
Evaluation Of Dynamic Load Allowance Factors For ... - DigiNole
93
Florida State University Libraries Electronic Theses, Treatises and Dissertations The Graduate School 2010 Evaluation of Dynamic Load Allowance Factors for Reinforced Concrete Highway Bridges Sharnie Fiona Earle Follow this and additional works at the FSU Digital Library. For more information, please contact [email protected]
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of Evaluation Of Dynamic Load Allowance Factors For ... - DigiNole

Florida State University Libraries
Electronic Theses, Treatises and Dissertations The Graduate School
2010
Evaluation of Dynamic Load AllowanceFactors for Reinforced Concrete HighwayBridgesSharnie Fiona Earle
Follow this and additional works at the FSU Digital Library. For more information, please contact [email protected]

THE FLORIDA STATE UNIVERSITY
FAMU-FSU COLLEGE OF ENGINEERING
EVALUATION OF DYNAMIC LOAD ALLOWANCE FACTORS FOR REINFORCED
CONCRETE HIGHWAY BRIDGES
By
SHARNIE EARLE
A Thesis submitted to the
Department of Civil and Environmental Engineering
in partial fulfillment of the
requirements for the degree of
Master of Science
Degree Awarded:
Spring Semester, 2010
The members of the committee approve the thesis of Sharnie Earle defended on April 4, 2010.
____________________________________
Jerry Wekezer
Professor Directing Thesis
____________________________________
Michelle Rambo-Roddenberry
Committee Member
____________________________________
Primus Mtenga
Committee Member
Approved:
______________________________________________________________
Kamal Tawfiq, Chair, Department of Civil and Environmental Engineering
______________________________________________________________
Chen, Dean, FAMU-FSU College of Engineering
The Graduate School has verified and approved the above-named committee members.
ii

I dedicate this to my mother, Auleen Earle and to my father Lexley Earle. Without the support
of my mother I would not have been able to attend Florida State University. She supported me
financially and emotionally. Without her help, none of this would be possible. My father
provided me with the technical guidance that I needed in order to become a successful Civil
Engineer. I would also like to thank Mark Coppola Jr., who encouraged me all throughout
engineering school. Whenever I thought I could not do it, he would always reassure me that I
was too smart to give up. Lastly, to all my extended family, who over the years realized the
passion that I had for school and they too, began supporting me.
iii

ACKNOWLEDGEMENTS I would like to acknowledge Professor Jerry Wekezer at the FAMU-FSU College of Engineering for all of his guidance throughout my Master of Science research. His knowledge and assistants was of the utmost importance when putting this research together. I would also like to acknowledge Mr. Marc Ansley for his technical support throughout the research. A special thanks goes to Piotr Szurgott, Hongyi Li, and Dr. Kwasniewski for their outstanding work on previous research projects which, opened the door for my research.
iv

TABLE OF CONTENTS
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
1. INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1.1 Problem Statement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1.2 Research Objective . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.3 Significance of Research . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2. LITERATURE REVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 2.1 Bridge Dynamic Effect in AASHTO Specification . . . . . . . . . . . . . . . . . . . . . . . . . . 6 2.2 FE Modeling of Highway Bridge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 2.3 Analysis of Elastomeric Bearing Pads . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 2.4 Validation and Verification of FE Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 2.5 FE Modeling of Vehicles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3. SELECTION OF OBJECTS FOR TESTING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 3.1 Use of Existing Vehicle Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 3.2 Selection of Highway Bridge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4. DEVELOPMENT OF THE FINITE ELEMENT MODEL . . . . . . . . . . . . . . . . . . . . 22 4.1 Geometric Adjustment of Existing FE Model . . . . . . . . . . . . . . . . . . . . . . . . . . 23 4.2 Material Characterization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 4.3 Importing of Key File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5. ELASTOMERIC BEARING PADS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.1 Improvements of Bearing Pad Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 5.2 Analysis of Bearing Pad Improvements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 5.3 Parametric Study of Reinforced Neoprene Bearing Pads . . . . . . . . . . . . . . . . . . . . 55
6. VERIFICATION AND VALIDATION OF NEOPRENE BEARING PADS . . . . . . . . 67 6.1 Verification and Validation of Existing FE Model . . . . . . . . . . . . . . . . . . . . . . . . . . 68
7. DYNAMIC LOAD ALLOWANCE FACTORS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72 7.1 Evaluation of Dynamic Load Allowance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73 7.2 Summary and Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78 7.3 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79 7.4 Bibliography Sketch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
v

LIST OF TABLES
4.1 Units adopted for FE analysis in this study . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 4.2 Summary of concrete slab parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 4.3 Material properties for concrete beams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 4.4 Dimensions for ASTM standard reinforcing bars used in bridge structure . . . . . . . . 33 4.5 Material properties of the concrete slab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 4.6 Material properties for concrete girders . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 4.7 Summary information for No Name Creek FE Model . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 5.1 FDOT bearing pad dimensions for AASHTO beams . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 5.2 Typical bearing properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47 5.3 Dimension tolerance for bearing pads . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 5.4 Result of geometric design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51 5.5 Summary of FE Model for Shear Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57 5.6 Material Properties for Compression Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61 6.1 Comparison metrics for analytical curves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68 7.1 Total displacement values for each case . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71 7.2 Complete displacement values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73 7.3 Results for displacement Dynamic Load Allowance . . . . . . . . . . . . . . . . . . . . . . . . . . 73 7.4 Dynamic Load Allowance result for strains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74 7.5 Final results for improvement of neoprene pads . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 7.6 Results for new bridge model with improved pads . . . . . . . . . . . . . . . . . . . . . . . . . . 75
vi
LIST OF FIGURES
2.1 Dynamic analysis procedure of vehicle and bridge interaction . . . . . . . . . . . . . . . . . . . . 8 2.2 Grillage model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 2.3 Finite element model of a bridge (Tedesco, Stallings, & El-Mihimy, 1999) . . . . . . . . 10 2.4 Bearing deformation due to compression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 2.5 Bearing deformation due to shear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 2.6 Bearing deformation due to rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 2.7 Shape factor dimensions for neoprene pads . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 2.8 Types of neoprene pads . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 2.9 Simplified analytical vehicle models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 2.10 Three dimensional analytical vehicle model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 2.11 Analytical model of an AASHTO HS20-44 truck . . . . . . . . . . . . . . . . . . . . . . . . . . 16 2.12 Finite element models available in public domain . . . . . . . . . . . . . . . . . . . . . . . . . . 17 2.13 FE model of the tractor-trailer and lowboy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 3.1 Detailed sketch of a Mack CH613 Tractor-Trailer truck . . . . . . . . . . . . . . . . . . . . . . . . . . 19 3.2 Mack CH613 Tractor-Trailer truck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 3.3 Bridge #540074 used for FE modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 3.4 Localization of the bridge used for modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 4.1 FE model of concrete slab with LS-Dyna summary . . . . . . . . . . . . . . . . . . . . . . . . . . 25 4.2 AASHTO dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 4.3 Girder modification in z-direction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 4.4 FE model of completed girder modifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
vii

4.5 FE model of traffic barriers railings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 4.6 FE model of diaphragms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 4.7 FE model of neoprene pads . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 4.8 Cross-section of traffic railing barriers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 4.9 FE model of reinforcements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 4.10 *Part interface dialog box for LS-Dyna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 4.11 LS-Dyna error reports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 4.12 Complete FE model of new bridge, No Name Creek . . . . . . . . . . . . . . . . . . . . . . . . . . 40 5.1 Time histories of existing material pad parameters . . . . . . . . . . . . . . . . . . . . . . . . . . 41 5.2 Detailed sketch of elastomeric bearing pad cross-section . . . . . . . . . . . . . . . . . . . . 46 5.3 Original neoprene pad used on existing FE bridge model . . . . . . . . . . . . . . . . . . . . 48 5.4 Improved neoprene pad for existing FE model; a) top pad, b) bottom pad . . . . . . . . 48 5.5 Graph of shape factor vs. internal layer thickness . . . . . . . . . . . . . . . . . . . . . . . . . . 50 5.6 Graph of geometric study . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 5.7 In-Lab Shear-Test Apparatus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56 5.8 Detailed Sketch of Shear-Test Apparatus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57 5.9 FE Model of Shear Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59 5.10 Results for Case 1 compression test; a) displacement, b) strain . . . . . . . . . . . . . . 60 5.11 Results for Case 2 compression test; a) displacement, b) strain . . . . . . . . . . . . . . 60 5.12 Results for Case 3 compression test; a) displacement, b) strain . . . . . . . . . . . . . . 61 5.13 Load vs Displacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63 5.14 Displacement vs Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63 5.15 Stress vs Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
viii

5.16 Strain vs Displacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64 5.17 Stress vs Strain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65 6.1 Dynamic test of vehicle-bridge interaction, (a) Full-scale field test and (b) Finite Element simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67 6.2 Case 1 strain results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69 6.3 Case 2 strain results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69 6.4 Case 3 strain results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
ix

x
ABSTRACT
The evaluation of existing structures is critical for the efficient management of transportation
facilities, especially bridges. According to the Florida Department of Transportation Plan,
Safety, and System Management, which include bridge repairs and replacements, a cost of about
30% of all state and federal revenues will be needed in order to get the nation’s bridge integrity
to a sufficient level [4]. ASCE estimates $930 billion dollars will be needed within 5 years in
order to improve all roads and bridges. This project responds to the growing need to rehabilitate
our nation’s bridges by focusing on vehicle-bridge interaction. Frequently, bridges are evaluated
using traditional stability methods and simplified static analysis methods.
The main objective of this research was the analysis of an already verified and validated bridge
model in order to improve on the dynamic nature of vehicle-bridge interaction. Special attention
was made to the improvement of the elastomeric bearing pads in the existing model. The main
focus of the research was placed on this part of the bridge due to the fact that these pads are ideal
for bridge design because they are economical, effective, and require no maintenance. They
deflect in shear to accommodate expansion, contraction, and end rotation of the bridge. There is
no need for lubrication, cleaning, nor do they have the opportunity to seize. In order to analyze
the improvements of the older bearing pads, an in-lab compression test was created using the
same finite element software that was used to create the bridge model. Several compression tests
were performed using different material properties in order to determine which set of material
characteristics would yield the best results for the improvement of these pads. Once these
parameters were determined, they were then verified and validated by a program known as the
Roadside Safety Validation and Verification Program, RSVVP. This program is an essential part
when developing a model if the model is to be accepted and used to support decision making.
The parameters that yield the closest results to the actual field test were then implemented onto
the new bridge model. This ensured that the new bridge model was in fact a better representation
of what happens in the field. A final calculation of the dynamic load allowance, DLA verified
that the vehicle-bridge interaction was successful due to the DLA factor decreasing when
compared to the previous calculated DLA factors from an existing vehicle-bridge interaction
research.

CHAPTER 1
INTRODUCTION
This project responds to the growing need to rehabilitate our nation’s roads, highways, and
bridges. With the recent report card from the American Society of Civil Engineers giving
America’s roadways and bridges a grade of D, it is vital more than ever to reduce the
deterioration of our country’s infrastructure. According to ASCE, an estimated $930 billion
dollars within 5 years will be needed to improve our nation’s roadways and bridges [1]. A price
tag like this can be reduced significantly if the proper operation and maintenance are performed.
In order to reduce this problem, knowledge of the actual load effects and structure resistance is
necessary. This information will be very useful for determining the load carrying capacity and
the condition of structures. It can also help in making management decisions, such as
establishing permissible weight limits for certain roadways and bridges and most importantly
provide fundamental economic and safety implications. Advanced structural analysis and
evaluation procedures can also be applied to a structure that exhibits behavior difficult to explain
such as, excessive vibration, deflection, and others.
Frequently, bridges are evaluated using simplified static analysis methods. Unfortunately, these
methods do not represent what is actually happening in the structure, due to the ignorance of
certain dynamic effects. The dynamic nature of live loads and vehicle-bridge interaction is not
sufficiently considered in the design process. Dynamic Load Allowance suggested by the
current bridge design codes usually lead to conservative solutions, especially for overloaded
vehicles. Accurate and inexpensive methods are needed for diagnostics and verification of the
actual dynamic effect on our nation’s bridges and the impact factor associated with them.
Traditional bridge analysis is based on several simplifications of geometry, material, boundary
conditions and loading. Bridge live load is considered one of the most questionable
simplifications. The interaction between a vehicle and the bridge structure is usually represented
by concentrated and uniformly distributed static loads. Dynamic effects of the actual live load
are considered by scaling up the static loads by values known as impact factors. The magnitude
of the dynamic load allowance, DLA is usually determined based on the simplifications and was
1

related only to the length of the bridge. Unfortunately, the bridge’s surface roughness and the
dynamic characteristics of the vehicle were ignored.
Due to the increasing computational capabilities of computers and the development of
commercial finite element programs, advanced numerical and 3-D dynamic analysis of bridge
structures are calculated faster and easier than ever before. Growing knowledge of finite element
analysis is making it possible to create more detailed 3-D models of bridges that contain a large
amount of finite elements with consistent mass and stiffness distributions. Commercial finite
element software has also allowed for advanced material models of steel and concrete, options
for modeling rebar for reinforcement, application of different types of constraints, and damping
options which allows for more accurate description of the actual bridge behavior. There are also
finite element models of vehicles available in the public domain. These models are ready to use
but may have different levels of detailed representation for the suspension system, kinematical
characteristics of the vehicle components and wheel models. Once improvements have been
made, these models can be used successfully for simulation of truck passes onto the bridge
structure. Applications of these models will allow for more complex mechanical phenomena,
such as contact between wheels and pavement surface, impact forces caused by surface
discontinuities, and time dependence of moving live loads caused by dynamic interaction among
suspended masses representing vehicle components. Actual live loads caused by overloaded
heavy vehicles can also be modeled.
A full scale bridge test should be carried out in order to validate computational dynamic analysis.
Validated finite element models can provide extensive information about the structural behavior,
which is both expensive and difficult, if not impossible, to obtain through experimental study
only. This project focuses on dynamic load allowance factors for short and medium span
reinforced concrete bridges, involving advanced finite element analysis and field testing.
2
1.2 Research Objective
This research focuses on the development of an analytical model of a highway bridge in North
Florida. The bridge is #540074 located on Hwy 90 in Tallahassee, FL and crosses “No Name
Creek”. The development of the finite element (FE) model was completed through the
modification of a previous validated FE bridge model [5]. The finite element model of the
bridge was developed and validated under the previous BD 493 contract. Validation of this
bridge was done through experimental testing only. Once this model has been successfully
validated, modifications of the existing model were completed order to create the new FE model
for the bridge.
The previous bridge model was validated by a field test conducted by the Florida Department of
Transportation Structures Lab a on selected bridge #500133 over “Mosquito Creek.” The
validation included a full scale suspension tests which was carried out in order to develop and
validate the spring and damping characteristics for the suspension system of the vehicle. During
the experimental tests, a heavy vehicle was driven across a speed bump at different speeds.
Relative displacement and acceleration histories were collected for several points located on the
axles and frame of the vehicle. Afterwards, these tests were reflected in numerical simulations
based on non-linear, explicit, dynamic, finite element (FE) computational mechanics using the
LS-DYNA computer code.
Since the previous bridge model, bridge #500133 has already been validated through
experimentation only; another method of verification was used in order to further validate the
previous model. The existing model is verified and validated using a Roadside Safety
Verification and Validation Program (RSVVP) [21]. This program was designed to calculate
comparison metrics in order to verify and validate roadside crash test and simulations. The
comparison metrics calculated by RSVVP can be used to validate computer simulation models
using data obtained from experimental tests, verify the results of a simulation with another
simulation or analytical solution, assess the repeatability of a physical experiment or, to perform
a comparison of virtually any pair of curves [13].
The selection of the validated vehicles and bridges were determined by the Florida DOT staff.
Due to the fact that span length, vehicle speed, suspension parameters, truck weight, truck
3

position on bridge lane, and road surface condition have a significant influence on dynamic
responses, emphasis were placed on these specific parameters.
The main focus of the new FE model will be the enhancement of the elastomeric neoprene
bearing pads, application of the Roadside Safety Verification and Validation Program, and the
evaluation of Dynamic Load Allowance. Since these pads have a proven long and successful
record of performance supporting bridges, railroads, buildings, and heavy machinery, they will
be a key factor in the improvement of the FE model, bridge #540074. These improvements will
allow for a better correlation between the experimental test and the numerical simulation.
A finite element model of an in-lab shear test was also developed using Hypermesh. This model
was used solely for the investigation of the neoprene bearing pads. In order to perform
successful parametric study different material characteristics were investigated and the results of
the compression test will give us a good idea of which parameters were the most suitable for the
chosen bearing pad design. Once these parameters were determined, they were then
implemented onto the new bridge model.
Parameters such as shape factor, shear modulus, Poisson ratio, bulk modulus were the focus of
improving the bearing pads. Once improvements have been made, a Roadside Verification and
Validation Program were used in order to analyze the result of the existing model with the new
neoprene bearing pad parameters. This is a vital part in the research because it showed the
improvement of the numerical results, when compared to the experimental results. Whichever
neoprene pad parameter yields the closest result to the actual field test, those parameters were
used when modeling the new FE model, bridge #540074 “No Name Creek”. By modifying the
new FE model with the existing bridge model results, it helped in verifying the new model
without any experimental test.
1.3 Significance of Research
The U.S. Department of Transportation has seen deterioration in the nations bridges for years.
With roughly 12% of our National Bridge Inventory classified as structurally deficient, research
in this area has become increasingly in demand, especially in the state of Florida. The Florida
Department of Transportation faces a challenge of allowing larger and heavier vehicles on
Florida’s highway and bridges without compromising safety. With a National grade of D, given
4

by the American Society of Civil Engineers, for the nation’s roadways and bridges, it is easy to
see why this presents a challenge for the FDOT. Since the FDOT issues 95,000 overweight/over
dimension permits per year to heavy trucks and cranes, quick decisions must be made on the
maximum dynamic loading imposed on these types of vehicles [4]. In order to do this, accurate
and reliable finite element models must be created, validated and easily accessed for use by the
FDOT.
This research focuses on this challenge by analyzing the dynamic effects of vehicle-bridge
interaction and coming up with information on actual impact factors. This information is
important because it provides critical assessment of the ultimate load bearing capacity for the
bridge in order to provide quick and accurate overload permits. Once these models were created
and validated and the necessary information is extracted from them, these models can be stored
away and later used for future projects of interest to FDOT. Issues related to health monitoring,
effects of fatigue during the life span of girders, effects of using different materials, bridge
strengthening studies, and many more can all be analyzed by the use of these FE models. These
models are also easy to modify in order to represent any bridge or vehicle type.
5

