
Fault diagnosis and logic debugging using Boolean satisfiability

VasiÌe Palade. PhD Lakhmi Jâin, PbDOÍford University Coftpuling Lâborãrory KES CenterOÌfo UniveÍsity ot So th AustrâliaUK
Cosmin Danut Bocaniâlâ, PhdDepaftmot of Commünication SyíemsLdcaúer Univenity
UK
BriÌish Lihrary CataÌoguirs ú Pubücârior DaÌaA cat.losu€ Ecord for Ìnis book is availèble from úe BrilìslÌ Lihrary
Library of Congress CônlrcINunbeÌ: 2006922571
AdvdÌced Information and Knowledee Processins ISSN l6l0-3947ISBN l0: 1-84628-:143-4 Printed o. acid fÍee pèperìSBN l3: 9?8-t-84628-343-7
O Sprinser-Vcrlag Lon.lon Liúited 200ó
Apart fiom any fair deaüns fo. ú€ pnrposes of rcsearch or prìvatè íudy. o. crilìchm or Eview.as pernitted ìtrdcr the Colyrighl, Desiels ard Pat€nts Aci 19E8. this plbli€lior may only beepoduced, stored or Ìransmitled, in út lorn o. by my neus. with tte lrior pemision ìnwntng of the publislÌ€rs, or in ibc ase of ÍelroeÍalhic reprodnclìon ú accordane wìtn theÌcrms of lìcenc* issued by the CopyrighÌ Licersìne Agency. Enqui.ies conceming rcprodüctiorontsidc those 1€ms should be setrt Ìo the publhhctr.
The e of €sist€Ed Ìmcs, tmdmaÍl! e1c. in úis pnbiicatior does nor imply, *en in theabscnce of a slecific stal€meDÌ, rhat cn nanes are eidlr lìon the Ìelermr lâws aldreexlations and thcrefoÍe fÍee lor geneÌdl use
Thc Nblisher nales no represertation. cxpress or inplìed, *iLh Èsard 10 the aouracy of rlì€úfornaÌio. contained in this book ând cmnot âmept any legal Êslonsibiliry or liabiliÌy for aryerrors or onissions thal may be m.de
Pnnted in 1lÌe Urited Srares of Ameri€ (Ml,'Y)
941654321
Springer Scieíce+Buiness Mediâ

10. Fuzzy Neural Networks APPlied to
Fault DiagnosisJoão Câlado ând José SádaCostâ
*"1H,,ïï11 il j,Ïil,i,llï1,:ïï;ïllÏ;il"ï: ffi ,ï:,ï,lff il'i'{:Ïïì
ìt**.$*4q;.;.*mi-i'Ëd;;1;5,5fiï:iïÏï:';Y i::i.::"ì:'.' *ìi i ìilï Ìffi ,::ì *;,: "; jl;,:,.rut#lï.""'#lï:ïi,ï:"XÌÍ'Ë'i'ïïl,ïìi h;;Jiagnosis orúe'raults can becârried out more efficjently
ïï.*#nl'*i*ff;;l;çïr"-tlil:';x#:lqi",;"q;il;ïãL:, ,h;'1"4"; ;" ser of fault svmptoms will be and' hence' the longeÌ and
nÏ::t[*:lt*mlÌ;:"; i,";fl "nn::' *:i"".ï:ìÏ iï:'?'ï'""'ïfiiìnïlrì*..x:JÍÍ..*.:';*n::rlï;ir:Iïìil..."f "1""ïiilfll;È;l',ü''FJìt',ïï:ï"ïïïHiH idït üïü d *nixì[* "r* l;r.::Í":' :n:.**'*ul;ï: .i ìi.',ï J:::iì.:"*:ït*t"ffïi:ï',i"ij:,uiïil:à"'-"" and Ìobustness or th,- clmenr raült
*--:ul;::k"lii,::::t'i:n""rg.ilii"*'ïï*ïïi"ïiï:'":"*''::conolusions dÍâwn.
10.1. lntroduction
il:ï.ïii' ;ï:"1"ï",f#i ffi ,H"""fi :'ï:i:'nl ü:":"iiiJii!:Ëi$Ë;"Iil.*Élr'ìïìÍHii'mlil:;m1'ï#l;:1":tü.1'ïiiiiìl'ï"i".ii.ìïr* *.'.i"'ni'"riut'rib u';irub'ìir),ï:;J;ï"Jï:Hiilïï;
llÌi."Íïlï;"il"iiï'ff"J#*ïhïi:ï:J'*^ililì1. L"Jn ii'r'"'i-'i rr'i"
306 VPalade, CDBocdidla a LJâh(Eds)
t*Ëï.ï*irt',ir'*iïï;""ïï',nïrïtüïìi:"'i:':i"iifrl[*ìi;r:fr Íiu*i::*:r ;:;,:"1":l:::J',xi,iìì;'l''l'ï :,1fl'ïï.ilcrjtlcal iÌÌdusrriêDroc€ssesems,
faúts nav be r:livirled jn two main cÌasses: abrupt
:1,:*rkit'r;'*:*i"ïïïï:":*ii:.:'á"J'i''3i"'ïffiff 1:ìi1"""-'x*"Í*rl;";;'"n'r;;;m"nï.""*3ï:"lxËityiï1"*"nromore difficult lo detecr sìnc€ thev could res
**":"#ï,"'"'"i'ï"ïiilËïi:::t*ï;itl'"ff ìiïï11ï;ï;1,f i"*1ïËïrï{f ;tiliïïïüÍ.i1ïli:ï'+:ifl *ï{ì*ïH*:ì{if,ü"",'i'}J*i:';:ffi";Ïf 'í""::[ï"1"ï Fi"','ïïif:*;]#"1ïti fi"Ëdlï'*f ,fiiï,:ihi','tïr:;.,"r*"1:i[iffi
m;;;;;;;'seri'us Lu'l also when'ffi iïifi ,iiïiïïï:,,jiJ#;'iiriqiï'"-'"':'#È:ffi qfi::,.'Ìif ff .;ïü,ï:rr:**lf*.",,t',li*:iïrrfr ï1ï',:ffi'f *i'ïïí'l;'f-::'"l;;tln'+';"q*'^*nr3.t":i"ri,ï$Ëü+ir}**,-*U.tï',ï?;:"ãï',ilïlï;*i#.jffiHr*ft ïï"-;1l:Ë:'i*iÏïti#lïr"",ïïï.ïr"s"*ffi 'tr*:ïÏffi ,ï;;ì#*r;;i#il"-;;-i;n;, Èiling rarse arams FuÌthennore' dealins with incipient
*l*;iru:'l'lr*ï'""i:li"ïi#'"ï:lï::Í s :ï:*iï"ïlïHïi;J#lFDI svstems
increased nÌrmber of inreÌrÌatioì'Ìal conferences ând wotkshops
;xrJ{:l:"*:t;,,**:'l'm"n:m*:iï+:!{iiïrïi::h:fiüli,nkí:;*y;m:iïJï.ïiil'ï:'ï*ï;ff :.1"-1"0ïïÏïï":"iïï
*$ilï'**ï##:i*":"rn#J,rï::i{ï'hïii:ïrtrJËq*{

CoÌnlulational lntelligence iú Fault Diagúosis 307
Droces'e. . l i l 'c tuzl) models or oìheÌ quâl iL.aìr \e ìecbÌuquec ((alado ?I . ' r l 2001)
ï ï ï ìÃi 'ã t l "p"Ì ior approacbes i rcìudes rhe coupl ins berweeD quãl i tn ' i \e âod
t*""' ì:[ïT:ï: i[r 'se\eraì âuúo,,, pâ,Ìon.r,/. rocq: carado e/ a/.2n0rì.
rr'. uppri.r"ln of dilreÍe;ì meúods depends on 'rur knowledge abour rhe Drôces5
*alìï "ir"i
,t" nain objectivos neèa"a ro t" achieved Ho\:l'ever' choosng
ï"*ï* r^"ì.-"tr'"i -"r#dolosv
to implement â specific FDI svstem is oftên not
*'""* ã"t "t""",
accordìng to ihe tlpe of faults that such â svslem hês to cope
f ü"'Jï"'mãì'"r'.*tã*"atvso-"aau*rug""#*,i""#:1;ïffJ;*:ï:"#:i;'",,ï:ÏlËt':5-il:ïiljï"*":Jr'"" *' **esses aÍe normârv very
*l[r***,p*t:tï{ïint'*ïJ:nÏ*r;x$.i-''*l'àì""iJ *rvir'"
"*dr-state behavloú orthe
ïïï":ï iiì""il:Ti"lii'"ï;dualÌtative lDDroaches (lrte íiuzy systems
:ï#ï:" ;#ì;;;"ì;;. ;;;'.... so úc bi'r 'orur on i' úe combnd ion
i"ã'"*ii.r'"" "pp-*r'es' whire the a<ìvantages of both methodologies could be
** *"i",ïïi"JXil5iiìiïìi::ïïL.. wì,h üe appricarioo ôr irvl) oeúilneruorls for faulr rsolaiion pLrposc' and I' o'gânjrd as foÌìo$': rn lhe De\r secìroo
a tr"iiot'oao"soo to tt'" tÌtir,ciar neuÌâl networks toXlï,; ïiË"ïïiï"ï i"Xï
f#m"i'J.iï"#ïï:"ïiillï,i1'3iï31h:;;" ii" uffi i",,i." o ",tin";árffi;i;;;Ã-;;;r-" râurt detectioD ând isoratìon (FDt) ând â specinc
."ï"a"j"gy'i*"a on a hierarchical sttucture of fuzzv neurâl ne$vorks.is
"r"'Ài"f ï"ti"" 10.4 presents the Íesults achieved with the applicâtion of the
**"jl*:t"*";n.*:"ffi ,'::ïffi ìïiï'f ,1',k"""ã:ï:s"" J"ï:ìffi:l;remâÌks arc Presented
10.2. Artificial Neural Networks
Anincial Neuar Networks (ANNS) shâÌe,then onsins àv'ffl"#jÏ:ffi'.ïïTïbased iúformation pÍocessing, when McCr
r"ir".i-"ì -"***,ing
threshold units could replicate ânv.Booleân.tunction
rilr" "ti"
*" mo<lelled on úe Ìesponse of neural celìs il biologicâÌ nervous
'#;'ï;l':'"::,3";iL in AÍiÍiciar InterÌigence;
mr;júk$u.*tr;JH,,iJ'ïïïi","'",1ï'"fi:Hri*:ïj:li';l;'n;:i:::, l,': *:"'ll*;l mi:'"",: ï::!.*ffi ffi ;"i.Ï i:::f :ï;,.";ì"ïil.;;;';".;ptins to mimic
\ïïï:T f.::liiji,Xïï:âÌliliprocessei are buiÌt upon rnanìpulation of sv
í'J*ï"tt"-t, Jrr'-ier' 'erv
usetul in some <ìomains' failed to capture certaìn kev
308 V Palâde, CD BocmiaÌa úd L Jain (Eds )
aspects of human intelligence. In order to reproduce inteÌlìeence, it would be
rÌecessary to build systeÍns wiú â similar aÌchitecture.The brah is nìainly compos€d of â very large numbeÌ (âbout
10,000,000,000) of,erors, nassively Eâch neuron is a specialìzed ceÌÌ that can
DroDa!.aLc ân eleclrochemicâl çignal Ìhe Deuron bas a brâícbing inpuL sb-Ì cru?
trli dindnre.t. a cett body. and d branctung ourpul çnucÌurc rúe aÀon) flìe a\oo
;f one cell conrÌects to the denilrites of ânoúer viâ a svnâpse When a neuron ìs
âdivated, it trer an ôlectrocbemical signâl along úe axon. This signaÌ crosses the
smaDses to otheÌ reurons, \vbich may in tum üre A úeuÌon flres only ifìhe n]tâÌ
signál received at úe ce[ body ftom the dendrites exceeds a ceÍain level known âs
the finng thÌeshold. The strcngth of the signal tcc€ived bv a neürorÌ ând, lÌeüce, its
chalces of tuing, critically depends on úe efãcâcv of the svnapses- Eâch s)'nâpse
actuaìly contains â gap, ÌÍith neüotransmitter chemicals poised to transmit â signâÌ
acÌoss the gap. One of the most int'luential Íes€ffchers into neurological systems(Donah H;bú) postulated úat leaming consjsted maiDlv in aftenng th€ 'stÌengih"òf svnaotic connections. Recent reseaÍch ìn cogrÌitive science' jn pffticulaÌ in Ìh€
u."i of oo oo*"io"" infonÌÌation processing, has firther demonstrated the
enorÌnous capâciq, of the human mind to infer ("1êâm") siÌÌple input-ouipul
covariaiions fiom ext.emely comPlex stimuli (!ew\çki et al., 1992)ThrÌs, ftom a v€ry laÌge nÌrmber of extemely simple processing units (ea'h
pcdorming â weighted sÌrm of its inputs, ând then firing a binary sigrìaÌ if úe total
inout excéeds â ceÍâìn level), the blain mffÌages to perfoÌm €xtremeÌy complex
a;ks. Of coüÍse, ttrere is a grear deal of complexiry in the bÌain which hâs not b€en
discussed here, but it is interesting úat ANNS can âchieve some remarkable resulh
usrDg a model oor mJch more complex ìhâo LhjsANN models, as ân approxination scheme, aÌe nornÌallv viewed as â
composition of many non-linear computationâl €lements operating in paralleÌ and
arra;ged in ceÍâin patterns- These models attempt to aohiev€ good performance via
densJ interconnections of simple computalional elements The paÊneters
associâted with câch interconnection âre detemined during â tÌâiÌÌing period
whateveÍ the topoÌogical stÍucnrre of the neural network lnodels' How€ver, all âre
aimed at approiimating complex nonlinearities by lineaÍ combimtion of a simple
nonlineff tunction.Thus. ANNS witnessed ân explosiorÌ ofinterest over the lâst few vcâÌs, and
âÌe beiry successtully âpplied acÌoss a broâd range ofproblem domâins' in âreas as
diverse ãs frnance. mediiine, engineering, geolosv ând phvsics. Indeed, anlnrheÌ€
thcÌe are pÍoblems of predictjon, classifcation or control, ANNS âre beúg
introdüced. This sweeping success cân be âttributed to â few kev fâctors:. AÌ.!\, a'e parallel slslemq uced fo' çohinC
'egÍession and
classification probÌems (Bishop, 1995). Thev esti ate a tunctionwithoul requiring â mathemâticat dcscription of how lhe outpuitunctionâlly depends on the input: thev leam âom examples ltrpaúiculâr, ANNS aÍe ,?onliredl systems. FoÌ many yeaÍs /iflealmodelti g has been the commonly used rechnique in nostmodelling dornains, since lineaÍ models have veÌÌ-kno\Ìnoptimisation slÍâregies. Wtere the Ìinear approxiúÌation was notuatia, *U"tt was fteqüentlv the case, the models sufered

