Co-circular and Co-spherical Kite Central Configurations
13
Qual. Theory Dyn. Syst. (2011) 10:29–41 DOI 10.1007/s12346-011-0035-z Qualitative Theory of Dynamical Systems Co-circular and Co-spherical Kite Central Configurations Luis Fernando Mello · Antonio Carlos Fernandes Received: 25 March 2010 / Accepted: 12 January 2011 / Published online: 1 February 2011 © Springer Basel AG 2011 Abstract In this article we give a simple proof of the existence of kite central config- urations in the planar four-body problem which lie on a common circle. We also give a simple proof of the existence of kite central configurations in the spatial five-body problem which lie on a common sphere. Keywords Co-circular central configuration · Co-spherical central configuration · Kite central configuration Mathematics Subject Classification (2000) Primary 70F10 · 70F15; Secondary 37N05 1 Introduction The Newtonian n-body problem in celestial mechanics consists in studying the motion of n punctual positive masses m 1 ,..., m n with position vectors r 1 ,..., r n , r i ∈ R d , d = 2, 3, interacting between themselves through no other forces than their mutual gravitational attraction according to Newton’s gravitational law [9]. In this paper we take the inertial barycentric system, that is the origin of the inertial system is located at the center of mass of the system, which is given by ∑ n j =1 m j r j / M , where M = m 1 +···+ m n is the total mass. The space of configuration is defined by {(r 1 , r 2 ,..., r n ) ∈ R dn : r i = r j , i = j }. L. F. Mello (B ) · A. C. Fernandes Instituto de Ciências Exatas, Universidade Federal de Itajubá, Avenida BPS 1303, Pinheirinho, Itajubá, MG CEP 37.500-903, Brazil e-mail: [email protected] A. C. Fernandes e-mail: [email protected]
Transcript of Co-circular and Co-spherical Kite Central Configurations

Qual. Theory Dyn. Syst. (2011) 10:29–41DOI 10.1007/s12346-011-0035-z
Qualitative Theoryof Dynamical Systems
Co-circular and Co-spherical Kite CentralConfigurations
Luis Fernando Mello · Antonio Carlos Fernandes
Received: 25 March 2010 / Accepted: 12 January 2011 / Published online: 1 February 2011© Springer Basel AG 2011
Abstract In this article we give a simple proof of the existence of kite central config-urations in the planar four-body problem which lie on a common circle. We also givea simple proof of the existence of kite central configurations in the spatial five-bodyproblem which lie on a common sphere.
Keywords Co-circular central configuration · Co-spherical central configuration ·Kite central configuration
Mathematics Subject Classification (2000) Primary 70F10 · 70F15;Secondary 37N05
1 Introduction
The Newtonian n-body problem in celestial mechanics consists in studying the motionof n punctual positive masses m1, . . . , mn with position vectors r1, . . . , rn , ri ∈ R
d ,d = 2, 3, interacting between themselves through no other forces than their mutualgravitational attraction according to Newton’s gravitational law [9].
In this paper we take the inertial barycentric system, that is the origin of the inertialsystem is located at the center of mass of the system, which is given by
∑nj=1 m jr j/M ,
where M = m1 + · · · + mn is the total mass. The space of configuration is defined by{(r1, r2, . . . , rn) ∈ R
dn : ri �= r j , i �= j}.
L. F. Mello (B) · A. C. FernandesInstituto de Ciências Exatas, Universidade Federal de Itajubá,Avenida BPS 1303, Pinheirinho, Itajubá, MG CEP 37.500-903, Brazile-mail: [email protected]
A. C. Fernandese-mail: [email protected]
30 L. F. Mello, A. C. Fernandes
At a given instant t = t0 the n bodies make a central configuration if there exists λ �=0 such that r̈i = λri , for all i = 1, . . . , n. Two central configurations (r1, r2, . . . , rn),(r̄1, r̄2, . . . , r̄n) are said to be related if we can pass from one to the other through adilation and a rotation (centered at the center of mass). So we can study the classes ofcentral configurations defined by the above equivalence relation.
We are interested in the following question: What are the central configurationswhich lie on a common circle or sphere? These central configurations are called hereco-circular central configurations, in the planar case and co-spherical central con-figurations, in the spatial case. Trivial examples of co-circular and co-spherical cen-tral configurations are three positive masses at the vertices of an equilateral triangleand four positive masses at the vertices of a regular tetrahedron, respectively. In [4]Hampton proved that the square with four equal masses at the vertices is the onlyco-circular central configuration in which the center of mass coincides with the centerof the circle.
In [4] Hampton posed two questions. The first one is the following: is the equal massn-gon the only co-circular central configuration in which the center of mass coincideswith the center of the circle? As far as we know this question remains open for n ≥ 5.The second question is to characterize all the four-body central configurations whichlie on a common circle. In this sense, the present article gives a partial answer to thisquestion.
