A technique for fault diagnosis of defects in scan chains
10
268 0-7803-7169-0/01 $10.00 © 2001 IEEE Paper 10.2 ITC INTERNATIONAL TEST CONFERENCE A Technique for Fault Diagnosis of Defects in Scan Chains Ruifeng Guo RA1-329, Intel Corp. Hillsboro, OR 97124 [email protected] Srikanth Venkataraman RA1-329, Intel Corp. Hillsboro, OR 97124 [email protected] Abstract In this paper, we present a scan chain fault diagnosis procedure. The diagnosis for a single scan chain fault is performed in three steps. The first step uses special chain test patterns to determine both the faulty chain and the fault type in the faulty chain. The second step uses a novel procedure to generate special test patterns to identify the suspect scan cell within a range of scan cells. Unlike previously proposed methods that restrict the location of the faulty scan cell only from the scan chain output side, our method restricts the location of the faulty scan cell from both the scan chain output side and the scan chain input side. Hence the number of suspect scan cells is reduced significantly in this step. The final step further improves the diagnostic resolution by ranking the suspect scan cells inside this range. The proposed technique handles both stuck-at and timing failures (transition faults and hold time faults). The extension of the procedure to diagnose multiple faults is discussed. The experimental results show the effectiveness of the proposed method. 1. Introduction Logic fault diagnosis or fault isolation is the process of analyzing failure logic portions of an integrated circuit to isolate the cause of failure to enable design or fabrication process modification to avoid similar failures. Scan design has been used widely as a design for testability methodology to improve the testability and facilitate the diagnosis of VLSI circuits. In a typical scan design, the area occupied by the logic associated with the scan chains (including the scan cells) ranges from 10%-30% of the total area of the circuit. As a consequence, about 10%-30% of defects that impact logic cause the scan chain to fail. A functional scan chain is critical to the testing and diagnosis of other parts of the circuit, hence it is necessary to find the fault location in a faulty scan chain and finally find the root cause of the failure. Scan chain fault diagnosis is the process of identifying the defective scan cell in a scan chain. Several methods have been proposed to diagnose scan chain failures. They can be classified into two categories. In the first category, hardware modification beyond the basic scan design is necessary through special scan cell design or additional circuitry. These special designs are then used to facilitate the scan chain diagnosis process. Schafer proposed a new shift register design to connect the output of each scan cell to another scan cell such that its value can be observed by the other scan chain in diagnosis mode [1]. Edirisooriya uses a global diagnosis signal and XOR gates between the adjacent scan cells to improve the stuck-at fault diagnosis along the scan chain [2]. A set/reset circuitry is proposed by Nayaranan to enhance the stuck-at fault diagnosibility of the scan chain [3]. The techniques of flipping scan flip-flops and setting/resetting scan flip-flops are used by Wu to identify the defective scan cell [4]. The techniques in this category introduce area overhead and performance penalty, which may not be acceptable. The other category of scan chain fault diagnosis techniques does not need any modification in addition to the basic scan design. Sequential ATPG techniques or special algorithms are designed to isolate the defective scan cell. Kundu proposed the use of sequential ATPG techniques to set the scan cells to specific values and the diagnosis information is collected during the unload of the scan cells [5]. Because of the complexity of the sequential ATPG techniques, this method is very time- consuming and may be infeasible. Instead of using ATPG techniques, Cheney proposed to use random test pattern simulation [6]. This method is very time efficient while the resolution largely depends on the randomly generated test patterns. Fault simulation and matching
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of A technique for fault diagnosis of defects in scan chains

268 0-7803-7169-0/01 $10.00 © 2001 IEEE
Paper 10.2 ITC INTERNATIONAL TEST CONFERENCE
A Technique for Fault Diagnosis of Defects in Scan Chains
Ruifeng Guo
RA1-329, Intel Corp.
Hillsboro, OR 97124
Srikanth Venkataraman
RA1-329, Intel Corp.
Hillsboro, OR 97124
Abstract
In this paper, we present a scan chain fault
diagnosis procedure. The diagnosis for a single
scan chain fault is performed in three steps. The
first step uses special chain test patterns to
determine both the faulty chain and the fault type in
the faulty chain. The second step uses a novel
procedure to generate special test patterns to
identify the suspect scan cell within a range of scan
cells. Unlike previously proposed methods that
restrict the location of the faulty scan cell only from
the scan chain output side, our method restricts the
location of the faulty scan cell from both the scan
chain output side and the scan chain input side.
Hence the number of suspect scan cells is reduced
significantly in this step. The final step further
improves the diagnostic resolution by ranking the
suspect scan cells inside this range. The proposed
technique handles both stuck-at and timing failures
(transition faults and hold time faults). The
extension of the procedure to diagnose multiple
faults is discussed. The experimental results show
the effectiveness of the proposed method.
1. Introduction
Logic fault diagnosis or fault isolation is the process
of analyzing failure logic portions of an integrated circuit
to isolate the cause of failure to enable design or
fabrication process modification to avoid similar
failures. Scan design has been used widely as a design
for testability methodology to improve the testability and
facilitate the diagnosis of VLSI circuits. In a typical scan
design, the area occupied by the logic associated with
the scan chains (including the scan cells) ranges from
10%-30% of the total area of the circuit. As a
consequence, about 10%-30% of defects that impact
logic cause the scan chain to fail. A functional scan chain
is critical to the testing and diagnosis of other parts of the
circuit, hence it is necessary to find the fault location in a
faulty scan chain and finally find the root cause of the
failure.
Scan chain fault diagnosis is the process of identifying
the defective scan cell in a scan chain. Several methods
have been proposed to diagnose scan chain failures.
