Bai bao cao Phandoananh
103
Đề tài môn học Nhóm 2: Khanh, Ánh, Thảo, Dương. Mục lục: Lời giới thiệu 1. Tách không liên tục 1.1. Tá ch điểm 1.2. Tá ch dòng 1.3. Tá ch biên 2. Liên kết biên và tách đường giới hạn 2.1. Xử lý cục bộ 2.2. Li ên kết cạnh và tách biên 2.3. Xử lý toàn cục bằng phương pháp lý thuyết đồ thị 3.Ngưỡng 3.1. Sự thành lập 3.2. Va i trò của sự chiếu sáng 3.3. Ng ưỡng toàn cục cơ bản 3.4. Ng ưỡng động cơ sở 3.5. Ng ưỡng động và ngưỡng toàn cục tối ưu Phân đoạn ảnh Trang 51
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of Bai bao cao Phandoananh
Đề tài môn học Nhóm 2: Khanh, Ánh, Thảo, Dương.
Mục lục: Lời giới thiệu
1.Tách không liên tục1.1. Tách điểm
1.2. Tách dòng
1.3. Tách biên
2.Liên kết biên và tách đường giới hạn2.1. Xửlý cục bộ
2.2. Liên kết cạnh và tách biên
2.3. Xửlý toàn cục bằng phương pháp lý thuyết đồ thị
3.Ngưỡng3.1. Sựthành lập
3.2. Vai trò của sự chiếu sáng
3.3. Ngưỡng toàn cục cơ bản
3.4. Ngưỡng động cơ sở
3.5. Ngưỡng động và ngưỡng toàn cục tối ưu
Phân đoạn ảnh Trang 51

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
3.6. Sửdụng những đặc điểm biên để cải tiến histogram và
phân ngưỡng địa phương3.7. Ngưỡng dựa trên 1 vài biến số
4.Phân đoạn trên cơ sở vùng4.1. Công thức cơ bản
4.2. Tăng vùng
4.3. Chia và trộn vùng
5.Phân đoạn theo mức hình thái5.1. Khái niệm cơ bản
5.2. Xây dựng đập
5.3. Thuật toán phân mức
5.4. Ápdụng cho những ảnh nhiễu hay những vùng phân đoạnnhỏ
6.Phân đoạn ảnh động6.1. Kỹthuật miền không gian
6.2. Kỹthuật miền tần số
Tổng kết
Phân đoạn ảnh Trang 2

Đề tài môn học Nhóm 2: Khanh, Ánh, Thảo, Dương.
Lời giới thiệu Phân đoạn ảnh là các thao tác chia nhỏ bức ảnh đầu vào thành các miền hoặc các vật thể con với mức độ tùy theo nhu cầu xử lý. Có rất nhiều kiểu phân đoạn nhưxác định biên của vật thể, xử lý các vùng ảnh, tách bạch rõ ràng vật thể và nền bằng 1 ngưỡng,… nhưng tựu chung lại mục tiêu của phân đoạn ảnh là làm nổi bật hoặc tách hẳn vật thể cần quan tâm ra từ ảnh ban đầu. Trong các thao tác về xử lý ảnh thì phân đoạn ảnhđược xem là thao tác khó nhất và là thao tác rất quan trọng vì độ chính xác của quá trình phân đoạn ảnh có ý nghĩa quyết định tới các xử lý tính toán sau đó. Phân đoạn có thể đóng vai trò trung tâm trong 1 số xử lý kĩ thuật như phân tích chất lượng sản phẩm, kiểm tra quá trình lắp ráp các chi tiết điện,… hoặc là 1 khâu trung gian cần thiết cho các quá trình xử lý tiếp theo như các xử lý trong y học. Vì thời gian có hạn nên đề tài chỉ giới hạn trongviệc xét ảnh xám chứ hầu như không xét tới sự phân đoạnảnh màu. Và cấu trúc của đề tài gồm các phần sau: Chương 1: là các vấn đề về tách 1 phần nhỏ của bức ảnh, cụ thể là tách điểm, tách dòng, tách biên.Kĩ thuật chính của phần này là dựa vào sự rời rạc mức xám tại các phần này. Chương 2: dựa trên một số thuộc tính của mứcxám là gradient và toán tử Laplace để tiến hành liên kết các đường biên bị gián đoạn và dùng lý thuyết đồ thị để tìm ra các đường biên phân chia vật thể và nền. Chương 3: là các phương pháp chọn và xử lý trên ngưỡng; đây là kĩ thuật trung tâm của phân đoạn ảnh. Trong đó chúng ta sẽ đi từ việc chọn ngưỡng toàn cục đơn (dễ thực hiện nhất) tới chọn 1 ngưỡng động bằng
Phân đoạn ảnh Trang 51

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. cách chia nhỏ ảnh và chọn ngưỡng tối ưu dựa trên các tính toán về xác suất. Chương 4: chúng ta tiến hành chia bức ảnh thành các vùng nhỏ theo 1 số đặc trưng nhất định rồi sau đó, tùy theo yêu cầu bài toán, ta sẽ tiến hành 1 sốxử lý như chia vùng, trộn vùng.
Chương 5: chương này nói về cách xác định các đường phân mức dựa trên 1 hình ảnh rất tự nhiên là các con đập. Chúng ta sẽ tiến hành xây dựng các đập trên bức ảnh rồi cho ngập nước từ từ toàn bộ ảnh. Tới1 lúc nhất định khi chỉ còn các chỗ cao trên con đập chưa bị ngập thì ta có thể xác định được các đường biên của đập. và các đường biên này là các đường địnhmức cần tìm. Chương 6: nhiệm vụ của chúng ta trong phần này là làm sao tách các vật thể chuyển động từ 1 bức ảnh đưa vào gồm các đối tượng động và tĩnh. Có 2 kĩ thuậtchính: kĩ thuật miền không gian dựa vào việc tạo ra 1ảnh mẫu chỉ gồm các vật thể tĩnh và tính toán sai biệt tích lũy để xác định vật thể động, còn kĩ thuật miền tần số dựa vào các biến đổi Fourier.
1. TÁCH KHÔNG LIÊN TỤC:
Phần này chúng ta sẽ nói về 3 kỹ thuật cơ bản đểtách mức xám không liên tục trong một ảnh số: điểm,đường và biên. Cách phổ biến nhất để tìm ra sự khôngliên tục này là sử dụng mặt nạ quét qua hết bức ảnh. Vídụ đối với mặt nạ 3x3 ở hình 1, quá trình này bao gồmviệc tính tổng các tích của trọng số với mức xám trongvùng mặt nạ đi qua để thu được đáp ứng của mặt nạ:
Phân đoạn ảnh Trang 4

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
(1.1)
Trong đó, là mức xám của Pixel xác định bởimặt nạ, là trọng số của mặt nạ. Thông thường, đápứng mặt nạ được xác định chủ yếu dựa vào vị trí của tâmmặt nạ.
Hình 1
1.1Tách Điểm:
Về nguyên tắc, việc tách các điểm cô lập trong 1bức ảnh khá đơn giản. Ví dụ khi sử dụng mặt nạ như hình2a, ta tách điểm có vị trí mà mặt nạ tập trung nếu :
|R| ≥T (1.2) Ở đây T là ngưỡng dương và R được xác định bởi(1.1). Về cơ bản, công thức này đo độ chênh lệch giữađiểm trung tâm và các lân cận của nó. Ý tưởng chủ đạo ởđây là một điểm cô lập (điểm có mức xám khác với nềncủa nó, và được định vị trong vùng đồng nhất hoặc cóthể nhận thấy) thì hơi khác so với những điểm xungquanh, vì vậy nó dễ dàng bị tách bởi loại mặt nạ này.Lưu ý là các điểm cô lập phải đủ lớn (xác định bởi T).Tổng hệ số của mặt nạ bằng 0, điều đó chứng tỏ rằng đápứng của mặt nạ sẽ bằng 0 tại những vùng có mức xámkhông đổi.Phân đoạn ảnh Trang 5

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. Hình 2b là 1 minh họa cho việc tách các điểm côlập trong 1 ảnh. Hình 2b biểu diễn ảnh chụp bằng tia Xcủa bề mặt tua bin của 1 động cơ phản lực ở trạng tháibị rỗ. Có 1 pixel màu đen đơn lẻ ở trong mỗi vùng bịrỗ. Hình 2c là kết quả sau khi áp dụng tách điểm bằngcách sử dụng mặt nạ 2a cho ảnh 2b. Hình 2d là kết quảáp dụng công thức 1.2 với ngưỡng T bằng 90% giá trị củacác pixel cao nhất trong hình 2c. (Việc chọn ngưỡng –threshold sẽ được nói chi tiết trong phần sau). Nhữngpixel đơn hiện ra rõ ràng trong bức ảnh này.
Hình 2 Kiểu xử lý tách này thì khá đặc biệt bởi vì nódựa trên cơ sở là những pixel đơn không liên tục trênnền đồng nhất của mặt nạ tách. Khi điều kiện này khôngthỏa mãn thì ta dùng phương pháp khác phù hợp hơn (sẽđược bàn đến trong chương này) để tách mức xám khôngliên tục.
1.2Tách Dòng:
Phân đoạn ảnh Trang 6

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. Phương pháp tiếp theo là tách dòng. Cho những mặtnạ như trong hình 3. Nếu ma trận đầu tiên di chuyển qua bức ảnh, nó sẽđáp ứng mạnh tại những đường có hướng nằm ngang (độ dàymột pixel). Với nền không đổi, kết quả trả về lớn nhấtkhi đường đi qua hàng giữa của mặt nạ. Thực nghiệm chothấy mặt nạ thứ 2 trong hình 3 sẽ đáp ứng tốt nhấtnhững đường có hướng là +45o, mặt nạ thứ 3 thì đáp ứngtốt với đường thẳng đứng, mặt nạ thứ tư thì đáp ứng tốtvới những đường có hướng là -45o. Những hướng này cũngđược thiết lập bằng cách làm chú ý rằng các hướng thíchhợp của mỗi mặt nạ có trọng số lớn hơn những hướngkhác. Chú ý rằng các hệ số trong 1 mặt nạ có tổng bằng0, hệ số đáp ứng của mặt nạ sẽ bằng 0 tại những vùng cómức xám không đổi.
Hình 3
Đặt , , và là đáp ứng của những mặt nạtrong hình 3 từ trái qua phải, trong đó Ri được xácđịnh bởi (1.1). Cho 4 mặt nạ này lần lượt quét qua toànbộ ảnh. Nếu tại một điểm xác định trong hình, | |>| |với mọi j≠i, ta nói rằng điểm đó có hướng phù hợp vớihướng của mặt nạ i hơn. Ví dụ nếu tại một điểm trongbức ảnh mà | |>| |, với j=2,3,4, thì điểm đó có hướngphù hợp hơn với hướng của đường nằm ngang. Lần lượtchúng ta quan tâm đến việc tách những đường có hướngxác định. Trong trường hợp này, chúng ta sẽ sử dụng mặt
Phân đoạn ảnh Trang 7

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. nạ phù hợp với hướng và ngưỡng đó của đầu ra, theo biểuthức (1.2). Nói cách khác, nếu như chúng ta quan tâmđến việc tách tất cả các đường trong ảnh với hướng xácđịnh bởi một mặt nạ cho trước, chúng ta chạy mặt nạ nàyqua ảnh và tạo ngưỡng cho giá trị tuyệt đối của kếtquả. Những điểm còn lại là những điểm có đáp ứng mạnhnhất, đối với những đường có độ dày 1 pixel, phù hợpnhất với hướng được xác định bởi mặt nạ. Ví dụ sau sẽminh họa cho điều này. Ví dụ: Giả sử rằng chúng ta quan tâm đến việc tìm tất cảcác đường có độ dày 1 pixel và có hướng -45o. Với giảthuyết này, chúng ta sử dụng mặt nạ cuối cùng tronghình 3. Kết quả được thể hiện trong hình 4b. Chú ý rằngtất cả những phần ngang và phần đứng trong bức ảnh thìbị loại bỏ và những phần của bức ảnh ban đầu mà cóhướng -45o thì được nổi rõ nhất trong hình 4b. Để xácđịnh những đường nào phù hợp nhất với mặt nạ chúng tachọn ngưỡng cho hình này. Kết quả của việc sử dụngngưỡng bằng với giá trị lớn nhất của bức ảnh thể hiệntrong hình 4c. Giá trị lớn nhất này là một lựa chọn tốtcho 1 ngưỡng trong trường hợp này, bởi vì ảnh đầu vàolà ảnh nhị phân. Thực hiện xong việc này, chúng ta tìmnhững đáp ứng mạnh nhất. Hình 4c biểu diễn tất cả nhữngđiểm vượt qua ngưỡng bằng màu trắng.
Phân đoạn ảnh Trang 8

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 4
Trong trường hợp này, phương pháp trên chỉ tìm ranhững đoạn có độ dày 1 pixel và hướng -45o. Những điểmcô lập nhìn thấy trong hình 4c là những điểm đáp ứngmạnh đối với mặt nạ. Trong ảnh ban đầu, những điểm nàyvà láng giềng của chúng được định hướng theo hướng mặtnạ đáp ứng mạnh nhất. Những điểm cô lập này có thể đượctách bằng cách sử dụng mặt nạ trong hình 2a và sau đóđược xóa đi.
1.3Tách Biên:
Mặc dù phương pháp tách điểm và tách dòng là cáckỹ thuật phân đoạn quan trọng, nhưng việc tách biên lạihoàn toàn khác xa với các kỹ thuật trên, nó được sửdụng phổ biến nhất cho việc tách độ trung bình khôngPhân đoạn ảnh Trang 9

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. liên tục của mức xám. Trong phần này chúng ta sẽ nói vềcông cụ đạo hàm bậc 1 và bậc 2 và nhấn mạnh về cácthuộc tính của chúng để tách biên cho bức ảnh.
Cơ sở của việc tách biên:
Một cách trực quan, một biên là tập hợp nhữngpixel ( nằm trên đường biên giới giữa 2 vùng) liên kếtvới nhau. Tuy nhiên, biên và cạnh có sự khác nhau.Về cơbản ta sẽ xem xét một cách ngắn gọn, một cạnh là 1 kháiniệm “cục bộ”, trong khi đường biên của một miền mangtính toàn cục hơn nhiều. Một định nghĩa hợp lý của“biên” đòi hỏi khả năng đo được sự chuyển tiếp mức xám. Chúng ta bắt đầu bằng việc làm mô hình cho biênvà việc đo đạc sự chuyển tiếp trung bình của mức xámchỉ mang tính hình thức. Một cách trực quan, một biênlý tưởng có các thuộc tính của mô hình ở hình 5a. Theomô hình này thì một biên lý tưởng là một tập hợp cácpixel (ở đây là theo hướng thẳng đứng) liên kết vớinhau, mỗi thành phần của biên có vị trí tại 1 bướcchuyển tiếp trực giao mức xám.
Phân đoạn ảnh Trang 10

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 5 Trong thực tế, quang học, lấy mẫu,... và nhữngcách thu nhận hình ảnh khác không hoàn hảo dẫn đến biênbị nhòe với độ nhòe được xác định bởi những nhân tố nhưlà chất lượng của hệ thống thu nhận hình ảnh, tốc độlấy mẫu và điều kiện chiếu sáng của mỗi bức ảnh. Vì vậykết quả là biên được mô hình gần giống với một đoạn dốchơn đoạn thẳng đứng, được thể hiện trong hình 5b. Độnghiêng của dốc tỉ lệ nghịch với độ nhòe của biên.Trong mô hình này, chúng ta không bao giờ có một đườngbiên mảnh (có độ dày một pixel). Thay vào đó, một điểmbiên bây giờ là một điểm bất kì chứa trong đoạn dốc vàbiên là tập hợp những điểm liên thông. Độ dày của đườngbiên được xác định bởi chiều dài của đoạn dốc, khi biênbiến đổi từ đầu đến cuối mức xám. Độ dài này được xácđịnh bởi độ nhòe. Dễ dàng nhận ra rằng: biên nhòe thìdày và biên sắc nét thì mảnh.
Phân đoạn ảnh Trang 11

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 6
Hình 6a hiển thị 1 phần trích ra từ hình 5b. Ảnh6b thể hiện mặt nghiêng của một mức xám theo hướng nằmngang của biên nằm giữa hai vùng. Hình này cũng chothấy đạo hàm bậc một, bậc hai của mức xám. Đạo hàm bậc1 dương tại những điểm chuyển tiếp từ trong ra ngoàiđoạn dốc theo hướng di chuyển từ trái sang phải, vàkhông đổi đối với những điểm nằm trên dốc, bằng 0 tạinhững vùng có mức xám không đổi. Đạo hàm bậc hai dươngtại những biến đổi tương ứng với phía tối của biên, âmtại những biến đổi tương ứng với phía sáng của biên, vàbằng 0 dọc theo dốc hoặc trong những vùng mức xám khôngđổi. Dấu của đạo hàm trong 6b sẽ bị đảo ngược đối vớinhững biên biến đổi từ sáng sang tối. Từ những quan sát trên ta kết luận rằng độ lớncủa đạo hàm bậc 1 có thể được sử dụng để phát hiện raPhân đoạn ảnh Trang 12

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. dấu hiệu của một biên tại một điểm trong hình (nghĩa làxác định điểm đó có nằm trên dốc không). Tương tự nhưvậy dấu của đạo hàm bậc 2 có thể được sử dụng để xácđịnh một pixel cạnh nằm trên phía sáng hay phía tối củabiên. Chúng ta chú ý thêm hai thuộc tính của đạo hàmbậc hai xung quanh một biên: (1) Nó tạo ra hai giá trị cho mỗi cạnh (điều khôngmong muốn) (2) Một đường thẳng tưởng tượng nối từ điểm dươnglớn nhất và điểm âm nhỏ nhất của đạo hàm bậc hai sẽ điqua 0 gần với điểm giữa của biên. Thuộc tính zero-crossingcủa đạo hàm bậc hai thì hữu dụng cho việc xác địnhtrung tâm của biên dày. Ví dụ: Biên thể hiện trong Hình 5 và 6 thì không cónhiễu. Cột đầu tiên của Hình 7 thể hiện 4 biên (đoạndốc) phân ra thành một vùng đen ở bên trái và một vùngtrắng ở bên phải. Lưu ý là toàn bộ biến đổi từ đen sangtrắng này chỉ là biểu diễn của một cạnh đơn. Vùng ảnh ởtrên cùng bên trái là ảnh không có nhiễu. Ba ảnh cònlại trong cột đầu tiên của Hình 7 bị sai lệch bởi nhiễuGauss với “zero mean” và độ lệch chuẩn mức xám lần lượtlà 0.1 và 1.0 và 10. Đồ thị biểu diễn bên dưới mỗi ảnhnày là hình chiếu mức xám của đường quét theo hàngngang qua toàn bộ ảnh.
Phân đoạn ảnh Trang 13

