
Computer Graphics - PTU (Punjab Technical University)
285
Self Learning Material Computer Graphics (MSIT-301) Course: Masters of Science [IT] Semester-III Distance Education Programme I. K. Gujral Punjab Technical University Jalandhar
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Computer Graphics - PTU (Punjab Technical University)

Self Learning Material
Computer Graphics (MSIT-301)
Course: Masters of Science [IT]
Semester-III
Distance Education Programme
I. K. Gujral Punjab Technical University
Jalandhar

2
Syllabus
I. K. Gujral Punjab Technical University
SECTION- A
MSIT301- Computer Graphics
Introduction to Active and Passive Graphics, Applications of Computer Graphics. Input devices: light pens, Graphic tablets, Joysticks, Trackball, Data Glove, Digitizers, Image scanner, Graphs and Types of Graphs. Video Display Devices-- Refresh Cathode Ray Tube, Raster Scan displays, Random Scan displays, Architecture of Raster and Random Scan Monitors, Color CRT-monitors and Color generating techniques (Shadow Mask, Beam Penetration) , Direct View Storage Tube, Flat-Panel Displays; 3-D Viewing Devices, Raster Scan Systems, Random Scan Systems, Graphics monitors and workstations, Color Models (RGB and CMY), Lookup Table. SECTION-B Process and need of Scan Conversion, Scan conversion algorithms for Line, Circle and Ellipse, effect of scan conversion, Bresenham's algorithms for line and circle along with their derivations, Midpoint Circle Algorithm, Area filling techniques, flood fill techniques, character generation. SECTION-C 2-Dimensional Graphics: Cartesian and need of Homogeneous co-ordinate system, Geometric transformations (Translation, Scaling, Rotation, Reflection, Shearing), Two- dimensional viewing transformation and clipping (line, polygon and text), Cohen Sutherland, Sutherland Hodgeman and Liang Barsky algorithm for clipping. Introduction to 3-dimensional Graphics: Geometric Transformations (Translation, Scaling, Rotation, Reflection, Shearing), Mathematics of Projections (parallel & perspective). Introduction to 3-D viewing transformations and clipping. SECTION-D Hidden line and surface elimination algorithms: Z-buffer, Painters algorithm, scan-line, subdivision, Shading and Reflection: Diffuse reflection, Specular reflection, refracted light, Halftoning, Dithering techniques. Surface Rendering Methods: Constant Intensity method, Gouraud Shading, Phong Shading (Mash Band effect). Morphing of objects. Note: Graphics Programming using C/C++ with introduction to Open GL. References: 1. D. Hearn and M.P. Baker, ―Computer Graphicsǁ, PHI New Delhi; Third Edition.
2. J.D. Foley, A.V. Dam, S.K. Feiner, J.F. Hughes,. R.L Phillips, ǁComputer Graphics Principles & Practices, Second Editionǁ, Pearson Education, 2007. 3. R.A. Plastock and G. Kalley, ―Computer Graphicsǁ, McGraw Hill, 1986. 4. F.S. Hill: Computer Graphics using Open GL- Second Edition, Pearson Education- 2003

Table of Contents
ChapterNo. Title Written By Page No.
1 Introduction to computer graphics Ms. Kamaljeet Kaur, AP,
Deptt. Of Computer Science,
DAV College Jalandhar
1
2
OUTPUT DEVICES Ms. Kamaljeet Kaur, AP,
Deptt. Of Computer Science,
DAV College Jalandhar
33
3
Scan Conversion and its techniques
for Line drawing
Ms. Kamaldeep Kaur, AP,
Deptt. Of Computer Science,
DAV College Jalandhar
60
4
Scan converting techniques for circle
Ms. Kamaldeep Kaur, AP, Deptt. Of Computer Science, DAV College Jalandhar
88
5
Scan converting techniques for ellipse
Ms. Kamaldeep Kaur, AP, Deptt. Of Computer Science, DAV College Jalandhar
115
6 Area filling and character
generation techniques
Ms. Kamaldeep Kaur, AP, Deptt. Of Computer Science, DAV College Jalandhar
135
7
2D Transformations
Ms. Richa, AP, Deptt. Of Computer Science, DAV College Jalandhar
155
8
2D Viewing Transformations
Ms. Richa, AP, Deptt. Of
Computer Science, DAV
College Jalandhar
180
9
3-Dimensional Graphics
Ms. Richa, AP, Deptt. Of Computer Science, DAV College Jalandhar
201
10 Hidden line and Surfaces
elimination algorithm
Ms. Monika Chopra, AP, Deptt. Of Computer Science, DAV College Jalandhar
220
11
Shading and Reflection
Ms. Monika Chopra, AP, Deptt. Of Computer Science, DAV College Jalandhar
241
12 Surface rendering and its methods
Ms. Monika Chopra, AP,
Deptt. Of Computer Science,
DAV College Jalandhar
261
3

4
Reviewed By: Dr. Dalveer Kaur
IKGPTU, Jalandhar, Punjab, 144603
©IK Gujral Punjab Technical University Jalandhar All rights reserved with I K Gujral Punjab Technical University Jalandhar

1
Lesson 1
Introduction to computer graphics
Structure of the Chapter
1.0 Objectives
1.1 Introduction to computer graphics and input devices 1.2 Difference between active and passive Graphics 1.3 Applications of Computer Graphics 1.4 Graphs and Types of Graphs 1.5 Input Devices
1.5.1 Light pen 1.5.2 Graphic tablet 1.5.3 Joystick 1.5.4 Trackball 1.5.5 Data gloves 1.5.6 Digitizers 1.5.7 Image scanner
1.6 Summary 1.7 Glossary 1.8 Answer to check your progress/self assessment questions 1.9 References and suggested readings 1.10 Model Questions
1.0 Objective After studying this chapter students will be able to:
Differentiate raster and vector images Identify the importance of graphics in day to day life Identify the kind of graph to be used to graphically represent the data Identify the input device to be used for certain application.
1.1 Introduction to Computer graphics includes“almost anything on computer that is not
text or sound”. It incorporates image data created with the help of specialized graphical
hardware and software. It is an important sub field of computer science. The phrase was
coined in 1960 by pioneer researchers Verne Hudson and William Fetter of Boeing. The
process of computer graphics depends on underlying sciences of geometry, optics and
physics. It is greatly helpful in the display of art and image data in an effective and efficient
way. It is found to be of great use in understanding of computers and interpretation of data. In
general they are making their contribution in animation, movies, advertisement, video games

2
and graphic design and many more. It includes the display of the image, its manipulation and
storage by using a computer.
Resolution
It is the amount of pixel data that is used to make an image. 300 dpi (dots per inch) is the
resolution of standard and commercial printing. It means the total number of pixels in an
image, along with its length and height. It determines the quality of image. If an image
without enough pixel information is used to fill the output area, and if the image is enlarged
to fill up the area, the image will get distorted. It is called pixilation. Fig 1.1 shows letter A
without and with pixilation.
Type of Images
Fig. 1.1: Pixilation
Computer graphics deals with images in digital form. Mainly two types images are dealt in
Computer graphics namely
Raster Images Vector Images
Raster Images
A raster image is displayed by the arrangement of pixels having different colours. The quality of image is calculated in ppi. A 300 ppi image has 300 pixels in every one inch. Higher the ppi, higher is the quality of the resultant image. Since, bitmap image stores the colour information for each pixel that forms the image so it is larger in size.
In order to determine the size of a raster image for a high quality outlook and printing, multiply the resolution required by the area to be printed.
To print an image in a 5 inch area on a printer of minimum 300 ppi, the image must be at least 300 * 5= 1500 pixels wide. JPEG, GIF, BMP are types of vector images. These are well supported on the web. These are best for images having a wide range of colour gradations
Vector Images

3
It is another kind of images dealt in Computer Graphics. These are comprised of paths defined by start and end point. These are made up of paths defined by a mathematical formula defining the path, its colour and other information. Since, such images are not made of dots, so they could be easily scaled to a larger size without losing quality of the image. If a vector image is enlarged, the edges of the object within the graphic stay smooth and clean. It is the reason; vector images are used to deal with logos which could be used on ID card as well as a banner. They take less space than a raster image. This is because; vector image stores the mathematical formulas to make up the image. Vector images are useful for images that consist of a few areas of solid colour. EPS, SVG, DRW are types of vector images.
Differences between Raster and Vector Image
Raster Image Vector Image A raster image is made up pixels having different colours.
Raster images are not scalable. With increase in size of image, the quality of raster image decreases.
These are made up of paths defined by a mathematical formula defining the path, its colour and other information Vector images are scalable. These images retain appearance even when zoomed. This is because, their render is dictated by mathematical formulas
They can display natural quality of image Natural quality of image is sacrificed. Raster images are often large in size Size of a vector images is comparatively
lesser. Web images are raster images Vector images are converted to raster image
before publishing on web. Text is rendered using vector format.
Raster image could not be displayed at highest resolution of output device.
These are generally used with photos. Photoshop is an example of raster image editing program
Vectors image could be displayed at the highest resolution allowed by the output device Adobe Illustrator is an example of vector editing program. It automatically creates vector formulas for the images drawn.
Photographs are handled as raster images Logos are handled as vector images.
1.2 Difference between Active vs Passive Graphics
Differences between Active and Passive Graphics Active/Interactive Graphics Passive Graphics
These are interactive graphics in which the
user can interact with the graphics as well as
the programs used to generate that graphic.
The user can make any change in image
show on the screen including colour change
or adding animation in the graphic as per
In case of Passive graphics, the user has no
control over the image. The user is unable to
make any change in image show on the
screen

4
requirement.
In case of web page interactive graphics, it
leads to increase in the size of the associated
web page. In case of slow internet
connectivity, the problem multiplies.
For slow internet connectivity, passive
graphics are recommended.
The output of the interactive graphic used
through internet depends on the client’s
computer. The computer on client site may
not support the scripting language used or it
may has an older version.
The image formats used in passive graphics
to be used online are very common. Most of
the browsers support these image formats.
These are quite entertaining but are difficult
to deal with.
These are quite easy to handle but are found
to be monotonous.
The quality of image produced with
interactive graphics is quite high.
The quality of passive images are lesser than
that produced with active graphics
Example: video games is a kind of active
graphics in which the user decides the next
scene to appear on the basis of interaction
through the mouse, keyboard, joystick etc.
Example: Watching a TV channel, in which
the user can switch off the TV or change the
channel but have to watch whatever is
broadcasted by that particular channel.
Let us discuss the working of Interactive Graphics Display
It consists of three main components:
Frame Buffer or Digital Memory: The image to be displayed is stored in this digital memory or frame buffer in the form of binary numbers representing individual pixel making up the image. For a black and white image, the information is in the form of 1’s and 0’s.
Display Controller: It reads the information about the image form the digital memory or frame buffer in the form of binary number and converts them into video signals.
Monitor: Display controller displays the image picked from digital memory onto the monitor to produce the image.
In order to make modifications in the image, suitable changes could be made in the
information stored in the digital memory.

5
1.3 Applications of Computer Graphics Computer graphics is the field of computer science which is observing wide variety of
applications. Computer graphics is emerging as a powerful tool for the rapid and economical
production of pictures. Advances in this field have made the availability of interactive
computer graphics a practical tool. It has found applications in areas ranging from science,
engineering, medicine, business, government, art, entertainment, advertising, education etc.
Some of the important applications are listed below
Graphic User Interface (GUI) It is the most important application of computer graphics that has been widely used. It is an
interface between the user and the graphics application program. It helps the user to interact
with the graphic application program for input as well as output.
Some of the most common and typical components used in GUI are
Menus Icons Cursors Dialog boxes Scrollbars Buttons Grids
Let us discuss these components as typical GUI.
Let us take an example of a graphic user interface of Ms-Word. Fig. 1.2 shows a snapshot of
this interface.
Fig. 1.2: Microsoft Word GUI
It uses various components o f GUI.
Clicking on Office button displays a pull down menu to select options to open, save the document.
Different icons are visible in the figure that acts as a GUI.

6
Cursor is used to click and make selections. The dialog box is an important component of GUI that is used by a computer graphic
system for interaction with the user. The scroll bar is another example of GUI. It is used to scroll up and down the
application program. It is helpful to view previous and next data in the document.
Computer-Aided Design Computer-aided design (CAD) is an important application of Computer graphics in which the
computer technology is used for the design of real or virtual objects. Another application
includes the design of geometric models for object shapes called computer-aided geometric
design (CAGD).
It is one of the major uses of computer graphics and is used by the engineers and architects in
the design processes. It makes their job comparatively easier as for some design applications
the objects could be displayed in a wireframe outline form to describe the internal features of
objects prior to its make. Some of the uses of CAD technology are listed below.
The designers can watch multiple views of the object which leads to see enlarged sections or different views of objects at the same time.
Animations are often used in CAD applications which are used in entertainment and movie industry.
Real-time animations are also possible which could be used to display wire frame of the objects that could be used by the engineering for testing performance of a vehicle.
The designers can see the interior behaviour of vehicle during motion which is otherwise not easily feasible.
These are very much helpful for finalising the layouts of the buildings. Interior-designers use them for deciding the interior layouts and lightening with the
help of realistic inbuilt lightening models. In this way, a designer using CAD is enabled to lay out the design and save it for
future editing, which ultimately leads to saving time on their drawings. These are useful is in the design of tools and machinery. It is found to be very much helpful in drafting and design of all types of buildings,
hospitals, shopping malls and factories. It could be used for detailed engineering of 3D models as well as 2D drawings. It has found applications throughout the engineering process ranging from conceptual
design, layout, strength and dynamic analysis of assemblies and so on. CAD packages are now included with virtual-reality systems. With the help of this
utility, the designers can plan a simulated walk inside the building. This technique is based on virtual reality environments and is dominated primarily by visual experiences. Monitors or sometimes special display devices are used as output. Additional sensory information, such as sound through speakers etc is also used. Users can interact with a virtual environment either through the use of standard input devices such as a keyboard and mouse. Sometimes advanced multimodal devices such as a wired glove and omni-directional treadmill etc are also used. The simulated environment is quite similar in appearance to the real world. The simulators used for the training of pilots are very much using the concept of virtual reality.

7
Fig. 1.3 shows an example design developed in CAD.
Fig. 1.3: Design developed in CAD
In this way they have made the working of people using them easy, efficient and effective.
Entertainment
It is one of the most widely used applications of computer graphics. IT is an important and
huge market for graphic software. Computer Graphics system are used in the designing of
movie, TV advertisements, video games etc. In fact a majority of the market economy of
computer graphics are generated by the entertainment industry including creation of
animation and carton movies, real time movies with the real time characters (Hindi movie
RAVON is an example where Computer graphics have been widely used), TV
advertisements made impressive with the involvement of both real characters as well as
cartoon characters and other animations to make them more impressive.
Video game is an entertainment industry which is very much in boom these days. So is the
use of computer graphics. A video game is defined as an electronic game which is played by
the interaction of the use through GUI to generate visual feedback on a output device usually
a raster display device. The electronic system that is generally used to play video games
includes personal computers to small handheld devices like smartphones. The user can use a
keyboard, mouse, joystick etc as a game controller input device for manipulating the video
games. Fig 1.4 shows some of the game controller input devices.

8
Fig. 1.4: Game controller input devices
making very much use of computer graphics an
nown real system. Computer simulations have
ematical modelling in the field of computationa
s, psychology, and social science etc. Fig 1.5 sh
Computer Simulation
It is a technique that is d is used to simulate
an abstract model of a k become a powerful
tool to be used in math l physics, chemistry
and biology, economic ows a view of pilot
simulator.
Fig 1.5. A view of pilot simulator.
Visualization
Information Graphics: Information graphics or infographics deals with the visual
representations of information, data or knowledge. A picture is worth more than thousand
words. It well justifies the use of computer graphics for visualization. These graphics are very
much helpful to display complex information quickly and clearly. For example maps,
technical writings etc. They are highly used by scientists, mathematicians, and statisticians
for communicating conceptual information easily and effectively. It is being used these days
as visual shorthand for everyday concepts such as stop and go.
Scientific Visualization: It is the branch of computer graphics which deals with the
visualization of complex data which is otherwise difficult to interpret. Data from the field of

9
meteorology, medicine, biology could be easily interpreted and visualized using computer
graphics. Scientific visualization deals with the use of computer graphics to create visual
representation for understanding of complex, massive numerical representation off of
concepts and results. Fig. 1.6 shows example of scientific visualization.
Fig. 1.6: Example of scientific visualization
Business Visualization is an application of computer graphics for visualization of complex
data sets from the field of commerce, industry and other non-scientific areas.
Image processing
Computer graphic deals with the creation, storage and manipulation of digital images. Image
Processing include the techniques that are applied to modify or interpret existing pictures
such as photographs and TV scans. It could be used in for ultrasound and nuclear medicine
scanners; to improving the quality of the picture (by enhancing color separation, quality of
shading), for machine perception of visual information to be used in robotics. One of the
recent medical applications of image processing is in computer-aided surgery in which used
to plan and practice surgery, artificial limbs designing etc. Fig 1.7 shows an improvement in
an image with image processing techniques.

10
Fig 1.7: Improvement in quality of an image using image processing techniques.
Digital Art
Digital art is another application of computer graphics. It is related to the art that has been
created on a computer in digital form. The advancements in the field of computer graphics
have made the practice of traditional art such as painting, drawing and sculpture. These
traditional art activities are transformed into net art, digital installation art, and (VR) virtual
reality. The artists making use of digital practices are called Digital artists. They are using
computer graphics software along with other advanced technologies such as digital
photography and computer assisted painting for the creation of art. Fig 1.8 shows example
digital art.
Fig 1.8: Example digital art.
Education and Training
With advancements in technology, children are getting exposed to new techniques in schools,
home everywhere. For the people with special needs, technology is found to be very much
helpful in education and training. Using advanced computer graphic software, people with
special needs could be taught about colours, shapes, basic techniques and concepts etc.
In order to make students under concepts from the core, computer generated models of
physics, finance and economics are quite popular.
Numbers of specialized systems are available for training purpose. Computer aided graphical
training systems for training of
ship captains pilots heavy equipment operators air traffic-control personnel

11
Fig 1.9: Model of solar system built using computer graphics7
Web Design Web designing is the technique that is used to present the contents in the form of hypertext or
hypermedia that presented to the end-user through the World Wide Web on the client side
Web browser. The designing of web pages incorporate the technique of computer graphics
for effective and efficient convey of information to the users.
Presentation Graphics In order to present the information in a meeting, conference, symposium etc., presentations
are used these days. The main reason of using presentation is the ease and effectiveness in
convey of information to the mass by the use of computer graphics in these presentations.
Graphics in the form of bar charts, line graphs, surface graphs etc display relationship
between parameters in an efficient manner. 3-D graphics are a step ahead in this case.
Fig. 1.10 shows a graph to be used in a business presentation.
Fig. 1.10: Graph to be used in a business presentation.

12
Check your progress
1. Differentiate vector and raster graphics.
2. What is the significance of resolution of an image?
3. How is Computer graphics helpful in CAD?
4. What is aspect ratio?
Exercise
1. In a black and white image, the intensity of the pixel could be between 0 (black)
and (white) 2. Video game is a kind of (Active/Passive) graphics.
1.4 Graphs
Graphs are the pictures that help to understand data. A well structured and properly
constructed graph can present complex statistics that could be easily interpreted. It leads to
well understanding of the data otherwise difficult to interpret in text. These are quite helpful
to illustrate data in research papers, reports, thesis and other presentations etc. It helps to
understand large quantity of data and relationship between variables.
Graphs are used in abundance in business and economics to create financial charts to represent important textual at that would be otherwise ignores.
Advantages of Graphs
These are useful to grasp attention of viewers and readers to a particular numerical data.

13
Helps in understanding of concepts and makes it more understandable. 1.4.1 Principles in construction of graphs
Distortion of data should be avoided while construction a graph. Proportion and scale should be maintained. Generally have greater length than breadth. Most commonly the height (y-axis) and length
(x-axis) of the graph should have 3:4 ratios. This is because horizontal axis displays the causal variable in more detail.
Abbreviations are spelled in a note for better understanding Colours could be used to clarify the groupings
Different kinds of graphs are used to convey different type of information sometimes
depending on type of variable namely nominal, ordinal or interval.
1.4.2 Bar Charts
It is a specialised kind of graph which is used to display information that fall into categories.
It is used to shoe how nominal data changes over time. It could be used to display
information about one or more variables. The simplest bar chart is the one-variable bar chart.
Each category of the variable is represented by a bar.
Some of the important points to be taken care while construction bar graphs are listed below:
The categories of the bar are arranged in some order that might be an alphabetical order. The bars constructed in the bar graph could be horizontal or vertical. The bars may be positioned vertically or horizontally. The width of the bars should be equal for excellent look of the graph. Space should be left between subsequent group of bars and not among bars in the same
group. Different variables are given codes in terms of different colours or shades or patterns for
distinction. Legends should be included for interpretation of codes.
Advantages of Bar graphs
They are very much useful in displaying nominal or ordinal data in frequency distribution.
They are very efficient in summarizing large data in visual form.
14
Trends could be better visualized as compared to tables. Makes the interpretation and understanding of the data easy.
Disadvantages of Bar graphs
These could be easily manipulated and may yield to false impressions They are unable to disclose assumptions, cause-effect relationship precisely.
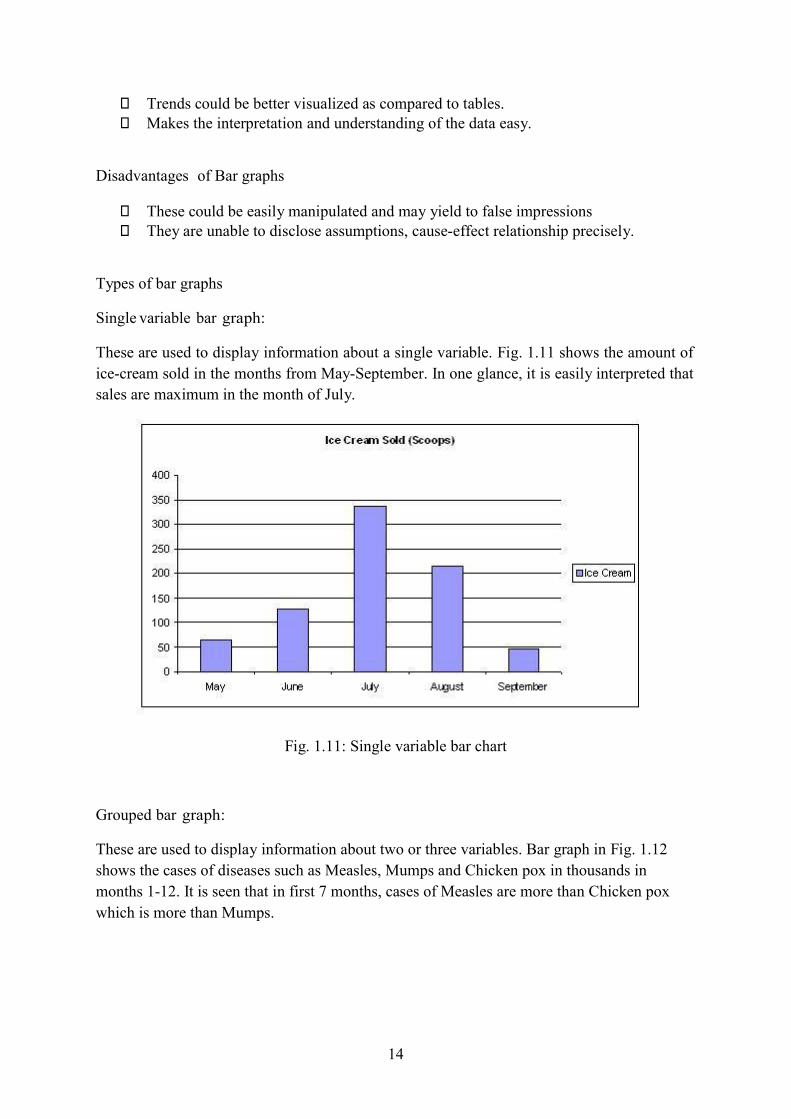
Types of bar graphs Single variable bar graph:
These are used to display information about a single variable. Fig. 1.11 shows the amount of
ice-cream sold in the months from May-September. In one glance, it is easily interpreted that
sales are maximum in the month of July.
Fig. 1.11: Single variable bar chart
Grouped bar graph: These are used to display information about two or three variables. Bar graph in Fig. 1.12
shows the cases of diseases such as Measles, Mumps and Chicken pox in thousands in
months 1-12. It is seen that in first 7 months, cases of Measles are more than Chicken pox
which is more than Mumps.

15
Fig. 1.12: Grouped bar graph
Stacked bar graph: Each data category is stacked over one another to form a single bar.
They are very difficult to interpret. Only bottom category rest on a flat baseline. When one category of the variable ends, the next begins. They are quite deceptive and are generally used to hide information.
Fig 1.13 displays sales in each quarter in North, South, East, and West.

16
Fig. 1.13: Stacked bar graph
1.4.3 Histogram These are used for graphing grouped interval data.
Advantages of Histogram These are useful to depict the central tendency and dispersion of a data set
It is used to show trends better than do tables or arrays.
They are easy to understand and interpret the data.
Disadvantages of Histogram They could be very easily manipulated to yield false impressions.
It is very difficult to display data of all kinds on a single scale.
It is difficult to read and extract exact values as data is grouped into categories.
It is difficult to compare two data sets.
The Fig 1.14 shows the birth weight of 32 lambs. X-axis shows the weight of lambs and y-
axis shows the number of lambs with that weight.

17
1.14: Example Histogram
Difference between histogram and bar graph
Bar graph Histogram
It is used to display data that has categories It is used to display frequency distribution of
in it. variables.
The variables involved are discrete The variable involved is continuous.
The bars do not touch each other The bars touch each other. There is no space
in between.
1.4.4 Pie Chart
A pie chart is a kind of graph which could be easily understood. In a pie chart, total
contribution from the entire variable should be 360. This is because the total degree in a
circle is 360. The contribution from each variable is depicted by the proportional
contribution to the complete pie. To calculate the contribution from each variable determines
the proportion of the pie to be represented by variable by first multiplying the proportion by
360.
18
It displays variable as percentage of whole.
Advantages of Pie Chart
It can display multiple variables in the form of relative proportion. It is able to summarize a large data in an effective manner. It is visually simpler as compared to other types of graphs. It has the capability to check the accuracy of calculations. As compared to other types of graphs, pie charts need minimal additional
explanation. These are widely used in business and research presentations.
Disadvantages of Pie Chart
It is difficult to understand and extract exact values. It is unable to reveal key assumptions, causes and effect etc. It is difficult to compare variables. It could be used only with discrete.
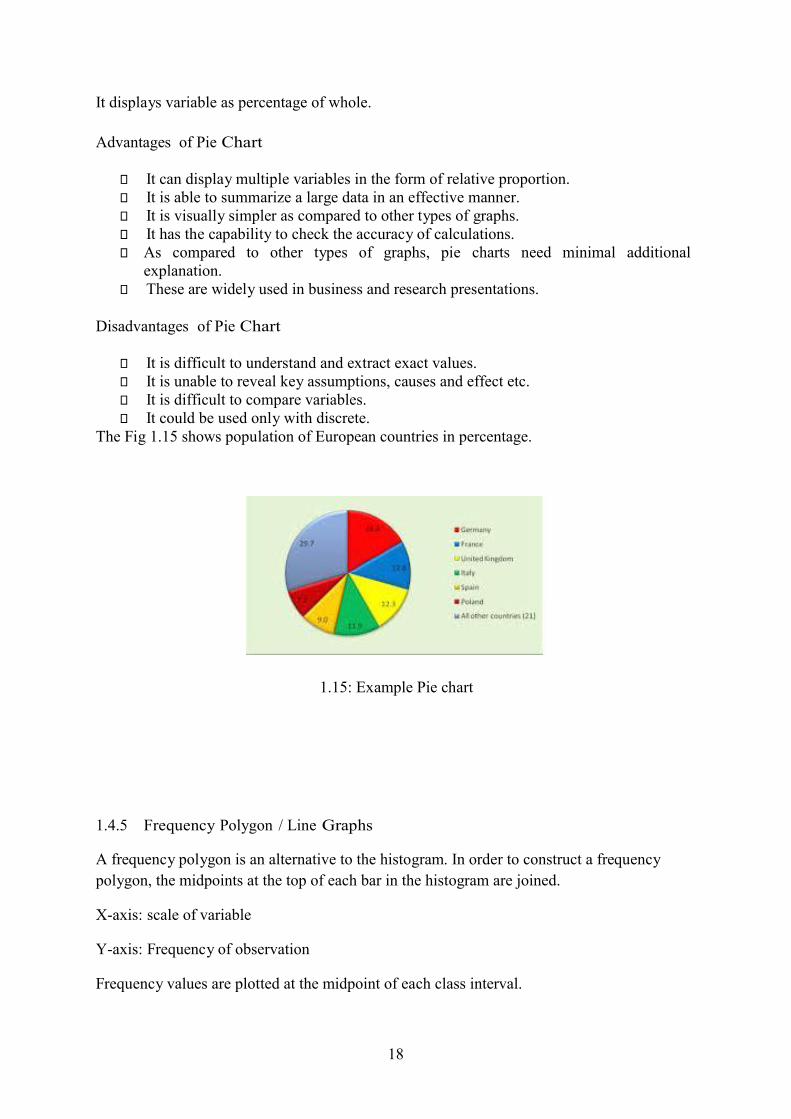
The Fig 1.15 shows population of European countries in percentage.
1.15: Example Pie chart
1.4.5 Frequency Polygon / Line Graphs A frequency polygon is an alternative to the histogram. In order to construct a frequency
polygon, the midpoints at the top of each bar in the histogram are joined.
X-axis: scale of variable Y-axis: Frequency of observation
Frequency values are plotted at the midpoint of each class interval.

19
Advantages of Frequency Polygon Frequency polygons can be plotted on the same graph for comparison purposes.
Frequency polygons also are easy to interpret.
It is very easy to interpret the skewness of the data involved.
It helps in quick analysis of data
It can clarify patterns better than counterparts It has a capability to show minimum and maximum values easily.
Clusters and outliers are easily identifiable.
Exact and original values are retained as such.
Need minimum additional information.
Disadvantages of Frequency Polygon It is not possible to identify the exact values of the distribution.
It is also difficult to compare different data sets.
It is not visually appealing It can work with small range of data only.
Large data values are difficult to interpret
IT has minimal ability to reveal statistics, skew, kurtosis about the data plotted Accuracy of the data could not be checked.
The Fig 1.16 shows the frequency polygon between marks and number of students scoring
those marks.

20
1.16: Example Frequency Polygon
1.4.6 Scatter Diagram Scatter plot is a graphic technique that is used to display the relationship between two
continuous variables. One variable is plotted on x-axis and other on y-axis. In order to
analyse the relationship between variables, put a point on the graph corresponding to the
values of both the variables.
Scatter diagram helps to analyse the overall pattern (Correlation and regression) among the
variables. Fig 1.17 shows the scatter diagrams showing relationship between variables
involved.
Advantages of Scatter Diagram The relationship between variables could be linear if the points fall in a straight line
Highly scattered points indicate no relationship among variables.
It helps in quick analysis of data.
Clusters among the data could be identified at a glance.
Outliers could be easily identified at a glance.
Disadvantages of Scatter Diagram
It is hard to visualize large datasets.
Flat trends are difficult to analyse.
They need data on both axes to be continuous. .

21
No correlation Weak positive correlation
Strong positive correlation Strong negative correlation
Fig. 1.17:Exmaple Scatter graphs
1.5 Input Devices
An input device is a peripheral hardware device is used to supply data and control
information to the information processing system that may include a computer or information
appliance.
Some of the most common input devices are keyboard, mice, scanner, digital camera and
joystick etc. Some of the input device that are commonly used while delaing with computer
graphics are
Light pen Graphic tablet Joystick Trackball Data gloves Digitizers Image scanner
1.5.1 Light pen A light pen is an input device similar in appearance to a light sensitive wand which is used along with a computer (Cathode Ray Tube) CRT display. It provides the user a facility to

22
point to the displayed objects or draw on the screen very much similar to a touch screen but with much more positional accuracy. It is particularly a pointing device that detects the presence of light. Fig. 1.18 shows a light pen.
The light pen works on the technology in which it detects a change in brightness of screen pixels near its placement. CRT scans the entire screen pixel by pixel and the computer infers the pen’s position from the latest timestamp.
Light pens are very popular among health care professionals like doctors and dentists and design work. CAD users use them as input device.
Let us discuss some of the advantages and disadvantages of light pen.
Advantages of light pen
It is more direct and precise as compared to a mouse.
It is found to be convenient for applications having limited desktop space.
For simple input, use of light pen is faster than mouse.
It works very efficiently in keeping track of moving objects.
It is observed to be very efficient for subsequent multiple selection
No need to scan for the cursor on the screen for its usage.
Disadvantages of light pens
The use of light pen normally needs a specially designed monitor.
Use of light pen is not as natural as use of a normal pen.
Sometimes the contact with the computer may be lost unintentionally
Simultaneous pressing of button may lead to inaccuracy.
It is required to be attached to the terminal which is sometimes inconvenient.
Pen is required to be held perpendicular to the usage point which could be tiring.
Tilted pen leads to glare and inaccuracy.
While usage, hand may act as an obstacle for a portion of screen.
Adequate “activate” area is required to be provided around choice point.
It cannot be used on gas plasma panel.
Accuracy and precision might be reduced because of the aperture distance from the CRT screen

23
1.18: Light Pen
1.5.2 Digitizer / Graphic tablet
Digitizer is a common input device that is used for drawing, painting and sometimes selecting
co-ordinate positions on an object interactively. Such devices could be used to input co-
ordinate values in either a two-dimensional or a three dimensional space.
Graphicstablet is a kind of digitizer. Fig. 1.19 shows a digitizer graphic table. A graphics tablet is an input device that enables a user to draw images, animations and graphics. It is used in a way similar to a pencil and paper. It could be used for capturing data or signatures. The process of capturing data by tracing and entering corners of the shape is called digitization.
It consists of a flat surface on which image could be drawn using a pen type drawing apparatus called stylus and an optional screen to display the output.
Advantages of graphic tablet
It is of much use for graphic artists.
It is an effective input device as compared to mouse.
It is available in variable sizes
It is familiar to use for anyone who can use pen
It can read levels of pressure for input which is not possible in other input device.
Disadvantages of Graphic tablets
It is slower to draw than paper drawing
It is sometimes difficult to access menus and make selections using tablets.
It is comparatively an expensive device.
24
Fig. 1.19: Digitizer 1.5.3 Joystick
Ajoystick is an input device that has a stick pivoting on a base and one or more push buttons called triggers. A change in direction or angle of stick or state of the buttons is reported to its controlling device. A kind of joystick is used in the cockpit of many aircrafts. It is also used as a controlling device in video games and has one or more push buttons. It is also used as a controlling device in machines such as cranes, trucks, wheelchairs etc.
Variations of joystick are used in video game consoles or some types of mobile phones and ultrasound scanners. Fig. 1.20 shows a joy stick.
Advantages of using a joystick
A joystick acts an input and controlling device in computer games. It helps in fast interactions
which are required in most games.
The directional controls of joystick are very strong and could be comfortably used without
fatigue.
While usage a joystick does not cover parts of the display screen. It does not require a course surface for movement similar to mouse.
Disadvantages of using a joystick
It is less precise and difficult to use to point and select objects on the screen. It is slower than the light pen and mouse for simple input and option selections.
It is not very durable. It breaks if used with a force.

25
Fig. 1.20: Joy Stick
1.5.4 Track Ball
A trackball is a pointing input device whose working is based on a ball mechanism on its top.
It consists of a ball held by a socket which detects the rotation and movement of ball (through
sensors) about two axes. The user may give input by rolling the ball with the thumb, figure or
palm etc. As compared to mouse there is no limit on working area. A mouse may reach edge
of working area while rolling but there is no such limit in trackball. Fig. 1.21 shows a track
ball.
Uses
CAD users are very fond of using track ball due to its efficient working style. They are appreciated in computer game industry as a successful input device.
Advantages of a trackball
A trackball is highly appreciated as input device where desk space is limited. The user needs t
move the ball the entire device being stationary.
It can successfully work on any kind of surface even your lap.
Disadvantages of trackball
It is not as accurate and precise as mouse. The structure of device needs more frequent cleaning as compared to mouse

26
Fig. 1.20: Track Ball
e input device similar in appearance to
es physical sensing and accurate and pr
eality. Data gloves are the devices whic
pplications possible. Haptics means co
ve that can be used as an input device t
eries of sensors that can detect hand an g
and receiving antennas that can be u
information about the position and ori
1.21 shows a data glove.
1.5.5 Data Gloves
A data glove is an interactiv a glove worn on the
hand. It is used in which facilitat ecise motion control
in robotics and (VR) virtual r h makes the
development of computer based haptics a
mmunication by touch.
Fig. 1.21 shows a data glo o grasp a “virtual” object. A
data glove is built with a s d finger motions to capture
input. It has transmittin sed for electromagnetic
coupling to provide input entation of the hand. Fig.
Fig. 1.21: Data Gloves
Advantages of Data Gloves
Same glove could be used in left and right hand

27
Palm and rear side of the hand works in a similar manner It does not have an impact of size of any hand
It works very precisely for two dimensional hand positioning
It is available with both close and open finger tips as per the user’s convenience.
Disadvantages of Data Gloves
The performance of the input device depends on the illumination condition For precise input palm should be kept perpendicular to the camera
Bends in the fingers are not recognizable
1.5.6 Image scanner
It is an electronic device that captures a printed text, object or image and converts it into
digital format for manipulation and storage. These are available in various forms including:
Flatbed scanners: The input to be scanned is placed on top of scanner. A light is placed on the
image by the scanner and sensor scans the document automatically.
Handheld scanners: The user has to be push manually and sensor senses the image. It is
generally of small size. Fig. 1.22 shows scanners of both kinds.
Fig. 1.22: Scanner
A scanner acts as an input device but needs computer software program to import data to the
computer from the scanner. Another application of scanner is OCR (Optical character
recognition) systems that can convert scanned text document into digital text that can be
manipulated in word processing software.

28
Advantages of scanner
A document or image could be converted into digital form very easily and quickly. Even if
original document has taken days to be produced, the scanner can reproduce it without
damaging in seconds.
The document could be altered and can be easily transmitted via email or pen drive.
Disadvantages of scanner
3-D scanning is not possible yet. It is not as good in quality as original document due to hardware limitations
Maintenance could be an issue sometimes. A scanner may need new drivers, LED bulbs may
dim with time.
Cleaning scan bed is required frequently for quality scan.
Flatbed scanners are not portable as they need host computers.
Image may take a lot of space in memory.

29
Check your progress
5. What are the principals to be followed in the construction of graph?
6. What are the kinds of bar graphs?
7 Ppi means 8 Vector image takes (less/more) space than raster image. 9 Graphic tablet is a input/output devices.
Exercise
1. Track ball is a kind of (input/output) device. 2. Image scanner is helpful in .
1.6 Summary Computer graphics deals with the display of the image, its manipulation and storage by using
a computer.
Two types of graphic images namely raster and vector are mainly used in computer graphics A raster image is displayed by the arrangement of pixels having different colours. Vector
image comprises of paths defined by start and end point.
Two kinds of graphics are available. Active graphics in which the user can interact with the
graphics as well as the programs used to generate that graphic. In passive graphics the user is
unable to make any change in image show on the screen.
They are used in wide variety of applications including GUI, CAD, entertainment, computer
simulation, entertainment, image processing, digital art, education and training, presentations
etc.
Various kinds of graphs could be used to present data in an effective manner. It includes bar
charts, histogram, pie chart, frequency polygon, scatter diagram.
Various kinds of input devices such as light pen, Graphic tablet, Joystick, Trackball, Data
gloves, Digitizers, Image scanner are used to input information about graphics. Each has its
own advantages and disadvantages and application

30
1.7 Glossary Pixel
Pixel is also called picture element. In a digital image, a pixel is a smallest element to be
displayed. In a raster image, it is a single point. On a two-dimensional representation, pixels
are generally represented using dots or squares. Each individual pixel acts as a sample of
original image. It means more samples provide more accuracy in the resultant picture. The
intensity of the pixel is a variable. In a black and white image, the intensity of the pixel could
be between 0 (black) and 255(white). For coloured image the intensity could be represented
as a RGB (Red, Green, Blue) colour or CYMK (Cyan, Magenta, Yellow, Black).
DPI (Dots per Inch)
It is being set by the printer device and measures the amount of ink dots the printer will use
on each pixel of the image.
Rendering It deals with the generation of a 2D image from a 3D model by means of computer programs
often called rendering programs. A 3-D model is always associated with a scene file which
contains objects in a strictly defines data structures. The scene contains information about
geometry, texture, lightening and shading information about the scene to be described. The
data stored in the scene file is passed as an input to a rendering program to be processed and
digital image is obtained as an output. The rendering program is often available as a built in
the computer graphics software. Sometimes their plug-ins is available as entirely separate
programs. It is also useful to describe the process of calculating effects in a video editing file
to produce final video output
3D projection
It deals with the projection of three dimensional graphic to two-dimensional plane. It is a
widely used in computer graphics especially related to engineering and medicines. This is
because most of the present methods for displaying graphical data are associated with planar
two dimensional media.
Aspect Ratio It is the ratio of vertical points of an image to that of the horizontal points. It is a projection
attribute which is often necessary while resizing the graphics. It helps to avoid resizing it out
of proportion. It is generally expressed as x:y as a relation between width and height. For
example, aspect ratio of 2:1 means the width is twice of the height.

31
1.8 Answer to check your progress/self assessment questions
1 Raster image is made up of pixels of different colours and hence are not scalable where as vector image is made up of paths defined by mathematical formulae and hence are scalale.
2 Resolution determines the quality of image. It indicates the total number of pixels in an image, along with its length and height.
3 Computer graphics are helpful in CAD as The designers can watch multiple views of the object which leads to see
enlarged sections or different views of objects at the same time. Animations are often used in CAD applications which are used in
entertainment and movie industry. Real-time animations are also possible which could be used to display
wire frame of the objects that could be used by the engineering for testing performance of a vehicle.
The designers can see the interior behaviour of vehicle during motion which is otherwise not easily feasible.
These are very much helpful for finalising the layouts of the buildings. 4 It is the ratio of vertical points of an image to that of the horizontal points. 5 Following are the major principles to be followed while constructing graphs
Distortion of data should be avoided while construction a graph. Proportion and scale should be maintained. Generally have greater length than breadth. Most commonly the height (y-
axis) and length (x-axis) of the graph should have 3:4 ratios. This is because horizontal axis displays the causal variable in more detail.
Abbreviations are spelled in a note for better understanding Colours could be used to clarify the groupings
6 Single variable, Grouped, stacked bar graph 7 Pixel per inch 8 More 9 Input 10 Track ball is based on a ball mechanism on its top rather than at bottom in mouse.
1.9 References and suggested readings 1 Computer Graphics, Donald Hearn and M.Pauline Baker, Prentice Hall of India,
New Delhi. 2 Introduction to computer graphics, A. Van Dam, S. K. Feiner, J. F. Hughes,, R. L.
Phillips,Reading: Addison-Wesley.
1.10 Model Questions 1 What does pixilation means? 2 How is computer graphics helpful in education? 3 How does visualization and presentation improve with computer graphics? 4 Discuss the scenario where pie chart is advantageous to other data presentation
graphs.

32
33
Structure of the Chapter
2.0 Objectives
Lesson 2
OUTPUT DEVICES
2.1 Output devices and Video display devices
2.2 Colour Models (RGB, CMYK)
2.3 Cathode ray tube
2.4 Direct view storage tube
2.5 Raster scan displays
2.6 Random scan displays
2.7 Architecture of raster and random scan monitors
2.8 Colour CRT monitors.
2.9 Flat panel displays
2.9.1 3-D viewing devices
2.9.2 Raster scan systems
2.9.3 Ransom scan systems
2.9.4 Graphics monitors and workstations 2.9.5 Lookup tables
2.10 Summary 2.11 Glossary 2.12 Answer to check your progress/self assessment questions 2.13 References and suggested readings 2.14 Model Questions
2.0 Objective After studying this chapter students will be able to:
Differentiate colour models to be used in graphics Identify the technology behind graphic based output devices Identify the technology behind recent advancements in technology used in grahic
display devices including television.
Anoutput device is a computer hardware which is used to communicate the electronically
obtained information resulted by processing performed by an information processing system
such as computer into human readable form.

34
2.1 Video display devices It is an electronic device which is used as an output device to represent information in visual
form. For example CRT, LCD monitors, Television screen etc.
2.2 Colour Models
Colour is the way a human brain interprets combination of band of wavelengths of light. A
colour model refers to an abstract mathematical model by which human brain’s colour vision
is modelled. It includes the way by which colours are represented as combination of numbers
called colour components
Two colour models very much famous in computer graphics are
RGB
CMYK RGB Colour Model
The RGB colour model was introduced by two scientists named Thomas Young and Herman
Helmholtz in their research work called ‘Theory of Trichromatic Colour vision’ in early 19th
Century.

