Approved - International Nuclear Information System (INIS)
126
Approved: THE DEVELOPMENT OF A DIGITAL DATA PROCESSING SYSTEM FOR TWO-PHASE TURBULENCE DATA by Sung Jin Lee A Thesis Submitted to the G raduate Faculty of Rensselaer Polytechnic 1 nstitute in Partial Fulfillment of the Requirements for the Degree of MASTER OF SCIENCE PrOOrô: ê. Jones, Jr. Thesis Co-Advisor Rensselaer Polytechnic 1 nstitute Troy, New York December 1982
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Approved - International Nuclear Information System (INIS)

Approved:
THE DEVELOPMENT OF
A DIGITAL DATA PROCESSING SYSTEM
FOR TWO-PHASE TURBULENCE DATA
by
Sung Jin Lee
A Thesis Submitted to the G raduate
Faculty of Rensselaer Polytechnic 1 nstitute
in Partial Fulfillment of the
Requirements for the Degree of
MASTER OF SCIENCE
~ PrOOrô: ê. Jones, Jr. Thesis Co-Advisor
Rensselaer Polytechnic 1 nstitute Troy, New York
December 1982

_.,.,.··
· ..
CONTENTS
page LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
NOMECLATURE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
ACKNOWLEDGEMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
1. INTRODUCTION 1
2. EXPERIMENTAL APPARATUS AND DATA ACQUISITION SYSTEM . 4
Air/Water Loop ........................ ·. . . . . . . . . . . 4 Hot Film Anemometry. .. . . . . . . . . . . . . . .. . .. .. . . .. . . . 6 Signal Conditioning. .. . . . .. . . . . . . . . . . . . . .. .. . . . . . 9 Data Acquisition System .......................... 10 Preliminary Calibration of The Anemometer . . . . . . . . 13 Frequency Response of The Anemometer ............. 13 Noise and Accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 Simultaneous Digitization ........................ 18
3. PHASE DETERMINATION TECHNIQUE ...................... 21
Anemometer Signal Interpretation ................. 21 Digital Implementation of Phase Determination
Technique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 Description of Computer Codes, VOID1 and VOID3 . . . 28 Re sul ts ........................... ·............... 30
4. DIGITAL COMPUTATION OF FLOW PARAMETERS ............. 31
One Dimensional Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 Liquid Phase Indicator Function ............. 32 Local Void Fraction ......................... 31 Mean Liquid Phase Velocity .................. 32 The RMS Value of The Liquid Phase Velocity
Fluctuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Three Dimensional Data ........................... 33 Local Void Fraction ......................... 34 Reynold's Stresses .......................... 34 Anisotropy Factor ........................... 36
5. SPECTRAL ANALYSIS OF DIGITAL DATA .................. 38
ii

,. ! ' 1
: : 1 ,( •• 1
• 1 1 1
1
Auto and Cross-correlation Functions . . . . . . . . . . . . . 39 The Auto correlation Function and The Liquid-phase
Turbulence Scales . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 Power Spectral Density Functions ................. 40 Cross-spectral Density Functions ................. 42 Coherence Function ............................... 43 Computation of Correlation Estirnates . . . . . . . . . . . . . 43 Computation of Power Spectrurn Estirnates . . . . . . . . . . 45 Finite Length Effect ............................. 45 Discrete Tirne Effect ............................. 48 Determination of Digitization Rate ............... 52 Spectral Analysis of Segrnented Signal . . . . . . . . . . . . 53 Description of The Spectral Analysis Code, POWER . 54 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6. SUMMARY AND CONCLUSIONS ............................ 68
REFERENCES 69
APPENDIX A - THE LIQUID-PHASE TURBULENCE SCALES . . . . . . . 70
APPENDIX B - USING DISCRETE FOURIER TRANSFORM FOR CORRELATION ESTIMATES .................... 74
APPENDIX C - HOW TO READ THE HP PRODUCED MAGNETIC TAPE WITH THE IBM COMPUTER ............... 78
APPENDIX D- COMPUTER PROGRAM LISTING ................. 84
iii

LIST OF TABLES
Page Table I List of Window Functions ................... 49
Table II ADC Throughput Header Content . . . . . . . . . . . . . . 80
iv

Figure 2.1
Figure 2.2
Figure 2.3
Figure 2.4
Figure 2.5
Figure 2.6
Figure 2.7
Figure 2.8
Figure 2.9
Figure 3.1
LIST OF FIGURES
Page Schematic of Air/Water Loop.... .. . . . . . .. . . 5
Probe Mounting Fixture 7
Dimensions of The Conical Probe 8
Circuit Diagram of The Clipping Circuit . . . 11
Signal Conditioning of Two-phase Data ..... 12
Schematic of The Data Acquisition System . . 14
Conical Probe Velocity Calibration Data . . . 15
Electrical Testing Result of The Conical Probe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Simultaneous Digitization Result of A Square Wave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Schematic of Bubble Passage Through A Conical Probe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Figure 3.2 Modified Schematic of Bubble Passage Through A Conical Probe ................... 26
Figure 3.3 The Digital Signal and The Corresponding Phase Indicator Functions ................. 29
Figure 5.1 Rectangular Window Function and Its Fourier Transform ......................... 47
Figure 5.2 Effect of Discrete Time Sampling On The Fo~rier Tranform of a Signal .............. 51
Figure 5.3 Power Spectrum of The Pseudo Liquid Phase Indicator Function . . . . . . . . . . . . . . . . . . 55
Figure 5.4 Schematic of The Power Spectrum Computation of Two-phase Data ......................... 56
Figure 5.5 Schematic of Computing Correlation and Power Spectrum Estimates .................. 58
Figure 5.6 Autocorrelation of a Sine Function 59
Figure 5.7 Power Spectrum of a Exponential Autocorrelation Function .................. 60
v

i•
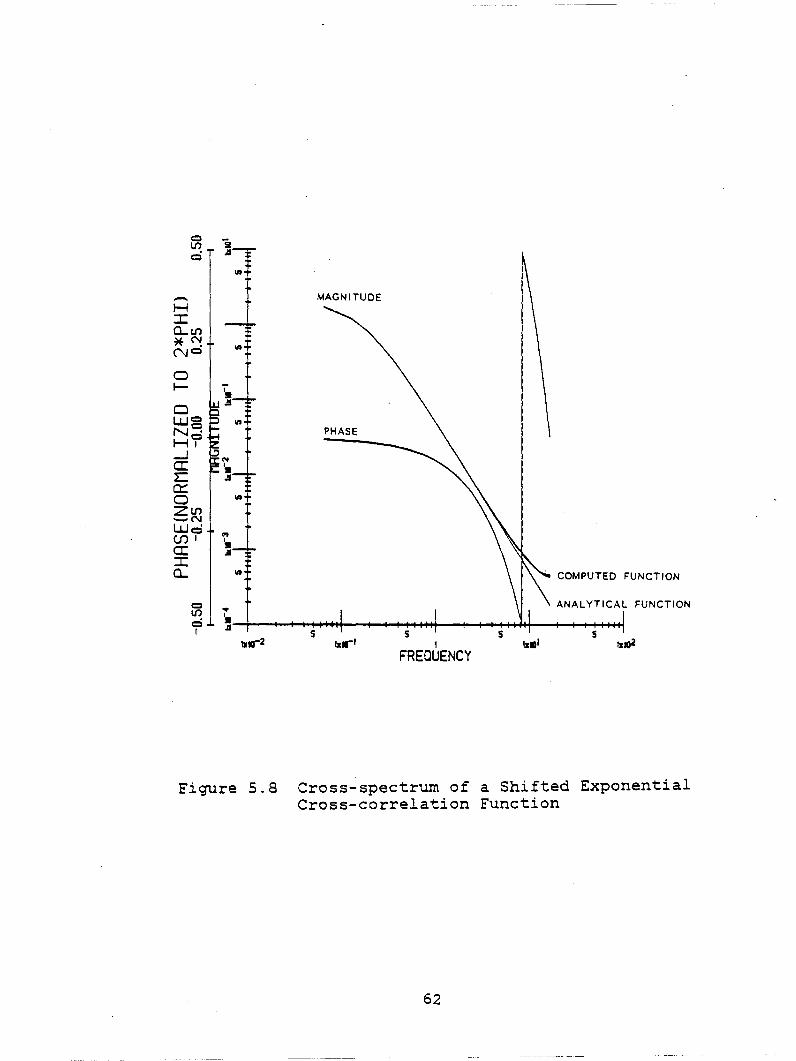
Figure 5.8 Cross-spectrum of a Shifted Exponential Cross-correlation Function ................ 62
Figure 5.9 Autocorrelation Function of Single-phase Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Figure 5.10 Cross-correlation Function for A Pair of Shifted Single-phase Data .............. 64
Figure 5.11 Power Spectrum of Single-phase Data ....... 65
FigUre 5.12 Power Spectrum of Two-phase Data .......... 66
Figure B.1 4-Point Circular Convolution of Two Sequences 75
Figure C.1 Data Word Content ......................... 81
Figure C.2 Schematic of the Relationship Between The Analog Signal and The Corresponding Digital Representation in The Data Word . . . . . . . . . . . 82
vi

a, ~' o
0 (f) x y
E
E(n)
e(n)
v
U(n)
u
u(n)
v(n)
w(n)
f
f
Rx(•)
R (t} x y
Gx(f)
Gxy(f}
Af
Àf
0 2 x
X(n)
NOMECLATURE
Local Void Fraction
Directional Sensitivities of the Probe Sensors
Coherence Function
Anemometer Output Voltage
Digitized Anemometer Output Data
Fluctuating Components of the Digitized Anemometer Output data
Fluid Velocity
Instantaneous Axial Liquid-phase Velocity
Mean Axial Liquid-phase Velocity
Fluctuating Components of the Axial Liquid-phase Velocity, U(n) = U + u(n)
Radial Liquid-phase Velocity Fluctuation
Azimuthal Liquid-phase Velocity Fluctuation
Time Displacement
Space Displacement
Frequency
The Longitudinal Correlation Coefficient
Autocorrelation Function of x(t)
Cross-correlation Function of x(t) and y(t)
Power Spectral Density Function of x(t)
Cross-spectral Density Function of x(t) and y(t)
The Integral Scale of The Liquid Turbulence
The Dissipation Scale
Variance of x = x 2
Liquid Phase Indicator Function
vii
x+(n)
X(f)
x(rn)
OPERATORS
Pseudo Liquid Phase Indicator Function
Liquid Phase Density
Gas Phase Density
Sarnpling Period
Fourier Transforrn of x(t)
Discrete Tirne Sarnples of x(t) where t=rnT
t Expectation Value, or Vector, or Matrix
VAR Variance Matrix
x(t)*y(t) Convolution of x(t) with y(t)
* X(f) Cornplex Conjugate of X(f)
SUBSCRIPTS
1 1 2 1 3 Of Sensor 1, 2 1 3
2t Of Two-phase flow
UNITS
SCFH Standard Cubic Feet Per Hour
viii

ACKNOWLEDGEMENT
The author wishes to express his gratitude to Drs. R.
T. Lahey, Jr. and O. C. Jones, Jr. for the guidance and
encouragement received under their supervision. The work of
Kong Wang in setting up the experimental apparatus and
making the preliminary calibration runs is acknowledged.
Also the support of the National Science Foundation (Dr. Win
Aung) is gratefully acknowledged.
Finally, the author is especially grateful to his wife,
Young Mae, for her patience and understanding during the
preparation of this manuscript.
ix

ABSTRACT
A digital data acquisition and reduction system to
process two-phase turbulence data from hot film anemometers
were developed and tested against both actual and
hypothetical data. In particular, the interpretation of the
two-phase turbulence signal and the digital technique
developed for phase determination was discussed in detail.
The latter method is based on a cornbination of level and
slope thresholding. It was applied successfully to the phase
determination of actual two-phase data.
The data reduction system can handle digital signals
from either a single-sensor or a three-sensor probe. From
single-sensor data, it computes the local void fraction,
mean axial liquid phase velocity, and the axial liquid phase
turbulence intensity. From three sensor data, it computes
the local void fraction, and all six components of the
Reynolds stress tensor. It also performs spectral analysis
of the data and computes the autocorrelation function, the
cross-correlation function, the power spectral density func
tion, and the cross-spectral density function.
x
--------------
CHAPTER 1
INTRODUCTION
The local void fraction and the statistics of the phase
velocity of the continuous phase are two of the most
important parameters characterizing a fully developed
two-phase turbulent flow. Although past attempts have been
made with hot film anemometry, no reliable method has been
developed with which to measure these two quantities simul
taneously. This is particularly true when one is concerned
with three-dimensional velocity fluctuations.
Hot film anemometry consists of a miniature sensing el
ement attached at, or near, the tip of a supporting probe
and a feedback circuitry. For constant temperature
operation, which is usually prefered over constant current
operation, the sensing element is electrically heated to a
constant temperature, higher than the arnbient f1uid
temperature. The feedback circuit senses any variation of
the sensor temperature due to the convective cooling by the
fluids and tries to restore the sensor temperature by
sending more or less current to the sensor. Hence, the time
history of the current through the sensor can be related to
the f1uid velocity fluctuations at the sensor. In principle,
the three-dimensional instantaneous velocity can also be
measured with this technique by using three sensors in an
1

appropriate configuration.
Liquid cools the sensor more effectively than gas.
Hence when the sensor is immersed in the gas phase much less
current is required to keep the sensor temperature constant
than in liquid phase. This fact can be used when operating
an anemometer in two-phase flow to determine the local in
stantaneous phase [1] .
The project reported on herein was motivated by the
analytical model Lahey and Drew derived to relate the
lateral void distribution to the liquid phase turbulence
distribution [2] . In order to verify the analytical model,
one needs experimental measurements of the lateral void dis
tribution as well as the three-dimensional liquid turbulence
structure of a flow through ducts of various geometry. In
order to develop the technique, a cylinderical duct
installed in a two-phase flow loop was used with a
single-sensor TSI hot film probe for one-dimensional
measurements. However, the data acquisition and reduction
system was developed to process signals from both single and
three-sensor probes.
This thesis starts with a brief description of the
airjwater loop and various measurment deviees. Then the
preliminary calibration curve and the frequency response
curve of the anemometer will be discussed. The majority of
the thesis is devoted to a description of the digital data
2

reduction system. In particular, the determination of phase
and spectrum from the digital data is discussed in detail.
3

