
BAB III PERANCANGAN KENDALI KECEPATAN MOTOR ...
16
21 BAB III PERANCANGAN KENDALI KECEPATAN MOTOR BLDC BERBASIS FPGA 3.1. Pendahuluan Bab ini menjelaskan tentang langkah – langkah pemrograman FPGA dan perancangan kendali kecepatan motor BLDC menggunakan referensi sensor hall effect [16]. Sensor hall effect di dalam motor BLDC dijadikan masukan oleh FPGA yang digunakan sebagai referensi pola komutasi yang sesuai pada stator. Pola komutasi yang sesuai menyebabkan motor BLDC bekerja dengan baik. Pengolahan sensor hall effect menjadi sinyal komutasi juga akan dijelaskan pada bab ini. Bab ini akan menjelaskan beberapa topik yaitu ADC tipe 0820, FPGA Altera Cyclone IV, implementasi PWM berbasis FPGA, impelentasi pola komutasi pensaklaran IGBT berbasis FPGA, rangkaian driver, rangkaian sensor arus LEM HX 10-P, rangkaian inverter tiga fasa tiga lengan, catu daya DC-DC tipe B1205s isolated dan B1212s blok kendali kecepatan motor BLDC berbasis FPGA. 3.2. ADC tipe 0820 Pengendalian kecepatan motor BLDC memerlukan sinyal analog sebagai masukan. Sinyal analog harus dikonversi ke sinyal digital agar dapat diolah oleh FPGA. FPGA yang digunakan pada Tugas Akhir ini tidak mempunyai ADC di dalamnya, maka diperlukan sebuah IC ADC eksternal untuk pengolahan sinyal
-
Upload
khangminh22 -
Category
Documents
-
view
4 -
download
0
Transcript of BAB III PERANCANGAN KENDALI KECEPATAN MOTOR ...