CHAPTER 2
LITERATURE REVIEW
The literature relevant to this project has been continuously reviewed throughout the project
duration. Intense reviewing was conducted at the earlier stages of the research. The review
focused on the following topics: AASHTO specification of bridge dynamic effects, FE modeling
of highway bridge, analysis of elastomeric bearing pads, and validation and verification of FE
model.
2.1 Bridge Dynamic Effect in AASHTO Specification
Highway bridges have always been subjected to dynamic influences due to vehicles driving over
them. These dynamic effects can lead to deterioration of the bridge. The damage typically
occurs in the bridge deck and in the main superstructure [FDOT report BC-379]. The main
elements of concern in the superstructure include the floor beams, girders, diaphragms, joints,
and bearings. With the rapid growth of highway transportation and the fact that vehicles are
increasingly becoming heavier, fatigue damage is quickly becoming a serious concern. As a
result, bridge maintenance is becoming more difficult and more costly due to the fact that
maintenance, rehabilitation, and/or replacement are becoming more frequent [12]. Since
dynamic effects are significant in bridge fatigue, it is necessary to consider them when
evaluating an existing bridge or designing a new one. An impact factor (now called dynamic
load allowance) is frequently used to assess the dynamic effects of vehicle loads on bridges.
These effects can result from the two following sources:
• hammering effect or dynamic response of the wheel assembly to riding surface
discontinuities such as deck joints, cracks, potholes and delaminations,
• dynamic response of the whole bridge to passing vehicle.
In AASHTO (American Association of State Highway and Transportation Officials) standard
specifications for highway bridges (AASHTO Standard Specifications for Highway Bridges,
6

2002), the impact factor is expressed as the increment of the static response of the wheel load
and is determined by the formula:
125
50
+=
LDLA (2.1)
where L = the length (feet) of the portion of the span that is loaded to produce the maximum
stress in the member.
Equation (2.1) is based on field tests and theoretical analysis for specific trucks. This equation
gives only an approximation of the dynamic load allowance. Therefore, this research is being
conducted to accurately evaluate the impact factor of three oversized and overweight vehicles in
order to evaluate the bridge dynamic response using advanced numerical methods. LS-Dyna, a
post-processing FE software will be used in order to run the simulations. Once results are
obtained from LS-Dyna, a more exact solution can then be used to calculate the dynamic load
allowance. This equation is presented in Equation 2.2.
DLA = (2.2)
where Rd is the dynamic response and Rs is the static response of any physical event. There are
several procedures in which vehicle-bridge interaction can be analyzed. Figure 2.1 presents a
dynamic analysis procedure for studying vehicle-bridge interaction.
2.2 FE Modeling of Highway Bridge
As we enter a new era of structural analysis and design, it is important to develop techniques that
will aide in the speedy development of a product, reduce cost to develop a product, improve
quality of product, increase product life, provide greater product reliability, and increase
customer satisfaction[]. With the development of finite element method (FEM), one can
significantly improve both the standard of engineering design and the methodology of the design
process. The Federal Highway Administration (FHWA) have focused much of their attention on
developing highly reliable, realistic, and detailed analytical models of highway bridges. By
using FE modeling certain key features in a bridge can be modeled accurately. These features
7

include a complete detailed geometric component, constitutive material models, connections,
boundary conditions, and dynamic loading.
Bridge Finite Element Model
Modal Coupled Method (super-system of bridge-vehicles)
Convergence without iterations: time step is smalltΔ
Method of Solution the central difference method
Interface: Road Surface Roughness
Vehicle Finite Element Model
mb
Bridge
Vehicle mv
Vehicle-Bridge Interaction
Uncoupled Method (each dynamic system of bridge
and vehicle is resolved separately)
Method of Solutioninteractive process using
the Newmark implicit scheme for each dynamic system
Convergence in 2 or 3 iterations: time step is largetΔ
Solution of bridge’s and vehicle’s degrees of freedom
Figure 2.1: Dynamic analysis procedure of vehicle and bridge interaction [4]
In a lot of cases, bridges are modeled as simply supported or continuous beams. This is due to
the fact that in structural analysis the effects of torsion are usually neglected with only bending,
shear, and axial taken into account. The simply supported or continuous models are accurate if
and only if the bridge is straight, non-skewed and symmetric about the centerline. It is also
important that the model has a large length to width ratio, uniform stiffness, mass distribution,
and symmetrical loading. [5] Unfortunately, when a vehicle drives over a bridge, it will travel
along the west or east lane. This violates the simply supported and continuous beam model due
to the lack of symmetrical loading thus, the introduction of torsional and transverse modes.
Analyzing torsional behavior of a reinforced concrete member is essential in obtaining accurate
8

results. Even small torsional moments can cause considerable stresses which can change the
response of the whole structure. By using finite element analysis (FEA), torsional loads can
easily be calculated [6]. It is also important to also remember that when a bridge is subject to
extreme traffic loads, a nonlinear response is possible either locally or globally. This can be due
to plastic deformation, time varying dependency of materials and aging degradation. With
commercial FE codes, materials that exhibit a nonlinear behavior can easily produce a stress-
strain curve.
Since flexural and torsional stiffness are taken into account in FE modeling, grillage modeling
will be applied to the bridge deck in order to get a more accurate response. Without grillage
modeling solid elements would need to be used in order to create beam models. Given the
intense nature of developing a complete FE model of a bridge deck using all solid elements, one
can see why a grillage model is necessary. Figure 2.1 shows a single grillage element and a
grillage model of the bridge.
Figure 2.2: Grillage model: a) a single grillage element, b) grillage model of bridge [5]
The use of solid elements for bridge deck modeling is currently limited to research and highly
specialized applications due to its excessive run time, computer storage requirements and, a
shortage of user-friendly software, particularly for the large quantities of output data generated
[7]. The grillage model is made up of a series of discrete elements, including longitudinal
beams (girders) and transverse beams (diaphragms). The elements are connected at joints where
loads and constraints are applied. The stiffness and spacing of girders were determined so that
the deflection of the model and the actual behavior were the same. It is important to note that the
i j x ( )xθ
z w( )z
y ( )yθ
wzj
θxj
θyj
wzi
θxi
θyi
Ty
Qz
Mx
a)
X
b)Y
Z
O
9

more girders that are used, the more accurate the results. However, computation time will
increase [6].
Connections between components such as bolts and welds in a bridge can easily be modeled
using commercial FE software. LS-DYNA, 3D explicit FE software, provides several options
when modeling connections [6].
Elastomeric bearing pads are essential in modeling the connection between the superstructure
and the pier. These pads allow for translation along the longitudinal direction of the bridge
girder. In a FE model, bearing pads can be modeled using their real geometry and by applying
the appropriate material model. The complete FE model of the bridge is shown in Figure 2.3.
Figure 2.3: Finite element model of a bridge [4]
2.3 Analysis of Elastomeric Bearing Pads
Among today’s trend in technology, recyclable materials and recycling are in the forefront. The
emphasis on sustainability is so direct that that we forget the basic facts that durability and
serviceability, along with proven performance are much more preferable to replacement even if it
is recyclable.
Elastomeric bearing pads, specifically the laminated neoprene pads, are a subset of the
elastomeric pads. These pads are ideal for bridge design because they are economical, effective,
and require no maintenance. They deflect in shear to accommodate expansion, contraction, and
end rotation of the bridge. There is no need for lubrication, cleaning, nor do they have the
opportunity to seize [9]. They are also simple solid pads with no moving parts which makes
them straightforward when developing them in the FE model. They were first introduced in
10

1958 by the American Association of State Highway and Transportation Officials (AASHTO)
and ever since then, the popularity of these pads grew. When designing bearing pads, it is
important to understand what causes them to fail. These pads will fail due to compression, shear,
or rotation. By understanding the modes in which they fail, improvements on these pads can be
better understood. Figure 2.4-2.6 illustrates the different ways in which a bearing pad will fail.
Figure 2.4: Bearing deformation due to compression
Figure 2.5: Bearing deformation due to shear
Figure 2.6: Bearing Deformation to rotation
11

Several factors need to be considered when designing a steel-laminated neoprene bearing pad.
These parameters include:
1. shape factor
2. reinforcement type
3. effective rubber thickness
4. hardness
5. compressive modulus
The shape factor is one of the key parameters in determining vertical deflection characteristics.
The shape factor is defined as the ratio of the surface area or plan area of one loaded face to the
area free to bulge around the perimeter of one internal elastomeric layer of the pad [9]. As the
reinforcement between the layers increase, the shape factor increases thus, reducing the
deflection for a given load. Unfortunately, there is no consistent relationship between shape
factor and compressive modulus which is why FE models will be very important in determining
bridge deflection with the neoprene pad improvements. Figure 2.3 illustrates the dimensioning
of a typical neoprene pad.
Figure 2.7: Shape factor dimensions for neoprene pad
The effective layer of the bearing pad is defined as the combined thickness of all the elastomeric
layers in the pad. This is a critical part in design because it determines the amount of horizontal
movement a bearing will permit.
The hardness of the elastomeric material in a bearing pad is a relative measure of the modulus of
the bearing in both compression and shear. Generally, as hardness increases, modulus increases
and deflection decreases [9].
12

Neoprene, a synthetic rubber, is highly resistant to deterioration by weathering and natural aging.
It has a history of long-term service and with its proven record of durability and economical
necessity; it has easily become the elastomer of choice in bridge bearing design. Analyses of
these bearings have been conducted with the assumption that they are linear elastic, isotropic and
that the deformations are small enough to be negligible. Unfortunately, this material has highly
nonlinear, visco-elastic, thixotropic constitutive properties and can only be properly analyzed
through advanced experiments or commercial FE software. Figure 2.4 illustrates the two most
common types of neoprene pads used in bridge construction.
Figure 2.8: Types of neoprene pads
2.4 Validation and Verification of FE Model
The verification and validation (V&V) of a FE model is increasingly becoming more important
in today’s research. The process of V&V is an essential part when developing a model if the
model is to be accepted and used to support decision making. The verification process is
concerned with the specifications being met and that mistakes have not been made in
implementing the model. Verification is done to ensure that:
• The model is programmed correctly
• The algorithms have been implemented properly
• The model does not contain errors, oversights, or bugs
On the other hand, the validation process is concerned with building the model right. Its main
objective is to determine that a model is an actual representation of the real system. Validation is
usually achieved through the calibration of the model, an iterative process of comparing the
model to actual system behavior and using the discrepancies between the two, and the insights
13

gained, to improve the model. This process is repeated until model accuracy is judged to be
acceptable [14]. Validation is done to ensure that:
• The model addresses the right problem
• Provides accurate information about the system being modeled
• The model meets intended requirements in terms of results obtained
As mentioned in chapter 1, the Roadside Safety Verification and Validation Program, RSVVP is
a program that can be used to calculate and compare metrics in order to validate computer
simulation models using data obtained from experimental test, verify the results of a simulation
with another simulation or analytical solution, assess the repeatability of a physical experiment
and, generally speaking perform a comparison of virtually any pair of curves. This software
utilizes statistical techniques in order to verify and validate curves. Statistical test such as the
Analysis of Variance and the Sprague-Geers MPC are used when calculating and comparing
curves. The Analysis of Variance (ANOVA) metrics are based on the residuals between the true
and test curve while the Sprague and Geers metrics indicate the quality of comparison for the
magnitude and phase of the test and true curve. These tests are located in the RSVVP Manual
and are strongly recommended that this profile be used when comparing a full-scale
experimental test to a numerical simulation.
2.5 Finite Element Modeling of Vehicles
Analytical modeling of vehicles is different from the analytical modeling of a bridge. There are
several approaches that can be used when are simple for mathematical convenience but consist of the
most essential elements of the vehicle such as the body, wheels and suspension systems. Bodies are
commonly represented by masses subjected to rigid body motions. Suspensions are assumed to be the
combination of springs and dampers dissipating energy during oscillation. The simplest two-dimensional
analytical models are depicted in Figure 2.9. In the first case, the body is modeled with a rigid bar while
the suspension unit is composed of a spring and a damper (Yang & Lin, 1995). Further simplification can
be achieved by using lumped masses at the ends of the bar with the rotation degrees of freedom excluded
(Yang, Chang, & Yau, 1999) [5].
Figure 2.9 part (a), represents the body of the vehicle which is modeled by a rigid bar while the
suspension unit is composed of a spring and a damper. These three parts are the main elements
14
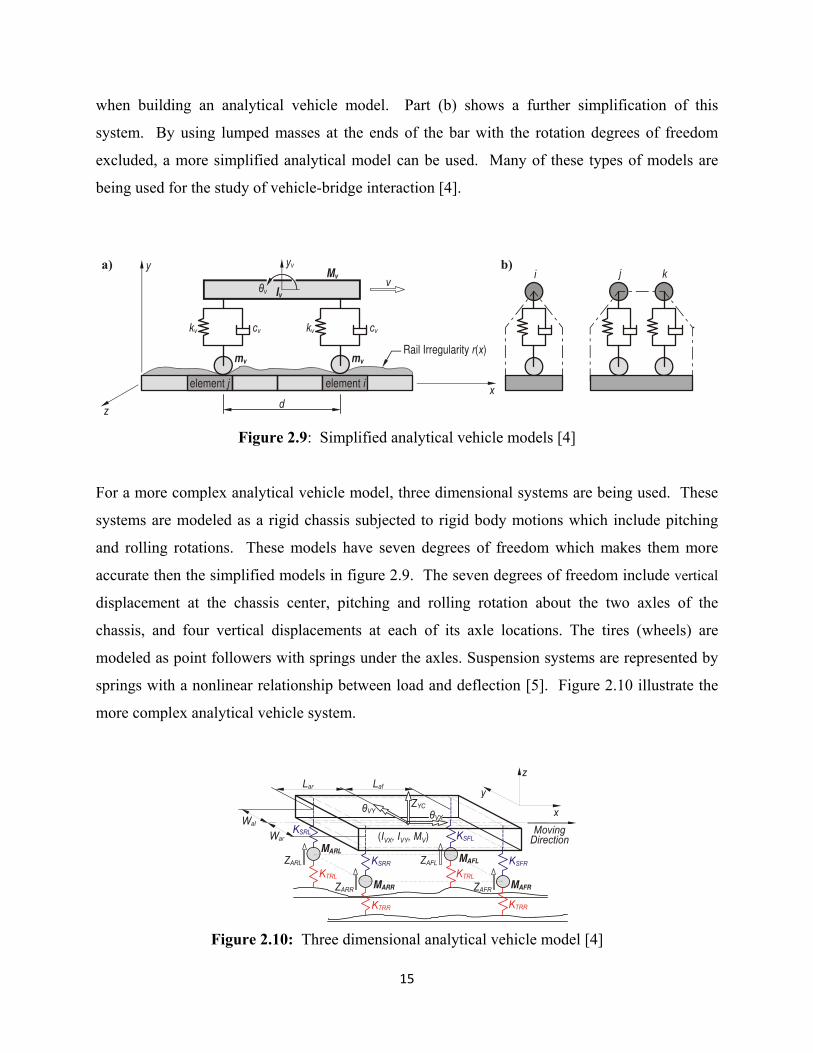
when building an analytical vehicle model. Part (b) shows a further simplification of this
system. By using lumped masses at the ends of the bar with the rotation degrees of freedom
excluded, a more simplified analytical model can be used. Many of these types of models are
being used for the study of vehicle-bridge interaction [4].
element j element ix
y
z
Rail Irregularity ( )r x
kv kv cvcv
θv
Mv
mv mv
yv
Iv
d
v
a)i j k
b)
Figure 2.9: Simplified analytical vehicle models [4]
For a more complex analytical vehicle model, three dimensional systems are being used. These
systems are modeled as a rigid chassis subjected to rigid body motions which include pitching
and rolling rotations. These models have seven degrees of freedom which makes them more
accurate then the simplified models in figure 2.9. The seven degrees of freedom include vertical
displacement at the chassis center, pitching and rolling rotation about the two axles of the
chassis, and four vertical displacements at each of its axle locations. The tires (wheels) are
modeled as point followers with springs under the axles. Suspension systems are represented by
springs with a nonlinear relationship between load and deflection [5]. Figure 2.10 illustrate the
more complex analytical vehicle system.
KSRR
KTRR
KTRL
War
Wal
Lar Laf
KSRL
KSFR
KSFL
KTRR
KTRL
MAFR
MAFL
MARR
MARL
ZAFR
ZAFLZARL
ZARR
Moving Direction
θVX
θVYZYC
x
y
z
(IVX, I , MVY V)
Figure 2.10: Three dimensional analytical vehicle model [4]
15

