BFO APPROACH TO IDENTIFY AND CONTROL UNSTABLE PROCESS USING A DOUBLE FEEDBACK LOOP
10
Intelligent Automation and Soft Computing, Vol. 1X, No. X, pp. 1-3, 2012 Copyright © 20XX, TSI ® Press Printed in the USA. All rights reserved BFO APPROACH TO IDENTIFY AND CONTROL UNSTABLE PROCESS USING A DOUBLE FEEDBACK LOOP V. RAJINIKANTH Department of Electronics and Instrumentation, St.Joseph’s College of Engineering, IT Highway, Chennai, India. [email protected] K. LATHA Department of Instrumentation Engineering, M.I.T. Campus, Anna University, Chennai, India. [email protected] ABSTRACT— System identification is the preliminary practice, widely executed in the field of process control to develop the mathematical model from experimental data. In this paper, we attempted the proportional controller based system identification procedure for a class of time delayed unstable systems using Bacterial Foraging Optimization algorithm. In the proposed work, a double feedback control loop is considered to identify and control the unstable system. The inner loop with a „P‟ controller is considered for the system identification procedure and outer loop with the „PI/PID‟ controller is used to control the system. The proposed method is tested on a class of unstable systems in the presence and absence of measurement noise. The performance of proposed identification procedure is compared with the classical identification procedures existing in the literature. The results evident that, the discussed method helps to accomplish a satisfactory model with considerably reduced model mismatch. The identified model is then considered for the controller tuning manoeuvre. The method has been tested successfully on many time delayed unstable processes. Keywords - Bacterial foraging optimization, CSTR, Double feedback control, Identification, Performance measure, Unstable process 1. INTRODUCTION System identification is the preliminary practice, widely performed in process industries to develop mathematical models from experimental data. Derivation of accurate models from nonlinear chemical systems such as Continuous Stirred Tank Reactor (CSTR), biochemical reactor, polymerization reactor, etc., is difficult because of their complex nature. Based on the operating region, these chemical systems may exhibit stable or unstable steady states. System identification procedure followed for stable system is quite uncomplicated and simple open loop test is sufficient to develop an approximated model. For unstable systems, the identification procedure should be performed in closed loop condition. Closed loop step test and relay tuning are the two most popular schemes widely employed in industries to identify the approximated process model for time delayed unstable systems. The practical application of relay based system identification is limited by the delay time to process time constant (θ/τ) ratio. An unstable process under relay feedback produce limit cycle when θ/τ ratio < 0.693 [11]. Moreover the relay based identification cannot provide an appropriate response when the process time of the real time system is very large (Ex: cell growth in bioreactor). Hence, closed loop step test can be used as an alternate for relay based identification.
Transcript of BFO APPROACH TO IDENTIFY AND CONTROL UNSTABLE PROCESS USING A DOUBLE FEEDBACK LOOP
Intelligent Automation and Soft Computing, Vol. 1X, No. X, pp. 1-3, 2012
Copyright © 20XX, TSI®
Press Printed in the USA. All rights reserved
BFO APPROACH TO IDENTIFY AND CONTROL UNSTABLE
PROCESS USING A DOUBLE FEEDBACK LOOP
V. RAJINIKANTH Department of Electronics and Instrumentation, St.Joseph’s College of Engineering,
IT Highway, Chennai, India.
K. LATHA Department of Instrumentation Engineering, M.I.T. Campus,
Anna University, Chennai, India.
ABSTRACT— System identification is the preliminary practice, widely executed in the field of process
control to develop the mathematical model from experimental data. In this paper, we attempted the
proportional controller based system identification procedure for a class of time delayed unstable systems
using Bacterial Foraging Optimization algorithm. In the proposed work, a double feedback control loop is
considered to identify and control the unstable system. The inner loop with a „P‟ controller is considered
for the system identification procedure and outer loop with the „PI/PID‟ controller is used to control the
system. The proposed method is tested on a class of unstable systems in the presence and absence of
measurement noise. The performance of proposed identification procedure is compared with the classical
identification procedures existing in the literature. The results evident that, the discussed method helps to
accomplish a satisfactory model with considerably reduced model mismatch. The identified model is then
considered for the controller tuning manoeuvre. The method has been tested successfully on many time
delayed unstable processes.
Keywords - Bacterial foraging optimization, CSTR, Double feedback control, Identification, Performance
measure, Unstable process
1. INTRODUCTION
System identification is the preliminary practice, widely performed in process industries to develop mathematical models from experimental data. Derivation of accurate models from nonlinear chemical systems such as Continuous Stirred Tank Reactor (CSTR), biochemical reactor, polymerization reactor, etc., is difficult because of their complex nature. Based on the operating region, these chemical systems may exhibit stable or unstable steady states. System identification procedure followed for stable system is quite uncomplicated and simple open loop test is sufficient to develop an approximated model. For unstable systems, the identification procedure should be performed in closed loop condition. Closed loop step test and relay tuning are the two most popular schemes widely employed in industries to identify the approximated process model for time delayed unstable systems. The practical application of relay based system identification is limited by the delay time to process time constant (θ/τ) ratio. An unstable process under relay feedback produce limit cycle when θ/τ ratio < 0.693 [11]. Moreover the relay based identification cannot provide an appropriate response when the process time of the real time system is very large (Ex: cell growth in bioreactor). Hence, closed loop step test can be used as an alternate for relay based identification.

