EURON Roadmap - CiteSeerX
137
Key Area 1 on "Research Coordination" – KA1 Co-chairs: Prof. Paolo Dario, Scuola Superiore Sant’Anna, Pisa, Italy Prof. Rüdiger Dillman, Universität Karlsruhe (TH), Germany Prof. Henrik I Christensen, Royal Institute of Technology, Sweden EURON Research Roadmaps Contributors (in alphabetical order): Carlos Balaguer, University Carlos III of Madrid, Spain Alicia Casals, Universitat Polytecnica de Catalunya, Spain Raja Chatila, LAAS, Toulouse, France Thomas Christaller, Fraunhofer AiS, Sankt Augustin, Germany Ian.S. Dai, King's College, London Paolo Fiorini, University of Verona, Italy Martin Haegele, IPA, Germany Gerd Hirzinger, DLR, Munich, Germany Alois Knoll, University of Bielefeld, Germany Christian Laugier, INRIA, France Claudio Melchiorri, University of Bologna, Italy Rezia Molfino, University of Genova, Italy Anibal Ollero, University of Seville, Spain Erwin Prassler, FAW, Germany José Santos-Victor, Institute for Systems and Robotics (ISR), Lisbon, Portugal Pedro Sanz Valero, University Jaume I, Castellon, Spain Klaus Schilling, University of Applied Sciences Ravensburg-Weingarten, Germany Roland Siegwart, EPFL, Lausanne, Switzerland Jianwei Zhang, University of Bielefeld, Germany Date: 23 April 2004 1
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of EURON Roadmap - CiteSeerX

Key Area 1 on "Research Coordination" – KA1 Co-chairs: Prof. Paolo Dario, Scuola Superiore Sant’Anna, Pisa, Italy
Prof. Rüdiger Dillman, Universität Karlsruhe (TH), Germany Prof. Henrik I Christensen, Royal Institute of Technology, Sweden
EURON Research Roadmaps
Contributors (in alphabetical order): Carlos Balaguer, University Carlos III of Madrid, Spain Alicia Casals, Universitat Polytecnica de Catalunya, Spain Raja Chatila, LAAS, Toulouse, France Thomas Christaller, Fraunhofer AiS, Sankt Augustin, Germany Ian.S. Dai, King's College, London Paolo Fiorini, University of Verona, Italy Martin Haegele, IPA, Germany Gerd Hirzinger, DLR, Munich, Germany Alois Knoll, University of Bielefeld, Germany Christian Laugier, INRIA, France Claudio Melchiorri, University of Bologna, Italy Rezia Molfino, University of Genova, Italy Anibal Ollero, University of Seville, Spain Erwin Prassler, FAW, Germany José Santos-Victor, Institute for Systems and Robotics (ISR), Lisbon, Portugal Pedro Sanz Valero, University Jaume I, Castellon, Spain Klaus Schilling, University of Applied Sciences Ravensburg-Weingarten, Germany Roland Siegwart, EPFL, Lausanne, Switzerland Jianwei Zhang, University of Bielefeld, Germany
Date: 23 April 2004
1

EURON Table of contents Research Roadmaps
Table of Contents
1 Executive Summary.......................................................................................................... 4 2 Introduction....................................................................................................................... 5
2.1 Scope ........................................................................................................................ 6 2.2 Method ...................................................................................................................... 6 2.3 Societal...................................................................................................................... 8 2.4 Structure of the document ......................................................................................... 9
3 Key Areas ....................................................................................................................... 10 3.1 Automation & Manufacturing ................................................................................... 10
3.1.1 Key Issues and State of the Art........................................................................ 11 3.1.2 Future development ......................................................................................... 18
3.2 Working and production assistant ........................................................................... 19 3.2.1 State of the art.................................................................................................. 19 3.2.2 Technical aspects in future development......................................................... 21 3.2.3 Societal aspects ............................................................................................... 22
3.3 Service robots ......................................................................................................... 22 3.3.1 State of the art.................................................................................................. 22 3.3.2 Service Robots Market Prospects.................................................................... 26 3.3.3 Case Studies and Open Problems................................................................... 27
3.4 Care assistant / Intelligent Homes........................................................................... 30 3.4.1 State of the art.................................................................................................. 30 3.4.2 Problems to be addressed ............................................................................... 48
3.5 Medical robotics ...................................................................................................... 50 3.5.1 State of the art.................................................................................................. 50 3.5.2 Open problems................................................................................................. 59 3.5.3 Future research................................................................................................ 60
3.6 Intelligent Vehicles .................................................................................................. 60 3.6.1 R&D programs throughout the world................................................................ 61 3.6.2 State of the Art ................................................................................................. 62 3.6.3 Open problems................................................................................................. 67
3.7 Logistics .................................................................................................................. 67 3.7.1 Current research .............................................................................................. 67 3.7.2 Open research issues ...................................................................................... 70
3.8 Field robotics ........................................................................................................... 71 3.8.1 State of the art.................................................................................................. 71 3.8.2 Key issues/open problems ............................................................................... 78
3.9 Space robotics......................................................................................................... 79 3.9.1 Motivation of research field .............................................................................. 79 3.9.2 Important projects and milestones ................................................................... 79 3.9.3 Current and future Key issues.......................................................................... 83
3.10 Underwater systems ............................................................................................ 84 3.10.1 State of the art.................................................................................................. 85 3.10.2 Open Problems and Roadmap......................................................................... 86
2

EURON Table of contents Research Roadmaps
3.11 Edutainment......................................................................................................... 89 3.11.1 State of the art.................................................................................................. 89 3.11.2 Future Development and Opportunities ........................................................... 93
4 Overall key issues and social impact.............................................................................. 94 4.1 Overall key issues ................................................................................................... 94
4.1.1 Trust/Acceptability............................................................................................ 94 4.1.2 The European Dimension & Perspective ......................................................... 95 4.1.3 Robustness ...................................................................................................... 95 4.1.4 Economical & Industrial aspects ...................................................................... 96
4.2 Expected impact on the society............................................................................... 99 4.2.1 Ageing society.................................................................................................. 99 4.2.2 Ambient intelligence ....................................................................................... 104 4.2.3 Environment & Quality of Life......................................................................... 104 4.2.4 Economic growth............................................................................................ 105 4.2.5 Expanding frontiers ........................................................................................ 105
5 Vision for the future ...................................................................................................... 107 5.1 Advanced production robots.................................................................................. 107 5.2 Adaptive robotic servants and intelligent homes ................................................... 108 5.3 Field and service robotics...................................................................................... 110 5.4 The Super-Human................................................................................................. 112 5.5 Intelligent vehicles and logistics ............................................................................ 114 5.6 Evolvable swarm ................................................................................................... 116
6 Long term progress ...................................................................................................... 118 6.1 Key issues to be addressed .................................................................................. 118
6.1.1 General considerations .................................................................................. 118 6.1.2 Societal needs................................................................................................ 118 6.1.3 Industrial needs.............................................................................................. 120 6.1.4 Research and Education................................................................................ 122
6.2 Mechanisms to achieve progress.......................................................................... 123 6.2.1 Robotics resources for education................................................................... 123 6.2.2 Education and training human resources....................................................... 123 6.2.3 Applied Research........................................................................................... 124 6.2.4 Basic Research .............................................................................................. 125 6.2.5 Benchmarking ................................................................................................ 125 6.2.6 High risk exploratory research ....................................................................... 126 6.2.7 End User Evaluations..................................................................................... 126
7 Conclusion and recommendations ............................................................................... 128 8 References ................................................................................................................... 129
3

EURON Executive Summary Research Roadmaps
1 Executive Summary Today robotics is first and foremost used in discrete manufacturing and for extending human capabilities in hazardous and inaccessible environments. In this area Europe is already the market leader. Recent progress in mechanical engineering, human factors, sensory perception and computing is at the same time opening up a number of new potential application domains for robotics. In particular there are a number of new application domains in which computers are augmented with facilities for physical interaction with the environments. This opens up new possibilities. In parallel, society is facing a number of new challenges. First of all the aging of society throughout the western world is posing a challenge to the health care and the living standards for retired and handicapped. It is thus vital that adequate facilities are provided to ensure a dignified living standard for our elderly. While the number of citizens actively involved in production and economic growth is decreasing the economic gain is required to increase significantly to allow maintenance of the same living standards, which call for new industries and radical increases in productivity. This again calls for new methods in automation and manufacturing. There is thus a need for a significant growth in production (in new and established industries). Through adaptation of a holistic approach to robotics research it is considered likely that such new industries and economic growth factors can be provided. In this document a comprehensive review of state of the art in robotics is provided as a basis for an in-depth analysis. From the state of the art the major obstacles to progress in terms of manufacturing, acceptance, market penetration, technological issues, etc are identified. These obstacles are the major factors that limit added economic growth through deployment and use of robotic technology. The identified obstacles are analysed and various approaches to alleviate them are discussed. This involves a plan for new R&D efforts to allow use of robotics in a number of new areas. For concrete discussion of a plan for implementation a set of "man-on-the-moon" projects are proposed. These projects serve as integration platforms and demonstrators for a holistic approach to robotics in a number of new (and established) research domains. In the context of the Man-on-the-Moon (MOM) projects the European potential is discussed and it is identified how the region can become both an industrial and research leader in the field. This is in part due to a well developed social system, a diversified cultural market for deployment of systems, and a string industrial basis. At the same time it is shown that no single country will have adequate resources to pursue such a bold vision for the future on its own. The plan for implementation of the research in terms of concrete action and initiatives is put forward to enable a sustained exploitation of the identified opportunities. At the same time the plan discusses a diverse set of efforts from education to basic research to achieve the overall goal. The expected deliverables of an initiative will involve both new applied and basic science, a number of new technologies which also have applications beyond robotics, a number of new industries and strengthening of existing companies, and finally new human resources will be trained as a basis for the implementation of the plan and the social impact in terms of growth and quality of life are key factors considered.
4

Research RoadmapsKey Areas EURON
2 Introduction This document presents the first draft of the EURON robotics research roadmap for developing and employing advanced robot technology over the next 10 - 20 years (2002 to 2022). The document describes the tasks and missions identified for future robot generation systems and areas to which these systems could be applied, and compares them to theoretical and technological advances required to implement the intended robotic systems. The envisaged applications are not only technology-driven, but they take into account a vision on future societal needs in Europe, such as the aging society, limited resources, environment, quality of life and health, as well as opportunities for economic growth. A series of trends is discussed to forecast technological advances over this period in the key areas of mechatronics, perception, action control, MMI, intelligent behaviour and micro/nano technology as well as information processing capabilities. The results are roadmaps of capability-enhancing technologies plotted against the life span of current and actual projected robot systems. It is a map of opportunities, not point designs - a descriptive, not a prescriptive future for robot system technology and its applications. This study identifies R&D needs necessary to reach the envisaged goals. Furthermore, the conclusions at the end of this report include a European perspective of opportunities offered by the new robotic technologies and system approaches and a list of actions that should be taken in order to accelerate the achievement of the goals. To this aim, we highlight opportunities in the broad areas of technology, operations, and organizations, that the robotics industry or other -related organizations may wish to consider when developing plans and budgets for future robotics R&D activity. European research and industry has a long and solid history of involvement with robotics, stretching back to the first industrial robots in the seventies. Today, European robot industries play a leading role in the world with systems allowing more skillfull tasks and being more sophisticated than ever. These roadmaps merge the indications provided by the well established European robotics industry with the vision generated by the European community of robotics researchers. A non exhaustive list of capabilities projected for robots over the next 10 -20 years include:
• Robots sharing with humans their working space in daily life • Service robot systems for elderly care • Field robotics with systems capable to operate over long distances and over long time
autonomously while extending and adapting their ability to handle varying situations • Interactive learning robots with multimodal communication links • Highly dexterous robot systems for surgery • Miniaturized robotic systems • Autonomous robot systems • Locomotion and navigation • Adaptive manufacturing systems.
Furthermore, methods and technologies derived from robotics (viewed as the “science of controlling motion and force”) will have major impact on virtually any new product incorporating moving parts, at any scale, well beyond the traditional representation of robots as “manipulators”.
5

Research RoadmapsEURON Key Areas
The advantages offered by robots in the context of ambient intelligence are numerous and they will have an impact on a number of applications, such as service, field-, medical or human healthcare domains. Accurate comparisons of manned service versus unmanned service systems tend to show little advantage for the latter. However, by exploiting new concepts in the fields of interaction and cooperation, robots may offer increased efficiencies in operations and cost. Advanced robotics will play a major role in the increasingly dynamic urban life that will evolve in the 21 st century. There will be autonomous vehicles as well as assistance robots or inspection robots to perform difficult, dangerous or unlikely work. Field robots will stay for weeks or months and longer outside (ground, air, underwater), sensing data at high performance and data rate, communicating their data maybe in a multimodal way. Robots will augment surgeon capabilities to enhance medical support and revolutionize diagnosis and therapy methods. Multimodal robots will open robot technology even for non technical people. In the following, the scope and methods for elaborating the EURON research roadmaps are outlined
2.1 Scope The EURON Key Area on Research Coordination (KA1) has the aim of providing a strategic view of robotics world-wide for defining long term plans for European research, resulting in research and technology roadmaps. KA1 also aims at exploiting and coordinating the efforts spent in the different countries and to define benchmarks and standards for the exchange of results. As a result of the activities of KA1, the research roadmaps presented here are intended to give an organic view on how robotics research should go on co-ordinately in Europe in the next 10-20 years, as shared by the researchers gathered in EURON.
2.2 Method The model and workplan adapted for defining research roadmaps consisted of:
• agreeing on a vision for the future and a set of ‘innovative robotics systems’ (“man on the Moon” ideas)
• defining enabling research, in terms of ‘building blocks’ for the proposed systems; • setting up a ‘cluster of excellence’ for each building block, by identifying a Chair, able
to gather and coordinate a working group of experts among the EURON members; • defining research roadmaps for each building block; • determining the enabling technologies for the built blocks; • identifying the overall key issues and social impact ; • determining criteria for achieving progress.
6
Research Roadmaps Key Areas EURON
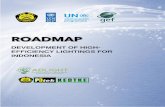
Proposed Proposed EURON EURON stepssteps
EURON (roadmaps)EURON EURON
((roadmapsroadmaps))DemonstratorsDemonstratorsDemonstrators MarketMarketMarket
EU V FP1998-2002EU V FP1998-2002
EU VI FP2003-2007
EU VI FP2003-2007 20102010
Establishing clusters of excellence on the building blocks and defining roadmaps
Figure 1 The depicted scheme illustrates the proposed steps by which EURON can foster research and industrial developments of robotics.
As a starting point the KA1 Chairs circulated to all the EURON members a summary of it a brainstorming, incorporating the comments of participants, and asked for the following contributions:
• identification of new robotics systems, according to their own view, • identification of innovative basic technologies or components.
At the same time, the KA1 Chairs asked for synthetic information on the core activities and expertise of the members in order to compose the clusters of excellence. The clusters of excellence, which contributed to this document, have been defined as follows: i. Intelligent Vehicles: Christian Laugier (LIRMM, Montpellier, France) & Roland Siegwart (EPFL, Lausanne, Switzerland) ii. Logistics: Raja Chatila (LAAS, Toulouse, France) iii. Automation & Manufacturing incl AGV: Rezia Molfino (University of Genova, Italy), Pedro Sanz Valero (Univerity Jaume I, Castellon, Spain) & Claudio Melchiorri (University of Bologna, Italy) iv. Interfaces: Ruediger Dillmann (University of Karlsruhe, Germany) & Jianwei Zhang (University of Bielefeld, Germany) v. Sensor systems: Raja Chatila (LAAS, Toulouse, France) vi. Space robotics: Gerd Hirzinger (DLR, Wessling, Germany) vii. Underwater systems: José Santos-Victor (IST, Lisbon, Portugal) viii. Service robots: Erwin Prassler (FAW, Ulm, Germany) & Paolo Fiorini (University of Verona, Italy) ix. Medical robotics: Paolo Dario (Scuola Superiore Sant'Anna, Pisa, Italy) x. Field robotics: Raja Chatila (LAAS, Toulouse, France) xi. Working and production assistant: Martin Haegele (IPA, Stuttgart, Germany)
7

Research RoadmapsEURON Key Areas
xii. Care assistant / Intelligent Homes: Paolo Dario (Scuola Superiore Sant'Anna, Pisa, Italy) xiii. Entertainment: Alois Knoll (University of Bielefeld, Germany), Ruediger Dillmann (University of Karlsruhe, Germany) & Thomas Christaller (AIS, Sankt Augustin, Germany) xiv. Education: Alicia Casals (UPC, Barcelona, Spain) & Klaus Schilling (University of Applied Sciences Ravensburg-Weingarten, Germany)
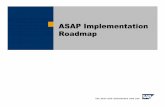
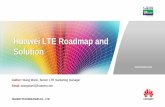
2.3 Societal Nowadays robotics is having a higher and higher potential of social impact, especially concerning service applications and in particular the application of robots in personal assistance, such as residential or hospital care to the disabled and the elderly. Furthermore, the wide spreading of humanoid robotics research world-wide is making the introduction of such robots in our society more and more likely. Until now robots in our society could be seen as mere machines, but humanoids and service robotics introduce different concerns about social acceptability, both for their aspect and for their expected role. Ontological considerations can be induced by humanoid robots, so that they could be seen as a possible ‘new species’ introduced in the society of humans. Increasing interaction with robots and generally with intelligent systems in industry or household is emerging in the past years. Especially intuitive multi modal devices combining speech, gestures and body language are needed for household and small-scale industry, whereas accurate, special input devices which can easily be handled are required from the industry in order to minimize programming and controlling costs. Also new methods for interaction based on conventional sensors like displays, keyboards but also on virtual technologies have to be provided. The last years have shown, that social acceptance for robotic systems or generally for intelligent systems in household environments goes hand in hand with the development of adequate interfaces. These should be as intuitive and humanlike as possible. Even in industry the need for specialised intuitive interacting devices is growing with increasing demands of flexibility. A particular issue that motivates increased attention to robotics is the demographic profile of the industrialised world. Over the next 20-30 years there will be a significant increase in the number of elderly aged above 85 year. This group of citizens will need assistance to remain in their houses, as the alternative is managed care, which will influence quality of life and health care costs significantly. As an example the development in number of retired people of more than 85 years of age is shown below for Sweden. The number are however representative for the rest of Europe as well.
8

Key Areas Research RoadmapsEURON
Elderly in need of care (In Sweden)
200000
250000
300000
350000
400000
450000
1995 2000 2005 2010 2015 2020 2025 2030 2035 2040 2045 2050
Year
Peop
le >
85
Figure 2 Development in number of retired people above 85 years of age as a function of time for Sweden. The numbers are representative for all of Europe.
These figures have already started to influence health care policies across Europe and it is expected that major new initiatives will be started in the next 10 years.
2.4 Structure of the document This document is structured in eight sections, were section 3 “Key Areas” incorporates the robotic areas according to the identified clusters. Each key area consist a state of the art as well as a discussion and identification of open problems. Global issues and the social impact of robotics are discussed in the following section 4. Section 5 holds “Vision for the future” in a long term perspective (~20 years). In the section 6 “Long term progress” criteria for achieving progress are identified. Finally a brief conclusion is given in section 7.
9

Research RoadmapsEURON Key Areas
3 Key Areas
3.1 Automation & Manufacturing A strong manufacturing base is vital to the economic strength of the nations. “to live well, a
nation must produce well“. Figure 3 shows how the end-result of manufacturing is wealth creation.
Figure 3 The manufacturing framework
In manufacturing industries, effectiveness was traditionally looked for by the scientific work organisation, reducing complex schedules into simple tasks and by adopting vertical flow-shop through sequential manufacturing lines. The approach leads to the highest productivity and it is prised for mass-production. Flow-lines and fixed schedules, however, are rewarding only for product volumes exceeding some minimal threshold. Robotics and automation are key issues to reduce labour cost, to boost productivity and to improve product quality standardization, freeing workers from dangerous and repetitive tasks. The globalisation of the market-place, the trade instability and the explosion of product variety are stressing the problems of time to market and manufacturing systems improved flexibility and agility. Customised quality, frequently up-dated products, quick delivery dates, etc. need a new approach to effectiveness, exploiting knowledge-intensive set-ups, by intelligent work organisation and by modularly distributed versatility job-shop like robotised cells and multi-agent transportation systems. The return on investments deals with leanness and with economy of scope, namely on carefully monitoring aims and tasks on their ability of granting a positive value-chain, while avoiding unnecessary skills and useless resources. The market trend to highly diversified product mixes requires flexible manufacturing solutions in order to reach short time to delivery, with work organizations based on just-in-time small batched production. The efficient exploitation of technological resources and the high work
10

Research RoadmapsKey Areas EURON
ring is positively concerned by setting-up cost effective facilities. To obtain
ment of a disassembly system needs features for flexible reaction to changing product onditions (markets, regulations,
l design tradeoffs between electronic and mechanical disc li nstraints. Integrated design mo
; rk-cycles;
ents;
s;
• , for market-driven changes of the business; to comply with eco-requirements, ergonomic realizations, prevention of industrial
. Then simulation, after throughout investigation of achievements and drawbacks, offers affordable commitment, making possible to rank competing manufacturing facilities and plans.
direct costs call for factory automation with recovery flexibility for assuring the production even at emergencies without spare investments or hidden shelvings. Efficient manufacturing of industrial artefacts is conditioned by assembly. Product-and-process re-engineethe right layout, the effectiveness of the assembly section has to be assessed against actual potentialities, [39]. The disassembly process of consumer goods is characterised by a great variety of different types and strongly differing retention conditions of the disassembly goods. New techniques in plant planning, logistics, product design, new processes and tools have to be studied. Disassembly is a non-determined process that needs to be planned and controlled. The equiptypes and product conditions as well as changing boundary c...).
3.1.1 Key Issues and State of the Art 3.1.1.1 Integrated mechatronic design approach A mechatronically designed product relies heavily on system and component modeling and simulation to establish the optima
ip nes when subject to specific cost and performance coves on standard goals, namely: • to rationalise the procedures and standardise the steps; • to automate routine developments (computer graphics, stress analysis, etc.); • to transfer customers’ demands, with transparent assessments• to simplify products and production processes, with optimal wo• to modify work-cycles schedules, for minimal time-to-market; • to provide visibility of the overall technical specifications files; • to reach design robustness (to grant zero-defect manufacturing); • to refer to value-chain models for measuring the return on investm• to perform condition monitoring maintenance with reliability margins; • to exploit benchmarking for the adaptive designing of artefact• to include quality checks, as routine tasks of the process operators; • to enable re-engineering with design-to-costs requirements;
to resort to paradigms shifts•
accidents (sustainability).
3.1.1.2 Computer simulation tools Computer simulation has to deal with a series of packages, each one corresponding to the particular view of the problem, to be investigated. At the design-development stage, several production facilities are compared in terms of enterprise policies; at the management-fitting stage, several production plans are assessed in terms of delivery requests. The monitoring of value forming, by respect with cost build-up, is performed in virtual reality, to establish comparative enterprise forecasts and to anticipate achievements or drawbacks of (actually) selected production policies. The approach is particularly useful for the traditional manufacturing industry, where ‘intelligent factory’ set-ups are still observed with caution, since addition of technology-driven options to a labour-intensive environment cannot be accepted without having previously acknowledged the returns on investment
11
Research RoadmapsEURON Key Areas
Digital mock-up, virtual and rapid prototyping technologies are becoming the engineering means to range appropriateness and leanness of competing solutions “a priori” to the realization. Rapid prototyping can be useful to produce one of a kind robotic elements Intelligent manufacturing. The main factors related both to material and information flows are:
• Piecewise continuous improvement: to yield the successful effort of adapting products to consumers' wishes (increasing quality and lowering price);
• Cooperative knowledge processing: to enable a reward system granting individual and team creativity, which aims at innovating products and processes.
• Diagnostics and monitoring maintenance: to aim at company-wide quality-control, and at predictive maintenance policies. Knowledge intensive set-ups bring to exploit monitoring data: for process, to enable recovery flexibility and to promote predictive maintenance; for product, to grant intrinsic quality, selectively adapting technical specifications. Diagnostics operates on-line. Actions are taken on the processes; the products profit of results.
• Lean engineering check-up assessment: to remove material and information additions, that do not improve enterprise profitability.
3.1.1.3 Equipment A picture of the state of the art of Automation and Manfacturing is given by [66]. In the following a short insight into the main typical classes of the manufacturing equipment is given. 3.1.1.3.1 Machine tools Conventional machine tools are characterised by a serial arrangement of the feed axes. The individual axes are assembled one on the top of the other, with the lower axis carrying the ones above it. In connection with the increasing requirements on productivity, economy and flexibility, the conventional machines are subjected to the following limitations:
• load on machine architecture on bending; • large mass to be moved; • limited dynamics in the feed axes; • high requirements from the precision of the individual components; • accumulation of errors occurring in the individual axes; • low number of repetition parts for large components.
The importance of high speed cutting in manufacturing engineering is growing, higher cutting velocities allow a reduction in machining times or, in the same time, an increase in workpiece precision, due, for example, to narrower line spacing during the milling process. Die and mould making represents one field of application for high speed cutting, whereby high-speed milling is frequently used for finishing operations. Promising solutions to approach higher velocity and acceleration are the new machine concepts with advanced kinematic structure and the application of electric linear motors. When Stewart Platform machines first emerged as a possible machine tool configuration in the early nineties there was considerable excitement in the manufacturing community about the possibility they would open up. Machine tool users perpetually seek faster, stiffer and more accurate machines with smaller footprints and great dexterity and Parallel Kinematic Machines (PKM) are known to have these attributes. However designer have always realised that these objectives compete and suitable trade-off’s have to be made to optimise hexapod machine tools for a particular application. The research community is studying technologies that permit the effective use of PKM in the face of these challenges.
12

Research RoadmapsEURON Key Areas
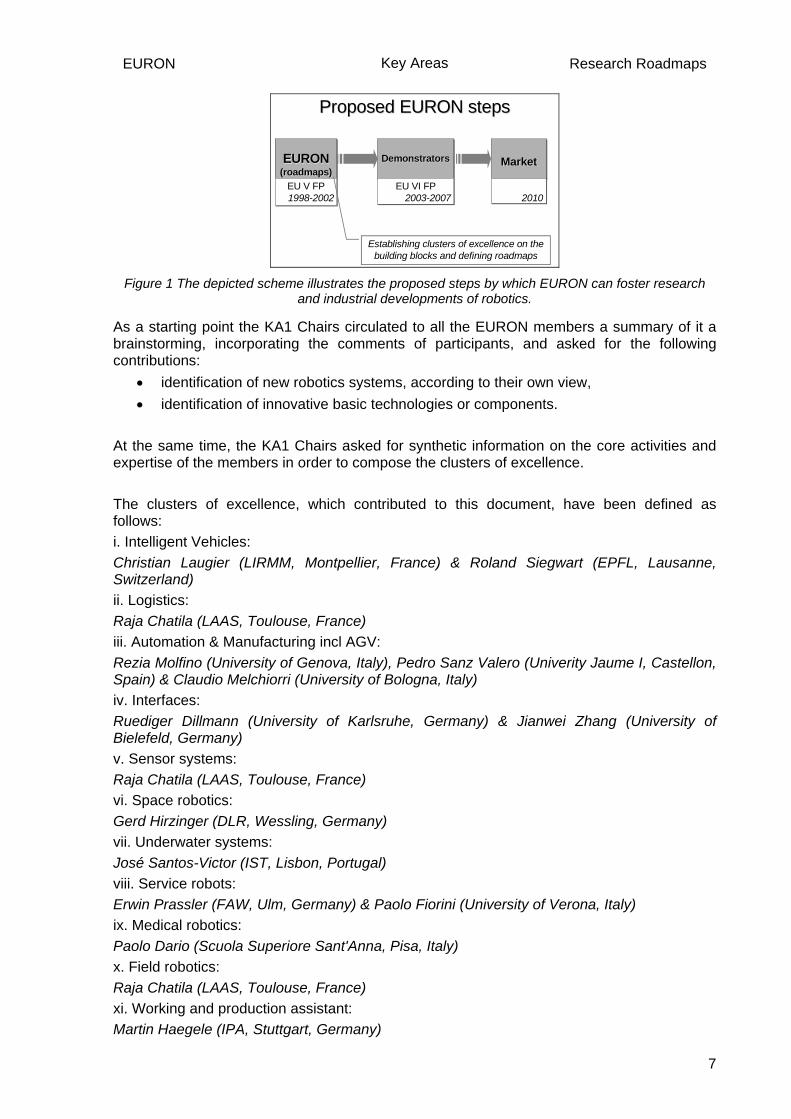
As for much other manufacturing equipment, the open architecture of the control system is a key to success. Real-time coordinate transformation in the NC-kernel is necessary to use the PKM like any other conventional machine. During the development of the machine a mechatronic approach is useful to achieve an optimised system and to provide high performance. The fine-tuning of the drive system, using specially developed software tools and state of the art measurement equipment is another tool to improve the machine accuracy. Calibration is necessary not only in the initial assembly of the machine but also in maintenance and repair operations, calibration of parallel structured machine tools is much more difficult and less developed than classical serial ones. 3.1.1.3.2 Industrial robots Robots as the most flexible components take on a central role in manufacturing (production, assembly..) systems. Since the introduction of industrial robots in industry at the early 1970s, the interest in robotics by industry grew steadily to a point in the middle 1980s where it was poised before to explode. Some robotics backlash can be related to the lack in the satisfaction of the high expectations held by their users. The stock of installed robots is today close to 1 million as shown below.
Operational stock of industrial robots
0
50000
100000
150000
200000
250000
300000
350000
400000
450000
1995 1996 1997 1998 1999
Num
ber o
f uni
ts
Other USA Japan Western Europe
Figure 4 The stock of installed robots across regions
Over the last decade production of robots has moved from Asia and USA to Europe, which today is the major provider of in particular advanced manipulation systems. While the interest in robotics by industry grew, the academic community continued investigating different fundamental problem areas. The emphasis has been on key components, such as kinematics, dynamics, control, 3D vision, but not complete systems, and integration of these results into industrial practice has been slow. As a result academic robotics researchers, perhaps faced with the difficulties of technology transfer to industry, turned their attention and interest to other, more exploratory, areas such as mobile, medical,
13

Research RoadmapsEURON Key Areas
space, service and personal robotics. Nowadays to enable further growth, there must be significant changes in the way robotic systems are deployed in manufacturing environments. In the last decade industrial robot producers have begun to service the demand for increased flexibility and accuracy. Adept has developed a concept of rapid deployment automation that embraces key elements of modularity and off-line programming. Megamation and Yaskawa have produced systems of small, modular, easily programmable robots capable of moderately precise assembly. Applications employing multiple robots working together with coordinated movements simultaneously are already accomplished for welding tasks by Yaskawa. Great advances in technology, particularly in computer processing power, have turned a robot into a fast, accurate, and versatile leader of the assembly line. Industrial robots are reducing labor costs, boosting productivity, and minimizing error, freeing workers from dangerous and even merely repetitive tasks. There are now significant opportunities for applying increased intelligence and autonomy to industrial robot systems, maintaining costs acceptably, [39] Actually this consideration is supported by several factors, including:
• increasing demand for more complex products with ever shortening lifetime; • need to remove humans from the manufacturing process because of cleanliness
requirements; • ubiquitous availability of significant computing power at reasonable costs; • the internet explosion.
3.1.1.3.3 Instrumental robotics Economic considerations drive the development as unnecessary complex technology-driven solutions might become misleading. Robots need to be offered with fit-for-use properties and should be designed with bounded operation range and application scope. Activity outlook, rather than sophistication, is the winning alternative of instrumental robotics. Instrumental robotics evolves to provide functionally oriented equipment, having duty adapted activity performance figures to accomplish sets of required tasks, with proper autonomy ranges. Basically, industrial robots characterise the domain of intelligent automation, supplying the active adaptation of the actuating, handling, grasping or machining dynamics. A task driven manipulation equipment is, most of the times, concerned with uncertainty, since its end-effector is interfaced to the more or less structured external world. The uncertainty is handled by knowledge-intensive techniques that, mainly, exploit:
• system hypotheses to drive the manipulation dynamics with due consideration of the modelled non-linear inertial couplings;
• observation data to modify the current behaviour while counteracting the external off-setting influences.
The autonomous operation presumes on-line task-planning, performed by exploiting goal-oriented techniques and self-learning abilities to generate proper activity patterns. Autonomy under-emphasises robots as rigs that do jobs. 3.1.1.3.4 Parallel Kinematic Machines Today parallel robots (with closed kinematic chain) offer interesting solutions to the manufacturing area. In these machines, the end-effector is a platform carried in parallel by several articulated or telescopic elementary drive chains. These elementary devices are usually equipped with only one motor, and they would be under-constrained if they were not connected to the same end-effector. Since the kinematic chains are linked together, the system is globally characterised by a degree of freedom smaller than or equal to six.
14

Research RoadmapsEURON Key Areas
In comparison with traditional (serial) robots with open kinematic chain, in which each link is carried by the previous one, these machines have some intrinsic advantages. Above all, the structural stiffness is evidently higher, and this facilitates higher accuracy. Each elementary kinematic chain is equipped with only one motor, so it is often possible to place all the motors fixed to the ground; this drastically reduces the moving masses, and consequently high speed and acceleration are achievable. The mechanical structure of a parallel robot is often less expensive than that of a serial robot, also because of the modularity of the elementary kinematic chains, that are frequently equal. One of the main hindrances to the diffusion of these machines is the complexity of kinematic and dynamic equations, that are often not achievable in an explicit form. In particular, while the existence and unicity of the direct position analysis are assured for serial robots, for parallel robots the direct kinematic problem is characterised by multiple solutions, rarely obtainable in analytic form. This causes remarkable control problems. Only recently, thanks to the progress in computer technology, the first industrial parallel robots are appearing; they may be divided in two well distinct categories that are antithetic in many points of view. The first category is represented by machines designed for fast pick-and-place, such as the FlexPicker by ABB, conceived as DELTA by Reymond Clavel (1989); these robots are designed for fast handling of small payloads, then their mechanical structure is very light, often built with composite materials; speed and acceleration are very high (respectively 10 m/s and 10 g). The second category is represented by robots designed for machining, such as the machining centers by Ingersoll and for assembly, such as the Tricept of NEOS, conceived by Karl-Erik Neumann. The mechanical structure is obviously very stiff in order to obtain high accuracy; speed and acceleration are lower in comparison with the previous category, but however higher in comparison with a traditional machining center. This causes a remarkable productivity increment, because of the reduction of non-operative time of tool movement. 3.1.1.3.5 Transport Systems/ Automated Material Handling Transport systems and material handling equipment for industry include: hand trucks, powered trucks, cranes, monorail, hoists, conveyors, AGVs; in the following only conveyors and AGVs are considered. Different factors affect the selection of the material handling system: the type of material to be moved, its quantity, the rate of flow required, the scheduling of moves, the route to be used, etc. The design of the system is strictly related with the manufacturing system layout and requires the definition of many parameters such as location of load/unload stations, alternate routes between locations, distances traveled to move material, flow patterns, areas of congestion, arrangement of equipment. Rigid or dedicated transfer line structures using conveyors to handle and transport product have relatively low cost and system is relatively easy to set up, but they present the disavantages of rigidity and relatively low utilization rate. Functional cells linked by AGVs present high system utilization rate and reliability, but it is expensive and more difficult to implement. Usually they need buffers. The introduction of the new concepts of flexible resource allocation and material flow performed by holonic redesign of the material flow processes leads to a significant increase of throughput and productivity. This result is reached by consequent introduction of agent based control structures and so called Holonic Autonomous Guided Vehicles (H-AGVs) or like ones. The material handling principle are presented by [32]
15

Research RoadmapsEURON Key Areas
3.1.1.3.6 Conveyors A conveyor is a mechanized device to move materials in relatively large quantities between specific locations over a fixed path. The major types of conveyors are:
• roller conveyors: series of tube rollers perpendicular to motion direction, which can be powered or use gravity for motion;
• skate-wheel conveyors: similar to rollers but use skate wheels parallel to motion direction;
• belt conveyors: drives move flat or belts shaped into a trough; • chain conveyors: uses loops of chain that are typically moved by sprockets as driven
by motors; • overhead trolley conveyors: items are moved in discrete loads by hooks or baskets
suspended from overhead rails; • in-floor towline conveyors: similar to overhead trolley but carts are pulled by hook to
in-floor conveyor; • cart on track conveyors: items are moved by a cart attached to a rail system, which
uses a rotating tube to move the cart along the rail. From the layout point of view the conveyors may be configured in line, with single direction, as continuous loop or recirculating; typically the flow is unidirectional and loads discrete. Modularity is properly exploited for the transfer structures by using already available units, built with standard tracks, completed with forks, by-passes and spur tracks. Transport is done by belts or chains, with locking-unlocking mechanisms operating on palletised trays. The tracks are easily rearranged, with bend connections, providing the opportunity of modifying the loop or of interlacing more than one loop. The manufacturing and assembly stands are located along the tracks, with the local processing modules properly linked and interfaced to the parts feeding devices. The resulting set-up presents as a fixed automation assembly line, with a single entry and a single output, when an artefact type is machined alone. It can reach comparable productivity, with sequential machining schedules properly split, if the work-cycles are balanced at each stand. Inclusion of singling and sequencing devices; change of work-stations order; monitoring or testing instruments; etc. is possible, but not easy; moreover the designer has the possibility of distinguishing the product flow (completed by special purpose modules) from the dispatching flow (assured by redundant tracks). 3.1.1.3.7 AGVs versus Mobile Robots An AGV is an independently operated vehicle that moves material along defined paths between defined delivery points or stations. Typically the paths are defined by either using wires embedded in the floor or reflecting paint strips on the floor. Some of the more advanced technologies use inertial guidance systems on-board the vehicles, with distributed calibration stations for position updating. AGVs can be classified as:
• driverless trains: AGV is a towing vehicle used to tow one or more trailers forming a train between stations;
• pallet trucks: used to move palletized loads along predetermined routes. Typically, personnel will steer the AGV to the pallet, acquire the pallet, then steer it to the guide-path where the automated guidance system will then move it to its destination. In a sense, it can be thought of as an automated forklift;
• unit load carriers: move unit loads from one station to another station. A unit load is a collection of items that is delivered repetitively as a unit.
16

Research RoadmapsEURON Key Areas
AGV are generally used in manufacturing systems and assembly line operations; sometimes AGV’s become part of the assembly operation.
Flexible manufacturing systems are often served by AGV’s that are used to transfer parts, materials and tooling between the FMS process stations.
Guidance and control functions may be distinguished as:
vehicle guidance level: on-board control system to move the vehicle along pre-defined paths by a feedback loop between the control system and the guide wire (or paint). More modern systems use inertial guidance to move the AGV between stations. In situations where the guide wire or paint is discontinuous, the control system uses dead reckoning to transition these points;
traffic control level: collision avoidance between multiple AGV’s. The control system is designed with blocking algorithms that use a combination of on-board vehicle sensing and zone control;
systems management level: programming interfaces and algorithms for moving AGV’s between stations, and for scheduling the movement of multiple AGV’s.
For the different control levels and safety purposes an on-board multi-sensory system is needed. The carriers have to be able to move on tracks where also humans and other vehicles can walk or drive They are endowed with bumpers; if the bumpers collide with obstacles, the carrier has to stop within a space smaller than the depth of the bumper itself. Consequently the velocity is limited, usually lower that 1m/s.
AGV research concentrates on alternative track layout designs and operational control policies.
3.1.1.4 Robotic grasping In the past ten years, robotic grasping and restraint have evolved into an important field of robotics research, which is due partly to the evolution of industrial automation towards flexible automation that requires re-configurable adaptive grippers, partly to the growth of robotization in non traditional manufacturing areas concerning difficult to handle products (food, textile, shoe..), and partly to the progress in the study of fundamentals. Attention has been given to the mechanics of grasps and to the grasping of a broader class of objects, both in precise assembly and in hazardous environments. This has pointed out the need for us to determine the graspability of objects, so as to plan a stable and optimal grasp, and to impart fine motion and force control. 3.1.1.4.1 Arbitrary object grasping Grasping an arbitrary object is an essential issue, in particular, when an object has an uncertain geometry and when in an uncertain environment. To make a generic grasp which is suitable and successful to any object, it requires the fundamental study in the theory of constraints. These studies can be dated back to the 19th century, with the work of Relaux (1875) concerning form closures properties of planar objects. More recently, his results have been extended to the 3D case by Somov (1900) and successively used for grasp synthesis by several authors. For example, [36] completed his derivation from equilibrium equations and proposed a minimum number of contacts under an applied wrench. The study was extended to the geometry of a grasped object and a systematic approach was proposed to synthesise the point contact restraint of a rigid body. For example [58], or [35] associated aspects of screw and vector theory with the kinematic constraint. The approach is based on the concept of reciprocity between constraints and freedom, to establish a set of linearly independent screws which are reciprocal to the freedom screws. These concepts have been investigated and applied to the design of anthropomorphic hands by Mason and Salisbury in the early 80’s. The analysis of frictional grasping was then proposed by several authors (Salisbury, Duffy, Bicchi, Melchiorri and many others) by using several techniques, among which a general elastic model for restraint using a screw transformation matrix. In parallel,
17