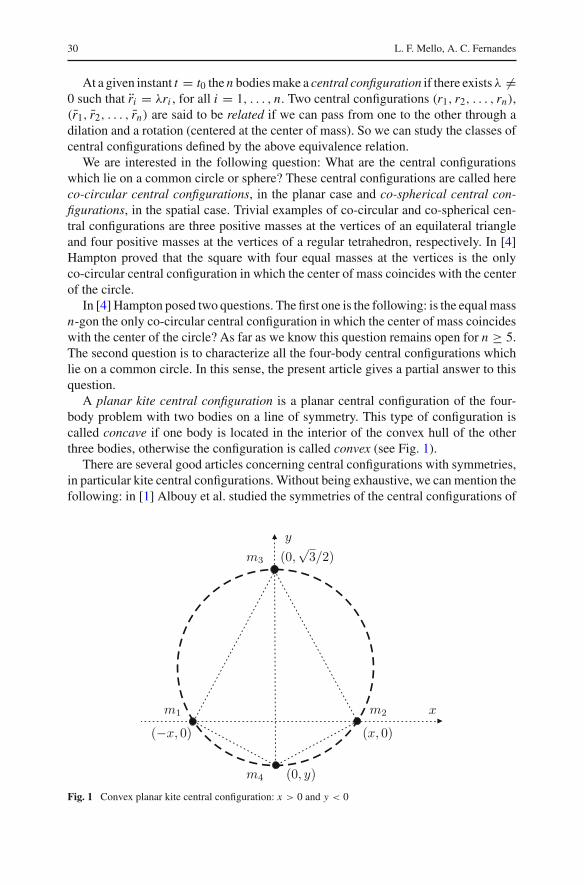
A planar kite central configuration is a planar central configuration of the four-body problem with two bodies on a line of symmetry. This type of configuration iscalled concave if one body is located in the interior of the convex hull of the otherthree bodies, otherwise the configuration is called convex (see Fig. 1).
There are several good articles concerning central configurations with symmetries,in particular kite central configurations. Without being exhaustive, we can mention thefollowing: in [1] Albouy et al. studied the symmetries of the central configurations of
Fig. 1 Convex planar kite central configuration: x > 0 and y < 0
Co-circular and Co-spherical Kite Central Configurations 31
the four-body problem; in [2] Bernat et al. studied planar central configurations of thefour-body problem with three equal masses (these studies naturally lead to kite centralconfigurations); in [6] Leandro proves the finiteness for a family of d-dimensionalsymmetrical configurations of d + 2 point masses (when d = 2 the studied case leadsto a planar kite central configuration); in [7] Mello et al. studied all the possible casesof planar kite central configurations.
In this paper we study co-circular kite central configurations, that is convex planarkite central configurations where the four bodies lie on a common circle. See Fig. 1.We have the following theorem.
Theorem 1.1 Consider four bodies with masses m1, m2, m3 and m4 located at r1 =(−x, 0), r2 = (x, 0), r3 = (0,
√3/2), r4 = (0, y), x > 0 and y < 0, respectively.
There is a curve C = {(x, y) : y = −2√
3x2/3, 1/2 < x < 3/2} with the follow-ing property: for each (x0, y0) ∈ C there are positive masses m1 = m2, m3(x0, y0)
and m4(x0, y0) located at (−x0, 0), (x0, 0), (0,√
3/2), (0, y0), respectively, such thatthese bodies are in a co-circular kite central configuration according to Fig. 1.
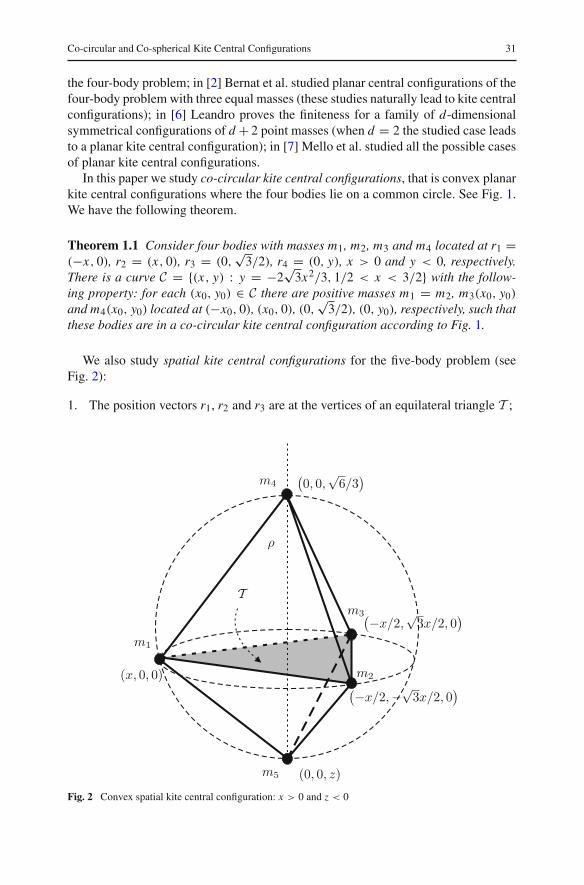
We also study spatial kite central configurations for the five-body problem (seeFig. 2):
1. The position vectors r1, r2 and r3 are at the vertices of an equilateral triangle T ;
Fig. 2 Convex spatial kite central configuration: x > 0 and z < 0

32 L. F. Mello, A. C. Fernandes
2. Let ρ be the line passing through the barycenter of T that is perpendicular to theplane that contains T . The position vector r4 ∈ ρ is fixed and does not belong tothe plane that contains T ;