21
BAB III
PERANCANGAN KENDALI KECEPATAN MOTOR BLDC
BERBASIS FPGA
3.1. Pendahuluan
Bab ini menjelaskan tentang langkah – langkah pemrograman FPGA dan
perancangan kendali kecepatan motor BLDC menggunakan referensi sensor hall
effect [16]. Sensor hall effect di dalam motor BLDC dijadikan masukan oleh
FPGA yang digunakan sebagai referensi pola komutasi yang sesuai pada stator.
Pola komutasi yang sesuai menyebabkan motor BLDC bekerja dengan baik.
Pengolahan sensor hall effect menjadi sinyal komutasi juga akan dijelaskan pada
bab ini. Bab ini akan menjelaskan beberapa topik yaitu ADC tipe 0820, FPGA
Altera Cyclone IV, implementasi PWM berbasis FPGA, impelentasi pola
komutasi pensaklaran IGBT berbasis FPGA, rangkaian driver, rangkaian sensor
arus LEM HX 10-P, rangkaian inverter tiga fasa tiga lengan, catu daya DC-DC
tipe B1205s isolated dan B1212s blok kendali kecepatan motor BLDC berbasis
FPGA.
3.2. ADC tipe 0820
Pengendalian kecepatan motor BLDC memerlukan sinyal analog sebagai
masukan. Sinyal analog harus dikonversi ke sinyal digital agar dapat diolah oleh
FPGA. FPGA yang digunakan pada Tugas Akhir ini tidak mempunyai ADC di
dalamnya, maka diperlukan sebuah IC ADC eksternal untuk pengolahan sinyal
22
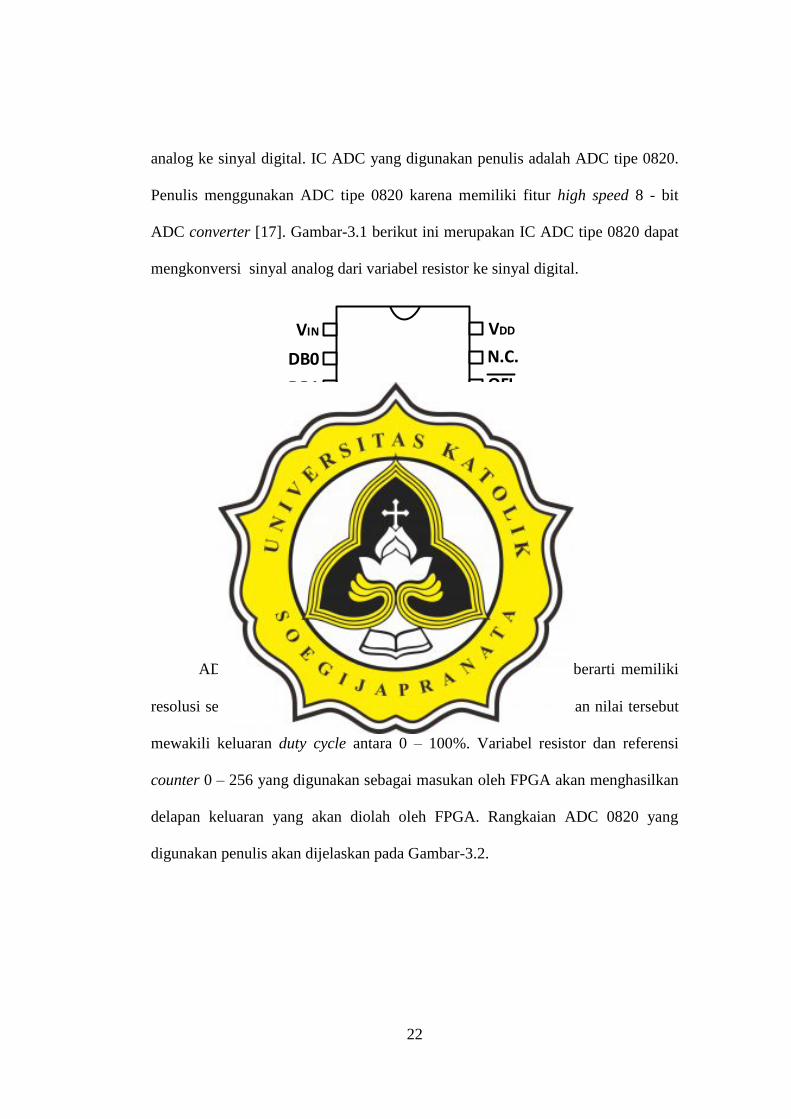
analog ke sinyal digital. IC ADC yang digunakan penulis adalah ADC tipe 0820.
Penulis menggunakan ADC tipe 0820 karena memiliki fitur high speed 8 - bit
ADC converter [17]. Gambar-3.1 berikut ini merupakan IC ADC tipe 0820 dapat
mengkonversi sinyal analog dari variabel resistor ke sinyal digital.
VIN
DB0
DB2
DB1
DB3
WR/RDY
RD
MODE
INT
GND
VDD
N.C.
DB7 (MSB)
OFL
DB6
DB5
CS
DB4
VREF+
VREF-
ADC0820
Gambar-3.1 ADC tipe 0820
ADC tipe 0820 mempunyai keluaran 8 – bit ADC yang berarti memiliki
resolusi sebanyak 28 = 256. Resolusi mulai dari 0 – 256 perubahan nilai tersebut
mewakili keluaran duty cycle antara 0 – 100%. Variabel resistor dan referensi
counter 0 – 256 yang digunakan sebagai masukan oleh FPGA akan menghasilkan
delapan keluaran yang akan diolah oleh FPGA. Rangkaian ADC 0820 yang
digunakan penulis akan dijelaskan pada Gambar-3.2.