Research RoadmapsEURON Key Areas
researchers faced the problem of frictionless grasps. Among others [62] and [54] which proposed boundless frictionless grasp and stable grasp in the sense of form closure, based on the basic concepts of computer geometry. This latter approach was extended to frictional grasp. Definition of optimal grasps was another interesting problem, and several authors have proposed interesting results, see Salisbury, Bicchi, Orin, Kerr, Dai, Canny and many others. For example, [26] introduced the screw image space in the grasping study by mapping the geometric shape of an object onto the image space and hence to generate an optimal grasp. In application to a frictional contact, the image space was augmented by using the elasticity of the contact fingers. Michelini, Molfino et alii [64] investigated grippers able to handle and assembly different geometry 3D parts and conceived new grasping, shape keeping, methods for 2D very soft objects manipulation. 3.1.1.4.2 Grasp planning Grasp planning involves three issues:
• characterization of contacts and secure grasp of objects, • planning of contact positions and finger configurations, and • determination of internal force and force distribution.
The task of grasp planning is generally referred to as the determination of the contact positions (on the object to be grasped) and the finger’s postures. Form-closure and force-closure provides a guideline in the analysis of a grasp [26], [28]. 3.1.1.4.3 Motion control in grasping In grasping, fine motion is becoming increasingly desirable in applications which require great precision such as assembling electronic components and handling precise instrument parts. The study of fine motion dates back to 1977 when Hanafusa and Asada proposed the induction of elastic motion to a grasped object with the help of elastic fingers activated through a servo system. A typical representation of fine motion was given by Cutkosky in 1986. A fine motion can be introduced by using finger joints or by exploiting the elasticity of fingertips[37], [46]. In parallel to these research works, a second approach is to manipulate the grasped object with elastic fingertips by using the selective pre-loading in a grasp. Ghafoor and Kerr [31] proposed to analyse the fine motion using elastic characteristics of the fingertips without activating any finger joints. Ghafoor, Dai and Duffy [28] investigated different configurations of pre-loading and their effect on the study of the fine motion control. Mathematical models for a new way of using a set of preloads were proposed with a number of constraints which include slipping and stability parameters of the grasp to determine the optimal displacements allowed in a particular grasp.
3.1.2 Future development The manufacturing of traditional components like machine-tools, robots, part-feeders, transport units…, is usually designed as stand alone equipment. Up to now little explicit effort has been dedicated to enabling the integration of these components into a manufacturing system. Hence, high economic and technical costs remain associated with the manufacturing integration process that in turn severely limits the utilisation of such elements in many practical applications. The use of compact, mechanically simple elements whose customisably combined behaviours fulfil the specific application requirements is foreseen to adhere to the industrially accepted model of flow-through processing while providing for the rapid deployment and reconfiguration of manufacturing systems. We expect these modules to act smoothly in concert with humans, serving as intelligent cooperating tools.
18

Research RoadmapsEURON Key Areas
To improve the manufacturing efficiency appropriate techniques, such as: • trend monitoring pro-active maintenance; • anthropocentric work-organisation; • total quality, on-line process control; • automation, self-adapting fixtures; and the like, should be applied. The policy is a combination of flexibility and cooperation; it takes account of the entire production chain, from customer's fancies, to ecological disposal; it includes process re-engineering and corporate strategies. It requires empowerment with team-work, and the transfer of decision-making as low as possible, with supportive management style. It is based on: • off-process (re-configuration) flexibility: the possibility of resetting factory lay-out for
modified production requirements • on-process (adaptivity) flexibility: the capability of manufacture high diversified product
mixes and enabling recovery plans without set-apart redundancies at emergencies.
Agile manufacture is thought as a distributed system of tightly integrated mechanical and computational robotic modules endowed not only with information about their own capabilities but also with the ability to appreciate their role in the factory as a whole and to negotiate with their peers to participate in flexible factory cooperation.
3.2 Working and production assistant 3.2.1 State of the art Robotic assistants provide physical or informational assistance to the worker. They can be viewed as evolutions of industrial robots and have been under investigation for some time [2]. A wide spectrum of robot systems with direct exposure to people, sometimes with direct interaction have been suggested. In 1984 the MORO (MObiler ROboter) was introduced as a robot arm installed on a mobile platform navigating freely in the shop floor delivering and handling tools and work pieces [3]. High system costs prevented its industrial use at that time. The KAMRO represented an ambitious extension of this concept. With two servo-driven arms on an omnidirectional mobile base the system could impressively execute human skills and dexterity for a wide variety of tasks [4]. Several specialist robot solutions have been worked out where worker and robot work side by side executing complementary tasks according to the classical industrial engineering rule “men are better at… machines are better at...”. A cooperative welding robot system in the ship yard industry serves as an example: The gantry-mounted uncaged robot welds standard seams on a ship segment while the worker on the same segment specializes on sensitive seams. A light curtain and bumpers on the robot’s axes serve as protections against intrusion and collision. The COBOT was suggested to provide assistance to the human operator by setting up virtual surfaces to constrain and guide motions when handling or placing objects [5]. Advanced robot assistants were presented by Khatib [6]. A platform mounted arm is designed to supplement the physical capabilities of a human operator, providing an "extra pair of hands" that can move a load in response to forces he/she exerts. Also, multiple robot assistants will work co-operatively in moving, and positioning objects under the supervision of the human operator.
19

Research RoadmapsEURON Key Areas
Assistive systems in homes have been proposed by Engelberger (Elderly Care Giver), Dario (MOVAID), and Schraft (Care-o-Bot) all of which are aimed at supporting a mobility impaired person’s life in a natural home setting [7][8][9]. This assistance is expressed by guiding a person, performing autonomously fetch-and-carry tasks or executing jobs such as preparing a simple meal. Denso of Japan suggested a concept where a mobile robot arm can be rapidly deployed at conventional assembly lines to add capacity to the assembly worker as the production throughput increases. Currently the MORPHA project funded by the German Ministry of Education and Research (bmb+f) comprising 16 partners both from research organizations and industry aims at conducting R&D to equip robot assistants with powerful and versatile mechanisms to communicate, interact and collaborate with users in a natural and intuitive way [10]. Two scenarios should demonstrate the technical developments, systems integration and gain first field experience:
• Manufacturing Assistant (co-ordinated by DaimlerChrysler AG) and • Robot Assistant for Housekeeping and Home Care (co-ordinated by Siemens AG)
Man-machine-interaction has been addressed by numerous researchers and is viewed as a prime research topic by the robotics community. More general approaches focus on humanoid robots which mimic human mobility and skills so that they can cope with complex tasks in unaltered environments both at the shop floor or in homes [11].
3.2.1.1 An example of a Manufacturing Assistant Scenario Currently a robot assistant is being developed by Fraunhofer IPA in a realistic scenario, see Figure 5. Emphasis was placed on the most compact shape of the system while maintaining a battery capacity (48 V) of some 8 h under normal operation.
Figure 5 Structure of the Fraunhofer IPA robot assistant (rob@work)
The prototype scenario deals with the assembly of hydraulic motors and can be described in its manual task execution as follows:
• The assembly process is batch oriented. One product is manually assembled on a work bench segment at a time.
• One station involves the fitting of a ball bearing under a press. • Preparation of the assembly starts with the worker carrying all required parts from the
storage and placing them at their workbench segments. • The worker then moves from segment to segment assembling unit by unit until the
batch is finished. A robot assistant could take over the following steps upon command by the worker at the manual workplace:
• Fetching the assembled parts from the storage and placing them at their segment
20

Research RoadmapsEURON Key Areas
• Placing seals and screws on the motor’s housing. • Attaching the name plate. • Eventually performing simple assembly tasks such as fitting a ball bearing on a shaft.
3.2.2 Technical aspects in future development In our understanding robot assistants should communicate and interact in a “human-like” way and therefore should take into account both shape and mobility of the human body, the performance and versatility of the human senses as well as the natural operating environments. Robot assistants represent a generalization of industrial robots characterized by their advanced level of interaction and their ability to cope with natural environments both at homes and shop floors, see Figure 6.
Teleoperat edmanipulat or
Service Robot
Indust r ial Robot
co-operative
physical andinformational
informational
physical
unstructured
partly structured
fully structured
hybrid autom. full automation
degree ofautomation
structurednessof environment
Robot Assistant
level of interaction
Figure 6 Context of robotic assistants relative to tele-operated manipulators, industrial and service
robots
Five technical fields have been identified in MORPHA for developing and putting manufacturing assistants into practice.
• Channels of Human-Machine Communication. User and robot assistant should co-operate and safely interact even in complex situations. This implies that the assistant understands the user intent through natural speech, haptic or graphical interfaces.
• Scene analysis and interpretation. Effective co-operation depends on the recognition and perception of typical production environments as well as on the understanding of tasks in their context.
• Learning and self-optimizing. Effective assistance not only requires technical intelligence of the robot but also a knowledge and skill transfer between human and robot. A typical example of learning is programming by demonstration.
• Motion planning and co-ordination. During human-machine interaction motions have to be planned and quickly co-ordinated. For motions without physical user contact skills such as avoiding obstacles, approaching a human, presenting objects etc. have to be performed. In the more difficult case of physical contact with the user typical skills would comprise compliant motion, anthropomorphic grasping and manipulation.
21

Research RoadmapsEURON Key Areas
• Safety, Maintenance, Diagnoses. A suitable safety concept must account for the integrity of the system just as it must account for the integrity of its surroundings. External events affecting the proper function of the system and internal error conditions must be identified and classified according to their inherent risk factors[12][13][14][15].
3.2.3 Societal aspects In a global market comparable products are offered: the enterprises, to preserve and expand their trading positions have to continuously adapt the current products to the users satisfaction. The trend becomes more relevant, as the number of specifications includes the adaptation of the products to life-cycle standards on safety, anti-pollution, on recycling and dismantling rules, according to prescriptions aiming at sustainable development, promulgated by every industrialised Country, Alting [17][18], Boothroyd [20], Charter [21], Ebach [27], Guinee [33], Jovane [34], Seliger [48], Figure 7.
MANUFACTURE
DESIGN
CUSTOMERSERVICE
ASSEMBLY RECYCLE
REUSE
ENVIRONMENT
USER NEEDSDISPOSAL
RAWMATERIAL
Figure 7 Material flow in a life cycle of a product.
Each offered artefact is, thereafter, endowed by quality ranges attributes, covering multitudes of users’ requests The actual trend is to re-propose one-of-a-kind products, purposely adapted to individual whims with quality figures granted by standard tolerances, as compared to craftworks. With markets globalising, short delivering with customer-driven quality is becoming critical request. Actually time-to-market and product quality are vital factors for enterprises aiming at remaining, or becoming, world-wide competitors.
3.3 Service robots 3.3.1 State of the art Although the first steps to employ robot technology for an automation of everyday tasks and services reach back almost 20 years, the notion "service robotics" did not reach a broader awareness before Joseph Engelberger had published his book "Robotics in Service" in 1989. This book gave a rather comprehensive overview of the service robots which had been invented and developed from the mid to the end eighties. Their number was manageable and only a few of them really delivered a service that paid off its development cost. More than for this overview of the state of the art in 1989 the book deserves recognition, since it also gave an enthusiastic picture of the potential of this new field "Service Robotics". Since then almost 15 years have passed and we have witnessed the development of an overwhelming variety of new service robots. Quite a few of them have reached the mature state of products, some more are in the process of maturation, and a far larger number is still in the beginning of this process. During these years, however, it has also become evident that the road to robust,
22

Research RoadmapsEURON Key Areas
safe, and economically useful service robots is far longer and bumpier then was expected and predicted in 1989. In the following we give a survey of the state of the art in some selected service robotics applications today and describe the developments, which have taken place since then. In subsequent sections we provide case studies for those selected applications and analyze the reasons for their success or still pending success. In a concluding section we propose some measures for remedying technological deficits as well as technology transfer measures. When talking about service robotics research it is important to realize that service robotics per se is not a basic research topic. The science of service robotics is the science of integrating methods and approaches from the various fields of robotics into real-time capable robot systems, which are customized to specific applications. In the following we therefore review the state of the art with respect to system developments rather than the state of the art of disciplines contributing to an operating service robot. In "Robotics in Service" Engelberger already listed more then 15 different application fields which according to his assessment lend themselves to automation by means of robotics technology. Amongst these were:
• medical robotics • health care and rehabilitation • commercial cleaning • household tasks • fast food service • farming • gasoline station attendant • military services • mining • construction • surveillance • aiding the handicapped and the elderly
Schraft and Schmierer (Schraft and Schmierer 1998) have added a few more applications such as:
• fire fighting and rescue robots • entertainment (was included in household tasks in "Robotics in Service") • office logistics • catering and service applications in hotels and restaurants
It is obvious that the list of new applications will continue to grow as the available technology becomes more robust and reliable. For some of the applications listed above including medical robotics, entertainment and educational robotics or field applications such as mining, construction, farming there will be separate surveys. In our survey we confine ourselves to the following indoor service applications:
• cleaning • robotics in construction industry
We believe that apart from medical robotics and edutainment robotics the above applications have by far the highest economic and/or social potential.
3.3.1.1 Cleaning Prassler et al. (2000) have reviewed the development of cleaning robots from the mid eighties to the present [69].Their survey describes a selection of 30 cleaning robots, ranging from small, moderately expensive household cleaning devices to high-cost, high-tech, large automated cleaning machines. The authors classify these 30 cleaning robots in home
23

Research RoadmapsEURON Key Areas
cleaning robots and industrial cleaning robots. Among home cleaning robots they count robotic vacuum cleaners, sweepers, and floor scrubbers and pool cleaning robots. Taken together research prototypes, industrial prototypes and commercially available products the authors collected information on 12 different developments of home cleaning robots. Probably the most telegen application in this area is robotics vacuum cleaning. Surprisingly, there was a number of robotic vacuum cleaner for private households, which had been announced to become commercially available very soon for quite a while. These announcements were renewed almost annually and it was not until the end of 2001, that Electrolux a large appliance manufacturer in Sweden dared to make the first step and finally introduced his robotic vacuum cleaner to the market. Somewhat more established than robotic vacuum cleaners are robotic pool cleaning robots. There is a growing number of retailers, particularly in the US, which offer robotic pool cleaners. This may be explained by several circumstances. The targeted customer groups may be different (and so may be their income), the application may lend itself more to automation due to the regular structure of a pool, the service as such may be rated higher. Prassler et al. further survey 18 developments of industrial cleaning robots. This number is not surprising since in Europe only the estimates for the market for commercial cleaning services range up to the order of Euro $ 50-100 billion per year. Again this number includes research prototypes, industrial prototypes and commercially available systems. In spite of the seemingly huge market for industrial cleaning it is literally only two or three systems, whose sales figures have so far exceeded a dozen, amongst them ST82 Variotech from Hefter-Cleantech, Germany, and ScrubberVac from ServusRobots, US.
3.3.1.2 Robotics in construction industry The construction industry is one of the oldest and the biggest economical sectors. The contribution of construction industry to the GDP in the industrialized countries is about 7-10%. In the European Union there are about 2.7 million enterprises in the field of construction, most of them small enterprises. On the other hand, the turnover of the 10 top EU construction companies is in the range of 15.000-5.000 M€ each. These economical facts are comparable to the manufacturing industry. Nevertheless, the advance in construction industry is not comparable to advances in other industries such as manufacturing and especially in the sectors of automobile, electronics, train, aircraft, etc. These industries enjoy the double investments in R&D than in the construction area. [135]. It is evident that nowadays the level of automation in construction is very low in comparison with the exiting technological advances. This is why construction will be one of the areas of biggest expansion of robotics in the next decades. All the actors - researchers, companies and administrations - must do further efforts to increase the level of robotization in this important sector. The research activities in the field of robotics and automation in the construction industry are divided according to the applications in two big groups:
• civil infrastructure • house building • service application
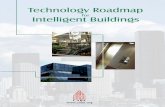
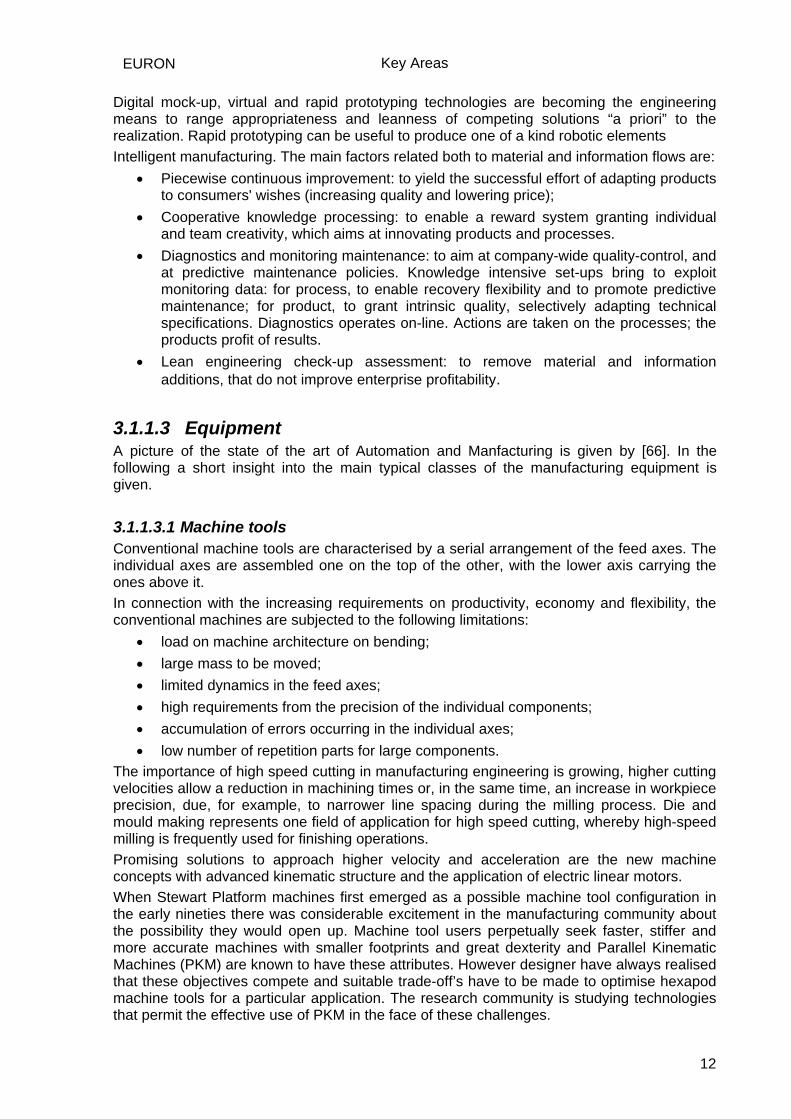
The most typical civil infrastructure applications are the automation of the road & railway construction, tunneling construction, bridge construction, earthwork, etc. In the field of house building the main applications are the building skeleton erection & assembly, the concrete compacting, the interior finishing process, the pre-fabrication, etc. Service applications contain mostly inspection and maintenance tasks. There exists an other type of classification which divides the R&D activities according to the developed technology: a) development of new equipment and processes (robots, automatic systems, etc.) or b) adaptation of the existing machinery to transform them into robotic systems (excavators, cranes, compactors, etc.). Figure 8 summarize the main fields of application of robots in construction industry. Japanese companies were the pioneers of the robotization of construction. The last decade, with the help of government projects funding, Japan had the leader role in this field. It had
24

Research RoadmapsEURON Key Areas
been developed numerous innovative systems in the majority of the application fields. The SMART system was the first to be developed during 1992-94 [136]. It was adopted in the construction of two buildings with more than 30 stories in Nagoya and Yokohama. The system consists of all-whether full-robotic factory on the top of the building. The lift-up mechanism automatically raises the construction plant. The continuation of this effort is the Japanese project IF7 [137]. EU only recently starts the R&D activities in this field, trying to compete with Japanese. FutureHome EU project is one of these examples [138].
Civil engineering applications: automatic excavation, teleoperated compactor, robotized piling system
House building applications: wall erection robot, concrete floor finishing robot, column welding robot
Service applications: climbing inspection robot, facade cleaning robot, exterior vigilance robot
Figure 8 Examples of different robots in construction industry
In civil engineering road construction is one of the most important areas. The development of robots is significant. The new generation of autonomous road pavers and asphalt compactors are under development nowadays [139]. These mobile machines are heavy out-door mobile robots strongly using the GPS tracking technology for autonomous navigation and pavement quality control. Similar situation holds for tunnelling construction which leads to fully automatic working. The automated transportation, the driving head based on the parallel manipulator concept and sensor-based navigation by lasers, gyrocompasses, level-gauge and inclinometers, are used in the tunnelling machines. The earthwork research activities are mainly focused in the introduction of new control techniques to the existing civil
25

Research RoadmapsEURON Key Areas
machinery: excavators, graders, etc. The dynamics and kinematics control together with the force/torque feedback in the excavator bucket are important issues toward the robotic autonomous excavation [140]. Moreover, teleoperation of the backhoe excavators remotely operated using visual and force feedback is very much appreciated by operators. The automatic construction of buildings is another big businesses of the future. For efficient house building the transportation & assembly devices for heavy and big parts are necessary. Several robots for automated assembly were developed during the last years. The EU ROCCO project developed the large range 10m long and 500kg payload hydraulic robot with laser telemeter auto-tracking feedback [141]. The automation of commercially available construction cranes for assembly of building parts is focusing mainly in the precise anti-swinging control. The finishing interior operations are very time consuming and need good accuracy. Mobile robots will help to compact and control the thickness of the concrete, using the toweling system. In the area of interior assembly the wall panels assembly by mobile manipulators is continue to be an open issue [142]. The role of pre-fabricated elements in house building increases every day. The automatic modular design and flexible and rapid manufacturing of these elements is very important. There exist also a lot of service applications in the construction industry, starting from on-site and finishing with maintenance and inspection. The periodical inspection of civil and house infrastructure represents extensive and valuable field of work. It is estimated that in the EU there are over 42.000 steel bridges with replacement value of 350 M€. This is why there are several ongoing research projects related to robotic inspection, specially by developing climbing robots [143]. Façade cleaning and inspection is another important filed of application, together with the vigilance of out-door and in-door environments.
3.3.2 Service Robots Market Prospects By the mid -90ties the potentials of service robots have been widely recognized so that the International Federation of Robotics (IFR) began to establish a definition of service robots on which its annual market survey is based upon. According to that counting scheme the total stock of service robots in 2000 reached an astonishing 10.400 units without counting domestic robots (robot vacuum cleaners, lawn mowers). Some 30.000 installations, again not counting household robots, are expected by the year 2004. A survey by the UN/ECE among some 80 service robots manufacturers confirmed that the majority of the companies offering products and services in the field of service robots are small and medium sized, extremely innovation-driven and very well networked to technology providers such as universities and research organizations. It is to be expected that in the wake of the IT-start-up era, the number of start-up companies in this field will increase significantly in the near future. This will certainly result in a dynamic market of interesting future products where Europe will stand in a tight competition to enterprises from both the US and Japan. Although service robots are as diverse as the applications they are designed for, three categories can be distinguished:
• Modification of classical robots for application outside of the manufacturing environment which is increasingly pursued by robot systems integrators looking for new markets. Examples being refueling robots, automated warehousing or medical robots, where the system basis is deduced from industrial robot technology.
• Service robots such as cleaning, inspection robots often result from the upgrading of specialist existing machines. Here established machine producers use advanced robot technology for the automation of their high-end systems.
• Product designs which are done “from scratch” especially for large volume markets (robot household appliances, entertainment robots etc.)
Figure 9 gives some examples of service robots out of the above described categories.
26

Research Roadmaps EURON
Key Areas
Service robots as low volume specialists: floor cleaning, sewer inspection, entertainment
Robots as household appliances for large volume markets: Lawn-mower, Vacuum cleaner and tennis ball collectors
Service robot systems based on conventional robot arms: refueling, orthopedic surgery, automated drink terminal
Figure 9 A number of different service robot applications.
3.3.3 Case Studies and Open Problems In the following case studies we analyze the potentials and limiting factors in service robot applications.
3.3.3.1 Cleaning Robots With the advent of autonomous mobile robot technology the automation of manually driven cleaning machines was an obvious application target. First research projects were aimed at developing autonomous cleaning robots (EU Esprit ACRO) explicitly by taking into account end-user requirements. Meanwhile several prototypes and first products of commercial autonomous cleaning machines have proven their technical feasibility in public settings, see chapter 2. Still market penetration of autonomous cleaning machines (currently some 4401) fall short behind expectations despite the great interest this technology has arisen among the cleaning service industries:
• Cleaning machine operation counts among entry level jobs so that a cost effective solution has to be compared to low labor costs. So far the “cost barrier” of 10 TEuro
27

Research RoadmapsEURON Key Areas
for the required machine “intelligence” as one of the most stringent criteria has not been met yet.
• Operation of the cleaning machine needs human supervision. The worker either supervises several machines or simultaneously takes over other tasks. In any case a cost benefit is reached by an increased productivity of an effective “man-machine” system. This would mean a change in operations and qualifications which still has to be established.
• Instead of retrofitting existing machines it has become obvious that a cleaning robot requires a specific design. Cleaning machine manufacturers have been reluctant to invest into advanced robot technology which will not have a significant impact on their current business and return profits eventually in years to come.
3.3.3.2 Robots for courier services and logistic tasks Engelberger recognized that up to 30% of a qualified nurse’s working time is lost in unproductive courier activities at the expense of valuable patient attention. Presumably simple delivery tasks should be supported by an automated system at the hands of nurses. This led to the development and in 1993 to the first introduction of the HelpMate courier robot which is characterized by:
• Operating hour is less expensive than human couriers • Completely autonomous; independent of any external guidance system, such as
tracks or wires • Deals easily with cluttered, unstructured environments • Gets on and off elevators without assistance • Simple user-interface; easy to learn • Few facility modifications such as radio links, access to elevator and door control etc. • Flexible and easy to reprogram
From beginning on HelpMate was considered technically ahead in mobile robotics. Public interest, a robust system performance and a well thought through technical concept made Helpmate a pioneering representative for the cause of service robots. After eight years of operation with at times more than 100 installations and meanwhile 3 Mill. hours of field experience a well deserved economical break-through has not occurred yet, probably due to a mix of the following reasons:
• The cost saving compared to manual labor is relatively low. Other cost cutting measures in a hospital may be easier to reach.
• The installation phase (environmental adjustments, employee training, providing access to service people etc.) slight as it may be, constitutes a troublesome effort
• A sometimes complicated decision process in hospitals where such measures have to be in harmony with investment plans, employee’s regulations, trade unions
• Missing direct market access and service network into health care industry for a robot producer
• Limited financial and personal resources for a small company (HelpMate Robotics) to account for R&D, setting up and servicing system installations, renting and customer support.
HelpMate is now a product of Pyxis Corporation, USA, an established supplier of medication systems to hospitals. Apparently, other companies (Matsushita and Siemens) have come up with similar products to Helpmate.
28
Research RoadmapsEURON Key Areas
3.3.3.3 Automated Refuelling First efforts to automate fuel refilling for cars date back to the 1950ties. But not before the end of the 80ties could a first prototype of a refueling robot (Autofill of Sweden) has been put out for trials. In Germany, a consortium of leading automobile manufacturers and oil companies set out to develop a robot for automatic fuel dispensing for the following reasons:
• More convenience for the driver through reduced delay times at tank stops • No obligation to leave the car which is especially important for handicapped people • Higher throughput and reduced area consumption of gas stations • No leakage of fuel gases or liquids during refilling • Future fuels for automobiles such as hydrogen, compressed natural gas will play an
increasing role in the near future but will depend on complicated refilling techniques which will not be suitable for a self-service refilling. The availability of automatic equipment which performs a controlled and safe dispensing constitutes a key to the introduction and exploitation of these fuels.
A first fully functional prototype for mineral oil refueling has been introduced in 1996 which showed all characteristic features of a service robot:
• The robot will be operated by untrained customers in a public environment • Only intuitive positioning of the car relative to a terminal can be expected from the
driver • The car's doors must not be obstructed • The workspace of the robot should be constantly monitored against entrance • Unexpected car movements (oscillations and sudden start) have to be tolerated by
compliance of the robot or rapid undocking) • Only minimal chances of the tank flap and tank cap can be tolerated • The system should resist (within limits) vandalism.
A redesign followed in 2000. Meanwhile other designs were introduced of which none could make the step to larger serial installation.
• The break-even costs of a complete automated are estimated to be some 80 TEuro which can be met with moderate effort.
• The critical part is a retrofitable standard refueling cap which complies with national regulations
• A wide introduction of automated gasoline pumps would represent a tremendous investment which mineral oil companies are not ready to bear.
• For closed car parks (especially refilling community vehicles and buses) first installations proved to be successful.
A version for hydrogen fuel refilling is under trial at Munich since 1999 and it is expected that it will pioneer the introduction of hydrogen fuelled cars in the future:
• The robot system is part of an integrated systems concept taking into account all relevant aspects of the specific car designs, altered refueling operations, man-machine-interaction, money transfer and fuel logistics
• All interfaces on the car side such as the filling valves followed a robot-suitable design
• A complete personal safety evaluation and design was implemented • The system has undergone a thorough trial phase in a controlled setting
3.3.3.4 Conclusions from the Case Studies Only few industrial robot manufacturers have entered service robot development and manufacturing. Most companies offering service-robot solutions have either built up their own
29

Research RoadmapsEURON Key Areas
advanced robot technology or accessed it through partnerships. As mentioned, service robot development is the art of integrating technologies and embedding systems into existing environments. As pointed out in the case studies, the way towards a competitive and marketable system depends on the following factors:
• Rigorous systems approach. Given overall requirements in terms of cost effectiveness and quality of task-execution a design is valued by
o its integration into existing environments o user acceptance regarding physical appearance and usefulness o compatibility to user’s investment and service policies o the qualification requirements of its users o clear interfaces to its embedding environment and the user
• Development and system costs. Contrary to industrial robots, service robots are designed for specific tasks generally taking place in an unstructured environment with the possibility of direct human-machine-interaction. Cost advantages can be achieved by using application-independent components or subsystems with key-functionality. In this context components are both hardware and software.
• Technical requirements. Numerous components of service robots can be adopted from industrial robot technology. However, the need for significant extensions in functionality and increased performance of components or subsystems are obvious for many applications:
o environmental perception and modeling o navigation (in dynamic environments) o task planning o interaction and communication with human and the environment
• Safety. In many cases task execution by service robots takes place in public areas and therefore requires well defined human-machine-interaction. Existing safety regulations are often difficult to apply and may also limit the available workspace considerably.
A large variety of service robot applications with significant installation numbers seem now to be within reach. To address these applications a coordinated and integrated approach to research and development within a network of service robot-users, research organizations, and component- and system manufacturers is needed.
3.4 Care assistant / Intelligent Homes 3.4.1 State of the art The application of robotics in rehabilitation, in particular in the assistance to disabled and elderly people, has been investigated in the last decades by many research groups, especially as an answer to a growing social need (Ballabio 1998). A variety of solutions is thus available, at different levels of technological complexity. Rehabilitation Robotics played an important role in this framework [101], by combining the need for personal assistance to disabled and elderly people (Eurostat 1997) with the emerging concept of Personal Robot as the natural evolution of advanced robotics (Crisman 1996; Engelberger 1989; Dario 1999(a)]. Encouraging results were achieved within joint projects in Europe (Cammoun 1993; Hoyer 1995; Kwee 1993), USA (Leifer 1981; VA R&D 1997; Evans 1995) and Japan (NRDP 1995; Fujie 1998), demonstrating not only the technical feasibility, but also the acceptability potential of robotic solutions in personal assistance (Dario 1996(b); Dario - 1999(b)). In this section, Rehabilitation Robotics is presented by following his historical evolution, i.e. describing first fixed workstations and then wheelchair mounted manipulators and intelligent
30

Research RoadmapsEURON Key Areas
wheelchairs, autonomous mobile robots and finally distributed systems, as illustrated in Figure 10.
Figure 10 the historical evolution of Rehabilitation Robotics
3.4.1.1 Fixed workstations Fixed workstations have been the first attempt to apply robotics, and in particular the results achieved in the field of industrial robotics, to help disabled people. Fixed workstations usually consist of an industrial manipulator fixed on a table, mainly used in vocational tasks carried out in working environments that can be structured on the robot functionality. Usually a user controls the robot through a graphical user interface by means of a personal computer performing predefined tasks, such as grasping and manipulation tasks. The Devar system, developed by the Rehabilitation Research and Development Center of the Department of Veterans Affairs (Palo Alto, California), was one of the first fixed workstations. A picture of DEVAR is shown in Figure 11.
Figure 11 the Devar fixed workstation of the Rehabilitation Research and Development Center of the
Department of Veterans Affairs
Actually, the follow up of DEVAR project is the PROVAR system, a robotic manipulator for grasping and manipulation tasks. The system has been designed for user with high level of disability, such as quadriplegic people, with good cognitive ability. The system, whose
31

Research RoadmapsEURON Key Areas
architecture is shown in Figure 12, consists of the robot PUMA 260 equipped with the Ottobock prosthetic hand as gripper. The working environment is also provided with telematic facilities, such as telephone and Internet, and with a home automation system based on the X10 bus.
Figure 12 the Devar fixed workstation of the Rehabilitation Research and Development Center of the
Department of Veterans Affairs
The RAID system (see Figure 13), Robot for Assisting the Integration of the Disabled, is a fixed workstation for the office or home environment that allow a disabled user, with full cognitive capabilities, to be independent in the execution of tasks like pick and place of common objects, such as paper sheets, books, CD Rom, folder, etc. or in tasks of personal assistance such as drinking.
Figure 13 the RAID system.
The RAID system, initially developed in the framework of the MASTER RAID project coordinated by the CEA-STR centre in France, was then improved and clinically validated in the RAID and EPI-RAID (Evaluation of Prototype and Improvements to the RAID Workstation) projects between the years 1992 and 1996, both funded by the TIDE programme of the European Community. Clinical validation of the system has been carried out in rehabilitation centres all over Europe. Finally, the CAPDI project (Adapted Kitchen for the Disabled), coordinated by UPC and supported by the PITER programme, funded by IMSERSO, (Institute of the Spanish working and social affairs ministry), aims at developing a fixed workstation for the kitchen. The system consists of a robotic manipulator mounted on a track performing typical tasks in a kitchen environment. In order to facilitate the task both to the robot and to the user, part of the kitchen components, such as the clipboard, have been motorised. The distribution of cameras around the kitchen facilitates the automatic location of the elements to be manipulated, avoiding the burden of positioning the robot manually. A scheme of the system and a view of the interface for the control of the robot and the other controllable elements are shown in Figure 14.
32

Research RoadmapsEURON Key Areas
Figure 14 the CAPDI system: a robotic manipulator mounted on a track for typical kitchen tasks and its
friendly interface
3.4.1.2 Wheelchair mounted manipulators and “intelligent” wheelchairs
Wheelchair mounted manipulators allow the user to make use of the robot in more then one place, at home or at the workplace, indoor and outdoor, transporting the manipulator thanks to the wheelchair functionality. However, this solution presents technical disadvantages mainly due to the poor accuracy of the system and to the lack of knowledge of the working environment that does not allow the robot to work autonomously. The robot is usually controlled step by step by the user with consequent poor usability of the system. An example of wheelchair-mounted manipulator is the Manus Arm, produced by Exact Dynamics, The Netherlands. The SPRINT-IMMEDIATE project aimed at developing and validating prototypes by mounting the Manus arm on different European electronic wheelchairs, by exploiting the M3S standard for interfacing. In Italy, the TGR Explorer, an all-terrain electric wheelchair, was equipped with the Manus Manipulator; a picture of the system is shown in Figure 15.
Figure 15 the Manus Arm, by Exact Dynamics, mounted on the Explorer electronic wheelchair, by
TGR.
Handy 1, produced by RehabRobotics, Great Britain, stands as another example of a mobile manipulator. Handy 1 is a simple manipulator with 5 d.o.f.s for feeding tasks. It is able to pick up pieces of food from a tray and to raise them to the user’s mouth, and to serve a glass of water to the user. Figure 16 shows the Handy 1 system.
33

Research RoadmapsEURON Key Areas
Figure 16 the Handy 1, by Rehab Robotics, a feeding manipulator.
In parallel with the development of wheelchair-mounted manipulators, robotic research dedicated remarkably efforts in studying the development of intelligent wheelchairs. One of the main advantages in using an electronic wheelchair is the possibility to increase its mobility performance by equipping the wheelchair with sensory systems and reasoning capability. In particular, electronic wheelchairs able to navigate autonomously, to assist the user in navigation tasks or to navigate in presence of obstacles or in difficult areas have been developed. The TIDE-OMNI project stands as an example of development of an intelligent wheelchair: the system, shown in Figure 17, equipped with ultrasound and infrared sensors, personal computer and with reasoning capability, assists the user in the control of the wheelchair, avoiding unpredictable obstacles and redefining the trajectory determined by the user according to the information on the environment perceived by the sensory system.
Figure 17 the OMNI prototype
ESCLATEC was a wheelchair project supported by PITER programme and funded by the Spanish Institute of the working and social affairs ministry and completely design and developed at the Polytechnic University of Catalonia. The wheelchair was designed with the aim to able handicapped people to go to beach and also to use the wheelchair in cross-country. The wheelchair has four driving wheels and it was articulated to increase its manoeuvrability.
34

Research Roadmaps Key Areas EURON
Figure 18 the wheelchair in the beach Figure 19 the wheelchair in cross country
Figure 20 the wheelchair articulated
SPHERIC 3x3 was a mobile robot project supported by a Reference Center (CERTAP) and funded by the Research and Technology Commission of Catalonia (CIRIT), and completely design and developed at the Polytechnic University of Catalonia. SPHERIC 3x3 has 6 spheres which configure a 3 wheels mobile robot that has the maximum manoeuvrability and a possible use of this mobile robot is also as wheelchair.
Figure 21 SPHERIC 3x3 frame
35

Research Roadmaps Key Areas EURON
Figure 22 SPHERIC 3x3 as a wheelchair
3.4.1.3 Mobile autonomous systems The more flexible solution in the framework of rehabilitation robotics consists of mobile autonomous robotics systems, that consists of autonomous or semi-autonomous mobile robots equipped with a manipulator and additionally sensory systems to perform manipulation and transportation tasks. The system appeared as the best promising solution in helping users with high level of disability or bed-constrained, if provided with proper user interface: the user should be able to ask for the execution of task using a high level language optimising the interaction with the system. This kind of systems, overcome the limits imposed by the wheelchair mounted manipulators, but represents also the most complex solution with technical unsolved problems related not only to the interface, but mainly to the ability of the system in performing autonomously tasks for personal assistance, ability that depends both on the actuation, sensorial and reasoning aspects. The concept of mobile autonomous systems for personal assistance has been proposed for the first time by the research group of the Stanford University, in collaboration with the Veterans Affairs Rehabilitation R&D Center of Palo Alto, California. The proposed scheme, shown in Figure 23, has been realised with the MOVAR system (see Figure 23) a mobile robotic system for vocational assistance.
Figure 23 the scheme of autonomous mobile robot for personal assistance and its implementation, the
MOVAR system
36