35
In this model, a colour is specified by three components for intensity level of
primary colours – Red, Green and Blue. They are based on the theory that every
possible colour is made of these three primary colours. Each colour is specified by
a binary number with 32 bits. 32 bits are decomposed into 4 bytes of 8 bits each.
Each byte can hold 0-255 values. The fourth byte is used to specify the opacity of
the colour. It means if the colour in the topmost layer has value in fourth byte less
than 255, the colour from underlying layer is seen through.
This model is used for display in Televisions and Computer monitors. Fig 2.1
shows RGB colour wheel.
As an example
Red Green Blue Colour
255 0 0 Red
0 255 0 Green
0 0 255 Blue
0 255 255 Magenta
255 0 255 Cyan
255 128 0 Orange
255 255 0 Yellow
255 255 255 White
0 0 0 Black
Fig. 2.1: RGB Colour Wheel
RGB is an additive colour model. It means new colours could be created by adding these
primary red, green and blue colours. White colour is created by combination of all primary
colours and black is created by absence of these colours. New colours are created by making
changes in these three values along with changes in shades, tints and tones. The equations
and examples are discussed below.
Change in shades of the colour
The shades (new intensity) of a colour could be created by using following equation
new intensity = current intensity * (1 – shade factor)

36
Shade factor of 0 means no change in colour and 1 means colour completely powered by
black colour.
For example if in orange colour (255, 128, 0), the shades are as shown below.
0
.25
.5
.75
1.0
(255, 128, 0)
(192, 96, 0)
(128, 64, 0)
(64, 32, 0)
(0, 0, 0)
Change in tints of the colour
The tints (new intensity) of a colour could be created by using following equation
new intensity = current intensity + (255 – current intensity) * tint factor
A tint factor of 0 means no change in colour and 1 produces white:
For example if in orange colour (255, 128, 0), the tints are as shown below.
0
.25
.5
.75
1.0
(255, 128, 0)
(255, 160, 64)
(255, 192, 128)
(255, 224, 192)
(255, 255, 255)
The value of shade factor and tint factor must be between 0 and 1.
Change in tones of the colour
The tones (new intensity) of a colour could be created by using both shade and tint. On the
application of tint operation and then shade, the intensity of the dominant colour is used in
place of 255.
For example if in orange colour (255, 128, 0), the tones are as shown below.
0
.25
.5
.75
1.0
0
(255, 128, 0)
(192, 96, 0)
(128, 64, 0)
(64, 32, 0)
(0, 0, 0)
.25
(255, 160, 64)
(192, 144, 96)
(128, 80, 32)
(64, 40, 16)
(0, 0, 0)
.5
(255, 192, 128)
(192, 144, 96)
(128, 96, 64)
(64, 48, 32)
(0, 0, 0)

37
.75
(255, 240, 192)
(192, 168, 144)
(128, 112, 96)
(64, 56, 48)
(0, 0, 0)
1.0
(255, 255, 255)
(192, 192, 192)
(128, 128, 128)
(64, 64, 64)
(0, 0, 0)
CMYK Colour Model
It is a subtractive colour model which is based on four colours namely CYAN, MAGENTA,
YELLOW and key BLACK. Cyan, magenta and yellow are secondary colours as shown in
Fig 2.1. The model is based on subtractive colour combinations which means new colours are
created by partially or entirely masking base colours on a lighter, usually white, background.
Ink is used to reduce the light that would be reflected to produce white colour. Since ink
subtracts brightness of white colour to produce new colours the model is called subtractive.
In this model, white is created by absence of these colours and black by combination of all
the colours. The primary advantage of using black colour as key colours long with three
secondary colours include
Rather than mixing cyan, magenta and yellow colours to make black ink, use of black
ink is cheaper. Printing text with black ink results in quality better than if printed with using three
different colours. Black shade obtained by missing cyan, magenta and yellow is not perfect black. Using three colours to create blank colour takes time to dry up.
CMYK uses dithering to display colours. Dithering is a technique in which a computer
program approximates a colour cyan; magenta, yellow and black if the colour to be displayed
is not available. For example, when a web page contains a colour that the client browser does
not support. Fig 2.2 shows CMYK colour wheel.
Fig 2.2: CMYK model
Difference between RGB and CMYK colour models
RGB CMYK
RGB is based on projecting. CMYK is based on ink
38
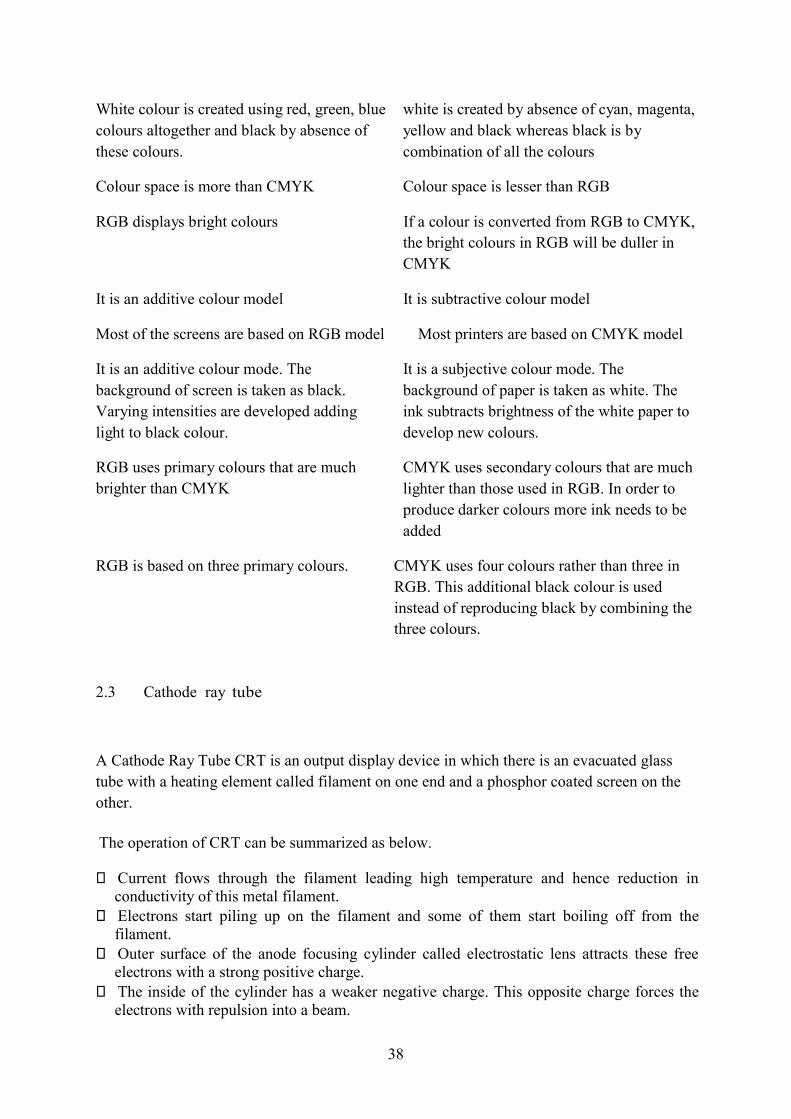
White colour is created using red, green, blue
colours altogether and black by absence of
these colours.
white is created by absence of cyan, magenta,
yellow and black whereas black is by
combination of all the colours
Colour space is more than CMYK Colour space is lesser than RGB RGB displays bright colours If a colour is converted from RGB to CMYK,
the bright colours in RGB will be duller in
CMYK
It is an additive colour model It is subtractive colour model Most of the screens are based on RGB model Most printers are based on CMYK model
It is an additive colour mode. The
background of screen is taken as black.
Varying intensities are developed adding
light to black colour.
It is a subjective colour mode. The
background of paper is taken as white. The
ink subtracts brightness of the white paper to
develop new colours.
RGB uses primary colours that are much
brighter than CMYK
CMYK uses secondary colours that are much
lighter than those used in RGB. In order to
produce darker colours more ink needs to be
added
RGB is based on three primary colours. CMYK uses four colours rather than three in
RGB. This additional black colour is used
instead of reproducing black by combining the
three colours. 2.3 Cathode ray tube
A Cathode Ray Tube CRT is an output display device in which there is an evacuated glass
tube with a heating element called filament on one end and a phosphor coated screen on the
other.
The operation of CRT can be summarized as below.
Current flows through the filament leading high temperature and hence reduction in
conductivity of this metal filament. Electrons start piling up on the filament and some of them start boiling off from the
filament. Outer surface of the anode focusing cylinder called electrostatic lens attracts these free
electrons with a strong positive charge. The inside of the cylinder has a weaker negative charge. This opposite charge forces the
electrons with repulsion into a beam.

39
As a result the electrons shoot at a very fast pace. The electrons pass through two sets of weakly charged focussing deflection plates having
opposite charges. The charge on these plates influences the path of the electron beam. The first set of deflection plates displaces the beam up and down. Further, the second set of plates displaces them left and right. The electrons shoot out of neck of the tube and smash into the screen with phosphor
coating placed on the other end of the bottle. As a result of this smash on phosphor some of the electrons are made to jump into another
band.
The picture is redrawn by directing the electron beam to the same screen points quickly
over and over again.
Fig 2.3 displays the complete operation including the electron gun with accelerating mode
and working of deflection plates

40
Fig. 2.3: CRT operations
2.4 Direct-view storage tube
Direct View Storage Tube (DVST) has concepts very much similar to a CRT and is
accompanied with highly persistent phosphor. The main advantage of DVST is that the
graphic drawn will persist for several minutes (40-50 minutes) before getting fade. The
working of DVST is described below.
It consists of electronic gun and phosphor-coated screen similar to CRT.
A fine-mesh wire grid is used to display graphic on phosphor coated screen rather than the
electron beam.
This grid is made up of high quality wire.
It is located with a dielectric and is mounted just before the screen.
It is mounted on the path of the electron beam from the gun.
The graphic to be displayed is deposited on this wire grid as a pattern of positive charges.
The pattern is transferred to phosphor coated CRT with the help of continuous flood of
electrons.
Flood gun separate frame the electron gun is used to generate flood of electrons.
Another grid called collector is placed behind the mesh.
The flow of flood of electrons is managed and smoothened with the help of collector
mesh.
The high velocity flood of electrons is slowed down by the negative charge of the collector
grid.
The low velocity negatively charged flood of electrons pass through the collector and
attracted to the positively charged storage mesh
This pattern of positive charges which are residing on the storage mesh leads to display of
the picture.
Electrons have been slowed down by the collector. As a result, the image might not be
sharp and bright as required.
To make the image bright, the screen is applied high voltage to provide a high positive
potential.
Voltage is applied to a thin aluminium coating that has been added between the tube face
and the phosphor screen.

41
The phosphor on the CRT screen has a very high persistence quality, the image and
graphics created on the screen will persist for several minutes without the need for being
refreshed.
To remove the picture, a positive charge is applied to the negatively charged mesh for its
neutralization. As a result all charges are removed and screens clears up.
It may produce an unpleasant momentary flash.
A gradual degradation in the quality of image produced occurs due to the accumulation of
the background glow.
Selected part of the graphic cannot be erased.
Fig 2.4 shows the architecture of DVST. It contains two guns called Flood gun and primary
gun.
Fig 2.4: Direct view storage tube DVST is accompanied by several advantages as well as disadvantages.
Advantages of DVST
Refreshing of graphics is not required for a longer period of time.
It can display very complex pictures at very high resolution without flicker
Disadvantages of DVST
Generally they don’t display colours.
Some part of the graphics can’t be erased.
The erasing and redrawing of a new and complex graphics may take some time.

42
Animation is not possible with DVST. Difference between DVST and CRT
Although DVST is similar to CRT but some of the differences are listed below.
DVST CRT
It has flat screen It may or may not have a flat screen
It has poor contrast Contrast is better than DVST
Refreshing is not required Frequent refreshing is required
Selective erasing of the graphics is not
allowed
Selective erasing of the graphics is possible
Performance is inferior as compared to CRT Performs very well as compared to DVST
Complex pictures could be displayed at a
high resolution
Performance to generate flicker free complex
graphics is poor as compared to DVST
Check your progress
1. RGB is additive/subtractive colour model.
2 CMYK is additive/subtractive colour model.
3 CMYK stands for , , and
.
2.5 Raster scan Araster scan is a technique that has been most commonly used to display images in CRT. It
is used to capture rectangular pattern of an image as well as for reconstruction in television.
The term has been derived from raster graphics which is a kind of image storage and
transmission technique used in most computer bitmap images.
It is based on the line-by-line scanning technique to be used for covering the display area
progressively, one line at a time. It resembles the way a reader’s gaze travels while reading
lines of text.
Image Scan Process

43
Image is divided into a sequence of horizontal strips called "scan lines". The scanned lines
could be transmitted as analog signals (in Television systems) or discrete pixels (computer
systems) as read from video source.
For image scan, the beam is swept horizontally from left to right at a steady pace. For next
line scan, the vertical position for the scan increases steadily and slowly and for horizontal
scan, the beam moves back rapidly to the left.
The beam is off while moving back from right to left.
For horizontal scan, the backward sweep is faster than forward one.
The display screen is taken as matrix of pixels and each point is addressable in memory as
well as display screen.
On reaching the bottom of the screen, beam is made off. It is brought rapidly at the beginning
of screen at top left to start again.
There happens one vertical sweep per image frame and one horizontal per line of resolution.
In this way, it is observed that or vertical the scanning process there occurs a downhill slope
towards lower right and the slope is almost 1/horizontal resolution.
This resulting slope is compensated mostly by the tilt and parallelogram adjustments. As a
result of adjustments this tilt cancels the downward slope of the scanned lines.
The scanning is done by using the technique of magnetic deflection which is imposed by the
change in current in the coils of the deflection yoke.
Printers are example where images are created using raster scanning.
Fig 2.5 displays how this horizontal and vertical sweep takes place.
Get rid of flicker
Fig 2.5: Raster scan

44
The phosphor used in the display screen has persistence impact which means that even if
pixels are drawn one at a time, by the time whole pixels on the screen are drawn, the initial
pixels are still illuminating. Flicker impact is created due to drop in brightness of the pixels.
Interlacing technique has been used to get rid of flickers in raster scan.. In this technique,
Odd-numbered scan lines are displayed for the first vertical scan followed by the even-
numbered lines. As every other line is drawn in a single broadcast, the newly-drawn lines will
be brighter and when interlaced with the earlier drawn somewhat dimmed the overall
illumination happens to be more even. Most appropriate refreshing rate on raster-scan is 60 to
80 frames per second.
2.6 Random-scan display
Random scan monitors draw an image line by line and so are called vector displays (or
stroke-writing or calligraphic displays). The individual line could be displayed and refreshed
in any specified order.
Only desired lines are traced on CRT. As an example, in order to connect a point A and B on
the vector graphics display, drive the beam deflection circuitry to move it directly from Point
A to B. To move the beam from point A to point B without showing a line between points
blank the beam while moving. Both magnitude and direction information are required for
effective display. Vector graphics generator is used to perform these operations. Fig 2.6
displays one such vector.
Fig 2.6: Vector component
On a random scan system, in order to get rid of flicker, refresh rates selected depending on
the number of lines to be displayed. Refresh display file is used to store image definition as
vectors in the form of set of line-drawing commands. Refresh display file is also called
display list, display program, or simply the refresh buffer.
In order to display an image in random scan, the set of line commands stored in refresh file
are executed resulting in display of each component line in turn.
After processing all line drawing commands, the random scan system gets back to the first
line command in the list. All the component lines of an image are processed 30 to 60times
each second in most of the cases.

45
2.7 Architecture of Raster Scan Raster scan consists of a
Display controller Central Processing Unit (CPU) Video Controller Refresh buffer Keyboard Mouse CRT
A special area of memory called frame buffer is dedicated to graphics only. The set of
intensity values are stored for all the screen pixels. The image displayed is stored in the form
of 1s and 0s in the refresh buffer.
Actual image is displayed by reading stored intensity values from the refresh buffer and
display one scan line at a time.
Pixel position is specified by a row and column number.
Intensity range for pixel positions can be a simple black and white system or colour system.
Simple black and white system is simple as you need to store one bit per pixel as either on or
off. The frame buffer is called bitmap. For colour system, additional bits are required to store information about colour and intensity.
A high quality display of image by using 24 bits per pixel and it may require several
megabytes of buffer storage space. The buffer is called a pixmap.
Fig. 2.7 displays the raster scan system architecture

46
Fig 2.7: Raster scan system architecture
A separate display controller called display processor is used to access the display
information from refresh buffer and process it in every refresh cycle. In this way, the CPU
gets free from graphic display processes. Along with this, the display processor digitises a
picture definition given in an application program into a set of pixel-intensity values that
could be stored in refresh buffer. This process is called scan conversion.
Video Controller:
The purpose of video controller is to receive the intensity information of each pixel from
frame buffer to display graphics on the screen. It is made of following components
Raster-scan generator: It is used to produce deflection signal that generates the raster
scan. It also controls the x and y address registers.
x and y address registers: These are used to define the location in the memory to be
accessed next.
Pixel value registers: Defines the screen positions referenced as Cartesian
coordinates. The architecture of Random scan
Fig 2.8 displays the typical vector display architecture. It consists of following components.

47
Display controller Central processing unit (CPU) Display buffer memory CRT
The image to be displayed is stored in the display buffer memory in the form of display
commands.
Display controller is connected to the CPU as I/O peripheral. The commands stored in display buffer are drawn by sending commands in the form of point
coordinates to a vector generator.
The digital coordinate values obtained are converted to analog voltages by vector generator
so that information could be sent to beam deflection circuits of CRT to displace electron
beam displaying image on phosphor coated CRT screen.
Fig 2.8 displays the Random scan system architecture.
Fig 2.8: Random scan system architecture
Difference between Raster scan and random scan
Raster scan Random scan
The beam is moved one scan line at a The beam is moved between the end points

48
Time first from top to bottom and then back to top.
of the primitive vectors of the graphic to be
displayed.
Refresh rate is independent of complexity of
the image
With increase in primitive vectors in the
image, the complexity and hence refresh rate
needs to be increased
Primitive are required to be scan converted
into their corresponding pixels
in the frame buffer.
No scan conversion is required
Raster display can display continuous and
smooth lines by approximating them with
pixels on the raster grid.
Vector display is made to work on draws
continuous and smooth lines.
Cost is less It costs more
Raster scan has the capability to display has
images filled with solid colours or patterns.
Random scan has cannot display images
filled with solid colours or patterns They can
only draws line characters.
Electron beam is directed across whole
screen for display of image
Electron beam is directed only to the part
where graphics is to be displayed
Resolution is poor Resolution is good
Graphics is stored as set of intensity values
for all screen pixels in the refresh buffer
Graphics is stored as set of lines in display
file
As intensity value of pixels are stored as such
so it is well suited to display realistic scenes
containing even shadows
It is based on line drawing capability, so it is
not well suited for realistic scene display.
Pixels are the base of display Mathematical functions are base of display Editing is difficult Editing is easy
It uses interlacing It doesn’t use interlacing
It uses shadow penetration It is based on beam penetration
2.8 CRT colour monitors
In order to display a graphic on coloured CRT monitor, the pixel values are read to control
the intensity of the CRT beam to be displayed on the screen during each refresh cycle.. In
order to display coloured graphics on CRT, different phosphors having the ability to emit
different coloured lights. Two main methods to perform this operation are

49
Shadow mask method.
Beam penetration method Shadow Mask Method: This method of displaying coloured images is used in Raster scan displays (colour TV). The screen is made of phosphor of three different coloured dots that can emit red, green and blue colours in a single pixel position. Three guns emitting electrons are used to emit these three colours namely red, green and blue. Fig 2.9 shows the technique of shadow masking. The steps followed are listed below.
Three guns emit three electrons simultaneously
These electrons when go through a shadow mask a phosphor dot triangle red, green and
blue colours are formed on CRT screen. It is actual pixel on screen.
In order to generate different colours on the pixel the intensity of the electron beams are
controlled. It can generate colours from combination of colours red, green and blue.
Fig 2.9: Shadow masking
Beam penetration method: It is used to display coloured images in random or vector scan
systems. It is cheaper than shadow masking. In this method, an outer red layer and inner
green layer phosphors are coated in the inside section of CRT.
By adjusting the speed of electrons, the amount of their penetrations is adjusted. In order to
generate red colour, the electrons are emitted slow so that they penetrate only the outer layer.
In order to get green colour the electrons are emitted fast so that they can penetrate the outer
layer and the inner layer. In this way adjusting speed of electrons may generate red, green,
orange and yellow colours. The main limitation of this method is that it can display only four
colours on the screen and hence quality of image thus obtained is diminished.
Beam Penetration Shadow Penetration It is used in random or vector scan system to display coloured graphics Only four colours namely red, green, orange and yellow could be displayed
It is used in raster scan system to display coloured graphics Million of colours could be displayed

50
Since the colours to be displayed depends on the speed of colours, few colours are possible
Since the colours depend on kind of ray, millions of colours are possible
It is less expensive It is costly Quality of graphic thus obtained is poor. Quality of graphic thus obtained is high. It has high resolution It has low resolution
2.9 Flat panel displays
Flat panel displays are a class of video display devices with reduced volume, weight, and
power requirements as compared to a CRT. They are thinner than CRT and it could be hung
on walls. Flat-panel displays are categorised as
Emissive displays
Non-emissive displays
The emissive displays also called emitters convert electrical energy into light to display. For
example light-emitting diodes (LED).
In this technique, matrix of diodes is arranged on the basis of information stored in refresh
buffer to form the pixel positions in the display. Picture definition is read from the refresh
buffer and on the basis of information; voltage levels are generated that are applied to the
diodes to produce the light patterns in the display.
Non-emissive displays also called non-emitters use optical effects to convert sunlight or light
from some other source into graphics patterns. For example liquid- crystal device (LCD).
Plasma panel is a type of flat panel display. It is also called gas discharge displays. It
contains two glass plates. The region between glass plates is filled with a mixture of gases
usually neon. One glass panel is encompassed with a series of vertical conducting ribbons
and the other with horizontal. Application of voltages to these horizontal and vertical
conductors breaks down the gas at the intersection of two conductors into glowing plasma of
electrons and ions. Information about the picture is stored in refresh buffer and the voltage is
used to refresh picture pixels usually 60 times per second.
Liquid- crystal displays
Liquid- crystal displays (LCDs) are kind of flat panel display devices that are commonly used
in calculators and laptop computers. These are non-emissive devices in which a picture is
displayed by passing polarized light through a liquid- crystal material. This crystal material is
adjusted to either block or transmit the light. It consists of two glass plates having liquid
crystal material containing a light polarizer at right angles to the other palate. One glass plate
has horizontal conductors and other has vertical. Both types of plates intersect at a pixel
position. Voltage has been applied to two intersecting plates to turn the pixel on. It leads to
alignment of molecules in the liquid so that the light is not twisted. It is also called passive
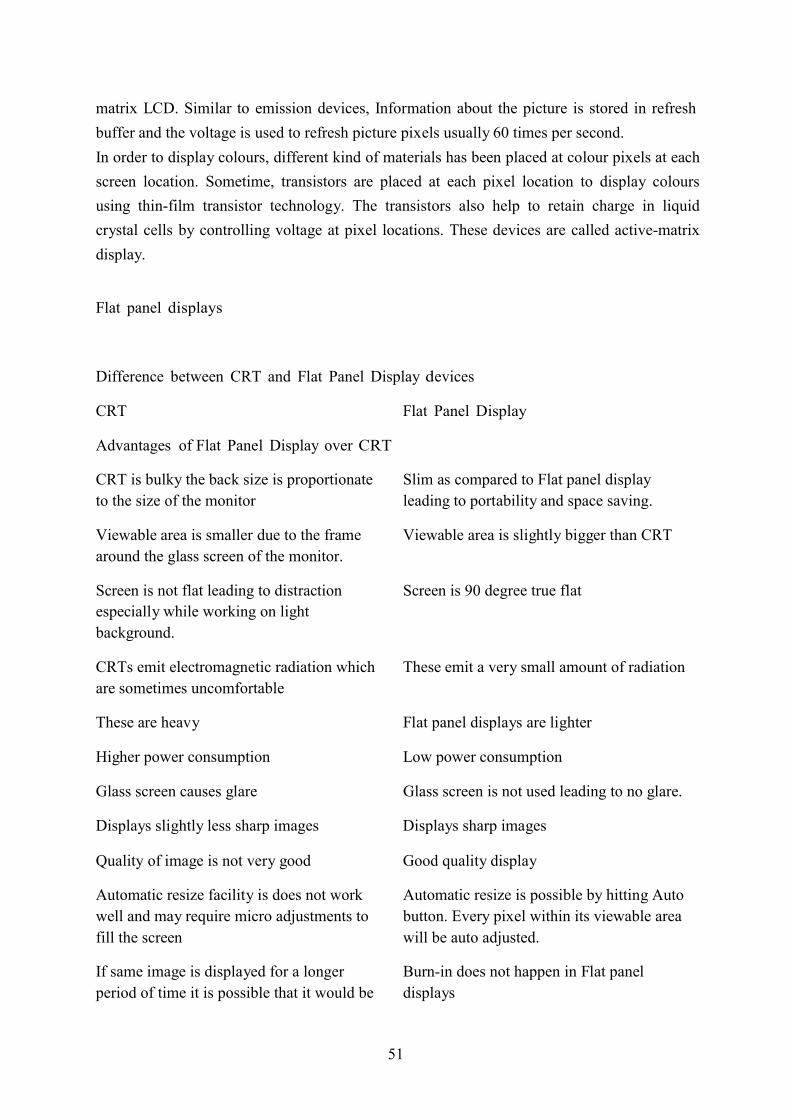
51
matrix LCD. Similar to emission devices, Information about the picture is stored in refresh
buffer and the voltage is used to refresh picture pixels usually 60 times per second.
In order to display colours, different kind of materials has been placed at colour pixels at each
screen location. Sometime, transistors are placed at each pixel location to display colours
using thin-film transistor technology. The transistors also help to retain charge in liquid
crystal cells by controlling voltage at pixel locations. These devices are called active-matrix
display.
Flat panel displays
Difference between CRT and Flat Panel Display devices CRT Flat Panel Display
Advantages of Flat Panel Display over CRT
CRT is bulky the back size is proportionate
to the size of the monitor
Slim as compared to Flat panel display
leading to portability and space saving.
Viewable area is smaller due to the frame
around the glass screen of the monitor.
Viewable area is slightly bigger than CRT
Screen is not flat leading to distraction
especially while working on light
background.
Screen is 90 degree true flat
CRTs emit electromagnetic radiation which
are sometimes uncomfortable
These emit a very small amount of radiation
These are heavy Flat panel displays are lighter Higher power consumption Low power consumption
Glass screen causes glare Glass screen is not used leading to no glare.
Displays slightly less sharp images Displays sharp images
Quality of image is not very good Good quality display
Automatic resize facility is does not work
well and may require micro adjustments to
fill the screen
Automatic resize is possible by hitting Auto
button. Every pixel within its viewable area
will be auto adjusted.
If same image is displayed for a longer
period of time it is possible that it would be
Burn-in does not happen in Flat panel
displays

52
embedded in the display permanently.
In order to generate a flicker free image
minimum of 75hz is required
They generate flicker free image every time
Gets noticeably warm Does not get too warm Advantages of CRT over Flat Panel Displays
Dead pixels are not there on CRT There could be dead pixels due to
manufacturing defects
Cheaper Expensive
It could be used at any resolution up to the
maximum supported.
It should be used at a native resolution
It has wide viewing angle It has narrow viewing angle
2.9.1 3-D Viewing Devices
Modern monitors have the ability to provide a stereoscopic perception of 3D depth of the graphic involved.
The main operation of 3-D view is made by displaying the views for left and right eye separately. These are called 2D offset. These image offsets are then combined in the brain which gives the perception of 3D view. 3D is overestimation of capability of such display systems. This is because these are considering two 2D images as being 3D. More accurate term that could be used for such monitors is "stereoscopic".
Stereoscopic technology deals with the different image captured by left and right eye of the viewer. For example anaglyph images and polarized glasses. It means Stereoscopic technologies generally deal with special kind of spectacles.
Due to the issues such as price and basic infrastructure the growth in this market is lacking a bit. But they have potential of tremendous growth. Some of the existing applications of this technique include TV, film, and game industry.
The main versions of "3D" (stereoscopic) technology are:
Active Stereo 3D – It is most widely used technology for 3-D views. In this
technology, images captured by left and right eyes are separated by active shutter glasses which lead to 3D effect to the user.
Passive Stereo 3D – In this technology, left and right images are separated by using polarized glasses. Screen is activated by special films. It is becoming very popular these days.
Autostereoscopic 3D – In this technology, there is no use of glasses. The technology is quite expensive and needs special stereoscopic screens.

53
Stages of Stereo 3D Presentation
Stereo 3-D presentation includes stages shown in Fig 2.10.
Source: Stereo 3D content to be displayed are created for view Preparation and Transmission: Left and right images to be viewed for creation of
3D are prepared. These images are transmitted to the display device Presentation: With the help of stereo glasses, left image and right images are
relayed to the eyes.
Fig 2.10: Stages of 3D stereo presentation
Active Shutter Technology (SG)
In order to reach the desktop LCD monitors active shutter technology using shutter glasses (SG) or liquid crystal glasses has been a boon. The active use of these shutter glasses for presenting 3-D affect is the reason for addition of word active in its name. It is also called time division switching.
The hardware required for this technology involves:
Special shutter glasses 3D enabled display Graphics card Software package
The glass on each eye contains a liquid crystal layer having the ability to become dark when voltage is applied. A special transmitter is connected to the glasses is controlled by PC with the help of timing signal to make glasses dark in synchronization on the basis of refresh rate of the screen. The glasses open and close at a very fast speed (60 times per second) to view the image by one eye at a time.
Polarized or passive 3D technology
This technology creates 3D effect by the screen and not by the glasses. Some of the modern 3D films like Avatar or Harry Potter are built with this technology.
Each image is polarized in a different direction Glasses wear have lenses that are polarized in opposite directions Each lens polarizes according to corresponding image. The polarized lens on the left eye polarizes and blocks the right image In this way, left eye will be able to see left image and right eye only right image. Images with different polarizations can’t be displayed as such on flat screen.

54
Special film polarizes left and right image and resultant 3D graphics could be seen with polarized glasses which filter light so that correct eye sees the correct image.
2.9.2 Raster scan systems
In a raster- scan system the graphics is created by sweeping electron beam row by row across the display screen. While sweeping, the intensity of the beam is turned on and off for displaying illumination on the display screen. Frame or refresh buffer stores the information about the graphic to be displayed. The screens are refreshed at 60 to 80 frames per second. After scanning all the rows, the electron beam returns to the beginning of the next line. It is called the horizontal retrace of the electron beam. After scanning all the rows the electron beam returns to the beginning of top left corner of the screen called vertical retrace
2.9.3 Random-scan Systems
Random scan monitors draw graphics line by line. The vectors are refreshed at a rate which depends on the number of lines to be displayed. The vectors could be refreshed in any order. Information about the graphics is stored in an area of memory called the refresh display file. In order to display a specified graphic, the system cycles through the set of commands in the display file to draw vectors one by one. After displaying all the vectors, the system cycles back to the first line command in the display file.
7 Raster scan is used to display in monitors.
8 Resolution of raster scan is than random scan. 9 Raster scan uses (Beam penetration/shadow
masking) for image display.
10 LCD is a kind of (CRT/Flat panel) monitor.
2.9.4 Graphic monitors and workstations
Graphic monitor is the monitor which has the ability to display graphics along with text.
Most of the modern monitors are graphic monitors. They are output device.
In other words, monitors that support the following graphic applications are called graphic
monitors.
Animation CAD Drawing programs Paint Applications Presentation Graphics Software’s such as Excel capable of managing pie and bar
charts

55
Desktop publishing such as MS Office, Share points, Document managements Graphic workstation refers to the specially configured computer for graphic works such as image manipulation. For management of complex graphics, workstations need good operating power and graphic capabilities.
The general specification of such computers include
Minimum of 64 Megabytes of RAM Very good Resolution Graphics screen GUI Graphical User Interface High capacity storage device Built-in Network Support
The computing capabilities of workstations lie between Personal computer and minicomputers They can work as standalone station or local area network LAN. The most common operating systems used in workstations are Unix and Windows NT.
2.9.5 Look up tables
A look up table (LUT) also called colour map is a table which is used to display a graphic
image in the computer. It contains information about the association of a numeric pixel value
and its colour to be displayed on the output device. Similar to a painter, this colour palette is
the basis of coloured images. This colour is managed in the computer as a combination of
Red, Green, and Blue colours. Corresponding to each pixel, colour map thus contains three
components. Generally speaking, a colour map has 256 rows corresponding to 0-255 pixels
that could be stored in an 8-bit field. GIF images are an example of image file type that uses
LUT to store colour information. It is called pseudo-colour because they are unable to display
photo-realistic images. A true-colour system can display 16 million colours developed by all
possible mixtures of 256 levels for each primary colour.
Characteristics of LUT
The number of entries in the palette: This is a base to identify the maximum number of
colours that can appear on screen simultaneously. It is actually a subset of the full RGB
colour palette.
The width of each entry in the palette: It is the base to identify the number of colours that
could be represented by the wider full palette.
As an example, a palette of 256 colours which needs 8 bits to store information. It is called
colour depth or bits per pixel (bpp). The width of each entry is formed by 8 bits for each
colour making a total of 24 bits.

56
Further, 8 bits per channel makes 256 levels for each possible red, green, and blue sub-
components making total of 256 × 256 × 256 = 16,777,216 colours.
So, we can say each colour could be chosen from a full palette of RGB with a total of 16.7
million colours.
If changes are made in the palette, the whole screen is affected at once. This technique could
be used to produce special effects.
Advantages of Look up tables
In this way, we can have large number of simultaneous colours without large frame buffers.
Entries in the colour table could be easily manipulated for experimentation with different
colour combinations without changing the attribute settings. In image processing applications, LUT could be used for setting a threshold value such that
pixels having value above or below this threshold are set to same colour.
Fig. 2.11 displays a look up table with 24 bit entries with 8 bits per colour. A value of 200
stored at a pixel accesses information from the table as 2083. Each 8 bit component of this
entry is used to control the intensity of each of electron guns for Red, green and blue colours.
0
200
2083
200
255
00000000 00001000 00100011
RED GREEN BLUE
Fig 2.11 :A colour lookup table with 24 bits.
2.10 Summary Video display device is an electronic device which is used as an output device to represent
information in visual form. RGB and CMYK are two most popular colour models popular for
video display. RGB is an additive colour model in which new colours could be created by
adding these primary red, green and blue colours. CMYK is a subtractive colour model which
is based on four colours namely CYAN, MAGENTA, YELLOW and key BLACK.
Various display devices are used in computer graphics. A Cathode Ray Tube CRT is an output display device in which there is an evacuated glass
tube with a heating element called filament on one end and a phosphor coated screen on the
other.

57
Direct View Storage Tube (DVST) is an output device which has concepts very much similar
to a CRT and is accompanied with highly persistent phosphor. The main advantage of DVST
is that the graphic drawn will persist for several minutes.
Araster scan is a based on the line-by-line scanning technique to be used for covering the
display area progressively, one line at a time.
Random scan monitors draw an image line by line and so are called vector displays (or
stroke-writing or calligraphic displays). The individual line could be displayed and refreshed
in any specified order
Flat panel displays are a class of video display devices with reduced volume, weight, and
power requirements as compared to a CRT.
A look up table (LUT) also called colour map is a table which is used to display a graphic
image in the computer. It contains information about the association of a numeric pixel value
and its colour to be displayed on the output device. Similar to a painter, this colour palette is
the basis of coloured images. This colour is managed in the computer as a combination of
Red, Green, and Blue colours.
2.11 Glossary Let us discuss some key concepts to be used for better understanding of video display device
Phosphor: It is a key substance use to display in video display devices. This substance emits
light when exposed to electron beam.
Persistence: There are different kinds of phosphors which differ in their persistence.
Persistence means the time taken by the emitted light from the screen of phosphors to decay
to one-tenth of its original intensity. Lower persistence phosphors means the phosphors takes
lesser time for its emitted light to decay and hence needs higher refreshing rates for the
maintenance of the picture on the screen without flicker.
Look up table: A look up table (LUT) also called colour map is a table which is used to
display a graphic image in the computer. It contains information about the association of a
numeric pixel value and its colour to be displayed on the output device
Liquid- crystal displays (LCDs): It kind of flat panel display devices that are commonly
used in calculators and laptop computers.

58
Raster scan monitors: It is based on the line-by-line scanning technique to be used for
covering the display area progressively, one line at a time.
Random scan monitors draw an image line by line and so are called vector displays (or
stroke-writing or calligraphic displays).
2.12 Answer to check your progress/self assessment questions 1. Additive 2. Subtractive 3. Cyan, Magenta, Yellow, Black 4. highly persistent phosphor 5. In RGB, white colour is created using red, green, blue where as in CMYK it is
created by the absence of cyan, magenta, yellow and black. 6. The phosphor used on the display screen has a very high persistence quality.
So, the image and graphics created on the screen will persist for several minutes without the need for being refreshed.
7. CRT 8. poor 9. shadow masking 10. flat panel 11. For image scan, the beam is swept horizontally from left to right at a steady
pace. For next line scan, the vertical position for the scan increases steadily and slowly and for horizontal scan, the beam moves back rapidly to the left.
12. Flickering is removed in raster scan by interlacing. Odd-numbered scan lines are displayed for the first vertical scan followed by the even-numbered lines.
13. In order to get rid of flicker in random scan, refresh rates are selected depending on the number of lines to be displayed.
2.13 References and suggested readings 1. Computer Graphics, Donald Hearn and M.Pauline Baker, Prentice Hall of India, New
Delhi. 2. Computer graphics: Principals and practice, J. F. Hughes, A. Van Dam, James D Foley,
S.K. Feiner, Pearson ‘education, India, New Delhi. 3. Introduction to computer graphics, A. Van Dam, S. K. Feiner, J. F. Hughes,, R. L.
Phillips, Reading: Addison-Wesley.
2.14 Model Questions 1 Discuss the operation of CRT monitor. 2 Differentiate RGB and CMYK colour model. 3 How is DVST different from CRT? 4 Discuss the image scan process used in Raster scan. 5 How to you get rid of flicker in Raster image architecture? 6 Discuss the role of raster buffer in raster scan display architecture. 7 How is beam penetration technique of image display different from shadow masking? 8 How is flat panel display better than CRT monitors?

9 What is purpose of Look up tables in display of coloured graphics?
59

60
Lesson -03
Scan Conversion and its techniques for Line drawing Structure of the chapter
3.0. Objective
3.1. Process and need of Scan Conversion
3.1.1. Scan Converting a Point
3.2. Scan Converting a straight line
3.3. Algorithms for scan converting a line
3.3.1. Direct method of line drawing
3.3.2. Simple DDA method of line drawing
3.3.3. Incremental DDA method of line drawing
3.3.4. Integer DDA method of line drawing
3.4. Bresenham’s line drawing algorithm and its derivation
3.4.1. Derivation
3.4.2. Algorithm
3.4.3. Program to scan convert a line using Bresenham line drawing algorithm
3.5. Summary
3.6. Glossary

61
3.7. Answers to check your progress / self assessment questions 3.8. Model Questions
3.0. Objective After studying this chapter, the student will be able to:
Explain what scan conversion is and how it is done. Explain scan conversion of a straight line. Explain various methods of scan converting a line. Explain Bresenham line drawing algorithm. Solve various numerical based on scan conversion.
3.1. Process and need of Scan Conversion

62
Scan conversion is a fundamental operation in computer graphics and visualization. We know
that our display screen is made up of large number of pixels and any image can be displayed
by illuminating the pixels at suitable locations. For this, the image information is stored in the
refresh buffer of the display device. This information is used by the video controller circuitry
of the computer and voltages are applied to the control grid and the deflection plates are
moved to ‘on’ the required pixel.
A pixel (short form of ‘picture element’) is the smallest dot that makes up the complete image
in a computer memory. Pixel in our display screen looks like the one shown in figure 3.1.
Scan conversion refers to the process of plotting the objects on the screen. If we talk about
raster devices, this process is referred as Rasterization. We can think of image as being made
up of graphics primitives such as point, straight line, circle, ellipse and other conic sections or
quadratic surfaces. In any raster scan device, the screen pixels are located at integer positions.
Hence for displaying an image, the pixels closest to the actual points are illuminated. An
image usually appears on any raster screen like the one shown in Figure 3.2 where a triangle
is drawn using three vertices.
Scan conversion is needed in many applications such as video projectors, LCD monitors, TV,
cinema equipments and other aspects of image processing.
3.1.1. Scan Converting a Point
We know that our display screen is made up of 2-dimensional array of pixel positions in
which the origin lies at the upper left corner and each pixel position is referred as (x,y)
coordinate pair where x-value signifies the column position and the y-value signifies the
corresponding row position. But in mathematic coordinate system, the origin lies at bottom
left corner from where x axis runs to the right and y axis runs upward.
In order to scan-convert a mathematical point expressed as (x,y), where x and y are real
numbers to a pixel position (x’,y’), where x’ and y’ are integers, we need to extract only

63
integral part of x and y and store the result into x’ and y’ respectively. This can be done with
the help of floor function as shown below
x’=floor(x)
y’=floor(y) where floor will return the largest integer which is less than or equal to the parameters
specified.
For example, a point P1(1.7, 0.8) will be represented at pixel position (1,0) because
Here x=1.7 and y=0.8, then
x’=floor(x)=floor(1.7)=1
y’=floor(y)=floor(0.8)=0
One thing that is important to note here is that with the above approach, all the points that
satisfy the conditions:
x’< x < x’+1 and y’< y< y’+1 are scan converted to same pixel position (x’,y’).
For example, let us take two points P2 (2.2, 1.3) and P3 (2.7, 1.9) are both mapped to same
pixel position (2,1). Now, if we want to have round-off values then we need to modify the
above function as :
x’= floor(x+0.5)
y’= floor(y+0.5) By doing this, we will get two different pixel values of points P2 and P3.
For point P2(2.2, 1.3), x’= floor(2.2+0.5)= floor(2.7)=2 and y’= floor(1.3+0.5)=floor(1.8)=
1 i.e. the corresponding pixel position is (2,1). Similarly for point P3(2.7, 1.9),
x’=floor(2.7+0.5)= floor(3.2)=3 and y’=floor(1.9+0.5)=floor(2.4)= 2 i.e. the corresponding
pixel value is (3,2) as shown in figure 3.3.

64
In order to plot any point on the screen, we will use a function PlotPixel(x,y). Check your progress / Self assessment questions
Q1. Points are scan converted to integer values so that they can be plotted on the screen. State
whether true or false.
Q2. Why do we need to scan convert a point? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
------------------------------------------ 3.2 . Scan Converting a straight line
A straight line can be drawn if we are given two end points of the line. All the discrete points
between these two end points are illuminated to make a line visible on the screen. We find
these discrete points using the equation of line. As we already know that our screen is
composed of pixels which have integral values. So every point (x,y) on the line must be
converted into integer values because the end points and the intermediate points can be real
numbers. This means that the plotted line will be an approximation of the actual line. This
approximation basically refers to aliasing effect that shows distortion between the plotted and
the actual object.
We do not get this aliasing effect when we are dealing with horizontal and vertical lines but
this problem is clearly visible while scan converting diagonal lines. The approximation
results in staircase effect which gives a jaggy look.
In order to scan convert a straight line, we need to calculate all the intermediate points
between the two end points which will be given. Then they will be converted into integer
values and finally are plotted with the help of PlotPixel function on raster screen.
Let us go through the equations of a straight line which are going to be used further: Slope-Intercept form : y = mx+b

65
where m is slope of the line, m=(y2-y1)/(x2-x1)
and b is y-intercept, b=y1-m*x1
One-Point form: (y-y1) = m(x-x1)
where m= (y2-y1)/(x2-x1)
3.3 . Algorithms for scan converting a line There are various methods available for scan converting a straight line. These are discussed
as follows:
3.3.1. Direct method of line drawing:
We will use the slope-intercept form of the straight line i.e. y= mx+b. Let us given two end
points of the line i.e. (x1,y1) and (x2,y2). The slope and y-intercept can be calculated as
m= (y2-y1)/(x2-x1) and b=y1-mx1 In order to draw any line, we first need to find the orientation of line which will be decided
from the slope. There are two major cases:
Case 1: If |m|<=1, then the line is more inclined towards x-axis. So in this case we will
increment x-value by unit intervals and then find the corresponding y- values from the
equation:
y=mx+b This calculated value may be a floating point value which must be rounded off to its nearest
integer which will provide the pixel position and is then plotted.
Case 2: If |m|>1, then the line is more inclined towards y-axis. So in this case we will keep
on incrementing y-value by unit intervals and then find the corresponding x-values from the
equation:

66
x= (y-b)/m This will also give us a floating point value which should be converted into integer value in
order to illuminate the corresponding pixel position.
Algorithm: Step 1: Enter two end points of the line: (x1,y1) and (x2, y2)
Step 2: Calculate the slope of the line: m=(y2-y1)/(x2-x1)
Step 3: Calculate the y-intercept as: b=y1-m.x1
Step 4: Initialize the values of x and y as : x=x1 and y=y1 Step 5: Plot the first end point as PlotPixel(x,y)
Step 6: If |m|<=1 then
While(x<=x2)
x= x+1
y= mx+b
Round off y value and PlotPixel(x, y)
EndWhile
EndIf
Else
While(y<=y2)
y= y+1
x= (y-b)/m
Round off x value and PlotPixel(x, y)
EndWhile
EndIf Step 7: End
Example : Trace all the intermediate points between the two end points (12,10) and (20,20)
using direct method of line drawing. Solution: (x1,y1)=(12,10) and (x2,y2)=(20,20)
Slope of the line, m=(y2-y1)/(x2-x1)= (20-10)/(20-12) = 10/8=1.25 > 1

67
Y-intercept, b= y1-m.x1= 10-1.25*12= -5 Since the value of m>1, this means our line is more inclined towards y-axis so we will
increment y by 1 and will find the corresponding x- value as shown in table below:
x=(y-b)/m y=y+1 PlotPixel(x,y)
12 10 (12,10)
12.8 11 (13,11)
13.6 12 (14,12)
14.4 13 (14,13)
15.2 14 (15,14)
16 15 (16,15)
16.8 16 (17,16)
17.6 17 (18,17)
18.4 18 (18,18)
19.2 19 (19,19)
20 20 (20,20) The first and last points to be plotted will always be the end points of the line.
3.3.2. Simple DDA method of line drawing:
DDA stands for Digital Differential Analyzer. This method is better than the direct method.
In this method, previous x and y coordinate values are used to find their new values and
hence pixel positions determined by this method are closer to the actual points. Here less
aliasing is achieved. In this approach, we increment both x and y values at each step to find
the plotted points. We use dx and dy as change in x-coordinate and change in y-coordinate
respectively which are determined as:
dx=(x2-x1) and dy=(y2-y1)
So, slope can be found by m= dy/dx.
Equation of line which will be used here is: y-y1= m(x-x1), where (x1,y1) is the first end
point.
Before finding the intermediate points, we need to check the orientation of the line which is
determined by the value of slope. There are two cases:

68
Case 1: If |m|<=1, then the line is more inclined towards x-axis. In this case, we increment
x-value by unit interval i.e. dx=1 and will find the corresponding y-value using the above
equation.
Let (xk , yk)be the kth pixel position. Then, using above equation,
y- yk = m(x- xk,)………………….(1)
Let (xk+1 , yk+1) be the (k+1)th pixel position, then
y- yk+1 = m(x- xk+1,)………………….(2)
Subtracting (2) from (1), we get
yk+1 – yk = m (xk+1 – xk) ………………..(3) Since in this case (xk+1 – xk)= 1 as dx=1, so substituting this value, we get
yk+1 – yk = m i.e. yk+1 = yk + m ,
where the value of k = 1 for the first point and it increases on each step. The calculated value
of y can be a floating point number so it must be rounded off in order to plot this point. This
process will be repeated until we reach the second end point of the line.
Case 2: If |m|>1, then the line is more inclined towards y-axis. So in this case we will keep
on incrementing y-value by unit i.e. dy = 1 and then calculate the corresponding x-values by
using the equation (3)
yk+1 – yk = m (xk+1 – xk)
dy = m (xk+1 – xk)
Since dy = 1 in this case. So we get,
1 = m (xk+1 – xk)
1/m = xk+1 – xk
xk+1 = xk + 1/m
where the value of k = 1 for the first point and it increases on each step. The calculated value
of x can be a floating point number so it must be rounded off in order to plot this point. This
process will be repeated until we reach the second end point of the line.
So we can see that this process uses the previous values of x and y to calculate the new
values. The approach we discussed above is applicable when we attempt to draw a line from
left to right. But if our concern is to plot a line from right to left using the simple DDA
method, then minute changes will be applied. Instead of incrementing the value of x and y,
we decrement these values by unit interval in both the cases i.e in case 1, where |m|<=1, dx =
-1 , then the equation to calculate the next y- value will be,
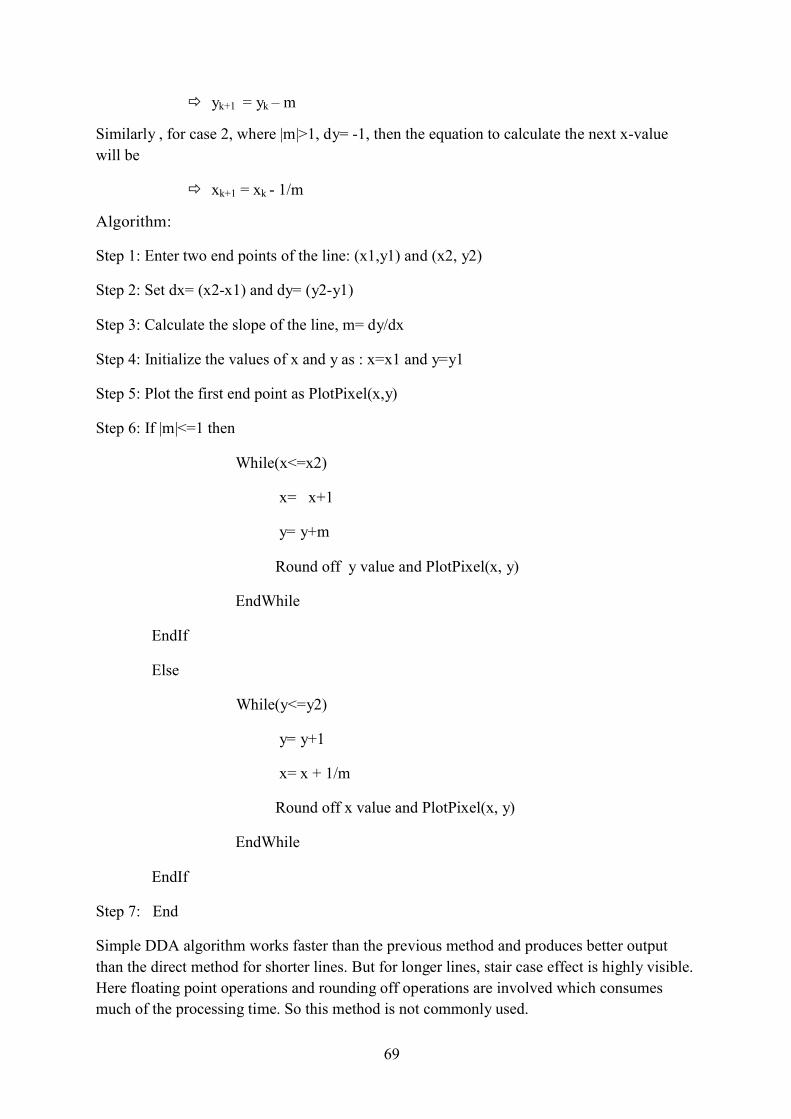
69
yk+1 = yk – m
Similarly , for case 2, where |m|>1, dy= -1, then the equation to calculate the next x-value
will be
Algorithm:
xk+1 = xk - 1/m
Step 1: Enter two end points of the line: (x1,y1) and (x2, y2)
Step 2: Set dx= (x2-x1) and dy= (y2-y1)
Step 3: Calculate the slope of the line, m= dy/dx Step 4: Initialize the values of x and y as : x=x1 and y=y1
Step 5: Plot the first end point as PlotPixel(x,y)
Step 6: If |m|<=1 then
While(x<=x2)
x= x+1
y= y+m
Round off y value and PlotPixel(x, y)
EndWhile
EndIf
Else
While(y<=y2)
y= y+1
x= x + 1/m
Round off x value and PlotPixel(x, y)
EndWhile
EndIf Step 7: End
Simple DDA algorithm works faster than the previous method and produces better output
than the direct method for shorter lines. But for longer lines, stair case effect is highly visible.
Here floating point operations and rounding off operations are involved which consumes
much of the processing time. So this method is not commonly used.

