Design and Performance of Plastic Modular Adaptors for External Transtibial Prostheses
8
Proceedings of the 2010 Design of Medical Devices Conference DMD2010 April 13-15, 2010, Minneapolis, MN, USA DMD2010-3833 DESIGN AND PERFORMANCE OF PLASTIC MODULAR ADAPTORS FOR EXTERNAL TRANSTIBIAL PROSTHESES Rafael R. Torrealba * and Carmen M. M ¨ uller-Karger Biomechanics Research Group Department of Mechanics, Sim ´ on Bol´ ıvar University Caracas, Miranda, 1080A, Venezuela Email: [email protected] ABSTRACT There is a very large need for prosthetic components in de- veloping countries, where such devices are imported and pro- hibitively expensive. The present work explores the possibility of developing and manufacturing prosthetic components locally in Venezuela, preserving high quality and function. We aimed to develop a kit of plastic modular adaptors for external transtib- ial prostheses. The project was divided in four stages that cov- ered design, stress analyses, manufacture, and function assess- ment of the components. The design process is presented in de- tail, resulting a prototype that comprises four adaptors of simple design. Their response was studied with stress analysis using the Finite Element Method applying static loads for different in- stants of gait during the stance phase. Then, five kits of adaptors were manufactured with thermoplastic material using conven- tional metal-working machines. The resulting components were lighter and cheaper than equivalent imported metallic ones. The kits were adapted to four patients and assessed via gait analy- sis. A very good function was observed, with no significant dif- ferences in spatio-temporal gait parameters (p<0.05) compared to normal values nor significant asymmetries between prosthetic and sound sides. However, these results are preliminary as the kits were not tested to structural fatigue. This remains for a fu- ture work aimed to assess the performance of such adaptors in the field. Keywords: Transtibial prostheses, modular adaptors, prostheses design, stress analysis, gait analysis. * Address all correspondence to this author. INTRODUCTION Several kinds of adaptors for external transtibial prostheses are available today from a variety of prostheses manufacturers, usually based in developed countries. These components are ex- ported to developing countries, where access is limited because of their high cost. Important efforts to facilitate access have been done by organizations such as the International Society for Prosthetics and Orthotics (ISPO), the World Health Organiza- tion (WHO) and the International Committee of the Red Cross among others [1–4]. Despite these efforts, the gap between the patient need and the availability of components is significant and currently growing. According to WHO, the demand of prosthe- ses in low-income countries is estimated to be of 30 million by 2010 [5], and given the trends, the present supply model will not be able to satisfy this demand. The aim of this research is to design generic prosthetic com- ponents of good quality, taking advantage of the manufacturing processes already available in many developing countries [6,7]. This project started in 2006 with the development of a transtibial prosthesis consisting of a modular adaptor for a specific patient in Venezuela [8]. These adaptors are essential to build lower limb prostheses as they join the socket, the knee (in transfemoral amputees) and the foot-ankle unit. Nevertheless, being just the connecting parts, they may seem not important in the overall eco- nomics of a prosthetic limb. In transtibial prostheses, however, although the ankle-foot unit would be expensive, the sum of all the adaptors required may represent the main cost of the pros- thesis. As example, using a typical SACH foot, the imported metallic adaptors found nowadays in Venezuela may represent 1 Copyright c 2010 by ASME Proceedings of the 2010 Design of Medical Devices Conference DMD2010 April 13-15, 2010, Minneapolis, MN, USA DMD2010-3833 1 Reprinted with permission of Rafael R. Torrealba, Carmen M. Müller-Karger
Transcript of Design and Performance of Plastic Modular Adaptors for External Transtibial Prostheses

Proceedings of the 2010 Design of Medical Devices ConferenceDMD2010
April 13-15, 2010, Minneapolis, MN, USA
DMD2010-3833
DESIGN AND PERFORMANCE OF PLASTIC MODULAR ADAPTORSFOR EXTERNAL TRANSTIBIAL PROSTHESES
Rafael R. Torrealba∗ and Carmen M. Muller-KargerBiomechanics Research Group
Department of Mechanics, Simon Bolıvar UniversityCaracas, Miranda, 1080A, Venezuela
