Communications in Computer and Information Science: Using Marker Augmented Reality Technology for...
8
Communications in Computer and Information Science: A Weight Least square Algorithm for Hyperbolic Localization with Linear Sensor Array in 3-D scenario H. Kabir 1 , K. Jeevan 1 , A. W. Reza 1 , and H. Ramiah 1 1 Faculty of Engineering, Department of Electrical Engineering University of Malaya, 50603 Kuala Lumpur, Malaysia Abstract. In modern communication technology, source localization is a key research in application of navigation, tracking, radar, and sonar. A low-complex and non-iterative is proposed to estimate the source position based on Time difference of arrival at linear array sensor network (LSAN) in three dimensional scenario. We simulated our proposed method for (1) close and disjoint source from LSAN and (2) different baseline of LSAN where all sensors are on the x- axis under the Gaussian noise. The proposed method has approximated the CRLB at low to moderate noise level and contributed the better localization accuracy than Taylor’s series. Only using three sensors in LSAN, the source position is estimated by the proposed method in the 3-D scenario. Keywords: TDOA, Localization, LSAN and 3-D. 1 Introduction In radar, sonar, acoustic tracking and navigation application, signal source localization is a key challenge [1, 2]. A number of sensors which are arranged arbitrary or linear fashion, receive the signal from the emitter is used for source position estimation [3]. Time difference of arrival (TDOA) is one of the common techniques to estimate the source position, because it is appropriate for passive localization, does not have necessary time-stamping and easy to implement in the practical localization set up [4]. In arbitrary sensor fashion, Maximum likelihood estimation (MLE)[5], least square (LS)[6], Weight least square (WLS)[7], Taylor’s series [8], Genetic algorithm [9], etc. are applied to estimate the source location in the two or three dimensional scenario. However, in linear array sensor network (LASN) in Figs.1 and 2, the same method cannot be applied to singularity problem. For avoiding the singularity problem, Yiu-tong [5] , Zhengyan Xu [10], and K.C ho [11] developed an approximate maximum likelihood estimation based on time of arrival, hyperbolic geometrical solution, and analytical solution based on TDOA for 2-D scenario respectively. In our best knowledge, nobody has worked with a linear sensor array in 3-D scenario for estimating the position of the source. Therefore, we proposed an algebraic solution to locate the stationary source based on TDOA on
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of Communications in Computer and Information Science: Using Marker Augmented Reality Technology for...

Communications in Computer and Information
Science:
A Weight Least square Algorithm for Hyperbolic
Localization with Linear Sensor Array in 3-D scenario
H. Kabir1, K. Jeevan
1, A. W. Reza
1, and H. Ramiah
1
1Faculty of Engineering, Department of Electrical Engineering
University of Malaya, 50603 Kuala Lumpur, Malaysia
Abstract. In modern communication technology, source localization is a key
research in application of navigation, tracking, radar, and sonar. A low-complex
and non-iterative is proposed to estimate the source position based on Time
difference of arrival at linear array sensor network (LSAN) in three dimensional
scenario. We simulated our proposed method for (1) close and disjoint source
from LSAN and (2) different baseline of LSAN where all sensors are on the x-
axis under the Gaussian noise. The proposed method has approximated the
CRLB at low to moderate noise level and contributed the better localization
accuracy than Taylor’s series. Only using three sensors in LSAN, the source
position is estimated by the proposed method in the 3-D scenario.
Keywords: TDOA, Localization, LSAN and 3-D.
