Capitulo6 12
18
Análise de Estabilidade 113 Francisco A. Lotufo 6– Análise de Estabilidade 6.1– Estabilidade: A) Um sistema é estável se a sua resposta ao impulso tende para zero à medida que o tempo tende para o infinito. B) Um sistema é estável se cada entrada limitada produz uma saída limitada. Um sistema linear será definido como estável se, e somente se, todos os pólos da função de transferência do sistema tiverem partes reais negativas. Note que esta definição é mais forte, uma vez que ela não admite pólo simples no eixo imaginário. Isso resulta do fato de que todos os componentes da resposta natural decrescerão então com o tempo. 6.2– Grau de estabilidade: Se o sistema é estável, quão próximo está de se tornar instável? Este é o conceito de Estabilidade Relativa (restringir as possibilidades, a faixa de trabalho). 6.3 – Sistema Marginalmente Estável: É aquele que tem algumas raízes com partes reais iguais a zero, mas nenhuma com partes reais positivas. 6.4 – Critério de Estabilidade de Routh – Hurwitz: O problema mais importante em sistemas de controle lineares e invariantes no tempo é o da estabilidade, ou seja, em que condições um sistema se tornará instável? Ou ainda, se ele é instável, como devemos estabilizá-lo? Conforme dito anteriormente, um sistema de controle é estável se e somente se todos os pólos de malha fechada estiverem situados no semi-plano esquerdo do plano “s”. Como a maioria dos sistemas lineares de malha fechada ) ( ) ( ) ( 1 ) ( ) ( ) ( ) ( ) ( s H s G s G s G s G s R s C s T C C + = = C(s) R(s) G(s) Planta H(s) Elemento de Medida G c (s) Controlador
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of Capitulo6 12

Análise de Estabilidade 113
Francisco A. Lotufo
6– Análise de Estabilidade 6.1– Estabilidade: A) Um sistema é estável se a sua resposta ao impulso tende para zero à medida que o tempo tende
para o infinito. B) Um sistema é estável se cada entrada limitada produz uma saída limitada.
Um sistema linear será definido como estável se, e somente se, todos os pólos da função de transferência do sistema tiverem partes reais negativas. Note que esta definição é mais forte, uma vez que ela não admite pólo simples no eixo imaginário. Isso resulta do fato de que todos os componentes da resposta natural decrescerão então com o tempo.
6.2– Grau de estabilidade:
Se o sistema é estável, quão próximo está de se tornar instável? Este é o conceito de Estabilidade Relativa (restringir as possibilidades, a faixa de trabalho).
6.3 – Sistema Marginalmente Estável:
É aquele que tem algumas raízes com partes reais iguais a zero, mas nenhuma com partes reais positivas. 6.4 – Critério de Estabilidade de Routh – Hurwitz:
O problema mais importante em sistemas de controle lineares e invariantes no tempo é o da estabilidade, ou seja, em que condições um sistema se tornará instável? Ou ainda, se ele é instável, como devemos estabilizá-lo? Conforme dito anteriormente, um sistema de controle é estável se e somente se todos os pólos de malha fechada estiverem situados no semi-plano esquerdo do plano “s”. Como a maioria dos sistemas lineares de malha fechada
)()()(1
)()(
)(
)()(
sHsGsG
sGsG
sR
sCsT
C
C
+==
C(s)R(s) G(s)
Planta
H(s)
Elemento de Medida
Gc(s)
Controlador

Análise de Estabilidade 114
Francisco A. Lotufo
apresentam funções da transferência de malha fechada da forma:
)(
)(
...
...
)(
)()(
11
110
11
110
sD
sN
asasasa
bsbsbsb
sR
sCsT
nnnn
mmmm
=++++++++==
−−
−−
onde ia e jb são constantes e nm≤ . Deve-se então fatorar o polinômio )(sD para achar os pólos à
malha fechada.
Como exemplo, a resposta ao degrau unitário do sistema estável da Figura 6.1(a) é comparada com a de um sistema instável da Figura 6.1(b). As respostas, também mostradas na Figura, evidenciam que enquanto as oscilações nos sistemas estáveis diminuem nos instáveis crescem sem limite. Observe também as respostas em regime permanente1.
Figura 6.1: Pólos a Malha Fechada e Natureza da Resposta
1 Figura retirada do livro: NISE, N. Control Systems Engineering, Third Edition, John Wiley & Sons, 2000.

