
Modeling Leakage in Water Distribution Systems - Diginole ...
80
Florida State University Libraries Electronic Theses, Treatises and Dissertations The Graduate School 2007 Modeling Leakage in Water Distribution Systems Kristin Brown Follow this and additional works at the FSU Digital Library. For more information, please contact [email protected]
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of Modeling Leakage in Water Distribution Systems - Diginole ...

Florida State University Libraries
Electronic Theses, Treatises and Dissertations The Graduate School
2007
Modeling Leakage in Water DistributionSystemsKristin Brown
Follow this and additional works at the FSU Digital Library. For more information, please contact [email protected]

THE FLORIDA STATE UNIVERSITY
COLLEGE OF ENGINEERING
MODELING LEAKAGE IN WATER DISTRIBUTION SYSTEMS
By
KRISTIN BROWN
A Thesis submitted to the Department of Civil and Environmental Engineering
in partial fulfillment of the requirements for the degree of
Master of Science
Degree Awarded: Spring Semester, 2007

ii
The members of the Committee approve the thesis of Kristin Brown defended on March 2, 2007.
______________________________ Amy Chan Hilton Professor Directing Thesis ______________________________ Soronnadi Nnaji Committee Member __________________________________ Wenrui Huang Committee Member
Approved: _____________________________________________ Kamal Tawfiq, Chair, Department of Civil Engineering _____________________________________________ Ching‐Jen Chen, Dean, College of Engineering
The Office of Graduate Studies has verified and approved the above named committee members.

iii
TABLE OF CONTENTS
List of Tables ……………………………………………………………………………….. iv List of Figures ……………………………………………………………………………… v Abstract …………………………………………………………………………………….. vi 1. INTRODUCTION…………………………………………………………..……….. 1 Historical Sources of Water Leaks ……………………………………………. 1 Consequences of Water Leaks ………………………………………………… 4 Objectives of Research …………………………………………………………. 7 2. LITERATURE REVIEW……………………………………………………………... 9 Methods for Leak Detection ……………………………………………….….. 9 Alternatives ……………………………………………………….…..………… 12 Introduction of Computer Simulations ………………………………….…… 14 Background …………………………………………………………..…….…… 20 3. METHODOLOGY ………………………………………………….……………….. 23 Background …………………………………..………………………..………… 23 Overview of Research Tasks………………..……………………..…………… 27 WaterCAD Modeling Software……………..…………………….…………… 27 Development of WaterCAD Model………..……….…………….…………… 29 4. RESULTS ….…………………………………………………..……………………… 33 5. DISCUSSION ………………………………………………….…………………….. 53 Possible Modeling Errors/Calibrations……………………………..………… 53 Discussion of Results…………………………………….……………………… 54 Additional Experiments – Scenario 7 and Scenario 8 ……………………….. 59 6. CONCLUSION……………………………………………………………………….. 63 Summary of Research Results………………………….…………….………... 64 Limitations of Work …………………………………………………..………... 67 Future Work …………………………………………………………...………... 68 REFERENCES………………………………………………………………………………. 70 BIOGRAPHICAL SKETCH……………………………………….………………...…….. 73

iv
LIST OF TABLES
TABLE 3.1: Experimental Results …………………………………………………….… 25 TABLE 3.2: Characteristics of Pipes within the WaterCAD Model …………………. 30 TABLE 3.3: Explanation of Each Scenario …………………………………………..…. 32 TABLE 4.1: Calibration Results – No Leak Scenario ………………….………………. 33 TABLE 4.2: Pressure Measurements under Scenario 1‐3 …………….…………….…. 35 TABLE 4.3: Differential Pressure Measurements for Scenario 1‐3….……………..…. 36 TABLE 4.4: Pressure Measurements under Scenario 4‐6 …………………………….. 38 TABLE 4.5: Differential Pressure Measurements for Scenario 4‐6 ….…………….…. 39 TABLE 4.6: Power Usage for Scenarios 1‐6 ………………………….…………………. 40 TABLE 4.7: Pipe Head Losses in Scenario 0‐3 …………………………………………. 42 TABLE 4.8: Pipe Head Losses in Scenario 4‐6 ………………………………………….. 43 TABLE 5.1: Pressure Measurements from Scenario 7 and Scenario 8 ……………….. 61

v
LIST OF FIGURES FIGURE 1.1: Distribution System Losses ………………………………………………. 3 FIGURE 1.2: Water System Usage ……………………………………………………… 6 FIGURE 2.1: Typical Pressure Dependent Demand Curve ………..……….………… 17 FIGURE 2.2: Water System Hydraulic Grade Line …………………………….……… 21 FIGURE 2.3: Schematic View of a Diffuser …………………………………………….. 22 FIGURE 3.1: Experimental Facility at Instituto Superior Tecnico…………………….. 24 FIGURE 3.2: Transient Pressure at Six Measurement Sites…………………..……….. 26 FIGURE 3.3: Enlarged View of Transient Head at T1 Transducer …………………… 26 FIGURE 3.4: WaterCAD Model Setup ………………………………………………….. 29 FIGURE 4.1: Pressure Profile Path for the Left Side of Model ……………………….. 44 FIGURE 4.2: Left Side Pressure Profile for Scenario 0‐6……………………………….. 45 FIGURE 4.3: Enlarged Pressure Profile for Scenario 0‐6 (Left Side) …………..…….. 46 FIGURE 4.4: Enlarged Pressure Profile for Scenario 0‐6 (Left Side) ……………..….. 46 FIGURE 4.5: Pressure Profile Path for Middle of Model ……………………………... 47 FIGURE 4.6: Middle Pressure Profile for Scenario 0‐6……………………………..….. 48 FIGURE 4.7: Enlarged Pressure Profile for Scenario 0‐6 (Middle) …………….…….. 48 FIGURE 4.8: Enlarged Pressure Profile for Scenario 0‐6 (Middle) …………….…….. 49 FIGURE 4.9: Pressure Profile Path for the Right Side of Model …………….……….. 50 FIGURE 4.10: Right Side Pressure Profile for Scenario 0‐6……………………..…….. 51 FIGURE 4.11: Enlarged Pressure Profile for Scenario 0‐6 (Right Side) ………..…….. 51 FIGURE 4.12: Enlarged Pressure Profile for Scenario 0‐6 (Right Side) ………..…….. 52

vi
ABSTRACT Due to the continuous need to improve water supply sources, water operators
are looking towards ways to conserve water and protect water quality through leakage
protection. Currently computer generated models have been used to try to identify
leakage areas and develop a relationship between leakage and pressure variations in
water systems. The method of the leakage prediction has used both transient analysis
and inverse transient analysis to determine the relationship between leakage and
pressure variations. Currently there has been limited success in both these methods.
The experiment expressed in this research will explore the accuracy of the WaterCAD
software to develop a relationship between pressure variations and leakage quantities
and leakage locations. Engineers and owners of water systems use the WaterCAD
software to develop models of both proposed and existing water distribution systems.
If these same models could be calibrated using post‐condition pressure values and
using system parameters (roughness coefficients, etc.) pressure differences in the
system which do not match the calibrated computer generated model could be
identified thereby indicating a leakage and possibly suggest a location for the leakage.
Using a previous transient experiment for both reference and calibration, the
effects of leakage on pressure variations within a distribution system were explored.
The results found within this experiment suggest that there is a relationship between
pressure variations and leakage quantities. The location of leakage areas also affects the
pressures within the distribution system. By examining the results of this experiment,
both engineers and water operators can learn how leakage affects pressure within a
water system and become more aware of these symptoms for leakage prevention.

1
CHAPTER 1
INTRODUCTION
Historical Sources of Water Leaks
In the last decade the changing climatic condition, in which the extreme events of
floods and droughts have been increasingly more frequent, have led to shortages and
water restrictions in many countries. As a result, leakage control and demand
management have become high priorities for water supply utilities and authorities.
One early survey revealed that Chicago was pumping more than twice the water
required, a level still not rare today. A typical range for unaccounted for water (UFW)
in Europe is 9‐30%, while rates for Malaysia of 43% or for Bangladesh of 56% have been
reported. In North America, Brothers (2001) suggests that some utilities experience
water losses of 20‐50%. Leakage is the dominant component of unaccounted for water
(Colombo, Karney, 2002).
The American Water Works Association has identified three major categories of
“losses” in a water distribution system. These categories are:
1. Accounted for losses
2. Real losses
3. Apparent losses
Accounted for losses occur at metered locations. Water meters are typically
placed at service connections to monitor the amount of water that a billable customer
uses and may also be placed on service connections to non‐paying customers who put
the water to beneficial use. Non‐billable customers typically include municipal users
and the fire stations. All water that is metered, whether billable or un‐billable, can be
identified and quantified by the utility so that accurate records of water usage can be

2
recorded. All usage of water which is metered, regardless of billable or un‐billable, is
classified as accounted for losses.
Real losses are the physical losses of water from the distribution system which
cannot be tracked by the utility. Typically they occur because the utility did not meter
the quantity of water leaving the plant. These losses inflate the water utility’s
production costs and stress water resources since they represent water that is extracted
and treated, yet never reaches beneficial use. Examples of this type of loss include
leakage, storage overflows and breaks in the water mains.
Controlling real losses effectively relies up on a proactive leakage management
program which will include a means to identify hidden leaks, optimize repair functions
and upgrade piping infrastructure before its useful life ends. Many effective strategies
now exist to allow water utilities to identify, measure, reduce or eliminate leaks in a
manner that is consistent with their cost of doing business. This research will focus
primarily on the real losses within a water system and try to determine a means to
identify leaks through pressure variations.
The third type of water loss, apparent losses, are the paper losses that occur in
utility operations due to customer meter inaccuracies, billing system data error,
unauthorized consumption and authorized un‐metered consumption. This is water
which is consumed but not properly measured, accounted or paid for. These losses cost
utilities revenue and distort data on customer consumption patterns. Authorized un‐
metered consumption losses are typically put to beneficial use by the municipality or
utility and are commonly used for flushing water mains and fire fighting.
Because providing quality drinking water is a critical service that generates
revenues for water utilities, specific measures can be taken to prevent apparent losses.
These revenues rely upon efficient systems of customer metering, meter reading, and
billing that prevent revenue loss from occurring. By assessing their policies and

3
mapping the working of the customer billing system for a flow chart, errors within the
system can be located (AWWA, 2006).
Leaks in pipe networks can result for several situations. A water operator must
have an understanding of the causes of leaks so that they can be both repaired and
prevented in the future. The main source of leaks in water mains is external corrosion.
Corrosion is the root, if not the immediate, cause of most breaks in metal pipes. Some
researchers believe that corrosion occurs due to metals have a natural tendency to
return to their ore state (Stathis, 1999). Because corrosion is more susceptible in a
specific environment, pipes in wet, humid soils are more likely to corrode externally as
compared to pipes in drier soils. The low redox potential and low resistivity in wet
soils lead to significant corrosion problems. Several other factors can work with
corrosion to cause leakage. These factors include physical pipe characteristics, soil type,
pressure within the water system, and installation procedures. As the pipes within the
system age, they have a higher tendency to be susceptible to weakness. A good water
operator should know the types of pipes within the system and be cautious of areas
susceptible to water main leaks or ruptures.
Although it may seem obvious to properly utilize leak reduction methods for the
financial benefits, there are several additional reasons to implement these methods.
TOTAL WATER WITHIN
DISTRIBUTION SYSTEM
ACCOUNTED FOR LOSSES
1. Metered Potable Water
REAL LOSSES
1. Leakage
2. Breaks
3. Storage Overflow
APPARENT LOSSES
1. Fire Fighting
2. Flushing Mains
3. Meter Inaccuracies
Figure 1.1: Distribution System Losses (AWWA, 2006)
4
Other reasons for controlling leakage within a water distribution system include:
(Stathis, 1999)
� Avoided costs for treatment plant and distribution system expansion
� Increased knowledge of the water distribution system
� Reduced risk of water contamination
� Increased fire fighting capability
� Less wear and tear on pumps, treatment plants and distribution systems due to
less water going into the system
� Less property damage resulting in fewer insurance claims or lawsuits
� Enhanced public relations through more efficient service to customers
� Delayed expansion of treatment plant and distribution system
� More efficient leak repair, resulting in fewer “surprise” leaks or breaks
� Less overtime required of utility workers for fixing leaks at odd hours
� Reduced flow to wastewater treatment plants due to less inflow into sanitary or
combined sewers
� Improved overall environmental quality
� Increased revenue to the utility
Consequences of Water Leaks
Leakage in a pipe network incurs several consequences on utilities and
agricultural users. It can contribute to the cost of pumping, treating and distributing
water to be unnecessarily higher than normal. When treatment of the potable water is
utilized, chemicals and energy are used to treat the quantity of water produced.
However, due to the leakage within the system, more resources (especially chemicals)
are being used than are normally required. This additional usage can add up to
significant cost for the utility over time. Because there is no return on this additional

5
treated water, the utility will suffer a temporary financial loss and shift this cost/loss to
the consumer by dividing the total cost among the paying customers.
If extreme leakage occurs, it can cause utilities to look forward and develop a
plan to expand the existing water treatment plant. Premature expansion of a water
treatment plant may incur unnecessary costs that could be avoided simply by
increasing the capacity of the distribution system through leak detection and repair
programs. If the leakage occurs in areas of extreme dryness or areas prone to drought,
it can cause utilities to prematurely develop alternative water sources. Water resources
in these areas are precious and in short supply. Any effort to conserve water and
eliminate waste in a water distribution system will provide great benefits in terms of
delaying further development of water resources.
Aside from monetary consequences of leakage within a water system,
environmental consequences should not be overlooked. The main environmental
concern with leakage is the fact of any opening in a pipe will allow potential
contaminants to enter the water supply. The water quality can be compromised by
unwanted sediment and chemicals entering the network, thereby posing a hazardous
situation to the community.
Other environmental concerns which could occur during extremely large
quantities of leakage include the effects of the groundwater and the effects on a local
sanitary sewer system. Should the large leakage seep to the groundwater level it could
cause an unwanted rise in the water table. If the additional water from leakage should
flow into the sanitary sewer system, the extra flow could increase the necessary capacity
of the wastewater plant thereby incurring greater treatment costs and the expansion of
the wastewater treatment facility. If sewer pipes cannot sufficient hold the additional
volume, combined sewer overflows could provide harm to the receiving waters.
The ultimate goal of any water utility should be to maximize the quantity of
revenue‐producing water in the system. It is estimated that 70% of the water produced