1 Introduction
In radar, sonar, acoustic tracking and navigation application, signal source
localization is a key challenge [1, 2]. A number of sensors which are arranged
arbitrary or linear fashion, receive the signal from the emitter is used for source
position estimation [3]. Time difference of arrival (TDOA) is one of the common
techniques to estimate the source position, because it is appropriate for passive
localization, does not have necessary time-stamping and easy to implement in the
practical localization set up [4]. In arbitrary sensor fashion, Maximum likelihood
estimation (MLE)[5], least square (LS)[6], Weight least square (WLS)[7], Taylor’s
series [8], Genetic algorithm [9], etc. are applied to estimate the source location in the
two or three dimensional scenario. However, in linear array sensor network (LASN)
in Figs.1 and 2, the same method cannot be applied to singularity problem. For
avoiding the singularity problem, Yiu-tong [5] , Zhengyan Xu [10], and K.C ho [11]
developed an approximate maximum likelihood estimation based on time of arrival,
hyperbolic geometrical solution, and analytical solution based on TDOA for 2-D
scenario respectively. In our best knowledge, nobody has worked with a linear sensor
array in 3-D scenario for estimating the position of the source. Therefore, we
proposed an algebraic solution to locate the stationary source based on TDOA on
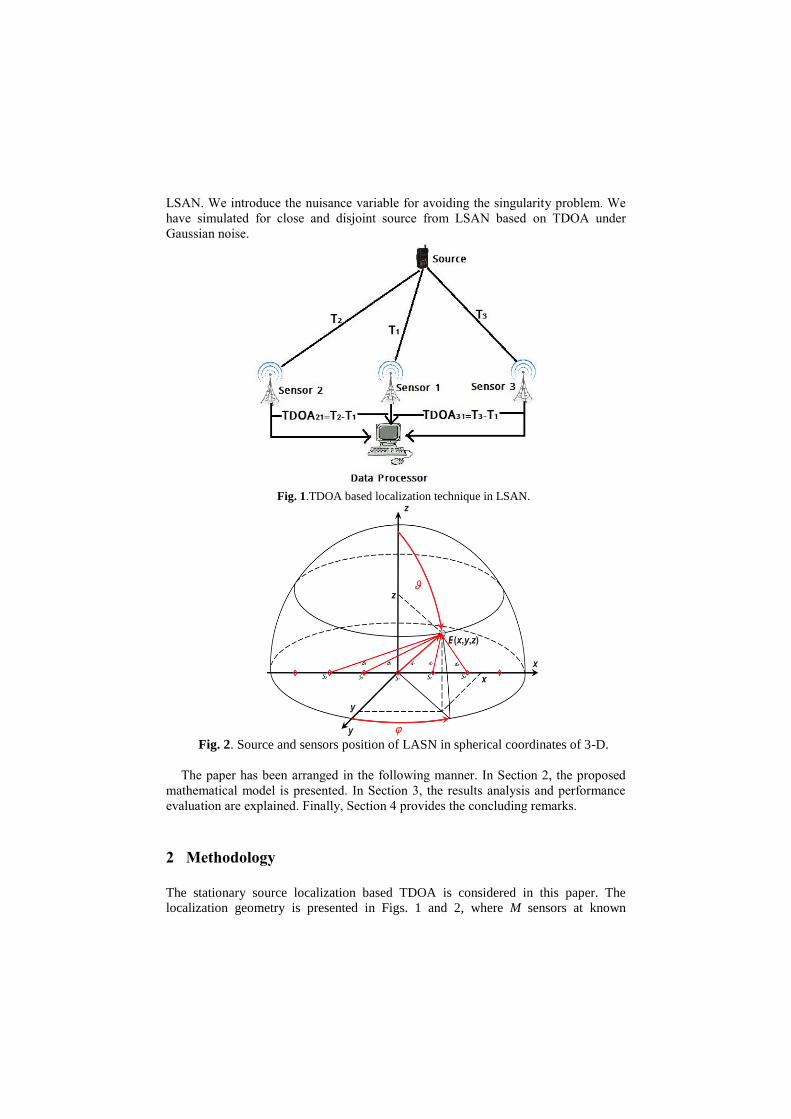
LSAN. We introduce the nuisance variable for avoiding the singularity problem. We
have simulated for close and disjoint source from LSAN based on TDOA under
Gaussian noise.
Fig. 1.TDOA based localization technique in LSAN.
Fig. 2. Source and sensors position of LASN in spherical coordinates of 3-D.
The paper has been arranged in the following manner. In Section 2, the proposed
mathematical model is presented. In Section 3, the results analysis and performance
evaluation are explained. Finally, Section 4 provides the concluding remarks.
