
AUTOMATIC LOAD FREQUENCY CONTROL
72
Cairo University – Faculty of Engineering Energy Research Center Diploma in Control System Project AUTOMATIC LOAD FREQUENCY CONTROL Presented to: Prof. Dr. M. M . EL-METWALLY Project group: Eng. Mahmoud saad eldin Eng. Hany ali hussein eng. Osama othman Load frequency control 1
Transcript of AUTOMATIC LOAD FREQUENCY CONTROL

Cairo University – Faculty of EngineeringEnergy Research CenterDiploma in Control System Project
AUTOMATIC LOAD FREQUENCY CONTROL
Presented to:
Prof. Dr. M. M . EL-METWALLYProject group:
Eng. Mahmoud saad eldinEng. Hany ali husseineng. Osama othman
Load frequency control 1
eng.mohammed shabkaeng.randaeng.shimaaeng.ibrahim
Load frequency control 2

Chapter 1: INTRODUCTION
Chapter 2:
2.Load frequency control of single area system
2.1Dynamics of the power generating system
2.1.1SPEED GOVERNOR
2.1.2HYDRAULIC VALVE ACTUATOR
2.1.3TURBINE – GENERATOR
2.1.4 STATIC PERFORMANCE OF SPEED GOVERNOR
2.1.5Closing the ALFC loop
2.1.6Static Response of primary ALFC loop
2.1.7Dynamic Response of ALFC loop
2.1.8PROPORTIONAL PLUS INTEGRAL CONTROL Load frequency control 3
2.2Application (Matlab & Result )
2.3discussion
Chapter 3:3.Load frequency control of Two area system
3.1 Modeling of Tow area system3.1.1 Static Response of primary ALFC
loop
3.1.2 Dynamic Response of ALFC loop
3.1.3 Tie line Bias control for two
area
3.2 Application (Matlab & Result )
3.3 Discussion
Chapter 4: Optimal load frequency control 4.1 : Optimal of single area4.2 : Optimal of two area4.3 : Application of optimal control
Chapter 5: Comparison between conventional and optimal load frequency control
Chapter 6: Conclusion References :
Load frequency control 4

Load frequency control 5

INTRODUCTION:
The main objective of power system operation and controlis to maintain continuous supply of power with an acceptable quality, to all the consumers in the system. The system will be in equilibrium, when there is a balance between the power demand and the power generated. As the power in AC form has real and reactivecomponents: the real power balance; as well as the reactive power balance is to be achieved.
Thus steam input to turbine must be continuously regulated to match the active power demand. The system frequency otherwise will change which is not desirable. (A change in the electric power consumption will result in a deviation of the frequency from its steady state value. The consumers require a value of frequency and voltage constant. To maintain these parameters, controlsare required on the system and must guarantee a good level of voltage with an industrial frequency).
Excitation of the generator must also be maintained continuously to match the reactive power demand; otherwise the voltage at various system buses may go beyond the specified limit. Manual regulation is not possible. There are two basic control mechanisms used to
Load frequency control 6
Chapter 1

achieve reactive power balance (acceptable voltage profile) and real power balance (acceptable frequency values). The former is called the automatic voltage regulator (AVR) and the latter is called the automatic load frequency control (ALFC) or automatic generation control (AGC). Thus, Voltage is maintained by the control of excitation of the generator and frequency is maintained by the elimination of the difference in powerbetween the power provided by the turbine and the power required by the load. It is known that although the loads are time-variant, the variations are relatively slow. The controllers are set for a particular operatingcondition and they take care of small change in load demand without frequency and voltage exceeding the précised limits .As the change in load demand becomes large, the controllers must be reset either manually or automatically.
Load frequency control
The main purpose of operating the load frequencycontrol is to keep uniform the frequency changesduring the load changes. During the power systemoperation rotor angle, frequency and active power arethe main parameters to change. In multi area system a change of power in one areais met by the increase in generation in all areasassociated with a change in the tie-line power and areduction in frequency. In the normal operating state
Load frequency control 7

the power system demands of areas are satisfied atthe nominal frequency.
The basic role of ALFC is:
1.To maintain the desired megawatt output powerof a generator matching with the changing load
2. To assist in controlling the frequency oflarger interconnection.
3. To keep the net interchange power between poolmembers, at the predetermined values.
Load frequency control 8

Load frequency control of single area system
2.1 Dynamics of the power generating system
The real power control mechanism of a generator is shown in Fig. 1. The main parts are: 1) Speed changer 2) Speed governor 3) Hydraulic amplifier 4) Control valve. They areconnected by linkage mechanism. Their incremental movements are in vertical direction. In reality these movements are measured in millimeters; but in our analysiswe shall rather express them as power increments expressedin MW or p.u. MW as the case may be. The movements are assumed positive in the directions of arrows. Corresponding to “raise” command, linkage movements will be: “A” moves downwards; “C” moves upwards; “D” moves upwards; “E” moves downwards. This allows more steam or water flow into the turbine resulting incremental increasein generator output power. When the speed drops, linkage point “B” moves upwards and again generator output power will increase.
Load frequency control 9
Chapter 2
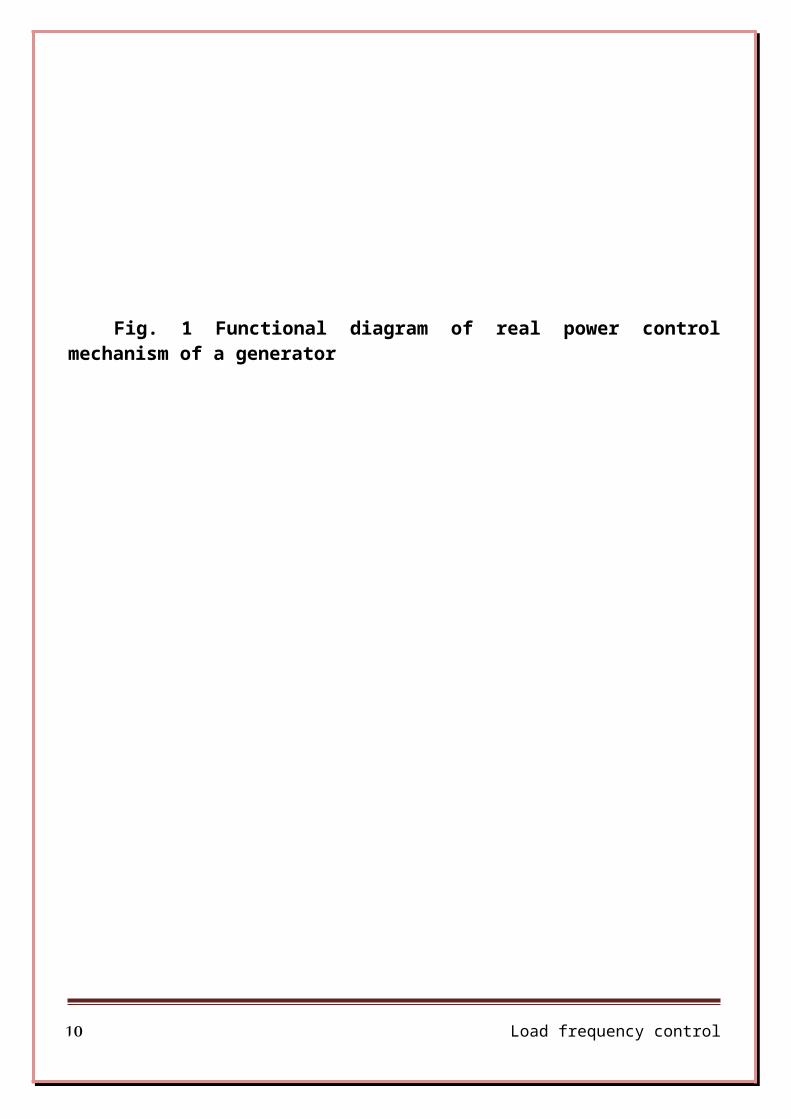
Fig. 1 Functional diagram of real power controlmechanism of a generator
Load frequency control 10
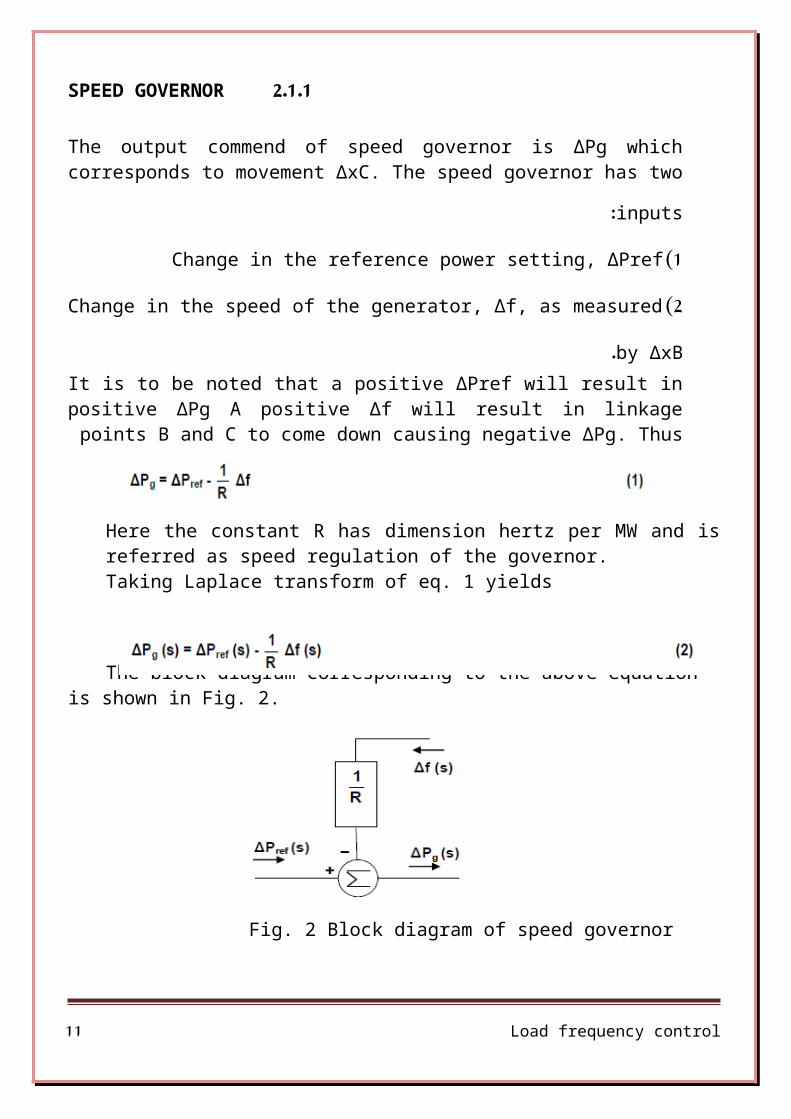
2.1.1SPEED GOVERNOR
The output commend of speed governor is ΔPg whichcorresponds to movement ΔxC. The speed governor has two
inputs :1 )Change in the reference power setting, ΔPref 2 )Change in the speed of the generator, Δf, as measured
by ΔxB.It is to be noted that a positive ΔPref will result inpositive ΔPg A positive Δf will result in linkagepoints B and C to come down causing negative ΔPg. Thus
Here the constant R has dimension hertz per MW and isreferred as speed regulation of the governor.Taking Laplace transform of eq. 1 yields
The block diagram corresponding to the above equation is shown in Fig. 2.
Fig. 2 Block diagram of speed governor
Load frequency control 11
2.1.2HYDRAULIC VALVE ACTUATOR
The output of the hydraulic actuator is ΔPv. This depends on the position of main piston, which in turn depends on the quantity of oil flow in the piston. For a small change ΔxD in the pilot valve position, we have
The constant “kH” depends on the orifice, cylindergeometries and fluid pressure.
The input to ΔxD are ΔPg and ΔPv. It is to be notedthat for a positive ΔPg, the change ΔxD is positive.Further, for a positive ΔPv, more fuel is admitted,speed increases, linkage point B moves downwardscausing linkage points C and D to move downwardsresulting the change ΔxD as negative. Thus
Load frequency control 12