2 Intelligent Automation and Soft Computing
The closed loop system identification procedure for unstable system is widely addressed in the literature [10-12, 14, 16]. To reduce the computation time and also to increase the identified model accuracy, it is necessary to develop soft computing based system identification technique. In recent years, nature inspired heuristic algorithms such as Genetic Algorithm (GA), Particle Swarm Optimization (PSO), and Bacterial Foraging Optimization (BFO) are widely proposed to find solutions for a variety of engineering problems [1, 4-9, 13].
The heuristic algorithm based system identification procedure is initially discussed by Shin
et.al for stable processes [6]. In their work a real-coded GA based system identification procedure is discussed to identify transfer function model from the step response data. From the recent literature, it is observed that the Bacterial Foraging Optimization (BFO) algorithm have emerged as a powerful tool for finding the solutions for a variety of complex engineering problems [5, 8, 15]. In a classical BFO, the number of parameters to be assigned is large compared to other existing nature inspired algorithms. Hence, in this work we considered the recently discussed enhanced Bacterial Foraging Optimization (BFO) algorithm [15].
In the present work, we combined the „P‟ controller based closed loop system identification
procedure discussed in the book by Padmasree and Chidambaram [12] with the BFO algorithm. A double feedback control structure discussed by Vijayan and Panda [17] is considered for identification and control. The proposed procedure helps to attain an approximated First Order Plus Time Delayed (FOPTD) model for a class of unstable processes. Through a comparative study with the classical system identification techniques existing in the literature, the performance of the identified model is validated. The outer loop with a PI/PID controller is then tuned using the BFO algorithm. The BFO tuned double feedback controller provides better process performances such as smooth reference tracking, reduced peak overshoot, reduced settling time, and error minimization for the unstable processes considered in this paper.
The remaining portion of the paper is organized as follows: Section 2 provides the
description of „P‟ controller based system identification procedure. Section 3 and 4 provide overview of BFO and BFO based system identification procedure respectively. Results and discussions are presented in Section 5. The conclusion of the present work is drawn in Section 6.
2. CLOSED LOOP SYSTEM IDENTIFICATION PROCEDURE
The proportional (P) controller based system identification technique is very simple and the parameter to be adjusted is only the proportional gain „Kp1‟. It is a closed loop test and it can be applicable to the unstable system having the „θ/τ‟ ratio up to 0.8. The previous study reports that, the identification procedure with a stable under damped like process response can minimize the mismatch between the original process and the identified process model [14]. The closed loop structure of the double feedback scheme attempted in this work is shown in Fig. 1 [17].
Where Gp(s) is the unstable system to be identified and controlled, Gc1(s) is the inner loop „P‟
controller considered for identification, and Gc2(s) is the outer loop „PI/ PID‟ controller to stabilize the system (parallel for of PID controller with a derivative filter is considered in Gc2(s)).
Gc1(s)
Y(S)
R(S) - Gc2(s)
Gp(s)
N(S) -
1
2
S
Inner loop
Outer loop
Figure 1. Double feedback loop for Identification and Control of unstable system
BFO Approach to Identify and Control Unstable Process using a Double Feedback Loop 3 During the system identification procedure, the selector switch „S‟ is placed at position „1‟
and the inner loop controller is tuned manually by the operator. The inner loop is used to identify the process model using the step response data. In the proposed work, the identification procedure is performed in the presence and absence of the measurement noise term „N(s).
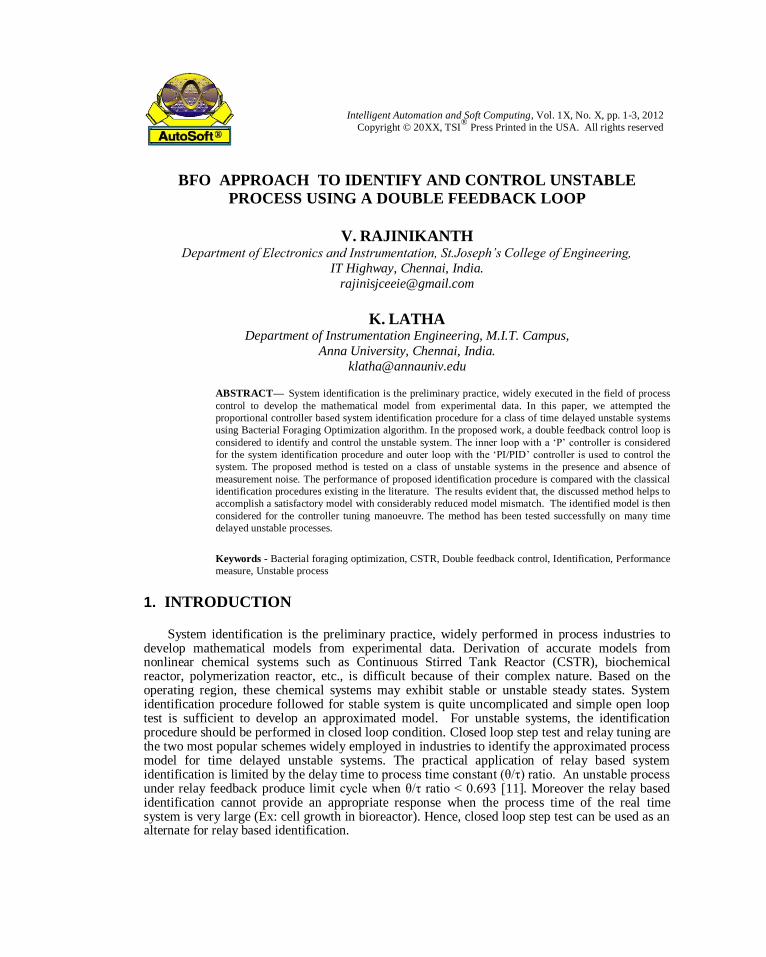
The key steps in „P‟ controller based system identification using the double feedback control loop is as follows;
Step.1 Place the selector switch ‘S’ at terminal 1. Consider the loop with ‘Gc1’ only, and
Excite the system with an unity step signal ‘R(s)’,
Step.2 Adjust the value of ‘Kp1’ until the closed loop response of the inner loop is similar
to an under damped second order system as in Fig 2.
