.
Durch Anwendung der mathematischen Beziehung cos t = − tan x tan wird der halbe Tagbogen des
Gestirns berechnet. Unter Beachtung der Herausrechnung der Kulminationszeit aus dem Nautischen
Jahrbuch erfolgt dann das Berechnen der Auf- und Untergangzeiten von Gestirnen.
6.) Zeitkontrollen
Eine Zeitkontrolle des Schiffschronometers kann nach der Methode der Monddistanzen erfolgen.
Dabei wird der Winkelabstand zwischen dem schnell an den Fixsternen vorbeiziehenden Mond und
einem auf der Mondbahn liegenden Fixstern gemessen. Durch Berechnung des Sollwinkelabstandes
und der Mondhöhe gelingt das Herausrechnen der Uhrzeit.
Diese Verfahren spiegeln jedoch nur Teilaspekte der astronomischen Navigation wieder. Soll die
astronomische Navigation als eigenständiges Ortungssystem gelten, welches zu jeder Zeit, die Sicht
der Sterne natürlich vorausgesetzt, anwendbar wird und ohne den Bezug zum Horizont auskommt,
muss eine ganzheitliche Betrachtung der Positionsastronomie angestrebt werden. Es wird dabei
bewusst davon ausgegangen, dass zu jeder Zeit der Sternenhimmel auf jeder beliebigen Position der
Erde anders erscheint. Es ist ein Verfahren, um sozusagen an der sich drehenden Himmelskugel entlang
zu navigieren.
An einem Beispiel aus der polynesischen Navigation wollen wir uns einmal das Navigieren an der sich
drehenden Himmelskugel veranschaulichen.
Der polynesische Sternennavigator hatte nun weder Kompass, noch Seekarte, noch Sextant zur
Verfügung. Statt dem nautischem Jahrbuch, indem der heutige Nautiker alle scheinbaren Gestirnsorte
am Firmament findet, hatte der polynesische Sternennavigator nur seinen Erfahrungsschatz, der von
Generation zu Generation weitergetragen wurde. Der heutige Navigator besitzt natürlich diesen
Erfahrungsschatz nicht mehr. Er muss mit Hilfe der Mathematik sich den augenblicklichen
Erkenntnisstand errechnen. Soll eine Navigation ohne nautische Geräte erfolgen, so kann dieses nur in
Anwendung des Nautischen Jahrbuchs erfolgen, denn das Bekanntsein der Gestirnspositionen am
nächtlichen Himmel ist Grundvoraussetzung für die Durchführung der Navigation ohne Hilfe nautischer
Geräte. Grundlage dieser Navigation ist das Fahren nach Sternenazimuten. Der Nautiker muss nun
wissen, welche Sterne er auf seiner Kurslinie von A nach B ansteuern muss. Da der moderne Nautiker
keinen Erfahrungsschatz in dieser Hinsicht besitzt, muss er sich vorher diese Sterne errechnen. Mit
Hilfe eines Beispiel soll die Vorgehensweise dabei erläutert werden. Die Uhr bzw. der Kompass soll

128
allein dazu dienen, die Richtigkeit dieser Vorausberechnungen zu prüfen. Einmal diese Methodik für
den Weg zwischen zwei Positionen erprobt, kann später auf die Anwendung von Uhr und Kompass
ganz verzichtet werden. Bei der polynesischen Art der Navigation wird der Umstand ausgenutzt, dass
zu verschiedenen Zeiten auf verschiedenen Positionen der Sternenhimmel anders erscheint, d. h. die
laufende Bewegung der Gestirne wird bewusst beachtet. Je mehr Sterne als Leitsterne betrachtet
werden, d. h. je mehr Rechenvorgänge zur Gewinnung der entsprechenden Sternenazimute
durchgeführt werden, desto genauer wird die Durchführung der Navigation selbst sein, da die
durchgeführten Rechnungen nur die Stillstände zwischen zwei oder mehreren Zeitspannen der
Sternbewegungen betrachten kann. Je mehr Stillstände berechnet werden, desto mehr erfolgt die
Annäherung an die tatsächliche Bewegung. Da keine Positionsbestimmung zur Kontrolle des
Schiffsweges erfolgt, ist die Methode in erster Linie für die hohe See geeignet. Die Küstennavigation
kann dadurch nicht ersetzt werden. Es wird aber hinreichend genau das Segeln auf den größtem Kreise
möglich sein, wie wir nachfolgend noch sehen werden.
Somit vollzieht sich die polynesische Sternennavigation, die ohne den Bezug Horizont auskommt, nur
mit Hilfe der Sternenazimute, der Gestirnsbildpunkte und den unterschiedlichen Richtungen und
Distanzen, die verschiedenen Sterne zueinander einnehmen. Der Umstand, dass Sterndistanzen
zueinander, wie auch die Deklinationswerte über lange Zeit unverändert sind, spielt dabei die
entscheidende Rolle, denn davon hängt die periodische Wiederkehr der Sternbilder über bestimmte
Orte bzw. Positionen der Erde ab. Es handelt sich sozusagen um eine Navigation an der drehenden
Himmelskugel entlang. Die polynesische Navigation wendet dabei folgende Verfahren an:
1.) Kursausrichtung nach dem für den Bestimmungsort geltenden Zenitstern, der über dem
Bestimmungsort von Ost nach West zieht.
2.) Kursausrichtung nach einem Leitstern, der die geplante Großkreisbahn schneidet bzw. auf dem
Großkreis auf- oder untergeht.
3.) Kursausrichtung nach dem Winkel, die ein Stern oder mehrere Sterne zum geplanten Großkreis
einnehmen, während sie kulminieren bzw. auf- oder untergehen.
4.) Kursänderung nach der Richtung, die zwei ausgewählte Sterne untereinander verbindet. Diese
Richtung ist die unveränderte Sterndistanz zweier Sterne, parallel zum Großkreis oder in einem Winkel
zum Großkreis, wobei ein dritter Stern über dem Großkreis zieht.
5.) Kursausrichtung nach Gestirnen, die erstmals über den Horizont kommen bzw. nicht mehr über den
Horizont kommen und letztmalig sichtbar sind.
Bei dieser Art der Navigation ist zu unterscheiden zwischen Zirkumpolarsternen und Sternen, die
täglich auf- und unter gehen. Auch ist die Kenntnis von Bedeutung, wie der Großkreis zu den
Breitenparallelen steht, d. h. wie die Schiffsrichtung zum Sternenweg am Himmel steht und in welchen
Teil der Himmelskugel sich der Standort des Beobachters befindet. So teilt der polynesische
Sternennavigator abhängig vom Beobachtungsort den Himmel in drei Teile, einen nördlichen, einen
mittleren und einen südlichen Teil. Diese Teilung ermöglicht die Zuordnung der Gestirne , wobei es
von Bedeutung ist, ob das Boot zum Beispiel in einem dieser Teile verbleibt oder von einem Teil zum
anderen wechselt. So bedeuten Nord – Südkurse, ein navigieren vorwiegend nach
Kulminationsgestirnen, Ost - Westkurse bedeuten dagegen von einem Stern begleitet zu werden.

129
Zwischenkurse bedeuten gleichzeitig nach Kulminationssternen und nach Begleitsternen navigieren zu
müssen, da das letzte genannte Verfahren auch vom Rechenaufwand das schwierigste und
komplizierteste Verfahren darstellt, soll es nun erläutert werden.
Wir wollen eine Atlantiküberquerung beginnen und stehen mit unserem Boot an 12. August 1995 um
21.00 Uhr (Weltzeit) im Ausgang des englischen Kanals. Die Fahrt soll mit Südwestkurs nach Puerto
Rico gehen.
GROSSKREISBERECHNUNG ZWISCHEN ABFAHRTS - UND BESTIMMUNGSORT
Zuerst führen wir die Großkreisberechnung durch, die sich zwischen der Startposition (Abfahrtsort)
und der Endposition (Bestimmungsort) ergibt. Dadurch ermitteln wir die sphärische Distanz und den
Anfangs- und Endkurs nach Puerto Rico.
Startposition: φA = 49° 35' N; λA = 5° 00' W
Endposition: φB = 19° 00' N; λB = 65° 00' W
Anfangskurs: = N 100° 18’ 11“ W, rwK = 259,7°
Endkurs: = S 042° 25’ 35“ W, rwK = 222,4°
Distanz: = 3379,92 Seemeilen (aus 90° - h = dsm).
Diese Distanz ist gleichzeitig eine Höhe von 33° 40' 05", d. h. ein im Zenit stehender Stern über
Puerto Rico wird im Ausgang des englischen Kanals (Startposition) 33° 40' 05" Höhe über dem
Horizont besitzen. Ausgehend von diesen Ausgangswerten ergibt sich die folgende Übersicht über
den Verlauf des Großkreises

130
Position Koordinaten rwK Distanz Zeit auf Kurs
mit 8 kn
Tag Uhrzeit (UTC)
Position A φ = 49° 35,0’ N
λ = 5° 00,0’ W
259,7° 200,4 sm 25h 03 min 12.08.1995 21.00 Uhr
Zwischenpunkt 1 φ = 48° 52,6’ N
λ = 10° 00,0’ W
255,9° 423,0 sm 52h 52 min 13.08.1995 22.03 Uhr
Zwischenpunkt 2 φ = 46° 42,9’ N
λ = 20° 00,0’ W
248,5° 467,6 sm 58h 27 min 16.08.1995 02.55 Uhr
Zwischenpunkt 3 φ = 43° 24,2’ N
λ = 30° 00,0’ W
241,4° 532,8 sm 66 h 36 min 18.08.1995 13.22 Uhr
Zwischenpunkt 4 φ = 38° 41,9’ N
λ = 40° 00,0’ W
234,8° 620,7 sm 77h 35 min 21.08.1995 07.58 Uhr
Zwischenpunkt 5 φ = 32° 17,8’ N
λ = 50° 00,0’ W
229,0° 728,5 sm 91h 04 min 24.08.1995 13.33 Uhr
Zwischenpunkt 6 φ = 23° 56,1’ N
λ = 60° 00,0’ W
224,3° 406,9 sm 50h 52 min 28.08.1995 08.37 Uhr
Position B φ = 19° 00,0’ N
λ = 65° 00,0’ W
30.08.1995 11.29 Uhr
gesamt: 3379,9 sm 422h 29 min 17d 14h 29 min
131
FESTSTELLEN DER ZENITSTERNE, DIE ÜBER DEN BESTIMMUNGSORT ZIEHEN
Entsprechend der geographischen Breite des Bestimmungsortes werden die Gestirne gesucht, dessen Deklination (δ) annähernd gleich der geographischen Breite des Bestimmungsortes ist. Der gefundene Stern zieht dann von Ost nach West über den Bestimmungsort. Der Stern Arcturus, aus dem Sternbild Bootes (Bärenhüter) erfüllt genau diese Bedingung. Er besitzt eine Deklination (δ)von 19° 13,2' N und zieht somit 13,2 sm nördlich an Puerto Rico vorbei. Sein Sternwinkel (t) beträgt 146° 09,9'. Wenn er über Puerto Rico kulminiert, wird er von der Startposition aus in einer Höhe von 33° 49' 50" und mit einem Azimut von 259,9° zu beobachten sein. Das entspricht genau dem Kurs, der gesteuert werden muss. Gleichzeitig kann errechnet werden, dass der Stern Mirak, ebenfalls aus dem Sternbild Bootes ebenfalls in Kursrichtung 10° unterhalb von Arcturus zu beobachten ist. Um den Zeitpunkt zu finden, wann Arcturus über Puerto Rico kulminiert, müssen Kontrollsterne verwendet werden, die über der eigenen Position beobachtet werden. Die Größe der Deklination dieser Kontrollsterne wird durch die geographischen Breite des Standortes bestimmt, wobei der Sternwinkel dieser Kontrollsterne um den Längenunterschied zwischen Standort und Bestimmungsort kleiner sein muss, als der des Zenitsternes. Wenn der Stern Eltanin, Sternbild Draco (Drachen) sich auf der Position zwischen dem Zenitpunkt des Abfahrtsortes und dem Stern Polaris, Sternbild Ursa Minor (Kleiner Bär) - genau in Nordrichtung also - befindet, er durchwandert dabei gerade seine obere Kulmination, ist der Zeitpunkt gesetzt, Arcturus anzusteuern. Denn Arcturus kulminiert dann gerade über Puerto Rico. Rechnet man den Kulminationszeitpunkt aus dem Nautischen Jahrbuch, kann festgestellt werden, dass Arcturus am 12. August 1995 genau um 21-11-57 Uhr (Weltzeit) über Puerto Rico kulminiert und dabei auf dem Großkreis steht. Der Stern Eltanin hat zu diesem Zeitpunkt eine Höhe von 86° 26' 38" und steht in einer Richtung am Kompass von 304,2°, genau kulminiert Eltanin um 20-53-06 Uhr (Weltzeit).
So kann die Reise nach Puerto Rico also beginnen. Eltanin hat seine Kulmination gerade durchwandert
und Arturus und Mirak stehen genau auf dem Großkreis. Wir segeln und steuern Arcturus und Mirak
nun voraus an. Die Frage ist: Wie lange können diese beiden Sterne mit hinreichender Genauigkeit
angesteuert werden?
AUFFINDEN WEITERER LEITSTERNE FÜR DIE NACHT
Steuern wir den Sternen Arcturus und Mirak stundenlang hinterher, werden wir unsere Großkreisbahn
sehr bald verlassen, denn diese Leitsternen schneiden den Großkreis und laufen nicht auf ihn mit. Um
nach weiteren Leitsternen zu fahren, dürfen diese nicht sehr hoch stehen und müssen gut sichtbar
sein, denn es ist ein besseres Steuern, wenn die Sterne flach stehen. Stehen sie allerdings sehr flach,
sind sie aufgrund der terrestrischen Strahlenbrechung am Horizont nicht mehr sichtbar, deshalb
eignen sich am besten Gestirnshöhen zwischen 10° und 40°. Da alle Gestirne eine Gestirnsbildpunkt
auf der Erdkugel einnehmen, ist die Entfernung des Gestirnsbildpunktes vom Standort des Bootes
ebenfalls von entscheidender Frage. Denn je weiter ein Gestirnsbildpunkt vom Beobachtungsort
entfernt liegt, je geringer die Differenz seiner Azimutänderung in einer Zeitspanne. Die
Geschwindigkeit eines Bahnpunktes ist 15° 02' bestimmt. Das sind 902 sm/h auf dem Äquator bzw. auf
dem Deklinationsparallel von 45° nur Kosinuswert von 902 sm/h (637,8 sm/h). Es ist in dieser
Bewegung der Grund zu finden, warum der polynesische Navigator den Himmel in drei Teile teilt und
diesen Himmelsteilen die wichtigsten Sterne Sternbilder zuordnet. Denn aufgrund dieser Tatsache
überholt in einer Zeitspanne ein Stern den anderen Stern in seinem Lauf (gleich zwei Punkten auf einer
Fahrradspeiche, dessen Rad sich gleich schnell dreht). Um genügend Leitsterne zur Verfügung zu
haben, musste der polynesische Sternennavigator) Sterne kennen. Er musste sie nicht nur kennen, er
musste auch wissen, über welche Inseln und Positionen sie ziehen, welcher Stern welchen überholt.
Dazu musste er diese in sogenannten Sternreihen ordnen. Er musste die Frage beantworten können:
Welcher Stern ist nach dem ersten Stern weiter anzusteuern, um auf Kurs zu bleiben? Um diese

132
schwierige Aufgabe zu bewältigen, musste der Navigator eine Ausbildung von ca. 10 Jähren hinter sich
lassen und das war noch nicht alles, wie wir vorher schon angemerkt haben. Der heutige Nautiker
muss, will er polynesische Sternennavigation betreiben, mit dem Umstand leben, dass im Nautischen
Jahrbuch nur ca. 80 Hauptsterne verzeichnet sind. Da wir aber heute über genügend andere
Ortungsmöglichkeiten bzw. Kontrollmöglichkeiten auf See (Kompass, Uhr, Sextant) verfügen, muss
dieses kein Nachteil sein. Über eine Nacht benötigen wir ca. acht bis zehn Leitsterne, die den Großkreis
von der Bootsposition bis zum Bestimmungsort bzw. auch darüber hinaus schneiden müssen. Es ist
somit die Sternenreihe zu berechnen, der wir folgen müssen. Mit Vorgabe der Höhe zwischen 10° und
40° und des Kurses (Azimutwinkel) auf dem Großkreis muss zunächst der entsprechende
Deklinationswert (δ) und der dazu gehörige Stundenwinkel (t) berechnet werden. Es sind die Leitsterne
gemäß ihrem Stundenwinkel (t) und gemäß ihrem Deklinationswert (δ) sozusagen auf den Großkreis
zuschneiden. Dazu genügt es vom Abfahrtsort und vom Bestimmungsort und einigen dazwischen
liegenden Punkten des Großkreises auszugehen. Die eigentliche Bootsposition spielt dabei nur eine
untergeordnete Rolle. So wie der Großkreis die Leitsterne fesselt, binden die Leitsterne das Boot an.
den Großkreis. Es ist niemals umgekehrt. Der Bestimmungsort bestimmt den Großkreis, der Großkreis
stimmt die Leitsterne. Dabei ist es völlig belanglos, wie schnell das Boot sich vorwärts bewegt und auf
welchen Koordinaten es sich befindet: Nur der Kurs, die Fesselung des Bootes an die Leitsterne ist von
Bedeutung. Die Gestirnshöhe, das Gestirnsazimut, der Stundenwinkel und die geographische Breite
stehen im Verhältnis und bedingen einander. Dieses Verhältnis ist l : l, wenn Az = t und δ = h betragen.
In unserem Beispiel ist dieses Verhältnis bei φ = 49° 35' N; t = 77° 43' 48" und δ = 30° N erreicht, dann
beträgt das Az ebenfalls 77° 43' 48" und die h beträgt 30°.
Am 12. 08. 1995 um 21-11-57, zur Kulminationszeit des Sterns Arcturus über Puerto Rico beträgt der
Greenwicher Stundenwinkel des Frühlingspunktes Grt = 278° 50’ 06“. Der Sternstundenwinkel (t)
errechnet sich für tW = 75° 42' 58" mit β = 161° 52’ 52“ und für
tW = 55° 20’32“ mit β = 141° 30' 36".
Weiterhin ist am 12. 08. 95 um 19. 15 Uhr Weltzeit Sonnenuntergang und am 13. 08. 95 um 04. 50 Uhr
Sonnenaufgang.
Mit einer entsprechend den loxodromischen Winkelfunktionen für die Koppelkursrechnung erstellter
Koppeltabelle wird der Schiffsweg für die Nacht vom 12. 08. (Sonnenuntergang) zum 13. 08. 95
(Sonnenaufgang) vorausberechnet, zugleich wird der Grt mit dem Nautischen Jahrbuch errechnet.

133
Uhrzeit Position rwKLOX Grt
(UTC) BREITE LÄNGE
21.00 49° 35,0’ N 5° 00,0’ W 260° 275° 50,4’
22.00 49° 33,6’ N 5° 12,1’ W 260° 290° 52,9’
23.00 49° 32,2’ N 5° 24,2’ W 260° 305° 55,3’
00.00 49° 30,8’ N 5° 36,3’ W 260° ----
01.00 49° 29,3’ N 5° 48,4’ W 259° ----
02.00 49° 27,8’ N 6° 00,5’ W 259° ----
03.00 49° 26,1’ N 6° 12,5’ W 258° ----
04.00 49° 24,4’ N 6° 24,5’ W 258° ----
05.00 49° 22,8’ N 6° 36,5’ W 257° 36° 10,1’
Mit dieser Approximation des Großkreises durch Loxodromstücke sind die Eingansargumente
gefunden, die zur weiteren Berechnung der Gestirnsbildpunkte unter Einbeziehung von
Schiffsgeschwindigkeit und gelaufener Distanz notwendig sind.
Unter Vorgabe der gegebenen Großkreisrichtung dem Azimut von 259,7° (N 100°18’ 00“ W), der
Anfangsposition von φ = 49° 35’ N, λ = 5° 00' E, der Uhrzeit in Weltzeit (UT1) von 21.00 Uhr wird unter
Vorgabe der hr von 10° bis 40° die entsprechenden Deklinationswerte und Stundenwinkel errechnet.
für h = 10° δ = 1° 09’ 55” N tW = 75° 42’ 58”
für h = 20° δ = 8° 42’ 36” N tW = 69° 16’ 52”
für h = 30° δ = 16° 16’ 31” N tW = 62° 34’ 38”
für h = 40° δ = 23° 36’ 47” N tW = 55° 20’ 32”
Weiter errechnen sich für den 13. 08. 1995 für 05.00 Uhr (UTC) die folgenden Werte:

134
für h = 10° δ = 0° 05’ 08” S tW = 74° 25’ 37” β = 44° 52’ 01”
für h = 40° δ = 22° 35’ 42” N tW = 54° 15’ 08” β = 24° 41’ 32“
Man entnehme nun alle Sterne dem Sternverzeichnis des Nautischen Jahrbuchs, dessen Deklination
zwischen 0° 05’ 08” S und 23° 36’47“ N und dessen Stundenwinkel zwischen den Werten 161° 52’52“
und 24° 41’ 32“ liegen.
Es sind dies die Sterne:
Stern Sternbild Sternwinkel (β) Deklination (δ)
Vindemiatrix Sternbild VIRGO(Jungfrau) 164° 30,6’ 10° 59,0’ N
Arcturus Sternbild BOOTES (Bärenhüter) 146° 08,1’ 19° 12,4’ N
Gemma Sternbild CORONA (Nördliche Krone) 126° 22,3’ 26° 43,9’ N
Unuk Elhaia Sternbild SERPENS (Schlange) 123° 59,3’ 6° 26,5’ N
Ras Alhague Sternbild OPHIUCHES (Schlangenträger) 96° 19,0’ 12° 33,9’ N
Atair Sternbild AQUILA (Adler) 62° 21,4’ 8° 51,5’ N
Enif Sternbild PEGASUS (Pegasus) 34° 00,4’ 9° 51,4’ N
Mirak Sternbild BOOTES (Bärenhüter) 138° 48,1’ 27° 05,6’ N

135
Um 21. 00 Uhr (UTC) soll nun Arcturus und Mirak angesteuert werden. Der rwK beträgt 260°. Dazu die
nachfolgende weiteren Berechnungsergebnisse.
Stern Arcturus Stern Mirak
21-00-00 tW = 56° 58” 30” tW = 49° 38’ 30”
hr = 35° 44’ 34” hr = 46° 05’ 52“
Az = 257° 17’ 30“ Az = 258° 02’ 42“
22-00-00 tW = 71° 52” 54” tW = 64° 28’ 54”
hr = 26° 09’ 34” hr = 36° 32’ 29“
Az = 269° 21’ 15“ Az = 270° 15’ 05“
An den Ergebnissen wird erkennbar, dass die beiden Sterne senkrecht übereinander stehen.
Die Übersicht nun folgender Berechnungsergebnisse veranschaulicht, die Sichtbarkeit und die
gegenseitige Lage der ausgewählten Leitsterne am Himmel.