Laplace transformation of the last two equations are:
Eliminating ΔxD and writing ΔPv (s) in terms of ΔPg (s), we get
where TH is the hydraulic time constant given by
In terms of the hydraulic valve actuator’s transfer function GH (s), eq. 5 can be written as
Hydraulic time constant TH typically assumes values around 0.1 sec. The block diagram of the speed governortogether with the hydraulic valve actuator is shown in
Fig. 3.
Load frequency control 13

Fig. 3 Block diagram of speed governor together with hydraulic valve actuator
2.1.3TURBINE – GENERATOR In normal steady state, the turbine power PT keepsbalance with the electromechanical air-gap power PGresulting in zero acceleration and a constant speed and
frequency.During transient state, let the change in turbine powerbe ΔPT and the corresponding change in generator power
be ΔPG. The accelerating power in turbine generator unit = ΔPT – ΔPG
Load frequency control 14

Thus accelerating power = ΔPT (s) - ΔPG (s)
)8)If ΔPT - ΔPG is negative, it will decelerate.The turbine power increment ΔPT depends entirely upon the valve power increment ΔPv and the characteristic ofthe turbine. Different type of turbines will have different characteristics. Taking transfer function with single time constant for the turbine, we can write
The generator power increment ΔPG depends entirely uponthe change ΔPD in the load PD being fed from thegenerator. The generator always adjusts its output soas to meet the demand changes ΔPD. These adjustmentsare essentially instantaneous, certainly in comparison
with the slow changes in PT.We can therefore set
In view of equations 8,9 and 10,
the block diagram developed is updated as shown in Fig.4. This corresponds to the linear model of primary ALFC
loop excluding the power system response.
Load frequency control 15

Fig. 4 Block diagram corresponding to primary loop of
ALFC excluding power system response 2.1.4 .STATIC PERFORMANCE OF SPEED GOVERNOR
The present control loop shown in Fig. 4 is open. Wecan nevertheless obtain some interesting informationabout the static performance of the speed governor. Therelationship between the static signals (subscript “0”)
is obtained by letting we obtain directly from Fig. 4
Note that at steady state, ΔPT is equal to ΔPG. i.e. ΔPT 0 = ΔPG 0
We consider the following three cases.Case A The generator is synchronized to a network of verylarge size, so large in fact, that its frequency willbe essentially independent of any changes in the poweroutput of this individual generator (“infinite”
network). Since Δf0 = 0, the above eq. becomes Load frequency control 16

Thus for a generator operating at constant speed,(or frequency) there exists a direct proportionality
between turbine power and reference power setting .Thus for a generator operating at constant speed, (or frequency) there exists a direct proportionality
between turbine power and reference power setting.ΔPT 0 = ΔPref 0 i.e. when the generator is operating atconstant frequency, if the speed changer setting is INCREASED,(DECREASED) turbine output power will
increase ( decrease ) to that extent.
Load frequency control 17

Case B
Now we consider the network as “finite”. i.e. itsfrequency is variable. We do, however, keep the speedchanger at constant setting. i.e. ΔPref = 0. From eq.
(11)
The above eq. shows that for a constant speed changersetting, the static increase in turbine power output is
directly proportional to the static frequency drop.
The above eq. (13) can be rewritten as Δf 0 = - R ΔPT0. This means that the plot of f 0 with respect to PT 0
(or PG 0) will be a straight line with slope of – R.We remember that the unit for R is hertz per MW. Inpractice, both the frequency and the power can be
expressed in per unit.Case C
In general case, changes may occur in both the speed changer setting and frequency in which case the
relationship
Load frequency control 18

For a given speed changer setting, ΔPref 0 = 0 andhence Δf0 = - R ΔPT 0. In a frequency-generation power
graph, this represents a straight line with a slope= - R.
For a given frequency, Δf 0 = 0 and hence ΔPT 0 =ΔPref 0. This means that for a given frequency,generation power can be increased or decreased by
suitable raise or lower command . Thus the relationship
represents a family of sloping lines as depicted in Fig. 5, each line corresponding to a specific speed
changer setting.
Fig. 5 Static frequency-power response of speed governor (R = 0.04 p.u.)The thick line shows that corresponding to 100% ratedfrequency, the output power is 100 % of rated output. Butfor the new speed changer setting as shown by the dottedline, for the same 100% rated frequency, output power is50 % of rated output. Hence the power output of the
Load frequency control 19

generator at a given frequency can be adjusted at will, bysuitable speed changer setting. Such adjustment will beextreme importance for implementing the load division as
decided by the optimal policy.
2.1.5 .CLOSING THE ALFC LOOP
We observed earlier that the loop in Fig. 4 is “open”. Wenow proceed now to “close” it by finding a mathematicallink between ΔPT and Δf. As our generator is supplyingpower to a conglomeration of loads in its service area, itis necessary in our following analysis to make reasonable
assumptions about the “lumped” area behavior.We make these assumptions:
1.The system is originally running in its normal statewith complete power balance, that is, PG0 = PD0 +losses. The frequency is at normal value f 0. Allrotating equipment represents a total kinetic energy
of W0kin MW sec.
2. By connecting additional load, load demand increasesby ΔPD which we shall refer to as “new” load. (If loaddemand is decreased new load is negative). The
Load frequency control 20

generation immediately increases by ΔPG to match the
new load, that is ΔPG = ΔPD.
3.It will take some time for the control valve in thespeed governing system to act and increase the turbinepower. Until the next steady state is reached, theincrease in turbine power will not be equal to ΔPG.Thus there will be power imbalance in the area thatequals ΔPT - ΔPG i.e. ΔPT – ΔPD. As a result, thespeed and frequency change. This change will beassumed uniform throughout the area. The above saidpower imbalance gets absorbed in two ways. 1) By thechange in the total kinetic K.E. 2) By the change in
the load, due to change in frequency.Since the K.E. is proportional to the square of the speed, the area K.E. is
The “old” load is a function of voltage magnitude andfrequency. Frequency dependency of load can be written
as
Load frequency control 21