23
VIN
DB0
DB2
DB1
DB3
WR/RDY
RD
MODE
INT
GND
VDD
N.C.
DB7 (MSB)
OFL
DB6
DB5
CS
DB4
VREF+
VREF-
ADC0820
Vcc
RD
CS
Vref (+)
Vref (-)
GND
Vin
MODE
OFL
RDY
INT
DB0
DB1
DB2
DB3
DB4
DB5
DB6
DB7
FPGAN.C.
5V
Gambar-3.2 Rangkaian ADC tipe 0820 sebagai masukan FPGA
Rangkaian ADC tipe 0820 diberikan masukan tegangan 5 Volt DC untuk
mengaktifkannya. Delapan sinyal keluaran ADC tipe 0820 yaitu DB0, DB2, DB3,
DB4, DB5, DB6 dan DB7 selanjutnya akan diolah oleh FPGA menjadi sinyal
PWM.
3.3. FPGA Altera Cyclone IV
IGBT memerlukan alat pemrograman untuk mengendalikan saklar - saklar
di dalamnya. Pada Laporan Tugas Akhir penulis menggunakan kontroler IC
digital yaitu FPGA Altera Cyclone IV untuk mengendalikan saklar – saklar pada
IGBT. Penulis menggunakan FPGA Altera Cyclone IV karena memiliki beberapa
kelebihan yaitu memiliki banyak fitur, kebebasan dalam pengembangan fungsi –
fungsi khusus dalam pemrograman dan harganya yang cukup terjangkau. Pada
Gambar-3.3 menjelaskan FPGA Altera Cyclone IV dan komponen – komponen
pendukungnya.

24
(a)
(b) (c)
(d)
(f)
(e)
Gambar-3.3 Modul FPGA Altera Cyclone IV
[https://www.dhresource.com/0x0/f2/albu/g5/M00/1D/65/rBVaJFgkLliAMlLJAASb4mrjjM0956.j
pg]
FPGA Altera Cyclone IV (Gambar-3.3a) memiliki beberapa komponen
pendukung yaitu IC EP4CE6 (Gambar-3.3b), kabel power (Gambar-3.3c), remote
(Gambar-3.3d), kabel USB (Gambar-3.3e) dan downloader tipe USB Blaster
(Gambar-3.3f). FPGA Altera Cyclone IV juga memiliki banyak fitur seperti Led
Emmiting Diode (LED), buffer, inframerah, Random Access Memory (RAM) dan
seven segment.
3.4. Implementasi PWM berbasis FPGA
FPGA memerlukan counter 8-bit dan sebuah D tipe FF untuk membuat
PWM. Counter yang diprogram kemudian dikendalikan oleh 50MHz clock di
dalam FPGA. Periode PWM ditentukan oleh nilai konstan (per_val) pada input
komparator pertama. Counter akan reset ketika perbandingan pada komparator

25
sudah tercapai kemudian akan set FF. Untuk membuat PWM yang dipengaruhi
oleh perubahan variable duty cycle diperlukan (dc_val) pada input komparator
kedua. Nilai (per_val) akan lebih tinggi dari (dc_val). FF akan reset ketika
variable duty cycle dan counter sudah matching [7]. Gambar-3.4 di bawah ini
menunjukkan urutan pemrograman PWM menggunakan FPGA.
Clock
50MHz
8-bit
CounterComparator
1
Comparator
2
D-FFset
reset
Duty cycle
reset
Output
PWM
Gambar-3.4 Diagram blok pemrograman PWM variable duty cycle menggunakan FPGA
Untuk mengaktifkan output dari FF pada jumlah yang ditentukan yaitu :
DC_time = ( per_val – dc_val) * 20ns (3-1)
Pada pengimplementasian frekuensi PWM akan diturunkan ke 5KHz maka nilai
(per_val) adalah 9999 :
PWM_PER = ( per_val + 1 ) * 20ns = 200ns (3-2)
3.5. Implementasi Pola Komutasi Pensaklaran IGBT Berbasis FPGA
Implementasi pola komutasi pensaklaran Insulated Gate Bipolar
Transistor (IGBT) dilakukan dengan metode perancangan diagram skematik.
Diagram skematik tersebut dibuat dengan menggunakan aplikasi Quatrus II. Di
dalam aplikasi Quartus II terdapat fitur pengkonversi diagram skematik menjadi

26
bahasa VHSIC Hardware Description Language (VHDL). Diagram skematik
akan dikonversi ke bahasa VHDL kemudian diolah oleh FPGA untuk memperoleh
hasil yang sesuai dengan pola komutasi. Terdapat masukan dari sensor hall effect
yaitu H1, H2, dan H3 yang diolah melalui gerbang logika kemudian akan
menghasilkan pola komutasi untuk saklar S1, S2, S3, S4, S5, dan S6.
Pengendalian kecepatan motor BLDC saklar S2, S4, dan S6 diberi masukan PWM
1, PWM 2, dan PWM 3. Gambar-3.5 menunjukkan penyambungan gerbang
logika, kemudian akan diubah menjadi bahasa VHDL pada aplikasi Quartus II
untuk mengendalikan motor BLDC.