2 Methodology
The stationary source localization based TDOA is considered in this paper. The
localization geometry is presented in Figs. 1 and 2, where M sensors at known

locations t
iiiizyxs ] [ are used to estimate the emitting electromagnetic source at
an unknown location Tzyx ] [ . The range between thethi sensor and emitter is
2220 )()()(||iiiii
zzyyxxsr where, i 1,2, 3,….N (1)
The true range difference between the thi sensor and the reference which is assumed
sensor 1is
0
1
0
1
0
1 rrctr iii (2)
where c and 1i
t are the velocity of signal propagation and the time difference of signal
arrival in thi sensor and reference. Equation (2) is rearranged as 00
1
0
11 iirrr and
squared both sides. Substituting the 0
1r and 0
ir form equation (1), we obtained
zzzyyyxxxzyxzyxrrriiiiiiii
)(2)(2)(22111
2
1
2
1
2
1
2220
1
0
1
20
1 (3)
where i 2,3,…, N. The nonlinear equations set with and 0
1r produced M-1
hyperbolic curves which are intersected a single point. This point is the estimated
position of the source. Adding the measurement noise with true TDOA, we obtained,
1
0
11 iiinrr (4)
where 1i
n is the Gaussian noise. The vector of noisy TDOA , ] ... [13121 N
rrrR and has a
covariance matrix and variance σ2 [7]
1
0.5
.
.
.
.
. .
. . . . .
. . 0.5 1 5.0
. . 0.5 0.5 1
}{ 2TRREQ
(5)
Substituting the 1i
r in equation (3), nonlinear equation sets are
20
1
2
1
2
1
2
1
2220
1
0
11112)(2)(2)(2
iiiiiiiirzyxzyxrrzzzyyyxxx (6)
All sensors are situated on a straight line in LSAN. We considered all sensors are on
the x-axis where 0i
y and 0i
z . Singularity problem is introduced in equation (6)
because of 01 yy
i and 0
1 zz
i. For avoiding the singularity problem, an
equation (6) can be rewritten when the reference sensor is at the origin as
22
1
0
111 2)(2 iiii xrrrxxx (7)

where x and 0
1r are unknown and y-axis and z-axis position parameters of source are
absent. The error vector of equation (7) is obtained as
gh (8)
where is the error vector of TODAs equation
22
1
2
3
2
31
2
2
2
21
.
NN xr
xr
xr
h ,
1
31
21
3
2
.
.
2
NM r
r
r
x
x
x
g and Trx ] [ 0
1
Minimizing the error vector, equation (8) can be written as
)(minarg1
gh (9)
Weight least squared method is used for minimizing the error vector. We get the
unknown vector as
WhgWgg TT 1
1)( (10)
where 1 QW . From the above equation, only x-axis unknown position x and one
nuisance variable 0
1r are estimated. Determining the y-axis and z-axis position
parameters, x and 0
1r values are substituted in equation (1)
20
1
222 rzyx (11)
Estimating the y-axis and z-axis coordinates of source, a function is introduced
as20
1
222),( rzyxzyf solving ),( zyf where y-axis and z-axis
coordinates are estimated as
),(minarg,
1zyf
zy
(12)
Finally, we estimate the source position Tx ] [
1 from equations (9) and (12).