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 7
Các ảnh trong cột 2 của hình 7 là đạo hàm bậc 1của những ảnh ở cột 1. Xét ảnh ở giữa trên cùng, đạohàm bằng 0 tại những vùng đen và trắng không đổi. Đạohàm của một đoạn biên không đổi là hằng số biểu thị độnghiêng của dốc. Đạo hàm không đổi này được biểu diễnbằng màu xám. Hình tiếp theo của cột 2 thì các đạo hàmcàng tăng so với trường hợp không có nhiễu. Và tronghình cuối cùng của cột 2, rất khó để chỉ ra biên. YếuPhân đoạn ảnh Trang 14

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. tố gây ra sự sai lệch này chính là nhiễu. Ảnh cuối cùngcó nhiều hạt nhỏ nhưng sự sai lệch này hầu như khôngthể nhận thấy. Ví dụ trên cho thấy độ nhạy của đạo hàm đối vớinhiễu, đạo hàm bậc hai nhạy hơn đối với nhiễu. Đạo hàmbậc hai của ảnh không nhiễu ở ảnh trên cùng bên phảicủa hình. Đường mảnh màu trắng và đen là thành phầndương và âm được nhắc đến trong hình 6. Màu xám trongnhững ảnh này biểu diễn cho số 0 tương ứng trong thangchia tỷ lệ. Nhiễu đạo hàm bậc hai (tương tự với trườnghợp không có nhiễu) tương ứng với nhiễu có độ lệchchuẩn ở mức xám 0.1. Hai ảnh đạo hàm bậc hai và biêncho thấy rất khó để các tách thành phần âm và dương. Thực tế, nhiễu khá nhỏ vẫn có thể có sự tác độngđáng kể trên 2 đạo hàm then chốt được dùng cho việctách ảnh. Vì vậy đối với những ứng dụng rất có khả năngxuất hiện nhiễu với các mức độ chúng ta vừa đề cập, tanên làm trơn ảnh trước khi xử lý. Dựa vào ví dụ này và 3 nội dung đã trình bày,chúng ta đưa ra kết luận rằng tiêu chuẩn để phân loại 1điểm biên là sự chuyển tiếp mức xám tương ứng với điểmđó phải mạnh hơn đáng kể so với nền của điểm đó. Vìchúng ta đang đề cập đến tính toán cục bộ, do đó chúngta kết luận 1 điểm trong ảnh là điểm biên nếu đạo hàmbậc nhất của nó lớn hơn một ngưỡng lý thuyết. Biên làtập hợp những điểm thỏa điều kiện đó liên kết với nhautheo một tiêu chuẩn xác định cho trước. Sự phân đoạngiới hạn biên được sử dụng nếu biên ngắn so với cáckích cỡ của ảnh. Vấn đề then chốt trong việc phân đoạnlà lắp ráp các phần biên thành những biên dài hơn. Nếuchúng ta quyết định sử dụng đạo hàm bậc hai để dễ dàngxác định các điểm biên trong 1 ảnh khi đạo hàm bậc haicủa nó là 0 thì có 1 định nghĩa thay thế. Trong trườnghợp này, định nghĩa của biên cũng giống như trên. Điềuquan trọng cần chú ý là những định nghĩa này không đảmPhân đoạn ảnh Trang 15

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. bảo thành công trong việc tìm điểm biên của ảnh. Chúngchỉ đơn giản là cho chúng ta một hình thức tìm kiếm cácđiểm biên đó.
Toán tử Gradient :
Đạo hàm bậc nhất của 1 ảnh số dựa trên những xấpxỉ khác nhau của độ chênh lệch của cả hai thành phần xvà y. Gradient của 1 ảnh f(x,y) tại vị trí (x,y) đượcxác định là vectơ :
(1.3)
Từ sự phân tích vector, ta thấy rằng các vectorGradient cho biết hướng và tốc độ thay đổi cực đại củaf tại (x, y). Một đại lượng quan trọng trong tách biên là độlớn của vector này, được ký hiệu là : (1.4)
Đại lượng này cho biết tốc độ cực đại của việctăng f(x,y) trên 1 đơn vị khoảng cách theo hướng của . Mặc dù không hoàn toàn đúng, nhưng thông thường tacoi như Gradient, chỉ cần phân biệt vector và độ lớncủa nó trong trường hợp dễ có sự nhầm lẫn. Hướng của vector Gradient cũng là một thông sốquan trọng. Cho α(x,y) biểu diễn hướng góc của vector∆f tại (x, y). Từ sự phân tích vector, ta có:
(1.5)
Trong đó, góc được đo xét theo trục x. Hướng củamột biên tại (x,y) trực giao với hướng của vectorGradient tại điểm đó.
Phân đoạn ảnh Trang 16

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. Việc tính Gradient của 1 ảnh dựa trên cơ sở tínhtoán đạo hàm riêng phần và tại mỗi vị trípixel. Cho vùng (3x3) trong hình 8(a) biểu diễn các mứcxám trong vùng lân cận của ảnh. Một trong những cách dễnhất để tính đạo hàm riêng bậc nhất tại điểm là sửdụng toán tử Robert:
(1.6) Và
(1.7) Những đạo hàm này có thể được sử dụng cho toàn bộảnh bằng cách sử dụng những mặt nạ trong hình 8(b). Những mặt nạ kích thước 2 x 2 khó khăn cho việcthực hiện bởi vì mặt nạ đó không có một tâm rõ ràng.Một phương pháp khác là sử dụng mặt nạ kích thước 3 x 3: (1.8) Và
(1.9)
Phân đoạn ảnh Trang 17

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 8
Trong công thức này, sự khác nhau giữa hàng 1 vàhàng thứ 3 của vùng ảnh 3 x 3 xấp xỉ với đạo hàm theox, và sự khác nhau giữa cột thứ 3 và cột thứ 1 xấp xỉvới đạo hàm theo y. Những mặt nạ trong hình 8(d) và (e)gọi là các toán tử Prewitt, có thể được sử dụng để thựchiện hai phương trình này. Một sự biến đổi nhỏ giữa hai phương trình này làviệc nhân hệ số trung tâm với 2:
Phân đoạn ảnh Trang 18

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
(1.10) Và
(10.1-11) Hình 8(f) và (g) là toán tử Sobel được dùng đểthực hiện hai phương trình này. Toán tử Prewitt và toántử Sobel được sử dụng nhiều nhất trong thực hành tínhtoán các gradient số. Việc thực hiện mặt nạ Prewitt đơngiản hơn so với mặt nạ Sobel, nhưng lại gây ra nhiễusuppression nhỏ, một vấn đề quan trọng khi sử dụng đạohàm. Chú ý rằng các hệ số trong tất cả các mặt nạ ởhình 8 đều có tổng bằng 0, nên các đáp ứng phải bằng 0trong vùng mức xám cố định. Những mặt nạ vừa đề cập được sử dụng để tính cácthành phần Gradient và . Việc tính Gradient theophương trình (1.4) không phải bao giờ cũng được sử dụngbởi vì những tính toán bắt buộc là bình phương và khaicăn bậc hai. Một phương pháp hay được sử dụng là xấp xỉgradient bằng giá trị sau:
(10.1-12) Phương trình này thuận tiện hơn cho việc tínhtoán, và vẫn bảo toàn được những thay đổi tương ứngtrong mức xám. Những mặt nạ Sobel và mặt nạ Prewitt chỉcho kết quả tốt đối với những biên theo hướng ngang vàthẳng đứng, vì vậy thậm chí nếu chúng ta sử dụng phươngtrình (1.4) để tính gradient thì kết quả cũng chỉ đẳnghướng đối với những biên theo hướng ngang và thẳngđứng. Trong trường hợp này, phương trình (1.4) và(1.12) cho kết quả giống nhau. Chúng ta có thể điều chỉnh mặt nạ 3x3 trong hình8 để có những kết quả trả về tốt nhất theo hướng chéo.Các mặt nạ Prewitt và Sobel bổ sung để tách những điểmkhông liên tục theo hướng chéo được thể hiện trong hình9.
Phân đoạn ảnh Trang 19

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 9
Hình 10 minh họa đáp ứng của hai thành phần củagradient, và như là ảnh gradient được tạo thànhtừ tổng của hai thành phần này. Hướng của hai thànhphần rất rõ trong hình 10(b) và (c). Chú ý đặc biệt làsự nổi rõ của ngói lợp mái nhà, những chỗ nối viên gạchnằm ngang và những phần ngang của cửa sổ trong hình10(b). Ngược lại, hình 10(c) lại nổi rõ những thànhphần dọc, như là góc của bức tường kế bên, những thànhphần dọc của cửa sổ, những chỗ nối viên gạch theo chiềudọc, và cột đèn ở bên phải của bức tranh.
Phân đoạn ảnh Trang 20

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 10
Ảnh ban đầu có độ phân giải cao hợp lý (1200x1600pixel ) và ở khoảng cách mà ảnh đưa ra, ta vẫn có thểthấy những viên gạch trên bức tường. Mức độ chi tiếtnày thường là điều không mong muốn, và 1 cách để giảmbớt nó làm trơn ảnh. Hình 11 tương tự hình 10, nhưngảnh gốc đầu tiên của hình 11 được làm trơn bằng cách sửdụng một bộ lọc trung bình 5x5. Đáp ứng của mỗi mặt nạhầu như không biểu diễn chi tiết các viên gạch, và kếtquả bị chi phối hầu hết bởi các biên chính. Chú ý rằngviệc tính trung bình làm cho đáp ứng của biên bị mờ đi. Ở hình 10 và 11 rõ ràng những mặt nạ Sobel theochiều ngang và chiều dọc đáp ứng tốt gần như nhau vớinhững biên định hướng -450 và +450. Nếu chú ý đến việclàm nổi biên theo hướng đường chéo, thì ta nên dùng mộttrong những cặp mặt nạ ở hình 9. Đáp ứng tốt của mặt nạ Sobel chéo được biểu diễnở hình 12. Rõ ràng trong hình này những đường chéo đápứng mạnh hơn với những mặt nạ này. Cả 2 mặt nạ đườngPhân đoạn ảnh Trang 21

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. chéo đều này đều có đáp ứng giống nhau cho biên ngangvà biên dọc, nhưng như dự đoán, đáp ứng của chúng theonhững hướng này yếu hơn đáp ứng của mặt nạ Sobel ngangvà dọc biểu diễn trong hình 10(b) và 10(c).
Hình 11
Hình 12
Toán tử Laplace :
Toán tử Laplace của hàm 2 chiều f(x,y) là đạo hàmbậc 2 được định nghĩa như sau :
Phân đoạn ảnh Trang 22

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
(1.13)
Cho một vùng 3x3, một trong hai công thức thườnggặp nhất trong thực tế là: (1.14)
Hình 13
Trong đó, zi đã được xác định trong hình 8(a).Xấp xỉ của láng giềng trên đường chéo được đưa bởi côngthức: (10.1-15) Những mặt nạ để thực hiện hai phương trình trênđược biểu diễn ở hình 13. Toán tử Laplace thường không được sử dụng ở dạngnguyên bản để tách biên vì một số lý do sau:
Vì là đạo hàm bậc 2 nên toán tử Laplace rất nhạyvới nhiễu (hình 7).
Toán tử Laplace thường tạo ra biên kép (xem ở hình6 và 7), đây là một hiệu ứng không mong muốn bởi vìnó làm cho việc phân đoạn trở nên rắc rối.
Lý do cuối cùng là toán tử Laplace không thể nhậndạng hoặc tách hướng biên ảnh một cách trực tiếp.
Phân đoạn ảnh Trang 23

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. Vì những lý do này nên vai trò của toán tửLaplace trong phân đoạn bao gồm :(1) Sử dụng thuộc tính Zero-crossing cho vị trí biên.(2) Sử dụng nó với mục đích bổ sung là xác định một
pixel ở mặt tối hay mặt sáng của biên. Ở vai trò đầu tiên, toán tử Laplace được kết hợpvới hàm làm trơn là tiền thân của việc tìm biên thôngqua thuộc tính Zero-crossing. Xem xét hàm sau:
(1.16)
Trong đó : và là độ lệch chuẩn. Sửdụng hàm này sẽ làm cho ảnh bị mịn hơn. Toán tử Laplacecủa h ( nghĩa là đạo hàm bậc 2 của h đối với r) là :
(1.17)
Hàm này thường được gọi là toán tử Laplace củahàm Gauss (LoG) vì phương trình (1-16) có dạng giốnghàm Gauss.
Phân đoạn ảnh Trang 24

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 14 Hình 14 biểu diễn đồ thị 3-D, mặt cắt ngang củahàm LoG, và một mặt nạ 5 x 5 xấp xỉ . Xấp xỉ nàykhông phải là duy nhất. Mục đích của nó là thu đượchình dạng cơ bản của , đó là hình gồm một vùng ởgiữa dương, kề liền là vùng biên mang giá trị âm baobọc xung quanh có giá trị tăng theo khoảng cách với gốctọa độ và một vùng bên ngoài mang giá trị 0. Các hệ sốcũng phải có tổng bằng 0 để đáp ứng mặt nạ bằng 0 ởnhững vùng mức xám không đổi. Mặt nạ nhỏ chỉ hữu dụngđối với những ảnh không có nhiễu. Dựa vào hình dạng củanó, đôi khi toán tử của Gauss cũng được gọi là hàm mũMexico (Mexican hat) . Vì đạo hàm bậc 2 là toán tử tuyến tính nên tíchchập của ảnh với cũng tương tự như tích chập củaảnh với hàm làm trơn Gauss ở phương trình (1.16), sau
Phân đoạn ảnh Trang 25
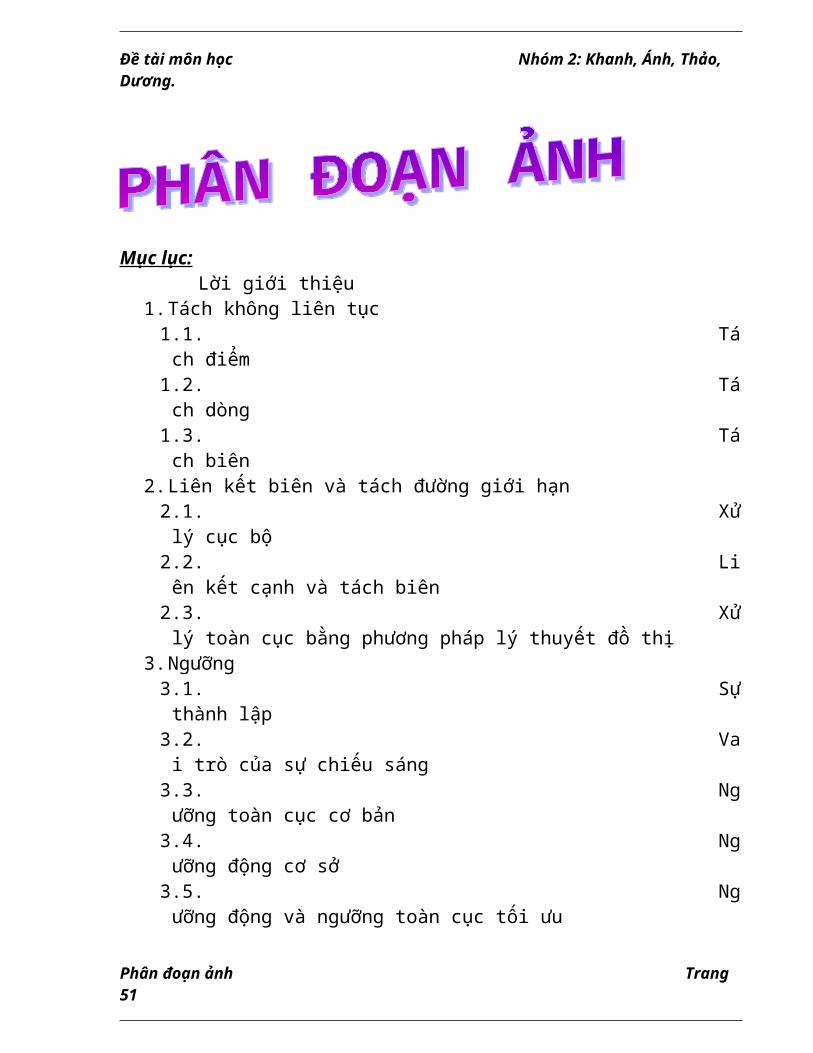
Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. đó tính Laplace của kết quả vừa tìm được. Vì vậy, tathấy rằng mục đích của hàm Gauss trong việc tính toántheo công thức LoG là để làm trơn ảnh, và mục đích củatoán tử Laplace là để cung cấp hình ảnh với Zerocrossing được dùng để xác định vị trí của biên. Việclàm trơn ảnh sẽ làm giảm đi tác động của nhiễu và chủyếu là nó ngăn chặn sự tăng tác động của nhiễu gây rabởi đạo hàm bậc 2 của toán tử Laplace.
Hình 15
Phân đoạn ảnh Trang 26

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 15(a) là hình chụp X-Quang của mạch máu. Hình15(b) biểu diễn Gradient Sobel của hình này. Hình 15(c)là 1 hàm Gauss trong không gian ( với một độ lệch chuẩn5 pixel) được dùng để thu được mặt nạ trơn trong khônggian 27 x 27. Hình 15(d) là mặt nạ trong không gianđược sử dụng để thực hiện phương trình (1.5). Hình15(e) là hình LoG thu được bằng cách làm trơn ảnh banđầu với mặt nạ làm trơn Gauss, sau đó áp dụng mặt nạLaplace (hình này đã được dùng để khử hiệu ứng đườngbiên tạo ra bởi mặt nạ làm trơn). Kết quả LoG biểu diễn trong hình 15(e) là ảnh thuđược từ việc tính toán Zero crossing để tìm biên. Mộtphương pháp dễ hiểu cho xấp xỉ zero crossing là tạongưỡng ảnh LoG bằng cách thiết lập tất cả giá trị dươngcho điểm màu trắng, và tất cả giá trị âm cho điểm màuđen. Kết quả được biểu diễn trong hình 15(f). Tínhlogic của phương pháp này là zero crossing xảy ra giữanhững giá trị âm và dương của toán tử Laplace. Cuốicùng, hình 15(g) biểu diễn ước lượng zero crossing thuđược bằng cách quét ngưỡng ảnh và làm nổi phần chuyểntiếp giữa vùng màu đen và vùng màu trắng. So sánh hình 15(b) và (g) ta phát hiện ra vài sựkhác biệt quan trọng và thú vị. Trước tiên, chúng tachú ý thấy biên trong ảnh zero-crossing mảnh hơn biêntrong ảnh gradient. Đây là đặc trưng của zero-crossinglàm cho phương pháp được thu hút. Mặt khác, chúng taxem trong hình 15(g), biên được xác định bởi zero-crossing hình thành các mạch kín nhiều hơn. Cái nàythường được gọi là hiệu ứng spaghetti, là một trongnhững mặt hạn chế lớn nhất của phương pháp này. Mặt hạnchế lớn khác là độ phức tạp của việc tính toán zerocrossing, mà việc tính toán này lại là nền tảng củaphương pháp. Mặc dù nó hợp lý trong ví dụ này, nhưngthực tế việc tính toán zero crossing thường có rấtnhiều trở ngại, và để thu được kết quả có thể chấp nhậnPhân đoạn ảnh Trang 27