An analytical model was also created by the Florida Department of Transportation along with the
Florida International University in order to create an AASHTO HS20-44 truck. This truck has
11 degrees of freedom and was used to evaluate the dynamic response of highway girder bridges.
Figure 2.11 illustrates the complexity in this system.
Ksy5 Dsy5 Ksy3 Dsy3 Ksy1 Dsy1
TractorTrailer
Kty5 Dty5 Kty3 Dty3 Kty1 Dty1
ya1ya2ya3
yt2 yt1
θt1θt2
Ksy1 Ksy2Dsy1 Dsy2
Kty1 Kty2Dty1 Dty2
yt1
θt1
ya1θa1
Figure 2.11: Analytical model of an AASHTO HS20-44 truck [4]
Analytical models of this type are treated as a multi-body system which is ideal for studying the
vehicle-bridge interaction theoretically. However, the number of degrees of freedom is limited
for mathematical convenience only. Since most parts of these analytical models are assumed to
be rigid, finite element software is needed to for the additional modeling of non rigid bodies.
Finite element modeling becomes extremely convenient for modeling complicated parts such as
the transmission, suspension system, etc. Very often, FE models are available in the public
domain for immediate use. These models are the most reliable because they consist of more
structural components then any other type of analytical vehicle model thus far. Components that
are included in these models are extremely detailed representations of the suspension systems
and kinematical characteristics of components and wheel models with airbags applied [5]. These
models are mostly developed for crashworthiness analysis but, can also be used when studying
vehicle-bridge interaction. Examples of FE models are available on-line (Finite Element Model
Archive, 2008) are presented in Figure 2.12.
The Crashworthiness and Impact Analysis Lab decided to utilize an already existing vehicle
model of a tractor-trailer in order to make additional modifications for a vehicle-bridge
interaction study. The tractor-trailer Mack CH613 with a three axle single drop lowboy trailer
was selected as a representative for the vehicle-bridge study. This vehicle was selected due to
the fact that it is the most popular truck in the United States. The complete FE model consists of
16

over 25,000 finite elements. Blueprints and data from the manufacturer’s website were used for
the development of the FE model. The following components were included in the FE model
once the necessary modifications were made. These components include:
• a chassis, including complete wheels with elastic tires, simplified front single axle,
rear tandem axles, and suspension systems;
• a complete frame, including longitudinal frame rail and transverse beams,
e.g. cross-members, engine support beam, etc.;
• a fifth wheel.
Figure 2.12: Finite element models available in public domain [4]
In addition to all the necessary modifications, a load configuration was created to go on back of
the lowboy trailer. This additional load was distributed evenly on the load and top deck of the
trailer. The reason for this additional loading is to represent the heavy cargo that is commonly
carried when these types of trucks travel along highway bridges. Figure 2.13 illustrates the
completed FE model of the tractor-trailer used in the previous vehicle-bridge study, BD 493
contract.
Figure 2.13: FE model of the tractor-trailer and lowboy [5]
17

CHAPTER 3
SELECTION OF OBJECTS FOR TESTING
One of the main objectives in this research is to analyze the effects of vehicle-bridge interaction.
In order to do this a FE model of a highway bridge was developed along with FE models of
heavy trucks. Under the BD 493 contract, FE models of three vehicles and an AASHTO Type
III girder bridge were created and validated for the Florida Department of Transportation. The
information from this contract will aide in obtaining the necessary information in order to verify
and validate a new bridge model with AASHTO Type II girders.
The use of existing finite element models of the vehicle were adopted from the previous contract
[5]. No modifications were performed to these models since the focus of the research deals with
the improvement of the bridge model. Three vehicle models were created under the previous
contract but only two of the vehicles were used for purpose of analyzing the dynamic behavior
between vehicle-bridge interactions. The decision on which vehicles to use were based on the
results from the BD 493 contract as well as the parameters and weight of the modeled trucks.
3.1 Use of Existing FE Model of Vehicles
Under the BD 493 contract, three vehicles of heavy trucks were carefully selected and validated
for use by the Florida Department of Transportation. Selection of these vehicles was based on
the following criteria [5]:
• Heaviest vehicle permitted for crossing bridge #500133
• Relatively small outer bridge length which is defined as the distance from the steering
axle to the last axle of the vehicle.
By taking these factors into account, this allowed one to obtain results for the worst case
scenario. Based on information obtained from the FDOT Permit Office the gross weights of the
heaviest vehicles permitted for crossing bridge #500133 were 90,265 kg, 89,358 kg, and
77,111 kg (199,000 lb, 197,000 lb and 170,000 lb respectively).
18

For this project one vehicle was selected and was used in the study in order to analyze the
dynamic effects of vehicle-bridge interaction. Selection of this vehicle was based on the
following criteria:
• Results obtained from the previous project
• Information regarding the parameters and weight of each vehicle
Finite element models of the Tractor-Trailer truck were used for this study. The Tractor-Trailer
was used due to it being the longest in length and the heaviest in weight.
Once the decision was made to use this model, an assessment of the models had to begin in order
to make sure it was still accurate and reliable. Assessment of this model included several
analytical simulations. These simulations were done in order to ensure that the results would be
consistent with what was obtained two year ago, when the project was originally completed.
Once these models were verified, they were stored away for later use with the new bridge model.
Figure 3.1 provides pictures along with a detailed drawing of the selected vehicle for this project.
Figure 3.1: Detailed sketch of a Mack CH613 Tractor-Trailer truck [5]
Figure 3.2. Mack CH613 Tractor-Trailer truck [5]
19
3.2 Selection of Highway Bridge
One of the main objectives of this research is to develop a finite element model of a new bridge
by modifying an already validated model developed previously for the Florida Department of
Transportation. When selecting the new bridge for modeling the same criteria was used for the
selection of the previous bridge. The main difference is that the new bridge could not have
AASHTO Type III prestressed girders. The reason for this has to do with the focus of this
research. In order to see if we can modify an already existing finite element model to represent a
new bridge model, it is important not to have the same girder type. Girders are one of the main
parts to a beam bridge and modeling AASHTO Type III girders, even if the bridge dimensions
were different, would be redundant for this purpose. For this reason an AASHTO Type II bridge
was used for the new model.
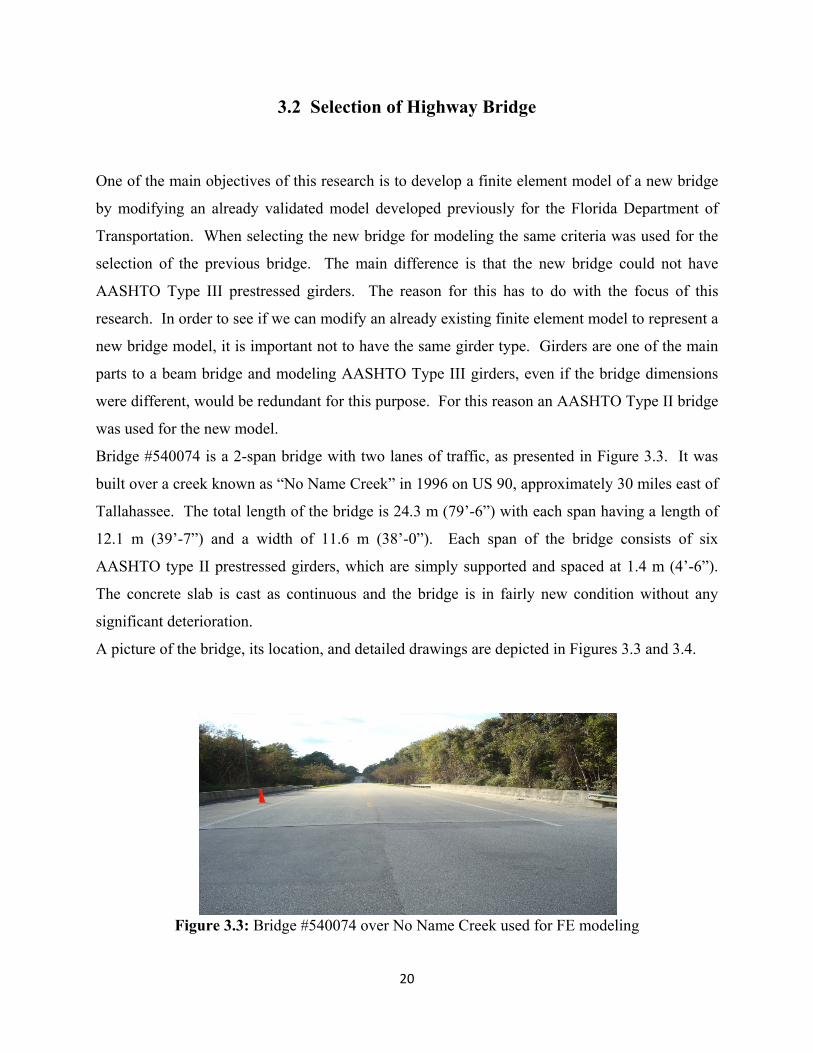
Bridge #540074 is a 2-span bridge with two lanes of traffic, as presented in Figure 3.3. It was
built over a creek known as “No Name Creek” in 1996 on US 90, approximately 30 miles east of
Tallahassee. The total length of the bridge is 24.3 m (79’-6”) with each span having a length of
12.1 m (39’-7”) and a width of 11.6 m (38’-0”). Each span of the bridge consists of six
AASHTO type II prestressed girders, which are simply supported and spaced at 1.4 m (4’-6”).
The concrete slab is cast as continuous and the bridge is in fairly new condition without any
significant deterioration.
A picture of the bridge, its location, and detailed drawings are depicted in Figures 3.3 and 3.4.
Figure 3.3: Bridge #540074 over No Name Creek used for FE modeling
20
Figure 3.4: Localization of the bridge used for modeling
21

CHAPTER 4
DEVELOPMENT OF FINITE ELEMENT MODEL
A completely new FE model of a bridge was developed for this research by performing all the
necessary geometric and material adjustments to a FE model developed during the previous
FDOT project: Investigation of Impact Factors for Permit Vehicles – FDOT Project No. BD543
[5]. The bridge that was modeled under this project was successfully created, verified, and
validated a concrete bridge in Chattahoochee, Fl. The new FE model took advantage of the
already existing bridge model in order to create a new bridge model which is located in
Tallahassee, Fl. The only major difference between the Chattahoochee bridge model and the
Tallahassee bridge model are in the girders. Since girder size governs the behavior of these
bridges, it is important to pay special attention to this part when modeling the new bridge.
FEA consists of a computer model that is stressed and then analyzed for specific results. Results
were used for new product design and existing product refinement. Today, nonlinear finite
element methods are commonly used in order to solve complex engineering problems.
In finite element analysis the prediction of structural performance and the modeling of girder
members under moving vehicle loads are essential in any bridge design. Since moving vehicles
cause an additional dynamic effect on bridges, this dynamic effect was accounted for in terms of
a dynamic load allowance. Dynamic Load Allowance (DLA) can be defined in several ways [7]:
• Definition 1: the difference in the maximum instantaneous dynamic response and static
response divided by the maximum static response.
• Definition 2: divide the dynamic response that occurs at the same location as the
maximum static response by the maximum static value.
• Definition 3: divide the maximum dynamic response by the static response that occurs
simultaneously with the maximum dynamic response.
For this research, definition 1 is used since it is the most rational definition for this type of study.
This is because, in design, the maximum static effect is scaled to give the maximum dynamic
effect regardless of when the two responses occur [18].
22
In order to study and validate the dynamic response of a highway bridge with a medium span
(20-30 m) or (65-98 ft) subject to moving loads, finite element analysis was the chosen approach.
Emphasis was placed on the development of a finite element (FE) model of a selected highway
bridge by adopting an already existing bridge model and making all the necessary modifications
in order to get a newly modeled bridge.
4.1 Geometric Development of Existing FE Model
The FE model was developed using LS-PrePost, an interactive and commonly used pre-
processor for LS-DYNA. All necessary parameters including boundary conditions, element
properties, material properties, solution type, and many others were defined using this pre-
processor. Once the necessary modifications were complete, a key file was created in order to
save the model and export to LS-DYNA. The latest available version 971 of the LS-DYNA was
used for the FE analysis [19]. Preliminary analyses, including simulations with the isolated FE
models of the vehicles, were performed on 8 GB workstation with 4 Dual-Core processors. A 32-
node cluster was used when a large number of finite elements and long real time analyses were
required for a complete vehicle-bridge interaction study [5].
All dimensions and material properties were expressed in SI units. Table 4.1 presents the units
that were adopted for use in this study.
Table 4.1 Units adopted for FE analysis in this study [19]
Length unit Time unit Mass unit Force unit Stress unit
millimeter
(mm)
second
(s)
megagram
(Mg)
Newton
(N)
megapascal
(MPa)
4.1.1 Concrete Slab
The previous model used four layers of 8-node solid elements across the slab thickness. Elastic
material properties for the slab were obtained from laboratory tests conducted by the Florida
Department of Transportation Structures Research Center.
23

The new model consists of the same material parameters because modification of the material
properties may cause inconsistencies in the results. Since the previous bridge model has already
been successfully validated, staying consistent with the element and node count in the
modification process is important. This will ensure that there are no inconsistencies when
creating the new bridge model. The first step in creating the new model was the modification of
the span length and width. A scale factor of 1.37 was used to edit the span length along with a
scale factor of 1.15 for the span width. Figure 4.1 shows the concrete slab of the existing model
and of the new model.
a)
b)
Figure 4.1. FE model of concrete slab with LS-Dyna summary: a) existing bridge model, b) modified bridge model
24

Despite the noticeable difference in the concrete slab, it is important that element count and node
counts remain the same. Table 4.2 shows the dimensions for both, existing and new, bridge
models.
Table 4.2. Summary of concrete slab model parameters
Model Type Span Length (m/ft) Span Width (ft) Element Count
Existing model 69 ft (21.0 m) 45 ft (13.1 m) 45360
New model 40 ft (12.1 m) 34 (10.2 m) 45360
4.1.2 AASHTO Type II Beams
The most important component in the alteration process is of the AASHTO beams (girders). A
concrete bridge is governed by the girder type that supports the concrete deck. Because of this
special attention was made when modifying this part. In the original model each beam includes
two No. 9 strands at the top and 24 No. 13 strands at the bottom. Only one equivalent strand at
the top and eleven equivalent strands at the bottom were modeled due to discrete location of the
nodes in the cross-section of the beam FE model. Selected strands were grouped and their
properties were distributed into equivalent ones to make sure that the FE model well represents
the real beam [5].
The new model encompassed these same material parameters when developing the AASHTO
Type II model from the AASHTO Type III. Table 4.3 summarizes the material properties of the
concrete beams.
Table 4.3. Material properties for concrete beams [5]
Specification Unit Value
Young's modulus, E (GPa) / (ksi) 37.5 / 5441.9
Poisson's ratio, ν — 0.22
Specify compressive strength, fc' (MPa) / (ksi) 63.7 / 9.24
The first step in the modification of the concrete beam is to figure out the dimensioning of an
AASHTO Type II girder. Figure 4.2 shows the dimensioning of the cross section of an
25

AASHTO girder. Once this is done, the Scale command can then be used in order to get the
desired dimensions.
The Scale command was the most useful geometric tool in LS-PrePost. This command allowed
the scaling of selected elements. The scaling direction and factor can be specified using various
methods for maximum flexibility to suit different users needs [19]. The scale factor was
determined by taking the previous model location of the node and subtracting it from the location
of where the new nodes should be for the new model. Once that difference is calculated, divide
the difference by the original model location. The direction of scaling was decided upon by the
direction of the previous model in order to keep consistency. This procedure was done very
carefully and methodically until all the girder nodes of the existing model were in the location of
where the new girder nodes should be. Equation 4.1 displays the formulas used for scaling all
nodes.
SF 4.1
NE is the node location of the existing model and NM is the location of the new model. Equation
4.1 is a standard algebraic equation that is often used to find the percent difference in science and
math.
a) b)
Figure 4.2: AASHTO girder dimensions:
26

Once dimensions have been established the editing can begin. The z-direction were the first
direction used for scaling. This direction is important because it takes into account the
modification of the web. Once scaling in the z-direction is completed, the same procedure was
used to scale the y-direction. The y-direction focused on the modification of the flange as
oppose to the web. The dimensions of both type II and III AASHTO girders are illustrated in
Figure 4.3. The only direction that was not taken into account is the x-direction. This direction
was automatically scaled due to the scaling of the bridge span which occurred in the x-direction.
Figure 4.3. Girder modification in z-direction: a) Existing model,
b) Modified model
The lengths are expressed in millimeters. It is important to note that the nodes that were selected
for measuring are the same for both the existing model and the new model. For this type of
research, it is important to have the same nodes as the existing model. This ensures consistency
when creating the new model from the previous one. This also ensures that there is no depletion
or addition of nodes or elements throughout the modification process. The girders in the new
bridge model are of an AASHTO Type II girder. It is easily seen that the previous model is
larger due to the type of girder that was being used to model that specific bridge, AASHTO Type
III.
27

