
Dynamic Voltage/Frequency Scaling and Power-Gating of ...
89
Dynamic Voltage/Frequency Scaling and Power-Gating of Network-on-Chip with Machine Learning A thesis presented to the faculty of the Russ College of Engineering and Technology of Ohio University In partial fulfillment of the requirements for the degree Master of Science Mark A. Clark May 2019 © 2019 Mark A. Clark. All Rights Reserved.
-
Upload
khangminh22 -
Category
Documents
-
view
5 -
download
0
Transcript of Dynamic Voltage/Frequency Scaling and Power-Gating of ...

Dynamic Voltage/Frequency Scaling and Power-Gating of Network-on-Chip with
Machine Learning
A thesis presented to
the faculty of
the Russ College of Engineering and Technology of Ohio University
In partial fulfillment
of the requirements for the degree
Master of Science
Mark A. Clark
May 2019
© 2019 Mark A. Clark. All Rights Reserved.

2
This thesis titled
Dynamic Voltage/Frequency Scaling and Power-Gating of Network-on-Chip with
Machine Learning
by
MARK A. CLARK
has been approved for
the School of Electrical Engineering and Computer Science
and the Russ College of Engineering and Technology by
Avinash Karanth
Professor of Electrical Engineering and Computer Science
Dennis Irwin
Dean, Russ College of Engineering and Technology

3
Abstract
CLARK, MARK A., M.S., May 2019, Electrical Engineering
Dynamic Voltage/Frequency Scaling and Power-Gating of Network-on-Chip with
Machine Learning (89 pp.)
Director of Thesis: Avinash Karanth
Network-on-chip (NoC) continues to be the preferred communication fabric in
multicore and manycore architectures as the NoC seamlessly blends the resource efficiency
of the bus with the parallelization of the crossbar. However, without adaptable power
management the NoC suffers from excessive static power consumption at higher core
counts. Static power consumption will increase proportionally as the size of the NoC
increases to accommodate higher core counts in the future. NoC also suffers from excessive
dynamic energy as traffic loads fluctuate throughout the execution of an application. Power-
gating (PG) and Dynamic Voltage and Frequency Scaling (DVFS) are two highly effective
techniques proposed in literature to reduce static power and dynamic energy in the NoC
respectively. DVFS is a popular technique that allows dynamic energy to be saved but may
potentially lead to a loss in throughput. Power-gating allows static power to be saved but
can introduce new problems incurred by isolating network routers. Further complications
include the introduction of long wake-up delays and break-even times. However, both
DVFS and power-gating are critical for realizing energy proportional computing as core
counts race into the hundreds for multi-cores.
In this thesis, we propose two distinct but related techniques that enable energy-
proportional computing for NoC. We first propose LEAD - Learning-enabled Energy-
Aware Dynamic voltage/frequency scaling for NoC architectures. LEAD applies machine
learning (ML) techniques to enable improvements in both energy and performance with
reduced overhead cost. This allows LEAD to enact a proactive energy management
strategy that relies on an offline trained regression model while also providing a wide

4
variety of voltage/frequency (VF) pairs. In this work, we will refer to various VF pairs
as modes. LEAD groups each router and the router’s outgoing links locally into the
same V/F domain allowing energy management at a finer granularity without additional
timing complications and overhead. We then build on LEAD and propose DozzNoC, an
adaptable power management technique that effectively combines LEAD with a partially
non-blocking power-gating technique. This allows DozzNoC to target both static power
and dynamic energy simultaneously, thereby enabling energy proportional computing. Our
ML DVFS techniques from LEAD are applied on top of a partially non-blocking power-
gated scheme that uses real valued wake-up/switching delays. DozzNoC also allows
independently power-gated or voltage scaled routers such that each router and its outgoing
links share the same voltage/frequency domain.
We evaluate both LEAD and DozzNoC using trace files generated from PARSEC 2.1
and Splash-2 benchmark suits. Trace files are gathered at various network sizes and across
two different network topologies. For a 64 core 4 × 4 concentrated mesh (CMesh) network,
simulation results show that LEAD can achieve an average of 17% dynamic energy savings
for an average loss of only 4% throughput. Our simulation results for DozzNoC on an 8 ×
8 mesh network show that for an average decrease of 7% in throughput, we can achieve an
average dynamic energy savings of 25% and an average static power reduction of 53%.

5
Acknowledgments
I thank my advisor, Dr. Avinash Karanth for the support, guidance, and motivation he
provided. I also want to thank the many wonderful friends I made throughout my time at
Ohio University, even if we have since gone our own ways in life.

6
Table of Contents
Page
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Acknowledgments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
List of Acronyms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.1 Integrated Circuits to Multicores . . . . . . . . . . . . . . . . . . . . . . . 131.2 Energy Proportional Computing and NoC . . . . . . . . . . . . . . . . . . 161.3 Dynamic Voltage and Frequency Scaling for Multicores . . . . . . . . . . . 191.4 Power-gating for Multicores . . . . . . . . . . . . . . . . . . . . . . . . . 211.5 Benefits of Machine Learning . . . . . . . . . . . . . . . . . . . . . . . . 231.6 Major Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.7 Thesis Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2 LEAD: Offline Trained Proactive DVFS for NoC . . . . . . . . . . . . . . . . . 272.1 Related Works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.2 LEAD Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2.1 Operating V/F Modes . . . . . . . . . . . . . . . . . . . . . . . . 332.3 DVFS Models and Implementation . . . . . . . . . . . . . . . . . . . . . . 34
2.3.1 DVFS Implementation . . . . . . . . . . . . . . . . . . . . . . . . 372.4 Machine Learning for DVFS . . . . . . . . . . . . . . . . . . . . . . . . . 39
3 DozzNoC: Combination of ML based DVFS and Power-Gating for NoC . . . . . 413.1 Related Works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.2 DozzNoC Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.2.1 Operational States . . . . . . . . . . . . . . . . . . . . . . . . . . 483.3 Power-Gated DVFS Models . . . . . . . . . . . . . . . . . . . . . . . . . 503.4 Machine Learning for PG-DVFS . . . . . . . . . . . . . . . . . . . . . . . 55
4 Performance Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.1 LEAD Simulation Methodology . . . . . . . . . . . . . . . . . . . . . . . 58
4.1.1 LEAD Model Variants . . . . . . . . . . . . . . . . . . . . . . . . 604.1.2 LEAD Mode Breakdown . . . . . . . . . . . . . . . . . . . . . . . 61
4.2 LEAD ML Simulation Methodology . . . . . . . . . . . . . . . . . . . . . 62

7
4.2.1 LEAD Feature Engineering . . . . . . . . . . . . . . . . . . . . . 634.2.2 LEAD ML Accuracy . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.3 DozzNoC Simulation Methodology . . . . . . . . . . . . . . . . . . . . . 674.3.1 DozzNoC Model Variants . . . . . . . . . . . . . . . . . . . . . . 694.3.2 DozzNoC Mode Breakdown . . . . . . . . . . . . . . . . . . . . . 71
4.4 DozzNoC ML Simulation Methodology . . . . . . . . . . . . . . . . . . . 724.4.1 DozzNoC Feature Engineering . . . . . . . . . . . . . . . . . . . . 73
4.5 LEAD Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754.5.1 LEAD Energy and Throughput . . . . . . . . . . . . . . . . . . . . 75
4.6 DozzNoC Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 764.6.1 DozzNoC Throughput, Static Power, and Dynamic Energy . . . . . 77
5 Conclusions and Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83

8
List of Tables
Table Page
3.1 DozzNoC’s Reduced Feature Set [16] . . . . . . . . . . . . . . . . . . . . . . 564.1 LEAD Benchmarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.2 Multi2sim Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.3 Dynamic Energy Per Hop (Modes 1-5) [17]©2018 ACM . . . . . . . . . . . . 604.4 Full LEAD Feature Set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.5 Full LEAD Feature Set (Cont.) . . . . . . . . . . . . . . . . . . . . . . . . . . 664.6 LEAD-τ Mode Selection Accuracy [17]©2018 ACM . . . . . . . . . . . . . . 674.7 DozzNoC Benchmarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.8 Static Power and Dynamic Energy Per Hop for Active State Operational Modes
[16] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70

9
List of Figures
Figure Page
1.1 Rapid growth of processor performance from increased clock speed to multi-core processors [46]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.2 Various network topologies ranging from the bus to a hypercube. . . . . . . . . 171.3 Depiction of static power becoming the majority of power consumption in the
NoC as technology size decreases. [9]. . . . . . . . . . . . . . . . . . . . . . . 181.4 Depiction of DVFS being applied at various granularities ranging from per
network to per element. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.5 An example of power-gating applied to the NoC where the router modification,
handshaking, and router pipeline are shown from Power-Punch [13]. . . . . . . 222.1 An example DVS link is shown in part (a), while a history-based DVS
algorithm is shown in part (b) [51]. . . . . . . . . . . . . . . . . . . . . . . . . 302.2 A Threshold and PI controller Finite State Machine (FSM) are shown in (a),
while a Greedy controller FSM is shown in (b) [30]. . . . . . . . . . . . . . . . 312.3 An example of simultaneous power, temperature, and performance manage-
ment using Q-learning [52]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.4 We apply LEAD to a CMesh with 16 routers and 64 cores. We use on chip
voltage regulators that can adjust the supply voltage between 0.8V and 1.2V,allowing us to apply DVFS to individual routers and their corresponding links[17]©2018 ACM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.5 The architecture as well as all additional units required for reactive or proactivemode selection are shown in (a). A simple voltage regulator setup that allowsthe selection of voltage levels in the range of 0.8V to 1.2V for every router andits’ associated outgoing links is shown in (b) [17]©2018 ACM. . . . . . . . . . 35
2.6 LEAD-τ uses a predicted input buffer utilization to select the optimal modeper epoch. LEAD-∆ uses a predicted change in input buffer utilization tomove in the direction of the optimal mode per epoch. LEAD-G incorporatesboth energy and throughput into the label and moves up/down adjacent modes(based on exploration direction) such that energy divided by throughput isminimized [17]©2018 ACM. . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.1 The difference in network component sizes between a Single-NoC and a Multi-NoC [19]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.2 The NoRD network bypass ring is shown in (a), the router bypass datapath isshown in (b), and the network interface datapath is shown in (c) [11]. . . . . . . 44
3.3 Four seperate DarkNoC layers are shown in (a), a single DarkNoC layer isshown in (b), and DarkNoC routers are shown in (c) [8]. . . . . . . . . . . . . 46
3.4 We apply DozzNoC to both a CMesh in (a), as well as a mesh in (b). The routermicroarchitecture for a mesh topology is shown in (c) [16]. . . . . . . . . . . . 47

10
3.5 Our version of Power Punch acts as a baseline and is shown in (a). LEAD-τhas only one state, the active state; however active routers may operate at oneof five different voltage levels (b). DozzNoC has three states and when a routeris active it may operate at one of five different voltage levels as shown in (c) [16]. 49
3.6 DozzNoC mode selection is shown in (a), while LEAD-τ mode selection isshown in (b) [16]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.7 A walkthrough example showing the difference in active state mode selectionacross two epochs for a dummy network [16]. . . . . . . . . . . . . . . . . . . 53
4.1 The throughput loss and dynamic energy savings across multiple LEAD-τvariants with an epoch size of 500 cycles [17]©2018 ACM. . . . . . . . . . . . 61
4.2 The time routers and links spent in each mode for all LEAD models across alltest traces [17]©2018 ACM. . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.3 The change in throughput, dynamic energy, and latency of DozzNoC at variousepoch sizes compared to a baseline DozzNoC model with an epoch size of 100cycles [16]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.4 A breakdown of predicted operational modes while in an active state for an 8× 8 mesh network for DozzNoC (a), LEAD-τ (b), and ML+TURBO (c) [16]. . 72
4.5 The results of DozzNoC single feature mode selection accuracy testing [16]. . . 734.6 The throughput, latency, dynamic energy savings, static power savings and
EDP of DozzNoC-5 versus DozzNoC-41 [16]. . . . . . . . . . . . . . . . . . . 744.7 The throughput (a) and Normalized Dynamic Energy (b) for all LEAD models
compared against baseline and greedy [17]©2018 ACM. . . . . . . . . . . . . 764.8 DozzNoC throughput for CMesh architecture at epoch size of 500 cycles (a).
DozzNoC normalized static and dynamic energy for CMesh at epoch size of500 cycles at high load (b). DozzNoC normalized static and dynamic energyfor CMesh at epoch size of 500 cycles at low load (c) [16]. . . . . . . . . . . . 78
4.9 DozzNoC throughput for mesh architecture at epoch size of 500 cycles (a).DozzNoC normalized static and dynamic energy for mesh at epoch size of 500cycles at high load (b). DozzNoC normalized static and dynamic energy formesh at epoch size of 500 cycles at low load (c) [16]. . . . . . . . . . . . . . . 79

11
List of Acronyms
BW - Buffer Write
CMesh - Concentrated Mesh
DOR - Dimension Order Routing
DozzNoC - Partially non-blocking Power-Gating with ML based DVFS
DVS - Dynamic Voltage Scaling
DVFS - Dynamic Voltage and Frequency Scaling
HPC - High-Performance Computing
HVt - High Threshold Voltage
IC - Integrated Circuit
LEAD - Learning-enabled Energy-Aware Dynamic voltage/frequency scaling
LVt - Low Threshold Voltage
ML - Machine Learning
MOSFET - Metal-Oxide-Semiconductor Field-Effect Transistor
NoC - Network-on-Chip
NVt - Normal Threshold Voltage
PG - Power-Gating
RC - Router Computation
RL - Reinforcement Learning
SA - Switch Allocation
SCC - Single-chip Cloud Computer
SSI - Small-Scale Integration
ST - Switch Traversal
T-Breakeven - Breakeven Time
T-Wakeup - Wake-up Delay
ULSI - Ultra-Large-Scale Integration

12
VA - Virtual Channel Allocation
VC - Virtual Channel
VFI - Voltage Frequency Island

13
1 Introduction
1.1 Integrated Circuits to Multicores
1The modern multi-core processor is a result of several technological advancements
that began with the development of the integrated circuit (IC). The IC, a collection of
microelectronic components or circuits fabricated onto the same microchip [36], were
enabled largely due to the discovery of the transistor. A transistor is a semiconductor
that acts like an electronic switch in most cases [23, 53, 60] but may also be used for
signal amplification. At the time of its discovery almost 70 years ago, the transistor
was large and made with vacuum tubes. The number of transistors contained within
an IC was negligible and in the small-scale integration (SSI) range. However, in the
next few decades, MOSFET (metal-oxide-semiconductor field-effect transistor) scaling
following Moore’s Law [42] had allowed the size of the transistor to be drastically
reduced. Moore’s Law [42, 50] is an observation from Gordon Moore which states that
the number of transistors per square inch on an IC will double every year, which eventually
changed into doubling every 18 months. This allowed the number of transistors packed
onto IC’s to grow into the ultra-large-scale integration (ULSI) range. In 1974, Robert
H. Dennard noted that as transistor size decreased, power density remained constant
[54]. Dennard Scaling meant that as technology size decreased there would be an ever-
increasing need for power management strategies. At larger technology sizes, dynamic
power constituted the majority of the power consumed by the chip. Therefore, early
power management strategies focused on the reduction of dynamic energy, the energy
that is expended due to transistor switching [7, 20, 41, 51]. However, power consumption
has not remained proportional to area as Dennard failed to consider leakage current. At
1 Some material including figures, sentences, and paragraphs are used verbatim from prior publications[17, 26] with permission©2018 ACM and©2018 IEEE as well as a submitted publication awaiting decision[16]