Análise de Estabilidade 115
Francisco A. Lotufo
Um critério simples, conhecido como critério de estabilidade de Routh, permite determinar o número de pólos de malha fechada que estão no semi-plano direito do plano s sem ter que fatorar o polinômio.
O critério de estabilidade de Routh – Hurwitz é um método rápido para a verificação da estabilidade assintótica de sistemas racionais; é na realidade um algoritmo que permite uma contagem rápida do número de raízes com parte real positiva de uma equação polinomial, ou seja, dos pólos com parte real positiva do respectivo polinômio.
O procedimento no critério de estabilidade é o seguinte:
1-) Escrever o polinômio )(sD na seguinte forma:
nnnn asasasa ++++ −
− 11
110 ...
Onde os coeficientes são grandezas reais. Admite-se que 0≠na ; isto é, qualquer raiz nula foi
removida. 2-) Se qualquer dos coeficientes for zero ou negativo na presença de pelo menos um coeficiente positivo, então há uma raiz ou raízes que são imaginárias ou que têm partes reais positivas. Portanto, em um caso como este o sistema não é assintoticamente estável. É importante notar que a condição de que todos os coeficientes sejam positivos não é suficiente para assegurar a estabilidade. A condição necessária, mas não suficiente, para a estabilidade é que os coeficientes de)(sD estejam
todos presentes e todos tenham sinal positivo. (Se todos os ia são negativos, eles podem ser
tornados positivos multiplicando-se ambos os membros da equação por 1− .) 3-) Se todos os coeficientes são positivos, arranjar os coeficientes do polinômio em linhas e colunas de acordo com o seguinte padrão:
a0s
n + a1sn-1 + …+ an-1s
1 + an = 0 (eq. característica) sn a0 a2 a4 a6 …
sn-1 a1 a3 a5 a7 … sn-2 b1 b2 b3 … … sn-3 c1 c2 c3 … … … … … … … … s0 … … … … …
1
30211
..
a
aaaab
−= ;
1
50412
..
a
aaaab
−= ;
1
70613
..
a
aaaab
−=
1
21311
..
b
baabc
−= ;
1
31512
..
b
baabc
−= ;
1
41713
..
b
baabc
−=
O arranjo completo de coeficientes é triangular. Note que, ao desenvolver o arranjo, uma linha inteira pode ser multiplicada ou dividida por um número positivo visando simplificar os cálculos subseqüentes sem alterar a conclusão de estabilidade.
O critério de estabilidade de Routh diz que o número de raízes de )(sD com partes reais positivas é igual ao número de mudanças de sinal dos coeficientes da primeira coluna do arranjo tabular. Deve-se notar que os valores exatos dos termos da primeira coluna não precisam ser

Análise de Estabilidade 116
Francisco A. Lotufo
conhecidos; apenas os sinais são necessários. A condição necessária e suficiente para que todas as raízes de )(sD fiquem no semi-plano esquerdo do plano “s”, é que todos os coeficientes de )(sD sejam positivos e que todos os termos da primeira coluna do arranjo tabular sejam maiores do que zero (tenham sinais positivos).
Se estas condições forem satisfeitas, o polinômio é dito ser um polinômio de Hurwitz, caso a
terceira parte da condição não seja satisfeita, o número de raízes no semiplano direito será igual ao número de trocas de sinal dos coeficientes na primeira coluna do arranjo acima. Exemplo:
012345 fsesdscsbsas +++++ s5 a c e s4 b d f s3 badbc /)( − bafbe /)( − 0 s2 * f s1 ∆ s0 f
Onde:
b
adbc
bb
afbed
b
adbc
−
−−
−
=* e *
* fb
adbc
b
afbe
−−
−
=∆
Exemplo1: Verificar se o sistema representado pela função de transferência abaixo é estável:
2322
475)(
234
23
+++++++=
ssss
ssssT
2322 234 ++++ ssss s4 2 1 2 s3 2 3 s2 -2 2 s1 5 s0 2
Neste caso: - Ocorrem 2 mudanças de sinal na 1a coluna; portanto há 2 pólos no semi-plano direito. - Logo, há 2 pólos no semi-plano esquerdo. - Para haver pólo no eixo, deve-se ter zero na 1a coluna.
Resposta: O sistema é instável, porque a 1a coluna possui elementos menores que zero, ou seja, temos duas raízes no semi-plano direito do plano s (há duas trocas de sinal).

