Parcerias e Lógicas de Cooperação nos Processos de Desenvolvimento da Náutica de Recreio
Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
1
EL RADAR

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
2
1.1 IDEA ELEMENTAL DEL PRINCIPIO DE FUNCIONAMIENTO DEL RADAR Radio Detection and Ranging, es el significado de sus siglas. Este aparato electrónico se ha convertido en una ayuda para la navegación en barcos de cierto porte, resultando su utilización imprescindible sobre todo cuando se navega en condiciones de visibilidad reducida, en las recaladas y entradas en radas y bahías, aproximaciones a puntos de fondeo etc. En los últimos años, y debido a la generalización de uso de equipamiento electrónico a bordo de buques y embarcaciones y a la reducción de precios, el Radar se ha incorporado con gran velocidad a la flota de embarcaciones de recreo. Las ondas electromagnéticas emitidas por una antena tienen la propiedad de la directividad, es decir, se reciben en la misma dirección en que se transmiten. Los radares marinos pueden ser, según la frecuencia de la onda electromagnética emitida, radares de banda X y de banda S. Los de banda X, emiten a una frecuencia próxima a los 10.000 Mhz y con una longitud de onda de 3 centímetros. Los de banda S, emiten a una frecuencia de unos 3.000 Mhz y una longitud de onda de 10 centímetros. Su funcionamiento se basa en medir la distancia desde el punto de emisión a otro, mediante la medida del tiempo transcurrido desde que se emite la radiofrecuencia hasta que vuelve su eco. El transmisor emite un impulso de radiofrecuencia que se propaga a la velocidad de la luz y cuando encuentra un objeto (blanco) se refleja y vuelve, este eco es recogido en la antena y cuando pasa al receptor su señal se amplifica, presentando el blanco en una pantalla. La medida de la distancia al objeto se realiza dividiendo el tiempo transcurrido desde que se emitió la señal de radiofrecuencia hasta que se recibió el rebote de la misma, provocado por el choque con el blanco, entre 2, puesto que recorre camino de ida y vuelta. Al ser la velocidad de propagación de la señal de radiofrecuencia igual a de la luz, que recordamos es de 300.000 kms por segundo y teniendo en cuenta que:
tVD •=
Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
3
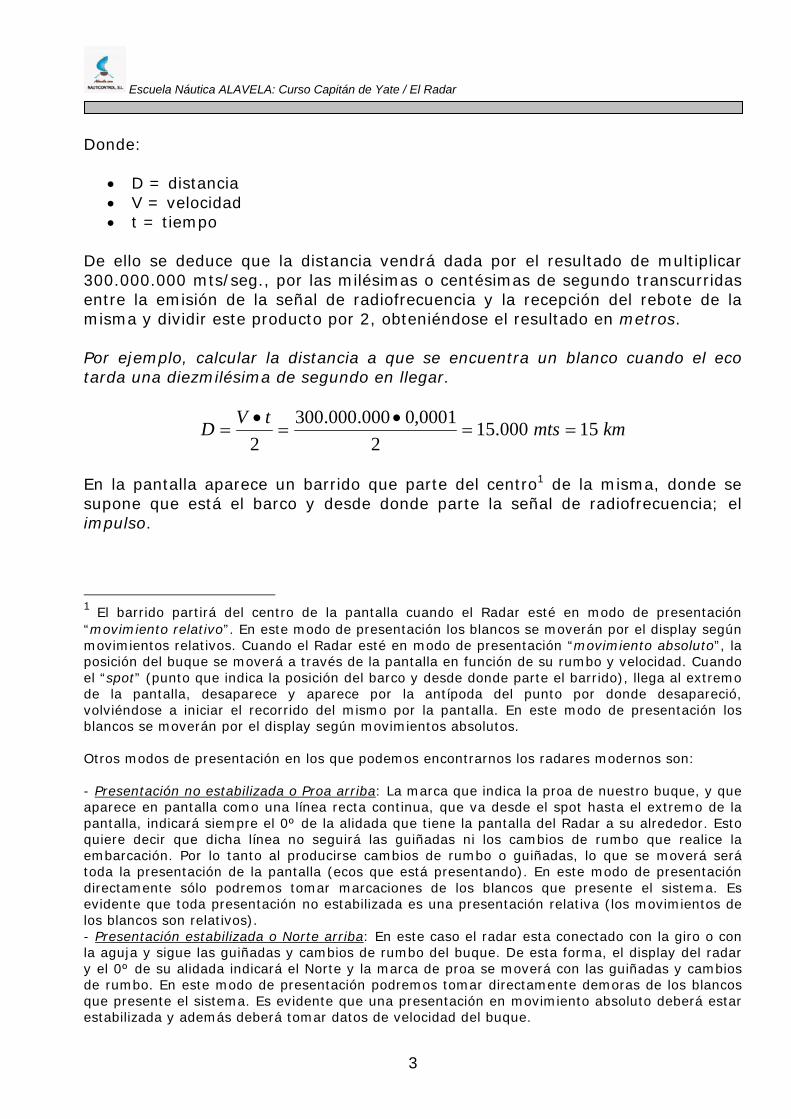
Donde:
• D = distancia • V = velocidad • t = tiempo
De ello se deduce que la distancia vendrá dada por el resultado de multiplicar 300.000.000 mts/seg., por las milésimas o centésimas de segundo transcurridas entre la emisión de la señal de radiofrecuencia y la recepción del rebote de la misma y dividir este producto por 2, obteniéndose el resultado en metros. Por ejemplo, calcular la distancia a que se encuentra un blanco cuando el eco tarda una diezmilésima de segundo en llegar.
kmmtstVD 15000.152
0001,0000.000.3002
==•
=•
=
En la pantalla aparece un barrido que parte del centro1 de la misma, donde se supone que está el barco y desde donde parte la señal de radiofrecuencia; el impulso.