27
H1
H2
H3
S1
S2
S3
S4
S5
S6
PWM 1
PWM 2
PWM 3
Gambar-3.5 Diagram skematik kendali kecepatan motor BLDC

28
Pada aplikasi Quatrus II terdapat pemrograman dengan bahasa VHSIC
VHDL dan diagram skematik. Untuk mengkonversi sensor hall effect penulis
menggunakan penyambungan gerbang gerbang logika yaitu NOT, AND dan OR
sebelum dijadikan keluaran FPGA. Gerbang – gerbang tersebut yang akan
mengubah tiga buah sinyal dari sensor hall effect menjadi keluaran yang sesuai
dengan pola komutasi untuk mengendalikan saklar – saklar pada IGBT.
3.6. Rangkaian Driver Pengendali Motor BLDC
Rangkaian driver sangat dibutuhkan untuk mengendalikan motor BLDC.
Selain sebagai penghubung antara rangkaian daya dan rangkaian driver, rangkaian
driver juga digunakan sebagai pengaman motor BLDC supaya tidak mudah terjadi
kerusakan [18]. FPGA akan memerintah rangkaian driver yang dikonduksikan
oleh IGBT. Di dalam rangkaian driver terdapat sebuah buffer yaitu IC
74CHC541N dan enam buah optocoupler TLP250. Rangkaian buffer dapat dilihat
pada Gambar-3.6.
A0
A1
A2
A3
A4
A5
A6
A7
Y0
Y1
Y2
Y3
Y4
Y5
Y6
Y7
OE1
OE2

29
Gambar-3.6 IC buffer 74CHC541N
Fungsi dari buffer pada rangkaian driver adalah sebagai pengunci dan
penguat tegangan yang dikeluarkan oleh FPGA, agar keluaran FPGA yang berupa
tegangan tidak mengalami kenaikan dan penurunan. IGBT bekerja secara optimal
jika diberi masukan tegangan yang konstan yaitu tidak mengalami kenaikan dan
penurunan. Rangkaian buffer pada umumnya mempunyai dua buah gerbang NOT
yang mempunyai fungsi yang berbeda. Gerbang NOT yang pertama memiliki
fungsi untuk mengkonversi sinyal digital FPGA yang mengalami penurunan
(bernilai kurang dari 5 Volt dan lebih dari 3 Volt) menjadi nilai 0 Volt. Untuk
melanjutkan nilai tegangan 0 Volt DC ke 5 Volt DC membutuhkan gerbang NOT.
Komponen optocoupler TLP250 memiliki fungsi untuk mengkonversi sinyal
keluaran tegangan 5 Volt DC menjadi tegangan 12 Volt DC. Untuk mengaktifkan
TLP250 diperlukan tegangan supply yaitu 12 Volt DC. Pada Gambar-3.7
memperlihatkan rangkaian driver optocoupler TLP250.
N.C
Anode
Cathode
N.C GND
Vo(out)
Vo
Vcc
TLP250
Input PWM
+ 12V D
G
S1
2
3
4 5
6
7
8
Gambar-3.7 Rangkaian driver optocoupler TLP250