They can be classified into two categories. In the first
category, hardware modification beyond the basic scan
design is necessary through special scan cell design or
additional circuitry. These special designs are then used
to facilitate the scan chain diagnosis process. Schafer
proposed a new shift register design to connect the
output of each scan cell to another scan cell such that its
value can be observed by the other scan chain in
diagnosis mode [1]. Edirisooriya uses a global diagnosis
signal and XOR gates between the adjacent scan cells to
improve the stuck-at fault diagnosis along the scan chain
[2]. A set/reset circuitry is proposed by Nayaranan to
enhance the stuck-at fault diagnosibility of the scan
chain [3]. The techniques of flipping scan flip-flops and
setting/resetting scan flip-flops are used by Wu to
identify the defective scan cell [4]. The techniques in this
category introduce area overhead and performance
penalty, which may not be acceptable.
The other category of scan chain fault diagnosis
techniques does not need any modification in addition to
the basic scan design. Sequential ATPG techniques or
special algorithms are designed to isolate the defective
scan cell. Kundu proposed the use of sequential ATPG
techniques to set the scan cells to specific values and the
diagnosis information is collected during the unload of
the scan cells [5]. Because of the complexity of the
sequential ATPG techniques, this method is very time-
consuming and may be infeasible. Instead of using
ATPG techniques, Cheney proposed to use random test
pattern simulation [6]. This method is very time efficient
while the resolution largely depends on the randomly
generated test patterns. Fault simulation and matching

269
Paper 10.2
algorithm are used to find the best possible faulty scan
cell [7]. However, the number of suspect scan cells that
need to be considered could be very large for a long scan
chain making this method time consuming and adversely
affect the resolution. IDDQ testing was proposed for
scan chain fault diagnosis by loading special test patterns
to the scan chain and observing the quiescent current
after each shift [8]. This method is effective in
diagnosing stuck-at faults, but its application to transition
faults is very limited. Further, this method requires the
circuit to be IDDQ testable.
In this paper, we propose an algorithmic method to
diagnose a circuit with a scan chain defect. Three steps
are implemented in the proposed scan chain diagnosis
procedure. In the first step, we use special chain test
patterns, which only contain scan pattern load and
unload operations, to determine both the faulty scan
chain (we assume there is more than one scan chain in
the circuit under test) and the fault type of the faulty scan
chain. In the second step, we use a modified ATPG test
pattern set to identify the range of the suspect scan cells.
In this step, we restrict the location of the faulty scan cell
both from the scan chain input and from the scan chain
output. This can significantly reduce the number of scan
cells to be considered and in many cases this step may
even provide the exact location of the scan cell with the
defect. In the last step, we use ATPG test patterns to
simulate faults in the suspect scan cells. By comparing
the simulation responses and the observed faulty circuit
responses from the tester, each suspect scan cell is given
a score.
The paper is organized as follows. In Section 2,
definitions used in this paper are provided. In Section 3,
we discuss the fault model handled by the proposed
procedure. Section 4 describes the proposed scan chain
fault diagnosis procedure for a single scan chain fault.
Section 5 discusses the extension of the procedure to
handle multiple faults. Experimental results are provided
in Section 6. Section 7 concludes the paper.
2. Definitions
We provide the definitions and terms that are used in
this paper. We use SCI to denote the scan data input pin
of a scan chain, and SCO to denote the scan data output
pin of a scan chain. The length of a scan chain is the
total number of scan cells in the scan chain. Each scan
cell in a scan chain is given an index. The cell connected
to SCO is numbered 0 and numbers incremented up to
the SCI. In this paper, the scan cell with index n is
referred to as scan cell n (Sn). For a list of consecutive
scan cells in a scan chain, the scan cell with the highest
index is called the upper bound, and the scan cell with
the lowest index is called the lower bound. The scan
cells between the SCI and the scan input pin of a scan
cell are called the upstream cells of this scan cell, while
the scan cells between the SCO and the scan input pin of
a scan cell are called the downstream cells of this scan
cell. Note that from this definition, the downstream cells
of a scan cell include the scan cell itself. During scan
shift, data flows from upstream cells to downstream
cells. For example, a scan chain of length 6 is shown in
Figure 1. The index of each scan cell is also shown in
this figure. Scan cells 4 and 5 are upstream cells of scan
cell 3 while scan cells 0, 1, 2, and 3 are downstream cells
of scan cell 3. For a list of scan cells that consist scan
cells 1, 2, 3 and 4, the lower bound of this list is scan cell
1 and the upper bound is scan cell 4.
If the number of inversion gates between the scan
input pin of scan cell Sc and the SCO is even, then scan
cell Sc has positive polarity. Otherwise, Sc has negative
polarity. In many cases the scan cell itself may have an
inverter inside it, thus the scan input pin and the scan
output pin of the scan cell may have different polarities.
We define the polarity of the scan input pin of the scan
cell as the polarity of the scan cell. For example, in
Figure 1, scan cells 0, 1, 4 and 5 have positive polarities
and scan cells 2 and 3 have negative polarities.
In this paper, for a given load pattern or unload
pattern, the right most bit is the value of scan cell 0. For
example, after loading pattern 111000 to the scan chain
shown in Figure 1, the values of scan cells from 5 to 0
are 110100.
Figure 1: An Example of a Scan Chain of Length 6
3. Fault Models
Both stuck-at fault models and timing related fault
models have been proposed for scan chain fault
diagnosis in previous works [4][7]. Our method targets
similar fault models.
Stuck-at faults: Stuck-at-0 and Stuck-at-1 faults are
the classical fault models used for logic testing and
SCISCO
5 4 3 2 1 0Index
+ - + +-Polarity
not not
1 1 0 1 0 0
+

270
Paper 10.2
diagnosis. Stuck-at behavior may occur when a scan
chain is bridged to the ground or power, when the clock
signal to some scan cells stays stuck-off, or when a scan
chain is open. When a SA0 or SA1 behavior occurs on a
chain, the scan unload data will be a string of zeros or
ones, depending on the polarity of the defect site and the
stuck-at value. If the defective scan cell has positive
polarity, the scan output string has the same value as the
stuck-at value while if the defective scan cell has
negative polarity, the scan output string has the
complementary value of the stuck-at value. For example,
in the scan chain shown in Figure 1, a stuck-at-0 fault at
the scan input pin of scan cell 0, which has positive
polarity, results in the unload values to be a string of 0s
at SCO. A stuck-at-0 fault at the scan input pin of scan
cell 2, which has negative polarity, results in the unload
values to be a string of 1s at SCO.