1 El barrido partirá del centro de la pantalla cuando el Radar esté en modo de presentación “movimiento relativo”. En este modo de presentación los blancos se moverán por el display según movimientos relativos. Cuando el Radar esté en modo de presentación “movimiento absoluto”, la posición del buque se moverá a través de la pantalla en función de su rumbo y velocidad. Cuando el “spot” (punto que indica la posición del barco y desde donde parte el barrido), llega al extremo de la pantalla, desaparece y aparece por la antípoda del punto por donde desapareció, volviéndose a iniciar el recorrido del mismo por la pantalla. En este modo de presentación los blancos se moverán por el display según movimientos absolutos. Otros modos de presentación en los que podemos encontrarnos los radares modernos son: - Presentación no estabilizada o Proa arriba: La marca que indica la proa de nuestro buque, y que aparece en pantalla como una línea recta continua, que va desde el spot hasta el extremo de la pantalla, indicará siempre el 0º de la alidada que tiene la pantalla del Radar a su alrededor. Esto quiere decir que dicha línea no seguirá las guiñadas ni los cambios de rumbo que realice la embarcación. Por lo tanto al producirse cambios de rumbo o guiñadas, lo que se moverá será toda la presentación de la pantalla (ecos que está presentando). En este modo de presentación directamente sólo podremos tomar marcaciones de los blancos que presente el sistema. Es evidente que toda presentación no estabilizada es una presentación relativa (los movimientos de los blancos son relativos). - Presentación estabilizada o Norte arriba: En este caso el radar esta conectado con la giro o con la aguja y sigue las guiñadas y cambios de rumbo del buque. De esta forma, el display del radar y el 0º de su alidada indicará el Norte y la marca de proa se moverá con las guiñadas y cambios de rumbo. En este modo de presentación podremos tomar directamente demoras de los blancos que presente el sistema. Es evidente que una presentación en movimiento absoluto deberá estar estabilizada y además deberá tomar datos de velocidad del buque.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
4
Fig.1 Pantalla de radar estabilizada. Podemos observar el eco de la costa, diversos ecos de barcos así como la señal racon de dos
boyas
La pantalla es un tubo de rayos catódicos. En ella los haces electrónicos de los impulsos se van desplazando horizontalmente a velocidad constante2, que es la del barrido, por lo que el horizonte quedará recorrido en cada vuelta o giro completo de la antena. Se toma como referencia para saber en que dirección se encuentra un blanco la línea proa-popa o la línea Norte-Sur verdadera; el radar nos facilita distancia y marcación o demora verdadera del blanco en todo momento y en situación real. Cuando la posición de un blanco está referida, angularmente, a la línea de proa-popa, es decir que la línea de fe, que así se llama, coincide con la línea proa –popa, entonces la posición de los blancos con respecto a nuestro buque vendrán dadas por marcaciones, que convertiremos en demoras si le sumamos el rumbo cuando la marcación es a estribor y la restamos del rumbo cuando la marcación del blanco es por el costado de babor, y distancias. La otra presentación es llevando el Norte-Sur como línea de fe. En este caso, al acoplar al radar una aguja o al estar conectado al compás, obtenemos demoras verdaderas de los blancos detectados.
2 El barrido se moverá a la misma velocidad angular de la antena del radar.
Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
5
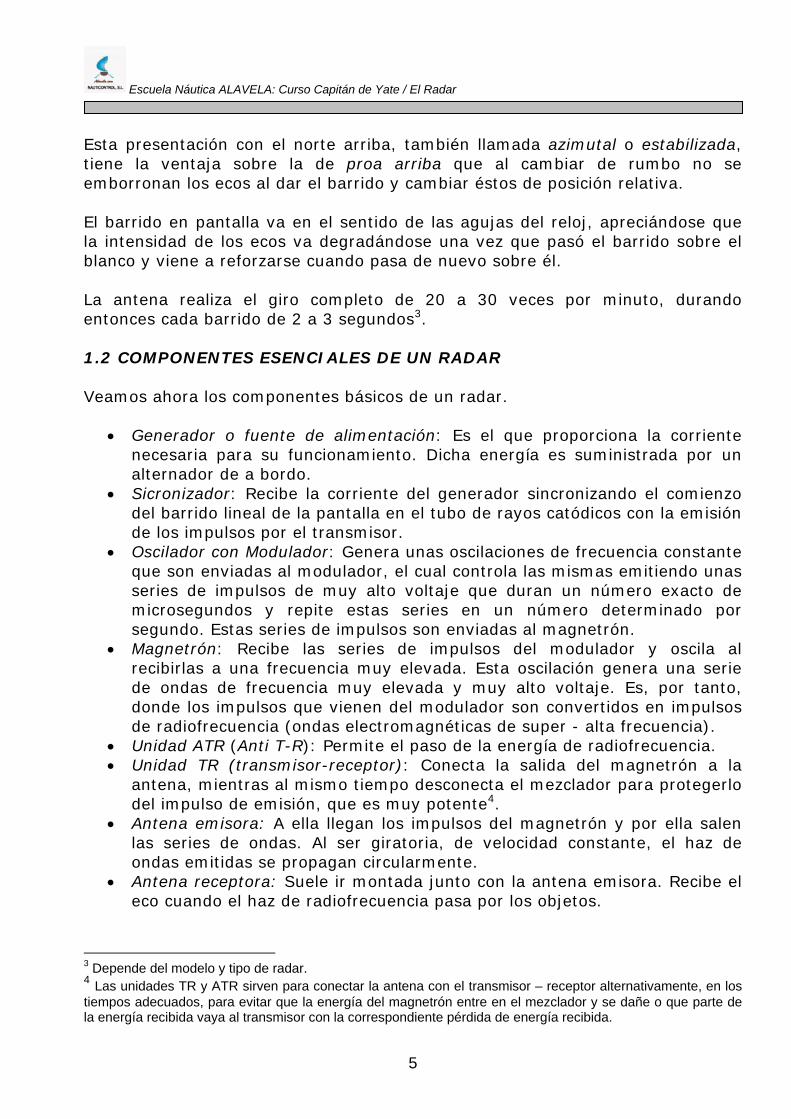
Esta presentación con el norte arriba, también llamada azimutal o estabilizada, tiene la ventaja sobre la de proa arriba que al cambiar de rumbo no se emborronan los ecos al dar el barrido y cambiar éstos de posición relativa. El barrido en pantalla va en el sentido de las agujas del reloj, apreciándose que la intensidad de los ecos va degradándose una vez que pasó el barrido sobre el blanco y viene a reforzarse cuando pasa de nuevo sobre él. La antena realiza el giro completo de 20 a 30 veces por minuto, durando entonces cada barrido de 2 a 3 segundos3. 1.2 COMPONENTES ESENCIALES DE UN RADAR Veamos ahora los componentes básicos de un radar.
• Generador o fuente de alimentación: Es el que proporciona la corriente necesaria para su funcionamiento. Dicha energía es suministrada por un alternador de a bordo.
• Sicronizador: Recibe la corriente del generador sincronizando el comienzo del barrido lineal de la pantalla en el tubo de rayos catódicos con la emisión de los impulsos por el transmisor.
• Oscilador con Modulador: Genera unas oscilaciones de frecuencia constante que son enviadas al modulador, el cual controla las mismas emitiendo unas series de impulsos de muy alto voltaje que duran un número exacto de microsegundos y repite estas series en un número determinado por segundo. Estas series de impulsos son enviadas al magnetrón.
• Magnetrón: Recibe las series de impulsos del modulador y oscila al recibirlas a una frecuencia muy elevada. Esta oscilación genera una serie de ondas de frecuencia muy elevada y muy alto voltaje. Es, por tanto, donde los impulsos que vienen del modulador son convertidos en impulsos de radiofrecuencia (ondas electromagnéticas de super - alta frecuencia).
• Unidad ATR (Anti T-R): Permite el paso de la energía de radiofrecuencia. • Unidad TR (transmisor-receptor): Conecta la salida del magnetrón a la
antena, mientras al mismo tiempo desconecta el mezclador para protegerlo del impulso de emisión, que es muy potente4.
• Antena emisora: A ella llegan los impulsos del magnetrón y por ella salen las series de ondas. Al ser giratoria, de velocidad constante, el haz de ondas emitidas se propagan circularmente.
• Antena receptora: Suele ir montada junto con la antena emisora. Recibe el eco cuando el haz de radiofrecuencia pasa por los objetos.