14
smaller technology sizes, leakage current has caused static power to become the dominant
source of power consumption in the IC [10, 25, 28, 43]. Modern integrated circuits known
as microprocessors contain several billions of transistors. Examples of microprocessors
include the many core TILE-Gx [47], the Kalray MPPA-256 [21], and the 336-core Ambric
Am2045 [33]. With these astronomical number of transistors, there is an urgent need for
power management strategies. Such strategies must enable energy proportional computing
through the reduction of both static power and dynamic energy.
The multi-core processor is an advanced microprocessor that contains multiple
independent processing units. Each individual processing unit can execute separate
instructions from multiple threads in parallel. Processing cores/threads can also work
together on the same application or task by dividing parallel instructions among the cores.
The popularity of multi-core processors is a direct result of the ever-increasing demand
for computational power to run high-performance computing (HPC) applications. Such
applications range from simulations in astrophysics or biology, to large artificial neural
networks in machine learning, to cloud computing [34, 38, 49].
There are essentially two different methods of increasing the computational power
of the processor, the first involves increasing clock speed. Instructions are executed on
the rising or falling edge of the clock, therefore if the clock frequency is increased the
throughput of the processor will rise. This can be accomplished by increasing the power
consumption of the processor as power and frequency are directly related. However, due
to Moore’s Law and Dennard Scaling, there is an upper limit to this growth. Eventually
the amount of power consumed to raise the clock frequency will outweigh any additional
performance benefits. Intel and other chip manufacturers saw this phenomenon around 3-4
GHz as processor designers ran into the power-wall [46]. As this upper limit was reached,
a new method emerged to increase computational throughput. Instead of increasing
the clock frequency, several lower frequency processing units were built onto the same
15
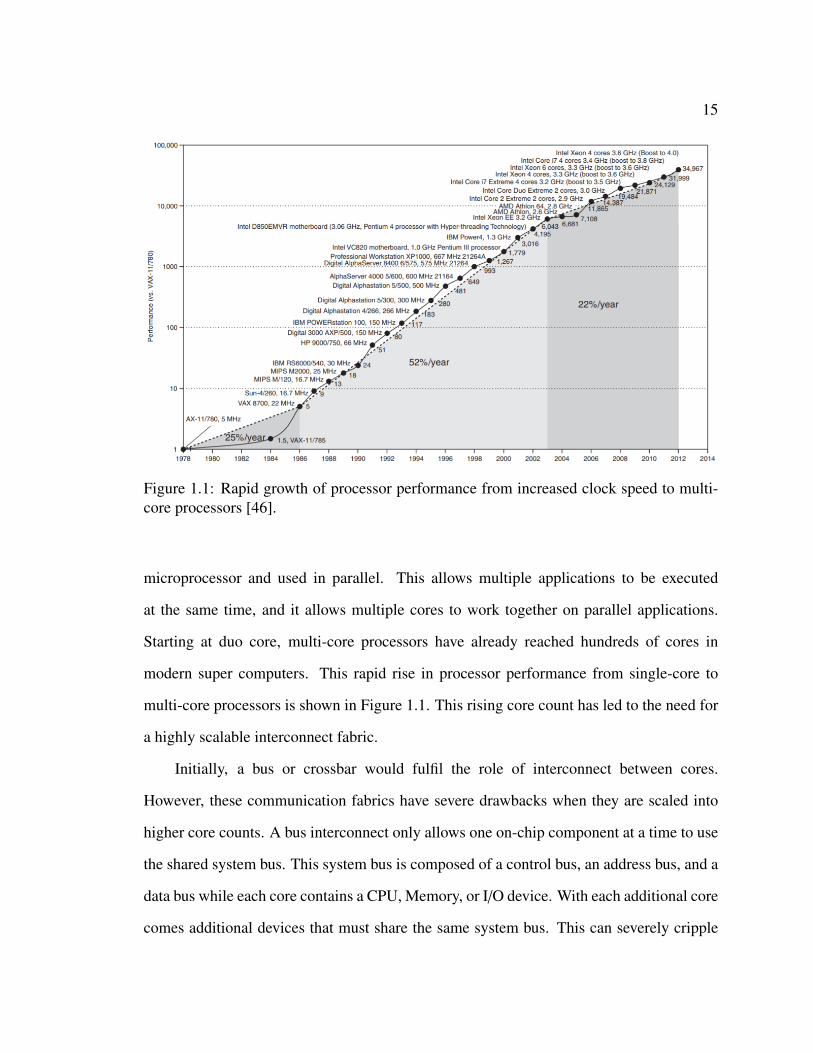
Figure 1.1: Rapid growth of processor performance from increased clock speed to multi-core processors [46].
microprocessor and used in parallel. This allows multiple applications to be executed
at the same time, and it allows multiple cores to work together on parallel applications.
Starting at duo core, multi-core processors have already reached hundreds of cores in
modern super computers. This rapid rise in processor performance from single-core to
multi-core processors is shown in Figure 1.1. This rising core count has led to the need for
a highly scalable interconnect fabric.
Initially, a bus or crossbar would fulfil the role of interconnect between cores.
However, these communication fabrics have severe drawbacks when they are scaled into
higher core counts. A bus interconnect only allows one on-chip component at a time to use
the shared system bus. This system bus is composed of a control bus, an address bus, and a
data bus while each core contains a CPU, Memory, or I/O device. With each additional core
comes additional devices that must share the same system bus. This can severely cripple

16
any potential performance gains. This means that while the bus is extremely resource
efficient, its performance is not scalable into higher core counts. The crossbar switch is
a non-blocking interconnect. A crossbar allows multiple components to use dedicated
channels without interrupting the connectivity of other components. However, this type
of interconnect uses vast amounts of wires and switch points at higher core counts. This
implies that the crossbar interconnect is not easily scalable in terms of on-chip area and
resource in-efficiency. Therefore, a newer communication fabric known as the Network-
on-Chip (NoC) has emerged that seeks to combine the resource efficiency of the bus with
the parallelizable nature of the crossbar.
1.2 Energy Proportional Computing and NoC
The NoC allows several cores to communicate and work in parallel through the usage
of multiple routers and links. These routers and links may be arranged in various physical
layouts or network topologies which belong to two types of networks. The first type of
network is called a direct network in which every node is both a terminal and a switch.
This differs from an indirect network in which nodes may be either switches or terminals
[1]. The simplest direct network is the mesh topology wherein routers and links form a
grid-like pattern. Each core is connected to a dedicated router which is used to send and
receive data among cores. A concentrated mesh (CMesh) topology is similar to a mesh in
that routers and links are arranged in a grid-like pattern. However, the CMesh differs from
a mesh because multiple cores share a common router. The idea is to balance resource
efficiency and network performance with varying concentration factors. Torus is another
popular network topology like a mesh, however it contains wrap-around links. Wrap-
around links enable fewer hops between distant cores which in turn decreases network
latency. While a torus network can increase performance over a mesh, it has a larger
footprint due to increased numbers of wires. In larger torus networks, the wrap-around

17
Figure 1.2: Various network topologies ranging from the bus to a hypercube.
link may be significantly larger than normal links, leading to uneven data arrival times.
Hypercubes are multi-dimensional and can range from n-dimensional meshes to k-ary n-
cubes. Hypercubes allow increased network bisection bandwidth with increased design
complexity. At higher dimensions, the design can be difficult to physically implement with
the number of communication ports and links per processor increasing logarithmically.
These various network topologies are shown in Figure 1.2.
The two most essential components of the NoC are the routers and links which allow
for the storing, switching, and routing of data between cores [18]. Data is sent in the form
of packets and a packet is often split into smaller units called flits. The flit is the smallest
unit of data sent through the network, and there are three different types of flits. The head
flit traverses the network first and secures the data path. Body flits and tail flits follow once
the path is secured, with the tail flit deallocating the path. Routers are composed of several
units such as input/output buffers and a crossbar that are used in different stages of the router

18
Figure 1.3: Depiction of static power becoming the majority of power consumption in theNoC as technology size decreases. [9].
pipeline. A simple 5 stage pipeline would start with a buffer write (BW) stage wherein flits
are written to an input virtual channel. The next stage is the route computation (RC) stage
where the route is computed. Route computation may be done statically or dynamically in
several different ways. If the routing decision was static (deterministic) then downstream
data paths are fixed, and the route is pre-determined. If the routing decision was dynamic
(adaptive) then the downstream data paths are not fixed, and the route is determined based
on the current state of the network. The next stage is the virtual channel allocation (VA)
stage where a downstream virtual channel is allocated, then during the switch allocation
(SA) stage packets compete for the crossbar. Finally, in the switch traversal (ST) stage the
packet is switched across the crossbar and the stages repeat in the downstream router.
Previous research has shown that the interconnect fabric consumes as much as 30%
or more of the total chip power [27]. We have also seen how the interconnect can account
for over 50% of the total chip dynamic power [39]. At large technology sizes, static power
consumption is a relatively small portion of the total power. However, as technology size
has decreased, NoC static power consumption has risen from 17.9% of total power at 65nm
to 74% at 22nm [3, 11, 14, 45, 56]. This growing percentage of static power consumption

19
in the NoC is shown in Figure 1.3. If these trends continue, we can expect static power
consumption to dominate total power consumption of multicore chips at 14nm and below.
Naturally there have been many attempts to reduce both static and dynamic power and
these energy proportional computing methods will be introduced in sections 1.3 and 1.4.
Energy proportional computing states that the power consumed by the electronic circuit or
microprocessor should be equivalent to the amount of work being done [19]. This means
that processors under higher work-load are expected to consume more static and dynamic
power than idle processors. On the other hand, idle processors or those under light loads
should consume little to no power. This concept can be applied to the NoC such that an
idle NoC consumes substantially less static and dynamic power than a fully active NoC.
1.3 Dynamic Voltage and Frequency Scaling for Multicores
Dynamic voltage and frequency scaling (DVFS) is a popular technique that allows
supply voltage and clock frequency of various chip components to be dynamically altered
at run-time. DVFS may be applied to the cores and the entire NoC, or it may be
applied individually to various NoC components such as routers and links. The supply
voltage and clock frequency are increased/decreased in proportion to network load with
the key goal of saving dynamic power while meeting strict performance requirements
[4, 7, 20, 41, 51, 59, 63, 64]. The relationship between transistor dynamic power and
supply voltage/clock frequency is given as [37]:
Pdynamic = CV2A f (1.1)
where C is load capacitance, V is supply voltage, f is frequency, and A is activity factor.
The supply voltage can be increased/decreased at run-time, and scaling techniques will
decrease the supply voltage when network demand is low and increase the supply voltage
when network demand is high. At low network loads, performance loss is tolerable to save
dynamic energy, while at high network loads any loss in performance can result in network

20
Figure 1.4: Depiction of DVFS being applied at various granularities ranging from pernetwork to per element.
saturation, dropped packets, and increased network contention. A smart voltage switching
algorithm selects optimal voltage levels at both low and high network demand. The optimal
voltage level will maximize dynamic energy savings while minimizing performance loss.
Recent work has shown that machine learning can be applied to the voltage switching
logic to improve voltage level selection through predictions of future network states and
parameters [16, 17]. This will be discussed in greater detail in section 1.5.
Dynamic voltage and frequency scaling may be applied to various NoC components
such as input ports, routers, links, buffers, crossbars, and other shared resources at various
granularities ranging from coarse to fine grain. A coarse-grained approach could apply
DVFS to all routers and links at the same time so that they all share the same voltage
level. This differs from a more fine-grained approach which might apply DVFS to
individual routers and links allowing each to operate at different voltage levels. An example
showing various voltage frequency island (VFI) granularities is shown in Figure 1.4. It is
often assumed that fine-grain DVFS schemes offer a greater potential for energy savings.
However, there is concern that the overhead cost of providing separate voltage domains for
each router/link could offset any potential savings [26]. Prior research has also used various

21
network parameters to quantify and measure network traffic including link utilization
[51], VFI utilization [30], network slack [24], buffer utilization [20], and cache-coherence
properties [31].
1.4 Power-gating for Multicores
Power-gating is another very popular and well-researched energy proportional
computing technique that seeks to save static power. This is accomplished by switching
off the supply voltage to various NoC components such as routers and links in proportion
to network load [8, 10–13, 19, 25, 28, 43, 48]. The key goal of power-gating is to maximize
the static power savings of powered off network components with minimal impact on
network performance. High static power is a direct result of transistor leakage power as
shown in the formula below [37]:
Pstatic = V(ke−qVth/(akaT )) (1.2)
where V is the supply voltage, Vth is the threshold voltage, T is the temperature, and the
remaining parameters fluctuate with design. Power-gating is challenging to implement
successfully due to large wake-up delays (T-Wakeup), minimum breakeven time (T-
Breakeven), and potential loss in network connectivity. T-Wakeup is the wake-up delay
of the powered off network component and represents the time needed to fully charge local
voltage levels up to Vdd [16]; other work has estimated this to be around 10 cycles [11–
13, 19] but it is largely hardware dependent. This differs from the breakeven time, which
refers to the minimum time that a component must be powered off to ensure a net savings
in static power when it is switched back on [16]. Other work has estimated T-Breakeven to
be around 12 cycles [19], however this too is largely hardware dependent.
A successful power-gating model will ensure that (i) only unused or lightly used
components are power-gated, (ii) power-gated components do not cause loss in network
connectivity and are woken before they cause blocking, and (iii) power-gated components

22
Figure 1.5: An example of power-gating applied to the NoC where the router modification,handshaking, and router pipeline are shown from Power-Punch [13].
meet or exceed T-Breakeven ensuring static power savings are maximized [16]. Power-
gating models that follow these three rules have the greatest potential to maximize static
power savings while minimizing performance loss. Many new power-gating techniques
also operate on cycle-by-cycle time granularity as this increases potential power savings
across small periods of idleness. The critical challenge of maintaining network connectivity
when individual routers or links are powered off can be tackled in many ways. Such
methods range from the addition of escape channels to packet re-routing to early wake-
up. The underlying idea behind all methods is to minimize network performance impact by
hiding wake-up latency and avoiding router blocking. The router architecture, handshaking
protocol, and router pipeline of a typical power-gated router is shown in Figure 1.5.
Previous research has broken the NoC into multiple sub-networks that can be powered
on/off in proportion to network load [19]. Each sub-network always maintains full
connectivity alleviating deadlock and live-lock complications. Another work leverages
the amount of dark-silicon at smaller technology sizes to create multiple fully connected
NoCs made from high threshold voltage (HVt), normal voltage threshold (NVt), and low
voltage threshold (LVt) cells. This allows the most energy efficient NoC to be selected

23
that meets network demands [8]. Other research has focused on maximizing router off
time by updating routing tables and re-routing packets around powered-off components
[45]. Another work minimized the effects of router blocking by sending wake-up signals
to power-up downstream routers before packets arrive and wait to hop across them [13].
The key goal behind all this prior research is to ensure maximal static power savings with
minimal performance loss while maintaining network connectivity [16].
1.5 Benefits of Machine Learning
Older DVFS and power-gating techniques were reactive, i.e. they reacted to changes
in traffic demand after network loads had already shifted. Such approaches often rely on
old/outdated values of network parameters, resulting in performance loss and suboptimal
dynamic energy savings. Recent work has begun to incorporate machine learning
algorithms and other advanced techniques that allow accurate predictions of future network
parameters. Accurately predicting the future needs of the network enables proactive voltage
switching and more optimal voltage level selection. Ultimately proactive voltage switching
improves energy/performance trade-offs [15, 22, 29, 35, 52, 62].
Machine learning is a rapidly growing field in computer science and refers to a
collection of pattern recognition techniques that allow algorithms to recognize patterns and
make data-driven predictions or decisions. Three large fields in machine learning include
supervised learning, unsupervised learning, and reinforcement learning [6]. Supervised
learning is the most well-known technique and involves supplying a label during training.
During unsupervised learning, labels are not supplied during training. Reinforcement
Learning (RL) is a more complex type of ML. RL is a powerful state-action-reward
technique that allows an agent to learn the set of actions that garner the highest cumulative
reward.