3. The position vector r5 ∈ ρ, r5 �= r4.
This type of configuration is called concave if one body is located in the interior ofthe convex hull of the other four bodies, otherwise the configuration is called convex(see Fig. 2). For more details on spatial kite central configurations see [6,8].
In order to be more precise and without loss of generality, consider a coordinatesystem such that r1 = (x, 0, 0), r2 = (−x/2,−√
3x/2, 0), r3 = (−x/2,√
3x/2, 0),r4 = (0, 0,
√6/3) and r5 = (0, 0, z) with x > 0 and z �= √
6/3. See Fig. 2. Thusx is the radius of the circumscribed circle that contains r1, r2, r3 and z is the signedheight of the body five with respect to the plane that contains the triangle T . There isno special reason to take r4 at (0, 0,
√6/3). With this choice the length of the edge
of the regular tetrahedron is 1. Note that the body five is at the barycenter of T if andonly if z = 0. Therefore the configuration is convex if and only if z ≤ 0.
In this paper we also study co-spherical kite central configurations, that is convexspatial kite central configurations where the five bodies lie on a common sphere. SeeFig. 2. We have the following theorem.
Theorem 1.2 Consider five bodies with masses m1, m2, m3, m4 and m5 locatedat r1 = (x, 0, 0), r2 = (−x/2,−√
3x/2, 0), r3 = (−x/2,√
3x/2, 0), r4 =(0, 0,
√6/3) and r5 = (0, 0, z), respectively. There is a curve S = {(x, z) : z =
−√6x2/2,
√3/3 < x < 2
√3/3} with the following property: for each (x0, z0) ∈ S
there are positive masses m1 = m2 = m3, m4(x0, z0) and m5(x0, z0) locatedat (x0, 0, 0), (−x0/2,−√
3x0/2, 0), (−x0/2,√
3x0/2, 0), (0, 0,√
6/3), (0, 0, z0),respectively, such that these bodies are in a co-spherical kite central configurationaccording to Fig. 2.
The proof of Theorem 1.1 is given in Sect. 2 while the proof of Theorem 1.2 isgiven in Sect. 3.
2 Proof of Theorem 1.1
Denote the Euclidean distance by ri j = |ri − r j |. The equations of motion of theNewtonian n-body problem are given by
r̈i = −n∑
j=1j �=i
m jri − r j
r3i j
, (2.1)
for i = 1, 2, . . . , n. In (2.1) the gravitational constant is taken equal to one.From the definition of central configuration, Eq. (2.1) can be written as
λri = −n∑
j=1j �=i
m jri − r j
r3i j
, (2.2)

Co-circular and Co-spherical Kite Central Configurations 33
for i = 1, 2, . . . , n. For the planar case, simple computations allow us to write Eq. (2.2)in the following form
fi j =n∑
k=1k �=i, j
mk (Rik − R jk) �i jk = 0, (2.3)
for 1 ≤ i < j ≤ n, where Ri j = 1/r3i j and �i jk = (ri − r j ) ∧ (ri − rk). In fact, �i jk
is twice the oriented area of the triangle formed by the bodies at ri , r j and rk . See thereferences [3,7]. These n(n − 1)/2 equations are called Dziobek or Laura–Andoyerequations.
For the four-body problem Eq. (2.3) is a set of six equations. Our class of configu-rations with four bodies as in Fig. 1 without collisions must satisfy
r13 = r23, r14 = r24, �143 = �234.
Equation (2.3) can be written as
f12 = m3 (R13 − R23) �123 + m4 (R14 − R24) �124 = 0, (2.4)
f13 = m2 (R12 − R23) �132 + m4 (R14 − R34) �134 = 0, (2.5)
f14 = m2 (R12 − R24) �142 + m3 (R13 − R34) �143 = 0, (2.6)
f23 = m1 (R12 − R13) �231 + m4 (R24 − R34) �234 = 0, (2.7)
f24 = m1 (R12 − R14) �241 + m3 (R23 − R34) �243 = 0, (2.8)
f34 = m1 (R13 − R14) �341 + m2 (R23 − R24) �342 = 0. (2.9)
From the symmetries of our configuration, Eq. (2.4) is trivially satisfied and Eq. (2.9)can be written as
(m1 − m2) (R13 − R14) �341 = 0.