The ΔP’s are now measured in per unit (on base Pr) and D
in pu MW per Hz.Typical H values lie in the range 2 – 8 sec.
Laplace transformation of the above equation yields
Load frequency control 22

Load frequency control 23

Equation (22) represents the missing link in the controlloop of Fig. 4. By adding this, block diagram of the
primary ALFC loop is obtained as shown in Fig. 6.
Fig. 6 Block diagram corresponding to primary loopof ALFC
2.1.6Static Response of primary ALFC loop
The primary ALFC loop in Fig. 6 has two inputs ΔPref and ΔPD and one output Δf.
Load frequency control 24
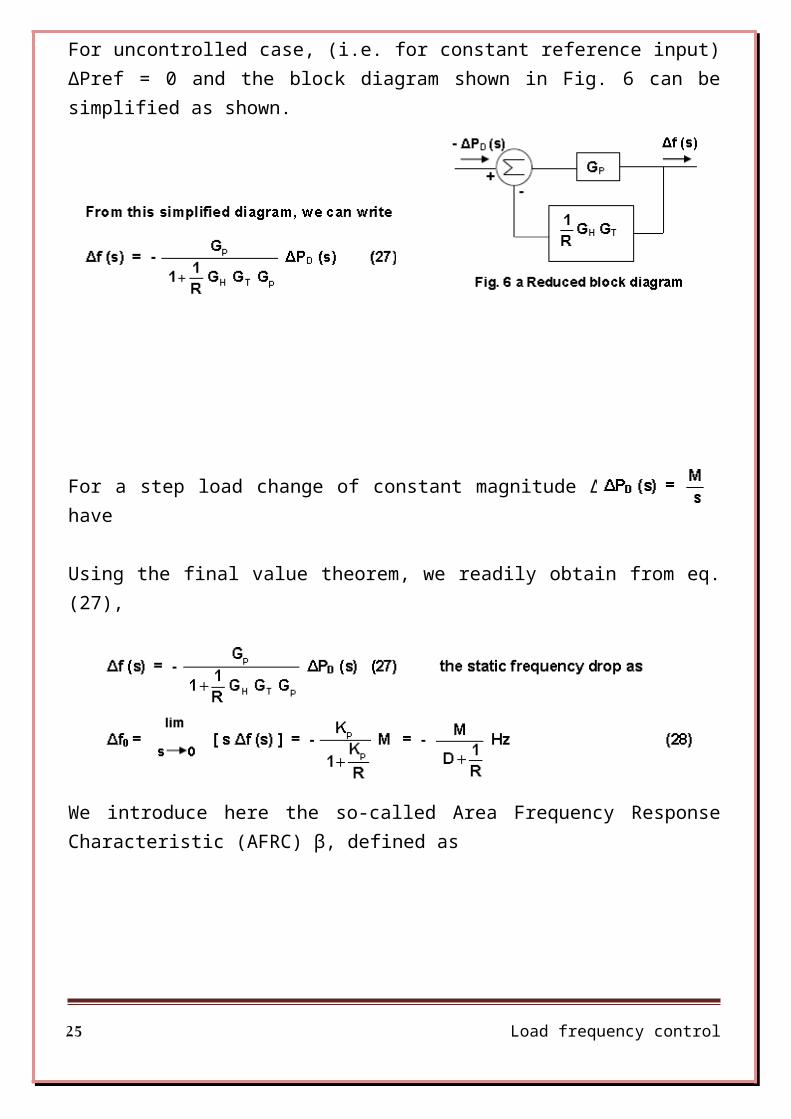
For uncontrolled case, (i.e. for constant reference input)ΔPref = 0 and the block diagram shown in Fig. 6 can besimplified as shown.
For a step load change of constant magnitude ΔPD = M, wehave
Using the final value theorem, we readily obtain from eq.(27),
We introduce here the so-called Area Frequency ResponseCharacteristic (AFRC) β, defined as
Load frequency control 25

2.1.7DYNAMIC RESPONSE OF PRIMARY ALFC LOOP - UNCONTROLLEDCASE We know that
Finding the dynamic response, for a step load, is quitestraight forward. Eq. (27) upon inverse Laplacetransformation yields an expression for Δf (t). However,as GH, GT and Gp contain at least one time constant each,the denominator will be a third order polynomial resultingin unwieldy algebra.
We can simply the analysis considerably by making thereasonable assumption that the action of speed governorplus the turbine generator is “instantaneous” comparedwith the rest of the power system. The latter, asdemonstrated in Example 5 has a time constant of 20 sec,and since the other two time constants are of the order of1 sec, we will perform an approximate analysis by settingTH = TT = 0.
Load frequency control 26

Making use of previous numerical values: M = 0.01 p.u. MW;R = 2.0 Hz / p.u. MW; Kp = 100 Hz / p.u. MW; Tp = 20 sec.
The approximate time response is purely exponential and isgiven by
Load frequency control 27
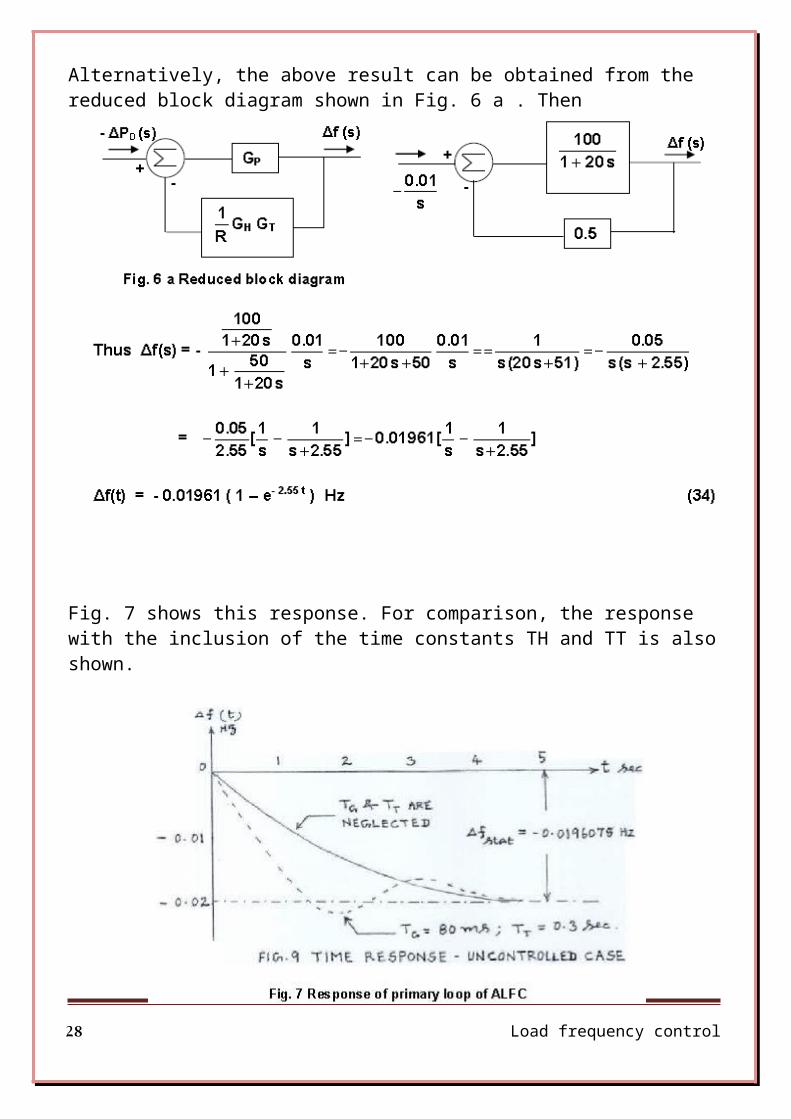
Alternatively, the above result can be obtained from the reduced block diagram shown in Fig. 6 a . Then
Fig. 7 shows this response. For comparison, the response with the inclusion of the time constants TH and TT is alsoshown.
Load frequency control 28