CHAPTER 2
EXPERIMENTAL APPARATUS AND DATA ACQUISITION SYSTEM
AIR/WATER LOOP
The airjwater loop and arragement of the measurment
deviees are shown in Fig. 2.1 . The water is drawn from the
city water main to give flow rates up to 4 x 10- 4 m3 js. To
vary the water temperature from 55°F to 130°F, hot tap-water
can also be mixed with the feed water. The water passes
through a custom-made orifice flow meter(featuring three
meters of different ranges in prallel) and is routed into
the bottom of the loop.
Two-phase flow is simulated by injecting air through
either an air stone or a mixing tee from the bottom of the
loop. Three parallel rotometers are used to control the air
flow rate from 1 to 100 SCFH. We can achieve virtually any
flow regime of interest in this loop. The two-phase flow
exits via the top of the loop into a water storage tank;
hence, this airjwater loop is a once-through cycle.
The test section is a one-inch diameter plexiglass
pipe. About 60 inches above the bottom of the loop, a TSI
1231 W conical hot-film probe and a pitot tube are mounted
at diametrically opposite sides such that they can traverse
4

TO WATER COLLECTION TANK
U-TUBE MANOMETER
l
CONICAL TO PROBE ANEMOMETER
TWO-PHASE (AIR/WATER)
FLOW
AIR STONE
THERMOCOUPLE
WATER IN LET
~
-HOT WATER
TO THERMOCOUPLE TEMPERATURE
READ OUT
ORIFICE #2
U-TUBE MANOMETER
Figure 2.1 Schematic of AirjWater Loop
5
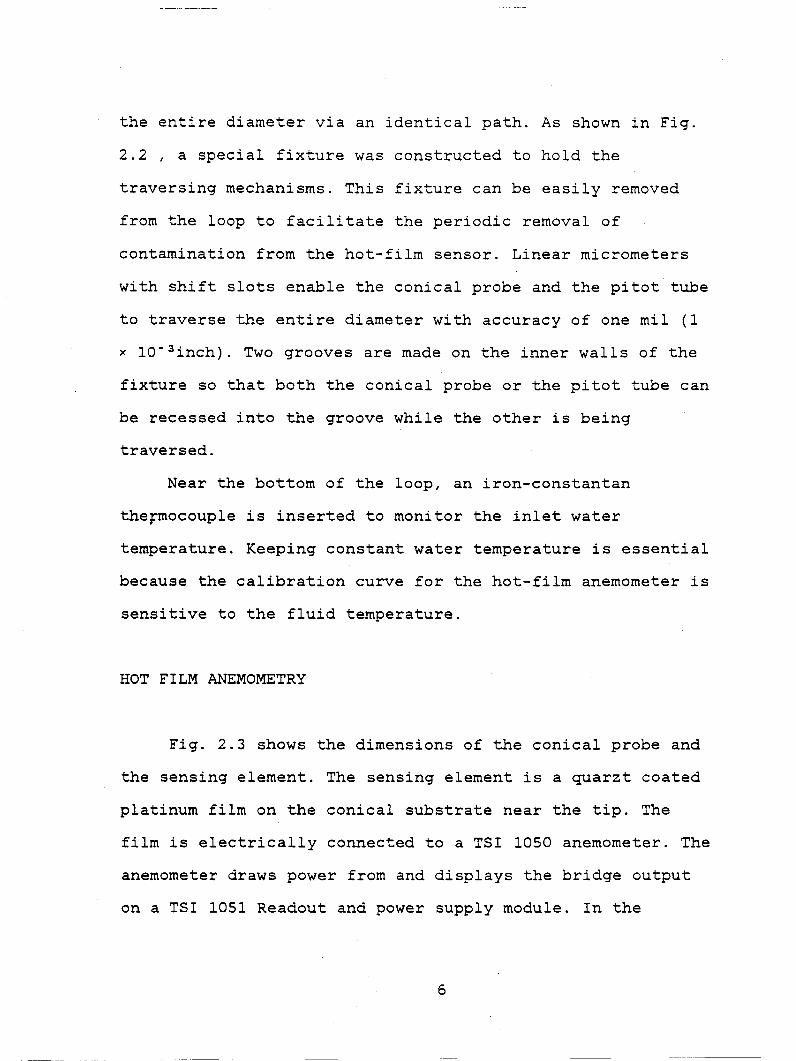
the entire diameter via an identical path. As shown in Fig.
2.2 , a special fixture was constructed to hold the
traversing mechanisms. This fixture can be easily removed
from the loop to facilitate the periodic removal of
contamination from the hot-film sensor. Linear micrometers
with shift slots enable the conical probe and the pitot tube
to traverse the entire diameter with accuracy of one mil (1
x 10- 3 inch). Two grooves are made on the inner walls of the
fixture so that both the conical probe or the pitot tube can
be recessed into the groove while the other is being
traversed.
Near the bottom of the loop, an iron-constantan
thefmocouple is inserted to monitor the inlet water
temperature. Keeping constant water temperature is essential
because the calibration curve for the hot-film anemometer is
sensitive to the fluid temperature.
HOT FILM ANEMOMETRY
Fig. 2.3 shows the dimensions of the conical probe and
the sensing element. The sensing element is a quarzt coated
platinum film on the conical substrate near the tip. The
film is electrically connected to a TSI 1050 anemometer. The
anemometer draws power from and displays the bridge output
on a TSI 1051 Readout and power supply module. In the
6
TEST SECTION
PITOT TUBE
Figure 2.2
QUICK DISCONNECT FITTINGS
TSI CONICAL
PROBE
Probe Mounting Fixture
7
- • 1 \• ..

PLATINUM FILM THICKNESS
QUARTZ FILM THICKNESS
----------
ALL DIMENSIONS IN INCHES
0.2 MICRONS
4 MICRONS
~-- 0.060----
QUARTZ SUBSTRATE
1231 CONICAL SENSOR
Figure 2.3 Dimensions of The Conical Probe
8
anemometer, there are three wheatstone bridges to select
from, depending on the power dissipation rate at the sensor.
It was found that bridge #1, the least powerful but the most
sensitive bridge, was the most suitable for two-phase
turbulence measurement.
SIGNAL CONDITIONING
The anemometer bridge output is also internally
connected to a TSI 1051 Signal conditioner. The signal
conditioner has both low-pass and high-pass filters and
zero-suppression capability. The bridge output range, 0 to
15 volt, is too large for the input range of the FM
recorder, -1.41 to 1.41 volt. For single-phase turbulence
data, the signal can be biased so that the turbulence
portion of the signal is within the input range of the
recorder. However, for two-phase measurements, the voltage
variation due to phase change is greater than 2.42 volt, the
input range of the recorder. For this case, the signal was
attenuated using a custom-built voltage divider before being
fed into the FM recorder.
Because the FM recorder has a fixed noise-tc-signal
ratio, 0.3%, the accuracy of the signal is best preserved
when the 2.42 volt input range is fully utilized to record
the turbulence portion of the signal. For single-phase
9

signals, the noise levels can be easily reduced to minimal
levels relative to the liquid turbulence level by simply
suppresing the DC component of the signal. This is not the
case for two-phase flow, where the signal fluctuation due to
phase change is about 10 times larger than that of liquid
turbulence. A sizable noise level on the liquid turbulence
signal was observed when the two-phase signal was
attenuated, stored in the FM recorder, and then played back.
One solution was to reduce the signal fluctuation due to
phase change by clipping the signal at the bottom. Indeed,
except for phase determination, the gas phase signal is of
no interest. Fig. 2.4 is the circuit diagram of such a
clipping circuit and Fig. 2.5 illustrates how this clipping
circuit improves the signal-tc-noise ratio for two-phase
flows.
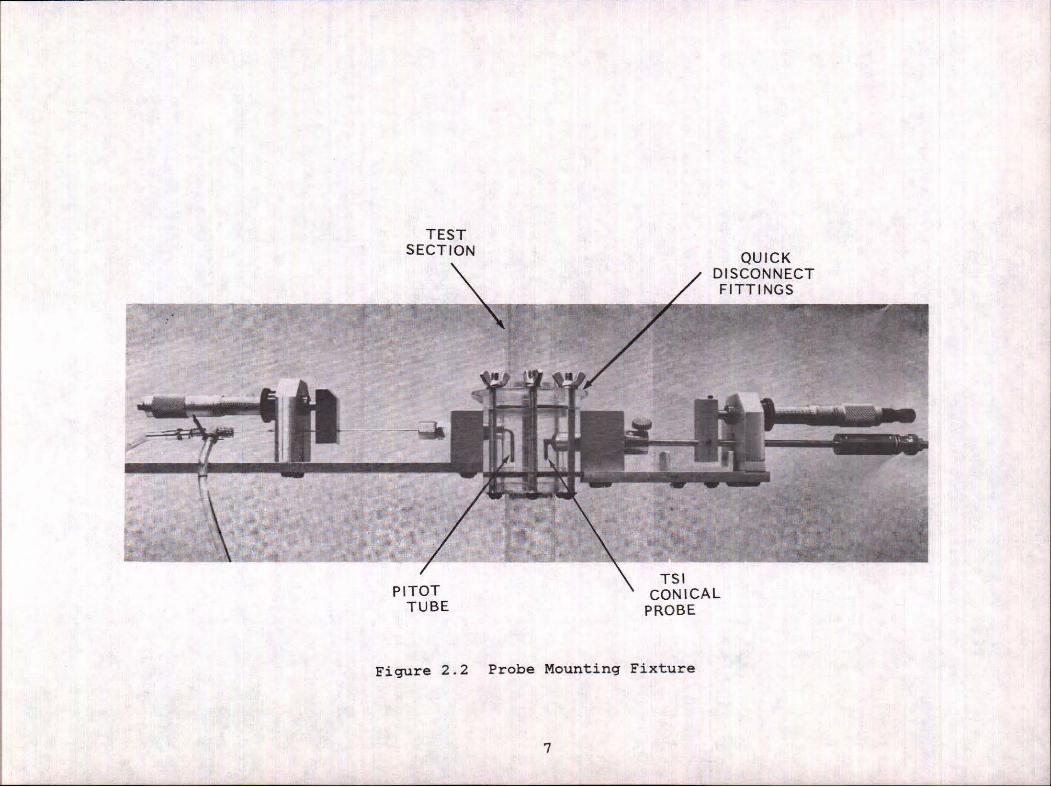
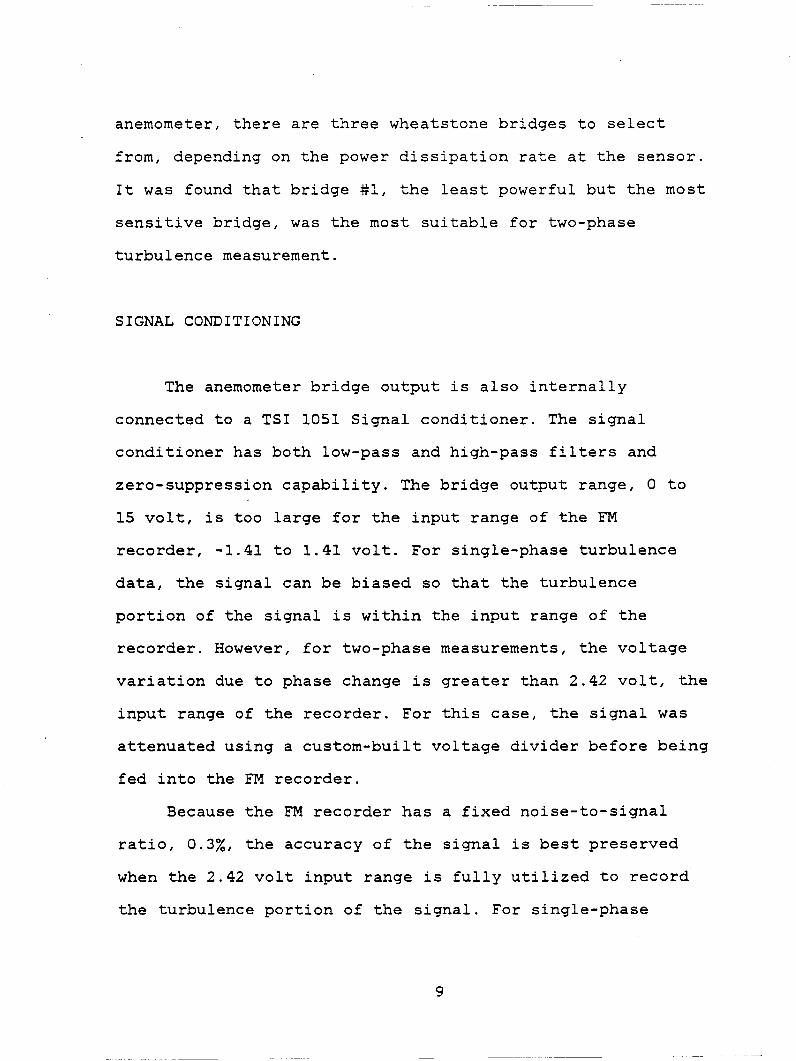
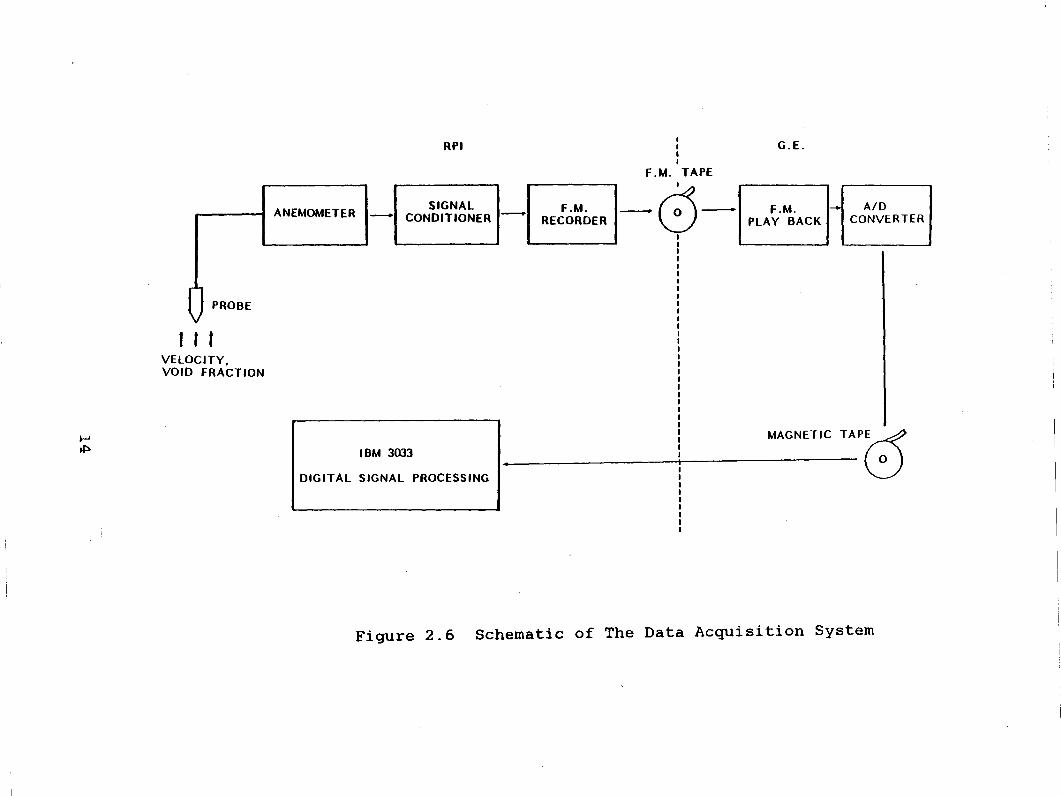
DATA ACQUISITION SYSTEM
The conditioned signal was recorded on a Honeywell 5200C
14-channel FM recorder. Subsequent to the experiment, the
analog tape was played back into a A/D converter, which
wrote the digital data on a magnetic tape. The A/D converter
used is a part of a Hewllet-Packard Fourier Analyzer system
at the General Electric Co. It can digitize and write up to
4 signals simultaneously at a rate in excess of 10 kHz. The
10