Research RoadmapsEURON Key Areas
The URMAD system (Unità Robotica Mobile per l’Assistenza ai Disabili), developed by an Italian project led by the Scuola Superiore Sant'Anna, consists of an omni-directional mobile base equipped with an 8 degree of freedom, a 2 degree of freedom robotic hand and a pan tilt head with two TV cameras. The mobile base is equipped with a ring of ultrasound sensors and of a further vision system for the detection of unpredictable obstacle while the hand is equipped with force sensors on the fingertip for the grasp control. The system comprises also a personal computer where the graphical user interface is installed and that communicates with the mobile unit with a radio link. The user interface makes two control modalities available: in the autonomous mode the user can ask the execution of a predefined task or he can compose a new task by defining it with a natural language with the keyboard or by voice. The robot then performs the task autonomously. In tele-operation mode the user can control each component of the robot step by step and he/she can eventually store a sequence of movements to be used at a different time. A picture of the URMAD prototype during the execution of a demonstration task is shown in Figure 24.
Figure 24 the URMAD prototype during the execution of a demonstration task.
The Care-O-bot system is a mobile robotic platform for home assistance of disabled and elderly people, designed and developed by the Fraunhofer Institut IPA, Stuttgart, Germany. The system has been designed to perform grasping and transportation tasks in a home environment, such as transportation and delivery of meals, drinks and flowers, and to perform simple domestic tasks, such as cleaning or water flowers. Particular attention has been spent on the interface of the system that it is also provided with telematic facilities: Care-o-bot is equipped with a loud-speaker and video phone that allows the communication with health care and public services, emergency calling and the management of electronic devices (video phone, TV, video-recorder) and of home automation devices (doors and windows opening/closing, air conditioning, lights switching on/off). Finally, the system could be used also as a personal lifter or walking aid. A prototype of the system, shown in Figure 25, has been integrated and presented to the Hannover exhibition in 1998. Based on the first demonstration trials, the system, that will be also equipped with a manipulator, will be further developed in collaboration with industrial partners and rehabilitation centres.
37
Research Roadmaps EURON Key Areas
Figure 25 the Care-o-bot system and possible application scenarios
As mentioned above, fixed workstations, that are merely replication of industrial applications, pose well-known technical problems and show very high performance in suitably structured environments; wheelchair-mounted manipulators are much more flexible, but their performance is strictly dependent on the user’s ability to control the arm and to access the interface; and mobile robots require the more complex technical solutions, and provide the richer functionality as well. Furthermore, changes in autonomy levels came along with these technical developments. System autonomy, as perceived by the user, is very high in fixed workstations: the user sends a high-level command and the robot independently carries out the corresponding task, according to its own pre-programmed rules of behaviour. In wheelchair-mounted manipulators, robotic arms have to be operated by the user at each step: system autonomy is basically absent. Mobile robots are supposed to be autonomous, but in order to satisfy this requirement in unstructured environments much more sophisticated planning schemes are needed. MOVAID (MObility and actiVity AssIstance system for the Disabled) is a project partly funded by the European Union in the framework of the TIDE (Technology Initiative for Disabled and Elderly people) research programme from 1994 to ’97, for the development of a semi-autonomous modular robotic system for residential care of disabled and elderly people. The MOVAID system concept combines the performance of a static robotic workstation with the versatility of a mobile, semi-autonomous robot. The system consists of static activity workstations, to which a comparatively simple mobile robot can dock: the mobile robot has the minimum technology required for it to navigate around the environment safely, but when docked, the combined robot and workstation offer the high performance of a static robot. The basic philosophy of the project relies on the concepts of ‘design for all’ and ‘user oriented approach’, as key factors for the introduction of technology in everyday life. The focus of the project was more on the satisfaction and pleasure of interaction than on efficiency and effectiveness. Thus, potential users were involved at various stages of the project, in order to define the acceptability of the product before its design, on one hand, and to validate its efficiency after the design, on the other hand. According to this user-oriented approach, the project has carried out a number of essential tasks, including: user requirement analysis and development of scenarios of use; definition of the MOVAID system based on user requirements and scenarios; definition of functional specifications; re-design of existing components; definition of design guidelines; prototyping of MOVAID system; user testing revision and improvement of systems, followed by integration of systems; and user trials in Italy, France and Switzerland with elderly and disabled users. The analysis of user needs for MOVAID has been carried out through interviews to disabled people, their relatives and assistants, in Italy, France and Switzerland [21], and a total of six user profiles have been specified, three severely disabled and three moderately disabled. The tasks identified for the system are to warm-up a dish of pre-prepared food in the
38

Research RoadmapsEURON Key Areas
microwave oven and serve it at bed, dispose of empty packages (or peels) on the kitchen work surface and clean it and remove dirty upper and lower sheet from the bed and put them in a container. The MOVAID system is composed of a distributed robotic system, including a mobile robotic unit and two fixed workstations, and dedicated interfaces for standard kitchen appliances (see the mobile unit in Figure 26) The MOVAID mobile unit is composed of a four-wheel mobile base supporting a robotic arm and hand. On the first link of the arm a pan-tilt head supporting two TV cameras and a DLPS-based self-localisation system are mounted. The mobile base is also equipped with a ring of ultrasound sensors for obstacle detection and is partially covered by a tray for object transportation. An active bumper around the vehicle halts the system in case of collisions. On the rear lower part of the mobile base the male docking system is also mounted. The mobile unit structure is modular, so that the vehicle can be used on its own, as a mobile platform, and the arm can be mounted on a different support (a table or a wheelchair). In the experimental MOVAID scenario, two fixed workstations are located in the house: the main workstation is located in the bedroom, close to the possible bed-ridden user, while the second workstation is located in the kitchen [24]. Each fixed workstation is constituted by a PC, on which the most of the software modules of the system (i.e. the modules not strictly required on board) are implemented. The two fixed workstations are connected into a local network by an Ethernet link and are connected to the mobile base by the Ethernet radio link. The female parts of the docking system are located near the fixed workstation, one on the bottom of the kitchen furniture and one under the bed. The fixed workstations allow the access to the robot through a graphical man-machine interface, which can be used either by means of the standard PC mouse or by a specific human-machine interface. Semi-autonomy was implemented in the MOVAID system by defining four levels of use that are also reflected in the user interface, and are named Beginner, Standard, Advanced and Expert. The beginner level corresponds to the less restrictive sense of semi-autonomy. The user can only choose a pre-defined task to be executed, out of a list. This level includes training procedures, self-explanatory commands, on-line help. The standard level is a good compromise of user involvement: the user can compose by himself/herself the task to be executed using coarse-grained action primitives, such as “go to the kitchen” or “take the glass”. The system can accomplish these tasks without further user intervention. The user, however, can participate in the task if he/she wishes. For example, user intervention can be explicitly asked by the robot to help localizing an object or in error recovering, even though the robot can apply a default autonomous solution in case of no answer from the user. The advanced level allows the user to compose tasks in a finer-grained action language (action primitives are, for example, single actions or objects, e.g. “go to”, “glass”, “kitchen”). Furthermore, it allows tele-operation, that is, the possibility of independently controlling each different component. At this level tele-operation is supervised, that is the robot maintains its control on operations and integrates user commands with responses from sensors. The expert level is a sort of ‘system manager level’. The user can completely control the robot, up to unsupervised tele-operation. At intermediate levels, the MOVAID system includes tools for co-operation between the robot and the user in the execution of tasks. For example, the system sends the user the image taken by on-board cameras and the user can indicate objects and positions by ‘point & click’ on the shared image. A validation phase was planned for the final period of the MOVAID project for the evaluation of the MOVAID system through user trials with disabled and elderly people, in Italy, Switzerland and France. The six sample user profiles and the three typical tasks resulting from the analysis of user needs were used as basic references for the evaluation. In Italy the
39

Research RoadmapsEURON Key Areas
whole system has been validated with disabled people and assistants in a real house for disabled people, where the system was installed. As a general result, the system was enthusiastically accepted especially by severely motor disabled users and by those with poor or no functionality of upper limbs, while it was evaluated as a helpful, but not strictly needed tool by paraplegic people with full ability of upper limbs. When searching for common features in the results of the different sessions, a great interest can be observed by most users in the various groups; the difference in users’ attitude between the first phase of analysis of users’ needs and this phase of validation is clearly evident (see Figure 26). In the first phase, users were proposed something which was almost completely unknown and a generalised sense of mistrust was detected. In the phase of validation, instead, users were asked to evaluate something much more concrete, which they could see while operating (live or in a video). This changed the opinion of users very much who, in the validation phase, showed a much more positive interest instead.
Evaluation of the MOVAID prototype
Before Before MOVAID MOVAID
Can you imagine a robotic assistant?
Don’t know48%No
42%
Yes10%
Yes43%
No21%
Don’t know36%
Would you have a robotic assistant?
After After MOVAIDMOVAID
User TrialsUser Trials
64 64 users involved users involved inin user user trialstrials andand demonstrationsdemonstrationsin 3 in 3 European countriesEuropean countries
Figure 26 (a) The MOVAID System and (b). Synthesis of results of the MOVAID validation
3.4.1.4 Distributed Systems As illustrated above, the field of Rehabilitation Robotics has been investigated world-wide for many years: significant results have been achieved by important research groups and some of them have been concretised as commercial products. Nevertheless, few applications exist in comparison to the technical advancement of the sector. This is mainly due to the high cost of such systems respect to the functionalities they offer. Robotic systems are intrinsically technologically complex and their reliability is still poor. In order to reduce costs and increase reliability of rehabilitation systems, modular distributed and integrated systems have been proposed. This kind of systems consists of simple and cheaper robotic devices that can be combined in multiple ways to obtain the required functionality by exploiting the wide spreading home automation systems. The automation of the environment can increase the functionality of robotics systems, by making home function more accessible, and can help the integration of different devices. For example, the action of opening and closing a door in a house, that is a complex navigation and manipulation problem in mobile robotics, is easily solved with an automated door. Systems for home automation, or domotic systems, developed to increase the comfort at home for all people, are especially helpful for the disabled and the elderly. The fact that these systems are designed for all favours their diffusion and their cost reduction. As a result, there
40
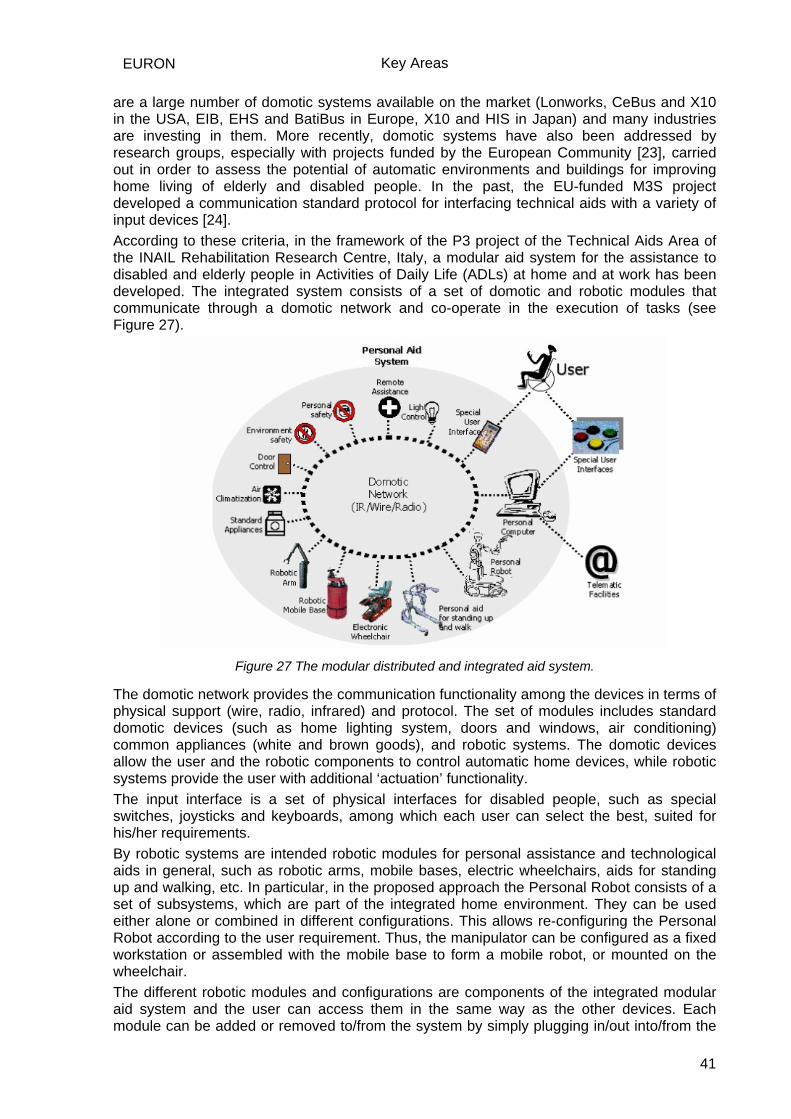
Research RoadmapsEURON Key Areas
are a large number of domotic systems available on the market (Lonworks, CeBus and X10 in the USA, EIB, EHS and BatiBus in Europe, X10 and HIS in Japan) and many industries are investing in them. More recently, domotic systems have also been addressed by research groups, especially with projects funded by the European Community [23], carried out in order to assess the potential of automatic environments and buildings for improving home living of elderly and disabled people. In the past, the EU-funded M3S project developed a communication standard protocol for interfacing technical aids with a variety of input devices [24]. According to these criteria, in the framework of the P3 project of the Technical Aids Area of the INAIL Rehabilitation Research Centre, Italy, a modular aid system for the assistance to disabled and elderly people in Activities of Daily Life (ADLs) at home and at work has been developed. The integrated system consists of a set of domotic and robotic modules that communicate through a domotic network and co-operate in the execution of tasks (see Figure 27).
Figure 27 The modular distributed and integrated aid system.
The domotic network provides the communication functionality among the devices in terms of physical support (wire, radio, infrared) and protocol. The set of modules includes standard domotic devices (such as home lighting system, doors and windows, air conditioning) common appliances (white and brown goods), and robotic systems. The domotic devices allow the user and the robotic components to control automatic home devices, while robotic systems provide the user with additional ‘actuation’ functionality. The input interface is a set of physical interfaces for disabled people, such as special switches, joysticks and keyboards, among which each user can select the best, suited for his/her requirements. By robotic systems are intended robotic modules for personal assistance and technological aids in general, such as robotic arms, mobile bases, electric wheelchairs, aids for standing up and walking, etc. In particular, in the proposed approach the Personal Robot consists of a set of subsystems, which are part of the integrated home environment. They can be used either alone or combined in different configurations. This allows re-configuring the Personal Robot according to the user requirement. Thus, the manipulator can be configured as a fixed workstation or assembled with the mobile base to form a mobile robot, or mounted on the wheelchair. The different robotic modules and configurations are components of the integrated modular aid system and the user can access them in the same way as the other devices. Each module can be added or removed to/from the system by simply plugging in/out into/from the
41

Research RoadmapsEURON Key Areas
domotic network, without re-configuring the entire systems. Each device offers its functionality to the user and to the other devices. The system control and supervision is distributed among the devices: each of them has an autonomous supervisory system that plans its behaviour in response to the requests of other components or from the user. The set of devices consists of a 5 d.o.f. rehabilitation arm, the Manus Manipulator, an all-terrain electric wheelchair, the TGR Explorer, an omni-directional mobile base, the B21r by RWI, and a set of environmental control devices (i.e. IR programmable scanning remote control, IR loud speaker telephone and IR 220V relè units), the Gewa Systems. The robotic modules are configured as: desktop workstation, wheelchair-mounted manipulator and mobile robot. The integration of the system has been achieved through infrared communications protocol, as shown in Figure 28. The system has been also experimentally validated with a set of severely motor disabled people, with full cognitive ability.
Figure 28 the modular aid systems validated within the INAIL RTR Centre
3.4.1.5 Anthropomorphic robotic solutions for care assistants Even though robotic solutions for personal care and home assistance are usually designed to respond to well-identified user needs, a general-purpose solution like a humanoid robot deserves a special mention in the overview of the International state of the art. Humanoid robotics is fast and widely developing world-wide and currently represents one of the main challenges for many robotics researchers. In Japan, this trend of current research is particularly evident. Many humanoid robotic platforms have been developed in the latest years, most of them with an approach especially focussed on the mechanical, or more in general, hardware problems, in the attempt to replicate as closely as possible the appearance and the motion ability of human beings. Impressive results were achieved by the Waseda University of Tokyo since 1973 with the WABOT system and its later version WASUBOT, that was exhibited in playing piano with the NHK Orchestra at a public concert in 1985 [1]. The WASUBOT system could read the sheets of music by a vision system (Fig. 29) and could use its feet and five-finger hands for playing piano. The evolution of this research line at the Waseda University has led to further humanoid robots, such as: Wabian (1997), able of walking on two legs, dancing and carrying objects; Hadaly-2 (1997), focused on human-robot interaction through voice and gesture communication; and Wendy (1999) [2,3].
42

Research Roadmaps EURON Key Areas
Fig.23. Waseda Humanoid Robots: a) Wabot-2, the pioneer piano player, b) Hadaly-2, c) Walking
Wabian and d) Wendy
What is even more impressive in the scene of Japanese Humanoid Robotics research is that big companies are also devoting considerable efforts to this objective. The outstanding example is the Honda Humanoid Robot, whose current version is called ASIMO, which absorbed a dedicated Honda team in a research effort for over 13 years. ASIMO presents very advanced walking abilities and fully functional arms and hands with very limited capabilities of hand-eye coordination for grasping and manipulation [4].
(a) (b) (c)
Fig. 24. The Honda Humanoid Robots (a) P2 and (b) P3, and (c) the current version, ASIMO. Even if the robots are presented here in the same size, the real size was consistently reduced during the
evolution: height went down from the P3’s 160cm to the ASIMO’s 120cm, and weight was reduced from the P3’s 130kg to the ASIMO’s 43kg
Even if the robots are presented here in the same size, the real size was consistently reduced during the evolution: height went down from the P3’s 160cm to the ASIMO’s 120cm, and weight was reduced from the P3’s 130kg to the ASIMO’s 43kg It is worthwhile to outline how these systems are developed in Japan with a special focus on the mechanical, kinematic, dynamic, electronic, and control problems, with minor concerns for the robot behaviour, their application perspectives, and their acceptability. Most progresses in humanoid robotics in Japan have been accomplished without focussing specific applications, and maybe this is one of the main peculiar features of this area of
43
Research RoadmapsEURON Key Areas
robotics, especially in that country. Nevertheless, among the possible applications of humanoids envisaged by researchers in this field, even in a long-term perspective, assistance to human beings is one of the most common. In Japan, the long-term perspective of application of humanoids concerns all those roles in the Society in which humans can benefit by being replaced by robots. This includes some factory jobs, emergency actions in hazardous environments, and other service tasks. Among them, in a Society which is fast and steadily increasing its average age, personal assistance is felt as one of the most critical ones. On the market landscape, some products are being proposed as first attempts of introduction of robots in the society. Such introduction has been pursued in Japan gradually, starting from entertainment pet robots, such as the popular Sony AIBO, to arrive to the first robotic devices able to provide some simple services, like the recent Papero and the Temsuk housekeeper. The Sony AIBO dog was launched at the end of 1998 by an Internet limited sale and all the 3,000 available items were bought in 20 minutes. This was especially a demonstration of how robotics was ready to be attractive also from a commercial point of view. Following the AIBO experience, many other pet robots, sometimes simpler and cheaper, were proposed on the market with a relatively good success. Examples are the robotic toys produced by Tomy and other toy companies. While Honda was putting its ASIMO humanoid on the market, other small humanoid robots were also proposed as hi-tech entertainment products. For instance, Sony launched the SDR-3X and Fujitsu the HOAP-1. More recently the Pino humanoid robot became very popular in Japan and it is successfully sold together with a variety of gadgets. In addition to the commercial aspects, one of the peculiarities of Pino is that it was designed so as to be assembled with no-specialised off-the-shelf components and materials and with an open software platform, in order to favour humanoid robotics research especially for young researchers and students. These robotic toys are now opening the way to the first commercial personal robots, i.e. still entertainment robots with some ‘helpful’ functionality: the novel Papero (by NEC) is a small mobile robot with a non-anthropomorphic pleasant shape, with big eyes and speech and audition capabilities. It can recognise some faces, welcome guests and take messages for other people. On this line, the Temsuk housekeeper has a more anthropomorphic shape, resembling a feminine household figure, and is intended to provide simple services around the house.
44

Research Roadmaps EURON Key Areas
Fig.25. (a) The new Sony AIBOs (named Latte and Macaroni); (b) the Sony SDR humanoid; (c) the popular Pino humanoid
Figure 30 More helpful robots: (a) Papero and (b) the Tmsuk housekeeper
In the USA, the research on humanoid robotics received its major impulse within the studies related to Artificial Intelligence, mainly through the approach proposed by Rodney Brooks, who identified the need for a physical human-like structure as prior for achieving human-like intelligence in machines [5]. Brooks’ group at the AI lab of the MIT is developing human-like upper bodies able to learn how to interact with the environment and with humans. Their approach is much more focused on the robot behaviour, which is built-up by experience of the world. In this framework, research on humanoids does not focus on any specific application, as well. Nevertheless, it is accompanied by studies on human-robot interaction and sociability, which aim at favouring the introduction of humanoid robots in the Society of Humans. Still at the MIT AI Lab, the Kismet robot has been developed as a platform for investigation on human-robot interaction. Kismet is a pet-like head with vision, audition, speech and eye and neck motion capability. It can therefore perceive external stimuli, track faces and objects, and express its own feeling accordingly [154].
45

Research Roadmaps Key Areas EURON
Figure 31 (a) The MIT’s COG Humanoid Robot and (b) Kismet.
At the market level, in the USA robotics diffusion is fostered through entertainment applications, as well. In the latest 10 years a big impetus was given by Sarcos, which develops and commercialises entertainment humanoid robotic systems, such as Sarcoman, which can be remotely controlled by a human operator and used in shows and demonstration.
Figure 32 Sarcosman Humanoid robotic personal assistants are still at the research level, in
the USA.
46

Research RoadmapsEURON Key Areas
At the Intelligent Robotics Laboratory of the Vanderbilt University, ISAC is a humanoid robot designed and built as a research platform for service robotics. The humanoid system also provides a test-bed to develop new technologies for human-to-robot and robot-to-human communications, including audio, visual, and gestural methods [155]. The Nursebot project (Personal Robotic Assistants for the Elderly) is an inter-disciplinary multi-university research initiative focused on robotic technology for the elderly that brings together researchers from the University of Pittsburgh and Carnegie Mellon University. The goal of the project is to develop mobile, personal service robots that assist elderly people in their everyday life. A first prototype is named Pearl and, when fully developed, it will be able to assist elderly people in their homes, allowing them to live independently longer before they need for the full time care of a nursing home. Pearl can perform such routine tasks as opening a jar, reminding people to take their medication or calling for help if they fall.
Figure 33 Two images of Nursebot
Europe is more cautiously entering the field of humanoid robotics, but can rely on an approach that, based on the peculiar cultural background, allows integrating considerations of different nature, by integrating multidisciplinary knowledge from engineering, biology and humanities. Generally speaking, in Europe, research on robotic personal assistants has received a higher attention, even without the implication of anthropomorphic solutions. On the other hand, in the European humanoid robotics research the application as personal assistants has always been much more clear and explicitly declared. Often, humanoid solutions are answers to the problem of developing personal robots able to operate in human environments and to interact with human beings. Personal assistance or, more in general, helpful services are the European key to introduce robots in the society and, actually, research and industrial activities on robotic assistants and tools (not necessarily humanoid) have received a larger support than research on basic humanoid robotics. While robotic solutions for rehabilitation and personal care are now at a more advanced stage respect to the market opportunities, humanoid projects are currently being carried out by several European Universities. Some joint European Projects, like the Brite-Euram Syneragh and the IST-FET Paloma, are implementing biologically-inspired sensory-motor coordination models onto humanoid robotic systems for manipulation. In Italy, at the University of Genova, the Baby-bot robot is being developed for studying the evolution of sensory-motor coordination as it happens in human babies. ARMAR, developed by the Karlsruhe University, is an autonomous mobile humanoid robot for supporting people in their daily life as personal or assistance robot. Currently, two anthropomorphic arms have been built up and mounted on a mobile base and studies on manipulation based on human arm movements are carried on [15] [16]. Thus, even though European humanoids are still a step before application and exploitation, they are being developed in view of their integration in our society and, meeting the need for
47

Research RoadmapsEURON Key Areas
robotic assistants already strongly pursued in Europe, they are very likely to be employed in assistance activities.
Figure 34 The European (a) Baby-bot, and (b) Armar
3.4.2 Problems to be addressed According to the National Health Interview Survey (NHIS)21990 results, more than 13.1 millions American people (about 5.3% of total population) use assistive technology (AT) devices to compensate their physical disabilities. Potential benefit of AT in improving functional selfdependency of disabled patients, well known in rehabilitation practice, has been reported in a number of legislative acts in different countries. In the analysis, design and final creation of disabled oriented devices, it is mandatory to keep in mind the interface problem, either because of a severe mental or mobility dysfunction or the usual complex relationship among elder people and new technologies. The Rehabilitation Engineering Research Center on Technology Evaluation and Transfer (RERC-TET) (Buffalo, NY, USA) has focused on consumer-identified needs and preferences regarding several categories of AT. According to studies of the RERC-TET several criteria have been identified that disabled patients consider important when selecting assistive devices: among others, Effectiveness, Reliability and, mainly, Operability [156] Despite the state-of-the-art has shown quite well the several possibilities to provide the disabled with an independent life, it can be noticed that all approaches lead to a technology dominated life for the disabled with the problem of acceptance. Therefore smarter robots should integrate more seamlessly in the disabled’s and elder’s environment. Above, machine learning techniques that allow to recognise the elder’s changing capabilities and which tailor the behaviour of the robots accordingly. The problems of the five approaches mentioned previously are described succeedingly:
2 This study was co-sponsored by National Center for Health Statistics (NCHS) and National Institute on Disability and Rehabilitation Research (NIDDR).
48

Research RoadmapsEURON Key Areas
Fixed workstations: Fixed workstations are based on industrial systems that operate mainly in structured environment performing similar tasks. They usually operate at high speed and with a excellent probability of success, so that they have a good effectiveness. Despite of these features, fixed workstations pose two main problems.
1. They are not flexible enough to be used in domestic environment where the task changes depending on the user need and on the changeable environment.
2. Since the robot is mounted on a table, fixed workstations lack in mobility. In order to overcome the restrictions imposed by the robotic workstations, i.e. poor flexibility and lack of mobility, the robotic research in rehabilitation evolved in mobile robotic systems. But because of the good effectiveness of fixed workstations and the lower costs in comparison with mobile robots it is worth to continue research in this field. Wheelchair mounted manipulators and intelligent wheelchairs: Despite they give mobility to disabled persons and assist in avoiding obstacles as for example the OMNI prototype they can not be used for both outdoor (on the rough road) and indoor (with stairs). For independent life it is mandatory that a seamless transition is possible. “Intelligent” wheelchairs should sometimes be able to make decisions autonomously on the base of the even noisy inputs from the user and from the environment. For example a disabled person, which controls a powered wheel chair but must be stopped to cross a road to prevent an accident. This “foreseeing” must be addressed by integrating more and more environmental knowledge to judge situations correctly and to react in the right manner. Another assistance of an intelligent wheelchair could be to recognise the patient’s activity using input from sensors placed on the patient to track different body signals using machine learning techniques to detect abnormal situations that recommend calling for assistance Mobile autonomous systems A problem of an autonomous personal robot is the fact of high technical complexity but not so good efficiency in comparison with fixed workstations because of the more general approach. Especially in this area the human-machine interface becomes an important aspect. Here technologies adapted to the disabled’s abilities must be used. A natural way of communication with language and gestures is mandatory. For those with a more serious disability eye pointing and interpretation of facial expressions could be more useful. Distributed Systems The integration of multiple devices in the disabled’s environment is a challenging task. Here we have to address the problem of sensor fusion. From the disabled’s point of view it is important to be able to interact efficiently with multiple devices. Anthropomorphic robotic solutions for care assistants The humanoid robot can be used as a general-purpose assistant to the employees of hospitals, homes for elder people or other health care facilities, and even for the personal care in a private household. The robot should be able to do most simple but extensive work, like feeding patients, lifting persons out of the bed, bringing food, medicine or other things to the people, supervising the general state of the patients (e.g. if a confused persons tries to leave the hospital) and reacting on specific demands of the patients. This application field is commercially attractive because there is a lot of low-level work to be done which requires certain versatility. Personnel costs are usually quite high in the health care field, and no untrained human employees can be used. The cost pressure is also very high, as health care should stay affordable while the possibilities are growing. With the number of old people
49

Research RoadmapsEURON Key Areas
growing in the developed countries, the need for an affordable care for elder people rises, both in households and public homes. The humanoid appearance is the clear advantage, as the robot will have to interact with confused patients or elder people who are not used to robots and don’t want to have to learn anything about them. However, the question must be posed if the humanoid appearance of the robot is really needed. With wheelchair ramps making all areas of a health care facility accessible anyhow, wheels could be cheaper, faster, more stable, safe and reliable than legs. A service robot has in most cases no need for extensive motion sequences like climbing, crawling or jumping. The outer appearance could be kept human-like with an upright body and a fake dress covering the wheel system. The health care field is indeed an attractive market for humanoid robots, as their advantages pay off and the disadvantages can be handled [157].
3.5 Medical robotics The following chapters give an overview on current research, problems to be addressed and future research trends in medical robotics.
3.5.1 State of the art Below we suggest a classification scheme for medical robots, then we describe necessary preprocessing steps and finally we shop leading examples of current research in this field.
3.5.1.1 Classification A possible classification of the current medical robotic systems which can be useful also for the definition of the “dreams” and trends of future surgical robots for the next years is illustrated in the figure below.
TraditionalAccess
Teleoperatedsystems
Interactivesystems
Autonomoussystems
Minimally InvasiveAccess
Endocavitary/endoluminal
access
Passivesystems
Type of Access
Type
of I
nter
actio
n
ROBODOC
CASPAR
Eye scalpel
RinC
AESOP
MIAS
da Vinci
ZEUS
MUSYC/EMIL
Mammotome
PAKY
Active Catheters
Given Imaging(not robotic)
HALS(not robotic)PinPoint
Stereotaxis Inc
MiNOSC
TraditionalAccess
Teleoperatedsystems
Interactivesystems
Autonomoussystems
Minimally InvasiveAccess
Endocavitary/endoluminal
access
Passivesystems
Type of Access
Type
of I
nter
actio
n
ROBODOC
CASPAR
Eye scalpel
RinC
AESOP
MIAS
da Vinci
ZEUS
MUSYC/EMIL
Mammotome
PAKY
Active Catheters
Given Imaging(not robotic)
HALS(not robotic)PinPoint
Stereotaxis Inc
MiNOSC
Figure 35: Classification of surgical robots
Most important examples within this scheme will be dealt with in chapter 3.5.1.4.
3.5.1.2 Constraints A surgical robot systems has to contain at least the following components:
• Planning system • Navigation system • Safety and security system
Special requirements for intraoperative application of robots include: • Sterilisation
50

Research RoadmapsEURON Key Areas
• Small workspace with humans around • Safety for the patient and medical personal
3.5.1.3 Preprocessing Surgical robotic systems are only useful if they are embedded in a planning process which leads to the concrete application of the robot. The figure below shows typical steps of that process.
Figure 36: Typical process of computer and robot assisted surgery.
Each robotic system is only as accurate as the overall process is. This has the implication that, even we’ve got sub-millimeter precision of the endeffector, we nowadays are happy if we can achive a precision of 2-3mm for the overall robotics system.
3.5.1.4 Prominent approaches A summary of medical robotic development up to 1996 is given in [173], more recent advanecs are described in [174] and [175]. Most popular and also eldest medical robots have been developed in the United States. ROBODOC was designed by IBM together with the University of Carlifornia [176]. Since 1992 thousands of total hip replacements have been performed with this tool around Europe. While very precise during execution, ROBODOC has not been FDA approved and is recently suspected to cause severe long-run damages to patients. A similar system, the CASPAR robot for hip an knee replacement and craniofacial surgery has been develped by orto Maquet in Germany and was afterwards sold by URS Ortho. However, both companies are insolvent today and systems must not be used in clinical environment any longer. The AESOP system for minimally invasive surgery was the first product that got FDA approved for clinical use in the US in 1994. Its speech control is until now one of the most intuitve handling concept. The product is sold by Intuitive Surgical Inc., as well as the telemanipulator Da Vinci [177].
51

Research RoadmapsKey Areas EURON
Figure 37: Medical robots ROBODOC, CASPAR and da Vinci
Research in the field of medical robotics is driven by groups at John-Hopkins-University, Baltimore, at Imperial College, London, at Scuola Superiore Sant‘Ana in Pisa and also by groups in France and Germany. The following figure shows robots from John-Hopkins, from London and a hexapod robot by Fraunhofer IPA, Stuttgart.
Figure 38: Robotics research: Steady hand, Bloodbot and surgical hexabot
An interesting approach for a prothetic robot is presented by Scuola Superiore Sant‘Ana. Many research centers are trying to develop effective artifical hands able to restore (some) manipulation abilities. The hand prostheses are commonly divided into three categories:
• cosmetic (or passive) • active “body-powered” • active “externally-powered”
In the figure below the evoluation of the body-powered hand prostheses is illustrated.
52
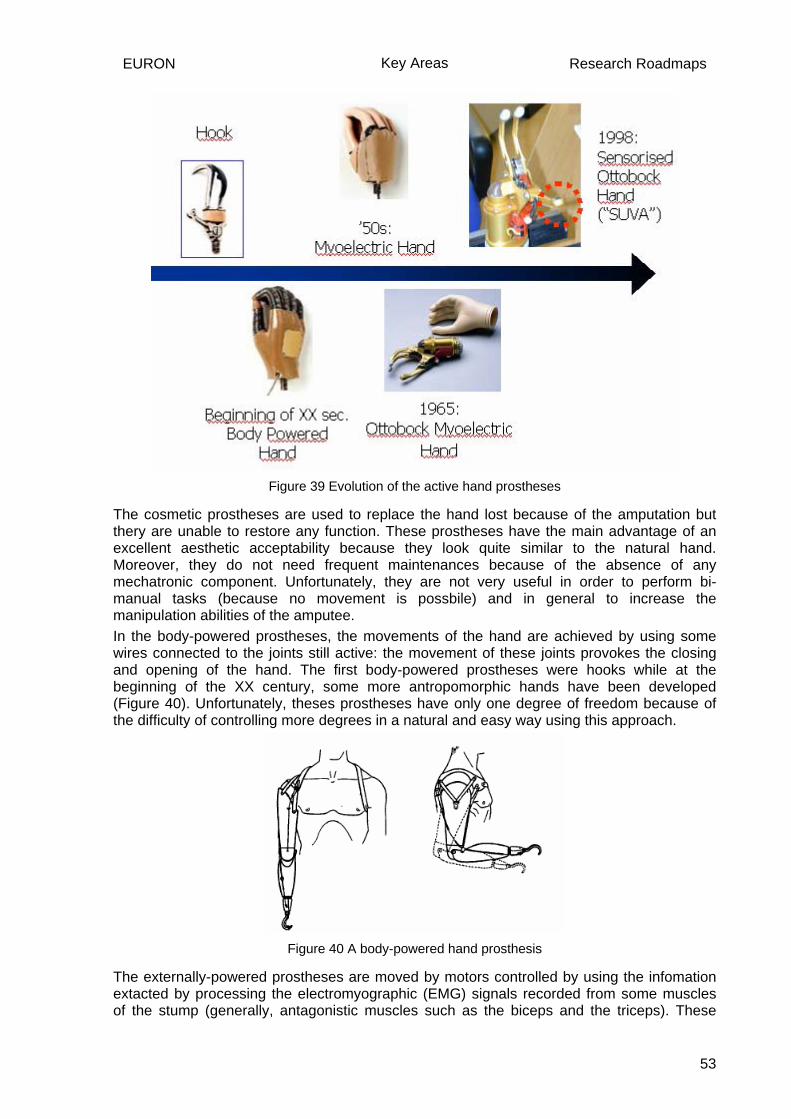
Key Areas Research RoadmapsEURON
Figure 39 Evolution of the active hand prostheses
The cosmetic prostheses are used to replace the hand lost because of the amputation but thery are unable to restore any function. These prostheses have the main advantage of an excellent aesthetic acceptability because they look quite similar to the natural hand. Moreover, they do not need frequent maintenances because of the absence of any mechatronic component. Unfortunately, they are not very useful in order to perform bi-manual tasks (because no movement is possbile) and in general to increase the manipulation abilities of the amputee. In the body-powered prostheses, the movements of the hand are achieved by using some wires connected to the joints still active: the movement of these joints provokes the closing and opening of the hand. The first body-powered prostheses were hooks while at the beginning of the XX century, some more antropomorphic hands have been developed (Figure 40). Unfortunately, theses prostheses have only one degree of freedom because of the difficulty of controlling more degrees in a natural and easy way using this approach.
Figure 40 A body-powered hand prosthesis
The externally-powered prostheses are moved by motors controlled by using the infomation extacted by processing the electromyographic (EMG) signals recorded from some muscles of the stump (generally, antagonistic muscles such as the biceps and the triceps). These
53