136
Stern Stundenwinkel errechnete Höhe viertelkreisiges Azimut Kurs
12. 08. 1995 um 22-00-00 Uhr UT1; Grt = 290° 52,9’φ = 49° 33,6’ N; λ = 5° 12,1’ W
Gemma tW = 37° 00’ 36“ hr = 53° 36’ 21” Az = N 115° 01’ 43” W 244,97°
Unuk Elhaia tW = 34° 37’ 36“ hr = 38° 00’ 30” Az = N 134° 13’ 27” W 225,78°
Ras Alhague tW = 6° 57’ 18“ hr = 52° 33’ 49” Az = N 168° 47’ 19” W 191,21°
Atair tue = 27° 00’ 18“ hr = 43° 29’ 26” Az = N 141° 47’ 59” E 141,80°
Enif tE = 55° 21’ 18“ hr = 29° 34’ 38” Az = N 111° 15’ 09” E 111,25°
13. 08. 1995 um 05-00-00 Uhr UT1; Grt = 36° 10,1’φ = 49° 22,8’ N; λ = 6° 36,5’ W
Gemma tW = 155° 55’ 54“ hr = – 10° 55’ 20” Az = N 21° 46’ 29” W 338,23°
Unuk Elhaia tW = 153° 32’ 54“ hr = – 29° 36’ 24” Az = N 30° 36’ 40” W 339,40°
Ras Alhague tW = 125° 52’ 36“ hr = – 11° 57’ 45” Az = N 53° 56’ 34” W 306,06°
Atair tW = 91° 55’ 00“ hr = 5° 28’ 22” Az = N 82° 46’ 00” W 277,23°
Enif tW = 63° 34’ 00“ hr = 24° 32’ 57” Az = N 104° 09’ 12” W 255,85°
Allein diese Übersicht zeigt nicht, wann die Deklinationsparallele der Leitsterne den Großkreis des
Bootes zum Zielort schneiden. Da die Uhrzeit nicht bekannt ist und dadurch der Stundenwinkel nicht
errechnet werden kann, somit auch keine Berechnung der Gestirnshöhe und des Azimutes erfolgen
kann, muss mit einer Interpolierungsmethode die Lösung bewältigt werden.
Es ist erforderlich den Stundenwinkel des betreffenden Gestirns für das Azimut des Großkreises
(100°18’11“) zu erhalten. Unter Vorgabe im Überschlag ausgewählter Stundenwinkel wird die
Gestirnshöhe und das Gestirnsazimut solange berechnet, bis das errechnete Azimut mit dem Azimut
des Großkreises übereinstimmt. Eine weitere Möglichkeit besteht, wenn der Großkreisverlauf mit je
1° Längendifferenz erfasst wird. Auch dann kann der Schnittwinkel herausinterpoliert werden.
Wie sich dieser Interpolierungsvorgang vollzieht sei mittels der nachfolgenden Berechnungen
aufgezeigt:

137
Vorgabe der
Stundenwinkel
berechnete Höhe berechnetes Azimut rechtweisendes
Azimut (Kurs)
Gemma
tW = 45° hr = 48° 45’ 47” Az = N 106° 39’ 03” W
tW = 50° hr = 45° 37’ 16” Az = N 101° 58’ 43” W
tW = 51° hr = 44° 49’ 08” Az = N 101° 05’ 11” W
tW = 51° 40’ hr = 44° 33’ 38” Az = N 100° 29’ 56” W 259° 30’ 04“
Unuk Elhaia
tW = 72° hr = 16° 31’ 59” Az = N 99° 39’ 51” W
tW = 71° 35’ hr = 16° 47’ 57” Az = N 99° 59’ 42” W
tW = 71° 15’ hr = 17° 00’ 43” Az = N 100° 15’ 37” W 259° 44’ 23“
Ras Alhague
tW = 70° hr = 22° 27’ 52” Az = N 97° 01’ 16” W
tW = 65° hr = 25° 40’ 00” Az = N 101° 03’ 18” W
tW = 66° hr = 25° 01’ 46” Az = N 100° 14’ 14” W 259° 45’ 46“
Atair
tW = 70° hr = 19° 39’ 29” Az = N 99° 36’ 59” W
tW = 69° hr = 20° 17’ 49” Az = N 100° 25’ 07” W 259° 34’ 53“

138
Enif
tW = 70° hr = 20° 25’ 04” Az = N 98° 55’ 37” W
tW = 69° hr = 21° 03’ 28” Az = N 99° 43’ 40” W
tW = 68° 30’ hr = 21° 22’ 38” Az = N 100° 07’ 48” W 259° 52’ 12“
Da jetzt die Stundenwinkel für den Durchgangs des Gestirns durch den Großkreis des Bootes
interpoliert worden sind, können nun aus den Stundenwinkelwerten die entsprechenden Zeitpunkte
bestimmt werden. Indem die Größe des Wertes des Greenwicher Stundenwinkels des
Frühlingspunktes aus dem Gestirnsstundenwinkel herausgerechnet wird, kann der Zeitpunkt
entsprechend dem Grt aus dem Nautischen Jahrbuch entnommen werden.
Stern t Grt UT1
Gemma tW = 51° 40’ 00“ Grt = 290° 29’ 48“ UT1 = 21-58-38
Unuk Elhaia tW = 71° 15’ 00“ Grt = 312° 37’ 48“ UT1 = 23-26-06
Ras Alhague tW = 66° 00’ 00“ Grt = 334° 52’ 30“ UT1 = 00-55-30
Atair tW = 69° 00’ 00“ Grt = 11° 50’ 58“ UT1 = 03-22-58
Enif tW = 68° 30’ 00“ Grt = 39° 29’ 42“ UT1 = 05-13-16
Da das Boot selbst seiner Koppelkursgeschwindigkeit von 8 kn folgen soll, ist diese Bewegung für die
Berechnung der Großkreisschnittpunkte und der jeweiligen Gestirnspositionen mit einzubeziehen.
Das Ergebnis dieser Berechnungen entsprechend den Koppelorten und der jeweiligen Uhrzeiten zeigt
die folgende Übersicht.
Ab 21-58-38 (UT1) wird der Stern Gemma angesteuert. Großkreiskurs 259,5°
Koppelstandort des Bootes: φ = 49° 33,6’ N; λ = 5° 11,9’ W
Gestirnskoordinaten: tW = 51° 40’ 12“
hr = 44° 33’ 31“
Az = N 100° 29’ 45“ W rwAz = 259,5°

139
Ab 23-26-06 (UT1) wird der Stern Unuk Elhaia angesteuert. Großkreiskurs 259,5°
Koppelstandort des Bootes: φ = 49° 31,6’ N; λ = 5° 29,5’ W
Gestirnskoordinaten: tW = 70° 57’ 36“
hr = 17° 12’ 11“
Az = N 100° 28’ 52“ W rwAz = 259,5°
Ab 00-55-30 (UT1) wird der Stern Ras Alhague angesteuert. Großkreiskurs 259,3°
Koppelstandort des Bootes: φ = 49° 29,4’ N; λ = 5° 47,6’ W
Gestirnskoordinaten: tW = 65° 24’ 30“
hr = 25° 25’ 11“
Az = N 100° 41’ 16“ W rwAz = 259,3°
Ab 03-22-58 (UT1) wird der Stern Atair angesteuert. Großkreiskurs 258,8°
Koppelstandort des Bootes: φ = 49° 25,4’ N; λ = 6° 17,1’ W
Gestirnskoordinaten: tW = 67° 55’ 00“
hr = 21° 00’ 49“
Az = N 101° 14’ 29“ W rwAz = 258,8°
Ab 05-13-16 (UT1) wird der Stern Enif angesteuert. Großkreiskurs 258,6°
Koppelstandort des Bootes: φ = 49° 22,4’ N; λ = 6° 39,1’ W
Gestirnskoordinaten: tW = 66° 51’ 00“
hr = 22° 27’ 56“
Az = N 101° 23’ 27“ W rwAz = 258,6°
So bestätigen die aufgezeigten Berechnungsmethoden die Richtigkeit der polynesischen
Sternennavigation. Wir müssen feststellen, dass ein immenser Rechenaufwand erforderlich ist, bis die
Gestirnsbahnen für den Großkreis des Bootes „zugeschnitten“ sind. Und doch mag der Leser erleichtert
sein. Für die Praxis ist es nicht nötig, diese Rechnungen nun jedes Mal genauso nachvollziehen zu
müssen. Für einen einmal ausgewählten und berechneten Großkreis wird die Sternenreihe der

140
Leitsterne, die anzusteuern sind immer gleich bleiben. Die Zeitpunkte werden sich jedoch
entsprechend des gewählten Datums im Jahr verschieben. Dennoch bleiben aufgrund der geringen
Änderung der Deklinationswerte die Leitsterne für feste Tage über Jahre fast immer die gleichen. Hier
ist es sinnvoll, die Startzeit auf immer den gleichen Zeitraum eines Jahres zu legen. Für eine Überfahrt
über den Atlantik ist ja nicht nur die navigatorische Sichtbarkeit der Gestirne wichtig ist, sondern
ebenfalls die jahreszeitliche Wetterperiode. Selbstverständlich muss die Wetterroutung und die
Berücksichtigung der globalen Wetterentwicklung sowie die Entwicklung vor Ort mit in die nautische
Vorbereitung einer solchen Fahrt mit einfließen (siehe Abschnitt
„Seenavigationsorientierungsräume“).
Soll ein Fahren auf dem Großkreis ohne Uhr und Kompass erfolgen, so ist es letztendlich nur wichtig
zu wissen, wie sich die Lage der Positionen der Gestirne zueinander und in bezug auf den Großkreis
bei einer Höhe von ca. 10° bis ca. 40° gestaltet.
Wie genau diese Art der Navigation sein kann, sei abschließend mit der zeichnerischen Darstellung des
Seeraumes bezeugt.

141
Die Methode der Orientierung nach Gestirnsazimuten ist im eigentliche Sinne das gleiche Verfahren,
nach dem auch Vögel und verschiedene Insekten navigieren. Schon längst ist bekannt, dass Vögel,
um lange Distanzen während der Nacht zu bewältigen, nach den Gestirnen fliegen. Sie haben nach
ihrer Art die verschiedenen Stellungen der hellen markanten Gestirnsbilder in ihrer Erinnerung.
Bekannt ist auch, dass die Leuchtfeuer an der Küste den Vögeln den falschen Weg zeigen, da diese
für ein tief liegendes Gestirn gehalten werden. Die Vögel können die Leuchtfeuer nicht in ihren
Orientierungssystem nach den Gestirnen einordnen und verhalten sich völlig orientierungslos.
Somit ist die Orientierung nach Gestirnazimuten „an der sich drehenden Himmelskugel“ entlang
ein ganz natürliches Prinzip der Tierwelt.
Um das Prinzip der ganzheitlichen astronomischen Navigation zu verstehen, sind die Bedeutungen
Azimutgleiche und Höhengleiche (Distanzgleiche) die wichtige Aspekte. Aus der Integration der Zeit
erfolgt hieraus dann die Zeitgleiche.
Als Standlinie (LOP) ist der geometrische Ort aller Punkte zu verstehen, von denen ein Wellen
ausstrahlender Fixpunkt (Gestirn – Licht; Funksender, Funkmesssender – elektromagnetische Wellen)
in einer gleichen Peilung oder Entfernung beobachtet wird.
Der geometrische Ort wird dabei auf das geographische Koordinatensystem S bezogen. Dieser Bezug
erfolgt durch bei Gestirnen durch vorherige Berechnung der Gestirnsbildpunkte bezüglich des
geographischen Koordinatensystems und ist im jeweiligen Nautischen Jahrbuch veröffentlicht. Bei
Funksendern ist die geostationäre Position der geographischen Koordinaten in der Seekarte bzw. im
Nautischen Funkdienst angegeben.
Wird von mehreren Systemen S’ (Schiffen) eine Welle in der gleichen Großkreisdistanz geortet, so
befinden sich alle auf einem sphärischen Kleinkreis, dessen Abstand zum Zentrum des geographischen
Bildpunktes oder Senders gleich ist und als Höhengleiche (Hgl.) (Gestirne, Satelliten) oder
Distanzgleiche (Dgl.) bezeichnet wird.
Wird von mehreren Systemen S’ (Schiffen) eine Welle in der gleichen Großkreispeilung geortet, so
befinden sich alle auf einer doppelt gekrümmten Linie, die äquatorwärts vom Großkreis liegt und als
Azimutgleiche (Azgl.) bezeichnet wird.
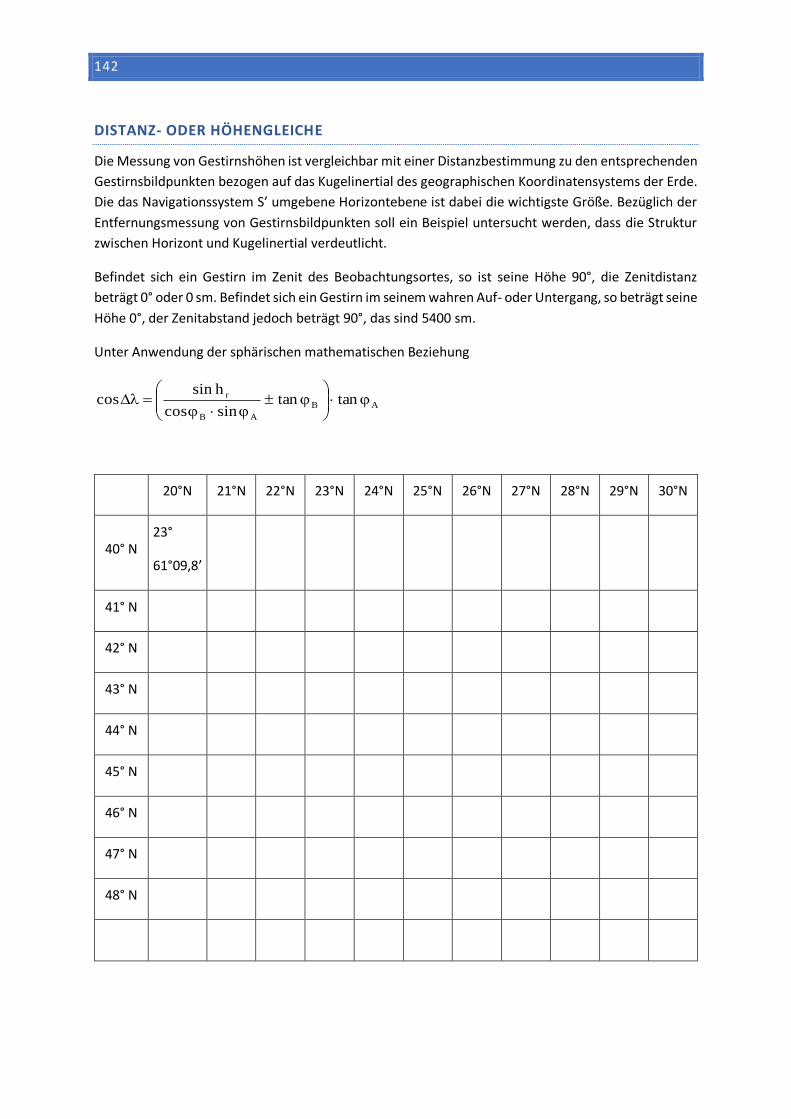
142
DISTANZ- ODER HÖHENGLEICHE
Die Messung von Gestirnshöhen ist vergleichbar mit einer Distanzbestimmung zu den entsprechenden
Gestirnsbildpunkten bezogen auf das Kugelinertial des geographischen Koordinatensystems der Erde.
Die das Navigationssystem S’ umgebene Horizontebene ist dabei die wichtigste Größe. Bezüglich der
Entfernungsmessung von Gestirnsbildpunkten soll ein Beispiel untersucht werden, dass die Struktur
zwischen Horizont und Kugelinertial verdeutlicht.
Befindet sich ein Gestirn im Zenit des Beobachtungsortes, so ist seine Höhe 90°, die Zenitdistanz
beträgt 0° oder 0 sm. Befindet sich ein Gestirn im seinem wahren Auf- oder Untergang, so beträgt seine
Höhe 0°, der Zenitabstand jedoch beträgt 90°, das sind 5400 sm.
Unter Anwendung der sphärischen mathematischen Beziehung
AB
AB
r tantansincos
hsincos
=
20°N 21°N 22°N 23°N 24°N 25°N 26°N 27°N 28°N 29°N 30°N
40° N 23°
61°09,8’
41° N
42° N
43° N
44° N
45° N
46° N
47° N
48° N
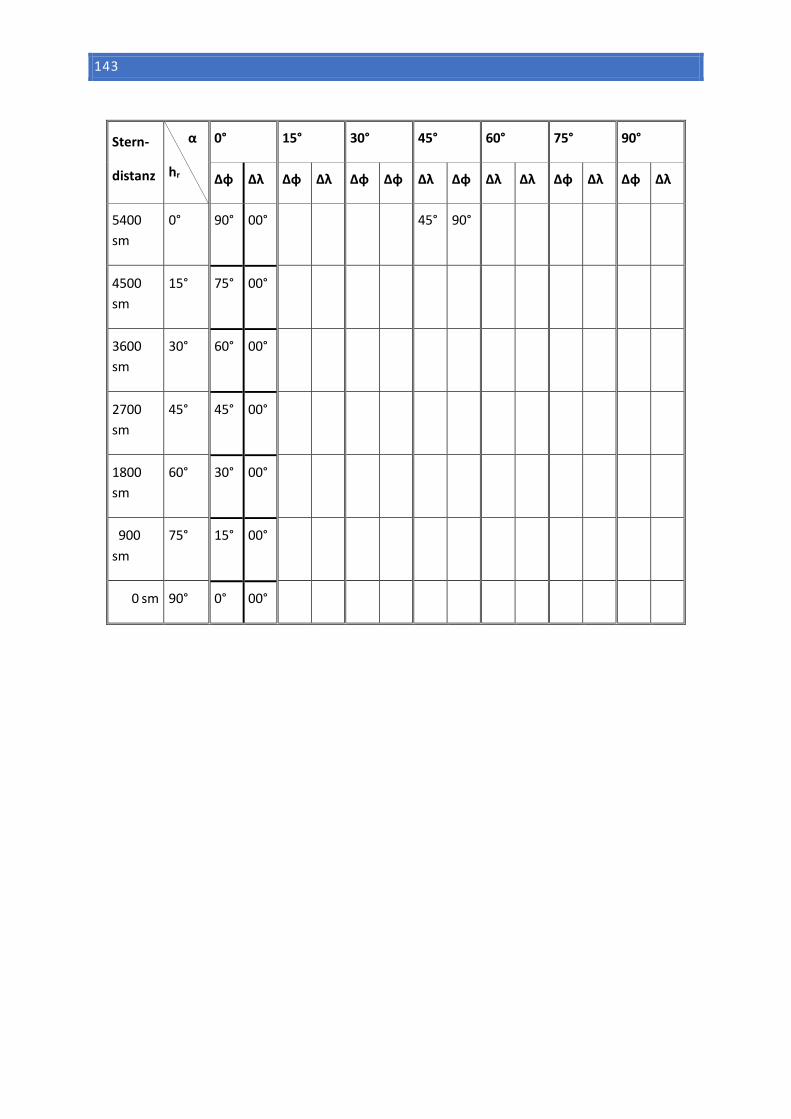
143
Stern-
distanz
α
hr
0° 15° 30° 45° 60° 75° 90°
Δφ Δλ Δφ Δλ Δφ Δφ Δλ Δφ Δλ Δλ Δφ Δλ Δφ Δλ
5400
sm
0° 90° 00° 45° 90°
4500
sm
15° 75° 00°
3600
sm
30° 60° 00°
2700
sm
45° 45° 00°
1800
sm
60° 30° 00°
900
sm
75° 15° 00°
0 sm 90° 0° 00°

144
AZIMUTGLEICHE
Az = N 130° E
20°N 21°N 22°N 23°N 24°N 25°N 26°N 27°N 28°N 29°N 30°N
40° N 23°
61°09,8’
41° N
42° N
43° N
44° N
45° N
46° N
47° N
48° N
nautisch astronomisches Messprinzip
Das Prinzip der astronomischen Standort- bzw. Standlinienbestimmung beruht auf das Einmessen der
Gestirnsbildpunkte des betreffenden Gestirns auf dem Kugelinertial Erde. Hier liegen die folgenden
Gesetzmäßigkeiten zugrunde:
1. Für den Beobachter, der einen Stern genau im Zenit beobachtet, bedeutet es sich auf der
Position des Gestirnsortes zu befinden. Die Höhe zum Gestirn beträgt 90°, die Zenitdistanz
beträgt 0,0 sm.
2. Für den Beobachter, der einen Stern in seinem Aufgang oder Untergang beobachtet, bedeutet
es, sich auf einer geographischen Position zu befinden, bei die Höhe 0° und die Zenitdistanz
5400 sm beträgt.