Análise de Estabilidade 117
Francisco A. Lotufo
Exemplo2: Determinar o número de raízes com parte real positiva da seguinte equação:
2401527210)( 2345 +++++= ssssssQ
5 4 3 210 72 152 240s s s s s+ + + + +
s5 1 10 152 s4 1 72 240 s3 -62 -88 s2 70,6 240 s1 122,6 s0 240
∴ O sistema não é estável.
A tabela possui duas trocas de sinal na 1a coluna; da linha de s4 para a linha s3, e da linha s3 para a linha s2. Portanto, o polinômio apresenta duas raízes com parte real positiva. O número de trocas de sinais, é o número de raízes no semi-plano direito.
Na verdade, o polinômio Q(s) foi pré-fabricado sendo resultado do seguinte produto:
)42)(42)(31)(31)(3()( jsjsjsjsssQ +−−−++−++=
Onde as duas raízes que provocam a troca de sinal são: 42 j± Obs.: No MatLab podemos obter as raízes a partir de:
q = [1 1 10 72 152 240]; <enter> roots(q) <enter>
Casos Especiais: A) O primeiro termo de uma linha (ou fila) é igual a zero e os demais não são todos nulos: Exemplo 1:
522)()(
)()( 234 ++++=⇒= sssssD
sD
sNsT
s4 1 2 5 s3 1 2 s2 0 5 ⇐⇐⇐⇐ s1 s0
Para prosseguirmos, devemos fazer xs 1= em )(sD .
Se a parte real do número complexo “x” for positiva, a parte real de “s” também será:
4
432
234
5221)(5
2211)(
x
xxxxxD
xxxxxD
++++=⇒++++=
522 234 ++++ ssss

Análise de Estabilidade 118
Francisco A. Lotufo
Logo: 05221)( 432 =++++= xxxxxD 1225 234 ++++ xxxx
x4 5 2 1 x3 2 1 x2 -1/2 1 x1 5 x0 1
Como )(xD possui duas raízes com parte real positiva, o mesmo ocorrerá com )(sD . O sistema não é estável porque contém duas raízes no semi-plano direito do plano s. Exemplo 2: Através do algoritmo de “Routh”, deseja-se determinar o número de raízes com parte real positiva do seguinte polinômio.
1)( 234 ++++= sssssD
s4 1 1 1 s3 1 1 s2 0 s1 s0
Para este caso, é evidente que a mudança de variável ( xs 1= ) não funciona, pois os coeficientes de )(xD e )(sD são os mesmos. Aplica-se então o seguinte procedimento:
“Multiplica-se )(sD por )( 1ps− , onde p1 é um pólo conhecido”.
Para este caso:
12222)1()()(
10)1(2345 +++++=+=
−=→=+sssssssDsD
ss
A
12222 2345 +++++ sssss 5s 1 2 2 4s 2 2 1 3s 1 3/2 2s -1 1 1s 5/2 0s 1
A tabela apresentou duas trocas de sinal na 1a coluna; portanto o polinômio dado, tem duas raízes (dois pólos) com partes reais positiva, ou seja, duas raízes no semi-plano direito do plano “s”. Logo, não é estável.
1234 ++++ ssss

Análise de Estabilidade 119
Francisco A. Lotufo
B) Ocorrência de uma linha com todos os elementos nulos:
“Deve-se utilizar a linha anterior, àquela que contém todos os elementos nulos, descrevê-la em polinômio e derivá-la. Esse resultado impõe os novos coeficientes da linha que era nula”.
Exemplo: 2896554)( 234567 +++++++= ssssssssD
s7 1 5 6 8 s6 4 5 9 2 s5 15/4 15/4 30/4 s4 1 1 2 → 2)( 24
1 ++= sssa s3 0 0 ssdssda 24/)( 3
1 += s2 1/2 2 s1 -14 s0 2
Obs.: A linha de zeros é causada pela ocorrência de duas linhas proporcionais anterior a ela. Neste caso, retornamos para a linha anterior à linha de zeros e formamos o polinômio “ 224 ++ ss ”, que é um fator do polinômio original )(sD ; para continuarmos, derivamos “ 224 ++ ss ” em relação à s e substituímos os coeficientes na linha s3:
ssds
ssd
ds
sda24
)24()( 324
1 +=++=
As raízes são, aproximadamente:
-2,6180+j0; -0,3820+j0; -1,0+j0; -0,6761-j0,9783; -0,6761+j0,9783; 0,6761-j0,9783; 0,6761+j0,9763
Duas mudanças de sinal, duas raízes no semi-plano direito: o sistema é Instável.