3 Depende del modelo y tipo de radar. 4 Las unidades TR y ATR sirven para conectar la antena con el transmisor – receptor alternativamente, en los tiempos adecuados, para evitar que la energía del magnetrón entre en el mezclador y se dañe o que parte de la energía recibida vaya al transmisor con la correspondiente pérdida de energía recibida.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
6
• Mezclador: Su misión es mezclar la señal del eco en el intervalo en el que las unidades TR y ATR están en reposo con otra señal generada en una válvula llamada Klistrón, formando una señal de frecuencia intermedia.
• Amplificador: Amplifica la señal de frecuencia intermedia. • Detector: Detecta las señales amplificadas y las envía a la pantalla radar. • Unidad de presentación visual: El elemento principal es un tubo de rayos
catódicos (TRC), que presenta en una pantalla circular los ecos recibidos a medida que la antena va barriendo el horizonte.
Fig.2 Diagrama de bloques de un radar
Alrededor de la pantalla nos encontramos la graduación de 0° a 360° con cursor para calcular demoras o marcaciones según convenga y una graduación de distancia por medio de anillos convergentes5.
5 En los radares modernos el cursor es electrónico (EBL 0 Electronic Bearing Line). Se presenta como una marca luminosa que podemos girar con un control. Asimismo, además de los anillos de distancias, que aparecen a distancias fijas y separados proporcionalmente a la escala que estemos utilizando, los radares modernos montan el que se llama Anillo Variable de Distancias (gusanillo), que es una circunferencia generada electrónicamente y controlada mediante un botón giratorio y que nos da la distancia a cualquier blanco.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
7
En muchos radares está incorporado el dispositivo A.R.P.A. mediante el cual se puede hacer un estudio de la evolución propia real y relativa de los ecos que se reflejan en pantalla, incorporando un análisis cinemático del conjunto de movimientos, pudiendo saber distancia mínima a pasar de un eco, velocidades reales de estos, rumbo de colisión, etc.
Fig.3 Imagen radar de un equipo moderno
En la imagen anterior se observan los blancos en color verde. En estos equipos se puede insertar cartas electrónicas de las zonas por las que naveguemos (video sintético en color marrón) para facilitar el reconocimiento de los puntos. También se pueden insertar zonas de blanking para no emborronar con ecos de tierra la pantalla del radar. De esta forma la línea de costa se nos presenta mucho más clara. Los blancos móviles (buques) se pueden adquirir, bien sea manual o automáticamente, presentando el radar un vector que nos informa sobre su movimiento (en este caso absoluto).

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
8
1.3 PRINCIPALES MANDOS DEL RADAR Los controles principales que encontraremos en la mayoría de los equipos son:
• Brillo: Se aplica desde cero hasta conseguir la luminosidad adecuada. • Ganancia y sintonía: Proporcionan el ajuste adecuado de la emisión de
radiofrecuencia, para apreciar bien las imágenes. • Escalas: Definen el radio máximo de alcance, desde 0,25 millas hasta 48-
64 millas6, las escalas más utilizadas son las de 3,6 y 12 millas. • Anillos de distancia: Círculos concéntricos que nos ayudan a tomar la
distancia a un objeto, aunque es más útil el anillo de distancia variable (VRM).
• Marcador: Línea electrónica superpuesta a la pantalla con objeto de calcular la dirección de un blanco.
• Línea de fe: línea permanente que nos señala la dirección de la proa o el rumbo.
• Sea-clutter: Supresor o eliminador de los ecos del oleaje que pueden llegar a tapar la visión de los barcos. Cuando se emplea disminuye la ganancia de los ecos hasta una distancia próxima (4 millas) a partir de esta la ganancia es normal.
• Rain-clutter: Supresor de las manchas provenientes de chubascos de lluvia. Actúa dispersando cada blanco de lluvia en blancos mucho más pequeños que emborronan menos la pantalla. Esto lo hace actuando sobre la unidad de vídeo.
Fig.4 Las manchas verdes que se observan son debidas a un chubasco. Se pueden eliminar totalmente o en
parte actuando sobre el anti – lluvia.
6 Depende de los radares. En la actualidad hay radares marinos con alcances superiores.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
9
Debemos ser cuidadosos a la hora de actuar sobre el sea – clutter y el rain – clutter, ya que el primero disminuye la ganancia en las proximidades de nuestra embarcación, con la posible pérdida de ecos pequeños que correspondan a otras embarcaciones en movimiento, y el segundo dispersa blancos de lluvia actuando sobre el sistema de video, lo que puede dar lugar a pérdida de blancos importantes. 1.4 ALCANCES DEL RADAR – FACTORES QUE LO CONDICIONAN El alcance de un radar podemos dividirlo en alcance máximo y alcance mínimo. El alcance máximo teórico de una instalación viene a depender de los siguientes factores que a continuación se detallan:
• Potencia radiada. El alcance es proporcional a la raíz cuarta de la potencia emitida o radiada.
• Longitud de onda. El alcance es inversamente proporcional a la raíz cuadrada de la longitud de onda; cuanto mayor sea la frecuencia7 mayor será el alcance de la emisión.
• Elevación de la antena sobre el nivel del mar. La propagación de las ondas se efectúa afectada por la refracción8. Se llama horizonte radar a aquel que se alcanza desde el tope de la antena y que es mayor que el horizonte geométrico y el horizonte visible u óptico debido a que las ondas electromagnéticas emitidas por el radar, al ser de muy alta frecuencia, son más afectadas por los fenómenos de refracción que las ondas situadas en el espectro visible, dando lugar a un mayor alcance. En la figura 5 vemos el horizonte geométrico (A), el horizonte visible (B) y el horizonte radar (C). En condiciones normales el alcance máximo del radar de navegación suele ser de un 15% a un 30% mayor que el alcance óptico correspondiente a la altura de la antena. Se puede calcular el horizonte radar de acuerdo con la siguiente expresión:
hd 22,1=
Siendo: d = distancia al horizonte radar. h = altura de la antena
7 La frecuencia es la inversa de la longitud de onda. 8 Cambio en la dirección de propagación de un fenómeno ondulatorio, como por ejemplo la emisión de una señal de radiofrecuencia. La refracción se produce cuando la emisión de radiofrecuencia pasa de un medio a otro o se mueve por un medio que cambia sus condiciones físicas. Dichas condiciones físicas, en el caso que nos ocupa, son alteradas por fenómenos meteorológicos o climáticos. La refracción dará lugar a que se aumente el alcance geométrico.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
10
• Elevación del objeto detectado, cuanto mayor sea el objeto y más altura tenga, antes será detectado por el radar.
• Tamaño y naturaleza de objeto. Los objetos metálicos y grandes serán detectados con prioridad frente a los menores y de madera u otro material poco reflectante y que absorba una parte importante de la energía de la onda incidente.
• Condiciones atmosféricas. Con niebla disminuye el alcance porque la refracción es mínima. Hay circunstancias en las que las variaciones de presión, temperatura y humedad de las capas atmosféricas determinan distintos valores de propagación de las radiofrecuencias que hacen que varíe el alcance del radar.
Fig.5 Horizonte radar
Fig.6 Alcance de las distintas transmisiones en función de su frecuencia

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
11
En las figuras que se muestran a continuación se ve, de forma simple, y exceptuando la energía radiada en lóbulos laterales, como se transmite en el plano horizontal y vertical el haz electromagnético desde la antena del radar.