145
3. Befindet sich der Beobachter auf gleicher Länge des Gestirnsbildpunktes, so beträgt das
Azimut zum Gestirn 180° (Süd) oder 360° (Nord). Der Breitenunterschied (Δφ) zum
Gestirnsbildpunkt beträgt 90°, wenn die Höhe 00° beträgt. Der beträgt Längenunterschied (Δλ)
0°.
4. Befindet sich ein Beobachter auf gleicher Breite eines Gestirnsbildpunktes und beobachtet er
einen Stern mit einer Höhe von 00°, so beträgt das Azimut zum Gestirn 270° (West) – der
Untergang des Gestirns wird beobachtet– oder 090° (Ost) – der Aufgang des Gestirns wird
beobachtet–. Der Breitenunterschied (Δφ) zum Gestirnsbildpunkt beträgt 0°, während er
Längenunterschied 90° beträgt. Die Sterndistanz in Seemeilen entspricht der Abweitung =
a sec Stern t.
Es sei nun angenommen: Am 16. 04. 1999 um 01-28-00 UT1 wird der Stern Mizar des Sternbildes
Großer Bär von zwei Schiffen beobachtet.
Schiff A stellt eine Höhe von 85° 00,0’ fest, während Schiff B eine Höhe von 65° 00,0’ misst. Beide
Schiffe errechnen ein rechtweisendes Azimut von 180,0° zum Stern Mizar.
Die Position des Sterns entsprechend dem Nautischen Jahrbuch 1999 lautet:
GrtΥ = 225° 52’ 24“ für 01-28-00 δ = 54° 55,8’ N
β = 159° 01’ 42“
OSW = 024° 54’ 06“ das entspricht λ = 024° 54,1’ W
Die geographische Bildpunkposition des Gestirns lautet somit:
φ = 54° 55,8’ N und λ = 024° 54,1’ W
Für beide Schiffe bedeutet es, die Kulmination des Gestirnes zu beobachten.
Mit der astronomischen Beziehung (90° – φ) = h – δ) (φ und δ ist gleichnamig) errechnen sich
geographischen Breiten der beiden Schiffsorte. Da das Gestirn während der Kulmination beobachtet
wird, ist die geographische Länge der Schiffsorte gleich der geographischen Länge des
Gestirnsbildpunktes des Gestirns.
Die beiden Schiffspositionen lauten demnach:
Schiff A Schiff B
(90° – φ) = h – δ) (90° – φ) = h – δ)
(90° – φ) = 85° 00,0’ – 54° 55,8’ (90° – φ) = 65° 00,0’ – 54° 55,8’
(90° – φ) = 30° 04,2’ (90° – φ) = 10° 04,2’

146
φ = 59° 55,8’ N φ = 79° 55,8’ N
λ = 024° 54,1’W λ = 024° 54,1’W
Wird der gemessene Höhenwinkel für eingesetzt, so sei der Versuch gemacht , mit Hilfe der
trigonometrischen Beziehung h = tan e die Höhe des Sternes Mirak über seinem Bildpunkt zu
bestimmen.
Die Entfernungen zwischen Gestirnsbildpunkt und Schiffsort ist gegeben durch die Beziehung
dsm = (90° - hr) x 60’
Für das Schiff A beträgt die Distanz zum Gestirnsort bei hr = 85° d = 300 sm.
Für das Schiff B beträgt die Distanz zum Gestirnsort bei hr = 85° d = 1500 sm.
Schiff A Schiff B
h = tan 85° x 300 sm
h = 3429,0156 sm
oder
h = tan 85° 00’ 00“ x 5° 00’ 00“
h = 57° 09’00“
h = 57° 09’00“ x 60’
h = 3429,0155 sm
Somit würde Mizar also 3429,02 sm hoch bzw. 3216,77 sm über seinem Zenitbildpunkt stehen, wenn
wir die Verbindung Gestirnsbildpunkt – Stern theoretisch betrachten.
Rein rechnerisch müsste somit der Stern Mizar in einer Höhe über der Erdoberfläche von ca. 3500 sm,
das sind 6482 km zu finden sein. Dieses wäre physikalisch unmöglich. Die Erde würde auf dieser kurzen
Distanz verbrennen. Die wirkliche Entfernung des Sternes Gemma von der Erde beträgt immerhin 89
Lichtjahre.
Auch ist ein Unterschied in der Berechnung der Höhe von 212,25 sm, das sind 393,09 km erkennbar.
Dieser Höhenunterschied liegt an der Erdkrümmung, wodurch der Fußpunkt der Stecke Erdoberfläche
- Gestirn genau um diesen Höhenunterschied höher liegen muss, wenn wir die Rechnung auf das
senkrecht auf dem Meridian stehende ebene Dreieck ABC beziehen. Setzt man den Höhenwert für
Schiff A für die Errechnung der ebenen Entfernung von Schiff B ein, wobei die Erdoberfläche als Ebene
definiert sei, erhalten wir eine Entfernung von
e = h cot

147
e = 3429,02 sm cot 65°
e = 1598,98 sm.
Eine Entfernung somit, die um 98.98 sm länger ist, als der Großkreisbogen auf dem Meridian von 1500
sm. Der Leser mag die kleine rechnerischen Spielerei mit Nachsicht betrachten, aber deutlich wird
erkennbar, dass die Methodik der terrestrischen Entfernungsbestimmung mit Objekten, dessen Höhe
bekannt ist, sich vollkommen anders darstellt, als dass der astronomischen Höhenauswertung von
Gestirnsorten zur Gewinnung der Höhengleiche.
Somit würde GEMMA also 3437,66 sm hoch über seinem Zenitbildpunkt stehen, wenn wir die
Verbindung Gestirnsbildpunkt – Stern theoretisch betrachten.
Eine zweite Berechnung zur Probe soll nun das erste Ergebnis bestätigen.
Wir verdoppeln einfach die Distanz vom Gestirnsbildpunkt GEMMA zur Schiffsposition und nehmen
an, sie beträgt jetzt 2 x 29,8 sm = 59,6 sm. Unter Einsetzung dieser Distanz vom Gestirnsort weg und
des deshalb westlichen rechtweisenden Kurses (360° – α) von rwK = 275° 47’ 12“ (α = 84° 12’ 48”)
errechnen wir mit der Besteckrechnung die neue Schiffsposition.
= d cos
= 59,6 sum cos 84° 12’ 48”
= 00° 06,0’N
Unterschied der
Höhen zw. Schiff
A und Schiff B
Schiff A Schiff B

148
a = d sin
a = 59,6 sum sin 84° 12’ 48”
a = 000° 59,2’ W
Daraus folgt für die Mittelbreite
+=
2
Am
+=
2
'0,0600'9,4336m
φm = 36°46,9’N
Die Umwandlung a in Δλ ergibt:
= a sec m
= 000° 59,2’ sec 36°46,9’
= 001° 13’ 55”
Der neue Schiffsort hat somit die Koordinaten:
φStern = 36° 43,9’ N λStern = 000° 00,8’ E
Δφ = 00° 06,0’ N Δλ = 001° 13,9’ W
φSchiff = 36° 49,9’ N λSchiff = 001° 13,1’ W

149
Die Stern – Zenitdistanz beträgt 59,6 sm. Das bedeutet den Stern GEMMA von der neuen ermittelten
Schiffsposition mit einer berechneten Höhe (90° – 0° 59’ 36“) von 89° 00’ 24“ zu finden. Mittels den
astronomischen Höhen- und Azimutformeln rechnen wir das Ergebnis nach und bekommen:
hr = 89° 00’ 31“
Az = N 84° 34’ 50“ W
rwAz = 275° 25’ 10“ = 275,42°
Die ersichtlichen Abweichungen zwischen der orthodromen und der loxodromen Rechenmethode
betragen in der Höhe 7“ (~ 1 kbl) und im Kurswinkel 22’ (0,37°). Diese Unterschiede sind in erster Linie
Rundungsfehler aufgrund der verschiedenen angewandten mathematischen Beziehungen und können
leicht vernachlässigt werden.
Wird jetzt unter Einsetzung der astronomischen Höhe von 89° 00’ 24“ und der angenommenen Distanz
von 59,6 sm die theoretische Strecke vom Gestirnsbildpunkt bis zum Stern GEMMA berechnet, müsste
sich ein gleicher Wert von h = 3437,658 sm ergeben.
h = tan 89° 00’ 24“ x 59,6 sum
h = 3437,400 sm
Wir stellen lediglich eine Abweichung von 0,258 sm (15,5“) fest.
Rein rechnerisch müsste somit der Stern GEMMA in einer Entfernung von ca. 3437,5 sm, das sind
6366,25 km neben der Erdoberfläche stehen. Dieses wäre physikalisch unmöglich. Die Erde würde auf
dieser kurzen Distanz verbrennen. Die wirkliche Entfernung des Sternes Gemma von der Erde beträgt
immerhin 76 Lichtjahre
α CrB Gemma RA = 15° 32,6’ Dekln. 26° 53’ N

150
DAS SYSTEM DER KARTOGRAPHISCHEN ABBILDUNGSVERFAHREN
Als im Jahre 235 v.d.Z. der griechische Gelehrte Eratosthenes aus Kyrene (etwa 275 bis 195 v.d.Z.) die
Leitung der Bibliothek im ägyptischen Alexandria übernahm, waren dort hervorragende Schriften der
griechischen Wissenschaft gelagert. Neue Erkenntnisse ergaben eine neue Weltanschauung. Während
noch zu der Zeit des Herodot von Halikarnassos’ (griechischer Geschichtsschreiber und Weltreisender
um 450 v.d.Z.) die Gestalt der Erde als Scheibe angenommen wurde, waren die griechischen
Astronomen und Gelehrten um 200 v.d.Z. von der Kugelgestalt der Erde überzeugt. Lange brauchte
diese Überzeugung, um im alten Griechenland zu reifen. So wurde erstmals der Gedanke, der
Kugelgestalt der Erde schon ca. 100 Jahre vor Herodots Zeit durch den Philosophen, Mathematiker und
Astronomen Pythagoras von Samos angenommen. Dieser Philosoph gründete in Kroton (Crotone)
Mitte des 6 Jh. v.d.Z. einen Geheimbund, dessen Aufgabe darin bestand, wissenschaftliche und
philosophische Ansichten zu systematisieren und immer neue Erkenntnisse über das Weltbild zu
gewinnen. Wissenschaftliche Erfolge, wie z. B. die Entdeckung, dass die Tonhöhe der Musik von der
Länge der schwingenden Seite abhängig ist, prägten den Arbeitsstil dieses Bundes. Die vollkommenste
Fläche erkannte man im Kreis. Der vollkommenste Körper war demzufolge die Kugel und die Zahl Zehn
war die vollkommenste Zahl. Diese philosophische Grundlage war Ausgangspunkt für das Schaffen
einer erneuerten gesetzmäßigen Ordnung im Universum. Die Erde musste und mit ihr alle im Weltraum
vorhandenen Körper die Gestalt einer Kugel aufweisen. Die Bahnen der Planeten mussten Kreisbahnen
um ein Zentralfeuer sein. Diese von mystischen Erscheinungsformen durchdrungene Erklärung der
Welt, von der nicht umsonst nur Eingeweihte Kenntnis hatten, würde zum damaligen Zeitpunkt die
ganze griechische Welt ins Schwanken gebracht haben. Denn die griechische Götterwelt war eine
andere und mit dem heftigen Widerstand der Priester war wohl zu rechnen.
Der erste, wenn auch nur indirekte Beweis der Kugelgestalt der Erde vollzog sich in Auswertung
einfacher irdischer und astronomischer Beobachtungen im 4. Jh. v.d.Z. Es war Eudoxos von Knidos und
Platon, die gleichzeitig an der Akademie in Athen lehrten sowie Aristoteles, die sich intensiv mit diesen
Beweisen befassten.
Der Horizont bildet einen Gesichtskreis, der, je höher man steht, im Durchmesser zu nimmt.
Schiffe, die von Ferne auf einen zu laufen, fahren einen Berg herauf, denn man sieht zuerst die
Mastspitze und später erst den Schiffsrumpf.
Wenn bei einer partiellen Mondfinsternis der Erdschatten auf dem Mond sichtbar wird, stellt er
sich als Kreis dar.
Im Süden sieht man andere Sterne als im Norden.
Diese Beobachtungen ließen die Vermutung zu, dass die Erde eine Kugel ist. Nun musste der
Versuch unternommen werden, auch mathematisch die Kugelgestalt der Erde zu beweisen.
Dikaiarchos aus Messene / Sizilien (heute Messina) ein Schüler des Aristoteles, führte zuerst

151
geographische Vermessungen von Berghöhen durch. Er war es auch, der die damals bekannte
Mittelmeerwelt mit einem Gradnetz versah. Seiner im Jahre 285 v.d.Z. verfassten Erdbeschreibung gab
er eine Erdkarte bei, die sich durch das Vorhandensein einer Mittelachse und einer Längsachse
auszeichnete. Die Mittelachse begann an der Straße des Herakles (Gibralta) und endete am Imaos
(Himalaja), während die Längsachse sich von dem Ort Syene in Oberägypten (Assuan) bis zur Halbinsel
Gelibolu am Hellespont (Lysimacheia) zog. Obwohl diese Karte die Expeditionen und Eroberungen des
Alexanders des Großen darstellte, ist sie doch ein Beleg für den ersten Versuch der Konstruktion eines
Gradnetzes der Erde.
Das war nun das Weltbild, das Erastosthenes kannte, als er als Geograph, Mathematiker und
Astronom in Alexandria wirkte. Von der Erde kannte man erst 10% und von den Meeresteilen kannte
man nur den Mittelmeerraum mit seinen angrenzenden Gewässern. Und dennoch die Erde war als
Kugel charakterisiert und zum Beweise dessen musste eine Vermessung derselben auch durchführbar
erscheinen. So einfach uns heute auch die Vermessungsmethoden erscheinen mögen, die manchmal
erst auf Grund ungewollter Zufälle möglich wurden, so großartig zugleich muss man die Ergebnisse
betrachten, die erst zweitausend Jahre später auf ihre Richtigkeit hin überprüfbar wurden.
Und so wollte es der Zufall, dass sich in Syene ein Brunnen befand, der auf dem nördlichen
Wendekreis gebaut wurde. Zur Zeit der Sonnensommerwende (21. Juni) war im Brunnen das Abbild
der Sonne zu sehen, denn sie stand dann genau im Zenit über dem Brunnen. Wenn man nun genau
zeitgleich zu diesem astronomischen Ereignis in Alexandria den Höhenwinkel der Sonne misst, müsste
es gelingen, den Erdumfang zu errechnen. So musste Eratosthenes überlegt haben, als er eine
Halbkugel mit dem Stab in der Mitte in Alexandria aufstellte, um mit Hilfe der Schattenlänge den
Sonnenwinkel zu erhalten. Und tatsächlich bedeckte der Schatten zur Sonnenwende 1/50. tel des
Umfangs der Schale. Die Sonnenhöhe betrug somit 7,2° (360° : 7,2° = 50). Die Entfernung zwischen
Syene und Alexandria entsprach also einem 1/50 .tel des Erdumfangs. Legt man nun das ägyptische
Stadion mit 300 ägyptischen Ellen, gleich 157,5 m zu Grunde, errechnet sich der Erdumfang zu 39 375
km, da die damals amtliche Entfernung zwischen Syene und Alexandria mit 5000 Stadien angegeben
war. Dieses Ergebnis, auch wenn die geringe Abweichung zum heutigen Wert eher wohl zufällig war,
bestätigt dennoch die Erde als Kugel. Fehlerquellen, die Eratosthenes nicht wissen konnte, waren, dass
Syene und Alexandria nicht genau auf einem Längengrad liegen. Es besteht ein Längenunterschied von
3°01’ zwischen beiden Orten. Auch war der Nord-Südabstand etwas kleiner angesetzt, als wir ihn heute
kennen. Doch ist der errechnete Wert höchst erstaunlich, wenn wir ihn mit den heutigen Werten
vergleichen, nämlich für den Äquatorumfang 40 075,18 km und für den Erdumfang über die Erdpole
39 940,808 km (Werte nach dem internationalen Referenzellipsoid).
Auch wenn 100 Jahre nach dieser Messung, die Messwerte auf Grund der immer noch
unzureichenden oder nicht vorhandenen Instrumente nicht genauer, sondern eher schlechter wurden,
-z. B. hatte Poseidonius in Nordafrika und in Kleinasien an Hand von Gestirnsmessungen einen Umfang
von nur 32 000 km errechnet-, war doch die Kugelgestalt der Erde nicht mehr in Frage zu stellen. Leider
hat der alexandrinische Geograph Klaudios Ptolemaios (lat. Claudius Ptolemaes) in seinen Schriften,
die noch bis ins 16 Jh. in Europa ihre Unfehlbarkeit behielten, den Erdumfang des Poseidonios benutzt,
und diesen damit viel zu klein angegeben. Dieser Fehleinschätzung verdanken wir es letztendlich, dass
Kolumbus seine Reise nach Indien in westlicher Richtung antrat und Amerika wieder entdeckte.

152
Um die Erdoberfläche für die u. a. navigatorische Nutzung darzustellen, macht es sich erforderlich, mit
den Grundlagen der Kartographie vertraut zu sein. Der Globus (lat. Kugel) und die Karte geben die
Lage-, Flächen- und Raumverhältnisse der Erdoberfläche verkleinert, verallgemeinert und erläutert
wieder, und zwar so, dass die geographischen Tatsachen ablesbar und messbar werden.
Das Maß der Verkleinerung wird durch den Maßstab angegeben. So lassen sich verschiedene
Maßstäbe wählen, z. B. für eine Weltkarte 1 : 1 000 000, das entspricht 1 cm auf der Karte : 10 km in
der Natur bzw. 1 km in der Natur : 1 mm in der Karte. Der Kartenmaßstab gibt somit das Verhältnis an,
in dem die Längen auf der Karte zu denen in der Natur stehen. Die Meridiane und Breitenparallele
bilden das Kartennetz. Dieses Netz ist das auf eine Ebene übertragene (projekzierte) Globusnetz. Die
Netzübertragung bezeichnet man daher als Projektion. Es gibt keine Projektion ohne Verzerrung des
Globusnetzes Die Karte kann daher niemals dem Globusnetz ähnlich werden. Sie entweder winkeltreu
oder flächentreu, sie ist niemals längentreu, sondern höchstens mittelabstandstreu, d. h. längentreu
auf den durch den Mittelpunkt der Karte laufenden Großkreisen.. Entsprechend den verschiedenen
Bedürfnissen werden zahlreiche Projektionen unterschieden.
KARTENPROJEKTION
Kegelentwürfe Zylinderentwürfe
orthographische
Projektion
stereographische
Projektion
gnonomische
Projektion
abstandtreuer
Zylinderentwurf
(Plattkarte)
flächentreuer
Zylinderentwurf mit
längentreuen Äquator
winkeltreuer
Zylinderentwurf
(Mecartorentwurf
)

153
Da für die Bedürfnisse der Navigation, hier mit dem Ziel
1. den Kurswinkel zwischen zwei Sterne in der Karte in der gleichen Größe wie auf der
Erdkugel erscheinen zu lassen;
2. die Richtungen zwischen zwei Sternen als Loxodrome in einer geraden Linie zeigen zu
können
und
3. die Distanzen zwischen zwei Positionen abgreifen zu können,
die winkeltreue Mecartorprojektion am besten geeignet ist, soll diese eingehender erläutert werden.
Mit dieser Karte hat man einen Sternenkompass in der Hand, dessen Gebrauch an späterer Stelle erläutert werden soll.
Bevor jedoch so eine Karte konstruiert werden kann, sollen noch einige Grundbegriffe der Navigation eingeführt werden.
Loxodrome und Orthodrome
Als Loxodrome bezeichnet man eine Linie, die alle Meridiane unter gleichem Winkel schneidet. Auf der
Loxodrome bewegt sich ein Schiff, wenn ein konstanter Kurs gehalten wird. Somit sind Loxodromen
sphärische Kurven, deren Tangenten mit der Nord-Südrichtung in jedem ihrer Punkte einen konstanten
Winkel einschließen. Ein auf loxodromischen Kurs fahrendes Schiff würde den Nord- oder Südpol auf
einer Spiralkurve umlaufend erreichen. Dieser Kurvenbogen ist kein Großkreis, denn ein Großkreis
schneidet die Meridiane nicht unter einem konstanten Winkel. Der Großkreis ist die kürzeste
Verbindung zwischen zwei Orten auf der als Kugel angenommenen Erde (siehe vorherigen Abschnitt).
Die sphärische Richtung zwischen diesen beiden Orten bezeichnet man als Orthodrome. Sie schneidet
auf einer winkeltreuen Karte (Mercartorprojektion) die Meridiane unter einem sich ständig ändernden
Winkel. Konstruiert man ein Abbild der Erde als stereographische Normalprojektion, bei der die
Meridiane als Geradenbüschel von einem Pol ausgehen, so stellt das Bild der loxodromen Verbindung
zweier Punkte eine logarithmische Spirale dar. Wegen der Winkeltreue ist das Bild der Loxodromen
eine Kurve, die die Geraden des Büschels unter einem festen Winkel schneidet. Dies leistet nur eine
logarithmische Spirale. Wenn eine Karte nun so verzerrt wird, daß die Meridiane parallel in einem
gleichen Abstand zu einander stehen, während die Abstände der Breitenparallele ständig wachsen, um
die Abweitung auszugleichen, wird sich die Loxodrome als Gerade darstellen, die die Meridiane unter
gleichen Winkel schneidet. Das logarithmische Verhalten der Loxodrome bleibt davon natürlich
unberührt.