Transition faults: This fault model covers defects that
cause scan cells to exhibit timing problems in
transitioning from 0 to 1 or vice versa. As described in
[7], the result could be any of the following four
conditions: slow-to-rise, slow-to-fall, fast-to-rise, fast-to-
fall. For example, consider a defect at a positive polarity
site. Suppose the fault free circuit unload pattern is
001100110011 and the defect behaves as a slow-to-rise
fault, the observed unload values are 00100010001X
(where X depends on the initial value of the faulty cell).
If the defect behaves as a slow-to-fall fault, the observed
output values are 011101110111. If the defect behaves as
a fast-to-rise fault, the observed output values are
X01110111011 (where X depends on the next scan in
value.) If the defect behaves as a fast-to-fall fault in the
scan chain, the observed output values are
000100010001.
Hold time faults: If the clock to the scan latches stays
ON, the function of the scan latch is the same as a buffer
[7], or if there are large clock skews [4], the expected
output values come out one clock cycle earlier. For
example, suppose the expected unload values are
00110011. However, if there is a hold time fault in the
scan chain, the observed output values are X0011001,
where X depends on the next load value.
4. Scan Chain Fault Diagnosis
Procedure
The detailed description of the proposed scan chain
fault diagnosis procedure for a single scan chain fault is
presented in this section. Figure 2 shows the block
diagram of the proposed procedure. The procedure takes
the circuit description and its scan chain design as the
inputs. We also assume that logic ATPG test patterns are
available for the circuit under test. The output of the
procedure is a list of candidate scan cells in the
decreasing order of the probability.
Figure 2: Scan Chain Fault Diagnosis Procedure
There are three steps in the procedure. In the first step,
we use special chain test patterns to determine the faulty
scan chain and the fault type for the defective scan chain.
In step 2, modified ATPG test patterns are applied to the
circuit under test and the observed outputs from the
faulty scan chain are analyzed. The novelty of this step is
that both the upper and lower bounds of the suspect scan
cells are calculated. Hence the number of suspect scan
cells could be significantly reduced and in many cases
the exact location of the defective scan cell can be
identified in this step. The modification to the ATPG test
patterns masks the effect of the faulty scan cell on the
scan load operation. After simulating the modified ATPG
test patterns, the upper and lower bounds can be derived
during the unload process. The reasoning behind our
method is based on the observation that during scan data
unload only the upstream scan cells are affected by the
faulty scan cell. The lower bound of the suspect scan
cells can be collected from the scan cells that have the
expected binary values observed in the faulty circuit
responses. The upper bound information of the candidate
scan cells can be collected from the scan cells that don't
have the expected binary values observed in the faulty
Circuit under
Diagnosis
ATPG Test
Patterns
Chain test to determine the faulty
chain and the fault type
Modified ATPG test patterns to
identify upper and lower bounds
Use matching method to score and
rank the candidate scan cells
Candiate cells with decreasing
score
Step 1
Step 2
Step 3

271
Paper 10.2
circuit responses. In Step 3, the procedure uses the logic
ATPG test patterns to characterize the candidate scan
cells. By comparing the simulated responses for each
candidate scan cell with the observed faulty circuit
responses, scores are calculated and assigned to the
candidate scan cells. The candidate scan cells with the
highest scores are most likely to contain the real defect.
Note that matching algorithm was also proposed by
Stanley for scan chain defect diagnosis [7]. Similar
metrics are evaluated in our method, but we use different
method to calculate scores for each candidate scan cell.
Details of each step follow.
4.1. Chain Test to Determine Fault Type
Special load patterns are used in the chain test to
determine the fault type for the defective scan chain.
Chain test patterns were also used in [4] and [7] to
differentiate the behaviors of different fault models. Note
that the fault type is determined with respect to the
positive polarity positions. The fault type for the
negative polarity positions are opposite in the values for
stuck-at faults and opposite in the transition directions
for the transition faults with respect to the positive
polarity positions. For the fault models described in
Section 3, three test patterns can be applied to the faulty
scan chain. The load patterns for positive SCI, the
expected fault-free circuit outputs and the faulty circuit
outputs for each type of faults at positive polarity
positions are given in Table 1.
Table 1: Chain Tests to Determine Fault Type
The first two patterns are all-0s and all-1s patterns.
From Table 1, it can be seen that stuck-at-0 fault (SA0)
and stuck-at-1 fault (SA1) can be easily determined by
the all-0 and all-1 scan patterns. The third pattern is the
regular chain test pattern that consists of double 0s and
double 1s. The hold time faults and the transition faults
have different unload values for the third test pattern. By
comparing the expected outputs for each fault model
with the observed faulty values, we determine the fault
type to model the defect in the scan chain. Note that the
first two chain test patterns are necessary because the
regular chain test cannot differentiate the stuck-at faults
from the cases where two transition faults of the same
type exist in the same scan chain. More complex chain
test patterns are required if more than one transition
faults are to be considered in a scan chain. This will be
discussed in Section 5.
4.2. Calculating lower and upper bounds
Cheney proposed loading pseudo-random test patterns
into the scan chains and clocking the circuit [6]. Based
on the observation that during the unload process the
defect only affects the upstream cells of the faulty scan
cell, by analyzing the unload data the faulty site can be
claimed to be in the upstream cells of some scan cell.
One problem with this method is that pseudo-random
test patterns can introduce bus contention that could
destroy the circuit under diagnosis. The other limit to
pseudo-random test patterns is that they can only find the
lower bound for stuck-at faults while providing no
diagnostic information for transition faults and hold time
faults.