24
RL is also the most common type of machine learning applied to DVFS, however,
this method is often trained online as data becomes available. Online training can result in
high runtime overhead and suboptimal initial agent performance. This thesis will instead
explore offline-trained supervised learning, eliminating training/validation overhead while
maintaining low run-time computational overhead. We will discuss how proactive versions
of each DVFS model were developed, how features and labels were extracted, and how
labels were supplied during training and validation to train models. We will also discuss
how the trained weights are subsequently used at run-time to govern DVFS voltage level
selection.
1.6 Major Contributions
In this thesis, we propose several different ML enhanced energy proportional
computing techniques. These techniques enable more optimal energy/performance trade-
offs for the NoC. The key goal behind our DVFS and DVFS+PG models is to save power
and energy without impacting the performance of the NoC. Learning-enabled Energy-
Aware Dynamic voltage/frequency scaling (LEAD), is a collection of offline-trained linear
regression based DVFS techniques. LEAD models are proactive, using only local router
information when calculating labels. LEAD scales the router and the router’s outgoing
links simultaneously to avoid inefficient use of network bandwidth or excess energy
consumption. LEAD-τ predicts future buffer utilization, LEAD-∆ predicts change in buffer
utilization between the current and future epoch, and LEAD-G predicts change in energythroughput2 .
Based on these predicted values, voltage levels are selected on a per router basis without
the need for global coordination [17].
In this thesis we also propose DozzNoC, an adaptable power-management technique
that effectively combines power-gating (to target low-network activity) and DVFS (to
target variability in network load) with supervised ML. Each router in DozzNoC has three

25
operational states; while in an active state, DozzNoC routers operate at one of five different
voltage levels using DVFS. While in the inactive state the router is power-gated. While
in the wakeup state the routers local voltage level is charged up to Vdd. To minimize the
performance penalty due to powered off network components, DozzNoC implements a
partially nonblocking power-gated design [16].
For a 4 × 4 CMesh architecture, our simulation results show that LEAD-τ achieves an
average of 17% savings in total dynamic energy for a minimal loss of 2-4% in throughput
for real traffic patterns [17]. When applied to an 8 × 8 mesh network, DozzNoC achieves
an average reduction of 25% in dynamic energy and 53% in static power for a loss of 7%
in throughput [16]. The major contributions of this work are as follow:
• Machine Learning+DVFS: LEAD and DozzNoC both apply linear regression
based ML techniques that enable proactive DVFS using a minimal amount of router
features so as to maximize energy savings with minimal impact on performance.
Offline training and local router features ensure minimal overhead and design
scalability [16].
• Power-Gating+DVFS: DozzNoC simultaneously combines partially non-blocking
power-gating with DVFS techniques. This allows power-gating of NoC routers
during periods of low network activity (to save static power) and DVFS during
periods of medium to high network activity (to reduce dynamic energy consumption)
[16].
1.7 Thesis Organization
The organization of my thesis is as follows: In Chapter 2, we will present an in-
depth analysis on current state-of-the-art DVFS techniques. Then we will discuss our
proposed LEAD models. We will introduce our router architecture including additional
LEAD specific components as well as the network topology. Then we will delve into the

26
specific V/F pairs used in this work and introduce our various LEAD models and show
how they are used for proactive mode selection. In the latter part of Chapter 2 we will
also discuss the machine learning aspect of the design and detail how training, validation,
and testing are performed for our LEAD models. In Chapter 3 we will present an in-depth
analysis on current state-of-the-art power-gating techniques. We will discuss DozzNoC,
our proposed power-gated DVFS model that builds on LEAD via the addition of partially
non-blocking power-gating. We will introduce the different operational states and discuss
the various models used to compare against DozzNoC. Then, we will delve into the ML
aspect of DozzNoC and discuss the reduced feature set as well as label generation and
overhead. In Chapter 4, we will discuss the simulation methodology for both LEAD and
DozzNoC. This will include all LEAD and DozzNoC model variants and will include and
in-depth explanation of the feature engineering and ML evaluation. The final two sections
of Chapter 4 will present the throughput, latency, dynamic energy, and static power results
for LEAD and DozzNoC respectively. Finally, Chapter 5 will conclude our thesis and
remind our readers of our contributions as well as plans for possible future work.

27
2 LEAD: Offline Trained Proactive DVFS for NoC
The main focus of this chapter is the introduction of LEAD, machine learning
enhanced dynamic voltage and frequency scaling of NoC routers and links. While
previously introduced in section 1.3, a more detailed discussion of select prior DVFS
techniques will be presented in the first section of this chapter. The next section will focus
on our proposed LEAD architecture and network topology, followed by a section detailing
the specific LEAD models and their implementation. The final section of this chapter will
focus on the application of ML to enable proactive mode selection, including the feature
set, label, and ML overhead.
2.1 Related Works
There is a large volume of work focusing on the application of DVFS to both the
core and uncore with a recent rise in the application of ML techniques. Dynamic voltage
scaling (DVS) scales only the supply voltage. While scaling only voltage can lead to
energy savings, device delay will rise. Naturally most DVS schemes correct this problem
by also increasing/decreasing the frequency proportionally to the supply voltage (DVFS).
Most prior work applies DVFS on a per-router or per-core level [4, 7, 41, 59] as a finer
granularity is expected to yield higher energy savings. However, it is uncertain whether per-
core DVFS and finer VFI granularities can provide the necessary power savings to mitigate
increased voltage regulator overhead and complexity. Much of this additional overhead is
due to voltage drop of inefficient on-chip voltage regulators [26]. However, newer voltage
regulator frameworks have alleviated this concern using a hierarchy of on-chip and off-
chip voltage regulators with many modern approaches achieving 90% energy savings [2] or
more [26]. One such work seeks to better explore this issue [30] and proposes an in-depth
analysis of energy-efficiency gains as a direct result of using per-core DVFS. This work
used real workloads with many different DVFS control algorithms. These algorithms all

28
have different logic for voltage switching, which can have huge impacts on energy savings
and performance loss. The first model, Threshold, measures VFI utilization over a window
of several cycles and uses this to predict VFI utilization over the next window. Based on
this prediction, voltage levels are increased, decreased, or held constant. The PI based
algorithm uses a proportional-integral controller. These per-VFI PI controllers compute
utilization and voltage levels the same was as Threshold. Both the Threshold and PI models
are shown in Figure 2.2 (a). The final comparative model is called Greedy, an adaptation
of a Greedy-search method proposed in [40]. The Greedy model uses explorative logic to
either increase or decrease VFI voltage levels to move in the direction of the most energy-
efficient mode every time window. This model is the basis for LEAD-G and the full logic is
shown in Figure 2.2 (b). The results of this work showed that the Greedy control algorithm
could achieve 38.2% reduction in energythroughput2 , resulting in high energy reduction.
The voltage regulator hierarchy is also important to the design of the DVFS algorithm
as it directly impacts the number of voltage levels and VFI’s allowable in the network.
Off-chip voltage regulators have high energy-efficiency and do not consume precious chip
space, but they also have very large switching latencies, often in the micro second range.
This is not suitable for voltage scaling of cores or other uncore components as high
switching latencies could result in the loss of thousands of cycles of processor performance.
However, on-chip voltage regulators have much smaller switching latencies, often in the
nano second range. On-chip voltage regulators may also be combined with off-chip voltage
regulators in a highly energy-efficient voltage regulator hierarchy. One work, [24] presents
an in-depth analysis of fine-grain DVFS using on-chip voltage regulators and presents
the trade-offs associated with both on-chip and off-chip voltage regulation. They find
that scaling of voltage and frequency of individual off-chip memory accesses in memory
intensive workloads can result in substantial energy savings. They propose both a proactive
voltage scaling technique that tries to scale up voltage before a memory access returns

29
from memory, and a reactive scheme that upscales voltage after a memory access returns
from memory. For memory intensive workloads they find that proactive scaling results
in an average of 12% energy savings for .08% performance loss while the reactive model
results in an average of 23% energy reduction for 6% performance loss. We have also
seen how scaling the links and router together can result in higher energy savings [55]. In
this work, DVS with proportional frequency scaling is applied to both the links and CPU
using sparse matrix computations. The main goal of the design is to achieve maximal
energy savings with minimal impact on execution time across various applications. These
matrixes are represented as tree-based parallel sparse computations. This approach applies
load-balancing techniques and then exploits load imbalances across parallel processors to
determine the optimal voltage level for each processor and its set of communication links,
but only applies such techniques to processors that are not in the critical path. The authors
develop three separate models, one that scales only the CPU voltage levels (CPU-VS), one
that scales only the link voltage levels (LINK-VS), and one that scales both the CPU and
link voltage levels (CPU-LINK-VS). The authors found that they could save on average
13-17% more energy by integrating CPU and link voltage scaling.
Another work [51] uses DVS to scale the voltage and frequency of routers and links
using a history-based approach. DVS links require adaptive power-supply regulators that
can increase/decrease both frequency and voltage of the link, but most modern designs
instead use multi-voltage supplies. A typical DVS link is shown in Figure 2.1 (a). The
proposed history based DVFS approach keeps track of link utilization over a window of
H cycles and combines both a short-term and long-term utilization to create a weighted
average. Using this weighted average, the future link utilization is predicted and the DVS
algorithm increases/decreases voltage levels accordingly with the main goal of achieving
power savings without decreasing performance in the network. If the network is predicted
to have high link utilization, then the link speed is increased (voltage increase), if the
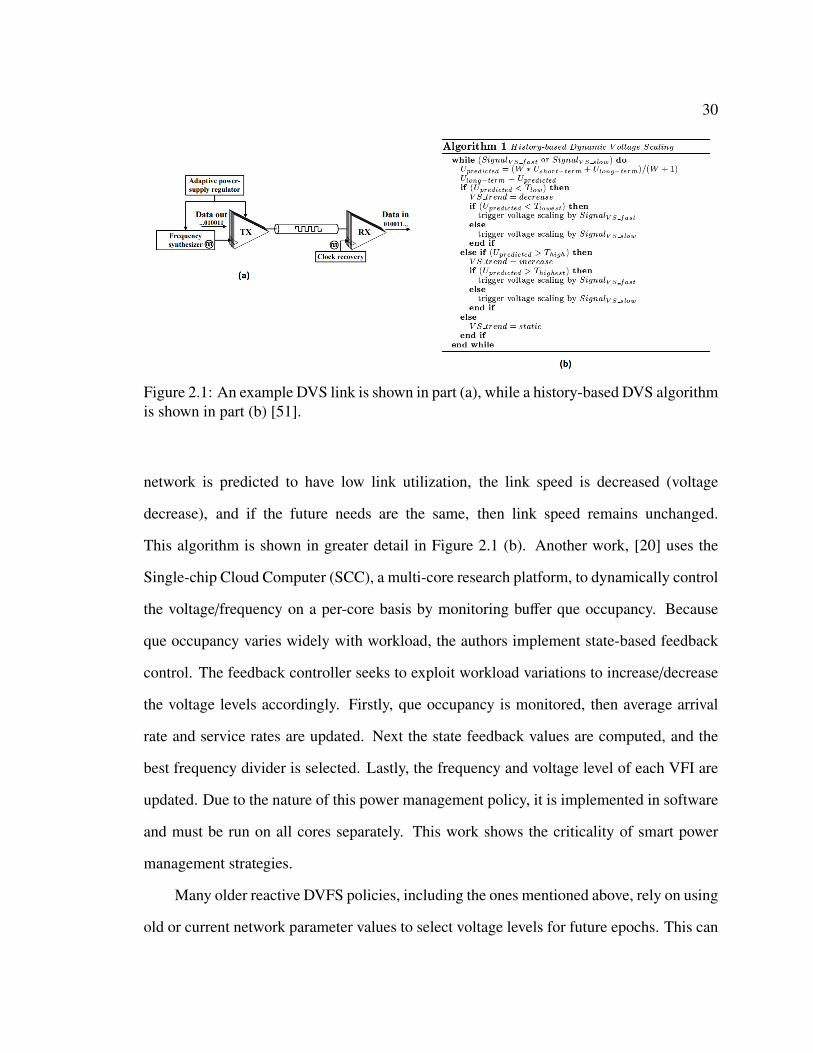
30
Figure 2.1: An example DVS link is shown in part (a), while a history-based DVS algorithmis shown in part (b) [51].
network is predicted to have low link utilization, the link speed is decreased (voltage
decrease), and if the future needs are the same, then link speed remains unchanged.
This algorithm is shown in greater detail in Figure 2.1 (b). Another work, [20] uses the
Single-chip Cloud Computer (SCC), a multi-core research platform, to dynamically control
the voltage/frequency on a per-core basis by monitoring buffer que occupancy. Because
que occupancy varies widely with workload, the authors implement state-based feedback
control. The feedback controller seeks to exploit workload variations to increase/decrease
the voltage levels accordingly. Firstly, que occupancy is monitored, then average arrival
rate and service rates are updated. Next the state feedback values are computed, and the
best frequency divider is selected. Lastly, the frequency and voltage level of each VFI are
updated. Due to the nature of this power management policy, it is implemented in software
and must be run on all cores separately. This work shows the criticality of smart power
management strategies.
Many older reactive DVFS policies, including the ones mentioned above, rely on using
old or current network parameter values to select voltage levels for future epochs. This can

31
Figure 2.2: A Threshold and PI controller Finite State Machine (FSM) are shown in (a),while a Greedy controller FSM is shown in (b) [30].
become problematic if future needs are not accurately represented, especially since voltage
levels are switched on the scale of 100s-1000s of cycles. If the optimal voltage level isn’t
selected, then the network will not have the opportunity to choose a new voltage level for
many cycles, meaning hundreds or thousands of cycles of excess power consumption or
lost performance. To ensure that the optimal voltage level is chosen, the voltage switching
logic must be supplied with an accurate estimate of future network needs to help combat
under/over estimation. If future network needs are over estimated, then the switching
logic will choose a voltage level that exceeds future needs, leading too little to no power
savings. If future network needs are under estimated, then the switching logic will choose a
voltage level that cannot meet future needs and performance will suffer. One work [31] uses
cache coherent protocols to determine future network states. This work differs from prior
reactionary techniques that focused on measuring current network parameters to estimate
future network needs because of the high prediction accuracy (87%) of cache-coherence
properties. In a cache-coherent NoC, traffic messages are defined by the coherence protocol
and must adhere to a strict set of communication rules. These protocols (ACKs, NACKs,
data requests, etc.) are sent from source to destination using end-to-end communication.

32
Figure 2.3: An example of simultaneous power, temperature, and performance manage-ment using Q-learning [52].
Because traffic messages in a cache-coherent NoC are regular and predictable, they are
used to better predict future network needs than typical parameters such as link/router
utilization, round-trip time, latency, or network slack. Due to this inherently exploitable
nature, the authors can rely on accurate predictions of future network demand which leads
to more optimal voltage level selection.
Newer methods have begun to incorporate machine learning techniques as they can
lead to highly accurate predictions of future network needs. RL algorithms can even
learn optimal control polices as data become available. One such work [22] uses online
learning based DVFS in a single-tasking and multi-tasking environment and compares
the potential energy savings of each. Another work [52] uses Q-learning based DVFS
to manage temperature, performance, and energy in a processor as shown in Figure 2.3.

33
2.2 LEAD Architecture
LEAD is built on a CMesh topology using a hierarchy of off-chip and on-chip voltage
regulators that allow the selection of multiple voltage modes as shown in Figure 2.4. Our
network consists of 16 routers, 64 cores, and 48 unidirectional links corresponding to a
more area/energy efficient network. We propose per router DVFS such that the router
as well as the outgoing links are scaled simultaneously to operate at the same mode of
operation. Each router consists of 8 input ports, 8 output ports, and 4 virtual channels
per port while each processor has an individual L1 cache and each router has an L2 cache
shared among the four cores connected to each router. DVFS is not applied to the cores,
LLC or other uncore components. When a packet is first generated, the packet is stored in
the input buffer. The output port is computed using XY dimension-order routing (DOR)
in the route computation (RC) stage of the router pipeline. After a virtual channel is
allocated, the head packet competes for the output channel in the switch allocation (SA)
stage. After successfully competing and being awarded the channel, the packet is sent
across the crossbar to the destination port in the switch traversal (ST) stage. The proposed
router microarchitecture is shown in Figure 2.5(a) [17].
2.2.1 Operating V/F Modes
Each LEAD model uses five modes of operation with voltage and frequency levels
similar to those proposed in previous work [31]. The supply voltage changes in 100
mV steps with proportional changes in clock frequency which allows decreased voltage
regulator framework complexity. The V/F pairs our models use include {0.8 V/1 GHz,
0.9 V/1.5 GHz, 1.0 V/1.8 GHz, 1.1 V/2 GHz and 1.2 V/2.25 GHz} which correspond to
modes 1-5 as shown in Figure 2.5(b). We carefully chose five modes to balance overhead
and energy savings because having a large number of V/F pairs leads to increased voltage
regulator overhead without the guarantee of increased energy savings, whereas too few

34
Figure 2.4: We apply LEAD to a CMesh with 16 routers and 64 cores. We use on chipvoltage regulators that can adjust the supply voltage between 0.8V and 1.2V, allowing usto apply DVFS to individual routers and their corresponding links [17]©2018 ACM.
modes will not allow the DVFS algorithm to exploit traffic load variation and save energy
at run-time [17]. Power-gating introduces several unique challenges (deadlocks, breakeven
time, loss in throughput) and while this chapter will not focus on power-gating, we have
implemented a power-gated version of LEAD which will be further discussed in Chapter
3.
2.3 DVFS Models and Implementation
In this portion of our work we focus on measuring the impact of different mode
selection models on dynamic energy savings and performance. In this chapter we propose
three machine learning based models; LEAD-τ, LEAD-∆, and LEAD-G. LEAD-G is based

35
Figure 2.5: The architecture as well as all additional units required for reactive or proactivemode selection are shown in (a). A simple voltage regulator setup that allows the selectionof voltage levels in the range of 0.8V to 1.2V for every router and its’ associated outgoinglinks is shown in (b) [17]©2018 ACM.
on an already proposed reactive model called Greedy. This Greedy model is presented in
[30] as an adaptation of a Greedy search method presented in earlier work [40]. Greedy
and LEAD-G are used strictly for comparative purposes. All three of these models do
not apply power-gating, but we will introduce an additional LEAD model that does apply
power-gating in chapter 3 [17].
Baseline: The baseline model always operates all routers in mode 5 (highest V/F
pair) and does not apply DVFS to the network. This model has the highest throughput and
lowest latency but has no dynamic energy savings [17]. We use this as our baseline because
it has the highest performance and we want to ensure energy savings with as little loss in
performance as possible.
LEAD-τ: This model starts each router in the lowest mode of operation, mode 1.
It then chooses the routers’ mode for the next epoch based on the predicted input buffer