~ ~
ANEMOMETER SIGNAL
-15V
CLI PPED SIGNAL
lK ~ , 1N914B 1
+15V
lK l CLIPPING VOLTAGE -0.7V
--
Figure 2.4 Circuit Diagrarn of The Clipping Circuit

ORIGINAL SIGNAL FROM THE ANAMOMETER
v
TIME
SUPPRESSION OF THE ZERO
v
TIME
CLIPPING THE SIGNAL AT THE BOTTOM
v
TIME
Figure 2.5 Siqnal Conditioninq of Two-phase Data
12

digital tape was then processed on a IBM 3033 computer.
Appendix-C describes how the Hewlet-Packard generated tape
was read with IBM computer. Fig. 2.6 shows schematic diagram
of the data acquisition system ..
PRELIMINARY CALIBRATION OF THE ANEMOMETER
It is a standard practice to relate the anemometer out
put voltage to the fluid velocity by King's Law,
where,
E = anemometer output voltage,
V = fluid velocity,
A,B,n = calibration constants.
( 2. 1)
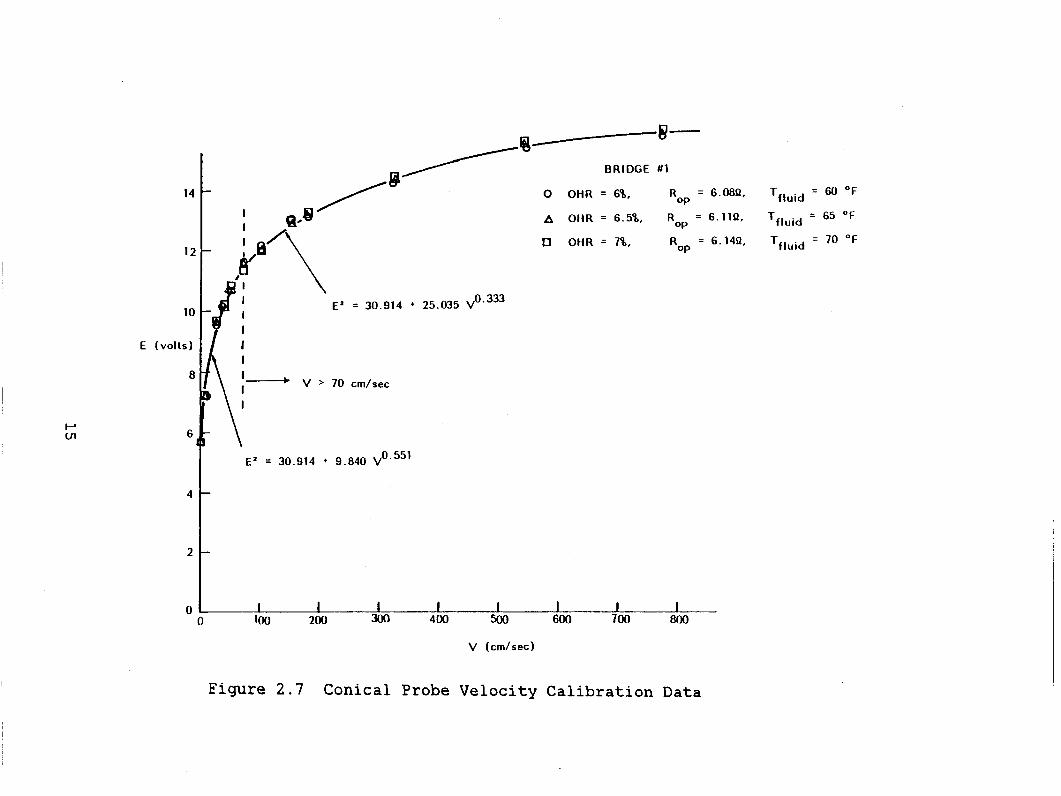
As shown in Fig. 2.7 our preliminary calibration data indi
cates that a different power law applies in two different
regions of Renolds nurnber; n = 0.551 for Re < 10,000, and n
= 0.333 for Re > 10,000. The parameters A and B were found
to be sensitive to the fluid temperature and the probe's
overheat ratio. For our preliminary calibration curve, the
parameters A and B were determined such that the two
different power laws match at Re = 10,000. In practice the
actual point-to-point calibration data will be used.
FREQUENCY RESPONSE OF THE ANEMOMETER
13
..... ,p.
PROBE
t r r VElOCITY, VOID FRACTION
RPI
SIGNAL ANEMOMETER 1--1 CONDITIONER
IBM 3033
DIGITAl SIGNAl PROCESSING
F.M. RECORDER
1 1 1 1
F.M. TAPE
-~-
1 1 1 1 1 1 1
1 1 : 1 1 1 1 1 1
G.E.
F.M. , ...... , AID PlAY BACK CONVERTER
MAGNETIC TAP~
Figure 2.6 Schematic of The Data Acquisition System
~ ll1
14
10
E (volts)
6
4
2
0
----------~3 g .. W :a/\
ir' 0.333 11 914 • 25.035 v E' = 30.
' V > 70 cm/sec
E' = 30.914 • 9.840 v0.551
~~
BRIDGE #1
0 OHR = 6\, R0
P = 6.08!2,
b. OHR = 6.5%, R0
P = 6.1H2,
[] OHR = 7't., R0
P = 6.1412,
lOO 200 Q nnn
V (cm/sec)
Figure 2.7 Conical Probe Velocity Calibration Data
T fluid = 60 oF
T fluid = 65 oF
T fluid = 70 oF

Because generating flow fluctuations of known amplitude over
a wide range of frequencies is difficult, the electrical
testing technique suggested by Freymuth [3] is usually used
to estimate the frequency response of the anemometer. With
the probe immersed in a single-phase(liquid) flow of typical
velocity, the amemometer bridge is excited by a sine wave
signal. The frequency response of the sine wave signal is
then used to estimate the frequency response of the system
to velocity fluctuations. In particular, theory [3] says
k that the electrical testing result should follow a f 2 curve
for a flat frequency response to velocity fluctuations. It
can be seen from our electrical testing data, Fig. 2.8 ,
that the frequency response stays flat up to about 29 kHz.
However, this frequency response is for a single-phase
signal. For two-phase signal, where interface penetration
causes a sudden and large change of the signal, the
electrical testing technique may not apply. Indeed, the
overshoot and signal decay observed in our two-phase data
indicate that the frequency response may be much lower for
large amplitude fluctuations such as those encountered
during phase change.
NOISE and ACCURACY
Noise, linearity, and drift problems are inevitably
16

BRIDGE
LOG(E/Et ) Rop
Tfluid
Et
10 v max
Re
#1
= 6.08!2
= 71 OF
= 4 volts
= 57.4 cm/sec
= 7200
FREQUENCY (Hz)
/ /
' -3db
f0P = 29 kHz
Figure 2.8 Electrical Testing Result of The Conical Probe
17

introduced when the analog signal is recorded, played-back,
and digitized. To determine the magnitude of these errors,
three constant voltages, 0.400 V, 0.300 V, and 0.400 V were
recorded for 10 second intervals. The recorded signals were
then digitized at 10 kHz. 10 records(one record contains
1024 digital data points) of each run were examined to
compute the mean and the standard deviation. The result is
as follows:
Signal 0.400 v 0. 300 v 0.400 v
Mean(V) 0.3571 0.2665 0. 3554
S.D. (V) 0.0024 0.0025 0.0024
Since the input range of the recorder is ±1.41 V, 0.0025 V
noise level corresponds to signal/noise ratio of 55 dB,
which is better than the specified signal/noise ratio of the
recorder, 50 dB. The two 0.400 V results indicate
reproducibility. The signal drifted about 2 mV in 10 second.
A 0.10 volt difference in the analog signal corresponded to
only 0.09 volt difference in the digitized form. To monitor
and correct for these noise and drift, constants voltage
signals will be inserted in between each experimental run.
SIMULTANEOUS DIGITIZATION
To test simultaneous recording and digitization of two
signals, a 1 kHz square-wave signal was recorded into two
18
------------- --- ---

channels, channel 1 and 3, of the recorder and was sampled
at 200 kHz. The plot of the digitized signals in Fig. 2.9
shows a shift of less than 0.01 ms. It should be noted that
with the H.P. system to ensure simultaneous digitization
either even number channels or odd number channels must be
used together. That is, ether channel 1, 3, and 5 or channel
2, 4, and 6 must be used for three channel simultaneous
recording.
19
----------------------------

N 0
0 ._ --- -- ·-
1 2
Time(ms)
3
Figure 2.9 Simultaneous Digitization Result of A Square Wave

CHAPTER 3
PHASE DETERMINATION TECHNIQUE
After the anemometer output signal is conditioned,
digitized, and written on a magnetic tape, the remaining
data reduction is done by a set of FORTRAN programs. The
programs perform basically two tasks: recognize and
separate-out segments of the signal corresponding to liquid
phase, and compute parameters of interest from the liquid
phase data. This chapter is concerned with the former of the
two. First, we will discuss how void passages shows up in
the a.nemometer output signal. Then, a digital technique to
automate this signal interpretation will be described.
Finally, the computer progams and sorne preliminary results
will be presented.
ANEMOMETER SIGNAL INTERPRETATION
The basic problem in interpretating two-phase data has
to do with dynamic response of the probe and with the
interaction of surface tension with the probe. Because the
beat transfer coefficient between the probe substrate and
the arnbient fluid is lower in gas than in liquid, the
temperature distribution in the substrate, bence the beat
conduction from the sensor to the substrate, undergoes a
21

substantial change during void passage. This may result in
an unrealistic reading of the liquid phase velocity imrnedi
ately following probe entrance into liquid phase from gas
phase. Only after the probe substrate achieves a new
equilibrium temperature distribution in the liquid phase,
will the signal start to read a realistic liquid phase
velocity.
When gas bubbles approach and intersect the probe,
surface tension causes them to deform around the probe tip,
and thus immediate penetration of the interface does not
occur. Actual penetration, and consequently a sudden dip in
the signal, occurs much later in time, when the imaginary
undeformed interface is well advanced along the probe. This
phenomena has been throughly investigated by Delhaye [4] who
took high-speed pictures(2000 frames per second) of the
bubble passages and the probe output signal displayed on an
oscilloscope. His findings are summarized bellow.
On Fig. 3.1 Delhaye has observed the bubble passage
through a vertical conical probe. Before tA , the probe
responds to the liquid velocity and turbulence. At tA , the
probe begins to sense the bubble due to buyancy-induced
liquid displacement, and the signal increases gradually. At
tB the imaginary bubble interface reaches the sensor element
on the probe. However, the actual interface deforms around
the probe tip and penetration does not occure until tc at
22