3 Result and discussion
The stationary source localization simulation based on TDOA on LSAN in the 3-D
scenario are presented and discussed in this section. The sensors position are
( ixi , 0
iy , and 0
iz ) and ( )1( ix
i0
iy and 0
iz ) when i are even and
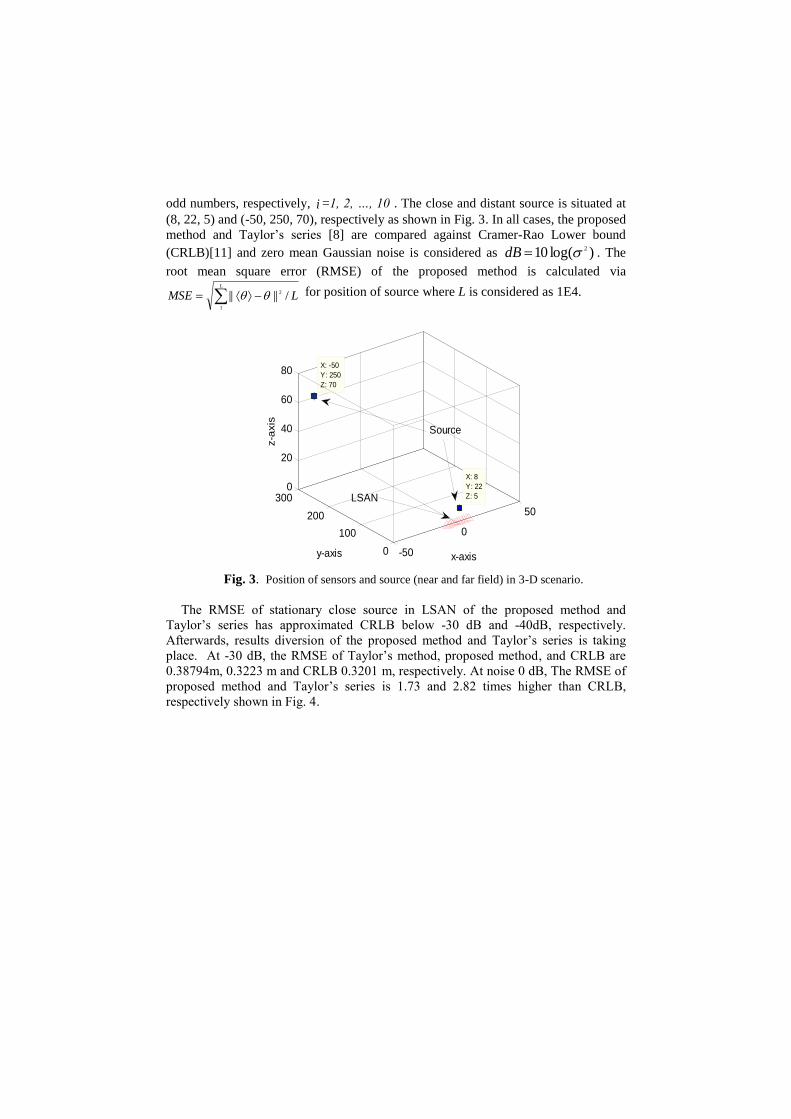
odd numbers, respectively, i =1, 2, …, 10 . The close and distant source is situated at
(8, 22, 5) and (-50, 250, 70), respectively as shown in Fig. 3. In all cases, the proposed
method and Taylor’s series [8] are compared against Cramer-Rao Lower bound
(CRLB)[11] and zero mean Gaussian noise is considered as )log(10 2dB . The
root mean square error (RMSE) of the proposed method is calculated via
LMSEL
/||||1
2 for position of source where L is considered as 1E4.
-50
0
50
0
100
200
3000
20
40
60
80
X: 8
Y: 22
Z: 5
x-axisy-axis
X: -50
Y: 250
Z: 70
z-a
xis
LSAN
Source
Fig. 3. Position of sensors and source (near and far field) in 3-D scenario.
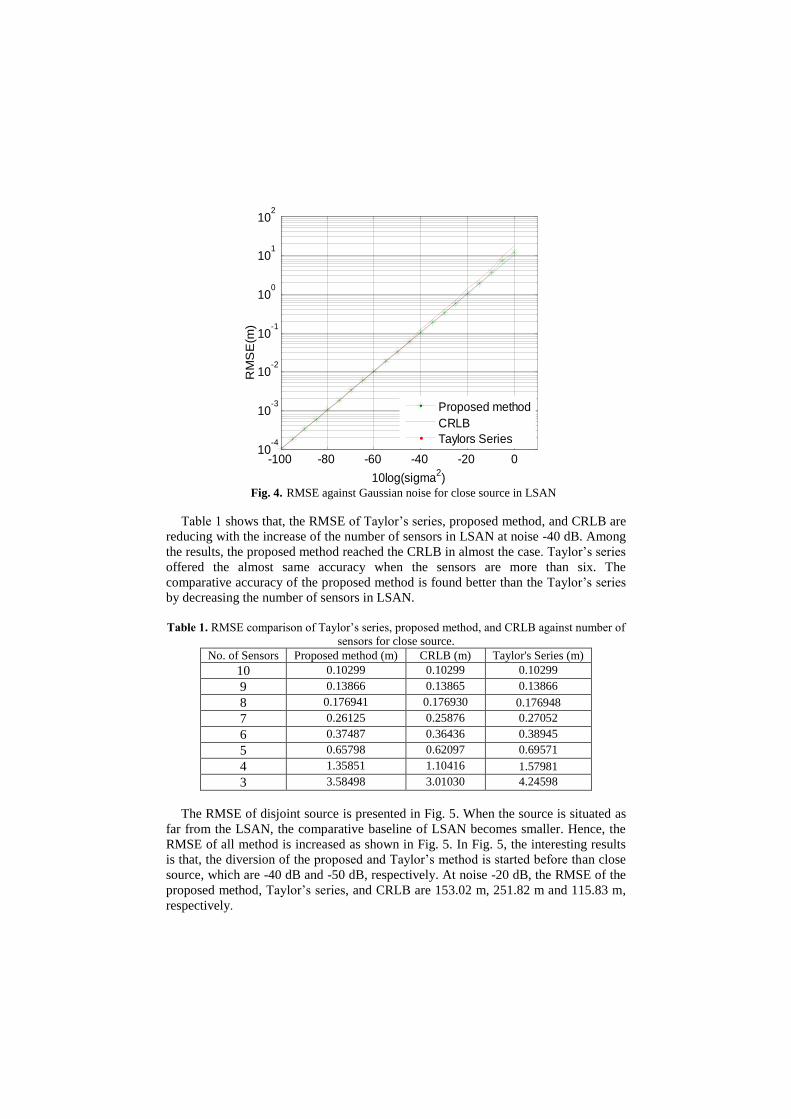
The RMSE of stationary close source in LSAN of the proposed method and
Taylor’s series has approximated CRLB below -30 dB and -40dB, respectively.
Afterwards, results diversion of the proposed method and Taylor’s series is taking
place. At -30 dB, the RMSE of Taylor’s method, proposed method, and CRLB are
0.38794m, 0.3223 m and CRLB 0.3201 m, respectively. At noise 0 dB, The RMSE of
proposed method and Taylor’s series is 1.73 and 2.82 times higher than CRLB,
respectively shown in Fig. 4.
-100 -80 -60 -40 -20 010
-4
10-3
10-2
10-1
100
101
102
10log(sigma2)
RM
SE
(m)
Proposed method
CRLB
Taylors Series
Fig. 4. RMSE against Gaussian noise for close source in LSAN
Table 1 shows that, the RMSE of Taylor’s series, proposed method, and CRLB are