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. được đòi hỏi phải có những kỹ thuật tinh vi hơn( Huertas và Medione [1986] ). Phương pháp zero-crossing được quan tâm sử dụngvì khả năng làm giảm nhiễu và ẩn đi những biểu diễn gồghề. Tuy nhiên, sự hạn chế chỉ nổi rõ khi biểu diễn mộtchướng ngại vật khá lớn trong các ứng dụng thực tế. Vìlý do này, các kỹ thuật tìm biên dựa trên những cáchtính gradient khác nhau vẫn thường được sử dụng hơnphương pháp zero crossing trong việc thực hiện thuậttoán phân đoạn.
2. LIÊN KẾT BIÊN VÀ TÁCH ĐƯỜNG GIỚI HẠN :
Những phương pháp đã thảo luận trước đây giúpđịnh ra những pixel nằm trên biên và sắp xếp các pixelđó vào các tập hợp riêng. Tuy nhiên trong thực tế thìhiếm khi tập hợp các pixel này xác định 1 cạnh hoànchỉnh vì có sự xuất hiện của nhiễu, sự vỡ cạnh do chiếusáng không đồng đều và các tác động khác tạo ra mật độgián đoạn sai lệch . Chính vì vậy mà các giải thuật xácđịnh biên luôn đi kèm với việc liên kết các thủ tụcnhằm tập hợp các pixel thành các cạnh có ý nghĩa. Sauđây là một vài phương pháp cơ bản:
2.1 Xử lý cục bộ:
Một trong những phương pháp đơn giản nhất để liênkết cạnh là phân tích tính chất của các pixel trong 1láng giếng nhỏ (3 3 hay 5 5) của những pixel mà đã được định là 1 điểm của 1 cạnh nào đó bằng 1 trong cácphương pháp đã bàn trong phần trước. Tất cả các điểm màthỏa một số tính chất định trước nào đó thì được liênkết lại. Sau cùng ta sẽ có 1 cạnh thỏa các tính chất đãđịnh trước. Hai tính chất chính được dùng trong phương phápphân tích này là : (1) Độ dài của kết quả của toán tử
Phân đoạn ảnh Trang 28

Tách không liên tục Nhóm 2: Khanh, Ánh, Thảo, Dương. gradient được sử dụng để tạo ra các pixel cạnh; và (2)Hướng của véctơ gradient. Tính chất đầu tiên sử dụnggiá trị của :
Phân đoạn ảnh Trang 29

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
(1-4)
Hoặc : (1-12)
Với và
Vì vậy một pixel cạnh ( nghĩa là pixel đã đượcđịnh là 1 điểm của 1 cạnh nào đó) có tọa độ trongmột lân cận được xác định trước của (x,y) thì tươngđương với pixel (x,y) về độ lớn nếu: ,trong đó E là 1ngưỡng không âm. Hướng (góc) của véctơ gradient được đưa ra trongphương trình (1-5), một pixel cạnh tại trong mộtlân cận cho trước của (x,y) có góc tương tự với pixel(x,y) nếu: , vớiA là ngưỡng góc không âm. Như đã chú ý trong phươngtrình (1-5), hướng của một biên tại (x,y) vuông góc vớihướng của véctơ gradient tại điểm đó. Một điểm trong lân cận cho trước của (x,y) đượcliên kết với pixel tại (x,y) nếu cả tiêu chuẩn về độlớn và hướng được đáp ứng. Quá trình này được lặp lạitại mọi vị trí trong bức ảnh. Sẽ có một mẫu tin lưu lạinhững điểm liên kết với điểm trung tâm của vùng lân cậnlần lượt di chuyển từ pixel này sang pixel khác. Mộtthủ tục đánh dấu đơn giản là đưa ra cho mỗi tập hợp cácpixel biên liên kết một mức xám khác nhau. Để minh họa cho những thủ tục đã nói, hãy nhìnvào hình 16(a) - ảnh chụp phía sau chiếc xe. Mục đíchlà để tìm ra hình chữ nhật có kích thước phù hợp với

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. kích thước của bảng số xe. Thông tin của những hình chữnhật này có thể được lấy được bằng cách xác định cáccạnh dọc và ngang của chúng. Hình 16(b) và (c) thể hiệnnhững cạnh dọc và ngang nhận được bằng cách sử dụngtoán tử Sobel dọc và ngang. Hình 16(d) là kết quả nhậnđược sau khi liên kết tất cả những điểm có giá trịgradient lớn hơn 25 và hướng của véctơ gradient khôngkhác biệt quá . Các đường ngang được tạo ra bằng cách sử dụng liêntiếp các tiêu chuẩn trên cho từng dòng của hình 16(c).Lần lượt quét từng cột của hình 16(b) thì ta có cáccạnh dọc. Hơn nữa quá trình xử lý trên còn bao hàm cảthao tác liên kết các đoạn cạnh nhỏ bị phân chia do cácvết nứt nhỏ và hủy bỏ các đoạn cạnh ngắn cô lập.
Hình 16Cuối cùng, như ta thấy ở hình 16(d), hình chữ nhậttương ứng với bảng số xe là 1 trong số các hình chữnhật được xác định trong ảnh. Và bây giờ thì thật dễdàng để định vị bảng số xe dựa vào các hình chữ nhật

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. này (tỉ lệ chiều dài chia chiều cao của bảng số xe hìnhchữ nhật luôn là 2:1 với các bảng số của U.S.)
2.2 Liên kết cạnh và tách biên:
Trong phần này, các điểm được liên kết với nhauđầu tiên nếu chúng nằm trên một đường cong có hình dạngđược định trước. Không giống như phương pháp phân tíchcục bộ đã được thảo luận trong phần trước, bây giờchúng ta lại quan tâm tới mối quan hệ toàn cục giữa cácpixel. Cho n điểm trên 1 bức ảnh. Giả sử rằng ta muốntìm ra những tập con của các điểm thuộc cùng một đườngthẳng. Một lời giải khả dĩ là trước tiên tìm ra tất cảcác đường thẳng được xác định bởi mỗi cặp điểm, rồi sauđó tìm các tập con của những điểm gần với các đường đặcbiệt. Vấn đề nảy sinh trong cách làm này là nó bao gồm
việc xác định ra đường thẳng và sau đó là
khoảng phép so sánh từng điểm có thuộc ngầnấy đường đó hay không. Cách tiếp cận này làm cho việctính toán trở nên rất phức tạp ngay cả trong các ứngdụng bình thường nhất. Hough [1962] đã đề xuất 1 cách tiếp cận khác, đólà biến đổi Hough (Hough transform). Xét điểm vàphương trình tổng quát của đường thẳng có dạng:
. Có vô số đường thẳng cùng đi qua ,nhưng tất cả chúng đều có dạng với các giátrị khác nhau của a và b. Tuy nhiên, khi viết lạiphương trình này dưới dạng và xét mặt phẳng ab(còn gọi là không gian tham số) ta đưa ra được phươngtrình của một đường đơn cho một cặp tương ứng.Hơn nữa, một điểm thứ hai cũng có một đườngtrong không gian tham số tương ứng với nó, và đường này

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. giao với đường thẳng ứng với tại (a', b'), với(a',b') là giao điểm của đường thẳng chứa cả hai điểm
và trong mặt phẳng xy. Thực tế, tất cả mọiđiểm trên đường này đều có các đường trong không giantham số giao nhau tại (a’,b’). Hình 17 minh họa chonhững khái niệm này.
Hình 17 Sự hấp dẫn trong tính toán của biến đổi Hough bắtnguồn từ việc chia nhỏ không gian tham số thành nhữngcái gọi là ô tích lũy (accumulator cells) như minh họatrong hình 18, trong đó và là nhữngkhoảng mong đợi của các giá trị độ dốc (slope) vàintercept. Ô ở tọa độ (i,j) (có giá trị tích lũyA(i,j)) tương ứng với hình vuông trong không gian thamsố có tọa độ .

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 18
Quá trình xác định các giá trị tích lũy được làmnhư sau : B1: Cho mọi giá trị tích lũy A(i,j) = 0. B2: Với mỗi điểm trong mặt phẳng ảnh.Tađặt tham số a = giá trị chia nhỏ trên trục x. Sau đógiải rồi làm tròn b tới giá trị gần nhấttrên trục b. Nếu một lựa chọn của ap tìm được bq, chúngta gán A(p,q) = A(p,q)+1. B3: Cuối cùng ta thay giá trị Q trong A(i,j)tương ứng với Q điểm trong mặt phẳng xy nằm trên đườngthẳng . Số lượng các điểm chia trong mặt phẳngab quyết định sự chính xác của sự cộng tuyến của cácđiểm này. Chú ý rằng nếu số khoảng chia nhỏ của trục a là Kthì ứng với mỗi điểm ảnh , giá trị K của b tươngứng với các giá trị K có thể có của a. Do đó với n điểmảnh thì ta chỉ tốn nK phép tính. Vì vậy mà quá trình xửlý này là tuyến tính theo n, và tích nK không đạt đếnsố phép tính đã được thảo luận ở đầu phần này trừ khi Kxấp xỉ hoặc lớn hơn n.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. Tuy vậy có vấn đề nảy sinh khi sử dụng phươngtrình y = ax + b để biểu diễn 1 đường thẳng là hệ sốgóc sẽ tiến tới vô cùng khi đường thẳng “xấp xỉ” trụcđứng. Một cách để khắc phục khó khăn này là sử dụngbiểu diễn thông thường của đường thẳng :
(2-3) Hình 19a minh họa sự giải thích bằng hình học củanhững tham số được sử dụng trong phương trình (2-3).Việc sử dụng biểu diễn này trong việc xây dựng một bảngcủa những bộ đếm thì giống với phương pháp đã thảo luậncho cách biểu diễn Slope-intercept. Tuy nhiên, thay vìlà những đường thẳng, quỹ tích các điểm đó lại là cácđường hình sin trong mặt phẳng . Như trên, Q điểmcùng nằm trên đường thẳng tạo ra Qđường hình sin giao nhau tại trong không gian thamsố. Hình 19b biểu diễn việc chia không gian tham số.Tăng và giải tương ứng sẽ thu được Q dữ liệu tronggiá trị tích lũy A(i,j) tương ứng với ô được xác địnhbởi . Hình 19b minh họa việc chia nhỏ cho khônggian tham số. Khoảng giá trị của là , tương ứng với trụcx. Do đó với biểu diễn trong hình 19a, một đường thẳngnằm ngang sẽ có = và bằng x-intercept dương. Tươngtự với trường hợp đường thẳng dọc ta có còn bằng y-intercept dương , hoặc , với bằng giátrị y-intercept âm.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 19 Hình 20 minh họa biến đổi Hough dựa vào phươngtrình (2-3). Hình 20a biểu diễn ảnh với 5 điểm đượcđánh số. Mỗi điểm được ánh xạ qua mặt phẳng như biểudiễn ở hình 20b. Khoảng giá trị của giá trị là ,và khoảng của trục là , với D là khoảng cách giữahai góc trong ảnh. Không giống như biến đổi dựa trênviệc sử dụng slope-intercept, mỗi đường cong có dạnghình sin khác nhau. Đường nằm ngang là kết quả của việcánh xạ điểm 1, đó là trường hợp đặc biệt của một hàmsin với biên độ 0. Thuộc tính nhận dạng sự cộng tuyến của biến đổiHough được minh họa trong hình 20c. Điểm A là giao điểmcủa những đường cong tương ứng với các điểm 1,3 và 5trong mặt phẳng ảnh xy. Vị trí của điểm A cho thấy 3điểm này nằm trên một đường thẳng đi qua gốc tọa độ
và có hướng là . Tương tự, giao điểm của nhữngđường cong tại điểm B trong không gian tham số cho thấycác điểm 2, 3, 4 nằm trên một đường thẳng có hướng và khoảng cách của các điểm đó đến gốc tọa độ bằng nửakhoảng cách đường chéo từ gốc đến góc đối diện của ảnh.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 20 Cuối cùng, hình 20d cho thấy rằng biến đổi Houghbiểu diễn mối quan hệ đối xứng tại những biên bên tráivà bên phải của không cách tham số. Thuộc tính này đượcbiểu diễn bởi những điểm A, B, C trong hình 20d, là kếtquả của phương pháp với và thay đổi dấu tại cácđường bao . Mặc dù biến đổi Hough chủ yếu dành cho đườngthẳng nhưng ta vẫn có thể áp dụng nó cho bất cứ hàm nàocó dạng g(v,c) = 0, trong đó v là vector tọa độ và c làvector hệ số. Ví dụ các điểm nằm trên đường tròn
(2-4)có thể được xác định bằng cách sử dụng phương pháptrên. Sự khác nhau cơ bản là sự hiện diện của 3 tham số(c1, c2 và c3), mà kết quả nằm trong không gian tham số3-D với những khối lập phương và tích lũy có dạng A(i,j, k). Thủ tục này là để tăng c1, c2, tìm c3 theo

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. phương trình (2-4) và cập nhật giá trị tích lũy cho cácô tương ứng với bộ ba (c1, c2 và c3). Rõ ràng, độ phứctạp của biến đổi Hough tỉ lệ với số lượng tọa độ vànhững hệ số được cho trong phương trình biểu diễn. Hơnnữa, ta có thể suy rộng biến đổi Hough nhằm nhận diệncác đường cong có biểu diễn không đơn giản, như là ứngdụng của biến đổi ảnh xám. Bây giờ, chúng ta trở lại vấn đề liên kết cạnh.Một phương pháp dựa trên biến đổi Hough được trình bàynhư sau:
1.Tính gradient của một ảnh và ngưỡng để thu được ảnhnhị phân.
2.Chia nhỏ mặt phẳng .3.Kiểm tra việc đếm các ô tích lũy (accumulator cell)
cho những vùng tập trung pixel cao.4.Kiểm tra các quan hệ ( chủ yếu là về sự liên tục)
giữa các pixel trong ô được chọn. Khái niệm liên tục trong trường hợp này dựa trêntính toán khoảng cách giữa những pixel không liên kếtđược xác định trong suốt quá trình quét tập hợp nhữngpixel tương ứng với những ô tích lũy (accumulator cell)được đưa vào. Độ lệch tại một điểm bất kì là đáng kểnếu khoảng cách giữa điểm đó và lân cận gần nhất của nóvượt quá một ngưỡng xác định.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 21
Hình 21a biểu diễn một ảnh hồng ngoại tưởng tượngbao gồm hai chỗ chứa máy bay và một đường băng, hình21b là ảnh radient đã được phân ngưỡng thu được bằngcách sử dụng toán tử Sobel như đã thảo luận ở phần 1.3(chú ý khoảng cách nhỏ giữa hai tầng cánh của máy baytrong đường biên của đường bay). Hình 20c (màu trắng)biểu diễn biến đổi Hough của ảnh gradient, hình 20dbiểu diễn tập hợp những pixel được liên kết với nhaudựa trên tiêu chuẩn: - Thuộc vào một trong 3 ô tích lũy(accumulation cell) với bộ đếm cao nhất. - Không lệch quá 5 pixel. Chú ý rằng sự biến mất của các kẽ hở chính là kếtquả của sự liên kết.
2.3 Xử lý toàn cục bằng phương pháp lý thuyết đồ thị:

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. Chúng ta bắt đầu với một số định nghĩa cơ bản.Một đồ thì G= (N, U) là một tập hợp các nốt N khác rỗnghữu hạn, với một tập hợp U không có thứ tự các cặpthành phần nhất định của tập N. Mỗi cặp (ni, nj) của Uđược gọi là một cung.
Hình 22
Một đồ thị mà các cạnh có hướng được gọi là đồthị có hướng. Nếu một cung có hướng từ ni đến nj, thìnj là con của nốt ni. Quá trình nhận biết một successorcủa 1 nốt được gọi là khai triển của một nốt. Trong mỗiđồ thị chúng ta xác định các mức của nó, chẳng hạn mức0 gồm một nốt đơn, gọi là nốt bắt đầu hay nốt gốc, vànhững nốt ở mức cuối cùng được gọi là nốt lá. c(ni, nj)có thể kết nối được với mọi cung (ni, nj). Một dãy cácnốt n1, n2,…, nk ( trong đó mỗi nốt ni là một nốt con củani-1) được gọi là một đường đi từ n1 đến nk. Trọng số củatoàn bộ đường đi là:
(2.5) Một thành phần cạnh như là đường bao giữa 2 pixelp và q, với p và q là láng giềng-4 như minh họa ở hình22. Những thành phần cạnh được định nghĩa bởi những tọađộ (x,y) của điểm p và q. Nói cách khác, thành phầncạnh trong hình 22 được định nghĩa bởi cặp (xp, yp)(xq,

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. yq). Giống với định nghĩa trong 1.3, một cạnh là một dãycác thành phần cạnh liên kết với nhau. Chúng ta có thể minh họa cách áp dụng tư tưởngtrên để tách biên sử dụng ảnh 3x3 trong hình 23a. Cácsố bên ngoài là các tọa độ pixel và số bên trong ngoặcvuông biểu diễn giá trị mức xám. Mỗi thành phần biên xác định bởi pixel p và q cótrọng số tương ứng được định nghĩa bởi:
(2.6)
Với H là giá trị mức xám cao nhất trong bức ảnh(trong trường hợp này là 7), và và là giá trịmức xám của p và q. Qui ước điểm p nằm bên tay phải củahướng di chuyển dọc theo thành phần biên.
Hình 23
Ví dụ: đoạn biên (1, 2) (2, 2) nằm giữa điểm (1, 2)và (2, 2) trong hình 23b. Nếu hướng di chuyển sang bênphải thì p là điểm có tọa độ (2, 2) và q là điểm có tọađộ (1, 2); khi đó c(p, q) = 7 - [ 7 - 6] = 6. Trọng sốnày được biểu diễn trong hình vuông bên dưới thành phầnbiên. Nếu chúng ta di chuyển sang trái giữa hai điểmnhư trên thì p là điểm (1, 2) và q là điểm (2, 2).Trong trường hợp này c(p, q) = 8, được thể hiện bêntrên của thành phần biên trong hình 23b. Để đơn giản

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. chúng ta giả sử rằng các cạnh bắt đầu ở hàng trên cùngvà kết thúc ở hàng cuối, vì vậy thành phần đầu tiên củabiên chỉ có thể nằm giữa những điểm (1, 1), (1, 2) hoặc(1, 2), (1, 3). Tương tự thành phần biên cuối cùng chỉnằm giữa những điểm (3, 1), (3, 2) hoặc (3, 2), (3, 3).Dựa theo ý tưởng này thì p và q là liên láng giềng 4như chú ý trên. Hình 24 biểu diễn đồ thị cho vấn đề này. Mỗi nốttrong đồ thị tương ứng với thành phần biên từ hình 23.Giữa 2 nốt có một cung nếu 2 thành phần biên tương ứnglà một thành phần của một cạnh. Như hình 23(b), trọngsố của mỗi thành phần biên được tính toán bằng côngthức 2.6, được biểu diễn trong hình vuông nằm bên cạnhcung nối với nốt tương ứng. Các nốt lá được tô đậm.Đường đi có trọng số nhỏ nhất được biểu diễn bằng đườngđứt nét và cạnh tương ứng với đường đi này được biểudiễn trong hình 23(c).