In the proposed procedure, we use modified ATPG
test patterns to identify the upper and lower bounds of
the candidate scan cell for all the fault types we
proposed in Section 3. The purpose of the modification
to the ATPG test patterns is to mask the effect of the
faulty scan cell during the scan pattern load process. One
way to modify the ATPG test patterns is called fully
constrained. In this method we change the load values of
the faulty scan chain cells to all X (unknown) values
while the load values of other fault free scan chains
remain unchanged.
To get both the upper and lower bounds of the
candidate scan cell, we logic simulate the modified
ATPG test patterns with full constraints. After logic
simulation, the scan cells in the defective scan chain that
have binary values (0 or 1) are marked with their values.
These values are not affected by the faulty scan cell. For
the marked scan cells, by comparing the values obtained
during simulation and the values observed in the faulty
circuit responses, we can derive the upper and lower
bounds of the potentially faulty scan cells (also called
Pattern 1 Pattern 2 Pattern 3
Load Value 00000000 11111111 11001100
Unload Value 00000000 11111111 11001100
SA0 00000000 00000000 00000000
SA1 11111111 11111111 11111111
Slow-to-Rise 00000000 11111111 10001000
Slow-to-Fall 00000000 11111111 11011101
Fast-to-Rise 00000000 11111111 11101110
Fast-to-Fall 00000000 11111111 01000100
Hold Time 00000000 11111111 01100110

272
Paper 10.2
the candidate list). Note that those scan cells that have
unknown values after logic simulation may have their
values affected by the faulty scan cell and hence cannot
be used to identify the upper and lower bounds for the
candidate list.
The following examples illustrate how to determine
the upper and lower bounds of the candidate list. For
ease of understanding, we assume that all the scan cells
in the faulty scan chain have positive polarities.
However, the algorithm can be generalized if the scan
chain has both positive polarity cells and negative
polarity cells.
5 34 012
SCOSCI
Sim. Value:
Obs. Value:
0 1
1 1
0 1
0 1
defect location
Figure 3: Determine the Upper/Lower Bounds
Consider stuck-at faults. Suppose the fault type is
stuck-at-1 and the scan cell Sc has binary value 0 after
logic simulation of the modified ATPG test pattern. After
applying the modified ATPG test pattern to the faulty
circuit, if the observed faulty circuit value of scan cell Sc
is 0, then we claim that the stuck-at fault must be in the
upstream cells of Sc. On the other hand, if the observed
faulty circuit value of scan cell Sc is 1, then we claim that
the stuck-at fault must be in the downstream cells of Sc.
For example, consider a stuck-at-1 fault in the scan chain
shown in Figure 3. After logic simulation scan cells 1
and 4 have value 0. If the observed value of scan cell 1
is 0, then we can conclude that the fault is in the
upstream cells of scan cell 1 since if the fault were in the
downstream cells we would observe a value 1 in scan
cell 1. If the observed value of scan cell 4 is 1, then we
can conclude that the fault is in the downstream cells of
scan cell 4 since if the fault were in the upstream cells,
we would have observed value 0 in scan cell 4.
For transition faults, we need the values of two
adjacent scan cells to claim an upper bound or a lower
bound. Consider a slow-to-rise fault in a scan chain. Let
scan cells Sc-1 and Sc both have binary values after logic
simulating the modified ATPG pattern. Let us assume
that scan cell Sc-1 has value 0 and that scan cell Sc has
value 1, i.e. there is a 0 to 1 transition at scan cell Sc-1
during unload. If the observed faulty circuit responses
show that scan cell Sc-1 and scan cell Sc both have the
same values as their marked values, we claim that the
fault must be in the upstream cells of scan cell Sc-1.
Otherwise, if both scan cell Sc-1 and Sc have values 0, the
fault must be in the downstream cells of Sc-1. For
example, suppose there is slow-to-rise fault in the scan
chain shown in Figure 3. If scan cells 0 and 3 have
simulation value 1 and scan cells 1 and 4 have
simulation value 0. If the observed values for scan cell 0
and 1 are the same as their simulation values, then we
claim that the fault must be in the upstream cells of scan
cell 0. If the observed value for scan cell 3 is 1 and the
observed value for scan cell 4 is 1, then we conclude that
the fault must be in the downstream cells of scan cell 3.
Similarly, for the hold time faults, we have to observe
the values for two adjacent cells to decide whether a
specific scan cell is an upper bound or lower bound. To
do this, the adjacent scan cells must be marked with
different binary values during logic simulation of the
modified ATPG test patterns. For example, scan cells Sc-
1 and Sc have different binary values after logic
simulation of the modified ATPG test patterns. If the
observed faulty circuit outputs show that scan cells Sc-1
and Sc have the same values as they were marked, we
claim that the fault must happen in the upstream cells of
scan cell Sc-1. Otherwise, the fault must be present in the
downstream cells of scan cell Sc-1.
In the above examples, we assume all the scan cells in
the scan chain have positive polarities. This can be
extended to the scan chains consisting of both positive
polarity and negative polarity scan cells. In general, for
stuck-at-a faults, where a is 0 or 1, after logic simulating
the modified ATPG test pattern, we mark the positive
polarity scan cells which have binary values (1-a) and
the negative scan cells which have values a. From the
observed faulty circuit responses, if the marked value is
observed for any scan cell, we claim the defect is in the
upstream cells, if the complimentary value of the marked
value is observed, then we claim that the fault is in the
downstream cells. For transition faults and hold time
faults, after simulating the modified ATPG test pattern,
we need to mark all pairs of adjacent scan cells that have
values necessary to activate the fault in the scan chain. If
the observed values of the scan cells are the same as
their marked values, then we claim the fault must be in
the upstream cells of the scan cell with lower index.
Otherwise, if the expected transition is not observed,
then we claim the fault must be in the downstream cells
of the scan cell with the lower index.
Note that changing the load values of the faulty scan
chain to all-Xs is not the only way to mask the faulty

273
Paper 10.2
scan cell, full constraints can be relaxed based on the
fault model. Consider the case of stuck-at faults. For a
stuck-at-0 fault on the positive polarity position or a
stuck-at-1 fault on the negative polarity position, if the
SCI has positive polarity we can load the all-0 vector to
the faulty scan chain without activating the SA0 fault.