1 1 ---- LJQUID---+1+----+--- GAS ---4--l--li----LIQUID
Figure 3.1 Schematic of Bubble Passage Through A Conical Probe [4]
23

which point the signal drops. At t 0 , the rear surface of
the bubble touches the probe tip. A rapidly rising miniscus
cools the sensor from t 0 to tE . At tF , the imaginary rear
interface reaches the sensor, and at tG the probe is fully
irnrnersed in liquid. Delhaye measured the average durations
tC-tB and tF-tE :
tC-tB = 1.3 ms
tF-tE = 2.0 ms
Our bubble passage data has similar features as
Delhaye's except for the much higher posterior overshoot.
Rapid meniscus cooling ,as suggested by Delhaye, does not
seem to be soley responsible for the overshoot because the
overshoot, if converted to velocity, can reach upto 250
cm/sec for mean liquid phase velocity of 50 cm/sec. Rather,
the dynamic response of the probe substrate to the medium
change may contribute to the transient behavior. Thus, the
time at which the probe signal returns to read the actual
liquid phase velocity cannet be determined by visual exami
nation of the bubble passage. Instead, transient heat
transfer analysis of the substrate and the sensor may be
needed to learn more of this phenomenon.
Another disagreement lies in the time the rear surface
takes to travel from the probe tip to the sensor, tF-tD .
According to Delhaye, the overshoot decays away completely
in this time interval and the liquid phase data can be taken
24

from tF on. For the experimental conditions for which our
data was obtained, a bubble travelling at 50 cm/s can cover
the distance from the probe tip to the sensor, 0.026 cm, in
0.5 ms. However, visual examination of many bubble passage
signals indicates that the overshoots decays away only after
2.0 ms. Therefore, we conclude that the overshoot persists
even after the rear surface of the bubble passes the sensor.
Delhaye's interpretation was slightly modified before
being applied to our data. Fig. 3.2 is a schematic of a
typical signal and the corresponding position of the bubble
with respect to the probe's sensor according to the modified
interpretation. The time tB represents the time at which the
imaginary bubble interface crosses the sensor. The interface
is penetrated at tc . At ~ , the probe tip contacts the
rear surface of the bubble. At tE , which does not
necessarily coincide with the peak of the overshoot, the
imaginary rear interface reaches the sensor. At tG the
signal returns to read the liquid phase velocity.
Unfortunately, sharp changes in the signal occur only
at tc and tD i the other times, tB , tF , and tG must be
estimated using ether means. Delhaye suggested 1.3 ms for
tC-tB . However, this time interval can be expected to be
related to the velocity of the liquid phase and the bubble
size. The time interval tF-tD can be approximated by
dividing the distance from the probe tip to the sensor by
25

....
- LIQUIO ----1·------- GAS ----~------- LIQUIO-
Figure 3.2 Modified Schematic of Bubble Passage Through A Conical Probe
26

the mean axial liquid phase velocity. Time tG , the time at
which the signal returns to reflect the realistic liquid
phase velocity, may be determined from the analysis of
dynamic response of the probe. At present such analysis is
not available. Therefore, the average duration of the
overshoot was emprically determined. About 2 ms after t 0 the
overshoot seemed to decay away to the level of the liquid
phase, thus tG ~ t 0 + 2 ms.
DIGITAL IMPLEMENTATION OF THE PHASE DETERMINATION TECHNIQUE
To determine the phase of the probe signal, one must be
able to detect tc and t 0 . Past investigators have used
either level thresholding or slope thresholding. In level
thresholding, the gas phase is triggered whenever the signal
dips below a specified level and is terminated when the
signal rises above that level. Phase determined using this
method is not precise but the method is stable in the sense
that while it may fail locally, it always succeeds globally.
In slope thresholding, the fact that tc and t 0 accompanies
much steeper signal changes compared to that of liquid phase
turbulence is used to trigger the phase indicator on and
off. This method, when it works, detects tc and t 0 quite
precisely. However, it is unstable in the sense that a sin
gle failure to trigger on interface passage leads to
27

complete failure of the method.
Both methods were tried to our data and it was found
that the best method was a combination of both. That is,
slope thresholding was used to trigger on and off the gas
phase and then in each phase, excluding transition periods,
each data point also was tested against level thresholding.
In this way, precise slope thresholding was used most of
time, and occasional failure of the method was immediately
corrected by level testing. This dual method is herein
termed the "modified slope" thresholding method.
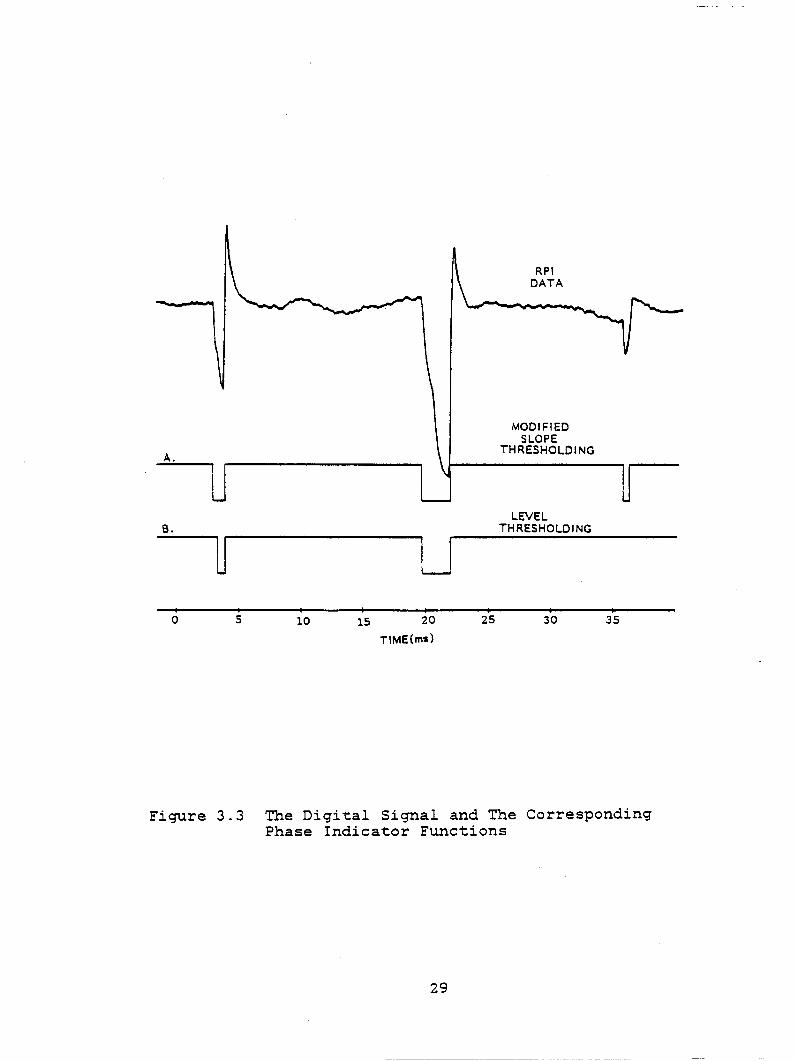
Fig. 3.3 shows an actual probe .signal with the two cor
responding phase indicator functions generated using two
different methods: curve-A by level thresholding and curve-B
by rnodified slope thresholding (note that tC-tB and tF-tD
were arbitrarily set to zero for simplicity). It can be seen
that level thresholding method triggers at delayed time, as
seen by the first bubble passage, and it misses small
bubbles, as seen by the third bubble passage.
DESCRIPTION OF COMPUTER CODES, VOIDl and VOID3
The rnodified slope thresholding method is used for
phase determination in two computer codes, VOIDl for
single-sensor probe data and VOID3 for three-sensor probe
data. Once the phase is correctly determined, the
28
A.
B.
~ 0 5
Figure 3.3
- --- - ---------
u 10 15 20 25
TIME(ms)
RPI DATA
MODIFIED SLOPE
THRESHOLOING
LEVEL THRESHOLDING
30 35
The Digital Signal and The Corresponding Phase Indicator E'unctions
29

computation of the various flow parameters is
straightforward. VOIDl computes the local void fraction, a ,
the axial mean liquid velocity, U, and the
root-mean-square(RMS) value of the velocity fluctuation
about the mean, u 2 . It also generates the peudo liquid
phase indicator function, x1n). VOID3 computes a and the
variance matrix of the liquid velocity fluctuation about the
mean, VAR(v). The phase indicator function is also generat
ed. To monitor the algorithrn, these programs also output
running statistics such as the maximum void size, the maxi
mum gas phase signal, the minimum liquid phase signal, and
the steepest slope in liquid phase.
RESULTS
VOIDl has been thoroughly tested against two-phase data
obtained on the test facility previously described. At
present .there are no other means to verify the flow parame
ters computed by VOIDl. However, the running statistics of
the program indicates that the algorithrn seems to work cor
rectly. Since only single-sensor probe data is currently
available, VOID3 was tested against hypothetical data and
was found to give the expected results.
At present, there are no systematic way of determining
the proper level and the slope threshold values available.
30

They have been determined using qualitative judgement after
visual examination of the probe output signal. A more
systematic approach may be found in the probability plot of
bath the amplitude the slope of the signal, although such a
method has not been developed to date.
31

CHAPTER 4
DIGITAL COMPUTATION OF FLOW PARAMETERS
The digital data is assumed to be a sequence of length
N, whose index ranges from 0 to N-1. The index is related to
the time through the sampling period. Throughout this
chapter index and time are used interchangably. Also the
equal sign" =" is used to mean "is computed by".
ONE DIMENSIONAL DATA
Liquid Phase Indicator Function, X(n):
= l 01
X(i) 1, otherwise
Local Void Fraction, a
N-1
a = 1 - ~ X(i)/N
i=O
Mean Liquid Phase Velocity, U:
Data points in the overshoot region, although they
belong to liquid phase, should be excluded in computing
32
(4.1)
(4.2)

liquid phase flow parameters because it is felt they do not
represent realistic liquid phase turbulence. Let us define a
pseudo liquid phase indicator function by,
~' 0, ( tB ~ i ~ tG)
x+(i) = 1, otherwise
Then, the axial mean liquid phase velocity is given by,
u = N-1 , ·~ N-1 t; x•(i)U(i)~ t; x•(iJ
(4.3)
(4.4)
where the intantaneous axial liquid phase velocity, U(i), is
computed from the data, E(i), based on the calibration.
The RMS Value of The Liquid Phase Veloci ty Fluctuation, ./ u 2 :
N-1
w =[ L i=O
., ;N-1 x•(i)(U(i)-Ü)jl t;
THREE DIMENSIONAL DATA
(4.5)
The measurement of three dimensional liquid velocity
fluctuation in two-phase flow using a three-sensor probe
33

gives three sequences of data, E1 (n), E2 (n), and E 3 (n). For
each sequence of data, the same phase determination
technique can be applied and obtain three liquid phase
indicator functions X1 ,X 2 , and X3 as well as three pseudo
liquid phase indicator functions xi(n), x;(n), and X~(n).
Local Void Fraction, a
N-1
a= 1- ~ Xt(i)/N
i=O
Reynold's Stresses:
For a given flow condition, the signal fluctuation
( 4. 6)
about the mean for sensor i, e. , is assumed to be related ~
to the velocity fluctuation by the following linear equa-
tiens,
where
el(n) = alu(n)/Ü + elv(n)/Ü + olw(n)/Ü
e2(n) = a2u(n)/Ü + e2v(n)/U + o2w(n)/Ü
ea(n) = aau(n)/Ü + eav(n)/Ü + oaw(n)/Ü
u(n), v(n), and w(n) are velocity fluctuations in
( 4. 7)
axial, radial, and azimuthal directions, respectively. The
directional sensitivities ai 1 ei 1 and oi must be deter
mined from experiment [5] . It is convenient to cast
34

equation (4.7) into matrix formas,
§(n) = A v(n)
where,
and,
Then,
e(n) = (edn),e 2 (n),e 3 (n)) T
v(n) = (u(n),v(n),w(n)) T
1 [a1 ~1 r1]
A = U cx2 ~2 r 2
cx3 ~3 r3
y(n) = A- 1 ~(n)
(4.8)
(4.9)
The variance matrix of v can be expressed in terms of the
variance matrix of E as follows.
[
U2 uv uw]
VAR(v) = uv ~ vw
wuwv~
T = ~(y Y. )
Substituting equation (4.9),
= .;,(A-1 ~eT A-1T)
= A-1 .!(.§. .§.T) A-1T
= A- 1 VAR(~) A_ 1T -
However, by definition,
VAR(~) = VAR(E_)
=,;<~ET) - E.CE;) (~(~) )T
35
(4.10)
(4.11)

where ~(E) is the expectation vector of E,
(4.12)
Thus, from equations (4.11) and (4,10),
( 4. 13)
Equations (4.12) and (4.13) are used in VOID3 to compute the
Reynold's stresses which are obtained by multiplying VAR(y)
by minus the density of the liquid phase.
Anisotropy Factors:
Recall that the ultimate goal of the on-going project
is to experimentally verify the relationship Lahey and Drew
have previously derived (2] between the void distribution
and the liquid phase turbulence structure in two-phase flow.
Although the relationship applies to flows in channels of
arbitrary cross section, at present we are interested in the
flow through a circular pipe. In cylinderical coordinates,
the relationship is given by (2],
36

r
1-q (1-a)K qq rr dr} f
F (r' )-F (r')
t r'F (r') rr
R
(4.14)
where
C 1 = constant of proportionality between liquid and
vapor phase Reynolds stresses,
K1 = liquid phase turbulent kinetic energy
= !s p 1
( U"Z +vz + w2 ) ,
E' rr = Vl 1 ( U2 + VZ: + ~ ) '
E' qq = W2 1 ( ~ + v' + w' ) ,
and C2 is the constant of integration.
The integration inside the exponent accounts for the
anisotropy of the turbulence. To determine the degree of
anisotropy, one has to measure the Reynold's stresses along
the entire radius of the conduit.
37

