Realtime scan modeling
29
ق و کا ی س ند مهه ا د ی کا س ند مه روه گ پاياىاه اسي کارشر دترم کاهپی علرت ص بعدی بام سکي اجس اسRealTime کت از کیستفاد ا با بعدیای هدل س ش پلي گاى کا سط: ت بیکيادی وا:د راستا ا رضائیاىدی دکتر هابستا ت ى2931
Transcript of Realtime scan modeling

دادکشنه مهندسی ربق و کاویپمرت
گروه مهندسی کاویپمرت
علم کاهپیتردر کارشاسي اه پاياى
با استفاد از کیکت RealTimeاسکي اجسام س بعدی ب صرت
کاش پلي گاى ای هدل س بعدی
تسط:
ادی بیکي
استاد راوا:
دکتر هدی رضائیاى
2931ىتابستا


ولي حمق هادي هترتة تر تايح
ايهغالؼات، اتتىارات آري
اهاؼي از تحميك هضع ايي پاياى
اظتيسد داؽگا واهپيتر هذظي گرهتؼلك ت

چکيده
در ايي تحميك ظؼي ؼذ اظت راىاري تراي تذظت آردى يه هذل ظ تؼذي هغرح ؼد و ن ارزاى
تاؼذ ن در زهاى وتاي تتاى هذل ظ تؼذي خد را تذظت آرد.در ايي تحميك ي ديگرتر از ؼي ا
لفذ ؼذ اظت تا تا اظتفاد از ؼي اي خذيذ هاذ تيايي هاؼيي اظىي وردى اخعام تتاى ت را
حل هرتع دظت پيذا ورد.
ن و ارزاتر از دظتگا اي اظىي ظ تؼذي ها در ايي تحميك ظخت افسار ويىت را هؼرفي هي وي
اظت ويفيت وار تا آى يس تفات چذاي در تيد ي وار ذارد.
اظىي ظ تؼذي،هذل ظ تؼذي،ويىت کليد واژه:

أ
فهرست مطالب
صفحه عنواى
ب ........................................................................................................................................................ ا ؼىل فرظت
3 ............................................................................................................................... هقدهه :1فصل
3 ................................................................................................................................... كيتحم ايي از ذف -1-1
4 ...................................................................................................... یبعد سه هدل و نکتيک:2 فصل
5 .................................................................................................................................... يتؼذ ظ يظاز هذل-2-1
6 ............................................................................................................................. ىتيو اظن ت يدظتگا-2-2
Kinect Fusion: ................................................................................................ 7 ي پرش SDK ىتيو-2-3
8 ................................................................................................................................ :شىيف ىتيو تنيالگر-2-4
Bilateral Filter: ......................................................................................................................... 9 تنيالگر-2-5
multi-resolution pyramid: ................................................................................................. 11 تنيالگر-2-6
Aligment : ................................................................................................................................. 11 تنيالگر-2-7
Polygon : ..................................................................................................... 11 اي ـفح ظاخت تنيالگر-2-8
15 ...................................................................................... یبعد سه هدل صیرایو افزار نرم:3 فصل
3-1-Autodesk 3D max: .................................................................................................................................. 16
17 ................................................................................................................................. :ماط واػ تنيالگر-3-2
19 ........................................................................................................................... : خغط واػ تنيالگر-3-3
21 ......................................... :خغط واػ تنيالگر ت عثت ماط واػ تنيالگر ةيهؼا ايهسا-3-4
21 ................................................................................................................................ هراجع فهرست
22 ......................................................................................................... یسيانگل به یفلرس ناهه واژه
23 .......................................................................................................... یفارس به یسيانگل ناهه واژه