6
by a utility shows a form of return on investments in the form of metered water sales.
The remaining 30% of water produced does not produce any revenue for the utility. It
is also estimated that 14% of the water which does not produce revenue is lost due to
underground leakage in water mains. Inaccurate meter readings account for 10% of the
non‐revenue produced usage (Stathis, 1999).
The amount of real losses and unaccounted for losses in a system must be
determined before an evaluation of the pipe network and its ability to function
adequately in terms of reliability and service can be determined. It is detrimental to a
utility to known whether their system is functioning as it was designed. If these losses
are excessive then remedial measures should be taken to restore the system to its full
capacity (Stathis, 1999). The repair of inaccurate water meters and leaks within mains
should be focused on primarily. This research will focus on developing a relationship
between the pressure variations within a water system caused by leakage. By
examining both the leakage quantity and leakage location and their effects on pressure
variations, a relationship between leakage and pressure fluctuations will be identified.
It is possible that this relationship between leakage and pressure will allow water
utilities to identify is losses are occurring within the water system.
10%
6%
14%
70% 30%
Produces Revenue
Produces No Revenue
Lost due to Leakage
Inaccurate Meters
Other
Figure 1.2: Water System Usage (Stathis, 1999)

7
Objectives of Research
Because the transient analysis is dependent upon pressures within the system to
determine the location of leaks within the system, it is questioned as to whether reliance
on pressures alone can determine the location of leaks. This research will analyze the
accuracy of pressure dependence on leak detection and determine whether there is a
relationship between the pressures within a water system and leakage. With the use of
the hydraulic computer simulation software WaterCAD different leakage scenarios will
be created. These scenarios will vary both the leakage quantity at a specific node as
well as the leakage location. Pressure variations due to these scenarios will be observed
and duly noted so that any relationship between both leakage location and pressure
fluctuations can be derived. The relationship between pressure variations within a
water system and various leakage flow rates will also be evaluated. If there is a
relationship between pressure variations and quantity of leakage, it is possible water
system operators could record unusually low pressures or pressure decreases within
the system and potentially locate the area of leakage.
Typical computer programs which simulate water system usage and pressures
rely on the continuity equation to calculate the flow throughout the water system. If all
the water usage quantities throughout the water system are known, it is possible that
potential leakage could be identified solely based on the continuity equation. However,
it is often difficult for water system personnel to accurately track every gallon of water
which leaves the plant site for potable usage. Typically water operators rely on
pressure data at certain areas within the system to acknowledge whether a problem
may be occurring within the system. In fact, even citizens can notice unusually low
pressures within the system and refer this information to the water utility as a possible
problem area. Because pressure is commonly used to acknowledge potential problems
(including leakage) it is important to note the relationship between pressure and

8
leakage. Perhaps the relationship between pressure variations and leakage could help
operators identify the possibility of a potential leak based on the variations from
“normal” pressures within the system.
The accuracy of the computer simulation as compared to laboratory data will
also be examined. It is vital that the software used for these simulations has the ability
to produce highly comparable calibrated results as computer simulations are used more
frequently to design water systems and water system upgrades. The importance of the
WaterCAD software is discussed in greater depth in Chapter 3.

9
CHAPTER 2
LITERATURE REVIEW
Methods for Leak Detection
In the last decade, leakage reduction and control has become a high priority for
water supply utilities and authorities. Through much research over the past decade
several methods have been developed for detecting leaks within water distribution
systems. Consequently, there has been a significant interest in the application of the
Inverse Transient Analysis for leak detection and calibration in water pipe systems
(Covas and Ramos, 2003).
In 1994 two professors, Liggett and Chen, at Cornell University developed an
innovative technique to determine, from unsteady pressure traces at a number of nodes
in the network, the locations and magnitudes of any leaks that are occurring and the
friction factor for each pipe in the network (Vitkovsky et al, 1999). This technique is
known as the inverse transient analysis. They hypothesized that the leakage locations
could be identified with the use of generating transients within a water system rather
than using steady state analysis. The results of their research concluded that the use of
hydraulic transients would in fact provide results that could produce pressure
variations which would strongly suggest the possible location of leaks. Part of the
accuracy obtained from the inverse transient analysis is due to the ability of this method
to correctly simulate the friction factors within pipes of the system.
Over time, the friction factor of a pipe changes due to tuberculation or the build
up of deposits on the pipe wall. This can cause friction factor values to increase with
age. Different pipes in a network are subject to different conditions including variations
in dissolved solids loadings, flow, pressure and temperature. Thus, in an aging
network, reliable estimates of friction factors can be difficult to obtain. Pudar and

10
Liggett (1992) introduced the inverse steady state analysis that used a set of measured
steady state pressure data at different nodal positions to both calibrate pipe roughness
and locate leaks in pipe networks. They developed a looped network with several
leakage nodes in the system. Using steady state data they calibrated their model and
solved for the head measurements at the leakage nodes, comparing the calculated head
measurements with the head measurements used for calibration. Pudar and Liggett
concluded that leak detection by static methods is unlikely to provide definitive results
that would supersede more conventional methods. However, the inverse problem
could serve as a supplement to leak surveys. The effectiveness of inverse type problems
relies solely on large quantities of accurate data. The existence of massive data makes
the inverse problem both solvable and correct information is more likely to be derived
from the computer simulation. The purpose for the research performed by Pudar and
Liggett was primarily to compare the results of the undetermined problem with the
results from the over determined problem.
A potential problem predicted by Pudar and Liggett (1992) was the applicability
of their solution method to very large water distribution networks. Liggett and Chen
posed a solution to this potential shortcoming that was to use analysis of transient
events rather than steady state calibration (Vitkovsky et al, 1999).
Another inverse transient analysis experiment was performed in 2003 by Covas,
Ramos, Graham, Maksimovic, Kapelan, Savic and Walters. The research work was
performed jointly by Exeter University and Imperial College, both located in London,
U.K. The application of inverse transient analysis was tested using physical data
collected in the laboratory and under quasi‐field conditions. The inverse transient
analysis proved to be successful in the detection and location of leaks of a ‘reasonable’
size, provided that physical and hydraulic characteristics of the system are known.
Leak location uncertainties depended on the leak size and location, flow regime and
location where the transient event is generated. Although further research was

11
necessary to assess the success of this technique in real life systems, the inverse
transient analysis appears to be useful for the diagnosis, monitoring and control of
existing systems, not only to estimate leak locations and sizes, but also for a better
understanding of the causes of pipe bursts induced by transient events (Covas et al,
2003).
In essence, hydraulic transients are pressure waves that propagate in the pipe
system as a response to relatively rapid flow adjustments. Transients have the potential
to burst a pipe (due to high pressure) or to cause regions of low pressure of vacuum
conditions. Specifically, leaks may enhance the likelihood that foreign matter is drawn
into a pipe when a low pressure transient event occurs. Matter drawn into the pipe
might include potentially toxic pollutants, pathogens, and soil constituents. Pathogens
pose a direct health risk by increasing the likelihood of waterborne disease and certain
soil compounds, though not directly toxic, may act as disinfectant byproduct
precursors. The extent of transient intrusion depends on the severity and duration of
internal pressure changes, the external groundwater pressure, and the orifice
parameters of the leak (Colombo and Karney, 2002).
Transient analysis has historically been used during the design period to
simulate the effects of leaks and transients in a water system. Through this transient
analysis, it can be determined whether pipe sizes are adequate to handle potential
surges which may occur during the life of the water system. The transient analysis
utilizes prevention of line ruptures or breaks as compared to locating leaks after their
occurrence. Research, as that previously mentioned, has used transient analysis and
inverse transient analysis to determine whether leaks can accurately be located using
known pressures from areas of concern in an existing water system.

12
Alternatives
Although the use of pressure results from laboratory experiments to possibly
determine leakage locations (i.e. transient analysis) has gained popularity there are
other methods which have gained recognition as well. These methods include: genetic
algorithms, acoustic emission testing and inverse transient analysis.
Genetic algorithms mimic the way populations of species genetically evolve to
suit their environment over many generations. Using this analogy a process can be
used to evolve a population of potential solutions representing engineering design
problems towards improved solutions. These solutions will satisfy the specified
constraints while minimizing or maximizing one or more objective functions (Vitkovsky
et al, 2000).
Acoustic emission testing (AET) is currently being implemented in the field
today to detect leaks on existing water systems. This method is effective because it
utilizes sensors to detect the sound of leakage beneath the ground. When a pre‐
stressing wire breaks or releases pre‐stress, it generates a sudden release of energy that
can be detected using an appropriate sensor. The sound from such an event is known
to propagate through the pipe core, inducing vibration in the pipe wall, and into the
column of water within the pipe. Recent advances in instrumentation and sensor
technology have meant that it is possible to use of non‐intrusive, surface mounted
accelerometers instead of hydrophones. The use of these sensors mounted on the
surface of prestressed concrete pipe has negated the need to tap the pipelines to allow
the insertion of hydrophones. In addition, because of the use of surface mounted
accelerometers, acoustic monitoring of water mains can be conducted without worrying
about occupational safety issues. Specifically, if the baseline condition of a pipeline is
well understood, acoustics offers a powerfully view into the ongoing health of the line
(Kong and Mergelas, 2005).

13
This method is generally expensive to use and therefore is more cost efficient if
used with another leakage detection method. If the location of possible leaks could be
confined to a general area of the water distribution system using the transient analysis,
the acoustic emission testing could be used to locate the exact location of pipe in which
the leak occurs.
Another successful way to control leakage is to construct a water main break
database. To reduce contamination risks and optimize investments in aging
infrastructure, a utility must be able to predict breaks. Break prediction is possible,
however, only if the utility possess reliable data on factors such as pipe age, diameter
and material, along with the number and nature of all breaks. Surveys and literature
indicate that such data are typically scarce. Collecting, recording, and monitoring break
data are important to utility managers because the information can yield insights in to
the management of the entire network. The analysis of water main breaks, although
vital to the health of a distribution system, is limited by common utility challenges –
limited personnel and resources, missing and conflicting data, and non‐computerized
information. Most municipalities do have some information about their water pipes
and conditions, but few have been maintaining records of pipe breaks for longer than a
decade. In addition, very little information is typically available about individual pipes
in a given network (Wood et al, 2007).
Many utilities have developed improved data acquisition and management
strategies for water main breaks in recent years. In some cases, they are using third
parties to obtain and analyze specialized data such as soil conductivity. Wood and
Lence (2006) surveyed North American utilities and conducted detailed interviews to
determine the richness of data available for analyzing water main breaks. They observe
that break information varies widely among utilities and that many utilities do not
collect data of the breadth and richness necessary for comprehensive analyses.
Determining the exact condition of buried pipes is difficult because they do not lend

14
themselves to comprehensive inspection. At a minimum, utilities should maintain a
database of water main breaks because the occurrence of breaks may reflect pipe
conditions. In addition, the number of annual water main breaks is typically used as a
surrogate for the condition of the network. Breaks do not, however, necessarily reflect
pipe condition because breaks can result pipe condition because breaks can result from
a number of causes (e.g., damage from adjacent construction or frost heave). The
hydraulic model and the pipe network often do not have a one‐to‐one relationship, and
the hydraulic model is commonly a skeleton of the network (where a link in the model
may actually represent a number of pipes in the real system) (Wood et al, 2007).
Introduction of Computer Simulations
Only a few years ago, these solutions were made by a trial and error hand
computation, but recent applications using digital computers have made the older
methods obsolete. Even with these advances the engineer charged with the design or
analysis of such a system must understand the basic hydraulics of the system to be able
to interpret the results properly and to make good engineering decisions based on the
results.
In order for an engineer to predict pressures throughout the network for various
operating conditions, the solution of the problem must satisfy three basic requirements
(Roberson et al, 1998):
1. Continuity must be satisfied. That is, the flow into a junction of the network must
equal the flow out of the junction. This must be satisfied for all junctions.
2. The head loss between any two junctions must be the same regardless of the path
in the series of pipes taken to get from one junction point to the other. This

15
requirement results because pressure must be continuous throughout the
network (pressure cannot have two values at a given point). Therefore, if we
consider flow around a given loop of a network, the summation of head loss for
flow in pipes with a clockwise sense around the loop must be equal to the
headloss for flow having a counter‐clockwise sense around the loop.
3. The flow and head loss must be consistent with the appropriate velocity‐head loss
equation.
Computer simulations of water systems have become a vital tool for water
supply utilities and consultants. However, one of the largest unknowns in developing
these models is the condition of the pipes, particularly the older pipes. This unknown
contributes greatly to the estimation of friction factors. It is very difficult to obtain
reliable estimates of the roughness for each pipe in the system using steady state
analysis.
A water distribution model is created by using a link‐node formulation that is
governed by two conservation laws, namely mass balance at nodes and energy
conservation around hydraulic loops. The node is a point where water consumption is
allocated and defined as demand, which is treated as a known value so that nodal
hydraulic head can be solved. This formulation is valid only if the hydraulic pressures
at all nodes are adequate so that the demand is independent of pressure. All nodes are
connected by pipes. The characteristics of each pipe (i.e. diameter, material, roughness
coefficient, length, etc) can be defined in the model. Other hydraulic structures such as
wells, tanks, pumps, and reservoirs can be incorporated within the model so a more
accurate model can be generated, hence more accurate results.
There are several types of computer programs which simulate the conditions and
pressures of a water system using the parameters previously mentioned. Popular

16
computer programs which simulate both steady state and extended period analysis
include WaterCAD and EPANET. Much research has been completed using the
EPANET software which was originally developed by the Water Supply and Water
Resources Division (formerly the Drinking Water Research Division) of the U.S.
Environmental Protection Agencyʹs National Risk Management Research Laboratory
(User’s Manual, 2000). It is public domain software that may be freely copied and
distributed, however there is no formal support offered for EPANET. Both the
WaterCAD and EPANET softwares have the capabilities to perform extended period
simulations and determine water quality behavior within pressurized pipe networks.
EPANET is typically used by researchers due to the free availability while engineers are
more prone to utilize the WaterCAD software because of its user friendly capabilities
and technical support.
A limitation of both the EPANET and WaterCAD software is the lack of use of
the pressure dependent demand function to calculate the pressures within a water
system. A typical pressure dependent demand power function is illustrated in Figure 3.
As can be seen in the figure, the actual demand increases to the full requested demand
(100%) as pressure increases, but remains constant after the pressure is greater than the
pressure threshold, namely the percent of pressure threshold is greater than 100%.
Pressure percentage is the ratio of actual pressure to a nodal threshold pressure while
demand percentage is the ratio of the calculated demand to the reference demand (Yi
Wu et al, 2006).
Pressure may drop below a reference level, so called reference pressure for
supplying 100% of the desired demand or reference demand. Whenever the pressure is
below the reference pressure, nodal demand, the water available at a location, is
certainly dependent on the pressure at the node. In other words, unlike the
conventional approach of demand driven analysis, demand is a function of pressure in
pressure dependent demand.