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 24
Thông thường vấn đề tìm đường đi có trọng số nhỏnhất không đơn giản trong tính toán. Phương pháp này sẽlàm mất đi sự tối ưu tốc độ. Thuật toán sau đây biểudiễn lớp các thủ tục sử dụng heuristic để giảm đi việctìm kiếm. Đặt r(n) là ước lượng của trọng số của đườngđi có trọng số nhỏ nhất từ điểm bắt đầu s cho đến nốtlá, trong đó đường đi phải đi qua n. Trọng số này cóthể biểu diễn như là một trọng số ước lượng của đườngđi có trọng số nhỏ nhất từ s đến n cộng với trọng sốcủa đường đi đó từ n đến nốt lá, tức là,
r(n) = g(n) + h(n) (2.7)trong đó g(n) có thể chọn như là đường đi có trọng sốnhỏ nhất từ s tới n đã được tìm thấy, và h(n) có được

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. bằng cách sử dụng bất kỳ thông tin heruristic nào cógiá trị. Một thuật toán sử dụng r(n) như là nền tảngcho biểu diễn tìm kiếm trong đồ thị gồm các bước sau:
Bước 1 : Đánh dấu nốt bắt đầu là OPEN và đặt g(s)
=0.
Bước 2 : Nếu không có nốt nào OPEN thì thoát và báo
lỗi, ngược lại đến bước 3.
Bước 3 : Đánh dấu CLOSED cho nốt OPEN n mà ước
lượng r(n) được tính từ phương trình (2.7) là nhỏnhất.
Bước 4 : Nếu n là nốt lá thì kết thúc, ta nhận được
đường đi kết quả bằng việc dò ngược con trỏ. Ngượclại, qua bước 5.
Bước 5 : Mở rộng nốt n, khởi tạo tất cả các phần tử
tiếp theo của nó (nếu không có phần tử tiếp theothì đến bước 2).
Bước 6 : Nếu một phần tử tiếp theo ni không được
đánh dấu. Đặt r(ni)= g(n) + c(n, ni) , đánh dấu OPEN, và hướng con trỏ quay ngược
lại n.
Bước 7 : Nếu phần tử kế tiếp ni được đánh dấu CLOSED
hoặc OPEN, cập nhật giá trị của nó bằng cách đặt g’(ni) = min[ g(ni), g(n) + c(n,ni)] . Đánh dấu OPEN cho những nốt CLOSED kế tiếp có
giá trị g’ nhỏ và định hướng lại các con trỏ đến ntừ tất cả những nốt mà giá trị g’ nhỏ, trở về bước2.
Thuật toán này không chắc chắn đưa ra đường đingắn nhất, ưu điểm của nó là tốc độ nhờ sử dụngheuristic. Tuy nhiên, nếu h(n) là giới hạn nhỏ hơn của

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. trọng số của đường đi ngắn nhất từ n đến một nốt lá thìthuật toán này sẽ tìm được một đường đi tối ưu. Nếukhông có thông tin Heuristic nào có giá trị (nghĩa là h≡ 0) thì phải dùng thuật toán Dijkstra [1959].
Ví dụ :
Hình 25
Hình 25 biểu diễn bức ảnh của một ảnh của bóngnhiễm sắc thể bị nhiễu và một biên được tìm thấy bằngcách sử dụng tìm kiếm đồ thị heuristic dựa trên thuậttoán được phát triển trong mục này. Biên biểu diễn bằngmàu trắng chồng lên trên ảnh gốc. Chú ý rằng, trongtrường hợp này biên và giới hạn của đối tượng là xấp xỉnhư nhau. Trọng số tính theo phương trình 2.6 vàheuristic sử dụng ở một điểm bất kỳ trên đồ thị là đểxác định và sử dụng đường đi tối ưu cho 5 mức từ điểmđó. Xem xét số lượng nhiễu biểu diễn trong hình này, ta

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. thấy phương pháp tìm kiếm đồ thị đã đưa ra một kết quảchính xác hợp lý.
3. NGƯỠNG:
Bởi vì những tính chất trực giác và sự thực hiệnđơn giản nên phân ngưỡng đóng vai trò trung tâm trongphân đoạn ảnh. Trong các chương trước chúng ta đã nhắcsơ về ngưỡng cùng 1 số ứng dụng đơn giản của nó, cònchương này sẽ trình bày về ngưỡng 1 cách chính thức hơnvà đưa nó vào trong những kỹ thuật mà tổng quát hơn rấtnhiều.
3.1 Sự thành lập:
Hình 26
Giả sử rằng histogram mức xám trong hình 26a làhistogram của 1 tấm ảnh (gọi là f(x,y)) gồm có các vậtthể sáng trên 1 nền tối. Các pixel của các vật thể lẫncái nền có mức xám được chia vào 2 dạng chính( dominant modes). Một cách tự nhiên để trích các vậtthể ra là chọn 1 ngưỡng T mà có thể phân chia các dạngnày. Khi đó với điểm (x,y) thì (x,y) sẽ được gọi làđiểm vật thể nếu f(x,y) > T, ngoài ra gọi (x,y) là điểmnền. Đây là loại ngưỡng được giới thiệu trong phần 3.1.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. Hình 26b thể hiện 1 trường hợp tổng quát hơn 1chút về cách tiếp cận này. Trong đó 3 dạng chính biểuthị tính chất của histogram ảnh ( trong ví dụ ta thấycó 2 vật thể sáng trên 1 nền tối). Ở đây, ngưỡng nhiềumức (mutilevel thresholding) chia 1 điểm (x,y) hoặcthuộc về 1 lớp vật thể nếu hoặc thuộc 1 lớpvật thể khác nếu f(x,y) > , và hoặc thuộc về nền nếu
. Trong trường hợp tổng quát, bài toán phânđoạn yêu cầu nhiều ngưỡng được giải quyết tốt nhất bằngcách dùng phương pháp tăng vùng (sẽ giới thiệu trongphần 4). Dựa trên những gì đã nói trên , việc chọn ngưỡngcó thể xem như 1 thao tác kiểm tra hàm T : T = T[x, y, p(x,y), f(x,y)](3.1) với f(x,y) là mức xám của điểm (x,y) còn p(x,y)là 1 số tính chất địa phương của điểm này (ví dụ nhưmức xám trung bình của 1 láng giềng tâm (x,y)). Một bứcảnh đã được phân ngưỡng g(x,y) được định nghĩa như sau:
trong đó ta hiểu f(x,y) là mức xám tại (x,y). Dođó tất cảc các pixel nào được gán giá trị 1 (hoặc bấtkỳ 1 mức xám thuận lợi nào) thì tương ứng với các vậtthể, còn các pixel được gán giá trị 0 (hoặc 1 giá trịnào khác mức xám đã gán cho các vật thể) tương ứng vớinền. Khi T chỉ phụ thuộc vào f(x,y) (tức là chỉ phụthuộc vào giá trị mức xám) thì ngưỡng được gọi làngưỡng toàn cục. Nếu T phụ thuộc vào f(x,y) và p(x,y)thì ngưỡng được gọi là ngưỡng cục bộ. Ngoài ra nếu Tphụ thuộc vào các tọa đô không gian x và y thì ngưỡngđược gọi là động (adaptive).

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. 3.2 Vai trò của sự chiếu sáng :
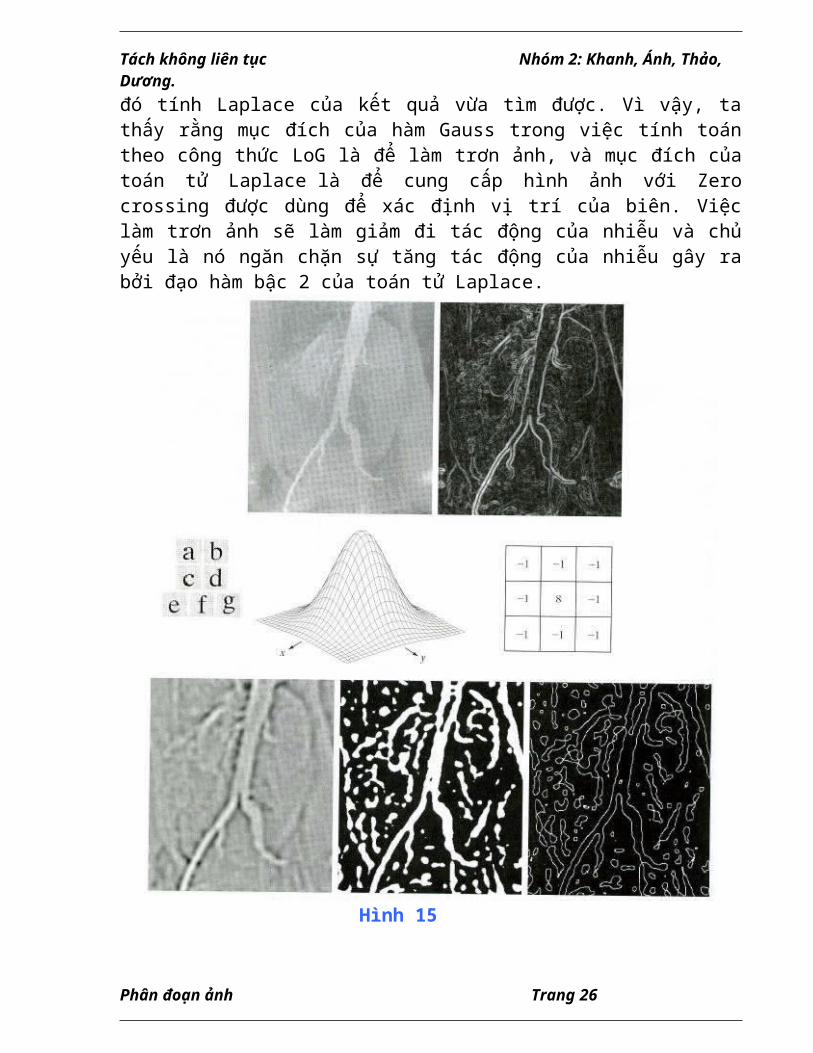
Chúng ta đã biết f(x,y) có thể được định dạng nhưtích của thành phần năng suất phản xạ (reflectancecomponent) r(x,y)và thành phần chiếu sáng (illuminationcomponent) i(x,y). Do đó trong mục này sẽ sử dụng dạngnày nhằm giới thiệu ngắn gọn về ảnh hưởng của sự chiếusáng lên trên việc chọn ngưỡng, đặc biệt với ngưỡngtoàn cục. Chú ý tới hàm phản xạ được xác định bởi máy tínhbiểu diễn trong hình 27a. Histogram của hàm này ( đượcthể hiện trong hình 27b) phân làm đôi một cách rõ ràngvà có thể dễ dàng chia ra bằng cách dùng một ngưỡngtoàn cục đơn (single global threshold) T tại rãnh củahistogram. Nhân hàm phản xạ trong hình 27a với hàmchiếu sáng (biểu diễn bằng hình 27c) thì tạo ra bức ảnhnhư trong hình 27d. Và hình 27e là histogram của bứcảnh này. Chú ý là rãnh gốc ban đầu hầu như đã bị loạibỏ, do đó việc phân đoạn ảnh bằng 1 ngưỡng đơn trở nênkhông thể. Mặc dù chúng ta hiếm khi làm việc với hàmphản xạ nhưng minh họa này cho thấy chúng ta có thể dễdàng phân chia tính chất phản xạ tự nhiên của các vậtthể và nền. Ngược lại, bức ảnh kết quả trong ví dụ lạirất khó để phân đoạn. Lý do tại sao histogram trong hình 27e bị biếndạng rất nhiều so với histogram của hàm phản xạ có thểđược giải thích như sau: Trước hết, từ phương trình(4.5 – 1) : (10.3 – 3) Lấy ln hai vế ta có : = lni(x,y) +lnr(x,y) (10.3 – 4)
Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. = i’(x,y) +r’(x,y)
Theo định lý xác suất (Papoulis – 1991), nếui’(x,y) và r’(x,y) là 2 biến ngẫu nhiên độc lập thìhistogram của z(x,y) là tích chập (convolution) củahistogram của i’(x,y) và histogram của r’(x,y). Nếui(x,y) là hằng số thì i’(x,y) cũng là hằng số và
Hình 27
Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. histogram của i’(x,y) có dạng xung đơn (nghĩa là 1 đoạnthẳng) giống như một xung lực. Tích chập của hàm sốdạng xung lực này với histogram của r’(x,y) không làmthay đổi hình dạng cơ bản của histogram của r’(x,y)(tích chập của một hàm số với một xung lực sẽ sao chéplại hàm số ở vị trí xung lực). Tuy nhiên nếu i’(x,y) cómột histogram rộng hơn (nguyên nhân là do sự chiếu sángkhông đồng đều) thì tích chấp sẽ làm thay đổi nhiềuhình dạng của histogram của r’(x,y). Do đó histogramcủa z(x,y) có thể có hình dạng hoàn toàn khác histogramcủa r’(x,y). Độ sai lệch phụ thuộc vào độ rộng củahistogram của i’(x,y), mà độ rộng này thì lại phụ thuộcvào mức độ không đồng đều của sự chiếu sáng. Chúng ta đã xử lý thay vì xử lý ,chính nhờ cách dùng ln để phân tách thành phần chiếusáng và thành phần phản xạ mà chúng ta đã giải thích rõràng bản chất của vấn đề. Phương pháp tiếp cận này chophép chúng ta coi histogram của như một tíchchập, như thế giải thích tại sao một rãnh rõ ràng tronghistogram của thành phần phản xạ lại bị mờ đi do sựchiếu sáng không phù hợp. Trong trường hợp chúng ta được phép xử lý nguồnsáng thì một giải pháp thường được sử dụng đẻ bù đắp sựchiếu sáng không đồng đều là lấy mô hình chiếu sángchiếu lên một mặt phản xạ không đổi, trắng (tức là lúcnày thành phần phản xạ là 1 hằng số k phụ thuộc vào mặtphản xạ này). Khi đó sẽ nhận được bức ảnh g(x,y) =ki(x,y) với i(x,y) là mô hình chiếu sáng. Lúc này vớibất kỳ ảnh = i(x,y)r(x,y) nào được chụp trong môhình sáng trên thì chỉ cần chia cho g(x,y) ta sẽđược 1 hàm số đã tầm thường hóa : h(x,y) = /g(x,y) = r(x,y) / k. Và nếu r(x,y) có thể được phânđoạn bằng 1 ngưỡng đơn T thì h(x,y) cũng có thễ đượcphân đoạn bằng ngưỡng đơn T/k.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. 3.3 Ngưỡng toàn cục cơ bản (basic global
thresholding):
Từ những gì được đề cập trong phần 10.3.1, chúngta có thể thấy kĩ thuật đơn giản nhất trong mọi kĩthuật phân đoạn ngưỡng là phân chia histogram ảnh bằngcách sử dụng một ngưỡng toàn cục đơn T như minh họatrong hình 26a. Sự phân đoạn ảnh được thực hiện bằngcách quét qua bức ảnh từng pixel một và gán cho mỗipixel hoặc là vật thể, hoặc là nền bằng cách xem xétmức xám của pixel đó lớn hơn hay nhỏ hơn ngưỡng T. Vànhư đã trình bày, sự thành công của phương pháp này phụthuộc hoàn toàn vào việc histogram của bức ảnh có thểđược phân tách tốt như thế nào. Hình 28a là một bức ảnh đơn giản, và hình 28b làhistogram của nó. Hình 28c là kết quả phân đoạn hình28a bằng 1 ngưỡng T là trung bình của mức xám lớn nhấtvà mức xám nhỏ nhất. Ngưỡng này đã đạt đến 1 sự phânđoạn “sạch” vì đã loại hết bóng và để lộ rõ vật thể.Trong trường hợp này, vật thể tối hơn nền, và như thếchúng ta đã xử lý ảnh bằng cách : bất kỳ pixel nào có