Computâlionâl IntelliSerce in Fâult DiaSoosÌs 309
âccordingly. ANNS also keep in check the ú?//se o/.linensìonalitvproblem thât bedeüls attemprs to model nonlineâÌ 1ìnciions withlarge numbers of vadables.
. AN\s learn br Òdnpk'. nìe AN\ user gaúeh 'eprcsenrdÜ\edata, and then invokes ,/dining algorithüs to aúto]ntaticâÌÌy Ìeam
the structure of lhe data. Although the üser does need to havesome heuÌistic knowledge of how to selecl ând preparc dâtâ, howto select an appropriâ1e neual netfforh and how to inteÌpÌet theÌesults, tle levcl of user knowledge needed to suc€essfuÌÌy applvANNS is ÌÌuch lower úa.Ìì would be the case using some morctÌadilional nonlinear statisticâì methods.
ANNS are also intuitively appealing âs úey are a crude low-level model ofbiologjcâl neüal systems. In the tuture, úo development of úis neüobiologìcalnodelling Ìnay lead to genuinely intelligent corÌÌputers.
ANNS ffe appÌicâble ir virtually evcry situation in wbich â relatioÌìshipbefrr'een the predìctoÌ vâriables (inputs) ând pÌedicted variâbles (outputs) exists,even when úat ÌelatÌonship is very compÌex ând not easy to âÍicúate in the usuâÌterms of "co eiations" or "differences between groups." A few representâtivecxâmples of problems to which neuÌal network ânâlysis has been âppìiedsucc€ssfirlly are:
. Det€ction of medical phenomenâ. A vaÌiery of health-relatediÌÌdices (e.g., a combination of heart rate, levels of varioìrssubstãnces in the bloo4 respiÌâtion Éte) can be monitored. Theonset of a particular medicâl condition could be associated with âveÌy coÌnp1ex (e.g., nonlinear and interâctive) combination ofohâÌses on â subset of úe varìables being monitored ANNS hâvebcen üsed to recognize this prediclive pattem so thât theappÍopriat€ treatnent can be prescribed.
. Stock mârket pÌedictiotr. Fluctqâtions of stock pÍices and stockindices are ânotheÍ example of â complex, muìtidimensional, butin some cÍcumstances ât least pâúâlly-deteministiophenomenon- ANNS aÌe being us€d by many technical analysts tomake Fedictions about stock prices based upon â lffge number offaclors süch as past performance of oúer stocks and vadoüseconomic indicators.
. Credit aNsignm€nt. A vanety of pieces of infoÌmâtion areusually known about an appÌicant for a loan. For instance' theapplicant's age. educatioD, occrìpâtion, and many other Íàcts mavbe avâilâble. AfteÌ training an ANN on historicâl data, úe ANNcould be used to classify applicants as good or bâd credit risks.
. Monitoring the condition of machitrory. ANNS cân beinstrumentaÌ in cuiting costs by bdnging additional expeúse loscheduüng lhe pÌeventive maintenânce ofrÌachiDes. An ANN canbe lrairÌed to distiÌÌguish between the nomaì opeÊhonêÌconditions of â mâchine versus when it is on the verge of aproblem. A*eÌ úis training period, the expeúise of rhe network
310 v Palade. CD BocúiaÌa ud L Jâln (Eds.)
caÌì be üsed to wâm a technician of an upcomiÌrg breakdown,before it occurs ând avoid cosily unfo.€seen "do\rÍÌtime "
. Engine mânagement. ANNS have been used lo arÌalyze úe inputof sensors from âÌì engine. The ANN contÌois úe vúousparamelels witbin which the engine tunotions' in order to achievea paÌ'ricular goal, süch as minimiziÌÌg tuel cotsumpion
As a matter of fâct, neurâl computation is a highly interdiscipünary field,touching üpon such diverse disciplìnes as stâtistics' nemoscieDce, psvchoÌog/,
ohvsics or liÌÌsuistics. Às meDtioned âbove, whât unites the field is úe originalirótivation búind ncural netÌvoíks to absÍactlv model the Ânction ofneurons andneuroÍ âssemblies in úe brain- Siffting fiom úis motivâtion' and úe numbeÌ ofmodels that have been developed, úe field has moved out'íârds iúto seveÌâÌdiroctions, and continues to move today.
ln tbe next two subsectioÌìs, some industriâl âpplications offftificiâl neuràl
networkr, are Ìeported.
10.2.í. Industrial Applications of Multilayer Perceptron
In eügineerìng and physics, the clêssical apFoâch to describe the behâviour ind
tunctioning properties of reâl systems ând to obtain matheÌÌaúcêl models to
represcnt úern relies on úe use of algebraic ând diffeÌentiâl equations The usc ofparameler estimation techniques ând acouíâte knowledge of the physical systemàynamics are requíed by such âpFoaches together rvilh numericâl calculations toemdâte the svstem oDeration. HoweveÌ. due to the complexity of the physical
system, unceúdies aÌe ahvâys pÌesent, mâking the conesponding mathemâticâlmorlel inaccuÌâte, or even nonÌealistio Hence, in pÌâctice, approxinìate anâÌvsis is
used and lineâdty assumptions are usually made.To overcome the âbove difÉculties, as mentioned in úe last section, ANNS
implement âlgoritlms rhât attempt to âchieve â n€urologicâl related peúòrÌnarce,
such as leaming fton e*perìence, making generalizâtions fÌon similar situâúonsand judging stâtes when poor results were achjeved
In recent years, many reaÌ-wor1d hdusaiâl pmbleÌns have been solved bvapplying ANNS. Such âppÌoaches include flÌnclional predìctions and svstemsmoaeling wnen the physìcâl systems âre not well ündelstood or are highly
compìex, pattern Íccognìtion ând robust classifiels, with úe ability to geneÌâlu€'while makiÌÌg decisions about imprecise input dâta
Nowadays, mâny differeni Ípes of ANNS are known. HoweveÌ' sorne ot
the more popúar include multiÌâyer perceptron (MLP), which is generalv tÌâinedwith the bâ;kpropagatìon leâming algoritìm, leaming vector quântization' râdiâ1
basis tunction (RBF), Hopfield ând Kohonen netuoÌks, to Íam€ â few Dependingon how data is processed thÌough the aì1ificia1 neurâl network, thev can be diüdedin two main groups. One of úose gloups is concemed with feedforward ANNSwhile úe otheÌ includes the recurent ANNS (i e., implenent fe€dback) AÌÌother
wây of classityìng ANNS is related to the leaming (oÌ tÌaining) method used, assome ANNS employ supervised leaming, while oúers are ÌefeÌaed to asunsupervised or self-oÌgânüing leaming Íìettìodologìes

Comlutâtional Intelligence in Fãult Diagnosis 31i
Control engineeÌs are often fâced wiú engineoring probÌems exhibÌtmg
knottiness, nor ineârities ând uÌceÍtâinties (Iukudâ ând Shibata, 1992) ANNS have
been proven to be â poweÌtul m€thodologv providing accììrâte solutions for such
chsseì of probÌens and overcoming ihe difficulries associated wiú úe classÌcal
mett'ods tã aeaì wiú those problems They are suitâble to cope wiú such
compleÍties düe to ilÌe fo[owìng feâtures: leârning fÌom trainìng da]a used ÍòÍ
physìcal system identificâtion by finding a set of comection strengús thât wil
ãttàw úe network to cany out úe desiÌed computation (Rumelhart er dl, 1994);
Eenerâl isahon Èom inpus nor pÍe\ iousl) p 'e 'enLed dunng úe rraiDing phâse b)
ãccepúg an rnpuL uo<l producrng a pldutibìe re'pon*. derermircd b) the rolemal
ANN connection structüre, which makes the overaÌl system robust agaÌnst nolsy
dâtâ ânil feâtures exploiied in industÌial appücations (Jung aÌÌd Hsia, 1998);
mapping ofno ineâÌÌties makìng úem suitable for identification in process contlol
apilicatìons (Rahman er al, 2000); pârallel proo€ssing capabiliÌies' allowing fastpìocessiry for large+cale dlaÌamical systems; appÌicable to mültivariabÌe svstems,
iince they natuÌaliy process mâny iÌÌpiÌts and have manv olttputs; used âs a black-
box app'oâcb and implemenÌed on compdcl proce'sors loÍ space ând-power
constrained applications witll no pÍior knowledge aboüt the physical svstcm being
modelled.The Multilayer PeÌceptron (MLP) is the nost used model in olâssification
probÌems; it is an aúificial neuÌãl network wiú a topoÌogv wherc each neuron
;uQut is connected to every neuron in subseqüent lavers, connected in cascade with
no ?eedbaok conÌÌections or connections between neurons in úe same laver' Such ân
aDDroâch hâs been used in severaì industrial âpplications ÌeporÍed by many authols
Some examples are automatic wood surface inspection (Lampinen el al, 1998)'
speed coDlrol of DC motors (Rubaai and KorâÍìr, 2000; Venavagamoorthv ând
Iiarley, 1999), diasloslics of induction motoÍ faults (Chow €t dt, 1991, 1993;
Fillppetti et a1.,1995, 2000), indüction motor control (Buíon and Harlev, 1998;
BuÍor e/ at, t995 ]l.J;aug eí dl,1999; Wishaú and Harlev, 1995), and cunent
regulator for pulsewidú-modülation (PwM) rectiÍiels (Ciohowlas et aL. 2000)
úint"n*"" and sensoÌ failur€ deteúion was repoÍed bv Naidu eí al (.1990)'
check vâlves opeÍâting in a nuclear pow€r plant (Ikonomopoulos et al, 1992;
TsoukaÌas and Reyes-Jimenez, 1990), and úhation monito ng in rolling €lement
bearings (dsúndÌgne and UhÌig, 1994) It has been wideÌv applied in feedback
controi (Careni €/ dl, 1995; Er and Liew, 1997; Hâshimoto er al, 1992; Jung and
Hsia. 1998r Ozâki er al. 1991; PaveuÌ e/ dl, 1995; Sun el al, 2001; Sundâreshanand Askew, 1997) and fault diagrosis ofrobotic svstems (Venìuri and PoÌvcaryou,
199?)- Ihe MLP was used in modelling chemical processes (Bhal el dl, 1990), to
produce quantitative estimâtion of concentration of chemicâl components (liu eÍ
;1, 1993), and to select powder metâllurgy materials ând process pârameters
(Cherian el at, 2000). lt was used in â turbo geneÉtor controÌÌer(Venayagamoorúy a.ÌÌd Harley, 1999), digitâl cuÍeni regülâtion of inverter divers(Buhl and Loreü, 1991), modelìiÌÌg and control of a rvelding prooess (Andenen er
al., 1gg0; Cook et al.. 1995). An optimisâtion tool applied to the gâs lndustlv wasÌeported by Martineâu e, al (2002), as well as a tool to predict dâilv naturâl gas
consÌrmptjon needed by gas utilities (Khotânzad el dl, 2000) Such ârtificial neuÌâÌnetwork was also used in a tempelatüe control svstem (Khalìd and Omatu, 1992;