17
Figure 2.1: Typical Pressure Dependent Demand Curve (Yi Wu et al, 2006)
Walski (2006) noted that pressure reduction within a distribution system may not
only decrease leakage rates from existing leaks but also may reduce the rate at which
new leaks occur. Walski determined that when pressures were reduced, the percentage
of unaccounted for water was reduced from 21.6 to 15.0%. Simply reducing the
pressure at the source results in a number of undesirable consequences. Most notably,
the pressure to customers in higher elevations is reduced and the number of nodes in a
model with unacceptable pressure increases. It is possible that low pressure problems
can be avoided by reducing the pressure only during nighttime hours. Of course, the
potential for reducing leakage is reduced and the effect on customer pressure is
minimized. If this alternative is taken it is recommended the pressure be decreased
after 9 p.m. and before 6 a.m.
In inverse problems we know the characteristics of the system and the demands,
but some quantities are unknown. These unknown quantities correspond to leaks, or

18
unaccounted outflows. If the known quantities are extended to a sufficient number of
pressures we can, in principle, find the leaks. The inverse problem can be formulated in
many different ways. In the case of design we know the demands, have target
pressures and would like to determine the characteristics of the system to meet the
demands and pressures.
There are three major types of classification for inverse problems. Inverse
problems can be even‐determined where a pressure or flow rate is given for every
unknown demand or parameter, underdetermined where there are more unknowns
than equations, or overdetermined where there are more extra measurements and
equations than unknowns. The latter case is the most desirable form the point of view
of parameter determination or leak detection as it gives than dependable results. An
underdetermined system, however, can still give information. Computer simulations
are very useful for solving the underdetermined system solutions. In addition to the
aforementioned categories a system can be mixed‐determined where there are as many
or more measurements and equations than unknowns, but still insufficient information
to find a unique solution to the problem (Pudar and Liggett, 1992).
Modeling leakage depends on understanding the hydraulics of leaks and how to
incorporate those hydraulics into existing models of the water distribution system.
Existing models attempt to model leakage using some approximation of the orifice flow
equation. A general form of the orifice flow equation is used to estimate the
effectiveness of pressure reduction is shown below:
(Eqn. 1)
in which P1 is the pressure inside the pipe, Q1 is the flow from the leak at pressure i, N is
the exponent relating flow and pressure, subscript 1 is the condition before the
implementation of the corrective measure, and subscript 2 is the condition after

19
implementation. If the leakage at one pressure is known, the leakage at another
pressure can be determined with Equation 1. If the leak behaves as an orifice, the
exponent N is 0.5. Hikki found exponents of 0.5 for holes drilled in pipes. Ashcroft and
Taylor found values for slits ranging from 1.39 to 1.72 (Walski et al, 2006). Most leaks
that persist tend to be smaller leaks with a fixed orifice size. Larger leaks are usually
found and repaired quickly.
Equation 1 compares the pressure from two leakage areas so that flow can be
determined at one of the sites. However if the pressures, both upstream and
downstream, of a single leak need to be compared the following orifice equation should
be used (Alonso et al, 2000):
q = K(p1‐p2) (Eqn. 2)
Taking into account that permanent leakage is the consequence of defects in the
network, leakage characterization may be based on the equation for a discharge
through an orifice. Parameters within this equation include p1 = pressure upstream of
the orifice, p2 = pressure downstream of the orifice, = exponent taking the value of 0.5
according to both theory and laboratory experiments and K = coefficient that depends
on the shape and size of the orifice.
Previous research shows that more scientists and engineers are depending upon
computer simulations to design water systems. The speed of the computers and
accuracy of certain softwares is sufficient to provide accuracy to the design of
distribution systems, water plant improvements, fire flow tests, pressure predictions
and other aspects of design. Although steady state analysis for water system modeling
is not preferred method, it has not been proven to be a completely inaccurate way to
determine leakage than steady state. Because the average day usage, maximum day
usage or peak hour usage within any given water system is not steady state, the steady
state analysis is not going to provide completely correct results which fit all field data

20
derived from the existing system. This is another reason researchers are expanding
their modeling capabilities and laboratory experiments to include transient analysis.
Transient analysis has become the latest method in trying to determine leakage
areas within a system. Although there is not much research available, the preliminary
results and experiments, have verified researchers’ hypotheses and present promising
results for predicting leakage. However, in order to create an accurate model much
data is needed. Perhaps the largest challenge is to create a model which accurately suits
a water system, hence producing accurate results. Several research experiments,
including both steady state and transient analysis, were examined before the
experiment presented in this thesis was created.
Background
For this experiment, the Bernoulli equation can be used since we are assuming
non‐viscous, one dimensional, incompressible flow. Bernoulli’s equation shows that
pressure differences within the pipes are also dependent upon velocity, gravity, unit
weight of the fluid, elevation and head losses, as shown in Equation 3. The vast
majority of computer simulations are dependent upon this equation for determining
pressure measurements at each node. Bernoulli’s equation is defined as:
(Eqn. 3)
where z is the elevation above an arbitrary datum, p is the pressure intensity, V is the
mean velocity in the pipe, g is the gravitational acceleration, is the specific weight of
the fluid, is the kinetic energy correction factor (for most of the practical cases ≈
1.05, hence, it will be subsequently omitted), and hL is the head loss. Subscripts 1 and 2
refer to cross sections normal to the flow field. All the terms in the above equation are

21
heads (or lengths), actually energies per unit weight. Different expressions are used for
hL, depending on their type, namely, losses due to frictional resistance of the pipe or
losses due to flow transition in the pipe (such as vanes, fittings, inlets, outlets, etc.)
Another way to compare the characteristics of a system is through a hydraulic
grade line (HGL). A sample hydraulic grade line is shown in Figure 2.2 for a typical
water system. In this figure an elevated storage tank is used to generate the high head
and pressure for the remaining distribution system to use. Note that the variables
which generate this graph are the exact variables in Equation 3.
Figure 2.2: Water System Hydraulic Grade Line
By allowing the modeler to examine a HGL, the computer model can help locate
which individual pipes are in need of repair or rehabilitation (Haestad et al, 2004). The
hydraulic grade line can show the pressure head and elevation head of water within the
system. By creating a HGL for a water system, the characteristics of the system can be
determined. If accurate pressure data is obtained from a water system a HGL should be
able to be generated from that data and compared to the accurate grade line of the
system. If these graphs vary (i.e. collected data has a lower grade line than the accurate
22
grade line of the system) then areas of potential low pressure can be identified.
Determining the cause of discrepancy between the HGLs is dependent upon good
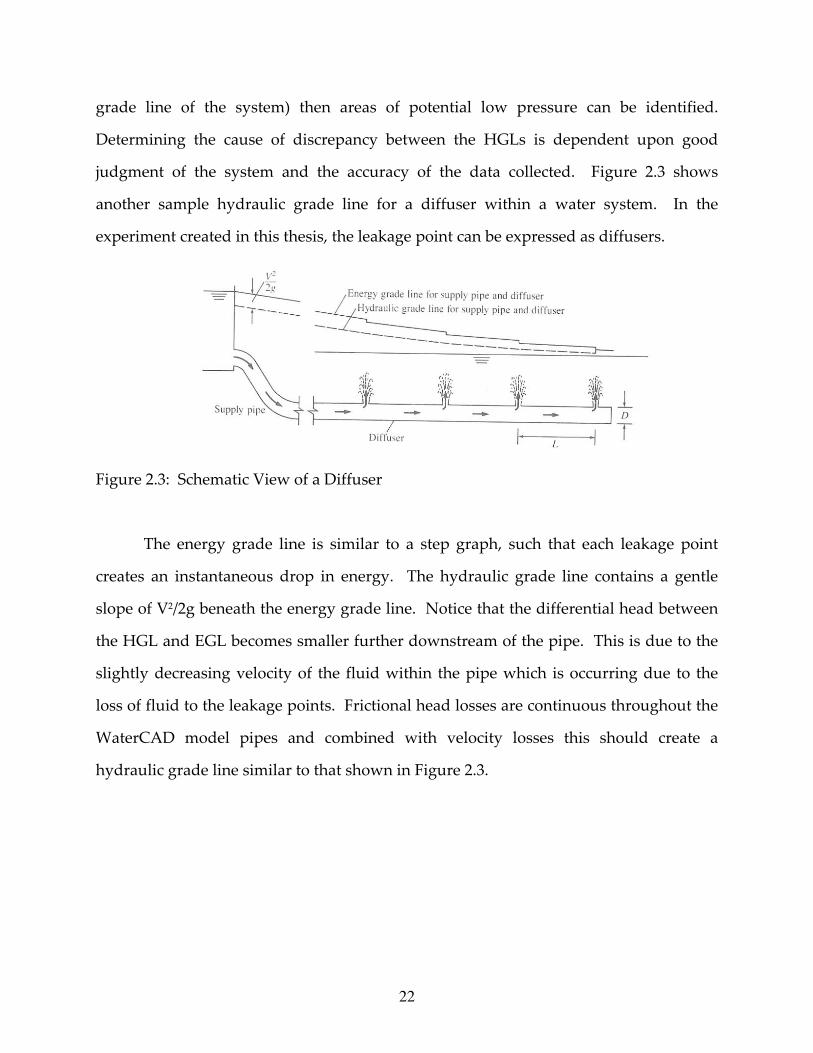
judgment of the system and the accuracy of the data collected. Figure 2.3 shows
another sample hydraulic grade line for a diffuser within a water system. In the
experiment created in this thesis, the leakage point can be expressed as diffusers.
Figure 2.3: Schematic View of a Diffuser
The energy grade line is similar to a step graph, such that each leakage point
creates an instantaneous drop in energy. The hydraulic grade line contains a gentle
slope of V2/2g beneath the energy grade line. Notice that the differential head between
the HGL and EGL becomes smaller further downstream of the pipe. This is due to the
slightly decreasing velocity of the fluid within the pipe which is occurring due to the
loss of fluid to the leakage points. Frictional head losses are continuous throughout the
WaterCAD model pipes and combined with velocity losses this should create a
hydraulic grade line similar to that shown in Figure 2.3.

23
CHAPTER 3
METHODOLOGY
Background
The experiment created and explained within this thesis was based on an
experiment previously performed by two researchers in Libson. Covas and Ramos
developed an experimental facility with a looped system at the Technical University of
Libson in 2000. This facility was specially designed for two reasons. The first reason
was to collect leakage transient data so that it could be placed in a transient database
(Transdat). The second reason is to test and analyze the inverse transient leakage
detection methodology (Covas & Ramos, 2001).
The configuration of their experimental set‐up consists of a pipe network with
six square loops, having each loop 2m x 2m, supplied by a pressurized vessel with a
constant head of approximately 26 meters. The pipes are massively anchored in several
sites along its length, in order to avoid any longitudinal movement in the several
fittings of the system during the transient event. The pipes are made of transparent
PVC PN10 (nominal pressure 10 kg‐m‐2), with 45 mm internal diameter and 2.4 mm of
wall thickness.
At the downstream end of the network, there are two valves: a gate valve, to
control the flow that discharges to the atmosphere, and a ball valve, immediately
upstream the former, to generate the transient event. The closure of the water hammer
valve is carried out manually.
The leaks are located at interior sections of the hydraulic system and are
simulated by small ball valves with 9 mm of inner diameter discharging directly to the
atmosphere. An electromagnetic flow meter was used to measure steady state flow at
the upstream end after the pressurized vessel. See Figure 3.1 for the experimental
network layout.

24
Figure 3.1: Experimental Facility at Instituto Superior Tecnico (Covas and Ramos, 2001)
Covas and Ramos performed two important tests with this facility. The first one
corresponds to the system without leakage and the other one with a leak located at
node 26 and with the size of 0.00003 m2. For both tests, the initial steady state flow at
the downstream end is 6 liter per second (l/s). The hydraulic transients were generated
by the closure of the downstream water hammer valve.
Covas and Ramos assumed that the initial flow through the distribution system
model was 6 l/s with no leakage. From this trial run, a background or control transient
could be generated. This control transient, at most node locations, is crucial to the
model because it allows comparison of the leak scenarios. It also allows the water
operator or engineer to determine the transients at specific node locations to verify if
leaks are occurring.
In the second trial, a leak of 0.67 l/s was modeled in two locations with an
effective leaks size of 0.00003 m2. In addition to the leak flow, an initial flow of 6 l/s was

25
maintained within the distribution system model. The variance of transient curves
comparing the “no leak” scenario with the “leakage” scenario is shown in Figure 3.2.
Table 3.1: Experimental Results (Covas and Ramos, 2001)
Test Initial Flow at Downstream Initial Leak Flow Leak Effective Size* No Leak 6 l/s ‐ ‐ Leak 1 6 l/s 0.670 l/s 0.00003 m2 (*) Leakʹs Effective size is Aef = Discharge Coefficient (Cd) multiplied by the area of the orifice (AL)
Despite the differences of each scenario within the Covas/Ramos experiment,
these scenarios did share a common characteristic. Figure 3.2 displays the transient
curves derived from both leakage scenarios. Although these transient curves vary in
head, they do share a common head measurement from 0.1 to 0.2 seconds. An enlarged
view of this specific time frame is shown in Figure 3.3 and contains a head of
approximately 26 meters. This value, which is steady state prior to the generation of the
transient, was used to calibrate the WaterCAD model.
Through this experiment, they were able to prove that with adequate
experimental data, a computer generated model of the water system could be created
and calibrated. This model when calibrated can create transient curves at junctions
within the system that match the transients created in the laboratory experiment. Thus
there is excellent correlation between experimental data and information obtained from
the computer model as shown in Figure 3.2. Covas and Ramos were able to
successfully develop a relationship between transient and inverse transient analysis.
Their results provide a beginning and foundation for similar transient experiments by
providing proof that there is a correlation between laboratory data and computer
simulated results.

26
Figure 3.2: Transient Pressure at Six Measurement Sites (Covas & Ramos, 2001)
Figure 3.3: Enlarged View of Transient Head at T1 Transducer (Covas & Ramos, 2001)

27
Overview of Research Tasks
It is the intention of this thesis and research to use the experimental data from
Covas and Ramos facility and create a model of the experimental facility using the
Haestad WaterCAD Version 7 software. The two leakage scenarios used by Covas and
Ramos will be utilized to detect the pressure variations throughout the system caused
by the potential leak. They will also be used to calibrate the model generated with
WaterCAD software. Different leakage scenarios will then be performed with the
calibrated model to determine the relationship between pressure variations within a
water system and the location of these leaks. An explanation of each scenario is
detailed in Table 3.3. These leakage scenarios vary in both the quantity of leakage at a
specific point and in the location of the leakage point. The model will also be used to
determine if a relationship between the effective size of the leak and pressure variations
exist. If a relationship between the leakage quantities and pressure variations exist,
water operators will be able to detect the possibility of leakage in their respective water
system and fix it, thereby reducing the amount of revenue lost and protecting the water
quality.
WaterCAD Modeling Software
Covas and Ramos (2001) utilized the TRANSDAT software (2001) after they had
obtained experimental data from their laboratory pipe model. The TRANSDAT
software is beneficial in modeling transients created in a water system. With enough
correct information to enter into the software program, TRANSDAT will solve the over‐
determined model. From both the computer model results and laboratory results that
Covas and Ramos (2001) obtained, it was found that both sets of results were
comparable to each other as seen in Figure 3.3. The TRANSDAT software used the
method of characteristics to solve for unknown pressures at nodes within the model.