ب
ا شکلفرست
صفحه عنواى
5 ......................................................................................................................................... یبعد سه مدل_1 _2 ؼىل
7 .......................................................................................................................................................نکتیک_2 _2 ؼىل
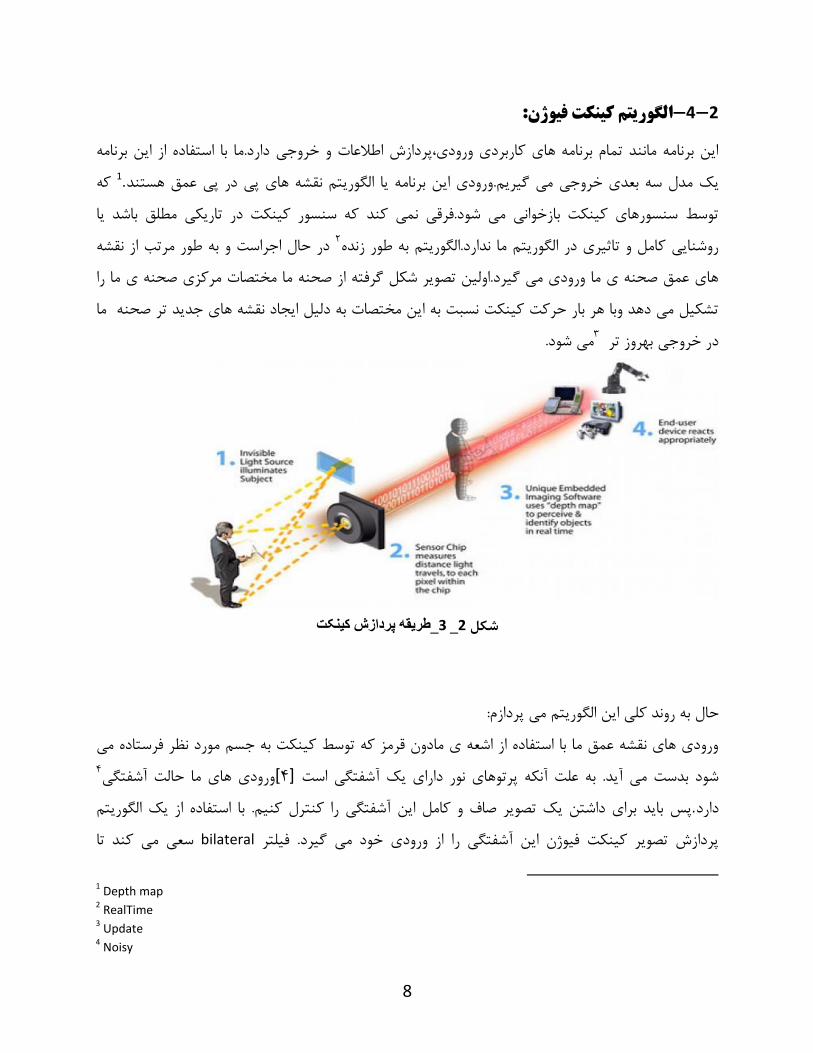
8 ........................................................................................................................ نکتیک پردازش قهیطر_3 _2 ؼىل
Bilateral ................................................................................................................................ 9 تمیالگور_4 _2 ؼىل
Bilateral ....................................................................................................................... 9 تنيالگر رغ_5 _2 ؼىل
multi-resolution pyramid ........................................................................................ 11 تمیالگور _6 _2 ؼىل
ICP ....................................................................................................................................... 11 تمیالگور _7 _2 ؼىل
TSDF ................................................................................................................................... 12 تمیالگور _8 _2 ؼىل
Kinect Fusion...................................................................................................... 13 تراه ي ديت _9 _2 ؼىل
3D MAX ........................................................................................... 16 افسار رم در ها هذل يرد _1 _3 ؼىل
17 ................................................................................................................ماط وردى ـل تنيالگر _2 _3 ؼىل
18 ........................................................................................................... خعن هي وردى احذ ديت _3 _3 ؼىل
3D max .......................................................................... 19 افسار رم در MultiRes پدر ػيوا _4 _3 ؼىل
3D max .......................................................................... 21 افسار رم در Optimize پدر ػيوا _5 _3 ؼىل

3
:1فصل
هقده
پيؽرفت ورد اظت.تاايي هذل ري يا ظ تؼذي در ظال اي اخير ت عر لاتل تخي واهپيت1هذل ظازي
اي ظ تؼذي در پردازغ ريذاداي فيسيىي خاى هرد تخ ظازهاى اي زيادي لرار دارد.عرح يه هذل ظ
عثي تؼذي ت عر دليك هظن واري دؼار لي خاللا اظت ظثة هي ؼد هحاظثات پيچيذ ت عر
درظت ادام ؼد.ذف از خلك يه هذل ظ تؼذي هي تاذ داليل زيادي داؼت تاؼذ ت عر هثال در زهي ي
اؼاظي هذل اي و ا اترا مػ ت ظسايي در يتيد ي آب اي يه هغم دارذ.هذل اي ظ
هي تاى ت هذل ظازي ظ تؼذي در تازي اي تؼذي اهرز وارترد فرااى تري دارذ و يىي از وارترد اي آا
ام ترد و اهرز مػ تعسايي در رذ التفادي ايي ؼروت ا دارد.در ايي گ از ؼروت ا تراي 2رايا اي
ظاخت هذل اي ظ تؼذي از ظايل تىيه اي گاگي اظتفاد هي ؼد و هي تاى ت اظىر اي ظ
ظؼي هي ؼد هذل ظ تؼذي هغاتك واى 4ي رغ ا تا اظتفاد از تازتاب يه ر ليسر اؼار ورد.در اي3تؼذي
و يا خد دارد يا ؼخفيت تذي آى لثال تظظ فردي ظاخت ؼذ اظت هدعو آى خد دارد5هذل زذ
پياد ظازي وين. لعظ دارين ايي تىيه را 6.در ايي رغ ها تا اظتفاد از دظتگا ويىتدر رايا ت خد آيذ
دف از ايي تحقیق -1-1
اظىي ظ 7ي تحميك خوغ آري اعالػاتي در زهي ي پردازغ تيايي هاؼيي ي ايت از اظاظي ذف
در ايي زهي ت ها ووه هي وذ تا تتاين خعن هرد ظر خد را پردازغ ورد تؼذي الگريتن ايي و
را تذظت آرين.در وعري از ثاي هذل ظ تؼذي آى
1 Modeling
2 Computer Game
3 3D Scanner
4Infrared light
5 RealTime
6 Kinect
7 Machine Vision