70
Example : Calculate all the intermediate points between the two end points (13,10) and
(21,20) using Simple DDA method of line drawing. Solution: (x1,y1)=(13,10) and (x2,y2)=(21,20)
dx= (x2- x1) = (21-13)= 8 and dy = (y2- y1) = (20 – 10) = 10
Slope of the line, m = dy/dx = 10/8= 5/4= 1.25 > 1
Since the value of m>1, this means our line is more inclined towards y-axis so we will
increment y by 1 and will find the corresponding x- value. We need 1/m here.
1/m= 4/5= 0.8 The following table will give all the points of the line.
x= x+1/m y=y+1 PlotPixel(x,y)
13
10
(13,10)
13+0.8= 13.8
11
(14,11)
13.8 + 0.8 = 14.6
12
(15,12)
14.6 + 0.8 = 15.4
13
(15,13)
15.4 + 0.8 = 16.2
14
(16,14)
16.2 + 0.8 = 17
15
(17,15)
17+ 0.8 = 17.8
16
(18,16)
17.8 + 0.8 = 18.6
17
(19,17)
18.6 + 0.8= 19.4
18
(19,18)
19.4 + 0.8 =20.2
19
(20,19)
20.2 + 0.8 = 21
20
(21,20)
3.3.3. Incremental DDA method of line drawing:
In this method, we increment both x and y coordinates at each step. We will use Δx and Δy as
x-extent and y-extent respectively which denotes change in x coordinate and change in y
coordinate. We include a variable called step and two more variable x-inc and y-inc that show
increment towards x-axis and y-axis respectively. There are again two cases that will
determine the orientation of the line.
Case 1: If |m|<=1, then the line is more inclined towards x-axis. Variable step= Δx .

71
Case 2: If |m|>1, then the line is more inclined towards y-axis. Variable step= Δy. In both the above cases, after finding the step value, we need to calculate x-increment and y-
increment which be added to x and y respectively at each step to computer new (x,y) values
from their previous values. They are calculated as:
x-inc = Δx / step
y-inc = Δy / step
This method is quite simpler and easier to understand but is also not used commonly because
of the time consuming rounding off and floating point arithmetic involved.
Algorithm: Step 1: Enter two end points of the line: (x1,y1) and (x2, y2)
Step 2: Set Δx = (x2-x1) and Δy = (y2-y1)
Step 3: Calculate the slope of the line, m= Δy / Δx Step 4: If |m|<=1 then
step = Δx
else
step = Δy
EndIf Step 5: Calculate x-inc = Δx / step and y-inc = Δy / step
Step 6: Initialize the values of x and y as : x=x1 and y=y1
Step 7: Plot the first end point as PlotPixel(x,y)
Step 8: For i= 1 to steps do
x= x + x-inc
y= y + y-inc
Round off x and y value and PlotPixel(x,y)
EndFor
Step 9: End Example: Scan convert a line by using incremental DDA method whose end points are (3,4)
and (9, 5).

72
Solution: (x1, y1)=( 3,4) and (x2,y2)= (9,5)
Δx = x2-x1 = 9 – 3 = 6 and Δy = y2-y1 = 5 – 4 = 1 Slope of the line, m = Δy /Δx = 1/6= 0.166 < 1
Since the value of m < 1, this means our line is more inclined towards x-axis so we will
increment x by 1 and will find the corresponding y- value.
step = Δx = 6
So, x-inc = Δx / step = 6 / 6 = 1
y-inc = Δy / step = 1 / 6 = 0.166 The following table will provide us all the points of the given line.
x= x+1 y= y+ y-inc PlotPixel(x,y)
3
4
(3,4)
3+1=4
4+0.166= 4.166
(4,4)
4+1=5
4.166+0.166= 4.332
(5,4)
5+1=6
4.332+0.166=4.498
(6,4)
6+1=7
4.498+0.166=4.664
(7,5)
7+1=8
4.664+0.166=4.83
(8,5)
8+1=9
4.83+0.166=4.996
(9,5)
3.3.4. Integer DDA method of line drawing:
Although simple DDA and incremental DDA are better than direct method but a lot of time is
wasted in rounding off and floating point operations. This makes these methods
comparatively slow. Integer Digital Differential Analyzer (DDA) method overcome these
drawbacks because in this method, floating point operation is eliminated and real values are
replaced with their integer parts. This method is faster than the previous methods discussed
so far.
We know that the plotted pixels are different from the actual points. We use this deviation
between the plotted pixels and the actual points of the line. Here a variable called dev will be
used that will check this deviation at each step. Since the first end point is plotted as such , so
initial deviation is set to zero. Let us discuss the two cases that decide the orientation of the
line.

73
Case 1: If |m|<=1, then the line is more inclined towards x-axis. We will increment x-
coordinate by unit interval and will calculate the y value at each step. Here two sub cases
arise.
i. If deviation is negative (i.e. dev < 0), this means that the plotted point lies below the actual point. So in order to make it aligned, we increment y coordinate by unit interval and will add (Δx – Δy) to deviation.
ii. If the deviation is positive (i.e. dev > 0), this means the plotted point is above the actual point, so in order to make it aligned, we do not increment y coordinate but will subtract Δy from the deviation.
Case 2: If |m|>1, then the line is more inclined towards y-axis. So in this case we will keep
on incrementing y-value by unit intervals and then find the corresponding x-values.
i. If deviation is negative (i.e. dev < 0), this means that the plotted point lies below the actual point. So in order to make it aligned, we increment x coordinate by unit interval and will add (Δy – Δx) to deviation.
ii. If the deviation is positive (i.e. dev > 0), this means the plotted point is above the actual point, so in order to make it aligned, we do not increment x coordinate but will subtract Δx from the deviation.
At the end, the deviation will again turn to zero value. This means that we have reached the
second end point of the line.
Algorithm: Step 1: Enter two end points of the line: (x1,y1) and (x2, y2)
Step 2: Set Δx = (x2-x1) and Δy = (y2-y1)
Step 3: Initialize deviation, dev = 0 Step 4: Calculate the slope of the line, m= Δy / Δx
Step 5: Initialize the values of x and y as : x=x1 and y=y1
Step 6: Plot the first end point as PlotPixel(x,y)
Step 7: If |m| <= 1 then
While (x <= x2)
If dev < 0 then
x= x + 1
y= y + 1
dev= dev + (Δx – Δy )
Else

74
x= x + 1
dev= dev – Δy
EndIf
PlotPixel (x, y)
EndWhile
Else
While (y <= y2)
If dev < 0 then
y= y + 1
x= x + 1
dev= dev + (Δy – Δx )
Else
y= y + 1
dev= dev – Δx
EndIf
PlotPixel (x, y)
EndWhile
EndIf Step 8: End
Example: Find the points of the that can be plotted using Integer DDA method whose end
points are (3,4) and (9,8).
Solution: (x1, y1)=( 3,4) and (x2,y2)= (9,8)
Δx = x2-x1 = 9 – 3 = 6 and Δy = y2-y1 = 8 – 4 = 4 Slope of the line, m = Δy /Δx = 4/6= 0.66 < 1
Since the value of m < 1, this means our line is more inclined towards x-axis so we will
increment x by 1 and will find the corresponding y- value. As the first point plotted will be
same as the first end point of the line, dev = 0 initially.
Δx – Δy = 6 – 4 = 2

75
The following table will give all the points of the line.
x = x+1 y dev PlotPixel(x,y)
3
4
0
(3,4)
4
4
0-4= -4
(4,4)
5
5
-4 +2 = -2
(5,5)
6
6
-2 + 2= 0
(6,6)
7
6
0-4 = -4
(7,6)
8
7
-4 + 2= -2
(8,7)
9
8
-2 + 2 = 0
(9,8)
As it can be seen from the above table that when the deviation is positive (i.e. >=0) then the
previous value of y is remained unchanged and Δy is subtracted from dev. When deviation
becomes negative, y is incremented by 1 and (Δx – Δy ) is added to dev. Check your progress / Self assessment questions
Q3. What is the difference between Direct method and DDA method of line drawing? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
------------------------------------------ Q4. What are various DDA methods available to scan convert a line and how they differ from
each other?
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
------------------------------------------ 3.4. Bresenham line drawing algorithm and its derivation
Bresenham’s line drawing algorithm is widely used line drawing algorithm in computer
graphics. Earlier it was used to plot lines on digital plotter but now it is commonly used in
computer graphics. It was developed by Jack Bresenham of IBM and was later rectified by
various other researchers. It is the efficient algorithm because it makes use of only integer
arithmetic i.e. integer addition, subtraction and multiplication by 2. This method is faster than
the previously discussed methods as it eliminates the complex floating point and rounding off
operations that consumes most of the processing time.

76
First we have to calculate the slope of the line. As in other methods, there arises two cases.
The first one, when |m| <= 1, then the line is more inclined towards x-axis. Here we will
increment x-coordinate by unit interval and will calculate the corresponding y value. The
second case, when |m|>1, then the line is more inclined towards y-axis. So in this case we
will keep on incrementing y-value by unit intervals and then find the corresponding x-values.
3.4.1. Derivation:
Here we will derive the Bresenham’s line drawing algorithm for the case where slope of the
line is less than or equal to 1 (i.e. |m| <= 1). In this case, we are more inclined towards x axis
and we start from the first end point and increment x coordinate by unit interval. At each
point, we have two options of the pixel position that are candidates for plotting as shown in
the figure 3.5.
Let at the ith position, we have plotted the point (xi, yi). Then at the (i+1)th position, we will
increment xi by 1 i.e. xi+1 = xi + 1 and there will be two options for y-coordinate. These are yi
or yi+1. This means two candidate pixel positions are (xi + 1, yi ) and (xi + 1, yi+1 ).
We know slope intercept form of line: y= mx + b
where m is slope of the line and b is the y-intercept.
Using above equation, y = m xi + b at ith
position and similarly at (i+1)th position,
value of y coordinate will be
y = m (xi + 1) + b
…………………………………….. (1)
Let ‘s’ and ‘t’ be the distance between the
lower and the upper pixel positions from
the actual point on the line. On the basis
of this distance, we are going to decide
which pixel position is going to be
illuminated.

77
As it can be seen from the figure 3.6,
s = y - yi
t = yi+1 – y Here, y is the y value of the actual pixel position, yi is the y value of the previous plotted
pixel which is below the actual point and will remain unchanged for (i+1)th position and yi+1
is the y value which is above the actual point which is 1 more than the previous y value. This means y will take either of two values- yi or yi+1 . If s is smaller, then point yi will be chosen
and if t is smaller, then point yi+1 will be taken. This we see later on.
s – t = (y - yi ) – (yi+1 – y )
= y - yi - yi+1 + y
= 2y - yi - yi+1
As yi+1 = yi + 1, so substituting this value, we get
s – t = 2y - yi – (yi + 1)
= 2y - 2 yi - 1
Put y from (1), we get
s – t = 2 (m (xi + 1) + b ) - 2 yi - 1
s – t = 2 m (xi + 1) + 2b - 2 yi - 1
For the selection of next pixel position, we will include a decision parameter (di) at the ith
position that will take this decision. This parameter will examine which of the two candidate
pixels is more closer to the line. As we are moving on x axis by unit interval, so di has value:

78
di = Δx (s – t)
= Δx { 2 m (xi + 1) + 2b - 2 yi – 1}…………………………...... (2)
As m = Δy / Δx => Δx = Δy / m
di = Δx { 2 (Δy / Δx) (xi + 1) + 2b - 2 yi – 1}
= 2Δy (xi + 1) + 2bΔx - 2 yi Δx – Δx
= 2Δy xi + 2Δy + 2bΔx - 2 yi Δx – Δx
= 2 xi Δy – 2 yi Δx + 2Δy + 2bΔx – Δx
= 2 xi Δy – 2 yi Δx + k ………………………………………. (3)
where k = 2Δy + 2bΔx – Δx
Similarly at (i+1)th position,
di+1 = 2 xi+1 Δy – 2 yi+1 Δx + k ………………………………….. (4)
For the intermediate point, subtract (3) from (4)
di+1 - di = 2 xi+1 Δy – 2 yi+1 Δx + k – { 2 xi Δy – 2 yi Δx+ k }
= 2 xi+1 Δy – 2 yi+1 Δx + k – 2 xi Δy + 2 yi Δx- k
= 2Δy (xi+1 - xi) - 2Δx(yi+1 - yi) Because we are increasing x coordinate by unit interval, so xi+1 = xi + 1
di+1 - di = 2Δy (xi + 1- xi) - 2Δx(yi+1 - yi)
di+1 = di + 2Δy - 2Δx(yi+1 - yi) ………………………………………(5)
Now if we choose T point whose coordinates are (xi+1, yi+1), that means yi+1 = yi +1
Put this value in equation (5), we get
di+1 = di + 2Δy - 2Δx(yi +1- yi)
di+1 = di + 2Δy - 2Δx(1)
di+1 = di + 2Δy - 2Δx But if we choose S point whose coordinates are (xi+1, yi), that means yi+1 = yi
Substituting this value, we get
di+1 = di + 2Δy - 2Δx(yi - yi)
di+1 = di + 2Δy - 2Δx(0)

79
+ – ; ≥ . . + ; < 0 . .
di+1 = di + 2Δy
+ =
To find the initial decision parameter, put i =1 in equation (2)
d1 = Δx { 2 m (x1 + 1) + 2b - 2 y1 – 1}
= Δx { 2 m x1 + 2 m + 2b - 2 y1 – 1}
= Δx { 2 (m x1 + b - y1) + 2 m – 1}…………………………………. (6)
According to equation y = m x + b , y1 = m x1 + b => m x1 + b - y1 = 0
Put this value in equation (6), so we get
d1 = Δx { 2 (0) + 2 m – 1}
d1 = Δx {2 m – 1}
Substituting m = Δy / Δx,
d1 = Δx {2Δy / Δx – 1} d1 = 2Δy - Δx
Similarly we can derive Bresenham’s line drawing algorithm for slope |m| > 1. This is left as
an exercise.
3.4.2. Algorithm:
Step 1: Enter two end points of the line: (x1,y1) and (x2, y2)
Step 2: Set Δx = (x2-x1) and Δy = (y2-y1)
Step 3: Calculate the slope of the line, m= Δy /Δx Step 4: Initialize the values of x and y as : x=x1 and y=y1
Step 5: Plot the first end point as PlotPixel(x,y)
Step 6: Calculate decision parameter, d = 2 * Δy – Δx
Step 7: If |m| <= 1 then
While (x <= x2)
If d < 0 then
x= x + 1
d= d + 2*Δy

80
Else
x= x + 1
y= y + 1
d= d + 2*Δy – 2*Δx
EndIf
PlotPixel (x, y)
EndWhile
Else
While (y <= y2)
If d < 0 then
y= y + 1
d= d + 2*Δx
Else
y= y + 1
x= x + 1
d= d + 2*Δx – 2*Δy
EndIf
PlotPixel (x, y)
EndWhile
EndIf Step 8: End
Example 1: Scan Convert a line whose end points are (2,3) and (8,6) using Bresenham line
drawing algorithm.
Solution: (x1, y1)=( 2, 3) and (x2, y2)= (8, 6)
Δx = x2-x1 = 8 – 2 = 6 and Δy = y2-y1 = 6 – 3 = 3 Slope of the line, m = Δy /Δx = 3/6= 0.5 < 1
Since the value of m < 1, this means our line is more inclined towards x-axis so we will
increment x by 1 and will find the corresponding y- value.
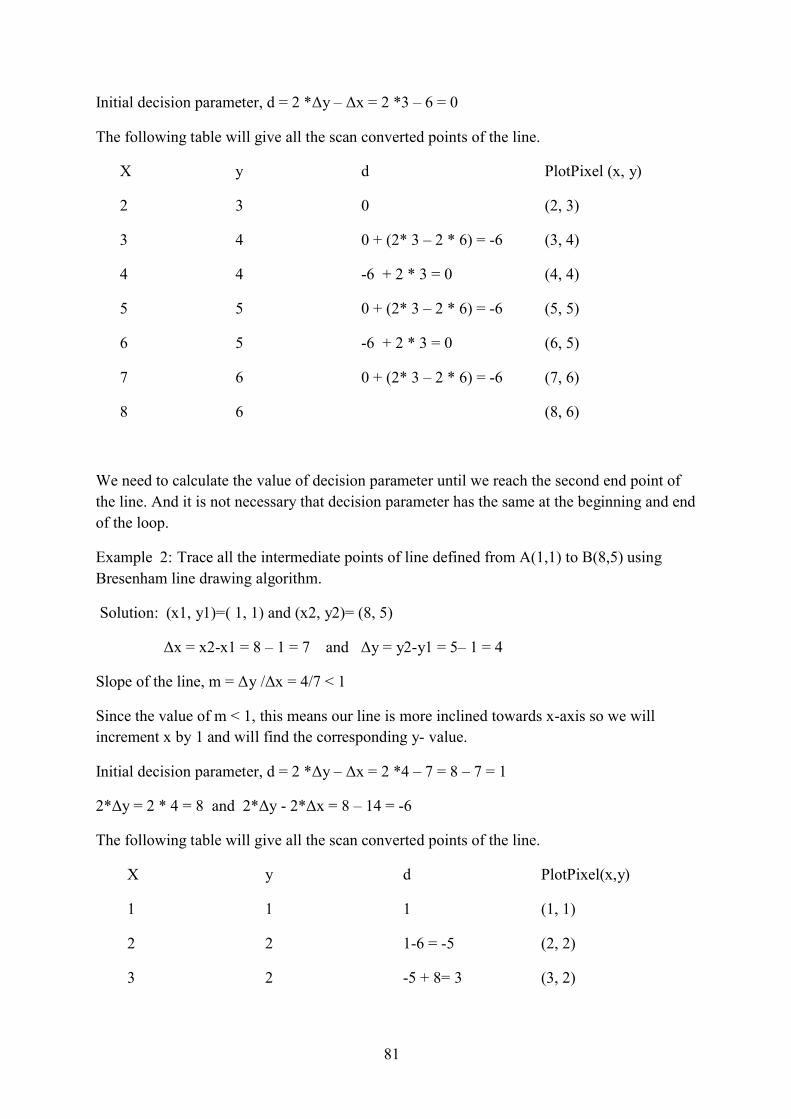
81
Initial decision parameter, d = 2 *Δy – Δx = 2 *3 – 6 = 0 The following table will give all the scan converted points of the line.
X y d PlotPixel (x, y)
2
3
0
(2, 3)
3
4
0 + (2* 3 – 2 * 6) = -6
(3, 4)
4
4
-6 + 2 * 3 = 0
(4, 4)
5
5
0 + (2* 3 – 2 * 6) = -6
(5, 5)
6
5
-6 + 2 * 3 = 0
(6, 5)
7
6
0 + (2* 3 – 2 * 6) = -6
(7, 6)
8
6
(8, 6)
We need to calculate the value of decision parameter until we reach the second end point of
the line. And it is not necessary that decision parameter has the same at the beginning and end
of the loop.
Example 2: Trace all the intermediate points of line defined from A(1,1) to B(8,5) using
Bresenham line drawing algorithm.
Solution: (x1, y1)=( 1, 1) and (x2, y2)= (8, 5)
Δx = x2-x1 = 8 – 1 = 7 and Δy = y2-y1 = 5– 1 = 4 Slope of the line, m = Δy /Δx = 4/7 < 1
Since the value of m < 1, this means our line is more inclined towards x-axis so we will
increment x by 1 and will find the corresponding y- value.
Initial decision parameter, d = 2 *Δy – Δx = 2 *4 – 7 = 8 – 7 = 1 2*Δy = 2 * 4 = 8 and 2*Δy - 2*Δx = 8 – 14 = -6
The following table will give all the scan converted points of the line.
X y d PlotPixel(x,y)
1 1 1 (1, 1)
2 2 1-6 = -5 (2, 2)
3 2 -5 + 8= 3 (3, 2)

82
4 3 3 - 6 = -3 (4, 3)
5
3
-3 + 8 = 5
(5, 3)
6
4
5 – 6 = -1
(6, 4)
7
4
-1 + 8 = 7
(7, 4)
8
5
(8, 5)
Let us give some examples where the slope of the line is negative. All the signs in calculating
decision parameter at each step will be reversed.
Example 3: Scan convert a line using Bresenham line drawing algorithm where end points of
the line are A(0, 6) and B(4, 0).
Solution: (x1, y1)=( 0, 6) and (x2, y2)= (4, 0)
Δx = x2-x1 = 4 – 0 = 4 and Δy = y2-y1 = 0 – 6 = -6 Slope of the line, m = Δy /Δx = -6/4= - 1.5
|m| = |-1.5|= 1.5 > 1 i.e. our line is more inclined towards y-axis. As we can see that initial y
coordinate is higher than second end point so we will decrement y value by 1 at each step and
will increment x value according to the algorithm.
Initial decision parameter, d = - 2 *Δx + Δy = -2 *4 + 6 = -8 + 7 = -2 2*Δx = 2 * 4 =8 and 2*Δx + 2*Δy = 8 – 12= -4
If d>0, d = d - 2*Δx else d = d – (2*Δx + 2*Δy)
If d is negative, x will be incremented else it will remain the same.
The following table will give all the scan converted points of the line.
X y d PlotPixel(x, y)
0 6 -2 (0, 6)
1 5 -2 – (-4)= 2 (1, 5)
1 4 2 – (8)= -6 (1, 4)
2 3 -6 – (-4)= -2 (2, 3)
3 2 -2 – (-4)= 2 (3, 2)
3 1 2 – (8)= -6 (3, 1)
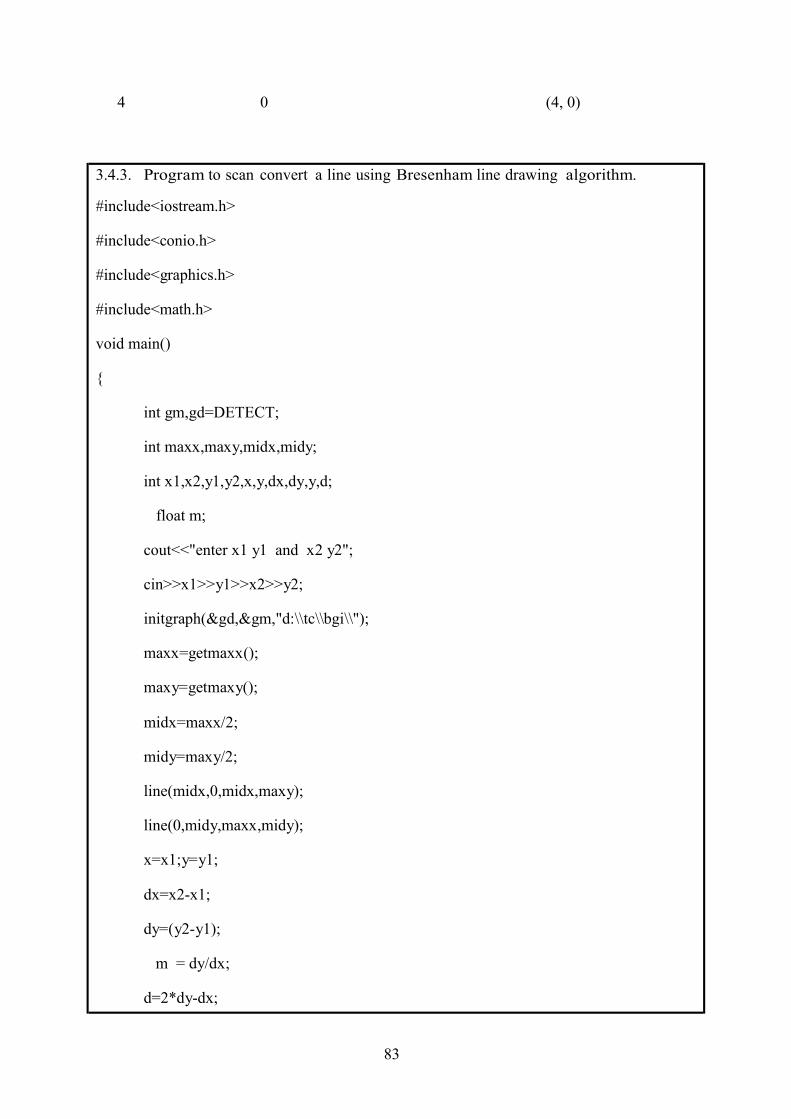
83
4 0 (4, 0)
3.4.3. Program to scan convert a line using Bresenham line drawing algorithm.
#include<iostream.h> #include<conio.h>
#include<graphics.h>
#include<math.h>
void main()
{
int gm,gd=DETECT;
int maxx,maxy,midx,midy;
int x1,x2,y1,y2,x,y,dx,dy,y,d;
float m;
cout<<"enter x1 y1 and x2 y2";
cin>>x1>>y1>>x2>>y2;
initgraph(&gd,&gm,"d:\\tc\\bgi\\");
maxx=getmaxx();
maxy=getmaxy();
midx=maxx/2;
midy=maxy/2;
line(midx,0,midx,maxy);
line(0,midy,maxx,midy);
x=x1;y=y1;
dx=x2-x1;
dy=(y2-y1);
m = dy/dx;
d=2*dy-dx;

84
if(fabs(m)<=1)
{
while(x<=x2)
{
putpixel(midx+x,midy-y,15);
if(d>=0)
{
d+=(2*dy – 2*dx);
y=y+1;
}
else
{
d+=2*dy;
}
x=x+1;
}
}
else
{
while(y<=y2)
{
putpixel(midx+x,midy-y,15);
if(d>=0)
{
d+=(2*dx – 2*dy);
x=x+1;
}

85
else
{
d+=2*dx;
}
y=y+1;
}
}
getch();
closegraph();}
3.4.4. Differences between DDA and Bresenham line drawing algorithm
S.no. Criteria DDA algorithm Bresenham algorithm
1. Arithmetic
operation
This algorithm uses real i.e.
floating point arithmetic. It uses
multiplication and division in its
operation.
This algorithm uses only fixed point
i.e. integer arithmetic operations.
Only addition and subtraction is
involved.
2. Speed This algorithm is slower than
Bresenham algorithm because it
works with real numbers.
It runs faster as compared to other
methods.
3. Accuracy Results provided by DDA are not
as accurate as provided by
Bresenham’s algorithm.
This is the most accurate and
efficient line drawing algorithm.
4. Round off operation It makes use of round off operation
because of the floating point
arithmetic.
There is no need of any rounding off
operation.
5. Expensive It is expensive because it
consumes much of the processing
time since there are complex
floating point and round off
operations being involved.
It is less expensive since it runs
faster because it deals only with
integers.
Check your progress / Self assessment questions

86
Q5. Why is Bresenham line drawing algorithm the most efficient among various scan
converting methods of line?
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
------------------------------------------ 3.5. Summary
Scan conversion is an important operation in computer graphics. It illuminates the pixel
positions that will make the complete picture. We have discussed about various line drawing
methods. Line is a primitive that is used in almost every image so it is important to learn how
we can scan convert an image. Direct method is the simplest among all the methods but is
very inefficient because every time, x and y values are calculated without using any previous
values. DDA methods are better than the direct method since it reduces the computation time
and hence provides better throughput. Both Direct and DDA methods except integer DDA
involve large number of rounding off and floating point operations that make these methods
time consuming. Bresenham line drawing method is the most accurate method and provides
faster results because it involves only integer arithmetic.
3.6. Glossary Pixel – A pixel (short form of ‘picture element’) is the smallest dot that makes up the
complete image in a computer memory.
Scan conversion – The process that involves plotting the objects on a display screen by
illuminating discrete pixel positions is called scan conversion.
3.7. Answers to check your progress / self assessment questions 1. True.
2. We need to scan convert a point because point is a basic element that makes up a complete
image. We use the function PlotPixel(x, y) in the process of scan conversion of any graphics
primitive which is function that plots a single point. All the calculated values of the point
should be converted into their integer counterpart so that this point can be plotted.
3. Direct method is the simplest method with less efficiency. In this method, x and y-values
are calculated from scratch at each step without using the previous values. DDA (Digital
Differential Analyzer) method is faster as compared to direct method. It uses the previous
values of x and y to calculate their next values.
4. There are various DDA methods such as Simple DDA, Incremental DDA and Integer
DDA. Simple DDA uses the previous values of x and y to calculate the new values by using
the formula. In Incremental DDA, both x and y coordinates are incremented by a fixed
amount at each step. In Integer DDA method, floating point operation is eliminated and real

87
values are replaced with their integer parts. This method is faster than the other DDA
methods. 5. Bresenham line drawing algorithm is the most efficient among various scan converting
methods of line because there is no floating point and rounding off operation involved in this
method. It works faster and provides more accurate results. Aliasing effect is less visible in
Bresenham method.
3.8. Model Questions
1. What is scan conversion in computer graphics?
2. What are various line drawing algorithms? Explain in brief.
3. Explain Bresenham line drawing algorithm with example.
4. Differentiate between DDA and Bresenham line algorithm. Which is the accurate line
drawing algorithm? Explain in brief.
5. Indicate the raster positions that will be illuminated by Bresenham line algorithm,
when scan converting a line from A(3,7) to B(6,1).
6. Scan convert a line using Bresenham’s line algorithm whose end points are P (-2, -1)
and Q (4, 5).
7. Trace all the points of the line whose end points are (-6, 4) and (-2, -5) using
Bresenham line algorithm.

88
Lesson-04
Scan converting techniques for circle Structure of the chapter
4.0. Objective
4.1. Scan converting a circle
4.2. Algorithms for scan converting a circle
4.2.1. Direct method of Circle Drawing

89
4.2.2. Trigonometric method of Circle Drawing 4.3. Bresenham’s Circle drawing algorithm and its derivation
4.3.1. Derivation
4.3.2. Algorithm to scan convert a circle using Bresenham’s circle drawing
4.3.3. Program to scan convert a circle using Bresenham circle drawing
algorithm
4.4. MidPoint Circle drawing algorithm and its derivation
4.4.1. Derivation
4.4.2. Algorithm to scan convert a circle using MidPoint circle drawing
4.4.3. Program to scan convert a circle using MidPoint circle drawing algorithm 4.5. Summary
4.6. Glossary
4.7. Answers to check your progress / self assessment questions
4.8. Model Questions
4.0. Objective After studying this chapter, the student will be able to:
Explain scan conversion of a circle. Explain various methods of scan converting a circle. Explain Bresenham circle drawing algorithm. Explain MidPoint Circle drawing algorithm. Solve some problems based on scan conversion of a circle.
4.1. Scan converting a circle Circle is one of the most widely used shape in drawing pictures and graphs and in computer
graphics, various procedures are developed to draw complete circles or any portion of it such
as arcs and sectors.
A circle is such a geometric shape that is defined by a center position and a fixed distance
from the center which is called radius. It is drawn by combining all the points that are at a
fixed distance from the center. Scan converting a circle requires each point on the
circumference of the circle to be illuminated. Various algorithms and techniques are
employed in computer graphics to scan convert a circle that uses equation of circle. The

90
Polynomial equation of the circle in Cartesian coordinates whose center is C ( h, k) and
radius is r units is given as
(x – h)2 + (y – k)2 = r2
Let us see how this equation has been derived. Pythagoras theorem is being used to derive
this standard equation of a circle.
As it can be seen from above figure that in a right angled triangle ΔPCQ,
CP = r , PQ = y – k , CQ = x – h
Using Pythagoras theorem,
CQ2 + PQ2 = CP2
(x – h)2 + (y – k)2 = r2
Another widely used equation of circle is by using polar coordinates. The equations to
calculate any arbitrary position on circle P(x,y) are given as:
x = h + r cosθ
y = k + r sinθ
Now let us see how these equations are derived. Using figure 4.1, in right angled triangle
ΔPCQ,
cosθ = i.e cosθ =
x – h = r cosθ

91
x = h + r cosθ Similarly, sinθ = i.e sinθ =
y – k = r sinθ
y = k + r sinθ
Check your progress/ Self assessment questions
Q1. Write the equation of circle in Cartesian coordinates and in polar coordinates. ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------------- 4.2. Algorithms for scan converting a circle
Circle is a symmetrical geometric shape. It can be drawn by using two way, four way or eight
way symmetry. There are various algorithms available that helps in scan converting a circle
and each of them employ some symmetry. Here is a brief description about symmetry of the
circle:
Two-way symmetry:In this symmetry, we calculate points for only half of the circle (i.e.
semicircle). Since it is symmetrical about its diameter, we just
copy those points to other semicircle to make it a complete circle.
For example, if we are scan converting a circle about x- axis,
then each x-value will have two corresponding y-value ( whose
magnitude is same but one is above x- axis and other is below x-
axis). So here we need to find single pixel position and other will
be foung by inverting the sign of its y-value. Two way symmetry
is shown in figure 4.2.
Four-way symmetry: A circle deals with greater symmetry. In
four way symmetry, instead of computing values for semicircle,
we just need to find the values for quadrant of the circle. We
know that there are four quadrants in a circle and each value in
first quadrant has three corresponding values in other three
quadrants. For example, there is value (x, y) in first quadrant, other three values will be (-x,
y) in second quadrant, (-x, -y) in third quadrant and (x, -y) in fourth quadrant. It is shown in
figure 4.3.

92
hod is also called Polynomial
his method uses polynomial
Eight-way symmetry:We can save computation time by using 8 – way symmetry of the
circle in which we compute pixel positions only for one octant and rest of the pixel
positions for other octants can be computed from that value. For example, if we have
computed (x, y) in 1st octant, then seven other corresponding values will be (x, -y), (-
x,y), (-x,-y), (y,x), (y,-x), (-y,x),(-y,-x). hence, we are dealing with only 1/8th part of the
circle and from that we can generate the complete circle. It is shown in figure 4.4. Various circle drawing algorithms are discussed in the following sub sections:
4.2.1. Direct method of Circle drawing:
Direct met
method. T
equation
of the
circle. It
is the
simplest
among
all the
algorith
ms. Let
us
discuss
it with
two way

93
symmetry, we are supposed to draw a circle about x – axis. As it can be seen from figure 4.5,
we will start from (h - r) and end at (h + r) where (h , k) are the center coordinates and r is
radius of the circle.
(x – h)2 + (y – k)2 = r2
Here we will increment x- axis by unit interval and will calculate the corresponding y- value
using the formula,
= ± − ( − ℎ)
As we know that pixel positions are discrete integer values, so we need to round off y- value
every time we want to plot a point (x, y).
Algorithm to scan convert a circle using two-way symmetry: Step 1: Enter center of circle C (h, k) and radius = r units
Step 2: Initialize x = h – r and y = k
Step 3: Plotpixel(x, y)
Step 4: While ( x <= (h+r) )
y = ± − ( − ℎ)
Round off y-coordinate and PlotPixel (x, y)
x = x + 1
EndWhile Step 5: End
This algorithm is slower since it takes a lot of processing time. So this algorithm is not so
good. Hence we move towards 4-way symmetry. In this case, we start x from h instead of (h
– r) and will end at (h+r) i.e. 1st quadrant. The formula to calculate y value corresponding to
the values of x in 1st quadrant is given as:
= + − ( − ℎ)
We have taken only positive sign because in first quadrant, both x and y coordinates are
positive. For one (x, y) value, other three values will be (- x, y), (- x, -y) and (x, -y) as it can
be seen from figure 4.6.

94
Algorithm to scan convert a circle using four-way symmetry: Step 1: Enter center of circle C (h, k) and radius = r units
Step 2: Initialize x = h and y = r
Step 3: While ( x <= (h+r) )
y = + − ( − ℎ)
Round off y-coordinate
PlotPixel (x, y) , PlotPixel (-x, y)
PlotPixel (x, - y) , PlotPixel (- x,- y)
x = x + 1
EndWhile Step 4: End
Although this algorithm works faster as compared to previous algorithm but we can better
utilize the symmetry by using 8-way symmetry. 8-way symmetry works faster among all and
consumes less processing time. Here we start from x = h and will end at √ 2. Let us see how
this value comes. From figure 4.7, in ΔPOQ which is right angled at Q,
cosθ =

95
here θ = 45° i.e.
cos 45° =
= √
x = √ 2 At Q.
For one pixel position (x, y) in one octant, we have other seven values as (x, -y), (-x,y), (-x,- y), (y,x), (y,-x), (-y,x),(-y,-x) .
Algorithm to scan convert a circle using eight-way symmetry:
Step 1: Enter center of circle C (h, k) and radius = r units
Step 2: Initialize x = h and y = r
Step 3: While ( x <= √ 2 )
y = + − ( − ℎ)
Round off y-coordinate
PlotPixel (x, y) ,
PlotPixel (y, x)
PlotPixel (-x, y) ,
PlotPixel (-y, x)
PlotPixel (x,- y) ,
PlotPixel (y, -x)
PlotPixel (- x,- y) ,
PlotPixel (- y,- x)
x = x + 1
EndWhile Step 4: End
Program to scan convert a circle using Polynomial method (by using eight way
symmetry).
#include<iostream.h> #include<conio.h>
#include<graphics.h>

96
#include<math.h> int h,k,midx,midy;
void plot8points(int x,int y);
void main()
{
int gm,gd=DETECT;
int x;
float r,y;
cout<<"enter h & k:";
cin>>h>>k;
cout<<"enter radius:";
cin>>r;
initgraph(&gd,&gm,"d:\\tc\\bgi");
int maxx,maxy;
maxx=getmaxx();
maxy=getmaxy();
midx=maxx/2;
midy=maxy/2;
line(midx,0,midx,maxy);
line(0,midy,maxx,midy);
x=0;
y=r;
while(x<=y)
{
plot8points(x,(int)(y+0.5));
x=x+1;
y=sqrt(r*r-x*x);
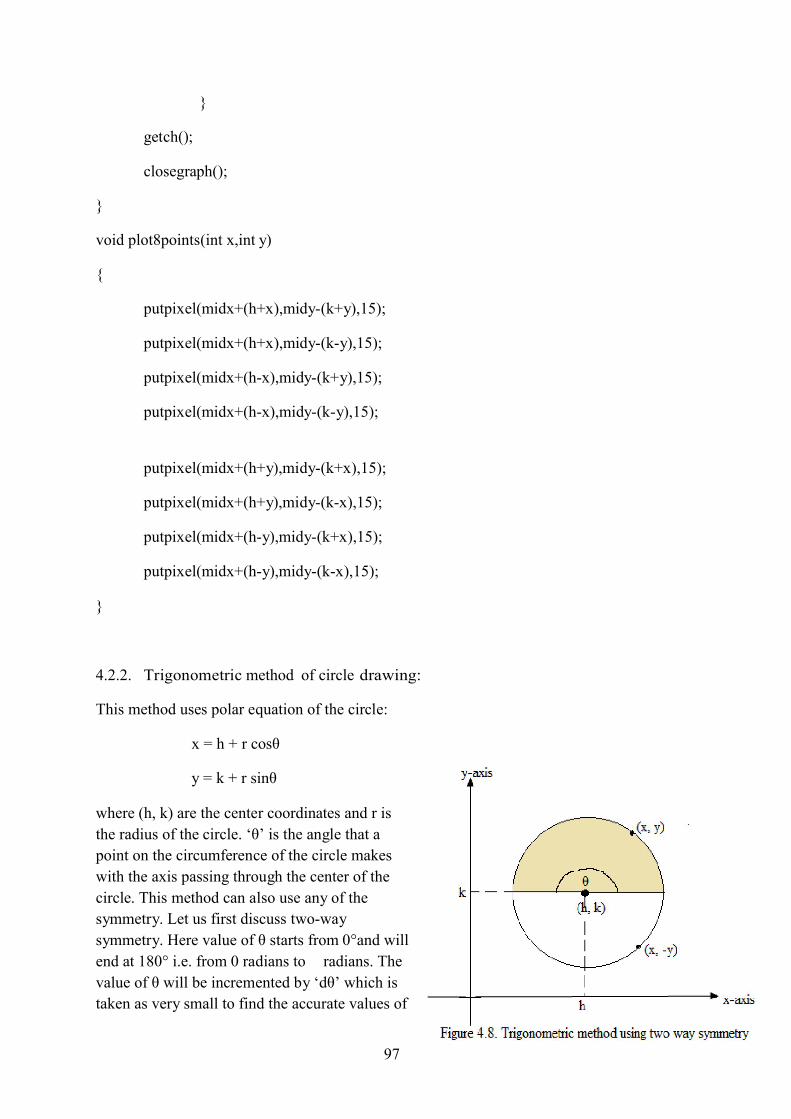
97
}
getch();
closegraph();
} void plot8points(int x,int y)
{
putpixel(midx+(h+x),midy-(k+y),15);
putpixel(midx+(h+x),midy-(k-y),15);
putpixel(midx+(h-x),midy-(k+y),15);
putpixel(midx+(h-x),midy-(k-y),15);
putpixel(midx+(h+y),midy-(k+x),15);
putpixel(midx+(h+y),midy-(k-x),15);
putpixel(midx+(h-y),midy-(k+x),15);
putpixel(midx+(h-y),midy-(k-x),15);
}
4.2.2. Trigonometric method of circle drawing: This method uses polar equation of the circle:
x = h + r cosθ
y = k + r sinθ
where (h, k) are the center coordinates and r is
the radius of the circle. ‘θ’ is the angle that a
point on the circumference of the circle makes
with the axis passing through the center of the
circle. This method can also use any of the
symmetry. Let us first discuss two-way
symmetry. Here value of θ starts from 0°and will
end at 180° i.e. from 0 radians to radians. The
value of θ will be incremented by ‘dθ’ which is
taken as very small to find the accurate values of

98
(x, y) at each step. Although we can take any value of dθ, but just to keep it small, we take it
as 1/r. After finding values for semi-circle, we invert the sign for y-value to calculate values
for other semi-circle.
Algorithm to draw a circle using two-way symmetry:
Step1: Enter center of circle C (h, k) and radius = r units
Step 2: Initialize theta to 0 and dtheta = 1/ r
Step 3: While (theta < = )
x = h + r cos(theta)
y = k + r sin(theta)
Round off both x and y values
PlotPixel(x, y)
PlotPixel(x, - y)
theta = theta + dtheta
EndWhile Step 4: End
As discussed in previous algorithm, we can use
four-way symmetry to reduce the processing time
and increase the efficiency. Here we start with θ =
0°and will end at 90° i.e. from 0 radians to /2
radians. So by finding value in one quadrant, we can calculate corresponding values in rest of the quadrants. For each value (x, y) we have three values (x, -y), (-x, y) and (-x, -y). We can
use dθ as 1/r but for the sake of simplicity we have increased θ by unit interval in this case.
Algorithm to draw a circle using four-way symmetry:
Step1: Enter center of circle C (h, k) and radius = r units
Step 2: Initialize theta to 0
Step 3: While (theta < = /2)
x = h + r cos(theta)
y = k + r sin(theta)
Round off both x and y values
PlotPixel(x, y) PlotPixel(-x, y)