It is to be observed that the primary loop of ALFC does not give the desired objective of maintaining the frequency constant. We need to do something more to bring the frequency error to zero. Before discussing the necessary control which can make the frequency error to zero, we shall shed some light on to the physical mechanism in the primary loop of ALFC.2.1.8 PROPORTIONAL PLUS INTEGRAL CONTROL ( Secondary ALFC
loop)
It is seen from the previous discussion that with the speed governing system installed in each area, for a givenspeed changer setting, there is considerable frequency drop for increased system load.
In the example seen, the frequency drop is 0.01961 Hz for 20 MW. Then the steady state drop in frequency from no load to full load ( 2000 MW ) will be 1.961 Hz.
System frequency specification is rather stringent and therefore, so much change in frequency cannot be tolerated. In fact, it is expected that the steady state frequency change must be zero. In order to maintain the frequency at the scheduled value, the speed changer setting must be adjusted automatically by monitoring the frequency changes.
For this purpose, INTEGRAL CONTROLLER is included. In theintegral controller the frequency error is first amplifiedand then integrated. Further, a negative polarity is alsoincluded so that a NEGATIVE frequency deviation will giverise to RAISE command. The signal fed into the integratoris referred as Area Controlled Error (ACE). For this caseACE =ΔF. Thus
Load frequency control 29
Taking Laplace transformation
The gain constant KI controls the rate of integration andthus the speed of response of the loop.
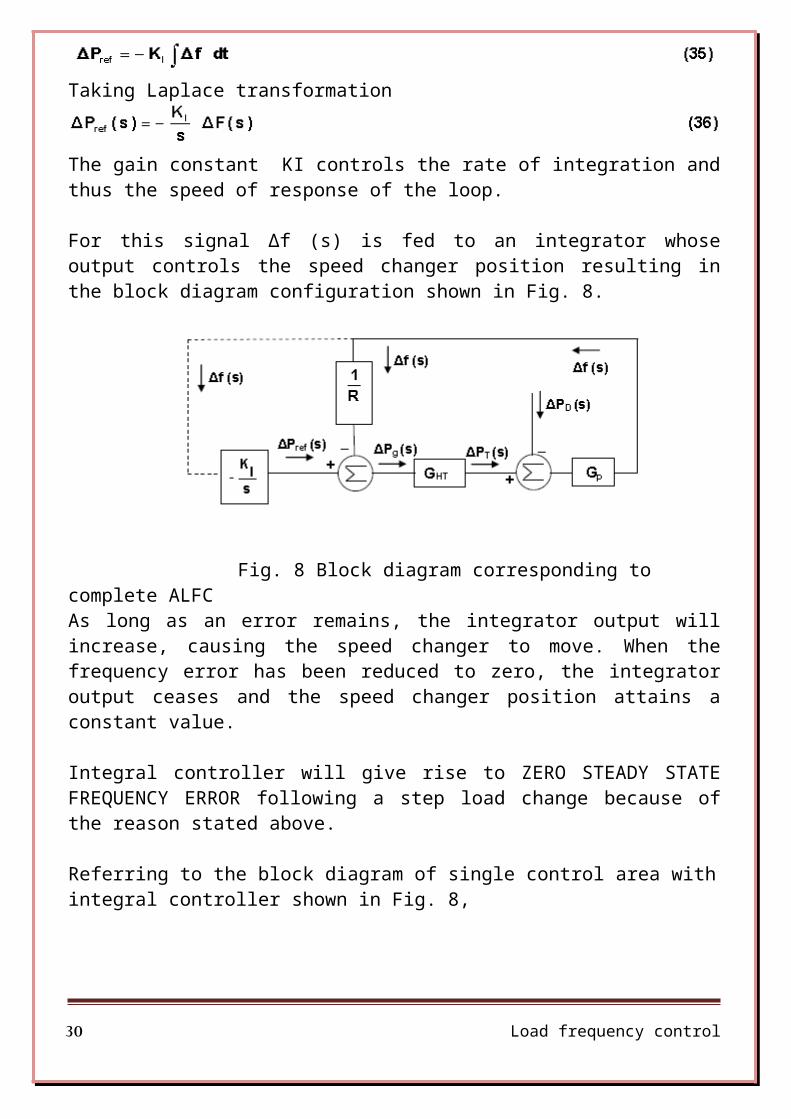
For this signal Δf (s) is fed to an integrator whoseoutput controls the speed changer position resulting inthe block diagram configuration shown in Fig. 8.
Fig. 8 Block diagram corresponding to complete ALFCAs long as an error remains, the integrator output willincrease, causing the speed changer to move. When thefrequency error has been reduced to zero, the integratoroutput ceases and the speed changer position attains aconstant value.
Integral controller will give rise to ZERO STEADY STATEFREQUENCY ERROR following a step load change because ofthe reason stated above.
Referring to the block diagram of single control area withintegral controller shown in Fig. 8,
Load frequency control 30