Research RoadmapsEURON Key Areas
segnals are used to identify the intentions of the user e.g., the opening and closing of the hand (see Figure 41 for a scheme of the EMG signal processing).
Figure 41 The scheme for the acquisition and analysis of the EMG for the control of prosthetic
devices.
The externally-powered prostheses could have the potentiality of restoring many functions of the amputee but nowadays they have many drawbacks (in terms of manipulation ability, controllabilty, etc.) which limit their use. In fact, only the 30% of the amputees in Europe use externally-powered prostheses. For this reason, many efforts have to be done in order to improve either the mechanics (increasing the number of degrees of freedom and thelevel of sensorisation) and the control strategy (increasing the easiness of use) of these systems. The prostheses should be also able to provide some sensory feedback to the patient in order to be felt by her/him as part of the body. Finally, the “task-oriented” prostheses developed to help the persons to perform different tasks (such as playing sport) have to be cited because of their “social” importance. In Figure 42, some trask-oriented prostheses are shown.
Figure 42 “Task-oriented” hand protheses
3.5.1.5 Key issues: technical aspects At the beginning of MIS it was necessary to pay a high price to the learning curve, because nobody had sufficient experience. Today this risk for the patients’ health cannot be justified anymore and new modalities for the surgeons’ training must be investigated. The possibility to train on animal models is not only critical from an ethical point of view, but it reproduces an anatomy too different from the human anatomy and it cannot be proposed with a real profit for the young surgeon. In our opinion, the training problem for the surgeon approaching the new minimally invasive techniques can be faced in a three phases process:
(a) Theoretical study of the surgical procedure, by exploiting multimedia interactive means which drive the surgeon in the different phases of the intervention and to stimulate the attention to the most important details and to the safety rules;
(b) Training on simulators in order to improve the manual dexterity of the operator in a remote environment by performing exercises with the aim of evaluating and amplifying the elementary abilities: hand-eye coordination; stereoscopic perception; motion synchrony; performance of complex motions with the non-dominant arm; etc;
54
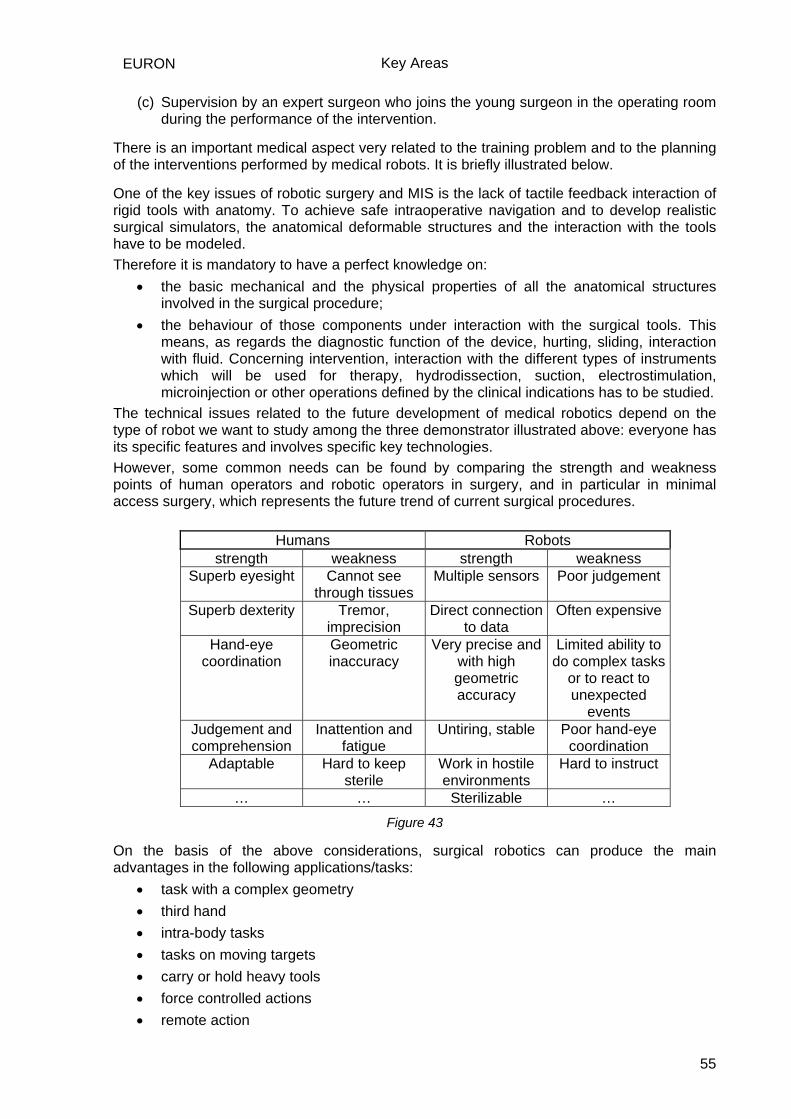
Research RoadmapsEURON Key Areas
(c) Supervision by an expert surgeon who joins the young surgeon in the operating room during the performance of the intervention.
There is an important medical aspect very related to the training problem and to the planning of the interventions performed by medical robots. It is briefly illustrated below.
One of the key issues of robotic surgery and MIS is the lack of tactile feedback interaction of rigid tools with anatomy. To achieve safe intraoperative navigation and to develop realistic surgical simulators, the anatomical deformable structures and the interaction with the tools have to be modeled. Therefore it is mandatory to have a perfect knowledge on:
• the basic mechanical and the physical properties of all the anatomical structures involved in the surgical procedure;
• the behaviour of those components under interaction with the surgical tools. This means, as regards the diagnostic function of the device, hurting, sliding, interaction with fluid. Concerning intervention, interaction with the different types of instruments which will be used for therapy, hydrodissection, suction, electrostimulation, microinjection or other operations defined by the clinical indications has to be studied.
The technical issues related to the future development of medical robotics depend on the type of robot we want to study among the three demonstrator illustrated above: everyone has its specific features and involves specific key technologies. However, some common needs can be found by comparing the strength and weakness points of human operators and robotic operators in surgery, and in particular in minimal access surgery, which represents the future trend of current surgical procedures.
Humans Robots strength weakness strength weakness
Superb eyesight Cannot see through tissues
Multiple sensors Poor judgement
Superb dexterity Tremor, imprecision
Direct connection to data
Often expensive
Hand-eye coordination
Geometric inaccuracy
Very precise and with high geometric accuracy
Limited ability to do complex tasks
or to react to unexpected
events Judgement and comprehension
Inattention and fatigue
Untiring, stable Poor hand-eye coordination
Adaptable Hard to keep sterile
Work in hostile environments
Hard to instruct
… … Sterilizable …
Figure 43
On the basis of the above considerations, surgical robotics can produce the main advantages in the following applications/tasks:
• task with a complex geometry • third hand • intra-body tasks • tasks on moving targets • carry or hold heavy tools • force controlled actions • remote action
55

Research RoadmapsEURON Key Areas
• motion and force augmentation or scaling • repetitive tasks
For the performance of the above tasks, new mechanisms, actuators, power supplies, controllers, sensors and HMIs are needed. For each future robotic system (RS, ME, HHMT) we will identify the most critical component(s). In the case of large robotic systems for surgery, the main issues for the mechanical system are:
• safety (lightweight, brake feature at the joints) • precision (absence of backlash, windup, deflections) • clean operation (dry mechanisms or sealed joints) • X-rays and magnetic compatibility (not- or low-ferromagnetic materials allowed) for
intraoperative imaging and guidance. All these items can be considered as an evolution of the current design in robotics, so that no high degree of novelty in this field is required. Aeronautical methods in design are a good reference for achieving the mentioned objectives. In this case, due to the small dimensions, commercial or standard mechanical components do not exist. Furthermore, especially in the case of ME, acceptable rotary joints cannot be fabricated because of the backlash and friction they show. Therefore flexible hinges represent at present an interesting solution, since they have no friction between the mechanical moving parts. Advanced application in the microscale can be found in mechanics for computers, or also in biomedical microdevices (active endoscope). Superelastic alloys can improve the mobility of flexible hinges. In few cases LIGA technology and micro electro-discharge machining allow to fabricate effective metal components (Institut für Mikrotechnik Mainz GmbH, Germany). An annular pump integrated in a catheter for angioplasty and based on gears and bearings was developed by HNP Mikrosysteme GmbH (1998), as shown in Figure 44.
Figure 44 Balloon cathether and LIGA technology
Micro-sized silicon components are at their early stage of development but results are very promising. MEs require the development of light, small and durable microbatteries. The energy density in an autonomous microdevice has to be higher than in the macroscale, because of the dissipative forces arising in the microworld that require a greater work per unit of volume. High expectance is therefore addressed to Power MEMS and Fuel Cells, whose energy is related to combustion reactions, two order of magnitude more energetic than electrochemical ones. The following diagram shows the performances of experimental aluminium fuel cells.
56

Key Areas Research RoadmapsEURON
Figure 45
HHMTs will possibly include the batteries, but it is not essential. RSs do not need energetic autonomy. RS: intracorporeal stereoscopic vision sensors; position, torque and force sensors for the feedback to the operator; contact sensors to avoid dangerous collisions. ME: miniaturised vision sensors; position, contact and force sensors to provide the ME with a bio-mimetic perceptive behaviour. HHMT: micro position, speed, accelerometer sensors; miniaturised cameras. In summary, the categories of sensors that are needed are: force and contact, position, vision. Regarding force and contact strain gauges are the first choice in the development of proprioceptive and exteroceptive sensors. RS forces could be theoretically controlled by simply using the actuators as transducers, but, differently from industrial applications, a closed-loop configuration is required for safety reasons. In literature load cells are both based on metallic and on silicon strain gauges, and are developed in submillimetric scale. The smallest metallic sensor available on the market has a size of 0.6 mm x 0.6 mm (Hottinger Baldwin Messtechnick GmbH), while silicon sensors can be further miniaturized using local doping. The Scuola Sant'Anna is collaborating with the Institut für Mikrotechnik of Mainz in Germany for the development of a three components load cell, which size is 2 mm x 2 mm x 1 mm. Position measuring is not critical in large devices like RS because of the wide choice available among commercial products (optical localizers like Flashpoint or Optotrack, precision encoders). In MEs and HHMTs position can be detected by magnetic induction. However both Hall sensors and variable reluctance devices are commercially available only in dimensions greater than 1.5 mm in external diameter and 8 mm in length (i.e.: the smallest Differential Variable Reluctance Transducer, by Microstrain Inc., Burlington, VT, USA). Another mean for measuring the position is via integration (accelerometers and gyros). This solution, which is affected by drift errors, can be acceptable in the case of HHMTs, where the device has only to co-operate with the surgeon.
57
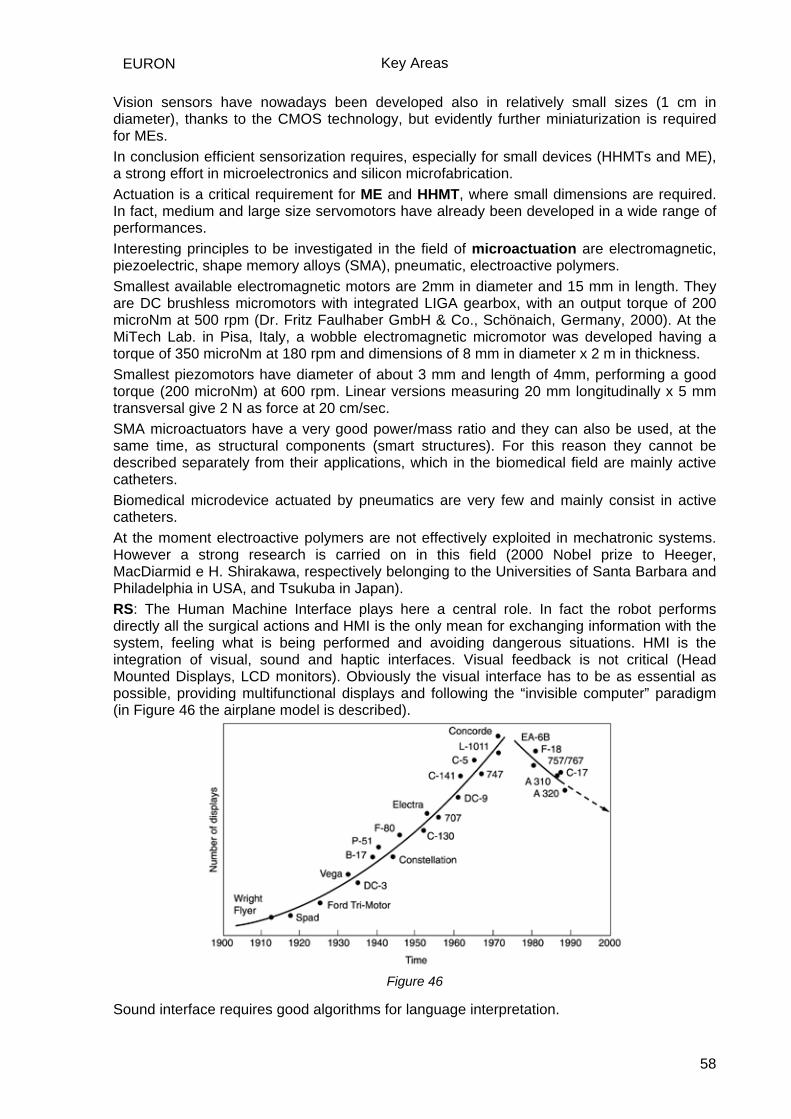
Research RoadmapsEURON Key Areas
Vision sensors have nowadays been developed also in relatively small sizes (1 cm in diameter), thanks to the CMOS technology, but evidently further miniaturization is required for MEs. In conclusion efficient sensorization requires, especially for small devices (HHMTs and ME), a strong effort in microelectronics and silicon microfabrication. Actuation is a critical requirement for ME and HHMT, where small dimensions are required. In fact, medium and large size servomotors have already been developed in a wide range of performances. Interesting principles to be investigated in the field of microactuation are electromagnetic, piezoelectric, shape memory alloys (SMA), pneumatic, electroactive polymers. Smallest available electromagnetic motors are 2mm in diameter and 15 mm in length. They are DC brushless micromotors with integrated LIGA gearbox, with an output torque of 200 microNm at 500 rpm (Dr. Fritz Faulhaber GmbH & Co., Schönaich, Germany, 2000). At the MiTech Lab. in Pisa, Italy, a wobble electromagnetic micromotor was developed having a torque of 350 microNm at 180 rpm and dimensions of 8 mm in diameter x 2 m in thickness. Smallest piezomotors have diameter of about 3 mm and length of 4mm, performing a good torque (200 microNm) at 600 rpm. Linear versions measuring 20 mm longitudinally x 5 mm transversal give 2 N as force at 20 cm/sec. SMA microactuators have a very good power/mass ratio and they can also be used, at the same time, as structural components (smart structures). For this reason they cannot be described separately from their applications, which in the biomedical field are mainly active catheters. Biomedical microdevice actuated by pneumatics are very few and mainly consist in active catheters. At the moment electroactive polymers are not effectively exploited in mechatronic systems. However a strong research is carried on in this field (2000 Nobel prize to Heeger, MacDiarmid e H. Shirakawa, respectively belonging to the Universities of Santa Barbara and Philadelphia in USA, and Tsukuba in Japan). RS: The Human Machine Interface plays here a central role. In fact the robot performs directly all the surgical actions and HMI is the only mean for exchanging information with the system, feeling what is being performed and avoiding dangerous situations. HMI is the integration of visual, sound and haptic interfaces. Visual feedback is not critical (Head Mounted Displays, LCD monitors). Obviously the visual interface has to be as essential as possible, providing multifunctional displays and following the “invisible computer” paradigm (in Figure 46 the airplane model is described).
Figure 46
Sound interface requires good algorithms for language interpretation.
58

Research RoadmapsEURON Key Areas
Haptics has to perform high fidelity even at working frequencies in the order of ten hertz (e.g.: for feeling the meso-scale geometry of anatomical structures). Therefore low inertia and high stiffness are required. The Phantom device produced by SensAble Technologies (CA, USA) represents a good example in the field, but custom interfaces have to be developed for specific applications (in order to have lower costs and better performances) and therefore there is a need for haptics research and development in Europe. RSs need both autonomous control (for high accurate, predictable, repetitive tasks) and teleoperated control (for other tasks in which man cannot be substituted). RS control has to implement the 3D anatomic reconstruction of the surgical site in the case of autonomous operation, while it has to embed the soft-tissues modelling in the case of teleoperation. MEs have to perform distal reactive behaviour, because of the non-rigid connection with the operator. Embedded power drives are also needed for local actuation, while only logical signals are provided from the operator (e.g.: via radio waves). HHMTs are characterized by autonomous low level control, with real-time operation, requiring the use of high speed embedded microcontrollers. One more consideration on technical issues can be interesting. By observing the overall world scenario, and trying to define roadmaps towards the future, we can say that significant results, both from a clinical and technological/commercial point of view, have been achieved only for applications in neurosurgery, ear-nose-throat (ENT) surgery and orthopedics. The development of systems for applications in abdominal and thoracic surgery represents a key challenge in the sector of image-guided surgery. In fact, due to the high deformability of the anatomical structures interested by the intervention, handling of soft tissue models introduces many issues related to model creation, registration with the patient's position in the operating room and intra-operative localization of anatomical structures and surgical tools. Additional details will e provided in paragraph 4-b).
3.5.1.6 Conclusion In contrast to wide-spread expectancy, medical robots do nowadays only rarely offer real benefit for patients and doctors. Most of the systems are very complex and require time-consuming preoperative planning and intraoperative preparation. Moreover, they are very expensive and some of them are even suspected of causing severe damages to patients. As a consequence of this situation, many manufacturers have stopped their programs for surgical robots or are insolvent by now. Medical robots have also a bad reputation in big parts of society today.
3.5.2 Open problems As far as existing systems are concerned, one have to deal with the following unsolved problems:
• Achievement of transparency of robot actions • Optimization of robot sensors, especially tactile human-machine-interaction and
detection of risks and dangers • Saving of time in preoperative planning and intraoperative preparation • Reduction of complexity • Ensure safety and security • Reduction of end-user price
More general, one have to think about the following topics: • What are main risks for patient and doctors? Are we able to handle them, are they
acceptable or too high? • Is there any benefit caused by medical robots? What exactly is it?
59

Research RoadmapsEURON Key Areas
• Is it worthwile – from a business point of view – to develop and to use medical robots?
• Are the classical medical robots, which have been developed from industrial manipulators, applicable to complex medical problems?
3.5.3 Future research When thinking about future research, one have to consider short-term and long-term aspects. As for the first topic, existing medical robot systems must be revised in some way, especially concerning
• Completion and optimization of robot sensors • Combination of robot systems with intraoperative image acquisition technologies (CT
/ MRI / ultrasound) On the other hand, there is a trend towards design and construction of new medical robots, moreover, medical assistants. These systems are characterized by
• Small size and low weight • Passive or teleoperation work mode • Dedication to special, single surgical task
Considering the latter aspect of long-term development in the field, there are also two important aspects. Existing systems will undergo a complete redesign and will be completed by further assistant tools, including augmented reality and learning capabilities. One may e.g. think of skill acquisition and programming by demonstration for intuitive instruction of the systems. On the other hand, research groups will again try to develop universal medical robots. In order to be more successful than today one may think of
• Universal medical robots for various application areas • Completely new design and manufacturing of mechanics, actuators, sensors, power
supply and human-machine-interface • Miniaturized medical robots, based on micro- and nano-technology
3.6 Intelligent Vehicles At the beginning of this twenty first century, nobody can ignore the tremendous impact the development of the automobile has had on our lives and on society in general. In just a bit more than a century, this product has become at the same time something now indispensable for the daily living of billions of inhabitants, and also a major nuisance for many of them and a threat for the planet. It is clear that the problems created by the success of automobile will certainly increase over time if strong steps are not taken in the next decade. Among these problems, safety is probably of a the major concern (in Europe, there is an average of 150 deaths due to automobile accidents each single day… the equivalent of an airplane crash). The increasing transportation problems in European cities are also one of the problems to be addressed at both the research and industrial level. Solving these problems require to develop emerging technologies in the field of ITS (Intelligent Transportation Systems) and of IV (Intelligent Vehicles). At the moment, the interaction between the infrastructure and the car is only through the driver who gets information through message signs, traffic light, radio, internet, etc. and acts according to this information. In the future, the infrastructure may interact directly with the automobile, for example through speed control or lateral guidance. In fact, we might see in the next two decades, a progressive disconnection between the driver and his/her car with the possibility (which already exists on some very dedicated vehicles) to leave entirely the driving to machines. Robotics is clearly central in such a system, with a major attention to subjects
60

Research RoadmapsEURON Key Areas
such as sensor-based navigation, dynamic obstacle avoidance, autonomous maneuvering, smart vehicle control, sensor fusion, MMI…
3.6.1 R&D programs throughout the world Large R&D programmes for developing technologies in the field of ITS and IV have been launched in the last decade in Europe, USA, and Japan; large scale demonstrations have also been conducted in these countries : Prometheus demo on “Driving Assistance” in France (1994), IV exhibition in Netherlands (1998), “Automated Highway System (AHS)” demo in Japan (1995, 1996), “Smart-Cruise 2000” demo in Japan, AHS demos in USA (1997, 1999), “IV Technology Showcase 2000” in USA. Some of the demonstrated technologies are almost ready for being transferred to industry, but most of them require further developments for being really applicable in real life situations. Japan is strongly involved in the development of IV technologies for both the domestic market and the international market (including Europe). The related R&D is conducted through both several Government/Public projects and some Private Sector product developments. The government/public projects are conducted and supported by several ministries including the MLIT (Ministry of Land, Infrastructure and Transport), and by a public-private partnership organization called AHSRA (Advanced Cruise-Assist Highway Systems Association); the main projects are the followings: Advanced Safety Vehicle (ASV), Advanced Cruise-Assist Highway Systems (AHS), Super-Smart Vehicle Systems (SSVS). The private sector (i.e. the Japanese automotive constructors and OEMs suppliers) is strongly interested in developing and selling advanced vehicle control and safety systems. The Japanese industry takes advantage of the atypical characteristics of the domestic market, which allows them to introduce products that would not be considered acceptable in maturity in other parts of the world; the main developments are the followings: Advanced Cruise Control (ACC), various warning systems such as lane departure warning systems or collision warning systems, and fully automated driving systems such as the Intelligent Multimode Transit System (IMTS) of Toyota or the Intelligent Community Vehicle System (ICVS) of Honda.
Figure 47 (a) Overview of the infrastructure equipment for the Japanese AHS project. (b) The ICVS system from Honda. (c) The IMTS system from Toyota.
Several large R&D projects on ITS have been launched in the last decade in the USA at both the Government/Public level and the Private Sector level. Some of these projects have recently been stopped, some of them are still alive with a 10 years perspective. Among the existing Government/Public projects, the most significant results and programmes are those related to the “California Path program” aimed at developing vehicle-highway automation technologies (since 1988), the “Intelligent Vehicle Initiative program” aimed at enhancing driving safety, and the “Minnesota DOT programs” aimed at developing IV technologies for snowplows, trucks, or buses. The DARPA has announced a challenge for autonomous vehicles (http://www.darpa.mil/grandchallenge/). The aim is to motivate researchers to develop vehicles which are able to drive a certain distance of approximately 400km in partially unstructured environment. The first demonstration in 2003 showed, that non of the vehicles was able to fulfil the whole course. R&D developments in the private sector includes
61

Research RoadmapsEURON Key Areas
technologies for ACC, collision and lane departure warning, manoeuvring aids, and night vision enhancement.
Figure 48 (a) Illustration of the Path AHS project in USA.. (b) Platooning system
demonstration in San Diego (1997).
Research on transport in Europe is carried out at basically three levels : at the Industrial level without any government support (sometimes with the involvement of public or private research organisations under contract from the industry), at the National level through contracts or research grants, usually involving several partners, and at the European level through research contracts awarded by the European Commission under different procedures (see section 8). There exists also another light procedure to do research between two or more European partners with public funding: the Eureka procedure. Several countries such as Germany, Italy, Netherlands, and France have national programmes for encouraging and supporting R&D in the fields of ITS and IV. The Netherlands is probably one of the pioneers in transportation research in Europe, with the support of the ministry of transport and public work (Rijkswaterstaat), of private research organisations such as TNO, and of industry; the estimated budget for this national program should be in the order of 150M€. In France, the research on this topic is mainly supported by the government through several ministries (ministry of research, ministry of transport, ministry of industry, ministry of city) and research organisations such as INRETS (National Research Laboratory on Transport and Safety) or LCPC (National Research Laboratory on Road Infrastructures). The research is organised under global four years duration programmes (like European programmes), e.g. the “Predit1” programme (1998-2002) or the “Predit2” programme (2002-06) having a large part focussing onto “Intelligent Road”. Under these programmes, the ARCOS project for driving safety enhancement involves about 50 French industrial and academic (including INRIA and CNRS) partners with a budget of about 12M€.
3.6.2 State of the Art 3.6.2.1 Assistance Systems Assistance systems combine systems which do not aim at autonomous driving of the vehicle. Instead they could be seen as passive systems which support the driver through warning signals if dangerous situations are detected or just provide additional information to the driver. There exists a wide range of systems addressing different problems of driving like distance keeping, night vision enhancements or collision detection. Adaptive Cruise Control (ACC) research has started in Europe very early during the Prometheus project (1986-1994). During these years, several European car manufacturers have experienced with a first generation of expensive scanning radar (mainly from Celsius). During these first years, the control of the distance was performed almost exclusively through throttle control without action on braking which was thought to be too risky. These researches brought several companies to the development of radar and control systems for ACC. Besides Celsius, appeared ADC, Thomson-CSF (now Thales), Bosch, and Siemens. Daimler-Chrysler was the first company in Europe to introduce ACC on a vehicle (the Class S) in 1999 with action on both throttle and brake (limited to 3m/s/s); similar systems are now starting to appear on other European brands with similar performances. However, because of the current technology limits, these systems are mainly “comfort systems” (and not “safety
62

Research RoadmapsEURON Key Areas
systems”), since in emergency braking, the driver has to take the control of the vehicle. All the systems currently on the market have a range of 120 to 150 m and work rather well on highways with a headway which can usually be set manually between 1.0 and 2 sec; this headway is comfortable for the driver, but in very high density traffic (where the headway is often below 0.5 sec), it can lead to many cut-ins and can therefore become a dangerous feature. Simulations has shown that, depending on the type of control algorithm implemented in the speed controller, the stability of a string of ACC cars is not guaranteed. Making this technique more general and more robust, in order to be able to deal with hazards and non equipped vehicles, is still an important research issue. The main improvements concern the lateral and longitudinal control, and the ahead and lateral sensing, e.g. by combining several radars to obtain a better range and a better angular accuracy (Siemens approach in the European RadarNet project), or by combining radar and vision systems like in the European Carsense Project. Although it seems that forward vehicle collision warning systems would be easier to develop and cheaper than ACC systems, there are still almost no product of this type on the European market if we except the ultrasonic parking sensors. One inexpensive Israeli product (ControLaser 200) using a single beam laser has been put on the market in the late 1990’s, mostly for truck application but it seems that it did not meet a strong demand. This is probably due to the fact that such system are not perceived by their users as bringing any added value : they consider that they drive safely and do not like to be reminded (especially if this is not true) that they drive too closely from the preceding vehicle. On the other hand, the ACC is perceived a bringing a driving comfort which is worth the price. Therefore it seems that such systems can reach the market only through state or company policies. Side-obstacle warning systems and lane-change assistance have been demonstrated on the Vita II demonstrator from Daimler-Chrysler at the end of the Prometheus project. This demonstration included even full lane change automation and relied on a large number of CCD cameras. Since then, the technology has moved towards simpler systems using mostly short range lateral radars but there is no system available on the market at this time. However, research is still very active in this field with several European projects dealing at least partly with this topic or with low speed urban driving (Protector, Carsense, RadarNet …). Night vision is actively studied by the European car manufacturers and suppliers. Several systems are now being tested. Two technologies are considered. One uses near infrared CCD camera associated with active IR lighting; the other uses a non-cooled far-infrared imager and does not need a special lighting. Both systems have advantages and drawbacks: near infrared needs a special light and can be disturbed by similar cars coming in the other direction; the visibility is also limited in the distance; far infrared cannot see cold objects such as a parked car which has not been running for a long time. However, the biggest difficulty of both systems relies on the human-machine interface. The general approach is to display the image seen by the sensor either on an head-up display or on a screen on the dashboard. A this time, no system is available on the market, but industrial research is very active. Intelligent Speed Adaption is studied in various European and National under three variants. The first one gives only a visual or audio warning if the speed limit is exceeded; this system, like the forward collision warning, is hard to sell to customers who perceive it as a bother without any comfort value. The second variant implies a haptic accelerator pedal which allows the driver to maintain the maximum allowed speed without looking at the speedometer; at any moment, there is a possibility to go above the speed limit by pressing the accelerator above the threshold given by the system. The last approach is to limit the speed to the official limit without any possibility of override. All these systems are based
63

Research RoadmapsEURON Key Areas
either on a localisation through a navigation system where the maximum speed limit has been added by segments, or on a local communication system with the infrastructure. This second system has the advantage of being more dynamic to take care of changing conditions (fog, rain, snow, road work, congestion, school hours,….). A dynamic system could also allow for the implementation of automatic traffic flow control through variable speed limits, as it is already done in UK and in the Netherlands with variable message signs. Several European projects have addressed Driver Monitoring, and the automotive suppliers have now some operational systems close to marketing. Siemens in France has recently been granted by the Predit the award for the best research for enhancing the safety on roads with their driver monitoring. These systems are based essentially on the monitoring of the driver face through vision. A small CCD camera placed in (or near) the rear view mirror looks at the driver’s head, sometimes with infrared illumination. The principle is to look at the blinking time and at the time during which the eyelids remain closed. Sometimes, this information is coupled with steering movements to improve the detection of sleepiness. The major problem remains the number of false alarms with respect to the number of missed detections. Research has also started in Europe for lane departure warning and lane keeping assistance under the Prometheus Project with a number of operational prototypes presented at the end in 1994. All of these developments were based on the detection of lane markings or road sides through vision systems. The first systems used dedicated (and expensive) hardware but as soon as 1996, regular microcomputers had enough processing power to do this task. The research has progressed in parallel (and often in cooperation) between industry and public research on both tasks : road detection and steering control. Several prototypes have been demonstrated since Prometheus, the most noticeable being the demonstrations by Daimler-Chrysler (which included also ACC, obstacle avoidance and sign recognition) and the Argo demonstration by the University of Parma, Italy, which ran a vehicle through Italy in 1999. Lane keeping assistance is obviously more complex than lane departure warning, especially if it is coupled with ACC (we are then close to full driving automation). The technology is ripe for the introduction of this feature on well marked freeways with the availability of electric assisted steering and inexpensive vision systems (as it has been demonstrated in Japan with the Nissan Cima), but the European car manufacturers seems to be quite reluctant to install such features on private cars and even on trucks (except for platooning, see section on fully-automated driving). However, there is one area where lane keeping is now an industrial product : it is for guided bus. This technique, which is in competition with mechanical guidance through a single rail imbedded in the ground (Ansaldo, Bombardier, Lohr) uses vision guidance developed by Matra and is commercialised by Irisbus on the Civis articulated bus. Two French cities (Clermont and Rouen) have already ordered such systems, and many cities throughout the world are interested. This technique offers a cheaper alternative to light rail because of the lower cost of the infrastructure. A similar product is under development in the Netherlands by the APTS Consortium with the Phileas , a double articulated hybrid bus with lateral control through magnets imbedded in the road but also with longitudinal control, all developed by Frog Navigation Systems.
3.6.2.2 Semi-Autonomous Systems In 1989, VW presented the Futura, a car equipped with laser sensors which was able to park automatically. Since then, this topic has been a major research subject in the scientific community with many demonstrations (see for instance the “parking assistant” developed at Inria). The research has mainly focussed on the trajectory computation and the planning in the presence of obstacles. However, the main problem of the sensors to grasp the geometry of the car environment has been left to the industry. At the moment, only ultrasonic sensors are available at a cost acceptable for the automotive industry. These sensors however, offer
64
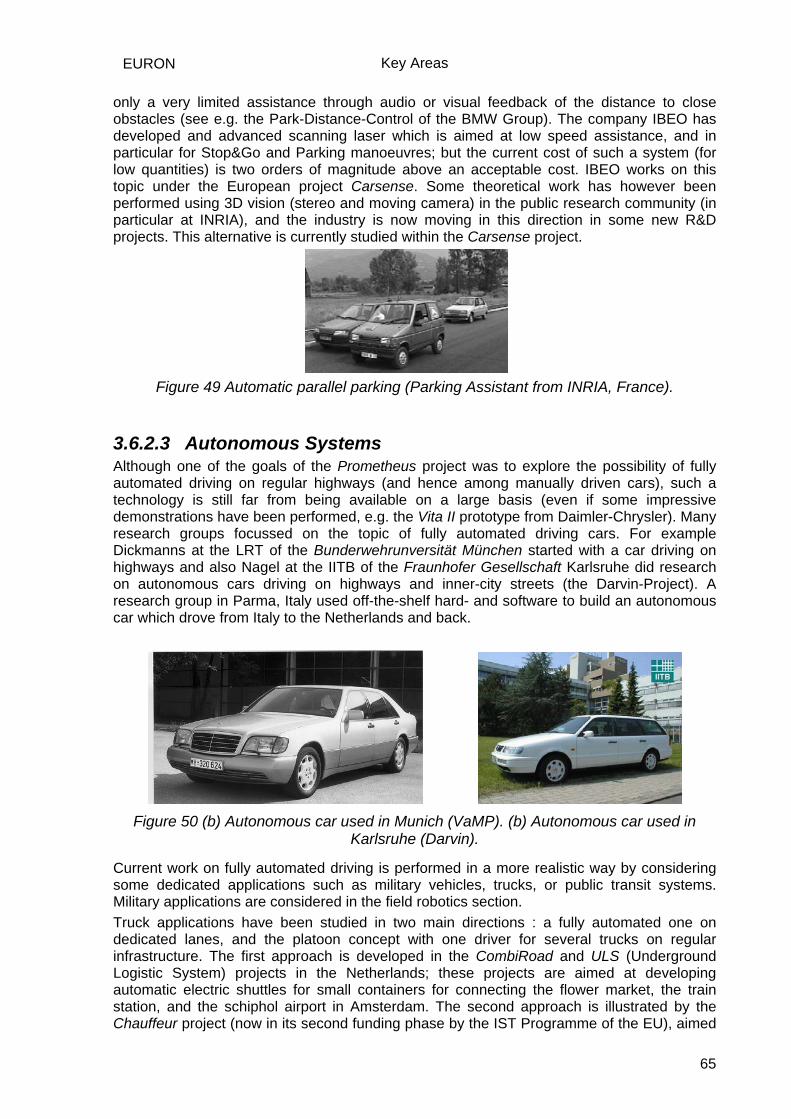
Research RoadmapsEURON Key Areas
only a very limited assistance through audio or visual feedback of the distance to close obstacles (see e.g. the Park-Distance-Control of the BMW Group). The company IBEO has developed and advanced scanning laser which is aimed at low speed assistance, and in particular for Stop&Go and Parking manoeuvres; but the current cost of such a system (for low quantities) is two orders of magnitude above an acceptable cost. IBEO works on this topic under the European project Carsense. Some theoretical work has however been performed using 3D vision (stereo and moving camera) in the public research community (in particular at INRIA), and the industry is now moving in this direction in some new R&D projects. This alternative is currently studied within the Carsense project.
Figure 49 Automatic parallel parking (Parking Assistant from INRIA, France).
3.6.2.3 Autonomous Systems Although one of the goals of the Prometheus project was to explore the possibility of fully automated driving on regular highways (and hence among manually driven cars), such a technology is still far from being available on a large basis (even if some impressive demonstrations have been performed, e.g. the Vita II prototype from Daimler-Chrysler). Many research groups focussed on the topic of fully automated driving cars. For example Dickmanns at the LRT of the Bunderwehrunversität München started with a car driving on highways and also Nagel at the IITB of the Fraunhofer Gesellschaft Karlsruhe did research on autonomous cars driving on highways and inner-city streets (the Darvin-Project). A research group in Parma, Italy used off-the-shelf hard- and software to build an autonomous car which drove from Italy to the Netherlands and back.
Figure 50 (b) Autonomous car used in Munich (VaMP). (b) Autonomous car used in
Karlsruhe (Darvin).
Current work on fully automated driving is performed in a more realistic way by considering some dedicated applications such as military vehicles, trucks, or public transit systems. Military applications are considered in the field robotics section. Truck applications have been studied in two main directions : a fully automated one on dedicated lanes, and the platoon concept with one driver for several trucks on regular infrastructure. The first approach is developed in the CombiRoad and ULS (Underground Logistic System) projects in the Netherlands; these projects are aimed at developing automatic electric shuttles for small containers for connecting the flower market, the train station, and the schiphol airport in Amsterdam. The second approach is illustrated by the Chauffeur project (now in its second funding phase by the IST Programme of the EU), aimed
65

Research RoadmapsEURON Key Areas
at developing a system for “pulling” several electronically coupled driverless trucks using a leading truck driven on a regular highway infrastructure by a human driver. The related technology consists in using a vision system for localizing the preceding truck through active targets; a communication is needed between the trucks to insure the stability of the platoon, and prevent collisions in case of a sudden braking. A demonstration has been carried at the end of the first contract (in 1999), and more work is now in progress to refine the technique.
Figure 51 (a) Electronic tow-bar between two trucks (Chauffeur project). (b) Prometheus French Prolab vehicle for driving assistance . (c) Parkshuttle system at schiphol airport.
Several projects aimed at developing new Public Transit Systems involving fully autonomous vehicles are under way in Europe. The oldest system of this type, which has been developed by Frog Navigation, is the ParkShuttle system operating since December 1997 at the Schiphol airport in Amsterdam. The system consists of four electric vehicles, having a maximum speed of 30 km/h and a capacity of 12 passengers, and moving inside a large long term parking on dedicated tracks not completely separated from pedestrian traffic. Collision avoidance is performed by a scanning laser from SICK; guidance is performed using the Frog technology based on transponders in the ground and a specific antenna in the vehicle. A similar system has been put in operation in Capelle, a suburb of Rotterdam, to link a train station to a business park. In Lausanne, an other similar system (called Serpentine, and based on small electric shuttles having a capacity of 4 standing passengers) will be soon experimented along the Geneva lake on a pedestrian zone using an other technology based on electromagnetic fields. Some similar technologies (magnets, various collision avoidance systems …) are currently used for developing various mass transit systems operating on “light” dedicated tracks. For instance, the HOV system is a multi-articulated bus which will be operational in Eindhoven in 2003 and which should run at up to 80 km/h under the supervision of a human operator. This system is somewhat similar to the French Civis system, but it also includes a longitudinal control making it a “fully automated system” even if there is an operator watching (in the case of the Civis, the operator controls the speed in a same fashion as for a light rail system). The small “automated shuttles” are also studied by several other industrial companies in Europe, and it seems that Europe could lead the rest of the world with this technology. A large European project (called CyberCars ) funded by IST and EESD since summer 2001, is aimed at improving the related technologies and in studying the conditions for a large introduction of these systems in European cities.
Figure 52 CyberCars : (a) Cycab from INRIA (France) ; (b) Serpentine system (Switzerland); (c) E-cab from Yamaha (Japan).
66