Fig.7 Amplitud horizontal y vertical del haz de transmisión de un radar
El alcance mínimo dependerá del llamado tiempo de conmutación, que es el tiempo que tarda el receptor, después de emitir el impulso, en poder estar en condiciones de recibir el eco. La distancia mínima a la que puede detectarse un blanco depende de la longitud del impulso emitido y del tiempo de conmutación del receptor. Todo objeto situado a una distancia menor de la mitad de la longitud del impulso (ida y vuelta) no podrá ser detectado ya que cuando la onda de rebote de dicho eco llegue a la antena, ésta se encontrará todavía en período de transmisión. 1.5 PRESENTACION DE ECOS EN LA PANTALLA – PERFIL DE LA COSTA La imagen que se dibuja en la pantalla de un radar de calidad es realmente interesante. A primera vista su detalle parece asombroso y la variedad de ecos recogidos infinita. Una observación más detenida, nos inducirá a sospechar que sin gran experiencia y conocimiento del comportamiento de los blancos, y de las distorsiones de su presentación, no será fácil reconocer a plena satisfacción los ecos recibidos, e identificarlos con los blancos de los que proceden.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
12
Los ecos de ciertas líneas de costa y estructuras, muestran en ocasiones una semejanza notable con sus verdaderas formas, pero la identificación de muchos objetos, de interés para el navegante, puede ser difícil si se carece de la suficiente experiencia y habilidad para maniobrar los distintos controles del radar. La imagen que nos proporciona la pantalla radar es un plano bidimensional, en un solo color, generalmente ambarino, a veces verdoso; en fin, se caracteriza por una gama de tonos extremadamente limitada9. Al buscar la identidad del contorno de un blanco y su eco en la pantalla habrá que tener en cuenta factores tales como la estructura, características, etc., del objeto y factores técnicos tales como la discriminación del equipo radar. Sin embargo, puede ser de utilidad describir el aspecto de una imagen típica de pantalla radar, suponiendo que el buque se encuentre a pocas millas de la costa, en una mar ligeramente picada. Pues bien, el aspecto corriente sería como el que se describe a continuación: En la inmediata vecindad del pequeño punto brillante situado en el centro de la imagen10, que representa al buque propio, habrá indicaciones de interferencias varias11, que se presentan como una nube de puntos cuya situación es aleatoriamente cambiante, y que puede ser disminuida usando el control de anti – mar. Más allá de una cierta distancia del buque propio, todos estos ecos de mar anteriores se debilitan y desaparecen, quedando la superficie de la mar representada por un fondo oscuro, sobre el que destacarán los ecos de la línea de costa, de otros buques y de otros objetos que se encuentre el haz radar. La línea de costa puede estar o no claramente definida; más allá de ella, se verán los ecos de objetos terrestres tales como edificios, colinas, montañas, etc., mientras que a distancias más grandes la pantalla volverá a mostrarse oscura, bien porque los ecos reflejados por las tierras altas sean demasiado débiles para presentarse en pantalla, o bien porque los blancos distantes queden ocultos por tierras intermedias. En cualquier caso, antes de exponer concisamente el aspecto que ofrecen los ecos más frecuentes, conviene precisar los principales aspectos técnicos del equipo que influyen en la imagen radar:
• Alargamiento de figura: Como vimos, el haz de proyección tiene una cierta amplitud horizontal que motiva que el objeto detectado sufra una distorsión sobre la pantalla, que se traduce en un alargamiento de la
9 En algunos radares de última generación es posible introducir, como video sintético, cartas electrónicas de navegación, que ayudan en gran medida, en el reconocimiento de la costa. 10 Si la presentación es relativa. 11 Ecos de mar, debidos a que la mar está picada.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
13
imagen del eco12 y por tanto un error en las marcaciones de los extremos del citado eco.
• Discriminación en marcación: Queda definida por el ángulo mínimo, entre dos objetos situados a la misma distancia, que es necesario que subtiendan para que puedan ser diferenciados en la pantalla radar. Si el ángulo que subtienden es menor que este mínimo, los dos ecos aparecen como uno sólo. Su valor está condicionado, principalmente por la anchura del haz de transmisión13.
• Discriminación en distancia: Queda definida por la mínima distancia, entre dos objetos situados en la misma marcación, para poder ser diferenciados en la pantalla. Su valor está condicionado fundamentalmente por la longitud del impulso y características del aparato14.
Fig.8 DISCRIMINACIÓN EN DEMORA: Si los blancos situados a la misma distancia, subtienden un ángulo inferior a la discriminación en demora, se presentarán como un solo eco en pantalla
Con relación a la imagen devuelta por la línea de costa, la pantalla acusará ecos de una zona de costa que llega hacia el interior unas 2 ó 3 millas. Si una elevación destacada se encuentra más distante, también, probablemente, devolverá eco, si bien hay que tener en cuenta que éste no ha de ser precisamente del punto más elevado.
12 En sentido perpendicular al barrido. 13 En los radares normales actuales menor de 1º. 14 En los radares normales actuales menor de 12 mts.
Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
14
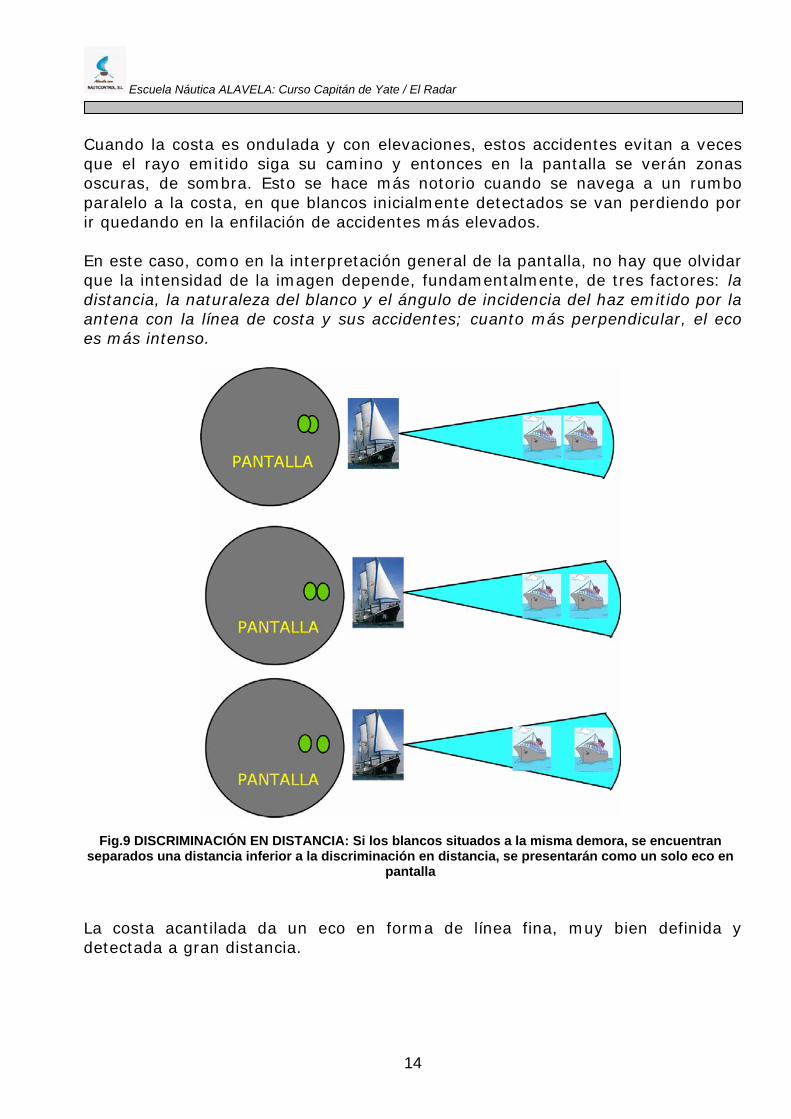
Cuando la costa es ondulada y con elevaciones, estos accidentes evitan a veces que el rayo emitido siga su camino y entonces en la pantalla se verán zonas oscuras, de sombra. Esto se hace más notorio cuando se navega a un rumbo paralelo a la costa, en que blancos inicialmente detectados se van perdiendo por ir quedando en la enfilación de accidentes más elevados. En este caso, como en la interpretación general de la pantalla, no hay que olvidar que la intensidad de la imagen depende, fundamentalmente, de tres factores: la distancia, la naturaleza del blanco y el ángulo de incidencia del haz emitido por la antena con la línea de costa y sus accidentes; cuanto más perpendicular, el eco es más intenso.