reducing with the increase of the number of sensors in LSAN at noise -40 dB. Among
the results, the proposed method reached the CRLB in almost the case. Taylor’s series
offered the almost same accuracy when the sensors are more than six. The
comparative accuracy of the proposed method is found better than the Taylor’s series
by decreasing the number of sensors in LSAN.
Table 1. RMSE comparison of Taylor’s series, proposed method, and CRLB against number of
sensors for close source.
No. of Sensors Proposed method (m) CRLB (m) Taylor's Series (m)
10 0.10299 0.10299 0.10299
9 0.13866 0.13865 0.13866
8 0.176941 0.176930 0.176948
7 0.26125 0.25876 0.27052
6 0.37487 0.36436 0.38945
5 0.65798 0.62097 0.69571
4 1.35851 1.10416 1.57981
3 3.58498 3.01030 4.24598
The RMSE of disjoint source is presented in Fig. 5. When the source is situated as
far from the LSAN, the comparative baseline of LSAN becomes smaller. Hence, the
RMSE of all method is increased as shown in Fig. 5. In Fig. 5, the interesting results
is that, the diversion of the proposed and Taylor’s method is started before than close
source, which are -40 dB and -50 dB, respectively. At noise -20 dB, the RMSE of the
proposed method, Taylor’s series, and CRLB are 153.02 m, 251.82 m and 115.83 m,
respectively.

-100 -80 -60 -40 -2010
-2
10-1
100
101
102
10log(sigma2)
RM
SE
(m)
Proposed method
CRLB
Taylors Series
Fig. 5. RMSE against Gaussian noise from disjoint source in LSAN
Linearization error is introduced when the baseline reduces in LSAN. For the
linearization problem, the RMSE of simulated methods is so large when the sensors
are three in LSAN. The proposed method gives the better accuracy as also represented
in Table 2.