Research RoadmapsEURON Key Areas
3.6.3 Open problems The main objective in assistance systems and semi-autonomous systems is to accelerate the development of driving assistance techniques like adaptive cruise control and of novel transportation systems. A major part of the work will involve the improvement and testing of key technologies for better guidance, collision avoidance, fleet management, and for the development of simple standard user interfaces. Depending on the technologies and on the needs identified with the users, the operational objectives will be a significant improvement in the performances of the various components and/or a significant decrease in cost. Automobile industries have a great interest in improving technologies like adaptive cruise control, lane departure warning or night vision enhancement. Great efforts are also made to establish new technologies like pedestrians safety systems. The aim is to improve the safety of automobiles considering increasing traffic and the one hand and on the other hand to enhance the comfort of the human driver. We expect improvements of about 30% on either of these objectives for each key technology. The following list gives an overview of which key areas need further enhancement in order to improve assistance driving systems and semi-autonomous systems (from efficiency and robustness point of views): navigation, guidance, obstacle detection, collision avoidance, vehicle control, remote operation, platoon driving, user interfaces, safety and energy management, sensors. Considering the development of vehicles being capable of driving fully autonomously, the DARPA Challenge demonstration has shown impressively that much effort is needed further on. While technologies for semi-autonomous driving increase the safety in special traffic situations, research of autonomous vehicles could lead to intelligent driving assistant systems which improve safety importantly, because these systems should have an understanding of the actual scene and are therefore able to react and assist accordingly. Many fundamental research is needed although research in autonomous vehicles started in the 1980s. But in the early days research was mainly concentrated in driving under well defined conditions like constant daylight and well structured highways. Therefore the next steps should lead to an improvement of technologies dealing with road surface and lane detection, detection and evaluation of traffic signs, obstacle detection to mention a few. Efforts have to be made to improve person detection and the detection of other traffic participants in order to understand their intentions and to be able to react accordingly. Progress has to be made to enable driving on lesser structured lanes likes inner-city streets or also country lanes. Last not least it is desirable to be able to drive in disadvantageous weather conditions like rain, fog or snow and even at night.
3.7 Logistics Logistics and transportation of goods are one of the early applications of robotics starting with wire-guided vehicles or automated guided vehicles (AGVs) within the workshop or the warehouse and developing more recently to other environments such as hospitals, or at a larger scale, harbours or railway freight stations for transport and handling of large cargo. The term logistics applies more precisely to this latter case. As long as AGVs were indeed wire-guided, not much research was actually involved in robotics. However, the need for flexibility and the emergence of the new aforementioned application areas which require more operational autonomy for the robot, was a pull for research work encompassing several issues of mobile robotics such as new kinds of localisation means, algorithms for motion planning and obstacle avoidance, and coordination of multiple vehicles.
3.7.1 Current research As the research area of logistics spans such a wide range of problems, there are naturally many projects covering only some aspects of it. In particular, there has been as lot of research in the areas of path planning and navigation in general, and also some research applied to the specific problems of AGVs. [144] identify the areas of scheduling and routing as two of the most important problems to be solved for an AGV system. There has also been
67
Research RoadmapsEURON Key Areas
some research on the level of hardware, although most of the current AGV systems use more or less the same hardware as in human-guided systems, e.g. fork lifts. Other interesting issues include the problem of localization of the AGVs and of appropriate sensor systems as well as the coordination of large AGV fleets, some ot them containing significantly more than ten AGVs. [145] present a logic control system for such a large scale system which is supposed to be built up at the Amsterdam airport Schiphol, connecting the airport itself with freight terminals and thus allowing to deliver expensive or time-critical air-cargo to the appropriate flights in time. The most important aspects of their logistic control system are decentralization, distribution, and an event-based information exchange between hierarchical control layers. An example for routing through a complex path network is demonstrated in [146]. This research focusses on complex path networks where alternate paths to a goal position exist. The choice of search algorithms in this case is crucial, as they have to be fast enough, and at the same time produce as optimal results (e.g. in terms of driving time, work load for AGVs etc) as possible. [147] developed the mobile robot ROBOLIFT, which is based on a conventional fork lift carrier. They mainly concentrated on research in the areas of sensory capability and local intelligence. Computer vision is used as sensory system for autonomous navigation and pallet recognition. In addition, the hardware of the system has been modified such that the conventional driving control has not been altered, and the system can still be directed by a human driver. Other work on sensor systems tries to get away from wire-guided AGVs by keeping the advantages of guided systems in general. [148], e.g., introduce a system which is guided by infrared digital signals. Such systems are much more flexible and also cheaper than wire-guided systems. Several projects pertaining to organisational aspects of logistics and multi-modal transhipment were financed within the EC programmes (e.g., within ESPRIT 3 and 4), but there have been comparatively a small number of projects on the automatisation of the procedures. In France, the COMMUTOR project run by the French railway company SNCF studied an automated crane and truck for container handling. The system in operation at the harbour of Rotterdam, exploited by ECT (Europe Combined Terminals) uses tens of automated trucks for container transport. The system is similar to AGVs with a central scheduling and control and navigation using predefined paths. The Esprit 3 project 6668 (MARTHA), with the participation of ECT, Frankfurt Airport, SNCF as end users aimed to make such a system more flexible by adding autonomous functions to the trucks. This project’s objectives were to study the use of mobile robots with as little as possible centralised control with the possibility of distributed coordination. The main results of the project were on autonomous navigation, control architecture and multi-robot interaction protocols. At the international level, the most significant work in this domain is accomplished by the Australian Centre of Field Robotics of the University of Sydney. This work includes navigation based on millimetre wave radars, vehicle control, planning and scheduling, and system safety. In addition, ACFR works on the enhancement of the performance of quay cranes.
68

Key Areas Research RoadmapsEURON
Figure 53 The Delta Terminal at Rotterdam Harbour and an automated container transport
Figure 54 Automated container carrier instrumented by the ACFR
69

Research RoadmapsEURON Key Areas
3.7.2 Open research issues As pointed out above, the area of logistics covers several important research areas in robotics, and by now, there is hardly any project which aims to cover all of them – to widespread are the problems in each of the partial research areas. On the other hand, to set up a large-scale AGV system which can cover real-life demands on logistics, it is very important to consider all of these areas in combination. Thus, there still is need for large-scale projects with real-life evaluation to improve the promising results which have been made so far. Concerning the different areas of research, some of the key issues for future research are: • The development of dependable and robust control architectures for autonomous
operation • The development of distributed multi-robot cooperation and coordination protocols
and algorithms. • The development of all-condition navigation and guidance systems, including
sensors, localisation methods and systems and obstacle avoidance methods. • The expansion of existing systems to large-scale systems which can e.g. be used on
airports, freight harbours, train stations etc. • As far as possible, the use of available hardware to minimize costs, especially for
large systems containing many AGV. • The combination of internal sensor systems of the AGV (e.g. laser sensor systems)
and external sensor systems (e.g. infrared) to guidance systems which combine the advantages of both.
70

Research RoadmapsEURON Key Areas
3.8 Field robotics 3.8.1 State of the art The domain of Field Robotics encompasses the applications where the robots are usually acting in outdoor semi-structured or unstructured environments. Examples span from agriculture and forestry over mining, construction, rescue, fire surveillance and fighting, intervention in hazardous environments to planet exploration (including natural landscapes on Earth, such as Antarctica) and military. Field robotics does not only include terrestrial robots but also extends to other kinds of vehicles such as blimps, helicopters and drones, especially for reconnaissance in military applications. Many developments are being achieved in the domain of Field Robotics. The main centres in the domain outside Europe are the Robotics Institute at Carnegie Mellon University (Pittsburgh, USA), and the Australian Centre for Field Robotics at the University of Sydney. In Europe, the main actors in the domain are in France, Sweden, Finland and Spain. CMU has undertaken a large number of projects in Field robotics: mining, agriculture (robotized harvester and tractor), planetary exploration (Ambler, Dante, Nomad) . Worthy of note is that Nomad (Figure 55, right) is the only robot that operated autonomously in Antarctica in 1999 [149]. Indeed, planetary exploration was one of the motivations for several developments in field robotics, with applications in terrestrial robots in extreme environments.
Figure 55 Robotized harvester (left) and the Nomad robot in Antarctica (right) developed by CMU.
71

Research RoadmapsKey Areas EURON
Figure 56 The LAMA robot for planetary exploration developed at LAAS (Toulouse). There have been comparatively few projects funded by the EU on this topic in the late 80’s and early 90’s. The ESPRIT PANORAMA project aimed at studying perception and navigation for field robotics applications (forestry, mining). Figure 57 shows the ARSKA robot developed in this project. The Eureka AMR project objective was autonomous intervention robots for civil security applications. The Eureka projects CITRUS (robot for citrus harvesting and handling) and ROSAL (robot for the handling and grafting of rose plants), funded by Spain and France, and MAGALI (apple harvesting) are examples of the European research effort in agriculture robotics during the nineties.
Figure 57 ARSKA : Autonomous Robot for Surveillance Key Applications developed by the Helsinky University of Technology.
72

Research RoadmapsEURON Key Areas
There are also a number of national projects dealing with field robotic applications in agriculture and forestry. Particularly, greenhouse robotics was the subject of several projects by the middle of the nineties in Spain and Italy. Figure 58 (left) shows the Aurora robot for greenhouse applications, including autonomous spraying of chemicals. The main objectives here are to preserve the workers’ health and to decrease the environmental impact. More recent is the forestry robot shown in Figure 58 (right) in which several functions of a forestry machine have been automated.
Figure 58 The AURORA greenhouse robot developed at the University of Malaga (Spain) (left) and The ROFOR project developed at Sevilla (Spain) (right). Robotics technology has been also applied to sectors of the mining industry that need improvement in worker safety, energy efficiency, labour requirements, and production. Some of the current robotics projects are solving problems in areas such as handling of materials, remote investigation, and equipment automation. The objective of many of the projects is to develop control systems that reduce operator demand and reduce or eliminate personnel exposure to hazardous environments. Significant efforts in mining robotics have been developed in USA. Thus, several robots for underground mining have been designed and built at Carnegie Mellon University and the National Robotics Engineering Consortium (see Figure 59). Furthermore CATERPILLAR and the ORNL's Center for Engineering Science Advanced Research (CESAR) are developing cooperative robotics for mining applications. In Canada, the Federal Government (Minerals and Metals Sector, Mineral Technology Branch), and several Universities are also developing robotics in the framework of mining automation programmes. Thus, the Ecole Polytechnique de Montreal is working in a SMART (Sensori Motor Augmented Reality for Telerobotics) project with mining as the main application area (see Figure 60).
73

Key Areas Research RoadmapsEURON
Figure 59 Continuous underground mining machine (Carnegie Mellon University).
Figure 60 SMART project at the Ecole Polytechnique de Montreal: Drilling operation using telerobotics. In Australia mining robotics is also important with significant research projects in several centres (CSIRO, University of Sydney, University of Western Australia). Figure 61 shows an automated dragline built by CSIRO. ESA Harsh Environments Initiative includes mining operations, tunnelling and other field robotics operations. In fact, it should be noted that existing space technologies are ideally suited towards resolving some of the issues in field operations in order to improve efficiencies and safety of operations in terrestrial and marine harsh environments. Some of these technologies will need to be adapted to work efficiently. However, in spite of these and other national efforts, mining robotics is not well developed in Europe. Many of the above mentioned field robotic works are largely concerned with automating existing manually operating machines. This is the case of the machines in Figure 58 (right) and Figure 61 (left). Figure 61 (right) shows a vehicle for working in mining, construction and quarries which has been automated in Spain (autonomous navigation using DGPS).
74

Research Roadmaps Key Areas EURON
Figure 61 Automated dragline (CSIRO, Manufacturing Systems and Automation) (left) and Autonomous navigation of heavy machines using DGPS (University of Sevilla) (right).
An example for a field robot used for fire surveillance and fighting is the FireSearch Robot, developed in Japan (Figure 62). Due to heat, poisonous gas or danger of collapse of buildings, assignment of humans is too hazardous. Most existing robots in this category are telemanipulated to allow full control over the robot during operation. High purchase costs restrict the numbers of robots in real practice to a few.
Figure 62 FireSearch Robot, Japan
Two recent space projects including field robots are the NASA and ESA Mars missions (Figure 63) [152][153]. In the area of long-distance unmanned space missions, field robots are the only option to explore planets and provide mobility for exploration. Rovers are dropped from a carrier and are used to move sensors and measuring systems to places around the land site. Long distance and therefore time delays in radio communication require a high grade of independence and intelligence of the platform in this field of application.
75

Research Roadmaps Key Areas EURON
Figure 63 Mars Rover Beagle (ESA) (left) and Mars Rover Spirit (NASA) (right).
Today, use of robots in military operations is low due to the challenges on military missions and the very complex and unstructured outdoor-environment. Military robots could be used for investigation or observation tasks behind the enemy’s lines and so reduce risks for the own troops. Organization of the DARPA Grand Challenge in 2004 shows that interest of military in robots for the battlefield is high and will be field of application in the future (Figure 64). More than 20 participating groups from industry and universities are joining the race. CMU is taking part with the “Red Team” [150], using a HMMWV and various sensor technologies (Radar, Lidar, DGPS) to navigate autonomously. Another Team from UC Berkeley will send an unmanned motorcycle, named Ghostrider [151], into the race and therefore is also going to face the difficulty of balancing.
Figure 64 CMU Red Team vehicle (left), and UC Berkeley Ghostrider motorcycle (right), two of few robots racing in Darpa Challenge. Unmanned aerial vehicles (UAVs) have historically been used primarily for military purposes. In the last ten years a significant progress toward autonomous aerial vehicles with on-board intelligent capabilities has been experienced, mainly in the United States: the University of Southern California (USC) has conducted, since 1991, an autonomous helicopter project developing several prototypes and a behaviour-based architecture for helicopter control. Georgia Tech. also has a significant tradition in aerial robotics, being very active in the International Aerial Robotics Competition, and developing autonomous helicopters and research in flight controls, avionics and software systems. The Carnegie Mellon University Robotics Institute also has ten years of experience on visual-based autonomous helicopters
76
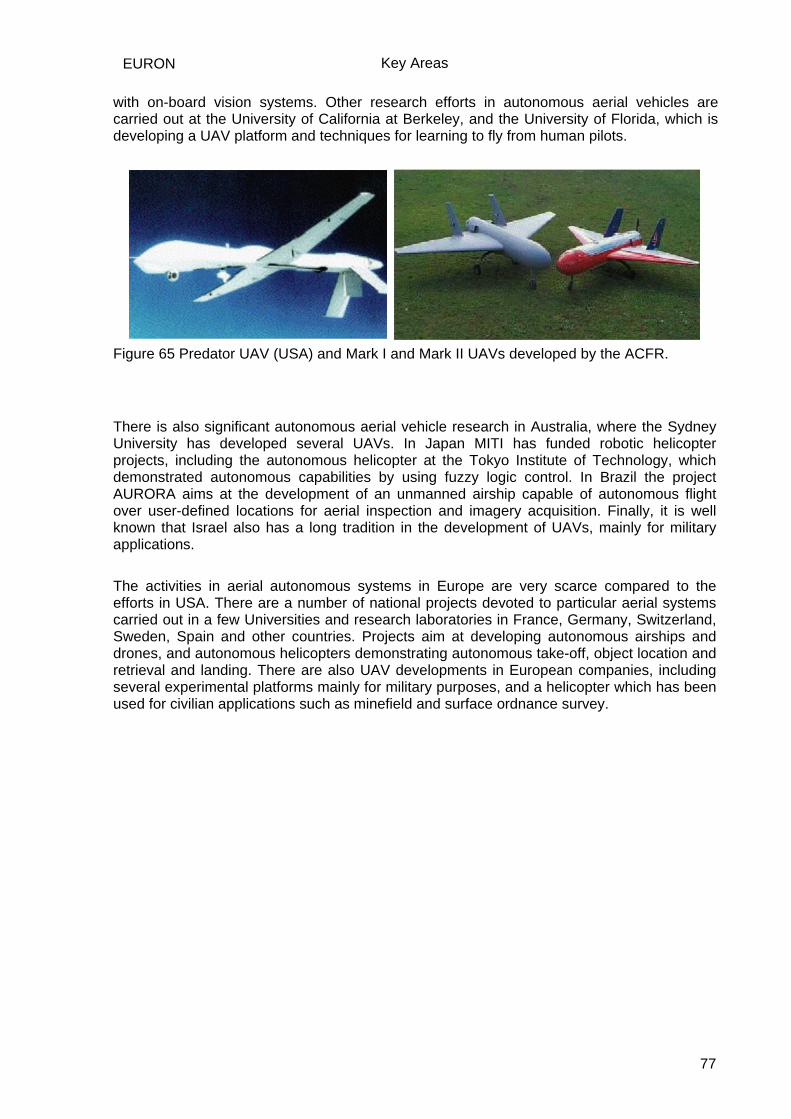
Research RoadmapsEURON Key Areas
with on-board vision systems. Other research efforts in autonomous aerial vehicles are carried out at the University of California at Berkeley, and the University of Florida, which is developing a UAV platform and techniques for learning to fly from human pilots.
Figure 65 Predator UAV (USA) and Mark I and Mark II UAVs developed by the ACFR.
There is also significant autonomous aerial vehicle research in Australia, where the Sydney University has developed several UAVs. In Japan MITI has funded robotic helicopter projects, including the autonomous helicopter at the Tokyo Institute of Technology, which demonstrated autonomous capabilities by using fuzzy logic control. In Brazil the project AURORA aims at the development of an unmanned airship capable of autonomous flight over user-defined locations for aerial inspection and imagery acquisition. Finally, it is well known that Israel also has a long tradition in the development of UAVs, mainly for military applications. The activities in aerial autonomous systems in Europe are very scarce compared to the efforts in USA. There are a number of national projects devoted to particular aerial systems carried out in a few Universities and research laboratories in France, Germany, Switzerland, Sweden, Spain and other countries. Projects aim at developing autonomous airships and drones, and autonomous helicopters demonstrating autonomous take-off, object location and retrieval and landing. There are also UAV developments in European companies, including several experimental platforms mainly for military purposes, and a helicopter which has been used for civilian applications such as minefield and surface ordnance survey.
77

Key Areas Research RoadmapsEURON
Figure 66 The autonomous blimp developed at LAAS-CNRS (Toulouse). Three projects related to UAVs were funded in the 5th framework programme: the MARVEL project to introduce innovative microaerial vehicles (from 150 mm to 80 mm), the ARC project devoted to minefield area reduction by using an existing low-cost helicopter drone and a combination of new sensors, the HELIPLAT project based on a high altitude (stratospheric) long endurance aerial platform for telecommunication services as well as for localisation and surveillance, and the COMETS project related to the coordination and control of multiple autonomous and heterogeneous aerial robotic systems and their application to forest fire detection and fighting.
3.8.2 Key issues/open problems The main issues to resolve major challenges in field robotics are related to research on perception, localisation and motion planning and control. The high complexity of an outdoor environment requires exact information to apply correct planning and control techniques. Research in sensor technology, e.g. higher resolution cameras, better 3D range sensors and also faster data processing would help to meet the perception requirements and solve these main issues. Combinations of today’s standard localization methods like DGPS and internal sensors yield to good results in outdoor localization, so that this might not be the main topic in future research. Planning and control techniques change with development of new sensor technology and faster data processing. From there, it is assumed that these issues will also be in the focus of research in the next years. The domain of UAVs is developing quickly and clearly the main issues involved are automated piloting, including sensor based control, and perception.
78

Research RoadmapsEURON Key Areas
3.9 Space robotics 3.9.1 Motivation of research field Despite of the human desire to discover and explore space in manned space missions, there is no doubt that space robotics and automation is the key technology to efficiently operate space infrastructure or to perform planetary exploration. Robots extend the human capabilities in space in terms of scale and distance in manned or unmanned space missions. One important aspect of space robotics is that the technology allows to reduce crew time or to conduct unmanned missions, such that a part of the high costs that are usually spent for human safety can be invested in the development of the robot system itself. At the same time space robotics offers an excellent opportunity as a technology driver for other application fields, since developments for space in the field of perception, control and manipulation are not domain specific. Space robotics encompasses applications like external and internal servicing of space infrastructure to enable tasks like the execution of repetitive experiments, inspection, and pay-load handling. The robot manipulator system can be stationary, movable on a macro-micro manipulator setup, climbing, or free-flying. The latter is particular of interest for servicing of satellite platforms. Another important application is planetary exploration. Due to the inherent long communication time delay such systems have to be equipped with autonomous functions that guide the vehicle in an unstructured environment. For this reason these systems are discussed in the context of field robotics.
3.9.2 Important projects and milestones R&D Work in the field of space robotics can be classified in the following R&D phases:
(a) Development of basic technologies
(b) Development of application scenarios to test the feasibility of engineering aspects of a possible mission
(c) Development of actual space flight systems
Where as phase (a) is a matter of basic engineering research, phase (b) & (c) are in general funded as projects by ESA or other national space agencies. In general many phase (b) projects are necessary before a decision to actually fly a respective mission can be made. The major obstacle in the field of space robotics is the large scale of a mission and its related risks such that with the limited resources available only few missions have been flown so far. The robotics manipulator systems that have been flown in a real mission are:
3.9.2.1 ROTEX The first remotely controlled robot in space has been ROTEX (Figure 67) [73]. It flew with the Spacelab-Mission D2 inside shuttle COLUMBIA in April ’93 and performed several prototype tasks (e.g. assembly and catching a free-floating object) in different operational modes, e. g. remotely programmed, but also on-line teleoperated by man and machine intelligence. Its success was essentially based on
• multisensory gripper technologies • local autonomy using the above sensory feedback capabilities • predictive graphics simulation compensating for 5 – 7 seconds delay
3.9.2.2 ETS VII The next step in space robotics was NASDA’s Engineering Test Satellite (ETS VII) (Figure 68) [74], the first free-flying space robot that was operable for around two years. European
79

Research RoadmapsEURON Key Areas
participation was made possible in April ’99 when the German space agency (DLR) and ESA got the permission by NASDA to conduct experiments to remotely program and control their robot from Tsukuba / Japan. The German project called GETEX (German Technology Experiment) was again very successful (as was the whole ETS VII mission); the goals in particular had been:
• To verify the performance of the telerobotic concept MARCO, in particular concerning the implicit task level programming capabilities as well as the sensor-based autonomy and world model update features [75][76]. DLR`s sub-contractor University of Dortmund verified specific virtual reality concepts.
• To verify 6 dof dynamic models for the interaction between a robot and its free-flying carrier satellite. A major part of the GETEX experiment time was allocated to these experiments, which consisted of a series of manoeuvres carried out by the manipulator while the attitude control system of ETS-VII was switched off [77][78].
3.9.2.3 Mobile Servicing System on ISS The Mobile Servicing System (MSS) (Figure 69, left) [79], Canada’s main contribution to the International Space Station (ISS), is one of the first operational space robot systems (the Space Shuttle manipulator which has been flown in several missions before can be considered more like a crane device, due to the joystick interface and the lack of external sensors). It was developed for payload handling and inspection. The MSS consists of three parts:
• the Special Purpose Dexterous Manipulator (SPDM) – two 7 degree-of-freedom manipulators as a end-effector system
• the Space Station Remote Manipulator System (SSRMS) – a 7 DoF macro manipulator
• the Mobile Base System (MBS) In April 2001 the SSRMS manipulator has been transferred to and set in operation on ISS. Its first real operational task in July 2001 was to mount an airlock on ISS. It was the first operation on ISS which completely relied on robotics technology, since the task required handling forces far beyond the physical capabilities of an astronaut team. Due to the low speed of operation (1 mm/s), required in space robotics, the operation with the MSS remains a tedious time consuming task. Considering that the crew time is a critical resource on ISS, remote control of MSS is essential, nevertheless had not been planned for MSS originally. However now, in a first step, European technology represented by DLR`s telerobotic system MARCO [76] (Figure 69, right) is being used to remotely control the MSS Operations and Training Simulator (MOTS) in a joint project with CSA with the goal of attaining the qualification to operate the real MSS in space. Other manipulator systems are planned for the Japanese and Russian module of the ISS. The latter will be equipped with the ERA manipulator, a development funded by ESA and performed by the companies FOKKER (Netherlands) and ASTRIUM (Germany). And Japan`s NASDA is now also entering into negotiations with the German space agency concerning the remote control of their JEM manipulator with DLR`s telerobotic system.
80

Key Areas Research RoadmapsEURON
Figure 67 ROTEX – the first remotely controlled space robot.
81

Key Areas Research RoadmapsEURON
Figure 68 ETS VII - the first free-flying space robot. The first row shows the view of the manipulator hand camera (left) and the stationary camera (right), in the second row the ground control station of the GETEX mission (left) and the virtual model showing the robot manipulator configuration (right) (Courtesy of NASDA, the Japanese national space agency)
Figure 69 The Canadian Mobile Servicing System (MSS) – one of the first operational space robot systems (Photo left, courtesy of the Canadian Space Agency, CSA), and the DLR MARCO system (right side) for remote control of the MSS as a result of a joint project with CSA. A particularly strong interest in space robotics has been shown over years by Italy’s space agency ASI. ASI has prepared an ISS experiment handling demonstration mission EUROPA to fly around 2006 using Technospazio`s SPIDER arm and the ground control system DREAMS (formerly FAMOUS) financed by ESA. Belgium companies (TRASYS, SAS) are contributing here, while Germany intends to enter now into a light weight joint verification and telepresence project ROKVISS on ISS. Indeed the round-trip delays in ROTEX as well as in ETS VII were around 6 sec, while physically necessary (when using a geostationary relay satellite) are only around 0,5 sec. So our central interest is to build up new fast
82

Research RoadmapsEURON Key Areas
telecommunication structures which would allow e.g. also the ultrasonic medical investigation of astronauts on ISS or of elderly and sick people on cruising ships including force feedback to the remote experienced medical doctor (Figure 70). Italy also co-operates with NASA in a project PAYLOAD TUTOR, a small station-internal experiment handling system. The University of Bologna with its outstanding experience in robot hand design contributes here in the field of grippers. And the French space agency CNES has strongly focussed its interest on planetary rover systems with excellent facilities and technology developments in Toulouse. Although MARS EXPRESS seems indeed to become a European MARS mission, a drilling mechanism but no real robot system will be involved. ESA studies including institutes like Uni Leuven (3D world modelling), EPFL Lausanne (mechanisms, control) and DLR (navigation and tracking) try to prepare rovers with manipulators for Mars and Mercury exploration. Real missions however are not yet decided.
Figure 70 Remote medical investigation of ISS astronauts or cruising ship passengers via fast
telepresence links
3.9.3 Current and future Key issues The following core technologies are relevant for future space robotics and at the same time are as equally important for the progress in other domains like service, medical, and care assistant robotics:
3.9.3.1 Light-Weight Arms and Articulated, Multi-Fingered hands A definitely central need for space (as a technology driver) but also for the wide variety of future terrestrial service robot applications, are sensor-controlled light-weight arms (in contrast to the stiff and heavy industrial solutions) and articulated, multi-fingered hands, which come closer and closer to the delicate human performance. Two of these arms combined with an arrangement of a stereo camera pair tends to provide such a system with humanoid appearance and thus provokes the “robonaut” terminology (Figure 71, left). NASA
83

Research RoadmapsEURON Key Areas
has recently presented remarkable results in this context. In European an advanced light weight robot manipulator and a 4-finger-hand has been built by the DLR [80]. In Figure 71 (right) a robonaut concept of a free-flying service satellite is shown using components of the DLR robotics technology.
3.9.3.2 Telepresence and Autonomy Operations and experiments performed with existing systems have clearly shown that the state of the art control technology implemented in systems like MARCO has to be extended in two different directions:
• Since many tasks cannot be pre-planned or are unknown in its structure, the operator should be enabled to perform the task manually under remote control. The key technology for manual control is telepresence. It has to provide a sufficient degree of immersion, e.g. that the operator receives stereo images and kinaesthetic feedback for dexterous manipulation. Recent developments have shown that haptic feedback is possible when advanced direct communication links are used between the ground station and the satellite systems in low and geo-stationary earth orbit.
• On the other hand many tasks are repetitive and/or are time consuming when performed manually. The methodology of task directed programming has been developed to program and control robots when performing tasks under such conditions. This methodology has to be extended such that dexterous complex tasks, e.g. the grasp of known or unknown objects is supported using autonomous modes that e.g. automatically generate safe grasps using the robots sensor system.
The development of these technologies is even more essential since they are key issues in other robotic application domains, as well. Telepresence and autonomy are e.g. key technologies in minimal invasive surgery robotics and the robotic assembly systems of MEMS. In the first application the surgeon performs dexterous operations like by-pass heart surgery with the robot system, not necessarily remote, but with the same degree of immersion as required in space robotics. Again the autonomous execution of parts of the task becomes essential to reduce operation time and to increase the overall feasibility of the system.
Figure 71 The NASA Robonaut (left) (courtesy of NASA) and a Robonaut study using the DLR light-
weight robot components and multi-sensory 4-finger hand technology.
3.10 Underwater systems
84

Research RoadmapsEURON Key Areas
The oceans cover more than 70% of the Earth surface, and their impact on climate regulation is now well established. Also, water is one of the most precious resources for life on earth. In all international resolutions concerning the environment, the observation of the oceans is a major component. The need for continued observation of the ocean has thus been implicitly acknowledged at the international level. However, the use of underwater vehicles is still reduced. The areas of potential intervention of underwater robotics are almost as diverse as range of human activities that take place in the oceans, seas and lakes, covering the very general domains of industrial activities, military operations and scientific studies. Underwater robots extend the operational range of human divers to very deep waters (up to 10000 meters), can operate in polluted or difficult to access areas and for long periods of time. Autonomous mobile underwater platforms are also a more flexible and economic alternative to current sea surveying means for oceanographic surveys and even for acoustic surveying for fish stock assessments. Their stealth nature make them an attractive tool for coveted military operations. Each potential field of application imposes special constraints on size, degrees of freedom, sensor payloads, energetic autonomy, intelligence, and dextrous ability.
3.10.1 State of the art The first underwater robots started as robotic arms mounted on manned submersibles, under direct control of an human operator in direct field of view of the end-effectors. The next step has been to eliminate the need for a manned submersible, increasing the distance between the robotic arm and the human operator: the Remotely Operated Vehicles (ROVs) were born. The PUV (Programmed Underwater Vehicle) was a torpedo developed by Luppis-Whitehead Automobile in Austria in 1864, however, the first tethered ROV, named POODLE, was developed by Dimitri Rebikoff in 1953. There are presently over 100 ROV manufacturers over the world. Tele-control generalised to the motion of the mobile platform on which the arm is mounted, and not only to the robotic arm itself, through an umbilical cable sending power to the motors and actuators, and receiving signals (mostly video and sonar scans) from the sensors mounted on the platform. The vast majority of the underwater robots in routine operation presently belong to this category, finding application in many diverse fields (de-mining, off-shore, archaeology,…).
Figure 72 Cable Controled ROVs: ADELINE Hannover, Germany(left), OLISTER, France (right)
The umbilical cable was soon identified as the weak link in these systems: it poses problems for the safety of the platform safety (it can be broken), it limits the robot manoeuvrability, and, probably more fundamentally, it enormously limits the operational range of the platform with respect to the surface operation station. The next step has been thus to eliminate the need for a cable: the Autonomous Underwater Vehicles (AUVs) appeared. Actual development started in thee early 60’s with vehicles such as the SEA SPOOK and SPURV in the USA. They were soon followed by others such as SKAT (Russia), EAVE West/East and UFSS
85

Research RoadmapsEURON Key Areas
(USA) and EPAULARD (France). Today, over 12 countries have AUV development capabilities.
Figure 73 Autonomous Underwater Vehicles: GAVIA, Iceland (left), Maridan, Denmark(right)
3.10.2 Open Problems and Roadmap Compared to other areas of field robotics, underwater robotics is strongly affected by two main problems, which are directly linked to the propagation characteristics of the medium: communications and perception range. Electromagnetic waves do not propagate inside the ocean, leaving acoustic waves as sole possible alternative to support transmission of information at long distances. Since light attenuation is strong, use of optical instruments for the perception of the environment is limited to the close vicinity of the platform – and can be severely affected by suspended matter – leaving again acoustics (sonars) as the single possible reliable technology on which perception can be based. With the development of Autonomous Underwater Vehicles (AUVs), new technological problems have spurred: on-board energy sources, need for increased behavioural autonomy (given the very low bandwidth of the underwater acoustic channel), requirement of precise absolute positioning (the robot must be able to find by itself its way between the launching and returning points). While these problems are not specific to underwater robotics, and also arise in other field robotics domains, the specificities of the medium have called for solutions adapted to its characteristics, at least for the first and the last points, which are identified as the main present issues in the design of AUVs.
3.10.2.1 Energy The problem of energy storage is mission related. In cases where the mission is confined to a given area, and not a long one-way ocean transit, the ability to provide a stationary energy supply where the AUV can dock and recharge its batteries becomes an option. Submerged charging stations, such as the one used by the Woods Hole oceanographic Institution vehicle ABE, are a proved alternative to complete storage of required energy on-board. In the past 30 years of AUV development, there has been a tendency to use low cost, low energy density batteries such as lead acid and nickel cadmium for testing and trials, while turning to higher energy density batteries for operational missions. Until recently, the silver-zinc batteries have been the battery of choice for long range missions. The emerging requirement for electric cars, as well as developments in the space and computer industries helped advancing new power sources. Two of the most promising are Lithium Ion and Lithium Polymer batteries. As an alternative, both aluminium-air and zinc-air semi-fuel cells have been developed, providing at least three times more endurance than silver-zinc batteries, and ten times more than lead-acid. AUV’s using this technology can have an endurance of up to 270 hours of continuous mission operation. These systems, however, have associated high costs, that limit their use to military systems. There have also been experiences on solar-powered
86

Research RoadmapsEURON Key Areas
systems. A joint research program between AUSI and the Institute of Marine Technology Problems (Russia), started developing a solar auv engineering prototype in 1997. Another possibility to overcome energy restrictions would be the usage of highly integrated mechatronic components and low power circuits.
3.10.2.2 Navigation Current navigation systems of AUVs rely on the joint use of INS (Inertial navigation systems), acoustic systems (Long Baseline, Short BaseLine, Ultra Short BaseLine) and GPS. The performances of these systems vary considerably, being mostly dictated by their cost. While military systems can incorporate expensive INSs with very small drifts, these systems are too expensive for the majority of civil operations, requiring a distinct approach to navigation. Recently, there has been an effort to incorporate perception or map based navigation techniques to decrease the dependability from high cost INSs, externally installed acoustical systems or the necessity to surface returns for GPS fixings. These systems are still experimental, and no commercially available AUV incorporates this new type of technology. They are an important contribution to bring the cost of AUVs (and their associated support systems) down, trading sophistication of equipment by increased on-board intelligence. AUV systems, even the first platforms date as far back as the early 60’s – mostly dedicated to military operations for under-ice observations – are still mostly experimental prototypes maintained by research centres in industry, military and academia. Even if some companies offer commercial AUVs for sale or for rental (Sias-Patterson (USA), Maridan (Denmark), Bfluefin, Kronsberg, …) their use for routine operations is not yet a reality. One exception seems to be the TAM-TAM Japanese system, which performs weekly observations of the lake Bivan. The major reason preventing large scale use of AUVs for ocean exploration is the human nature: the inability to cut the link, and let the AUV leave home. To overcome this problem. AUVs’ cost must be driven low enough to be considerable “expendable.” While academic institutions drive the cost down (since they cannot afford to loose large investments), the military is driving the cost up due to the requirements of reliability and mission complexity. But even in the military field, AUVS will not reach a level of routine use unless they become expandable, as it is the case with torpedoes Concerning oil industry, AUVs are sitting on the cusp of the curve where ROV technology was in the beginning of the 80’s, prior to its acceptance in the off-shore industry, which provided the impetus for them to become reliable Although there are indications of a positive trend towards the acceptance of larger costs for AUVs in this field, unless the industry embraces AUVs as it embraced ROVs in the past, they will not gain the necessary degree of reliability. Unless proper levels of funding are made available to develop a fleet of cost effective, reliable autonomous vehicles, their high cost, and the fear to loose the vehicle will overshadow their vast potential. This will result in a limited number of vehicles, operated by a limited number of organizations. For the cost of launching one space satellite, hundreds of AUVs could be launched into the oceans on limited duration missions today. The last decade has witnessed tremendous progress in the development of marine technologies that are affording scientists with advanced equipments and methodologies for ocean exploration and exploitation. Recent advances in marine robotics, sensors, computers, communications, and information systems are being brought to bear on the development of sophisticated technologies to enable safer, better, faster, and more efficient methodologies for the study of the oceans. These fast paced developments will undoubtedly revolutionize the way the oceans are studied, effectively placing scientists at the threshold of a new and exciting area when science and technology will join efforts to unravel the secrets behind recent and unexpected discoveries: intriguing ecosystems and life forms, thermal vents and cold seeps, and huge accumulations of methane in the form of gas hydrates, to name but a few. In a recent IARP International Workshop on Underwater robotics for Sea Exploitation and Environmental Monitoring, it was discussed that some of the technologies for developing
87

Research RoadmapsEURON Key Areas
autonomous underwater vehicles, like control, navigation, computer vision, mapping, etc, have matured to the point where some of them can be used as tools for continuous data gathering and exploration of the marine environment. One potential application domain is related to off-shore exploration. Oil companies are drilling at increasing depths, laying a large number of tubes and infrastructure in the sea-bottom. Regular inspection (and maintenance) of such structures is a crucial need today and it is prone to increase dramatically in the years to come. Habitat mapping may be one of the fundamental applications in the near future. Environmental monitoring is also a major aspect that is likely to receive significant effort in the near future. As an example, killer algae have been affecting spreading in the Mediterranean and little is know about their exact quantity and localization, not to mention the fact that removal is done almost by hand! All these potential application domains will push for new developments in the sensor, perception, navigation, control, energy technologies and, in the longer term, for (large) teams of underwater autonomous systems working together to solve a common task.
3.10.2.3 Future technical aspects Current research in Underwater Robotics advances in two complementary working areas: ROV’s, and AUV’s, with two different objectives. Remote Operated Vehicles are oriented to the execution of concrete tasks using teleoperated arms, while Autonomous Underwater Vehicles are more oriented to perform exploration missions in wide environments using their perception capabilities. These two research lines tend to converge towards the union of both performances in the same vehicle. The difficulties coming up from the progress in this new research direction rely on the fact that, for the achievement of efficiency and reliability in long distance autonomous missions, which is the basic function of AUV’s, it is necessary to have available high planning and control capabilities. Working in environments characterised by their uncertainties level and the lack of data transmission channels in long range underwater environments, the control and planning is based on multisensorial capabilities. Furthermore, the vehicle operates uniquely from the energy stored in their batteries, fact that implies strong limitations. An additional problem is the positioning control and the execution of tasks in a frictionless medium, in which the stability over 6 degrees of freedom is achieved dynamically with the propellers. This more difficult control problem requires the use of some sensors more costly and less precise than those used in stand-alone robots or robots mounted in a mobile base, wheeled type. ROVs replace the limitations of their local control based position and environment sensors with teleoperation, that is, with the manual control relying on the environment interpretation capabilities and the decision of a human operator. This is possible since, being ROVs oriented to the execution of tasks in more reduced environments, it is possible to use an umbilical cable, and consequently the system has wide band information transmission capabilities and at the same time can receive energy from outside, thus, it operates practically without limitations. This higher capacity in the development of complex tasks carries with it higher autonomy restrictions. Therefore, the challenge is to achieve in the same vehicle the high operation capabilities of a ROV as well as the high operating autonomy of an AUV, requiring the minimum power consumption, and consequently also more temporal autonomy. The progress in this converging line requires the use of absolute and relative position sensors, more precise, and without the need to rely on external elements such as responders, that limit the range of the practical working area. On the other hand, the difficulties of visual perception in underwater environments are higher than those present in other environments. This is mainly due to the frequent lack of water transparency, the difficulties in getting the adequate illumination, as well as to the biological recovering that is usually produced on the surface of submerged elements, that disturb the images. The
88

Research Roadmaps Key Areas EURON
limitations that appear in the computer vision field, are still more evident in underwater robotics.
3.11 Edutainment Edutainment robotics is an area often shunned by robotics researchers, since production of robots for entertainment purposes is not considered “serious” research. Even companies that are actually rather economically successful selling entertainment robots (Sony, Honda et al.) stress that the technology developed in creating those products is intended to be used in “serious” products released later. Those concerns notwithstanding, the fact remains that some very fascinating work has been and is currently being done in entertainment robotics, and that there is actually a market for robotic toys where money can be made right now, while it is generally agreed that such a market does not yet exist (or is very small) in service robotics, since the devices still lack essential capabilities to be of actual “use”. That restraint is much easier on “non-serious” robots that are not required to fulfill any special purpose reliably. Therefore, it cannot be denied that the development of edutainment robots provides one of the strongest driving forces in robotics today, and that it is important to investigate current and future trends in that area. It should also be noted that entertainment robotics is by no means a new phenomenon. Mechanical toys and diversions have been built and sold for centuries, starting with the mechanical duck ( that French inventor Charles de Vaucanson built in 1738, continuing with wind-up tin toys and going on to battery-driven motorized dogs and baby dolls that were popular during the 1980s and still are today. Much of the devices that are called “robotic toys” (see section 3.11.1.1) are little more than an extension of these very simple toys.
Figure 74: Vaucanson's Duck
3.11.1 State of the art From the technological, the didactical and psychological point of view the requirements of robot systems for education and for entertainment are so similar that they are usually combined into one field, for which the term “entertainment robotics” was coined. The discipline is usually subdivided into four segments with progressively higher degrees of sophistication: robotic toys, construction kits, robotic pets and larger robots. The lines between these segments can not always be clearly drawn, but a general trend is quite recognizable.
3.11.1.1 Robotic Toys This area encompasses cheap robots with limited sensory and/or motor abilities, usually in the form of dolls or fantasy animals, for the education and entertainment of little children.
89Figure 75: The Furby
3.11.1.1.1 Available Toys One very notable marketing success was Hasbro’s Furby [158], a toy that is sold since 1998 and ignited a cult known as “Furbymania”. The Furby is remarkable in its clever utilization of a single motor, an audio output device, a simple infrared light sensor and three tactile switches to convey a very convincing illusion of a fantasy