The term �341 �= 0, then m1 = m2 or R13 = R14. If R13 = R14, then the only centralconfiguration occurs when the bodies are at the vertices of a square and m1 = m2 =m3 = m4. Without loss of generality, we can suppose that
m1 = m2 = m.
The fact that m1 = m2 can be viewed as a consequence of the symmetry. See [1].Thus f13 = 0 ⇔ f23 = 0 and f14 = 0 ⇔ f24 = 0. Therefore it is sufficient tostudy Eqs. (2.5) and (2.6) only. These equations can be explicitly solved in the formm3 = m3(x, y, m) and m4 = m4(x, y, m) respectively. In these equations m can be
34 L. F. Mello, A. C. Fernandes
understood as a parameter for the central configurations. Thus we have
m3
m= (R12 − R24) �142
(R34 − R13) �143, (2.10)
m4
m= (R12 − R23) �132
(R34 − R14) �134. (2.11)
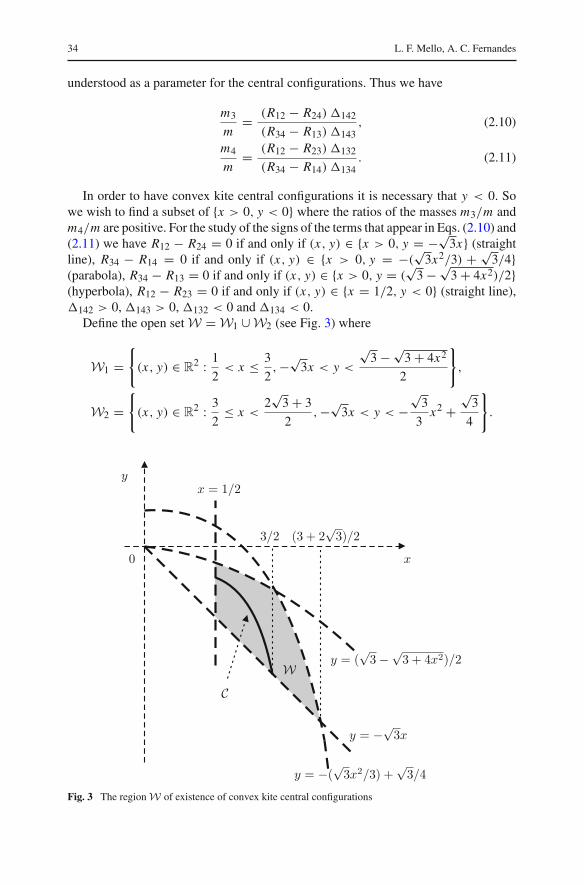
In order to have convex kite central configurations it is necessary that y < 0. Sowe wish to find a subset of {x > 0, y < 0} where the ratios of the masses m3/m andm4/m are positive. For the study of the signs of the terms that appear in Eqs. (2.10) and(2.11) we have R12 − R24 = 0 if and only if (x, y) ∈ {x > 0, y = −√
3x} (straightline), R34 − R14 = 0 if and only if (x, y) ∈ {x > 0, y = −(
√3x2/3) + √
3/4}(parabola), R34 − R13 = 0 if and only if (x, y) ∈ {x > 0, y = (
√3 − √
3 + 4x2)/2}(hyperbola), R12 − R23 = 0 if and only if (x, y) ∈ {x = 1/2, y < 0} (straight line),�142 > 0, �143 > 0, �132 < 0 and �134 < 0.
Define the open set W = W1 ∪ W2 (see Fig. 3) where
W1 ={
(x, y) ∈ R2 : 1
2< x ≤ 3
2,−√
3x < y <
√3 − √
3 + 4x2
2
}
,
W2 ={
(x, y) ∈ R2 : 3
2≤ x <
2√
3 + 3
2,−√
3x < y < −√
3
3x2 +
√3
4
}
.
Fig. 3 The region W of existence of convex kite central configurations

Co-circular and Co-spherical Kite Central Configurations 35
For (x, y) ∈ W it follows that x > 0, y < 0, R12 − R24 < 0, R34 − R14 < 0,R34 − R13 < 0, R12 − R23 < 0, �142 > 0, �143 > 0, �132 < 0 and �134 < 0.
It is simple to see that for (x0, y0) ∈ W the right-hand sides of Eqs. (2.10) and(2.11) are positive and therefore we have convex kite central configurations.