4
:کیکت هدل س بعدی2فصل

5
هدل سازی س بعدی-2-1
در گرافيه واهپيتر ظ تؼذي ،هذل ظازي ظ تؼذي ايگ تؼريف هي ؼد:ت رذ پردازغ رياضي از ر ظ
تخففي .ت هحفل ايي رذ يه هذل ظ تؼذي هي گيذ..يه 1تؼذ يه خعن تا اظتفاد از رم افسار اي
ظ تؼذي وايذ ي يه ظري از هدوػ ماط در يه فضاي ظ تؼذي اظت و تظظ ؼىل اي الي هذل
ي ذظي هاذ هثلث،خغط ،ظغح هحي غير تؽىيل ؼذ ؼذ اظت.
_مدل سه بعدی1 _2 ضکل
اهرز هذل اي ظ تؼذي در يه عيف گعترد اي از زهي ا وارترد دارذ.از زهي ايي و هي تاى از هذل
ي رايا اي ،ايويؽي واهپيتري ـؼت فيلن ،ـؼت پسؼىي اي ظ تؼذي اظتفاد ورد هي تاى ت تازي ا
غير اؼار ورد.هذل اي ظ تؼذي اهرز تا اظتفاد از تىيه ايي ت دظت هي آيذ و ؼايذ هؼول تريي
آى هؽاذ ػىط ترداري از هذل عثيؼي اظت تؼذ تا هؽاذ وردى ايي ػىط ا ؼاذي و هخد
ذلي را از ؼىل خد تذظت هي آرد.يه رغ ديگر آى ظاخت هذل ظ تؼذي تا اظتفاد از اظت هذل ظاز،ه
اظىر اي ظ تؼذيعت و تعيار پر سي گراى ليوت اظت لي عثت ت تىيه لثل اعالػات تيؽتري
دليك تري را ت ها هي دذ.
و ظاخت ؼذ تظظ ]1[از دظتگا ويىت هي در ايي پرش لفذ دارم يه رؼي را دثال ون و تا اظتفاد
گرفتي هذل ظ تؼذي ها ت عت تاايي پردازغ اؼىال را دارد هي تاذ ت خرخيهايىرظافت ؼروت
1 Software

6
ووه وذ.ايي دظتگا عثت ت اظىر اي هخد در تازار ليوت هاظثي دارد ارزاى تر از ديگر 1ـرت زذ
هايىرظافت عت Xbob 360وعلي تراي تازي اي رايا اي و ورا تا دظتگاا اظت هؼوال ت
تظظ هايىرظافت روايي ؼذ. در اليي روايي خد اظن 2119ظال E3ؼاخت هي ؼد.ايي دظتگا در
Project Natal ال ت تؼذ تغيير داد از آى ظ ويىترا ت ورا داؼت و تؼذ ا تا ت داليلي اظن خد را ت
ؼروت اي عراحي تازي خذهات خد را تراي ايي دظتگا پردازغ گر افسايػ دادذ ها ؼاذ افسايػ
رزافسى ايي هحفالت عتين.
هي در اتتذا گاي ت دظتگا ويىت دارم تؼذ الگريتن ايي را پياد ظازي هي ون تا هذل اي ظ تؼذي
تذظت آرم.خد را تا اظتفاد از ايي دظتگا
دستگاي ب اسن کیکت-2-2
ؼد. الثت اي تذى اظتفاد از يچگ وترلگري هي اي رايا ام ظيل ايعت و هدر ت اظتفاد از تازي
تواهي هارد ظرگرهي واذ در آى از تاى هي تلى ثد اي رايا اي تازي هرد در آى ي تا اظتفاد
اظت ظاخت ؼذ ايىرظافتهدادى ت هظيمي اظتفاد ود. ايي ظيل تظظ ؼروت تواؼاي فيلن گغ
ػذد د تا درتيي يههرخغ ايي ظيل تر پاي ].2[اظت لاتل اظتفاد ۰۶۳ايىط تاوط تر ري دظتگا تازي
ك تفاير اظت ا تراي تؽخيؿ ػو هادى لرهس يىي از درتيي درگا و اظت لرهس هادى درگا يه لس
ايىط تاؼذ. ايي درتيي ت وارتراى تفاير هي اظت تراي تؽخيؿ2 درتيي ديگر ن و يه درتيي رگي
دذ تا تذى لوط وردى يچ وترلگري تتاذ تواهي اخساي هخد تر ـفح را ت اخاز هي ۰۶۳تاوط
تاؼذ تا تؽخيؿ ؿ ـذااي وارتر خد يس هيوترل خد در تيارذ. ايي درتيي حتي تاا ت درن تؽخي
.آا لادر ت ادام فرهاى آهذ از ظي وارتر اظت
ايي دظتگا لادر ت خرخي گرفتي از هحيظ تد و خرخي اي آى هرتط ت يه ػىط رگي تظظ درتيي
يه پردازؼي را تر رگي خد اظت،هي تاذ اظىلت تذي اؼخاؾ را تؽخيؿ دذ از آا خرخي تگيرد
ري فاـل ي اخعام از خد داؼت تاؼذ و تظظ درتيي اي تؽخيؿ ػوك فايلي را تيرى هي دذ و در
يه تفير ؽاى داد هي ؼد.
1 RealTime
2 RGB