Research RoadmapsEURON Key Areas
animal that reacts to user actions, even learning the user’s language bit by bit (an effect achieved by making localized versions of the Furby and unlocking more and more natural-language words over time). While entirely illusionary, this alleged “learning” ability was so successfully marketed that the American National Security Agency imposed a ban (quickly lifted after the myth was dispelled), disallowing Furbys in their offices since they might be able to record sensitive material. Inspired by the very big success of the Furby, Hasbro Inc. later released several robotic toys with higher levels of sophistication, such as the “My real baby” doll, which is equipped with much more sophisticated sensors and much more computing power than its predecessors in the mechanical-doll segment. Simple actuators, e.g. for generating “face expressions” in combination with an “artificial skin” make it possible to communicate “emotions” from the puppet to the child.
It is easy to predict that the range of behaviours these robots have at their disposal will increase constantly as sensors and on-board computers are getting cheaper. Actuators’ cost will be the limiting factor for implementing those interaction patterns that also involve action/motion on the part of the robot. While these creatures are real robots, their development, their production and their marketing will be done by large toy makers. Although this market amounts to many billion US$, companies with sufficient managerial expertise and financial resources are not located in Europe. 3.11.1.1.2 Usability in Research and Teaching Quite a number of projects have sprung up to “hack” the Furby and other robotic toys. Many of these are or have been quite popular because of the ready availability of the toys and their cheap price. Nonetheless, the grade of capabilities of the toys is (still) quite low, and since their electronic innards are often undisclosed and epoxied away, they are mostly impossible to upgrade or enhance. Therefore, beyond their toy factor, they are quite unusable in teaching or research.
3.11.1.2 Construction Kits A number of robot construction kits has appeared on the market during the last decades. These kits can be roughly divided into toy kits and engineering kits, based on the amount of electronical knowledge that is required to work with them. 3.11.1.2.1 Toy Kits The most important representatives of the toy kit variety are the Fischertechnik Robotik and LEGO Mindstorms kits. They are mostly characterized by encapsulating all electronics into monolithic “intelligent bricks” which contain a microcontroller and analog electronics for coupling sensors, and which can be interfaced with a host computer to program them. Additionally, the mechanical elements contained in toy kits are mostly of the “snap-together” variety, requiring very little mechanical skill. The LEGO Mindstorms [160] kits have appeared on the market around the turn of the millennium. True to the children-oriented image of the company, they use fairly simple elements with few connection possibilities (true for both the mechanical and software side) which work very well together to make fast results possible. LEGO managed to sell 80,000 Mindstorms kits (at $200 each) in under six weeks upon market introduction. The company assumed that nearly half of all purchases were made not for children, but for people over 18 years of age.
Figure 76: The LEGO RCX "programmable brick"
90

Research RoadmapsEURON Key Areas
Fischertechnik robotics kits [159] have been available since the early 1980s, starting out as “dumb” motor/sensor interfaces that could be plugged into then-popular home computers such as the Sinclair ZX Spectrum. They now use the Intel 80C32-based “Intelligent Interface”, which is connected to the host PC using a serial connection. Fischertechnik has traditionally had more of an engineering approach than LEGO, appealing to an older age group. This is also true for their robotics kit, which requires significantly more technical knowledge than LEGO’s. 3.11.1.2.2 Engineering Kits The second kind of robotics kits available on the market is much more sophisticated, both in demand to the constructor and in obtainable results. They usually center around a specific microcontroller (such as the Intel 8051 or the Motorola 68HC11 and derivatives), and often require the user to do quite a bit of soldering himself. Some of the systems are based on descriptions in books such as the classic on the HC11-based MIT Rug Warrior [161] or robotics-project books such as John Iovine’s [162]. Detailed in these books are not so much kits but rather kit-like instructions on how to construct microcontroller boards, sensors and actors; but most of the projects are available in kit form from the authors or other supply companies. Other systems, such as Acroname’s BrainStem [163] (based on an undisclosed “40MHz RISC processor”) or Parallax’s controller kits [164] (based on the Basic Stamp) are ready-made circuit-board modules containing CPUs, RAM, motor and sensor controllers, that can be plugged together to form a robot’s electronic base. Sensor and actor modules are usually available from the circuit-board supplier as well. 3.11.1.2.3 Usability in Research From the capabilities of the available Engineering Kits, it is quite obvious that they are very usable in teaching (the Rug Warrior, as detailed in [161], has its origins in a MIT Media Lab teaching project), and countless projects are done with them all over the world; see, for example, the University of Karlsruhe’s EduKaBot system [165]. But Toy Kits are quite usable in Teaching as well. Usually, programming the “intelligent bricks” is done using special graphical programming tools that are usually modelled after the mechanical components, giving the illusion of “snapping together” a program. While these interfaces are ideal for children and beginning students, already allowing the construction of fairly sophisticated programs with loops, conditions etc., different programming tools are also available such as the Not Quite C language [166] or Markus Noga’s legOS operating system [167] for the LEGO intelligent brick. Many beginner-level projects are being performed especially with the LEGO system; see [168].
3.11.1.3 Robotic Pets Beginning with the introduction of the Sony AIBO robot in 1999, a new market segment has appeared: That of robotic pets. Going far beyond the capabilities of simple robotic toys and often having quite astonishing mechatronic capabilities, these facsimile cats, dogs and fantasy animals have had quite an impact on the world of robotics research, mainly because the great marketing success of these systems has been largely unexpected. 3.11.1.3.1 Market Overview The prime example of robotic pets is, of course, Sony’s AIBO robot [169]. By now in its third generation, this robot features 3 degrees of freedom for each leg and another 3 for the head (totalling 20 DOF together with mouth, tail, and ears), as well as a head-mounted CCD camera of 492x362 pixel resolution, infrared distance sensor, stereo microphones and several internal sensors (thermometric, acceleration, vibration, etc.) It uses an undisclosed “64bit RiSC processor” by MIPS.
91Figure 77: Sony AIBO

Research RoadmapsEURON Key Areas
When the AIBO was first introduced in June 1999, at a price tag of $2500, an original sale contingent of 5,000 units was planned, which was sold out in less than twenty minutes through telephone and internet orders. Encouraged by this success, Sony offered 10,000 more units in November 1999, but was met with a demand of 135,000 orders worldwide (of which, interestingly, 132,000 came from Japan, 2,000 from North America and 1,000 from Europe). Sony therefore was forced to distribute the units by lottery. Following the unexpected success of the AIBO, other companies followed up with similar robots, which were mostly much cheaper in price; examples are the iCybie by Hasbro (originally developed by Tiger Electronics, discontinued by now) and the Poo-Chi, also by Tiger Electronics. While much more limited in sensory and cognitive capabilities (a limitation imposed by the lower price), they are of similar actory sophistication as the AIBO. 3.11.1.3.2 Usability in Research Due to the high degree of sophistication, especially the AIBO has made quite a large impact in the research market, since it constitutes a ready-made four-legged platform with enough sensory and processing capabilities to make it very usable for many kinds of work, such as walking machine / gait research, visual servoing, etc. An AIBO programming kit is available, and programs can be uploaded to it via its integrated MemoryStick slot. There is a separate AIBO league in the RoboCup, and many enhancements and/or replacements for the original software have been written to make the AIBO perform quite well as a soccer player (see, for example, Golubovic et al [170]). The other robot pets have not been as extensively used because they are harder to program and not easy to extend while being more limited than the AIBO in the first place. There is a SDK, but it is very limited in capability, aiming more towards programming the “character” of the pet (i.e. the way it responds to sounds, “mood swings” etc.) than the actual robotic platform. There are, however, a number of hobbyist projects that aim to enhance the iCybie by upgrading its system software, making it a more open platform. For details, see [171].
3.11.1.4 Humanoid Robots Following the unexpected success of the AIBO, when it became obvious that toy robots could be very expensive, very sophisticated, yet still very profitably marketable, several companies began development on more ambitious, humanoid robots (or began modifying existing research work on humanoids, which had never been intended for entertainment purposes, to produce entertainment robots). The last few years have seen the release of several such humanoids.
One of these is the Sony QRIO [172], which is about 60cm high and has 6DOF legs, 5DOF arms and a 2DOF body, as well as dual color cameras, infrared distance sensors in every limb, and power sensors in the legs. The QRIO is able to adapt to ground slopes of up to 10° and balance height differences of up to 1cm between its legs. It is equipped with two separate computer systems, the technical data of which is very similar to that built into the AIBO. The QRIO has integrated adaptive motion control and adapts automatically to ground surface conditions. Demonstrations of the QRIO have shown it dancing and playing soccer. At the time of writing, the QRIO is not yet sold by Sony, but its sale price is expected to lie between $40,000 and $50,000.
Figure 78: Sony QRIO
The research capabilities of robots such as the QRIO are quite obvious. The construction of bipedal robots is very difficult and very expensive, so a platform that is readily available on the market (with a warranty for breakage) and has enough sensory and actory capabilities to do actual work with is very welcome.
92

Research RoadmapsEURON Key Areas
3.11.2 Future Development and Opportunities As the dramatic market successes of LEGO Mindstorms kits and Sony AIBO robots show, there is indeed a huge market in educational and entertainment robotics, and it has gone largely untapped due to the lack of product availability. Without a doubt, it would be possible for innovative companies to duplicate or at least come close to the success of these two vendors.
Triggered by the success of robots in the toy market, several vendors have jumped the bandwagon and have developed prototypes of anthropomorphic robots. Like the QRIO, these robots carry price tags well above $10,000. Despite this, there are several companies that are currently trying to market these machines as toys, although currently almost exclusively in Japan.
It is still difficult to assess what the final successful marketing focus of these sophisticated toy robots will be. However, it is clear that once a niche is found, unit sales will increase dramatically, which will in turn drive down the prices and generate both additional demand and new applications.
The focus of this developing market is currently clearly in Japan and other far-east countries. But since the market is still in a relatively early stage of its development and mostly populated by small companies, but both the technological and economic promise are extremely good, it is a field that European companies can be very successful in. It makes much sense for Europe to identify niches in the entertainment-robot market that can be combined with traditional European technological strongholds and take the lead in this market.
93
Research RoadmapsEURON Overall key issues and social impact
4 Overall key issues and social impact
4.1 Overall key issues 4.1.1 Trust/Acceptability In the robotics applications where robots are intended to share humans’ environment, to interact with them and eventually to be introduced in our society, acceptability is one of the main concerns. Intuitively, acceptability can be viewed as “the balance of perceived and real costs against the perceived tangible benefits obtained by a user in the use of given technologies or services. […]. Acceptability relates to the ‘willingness’ to use a system or service in a particular context” [RM4]. Acceptability is therefore the combination of a number of parameters, some of them objective and quantitative, some others absolutely subjective and qualitative. A number of key issues therefore emerge for robotics research if acceptability is pursued. A key factor for pursuing acceptability is adopting design methodologies that allow to take into account the needs and preferences of the potential end users, or more in general, user-centred. These methods are more common in the design of mass market products, than of robots, traditionally addressing highly specialised professional users, and include considerations of ergonomics, human factors, occupational biomechanics, cognitive engineering. One of the main aspects amplifying the problem of acceptability in robots is that they are perceived as ‘living creatures’, which can move autonomously and eventually decide autonomously. This aspect can be coped in the design of an acceptable robot by following to lines: on one side, ethological studies can provide a number of indications on the expressions and gestures by which an exemplar of the same or different species communicates friendliness and non-aggressive intentions; there are a number of signals codifying attitude, status and mood, which can be taken into account in the design of the robot appearance and behaviour. On the hand, the autonomy of the system should be designed so as to optimise the interaction with the user, providing him/her a perception of monitoring and controlling on the robot, more similar to the interaction with an appliance. An important factor affecting acceptability is helpfulness. Even though entertainment robots are receiving a significant success on the market, especially in Japan, on the other side if a robot demonstrates to be helpful and effective its acceptability is almost straightforward. Of course, economical considerations also play an important role in determining acceptability. At the moment, robotics is a pretty expensive technology, with poor opportunities to be resized by scale economy. Economical concerns are more likely to be managed in the information society of the future, highly technological and with a different social organisation, where robots can prove their affordability in the accomplishment of service tasks. If reliability and acceptability are important factors for the development of most devices, this is particular true in the field of surgical robots. The surgical sector is the typical one in which the saying “right first times, right every time” is of paramount importance. Thus, the reliability and the acceptability of the surgical robots depend strongly on the weight of the “learning curve” of the surgeons in the overall mechanism. Because of the intrinsic features of minimally invasive interventions in their current development phase, the benefits for the patient come along with a new series of problems for the surgeon. The loss of direct access to the internal organs involves a dramatic limitation of the interaction capabilities with the tissues. Some important properties for the safe performance of complex surgical interventions are partially or totally lost. Endoscopic vision
94

Research RoadmapsEURON Overall key issues and social impact
has a low quality in comparison with direct naked-eye vision, in terms of spatial perception, image resolution, color and contrast. The mobility and handiness of surgical tools introduced through small incisions in the patient’s body is dramatically limited in comparison with open surgery conditions. Moreover, a high degree of eye-hand coordination is necessary to correctly navigate in a remote environment which is “perceived” as bidimensional. These important features, together with the technological limitations of endoscopic surgery, reduce the application field of minimally invasive procedures in general surgery. In some cases, the risk of difficult to control intra-operative complications is higher than the potential benefits of the minimally invasive approach. Thus, the surgeons need a long specific training before being able to start performing minimally invasive interventions; on the other hand, there is a general need to improve the technologies to support the learning phase in order to make MIS procedures intrinsically safer. More details related to the surgeon training will be provided in paragraph 4-b). Road safety another major concern in our modern society. It is well known that almost all accidents are due to human errors, mostly reaction time too long and inability to control the vehicle in emergency situations. Driving assistance and/or autonomous driving is certainly the best solution to improve safety and driving comfort. The main difficulties comes from two major factors: the technological factor which require to be highly improved in order to obtain the require robustness (sensing and share-control in particular); the human factor which has to be taken into account at each level of the control and decisional process. Moreover, the deployment of such facilities requires to have intermediate phases where only part of the fleet and of the road network will be equipped. An other difficulty relies on the liability and acceptance considerations (such aspects are taken into account in Japan and in some European projects such as the Cybercars project). In cities, the automobile generates nuisances such as noise, pollution, traffic jams, and lack of space for pedestrians. These nuisances are becoming unbearable, and city authorities are introducing more and more restrictions to the use of private automobile, such as parking restrictions, pedestrian zones, city pricing (e.g. in Singapore), and various alternatives to the automobile (better mass transit, park and ride, car-pooling, car-sharing, station cars…). In order to avoid the negative effects of these initiatives which may lead to kill the living heart of European cities (historic centers, shops …), a better solution is to introduce a new substitute to the private automobile in downtown cities : fleets of dual-mode public electric vehicles.
4.1.2 The European Dimension & Perspective As in the basic motivations and general objectives of EURON, the coordination of robotics research at European level is one of the main issues to be concerned with, in order for Europe to be competitive respect to USA and Japan. This could be fostered by the definition and adoption of standard platforms and open software, which could favour research and exchange of tools and results. Furthermore, common criteria in user/clinical trials would help collecting homogeneous data on robotics acceptability and applicability, from which the different research groups could benefit.
4.1.3 Robustness Robustness is still a major issue in robotics, especially for robots employed in common humans’ environments and in interactions with humans. In industrial applications like automation and production engineering robustness is significant and had been developed for years up to a high standard. However the main realized emphasis for these applications is availability and reliability in special industrial environments. Assuming that in the future robots will move and work autonomously in human environments and interact with humans, robustness has to be fully integrated in the development process
95

Research RoadmapsEURON Overall key issues and social impact
of such systems. Furthermore there is obviously a need for developing standards and guidelines to enable the integration as a part of research and development. In 2001, the first ‘Workshop on “Robot Dependability” was held with the joint support of IARP and the IEEE Robotics and Automation Society, in order to start applying the concept of ‘dependability’, defined by Laprie for IT systems [Laprie, 1992], also to robotics. Dependability is defined as a combination of:
• availability: respect to readiness for usage • reliability: respect to continuity of service • safety: respect to avoidance of catastrophic consequences on the environment • security: prevention of unauthorized access and/or handling
Regarding these topics under the constraints that robots should work in unstructured / human environments and interact with humans none of them are achieved by nowadays research. In industrial applications topics like availability or reliability are integrated in the developing process for a long time. Even if the technological development in industrial terms has reached an advanced state, it lacks the flexibility for use in different fields of application or changing environments. But for all that in the last years a rethinking can be determined in industrial development process toward more flexibility and usability. One indication for this process is the development of more and more sophisticate diagnosis systems which can lead to flexible technologies. Especially for the topics reliability and security the development of Man-Machine-Interfaces is crucial. Hereby there are many research groups developing various MMI’s based on diverse modalities for serving special applications. But most of these researches are far form reaching maturity and consequently industrial applications lacks an intuitive MMI’s. Like for the other topic there is a need for defining standards for interacting with robot systems. Concluding it can be said that one of the major issues for robotics nowadays can be defined as the identification and application of criteria for the development of dependable components and systems.
4.1.4 Economical & Industrial aspects To be harmonised Europe is leading the machine tools world both in quantity and quality of product and may be considered also leading from the technological point of view. The 1999 turnover of 16 billion Euro in the european countries is more than half of the rest of the world put together. In 2000 this figure even exceeded 18 billion Euros. 33 % of the exports go the USA. Most machines in Europe are fully or partially automated. The logistics around machine tools is now coming into our area more and more. It is vital for efficient production that the product is moved quickly from operation to operation according to integrated manufacturing. It is useful to have as many operations as possible carried out in one go by the same machine tool.
96
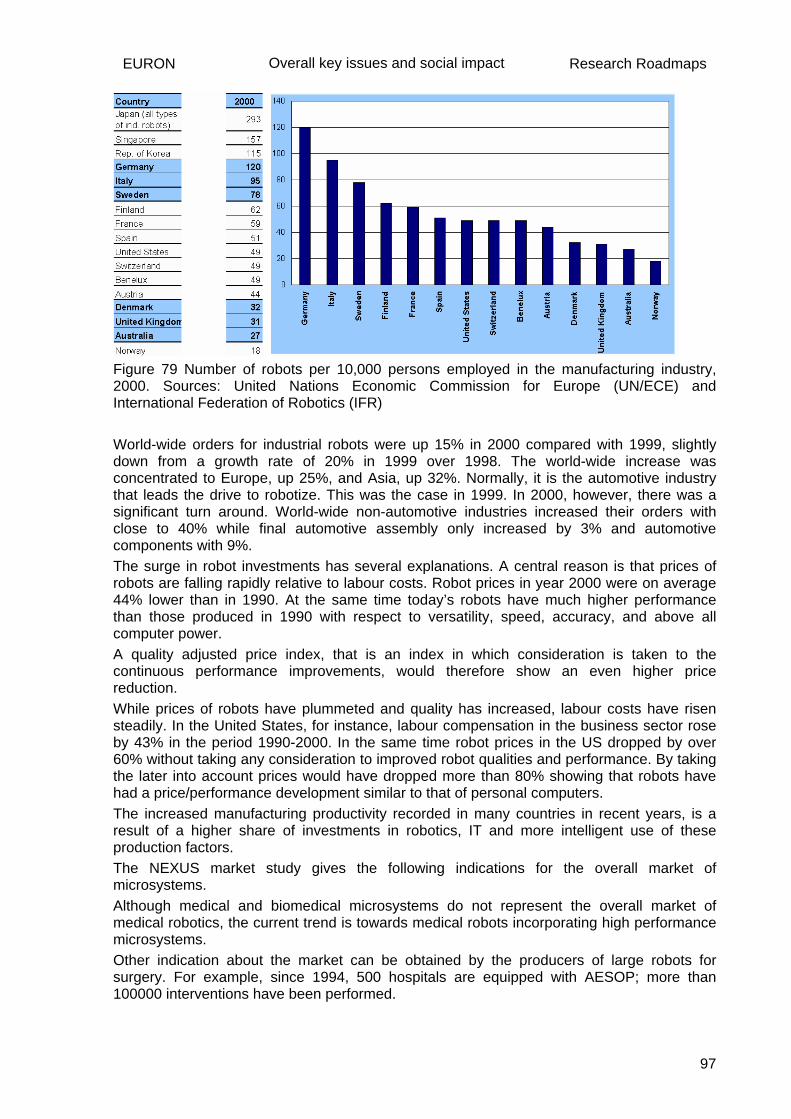
Overall key issues and social impact Research RoadmapsEURON
Figure 79 Number of robots per 10,000 persons employed in the manufacturing industry, 2000. Sources: United Nations Economic Commission for Europe (UN/ECE) and International Federation of Robotics (IFR) World-wide orders for industrial robots were up 15% in 2000 compared with 1999, slightly down from a growth rate of 20% in 1999 over 1998. The world-wide increase was concentrated to Europe, up 25%, and Asia, up 32%. Normally, it is the automotive industry that leads the drive to robotize. This was the case in 1999. In 2000, however, there was a significant turn around. World-wide non-automotive industries increased their orders with close to 40% while final automotive assembly only increased by 3% and automotive components with 9%. The surge in robot investments has several explanations. A central reason is that prices of robots are falling rapidly relative to labour costs. Robot prices in year 2000 were on average 44% lower than in 1990. At the same time today’s robots have much higher performance than those produced in 1990 with respect to versatility, speed, accuracy, and above all computer power. A quality adjusted price index, that is an index in which consideration is taken to the continuous performance improvements, would therefore show an even higher price reduction. While prices of robots have plummeted and quality has increased, labour costs have risen steadily. In the United States, for instance, labour compensation in the business sector rose by 43% in the period 1990-2000. In the same time robot prices in the US dropped by over 60% without taking any consideration to improved robot qualities and performance. By taking the later into account prices would have dropped more than 80% showing that robots have had a price/performance development similar to that of personal computers. The increased manufacturing productivity recorded in many countries in recent years, is a result of a higher share of investments in robotics, IT and more intelligent use of these production factors. The NEXUS market study gives the following indications for the overall market of microsystems. Although medical and biomedical microsystems do not represent the overall market of medical robotics, the current trend is towards medical robots incorporating high performance microsystems. Other indication about the market can be obtained by the producers of large robots for surgery. For example, since 1994, 500 hospitals are equipped with AESOP; more than 100000 interventions have been performed.
97

EURON Overall key issues and social impact Research Roadmaps
In addition to the traditional impact of robotics in medicine and surgery, a new business can be represented by the economical assessment of innovative medical technologies, as illustrated below. Due to the rapid evolution of the knowledge in medical engineering, in medicine and in surgical techniques, the area of technologies in surgery is extremely dynamic and in continuous evolution. In this regard, particular attention of the research is devoted to the mininvasive and the computer assisted surgery. This one, in fact, potentially retains the "most desired" properties by the patient, the hospital and the whole community: less pain, shorter hospitalisation, more rapid recovery and lesser loss of working days. The Health Care Sector has faced noticeable changes in organisation, management and cost assessment as a result of new technologies and methods in satisfying needs. This in turn has determined a deep change in ICT (Information & Communication Technology) needs to support management decision making in areas of responsibility in Health Care Centers.
MST - Application Fields (1996 2002)
0
5
10
25
1996
2002
IT- Peri-pherals
MedicalandBiomedical
Automotive Products
Environ-mental Monitoring
Industryand Auto-mation
Tele-Communi-cation
15
20
Figure 80
The major events that have a strong influence in Health Care Center (hospital) management are:
• technological innovation, • scientific developments, • the importance of the activities linked with prevention and early diagnosis, • changes in the patient/user demands: ranging from the need of health to that of
fitness and well being, • more investment in and use of Information & Communication Technology, • increasing diversification in the services offered to the patient, • new financing tools, • reduction of hospitalisation and increase in Day-Hospital practices. • the economic analysis will allow to assess in a more complete way: • the effects of new technologies on the organisation; • the resources used, not only for the initial investment but also for the running of the
new technologies; • possible managerial innovations to make the complete services offered to the
patients more effective and efficient. This information facilitates the decision making process in the Health Care Centers. The use in health care of an economic perspective and of tools like cost management, may actually help find the right solution in eliminating waste of resources and redundant activities (cost reduction), in order to have resources ready to satisfy the new demands of patients (users). As for what concerns robotic assistants, one of the main issues is to achieve a cost/benefit ratio that can make their adoption affordable. Costs of robotics are intrinsically high and can rarely be reduced by scale economy. Instead, their benefits can be improved in the
98
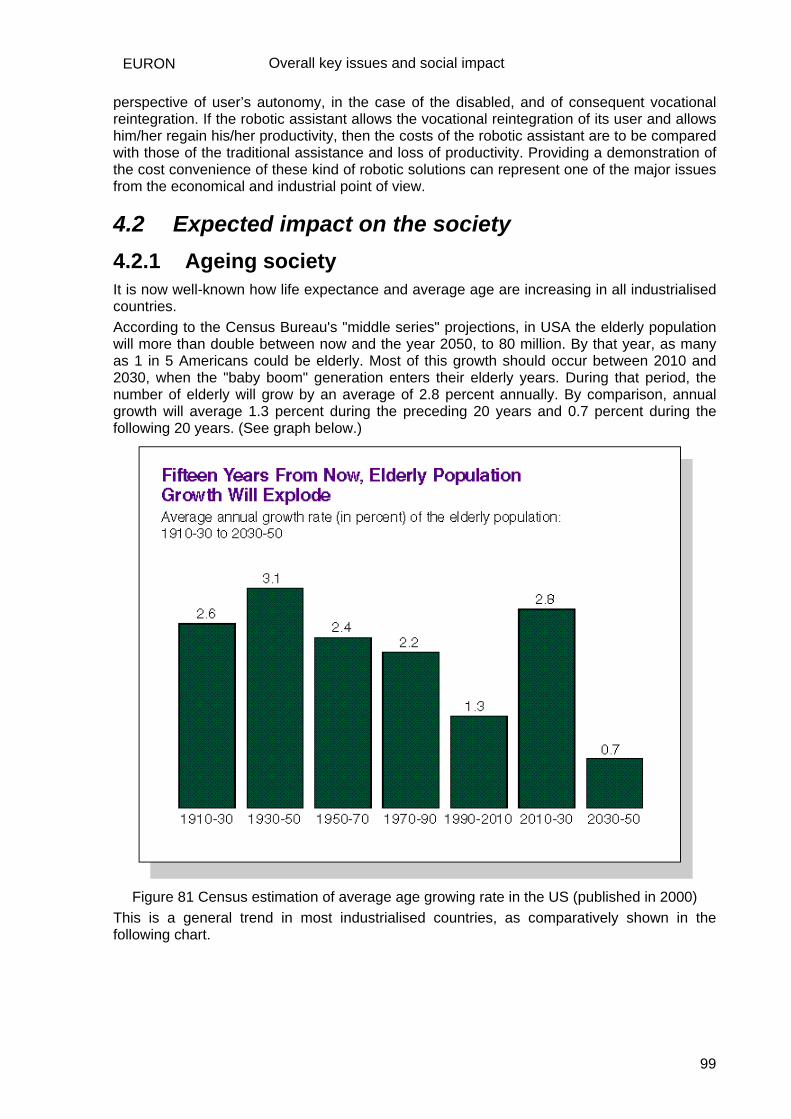
Research RoadmapsEURON Overall key issues and social impact
perspective of user’s autonomy, in the case of the disabled, and of consequent vocational reintegration. If the robotic assistant allows the vocational reintegration of its user and allows him/her regain his/her productivity, then the costs of the robotic assistant are to be compared with those of the traditional assistance and loss of productivity. Providing a demonstration of the cost convenience of these kind of robotic solutions can represent one of the major issues from the economical and industrial point of view.
4.2 Expected impact on the society 4.2.1 Ageing society It is now well-known how life expectance and average age are increasing in all industrialised countries. According to the Census Bureau's "middle series" projections, in USA the elderly population will more than double between now and the year 2050, to 80 million. By that year, as many as 1 in 5 Americans could be elderly. Most of this growth should occur between 2010 and 2030, when the "baby boom" generation enters their elderly years. During that period, the number of elderly will grow by an average of 2.8 percent annually. By comparison, annual growth will average 1.3 percent during the preceding 20 years and 0.7 percent during the following 20 years. (See graph below.)
Figure 81 Census estimation of average age growing rate in the US (published in 2000)
This is a general trend in most industrialised countries, as comparatively shown in the following chart.
99

Overall key issues and social impact Research RoadmapsEURON
Figure 82 Population trends. Source: United Nations
Figure 83 Population trends. Source: OECD
Among the many changes that the aging society is bringing to societal needs, to health care and social policies and also to social organisation at the family level, an increased need for personal assistance is one of the first evident and mostly experienced. Many assume health among the elderly has improved because they, as a group, are living longer. Others hold a contradictory image of the elderly as dependent and frail. The truth actually lies somewhere in between. Poor health is not as prevalent as many assume. In 1992, in the US, about 3 in every 4 noninstitutionalized persons aged 65 to 74 considered their health to be good. Two in three aged 75 or older felt similarly.
100

Research RoadmapsEURON Overall key issues and social impact
On the other hand, as more people live to the oldest ages, there may also be more who face chronic, limiting illnesses or conditions, such as arthritis, diabetes, osteoporosis, and senile dementia. These conditions result in people becoming dependent on others for help in performing the activities of daily living. With age comes increasing chances of being dependent. For instance, while 1 percent of those aged 65 to 74 years lived in a nursing home in 1990, nearly 1 in 4 aged 85 or older did. And among those who were not institutionalized in 1990-91, 9 percent aged 65 to 69 years, but 50 percent aged 85 or older, needed assistance performing everyday activities such as bathing, getting around inside the home, and preparing meals. (See plot below.)
Figure 84 Need for personal Assistance
This is also reflected in the health care expenditure of public services, as shown in the plot below.
101

Overall key issues and social impact Research RoadmapsEURON
Figure 85 Health spending quantitities. Source: OECD
The following table shows the estimated number of disabled and elderly people living in the European Union. Elderly refers to people aged 60 and over. (Besson, R. (ed.) 1995. Trends in technologies for disabled and elderly people. COST 219).
Figure 86 Disabled and elderly perons living in the European Union
The following picture shows a comparison over 8 countries of the institutionalisation of the elderly.
102

Overall key issues and social impact Research RoadmapsEURON
Figure 87 Institutionalized persons. Source: OECD
This scenario opens clear opportunities to robotics for personal assistance, as long as it can propose solutions for the care of the elderly which are effective and economically affordable. The aging society will also need more and more minimally invasive techniques for diagnosis, surgery and therapy. In fact, elderly people face hardly long, invasive surgical operations. The aging society represents not exactly a challenge, but a very interesting (and perhaps the best) opportunity of application for surgical robotics. The long life expectation of current elderly people makes necessary to operate over-seventy and over-eighty people who before were just treated with medicines and therapeutic means not requiring interventions. On the other hand, frequently elderly people cannot tolerate invasive operations and the minimally invasive techniques often represent the only way to survive or to live in a normal way. Among all the different types of operations, the introduction of robots in hip surgery and bone replacement produced an important benefit for elderly people. In this sense, the possibility to treat elderly people is one of the main societal aspects of the surgical robotics. Today, research performed in service robotics, medical robotics, care assistant, and intelligent homes significantly influences further development of products that cope with the problems of aging society.
Figure 88 Espected impact on the aging society
103

Research RoadmapsEURON Overall key issues and social impact
However, these areas need to be bundled to bring up system solutions in the future. Obviously, developments in the areas service robots, care assistants and intelligent homes still do not satisfy constitutional requirements in robustness and ease of usability to play an important role for elderly people
4.2.2 Ambient intelligence The wide spreading of telecommunications, telematics and domotics and the scenario that has been envisaged as ‘ambient intelligence’ at the European level, are providing good opportunities to robotics. This technological diffusion is not only affecting vocational tasks and professionals, but it is occurring at the level of common citizens and is pervading houses and everyday lives. This creates an ideal technological substrate for the introduction of robots in the society, for at list three categories of reasons:
• from a technical point of view, a smart house is much more ‘receptive’ respect to a robotic aid; it is much easier to integrate a robot into a domotic system, by which it can communicate with other devices through a standardised protocol;
• still from a technical point of view, an automated environment can simplify some tasks to the robot, especially those related to perception and sensory-motor coordination in the interaction with the environment;
• from the point of view of the acceptability, ambient intelligence is gradually nurturing a novel attitude of common people towards technology and a general wider acceptance and capability of appreciating and using the available functionality.
Automated environments will need a powerful synthesis of devices in the environment. Thus, standardization of interfaces between part solution developed in research areas in edutainment, service robots and logistic is necessary. A common approach can lead to powerful application scenarios.
Figure 89 Estimated impact on Ambient Intelligence
4.2.3 Environment & Quality of Life The importance of the environment and quality of life is an unchallenged goal for the development of robotic research. Nevertheless, past research approaches did not account enough advertence to this problem. Because of increasing hardware and component capabilities robots can be considered for really substituting the human in dangerous or awkward situations. Obviously, this holds for various application scenarios in automation & manufactuing, underwater systems, working assistants, intelligent vehicles, space-, field-, and service-robots. Thinkable are robots for handling natural or human caused disasters, service applications in dangerous or polluted environment, or advanced production factories with production lines with harmful resources. Thus, for further research within these areas a
104

Research RoadmapsEURON Overall key issues and social impact
stronger emphasis should be considered to take this chance of improving quality of life and have positive effect on the environment.
Figure 90 Estimated impact on Environment and Quality of Life
4.2.4 Economic growth Economic growth will lead to larger scale projects in automation, logistics and production. This will directly lead to new challenges in related robotic research fields like logistics, intelligent vehicles, automation and manufacturing, and for service robots acting as working assistants. Today many promising robotic projects do proceed very slowly, since not enough financing and man-power is being allocated. The reason is, that expensive hardware components with only small lot-sizes are required. Economic growth will help to also consider investigation of high-risk and high-cost robotic projects with high potential.
Figure 91 Estimated impact on economic growth
4.2.5 Expanding frontiers On the one hand, globalisation stands for growth of markets and wealth. On the other hand especially logistic problems will have a much more complex character. It is expected that automated container transport will increase significantly, because of expanding markets.
105

Research RoadmapsEURON Overall key issues and social impact
Naturally, this also leads to new concepts for solving automated transportation problems in planning, scheduling and vehicle control. Expanding frontiers will also lead to a common education and entertainment concept. This opens the market for robotic edutainment application.
Figure 92 Estimated impact on expanding frontiers
106