CHAPTER 5
SPECTRAL ANALYSIS OF DIGITAL DATA
Spectral analysis of signals from both single-sensor
and three-sensor probes provides valuable information about
the turbulence structure of the flow, about the frequency
content of the signal, and the bubble convection from one
sensor to another in the case of a three-sensor probe. The
frequency composition of the signal, in turn, determines the
minimum digitization rate required to avoid aliasing. Any
noise with characteristic frequency shows up as a
distinctive peak in the power spectrum. Thus, spectral
analysis is useful in designing the experiment.
Spectral functions are defined for continuous time
signals. Our data, however, is a digital(discrete tirne)
signal derived by periodically sarnpling the probe output
voltage. Hence, we can only estirnate the exact spectral
functions from the digital data. Accuracy of the estimates
depends mainly on the length of the data record and the
digitization rate. Ideally, both the data record length and
the digitization rate should be very large. Unfortunately,
practical considerations often determine the record length.
This chapter discusses the effects of the finite record
length of data and the digitization rate on spectral func
tions estimation.
38

The fluctuating liquid velocity at the sensor is as-
sumed to be erogodic. That is, the time average is equiva-
lent to the corresponding ensemble average. For sufficient
long record lengths, this assumption is valid as long as the
flow conditon stays constant. Throughout this chapter, it is
assumed that the flow on which the spectral anaysis is
performed is erogodic.
AUTO AND CROSS-CORRELATION FUNCTION, Rxy(t)
The cross-correlation function of two continuous time
signals, x(t) and y(t), is given by,
= lim T-+-
T
i ~ x(t)y(t+t) dt
0
( 5. 1)
When x(t) and y(t) are identical, we get an autocorrelation
function, Rx{t). Usually, the means are removed from the
signals before performing spectral anaysis. The correspond-
ing correlation functions for the fluctuating part of the
signals are called autocovariance and cross-covariance func-
tiens. Sorne of the important properties of the
autocovariance function are [6] :
R { -T) = R { T) x x ( 5. 2)
39

a 2 =R(O) (5.3) x x lim R (~) = 0 (5.4) ~..... x
For the cross-covariance function, the following property is
useful for computational purpose,
R (-t) = R (t) xy yx ( 5. 5)
AUTOCORRELATION FUNCTION AND LIQUID TURBULENCE SCALES
If a flow has a uniform mean velocity U, such that U >>
uz, the autocorrelation R (~) for the velocity fluctuation u
u(t) at a fixed point can be used to determine the so-called
integral scale of the liquid turbulence, Af' and the
dissipation scale, Àf (Appendix-A). That is,
and,
1
17 =
..
1 2R (O)U 2
u
POWER SPECTRAL DENSITY FUNCTION, Gx(f)
(5.6)
( 5. 7)
The Fourier transform of an autocorrelation function
yields the power spectral density function. That is,
40
00
-oo
R (t)exp(-j2~ft) dt x ( 5. 8)
It should be noted that Rx(t) _is an even function, and Gx(f)
is a real, even function. This symmetric property of the
autocorrelation function can be used for efficient
computation of the power spectral density function,
00
R (t)cos(2~ft) dt x ( 5. 9)
The power spectral density function can also be computed di-
rectly from the finite Fourier transform of the signal [6]. /
That is,
where
T
lim i X(f)X(f)* ~-
X(f)= ~x(t)exp(-j2~ft) dt
0
(5.10)
(5.11)
Physically, the power spectrum represents the frequency
composition of the mean square value of the signal. That is,
lim 1 ( lim 1 6f-+O 6f ~00 T
T
~x2 (t,f,U) dt )
0
(5.12)
where x(t,f,6f) is that portion of x(t) in the frequency
range from f to f+6f. Hence the mean square value is equal
41

to the total area under a plot of the power spectral density
function versus frequency. Usually the power spectral
density function is computed for only the fluctuating part
of the signal because the mean value shows up as a spike at
the orgin of the power spectra. That is,
CROSS-SPECTRAL DENSITY FUNCTION, G (f) x y
(5.13)
Just as the power spectral density function of a single
signal is the Fourier transform of the autocorrelation func-
tion, so the cross-spectral density function of a pair of
signals is the Fourier transform of the cross-correlation
function.
00
(5.14) -oo
Unlike the power spectral density function, which is real,
the cross-spectral density function is generally complex.
The typical cross-spectral density plot(ie. cross-spectrum)
consists of two parts, magnitude and phase.
42

COHERENCE FUNCTION, ~ (f) x y
To give physical significance to the cross-spectral density
function a real quantity, the coherence function is defined
as,
0 ( f) 2
x y = IG (f) 12
x y Gx(f}Gy(f)
(5.15)
The coherence function, which takes value from zero to one,
gives a measure of the correlation between x(t) and y(t) at
different frequencies. x(t) and y(t) are fully coherent at a
frequency if the coherence function at that frequency is
unity.
COMPUTATION OF CORRELATION ESTIMATES
Correlation functions as previously defined cannot be
applied directly to our data because, first, the data is a
discrete time signal derived from periodic sampling of the
analog (anemometer) output and, second, the data has finite
length. This section presents the digital estimation methods
and examines the finite length and discrete time effects
on the accuracy of the spectral estimation when the methods
is applied to our data.
For a digital signal of length N the M-point
cross-correlation estimate is given by
43

N-m-1 " 1 L /'. A R (rn) =-N x(n)y(n+m) xy -rn
n=O
, 0 s rn s M-1 (5.16)
where Ms N. Equation (5.5 ) is used to compute the
cross-correlation estimate for rn < O. The digital signals
x(n) and y(n) are related to the corresponding analog signal
by
x(n) = x(nT)
y(n) = y(nT)
where T is the sampling period. Clearly, if N is ,.
(5.17)
sufficiently large, Rxy(m) is just a uniform sampling of Rxy
( t ) • Th at i s ,
(5.18)
A
Since Rxy(m) estimates Rxy{t) exactly at M points, as long
as the sampling period is short enough to follow any erratic
behavior of the true autocorrelation, and the true
autocorrelation vanishes at t > MT, the estimation is a
good one.
Appendix-B describes how Fast Fourier Transform(FFT)
techniques can be used to efficiently compute the equation
(5.16). Computing equation (5.16) directly takes time
proportional to NM. But using FFT the computing time is
proportional to (N+M)Log 2 (N+M). For N=5120 and M=256, which
is our typical figure, the computation saving is 95%.
44
COMPUTATION OF THE POWER SPECTRUM ESTIMATE
From the autocorrelation estirnate of length M the power
spectrurn estirnate is given by
M-1
Gx(k) = T L rn=-M+l
R (rn) exp ( - j 1rrnk/M) , - M ~ k ~ M ( 5 . 19 ) x
"" Cornparing equation (5.19) with equation (5.8) Gx(k) is the
estirnate of Gx(f) at
f = k/(2MT). (5.20)
" However, unlike the autocorrelation G (k) is not the exact x
sarnpling of Gx(f) but will depend on the value of M or T
chosen.
FINITE LENGTH EFFECT
Note that except for the finite lirnits of integration,
equation (5.19) is the nurnerical equivalent of equation
(5.8). In this section, we will assume T is sufficiently
srnall to rnake the discrete tirne effect negligible and will
concentrate on the effect of finite lirnit of integration.
That is, we define
"C rn
Gx(f) = ~ Rx(t)exp(-j21Tft) dt -"(
rn
45
(5.21)

,... To see how the estimate G (f) is related to the true power x
spectral density function G (f) , we can rewrite the previx
ous equation as,
00
-oo
W(1)R (•)exp(-j2Tif1) d1 x
where W(1) is a window function defined by,
W( 1) = { 1,
0, otherwise
A
(5.22)
(5.23)
It is clear from (5.22) that Gx(f) is the Fourier transform
of the product of the window function and the
autocorrelation fuction. From the properties of Fourier
transform, multiplication in time domain is equivalent to
convolution in frequency domain. Therefore, A
Gx(f) = Gx(f)*w(f)
00
=f (5.24)
-oo
where w(f) is the Fourier transform of W(1). Fig. 5.1 shows
the rectangular window function and its Fourier transform.
The effect of convoluting the true power spectrum with the
Fourier transform of the window function is to cause
"leakage" by spreading the true power spectrum with the
weighing window function. The Fourier transform of the
46
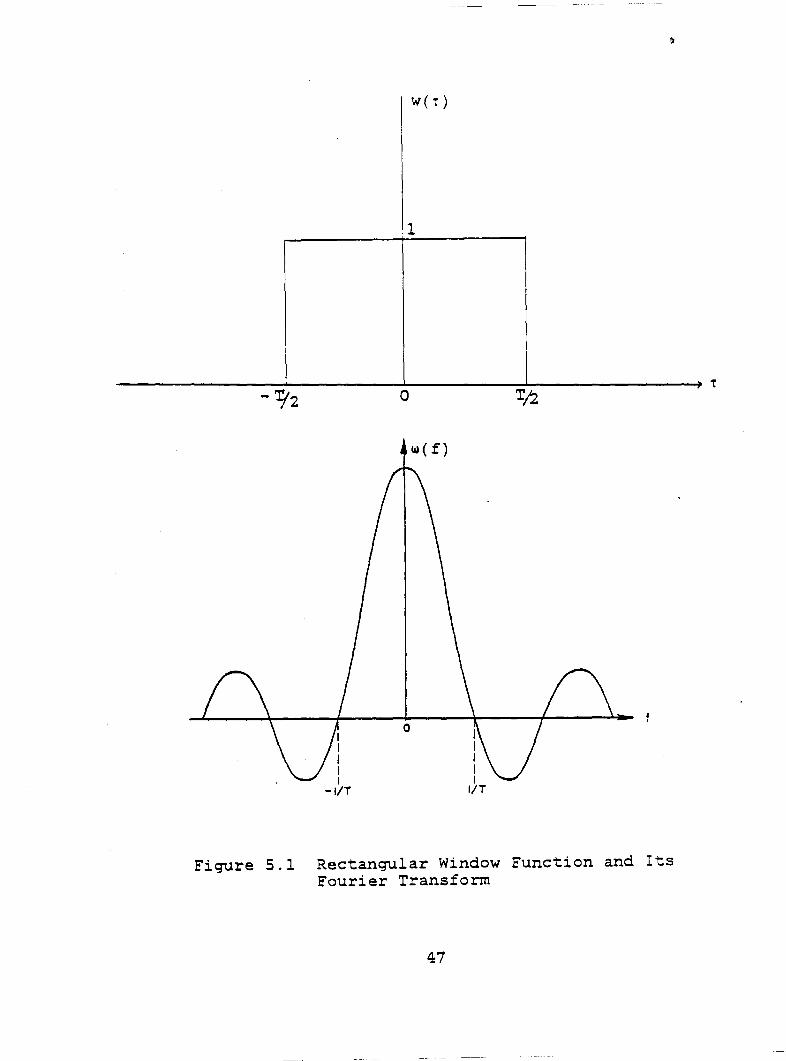
w( r)
.l
0
f.IJ(f)
Figure 5.1 Rectangular Window Function and Its Fourier Transform
47

rectangular window function shows large undesirable side
lobes. To suppress this leakage problem, the window function
must be modified in the time domain. Technique for designing
a better window function involves mainly reducing the side
lobes at the expense of broader main lobe. Table 5.1 lists
three other windows which were implemented as an option in
the computer program POWER.
DISCRETE TIME EFFECT
Let us consider a Fourier transform pair of a
continuous time signal, x(t) and X(f).
-X(f) =f x(t)exp(-j21Tft) dt (5.25)
-...
~
x(t) =f X(f)exp(j21Tft) df (5.26)
-~ A
derived by sampling Suppose a discrete ti me signal x(n) is
x(t) with period T,
" x(n) = x(nT). (5.27)
A Fourier transform pair can also be defined for the
descrete time signal and its frequency-domain representa-
ti on.
48