Email: [email protected]
ABSTRACTThere is a very large need for prosthetic components in de-
veloping countries, where such devices are imported and pro-hibitively expensive. The present work explores the possibilityof developing and manufacturing prosthetic components locallyin Venezuela, preserving high quality and function. We aimed todevelop a kit of plastic modular adaptors for external transtib-ial prostheses. The project was divided in four stages that cov-ered design, stress analyses, manufacture, and function assess-ment of the components. The design process is presented in de-tail, resulting a prototype that comprises four adaptors of simpledesign. Their response was studied with stress analysis usingthe Finite Element Method applying static loads for different in-stants of gait during the stance phase. Then, five kits of adaptorswere manufactured with thermoplastic material using conven-tional metal-working machines. The resulting components werelighter and cheaper than equivalent imported metallic ones. Thekits were adapted to four patients and assessed via gait analy-sis. A very good function was observed, with no significant dif-ferences in spatio-temporal gait parameters (p<0.05) comparedto normal values nor significant asymmetries between prostheticand sound sides. However, these results are preliminary as thekits were not tested to structural fatigue. This remains for a fu-ture work aimed to assess the performance of such adaptors inthe field.Keywords: Transtibial prostheses, modular adaptors, prosthesesdesign, stress analysis, gait analysis.
∗Address all correspondence to this author.
INTRODUCTIONSeveral kinds of adaptors for external transtibial prostheses
are available today from a variety of prostheses manufacturers,usually based in developed countries. These components are ex-ported to developing countries, where access is limited becauseof their high cost. Important efforts to facilitate access havebeen done by organizations such as the International Society forProsthetics and Orthotics (ISPO), the World Health Organiza-tion (WHO) and the International Committee of the Red Crossamong others [1–4]. Despite these efforts, the gap between thepatient need and the availability of components is significant andcurrently growing. According to WHO, the demand of prosthe-ses in low-income countries is estimated to be of 30 million by2010 [5], and given the trends, the present supply model will notbe able to satisfy this demand.
The aim of this research is to design generic prosthetic com-ponents of good quality, taking advantage of the manufacturingprocesses already available in many developing countries [6, 7].This project started in 2006 with the development of a transtibialprosthesis consisting of a modular adaptor for a specific patientin Venezuela [8]. These adaptors are essential to build lowerlimb prostheses as they join the socket, the knee (in transfemoralamputees) and the foot-ankle unit. Nevertheless, being just theconnecting parts, they may seem not important in the overall eco-nomics of a prosthetic limb. In transtibial prostheses, however,although the ankle-foot unit would be expensive, the sum of allthe adaptors required may represent the main cost of the pros-thesis. As example, using a typical SACH foot, the importedmetallic adaptors found nowadays in Venezuela may represent
1 Copyright c© 2010 by ASME
Proceedings of the 2010 Design of Medical Devices Conference DMD2010
April 13-15, 2010, Minneapolis, MN, USA
DMD2010-3833
1 Reprinted with permission of Rafael R. Torrealba, Carmen M. Müller-Karger

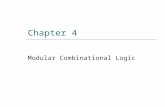
Figure 1. FINAL DESIGN OF ADAPTORS AND ASSEMBLY.
up to 70% of the cost of a transtibial prosthesis.To deal with the aforementioned situation there are con-
ceived two ways, to produce these components in an automatedline to reduce the manufacturing costs, or to develop a particu-lar design feasible to manufacture in conventional metal-workingmachines found all over the country, to allow medium level tech-nicians to produce these adaptors according to patients’ needs.This work presents an approach in the second direction, eventhough the resulting adaptors might be manufactured in an auto-mated process as well.
METHODSDesign process
The design criteria for the kit of adaptors were establishedas follows:
? Should have as few components and be as simple as pos-sible, but robust enough to support the loads applied on alower limb during walking for a person weighing up to 100kg, considering 2.5 as design safety factor.