Fig.9 DISCRIMINACIÓN EN DISTANCIA: Si los blancos situados a la misma demora, se encuentran separados una distancia inferior a la discriminación en distancia, se presentarán como un solo eco en
pantalla
La costa acantilada da un eco en forma de línea fina, muy bien definida y detectada a gran distancia.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
15
La costa en pendiente da un eco de trazo más grueso que el anterior pero que es detectable a menos distancia. La costa baja da un eco en forma de línea muy suave y fina, detectable a distancias medias. Es muy corriente en estos casos que si hacia el interior el terreno es algo elevado, sea este el primer eco que aparezca en estos casos, dando, el equipo, una distancia a tierra mayor que la real. Al ir acercándose el buque hacia tierra, se irá precisando la línea de costa verdadera. La costa con puerto, y con independencia de las características propias de la misma, suele presentar las líneas de malecones, rompeolas, diques, instalaciones, etc., siempre que tengan alguna importancia. Conviene advertir que si en los diques y atraques se encuentran amarrados buques, o hay fondeaderos cerca de aquellos, en donde se encuentren gran número de buques, gabarras, etc., y el equipamiento radar no tiene suficiente discriminación en marcación y distancia, la línea de costa resultará avanzada hacia el mar, además de deformada. Los tipos de ecos acabados de exponer se ven modificados por numerosos factores, entre los que hay que destacar la presencia de arbolado abundante, que en unas ocasiones debilita y en otras refuerza el eco. También en zonas de marea de gran amplitud, el perfil de la costa puede ser muy distinto de la pleamar a la bajamar. Como el barco está en movimiento, la imagen radar va cambiando lenta pero continuamente y hará falta ir comparando con la carta náutica buscando analogías. En cuanto a la intensidad de los ecos presentados por otros buques, dependerá de varios factores, entre los que hay que destacar el tipo de obra muerta, estado de carga, ángulo de inclinación y condiciones de propagación. Normalmente, salvo el caso de embarcaciones muy pequeñas y de madera, reflejan a distancias medias y grandes. Las boyas, debido a su poca elevación, sólo muestran ecos precisos y definidos a distancias medias y pequeñas. Inicialmente, sólo se apreciarán en algunos barridos y gradualmente se irán perfilando hasta alcanzar su forma e intensidad definitiva. Hay que tener en cuenta que al estar la boya sometida a la acción del viento y mar, su posición respecto al haz emisor cambia continuamente, lo que supone fluctuaciones en la imagen, sobre todo cuando se está alejado. Los grupos de edificaciones y otras estructuras metálicas o no suelen dar ecos bien definidos, dependiendo de su orientación y distancia.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
16
A continuación se da una descripción somera de los dos tipos básicos de presentación, con los que nos encontraremos al manejar equipos de radar marino.
• Proa arriba: Fue la primera presentación de que disponían los equipos radar15. Es la presentación más instintiva, ya que se relacionan los ecos según su marcación en primer lugar teniendo como línea de fe la línea proa. En este tipo de presentación se mostrará en pantalla una línea continua brillante que partiendo del centro del display va hasta el 0º de la alidada16 que tiene la pantalla del radar. Esta línea es la línea de proa, ya que coincide con la dirección proa – popa de nuestro buque. La línea de proa, por tanto, indica la proa de nuestro buque. Como ya se dijo, en esta forma de presentación, las alteraciones de rumbo y las guiñadas del buque suponen una variación de las posiciones de todos los ecos en pantalla debido a esas alteraciones y guiñadas. Es como si toda la pantalla girase con dichas alteraciones, únicamente manteniéndose en la misma posición la línea de proa. En suma, el movimiento presentado es relativo, la posición de nuestro buque ocupa el punto central de la pantalla y los ecos presentados se moverán siguiendo un movimiento relativo, composición vectorial de su movimiento absoluto y el propio de nuestro barco. En este tipo de presentación sólo podremos tomar marcaciones de los ecos presentados en pantalla, debiendo sumar el rumbo a las mismas para obtener demoras.
• Norte arriba: Cuando la pantalla está en un lugar cerrado y no tenemos
una referencia visual directa quizás entonces la presentación apropiada es la de norte arriba. De esta manera y con el girocompás conectado, la línea de proa marca directamente el rumbo verdadero. En este caso, las alteraciones de rumbo y guiñadas darán lugar a que sea la línea de proa la que se mueve, evitando así que todos los ecos presentados en pantalla varíen con las citadas alteraciones y guiñadas. Se evitan los emborronamientos de pantalla que se producen en las proximidades de los ecos cuando la presentación es proa arriba y se producen alteraciones de rumbo. El movimiento de los ecos en pantalla será también un movimiento relativo igual que en la presentación proa arriba17. En cambio, en este modo de presentación podremos tomar directamente demoras de los ecos presentados.
15 En principio, los radares no estaban conectados a otros elementos y equipos del sistema de navegación del buque, como por ejemplo giroscópica, aguja, etc. De esta forma, el radar no recibía datos de entrada de rumbo, con lo que no podía seguir las alteraciones de éste y las guiñadas del buque. 16 Circunferencia graduada, de grado en grado, de 0º a 360º. 17 Es evidente que para poder trabajar en un radar con movimientos absolutos, se deberán introducir como datos de entrada al radar además del rumbo la velocidad del buque propio, consiguiendo así el radar de movimiento absoluto.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
17
A nuestro modo de ver, la mejor presentación, de las dos reseñadas, y a los efectos del uso del radar como ayuda anticolisión, es la presentación norte arriba, ya que nos permite tomar directamente demoras sobre los ecos de otros buques, controlando más rápidamente y con menos errores la derrota relativa de esos blancos y evitando el efecto emborronamiento y salto de eco que se produce en la presentación proa arriba. En cualquier caso, la correcta interpretación de la imagen radar requiere bastante experiencia y siempre deberemos tomar su información, ciertamente muy valiosa, con ciertas restricciones debidas tanto a los errores y perturbaciones que tiene como en función de la experiencia del operador.