99
PlotPixel(x, - y) PlotPixel(-x, - y)
theta = theta + 1
EndWhile Step 4: End
In order to further reduce the processing time,
we can take the advantage of eight way
symmetry in which we start θ from 0° and will
continue upto θ = 45° i.e from 0 radians to /4
radians. By doing so we are traversing only the octant of the circle but we are able to draw the
complete circle by using the points in one
octant. One pixel position (x, y) has seven
values in other octants which are (x, -y), (-x,y),
(-x,-y), (y,x), (y,-x), (-y,x), (-y,-x) .
Algorithm to draw a circle using eight-way symmetry:
Step1: Enter center of circle C (h, k) and radius = r units
Step 2: Initialize theta to 0
Step 3: While (theta < = /4)
x = h + r cos(theta)
y = k + r sin(theta)
Round off both x and y values
PlotPixel(x, y) PlotPixel(y, x)
PlotPixel(x, - y) PlotPixel(y, - x)
PlotPixel(-x, y) PlotPixel(-y, x)
PlotPixel(-x, - y) PlotPixel(-y, - x)
theta = theta + 1
EndWhile Step 4: End
Program to scan convert a circle using Trigonometric method (by using eight way
symmetry).
#include<iostream.h>

100
#include<conio.h> #include<math.h>
#include<graphics.h>
#define Pi 3.142
void plot8points(int,int);
int midx,midy;
float h,k,x,y;
void main()
{
int gm,gd=DETECT;
int maxx,maxy;
float r;
cout<<"enter h,k and r";
cin>>h>>k>>r;
initgraph(&gd,&gm,"d:\\tc\\bgi");
maxx=getmaxx();
maxy=getmaxy();
midx=maxx/2;
midy=maxy/2;
line(midx,0,midx,maxy);
line(0,midy,maxx,midy);
int i;
for(i=0;i<=45;i++)
{
x=r*cos(i*Pi/180); y=r*sin(i*Pi/180);
plot8points((int)(x+0.5),(int)(y+0.5));

101
}
getch();
closegraph();
} void plot8points(int x,int y)
{
putpixel(midx+(h+x),midy-(k+y),15);
putpixel(midx+(h+x),midy-(k-y),15);
putpixel(midx+(h-x),midy-(k+y),15);
putpixel(midx+(h-x),midy-(k-y),15);
putpixel(midx+(h+y),midy-(k+x),15);
putpixel(midx+(h+y),midy-(k-x),15);
putpixel(midx+(h-y),midy-(k+x),15);
putpixel(midx+(h-y),midy-(k-x),15); }
Two important and efficient circle drawing algorithms are explained in the following
sections. Check your progress/ Self assessment questions
Q2. Among the different types of symmetry, which symmetry is more efficient and why? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
------------------------------------------ 4.3. Bresenham’s Circle drawing algorithm and its derivation
This algorithm is better than previously discussed methods. Processing time is sufficiently
reduced because complex square root and multiplication operations are removed in this
method. It just includes integer addition and subtraction. This method uses eight-way
symmetry of the circle. At every plotted point, we have two options to plot next point. So a

102
decision parameter (d) is used here that will decide which of the two locations is closer to the
circumference of the circle. In this algorithm we will move towards x-axis and will find the
corresponding closest y-coordinate. It is an incremental approach of circle drawing.
4.3.1. Derivation:
In this method, we just find the points in the first octant of the first quadrant i.e. we will start
at x = 0 and will continue till x< = y. Suppose at ith position, plotted pixel is (xi , yi ). At
position (i + 1)th , we have two candidate y-coordinates for xi+1 = xi + 1 as shown in figure
4.11. These candidate locations are marked as S(xi + 1 , yi -1) and T(xi + 1 , yi ).
From the above figure, it can be seen that if we generating points from 90° to 45°(i.e. from x=
0 to x= y), each new pixel position closest to the actual circumference of the circle can be
found by taking either of the two actions:
i. moving in the x-direction by unit interval and not changing the y-coordinate. ii. moving in the x-direction by unit interval and moving in the negative y-direction by
unit interval (i.e. decrementing y-coordinate by unit interval).
Distance of the pixel T from the origin is calculated by using distance formula i.e.
CT = (x + 1) + y
Similarly Distance of the pixel S from the origin is given as
CS = (x + 1) + (y − 1)

103
Here we are using a function D( ) that provides a relative measurement of the distance from
the center of the pixel from the actual circle. Let D(T) be the square of the distance from the
origin to the pixel T minus square of the distance to the actual circle ( i.e. r (radius)).
D(T) = CT2 – r2
D(T) = (x + 1) + y - r2
Let D(S) be the square of the distance from the origin to the pixel S minus square of the distance to the actual circle.
D(S) = CS2 – r2
D(S) = (x + 1) + (y − 1) - r2
Since T point lies outside the actual circle so D(T) is always positive but D(S) is negative because point S lies inside the circle. The decision parameter is defined as the sum of D(S)
and D(T) and is given as:
di = D(S) + D(T)
di = (x + 1) + (y − 1) - r2 + (x + 1) + y - r2
di = 2(x + 1) + y + (y − 1) - 2r2
…………………………………………(1)
If di< 0 (i.e. D(S) > D(T)), then in this case, point T is closer to the circle and will be plotted
otherwise point S is closer and will be illuminated.
Decision parameter at (i+1)th position is given as
di+1 = 2(x + 1) + y + (y − 1) - 2r2
………………………………..(2) Subtracting (1) from (2), we get
di+1 - di = 2(x + 1) + y + (y − 1) - 2r2 – {2(x + 1) + y + (y − 1) - 2r2}
As x = x + 1, so

104
di+1 = di + 4 xi +2 (y - y ) – 2 (yi+1 - yi ) + 6
……………………………....................(3) If we choose point T, then put yi+1 = yi, in (3)
di+1 = di + 4 xi +2 (y - y ) – 2 (yi - yi ) + 6
di+1 = di + 4 xi + 6 If we choose point S, then put yi+1 = yi – 1 in (3)
di+1 = di + 4 xi +2 {(y − 1) - y } – 2 {(yi -1) - yi } + 6
di+1 = di + 4( xi - yi ) + 10
+ + ; < . . =
+ ( − ) + ; ≥ 0 . .
To find the starting decision parameter, we need to put the starting point i.e. (0, r) in
equation(1)
d1 = 2(x + 1) + y + (y − 1) - 2r2
d1 = 2(0 + 1) + r + (r− 1) - 2r2
d1 = 2 + r + r + 1 - 2r - 2r2
d1 = - 2r
4.3.2. Algorithm to scan convert a circle using Bresenham’s circle drawing
Step 1: Enter center of circle C (h, k) and radius = r units
Step 2: Initialize x to 0 and y to r
Step 3: Calculate decision parameter d= 3 - 2r
Step 4: While (x <= y)
If(d < 0) then
x = x + 1
d = d + 4x + 6
else

105
x = x + 1
y = y – 1
d = d + 4(x – y) + 10
EndIf
PlotPixel (x + h, y + k) PlotPixel (y + h, x + k)
PlotPixel (-x + h, y + k) PlotPixel (-y + h, x + k)
PlotPixel (x + h, -y + k) PlotPixel (y + h, -x + k)
PlotPixel (-x + h, -y + k) PlotPixel (-y + h, -x + k)
EndWhile Step 4: End
4.3.3. Program to scan convert a circle using Bresenham circle drawing method
#include<iostream.h>
#include<conio.h>
#include<graphics.h>
#include<math.h>
float h,k;
int midx,midy;
void plot8points(int x,int y);
void main()
{
int gm,gd=DETECT;
int x;
float r,y,d;
cout<<"enter h & k:";
cin>>h>>k;
cout<<"enter radius:";
cin>>r;

106
initgraph(&gd,&gm,"d:\\tc\\bgi");
int maxx,maxy;
maxx=getmaxx();
maxy=getmaxy();
midx=maxx/2;
midy=maxy/2;
line(midx,0,midx,maxy);
line(0,midy,maxx,midy);
x=0;
y=r;
d=3-2*r;
while(x<=y)
{
plot8points(x,(int)(y+0.5));
if(d<0)
{
d=d+4*x+6;
}
else
{
d=d+4*(x-y)+10;
y=y-1;
}
x=x+1;
}

107
getch();
closegraph();
} void plot8points(int x,int y)
{
putpixel(midx+(h+x),midy-(k+y),15);
putpixel(midx+(h+x),midy-(k-y),15);
putpixel(midx+(h-x),midy-(k+y),15);
putpixel(midx+(h-x),midy-(k-y),15);
putpixel(midx+(h+y),midy-(k+x),15);
putpixel(midx+(h+y),midy-(k-x),15);
putpixel(midx+(h-y),midy-(k+x),15);
putpixel(midx+(h-y),midy-(k-x),15);
}
Example 1: Scan Convert a circle whose center is (50, 60 ) and radius is 8 units using
Bresenham Circle drawing algorithm. Solution: (h , k) =(50 , 60) and r = 8
Initial decision parameter , d = 3 – 2r = 3 – 2 * 8 = 3 – 16 = -13
We will increment x coordinate by unit interval at each step and will find the corresponding y
coordinate. The following table gives all the points in the first octant of the circle.
x y d (x, y) PlotPixel(x+h, y+k) 0 8 -13 (0, 8) (50, 68)
1 8 -13 + 4(1) + 6 = -3 (1, 8) (51, 68)
2 8 -3 + 4(2) + 6 = 11 (2, 8) (52, 68)
3 7 11 + 4(3 - 7) + 10 = 5 (3, 7) (53, 67)
4 6 5 + 4(4 – 6) + 10 = 7 (4, 6) (54, 66)

108
5 5 (5, 5) (55, 65)
We will stop when the value of both x and y are same. So there is no need to calculate
decision parameter at this step. Check your progress/ Self assessment questions
Q3. What is the value of initial decision parameter in Bresenham Circle Drawing Algorithm? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------------- 4.4. Mid-Point circle drawing algorithm and its derivation
This algorithm is like Bresenham’s algorithm. Here also we start from x=0 and will continue
till x< = y. It is also an incremental approach of circle drawing. In this algorithm, we will
consider the point that will lie in the middle of two candidate pixel points to determine which
among the two candidate pixel positions will be plotted.
4.4.1. Derivation: As shown in figure 4.12, the point in the middle of points S(xi + 1 , yi -1) and T(xi + 1 , yi ) is
calculated by using mid-point formula i.e.
M = ( , ) = ( , ) = (x + 1, − )
We know that equation of circle whose center is (0, 0) and radius = r units is given as :
x2 + y2 = r2 i.e. x2 + y2 - r2 = 0
To define this equation, we choose a function f(x, y) that will define any point on the circle
i.e.
f(x, y) = x2 + y2 - r2 = 0 This function always gives 0 for all the points that lie on the circle. Its value will be negative
(i.e. < 0) if the points are inside and will be positive (i.e. > 0) if the points lie outside the
circle.
The decision parameter (d) for this algorithm at position ‘i’ is defined as
di = f (x + 1, y − )
di = (x + 1)2 + ( y − )2 - r2
………………………………………………………(1)
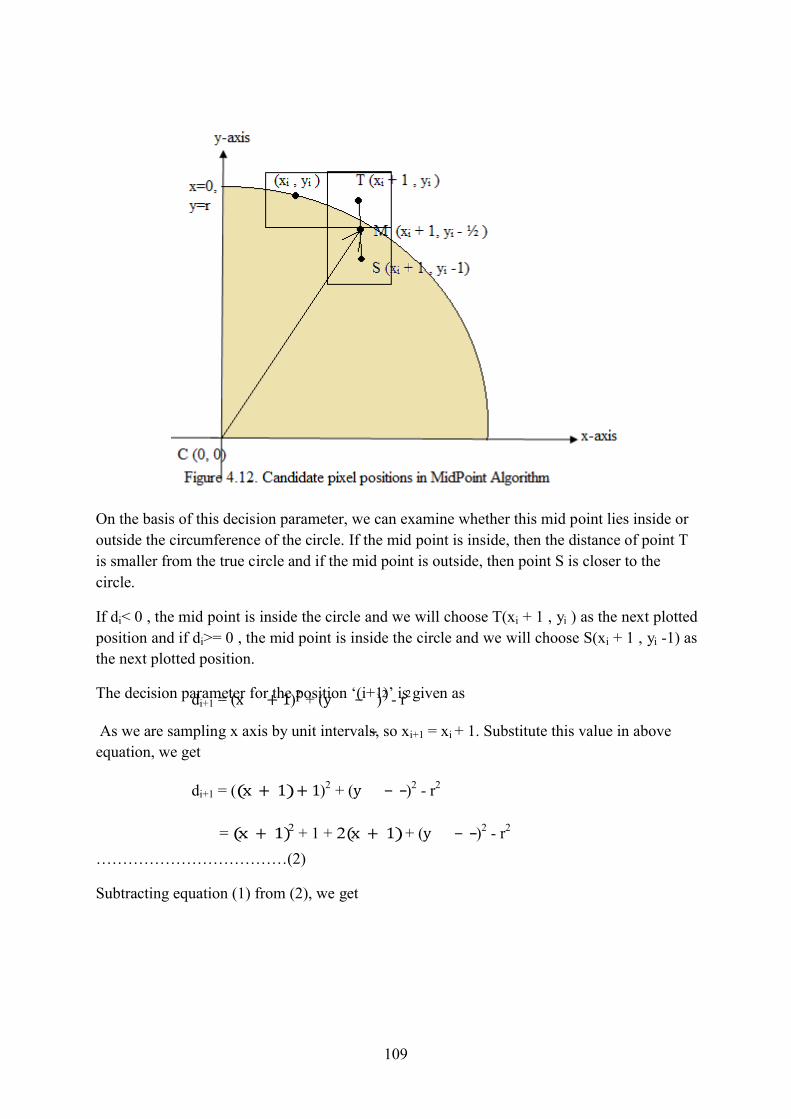
109
On the basis of this decision parameter, we can examine whether this mid point lies inside or
outside the circumference of the circle. If the mid point is inside, then the distance of point T
is smaller from the true circle and if the mid point is outside, then point S is closer to the
circle.
If di< 0 , the mid point is inside the circle and we will choose T(xi + 1 , yi ) as the next plotted
position and if di>= 0 , the mid point is inside the circle and we will choose S(xi + 1 , yi -1) as
the next plotted position. The decision parameter for the position ‘(i+1)’ is given as di+1 = (x + 1)2 + (y − )2 - r2
As we are sampling x axis by unit intervals, so xi+1 = xi + 1. Substitute this value in above
equation, we get
di+1 = ((x + 1)+ 1)2 + (y − )2 - r2
= (x + 1)2 + 1 + 2(x + 1) + (y − )2 - r2
………………………………(2)
Subtracting equation (1) from (2), we get

110
= 2(x + 1) + 1 + y + − y − y − + y
= 2(x + 1) + 1 + y − y − y + y
= 2(x + 1) + 1 + (y − y ) − (y − y )
di+1 = di + 2(x + 1) + 1 + (y − y ) − (y − y )
……………………………………...(3)
If we choose T point, then y = y so
di+1 = di + 2(x + 1) + 1 + (y − y ) − (y − y )
di+1 = di + 2x + 2 + 1 + 0 − 0
di+1 = di + +
If we choose S point, then y = y − 1 so
di+1 = di + 2(x + 1) + 1 + ((y − 1) − y ) − (y − 1 − y )
di+1 = di + 2(x + 1) + 1 + y + 1 − 2 − y + 1
di+1 = di + 2x + 2 + 1 − 2 + 1 + 1
di+1 = di + ( − ) +
+ + ; < . .
= + ( − ) + ; ≥ 0 . .
For finding initial decision parameter, put (0, r) in equation (1),
d1 = (0+1)2 + (r – ½)2 – r2
d1 = 1 + r2 + ¼ -r - r2
d1 = 5/4 – r
Now integer value of 5/4 can be used as 1 just to keep our decision parameter an integer
value,
d1 = 1 – r 4.4.2. Algorithm to scan convert a circle using MidPoint circle drawing algorithm
Step 1: Enter center of circle C (h, k) and radius = r units

111
Step 2: Initialize x to 0 and y to r Step 3: Calculate decision parameter d= 1 - r
Step 4: While (x <= y)
If(d < 0) then
x = x + 1
d = d + 2x + 3
else
x = x + 1
y = y – 1
d = d + 2(x – y) + 5
EndIf
PlotPixel (x + h, y + k) PlotPixel (y + h, x + k)
PlotPixel (-x + h, y + k) PlotPixel (-y + h, x + k)
PlotPixel (x + h, -y + k) PlotPixel (y + h, -x + k)
PlotPixel (-x + h, -y + k) PlotPixel (-y + h, -x + k)
EndWhile Step 4: End
4.4.3. Program to scan convert a circle using MidPoint circle drawing method
#include<iostream.h>
#include<conio.h>
#include<graphics.h>
#include<math.h>
float h,k;
int midx,midy;
void plot8points(int x,int y);
void main()
{

112
int gm,gd=DETECT;
int x;
float r,y,p;
cout<<"enter h & k:";
cin>>h>>k;
cout<<"enter radius:";
cin>>r;
initgraph(&gd,&gm,"d:\\tc\\bgi");
int maxx,maxy;
maxx=getmaxx();
maxy=getmaxy();
midx=maxx/2;
midy=maxy/2;
line(midx,0,midx,maxy);
line(0,midy,maxx,midy);
x=0;
y=r; p=1- r;
while(x<=y)
{
plot8points(x,(int)(y+0.5));
if(p<0)
{
p=p+2*x+3;
}
else
{

113
p=p+2*(x-y)+5;
y=y-1;
}
x=x+1;
}
getch();
closegraph();
} void plot8points(int x,int y)
{
putpixel(midx+(h+x),midy-(k+y),15);
putpixel(midx+(h+x),midy-(k-y),15);
putpixel(midx+(h-x),midy-(k+y),15);
putpixel(midx+(h-x),midy-(k-y),15);
putpixel(midx+(h+y),midy-(k+x),15);
putpixel(midx+(h+y),midy-(k-x),15);
putpixel(midx+(h-y),midy-(k+x),15);
putpixel(midx+(h-y),midy-(k-x),15);
}
Example: Using MidPoint Circle generating algorithm, trace all the points which center (0,
0) and radius is 10 units. Solution: (h , k) =(0 , 0) and r = 10
Initial decision parameter , d = 1 – r = 1 – 10 = - 9
We will increment x coordinate by unit interval at each step and will find the corresponding y
coordinate. The following table gives all the points in the first octant of the circle.
x y d (x, y) PlotPixel(x+h, y+k) 0 10 -9 (0, 10) (0, 10)

114
1 10 -9+ 2(1) +3 = -4 (1, 10) (1, 10)
2
10
-4 + 2(2) + 3 = 3
(2, 10)
(2, 10)
3
9
3 +2(3 - 9) + 5 = -4
(3, 9)
(3, 9)
4
9
-4 + 2(4) + 3 = 7
(4, 9)
(4, 9)
5
8
7 + 2(5 - 8) + 5 = 6
(5, 8)
(5, 8)
6
7
6 + 2( 6 – 7) + 5 = 9
(6, 7)
(6, 7)
7
6
Stop here
- -
Check your progress/ Self assessment questions
Q4. What is the value of initial decision parameter in MidPoint Circle Drawing Algorithm?
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------
4.5. Summary
Circle is one of the most commonly used graphics primitive and hence it is necessary to know
about its scan conversion in computer graphics. We have discussed here the two widely used
equations of circle that provides the basis for various algorithms. Many algorithms are there
those attempts to scan convert a circle but two most important algorithms are Bresenham’s
Circle Drawing and MidPoint Circle Drawing. These methods are highly efficient and less
time is consumed in their processing.
4.6. Glossary
Circle - A circle is such a geometric shape that is defined by a center position and a fixed
distance from the center which is called radius.
4.7. Answers to check your progress / self assessment questions
1. The equation of circle in Cartesian coordinates is (x – h)2 + (y – k)2 = r2 and the equation
of circle in polar coordinates is x = h + r cosθ and y = k + r sinθ
2. Among the different types of symmetry, eight-way symmetry is the most efficient because
it reduces the processing time as we are supposed to find the points in the first octant and then
replicate the same in other octants. For example, if we have calculated a point (x, y) in first
octant, the values in other octants will be (x, -y), (-x, y), (-x, -y), (y, x), (y, -x), (-y, x) and (-y,
-x).

115
3. The value of initial decision parameter in Bresenham Circle Drawing algorithm is d1 = 3 -
2r.
4. The value of initial decision parameter in MidPoint Circle Drawing algorithm is d1 = 1 - r.
4.8. Model Questions
1. How scan conversion of a circle is carried out?
2. What are various methods to scan convert a circle?
3. Explain Bresenham circle drawing algorithm.
4. Explain MidPoint circle drawing algorithm.
5. Scan convert a circle whose center is (20, 20) and radius is 10 units using Bresenham
circle drawing algorithm.
6. Scan convert a circle whose center is (50, 60) and radius is 8 units using MidPoint
circle drawing algorithm.
Lesson-05
Scan converting techniques for ellipse

116
Structure of the chapter 5.0. Objective
5.1. Scan converting an ellipse
5.2. Algorithms for scan converting an ellipse
5.2.1. Direct method of ellipse drawing
5.2.2. Trigonometric method of ellipse drawing
5.2.3. MidPoint method of ellipse drawing
5.3. Effects of scan conversion
5.4. Summary
5.5. Glossary
5.6. Answers to check your progress / self assessment questions
5.7. Model Questions
5.0. Objective
After studying this chapter, the student will be able to:
Explain scan conversion of ellipse. Explain various methods of ellipse scan conversion. Explain various effects of scan conversion.
5.1. Scan converting an ellipse An ellipse is a graphic primitive that is similar to circle but is elliptical in shape and is one of
the widely used shapes in computer graphics. It can be thought of made up of set of points
such that sum of distance of any point on the circumference of the ellipse from two fixed
positions called foci (or focus) is always same. This is true for all the points on the ellipse
boundary. Let two focus points of the ellipse be F1 (x1 ,y1 ) and F2 (x2 ,y2 ) and P (x, y) be
any point on the ellipse, then
d1 + d2 = constant value
…………………………………………………… (1) where d1 is the distance of the point P(x, y) from the focus point F1 and d2 is the distance of
the point P from the second focus point F2. It is shown in figure 5.1.

117
Using distance formula,
d1 = (x − x ) + (y − y ) and
d2 = (x − x ) + (y − y )
Substituting these values in equation (1), we get
(x − x ) + (y − y ) + (x − x ) + (y − y ) = constant …………………………(2)
Scan converting an ellipse means illuminating those pixel positions that are quite near to the
boundary of the ellipse. Ellipse is comparatively difficult to plot as compared to other graphic
primitives that we have discussed in previous chapters. If we try to scan convert an ellipse
using equation (2), then it will be very difficult since it will take considerable amount of time
to perform computations to calculate the value of constant for every point.
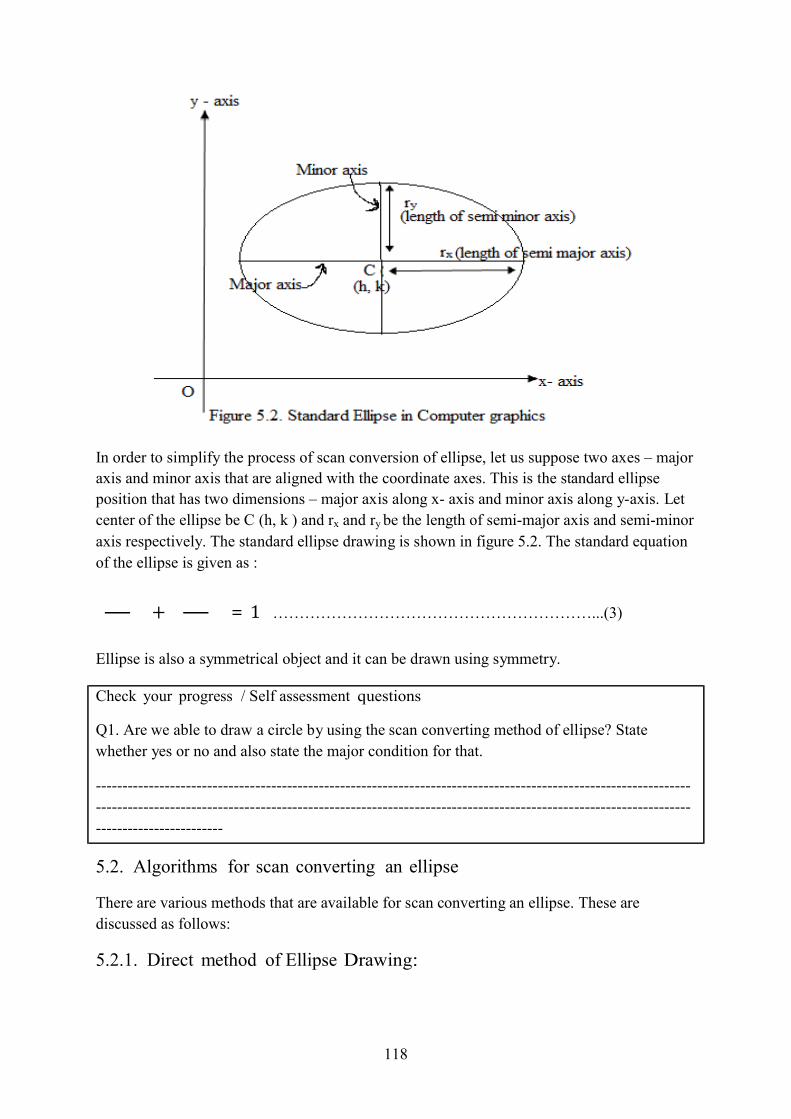
118
In order to simplify the process of scan conversion of ellipse, let us suppose two axes – major
axis and minor axis that are aligned with the coordinate axes. This is the standard ellipse
position that has two dimensions – major axis along x- axis and minor axis along y-axis. Let
center of the ellipse be C (h, k ) and rx and ry be the length of semi-major axis and semi-minor
axis respectively. The standard ellipse drawing is shown in figure 5.2. The standard equation
of the ellipse is given as :
+ = 1 ……………………………………………………...(3)
Ellipse is also a symmetrical object and it can be drawn using symmetry.
Check your progress / Self assessment questions
Q1. Are we able to draw a circle by using the scan converting method of ellipse? State
whether yes or no and also state the major condition for that.
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
------------------------
5.2. Algorithms for scan converting an ellipse There are various methods that are available for scan converting an ellipse. These are
discussed as follows:
5.2.1. Direct method of Ellipse Drawing:

119
This method is also known as polynomial method. In this method, we will use the standard
ellipse equation. Here we will increment x- coordinate by unit interval and will find the
corresponding y value for each x value using equation (3).
From equation (3),
x − h
r
y − k + = 1 r
= 1 −
= ± 1 −
y-k = ± r 1 −
y = k± r 1 −
Using Two – way symmetry:
Here we will start from x = (h – rx ) and will
end at (h + rx). We will increment x value by 1
and will calculate the y value from above
equation at each step. This calculated value
can be a floating point value so we need to
round off the y value to get integral pixel
position. In this case, we are supposed to find
the values for half of the ellipse and will invert
the y value for all the points to find the other half of the ellipse i.e. corresponding to (x, y )
value we have (x, -y) value. Algorithm:
Step 1: Enter Center of Ellipse i.e. C(h, k)
Step 2: Enter length of semi major and semi minor axis i.e. rx and ry
Step 3: Initialize x = (h – rx ) and y = k
Step 4: While (x < = (h + rx))
x = x + 1
Calculate y = k +r 1 −

120
Round off y-value PlotPixel (x, y) and PlotPixel (x, -y)
EndWhile
Step 5: End We have discussed two-way symmetry of ellipse about its major axis in which we are
increasing x coordinate by 1 and finding y coordinate. Similar approach can be followed if
are supposed to scan convert an ellipse about minor axis in which we will increment y
coordinate by 1 and we will find the x value by using the equation (3).
From equation (3),
x − h
r
y − k + = 1 r
= 1-
± r 1 −
= ± 1 −
x – h =
x = h ± r 1 −
Four-way symmetry:
We can use four-way symmetry to draw
an ellipse with direct method. It is less
time consuming than previous one
because we will find points in 1st quadrant and rest of the points in other quadrants can be
found by using symmetry. If we plot a point (x, y) in 1st quadrant, rest of the three points will
be (x, -y), (-x, y) and (-x, -y). Here we will start from x = h and will continue till x <= (h +
rx). X-coordinate is incremented by unit interval and we will find the corresponding y value at
each step. Here we are using symmetry about major axis but same can be done about minor
axis also in which y coordinate will be incremented by 1 and corresponding x value can be
found at each step and in this case, y will be started at k and will end at (k + ry ).
Algorithm:

121
Step 1: Enter Center of Ellipse i.e. C(h, k) Step 2: Enter length of semi major and semi minor axis i.e. rx and ry
Step 3: Initialize x = h
Step 4: While (x < = (h + rx))
Calculate y = k +r 1 −
Round off y-value
PlotPixel (x, y) PlotPixel (x, -y)
PlotPixel (-x, y) PlotPixel (-x, -y)
x = x + 1
EndWhile Step 5: End
5.2.2. Trigonometric method of Ellipse Drawing: The equation of an ellipse in polar coordinates with center C(h, k) and rx and ry , the lengths
of semi-major and semi-minor axis is:
x = h + rx cosθ and
y = k + ry sinθ
where θ is an angle made by any point (x, y) on
the ellipse with the major axis of the ellipse as
shown in figure 5.5. θ can have values ranging
from 0 to 2π radians. At each step, we find both
x and y value and will increment θ by small
amount which is dθ and it is usually taken very
small. We can take dθ as or . In this
method also, we take advantage of symmetry.
Two-way symmetry:
Here θ is initialized to 0 and loop will be continued upto π radians. In this method, just for
simplicity, we will increment θ by 1.
Algorithm:
Step 1: Enter Center of Ellipse i.e. C(h, k)

122
Step 2: Enter length of semi major and semi minor axis i.e. rx and ry
Step 3: Initialize theta to 0
Step 4: While (theta < = 180)
x = h + rx cos(theta)
y = k + ry sin(theta)
PlotPixel(x, y) PlotPixel(x, -y)
theta = theta + 1
EndWhile
Step 5: End
Four-way symmetry: In this case, we start θ from 0 and will end at radians. We deal with only the first quadrant
of the ellipse and rest of the points can be found from the points in first quadrant. For
example, if we have calculated a point (x, y) in the first quadrant, then rest of the points will
be (x, -y), (-x, -y ) and (x, -y) in rest of the three quadrants.
Algorithm:
Step 1: Enter Center of Ellipse i.e. C(h, k)
Step 2: Enter length of semi major and semi minor axis i.e. rx and ry

123
Step 3: Initialize theta to 0 Step 4: While (theta < = 90)
x = h + rx cos(theta)
y = k + ry sin(theta)
PlotPixel(x, y) PlotPixel(x, -y)
PlotPixel(-x, y) PlotPixel(-x, -y)
theta = theta + 1
EndWhile Step 5: End
5.2.3. Midpoint ellipse drawing method: Midpoint ellipse drawing method is very similar to midpoint circle drawing algorithm. The
basic difference is that in circle drawing, we just draw the circle in first octant and then copy
it to other octants using eight-way symmetry. But in midpoint ellipse method, we have to
draw the ellipse in both the octants of the first quadrant and further copy it rest of the
quadrants using four-way symmetry. This method is the most efficient among all the methods
of the ellipse drawing. It is faster and accurate one.
Derivation:
Let us suppose an ellipse whose center is C(h, k) and whose length of semi-major and semi-
minor axis is rx and ry respectively. We will draw the ellipse with center at the origin and then
translate it to the given center C by just adding h and k to the x and y coordinate respectively
of the calculated points.
Scan converting the ellipse in the first quadrant requires further two parts because of its
elliptical shape. We have shown an ellipse whose rx < ry in figure 5.7.

124
As shown in above figure, we have divided the first quadrant into two parts- octant 1 with
slope < -1 and octant 2 with slope > -1 and the line that separates these octants has |slope| = 1.
So in octant 1, we will move towards x-axis by unit intervals and find the corresponding y-
coordinate at each step and when we move in octant 2, we will increment y-coordinate by 1
and will find the corresponding x-value at each step.
From equation (3), we get
x − h
r +
y − k
r = 1
If the center of the ellipse is at the origin, i.e. (h , k) = (0 , 0), then
+ = 1
r x + r y = r r
r x + r y - r r = 0………………………………………………………….(4)
We can define an ellipse function as:
f (x, y) = r x + r y - r r
This function returns 0 for all the points that lie on the boundary of the ellipse and f (x, y) < 0 for any point that is inside the ellipse and f (x, y) > 0 for any point that is outside the ellipse.

125
So it can be decided from the sign of this function that whether a point is inside or outside the
ellipse. Hence this function can be taken as the decision parameter of this method.
The procedure of ellipse drawing is started at (0, r ) which will be the first point to be
plotted. In octant 1, we will increment x value by 1 until we reach a point where slope = -1 i.e. at the joining of octant 1 and octant 2. In order to find the slope, we need to differentiate
equation (4) w.r.t x.
2r x + 2r y = 0
∴ = -
The boundary of octant 1 and octant 2 has slope = -1, so
=1
- = -1
2r x = 2r y i.e. r x = r y
This is the condition that decides when we will move from octant 1 to octant 2. We will continue in octant 2 until we reach the final point (rx , 0). Once we find points in first
quadrant, we will copy these points to rest of the quadrants.
Octant 1:
At ith position, let us suppose that we have plotted a point (xi , yi ). At position (i+1)th, we
have two candidate pixels that can be plotted. They are points T (xi + 1, yi ) and S (xi + 1, yi –
1) as shown in figure 5.8. Mid-point of these two pixel values is M (xi + 1, yi – ½ ).
The decision parameter di will take into account the ellipse function.
di = f (xi + 1, yi – ½ )
di = r (xi + 1) + r (yi
– ½ ) - r r
……………………………………………..(5)
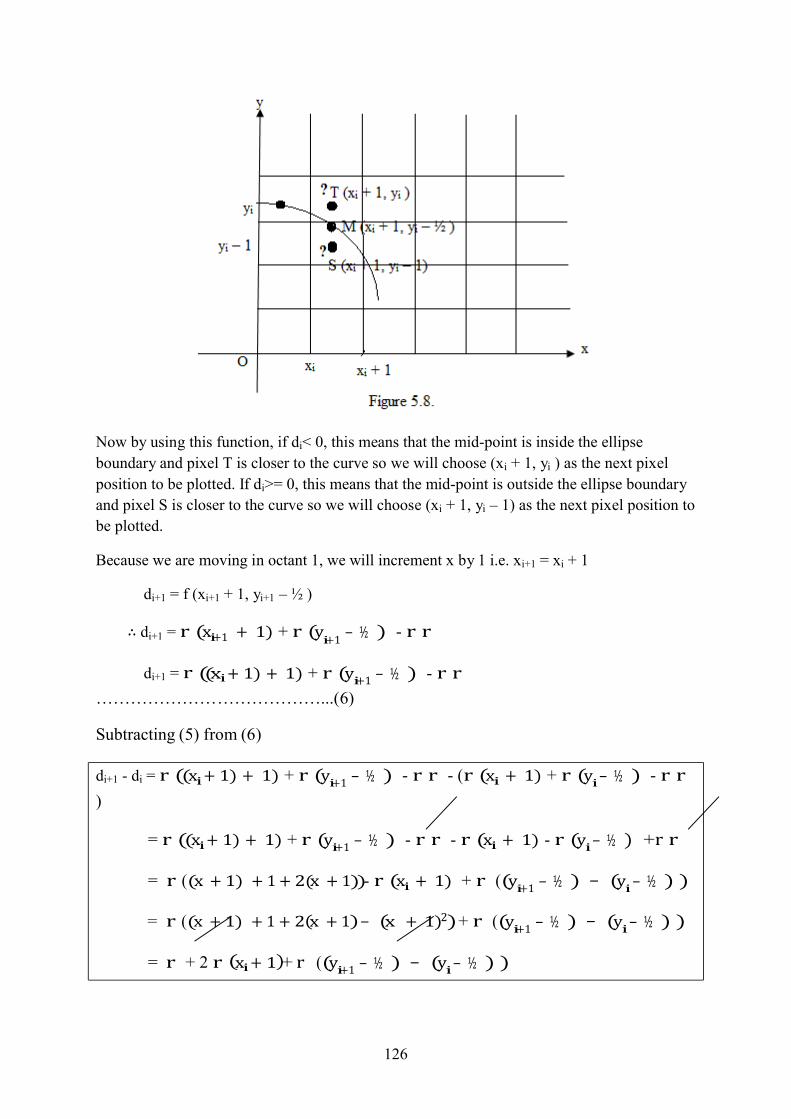
126
2
Now by using this function, if di< 0, this means that the mid-point is inside the ellipse
boundary and pixel T is closer to the curve so we will choose (xi + 1, yi ) as the next pixel
position to be plotted. If di>= 0, this means that the mid-point is outside the ellipse boundary
and pixel S is closer to the curve so we will choose (xi + 1, yi – 1) as the next pixel position to
be plotted.
Because we are moving in octant 1, we will increment x by 1 i.e. xi+1 = xi + 1
di+1 = f (xi+1 + 1, yi+1 – ½ )
∴ di+1 = r (xi+1 + 1) + r (yi+1
– ½ ) - r r
((x + 1) + 1) + r (y
– ½ ) - r r
di+1 = r i i+1
…………………………………...(6)
Subtracting (5) from (6)
di+1 - di = r ((xi + 1) + 1) + r (yi+1
– ½ ) - r r - (r (xi + 1) + r (yi
– ½ ) - r r
)
= r ((xi + 1) + 1) + r (yi+1
– ½ ) - r r - r (xi + 1) - r (yi
– ½ ) +r r
= r ((x + 1) + 1 + 2(x + 1))- r (xi + 1) + r ((y
i+1 – ½ ) − (y
i – ½ ) )
= r ((x + 1) + 1 + 2(x + 1) − (x + 1) ) + r ((y
i+1 – ½ ) − (y
i – ½ ) )
= r + 2 r (xi + 1)+ r ((y
i+1 – ½ ) − (y
i – ½ ) )

127
r + 2 r ( i )+ r (( i
) − ( i
)1
di+1 = di + r + 2 r (xi + 1)+ r ((yi+1
– ½ ) − (yi
– ½ ) )
…………………………(7) if di< 0 , then yi+1 = yi. Put this value in (7), we get,
di+1 = di + r + 2 r (xi + 1)+ r ((yi
– ½ ) − (yi
– ½ ) )
di+1 = di + r + 2 r (xi + 1)+ r (0)
di+1 = di + r + 2 r (xi + 1)
Since x + 1 = xi+1
So, di+1 = di + + 2 xi+1
If di>= 0 , then yi+1 = yi - 1. Put this value in (7), we get,
di+1 = di + r + 2 r (xi + 1)+ r ((yi
− 1 – ½ ) − (yi
– ½ ) )
3 di+1 = di + x + 1 y − 2
y – ) 2
di+1 = di + r + 2 r (xi + 1)+ r (y + − 3y − (y + − y ))
di+1 = di + r + 2 r (xi + 1)+ r (y + − 3y − y − + y )
di+1 = di + r + 2 r (xi + 1)+ r ( − 2y )
di+1 = di + r + 2 r (xi + 1)+ r (2 − 2y )
di+1 = di + r + 2 r (xi + 1)- 2 r (y − 1)
In this case also, x + 1 = x and y − 1 =y
So, di+1 = di + + 2 + - 2
+
In order to find the initial decision parameter, we need to put (0, ry) in equation (5) and is denoted as d0.
d0 = r (0 + 1) + r (ry – ½ ) - r r
= r + r (r + − r ) - r r
= r + r r + r − r r - r r
d0 = − +

128
i
2
Octant 2: In this octant, we keep on incrementing y coordinate by unit interval along the negative y-
axis. Let us suppose that at position i, we have (xi , yi ). At position (i+1)th, we have two
candidate pixels that can be plotted. They are points P (xi , yi - 1 ) and Q (xi + 1, yi – 1) as
shown in figure 5.9. Mid-point of these two pixel values is M’ (xi + ½ , yi – 1). In this case, at
each step yi+1 = yi – 1.
The decision parameter di’in this case will be The decision parameter di will take into account the ellipse function.
di’ = f (xi + ½ , yi – 1 )
1
di’ = r (xi + ) + r (y – 1 ) - r r 2
……………………………………………..(8) Now by using this function, if di’< 0, this means that the mid-point is inside or on the ellipse
boundary and pixel Q is closer to the curve so we will choose (xi +1, yi-1) as the next pixel
position to be plotted. If di>= 0, this means that the mid-point is outside the ellipse boundary
and pixel P is closer to the curve so we will choose (xi, yi – 1) as the next pixel position to be
plotted.
Because we are moving in octant 2, so yi+1 = yi – 1
di+1’ = f (xi+1 + ½ , yi+1 – 1 )
1
∴ di+1’ = r (xi+1 +
) + r (yi+1
– 1 ) - r r

129
+ r ( i
) - r r
+ r ( i
) - r r - r ( i -r ( i
) +r r
− ( i
− ( i ) + r - 2r i
)+ r ( i
+ 1 − 2 i
( i
) )
1
1
3
1i
1
1i
1i
di+1’ = r (xi+1 + 1 ) (y − 1) – 1 2
…………………………………...(9) Subtracting (8) from (9)
di+1’ - di’ = r (xi+1 + 1 ) (y − 1) – 1 x + 2
1 ) y – 1 2
= r ((xi+1 +
= r ((xi+1 +
1 ) x + 2
1 ) x + 2
1 ) (y − 1) (y − 1) − y – 1 2
1 ) (y − 1) 2
di+1’ = di’ + r - 2r (yi
− 1)+r [ xi+1 + 2
………………………………(10)
− x + ] 2
If di+1’ > 0, put xi+1 = xi in equation (10), we get
1
− x + ]
di+1’ = di’ + r - 2r (yi
− 1)+r [ xi + 2 i 2
di+1’ = di’ + r - 2r (yi
− 1)+r (0)
di+1’ = di’ + r - 2r (y
i − 1)
Since y − 1 = yi+1, so
di+1’ = di’ + - 2
+
If di+1’ <= 0, put xi+1 = xi + 1in equation (10), we get
di+1’ = di’ + r - 2r (yi
− 1)+r [ xi + 1 + 2 − x + ]
2
di+1’ = di’ + r - 2r (yi
− 1)+r [ xi + 2 − x + ]
2
di+1’ = di’ + r - 2r (yi
− 1)+r [x + + 3x − x − − x ]
di+1’ = di’ + r - 2r (y
i − 1)+r (2x + )
di+1’ = di’ + r - 2r (y
i − 1)+r (2x + 2)
di+1’ = di’ + r - 2r (y
i − 1)+2r (x + 1)
Since in this case, y − 1 = y and (x + 1) = x , so

130
0
di+1’ = di’ + - 2 +
+
In order to find the initial decision parameter in octant 2, we have to put the last position in octant 1 i.e. the position which will be the start of octant 2. Let it be (x0, y0) and by putting
this value in equation (8) d0’ will be:
1
d0’ = r (x0 + ) + r (y – 1 ) - r r 2
If we want to simplify the calculation, we can start second octant from ( rx , 0) and will move
along the positive y axis i.e. incrementing y value by 1. Algorithm:
Step 1: Enter Center of Ellipse i.e. C(h, k)
Step 2: Enter length of semi major and semi minor axis i.e. rx and ry
Step 3: Calculate the initial decision parameter, d = r − r r + r
Step 4: Initialize the x and y values as x =0 and y = ry Step 5: Plot the initial point, PlotEllipsePoint (x + h , y + k ) Step 6: While (r x<= r y )
If (d < 0)
x = x + 1
d = d + r + 2 r x
Else
x = x + 1
y = y – 1
d = d + r + 2 r x - 2 r y
EndIf
PlotEllipsePoint( x+ h, y + k)
EndWhile
Step 7: Calculate initial decision parameter taking the last values of x and y,
d = r (x + ) + r (y – 1 ) - r r Step 8: While((x < rx) and (y > 0))

131
If (d <= 0)
y = y – 1
x = x + 1
d = d+ r – 2r y+2r x
Else
y = y - 1
d = d + r - 2r y
EndIf
PlotEllipsePoint( x+ h, y + k)
EndWhile
Step 9: End Check your progress / Self assessment questions
Q2. Write the value of initial decision parameter in octant 1 in midpoint ellipse drawing
method.
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
------------------------ Q3. State the condition that is necessary for switching from octant 1 to octant 2.
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
------------------------
5.3. Effects of Scan conversion
There are many side effects of scan conversion which is observed in scan converting any of
the computer graphics primitives. Some of the commonly visible effects of scan conversion
are discussed as follows:
1. Aliasing: We know that pixel positions on a raster screen are integer values. Aliasing refers to the problem of plotting a point at a location which is different from its actual location on a display screen. For example, if we are drawing a line, the calculated co- ordinates of a point is (4, 5.6). But in order to plot this point using PlotPixel() function, we have to round off the value and we get (4, 6) which is different from the true position. The plotted position is called as alias position. The figure 5.10. shows this effect. The aliasing effect is more visible at lower resolutions of the screen. In case of a straight line, this effect is also known as jaggy or stair-case effect. If we

132
want to minimize this aliasing effect, we can increase the resolution i.e. number of pixels of the screen so that the visibility of the staircase effect is reduced.
2. Unequal Intensity:Our raster screen consists of an array of pixels which are arranged
in rows and columns. Let us suppose that the spacing in the horizontal and vertical
direction is 1 unit. Then the spacing in the diagonal opposite pixels will be √ 2 as shown in figure 5.11. This means that the arrangement of pixels in the horizontal and vertical direction is denser than the pixels that lie on the diagonals. Therefore if the resolution of the screen is low, then the diagonal lines will appear dimmer than the horizontal and vertical lines. The reason being vision of a human eye depend not only the intensity of light but it is dependent on the density of light sources as well.
The problem discussed above is called as unequal intensity and to resolve this
problem, the number of pixels should be increased. And other solution can be to
increase the intensity of pixels plotted on the diagonal line.