36
utilization of the router for the next epoch. If the router’s buffers are predicted to be less
than 5% full, then the lowest mode is chosen. If the buffers are predicted to be between 5%
and 10% full, then mode 2 is chosen. If the buffers are predicted to be between 10% and
20% full, then the third mode is chosen. If the buffers are predicted to be between 20% and
25% full, then the router will operate in the fourth mode. Finally, if the buffers are predicted
to be greater than 25% full for the next epoch, then the router will operate in the highest
mode of operation, mode 5. For larger epoch sizes the thresholds are reduced for more
aggressive scaling to counter a larger theoretical maximum. This theoretical maximum is
calculated as a worst-case time variant sum over the duration of an epoch. For simplicity
sake we will show the thresholds as if they are all for epoch size of 100 cycles. The LEAD-
τ model assumes a voltage regulator scheme that allows the transition from any mode to
any mode in one cycle without the need to transition into adjacent modes [17]. While this
is not practical, real-valued switching delay is introduced into the models we present in
Chapter 3. This model emphasizes the importance of being able to select the optimal mode
at any given epoch versus other designs which are constrained to only being allowed to
transition into adjacent modes [17].
LEAD-∆: This model starts each router in the highest mode of operation, mode 5.
Every epoch routers’ transition one mode up/down based on the predicted change in input
buffer utilization between the current and future epochs. Mode transitions only occur if this
predicted change in buffer utilization falls within certain carefully selected criteria. These
criteria must ensure that small variations in network traffic over a short time span do not
govern mode selection over an entire epoch; however, it is critical that the router still be
able to adequately adapt to long-term changes in network traffic patterns. The buffers must
be predicted to increase by at least 6% of their maximum utilization over the next epoch to
warrant a mode transition into a higher mode, and they must be predicted to decrease by at
least 3% of their maximum utilization to warrant a mode transition into a lower mode for
37
the next epoch. We ensure dynamic energy savings by requiring the predicted change in
buffer utilization required to move down a voltage level be less than the change required to
move up. The LEAD-∆ model is used to compare the trade-offs associated with being able
to transition only into adjacent modes at every epoch and still assumes that each transition
takes one cycle. This model is more suited to gradual traffic changes where adjacent mode
transitions are optimal [17].
LEAD-G: This model (based on prior work [30], [40]) explores to find the mode that
minimizes a predicted future energythroughput2 . LEAD-G adds explorative logic and introduces
both dynamic energy and throughput into the label in the hopes of better balancing the
trade-off between the two. LEAD-G starts each router in the highest mode of operation
and in a downwards explorative direction. If the predicted change in energythroughput2 between the
current and future epoch is less than or equal to 0, then the router will move one mode
further in the current exploration direction (downward/upward). If the predicted change in
energythroughput2 is greater than 0, then the router is put into a hold phase. The hold phase lasts 2
epochs, a similar duration to prior work [30], and during the hold phase the router cannot
increase/decrease its’ voltage level. After the hold phase expires, the exploration direction
is flipped and the model begins to explore in the opposite direction until the predicted
energythroughput2 is greater than 0 again. This model seeks to minimize the predicted energy
throughput2 and
assumes that routers may only transition into adjacent modes. The logic behind all three
LEAD models is further explained in Figure 2.6 [17].
2.3.1 DVFS Implementation
As shown in Figure 2.5(a), LEAD uses four components per router in order to perform
reactive (non-ML) or proactive (ML) model selection. We have not mentioned how reactive
mode selection is done, but it is a simple process wherein each LEAD model uses current
values to govern mode selection instead of labels (predicted future values). This shall be

38
Figure 2.6: LEAD-τ uses a predicted input buffer utilization to select the optimal mode perepoch. LEAD-∆ uses a predicted change in input buffer utilization to move in the directionof the optimal mode per epoch. LEAD-G incorporates both energy and throughput into thelabel and moves up/down adjacent modes (based on exploration direction) such that energydivided by throughput is minimized [17]©2018 ACM.
further discussed in Chapter 4. The first additional router component is called Feature
Extract. It gathers local router/link features and supplies them to the Non-ML Model
unit. For reactive mode selection, the Non-ML Model unit takes key values supplied from
Feature Extract and selects the appropriate mode for the router and the router’s outgoing
links. For proactive mode selection, we require the addition of two new units. The
first component, Label, takes the features supplied by Feature Extract and applies Ridge
Regression to generate a corresponding label. This label is then supplied to the ML Model
unit to select the appropriate mode for the router and the outgoing links [17].
39
2.4 Machine Learning for DVFS
We use machine learning to train different Ridge Regression algorithms corresponding
to LEAD-τ, LEAD-∆, and LEAD-G. There are two arrays of values needed when using
regression, the first being the feature set and the second being the weight vector. Each
feature has a corresponding weight, a scalar factor representing the impact on predicting
the output. The Ridge Regression equation is shown below:
E(w) =12
N∑n=1
{y(xn,w) − tn}2 +
λ
2
M∑j=1
w2j (2.1)
Where,
xn = (xn1, xn2, ..., xnK) (2.2)
w = (w1,w2, ...,wi)T (2.3)
y(xn,w) =
K∑k=1
xn,k · wk (2.4)
In the Ridge Regression equation listed above, we minimize the sum of squared errors
between our predicted label y(xn,w) and the actual label tn. The feature vector xn
(containing K features) as well as the supplied labels tn are used to train the system offline
such that a corresponding weight vector w (also of size i) is created. During tuning, different
values of λ are tried for the equation λ2
∑Mj=1 w2
j until the best fitting solution for the training
data is found. This validation phase is important as it helps reduce model complexity
and combat over-fitting. We used a total of 14 different trace files; 6 for training, 3 for
validation, and 5 for testing [17].
Feature Set: The feature set is directly related to prediction accuracy and overhead
cost. The feature set must be kept as small as possible because every new feature
increases computational overhead during label generation. Features must also be carefully
chosen such that accurate predictions of future network needs can be gleaned from them.
Our feature set for this work is composed of 39 network parameters (buffer utilization,

40
incoming/outgoing link utilization per direction, request/response packets, etc.) as well as
a label local to each of the 16 routers [17]. The full LEAD feature set is shown in Chapter
4, while a reduced feature set obtained after extensive feature engineering and testing will
be presented in Chapter 3.
Label: A reactive version of each LEAD model is used to govern mode selection for
all training and validation trace files so that features and labels can be extracted. This data is
then used to train/validate each LEAD model. While the same features are used to train all
LEAD models, the label supplied for training is unique to each LEAD model. Therefore,
after training/validation each LEAD model will be composed of a uniquely trained set of
weights. The label for LEAD-τ is the future input buffer utilization of the router for the
next epoch. The label for LEAD-∆ is the difference between the routers’ current and future
buffer utilization. The label for LEAD-G is the difference between the routers’ current and
future energythroughput2 . These labels are supplied along with the corresponding features to train
and validate all ML algorithms offline [17].
ML Overhead: A trained linear regression algorithm uses a series of additions and
multiplies to calculate a label; thus, the overhead cost can be simplified to the timing,
power, and area cost required to execute a set number of additions and multiplies. The
energy cost of a single 16 bit floating point add is estimated to be 0.4 pJ and the area cost is
1360 um2 [32]. The energy cost of a multiply is estimated to be 1.1 pJ and the area cost is
1640 um2 [32]. The total energy overhead cost is 58.1 pJ (considering two-stage multiplies
followed by an addition). The total area overhead cost is 0.12 mm2, and the total timing
cost is 3-4 cycles [17]. We use larger epoch sizes of 500 cycles and 1000 cycles to ensure
that such overhead costs are kept relatively small as labels only need to be calculated once
per epoch.

41
3 DozzNoC: Combination ofML based DVFS and
Power-Gating for NoC
This chapter focuses on the introduction of DozzNoC, a power-gated LEAD model.
DozzNoC enables energy proportional computing by applying both power-gating and
DVFS to network routers and links. DozzNoC applies power-gating at times of network
idleness and DVFS at times of low-high network traffic; this will be discussed in greater
detail in section 2.2. While previously introduced in section 1.4, a more detailed discussion
of select prior power-gated techniques will be presented in the first section of this
chapter. The second section will focus on our proposed DozzNoC architecture and network
topology, followed by an in-depth explanation of the various DozzNoC states, as well as
how states and operational modes are selected. The last section of this chapter will detail
how we have applied machine learning to DozzNoC, heavily drawing from our LEAD
models. We will also detail the reduced feature set, label, and reduced ML overhead.
3.1 Related Works
Much prior PG research has focused on the application of runtime power-gating to
both the core and various uncore components as well as the NoC. Power-gating is used to
completely power off unused or lightly used cores or other network components. Successful
power-gating techniques can drastically reduce leakage power, making them critical for
energy proportional computing. Most designs that apply power-gating to the NoC assume
a single network. If a downstream router or link is power-gated, network connectivity will
be lost. Typically, this scenario results in performance loss and introduces the risk of dead-
locks and live-locks. Therefore, preventative measures such as data re-routing or early
wake-up must be taken.

42
Other research has focused on the benefits and trade-offs associated with applying
power-gating at various time granularities. Coarse-grain power-gating methods that use
large re-configuration windows of 10K cycles or more have several major drawbacks. The
first drawback comes from cutting network connectivity for large periods of time, which
can result in massive performance loss if counter measures such as bypass paths or packet
re-routing are not implemented. The second drawback comes from the inability to exploit
small periods of router idleness of 10-100 cycles that are common across real traffic patterns
and applications. Both problems are solved with smaller re-configuration windows. Such
techniques employ header transistors with high threshold voltage that cut power when the
sleep signal is asserted. Fine-grain power-gating can achieve up to 10x reduction in leakage
power, therefore I will focus on newer research that use smaller re-configuration windows.
One such work seeks to avoid loss of connectivity by breaking the network up into
several smaller but fully connected networks in a Multi-NoC architecture [19]. This
Multi-NoC design is built on a 256-core CMesh with 8 memory controllers. This design
partitions wires, buffers, and other network components into several subnetworks built
from proportionally smaller components. This Multi-NoC concept is visualized in Figure
3.1. Figure 3.1 also highlights the differences between a Single-NoC and a Multi-NoC
composed of four subnetworks. If link width in a Single-NoC was 512 bits, it would
equal 128 bits in a Multi-NoC. This same concept is also applied to the router and other
network components. If all four subnetworks are active, then total bandwidth in the Multi-
NoC would remain unchanged from the original larger Single-NoC. This allows Catnap
to power-gate entire subnetworks proportional to network demand without loss in network
connectivity. Catnap uses a unique subnet-selection policy to determine what subnetwork
new packets are injected into, and a unique power-gating policy to determine when a
subnetwork should be switched on/off. Catnap routers can be in three different power
states: active, sleep, and wake-up. In the active state, routes are on and operational and can

43
Figure 3.1: The difference in network component sizes between a Single-NoC and a Multi-NoC [19].
be used to send/receive data. In the sleep state, routers are powered off and cannot be used.
In the wake-up state, local voltage levels are being charged up to Vdd and the router cannot
be used until the wake-up delay has been met, which the authors estimate to be 10 cycles.
There is also the energy cost to wake-up a powered off router, which was estimated to be
around 12 cycles worth of leakage energy. Catnap demonstrates that a power-gated Multi-
NoC design can consume about 44% less power than a bandwidth proportional Single-NoC
for a minimal 5% loss in performance.
Normally a router cannot be used to send/receive or forward data unless it is powered
on, however one work seeks to decouple the node’s ability to send/receive packets from
the power state of the router [11]. This is accomplished by providing separate wake-
up avoidance decoupling bypass paths, alleviating the need for packets to wait until the
router has been woken up. Packets have the option to choose between normal paths and
bypass paths if routers are power-gated. This approach allows the network interface to

44
Figure 3.2: The NoRD network bypass ring is shown in (a), the router bypass datapath isshown in (b), and the network interface datapath is shown in (c) [11].
forward packets directly into specific input ports of the router via bypass paths, forming
a fully connected unidirectional ring. The network level bypass channel, the additional
router level bypass path, and the network interface bypass path are shown in Figure 3.2(a-
c) respectively. NoRD operates while trying to fulfill two key objectives. The first objective
is to maximize net energy savings which is done by maximizing the amount of router off
time. NoRD must ensure that during fragmented idle periods packets have a bypass path
around powered off routers, ensuring they are not woken prematurely. The second objective
is to minimize performance loss, which is done by ensuring that wake-up delay is reduced
or hidden entirely. This can be accomplished by routing around powered off routers. If the
wake-up delay is not properly hidden, it can compound across multiple hops. This work
estimates typical wake-up delay to range from 10-20 cycles depending on clock frequency.
The authors also estimate the break-even time to be approximately 10 cycles, slightly less
than Catnap’s estimated 12 cycles. However, these delays and break-even times are largely
hardware dependent. NoRD shows that by decoupling the node and router, static energy
can be reduced by an additional 29.9% over traditional power-gating techniques that fail to
exploit periods of fragmented traffic.
45
Another work focuses on minimizing the performance loss incurred from wake-up
delays by sending wake-up signals to downstream routers [13]. The authors of this work
accomplish that goal using two key mechanisms. The first ensures that power control
signals utilize existing network slack to wake up initial routers in the packets path. The
second mechanism ensures that wake up signals stay sufficiently far ahead of the packet
to “punch through” blocked routers. Router blocking occurs when a packet arrives at a
router that is powered off and must wait for it to be turned on to switch across it. As
previously mentioned, this delay can become compounding if multiple routers are powered
off in the packets path resulting in massive performance loss. However, some of this delay
can be hidden simply by sending a wake-up signal to downstream routers once the route is
calculated. Power Punch demonstrates how early wake up detection enables power-gated
schemes to save up to 83% of router static energy with minimal impact on execution time.
DarkNoC [8] is difficult to classify as a DVFS scheme. Instead I will discuss this work
with power-gated schemes like Catnap which used several fully connected subnetworks.
This is because DarkNoC focuses on leveraging the amount of dark silicon on future chips
to create multiple fully connected NoCs. Each different NoC is built with different ratios
of various transistor types to leverage associated advantages. Low threshold voltage cells
(LVt) allow for faster switching at the cost of increased leakage power, therefore LVt cells
are used along critical paths where decreased latency is most valued. Normal voltage
threshold cells (NVt) allow for normal switching speeds and normal leakage power. High
voltage threshold cells (HVt) allow for low leakage power at the cost of slow switching
speeds, therefore HVt cells are used along non-critical paths to enable power savings.
Each layer is optimized for a specific voltage/frequency range, but all are architecturally
identical. Figure 3.3 shows the different DarkNoC layers and how routers are optimized. At
any given time, only the most energy efficient layer that adequately meets network demands
is powered on, the rest remain off. DarkNoC improves EDP by up to 56% compared to state

46
Figure 3.3: Four seperate DarkNoC layers are shown in (a), a single DarkNoC layer isshown in (b), and DarkNoC routers are shown in (c) [8].
of the art DVFS techniques, however due to the nature of this design it would require four
fully connected NoCs, potentially quadrupling the area overhead of the NoC.
3.2 DozzNoC Architecture
DozzNoC improves upon LEAD with enough versatility to be applicable to multiple
network topologies. We specifically apply DozzNoC to both a CMesh and a mesh network
topology unlike LEAD which was only applied to a CMesh [16]. When applying DozzNoC
to a CMesh we use a 4 × 4 NoC with a concentration factor of 4. When applying DozzNoC
to a mesh we use an 8 × 8 network with 64 cores. We can easily switch between other
network topologies and scale to increased numbers of routers because we use only local
router features to select voltage levels. Using only local router features is critical because
we eliminate the need for global co-ordination. This means adding a new router is as simple
as adding another voltage regulator and will incur minimal amounts of extra computational
overhead. The difference between applying DozzNoC to a mesh and CMesh network can
be seen in Figure 3.4(a,b). When applying DozzNoC to a CMesh network, we use larger
routers with 8 input ports, 8 output ports, and 4 virtual channels per port. When applying