7
_کینکت2 _2 ضکل
:Kinect Fusion پرش ی SDKکیکت -2-3
ا ه ورد اعالػات آى را اظتخراج وذ.ؼروت هايىرظافت خثري لتي ىرا تاعتذ دظتگا ويىت ر
را هتؽر ورد و تراظاض آى تراه يعاى هي تاعتذ ت وذاي اعالػاتي ويىت دظترظي داؼت تاؼذ
وذا و اي الي ي تراه يعي ويىت و خد هايىرظافت آا را ارائ داد تد تثيذ.ايي تراه ا
اتمال تذذ Visual Studioري ظيعتن فة هي ؼد هي تاذ رفرعايي را ت تراه ي SDKدر لالة يه
و راتظ رم افساري ظخت افساري ويىت تاؼذ.
]Kinect Fusion3[ ام يه تراه ي وارترديSDK تحميماتي هايىرظافت هايىرظافت عت و تظظ ؼروتهايىرظافت تر ري ظيعتن فة هي ؼد.ايي تراه يه پرش SDK تا اظتفاد از افس ي تي ؼذ اظت 1
ي تحميماتي اظت و از ويىت اظتفاد هي وذ تا از اؼياء هحيظ اعراف خد يه هذل ظ تؼذي تليذ
ظت آرين آى را وذ.ها تا اظتفاد از ايي الگريتن هي خاين يه هذل ظ تؼذي از ـرت يه ؼخؿ را تذ
تازي راحت تر ادام گيرد. يه.فرآيذزي تا وار هذل اي ظ تؼذي تراي آهاد وين تراي رم افساراي تازي ظا
1 Microsoft Reaserch
8
الگريتن کیکت فیشى:-2-4
ايي تراه هاذ توام تراه اي وارتردي ردي،پردازغ اعالػات خرخي دارد.ها تا اظتفاد از ايي تراه
و .1ردي ايي تراه يا الگريتن مؽ اي پي در پي ػوك عتذظ تؼذي خرخي هي گيرين.يه هذل
تظظ ظعراي ويىت تازخاي هي ؼد.فرلي وي وذ و ظعر ويىت در تاريىي هغلك تاؼذ يا
عر هرتة از مؽ در حال اخراظت ت 2رؼايي واهل تاثيري در الگريتن ها ذارد.الگريتن ت عر زذ
اي ػوك ـح ي ها ردي هي گيرد.اليي تفير ؼىل گرفت از ـح ها هختفات هروسي ـح ي ها را
تؽىيل هي دذ تا ر تار حروت ويىت عثت ت ايي هختفات ت دليل ايداد مؽ اي خذيذ تر ـح ها
هي ؼد.3در خرخي ترز تر
_طریقه پردازش کینکت3 _2 ضکل
حال ت رذ ولي ايي الگريتن هي پردازم:
ردي اي مؽ ػوك ها تا اظتفاد از اؼؼ ي هادى لرهس و تظظ ويىت ت خعن هرد ظر فرظتاد هي
4ردي اي ها حالت آؼفتگي]4[رتاي ر داراي يه آؼفتگي اظت ؼد تذظت هي آيذ. ت ػلت آى پ
پط تايذ تراي داؼتي يه تفير ـاف واهل ايي آؼفتگي را وترل وين. تا اظتفاد از يه الگريتن .دارد
ظؼي هي وذ تا bilateralپردازغ تفير ويىت فيشى ايي آؼفتگي را از ردي خد هي گيرد. فيلتر
1 Depth map
2 RealTime
3 Update
4 Noisy

9
دي را تا اظتفاد از هياگيي همذار ػوك اي پيىعل اي وعاي يه پيىعل خايگا آى پيىعل آؼفتگي ر
را تؼييي هي وذ.
Bilateral_الگوریتم 4 _2 ضکل
:Bilateral Filter يتن الگر-2-5
وىاراػ هؼرفي ؼذ اظت و هفم آى از رهي 1تهاظييه رغ غير خغي اظت و تظظ 5ايي فيلتر
گاظي تظظ ضرب زى فيلتر تا ؼذت عثي پيىعل هتاظر تا آى ا ؼىل هي گيرد.پيىعل ا ي اعراف يه
ن تاؼذ.ايي فيلتر خايگا زى پيىعل را تراظاض پيىعل در ؼذت زى تا ن هتفاتذ رچذ خيلي سديه ت
پيىعل ادام هي ظختي آى پيىعل هؼيي هي وذ.ايي وار تظظ د پيىعل تا ـافي گظي در وعايگي يه
. ظپط تا اظتفاد از فرهل اي 3لرار هي گيرد ديگري در داه ؼذت لرار هي گيرد2 فضا ؼد.يىي درداه
ار داد ؼذ اظت خايگا پيىعل ا را ؽاى هي دذ.رياضي و در ليه لر
Bilateralروش الگوریتن _5 _2 ضکل
1 Thomasi
2 Domain Filter
3 Range Filter