? Should be easy-to-manufacture using conventional metal-working machines and materials found in Venezuela.
? Should be compatible with other standard kinds of adaptors.
A state-of-the-art review was performed studying differ-ent models offered by manufacturers [9–11] and internationalpatents [12–14]. Eight designs emerged as potentially meetingthe aforementioned criteria. From these, the design composedof the socket adaptor, the upper adaptor, the extension adaptor,and the foot adaptor, shown in Fig. 1, was selected and furtherdeveloped in the software ProENGINEER R© WilfFire 3.0.
The adaptors were designed from a cylindrical geometry andusing thermoplastic material, as recommended by the ISPO [1].Dimensions were given according to standard metallic adap-tors, counterbalancing the reduced strength of the plastic mate-rial by adding more material, especially in the wall thicknesses.
(a)
(b)
Figure 2. DETAIL OF THE CLAMP DESIGN: (a) UPPER ADAPTOR, (b)FOOT ADAPTOR.
These adaptors, including the clamps, can be manufactured us-ing mostly a conventional lathe given their cylindrical shape, andonly few manufacturing steps require a milling machine instead.In this regard, the key feature of this design is the way the clampis created by moving its section away from the cylinder axis, andmaking its diameter bigger as seen in Fig. 2.
Stress analysesStresses, strains and displacements on the adaptors were an-
alyzed using the Finite Element Method (FEM) with the softwareANSYS R© 10.0. Table 1 shows loads acting on the foot along thestance phase of gait cycle for a patient weighing 100 kg. Theseforces were calculated according to Nordin and Frankel [15] andresults for the most critical cases, namely Flat foot (FF) and Im-pulse (I), are presented. Four different analyses combining theseloads with the corresponding boundary conditions on the adap-tors were performed to model tension, compression, torsion andbending.
The material used for the tests was nylon 6.6. However, asteel nut was included in the hole of the adaptors clamp to re-duce an apparent stress concentration. This nylon, and the nutsand bolts required by the adaptors are easily found locally. Thematerials properties are shown in Tab. 2. All the materials areconsidered to be homogeneous, linear and isotropic.
The sequence of the analyses was completed from the sim-
2 Copyright c© 2010 by ASME
2

Table 1. FORCES ACTING ON THE FOOT ALONG THE STANCE PHASE OF GAIT CYCLE FOR A PATIENT WEIGHING 100 KG.
EVENTS
FORCES ON THE FOOT Heel contact (HC) Flat foot (FF) Heel-off (HO) Impulse (I) Toe-off (TO)
Vertical load [N] 0 1050 900 1200 100
Sagittal shear [N] 50 (forward) 140 (backward) 0 160 (forward) 50 (forward)
Coronal shear [N] 0 50 (inside) 40 (inside) 40 (inside) 20 (inside)
Axial torque [Nm] 0 4 (outside) 0 3 (inside) 0
Table 2. MECHANICAL PROPERTIES OF MATERIALS.
MATERIAL Young’s modulus [MPa] Poisson’s ratio
Nylon 2,240 0.39
Steel 205,800 0.29
plest model to the more complex, performing a convergenceanalysis for each one. The convergence is reached once the re-sults of two meshes, with a difference in number of elements noless than 10,000, differ in less than 5% in terms of the maxi-mum Von Mises stress, strain and displacements. All the mesheswere created using the ten-nodes tetrahedral element SOLID92.Meshes were refined in critical sections as small areas and transi-tion fillets. The average distance between nodes in these sectionswas 0.75 mm, resulting at least two elements across. Boundaryconditions were applied on nodes located in the specific areaswhere load transfer and displacement restrictions actually occuron the adaptors, for example the screw holes in the upper adaptorand the pin holes in the foot adaptor.
ManufactureFive kits of adaptors were machined in nylon 6.6 using con-
ventional metal-working machines, specifically a lathe and amilling machine. Figure 3 shows one of the kits assembled. Thefinal weight of the plastic kit compared to a metallic commer-cial one is presented, as well as the total machining time of theadaptors. Also, a comparison of costs between the kit of adaptorsdeveloped and a standard imported one is performed.