47
Figure 3.4: We apply DozzNoC to both a CMesh in (a), as well as a mesh in (b). The routermicroarchitecture for a mesh topology is shown in (c) [16].
DozzNoC to a mesh network, we use smaller routers with 5 input ports, 5 output ports,
and 4 virtual channels per port. Processor count remains unchanged between topologies
and each core has a separate L1 cache, however, in a CMesh the L2 cache is shared among
cores. The router microarchitecture for DozzNoC remains unchanged from LEAD. Newly
generated packets sit in the input buffers of the routers. This location corresponds to the
packets’ injection source. Next the output port is computed using look-ahead routing in
the route computation stage. We then use XY dimension order routing to select the output
ports. We also use this information to ensure that downstream routers are not allowed to
be powered-off, and if they are off, to wake them up for a partially non-blocking power-
gated scheme. Naturally it would be more difficult to design a partially non-blocking
power-gated scheme if we did not use XY routing, but it is still achievable if downstream
routers can be determined and woken up in advance. Next, a virtual channel is allocated
to the packet and it competes for the output channel. Lastly, the packet is sent across the
crossbar and into the destination port after a successful switch traversal [16]. Our proposed
router microarchitecture does not really change from LEAD, therefore we will not replicate
previously presented material. However, we have removed one redundant component. The

48
new DozzNoC router microarchitecture is shown in Figure 3.4(c), while Figure 3.4(a)
shows DozzNoC being applied to a CMesh and Figure 3.4(b) shows DozzNoC being
applied to a mesh.
3.2.1 Operational States
Routers and links under DozzNoC are given three states of operation as shown in
Figure 3.5. These three states include an inactive state, an active state, and a wakeup state.
While these states appear to be similar to the states one would observe from a normal
power-gated scheme, the active state is unique [16]. All wake-up and switching latencies
are estimated using equivalent capacitance of a router and its’ outgoing links, however the
voltage regulator design as well as the specific values for voltage switching and wake-up
delay were created and evaluated by another team of researchers. While the switching and
wake-up delays are based on real values, they will not be discussed in this thesis, nor will
the voltage regulator design.
Inactive State: In this state, the power supply to an individual router and its’ outgoing
links is reduced to 0 V , thus the router and associated links are completely switched off.
While in an inactive state, the router and its’ outgoing links consume no power. However,
inactive components may not be used to send/receive packets and cannot be used to hop
packets across them. The router can transition from an active state to an inactive state in a
single cycle, but it must satisfy specific conditions before it is allowed to switch off. For
this work we ensure that the routers’ buffers have been empty for several consecutive cycles
and that it is not a downstream router before we allow the router to be switched off [16].
Wakeup State: A router that is in the process of transitioning from an inactive state to
an active state goes into a wakeup state. While in the wakeup state, the router consumes
the same amount of power as if it were on as it is supplied with one of 5 various Vdds.
However, components that are in this state may not be used to send/receive packets and it

49
Figure 3.5: Our version of Power Punch acts as a baseline and is shown in (a). LEAD-τ hasonly one state, the active state; however active routers may operate at one of five differentvoltage levels (b). DozzNoC has three states and when a router is active it may operate atone of five different voltage levels as shown in (c) [16].
may not be used to hop packets across them until the wake-up delay has been satisfied. This
is similar to prior work that also called this a ”wake-up” state [19]. A router can transition
from an inactive state to a wakeup state in a single cycle, but the router must wait in the
wakeup state for a set amount of cycles before it can be considered fully on and functional.
In a power delivery system this is called the wake-up time, and it is defined as the interval
from the instant of a voltage change until the local voltage level settles to meet the supply
voltage level [16].
Active State: A router that is in an active state can operate at one of five different
voltage levels. These different V/F pairs are referred to as various modes of operation in
which the supply voltage and clock frequency are proportionally increased/decreased. The
V/F pairs our DozzNoC model uses in this work are {0.8 V/1 GHz, 0.9 V/1.5 GHz, 1.0
V/1.8 GHz, 1.1 V/2 GHz and 1.2 V/2.25 GHz} which correspond to being in the active
state in modes 3-7. We start the numbering at mode 3 because we consider mode 1 to be
the inactive state and mode 2 to be the wakeup state. These V/F pairs are similar to those
used in other works [17, 31]. A key difference in this portion of our work is that we use real
valued switching delays obtained from a unique SIMO voltage regulator design supplied

50
Figure 3.6: DozzNoC mode selection is shown in (a), while LEAD-τ mode selection isshown in (b) [16].
by other researchers in [16]. We chose not to add/remove modes for several reasons. First,
we wanted to maintain a fair comparison against prior work that used a similar number of
V/F pairs. Secondly, we did not wish to add unnecessary design complexity [16].
3.3 Power-Gated DVFS Models
This research focuses on combining the static power savings of power-gating with the
dynamic energy savings of DVFS. To that end, we propose two machine learning models
built on a power-gated framework that use supervised learning to train the regression
algorithm. These two algorithms correspond to DozzNoC and ML+TURBO. We also
compare to our best performing LEAD model from prior work that also used machine
learning and DVFS, LEAD-τ. All three machine learning models use the same threshold
based DVFS mode selection logic. This logic looks at the predicted future buffer utilization
and compares it to a theoretical maximum to determine what mode should be selected for
the next epoch. The state transition logic for all three ML models is shown in Figure

51
3.6. DozzNoC and ML+TURBO use the state selection logic from part a, while LEAD-
τ will never transition out of the active state. When the router is in the active state, all
three comparative ML models use the logic in part b to select the optimal voltage mode.
ML+TURBO was added to see the impact on static power and dynamic energy when the
highest mode is chosen instead of a lower predicted mode [16].
Baseline: The baseline model starts with all routers operating in the active state at the
highest voltage level, mode 7. The Baseline does not allow the transition of a router into
any other state. Therefore, all routers are always active and always operate in mode 7. This
model will always have the highest throughput and the lowest latency as it incurs no router
wake-up delay and no voltage level switching delay. However, the baseline offers no static
power savings and no dynamic energy savings and is mostly used as an upper bound on
performance and power cost [16].
Power Punch (PG): The Power Punch model is based on prior work from which the
name was created [13]. This model is not an exact replica of Power Punch, rather it behaves
similarly in that look-ahead routing is used to wake-up downstream routers and minimize
the impact of router blocking. Therefore, it is used for comparative purposes against a
state-of-the-art power-gating technique. This model operates routers individually in one of
three states. Either a router is inactive, waking up, or active. If the router is inactive, then
it consumes no power but cannot be used to send/receive packets. If a router is waking
up, it consumes the same amount of power as if it was active, but it cannot be used to
send/receive packets. Finally, if a router is active, then it will operate at the highest mode
of operation, mode 7. For a router to transition from an active state to an inactive state,
it must be idle for at least T-Idle consecutive cycles. A router is considered idle only if
its’ input buffers are empty and it is not a downstream router. This secondary condition
was developed to make this model as non-blocking in nature as possible so that a fairer
comparison to Power Punch can be made. We use XY look-ahead DOR routing, which
52
allows us to easily know the next router in a packets path so that downstream routers can
be secured. When a router is in a secured state, it cannot be switched off. If it is currently
off, it will immediately transition into a wakeup state where it will stay until the wake-up
delay has been met. The main purpose of this model is to compare the static power savings
of a state-of-the-art power-gating technique against a design that combines power-gating
and DVFS [16].
DozzNoC (ML+PG+DVFS): The DozzNoC design uses the same underlying
partially non-blocking power-gated design proposed earlier wherein all routers may be in
one of three states. In the inactive state, a router consumes no power but cannot be used
to send/receive packets. Transitioning to an inactive state takes a single cycle, and in order
to transition to an inactive state the router must first be in an active state and idle for more
than T-Idle consecutive cycles. The second state is the wakeup state. A router transitions
to a wakeup state when it is off and needs to be woken up. A router in the wakeup state
cannot be used to send/receive packets until the wake-up delay has been met. The length of
the wakeup state depends on the voltage level of the active state and is based on real values
presented in prior work [16]. The final state is the active state. A router that is in an active
state may send/receive packets and operate like normal. However, the key difference is that
DozzNoC uses predictive machine learning techniques to determine the optimal voltage
level for a router that is in an active state. This means that DozzNoC dynamically adjusts
the supply voltage to select the optimal active state operational mode. In order to do this,
we predict future input buffer utilization of a router and then compare this to the theoretical
maximum utilization to determine the optimal voltage level. This optimal voltage level
must meet network performance demands while still ensuring dynamic energy savings.
This DVFS design relies on aggressive voltage scaling that minimizes potential loss in
throughput. For epoch size of 100 cycles, if we predict the buffers to be less than 5% of
the maximum over the next epoch, we select the lowest voltage level for the active state to

53
Figure 3.7: A walkthrough example showing the difference in active state mode selectionacross two epochs for a dummy network [16].
operate at, mode 3. Mode 3 is considered the lowest mode of operation because mode 1
corresponds to the inactive state and mode 2 corresponds to the wakeup state. If the buffers
are predicted to be between 5% and 10% of the maximum we select mode 4, if the buffers
are predicted to be between 10% and 20% we select mode 5, if the buffers are between 20%
and 25% we select mode 6, and finally if the buffers are predicted to be more than 25% full
we select mode 7. These thresholds are slightly different at higher epoch sizes as they need
to be more aggressive to counteract a higher theoretical maximum [16].
In Figure 3.7 we show a walk-through example detailing how routers and links in
a dummy network would transition between different states on a per cycle basis. We

54
also show how the optimal active state voltage level is updated every epoch. R-Idle is
the number of consecutive cycles that a router has been idle, while R-Wakeup is used to
measure the number of cycles a router has spent in the wakeup state. For example, if in the
first epoch (Ek) DozzNoC predicts that the input buffers will be greater than 25% full for the
next epoch, then it will subsequently determine that the optimal active mode of operation
is the highest mode. This is highlighted with router 1 operating at the highest mode until
it is turned off, and router 2 waking up into the highest mode after the wake-up delay
is satisfied (RWakeup = 0). Router idleness (RIdle) along with number of cycles a router has
been waking up (RWakeup) are measured every cycle. A router will only switch off if a router
has been idle for several consecutive cycles (T-Idle) meaning the buffers are empty and it
is not a downstream router. Once a router is off, it must wait several cycles corresponding
to the wake-up delay before it is useable (T-Wakeup). This delay is kept track of by setting
RWakeup = TWakeup and subtracting one from Rwakeup every cycle. Once the router is finished
waking up (RWakeup = 0) we may use the router. If at the next epoch Ek+1 DozzNoC predicts
that the input buffers will be less than 5% full for the next epoch, then it will subsequently
determine that the optimal active mode of operation is the lowest mode. Thus router 1 will
now operate in the lowest mode when active and router 2 will operate in the lowest mode
after it successfully transitions from the wakeup state to the active state. When the router
has been idle for T-Idle consecutive cycles it is turned off, as can be observed by router
1. When a router is no longer considered idle (RIdle = 0), it transitions from the inactive
state to the wakeup state as shown by router 3. While this example network has only four
routers, the actual network will have 16 routers for a CMesh and 64 routers for a mesh.
The three states, inactive, wakeup and active will remain the same as the dummy network.
However, in this example a router in the active state has only three modes of operation, low,
medium and high while the real network has five operational modes. Also, for simplicity,

55
all routers in the dummy network have the same active mode of operation, while in the real
network each individual router selects operational modes based on local router labels [16].
LEAD-τ (ML+DVFS): LEAD-τ [17] is used for comparative purposes so that
throughput loss and dynamic energy savings of DozzNoC can be compared to prior work
that only applied machine learning-based DVFS to the NoC. While using this model, the
router can only be in the active state and may never transition to an inactive or wakeup state.
While in the active state LEAD-τ uses the same mode selection logic as DozzNoC where
future input buffer utilization is predicted, and an optimal active voltage level is selected.
This model may transition from any voltage level to any other voltage level within the range
of 0.8V to 1.2V. The main purpose for including this model is to compare how a stand-alone
machine learning DVFS design performs against a machine learning design that has DVFS
and power-gating [16].
ML+TURBO: This model seeks to apply power-gating and DVFS to the NoC in a
similar fashion to DozzNoC. It uses the same three states of operation as DozzNoC; the
inactive state, the wakeup state, and the active state. When a router and its’ links are active,
a prediction of the future input buffer utilization is used to govern the voltage level. The
key difference between this model and DozzNoC is that every three times we predict that a
router should be at any active mode other than mode 3 or mode 7, we instead select mode
7. The key goal of this model is to improve throughput and static power savings at the cost
of dynamic energy since we opt for the highest operational mode even if we predict a lower
mode sufficient to meet network demand [16].
3.4 Machine Learning for PG-DVFS
Machine Learning enables us to use proactive mode selection techniques for DozzNoC
and all comparative models. This allows DozzNoC to use ML techniques to select
operating voltage levels while in the active state. The underlying ML equations have not

56
changed between LEAD and DozzNoC. We use the same Ridge Regression optimization
formulation as in Section 2.4, and the feature vector and weight vector are trained and
validated in the same way. The major difference for DozzNoC is that extensive feature
engineering allows us to reduce the number of features to only 5.
Feature Set: The feature set is carefully crafted such that prediction accuracy is
maximized while overhead is kept to a minimum. This is accomplished by selecting local
router features that give the greatest insight into network performance while also keeping
the relative number of features small. For DozzNoC we determined the features that were
most relevant to accurate label prediction exhaustively as is shown in 4.5. This will be
further explained in the results section. We found that it is possible to reduce the number
of features (starting with the same 41 features proposed in prior work) without having a
significant impact on the overall performance, which is shown in 4.6. Each additional
feature equates to more run-time computational overhead because the number of additions
and multiplications necessary to generate the label increases. The original feature set
proposed in [17] contained 41 features in total as well as a label, however we have reduced
this to only five critical features. These five features are listed in detail in Table 3.1 [16].
Table 3.1: DozzNoC’s Reduced Feature Set [16]
Feature Set:
Feature 1: Array of 1’s
Feature 2: Requests Sent by All Cores
Feature 3: Requests Received by All Cores
Feature 4: Router Total Off Time
Feature 5: Current Input Buffer Utilization
Label: Future Input Buffer Utilization

57
Label: Label generation for DozzNoC remains unchanged from LEAD, however,
LEAD used 40 features, while DozzNoC uses only 5. Like LEAD, DozzNoC and all
comparative models are trained offline and are ready to use at test time [16].
Machine Learning Overhead: After a model has been trained, the weight vector is
exported to the network simulator where it can be used to select voltage levels when routers
are active. The additional overhead incurred from machine learning can be broken down
into the timing, area, and energy cost to execute a series of additions and multiplications
as this is how a label is calculated. Each feature is multiplied by its equivalent weight and
then the results are summed to generate a label. Prior work [32] has already estimated the
cost to do these operations and they do not change from LEAD ML overhead. Prior work
that used 41 features calculated the total energy overhead cost to be 61.1pJ, the total area
overhead cost to be 0.122 mm2, and the total timing cost to be 3-4 cycles. We will show
in Chapter 4 that the feature set can be reduced to 5 features without causing a significant
impact on model performance. Therefore, the overhead to generate a label for DozzNoC
and all comparative models can be reduced to only 5 multiplications and 4 additions. This
equates to a total energy overhead cost of 7.1pJ, a total area overhead cost of 0.013 mm2,
and a total timing cost of 3-4 cycles per router. Our epoch size is 500 cycles, with label
generation occurring on a per router basis once per epoch. However, if the additional
energy overhead were too large, it could be further reduced by increasing the size of the
epoch. If the area overhead was too large, it could be reduced by forcing routers to share
computational resources, which would increase the timing overhead proportional to the
amount of shared resources [16].