28
This method is popular for handling hydraulic transients. It converts the two partial
differential equations (PDEs) of continuity and momentum into four ordinary
differential equations that are solved numerically using finite difference techniques
(Haestad et al, 2004).
The WaterCAD Version 7 software (User’s Guide, 2005) which was used within
the experiment explained in this thesis utilizes the parameters entered for the pipes and
nodes (demands) to solve for the pressures at each node and within the pipes. The
pressures at all nodes which are calculated by WaterCAD are independent of pressures
needed to satisfy the inputed demands. Therefore it is essential that calculated
pressures be viewed and compared to the inputed demands to verify whether the
results are reasonable. Due to small leakage rates incorporated within the model, the
results generated should be justified as reasonable. Of course, laboratory results
justifying all other scenarios would be needed to verify the accuracy of the WaterCAD
software. It is important to note that this software utilizes the continuity equation and
Bernoulli’s equation to solve for pressure and balance the flows within the model.
The WaterCAD software was chosen due to its popular usage by engineers and
municipalities. The EPANET software seems to be more heavily used by researchers
due to its free availability. However if municipalities are leaning toward the usage of
the software then the accuracy of the software and ability to simulate leakage in water
systems needed to be explored. Hence, the WaterCAD software was chosen to simulate
the water system expressed in this thesis.
Overall, the WaterCAD software is believed to be sufficient for this experiment.
Although TRANSDAT is used for solving pressure waves due to transients at specific
nodes, something which was not observed in this experiment, it was able to find
common similarities (i.e. pressure) with the capabilities of WaterCAD.

29
Development of WaterCAD Model When the computer model was initially developed a few trial runs were
performed so that the extent of the calibration needed could be detected. All pipes were
set to be Polyvinyl chloride (PVC) with a Hazen‐Williams coefficient of 150. Interior
diameters were 45 mm and the lengths of pipe were created as shown in Table 3.2. In
order to create a pressurized vessel, as Covas and Ramos did in their experiment, a
pump downstream of a reservoir was created. This pump has logical controls which
force the pump to turn on when the pressure is below 254 kPa and turn off when the
pressure is above 255 kPa. These pump settings allow the pipe system to maintain a
continuous pressure of approximately 254 kPa, which is comparable to the pressures
within the Covas and Ramos experiment. This also allows the pump to become a
pressurized vessel that Covas and Ramos used in their experiment rather than behaving
as a typical pump with a pump curve.
Figure 3.4: WaterCAD Model Setup

30
Table 3.2: Characteristics of Pipes within the WaterCAD Model
Label Length (m) Diameter (mm) Material Roughness Coefficient
P‐1 2.0 45 PVC 150
P‐2 2.0 45 PVC 150
P‐3 2.0 45 PVC 150
P‐4 2.0 45 PVC 150
P‐5 2.0 45 PVC 150
P‐7 2.0 45 PVC 150
P‐9 2.0 45 PVC 150
P‐12 2.0 45 PVC 150
P‐13 2.0 45 PVC 150
P‐14 2.0 45 PVC 150
P‐15 2.0 45 PVC 150
P‐17 2.0 45 PVC 150
P‐18 1.0 45 PVC 150
P‐19 1.0 45 PVC 150
P‐20 1.0 45 PVC 150
P‐21 1.0 45 PVC 150
P‐22 0.15 45 PVC 150
P‐24 0.9 45 PVC 150
P‐25 0.1 45 PVC 150
P‐26 1.0 45 PVC 150
P‐27 0.5 45 PVC 150
P‐28 0.5 45 PVC 150
P‐29 0.55 45 PVC 150
P‐30 1.3 45 PVC 150
P‐31 0.5 45 PVC 150
P‐33 0.5 45 PVC 150
P‐34 10.0 45 PVC 150
P‐35 3.4 45 PVC 150
P‐36 11.58 152.4 PVC 150
Table 3.2 shows the characteristics and parameters of every pipe within the
WaterCAD model. The lengths, diameters and material of pipe were derived from the

31
Covas/Ramos model. The roughness coefficient of 150 is standard for PVC pipe and
was verified through the calibration process. Pipe P‐36 was given a larger diameter to
reduce the head losses caused by friction. This was used so that the model would
achieve higher calibration results and better suit the Covas/Ramos model.
Seven different scenarios were run with the WaterCAD software. A summary of
these scenarios can be seen in Table 3.3. The first scenario, Scenario 0, was used as a
calibration trial run and was modeled with no leakage. The only flow which was
generated was used to flow to the reservoir downstream of the model, similar to the
Covas/Ramos experiment. This flow was equal to 6 l/s. The second scenario, Scenario
1, was also similar to the Covas/Ramos experiment. A leakage at a specific node of 0.67
l/s was generated in addition to the normal flow of 6 l/s through the system. This
leakage is approximately 11% of the total base flow throughout the water system. This
scenario was used as a double calibration to verify the accuracy of the inputted
parameters, such as pipe, nodes and pump characteristics. Scenarios 2‐6 were used to
vary the leakage rates and leakage locations in the WaterCAD model.
Scenarios 1, 2 and 3 will vary the leakage quantity at a constant node (Leak 1).
The original leakage quantity of 0.67 l/s will be halved in Scenario 2 and doubled in
Scenario 3. The purpose of these three scenarios will determine how leakage quantity
affects pressure measurements throughout a water system. Scenario 4, 5 and 6 will be
used to compare the affects of leakage location to calculated pressure measurements.
The leakage rate of 0.67 l/s will be maintained at a constant value while the leak is
located at three different locations within the water system. These locations are located
at different distances from the pump. Scenario 6 will utilize two locations to simulate
the effects of two leaks within a system. However, the total combined leakage quantity
will be 0.67 l/s from both leaks. The pressure variations which occurred due to these
leakage scenarios are discussed in further detail in the following chapters.

32
Table 3.3: Explanation of Each Scenario
Scenario No. Description
Scenario 0 No Leakage, used for calibration purposes
Scenario 1 Leak 1 = 0.67 l/s
Scenario 2 Leak 1 = 0.335 l/s
Scenario 3 Leak 1 = 1.34 l/s
Scenario 4 Leak 1 moved closer to Pump at T3 = 0.67 l/s
Scenario 5 Leak 2 = 0.67 l/s
Scenario 6 Leak 1 = 0.335 l/s Leak 2 = 0.335 l/s
Figure 3.2 shows the comparison between the experimental laboratory data and
the computer simulation that Covas and Ramos obtained. Although this information is
due to transient analysis, the initial 0.1 second is steady state rather than transient. This
is due to the short time lag required for the effects of the transient to affect the pressures
and head at the measurement nodes. This steady state data at all six measurement
nodes was used to calibrate the WaterCAD model. These values, along with the
calibration percent errors, can be seen in Table 4.1.
Comparison of Leak Quantities
Comparison of Leak Location
Control Scenario

33
CHAPTER 4
RESULTS
The comparison between the Covas/Ramos (2001) experimental results and
initial WaterCAD scenario results from Leak #1 having a leakage of 0.67 l/s are very
similar. The no leakage scenario, Scenario 0, did provide some pressure differences
within the system as compared to the Covas/Ramos experiment, however these
differences were small and can be expected to be insignificant. The units used to
display pressure (Pascal) are very small which allow almost insignificant changes in
pressure to be noticed. The comparison of a Pascal to pounds per square inch, which is
commonly used in the U.S. is 1 pascal = 0.00014503 psi. This is beneficial since small
changes within the pressures of the model need to be considered. Initial calibration of
the WaterCAD model with a comparison of the pressure results from the Covas/Ramos
model and the WaterCAD model are shown in Table 4.1. The variations of pressure
were converted to error percentages which are small enough to confirm a successful
calibration of the WaterCAD model. With minimal calibrations, both models seem to
contain results which are comparable.
Table 4.1: Calibration Results – No Leak Scenario
Covas/Ramos Model WaterCAD Model
Node Head (m) Pressure (kPa) Head (m) Pressure (kPa) Percent Error (%)
T1 26 254 26.20 256.70 0.769
T2 26 254 26.07 255.29 0.269
T3 26 254 26.05 255.12 0.192
T4 26 254 26.03 254.92 0.115
T5 26 254 26.03 254.89 0.115
T6 26 254 25.83 252.95 0.654

34
After the model was properly calibrated using the no leak scenario pressures
throughout the model were compared. With the no leak scenario all pressures within
the distribution system were stabilized to an average pressure of 254‐255 kPa. The
highest pressure generated (258.16 kPa) was located in close proximity to the pump,
which was expected since the pump is responsible for charging the system. When
scenario #1 was performed using a leakage rate of 0.67 l/s at Leak #1 node, the pressures
at all nodes downstream of the pump in the system were affected. The node pressures
were decreased an average of 2.5 kPa at each node for a total system pressure of
approximately 251‐252 kPa. This decrease in pressure is not unusual or unexpected for
pipes downstream of the leak.
Data collected from both leakage scenarios revealed that the pump delivered
adequate flow to all nodes to satisfy their demands, however more power was needed
when Leak #1 was in operation due to the slightly larger demand of flow. Pump heads
remained the same for both scenarios. Approximately 10.5% more power is required to
operate the pump and deliver the additional flow as compared to the no leak scenario.
During Scenario #2 the demand of leakage for Leak #1 was reduced from 0.67 l/s
to 0.335 l/s. The results from scenario #2 are not surprising. As could be expected, the
pressure values from this scenario are larger than scenario #1 (Leak #1 = 0.67 l/s) and
smaller than the scenario which involved no leakage. Due to a smaller quantity of
water being released from the system through leakage, pressures within the system are
expected to be larger as compared to when greater quantities of water are released
through leakage. The pressure drop from this scenario is approximately half of the
pressure drop difference between the no leak and leakage of 0.67 l/s scenario. This can
be expected due to the leakage rate of 0.335 l/s is one half of the original leakage of 0.67
l/s used in Scenario 1. An average pressure drop of 1.28 kPa was experienced
throughout the system as compared to the no leak scenario. The effect of the pressure
variations occurred at all nodes downstream of the pump. The power required to
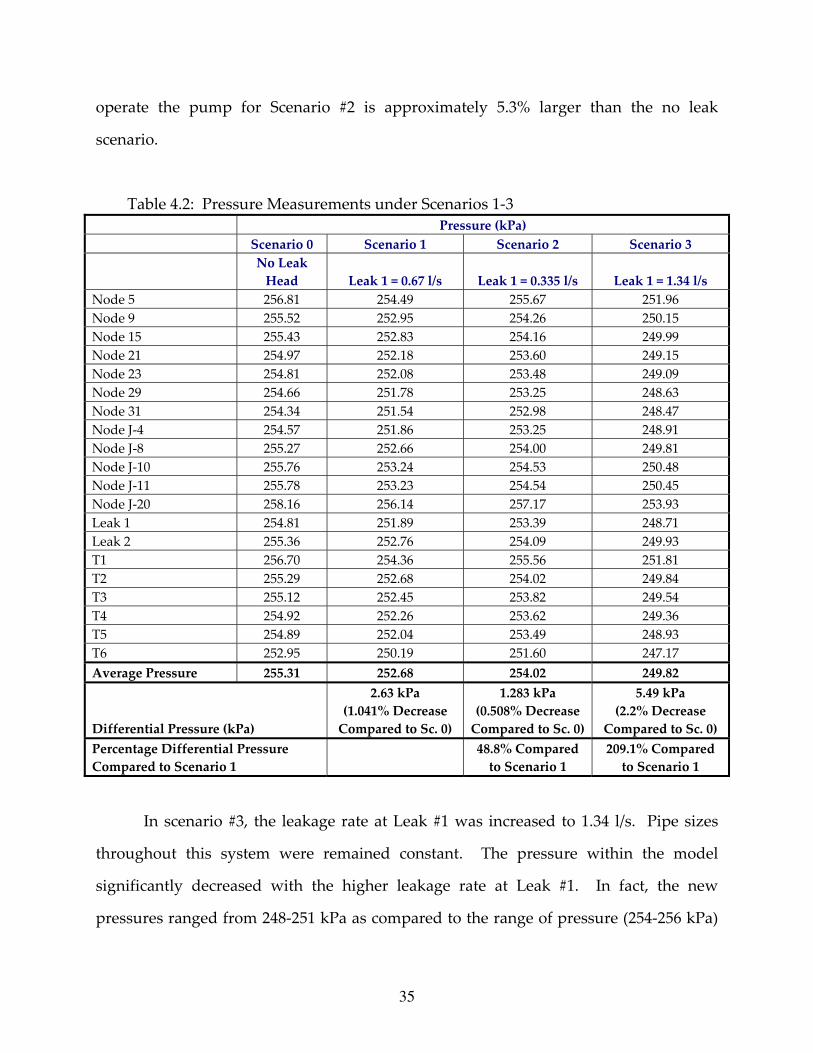
35
operate the pump for Scenario #2 is approximately 5.3% larger than the no leak
scenario.
Table 4.2: Pressure Measurements under Scenarios 1‐3 Pressure (kPa)
Scenario 0 Scenario 1 Scenario 2 Scenario 3
No Leak Head Leak 1 = 0.67 l/s Leak 1 = 0.335 l/s Leak 1 = 1.34 l/s
Node 5 256.81 254.49 255.67 251.96 Node 9 255.52 252.95 254.26 250.15 Node 15 255.43 252.83 254.16 249.99 Node 21 254.97 252.18 253.60 249.15 Node 23 254.81 252.08 253.48 249.09 Node 29 254.66 251.78 253.25 248.63 Node 31 254.34 251.54 252.98 248.47 Node J‐4 254.57 251.86 253.25 248.91 Node J‐8 255.27 252.66 254.00 249.81 Node J‐10 255.76 253.24 254.53 250.48 Node J‐11 255.78 253.23 254.54 250.45 Node J‐20 258.16 256.14 257.17 253.93 Leak 1 254.81 251.89 253.39 248.71 Leak 2 255.36 252.76 254.09 249.93 T1 256.70 254.36 255.56 251.81 T2 255.29 252.68 254.02 249.84 T3 255.12 252.45 253.82 249.54 T4 254.92 252.26 253.62 249.36 T5 254.89 252.04 253.49 248.93 T6 252.95 250.19 251.60 247.17 Average Pressure 255.31 252.68 254.02 249.82
Differential Pressure (kPa)
2.63 kPa (1.041% Decrease Compared to Sc. 0)
1.283 kPa (0.508% Decrease Compared to Sc. 0)
5.49 kPa (2.2% Decrease
Compared to Sc. 0) Percentage Differential Pressure Compared to Scenario 1
48.8% Compared to Scenario 1
209.1% Compared to Scenario 1
In scenario #3, the leakage rate at Leak #1 was increased to 1.34 l/s. Pipe sizes
throughout this system were remained constant. The pressure within the model
significantly decreased with the higher leakage rate at Leak #1. In fact, the new
pressures ranged from 248‐251 kPa as compared to the range of pressure (254‐256 kPa)