154
Grundlagen der Mercartorprojektion
Um den Mercartorentwurf (nach Gerhard Kramer, genannt Mecartor, Kartograph, 1512 bis 1594)
konturieren zu können, muss man sich mit den Kontruktionsgesetzen den Zylinderentwurf kennen, aus
dem die Mercartorprojektion hervorgeht. Es ist die schon im Mittelalter verwandte Plattkarte
(Zylinderentwurf mit längentreuen Äquator).
Ummantelt man den Erdglobus mit einem Zylinder, so dass dieser senkrecht um den Globus
zur Äquatorebene steht, wobei er der Äquatorebene berührt und die Erdachse gleichzeitig die
Mittelachse dieses Zylinders darstellt, kann man die Punkte (P) der Erdoberfläche so abbilden, dass der
sphärische Abstand eines Punktes auf der Erde vom Äquator gleich dem Abstand des Bildpunktes vom
Äquator auf der Innenseite des Zylinders ist. Schneidet man nun den Zylinder längs seiner Mantellinie
auf und wickelt ihn zu einer Fläche ab, so erhält man eine Karte, die eine Breite vom Betrage des
Äquatorumfangs 2 r (r ist der Erdradius) und eine Höhe von vom Betrage des halben Äquatorumfangs
r hat. Das Kartennetz besteht aus lauter quadratischen Netzmaschen. Es besteht Längentreue, da
diese Karte in der Nord-Südrichtung keine Verzerrung aufweist (Verzerrung Nord-Süd = NS = 1). Da
nun jeder Breitenparallel dieselbe Länge wie der Äquator besitzt, jedoch aus der Abbildung der
Breitenparallele auf der Kugel bekannt ist, dass Radien der einzelnen Breitenparallelen mit
zunehmender Breite um den Kosinus der Breite abnehmen, muss eine Ost-West Verzerrung dagegen
gesetzt werden.. Man erhält die Ost-West Verzerrung, in dem man die Länge eines Breitenparallels in
der Karte 2 r durch die Länge des Breitenparallels auf der Erdoberfläche dividiert. Diese Länge ergibt
sich aus dem Äquatorumfang, multipliziert mit dem Kosinus der Breite, U = 2 r cos , somit lautet die
Beziehung für die Ost-West Verzerrung:
Verzerrung Ost-West = EW = (2 r) : (2 r cos )
EW = 1 : cos (20)
Diese Karte kann nicht winkeltreu sein, da die Verzerrung NS eine andere ist, wie die Verzerrung EW,
Lediglich für den Äquator ist Winkeltreue gegeben, da für = 00° die Verzerrung 1 : cos gilt. Distanzen
in der Nord-Südrichtung nimmt man deshalb immer am Äquator ab, während Distanzen in Ost-
Westrichtung auf den verschiedeneren Breiten (außer 00°) einen anderen Maßstab erfordern, und
zwar müssen wegen der Abweitung für x Seemeilen x sec Äquatorminuten entnommen werden. Für
beliebige Kurse gelten somit unterschiedliche Maßstäbe. Die Loxodrome ist somit in der Plattkarte
keine gerade Linie, zudem wächst die Verzerrung Ost-West mit zunehmender Breite. In hohen Breiten
ist stellt sich ein rundes Gebiet in der Ost-West Ausdehnung oval dar, denn nur die Breitenausdehnung
stimmt mit der Realität auf der Erdkugel überein. Somit ist eine Flächentreue auch nicht gegeben.
Um von der Plattkarte zur Mercartorkarte zu kommen, bildet man die Meridiane zuerst nach den
Abbildungsgesetzen der Plattkarte ab.

155
Für den erdachsigen Entwurf gilt:
x Abstand des Meridians der Länge vom
Greenwicher Meridian
x = r x y Abstand des Breitenparallels der vom Äquator
y = r x und sind im Bogenmaß anzugeben
Um das Gradmaß in Bogenmaß umzurechnen, gilt:
Das Bogenmaß eines Winkels ist die Maßzahl der Länge des zum Winkel gehörenden Bogens auf
einem Kreis mit Radius r =1 oder das Verhältnis der Bogenlänge zur Länge des Kreisradius. Wird dieses
Maß mit arc (lat. arcus, Bogen) bezeichnet, so gilt:
arc 360° = 2 , arc ° = 2 ° = ° = ‘ = . (21)
360° 180° 180° x 60’ 180° x 3600“
Im Vermessungswesen ist es wichtig, den Winkel zu kennen, dessen Bogenmaß 1 ist:
arc = 1 = x ° und danach
180°
° = 180 = 57° 17’ 44,8“ oder
= 180° x 3600“ = 206264,81“ = 57° 17’ 44,8“
arc 1’ = 0,000290888
Hat man nun die Meridiane nach den Abbildungsgesetzen der Plattkarte konturiert, gilt es die
mathematische Beziehung für die Verzerrung Ost-West zu finden, so dass ein ausgewählter Kurs (die

156
Loxodrome) alle Meridiane unter einem gleichen Winkel schneiden kann. Das heißt, soll winkeltreue
erreicht werden, muss die Verzerrung in einem Gebiet zu zwei senkrecht zueinander stehenden
Richtungen gleich sein. Die Verzerrung Ost-West ist 1 : cos . Die mathematische Beziehung für die
Verzerrung Nord-Süd muss nun so lauten, dass sie ebenfalls 1 : cos entspricht. Folglich muss man
eine Integrationskonstante
y = r x f () finden, die dieser Bedingung gerecht wird.
Die Funktion f () lautet:
f () = In tan ( /4 + /2 )
Da sich diese Integrationskontante dadurch bestimmt, dass für = 0 auch y = r x f () gleich 0 sein
muss, drückt man r in diesen Einheiten aus. Nur dadurch kann der Äquator auf der x-Achse abgebildet
werden.
Folglich gilt:
y = r In tan ( /4 + /2 )
oder
y = r lg tan ( /4 + /2 ).
0,4342954
Um y in Seemeilen des Äquatormaßstabes zu erhalten, drückt man R in diesen Einheiten aus.
1 Äquatorseemeile = r x arc 1’
oder

157
r = 1 = 3437,7468 Seemeilen des Äquatormaßstabes
arc 1’
So wird
y = 3437,7468 x lg tan ( /4 + /2 ).
0,4342945
y = 7915,7045 x lg tan ( /4 + /2 ).
oder
= 7915,7045 x lg tan (45° + /2 ). (22)
Nach der letzten mathematischen Beziehung werden die Meridionalanteile oder bzw. wird die
vergrößerte Breite () berechnet (siehe Tafel 1)
Die in Tafel 1 angebenden Werte bedeuten den Abstand vom Äquator, in dem ein Breitenparallel in
die Mecartorkarte eingezeichnet werden muss, und zwar in Äquatorminuten. Im Vergleich mit der
Plattkarte wachsen die Breitenparallele zu den Polen ständig an. Die Pole selbst können in der
Mecartorkarte so nicht dargestellt werden, da die Bezugsbreite der Äquator ist und der sec für 90°
unendlich ist. Die Karte ist deshalb nicht flächentreu. Für die Bedingung, dass die Positionen der
Fixsterne in dieser Karte dargestellt werden sollen, und da in der sphärischen Astronomie die Sterne
sowieso als Punkte am Himmel angenommen werden, ist somit diese Kartenprojektion u.a. eine gute
Grundlage um Sternenwege und Schifffahrtswege im groben Überblick darzustellen. Sie ist
winkeltreu und die Loxodrome (Kurse und Peilungen / Azimute) bildet sich als Gerade ab. Distanzen
müssen entsprechend der Breite am linken oder rechten Kartenrand abgenommen und aneinander
angekoppelt werden. Auch kann diese Karte für Ausschnitte kleinerer Weltgegenden dienen, wobei
dann eine Bezugsbreite festzulegen ist.
Umso eine Karte zu zeichnen, muss man zuerst den Kartenmaßstab, die Karteneinheit und
die Ausdehnung der Karte berechnen. Danach berechnet man die Abstände der Meridiane von einem
Randmeridian und die Abstände der Breitenparallele von einem Randparallalel. Weiter werden zur
Kontrolle die Abstände eines Ortes vom Randmeridian und vom Randbreitenparallel berechnet. Man
erhält die Abstände der Breitenparallele auf der Mecartorkarte (unechter Zylinderentwurf), indem
man jeden Breitengrad mit der Sekante der geographischen Breite ( 1: cos = Sekans ) multipliziert
und die gewonnenen Strecken addiert, bis man die gewünschte Breite erreicht hat. Um die
Genauigkeit zu erhöhen, verwendet man statt Breitengrade die Breitenminuten. bzw.
Breitensekunden.
158
Die Berechnung und Konstruktion soll nun an einem Beispiel erläutert werden.
Für das Gebiet zwischen 1 = 80° N, 2 = 80° S und 1 = 180° E, 2 = 180° W soll der Netzentwurf einer
Seekarte (in Mercartorprojektion) gezeichnet werden. Die Bezugsbreite (hier Äquator) soll 250 mm
lang sein, wobei in der Mitte der Nullmeridian liegt. Die Karte soll einen Maßstab von
1 : 100 000 000 haben. Meridiane und Breitenparallele sind in Abständen von zu je 30°
einzuzeichnen. In den Netzentwurf sind die Positionen von Hawaii als Ort A 1 = 19° 30,0’ N; 1 =
155° 30,0’ W und die Position von Rapa Nui als Ort B 2 = 27° 00,0’ S; 2 = 109° 18,0’ W
einzuzeichnen.
Lösung: Auf Grundlage des modifizierten internationalen Referenzellipsoids nach HAYFORD (ED 50)
und mit den entsprechenden Meridionalanteilen werden zuerst die folgenden Berechnungen
durchgeführt, dabei lauten die Ausgangswerte für das HAYFORDsche Rotationsellelipsoid (bekannt
unter ED-50), wie folgt:
a = 6378388, 000 m große Halbachse der Erde
b = 6356911, 946 m kleine Halbachse der Erde
a − b = 1 . Abplattung
b 297,00
Der Kartenmaßstabes (M)drückt das Verhältnis der Länge einer Linie in der Natur (LN) zur Linie in der
Karte (LK) aus. Es gilt die Beziehung
M = 1: (LN : LK) (23)
Der Ausdruck (LN : LK) = wird als Maßstabzahl bezeichnet. Damit gilt
LN = LK
Da in dem ausgesuchten Beispiel der Maßstab 1 : 200 000 000 beträgt, ist = 200 000 000

159
Zuerst muß man wissen, wie groß die Entfernung zweier Punkte in der Natur ist, wenn die Strecke
zwischen diesen zwei Punkten in der Karte 10 mm beträgt.
LN = 200 000 000 x 10 mm
LN = 209 mm
LN = 2000 km = 1079, 9 sm
Auch sollte man wissen, wie groß die Kartenlänge einer Strecke ist, wenn die Naturlänge 1000 sm
beträgt.
LK = LN :
LK = (1000 sm x 1852000 mm) : 200 000 000
LK = 9, 26 mm
Der Hauptmaßstab für das zu berechnende Kartennetz wird entweder auf den Äquator oder auf
einen bestimmten Breitenparallel bezogen. Im Rechnungsbeispiel ist die Maßstabzahl für den
Äquator, so ergibt sich die zugeordnete Karteneinheit K.
K = (a x arc 1’) :
(24)
K = (6378388 m x 0,000290888) : 200 000 000
K = 0, 00000928 m
K = 0, 00928 mm
Die Karteneinheit ist damit die Strecke, die einer Bogenminute entspricht. Sie gilt für Netzentwürfe,
die große Gebiete und den Äquator erfassen.. Bezieht man den Kartenmaßstab statt auf den
Äquator, auf einen anderen Breitenparallel und die Maßstabzahl eben auf diese Breite
(Bezugsparallel), so ergibt sich die zugeordnete Karteneinheit K1 entsprechend der Beziehung

160
K1 = (N cos 1 arc 1’) : 1, (26)
wobei N der Querkrümmungshalbmesser ist. Für die große Halbachse a des Erdellipsoids in Formel
(26) ist hier der Radius r = N cos 1 des Bezugsparallels mit dem Erdellipsoid gleichzusetzen
Die Längenausdehnung der Karte ergibt sich nach der Beziehung
x = K x (27)
x = 0, 00928 mm x 21600’ (aus l = 2 x 180° in nautische Minuten)
x = 200, 38 mm
die Breitenausdehnung nach der Beziehung
y = K x (28)
y = 0, 00928 mm x 16750’ (aus b = 2 x 80° in Meridionalteile)
y = 155, 39 mm
Dabei ist der Längenunterschied zwischen den Randmeridianen der zu konstruierenden Karte
(180° E bis 180° W) und der Unterschied zwischen den Meridionalteilen der Rand-Breitenparallele
(80° N bis 80° S).
Die Abstände x der einzubeziehenden Meridiane von einem Randmeridian ergeben sich dann nach
der Beziehung
x = K x mit ln in nautische Minuten. (29)
Die Abstände y der einzuzeichnenden Breitenparallele vom benachbarten Breitenparallel ergeben
sich aus der Beziehung

161
y = K x mit n in Meridionalanteile. (30)
Dabei befindet sich der Koordinatenursprung auf = 00°, = 000°, so daß die errechneten
Differenzwerte nach beiden Seiten auf der x Achse und auf der y Achse abtragen werden.
° ‘ x
000° 000’ 0, 00 mm 00° N/S 0, 0’ 0, 0 mm
030° 1800’ 16, 70 mm 10° N/S 603, 1’ 5, 60 mm
060° 3600’ 33, 41 mm 20° N/S 1225, 1’ 11, 37 mm
090° 5400’ 50, 11 mm 30° N/S 1888, 4’ 17, 52 mm
120° 7200’ 66, 82 mm 40° N/S 2622, 7’ 24, 34 mm
150° 9000’ 83, 52 mm 50° N/S 3474, 5’ 32, 24 mm
180° 10800’ 100, 22 mm 60° N/S 4527, 4’ 42, 01 mm
65° N/S 5178, 8’ 48, 06 mm
70° N/S 5965, 9’ 55, 36 mm
75° N/S 6970, 3’ 64, 68 mm
80° N/S 8375, 0’ 77, 72 mm
Die Eintragung eines Objektes mit den Koordinaten 1 und 1 in das Kartennetz erfolgt mit den Werten
x1 = K1 x 1 (31)
y1 = K1 x 1 , (32)
wobei 1 und 1 Längenunterschied bzw. vergrößerter Breitenunterschied zu den Berandungen des
Kartennetzes sind. Zur Kontrolle kann zusätzlich der Abstand zu einem Eckpunkt des Kartennetzes
berechnet werden:
_________

162
e = x21 +y2
1 . (33)

163
GANZHEITLICHE NAVIGATIONSMETHODEN
Die polynesische Navigation
Der polynesische Sternennavigator hatte nun weder Kompass, noch Seekarte, noch Sextant zur
Verfügung. Statt dem nautischem Jahrbuch, indem der heutige Nautiker alle scheinbaren Gestirnsorte
am Firmament findet, hatte der polynesische Sternennavigator nur seinen Erfahrungsschatz, der von
Generation zu Generation weitergetragen wurde. Der heutige Navigator besitzt natürlich diesen
Erfahrungsschatz nicht mehr. Er muss mit Hilfe der Mathematik sich den augenblicklichen
Erkenntnisstand errechnen. Soll eine Navigation ohne nautische Geräte erfolgen, so kann dieses nur in
Anwendung des Nautischen Jahrbuchs erfolgen, denn das Bekanntsein der Gestirnspositionen am
nächtlichen Himmel ist Grundvoraussetzung für die Durchführung der Navigation ohne Hilfe nautischer
Geräte. Grundlage dieser Navigation ist das Fahren nach Sternenazimuten. Der Nautiker muss nun
wissen, welche Sterne er auf seiner Kurslinie von A nach B ansteuern muss. Da der moderne Nautiker
keinen Erfahrungsschatz in dieser Hinsicht besitzt, muss er sich vorher diese Sterne errechnen. Mit
Hilfe eines Beispiel soll die Vorgehensweise dabei erläutert werden. Die Uhr bzw. der Kompass soll
allein dazu dienen, die Richtigkeit dieser Vorausberechnungen zu prüfen. Einmal diese Methodik für
den Weg zwischen zwei Positionen erprobt, kann später auf die Anwendung von Uhr und Kompass
ganz verzichtet werden. Bei der polynesischen Art der Navigation wird der Umstand ausgenutzt, dass
zu verschiedenen Zeiten auf verschiedenen Positionen der Sternenhimmel anders erscheint, d. h. die
laufende Bewegung der Gestirne wird bewusst beachtet. Je mehr Sterne als Leitsterne betrachtet
werden, d. h. je mehr Rechenvorgänge zur Gewinnung der entsprechenden Sternenazimute
durchgeführt werden, desto genauer wird die Durchführung der Navigation selbst sein, da die
durchgeführten Rechnungen nur die Stillstände zwischen zwei oder mehreren Zeitspannen der
Sternbewegungen betrachten kann. Je mehr Stillstände berechnet werden, desto mehr erfolgt die
Annäherung an die tatsächliche Bewegung. Da keine Positionsbestimmung zur Kontrolle des
Schiffsweges erfolgt, ist die Methode in erster Linie für die hohe See geeignet. Die Küstennavigation
kann dadurch nicht ersetzt werden. Es wird aber hinreichend genau das Segeln auf den größtem Kreise
möglich sein, wie wir nachfolgend noch sehen werden.
Somit vollzieht sich die polynesische Sternennavigation, die ohne den Bezug Horizont auskommt, nur
mit Hilfe der Sternenazimute, der Gestirnsbildpunkte und den unterschiedlichen Richtungen und
Distanzen, die verschiedenen Sterne zueinander einnehmen. Der Umstand, dass Sterndistanzen
zueinander, wie auch die Deklinationswerte über lange Zeit unverändert sind, spielt dabei die
entscheidende Rolle, denn davon hängt die periodische Wiederkehr der Sternbilder über bestimmte
Orte bzw. Positionen der Erde ab. Es handelt sich sozusagen um eine Navigation an der drehenden
Himmelskugel entlang. Die polynesische Navigation wendet dabei folgende Verfahren an:
1.) Kursausrichtung nach dem für den Bestimmungsort geltenden Zenitstern, der über dem
Bestimmungsort von Ost nach West zieht.
2.) Kursausrichtung nach einem Leitstern, der die geplante Großkreisbahn schneidet bzw. auf dem
Großkreis auf- oder untergeht.
3.) Kursausrichtung nach dem Winkel, die ein Stern oder mehrere Sterne zum geplanten Großkreis