Research RoadmapsVision for the future EURON
5 Vision for the future
5.1 Advanced production robots The classical application field of production robots is the automation and manufacturing sector and the advance in this sector for the next future (20-25 years) is strongly related to the development of production robots as a main component of manufacturing systems. The actual trend in manufacturing industry from ‘effectiveness’ to ‘flexibility and agility’, as a consequence of the globalization of the market place, will continue. There will be a strong need for flexible manufacturing solutions able to provide highly diversified product mixes in a short delivery time based on just-in-time small batched production. The manufacturing of traditional components like machine-tools, robots, part-feeders, transport units etc., is usually designed as stand alone equipment. Up to now little explicit effort has been dedicated to enabling the integration of these components into a manufacturing system. Hence, high economic and technical costs remain associated with the manufacturing integration process that in turn severely limits the utilisation of such elements in many practical applications. In the future the integration of components has to be enhanced, in order to achieve a higher flexibility. The use of compact, mechanically simple elements whose customisability combined behaviours fulfil the specific application requirements is foreseen to adhere to the industrially accepted model of flow-through processing while providing for the rapid deployment and reconfiguration of manufacturing systems. We expect these modules to act smoothly in concert with humans, serving as intelligent cooperating tools. The policy is expected to be a combination of flexibility and cooperation. Therefore agile manufacture is thought as a distributed system of tightly integrated mechanical and computational robotic modules endowed not only with information about their own capabilities but also with the ability to appreciate their role in the factory as a whole and to negotiate with their peers to participate in flexible factory cooperation. One other aspect of the use of advanced production robots will be a diversity of different kinds of working areas. The classical factory environment may spread from small workshop environments up to large factory environments. Taking all this reasons future production robots will have to cope with flexibility, have to be easy to use and to program, have good interfaces, include pro-active maintenance and self-adapting fixtures. New lightweight manipulation systems, with weight/payload ratio in order of one, have to be conceived, analysed and realised in order to reduce working cycle times enabling progress on stiffness and accuracy. This requires an entire new approach to integrated mechatronic design taking into account simultaneously the new mechanisms architectures, new types of advanced materials, new actuators and new methods for control, multi-sensory feedback and calibration, considering inherent mechanical elasticity and overall system non-linearity. Flexible production and manipulation, rapid change of manipulation tasks have a high impact on the development of new kinds of universal gripper, including planning, motion control and mechatronics. Main research topics:
• Components and systems smaller, reliable, smart, highly integrated as intelligent distributed function elements of robots and equipments.
• Open robot control and open robot interfaces are very important and fruitful to accelerate to introduce networked robots powered by IT into manufacturing systems.
• Standard interfaces with reference to communication, component integration, user and human interaction.
107
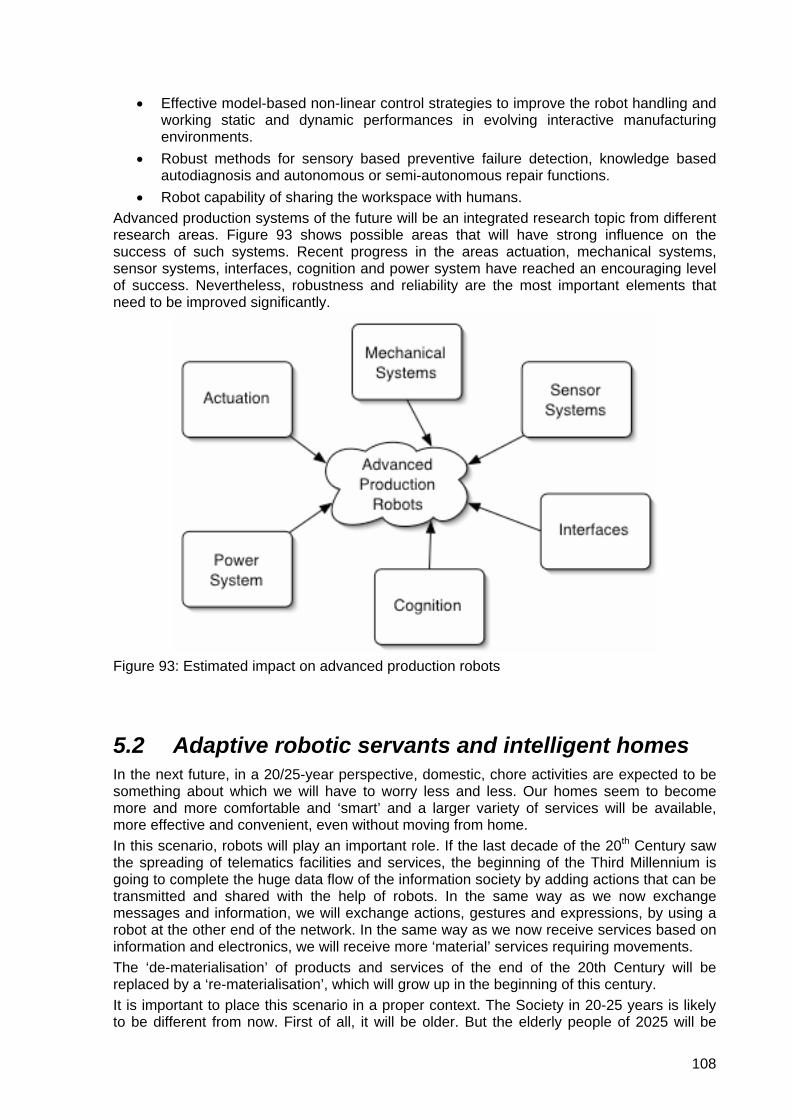
Research RoadmapsVision for the future EURON
• Effective model-based non-linear control strategies to improve the robot handling and working static and dynamic performances in evolving interactive manufacturing environments.
• Robust methods for sensory based preventive failure detection, knowledge based autodiagnosis and autonomous or semi-autonomous repair functions.
• Robot capability of sharing the workspace with humans. Advanced production systems of the future will be an integrated research topic from different research areas. Figure 93 shows possible areas that will have strong influence on the success of such systems. Recent progress in the areas actuation, mechanical systems, sensor systems, interfaces, cognition and power system have reached an encouraging level of success. Nevertheless, robustness and reliability are the most important elements that need to be improved significantly.
Figure 93: Estimated impact on advanced production robots
5.2 Adaptive robotic servants and intelligent homes In the next future, in a 20/25-year perspective, domestic, chore activities are expected to be something about which we will have to worry less and less. Our homes seem to become more and more comfortable and ‘smart’ and a larger variety of services will be available, more effective and convenient, even without moving from home. In this scenario, robots will play an important role. If the last decade of the 20th Century saw the spreading of telematics facilities and services, the beginning of the Third Millennium is going to complete the huge data flow of the information society by adding actions that can be transmitted and shared with the help of robots. In the same way as we now exchange messages and information, we will exchange actions, gestures and expressions, by using a robot at the other end of the network. In the same way as we now receive services based on information and electronics, we will receive more ‘material’ services requiring movements. The ‘de-materialisation’ of products and services of the end of the 20th Century will be replaced by a ‘re-materialisation’, which will grow up in the beginning of this century. It is important to place this scenario in a proper context. The Society in 20-25 years is likely to be different from now. First of all, it will be older. But the elderly people of 2025 will be
108
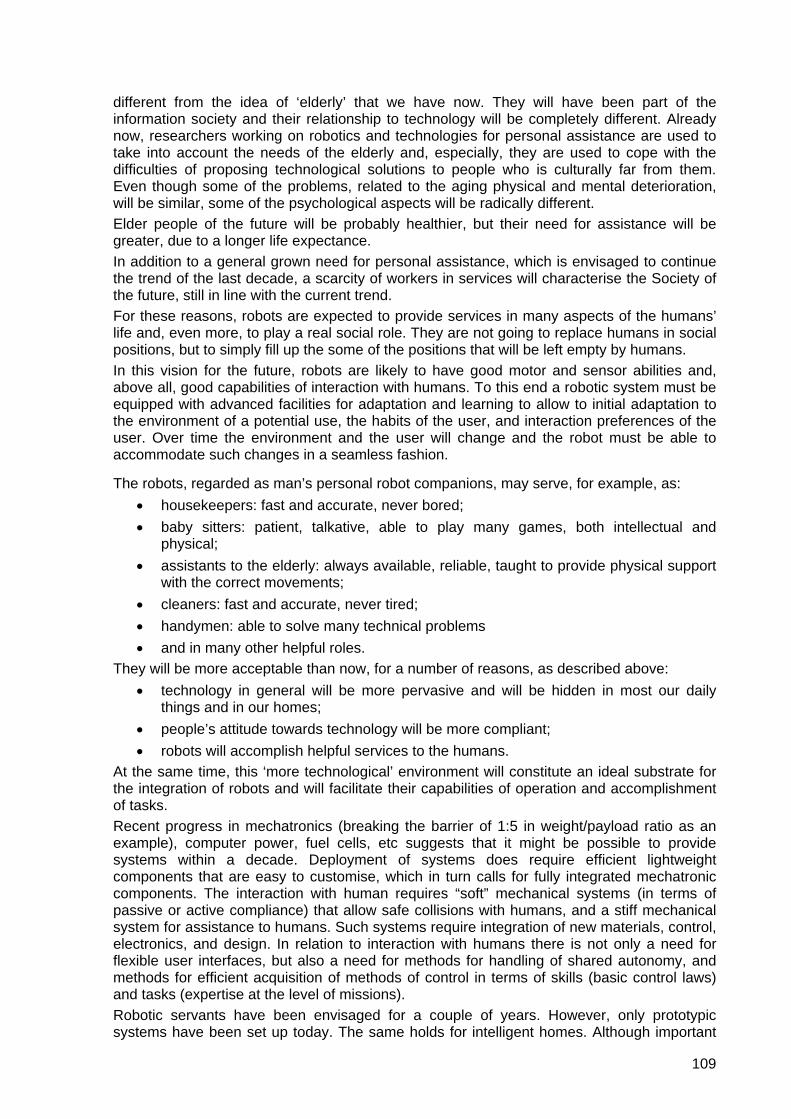
Research RoadmapsVision for the future EURON
different from the idea of ‘elderly’ that we have now. They will have been part of the information society and their relationship to technology will be completely different. Already now, researchers working on robotics and technologies for personal assistance are used to take into account the needs of the elderly and, especially, they are used to cope with the difficulties of proposing technological solutions to people who is culturally far from them. Even though some of the problems, related to the aging physical and mental deterioration, will be similar, some of the psychological aspects will be radically different. Elder people of the future will be probably healthier, but their need for assistance will be greater, due to a longer life expectance. In addition to a general grown need for personal assistance, which is envisaged to continue the trend of the last decade, a scarcity of workers in services will characterise the Society of the future, still in line with the current trend. For these reasons, robots are expected to provide services in many aspects of the humans’ life and, even more, to play a real social role. They are not going to replace humans in social positions, but to simply fill up the some of the positions that will be left empty by humans. In this vision for the future, robots are likely to have good motor and sensor abilities and, above all, good capabilities of interaction with humans. To this end a robotic system must be equipped with advanced facilities for adaptation and learning to allow to initial adaptation to the environment of a potential use, the habits of the user, and interaction preferences of the user. Over time the environment and the user will change and the robot must be able to accommodate such changes in a seamless fashion.
The robots, regarded as man’s personal robot companions, may serve, for example, as: • housekeepers: fast and accurate, never bored; • baby sitters: patient, talkative, able to play many games, both intellectual and
physical; • assistants to the elderly: always available, reliable, taught to provide physical support
with the correct movements; • cleaners: fast and accurate, never tired; • handymen: able to solve many technical problems • and in many other helpful roles.
They will be more acceptable than now, for a number of reasons, as described above: • technology in general will be more pervasive and will be hidden in most our daily
things and in our homes; • people’s attitude towards technology will be more compliant; • robots will accomplish helpful services to the humans.
At the same time, this ‘more technological’ environment will constitute an ideal substrate for the integration of robots and will facilitate their capabilities of operation and accomplishment of tasks. Recent progress in mechatronics (breaking the barrier of 1:5 in weight/payload ratio as an example), computer power, fuel cells, etc suggests that it might be possible to provide systems within a decade. Deployment of systems does require efficient lightweight components that are easy to customise, which in turn calls for fully integrated mechatronic components. The interaction with human requires “soft” mechanical systems (in terms of passive or active compliance) that allow safe collisions with humans, and a stiff mechanical system for assistance to humans. Such systems require integration of new materials, control, electronics, and design. In relation to interaction with humans there is not only a need for flexible user interfaces, but also a need for methods for handling of shared autonomy, and methods for efficient acquisition of methods of control in terms of skills (basic control laws) and tasks (expertise at the level of missions). Robotic servants have been envisaged for a couple of years. However, only prototypic systems have been set up today. The same holds for intelligent homes. Although important
109

Research RoadmapsVision for the future EURON
technology is already available, integrated experiments and research has been performed in the early stages. Recent progress in the development of enabling technologies like sensor system, actuation, communication, interfaces and mechanical system (Figure 94) have been an important step to set up adaptive robotic servant acting in intelligent homes.
Figure 94: Estimated impact on adaptive robotic servants and intelligent homes Good research with a robotic servant as an objective would contribute to the emergence of a service robot industry, but it would also generate a significant number of spin-off results in terms of flexible manipulation systems, useful grippers (beyond task specific mechanical systems), perception systems, in-door transportation systems, adaptive user interfaces for the numerical control and robotics industry.
Given the demographic challenge of the next three decades it is consider likely that Europe might establish itself as the major provider of such systems through a sustained and integrated effort.
5.3 Field and service robotics The exploration of previously almost unknown areas like space and deep sea and at the same time the expansion of the human living and working space towards more and more human unfriendly environments is a development which started some decades ago but will still be going on for the next few decades. Living and working not only on the sea (e.g. on oil platforms), but also under the sea (to set up new drilling applications), flying towards space and at some point maybe even living there, and exploring environments on earth which are unsuited for humans (like volcanos) will not only become a big social challenge, but also an economical gain. But the more rough the environments are that humans will work and live in, the more it is important to protect human life and health – and robots are ideally suited for such tasks. These considerations do in particular affect the area of field and service robotics which has made huge progress in the past, but is still far from offering all of the services needed from such robots. Also, the economical gain to be expected with increased progress in this area is enormous.
110

Research RoadmapsVision for the future EURON
Nowadays field and service robots are already employed in adverse or inaccessible environments or are performing “dirty works” like cleaning or transporting etc. But at the moment, there are still huge problems in areas like navigation or sensor systems and processing sensor data. For example, in an area like underwater robotics, it is still a great challenge for an autonomous robot to navigate safely to a certain point on the sea ground. Problems like navigation, control etc. occur comparably in other areas of field robotics. The second main issue is the interaction with humans and the ability to learn and cope flexibly with new situations and tasks. So far, these systems are not able to interact with humans beyond their control systems and are very limited in terms of learning, adaptivity, cooperation etc. Having a closer look onto research in these areas one can see various promising developments of hardware and software technologies, which lead to the vision of intelligent servants performing a wide range of tasks in most diverse environments, interacting with humans and offering various services. Even if these visions sound similar to the vision of having humanoid robots, future service robots do not necessarily have to be humanoid. On contrary, in field robotics a humanoid shape (e.g. considering workspace) might rather be a limitation than a gain in performing various tasks. Also in these areas, there is no need to have a universally applicable robot which could perform all possible tasks, but the robots in use might be very different depending on their application area and environment. The areas of application of robots in field and service robotic tasks in the future are manifold. Examples which are also of high economical interest include:
• Space robotics: planetary explorations; setting up and maintaining of space stations, even of space stations on other planets
• Applications which need improvement in worker safety, energy efficiency, labour requirements and production, such as mining industry, exploitation of natural mineral resources in volcanic areas and other hazardous environments etc.
• Military applications: investigation or observation tasks behind the enemy’s lines, such reducing risks for the own troops, e.g. by use of autonomous airships, helicopters and drones; underwater robots for military operations
• Environmental monitoring and exploration: continued observation of the ocean or other hardly accessible areas; investigation of ecosystems, habitats, unknown life forms, and botanic and mineral resources
• Regular inspection and maintenance of oil companies’ tubes and infrastructure in the sea bottom
• Oceanographic surveys and even acoustic surveying for fish stock assessments by autonomous mobile underwater platforms
Much more applications are thinkable in various environments and for a wide range of tasks. It is also very important to note that a lot of results from the area of field and service robotics will also be very useful to other areas of robotics and technology in the next future. E.g., new fast telecommunication structures for space robotics could also allow for the ultrasonic medical investigation of astronauts on the International Space Station or of elderly and sick people on cruising ships including force feedback to the remote experienced medical doctor, and technologies like telepresence and autonomy which will be developed to allow for interaction with humans and the robot’s environment will also be useful e.g. in minimal invasive surgery robotics. On the other hand, the area of field and service robotics also relies on advances which are closely related to other areas of research. Examples for such demands are sensor-controlled light-weight manipulators which will be able to perform also very delicate tasks. The state of the art in control has to be brought much further in order to allow for the task directed programming also of dexterous complex tasks like autonomously generating safe grasps for known and unknown objects using the robots sensor systems. Additionally, the amount of
111

Research RoadmapsVision for the future EURON
operator demand of current service robot systems is very high, and thus it would be very important to develop control systems which allow for a more autonomous operation of field and service robots, and such also to reduce or eliminate personnel exposure to hazardous environments. The final challenge is then to achieve in the same robot the high operation capabilities of a remotely operated robot, and at the same time as high an operating autonomy as possible. The resulting vision for the future, for applications as the ones suggested above, are then various (autonomous) intelligent, swimming, flying, walking or riding platforms. These should own vast cognitive abilities with access to a world wide database and an intelligent interactive interface allowing for communication with humans and other robots. Furthermore a cooperation module would enable mixed team working, with both robots and humans. For manipulation tasks plenty of kinematical structures could be chosen of from a tool center and mounted. The following key factors of this area can such be distinguished:
• Modular and expandable build up systems • Intuitive (standardized) interaction with humans • Easy programming methods • Standardized (world wide) knowledge base • Vast perceptive and cognitive abilities
The development will be based on the identified enabling technologies. The most important factors will be (see also Figure 95):
• Cognitive components enabling intelligent interaction with the human • Power systems for long duration outdoor performance • Highly developed mechanical components • Intelligent control for difficult tasks in service and field applications
Figure 95: Estimated impact on field and service robotics
5.4 The Super-Human The super human systems augment human interaction with the environment by direct control of sophisticated robotics and information systems using non-invasive bi-directional interfaces with afferent and efferent nervous system or directly with the brain at a natural cognitive level. Combined with appropriate models and novel actuation systems (such as prosthetics, exoskeletons, etc) it will be possible not only to match existing human performance, but to enhance and go beyond natural systems.
112

Research RoadmapsVision for the future EURON
On the basis of the state of the art and by considering the main needs of society and surgeons community, three classes/demonstrators of the future medical robots have been conceived:
• the SUPER-robotic surgeon (RS) (); • the SUPER-micro endoscope (ME); • the SUPER-hand-held mechatronic tool (HHMT).
Obviously the demonstrators are not totally “independent”: the border line among them is not always defined and some of their features can be “mixed” in order to obtain a different (and probably better) robotic system for surgery. The three demonstrators are the natural evolution (and overcoming) of the robotic systems introduced in the state of the art. The development of these systems will be possible by considering the development (in the next 10-25 years) of the enabling technologies. Today’s robots are controlled in a crude fashion using very limited interfaces and at the same time the physical interaction with humans is also limited and unnatural. To be able to construct such systems there is a need to consider neural interfaces, where major progress is needed. In addition it is desirable to design systems that exhibit shared control. Finally a largely unsolved problem is the issue of representation of sensory and motor information in artificial systems that would be compatible (or interfacable) with neural and cognitive representations in natural systems. A major challenge is the lack of system theories that allow a holistic analysis of the overall system, processes involved and their interaction. This includes a number of diverse issues in terms of perception, control, and actuation systems. In addition the control and use of decision level processes is poorly understood. All current models of systems suffer from significant scalability problems and at the same time the problems of derivation, use and integration of representations for modelling of the environment, control, and motivation have so far only received limited attention. In biological systems recent progress on fMRI now allows detailed studies of the brain and through active pursuit of such models it will be possible to generate efficient interfaces for hybrid (human-robot) systems. The future of the hand protheses (and in general of all protheses) relies in the possibility of interfacing the devices directly to the peripheral nervous system. This connection would allow the user to feel the device as part of her/his own body. In this research a number of different paths to interfacing with the human can be pursued, including standard interfaces using gestures, force, torque, and pressure; direct electrical connections (EMG, EEG …); indirect electric and magnetic stimulation; biochemical interaction, neurons in vitro on silicon; bio-mimetics; etc. The set of open problems and the potential avenues to pursue these open up a rich field of research that could have a significant impact on human-robot co-operation. The research should pursue systems that extend the human capabilities, but no need for a full human equivalent body (e.g. humanoids) is foreseen for this research. In addition it is assumed that the number of “connections” between the human and the artefact is limited. The following key factors can be distinguished:
• Reliability and Safety • Precision • Multi-modality • Virtual Reality • Realistic Feedback and real time operation
The following technological advances should be achieved in the field of microcomponents, microsystems for local diagnosis and therapy, and embedded microcomponents into hand-held intelligent systems:
• Design of miniaturized mechanisms, actuators and sensors • New 3D microfabrication and microassembly technologies
113

Research RoadmapsVision for the future EURON
• Development of microelectronics for power drive and communication • Design and fabrication of microfluidic components • Development of intelligent material and structures • Developing powerful integration and assembly Technologies • Ergonomics and packaging issues to reach invisible technology • User-friendly programming and use
Through pursuit of such an action line it is envisaged that a new generation of highly immersive tele-presence interfaces and systems can be provided. In addition the research will allow for improved understanding of the nervous system including higher level brain functions. Major new results could be expected in terms of:
• Advanced interfaces to the brain • Advanced tele-operation systems • Versatile efficient robot exoskeletons • Enhanced medical instruments and diagnostics • New materials and redundant light weight manipulation structures • New high performance sensors and actuators • Improved methods for shared control
Summarizing, Figure 96 displays the main influences of enabling technologies for the development of the super human.
Figure 96: Estimated impact on super human
5.5 Intelligent vehicles and logistics Globalisation, enlargement of the European Union and increased trade over the internet has an important impact on goods traffic worldwide especially in Europe with its Single European Market. Therefore, freight traffic by lorries, trains, planes and ships will heavily increase in the next decades. Obviously, today’s technologies in logistics and distribution of goods would not suffice the forthcoming demands. One part of the whole logistics supply chain are centres where the goods (containers, packages and general cargo) are gathered, rearranged and
114

Research RoadmapsVision for the future EURON
redistributed, like harbours, airports or cargo centres. One of the key-roles for robotics in logistics lies in the development of automated guided vehicles (AGV) and the cooperation of teams of such AGVs. The following key areas for logistics need further research:
• Development of an overall decentralized control structure for coordination of teams of AGVs
• High scalability of these systems and expansion of the existing systems • Sophisticated methods for communication and cooperation of multiple AGVs • Advanced methods for navigation and guidance
Over the last years the volume of traffic increased continuously and it is obvious that this increase will last for some time in the future. Therefore intelligent vehicles will become more and more important for several reasons:
1. More efficient use of existing traffic infrastructure 2. Increased economic efficiency 3. Increased safety in traffic
The first two points a tightly coupled as a better use of the existing infrastructure allows a more efficient freight traffic and also personal disadvantages due to traffic jams are reduced. Intelligent vehicles whether semi autonomous or fully autonomous are a promising way of solving these problems and additionally could increase safety in daily traffic. Driving assistance system could be seen as step towards these autonomous vehicles because they need a comprehensive perception and understanding of the vehicle’s surrounding and respective traffic situation. To achieve the capabilities for such a vehicle, much research effort has to be done in the future. At the sensory level improvements are necessary to perceive the environment even under bad conditions for example driving at night, in rain or a combination must be possible. Up to now it is not clear which sensors are best for these requirements, at least today’s camera technology does not provide sufficient performance. Actually many sensors are being employed by car manufacturers and research groups like sonar, laser, infrared or others. Another fact that has to be considered while selecting appropriate sensors are the mechanical constraints which exist in cars or lorries. Beyond car sensors it is also desirable to enhance the traffic infrastructure with additional sensors which could support intelligent vehicles. At the methodical level many research has to be done to analyse the sensor data. This comprises the detection of road surfaces even in less structured environments, the detection of outside traffic participants like pedestrians or bicyclists and the detection of other traffic participants like cars, motorcycles and lorries. Furthermore unexpected objects have to be recognised in order to detect exceptional situations. Evidently all these methods have to be adaptable and some sort of learning ability has to be introduced to keep the system safe and applicable. Further research has to be done at the cognitive level to get an understanding of the actual scene and to enable the vehicle to act accordingly. This influences heavily the development of driving assistance systems because they need some sort of understanding of the scene in order to evaluate the driver’s behaviour. Again methods at this level must be adaptable, must have the ability to acquire, verify and integrate new knowledge of traffic situations and adequate behaviour patterns. In addition intelligent vehicles will need an overall sophisticated system concept which is able to integrate all needed methods, acts reasonable and is furthermore extendable. Another aspect which has to be considered with respect to an efficient use of the traffic infrastructure is the communication among traffic participants. Multi-agent approaches could be inspected to optimize traffic flows. Driver assistance systems will require new types of human-machine-interfaces. Ideally the future driver assistance system will not be recognized by the driver but just acting safely.
115
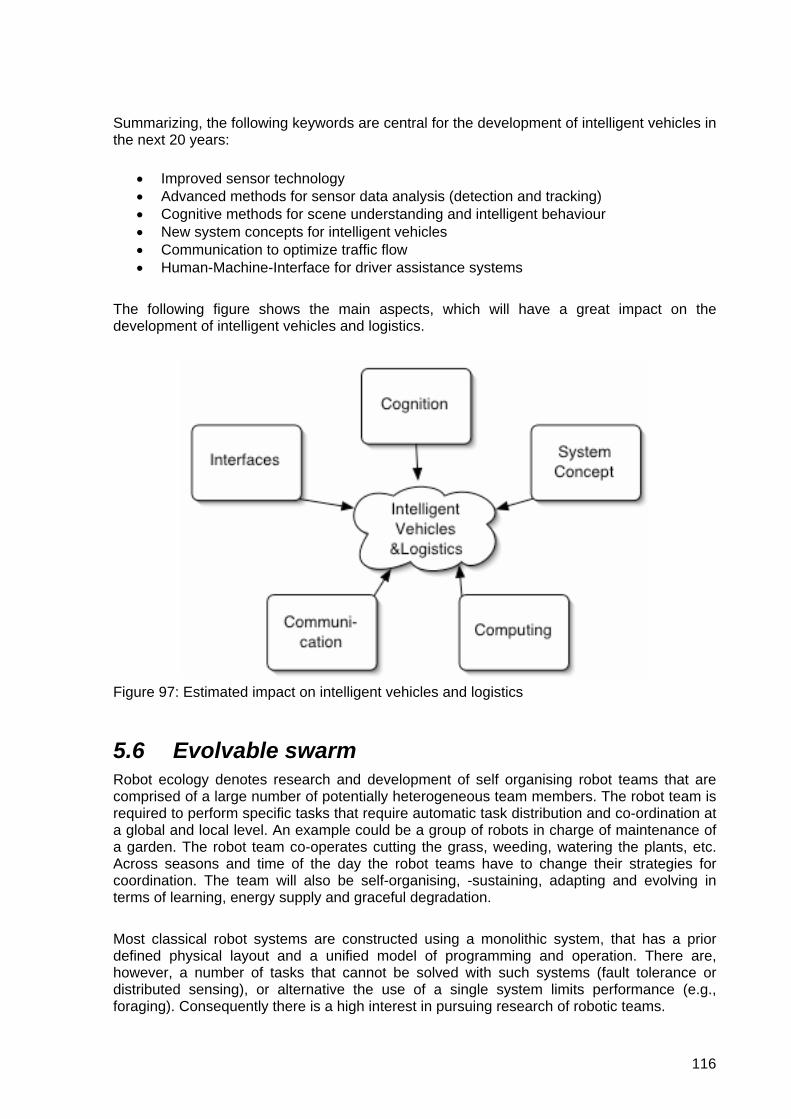
Research RoadmapsVision for the future EURON
Summarizing, the following keywords are central for the development of intelligent vehicles in the next 20 years:
• Improved sensor technology • Advanced methods for sensor data analysis (detection and tracking) • Cognitive methods for scene understanding and intelligent behaviour • New system concepts for intelligent vehicles • Communication to optimize traffic flow • Human-Machine-Interface for driver assistance systems
The following figure shows the main aspects, which will have a great impact on the development of intelligent vehicles and logistics.
Figure 97: Estimated impact on intelligent vehicles and logistics
5.6 Evolvable swarm Robot ecology denotes research and development of self organising robot teams that are comprised of a large number of potentially heterogeneous team members. The robot team is required to perform specific tasks that require automatic task distribution and co-ordination at a global and local level. An example could be a group of robots in charge of maintenance of a garden. The robot team co-operates cutting the grass, weeding, watering the plants, etc. Across seasons and time of the day the robot teams have to change their strategies for coordination. The team will also be self-organising, -sustaining, adapting and evolving in terms of learning, energy supply and graceful degradation. Most classical robot systems are constructed using a monolithic system, that has a prior defined physical layout and a unified model of programming and operation. There are, however, a number of tasks that cannot be solved with such systems (fault tolerance or distributed sensing), or alternative the use of a single system limits performance (e.g., foraging). Consequently there is a high interest in pursuing research of robotic teams.
116

Research RoadmapsVision for the future EURON
A major obstacle to progress in this area is lack of flexible mechanical structures that are easily configurable with flexible methods for interconnection. Another problem is automated task decomposition and control in the presence of variable kinematics and heterogeneous components/robots. To this end there is also a need for methods for rational design of components and teams, which implicitly is related to the definition of a system-level theory of operation. Recently there have been several studies of learning in the context of robotic teams, but in almost all cases for homogenous teams of robots, which is considered a highly limited class of systems. Finally, the issue of distributed control and sensing is largely unresolved. In complex information systems this issue has recently received some attention in terms of information fusion, but so far no satisfactory solutions have been reported, that would scale to large scale systems that carry our a number of time-varying tasks. Current single unit robot systems provide an adequate basis for pursuing an initiative on self-organising robot teams. There are however fundamental problems to be studied in terms of new types of mechanical structures (that can self-assemble), and ad-hoc definition of communication structures. In terms of control of complex systems there are at present no adequate solutions, which is also true for cognitive level functions that consider both individual members and the entire team. The construction of robot teams poses interesting challenges both in terms of mechanical design, communication, sensing and control/coordination. In spite of scarcity of flexible mechanical structures many of the basic problems of co-ordination, sensing and control might however be pursued through simulation and/or specific solutions so as to ensure partial progress in such an initiative. Consequently, enabling technologies in the field of system design, computing and communication will have significant influence in the development of evolvable robot swarms (see Figure 98).
Figure 98: Estimated impact on evolvable swarms A full scale ecological robot team will be of tremendous value in a number of applications such as surveillance, monitoring, gardening, and pharmaceutical manufacturing. In addition the co-ordination of heterogeneous teams of robots will also be of significant value in terms of planning, co-ordination and use of advanced manufacturing systems. The basic methods are thus expected to be of both short and long term relevance to industrial progress.
117

Research RoadmapsEURON Long term progress
6 Long term progress
6.1 Key issues to be addressed
6.1.1 General considerations Progress in robotics is achieved when meeting the requirements of the society on the one hand or of the industry on the other. Current opportunities and challenges in these two fields have been identified in the preceding chapter. From these, key issues may be derived that have to be addressed in order to improve today’s status quo. Those key issues will be discussed in detail in the following sections.
Figure 99 Key issues for coarse plan
6.1.2 Societal needs Robotic research in the future will certainly influence public domains of the society. This does not only involve economic effects but also social aspects like ethics and acceptability. In the following the most important aspects that can be foreseen today are discussed.
118

Research RoadmapsEURON Long term progress
6.1.2.1 Economic growth Due to economic growth new robot technologies become affordable for public domain. This opens the market for a variety of different application scenarios. As outlined in the previous section several possibilities are feasible. For example robotic edutainment applications might conquer ordinary households and schools. Thus, education quality and quality of learning will increase significantly Another interesting area are service robots including evolvable swarm applications for house-, garden-, and security-scenarios. In both cases research activity must be guided on a very early stage to bring up methods, systems and products to satisfy possible request for such robotic applications.
6.1.2.2 Ageing Concentration on target areas: house assistant, super human One problem that imperatively needs to be addressed is the problem of an aging society. It is unquestioned that the generation of young people in Europe cannot compete in world wide business and take for all elderly people at the same time. Here, the aid of robot technology is desperately needed. From our point of view the main issue concerning further research and development should be laid on
• Service and care applications with robotic systems. For this purpose the systems must have easy to use interfaces and robust performance in different environments.
• Medical support to reduce costs and increase quality of health care. Especially, elderly people will need medical support in various situations.
Today, both application areas are not supported by robotic systems at all. Taking into account rising numbers of elderly people, it must be feared that the current social arrangement collapses. So a strong emphasis must be laid on the respective research and development activities.
6.1.2.3 Ethics When machines take over important roles in the society, also an ethic altercation of need and output is necessary. Sensitive areas of human life as for example, elderly care, medical robotic and edutainment will need a detailed investigation of pros and contras of developed robotic solutions. Especially bad influences from the ethical point of few must be identified and discussed. Based on this discussion current law must be adapted to ensure ethic aspects. Of course the need for such decisions depends strongly on upcoming developments and is hard to foretell today. However, critical areas can already be identified today:
• Substitution of humans by robots. This aspect has two different proficiencies: Firstly, when do we accept a machine to take over someone’s employment and secondly, do we need to accept robot substitutes for humans in cases where personal connections are very important, e.g. for elderly care or edutainment applications.
• Responsibility of damage caused by robotic systems. If we assume that robot systems take over important roles in the society such as medical treatment, surgery, and service applications we must also consider errors or malfunction which leads to injury or even death of humans. Therefore, security and ethic responsibility must be also a very important aspect for research and development.
It is important that the this discussion must also include people outside the robotic community, since this problem also addresses a broad part of the society.
119

Research RoadmapsEURON Long term progress
6.1.2.4 Acceptability Acceptability will play an important role for the market for robotic systems as well as for preferred development strategies. Thus, robotic systems that enter important areas in the society must be accepted and tolerated by humans. Acceptance consists of confidence in the usefulness and social factors (fashion, price, curiosity and applicability). As usefulness might be evaluated very easily social factors are hardly to foretell. Nevertheless, it is important to consider social factors in research and development activities. Here, public-opinion polls would be an adequate instrument to guide rtd-approaches.
6.1.2.5 Life cycle systems When humanoid robots achieve a certain life expectance they might be regarded as long-term partners. People would train individual systems and they surely tend to personalize them. They might even share experiences and memories with them. This does also apply for task-specific robot systems: once human-like communication and certain degrees of intelligence are available, robot companions as well as service robots will become tools that learn and become better over time. Thus, users will become familiar with them and will be interested in passing growing parts of their lives with them. This raises expectances in markets for systems that are built for long-term use as well as markets for standard interfaces in order to avoid forcing users to get to know new systems every once in a while. Teaching robot systems is costly. Thus, robots will commercially be successful when equipped with the ability to profit from the information that their predecessors have gathered.
6.1.2.6 High risk management (nuclear, demining, …) Riskily scenarios and dangerous situations have always played a major role for robot installations. Further development of systems assigned to tasks in such conditions is extremely relevant for societal progress since safety aspects are likely to gain more importance. Today, example scenarios for the application of robots are:
• Nuclear contamination • Chemically polluted areas as well as biologically delicate scenarios • Natural disasters like earthquakes, inundations, gales or volcanos • Terror scenarios like bomb attacks • High buildings or subterranean locations like canals, mine shafts or pits • Mine fields
Systems currently in use here do not operate in an autonomous way but are mostly remotely controlled. Telepresence. approaches have to be refined in order to supply more flexible and more responsive systems that are easy to use. On the other hand, field and service robots have to be developed that are able to cope with unstructured environments with respect to object recognition, navigation and locomotion and a specific rescue or decontamination task.
6.1.3 Industrial needs Industrial needs in terms of increasing productivity are still focused on automation and logistics. But due to the fact that the markets are keeping demands of product varieties there is a need for a greater flexibility of the production process. This evolution leads to new concepts for integration of robotic technologies in the production lines. With the development of new technologies classical robotic market can be expanded into sectors like agriculture,
120

Research RoadmapsEURON Long term progress
edutainment, service or surveillance applications. Other sectors like Food, cosmetics and drugs productions will increase there economic growth rate.
6.1.3.1 Economic growth The number of robots in industry keep rising continuously and this evolution decouple itself from the automobile industry, which was decisive for the automation boom in the last decades. Furthermore the reduction of cost for robotic systems during the past two years leads to an increasing growth rate of robotic application. Factor for increasing economic growth for the next years are:
o Costs of robotic systems o Dependability of new technologies o Integrated intelligence of developed components o Integration of intelligent robot systems into the production process o Adaptation of new application to a flexible production process.
Regarding these topics and due to the fact that Europe is leading the robotic market in terms of new, advanced technologies the research and development sector on this topics should be pushed furthermore in order to increase and maintain economic growth.
6.1.3.2 Expanding markets Developing and integrating new technologies in the classical industrial robotic market in order to make machines smarter and autonomous new market sectors will be accessible. Hereby first of all service robots have to be named, as a key factor for small and medium-sized enterprises (SME). They fulfil the demands of these enterprises for more flexibility and the production of lot size one series. Due to the fact that robotic will be affordable and flexible the small size business will expand as well and establish itself on the market. Looking ahead, personal robots as a further development will establish a new market, which will grow proportional to the decrease of robot prices. This evolution is emerging since prices for robotic technologies are decreased definitely in the past two years and as it looks now they will precede the same trend like the computer sector. Beside the availability of technologies social aspects like aging and a new generation paired with a new attitude to robotic will certainly abet the evolution. In connection with the development of high robotic technologies the existing medical and rehabilitation market will expand as well. The development of several features like autonomous navigation, robustness and sensor processing will lead to several new outdoor applications which will open or change new markets in Agriculture or Automobile industry. The Edutainment and Education Sector will grow too as in consequence of sinking technological prices and the change of the consumer attitude. Finely the whole robotic components market like sensor systems, MMI, actuators etc. will grow as well.
6.1.3.3 Benchmarking Benchmarking is a very important issue for the industry as a quantum of Quality. The development of new technologies demands new criteria for measurement of quality. The existing industrial Benchmarks for robots like velocity, accuracy, performance are not longer adequate. In fact there is need for developing new Benchmarks in parallel to the advancement of new technologies. Beside benchmarks for single technological components there is a need for benchmarking the integration of these to intelligent systems like personal robots etc. Hereby possible performed tasks should be classified and analysed. A mass of flexibility for new intelligent systems in terms of interaction, robustness, application area has to be determined. Finally the constraints of the applications should be included in the benchmarks as well.
121

Research RoadmapsEURON Long term progress
6.1.3.4 High profit markets The change of robotics into intelligent flexible systems with vast sensorial and auctorial capacities will lead to high profit markets in the classical sectors of flexible production, manufactory, logistics etc. But also new profitable sectors like Agriculture, Service (cleaning) and Medicine will be able to establish as well. Furthermore actual social topics like environment monitoring, protection and surveillance will capture a great market share. In consequence of high automation and for adverse condition tele-presence technologies will grow too. The increasing energy and environmental protection leads robotics as component supplier above all the sectors under water and space robotics to high expanding and profitable market.
6.1.3.5 Edutainment / Entertainment Entertainment industry in terms of games and electronic had met a significant upturn in last few years. Companies like Sony and Lego dominated the market with video / computer games and toy / games like Sony - IBO or Lego-Mind-storms. Initial doubts about the establishment of Low Cost Robotics on the market turn out to be baseless. The educational sector provided a similar evolution. Therefore there is a major need for developing smart embedded systems, intelligent miniature sensor and actors. Further easy programming methods have to be developed for serving the high educational demands.
6.1.3.6 Food, cosmetics and drugs production For increasing production on these sectors features like automation and flexibility have to be improved first of all. Further classic tasks like packing have to be enhanced in terms of automation and flexibility. The Food industry needs new suitable technologies for preparation comestibles. Therefore new sensors systems have to be developed e.g. for detection of impurities, contaminants etc. For handling inhomogeneous materials new robots with sophisticate control mechanisms are necessary. Another aspect of a fully automatic food production is automation of the outdoor works form the seeding to the crop. Hereby autonomous cross-county vehicles equipped with a high sensorial technology. The cosmetics and drugs industry has enormous laboratory cost, which can be reduced by the use of robotic technologies. A development of such products hast to consider the hard production constraints like clean rooms, dependability etc.
6.1.4 Research and Education
6.1.4.1 Motivating technical interest (recruitment) The growing market for pet robots and dedicated service systems in households will make people familiar with robots. However, robotic research requires vast interest in analysing and setting up technical things. In order to motivate technical interest among pupils and students, the mentioned implications and relevance of robotic research must be propagated. This could especially motivate women which have very low quotas in technical subjects.
6.1.4.2 Human resources for the industry Development of advanced robotic application will need professional and well educated researchers and developers to compete at the market. Especially, when the robotic market is
122
Research RoadmapsEURON Long term progress
growing, specialists will be needed to succeed. But not only highly educated specialists are needed but also the abilities of industrial production personal must be trained for new tasks. This is caused by rising component complexity.
6.1.4.3 The Humanoid (the “Perfect Robot”) The appeal of research for humanoid robots is two-fold: on the one hand, these types of robots may serve humans as tools some day that will be very easy to interact with. Construction of these systems is challenging since problems cover a wide area of scientific disciplines. Once developed, this sort of robots could push mankind onto another level of development. On the other hand, these systems may give mankind an insight in their way of thinking and could help establishing better theories of mind, perception and world view. This could dramatically change human self understanding. Besides economical considerations, the latter affects and is even interdependent with subjects such as ethics, medicine (prosthetic), theory of mind and science (philosophy), biology, sociology, neurology, linguistics and so on. Models that have been developed in these disciplines may be tested in humanoids and reverse: models that have shown applicability on working humanoids may play a role in understanding human life.
6.2 Mechanisms to achieve progress 6.2.1 Robotics resources for education Quality of applied robotics strongly depends on problem oriented education of researchers and development engineers. Practical experiments during school and university play an important role to form adequate problem solving skills for robotic problems. Today, schools as well as universities do not provide enough robotic resources for enabling such a problem oriented education. Education is mostly done on the theoretical sector. In the future, engaging complexity of robotic systems strongly needs, more technology oriented activities. Thus, education institution will need access to robotic resources in form of
• Support of industry for technical internships • Increase of robotic experimental set-ups in universities and schools • Sponsored high tech robotic equipment from industry
6.2.2 Education and training human resources Education and training of human resources have many different aspects. As stated in previous sections, motivation of technical interest is an important precondition for recruiting competent young people. Features on television, introductions in school, widely announced competitions in building or using robots and introductory classes in universities could push interest in this area. Of course education and training need to be adapted to future needs of application scenarios. Due to this fact the following considerations seem to be appropriate:
• Integration of more industrial internships for university students in the education plan • Implementation of summer schools & workshops with application oriented topics
(Super human, evolvable swarms, service robots, …) • Development of several topic oriented large scale knowledge repositories including
teaching material • Offering of internet courses for distributing experience through education institutions. • Integration of students in project oriented research activities. Here, especially funded
exchange programs might support cooperation between project partners
123

Research RoadmapsEURON Long term progress
6.2.3 Applied Research Applied research has usually an application specific character and therefore the mechanisms for progress in applied research are varying very much. Nevertheless most applied researches build up on the basic research and adapt and integrate these with respect to a given application into new technologies. Due to this fact three major issues can be determined:
• Transferring (base) technology to the applied research • Impact to base research in terms of leading or influencing the goals of the
research • financing expenses for base research
As the effect of these issues varies depending of the institution or company who is doing the applied research the following sections are doing a closer description of these aspects.
6.2.3.1 Promotion of entrepreneurial (start-up) activities As small or startup companies have a very small capital outlay for research at all and additional most of them are very specialized, there promotion must at least imply financial support and a good access to base research. The financial support should cover the expense for basic research. On account of their specialization national cooperation with basic researcher might not be enough, so a European Program supporting these costs is needed as well. A further consequence of a low research budget is that technology transfer can be established only within the given frameworks of porting programs. So cooperation between basic research institutes and small companies should be promoted because for these companies high technological development the only way to exist on the market. Further technology transfer methods which will be applied are described in the next section
6.2.3.2 Technology transfer An optimal technology transfer should be bidirectional namely from base research to applied research and vice versa. The following transfer methods can be distinguished:
• Information interchange o Publications o Summer schools o Conferences / workshops o Further education o Yellow pages o Roadmaps
• Access to Software (open source projects) • Access to Hardware
o Access to prototypes o Access to interfaces (open documentation)
The (patent) protection of developed technologies considerable restricts the transfer methods. A tight cooperation between institutes and industry can overwhelm this barrier.
6.2.3.3 Industrial research There is a trend emerging in industrial research of the last years from outsourcing basic research to application specific research. This evolution implies higher demands on
124