Análise de Estabilidade 120
Francisco A. Lotufo
A ocorrência de uma fila (ou linha) nula na “Tabela de Routh” é um caso especial “muito importante”, com as seguintes peculiaridades:
1a) Uma fila nula na tabela (“arranjo”) de Routh indica a existência de raízes simétricas com relação à origem. Este tipo de simetria pode ser de 3 formas:
(I) pares de raízes imaginárias; (II) pares de raízes reais; (III) 2 pares de raízes complexas conjugadas com partes reais e imaginárias e de sinais opostos.
2a) Se o polinômio não tiver raízes nulas, a fila que se anula sempre será de grau ímpar.
3a) As raízes simétricas são zeros (ou pólos) do polinômio formado com os coeficientes da fila anterior a que se anula. Exemplo: Considere o polinômio e avalie a estabilidade de Q(s) para qual o arranjo de Routh é dado a seguir:
122823115)( 2345 +++++= ssssssQ
s5 1 11 28 s5 1 11 28 s4 5 23 12 s4 5 23 12 s3 6,4 25,6 s3 6,4 25,6 s2 3 12 s2 3 12 s1 0 s1 6 →→→→ 123)( 2
1 += ssa s0 12 s0 12 sdssda 6/)(1 =
Não há troca de sinal na 1a coluna, mas isso não significa que o sistema seja assintoticamente ESTÁVEL, pois usamos um artifício (“eliminação dos zeros”) no arranjo de Routh. Na verdade, o sistema pode ser marginalmente estável, caso seu possível mapa de pólos (“raízes”), seja o número I mostrado acima, com duas raízes simétricas e imaginárias.
O sistema é Marginalmente Estável. Não há nenhuma mudança de sinal na 1a coluna; portanto todas as raízes têm parte real negativa, EXCETO para um par de raízes imaginárias puras no eixo imaginário, onde estas raízes são obtidas de:
0123)( 21 =+= ssa ou: 2js ±=
Assim, as raízes de Q(s) são: -3, ± j2, -1, -1.