Load frequency control 31

IN STATIC FREQUENCY DROP FOLLOWING A STEP LOAD CHANGE
Thus static frequency drop due to step load change becomeszero, which is a desired feature we were looking. This is made possible because of the integral controller that has been introduced.
IN DYNAMIC ANALYSIS
Let us assume time constants TH and TT as zero
Load frequency control 32
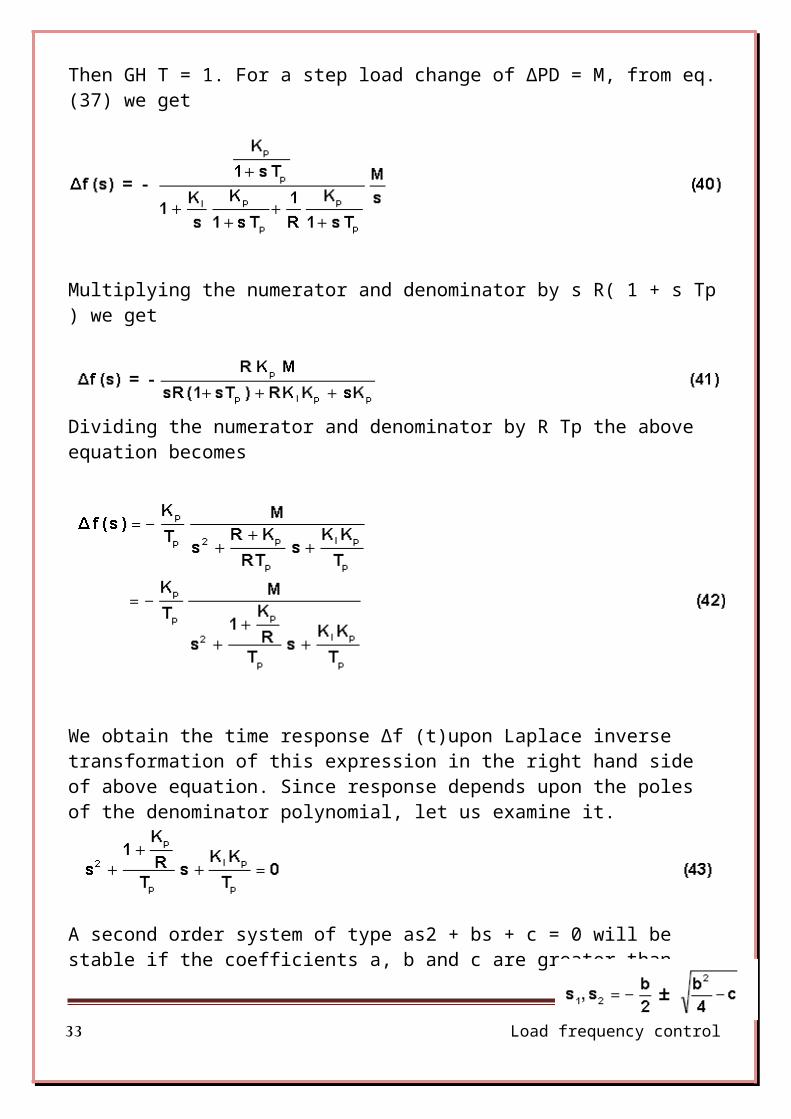
Then GH T = 1. For a step load change of ΔPD = M, from eq.(37) we get
Multiplying the numerator and denominator by s R( 1 + s Tp) we get
Dividing the numerator and denominator by R Tp the above equation becomes
We obtain the time response Δf (t)upon Laplace inverse transformation of this expression in the right hand side of above equation. Since response depends upon the poles of the denominator polynomial, let us examine it.
A second order system of type as2 + bs + c = 0 will be stable if the coefficients a, b and c are greater than
Load frequency control 33
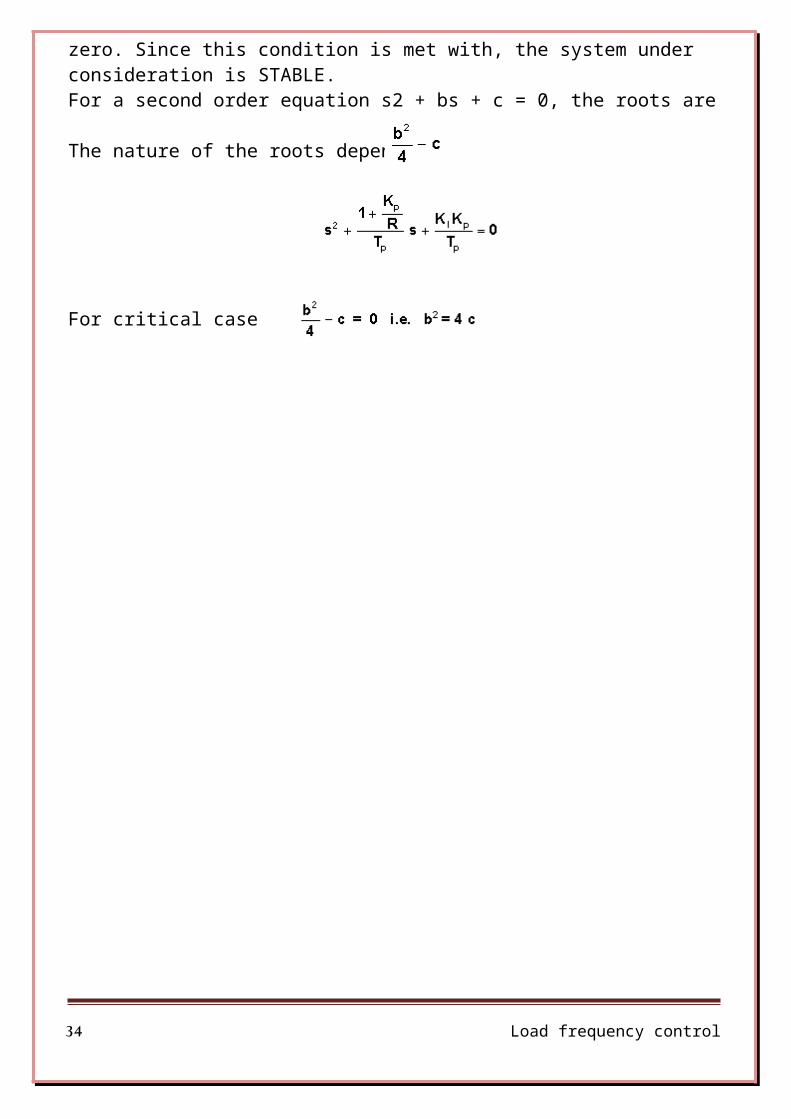
zero. Since this condition is met with, the system under consideration is STABLE.For a second order equation s2 + bs + c = 0, the roots are
The nature of the roots depends on
For critical case
Load frequency control 34

Now, both the roots are real, equal and negative. For thiscritical case
Super critical case
When b2 < 4 c the roots are complex conjugate and the solution is exponentially damped sinusoidal. For this casethe integral gain constant KI is obtained from
When the system is said to be super-critical. Due to damping present, the final solution will tend to zero. However, the solution will be oscillatory type.
Sub-critical case
When b2 > 4 c the roots are real and negative. For this case, the integral gain constant KI is given by
This case is referred as sub-critical integral control. Inthis case the solution contains terms of the typeand it is non-oscillatory. However, finally the solutionwill tend to zero.
Load frequency control 35
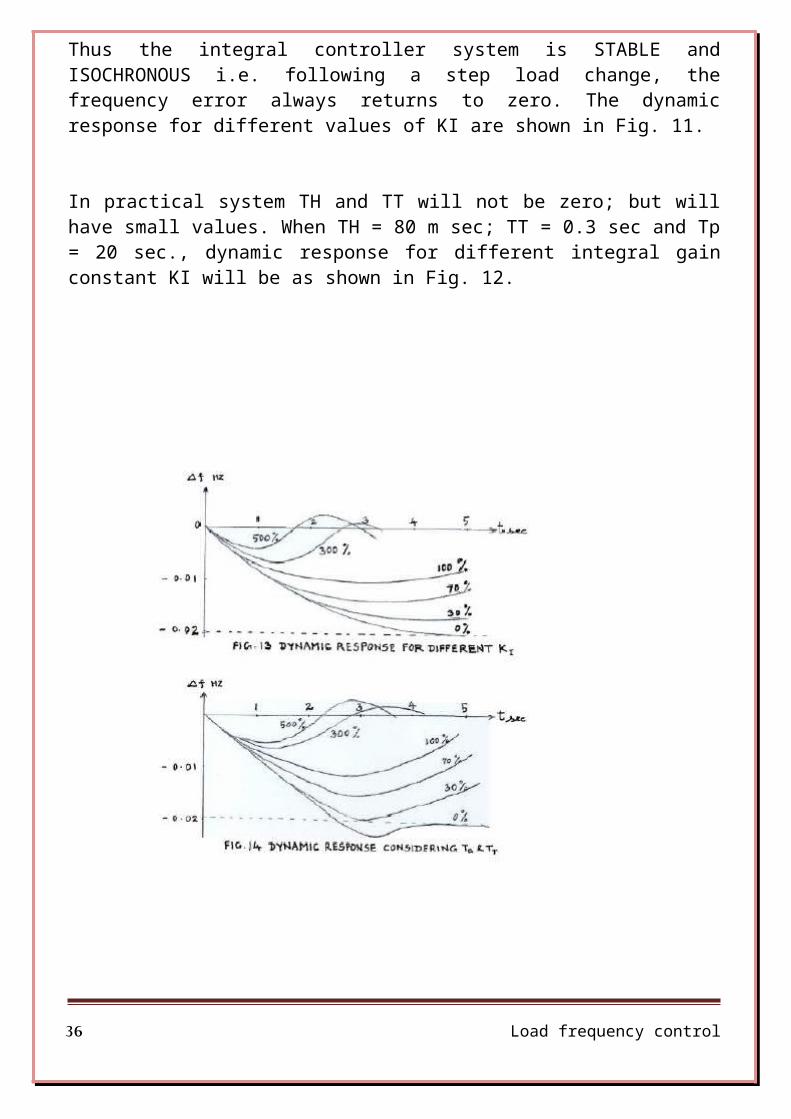
Thus the integral controller system is STABLE andISOCHRONOUS i.e. following a step load change, thefrequency error always returns to zero. The dynamicresponse for different values of KI are shown in Fig. 11.
In practical system TH and TT will not be zero; but willhave small values. When TH = 80 m sec; TT = 0.3 sec and Tp= 20 sec., dynamic response for different integral gainconstant KI will be as shown in Fig. 12.
Load frequency control 36
Load frequency control 37

2.2Application :Matlab simulation For uncontrolled single area by simulinkfig. shown:
Simulink model of single area as shown in the fig. contains of a model of a governer characteristic equation, turbine, load and a kind of disturbance. a case study :Turbine time constant (Tτ)=0.5s,Speed regulator time constant (τg)=0.2s,Generator inertia constant (H)= 5s,Speed regulation rate( R)=0.05
Load frequency control 38

Load frequency control 39

kp12.5s+1
10.5s+1
10.2s+1
1s
y
To W orkspace
-K-
H
FromW orkspace
From the previous fig. it is declared now the affection ofthe load disturbance change where we have changed the disturbance to the system by 20 MW,50MWand 700 MW where the drop in the trend show the affection of the load on the frequency curve in this case the frequency curve goes down proportional with the amount of change in the load applied to the system.
Matlab simulink for a controlled sinle area: in this case we want to check the system stability in case we added an integral term (controlled or compensated term ) to stop on the situation of the change in the frequency at a constant disturbance and changing in the inertia and mass load characteristic gain Kp by (kp=1.25,kp=1.5 ,kp=2)
Case study :
Load frequency control 40