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
mức xám T được coi là pixel đen (0), còn pixel nào cómức xám > T coi được coi là pixel trắng (255). Điềuquan trọng là tạo ra 1 bức ảnh nhị phân, do đó có thểđảo ngược quan hệ trắng đen trên. Loại ngưỡng toàn cục trên có thể xem như là 1thành công trong các môi trường kiểm tra kĩ thuật caonhư trong các ứng dụng về kiểm tra công nghiệp vìthường trong điều kiện này chúng ta có thể điều chỉnhsự chiếu sáng được.Ngưỡng trong ví dụ trên được xác định bằng một phươngpháp mang tính kinh nghiệm dựa vào việc xem xéthistogram của ảnh. Vì vậy ta có thể dùng giải thuật sauđể có được ngưỡng T một cách tự động :
Chọn một giá trị xấp xỉ ban đầu cho T.
Hình28
Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Phân đoạn bức ảnh với ngưỡng T. Khi đó ta nhận được
2 nhóm pixels: bao gồm các pixel với mức xám> T và bao gồm các pixel có mức xám T.
Tính lần lượt mức xám trung bình và của các
pixels trong vùng và .
Tính ngưỡng mới :
Lặp lại từ bước 2 tới bước 4 cho tới khi sự sai
khác giữa 2 giá trị T liền nhau bé hơn 1 tham sốchọn trước .
Khi có thể chắc chắn rằng nền và vật thể có độlớn tương đối giống nhau thì một ngưỡng ban đầu thíchhợp chính là mức xám trung bình của bức ảnh. Còn khivật thể có kích thước nhỏ hơn nền (hoặc ngược lại) thìmột nhóm pixel (biểu thị co nền hoặc vật thể) sẽ chiếmgiữ phần lớn histogram, do đó lúc này việc chọn mức xámtrung bình làm ngưỡng ban đầu là không thích hợp. Lúcnày một xấp xỉ tốt hơn cho giá trị ban đầu T là trungbình của mức xám cao nhất và mức xám thấp nhất. Tham sốđược dùng để dừng giải thuật lại : khi sự chêng lệch
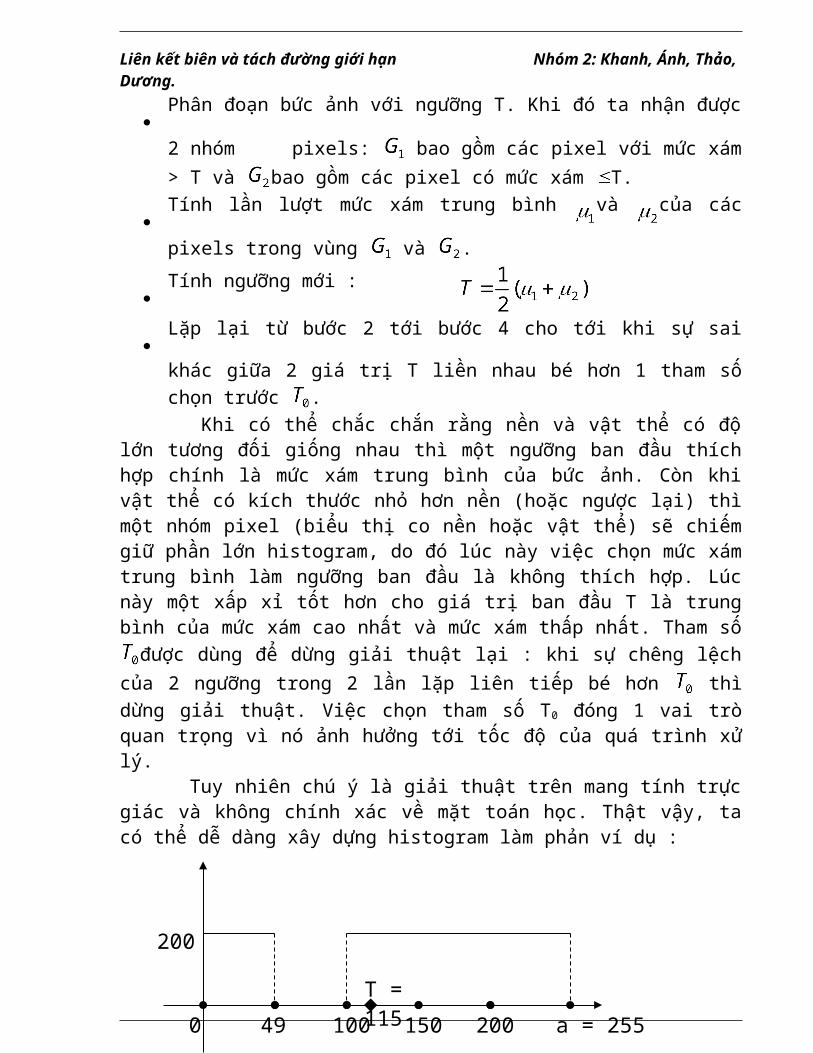
của 2 ngưỡng trong 2 lần lặp liên tiếp bé hơn thìdừng giải thuật. Việc chọn tham số T0 đóng 1 vai tròquan trọng vì nó ảnh hưởng tới tốc độ của quá trình xửlý. Tuy nhiên chú ý là giải thuật trên mang tính trựcgiác và không chính xác về mặt toán học. Thật vậy, tacó thể dễ dàng xây dựng histogram làm phản ví dụ :
0 49 100 200150 a = 255T = 115
200

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Xét histogram như hình trên. Trong đó phần có mứcxám bé hơn 50 là phần histogram của vật thể, còn phầncó mức xám lớn hơn 99 là biểu thị cho nền (thực rahistogram phải được biểu thị dưới dạng các đoạn thẳngrời nhau – biểu đồ đường, nhưng ở đây ta xét trường hợpmọi số lượng pixel của mỗi mức xám hoặc là 0, hoặc là200, nên vẽ như trên cho đơn giản). Theo hình trên tathấy ngay có rất nhiều giá trị có thể dùng làm ngưỡngtoàn cục, cụ thể các giá trị từ 50 tới 99 đều thỏa. Tuynhiên bây giờ ta sẽ dùng giải thuật trên để xây dựng ra1 ngưỡng không thích hợp như sau : trước hết chọn 1 giátrị không thích hợp là 115 làm ngưỡng (T = 115) và tachọn mức xám lớn nhất a sao cho có phương trình :
(I)

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Tức là ta chỉ chạy bước 2 tới bước 4 đúng 1 lầnrồi dừng lại luôn và nhận 115 làm giá trị ngưỡng cầntìm. Tính ra ta được : = 44.62 và = (T + a)/2.Thế vào (I) ta được a = 255. Vậy với 1 bức ảnh cóhistogram như hình trên và nếu ta chọn ngưỡng ban đầu
Hình 29

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. là 115 thì sau khi chay giải thuật ta sẽ được giá trịngưỡng cần tìm là 115, không thích hợp! Hình 29 là 1 ví dụ về việc phân đoạn bằng cáchdùng ngưỡng mà được tính toán bằng giải thuật trên.Hình 29a là ảnh gốc, hình 29b là histogram của ảnh. Chúý tới cái rãnh được phân ly rõ ràng của histogram. Nếuta chọn giá trị ngưỡng ban đầu là mức xám trung bình và= 0 thì sau 3 lần lặp sẽ thu được giá trị ngưỡng
125.4. Và khi dùng T = 125 làm ngưỡng để phân đoạn ảnhgốc thì sẽ được hình 29c. Từ bức ảnh kết quả này tathấy vật thể và nền đã được phân ly rất tốt, như nhữnggì ta mong đợi qua sự phân ly rõ ràng của các vùngtrong histogram.
3.4 Ngưỡng động cơ sở (basic adaptive thresholding):
Như trong ví dụ 27, nhiều nhân tố cấu thành ảnhnhư sự chiếu sáng không đều có thể làm biến đổi từ 1histogram có khả năng phân đoạn hiệu quả thành 1histogram không thể phân đoạn tốt bằng 1 ngưỡng toàncục đơn. Một cách khắc phục những trường hợp này làchia bức ảnh gốc thành các bức ảnh con rồi dùng cácngưỡng khác nhau cho từng ảnh con. Trọng tâm của phươngpháp này là làm sao chia nhỏ bức ảnh ban đầu và làm saotính toán được các ngưỡng cho từng ảnh con. Bởi vìngưỡng dùng cho mỗi pixel phụ thuộc vào việc pixel đónằm ở trong bức ảnh con nào nên ngưỡng mang tính động(adaptive). Sau đây chúng ta sẽ minh họa cho ngưỡngđộng bằng 1 ví dụ đơn giản. Một ví dụ tổng quát hơn sẽđược cho trong phần tiếp theo. Hình 30a chính là bức ảnh 27d – cái mà chúng takhông thể phân đoạn 1 cách hiểu quả bằng ngưỡng toàncục đơn. Hình 30b là kết quả của việc phân đoạn bức ảnhbằng 1 ngưỡng toàn cục là giá trị tại rãnh tronghistogram của ảnh trong hình 27e (việc xác định ngưỡng

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. này làm bằng tay). Một cách để giảm tác hại của việcchiếu sáng không đồng đều là chia bức ảnh thành nhiềubức ảnh con nhỏ hơn mà trong mỗi bức ảnh con thì sựchiếu sáng có thể coi là “gần gần” đồng đều. Hình 30clà 1 cách phân chia : chia bức ảnh thành 4 phần bằngnhau, rồi lại chia mỗi phần nhỏ thành 4 phần bằng nhaunữa. Những ảnh con nào không chứa biên giữa vật thể vànền thì có sự dao động mức xám không quá 75. Còn bứcảnh con nào có chứa biên giữa vật thể và nền thì daođộng mức xám lớn hơn 100. Mỗi bức ảnh con có dao độngmức xám lớn hơn 100 được phân đoạn bằng 1 ngưỡng đượcxác định như giải thuật trong phần trước và ứng với ảnhcon đó. Giá trị ngưỡng đầu tiên được lấy là trung bìnhcủa mức xám lớn nhất và mức xám nhỏ nhất của ảnh con.Tất cả các ảnh con có dao động mức xám không quá 100được hợp lại như 1 bức ảnh và được phân đoạn bằng 1ngưỡng đơn với cùng giải thuật. Kết quả của việc phân đoạn như trên thể hiệntrong hình 30d. Nếu bỏ qua 2 ảnh con hỏng thì ta thấysự cải tiến so với hình 30b là rất rõ ràng. Đối với 2bức ảnh con bị phân đoạn không hợp lý ta để ý thấy rằngđường biên giữa vật thể và nền của chúng nhỏ và tối,còn histogram của chúng thì hầu như chỉ có 1 dạng (chứkhông chia ra 2 dạng với 1 rãnh chính giữa nhưhistogram của các ảnh khác).

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 30 Hình 31a là 2 bức ảnh con từ hình 30c : một cái làảnh con bị phân đoạn không hợp lý ở trên, còn 1 cái làảnh con ngay phía trên nó – cái mà được phân đoạn hợplý. Histogram của bức ảnh được phân đoạn hợp lý thìđược chia làm đôi rõ ràng đến nỗi chúng ta có thể địnhnghĩa đỉnh và rãnh cho nó. Ngược lại, histogram kiathì hầu như chỉ có 1 dạng, không hề có sự phân chia cụthể giữa vật thể và nền. Hình 31d thể hiện bức ảnh con thất bại đã đượcchia thành nhiều bức ảnh con nhỏ hơn nữa, và hình 31elà histogram của bức ảnh con ở phía trên, bên trái –bức ảnh con chứa đường biên giữa vật thể và nền. Bức

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. ảnh con nhỏ hơn này có 1 histogram được phân đôi rõràng và có thể dễ dàng để phân đoạn. Sự phân đoạn nàythể hiện trong hình 31f. Hình này cũng thể hiện sự phânđoạn cho tất cả các ảnh con nhỏ hơn khác. Những ảnh connhỏ hơn còn lại này có 1 histogram hầu như chỉ có 1dạng và mức xám trung bình của chúng thì gần với vậtthể hơn với nền, do đó chúng được gán nhãn là vật thể.Điều này như 1 đề xuất rằng sự phân đoạn có thể đạt đến1 độ chính xác đáng chú ý bằng cách chia bức ảnh tổngthể thành các bức ảnh con có kích thước như trong hình31d.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
3.5 Ngưỡng động và ngưỡng toàn cục tối ưu :
Trong phần này chúng ta sẽ cùng thảo luận phươngpháp để tính được những ngưỡng mà tạo ra lỗi phân đoạntrung bình (error segmentation average) nhỏ nhất. Nhưvậy, phương pháp sẽ được áp dụng cho 1 vấn đề mà đòihỏi lời giải của nhiều vấn đề quan trọng phát sinhtrong các ứng dụng thực tế của tạo ngưỡng. Giả sử rằng 1 bức ảnh chỉ bao gồm 2 vùng mức xámchính. Kí hiệu các giá trị mức xám là z. Chúng ta cóthể xem các giá trị này như các con số ngẫu nhiên, và
Hình 31

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. histogram của chúng có thể coi như 1 xấp xỉ của hàm mậtđộ xác suất (probability density function – PDF) p(z)của chúng. Hàm mật độ tổng thể này là tổng hoặc là hợpcủa 2 hàm mật độ khác: một cái của những vùng sáng và 1cái của những vùng tối trong bức ảnh. Hơn nữa các hệ sốhợp (mixture parameters) có sự tương ứng với các phầngiao của các vùng sáng và tối. Nếu hình dạng của hàmmật độ được biết hoặc được giả thuyết là có 1 hình dạngquen thuộc nào đó thì chúng ta có khả năng xác định 1ngưỡng tối ưu cho việc phân đoạn 1 bức ảnh thành 2 vùngrời nhau. Hình 32 biểu diễn 2 hàm mật độ xác suất. Giả sửrằng PDF lớn hơn tương ứng với mức xám của nền và PDFnhỏ hơn miêu tả cho mức xám của vật thể trong bức ảnh.Hàm mật độ hỗn hợp miêu tả cho sự dao động của mức xámtrên toàn bức ảnh là : (3.5) Với và được xác định như sau : là xácsuất 1 pixel ngẫu nhiên là pixel của vật thể, còn làxác suất mà 1 pixel ngẫu nhiên là pixel của nền. Chúngta đang xét trường hợp ảnh chỉ có vật thể và nền nên 1pixel bất kỳ thì hoặc thuộc nền hoặc thuộc vật thể, dođó :
(3.6) Bức ảnh của chúng ta được phân đoạn bằng cách
xem tất cả các pixel với mức xám lớn hơn ngưỡng T lànền, còn lại là vật thể. Do đó nhiệm vụ chính của chúngta là làm sao xác định giá trị T sao cho sai số trungbình nảy sinh trong quá trình quyết định 1 pixel là nềnhay vật thể là bé nhất.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. Nhắc lại rằng xác suất 1 biến ngẫu nhiên có giá trị nằmtrong khoảng [a,b] là tích phân của hàm mật độ từ a tớibiên, tức là diện tích của đường cong PDF giữa 2 đầumút. Vì vậy xác suất phân loại sai lầm 1 pixel nềnthành 1 pixel vật thể là :
(3.7) Đây là diện tích của vùng nằm dưới đường cong và nằm bên trái ngưỡng T.
Hình 32 Tương tự, ta cũng có xác suất phân loại sai lầm 1pixel vật thể thành 1 pixel nền là :
(3.8) Tức là diện tích của vùng nằm bên dưới đường cong
và nằm bên phải ngưỡng T. Như vậy xác suất sai lầmtoàn cục là : (3.9)

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. Chú ý rằng các con số E1 và E2 được nhân thêm 1lượng P1 và P2 theo thứ tự ngược lại ( E1 nhân với P2 vàngược lại). Điều này cũng dễ hiểu : xét 1 pixel A bấtkỳ. Xác suất để phân loại sai A gồm có sai lầm loại 1:A là pixel nền nhưng lại phân loại A là vật thể và sailầm loại 2 là ngược lại. Để có sai lầm loại 1 thì Aphải là pixel nền (xác suất của điều này là P2) và phảiphân loại A là vật thể (xác suất này là E1), tức là xácsuất sai lầm loại 1 xảy ra với pixel bất kỳ A là P2E1.Tương tự, xác suất sai lầm loại 2 xảy ra với pixel bấtkỳ A là P1E2. Và ta có công thức 3.9. Nếu các pixel nền và vật thể có xác suất suấthiện giống nhau thì ta có P1 = P2 = 0.5. Để tìm ra 1 ngưỡng mà E nhỏ nhất cần đạo hàm Etheo T và cho đạo hàm này bằng 0 ( dùng phương pháp tìmcực trị) thì thu được: P1p1(T) = P2p2(T) (3.10) Giải phương trình biến T này để tìm ra ngưỡng tốiưu. Chú ý là nếu P1 = P2 thì ngưỡng tối ưu là vị trí màtại đó 2 đường cong p1(z) và p2(z) giao nhau (xem hình32). Để có 1 biểu thức giải tích cho giá trị T đòi hỏichúng ta phải biết phương trình của 2 PDF. Tuy nhiênviệc ước lượng những hàm mật độ này không phải luôn làmđược trong thực tế, do đó 1 phương pháp thường đượcdùng là sử dụng các hàm mật độ có các hệ số dễ tínhtoán đã biết. Một trong các hàm mật độ chính được sửdụng trong phương pháp này là hàm mật độ Gauss, hàm mậtđộ mà được mô tả hoàn toàn thông qua 2 hệ số: giá trịtrung bình và phương sai. Cụ thể là ta coi p1 và p2 đềulà hàm phân phối chuẩn. Khi đó ta đặt và là giátrị trung bình và phương sai của phân phối Gauss của 1lớp pixels (trong trường hợp này ta lấy là lớp cácpixel vật thể, tức là ứng với ), còn và là giá

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. trị trung bình và phương sai của phân bố Gauss của 1lớp pixels còn lại (ứng với p2). Khi đó công thức 3.5viết lại là:
(3.11)
Kết hợp 3.10 và 3.11 ta có thu được:AT2 + BT + C = 0 Với:
(3.13) Bởi vì 1 phương trình bậc 2 có thể có 2 nghiệmnên 2 nghiệm này đều có thể là ngưỡng tối ưu. Nếu 2 phương sai là bằng nhau: thìphương trình chỉ có 1 nghiệm:
(3.14) Nếu hoặc thì ngưỡng thích hợp là giátrị trung bình của 2 phương sai. Đối với các phân bốkhác (mà ta đã biết dạng của hàm mật độ, như phân bốRaleigh và phân bố log-normal) ta cũng có thể xác địnhngưỡng tối ưu 1 cách tương tự. Thay thế cho việc giả định dạng hàm số của p(z),chúng ta có thể dùng phương pháp sai số bình phươngtrung bình nhỏ nhất (minimum mean-square-errorapproach) để ước lượng PDF mức xám hỗn hợp của 1 bứcảnh từ histogram của bức ảnh đó. Ví dụ sai số trungbình bình phương giữa hàm mật độ hỗn hợp p(z) (có dạngliên tục) và histogram h(zi) (có dạng rời rạc) là:

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
(3.15) Với n là số lượng các mức xám suất hiện trên bứcảnh. Nguyên nhân chính cần phải ước lượng hàm mật độmột cách đầy đủ là để xác định xem có tồn tại các dạngchiếm ưu thế (dominant modes) trong PDF hay không. Nói chung việc xác định 1 cách giải tích những hệsố mà làm cho sai số trung bình bình phương này trở nênbé nhất không phải là 1 vần đề dễ. Ngay cả đối với phânbố Gauss, thì các tính toán không quá phức tạp trongviệc lập nên các phương trình đạo hàm riêng bằng 0 cũngdẫn tới việc giải 1 hệ các phương trình siêu việt; màviệc giải các phương trình siêu việt này thường chỉđược thực hiện bằng các thủ tục số như phương phápgradient liên hợp hay phương pháp Newton cho hệ phươngtrình phi tuyến. Ví dụ sau là 1trong những ví dụ xuất hiện sớmnhất cho việc phân đoạn ảnh bằng ngưỡng tối ưu. Ví dụnày đặc biệt thú vị bởi vì nó thể hiện kết quả phânđoạn có thể được cải thiện như thế nào bằng cách sửdụng những kỹ thuật tiền sử lý dựa trên các phương phápđược phát triển trong phần tăng cường ảnh. Thêm nữa vídụ còn minh họa cho việc sử dụng ước lượng histogramđịa phương và ngưỡng động. Vấn đề chung là cần vẽ phác thảo tự động nhữngđường biên của 2 tâm thất tim trong cardioangiograms(ảnh X quang của tim sau khi tiêm thuốc cản quang –loại chất dùng tăng cường sự nhìn thấy được của cấutrúc khi chụp X quang). Phương pháp thảo luận ở đâyđược phát triển bởi Chow và Kaneko (1972) để vẽ phácthảo đường biên tâm thất trái của tim. Trước khi phân đoạn, tất cả các bức ảnh được tiềnxử lý như sau:

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
(1)Mỗi pixel được ánh xạ qua 1 hàm log để chống lạitác động lũy thừa bị gây ra bởi sự hấp thụ phóngxạ.
(2)Lấy mỗi bức ảnh mà được chụp sau khi sử dụngthuốc cản quang trừ cho bức ảnh trước khi sửdụng thuốc cản quang để bỏ đi phần xương sốnghiện diện trong mỗi bức ảnh .
(3)Một vài các bức ảnh X quang chụp mạch máu đượccộng lại để giảm các nhiễu ngẫu nhiên.
Hình 33 thể hiện 1 cardioangiograms trước và sautiền xử lý, trong đó 2 khu vực được đánh dấu A và B sẽđược giải thích sau. Để tính ngưỡng tối ưu, mỗi bức ảnhsau tiền xử lý được chia thành 49 vùng nhỏ bằng cáchđặt 1 đường kẻ ô với 50% chồng lên nhau ( tất cảcác bức ảnh gốc lấy trong ví dụ này có độ phân giải
, như thế 49 vùng con có kích thước ).
Hình 33 Hình 34(a) và 34(b) là histogram của các vùng Avà B trong hình 33(b). Chú ý rằng histogram của vùng Ađược chia làm 2 phần rõ ràng, đây là dấu hiệu của 1

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. đường biên. Ngược lại, histogram của vùng B chỉ có 1phần, đây là dấu hiệu không có các vùng được phân biệtrõ ràng. Sau khi lập ra 49 histogram, 1 sự kiểm tra vềviệc histogram có được phân làm 2 phần hay không đượcthực hiện nhằm loại bỏ các histogram chỉ có 1 phần. Vớicác histogram còn lại ta coi mỗi histogram như 1 hàmmật độ và dùng phân phối Gauss xấp xỉ các hàm mật độnày như đã trình bày ở trên để tìm cho mỗi histogram 1ngưỡng tối ưu. Hai đường X và O trong hình 34a là 2đường mật độ xấp xỉ của đường histogram gốc (là cácchấm đen). Ở giai đoạn xử lý này chỉ những vùng có histogramcó 2 phần mới được chọn ngưỡng. Ngưỡng cho những vùngcòn lại được nhận bằng cách nội suy những ngưỡng này.Sau đó 1 sự nội suy thứ 2 được thực hiện từng điểm bằngcách sử dụng những giá trị ngưỡng lân cận. Như vậy tớihết giai đoạn xử lý này thì mọi điểm đã được chọn 1ngưỡng. Và cuối cùng mỗi điểm được đặt lại giá trị theoquy tắc:
Với Txy là ngưỡng của điểm (x,y) (đây là cácngưỡng động vì các ngưỡng này phụ thuộc vào vị trí(x,y)). Những đường biên được nhận bằng cách lấygradient của ảnh nhị phân vừa có (nếu gradient mà khác0 thì đó là biên và ngược lại).

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 34 Hình 35 thể hiện kết quả cuối cùng khi nhữngđường biên được thêm vào ảnh gốc. Sự biến đổi và phứctạp của ảnh kết quả cho ta thấy xử lý này đạt kết quảtốt.
Hình 35
Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. 3.6 Sử dụng những đặc điểm biên để cải tiến
histogram và phân ngưỡng địa phương:
Dựa trên những gì đã nói trong 5 phần trước, tacó thể nhận thấy khá rõ ràng rằng khả năng chọn 1ngưỡng tốt sẽ rất lớn nếu các đỉnh của histogram nhọn,cao đối xứng và được phân chia bởi những đường rãnhdài. Một phương pháp để cải thiện histogram là chỉ chúý tới những pixel đặt trên hoặc gần những cạnh nằm giữavật thể và nền. Khi đó histogram sẽ ít phụ thuộc hơnvào kích thước của vật thể và nền, do đó các đỉnh củahistogram sẽ dễ có dạng đối xứng hơn. Bởi vì nếu khôngcải tiến thì các bức ảnh của 1 vật thể nhỏ đặt trên 1nền lớn (hoặc ngược lại) sẽ có histogram không đốixứng, cụ thể là hình dạng của lớp pixel nhiều hơn sẽ làhình dạng chủ đạo của histogram. Hình 30, 31 là các vídụ tốt cho chúng ta thấy kết quả phân đoạn bị ảnh hưởngbởi hình dạng histogram như thế nào. Nếu chỉ các pixel ở gần biên của vật thể và nềnđược dùng thì histogram phải có các đỉnh có chiều caogần gần nhau. Ngoài ra xác suất mà 1 pixel bất kỳ(trong các pixel được quan tâm này) là pixel vật thểcũng phải xấp xỉ xác suất mà pixel này là nền, tức làcác đỉnh histogram sẽ dễ có dạng đối xứng hơn. Và cuốicùng, việc sử dụng các pixel thỏa mãn 1 số tiêu chuẩnvề gradient và toán tử Laplacian đơn giản thì có khảnăng làm cho đường rãnh giữa các đỉnh histogram sâuthêm. Vấn đề chính trong phương pháp này là giả địnhrằng các cạnh giữa vật thể và nền được biết trước. Việcbiết trước này rõ ràng là không khả dĩ trong quá trìnhphân đoạn vì nhiệm vụ của phân đoạn là tìm ra sự phânchia giữa vật thể và nền. Tuy nhiên ta có 1 dấu hiệunhận biết 1 pixel là cạnh bằng cách tính gradient của

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. nó. Và ta có thể nhận biết 1 pixel được cho đặt bên tốihay bên sáng của 1 cạnh bằng cách sử dụng toán tửLaplacian. Giá trị trung bình của toán tử Laplacian là0 ở lúc chuyển tiếp của 1 cạnh, do đó trong thực tế cácrãnh của histogram (mà được tạo thành từ các pixel thỏacác tính chất về gradient và Laplacian) có thể được làmrộng ra. Tính chất này tạo ra các rãnh sâu rất đángmong đợi. Gradient của 1 điểm (x,y) trong bức ảnh đượccho bằng phương trình 1.4 hoặc phương trình 1.12. Tươngtự, Laplacian được cho bởi phương trình 1.14 hoặc1.15. hai toán tử này có thể dùng để định dạng nên 1bức ảnh 3 mức như sau:
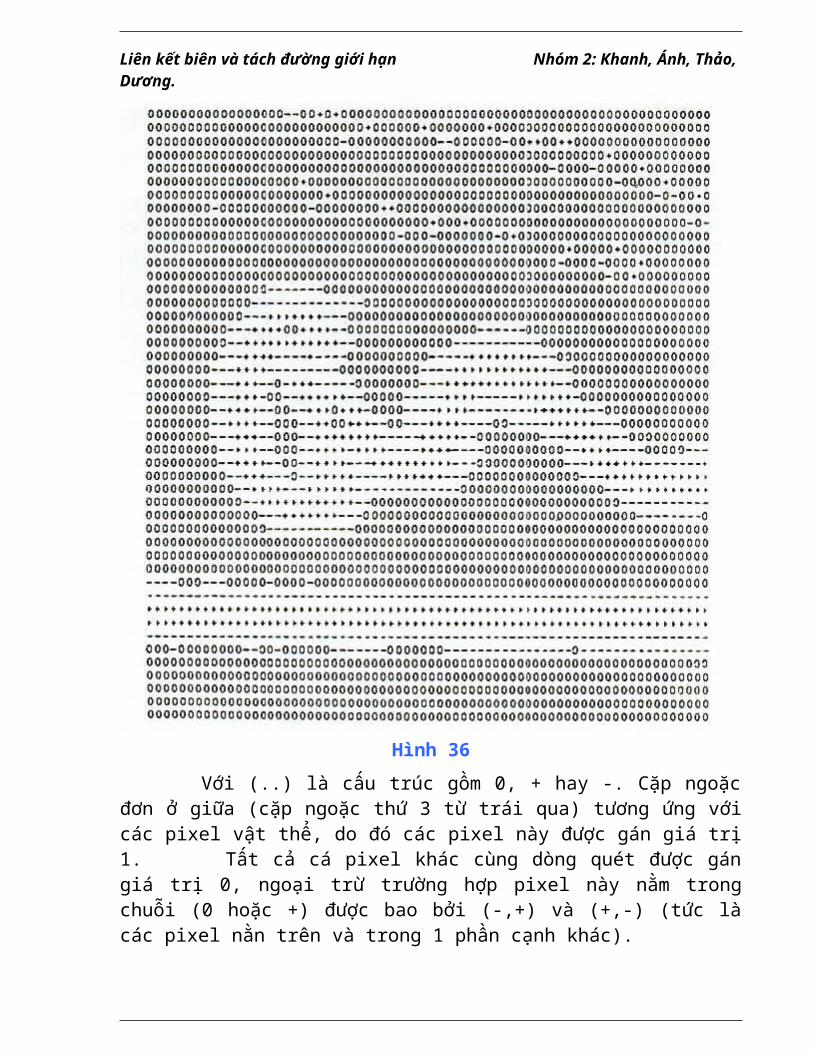
(3.16) Với các kí hiệu 0, +, - thay thế cho 3 mức độ xámkhác nhau, còn T là ngưỡng, gradient và Laplician đượctính toán ở mọi điểm (x,y). Xét 1 vật thể tối trên 1nền sáng như trong hình 6, sau khi dùng phương trình3.6 ta thu được 1 ảnh s(x,y) mà: (1) Tất cả các pixel không nằm trên cạnh (đượcxác định bởi < 0) được gán giá trị 0. (2) Tất cả các pixel nằm bên phần tối của cạnhđược gán kí hiệu +. (3) Tất cả các pixel nằm bên phần tối của cạnhđược gán kí hiệu -. Đối với trường hợp 1 vật thể sáng đặt trên nềntối thì các kí hiệu +, - ngược lại. Hình 36 là 1 bứcảnh các nét bút viết tay tối và được gạch dưới trên 1nền sáng, trong đó các kí hiệu có dạng tam giác là thaythế cho các kí hiệu +.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. Thông tin nhận được từ sự mã hoá bằng phươngtrình 3.16 trên có thể được dùng trong phân đoạn. Sựchuyển đổi (dọc theo 1 dòng quét dọc hoặc ngang) từ 1nền sáng sang 1 vật thể tối phải được mô tả bởi các dấu– theo sau bởi 1 + trong s(x,y). Phần trong vật thể baogầm các pixel được gán kí hiệu 0 hoặc +. Cuối cùng, sựchuyển đổi từ vật thể sang nền được mô tả bởi các dầu +theo sau bởi 1 dấu -. Vì vậy các dòng quét dọc hoặcngang chứa 1 phần của vật thể có cấu trúc sau:(…)(-,+)(0 hoặc +)(+,-)(..)
Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 36 Với (..) là cấu trúc gồm 0, + hay -. Cặp ngoặcđơn ở giữa (cặp ngoặc thứ 3 từ trái qua) tương ứng vớicác pixel vật thể, do đó các pixel này được gán giá trị1. Tất cả cá pixel khác cùng dòng quét được gángiá trị 0, ngoại trừ trường hợp pixel này nằm trongchuỗi (0 hoặc +) được bao bởi (-,+) và (+,-) (tức làcác pixel nằn trên và trong 1 phần cạnh khác).
Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
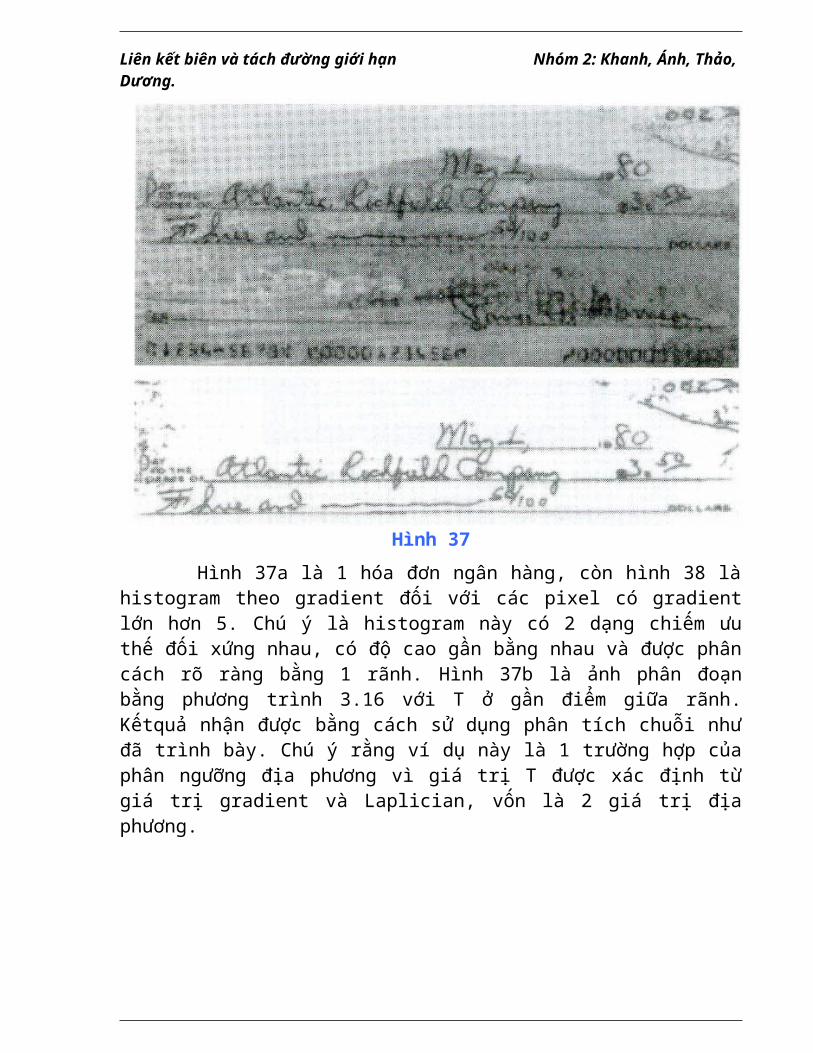
Hình 37 Hình 37a là 1 hóa đơn ngân hàng, còn hình 38 làhistogram theo gradient đối với các pixel có gradientlớn hơn 5. Chú ý là histogram này có 2 dạng chiếm ưuthế đối xứng nhau, có độ cao gần bằng nhau và được phâncách rõ ràng bằng 1 rãnh. Hình 37b là ảnh phân đoạnbằng phương trình 3.16 với T ở gần điểm giữa rãnh.Kếtquả nhận được bằng cách sử dụng phân tích chuỗi nhưđã trình bày. Chú ý rằng ví dụ này là 1 trường hợp củaphân ngưỡng địa phương vì giá trị T được xác định từgiá trị gradient và Laplician, vốn là 2 giá trị địaphương.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
3.7 Ngưỡng dựa trên một vài biến số:
Trong 1 số trường hợp, 1 bộ cảm biến có khả năngtạo ra hơn 1 biến để mô tả từng pixel trong 1 bức ảnh,như thế cho phép tạo ra ngưỡng quang phổ (multispectralthresholding). Như đã thảo luận chi tiết trong 6.7, ảnhmàu là 1 ví dụ tốt: trong ảnh màu mỗi pixel được mô tảbởi 3 giá trị RBG. Trong trường hợp này, 1 cấu trúchistogram “3D” trở nên khả dĩ. Các phương pháp thựchiện thì tương tự trường hợp 1 biến. ví dụ cho 1 bứcảnh RBG 3 biến mà mỗi màu có 16 giá trị: . Vấn đề của phân ngưỡng bây giờ là tìm 1 tập điểmtrong không gian 3D. Giả sử rằng ta đã tìm ra K tậpdiểm quan trọng trong histogram. Bức ảnh có thể đượcphân đoạn bằng cách gán 1 giá trị bất kỳ (có thể là màutrắng) cho các pixel nào có các thành phần RBG gần với1 trong các tập điểm đã tìm ra và gán 1 giá trị khác(ví dụ như màu đen) tới các pixel còn lại. Tư tưởng nàycó thể mở rộng cho nhiều thành phần hơn ( 1loại dải màukhác hay là tăng thành phần trong RBG) và nhiều tậpđiểm hơn. Vấn đề chính là sự khó khăn khi tìm các tậpđiểm tỉ lệ thuận với sự tăng biến ( tăng số biến hay
Giá trị 5
Số pixe
15 tới 25 tới