Step.3 Calculate the values of Yp, Yv, Δt = (Tv-Tp), and Y∞
Step.4 Find the FOPTD model of the system using Equations 1 to 8,
Step.5 Validate the model.
Step.6 Place the selector switch ‘S’ at terminal 2,
Step.7 Consider the identified model to tune the outer loop PID controller
Fig.2 depicts the under damped second order like response of the inner loop for both the noisy and the noise free response for the unstable system. Inorder to get the noisy response, a band-limited white noise with a noise power of 0.2 and a mean of „zero‟ is introduced along with the feedback signal as depicted in Fig 1. The parameters of the process model are identified by considering the following equations discussed in book by Padmasree and Chidambaram [12];
)1K)(1(P k2
1 (1)
1)(K(1)(K)1K(P k2
kk2 (2)
1pk K KK (3)
22 )Vln( /)Vln( (4)
)YY/()YY(V PV (5)
Where: P1, P2, V = variables, ξ = damping ratio, Kk = closed loop gain.
The process parameters can be found by considering the following mathematical relations;
0 50 100 150 200 250 300 350 400 450 500-0.5
0
0.5
1
1.5
2
2.5
3
Time, sec
Ste
p r
esponse w
ith 'P
' contr
olle
r
Step response (Noise)
Step response (Noise free)
Overshoot (Yp)
Openloop delay
Final value (Yinf)
Undershoot (Yv)
Tv - Tp
Figure 2. Closed loop response of the system with ‘P’ controller
4 Intelligent Automation and Soft Computing
Process gain : ))1Y(K/(YK p (6)
Process time constant : π
)P P t(τ 21 / )P P t(τ 21 (7)
Closed loop delay : π P/)P t 2( 21 (8)
The identified FOPDT unstable process model will be =1τs
e K(s)G
θs
p
(9)
A comparative study is executed between the identified FOPDT model with the original
process, and the model developed using the classical system identification procedures existing in
the literature [15] in order to find the model with best fit.
3. BACTERIA FORAGING ALGORITHM
Bacteria Foraging Optimization (BFO) algorithm is a new division of population based optimization technique developed by inspiring the foraging manners of E.coli bacteria. The basic
operation of BFO algorithm has four key steps namely chemo-taxis, swarming, reproduction, and
elimination-dispersal. A detailed description of the above procedures could be found in [4,5,8,15].
The parameters of the BFO algorithms are defined below:
D = the dimension of search space, N = the total number of E.Coli bacteria, Nc= total number
of chemotaxis steps, Ns = swim length during the search, Nre = total number of reproduction steps,
Ned = total number of elimination – dispersal events, Nr = number of reproduced bacteria, Ped =
the probability that each bacterium will be eliminated / dispersed, n = the run length.
In the literature there is no apparent guide line to assign parameters for the BFO algorithm. In this work, we considered the BFO algorithm recently discussed by Rajinikanth and Latha [15]. The
chief benefit of this method is, the number of parameters to be assigned is only the values of
bacteria size (N), search dimension (D), performance index (PI), and search boundary (SB).
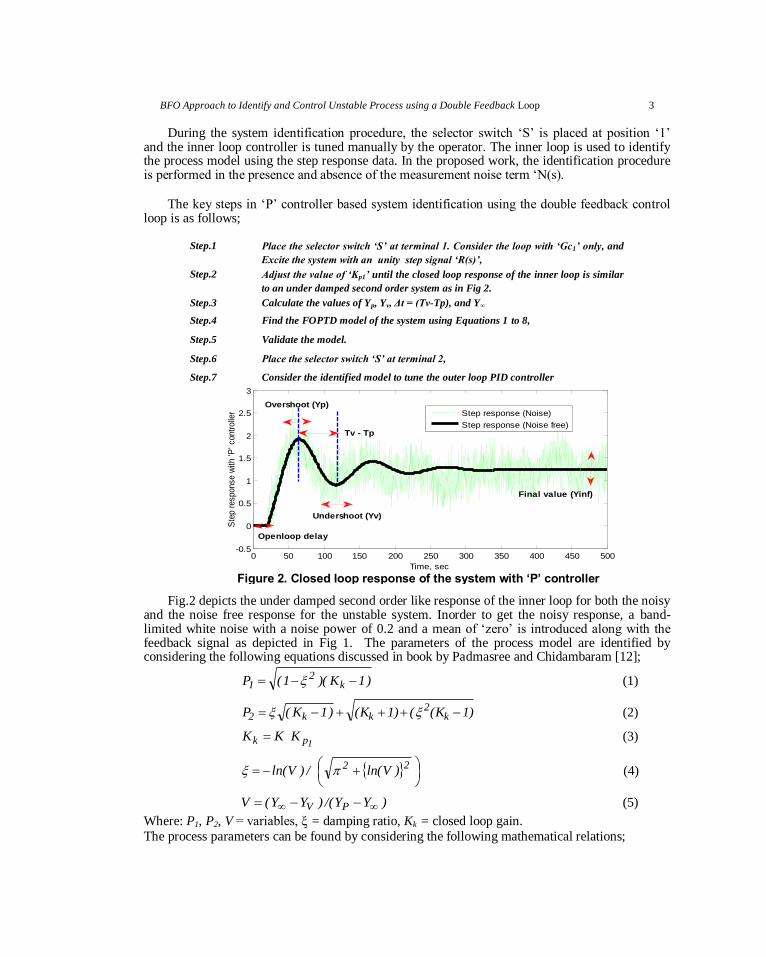
4. BFO BASED IDENTIFICATION and CONTROL In this paper, we proposed a time domain based Objective Function (OF), to support the BFO
based system identification search. Fig 3 shows the time response for the closed loop system.