Turbine time constant (Tτ)=0.5s,Speed regulator time constant (τg)=0.2s,Generator inertia constant (H)= 6.25s,Speed regulation rate( R)=0.05
Load frequency control 41

By applied the previous values to the simulink diagram andmake the change in the gain Kp we noticed that frequency behavior affected by the overshoots instantaneously and the goes to stability depending on the values of the gain Kp
2.4 Discussions:
From the previous figures of the uncontrolled ad controlled
simulation of the single area load frequency control its clear
that the effect of the integrator term on the overshot and the
Load frequency control 42

stability of the system by changing in the load disturbance
the integration term reduces the overshoot time and also
the value of the over shoot .
3.Load frequency control of Two area system
3.1 Modeling of Tow area system
SIMULATION OF TWO AREA CONTROL SYSTEM USING SIMULINK:As long as the system frequency is equal to its specified
value (the assumption here),the difference between an area's
actual interchange and its scheduled interchange is known as
the “area control error” (ACE) (the area control error also
includes a term dependent on the deviation in the system
frequency from the specified value; this frequency-dependent
term is not discussed here). The ACE is the single most
Load frequency control 43
Chapter 3

important number associated with control operations; it is
continuously monitored. Anytime the ACE is negative the area
is “under generating” and needs to increase its total
generation. Conversely, if the ACE is positive, the area is
“over generating” and needs to decrease its generation. Over
the last several decades, practically all control areas have
switched to an automatic process known as “automatic
generation control” (AGC). AGC automatically adjusts the
generation in an area to keep the ACE close to zero, which in
turn keeps the net area power interchange at its specified
value. Since the ACE has a small amount of almost random
"ripple" in its value due to the relentlessly changing system
load, the usual goal of AGC is not to keep the ACE exactly at
zero but rather to keep its magnitude close to zero, with an
“average” value of zero. Modern power system network consists
of a number of utilities interconnected together & power is
exchanged between utilities over tie-lines by which they are
connected. Automatic generation control (AGC) plays a very
important role in power system as its main role is to maintain
the system frequency and tie line flow at their scheduled
values during normal period and also when the system is
subjected to small step load perturbations. Many
investigations in the field of automatic generation control of
interconnected power system have been reported over the past
few decades. Literature survey shows that most of the earlier
work in the area of automatic generation control pertains to
interconnected thermal system and relatively lesser attention
Load frequency control 44

has been devoted to automatic generation control (AGC) of
interconnected hydro-thermal systems involving thermal and
hydro subsystems of widely different characteristics]. These
investigations mostly pertain to two equal area thermal
systems or two equal areas hydrothermal systems considering
the system model either in continuous or continuous discrete
mode with step loads perturbation occurring in an individual
area.L
LFC in two- area systemThe AGC of multi-area system can be realized by studying firstthe LFC for atwo-area system
Consider these two areas represented by an equivalent generating unitsinterconnected by a lossless tie line with reactance Xtie . Each area is representedby voltage source behind an equivalent reactance as shown in figure
Load frequency control 45

During normal operation the real power transferred over the tie line is given by:
Equation can be linearized for a small deviation in the flow ∆P12 from thenominal value, that is:
Linear representation of the tie line
Ps: the slope of the power angle curve at the initial operatingangle
Load frequency control 46

Thus
Then
Load frequency control 47

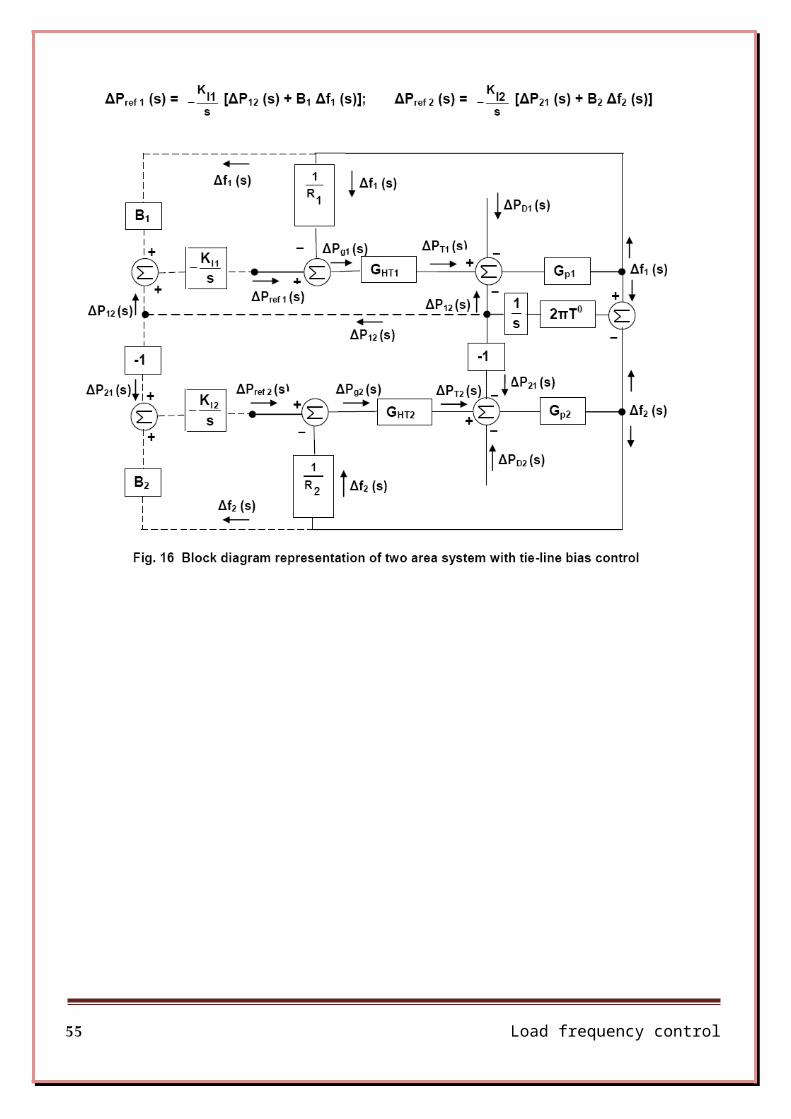
Block diagram representation of two area system with tie-line bias control
3.1.1 Static Response of primary ALFC loop
Load frequency control 48

Load frequency control 49

Load frequency control 50

3.1.2 Dynamic Response of ALFC loop
Load frequency control 51
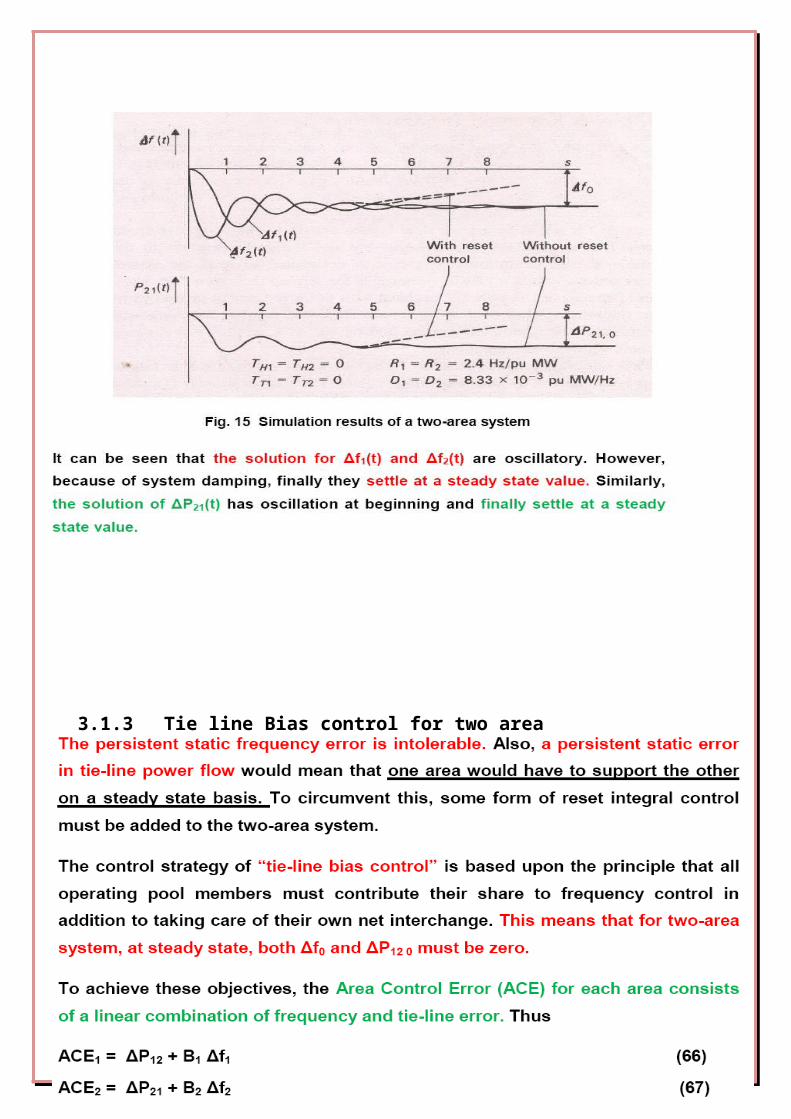
3.1.3 Tie line Bias control for two area
Load frequency control 52
*-Static system response with tie line biascontrol :
Load frequency control 53