133
3. Over Strike: During scan conversion, if the same pixel is illuminated more than once, then there is a problem of overstrike. Although its effect is not visible on the display screen, but the output speed is affected by it. The reason is time is consumed in scan converting the same pixel but the intensity of the pixel is not enhanced by plotting it two or more times. If instead of taking output on a raster screen, we take the output on a photographic medium, then overstrike effect can be clearly visible because of more exposure of the same portion of the medium to ink. This effect can be reduced if we make a check on the pixel position that whether the same position has been plotted or not.
4. Picket Fence Problem: There is another problem being faced by the graphics designer while working with the scan conversion. This problem occurs when either the object cannot be aligned with the pixel array or when the object itself cannot fit into it. If the distance between the two consecutive boundary edges of an object called its pickets is not equal to the unit distance between the pixels or any multiple of it, then scan converting will result into uneven distances between the pickets as we have to map the picket coordinates to the discrete pixel positions. It is shown in figure 5.12.(a). Figure 5.12.(b) shows that overall length of the pickets fence will be correct approximately through the spacing between the pickets is distorted. It is called global aliasing. Another solution to this problem is to reduce the distance between the pickets. The distance should be tried to make as close to their relative distances as possible. Again the overall length of the picket fence will get distorted. This case is shown in figure 5.12.(c). This is known as local aliasing. It is the decision of the computer graphics designer either to use global aliasing or to use local aliasing.

134
Check your progress / Self assessment questions
Q4. We can decrease the effects of scan conversion by increasing the number of pixels. State
whether True or False.

135
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
------------------------
5.4. Summary In this chapter we have discussed how to scan convert an ellipse and various methods that are
used in its scan conversion. Most important among these methods is MidPoint ellipse
drawing method because of its accuracy and efficiency. We have gone through many side
effects of scan conversion and along with some solutions to these problems are also provided.
We cannot eliminate these effects but we can reduce their visibility.
5.5. Glossary Aliasing - Aliasing refers to the problem of plotting a point at a location which is different
from its actual location on a display screen.
5.6. Answers to check your progress / self assessment questions 1. Yes, we are able to draw a circle using scan converting methods of an ellipse with a single
condition that rx = ry i.e. length of semi-major and semi-minor axis should be same.
2. The value of initial decision parameter is d = r − r r + r , where rx and ry are the
lengths of semi-major and semi-minor axis respectively.
3. We will switch from octant 1 to octant 2 when r x>r y .
4. True.
5.7. Model Questions
1. What do you mean by scan converting an ellipse? 2. What are the various methods of ellipse drawing? Explain briefly. 3. Derive MidPoint Ellipse drawing method. 4. State various effects of scan conversion.

136
Lesson-06
Area filling and character generation techniques Structure of the chapter
6.0. Objectives
6.1. Introduction to area filling
6.1.1. Types of polygons
6.1.2. Representing polygons
6.2. Area filling techniques
6.2.1. Seed fill
6.2.1.1. Boundary fill / Edge fill algorithm
6.2.2. Scan line algorithm
6.3. Flood fill technique
6.4. Character generation
6.5. Strategies of character generation
6.5.1. Stroke Method
6.5.2. Starbust Method
6.5.3. Bitmap Method
6.6. Advantages of character generation
6.7. Summary
6.8. Glossary
6.9. Answers to check your progress / self assessment questions
6.10. Modal questions
6.0. Objectives
After studying this chapter, the student will be able to:

137
Explain what area filling is. Explain what the various methods to fill areas in graphics are. Explain flood fill technique. Explain character generation strategies.
6.1. Introduction to area filling In the previous chapters, we have learnt scan conversion of basic primitives like lines, circles
and ellipses. This chapter aims to provide a basic overview of different kinds of polygons,
how to represent them and area filling techniques. In computer graphics, one of the standard
output primitives is a solid-color or patterned polygon area. Although a number of area
primitives are available but polygons are quite easier to process because they have linear
boundaries.
A polygon is basically a series of interconnected line segments. It can be specified by vertices
(or node) like P0, P1, P2, P3, and so on. The first node is called starting or initial vertex and the
last one is referred as final or terminal vertex. A simple polyline is shown in figure 6.1. When
the initial and the final vertex of a polyline is same, then it becomes a polygon as shown in
figure 6.2. We can say that a closed polyline is a polygon.
6.1.1. Types of polygons The types of polygons depend on the position of the line segment that joins any two points.
There are two basic types:
Concave Polygons
Convex Polygons
A concave polygon is the one in which the line segment that joins any two points may not lie
completely inside the polygon boundary. Examples are shown in figure 6.3.

138
A convex polygon, on the other hand, is the one in which the line segment that joins any two
points lie completely within the polygon. Figure 6.4. shows some examples.
6.1.2. Representing polygons As we know that a polygon is a closed polyline. Every polygon has its sides and edges. The
end points are known as nodes or vertices. There are three basic methods to represent
polygons according to the graphics system:
Polygon drawing primitive method
Trapezoid primitive method
Line and point method
The polygon primitive approach can draw the polygon shapes directly on the graphic devices.
Polygons are stored as a unit on such devices. In those graphic devices that support trapezoid
primitive method, the trapezoids are obtained from two scan lines and two line segments as
figure 6.5. depicts. The trapezoids are drawn by stepping down the line segments using two
vector generators and for every polygon, fill in all the pixels that lie between them. So every
polygon is divided into trapezoids and it is represented as a chain of trapezoids.

139
Many graphics devices are not having any polygon support at all. In these cases, we represent
polygons using lines and points. A polygon is stored in a display file. In the display file,
polygons are not stored just with a series of line commands since they do not identify how
many of the following line commands are the element of the polygon. So, a new command is
used in the display file to represent the polygons. The opcode (i.e. operation code) for new
command itself identify the number of line segments in the polygon. The figure 6.6.
represents the polygons and its depiction using display file.
Entering polygons: We can use the following algorithm to enter the polygon command and
data into the display file. In such a file, we need to enter the number of sides and coordinates
of each vertex.
Algorithm:
1. Read arrays Ax and Ay of length n. These arrays contain the vertices of the polygon
and length of the array specifies the number of sides of the polygon.
2. Initialize i to 0

140
DF_OP[i] <- n
DF_x[i] <- Ax[i]
DF_y[i] <- Ay[i]
i <- i +1 // loading polygon command
3. Do
{
DF_OP[i] <- 2
DF_x[i] <- Ax [i]
DF-y[i] <- Ay [i]
i <- i + 1
} while ( i < n) // entering line commands
4. DF_OP[i] <- 2
DF_x[i] <- Ax[0]
DF_y[i] <- Ay[0] // entering last line command
5. Stop.
Polygon test: When a polygon is being entered into a display file, we can draw the boundary
of the polygon. To draw the polygon as a solid object, we just need to illuminate the pixels
inside the polygons and the pixels that are on the pixel boundary. But how we can decide
whether a point is inside the polygon or not.
One method is even-odd method that determines the points inside the polygon. In this,
we draw a line segment between the given point and the point that is already known to
be outside. Then we count the number of intersections of this line segment with the
polygon boundary. If the number of intersections is odd, then the given point is inside
the polygon otherwise it is outside. This method is shown in figure 6.7.

141
Another method is winding-number method. In this method, we will take a given
point and a point that is known to be on the boundary of the polygon. Abstractly, we
will stretch a piece of elastic between these two points and slide the end point on the
boundary for a complete revolution. We will count the number of times the elastic
has wound around the given point. If there is at least one winding, the point lies inside
and if there is no winding, the point is outside. Similar to the previous method, we
will draw a line segment from the outside to the given point and we will consider the
polygon sides that it crosses. But instead of counting the number of intersections, we
will provide a direction number to every line that is crossed and will find the sum of
these direction numbers. This number indicates the direction in which the polygon
side was drawn relative to the line segment for our test. This test is shown in figure
6.8.
As it can be seen from the above figure that (xa, ya ) is a test point and y = ya is a horizontal
line that is running from the outside to the point (xa, ya ). We can draw the edges of the
polygon that are being crossed by this line in two ways. Firstly, the edge can be constructed
by initiating from below the line, crossing it and ending above the line or starting from above,
crossing and ending below the line. In the first one, we will give the direction number of -1
and in the second one, the direction number will be given as 1. After the direction number is
allocated, we will calculate the sum of them. This sum is referred as winding number. If this
number is nonzero, the point is said to be inside the polygon otherwise it is outside.
Check your progress / Self assessment questions
Q1. What are the different methods of representing polygons? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
--------------------------------- Q2. State the difference between convex and concave polygon.

142
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------------------
6.2. Area filling techniques Area filling means highlighting all the pixels that lie inside the polygon with some color
which is different from the background color. Polygons’ filling is easy because they have
linear boundaries.
There are two common methodologies for filling areas on the raster systems. The first way to
fill an area is by determining the overlapped intervals for scan lines that are crossing the area.
The second method for area filling is to initiate from a given internal position and paint
outward from this position till the point we encounter the specified boundary conditions. The
scan-line method is commonly used to fill the areas primitives like polygons, circles, ellipse
and other simple curves. The other method i.e. fill methods that start from an internal point
are used for more complex boundaries and responsive painting systems.
The two basic method of area filling is discussed below:
6.2.1. Seed Fill In this method, we will fill a polygon by starting from a given ‘seed’ point (i.e. a point which
is known to be inside the polygon) and we will be highlighting outwards from this seed pixel
which means neighbouring pixels will be highlighted until we reach the boundary. It is
similar to water flooding on the surface of a container. There are two algorithms based on this
approach: flood fill algorithm and the boundary fill algorithm or edge filled algorithm. The
flood fill algorithms fill the interior defined regions while the second one aims to fill the
boundary defined regions. In this section, we will discuss boundary fill algorithm and flood
fill algorithm will be discussed in the next section in detail.
6.2.1.1. Boundary fill / Edge Fill algorithm In this algorithm, polygon edges are constructed. Then, we will start from a seed (i.e. any
point inside the polygon) and we will examine the neighboring pixels to check if we have
reached the boundary pixel. If we have not reached the boundary pixels, the pixels are
highlighted and this process continues till we reach the boundary pixels.
The boundary defined areas can be either 4-connected or 8-connected as depicted in figure
6.9. If an area or a polygon region is 4-connected, then each pixel within the region can be
reached with a combination of moves in just four directions: left, right, up and down but for
an 8-connected polygon region, each pixel can be reached with a combination of moves in
two horizontal directions, two vertical directions and four diagonal directions.

143
In some cases, 8-connected regions are more preferred than 4-connected one. This is because
sometimes, 4-connected results in partial fill as shown in figure 6.10.
The following function provides the recursive method of filling a 4-connected polygon region
with the color specified in the parameter fill color (denoted as f_color) upto a boundary color
being specified with parameter boundary color (denoted as b_color). Boundary_Fill (x, y, f_color, b_color)
{
If (GetPixel(x, y) != b_color && GetPixel(x, y) != f_color)
{
PutPixel(x, y, f_color);
Boundary_Fill(x+1, y, f_color, b_color);
Boundary_Fill(x, y+1, f_color, b_color);
Boundary_Fill(x-1, y, f_color, b_color);
Boundary_Fill(x, y-1, f_color, b_color);

144
}
} The GetPixel() function being used here will return the color of the pixel being specified as
an argument and the PutPixel() functions plots the pixel with the color being specified as an
argument. We can use the same procedure for 8-connected regions also with some
modifications like we need to include four extra statements that test the diagonal positions
like (x+1, y+1).
6.2.2. Scan line algorithm
The recursive algorithms discussed in seed fill methods are facing two major difficulties. The
first difficulty is that if there are some pixels inside the polygon that are already colored, then
our recursive loop terminates and some of the internal pixels are remained uncolored. To
overcome this difficulty, we first need to change the color of some internal pixels which were
initially set to the fill color before seed fill algorithms are applied. The second difficulty is
that these methods are unsuitable for large polygons. It is so because it requires storage of the
neighboring pixels and for large polygons, the stack space for storing the pixels can be
insufficient. To overcome this problem, we need more efficient algorithms. Such methods fill
the horizontal pixels that spans across the scan lines instead of going to 4-connected or 8-
connected neighboring points. This can be done by recognizing the rightmost and the leftmost
pixels of the seed pixel and then draw a horizontal scan line between these two extreme
pixels. This process is repeated by changing the seed pixel above and below the scan line just
drawn till whole polygon is filled. With this method, we need to store the starting pixel for
every horizontal pixel span.
The scan line method for polygon filling is shown in figure 6.11. For every scan line that
crosses a polygon, this method locates the points of intersection of the scan line with the
edges of the polygon. These points are then sorted from left to right, and the corresponding
points between these intersection points are set to the desired fill color.

145
From the above figure, we can observe that there are two stretches of internal points from
x=6 to x=9 and x=12 to x= 15. The scan line method first finds the biggest and the smallest y
coordinates of the polygon. It then begins with the biggest y-value and works its way down,
scans from left to right just the way raster display do.
An important job in the scan line method is to locate the points of intersection of the scan line
with the boundary of the polygon. If the intersection points are even, they are arranged from
left to right in a sorted manner, are paired and the pixels between the paired points are set to
the fill color. But there are some cases in which the intersection point is a node (or vertex).
When the scan line intersects a polygon vertex, a special handling is needed to find the actual
intersection points. To handle these cases, we have to look at the other end points of the two
line segments of the polygons that meet at this vertex point. If these points are on the same
side ( up or down) of the scan line, then the given point will be counted as an even number of
the intersections and if they are opposite sides of the line, the point will be counted as a single
intersection. This is depicted by figure 6.12.
As we can see from the above figure that every scan line intersects the vertex of the polygon.
For scan line 1, the rest of the end points B and D of the two line segments are lying
on the same side of the scan line, so there are two intersections that result in two pairs:
1-2 and 3-4 where the intersection points 2 and 3 are actually the same points.

146
For scan line 2, the end points D and F of the two line segments of the polygon are
lying on the opposite sides of the scan line, so there is a single intersection that results
in two pairs: 1-2 and 3-4.
For scan line 3, there are two vertices that are the intersection points. For vertex F, the
other end points E and G of the two line segments of the polygon are on the same side
of the scan line while for vertex H, the end point G and I of the line segments are on
the opposite side of the scan line. So at vertex F, we have two intersections and for
Vertex H, we have a single intersection. The result is two pairs: 1-2 and 3-4 and the
points 2 and 3 are same.
It is required to calculate the x-intersection points for the scan line with each polygon edge.
We can use coherence properties to simplify the computations. A coherence property of a
picture is the one in which one part can be related to the other parts of the picture. We will
slope of an edge as a coherence property. Making use of this property, we can calculate the x-
intersection point on the lower scan line if we know the x-intersection value for the current
scan line. It is given as:
xi+1 = xi – 1/m
where m is the slope of the side.
Since we scan from top to bottom, the y-value changes by 1 and is given as:
yi+1 = yi – 1 Most of the times, it is not always required to calculate the x-interection value for scan line
with each polygon edge. We will just consider those polyon sides whose end points are
spanning the current scan as shown in figure 6.13.
If we sort the edges in order of their maximum y-coordinate, then it becomes easy to test for
x-intersection. When the sides are sorted, we scan the lines from top to bottom resulting in a
list of active edges for every scan line that crosses the polygon boundary. The list contains all

147
the edges crossed by the scan line. The figure 6.14. shows sorted order of the polygon along
with active edges.
Check your progress / Self assessment questions
Q3. Why 8-connected regions are more preferred over 4-connected regions? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
--------------------------------- Q4. What are the major difficulties being faced by seed fill methods?
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------------------
6.3. Flood fill technique Sometimes there is a requirement of filling an area which is not defined with a single color
boundary. For these cases, we can fill the areas by replacing a defined interior color rather
than searching for a boundary color. This method of filling areas is called flood fill. Like
boundary fill method, in this method also we will start from a seed point and then examine
the neighboring pixels. But in this case, we will check the neighboring pixels for a specified
interior color and not for a boundary color and after checking, they are replaced with a new
color. We can use 4-connected or 8-connected approach and can step through the pixels until
all the internal points have been filled. The following procedure depicts the recursive method
of filling an 8-connected area by using flood-fill algorithm.

148
Flood_Fill (x, y, old_color, new_color)
{
if ( getpixel (x, y) = old_color)
{
putpixel (x, y, new_colour);
Flood_Fill (x + 1, y, old_color, new_color);
Flood_Fill (x - 1, y, old_color, new_color);
Flood_Fill (x, y + 1, old_color, new_color);
Flood_Fill (x, y - 1, old_color, new_color);
Flood_Fill (x + 1, y + 1, old_color, new_color);
Flood_Fill (x - 1, y - 1, old_color, new_color);
Flood_Fill (x + 1, y - 1, old_color, new_color);
Flood_Fill (x - 1, y + 1, old_color, new_color);
}
} Check your progress / Self assessment questions
Q5. What is the role of GetPixel() and PutPixel() in area filling? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------------------
6.4. Character Generation

149
When we draw anything or any design, it should be labeled that requires letters, numbers and
special characters. This design and style is usually referred as typeface or fonts. We are
having hundreds of fonts available. On the basis of styles, commonly used are Times New
Roman, Arial, Calibri, etc and on the basis of language, it can be any regional language like
Korean, Japanese, Hindi, etc. Special characters like ®, ©, ™, E, $, etc are stored in a font
table. Each of these can be made bold, italic or underlined. Character creation is a fast
process in graphics. It refers to the process of generating characters in various applications.
There are two basic techniques to represent different fonts: bitmap font and outline font.
In bitmap font, a character or a letter is written on a rectangular grid. The on grid pixel
represents digital value 1 and the off pixels represent digital value 0. It makes use of font
table. In any font table, there are group of fonts that range from 0 to 255 (i.e. there are total
256 fonts) and each font is represented by 16 values and each row of a particular font is
represented by an 8-bit number i.e. 1 byte. So a single font is of 16 bytes. In order to store
256 fonts, we need 256 × 16 = 4096 bytes. This is the simplest method of representing and
storing different fonts. Another method is known as outline font. Straight lines and curved segments are used to
represent fonts like in PDF (portable data format). It consumes less storage as compared to
bitmap font. It is easy to produce variations in fonts by changing the curves for the outlines.
Clipping of these fonts is easier since we can consider a character as a simple polygon. More
processing is required because every font needs to be scan converted into a frame buffer. Check your progress / Self assessment questions
Q6. Write two ways to represent the characters in graphics? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------------------
6.5. Strategies of character generation In computer graphics, we display letters, numbers and characters usually as labels that
provide information and instructions to the users. These characters are built into the display
devices mostly as hardware but sometimes this can be done via software also. There are three
basic strategies of generating characters:
Stroke Method
Starbust Method
Bitmap Method
Let us discuss these strategies in detail.
6.5.1. Stroke Method
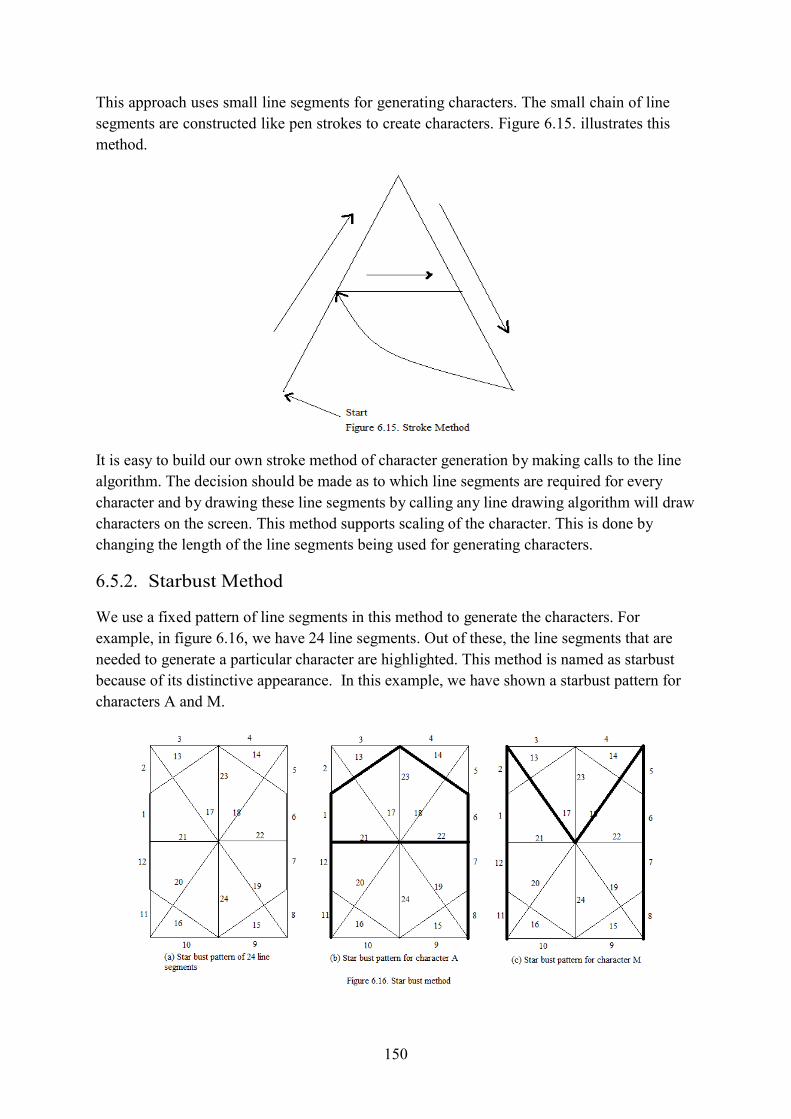
150
This approach uses small line segments for generating characters. The small chain of line
segments are constructed like pen strokes to create characters. Figure 6.15. illustrates this
method.
It is easy to build our own stroke method of character generation by making calls to the line
algorithm. The decision should be made as to which line segments are required for every
character and by drawing these line segments by calling any line drawing algorithm will draw
characters on the screen. This method supports scaling of the character. This is done by
changing the length of the line segments being used for generating characters.
6.5.2. Starbust Method We use a fixed pattern of line segments in this method to generate the characters. For
example, in figure 6.16, we have 24 line segments. Out of these, the line segments that are
needed to generate a particular character are highlighted. This method is named as starbust
because of its distinctive appearance. In this example, we have shown a starbust pattern for
characters A and M.

151
The pattern of line segments is stored as a 24-bit code where each bit represents one line
segment. If the line segment is highlighted, the corresponding bit is set to 1 otherwise it will
be set to 0. The 24-bit code for character A and M is given below:
Code for ‘A’: 0011 0000 0011 1100 1110 0001 Code for ‘M’: 0000 0011 0000 1100 1111 0011
This method is not so popular because of the following reasons:
Every character is being represented by 24-bits so more memory is required.
24-bits code needs to be converted to display a character that requires some code
conversion software.
The quality of the character is poor. This method is not suitable for curve-shaped
characters.
6.5.3. Bitmap Method The third strategy of character generation is bitmap method which is also called as dot-matrix
method because in this approach, characters are represented by an array of dots in the matrix
form. A two-dimensional array is used having rows and columns. Figure 6.17 shows a 5×7
array which is most commonly used for character representation. 7×9 and 9×13 arrays are
also popular. The devices having high resolution like inkjet printers or laser printers can use
arrays of size 100×100.
Every dot in the matrix represents a pixel. The character is shown on the display screen by
copying the pixel values from the matrix into a portion of the frame buffer. The pixel value
controls the pixel’s intensity.
A hardware device called a ‘character generationchip’ is used to store all the dot patterns for
each character. This device accepts an address for the character and provides the bit pattern
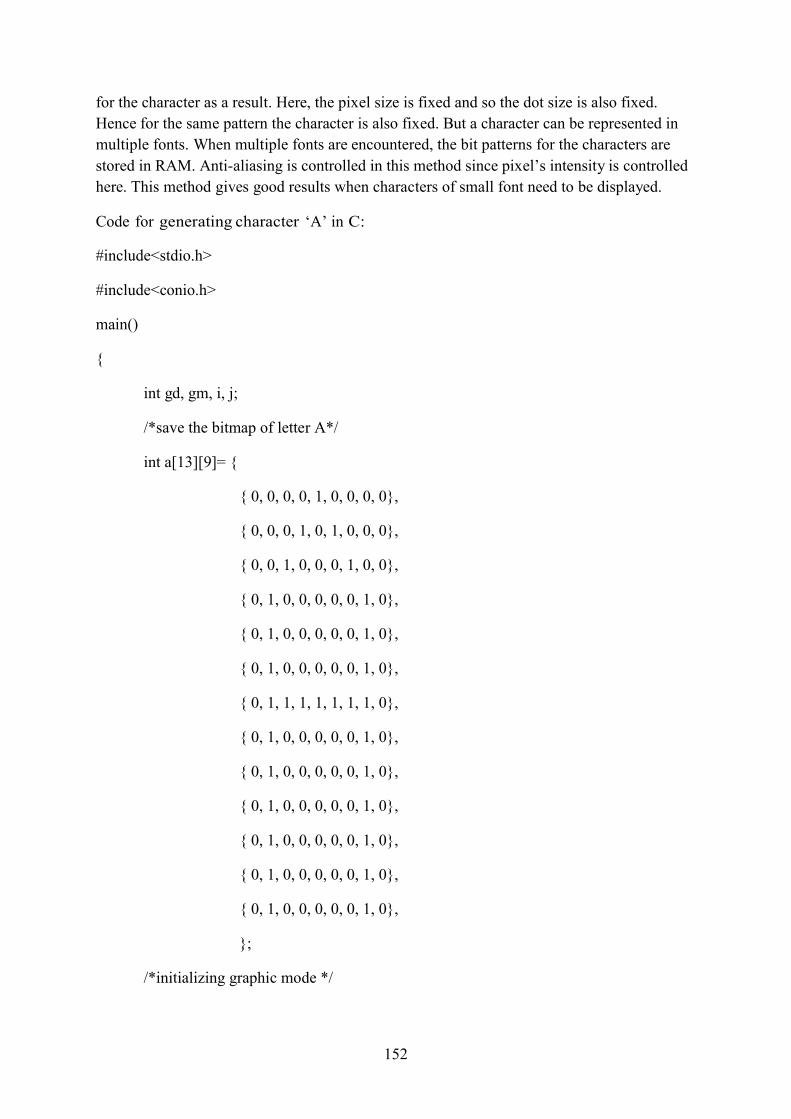
152
for the character as a result. Here, the pixel size is fixed and so the dot size is also fixed.
Hence for the same pattern the character is also fixed. But a character can be represented in
multiple fonts. When multiple fonts are encountered, the bit patterns for the characters are
stored in RAM. Anti-aliasing is controlled in this method since pixel’s intensity is controlled
here. This method gives good results when characters of small font need to be displayed.
Code for generating character ‘A’ in C: #include<stdio.h>
#include<conio.h>
main()
{
int gd, gm, i, j;
/*save the bitmap of letter A*/
int a[13][9]= {
{ 0, 0, 0, 0, 1, 0, 0, 0, 0},
{ 0, 0, 0, 1, 0, 1, 0, 0, 0},
{ 0, 0, 1, 0, 0, 0, 1, 0, 0},
{ 0, 1, 0, 0, 0, 0, 0, 1, 0},
{ 0, 1, 0, 0, 0, 0, 0, 1, 0},
{ 0, 1, 0, 0, 0, 0, 0, 1, 0},
{ 0, 1, 1, 1, 1, 1, 1, 1, 0},
{ 0, 1, 0, 0, 0, 0, 0, 1, 0},
{ 0, 1, 0, 0, 0, 0, 0, 1, 0},
{ 0, 1, 0, 0, 0, 0, 0, 1, 0},
{ 0, 1, 0, 0, 0, 0, 0, 1, 0},
{ 0, 1, 0, 0, 0, 0, 0, 1, 0},
{ 0, 1, 0, 0, 0, 0, 0, 1, 0},
};
/*initializing graphic mode */
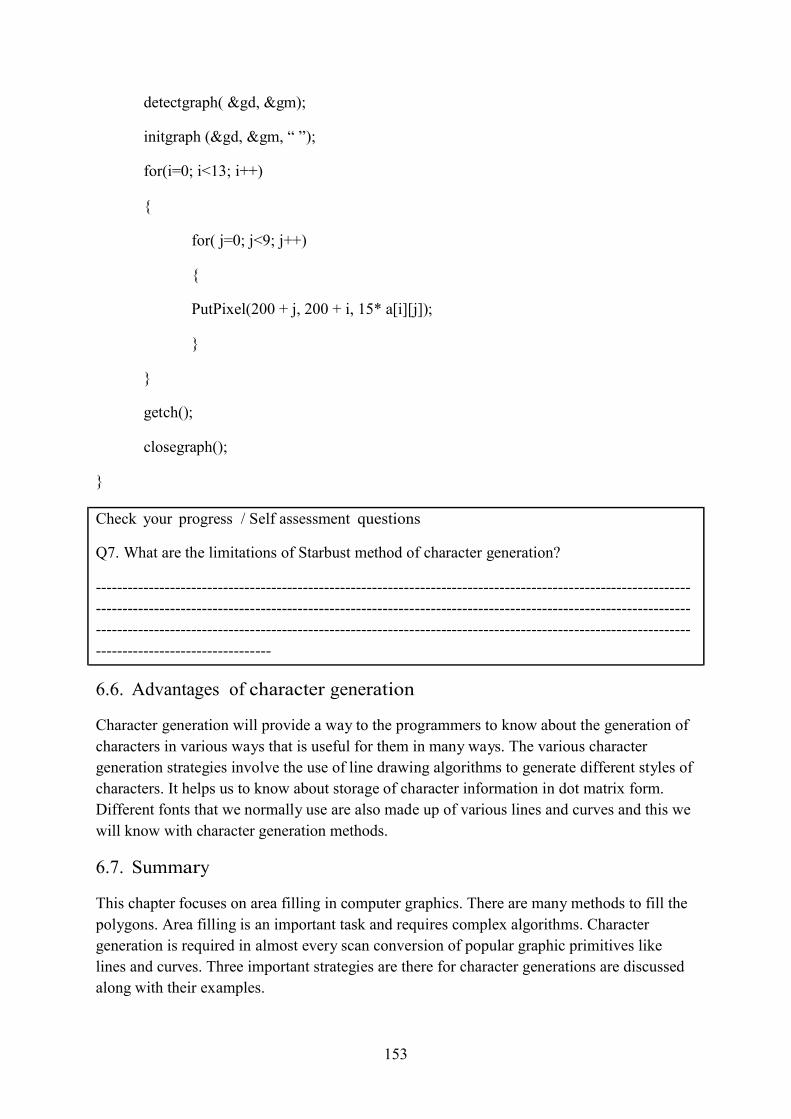
153
detectgraph( &gd, &gm);
initgraph (&gd, &gm, “ ”);
for(i=0; i<13; i++)
{
for( j=0; j<9; j++)
{
PutPixel(200 + j, 200 + i, 15* a[i][j]);
}
}
getch();
closegraph();
} Check your progress / Self assessment questions
Q7. What are the limitations of Starbust method of character generation? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------------------
6.6. Advantages of character generation Character generation will provide a way to the programmers to know about the generation of
characters in various ways that is useful for them in many ways. The various character
generation strategies involve the use of line drawing algorithms to generate different styles of
characters. It helps us to know about storage of character information in dot matrix form.
Different fonts that we normally use are also made up of various lines and curves and this we
will know with character generation methods.
6.7. Summary This chapter focuses on area filling in computer graphics. There are many methods to fill the
polygons. Area filling is an important task and requires complex algorithms. Character
generation is required in almost every scan conversion of popular graphic primitives like
lines and curves. Three important strategies are there for character generations are discussed
along with their examples.

154
6.8. Glossary Polygon - A polygon is basically a series of interconnected line segments. It can be specified
by vertices (or node) like P0, P1, P2, P3, and so on.
Concave polygon - A concave polygon is the one in which the line segment that joins any
two points may not lie completely inside the polygon boundary.
Convex polygon - A convex polygonis the one in which the line segment that joins any two
points lie completely within the polygon.
6.9. Answers to check your progress / self assessment questions
1. There are three basic methods to represent polygons:
Polygon drawing primitive method
Trapezoid primitive method
Line and point method
2. The major difference between concave and convex polygon is that in former, the line
segment joining any two points of the polygon may not lie completely inside the
polygon while in latter, the line segment that joins any two internal points always lie
within the polygon.
3. 8-connected regions are more preferred over 4-connected regions because 4-
connected regions result in partial filling because every pixel cannot be reached from
only four directions. In 8-connected region, there is no problem of partial filling.
4. Seed fill method is facing two major difficulties.
If there are some pixels inside the polygon that are already colored, then our
recursive loop terminates and some of the internal pixels are remained uncolored.
These methods are unsuitable for large polygons. It is so because it requires
storage of the neighboring pixels and for large polygons, the stack space for
storing the pixels can be insufficient.
5. The GetPixel() function being used here will return the color of the pixel being
specified as an argument and the PutPixel() functions plots the pixel with the color
being specified as an argument.
6. Two ways to represent the characters in graphics are Bitmap font representation and
Outline font representation.

155
7. Starbust method has the following limitations:
Every character is being represented by 24-bits so more memory is required.
24-bits code needs to be converted to display a character that requires some
code conversion software.
The quality of the character is poor. This method is not suitable for curve-
shaped characters.
6.10. Modal Questions
1. Why do we need area filling techniques in computer graphics?
2. Explain flood fill algorithm.
3. What do you mean by character generation?
4. Explain various strategies of character generation.

156
Lesson- 7
2D Transformations
Structure
7.0 Objective 7.1 Introduction
7.2 Cartesian coordinate system
7.3 Geometric Transformations
7.4 Homogeneous Coordinates
7.5 Inverse geometric Transformations
7.6 Coordinate Transformations
7.7 Composite Transformations
7.8 Summary
7.9 Glossary
7.10 Answers of Self-Assessment Questions
7.11 References
7.12 Model Questions
7.0 Objective
What are transformations and its types.
How objects move, rotate or change their shape.
Cartesian and Homogeneous Coordinate systems.
Learn to combine transformation matrices from simple transformation.
7.1 Introduction
With the passage of time, output devices change their attributes. We can create a variety of
animations, pictures, objects and graphics. In some cases we need to modify the existing
pictures. If we have only two coordinates say x and y axis, then it is called two dimensional
graphics and if we have three coordinates say x, y and z-axis then it is called three

157
dimensional graphics. A Transformation is the concept of repositioning any geometric objects
using some particular rules. Transformations in computer graphics can be used to change the
position, size and orientation of the objects.
Types of Transformations: There are two types of transformations depending upon the
object whether the object is moved relative to fixed coordinate
system or background, described by geometric transformation or
object is held stationary while the co-ordinate system is moving
relative to the object. This effect is described through coordinate
transformation.
Geometric Transformations
In this type of transformation, the object is moving relative to a fixed coordinate axis,
e.g. a car is moving, backdrop scenery is fixed. Following are the geometric transformation:
The basic geometric transformations are:
Translation
Scaling
Rotation Other transformations are:
Reflection
Shearing Coordinate Transformations Fig. 7.1
Here the object is fixed relative to a moving coordinate axis e.g. a car is fixed while backdrop
scenery is moving.
7.2Cartesian coordinate system
The Cartesian coordinate system is a two dimensional plane having two axes i.e. a horizontal
axis called as x-axis and a vertical axis called as y-axis. A Cartesian coordinate system
specifies each point in the x, y in plane with numerical coordinates, which are the signed
distances from the point to the x and y-axis. The point where both the axes intersect each
other is known as the origin. Here values of both x-axis and y-axis are zero. The intersection
of these two axes divides the two dimensional plane into four quadrants as shown in Fig. 7.1.
Cartesian coordinates are used in algebra and geometry in mathematics for solving
equations. Using the Cartesian coordinate system different geometric shapes can be
described. This is used in computer graphics, computer-aided design etc. But in computer
graphics, when we use these shapes and theorems, we need to calculate lengths, angles etc.

158
Homogeneous coordinate systems provide a method for doing calculations, when it is
used in practical applications. Homogeneous coordinate is used to represent the Cartesian
equations. People in computer field and graphics often deal with homogeneous coordinates.
Homogeneous coordinates are used to simplify various transformations. A Cartesian
pair(x, y) can be converted to a homogeneous coordinate (xh,yh, h) containing three
parameters xh, yh and h. We will discuss the concept of homogeneous coordinates after
transformations.
7.3Geometric Transformation
In this section, we will discuss about transformations of two dimensional objects and how
their matrix representation can be expressed.
7.3.1 Translation
Translation is the method to change the position of an object from one position to another
along a straight line path. We translate two dimensional objects by adding translation
distances and to the original co-ordinates(x, y) to move an object to a new position
x’ and y’ as:
’= + … (1)
’= + … (2)
Here ( , ) is known as translation vector or shift vector.
Suppose we have a point P at co-ordinate , and we want to
shift that point P to a new position P’ having co-ordinates ’
and ’see Fig. 7.2.
Matrix representation of the above equations is as follows:
′ = +
’ = +
where P = , P’ = ′
and T =
Fig. 7.2

159
Translation moves the objects without changing the object in size and shape. Each point on the object moves by same value. Suppose we want to translate a triangle with its three
vertices P(x1, y1), Q(x2, y2) and R(x3, y3) by tx along x-axis and ty along y-axis as shown in Fig 7.3
Fig. 7.3
In case of straight lines, triangles, polygons etc., we translate the objects by adding only translation vectors to the current set of vertices of the objects and redraw the objects using new set of vertices. In case of curved objects like circle or ellipse, we shift or translate the centre co-ordinates of the object and redraw the object at the new location.
7.3.2 Scaling with respect to the origin
Scaling transformation is used to change the size of the object. The scaling transformation is
carried out by multiplying the co-ordinates(x, y) of each vertex by scaling factors sx and syfor
transformed co-ordinates (x’, y’).
x’ = x. sx … (3)
y’ = y. sy ... (4)
The scaling factors sx and sy, scale the object along x and y-axis. The above set of
equations can be expressed in matrix form as:
0
′ = 0
P’ = P. S
where P = , P’ = ′
The values of :
and S =

160
1 2 2 1 3 0 3 6 6 3
1 1 2 2 0
1
1
Any positive real value can be assigned to scaling factors.
a) If the value of < 1, size of the object will be reduced.
b) If the value of > 1,size of the object will be increased.
c) If = , size of the object will remain same. This type of scaling is called
UniformScaling.
d) If ≠ ,this type of scaling is called Differential Scaling. This type of
scaling is often used in design applications, where pictures are constructed from a few fundamental shapes that can be adjusted by scaling and positioning
transformations.
With scaling transformation objects are scaled and repositioned. Scaling factors
having values less than 1 move objects closer to the co-ordinate origin (0, 0). The values
greater than 1 move objects farther from the co-ordinate origin. For example: The value of
is i.e. less than 1 moves the line closer to the
origin, see Fig. 7.4
Let us suppose we have a square having vertices:
P (1,1), Q(2,1), R(2,2) and S(1,2)
We scale it by scaling factors = 3 =
. After
scaling, square will transform in rectangle (see Fig. 7.5) as we
multiply scaling factors with original vertices and the value
becomes:
P’ (3, ), Q’ (7, ), R’(7,1) and S’ (3,1).
Matrix representation of above vertices is as follows: Fig. 7.4
P Q R Ssx sy P’ Q’ R’ S’
=

161
Before Scaling Fig. 7 5 After
We can take another example to scale a triangle. As a triangle has thre
(30, 0) and C (50, 100) and scaling factors = 2 = 2.Usin
scaling of triangle is as shown in Fig.7.6
. Scaling
e vertices A (20, 0), B
g equations of scaling,
Before Scaling Fig. 7.6 After Scaling
7.3.3 Rotation about the origin
In rotation, the object is rotated along a two dimensional plane. The rotation is done through
some angle θ ° about the origin, either in clockwise or in anti-clockwise direction.
If θ is the positive angle, the direction of rotation is anti-clockwise and if θ is the negative
angle, the direction of rotation is clock wise.
First we find the rotation transformation equations for a point P(x, y) which is rotated anti-
clockwise by an angel θ to the point P’(x’, y’) as shown in Fig. 7.7. This transformation can
also be specified as a rotation about a rotation axis that is perpendicular to the xy plane and
passes through the pivot point.

162
Fig. 7.7
The angular and coordinate relationship of the original and new transformed point is shown
in Fig. 7.8. In this Fig, r is the constant distance from the origin, is the original angular
position and θ is the rotation angel.
Now, we determine relationship between (x, y) and (x’, y’).
x = r cos … (5)
y = r sin … (6)
Similarly,
x’ = r cos (θ+ ) … (7)
y’ = r sin (θ+ ) … (8)
From eq. (7)
x’ = r cos (θ+ )
= r (cos θ cos - sin θ sin )
[∴ cos( + ) = cos cos − sin sin ]
= r cos cos θ – r sin sin θ
= (r cos ) cos θ – (r sin ) sin θ
= x cos θ - y sin θ
∴ x’ = x cos θ – y sin θ … (9) Fig. 7.8
Similarly, from eq. (8), we get
y’ = x sin θ+ y cos θ … (10)
Eq. (9) and (10) can be written in the matrix form as:
cos − sin
′ =
sin cos

163
P’ = Rθ.P
where Rθ = cos − sin sin cos
= Rotation matrix
If rotation of a point is in clockwise direction, then values of rotation matrix will not
change, only its sine components change signs i.e.
Rθ = cos sin
− sin cos
7.3.4 Reflection
A reflection is the transformation that produces the mirror image of the graphics objects. The
mirror image for two dimensional reflections is generated relative to axis of reflection by
rotating the object 180° about the reflection axis. The distances and image of the objects are
same from the reflection axis. We can choose an axis for reflection in the plane.
Reflection may be of horizontal type (about x-axis) or vertical type (about y-axis).
Following are the equations for mirror reflection: Reflection about x-axis:
The transformation matrix for getting the reflection image about the horizontal axis can be
expressed as:
x’ = x …(11)
y’ = -y …(12)
Eq. (11) and (12) can be written in the matrix form as:
Reflection about x-axis
1 0
′ =
0 − 1
P’ = Mx. P Fig. 7.9
where Mx = Reflection matrix about x-axis.
Reflection about y-axis:

164
Similarly, the transformation matrix for getting the reflection
image about the vertical axis can be expressed as:
x’= -x …(13)
y’=y …(14) Eq. (13) and (14) can be written in matrix form as:
= − 1 0
′ 0 1
P’=My.P
Where My= Reflection matrix about y-axis.
Fig. 7.10Reflection about y-axis Reflection about both axes:
In the same way, we can get the transformation matrix for the
reflection across the horizontal and vertical axis as:
x’’= -x’, y’’ =y’
And x’= x, y’= -y
∴x’’= -x …(15)
y’’= -y …(16)
Eq. (15) and (16) can be written in the matrix form as:
= − 1 0
′′ 0 − 1
P’’=M.P
M= Reflection matrix Fig. 7.11

165
axes
7.3.5 Shear
Reflection about both
This transformation distorts the shape of the image in such a way that it seems some layers of
the image have been sheared off from the original image. Two common shearing
transformations are used: towards x-axis and towards y-axis. The x-axis maintains the y-
coordinates but changes the x values. The y-axis shift y-coordinates but maintains x-
coordinate values.
Following are the equations of shearing: Shearing towards x-axis:
The transformation matrix for shearing in the x- axis direction can be given as:
x’ = x + ℎ . …(17)
y’ = y …(18) where ℎ is shearing constant towards x-axis. Any real value can be assigned to this constant. A coordinate position ( , ) is shifted horizontally from x-axis. Giving values of ℎ to 2 changes the square in parallelogram as in Fig. 7.12. Negative values for ℎ shift
coordinate positions to the left.
The matrix representation is as follows:
1 ℎ
′ =
0 1
Where ℎ = shearing matrix towards x-axis.
Any real value can be assigned to shearing matrix.
If value of ℎ is positive, shearing will be on right side.
If value of ℎ is negative, shearing will be on left side.
If value of ℎ is zero, there will be no shearing.

166
Fig. 7.12
Shearing
towards y-
axis:
The transformation matrix for shearing towards y-axis is as follows:
’ = … (19)
’ = + ℎ . … (20)
Above eq. can be written in matrix form as:
1 0
′ = ℎ 1
shy= shearing matrix towards y-axis. Like shx, shy can also take any real value.
If the value of shy is positive, the shearing will be towards upper side i.e. towards
positive y-axis.
If the value of shy is negative, the shearing will be towards lower side i.e. towards
negative y-axis.
If value of shy is zero, there will be no shearing.
Fig. 7.13 illustrates the conversion of a square into parallelogram with shy=1/2

167
Fig. 7.13 Shearing towards both axes:
The equation for both x-axis and y-axis is as follows:
x’ = x + shx . y …(21)
y’ = y + shy . x …(22)
The matrix representations of these equations are as follows:
1 ℎ
′ = ℎ 1
shx.shy = shearing matrix towards both directions.
7.4 Homogeneous Coordinates
Homogeneous coordinates are used for matrix representation of all these transformations.
Here two dimensional transformation matrix of 2×2 can be written in 3×3 matrix with the
Self Assessment-Questions:
Q1. What is the difference between geometric transformation and coordinate transformation?
Q2. When value of ℎ is positive towards x axis, shearing will be on left side?
a) TRUE b) FALSE

168
homogeneous coordinate triple (xh, yh, h)
where , x = xh/h and y = yh/h
h is called homogeneous parameter, it can have any non-zero value. Corresponding to each
value of h, we have different homogeneous representation of coordinate point (x, y). Most of
the time h will be taken as unity i.e. h=1.Homogeneous coordinates help us to represent all
transformation equations as matrix multiplication.
Every point (x, y) in two dimensional is represented with homogeneous coordinate (x, y, 1).
7.4.1 Advantages of Homogeneous Coordinates
a) Two dimensional transformations can be represented by 3×3 matrices. This will
make operations easier to perform.
b) For transformations of floating point calculations to integer calculations, the
operations will be performed in better way.
7.4.2Representation of Transformations in Homogeneous Coordinates
i. Translation
1 0
= 0 1 .
1 0 0 1 1
ii. Scaling
0 0
= 0 0 .
1 0 0 1 1
iii. Rotation
cos − sin 0
= sin cos 0 . 1 0 0 1 1
iv. Reflection
About x-axis =
1 0 0 0 − 1 0
0 0 1

169
M yx
About y-axis = − 1 0 0 0 1 0
0 0 1
v. Shearing
Relative to x-axis =
Relative to y-axis =
1 ℎ 0 0 1 0
0 0 1
1 0 0
ℎ 1 0
0 0 1
Relative to both the axes = 1 ℎ 0
ℎ 1 0
0 0 1
7.5 Inverse Geometric Transformations:
When geometric transformations are performed in opposite order, then they are called inverse
geometric transformations. Each transformation has its inverse. Inverse geometric
transformations are as follows:
a) Translation: Translation in the opposite direction. -1
Tv = T-v, where v is the translation vector.
b) Rotation: Rotation in the opposite direction.
Rθ-1 = R-θ, where θ is angle of rotation.
c) Scaling: Scaling in the opposite direction.
S-1 s , s
= S1/s ,1/s , where sx, sy are called scaling factors in x, y direction.
x y x y
d) Reflection: Reflection in the opposite direction. -1 = Mx , M -1
=My
7.6 Coordinate Transformation:
In this type of transformation, the body is fixed and coordinate system is moving. Here we
suppose that we have two coordinate systems in the plane. The first system is located at
origin O and has coordinates (x, y). The second coordinate system is located at origin O’ and
has coordinates (x’, y’) and v is the displacement vector as in Fig. 7.14.