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. tăng độ dài biến). Các phương pháp tìm kiếm các tậpđiểm (cluster-seeking methods) có thể đọc trong cáccuốn sách của Dada, Hart và Stork (2001), Tou vàGonzalez(1974). Hình 39 là ảnh đơn sắc của 1 ảnh chụp màu. Ảnhgốc là hỗn hợp của 3 ảnh RBG 16 màu. Khăn quàng cổ cómàu đỏ chói, tóc và mặt thì sáng, và khác về tính chấtquang phổ đối với cửa số và các đặc trưng nền khác.
Hình 39 Hình 39b nhận được khi phân ngưỡng về 1 trongnhững nhóm histogram (histogram cluster) tương ứng vớiđộ sáng khuôn mặt. Chú ý rằng trong bức tranh đơn sắccủa chúng ta thì cửa số có mức xám gần bằng mức xám củatóc lại không xuất hiện trong ảnh đã phân đoạn 39b vìchúng ta đã dùng các tính chất về quang phổ để phânchia 2 vùng này. Hình 39c là kết quả phân đoạn bằng 1ngưỡng gần với trục màu đỏ. Lúc này chỉ có khăn quàngcổ và 1 phần bông hoa (phần mà có màu đỏ) là xuất hiệntrong ảnh kết quả. 2 ngưỡng đã dùng là khoảng cách của1 ô. Vì vậy mà bất kỳ pixel nào mà có các thành phần màunằm bên ngoài ô gần với tâm của tập điểm đang xét thìđược coi như nền đen. Ngược lại, các pixel có các thànhphân nằm bên trong ô được tô màu trắng. Như đã nói trong 6.7 thì phân đoạn màu có thể dựatrên bất kỳ mẫu màu nào đã giới thiệu trong chương 6.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. Nhiều hơn và tập trung hơn là các tính chất quan trọngtrong rất nhiều ứng dụng liên quan tới kiểm tra ảnh tựđộng. Các tính chất này rất quan trọng trong sự nỗ lựcđể đưa ra các thuộc tính liên quan tới con người nhưkiểm tra độ chín của trái cây hay là kiểm tra sản xuấthàng hóa,… Trong đó mô hình HSI (Hue-Saturation-Instensity) có thể phù hợp với các ứng dụng loại này vìchúng gần với cách con người nhận thức màu sắc. Mộtphương pháp phân đoạn sử dụng sắc thái và sự bão hòacủa 1 tín hiệu màu là 1 sự thú vị vì nó bao gồm các tậpđiểm 2D mà dễ dàng phân tích hơn các tập điểm 3D cầncho phân đoạn RBG.
4. PHÂN ĐOẠN TRÊN CƠ SỞ VÙNG:
Mục đích của phân đoạn là phân chia bức ảnh rathành nhiều vùng . Trong phần 1 và 2 chúng ta đã tiếpcận bài toán này bằng phương pháp tìm đường biên giữacác vùng trên cơ sở sự không liên tục của độ xám, trongđoạn 3 phân đoạn được thực hiện qua ngưỡng các pixel cóthuộc tính phân biệt , như giá trị của độ xám hoặcmàu . Trong phần này chúng ta tìm hiểu về kỹ thuật phânđoạn dựa trên tìm kiếm các vùng một cách trực tiếp .
4.1 Công thức cơ bản:
Cho R mô tả toàn bộ vùng ảnh . Chúng ta xem phânđoạn ảnh là chia R thành n vùng nhỏ như , vì thế:a)
b) liên thông, i=1,2,…,n. c) với mọi i và j , . d) = TRUE với i=1,2,…,n. e) = FALSE với .

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. ở đây , là một hàm logic được định nghĩa
trước cho mọi điểm và là tập rỗng . Điều kiện (a) chỉ ra sự phân đoạn đã kết thúc ,điều này có nghĩa mỗi pixel đều đã nằm trong một vùng.Điều kiện b yêu cầu những điểm nằm trong một vùng phảiliên thông trong một điều kiện giới hạn trước. Điềukiện c cho biết các vùng phải rời nhau. Điều kiện (d)đòi hỏi những điểm đã được phân đoạn phải thỏa mãn mộtvài thuộc tính đã được xác định trước; ví dụ =TRUEnếu tất cả pixel trong có mức xám giống nhau. Cuốicùng điều kiện (e) nghĩa là chân trị của P theo cácvùng và khác nhau nếu j khác i.
4.2 Tăng vùng:
Tăng vùng là một thủ tục nhóm các pixel hoặc cácmiền thành những vùng lớn hơn dựa trên các điều kiệngiới hạn trước . Chọn một tập bắt đầu, gồm một hoặc nhiều điểm,thường dựa trên bản chất tự nhiên. Khi một điều kiệntrong những phần trước không có giá trị, thủ thuật nàysẽ xem xét mọi pixel giống như tập thuộc tính ban đầuđể cuối cùng gộp các pixel đó vào những vùng trên trongsuốt quá trình phát triển vùng. Kết quả xử lý của nhữngcụm điểm những pixel sẽ được xem là “hạt” (seeds) nếuthuộc tính của chúng gần với tâm thuộc tính của cụmpixel đó. Việc chọn tiêu chuẩn phụ thuộc vào từng loại ảnh.Ví dụ phân tích ảnh chụp vệ tinh trái đất phụ thuộc vàomàu sắc.Với ảnh trắng đen, phân tích vùng phải giảithích được một tập mô tả dựa trên giá trị mức xám vàđặc trưng không gian.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 40 . a) hình 1 mối hàn có lỗi. b)điểm hạt .c) Hình sau khi mở rộng vùng. d) các biên của mối
hàn lỗi được phân đoạn. Việc mô tả các thuộc tính một cách rời rạc có thểđưa ra những kết quả sai lạc khi thông tin liên thônghoặc lân cận không được dùng trong quá trình phát triểnvùng. Ví dụ, hiển thị một khoảng bất kỳ những pixel vớiba giá trị mức xám tách biệt. Những pixel phát triểnthì có giá trị mức xám giống nhau để có dạng một “vùng”mà không chú ý đến vấn đề liên thông sẽ đưa ra một kếtquả phân đoạn vô nghĩa trong ngữ cảnh của thảo luậnnày. Một vấn đề khác trong phát triển vùng là dạng củađiều kiện dừng. Cơ bản phát triển vùng sẽ dừng khikhông có pixel nào thỏa mãn tiêu chuẩn để nằm trongvùng đó. Tiêu chuẩn chẳng hạn như mức xám, cấu trúc,

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. màu là những bản chất cục bộ, không xét đến lịch sử củaquá trình phát triển vùng. Thêm tiêu chuẩn sẽ làm tăngthêm sức mạnh của định luật phát triển vùng dùng kháiniệm của kích thước, sự giống nhau của một pixel ứng cửvà những pixel đã được phát triển , và hình của nhữngvùng đã được phát triển. Sử dụng những loại tiêu chuẩnđã được miêu tả, dựa trên giả thuyết kiểu của kết quảđược mong đợi có giá trị từng phần bé nhất. Hình 40 thể hiện một ảnh X-quang của mối hàn chứanhiều vết nức và độ rỗng. chúng ta sẽ sử dụng pháttriển vùng để phân đoạn vùng của những mối hàn bị hỏng.Đặc điểm của phân đoạn này có thể được dùng để kiểmtra, điều khiển một hệ thống hàn tự động và cho nhiềuứng dụng khác. Vấn đề đầu tiên là cần xác định những điểm hạt.Trong ứng dụng này những pixel của mối hàn bị hỏng cóxu hướng đạt đến giá trị mức xám lớn nhất (trong trườnghợp này là 255). Dựa trên thông tin này chúng ta chọntập điểm bắt đầu là tất cả những điểm có giá trị 255.Những điểm như vậy được trích ra từ ảnh gốc như tronghình 40 b. Chú ý rằng có nhiều điểm nằm trong nhữngvùng hạt. Bước tiếp theo là chọn tiêu chuẩn pháttriển vùng. Trong ví dụ này chúng ta chọn hai tiêuchuẩn để một pixel được thêm vào một vùng : - Trị tuyệt đối hiệu mức xám giữa một pixelbất kỳ và hạt phải nhỏ hơn 65. Con số này dựa trênhistogram trong hình 41. - Để được nhóm vào một vùng, trong tám liênthông của một pixel phải có ít nhất một pixel nằm trongvùng đó. Trong hình 40 c biểu diễn kết quả của phát triểnvùng dựa trên tập điểm bắt đầu trong hình 40 b và sửdụng hai tiêu chuẩn đã được định nghĩa ở trên. Nhữngđường biên đè lên trên ảnh gốc trong hình 40 d đã thật

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. sự bộc lộ những mối hàn hỏng với một mức độ chấp nhậnhợp lý.
Hình 41 : histogram của 40
4.3 Chia và trộn vùng:
Đặt R biểu diễn toàn bộ vùng ảnh và chọn tínhchất P cho trước. Một phương pháp phân đoạn R là chianó ra thành những vùng nhỏ hơn và những vùng tứ phânnhỏ hơn, đối với bất kì vùng Ri nào, P(Ri)=TRUE. Chúngta bắt đầu với toàn bộ vùng. Nếu P(R)=FALSE thì ta chiaảnh thành 4 phần. Nếu P là FALSE cho bất kì vùng tứphân nào, chúng ta chia vùng tứ phân đó thành 4 phầnnhỏ hơn, và cứ tiếp tục như thế. Kỹ thuật phân chia đặcbiệt này có sự thuận lợi trong biểu diễn được gọi làcây tứ phân (Quadtree), như hình 39. Chú ý rằng gốc củacây tứ phân tương ứng với toàn bộ ảnh và mỗi node tươngứng với phần chia nhỏ hơn. Trong trường hợp này, chỉ R4được chia nhỏ hơn nữa.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương. Nếu chỉ phân chia thì phần cuối cùng sẽ chứanhững vùng gần nhau có cùng thuộc tính. Trở ngại này cóthể được khắc phục bằng cách hợp lại. Để thỏa mãn điềukiện 4.1 đòi hỏi hợp chỉ những vùng gần nhau mà cónhững pixel tổng hợp thỏa tính chất P. Nghĩa là 2 vùnglân cận Ri và Rj được hợp lại nếu P(Ri U Rk)=TRUE.
Hình 42a) Hình được chia cắt
b) Cây quan hệ tương ứng Tóm tắt lại ta có thủ tục sau: - Chia thành 4 vùng bằng nhau bất kì vùng nàocó P(Rj)=FALSE - Hợp những vùng kề nhau Ri và Rj với P(Ri URj)=TRUE - Dừng nếu không thể phân chia hoặc không thểhợp được nữa. Hình 43 a) hiển thị một ảnh đơn. Chúng ta địnhnghĩa P(Ri) = TRUE nếu có ít nhất 80% các pixel trong Rj
có thuộc tính |zj-mi|≤2σi với zj là mức xám của pixel thứj trong vùng Ri, mi là mức xám của vùng đó, và σi là độlệch chuẩn của mức xám trong Ri. Nếu P(Ri)=TRUE trongđiều kiện này, giá trị của tất cả các pixel được đặtbằng với mi. Phân chia và hợp được thực hiện sử dụngthuật toán trên.

Liên kết biên và tách đường giới hạn Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 43a) hình ban đầu b) kết quả sau khi tách và trộn
c) kết quả sau khi phân ngưỡng hình (a) Kết quả của việc áp dụng kĩ thuật này vào ảnhtrong hình 43a được hiển thị trong hình 43b. Chú ý rằngảnh đã được phân đoạn hoàn toàn. Ảnh hiển thị trong
Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương.
hình 43c nhận được bởi phân ngưỡng hình 43a, với mộtngưỡng đặt tại điểm chính giữa của 2 đỉnh chính củahistogram. Nhìn kỹ 2 hình b và c chúng ta thấy từ hìnha , kết quả b cho thấy chiếc lá vẫn còn cuống , kết quả cthì hình không còn cuống .
5. PHÂN ĐOẠN THEO MỨC HÌNH THÁI:
Chúng ta sẽ phân đoạn ảnh dựa trên 3 phương pháp :(a) Sự không liên tục của mức xám.(b) Tạo ngưỡng.
(c) Xử lý miền.
5.1 Khái niệm cơ bản:
Khái niệm phân mức là tưởng tượng ảnh trong khônggian 3 chiều : 2 chiều chỉ mức xám. Trong địa đồ chúng taquan tâm 3 loại điểm : (a) điểm thuộc miền tối tiểu, (b)điểm tại một mức nước, (c) điểm mà co thể rơi vào nhiềumiền tối tiểu. Trong một miền tối tiểu, tập các điểm thoảđiều kiện (b) gọi là phân mức của miền tối tiểu. Nhữngđiểm thoả điều kiện (c) có dạng một đường trên mặt địa đồgọi là đường phân mức. Thuật toán dựa trên những khái niệm đó để tìm đườngphân mức. Ý tưởng cơ bản thì rất đơn giản. Giả sử có mộthố trong miền tối tiểu. Và toàn bộ địa đồ được cho ngậpnước từ từ. Khi tới một mức nào đó thì các hố sẽ hợp nhất, một đập sẻ được xây dựng để ngăn cản sự hợp nhất đó.Khi nước dân tới một mức nào đó thì chỉ còn có những phầncao của đập là chưa bị ngập nước. Những biên của các đậpđó tương ứng với những đường phân mức. Những biên đó sẽđược tách ra bởi thuật toán phân đoạn đường mức. Ý tưởngđó như trong hình 44.

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương. Hình 44(a) là một ảnh xám, 44(b) là địa đồ của ảnhđó, trong đó chiều cao của những đỉnh núi trong địa đồ lamức xám của pixel trong ảnh xám. Để đơn giản chúng ta sẽbỏ qua những phần tối của địa đồ, chúng ta chỉ quan tâmđịa đồ tổng quát của không gian 3 chiều. Chúng ta tưởngtượng chúng ta sẻ bao toàn bộ địa đồ bởi những đập cóchiều cao lớn hơn chiều cao lớn nhất của núi trong địađồ, những giá trị đó được xác dịnh bởi mức xám lớn nhấtcùa ảnh nhập.
Hình 44

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương. Giả sử tất cả những miền tối tiểu điều được đặt mộthố ờ trong nó [ miền tối ở hình 44(b)] và toàn bộ địa đồsẻ được cho ngập nước đều từ từ. Hình 44(c)thể hiện bướcđầu tiên, nước sẻ phủ nền tối của ảnh. Hình 44(a) là mộtảnh xám, 44(b) là địa đồ của ảnh đó, trong đó chiều caocủa những đỉnh núi trong địa đồ la mức xám của pixeltrong ảnh xám. Để đơn giản chúng ta sẽ bỏ qua những phầntối của địa đồ, chúng ta chỉ quan tâm địa đồ tổng quátcủa không gian 3 chiều. Chúng ta tưởng tượng chúng ta sẻbao toàn bộ địa đồ bởi những đập có chiều cao lớn hơnchiều cao lớn nhất của núi trong địa đồ, những giá trị đóđược xác dịnh bởi mức xám lớn nhất cùa ảnh nhập.

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 44 Hình 44(d) và (e) chúng ta thấy nước dân từ cùngthứ nhất và vùng hai của hố tương ứng. Khi nước tiếp tụcdân sẽ làm gập tất cả các hố và nước sẽ tràn từ hố nàysang hố khác, như hình 44(f) và một đập sẽ được xây dựngtại những vị trí mà nước tràn giữa các hố, như hình44(g), và nước cứ dân tiếp tục cho tới mức xám cao nhấttrong ảnh. Cuối cùng những đập sẻ tương ứng với các đườngphân mức và ta đã phân đoạn được ảnh, kết quả như hình10.44(h), một đường pixel mảnh trên hình gốc. Cần chú ýrằng đường phân mức là đường lien thong, cho một biênlien tuc giữa các miền.
5.2 Xây dựng đập:
Ở mục này chúng ta chỉ quan tâm làm sao xây dựngđược đập( đường phân mức) mà thuật toán phân đoạn đườngmức yêu cầu. Cơ sở của việc xây dựng đập sử dụng phép giãn(dilation) như hình 45. Hình 45(a) là trạng thái của haihố tại bước n-1 và hình 45(b) là kết quả ở bước n, khimức nước được dân lên thì nước sẻ tràn từ hố này qua hốkhác, đập sẻ được xây dựng để chống nước tràn. Bây giờ ta định nghĩa một số kí hiệu :
là tập các điểm thuộc hai hố tương ứng Tập các điểm trong hố tại bước n-1 lần lược là
đó là hai miền tối trong hình 45(a). Đặt . Đó là hai thành phần liên thông ở bước n-1, và mộtthành phần lien thôn tại bước n. Sự hợp nhất giữa hai thành phần lien thông ý nóirằng nước đã tràn giữa hai hố tại bước n. Ký hiệu thành phần lien thông tại bước n là q,

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương. Thành phần liên thông tại bước n-1 là .Chúng ta kí hiệu tất cả các điểm thuộc một hố là mộtthành phần lien thông đơn giản. Giả sử mỗi thành phần lien thông trong hình 45(a)được giản bởi một thành phần cấu trúc trong hình 45(c) ,làm nãy sinh hai trường hơp :
(1) Phép giãn có quan hệ với q ( nghĩa là tâm củathành phần cấu trúc là những điểm trong q trong lúcthực hiện phép giãn) (2) Phép giãn không thể thực thi trên những điễm màtại đó những tập đi đến hợp nhất.( trở thành mộtthành phần liên thông ).
Hình 45d là phép giãn đầu tiên (trong mức xám sáng), nó mở rộng biên cho mỗi thành phần liên thông ban đầu.Chú ý rằng điều kiện (1) thoả tại mọi điểm trong khi thựchiện phép giãn, và điều kiện (2) không thể áp dụng chomột điểm bất kì trong khi thực hiện phép giãn, thật rabiên của mỗi thành phần liên thông được giãn điều. Trong phép giãn thứ hai trong mức xám trung bình,một vài điểm không thoả điều kiện (1) trong khi vẫn thoảđiều kiện (2), kết quả làm chu vi thay đổi trên hình. Rõràng rằng chỉ những điểm trong q mà thoả hai điều kiệnđược mô tả như là một đường pixel đơn liên thông nhưtrong hình 10.45(d). Đường đó thu được từ việc xây dựngđập tại bước n. Đập được xây dựng tạ bước đó được hoàntoàn xác định từ tất cả các điểm trong đường mà giá trịmức xám lớn hơn mức xám lớn nhất trong hình. Chiều caocủa đập bằng 1 cộng giá trị mức xám lớn nhất trong ảnh.Chú ý rằng đập được xây dựng theo cách trên, mà nó phânđoạn biên, và phân thành phần liên thông.

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 45
5.3 Thuật toán phân mức :
Đặt là tập những điểm trong miền tốitiểu của ảnh g(x,y).