Table 2: RMSE comparison of Taylor’s series, proposed and CRLB against a number of
sensors for disjoint source
No. of Sensors Proposed method (m) CRLB (m) Taylor's Series (m)
10 11.38253 11.38253 11.38254
9 14.7832 14.7636 14.7912
8 20.1489 20.0963 20.3458
7 28.84897 28.12984 29.0474
6 43.47981 42.5743 44.5456
5 72.9879 71.735 75.798
4 385.94 371.13 402.52
The most significant observation is that the proposed method can be located the
source position by using only three sensors in LSAN, though it is the 3-D scenario. X-
axis location parameter and nuisance variable are unknown in equation (7). To
determine the two unknown parameters, only )22( g and )21( h matrix is needed in
equation (10). Hence, the source position can be estimated by using three sensors.
From all the figures and tables, we have summarized that, RMSE depends on the
distance between the source and network and baseline of the network. Increase of the
distance and decrease of the baseline of network has contributed to increasing the
RMSE of the source position and velocity. In all cases, the performance of the

proposed method is better than the Taylor’s series, and achieved the CRLB at low to
moderated noise.
4 Conclusions
A low complex and non-iterative linear algorithm to estimate the position of
stationary source on the 3-D plane based on hyperbolic technique where all sensors
are positioned on x-axis is presented in this paper. In LSA network, singularity
problem is the key challenge. For avoiding this challenge, nuisance variable is
introduced for simulation. Our proposed method yields better accuracy than iterative
Taylor’s method and reached the CRLB under the Gaussian noise where close and
disjoint source are considered. By only using the three sensors in LSAN, the source
position is located by the proposed method in the 3-D scenario.
References
1. Arslan, G. and F.A. Sakarya, A unified neural-network-based speaker localization
technique. Neural Networks, IEEE Transactions on, 2000. vol. 11, no. 4, p. 997-1002.
2. Asono, F., H. Asoh, and T. Matsui. Sound source localization and signal separation for
office robot “Jijo-2”. in Multisensor Fusion and Integration for Intelligent Systems, 1999.
MFI'99. Proceedings. 1999 IEEE/SICE/RSJ International Conference on. 1999. IEEE.
3. Kozick, R.J. and B.M. Sadler, Source localization with distributed sensor arrays and partial
spatial coherence. Signal Processing, IEEE Transactions on, 2004. vol. 52, no. 3, p. 601-
616.
4. Ho, K., Bias reduction for an explicit solution of source localization using TDOA. Signal
Processing, IEEE Transactions on, 2012. vol. 60, no. 5, p. 2101-2114.
5. Chan, Y.-T., H. Yau Chin Hang, and P.-c. Ching, Exact and approximate maximum
likelihood localization algorithms. Vehicular Technology, IEEE Transactions on, 2006. vol.
55, no. 1, p. 10-16.
6. Ho, K., X. Lu, and L.-o. Kovavisaruch, Source localization using TDOA and FDOA
measurements in the presence of receiver location errors: analysis and solution. Signal
Processing, IEEE Transactions on, 2007. vol. 55, no. 2, p. 684-696.
7. Ho, K. and W. Xu, An accurate algebraic solution for moving source location using TDOA
and FDOA measurements. Signal Processing, IEEE Transactions on, 2004. vol. 52, no 9, p.
2453-2463.
8. Foy, W.H., Position-location solutions by Taylor-series estimation. Aerospace and
Electronic Systems, IEEE Transactions on, 1976 vol. 2, p. 187-194.
9. Duckett, T. A genetic algorithm for simultaneous localization and mapping. in IEEE
International Conference on Robotics and Automation. 2003. Citeseer.
10. Liu, N., Z. Xu, and B.M. Sadler, Low-complexity hyperbolic source localization with a
linear sensor array. Signal Processing Letters, IEEE, 2008. vol. 15: p. 865-868.
11. Chan, Y. and K. Ho, A simple and efficient estimator for hyperbolic location. Signal
Processing, IEEE Transactions on, 1994. vol. 42, no 8, p. 1905-1915.