36
from the no leak scenario, creating the largest decrease in pressure. The calculated
water power was 1.96 kW, also a significant increase in power usage. This is
approximately 21.7% more power needed to operate the pump as compared to Scenario
0. See Table 4.2 for exact pressure measurements at each node in Scenarios 1‐3. Table
4.3 has been included to show the differential pressure decrease at each node. Although
there are slight variations throughout the model, the pressure variations are fairly
uniform throughout the distribution system.
Table 4.3: Differential Pressure Measurements for Scenarios 1‐3 Differential Pressure
Scenario 0 No Leakage
Scenario 1 Leak 1 = 0.67 l/s
Scenario 2 Leak 1 = 0.335 l/s
Scenario 3 Leak 1 = 1.34 l/s
Pressure Measurement
(kPa)
Differential Pressure (kPa)
Percent Decrease1 (%)
Differential Pressure (kPa)
Percent Decrease1 (%)
Differential Pressure (kPa)
Percent Decrease1 (%)
Node 5 256.81 2.32 0.903 1.14 0.444 4.85 1.889 Node 9 255.52 2.57 1.006 1.26 0.493 5.37 2.102
Node 15 255.43 2.6 1.018 1.27 0.497 5.44 2.130 Node 21 254.97 2.79 1.094 1.37 0.537 5.82 2.283 Node 23 254.81 2.73 1.071 1.33 0.522 5.72 2.245 Node 29 254.66 2.88 1.131 1.41 0.554 6.03 2.368 Node 31 254.34 2.8 1.101 1.36 0.535 5.87 2.308 Node J‐4 254.57 2.71 1.065 1.32 0.519 5.66 2.223
Node J‐8 255.27 2.61 1.022 1.27 0.498 5.46 2.139 Node J‐10 255.76 2.52 0.985 1.23 0.481 5.28 2.064 Node J‐11 255.78 2.55 0.997 1.24 0.485 5.33 2.084 Node J‐20 258.16 2.02 0.782 0.99 0.383 4.23 1.639 Leak 1 254.81 2.92 1.146 1.42 0.557 6.1 2.394 Leak 2 255.36 2.6 1.018 1.27 0.497 5.43 2.126
T1 256.7 2.34 0.912 1.14 0.444 4.89 1.905 T2 255.29 2.61 1.022 1.27 0.497 5.45 2.135 T3 255.12 2.67 1.047 1.3 0.510 5.58 2.187 T4 254.92 2.66 1.043 1.3 0.510 5.56 2.181 T5 254.89 2.85 1.118 1.4 0.549 5.96 2.338 T6 252.95 2.76 1.091 1.35 0.534 5.78 2.285
Percent Decrease1 : This is compared to Scenario 0 (No Leakage Scenario)

37
There appears to be a linear relationship between the leakage quantity and
pressure decreases within the system. The pressure decrease from Scenario 3 is
approximately double (209.1%) as the pressure decrease of Scenario 1. This is
significant because of the leakage quantity factors for each scenario. Also, in Scenario 2
the pressure decrease is approximately half (48.8%) of the pressure decrease as
compared to Scenario 1, which is the approximately the same factor when comparing
the leakage quantity between the two scenarios.
In Scenario 4, the only leakage rate was 0.67 l/s at a node closer to the pump
(node T1). The purpose of this scenario was to determine how a leakage rate moved
closer to the pumps would cause the pressure variations to respond. After the new
leakage rate was simulated, the pressures at all nodes decreased. The pressure drop
was an average of 2.33 kPa at most nodes thereby creating an average pressure within
the experimental water system of 252‐253 kPa. The calculated water power was 1.78
kW, approximately 5.3% larger than the no leak scenario.
Scenario 5 was used to create a new leakage location on the right side of the
model. Leak 2 was used to generate a leak of 0.67 l/s. This node was the sole leakage
location. The pressure results shown in Table 4.4 show that a pressure drop was
experienced throughout the system due to this leakage. An average pressure decrease
of 2.58 kPa occurred as compared to Scenario 0. The calculated water power was 1.78
kW, approximately 5.3% larger than the no leak scenario.
In Scenario #6, another leak was incorporated into the model from a total of two
leaks. Leak #1 was adjusted so that the demand was 0.335 l/s. In Leak #2 a leakage rate
of 0.335 l/s was also incorporated into the model at a location away from Leak #1. The
purpose of this scenario was to observe the variations in pressure due to two leakage
points at opposite ends of the water system. The results of this scenario indicate that
with two different leakage locations in a water system, the pressures throughout the
system are significantly impacted. The average pressures at all nodes ranged from 252‐

38
253 kPa creating an approximate 2.6 kPa pressure decrease in the system. These
decreases in pressure are affected throughout the system in both pipes upstream and
downstream of the leakage locations.
Table 4.5 displays the differential pressure at each node within the model and the
corresponding pressure decrease percentage. From this table it can be seen that there
are slightly higher pressure changes at nodes very close to the leakage nodes as
compared to nodes located further away from the leakage nodes. Slightly higher
pressure changes are also visible in pipes downstream of both leak locations and are
common to both leaks.
Table 4.4: Pressure Measurements under Scenarios 4‐6 Pressure (kPa)
Scenario 0 Scenario 4 Scenario 5 Scenario 6
No Leak Head T1 = 0.67 l/s Leak 2 = 0.67 l/s Leak 1 & 2= 0.335
l/s Node 5 256.81 254.49 254.49 254.49 Node 9 255.52 253.18 252.81 252.88 Node 15 255.43 253.09 252.8 252.82 Node 21 254.97 252.62 252.38 252.28 Node 23 254.81 252.47 252.19 252.14 Node 29 254.66 252.31 252.05 251.92 Node 31 254.34 252.00 251.73 251.64 Node J‐4 254.57 252.23 251.91 251.89 Node J‐8 255.27 252.94 252.54 252.61 Node J‐10 255.76 253.43 253.17 253.21 Node J‐11 255.78 253.44 253.28 253.25 Node J‐20 258.16 256.14 256.14 256.14 Leak 1 254.81 252.47 252.21 252.06 Leak 2 255.36 253.02 252.58 252.67 T1 256.70 254.35 254.37 254.36 T2 255.29 252.95 252.55 252.62 T3 255.12 252.78 252.50 252.48 T4 254.92 252.58 252.23 252.25 T5 254.89 252.55 252.29 252.17 T6 252.95 250.61 250.31 250.26 Average Pressure 255.31 252.98 252.73 252.71
Differential Pressure (kPa)
2.33 kPa (0.918% Decrease Compared to Sc. 0)
2.58 kPa (1.021% Decrease Compared to Sc. 0)
2.6 kPa (1.028% Decrease Compared to Sc. 0)

39
Table 4.5: Differential Pressure Measurements for Scenarios 4‐6
Differential Pressure (kPa) Scenario 0 Scenario 4 Scenario 5 Scenario 6
No Leakage Leak at T1 = 0.67 l/s Leak 2 = 0.67 l/s Leak 1 & 2 = 0.335 l/s
Pressure Measurement
(kPa)
Differential Pressure (kPa)
Percent Decrease1 (%)
Differential Pressure (kPa)
Percent Decrease1 (%)
Differential Pressure (kPa)
Percent Decrease1 (%)
Node 5 256.81 2.32 0.903 2.32 0.903 2.32 0.903 Node 9 255.52 2.34 0.916 2.71 1.061 2.64 1.033
Node 15 255.43 2.34 0.916 2.63 1.030 2.61 1.022 Node 21 254.97 2.35 0.922 2.59 1.016 2.69 1.055 Node 23 254.81 2.34 0.918 2.62 1.028 2.67 1.048 Node 29 254.66 2.35 0.923 2.61 1.025 2.74 1.076 Node 31 254.34 2.34 0.920 2.61 1.026 2.7 1.062 Node J‐4 254.57 2.34 0.919 2.66 1.045 2.68 1.053
Node J‐8 255.27 2.33 0.913 2.73 1.069 2.66 1.042 Node J‐10 255.76 2.33 0.911 2.59 1.013 2.55 0.997 Node J‐11 255.78 2.34 0.915 2.5 0.977 2.53 0.989 Node J‐20 258.16 2.02 0.782 2.02 0.782 2.02 0.782 Leak 1 254.81 2.34 0.918 2.6 1.020 2.75 1.079 Leak 2 255.36 2.34 0.916 2.78 1.089 2.69 1.053
T1 256.7 2.35 0.915 2.33 0.908 2.34 0.912 T2 255.29 2.34 0.917 2.74 1.073 2.67 1.046 T3 255.12 2.34 0.917 2.62 1.027 2.64 1.035 T4 254.92 2.34 0.918 2.69 1.055 2.67 1.047 T5 254.89 2.34 0.918 2.6 1.020 2.72 1.067 T6 252.95 2.34 0.925 2.64 1.044 2.69 1.063
Percent Decrease1 : This is compared to Scenario 0 (No Leakage Scenario)
By initial assumption, it would be predicted that the pressures upstream of a leak
location should not be affected by a leak. However, as the computer simulations
demonstrate upstream pressures are affected by leakage. In order to overcome these
pressure fluctuations upstream of the leaks, a proper pump must be chosen which can
provide additional flow to overcome the amount of water lost in leakage.

40
Although the evaluation of power usage was not a research objective, it was
evaluated. Table 4.6 shows the power usage of Scenario 0‐6. There appears to be a
correlation between the leakage quantity and the power usage. Scenario 1, 4, 5 and 6
have a leakage quantity of 0.67 l/s and share the same power usage of 1.78 kW. The
remaining scenarios share a relationship between power and leakage such that the
power usage increases as the leakage quantity increases and decreases when the
leakage quantity decreases. It is important to note that the no leakage scenario requires
the least amount of power to operate the pump.
Table 4.6: Power Usage for Scenarios 1‐6
Scenario No. Power Usage (kW) Scenario 0 1.61
Scenario 1 1.78
Scenario 2 1.69
Scenario 3 1.96
Scenario 4 1.78
Scenario 5 1.78
Scenario 6 1.78
The results of the leak location analysis, though significant, are not surprising. A
leak present at any node causes every node to respond. Moreover, leaks at downstream
nodes cause a greater degree of pressure reduction, both in terms of the magnitude of
reduction and the number of nodes with reductions over a given quantity.
Equation 2 states that while there are pressure differences within a pipe, there is
leakage of flow through an orifice. This has proven true for the results of this
experiment as points of leakage have caused a fairly significant change in pressure both
upstream and downstream of the leakage.
Table 4.7 and 4.8 show the head losses within each pipe in the WaterCAD model.
When each scenario is compared, several data similarities were noted. There are two

41
pipes within the system that never had a change in head losses, despite the different
leakage rate in each scenario. Pipes P‐33 and P‐34 had a constant headloss of 2.775
meters/kilometers and 0.943 meters, respectively. This is possibly due to the location of
each pipe. P‐33 is located upstream of the flow control valve (FCV), while P‐34 is
located downstream of the flow control valve suggesting that the valve controls the
flow in each pipe regardless of the leakage rate. It is reasonable to expect the head
losses in close proximity of the valve to be affected, however it is not expected that the
head losses could be completely controlled by the valve. A combination of the effects
from the pump or pressurized vessel with the FCV could generate an effect which
would have amore dominant effect on the velocity of flow through the pipes and hence
a larger weight of pipe head losses.
By comparing the total head loss from each scenario, it is observed that Scenario
3 (Leak 1 = 1.34 l/s) produces the greatest total head loss from friction and related pipe
head losses. This could be expected because of the largest flows through the system (a
total of 7.34 l/s). When Scenario 1 and 4 were compared it can be seen that Scenario 1
produced a higher total pipe headloss, which at first glance would suggest that a leak
closer to the pump would produced less pipe headloss. Recall that Scenario 1 and 4
have the same leakage rate (0.67 l/s), but a different locations on a pipeline. However
when Scenario 1 and Scenario 5 were compared, it was observed that Scenario 1 had a
slightly high pipe headloss value. This comparison would suggest that a leak closer to
the pump will produce more pipe headloss, contrary to what was originally suggested.
Overall the smallest pipe headloss resulted from the no leak scenario which is
reasonable because this contained the smallest flow through the model (6 l/s).