1(:> \{)
WINDOW TYPE
RECTANGULAR WIN DOW
BARTLETT WIN DOW
HANNING WIN DOW
HAMMING WINDOW
N-POINT WEIGHTING FUNCTION SHAPE OF THE WINDOWS
W(i) = 1
W(i) = 1 _ 2 1 i - (N+1)/2 1 N•l
2j-N-1 W(i) = 0.5 + 0.5 COS( u N-1 )
W(i) = 0.54 + 0.46 COS( 11 ~~~-1 )
~-
Table 1 List of Window Functions

.. " X(f') =
... x(n)exp(-j2~f'n) (5.28)
n=--
~ " x(n) =f .....
X(f' )exp(j2~f'n) df' (5.29)
-~
Then, the sampling theory gives the relationship between
" X(f') and X(f) as [7]
.. X( f') = 1/T 2: X( f+r/T) (5.30)
r=-..
where,
f = f'/T. (5.31)
The relationship between the continuous-time Fourier trans-
form and the Fourier transform of a sequence derived by
periodic sampling is depicted in Fig. 5.2 . The Fourier
transform of the discrete-time signal is the scaled down
version of the overlapping periodic repetitions of the A
continuous-time Fourier transform. Hence, for X(f') to
accurately ref1ect X(f), X(f) must be band limited; that is,
X(f) is zero outside a finte frequency band. Furthermore, to
recover whole range of X(f) spectrum the sampling rate must
be sufficiently high to avoid overlapping. That is,
(5.32)
where f 0 is the upper bound of the frequency band. The
50

--- -~------------------------------
FOURIER TRANSFORM OF A CONTINUOUS SIGNAL
X(f)
0 f. f
FOURIER TRANSFORM OF THE DISCRETE SIGNAL WHEN f. T > 1/2
x(n
1/T
.. ... 0 1/2 '\ f'
f. T
FOURIER TRANSFORM OF THE DISCRETE SIGNAL WHEN f. T < 1/2
x(n
1/T
1/2
Figure 5.2 Effect of Discrete Time Sampling On The Fourier Tranform of a Signal
51
minimum sampling rate, 1/T, which satisfy the inequality in
equation (5.32) is generally referred to as the "Nyquist
rate".
DETERMINATION OF DIGITIZATION RATE
In practice, truly band limited signals are rare and
the anemorneter output signal is no exception. However, X(f)
may fall rapidly past a certain frequency. In that case, a
sufficiently large sampling rate can make the folding back
from high frequency into the low frequency range of
interest, aliasing, neglegible. Initially, we digitized our
data at 10,000 samples per second. This was choosen to
resolve the rapid fall and rise of the signal during the
penetration of the phase interface. The power spectrum of
both single and two-phase signals (figure (5.11) and fig
ure(S.12)) indicates that this rate is also more than
sufficient to avoid aliasing problem; for the single-phase
signal, the spectrum falls off rapidly to 10- 4 of the maxi
mum value at the frequency of 500 Hz and then levels off;
for the two-phase siganl, the spectrum falls off to 10- 3 of
the maximum value at 1000 Hz.
52

SPECTRAL ANALYSIS OF SEGMENTED SIGNAL
In two-phase flow, the liquid phase signal is frequently
interrupted by void passages. Here, we are dealing with a
segmented signal where the data is not available between
each segment. Any attempt to interpolate the data in these
gaps will inevitably produce artificial components in the
power spectrum. We have adapted Lance's method [8] where
zeros are inserted into the missing parts. This method has
merit in that we know the effect of a zero insertion on the
"true" power spectrm.
Inserting zeros into the missing parts of data is
equivalent to applying rectangular-tooth window to the
"true" data. Note that the window function is identical to
the modified liquid phase indicator function, x+(n).
Specialize the equation (5.10) for power spectrum of
two-phase liquid velocity,
where
= liin 1/T T-+-
T * (~ u(t)X+(t)exp(-j2~ft)dt)
0
T
x (~ u(t)X+(t)exp(-j2~ft)dt) 0
* = 1/T [ T ( f) *x ( f) ] [ T ( f) *x ( f) ]
53
(5.33)
T(f) is the finite Fourier transforrn of u(t},
x(f) is the finite Fourier transforrn of x+(t).
Thus, the effect of a zero insertion is to srnooth the "true"
power spectrurn by convoluting the finite Fourier transform
of the "true" signal with the finite Fourier transform of
the pseudo liquid phase indicator function. Fig. 5.3 is the
power spectrurn of the pseudo liquid phase indicator function
of a sample two-phase flow data.
Fig. 5.4 is the schematic of the zero insertion process
employed to compute the power spectrum estimate of the
liquid phase fluctuating veloc'ity in two-phase flow. First,
the computer program VOIDl is run on the data to obtain the
mean liquid phase velocity and the pseudo liquid phase
indicator function. Second, the mean liquid phase velocity
is subtracted from the data. Third, the resulting data is
masked with the pseudo liquid phase indicator function to
insert zeros into the missing parts. Lastly, the computer
program POWER is run on the resulting data to produce the
power spectrum for two-phase flow.
DESCRIPTION OF THE SPECTRAL ANAYSIS CODE, POWER
The computer program POWER processes either a single
sequence to compute the autocorrelation function and the
power spectral density function or a pair of sequences to
54
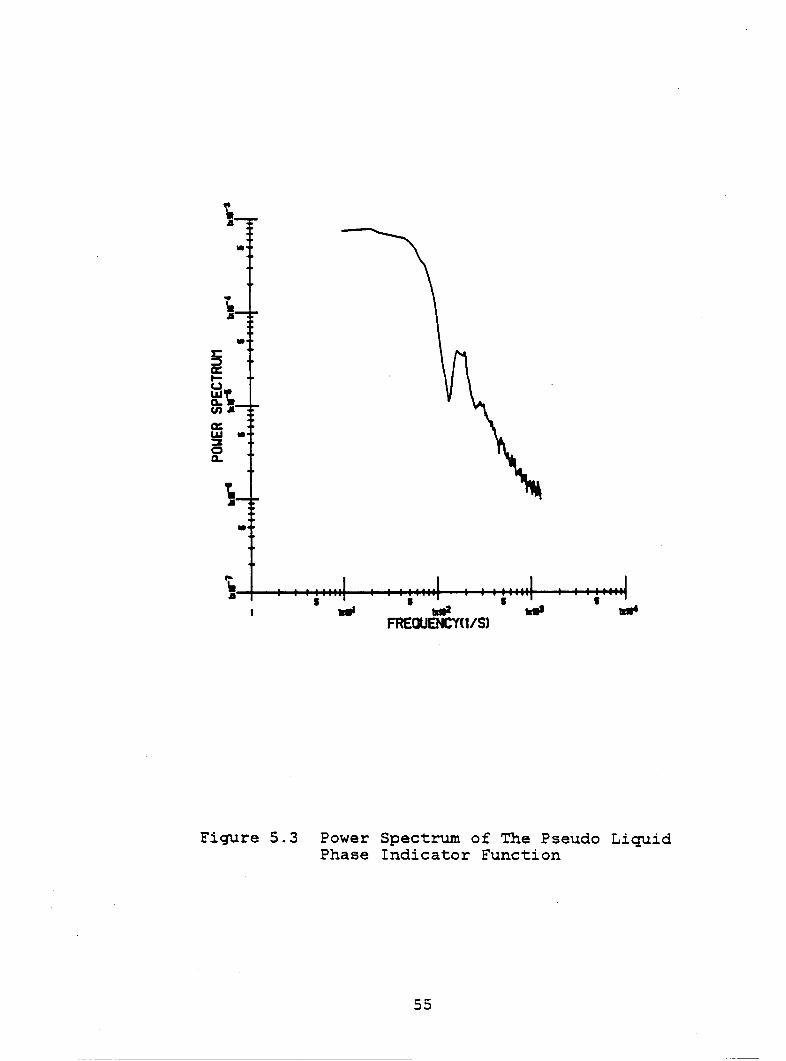
•
•
Figure 5.3 Power Spectrum of The Pseudo Liquid Phase Indicator Function
55

---------------------- --------
COMPUTE Û, X(i) AND x·(i) WITH VOID1
v SUBTRACT rJ FROM THE DATA
V INSERT ZEROS INTO THE GAS-PHASE AND THE OVERSHOOT REGION
Figure 5.4 Schematic of The Power Spectrum Computation of Two-phase Data
56

compute each one's autocorrelation and power spectral
density, the cross-correlation function, and the
cross-spectral density function. It removes the means from
the input sequences before computing the spectral functions.
Fig. 5.5 is the schematic of the computing sequence in
POWER. First the correlation functions are computed using
the FFT method outlined in Appendix-B. Then an optional
window is applied on the correlation functions to compensate
for the finite length effect before discrete Fourier trans-
form is performed to produce the power spectral density
function.
RESULTS
To test whether the spectral anaysis code POWER were
working properly, several functions whose spectral functions
are known were sampled and were used as the input to the
code. Fig. 5.6 is the autocorrelation function computed for
the sine function
x(t) = sin(t).
Fig. 5.7 is the power spectrum computed for an
exponential autocorrelation function
Rx(t) = exp(-ltl ).
Also shown on the computed power spectrum is the plot of the
Fourier transform of the the exponential function. Aliasing
57

l/1 ro
x(n)
y(n)
USE FFT TO COMPUTE ESTIMATE OF
CORRELATION FUNCTIONS
R (rn), Osm~ L-1 x y
W(m)
WINDOW USED TO REDUCE EFFECTS OF USING A FINITE LENGTH RECORD
Figure 5.5 Schematic of Computing Correlation and Power Spectrum Estimates
Gxy(k). OsksL

T<Sl
Figure 5.6 Autocorrelation of a Sine Function
59

... I: ::::) c:: 1-u t.uï 0..9 (,/),!!
c:: t.u ... ::t 0 a..
.... 1 COMPUTED !1 .li POWER SPECTRUM
... ANALYTICAL
POWER SPECTRUM
... 1 5I .li
~ztr2 5 5 5
1111"'1 t:atal FREOUENCYCl/Sl
Figure 5.7 Power Spectrum of a Exponential Autocorrelation Function
60
effect at the tailend of the computed power spectrum shows
up clearly in figure 5.7.
Fig. 5.8 is the cross-spectrum of a shifted exponential
cross-correlation function.
R {t) = exp(-lt-0.061) x y
The analytical cross-spectrum is almost indistinguishable
from the numerical function. The magnitudes are identical up
to near the tail end where the computed line deviates
slightly due to aliasing effect.
Fig. 5.9 is the autocorrelation function of actual
single-phase turbulence data and Fig. 5.10 is the
cross-correlation function of a pair of single-phase
turbulence data, one shifted by 0.008 second from the ether.
Note that the peak of the plot is slightly shifted from the
orgin towards the left. Cross-correlation functions can be
used to study the bubble convection from one sensor to ether
with a three-sensor probe.
The power spectrum of the single-phase liquid
turbulence data as shown on Fig. 5.11 exhibits the well
known slope of -5/3 in the inertial range. In contrast, the
power spectrum for the bubbly flow, as shown on Fig. 5.12 ,
exhibits a slope of -2.6, which is the same as reported by
Lance [8].
It appears that the spectral analysis code POWER is
running correctly and gives good estimates of
61
--------------
Q l/)
d
MAGNITUDE H ::J: Cl,. li)
*'""'! ("\JCI
0 1-
a Li.JCI "' N~ PHASE H? _J ... a: 's !: .!1
0:: 0 "' zl/) -N Li.Jd ... (./) 1 '5I a: .Il ::J: Cl.. "' COMPUTED FUNCTION
Cl • ANAL YTICAL FUNCTION l/)
'5I d .!1 1 s s tJtr2 br tri t till' tJ..Z
FREQUENCY
Figure 5.8 Cross-spectrurn of a Shifted Exponential Cross-correlation Function
62

TCSl
Figure 5.9 Autocorrelation Function of Single-phase Data
63

= (C
ci
f8 ci 1
~~------~----~------~------~----~ 1 -{).20 -{).12 -{).04 0.04 0.12 0.20
T(S)
Figure 5.10 Cross-correlation Function for A Pair of Shifted Single-phase Data
64

VI ........ .. .. E u -
s
SLOPE = -5/3
s,_. s
FREQUENCY(1/Sl
Figure 5.11 Power Spectrum of Single-phase Data
65

•
s s s 11.Z 11atl
s
FREOUENCYU/Sl
Figure 5.12 Power Spectrum of Two-phase Data
66
autocorrelation function, cross-correlation function, power
spectral function, and cross-spectral function. Furtherrnore,
when the code was run on our prelirninary data for both sin
gle and two-phase turbulent flow, the result agreed with the
existing results.
67

CHAPTER 6
SUMMARY AND CONCLUSIONS
An airjwater loop and ether experimental apparatus have
been prepared to calibrate the single-sensor hot film
anemometer and to measure the two-phase turbulent flow. The
electrical testing of the anemometer indicates that its
frequency response stays constant up to about 29 kHz in
single-phase turbulent flow.
A data acquisiton system consisting of a 14-channel FM
tape recorder, a 4-channel A/D converter in a HP computer,
and a IBM 3033 computer was established and its capability
to digitize two simultaneous signals at a rate in excess of
10 kHz was demonstrated.
Computer codes to process the digital data from either
a single-sensor or a three-sensor anemometer were developed
and tested aginst both actual data and hypothetical data. A
new method based on the slope thresholding with level
testing was used for phase determination. The spectral
analysis code was also implemented and was found to be work
ing correctly.
68