Where; T1 = process delay, T2 = rise
time, T3 = peak time (Tp), T4 = valley time
(Tv), T5 = settling time, Tmax = time to
reach Yinf (Y∞), Y= desired process output
(reference signal), Y1 = peak overshoot, Y2
= peak undershoot, Y3 = maximum limit for
Y; Y4 = minimum limit for Y.
The objective function for system
identification with „N(s) = 0‟ can be written
as follows;
maxT
4
4
3
3
1
1
T
4
T
T
23
T
T
12
T
0
1ident YWYWYWWOF
(10)
0 5 10 15 20 25
0
0.5
1
1.5
Time (sec)
Pro
cess r
esponse
Reference Input Process output
T2T1 T4 T5
Y1
Y2
Y3
Y4
TmaxT3
Figure 3. Time domain objective function
BFO Approach to Identify and Control Unstable Process using a Double Feedback Loop 5
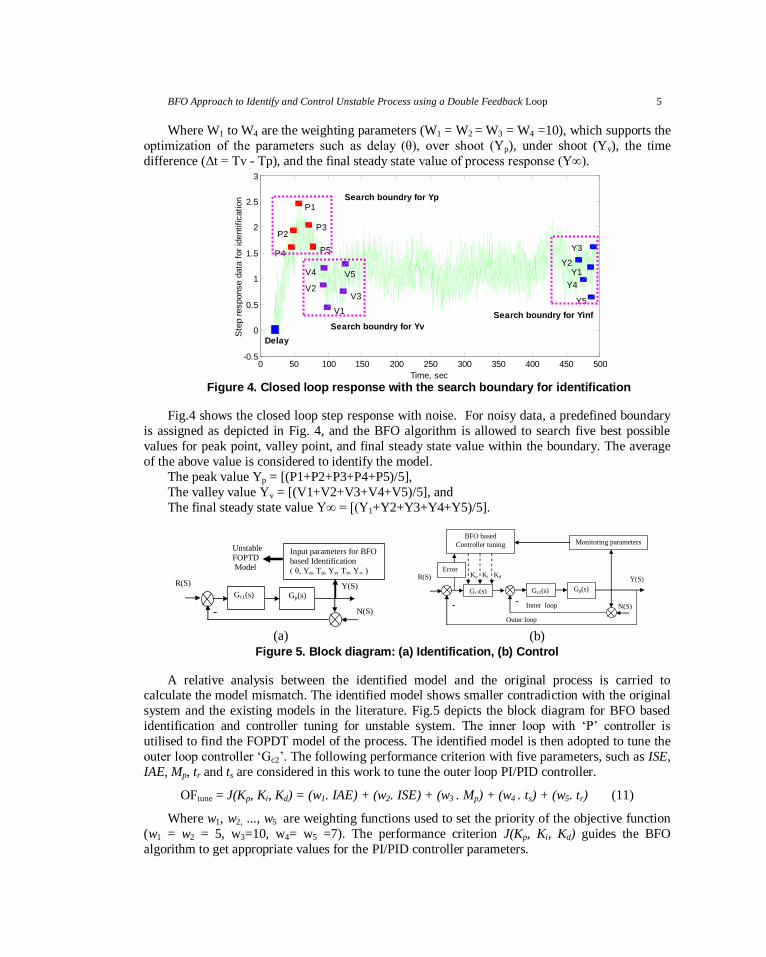
Where W1 to W4 are the weighting parameters (W1 = W2 = W3 = W4 =10), which supports the
optimization of the parameters such as delay (θ), over shoot (Yp), under shoot (Yv), the time
difference (Δt = Tv - Tp), and the final steady state value of process response (Y∞).
0 50 100 150 200 250 300 350 400 450 500-0.5
0
0.5
1
1.5
2
2.5
3
Time, sec
Ste
p r
esponse d
ata
for
identification
P5
P2
P4
V2
V1
V3
V4
P3
P1
Y1 Y2
Y4
Y5
V5
Y3
Search boundry for Yp
Delay
Search boundry for Yv
Search boundry for Yinf
Figure 4. Closed loop response with the search boundary for identification
Fig.4 shows the closed loop step response with noise. For noisy data, a predefined boundary
is assigned as depicted in Fig. 4, and the BFO algorithm is allowed to search five best possible
values for peak point, valley point, and final steady state value within the boundary. The average
of the above value is considered to identify the model.
The peak value Yp = [(P1+P2+P3+P4+P5)/5],
The valley value Yv = [(V1+V2+V3+V4+V5)/5], and
The final steady state value Y∞ = [(Y1+Y2+Y3+Y4+Y5)/5].
Figure 5. Block diagram: (a) Identification, (b) Control
A relative analysis between the identified model and the original process is carried to calculate the model mismatch. The identified model shows smaller contradiction with the original
system and the existing models in the literature. Fig.5 depicts the block diagram for BFO based
identification and controller tuning for unstable system. The inner loop with „P‟ controller is
utilised to find the FOPDT model of the process. The identified model is then adopted to tune the
outer loop controller „Gc2‟. The following performance criterion with five parameters, such as ISE,
IAE, Mp, tr and ts are considered in this work to tune the outer loop PI/PID controller.