312 V ?âÌade, CD Bocdiãlâ ud L Jain (Eds )
Hf#;íri:iï*Ë**"ri:*lr:ilr*n*rvJii'l'r*
#*n*s*g**ïwt**r;[**,:**l,*rl*gt'p***t*+:1.1.*"l-'::::ï"*$ï'::ïlJ*:ïïJ"trï:J:i*ï:';:
or ad'|speoiat'lvpe or âì1incìâÌ
10.2.2' Applications of Fuzzy Nêural NetwoÌks
*"Ë+***$*ç:e*tltffuwffitmffi***qffi[ç*r:'íüilffifrï:il,ffiiffi*ru$-f*ffi$**,tlr'5i,r*,;ll**nt-il'ú"t irffi

Comlutahonal Ínlellieerce i' Fault Diagnosis 3 I 3
fusion ofârtiícial neurâlnerworks and ivzy logic However' very iittÌe reseffch on
'-' *ïïiiii',[Ã1ï::il?Jiï
"*"'-* â suiiâbre Èamework ror pauem
ïì:ï:i:lÍ:%:'i*'Llill".',xl;n:r hecaJ\e o' rhc inìerenr tu// ne$
*"' iï'3,:::'sï?"H::::'1lïï:il:::ï'iÏ: ft:i".+ïifftf,"'1
'.,.r,"rlïï*g*"H*-*l*-**pix'*ryç*nffi '6";*(:ij:ll,:*-:"1*llsl
j:::l*:lmï:xl'#:.iü#x?Tï'*ï:
f"1i#*S',::"':-'*xi-ï,fl iiËtrÈ""iï,ï*i".liïüirËï.il#;;****liïiïïïi}m*ili$"t;ïìlïiJ,ffi i#Ïïï[-ill*i#.iÍï
"Hf-tï''Hì[ïïl: ir *"*tïr l**'x5 11;
l.;;llx*n:Íli$::;it,lï:ï';lï:.'^ï,i'3;:ï."1'Jï:iJ
ffi'#$**: l!*tUl**;Iï:Iï:" :tr.=rT:ï**,,'**x:Uiir'i*i}'iffi lti*r:ïri*;üht$;iïïl;'nÌ*:l-'#,r;+rïi":ïfl lÏà'È#iïi*3Ï:ïï::::trnípËrì"i,.1-y íear probrems'*' {:,ìH:;ï'',il'ïlil--: ":ïi:ïi:ïËïÏ"ïft,íiïij'* ï:ikl* ru.i'J;:lïï i *H., - -,. "**"r *i."ìiì" ú" i,'"d a úzv nzurar network, ú: "ìi:i,ì#g;iJ;jl,jJiï
ffi ï*ï#ïiïr*ï'Hf Ïfï"+ïïhÏì*ï"ï:Tiï:fu sff ï*:ï:":':ji{ï#$í*;ï'#ã**;:u'r"H::ïr"Hï!1Ëïïi{.;ïr","ri#.ruít*'x;r,'!i',i'#J"'".ià'JfliÍ,Biï"-u'o'""
314 V Palade. cD Bocúiala and L Jain (Eds )
In úe next secrion, úe use offuzzy ncural Detworks for fauÌt detection and
isolation will be pÌesenteil Furúelmore' a detailed description of â hieÌâÍchlcaì
.Àltur" or ru"ry "".,'ur
networks developed foÌ fault isolârion puÌposes will be
provided.
10.3. Fuzzy Neural Networks Applied to FDI
ReceDtìv. rhe use of FNN for FDI puÌposes has Ìeceived incÌeasing attention in both
researcb and appiication (Garciâ et al.. 1997; LeorhaÌdr and Ayoubi, 1997; Pâlton
i ìt., tsgg; ôinao ana Sa dâ costa, 1999; PâttoD e1 .l/', 2000; Koscielnv âni
sderi. zo00r Calado er a/., 2001; Mendes €t al' 2002; Kowâl e' dl, 2002; CaÌado
,i ri.. zooì. rft*" *p".t"d stìrtlìes have demonstated úat INNS coüld be used to
o*."o-" ifr" difficulties of conventionâl fauh isolation techniques to deaÌ r'ith
."rii"e* t"lati""*. Establishing an âppÌopriâte tÍâiniry set allows lhe tuzzv
neuraì networks to leâm anal generalize for opeÉting with unseen inpui-dâia
However, fauìt slmptoms conceming multiple simuhaneous faults me haÍder to
feam tfran tr'ose associated \íith single faults. Furthermore, úe lârger the set oí
faults, the laÌger úe seÌ of faült svmptoms wìll be and, úerefore, the longe' ând Ìess
ceÍain the tmining oulcomeHence, ú order to overcome the úfficuliies previouslv mentioned' the
authon will present an approach based on â hierarchical structÌre of úÍee Ìevels
wt'ere se'eral plWs are ìsed ftus, â large numbeÍ of pâfiems âÌe djvided into
manv smallcl subsets so tbât the cÌâssification can be canied out ììore efficientÌv'
ir,c',aopri,n ota r,ierarcr,:cdl srrucruÍe or F\\ appÍoach for laurr I'olarion a-im' al
d$eloomenL ofân ârchirccüe lhaÌ can local i .c âbnrpr and i ì ' rprenl túgle ald
muliiDie fâults coÍectlv. or ât l€asi with â minimum misclassificâtion râte and be
eâ'r l ) Uained. from oniy trngle abrupt faurr s lmpromfherefore- üe cunenl fâult isuldrion âpproach coosr\lç ol a hreraÌcrrcal
structwe with three leveÌs (lower, rnedium and upper) where the lowcÌ and the
mcdirun lcvels use one or more FNNs and the upper leveÌ is a tuzzv OR decision
bloch a, depicted in Figure 10 1 It can bc seen thât the tuzzv neüÌâl net\torks hâve
been achieved by adding a tuzzification laver to the convenrional feedfordâÌd
âÌ1ificial n€uraì networks (Haykin 1999)In p.cvious appÌicaìlons using úe current fâult isolâtion meúodologv
,CaUao.r a i , :OO t : Vcndes. / a/ . 2002, úeinpurrrorbehrerâíchical \ r Íucrureolfll.,) neuml nerúorks (llsl \, used loÍ fauìr i'olJrion purp'''es ha\c been bâ'ed
on úe differences of the proccss mea$rement vffjabies values, as expressed bv
Eq. Ì :dMI',L = Mt',r Ml'L i (l)
where ,lr'f is úe measured variable and & the samplirÌg time FuÌúer studies have
b€en peÌfonned and úe fâu1t isolation approach based on úe HSFNN has be€n
aDDlied foÌ fâult isolâtion purposes of a pnerunatic servomotor actuated indusirjal
"ont ot uutv". as <lescribeã in the next section. It has been obse ed during the
;€nlioned d;isn thât su€h tlpe of input vâriables has disadvantages' if th€v are
applìed to slowiy ,leveloping incipient fauìts lú these cases, it is âlÌnost impossiblo

ComldlatioúaL Intelligence in Fàult Diâgnosis 315
Lo rlbtinsüi'b lhe lâulì s)rìrpLoms Úom the med'uíemenl ooi'e $ilhoul ucing â Ìugh
",1"ï ï i ì "a l -^1. 'Hã;. 'á ' , : incc rhe I Dt s lsrem sbould be abìe ro rsolare laul Íç io â
ren ear lv sraee ol rheir de\elopmenl as al Íeady menlroned rhe rnde\ i ha' Ío be
*r j r rver i"m"Í . O"e "ar
ro o\ercome str \ 'b a problem \r i ì ì be to consrdeÍ as rnpur '
; ; "ú. ú;r . l ' . , i t " tú a. ' i ' " r i ' " of 'he mcâsuÌed \anable ' i r ì5Lead of rbei '
differeÍces as given bY Eq l
Low€r Lêvel Mediü6 LevellUppet Lev€r
FiguÌe 10.1. HierâÍchical shlclüe oftuzzv neual networks
However, since tbe measrìreme variabÌes are affecred by noise' it is
mcsrar\ Io e\crcìse some caul ion on bos úe csl imaled dcr i \arrve i ' oblarned
À;J; Ã." , ' i . ' * . e, Ì iúÌa ' |cd bv mean' o ' ì roe íesÍe* io ' beros s i !en bv
(:2)
h Lo. 2 rbe folìo$ ing ootdrron rs used: d' i: Ìbe slope ()1 úe lr-ne ar insLânl
r: r srands iorìimel Ir'l ts úc mea\ured vaÌidble: and i i" Iìe oumber 01 pornrs trsco
ïi. i"ú" ,r'" r'"". i" tt,r" "ase
studv detailed in the nexr s€crion' I 5 points hâve been
** *'i"'.ï.iiïïïìffïì';lì:"., '. '.r
orúe HSFN\ con'isr' of one
ll';ln I "kryï :iiliiìi".*itiïìï.1, -,'rn: -. *eouâÌ to the numbeÍ ofsingle fâult sccnaÌios cc
iJ"JJÃ" i.J*i'r, ,rr 'h-e
mea.uremenr 'ariabìc' aDd each ooe is associâred úiú
n:*"*t*,lu:'*,*':'#ï"àf ï:ïïi:x-Y";'*::iüÏi'"":iH:
1 tffi*' ''1', i-j-, !.. l]
i ,k:.+ FNÌ!. iii
i-ì* /l*ffit^l\ - F

316 V Pahde. CD Bocüiâlâ úd L Jain (Eds )
mediirm level. TheÍc are differ€nt tuzzy OR opeÊrors availâbl€ (Klir ând Folger,
lq88r. buÌ iD úe cuíenr apníoâcb $e use úe mâr-nìD opemtroos ro 'on'rrucr r ìe
tuzzy O& reFesent€d by Eq- 3. Thus, úe final fâult vector is the Íesult of this
operation, which means the maximum vâlues of each fault for all oütputs froln the
medium leveì.
r m.r . r { fn ' l . . .p{r- ' } l . , - r ( r ,
The eÌements ofthe set used i! the tuzzv OR operation âÌe deteÌmined bv
the outputs of the FNNo âr the loweÍ level Thus, if lhe Ëth a.Ììd l-ú oütputs of th€
FNNo ;t úe Ìower level âIe taking vâlues gÌeâter than 0.5, úe thrcshold considercd,then the ouFuts of the t-ú andj th FNNr âl the medìum level folm úe eÌ€mentÁ
used in the -tuzzy
OR opention However, if oniv one ouQüt of the FNNo at tle
lower level is taking â value gÌeârer than 0 5, lhen the correspondiDg FNNi ln the
medium level is useã to confiÌrÌ thât this fâtìli is a singie fault, or to isolate multiple
fârìlis. Obviously, the multiple fâuits must include the one corr€sponding to the
outDut of the FNNô at the lowe. Ìevel.In the fauìt isolâtioD âpploach considered, âs previouslv mentioned, tho
úopted FNN has ân âdditionâl tuzzy jnpui laver thât maps ihe increment of eâch
m;surement into quâlitative values whose semantics are repr€sented bv lúzzv sús
In the cuÍeni apiroacll *re tuzzificâtion laver converts each input into the
foÌÌowins ÂEzy quantity space, VlnÌarye, nneãiun' nsnalÌ' zero. Psnall'Dnedìun. ptatPel, b] as\ 'crâr ioo $rü 'e!en I lpe' of Beuron' ícomplemmt
srelnoia ,cìi'"úon tuncrioo fo' ,tu/ge {grnoid iuncüon for plarse and Cau*ian
úction for all thc others) The hidden and outpür lâveÌs pÍocessing elements use
ihe sigmoid tunction as theiÌ activâtìon tunction- The membeÌship tunctions
associ;ted \rith the neurons in úe tuzzificâtion lâyer couÌd be determined bv üsing
the c-mean clusteriÌÌg algorìthm @ezdek, 1981) applied lo the vectors used to tÌam
úe neural net.!vo*s. Both the lower Ìevel a.Ììd úe medium level neiworks arc made
up of lhÌee layels. The ncurâl netwoÌks used in the case study desoibed in the next
siction were trained using the Ne\tlon method combined with the Levenberg-
Marquardt meihod (MarquâÌdt, 1963) The tlâidng goal was to obtain â meân
souared effor smâlLer rhdn 10 'Ibe r.^,, {ìoseÌ lelel) tÍdnins daÉ wiìl be oblained Èom Ihe proce"
r i ìale abruol ldul l s im lddon ln general ând rD ordeí lo coPe $iú di f feÌeot fauì l
'trengrb', rie 'ame fâulr $ill bc 'iÌnúiared úrb te\ eÌal ditrcrent inlen:ine' Tì'us
the riumúer of training pattems used to trâin úe FNNo is equal to úe nÌrmber of
sinele abruot faúts tirneì the number of faült streryths considered pli$ a number of
t um"g pit"-" conesponding to úe noÌmal opeÍâtional conditions -In
general,
rable 1ô.r shows úa tuinirÌs data âssociated with the lower level FNN,
consideÌing only one fault htensityo; rhe oúer hand, Ihe tNÌ\ ' (medium levelr $ i l l be Úained using Ih! dâÌa
lor one. i íc le abrupr fauìr rúe fdulr âsçociared siú lh€ conespondmg FN' 'ü,) dnd
for all possúle double abmpt faults úat the FNNI will b€ âble to diagnosÔ This
traininé dâta ìs obiâircd by adding the daia for the coÍesponding singÌe abrupt
fâúts corÌsidered. âs shown in Table 10.2 ând in Eq 4:õel+, ... õe_1+): õel+òel ... ae,'+ae_' (4)