REFERENCES
1. Maher I. Kelada, Application of Anemometry in Two Phase Flow For Local Measurements and For the Study of Flow Behavior in The Entrance Region of a Long Vertical Pipe, Master's Thesis, University of Houston, 1977.
2. D.A. Drew and R.T. Lahey, Jr., "Phase Distribution Mechanisms in Turbulent Two-Phase Flow in Channels of Arbitrary Cross Section", J. of Fluids Engineering, Dec 1981, Vol 103.
3. Leroy M. Fingerson and Peter Freymuth, Thermal Anemometers, 1979 TSI INCORPORATED.
4. J.M. Delhaye, ''Hot-Film Anemometry in Two-Phase Flow," Froc. Eleventh National ASME/AlChe Heat Transfer Conference, Minneapolis, Minnesota, p.S8, 1969.
S. F.J. Resch, "Use of the Dual-sensor Hot-film Probe in Water Flow," DISA Information No.27, Jan. 1982.
6. Julius S. Bendat and Allan G. Piersol, Random Data: Analysis and Measurement Precedures, Wiley-Interscience, New York, 1971.
7. Alan V. Oppenheim and Ronald W. Shafer, Digital Signal Processing, Prentice-Hall Inc., Englewood Cliffs, 1975.
8. M. Lance, Contribution A L'Etude De La Turbulence Dans La Phase Liquide Des Ecoulements A Bulles, Ph.D. Thesis, L'Universite Claude Bernard De Lyon, 1979.
9. J.O. Hinze, Turbulence, 2nd ed., McGraw-Hill, Inc., 1975.
69

APPENDIX-A
LONGITUDINAL TURBULENCE LENGTH SCALES
The Integral Scale of Turbulence,Af:
Consider the longitudinal correlation coefficient de-
fined by
f(~) = u(z)u(z+~)/UZ
~~-b u(z+~)
~
L u(z)
(A. 1)
1 u
The integral scale,Af , which is a measure of the logest
connection, or correlation distance, between the velocities
at two points of the flow field is defined by [9] ,
(A. 2)
If U >> u 2 , the fluctuation at a fixed point may be imagined
to be caused by the whole turbulent flow field passing that
point as a "frozen" field. That is,
a at
- a =- uaz
70
(A. 3)

--- ---------------------------
When above condition is met(Taylor's Hypothesis), there ex-
ists a direct relationship between the longitudinal
correlation coefficient and the auto correlation function.
That is,
f(~) = R (t)/R (0) u u (A. 4)
where
~ = u '!
Substituting equation (A.4) into equation (A.2) yields
-Af = U/Ru(O)! Ru(t) dt (5.22)
0
The Dissipation Scale, Àf
! u(z) r u
If the flow is homogeneous along the mean flow direction,
then,
or,
u(z)u(z+~) = u(z-;)u(z)
u(z) au(z+~) a.t = u(z-;) au(z)
az
71
(A. 5)
Differentiating equation (A.S) with respect to ~ 1
As ~ ...,. 0 1
au( z-q aE;
= au(z-~) au(z)
au( z) az
aE; az
Thereforel at ~ = 0 1
u(z) a'u(z+$) 1 = aE; z ~=O
Substituting equation (A.l) 1
(A. 6)
(A. 7)
The shape of the longitudinal correlation coefficient
in the immediate neighbourhood of $ = 0 can be examined by
expanding f($) in a Taylor series.
f($) = f(O) + + (A. 8)
f(O) is unity by its definition. Its first derivative at the
orgin is zero because it is symmetric about the orgin.
Thereforel
f($) = 1 + +
Introduce a length Àf so that 1 for small ~ 1
f(~) = 1 -$ 2 /Àf 2
Then,
-L À 2
f = 1 a'fj
- 2 a~ 2 ~=O
(A. 9)
(A.lO)
(A.ll)
If U >> UZI equation (A.4) can be substituted in equation
(A.ll) to give
72

--------------
1 \'2
f
1 - - _2_R_(....:;O;_)"""U,.,..2
u
- -- ----- -- - --
(5.23)
Equation (5.23) can be used to determine Àf from the
autocorrelation function of a single-phase flow. To see the
physical significance of Àf substitute equation (A.7) in
equation (A.11). Then,
1 (au) 2
= -uz az (A. 12)
side of equation (A.l2), (au;az) 2 , is the mean
square of the rate of local changes of u. We may imagine
that this local changes in u is caused by the smalles~
eddies present in the turbulent flow field. Then Àf may be
considered a measure of the average dimension of the
smallest eddies. Since smallest eddies are mainly
responsible for dissipation of kinetic energy of the flow
field into beat, Àf is called the "dissipation scale".
73

APPENDIX-B
USING DISCRETE FOURIER TRANSFORM FOR CORRELATION ESTIMATES
The discrete Fourier transform(DFT) is a Fourier repre-
sentation of a finite length sequence which is itself a se-
quence rather than a continuous function. Consider a finite
length sequence x(n) of length N. A Fourier transform pair
can be defined by,
N-1
DFT[x(n)] = X(k) = ~ x(n)exp(-j2~nk(N) , 0 ~ k ~ N-1
n=O (B.1)
and,
N-1
IDFT[X(k)] = x(n) = ~ X(k)exp(j2~nk/N) , 0 ~ n ~ N-1.
n=O (B. 2)
One property of DFT is that the inverse discrete
Fourier transform(IDFT) of the product X1 (k)Xa(k) gives the
circular convolution of x 1 (n) with x,(n). That is,
N-1
IDFT[X 1 (k)X2 (k)] = ~ x 1 (m)xa (n-m)
m=O
(B.3)
where x1 (m) is an infinite periodic sequence of period N
whose first period is identical to x 1 (n). The circular
convolution of two sequences of length 4 is illustrated in
Fig. B.l.
74

y(n) x(n)
l l 0 2 3 0 2
y{n)
-3 -2 -1 0 2 3 4 5
x(-n)
1 1 1 l 0
-1 0 2 3 4 5
CIRCULAR CONVOLUTlON OF x(n) WITH y(n)
0 2 3
Figure B.l 4-Point Circular Convolution of Two Sequences
75

The key to understanding how DFT can be used to compute
Rxy(m) is to observe that Rxy(m) is a discrete convolution
of x(-n) and y(n). For finite length sequences x(n) and
* y(n), IDFT[X (k)Y(k)] gives the circular convolution of
x(-n) and y(n). To correct for this circular effect, we have
to devise a procedure in which the input sequences are
segmented and augmented with zeros so that the circular
convolution has the effect of a linear convolution. The fol-
lowing steps computes Rxy(n) ,0 s n s L, where x(n) and y(n)
are of length N, and N is divisible by L.
( 1 ) For i
(la)
= 1, 21 ... 1 N/L - 1
Form the sequences of length 2L
x(n+(i-l)L) 1 0 s n s L-1
x 1 (n) =
0 1 L S n s 2L-l
y. (n) = y(n+(i-l)L) 1 0 sn s 2L-l ~
(lb) Compute the 2L-point DFT
2L-l
X1 (k) = 2: x 1 (n)exp(-j'Trkn/L) 1 k::i:O,l, ... I2L-l
n=O
2L-l
=2: n=O
y. (n)exp(-j'Trkn/L) , k=O,l, ... ,2L-l ~
76

* (le) Compute the 2L-point IDFT of X. (k)Y. (k) J. J.
c. (n) = J.
1 2L
2L-1
L n=O
(2) Average over c. (n) J.
R ( n) x y = 1 L(N/L - 1)
N/L - 1
L i=l
C. (n) J.
1 n=O 1 ••• 1 2L-1
n=O, ... 1 L
Note that only the first L+1 enteries of c.(n) corresponds J.
to linear convolution 1 hence retained 1 and the last L-1
entries are discarded becuase they are affected by the
cirç:ular effect.
When Fast Fourier Transforrn is used to irnplernent above
DFT 1 cornputing tirne reduction of 95% in estirnating
correlation functions is achieved.
77

APPENDIX-C
HOW TO READ THE HP PRODUCED MAGNETIC TAPE WITH THE IBM
COMPUTER
Analog signal from the anemometer was first recorded on
a FM recorder. The tape was then taken to HP computer to be
played back, digitized, and the result written on a magnetic
tape. Since the data was processed by a IBM 3033 computer, a
problem arose in reading HP produced magnetic tape with the
IBM 3033 computer at RPI.
HP computer writes the magnetic tape using "ADC
Throughput" format in which records of unspecified length
are written consecutively with inter-record gaps(IRG) but
with no end-of-file(EOF) mark. These records can be
classified as either header record or data record. A single
digitization run produces a header record followed by sever-
al data records. A typical magnetic tape has following
contents:
D 1~ D D \rj H \Ij D ~ Record: l 2 3 4 5 6
where,
H - Header record
I - Inter-record gap
D - Data record
78

The header record contains such informations as the
number of channels, the record length, the number of
records, and the digitization rate. Before each digitization
run, the operator sets these sampling parameters. The header
record consists of 44 16-bit words. Among 44 words, those
words pertinent to the sampling parameters are summarized in
Table C.l.
Each data record consists of a sequence of 16-bit data
words. The actual digital data is stored in the first 12
bits of each data word in 2's complementary form, the most
significant bit being the sign bit. The lease significant 3
bits determines the overload voltage, the voltage corre-
sponding to the full scale indicated by a 0 sign bit and all
1's in the data. The content of data word is shown on Fig.
C.l.
The digital representation is slightly shifted such
that 0 volt has equal probability of producing 0 and -1 on
the data word. The relationship between the analog signal
and the corresponding di~ital representation in the data
word is illustrated in Fig. C.2. The analog signal can be
recovered from the digital data through the following
relationship,
Voltage = (Digital data + 0.5) x Overload Voltage 2047.5
79
( c. 1)
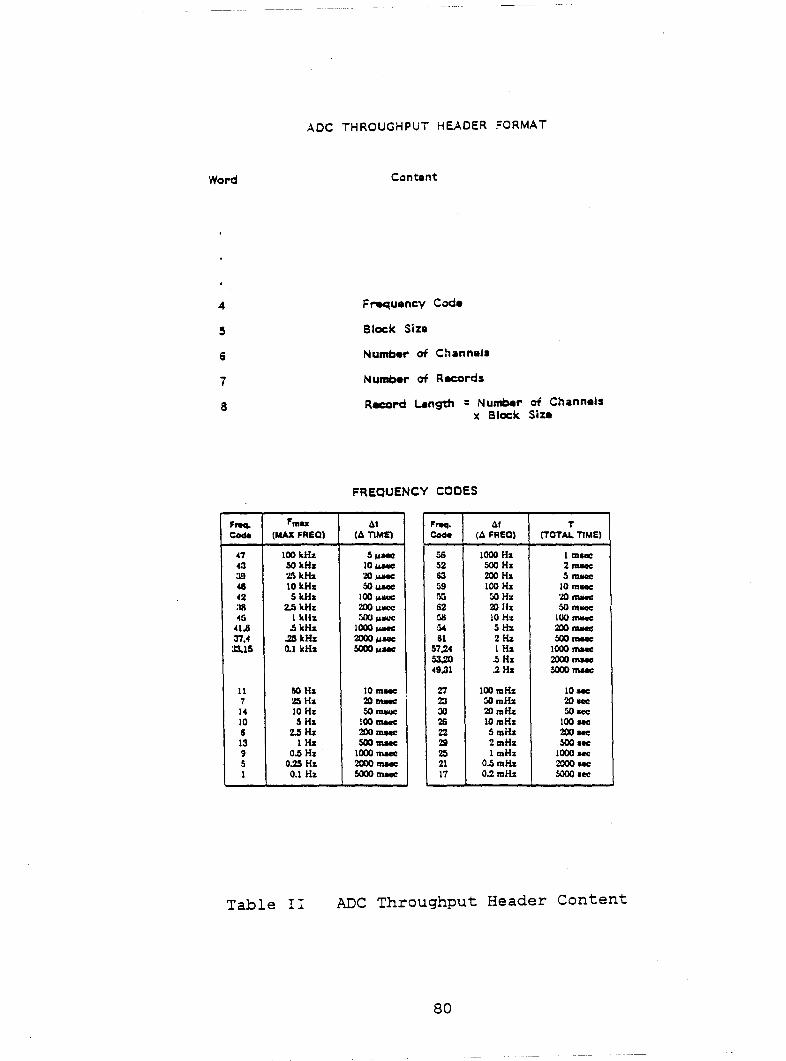
AOC THROUGHPUT HEADER FORMAT
Word Contant
4 F~uency Code
5 Black Si:z:e
6 Number af Channels
7 Numeer af Records
a Record Langth = Number af Channels x Black Si:z:e
FREQUENCY CODES
Freq. Fmu ~~ Freq. ~~ T Code (MAX FREQ) (.0. TlME} CQde (~ FR!Q) (TOTAL TlME)
~7 100kHz s .... 56 1000Hz 1maec ~:J 50kHz 10,....: 52 500Hz 2nuec :m 21; kHz 20...-: 63 200Hz SmMC 48 10kHz 50 ...... 59 100Hz IOmMC ~2 5kHz 100 lloiMlC !'15 r.o Hz "lOnwc :Ill 2.:; kHz 200 I'OICIC 62 20 lfz 50miH!C ~5 1kHz i.>OO ...... ..: 511 10Hz 100-~1.8 .5kHz 1000 ~JoNC 54 5tn 200maoec :17.4 .25kHz 2000 .. - 61 2Hz 500ruec :13,15 0.1 kHz sooo...- 57,24 1Hz IOOOtnaae
S3,20 .5Hz 2000mMC 49,31 .2Hz 5000maac
Il 110Hz 10m.- 27 100 mHz 10MC 7 25Hz 20INIIIC 2:l r.o mHz 20scc 14 10Hz 50...- JO 20 mHz r.o-10 S Hz IOOINIIIC 26 10 mHz 100 MC
6 2.5Hz 200maec 22 SmHz 200MC 13 !Hz 500maec 29 2mHz 500aec 9 0.5 Hz IOOOmaec 25 1 mHz IOOOMC 5 0.25 Hz 2000- 21 0.5mHz 2000aec 1 0.1 Hz 5000- 17 0.2mHz 5000aec:
Table II AOC Throughput Header Content
80

bit no. 15 14 13 12 1 1 10 9 8 7 6 5 4 3 2 0
ri 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
to=J~ sign 0 = + DATA 1 = -
bit 3 set = this data word be displayed in REPEAT mode.
OVERLOAD VOLTAGE switch setting
0 = +8 volts 4 = •o. 12s volt 1 = +4 volts 5 = +0.25 volt 2 = +2 volts 6 = +0.5 volt 3 = ., volt
Figure C.l Data Word Content
81