164
einnehmen, während sie kulminieren bzw. auf- oder untergehen.
4.) Kursänderung nach der Richtung, die zwei ausgewählte Sterne untereinander verbindet. Diese
Richtung ist die unveränderte Sterndistanz zweier Sterne, parallel zum Großkreis oder in einem Winkel
zum Großkreis, wobei ein dritter Stern über dem Großkreis zieht.
5.) Kursausrichtung nach Gestirnen, die erstmals über den Horizont kommen bzw. nicht mehr über den
Horizont kommen und letztmalig sichtbar sind.
Bei dieser Art der Navigation ist zu unterscheiden zwischen Zirkumpolarsternen und Sternen, die
täglich auf- und unter gehen. Auch ist die Kenntnis von Bedeutung, wie der Großkreis zu den
Breitenparallelen steht, d. h. wie die Schiffsrichtung zum Sternenweg am Himmel steht und in welchen
Teil der Himmelskugel sich der Standort des Beobachters befindet. So teilt der polynesische
Sternennavigator abhängig vom Beobachtungsort den Himmel in drei Teile, einen nördlichen, einen
mittleren und einen südlichen Teil. Diese Teilung ermöglicht die Zuordnung der Gestirne , wobei es
von Bedeutung ist, ob das Boot zum Beispiel in einem dieser Teile verbleibt oder von einem Teil zum
anderen wechselt. So bedeuten Nord – Südkurse, ein navigieren vorwiegend nach
Kulminationsgestirnen, Ost - Westkurse bedeuten dagegen von einem Stern begleitet zu werden.
Zwischenkurse bedeuten gleichzeitig nach Kulminationssternen und nach Begleitsternen navigieren zu
müssen, da das letzte genannte Verfahren auch vom Rechenaufwand das schwierigste und
komplizierteste Verfahren darstellt, soll es nun erläutert werden.
Wir wollen eine Atlantiküberquerung beginnen und stehen mit unserem Boot an 12. August 1995 um
21.00 Uhr (Weltzeit) im Ausgang des englischen Kanals. Die Fahrt soll mit Südwestkurs nach Puerto
Rico gehen.
Großkreisberechnung zwischen Abfahrts - und Bestimmungsort
Zuerst führen wir die Großkreisberechnung durch, die sich zwischen der Startposition (Abfahrtsort)
und der Endposition (Bestimmungsort) ergibt. Dadurch ermitteln wir die sphärische Distanz und den
Anfangs- und Endkurs nach Puerto Rico.
Startposition: φA = 49° 35' N; λA = 5° 00' W
Endposition: φB = 19° 00' N; λB = 65° 00' W
Anfangskurs: = N 100° 18’ 11“ W, rwK = 259,7°
Endkurs: = S 042° 25’ 35“ W, rwK = 222,4°
Distanz: = 3379,92 Seemeilen (aus 90° - h = dsm).
Diese Distanz ist gleichzeitig eine Höhe von 33° 40' 05", d. h. ein im Zenit stehender Stern über
Puerto Rico wird im Ausgang des englischen Kanals (Startposition) 33° 40' 05" Höhe über dem
Horizont besitzen. Ausgehend von diesen Ausgangswerten ergibt sich die folgende Übersicht über
den Verlauf des Großkreises

165
Position Koordinaten rwK Distanz Zeit auf Kurs
mit 8 kn
Tag Uhrzeit (UTC)
Position A φ = 49° 35,0’ N
λ = 5° 00,0’ W
259,7° 200,4 sm 25h 03 min 12.08.1995 21.00 Uhr
Zwischenpunkt 1 φ = 48° 52,6’ N
λ = 10° 00,0’ W
255,9° 423,0 sm 52h 52 min 13.08.1995 22.03 Uhr
Zwischenpunkt 2 φ = 46° 42,9’ N
λ = 20° 00,0’ W
248,5° 467,6 sm 58h 27 min 16.08.1995 02.55 Uhr
Zwischenpunkt 3 φ = 43° 24,2’ N
λ = 30° 00,0’ W
241,4° 532,8 sm 66 h 36 min 18.08.1995 13.22 Uhr
Zwischenpunkt 4 φ = 38° 41,9’ N
λ = 40° 00,0’ W
234,8° 620,7 sm 77h 35 min 21.08.1995 07.58 Uhr
Zwischenpunkt 5 φ = 32° 17,8’ N
λ = 50° 00,0’ W
229,0° 728,5 sm 91h 04 min 24.08.1995 13.33 Uhr
Zwischenpunkt 6 φ = 23° 56,1’ N
λ = 60° 00,0’ W
224,3° 406,9 sm 50h 52 min 28.08.1995 08.37 Uhr
Position B φ = 19° 00,0’ N
λ = 65° 00,0’ W
30.08.1995 11.29 Uhr
gesamt: 3379,9 sm 422h 29 min 17d 14h 29 min
Feststellen der Zenitsterne, die über den Bestimmungsort ziehen
Entsprechend der geographischen Breite des Bestimmungsortes werden die Gestirne gesucht, dessen
Deklination (δ) annähernd gleich der geographischen Breite des Bestimmungsortes ist. Der
gefundene Stern zieht dann von Ost nach West über den Bestimmungsort. Der Stern Arcturus, aus
dem Sternbild Bootes (Bärenhüter) erfüllt genau diese Bedingung. Er besitzt eine Deklination (δ)von
19° 13,2' N und zieht somit 13,2 sm nördlich an Puerto Rico vorbei. Sein Sternwinkel (t) beträgt 146°
09,9'. Wenn er über Puerto Rico kulminiert, wird er von der Startposition aus in einer Höhe von 33°
49' 50" und mit einem Azimut von 259,9° zu beobachten sein. Das entspricht genau dem Kurs, der
gesteuert werden muss. Gleichzeitig kann errechnet werden, dass der Stern Mirak, ebenfalls aus dem

166
Sternbild Bootes ebenfalls in Kursrichtung 10° unterhalb von Arcturus zu beobachten ist. Um den
Zeitpunkt zu finden, wann Arcturus über Puerto Rico kulminiert, müssen Kontrollsterne verwendet
werden, die über der eigenen Position beobachtet werden. Die Größe der Deklination dieser
Kontrollsterne wird durch die geographischen Breite des Standortes bestimmt, wobei der
Sternwinkel dieser Kontrollsterne um den Längenunterschied zwischen Standort und
Bestimmungsort kleiner sein muss, als der des Zenitsternes. Wenn der Stern Eltanin, Sternbild Draco
(Drachen) sich auf der Position zwischen dem Zenitpunkt des Abfahrtsortes und dem Stern Polaris,
Sternbild Ursa Minor (Kleiner Bär) - genau in Nordrichtung also - befindet, er durchwandert dabei
gerade seine obere Kulmination, ist der Zeitpunkt gesetzt, Arcturus anzusteuern. Denn Arcturus
kulminiert dann gerade über Puerto Rico. Rechnet man den Kulminationszeitpunkt aus dem
Nautischen Jahrbuch, kann festgestellt werden, dass Arcturus am 12. August 1995 genau um 21-11-
57 Uhr (Weltzeit) über Puerto Rico kulminiert und dabei auf dem Großkreis steht. Der Stern Eltanin
hat zu diesem Zeitpunkt eine Höhe von 86° 26' 38" und steht in einer Richtung am Kompass von
304,2°, genau kulminiert Eltanin um 20-53-06 Uhr (Weltzeit).
So kann die Reise nach Puerto Rico also beginnen. Eltanin hat seine Kulmination gerade durchwandert
und Arturus und Mirak stehen genau auf dem Großkreis. Wir segeln und steuern Arcturus und Mirak
nun voraus an. Die Frage ist: Wie lange können diese beiden Sterne mit hinreichender Genauigkeit
angesteuert werden?
Auffinden weiterer Leitsterne für die Nacht
Steuern wir den Sternen Arcturus und Mirak stundenlang hinterher, werden wir unsere Großkreisbahn
sehr bald verlassen, denn diese Leitsternen schneiden den Großkreis und laufen nicht auf ihn mit. Um
nach weiteren Leitsternen zu fahren, dürfen diese nicht sehr hoch stehen und müssen gut sichtbar
sein, denn es ist ein besseres Steuern, wenn die Sterne flach stehen. Stehen sie allerdings sehr flach,
sind sie aufgrund der terrestrischen Strahlenbrechung am Horizont nicht mehr sichtbar, deshalb
eignen sich am besten Gestirnshöhen zwischen 10° und 40°. Da alle Gestirne eine Gestirnsbildpunkt
auf der Erdkugel einnehmen, ist die Entfernung des Gestirnsbildpunktes vom Standort des Bootes
ebenfalls von entscheidender Frage. Denn je weiter ein Gestirnsbildpunkt vom Beobachtungsort
entfernt liegt, je geringer die Differenz seiner Azimutänderung in einer Zeitspanne. Die
Geschwindigkeit eines Bahnpunktes ist 15° 02' bestimmt. Das sind 902 sm/h auf dem Äquator bzw. auf
dem Deklinationsparallel von 45° nur Kosinuswert von 902 sm/h (637,8 sm/h). Es ist in dieser
Bewegung der Grund zu finden, warum der polynesische Navigator den Himmel in drei Teile teilt und
diesen Himmelsteilen die wichtigsten Sterne Sternbilder zuordnet. Denn aufgrund dieser Tatsache
überholt in einer Zeitspanne ein Stern den anderen Stern in seinem Lauf (gleich zwei Punkten auf einer
Fahrradspeiche, dessen Rad sich gleich schnell dreht). Um genügend Leitsterne zur Verfügung zu
haben, musste der polynesische Sternennavigator) Sterne kennen. Er musste sie nicht nur kennen, er
musste auch wissen, über welche Inseln und Positionen sie ziehen, welcher Stern welchen überholt.
Dazu musste er diese in sogenannten Sternreihen ordnen. Er musste die Frage beantworten können:
Welcher Stern ist nach dem ersten Stern weiter anzusteuern, um auf Kurs zu bleiben? Um diese
schwierige Aufgabe zu bewältigen, musste der Navigator eine Ausbildung von ca. 10 Jähren hinter sich
lassen und das war noch nicht alles, wie wir vorher schon angemerkt haben. Der heutige Nautiker
muss, will er polynesische Sternennavigation betreiben, mit dem Umstand leben, dass im Nautischen
Jahrbuch nur ca. 80 Hauptsterne verzeichnet sind. Da wir aber heute über genügend andere
Ortungsmöglichkeiten bzw. Kontrollmöglichkeiten auf See (Kompass, Uhr, Sextant) verfügen, muss

167
dieses kein Nachteil sein. Über eine Nacht benötigen wir ca. acht bis zehn Leitsterne, die den Großkreis
von der Bootsposition bis zum Bestimmungsort bzw. auch darüber hinaus schneiden müssen. Es ist
somit die Sternenreihe zu berechnen, der wir folgen müssen. Mit Vorgabe der Höhe zwischen 10° und
40° und des Kurses (Azimutwinkel) auf dem Großkreis muss zunächst der entsprechende
Deklinationswert (δ) und der dazu gehörige Stundenwinkel (t) berechnet werden. Es sind die Leitsterne
gemäß ihrem Stundenwinkel (t) und gemäß ihrem Deklinationswert (δ) sozusagen auf den Großkreis
zuschneiden. Dazu genügt es vom Abfahrtsort und vom Bestimmungsort und einigen dazwischen
liegenden Punkten des Großkreises auszugehen. Die eigentliche Bootsposition spielt dabei nur eine
untergeordnete Rolle. So wie der Großkreis die Leitsterne fesselt, binden die Leitsterne das Boot an.
den Großkreis. Es ist niemals umgekehrt. Der Bestimmungsort bestimmt den Großkreis, der Großkreis
stimmt die Leitsterne. Dabei ist es völlig belanglos, wie schnell das Boot sich vorwärts bewegt und auf
welchen Koordinaten es sich befindet: Nur der Kurs, die Fesselung des Bootes an die Leitsterne ist von
Bedeutung. Die Gestirnshöhe, das Gestirnsazimut, der Stundenwinkel und die geographische Breite
stehen im Verhältnis und bedingen einander. Dieses Verhältnis ist l : l, wenn Az = t und δ = h betragen.
In unserem Beispiel ist dieses Verhältnis bei φ = 49° 35' N; t = 77° 43' 48" und δ = 30° N erreicht, dann
beträgt das Az ebenfalls 77° 43' 48" und die h beträgt 30°.
Am 12. 08. 1995 um 21-11-57, zur Kulminationszeit des Sterns Arcturus über Puerto Rico beträgt der
Greenwicher Stundenwinkel des Frühlingspunktes Grt = 278° 50’ 06“. Der Sternstundenwinkel (t)
errechnet sich für tW = 75° 42' 58" mit β = 161° 52’ 52“ und für
tW = 55° 20’32“ mit β = 141° 30' 36".
Weiterhin ist am 12. 08. 95 um 19. 15 Uhr Weltzeit Sonnenuntergang und am 13. 08. 95 um 04. 50 Uhr
Sonnenaufgang.
Mit einer entsprechend den loxodromischen Winkelfunktionen für die Koppelkursrechnung erstellter
Koppeltabelle wird der Schiffsweg für die Nacht vom 12. 08. (Sonnenuntergang) zum 13. 08. 95
(Sonnenaufgang) vorausberechnet, zugleich wird der Grt mit dem Nautischen Jahrbuch errechnet.

168
Uhrzeit Position rwKLOX Grt
(UTC) BREITE LÄNGE
21.00 49° 35,0’ N 5° 00,0’ W 260° 275° 50,4’
22.00 49° 33,6’ N 5° 12,1’ W 260° 290° 52,9’
23.00 49° 32,2’ N 5° 24,2’ W 260° 305° 55,3’
00.00 49° 30,8’ N 5° 36,3’ W 260° ----
01.00 49° 29,3’ N 5° 48,4’ W 259° ----
02.00 49° 27,8’ N 6° 00,5’ W 259° ----
03.00 49° 26,1’ N 6° 12,5’ W 258° ----
04.00 49° 24,4’ N 6° 24,5’ W 258° ----
05.00 49° 22,8’ N 6° 36,5’ W 257° 36° 10,1’
Mit dieser Approximation des Großkreises durch Loxodromstücke sind die Eingansargumente
gefunden, die zur weiteren Berechnung der Gestirnsbildpunkte unter Einbeziehung von
Schiffsgeschwindigkeit und gelaufener Distanz notwendig sind.
Unter Vorgabe der gegebenen Großkreisrichtung dem Azimut von 259,7° (N 100°18’ 00“ W), der
Anfangsposition von φ = 49° 35’ N, λ = 5° 00' E, der Uhrzeit in Weltzeit (UT1) von 21.00 Uhr wird unter
Vorgabe der hr von 10° bis 40° die entsprechenden Deklinationswerte und Stundenwinkel errechnet.
für h = 10° δ = 1° 09’ 55” N tW = 75° 42’ 58”
für h = 20° δ = 8° 42’ 36” N tW = 69° 16’ 52”
für h = 30° δ = 16° 16’ 31” N tW = 62° 34’ 38”
für h = 40° δ = 23° 36’ 47” N tW = 55° 20’ 32”
Weiter errechnen sich für den 13. 08. 1995 für 05.00 Uhr (UTC) die folgenden Werte:
für h = 10° δ = 0° 05’ 08” S tW = 74° 25’ 37” β = 44° 52’ 01”
für h = 40° δ = 22° 35’ 42” N tW = 54° 15’ 08” β = 24° 41’ 32“
Man entnehme nun alle Sterne dem Sternverzeichnis des Nautischen Jahrbuchs, dessen Deklination
zwischen 0° 05’ 08” S und 23° 36’47“ N und dessen Stundenwinkel zwischen den Werten 161° 52’52“
und 24° 41’ 32“ liegen.

169
Es sind dies die Sterne:
Stern Sternbild Sternwinkel (β) Deklination (δ)
Vindemiatrix Sternbild VIRGO(Jungfrau) 164° 30,6’ 10° 59,0’ N
Arcturus Sternbild BOOTES (Bärenhüter) 146° 08,1’ 19° 12,4’ N
Gemma Sternbild CORONA (Nördliche Krone) 126° 22,3’ 26° 43,9’ N
Unuk Elhaia Sternbild SERPENS (Schlange) 123° 59,3’ 6° 26,5’ N
Ras Alhague Sternbild OPHIUCHES (Schlangenträger) 96° 19,0’ 12° 33,9’ N
Atair Sternbild AQUILA (Adler) 62° 21,4’ 8° 51,5’ N
Enif Sternbild PEGASUS (Pegasus) 34° 00,4’ 9° 51,4’ N
Mirak Sternbild BOOTES (Bärenhüter) 138° 48,1’ 27° 05,6’ N
Um 21. 00 Uhr (UTC) soll nun Arcturus und Mirak angesteuert werden. Der rwK beträgt 260°. Dazu die
nachfolgende weiteren Berechnungsergebnisse.
Stern Arcturus Stern Mirak
21-00-00 tW = 56° 58” 30” tW = 49° 38’ 30”
hr = 35° 44’ 34” hr = 46° 05’ 52“
Az = 257° 17’ 30“ Az = 258° 02’ 42“
22-00-00 tW = 71° 52” 54” tW = 64° 28’ 54”
hr = 26° 09’ 34” hr = 36° 32’ 29“
Az = 269° 21’ 15“ Az = 270° 15’ 05“
An den Ergebnissen wird erkennbar, dass die beiden Sterne senkrecht übereinander stehen.

170
Die Übersicht nun folgender Berechnungsergebnisse veranschaulicht, die Sichtbarkeit und die
gegenseitige Lage der ausgewählten Leitsterne am Himmel.
Stern Stundenwinkel errechnete Höhe viertelkreisiges Azimut Kurs
12. 08. 1995 um 22-00-00 Uhr UT1; Grt = 290° 52,9’φ = 49° 33,6’ N; λ = 5° 12,1’ W
Gemma tW = 37° 00’ 36“ hr = 53° 36’ 21” Az = N 115° 01’ 43” W 244,97°
Unuk Elhaia tW = 34° 37’ 36“ hr = 38° 00’ 30” Az = N 134° 13’ 27” W 225,78°
Ras Alhague tW = 6° 57’ 18“ hr = 52° 33’ 49” Az = N 168° 47’ 19” W 191,21°
Atair tue = 27° 00’ 18“ hr = 43° 29’ 26” Az = N 141° 47’ 59” E 141,80°
Enif tE = 55° 21’ 18“ hr = 29° 34’ 38” Az = N 111° 15’ 09” E 111,25°
13. 08. 1995 um 05-00-00 Uhr UT1; Grt = 36° 10,1’φ = 49° 22,8’ N; λ = 6° 36,5’ W
Gemma tW = 155° 55’ 54“ hr = – 10° 55’ 20” Az = N 21° 46’ 29” W 338,23°
Unuk Elhaia tW = 153° 32’ 54“ hr = – 29° 36’ 24” Az = N 30° 36’ 40” W 339,40°
Ras Alhague tW = 125° 52’ 36“ hr = – 11° 57’ 45” Az = N 53° 56’ 34” W 306,06°
Atair tW = 91° 55’ 00“ hr = 5° 28’ 22” Az = N 82° 46’ 00” W 277,23°
Enif tW = 63° 34’ 00“ hr = 24° 32’ 57” Az = N 104° 09’ 12” W 255,85°
Allein diese Übersicht zeigt nicht, wann die Deklinationsparallele der Leitsterne den Großkreis des
Bootes zum Zielort schneiden. Da die Uhrzeit nicht bekannt ist und dadurch der Stundenwinkel nicht
errechnet werden kann, somit auch keine Berechnung der Gestirnshöhe und des Azimutes erfolgen
kann, muss mit einer Interpolierungsmethode die Lösung bewältigt werden.
Es ist erforderlich den Stundenwinkel des betreffenden Gestirns für das Azimut des Großkreises
(100°18’11“) zu erhalten. Unter Vorgabe im Überschlag ausgewählter Stundenwinkel wird die
Gestirnshöhe und das Gestirnsazimut solange berechnet, bis das errechnete Azimut mit dem Azimut
des Großkreises übereinstimmt. Eine weitere Möglichkeit besteht, wenn der Großkreisverlauf mit je
1° Längendifferenz erfasst wird. Auch dann kann der Schnittwinkel herausinterpoliert werden.
Wie sich dieser Interpolierungsvorgang vollzieht sei mittels der nachfolgenden Berechnungen

171
aufgezeigt:
Vorgabe der
Stundenwinkel
berechnete Höhe berechnetes Azimut rechtweisendes
Azimut (Kurs)
GEMMA
tW = 45° hr = 48° 45’ 47” Az = N 106° 39’ 03” W
tW = 50° hr = 45° 37’ 16” Az = N 101° 58’ 43” W
tW = 51° hr = 44° 49’ 08” Az = N 101° 05’ 11” W
tW = 51° 40’ hr = 44° 33’ 38” Az = N 100° 29’ 56” W 259° 30’ 04“
UNUK ELHAIA
tW = 72° hr = 16° 31’ 59” Az = N 99° 39’ 51” W
tW = 71° 35’ hr = 16° 47’ 57” Az = N 99° 59’ 42” W
tW = 71° 15’ hr = 17° 00’ 43” Az = N 100° 15’ 37” W 259° 44’ 23“
Ras Alhague
tW = 70° hr = 22° 27’ 52” Az = N 97° 01’ 16” W
tW = 65° hr = 25° 40’ 00” Az = N 101° 03’ 18” W
tW = 66° hr = 25° 01’ 46” Az = N 100° 14’ 14” W 259° 45’ 46“
Atair
tW = 70° hr = 19° 39’ 29” Az = N 99° 36’ 59” W
tW = 69° hr = 20° 17’ 49” Az = N 100° 25’ 07” W 259° 34’ 53“