Similarly, for a stuck-at-1 fault on positive polarity
position or stuck-at-0 fault on negative polarity position,
if the SCI has positive polarity we can load the all-1
vector to the faulty scan chain without activating the
SA1 fault. For transition faults and hold time faults, full
constraints can be relaxed to loading all-0 or all-1 test
patterns to the faulty scan chain and then perform logic
simulation. For transition faults, more modification
methods are available by using combined strings of 1
and 0 without triggering the fault effect during scan load
operation. For example, if we have a slow-to-rise defect
in the scan chain, besides all-0, all-1 load patterns to the
faulty scan chain, the load pattern 00...0011...11 masks
the faulty scan cell during scan load process. Note that
only one transition, from 1 to 0, is allowed in this pattern
and this transition can happen at any position along the
load pattern. A second transition from 1 to 0 introduces a
0 to 1 transition and triggers the slow-to-rise fault and
makes the values in the scan cells uncertain during scan
load process. These modifications give us choices in
generating the modified test patterns. Similarly, a test
pattern 11...1100...00 can also set specific values to scan
cells in the scan chain with a slow-to-fall defect.
It is possible for the modified ATPG test patterns to
introduce bus contention. Bus contention is determined
by logic simulation and the ATPG test patterns that
introduce potential bus contention or bus contention are
discarded and are not used for diagnosis.
4.3. Score and Ranking
In this step, the logic ATPG test patterns are simulated
for each candidate scan cell between the upper bound
and the lower bound. The simulation outputs obtained
are compared against the observed faulty circuit outputs.
Based on a matching algorithm, a score is calculated and
assigned to each candidate scan cell. The candidates are
ranked in the decreasing order of scores with a higher
score denoting a higher probability that the candidate is
the actual defect site. Note that the test pattern
simulation for candidate scan cell is different from the
regular fault simulation which loads and unloads scan
chain values in parallel. To consider the effects of the
faulty scan cell, we use modified logic simulation to
derive expected outputs for each candidate scan cell.
During scan data load, the downstream cell values are
forced to be consistent with the fault effect caused by the
fault type. During scan data unload, the upstream scan
cell values are calculated according to the fault type. For
example, a SA0 fault in a scan chain with 500 scan cells
of positive polarity, the range of the candidate list is
identified to be scan cell 10 to scan cell 15. While we are
simulating candidate scan cell 10, during data load, we
force the values of scan cells 0 to 10 to value 0; which is
consistent with the effect caused by stuck-at-0 fault.
During data unload, we force the values of upstream
cells (scan cells 11 to 499) to value 0 which is consistent
with the fault effect of the stuck-at-0 fault.
NonpredictionIntersection
Misprediction
Candidate Signature (EO)
Observed Failures (EO’ )
Figure 4: Metrics to Calculate Scores
Score matching method is based on the hypothesis
that the closer the fault site to the actual defect site, the
better match between the tester unload data and the
simulated unload data. We use the same matching
calculation method as proposed in [9]. The calculation of
the score is based on the metrics of intersections, mis-
predictions, and the non-predictions, these are also
shown in Figure 4. Intersection is the count of failures
observed on the tester and also by the simulation. Vector-
wise intersection is the count of test patterns for which
the simulation results are exactly the same as the tester
outputs for that test pattern. Vector-wise intersection is
the strongest indication that the candidate scan cell has
the defect. The mis-prediction is the count of the failures
observed by the simulator but not on the tester. The non-
prediction is the count of failures observed on the tester
but not by the simulator. The score of each candidate
scan cell consists of the accumulated values for vector-
wise intersections, intersections, non-intersections and
mis-predictions for all the ATPG test patterns with
vector-wise intersection as the strongest metric and mis-
prediction as the weakest metric. Stuck-at faults,
transition faults and hold time faults are dealt with

274
Paper 10.2
identically while calculating the scores. Note that the
matching algorithm in [7] calculates scores based on the
intersection, mis-prediction and non-prediction, it
doesn’t consider the vector-wise intersection while we
use vector-wise intersection as the strongest metric [9].
In [7], the mis-prediction and non-prediction are given
the same priority to calculate scores while we believe the
non-prediction is a stronger metric than mis-prediction
and hence it is given higher priority than mis-prediction.
5. Extension to Multiple Faults
In the previous sections we described the fault
diagnosis for a single scan chain fault in the circuit
under test. We now discuss how the method can be
extended to handle multiple faults. Two conditions
are considered: single faults on multiple scan chains
and multiple faults on single scan chains.
First let's consider single faults in multiple scan
chains. To determine the faulty chains and fault
types, the proposed chain test patterns are still
applicable without any change. To identify the
range of the candidate lists for all the faulty chains,
modified ATPG test patterns can still be used.
However, instead of modifying the values for one
scan chain, we need to modify the values for all the
faulty scan chains while keeping the values of the
fault free scan chains unchanged. The upper bound
and the lower bound for each faulty chain can be
calculated separately. To match the candidate scan
cells with the observed faulty circuit outputs, we
consider the faulty scan chains one at a time. While
one faulty scan chain is being considered, the
original ATPG test patterns cannot be used directly.
Instead, all the load values of other faulty chains
should be masked with constraint values, and all the
unload values from other faulty chains should not
be considered to calculate the intersections, mis-
predictions and non-predictions.
In the case of multiple faults in a single scan
chain, diagnosis depends on the types of faults in
the scan chain. Our procedure only has limited
diagnosibility for some special cases. Modifications
to each step are necessary. For example, to
differentiate the fault effect of a stuck-at fault and
that of a multiple transition faults of the same type
in a single scan chain, more complex chain test
patterns are needed. For the multiple faults in a
single scan chain, our method can only find the
range for one fault. For example, if there are two
faults, one stuck-at-0 and one stuck-at-1 in a scan
chain, our method could only provide the diagnosis
for the fault which is closer to the SCO. If there are
two faults, one stuck-at-0 faults and one slow-to-fall
fault, then our method can only determine that there
is a stuck-at-0 fault and provide diagnosis for this
fault. However, in practice the occurrence of
multiple faults in a single scan chain is unlikely and
the diagnosis of one fault from one failing scan
chain provides useful information for follow up.