11
ورد اظت تؼذ از آى تايذ را تر آى اػوال Bilateral Filterردي خد را گرفت الگريتن ويىت فيشىحال
ماط را در فضاي هدازي خد ؼىل دذ ؼىل هدازي ظ تؼذي ها را ؽاى دذ.پط تايذ تا اظتفاد از ردي
-multiايي وار را تا اظتفاد از الگريتن ويىت فيشىخد و واى مؽ اي ػومي اظت ؼىل ها را تؼثي وذ.
resolution pyramid .ادام هي دذ
:multi-resolution pyramidالگريتن -2-6
ها هي ؼد يه ظري از مؽ اي 1ارد پردازؼگر Bilteralلتي ردي اي ها و تا اظتفاد از فيلتر ن د وار ايي الگريتدتؼذي عتذ و تايذ تراي تي ي هذل ظ تؼذي ت يه فضاي ظ تؼذي تثذيل ؼذ.2
هن ادام هي دذ يىي ماط را در فضاي هدازي ويىت ترظين هي وذ و واى هحيظ ظ تؼذي هاظت
تردار اي رهال ماط اتر فضايي ها را هؽخؿ هي وذ.ايي الگريتن تا اظتفاد از د 3وار تؼذي ؼثي ظازي
دار رهال هختفات ماط خعن ها را تؼييي مغ وعاي و تيؽتر در تاال ظوت راظت آى گرفت هي ؼد تر
يه خعن در حميمت ظغح خعن هرد ظر ها را تؽىيل هي دذ .4هي وذ.تردار رهال
multi-resolution pyramidالگوریتم _6 _2 ضکل
1 Kinect
2 Depth Map
3 Simulation
4 Normal vector

11
: Aligmentالگريتن -2-7
الي،تؼذ تا اظتفاد از پردازغ 1در اتتذا واى پردازغ الي خعن هاظت يؼي اتر ماط ]6[ردي ايي الگريتن
Iterative Closest Point algorithm (ICP)اي تؼذي و اتر ماط تؼذي تذظت هي آيذ تا اظتفاد از الگريتن
گريتن تاايي حذض هلؼيت د اتر ماط را دارد و ت يىي ويىت را تذظت هي آرد ايي ال 2همذار خاتدايي
گفت هي ؼد.ايي الگريتن تا ؼي اي هتفاتي ظؼي دارد تا همذار خاتدايي د 4 ديگري اتر ذف 3اتر هثغ
اتر را حذض تسذ و يىي از ايي رؼا حذض زدى تر اظاض مغ اي تذظت آهذ هي تاؼذ.ايي وار را تراظاض
ذار خاتدايي يه مغ از اتر هثغ يه مغ ي ديگر از اتر ذف ادام هي دذ ايي وار را آمذر ادام هي هم
دذ تا ت ـرت واهل درظتي خاتدايي را تذظت آرد.
ICPالگوریتم _7 _2 ضکل
: Polygonالگريتن ساخت صفح يا -2-8
ها حال ن ماط را دارين و هخفؾ عراحي ؼىل هاظت ن هختفات ماط هختفات خاتدايي ماط،
A Truncated Signedحال هي تاين ـفح ايي و تيي ماط اظت را عراحي وين ايي وار را الگريتن
1 Point Cloud
2 Relocation
3 Source
4 Target

12
Distance Function (TSDF) ا را تؼييي هي وذ ت ادام هي دذ .ايي تاتغ خالـ اي از ظغح اي خعن ه
پيىعل ايي و داخل خعن ها يا ها ز اظىي ىرد اين ػذد هفي هي دذ ت پيىعل اي تيري ػذد
هثثت هي دذ ت پيىعل ايي و ري ظغح ها عتذ ػذد ـفر هي دذ.
TSDFالگوریتم _8 _2 ضکل
الگريتوي اظت و تراي Ray Castingرا ـذا هي زذ.الگريتن Ray casting [7]تغ الگريتن تؼذ از آى ايي تا
تر ري ـفحات 3يا پردازغ ر 2هخفؾ رذريگ1ايداد ـفحات خعن و در هثحث گرافيه واهپيتري
پلي گاى ا تحث هي ؼد.
داؼتي اظت.ايي الگريتن خرخي خد را ؼىل ها در واي ويىت فيشى ؼىل هي گيرد هذل ها آهاد ي تر
و پعذ فايل اـلي يه هذل ظ تؼذي اظت رخير هي وذ. objدر هذل اي ظ تؼذي تا فرهت
آى اظت در ايدا وايػ هي SDKهي خرخي خدم را از ويىت فيشى و در دالد تراه اي هخفؾ
دن.
1 Geraphic Computer
2Rendering
3Light Processing