• Rumbo arriba: Es una presentación estabilizada, es decir, la línea de proa sigue los cambios de rumbo del buque, pero siempre se mantendrá orientada en el sector de proa del mismo, indicando el rumbo en la alidada. La figura 1 muestra una pantalla de radar, estabilizada, rumbo arriba. Reúne las mejores características de la presentación proa arriba y rumbo arriba.
Fig.10 RADAR BIDIRECCIONAL TIPICO - Consta de dos componentes principales, la antena propiamente dicha, que es un escáner horizontal en la parte alta y que contiene la unidad emisora y receptora. Gira a un ritmo de unas 20 rpm, barriendo la superficie con su onda electromagnética de
muy alta frecuencia. La caja que se ve debajo contiene la unidad motora y circuitos, cables y guiaondas para transportar los impulsos a y desde la unidad receptora y transmisora hasta la unidad
de presentación. 1.6 ERRORES Y PERTURBACIONES Los errores más comunes son los debidos a tomar puntos que no corresponden con la realidad o también errores procedentes de las lecturas de las demoras o marcaciones que pueden llegar a varios grados de diferencia con la realidad18. 18 Recordar la distorsión que se presenta en el eco y que hace que éste se alargue.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
18
Respecto a los errores en distancias muchas veces se toman como adelantados puntos que se encuentran más separados de la costa y se comete el correspondiente error en distancia. En sitios donde la amplitud de marea es considerable hay que tener en cuenta estas consideraciones.
Fig.11 ESQUEMA DE LA PRESENTACIÓN DE UNA UNIDAD RADAR - En el mismo podemos ver la pantalla y los distintos controles de brillo (BRILLIANCE), sintonía (TUNNING), distancia (RANGE),
conmutación y anillos fijos, anti-clutter y ganancia (GAIN)
Por desajuste en el aparato también se pueden tener errores en la distancia; es importante cuando se conozca una distancia con seguridad comprobar la distancia que muestra el radar para asegurarse de la posibilidad de error. En cualquier caso, un estudio detallado de los errores propios de cada aparato suele venir en los folletos que suministra la fábrica, pero como causas de error típicas comunes se pueden citar las siguientes:
Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
19
• Curvatura de la pantalla: En los bordes de la pantalla la curvatura de la misma ocasiona una distorsión en la imagen que puede producir errores en distancia19. Conviene cambiar la escala de forma que el eco a medir se desplace hacia el centro de la pantalla. Cuando esto no sea posible, la distancia debe medirse con los anillos fijos de distancia (calibración) los cuales están afectados de la mínima distorsión.
• Espaciado desigual de los anillos de distancia: Ocasionado por una falta de ajuste.
• Espaciado incorrecto de los anillos de distancia: Los intervalos de distancia son iguales pero no los debidos. Es poco corriente.
• Error de índice: El centro de los anillos de distancia no corresponde a la distancia cero. Se determina comparando la distancia radar de un eco preciso y definido con la distancia verdadera conocida del objeto que proporciona el eco.
• Amplitud del haz: Produce un error en demora. • Desplazamiento del centro: Produce error en la demora. Entre otras causas
puede estar ocasionado por un cambio de rumbo apreciable que modifique el estado magnético del buque. Es más notorio en latitudes bajas.
En cuanto a las perturbaciones más corrientes citaremos:
• Sea clutter: Las ondas electromagnéticas rebotan contra las olas cuando hay marejada devolviendo esa energía en forma de ecos. La zona donde se reflejan o notan estas interferencias con más intensidad es en el centro de la pantalla, alrededor del barco. Se producen, así, un gran número de pequeños ecos, variables en situación e intensidad con cada revolución de la antena. Cuando la mar es de fondo o leva y de suficiente envergadura hay que observar ante la sospecha de la presencia de un eco en una determinada dirección esa zona durante un determinado tiempo y observar que el blanco aunque desaparece, reaparece hacia la misma dirección y distancia al cabo de unos segundos. Para evitar esto los radares disponen de un sea-clutter actuando a modo de filtro20, con el inconveniente de que con su intervención los ecos se debilitan, hasta el punto de no apreciar boyas o ecos similares a poca distancia del barco, para corregir esto hay que aumentar la ganancia y jugar con la sintonía y el brillo.
• Ecos o reflexiones múltiples: Ocasionados generalmente por estructuras metálicas verticales próximas y de gran tamaño. Una parte de la energía reflejada por la estructura o casco de un buque grande, se vuelve a reflejar en el costado del buque propio y vuelve a producir en el blanco un nuevo eco. Se identifican fácilmente por aparecer en la pantalla, igualmente
19 En los radares modernos, con la mejora de construcción que se ha producido en los tubos de rayos catódicos, y con la aparición de otros tipos de pantalla, este error queda prácticamente anulado. 20 Disminuye la ganancia en las inmediaciones del buque propio.
Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
20
espaciados y sobre la misma marcación, 2, 3 y hasta 4 ecos, correspondiendo el más próximo al blanco real y siendo los restantes debidos a las sucesivas reflexiones. Se suelen presentar cuando otro barco navega en las proximidades, debido a que los impulsos rebotan contra este vuelven con fuerza al barco y de nuevo vuelven al barco próximo para volver a rebotar. Con el aumento de la distancia desaparece este efecto.
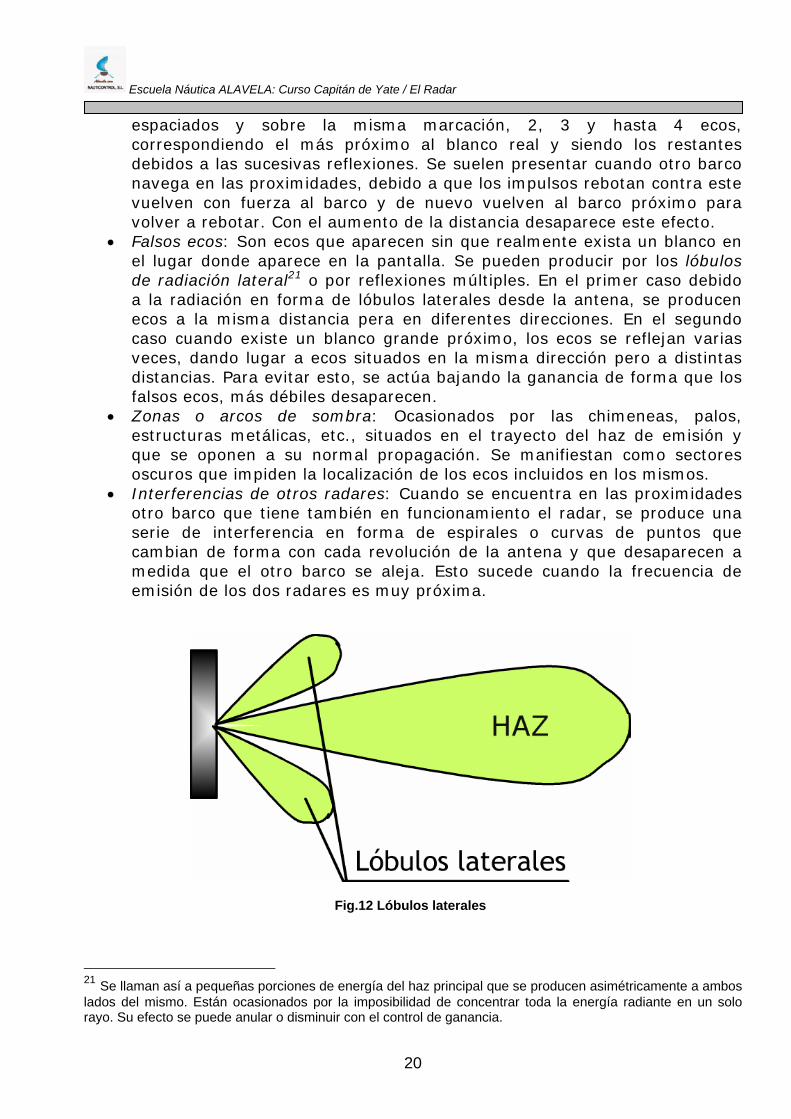
• Falsos ecos: Son ecos que aparecen sin que realmente exista un blanco en el lugar donde aparece en la pantalla. Se pueden producir por los lóbulos de radiación lateral21 o por reflexiones múltiples. En el primer caso debido a la radiación en forma de lóbulos laterales desde la antena, se producen ecos a la misma distancia pera en diferentes direcciones. En el segundo caso cuando existe un blanco grande próximo, los ecos se reflejan varias veces, dando lugar a ecos situados en la misma dirección pero a distintas distancias. Para evitar esto, se actúa bajando la ganancia de forma que los falsos ecos, más débiles desaparecen.