Other commands allowed for scaling in the XY, XZ, and YZ directions. These directions lie
along the angles of the girders cross section. Scaling of the angles will occur in the same manner
you would when scaling along an orthogonal direction. Scaling of the angles were done last due
to the fact that after scaling in the Y and Z direction were completed, most of the nodes in the
YZ direction took care of themselves and automatically scaled themselves into the right position.
Once all scaling of the nodes were completed, a new model of the bridge deck and girders were
then combined in order to begin the creation of the new bridge model. The complete FE model
of the new and existing girders is presented in Figure 4.4.
Figure 4.4. FE Model of completed girder modifications: a) Existing model, b) Modified model
28

Traffic Railing Barriers
The previous bridge model used 3D solid, fully integrated elements in order to model a concrete
barrier. The new model will utilize the same procedure used to model the barrier in the previous
model. The barrier length is the only modification that had to be done. The reason for this is due
to the fact the railing barriers has the same cross section as the new bridge model. The only
dimension that needs to be modified is the span length. A traffic railing barrier needs to run
along the span of the bridge. Since the span length between the existing and the new bridge
model are different, the barrier length needed to be scaled down to the length of the new bridge
span. In order to successfully scale down the barriers, the end nodes of the concrete deck should
be used as a reference point.
Once scaling of the desired length is completed, the Translt command is then utilized. The
purpose of this interface is to simply translate selected nodes to their appropriate location. The
direction and distance can be specified using various methods for maximum flexibility in order
to suit different user needs [19]. By using the points (nodes) on the coordinate system, one can
simply locate the node position on the existing model and translate it to the desired location on
the same coordinate system. The distance between those two points is considered as the
translation distance and should be used when translating selected nodes.
The FE model of the traffic railing barrier is presented in Figure 4.5. The Measure interface was
used in order to verify that the length of the barriers was in fact modified. This technique also
verifies that the span length of the bridge was also modified since traffic railing barriers are
constructed to be the same length as the concrete deck.
29

Figure 4.5: FE Model of traffic barrier railings: a) Existing model, b) Modified model
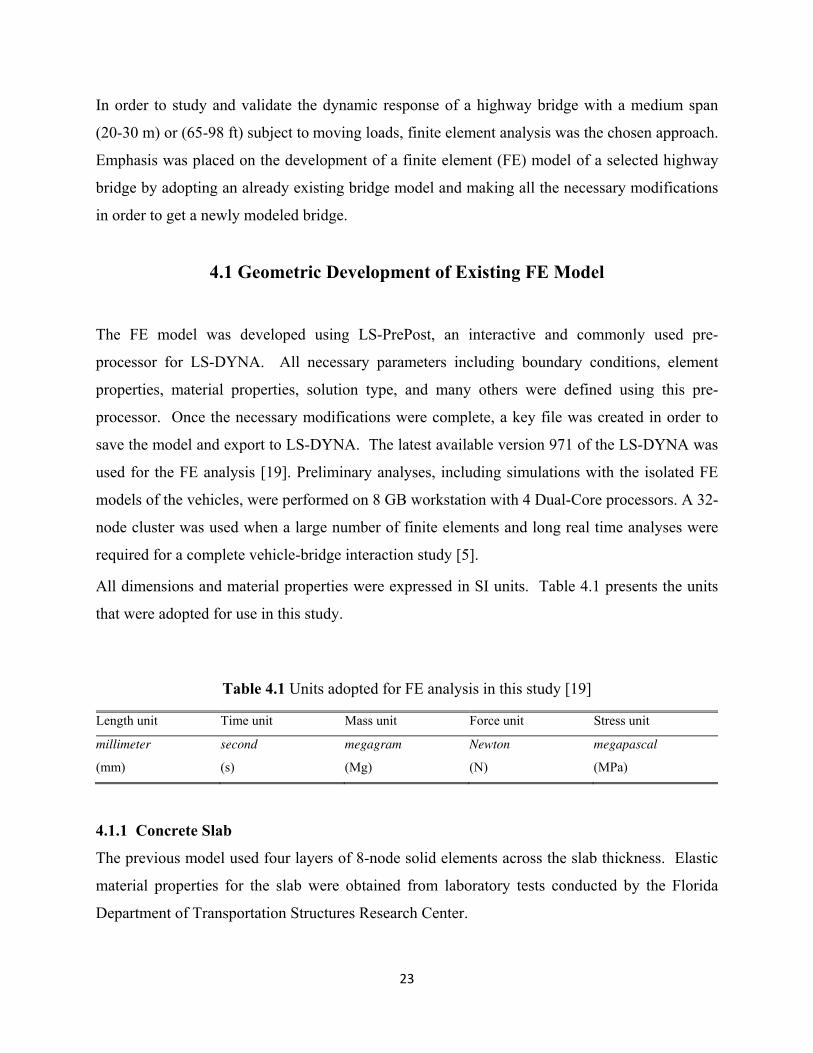
Diaphragms
Concrete diaphragms for the new bridge model will be made up of 3D solid elements just like
what was used in the previous bridge model. The Scale interface will be useful in modifying the
concrete diaphragms. Once girder modifications were completed, they served as an outline for
where the diaphragms needed to go. Due to this, the existing model was no longer needed for
modification assistance. By locating the node points along the girder of the new model, the
diaphragms were scaled down to the desired node location. Figure 4.6 illustrates how the
diaphragms were modified without the assistance of the existing model.
Elastomeric Bearing Pads
The main focus of the new bridge was in the neoprene pads, a subset of elastomeric bearing
pads. These pads are used to support each girder on bridge piers. Special attention was made to
the modification of these pads since this is the focus of improvement for this research. Solid
elements were used to model these parts in the previous model and will be utilized for the new
model. Dimensions for the neoprene pads were identified by the Florida Department of
Transportation Specifications for pads supporting AASHTO Type II girders. Once the
appropriate dimensions were identified, the Scale interface was used in the same manner as the
30
diaphragms. Scaling of the pads was based on the new FE model. Figure 4.7 illustrates the use
of the scale interface for the neoprene pads.
Figure 4.6: FE model of diaphragms: a) prior to scaling, b) after scaling
31
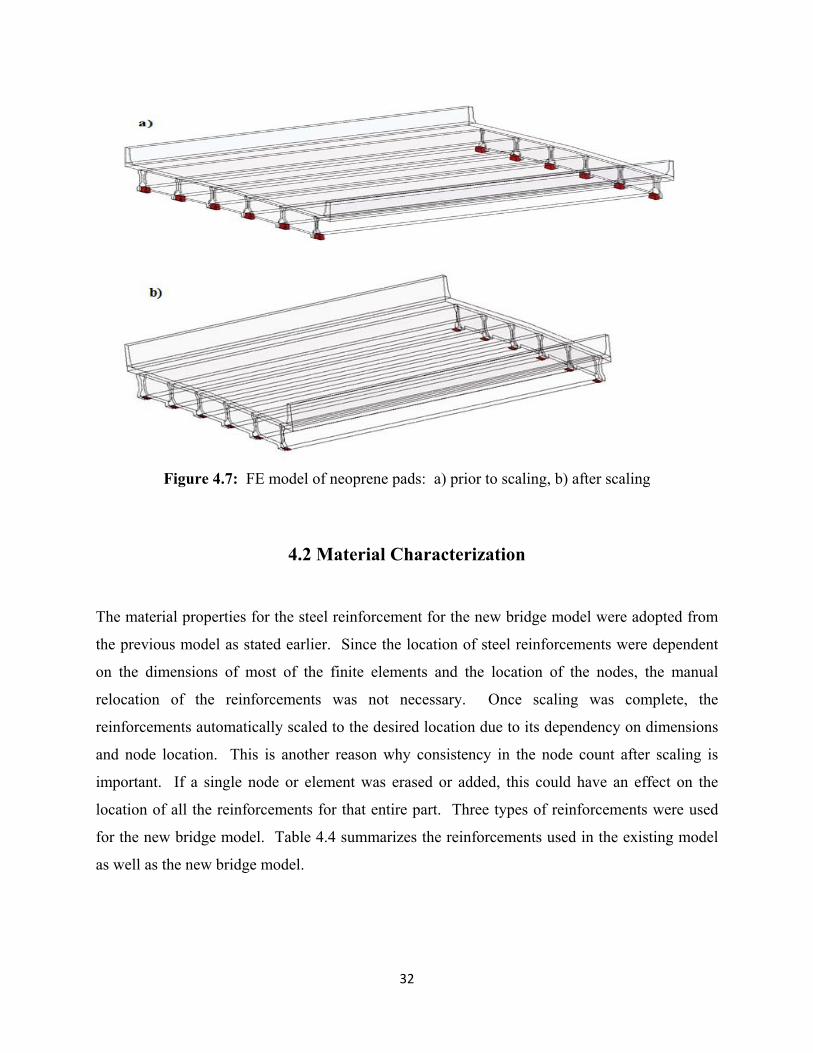
Figure 4.7: FE model of neoprene pads: a) prior to scaling, b) after scaling
4.2 Material Characterization
The material properties for the steel reinforcement for the new bridge model were adopted from
the previous model as stated earlier. Since the location of steel reinforcements were dependent
on the dimensions of most of the finite elements and the location of the nodes, the manual
relocation of the reinforcements was not necessary. Once scaling was complete, the
reinforcements automatically scaled to the desired location due to its dependency on dimensions
and node location. This is another reason why consistency in the node count after scaling is
important. If a single node or element was erased or added, this could have an effect on the
location of all the reinforcements for that entire part. Three types of reinforcements were used
for the new bridge model. Table 4.4 summarizes the reinforcements used in the existing model
as well as the new bridge model.
32

Table 4.4: Dimensions for ASTM standard reinforcing bars used in bridge structures [5]
Bar Size Designation Mass
(kg/m) / (lb/ft) Diameter
(mm) / (in) Area
(mm2) / (in.2)
10M 0.785 / 0.527 11.3 / 0.445 100 / 0.155
15M 1.570 / 1.055 16.0 / 0.630 200 / 0.310
20M 2.355 / 1.582 19.5 / 0.768 300 / 0.465
Material properties for the reinforcement of the concrete slab were obtained from laboratory test
conducted by the FDOT Structures Lab. Two types of the reinforcing bars were used in the slab
structure – size 10M and 15M. They were modeled using 1D beam elements with the elastic
material model applied. The material properties for the entire slab are presented in Table 4.5.
Table 4.5: Material properties of the concrete slab [5]
Specification Unit Value
Young's modulus, E (GPa) / (ksi) 40.5 / 5871.8
Poisson's ratio, ν — 0.20
Specify compressive strength, fc' (MPa) / (ksi) 55.9 / 8.11
The material for the reinforced concrete barriers consisted of 10M and 15M reinforcing bars. 1D
beam element with elastic material properties was used. The cross-section of the concrete
barriers with reinforcing bars is presented in figure 4.8.
Figure 4.8: Cross-section of traffic railing barriers [5]
33

Material properties for the beam are presented in Table 4.6. Each beam includes two No. 9
strands at the top and 24 No. 13 strands at the bottom. Only one equivalent strand at the top and
eleven equivalent strands at the bottom were modeled due to discrete location of the nodes in the
cross-section of the beam FE model. Selected strands were grouped and their properties were
distributed into equivalent ones to make sure that the FE model well represents the behavior of a
girder. A special material model type 071 (*MAT_CABLE_DISCRETE_BEAM) was applied
in order to introduce prestressing force in the rod elements. Material properties used for the
concrete girders are listed in Table 4.6.
Table 4.6: Material properties for concrete girders [5]
Specification Unit Value
Young's modulus, E (GPa) / (ksi) 37.5 / 5441.9
Poisson's ratio, ν — 0.22
Specify compressive strength, fc' (MPa) / (ksi) 63.7 / 9.24
Concrete diaphragms for the bridge included reinforcing bars represented by 1D beam elements.
Figure 4.9 shows the complete FE model of the bridge with only the steel reinforcement bars
visible. Due to the fact that the previous research used the location of the rebar based on the
node location of the model, all rebar were automatically scaled to the desired location once the
necessary geometric modifications occurred.
Figure 4.9: FE model of reinforcements
34

Since this research focuses on the improvement of the bearing pads, this was the only part in the
new model that was subjected to material modifications.
4.3 Importing of Key File
Imported files added data to a current model. This process is essential when time constraints are
of the essence. In order to import a file, it must first be saved as a key file using LS-Prepost.
The data that is added to an already existing file must be redefined. This is one of the most
important steps when importing a key file due to the lack of correlation once a key file has been
imported into another key file. The parameters that need to be redefined in order to have a
successful simulation are as follows:
• Part ID/Node ID
• Boundary Condition
• Constraint
• Contact
• Load curve
Once the key file of the new bridge model was completed and saved it was then imported into an
already existing key file. The existing key file is of a bridge with AASHTO III girders along
with a FE model of an already validated vehicle. The first step in the importing process is to
remove the already existing bridge. Once this bridge has been successfully deleted from the
existing vehicle-bridge model, the new key file of the AASHTO II girder bridge can then be
imported in order to replace the removed bridge. Data from the new bridge model will override
the previous data hence, redefining of parameters in certain interfaces is essential in order to get
the model to work. Interface definitions are used to define surfaces, nodal lines, and nodal points
for which the displacement and velocity time histories are saved at some user specified
frequency [LS-Dyna Manuel]. The interface feature represents a powerful tool for LS-Dyna
analysis capabilities.
The *Part interface is crucial in the redefining of the parameters. This interface relates part ID
to the *SECTION, *MATERIAL, *EOS and *HOURGLASS sections. Since the new bridge
model was developed using different Part IDs, the LS-Dyna will not recognize the parts of our
35

new bridge model. In fact, if the key file were to run as is, an error would occur right away
stating:
• Warning - MAT 7703 not found: Referenced in *Part ID index = 4351.
• Warning - SEC 3800 not found: Referenced in *Part ID INDEX = 4351.
These errors were common in the initial attempts to run the new model. The first part of the
warning message is telling the person that there was a problem finding that particular ID number
for that specific interface. This could be due to the fact that nothing has been redefined
therefore, LS-Dyna is not able to read these ID numbers or, ID numbers got erased when deleting
the old bridge model. In any case investigation on these errors must be sought out in order to get
the model to run and yield accurate results. The second part of the error message has to do with
where this error can be found. The two previous bullets indicate that both errors dealing with the
material and section can be found in the *Part interface, specifically ID number 4351. Figure
4.10 displays the *Part interface dialog box that is used to define the section and material that is
dependent on the PART ID. The *EOS and *HOURGLASS are not defined in this interface for
this particular study.
Figure 4.10: *Part interface dialog box for LS-Dyna
36