13
Kinect Fusionنتيجه ی برناهه _9 _2 ضکل
عت. objيه هذل ظ تؼذي دارين و پعذ آى ها حال
هسايای استفاد از کیکت فیشى:_
آى 2اظت هي تاى خرخي اي هتؼذدي از آى گرفت ن چيي دظترظي ت وذاي 1ايي تراه رايگاى_1
هخد اظت.
و ت ـرت اظتاذارد ICPدي الگريتن اي هتؼذد يؼي ؼوا هي تايذ الگريتن دظترظي ت داد اي ر_2
يعت را واهل تر ويذ خرخي هرد ظر خد را تتر از ويىت فيزى دريافت ويذ.
خرخي تا د فرهت هتفات_3
اظتفاد از يه دظتگا ويىت_4
هعايب استفاد از کیکت فیشى:_
اعاى حتوا تايذ د فر حضر داؼت تاؼذ.ايي هؽىل را هي تاى تا ظاخت يه دظتگاي تراي هذل ظازي _1
و ت در خد هي گردد حل ورد.
Iterative Closest Point algorithmذاؼتي الگريتن اظتاذارد تراي تغثيك دادى ردي اي اتر مغ اي _2
(ICP) اظت.ت ويي دليل ت لذرت پردازغ ظيعتن اتعت
1 Free
2 opensourc

14
ريس ؼذى خاظتي خرخي تا ويفيت اتعت ت دلت وردى حروت دادى ويىت اظت._3
حال ها هي خاين ايي هذل را تراي رم افساراي تازي ظازي اظتفاد وين .تراي ايي وار ايي ىت ضرري
اي Polygonا پردازغ هي ؼد تايذ از ـفحات ي 1اظت و هذل اي تازي ظازي چى تازي ت ـرت زذ
خيلي ون تليذ ؼد.تراي ويي ها هذل خد را تايذ تر اظاض ووتريي پلي گاى تليذ وين.ها تا اظتفاد از رم
.گاى هذلواى هي پردازين افسار اي هخفؾ هذل ظازي ت پردازغ ون وردى پلي
1 RealTime

15
:رم افسار يرايش هدل س بعدی3فصل

16
3-1-Autodesk 3D max:
افسار يىي از تاؼذ. ايي رم رذر هي 1تا لاتليت ظاخت هذلاي ظ تؼذي، هتحروعازي ]8[افساري رماي تعت
اي عراحي هذلاي ظ تؼذي ايويؽي ظازي رذريگ در ػرـ گرافيه واهپيتري لذرتوذ تريي تراه
تظؼ يافت ػالثت screetDi و Yost ،Kinetix اي هيادي هتفات ظير عت ظالاظت و تظظ ووپاي
خريذاري ؼذ. اهىاات تعثار گعترد وارايي ت Autodesk دتار ت ظيل تظؼ دذ اـلي خد يؼي
افسار لي عت. ت عر هتؼذد از هساياي ايي رمparty -third 2ايپالگین عثت آظاى وچيي ظاز گاري تا
اي يص اي واهپيتري پيػ پردازغ خل ، ظاخت تازي4احي ـؼتي، عر3اي در هؼواري ظاختواى گعتردوچيي داراي ظيعتن افسار رم ؼد تسرگتريي لاتليتػ اهىاات خب هذل ظازي اظت. ايي اظتفاد هي5
آاليس راي الؼي تراي تعيار لذرتوذ و هحيغي هاظة تراي ؼثي ظازي تفاير ـح7 ظيعتن رر6
اي تراه ر دچذاى ام دار لاتليت MAXscript ايي رم افسار و وذ. زتاى تراه يعي رتر ايداد هيوا
.وذ هي
.هي هذل خدم را ارد ايي رم افسار هي ون تؼذاد پلي گاى ا را ؽاى هي دن
3D MAXم افزار ورودی هدل ها در نر _1 _3 ضکل
1 Animation
2 Plugin
3 Architecture
4 Industrial Design
5 Special effects
6 indirect illumination & radiosity
7 particle system