Comlutational Inlelligenc€ in Fault Diagnosis 317
Trhle 10.1. TFining ilârì foÍ single abrupt faults
FNN irpütsFNN Frult
I2
n-1
000.100.
0 0 ... . r 0000.. .1
00 F1
F;.,F.
TibÌe 10.2. TFiling dâlâ for double abropt faul|s
FNN iÌputsFNN
l2
n, l
I t 0. .101..
0
00.. .11
I r F:
F F.
In order io cope with pÌocess tÌansi t behavioüÌs düe to nomlal set pointÌegulations, úe current fault isolâtion approaoh should be coupled with â fâultdeteúion systen! âs for instânce in úe âpploaoh píoposed by Calado el d/. (2003)
Thus, when qua.ÌÌtitrtive models are not Íôâdily âvailable, a conccdytrained âÍificiâl neural Detwork cân be used as a nonlineff dlnamic model of theplocess. However, úe neurâÌ network does not eâsily provide hsight into modeÌbehâviou! the model is erçìicit râúe! than implìcit in folm. This Ìnâin diíficultycan be overcome using quâlitâtive modeÌìing or rule-based ìnference methods FoÍexâmple, fruzy logic can be used togetheÍ wiú stête-space modeÌs or DeuraÌnetworks to enÌÌance FDI diagnoslic reasoning capabiüties (Lopez-Torìbio e1 d1,)999).
In the next section, úe fault isolation approach described âbove will beapplied to â pneumatic seívomotor actuated indüsiriâl control vaÌve ând th€ resuÌtsâchieved win b€ Drovided.
10.4. Case Study
Faults âÍo usually úe main cause of loss of pÌoductiüty irÌ the process industry.ODe ofúc most impoÍa.Ììt types of equipment present in the process industÍy is úeflorv control valve. A fault in â flow contÌol vaìve Íìây lead to a halt in pÌodüctionfoÌ long periods of time. ApâÌt iÌom úese economic considerations fauÌas may âÌsohave security implications. A fault in an actuatoÌ mây endaqer humân lives, as mthe câse ofa fault iD an elevâtoÌ's emergency brâkes or in ihe stems position controÌsystom of â nuclear power plânt. The occuÌrence of faults can be reduced tlìÌough

318 V Palade. CD BocmiaÌa ud L Jain íEds.)
pÌeventive maintenânce; however, they câÌulot be i.rlly elìmjnâied If a fault isdetected in its eatly stages a quick intervenrion can often pr€vent sedousconsequences to the ongoiÌÌg process. Thcrefore, úere is a ne€d foÍ fault diagnosissystems that detect âÌÌd isolate a faÌrÌt âs soon as it occurs (Chen ând Patton, 1999;Patton e/ da, 2000). The design and perfomance testing of fâulr úagnosis systemsfor industriaÌ process often requires a simúation model since the actual system isnor availabÌe to generate normal ând fâulty opeÌationâl data needed for desig! ândlestirÌg, due to the economic and secuÌity reâsons that they woüld imply.
One ofúe most common types of âctuators in the Focess industry is thoflow control valve. Their numbers cân Ìun up to lhe úousands in pÌocess indüslÌies,such as oil refineries ard the food iÌÌdustry. These Ílow contol valves me widelyLÌsed to control the distdbution ofprocess fluids as wâter ând steam The prccessesin which this kind ofvalve finds its most coÌÌmon application are châract€.ized byhigh time consiant, like themal regulation ând slow chemicâl Ìeacton ândevaporâtols. In all these casês, it is necessary to ensure úe flow to bê constant at aspecificd sel point for a long period, while the transient time to reâch the controÌvalue is usually of minor inreÍest. These devices âIe subject, relâtiveÌy o1Ìen, tofaults ând maltunctions due ro harsh enviÍoÌÌment conditions, which caus€ adecreâse in Foduction or even ân installatÌon shutdown. Recendy, th€ applicationof fâult diasnosis svsteÌns to ìndustrial valve âctuators has been stuúed under tneEüropean Íesearch DetwoTK D,{MADICSll?rnmg(http://diag.Ìncbtr.pw.edu.pl/danÌadics/) where a benchrnark problem was definedIn this chapter the peÌlbrmênce of the fâult isolation techniqu€ described in the
Fevious section will be demonslrated on úis industÌial benchmaÍk valve actualo.üsed to control thc flow of the feeding wâter of a steam generêtoÌ boiler. Thisbenclìmark problern wi1l be descdbed ncxt.
10.4.í. Flow Control Valve
Figure 10.2 shows a view ând the schelÌatics ofa !?ical industÍiâl flow contolvalve. The florv control valve is â final control devic€ that acts on úe controledprocess. Most of these valvcs âre pneunutically âctuated, consisting of tìÌee ma1npaúsr body of the vâlve, actuâtor (e.g., spring-and-diaphÍâgn pneunìaticseNonotor) and positioner contÌoller. Thc vâlve body is the component thatdet€mines úe flow throügh the valve. The fluid enteÌs the vâlve by port 1, it flowsâlross the reslrìcted section 2 and jt exils the valve by port 3 The plug 4 cantrânslate along its a-ris 5 in order to châÌÌge úe area of the resiricted seotion. Achânge of the restÌioted âÌea in the valve Ìegulâtes the flow. Therc are many mesof vâlve bodiesr the differences between úem rclate to the folm by which therestricted flow areâ changes. Here, the gÌobe valve case will be adopted
The flow úÌough the valve body mainly depends on úe valve opening,which is a firnction of the position of the stem, and on úe Fessure diffcÌence êcrossthe valve. The actuator sets the position ofthis stem TheÍe aÌe many t,?es oi servoactuatoÌs: elccúcâl motors, hydÌâ!ìlic cylhdeÌs, spring-ard-diaphÌagm pneumâtics€Ívomotor. êtc. The most co,Ìmon rype of actuator is the spdng-and-diapbÍâgmpneumati€ servomotor due to its lorv cost. This actuâtor consists of a stem thât has,ât one end, úc valve plug and âr the oúer end the plâÌe. The plate is plâced inside

Computãtionâi Intellgence ìn lault DiagÌosis I ì 9
an aiÍigbt châmber and connects to úe walls of this chamber by meâns ofa flexibÌediaptuagm. This assembìy is snpported by a spring, as shown in Figure 10.2Compressed âir is admitted in châmber 6 and il âcts on diaphngn T The spÌing 8 iscompressed and it develops â force pÌopotional to úe deflection that opposes theforce developed by the air orÌ the diâphÌâgm. The position of the stem is
Fopoúionâl to úe pressüe inside úe airtight chÂmber.
Figure
##&ff i10.2. Indushial tlow conrrol valve and schematics.
The positioner shown in Figure 10.3, detormines ihe flow of ân into tle
Positioner
Fieure 10.3. Positione. coúlÍolÌd
The positioneÌ is the control element thât performs úe position control ofúe stem. 11 Ì€ceives a control reference signai (setpoino íìom a computercontolling úe process, passes it tkough a second-order fiÌter, in order to get íid ofnoise and âbrüpt changes of the reference signâl, pdor to the PID control action thâtleads rhe stem's position ro thât reference signal The positioner comprises âs weìl aposìtion sensor and ân electrical-pneunìâtic (E/P) !ãnsducer' The first det€rminesthe actüal position of úe stem so thâl the eÍor between the actual ând desiredpositìon (reference signal) can be obtained. The E/P transducer receives a sigrìalfÌom úe PID controlleÍ transforming it into a pneumâtic vâlve-opening sÌgnaÌ thatadds oÌ removes air fiom úe pneumatic chamber. This trânsducer is also conÌÌectedto a pneumatic circuil ând to úe atmosphere. lf the conlÌoller indicates thât the stemshor d be lowered. th€ chamber is conÌÌected lo úe pneumatic ciÌcoit- If, on theoúeÌ hând, the stem shouid be râised, úe connection is estâblished with theâtnosphere, thus allowing the châmber to be emptied.

120 V Palade, CD Bocuiala dd L Jèitr (Eds.)
10.4.2. Faults
Thc controÌ valve rÌÌay be affected by a number of faults (Koj, 1998). These fâultsare grouped into four major categories: valve faults, actuator fâults, positioner fâultsand geneÌâÌ/extemâÌ fâuÌts. Here only abrupt or incipient faults are considered.
VâÌve fàüÌts âre faults that affect the valve body. There are sL\ differentfaults for úis 1r?e: valve clogeing (fault fl), valve plug or valve seat sedimentation(fêult 1:), vâlve plug ot valve seat erosion (fault f3), increased bushing iliction(fâult I4), extemâl lcâkâge (fault f5) and internal leakase or fault in vêlve tightnessífault f6ì.
Fault fl, vâÌve clogging, occurs when the seÌvomotor stem is blocked byan extemâl event of a mechânicâl nâtüre- This fâult doos not permit the stem to goabove a certain position ând therefore the flow cânnot dÌop below a ceÍain value.RestrictiÌg the stem motion to a smaller rânge siÌÌìnlâtes úis fâult.
Fault f2, valve plug or vâive seât sedinentâtion, occufs when solidpaÍicles that aÌe mixed rviú úe liquid stâÌ1 to sediÌì1€nt in the valve plug or in lhevalve seât reducing the orifice dimeÌÌsions. The âltering of the dimensions oausesthe K to decÌease, úe ma,{imum stem posilìon (r*) to be smâlÌeí ând the positionof the stem to change becâuse the force exerted by the fÌuid is smâÌler. Asimultâneous dccreâse of the flow coefficient K,. an alteÌation of úe stem molion.and â decÌeasc in its rarìge simulate ihe fault.
Fâtìlt f:, valve plug or valve seat erosion, occurs when úe continuing flowslarts to ícÌÌove matedal ftoÌn the valve plug or the valve seât, which alten theirdimensÌons. The altering of ihe dimensions causes the fiow coefiïcient K, tolnffease, lhe mâximum stem position to be higher and the position of the stem tochange becâuse the force exeÍed by úe fluid is bigger. A simultaneous inüease ofK,, arÌ alterâtion of úe slen molioq ând ân increase in ils range simulate the faút.
Fault i4, incÌeased bushing friction, occurs when the noÌmal force andstatic Èiction coeÍfrcieú on the valvc stcm pâcking box incrcases due to coffosion,sedimentatìon, pollution, etc. Thìs causes the hysteresis iÀat aheady occurs in thestem to be increased. This fauÌt is sjmulated by an increase in the hysteresis of the
fault f5, extemal leâkâge, occuÌs when the vâìve has a leakage, cãused bycorosion, mechanical wear or poor asseÍìbly. Tlìis fâült entâils â loss of flo1v to tleenvironment. This fault is simülated by ê redrÌction in the flow ât úe oüq'ut ofthe
Fault f6, internal leakage, ocflrs when theÍe is â loss ofvâlve pÌug valveseat tightness due to erosion, coÍosioÍÌ or nechâÌricâl weâÌ. This fault is simuÌatedby an increase ofthe flow coefiicient K,.
The actuator faults affect the pneumatic seÍomotoÌ. There âre fouÌ faúsúat fall into this category: twisted seffomotor stem (faút tf), servomolor hôusingtiútness (1àult Í8), dìâphâgm perforation (fault P), and sprins fauli (fault flo).
FauÌt f7, lwisted seÌïomotor stem, may occur wh€1Ì úe stem is bent due toextemaÌ or intenâÌ forces parâllel to the úem's a\is. This will cause úe normâlforce on the vâlve steÌn-pâcking box to increase and thereforc cause an increaso inhysteÍesìs. This fauÌt is simulated by aD increase in úe hysierisis that affects the