In order to prove the existence of co-circular kite central configurations we applyPtolemy’s Theorem.
Theorem 2.1 (Ptolemy’s Theorem). If ABC D is a convex quadrilateral, then wehave
AC.B D ≤ AB.C D + BC.AD, (2.12)
with equality if and only if the quadrilateral is inscribed in a circle.
In our case, equality in Eq. (2.12) is written as
r12 r34 = 2r13 r14 ⇔ y = −2√
3
3x2. (2.13)
From (2.13), we define the curve (see Fig. 3)
C ={
(x, y) ∈ R2 : y = −2
√3
3x2,
1
2< x <
3
2
}
. (2.14)
Therefore, if (x0, y0) ∈ C ⊂ W there are positive masses m1 = m2 = m,m3(x0, y0) and m4(x0, y0) located at (−x0, 0), (x0, 0), (0,
√3/2), (0, y0), respec-
tively, such that these bodies are in a co-circular kite central configuration accordingto Fig. 1. The proof of Theorem 1.1 is finished.
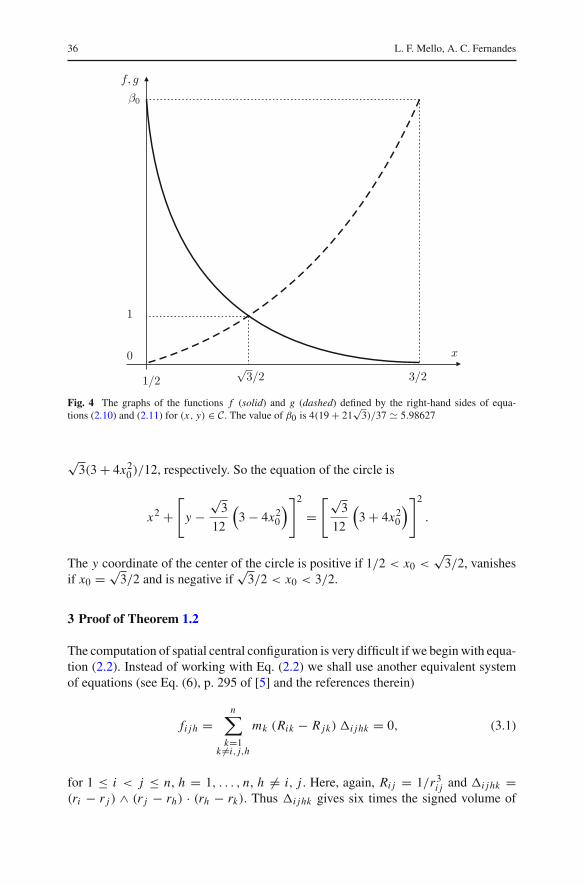
In order to have some quantitative information about the values of the masses mi ,i = 1, 2, 3, 4, define the functions f and g by the right-hand sides of equations(2.10) and (2.11), respectively, taking into account the y values in equation (2.13) andx ∈ (1/2, 3/2), that is for (x, y) ∈ C. By elementary calculations we have
limx→1/2+ f (x) = 4
37(19 + 21
√3), lim
x→3/2− f (x) = 0,
limx→1/2+ g(x) = 0, lim
x→3/2− g(x) = 4
37(19 + 21
√3).
The function f (g, respectively) is increasing (decreasing, respectively) in the interval(1/2, 3/2). The unique intersection point of the graphs of f and g is (
√3/2, 1). For
this point we have y = −√3/2. So the kite is the square and all the masses are equal.
It follows that m4 < m < m3, if 1/2 < x <√
3/2, m = m3 = m4, if x = √3/2 and
m3 < m < m4, if√
3/2 < x < 3/2. See Fig. 4.For each x0 ∈ (1/2, 3/2) the center and the radius of the circle that contains
the kite central configuration of Theorem 1.1 are given by (0,√
3(3 − 4x20 )/12) and
36 L. F. Mello, A. C. Fernandes
Fig. 4 The graphs of the functions f (solid) and g (dashed) defined by the right-hand sides of equa-tions (2.10) and (2.11) for (x, y) ∈ C. The value of β0 is 4(19 + 21
√3)/37 � 5.98627
√3(3 + 4x2
0 )/12, respectively. So the equation of the circle is
x2 +[
y −√
3
12
(3 − 4x2
0
)]2
=[√
3
12
(3 + 4x2
0
)]2
.
The y coordinate of the center of the circle is positive if 1/2 < x0 <√
3/2, vanishesif x0 = √
3/2 and is negative if√
3/2 < x0 < 3/2.