17
سار پلي گاى دارين 014واى عر و هي تييذ تؼذاد پلي گاى اي آى خيلي زياد اظت در ايي هذل تمريثا
و تراي ايي هذل هي زياد تلمي هي ؼد.
هي تا اظتفاد از الگريتن اي واػ پلي گاى يه خعن ظؼي هي ون پلي گاى اي آى را واػ دن.
ديگري تر حعة 1د هي تاؼذيىي تر حعة واػ ماطى اي هخد د الگريتن هختراي واػ پلي گا
يؼي در الگريتن ال پردازغ تر ري ماط ادام هي ؼد در الگريتن دم پردازغ تر .اظت 2واػ خغط
ري خغط ادام هي ؼد.
:قاطالگريتن کاش -3-2
اي و تا ن دارذ ت ن ـل هي ؼذ ايي وار اداه پيذا هي وذ تا در ايي الگريتن ماط تا تخ ت فاـل
درـذ اخرا ؼد يه خعن 244فمظ يه مغ داؼت تاؼين.هؽخؿ عت و اگر ايي الگريتن ت ـرت
اهاظة خاين داؼت.پط ايي الگريتن را تا خايي و خعن ها حالت اـلي خد را از دظت ذذ ادام هي
دين.
الگوریتن وصل کردى نقاط _2 _3 ضکل
عثك ؼىل تااللتي الگريتن درظت وار هي وذ و يه يال تيي د مغ هخد تاؼذ،الگريتن اي ديگيري
ماط را ؼوذ ت ن ـل هي وذ لي حذالل تايذ در يه ـفح تاؼذ يه هعير تيي ن خد دارد و
آا خد داؼت تاؼذ.عثك الگريتن ايي و خعن ظ تؼذي در ويىت فيشى را تؽىيل هي دذ ؽاى هي
وين تايذ توام دذ و هثلث تذي اي خعن از ن خذا عتذ ها تراي ايى تتاين الگريتن ماط را پياد
1 Vertex
2 Edge

18
ايي هثلث تذي ا را ت ن ـل وين ايي اؼىال را ت يه خعن احذ تثذيل وين. پط تايذ ال ماعي و
در وار ن عتذ ت ن ـل وين تثذيل ت يه مغ وين تا خعن ت يه خعن هظن تثذيل ؼد.خد
تري دي ذ.لتي خرخي ويىت فيشى را ارد رم افسار ايىار را تراي ها ادام هي د تری دی مکسرم افسار
لرار دارد ايي Editable Meshخعن ها در حالت Modify Stackدرلعوت Modifyهي وين در پدر هىط
تظيوات ت توام خسئيات خعن دظترظي دارد ن هي تاذ ت مظ ن ت يال ا ن ت ـفحات دظترظي
همذار فاـل ي آى Weldتخاب هي وين توام ماط را اتخاب هي وين از پدر ي دارد.گسي ي ماط را ا
را در ووتريي حذ خد اتخاب هي ون چى الگريتن ظاخت ـفح ا در ويىت فيشى تؽىيل ـفح ا را
تؼذ از اتخاب تر اظاض ماط وار ن تذظت هي آرد ايي تاػث هي ؼد فاـل ي تيي ماط همذار ووي تاؼذ.
فاـل تراي يىي ؼذى ماط پردازغ را ادام هي دن تا تيد را تثين
نتيجه واحد کردى یک جسن _3 _3 ضکل
ـفحات ت ن ـل هي ؼذ حال تا الگريتن خعن ت عر خيلي واهلي ت يه ـفح تثذيل هي ؼد
ام گرفت اظت ظؼي در واػ ماط ـفحات دارين و در ايدا MultiRes واػ ماط و درايي رم افسار ت
گسي ي تؼذاد ماط هخد اظت.

19
3D maxدر نرم افزار MultiResنوایص پنجره _4 _3 ضکل
تا اظتفاد از پردازغ الي تؼذاد ماط هؽخؿ هي ؼد و تؼذ تا اظتفاد از ون وردى تؼذاد ماط خد
الگريتن ت عر تي ماط را ت ن ـل هي وذ پلي گاى ا را ت عر هحعظي واػ هي دذ.تا اظتفاد
سار واػ داد.7يي خعن را تا همذار از ايي الگريتن هي تاى تؼذاد ـفحات ا
: خططالگريتن کاش -3-3
ايي الگريتن تر حعة فاـل ي خغط اذاز ي خغط وار خد را ادام هي دذ عثت ت الگريتن لثل
هؼرف اظت. Optimizeتي تر اظت.ايي الگريتن در ايي رم افسار ت

21
3D maxدر نرم افزار Optimizeنوایص پنجره _5 _3 ضکل
ايي الگريتن ت ػلت ادام ػوليات زياد ت پردازذ ي ؼوا تعتگي دارد هاذ حالت لثل ال خد الگريتن
دارد. يه هحاظث از هذل ها هي گيرد تؼذ تا اظتفاد از دظترات ها ظؼي در واػ خغط هذل ظ تؼذي ها
:ش قاط سبت ب الگريتن کاش خططهسايا هعايب الگريتن کا-3-4
از ظرػت تااليي ترخرداراظت تاايي ادام ايي وار را ت ـرت وسهاى ادام هي دذ.در ـرتيى _2
الگريتن واػ يال تراي اػذاد خيلي تاال زهاى تيؽتري را علة هي وذ
ا ت خاب ترظذ.الگريتن ياز ذارد زهاى خيلي وتاي را ظپري هي وذ ت ظخت افسار خيلي حرف اي_1
ت پردازؼگر لي ياز دارد تا تتاذ در ايي اتؼاد ت ها ووه وذ. واػ خغط