CompulâÌio!âl Intelligence in Fault Diasnosis l2Ì
laulr Í Ì , servomoÌor housing r ighrness occut l \ rhen úe'c are âir ìo 'es
duc ro rhe lack ol l ighlne" ol lhe pneumâl ic châmbeì lbese dir ìos 'e\ hd\e dn
i " r ì . . ì . . "" ' r , . . t 'a iU. '
p ' . -r ' . Thr ' üulr is srm! ' lâred bv d rcducì ior in rhe
airÍlow into or tÌoln the pneumatic chamber'------
F;"it í9, <liaphragrn perforation, occurs when úe flexible diapìÌagm ts
pun.ru,.a a* ìo rurìs. ."or ' 'n. mâreÍ iâl Íhrs c 'ruse' a lo 's ol dir Èom rbe
i"- ' ' " i . . r r" . t" ' , " i í . armosphere qhich arreÌ ' Ìhe chambeÌ pÍe*urc I Ï i ' ldul l
i . ; , ì ; ; i t , Íeducr,on in úe ai í Í ìo$ rnro or Ì Ìom tbe pneumâric chambcr and
in úe aÌea ofúe flexible diaphÌâgm.-- - i*r '
' iO,.p, ins fdulr . ;ccurs $hen rhe spnns qbicn tuppon' rhe çrem
hâs a raul l d e lo corÍo.ron ândor fal i tsue of rhe rpr ing s nìaLenal lbrs raurl r '
srmulâted b) redücúÌg the spnng conslant K-Tbere ae úrce mair faulr' úar alÏecl úe posiliooer I P rtdnsd!'€r Íauìì
Lfrul l f ì l r . s lem ú'plâcemeúr sensor çâult r fâul l l ì2) aDd po5i l ioDer leedbâcr laLrÌ
(faultÍ13).**'..-Éu.tft fll. E,P 1Ìânsducer faült' occuÌs when the chaÌacteristics of the
Ìran5duce, are.batrsed duc ro coil Janase or mechâ cal fdulr nìis faul' i'
' , . ,úì .J l i chang;e úe outpur ol lbe L P rÊnsdu(cr ' $hrch $i l l aÍ Ìècr rhe
aiÍflow into or ííom the chamber'Fêút flz, stem displaccment sensor fâuli' occuls when the potenbometnc
sensor responsible for suppiving the measrements ofthe st€m's position is fauÌÌv'
aì..rl.l-"iÀ" "*t".iis
or i'ìre breaks due to fatisue This fault is simülated bv
an increâse. or deciôase, ìn the reâdings ofthe poslhon seÌìsoÌ" - *i;;ì'
ì'j, o"'i**' feeJúck rauir' is ciused D) râuLr ur a 'ìr:o.Écâncel l ins lhc cleâraíce ro tbe poi i Ì roner mechârrcal le\er leedbâ'k \) ' lem lbìs
ì",'n i 'L,i"'fJ
Inl-a,. me hv'reÍe'r' in rbe fecdbacr poÍion ofrhe cunÌÌoì loop
not affectinq the sensor readrng'" ' - --õ"?. i rr . ' " -"r faul-n arc faulr t qho'e ongro i ' Dor rn úe Í ìo$ cooÌro'
\ahe ' \s lcm bül ralheÍ in Ihe pranl rDsral lâl ior ' bur may âl lecl lbe \dr\e r
"" 'ç"ã-. . . There âÍe fodí morn laulr ' rhar 'ar l mrc rhi" caÌegoÍv: po<rlroneÌ
ir" l i t t*r '* . l .p tr"r lL n4 r . unexpecred pre'su'e cbange ac'oss rhe !aì \ e í fduì l
í i i . l ,J.*a r to* ' ' " ' *
(raulr n hr and í ìo$ sensor fauìr r faulr n 7)' ' - - ' - i " i l i ïq,
0* i ' i "neí 'upplv prc 'sure droo occuÍ ' shen úe pÍe'sure of rhe
Dneumalic cúcLir ún, .onn".s $r lh lhe po'r l roner dÍop' This câusc' $e arnrow' i"ro r l r ì .uamtcr,o Uc,rre,ed Ths laLlr is ' i f lu lared bv â reducrion ol thc pÍe" 'uÍe
of the Dneumahc crrcuit' - -" i r rr ' n5. uoeÀpccred pre.ture châoge âcross rbe \âlve occtü\ $hen lor
some reâ'on rclaled Io lhe ' ) . r"8 whcíe úc \al \ c rs plâced rbe presuÌe Úl leÌmce
across the valve is altered. lt causes changes jn úe flow and in the stem posltton
iì'ilìal i" .i-"r""a U a change in úi values of the upstreaÌn pressure or the
vaÌües ofthe downstÌeam pÌessure'Faulr fl6, opened bwass vâlve, occurs when úe vâlve of a blpass circuit'
.rsea to Jtow úe control vaú to be chang€d without stopping the flow' is-opened'
"À". ã"" ì"
".pr"y* .'shandling or to a fauh in this valve This fault will Ìead to
^ "'""1"i n.* it ti" *it ofúe cìicuit úan \íhat would be expected. The fâult is
siiruìaled by an increase in th.- flow lbÌough the valve-

322 VPalàde, CDBocdiâLa andL lah(Eds )
FaL t fl7, Í1ow sensor faultJ occürs Ú1ìen úe sensor Ìesponsible for
**n*-H:* *'t#,s"'i:"xiln:l,iïii "1'1x;Jll::ï::::"ïjt''n" n"ï'""#i1:ì;
u".",iption of the faults and the wâv thev affect úe valve can
be found in (Louro,2003)
10.4.3. Flow Control Valve Benchmark Simulator
ffïfi:ïl,Ji'ffiïix"jiffiiï",1#*ffi ,J:ïHÍilJ::"fJ,"lH:ï#ï:J"" ; ;;;;"ã sv detning. ,I'! "T'Jffi .*ffi"ijJ"*"JU:1,:Ëili''Jï"1ï#ï,iï::i';'":'à'*: jï:l$i ;il; ;;;;;i"ì"ì."pr'i"ï'"'r"* *adaiâfilcs.'" - ìr," simura,oÍ " iípu,s "'" *" *',ï" jïJo'il:'ïï: ì:ffi.,:lÏ1 ,ï::lïï;,ï:"i:ï"il::Ï.ï:ü Ï:r'i*:lh:' lff :J:\ ;i ly;:ïi"ï;l;;*::::'t,L: H. T ËË.rl|$ï1: hilïïx ;kfu HnoutDuts Ìeferring to rhose !alues is ttìât norse
ïï:ui*l .*- ju;.:':1",1,':,,ï :i:,:i[ ïtf i.' ìï'Jli::*]'k**ru** ;rtïï: H"i:Ë'Jü1,üy,ff',1ï:ï ;liJi'JJIi,i.ïH:::-"i:rïl;*ili4"'f"iltrs;:"':$i:;""*n1i61i:ry;"6ill;Ìní"*, tr"::lnï'.:ì ff ìïïiï ï ì:i::ì :i:ì"ii,lll: ;:i"ìï5;purpose of fault diâgnosis design and tesnng'
í0.4.4. Faultlsolation
ro test the einciencv of úe fa[lt.horation (FÌ"ïiiHl"1ïL:ï,*ï,,Ï:ïH
i:ïì;ïÌ:*ïïi:;1,:ï":*il-"ï.ï","t*;ïì,".:H':l"ri;Ïlïìil,ïïlì'iil"ï;S,JFffJÏ:"li rie mLc or' ctrange or rhe pre-u*u'"**"ïïïì"ï; Jïï;'u oÌ rau,ts.isotlt{naïJhJ,li"ïì:"ii,ï,ïHïii:ïJi
Hi*:1iii::J"ï:iiüËïtï:ìkr":üri",.'l*'h"":.:*ï;:ï:1.::",i;" ti'"il'",ï#ïl*ïï[i"'J;""r"ti". "vsr"- ;" "i",iae'"a t" u

Comluiational Intellisence in Fãult Diàgnosjs 323
the result of â fuzzy OR op€râtion (upper level) oD several FNNj ouQuts in úemedjwn level, âs previously desüibed.
In the FI system considered all FNNS are equal, with a iuzificâtion lâyerconsisting of 28 pÌocessing elements aÍanged iD 4 groups, coÍesponding to üefonr Ìates of change of the meâsurement variables, where €ach gÌoup conlâins 7neÌrÌons coÌÌcsponding to the respective tuzzy sets (Fjgures 10.4 ând 10.5). Thenumber of neurons in the hidden layer is deteÌmincd by úe compler.ities of theÌelâtionships between ihe faults and the fault s)anplonrs. DuÌing the desigl stage,following â trial and error procedure, it wâs fouÌÌd úat 7 hidden processingclenents give satisfactory peÌfoÌmance for the fâu1t isolâtion systen underconsideÌâlion. However, firÍher research oould be conducted in order to optimizethe FNN topology by using ANN pruning algoithms. Moícover, since io iest úecuÌÌent FI system, only 8 relevant sjngle abrupt fâults hâve been considered (F2, F7,F10, F11, F13, F17, Fl8 and Flg), the ouQut lâyer of eâch network is up to 8neurons, eâch one coresponding to a fâult. Besides úe preüously menlioned set ofsingle fâults, a1l possible doublo fâult scenarìos correspondiry to an AND operationin úe single fault space have also been consideÍed.
The training ofthe FI systen hâs becn âccomplìshed by nsing data relativeto the nornêl behaviouÌ of the pÍocess znd all eight âbrupt faults, at one specificoperâting point (CV=0.5), considering onÌy one fault iniensiry (fs=0.75), giving atoral of 8 time seÌies containing the fâuÌly informâtion plus I time series containingthe data relative to the noÌÌnâl behâviour of the process. The I rime seÌies are uscdfor taiúing the lorver level netwoÌk. For tÍâiÌÌing the mediuln level networks thedata relative to one of the fâults is added úth the data relative to the otheí fâults inorder to form data relative to doüble faults. Only the time series peÍaining to thesâme opeÌatirÌg point and fâult intcnsiq, âre added, which means that for tÌâiningeach medium level network úcre is â totêl of I operating points, I peúainìng to thefault to which the network is âssociated ând 7 pertaining to multiple fâults- ThemembeÌship tunúions âssocial€d wiú the fruzy sets ìn the f,Ìzzy lâyer ofúe FNNare estimated by âpplying the Àuzy c-lnean clusteÌing âlgorithm 1() the tâi ngdata. The melÌbclship functìons obtained can be seen in FiguÌes 10-4 ând 10.5.
Thc testing set contains hfomation relative to noÌÌnâÌ operêtionconditions ând to â11 eight fâults, with two operating points (CV:0.65 andCV-0.75) and wiú thrce fault ìntensity values (fs=0.25, fs=0.5 ând fs:0.75) for thecase of abrupt fâults, âccording to what has been defined for bcnchmârk puryoses.Tâble 10.3 shows úe results achieved. Frcm thcsc resülts ìt cân be concluded thatfor abflpt fâuhs úe HSFNN pÌovides a good gencÌâÌizarion capabiLity as a faultisolâtion system. This is a very impoÍant aspect âs fâr as úe pedormânce of úefâült isolaúon system is concerned, since onÌy single abrupt fâult qanptoms at oneoperâting condition ând for one fault intensiry âro consideÌed during the trainirÌg
Incipìent faults aÌe a type of fâults where úe nagnitude of the àultintensity does not chaÍìge iÌrstantaneously but ÌatheÌ develops ttuough time. It isdifficult to know the shape ofthe evolüiion siÌÌce it depends on the case study ândthe rype of fault. For the prosent câse siudy, it is assumed that úe fault intensityvaries lineaÌly ftom 0, at ân instânt cal1ed fault starting time, to I, at ân instân1called fault settling iime. After the simulalion has rcached the fault settling time, the