172
Enif
tW = 70° hr = 20° 25’ 04” Az = N 98° 55’ 37” W
tW = 69° hr = 21° 03’ 28” Az = N 99° 43’ 40” W
tW = 68° 30’ hr = 21° 22’ 38” Az = N 100° 07’ 48” W 259° 52’ 12“
Da jetzt die Stundenwinkel für den Durchgangs des Gestirns durch den Großkreis des Bootes
interpoliert worden sind, können nun aus den Stundenwinkelwerten die entsprechenden Zeitpunkte
bestimmt werden. Indem die Größe des Wertes des Greenwicher Stundenwinkels des
Frühlingspunktes aus dem Gestirnsstundenwinkel herausgerechnet wird, kann der Zeitpunkt
entsprechend dem Grt aus dem Nautischen Jahrbuch entnommen werden.
Stern t Grt UT1
Gemma tW = 51° 40’ 00“ Grt = 290° 29’ 48“ UT1 = 21-58-38
Unuk Elhaia tW = 71° 15’ 00“ Grt = 312° 37’ 48“ UT1 = 23-26-06
Ras Alhague tW = 66° 00’ 00“ Grt = 334° 52’ 30“ UT1 = 00-55-30
Atair tW = 69° 00’ 00“ Grt = 11° 50’ 58“ UT1 = 03-22-58
Enif tW = 68° 30’ 00“ Grt = 39° 29’ 42“ UT1 = 05-13-16
Da das Boot selbst seiner Koppelkursgeschwindigkeit von 8 kn folgen soll, ist diese Bewegung für die
Berechnung der Großkreisschnittpunkte und der jeweiligen Gestirnspositionen mit einzubeziehen.
Das Ergebnis dieser Berechnungen entsprechend den Koppelorten und der jeweiligen Uhrzeiten zeigt
die folgende Übersicht.
Ab 21-58-38 (UT1) wird der Stern Gemma angesteuert. Großkreiskurs 259,5°
Koppelstandort des Bootes: φ = 49° 33,6’ N; λ = 5° 11,9’ W
Gestirnskoordinaten: tW = 51° 40’ 12“

173
hr = 44° 33’ 31“
Az = N 100° 29’ 45“ W rwAz = 259,5°
Ab 23-26-06 (UT1) wird der Stern Unuk Elhaia angesteuert. Großkreiskurs 259,5°
Koppelstandort des Bootes: φ = 49° 31,6’ N; λ = 5° 29,5’ W
Gestirnskoordinaten: tW = 70° 57’ 36“
hr = 17° 12’ 11“
Az = N 100° 28’ 52“ W rwAz = 259,5°
Ab 00-55-30 (UT1) wird der Stern Ras Alhague angesteuert. Großkreiskurs 259,3°
Koppelstandort des Bootes: φ = 49° 29,4’ N; λ = 5° 47,6’ W
Gestirnskoordinaten: tW = 65° 24’ 30“
hr = 25° 25’ 11“
Az = N 100° 41’ 16“ W rwAz = 259,3°
Ab 03-22-58 (UT1) wird der Stern Atair angesteuert. Großkreiskurs 258,8°
Koppelstandort des Bootes: φ = 49° 25,4’ N; λ = 6° 17,1’ W
Gestirnskoordinaten: tW = 67° 55’ 00“
hr = 21° 00’ 49“
Az = N 101° 14’ 29“ W rwAz = 258,8°
Ab 05-13-16 (UT1) wird der Stern Enif angesteuert. Großkreiskurs 258,6°
Koppelstandort des Bootes: φ = 49° 22,4’ N; λ = 6° 39,1’ W
Gestirnskoordinaten: tW = 66° 51’ 00“
hr = 22° 27’ 56“
Az = N 101° 23’ 27“ W rwAz = 258,6°

174
So bestätigen die aufgezeigten Berechnungsmethoden die Richtigkeit der polynesischen
Sternennavigation. Wir müssen feststellen, dass ein immenser Rechenaufwand erforderlich ist, bis die
Gestirnsbahnen für den Großkreis des Bootes „zugeschnitten“ sind. Und doch mag der Leser erleichtert
sein. Für die Praxis ist es nicht nötig, diese Rechnungen nun jedes Mal genauso nachvollziehen zu
müssen. Für einen einmal ausgewählten und berechneten Großkreis wird die Sternenreihe der
Leitsterne, die anzusteuern sind immer gleich bleiben. Die Zeitpunkte werden sich jedoch
entsprechend des gewählten Datums im Jahr verschieben. Dennoch bleiben aufgrund der geringen
Änderung der Deklinationswerte die Leitsterne für feste Tage über Jahre fast immer die gleichen. Hier
ist es sinnvoll, die Startzeit auf immer den gleichen Zeitraum eines Jahres zu legen. Für eine Überfahrt
über den Atlantik ist ja nicht nur die navigatorische Sichtbarkeit der Gestirne wichtig ist, sondern
ebenfalls die jahreszeitliche Wetterperiode. Selbstverständlich muss die Wetterroutung und die
Berücksichtigung der globalen Wetterentwicklung sowie die Entwicklung vor Ort mit in die nautische
Vorbereitung einer solchen Fahrt mit einfließen (siehe Abschnitt
„Seenavigationsorientierungsräume“).
Soll ein Fahren auf dem Großkreis ohne Uhr und Kompass erfolgen, so ist es letztendlich nur wichtig
zu wissen, wie sich die Lage der Positionen der Gestirne zueinander und in bezug auf den Großkreis
bei einer Höhe von ca. 10° bis ca. 40° gestaltet.
Wie genau diese Art der Navigation sein kann, sei abschließend mit der zeichnerischen Darstellung des
Seeraumes bezeugt.

175
Die Methode der Orientierung nach Gestirnsazimuten ist im eigentliche Sinne das gleiche Verfahren,
nach dem auch Vögel und verschiedene Insekten navigieren. Schon längst ist bekannt, dass Vögel,
um lange Distanzen während der Nacht zu bewältigen, nach den Gestirnen fliegen. Sie haben nach
ihrer Art die verschiedenen Stellungen der hellen markanten Gestirnsbilder in ihrer Erinnerung.
Bekannt ist auch, dass die Leuchtfeuer an der Küste den Vögeln den falschen Weg zeigen, da diese
für ein tief liegendes Gestirn gehalten werden. Die Vögel können die Leuchtfeuer nicht in ihren
Orientierungssystem nach den Gestirnen einordnen und verhalten sich völlig orientierungslos.
Somit ist die Orientierung nach Gestirnazimuten „an der sich drehenden Himmelskugel“ entlang
ein ganz natürliches Prinzip der Tierwelt.
176
Die arabische Navigation
In der Analyse einer ganzheitlichen Navigation darf selbstverständlich die Arabische Seefahrt des Mittelalters
nicht unerwähnt bleiben. Auch wenn es so scheinen mag, dass die wesentlichen Grundzüge der europäischen
Navigation auf die Iberische Hochseefahrt zurückgreifen, so ist dass, was wir heute in der astronomischen und
auch in der terrestrischen Navigation vorfinden unweigerlich mit der arabischen Seefahrt verbunden. Viele
Sterne tragen heute noch arabische Namen. Begriffe wie Azimut, Alhidade, Nadir, Zenit u.a. sind arabischen
Ursprungs. Es würde eine Lücke lassen, die hohen Leistungen der arabischen Seefahrer nicht zu analysieren und
einzugliedern in die ganzheitliche Betrachtung des Systems Navigation.
Nicht von ungefähr trafen sich am 24. April 1498 der arabische Kapitän Ibn Majid und Vasco da Gama
im ostafrikanischen Hafen Malindi (nördlich von Mombassa – Kenia-). Der Grund lag in der
Überquerung des Indischen Ozeans. Kapitän Ibn Majid sollte Lotse sein für diese Ozeanüberquerung
und er war es auch. Aber nicht nur Lotse war dieser Kapitän. Auf der Reiseroute nach Kalikut wurde
unter Vasco da Gama durch eben diesen Kapitän arabische Navigation betrieben.
In Kenntnis und Ausnutzung des Monsunwindes, der von April bis Mai und von August bis September
als Südwestmonsun im Golf von Oman ostwärst weht, während er von Oktober bis März als weitaus
stärkerer Nordostmonsun im Golf von Oman westwärts weht und der dadurch beeinflusste Nord-
Äquatorialstrom gelang die Beherrschung der Seewege im indischen Ozean. Während die Seefahrer
dieser Zeit in Kenntnis dieser natürlichen Wechselspiele der Monsunwinde und in Kenntnis der
Gezeiten in Abhängigkeit von den Mondzyklen mit dem Nordostmosun aus Maskat (Position: = 23°
36’ N; = 58° 32’ E ) ausliefen, war ihnen nicht nur die Reisedauer der Hinreise von 4 Monaten bekannt.
Durch die Wahl des Auslaufszeitpunktes war auch gleichzeitig der Einlaufzeitpunkt der Rückkehr
festgelegt. Nicht nur die Malabarküste Westindiens, die Inseln der Nikobaren (Kole-rue Position: =
8° 13’ N; = 93° 08’ E) im Golf von Bengalen oder die Südspitze Indiens waren als Reiseziel ausgewählt,
sondern auch die Inseln zwischen Singapur und Südchina kamen in Betracht. Schließlich konnte die
Reise bis nach Kanton in China gehen. Den Sommer in China verbringend, liefen die Schiffe dann im
Herbst wieder zurück in die arabische Heimat, den Südwestmonsun im Rücken. Nautische Tabelle,
Küstenbeschreibungen und vieles mehr unterlag einer ständigen Korrektur und Verbesserung, so dass
die praktische Navigation auf sicherer Basis stand. Die sogenannten „Rahmanis“ sind Beispiele für die
Ausübung jener hohen Kunst der Nautik, enthielten sie doch nicht nur Zeichnungen der verschiedenen
jahreszeitlichen bedingten Sonnenstände über den Daus, sondern auch Kompasszeichnungen mit
einer zweiunddreißigteiligen Stricheinteilung der Kompassrose, die zur Richtungsanzeige der
Hauptsterne genutzt wurden. Es bleibt anzunehmen, dass die arabischen Seefahrer den Unterschiede
des Azimutes am Kompass zum Stundenwinkels eines Gestirns sehr wohl kannten. So gibt es kein
Beispiel dafür, dass sie den Versuch unternahmen, mittels der Kompasspeilung die Uhrzeit herzuleiten,
wie es die europäischen Seefahrer des 15. Jahrhunderts anfangs versuchten.
Wie lange schon in der arabischen Navigation die Anwendung des Nordsternes für die
Breitenbestimmung verwendet wurde, lässt sich nicht mehr nachvollziehen. Es würde uns auch
verwundert, wenn gerade die Araber diesen Glückstreffer der Astronomie nicht für ihre
Navigationszwecke nutzen würden, taten es doch alle Kultur- und Naturvölker, für die der Nordstern
sichtbar war und die sich mit den Himmelsbeobachtungen befassten, gleichzeitig und vollkommen
unabhängig von einander. Da dieser Stern in unmittelbarer Nähe des Himmelspols steht und seine

177
Stellung dort kaum verändert, ergab sich das Verfahren der Bestimmung der geographischen Breite
nach diesem Stern fasst von selbst, zu dem dafür auch keinerlei Zeitgeräte, gar noch Tabellen
notwendig sind. Die Polhöhe von Polaris ist (unter Abzug kleinerer Korrekturen) auch gleichzeitig die
geographische Breite des Beobachtungsortes. Zum Einmessen der Polhöhe benutzen die arabischen
Navigatoren zwei Verfahren, die nachfolgend etwas eingehender erläutert werden sollen.
Das erste Verfahren ist die Einmessung von Gestirnshöhen mit der Hand. Diese Methode benötigt
keinerlei weitere Messgeräte und wurde in Ermangelung dieser schon vor tausend Jahren verwendet.
Hierbei wird die Höhe über dem Horizont in Fingerbreiten gemessen. Ein Höhenwinkel, der der Dicke
eines ausgestreckten Fingers entsprach, wurde als ein isba, der von vier Fingern zusammen als ein
dubban bezeichnet. Ein isba wurde zudem noch in acht zam unterteilt, wodurch der Höhenwinkel
verfeinert angeben werden konnte. Wenn man der Fingerbreite ca. 1, 6° zugrunde legt, so entsprechen
ca. 224 isba 360°. Selbstverständlich muss diese Messmethode aufgrund der Unterschiedlichkeit eines
menschlichen Fingers als relativ ungenau eingeschätzt werden. Genauer war dann schon die zweite
Methode der Höhenwinkelmessung. Die Ausführung dieser Methode gelang mit einem Brettchen, in
dessen Mittelpunkt ein Loch eingelassen war. Das Brettchen wurde so senkrecht gehalten, dass es mit
der Unterkante auf den sichtbaren Horizont zum Liegen kam, während im Loch das Gestirn (Polarstern)
sichtbar sein musste. Je nach Höhe des Gestirns musste das Brettchen bald mehr bald weniger weit
weg vom Auge des Beobachters gehalten werden.. Stand der Polarstern sehr hoch, musste das
Brettchen natürlich sehr dicht zum Gesicht des Beobachters stehen. Mittels einer an der Unterseite
des Brettchens befestigten Schnur, dessen loses Ende mit den Zähnen des Beobachters straff in der
Waagerechten gehalten wurde, gelang die Bestimmung des Abstandes vom Gesicht zum Brettchen.
Die Schnur war in Abständen durch Knoten markiert. Jeder Knoten verkörperte einen bestimmten
Höhenwinkel zum Nordstern und damit eine bestimmte geographische Breite. Die geniale Eigenschaft
dieser Schnur war, dass genau für einen Knoten auch die geographische Breite eines Ortes, einer
Hafenstadt, einer Insel oder eines besonderen Landmarke stand. Diese mathematische Klügelei lässt
auf den hohen mathematischen und astronomischen Wissensstand der arabischen Welt schließen. Im
heutigen Jemen war das Kamal, so wird dieses Brettchen bezeichnet noch bis Mitte des 19.
Jahrhunderts in Gebrauch. Als im 8. Jahrhundert dann die ersten Astrolabien in Gebrauch kamen,
verbesserten sich die astronomische Beobachtung ganz erheblich. Aber nicht nur in Arabien findet man
die Quellen jener arabischen Navigation. In China erwähnt ein Chronist, dass seit 671 u. Z. arabische
Schiffe in China Handel treiben. Und schließlich wird sogar ein Name genannt. Um 750 n. d. Z. segelt
ein Omani namens Abu Ubayda Abdullah bin al Quasim nach Guang Zhou, dem bekanntem Canton.
Leider ist mehr nicht bekannt. Es war jene Zeit als Bagdad seine Blütezeit begann und zur
bedeutendsten Handelsmetropole des Orients aufstrebte. Bagdad befand sich im Aufbau und binnen
relativ kurzer Zeit einstand ein Kreuzungspunkt der Seeverbindungen zu China, zu Indien, zum Roten
Meer und zur Küste Ostafrikas. Schließlich wurde 878 u. Z. das chinesische Canton in einen durch
Rebellen verursachten Krieg verwickelt. Der Seehandel nach Arabien brach ab. Dafür entwickelte sich
der arabische Handel nach Malaysia, Sumatra und nach Java noch intensiver. Wenn heute in
Indonesien und Malaysia die islamische Kultur vertreten ist, so ist das ein bleibendes Zeugnis alter und
älterer Handelsbeziehungen zwischen diesen Völkern und Erdteilen. Aber woher stammt so
hervorragendes Wissen. Hier mag es genügen, auf zwei Quellen aufmerksam zu machen.

178
Al-Battarie (877 bis 918), ein arabischer Astronom schrieb:
„Durch die Wissenschaft von den Steren gelangt der Mensch zu dem Beweis der Einheit Gottes und zur der Erkenntnis der
ungeheuren Größe, der höchsten Weisheit, der größten Macht der Vollendung seiner Tat.“
Und ein Zweites:
„ Und betrachtet ihr nicht den Himmel,
wie ER denselben gebaut hat!“
(Sure 88, 19)
Für die Ausübung der islamischen Religion war die Astronomie unentbehrliches Werkzeug. Sollten
doch nicht nur jeder Muezzin in der Lage sein, nach dem Sonnenstand den Beginn der fünf täglichen
Gebete festzulegen. Er musste auch nach den Mondzyklen Anfang und Ende des Fastenmonats
Ramadan errechnen können. Dabei musste er den Anfang des Ramadans mit Zeitpunkt des
Sonnenaufgangs und Ende mit Zeitpunkt des Sonnenuntergangs ankündigen können. Aber auch die
Vorhersage von Sonnen- und Mondfinsternissen musste gelingen, da damit bestimmte religiöse
Handlungen und die Einhaltung bestimmter Regeln verbunden sind. Vor allem aber muss ein Muezzin
die Himmelsrichtung zu Mekka, den heiligem Ort ermitteln können, denn das tägliche Beten geschieht
in diese Richtung. Astronomische Kenntnisse waren daher unentbehrlich.
Als Ptolemäus seinen Almagest, der alles damalige griechische Wissen zusammenfasste, schrieb und
dieser die griechische Blütezeit überdauerte, war er nicht nur in Bibliotheken des Abendlandes,
sondern auch im Morgenland zu finden. Doch während im Abendland dieses Wissen lange
unkorrigiertes Dogma blieb, dessen Unfehlbarkeit die Kirche beschwor, war dieses Werk in der
islamischen Welt nur Grundlage weiterer Arbeit und Verbesserung, Arabien erweiterte und korrigierte
dieses Wissen lange bevor in Europa im 14. und 15. Jahrhundert damit begonnen wurde. Griechische
Philosophie und babylonische Beobachtungsgabe, untermauert mit indischer Zahlenlogik ließen die
islamischen Wissenschaften sich zu jeder Form entwickeln, die den Beweis und das Experiment kennt,
die nicht glaubt, sondern untersucht. So musste sich diese Einstellung auch auf die Navigation durch
die Weiten einer Wüste, ganz gleich, ob nun Wasser oder Sand auswirken.
Vor ca. 1000 Jahren hatte die arabische Navigation eine Methode entwickelt, die sich rein auf
mathematische Berechnungen belief und mit Recht als einzigartig betrachtet werden kann. Dieser
allein durch Berechnungen bestimmte Schiffsstandort nannte sich tirfa.
Bekannter Weise benutzen die Navigatoren eine Seekarte des indischen Ozeans, auf der die
wichtigsten Häfen mit den Polhöhen zu Polaris und damit mit ihrer entsprechenden Breite eingetragen
waren. Aber jene Karte besaßen ähnlich der Art der Polynesischen Navigation Sternkompassrosen, in
denen jeweils zwei Peilungen für sechzehn Sterne angeben waren. Die erste Peilung bezog auf den
Aufgang des Gestirns, während die zweite Peilung die Richtung des Untergang des gleichen Stern
zeigte. Auch gab es eine Tabelle mit für die im Osten aufgehenden Gestirne und dessen Azimute von
einem im Westen gelegen Abgangshafen aus zu den verschiedenen indischen Häfen.
179
Um nun den Standort und die entsprechenden Entfernungen für die Reiseverlauf zu berechnen, wurde
ein sogenannter tirfa-Faktor benutzt. Dieser Faktor wurde aus dem Azimut des betreffendes Sternes
gebildet. Es ist der reziproke Wert des Cosinus eines Azimutes. (1/cos) . Mit diesem Faktor und der
Kenntnis von der geographischen Breite zweier Orte lässt sich mit den Winkelfunktionen eines ebenen
Dreiecks die Entfernung zwischen diesen Orten berechnen. Die Entfernung zwischen zwei
breitengeographisch benannten Orten musste selbstverständlich bekannt sein. Aber auch diese
konnte berechnet werden.
Mittels heutigen astronomischen Kenntnissen soll einmal diese Art der nautischen Astronomie
nachvollzogen werden.
Zuerst soll für den Indischen Ozean eine Sternenkompasskarte erstellt werden.
Folgende Orte wollen wir in die Berechnung einbeziehen:
Bestimmungshäfen:
Karāchi (Indien, Westküste) = 25° 01’ N; = 066° 48’ E
Bombay (Indien, Westküste) = 19° 05’ N; = 072° 42’ E
Cochin (Indien, Westküste) = 09° 57’ N; = 076° 09’ E
Male (Malediven) = 04° 10’ N; = 073° 29’ E
Kole-rue (Nikobaren –Inseln) = 08° 13’ N; = 093° 08’ E
Sri Javawardhenepura (Sri Lanka) = 06° 57’ N; = 079° 51’ E
Abgangshäfen:
Maskat (Oman) = 23° 36’ N; = 058° 32’ E
Mombasa (Kenia) = 03° 55’ S; = 039° 34’ E
Mit der Großkreisnavigation werden jetzt die Distanzen und Azimute von den Abgangshäfen zu den
Bestimmungshäfen ermittelt.