58
4 Performance Evaluation
4.1 LEAD Simulation Methodology
In this chapter we evaluate the static power and dynamic energy savings as well as
the performance trade-offs for our various proposed LEAD (LEAD-τ, LEAD-∆, LEAD-
G) and DozzNoC (DozzNoC, LEAD-τ, ML+TURBO) models. For fair comparison,
we specifically apply all LEAD models to a 4×4 CMesh topology with 64 cores. We
evaluate all LEAD models across 13 different real traffic traces gathered using Multi2sim.
Multi2sim [58] is a full system simulator that uses CPU benchmarks from PARSEC 2.1
[5] and SPLASH2 [61] in order to generate cycle accurate traces. These traces are used as
input for our in-house network simulator, where reactive versions of each LEAD model are
run such that features and labels can be extracted. The 13 different traces used to train and
validate each LEAD model are shown in Table 4.1.
Table 4.1: LEAD Benchmarks
Training Validation Testing
Barnes Raytrace Lu (non-contiguous)
Blackscholes Swaptions Lu (contiguous)
Bodytrack Ferret Radix
Dedup Fluidanimate
FFT Canneal
Ocean
The goal of using trace files generated with PARSEC 2.1 and SPLASH2 benchmarks
for these simulations is to evaluate the throughput, latency, and dynamic energy of various
machine learning enhanced voltage switching models across real traffic patterns. LEAD is
implemented in our in-house network simulator; therefore, each line of the trace file need

59
only consist of relevant packet data. This data includes packet injection source, packet
destination, packet type, and injection cycle. Packet source and destination information
must be known to calculate the route. It is also important that we know the packet type
(request or response) because only requests are used as inputs. Our network simulator
will automatically generate a response packet once a request has been received. It is also
crucial that we know the injection time since our results must be cycle accurate. Specific
Multi2sim parameters used to gather trace files are shown in Table 4.2.
Table 4.2: Multi2sim Parameters
Cores 64
Routers 16
Concentration Factor 4
L1/L2 Coherence Protocol MOESI
Private L1/L2 Yes
Private LLC No
L1 Instruction Cache Size (kB) 32
L1 Data Cache Size (kB) 64
L2 Cache Size (kB) 256
L3 Cache Size (MB) 8
Main Memory Size (GB) 16
We used DSENT [57] to model routers and links so that the resulting dynamic power
results could be converted into energy per hop. The energy per hop is gathered for all 5
different V/F pairs at a 22 nm technology node assuming a 128-bit flit width [17]. The
total dynamic energy is calculated as the cost to send a specific number of packets through
the network, where every hop is recorded and the cost per hop is known. Each entry
in a trace file contains a single packets injection information, therefore total packets sent

60
equal total requests in the trace file. Naturally the number of requests may vary slightly
between trace files, however, the number of packets sent per trace is still constant across
all LEAD models. The energy per packet is calculated as the cost to traverse a router and
an outgoing link. Routers and links may operate at one of five different operating voltages
corresponding to modes 1-5, thus energy per hop will change accordingly. This energy
cost is listed starting from lowest mode to highest mode: {25 pJ/packet, 32 pJ/packet, 39
pJ/packet, 47 pJ/packet, 57 pJ/packet} [17]. The voltage and frequency of each mode as
well as packet traversal energy is shown in table 4.3.
Table 4.3: Dynamic Energy Per Hop (Modes 1-5) [17]©2018 ACM
Mode 1 0.8V 1.0 Ghz 25 pJ/packet
Mode 2 0.9V 1.5 Ghz 32 pJ/packet
Mode 3 1.0V 1.8 Ghz 39 pJ/packet
Mode 4 1.1V 2.0 Ghz 47 pJ/packet
Mode 5 1.2V 2.25 Ghz 57 pJ/packet
4.1.1 LEAD Model Variants
For the LEAD-τ model, we needed to determine the ideal input buffer utilization
thresholds for switching between modes. To determine these ideal mode transition
thresholds, we conducted an exhaustive study. Figure 4.1 shows a small set of our threshold
studies on a single trace file. Each model variant’s name (shown on the x-axis) consists
of 4 values that correspond to the mode transition thresholds. For example, 5/10/20/25
implies a transition from mode 1 to mode 2 when buffer utilization exceeds 5%, from
mode 2 to mode 3 when the buffer utilization exceeds 10%, from mode 3 to mode 4 when
buffer utilization exceeds 20%, and finally a transition to mode 5 when buffer utilization
is above 25%. From Figure 4.1, we observe that the set of thresholds that lead to the

61
Figure 4.1: The throughput loss and dynamic energy savings across multiple LEAD-τvariants with an epoch size of 500 cycles [17]©2018 ACM.
best performance (lowest throughput loss and maximum energy savings) was 5/10/20/25
which yielded 15.51% energy savings while showing 5.35% throughput loss across a single
training trace file. Therefore, we use 5/10/20/25 threshold values for our LEAD-τ model
[17]. For the LEAD-∆ and LEAD-G models, similar testing occurred. LEAD-∆ model
variants changed the thresholds needed to transition up or down a voltage level, while
LEAD-G model variants changed the number of hold cycles before the model could change
explorative directions. Only the best performing models are shown in the results section.
4.1.2 LEAD Mode Breakdown
In Figure 4.2 we show the amount of time spent in each of the five different modes
across all five test applications for the best performing LEAD models. Every epoch the
routers’ current voltage level is recorded, and one of five various counters is incremented
corresponding to the routers’ voltage level. This is done for all 16 routers every epoch
so that total network time spent in each mode can be calculated. LEAD-τ has the unique
ability to switch from any-to-any mode, which allows it to avoid mode 4 altogether. We
can observe how LEAD-τ routers spend most of their time in the highest mode of operation
but can switch into lower modes to exploit idle traffic patterns. This ensures that LEAD-τ

62
Figure 4.2: The time routers and links spent in each mode for all LEAD models across alltest traces [17]©2018 ACM.
minimizes loss in throughput while maximizing energy savings. Both LEAD-∆ and LEAD-
G show significant amounts of time spent in the lower modes 2 and 1 respectively. However,
LEAD-∆ routers have a very even distribution of time spent in each of the five different
mode of operation, corresponding to the gradually changing nature of the model. LEAD-G
routers show the exact opposite behavior of LEADτ wherein they wish to stay in the lowest
mode of operation as much as possible to maximize energy savings. The LEAD-G model
does not conserve performance at high network load. All three models and their behaviors
will be discussed further in the following sections.
4.2 LEAD ML Simulation Methodology
Each LEAD model is trained using Ridge Regression, a machine learning algorithm
that minimizes the sum of squared errors and adds a regularization term. We must gather
training and validation data as well as test data to evaluate model performance. LEAD uses
supervised machine learning, thus both features and corresponding labels must be gathered
for training and validation. Labels are unique to each of the three different LEAD models

63
and will be discussed in greater detail in the following section. To gather training data, a
reactive version of each LEAD model is used to govern mode selection. Then, at every
epoch (100-1000 cycles) features as well as the previous epochs corresponding label are
exported to a text file for every router.
From Table 4.1, we observe that six trace files are used to gather features and target
labels, three are used to validate the trained models, and the remaining five are used at
test time to evaluate model generalization. This process must be repeated for each LEAD
model as each will have a unique reactive version used to gather training/validation data,
and each will have unique target label. This results in each LEAD model having a unique
set of trained weights which are exported for use during test time. It is important that we
tune the lambda hyper-parameter during the validation phase as it controls the amount of L2
regularization used to combat over-fitting. If the model over-fits, it will generalize poorly.
This means the model will perform very well on the training data but will perform poorly
at test time. Model training and tuning occurs in Matlab where we have implemented
our Ridge Regression algorithm. After this phase concludes, trained weights are exported
back to our in-house network simulator where they are used on test traces to predict router
specific target labels every epoch. These labels are used to govern mode selection and
enable proactive voltage switching. The five trace files used at test time are completely
untouched during training/validation. Seeing them in advance would be equivalent to
cheating, thus generalization performance could not be accurately measured.
4.2.1 LEAD Feature Engineering
The process of feature engineering involves selecting specific network parameters to
use as inputs for label generation while keeping overhead to a minimum. If the label is
the future state of the network, then features should contain relevant network information
that will help predict this future state. For example, the label for LEAD-τ is input buffer

64
utilization over the next epoch, therefore the most critical feature is the input buffer
utilization over the current epoch. Knowing the current value of a parameter helps pattern
recognition software predict the future value of that parameter immensely. We use a total
of 39 features ranging from requests sent and received on all directions, responses sent and
received on all directions, incoming and outgoing link utilization in all directions, current
input buffer utilization, current change in input buffer utilization, current slack, and current
voltage level.
The first feature is an array of 1’s, this is used for weight normalization. The
next several features are Requests/Responses sent and received on every direction.
These features are important because they provide the algorithm with useful direction
specific traffic insights. This adds directional traffic flow information to label generation.
Incoming/Outgoing link utilization help determine whether the performance needs of the
network are increasing or decreasing. These features are critical to determine whether
router modes should be increased or decreased to meet such changing needs. However, the
most critical feature for predicting future input buffer utilization, is knowing the current
input buffer utilization. Therefore, feature 36 is mainly added to improve performance
of the LEAD-τ model. Likewise, knowing the current change in input buffer utilization
between the last and current epoch is very helpful when trying to predict this change for
the next epoch. Therefore, feature 37 was added largely to help performance of the LEAD-
∆ model, however feature 36 is still important for this label as well. Similarly, feature
38 was added to help label generation of the LEAD-G model. The feature set does not
change between LEAD models, only the corresponding label changes. Therefore, we tried
to select enough key features such that each of the three various labels can be accurately
generated at test time using the same feature set. Each feature contains only local router
information with the full list of features given in two separate Tables 4.4 and 4.5. The
feature set is split into two different tables because of page size limitations. It is crucial

65
Table 4.4: Full LEAD Feature Set
LEAD Feats: (1-20)
Feature 1: Array of 1’s
Feature 2: Requests Sent by All Cores:
Feature 3: Responses Sent by All Cores:
Feature 4: Requests Recieved by All Cores:
Feature 5: Responses Recieved by All Cores:
Feature 6: Requests Sent by Cores per Direction (+X):
Feature 7: Responses Sent by Cores per Direction (+X):
Feature 8: Requests Recieved by Cores per Direction (+X):
Feature 9: Responses Recieved by Cores per Direction (+X):
Feature 10: Outgoing Link Utilization per Direction (+X):
Feature 11: Incoming Link Utilization per Direction (+X):
Feature 12: Requests Sent by Cores per Direction (-X):
Feature 13: Responses Sent by Cores per Direction (-X):
Feature 14: Requests Recieved by Cores per Direction (-X):
Feature 15 Responses Recieved by Cores per Direction (-X):
Feature 16: Outgoing Link Utilization per Direction (-X):
Feature 17: Incoming Link Utilization per Direction (-X):
Feature 18: Requests Sent by Cores per Direction (+Y):
Feature 19: Responses Sent by Cores per Direction (+Y):
Feature 20: Requests Recieved by Cores per Direction (+Y):
that the total number of features be kept minimal because each additional feature incurs
increased run-time computational overhead.

66
Table 4.5: Full LEAD Feature Set (Cont.)
LEAD Feats: (21-40)
Feature 21: Responses Recieved by Cores per Direction (+Y):
Feature 22: Outgoing Link Utilization per Direction (+Y):
Feature 23: Incoming Link Utilization per Direction (+Y):
Feature 24: Requests Sent by Cores per Direction (-Y):
Feature 25: Responses Sent by Cores per Direction (-Y):
Feature 26: Requests Recieved by Cores per Direction (-Y):
Feature 27: Responses Recieved by Cores per Direction (-Y):
Feature 28: Outgoing Link Utilization per Direction (-Y):
Feature 29: Incoming Link Utilization per Direction (-Y):
Feature 30: Requests Sent by Cores per Direction (core):
Feature 31: Responses Sent by Cores per Direction (core):
Feature 32: Requests Recieved by Cores per Direction (core):
Feature 33: Responses Recieved by Cores per Direction (core):
Feature 34: Outgoing Link Utilization per Direction (core):
Feature 35: Incoming Link Utilization per Direction (core):
Feature 36: Current Input Buffer Utilization:
Feature 37: Current Change in Input Buffer Utilization:
Feature 38: Current Slack:
Feature 39: Voltage Level:
Feature 40: Label:
4.2.2 LEAD ML Accuracy
Machine learning research will typically use RMSE to determine model accuracy,
however we define and use mode selection accuracy to evaluate both our LEAD models

67
and our DozzNoC models. We use mode selection accuracy because there is a large range
of acceptable label values per mode. Table 4.6 shows the achieved mode selection accuracy
for various applications for the LEAD-τ model. To calculate mode selection accuracy, we
start by recording the label every epoch. Then, during the following epoch, we measure the
actual buffer utilization and compare to the label from the previous epoch. We determine
what mode should have been chosen based on the actual utilization, and what mode was
chosen using the label. If both the label and actual utilization would lead to the same
mode being selected, then the selection was accurate, else the selection was inaccurate. All
accurate selections are divided by the total number of inaccurate and accurate selections to
generate mode selection accuracy. We achieve an average of 86% accuracy across all test
benchmarks, with the Canneal application showing almost 95% accuracy.
Table 4.6: LEAD-τ Mode Selection Accuracy [17]©2018 ACM
Models Lu Ls Radix Fluid Canneal
LEAD-τ 500 88.3% 82.3% 62.7% 68% 95.9%
LEAD-τ 1000 83.2% 73.2% 56.6% 53.2% 95.9%
4.3 DozzNoC Simulation Methodology
DozzNoC simulation methodology is almost identical to LEAD. Firstly, we use the
same cycle accurate full system simulator, Multi2sim [58] to gather trace files. We use
the same industry standard benchmarks from both PARSEC 2.1 [5] and SPLASH2 [61]
to create trace files containing cycle accurate network traffic. The full set of benchmarks
used for DozzNoC is the same as the benchmarks used in LEAD, and are shown in Table
4.7. The main difference is that DozzNoC is evaluated on time compressed and non-time
compressed trace files. DozzNoC is also evaluated across both a mesh with 64 cores, and
a CMesh with 16 routers and a concentration factor of 4. The goal of evaluating DozzNoC

68
across different network topologies is to see the trade-off in performance and energy savings
across topologies. Concentrated designs have lower network area overhead, but this can
also hinder potential static power savings. This is because power-gated schemes that use
shared components can be powered off less often. We also use time-compressed and non-
time compressed trace files to simulate different traffic loads. Time compressed trace files
simulate high network load. The idea is to decrease packet injection times so that packets
are injected into the network as fast as the scheme will allow. The second set of trace files
are not time compressed and simulate low-normal network load. The goal behind using
compressed and uncompressed traces is to ensure that DozzNoC performs well at times of
network saturation, as well as network idleness. All DozzNoC benchmarks can be seen in
Table 4.7. Traces are supplied to our in-house network simulator and are used as input for
real traffic patterns to gather training and validation data for our various models. This will
be discussed further in following sections. The goal of using PARSEC 2.1 and SPLASH2
benchmarks for these simulations is to increase the accuracy of the performance results
during the testing phase. The performance accuracy of synthetic traffic is not as reliable
because models can be designed that exploit synthetic traffic patterns as they are generated
using a predictable algorithm.
Table 4.7: DozzNoC Benchmarks
Time Compressed Non-Time Compressed
Training Validation Testing Training Validation Testing
Barnes Raytrace Lu (non-cont.) Barnes Raytrace Lu (non-cont.)
Blackscholes Swaptions Lu (cont.) Blackscholes Swaptions Lu (cont.)
Bodytrack Ferret Radix Bodytrack Ferret Radix
Dedup Fluidanimate Dedup Fluidanimate
FFT Canneal FFT Canneal
Ocean Ocean

69
DSENT [57] is used once more to model the router and the links as well as to
obtain their respective static power/dynamic energy costs. The static power as well as
the dynamic energy of the router and it’s outgoing links for a CMesh are shown in table
4.8. This table has three columns of significant importance, the first being the static power
in Joules/second. This is directly from DSENT and is an estimate of the static power to
operate a router and its outgoing links. We have converted this cost to a per cycle basis
so that total static power and dynamic energy can be calculated with our in-house network
simulator. Every cycle a router is operational in mode 1 will cost 66.7% less static power
than if it were operational in mode 5 as reflected in column 4. The final column shows
the dynamic energy per hop for a packet traversing a router in each of the five different
operational modes. It should be noted that this cost is identical to the energy per hop
from LEAD. The network latency of a CMesh is lower than a mesh as there are fewer
hops from source to destination. However, the power/energy cost per hop is higher for a
CMesh because it has more components and larger crossbars. Thus, the CMesh network
is used as a worst case for any power/energy costs and a best case for latency. We use the
same power/energy cost per hop for both a mesh and CMesh for simplicity sake. When
determining voltage switching latency and wake up delay, CMesh routers have a higher
equivalent capacitance, which in turn means they will have larger delays. However, we
once again assume the same switching delay and wake-up delay for both a CMesh and
a mesh router for simplicity. These delays are estimated for the five different modes of
operation at a technology size of 22nm with 128-bit flit width [16].
4.3.1 DozzNoC Model Variants
We tested many different variants of the DozzNoC model, just as we tested many
different variants of our LEAD models. We did not test different active state operational
threshold values, instead we kept these the same as those used in LEAD-τ. This was done