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương. Đặt là tập tất cả các điểm trong hố liên kếtvới (những điểm trong một hố tạo thành một thành phầnliên thông). Kí hiệu min và max là minimum và maximum giá trịcủa g(x,y). Cuối cùng, đặt Địa đồ sẽ được làm ngập nước từ min+1 đến max+1.Tại bước n thuật toán cần biết số điểm nằm dưới mức nước.Giả sữ rằng, các điểm thuộc T[n] nằm dưới mặt phăngg(x,y)=n là marked đen, và những điểm khác là trắng. Khiđó, khi chúng ta nhìn từ trên xuống mặt phăng xy, chúngta sẻ nhìn thấy một ảnh nhị phân mà các điểm đen tươngứng với tương ứng với các điểm mà hàm nằm dưới mặt phăngg(x,y)=n. Đặt là tập tất cả các điểm trong hố ứng với tại bước n. có thể xem như là một ảnh nhị phân
(1) tại nếu ; ngược lại
(2) Tiếp theo, là hội tất cà các hố tại bước n : (3) Khi đó là hội tất cả các hố : (4) Cả và không bao giờ được thay thể trongsuốt quá trình thực thi thuật toán, và số lượng thànhphần nằm trong 2 tập sẽ tăng và phần dư giống nhau tạibước tăng thứ n. Vì vậy : dựa vào (3) và (4) ta có : Từ đây ta có kết quả quan trọng là mỗi thành phầnliên thông của chứa trong chính xác một thành phầnliên thông của .

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương. Thuật toán sẽ tìm các đường mức với điều kiện đầulà : . Thuật toán chạy đệ quy, giả sử tại bước n đãđược tính.Thủ tục tính từ như sau : Đặt là tập tất cả các thành phần liên thông trong
. Khi đó với mỗi thành phần liên thông , mộttrong ba điều sau đây thoả :
(a) rỗng.(b) chứa một thành phần liên thông của .(c) chứa nhiều hơn một thành phần liên thôngcủa .
Tính từ phụ thuộc vào một trong ba điềukiện trên. Điều kiện (a) xảy ra khi một hố mới được hìnhthành, trong trường hợp thành phần liên thông q kết hợpvới để tạo nên . Điều kiện (c) xảy ra khi tất cảhay một phần của một cây cầu tách hai hay nhiều hố đượchình thành. Ở bước tiếp theo những hố đó sẽ hợp nhất. Vậymột đập (hay nhiều đập) phải được xây dựng trong q đểngăn tràn giữa các hố. Một đập pixel đơn có thể được xâydựng khi cần phép giãn với một thành phần cấu trúc
của 1, và phụ thuộc phép giãn với q.

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 46 Dữ liệu nhập của thuật toán chỉ là giá trị n tươngứng với mức xám tồi tại trong ; chúng ta có thể xácđịnh những giá trị đó cũng như những giá trị min, max, từhistogram của . Ví dụ :18 Mô tả thuật toán phân đoạn đường mức. Chú ý ảnh và ảnh gradient của nó, hình 46(a) và(b). Áp dụng thuật toán ta thu được những đường mức(đườngmàu trắng) của ảnh gradient, hình 46(c), và ành gốc hình46(d).
5.4 Sử dụng đánh dấu:

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương. Bây giờ chúng ta sẽ áp dụng thuật toán cho nhữngảnh bị nhiễu là cho ảnh có rất nhiều vùng nhỏ, và thuậttoán áp dụng không còn chính xác nữa, hình 47. Ở đây lờigiải của bài toán này ta cần một bước tiền xử lý, để giớihạn số vùng cho phép. Một phương pháp được sử dụng dựa trên khái niệmvùng nhỏ(markers), vùng nhỏ là một thành phần liên thôngtrong ảnh. Chúng ta có vùng trong, liên kết với đối tượngmà ta quan tâm, và vùng ngoài liên kết với nền. Thuậttoán áp dụng cho những vùng nhỏ dựa trên hai bước cơbản :
(1) Tiền xử lý.(2) Xác định các tiêu chuẩn mà những vùng nhỏ phảithoả.
Chúng ta lấy lại ví dụ trong hình 47(a), và kết quảsai ở hình 47(b), số lượng vùng nhỏ quá lớn. Bởi vì kíchthước của chúng chi tiết của một số vùng nhỏ không cònquan trọng nữa, chúng ta sẽ làm nhịn ảnh ban đầu rồi mớiáp dụng thuật toán phân đoạn.

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 47 Giả sử chúng ta định nghĩa một vùng trong trongtrường hợp này như là (1) một miền bao quanh bởi nhữngđiểm có tính chất (chẳng hạn, mức xám) cao, (2) nhữngđiểm đó trong một miền tạo thành một thành phần liênthông có cùng giá tri mức xám, như trong hình 48(a). Tiếptheo, ta sẽ làm mịn ảnh, dưới xử lý đó ta chỉ xét nhữngvùng trong có miền tối tiểu. Hình 48(a) là kết quả đườngphân mức. Những miền ngoài trong hình 48(a) là kết quả phânảnh thành các miền, mỗi miền chứa một vùng trong và mộtphần của nền. Chúng ta sẽ phân các miền đó thành hai loại: a simple object và nền của nó. Và sau đó chúng ta cóthể áp dụng các thuật toán phân đoạn trước đó. Một phươngpháp khác là áp dụng thuật toán phân đoạn đường mức tớimỗi miền riêng biệt. Nói theo cách khác, ta lấy ảnhgradient của ảnh sau khi đã làm mịn [như hình 46(b)] vàgiới hạn thuật toán trên những đường mức mà chứa nhữngvùng nhỏ trong những vùng riêng biệt. Kết quả thu đượcnhư hình 48(b).

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 48 Phân loại vùng nhỏ đơn giản dựa trên giá trị mứcxám. Những phương pháp phân loại phức tạp hơn ta sẽ bàn ởchương sau.
6. PHÂN ĐOẠN ẢNH ĐỘNG:
6.1 Ky thuật miên không gian:
Phương pháp cơ bản:
Một trong những phương pháp đơn giản nhất để xácđịnh sự khác biệt cơ bản giữa hai khung ảnh và
tại thời gian và tương ứng là so sánh từng
pixel trên hai ảnh. Một cách để làm việc đó là tạo ra mộtảnh mẫu. Giả sử rằng chúng ta có một ảnh mẫu chỉ chứa cácthành phần đứng yên. So sánh ảnh mẫu đó với các ảnh cóchứa 1 vật thể chuyển động trong chuỗi ảnh cùng cảnh(scene), kết quả khác nhau của hai ảnh có thể huỷ bỏ đốitượng tĩnh, chỉ quan tâm tới những vùng khác không màtương ứng với những thành phần không tĩnh trong ảnh. Sự khác nhau giữa hai ảnh tại thời gian và cóthể định nghĩa như sau:
với T là một ngưỡng dương nào đó. Chú ý rằng có giá trị 1 tại toạ độ chỉ nếu mức xám khác biệtgiữa hai ảnh lớn hơn ngưỡng T (giả sử rằng tất cả các ảnhcó cùng kích thước). Cuối cùng, chú ý rằng các giá trịcủa toạ độ trong phương trình (10.6-1) sinh ra các

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương. ảnh mới có cùng kích thước với các ảnh trong chuỗiảnh. Trong xử lý ảnh động, tất cả các pixel trong với giá trị 1 sẽ tương ứng với kết quả là đối tượngchuyển động. Phương pháp được áp dụng chỉ nếu hai ảnh đãđược đăng kí tần số và mức sáng tương đối hằng bên trongbiên bị chặn bởi T. Thực tế, giá trị 1 trên toàn bộ ảnh
thường do nhiễu. Cụ thể các giá trị đó có thể lànhững điểm cô lập trên ảnh mẫu, và phương pháp đơn giảnđể loại bỏ chúng là tạo miền 4- hoặc 8- liên thông củacác pixel có giá trị 1 trong và bỏ qua miền mà nhỏhơn một số định trước. Mặc dù cách này có thể bỏ quanhững đối tượng nhỏ hoặc di chuyển chậm.
Sai biệt tích lũy (accumulative differences):
Sự cô lập đầu vào (entries) từ nhiễu là bài toánkhông phải không quan trọng khi trích thành phần chuyểnđộng từ chuỗi ảnh. Mặc dù số lượng đầu vào đó có thể giảmbởi phân tích ngưỡng liên thông, nhưng quá trình lọc đócó thể loại bỏ các đối tượng nhỏ và di chuyển chậm như đãnói ở phần trên. Một phương pháp mà giải quyết bài toánđó là chú ý sự thay đổi pixel cục bộ trên vài ảnh trongchuỗi, và nó cần lưu lại trong quá trình xử lý. Ý tưởngđó bỏ qua thay đổi lác đác trên một vài ảnh trong chuỗivà có thể áp dụng cho nhiễu bất kì. Chú ý một chuỗi các khung ảnh
và đặt là ảnh mẫu. Mộtsự sai biệt tích lũy trong ảnh(Accumulative DifferencesImages - ADI) được tạo bởi so sánh ảnh mẫu với mọi ảnhtrong chuỗi. Một bộ đếm cho mỗi pixel cục bộ trong ảnhtích lũy tăng theo thời gian xuất hiện khác tại pixel cụcbộ giữa ảnh mẫu và ảnh trong chuỗi. Thật ra khi khung thứk được so sánh với mẫu, sự xem xét trên một pixel của ảnhtích lũy cho một số lượng mức xám tại một vị trí có sự

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương. khác biệt từ giá trị pixel tương ứng trong ảnh mẫu. Sựkhác biệt đó được ghi nhận, chẳng hạn, bởi sữ dụng phươngtrình (6-1). Thường chúng ta chú ý 3 kiểu ADI : dương, âm, vàtuyệt đối. Giả sử rằng giá trị mức xám của một đối tượngchuyển động lớn hơn nền, ba loại ADI được định nghĩa nhưsau: Đặt kí hiệu ảnh mẫu và, để đơn giản kí hiệu,đặt kí hiệu , sao cho . Chúng ta giả sử
. Khi đó, cho bất kì , và giá trị của ADIđược đếm lại, chúng ta định nghĩa như sau cho tất cả giátrị liên quan tới :
ở đây Ak(x,y), Pk(x,y), Nk(x,y) là trị tuyệt đối,dương, và âm ADI, tương ứng, sau khi ảnh thứ k trongchuỗi được thực thi. Các giá trị ADI bắt đầu bằng giá trị 0. Chú ý rằngảnh ADI cùng kích thước với ảnh trong chuỗi. Cuối cùng,thứ tự của bất phương trình và dấu của ngưỡng trongphương trình 6.3 và 6.4 ngược lại nếu giá trị mức xám củapixel nền lớn hơn của đối tượng chuyển động.
Hình 49

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương. Hình 49 là ba ADI như ảnh cường độ cho một đốitượng chữ nhật có kích thước 75x50 pixels di chuyển theohướng đông nam với tốc độ pixel/khung hình. Ảnh cókích thước 256x256 pixel. Chúng ta kí hiệu như sau : (1)Miền khác không của ADI dương bằng kích thước của đốitượng chuyển động. (2) Vị trí của các ADI dương tương ứngvới vị trí của đối tượng chuyển động trong khung mẫu. (3)Biến đếm trong ADI dương sẽ ngừng đếm khi đối tượng dichuyển bị thay thế hoàn toàn theo khung mẫu trong khungmẫu. (4) ADI tuyệt đối chứa miền của ADI dương và âm. (5)Hướng và tốc độ của đối tượng di chuyển có thể được xácđịnh từ đầu vào trong ảnh ADI tuyệt đối và âm.
Tao ảnh mâu (establishing a reference image)
Chìa khoá để thành công của kỹ thuật mà chúng tathảo luận trong chương trước là có một ảnh mẫu để việc sosánh tiếp theo có thể thực hiện được. Sự khác biệt giữahai ảnh trong bài toán ảnh động là xu hướng bỏ qua tất cảcác đối tượng tỉnh, chỉ quan tâm tới những đối tượngtương ứng với nhiễu và đối tượng chuyển động. Nhiễu cóthể được xử lý bởi phương pháp lọc nhiễu. Thực tế, thu được ảnh mẫu với chỉ một thành phầntỉnh không phải lúc nào cũng xảy ra, và tạo một mẫu từtập ảnh gồm một hoặc nhiều đối tượng di chuyển là cầnthiết. Sự cần thiết đó áp dụng cho những trường hợp phảithường xuyên cập nhật thay đổi. Một phương thức tạo ảnhmẫu như sau: Xem như ảnh đầu tiên trong chuỗi ảnh nhưmẫu. Khi đó các thành phần không tĩnh đã được loại bỏ rakhỏi vị trí của nó trong ảnh khung mẫu, nền tương ứngtrong khung đó được thay thế bởi đối tượng trong khungmẫu. Khi tất cả các đối tượng đã dược loại bỏ ra khỏi vịtrí gốc của nó, ảnh mẫu chỉ còn chứa các thành phần đượcthay thế tĩnh. Đối tượng bị chiếm chổ có thể thu được bởi

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương. điều khiển sự thay đổi trong ADI dương, như trong chươngtrước.
Hình 50 Hình 50a và 50b là2 hai khung ảnh của một giao lộ.Ảnh đầu tiên được xem như là mẫu. Ta loại bỏ các đốitượng động để tạo ảnh tĩnh.
6.2 Ky thuật miên tân số:
Trong chương này ta sẽ chú ý bài toán xác địnhchuyển động dựa trên phép biến đổi Fourier. Chuỗi ảnh
, của K khung ảnh kích thước được chụp bởi một camera tĩnh. Chúng ta giả sử rằng tấtcả khung có nền đồng nhất cường độ zero. Để loại bỏ đơngiản, đối tượng 1-pixel của cường độ đơn vị thì di chuyểnvới tốc độ hằng. Giả sử rằng, một khung ảnh (t=0) đượcchiếu xuống trục x, cường độ pixel được tình theo cột.Phép toán đó thu được một mảng 1-D với M giá trị nhập là0, trừ vị trí mà đối tượng được chiếu. Nhân các thànhphần của mảng với , với đối tượng tạitoạ độ tại thời gian đó, thu được một tổng bằng
, là một số dương, và là khoảng thời gian giữahai khung. Giả sử rằng khung hai (t=1) đối tượng di chuyển tớitoạ độ (x’+1,y’), nó di chuyển một pixel theo trục x. sauđó áp dụng phép chiếu ta thu được tổng .

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương. Nếu đối tượng tiếp tục di chuyển 1 pixel/khung,khi đó, tại một thời gian bất kì, kết quả là , sữdụng công thức Euler, ta biểu diễn:
. Thủ tục đó thu được một đường hình sin phứcvới tần số . Nếu đối tượng di chuyển pixel theo trụcx giữa các khung, đường hình sin sẽ có tần số . Bởi vìt thay đổi giữa 0 và , hạn chế từ tới một giá trịnguyên là nguyên nhân phép biến đổi Fuorier rời rạc cóhai đỉnh, một tại tần số và một tại . Đỉnh saucùng là kết quả tính đối xứng của phép biến đổi Fourierrời rạc, và có thể bỏ qua. Thật ra tìm một đỉnh trong phổFourier thu được . Chia cho ta được , làthành phần vận tốc theo hướng x, tốc độ khung đã biếttrước. Tương tự ta có , thành phần vận tốc theo hướngy. Một chuỗi khung mà không chuyển động lấy vị trítích với số mũ đồng nhất, tất cả phép biến đổi Fourierchứa 1 đỉnh đơn tại tần số của 0. Hơn nữa, bởi vì phéptoán ta đã thảo luận ở là tuyến tính, trường hớp tổngquát một hoặc nhiều đối tượng chuyển động trong một nềntĩnh bất kì có một phép biến đổi Fourier với một đỉnh tạitần số của 0 tương ứng với thành phần ảnh tĩnh và đỉnhtại vị trí đối xứng vận tốc của đối tượng. Những khái niệm đó có thể tóm tắt như sau: Cho mộtchuổi K ảnh có kích thước M x N, tổng của các giá trịchiếu lên trục x tại thời gian nguyên bất kì là
Tương tự ta cũng có tổng các giá trị chiếu lên trụcy là

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương.
là số nguyên dương. Phép biến đổi Fourier 1-D của Pt (10.6-6) và (10.6-7), lần lược là
Và
Mối quan hệ tần số-vận tốc là
Và
Trong công thức đó đơn vị của vận tốc là pixel trêntổng khung. Chẳng hạn, xem như là chuyển động của 10pixel trong K khung. Cho những khung đó là đều, thật ravận tốc vật lý phụ thuộc vào tỉ số khung và khoảng cánhgiữa các pixel. Nếu , tỉ số khung là 2khung/giây, khoảng cánh giữa các pixel là 0.5m, khí đóvận tốc thật sự theo hướng x là
Dấu của thành phần x của vận tốc thu được bởi tính
Và
Bởi vì là đường hình sin, có thể chứng minh có cùng dấu tại một điểm bất kì trong thời gian n,
nếu thành phần vận tốc là dương. Ngược lại, đổi dấu

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương. trong chỉ thành phần âm. Nếu hoặc hoặc là0, chúng ta chú ý điểm gần kế tiếp theo thời gian,
. Tương tự áp dụng cho dấu của .Ví dụ: Từ hình 51 đến hình 54 minh họa kết quả của thuậttoán vừa được nêu ra. Hình 51 biểu diễn một trong 32khung hình của ảnh LANDSAT sinh ra bằng cách thêm nhiễutrắng vào hình kết quả. Dãy hình này chứa những mục tiêudi chuyển với tốc độ 0.5 pixel / khung hình trên trục xvà một pixel/ khung hình trên trục y. Mục tiêu này đượckhoanh tròn trong hình 52 có độ lớn của phân phối Gaussnằm trong một vùng nhỏ (9 pixel ) và khó nhận thấy bằngmắt thường. Kết quả trong tính toán từ phương trình (6.8)và (6.9) với và được biểu diễn trong hình 53 và54. Đỉnh tại trong hình 53 đưa ra từ phươngtrình (6.10). Tương tự, đỉnh trong hình 54 nhận được
từ phương trình (6.11). Nguyên tắc để chọn và có thể được giải thíchvới sự hổ trợ của hình 53 và 54. Chẳng hạn, giả sử chúngta sử dụng thay cho . Trong trường hợp này đỉnhtrong hình 54 tại và 17 bởi vì , đây là mộtkết quả sai. Bởi vì , có thể được chọn một số dương agần nhất với , với là tần số giới hạn nhậnđược từ K và là tốc độ lớn nhất của đối tượng.

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 51
Hình 52

Phân đoạn theo mức hình thái Nhóm 2: Khanh, Ánh, Thảo, Dương.
Hình 53
Hình 54