6. Experimental Results
Experiments were performed on a chipset design with
more than 430K gates. There are about 22K scan cells
that are organized in 54 scan chains. The maximum scan
chain length is 410. We use simulation results and silicon
data to show the effectiveness of the proposed scan
chain fault diagnosis procedure for a single scan chain
fault.
6.1 Simulation Results
First we evaluate the technique to identify the upper
and lower bounds of the candidate list. The number of
scan cells between the upper and lower bounds (also
Figure 6: Distribution of candidate list
sizes for stuck-at-0 faults
0
50
100
150
Size of Candidate List
Figure 5: Distribution of candidate list
sizes for stuck-at-1 faults
0
50
100
150
1 2 3 4 5 6 7 8 9 10 11 12
Size of Candidate List

275
Paper 10.2
called the size of the candidate list) is used as the metric
of our evaluation. One hundred modified ATPG test
patterns are applied to each scan chain. We consider a
fault in each scan cell. Based on the logic simulation
results of the modified ATPG test patterns, we calculate
the lower and upper bounds of the candidate list for the
fault in each scan cell. Different fault models are used in
this experiment. The typical distributions of candidate
list sizes for stuck-at-1 faults and stuck-at-0 faults are
shown in Figure 5 and Figure 6 respectively. From
Figure 5 we can see that for 135 scan cells the size of the
candidate list is one. This means that for 32.9% of the
total scan cells in a scan chain, the technique to
determine the upper and lower bounds can identify the
exact defective scan cell if the defect behaves as a stuck-
at-1 fault. For more than 80% of the total scan cells, the
size of the candidate list is less than or equal to five.
These results show that Step 2 of the proposed
procedure can effectively reduce the number of
candidate scan cells. Note that these results are derived
only by logic simulation of one hundred modified ATPG
test patterns, which generally executes in a few minutes.
However, from Figure 5, it can be seen that there are
some scan cells (about 20% of the total scan cells) that
have a candidate list of size six or larger. This tells us
that further improvement of the diagnosis resolution
using Step 3 to reduce the size of the candidate list is
necessary. Similar conclusions can be drawn from the
distribution of the candidate list sizes for stuck-at-0
faults reported in Figure 6. In Figure 6, more than 70%
of scan cells have candidate lists of size smaller than or
equal to five and about 30% of scan cells have candidate
lists of size six or larger.
The typical distributions of candidate list sizes for
slow-to-fall faults and fast-to-rise faults are shown in
Figure 7 and Figure 8 respectively. While comparing
with the results shown in Figures 5 and 6, the sizes of the
candidate list for transition faults are larger than those
for stuck-at faults. This can be explained by the fact that
specific values of two consecutive scan cells are required
to determine an upper bound or lower bound for
transition faults. This is a stricter condition than that
required for stuck-at fault that only requires a single scan
cell value to determine an upper bound or lower bound.
For transition faults, we also observed that for about
40% of the scan cells, the sizes of the candidate lists are
less than or equal to five.
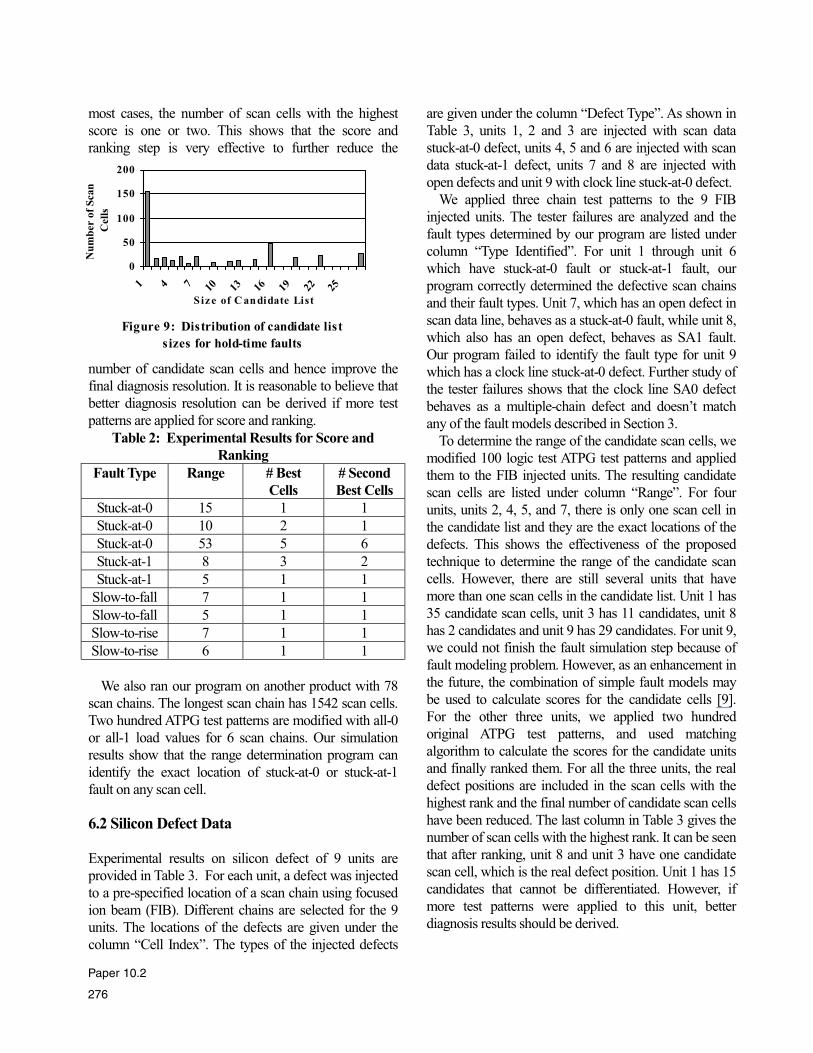
The typical distribution of candidate list sizes for hold-
time faults are shown in Figure 9. When comparing with
the candidate list sizes distribution for transition faults,
more scan cells have candidate lists consisting one scan
cell. Actually, for hold time faults, there are about 35%
of scan cells have a candidate list consisting of only one
scan cell. This result should be expected. The reason is
that even though the values of two consecutive scan cells
are required to determine an upper bound or lower
bound for hold time faults, this requirement is much
looser than those for transition faults because any value
transition (0 to 1 or 1 to 0) in the two consecutive scan
cells can be used to calculate the boundary of candidate
list for hold time faults. We also observed that some scan
cells have a large candidate list which tells us that further
improvement of the diagnostic resolution is necessary.