Research RoadmapsEURON Long term progress
technology transfer as well as high cross linking between basic research groups and industry. One of the main issues for basic research in this context is the problem field determination. Hereby special coordination sessions are needed for focusing the research engagement. Application based research is determined by several constraints which represent another issue. Hereby information interchange can be one solution for considering such restrictions in basic researches. For achieving progress common research between basic research groups / institutes and industry is crucial. Only in this way high technological developments can be achieved and fulfilled to commercial products. Furthermore a cycle can be build in which new technologies as products will be integrated in basic research and lead to more sophisticate technologies.
6.2.4 Basic Research Basic research may address distinct as well as integrated topics:
6.2.4.1 Topical research Topical research investigates issues relevant to robots seperately. These may include: sensor systems, power systems, actuation, mechanical systems, dedicated interfaces and control.
6.2.4.2 Integrated projects Encouraging topical research only will not end up in the desired results for two reasons:
• Miniaturization, power consumption, communication between computers and so on will cause problems when attempting to integrate separately investigated results. Thus, integration may be regarded as an research issue itself.
• Today’s concepts of cognition and mind do not admit studying intelligent behaviour without consideration of the respective self, it’s environment and it’s skills. Intelligence is embodied and therefore regarded as interdependent on modeling, control, actuation, perception, sensors etc.
6.2.5 Benchmarking A solid benchmarking is necessary to compare technical components and research results. Standardised interfaces and protocols have to be established in order to validate and measure quality of developed technological components and systems. Furthermore methodical and application based classifications and compare functions have to be determined.
6.2.5.1 Basic research In basic research, most problems are very specific with a very little number of groups working on the same topic. These groups are using different methods, hardware and programming languages because they are focused on the solution of a specific research problem. Therefore, it is difficult, to establish benchmarking standards which are applicable for a broader group of researchers. Most benchmarks and tests are composed by the using groups. Despite this fact, there are areas in which standardized benchmarks can and must be established to compare research results for enhancing competition and cooperation between researchers. Some demands on benchmarks for basic research can be formulated as follows:
o they have to be generic and platform independent o they should focus on the competitions of a specific task
125
Research RoadmapsEURON Long term progress
o they should integrate application based classes and classifations Some examples which meet these requirements can be benchmarks for vision, assembly tasks or medical navigation.
6.2.5.2 Technological driver tests In industrial applications, benchmarking is even more important than in basic research, benchmark results are an important factor for the consumer decision for one product or technical solution. Right now, diagnosis and testing tools are limited to a small application-field or they are measuring just theoretical important values like maximum speed, throughput or operations per second etc. In practical applications, these values are often unimportant because they are not taking into account the whole application area. Therefore there is a strong need for research concerning the construction of optimal benchmarks for industrial applications and further more the research must be integrated into the developing process of new technologies. Some demands on industrial benchmarks can be formulated as follows.
o Industrial benchmarking should focus on intelligent sensors and components o It should take in account the different protocols and interfaces. o The testing environment has to be well defined and, in an optimal case, easily
reproducible
6.2.6 High risk exploratory research
6.2.6.1 Blue sky research Robotics will affect human life in ways which are not fully predictable right now. To be in the frontline of new emerging developments, which might become a key factor for future technology, there has to be research which seems to be just science fiction right now. From the surgical robot for your home to the elderly-care-robot, from space- or sea-exploring vehicles to autonomous cars, all of these (and many more) application areas might be important in the future. Unfortunately, many of this research projects will not lead to the proposed end result, but history has show, that these visionary project are having side effects on other projects and some of them even succeed. Therefore, a number of visionary projects have to exist because without them, there would be no dream which challenges researchers to achieve best results.
6.2.7 End User Evaluations The end user is the aim of the development. This concerns private persons as well as enterprises.
6.2.7.1 Societal evaluation of research Collecting personal ratings of private persons of robotics research would best answer the question of societal evaluation. Surveys may gather information in several distinct categories regarding societal needs (see above): contribution to economic growth, impact on an ageing society, ethical factors, acceptance, life-cycle aspects, improvement for managing high risk situations.
126

Research RoadmapsEURON Long term progress
6.2.7.2 Industrial evaluation of research Advancements of meeting industrial needs may be judged from quantitative features by measuring speed, comfort and safety aspects of achievable prototypes and comparing the gathered information with current technologies.
127
Research RoadmapsEURON Conclusion and recommendations
7 Conclusion and recommendations Robotic research in Europe has a good position in worldwide comparison and surely this fact has aid and abet the European industry to achieve a leadership position in the extremely competitive robotic technology market. Looking into the near future new market segments involving all aspects of robotics from mechanical design over control to software systems and integration will emerge and consequently the R&D progress must meet these challenges to maintain the actual position. With these new markets a diffusion of technology into everyday live will take place revealing major driving force for the robotic research especially in terms of new human friendly interfaces and aid systems. Hence new challenges for robotics in terms of a strong linkage between different robotic fields like Human-Machine-Interfaces, cognitive science, new light weight manipulators, perception, and medical systems are imposed by social needs for robotic technology. To meet these challenges a set of projects covering most of the robotic fields from production robots over household servants, field and service robots, intelligent vehicles and logistic up to medical systems and ecological robot teams was proposed. These projects should serve as integration platforms and demonstrators for new approaches to robotics, establishing strong connections between different robotic domains. New R&D efforts, which allow using robotics in a number of new areas and consequently enable the robotic research to cope with the growing demands, both social and economic, involve deep scientific problems that can not be addressed by a single country. Therefore a close collaboration between the European research groups is needed in order to provide adequate resources and ensure a break trough in new robotic technology. An integrated EU initiative will not only enable the European industry to maintain its leading position but also to generate new business sectors. Furthermore it will also help to train human resources that can be involved in the integration of the new technology into a diverse set of domains.
128

Research RoadmapsReferences EURON
8 References [1] “Development of Adaptive Production System to Market Uncertainty – Mobile
Robot System -. In: JARA Robot News, November 1999, Vol. 12, No. 3, p. 1. [2] K. Kawamura, D.M. Wilkes, T. Pack et al.: “Humanoids: Future Robots for Home
and Factory.” In: Proceedings of the First International Symposium on Humanoid Robots, Waseda University, Tokyo, Japan, October 30th-31th, 1996, pp. 53-62.
[3] J. Schuler: Integration von Förder- und Handhabungseinrichtungen. Dissertation Universität Stuttgart. Springer-Verlag Berlin Heidelberg New-York, 1987.
[4] U. Nassal: “Mobile Manipulation für autonome Mehrmanipulatorsysteme”. In: P. Levi; Th. Bräunl (Hrsg.): Autonome Mobile Systeme 1994, 10. Fachgespräch Stuttgart, 13. Und 14. Oktober 1994. Springer Verlag, pp. 134-142.
[5] J. E. Colgate, W. Wannasuphoprasit, M. A. Peshkin: “Cobots: Robots for Collaboration with Human Operators.” Proceedings of the International Mechanical Engineering Congress and Exhibition, Atlanta, GA, DSC-Vol. 58, pp. 433-39.
[6] O. Khatib: ”Mobile Manipulation: The Robotic Assistant.” Journal of Robotics and Autonomous Systems, vol. 26, 1999, pp.175-183.
[7] D. Holmstrom: “ This Is Not Your Father's Robot”. The Christian Science Monitor, Boston, April 30th, 1998.
[8] P. Dario, E. Guglielmelli, C. Laschi, G. Teti: “MOVAID: A Mobile Robotic Syst em for Residential Care to Disabled and Elderly People”. In: Proceedings of the First MobiNet Symposium, Athens, Greece, May 15-16, 1997.
[9] C. Schaeffer, T. May: “Care-O-bot: A System for Assisting Elderly or Disabled Persons in Home Environments”. In: Bühler, Christian (Hrsg.); Knops, Harry (Hrsg.): Assistive Technology on the Threshold of the New Millennium Amsterdam u.a.: IOS Press, 1999, pp. 340-345 (Assistive Technologie Research Series 6).
[10] Flyer of the MORPHA-project: http://www.morpha.de/index_e.htm; January 2001. [11] Honda Motor Co., Ltd.: Honda Debuts New Humanoid Robot "ASIMO". New
technology allows robot to walk like a human. Press Release of November 20th, 2000, http://world.honda.com/news/2000/c001120.html,
[12] B. S. Dhillon, A. R. M. Fashandi: “Safety and Reliability Assessment Techniques in Robotics”, Robotica (1997), vol. 15, pp. 701-708.
[13] Y. Yamada, K. Suita et al.: “A Failure-to-Safety Robot System for Human-Robot-Coexistance”, In: Robotics and Autonomous Systems 18 (1996), pp. 283-291.
[14] H. Lim, K. Tanie: “Human Safety Mechanisms of Human-Friendly Robots: Passive Viscoelastic Trunk and Passively Movable Base”, In: The International Journal of Robotic Research, Vol. 19, No. 4, April 2000, pp. 307-335.
[15] V. J. Traver, A. P. del Pobil, M. Pérez-Francisco: “Smart Safe Strategies for Service Robots Interacting with People”, In: Intelligent Autonomous Systems 6, E. Pagello et al. (ed.). IOS Press, 2000, pp. 323-330.
[16] Acaccia G.M., L. Bruzzone, R.C. Michelini, R.M. Molfino, R.P. Razzoli: “ Parallel robot cooperating with a 3 D.O.F. machining center in deburrig tasks”, in Proc. Intl. Workshop on Parallel Kinematics Machines (PKM99), Milano, Italy, November 30th, 1999
[17] Alting L., J. Jorgensen: “The life-cycle concept as a basis for sustainable industrial production” CIRP Annals, vol. 42, n° 1, 1993, pp. 163-167.
[18] Alting L., J.B. Legarth: “Life-cycle engineering and design”, CIRP Annals, vol. 44, n° 2, 1995, pp. 569-580.
129

Research RoadmapsEURON References
[19] Behhuniak, J.A., 1986, Flexible automated assembly: a competitive weapon, 7th Intl. Conf. Assembly Automation, Zurich, pp.367-374.
[20] Boothroyd, G. and Alting, L., 1992, Design for assembly and disassembly, CIRP Annals 41/2, pp.625-636.
[21] Charter M., U. Tischner: “Sustainable solutions: developing products and services for the future”, Greenleaf Pub., Feb. 2001.
[22] R. Clavel; Une nouvelle structure de manipulateur parallèle pour la robotique légère; Institut de Microtechnique, Ecole Polytechnique Fédérale de Lausanne; 1989
[23] Cucchi, M., 1989, Robotics in integrated systems for vehicle assembly, 20th Intl. Symp. Industrial Robots, Tokyo, pp.387-395.
[24] Cutkosky, M. R., 1985, Grasping and Fine Manipulation, Boston Kluwer Academic Publishers, Massachusetts.
[25] Dai, J.S. and Kerr, D.R., (2000). A Six-Component Contact Force Measurement Device Based on Stewart Platform, Proc. of IMechE, Part C: Journal of Mechanical Engineering Science, 214(C3):510-519.
[26] Dai, J.S. and Kerr, D.R., (1992). Analysis and Synthesis of Planar Grasping in an Image Space, Proc., 22nd A.S.M.E. Biennial Mechanisms Conference, Scottsdale, Arizona, DE-vol 45, pp 283-292.
[27] Ebach, H, 1994, Advanced dismantling systems: an important step in life cycle, 2nd CIRP Conf. on Life Cycle Engineering, Erlangen, pp.267-274.
[28] Ghafoor, A, Dai, J.S. and Duffy, J., 2000. Fine Motion Control Based on Constraint Criteria Under Pre-Loading Configurations, Journal of Robotic Systems, 17(3):415-423.
[29] Ghafoor, A., Dai, J.S. and Duffy, J., 2001. Stiffness Modelling of Soft Finger Contact in Robotic Applications, submitted to ASME Transaction, Journal of Mechanical Design.
[30] Ghafoor, A. and Dai JS, 1999, “Control of In-grasp Optimal Elastic Fine Motion” tenth world congress on theory of machines and mechanism, Finland, 20-24, June.
[31] Ghafoor, A. and Kerr D.R., 1992. “In-Grasp Robotic Fine Motion with Frictionless Elastic Point Contacts” Proc Instn Mech Engrs, Vol 206, pp. 41-47.
[32] Groover, M., Automation, Production Systems, and Computer-Integrated Manufacturing, Prentice&Hall, USA 2001, ISBN 0-13-088978-4
[33] Guinee, J.B. et alii, 1993, Quantitative life cycle assessment of products, J. Cleaner Prod. vol. 1, n° 1, pp.3-13, and vol. 1, n° 2, pp.81-91.
[34] Jovane, F. et alii, 1993, A key issue in product life cycle: disassembly, CIRP Annals 42/2, pp.651-658.
[35] Kerr, DR. and Sanger, DJ, (1983). The Analysis of Kinematic Restraint, Proceedings of 6th World Congress on the Theory of Machines and Mechanisms, IFToMM, New Delhi, pp. 299-303.
[36] Lakshminarayana, K., (1978). “Mechanics of Form Closure”, ASME Paper 78-DET-32, New York.
[37] Li, Z., Hsu, P., and Shastry, S., 1989, “Grasping and Coordinated Manipulation by a Multifingered Robot Hand,” The International Journal of Robotics Research, Vol., no. 4, pp. 33-50.
[38] Lilley, S., 1966, Men, Machines and History, International Publishers, New York. [39] Michelini R.C., G.M. Acaccia, M. Callegari, R.M. Molfino, R.P. Razzoli: “
Instrumental Robots Design with Applications To Manufacturing”, in Computer Aided and Integrated Manufacturing Systems Techniques and Applications, Vol.
130

Research RoadmapsEURON References
II: Computer-Integrated Manufacturing, Cornelius T. Leondes Ed., CRC Press LLC, Boca Raton, Florida, 2001, pp. 2.1-2.69, ISBN 0-8493-0994-8.
[40] Michelini, R.C. et alii, 1990, Integrated management of concurrent shopfloor operations, Intl. J. Computer-Integrated Manufacturing Systems, vol. 3, n°1, pp.27-37.
[41] Michelini, R.C., 1992, Decision anthropocentric manifold for flexible-specialization manufacturing, 4th Japan-USA Intl. Symposium on Flexible Automation, San Francisco, vol. 1, pp.467-474.
[42] Michelini, R.C. et alii, 1994, Lean engineering and performace measurement in flexible manufacturing, 27th ISATA on Lean/Agile Manufacturing, Aachen, pp.279-286.
[43] Michelini, R.C. et alii, 1995, Assessing and exploiting quality control, Workshop ‘Quality '95’, Piest’any, pp.115-120.
[44] Murayama, Y. and Yamazaki, Y., 1990, Automatic assembly of many types of watches, 11th Intl. Conf. Assembly Automation, Dearborn, MS90-827-1-8.
[45] Naruki, K., 1981, How to promote automation in Japanese industries: high-speed and flexible automated assembly line, 2nd Intl. Conf. Assembly Automation, Brighton, pp.143-151.
[46] Nguyen, V.D., 1989, “Constructing Stable Grasp,” Int J. Rob. Res. 8 (1), pp. 26-37.
[47] Rizzi A.A:, Hollis R.L. “Opportunities for Increased Intelligence and Autonomy in Ronbotics Systems for Manufacturing” 8th Int. Symposium of Robotics Research, Haayama Japan, October 4-7, 1997
[48] Seliger, G. et alii, 1994, Integration of recycling: considerations into products design, Kluwer Acad. Pub. New York.
[49] Storm, T. and Boneschanscher, N., 1993, Internal transport: a key problem in flexible cells, Intl. Conf. on Assembly, Adelaide, pp.183-189.
[50] Takamori, K., 1991, The CIM system where computers and robots make robots, Robot, 83, pp.77-83 (in Japanese).
[51] Tobita, H. et alii, 1993, Development of lean automation equipment for automobile final assembly line, 26th ISATA, 93LM029, pp.77-84.
[52] Todd, Robert H., W. Edward Red, Spencer P. Magleby, "A Case for Manufacturing Education" Proceedings of the International Seminar on Manufacturing Technology Beyond 2000, Indian National Academy of Engineering, Nov. 17-19, 1999 Bangalore, India.
[53] Wiendahl, H.P., 1989, Shortening the manufacturing cycle of products with many variants by simultaneous assembly engineering, 10th Intl. Conf. Assembly Automation, Kanazawa, pp.11-29.
[54] Xiong, YL, Sanger, DJ and Kerr, DR, (1993). Geometric Modelling of Bounded and Frictional Grasps, Robotica, vol. 10, pp. 189-192.
[55] Zussman, E. et alii, 1994, Disassembly-oriented assessment methodology to support design for recycling, CIRP Annals, 43/1.
[56] Bicchi, A., “Hands for Dexterous Manipulation and Robust Grasping: A Difficult Road Toward Simplicity”, IEEE Trans. R&A, Vol. 16, No. 6, Dec. 2000, pp. 652-662.
[57] Cutkosky M., P. Wright, “Friction, Stability and the Design of Robotic Fingers”, Int. J. Robotics Res., Vol. 5, No. 4, pp. 20-37, 1986.
[58] Mason M.T., Salisbury, J.K., Robot hands and the mechanics of manipulation, MIT Press, Cambridge, MA, USA, 1985.
[59] Melchiorri, C., “Slip Detection and Control Using Tactile and Force Sensors'', IEEE Trans. on Mechatronics, Vol. 5, No. 3, Sept. 2000, pp. 235-243.
131
Research RoadmapsEURON References
[60] Melchiorri, C., G. Vassura, ``Mechanical and Control Issues for Integration of an Arm-Hand Robotic System'', ISER'91, 2nd Int. Symposium on Experimental Robotics, Toulouse, F, June 25-27, 1991, and in ``Experimental Robotics II, The 2nd Int. Symposium'' R.Chatile and G. Hirzinger Eds., Springer Verlag, 1993.
[61] Salisbury, J.K. , “Whole-Arm Manipulation”, Proc. 4th Int. Symp. of Robotics Research, Santa Cruz, CA. MIT Press, 1987.
[62] Trinkle, J., “A Quantitative Test for Form Closure Grasps”, IROS’92, 1992 IEEE/RSJ Int. Conf. on Int. Robots and Systems, Raleigh, NC, July 7-10, 1992.
[63] A. Bicchi, P. Dario, ``Intrinsic Tactile Sensing for Artificial Hands'', in Robotics Research, R. Bolles, R. Roth Eds., MIT Press, Cambridge, MA, 1987.
[64] E. Cavallo, R.C. Michelini, R.M. Molfino, R.P. Razzoli: “Task-driven design of a re-configurable gripper for the robotic picking and handling of limp sheets”, Proc. of the Intl. CIRP Design Seminar: Design in the new economy, Stockholm - Sweden, 6-8 June 2001 - pp. 79-82.
[65] Christensen H., Dillmann R., Hagele M., Norefors U.G. “A white paper on the status and opportunities of the European Robotics Industry” IFR ERF- EURON, September 2001
[66] Molfino R.M. , Dai J.S., Melchiorri C. “Automation and Manufacturing. State of the Art”, EURON, January 2002
[67] “Possibilities of man-machine interaction through the perception of human gestures “ J. Amat, A. Casals, M. Frigola, and J. Pagès, en Contributions to Science Vol. 1 N. 2 Oct.1999, pp:159-173 Institut d’Estudis Catalans
[68] “Vision based Control by Gestures” J. Amat, M. Frigola A. Casals and J. Pagès, 14th IFAC World Congress, Beijing - XINA Julio pp: 373-378 Preprints Volume P. ISSN: 8042-7545
[69] Prassler, E. Ritter, A.Schaeffer, C. Fiorini P. A Short History of Cleaning Robots. [70] Autonomous Robots, Special Issue on Cleaning and Housekeeping Robots.
Vol. 9 (3), 2000. [71] Tzafestas S.G. (Ed). Reinventing the wheelchair. Special issue of the RAS
Magazine on Autonomous Robotic Wheelchairs Projects in Europe. [72] Courier and logistic tasks in hospitals, offices and public buildings [73] G. Hirzinger, Sensor-based space robotics – ROTEX and its telerobotic features”,
IEEE Transactions on Robotics and Automation, vol. 9, No. 5, Oct. 1993. [74] T. Kasai, M. Oda, T. Suzuki: Results of the ETS-7 Mission – Rendezvous
Docking and Space Robotics Experiments, Proc. Fifth International Symposium on Artificial Intelligence, Robotics and Automation in Space.
[75] K. Landzettel, B. Brunner, G. Hirzinger, I. Schaefer, M. Fischer, M. Grebenstein, N. Sporer, J. Schott, „Space robotics – recent advances in DLR’s Robotics Lab“, ASTRA 98
[76] B. Brunner, K. Landzettel, G. Schreiber, B.M. Steinmetz, G. Hirzinger, “A universal task-level grund control and programming system for space robot applications, iSAIRAS 5th Int. Symposium on Artificial Intelligence, Robotics and Automation in Space, 1-3 June 99, ESTEC, Noordwijk
[77] R. Lampariello, Freeflying Robots – Inertial Parameters, Identification and Control Strategies, ASTRA 2000 Workshop ESTEC, Noordwijk
[78] S. Dubowsky, E. Papadopoulos, “The Kinematics, Dynamics and Control of Free-Flying and Free-Floating Space Robotic Systems”, IEEE Transactions on robotics and Automation, 5, 1993.
132

Research RoadmapsEURON References
[79] M.E. Stieber, D. Hunter, A. Abramovici, Overview of the Mobile Servicing System for the International Space Station, 5th International Symposium on Artificial Intelligence, Robotics and Automation in Space, Noordwijk, Netherlands, 1999
[80] G. Hirzinger, et al.: DLR's Robotics Lab - Recent developments in Space Robotics. 5th Intern. Symposium on Artificial Intelligence, Robotics and Automation, Noordwijk, ESTEC, (1999).
[81] C. Laugier, G.Dobias, “Rapport de mission ITS au Japon”, Transport/Environnement/Circulation Revue, 167, 2001, P.15-24.
[82] M. Parent and al, “Literature review of ADAS/AVG”, STARDUST European consortium, summer 2001.
[83] Intelligent Vehicle Technologies, L. Vladic, F. Harashima, M. Parent (editors), Butterworth-Heinemann 2001. See in particular the chapter “Decisional architecture for motion autonomy” (C. Laugier and T. Fraichard).
[84] E. Guglielmelli, P. Dario, C. Laschi, R. Fontanelli, "A physically and functionally distributed approach to the supervision of a semi-autonomous personal robot for household applications", in Proceedings of the First International Symposium on Humanoid Robots - HURO '96, Tokyo, Japan, October 30-31, 1996, pp.92-101.
[85] G. Sandini, P. Dario, M. De Micheli, M. Tistarelli, “Retina-like CCD sensor for active vision”, in Robots and Biological Systems, P. Dario, G. Sandini, P. Aebischer Editors, Berlin-Heidelberg: Springer-Verlag, 1993, pp.553-570.
[86] C. Mead, M. Ismail, Editors, Analog VLSI and Neural Network Implementations, DeKluwer, Boston, Massachussets, 1989.
[87] J. E. Dowling, The Retina: an Approachable Part of the Brain, Belknap Press of Harvard University Press, 1987.
[88] F. Ferrari, J. Nielsen, P. Questa, G. Sandini, "Space variant sensing", Sensor Review, Vol.15, No.2, pp.17-20, May 1995.
[89] R. S. Johansson, A. B. Vallbo, "Tactile sensory coding in the glabrous skin of the human hand", Trends in NeuroSciences, Vol.1, No.6, pp.27-32, January 1983.
[90] R. D. Howe, M. R. Cutkosky, Touch Sensing for manipulation and Recognition, in O. Kathib, J. Craig, and T. Lozano-Pérez, editors, The robotics review 2, pp.55-112, MIT Press, Cambridge, Massachusetts, 1992.
[91] P. Dario, editor, Sensors and Sensory Systems for Advanced Robotics, NATO ASI Series, Vol. F43, Springer Verlag, 1986. Proceedings of the NATO Advanced Research Workshop, Maratea, Italy, April 28 - May 3, 1986.
[92] P. Dario, Tactile Sensing for Robots: Present and Future, in O. Kathib, J. Craig, and T. Lozano-Pérez, editors, The robotics review 1, chapter II, pp.133-146, MIT Press, Cambridge, Massachusetts, 1989.
[93] J.G. Webster, Tactile Sensors for Robotics and Medicine, Wiley-Interscience, New York, NY, 1988.
[94] P. Dario, R. Lazzarini, R. Magni, S. R. Oh, "An integrated miniature fingertip sensor", in Proceedings of the 7th International Symposium on Micro Machine and Human Science (MHS '96), Nagoya, Japan, October 2-4, 1996, pp.91-97.
[95] R. Lazzarini, R. Magni, P. Dario, "A tactile array sensor layered in an artificial skin", Proceedings of the International Conference on Intelligent Robots and Systems - IROS '95, Pittsburgh, Pennsylvania, USA, August 5-9, 1995, pp.114-119.
[96] D. M. De Micheli, Realizzazione di un sistema di visione binoculare attivo con caratteristiche antropomorfe per robot, Ph. D. Thesis, Scuola Superiore Sant'Anna, Pisa, Italy, September 24, 1993.
[97] S. Scattareggia Marchese, M. Bergamasco, "The mechanical design of the MARCUS prosthetic hand", in Proceedings of the 3rd European Conference on the Advancement of Rehabilitation Technology, Lisbon, October 10-13, 1995.
133

Research RoadmapsEURON References
[98] R.A. Brooks, L.A. Stein, "Building Brains for Bodies," Autonomous Robots, Vol. 1, No. 1, November 1994, pp. 7--25.
[99] P. Dario, T. Fukuda, "Guest Editorial", IEEE/ASME Transaction on Mechatronics, Vol. 3, No. 1, March 1998, pp. 1-2.
[100] I.Fujimasa, Micromachines, A New Era in Mechanical Engineering, Oxford University Press, 1996.
[101] P. Dario, M. C. Carrozza, B. Allotta, E. Guglielmelli, "Micromechatronics in Medicine", IEEE/ASME Trans. on Mechatronics, 1 (2) June 1996, pp. 137-148.
[102] P. Dario, G. Sandini, P. Abisher (eds), Robots and Biological Systems: Towards a New Bionics ?”, NATO ASI Series, 1989.
[103] S. N. Zill, E. Seyfarth, "Exoskeletal Sensors for Walking", Scientific American, pp. 70–74, July 1996.
[104] S.A. Bailey, J.G. Cham, M.R. Cutkosky, and R.J. Full, "Biomimetic Robotic Mechanisms via Shape Deposition Manufacturing," Robotics Research: the Ninth International Symposium, J. Hollerbach and D. Koditschek (Eds), Springer-Verlag, London, 2000.
[105] M. Despont et al., "A comparative study of bearing designs and operational environments for harmonic side-drive micromotors", MEMS 92, pp. 171–176, 1992.
[106] H. Tilmans, S. Bouwstra, "A novel design of a highly sensitive low differential-pressure sensor using built-in resonant strain gauges", J. Micromech Microeng, vol. 3, pp. 198–202, 1993.
[107] http://csmt.jpl.nasa.gov/csmtpages/Technologies/mgyro/mgyro.html [108] P. Menzel, F. D’Aluisio, C. C. Mann, RoboSapiens, MIT Press, Cambridge, MA,
2000. [109] R.A. Brooks, Cambrian Intelligence, MIT Press, Cambridge, MA, 2000. [110] S. Hirose, Biologically Inspired Robots (Snake-like Locomotor and Manipulator),
Oxford University Press, 1993. [111] T. Shibata and K. Tanie, Creation of Subjective Value through Physical
Interaction between Human and Machine, Proc. of the 4th International Symposium on Artificial Life and Robotics, January 19-22, 1999, Oita, Japan.
[112] M. Fujita, "AIBO: Towards the Era of Digital Creatures", Proc. of the International Symposium on Robotics Research, Snowbird, UH, USA, October 9-12, 1999, pp. 257–262.
[113] H. Inoue, “HRP: Humanoid Robotics Project of MITI”, Proc. of the First IEEE-RAS International Conference on Humanoid Robots – Humanoids 2000, Cambridge, MA, September 7-8, 2000.
[114] R.A. Brooks, “The Cog Project” Journal of the Robotics Society of Japan Advanced Robotics, Vol.15, No.7, 1997, pp. 968-970.
[115] Hashimoto et al., “Humanoid robots in Waseda University – Hadaly-2 and Wabian”, in Proc. of the First IEEE-RAS International Conference on Humanoid Robots – Humanoids 2000, Cambridge, MA, September 7-8, 2000.
[116] P. Dario, C. Laschi, E. Guglielmelli, “Sensors and actuators for ‘humanoid’ robots”, RSJ International Journal Advanced Robotics, Special Issue on Humanoid, Vol.11, No.6, 1998, pp.567-584.
[117] R.D. Howe, M. R. Cutkosky, 1992. Touch Sensing for manipulation and Recognition, in O. Kathib, J. Craig, and T. Lozano-Pérez, editors, The robotics review 2, pp.55-112, MIT Press, Cambridge, MA.
[118] R. A. Russel, Robot Tactile Sensing, Australia: Prentice Hall Ltd, 1990. [119] C. Freschi, F. Vecchi, S. Micera, A. M. Sabatini, P. Dario, "Force Control during
Grasp using FES Techniques: Preliminary Results", 5th Annual Conference of the
134

Research RoadmapsEURON References
International Functional Electrical Stimulation Society (IFESS 2000), 17-24 june 2000, Aalborg (DK), accepted.
[120] F. Vecchi, C. Freschi, S. Micera, A.M. Sabatini, P. Dario, " Experimental evaluation of two commercial force sensors for applications in biomechanics and motor control", 5th Annual Conference of the International Functional Electrical Stimulation Sociaty (IFESS 2000), 17-24 june 2000, Aalborg (DK) (accepted).
[121] T. Sinkjaer, M. Haugland, J. Struijk, R.R. Riso, „Long-term cuff electrode recordings from peripheral nerves in animals and humans“, in Modern Techinques in Neuroscience Research, U. Windhorst and H.Johansson (eds), NY: Springer-Verlag, 1999.
[122] K. Najafi, K. D. Wise, T. Mochizuki, “A High-Yield IC- Compatible Multichannel Recording Array”, IEEE Trans. Electronic Devices, ED-32, 7, 1985, 1206-1211.
[123] M. Bove, M. Grattarola, G. Verreschi, “In vitro 2-D networks of neurons characterized by processing the signals recorded with a planar microtransducer array”, IEEE Trans Biomedical Eng, vol. 44, pp.964-977, 1997.
[124] M. O. Heuschkel, L. Guerin, B. Buisson, D. Bertrand, P. Renaud, "Buried microchannels in photopolymer for delivering of solutions to neurons in a network", Sensors and Actuators B 48 (1998) 356-361.
[125] P. Dario, P. Garzella, M. Toro, S. Micera, M. Alavi, U. Meyer, E. Valderrama, L. Sebastiani, B. Ghelarducci, C. Mazzoni, P. Pastacaldi, “Neural Interfaces for Regenerated Nerve Stimulation and Recording”, IEEE Transactions on Rehabilitation Engineering, 6, 4, 1998, 353-363.
[126] M. Schuettler, T. Stiegllitz, J.-U. Meyer, “A Multipolar Precision Hybrid Cuff Electrode for FES on Large Peripheral Nerves”, 21st Annual International Conference of the IEEE Engineering in Medicine and Biology Society, October 13-16, Atlanta, USA, 1999.
[127] M. C. Carrozza, P. Dario, R. Lazzarini, B. Massa, M. Zecca, S. Roccella, R. Sacchetti, "An Actuating system for a Novel Biomechatronic ProstheticHand", Actuator 2000, 19–21 June 2000, Bremen (DE).
[128] M.C. Carrozza, B. Massa, P. Dario, R. Lazzarini, M. Zecca, S. Micera, P. Pastacaldi, "A Two-DOF Finger for a Biomechatronic Artificial Hand", Technology and Healthcare, 2001 (accepted).
[129] P. Dario, R. Lazzarini, and R. Magni, "An Integrated Miniature Fingertip Sensor", MHS, 1997.
[130] Carrozza MC, Massa B, Dario P, Zecca M, Micera S, Pastacaldi P, “A two DoF finger for a biomechatronic hand prosthesis”, Tech Health Care, 2002 (accepted).
[131] Dario P, Carrozza MC, Micera S, Massa B, Zecca M, “Design and Experiments on a Novel Biomechatronic Hand”, ISER 2000.
[132] Dario P, Garzella P, Toro M, Micera S, Alavi M, Meyer J-U, Valderrama E, Sebastiani L, Ghelarducci B, Mazzoni C, Pastacaldi P, “A Neural Interface for Regenerated Nerve Stimulation and Recording”, vol. 6, pp. 353-362, IEEE Trans Rehab Eng, 1998.
[133] Doeringer JA, Hogan N, „Performance of the Above Elbow Body-Powered Prostheses in Visually Guided Unconstrained Motion Tasks”, IEEE Trans Biomed Eng, vol. 42, pp. 621-632, 1995.
[134] Popovic DB, Sinkjaer T, Control of Movement for the Physically Disabled, Sprinter-Verlag, 2000.
[135] C. Balaguer, "Open issues and future possibilities in the EU construction automation", keynote speech of the IAARC International Symposium on Robotics and Automation (ISARC'00), Taipei (Taiwan), 2000.
135

Research RoadmapsEURON References
[136] Y. Miyatake, "SMART system: A full-scale implementation of Computer Integrated Construction", IAARC International Symposium on Robotics and Automation (ISARC'93), Houston, TX (USA), Elsevier Science Publisher, 1993.
[137] http://www.ims.org/index_projects.html [138] http://www.cv.ic.ac.uk/futurehome/ [139] F. Peyret, J. Jurasz, A. Carrel, E. Zekri and B. Gorham, "The computer integrated
road construction project", Automation in Construction, vol. 9, nº5-6, 2000. [140] Q. Ha, M. Santos, Q. Nguyen, D. Rye and H. Durrant-Whyte, “Towards Robotic
Excavation in Construction Automation”, IEEE Robotics and Automation magazine, March 2002.
[141] E. Gambao, C. Balaguer, A. Barrientos, R. Saltaren, E.A. Puente, "Robot assembly system for the construction process automation", IEEE International Conference on Robotics and Automation (ICRA'97), Albuquerque, NM (USA), 1997.
[142] M. Handa et al., "Development of interior finishing unit assembly system with robot", Automation in Construction, vol.5, nº 1, 1996.
[143] C. Balaguer, A. Gimenez, J.M. Pastor, V.M. Padron and M. Abderrahim, "A climbing autonomous robot for inspection application in 3D complex environments", Robotica, vol. 18, 2000.
[144] L. Qiu, W.-J. Hsu, S-Y. Huang, H. Wang: “Scheduling and Routing Algorithms for AGVs: a Survey.” In: Int. J. Prod. Res., vol. 40(3), 2002, pp. 745-760.
[145] A. Verbraeck, C. Versteegt: “Logistic control for fully automated large scale freight transport systems; Event based control for the Underground Logistic System Schiphol.” In: Proceedings of the IEEE Intelligent Transportation Systems Conference, Oakland (CA), USA, August 25th-29th, 2001, pp. 768-773.
[146] M. Norman: „A Recursive Method for Traffic Management through a Complex Path Network.“ In: Proceedings of the 2002 Winter Simulation Conference, 2002.
[147] G. Garibotto, S. Masciangelo, M. Ilic, P. Bassino: “Service Robotics in Logistic Automation: ROBOLIFT: Vision based Autonomous Navigation of a conventional Fork-Lift for Pallet Handling.”. In: Proceedings of the IEEE International Conference on Autonomous Robots, Monterey (CA), USA, August 7th-9th, 1997, pp. 781-786.
[148] H. Zhu, D. Chen: “Study and Implementation of Infrared Digital Guiding on AGV.” In: Proceedings of the 4th World Congress on Intelligent Control and Automation, Shanghai, P.R. China, June 10th-14th, 2002, pp. 3224-3227.
[149] Project page on Norad and the desert trek http://www-2.cs.cmu.edu/afs/cs/project/lri-13/www/atacama-trek/
[150] Red Team, Carnegie Mellon University, http://www.redteamracing.org/ [151] Ghostrider Team, UC Berkeley, http://www.roboticinfantry.com/ [152] ESA Homepage, information on Mars missions and involved robots,
http://sci.esa.int/ [153] NASA Homepage, http://marsrovers.jpl.nasa.gov/home/ [154] C. Breazeal, "Sociable Machines: Expressive Social Exchange Between Humans
and Robots". Sc.D. dissertation, Department of Electrical Engineering and Computer Science, MIT, 2000.
[155] K. Kawamura, R.A. Peters II, D.M. Wilkes, W.A. Alford, and T.E. Rogers, "ISAC: Foundations in Human-Humanoid Interaction", IEEE Intelligent Systems, July/August 2000.
[156] U. Cortés, R. Annicchiarico, J. Vázquez-Salceda, C. Urdiales, L. Cañamero, M. López, M. Sànchez-Marrè, C. Caltagirone, “Assistive technologies for the
136

Research RoadmapsEURON References
disabled and for the new generation of senior citizens: the e-Tools architecture”, IOS Press, 2003
[157] PRO-ROBOT Paving the Road for Humanoid Robots, August 2003, Version 1.2 [158] Hasbro, Inc.: Furby Homepage, http://www.furby.com [159] Artur Fischer GmbH & Co. KG: Fischertechnik Homepage,
http://www.fischertechnik.de [160] LEGO Group: Mindstorms Homepage, http://mindstorms.lego.com [161] Joseph L. Jones, Anita M. Flynn, Bruce A. Seiger: Mobile Robots: Inspiration to
Implementation, 2nd Edition, A.K. Peters, Natick, Mass., 1999 [162] John Iovine: Robots, Androids, and Animatrons, McGraw-Hill, NY, 2002 [163] AcroName, Inc.: BrainStem® Robotics System Homepage,
http://www.acroname.com/brainstem/brainstem.html [164] Parallax, Inc.: Robotics Product Homepage, http://www.parallax.com/ [165] Tilo Gockel, Oliver Taminé, Pedram Azad, Rüdiger Dillmann: EduKaBot – Aufbau
eines edukativen Roboter-Baukastensystems, in: Proceedings of the AMS, Karlsruhe, 2003
[166] Not Quite C Homepage, http://bricxcc.sourceforge.net/nqc/ [167] Markus Noga: legOS Homepage, http://www.noga.de/legOS/ [168] Oliver Taminé, Rüdiger Dillmann: Gruppenbasierte Konstruktion von LEGO
Mindstorms Robotern in einem interdiisziplinären Studentenpraktikum, in: Proceedings of the AMS, Karlsruhe, 2003
[169] Sony Corporation: AIBO Homepage, http://www.sony.net/Products/aibo/ [170] D. Golubovic, B. Li, H. Hu, A Hybrid Software Platform for Sony AIBO Robots,
Proc. of the 7th international Symposium on RoboCup, Padua, 2003 [171] AiboPet’s iCybie Hack Site, http://aibohack.com/icybie/index.html [172] Sony Corporation: QRIO Homepage, http://www.sony.net/SonyInfo/QRIO/ [173] Dario, P., Guglielmelli, E., Allotta, B., Carrozza, M.C.. Robotics for medical
applications, IEEE Robotics & Automation Magazine, Volume: 3, Issue: 3, Pages:44 – 56, Sept. 1996.
[174] Tzafestas, G., Sgouros, N. Medical applications of intelligent robots – imaging and virtual reality, 16th IMACS World Congress, 2000.
[175] IEEE Robotics and Automation Society. Medical Robots, http://www.service-robots.org/MedicalRobots.php, 2003.
[176] Integrated Surgical Systems, Inc. ROBODOC, http://www.robodoc.com/eng/robodoc.html, 2002.
[177] Intuitive Surgical Inc. Products Overview, http://www.intuitivesurgical.com/products/index.html, 2003.
137