30
Rangkaian driver optocoupler TLP250 memiliki enam buah pin yang
memiliki fungsi masing – masing. Kedua pin N.C. (pin 1 dan pin 4) tidak
dihubungkan kemanapun atau tidak difungsikan. Pin anode (pin 2) digunakan
sebagai masukan sinyal PWM dari FPGA. Pin cathode (pin 3) difungsikan
sebagai ground dari FPGA. Pin GND (pin 5) digunakan sebagai ground dari catu
daya TLP250. Pin Vo (pin 6 dan pin 7) difungsikan untuk keluaran dari sinyal
PWM. Pin Vcc (pin 6) digunakan untuk masukan catu daya (+12V).
3.7. Rangkaian Sensor Arus tipe LEM HX 10-P
Pengukuran hasil gelombang arus pada motor BLDC dilakukan dengan
menggunakan sensor arus. Selain digunakan sebagai pengukuran gelombang arus
pada motor BLDC, sensor arus juga dapat digunakan sebagai pengkomfirmasi
hasil – hasil yang didapatkan dari teori dan pembuktian dari prototipe Tugas
Akhir yang telah dibuat [19]. Pengumpulan hasil dari data – data dapat digunakan
sebagai pengembangan topik pengendalian kecepatan motor BLDC berbasis
FPGA yang lebih banyak lagi. Pengujian pada Tugas Akhir ini menggunakan
sensor arus tipe LEM HX 10-P. Batasan arus maksimal dari sensor arus untuk
melewatinya adalah 10 Ampere. Untuk memperoleh hasil gelombang yang terlihat
jelas, sensor arus diberikan komponen penguat arus. Gambar-3.8 merupakan
skematik rangkaian sensor arus.