324 V Palade, CD Bocdiala and L Jâin (Eds.)
fâult iÌÌte.ìsiry Ìemâins ât I during thc remúning simulaíon. The testing set forincipient faults is composed of data relative to all fouÍ fâülts shoül1 in Tabìe 10.3,considering tlvo operâtine points (CV{.65 and CV=0.?5). Table 10 4 contâins thetimes used for simulatilrg tbese incipient faults.
E
E
Dsidvc ú Lh! nüsuÊl !e !hÈ h (F)
Figürê 10.4. MenbesLip funclions alplied 1o the ddivatìve of F üd T.
g
E€
r \ / i 'l l l i l l
\ / l ï \ l! l l t,[ 1\i] \
[igüre 10.5. Membership fúnctions ap!1ied to tle derìvative ofx dd P
:l
::l

Table 10.3. FI rcsnÌls lor single abropt and incipÌetrt faulÌs
Computatioú1 lnlelÌìgence in Fâult Diagnosis 125
F2
F6t7
F8
Fl0
r l l
F12Ft3
Ft4F15!r6F17
F18
100
Vahe llug or valve seat
Valve plug or lalve seat erosionIncrede Õfvahe or bushlng ]ìictionExtemal leâkage (leâÌ buhiúg,
Ínternâl leakage (va1ve tiehness)Medlun evàporatìon or critical flow
Tllsted servomolot's piston rodSenoúolor's housing or terú1Ml
Seromolor's diaPhÌlgm
Servomotot's spnng 1àu1t
Electo-pnemalic trusducer 1àultRod dispÌeeúent sensor Ìauri
Posilioner feedback faultPositiole. sxplly Pressu.e dropUncxpecied Presurè across the
l!Ììy or partìY olened bYpass
Eìow.âte sensor 1àuìt
100 100
100
ffi100 100 100vo%,t
100 0%
T3
F5
100 r00 100
a%
0%
100 r00
i00 100
100
100
100
Undetectâble faülts or faults onlv dynamicâUv detectable' hence'
the fàuft isolation system is Èot tdggeÍedFaült isolâtion systeú is not âble to cope wiú such faulqr
PeÍcentâg€ of correct isolãted faullsNot uscd foÌ benchÌÌâÍk PüPoses
Under these incipient faültv scenarios' Table 10 3 shows that unsuccesstul
resutts have been achieveì One ofúe reasons for úe bad performanc€ ofthe fauìt
i""üìJ" '".L-
*a* i"cipient fâultv scenâdos is concemed with úe v€ry slow
""'úiiã' ót,n"
'*n*'* associated wiú such fâtìlts, as can be seen &om râbÌe
iô.ì. iG "rl*g"i
oiserved in the m€âsurement variables are so sÌÌta thâr it is
i.oo.iúr" 'o
a'l'tgll"l ,be fâulr effecL' from ìhc ooise Ihar alfecr' rhe process A'
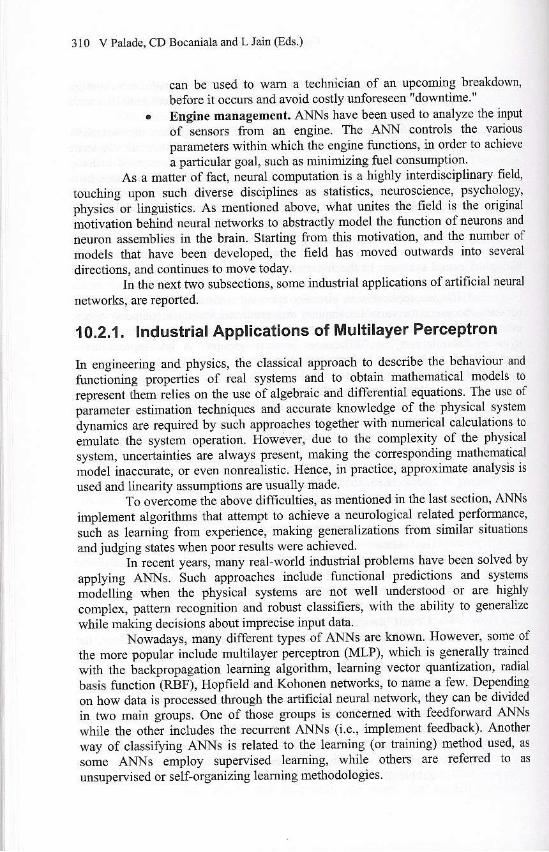
-" . i "rn0r. , p 'gurã, too âDd l0 ' i l lu ' Ì Ìare rhe t i r ar jon wben fatr l r r lq i \
convaere,l as a-n rncipreot fauh lâult lla ha' no efíecl on üe measuíemenl
"à.i"tf* r *a p. f"'.nermoÌe, it is woÍh noting that onlv 15 points are üsed to

326 V Pàlade, CD Bocdiala úd L lâin (Eds.)
evaluate úe derivêtives of the rìeasurement vãiâbles. which are the in ts of úelruh rsolar ion sysÌem. Arìoúer rea.on údl mckes | | \ery di t ì ìcul t lo isolale theiÌÌcipient faults simülated wilh a very low fêult develoFnent speed ìs concemedwith the pneumatic seffo-motor âctuâtcd industrial control valve üsed. which has aposition controller that compensates the influenoe of some faults in rhe prooess. Thecontroller action could mask the fault effect in the process and, hence. rhe incipienÌtàuÌt s)inptoms will be substantially different lìom the abrupt fauli symproms us€dto traiÌÌ the F|trNs.
Tabl€ I 0.4. Timcs thar chancterize inciDiert faults
Simulâdon Fâult fault SimulaíorPâult StâÍing StaÍina Settling Ending
Time (s) Tine(s) Time(s) Time ís)F20FÌI OFt3 0Fl7 0
50 84050 Ì0000050 84050 10000050 6s0 t20a
The double simültâneous abrupt faults used to iest the FDI system havebeen achievcd through an AND operâtion in úe single fauh spâce. FoÌ all doublesimüÌtaneous âbÌupt faults corsidered úe fauÌt detection sysiem wâs âble to detect ahpotheticâÌ fault and, úerefore, ihe fâult isoÌation system has been idggered. Theresults âchjeved by úe FI systen uÍder double simültaneous âbÌupt faultsconsidering only the situations where the abrupt faults me simulared wiú bigintensity ând the two opeÌatirÌg points mentioned above are sho$.! ìn Tâble 10.5.
50 3650 5000
Ìôetsl
Figüre 10.6. Effect of incipienl fâüt F l9 otr úe rod posirion.
E.-:0,5,&3
Coúputalionàl InteÌÌigence in FâultDiagmsis 327
rúE Isl
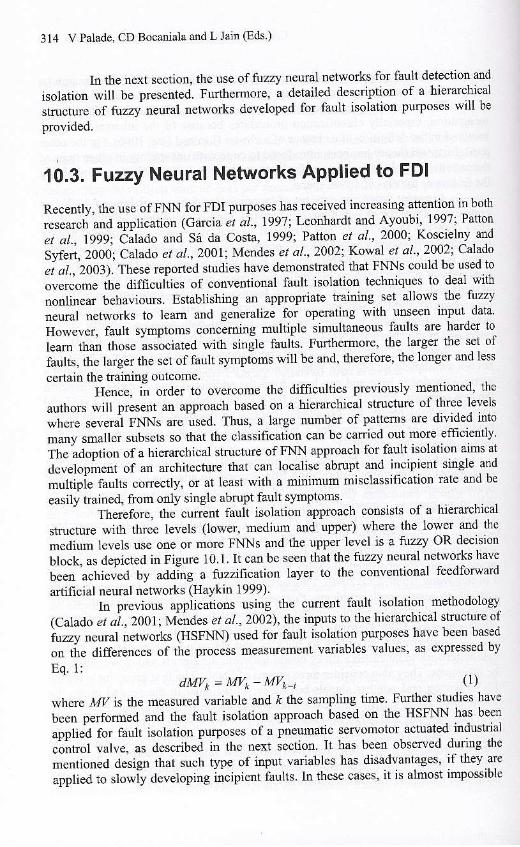
Figür€ 10.7. Eflect ofincipi€ní fâult F19 on the flow
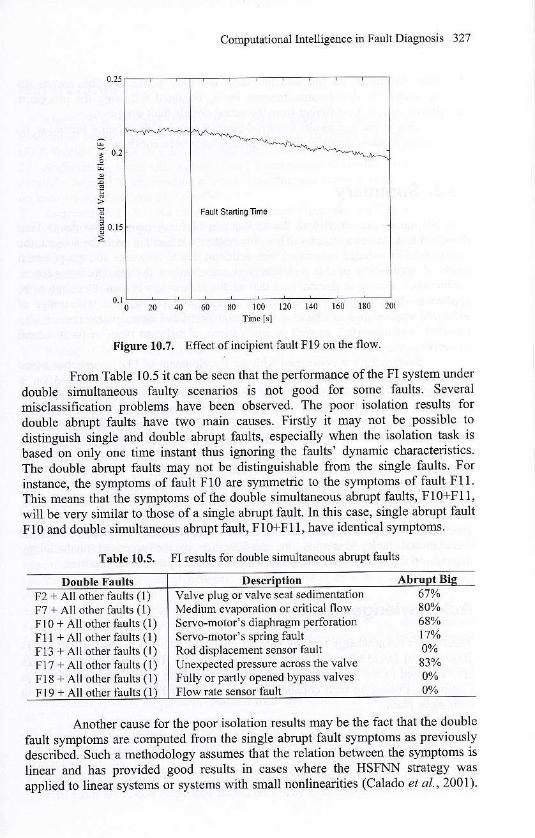
From Table 10.5 it can be seen thât úe peÌformance ofúe FI system undeÌdouble simultâneous fâulty scenarios is not good for some fâults. SeveraÌmisclassificatioD probleÌÌrs have been observed. The poor isoÌâtion results fordoublc âbrìrpl fauÌts have two lnain causes. FjÍsdy it may noi be possible lodistinguish single and double abÌupt faults, especìâIy when tbe isolâtion task isbased on only one time instant thus igrÌoring the fâults' dvnamic characterislicsThe double abrupt faults may Dot be distinguishable Èom the single faults. Forinstânce, the symptonrs of fault F10 ffe symmetric to the symptoms of fault FllThis m€ans tbat úe s],mptoms of the double sìmultaneous âbrupt faults, F10+Fll,witl b€ very sjmìlar to those ofâ single abrupl fault. ln this câse, single abrupt 1ãuÌtFlO and double simultaneous âbÍupt fault, F10+F11, have idenncaÌ svmptoms
F2 + All orher faults (l)F7 + All olher faults (1)Fl 0 + All othe! fauhs (1)F11 + All othei fâults (1)Fl3 + Au oüer faúts (l)Fl7 + AÌl oúer fitults (1)F18 + All other fauts (1)
Valve plog or valve seà1 sedimentationMedium evaporâlion or critical flowSeNo-notols diaúrâgm perforationSeflo motor's spdng fanÌtRod displâcemenr seNor fauìtUnexpected presulE âcross the valvêIxUy or !âíly opened bypals valves
67%80%68%
o%83%
0%
Another cause foÍ the poor isolaiion results mây be úe fact thal the doubÌefault symptoms are computed ftom the siÌÌgle abÍupt fâr t symptoms as previouslydescribed. Such a methodology âssumes úat tbe Ìelaúon between rhe slmptoms lslineaÍ and has provìded good results in cases where the HSFNN slratery wâsapplìed to lineaÌ systems or systems 1ïith small üonlinea.ities (Câlâdo et dl, 2001).
Table 10.5. FI resúts lor double simultoeoüs abfllt faulls