70
Table 4.8: Static Power and Dynamic Energy Per Hop for Active State Operational Modes[16]
Voltage Frequency Static Power Static Power Dynamic Energy
(Volts) (GHz) (J/s) (Cycle) (pJ/hop)
0.8 1.0 .036 .667 25.1
0.9 1.5 .041 .750 31.8
1.0 1.8 .045 .833 39.2
1.1 2.0 .050 .917 47.5
1.2 2.25 .054 1.0 56.5
partly for fair comparative purposes, but also partly because we had already performed
extensive threshold testing for LEAD-τ. Instead we opted to test how DozzNoC model
variants performed at various epoch sizes. This testing focused on the trade-offs between
coarse time-grained and fine time-grained DVFS applied to a partially non-blocking power-
gated scheme. In Figure 4.3, we observe how various epoch size variant DozzNoC
models compared against a baseline. The baseline DozzNoC model chose new active state
operational modes every 100 cycles. This means that if the router is active, it will operate
at one of five different operational modes to be re-calculated every 100 cycles. Our other
model variants include epoch sizes of 1000 cycles, 5000 cycles, and 10,000 cycles. The
percent change in throughput, latency, and dynamic energy across all test traces show that
epoch size of 500 cycles and 1000 cycles leads to the best model performance. Features and
labels are exported every epoch, therefore, to ensure sufficient training/validation data is
generated (improving generalization performance), we opt for an epoch size of 500 cycles.
We also tested several variations of the ML+TURBO model. This was accomplished by
changing how often ML+TURBO would force routers and links into the highest mode of
operation. For example, should it force routers and links into the highest mode of operation

71
Figure 4.3: The change in throughput, dynamic energy, and latency of DozzNoC at variousepoch sizes compared to a baseline DozzNoC model with an epoch size of 100 cycles [16].
every 2 re-configurable windows or every 3. In the following sections we will evaluate only
the best performing models for DozzNoC, LEAD-τ, and ML+TURBO.
4.3.2 DozzNoC Mode Breakdown
In Figure 4.4 we show the total network distribution of predicted active modes of
operation for DozzNoC, LEAD-τ and ML+TURBO. This means that when a DozzNoC
router is in the active state, it will operate at one of the five different operational modes
(Mode 3-Mode 7). DozzNoC active state voltage levels are updated every epoch, but a
router may transition between active, wake-up, and inactive states at any point within an
epoch. Therefore, the predicted operational modes over an epoch do not directly reflect
time spent in all modes, rather it is a proportional reflection. For LEAD-τ, routers will
never be in an inactive or wakeup state as power-gating is not applied. Therefore, the
predicted operational modes will reflect the actual network mode breakdown much like
the breakdown for other LEAD models presented in Figure 4.2. Because LEAD-τ routers
do not apply power-gating, they are always active in the operational mode determined by
the generated label. The baseline and Power Punch scheme are not shown as they do not
use DVFS logic to select optimal active modes. Instead, the baseline model is always
operational in the highest mode and the Power Punch model is a power-gating scheme with
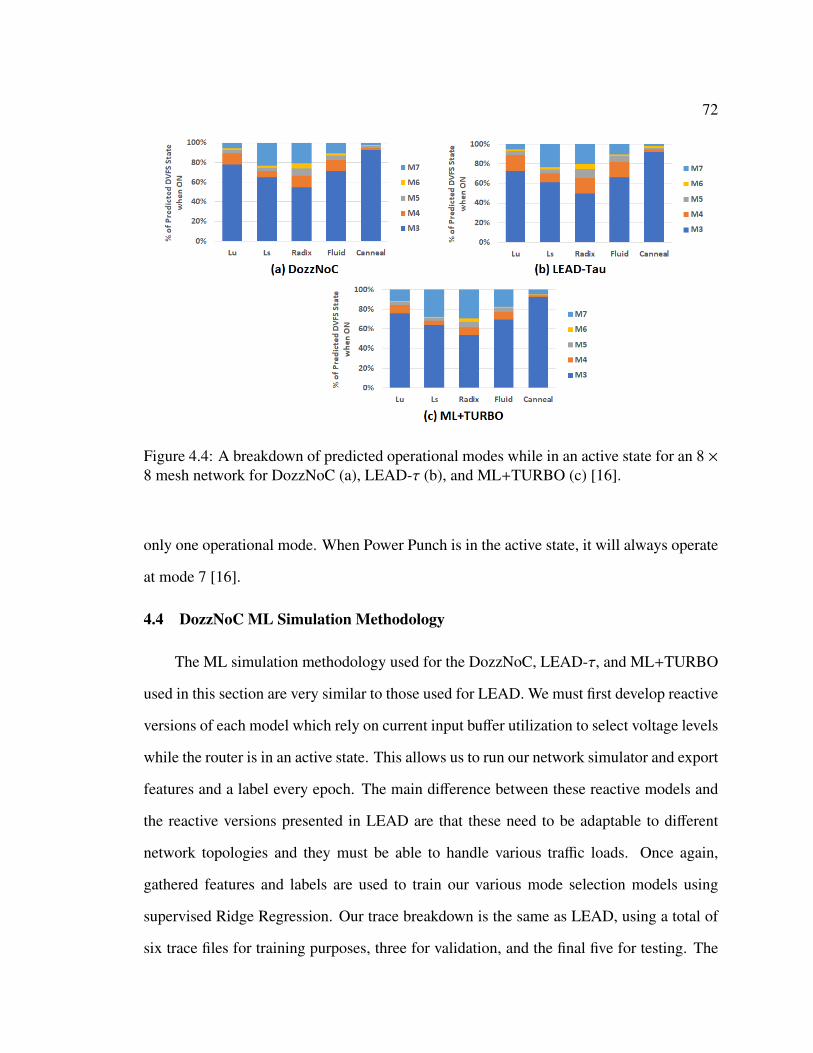
72
Figure 4.4: A breakdown of predicted operational modes while in an active state for an 8 ×8 mesh network for DozzNoC (a), LEAD-τ (b), and ML+TURBO (c) [16].
only one operational mode. When Power Punch is in the active state, it will always operate
at mode 7 [16].
4.4 DozzNoC ML Simulation Methodology
The ML simulation methodology used for the DozzNoC, LEAD-τ, and ML+TURBO
used in this section are very similar to those used for LEAD. We must first develop reactive
versions of each model which rely on current input buffer utilization to select voltage levels
while the router is in an active state. This allows us to run our network simulator and export
features and a label every epoch. The main difference between these reactive models and
the reactive versions presented in LEAD are that these need to be adaptable to different
network topologies and they must be able to handle various traffic loads. Once again,
gathered features and labels are used to train our various mode selection models using
supervised Ridge Regression. Our trace breakdown is the same as LEAD, using a total of
six trace files for training purposes, three for validation, and the final five for testing. The

73
Figure 4.5: The results of DozzNoC single feature mode selection accuracy testing [16].
main difference between DozzNoC comparative models and our LEAD models is that we
must repeat this process for both time compressed and non-time compressed trace files.
This means that we will have twice as many uniquely trained algorithms for DozzNoC.
The validation phase for DozzNoC remains unchanged from LEAD. After training and
validation, we test the trained algorithm by exporting the trained weights for use in our in-
house network simulator where they are used to generate labels. This time the label (future
input buffer utilization) does not change between models, however the process must still
be repeated for DozzNoC, LEAD-τ, and ML+TURBO as each will have a unique weight
array. The LEAD-τ model logic used in these tests does not change from the previous
version presented in section 4.1. However, we still need to repeat the training/validation
process for this model as it must be evaluated on both time compressed and non-time
compressed trace files as well as both a mesh and CMesh network topology.
4.4.1 DozzNoC Feature Engineering
For DozzNoC, we wanted to ensure that our feature set consisted only of relevant
network information. Therefore, we performed a series of experiments where a select
number of features were used to train, validate, and test model performance. Firstly, we
tested the single feature mode selection accuracy as shown in Figure 4.5. This experiment
consisted of using only a single feature for training, validation, and testing. Then, we

74
Figure 4.6: The throughput, latency, dynamic energy savings, static power savings andEDP of DozzNoC-5 versus DozzNoC-41 [16].
evaluated how accurately each single feature DozzNoC model selected operational modes
using mode selection accuracy.
We took the five features that had the highest single feature mode selection accuracy
and created a reduced feature set. This reduced feature set was used to evaluate model
throughput, latency, dynamic energy, static power, and EDP against a model that used
41 features as can be seen in 4.6. The reduced feature set model is called DozzNoC-
5 as it used only the five features that had the highest mode selection accuracy, while
the original DozzNoC model that used all 41 features is called DozzNoC-41. These 41
features are largely pulled directly from the original LEAD feature set. However, some
LEAD model specific features were removed, and some power-gating specific features
were added. Newly added features included current router off time and network total off
time. From Figure 4.6 we can observe that there is almost no impact on throughput, latency,
dynamic energy savings, static power savings, or EDP between the two DozzNoC model
variants. This allows us to reduce the run-time overhead incurred by label generation every
epoch to only 5 multiplies and 4 additions per router, far less than the original 41 multiplies
and 40 additions [16].

75
4.5 LEAD Results
In this section we will compare the throughput and dynamic energy for all LEAD
models against a baseline model which does not apply DVFS and the reactive Greedy
model proposed in [40]. All LEAD models will be evaluated on a CMesh topology with
16 routers and 64 cores. The goal is to evaluate dynamic energy savings in high load
environments.
4.5.1 LEAD Energy and Throughput
Figure 4.7 shows the average dynamic energy and throughput across all five test traces
for all LEAD models. The best performing LEAD-τ model is evaluated at epoch sizes of
both 500 and 1000 cycles. Other LEAD models show only the best performing model
variants at epoch size of 500 cycles. The epoch size determines how often mode re-
configuration is performed as well as how often features and labels are extracted. The
dynamic energy is normalized to a baseline that does not apply DVFS to make visualizing
energy savings and performance loss as simple as possible. At an epoch size of 500
and 1000 cycles, LEAD-τ reduces total dynamic energy by 13-17% for a minimal loss
in throughput of 2-4%. The LEAD-∆ model decreased dynamic energy by 34-35%,
far more than LEAD-τ, however this energy savings came at a substantial throughput
loss of 40-43%. LEAD-G performed the best in terms of dynamic energy reduction,
saving a significant 42% dynamic energy for an almost even throughput trade-off of 42%.
This makes sense since LEAD-G sought to move routers in the direction that minimized
energythroughput2 . If both the top and bottom terms are equally weighted, then we should see
an even trade-off between the two. We see that LEAD-τ greatly improves total dynamic
energy savings at both select epoch sizes with minimal loss in throughput. LEAD-G may
not have the highest performance, but overall it did save significantly more dynamic energy
than LEAD-∆ and was able to achieve an even trade-off between dynamic energy savings

76
Figure 4.7: The throughput (a) and Normalized Dynamic Energy (b) for all LEAD modelscompared against baseline and greedy [17]©2018 ACM.
and loss in throughput. In almost all networks, and especially networks under high load,
LEAD-τ would be the optimal mode selection model. However, if the network rarely
became congested, then LEAD-G would be the best option [17].
4.6 DozzNoC Results
In this section we will evaluate the throughput, normalized dynamic energy, and
normalized static power for DozzNoC, LEAD-τ, and ML+TURBO. These results will then
be compared against a baseline model with neither power-gating nor DVFS and a state-of-
the-art power-gating model based on Power Punch. DozzNoC and all comparative models
will be evaluated on both a CMesh topology with 16 routers and 64 cores at high network
load, and a mesh topology with 64 routers and 64 cores at a low network load. This will
allow a model’s performance and power/energy savings to be evaluated across multiple
topologies and multiple network load environments.

77
4.6.1 DozzNoC Throughput, Static Power, and Dynamic Energy
For traditional DVFS designs, the focus is often the trade-off between performance
loss and dynamic energy savings. This differs from traditional power-gated designs which
usually focus on the trade-off between performance loss and static power savings. For our
work, our results must focus on the trade-off between performance loss and both dynamic
energy savings as well as static power savings. Therefore, we compare a baseline model
that has neither power-gating nor DVFS implemented against four other models to show
case these numerous trade-offs. The baseline model is always active and always operates
routers and links at the highest voltage level while the Power Punch design operates routers
and links at mode 7 when in the active state. The baseline shows how a model that applied
neither DVFS nor power-gating would perform and acts as an upper bound on performance.
The Power Punch model shows the trade-offs associated with state-of-the-art power-gating
techniques that employ partial or full non-blocking techniques [16].
Overall network throughput and static power/dynamic energy across all five test
traces for the CMesh topology at high network load are shown in Figure 4.8. The same
information for a mesh topology at low network load is shown in Figure 4.9. These
two figures showcase the trade-offs between model performance and static power/dynamic
energy savings across multiple network topologies and network loads. For a mesh topology
at an epoch size of 500 cycles, our version of Power Punch can achieve an average of 47%
static power savings for an increase of 5% in latency and a throughput loss of 9%. For a
CMesh topology, the static power savings to an average of 32% for latency increase of 3%
and throughput loss of 5%. LEAD-τ shows the trade-offs associated with machine learning
based proactive DVFS and allows DozzNoC a direct comparison to our best performing
LEAD model. For a mesh topology at an epoch size of 500 cycles, LEAD-τ can achieve
an average of 25% dynamic energy savings and 25% static power savings for a 1% latency
increase and a 3% loss in throughput. We note that static power savings are obtainable

78
Figure 4.8: DozzNoC throughput for CMesh architecture at epoch size of 500 cycles (a).DozzNoC normalized static and dynamic energy for CMesh at epoch size of 500 cycles athigh load (b). DozzNoC normalized static and dynamic energy for CMesh at epoch size of500 cycles at low load (c) [16].
while only using DVFS because lower voltage levels will consume proportionally less static
power than the baseline which always operates at the highest voltage level. This means if
the simulation takes the same amount of time to execute the same amount of instructions for
both the baseline and DVFS model, the DVFS model will save static power as it operated
at lower modes throughout the course of the simulation [16].
DozzNoC highlights our novel power-gated DVFS design which seeks to save both
static power and dynamic energy. For a mesh topology with an epoch size of 500 cycles,
our DozzNoC model can save on average 53% static power and 25% dynamic energy.
This comes at the cost of increasing latency by 3% and decreasing throughput by 7%. For
a CMesh network, DozzNoC can save on average 39% static power and 18% dynamic
energy for a latency increase of 2% and a throughput loss of 5%. The ML+TURBO model

79
Figure 4.9: DozzNoC throughput for mesh architecture at epoch size of 500 cycles (a).DozzNoC normalized static and dynamic energy for mesh at epoch size of 500 cycles athigh load (b). DozzNoC normalized static and dynamic energy for mesh at epoch size of500 cycles at low load (c) [16].
is an experimental model designed to show the trade-off between dynamic energy savings
and static power savings. Every three epochs that our ML+TURBO model determined a
router should operate in a mode other than the lowest or highest mode, we instead forced
that router to operate in the highest mode. The goal was to see if we could lose some
dynamic energy savings to obtain a greater increase in static power savings through faster
simulations. For a mesh topology with an epoch size of 500 cycles, ML+TURBO saved
on average 52% static power and 21% dynamic energy for a latency increase of 3% and a
throughput loss of 7%. For a CMesh topology, ML+TURBO saved on average 37% static
power and 14% dynamic energy for a latency increase of 2% and a throughput loss of 4%.
When compared to our DozzNoC model, we note that not only did we have a slight loss in
static power savings, but that we also had a slight loss in dynamic energy savings. This is

80
because the highest mode of operation consumes the most dynamic energy and it has the
highest static power cost. Also, operating in the highest mode doesn’t necessarily mean
that the simulation will end sooner because packet injection is based on real valued cycle
times [16].