Function assessmentGait analyses were performed to assess the function of the
kits on patients. With written informed consent from the pa-tients and approval by the Bioethics Committee of Simon BolıvarUniversity for Medical Physics and Biomedical Engineering Re-
Figure 3. KIT OF ADAPTORS ASSEMBLED.
search, the kits were adapted to patients, with PTB sockets andSACH foot-ankle units. All patients had previous experience us-ing commercial prostheses and completed an adaptation periodof three months wearing the prostheses before the assessment.Table 3 shows the data of the patients selected to test the adap-tors under different load conditions.
The gait analyses took place at the Children’s OrthopedicHospital of Caracas’ Gait Lab. The motion capture system wascomposed of six optical cameras (VICON 460 SYSTEM, Ox-ford Metrics Ltd, UK) and three AMTI force plates. Duringthe trials, each patient walked through the 8m-long walkwayof the lab, carrying fifteen reflective markers placed at land-marks on the pelvis and both legs according to standard proto-col [16]. The best three trials were selected from each session.All patients walked at a self-selected speed and data samplingfrequency was 60Hz. Data was processed in the VICON pack-age (Workstation R©, Bodybuilder R© and Polygon R©) at the gait laband plots of kinematic and kinetic data were generated. Later,analysis of variance was performed on spatio-temporal gait pa-rameters via multiple comparison test in MATLAB, to determineif there were statistically significant differences between the pa-tients’ gait data and normal values reported by the gait lab, witha confidence level of 95% (p<0.05).
3 Copyright c© 2010 by ASME
3

Table 3. DATA OF THE TREATED PATIENTS.
Patient No. Gender Age [years] Height [m] Weight [kg] Side K-level ∗
1 M 41 1.82 76.8 L K4
2 M 23 1.69 70.3 L K2
3 M 16 1.76 48.0 L&R K3
4 M 32 1.82 100.7 L K4
∗ Grade of mobility according to U. S. K-level classification.
RESULTSStress analyses
The stress analyses carried out considered the upper adaptor,the foot adaptor and the extension adaptor (connecting bar). Thesocket adaptor was considered to be part of the socket and hence,not critical in terms of stresses.
Analysis 1: This analysis was aimed to determine themaximum closing displacement of the upper and foot adaptorclamps without the connecting bar, before exceeding the yieldstrength of nylon 6.6 (58 MPa). These maxima were 1.12 mmand 1.10 mm, respectively, appearing at the stress reliever zoneon both adaptors, as seen in Fig. 4.
Analysis 2: Two assemblies were studied in this anal-ysis: (a) upper adaptor-connecting bar and (b) foot adaptor-connecting bar. One end of the bar is always restricted tozero displacement, while the closing displacement of the adaptorclamp is applied on the other end. In assembly (a), the maximumclosing displacement admissible in the clamp was 0.22 mm, witha maximum Von Mises stress of 56.336 MPa occurring in theadaptor, specifically on the flat surface where the nut lies in theclamp hole. In assembly (b), the maximum closing displacementadmissible in the clamp resulted 0.25 mm, with a maximum VonMises stress of 57.460 MPa occurring in the adaptor, specificallyon the flat surface where the bolt head lies in the clamp hole.
Analysis 3: The contact condition and stresses of the as-semblies for analysis 2 were studied. The augmented Lagrangemethod was used as contact algorithm, with both flexible sur-faces, plus default values for contact conditions as admissiblepenetration and offset. The value of the static friction coefficientused for nylon-nylon contact was 0.15. The maximum Von Misesstress of assembly (a) was 28.653 MPa on the upper adaptor, witha maximum contact stress of 3.683 MPa occurring near the adap-tor slot, on the bolt head side of the clamp. Assembly (b) yieldeda maximum Von Mises stress of 41.233 MPa on the foor adap-
(a)
(b)
Figure 4. STRESSES (MPa) IN THE UPPER AND FOOT ADAPTORSWHEN CLOSING THE CLAMPS WITHOUT THE CONNECTING BAR:(a) UPPER ADAPTOR, (b) FOOT ADAPTOR.
tor, whereas the maximum contact stress was 4.396 MPa near theadaptor slot, also on the bolt head side of the clamp.