42
Table 4.7: Pipe Head Losses in Scenario 0‐3
Head Losses due to Friction
Scenario 0 Scenario 1 Scenario 2 Scenario 3
Node ID Length (m)
Headloss Gradient (m/km)
Pipe Headloss (m)
Headloss Gradient (m/km)
Pipe Headloss (m)
Headloss Gradient (m/km)
Pipe Headloss (m)
Headloss Gradient (m/km)
Pipe Headloss (m)
P‐1 2.00 15.91 0.032 12.08 0.024 14 0.028 8.31 0.017 P‐2 2.00 71.25 0.143 66.78 0.134 70.05 0.140 66 0.132 P‐3 2.00 82.68 0.165 85.37 0.171 83.97 0.168 88.49 0.177 P‐4 2.00 12.52 0.025 10.85 0.022 11.68 0.023 9.23 0.018 P‐5 2.00 23.95 0.048 27.45 0.055 25.6 0.051 31.72 0.063 P‐7 2.00 7.87 0.016 5.21 0.010 6.46 0.013 3.17 0.006 P‐9 2.00 7.77 0.016 8.36 0.017 8.05 0.016 9.12 0.018 P‐12 2.00 12.48 0.025 14.67 0.029 13.55 0.027 17.12 0.034 P‐13 2.00 17.2 0.034 20.98 0.042 19.05 0.038 25.11 0.050 P‐14 2.00 18.28 0.037 20.74 0.041 19.45 0.039 23.67 0.047 P‐15 2.00 41.75 0.084 53.89 0.108 47.73 0.095 66.71 0.133 P‐17 2.00 53.27 0.107 63.89 0.128 58.44 0.117 75.59 0.151 P‐18 1.00 31.34 0.031 38.36 0.038 34.74 0.035 46.2 0.046 P‐19 1.00 31.34 0.031 38.36 0.038 34.74 0.035 46.21 0.046 P‐20 1.00 36.09 0.036 40.85 0.041 38.38 0.038 46.32 0.046 P‐21 1.00 36.09 0.036 40.85 0.041 38.38 0.038 46.32 0.046 P‐22 0.15 12.48 0.002 14.68 0.002 13.55 0.002 17.12 0.003 P‐24 0.90 104.38 0.094 128.25 0.115 116.07 0.104 154.08 0.139 P‐25 0.10 104.39 0.010 128.25 0.013 116.06 0.012 154.08 0.015 P‐26 1.00 15.91 0.016 12.09 0.012 14 0.014 8.31 0.008 P‐27 0.50 15.91 0.008 29.07 0.015 22.12 0.011 44.85 0.022 P‐28 0.50 15.91 0.008 29.07 0.015 22.12 0.011 44.85 0.022 P‐29 0.55 12.49 0.007 14.67 0.008 13.55 0.007 17.12 0.009 P‐30 1.30 12.48 0.016 14.67 0.019 13.54 0.018 17.12 0.022 P‐31 0.50 277.49 0.139 337.59 0.169 306.87 0.153 403.08 0.202 P‐33 0.50 277.49 0.139 277.49 0.139 277.49 0.139 277.49 0.139 P‐34 10.00 277.49 2.775 277.49 2.775 277.49 2.775 277.49 2.775 P‐35 3.40 277.49 0.943 337.6 1.148 306.87 1.043 403.07 1.370 P‐36 11.58 0.73 0.008 0.89 0.010 0.81 0.009 1.06 0.012 Total Head Loss: 5.030 5.378 5.201 5.773

43
Table 4.8: Pipe Head Losses in Scenario 4‐6
Head Losses due to Friction
Scenario 0 Scenario 4 Scenario 5 Scenario 6
Node ID Length (m)
Headloss Gradient (m/km)
Pipe Headloss (m)
Headloss Gradient (m/km)
Pipe Headloss (m)
Headloss Gradient (m/km)
Pipe Headloss (m)
Headloss Gradient (m/km)
Pipe Headloss (m)
P‐1 2.00 15.91 0.032 15.88 0.032 16.58 0.033 14.29 0.029 P‐2 2.00 71.25 0.143 71.22 0.142 72.28 0.145 70.52 0.141 P‐3 2.00 82.68 0.165 82.71 0.165 81.58 0.163 83.47 0.167 P‐4 2.00 12.52 0.025 12.47 0.025 14.47 0.029 12.58 0.025 P‐5 2.00 23.95 0.048 23.96 0.048 23.77 0.048 25.53 0.051 P‐7 2.00 7.87 0.016 7.8 0.016 9.39 0.019 7.14 0.014 P‐9 2.00 7.77 0.016 7.71 0.015 13.35 0.027 10.71 0.021 P‐12 2.00 12.48 0.025 12.61 0.025 18.37 0.037 16.51 0.033 P‐13 2.00 17.2 0.034 17.52 0.035 18.86 0.038 19.87 0.040 P‐14 2.00 18.28 0.037 17.94 0.036 24.16 0.048 22.4 0.045 P‐15 2.00 41.75 0.084 41.56 0.083 46.02 0.092 49.91 0.100 P‐17 2.00 53.27 0.107 54.05 0.108 67.19 0.134 65.53 0.131 P‐18 1.00 31.34 0.031 31.42 0.031 31.25 0.031 34.66 0.035 P‐19 1.00 31.34 0.031 31.42 0.031 31.25 0.031 34.66 0.035 P‐20 1.00 36.09 0.036 36.18 0.036 32.37 0.032 36.53 0.037 P‐21 1.00 36.09 0.036 36.18 0.036 32.37 0.032 36.53 0.037 P‐22 0.15 12.48 0.002 12.62 0.002 5.41 0.001 9.53 0.001 P‐24 0.90 104.38 0.094 103.32 0.093 123.78 0.111 126.01 0.113 P‐25 0.10 104.39 0.010 142.69 0.014 123.78 0.012 126.02 0.013 P‐26 1.00 15.91 0.016 15.88 0.016 16.58 0.017 14.29 0.014 P‐27 0.50 15.91 0.008 15.88 0.008 16.58 0.008 22.47 0.011 P‐28 0.50 15.91 0.008 15.88 0.008 16.58 0.008 22.47 0.011 P‐29 0.55 12.49 0.007 12.61 0.007 5.4 0.003 9.54 0.005 P‐30 1.30 12.48 0.016 12.61 0.016 18.37 0.024 16.51 0.021 P‐31 0.50 277.49 0.139 337.59 0.169 337.6 0.169 337.6 0.169 P‐33 0.50 277.49 0.139 277.49 0.139 277.49 0.139 277.49 0.139 P‐34 10.00 277.49 2.775 277.49 2.775 277.49 2.775 277.49 2.775 P‐35 3.40 277.49 0.943 337.6 1.148 337.6 1.148 337.6 1.148 P‐36 11.58 0.73 0.008 0.89 0.010 0.89 0.010 0.89 0.010 Total Head Loss: 5.030 5.271 5.364 5.371

44
From the results of the seven scenarios performed with the WaterCAD software,
pressure profiles at specific routes within the model were generated. In fact, there were
three primary routes which were chosen to generate pressure profiles. The first route,
shown in Figure 4.1, begins at node R‐2 and ends 36 meters later at the Reservoir node.
This route incorporates the Leak 1 node so that pressure variations around this node
can be compared. The complete profile can be viewed in Figure 4.2. This figure shows
that the initial pressure at node R‐2 was zero and remained zero until it reached the
pump which dramatically increased to approximately 268.5 kPa. The final pressure at
the Reservoir node was also zero due to the water coming in contact with surface
pressure. More detailed views of the profile between the pump and the flow control
valve can be seen in Figures 4.3 and 4.4.
Figure 4.1: Pressure Profile Path for the Left Side of Model
Pressure Profile Path

45
Pressure Profile for Left Side (Scenario 0‐6)
0
30
60
90
120
150
180
210
240
270
0 5 10 15 20 25 30 35 40
Distance (m)
Pressure (kPa)
Scenario 0Scenario 1Scenario 2Scenario 3Scenario 4Scenario 5Scenario 6
Figure 4.2: Left Side Pressure Profile for Scenario 0‐6
Figure 4.4 shows the variations of pressure between each scenario with great
clarity. At a distance of 19.5 meters is the Leak 1 node. Pressure downstream of this
node seems to decrease fairly sharp as a result of any leakage from this area. There
appears to be a large variation in pressure decreases due to leakage quantity between
Scenarios 1‐3. Scenario 3 is mostly outside the graph area due to extremely low
pressures from the high leakage rate at Leak 1. However, when pressure variations due
to changes in leakage location are compared, there does not appear to be much
variation in pressure quantities. It is important to note that the highest pressures come
from Scenario 0 which has no leakage.

46
Pressure Profile for Left Side (Scenario 0‐6)
245
250
255
260
265
270
10 12 14 16 18 20 22 24 26 28 30
Distance (m)
Pressure (k
Pa)
Scenario 0Scenario 1Scenario 2Scenario 3Scenario 4Scenario 5Scenario 6
Figure 4.3: Enlarged Pressure Profile for Scenario 0‐6 (Left Side)
Pressure Profile for Left Side (Scenario 0‐6)
250
250.5
251
251.5
252
252.5
253
253.5
254
254.5
255
255.5
256
256.5
257
257.5
258
14 15 16 17 18 19 20 21 22 23 24 25 26 27 28
Distance (m)
Pressure (k
Pa)
Scenario 0Scenario 1Scenario 2Scenario 3Scenario 4Scenario 5Scenario 6
Figure 4.4: Enlarged Pressure Profile for Scenario 0‐6 (Left Side)

47
The second pressure profile was created using the route shown in Figure 4.5.
This route begins at node R‐2 and ends at the Reservoir node for a total distance of 36
meters. This route contains no leakage points and is located half the distance between
Leak 1 and Leak 2. Figure 4.6 shows the pressure profile for the entire 36 meter route.
The pressure located at the pump location appears to be the same as shown in Figure
4.2. The pressures at a distance of 0 and 36 meters are zero due to the surface pressure
at each reservoir. More detailed views of the pressures between the pump and the flow
control valve are shown in Figures 4.7 and 4.8.
Figure 4.5: Pressure Profile Path for Middle of Model
Pressure Profile Path

48
Pressure Profile for Middle (Scenario 0‐6)
0
30
60
90
120
150
180
210
240
270
0 5 10 15 20 25 30 35 40
Distance (m)
Pressure (kPa)
Scenario 0Scenario 1Scenario 2Scenario 3Scenario 4Scenario 5Scenario 6
Figure 4.6: Middle Pressure Profile for Scenario 0‐6
Pressure Profile for Middle (Scenario 0‐6)
245
250
255
260
265
270
10 12 14 16 18 20 22 24 26 28 30
Distance (m)
Pressure (k
Pa)
Scenario 0Scenario 1Scenario 2Scenario 3Scenario 4Scenario 5Scenario 6
Figure 4.7: Enlarged Pressure Profile for Scenario 0‐6 (Middle)

49
Pressure Profile for Middle (Scenario 0‐6)
250
250.5
251
251.5
252
252.5
253
253.5
254
254.5
255
255.5
256
14 15 16 17 18 19 20 21 22 23 24 25 26 27 28
Distance (m)
Pressure (kPa)
Scenario 0Scenario 1Scenario 2Scenario 3Scenario 4Scenario 5Scenario 6
Figure 4.8: Enlarged Pressure Profile for Scenario 0‐6 (Middle)
Figure 4.8 shows a more spread out display of pressures from each scenario.
However, the pressures caused by Scenario 1, 4, 5 and 6 are closely grouped together.
Scenario 3 continues to display low pressures which stretch outside the graph area.
Scenario 0 remains the pressure profile with the highest pressures in the model.
Scenario 2, with a leakage rate at Leak 1 of 0.335 l/s, has the second highest pressures in
the model. It appears that the pressures begin to sharply decrease at a distance of 20.5
meters from the node R‐2. This distance corresponds to node T3 which is located
almost directly in the middle of the model, both horizontally and vertically.

50
The third and final pressure profile is located on the right side of the model. This
layout is shown in Figure 4.9 and includes the Leak 2 node. Similar to the previous two
profiles, this route begins at node R‐2 and ends at the Reservoir node which is a total of
36 meters long. Figure 4.10 displays the entire pressure profile for this route. The
pump continues to increase the pressure to approximately 268.5 kPa. Pressures at both
the beginning and ending reservoirs are zero due to surface water pressures. See
Figures 4.11 and 4.12 form ore detailed views of the pressures at each scenario between
the pump location and the flow control valve.
Figure 4.9: Pressure Profile Path for the Right Side of the Model
Pressure Profile Path

51
Pressure Profile for Right Side (Scenario 0‐6)
0
30
60
90
120
150
180
210
240
270
0 5 10 15 20 25 30 35 40
Distance (m)
Pressure (kPa)
Scenario 0Scenario 1Scenario 2Scenario 3Scenario 4Scenario 5Scenario 6
Figure 4.10: Right Side Pressure Profile for Scenario 0‐6
Pressure Profile for Right Side (Scenario 0‐6)
245
250
255
260
265
270
10 12 14 16 18 20 22 24 26 28 30
Distance (m)
Pressure (k
Pa)
Scenario 0Scenario 1Scenario 2Scenario 3Scenario 4Scenario 5Scenario 6
Figure 4.11: Enlarged Pressure Profile for Scenario 0‐6 (Right Side)

52
Pressure Profile for Right Side (Scenario 0‐6)
251
251.5
252
252.5
253
253.5
254
254.5
255
255.5
256
14 15 16 17 18 19 20 21 22 23 24 25 26 27 28
Distance (m)
Pressure (kPa)
Scenario 0Scenario 1Scenario 2Scenario 3Scenario 4Scenario 5Scenario 6
Figure 4.12: Enlarged Pressure Profile for Scenario 0‐6 (Right Side)
Figure 4.12 shows a detailed view of the pressures between the distance of 15
meters and 25 meters. Similar to the pressure profile for the middle, Scenarios 0, 2 and
3 seem to be disbursed more. Scenarios 1, 4, 5 and 6 are spaced very close to each other.
Scenarios 5 and 6 are the only scenarios which involved leakage within the Leak 2 node.
Due to their similar pressure with scenarios 1 and 4 it appears that which the leakage
rate throughout the system was 0.67 l/s the pressures at the nodes where similar. Recall
that the total leakage rate in each of the four scenarios was 0.67 l/s.

53
CHAPTER 5
DISCUSSION
Possible Modeling Errors/Calibrations
It is important to note that a model is only as good as the data that it contains.
Thus the more accurate information and data that comprises the computer model, the
more accurate the results will be. A lack of information will lead to uncertainty and
almost always be visible in the final results. As engineers it is important to note these
assumptions so that calibrations can be performed after the initial results are derived. If
the use of calibrating the model seems futile, the use of certain assumptions should be
duly recorded so that an explanation of the results can be compiled.
If the characteristics of the system are well known, the need for field procedures
is greatly lessened; analysis can be done with much less data by using computational
algorithms. Essentially the same inverse techniques can be used to calibrate
distribution systems (Pudar and Liggett, 1992).
Covas and Ramos (2001) developed their experiment using the metric units, as is
typically customary in foreign countries. The use of measuring pressure within this
experiment in units of kilopascals (kPa) is extremely beneficial. A pascal (Pa) is a
sensitive measurement unit and compared to English units is equal to 1.4503x10‐4 psi or
1 psi is equal to 6,895 pascals. Therefore, the use of this metric unit is beneficial in
detecting small changes of pressure within the WaterCAD model. With a more
sensitive measurement perhaps the leakage detection and location approximation can
become more accurate and more beneficial to the outcome of the experiment. The
results in Table 4.1 demonstrate a successful calibration of the model. This is essential
to providing accurate results for the different scenarios and their corresponding
leakage.

54
Discussion of Results
As previously mentioned in Chapter 2, the Bernoulli equation is relevant for this
experiment and can be simplified based on parameters used within this research. The
parameters specific to this experiment are shown below:
= 9.81 kN/m3
V1,2 = assumed to be the same for both upstream and downstream of the leak location
g1,2 = 9.81 m2/s for both upstream and downstream of the leak location
z1,2 = 0 for both upstream and downstream of the leak location
1,2 = 1.05 for both upstream and downstream of the leak location
Using these parameters, the Bernoulli equation can be simplified to the following
form:
(p1 / ) = (p2 / ) + hL
p1 = p2 + hL•
Δp = (p1‐p2) = hL• (Eqn. 4)
Equation 4, which is specific only to this example, states that the pressure drop
within a pipe segment is dependent upon the head losses and unit weight of water. All
elevations of pipes and nodes have been set to zero; therefore there is no head loss due
to static head. Note that the velocity both upstream and downstream of the leak have
been assumed to be equal. Although this assumption is not entirely true, the velocity
difference surrounding the leakage point is small enough to disregard and can be
assumed to be equal for equation simplification purposes. In this simple experiment
the only head losses which could occur are due to friction losses through pipe
roughness and leakage. This is reasonable due to the simplicity of this model.