Another common warning message had to do with errors pertaining to boundary conditions and
constraints. The *Boundary interface applies various methods of specifying either fixed or
prescribed boundary conditions. The prescribed boundary condition deals with any boundary
conditions that has motion. This specific interface did not need to be redefined or altered due to
the fact that all prescribed boundary motion was applied to the vehicles only. Since the vehicles
were not imported, the data remains the same and there is no need for changes. On the other
hand, the fixed boundary conditions were applied to the bridge thus, modification of this
interface was needed. In order to fix errors pertaining to boundary conditions, node sets had to
be redefined first in order for recognition by LS-Dyna. Once that was completed the proper
boundary conditions were applied to the new redefined NODE_SET.
The *Cnstrnd interface is used to apply constraints within the structure between structural parts
[22]. For this research, constraints were applied as joints. Since the joints were applied solely to
the tractor-trailer and the crane, there was no need to go into this interface for redefining. Figure
4.11 illustrates the joint that were used for this study. If the imported key file was of a vehicle
rather than a bridge, joint constraints would certainly need to be looked into and redefined if
necessary.
Another interface that needs to be successfully modified in order for a simulation to occur are
issues pertaining to the *Contact and the *Define interface. Since the new imported bridge
model will be in contact with the existing vehicle models, these interfaces are vital in the
modification process. The *Contact interface allows the user to define contact options for
treating of deformable to deformable bodies, single surface contact in deformable bodies,
deformable rigid body contact, and tying deformable structures with an option to release the tie
based on plastic strain [22]. The most frequent error message resulting from contact issues were
as follows:
• Warning – Multiple contact label # 1- This may lead to confusion when viewing the
output.
• Warning – Error node set for extra node for rigid body # 7.
The first error message lets the user know that there are multiple contact definitions that
coincides with the first contact definition. The second part of the error message lets the user
know that this is confusing LS-Dyna and needs to fixed in order to run the file. Instead of
redefining parameters, all that is needed is the removal of any multiple contact card with the
37

exception of #1. This error occurs simply because when the key file is imported, extra data is
added to the already existing model. That is why issues concerning the multiple of any card
exist. The same principal applies to the second warning message, Error node set for extra node
for rigid body. The depletion of any duplicate node set that surfaced due to the importing of the
key file must be deleted so that there is no confusion. The *Define interface allows users to
define curves for loading, constitutive behavior, etc. [22]. This interface allows for the vehicle-
bridge interaction to take place. This is one of the most important interfaces when dealing with
motion. Without this interface, the vehicle would not know where to go, how to get there, or
even how to behave once it reaches the bridge. Common error messages for this interface were
as follows:
• Warning – DEFINE_CURVE 10 not found: Referenced in
*MAT_SPRING_NONLINEAR_ELASTIC id = 4641
• Warning – DEFINE_CURVE 11 not found: Referenced in
*MAT_DAMPER_NONLINEAR_VISCOUS id = 4642
The first error message states that LS-Dyna cannot find curve # 10 which is located in the
*Material interface under the nonlinear elastic spring card. In order to fix this error the
nonlinear elastic spring card must be pulled up under the *Material interface for modifying. In
this particular case id # 4641 only needs to be removed not redefined. This is because id #4641
is added data from the new model which is why LS-Dyna cannot find it. Once that id is
removed, LS-Dyna no longer reads it and can now continue with the simulation. The same idea
applies to the second warning message.
The *Dbase interface is used for controlling the output of ASCII databases and binary files
output by LS-Dyna. This interface defines the frequency for which the writing of databases
occurs. The D3PLOT card is one of the most important section in this study because this is
where the results are stored. This command contains plotting information to plot data over the
three dimensional geometry of the model. The D3THDT card contains files with time history
data for element subsets as well as global information. Since this study focuses on the validation
and verification of a new and existing FE model, keeping this interface the same, with no
changes, will allow for consistency between both sets of binary output files.
A total of 182 errors were found once the new file was imported into the already existing file.
These errors had to be dealt with systematically in order to decrease the error count rather than
38

create new ones. Figure 4.12 illustrates an actual error report that occurred throughout the
modification process once the new bridge model was imported onto the existing vehicle model.
Understanding error reports once a file has been submitted is essential in the development
process of a FE model. Once all errors have been successfully corrected, LS-Dyna will produce
a normal termination report, which signals to the user that the key file was successfully in the
analysis process and is ready for a simulation.
Once all the simulations were finished and the model was ready for analysis the following
summary information for the bridge model, No Name Creek is presented in Table 4.7.
a) b)
Figure 4.11: LS-Dyna error reports: a) error termination report, b) normal termination report
39
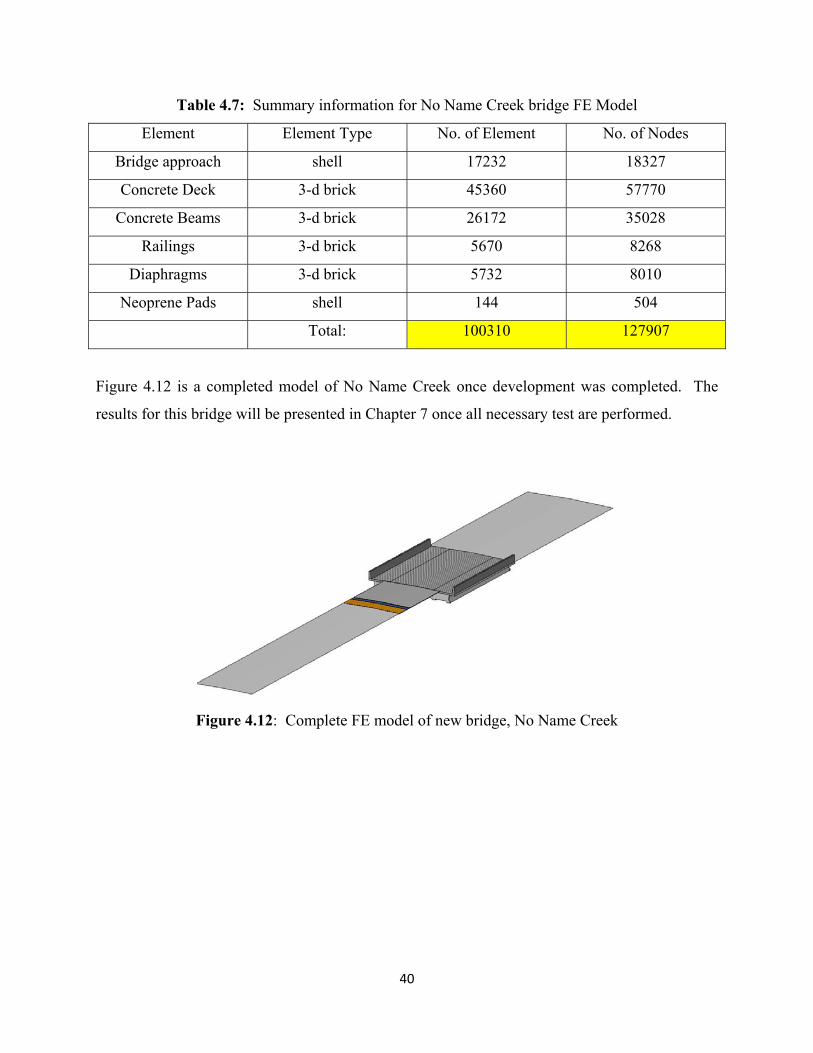
Table 4.7: Summary information for No Name Creek bridge FE Model
Element Element Type No. of Element No. of Nodes
Bridge approach shell 17232 18327
Concrete Deck 3-d brick 45360 57770
Concrete Beams 3-d brick 26172 35028
Railings 3-d brick 5670 8268
Diaphragms 3-d brick 5732 8010
Neoprene Pads shell 144 504
Total: 100310 127907
Figure 4.12 is a completed model of No Name Creek once development was completed. The
results for this bridge will be presented in Chapter 7 once all necessary test are performed.
Figure 4.12: Complete FE model of new bridge, No Name Creek
40

CHAPTER 5
ELASTOMERIC BEARING PADS
The American Association of State Highway and Transportation Officials (AASHTO) published
guidelines for the design of highways that include design specifications for bridge bearing pads.
Composite pads, also known as laminated bearing pads or reinforced pads, are made by bonding
layers of an elastomeric material with layers of reinforcement which typically consist of thin
steel plates. AASHTO recommends using steel plates as reinforcement because they carry the
greatest vertical loads [25].
This chapter focuses on the identification of material and geometric characteristics, in order to
get a better correlation between the analytical results and the experimental results. A geometric
study as well as a material characteristic study was performed in order to develop an ideal pad. In
order to design a pad with improvements from the existing bridge model pad, several factors
needed to be studied. The design of the pad was the first step for improvement followed by the
material properties. For simplicity, the material properties were broken down into 3 cases in
order to analyze the improvement of each case separately. The reason for focus on this particular
part of the bridge has to do with the fact that neoprene pads are simple solid pads with no
moving parts which makes them straightforward when creating finite element models for them.
The stiffness of these elastomeric bearing pads affects the dynamic response of the
superstructure, since it changes the natural frequency of the superstructure which influences the
vehicle-bridge interaction. Hence, elastomeric bearing pads are of significant importance. These
pads are also economical, effective and require no maintenance which makes them ideal for
improvements. A parametric study was performed on the material properties as well as the
geometric properties. The parameters studied include the shear modulus, Poisson ratio, and
shape factor. The FDOT has provided a detailed sketch of the recommended dimensions for
bearing pads on Florida highway [12]. This study will stay consistent with the recommended
specifications but, the amount of layers will need to be determined in order to get the best
possible shape factor and to find its influence on the bridge dynamic response.
41

The improvement of the elastomeric bearing pads were done by modifying an existing model.
Despite a successful validation by CIAL and the FDOT, special attention was made on
improving the bearing pads only. Since bearing pads are used to support dead and live loads,
allow for longitudinal movements and, accommodate girder rotation, a successful improvement
will allow for better support of the bridge therefore, minimizing its deflection.
The shape factor, defined as the plan area divided by the area of the perimeter free to bulge is the
most important geometric parameter of elastomeric bearing pads. The thinner the elastomer
layer, the larger the shape factor. The thickness and the plan dimensions of neoprene affect its
stiffness. For instance, with an increase in the thickness of the neoprene pads, its vertical
stiffness will decrease considerably [24]. The reduction in the vertical stiffness will decrease
significantly when reinforcement is added to each rubber layer. Hence, very close attention
should be paid to choosing these dimensions at the design stage. Since thinner layers provide for
more steel reinforcements, these pads are able to support larger loads and movements than a
plain pad, which has no steel reinforcements. In order to satisfy the compressive stress and shear
deformation criteria AASHTO recommends using the following equations presented in section
5.2 of this research. An assessment of the existing bearing pad model was also verified with this
data to ensure that the dimensioning was not an issue for error. Once dimensioning was
complete, a decision on the amount of layers was needed to be made in order to accurately
calculate the shape factor of the new bearing pads.
Another important parameter that needs to be taken into account when improving bearing pads
are the material parameters. These parameters are essential when analyzing the behavior of these
pads under certain loading conditions. Neoprene pads are subset of elastomeric bearing pads and
will be the material of chose in the improvement of these pads. Material properties for neoprene
rubber will be important in determining the main material parameter, the shear modulus.
In order to make improvements on the bearing pads, an analysis of the binary output files must
first be considered since this is how LS-Dyna produces results. If the outputs of these files are
not consistent with each other, it may cause issues with the verification and validation process.
Before any modification of the bearing pads can take place, an assessment of the existing model
must be done in order to verify that errors will not be due to inconsistencies. A problem with the
original model’s output was discovered during the assessment process. This problem was solved
prior to running simulations.
42

The problem with the old model was that it did not run for the time that was defined in the
database interface. In other words, the model terminated earlier than what was defined by the
user. The model was defined to terminate at t = 5.00 seconds but, upon completion of the
assessment, the model terminated at t = 3.62 seconds. By going into the LS-PrePost database
and changing the way LS-Dyna calculated certain elements, the termination time of 5.00 seconds
was reached. Without this initial improvement, verification and validation of these time histories
may result in miscalculations.
Once the necessary modifications have been applied to the time history graph, focus on the
improvement of the actual bearing pads can begin. Listed below in Figure 5.1 are the time
histories of the original model once corrections to the element formulation and the database were
completed. Emphasis will be placed on the displacement and strains of the neoprene pad only.
The reason other parameters were not studied in this research is due to the fact that field results
for the bridge only took into account displacement results and strain results. Without accurate
field results for the bridge, validation was not able to be performed between the new bridge
parameters and existing field results. Once improvements of the pads were completed, they were
then put into 3 different cases. These cases were used as a way to keep track of the different
material properties used. Case 1 will adopt the material properties used in the original bridge
model, with no changes made. Case 2 and 3 adopted their material properties due to an analysis
method taken by AASHTO. Section 5.3 of this chapter discusses exactly how material
characteristics have an effect on the neoprene pads and the analysis involved in obtaining Case 2
and 3 material properties. Chapter 6 will take these material characteristics for all 3 cases in
order to see how the neoprene pads will affect the entire bridge model as a whole. Once this was
completed, Chapter 7 produced the overall dynamic load allowance for each of the cases.
From the graphs in Figure 5.1, both numerical displacements and strains yield maximum values
higher than the field results. The maximum deflection of the field results and the numerical
results are 1.39 mm and 3.13 mm respectively. The maximum strain for the field test and the
numerical test are 48.34 µm/m and 67.67 µm/m respectively. By improving on the elastomeric
pads one can conclude that the results of the numerical simulation will come closer to the field
results, which ultimately will reduce the dynamic load allowance of the vehicle-bridge
interaction in the finite element model.
43

‐3.500
‐3.000
‐2.500
‐2.000
‐1.500
‐1.000
‐0.500
0.000
0.500
0.000 1.000 2.000 3.000 4.000 5.000 6.000
Deflection
(mm)
Time (s)
Field Displacements
Numerical Displacements
‐10.000
0.000
10.000
20.000
30.000
40.000
50.000
60.000
70.000
80.000
0.000 1.000 2.000 3.000 4.000 5.000 6.000
Strain
(m/m
)
Time (s)
Field Strain
Numerical Strain
Figure 5.1: Time histories of existing material pad parameters
The material characteristics that were used in the neoprene pads to determine the maximum
deflection and strain of the numerical model were as follows:
• Short-time shear modulus, GO = 17 MPa
• Infinite-time shear modulus, G∞ = 16 MPa
44

• Elastic bulk modulus, K = 101 MPa
The goal of this study was to decrease the amount of displacement and strain in order to get
better correlation with the field results. One can see that there is in fact a difference between the
computational and the field results. By improving on the geometric and material characteristics
of the neoprene pad, one will see that the computational results will have a better correlation
with the field results. It is important to note that once the appropriate geometric improvements
were made, they were adopted in all 3 cases. The result of the actual geometric improvements is
presented in Section 5.1.
5.1 Improvement of Bearing Pad Design
There are two design methods that can be used to design steel reinforced elastomeric bearing
pads according to AASHTO Specifications. These methods are referred to as Method A and
Method B. Method B is the most current method and was recently added to the AASHTO
specifications. The Commentary of the AASHTO Specification states that Method B typically
results in a higher bearing capacity as well as smaller horizontal forces [25]. The Florida
Department of Transportation Specifications was reviewed in order to assess the current bearing
pad design. This information was useful in determining the size, design requirements, and
material grades for the new bridge model bearing pads. These dimensions are for pads designed
to support Type II to IV (AASHTO) beams in prestressed bridges. These values are listed in
Table 5.1.
Table 5.1: FDOT bearing pad dimensions for AASHTO beams [25]
45
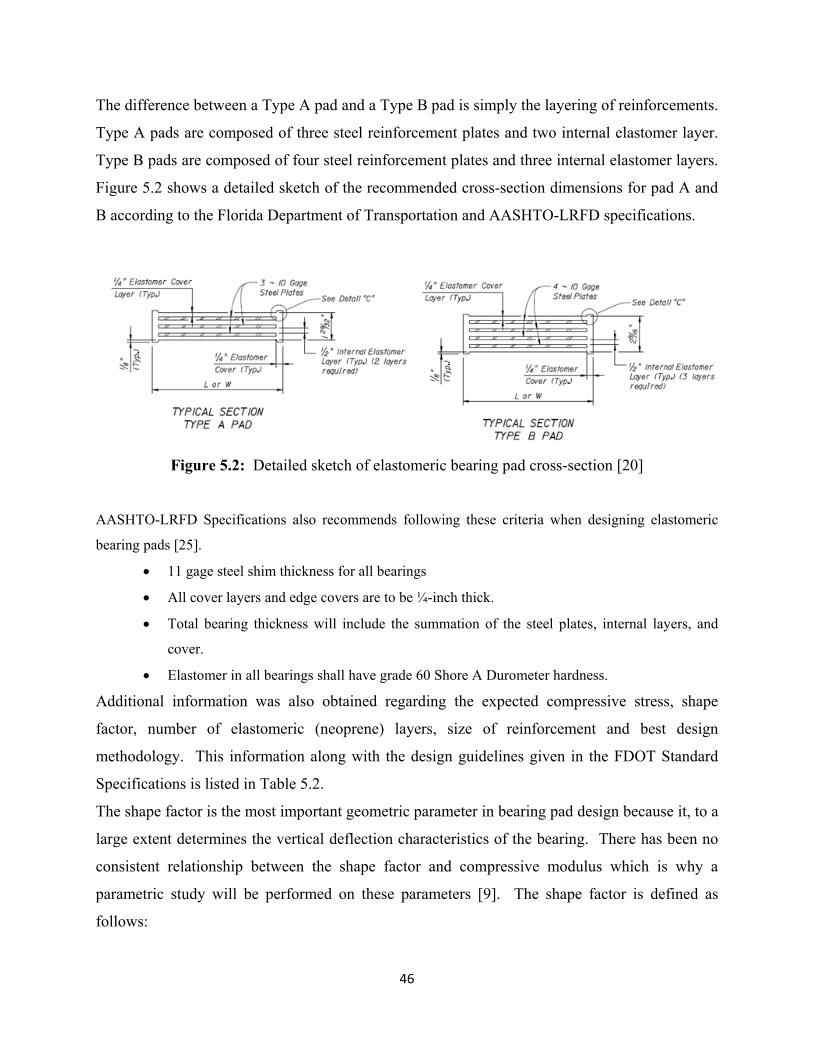
The difference between a Type A pad and a Type B pad is simply the layering of reinforcements.
Type A pads are composed of three steel reinforcement plates and two internal elastomer layer.
Type B pads are composed of four steel reinforcement plates and three internal elastomer layers.
Figure 5.2 shows a detailed sketch of the recommended cross-section dimensions for pad A and
B according to the Florida Department of Transportation and AASHTO-LRFD specifications.
Figure 5.2: Detailed sketch of elastomeric bearing pad cross-section [20]
AASHTO-LRFD Specifications also recommends following these criteria when designing elastomeric
bearing pads [25].
• 11 gage steel shim thickness for all bearings
• All cover layers and edge covers are to be ¼-inch thick.
• Total bearing thickness will include the summation of the steel plates, internal layers, and
cover.
• Elastomer in all bearings shall have grade 60 Shore A Durometer hardness.
Additional information was also obtained regarding the expected compressive stress, shape
factor, number of elastomeric (neoprene) layers, size of reinforcement and best design
methodology. This information along with the design guidelines given in the FDOT Standard
Specifications is listed in Table 5.2.
The shape factor is the most important geometric parameter in bearing pad design because it, to a
large extent determines the vertical deflection characteristics of the bearing. There has been no
consistent relationship between the shape factor and compressive modulus which is why a
parametric study will be performed on these parameters [9]. The shape factor is defined as
follows:
46