Analysis 4: This analysis studied the whole assembly,composed of the upper adaptor, the foot adaptor and the exten-sion adaptor. As boundary conditions, the forces correspondedto the I event (Tab. 1) and were applied on the foot adaptor,
4 Copyright c© 2010 by ASME
4

(a)
(b)
Figure 5. STRESSES (MPa) IN ASSEMBLY COMPOSED OF THE UP-PER ADAPTOR, THE FOOT ADAPTOR AND THE EXTENSION ADAP-TOR: (a) UPPER ADAPTOR, (b) FOOT ADAPTOR.
while the displacements of the base of the upper adaptor were re-stricted to zero. The results yielded a maximum Von Mises stressof 66.761 MPa, which occurs in the foot adaptor as shown in Fig.5(b), and exceeds the yield strength of nylon 6.6 (58 MPa). Thesame stress concentration in the zone where the nut is inserted inthe upper adaptor clamp is observed in Fig. 5(a).
The latter led to include the nuts in the assembly, which di-minished the maximum Von Mises stress to 38.943 MPa, occur-ring in the nut inserted in the upper adaptor clamp as seen in Fig.6. Regarding the nylon components, the highest Von Mises stressoccurred in the foot adaptor, with a value of 22.974 MPa, specif-ically on the flat surface where the bolt head lies in the clamphole.
ManufactureIn average, a kit of adaptors manufactured in nylon 6.6
weighs 539.8 g. This represents an overall weight reduction of17% compared to a standard metallic kit, even considering theconnecting bar that resulted 45.4 g heavier (19%) compared to itsmetallic counterpart (aluminum connecting tube). On the other
Figure 6. STRESSES (MPa) IN THE NUT INSERTED IN THE UPPERADAPTOR CLAMP.
hand, a kit of adaptors takes 5 hours and 17 minutes to be pro-duced by conventional metal-working machining. The cost ofthe manufactured kit was $126.00, resulting 69% less expensivethan a standard imported one as sold by local prosthetic facilitiesin Venezuela.
Function assessmentFigure 7 shows the angle and power plots at prosthesis an-
kle of patient 4, whereas Tab. 4 shows the spatio-temporal gaitparameters results for all four patients, which are all very sim-ilar. The prosthesis complied with the heel and ankle rockers,although not with the forefoot rocker. The latter corresponds topush-off towards the end of the stance phase of gait cycle, and itis clear that the prosthesis foot-ankle unit follows the trend butis out of the normal limits. Then, after toe-off, the ankle returnsto 0◦ of motion and keeps this way throughout the swing phase.In terms of ankle power, the same behaviour is observed, espe-cially the adequate response of the prosthesis along the first tworockers, whereas the difference during the third one.
Regarding Tab. 4, differences between the normal and pa-tients overall values were statistically significant (p<0.05) onlyfor stride and stance times. There were no significant asymme-tries between the sound and prosthetic sides (p<0.05). As nor-mal in prosthetic gait, the stance time tended to be longer on thesound side, whereas the swing time was shorter. Cadence andgait speed values were also typically lower than normal [17, 18],however patient 1 presented a higher gait speed (statistically dif-ferent with p<0.05), mainly attributed to a major stride length.