55
Although the experiment expressed in this research relies on a single pump to
provide pressure for the distribution system, the hydraulic grade lines at each water
source should be similar. The pressure head at the pump should be the highest point
on the hydraulic grade line, as demonstrated in Figure 4.3, 4.7, and 4.11. The HGL is
composed of both the elevation (z) and the pressure head (p/ ), but because all
elevations within the experiment have been set at zero, the hydraulic grade line is
affected only by pressure head. The head losses in this experiment are affected by
pressure heads upstream and downstream of the leak as well. Equation 4 can be
rearranged to generate:
hL = p1/ – p2/ (Eqn. 5)
This equation simply states the difference in pressure heads at the upstream and
downstream locations of the leakage is equal to the head losses at the leakage point.
Therefore, the head losses in the distribution system were primarily dependent upon
pressure head.
Frictional losses were not expected to be large because of the short lengths of
pipe within the experiment and fairly low velocity flowing through the pipes. The
headloss results for each scenario of the experiment, shown in Table 4.7 and 4.8, confirm
this initial assumption. The differential head loss in each scenario is fairly small when
compared with Scenario 0. For the no leak scenario a total head loss due to pipe head
loss was 5.03 meters. When a leakage of 0.67 l/s at Leak 1 node was incorporated into
the model the pipe headloss increased to 5.378 meters. Very similar pipe headloss
results were obtained from Scenario 5 and 6 (5.364 and 5.371 meters, respectively).
When the leakage location was moved to the Leak 2 node in Scenario 6, the headloss
value varied 0.007 meters from the headloss value from Scenario 1. Scenario 5
generated a total pipe headloss which decreased 0.014 meters as compared to Scenario
1. It appears that the location of the leakage does have an effect on the quantity of

56
headloss, however this effect is minimal. Scenario 4, which moved the leakage location
to the T1 node (closer to the pump), produced a decrease in pressure of 0.107 meters, as
compared to Scenario 1, which confirms the fact that leakage location does affect
headloss values. It is important to note that all headloss variations from Scenarios 1‐6
increased the head loss quantities as compared to the no leak scenario.
The effects of leakage quantities on headloss values were evaluated as well.
Headloss values were the highest when a leakage rate of 1.34 l/s was generated at the
Leak 1 node during Scenario 3 (5.773 meters). The value was lowest, excluding the no
leak scenario, when the leakage rate of 0.335 l/s in Scenario 2 was generated (5.201
meters). It appears that there is a relationship between the headloss values generated
within the pipes and the quantity of leakage. This is no surprise since pipe headloss is
primarily controlled by headloss through friction which is strongly dependent upon
velocity of fluid within the pipe. The higher the velocity of the fluid within a pipe
segment, the higher the friction losses should be. Of course the pipe characteristics such
as diameter, length and roughness coefficient also have a contribution to producing
headloss, however these factors are not as dominant as the velocity of fluid. It is also
important to note that velocity is contingent upon the diameter of pipe which the fluid
is flowing through. Velocity not only contributes to the headloss quantities within the
pipes, but also to the hydraulic and energy grade line as shown in Figure 2.2 and 2.3. In
fact the difference between the HGL and EGL is the velocity head (V2/2g).
Decrease in pressure in Scenario #1, #2, and #3 resulting from leakage within the
experimental water system seems to be fairly uniform across all nodes. If a pressure
decrease occurs, as in scenario #1, #2, and #3, the differential decrease seems to be
constant across the nodes both upstream and downstream of the leakage location.
Nodes upstream of the pump do not seem to be affected by the leakage. This is
reasonable due to the pump being the sole provider of pressure within the system.
Pressures are also unaffected at nodes downstream of the flow control valve (node

57
FCV‐1). This is justifiable since the water within the pipe being discharged to the
Reservoir which contains surface pressures of 0 kPa. Although pressure within pipe P‐
34 just downstream of FCV‐1 is not zero, WaterCAD calculates pressures within pipes
at the most downstream point. For node P‐36 this point of pressure will be located at
the Reservoir and is equal to zero, thus the result shown in the pressure profiles in
Figures 4.2 ‐ 4.13.
From the pressure results due to Scenarios 4‐6, several comparisons can be made.
Because Covas and Ramos (2001) utilized a leakage rate of 0.67 l/s during the course of
their experiment, the same total leakage rate was frequently maintained within this
experiment. Scenarios 1, 4, 5 and 6 utilized a total leakage of 0.67 l/s. From the node
pressures expressed in Table 4.4 and 4.5, it can be observed that these scenarios contain
fairly similar pressures at each node. In fact, the pressure results shown for Scenarios 1,
4, 5 and 6 are similar to each other suggesting that leakage location has a minimal effect
on pressure variations, however it does have an effect. It appears that the pressure
decreases throughout the water system are fairly uniform and there is not a linear
relationship between the leakage location and the pressure decreases. When the
leakage of 0.67 l/s was moved closer to the pump, in Scenario 4, the pressure
measurements at all nodes increased slightly which implies that as the leakage is moved
further from the source of pressure for the system (i.e. pumps, elevated tank, etc.) the
pressure measurements will decrease throughout the system. The pressure variations
in Scenario 4 also suggest that the closer a leak is located to the water source (pump,
elevated tank, etc.) the more likely the pressure results are to be slightly higher
throughout the system. The comparison of Scenario 1 and Scenario 5 imply the same
results. Leak 1 is closer to the pump as a compared to Leak 2, thus most likely the
reasoning behind pressures in the system being approximately 0.1 kPa higher than the
pressure results derived from Scenario 5.

58
Although Scenario 2 and 3 varied from the standard leakage rate of 0.67 l/s, the
purpose of these scenarios was to compare the variation of leakage at a single source.
Based on the comparison of Scenario 1, 2 and 3, Scenario 3 (leakage of 1.34 l/s) produced
results the lowest pressure values, while Scenario 2 (leakage of 0.335 l/s) produced the
highest pressure values excluding the no leak scenario. These results imply that the
larger the leakage quantities the smaller the residual pressure values will be. There
appears to be a linear relationship between the leakage quantity and the pressure
decreases within the system. If the leakage rate is increased to twice the original
leakage quantity (as in Scenario 3) the pressure decreases will increase approximately
twice the original amount. In an overall comparison of all scenarios, it can be observed
that leakage at any node regardless of the quantity or location will reduce the pressure
within a distribution system.
As shown in Figures 4.2 ‐ 4.13, a line displaying the pressure at three specific
routes was generated for all six scenarios. These figures are beneficial in comparing
pressures from one scenario in different pipes. The first profile included a path on the
left side of the experimental distribution system and Figure 4.4 shows an enlarged view
of the pressure profile. This profile shows that the higher the leakage rate the lower the
pressures within the system whereas no leakage produces higher pressures within the
system. The lower the leakage rate and the closer the leakage locations are to the pump
the more likely the pressures are to be larger. Of course, it is important to note that no
leakage will produce the highest pressure. Figure 4.8 and 4.12 show the pressure
profiles for the middle and right side section of pipes within the distribution system.
The results discussed above are applicable for both pressure profiles in the middle and
right side as well as the left side profile.
Analysis of the single leaky pipe within this experiment indicated it cannot be
determined whether leak location affects energy consumption of the pump. Although
direct extrapolation of this analytical result is not feasible for distribution networks, it is

59
logical to expect that leaks situated at the most downstream portions of a network will
often involve a larger energy cost, because the larger flows must be transmitted through
a great portion of the system. Also, the power required to push larger flows
downstream in a system will result in larger frictional head losses, thus requiring more
energy for the pump. However, it is important to note that additional head losses, such
as static head, much also be considered. The energy required to operate the pumps and
other pressure control apparatus’ is based on total dynamic head (TDH), which
accounts for all head losses, both frictional and static. Therefore the TDH should
always be considered before a definite conclusion can be derived. In this experiment,
all elevations were set at 0, thereby making static head a null factor.
In fact, it appears that the power usage results from the WaterCAD software
were dependent solely upon the quantity of leakage. For Scenarios 1, 4, 5, and 6, all
contained a total leakage rate of 0.67 l/s and the power usage calculations yielded a
usage of 1.78 kW for each scenario. Scenario 2 contained a total leakage rate one half
the amount as used in Scenario 1, 4, 5 and 6 and the power usage proved to be
approximately one half of the quantity used in Scenario 1, 4, 5, and 6. See Table 4.6 for
exact quantities of power usage results for each scenario. Because there is no calibration
technique for the verification of the power usage calculations it is difficult to discern the
accuracy of these calculations. However it is reasonable to assume that the power
needed to operate a pump would be dependent upon the quantity of water the pump
must deliver to a water system. This is, in fact, also dependent upon the length of time
the pump will need to operate.
Additional Experiments – Scenario 7 and Scenario 8
After the evaluation of the results derived from Scenarios 0‐6, another test was
performed to determine if there is a relationship between the pressure decreases in a
water system due to leakage and the size of the water system. The existing model, as

60
previously discussed in the Methodology section, was scaled to two times the size of the
original model for the evaluation of Scenario 7 and 8. All pipes lengths were increased
to two times the original lengths. The pipe diameters were kept at the original
parameters of 45 mm. The leakage rate in Scenario 7 was kept to the constant 0.67 l/s
leakage rate, similar to quantity used in Scenarios 1, 4, 5 and 6. However Scenario 8
utilized a leakage rate of 1.34 l/s (twice the original 0.67 l/s leakage rate). The purpose
of these experiments was to compare how the size of a water distribution system can
affect pressures within the system. The calculated pressures from this experiment are
shown in Table 5.1.
Scenario 7 involved the original leakage rate of 0.67 l/s at the Leak 1 node and the
constant base flow of 6 l/s. This provides a leakage rate of approximately 11.2%. The
purpose of this scenario was to determine the effects of the distribution size on the
pressure variations. The only variation between Scenario 7 and Scenario 1 are the pipe
lengths.
Scenario 8 was performed to evaluate effects of increasing the leakage rate to 1.34
l/s while maintaining a base flow of 6 l/s. This provides a leakage rate of approximately
22.3% which is comparable to the leakage quantity in Scenario 3. Again, the pipe
lengths were twice the original lengths (similar to Scenario 7).
From the results for both Scenario 7 and 8 it can be observed that much larger
pressure decreases are experienced at each node within the water system model due to
the increase in pipe lengths. Furthermore it appears that the pressure decreases are
fairly uniform across each node as in the previous experiment discussed in Chapters 3
and 4. However, some nodes located closer to the leakage location appear to have
larger pressure decreases as compared to the remaining nodes within the water system
model. The pressure decreases in the nodes upstream of the leakage are smaller
decreases compared to the nodes downstream of the leakage location. The nodes which
are downstream of the leakage contain pressure decreases which are larger than any

61
other nodes in the water system. This suggests that pressure decreases from Scenario 7
and 8 are affected by the location of the nodes relative to the leakage node. However, it
is important to note that all pressures within the system downstream of the pump are
affected by the leakage location.
Table 5.1: Pressure Measurements from Scenario 7 and Scenario 8
Differential Pressure Scenario 0 Scenario 7 Scenario 8
No Leakage Leak 1 = 0.67 l/s Leak 1 = 1.34 l/s
Pressure Measurement
(kPa)
Pressure Measurement
(kPa)
Percent Decrease1 (%)
Pressure Measurement
(kPa)
Percent Decrease1 (%)
Node 5 256.81 251.94 1.90 246.87 3.87 Node 9 255.52 250.12 2.11 244.51 4.31
Node 15 255.43 249.97 2.14 244.28 4.37 Node 21 254.97 249.11 2.30 243.04 4.68 Node 23 254.81 249.08 2.25 243.08 4.60 Node 29 254.66 248.61 2.38 242.30 4.85 Node 31 254.34 248.46 2.31 242.31 4.73 Node J‐4 254.57 248.88 2.24 242.97 4.56
Node J‐8 255.27 249.79 2.15 244.08 4.38 Node J‐10 255.76 250.47 2.07 244.94 4.23 Node J‐11 255.78 250.42 2.09 244.85 4.27 Node J‐20 258.16 253.92 1.64 249.49 3.36 Leak 1 254.81 248.68 2.41 242.30 4.91 Leak 2 255.36 249.90 2.14 244.23 4.36
T1 256.7 251.78 1.92 246.68 3.91 T2 255.29 249.81 2.15 244.12 4.38 T3 255.12 249.51 2.20 243.68 4.48 T4 254.92 249.34 2.19 243.52 4.47 T5 254.89 248.91 2.35 242.67 4.79 T6 252.95 247.15 2.29 241.10 4.68
Average Percent Decrease (%) 2.16 4.41 Percent Decrease1 : This is compared to Scenario 0 (No Leakage Scenario)

62
Scenario 7 and Scenario 8 differ in the respect that the leakage rate in Scenario 8
is double the leakage rate in Scenario 7. Pressure decreases from these two scenarios
suggest a linear relationship. Furthermore, the comparison between the pressure
variations from Scenario 1 (which contains a leak at the Leak 1 node = 0.67 l/s) and
Scenario 7 (which also contains a leak at the Leak 1 node = 0.67 l/s) suggests a linear
relationship between the two scenarios. The decrease in pressure variations for
Scenario 7 is approximately double the decrease in pressure as compared to Scenario 1.
The same conclusion can be derived for the linear relationship between Scenario 3 and
Scenario 8. The pressure decreases from Scenario 8 are approximately double the
pressure decreases from Scenario 3.
One conclusion which can be formed from these additional experiments or
scenarios is that as the leakage quantity increases within a water system, the pressure
within the system will decrease as well. It is reasonable to assume that the large
variances in pressure decreases caused by expanding the pipe lengths are a result of the
additional head losses within the additional pipe lengths. The head losses from these
two scenarios should be twice as large as compared to Scenario 1 and 3 due to twice the
quantity of pipe within the distribution system. However, the relationship between the
head losses and leakage flow has not been observed in detail.