170
Here we also have all these five transformations namely Translation, Rotation, Scaling,
Reflection and Shearing.
7.6.1 TranslationFig. 7.14
If the x, y plane or coordinate system is displaced to a new position, where the direction and
distance of the displacement is given by vector ⃗ = tx⃗+ ty ,⃗ where tx and ty are translation
towards x and y axes respectively.
The relationship between old coordinates (x, y) and new coordinates (x’, y’) is as follows:
x’ = x - tx
y’ = y - ty
Matrix representation is as follows:
1 0 −
= 0 1 − 1 0 0 1
1
P’ = . P
Where =
1 0 − 0 1 −
0 0 1
= Coordinate Translation matrix
7.6.2 Rotation about origin
The coordinate system xy is rotated by θ° about the origin then the coordinates of a point on
both systems are related by the rotational transformation . The equation of rotation is as
follows:
x’ = x cos θ + y sin θ
y’ = - x sin θ + y cos θ
Above equations can be written in matrix form as follows:

171
P’ = . P
= 1
cos sin 0
cos sin 0 − sin cos 0
0 0 1 1
Where = − sin cos 0 = Coordinate Rotational matrix
0 0 1
7.6.3 Scaling with respect to the origin
In this case, new coordinate system is formed by taking different measurement units along x
and y axis, here origin and coordinate axes remain unchanged. The relationship between new
coordinates (x’, y’) and old coordinates (x, y) is as follows:
x’ = . x
y’ = . y
where sx and sy are scaling factors along x and y axis respectively.
The matrix representation of the above equations is as follows:
⎡ 0 0⎤
= ⎢ ⎥
1 ⎢0 0⎥ 1
⎣0 0 1⎦
P’ = Ssx.sy
. P
⎡ 0 0⎤
⎢ ⎥
Where ̅Ssx.sy =
⎢0 0⎥ ⎣0 0 1⎦
= Coordinate Scaling matrix
7.6.3 Mirror Reflection about an axis
In this case, new coordinate system is reflecting the old coordinate system about either x or y
axes. Relationship between new coordinates (x’, y’) and old coordinates (x, y) is given by:
About x-axis
x’ = x
y’ = - y
Matrix representation is as follows:

172
1 0 0 = 0 − 1 0
1 0 0 1 1
P’ = Mx . P
Where ̅Mx =
1 0 0 0 − 1 0
0 0 1
= Coordinate Reflection matrix
About y-axis
x’ = - x
y’ = y
Matrix representation is as follows:
− 1 0 0
= 0 1 0 1 0 0 1 1
P’ = My . P
− 1 0 0
Where ̅My = 0 1 0 = Coordinate Reflection matrix 0 0 1
7.7 Composite transformations:
More complex geometric transformations can be built from basic transformations described
above. For composite transformation, we combine basic transformation and multiply
matrices. This process is known as concentration of matrices and the resultant matrix is called
composite transformation matrix. For example, rotation about a point other than the origin.
7.7.1 Translations
If two successive translation vectors (tx1, ty1) and (tx2, ty2) are applied to a coordinate
position P, P’ can be calculated as:
P’ = T (tx2, ty2). {T (tx1, ty1).P}
= {T (tx2, ty2).T (tx1, ty1)}.P
Now the product of these two translation vectors can be as follows:

173
cos − sin 0 cos − sin 0 sin cos 0 . sin cos 0
0 0 1 0 0 1
1 0 1 0 1 0 + 0 1 . 0 1 = 0 1 + 0 0 1 0 0 1 0 0 1
T (tx2, ty2). T (tx1, ty1) = T (tx1 + tx2, ty1 + ty2)
This expression indicates that the effects of successive translations are always additive in
nature.
7.7.2 Rotation
Using the same principal, we can write the general expression of the transformations if two
successive rotations are provided at point P, rotations of angle θ1 and θ2. The equation can be
expressed as:
P’ = R(θ2). {R(θ1).P}
= {R(θ2).R(θ1)}.P
= R(θ).P
∴ R(θ) = R(θ1).R(θ2)
=
cos .cos − sin .sin + 0 cos sin − sin .cos + 0 0 = sin .cos − cos .sin + 0 sin .sin − cos .cos + 0 0
0 0 1
R(θ) =
cos( + ) − sin( + ) 0 sin( + ) cos( + ) 0 0 0 1
In simple terms it can be written as:
R(θ1).R(θ2) = R(θ1+θ2)
This expression indicates that two successive rotations are additive. The result of composite
matrix is as follows:
P’ = R(θ1+θ2) . P
7.7.3 Scaling
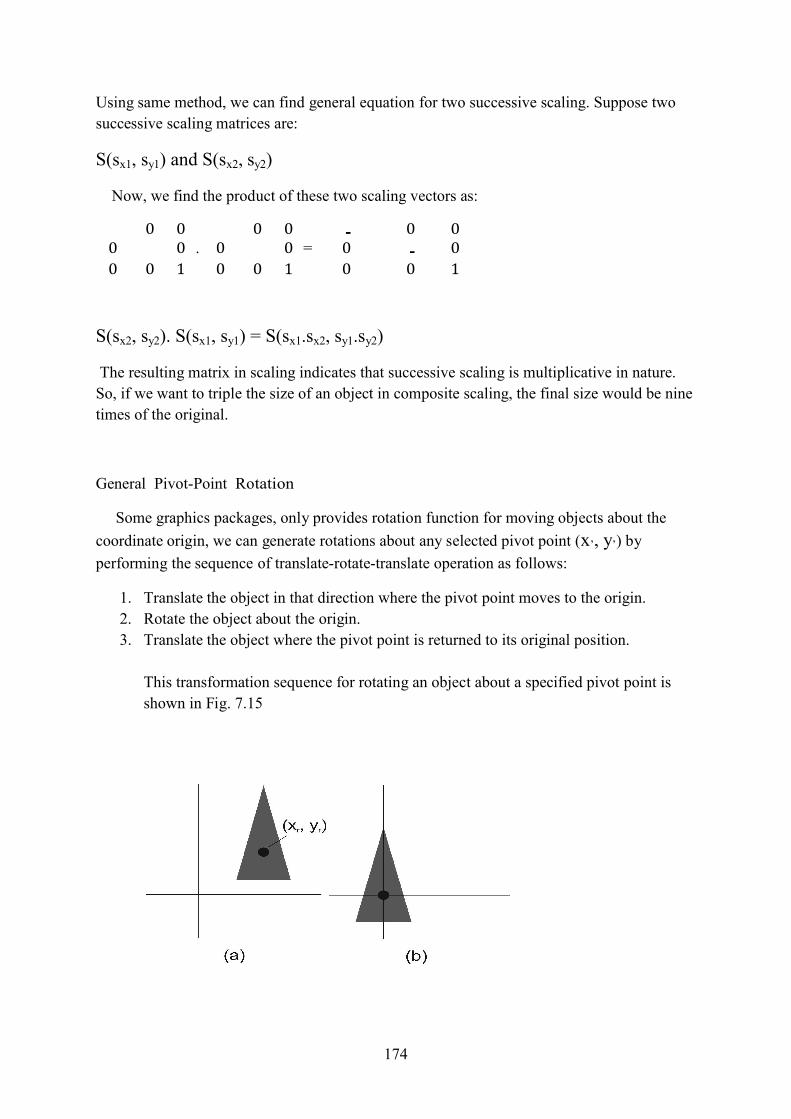
174
Using same method, we can find general equation for two successive scaling. Suppose two
successive scaling matrices are:
S(sx1, sy1) and S(sx2, sy2)
Now, we find the product of these two scaling vectors as:
0 0 0 0 . 0 0 0 0 . 0 0 = 0 . 0 0 0 1 0 0 1 0 0 1
S(sx2, sy2). S(sx1, sy1) = S(sx1.sx2, sy1.sy2)
The resulting matrix in scaling indicates that successive scaling is multiplicative in nature.
So, if we want to triple the size of an object in composite scaling, the final size would be nine
times of the original.
General Pivot-Point Rotation
Some graphics packages, only provides rotation function for moving objects about the
coordinate origin, we can generate rotations about any selected pivot point (x’, y’) by
performing the sequence of translate-rotate-translate operation as follows:
1. Translate the object in that direction where the pivot point moves to the origin.
2. Rotate the object about the origin.
3. Translate the object where the pivot point is returned to its original position.
This transformation sequence for rotating an object about a specified pivot point is
shown in Fig. 7.15

175
Fig. 7.15
For first translation: T(x’,y’) =
1 0 0 1
0 0 1
For rotation: R(θ) =
cos − sin 0 sin cos 0 0 0 1
For last transformation: T(-x’, -y’) = 1 0 − 0 1 −
0 0 1
The concatenated matrix is:
1 0 cos − sin 0 1 0 − 0 1 . sin cos 0 . 0 1 − 0 0 1 0 0 1 0 0 1
cosθ − sinθ (1 − cos ) + sin = sinθ cos (1 − cos ) − sin
0 0 1
In simple form:
T(x’,y’). R(θ). T(-x’,-y’)= R(x’,y’,θ)
where T(-x’,-y’) = T-1(x’,y’)
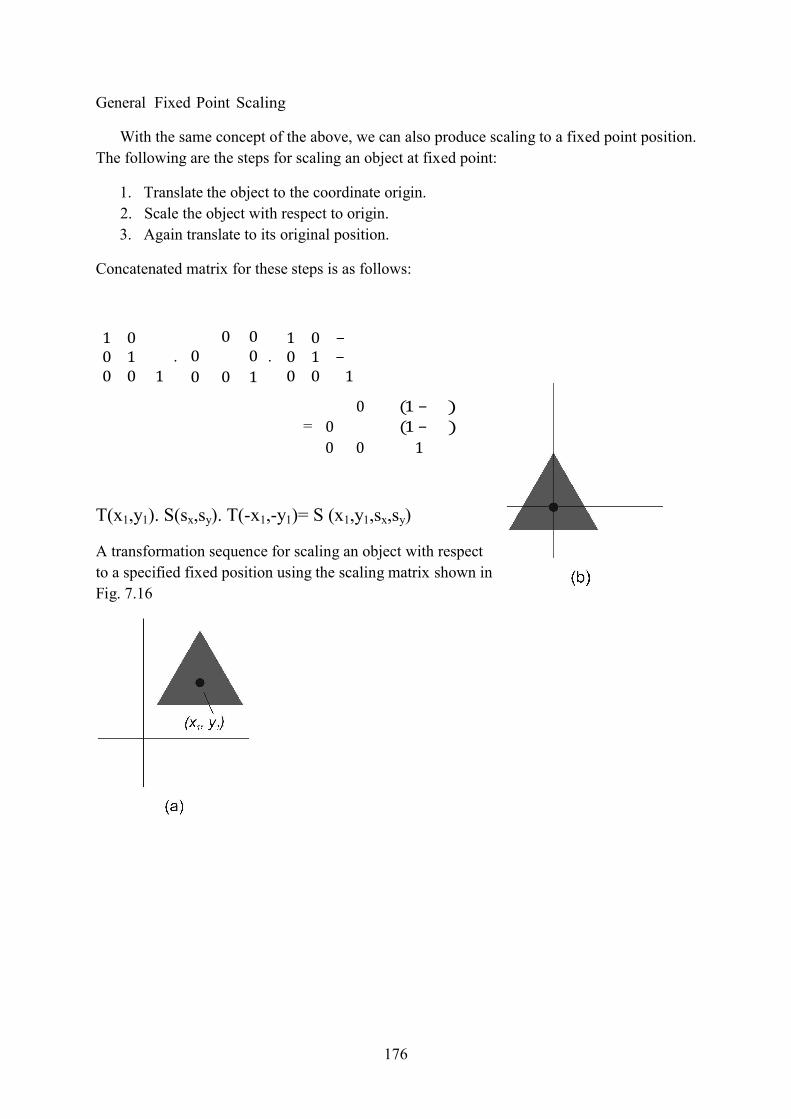
176
0 (1 − ) = 0 (1 − )
0 0 1
T(x1,y1). S(sx,sy). T(-x1,-y1)= S (x1,y1,sx,sy) A transformation sequence for scaling an object with respect
to a specified fixed position using the scaling matrix shown in
Fig. 7.16
1 0 0 0 1 0 − 0 1 . 0 0 . 0 1 − 0 0 1 0 0 1 0 0 1
General Fixed Point Scaling
With the same concept of the above, we can also produce scaling to a fixed point position.
The following are the steps for scaling an object at fixed point:
1. Translate the object to the coordinate origin.
2. Scale the object with respect to origin.
3. Again translate to its original position.
Concatenated matrix for these steps is as follows:

177
Fig. 7.16
Self Assessment Questions:
Q3. What is the general form of scaling with respect to a fixed point P (h, k)?
7.8 Summary Transformation is the process of repositioning any geometric
object to new location either by translation, rotation, scaling
or by other transformations (reflection, shearing) technique.
In translation, the object is moved to new location by adding
translation distance tx and ty. Scaling alters the size of the
objects i.e. the object can be compressed or expanded. This
transformation alters the size by multiplying with scaling
factors sx and sy to the coordinate values. In case of rotation,
an object is rotated about the origin at a certain angle θ. If θ is
the positive angle then the direction of rotation is anti clockwise and clockwise if θ is the
negative angle. Reflection produces the mirror image of graphics object. The reflection is
done by rotating the object 180° about the reflection axis. Shear transformation distorts the
shape of the image in such a way that it seems some layers of the image have been sheared
off from the original image. When geometric transformations are performed in opposite
order, they are known as inverse geometric transformations. Two dimensional
transformations can be represented by 3×3 matrix. In this each coordinate point (x, y) can be
represented with homogeneous coordinate (xh, yh, h). By combining elementary
transformations, we can generate composite transformation. Here we combine basic

178
transformations and multiply matrices, the resultant is called composite transformation
matrix.
7.9 Glossary
Coordinate system- A way to assign numerical coordinates to geometric points. Each point
is in the form of pair (x, y) and is called x-axis and y-axis respectively. The geometric points
is known as a plane.
Geometric transformation- The object is moved relative to a fixed or stationary coordinate
system.
Homogeneous coordinates- a way to represent transformations in matrix form. Two
dimensional transformation can be represented by 3×3 matrix by including homogeneous
parameter h. the value of h can be taken as unity i.e. h=1.
Inverse transformation- When geometric transformations are performed in opposite order,
they are known as inverse geometric transformations. Every transformation has its inverse.
Matrix- Collection of numbers arranged in rows and columns represented by rectangular
array of numbers.
7.10 Answers of Self Assessment Questions
1. In Geometric transformation, the object is moved relative to a fixed coordinate axis.
Example, a car is moving while backdrop scenery is fixed. In Coordinate
transformation, the object is fixed relative to moving coordinate axis. Example, a car
is fixed while backdrop scenery is moving.
2. FALSE
3. Following is the sequence of steps for fixed point scaling:
a. Translate point P (h, k) to the origin.
b. Scale about origin by scaling factors sx and sy along x-axis and y-axis
respectively.
c. Again translate to its original position.
Solutions of EXERCISES
EXERCISE 1
Sol. Rotation matrix is given by cos − sin
Rθ = sin cos
now, θ=45°(given)

179
R45° =
cos45° − sin45° sin45° cos45°
− √ √ 1
= ∵ sin45° = cos45° = √ 2
√ √
7.11 References
1. Computer Graphics, Donald Hearn, M. Pauline Baker, Second Edition
2. Computer Graphics, Shefali Aggarwal
7.12 Model Questions
Q1. What do you mean by Transformations? Explain geometric transformations with suitable
examples.
Q2. Explain composite transformation with example.
Q3. Discuss about the homogeneous coordinate system.

180

181
Lesson- 8
2D Viewing Transformations
Structure 8.0 Objective
8.1 Introduction
8.2 Window-to-Viewport Mapping
8.3 Clipping
8.4 Point Clipping
8.5 Line Clipping
8.6 Cohen-Sutherland Algorithm
8.7 Liang Barsky Algorithm
8.8 Polygon Clipping
8.9 Sutherland-Hodgeman algorithm
8.10 Text Clipping
8.11 Summary
8.12 Glossary
8.13 Answers of Self Assessment Questions
8.14 References
8.15 Model Questions
8.0 Objective
After studying this chapter, students will be able to:
Introduction of windowing concepts.
Understand Viewing Transformations.
Describe clipping and its algorithms.

182
8.1 Introduction
The two dimensional viewing is the concept to view an image from different positions. The
computer graphics images can be drawn either on two dimensional or three dimensional
planes. The two dimensional graphics normally use device coordinates. Any graphics object
that lies partially or completely outside the window then that part will not be viewed. Many
graphics packages allow a user to specify which part of specific picture is to be displayed. A
rectangular area with its edges parallel to coordinate axes where the picture is to be displayed
is called window and the viewing area is known as the viewport. The window describes what
is to be displayed and viewport describe where to display. A window and viewport are
rectangular in standard shape. They can be of any shape like general polygon shapes and
circles. But analysis of these shapes is complex than rectangular shape.
World co-ordinate system:A Cartesian co-ordinate system can be referred to as word
coordinate system (WCS) to display the picture.
Device co-ordinate system:The devices where picture is to be displayed. Normalized device co-ordinate system: The sizes of display devices like monitors differ
from one system to another, a device independent tool introduced to describe the display area
known as normalized co-ordinate system (NDCS). In this system, unit square (1×1) whose
lower left corner is at origin of co-ordinate system.
Viewing Transformation: Viewing transformation can be defined as the mapping of picture
co-ordinates of world co-ordinate system to device co-ordinate system or normalized device
co-ordinate system (NDCS). It can also be referred as windowing transformation or window
to viewport transformation or Normalized Transformation.
Fig. 8.1Viewing Transformation
8.2 Window-to-Viewport Mapping

183
A window is specified by four world co-ordinates: xwmin, xwmax, ywmin and ywmax. Similarly,
a viewport has four normalized device co-ordinates: xvmin, xvmax, yvmin and yvmax (see Fig.
8.2). The main purpose of window-to-viewport mapping is to convert the world co-ordinates
( , ) to its corresponding normalized device co-ordinates( , ). For maintaining the
relative placement of the point in the viewport as in the window, we need:
=
= … (2)
… (1)
Now calculate as:
=
=
− −
( − ) +
−
− ( − ) +
Fig. 8.2 Window-to-viewport mapping
There are total eight co-ordinate values that define window and viewport which are constants.
The normalized transformation N is as follows:
0 (− . + )
N= 0 (− . + )
Where
0 0 1
− − = = − −

184
, are co-ordinates of viewport and
, are co-ordinates of window.
Example1. Derive the normalization transformation N that maps a rectangular window
with x-extent xwmin to xwmax in the x direction and y-extent ywmin to ywmax in the y
direction onto a rectangular viewpoint with x-extent xvminto xvmaxand y-extent yvminto
yvmax
Sol. Scaling transformations
xw = =
yw = =
Normal Transformation
0 (− − + ) 1 0 ( − ) N = 0 (− . + ) 0 1 ( − )
0 0 1 0 0 1
0 (− . = 0 (− .
+
+
)
)
0 0 1
Examle2. Find the normalization transformation that maps a window whose lower left
corner is at (2, 2) and upper right corner is at (3, 4) onto
(a) A viewport that is the entire normalized device screen and
(b) A viewpoint that has lower left corner at (0, 0) and upper right corner (3/2, 3/2).
Sol. The windows parameters are:
xwmin = 2, xwmax = 3, ywmin = 2 and ywmax= 4
The viewport parameters are:
xvmin = 0, xvmax = 1, yvmin = 0 and yvmax= 1
xw = = = 1 yw = = =

185
0 (− . + ) (a) N = 0 (− . + ) 0 0 1
1 0 (− 1 ∗ 2 + 0)
= 0 1 2
− 1
∗ 2 + 0 2
0 0 1 1 0 − 2
= 0 1
− 1 2
0 0 1
(b) xvmin = 0, xvmax = , yvmin = 0, yvmax =
xw = =
3− 0 2 = , 3− 2
yw = =
3− 0 2 = 4− 2
3 0 − 3
2 N = 3 3
0 2
− 2
0 0 1
Self Assessment Questions:
Q1: To change the size and amount of the object, the dimensions of the viewport must be
changed.
(a) TRUE
(b) False
Q2. The rectangular area where a selected object is viewed is known as window.
(a) TRUE
(b) FALSE
8.3 Clipping
Clipping is the procedure that identifies the portions of the picture that are either inside or
outside of a specified region of space. It is also called clipping algorithm. The region or space
which is used to see the object is called as clip window.

186
In the viewing transformation, only
that part of picture is to be displayed which in
inside the clipping window. Everything outside
the window is discarded.
There are four types of clipping:
(1) Point Clipping
(2) Line Clipping
(3) Polygon Clipping or Area Clipping
(4) Text Clipping
8.4 Point Clipping
For point clipping, we assume that the clip window is rectangle in shape. We consider a point
P (x, y) for display if the following conditions are satisfied:
£ £
£ £
The edges of the clip window ( , ) and ( , ) can be either world co-
ordinate window boundaries or viewport boundaries. If any one of the above conditions is not
satisfied, the point is clipped but not saved for display. Point clipping is less required in real
life applications.
8.5 Line Clipping
A line clipping method is used to check whether a line is completely inside or outside a
window and if it is not,we perform intersection calculation with one or more clipping
boundaries. We start by checking the endpoints of the lines and test which points of the lines
comes inside or outside the clip window. A line with both the endpoints inside the clipping
boundary is saved as P1 and P2(see Fig. 8.3). A line with both the endpoints outside the
clipping boundaries is outside the window like P3and P4, P9and P10 (see Fig. 8.3). The P5 and
P6 line, the P5 is outside to the clipping window but P6 is inside the window. So that part of
the line will be visible that comes in clipping window.

187
Before Clipping Fig. 8.3After Clipping
There are two line clipping algorithms:
1) Cohen-Sutherland Algorithm
2) Liang Barsky Algorithm
8.6 Cohen-Sutherland Algorithm
This is one of the oldest and popular lines clipping algorithm. In this we divide the clipping
process into two steps:
1) Determine the lines for clipping which intersect the window.
2) Apply clipping process. The following are the line clipping categories:
a) Visible-In this category, both the endpoints of a line are inside the clipping window.
b) Not Visible- Here, the line segment is completely outside the clipping window. This
will happen when the line segment from (x, y) to (x’, y’) satisfies any one of the four
inequalities.
c) Clipping Candidate- when the line segment condition is neither in category (a) nor
(b). Cohen Sutherland algorithm for line clipping performs following procedure:
1. find the visibility of the line by assigning 4-bit region code to every endpoint of the line.
Each bit in the region code is used to indicate four relative co-ordinate positions of the point
with respect to the clip window (see Fig. 8.4). Bit 1 (left bit) of this code and all other bits are
set to 1 depending upon following conditions:
Bit 1- set to 1 if the endpoint is above the window.
Bit 2- set to 1 if the endpoint is below the window.
Bit 3- set to 1 if the endpoint is to the right of the window.
Bit 4- set to 1 if the endpoint is to the left of the window.

188
Fig. 8.4 A 4 bit region code 2. If both region codes are 0000, the line is visible and the line is inside the window. The line
is not visible, if the logical AND of the region codes is not 0000. If logical AND of the region
codes is 0000 the line is candidate for clipping.
3. Find the intersection points of the line which is candidate clipping with boundaries of
window.
The intersection point of the line is easy to calculate using slope intercept form of the line
equation. Let we have co-ordinates of line (x1, y1) and (x2, y2) and the minimum and
maximum co-ordinates of the boundary lines are (xmin, ymin) and (xmax, ymax).
To find intersection points with vertical boundary i.e. left or right, following equations used:
− 1 = ( − 1)
= ( ℎ )
= ( )

189
To find intersection points with horizontal boundary i.e. top or bottom, following equations
used:
− = +
= ( )
= ( )
After finding intersection points, the new points are generated. Hence, the line is clipped. Example:
Fig. 8.5
The region codes for all points are:
A 0000 D 1010
B 0000 E 1001
C 0000 F 1000 As we can see, the line AB is inside the clip window, so save this line. Perform AND
operation on C and D and E and F

190
C 0000 E 1001
D 1010 F 1000
——
0000 candidate for clipping
——
1000 discard the line
CD line is candidate for clipping. Clipping of CD is performed with top boundary
−
= + … (1)
Ymax = 6, (3, 8) i.e. x1= -1, y1= 5
− = −
8 − 5 3 = = 3 + 1 4
Put values of x1,y1, ymax and m in eq. (1)
6 − 5 = + (− 1)
1 = − 1 =
4 − 1 = 3
4 − 3 1 = 3 3
1 = 3
∴ = = 6
∴ C= (-1, 5) and D= ( , 6)
After Clipping (see Fig. 8.6)

191
Fig. 8.6
8.7 Liang Barsky Algorithm
Liang Barsky line clipping algorithm is faster than Cohen Sutherland algorithm. This
algorithm has been developed using the parametric equation of line. This algorithm reduces
the intersection calculations. The parametric equation of the can be written as:
= + D
= + D
Where u is an independent variable and range of u is from 0 to 1 (see Fig.8.7) and Dx=x2-x1
and Dy=y2-y1.
If value of u is 0 then x will be equal to xmin and y will be equal to ymin. Similarly, if value of
u is 1 then x will be xmax and y will be ymax. Consider point clipping condition in parametric
form as:
£ + D £
£ + D £
The above four inequalities can be written as:
£ , k=1, 2, 3, 4
Where parameters p and q are defined as:
= − D , = 1 − (left)
= D , = − (right)
= − D , = 1 − (bottom)

192
= D , = − (top)
8.7
Fig.
Check the following situations:
if = 0, the line is parallel to the corresponding boundary. If k=1, it will parallel to left boundary. For k=2, it will be parallel to the right boundary. Similarly, for k=3 and k=4, the line will parallel to bottom and top of the boundary and
if < 0 , the line is completely outside the boundary and no clipping is
required. if ³ 0 , the line is inside the parallel clipping boundary.
if < 0 , the line will be proceeded from outside to the inside of the viewport and
the clipping will be required.
if > 0 , the line proceeds from the inside to the outside of the viewport and needs
to be clipped. if ≠ 0 , calculate the value of u where the line intersects the boundary k as:
=
Using above relation we can calculate values of parameters u1 and u2. The value of u1 can be
calculated by the line proceeds from outside to the inside ( < 0). For this we calculate =
/ . The value of u1 is taken as maximum of the set consisting of 0 and values of r. the
value of u2is calculated by from inside to the outside ( > 0) and value of u2 is minimum of
the set consisting of 1 and values of r. if u1>u2, the line is completely outside the clipping window and can be rejected. Otherwise, endpoints of the clipped line are calculated from u1
and u2.
8.8 Polygon Clipping
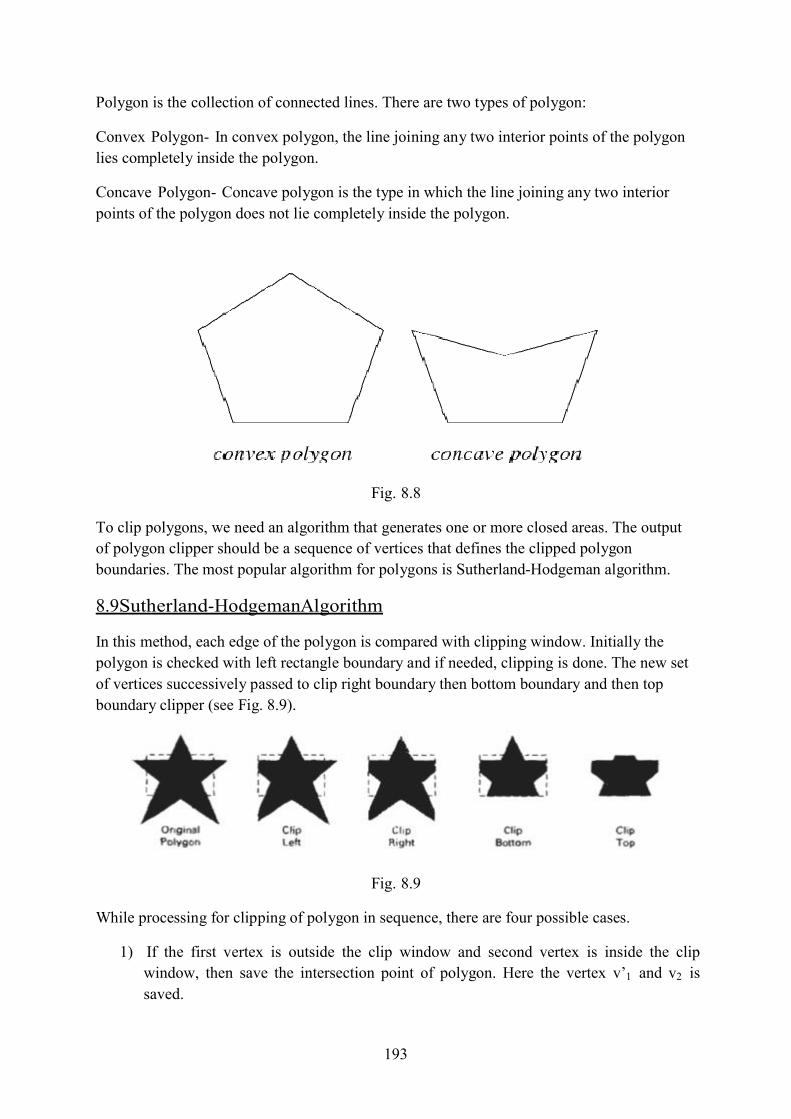
193
Polygon is the collection of connected lines. There are two types of polygon: Convex Polygon- In convex polygon, the line joining any two interior points of the polygon
lies completely inside the polygon.
Concave Polygon- Concave polygon is the type in which the line joining any two interior
points of the polygon does not lie completely inside the polygon.
Fig. 8.8
To clip polygons, we need an algorithm that generates one or more closed areas. The output
of polygon clipper should be a sequence of vertices that defines the clipped polygon
boundaries. The most popular algorithm for polygons is Sutherland-Hodgeman algorithm.
8.9 Sutherland-Hodgeman Algorithm
In this method, each edge of the polygon is compared with clipping window. Initially the
polygon is checked with left rectangle boundary and if needed, clipping is done. The new set
of vertices successively passed to clip right boundary then bottom boundary and then top
boundary clipper (see Fig. 8.9).
Fig. 8.9
While processing for clipping of polygon in sequence, there are four possible cases.
1) If the first vertex is outside the clip window and second vertex is inside the clip
window, then save the intersection point of polygon. Here the vertex v’1 and v2 is
saved.

194
Fig. 8.10
2) If both the vertices are inside the clip window, then save the second vertex only. In
this case, v1 and v2 both are inside the clip window so v2 is saved.
Fig. 8.11
3) If the first vertex is inside the clip window and second vertex is outside the clip
window, then save the intersection point of polygon edge and window boundary i.e.
v’1 and v1.
Fig. 8.12
4) If both input vertices are outside the clip window, then nothing is saved. Both vertices
v1 and v2 are outside of clip window.

195
Fig. 8.13 ple: Clip the polygon P1, P2, P3,…….., P8 against the window LMNO.
Exam
Fig. 8.14
(i) Clip against an edge LM of the clip window.
The vertex output list = I1, I2, P2, P3, P4, P5, P6, P7, P8,
where I1and I2 are intersection points of P1P2, LM, and P1P8, LM respectively.

196
Fig. 8.15. Clipping against bottom edge
(ii) Clip against an edge MN
The vertex output list = I1, I2, P2, I3, I4, P4, P5, P6, P7, P8,
where I3and I4 are intersection points of P2P3, MN, and P3P4, MN respectively.
Fig. 8.16. Clipping against right edge
(iii) Clip against an edge ON
The vertex output list = I1, I2, P2, I3, I4, P4,I5, I6,P6, P7, P8,
where I5and I6 are intersection points of P4P5, ON, and P5P6, ON respectively.

197
Fig. 8.17. Clipping against top edge
(iv) Clip against an edge OL
The vertex output list = I1, I2, P2, I3, I4, P4,I5, I6,P6, I7, I8, P8,
where I7 and I8 are intersection points of P6P7, OL, and P7P8, OL respectively.
Fig. 8.18. Clipping against left edge
So, polygon P1,P2……P8 after applying Sutherland-Hodgeman clipping algorithm will be
transformed to I1, I2, P2, I3, I4, P4,I5, I6,P6, I7, I8, P8.
8.10 Text Clipping
Sometimes it is required to clip text in the clipping window. There are different techniques to
clip the text. The methods are as follows:
All or none string clipping-If the string is completely inside the clip window, then we save
it. Otherwise the string is not saved and discarded (see Fig. 8.19). This is implemented by
considering a bounded rectangle around the string. The boundary positions of the rectangle
are compared to the clip window. If there is an overlap, the string is rejected.

198
Fig. 8.19
or none character clipping-In this method, we discard only these characters that are
pletely inside the clip window (see Fig. 8.20) and not the complete text. Here the
undary limits of each individual character are compared to the window. Any character t
utside the clip window is discarded.
All not
com
bo hat
is o
Fig. 8.20 Individual character clipping-This method checks character by character of the text
whether it is inside or outside the clip window. If the text is present inside the clip window, it
will be displayed. Otherwise it is discarded. If some part of the character is inside and some
part is outside of the clip window then clipping is done so that the part of the text which is
inside the clip window is saved (see Fig. 8.21).

199
Fig. 8.21
Self Assessment Questions:
Q3. In point clipping, the boundary of the clip window can be either world co-ordinate
boundary or viewport boundary.
a. TRUE
b. FALSE
Q4. If the line is either completely inside or not visible, then line is candidate for clipping.
a. TRUE
b. FALSE
8.11 Summary
A rectangular area with its edges parallel to coordinate axes where the picture is to be
displayed is called window and the viewing area is known as the viewport.A window and
viewport are rectangular in standard shape.Viewing transformation can be defined as the
mapping of picture co-ordinates of world co-ordinate system to device co-ordinate system or
normalized device co-ordinate system (NDCS).Window-to-viewport mapping is to convert
the world co-ordinates ( , ) to its corresponding normalized device co-
ordinates( , ). Clipping is the procedure that identifies the portions of the picture that are
either inside or outside of a specified region of space.Only that part of picture is to be displayed which in inside the clipping window. Everything outside the window is
discarded.A line clipping method is used to check whether a line is completely inside or
outside a window and if it is not,we perform intersection calculation with one or more
clipping boundaries. We start by checking the endpoints of the lines and test which points of
the lines comes inside or outside the clip window. Polygon is the collection of connected
lines.There are two types of polygon: Convex Polygon- In convex polygon, the line joining
any two interior points of the polygon lies completely inside the polygon. Concave Polygon-

200
Concave polygon is the type in which the line joining any two interior points of the polygon
does not lie completely inside the polygon. In Sutherland-Hodgeman Algorithm, each edge
of the polygon is compared with clipping window. Initially the polygon is checked with left
rectangle boundary and if needed, clipping is done. The new set of vertices successively
passed to clip right boundary then bottom boundary and then top boundary clipper. Text
Clippingis required to clip text in the clipping window. There are different techniques to clip
the text. All or none string clipping, all or none character clipping and Individual character
clipping.
8.12 Glossary
Clipping-The method that identifies the portions of the picture that is either inside or outside
of a specified region of space.
Device co-ordinate system:The devices where picture is to be displayed. Normalized device co-ordinate system: A device independent tool introduced to describe
the display area known as normalized co-ordinate system (NDCS). In this system, unit square
(1×1) whose lower left corner is at origin of co-ordinate system.
Viewing Transformation: The mapping of picture co-ordinates of world co-ordinate system
to device co-ordinate system or normalized device co-ordinate system (NDCS).
Viewport- Describe where the picture is to be displayed. Window-The window describes what is to be displayed.
World co-ordinate system:A Cartesian co-ordinate system can be referred to as word
coordinate system (WCS) to display the picture.
8.13 Answers of Self Assessment Questions
1. TRUE 2. TRUE
3. TRUE
4. False
8.14 References
3. Computer Graphics, Donald Hearn, M. Pauline Baker, Second Edition
4. Computer Graphics, Shefali Aggarwal
5. Introduction to Computer Graphics, Ravi Khurana, Amit Dawar.
8.15 Model Questions

201
Q1. What is line clipping? Explain Cohen-Sutherland line clipping.
Q2. Explain Sutherland-Hodgeman algorithm for polygons.
Q3. Distinguish between window and viewport. Q4. What is clipping? What are different types of clipping?

202
Chapter- 9
3-Dimensional Graphics
Structure 9.0 Objective
9.1 Introduction
9.2 Geometric Transformations
9.2.1 Translation
9.2.2 Scaling
9.2.3 Rotation
9.2.4 Reflection
9.2.5 Shearing
9.3 Projection
9.3.1 Parallel Projection
9.3.2 Perspective Projection
9.4 3-D Viewing
9.4.1 View Plane Coordinate System
9.4.2 World to View Plane Coordinates Transformation
9.4.3 View Volume
9.5 Clipping
9.5.1 3D Line Clipping Algorithm
9.5.2 3D Polygon Clipping Algorithm
9.6 Summary
9.7 Glossary
9.8 Answers of Self Assessment Questions
9.9 References
9.10 Model Questions

203
9.0 Objective
After studying this chapter, students will be able to:
3D Geometric Transformation Representation Explain Projections 3D Viewing and Clipping
9.1 Introduction
The three dimensional graphics include three axes x, y and z. x and y axes are used as two
dimensional plane. The z-axes can be shown in two directions. There are two methods of
placing z-axis. These are right handed system and left handed system. In right handed system
the z-axis is in positive direction and in left handed system the z-axis is in negative direction
as shown in Fig. 9.1. For representing any coordinate in the 3 dimensional we should have all
the values of x, y and z axes.
Fig. 9.1
9.2 Geometric Transformation
Like 2 dimensional systems, three dimensional systems also have geometric transformations.
The basic geometric transformations are translation, scaling and rotation and other
transformations are reflection and shearing.
9.2.1 Translation
Translation is the method to change the position of an object from one position to another
along a straight line path. We translate three dimensional objects by adding translation
distances tx , tyand tz to the original co-ordinates(x, y, z) to move object to a new position x’,
y’ and z’ as:

204
0 0 0
.
0 0 0 0 0 0
1 0 0 0 1 1
’= +
’= +
’= +
where , are the translation distances
along x, y and z directions respectively.
In three dimensional homogeneous system, a point P
having co-ordinates (x, y, z) is translated to new position the co-ordinates changes to (x’, y’,
z’). In two dimensional homogeneous systems we represent co-ordinates in 3×3 matrix.
In three dimensional homogenous systems it is converted in 4×4 matrix as follows:
1 0 0 0 1 0
= . 0 0 0
1 0 0 0 1 1
’= .
If we apply negative values of translation distances, the object will moves towards origin.
This is called inverse translation.
Fig. 9.2
9.2.2 Scaling
Scaling transformation is used to change or alter the size of the object. The scaling
transformation is carried out by multiplying the co-ordinates(x, y, z) of each vertex by scaling
factors sx, syand sz for transformed co-ordinates (x’, y’, z’) as:
’ = .
’ = .
’ = .
The matrix representation of the above equations is as follows:
=
’= .

205
e
e
y
s
ed
′ 0 0 1 0
1 0 0 0 1 1
where , , are scaling factors.
The values of , , are:
Any positive real value can be assigned to scaling factors.
e) If the value of , , <1, size of the object will b reduced and moves towards origin.
f) If the value of , , >1, size of the object will b
increased and moves away from origin. g) If = = , size of the object will reduced b
same size in all directions. This type of scaling i called UniformScaling.
h) If factors are different,this type of scaling is call
Differential Scaling. The inverse scaling matrix can be generated by taking
reciprocal of scaling factors.
9.2.3 Rotation To rotate an object we must select an axis for rotation, about
which the object is to be rotated and the rotation angle θ. If θ
is positive angle, the direction of rotation is anti-clockwise
about the coordinate axes and if θ is negative angle, the
direction of rotation is clock wise. The two dimensional
equations are easily extended to three dimensions in
rotation. Rotation about z-axis
Here the z coordinate remains same in the new position.
’ = cos – sin
’ = +
’= Fig. 9.3
The matrix representation of the above equations is as follows:
cos − sin 0 0 sin cos 0 0
= .
’= , .
Where , is the rotation matrix about z-axis by an angle θ. Fig. 9.4

206
1 0 0 0 0 cos − sin 0
Rotation about x-axis Rotation about other axes is same as rotation about z-axis and can be obtained with a cyclic
permutation of the coordinate parameters x, y and z. So x is replaced with y, y with z and z
with x.
Equations for rotation about x- axis are:
’ =
’ = cos – sin
’= +
The matrix representation of the above equations is as follows:
′ =
0 sin cos 0 .
1 0 0 0 1 1
’= , .
Where , is the rotation matrix about x-axis by an angle θ.
Rotation about y-axis Rotation about y-axis can be obtained from rotation about x-
axis using cyclic permutation.
Equations for rotation about y- axis are:
’ = +
’ = y
’= cos – sin
The matrix representation of the above equations is as follows:
cos 0 sin 0 0 1 0 0
′ =
− sin 0 cos 0 .
1 0 0 0 1 1
’= , .
Fig. 9.5

207
1 0 0 0 0 1 0 0 0 0 − 1 0 0 0 0 1
1 0 0 0 1 0 0 0 1 0 0 0 0 1
Where , is the rotation matrix about y-axis by an angle θ.
9.2.4 Reflection
A reflection is the transformation that produces the mirror image of graphics object. The
mirror image for three dimensional reflections is generated relative to axis of reflection by
rotating the object 180° about the reflection axis. Reflection of any object can be obtained in
any of the xy plane, xz plane or in yz plane. For example, a reflection from right handed
system to left handed system. This transformation changes the z coordinate and other
coordinates remains same.
’ =
’ = y
’= −
The matrix representation relative to plane is as follows:
=
Similarly, reflections relative to yz and xz plane can also be done in same manner.
9.2.5 Shearing
This transformation distorts the shape of the image in such a way that it seems some layers of
the image have been sheared off from the original image. A shear along a coordinate axis will
change the values of the other two coordinates by an amount to its distance from the third
axis. Like two dimensional shearing along x and y axes distorts the shapes of the object we can
also use it in three dimensional along z axis. The following transformation matrix produces a
z axis shear.
SHz =
Any real values can be assigned to theparameters a, b. The values of x and y coordinates
changes and z coordinate remains same.
Self Assessment Questions:

208
Q1. In three dimensional transformations, the representation of homogeneous coordinates is
in 3×3 matrix.
(a) TRUE
(b) FALSE
9.3 Projections
Projections can be defined as mapping of a point P (x, y, z) onto its image P’ (x’, y’, z’) in the
projection plane or view plane. The mapping is determined by a projection line called the
projector which passes through P and intersects the view plane. Based on the spatial
relationship between the projection lines and view plane projection methods can be divided
into two types:
1) Parallel Projections
2) Perspective Projections
9.3.1 Parallel Projections
In parallel projection, the viewing coordinate positions are transformed to the view plane
along parallel lines. The point at which projection lines meet the view plane forms the
projected image of the object point. All these projection lines are parallel to each other, so
this type of projection is called parallel projections. A parallel projection preserves the
relative dimensions of the object. Parallel projection is used by architects and drafters to
create scale drawings.
Parallel Projection is of two types:
(i) Orthographic parallel projection
(ii) Oblique parallel projection When the projection is perpendicular to the view plane, it is called orthographic parallel
projection. When the projection is not perpendicular to the view plane, it is called oblique
parallel projection.
9.3.1.1 Orthographic Parallel Projections
In orthographic projections the direction of the projection lines are parallel to each other and
perpendicular to the view plane. Orthographic parallel projection is of two types: Multiview
orthographic parallel projection and axonometric orthographic parallel projection.