21
هراجعفرست
__________________________

22
فلرسي ب اگلیسي اه اش
Source هثغ Point Cloud ماطاتر
Vertex مغ Plugin لذرتافس
Target ذف Noisy آؼفتگي
Indirect illumination & radiosity رآاليس
Normal vector رهالتردار
Light Processing رپردازغ
Relocation خاتدايي
Special effects اي يص خل
Edge خغط
Range Filter ؼذتداه
Domain Filter فضاداه
Thomasi تهاظيداؽوذ
Free رايگاى
Rendering گرفتيرذر
Particle system رر ايظيعتن
Simulation ظازيؼثي
Industrial Design ـؼتيعراح
Geraphic Computer واهپيتري رافيه گ
Animation ظازي هتحرن
Opensourc تاز هتي
Architectureظاختواى هؼواري

23
اه اگلیسي ب فارسياش
Source هثغ Animation ظازي هتحرن
Special effects اي يص خل Architectureظاختواى هؼواري
Target ذف Domain Filter فضاداه
Thomasi تهاظيداؽوذ Edge خغط
Vertex مغ Free رايگاى
Geraphic Computer واهپيتري گرافيه
Indirect illumination & radiosity رآاليس
Industrial Design ـؼتيعراح
Light Processing رپردازغ
Noisy آؼفتگي
Normal vector رهالتردار
Opensourc تاز هتي
Particle system رر ايظيعتن
Plugin لذرتافس
Point Cloud ماطاتر
Range Filter ؼذتداه
Relocation خاتدايي
Rendering گرفتيرذر
Simulation ظازيؼثي

24
[1] Microsoft Kinect, (http://www.youtube.com/watch?v=abDgEHqAXWo)
[2] Microsoft Xbox360, ( http://fa.wikipedia.org/wiki/%DA%A9%DB%8C%D9%86%DA%A9%D8%AA)
[3] Kinect Fusion, (http://www.youtube.com/watch?v=quGhaggn3cQ)
[4] Kinect Infrared Noisy , (http://www.youtube.com/watch?v=CEep7x-Z4wY)
[5] Bilteral Filter , (http://scien.stanford.edu/pages/labsite/2006/psych221/projects/06/imagescaling/bilati.html)
[6] ICP Algorithm , (http://en.wikipedia.org/wiki/Iterative_closest_point)
, (http://www.comp.nus.edu.sg/~lowkl/publications/lowk_point-to-plane_icp_techrep.pdf)
[7] Raycasting , (http://en.wikipedia.org/wiki/Ray_casting)
[8] Autodek 3D Max , (http://en.wikipedia.org/wiki/3d_max)
[9] Michele Pirovano , 3D structure from visual motion 2011/2012 Project Assignment
[11] Jing Tong, Jin Zhou, Ligang Liu, Zhigeng Pan_, and Hao Yan ,Scanning 3D Full Human Bodies using Kinects
[11] Microsoft kinect. http://www.xbox.com/kinect, 2010.
[12] MSDN ),http://msdn.microsoft.com/en-us/library/dn188670.aspx(
[13] Coding4fun, )http://channel9.msdn.com/coding4fun/kinect(
[14] Channel 9 ,( http://channel9.msdn.com/) [15] Jungong Han, Member, IEEE, Ling Shao, Senior Member, IEEE, Dong Xu, Member, IEEE, and Jamie Shotton, Member, IEEE , Enhanced Computer Vision with Microsoft KinectSensor: A Review [16] Yan Cuiy, Will Changz, Tobias N¨olly, Didier StrickeryAugmented Vision, DFKI KinectAvatar: Fully Automatic Body Capture Using a Single Kinect [17] Shahram Izadi, David Kim, Otmar Hilliges, David Molyneaux, Richard Newcombe, Pushmeet Kohli, Jamie Shotton, Steve Hodges, Dustin Freeman,Andrew Davison, Andrew Fitzgibbon , KinectFusion: Real-time 3D Reconstruction and Interaction Using a Moving Depth Camera [18] Razor Vision , (http://razorvision.tumblr.com/post/15039827747/how-kinect-and-kinect-fusion-kinfu-work) [19] Kinect Hacks , ( http://www.kinecthacks.com/) [20] WPF ,(http://www.soulsolutions.com.au/Blog/tabid/73/EntryId/733/Skeleton-Custom-Control-for-Kinect-SDK-WPF.aspx) [21] WPF VIEWR , (http://msdn.microsoft.com/library/ms748948.aspx) [22] P. Cignoni, C. Montani, R. Scopigno_ , A comparison of mesh simplification algorithms [23] Lijun Qu and Gary W. Meyer , Perceptually Guided Polygon Reduction

25
[24] Dr. Francis Colas , Iterative Closest Point Algorithm [25] Harvey Rhody, Multiresolution Image Analysis [26] Hugues Hoppe� ,Tony DeRose,� Tom Duchamp,yJohn McDonaldz,,, Werner Stuetzlez Mesh Optimization [27] Stan Melax , A Simple, Fast, and Effective Polygon Reduction Algorithm