63
CHAPTER 6
CONCLUSION
Leaks are expensive for a variety of reasons, including the loss of water and
treatment chemicals, the increased risk of water quality deterioration, unnecessary
capacity expansion, and the increased energy expenditure required to feed the leaks.
Given current typical prices, lost water costs upstage those associated with energy
wastage. Moreover, if either water or energy prices continue to rise the importance of
leak repair will become even more pronounced. For both pipe segments and
distribution networks, leaks are shown to substantially increase energy costs.
Although there are many reasons for minimizing leakage in municipal water
distribution networks, perhaps the most important relates to quality of service. A
network with physical failures may be exposed, under certain operating conditions, to
pathogen intrusions that affect the quality of water. Every leakage control program has
a water balance of the system as a common starting point.
Leak detection in pipelines is necessary to avoid economic losses, ensure safety,
and control environmental problems. The leak detection methods presently available
have several limitations and can only be employed in specific situations. The purpose
of the experiment presented in this thesis was to examine pressure throughout a system
at specific locations and review how the pressures at these locations will vary with
different leakage rates and different locations of leaks. The accuracy of the WaterCAD
software was also evaluated.
With the continuing increase of technology, water operators have easier ways to
account for the total water used within their system. Residential water meters are now
electronic and equipped with SCADA capabilities so that all water usage can be sent
directly to the water department in spreadsheet form. The use of water meters on
hydrants can help regulate and account for municipality water usage. Electronic flow

64
meters at well or plant sites will allow the water department to know the exact quantity
of water leaving the plant and entering the system for water consumption. If the
capabilities for accountability are available, leak detection through water accountability
is possible. This is perhaps the simplest and cheapest way to determine if leaks are
occurring within a system.
Summary of Research Results
Previous research in leak detection has utilized both the steady state and
transient analysis to identify the location of leaks based on pressure measurements
within laboratory experiments. The research presented through these experiments
focuses on the relationship between pressure measurements and leakage. This
relationship was determined by altering the leakage quantity and leakage location.
Perhaps through this research engineers and water operators can look at areas of
unusual pressure decreases and have a better understanding if these decreases were or
could be caused by leakage.
The research presented through these experiments varies from previous research
performed for leakage detection for several reasons. The reasons include:
� Identifying the relationship between leakage quantities and pressure
variations within a water system
� Identifying the relationship between leakage location and pressure variations
within a water system
� Utilizes laboratory data derived for a transient analysis experiment to calibrate
a inverse steady state analysis water model.
� Evaluates the accuracy of the WaterCAD software to properly generate a
water model and obtain results similar to those obtained from a previous
laboratory experiment.

65
The WaterCAD software produced results which were very similar to the results
within the Covas/Ramos experiment. This suggests that this software is sufficient and
capable of providing results which can be comparable with actual field or laboratory
results. This software is used by operators to simulate changes in existing water
systems so the effects can be predicted before they occur. These simulations can include
breaks in pipes, flow surges, excess fire flow and other various situations. It is also
heavily used by engineers for the design of proposed water systems and improvements
to existing systems. The ability of this software to generate results similar to field
conditions will be a tremendous asset to water operators and engineers who utilize this
software to simulate existing water systems.
Through this research, pressure variations in a distribution system due to
leakage locations and leakage quantities have been identified. The six scenarios which
examine the pressure variations were successful in developing a theoretical correlation
of pressures with respect to leakage location and quantity. It has been shown that the
higher the leakage quantity the larger the decrease in pressure as compared to the no
leakage scenario. Also, as the leakage location moves further from the source of
pressure for the distribution system, the pressures within the system are more likely to
decrease.
It is important to note that the pressure variations experienced through this
research and the scenarios were uniform across the entire network. Due to the pressure
variations occurring both upstream and downstream of the leakage locations, it is
difficult to determine the location of leakage from the fluctuations in pressure. More
research is needed to identify a solution to identifying leakage locations.
A relationship between the head losses in a system and the quantity of leakage
was identified as well. As the amount of leakage increases the head losses within a
system will increase as well. Scenario 3 contained the highest leakage quantity of 1.34

66
l/s and produced the highest head losses within the pipes of the experimental water
system. There is also a correlation between the location of leakage and the calculated
head losses. It appears that location may have an affect on the head loss values;
however this affect is minimal and is difficult to conclude an exact result. Scenario 4
provides a leakage of 0.67 l/s within a close distance to the pump. The corresponding
head loss values from Scenario 4 are smaller as compared to the remaining scenarios,
thereby suggesting that the closer a leak is to the water source or pressurized vessel, the
lower the head loss values will be. The percent difference between the head values of
similar scenarios (particularly Scenario 1, 4, 5, and 6) is very small which may suggest
that location of leakage has a minimal affect on head losses.
In order for this research to be applicable to existing water systems an accurate
model must be generated. One of the primary characteristics of the water system which
must be considered when creating a model of a water system is the typical water usage
in specific areas. Water usage databases are useful when determining this information.
Pressure measurements within specific areas of the existing water system are also
needed. Pressure gauges and modern pressure recorders are typically used to assist
water operators in obtaining this data. One an accurate water model is generated, the
existing water system can be compared to the model and discrepancies within the
computer model can be viewed closer. Unusually low pressure within the existing
system can suggest potential leakage; however the water balance of the system must be
viewed closely before any definite conclusions concerning leakage can be derived. Of
course, the most accurate identification of leakage within a water system is the
continuity equation or the water balance. This suggests that all water which flows in
the system must flow out. Good water usage records will help conclude whether a
leakage can exist, however accounting for every gallon of water used is easier said than
done.

67
It is perhaps the smaller leakage rates which can cause water operators the most
concern. Larger leaks usually have a tendency to surface, especially with the sandy soil
and high water tables which are prevalent in Florida. Once they have surfaced they can
be located easier and fixed more rapidly. Smaller leaks, however, produce a constant
steady loss of water and can go unnoticed. Not only do they contribute to water loss
and revenue, they also present an open space for bacteria and other containments to
enter the water system, thereby compromising water quality. However, as this research
has proven, small leaks such as shown in Scenario #2, do produce pressure reductions
within the system, thereby giving the consumers and water department personnel a
small indication that a problem may be present. Further research is needed to
determine the exact location of the leak.
Limitations of Work
Although this software has excellent calibration between laboratory data and
computer simulations there are certain aspects of this research which contain
limitations. The lack of pressure dependency for demand calculations could produce
invalid results for certain water systems with high leakage concerns. As the leakage
values are entered into the software as demands at specific nodes, the results for
pressure values may be below the reference pressure thereby producing results which
contain high error. This research focused primarily on the effects of smaller leakage
quantities rather than the larger quantities, therefore the lack of pressure dependent
demand calculation capabilities should not have adversely affected the pressure
calculations and results. This is the reasoning behind the successful correlation of the
model.
Another limitation of this research is the ability to produce field or laboratory
results which can calibrate each scenario. It is important to note that the results derived
within this experiment are theoretical only and need to be field verified. Cadman once

68
said “A little experience often upsets a lot of theory”. The research expressed within
this thesis is no exception.
Future Work
Although additional research, particularly field or laboratory research, is needed
to accompany this thesis before any viable conclusions can be reached, it is reasonable
to conclude that the unexpected decrease in pressure within a water system could
possibly be the results of leaks. Further actions need to be taken to adequately
determine whether leakage is the most probable cause of decreasing pressure. An
increase in water consumption in a possible area of decreasing pressure could be the
cause for concern. Pudar and Liggett (1992) suggested using the inverse steady state
analysis as a means for supplementing other leakage location identification solutions.
The results from this research confirm Pudar and Liggett’s suggestion. Perhaps the
most accurate type of leakage control or identification used today is the water database
previously discussed in Chapter 2. Every municipality must rely on large quantities of
accurate data derived from their water system to identify the characteristics of the
system. This data can include monthly operating reports, water usage within specific
areas of a water system, fluctuations in water increases during particular months of the
year, etc. After a database has been established and the personnel within the water
department are familiar with it, exceptions or variations within the system can be
identified. These variations, along with any pressure decreases suggested in this
research, can help locate any potential area of leakage. Hence, the research presented in
this thesis is sufficient and would be an asset to supplement a water system database or
any successful leakage identification program or tool.
Possible areas of improvement for this research include a lack of water usage in
the model. Although a flow of 6 l/s was discharged through the distribution system in
addition to the leakage quantities, this flow is very small and does not simulate the

69
water usage similar to that of field conditions. The simplicity of the model was efficient
for the comparison of the Covas/Ramos model; however it did not accurately portray
the conditions of actual water systems in the aspect of demands being spread
throughout the distribution system. By spacing the demands throughout the system
these demands would serve to simulate residences or metered connections. Perhaps a
larger scale model with more flow would provide a simulation similar to the existing
water systems and a better correlation between any laboratory experiment and field
conditions could be derived.
Previous research has suggested that transient analysis has great potential to
identify leakage location. Therefore, future research may utilize transient software to
identify the relationship between leakage quantity and location and pressure variations
rather than the steady state analysis presented here. Perhaps even additional research
can be performed on the identification of leakage locations within various size water
systems.

70
REFERENCES
Almandoz, J., Cabrer, E., et al. 2005. Leakage Assessment through Water Distribution Network Simulation. Journal of Water Resources Planning and Management. American Society of Civil Engineers. Nov/Dec 2005, p. 458‐466.
Alonso, J., Alvarruiz, F., et al. Parallel Computing in Water Network Analysis and
Leakage Minimization. Journal of Water Resources Planning and Management. July/Aug. 2000, p. 251‐260.
American Water Works Association (AWWA). Apparent and Real Losses. 2006.
http://www.awwa.org/WaterWiser/waterloss/Docs/02Apparent_Real_Loss.cfm Burnell, D., Race, J. Water Distributions Systems Analysis: Patterns in Supply‐Pipe
Leakage. 2000 Joint Conference on Water Resources Engineering and Water Resources Planning & Management. Vol. 104, Issue 40517, July 2000.
Colombo, A., Karney, B. Energy and Costs of Leaky Pipes: Toward Comprehensive
Picture. Journal of Water Resources Planning and Management. Nov/Dec. 2002, p. 441‐450.
Covas, D., Ramos, H. Hydraulic Transients used for Leakage Detection in Water
Distribution Systems. 2001 International Conference on Water Pipeline Systems. York, UK, March 2001.
Covas, D., Ramos, H., Graham, H., Maksimovia, C. An Assessment of the application of
inverse transient analysis for leak detection. Advances in water supply management; Proceeding of the International Conference on Computing and Control for the Water Industry. 15‐17 September 2003.
Covas, D., Ramos, H., Graham, H. Application of hydraulic transients for leak detection
in water supply systems. Water Science & Technology. Vol. 4, Issue 5‐6, 2004, p. 365‐374.
Crowe, C., Elger, D., Roberson, J. Engineering Fluid Mechanics. Seventh Edition, 2001. EPANET 2 User’s Manual, Cincinnati, Ohio, National Risk Management Research
Laboratory, United States Environmental Protection Agency, September 2000.

71
Haestad, Walski, T., Chase, D., Savic, D., Grayman, W., Beckwith, S., Koelle E. Advanced Water Distribution Modeling and Management. First Edition, 2004.
Kong, X., Mergelas, B. Condition Assessment of Small Diameter Water Transmission
Main. Optimizing Pipeline Design, Operations, and Maintenance in Today’s Economy. Pipelines 2005: Proceeding of the Pipeline Division Specialty Conference. P. 252‐262, 2005.
Mpesha, W., Gassman, S., Chaudhry, M. Leak Detection in Pipes by Frequency
Response Method. Journal of Hydraulic Engineering. Vol. 127, Issue 2, p. 134‐147. Feb. 2001.
Pudar, R., Liggett, J. Leaks in Pipe Networks. Journal of Hydraulic Engineering,
American Society of Civil Engineers. Vol. 118, Issue 7, July 1992. P. 1031‐1046. Roberson, J., Cassidy, J., Chaudhry, M. Hydraulic Engineering. Second Edition, 1998. Stathis, J., Loganathan, G.V. Analysis of Pressure‐Dependent Leakage in Water
Distribution Systems. Preparing for the 21st Century: Water Resources Planning and Management Conference 1999 Proceedings. 1999.
TRANSDAT Database and Software. University of New Castle. http://www.surge‐
net.info/workpack03.html. 2001. Vela, A., Perez, R., Espert, V. Incorporation of Leakages in the Mathematical Model of a
Water Distribution Network. Department of Hydraulic Engineering and Environment; Polytechnial University of Valencia, Spain. International Conference on Computer Methods and Water Resources. P. 245‐257. 1991.
Vitkovsky, J., Simpson, A., Lambert, M. Leak Detection and Calibration of Water
Distribution Systems Using Transients and Genetic Algorithms. Preparing for the 21st Century: Water Resources Planning and Management Conference. 1999.
Vitkovsky, J., Simpson, A., Lambert, M. Leak Detection and Calibration Using
Transients and Genetic Algorithms. Journal of Water Resources Planning and Management. July/Aug 2000, p. 262‐265.
Walski, T., Bezts, W., Posluszny, E., Weir, M., Whitman, B., 2006. Modeling Leakage
Reduction through Pressure Control. American Water Works Association Journal; Vol 94, Issue 4, P. 147‐155.

72
WaterCAD User’s Guide, Waterbury, Connecticut, Haestad Methods, 2005. Wood, A., Lence, B., Liu, W. Constructing Water Main Break Databases for Asset
Management. American Water Works Association; Vol 99, Issue 1, P. 52‐65. Yi Wu, Z., Sage, P. Water Loss Detection Via Genetic Algorithm Optimization‐Based
Model Calibration. Water Distribution System Analysis Symposium, Cincinnati, Ohio. Aug 2006.
Yi Wu, Z., Wang, R., Walski, T., Yang, S., Bowdler, D., Baggett, C. Efficient Pressure
Dependent Demand Model for Large Water Distribution System Analysis. Water Distribution System Analysis Symposium, Cincinnati, Ohio. Aug 2006.

73
BIOGRAPHICAL SKETCH
EEEDDDUUUCCCAAATTTIIIOOONNN:::
B.S. in Civil Engineering, December 2004
Florida State University
Tallahassee, FL GPA: 3.86
Florida Board of Professional Engineers
Fundamentals of Engineering Exam, Passed April 2004
WWWOOORRRKKK EEEXXXPPPEEERRRIIIEEENNNCCCEEE:::
Preble-Rish, Inc. May 2004 - Current
Bristol, FL
Project Engineer
* Experience in Permitting: FDEP Dredge and Fill, FDOT Utility Permit, FDOT
Connection Permit, and Northwest Florida Water Management District Consumptive
Use Permits
* Design of Water Systems, Wastewater Treatment Plants, Wastewater Collection
Systems, Highway Design, Stormwater Drainage, Low Water Crossings
HHHOOONNNOOORRRSSS:::
* Phi Theta Kappa Member
* Phi Theta Phi Member
* Phi Sigma Theta Member




