81
5 Conclusions and FutureWork
In this thesis, we presented and evaluated two novel energy proportional computing
techniques applicable to the NoC. The first technique was proactive machine learning
enhanced DVFS on a per router basis in the form of our various LEAD models. In the
sections that presented and evaluated our LEAD models, we showed how proactive mode
selection techniques such as LEAD-τ can lead to substantial dynamic energy savings of
17% on average with minimal loss in performance of 2-4%. LEAD-∆ highlights how we
can have an unequal trade-off between dynamic energy savings and performance with a 34-
35% dynamic energy reduction for 40-43% loss in throughput. This showed the opposite
side of the spectrum; how a poorly tuned or otherwise underwhelming mode selection
model can lead to sub-optimal dynamic energy savings/performance trade-off. LEAD-G
shows a mode selection model that achieved very good energy savings of 42% for an even
throughput loss of 42% resulting in an equal trade-off in saturated networks [17].
The second energy proportional computing technique we presented and evaluated
in this thesis was DozzNoC. DozzNoC is a combination of our best performing LEAD
model, LEAD-τ, with a partially non-blocking power-gated framework. In the sections
that presented and evaluated DozzNoC and its’ various comparative models, we showed
how it is possible to target both static power and dynamic energy. The power gated portion
of this design can be operated on a very fine time grain to ensure that break-even times,
wakeup times, and idle counters are accounted for, while the DVFS portion can be operated
on a larger time grain. This ensures that switching delays and computational overhead
costs are minimized. The LEAD-τ model as well as the Power Punch model were used for
comparative purposes, and highlighted the individual trade-offs associated with using either
a modern partially non-blocking power-gated scheme, or a proactive mode selection model
for DVFS. At high network load for the mesh network topology, our version of Power
Punch achieved an average of 47% static power savings at a cost of 9% throughput with

82
no reduction in dynamic energy. Our best performing LEAD model, LEAD-τ, applied
to the same topology achieved a dynamic energy reduction of 25% and a static power
reduction of 25% at a cost of only 3% throughput. Finally, our DozzNoC model achieved
an average static power reduction of 53% and an average dynamic energy reduction of 25%
for only 7% loss in throughput. These results showcase how it is possible to combine the
underlying ideas behind a partially or fully non-blocking power-gated design and smart
proactive DVFS to save both dynamic energy and static power. These savings can be
realized for minimal loss in performance and minimal run-time computational overhead
[16].
There are many avenues for future work that could improve various aspects of both
LEAD and DozzNoC. One example of future LEAD work would be the application of
more advanced machine learning techniques such as deep learning and reinforcement
learning. The goal of this future work would be to analyze the overhead and energy savings
associated with both online and offline learning, as well as the implementation of more
dynamic models that can easily adapt to new network load environments and topologies.
Another example of future LEAD work would include monitoring bit error rate and adding
noise so that reliability trade-offs can be evaluated. This type of work would mainly focus
on lower voltage levels where lower supply voltage may lead to an increase in bit error rate.
The goal of this future work would be to quantify error rate and determine the reliability
impact on energy savings and performance loss. Future DozzNoC work may include the
development of novel non-blocking strategies or other modification of the power-gating
scheme. Router/link off time would be maximized through the addition of either packet
re-routing or bypass channels. The goal would be to evaluate static power and energy
savings of a DozzNoC model with both reinforcement/deep learning techniques, and novel
non-blocking power-gating strategies.

83
References
[1] M. Baboli, N. Husin, and M. Marsono. A comprehensive evaluation of directand indirect network-onchip topologies. In Proceedings of the 2014 InternationalConference on Industrial Engineering and Operations Management, January 2014.
[2] Y. Bai, V. W. Lee, and E. Ipek. Voltage regulator efficiency aware power management.In Proceedings of the Twenty Second International Conference on ArchitecturalSupport for Programming Languages and Operating Systems (ASPLOS), April 2017.
[3] A. Banerjee, R. Mullins, and S. Moore. A power and energy exploration ofnetwork-on-chip architectures. In First International Symposium on Networks-on-Chip (NOCS’07), May 2007.
[4] Andrea Bianco, Paolo Giaccone, and Nanfang Li. Exploiting dynamic voltage andfrequency scaling in networks on chip. In 2012 IEEE 13th International Conferenceon High Performance Switching and Routing, pages 229–234, June 2012.
[5] C. Bienia and K. Li. PARSEC 2.0: A New Benchmark Suite for Chip-Multiprocessors . In Proc. of the 5th Annual Workshop on Modeling, Benchmarkingand Simulation, June 2009.
[6] Christopher M. Bishop. Pattern recognition and machine learning (informationscience and statistics). In Springer-Verlag, 2006.
[7] Paul Bogdan, Radu Marculescu, Siddharth Jain, and Rafael Gavila. An optimal con-trol approach to power management for multi-voltage and frequency islands multi-processor platforms under highly variable workloads. In International Symposium onNetworks on Chip (NoCS), pages 35–42, May 2012.
[8] Haseeb Bokhari, Haris Javaid, Muhammad Shafique, Jorg Henkel, and SriParameswaran. darknoc: Designing energy-efficient network-on-chip with multi-vtcells for dark silicon. In 2014 51st ACM/EDAC/IEEE Design Automation Conference(DAC) (DAC-51), pages 1–6, June 2014.
[9] R. Boyapati, J. Huang, N. Wang, K. H. Kim, K. H. Yum, and E. J. Kim. Fly-over:A light-weight distributed power-gating mechanism for energy-efficient networks-on-chip. In International Parallel and Distributed Processing Symposium (IPDPS), July2017.
[10] M.R. Casu, M.K. Yadav, and M. Zamboni. Power-gating technique for network-on-chip buffers. In Electronics Letters, pages 1438–1440, November 2013.
[11] Lizhong Chen and Timothy Pinkston. Nord: Node-router decoupling for effectivepower-gating of on-chip routers. In 2012 45th Annual IEEE/ACM InternationalSymposium on Microarchitecture, pages 270–281, December 2012.

84
[12] Lizhong Chen, Lihang Zhao, Ruisheng Wang, and Timothy Pinkston. Mp3:Minimizing performance penalty for power-gating of clos network-on-chip. In 2014IEEE 20th International Symposium on High Performance Computer Architecture(HPCA), pages 296–307, February 2014.
[13] Lizhong Chen, Di Zhu, Massoud Pedram, and Timothy Pinkston. Power punch:Towards non-blocking power-gating of noc routers. In 2015 IEEE 21st InternationalSymposium on High Performance Computer Architecture (HPCA), pages 378–389,July 2015.
[14] X. Chen and L. Peh. Leakage power modeling and optimization in interconnectionnetworks. In Proceedings of the 2003 International Symposium on Low PowerElectronics and Design, 2003., August 2003.
[15] Xi Chen, Zheng Xu, Hyungjun Kim, Paul Gratz, Jiang Hu, Michael Kishinevsky,Umit Ogras, and Raid Ayoub. Dynamic voltage and frequency scaling forshared resources in multicore processor designs. In 50th ACM/EDAC/IEEE DesignAutomation Conference (DAC), July 2013.
[16] Mark Clark, Yingping Chen, Avinash Karanth, Brian D. Ma, and Ahmed Louri.Dozznoc: Reducing static and dynamic energy in network-on-chips with low-latencyvoltage regulators using machine learning. In Submitted to Transactions, 2018.
[17] Mark Clark, Avinash Kodi, Razvan Bunescu, and Ahmed Louri. Lead: Learning-enabled energy-aware dynamic voltage/frequency scaling in nocs. In The 55th AnnualDesign Automation Conference (DAC), June 2018.
[18] W. Dally and B. Towles. Principles and practices of interconnection networks. InMorgan Kaufmann, 2003.
[19] Reetuparna Das, Satish Narayanasamy, Sudhir Satpathy, and Ronald Dreslinski.Catnap: Energy proportional multiple network-on-chip. In ISCA ’13 Proceedings ofthe 40th Annual International Symposium on Computer Architecture, pages 320–331,June 2013.
[20] Radu David, Paul Bogdan, and Radu Marculescu. Dynamic power management formulticores: Case study using the intel scc. In Internationa Conference on VLSI andSystem-on-Chip (VLSI-SoC), pages 147–152, October 2012.
[21] Benoit Dupont de Dinechin, Pierre Guironnet de Massas, Guillaume Lager, ClementLeger, Benjamin Orgogozoa, Jerome Reybert, and Thierry Strudela. A distributedrun-time environment for the kalray mppar-256 integrated manycore processor. InIntl. Conference on Computational Science, ICCS, Vol. 18, 2013.
[22] Gaurav Dhiman and Tajana Rosing. Dynamic voltage frequecy scaling for multi-tasking systems using online learning. In ACM/IEEE International Symposium onLow Power Electronics and Design (ISLPED), August 2007.

85
[23] C. Enz and Y. Cheng. Mos transistor modeling for rf ic design. In IEEE Journal ofSolid-State Circuits, February 2000.
[24] Stijn Eyerman and Lieven Eeckhout. Fine-grained dvfs using on-chip regulators. InACM Transactions on Architecture and Code Optimization (TACO), April 2011.
[25] Hossein Farrokhbakht, Mohammadkazem Taram, Behnam Khaleghi, and ShaahinHessabi. Toot: an efficient and scalable power-gating method for noc routers. In 2016Tenth IEEE/ACM International Symposium on Networks-on-Chip (NOCS), pages 1–8,August 2016.
[26] Quintin Fettes, Mark Clark, Razvan Bunescu, Avinash Karanth, and Ahmed Louri.Dynamic voltage and frequency scaling in nocs with supervised and reinforcementlearning techniques. In IEEE Transactions on Computers, October 2018.
[27] A. Flores, J.L. Aragon, and M. Acacio. An energy consumption characterizationof on-chip interconnection networks for tiled cmp architectures. In J Supercomput(2008) 45, September 2008.
[28] Kyle Hale, Boris Grot, and Stephen Keckler. Segment gating for static energyreduction in networks-on-chip. In 2009 2nd International Workshop on Network onChip Architectures, pages 57–62, December 2009.
[29] Richard Hay. Machine learning based dvfs for energy efficient execution ofmultithreaded workloads. In Dissertations and Theses Technical Reports-ComputerScience, November 2014.
[30] Sebastion Herbert and Diana Marculescu. Analysis of dynamic voltage/frequencyscaling in chip-multiprocessors. In Proceedings of the 2007 international symposiumon Low power electronics and design (ISLPED), August 2007.
[31] R. Hesse and N.E. Jerger. Improving dvfs in nocs with coherence prediction. InNOCS ’15 Proceedings of the 9th International Symposium on Networks-on-Chip,September 2015.
[32] M. Horowitz. 1.1 computing’s energy problem (and what we can do about it). In2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers(ISSCC), pages 10–14, February 2014.
[33] Brad Hutchings, Brent Nelson, Stephen West, and Reed Curtis. Optical flow on theambric massively parallel processor array (mppa). In 17th IEEE Symposium on FieldProgrammable Custom Computing Machines, April 2009.
[34] Keith R. Jackson, Lavanya Ramakrishnan, Krishna Muriki, Shane Canon, ShreyasCholia, John Shalf, Harvey J. Wasserman, and Nicholas J. Wright. Performanceanalysis of high performance computing applications on the amazon web services

86
cloud. In IEEE Second International Conference on Cloud Computing Technologyand Science (CLOUDCOM), 2010.
[35] Rahul Jain, Preeti Panda, and Sreenivas Subramoney. Machine learned machines:Adaptive co-optimization of caches, cores, and on-chip network. In Design,Automation and Test in Europe Conference and Exhibition (DATE), April 2016.
[36] R.M. Warner Jr. and B. L. Grung. Transistors: Fundamentals for the integrated-circuitengineer. 1984.
[37] S. Kaxiras and M. Martonosi. Computer architecture techniques for power-efficiency.In Morgan and Claypool Publishers, 2008.
[38] R. Lippmann. An introduction to computing with neural nets. In IEEE ASSPMagazine, 1987.
[39] N. Magen, A. Kolodny, U. Weiser, and N. Shamir. Interconnect-power dissipation ina microprocessor. In SLIP ’04 Proceedings of the 2004 international workshop onSystem level interconnect prediction, pages 7–13, February 2014.
[40] G. Magklis, P. Chaparro, J. Gonzalez, and A. Gonzalez. Independent front-end andback-end dynamic voltage scaling for a gals microarchitecture. In Proceedings ofthe 2006 International Symposium on Low Power Electronics and Design (ISPLED),2006.
[41] Asit K. Mishra, Reetuparna Das, Soumya Eachempati, Ravi Iyer, N. Vijaykrishnan,and Chita R. Das. A case for dynamic frequency tuning in on-chip networks. InProceedings of the International Symposium on Microarchitecture (MICRO), pages392–303, 2009.
[42] G. E. Moore. Cramming more components onto integrated circuits. In Proceedingsof the IEEE, January 1998.
[43] Nasim Nasirian, Reza Soosahabi, and Magdy Bayoumi. Traffic-aware power-gatingscheme for network-on-chip routers. In 2016 IEEE Dallas Circuits and SystemsConference (DCAS), pages 1–4, October 2016.
[44] B. Parhami. Computer architecture: From microprocessors to supercomputers. InOxford University Press, 2005.
[45] Ritesh Parikh, Reetuparna Das, and Valeria Bertacco. Power-aware nocs throughrouting and topology reconfiguration. In DAC ’14 Proceedings of the 51st AnnualDesign Automation Conference, pages 1–6, June 2014.
[46] D. A. Patterson and J. L. Hennessy. Computer organization and design: Thehardware/software interface, 5th ed. In Morgan Kaufmann, 2013.

87
[47] Carl Ramey. Tile-gx100 manycore processor: Acceleration interfaces and architec-ture. In 2011 IEEE Hot Chips 23 Symposium (HCS), August 2011.
[48] Ahmad Samih, Ren Wang, Anil Krishna, Christian Maciocco, Charlie Tai, andYan Solihin. Energy-efficient interconnnect via router parking. In 2013 IEEE19th International Symposium on High Performance Computer Architecture (HPCA),pages 508–519, February 2013.
[49] K.Y. Sanbonmatus and C.S. Tung. High performance computing in biology:Multimillion atom simulations of nanoscale systems. In Journal of Structural Biology,October 2006.
[50] R. R. Schaller. Moore’s law: past, present and future. In IEEE Spectrum Volume: 34,June 1997.
[51] Li Shang, Li-Shiuan Peh, and Niraj K. Jha. Analysis of dynamic voltage/frequencyscaling in chip-multiprocessors. In Computer Architecture Letters, pages 6–6, January2002.
[52] Hao Shen, Jun Lu, and Qinru Qiu. Learning based dvfs for simultaneous temperature,performance and energy management. In 13th International Symposium on QualityElectronic Design (ISQED), March 2012.
[53] W. Shockley and R. Brown. Electrons and holes in semiconductors with applicationsto transistor electronics. 1963.
[54] L. Shulenburger, A. Landahl, J. Moussa, O. Parekh, J. Wendt, and J. Aidun.Benchmarking adiabatic quantum optimization for complex network analysis. InTechnical Report SAND2015-3025, Sandia National Laboratories, June 2015.
[55] Seung Son, K. Malkowski, Guilin Chen, M. Kandemir, and P. Raghavan. Integratedlink/cpu voltage scaling for reducing energy consumption of parallel sparse matrixapplications. In Proceedings 20th IEEE International Parallel and DistributedProcessing Symposium, April 2006.
[56] C. Sun, C. Chen, G. Kurian, L. Wei, J. Miller, A. Agarwal, L. Peh, and V. Stojanovic.Dsent - a tool connecting emerging photonics with electronics for opto-electronicnetworks-on-chip modeling. In IEEE/ACM Sixth International Symposium onNetworks-on-Chip, May 2012.
[57] Chen Sun, C.-H.O. Chen, G. Kurian, Lan Wei, J. Miller, A. Agarwal, Li-Shiuan Peh,and V. Stojanovic. Dsent - a tool connecting emerging photonics with electronics foropto-electronic networks-on-chip modeling. In Networks on Chip (NoCS), 2012 SixthIEEE/ACM International Symposium on, pages 201–210, 2012.

88
[58] Rafael Ubal, Byunghyun Jang, Perhaad Mistry, Dana Schaa, and David Kaeli.Multi2sim: A simulation framework for cpu-gpu computing. In Proceedings of the21st International Conference on Parallel Architectures and Compilation Techniques,PACT ’12, pages 335–344, 2012.
[59] Saeeda Usman, Samee Khan, and Sikandar Khan. A comparative study ofvoltage/frequency scaling in noc. In IEEE International Conference on Electro-Information Technology , EIT 2013, pages 1–5, May 2013.
[60] R. Widlar. New developments in ic voltage regulators. In IEEE International Solid-State Circuits Conference. Digest of Technical Papers, February 1970.
[61] S.C. Woo, M. Ohara, E. Torrie, J. P. Singh, and A. Gupta. The SPLASH-2Programs: Characterization and Methodological Considerations. In Proc. of the 22ndInternational Symposium on Computer Architecture, June 1995.
[62] Sheng Yang, Rishad Shafik, Geoff Merrett, Edward Stott, Joshua Levine, JamesDavis, and Bashir Al-Hashimi. Adaptive energy minimization of embeddedheterogeneous systems using regression-based learning. In 25th InternationalWorkshop on Power and Timing Modeling, Optimization and Simulation (PATMOS),September 2015.
[63] Jia Zhan, Nikolay Stoimenov, Jin Ouyang, Lothar Thiele, Vijaykrishnan Narayanan,and Yuan Xie. Optimizing the noc slack through voltage and frequency scaling inhard real-time embedded systems. In IEEE Transactions on Computer-Aided Designof Integrated Circuits and Systems, pages 1632–1643, November 2014.
[64] Davide Zoni, Federico Terraneo, and William Fornaciari. A dvfs cycle accurate sim-ulation framework with asynchronous noc design for power-performance optimiza-tions. In Journal of Signal Processing Systems, pages 357–371, June 2016.

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!
Thesis and Dissertation Services




