• Zonas o arcos de sombra: Ocasionados por las chimeneas, palos, estructuras metálicas, etc., situados en el trayecto del haz de emisión y que se oponen a su normal propagación. Se manifiestan como sectores oscuros que impiden la localización de los ecos incluidos en los mismos.
• Interferencias de otros radares: Cuando se encuentra en las proximidades otro barco que tiene también en funcionamiento el radar, se produce una serie de interferencia en forma de espirales o curvas de puntos que cambian de forma con cada revolución de la antena y que desaparecen a medida que el otro barco se aleja. Esto sucede cuando la frecuencia de emisión de los dos radares es muy próxima.
Fig.12 Lóbulos laterales
21 Se llaman así a pequeñas porciones de energía del haz principal que se producen asimétricamente a ambos lados del mismo. Están ocasionados por la imposibilidad de concentrar toda la energía radiante en un solo rayo. Su efecto se puede anular o disminuir con el control de ganancia.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
21
Fig.14 IMAGEN TIPICA DE PANTALLA RADAR - Se observa el centro de la misma, con alguna perturbación de mar en las inmediaciones, se muestra, también la línea de proa y como se ve el radar esta estabilizado
norte arriba. La imagen radar presenta ecos de tierra y espigones y malecones de puerto, así como el tráfico circundante

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
22
Fig.15 CARTA DEL AREA REPRESENTADA EN LA IMAGEN RADAR ANTERIOR - En esta carta no se muestra todo el área representada en la imagen radar anterior, sino sólo las zonas más destacadas.
Así podemos observar tanto el espigón de entrada (en la parte interior de la carta y en la parte inferior de la imagen radar anterior), y también podemos observar la zona de atraques y muelles al norte de la
posición del buque propio
Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
23
• Rain – clutter: Los chubascos intensos provocan la aparición sobre la pantalla, en la zona en la que se producen, de una especie de nube de puntos, provocada por la reflexión y dispersión de la señal radar sobre las gotas de lluvia, tanto más intensa cuanto mayor es la intensidad del chubasco. Dicha nube, que presenta una imagen membranosa de bordes más bien suaves que pueden rodear al buque o estar más o menos distante según la posición del chubasco, puede enmascarar la detección de blancos que se encuentren dentro del aquél. De nuevo, para verificar la existencia de blancos en el área del chubasco, y al igual que con los ecos de mar, el operador debe fijar su atención sobre el área de puntos y observar aquellos que no varían de posición en los sucesivos barridos. Esos ecos corresponderán a verdaderos blancos ya que los ecos devueltos por las gotas de lluvia son continuamente variables en demora y distancia. En la mayoría de los casos, la intensidad del chubasco es tal que la citada nube se presenta como una mancha compacta que impide totalmente la detección en el área de la precipitación. Para evitar esto, los radares disponen de un filtro de lluvia que al habilitarlo va dispersando la mancha de lluvia, al actuar sobre el sistema receptor que discrimina los blancos según la intensidad de la energía devuelta por el mismo. De esta forma, señales de rebote de baja intensidad son filtradas por el sistema y se muestran como ecos. Debemos ser cuidadosos en el uso de este filtro ya que puede hacer desaparecer ecos de blancos pequeños que realmente se encuentran dentro del chubasco. Decir que el granizo provoca efectos similares a los chubascos, si bien interfiere menos la detección de otros blancos; la nieve, a no ser que sea de gran intensidad, provoca efectos similares en aspecto pero más débiles y rara vez interfiere la detección de otros blancos. La niebla no produce perturbaciones en la pantalla del radar aunque sí limita algo el alcance de detección al modificar la refracción.
1.7 MARCACION, DEMORA Y DISTANCIA RADAR La medida de estas magnitudes se realiza directamente sobre la pantalla. Para las marcaciones el radar lleva una graduación de 0º a 360º en la parte externa de la pantalla22. Con las distancias hay que tener en cuenta la separación entre anillo si se mide por interpolación. Para la medida de la distancia también podemos usar el VRM23 que nos permite medir exactamente la distancia al blanco, sin necesidad de interpolación, ya que se gobierna desde un control giratorio que abarca todo el rango de distancias en la escala considerada. La lectura del VRM se presenta en forma numérica en la ventanita correspondiente.
22 En los radares modernos esta graduación se representa de forma electrónica y la medición se realiza mediante EBL (Electronic Bearing Line) que es una línea marcadora, también generada electrónicamente. La medición se presenta en forma numérica en la ventanita correspondiente. 23 Variable Range Marker (anillo variable de distancias).
Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
24
Ya habíamos dicho que la lectura directa de demoras sobre la pantalla radar sólo podrá hacerse en aquellos radares que estén estabilizados, norte arriba. Si manejamos un radar en modo de presentación proa arriba, la lectura sobre el radar será una marcación a la que deberemos aplicarle la ya conocida fórmula de conversión de marcaciones a demoras24. Ya sabemos que el haz emitido por la antena tiene una cierta anchura, mientras que su presentación en pantalla es un trazo luminoso (barrido). Esto motiva que al incidir el extremo lateral del haz en el objeto la pantalla acusa el eco, pero con una marcación correspondiente a la del centro del haz en dicho instante. Este valor se debería corregir si se quieren obtener marcaciones o demoras correctas. En la pantalla este efecto se traduce en un alargamiento de las figuras, hacia cada lado del medio ancho del haz. Cuando el punto marcado es un objeto definido (boya, bote, etc.), la marcación se debe leer en el punto central del trazo que deja. Cuando el tamaño del objeto es apreciable se sumará (restará) a la marcación dada en la pantalla la mitad de la anchura del haz si se trata del extremo izquierdo (derecho) del mismo. Con objeto de efectuar mejor la medida el radar monta un cursor móvil superpuesto (o un EBL), cuyo punto de giro coincide con el centro de la pantalla y que se hace pasar por el objeto para tomar la marcación o demora. Las marcaciones se deben obtener con una escala de distancias que lleve la imagen radar del eco a medir lo más lejos posible del centro, con objeto de reducir al mínimo el error en la colocación del cursor móvil. Cuando el radar esté estabilizado norte arriba convendrá:
• Pasar a presentación proa arriba cuando se navegue en aguas restringidas (rías, canales, bahías, etc.), en donde la posición del barco es conocida. También cuando se quiera saber lo que abre de la proa otro barco o un punto de tierra.