Análise de Estabilidade 121
Francisco A. Lotufo
Exercício: Através do algoritmo de Routh, determine o número de raízes no semi-plano direito do plano s da seguinte equação: 01818112 234 =++++ ssss Resposta: Não existe. Dica: Vão ficar 2 raízes sobre o eixo imaginário “j w”, o que não é parte real positiva.
O método de Routh é também útil na determinação do “RANGE” de parâmetro para o qual um sistema realimentado mantém-se estável. Considere o sistema mostrado na figura abaixo. As propriedades de estabilidade do sistema e outras características de desempenho do sistema são uma função do ganho de realimentação “K”.
A equação característica do sistema é dada por:
0)6)(1(
)1(1 =
+−++sss
sK
Ou ainda:
0)6(5066
0)6)((0)6)(1(23223
2
=+−++⇒=++−−+=+++−⇒=+++−KsKssKKsssss
KKssssKKssss
Condições Necessárias:
606 >⇒>− KK e 0>K
O arranjo de Routh correspondente é:
s3 1 (K-6) s2 5 K
s1 5
)6(5 KK −−
s0 K
5,7
304030505/])6(5[
>>⇒>−−⇒>−−
K
KKKKK
∴ O sistema é estável em malha fechada somente se 5,7>K . Importante: Toda fila que tivesse envolvendo um termo em K originaria uma condição de restrição, sendo que todas devem ser descritas e a condição majoritária (no exemplo K > 7,5 enaltecida para fornecer a estabilidade do sistema).
Análise de Estabilidade 122
Francisco A. Lotufo
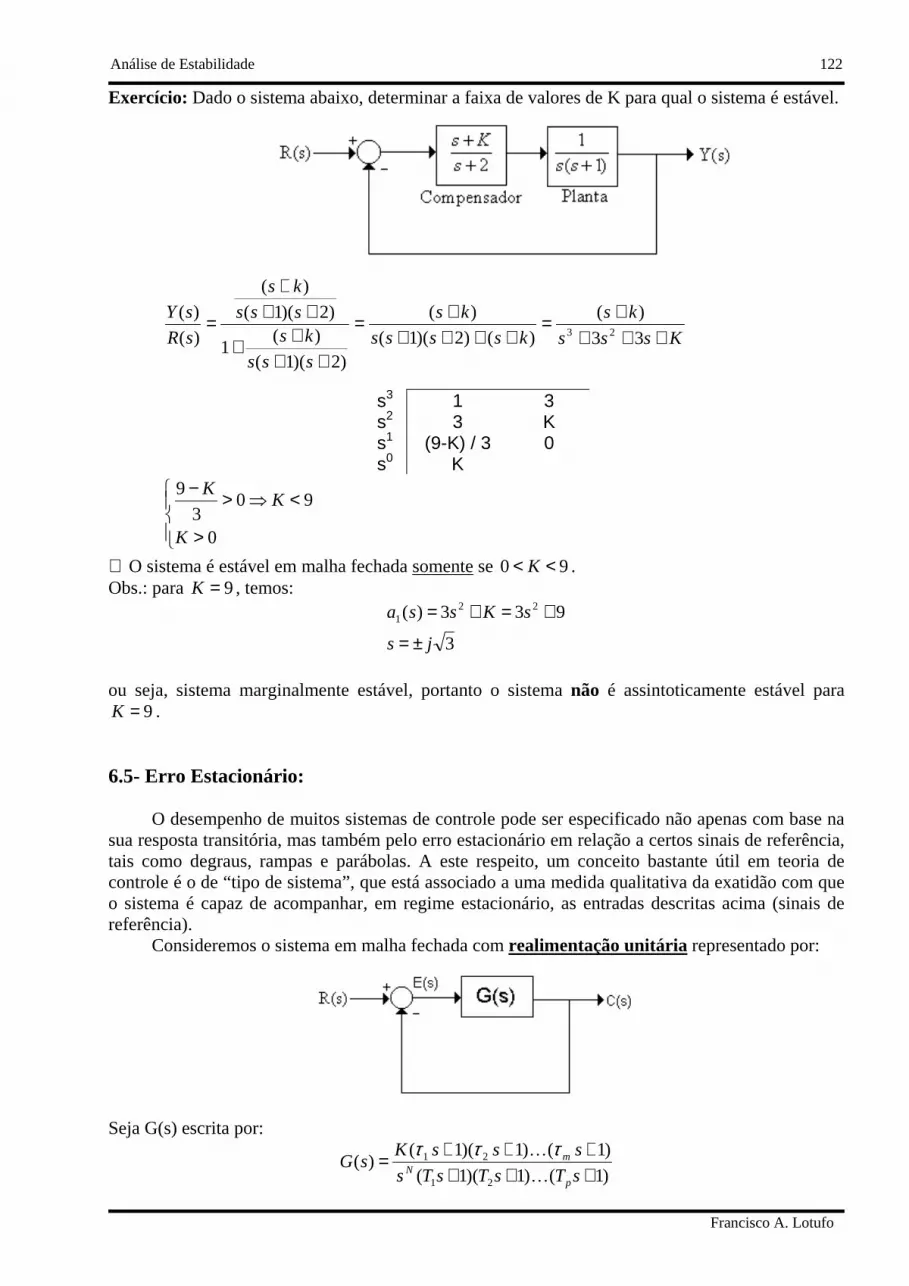
Exercício: Dado o sistema abaixo, determinar a faixa de valores de K para qual o sistema é estável.
Ksss
ks
kssss
ks
sss
kssss
ks
sR
sY
++++=
+++++=
++++
+++
=33
)(
)()2)(1(
)(
)2)(1(
)(1
)2)(1(
)(
)(
)(23
s3 1 3 s2 3 K s1 (9-K) / 3 0 s0 K
>
<⇒>−
0
903
9
K
KK
∴ O sistema é estável em malha fechada somente se 90 << K . Obs.: para 9=K , temos:
3
933)( 221
js
sKssa
±=
+=+=
ou seja, sistema marginalmente estável, portanto o sistema não é assintoticamente estável para
9=K . 6.5- Erro Estacionário:
O desempenho de muitos sistemas de controle pode ser especificado não apenas com base na sua resposta transitória, mas também pelo erro estacionário em relação a certos sinais de referência, tais como degraus, rampas e parábolas. A este respeito, um conceito bastante útil em teoria de controle é o de “tipo de sistema”, que está associado a uma medida qualitativa da exatidão com que o sistema é capaz de acompanhar, em regime estacionário, as entradas descritas acima (sinais de referência).
Consideremos o sistema em malha fechada com realimentação unitária representado por:
Seja G(s) escrita por:
)1()1)(1(
)1()1)(1()(
21
21
++++++=
sTsTsTs
sssKsG
pN
m
K
K τττ