Load frequency control 54
Load frequency control 55
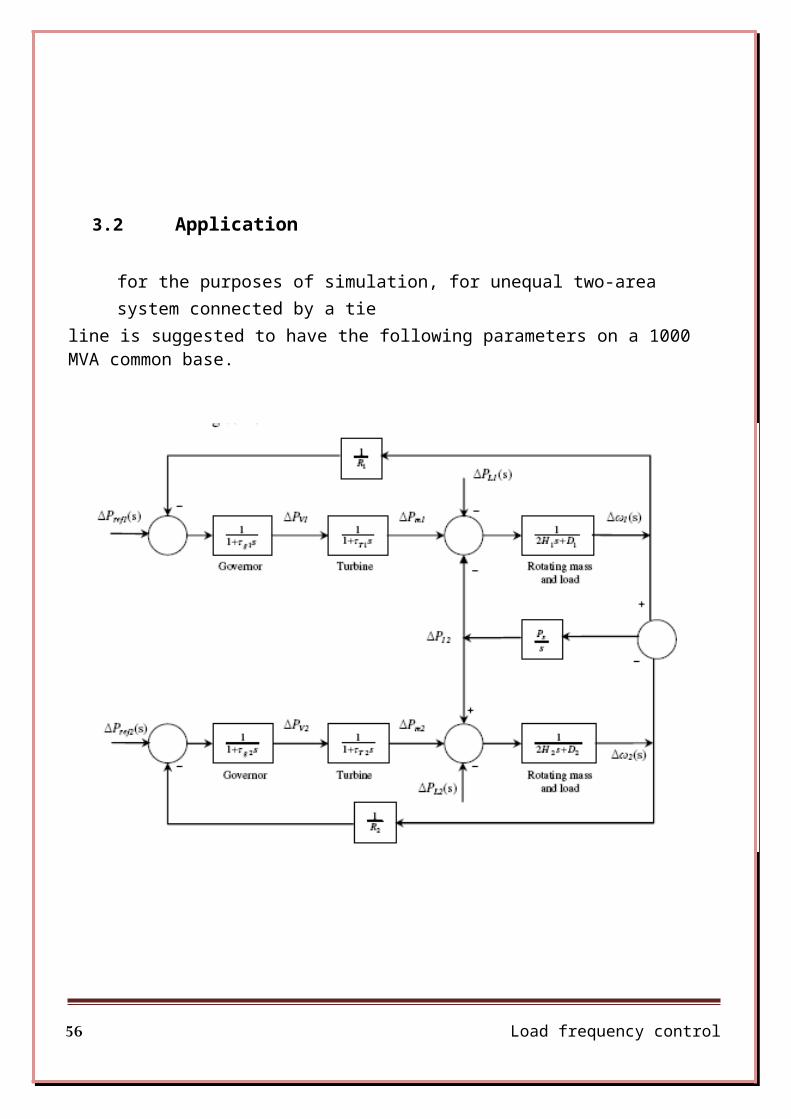
3.2 Application
for the purposes of simulation, for unequal two-area system connected by a tie
line is suggested to have the following parameters on a 1000 MVA common base.
Load frequency control 56

By applying the previous data in the related simulink drawing
below:
Load frequency control 57
10.3s+1
10.6s+1
110s+0.61
0.2s+1
18s+0.9
10.5s+1
1s
Step
-K-
-K-
-K-
Add4
Add3
Add2
Add1
Add

Two area simulation figure
By varying the governor speed regulation for onearea (R) we can notice its affection on the powerdeviation for the two areas and the tie linebetween them the related curve below declare howthe change in the governor speed regulation (R) canmake a power deviation in the tie line between thetwo areas and deviate also the power in the secondarea
Load frequency control 58

Power deviation in two area tie line
Frequency deviation in two area tie line
Load frequency control 59

1s
1s
10.3s+1
10.6s+1
110s+0.61
0.2s+1
18s+0.9
10.5s+1
1s
y1
To W orkspace1
y
To W orkspace
Step
0.3
16.9/16
0.3
20.6/20
1/0.5
1/0.0625
1/0.05
Add6
Add5 Add4
Add3
Add2
Add1
Add
MATLAB Simulation for the Two area system with tie line biased control
Tie line bias control for two areaAdding a biased gain B1=1/R1+D1 that gives theprefer ability for each area to bear its own loadand can share a part of the other load with amountdetermined by the biased gain and that is appearedin the curves below
Load frequency control 60

Results
Power deviation in two area tie line biased control
Frequency deviation in two area tie line biased control
Load frequency control 61
B1=1/R1+D1
Load frequency control 62

4. OPTIMAL CONTROL DESIGN FOR THE LOAD FREQUENCY CONTROL AGAINTST TO LOAD CHANGES
Optimal control is the branch of the modern controltheory. The control design process is realizeddepending on system variables and high performanceoperation of the system in ensured . In the study,optimal control design for the linear systems withquadratic performance (Linear Quadratic Regulator(LQR) is established. The purpose of optimalregulator design is to determine the optimalcontrol rule u*(x,t). For the studied power system,the performance index minimized from the firstentry values to the final state values istransferred. The performance index of the system isselected to obtain the best process between thecost and performance of the control system.Performance index is widely used in optimal controldesign process. It is expressed as quadraticperformance depended on minimum fault and minimumenergy criteria. The system is identified by thestate equation given below.
The problem faced during the system controls is tofind the control rule K(t) vector. The control rulevector below is expressed with the given equation.
The control rule vector minimizes the quadraticperformance index values in the dynamic systemexpression defined in equation . Linear Quadratic
Load frequency control 63

Performance index value (J) is expressed asfollows.
Where, Q is the positive semi-defined matrix and Ris the real symmetric matrix. If the marked minorsof all the elements of Q matrix are not negative, Qmatrix is positive semi-defined matrix. Selectionof Q and R elements are determined according to theweighted relations of state variables and controlentries .
To obtain the above explained solution, we may usethe Lagrange multiplies method. With using ofLagrange multiplies method, limited problem(λ)solution within definite limitations is made.Solution of this function aims to minimize thebelow given limitless function.
To calculate the optimal values, the above givenequation is equalized to zero and its partialderivatives are taken. (*) symbol in the followingexpressions expresses the optimal values.
Load frequency control 64