• Mantener la presentación norte arriba cuando se realicen evoluciones, y más si éstas son de noche y próximas a tierra, ya que de esta forma se elimina el emborronamiento de la pantalla. Para obtener una situación por demoras. Para comparar la imagen de la pantalla con la carta correspondiente y con objeto de saber si la demora de otro barco se mantiene constante y hay riesgo de colisión.
24 MRD += (marcaciones + a Er y – a Br).

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
25
El gráfico a continuación se representa las demoras tomadas a una isla y a una boya, con un radar con un ancho de haz de 4º. Las lecturas de demora deberían corregirse según la siguiente tabla25:
LECTURAS REALES RADAR
A 060º 058º B 075º 077º C 125º 123º - 127º
Fig.16 Lectura de demoras
En el gráfico las líneas verdes continuas representan la demora medida con el cursor sobre el eco y las líneas de puntos rojas la anchura del haz.
25 A efectos teóricos. En la práctica y con los radares modernos cuya tecnología da como resultado una mayor concentración del haz radiado, no se suele corregir la demora tomada por anchura del haz.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
26
En cuanto a las distancias la primera operación será elegir, de entre las diversas escalas, la más conveniente para realizar la medida. Con los anillos fijos de distancia ya dijimos que la medida se realiza por interpolación, a no ser que el eco del blanco se sitúe sobre alguno de ellos y con el anillo variable se gira hasta conseguir que el mismo bisecte al eco. Como mejor técnica para la medida de distancias se recomienda tangentear el eco por su interior, o sea por el punto más próximo al centro de la pantalla. 1.8 RADIOFAROS RADAR – RAMARK Y RACON El Ramark (Radar Marks) es una baliza radio que emite una señal de frecuencia adecuada para que al ser recibida por el radar, de en la pantalla una señal de identificación. Esta señal es un sector de líneas radiales brillantes, de trazos o de puntos, cuyo centro es la demora de la baliza. Emite continuamente en todas las direcciones y no tiene limitación de uso por número de barcos.
Fig.17 RAMARK y RACON
Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
27
El Racon (Radio Beacon) es un reflector electrónico que funciona al recibir las ondas del radar de a bordo, devolviendo una señal amplificada. Esta señal se traduce en la pantalla en unos pequeños arcos concéntricos que generalmente responden a una letra en código morse (combinación de puntos y rayas) y que sirve como señal identificadora de la boya. La demora de la boya se toma en la mitad del sector de los arcos representados y la distancia a la boya es la de la señal que aparece más próxima al centro. La medida de la distancia al RACÓN se hará hasta el punto más próximo al centro de la pantalla. Este sistema tiene sobre el anterior la ventaja de que da por si sólo la situación, pero a su vez tiene el inconveniente de que su capacidad de reflejar señales (en cantidad y sin interferencias) depende del número de buques que lo utilicen. En los dos casos el alcance es función de la altura de la antena radar del barco.
ANEXO:
UNIDAD DE PRESENTACION VISUAL
La unidad de presentación visual está compuesta por:
• Un tubo de rayos catódicos (TRC). • Un generador de la base de tiempos. • Un circuito de luminosidad del impulso. • Un generador de calibración y de marcas de distancias fijas.
Un TRC es una ampolla de vidrio, con forma de embudo, en la que se ha generado un vacío. La parte más ancha del embudo es la que forma la pantalla del radar, que se denomina PPI (Plan Position Indicador). Dicha pantalla está compuesta internamente por una sustancia fosforescente. La parte más estrecha del embudo forma el cañón electrónico.
Al conectar a red el TRC, el filamento calentador se pone al rojo y vibra debido al calor generado. Debido a esto se desprenden electrones26 de los átomos del filamento. El sistema así formado se denomina cátodo y emite un haz de electrones que pasan a través de una rejilla que regula la intensidad del flujo haciendo que converjan en un punto determinado.
El flujo de luminoso de electrones pasa ahora por una bobina de enfoque y un ánodo acelerador, que están cargados positivamente. Los electrones son fuertemente atraídos por ese conjunto y acelerados hasta unos 16.000 Km/seg., e impulsados contra la pantalla PPI, en la que chocan. Este choque genera un calor que activa la sustancia fosforescente formando un blanco.
26 Partículas cargadas negativamente.

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
28
Las bobinas deflectoras hacen que el punto luminoso así formado se mueva desde el centro de la pantalla a la periferia produciendo un barrido lineal. El barrido circular se genera haciendo girar las bobinas sincronizadamente con la antena.
Fig.18 Tubo de rayos catódicos
El generador de la base de tiempos permite la sincronización del barrido lineal en la pantalla con la emisión de los impulsos.
RADAR DE MOVIMIENTO VERDADERO
Los radares denominado ARPA (Automatic Radar Plotting Aid), o radares de punteo automático, muestran los movimientos verdaderos de todos los blancos que aparecen en la pantalla, incluido el del barco propio.
A estos radares se les ha acoplado un ordenador que recibe la información de video crudo detectado por el radar, convirtiéndolo, mediante una asignación binaria, en una señal digital sintética.
La adquisición de los ecos en la pantalla se puede hacer de forma manual o automática. En la adquisición manual, el operador decide que ecos le interesa seguir, en función de la situación del tráfico marítimo. Para ello situará el cursor del radar encima del eco elegido y pulsará la tecla de menú adquire target. Después de unos segundos aparecerá sobre el eco adquirido un vector indicativo

Escuela Náutica ALAVELA: Curso Capitán de Yate / El Radar
29
de su movimiento verdadero o relativo según que estemos en presentación verdadera o relativa.
Si el eco adquirido fuese falso el sistema lo perderá después de un número determinado de rotaciones de la antena e indicará lost target.
Una vez que el sistema muestra el vector de un blanco, le asignará un número y se podrá seleccionar poniendo el cursor encima y presionando la tecla del menú select target. Si se presiona entonces la tecla de menú target data se obtendrán todos los datos del movimiento del blanco, tales como rumbo y velocidad, demora y distancia al buque propio, CPA (closest point of approach) o mínima distancia de aproximación, TCPA (time of closest point of approach) o tiempo en que el blanco estará a la mínima distancia, etc.
La adquisición automática de blancos se hará en la zona o zonas determinadas por el operador, sobre todos los ecos detectados en las mismas. En este sentido, el operador podrá establecer zonas de guardia (guard zones), sonando una alarma cada vez que un blanco que entra en las mismas es adquirido.
Fig.18 Radar marino
Copyright © 2022 FDOKUMEN