Análise de Estabilidade 123
Francisco A. Lotufo
onde os pólos na origem em malha aberta foram explicitados através do termo Ns . O valor de “N” define o “tipo de sistema”. Usualmente, fala-se em sistema tipo Zero, Um ou
Dois, respectivamente, para N = 0, 1 ou 2. À medida que cresce o tipo do sistema, aumenta sua capacidade de seguir entradas, no
sentido: Degrau → Rampa → Parábola
s
1
2
1
s
3
1
s
Em compensação, sistemas de tipos mais altos requerem compensadores mais complexos para sua estabilização.
)()()( sCsRsE −= Mas: )()()( sEsGsC = Logo, )()()()( sEsGsRsE −=
)(
)(1
1)(
)()](1)[(
sRsG
sE
sRsGsE
+=
=+
Para o sistema representado pelo diagrama de blocos, obtém-se a função de transferência que
relaciona E(s) à R(s):
Admitimos que o sistema em malha fechada seja estável, o teorema do valor final diz que:
)()(1
1lim)(lim)(lim
00sR
sGsssEtee
sstss +
===→→∞→
Os coeficientes de erro estacionário definidos a seguir são figuras de mérito do sistema de controle no sentido de que, quanto maiores esses coeficientes, tanto menores os erros estacionários. Entrada Degrau Unitário:
Quando 1
( )R ss
= )(1
1lim
0 sGe
sss +
=→
Defini-se “coeficiente de erro de posição estacionário” Kp como:
)(lim0
sGKps→
=
De maneira que: Kp
ess +=
1
1
a) Sistemas de Tipo Zero:
KsTsTsT
sssKKp
p
m
s=
++++++
=→ )1()1)(1(
)1()1)(1(lim
21
21
0K
K τττ
)()(1
1)( sR
sGsE
+=

Análise de Estabilidade 124
Francisco A. Lotufo
e, portanto : K
ess +=
1
1
∴ no sistema Tipo “0”, c(t) não consegue atingir o degrau. b) Sistemas de Tipo Um:
1 2
01 2
( 1)( 1) ( 1)lim
( 1)( 1) ( 1)m
sp
K s s sKp
s T s T s T s
τ τ τ→
+ + += = ∞+ + +
K
K
01
1 =∞+
=sse
c) Sistemas de Tipo Dois ou Maior:
Da mesma forma: 0=→∞= sseKp
Entrada Rampa Unitária:
Neste caso: 2
1)(
ssR =
E, consequentemente,
)(.
1lim
)](1[
1lim
00 sGssGse
ssss →→
=+
=
Define-se “coeficiente de erro de velocidade estacionário” Kv como:
)](.[lim
0sGsK
sv →
=
Assim, o erro estacionário para a entrada rampa unitária é dado por:
Kvess
1=

Análise de Estabilidade 125
Francisco A. Lotufo
a) Sistemas do Tipo Zero: 1 2
01 2
( 1)( 1) ( 1)lim 0
( 1)( 1) ( 1)m
vs
p
K s s sK s
T s T s T s
τ τ τ→
+ + += =+ + +
K
K
e portanto: 0
11 ==v
ss Ke ∞=sse
b) Sistemas do Tipo Um:
KsTsTsT
sssKK
p
m
sv =
++++++=
→ )1()1)(1(
)1()1)(1(lim
21
21
0K
K τττ
de onde resulta que : K
ess
1=
c) Sistemas do Tipo Dois ou Maior:
∞=++++++=
→ )1()1)(1(
)1()1)(1(lim
21
21
0 sTsTsTs
sssKK
p
m
sv
K
K τττ
E dessa forma: ∞
== 11
vss K
e ; 0=sse
Entrada Parábola Unitária:
Para uma entrada do tipo: 2
)(2t
tr =