To improve the diagnostic resolution, we used the
matching algorithm to rank the candidate scan cells. In
this step, we used one hundred ATPG test patterns to
simulate each candidate scan cell. In this experiment, we
studied some cases where larger sizes of candidate lists
were obtained in the last step. The results are shown in
Table 2. The first column in Table 2 lists the fault types
of the targeting candidate lists. The sizes of the candidate
lists are shown in Column 2. Columns 3 and 4 show the
numbers of scan cells with the best score and the number
scan cells with the second best score. From Table 2, we
can see that after score and ranking, the number of
candidate scan cells can be reduced dramatically, and in
Figure 7: Distribution of candidate list
sizes for slow-to-fall faults
0
10
20
30
40
50
60
70
Size o f C andidate List
Figure 8: Distribution of candidate list
sizes for fast-to-rise faults
0
20
40
60
80
1 4 7 10 13 16 19 22 25 28
Size of Candidate List
Nu
mb
er o
f S
can
Cell
s
276
Paper 10.2
most cases, the number of scan cells with the highest
score is one or two. This shows that the score and
ranking step is very effective to further reduce the
number of candidate scan cells and hence improve the
final diagnosis resolution. It is reasonable to believe that
better diagnosis resolution can be derived if more test
patterns are applied for score and ranking.
Table 2: Experimental Results for Score and
Ranking
Fault Type Range # Best
Cells
# Second
Best Cells
Stuck-at-0 15 1 1
Stuck-at-0 10 2 1
Stuck-at-0 53 5 6
Stuck-at-1 8 3 2
Stuck-at-1 5 1 1
Slow-to-fall 7 1 1
Slow-to-fall 5 1 1
Slow-to-rise 7 1 1
Slow-to-rise 6 1 1
We also ran our program on another product with 78
scan chains. The longest scan chain has 1542 scan cells.
Two hundred ATPG test patterns are modified with all-0
or all-1 load values for 6 scan chains. Our simulation
results show that the range determination program can
identify the exact location of stuck-at-0 or stuck-at-1
fault on any scan cell.
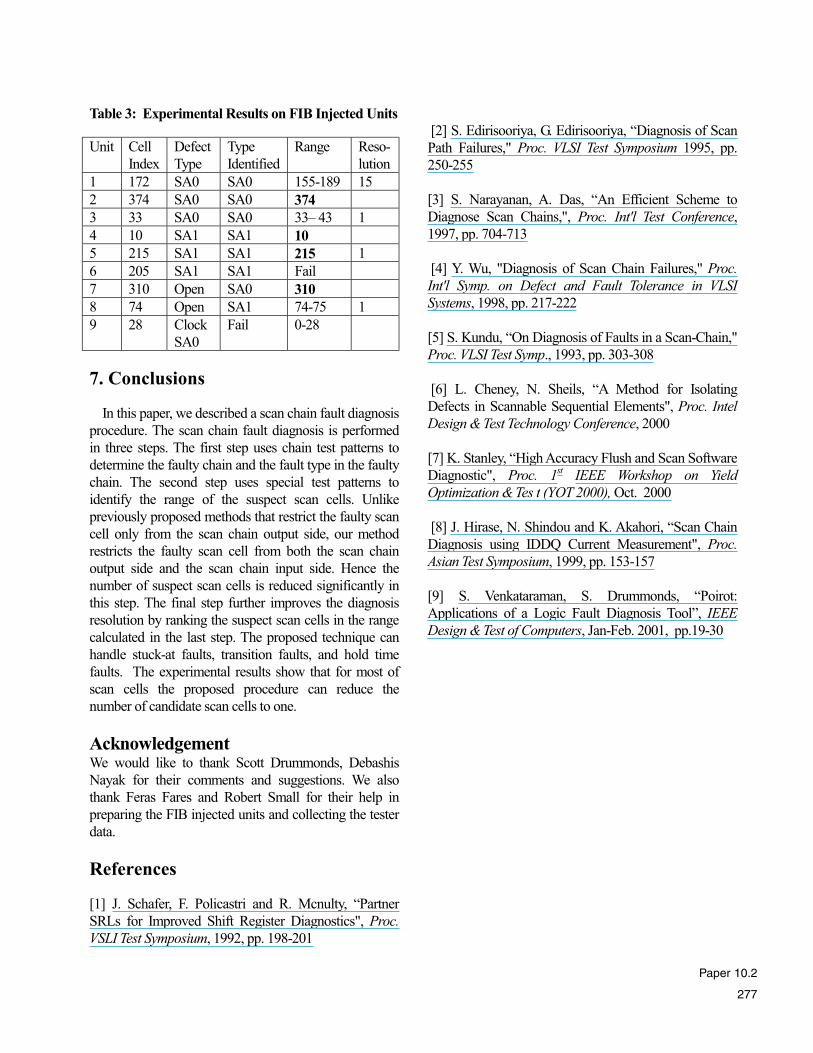
6.2 Silicon Defect Data
Experimental results on silicon defect of 9 units are
provided in Table 3. For each unit, a defect was injected
to a pre-specified location of a scan chain using focused
ion beam (FIB). Different chains are selected for the 9
units. The locations of the defects are given under the
column “Cell Index”. The types of the injected defects
are given under the column “Defect Type”. As shown in
Table 3, units 1, 2 and 3 are injected with scan data
stuck-at-0 defect, units 4, 5 and 6 are injected with scan
data stuck-at-1 defect, units 7 and 8 are injected with
open defects and unit 9 with clock line stuck-at-0 defect.