209
(a) Multiview Orthographic Parallel Projection
When the direction of projection lines is parallel to any of the principal axis this is called
multiview
orthographic parallel projections. This projection is used to create front, side and top views of
the objects. Front, side and rear orthographic projections are called elevation views. The top
orthographic projection is called plan view.
Fig. 9.6
(b) Axonometric Orthographic Parallel Projection

210
When the direction of projection lines is not parallel to any of the principal axes, then it is
called axonometric orthographic parallel projection. This projection is not perpendicular to
any principal axis. The axonometric projections are of three types:
(i) Isometric Projection: The direction of projection lines makes equal angles with
all the three axes. The view plane intersects each principal axes at the same
distance from origin.
(ii) Diametric Projection: The direction of projection lines makes equal angles with
exactly two of the principal axes.
(iii) Trimetric Projection: The direction of projection lines makes unequal angles
with all the three principal axes. In this case, the view plane intersects the
principal axes at different distances from origin.
Fig. 9.7
Transformation equations for parallel equations are easy to find. If P (x, y, z) is any point
then transformation of this point on the view plane is as follows:
’=
’=
’= 0
Where z coordinate is preserved for depth information and used in depth sorting as hidden surface removal purposes.
9.3.1.2 ObliqueParallel Projections

211
In this
projection, the parallel projection lines those are not perpendicular to the view plane but
specified by some angle to it. The direction of oblique parallel projection is specified by two
angles θ and . The point P (x, y, z) is projected to position P’ (x’, y’) on the view plane. The
Q (x, y) is the orthographic projected point on the view plane. Then length of the line joining the oblique projected point P’ (x’, y’) and the orthographic projected point is Q (x, y) is L. θ
is the angle with projection line makes with L. and is the angle that L makes with horizontal
direction of the view plane.
Fig. 9.8
From P’QA,

212
’= + ’= +
’= + ′
’= + ′
− cos =
And
− =
The projection coordinates as:
…(1)
Length L depends not only on an angle θ but also on z coordinate where the point is
projected. Closer the point is to the view plane smaller will be angle θ and line L.
From PP’Q,
tan =
=
= ’
’=
The above eq. (1) can be written as:
…(2)
Also z’=0 on the view plane. The above transformation eq. can be expressed as:
1 0 cos 0
0 1 sin 0
= . ′ 0 0 0 0
1 0 0 0 1 1
’= .
Where is called oblique parallel projection matrix.
The oblique parallel projection is of two types:
(a) Cavalier Projections

213
The common type of oblique projections is cavalier projection. Here tan θ=1 i.e. θ=45°. This
means the projection lines make an angle of 45° with the view plane. All lines perpendicular
to the view plane are projected with no change in length.
Fig. 9.9
(b) Cabinet Projections
Here the value of tan θ=2 i.e. 63.4°. this means the direction of projection makes an
angle of 63.4° with the view plane. All line perpendicular to the view plane are projected
one-half their angles.
9.3.2 Perspective Projections
For perspective projections the viewing coordinate positions are transformed to the view
plane along lines that meet at the projection reference point. The perspective projections are
commonly used by artists and designers to draw 3 dimensional objects and scenes.
Perspective projection gives realistic views of 3 d objects. Perspective foreshortening is an
illusion of the objects appear smaller as their distance from projection reference point
increases.
For perspective projections the transformations equations are placed on the view plane at -
distance zvpfrom the origin along the negative viewing zv axis. let P (x, y, z) is any object -
point then we draw projection line from P towards view plane that meets zv axis. at the
projection reference point C. the parametric equation for perspective projection can be as
follows:
’= −

214
’= −
’= − ( + )
Where varies from 0 to 1.
When = 0,then above eq. is as follows:
’=
’=
’=
But when u=1 then,
’= 0
’= 0
’=
And its projection reference point (0,0,− )
On the view plane, ’= − . Using this value of ’in above eq. we get
’= − ( + )
− = − ( + )
+ = ( + )
+ = +
Putting this value of u in parametric equations of x’ and y’, we get
+ ’= −
+
+ = (1 − ) +
+ − = .( ) +
− ’= .( ) +
Similarly

215
1
− ’= .( ) +
Also ’= −
The matrix representation of the above equations is as follows:
1 0 0 0 ⎡0 1 0 0 ⎤ ⎢
′ = ⎢0 0
⎢ 0 0 ⎣
. ⎥ ⎥.
⎥ 1
⎦
Vanishing Points
The point at which the set of projected lines appear to converge is called a vanishing point.
Each such set of projected parallel lines will have a separate vanishing point. The vanishing
point for any set of lines that are parallel to one of the principal axes of an object is said to be
as a principal vanishing point. We can control the number of principal vanishing points (one,
two or three) with the orientation of the projection plane and perspective projections are
classified as one-point, two-point or three point projections. The number of principal
vanishing points in a projection is determined by the number of principal axes intersecting the
view plane.
(a) One Point Perspective Projection When the view plane intersects one of the principal axes hence one principal vanishing point
is generated. This is called one-point perspective projection.
(b) Two Point Perspective Projection When the view plane intersects two of the principal axes then two principal vanishing points
are generated. This is called two-point perspective projection.
(c) Three Point Perspective Projection When the view plane intersects all the three principal axes then three principal vanishing
points are generated. This is called three-point perspective projection.

216
Fig. 9.10
9.4 3 D Viewing
Three dimensional viewing is much complex than two dimensional viewing. In three
dimensional viewing, the objects for view needs the projection plane or view plane and a
centre of projection known as viewpoint or the direction of projection and a view volume in
world coordinates.
9.4.1 View Plane coordinate system
To represent 3D objects onto a view plane, the object descriptions in world coordinates need
to be transformed to the coordinates of the view plane called viewing coordinates. First we
need to create a View Coordinate Reference Frame that needs the specification of the view
plane and its orientation. As discussed earlier, the view plane is perpendicular the viewing z-
axis.
For establishing, the view plane coordinate system or the Viewing Coordinate Reference
Frame, first we choose a point close to the object. This point in world coordinate system is
called View Reference Point (VRP). It is the origin of the View Coordinate Reference Frame
to be established. The view reference in world coordinate can be taken as ( , , ).
9.4.2 World To View Plane Coordinates Transformation
The general world coordinate system to view plane coordinate systems transformation is a
series of following transformation:
1. Translate the view plane reference point ( , , ) to the origin of world
coordinate system.

217
2. Rotate the view plane about axis with axis of the view plane for transformation matrix , . After this transformation we also get axis of the view plane. 3. Convert the right handed system to left handed system by applying the transformation
matrix. 9.4.3 View Volume
In 3D viewing, how much of the scene is to be projected on the view plane? In 2D viewing
we had view-window that bounded the region to be displayed on a device screen. Similarly,
we have a 3D viewing to bound the region of the scene in world coordinates to be projected
on the view plane and display on the screen. The portion of the scene which lies outside the
view volume is clipped or discarded.
9.5 Clipping
Three dimensional clipping finds and saves all portions of the image which is inside the
boundaries of the view volume for projection onto the view plane. The portions of image
which is outside the view plane are clipped or discarded and will not be projected onto the
view plane.
In two-dimensional viewing, tosimplify calculations;direct clipping is performed against the
boundary edges of a clip window which is aligned with x and y axes.But in these dimensional
viewing,clipping is performed against a view volume whose boundary planes can have any
position depending on the type of projection, the view window and the position of projection
referencepoint. The front and back clipping planes are kept parallel to the view plane,and so
they have constant z-coordinates values ,but the other four planes can have any position
.Finding the intersection points of edges of the objects in the scene with equations of the
boundary planes demands a great deal of calculations.
Two strategies are used for three dimensional clipping:
1) Direct Clipping: In this method, the clipping is done directly against the view
volume.
2) Canonical Clipping: Here, normalizing transformations are applied which transform
the view volume into canonical view volume. Then clipping is performed against the
canonical view volume.
Canonical view volume for parallel projection is unit cube defined by planes
= 0, = 1, = 0, = 1, = 0, = 1
Canonical view volume for perspective projection is unit cube defined by planes
= , = − , = , = − , = , = 1
Where is to be calculated.
9.5.1 3D Line Clipping Algorithm
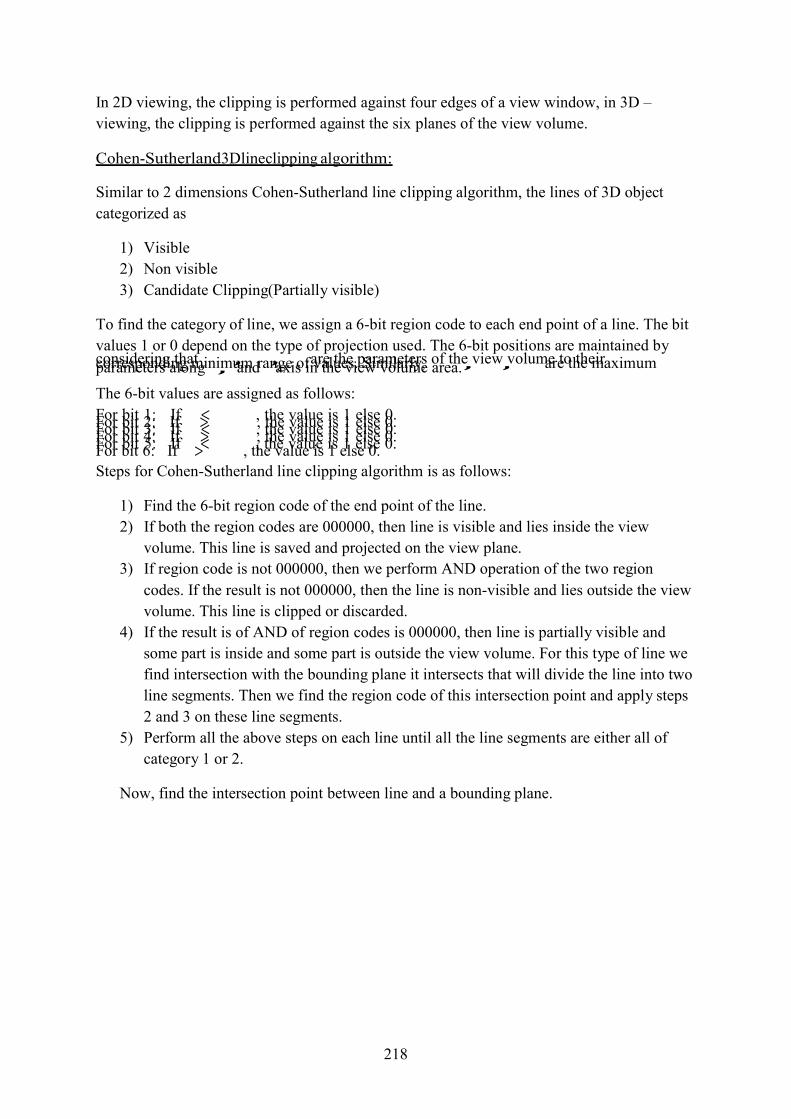
218
In 2D viewing, the clipping is performed against four edges of a view window, in 3D –
viewing, the clipping is performed against the six planes of the view volume. Cohen-Sutherland 3D line clipping algorithm:
Similar to 2 dimensions Cohen-Sutherland line clipping algorithm, the lines of 3D object
categorized as
1) Visible
2) Non visible
3) Candidate Clipping(Partially visible) To find the category of line, we assign a 6-bit region code to each end point of a line. The bit
values 1 or 0 depend on the type of projection used. The 6-bit positions are maintained by considering that , , are the parameters of the view volume to their corresponding minimum range of values. Similarly, , , are the maximum parameters along , and axis in the view volume area.
The 6-bit values are assigned as follows: For bit 1: If < , the value is 1 else 0. For bit 2: If > , the value is 1 else 0. For bit 3: If < , the value is 1 else 0. For bit 4: If > , the value is 1 else 0. For bit 5: If < , the value is 1 else 0. For bit 6: If > , the value is 1 else 0.
Steps for Cohen-Sutherland line clipping algorithm is as follows:
1) Find the 6-bit region code of the end point of the line.
2) If both the region codes are 000000, then line is visible and lies inside the view
volume. This line is saved and projected on the view plane.
3) If region code is not 000000, then we perform AND operation of the two region
codes. If the result is not 000000, then the line is non-visible and lies outside the view
volume. This line is clipped or discarded.
4) If the result is of AND of region codes is 000000, then line is partially visible and
some part is inside and some part is outside the view volume. For this type of line we
find intersection with the bounding plane it intersects that will divide the line into two
line segments. Then we find the region code of this intersection point and apply steps
2 and 3 on these line segments.
5) Perform all the above steps on each line until all the line segments are either all of
category 1 or 2.
Now, find the intersection point between line and a bounding plane.

219
Let a line present between two points ( , , ) and ( , , ). The
parametric equation of line is as follows:
= + ( − )
= + ( − )
= + ( − )
To find the intersection point of the line, consider an edge from the view volume. By considering, the view from the front plane of the viewing area, we take z-axis.
Here, =
Putting the value of z in above equation:
=
( − ) ( − )
Put values of u in x and y
= + ( − )
( − ) ( − )
( − )
= + ( − ) ( − )
The coordinate ( , ) will represent the coordinate of the intersection point.
9.5.2 3D Polygon Clipping Algorithm
3D-polygon clipping algorithms are also an extension of their 2D-counter parts.Where as in
2D viewing,a polygon is clipped against a view window;in 3D the polygon is clipped by
processing the polygon boundary formed by its vertices against each boundary plane of the
view volume.
3D Sutherland-Hodgeman Polygon Clipping Algorithm
The 3D Sutherland-Hodgeman polygon clipping algorithm is similar to 2D Sutherland –
Hodgeman Polygon clipping algorithm. The only difference is that instead of processing the
polygon edges against each view window boundary, we process the polygon edges against
the view volume as a whole. Four possible cases can be as follows:
(1) If first vertex is outside the view volume and second is inside, then we save both the
intersection point of polygon edge with the boundary plane it intersects and the
second vertex.
(2) If both the first and second vertices are inside the view volume, then we save the
second vertex.

220
(3) If the first vertex is inside and second vertex is outside the view volume,then we save
the intersection point of polygon edge with boundary plane it intersects.
(4) If both the first and second vertices are outside the view plane, then we save none.
Self Assessment Questions:
Q2. The polygon edges are clipped that lie outside the window boundary.
(a) TRUE
(b) FALSE
Q3. Parallel projections are the two dimensional objects that are placed on a three
dimensional projection plane.
(a) TRUE
(b) FALSE
9.6 Summary
Viewing procedures for three dimensional scenes follow the two dimensional viewing. We
started a viewing coordinate reference frame and transfer objects from world coordinates to
viewing coordinates. Unlike two dimensional viewing, three dimensional viewing requires a
projection to transform object to a viewing plane before the transformation to device
coordinates.
Parallel projections are either orthographic or oblique. Orthographic parallel projections that
display more than one face of an object are called axonometric projections. Commonly used
oblique projections are the cavalier and cabinet projection. Objects in three dimensional
scenes are clipped against a view volume. The top, bottom, and sides of the view volume are
formed with planes that are parallel to projection lines.
9.7 Glossary
Viewing transformation- That converts 3D world coordinates to 3D viewing. Viewport- Rectangular area where picture is to be displayed.
Projections-Mapping of a point P in the projection plane or view plane.
Clipping-The method that identifies the portions of the picture that is either inside or outside
of a specified region of space.

221
9.8 Answers of Self Assessment Questions
1. FALSE 2. TRUE
3. FALSE
9.9 References
6. Computer Graphics, Donald Hearn, M. Pauline Baker, Second Edition
7. Introduction to Computer Graphics, Ravi Khurana, Amit Dawar.
9.10 Model Questions
Q1. What do you mean by projection? What are its various types.
Q2. What is the difference between perspective and parallel projection.
Q3. Explain 3D geometric transformations.
Q4. What is clipping? How 2D and 3D line clipping algorithms.

222
Chapter – 10
Hidden line and Surfaces elimination algorithm Structure of the chapter
10.0. Objective
10.1. Need for hidden line and surface elimination algorithms
10.2. Z-buffer algorithm
10.3. Painters algorithm
10.4. Scan line coherence
10.5. Area subdivision algorithm
10.6. Summary
10.7. Glossary
10.8. Answers to check your progress / self assessment questions
10.9. Model Questions
10.0. Objective
After studying this chapter, the student will be able to:
Explain what is hidden line and surface elimination.
Answer what is the need of hidden line and surface removal algorithms in computer
graphics.
Explain some most commonly used algorithms for removing hidden objects.
Explain Z-buffer algorithm, Painters algorithm, Scan line coherence and Area
subdivision algorithm in detail.
10.1. Need for hidden line and surface elimination algorithms When we attempt to view a picture that contains some non-transparent things or surfaces,
then those objects or surfaces are hidden from us i.e. we cannot view those parts that are
behind the objects that we can see. We should remove such hidden surfaces to get a realistic

223
view of an image. Hidden surface problem is a process in which we identify and remove the
hidden surfaces of a picture as shown in figure 10.1.
Objects in computer graphics are generally represented in the three-dimensional system.
Usually most of the objects are not transparent, so we deal with the outer surfaces of the
objects. The properties such as shape, color and texture affect the graphical representation of
any object. In three dimensional, it is difficult to implement a wire-frame drawing of a solid
object as it includes those parts of the object which are hidden and thus there is a need for
some kind of hidden-line or hidden-surface removal. Although many algorithms for hidden
surface removal exist but not a single one can work well that can consider all the cases.
Many algorithms are there in computer graphics which are used to remove hidden lines and
surfaces. They are classified as follows:
(i) Object-Space Algorithms: These algorithms directly deal with the object
definition and their visibility is decided by line or surface. They include:
Back-Face Removal Algorithm
Depth Sorting ( or Painter’s Algorithm)
Area Subdivision Algorithm
Binary Space Partition Trees
(ii) Image-Space Algorithms: These algorithms deal with the projected image and
their visibility is checked point by point. They include:
Depth Buffer ( or Z-buffer Algorithm)
Scan-Line Algorithm
Depth Sorting (or Painter’s Algorithm) Both categories use sorting and coherence techniques since sorting methods are used to
compare the depth values and coherence is required to make use of the regularities in the
scene.
Check your progress/ Self assessment questions
Q1. Which algorithms deal directly with the object definition?

224
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------
10.2. Z-buffer algorithm
Depth comparisons:
We use hidden surface elimination algorithms to determine the edges and surfaces that are
visible either alongside the direction of projection in case of parallel projection or from the
center of the projection in case of perspective projection. If there are two points to view – A(
x1 , y1 , z1 ) and B (x2 , y2 , z2 ) in three dimensional coordinate system, then we use the
following steps to find out which point is hidden from the other:
(i) If A and B are not lying on the same line of projection, then neither point is hiding
the other point i.e. both points are visible.
(ii) If A and B lie on the same line of projection, then we use depth buffer algorithm (
or Z-buffer algorithm) to find the point that is hiding the other point.
In the case of parallel projection onto xy-plane, A and B will be in the same plane if x1 = x2
and y1 = y2. Now if z1< z2 then point A is in front of point B i.e. B is the hidden point as
shown in figure 10.2.
In the case of perspective projection, same is done viewing objects from the center of the
projection as shown in figure 10.3.
Z-buffer algorithm
Z-buffer Algorithm is modern and the most commonly used image-space method to detect
visible surfaces. It compares the surface depths at each pixel location on the projection plane.
It is also known as Depth Buffer Algorithm and it is the simplest one. It was introduced by
Edwin Catmull in 1974.

225
As its name imply, we need a z-buffer, which stores the depth values for every (x,y) position
when we process the surfaces. Initially, all the values in the depth z-buffer are set to the
farthest z value. We process each surface mentioned in the polygon tables and the z-value is
calculated for each position taking one scan line at one time. If the new calculated depth
value is small than the stored value in our z-buffer, then we store this new value.
This z-buffer is generally set as a two-dimensional array (x-y) with one value for each screen
pixel. If there is another object that should be rendered in the same pixel value, then 3-D
graphics card will compare the two depth value and it will choose the one which is closer to
the observer. The chosen depth value is then added to the z-buffer, replacing the old value.
The granularity of the z-buffer plays an important role in the scene quality: a 16-bit z-buffer
usually results in artifacts (called "z-fighting") when two objects are too close to each other.
A 24-bit or 32-bit z-buffer behaves comparatively better, although additional algorithms are
required to completely eliminate the problem. An 8-bit z-buffer is never used because of its
little precision.
In this algorithm, we use some coherence. Commonly used is point-by-point coherence
because the z-value of adjacent horizontal positions across the scan line is easily calculated
by adding some constant value to the previous z-value. Also, on every scan line, we can
simply calculate z-value at the starting point using the previous starting point of the previous
scan line.
So, this method is quite easy to implement and no sorting of the surface is required in a scene.
But there is a requirement of the availability of a second z buffer in addition to the frame
buffer.
In this algorithm, we will use two arrays : intensity and depth. Each array is indexed by pixel
value (x, y).

226
(i) For all the pixel values on the screen, set depth[x, y] = 1.0 (in the z-buffer) and set
intensity[x, y] to a background value.
(ii) For each polygon, find all the pixel positions that are within the boundaries of the
polygon when they are projected on the screen for each pixel.
Calculate the depth value Z of the polygon at the position (x, y).
If Z < depth[x, y], this means this pixel value is closer to the observer than
already recorded value for this pixel, so it will replace the previous value.
If Z > depth[x,y], this means the closest value of this pixel has already
been recorded in the depth buffer and no change is done to the buffer.
Pseudo code of this algorithm is given as follows:
For each polygon P
For each pixel (x, y) in P
Calculate z_depth at x, y
if z_depth < z_buffer (x, y) then
set_pixel (x, y, color)
z_buffer (x, y) = z_depth
If the points A( x1 , y1 , z1 ) and B (x2 , y2 , z2 ) are to be scan converted at a pixel P (x, y) and
if z1< z2 , A is hiding B and depth of A will be z1 = z value.
Advantages of z-buffer algorithm:
It is quite simple to implement.
It projects wire frame models onto the screen.

227
Disadvantages:
It may paint the same pixel numerous times and hence computing the color of a pixel
may be costly.
The Z-buffer algorithm is not always practical because of the erroneous size of the
depth array and the intensity array.
It consumes much of the CPU time.
It requires large amount of memory.
Example: Let us consider a z buffer with range of 0 (at the screen) to 10 (at the far clipping
plane), and having a 6x6 pixel image. We are taking four polygons here and will explain how
some parts of these polygons are hidden and are not shown on the display screen. Let us see
how it works:
Initialization:
All the z values are set to maximum.
Rendering polygons:
Polygon 1: Given :
Depth=4; vertex1=(1,1); vertex2=(1,3); vertex3=(3,3); vertex4=(3,1)

228
etely rendered because there is nothing to
0); vertex1=(3,2); vertex1=(5,2); vertex1
This polygon is compl obscure it.
Polygon 2: Given:
Depth=2; vertex1=(3, =(5,0)
This polygon is closer to the viewer than the red one, so it is drawn entirely.
Polygon 3: Given:
Depth=8; vertex1=(2,2); vertex2=(2,5); vertex3=(4,5); vertex4=(4,2)

229
his polygon has a higher depth value tha
fer does not allow some part of it to be dr
0); vertex2=(2,3); vertex3=(5,3); vertex4=
As it can be seen that t n the
previous polygons, so the z buf awn.
Polygon 4: Given:
Depth=4; vertex1=(2, (5,0)
This polygon is drawn hiding some portion of the red and purple polygons, but is
itself obscured by the yellow polygon.
Check your progress/ Self assessment questions
Q2. Which type of coherence is used in z-buffer algorithm? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------

230
Q3. Why Z-buffer algorithm is time consuming?
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------
10.3. Painter’s Algorithm
Painter’s algorithm is also called as depth sorting algorithm in which first the surfaces are
sorted according to their depth values in the decreasing order and then we start the scan
conversion with the surface having greater depth. Just like a painter paints the most far-off
objects first and then paints the closer objects and foreground objects are painted over the
background objects on the drawing canvas and rest of the objects which are of least interest
are painted separately, similar approach is used in this algorithm. Figure 10.5 illustrates this
approach of painter’s algorithm.
To describe Painter’s Algorithm, we use the following pseudo-code:
sort polygons by z;
for all polygon p do
for all pixel(x, y) ϵp do
paint polygon.colour;
end for
end for
Algorithm:
1. Arrangethe surfaces according totheir z-value. 2. Select the surface having thegreatest depth. 3. Select the next greatest-depthsurface. 4. If there is no depth overlap, then paint the surfaces.

231
5. If there is depth overlap, then we will carry out a number of tests to find whether surface projections (X and Y)overlap or not. These cases are shown in figure 10.6.
Being an object space algorithm, it considers all the objects in the scene. Therefore, some
sorting algorithms are used to sort all the polygons in the scene are by depth. There are
number of ways that define a polygon's depth that range from calculating the z-value in the
middle of the polygon, to the z-value farthest from the given view point. After all the
polygons are sorted depending on their z-values, they are painted from back to front. Pixels
of each polygon are painted until the final and closest object is painted.
We take k as the number of polygons in a picture, and n as the number of pixels in the
resolution of the screen. It is clear that Painter's algorithm which is painting from backto
front, going through each pixel of every object, has a complexity of O(kn). This is ignoring
the sorting algorithm which is used to sort each object according to it's z-value.The efficiency

232
of Painter's algorithm actually depends on the method of sorting, and using a simple sorting
algorithm, a worst case complexity of O(n2) is achieved, with an average complexity of O(nlog(n)).
Example: The above algorithm can be understood with the help of following example. Here we are
taking a set of triangle as shown in figure 10.7.
First we will create a depth order table as shown below:
Triangle Behind Counter List of triangle in front
1
2
of it
5
2
0
4,3,1
3
2
1,5

233
4 1 3
5
2
-
6
0
-
The Behind Counter tells the number of triangles that are behind the given triangle.
Step 1: We will paint those triangles first which are not in front of any triangle. From the
above table, we will see that triangle number 2 and 6 are not in the front list which means
they will be painted first. New behind counter is calculated in this step.
Triangle Front list Behind Counter Output New behind
counter
1
5
2
1
2
4,3,1
0 6
-1
3 4
1,5
3
2
1
2 1
0
5
-
2
2
6
-
0
-1
Because the triangles 2 and 6 have been painted now, so their new behind counter is set to -1
as their initial behind counter value was 0. Remaining values are also modified by
eliminating the count of 2 and 6 numbered triangle from them.
Step 2: As we can see from Step 1 table that the only triangle whose new behind counter is 0
is 4 so it will be painted next.
Triangle Front list Behind Counter Output New behind
counter
1
5
1
1
2
4,3,1
-1
-1
3
1,5
1
0
4
3
0
-1
5
-
2
2
6
-
-1
-1
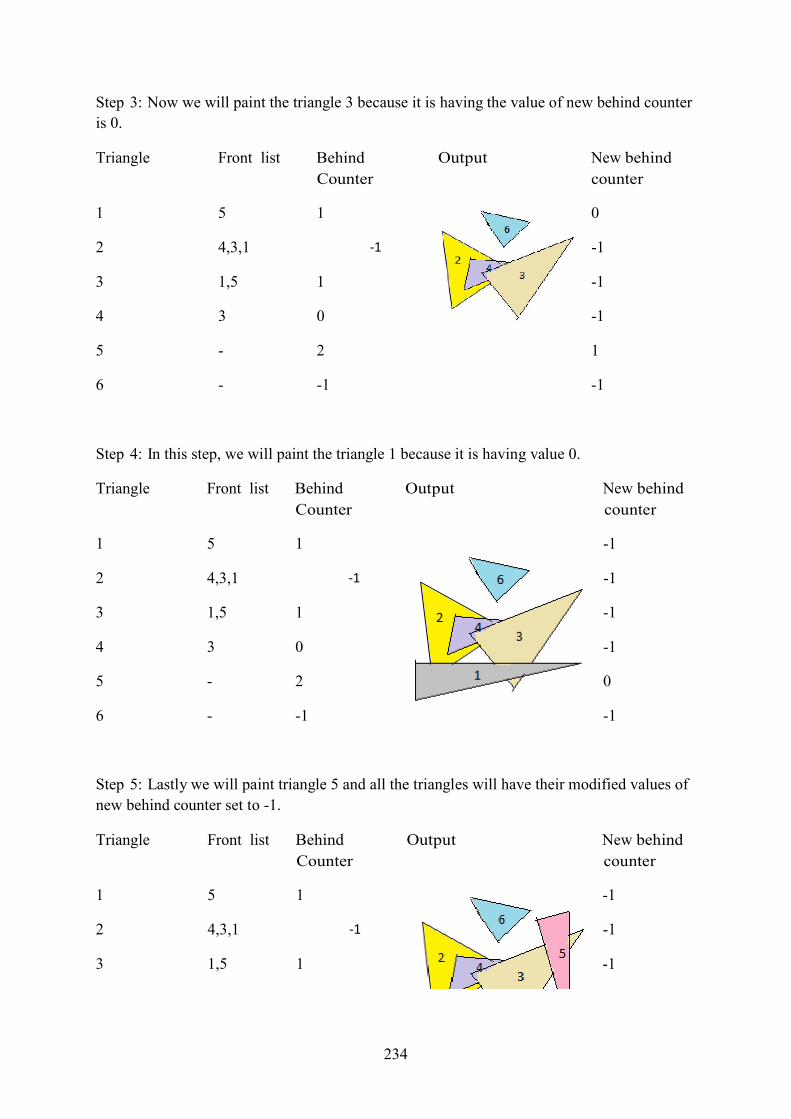
234
Step 3: Now we will paint the triangle 3 because it is having the value of new behind counter
is 0.
Triangle Front list Behind
Counter
Output New behind
counter
1 5 1 0 2 4,3,1 -1 -1
3 1,5 1 -1
4 3 0 -1
5 - 2 1
6 - -1 -1
Step 4: In this step, we will paint the triangle 1 because it is having value 0.
Triangle Front list Behind
Counter
Output New behind
counter
1 5 1 -1 2 4,3,1 -1 -1
3 1,5 1 -1
4 3 0 -1
5 - 2 0
6 - -1 -1
Step 5: Lastly we will paint triangle 5 and all the triangles will have their modified values of
new behind counter set to -1.
Triangle Front list Behind
Counter
Output New behind
counter
1 5 1 -1 2 4,3,1 -1 -1
3 1,5 1 -1

235
4 3 0 -1
5
-
2
0
6
-
-1
-1
Hence by using this step by step approach, we are able to paint the complete scene.
This method is well applicable to those triangles which do not overlap cyclically. One such
case is shown in figure 10.8. because in such a case, there is no depth order. But this
algorithm can be applied to such a case if we divide the intersecting polygons into smaller
triangles from the point of intersection and then we are able to prepare a depth order table.
But by doing so, complexity will be increased a lot.
Check your progress/ Self assessment questions
Q4. Why painter’s algorithm is also known as depth sort algorithm?
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------

236
10.4. Scan line coherence The scan line coherence method solves the problem of hidden surfaces one scan line at one
time. It processes the scan lines from top to the bottom of the screen. It successively
examines a series of windows on the display screen, where each window is one scan line high
and as wide as the screen. The simplest among the scan line algorithms is one dimensional
description of the depth buffer. We need two 1-D arrays: Intensity[x] and Depth[x] that hold
the values for a single scan line.
Algorithm:
Perform the following steps for each scan line:
1. For all the pixels on a scan line, set the value of Depth[x] to 1.0 and
Intensity[x] to a background value.
2. For every polygon in the scene, find all pixels on the currently scan line y that
lie within the polygon. This step uses the y-x scan conversion algorithm for
every x-value.
a) Compute the Depth z of the polygon at position (x, y).
b) If z > Depth[x], then set Depth[x] = z and Intensity[x] to 1.0 i.e. the
intensity value corresponding to the polygon shading and that surfaces will
be visible which are having depth values greater than the depth value of
this surface.
3. When all the polygons have been considered, the values which are contained
in the Intensity[x] array provide the solution and it will be copied into a frame
buffer.
This algorithm is a simple extension of the y-x scan conversion algorithm that requires
computation of the depth values and comparison with the value which is already stored in the
depth buffer.
Example:
Let us take two surfaces S1 and S2 in the view-plane as shown in figure 10.9.

237
The scan lines are checked starting from left to right for first scan line. When we move from
left to right, we get ab and bc edges where the surface S1 is visible and between the edges eh
and ef, S2 surface is visible. This means for scan line 1, we do not need to calculate the depth
value but we calculate the value of intensity of both the surfaces which are intersected by
scan line 1 and for the positions which are not intersected by scan line 1, the intensity values
are set to background intensity. For scan line 2, between the edges ad and eh, only surface S1
is present. But between the edges eh and bc, both the surfaces S1 and S2 are present. Hence
between the edges eh and bc, we need to calculate the depth values of both the surfaces S1
and S2. If the depth value of surface S1 is less than the depth value of S2, then surface S1 is
visible and we will calculate the intensity values of surface S1 from the edge ch until the edge
bc comes. After this only surface S2 is present between the edges bc and fg, so again there is
no need to compute the depth values. We will have to calculate the intensity values from edge
bc until fg is encountered.
In the above example, we have taken only two scan lines but we can draw any number of
scan lines and accordingly we can find which surfaces are hidden and which surfaces are
visible.
Advantages:
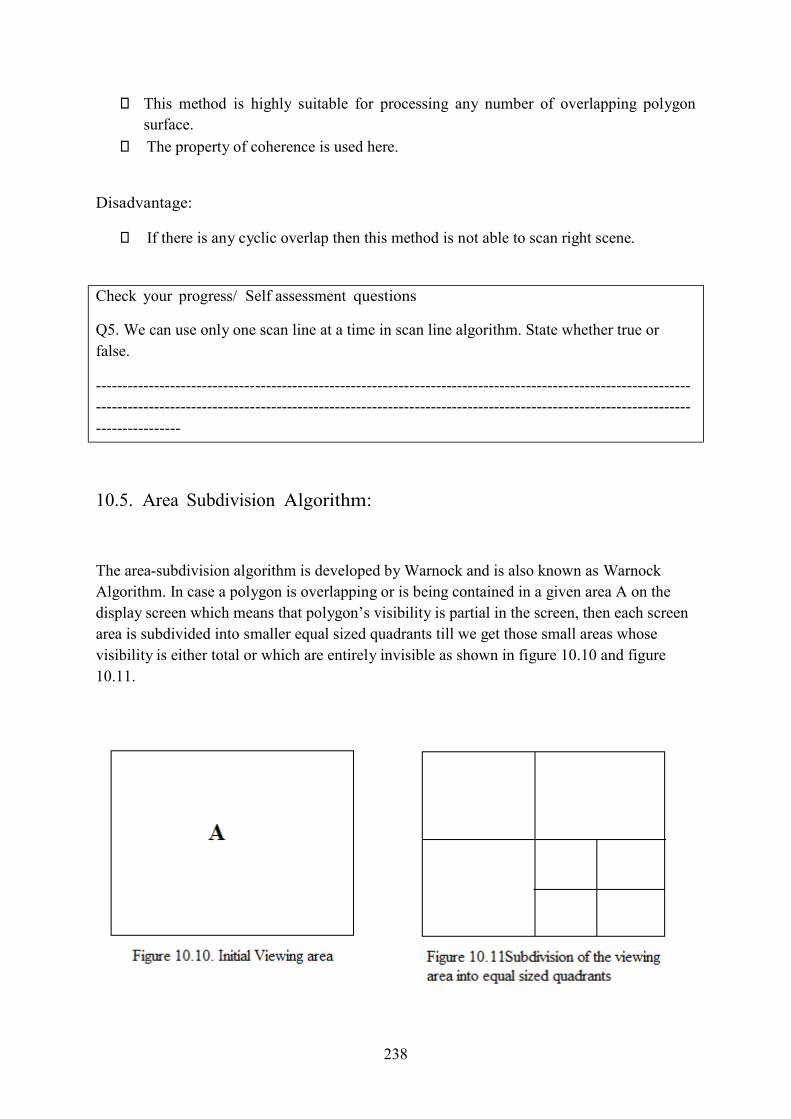
238
This method is highly suitable for processing any number of overlapping polygon
surface.
The property of coherence is used here.
Disadvantage:
If there is any cyclic overlap then this method is not able to scan right scene.
Check your progress/ Self assessment questions
Q5. We can use only one scan line at a time in scan line algorithm. State whether true or
false.
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------
10.5. Area Subdivision Algorithm:
The area-subdivision algorithm is developed by Warnock and is also known as Warnock
Algorithm. In case a polygon is overlapping or is being contained in a given area A on the
display screen which means that polygon’s visibility is partial in the screen, then each screen
area is subdivided into smaller equal sized quadrants till we get those small areas whose
visibility is either total or which are entirely invisible as shown in figure 10.10 and figure
10.11.
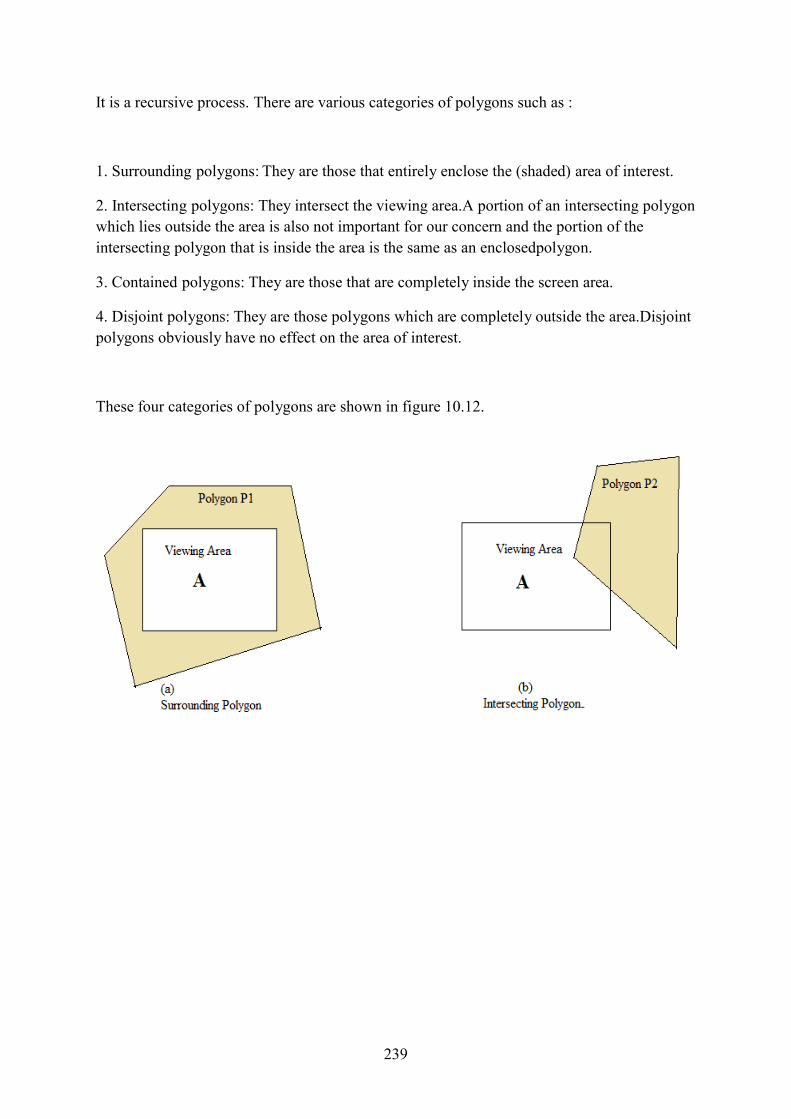
239
It is a recursive process. There are various categories of polygons such as :
1. Surrounding polygons: They are those that entirely enclose the (shaded) area of interest. 2. Intersecting polygons: They intersect the viewing area.A portion of an intersecting polygon
which lies outside the area is also not important for our concern and the portion of the
intersecting polygon that is inside the area is the same as an enclosedpolygon.
3. Contained polygons: They are those that are completely inside the screen area. 4. Disjoint polygons: They are those polygons which are completely outside the area.Disjoint
polygons obviously have no effect on the area of interest.
These four categories of polygons are shown in figure 10.12.

240
Algorithm:
The various steps involved in this algorithm are discussed as follows:
4. Firstly we need to define the viewing area of the screen.
5. We create a list of polygons that contains minimum zmin- coordinate value of
polygon’s vertex that is visible in a sorted order.
6. Divide the polygons into suitable categories. We will remove those polygons
that are disjointed i.e. which lie outside the viewing area and those polygons
will also be removed which are completely hidden by surrounding polygons.
7. For rest of the polygons, we will test their visibility taking into account the
following points:
a) If all the polygons appear under the category of the outside (disjoint)
polygon, then we will color all the pixels of the viewing area as
background color because these polygons are invisible.
b) If any polygon comes under the category of the surrounding polygon,
then color the viewing area as the color of the polygon since it should
be entirely visible.
c) If any polygon lies inside the viewing area, then we have to scan
convert the area and the remaining area of the screen should be colored
with the background color.
d) If there are polygons that are behind the surrounding polygons, then
the surrounding polygons which are closer to the viewport are visible

241
and other polygons are hidden. So the area of the screen will be
colored as the color of the visible polygon.
e) If there is a pixel (x, y) for which neither of the above points hold, then
we need to calculate the depth value of this pixel position and then it
will be compared with the z-value (depth value) in the polygon’s list
nor that pixel will be displayed which is having minimum depth value.
8. If neither of the steps 1 to 4 is applied to any of the polygons, then we have to
split the screen into equal quadrants and for each small area, we will go to step
(2).
Check your progress/ Self assessment questions
Q6. State the category of the polygons that are not having any influence on area of interest in
area subdivision algorithm.
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------
10.6. Summary In this chapter we focused on the removal of those surfaces which are hidden behind the other
surfaces. For this purpose, there arises a need of hidden surface removal algorithms. Various
methods are available each with some pros and cons. Most popular hidden line and surface
elimination algorithms are discussed here such as z-buffer, painter’s algorithm, scan line
algorithm and area subdivision methods.
10.7. Glossary Hidden surface problem - Hidden surface problem is a process in which we identify and
remove the hidden surfaces of a picture.
10.8. Answers to check your progress/ self assessment questions
1. Object space algorithms deal direct with the object definition. These algorithms
include Back-Face Removal Algorithm, Depth Sorting (or Painter’s Algorithm), Area
Subdivision Algorithm and Binary Space Partition Trees.
2. Point-to-point coherence is used in z-buffer algorithm.
3. Z-buffer algorithm is time consuming because it calculates the depth value of every
pixel of the image which consumes much of the processing time.

242
4. Painter’s algorithm is also known as depth sort algorithm because the surfaces are
first sorted according to their depth values in the decreasing order and then we start
the scan conversion with the surface having greater depth.
5. True.
6. Disjoint Polygons.
10.9. Modal Questions
1. Why do we need hidden surface removal algorithms in computer graphics?
2. Explain briefly the various methods that help in eliminating hidden lines and surfaces.
3. Explain Z-buffer algorithm.
4. Explain depth-sort algorithm.
5. Explain scan-line coherence.
6. Explain area subdivision algorithm.

243
Chapter-11
Shading and Reflection
Structure of the chapter
11.0. Objective
11.1. Introduction
11.1.1. Light sources
11.2. Diffuse Reflection
11.3. Specular Reflection
11.4. Refracted Light
11.5. Halftoning
11.6. Dithering Techniques
11.7. Summary
11.8. Glossary
11.9. Answers to check your progress/ self assessment questions
11.10. Modal questions

244
11.0. Objective
After studying this chapter, the student will be able to:
Explain the concept of illumination in computer graphics.
Explain Diffuse and specular reflections.
Explain refraction of light.
Explain need of halftoning.
Explain various methods of halftoning the images.
Explain dithering techniques. 11.1. Introduction
We can obtain realistic views of a scene by creating perspective projections of objects and by
using natural lighting effects to the visible areas. An illumination model which is also called a
lighting model or shading model is used to measure the intensity of light on the surface of an
object. There is a surface-rendering algorithm that uses the intensity calculations from an
illumination model to find out the light intensity for all projected pixel positions for the
various surfaces in a scene. Obtaining realism in computer graphics needs two elements:
precise graphical representations of objects and fine physical descriptions of the lighting
effects in a scene. The Lighting effects include light reflections, transparency, surface texture,
and shadows. Color modification and effects of lighting effects is a complex process that
involves principles of both physics and psychology. We describe lighting effects with models
that takes electromagnetic energy of the object surfaces into account. When light reaches our
eyes, it generates a perception of the scene. Number of factors is included in physical
illumination models like type of object, position of object with respect to light sources and
other objects, and the light-source conditions. Objects can be opaque, more or less
transparent, can have shiny or dull surfaces as well as can have distinctive texture patterns. In
order to give illumination effects to a scene, light sources of different shapes, color or
position can be used. The illumination models in graphics are frequently freely derived from
the physical laws that illustrate surface light intensities.
11.1.1. Light sources We see light reflected from the surface of an object whenever we view an opaque, non-
luminous object. Reflection refers to the phenomenon of bouncing back of light from an
object. The total light being reflected is basically the sum of the contributions from all light
sources and other reflecting surfaces in the scene as shown in figure 11.1.So, a surface that is
not directly exposed to a light source may still be visible if its nearby objects are illuminated.

245
object can be both a light source and a light reflector. For example, a pl
ght bulb inside it emits as well as reflects light from the surface of the gl ht
from the globe may then illuminate other objects in the surrounding a orm
for a light emitter is a point source. Rays from the light source then f
erging paths from the source position, as shown in figure 11.2.This light
mall as compared to the size of objects in the scene. Light sources like th
ufficiently far away from the scene, can be correctly taken as point sour
urce like the long fluorescent light as shown in figure 11.3, is referred as
light source. In this case, the illumination effects cannot be approximate
with a point source, because the area of source is not small compared t
the scene. An accurate model for the distributed source is the one which
ulated illumination effects of the points over the surface of the source.
Sometimes, the light sources are also referred to as light-emittingsources and the reflecting
surfaces like the walls of a room, are termed light-reflecting sources. The term light source is
used to refer to an object that will emit radiant energy. Example of light source can be light
bulb or the sun.
Aluminous astic globe
having a li obe.
Emitted lig reas. The
simplest f ollow
radially div -source
model is s e sun,
which are s ces. A
nearby so a
distributed d
realistically o the other
surfaces in considers
the accum When light is incident on an opaque surface, some part of light is reflected and some is
absorbed. The amount of incident light being reflected by any surface depends on the kindof
material. Glossy materials reflect most part of light incident on it, and dull surfaces absorb

246
most part of the incident light while for an illuminated transparent surface, some portion of
light will be reflected and some will be transmitted through the material. Surfaces which are
rough usually scatter the reflected light in all directions.
This light which is scattered is called diffuse reflection. A very rough surface produces
primarily diffuse reflections, so that the surface looks equally dazzling from all viewing
directions. Figure 11.4. depicts diffuse light scattering from a surface. The color of an object
is the color of the diffuse reflection of the light incident on it. A red object illuminated by a
light source, for example, reflects the red component of the white light and completely
absorbs all the other components of light. If the red object is viewed under a blue light, it
looks black because the entire incident light is absorbed. Along with diffuse reflection, light
sources can also create highlights, or bright spots, called specular reflection. The highlighting
effect is more pronounced on shiny surfaces than on dull surfaces. Specular reflection is
shown in figure 11.5.
The empirical models give a simple and quick method for calculating the surface intensity at
a given point, and they give good results for most scenes. Optical characteristics, background
light conditions and specifications of the light source are the basis of lighting calculations.
Optical parameters are used for setting the surface properties like glossy, rough, opaque, and
transparent. It controls the amount of reflection and absorption of the incident light. All light
sources will be considered as point sources which are specified with a coordinate position
value and an intensity value (i.e. color).
Ambient Light
A surface which is not uncovered directly to a light source is still visible if the objects closer
to it are illuminated. In our basic lighting model, we may set a general level of intensity for a
scene. This is an easy way to model the combination of reflections from different surfaces to
create a uniform illumination which is called the ambient light or background light. Ambient

247
light is not having any spatial or directional characteristics which mean the amount of
ambient light incident on every object is a constant for all the surfaces and over all directions.
The level for the ambient light in a picture can be set with parameter Iaand every surface will
be illuminated with this fixed value. The resulting reflected light is a constant for every
surface and this reflected light neither depend on the direction of viewer nor on the
orientation of the surface in space. But the amount of the reflected light for every surface
depends on the optical properties of the surface i.e. how much incident energy is to be
reflected and how much is absorbed.
Check your progress / Self assessment questions
Q1. Give an example of point light source and distributed light source. ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------
11.2. Diffuse Reflection
Diffuse reflection is consistent light reflection in which there is no directional dependence for
the viewer, e.g., a dull surface like a cardboard. Diffuse reflection has its origin from a
mixture of internal dispersion of light, i.e. first the light is absorbed and then re-emitted, and
external dispersion from the irregular surface of the object. There are two types of diffuse
reflections and an illumination model should hold both.
Direct diffuse reflection is one in which light is coming directly from a source of light
to a surface and is then reflected to the viewer.
Indirect diffuse reflection also called as diffuse interreflections, is the second type in
which light is coming from a source, it is being reflected to a surface, then is reflected
to another surface, so on, and is finally reflected to the viewer.
A number of local illumination models like those which are normally applied in many scan-
line depiction and ray tracing systems, hold the indirect diffuse reflection contribution by just
assuming that it has constant intensity in all the directions. This fixed term is referred as the
ambient involvement and it is considered as a non-directional background light. Radiosity
helps to compute this term for diffuse interreflections.