Análise de Estabilidade 126
Francisco A. Lotufo
Temos que: 3
1)(
ssR = . Neste caso, vem que:
ass
ss KsGssGse
1
)(
1lim
)](1[
1lim
2020==
+=
→→ )]([lim 2
0sGsK
sa →
=
RESUMO
Tipo de Entrada Tipo de Sistema ssRtr /1)(;1)( == 2/1)(;)( ssRttr == 32 /1)(;2/)( ssRttr ==
Zero )1/(1 K+ ∞ ∞ Um 0 K/1 ∞ Dois 0 0 K/1
Resposta temporal Exemplo: Um servomecanismo utilizando um motor DC controlado pela armadura pode ser representado pelo diagrama de blocos abaixo. Neste caso, temos:
OBS: A partir da planta do sistema “ )(sG ”, constatamos que este sistema é de “tipo 1”. Reescrevendo a função de transferência na forma de constante de tempo, forma esta que é essencial para a caracterização do sistema, obtemos:
+
=⋅+
=1
/1
/1
)()(
p
ss
p
k
p
p
pss
ksG
E, portanto:
+
=1
)(
p
ss
p
k
sG p
kKganhoDC =→
Sendo assim: - para entrada degrau unitário:
0lim ( ) 0p sss
K G s e→
= = ∞∴ =
- para entrada rampa unitária: 0
1lim ( )v sss
kK sG s e
p K→= = ∴ =
- para entrada parábola unitária: 2
0lim ( ) 0a sss
K s G s e→
= = ∴ = ∞

Análise de Estabilidade 127
Francisco A. Lotufo
Comparação entre os erros estacionários de sistemas à malha aberta e sistemas à malha fechada: Recordação Sejam os sistemas de controle à malha aberta e à malha fechada mostrados na figura abaixo:
)(1
)( sRs
KKsC c
+=
τ ou
sssR
sC 1
1
1
)(
)( ⋅
+=
τ
No sistema à malha aberta, o ganho cK é calibrado de modo a se ter K
Kc
1= . Assim, a função de
transferência do sistema de controle à malha aberta é: 1
10 +
=s
Gτ
.
No sistema de controle à malha fechada, o ganho pK do controlador é ajustado de modo que
1>>KK p .
Admitindo-se uma excitação em degrau unitário, vamos comparar os erros estacionários nestes dois sistemas. Para o sistema de controle à malha aberta, o sinal de erro é:
)()](1[)(
:,1
)()](1[)(
)()()()(
)()()()()()(
sRsGsE
quesetemKKComo
sRsKGKsE
sRsKGKsRsE
sCsRsEoutctrte
O
C
OC
OC
−=−≅
−=−=
−=−=
O erro estacionário a uma excitação em degrau unitário é:
)]0(1[)(1
)](1[lim)()(lim)(00
OssOs
sss
ss Gtes
sGstessEte −=⇒−=⇒=→→
Se )0(0G , o ganho estático do sistema de controle à malha aberta, for igual à unidade, então o
erro em regime permanente será nulo. Contudo, devido às mudanças no ambiente e ao envelhecimento dos componentes, o ganho estático )0(0G se afastará do valor unitário à medida
que o tempo passa, e o erro estacionário deixará de ser nulo. Este erro permanecerá no sistema à malha aberta até que se faça uma nova calibração do sistema.

Análise de Estabilidade 128
Francisco A. Lotufo
Para o sistema de controle à malha fechada, o sinal de erro é:
1)(
)(.)(1
1)()()()(
+=
+=⇒−=
s
KKsGonde
sRsG
sEsCsRsE
P
τ
O erro estacionário a uma excitação degrau unitário é:
KKte
Gte
ssGstessEte
Pssss
sss
sss +
=⇒+
=⇒⋅+
⋅=⇒=→→ 1
1)(
)0(1
1)(
1
)(1
1lim)()(lim)(
00
Num sistema de controle à malha fechada, o ganho pK é ajustável para ter um valor grande
em comparação com K/1 . Assim, o erro estacionário pode ser feito muito pequeno, embora não exatamente igual à zero. Observação: Admita-se a seguinte variação da função de transferência de um processo a controlar, supondo-se Kp e Kc constantes.
11)(
+∆+=
+=
s
KK
s
KsT
ττ
Por simplicidade, sejam os seguintes valores: 1,0/,1,10 =∆=∆= KKKK . Então, o erro estacionário na resposta ao degrau unitário se torna, para o sistema de controle à
malha aberta:
1( ) 1 ( ) 1 1,1 0,1sse t K K
K= − + ∆ = − = −
Erro negativo: a saída está um pouco acima da referência.
Para o sistema de controle à malha fechada, se pK for ajustado no valor KK p 100= , então o
erro de regime estacionário da resposta ao degrau unitário se torna:
1 1 10,009
1001 (0) 1 1101 ( )sse
G K KK
= = = =+ ++ + ∆
Assim, o sistema de controle à malha fechada é superior ao sistema de controle à malha
aberta, em presença de mudanças no ambiente, envelhecimento dos componentes e efeitos similares que afetam o desempenho em regime permanente. Exemplo 1: Seja o sistema mostrado na figura abaixo, mostrar que o valor de regime permanente do erro de acompanhamento de um sinal em rampa unitária é B/K. Este erro pode ser feito pequeno escolhendo-se B pequeno e/ou K grande. Contudo, reduzir o valor de B e/ou aumentar o valor de K tem como efeito a redução no coeficiente de amortecimento, o que normalmente não é desejável. Descrever um método ou métodos para reduzir a relação B/K e manter um valor razoável para o coeficiente de amortecimento: (0,5 < ζ < 0,7).