3 Proof of Theorem 1.2
The computation of spatial central configuration is very difficult if we begin with equa-tion (2.2). Instead of working with Eq. (2.2) we shall use another equivalent systemof equations (see Eq. (6), p. 295 of [5] and the references therein)
fi jh =n∑
k=1k �=i, j,h
mk (Rik − R jk) �i jhk = 0, (3.1)
for 1 ≤ i < j ≤ n, h = 1, . . . , n, h �= i, j . Here, again, Ri j = 1/r3i j and �i jhk =
(ri − r j ) ∧ (r j − rh) · (rh − rk). Thus �i jhk gives six times the signed volume of

Co-circular and Co-spherical Kite Central Configurations 37
the tetrahedron formed by the bodies at ri , r j , rh and rk . These n(n − 1)(n − 2)/2equations are also called here Dziobek equations.
For the proof of Theorem 1.2 we use Dziobek equations (3.1). For five bodies sys-tem (3.1) is a set of 30 equations. From the distances between the bodies it followsthat R12 = R13 = R23, R14 = R24 = R34 and R15 = R25 = R35.
Taking into account the symmetries we have the following equalities among others
�1425 = −�1435 = −�2415 = �2435 = �3415 = −�3425,−�1524 = �1534
= �2514 = −�2534 = −�3514 = �3524,
�1523 = −�1532 = −�2513 = �2531 = �3512 = −�3521.
Taking these symmetries into the Dziobek equations, the following nine equationsof (3.1) are trivially satisfied f123 = 0, f124 = 0, f125 = 0, f132 = 0, f134 = 0,f135 = 0, f231 = 0, f234 = 0 and f235 = 0.
Lemma 3.1 Consider r1, r2, r3 and r4 at the vertices of a regular tetrahedron. Then,there exists only one position for r5 at the center of the tetrahedron and positive massesm1 = m2 = m3 = m4 = m and m5 such that these bodies form a 2-parameter familyof central configurations.
Proof Due to symmetries we have the following equivalences between equations of(3.1)
f142 = 0 ⇔ f241 = 0, f143 = 0 ⇔ f341 = 0, f243 = 0 ⇔ f342 = 0,
f152 = 0 ⇔ f251 = 0, f153 = 0 ⇔ f351 = 0, f253 = 0 ⇔ f352 = 0.
Hence the remaining 21 equations are reduced to 15 equations. From f142 = 0,f143 = 0, and f243 = 0 we have m5(R15−R45)�1425 = 0, m5(R15−R45)�1435 = 0 andm5(R25 − R45)�2435 = 0, respectively. As �1425 �= 0, �1435 �= 0 and �2435 �= 0it follows that R15 = R45 = R25. This implies that r5 must be at the center ofthe tetrahedron. Adding this information into f152 = 0, f153 = 0 and f253 = 0we have (m3 − m4)(R13 − R35)�1523 = 0, (m2 − m4)(R12 − R25)�1532 = 0 and(m1 −m4)(R12 − R15)�2531 = 0, respectively. These last three equations are verifiedjust when m1 = m2 = m3 = m4. On the other hand, m5 can assume any positive value.The remaining equations of (3.1) are trivially satisfied and the lemma is proved. �
Due to Lemma 3.1, henceforth we assume that r12 �= r14, that is R12 �= R14. Fromequations f145 = 0, f245 = 0 and f345 = 0 we have
f145 = 0 ⇔ (R12 − R24)�1452(m2 − m3) = 0, (3.2)
f245 = 0 ⇔ (R12 − R14)�2451(m1 − m3) = 0, (3.3)
f345 = 0 ⇔ (R13 − R14)�3451(m1 − m2) = 0. (3.4)
As our classes of central configurations satisfy r4 �= r5 we have �1452 �= 0, �2451 �= 0and �3451 �= 0. From Eqs. (3.2), (3.3), (3.4) we have m1 = m2 = m3 = m. It follows

38 L. F. Mello, A. C. Fernandes
that equations f154 = 0, f451 = 0, f254 = 0, f452 = 0, f354 = 0 and f453 = 0 aresatisfied and
f142 = 0 ⇔ f143 = 0 ⇔ f241 = 0 ⇔ f243 = 0 ⇔ f341 = 0 ⇔ f342 = 0,
f152 = 0 ⇔ f153 = 0 ⇔ f251 = 0 ⇔ f253 = 0 ⇔ f351 = 0 ⇔ f352 = 0.
In other words, the initial 30 equations were reduced to 2 equations which are thefollowing
f142 = m (R13 − R34) �1423 + m5 (R15 − R45)�1425 = 0, (3.5)
f152 = m (R13 − R35)�1523 + m4 (R14 − R45) �1524 = 0. (3.6)
Equations (3.5) and (3.6) can be explicitly solved in the form m4 = m4(x, z, m) andm5 = m5(x, z, m) respectively. In these equations m can be understood as a parameterfor the central configurations.