31
`
+12V
-12V
+
+
+
+
-
--
-
LEMHX
10-P
Gambar-3.8 Skema rangkaian sensor arus tipe LEM HX 10-P
Sensor arus LEM HX 10-P berfungsi sebagai pengkonversi pembacaan
arus dari motor BLDC menjadi ke bentuk gelombang tegangan. Perbandingan
tegangan dan arus yang dihasilkan oleh sensor arus tersebut dapat diatur sesuai
dengan yang diharapkan.
3.8. Rangkaian Inverter Tiga Fasa Tiga Lengan
Pengendalian kecepatan motor BLDC membutuhkan IGBT sebagai
Inverter tiga fasa yang digunakan untuk mengkonversi tegangan DC ke tegangan
AC. IGBT yang digunakan penulis adalah IGBT tipe SEMIKRON
SK35GD065ET. IGBT tipe SEMIKRON SK35GD065ET merupakan tipe
Inverter tiga fasa tiga lengan yang mempunyai enam saklar statis. Pada motor
BLDC terdapat fasa – fasa stator yang dihubungkan dengan masing – masing
lengan IGBT sebagai pengendali motor BLDC. Driver optocoupler TLP250 akan
mengendalikan tiap saklar di dalam IGBT yang kemudian akan mengendalikan
motor BLDC. FPGA yang sudah diprogram akan mengandalikan driver untuk
mengendalikan IGBT. FPGA membutuhkan sensor hall effect yang dijadikan
32
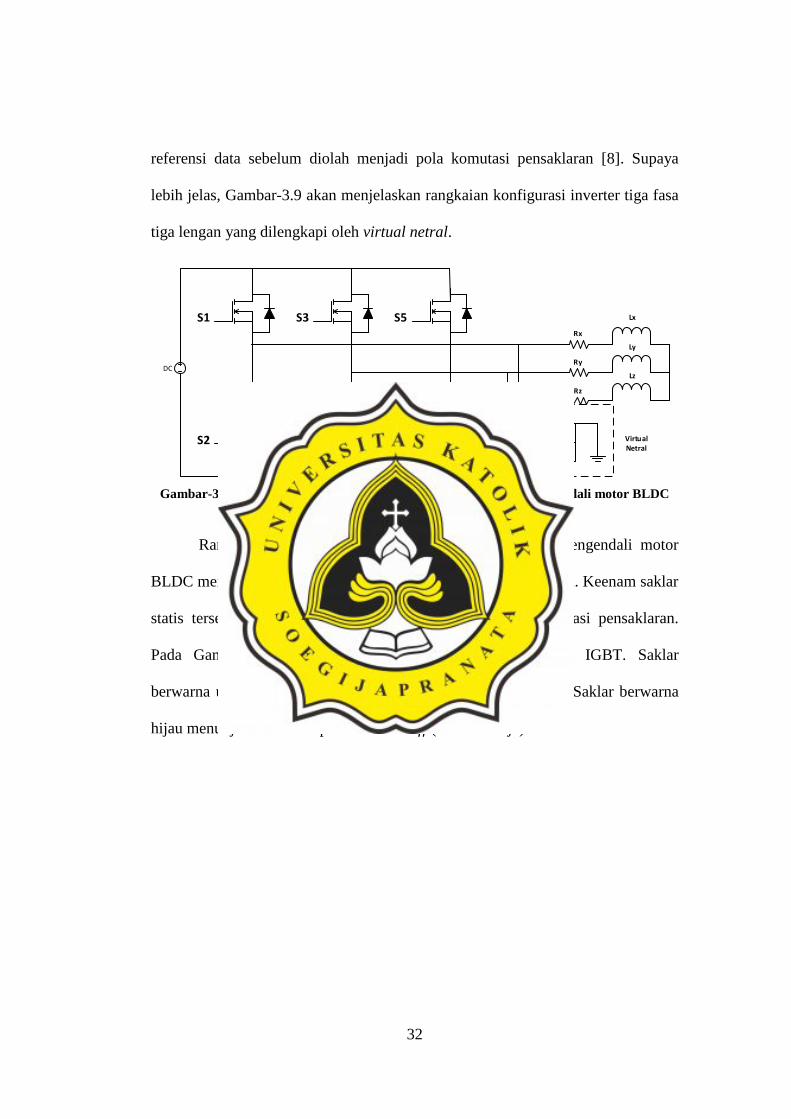
referensi data sebelum diolah menjadi pola komutasi pensaklaran [8]. Supaya
lebih jelas, Gambar-3.9 akan menjelaskan rangkaian konfigurasi inverter tiga fasa
tiga lengan yang dilengkapi oleh virtual netral.
DC
S1
S2
S3
S4
S5
S6
Rx
Ry
Rz
RxBEMF
RyBEMF
RzBEMF
Lx
Ly
Lz
Virtual Netral
Gambar-3.9 Rangkaian konfigurasi inverter tiga fasa tiga lengan pengendali motor BLDC
Rangkaian konfigurasi inverter tiga fasa tiga lengan pengendali motor
BLDC memiliki enam saklar statis yang bekerja secara bergantian. Keenam saklar
statis tersebut bekerja dengan enam kemungkinan pola komutasi pensaklaran.
Pada Gambar-3.10 menunjukkan pola komutasi pensaklaran IGBT. Saklar
berwarna ungu menunjukkan saklar pada keadaan on (bekerja). Saklar berwarna
hijau menunjukkan saklar pada keadaan off (tidak bekerja).

33
12V
S1
S2
S3
S4
S5
S6
A B C
110
12V
S1
S2
S3
S4
S5
S6
A B C
100
12V
S1
S2
S3
S4
S5
S6
A B C
101
12V
S1
S2
S3
S4
S5
S6
A B C
001
12V
S1
S2
S3
S4
S5
S6
A B C
011
12V
S1
S2
S3
S4
S5
S6
A B C
010 Gambar-3.10 Pola pensaklaran inverter tiga fasa tiga lengan
Saklar - saklar pada IGBT tiga fasa memerlukan suatu program untuk
mendapatkan pengendalian yang sesuai dengan pola komutasi. Pola komutasi
tersebut didapatkan dari konversi masukan sensor hall effect. Sensor hall effect
tersebut akan di masukkan ke gerbang – gerbang logika di dalam FPGA untuk
mendapatkan keluaran yang sesuai dengan pola komutasi. Tabel 3.1 akan
menunjukkan tabel konfigurasi pensaklaran motor BLDC.
Tabel-3.1 Konfigurasi
pensaklaran motor BLDC
Dari Tabel 3.1 dapat dilihat enam pola komutasi pensaklaran pada motor
BLDC di mana terdapat masukan dari sensor hall effect. H1, H2 dan H3 yang
terpasang pada motor BLDC yang akan diprogram oleh FPGA kemudian
H1 H2 H3 S1 S2 S3 S4 S5 S6
1 1 0 0 0 1 0 0 1
1 0 0 1 0 0 0 0 1
1 0 1 1 0 0 1 0 0
0 0 1 0 0 0 1 1 0
0 1 1 0 1 0 0 1 0
0 1 0 0 1 1 0 0 0