248
Diffuse reflection of ambient light
Let us assume a constant intensity of ambient light denoted by Ia, then at any point on the
object surface, the intensity of the diffuse reflection is given as:
I = ka × Ia,
where ka = coefficient of reflection for the ambient diffuse light and 0.0 <= ka<= 1.0.
There are three kavalues for the colored surfaces, one value for red, one for green, and one for
blue. Let us approximate the ambient diffuse part of the light reflection intensity function
referred as R(j,q,l) by this constant ka. For a matte and non-reflecting surface, value of kais
taken close to 0.0 while for a polished and highly reflective surface, eg, a mirror, ka is taken
close to 1.0.
Diffuse reflection in case of point light sources
Let us consider a point light source and assume that the source of light is quite far from the
object’s surface so that we can assume the incident light rays to be parallel. As figure 11.6.
shows that light rays coming from a nearby light source are not parallel. So we take the
source at some distance from the object.
For a point light source far away from the object’s surface, we will use Lambert's cosine law.
The intensity of light being reflected is f . Let us see two cases which is shown in figure 11.7.
We will use N which is the unit normal to the object’s surface and L which is the unit vector
i.e. the direction to the light source.

249
The Lambert's cosine law states that the light being reflected is proportional to cos q (where q
<= 90 otherwise the light is behind the surface). Let Ip be the intensity of a point light source, then the brightness is f (which is 1/d2 where
d=distance between the light source and the surface). Various models use a ‘d’ distance
instead of d2, and this mostly works because many light sources are not actually point sources.
Therefore, I = [( kd × Ip) / (D)] × (N . L)
where D = distance function. Its value is less than or equal to 1 for far away light sources and
its value is equal to d or d2 for other cases.
kd = the diffuse reflection coefficient and 0.0 <= kd<= 1.0.
There are some models that also add a constant term do in order to avoid the value of d to
become zero. Normally ka is set same askd. The vectors N and L are always taken in
normalized form.
We will get a two-term illumination model if we also include ambient light.
I = ka × Ia + [( kd × Ip) / (D)] × (N . L)
If we are considering color also then we need to have explicit wavelength reliance. But we
normally sample the color space at only three colors i.e. red, green and blue. Then there will
be 3 equations like the above: one each for Red, Green, and Blue color.
Check your progress / Self assessment questions
Q2. Discuss two types of diffuse reflection. ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------- Q3. Diffuse reflections occur on a smooth surface. State whether true or false.

250
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------- 11.3. Specular Reflection
When we keep a polished surface under the effect of light, we can find a bright spot at a
definite viewing direction. This event is called specular reflection. This effect is shown in
figure 11.9.
Law of reflection given by Fresnel gives the intensity of specular reflection as:
Ispec = W(θ) I1 cosnØ
where W(θ) gives the coefficient of specular reflection. At θ= 90ᵒ, W(θ) = 1and all the light
which is incident is reflected back.
The value of n depends on the object’s surface. It is taken large for glossy and shining
surfaces and it is quite small for dull and matte surfaces. This judgement can be made by
examining the range of available intensities and the plane to be considered.
Ø = viewing angle relative to the direction of specular reflection.
Figure 11.10. shows the model of specular reflection.

251
gress Self assessment questions
uation to calculate the intensity of specular reflection as give ------------------------------------------------------------------------
------------------------------------------------------------------------
--
ight
an interface between two mediums that are havin
all direction (shortly, isotropic mediums) and a homo
indices are n1 and n2 respectively. Assume a ray of ligh
index is n1 that hits the interface at a point P. We draw a no
he angle of incidence is the angle between the incident ra
int of intersection. This incident ray will get deviated into s
2 because of the concept of refraction. The angle of refra
acted ray of light and the normal to the interface.
Check your pro Q4. Give the eq
/
n by Fresnel.
--------------------
--------------------
--------------------
--------------------
--------------------
11.4. Refracted L
Let us consider
g same optical
characteristics in
geneous medium
whose refractive
t in the medium
whose refractive
rmal at this point
normal to the po
econd medium of
refractive index n
between the refr
ction is the angle
of intersection. T y of light and the
252
The laws of refraction judge the direction of refracted ray. The laws of refraction (also known
as Snell’s law) are given as follows:
1. The first law is called the plane of incidence and this law states that the incident light
ray, normal at the point of incident and the refracted light ray must lie in the same
plane.
2. The second law gives the following relation:
n1 sin i = n2 sin r
where n1 = refractive index of medium 1
n2 = refractive index of medium 2
i = angle of incidence, and
r = angle of refraction
We can also obtain the law of reflectionby substituting n2= -n1in the above law of refraction.
Two cases are there which are discussed as follows:
Case 1: When n1 < n2
In this case, the angle of refraction (r) is less than the angle of incidence (i) always. Hence
this case will always result in refraction when the angle of incidence is increased until 90o.
Case 2: When n1 > n2
in this case, the angle of refraction (r) is always more than the angle of incidence (i). When
the angle of incidence increases, the angle of refraction also increases a bit faster. There is a
value of angle of incidence when angle of refraction will become 90o and this angle of
incidence is known as critical angle (ic). For the angles of incidence which are greater than
the critical angle, there will be no refraction. Instead of refraction, the ray gets totally
reflected. This phenomenon is called total internal reflection and it plays a very important
role in the light guidance.

253
Check your progress / Self assessment questions
Q5. State the laws of refraction. ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------
Halftoning
Halftoning or analog halftoning refers to a process that simulates shades of gray by changing
the size of minute black dots arranged in a regular pattern. This practice is used in printers
and the publishing industry. When we examine a snap in a newspaper, we notice that the snap
is made up of black dots although it appears to be comprised of grays. It is possible because
of the spatial mixing performed by our eyes. Our eyes combine fine details and trace the
overall intensity. Digital halftoning is analogous to halftoning in which an image is divided
into a grid of cells of halftone. Units of an image are simulated by filling the suitable halftone
cells. More the number of black dots in a halftone cell, darker the cell will appear. For
example, in Figure 11.13., a tiny dot situated at the middle is simulated in digital halftoning
by filling the middle halftone cell. Similarly, a medium sized dot situated at the top-left
corner is examined by filling the four cells at the top-left corner. The big dot covering most of
the area in the third image is examined by filling all halftone cells.

254
on methods for producing digital halftoning ima
st two methods here and the last method will be nd easiest method among other techniques for pr
ates an image which is of superior spatial resol ge
has same number of halftone cells as that of t ery
halftone cell is further divided into a 4x4 gri aried
number of filled squares in the halftone cel ecause
a 4x4 grid is capable of representing onl
nd figure 11.15. depicts an example for this.
There are three comm ges. These are
1. Patterning
2. Error Diffusion
3. Dithering
We will explain the fir explained in the next
section.
Patterning
Patterning is simple a oducing digital
halftoned images. It cre ution than the original
image. The output ima he number of pixels in
the original image. Ev d. Every input pixel
value is formed by a v l. The original image
needs to be quantized b y 17 different
intensity levels. Figure 11.14. a

255
The patterning technique uses a pattern function that produces a digital halftoned image. This
function reads an image as input, then quantize the pixel values and each pixel is mapped to
its equivalent pattern. The result is 16 times bigger than the source image. The resulted image
is written to an output file in the form of a TIFF file. This technique needs a huge number of
computations. So generally those images are halftoned with this method whose size is less
than 100 x100.
Syntax of pattern is :
Pattern (input_filename, output_filename)
The example shown in figure 11.16. produces a digital haltoned image from an image named
painter using this method. The pattern function will be:
Pattern('Painter.TIF', 'new_painter.tif')
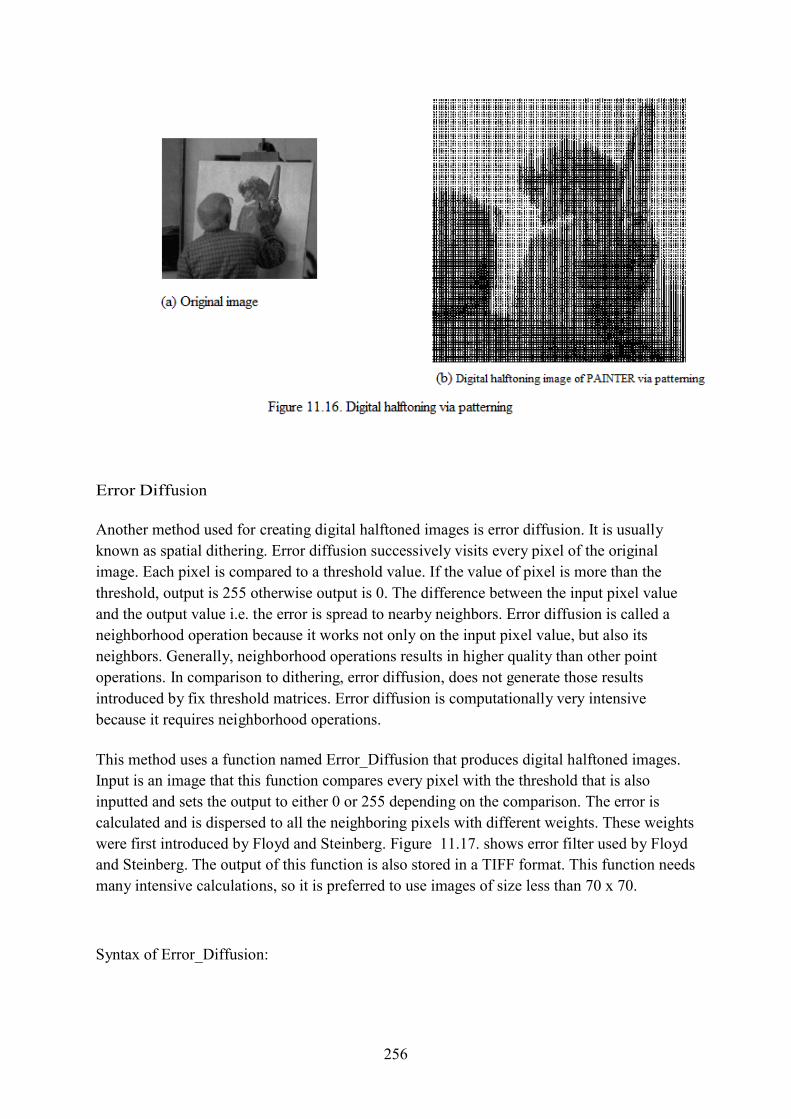
256
Error Diffusion
Another method used for creating digital halftoned images is error diffusion. It is usually
known as spatial dithering. Error diffusion successively visits every pixel of the original
image. Each pixel is compared to a threshold value. If the value of pixel is more than the
threshold, output is 255 otherwise output is 0. The difference between the input pixel value
and the output value i.e. the error is spread to nearby neighbors. Error diffusion is called a
neighborhood operation because it works not only on the input pixel value, but also its
neighbors. Generally, neighborhood operations results in higher quality than other point
operations. In comparison to dithering, error diffusion, does not generate those results
introduced by fix threshold matrices. Error diffusion is computationally very intensive
because it requires neighborhood operations.
This method uses a function named Error_Diffusion that produces digital halftoned images.
Input is an image that this function compares every pixel with the threshold that is also
inputted and sets the output to either 0 or 255 depending on the comparison. The error is
calculated and is dispersed to all the neighboring pixels with different weights. These weights
were first introduced by Floyd and Steinberg. Figure 11.17. shows error filter used by Floyd
and Steinberg. The output of this function is also stored in a TIFF format. This function needs
many intensive calculations, so it is preferred to use images of size less than 70 x 70.
Syntax of Error_Diffusion:

257
Error_Diffusion(input_filename, output_filename, threshold_value)
In this case, the threshold value determines whether the output will be set to 0 or 255 and it is
generally set to 128.
For example, figure 11.18. shows an error diffusion technique applied to Painter’s image and
threshold value is set to 128.
Error_Diffusion('Painter.TIF', 'new_err_diff_painter.tif', 128)
Check your progress / Self assessment questions
Q6. Write the file format in which output halftoned images are stored. ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------
11.6. Dithering Techniques

258
Dithering is a method which is used in quantization processes like graphics and audio to
decrease or remove the correspondence between noise and signal. Dithering is used in
computergraphics to form additional colors and shades from an existing pattern. It doesn't
decrease resolution. There are three types of dithering:
Regular dithering that uses a very regular predefined pattern
Random dithering is one in which the pattern is a random noise
Pseudo Random dithering that uses a very large, very regular, predefined pattern.
Dithering is used to make patterns that can be used as backgrounds, fills and shading, and for
making halftones for printing. When it is used for printing, it is very sensitive to properties
of paper. We can combine with rasterising but is not connected to anti-aliasing.
Dithering in digital graphics
All the digital photos are an estimation of the source as computers are not able to display an
infinite amount of colors. As an alternative, the colors are approximated, or rounded to the
closest color value available. For example, an 8-bit GIF image can comprise of 256 (i.e. 28)
colors. This is sufficient for a logo or computer graphic, but may not for a digital image. This
is the reason that most of the digital photos are stored as 16 or 24-bit JPEG images because
they bear thousands or millions of colors.
When a digital photo contains only a few hundred colors, they normally look blemished, as
big areas are represented by single colors. Dithering is used to decrease this spotted
appearance by adding some digital noise to smooth out the transitions between the colors.
This added noise makes the photo appear grainier, but it provides a more precise
representation as the colors mix together more smoothly. In reality, if we see a dithered 256-
colored image from far away, it looks similar to the same image which is represented by
thousands or millions of colors. Hence dithering helps to improve the appearance of digital
images.
Dithering in digital audio
Digital audio recordings are estimation of the original analog source just like digital images.
Hence if the sampling rate or bit depth rate of an audio is very low, it may sound choppy or
rough. We can apply dithering to the audio file to plain the roughness. Similar to dithering in
digital images, audio dithering also adds a digital noise to the audio to plain out the sound. If
we see a dithered waveform in an audio editor, it will look less blocky and if we listen to a
dithered audio track, it sound smoother and almost like the original analog sound.
Dithering in halftoning

259
The first syntax uses a default dither matrix to threshold the input image. The default dit
given as
Dithering is also used for creating digital halftoning images. Unlike patterning, dithering
generates an output image which is having same number of dots as the number of pixels in
the original image. Dithering uses a dither matrix for thresholding the source image. This
matrix is used frequently over the original image. When the pixel value of the image is
greater than the value in the dither matrix, a dot on the output image is filled at that point.
Dithering has a problem that it produces patterns specified by fixed thresholding matrices.
Figure 11.19. shows an example of the dithering operation.
The dithering operation uses a Dither function that generates a halftone image. It uses two
syntax given below:
Dither(input_filename, output_filename) // for default dither matrix
Dither(input_filename, output_filename, Dmatrix) // uses a dither matrix specified by
Dmatrix
her is
This matrix is a rectangular dither matrix taken from a 450 dither matrix.
The second syntax uses a dither matrix being defined by the user. Dither reads in an input
image, then compares every pixel with the corresponding part in the dither matrix, produces

260
the output image, and finally writes it to the output file in TIFF format. As Dither requires a
sufficient number of calculations, images whose size is less than 100x100 are preferred.
For example, figure shows dithering applied on an image named Lena using default dither
matrix and its syntax is given as follows:
Dither('Lena.TIF', 'Di_le.tif')
The figure 11.20. shows dithering applied on Painter image with a given dither matrix.
Dither(‘Painter.TIF', 'Di_spa.tif', [105,135,30;90,67.5,120;45,15,45;])
Various types of dithering techniques are used by several image and audio editors, although
random dithering is the most common one. Though dithering is usually used to enhance the
appearance and sound of low class graphics and audio, it is also applicable to high quality
images and recordings. In such situations, dithering is able to provide extra smoothness to an
image or sound.
Check your progress / Self assessment questions
Q7. What are the various types of dithering? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------- 11.7. Summary
In this chapter, we have studied about various light sources and two major types of reflection-
diffuse and specular. Diffuse reflections take place on a rough, irregular and matte surface
while specular reflection occurs on a glossy and shining surface. Refraction of light is
discussed. Halftoning in computer graphics is an important process and three important
methods- patterning, error diffusion and dithering that aims at halftoning are discussed in
detail.

261
11.8. Glossary
Diffuse reflection - Diffuse reflection is consistent light reflection in which there is no
directional dependence for the viewer, e.g., a dull surface like a cardboard.
Angle of incidence -The angle of incidence is the angle between the incident ray of light and
the normal to the point of intersection.
Angle of refraction -The angle of refraction is the angle between the refracted ray of light
and the normal to the interface.
Halftoning - Halftoning or analog halftoning refers to a process that simulates shades of gray
by changing the size of minute black dots arranged in a regular pattern.
Dithering -Dithering is a method which is used in quantization processes like graphics and
audio to decrease or remove the correspondence between noise and signal.
11.9. Answers to check your progress/ self assessment questions
1. An example of point light source is Sun and example of distributed light source is
long fluorescent light.
2. There are two types of diffuse reflection:
Direct diffuse reflection is one in which light is coming directly from a source
of light to a surface and is then reflected to the viewer.
Indirect diffuse reflection also called as diffuse interreflections, is the second
type in which light is coming from a source, it is being reflected to a surface,
then is reflected to another surface, so on, and is finally reflected to the
viewer.
3. False.
262
4. Ispec = W(θ) I1 cosnØ
5. There are two laws of reflection:
The incident light ray, normal at the point of incident and the refracted light
ray must lie in the same plane.
n1 sin i = n2 sin r
6. TIFF format.
7. There are three types of dithering:
Regular dithering that uses a very regular predefined pattern
Random dithering is one in which the pattern is a random noise
Pseudo Random dithering that uses a very large, very regular, predefined
pattern.
11.10. Modal questions
1. What is meant by light sources? What are the different types of reflections in
graphics?
2. Explain Diffuse and specular reflection.
3. Differentiate between Diffuse and specular reflection by giving suitable example.
4. What do you mean by the phenomenon of refraction of light?
5. How is halftoning of images achieved in computer graphics? Explain various
halftoning techniques.
6. What is Dithering? How is it done?

263
Lesson- 12
Surface rendering and its methods
Structure of the chapter 12.0. Objective
12.1. Introduction to shading models
12.2. Flat and smooth shading
12.3. Adding texture to faces
12.4. Rendering texture
12.5. Drawing shadows
12.6. Constant intensity method
12.7. Gourad shading
12.8. Phong shading (Mash Band effect)
12.9. Morphing of objects
12.10. Summary
12.11. Glossary
12.12. Answers to check your progress / self assessment questions
12.13. Model Questions
12.0. Objective After studying this chapter, the student will be able to:
Explain need of shading models in computer graphics Explain methods of shading the objects. Explain rendering and texture mapping. Compare various shading models. Explain the concept of shadows. Explain the morphing of objects.
12.1. Introduction to Shading models Images which are having visual realism are an effective means of sharing ideas and designs
for the designers. Shading is one of the major tools which are used to create the images that

264
are quite realistic. Shaded images with quite high degree of realism are able to create the
impression that these images are realistic objects and are not just artifacts or geometric
models. The shaded images with raised level of quality give an easy, more interactive and
less costly way of reviewing various design alternatives than designing actual models or
prototypes. Virtual graphics provides multidimensional views and is very effective. When the
geometric model of an object is prepared and is transformed according to the viewing
conditions, the image surfaces are shaded and are then analyzed from an artistic point of view
to estimate how good a model will be when it is finally released from any manufacturing
process. For example, a sofa set image is developed with various effects of creative computer
graphics modeling along with the shading effects under the given lighting. This model of sofa
set is then placed in a living room with certain color to examine whether the setting
arrangements are fine or there is some need of manipulation before manufacturing the actual
sofa set.
The shading models are also sometimes referred as illumination models. They can be used to
check the intensity of light at any given point on the surface of an object. But the surface
shading models are quite different. Surface shading refers to a process that determine the
light intensity calculations from a given illumination model. So surface shading models are
also known as surface rendering models. These methods are popular to interpolate across the
surfaces from a small set of illumination models at every pixel position and to transform the
computer models into the raster images that involve projecting a 3D model onto the 2D plane
screen that takes into account the lighting properties as well as the object properties. Check your progress / Self assessment questions
Q1. Why shading models are also called illumination models? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------- 12.1. Flat and Smooth Shading
Polygon Shading Methods
Any surface of an object can be shaded pixel to pixel by calculating the surface normal vector
at every pixel and obtaining the dot product with the light vector and then calculating the
intensity of that pixel. This process becomes slow when producing each frame if we consider
the effect of different rendering algorithms. This can be improved by dividing the surface into
a polygon mesh. The intensity of calculation is applied to each vertex of the polygon and
thereafter the intermediate points are interpolated.
There are two major methods of polygon shading – Flat shading and smooth shading. Flat Shading
A. Z-Flat Shading:

265
It is an uneven looking shading method which can be implemented by providing a polygon
the color intensity value depending on the z coordinate average value of the polygon’s
vertices:
I = Imax – (vertex1.z + vertex2.z + vertex3.z)/a, Where a is some appropriate number, dividing by a one get average value of z that ranges
from 0 to maximum intensity. There is an assumption that z is directing inside the plane of
the screen. Therefore, the intensity reduces as the point moves farther away from the screen.
Drawbacks: Some of the drawbacks of this method are:
1. When we are calculating the color of the polygons, such as KLGH and OPKL in
which the point K is common for both the polygons, the color value for the points that
are nearer to K will be different if all the points of each polygon do not have the same
average depth value.
2. The color changes suddenly. But still this method is commonly used because it is quite faster and is easy to understand.
B. Lambert Flat:
This technique attempts to make an object as real as possible because it uses a real light
source. This method uses a surface normal vector for calculating intensity. Surface normal
vector is defined as the vector which is perpendicular to the plane of the surface and is given
as:
N= a ı̂+ bȷ̂+ c k
This normal vector can be directed into or out of the plane of the surface. But we will use harmonized surface normals that consider that all the surfaces of a closed volume have their
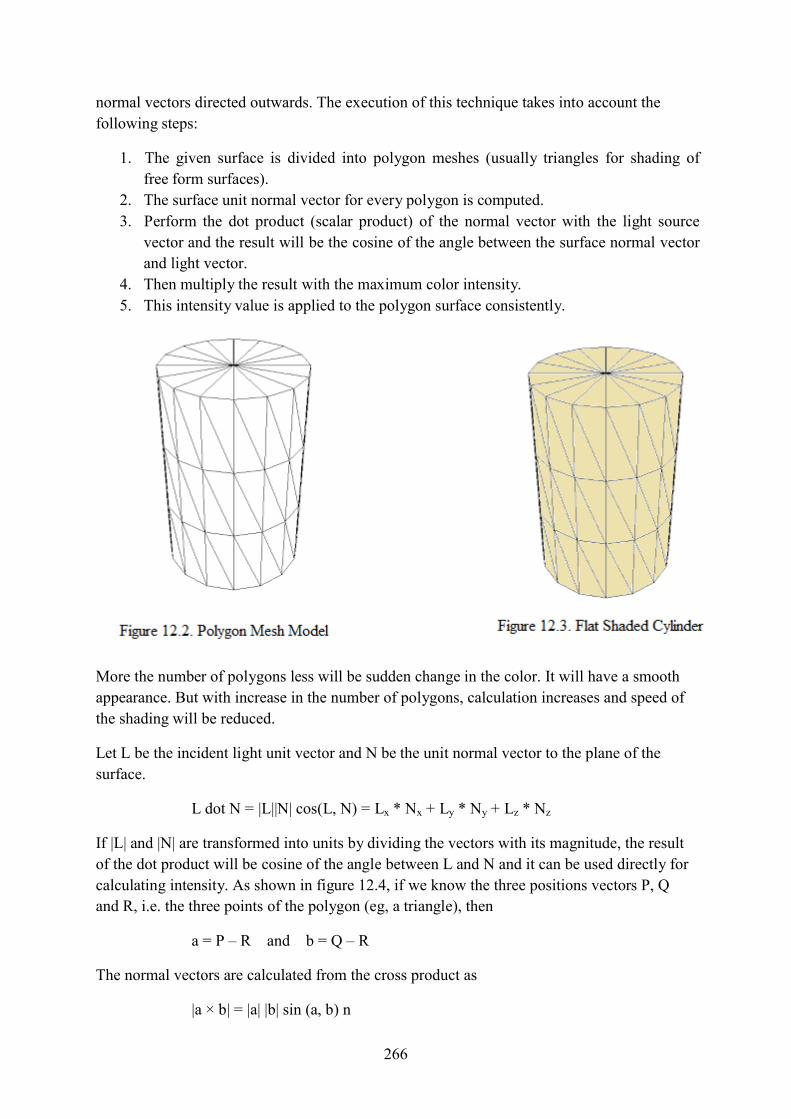
266
normal vectors directed outwards. The execution of this technique takes into account the
following steps:
1. The given surface is divided into polygon meshes (usually triangles for shading of
free form surfaces).
2. The surface unit normal vector for every polygon is computed.
3. Perform the dot product (scalar product) of the normal vector with the light source
vector and the result will be the cosine of the angle between the surface normal vector
and light vector.
4. Then multiply the result with the maximum color intensity.
5. This intensity value is applied to the polygon surface consistently.
More the number of polygons less will be sudden change in the color. It will have a smooth
appearance. But with increase in the number of polygons, calculation increases and speed of
the shading will be reduced.
Let L be the incident light unit vector and N be the unit normal vector to the plane of the
surface.
L dot N = |L||N| cos(L, N) = Lx * Nx + Ly * Ny + Lz * Nz
If |L| and |N| are transformed into units by dividing the vectors with its magnitude, the result
of the dot product will be cosine of the angle between L and N and it can be used directly for
calculating intensity. As shown in figure 12.4, if we know the three positions vectors P, Q
and R, i.e. the three points of the polygon (eg, a triangle), then
a = P – R and b = Q – R The normal vectors are calculated from the cross product as
|a × b| = |a| |b| sin (a, b) n

267
= ( Ay* Bz - By*Az , Az*Bx – Bz*Ax , Ax*By – Bx*Ay ) It gives the components of normal vector N. On dividing this vector with its magnitude, we
will get the unit normal vector n. The function that calculates the unit surface normal of a
triangle having the end points (x1, y1, z1), (x2, y2, z2 ) and (x3 , y3, z3 ) will provide the unit
normal vector.
Intensity will be calculated as
I = Imax * cos (L, N).
The second polygon shading method – smooth shading consists of two techniques: Gouraud
Shading and Phong Shading which will be discussed later. Check your progress / Self assessment questions
Q2. What are the two methods of polygon shading in computer graphics? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------- 12.3. Adding texture to faces
In computer graphics, the finer details of an object are produced using textures. The addition
of separately specified pattern gets converted into a smooth surface as texture. After the
pattern is added, the surface is still smooth. This is based on two types of internal mapping-:
In the first one, we map the texture image onto a simple three dimensional surface
such as a plane, cylinder, a sphere or a box. This is called S-mapping.

268
Secondly, map the result of S-mapping onto the final 3-D surface. This is called O-
mapping.
As the details become more complex, explicit modeling of polygons becomes impractical. So
we need to map a digital image onto a surface and this technique is called texture or pattern
mapping. The image is referred as texture map and the individual units or elements are called
texels. The rectangular texture map has its own (u, v) texture space. One image pixel is often
mapped into number of texels. In order to avoid the aliasing problems, all the relevant texels
are considered. When a texture is mapped to a polygon, it is common to assign the texture
map coordinates directly into its vertices.
In texture mapping methods, software and hardware are designed to display complex scenes
at real times frame rates (60 Hz or more). So there is need of high capacity data channel.
Texture hardware consists of a local memory for storing texture data. The size of its local
memory is 16MB or more. The download rate at which the texture maps are loaded from
texture memory into the frame buffer is as high as 240MB/second.
Check your progress / Self assessment questions
Q3. Discuss the two internal mappings in texture mapping.

269
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------- 12.4. Rendering Texture
Rendering takes a series of objects as input and use them to form new image from different
camera locations. The images resulted by rendering systems are usually more realistic as
compared to the classical rendering models. The basic objective is to take some subset of the
required viewpoints and from these, make the picture that we want to see from a new
viewpoint. It involves making choices among factors that affect the quality of the images, the
speed of producing the rendered images or both. Rendering refers to the process of
converting of a 3-D scene into a 2-D image using computer programs.
The 3-D scene is composed of models in three spaces. Models are entered by hand or are
created by a program. For many purposes, the models are already generated. The image is
drawn on the display screen, printed on a laser printer, or is stored in memory or file.
Basically the models are converted into device coordinate space where they are converted
into pixels for illumination. There are many coordinate systems that are being used such as :
MCS (Modelling Coordinate System)
WCS (World Coordinate system)
VCS (Viewer Coordinate System)
NDCS (Normalized Device Coordinate System)
DCS (Device Coordinate System) or SCS (Screen Coordinate System) Techniques for rendering:
The three major techniques that are being used for rendering in computer graphics are – Ray
casting, Ray tracing and Rasterization. These techniques are briefly discussed below:

270
1. Ray Casting: It is a method which is used to render high-quality images of solid
objects. The basic idea is to make best use of the given 3-D data without imposing
any geometric structure on it. It uses ray-surface intersection tests to resolve various
problems in graphics. It is being the first solution to the earlier problems when
computers were not able to run real 3-D engines.
2. Ray Tracing: It is a technique taken from optics that models that path taken by light
by following the rays of light as they intersect the optical surfaces. This technique is
used in designing the optical systems like camera lenses, microscope, telescope and
binoculars, etc. it facilitates advanced optical effects like correct simulations of
refraction and reflection and is quite efficient also.
3. Rasterization: This is a process that transforms the geometric primitives such as
lines, circles, ellipse, etc into a raster image i.e. finding appropriate pixel locations to
illuminate the image being formed. The basic raster process is described in the
following flow chart:
Check your progress / Self assessment
questions
Q4. Name the rendering technique which
is used in the design of optical systems.
-------------------------------------------------
-------------------------------------------------
-------------------------------------------------
-------------------------------------------------
-------------------------------------------------
- 12.5. Drawing shadows
Shadows are taken as an important sign
in computer graphics when we deal with
depth observation, allocation of light
sources, day time, weather conditions and reality, etc. Generally, shadows consist of a

271
penumbra and an umbra as shown in Figure 12.-, because there is a finite distance between
the finite sized light source and the object. We usually make an assumption that position of a
point-light source is at infinity, which will throw out rays that appear in parallel at any object
thus creating a perfect sharp shadow. For this we will ignore the diffraction effects. Shadow
generation becomes a complex problem when there multiple light-sources and reflective
surfaces. In such cases, the shadow generation problem becomes a part of the global
illumination problem and solutions are provided by special ray-tracing algorithm.
Because of the computational complexity of the shadow generation procedure, they are used
comparatively less. They are considered as quality add-on and are applied only to some parts
of the scene (e.g. main characters). Light sources are usually taken as point light sources.
We will discuss some methods of shadow generation and they depend on polygon mesh
models for their working.
1. Simple shadows on a ground plane
This quite simple and restrictive technique suggested by Blinn. It is an effective one. The idea
is to draw the projection of an object on a flat ground surface. The basic restriction is that the
scene is either limited to only one object, or if there are many objects, they should not be too
close to each other that result in shadow casting over one another. Another restriction is that
the ground plane should be flat. The advantage of this technique is its simplicity and it is a
modification of Z-buffer initialization.
2. Projecting polygons-scan line
This technique was developed by Appel as well as Bouknight and Kelley. Like a
preprocessing stage to the scan-line coherence, a secondary data structure is used that holds
information about all polygons that may throw shadows on a given polygon. The shadow
pairs (one the polygon and other polygon shadow) are detected by projecting all polygons
onto the surface of a sphere centered at the light source. Those polygon-pairs are discarded
which cannot possibly interact. If there are n polygons, the possible number of projected
shadows is n(n-1).
3. Shadow volumes
The shadow volume approach was developed by Crow and was further extended by others
including Brotman and Badler , which used Crow's method for soft-shadow generation. A
shadow volume is the junction between the view-frustum and the semi-infinite shadow
volume which was created by a polygon as shown in Figure 12.--. The polygons consisting of
the shadow volume are prepared with a front- and-back facing property and a point on an
object is said to be in shadow if it lies behind a front-facing shadow polygon and in the front
of a back-facing polygon.

272
This algorithm can be implemented most easily with a depth-priority method of hidden- surface-removal.
Check your progress / Self assessment questions
Q5. Which method of hidden surface removal is used in shadow volume? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------- 12.6. Constant Intensity method:
This is fast and simple method of polygon rendering techniques. It is also called as flat
shading. In this technique as its name suggests, single intensity value is calculated for every
polygon. All the points on the polygon surface are displayed with the same intensity value.
This type of shading is useful for displaying the general emergence of a curved surface in a
quick manner as shown in figure 12.10.

273
Generally, this type of shading technique provides accurate results for an object if the
following assumptions are valid:
1. The object should be a polyhedron and it should not be an approximation of an object
which is having a curved surface.
2. All the light sources providing light to the object should be sufficiently far from the
object’s surface so that N.L and the noise functions are constant over that surface.
3. The viewing position should also be far from the surface so that V.R is constant over
the object surface. If all the above listed assumptions are not satisfied, we are still able to approximate the
surface-lighting effects using small polygons with this method and calculate intensity for
each of the small polygon facet, assume, at the center of the polygon. Check your progress / Self assessment questions
Q6. Constant intensity method suffers from the mach band effect. State whether true or false. ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------- 12.7. Gouraud shading
This technique is an intensity interpolation method which was developed by Gouraud and it is
quite similar to Lambert Flat model. Here we will use a vertex normal (Nv) which is average
vector of the adjoining set of surface normals i.e.
N = ∑ a ı̂+ ∑ b ȷ̂+ ∑ c k
where n is the number of adjoining surfaces. Now we consider the angle with the vertex normal instead of surface normal. The intensity will be calculated at the vertex by taking the
dot product with the light vector and multiply it with the maximum intensity. The following
steps explain this technique more easily:
1. The surface is divided into polygon meshes.
2. The surface normal vector for each polygon surface is calculated.
3. All vertex normal is set to zero.
4. For every face, face normal is calculated and then added to the vertex normal for each
vertex which touches it. Alternatively, we can traverse the vertices and keep on
adding the face normal to it for each face that it touches.
5. Find the average value of the vertex normal (i.e. dividing the vertex normal with the
number of adjoining faces).
6. Normalize each vertex normal.
7. Illumination model is applied to calculate the color intensity at each vertex.
8. Then interpolate linearly the vertex intensity over each polygon surface.

274
This model is useful in providing a continuous appearance of the rendered model. Interpolation Technique for calculating intensity:
When the intensity value at the vertex of a polygon (e.g. a triangle) is computed, we assume
that intensity varies linearly across the vertices along the edge of a triangle. Firstly the
minimum and the maximum value of y of every vertex are detected. For all lines ranging
from minimum y-value to the maximum y-value, the edges of the triangle are detected.
For example, using figure 12.5, we can calculate the left edge and the right edge using the
following formulae
Left edge (x4 ) = min [ x1 + (y-y1)/slope(1-3), x2 + (y-y2)/slope(2-3) ]
Right edge (x5) = max [x1 + (y-y1)/slope(1-3), x2 + (y-y2)/slope(2-3) ]
For a given scan line below y1, the left edge is changed to the edges of line 1- 2 as
I4 = I + I
and I5 = I + I
Now when we know the color intensities of the end points of the scan line, then linear interpolation along the line 4-5 is done. Intensity at any point P can be calculated as
Ip = I + I
Similarly, we can calculate the intensity for every pixel within the triangle.

275
Example: By using Gouraud Interpolation technique, calculate the pixel color value at the
centroid P of the triangle shown in the figure 12.6. The coordinates and the color values of
the vertices of the triangle is given in the figure.
Solution: The centroid of the triangle ABC is P= ( , , )
P= (226.67, 143.33, 8) The parallel projected pixels can be obtained by assigning value z = 0 to all the points and
consider only the plane (x, y).
By using Gouraud method, for the scan line 143.33
I4 = I + I = .
0 + .
34
So, I4 = 7.3661
I5 = I + I = .
63 + .
34
So, I5 = 36.556 + 14.2711 = 50.8271 Left edge of the scan line (x4) = min [ x1 + (y-y1)/slope(1-3), x2 + (y-y2)/slope(2-3) ]
Slope(1-3) = (300-100)/(200-100) = 2
So, x4 = 100 + (143.33 – 100)/2 = 121.665 Right edge of the scan line (x5) = max [x1 + (y-y1)/slope(1-3), x2 + (y-y2)/slope(2-3) ]
Slope(2-3) = (300 – 30)/(200 – 380) = -1.5

276
. . . . . . . .
So, x5 = 380 – (143.33 – 30)/1.5 = 304.446
Ip = I + I
Ip = 7.3661 + 50.8271 = 32.33 Mach band effect:
Mach band is an optical illusion that consists of an image with two wide bands- one light and
other dark. These bands are separated by a narrow strip with a light-to-dark gradient. The
human eye receives two narrow bands of varying brightness on either side of the gradient
which are not present in the actual image. This effect is shown in figure 12.8. Another
example of this illusion is shown in figure 12.9. from which we can see that each grey band is
not constantly denser. The left band appears darker than the right one.
Check your progress / Self assessment questions
Q7. Write the equations to calculate the left and right edge in Gouraud interpolation method. ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------- 12.8. Phong Shading
This shading technique is similar to Gouraud shading. The basic difference is that this
method computes the average unit normal vector at each vertex of the polygons and then
interpolates the vertex normal over the polygon’s surface. After the surface normal vector is
calculated, the illumination model is applied to get the color intensity for each pixel of the
polygons.
The interpolation of the intermediate polygon surface normal is similar to the one that we
have done in Gouraud technique. Figure 12.7 illustrates the vector interpolation method being
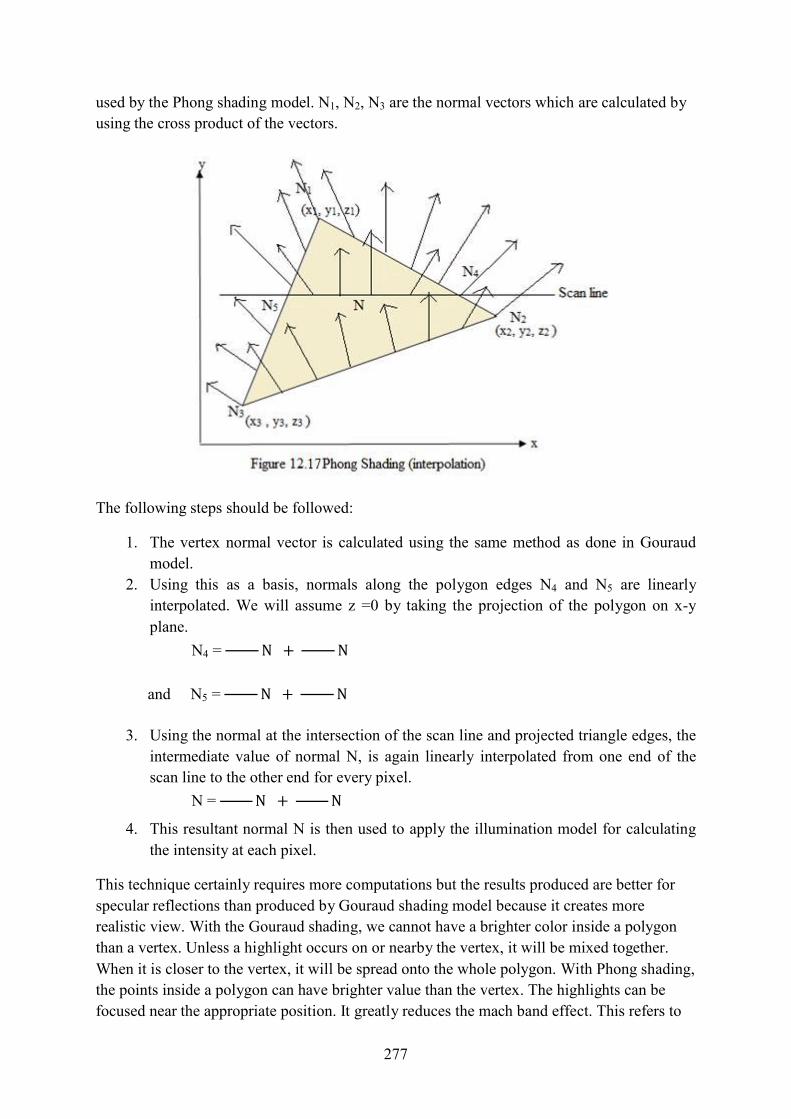
277
used by the Phong shading model. N1, N2, N3 are the normal vectors which are calculated by
using the cross product of the vectors.
The following steps should be followed:
1. The vertex normal vector is calculated using the same method as done in Gouraud
model.
2. Using this as a basis, normals along the polygon edges N4 and N5 are linearly
interpolated. We will assume z =0 by taking the projection of the polygon on x-y
plane.
N4 = N + N
and N5 = N + N
3. Using the normal at the intersection of the scan line and projected triangle edges, the
intermediate value of normal N, is again linearly interpolated from one end of the
scan line to the other end for every pixel.
N = N + N
4. This resultant normal N is then used to apply the illumination model for calculating the intensity at each pixel.
This technique certainly requires more computations but the results produced are better for
specular reflections than produced by Gouraud shading model because it creates more
realistic view. With the Gouraud shading, we cannot have a brighter color inside a polygon
than a vertex. Unless a highlight occurs on or nearby the vertex, it will be mixed together.
When it is closer to the vertex, it will be spread onto the whole polygon. With Phong shading,
the points inside a polygon can have brighter value than the vertex. The highlights can be
focused near the appropriate position. It greatly reduces the mach band effect. This refers to

278
an effect where the contrast between the two areas of different shading is enhanced and it
appears as the border between the shades.
Check your progress / Self assessment questions
Q8. Which method is suitable for specular reflections?
----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
----------------------
Comparison among various shading models:
S.no 1
Flat Shading
It is simplest and the fastest
Gouraud Shading
It is more realistic than flat
Phong Shading
It provides the highest
method. shading. quality and is expensive
in nature.
2
There is no mach band
effect.
It suffers from mach band
effect.
It also does not suffer
from mach band effect.
3
This technique finds the
vertex normal vector.
This method finds the
average normal at each
vertex.
This method also finds
the vertex normal.
4
There is no interpolation of
the normals across the
polygons.
This technique interpolates
vertex shades among each
polygon.
This method
interpolates normals
across the polygons.
5
It is unrealistic in nature.
It is realistic in nature.
It is also realistic in
nature.
6
It is not at all expensive.
It is costly approach.
It is most expensive
among all.
7
This is one of the oldest
method in computer
graphics.
It is slightly new method.
It is the latest technique
being used in graphics.
8
Specular effects are visible.
Specular effects are not
seen.
The problem of secular
effects has been
overcome.
12.9. Morphing of objects

279
Morphing refers to a process of transforming an image into another image. This process
makes use of the image processing techniques that includes warping and cross dissolving.
Morphing sequences produced by using cross-dissolving only (e.g. linear interpolation to
lighten from one image to another) of the original and the target images are very poor. These
results are of low quality because of the misalignment among the features of source and
destination images. When we are simply using cross dissolve technique, there will be the
double exposure effect in the misaligned regions. In order to reduce this problem, warping is
used that aligns the two images first before proceeding for cross dissolving. Warping
provides the way in which the pixels of one image should be transformed to the pixels in the
other image. For warping to execute, the mapping of few important pixels needs to be
specified. The movement of the other pixels is produced by extrapolating the information
specified for the control pixels. As cross dissolving is very effortless, warping becomes the
prime problem of morphing techniques. Morphing can be thought of a cross-dissolve method
which is applied to warped image. There are different warping techniques that differ in the
way the control pixels are to be specified and the interpolating technique that they use for the
other pixels. The prominent features of an image are specified by the set of these control
pixels.
Morphing= (warping)2 + blending As we can see from the above equation that morphing is basically a two-stage process that
involves coupling image warping with color interpolation. Check your progress / Self assessment questions
Q9. Why is warping important before cross dissolving? ----------------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------------
---------------------- 12.10. Summary
Shading creates a realistic view. We have discussed various shading models that describe
how light reflects a surface. Lambert shading is simplest method that takes source of light and
illumination models into consideration. In this method, objects appearance is not smooth.
Phong shading is a method that renders the surface of displayed objects providing them a
smooth appearance. Gouraud shading technique is also used for smooth shading but is
comparatively less efficient as compared to phong shading. Some techniques of rendering is
provided. Methods to cast shadows are discussed.
12.11. Glossary Rendering - Rendering refers to the process of converting of a 3-D scene into a 2-D image
using computer programs.
Ray Casting – It is a method which is used to render high-quality images of solid objects.

280
Ray Tracing - It is a technique taken from optics that models that path taken by light by
following the rays of light as they intersect the optical surfaces.
Rasterization - This is a process that transforms the geometric primitives such as lines,
circles, ellipse, etc into a raster image i.e. finding appropriate pixel locations to illuminate the
image being formed.
Mach band effect - Mach band is an optical illusion that consists of an image with two wide
bands- one light and other dark.
Morphing - Morphing refers to a process of transforming an image into another. This
process involves the image processing techniques of warping and cross dissolving.
12.12. Answers to check your progress / self assessment questions 1. The shading models are also called illumination models because they can be used to check
the intensity of light at any given point on the surface of an object.
2. The two methods are: Flat shading and Smooth shading. 3. The two types of internal mapping are:
S-mapping: In this, the texture image is mapped onto a simple three dimensional
surface such as a plane, cylinder, a sphere or a box.
O-mapping : In this, the result of S-mapping is mapped onto the final 3-D surface. 4. Ray tracing.
5. Depth-Sort (or Priority Algorithm).
6. False.
7. Left edge (x4 ) = min [ x1 + (y-y1)/slope(1-3), x2 + (y-y2)/slope(2-3) ]
Right edge (x5) = max [x1 + (y-y1)/slope(1-3), x2 + (y-y2)/slope(2-3) ]
8. Phong Shading method.
9. Warping is important before cross dissolving because it reduces the double exposure effect in the misaligned regions. Warping is used that aligns the two images first before proceeding for cross dissolving. It provides the way in which the pixels of one image should be transformed to the pixels in the other image.
12.13. Model Questions
1. Explain various polygon shading models in graphics.
2. Why do we need shading models in computer graphic?
3. Explain Gouraud Shading Model in detail.
4. Explain Phong Shading Model in detail.
5. Compare and contrast various shading models.

281
6. How can we add textures to objects?
7. How is morphing of objects done?




