DISCUSSIONThe simulation of the adaptors under forces applied on the
two most critical events of the stance phase showed that thestresses do not reach the yield strength of nylon 6.6. In the anal-ysis of the assembly, the maximun Von Mises stress occurs in the
5 Copyright c© 2010 by ASME
5

(a)
(b)
Figure 7. ANGLE AND POWER AT PROSTHESIS ANKLE ACCORD-ING TO GAIT ANALYSIS OF PATIENT 4.
nut inserted in the upper adaptor, and its value is four times lowerthan the yield strength of any carbon steel. Regarding the nylonparts, the yield strength of nylon 6.6 (58 MPa) considering 2.5 assecurity factor is 23.2 MPa, so the maximum Von Mises stress of22.974 MPa in the foot adaptor is admissible. Moreover, recentresearch has led to other local suppliers that offer nylon 6.6 witha yield strength around 80 MPa, which would represent a secu-rity factor even higher. The contact problem was not of mainconcern in this work, however, it provided information about thepresence of sticking zones that were considered as a limit condi-tion. Stress analyses were carried out to ascertain material per-formance under anticipated loads and decide whether to proceedwith manufacture of adaptors. Further dynamic analyses must beperformed to study fatigue failure on these components.
Regarding the adaptors weight, they resulted 17% lighterthan standard metallic ones, despite the material added to coun-terbalance the lower strength of nylon 6.6 compared to a metal.The lower weight was noticed by all treated patients. The man-
ufacturing time of the adaptors is high compared to automatedmanufacturing processes, nevertheless, this variable is not as im-portant (to address needs in low-income and developing coun-tries) as to make it practical for local manufacturers to producethese components themselves. In Venezuela, even in small ru-ral towns there are basic metal-working workshops, for exampleto repair parts of automobiles, washing-machines, refrigerators,etc. This enables to provide persons with limb loss in these townswith affordable adaptors that they can manufacture and repair.Thus, the dependence of assistance organizations and researchgroups would be diminished and local solution of prostheticneeds would be encouraged. On the other hand, the cost of themanufactured adaptors was more than three times (3.23) cheaperthan standard imported ones in Venezuela. This revealed thatproducing these adaptors even with conventional metal-workingmachines and materials found locally may represent a solution toavoid increasing their cost due to importation.
The assessment of the adaptors via gait analysis allowed toobtain a preliminary objective measure of adaptors function onpatients, however, tells nothing of long-term use of the adaptorsin the field. The angle and power plots at prosthesis ankle wereconsidered the appropriate curves to analyze the adaptors func-tion from the gait lab reports. The difference observed in theadaptors behaviour compared with a sound ankle was expected,since during the forefoot rocker the strongest propelling force ofthe gait cycle is applied by the gastrocnemius and soleus mus-cles [18, 19], which are not present in the prosthesis. Finally,from the statistical analysis of patients’ gait data, the adaptorsshowed no alterations of typical prosthetic gait attributed to theirbehaviour.
CONCLUSIONSThe possibility of manufacturing prosthetic components
with good function for a low cost, making use of technologyand materials easily accessible in Venezuela, has been explored.The total process of developing these components was presented,covering the design process, stress analyses, manufacture andfunction assessment. The kit designed comprises four adap-tors for external transtibial prostheses. Previous to manufacture,adaptors stresses were studied via FEM considering ground re-action forces applying on the foot for a person weighing up to100 kg and a design security factor of 2.5. In all cases, the stressanalyses results were admissible considering the adaptors madeof nylon 6.6.
Five kits of adaptors were manufactured using only conven-tional metal-working machines. The adaptors manufactured inplastic resulted 17% lighter than standard metallic ones, and theircost was 69% less expensive than standard imported adaptors inVenezuela. Finally, the kits were adapted to patients and assessedvia gait analysis after completing a three-months period of adap-tation. The patients’ gait data was studied with statistical analysis
6 Copyright c© 2010 by ASME
6

Table 4. MEAN AND STANDARD DEVIATION OF GAIT PARAMETERS REPORTED BY GAIT LAB ANALYSES.