328 V Palade, cD Bocdiala and L lain (Eds )
ï;ffiïi "'.ï ïl"i"iï J'"ï:i*ï,'J'à:,Ï i,$ LÏi"ff i" j Ï,'"ïi:ì*:;;-;,túHiJX.;."ï""lti:"".,",'",J r,ï$ï#1,#Jij,*,ï,1ïïijiË,";*"*' *a*Ur"
"i-ììo"*"" i'"ipient faultv scenarios hâve been considered
10.5. Summary
rhis châpter is concemôd with úe *P'1c"'ï:.:i*lïilirï'*,i"ilJ'"f.J:"i"dideectro; ând isolahon sysierís Thus lor rea'
r'"',P1 *H:ì:**,ïï'::fi ":"s', 1l ï :*:ï' i ""il"h tri"i'.ï'.":ï::lm.; I *:r ;l:rl11:+:ii'*ffiÏq,.'ï*#,r*n s:::f"t*::f'*n ï"ï'ï11ìi"'ilï"ïjIi;" ;r differenr rlpes or Âuzv neuÌã1
""'*o'kï""tion r0.3 i, "oncem€d iú ú€ deveropi:r'r,*,'?rt"i:trïl:i i,ï"ion frÌzzv neurâl nef,üoÌks ând â specificil*jï*'."iìï".*'. .r.eleíal iuTz) ueuml Deruorkr is de\cnbed in derail rhe
:ÌÍ:* :"ii*ut ï.ï'ff "f;ilïll ïï"uïnxzu:ïm:*ira"'Á"r *.,i"1
"^L;. DiffeÌent kod5 of n
n:Ll*Il ":: "i:Í,t,,i: ;*::. ";"ru'$;m ï'ì'il:'ï:ï f;;;tt"tffJi::ltt $ï::ï'' j:$ïi ; iï:Ì ; l[ï',i"lJil'l',ì*, "*0, .,'.*ï"rìx};ïil';',ï,:,''l"l+**1"ïii:ï::*ï$i"iï*'Hì'$:},:i:ï,ï.'ilx,ï,:i:ïilï"Jli.liili;;";''. s, çÌem Don,'Dean,ies
Acknowledgements
fhe dulhors âclnowledge luíding suppoÍ urÌdeÌ rhc t( l-P5 conÍÍacr rHPRN-CT-
io"òoltüiiõ '-ii^t"oËs
HuÌ; P;reDI ial"ResesÍch rrain'ns \er\ork rbatrÌs
âre exDrcs\ed lo lhe mânagcmenl ano 'ra'r ur úe Iublin 'ugâr lactory' Cuì'roMiâ
i"uri"ie. p.r""a r- *"ir colÌaboration and provision of manpower ând âccess rc
iheir sugar Plant.

Compulational Inlelligence in Fa!Ìt Dìagnosis 329
References
l. Aleuíndigue IE and Uhrig RE (1994) Automatic fault recogltitÌon inmechanìcâÌ conpon€nts using coupled aÌtificìâl neuÍâl networks. In: Proceedings ofIEEE WoÌld Congress on Computational Intelligence, June July, pp. 3312-33172. Andersen K, Cook GE. KâÌsai G and Ramaswamy K (1990) Arrificiâlnewa1networks applied to arc welding process modeling and coníoÌ. IEEE Tnnsactionson Industry Applications 26:824 8303. And€rson JA (1995) An Inlroduction to Neural Networks- MIT Prcss4. Alport M, Mllonso A, Najcker J and Plumb S (2002) Applicâtion of NeuralNetworks to Solve ÌndrÌstrial PÌoblens: Bridgìng ìn Practice. Physica SffiptaT97:118-1215. Bezdek JC (1981) Pâfiem Recognitìon Ìvith Füzzy objective FunctionÀlgoritbrÌÌs. Plenum PÌess, New York6. Bhat NV. MinderÍnan PA, McAvoy T ând wang NS (1990) ModcÌingchemical process syslems üa neüal computâtion. IEEE Control Systems Magâzine10:24 307. Bishop CM (1995) Neüal Neívorks for Pâttem Recognition OxfoÍdUniversiry Press.L Buckley JJ ând Hâyâshi Y (Ì994a) Fuzzy Neurâl Networks ln: Yaser RR ândZadeh LA (eds) Fuzzy Sets, Neuraì Netwo*s, and Soft Computing. Van NosaândReinhold. New York, pp.233-2,199. Buckley I and Hayashi Y (1994b) Can tuzzy neuÍâl nels appÍoximatecontinuous tunctions, Fuzzy Sets ând Systems 6l(1):43-5Ì10. Buhl M ând Lorenz RD (1991) Dosign and inplementation ofncuÌâÌ networksfor digitâl curÌent regulation of jnveÌter drives. In: Proceedings of CotI Rec. IEEE-IAS Annüâl Meeting, pp.415 42311. Burton B and Harley RG (1998) Reducing the compüiâtional denìands ofcontinually online{rained âíificiâl neuÌal networks foÍ system identification andcontrol offâst processes. IEEE Trans. on ÌndusrÌy AppÌicâtions 34:589 59612. Bürton B, KarÌran F, Hâ ey RG, Habetler TC, Brooke M and Poddar R (1995)Ideniification ard contÍol of hduction motor stâtor coÌÌents using fast onìinerândom lrâinhg of â neüal network. In: Prooeedjngs of Cont Rec. IEEEJASÂÌìnual MeetirÌg, pp. 1 78 l-178713. Boser z (199s) Experience in developing models of ìndustrial plants by Ìa€escale aúificial neürâl networks. In: Proceedings of úe Second New ZeâÌandIntemational Two-Stream Conl AÍificial NeuÌâ1 Networks and ExpeÍ Systems,pp.32ç32914. Calado JMF ând Sâ da Costa JMG (1999) An ExpeÍ Systea CoupÌed with aHierarchj€al Fuzzy Neüial Netvork AppÌoâch for Multiple Fault Diâgnosis.lntemational Joumal of Applied Mathemâtics ând Compuler Sciences 9(3): 667-68715. Calâdo JMF. Korbicz J, Pâtân K, Paiton RI and Sa dâ Costa JMG (2001) Softcomputing âpFoaches to fâult diâgnosis for dynamic systelns. European Joumal ofConhol 7(2-3): 169-20816. Câlado JìíF, CaÌÌeira FPNI, Mendes MJGC, Sa dâ Costa JMG and Bartys M(2003b) Fault Detection Approâ.h Based on Fuzzy Quâtitâlìve R€âsoning Applied

330 V Palade. CD Bocdiala dd L Jaú (Eds.ì
to the DAìtrADICS Benchmark ProbleÌÌì. In: Proceedings of the 5'" IFACSlmposium on Fault Detection, Supervision and Safety of TeclÌrical Plocesses,SAFEPROCESS'20o3, washington, D. C., USA, June 9-11, pp. 1179-118417. Carelli R, Camacho EF and Patiío D (1995) A neural network based f€edforward adaptive controller for robots. IEEE Tra.rìs. on Systems, Mar andCybemetics 25: 1281 128818. Cichowlas M, Sobczuk D, KazÌnieÌkowski MP and MaÌino\ryski M (2000)Novel aÌ1ificiâÌ neural netrvork based cuÌrent controÌÌeÌ for PWM rectifiers. In:Proceedings ofthe gth IDt. Cont or Power EÌectronics and Motion Control pp. 4l
19. ChaÌÌâborry S, PâÌ K ând Pâl NR (2002) A neuÌo fuzzy frameÌr'ork íorinference. Nêurâl NetwoÌks 15247 -26120. Chen J (199s) Robust Residuâl Generâtion for Model-Based Fault Diasnosisof Dlnâmic Systems. PlìD Thesis, Deparhì'Ìent of Electronics, University of York,UK21. Chen J and Pâtton RJ (1999) Robust Model Based Fâult Diâgnosis forDynâmic Systems. Kluwer Acâdemic PublisheÌs. New York22. Chen YC ând Teng CC (199s) A model refeÌence control struchfe using âtuzzy neual tretivork. Fuzzy Sets and Sysiens 73:291-31223. Cherìar RP, Smiú LN and Midha PS (2000.) A neüal network appÌoach forseÌectìon of powder metailurgy nÌaterials and process paÌaneten. AnificialIntelÌigence EngineeriDg 14139 4424. Chow MY, Mangun PM and Yee SO (1991) A neural netwoÌk approach 10real-time condition monitoring of iDduction motols. IËEE Tralìs. on IndustriâlElecfonics 38:448 45325. Chow Ìt/tY, Sharpe RN and HuÌÌg JC (1993) On the application and desigtr ofartificiâl neuÌâl netwo*s foÌ motor fâült deteciion-Pâí IL IEEE Tmns. o!Industrial Electronics 40: 189-19626. Cook GE, Bâmett RJ, AndeÌsen K ând Shâüss AM (1995) Weld nodeÌling ândcontÍol usiúg artificiâl neuml nehvoÌk. IEEE TÌâns- on IndustÌy ApplicâÍons31:1484-149127. EdwâÌds PJ, MürÌây ÀF, Papâdopoulos G, WâÌÌâce ÀR, BârÌÌâÌd J âúd Smith G(1999) The âpplication of neuÌal networks io the pâpeÌmâking industry. IEEETrans. on Neural Networks 10. 1456 146428. Er À4J and Liew KC (1997) Control of adept one SCARA robot using neuÌâlnetworks. IEEE Trans. on Industrial Ëlectronics 44r 762 76829. Faras WA, Quhtana VH and Tores GL (1998) A genetic-based neulo-Âuzyapproach for modelüng and cotrtrol of ônamical systems. IEEE Tlans. on NeurâlNetworks 9: 756-76730. Feuring T, Buckley J and Hayashi Y (1999) fuzzy neüal nets can solve theoveÌfttine pÌoblem. Irì: Proceedings of the IDl. Joint Conference on NeuralNetwo*s 4: 419?-420131. Filippetti F, Franceschini G ând Tâssonj C (1995) NeuÌâÌ nehHorks aided or-line diagnostics of indücrion motoÌ rotoÌ fâults. IEEE TÌâns. on IndüstyADDÌÌcations 3 1 i892 399

Coúputaúonal ÌnteÌÌigcnce in laut D;âgnosis 331
32. FilippettÌ F, FÌaDceschini G, Tassoni C and Vas P (2000) Recenr devclopmentsof inductjon motor dÍives fault úagnosis using AI teohniques. IEEE Tlans' onIndustdal Elcctronics 47: 994-10043l- FisheÌ Contols. Conaol Valve Engineering USA34. Fogel DB (1990) Selecting ân optimal ncüral neívork industrial eÌecrronicssociety. In: Proceedings ofIEEE IECON'90,vo1.2, pp l211-121435. Iukudâ T and Shibata T (1992) ï]ìeorv and applicâtions ofnetúal networks for
industriâl control systems. IEEE Tlans on Industial Applicarions 39: 472 48936. GâIcia FJ, Izquierdo V, Miguel L and Pelan J (1997) Fuzzv ldentification of
Systerns ând its Atpücâiions to Fault Diaglosis Svstems ln: Procecdings ofthe 3rd
IÉeC Synposiuú on Fault Deiection. SupeÌYision ând Safetv for TecbnicâlProcesses - SAFEPROCESS'97, Hu[, UK, vol 2, August 26-28, pp 705-71237. Gomi AA (1997) The âpplication of neural netwo*s in th€ modeling ofpÌâterolÌing plocesses. JOM-e 49(4) (electronic documenr):g. Uashimoto n, Kubota T, Sato M and Harashima F (1992) Visual control of
Íobotic manipulator bâsed on neural networks IEEE Trâns on Industrial
Electronics 39r490 49639. Hayashi Y, Buckley JJ and Czogâlâ E (1993) Fúzv Neürâl Networks with
Fuzzy Signals ând Weights. Intemationâl Joumal oflntelligent SystelÌìs 8: 527-537,40. úayÉÌ S (i999) Neolal Networks A Comprehensive Foundation (2'"
Edition). Prenrice-Hall. New Jersey41. HoÌikawa S, Furuhâshi T and Uchikawa Y (1992) OrÌ Âuzv modellins usjngtuzzy neÌÌtâl netwo*s with the bâck-propagation algorithm. IEEE Trâns on NeurâìNetworks 3:801-80642. Huang CY, Chen TC ând Huâns CL (1999) Robust contol of jndüction motor
úth a n;râl-network load torque €siimator ând a neuÌâI-network identification'IEEE Trans. on lndustriâ1 Electronics 46:990 99843. Ikonomopoulos À. Ukig RE and Tsoukâlâs LH (1992) Use ofneuÉÌ neti!'oÌksto monitor po\veí plant components. In: Proceedings of Amerìcan Power
Conference, vol. 54-IÌ, ApriÌ, pp. 1132 113744. Ishibuchi H. Morioka K âÌÌd Turkscn IB (1995) Leâming bv tuzzified neuÌ41
netrvoÍks. lnteÌnationêl Joumal of Approxjmate Reasoning 13(3) 1327-3 5 E45. Ishìbüchi H and Nii M (2001) Nurnedcal analvsis ofúe leâmins of tuzzifiedneuÌal networks from if-úen rules Fuzzy Sets and Svslems 120(2):281-30746. Jâng l-SR (1993) ANFIS: Adaptìve-nefivork-bâs€d tuzzv infeÍelÌce svsremIEEE Trâns. on Systems, Mân and CybeÌnetics 23:665-68447. Jung S and Hsia TC (1998) NeuÌâl n€twork Ìmpedance force controÌ of robot
mânipulÂtor. IEEE Tlans. on IndustriâÌ Electronics 45:451 '16148. Kavakljoglu K and Upâdhyaya BR (1994) Monitoring fcedwater flow mte and
conponelÌt th;mal perfoÌnance ofpressurized wâteÌ reactors by means of ârtificial
neurâl networks- NucleaÌ Teclnology 107:112 12349. Ke[eÌ JM ând Hunt D (1985) Incorporating lüzzv Memberchip FunctÌons intothe PerceptÍon Algoriúm. IEEE Trans on Pattem AÌÌâlvsis and MachjncInrelügencc 7: 693-69950. Khalid M and Omatu S (1992) A neurdl network oonholler for â temperaturecontlol system. lÉEE Control Systems Magazine 12:58 64