Análise de Estabilidade 129
Francisco A. Lotufo
2
2
2
2 20 0
( ) ( ) ( ) ( ) ( )
1 2( ) lim ( ) ( ) lim ( )
: ,2
ss ss sss s
n
n
Js BsE s R s C s E s R s
Js Bs K
Js Bs Be t sE s e t s e t
Js Bs K s K
B Konde
JKJ
ζω
ζ ω
→ →
+= − ⇒ =+ +
+= ⇒ = ⋅ ⇒ = =+ +
= =
Para assegurar que uma resposta transitória e um erro de regime permanente aceitáveis há
uma excitação em rampa unitária, ζ não precisa ser muito pequeno, nem ωn muito grande. É possível ter o valor do erro estacionário bem pequeno fazendo-se o valor de K ser grande. Um valor elevado para K, contudo, produziria um valor pequeno para ζ e aumentaria o valor máximo de ultrapassagem; o que é indesejável. Torna-se necessário, portanto, estabelecer um compromisso entre as magnitudes do erro estacionário e do valor máximo de ultrapassagem a uma excitação em rampa.
Para o sistema descrito, pode não ser muito fácil obter uma solução de compromisso; é então desejável que se considerem outros tipos de ação de controle que possam melhorar, ao mesmo tempo, a resposta transitória e o comportamento em regime permanente. Um deles consiste em usar um controlador PID (Proporcional + Integral + Derivativo), o outro diz respeito ao uso de retroação tacométrica (ou de velocidade). Exercício 1: Um braço de motor e uma câmara poderiam ser usados para colher frutas2. A câmara é usada para fechar a malha de retroação com um microcomputador que controla o braço. O processo é:
2)3()(
+=
s
KsG
a-) Calcule o erro de estado estacionário esperado da garra para um comando em degrau de amplitude A, como uma função de K. b-) Indicar um possível sinal de perturbação para este sistema:
2 Figura retirada do livro : Dorf, R.C.; Bishop, R.H. Modern Control Systems, Addison Wesley, Massachusetts, 7th Edition, 1995

Análise de Estabilidade 130
Francisco A. Lotufo
Solução: a-)
2
0 0
2
( ) ( ) ( )
1 1( ) ( )
1 ( ) 1( 3)
1 9( ) lim ( ) lim ( )
91 1( 3) 9
ss sss s
E s R s Y s
AE s R s
KG s ss
A A Ae t sE s s e t
K Ks Ks
→ →
= −
= = ⋅+ +
+
= = ⋅ ⇒ = =++ +
+
b-) Um possível sinal de perturbação seria o vento, pois dá o efeito de uma carga extra. Exercício 2: Um acionador de disco magnético requer um motor para posicionar uma cabeça de leitura/gravação sob trilhas de dados na superfície de um disco em rotação3. O motor e a cabeça são representados por:
)1(
10)(
+=
sssG
τ,
onde s001,0=τ . O controlador pega a diferença entre as posições atual e a desejada e gera um erro. Este erro é multiplicado por um amplificador de ganho K. a-) Qual é o erro de posição estacionário para uma mudança em degrau na posição desejada (entrada desejada)? b-) Calcule o valor requerido para K afim de conduzir ao erro estacionário de 0,1 mm para uma entrada em rampa de scm10 .
3 Figura retirada do livro : Dorf, R.C.; Bishop, R.H. Modern Control Systems, Addison Wesley, Massachusetts, 7th edition, 1995.