From Eqs. (3.5) and (3.6) we have
m4
m= (R35 − R13) �1523
(R14 − R45) �1524, (3.7)
m5
m= (R34 − R13) �1423
(R15 − R45)�1425. (3.8)
In order to have convex central configurations it is necessary that z < 0. We wish tofind subsets of D = {x > 0, z < 0} where the ratios of the masses m4/m and m5/mare positive. For the study of the signs of the terms that appear in Eqs. (3.7) and (3.8)we have R35 − R13 = 0 if and only if (x, z) ∈ {x > 0, z = −√
2x} (straight line),R14 − R45 = 0 if and only if (x, z) ∈ {x > 0, z = √
6/3−√9x2 + 6/3} (hyperbola),
R34 − R13 = 0 if and only if (x, z) ∈ {x = √3/3}, R15 − R45 = 0 if and only if
(x, z) ∈ {x > 0, z = √6(2 − 3x2)/12} (parabola).
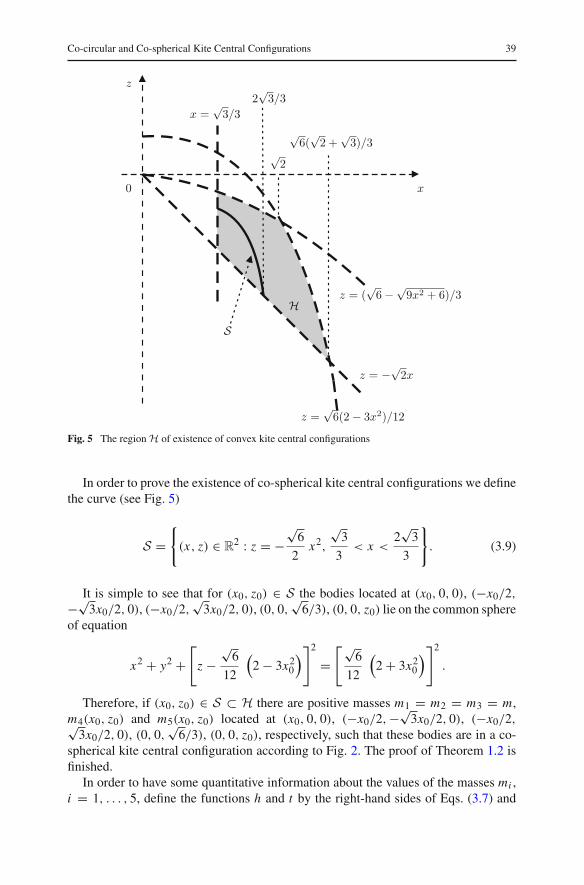
Define the open set H = H1 ∪ H2 (see Fig. 5) where
H1 ={√
3
3< x ≤ √
2,−√2x < z <
√6
3−
√9x2 + 6
3
}
,
H2 ={√
2 ≤ x <
√6(
√2 + √
3)
3,−√
2x < z <
√6(2 − 3x2)
12
}
.
For (x, z) ∈ H we have x > 0, z < 0, R35 − R13 > 0, R34 − R13 > 0, R15 − R45 > 0,R14 − R45 > 0, �1523 < 0, �1524 < 0, �1423 > 0 and �1425 > 0.
It is simple to see that for (x, z) ∈ H the right-hand sides of equations (3.7) and(3.8) are positive and therefore we have convex central configurations.
Co-circular and Co-spherical Kite Central Configurations 39
Fig. 5 The region H of existence of convex kite central configurations
In order to prove the existence of co-spherical kite central configurations we definethe curve (see Fig. 5)
S ={
(x, z) ∈ R2 : z = −
√6
2x2,
√3
3< x <
2√
3
3
}
. (3.9)
It is simple to see that for (x0, z0) ∈ S the bodies located at (x0, 0, 0), (−x0/2,
−√3x0/2, 0), (−x0/2,
√3x0/2, 0), (0, 0,
√6/3), (0, 0, z0) lie on the common sphere
of equation
x2 + y2 +[
z −√
6
12
(2 − 3x2
0
)]2
=[√
6
12
(2 + 3x2
0
)]2
.
Therefore, if (x0, z0) ∈ S ⊂ H there are positive masses m1 = m2 = m3 = m,m4(x0, z0) and m5(x0, z0) located at (x0, 0, 0), (−x0/2,−√
3x0/2, 0), (−x0/2,√3x0/2, 0), (0, 0,
√6/3), (0, 0, z0), respectively, such that these bodies are in a co-
spherical kite central configuration according to Fig. 2. The proof of Theorem 1.2 isfinished.