180
Abgangshafen Maskat
BESTIMMUNGSHAFEN Δλ Höhe Distanz Azimut
Karāchi 008° 16,0’ E 82° 20’ 08“ 7° 39’ 52“
459,865 sm
N 077° 39’ 53“ E
077,234°
Bombay 014° 10,0’ E 76° 03’ 44“ 13° 56’ 16“
836,272 sm
N 106° 21’ 05“ E
106,124°
Cochin 017° 37,0’ E
Kole-rue 034° 36,0’ E 53° 29’ 28“ 36° 30’ 32“
2190,531 sm
N 109° 09’ 10“ E
109,053°
Sri Javawardhenepura 021° 19,0’ E 63° 37’ 00“ 26° 23’ 00“
2374,500 sm
N 125° 42’ 14“ E
125,252°
Abgangshafen Mombasa
BESTIMMUNGSHAF
EN
Δλ Höhe Distanz Azimut
Karāchi 027° 14,0’ E 59° 07’ 11“ 30° 52’ 49”
1852,817 sm
N 021° 37’ 36” E
021.626°
Bombay 033° 08,0’ E 50° 06’ 11“ 39° 53’ 49”
2393,811 sm
N 053° 38’ 35”
053,643°
Male 033° 55,0’ E
Kole-rue 053° 34,0’ E 35° 12’ 56” 54° 47’ 03”
3287,060 sm
N 077° 04’ 32” E
077,076°
Sri Javawardhenepura 040° 17,0’ E 48° 21’ 00” 41° 39’ 00”
2499,006 sm
N 074° 57’ 39”
074,961°

181
Entsprechend müssen jetzt die Sterne benannt werden, die im Aufgang gleich dem Kurs entsprechend
über den Bestimmungshäfen sichtbar sind.
Aus dem Nautischen Jahrbuch wollen wir dazu einige Hauptsterne entnehmen und das Azimut bei
dessen Aufgang berechnen. Dazu verwenden wir die mathematische Beziehung für den wahren Auf-
bzw. Untergang eines Gestirn:
sinseccos =Az
Stern Sternwinkel Deklination Azimut
für Maskat
Azimut
für Mombasa
Capella 280° 50,5’ 45° 59,7’ N N 038° 17’ 09“ E N 043° 51’ 57” E
Wega 080° 46,3’ 38° 47,1’ N N 046° 52’ 36“ E N 051° 06’ 26” E
Castor 246° 21,8’ 31° 53,3’ N N 054° 47’ 48” E N 058° 01’ 41” E
Arcturus 146° 05,6’ 19° 11,3’ N N 068° 58’ 53“ E N 070° 45’ 54” E
Aldebaran 291° 01,8’ 16° 30,4’ N N 071° 56’ 14“ E N 073° 27’ 13” E
Regulus 207° 55,0’ 11° 58,2’ N N 076° 55’ 08“ E N 078° 00’ 06” E
Rigel 281° 22,5’ 8° 12,3’ S N 098° 57’ 35” E N 098° 13’ 28” E
Sirius 258° 43,3’ 16° 43,0’ S N 108° 17’ 38“ E N 106° 45’ 25“ E
Werte entsprechend dem Nautischen Jahrbuch 1999
Leicht wird ersichtlich, dass einige Gestirnsazimute hervorragend zum Auslaufkurs nach einem bestimmten
Hafen passen.

182
BESTIMMUNGSHAFEN Azimute
von Maskat
Azimut
von Mombasa
Karāchi N 077° 39’ 53“ E N 76° 55’ 08“ E
Regulus
N 021° 37’ 36” E
Kole-rue N 109° 09’ 10“ E N 108° 17’ 38“ E
Sirius
N 077° 04’ 32” E N 78° 00’ 06” E
Regulus
Sri Javawardhenepura N 125° 42’ 14“ E N 074° 57’ 39” E N 73° 27’ 13” E
Aldebaran
Der tirfa-Faktor
Um die Anwendung des tirfa-Faktors richtig zu verstehen, wollen wir zuerst ein Beispiel aus der
Küstennavigation untersuchen. Das Verfahren der horizontalen Winkelmessung zwischen zwei
Objekten erfolgt durch die Bestimmung eines Peripheriewinkels über der Basislinie zweier Objekte.
Die zu einem beobachteten Horizontalwinkel gehörende Standlinie ist der Teil eines Kreisbogens, der
durch die Objekte A und C und durch den Beobachtungsort verläuft. Zur Bestimmung des
Kreismittelpunktes werden die Komplementwinkel bei Hw > 90° bzw. die Supplementwinkel bei Hw <
90° errechnet und in Bezug auf die Basislinie in den Objekten A und B angetragen. Im Fall der
Benutzung von Komplementwinkeln ist der Kreismittelpunkt zwischen der Basislinie und dem
Schiffsort, während sich bei Benutzung der Supplementwinkel der Kreismittelpunkt auf der
entgegengesetzten Seite der Basislinie befindet. Der Schnittpunkt ist der Kreismittelpunkt, dessen

183
Radien zu den Objekten A und B und zum Beobachtungsort gleich sind. Wird auf der Mitte der Basislinie
die Senkrechte errichtet, so ergibt sich ein Dreieck mit den Seiten a, b und c, wobei a die Strecke der
halben Basislinie, b der Schenkel des Komplent- bzw. Supplementwinkel und c die auf der Basislinie
errichtete Senkrechte ist. Es gilt dann die mathematische Beziehung:
secαc
r=
r = c sec α
bzw.
r = c cosec Hw
Beispiel:
gegeben: c = 8 sm
Hw = 50°
Gesucht: r
r = 8 sm x cosec 50°
r = 8 sm x 1,30541
r = 10,44 sm
Die mathematische Funktion r = c sec α beschreibt im weiteren Sinn den tirfa-Faktor.
Sind die Werte der geographischen Breiten zweier Orte und sec Az-Wert zu einem von beiden Orte bekannt,
kann der Abstand zwischen diesen Orten berechnet werden.
Dabei gilt folgendes astronomisches Grunddreieck:
c
a
b
A
B
C
Komplement- bzw
Supplementwinkel α

184
Somit ist so ein rechtwinkliges sphärisches Dreieck entstanden.
Der tirfa-Faktor basiert nun auf die Anwendung der trigometrischen mathematischen Funktionen in der Ebene.
Das bedeutet, dass die mathematische Beziehung
esm = Δφ x sec Az
nur in Hinsicht auf eine loxodrome Berechnung anwendbar ist. Will der arabische Navigator nun einigermaßen
genaue Berechnungsergebnisse für den Großkreis erhalten darf dieses auf die Ebene projekzierte astronomische
Dreieck nicht all zu auffällig von dem orthodromen Grunddreieck abweichen.
Zwei Beispiele sollen dafür benannt werden, um diese Anschaulichkeit darzustellen.
Erstes Beispiel:
Auch wenn jetzt seit jenem historischen Treffen zwischen dem arabischen Kapitän Ibn Majid und Vasco
da Gama, dem 24. April 1498 fünfhundert Jahre verflossen sind und der Sternenhimmel sich aufgrund
der Präzessionsbewegung der Erde verschoben hat, so soll dennoch dieses Datum Grundlage sein, dass
wir für das Erstellen eines Beispieles wählen wollen.
So gehen wir einmal von dem 24. April 1999 aus und versuchen an einem Beispiel die Überfahrt nach der
arabischen Navigationsmethode nachzuvollziehen. Vasco da Gama trat am besagten 24. April 1498 von Melinde,
heute Malindi in Kenia (Position: φA = 03° 05’S; λA = 040° 10’ E)die Überfahrt über den Indischen Ozean an und
traf bereits am 20. Mai in Kalikut (Position: φB = 11° 15’N; λB = 075° 46’ E) an der vorderindischen Südwestküste
ein.
φA = 03° 05’ S λA = 040° 10’ E
φB = 11° 15’ N λB = 075° 46’ E
Δφ =14° 20’ N Δλ = 035° 36’ E
Pol
Beobachtungsort
φA und λA
Bestimmungsort
φB und λB
φA φB
Azimut und sphärische
Durch Ermittlung des
Breitenunterschiedes
zwischen Beobachtungs-
und Bestimmungsort
ergibt sich der
Scheitelpunkt
B zum Errichten der
Höhe auf dem
Bogenstück φB und
damit das neue
sphärische Dreieck ABC
B
A
C
Δφ
Δλ
185
Berechnung des wahren Kursdreieckes über Mittelbreite (loxodrom)
φm =04° 05’ N a = 035° 30’ 35” E
α = N 68° 01’ 08” E rwK = 68,0°
d = 38° 29’ 34” dsm = 2309,567 sm
Berechnung des astronomischen Grunddreiecks (orthodrom)
hr = 51° 47’ 51“ αAnfang = N 067° 23’ 46“ E
αEnde = N 070° 02’ 10“ E
d = 38° 12’ 09“ dsm = 2292,154 sm
In ca. 26 Tagen legte da Gama somit 2292,2 sm zurück. Das sind ca. 3,7 sm / h oder ca. 88,2 sm pro Tag.
Wir können nicht sagen, ob da Gama loxodrome oder orthodrome Kurse gesteuert hat. Wenn er während der
Nacht Sterne als Kompass genutzt hat, muss von einem unbewussten Fahren auf der Orthodromen ausgegangen
werden. Auch war sein Kompass von der Missweisung behaftet und es wurde zudem nicht nach Grad, sondern
nach Stricheinteilung gesteuert. 68° entsprechen 6 Strich, also Ostnordostkurs. Ist er vorwiegend nach diesem
Kurs fahren, hat er loxodromen Kurs gesteuert und hat (vergleiche die Berechnungen) 17,5 sm mehr
zurückgelegt, als auf reinem orthodromen Kurs. Dieser Unterschied kann als unerheblich betrachtet werden.
Erkennbar wird, dass die loxodrome Berechnung in Äquatornähe angewandt werden kann, weil hier die
Abweitung (Längenunterschied in Seemeilen) verhältnismäßig gering ausfällt. Man darf nicht annehmen, dass
die arabischen Navigatoren diesen Begriff der Abweitung beherrschten, denn die Länge einer Seemeile war
aufgrund der fehlenden Erdkugelmaße nicht vermessen. Es war ein glücklicher Umstand, dass die arabische
Navigation in Äquatornähe angewandt wurde, ansonsten hätte man den sogenannten tirfa-Faktor nicht nutzen
können.
Nach der astronomischen Funktion sinseccos =Az berechnet sich der Aufgang für den Stern Acturus
wie folgt:
cos Az = sec 03° 05’S x sin 19° 11,3’ N Deklination von Arcturus …19° 11,3’ N
Breite von Malindi………….3° 05,0’ S
cos Az = 0,32867434
Az = 70° 48’ 42“
dsm = 14° 20’ N x sec 70° 48’ 42“ Δφ =14° 20’ N
dsm = 43° 12’ 13” = 2592,22 sm

186
Der 24. April 1999 zeigt die Argumente für die Berechnung der Gestirnazimute und zeigt natürlich nicht den
Deklinationswert für 1498, weshalb heute Arcturus in 70° und nicht in 68° beim Aufgang peilt.
Geht man von der Deklination des Arturus für 1999 von 19° 11,3’ N aus und rechnet diesen Wert auf 501 Jahre
zurück, so hat Arcturus im Jahr 1498 eine Deklination von 21° 47,4’ besessen.
Im Januar 1982 besaß Arcturus einen Deklinationswert von 19° 16,5’ N
Im Januar 1999 besaß Arcturus einen Deklinationswert von 19° 11,2’ N
Das ist ein Unterschied in 17 Jahren von + 5,3’ und in einem Jahr von + 18,4“, so in 501 Jahren ein Unterschied
von + 156,194’ = + 2° 36,2’. Diesen obigen Wert in die astronomische Funktion sinseccos =Az
eingesetzt, ergibt einen Azimutwert von
cos Az = sec 03° 05’S x sin 21° 47,4’ N
= N 68° 10’ 36” E
Der tirfa Faktor des Stern Arcturus betrug (aus 1/ cos 68° 10’ 36“) somit 2,6900235
Die Entfernung konnte nun weiter berechnet werden:
e = Δφ x sec Az
e = 14° 20’ x sec 68° 10’ 36” (oder 860 sm x 2,69)
e = 38° 33’ 25”
esm = 2313,41 sm
Der Unterschied zur realen Großkreisdistanz beträgt hier nur 21,3 sm.
Aber nicht immer kann durch Anwendung der ebenen Trigonometrie die Berechnung so vorteilhaft verlaufen,
wie das nun nachfolgende zweite Beispiel zeigt.
Wenn eine arabische Dau den Hafen von Maskat in Oman ( = 23° 36’ N) verlässt, um nach Kole-rue auf den
Nikobaren –Inseln ( = 08° 13’ N) auszulaufen, so weiß der Kapitän, dass über dem Bestimmungshafen der Stern
Sirius mit dem Azimut von 108° 17’ 38“ aufgeht. Die Entfernung von Maskat bis Kole-rue beträgt auf dem
Großkreis 2190,5 sm, während der Anfangskurs 109° 09’ 10“ beträgt.

187
Die Berechnung der Entfernung mit dem tirfa-Faktor zeigt nun folgende Auswertung:
Maskat A = 23° 36’ N
Kole-rue - B = 08° 13’ N
= Δφ =15° 23’ S
e = 15° 23’ x sec 109° 09’ 10” (wir setzen die Azimutpeilung gleich dem Großkreiskurs)
e = 2813,27 sm
Der Unterschied von 622,8 sm zur wirklichen Großkreisdistanz ist nun doch zu viel. Da die arabischen Nautiker
jedoch auch hervorragend die Nordsternbreite in Zusammenhang mit den tirfa-Faktor zu nutzen in der Lage
waren, kann es nicht verwundern, wenn sie für ihr Navigationsgebiet dem Indischen Ozean so gute
Navigationsunterlagen besaßen.

188
Chronologie der Geschichte der Navigation zur See 4000 v. u. Z.
In Europa entstehen monumentale Steinbauten, die die Positionen der Sonne am Himmel kennzeichnen. Bekanntestes Bauwerk: Steinbau in Stoneshenge/England.
4000 v. u. Z.
Nachweisbar herrscht ein reger Warenaustausch zwischen Mesopotamien (Golf von Oman) und Hinterindien.
1300 v. u. Z.
Die Polynesier beginnen von Ostasien kommend die Südsee zu besiedeln.
1100 v.u.Z.
Die Phönizier segeln durch die Straße von Gibraltar in den Atlantik. Auf ihren Fahrten bis Cornwall und Madeira orientieren sie sich nach den Sternen.
1100 v. u. Z.
Die Polynesier entdecken Tonga, Santa Cruz und Samoa und besiedeln die Inseln. Im Laufe der Zeit entdeckten sie dann u. a. die Cook- und die Tuamotu-Inseln, die ebenfalls besiedelt wurden.
um 700 v. u. Z.
Der griechische Dichter Heloid beschreibt in seinem Werk „Werke und Tage“ u. a. den Gebrauch der Sterne für die Schiffahrt.
600 v. u. Z.
Pharao Necho schickt phönizische Seeleute auf eine Erkundungsfahrt, die in drei Jahren vom Roten Meer um ganz Afrika und zurück zu Nildelta führt. Die Seeleute berichten u. a. die Sonne habe im Norden gestanden.
600 bis 500 v. u. Z.
Die Philosophen und Mathematiker der Ioninschen Scgule tragen zur Verbesserung der Navigation bei. Anaxgoras von Milet, ein Schüler des Thales, soll als erster eine Seekarte gezeichnet haben. Die Ansicht der Pythogoräer, die Erde besitze Kugelform, setzt sich langsam in der Antike durch.
530 v. u. Z.
Der Kartager Hanno gelangt bis in den Golf von Guinea
um 400 v. u. Z.
Der „Periplus des Skylax“, eine erste Segelanweisung beweist, daß es vor diesem Zeitpunkt schon schriftliche Aufzeichnungen zur Durchführung der Navigation im Mittelmeer gab.
330 v. u. Z.
Pytheus von Marseilles bestimmt den „Himmelstrich“ (die geographische Breite) seiner Vaterstadt und stellt fest, daß der Himmelspol nicht mit dem Polarstern übereinstimmt. Er entdeckt den Einfluß des Mondes auf die Gezeiten.
325 v. u. Z.
Der Grieche von Monilia führt, aus dem Mittelmeer kommend, eine Seereise bis zu den britischen Inseln, den Shetland-Inseln und vermutlich bis zur Spitze Norwegens durch.
265 v. u. Z.
Der Grieche Aristarch von Samos verbreitet die Meinung die Sonne bildet den Mittelpunkt der Welt.
235 v. u. Z
Eratosthenes (etwa 275 bis 195 v. u. Z. führt die Bestimmung der geographischen Breite in Graden ein. Aus der Winkeldifferenz des Sonnenschattens zwischen Assuan und Alexandria und der ihm bekannten Entfernung zwischen beiden Städten berechnet er den Erdumfang mit beachtlicher Genauigkeit und sagt voraus, das Indien in westlicher Richtung zu erreichen sei.

189
um 200 v. u. Z
Der Grieche Philon von Byzanz beschreibt in seinen achtbändigen Lehrbuch der Technik (nur teilweise erhalten) eine „kardanische“ Aufhängung, die jedoch in Vergessenheit geriet. Erst 1550 u. Z. entwickelt man sie wieder.
um 150 v. u. Z.
Hipparch von Nikäa bemüht sich um die Bestimmung der geographischen Längendifferenz verschiedener Orte zueinander durch Beobachtungen von Mondfinsternisssen. Er erfindet das Astrolabium und legt den ersten Sternenkatalog mit über 1 000 Fixsternen an. Von Hipparch stammt auch der Entwurf für die stereographische Projektion.
um 140 u. Z
Der alexandrinische Geograph und Mathematiker Claudius Ptolemäus begründet in Alexandria in der „Syntaxis“, nach der arabischen Übersetzung „Almagest“ genannt, sein Weltsystem, nach dem sich die Erde im Mittelpunkt der Welt befindet.
130 v. u. Z.
Der griechische Astronom Hipparch macht auf den Umstand aufmerksam, daß die Mondfinsternis an allen Orten der Erde zur gleichen Zeit sichtbar ist.
85 bis 160 u. Z
Ptolemäus hinterläßt der Nachwelt ein großes Kartenwerk mit Längen- und Breitengraden, das dreizehn Jahrhunderte lang die Grundlage der abendländischen Navigation bildete.
um 600 Die Polynesier entdecken Hawaii und die Osterinseln und besiedeln sie. um 700 Persische und arabische Handelsschiffe segeln unter Ausnutzung der Monsunwinde bis
Kantion in China. um 800 Die polynesieschen Seefahrer entdecken Neuseeland. Auch hier siedeln sie sich an (Maorie-
Stamm). um 880 Der Wikinger Ottar umfährt die Nordküste Norwegens und die Halbinsel Kola, gelangt ins
weiße Meer und zur Mündung der Dwina. 983 Der Winkinger Erik der Rote entdeckt von Island aus die Westküste Grönlands. um 1000 Normannen verkehren über Island, Grönland mit dem nördlichen Amerika um 1000 Der arabische Astronom Ibn Junus gibt das bedeutendste Werk arabischer Astronomie
heraus: Die „Hakimitischen Tafeln“, benannt nach dem Kalifen Al Hakin, der eine bedeutende Sternwarte bauen ließ.
1190 Erwähnung einer Wasserbussole in Europa. Diese auf dem Strohhalm schwimmende Magnetnadel war den Arabern und vorher den Chinesen bereits bekannt.
1250 Der König von Kastilien, Alfons X veranlaßt das Berechnen neuer astronomischen Tafeln. Die
„Alfonsinischen Tafeln“ entstehen. 1270 Die Piloten des französischen Königs Ludwig der Heilige benutzen Seekarten zur Navigation. 1375 Der „Katalanische Atlas“ mit Kreisdiagrammen zur Berechnung der Gezeiten wird vom
Karthographen des Königs von Aragon angefertigt. 1394 bis 1449 Der Tatarenfürst Ulug-Beg erbaut in Sarmakant eine Sternwarte mit zahlreichen
Instrumenten von riesigen Dimensionen 1418 Prinz Heinrich von Portugal, der Seefahrer gründet einer Marineschule und schickt Schiffe auf
Entdeckungsfahrten entlang der afrikanischen Küste. Der Jacobsstab zur Bestimmung von Gestirnshöhen wird eingeführt. Die geographische Breite wird durch Vergleich mit der Höhe der Gestirne über Lissabon ermittelt.
190
1445 Die von Heinrich dem Seefahrer entsandten Portugiesen fahren unter Dinez Fernandez über die Westspitze Afrikas hinaus.
1463 Der deutsche Astronom und Mathematiker Regimontanus (1436 bis 1476) veröffentlicht
seine ersten astronomischen Tafeln, eine wertvolle Hilfe zur Standortbestimmung nach Meridianhöhen der Sonne.
1470 Der russische Seefahrer Nikitin erreicht Indien 1471 Regimontanus errichtet die erste deutsche Sternwarte in Nürnberg. Er gibt neue
astronomische Jahrbücher heraus. 1473 Diedrick Pining aus Hildesheim erreicht von Island aus Nordamerika 1484 bis 1486 Der Portugiese Diego Cao fährt zum Cap Cross in Südwestafrika 1487 bis 1488 Der Portugiese Bartolomeo Diaz (um 1450 bis 1500) umfährt die Südspitze Afrikas zum
großen „Fischzug“. Das von ihm bezeichnete „Cabo tormentoso“ (stürmisches Kap) wird von König Johann von Portugal in „Cabo de boa esperanca“ (Kap der Guten Hoffnung) umbenannt.
1492 bis 1504 Der Genuese Christoph Columbus (Critobal Colon; 1451 bis 1506) orientiert sich auf seiner
ersten Reise bei er Amerika entdeckte, nach einfachster Koppelnavigation, ohne dabei große Fehler zu machen. Er schätzt die Eigengeschwindigkeit und die Abtrifft und mißt die Zeit mit einer venezianischen Sanduhr. Columbus beobachtet auf seiner Reise, das die magnetische Mißweisung sehr verschiedenen Werte annehmen kann. Dabei entdeckte er 1492 die Insel Guanahani, Kuba und Haiti. Auf der zweiten Reise 1494/96 Puerto Rico und Jamaika, auf der dritten Reise 1498/1500 die Insel Trinidad und die Mündung des Orinoco, auf der vierten Reise 1502/04 die Küste von Honduras und den Golf von Darien
1494 Das päpstliche Rom erläßt den Vertrag von Tordesillas. Dieser Vertrag teilt die bekannte und
noch zu erforschende Welt unter Spanien und Portugal auf. Ungeachtet von Ländern und Kulturen wurde eine Demarkationslinie festgelegt, die durch den südamerikanischen Kontinent verläuft.
1497 Der italienische Seefahrer John Cabot, in englischen Diensten, entdeckt bei dem Versuch,
China auf der nordwestlichen Durchfahrt zu erreichen, Labrador und damit das amerikanische Festland.
1498 Der Portugiese Vasco da Gama (um 1469 bis 1524)m erreicht auf der Fahrt um das Kap der
Guten Hoffnung Calicut in Vorderindien 1502 Eine erste Weltkarte von Nic Canerio in Form einer Plattkarte mit einer auf dem Meridian
angegebenen Breitenskala erscheint 1509 Breitentabellen, genannt „Regimento do estrolabio e do quadrante“ erscheinen mit
erstaunlich guten Ergebnissen für diese Zeit. 1512 Der Portugiese gelangt als erster zu den Gewürzinseln, den Molukken 1513 de Leon entdeckt den Golfstrom 1515 Pizòn und de Solis entdecken auf der Suche nach einer Durchfahrt zum Stillen Ozean die la
Plata Mündung. 1517 Der englische Sebastian Carbot (Sohn des J. Carbot) entdeckt auf der Suche nach der
Nordwestpassage die Hudsonstraße