332 V PaÌade- CD Bocaniâlâ ând L Jãio (Eds.l
5l. Khâlid M, Omatu S ard Yusof R (1995) Tenperature regulâtion with nexÌalnetworks and altemative control schemes. IEEE Tmns. on NeuÌâl Networks ó:57258252. Khotanzad A, EÌÌãsâl H and Lu TL (2000) Conbinâtion of fftificial neural-network forecaúers for pÌediction of natural gas consumpiion. lEËE Trans onNeural Networks 1 I :464-473s3. Kiguchi K ând Ful(uda T (1997) lntelligent positionforce controÌler forindustrial robot maniputâton - appücation of fiEzy ncuÌâl networks. IBEE TÌanson Industdal Electronics 44:753-76154. KIir JC and Folger AT (Ì988) Fuzzy Sets, UncertâiÌÌty and IDfomation.Prentice-Hall, New York55. Koj J (1998) The Fault Sources of Pneümâtic Servo-MotoFcontroì VâlveAssembly. In: Proceediúgs of the III Polish National conference on Diâgnosis ofIndustriâl Prccesses, Jurata, Poland, pp.415-419 (in PoLish)56. Kosciolny JM and Syfert M (2000) Applicârion of Fuzzy NeuÌãl Networks fòlFault IsoÌâtion - Example for PoweÌ Boìler Sysiem. ln: Proceedings of 6'" IEEEIntemâtional Conference on Meúods ând Models in Automation and Roborics -MMAR2000, Miedzyzdroje, Polând, voÌ. 2, pp. 801-80657. Kowâl M, KoÌbicz J, MeÍdes MJGC and Calado JMF (2002) FauÌt Det€ctionUsing Neüro-Fuzzy Networks. SysteÌns Science JoÌrmal 28(1):45-5758. Lampircn J, SmoÌandcÌ S ând KorhonerÌ M (1998) Wood surfâce inspeciiotrsystem based on geüeric risìrâl features. ln: Fogelman-Soulìé F ând Gallinari P(eds) Industrial Applicatìons ofNeürâl Networks. WorÌd Scjentific, pp. 35-4259. Lee SC and Lee ET (197s) Fuzzy neuÌalnetworks. Mâthemâtical Biosciences23.151-11'/60. LeoDlÌardt S and Ayoobi M (1997) Meúods of fault diagnosis. ControlEngineeing Prâctice 5(5):683-69261. Lewicki P, Hill T and Czyzewska M (1992) Nonconscious AcquisitioD ofInforÌÌÌation. American Psychologist 47(6):796 80162. Lin C-T and Lee CSG (1996) Neural Fuzzy Sysiems: A Neuro-FuzzyS'ìrergism to Intelligent Systems. Prcntice-Hall, Uppcr Saddle River NJ63. Lin FJ. Hwâns WJ and wai RJ (1999) A supeívisory tuzzy neuÌ41 DeívorkcontroÌ system for tackiÌÌg periodic inputs. IEEE Trâns. on Fuzzy Systems 7:41 5264. Lin FJ, Wai RJ and Hong CM (2001) Hybrid SupeÌvisory Control UsingRecürrent Füzzy Neüal Network foÌ Tracking Periodic lnputs. IEEE Trâns. onNeurâl Neiworks 12(l):68-9065. Liu P (2000) On the appÌoximation reâlization of tuzzy closure mâpping bymultilâyer regulâÍ fuzzy neural DetwoÌk. Multiple Valued Losic 5(2): 463-,18066- Liu P ând wang H (1999) Resoarch on approriinÌation capability of reguÌâÌtuzzy neuÉl network to continuous flzzy tunction. Science in Chinâ, SeÌies E41(2):143-15167. Liu Y, Upadhyâyâ BR and Naghedoreizi M (1993) Chen1omeúc dâta analysisusing artificial neuml netwolks. Applied Spectoscopy. 4'7(l):121368. Lopez-Toribjo C, Pâtton R and Uppal F (1999) AÌtificial IntelLigenceApproaches to Fâult Diâgnosis for Dlnamic Systems. Intemâtionâl Joumal ofApplied Mathematics âÍd CoÌnpuier Science 9(3):471-5 1 8

Compülational InteÌÌigetce io Faulr Diaerosis 333
69. Louro R (2003) Fault Diagnosis of ân IndüstÌial Actuator Valve MSc
Olssertation, Instlturo Superior Tdrico, TecbnìcêÌ UniveÌsity ofLisbon, Novcmber
iO. l,a*o,'-at n (tsO:j An Algoriilìm for L€âst-SquâÌes Esúmation of Nonlinearparameters. Slqlt rournaÌ oÈÌ Applied Maúematics 1ì:164-168
7t. Maíúeau 5, Caur l . Bunúdm KJ dnd Hââs OCL 1200)) \eurr l networr
conüoi âDoroach foran rndustr iâl l ìmacc ln: P'oceedjngs ofúe l l lnrcmatronal
Conferenci on Systens ScieDcc, Las Vegâs' USÀ, pp 227-233
72. McCu ochwS ând Pitts W (1943) A Logical Calculus ofúe ldeas Immanent
in Nervous Activity. BulletirÌ ofMathenatìcs and Biophysics 5:115 Ì33
73. Mcndes MJGtl, Kowal M, Calado JMF, Korbicz J and Sâ da Costa JMG
(2002) faul l lsolar ion Approâch Using r Ptof ibu' Ner$ork: â ca'e ' rud) l í '
LONTROLO 2002, 5rh Portugue'e (onleren{c on Auromaric ( onÚoì pp 52<-
530i+. Nuia" sn, zâfiriou E and McAvov TJ (1990) use of neuÌal nefivoÌks foÌ
sensor failure detection in a contol svstcm IEEE ContÍol Svstems Magazile
10ì49 5575. ozaki T, Suzukì T, Furuhâshi T, OL:umâ S and Uchikawâ Y (1991) Trajcctorv
control of óotic Ììlanipulators using neural networks IEEE Tlans on lndüstriaÌ
Elecironics 38iO. pott"..o" DW (1996) AÍtificial NeuÌâl Netrío*s: Theory and ApplicêÌiors'
PÌentice-HaÌì77. Patton RJ, Lopez Toribio CJ and Uppal FJ (1999) AÍificial InteÌÌigence
ADproâches to Tâúì Diagnosis lnterDatioDal Joümal of Applied Mathenâtics and
CõmDutcr Sciences 9(3 ):'171-5 I 8Zs. Ëarcn nJ. Franh PM ard ClâÌk RN (2000) lssues of Fault Diagnosis for
D\ÍÌamic Systems. SpringeÍ. London-õ. Payeur P. I e-H.ry H and Uos'el in c\4 I I qq5 | I rdjccro0 p'cdicr ion for mo\ ing
obiects- usins artificial neual netwo*s IEEE Trans on IndüstriaÌ EÌectronlcs
4): t41 ì58 -
80. Rahman MH, Fzzlur R, Devanâthân R ând Kuânvi Z (2000) Ncural network
appÍoâch foÍ linearizing contoi of nonlinear process plants IEEE TÌans on
lndusldâl Elcctronics 47:470 47781. RosenbÌatt F (1958) The perceptron: A Fobabilistic model loÍ ìnfoÌmâtion
srorâee rDd oraani/rrron i Ì ' úe brain Pç)chologrcal Rc\ ieq 05 JU6 408
s: Ãubaai eíd roraru R (20001oíì l i r ìe rdenri f iczrron and conrrol old DC molof
using leaming adâptation ofneurâÌ netwoÍks lÉEE TÉns on lndÌrslry AppÌicarions
36:935 94283. Rumelhart DE. WidÌow B ând LehÌ MA (1994) The basic ideas in neural
networks. CoÍnnünicatìons ofthe ACM 37(3):87 9284. Rutkowska D ând Hayashi Y (1999) NeuÍo-Fuzzy Svstems AppÌoâches'
Joumal of Advanced Computationâl Intelligence 3(3):177-l 8s85. Sard) S. lbrabim I aío Yasuü Y I lqal) Aì dppl i \ 'âhon of vrçion-) ' rem lor,
the idenri f icar ion aod Jefecr dcrecúon ôn wo\en ldbr ic. b) u. ing anif ic idl oeurâl
nel.lvolks. Ìn: Proceedings of Inr. Joint Conference on Neural Nêtworks' pp 2141
214486. Sorsâ T, Koivo HN and Koivisto H (1991) Neural net'íorks in process fâtìÌi
diagnosis. IEEE Tra.Ììs on Systems, Mân aúd Cybemetics 21:815-825

ì14 \ Prlade, CD Bocdnrâlâ dd L Join íEdr ì
87. Sun F, Sun Z ând Woo PY (2001) Neurâl nettrork-based adaptive controÌÌer
design of;obotic manipulâtors wiú an observer' IEEE Trans on Neüral Networks
12.5Á788. SuÌÌdâreshân MK ând Askew C 0997) Neural network-assisted vffiable
structure control scheme for contÌol of a flexible manipulator ânn Automalca
33(9):1699 1710AS. iâkaei H (1990) Fusion lechlology of füzzv theoÌy and neÌrlal networks -
SuÌvev ;d tutuÍe directions ln: Proceedings oflnteÍnational Confer ce on Fuzv
Losic and NeuÌ41 NetwoÍks (IZUKA'9O), lizúa Japan, Julv 20-24, pp 13-26
90: Tsoukâlas L ard Reyes-Jimenez J (1990) Hvbrid expert svstem-neuÌaÌ netwoÌk
meúodoloev for nuc lear p lâít mon rroring and d iagno'ncs l n : P roceed ings oi SPIL
eppl icanois ofanif ic ial lnÌel l igeoce \ l Í l \o l l2ql {pr i l l9q0 pp ì024 1010
ei.'ljbrig nr (1994) Application of âÍtificial neurat netwo*s in indüstnaÌ
LecnnotoÃ. u: Proceedineiì l rbe l ì -ht Inr ' Coot lndustr ial ìecbnolog) pp7ì-77
92. \ em; AI and eollcarpou MM rlqq7, Neural-neÌqork-based robusr fduìL
diâgnosis in robotic systems. IEEE Trans on Neural Networks 8:1410-1420
93. Venâyâgamoorthy GK and Hãlev RG 0999) Expedm€ntal studies with a
continually online-trained aÍaificìal neuraÌ neiwork conlroÌler for a tuÍbo geneÌâtor'
In: PÌoceedings of tbe Intemational Joint CoÌlfeÌence on Neural Networks' vol 3'
washnaton. DC, lulv, pp. 2158-2t6394. h;aü ft\4 (ìqo2' lntÌoducnon lo Aftficiaì \euraì S)slems ue'r Pubtishing
CompanySS. Wâng LX (1997) A Course in Fuzzv Svstems and Control Prentice-Hall'
Enelewood Cliffs. NJ96:wishart M ând HâÍlev RG (1995) Ideütification ând control of induclion
mâchines using aúificial neüÌâl netrr'orks. IEEE Trans- on Industry Applications
3r:612 419
Copyright © 2022 FDOKUMEN




