S = (5.1)
where:
L = length parallel to the flow of traffic (mm)
W = width perpendicular to traffic flow (mm)
hri = height of individual elastomer layer (mm)
Table 5.2: Typical bearing properties [1]
In order to accurately model the new neoprene pads, a detailed sketch of the pads were obtained
by the FDOT Structures Research Center. Since the dimensions are the only definitive
parameter in this study, improvements will only be made to the layering and reinforcement of
these pads. AASHTO-LRFD recommends using a type A or type B pad when designing. Figure
5.3 shows a sketch of the existing neoprene pad used in the previous research.
The neoprene pad in the existing bridge model does not utilize steel reinforcements, Figure 5.3.
This pad was designed as a plain pad which resulted in a shape factor of 1.70. Table 5.2 shows
that the shape factor should fall in the range of 6 to 9. Therefore, the shape factor for the existing
bearing pad in the original model had to be improved. Figure 5.4 illustrates a Type A and Type
B design which is recommended by AASHTO. These design methods utilizes steel
47

reinforcement as a way to strengthen the elastomeric pad. It is the more current form of pad
design and is vital for improving the shape factor.
Figure 5.3: Original neoprene pad used on existing FE bridge model
Figure 5.4: Improved neoprene pad for existing FE model; a) top pad, b) bottom pad
48

Figure 5.4 shows that the cross section of the original pad, Figure 5.3, has no steel
reinforcements. This is the major difference between the original pad and the improved pad,
Figure 5.4. Since we only know the overall dimensions, it is important to perform a geometric
parametric study in order to figure out the exact dimensions of the cross section. The parametric
study was done in order to determine the internal elastomeric layer height. The internal layer
height is a key factor in determining the shape factor for the pads and therefore must be studied
carefully.
In order to begin analysis on the neoprene pad certain issues concerning the dimension tolerance
had to be considered. The tolerance is defined as the permissible variation from the dimensions
and configuration shown on the plans. Table 5.3 lists all the permissible variations for laminated
elastomeric bearing pads. The internal elastomer layer height, hri is significant in determining
the shape factor of the new bearing pad thus; the length and width are considered to be fixed in
this study. Hri will be the only geometric parameter that will need further investigation in order
to determine the ideal design. Once the ideal parameters are chosen a parametric study was
conducted in order to determine whether Type A or Type B pad is the better design. The result
of the study was used not only to improve on the existing model but, will also be implemented in
the new bridge model. This will ensure that the new bridge model utilizes the best geometric and
material parameters.
Since we already know the overall dimension of the pads, the tolerance was used only when
necessary. The parametric study helped in determining whether or not tolerance was an issue.
Given that the width and height are fixed, the internal layers were modified in order to obtain a
better shape factor for the existing neoprene pad design. A geometric parametric study was done
in order to investigate the variation of the internal elastomeric layer with the shape factor. Figure
5.5 shows a graph of how the shape factor changes depending on the internal layer thickness.
This will be vital information in determining the shape factor since it is based extensively on the
internal layer thickness.
The effect of variation of the internal elastomeric layer with the shape factor varies
hyperbolically. As the internal layers become larger, the shape factor gets smaller. This will
happen until the shape factor approaches zero.
When this happens, the neoprene laminated bearing pad becomes a plain pad with no internal
layering for reinforcements. On the other hand, having an internal layer equivalent to 1
49

millimeter produces a shape factor approximately equal to 47.0. This is also not realistic since a
design like this would not be considered economical due to the amount of steel reinforcements
that would be needed every 1 millimeter.
Table 5.3: Dimension tolerance for bearing pads [23]
0.00
5.00
10.00
15.00
20.00
25.00
30.00
35.00
40.00
45.00
50.00
0 1 2 3 4 5 6 7 8 9 10 11 12 13
Shape
factor,
S
Internal layer height, hri (mm)
Shape Factor
Figure 5.5: Graph of shape factor vs. internal layer thickness
50

The results of the parametric study of the shape factor and the internal height are listed in Table
5.4. The table on top are the values recommended by AASHTO and FDOT thus, must remain
fixed. The fixed height which is given as 45 mm. is important in this parametric study due to the
fact that this is the ideal height that should be obtain in the end of the parametric study. If the
height of the pad does not equal 45 mm, the study becomes invalid since it would no longer
acknowledges AASHTO or FDOT specification recommendations.
Table 5.4: Result of geometric design
Type Layers Length (mm) Width (mm) Internal Height
(mm)
Shape
Factor
Total Height
(mm)
A 3 458 230 12 6.38 45
B 4 458 230 7 10.94 45
The result of the geometric study, Table 5.3, yields a Type A design which resulted in three
layers of steel with each layer spaced at 12 mm., produced a shape factor of 6.38. On the other
hand, the Type B design yields 4 layers of steel with each layer spaced at 7 mm., which resulted
in a shape factor of 10.94. At first glance, Type B seems to be the ideal choice due to its larger
shape factor but, this may be considered to be too conservative and therefore not economical.
Table 5.2 states that the appropriate shape factor for standard AASHTO beam sizes should fall
between 6 and 9. Because of this statement, Type B was omitted and Type A was chosen as the
ideal geometric design for this study.
The result of Type A, which results in a shape factor of 6.38, is shown below in Figure 5.5. You
can see from this graph that the hyperbolic relationship holds true, as predicted earlier in Figure
5.4. Again, an internal layer of 1 mm. produces a shape factor of 76.56 which is very high but,
way too conservative thus, not practical. On the other hand an internal height of 45 mm, which
is the same as the plain pad design, produces a shape factor of 1.70 which is too low and is why
improvements are needed. The internal heights can be seen in Figure 5.6. The spacing between
the steel reinforcements is considered the internal height of the neoprene pads.
51

0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
90.00
0 10 20 30 40 50
Shape
factor,
S
Internal layer height, hri
Parametric Study for Shape Factor
Parametric Study for Shape Factor
Figure 5.6: Graph of geometric study
The initial parametric study shows that if a Type A pad is used as the basis for design, a shape
factor of 6.38 is produced. This is a vast improvement from the plain pad design in the original
bridge model of 1.70.
5.2 Analysis of Bearing Pad Improvements
Asides from the bearing pad design, the most important consideration are the material properties.
The neoprene pads used for this study were modeled using a viscoelastic material. This material
contains both elastic and viscuous components. The deformation of viscoelastic material is
dependent on load, time, and temperature. For the sake of our investigation, temperature will be
ignored and assumed to be the standard temperature of 73°, AASHTO-LRFD S14.7.4.2. For
simplicity, we will only consider limiting values of shear at very short and very long times.
Currently, our viscoelastic material has properties as follows:
1. Relative Density, (RO) = 1.3 x 10-9
2. Elastic Bulk Modulus, (K) = 101
3. Short Time Shear Modulus , (GO) = 17
4. Infinite Time Shear Modulus, (GI) = 16
52

5. Decay Constant (β) = 1.0
Since we know that the neoprene pads are made of viscoelastic material, the relative density will
stay the same. The short time modulus and infinite time shear modulus will need more
investigation since these are the main parameters that effect viscoelastic materials. Decay
constant will remain the same unless the modifications during the shear analysis cause changes
in the decay constant. The shape factor will also be used in determining the shear moduli.
The shear modulus is the most important material property for neoprene bearing pads and will be
the primary focus for improvement.
The shear modulus can be calculated by knowing Poisson ratio, Young’s modulus, and the shape
factor. Since the shape factor was already determined in the previous section, this will be the
basis for calculating the shear moduli for the neoprene pad of the new bridge model. Even
though there has not been an actual equation that relates the shape factor to the shear modulus,
AASHTO does stipulate that for steel-reinforced bearings, the following criterion should be
satisfied. This equation is presented in Equation 5.1. Furthermore, through previous research, a
linear relationship between the shape factor and shear modulus was also obtained [10]. Equation
5.2 describes the linear relationship between the shape factor and shear modulus. It is important
to note that the positive linear correlation coefficient is 0.73.
7 5.1
G = 0.0332(S) + 0.0239 [MPa] 5.2
Where G is the shear modulus and S is the shape factor found in the previous section. AASHTO
also uses an additional equation to determine the shear modulus. This equation will be the basis
for the parametric study and will be presented in the next section of this chapter. The initial
compressive strength is calculated from the shear modulus and will be useful in determining the
effective compressive strength of the viscoelastic material. The units in for this analysis will be
in S.I. The main reason for this is due to the fact that LS-Dyna uses S.I. units. The initial
Young’s modulus is calculated as follows;
Eo = 4.515(G) – 0.448 [MPa] 5.3
53

Where G is the shear modulus obtained from the previous equation. Once the initial Young’s
modulus is obtained, the degree of rotation can be calculated for the new pads. The degree of
rotation is also known as the material compressibility coeffient and will be useful in determining
the effective compression modulus.
Φ = 0.445 + .
5.4
The degree of rotation along with the shape factor will be used to find the effective compressive
Young’s modulus. This parameter will be important when determining the short-time and
infinite-time shear modulus of the new neoprene bearing pads. More importantly, the
compressive strength of the improved pads will have a more important role in determining the
short-time and infinite-time shear modulus.
Poisson’s ratio plays a major role in determining the short-time shear modulus but has no part in
the calculation of the infinite-time shear modulus. The equations for these parameters are
presented in equation 5.5 – 5.7.
Ec = Eo(1 + 2*Φ*S2) [MPa] 5.5
Go = [MPa] 5.6
G∞ = [MPa] 5.7 Method B of the AASHTO Design Specification states that the limit for the average compressive
stress under service loading for bearing subject to shear is calculated as follows [25]:
σc ≤ 1.66*G*S ≤ 11.0 MPa 5.8
Where σs is the service average compressive stress due to the total load, G is the shear modulus
and S is the shape factor. It is recommended by AASHTO that the compressive stress be
calculated as follows:
σc = 1.66*G*S 5.9
54

These equations will be very useful in determining the values that should be used for the parametric study.
5.3 Parametric Study of Reinforced Neoprene Bearing Pads
Parametric studies of reinforced neoprene bearing pads were conducted using Finite Element
software, LS-Dyna. In order to perform the parametric study, a Shear Testing apparatus was
modeled as well as the neoprene bearing pad. Method B from AASHTO was used throughout the
modeling process due to the fact that it is the most current method for analysis and design. The first
restriction of using Method B is that the shear modulus for neoprene material should fall in the range of
80 psi to 175 psi [25]. Method B also states that the summation of the individual elastomer layer heights
in a bearing pad be a minimum of twice the maximum shear displacement to which the bearing will be
subjected [25]. It is important to note that if a minimum height is selected for the design of a neoprene
bearing pad then the maximum permitted shear strain is 50%. The shear strain, along with the shape
factor and compressive stress make up the three key factors used to determine the shear modulus of the
bridge bearing pad. In addition to tests for calculating the shear modulus, AASHTO M 251-06 [25]
contains a method for calculating the shear modulus as a function of time. This was important in
determining the infinite-shear modulus as well as the short-time shear modulus. The method for
calculating the shear modulus is given in Equation 5.10.
G(t) = . 5.10
Where load(t) is the load at time t in minutes and G(t) is the shear modulus (MPa) at time t. The
area of the loaded side is denoted by A and should be in mm2, n is the number of samples being
tested at the time of the test, and the constant 0.5 is the 50% shear strain, which is the maximum
shear strain permitted by AASHTO.
Several factors such as shear modulus, Young’s modulus, and Poisson Ratio were investigated in
order to determine its effect on elastomeric bearing pads. Vertical displacement, strains, and
acceleration time histories are among the aspects presented and discussed. Finally, the results of
the parametric study were used to compare experimental data in order to show agreement
between the analytical and experimental results. These results were then implemented onto the
new bridge model, No Name Creek.
55

5.3.1 Finite Element Modeling of Shear Test Apparatus
The shear modulus test apparatus which will be modeled using LS-Prepost and simulated by LS-
Dyna, consists of two systems for applying loads. Both loads will be controlled separately. This
provides the ability to determine the shear modulus while the normal force is held at a constant
loading rate. The setup will consist of a vertically moveable plate that is free to slide against a
vertical steel channel [10]. A bottom plate will be modeled independently in order to allow
horizontal movement. At opposite ends of the top and bottom plate are the stoppers. In this
proposed shear test the shear force is introduced to the bearing pad by pulling the horizontal
moveable bottom plate, which in turn transfers the pull to one edge of the bottom bearing pad
[10]. The top horizontal fixed plate will resists the introduced force that is provided by the
bottom plate. This arrangement allows the introduction of shear force in the bearing pad that is
independent of the compressive load. Presented in Figure 5.7 and 5.8 illustrates a sketch as well
as a picture of the shear testing apparatus.
Figure 5.7: In-Lab Shear-Test Apparatus [10]
The neoprene pad sample size that will be used in the test will be 458 mm x 230 mm x 45 mm.
The neoprene pad will be modeled using solid and shell elements only. The neoprene rubber
will be made up of solid elements and the steel will be made up of shell elements. The finite
56

element model of the testing equipment will be made up of four parts. These parts include the
neoprene, steel, top plate, and bottom plate. Table 5.5 has a summary of the finished model.
Figure 5.8: Detailed Sketch of Shear-Test Apparatus
Table 5.5: Summary of FE Model for Shear Test
Part ID Section Material Element Count Node Count Neoprene pad Solid Viscoelastic 1520 7600
Steel reinforcement Shell Rigid 760 3040 Top plate Solid Rigid 380 3040
Bottom plate Solid Rigid 380 3040 3040 16720
Once the geometry is complete, a load curve for the compression force and the shear force was
defined. This is where the modeling of plates independently becomes vital. Since these two
plates are modeled independently, a normal force can be applied to the top plate only while the
bottom plate remains fixed. This will allow a complete analysis of the compressive strength of
the neoprene pad. Likewise, a constant normal force can be applied to the top plate while a shear
force is applied to the bottom plate in order to analyze the shear resistance of the bearing pad.
57

The elastomeric material of the pad will be modeled using a viscoelastic material. This material
has a short-time shear modulus, infinite-time shear modulus, and a bulk modulus. It is important
to note that the parametric study will be performed on these parameters. Once the neoprene
layers have been modeled steel reinforcement will then be added in order to represent the steel
shims of reinforced bearing pads. The steel material will have a modulus of elasticity of 29,000
ksi and will be modeled using a shell section. The compression plate (top plate) of the in-lab
testing equipment will be modeled as a rigid material. A load curve will be applied to the plates
in order to simulate a compressive force. This force is usually due to the dead load of the bridge.
In order to stay consistent with research that was performed in the pass regarding Elastomeric
Bearing Pads Under Combined Loading and Stiffness Evaluation of Neoprene Bearing Pads
Under Long Term Loading, a load of 53,387 Newton will be applied. This load is equivalent to
12 kips and was used throughout earlier research. Once the load curve is defined, contact and
boundary conditions were established. An AUTOMATIC_SURFACE_TO_SURFACE was
used in order to define the contact between all four parts of the shear test. Both top and bottom
plates were defined as the Master_ID and the pad was defined as the Slave_ID. A static
coefficient of friction was set to 0.60 to ensure that sliding would not occur.
PRESCRIBED_MOTION_RIGID was also defined in order to deal with the boundary
conditions. This would ensure that only the top plate is allowed movement. SPC_SET took into
account all the nodes that needed to remain fixed. By applying either a 0 or 1 to the degree of
freedom, where 0 indicates no translational constraints and 1 indicates translational constraints,
specific nodes would remain fixed despite the prescribed motion conditions, which were defined
earlier. A frictional coefficient was also applied between both the plates and neoprene pad
sample. This will ensure that there is no slippage while the compression force is being applied.
A complete view of the finite element model is shown in Figure 5.9.
5.3.2 Parametric Study
Finite element is one of the most common analysis methods for designing and predicting the
behavior of structural parts. This is why a parametric study using the finite element model of an
in-lab compression test, developed in the previous section, will be important in analyzing and
improving the neoprene pads from the existing bridge model. The main goal of the parametric
study is to investigate how several parameters affect the mechanical behavior of the reinforced
58

bearing pads. This will provide insight and better understanding into how the physical
mechanisms control the behavior of these bearing pads.
Figure 5.9: FE Model of Shear Test
The Shape Factor, Effective Young’s Modulus, and AASHTO Shear modulus will remain
constant throughout the parametric study. The only parameters that will be tested are the Shear
moduli and Bulk modulus. Determining the AASHTO shear modulus was taken from AASHTO
specification and was determined to be 1.09 MPa. This value allowed for a verification of the
calculated values in the study. In order to determine the initial shear modulus and the bulk
modulus, a parametric study of Poisson’s Ratio will be performed. Since neoprene rubber has a
Poisson Ratio that varies between 0.30-0.5, this will be the focus of the material parameters.
Appendix A lists all the shear values that were obtained throughout the study. It is important to
note that in Appendix A the values for shear has been normalized in order to match up with the
existing shear values used in the previous research. Once that was done, a comparison between
the existing shear moduli could occur. The normalization of these values also helped in
determining the input values for LS-Dyna. In order to determine what the actual LS-Dyna values
were, a calculation based on the existing values had to be performed. This would ensure that the
59