191
1517 Das erste portugiesische Schiff erreicht unter de Andrade einen chinesischen Hafen. 1520 bis 1521 Der Portugiese Fernando de Magalhaes (1450 bis 1521) findet die später nach ihm benannte
Straße und durchfährt den Stillen Ozean bis zu den Philippinen, wo er durch dortige Ureinwohner den Tod findet. Sein Schiff beendet die erste Weltumsegelung.
1526 Der Portugiese Menesess entdeckt Neuguinea 1534 bis 1535 Der Franzose Cartier entdeckt den St. Lorenz Strom 1541 Der Kartograph Gerhard Kremer, genannt Mercartor stellt einen Globus mit eingetragener
Loxodrome vor. 1542 Der Portugiese Pinto erreicht als erster Europäer Japan 1546 bis 1601 Der dänische Astronom Tycho Brache beobachtet im Laufe von vielen Jahren die
Planetenbewegungen und schafft damit praktische Grundlagen für die Erkenntnisse Joh. Keplers.
1550 Der Italiener Geronimo Cardano erfindet die „kardanische“ Aufhängung. 1543 Der polnische Astronom Nicolaus Copernicus veröffentlicht sein Hauptwerk „De
revolutionibus orbium coelestium“, wonach sich die Sonne im Mittelpunkt der Welt befindet. 1553 Britische Kaufleute gründen zwecks Erkundung neuer Handelswege die Gesellschaft der
„Abenteuerfahrer“ (später russische Handelsgesellschaft genannt). Im Auftrag dieser Gesellschaft versuchen Willoughby, Chancellor und Burrough die Nordwestpassage zu erzwingen. Willoughjby erreicht die Insel Nowaja Semlja und geht an der Nordostküste Kolas zugrunde. Chancellor dringt ins Weiße Meer bis zur Mündung der Dwina vor und gelangt von dort über Land nach Moskau. Burrouth erreicht die Karische Straße.
1567 Der Spanier Mendana entdeckt die Salomon-Inseln. 1569 Mecartors Weltkarte für Seefahrer wird veröffentlicht. um 1570 Das „Große Seebuch“ des Niederländers Lucas Janzzon Waghenaer (1533 bis 1606) mit dem
Titel „Spiegel der Seefahrt“ erscheint ungefähr in dieser Zeit und danach mit laufend neuen Auflagen. In diesem Werk befinden sich auch Tafeln der Sonnendeklination für einen Schaltjahresrythmus, die Neumondtage für eine Periode von 19 Jahren und die Rektaszension von ca. 100 Fixsternen sowie Verfahren zur Bestimmung der Nordsternbreite.
1574 William Borne aus Gravesend an der Temse beschreibt die Logge zur Bestimmung der
Schiffsgeschwindigkeit 1576 bis 1578 Der englische Seefahrer Frobisher findet auf der Suche nach der Nordwestpassage Grönland
wieder und entdeckt die nach ihm benannte Bai auf Baffinland. 1577 bis 1580 Der englische Kaperkapitän Sir Francis Drake (1545 bis 1596) führt, um spanischen
Kriegsschiffen zu entgehen, eine Weltumsegelung durch. Er gelangt dabei an die Nordwestküste Nordamerikas
1582 Papst Gregor XII aus Bologne läßt den Kalender verbessern (gregorianische Kalenderreform).

192
1599 bis 1602 Der italienische Seefahrer Americo Vespucci (1551 bis 1612) erkundet die Küste Südamerikas von Kolumbien vis Südbrasilien. Er entdeckt, daß Amerika ein eigener Kontinent ist. Im verdankt dieser Erdteil seinen Namen.
1594 bis 1597 Die Niederländer unter der führenden Beteiligung von Barents versuchen in drei Reisen die
Nordostpassage nach Indien zu finden. Nay erreicht 1594 durch die Jugorstraße die Westküste der Samjedenhalbinsel, während Barents zu der an der Nordspitze Nowaja Semljas auf 78° N gelegene Oranieninsel gelangt. Die ausgesandten Schiffe können das Eis der Karischen See nicht überwinden und kehren 1595 unverrichteter Sache zurück. In gemeinsamer Fahrt werden die Bäreninsel und Spitzbergen entdeckt. Dann trennen sich die Schiffe. Das Schiff unter Heemskeerk und Barents friert an der Nordspitze Nowaja Semlja ein; es kommt 1596 bis 1597 zur ersten Überwinterung im Polareis. Auf der Rückfahrt stirbt Barents an Erschöpfung. Die Mannschaft wird von russischen Fischern gerettet.
1585 bis 1587 Der englische Seefahrer John Davis entdeckt die nach ihm benannte Straße zwischen
Grönland und Baffinland. um 1600 Ein portugiesischer nautischer Almanach mit Himmelsrichtungen des Sonmnenauf- und -
untergangs für verschiedene Breiten erscheint. Erfindung des Davidquadranten, des Azimutkompasses, des Nokturnals und der in 360° unterteilten Kompaßrose.
um 1600 Die Logge zur Bestimmung der Schiffsgeschwindigkeit wird in die Seefahrt eingeführt. 1603 Der Astronom Johann Bayer gibt den Sternatlas „Urano metria“ heraus. 1603 Vossius erkennt drei große Stromkreise im Atlantik 1605 Der Spanier de Torres entdeckt die nach ihm benannte Straße zwischen Neuguinea und der
Nordspitze Australiens. 1606 Der Spanier de Quiros entdeckt Tahiti und die Neuen Hebriden. 1606 Niederländer betreten die Küste Australiens am Carpentariagolf. 1608 In Holland wird das Fernrohr erfunden. 1609 Der deutsche Astronom Johannes Kepler stellt in seinem Werk „Astromia nova“ das erste
und zweite Gesetz der Planetenbewegung vor. Seine Berechnungen beruhen auf den Beobachtungen Tycho Braches.
1610 Der italienische Physiker und Mathematiker Gallilei entdeckt die Jupitermonde, die
Sonnenflecken, die „Dreigestalt des Saturn und den Phasenwechsel der Venus mit seinem verbesserten Fernrohr und sieht darin den Beweis für das copernische Weltsystem.
1611 / 1687 Der Astronom Johannes Hevelius gibt seinen Sternenkatalog heraus. 1616 Der Engländer Baffin durchfährt die Baffinbai, erreicht Smithsund und entdeckt die
Lacasterstraße, den Eingang zur nordwestlichen Durchfahrt. 1616 Die Niederländer Lemaire und Schouten umsegeln Kap Horn. 1619 Joh. Kepler veröffentlicht sein Werk „Harmonices mundi“. Darin stellt er sein drittes Gesetz
der Planetenbewegung vor. 1624 Der Holländer Cernelis Drebbel unternimmt Versuche mit einem aus Holz bestehenden und
mit Leder verkleidetem Unterwasserfahrzeug auf der Temse in England.

193
1627 Keplers neue astronomische Tafeln, die „Tabulae Rudolphinae“ erscheinen und ermöglichen
erstmals eine vorausschauende Berechnung der Sternörter für eine lange Zeitperiode, da diese Tafeln auf das Heliozentrische Weltbild und auf den Keplerschen Planetengesetzen basieren. Für die Seefahrer ist es ein riesiger Zugewinn für die Durchführung astronomischer Standortbestimmungen.
1632 Gallilei Veröffentlicht sein Werk „Dialog über die beiden Weltsysteme“, welches auf heftigen
Widerstand der Kirche stößt. 1633 Gegen Galilei geht die kirchliche Inquisition vor, Galilei schwört seiner Lehre ab, um den Tod
zu entrinnen. 1642 Der Niederländer Tasman entdeckt die nach ihm benannte Insel Tasmanien und die
Inselnatur Australiens, Neuseeland, die Tongo-Inseln und die Fitschi-Inseln sowie den Bismarckarchipel.
1648 Der Russe Deshnjows erforscht das Nordostkap Asiens und erbringt den Beweis, daß das
Eismeer und der Stille Ozean zusammen hängen. 1675 Der englische Astronom j. Flamsteedt (1646 bis 1719) veranlaßt König Karl II zum Bau einer
Sternwarte in Greenwich bei London. Die Greenwicher Sternwarte wird gegründet. 1675 Der dänische Astronom O. Römer (1644 bis 1710) benutzt die Verfinsterung der
Jupitermonde, um eine geographische Längenberechnung durchzuführen. Er berechnet dabei die Lichtgeschwindigkeit.
1678 Kirerus veröffentlicht eine erste Stromkarte des Atlantiks. 1679 Der englische Astronom E. Halley gibt ein erstes vollständiges Sternenverzeichnis des
Südhimmels nach seinen Beobachtungen auf St. Helena heraus. 1687 Der englische Philosoph, Mathematiker und Physiker läßt sein Werk „Philosophia naturalis
principia mathematica“ erscheinen, Er stellt darin das Gravitationsgesetz vor und begründet die Keplerschen Planetengesetze.
1688 E. Halleys Karte über die Windverhältnisse im Atlantik erscheint. 1698 Eine erste meereskundliche Forschungsreise, u. a. zur Erforschung der magnetischen
Mißweisung, wird von dem Engländer Halley durchgeführt. 1706 E. Halley sagt mit Hilfe der Newtonschen Methode die Wiederkehr eines großen Kometen
voraus, der seinen Namen erhält. 1713 Der Preis des „Board of Longitude“ um die beste Bestimmung der geographischen Länge wird
nach langem Gefeilsche zu gleichen Teilen an Mayer, Euler und Harrison vergeben. 1718 E. Halley entdeckt die Eigenbewegung der Fixsterne. 1722 Der Niederländer Roggeveen entdeckt die Osterinseln und die Samoagruppe 1728 Der englische Astronom L. Bradley (1692 bis 1762) erklärt die Aberration des Lichtes (das ist
das Verhältnis der Geschwindigkeit des Sternenlichtes zur Umlaufbewegung der Erde um die Sonne).

194
1728 Der Däne Bering durchfährt im Auftrag des russischen Zaren Peter I die nach ihm benannte Straße zwischen Asien und Nordamerika von Süd nach Nord.
1731 Der Engländer J. Hadley baut den ersten Spiegeloktanten 1734 bis 1743 Die „Große Nordische Expedition“ der Petersburger Akademie der Wissenschaften von Peter
I zur Erforschung der sibirischen Nordküste angeregt und nach seinem Tode von Bering organisiert, beginnt gleichzeitig in Archangels, am Ob, am Jenissei, an der Lenk und in Petropawlowsk. Führend beteiligt waren die Russen Murawjew, Pawlow, Malykin, Skuratow, Minin, Sterlegow, Ch. Laptew, D. Laptew, Tscheljustin, Prontschischtschew, Lasinius und Tschirikow, dazu die deutschen Historiker G. F. Müller und J. E. Fischer, der deutsche Botaniker Gmelin, der Verfasser des Werkes „Flora Sibirica“, und der deutsche Zoologe Stelle sowie der französische Astronom l’ Isle de la Croýere. Bering und Tschirikow durchsegelten 1741 das Beringmeer, entdeckten Alaska und die Aleuten, Tschirikow erreicht das amerikanische Festland einen Tag vor Bering. Bering geht auf der Rückfahrt an Skorbut zugrunde. Nach ihm übernimmt Stella die Führung, Tscheljustin umfährt 1742 im Schlitten das später nach ihm benannte nördlichste Kap Asiens
1735 bis 1743 Die Gradmessung der Pariser Akademie in Peru unter la Condamine und P. Bouguer bestätigt
die Abplattung der Erde und ermöglicht eine genaue Berechnung der Länge des Meridians und des Erddurchmessers.
1752 Erst ca. 150 Orte waren auf der Erde nach der geographischen Länge und Breite sehr genau
vermessen. 1761 Der Durchgang der Venus vor der Sonnenscheibe wird auf Halleys Vorschlag benutzt, um die
Sonnenparallaxe und den Erddurchmesser zu berechnen. 1761 Bei einer Probefahrt von England nach Jamaica wird mit einem von J. Harrison (1693 bis
1776) gebauten Chronometer die geographische Länge mit einem Fehler von nur einer Seemeile bestimmt. Das Chronometer war somit in der Seefahrt eingeführt
1763 Der Mathematiker und Astronom Louis de Lacaille gibt seinen Sternenatlas heraus. 1766 Die britische Längenkommission gibt das Nautische Jahrbuch „Astronomical and Nautical
Ephemeris“ heraus, das auch verbesserte Monddistanztafeln (T. Mayer) und Tafeln für die Bestimmung der Nebenmeridianbreiten enthielt.
1768 bis 1771 Kapitän James Cook (1728 bis 1779) führt seine erste Weltumsegelung in die Südsee durch
Dabei entdeckt er von Tahiti aus die Gesellschaftsinseln, die Ostküste Australiens und die Zweiteilung Neuseelands. Er führt dabei, wie auch auf weiteren Reisen mit Spiegelsextant und Chronometer entsprechend damaligen Verhältnissen hervorragend genaue Standortbestimmungen und Küstenvermessungen durch. Er verwendet Geräte mit künstlichem Horizont (Quecksilber).
1772 bis 1775 Die zweite Weltumsegelung Cooks erfolgt. Er wird dabei von den Deutschen Naturforscher J.
R. Forster und dessen Sohn G. Forster begleitet. Er umsegelt dabei die Erde in hoher südlicher Breite und entdeckt die antarktischen Süd-Sandwich-Inseln. Dabei stellt er fest, daß es kein großes Südland gibt.
1776 bis 1780 Cook führt seine dritte Weltreise durch. Dabei dringt er in das Beringmeer bis zu einer Breite
von 70°41’N vor. Er entdeckt die Hawaii-Inseln, wo er 1779 von Eingeborenen getötet wird. Cook soll auf seiner Reise den Durchgang der Venus im Jahre 1769 beobachten und die Beobachtungsergebnisse aufzeichnen.

195
1769 Der Durchgang der Venus vor der Sonne wiederholt sich, erneute Berechnungen der Parallaxe und des Erddurchmessers erfolgen
1801 Der Amerikaner Robert Fulton baut das erste U-Boot mit Metallverkleidung („Nautilus“) 1833 Sir Lubbock veröffentlicht sein „nonharmonisches Verfahren“ zur Gezeitenberechnung. 1837 Der amerikanische Kapitän Summer führt die Berechnung mit astronomischen Standlinien
ein. 1845 Die USA überträgt über Funk erstmalig Zeitsignale zur Küstenvermessung 1848 bis 1851 der bayrische Unteroffizier Wilhelm Bauer konstruiert das erste deutsche U-Boot
„Brandtaucher“, welches bei Tauchversuchen in Kiel sinkt. 1850 Der französische Physiker Foucault (1819 bis 1868) weist erstmals mit einem
momentenfreien Kreisel die Erddrehung nach. 1853 Durchführung einer ersten internationalen hydrographischen Konferenz zur Koordinierung
von hydrometerologischen Beobachtungen (Wetterkunde, Gezeitenkunde). 1867 Lord Kelvin (1824 bis 1907) veröffentlicht sein „harmonisches Verfahren“ zur
Gezeitenberechnung. 1872 bis 1876 Durchführung einer ersten großen Tiefsee-Expedition unter dem Namen „Callanger“ 1875 Der französische Seemann Marcq St. Hilaire verbessert die Anwendung der astronomischen
Höhenmethode des amerikanischen Kapitäns Summer und führt diese für praktische Zwecke die Navigation ein.
1886 Der Forscher Fornander entdeckt auf Hawaii erste Belege einer polynesischen
astronomischen Beobachtungsstation natürlicher Art. um 1900 Die deutschen Ingenieure Dr. Anschütz-Kämpe und Dr. Schuler begannen den Kreiselkompaß
zu entwickeln. 1904 Der deutsche Ingenieur C. Hülsmeyer erhält ein Patent für ein Gerät zur Aufnahme der von
einem Schiff reflektierten Funkwellen (Vorläufer der Radar-Technik) 1907 Der erste funktionstüchtige Kreisel (Ein-Kreiselsystem) wurde durch Anschütz gebaut. 1912 Der Kreiselkompaß ist in der kaiserlich-deutschen Marine verbreitet 1920 Der erste Passagierdampfer hat einen Kreiselkompaß an Bord 1928 Die Kreiselgeräte für die Luftfahrt (künstlicher Horizont und Kurskreisel) kommen in Amerika
auf dem Markt. ab 1934 Beginn der Entwicklung der Funkmeßtechnik (Radar-Technik) in USA; England, Frankreich,
und Deutschland, z. T. unabhängig voneinander. 1938 Erster Einsatz eines Radargerätes zur Flugabwehr durch das U. S. Army Signal Corps 1939 Rauschenbach vereinfacht die Gezeitenberechnung durch Einführung von 10 Haupttiden.

196
1940 Die Bezeichnung RADAR (Radio Detection and Ranging) wird der offizielle Begriff für die Funkmeßgeräte der U. S. Navy, 1942 von der U. S. Navy, 1943 auch von England übernommen
ab 1942 Aufbau des Sendenetzes für das Langstrecken-Navigationssystem LORAN (Long-Range
Navigation) im Bereich Nordatlantik und Mittel- und Südwestpazifik, zunächst nur für militärische Zwecke der U. S. A.
1944 Das in England entwickelte Mittelstrecken-Navigationssystem Decca für Luft- und Seefahrt
kommt erstmalig zum Einsatz. 1946 Das UKW-Drehfunkfeuer VOR (Very-high-frequency Omnidirectional Radio range), in den U.
S. A. seit etwa 1940 entwickelt, wird von der International Civil Aviation Organization ICAO zur Einführung angenommen.
1946 Der Kapitän E. V. Ward entdeckt auf den Gilbert-Inseln eine künstlich errichtete
astronomische Beobachtungsstation, die der Bestimmung von Sternenpfaden zu benachbarten polynesieschen Inseln dient. Er entdeckt das Geheimnis der polynesischen „Stabkarten“ die schematisch typische Wellenmuster der Südsee darstellen.
1947 Für die Flugnavigation wurden erstmals durch die U. S. Navy. die „SIGHT REDUCTION TABLES
FOR AIR NAVIGATION“, Publ. NO 249 in drei Bänden veröffentlicht, die auch in der Seefahrt zur Berechnung von Gestirnshöhen und Azimuten sehr beliebt sind.
ab ca. 1950 Aufbau des Sendenetzes für das Kurzstrecken-Navigationssystem TACAN (Tactical Air
Navigation), zunächst für die Militärluftfahrt der U. S. A. 1953 Erster Langstreckenflug mit Trägheitsnavigation 1954 Stapellauf des ersten amerikanischen Atom-U-Bootes „Nautilus“ 1958 Das amerikanische Atom-U-Boot „Nautilus“ unterquert mit Hilfe der Trägheitsnavigation auf
der Fahrt vom Pazifik zum Atlantik die Eisdecke der Arktis. Der Nordpol wurde dabei am 03. 08. 1958 erreicht.
1958 Es erscheinen vom Hydrographischen Dienst der Kriegsflotte der (ehemaligen) UdSSR die
„VYSOTY I AZIMUTY SVETIL“, genannt VAS 58, in vier Bänden, die ebenfalls zur Berechnung von Gestirnshöhen und Azimuten sehr gut geeignet sind.
13. 04. 1960 Die U. S. A. starten den ersten Navigationsatelliten Transit I B 1969 Die deutsche Firma Wempe liefert das erste Quarz-Chronometer 1970 Erste Dopplerloganlagen werden in die Schiffahrt eingeführt. 1980 Es werden zuerst im englischen Kanal und in der Irischen See UKW-Funkbaken eingesetzt. Sie
ermöglichen das Peilen dieser Sendebaken (auf Kanal 88), 1983 Es existieren bereits weltweit 51 Decca Ketten, davon sind 25 Ketten in Europa in Betrieb.
Das Decca-Navigationsystem wird nach der Jahrtausendwende voraussichtlich abgeschaltet werden.
ab 1985 Das Satellitennavigationssystem „NAVigation System with Time And Ranging /-Global
Positioning System“ (NAVSTAR/-GPS) durch die U. S. A.wird weltweit eingeführt