OFtune = J(Kp, Ki, Kd) = (w1. IAE) + (w2. ISE) + (w3 . Mp) + (w4 . ts) + (w5. tr) (11)
Where w1, w2, ..., w5 are weighting functions used to set the priority of the objective function
(w1 = w2 = 5, w3=10, w4= w5 =7). The performance criterion J(Kp, Ki, Kd) guides the BFO
algorithm to get appropriate values for the PI/PID controller parameters.
Input parameters for BFO
based Identification
( θ, Yp, Tp, Yv, Tv, Y∞ )
Unstable
FOPTD
Model
Gc1(s)
Y(S) R(S)
-
Gp(s)
N(S)
(a)
Gc1(s)
Y(S) R(S)
- Gc2(s)
Gp(s)
N(S) -
BFO based
Controller tuning
Error Kp Ki Kd
Monitoring parameters
Outer loop
Inner loop
(b)
6 Intelligent Automation and Soft Computing
5. Results and Discussions To study the performance of the BFO based identification and control practice, four examples
are considered from the literature. The following simulation study demonstrates the ability of the
proposed method.
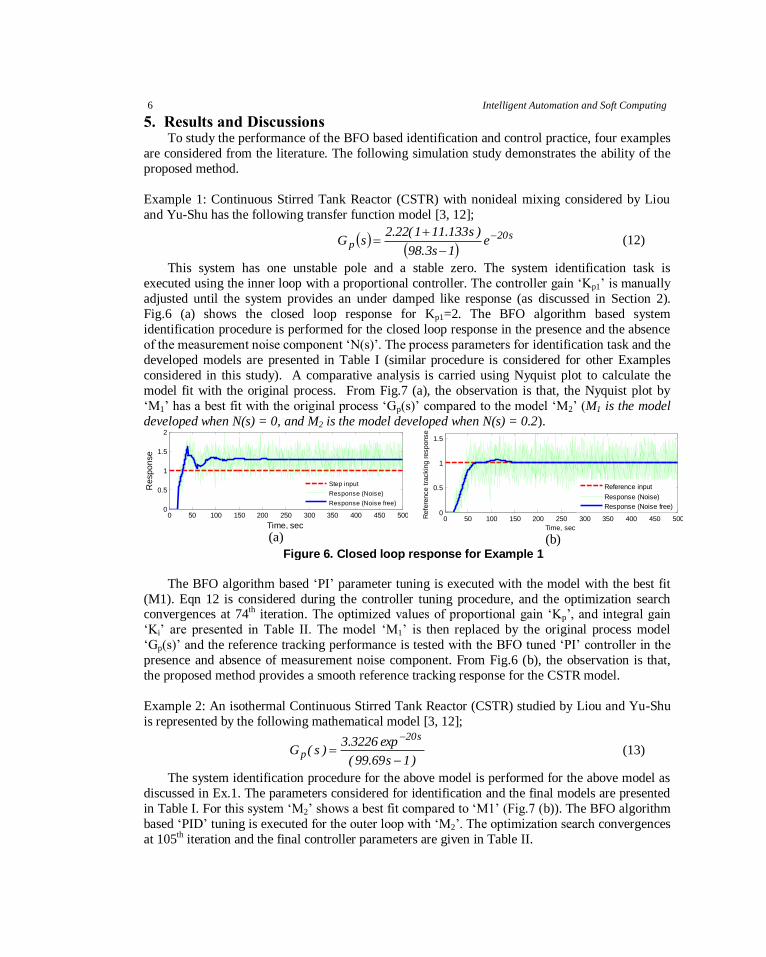
Example 1: Continuous Stirred Tank Reactor (CSTR) with nonideal mixing considered by Liou
and Yu-Shu has the following transfer function model [3, 12];
s20p e
198.3s
)s133.111(22.2sG
(12)
This system has one unstable pole and a stable zero. The system identification task is
executed using the inner loop with a proportional controller. The controller gain „Kp1‟ is manually
adjusted until the system provides an under damped like response (as discussed in Section 2).