34
menghasilkan enam pola komutasi pensaklaran untuk mengendalikan saklar S1,
S2, S3, S4, S5 dan S6 pada IGBT. Pola pensaklaran inilah yang akan
mengendalikan motor BLDC.
3.9. Catu Daya DC-DC Isolated B1212s
Sumber tegangan DC dibutuhkan untuk mengoperasian rangkaian driver
yang terdapat pada inverter tiga fasa. Rangkaian inverter tiga fasa yang
menggunakan IGBT tipe SEMIKRON SK35GD065ET membutuhkan sumber
tegangan 12 V DC. Untuk suplai tegangan DC untuk mengoperasikan IGBT,
dibutuhkan suatu rangkaian catu daya DC-DC Isolated sebagai sumber tegangan.
Inverter tiga fasa yang digunakan membutuhkan empat sumber tegangan DC
untuk menyuplai masing - masing lengannya secara terisolasi.
Gambar-3.11 Komponen catu daya B1212s isolated
[http://archive.communica.co.za/Content/Catalog/Images/I0100853722.jpg]
Pada Tugas Akhir ini digunakan suatu catu daya DC/DC isolated B1212s
yang dapat dilihat pada Gambar-3.11. DC/DC isolated B1212s sebanyak empat
buah yang digunakan sebagai suplai tegangan dari batere 12 V DC dibagi menjadi
masing - masing 12 V DC tegangan keluaran. Keempat catu daya terisolasi
tersebut menghasilkan tegangan keluaran yang dapat digunakan sebagai sumber

35
tegangan pada driver IGBT. Untuk spesifikasi catu daya DC/DC isolated B1212s
dapat dilihat pada Tabel-3.2.
Tabel-3.2 Spesifikasi DC/DC Isolated B1212s
Type
Input Output
Voltage (VDC) Voltage (VDC)
Current (mA)
Nominal Range Min Max
B1212s 12 10.8-13.2 12 17 167
3.10. Blok Kendali Kecepatan Motor BLDC Berbasis FPGA
Pada Gambar-3.12 ditunjukkan sinyal analog dari duty cycle selector akan
dikonversikan ke sinyal digital oleh ADC tipe 0820. FPGA Altera Cyclone IV
akan memberikan program untuk menghasilkan PWM yang nantinya akan
mengendalikan kecepatan motor BLDC. Motor BLDC mempunyai tiga buah
sensor hall effect yang akan dijadikan masukan oleh FPGA Altera Cyclone IV,
kemudian menghasilkan pola komutasi pensaklaran sebanyak enam buah keluaran
FPGA untuk mengendalikan pensaklaran IGBT [12].

36
Converter
Driver
ADC0820
Hall
Eff
ect
1,
2, 3
Duty cycle
selector
FPGA Altera
Cyclone IV
BLDC
Motor
Gambar-3.12 Diagram blok pengendalian kecepatan motor BLDC berbasis FPGA Altera
Cyclone IV
Pengendalian kecepatan motor BLDC menggunakan FPGA dilakukan
dengan menggunakan penyambungan gerbang – gerbang logika di dalam FPGA
tersebut. Gerbang – gerbang logika tersebut yang akan mengkonversi sinyal
masukan dari sensor hall effect menjadi suatu pola komutasi pensaklaran supaya
dapat mengendalikan motor BLDC tersebut. Pola komutasi tersebut diinjeksikan
dengan PWM yang sudah diprogram oleh FPGA untuk mengendalikan saklar –
saklar pada IGBT. Saklar – saklar pada IGBT yang sudah dikendalikan oleh
FPGA tersebut akan mengontrol kecepatan motor BLDC.




