In optimal solution, when symmetric and positivesemi-defined p(t) matrix that is variable dependingon time is considered, the following expression isgiven.
expression is expressed as equation , it gives theoptimal close cycle rule.
In solution of the above equation, Riccati equationsolution is used. The limit condition for theequation is p(tf)=0. For the time domain solutionof the Diccati equation, [τ,p,K,t,x]=riccatifunction is developed. Riccati equation matrixp(τ), optimal feed-back gaining K(τ), and stateresponse of the system at the beginning x(t) aresolved.Optimal control gaining is the feed-back and timeadjustable state variable. In many practicalapplications, it is sufficient to use the stablestate feed-back gaining. For the systems that donot change with linear time, •p=0. For the solutionof Riccati equation[k,p]=lgr2(A,B,Q,R] function inMatlab Control System Toolbox is used [4] If we usethe LQG control as optimal gaining, by using theLinear Quadratic Regulator(lqry) function, weobtain K feed-back gaining LQR design procedure issimpler and clearer than the traditional controldesign. In traditional controller, the gainingmatrix (K) may be directly selected. The controlexperts prefer Q and R parameters to design theoptimal LQR. Then by using the Riccati
Load frequency control 65
equations, K feed-back gaining matrix is selected .If the system response is not stable, the new Q andR weight matrixes are determined. This is animportant advantage for all the control cycles.
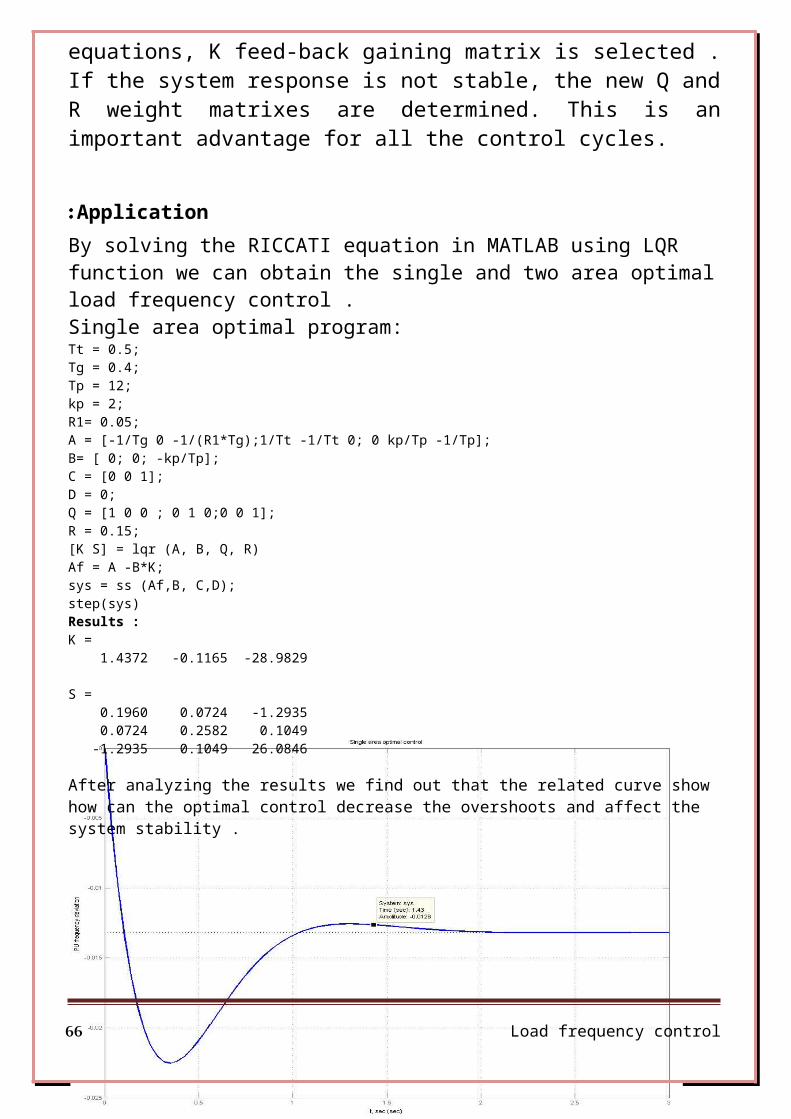
Application: By solving the RICCATI equation in MATLAB using LQR function we can obtain the single and two area optimalload frequency control .Single area optimal program:Tt = 0.5;Tg = 0.4;Tp = 12;kp = 2;R1= 0.05;A = [-1/Tg 0 -1/(R1*Tg);1/Tt -1/Tt 0; 0 kp/Tp -1/Tp];B= [ 0; 0; -kp/Tp];C = [0 0 1];D = 0;Q = [1 0 0 ; 0 1 0;0 0 1];R = 0.15;[K S] = lqr (A, B, Q, R)Af = A -B*K;sys = ss (Af,B, C,D);step(sys)Results :K = 1.4372 -0.1165 -28.9829
S = 0.1960 0.0724 -1.2935 0.0724 0.2582 0.1049 -1.2935 0.1049 26.0846
After analyzing the results we find out that the related curve show how can the optimal control decrease the overshoots and affect the system stability .
Load frequency control 66
Load frequency control 67

Single area optimal program:A = [0.05 6 0 -6 0 0 0; 0 -3.33 3.33 0 0 0 0 ;-5.2083 0 -12.5 0 -0.545 0 0; 0.5450 0 0 -0.05 0 0;0 0 0 6 -0.05 6 0;0 0 0 0 0 -3.33 3.33;0 0 0 0 -5.2083 0 -12.5];B = [0 0;0 0;0 12.5;0 0;0 0;0 0;12.5 0]; BPL=B*PL;C = [0 0 0 0 0 0 1];D = 0;Q = [1 0 0 0 0 0 0;0 1 0 0 0 0 0;0 0 1 0 0 0 0;0 0 0 1 0 0 0;0 0 0 0 1 0 0;0 0 0 0 0 1 0;0 0 0 0 0 0 1];R = [1 0;0 1];[K, P] = lqr2(A, B, Q, R)Af = A - B*Kt=0:0.02:20;[y, x] = step(Af, BPL, C, D, 1, t);Results: K = 0.2587 0.1618 0.0211 1.9479 0.6165 1.2311 0.6296 0.8336 1.4724 0.6685 -0.4770 0.0108 0.0997 0.0211
P = 0.6014 0.5082 0.0667 0.3635 0.0517 0.1087 0.0207 0.5082 0.7364 0.1178 -0.1081 0.0202 0.0642 0.0129 0.0667 0.1178 0.0535 -0.0382 0.0009 0.0080 0.0017 0.3635 -0.1081 -0.0382 5.8492 0.6154 0.8986 0.1558 0.0517 0.0202 0.0009 0.6154 0.4366 0.3839 0.0493 0.1087 0.0642 0.0080 0.8986 0.3839 0.6127 0.0985 0.0207 0.0129 0.0017 0.1558 0.0493 0.0985 0.0504
Af = 0.0500 6.0000 0 -6.0000 0 0 0 0 -3.3300 3.3300 0 0 0 0 -15.6278 -18.4044 -20.8567 5.9624 -0.6803 -1.2462 -0.2640 0.5450 0 0 0 -0.0500 0 0 0 0 0 6.0000 -0.0500 6.0000 0 0 0 0 0 0 -3.3300 3.3300 -3.2343 -2.0228 -0.2640 -24.3485 -12.9141 -15.3893 -20.3697
Load frequency control 68

If we regarded the frequency deviation curvefor the Two area we will find a bigmodification in the behavior of the frequencyafter applying the optimal control to thesystem where the over shoots happened in alittle time and the amplitude of theovershoots become more smaller than that inthe conventional methods .
Load frequency control 69

Conclusions and further work :1. Load frequency control investigated in this project has
recently come into question in operation of interconnected
power networks. Frequency is a sensitive parameter which
affects the system operation so it is controlled certainly.
Therefore, power utilities consider the frequency and active
power balance throughout their networks to sustain the
interconnection. In interconnection between
national/continental networks, providing the constant
frequency between areas is a serious operational problem.
Hence fast and no delay decision-making mechanism have to be
installed in network control units namely the LFC.
2. The load frequency control is achieved within tree levels,
considering many issues from maintaining constant frequency
and the minimization of losses through tie lines to the
optimal dispatch of generation between units or even areas.
3. The simulation techniques are very useful in studying and
predicting the response of control systems, giving the
opportunity to optimize the response and so the behavior of
the system under study.
Load frequency control 70
4. The great importance of the PID controllers is recognized,
considering the facilities it offers by the different
combinations of its terms.
5. As a further work, study could be extended to consider
methods of optimal design of the gains of the PID
controllers, like considering the artificial intelligence
methods or the fussy logic giving the opportunity to obtain
an optimal response of the control systems.
6. The economic dispatch of generation plays a vital rule
in the AGC, and this issue could be studied as an
extension of this project, adding an additional
dimension to the task of our project.
Load frequency control 71
REFERENCES:
[1]. Electric Machinery Fundamentals, By Stephen J. Chapman. 4th
Edition (2005).
[2]. Power System Analysis, by Hadi Saadat. 2nd Edition (2002).
[3]. PID Controllers, by K. J. Astrom and T. Hagglund (1995).
Modern Control Systems, by Richard C. Dorf and Robert H.
Bishop. 9th Edition (2000).
[5]. Demos of MATLAB program (version 7.6).
[6]. Power Generation Operation and Control, by A.J. Wood and B.F.
Wollenberg, John Wiley & Sons, New York, 1984.
[7]. Power System Stability and Control, by Kundur P, McGraw-Hill,
NewYork 1994.
[8]. Electric Energy Systems Theory: An Introduction, By Olle I. Elgerd,
University of Florida.
Load frequency control 72




