We applied three chain test patterns to the 9 FIB
injected units. The tester failures are analyzed and the
fault types determined by our program are listed under
column “Type Identified”. For unit 1 through unit 6
which have stuck-at-0 fault or stuck-at-1 fault, our
program correctly determined the defective scan chains
and their fault types. Unit 7, which has an open defect in
scan data line, behaves as a stuck-at-0 fault, while unit 8,
which also has an open defect, behaves as SA1 fault.
Our program failed to identify the fault type for unit 9
which has a clock line stuck-at-0 defect. Further study of
the tester failures shows that the clock line SA0 defect
behaves as a multiple-chain defect and doesn’t match
any of the fault models described in Section 3.
To determine the range of the candidate scan cells, we
modified 100 logic test ATPG test patterns and applied
them to the FIB injected units. The resulting candidate
scan cells are listed under column “Range”. For four
units, units 2, 4, 5, and 7, there is only one scan cell in
the candidate list and they are the exact locations of the
defects. This shows the effectiveness of the proposed
technique to determine the range of the candidate scan
cells. However, there are still several units that have
more than one scan cells in the candidate list. Unit 1 has
35 candidate scan cells, unit 3 has 11 candidates, unit 8
has 2 candidates and unit 9 has 29 candidates. For unit 9,
we could not finish the fault simulation step because of
fault modeling problem. However, as an enhancement in
the future, the combination of simple fault models may
be used to calculate scores for the candidate cells [9].
For the other three units, we applied two hundred
original ATPG test patterns, and used matching
algorithm to calculate the scores for the candidate units
and finally ranked them. For all the three units, the real
defect positions are included in the scan cells with the
highest rank and the final number of candidate scan cells
have been reduced. The last column in Table 3 gives the
number of scan cells with the highest rank. It can be seen
that after ranking, unit 8 and unit 3 have one candidate
scan cell, which is the real defect position. Unit 1 has 15
candidates that cannot be differentiated. However, if
more test patterns were applied to this unit, better
diagnosis results should be derived.
Figure 9: Distribution of candidate list
sizes for hold-time faults
0
50
100
150
200
1 4 7 10 13 16 19 22 25
S ize of C andidate List
Nu
mb
er o
f S
can
Cell
s
277
Paper 10.2
Table 3: Experimental Results on FIB Injected Units
Unit Cell
Index
Defect
Type
Type
Identified
Range Reso-
lution
1 172 SA0 SA0 155-189 15
2 374 SA0 SA0 374
3 33 SA0 SA0 33– 43 1
4 10 SA1 SA1 10
5 215 SA1 SA1 215 1
6 205 SA1 SA1 Fail
7 310 Open SA0 310
8 74 Open SA1 74-75 1
9 28 Clock
SA0
Fail 0-28
7. Conclusions
In this paper, we described a scan chain fault diagnosis
procedure. The scan chain fault diagnosis is performed
in three steps. The first step uses chain test patterns to
determine the faulty chain and the fault type in the faulty
chain. The second step uses special test patterns to
identify the range of the suspect scan cells. Unlike
previously proposed methods that restrict the faulty scan
cell only from the scan chain output side, our method
restricts the faulty scan cell from both the scan chain
output side and the scan chain input side. Hence the
number of suspect scan cells is reduced significantly in
this step. The final step further improves the diagnosis
resolution by ranking the suspect scan cells in the range
calculated in the last step. The proposed technique can
handle stuck-at faults, transition faults, and hold time
faults. The experimental results show that for most of
scan cells the proposed procedure can reduce the
number of candidate scan cells to one.
Acknowledgement We would like to thank Scott Drummonds, Debashis
Nayak for their comments and suggestions. We also
thank Feras Fares and Robert Small for their help in
preparing the FIB injected units and collecting the tester
data.
References
[1] J. Schafer, F. Policastri and R. Mcnulty, “Partner
SRLs for Improved Shift Register Diagnostics", Proc.
VSLI Test Symposium, 1992, pp. 198-201
[2] S. Edirisooriya, G. Edirisooriya, “Diagnosis of Scan
Path Failures," Proc. VLSI Test Symposium 1995, pp.
250-255
[3] S. Narayanan, A. Das, “An Efficient Scheme to
Diagnose Scan Chains,", Proc. Int'l Test Conference,
1997, pp. 704-713
[4] Y. Wu, "Diagnosis of Scan Chain Failures," Proc.
Int'l Symp. on Defect and Fault Tolerance in VLSI
Systems, 1998, pp. 217-222
[5] S. Kundu, “On Diagnosis of Faults in a Scan-Chain,"
Proc. VLSI Test Symp., 1993, pp. 303-308
[6] L. Cheney, N. Sheils, “A Method for Isolating
Defects in Scannable Sequential Elements", Proc. Intel
Design & Test Technology Conference, 2000
[7] K. Stanley, “High Accuracy Flush and Scan Software
Diagnostic", Proc. 1st IEEE Workshop on Yield
Optimization & Tes t (YOT 2000), Oct. 2000
[8] J. Hirase, N. Shindou and K. Akahori, “Scan Chain
Diagnosis using IDDQ Current Measurement", Proc.
Asian Test Symposium, 1999, pp. 153-157
[9] S. Venkataraman, S. Drummonds, “Poirot:
Applications of a Logic Fault Diagnosis Tool”, IEEE
Design & Test of Computers, Jan-Feb. 2001, pp.19-30