Fig.6 (a) shows the closed loop response for Kp1=2. The BFO algorithm based system
identification procedure is performed for the closed loop response in the presence and the absence
of the measurement noise component „N(s)‟. The process parameters for identification task and the
developed models are presented in Table I (similar procedure is considered for other Examples
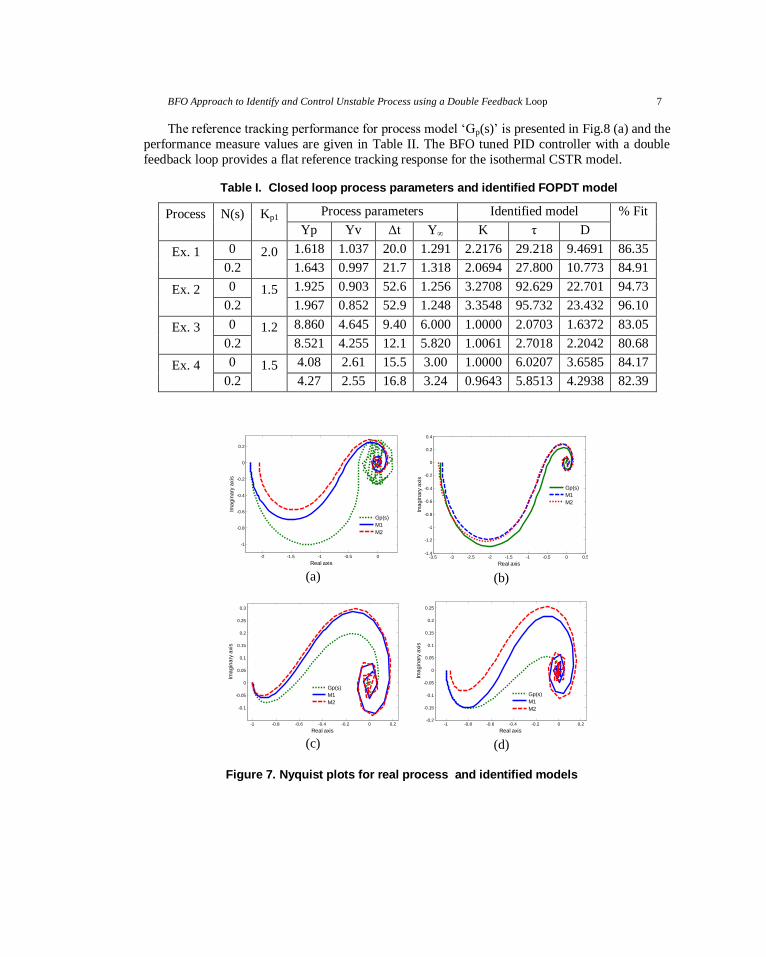
considered in this study). A comparative analysis is carried using Nyquist plot to calculate the
model fit with the original process. From Fig.7 (a), the observation is that, the Nyquist plot by
„M1‟ has a best fit with the original process „Gp(s)‟ compared to the model „M2‟ (M1 is the model
developed when N(s) = 0, and M2 is the model developed when N(s) = 0.2).
0 50 100 150 200 250 300 350 400 450 5000
0.5
1
1.5
2
Time, sec
Re
sp
on
se
Step input
Response (Noise)
Response (Noise free)
(a)
0 50 100 150 200 250 300 350 400 450 5000
0.5
1
1.5
Time, sec
Refe
rence t
rackin
g r
esponse
Reference input
Response (Noise)
Response (Noise free)
(b)
Figure 6. Closed loop response for Example 1
The BFO algorithm based „PI‟ parameter tuning is executed with the model with the best fit
(M1). Eqn 12 is considered during the controller tuning procedure, and the optimization search convergences at 74th iteration. The optimized values of proportional gain „Kp‟, and integral gain
„Ki‟ are presented in Table II. The model „M1‟ is then replaced by the original process model
„Gp(s)‟ and the reference tracking performance is tested with the BFO tuned „PI‟ controller in the
presence and absence of measurement noise component. From Fig.6 (b), the observation is that,
the proposed method provides a smooth reference tracking response for the CSTR model.
Example 2: An isothermal Continuous Stirred Tank Reactor (CSTR) studied by Liou and Yu-Shu
is represented by the following mathematical model [3, 12];
)1s69.99(
exp3226.3)s(G
s20
p
(13)
The system identification procedure for the above model is performed for the above model as
discussed in Ex.1. The parameters considered for identification and the final models are presented
in Table I. For this system „M2‟ shows a best fit compared to „M1‟ (Fig.7 (b)). The BFO algorithm
based „PID‟ tuning is executed for the outer loop with „M2‟. The optimization search convergences
at 105th iteration and the final controller parameters are given in Table II.
BFO Approach to Identify and Control Unstable Process using a Double Feedback Loop 7
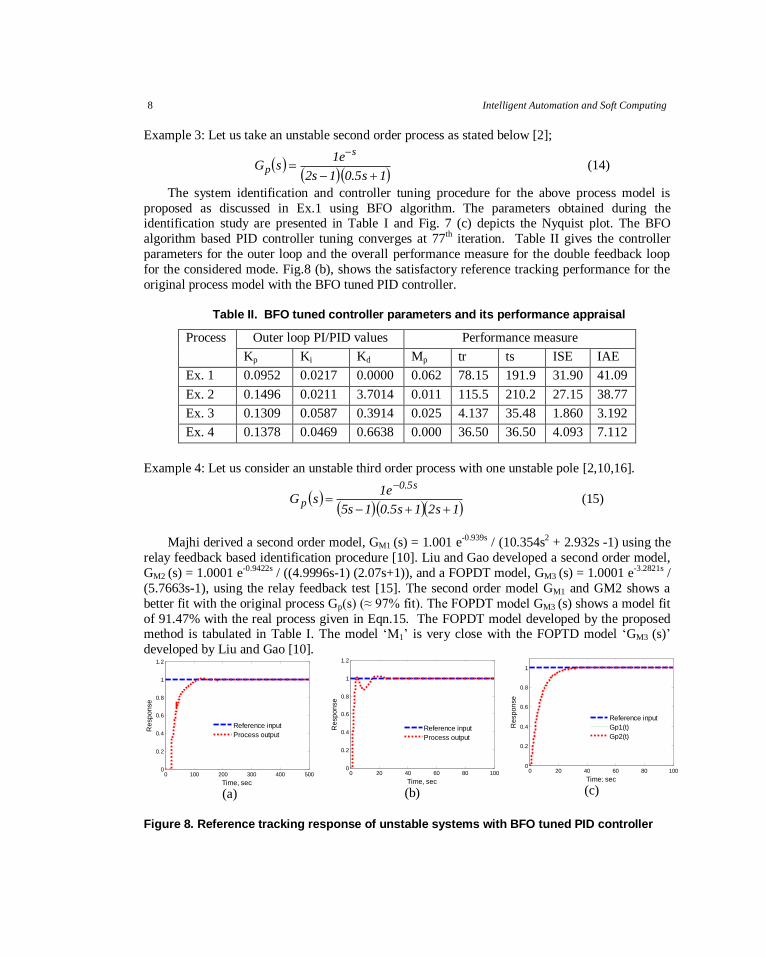
The reference tracking performance for process model „Gp(s)‟ is presented in Fig.8 (a) and the
performance measure values are given in Table II. The BFO tuned PID controller with a double
feedback loop provides a flat reference tracking response for the isothermal CSTR model.