final shear moduli were compatible with what was inputted in the existing bridge model. Step by
step analyses of these values are presented in Appendix A along with the table of all the tested
values.
The results of this study will focus on the displacement and strains of the neoprene pad. Figure
5.10-5.12 illustrates the results of the compression test simulation.
Figure 5.10: Results for Case 1 compression test; a) displacement, b) strain
Figure 5.11: Results for Case 2 compression test; a) displacement, b) strain
A termination time of 45 seconds was used in the analysis due to the fact that it represents the
first cycle when testing bearing pads under compressive loading. It is also recommended that the
time interval for short term loading should have a minimum termination time of 45 seconds. As
60

stated before, the shape factor for the tested neoprene pad remained at 6.38 while changes
occurred only to the material properties. Below are the three cases in which testing will occur on
the neoprene pads. Table 5.4 shows all the material properties that will be used for testing.
Figure 5.12: Results for Case 3 compression test; a) displacement, b) strain
Table 5.6: Material Properties for Compression Test
Case No. Go G∞ K 1 17 16 101 0.30 2 18.35 17.32 203 0.32 3 18.48 17.46 243 0.35
It is important to note that Case 1 is the original material properties used in the previous bridge
research. Due to this, a shape factor of 1.70 remained for the overall bridge analysis. For the
sake of analysis and in order to stay consistent, all three cases were designed with a shape factor
of 6.38 during the compression test in order to investigate the effects of different material
properties. Poisson Ratio is the basis for the material study since the bulk modulus and initial
shear modulus are heavily dependent on this parameter.
Looking at Figures 5.10-5.12 one can see a small variation between each case. It is hard to tell
which one of these cases displaces more thus further investigation will be done in order to
determine which case is the better of the two. Case 3, has more of the dark blue shading which
61

indicates that there is more deflection in that pad. At first glance, Figure 5.12 seems to be the
worst case due to the larger amount of bright green but, on the other hand Case 3 seems to have
larger amounts of deflection due to the darker blue shading that occurs at the top of the pad
sample. In order to see which case would be considered ideal, a study performed in a previous
research titled Elastomeric Bearing Pads under Combined Loading was used as a basis for
comparison. The goal was to determine whether Poisson Ratio, the Shape Factor, or the Shear
Moduli played a significant role in the improvement of the neoprene pad. Special attention will
be made to the 1st cycle results due to the fact that our test did not take into account cyclic
loading. This research was performed by Dr. Mtenga from the FAMU-FSU College of
Engineering and sponsored by the FDOT-FHWA.
In the Elastomeric Bearing Pads under Combined Loading study, denoted in purple, you can see
that the curve ends suddenly. This had to do with the fact that this curve was only tested under a
maximum load of 18 kN as oppose to the current research which had a maximum compressive
load of 54 kN, which is equivalent to 12 kips. The main purpose of adding this curve was to look
at a typical behavior of a neoprene pad under compression. The purple curve is made up of a
softer material but, attention should be made only to the behavior of the curve. The behavior of
the 3 cases does in fact follow the behavior of an already existed study performed in a previous
research by Dr. Mtenga. This lets us know that our results are in fact reasonable. In order to see
the dynamic effects of the compression test, three graphs were produced. These graphs
compared displacement, stress, and strain to time. Figure 5.13-5.17 shows the results of these
comparisons. In order to obtain the stresses on the neoprene pad, the load that was applied to the
pad was divided by the loaded area of the pad. Stress was introduced as a way to determine the
Young’s modulus graphically by analyzing the slope of the stress vs strain data. The strain was
calculated by dividing the resultant displacement by the overall thickness of the tested pad. Once
this was completed a graph of stress vs strain was developed. By determining the slope of the
line, one could obtain the Youngs modulus. The reason Youngs modulus is determined as
opposed to the shear modulus is due to the fact that only vertical displacements were considered
as oppose to the horizontal displacements. The same is true when it comes to the loading. Only
compression was applied as opposed to a shear load. Fortunately, we can use Ec to obtain both
initial and long term shear moduli, Equations 5.5-5.7. By using a second order curve, fluctuation
in the stress-strain graph can be eliminated.
62

After comparing all results, it seems that Case 1 and Case 2 have better material properties due to
the results of the FE model and the behavior of the graphs. Case 3 seems to be a little bit more
unpredictable. When looking at the results of the FE simulation, Case 3 is the only case in which
a slight orange color is introduced. This color is represented by a higher level of reaction while
the blue’s and green’s indicate a lower level of reaction. The next chapter will use verification
and validation in order to truly see which case is the best. Once the best case was determined,
the material properties were then implemented onto the new bridge model. This ensured that the
final bridge model was in fact improved.
0.00
10.00
20.00
30.00
40.00
50.00
60.00
0.00 2.00 4.00 6.00 8.00 10.00 12.00 14.00 16.00 18.00
Load
(KN)
Displacement (mm)
Load vs Displacement
Case 1
Case 2
Case 3
Dr. Mtenga
Figure 5.13: Load vs Displacement
63

0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
16.00
18.00
0 10 20 30 40 50
Displacement (mm)
Time (s)
Time vs Displacement
Case 1
Case 2
Case 3
Figure 5.14: Displacement vs Time
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0 10 20 30 40 50
Stress
(Mpa)
Time (s)
Stress vs Time
Case 1
Case 2
Case 3
Figure 5.15: Stress vs Time
64

0.0E+00
5.0E‐02
1.0E‐01
1.5E‐01
2.0E‐01
2.5E‐01
3.0E‐01
3.5E‐01
4.0E‐01
0.00 0.20 0.40 0.60 0.80 1.00 1.20 1.40 1.60
Strain
(mm/m
m)
Displacement (mm)
Strain vs Displacement
Case 1
Case 3
Case 2
Figure 5.16: Strain vs Displacement
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.0E+00 5.0E‐02 1.0E‐01 1.5E‐01 2.0E‐01 2.5E‐01 3.0E‐01 3.5E‐01 4.0E‐01
Stress
(Mpa)
Stress vs Strain
Case 1
Case 2
Case 3
Strain (mm/mm)
Figure 5.17: Stress vs Strain
65

66
Additional test were performed in the next chapter in order to determine the dynamic load
allowance for each of the three cases. This was done in order to determine if the results from
Chapter 5 were accurate.

CHAPTER 6
VERIFICATION AND VALIDATION OF NEOPRENE BEARING PADS
The verification and validation process is an essential part when developing a finite element
model especially, if that model is to be accepted and used to support decision making. As
mentioned in chapter 2 the verification process is concerned with the specifications being met
and that mistakes have not been made in implementing the model. On the other hand, the
validation process will determine if the model is an actual representation of the real system.
The Roadside Safety Verification and Validation Program (RSVVP) is a software that
automatically assesses the similarities and differences between two curves. The program is used
for curve comparison during the verification and validation (V&V) process of a numerical model
[LS-Dyna conference]. This research will focus on the verification and validation of the
improvements made to the neoprene bearing pads for the existing bridge model along with the
experimental results that were obtained from the previous research. It is important to note that
validation of the new bridge model will not be possible due to the fact that field results were not
obtained for the new bridge. Once the neoprene pads have been verified and validated, they will
be implemented onto the new bridge model.
RSVVP was used in order to compare two curves; one curve from a numerical simulation and
another from a physical experiment. The shape metric was used to assess the degree of
similarity between the two curves specifically the displacement and strain time histories. The
MPC (magnitude-phase-comprehensive) metric along with the ANOVA metric were the primary
shape comparison metric used in this research.
The MPC metrics treat the curve magnitude and phase separately. The magnitude component is
sensitive to the difference in the magnitude change of the curves while the phase component is
sensitive to the phase shift of the two curves. In general, this metric will tell us whether or not
the error was due to a shift in the magnitude or phase of the curve. This is very important
because prior to analyzing the set of curves, synchronization must occur. The ANOVA metrics
are based on the assumption that if two curves represent the same event, then any differences
between the curves must be attributable only to random experimental noise. In order to have a
67

successful validation, the ANOVA metrics must be less than or equal to 5%., which is an
accepted value in most statistical analysis.
6.1 Verification and Validation of Existing FE Model
Displacements and strains were the focus of verification and validation for the FE models. In
Figure 6.1 a finite element model along with a full-scale dynamic test is presented.
(a) (b)
Figure 6.1: Dynamic test of vehicle-bridge interaction, (a) Full-scale field test and (b) Finite Element simulation
Considering the results previously obtained, it was decided that the Sprague&Geers along with
the ANOVA metrics were used for the comparison of the time histories. Table 6.1 lists all the
comparison metrics for the analytical curves that are acceptable passing values for any of the
shape comparison curves. For the sake of this study, focus was placed only on the Sprague-
Geers Magnitude, Sprague-Geers Phase, and the Sprague-Geers Comprehensive MPC metrics
along with the Average or Mean and Standard Deviation of Residuals of the ANOVA metrics.
Since the M component of the MPC metrics is suppose to be insensitive to phase changes and
sensitive to magnitude changes, Table 6.1 will confirm this by displaying a 20 in the Sprague-
Geers Magnitude +20% column and a zero in the Sprague-Geers Phase column. Similarly, with
the Sprague-Geers Phase -20% and Sprague-Geers Phase +20% column [13]. The Average
68

Residual Error for both the magnitude and phase test for the ANOVA metrics all have values
either close to zero or equals zero. This indicates that the results of the curves are identical.
Table 6.1: Comparison metrics for analytical curves [13]
In order to successfully verify and validate the improvement of the neoprene bearing pads, three studies were conducted. Each case had two studies: strain and displacements, for each of the three cases. Figure 6.2-6.4 lists the results of all the cases once the improvements on the neoprene bearing pads were made. For reference, each case along with their material properties are listed in Table 5.4. The blue curve, which is also known as the true curve is taken as the experimental results. The red curve which is the test curve is the result of the numerical simulation. Displacement results were extremely insensitive to the RSVVP software thus, producing unreliable results for the validation process. Fortunately, Chapter 7 focuses more on
69

the displacement results, specifically the maximum displacement between the field and numerical data in order to determine the dynamic load allowance. This chapter will exclusively focus on the validation of the strain results due to the accuracy of the results when analyzed by RSVVP.
Figur 6.2: Case 1 strain results
Figure 6.3: Case 2 strain results
70
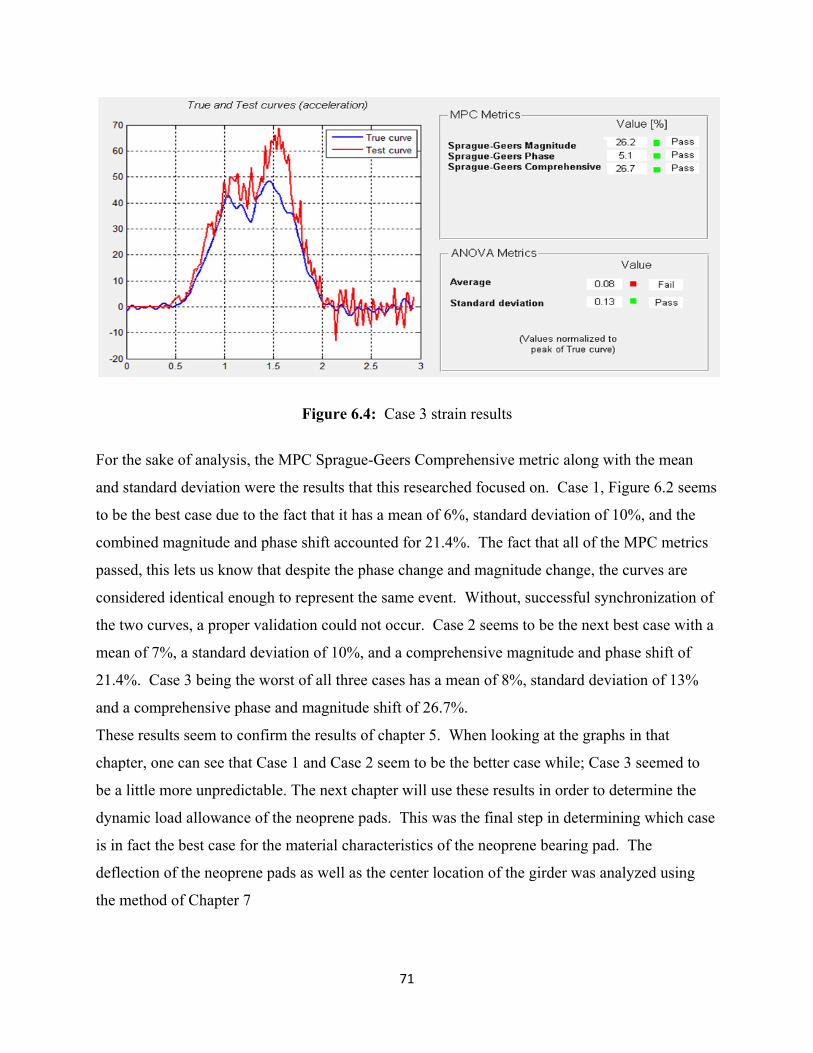
Figure 6.4: Case 3 strain results
For the sake of analysis, the MPC Sprague-Geers Comprehensive metric along with the mean
and standard deviation were the results that this researched focused on. Case 1, Figure 6.2 seems
to be the best case due to the fact that it has a mean of 6%, standard deviation of 10%, and the
combined magnitude and phase shift accounted for 21.4%. The fact that all of the MPC metrics
passed, this lets us know that despite the phase change and magnitude change, the curves are
considered identical enough to represent the same event. Without, successful synchronization of
the two curves, a proper validation could not occur. Case 2 seems to be the next best case with a
mean of 7%, a standard deviation of 10%, and a comprehensive magnitude and phase shift of
21.4%. Case 3 being the worst of all three cases has a mean of 8%, standard deviation of 13%
and a comprehensive phase and magnitude shift of 26.7%.
These results seem to confirm the results of chapter 5. When looking at the graphs in that
chapter, one can see that Case 1 and Case 2 seem to be the better case while; Case 3 seemed to
be a little more unpredictable. The next chapter will use these results in order to determine the
dynamic load allowance of the neoprene pads. This was the final step in determining which case
is in fact the best case for the material characteristics of the neoprene bearing pad. The
deflection of the neoprene pads as well as the center location of the girder was analyzed using
the method of Chapter 7
71

CHAPTER 7
DYNAMIC LOAD ALLOWANCE FACTORS
The dynamic behavior of vehicle-bridge interaction can cause severe deterioration in the bridge,
especially in the bridge deck and in the superstructure. Since dynamic effects are significant in
the integrity of the bridge, it is necessary to consider them when evaluating an existing bridge or
designing a new one. The dynamic load allowance (DLA) is becoming more and more popular
in assessing these types of interaction.
Traditional bridge analysis has always been based on the simplifications of geometry, material,
boundary conditions and loading. With the use of dynamic load allowance factors, static
analysis can now be scaled to a more realistic result once these factors have been applied.
Currently, AASHTO has not developed an exact equation that can relate the dynamic load
allowance to the span length of the bridge but, they have an equation that can give a reasonable
approximation for determining the DLA. T using Equation 7.1. his value was calculated
7.1
Where L is the span length in feet. This equation actually originated from railway design but,
has been used in order to get a reasonable approximation of the DLA of highway bridges.
Another equation that was developed in the Crashworthiness and Impact Analysis Lab gives an
exact solution to determining the DLA. Unfortunately, this equation is not straight-forward and
requires the results of a dynamic analysis. a on 7.2 produces a more reliable exact solution. Equ ti
7.2
Where Rd is the dynamic response and Rs is the static response. This research utilizes Equation
7.2 due to the use of FE software is this study. Once the verification and validation of the results
were determined, they were used to calculate the DLA of the existing bridge model which was
completed in the previous research. The main reason for calculating the DLA in the existing
bridge model was to see if by improving the material and geometric properties of the neoprene
bearing pads, would there be a decrease in the dynamic load allowance. Also, whichever case
resulted in the least DLA, its pads were then implemented onto the new bridge model in order to
guarantee improvements.
72

7.1 Evaluation of Dynamic Load Allowance
Once verification and validation is completed, the dynamic load allowance was then calculated
in regards to the displacement and strains for the entire FE bridge model. Due to the fact that the
displacement results were not validated and verified in the previous chapter, special attention
was made when calculating the total maximum displacement for each case. Equation 7.3
ensured that the neoprene pads were taken into account during the calculation process.
ΔT = ΔM + (ΔL + ΔR) 7.3
Where ΔT is the total maximum displacement, ΔM is the displacement in the middle of the girder,
ΔL is the displacement of the girders’ left neoprene pad, and ΔR is the displacement of the
girders’ right neoprene pad. Table 7.1 lists all the displacement in millimeters for each case.
Table 7.1: Total displacement values for each case
Case No. ΔM ΔL ΔR ΔT
1 -3.16 -0.478 -0.439 -3.63
2 -3.15 -0.452 -0.436 -3.59
3 -3.21 -0.598 -0.376 -3.69
By looking at Table 7.1, Case 3 deflects the most but, has the least deflection when it comes to
the center location of the girder. On the other hand, Case 3 neoprene pad deflects the most
which is what one would expect after analyzing the results of the previous chapters. Special
attention should also be made to Case 2. Earlier predictions in Chapter 5 and Chapter 6 would
have concluded that Case 1 would have the least amount of deflection but, after additional
analysis of the deflection, it is observed that in fact Case 2 has the least amount of deflection.
The result of Table 7.1 was used in order to determine the DLA for each case. Additional
analysis was performed on the strains in order to get a better idea of which case has the better
material characteristics for the improvement of the bridge model.
Unfortunately, in the previous bridge model, the displacements of the neoprene pads were not
taken into account when calculating the DLA. This resulted in total displacement values equal to
ΔM as opposed to ΔT.
73