In order to have some quantitative information about the values of the masses mi ,i = 1, . . . , 5, define the functions h and t by the right-hand sides of Eqs. (3.7) and
40 L. F. Mello, A. C. Fernandes
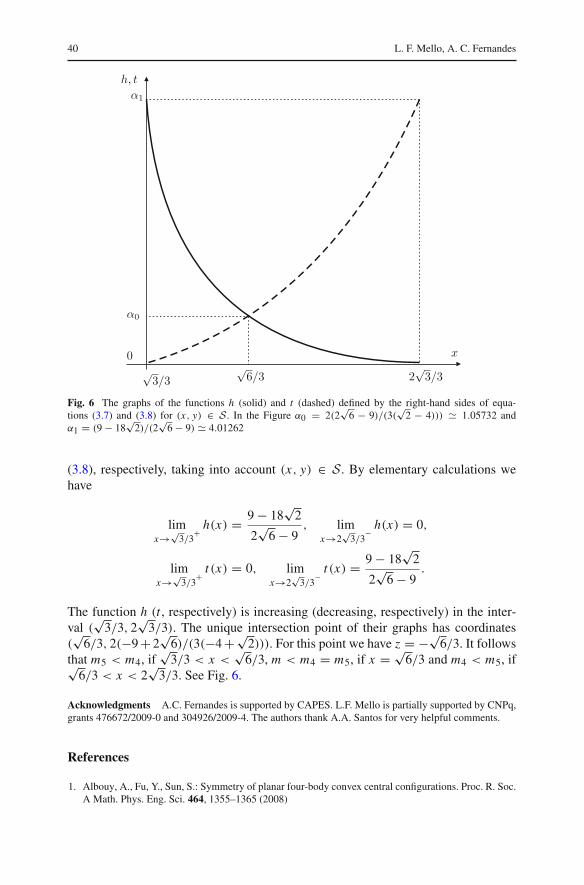
Fig. 6 The graphs of the functions h (solid) and t (dashed) defined by the right-hand sides of equa-tions (3.7) and (3.8) for (x, y) ∈ S. In the Figure α0 = 2(2
√6 − 9)/(3(
√2 − 4))) � 1.05732 and
α1 = (9 − 18√
2)/(2√
6 − 9) � 4.01262
(3.8), respectively, taking into account (x, y) ∈ S. By elementary calculations wehave
limx→√
3/3+ h(x) = 9 − 18
√2
2√
6 − 9, lim
x→2√
3/3− h(x) = 0,
limx→√
3/3+ t (x) = 0, lim
x→2√
3/3− t (x) = 9 − 18
√2
2√
6 − 9.
The function h (t , respectively) is increasing (decreasing, respectively) in the inter-val (
√3/3, 2
√3/3). The unique intersection point of their graphs has coordinates
(√
6/3, 2(−9 + 2√
6)/(3(−4 +√2))). For this point we have z = −√
6/3. It followsthat m5 < m4, if
√3/3 < x <
√6/3, m < m4 = m5, if x = √
6/3 and m4 < m5, if√6/3 < x < 2
√3/3. See Fig. 6.
Acknowledgments A.C. Fernandes is supported by CAPES. L.F. Mello is partially supported by CNPq,grants 476672/2009-0 and 304926/2009-4. The authors thank A.A. Santos for very helpful comments.
References
1. Albouy, A., Fu, Y., Sun, S.: Symmetry of planar four-body convex central configurations. Proc. R. Soc.A Math. Phys. Eng. Sci. 464, 1355–1365 (2008)
Co-circular and Co-spherical Kite Central Configurations 41
2. Bernat, J., Llibre, J., Pérez-Chavela, E.: On the planar central configurations of the 4-body problem withthree equal masses. Dyn. Contin. Discrete Impuls. Syst. 16, 1–13 (2009)
3. Hagihara, Y.: Celestial Mechanics, vol. 1. MIT Press, Massachusetts (1970)4. Hampton, M.: Co-circular central configurations in the four-body problem. In: Dumortier, F., Henk, B.
et al. (eds) Equadiff 2003. Proceedings of the International Conference on Differential Equations, pp.993–998. World Scientific Publishing Co., Singapore (2005)
5. Hampton, M., Santoprete, M.: Seven-body central configurations: a family of central configurations inthe spatial seven-body problem. Celest. Mech. Dyn. Astron. 99, 293–305 (2007)
6. Leandro, E.S.G.: Finiteness and bifurcations of some symmetrical classes of central configura-tions. Arch. Ration. Mech. Anal. 167, 147–177 (2003)
7. Mello, L.F., Chaves, F.E., Fernandes, A.C.: Configurações centrais planares do tipo pipa. Rev. Bras.Ens. Fis. 31, 1–7 (2009) (in Portuguese)
8. Mello, L.F., Fernandes, A.C.: New spatial central configurations in the 5-body problem. An. Acad. Bras.Ciênc. (2010, accepted for publication)
9. Newton, I.: Philosophi Naturalis Principia Mathematica. Royal Society, London (1687)