Table I. Closed loop process parameters and identified FOPDT model
Process N(s) Kp1 Process parameters Identified model % Fit
Yp Yv Δt Y∞ K τ D
Ex. 1 0 2.0 1.618 1.037 20.0 1.291 2.2176 29.218 9.4691 86.35
0.2 1.643 0.997 21.7 1.318 2.0694 27.800 10.773 84.91
Ex. 2 0 1.5 1.925 0.903 52.6 1.256 3.2708 92.629 22.701 94.73
0.2 1.967 0.852 52.9 1.248 3.3548 95.732 23.432 96.10
Ex. 3 0 1.2 8.860 4.645 9.40 6.000 1.0000 2.0703 1.6372 83.05
0.2 8.521 4.255 12.1 5.820 1.0061 2.7018 2.2042 80.68
Ex. 4 0 1.5 4.08 2.61 15.5 3.00 1.0000 6.0207 3.6585 84.17
0.2 4.27 2.55 16.8 3.24 0.9643 5.8513 4.2938 82.39
-2 -1.5 -1 -0.5 0
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Real axis
Ima
gin
ary
axis
Gp(s)
M1
M2
(a)
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
Real axis
Ima
gin
ary
axis
Gp(s)
M1
M2
(b)
-1 -0.8 -0.6 -0.4 -0.2 0 0.2
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Real axis
Ima
gin
ary
axis
Gp(s)
M1
M2
(c)
-1 -0.8 -0.6 -0.4 -0.2 0 0.2-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Real axis
Ima
gin
ary
axis
Gp(s)
M1
M2
(d)
Figure 7. Nyquist plots for real process and identified models
8 Intelligent Automation and Soft Computing
Example 3: Let us take an unstable second order process as stated below [2];
1s5.0 12s
1esG
s
p
(14)
The system identification and controller tuning procedure for the above process model is
proposed as discussed in Ex.1 using BFO algorithm. The parameters obtained during the identification study are presented in Table I and Fig. 7 (c) depicts the Nyquist plot. The BFO
algorithm based PID controller tuning converges at 77th iteration. Table II gives the controller
parameters for the outer loop and the overall performance measure for the double feedback loop
for the considered mode. Fig.8 (b), shows the satisfactory reference tracking performance for the
original process model with the BFO tuned PID controller.
Table II. BFO tuned controller parameters and its performance appraisal
Process Outer loop PI/PID values Performance measure
Kp Ki Kd Mp tr ts ISE IAE
Ex. 1 0.0952 0.0217 0.0000 0.062 78.15 191.9 31.90 41.09
Ex. 2 0.1496 0.0211 3.7014 0.011 115.5 210.2 27.15 38.77
Ex. 3 0.1309 0.0587 0.3914 0.025 4.137 35.48 1.860 3.192
Ex. 4 0.1378 0.0469 0.6638 0.000 36.50 36.50 4.093 7.112
Example 4: Let us consider an unstable third order process with one unstable pole [2,10,16].
1s21s5.0 15s
1esG
s5.0
p
(15)
Majhi derived a second order model, GM1 (s) = 1.001 e-0.939s / (10.354s2 + 2.932s -1) using the
relay feedback based identification procedure [10]. Liu and Gao developed a second order model,
GM2 (s) = 1.0001 e-0.9422s / ((4.9996s-1) (2.07s+1)), and a FOPDT model, GM3 (s) = 1.0001 e-3.2821s /
(5.7663s-1), using the relay feedback test [15]. The second order model GM1 and GM2 shows a
better fit with the original process Gp(s) (≈ 97% fit). The FOPDT model GM3 (s) shows a model fit
of 91.47% with the real process given in Eqn.15. The FOPDT model developed by the proposed method is tabulated in Table I. The model „M1‟ is very close with the FOPTD model „GM3 (s)‟
developed by Liu and Gao [10].
0 100 200 300 400 5000
0.2
0.4
0.6
0.8
1
1.2
Time, sec
Re
sp
on
se
Reference input
Process output
(a)
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1
1.2
Time, sec
Re
sp
on
se
Reference input
Process output
(b)
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1
Time; sec
Re
sp
on
se
Reference input
Gp1(t)
Gp2(t)
(c)
Figure 8. Reference tracking response of unstable systems with BFO tuned PID controller

BFO Approach to Identify and Control Unstable Process using a Double Feedback Loop 9
The BFO algorithm based „PID‟ tuning for „M1‟ convergences at 68th iteration and the
optimized controller parameters and the closed loop performance of the system are presented in
Table II. Form Fig.8(c), it is noted that, the double feedback control loop provides a smooth
reference tracking response with almost zero overshoot with satisfactory values for tr, ts, ISE, and
IAE .