GAIT PARAMETER Side Patient 1 Patient 2 Patient 3 † Patient 4 Overall ∗
Cadence [step/min] L 112.7 ± 1.5 99.5 ± 4.1 97.3 ± 2.7 100.5 ± 2.2 102.3 ± 23.1
Normal 108.8 ± 11.3 R 110.0 ± 2.6 101.5 ± 3.9 95.1 ± 0.8 102.0 ± 1.7
Stride time [s] L 1.07 ± 0.02 1.21 ± 0.05 1.23 ± 0.04 1.20 ± 0.03 1.18 ± 0.26
Normal 0.91 ± 0.09 R 1.09 ± 0.03 1.18 ± 0.05 1.26 ± 0.01 1.18 ± 0.02
Step time [s] L 0.55 ± 0.03 0.65 ± 0.03 0.61 ± 0.03 0.59 ± 0.01 0.59 ± 0.17
Normal 0.50 ± 0.02 R 0.52 ± 0.01 0.55 ± 0.03 0.62 ± 0.01 0.59 ± 0.03
Single support [s] L 0.41 ± 0.01 0.35 ± 0.01 0.45 ± 0.02 0.42 ± 0.01
(% gait cycle) (38%) (29%) (36%) (35%) 0.43 ± 0.15
Normal 0.34 ± 0.04 R 0.43 ± 0.02 0.45 ± 0.03 0.48 ± 0.01 0.44 ± 0.01 (37%)
(38%) (40%) (38%) (38%) (37%)
Double support [s] L 0.23 ± 0.02 0.39 ± 0.04 0.32 ± 0.01 0.33 ± 0.04
(% gait cycle) (22%) (32%) (26%) (28%) 0.32 ± 0.20
Normal 0.23 ± 0.02 R 0.26 ± 0.01 0.37 ± 0.05 0.33 ± 0.01 0.32 ± 0.01 (27%)
(24%) (24%) (32%) (26%) (27%)
Stance time [s] L 0.64 ± 0.01 0.74 ± 0.04 0.77 ± 0.02 0.76 ± 0.03
(% gait cycle) (60%) (61%) (62%) (63%) 0.75 ± 0.23
Normal 0.57 ± 0.06 R 0.69 ± 0.01 0.83 ± 0.04 0.81 ± 0.01 0.76 ± 0.02 (64%)
(62%) (64%) (70%) (64%) (64%)
Swing time [s] L 0.43 ± 0.01 0.47 ± 0.02 0.46 ± 0.02 0.44 ± 0.01
(% gait cycle) (40%) (39%) (38%) (37%) 0.43 ± 0.15
Normal 0.34 ± 0.04 R 0.40 ± 0.02 0.36 ± 0.01 0.46 ± 0.02 0.42 ± 0.03 (36%)
(38%) (36%) (30%) (36%) (36%)
Stride length [m] L 1.49 ± 0.04 1.29 ± 0.06 1.29 ± 0.03 1.31 ± 0.05 1.34 ± 0.38
Normal 1.11 ± 0.18 R 1.51 ± 0.03 1.29 ± 0.06 1.29 ± 0.02 1.29 ± 0.05
Step length [m] L 0.77 ± 0.03 0.68 ± 0.03 0.62 ± 0.03 0.70 ± 0.02 0.67 ± 0.23
Normal 0.56 ± 0.09 R 0.72 ± 0.01 0.61 ± 0.03 0.67 ± 0.02 0.59 ± 0.03
Gait speed [m/s] L 1.40 ± 0.03 1.07 ± 0.10 1.04 ± 0.05 1.10 ± 0.06 1.15 ± 0.58
Normal 1.21 ± 0.16 R 1.39 ± 0.03 1.09 ± 0.08 1.02 ± 0.02 1.09 ± 0.06
∗ All values with p<0.05; † Bilateral transtibial patient.
and compared to normal values reported by the gait lab. As noalterations of typical prosthetic gait attributed to the adaptors be-
haviour were found, it is concluded that the components showgood function. However, structural fatigue tests of the adaptors
7 Copyright c© 2010 by ASME
7

are still required, and will be performed according to ISO 10328as the next step of this project.
ACKNOWLEDGMENTThis work was supported with funds of the Project G-2005-
000172 of the Science, Innovation and Technology NationalFund of Venezuela (FONACIT, by its acronym in spanish).
REFERENCES[1] ISPO, 2000. Report of ISPO Consensus Conference on Ap-
propriate Orthopaedic Technology for Low-Income Coun-tries. Moshi, Tanzania.