The next important step in calculating the DLA was to determine the static deflection for each
case now that the neoprene pads had a different shape factor and material properties. In order to
do this basic math as well as results obtained from the previous study were used. Since LS-Dyna
is a dynamic software and the static results of the previous researched utilized a field test in order
to determine the static displacement basic algebra was used to determine the static deflection for
each case. Equation 7.4 illustrates just how the static deflection was calculated in regards to the
previous research results and the current FE results.
7.4
where ΔF is the displacement obtained from the field test, ΔM is the displacement at the center of
the girder from Table 7.1, ΔT is the total displacement in Table 7.1, and ΔS is the new calculated
static displacement. Table 7.2 is a duplicate of Table 7.1 with the exception of a new colum that
displays the static deflection for all three cases.
Table 7.2: Complete displacement values
Case No. ΔM ΔL ΔR ΔS ΔT
1 -3.16 -0.478 -0.439 -3.36 -3.63
2 -3.15 -0.452 -0.436 -3.33 -3.59
3 -3.21 -0.598 -0.376 -3.35 -3.69 At first glance the static displacement seems to be larger than the dynamic displacement but,
once the total dynamic displacement is calculated one can see that it is in fact larger than the
static deflection. The shape factor is introduced again, in order to show how it affects the overall
results of the DLA factor in regards to deflection and strain. Even with a Poisson Ratio of 0.30,
which is the stiffest value that can be used for neoprene rubber, Case 1, the original case, still
seems to have a larger deflection than Case 2. These values are listed in Table 7.3.
Once the appropriate static displacements were taken into account it seems as if Case 3 is in fact
the better case. A further analysis in regards to strains was performed in order to take a closer
look at exactly which case is the best.
74
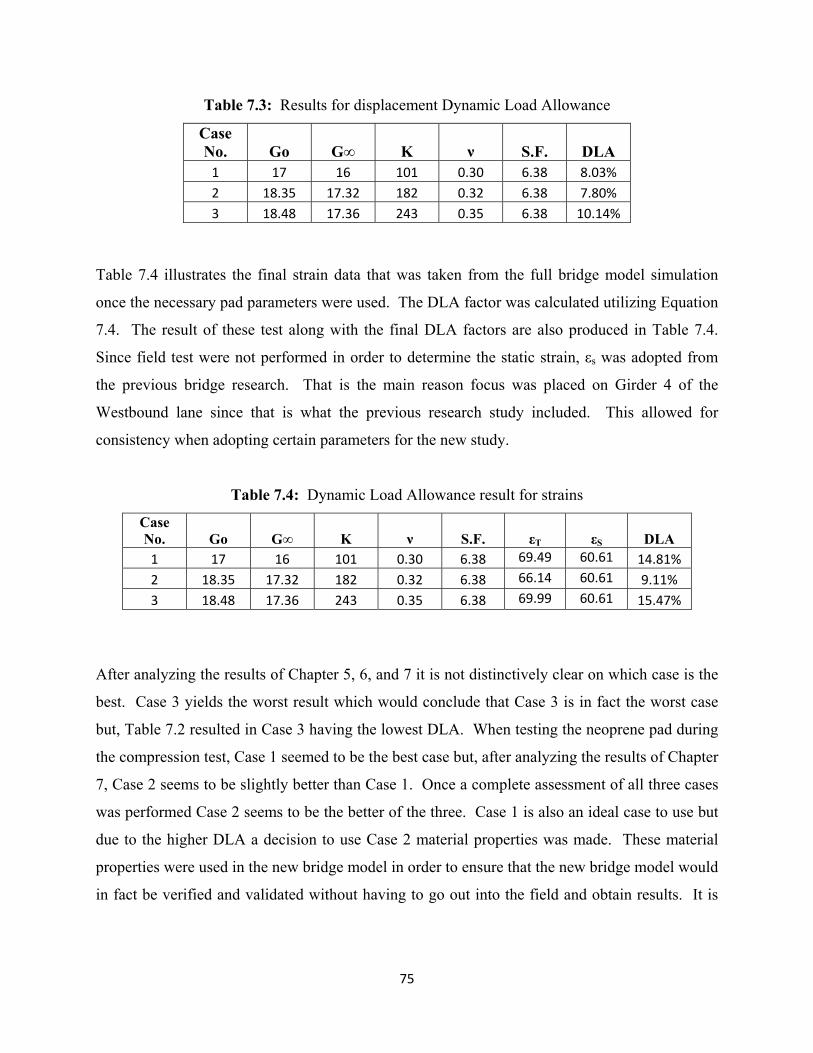
Table 7.3: Results for displacement Dynamic Load Allowance
Case
No. Go G∞ K ν S.F. DLA
1 17 16 101 0.30 6.38 8.03% 2 18.35 17.32 182 0.32 6.38 7.80% 3 18.48 17.36 243 0.35 6.38 10.14%
Table 7.4 illustrates the final strain data that was taken from the full bridge model simulation
once the necessary pad parameters were used. The DLA factor was calculated utilizing Equation
7.4. The result of these test along with the final DLA factors are also produced in Table 7.4.
Since field test were not performed in order to determine the static strain, εs was adopted from
the previous bridge research. That is the main reason focus was placed on Girder 4 of the
Westbound lane since that is what the previous research study included. This allowed for
consistency when adopting certain parameters for the new study.
Table 7.4: Dynamic Load Allowance result for strains
Case
No. Go G∞ K ν S.F. εT εS DLA
1 17 16 101 0.30 6.38 69.49 60.61 14.81% 2 18.35 17.32 182 0.32 6.38 66.14 60.61 9.11% 3 18.48 17.36 243 0.35 6.38 69.99 60.61 15.47%
After analyzing the results of Chapter 5, 6, and 7 it is not distinctively clear on which case is the
best. Case 3 yields the worst result which would conclude that Case 3 is in fact the worst case
but, Table 7.2 resulted in Case 3 having the lowest DLA. When testing the neoprene pad during
the compression test, Case 1 seemed to be the best case but, after analyzing the results of Chapter
7, Case 2 seems to be slightly better than Case 1. Once a complete assessment of all three cases
was performed Case 2 seems to be the better of the three. Case 1 is also an ideal case to use but
due to the higher DLA a decision to use Case 2 material properties was made. These material
properties were used in the new bridge model in order to ensure that the new bridge model would
in fact be verified and validated without having to go out into the field and obtain results. It is
75

recommended that additional field test be done on this new bridge to ensure that the results
obtained in this study are accurate.
As a result, having a shape factor of 6.38 was vital in the improvement of the neoprene pads.
This allowed for better results without taken into account new material properties. The new
bridge model must adopt a shape factor of 6.38 in order to get better correlation with the
numerical results. Poisson Ratio also played an important role in the development of the
material properties. Despite Case 1 having the lowest shear moduli, the Poisson Ratio of 0.30
allowed for better results than Case 3 which had shear moduli of over 1 MPa higher. This
verifies the importance of this parameter in the design of elastomeric neoprene bearing pads.
This parameter seems to be as important if not more important than the shear moduli. Table 7.5
list the final geometric and material properties that should be used in the design of the neoprene
pad for the new bridge model in order to improve analytical results.
Table 7.5: Final results for improvement of neoprene pads
Case
No.
GO
(MPa)
G∞
(MPa)
K
(MPa) ν Layers
Shape
Factor
Hri
(mm)
2 18.35 17.32 182 0.32 3 6.38 12
Now that we have validated and evaluated the improvements of the neoprene pads for the
previous bridge model, verification of the new model was completed. By applying the best case,
Case 2 to the new bridge model, one can assure that the new bridge model will be verified and
partially validated due to the previous test. The results of the new bridge model are presented in
Table 7.6. Despite not having field data to completely validate the new bridge, this research
allowed for a complete verification of the results for the new bridge, No Name Creek.
Displacements are given in millimeters and strains are given as micrometers.
Table 7.6: Results for new bridge model with improved pad parameters
Case No. ΔM ΔL ΔR ΔT εT
2 -1.53 -0.509 -0.330 -1.94 69.53
76

Now that Case 2 was chosen for improvements, a study involving different velocities was
performed on the new bridge model. In addition to the current model, four more FE analyses at
velocities of 30, 40, 60 and 70 mph were performed for the tractor-trailer located in the center of
the westbound traffic lane. These simulations allowed for estimation of the influence of the
velocity on the impact factor. The differences between the maximum deflections for the
considered velocities are relatively small however; even these slight differences had an influence
on the value of the dynamic load allowance. Equation 7.4 was utilized in order to determine the
static deflection of the AASHTO II bridge since field results were not obtained for the new
bridge model. The static deflection was calculated to be 1.75 mm and was used to determine the
DLA. The results are shown in Table 7.7 and Figure 7.1.
Table 7.7: Influence of the vehicle velocity on the dynamic load allowance
Vehicle Velocity (mph) Girder Deflection (mm) Dynamic Load Allowance (%)
0 -1.75 __
30 -1.80 2.85
40 -1.82 4.00
50 -1.89 5.02
60 -1.91 9.14
70 -1.95 11.4
0
2
4
6
8
10
12
0 20 40 60 80
DLA
(%)
Velocity (mph)
AASHTO II
AASHTO III
Figure 7.1: Influence of the vehicle velocity on the dynamic load allowance
77

The influence of the vehicle velocity on the DLA increases with respect to the speed. These
results verify that the AASHTO Type II model behaves in a similar matter as the previous
AASHTO Type III bridge. One can conclude by looking at these two curves that velocity does
in fact play a significant role in vehicle-bridge interaction and should be considered when
analyzing a bridge dynamic response.
7.2 Summary and Conclusion
The main purpose of this research was to develop and improve on a finite element model from an
existing bridge model. A tractor-trailer FE model was adopted from an existing project in order
to analyze vehicle-bridge interaction. Special attention was made to the neoprene bearing pads
in order to determine whether improving these pads would allow for better vehicle-bridge
interaction which ultimately would cause a lower dynamic load allowance, DLA. Since an
experimental test could not occur with the new bridge model, field results from the existing
bridge model were used in order to verify and validate improvements that were made onto the
new neoprene pads. An additional in-lab compression test FE model was created in order to
analyze the behavior of the neoprene pads once certain material parameters were discovered.
These material properties were then broken down into 3 cases in order to determine which case
would become the most successful in regards to a lower DLA thus, better vehicle-bridge
interaction. Results from the compression test were obtained and applied back onto the existing
bridge model. This was done in order to validate the improvements since field test were only
available for the existing bridge model. Once the neoprene pads were placed back onto the
bridge model successful validation between the newly improved bridge could occur. These
results were then used to calculate the new DLA in order to see whether there were
improvements made. Whichever test resulted in the lowest DLA, those material properties were
then adopted into the new bridge model that was created at the beginning of the research. This
would ensure that the new bridge model was verified through the validation of the existing
bridge model without having to do experimental test.
Initially, it was difficult to determine whether Case 1 or Case 2 was the better case. The
validation process resulted in Case 1 having the best parameters but after calculating the DLA,
Case 2 seemed to be better than Case 1. This may have to do with the fact that the DLA is based
78

79
solely on the maximum point as opposed to the verification method, where all points are
analyzed and an average is then calculated. After looking at the graphs of the in-lab compression
test, the results of the verification and validation program along with the DLA, Case 2 seems to
be the best case. The validation process played a major role in making the decision but, the
evaluation of the DLA was also essential when determining which case was the best. By
choosing Case 2 and applying those improvements to the new bridge model, No Name Creek, it
was assured that the results would in fact be verified but not yet validated due to lack of
experimental testing. This research in essence allowed for a complete verification of the results
of our new bridge model in regards to displacements and strains and ensured that these values
obtained in Table 7.6 would be the best results once further testing began.
7.3 Future Work
Despite improvements that were made to the neoprene pad, it is recommended that experimental
test be performed on the new bridge model to ensure the validation process and further verify the
results. Successful validation cannot occur without a set of field results. Additional parameters
such as acceleration and stress should also be analyzed. Vehicle velocity should also be
investigated further in order to make a better decision on which material parameters are the best.
In addition other vehicles should also be tested onto the bridge model such as a Terex crane and
FDOT truck to allow for further investigation of the vehicle-bridge interaction. By analyzing
multiple vehicles, one can get a better agreement on which elastomeric neoprene bearing pad
gives the lowest DLA. Once these additional parameters are analyzed, a more definitive decision
can be made in regards to which case is in fact the best.

REFERENCES
[1] AASHTO Standard Specifications for Highway Bridges (17 ed.), 2002 [2] John Roberts. What is Finite Element Analysis? Iowa State University of Science and Technology, Iowa, 2010. [3] Myint Lwin. Construction Loads on Bridges. United States Department of Transportation, Washington, DC, 2007. [4] Hongyi Li. Analytical and Experimental Evaluation of Existing Florida DOT Bridges. FAMU-FSU College of Engineering, Florida, 2004. [5] Piotr Szurgott. Investigation of Impact Factors for Permit Vehicles. FAMU-FSU College of Engineering, Florida, 2007. [6] Adam Csikos and Istvan Hegedus. Torsion of Reinforced Concrete Beams. Technical University of Budapest, Department of Reinforced Concrete Structures, Budapest, 1998. [7] Eugene J. O’Brien and Damien L. Keogh. Bridge Deck Analysis. E & FN Spon, New York, NY, 1999. [8] Stephanie Johnston, Public Works Online. Group Publisher, Chicago, IL, 2009. [9] Maupin, Brown, Lichtenstein. Extending the Life of Bridges. American Society for Testing
and Materials, Lake Buena Vista, Florida, 1990. [10] Dr. Primus Mtenga. Elastomeric Bearing Pads Under Combined Loading. FAMU-FSU College of Engineering, Tallahassee, Florida, 2006. [11] Edwards Deming. Oppurtunities are Adding up for Statisticians. American Statistical Association, Alexandria, VA, 2010. [12] Ton-Lo Wang. Influence of Heavy Trucks on Highway Bridges. Florida International University, Miami, Florida, 2000. [13] Chiara Silvestri, Marioa Mongiardini and Malcolm H. Ray. Roadside Safety Verification
and Validation Program. Worcester Polytechnic Institute, Worcestar, MA, 2009. [14] Ian Sommerville, Verification and Validation Lecture. Software Engineering, 7th Edition, 2004.
80

[15] Charles M. Macal. Model Verification and Validation. The University of Chicago and Argonne National Laboratory, Chicago, IL, 2005. [16] Rajan Sen and Ken Spillet. Restraint Effect on Bearings. Department of Civil Engineering and Mechanics, Tampa, Florida, 1994. [17] O. Murat Hamutcuoglu and Micheal H. Scott. Finite Element Reliability Analysis of Bridge
Girders Considering Moment-Shear Interaction. Science Direct, Volume 31, Issue 5: 356-362. [18] David I. McLean, M. Lee Marsh. Dynamic Impact Factors for Bridges. Transportation Research Board National Research Council, Washington, DC, 1998. [19] Thomas J.R. Hughes, David J. Benson, and Thomas J. Lange. 11th International LS-Dyna User Conference, Livermore Software Technology, Livermore, California, 2006. [20] Marcus H. Ansley. FDOT Design Standards. Florida Department of Transportation, Tallahassee, Florida, 2006. [21] Chiara Silvestri, Marioa Mongiardini and Malcolm H. Ray. Roadside Safety Verification
and Validation Program Manuel. Worcester Polytechnic Institute, Worcestar, MA, 2009. [22] Thomas J.R. Hughes, David J. Benson, and Thomas J. Lange. 11th International LS-Dyna User Conference, Livermore Software Technology, Livermore, California, 2007. [23] ANSYS Theory Reference Manual, Structures with Material Nonlinearities 4.5, Hyperelastcity, ANSYS 7.1 Documentation, 2003. [24] Hassan Moghimi and Hamid R. Ronagh. Development of a Numerical Model for Bridge–
Vehicle Interaction and Human Response to Traffic-Induced Vibration. Elsevier Ltd., Austrailia, 2008. [25] Damon T. Allen. Stiffness Evaluation of Neoprene Bearing Pads Under Long Term Loads. University of Florida, Gainesville, Florida, 2009. [26] Abdul Aziz A. Kamal, Pauleen A. Lane and Ali A.R. Heshmati. Parametric Study of
Reinforced and Unreinforced Embankment of Soft Soil. School of Mechanical ,Aerospace and Civil Engineering, Manchester, 2005. [27] Robert Michael and David Roth. The Study of a Neoprene Elevator Roller Guide. Penn State, PA, 2003.
81

82
BIOGRAPHICAL SKETCH
Sharnie Earle obtained a Bachelor’s degree in Civil Engineering from the Florida State
University in 2008. Shortly after, she received her Fundamental Engineering License for the
State of Florida. She continued her education at Florida State University in order to receive her
Master of Science degree in Civil Engineering. She will begin working for Turner Construction
Company in June 2010.




