6. Conclusions
In this paper, BFO based system identification and control procedure is discussed for a class of unstable processes using a double feedback control loop. A novel time domain based objective function is developed to guide the BFO based system identification search. The inner loop with proportional controller enables us to develop the first order plus time delayed model for the unstable processes. The identification analysis is tested on a varied class of unstable process models in the presence and absence of measurement noise. The proposed identification procedure shows a robust performance on the process data with measurement noise. The simulation result illustrates that, the discussed method helps to attain a satisfactory process model with considerably reduced model mismatch. The PI/PID controller in the outer loop is used to control the unstable system. The BFO tuned double feedback controller provides better process performances such as smooth reference tracking, reduced peak overshoot, reduced settling time, and error minimization for the unstable processes considered in this study.
REFERENCES
[1] Bhattacharyya, B, and Goswami, S.K,. “Reactive Power Optimization Through Evolutionary
Techniques: A Comparative Study of the GA, DE and PSO Algorithms”. Intelligent
Automation and Soft Computing, TSI Press, Vol. 13, no. 4, 2007, pp. 461-469. [2] Chan-Cheng Chen, Hsia-Ping Huang, Horng-Jang Liaw. “Set-Point Weighted PID Controller
Tuning for Time-Delayed Unstable Processes”. Ind.Eng.Chem.Res. Vol. 47(18), 2008, pp. 6983-6990. DOI: 10.1021/ie800001m
[3] Ching-Tien Liou and Chien Yu-Shu. “The effect of Nonideal Mixing on Input Multiplicity in a CSTR. Chemical Engineering Science. Vol. 46(8), 1991, pp.2113-2116.
[4] Dasgupta, S, Das,S, Abraham,A and Biswas, A. “Adaptive Computational Chemotaxis in Bacterial Foraging Optimization: An Analysis”. IEEE Trans. Evolutionary Computation. Vol.
13(4), 2009, pp. 919-941. [5] Das,S, Biswas,A, Dasgupta, S, and Abraham, A. “Bacterial Foraging Optimization Algorithm:
Theoretical Foundations, Analysis, and Applications”. Foundations of Computational Intelligence. (3), 2009, pp. 23-55.
[6] Gang-Wook Shin, Young-Joo Song, Tae-Bong Lee, and Hong-Kyoo Choi. “Genetic Algorithm for Identification of Time Delay Systems from Step Responses”. International
Journal of Control, Automation, and Systems, Vol. 5(1), 2007, pp.79-85. [7] Guojun Tan, Hui Zhang, Miaowang Qian, and Ruiwen Yu. “Optimization of Three-Phase
PWM Rectifier Robust Control System based on Improved PSO Algorithm”. Intelligent Automation and Soft Computing, TSI Press, Vol. 17, no. 7, 2011, pp. 847-858.
[8] Kevin M.Passino. “Biomimicry of bacterial foraging for distributed optimization and control”. IEEE Control Systems Magazine, 2002, pp.52-67.
[9] Latha, K., and Rajinikanth, V. “2DOF PID Controller Tuning for Unstable Systems Using Bacterial Foraging Algorithm”. SEMCCO 2012, LNCS 7677, 2012, pp. 519–527.

10 Intelligent Automation and Soft Computing
[10] Majhi,S. “Relay based Identification of processes with time delay”. Journal of Process
Control. 17, 2007, pp. 93-101.
[11] Padhy, P.K, Majhi, S. “Relay based PI-PD design for stable and unstable FOPDT
processes”. Computers and Chemical Engineering. 30, 2006, pp.790-796. [12] Padmasree, R. and Chidambaram, M. “Control of Unstable Systems”. Narosa Publishing
House, India. 2006. pp.1 – 44.
[13] Repperger, D.W, and Ling Rothrock. “Using GA-Based Intelligent Control Means to Enhance
Human-Machine Interfaces”. Intelligent Automation and Soft Computing, TSI Press, Vol. 10, no. x, 2004, pp. 1-18.
[14] Rajinikanth, V, and Latha, K. “Identification and Control of Unstable Biochemical Reactor”. International Journal of Chemical Engineering and Applications. Vol. 1(1), 2010, pp.106 -111.
[15] Rajinikanth,V, and Latha, K. “Controller Parameter Optimization for Nonlinear Systems Using Enhanced Bacteria Foraging Algorithm”. Applied computational Intelligence and Soft
Computing, Hindawi Publishing Corporation. Volume 2012, Article ID 214264, 12 pages. Doi:10.1155/2012/214264
[16] Tao Liu, and Furong Gao. “Identification of Integrating and Unstable Process from Relay Feedback. Computers and Chemical Engineering. 32, 2008, pp. 3038-3056.
[17] Vijayan, V, and Rames C. Panda. “Design of PID controllers in in double feedback loops for SISO systems with set-point filters”. ISA Transactions, Vol 51 (4), July 2012, pp. 514–521.
ABOUT THE AUTHORS
V. Rajinikanth received B.E. in Instrumentation and Control Engineering from the University of Madras (1999) and M.E. in Process Control and Instrumentation from
Annamalai University (2002). Currently he is working as an Assistant Professor in the Department of Electronics and Instrumentation Engineering in St.Joseph‟s College of Engineering, Chennai. His research interests are Unstable system identification and control, and Soft computing.
Dr. K. Latha received Ph.D in Electrical Engineering from the Anna University,
Chennai in 2006. Currently she is working as an Associate Professor in the Department of Instrumentation Engineering, Madras Institute of Technology Campus, Anna University, Chennai, India. Her research interests are Process modeling, Dynamic system modeling and control, and Soft computing.













![To Identify the given inorganic salt[Ba(NO3)2] To Identify the ...](https://static.fdokumen.com/doc/165x107/63169e619076d1dcf80b7c23/to-identify-the-given-inorganic-saltbano32-to-identify-the-.jpg)