[2] Word Health Organization, 2005. Guidelines fortraining personnel in developing countries forprosthetics and orthotics services. See also URLhttp://www.who.int/disabilities/publications/technology/en/.
[3] International Committee of the Red Cross,2007. Polypropylene technology. See also URLhttp://www.icrc.org/web/eng/siteeng0.nsf/html/p0913.
[4] Nummelin, L., and Lfstedt, T., 1995. “Finnish Red Crossmultiprosthesis system”. In Proceedings of the ISPO Con-sensus Conference on Appropriate Orthopaedic Technol-ogy for Low-Income Countries. Phnom Penh, Cambodia,pp. 160-163.
[5] Pearlman, J., Cooper, R.A., Krizack, M., Lindsley, A.,Wu, Y., Reisinger, K.D., Armstrong. W., Casanova, H.,Chhabra, H.S., and Noon, J., 2008. “Lower-Limb Pros-theses and Wheelchairs in Low-Income Countries: AnOverview”. IEEE Engineering in Medicine and Biology,27(2), pp. 12-22.
[6] Jensen, J.S., Craig, J.G., Mtalo, L.B., and Zelaya, C.M.,2004. “Clinical field follow-up of high density polyethylene(HDPE) Jaipur prosthetic technology for transfemoral-amputees”. Prosthetics and Orthotics International, 28(2),pp. 152-166.
[7] Boone, D.A., 1995. “Prosthetic outreach foundation pro-gramme evaluation of automated fabrication of limb pros-theses in Vietnam”. In Proceedings of the ISPO Consen-sus Conference on Appropriate Orthopaedic Technologyfor Low-Income Countries. Phnom Penh, Cambodia, pp.95-105.
[8] Lanza, U., Muller-Karger, C., and Graciano, C., 2006.“High-tech or solving the needs in developing countries”.Journal of Biomechanics, 39(1), pp. S524.
[9] TiMed, 2009. TiMed Prosthetic Components. On theWWW, URL http://www.ti-med.com/alum.html.
[10] Fillauer, 2008. Fillauer Advertis-ing Literature. On the WWW, Dec.http://www.fillauer.com/advertising/index.html.
[11] Ossur, 2008. Ossur Standard Adapters rated
to 100kg/220lbs. On the WWW, Dec. URLhttp://www.ossur.com/?pageid=3564#Socket%20Adapters.
[12] Arbogast, R.E., Bartkus, E.K., Colvin, J., and Arbogast,J., 1995. Adjustable lower limb prosthesis having conicalsupport, US Patent 5,405,410.
[13] Voisin, J.P., 2001. Prosthetic adaptor and prosthetic limbusing same, US Patent 6,312,475.
[14] Steinbarger, S., and Johncour, D., 2006. Prosthetic annularcoupling socket adaptor with adjustable clamp, US Patent6,994,732.
[15] Nordin, M., and Frankel, V.H., 2001. Basic Biomechan-ics of the Musculoskeletal System. Lippincott Williams &Wilkins, Philadelphia.
[16] Kadaba, M.P., Ramakrishnan, H.K., and Wooten, M.E.,1990. “Measurement of lower extremity kinematics dur-ing level walking”. Journal of Orthopaedic Research, 8, pp.383-392.
[17] Prat, J., ed., 2005. Biomecanica de la marcha humana nor-mal y patologica (Biomechanics of normal and pathologi-cal human gait). Instituto de Biomecnica de Valencia, Va-lencia, Chap. Analisis de la marcha con protesis de miem-bro inferior (Gait analysis in lower-limb prostheses), pp.262-310.
[18] Bateni, H., and Olney, S.J., 2002. “Kinematic and kineticvariations of below-knee amputee gait”. Journal of Pros-thetics and Orthotics, 14(1), pp. 2-12.
[19] Perry, J., 1992. Gait analysis: normal and pathologicalfunction. SLACK Incorporated, Thorofare.
8 Copyright c© 2010 by ASME
8