204 7 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
o 1 o!ololol olol@ ololololol -1 ,~-=,..,..1 ':"'"11 I-:'1"'T"'i:-T 11-:'1..,...1 ':"'"11 1:-:-. 1-:-1 ,~l-.,..1 ..,-1 1....,..1-1 ..-1 1....,1
-2 1 1 Il( 1 1 11 1/1/11 1 1 1 1 1 1 1 1 o 1
-2048 l1lololololotololol ololol
1. OVERLOAD VOLTAGE
...,......
.:.,-------- 0
- OVERLOAD VOLTAGE
Figure C.2 Schematic of the Relationship Between The Analog Signal and The Corresponding Digital Representation in The Data Word
82

Reading the magnetic tape and manipulating bits to
recover the data was implemented using FORTRAN statements.
Since the IBM computer has 32-bit word architecture,
half-word integer array was used to read in the data
records. Because the digital data in the data words is not
in ASCII code, the data records were read using character
data format, not integer. Then, the least significant 4 bits
of each data word were removed by dividing each integer
array by 16. If the result came out negative, one was
subtracted from the result. Lastly, the actual signal was
recovered by equation (C.l) In practice the header record
and the first three bits of each data word were not read ex
cept for checking purpose because we know these sampling pa
rameters beforehand.
83

APPENDIX-D
COMPUTER PROGRAM LISTING
84

C SUBROUTINE VOIDl c C SUBPROGRAM TO PROCESS DIGITIZED DATA FROM SINGLE CHANNEL HOT FILM C ANEMOMETER IN TWO PHASE FLOW. FLOW PARAMETERS BEING COMPUTED ARE C LIQUID PHASE MEAN VELOCITY, ITS TURBULENCE INTENSITY, AND THE VOID C FRACTION. TO SEPARATE GAS PHASE SIGNALS, COMBINATION OF SLOPE C AND LEVEL THRESHOLDING IS USED. BESIDE THE FLOW PARAMETERS THIS C SUBPROGRAM OUTPUTS SEVERAL STATISTICS TO MONITOR WORKING OF THE C ALGORITHM. c c-----------------------------------------------------------------------c C INPUT ARGUMENTS c C NORCRD - NUMBER OF DATA RECORDS C GSCALE - SCALE FACTOR OF THE DIGITIZED DATA C GZERO - ZERO OF THE DIGITIZED DATA: VOLTAGE = GSCALE*(DATA - GZERO) C A -C B -CALIBRATION CONSTANTS: VLOTAGE**2 =A+ B*VELOCITY**(l/C) c c -C ECRITl - GAS PHASE IS INITIATED WHEN TWO CONSECUTIVE VOLTAGE INCREMENTS C ARE BOTH GREATER THAN ECRITl C ECRIT2 - MINIMUM VOLTAGE DECREMENT REQUIRED TO TERMINAlE GAS PHASE C LEVEL1 - LIQUID PHASE TERMINAlES WHEN THE SIGNAL FALLS BELOW THIS LEVEL C LEVEL2 - GAS PHASE TERMINAlES WHEN THE SIGNAL RISES ABOVE THIS LEVEL C LEAD - TIME IN UNIT OF 0.1 MSEC BETWEEN THE PROBE-INTERFACE CONTACT AND PENETRATION C DELAY - INACTIVE PERIOD IN UNIT OF 0.1 MSEC FOLLOWING THE VOIDS POSTERIAL PEAK
00 C OPTION - IF EQUAL TO 1, LOCATIONS OF ALL PAIRS OF VOIDS TOUCHING EACH ln C OTHER ARE PRINTED
c C OUTPUT ARGUMENT c C GATE - VECTOR CONTAINING THE LOCATIONS OF PHASE CHANGE C -'VE SIGN INDICATES THE PHASE CHANGE FROM LIQUID TO GAS C +'VE SIGN INDICATES THE PHASE CHANGE FROM GAS TO LIQUID c C VARIABLES USED c C N - COUNTER FOR NUMBER OF DATA POINTS PROCESSED C L - COUNTER FOR NUMBER OF DATA RECORDS PROCESSED C NOBUBL - COUNTER FOR NUMBER OF VOIDS C DOUBLE - COUNTER FOR NUMBER OF PAIRS OF VOIDS TOUCHING EACH OTHER C LTIME - COUNTER FOR THE LEAD TIME C PTIME - COUNTER FOR PASSAGE liME C GAS - COUNTER FOR NUMBER OF DATA POINTS CORRESPONDING TO GAS PHASE C LIQUID - COUNTER FOR NUMBER OF DATA POINTS CORRESPONDING TO LIQUID PHASE C G( 1) - HALF LENGTH INTEGER CONTAINING 1-TH DATA POINT IN THE RECORD CE( 1) -VOLTAGE CORRESPONDING TO G( 1) C V - VELOCITY IN CM/SEC C SUM - RUNNING SUM OF VELOCITIES
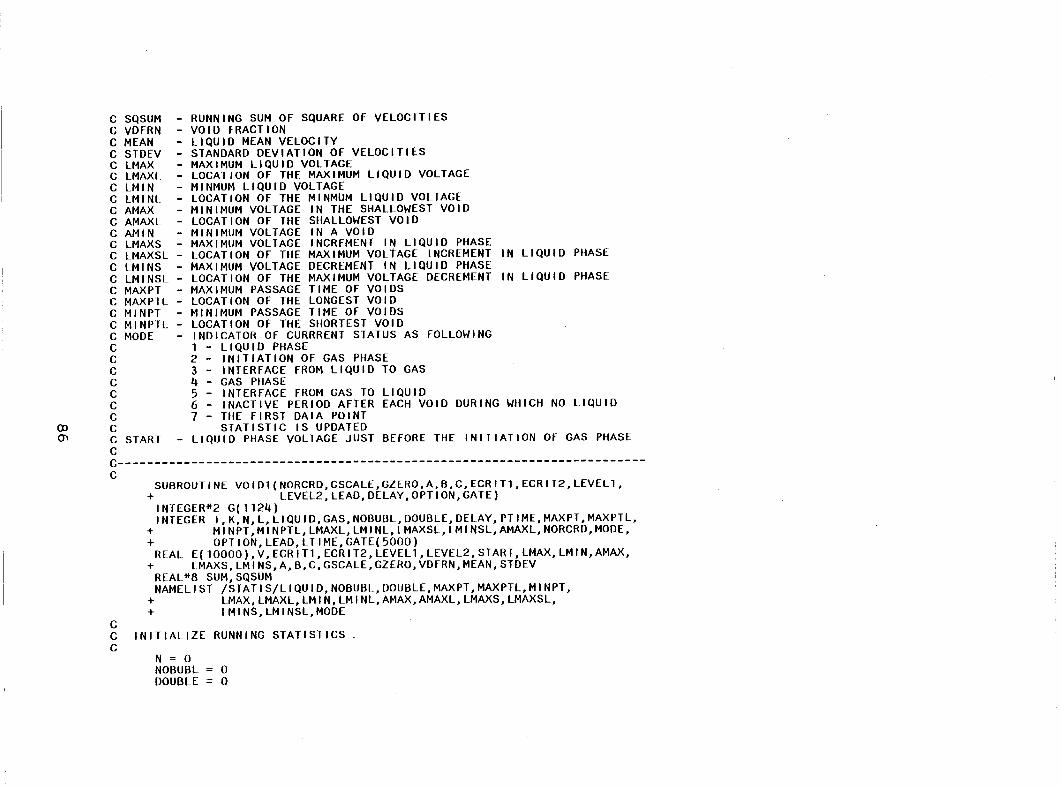
C SQSUM - RUNNING SUM Of SQUARE Of VELOCITIES C VDFRN - VOID FRACTION C MEAN - LIQUID MEAN VELOCITY C STDEV - STANDARD DEVIATION Of VELOCITIES C LMAX - MAXIMUM LIQUID VOLTAGE C LMAXL - LOCATION Of THE MAXIMUM LIQUID VOLTAGE C LMIN - MINMUM LIQUID VOLTAGE C LMINL - LOCATION Of THE MINMUM LIQUID VOLTAGE C AMAX - MINIMUM VOLTAGE IN THE SHALLOWEST VOID C AMAXL - LOCATION Of THE SHALLOWEST VOID C AMIN - MINIMUM VOLTAGE IN A VOID C LMAXS - MAXIMUM VOLTAGE INCREMENT IN LIQUID PHASE C LMAXSL - LOCATION Of THE MAXIMUM VOLTAGE INCREMENT IN LIQUID PHASE C LMINS - MAXIMUM VOLTAGE DECREMENT IN LIQUID PHASE C LMINSL - LOCATION Of THE MAXIMUM VOLTAGE DECREMENT IN LIQUID PHASE C MAXPT - MAXIMUM PASSAGE liME Of VOIDS C MAXPTL - LOCATION Of THE LONGEST VOID C MINPT - MINIMUM PASSAGE liME Of VOIDS C MINPTL - LOCATION Of THE SHORTEST VOID C MODE - INDICATOR Of CURRRENT STATUS AS FOLLOWING C 1 - LIQUID PHASE C 2 - INITIATION Of GAS PHASE C 3 - INTERFACE FROM LIQUID TO GAS C 4 - GAS PHASE C 5 - INTERFACE FROM GAS TO LIQUID C 6 - INACTIVE PERIOD AFTER EACH VOID DURING WHICH NO LIQUID C 7 - THE FIRST DATA POINT
00 C STATISTIC IS UPDATED ~ C START - LIQUID PHASE VOLTAGE JUST BEFORE THE INITIATION Of GAS PHASE
c c------------------------------------------------------------------------c
SUBROUTINE VOID1(NORCRD,GSCALE,GZERO,A,B,C,ECRIT1,ECRIT2,LEVEL1, + LEVEL2,LEAD,DELAY,OPTION,GATE)
INTEGER*2 G(1124) INTEGER I,K,N,L,LIQUID,GAS,NOBUBL,DOUBLE,DELAY,PTIME,MAXPT,MAXPTL,
+ MINPT,MINPTL,LMAXL,LMINL,LMAXSL,LMINSL,AMAXL,NORCRD,MODE, + OPTION,LEAD,LTIME,GATE(5000)
REAL E(10000),V,ECRIT1,ECRIT2,LEVEL1,LEVEL2,START,LMAX,LMIN,AMAX, + LMAXS,LMINS,A,B,C,GSCALE,GZERO,VDFRN,MEAN,STDEV
REAL*B SUM,SQSUM NAMELIST /STATIS/LIQUID,NOBUBL,DOUBLE,MAXPT,MAXPTL,MINPT,
+ LMAX,LMAXL,LMIN,LMINL,AMAX,AMAXL,LMAXS,LMAXSL, + LMINS,LMINSL,MODE
c C INITIALIZE RUNNING STATISTICS . c
N = 0 NOBUBL = 0 DOUBLE = 0

00 ....J
c
LIQU 1 D = 0 GAS = 0 SUM = O. SQSUM = O. LMAX = O. LMIN = 100. LMAXS = O. LMINS = O. MAXPT = 0 Ml NPT = 1000 AMAX = 0 LTIME = 0 If (OPTION .NE. 1) GO TO 90 WRITE(6 82)
82 FORMAT( 11','LOCATIONS OF DOUBLES') 90 CONTINUE
C SET ENTERING VALUES OF THE LOOP c
MODE = 7 K = DELAY + 1
c C PROCESS EACH DATA RECORD c
c c c
c
DO 2000 L=1,NORCRD
EACH RECORD CONTAINS 1024 DATA POINTS
READ(5,85) (G( 1 ), 1=101, 1124) 85 FORMAT(128(8A2))
C PROCESS EACH DATA POINT c
c
DO 1000 1=101,1124 G( 1 ) = G( 1 ) /16 E( 1) = GSCALE*(G( 1) + 0.5- GZERO) N = N + 1
C PROCESS THE DATA POINT ACCORDING TO CURRENT STATUS c
GO T0(100,200,300,400,500,600,70),MODE c C THE FIRST DATA POINT c
70 CONTINUE IF(E( 1) .LE. LEVELl) GO TO 80
NG = 1 GATE(NG) = LTIME = 0 MODE = 1
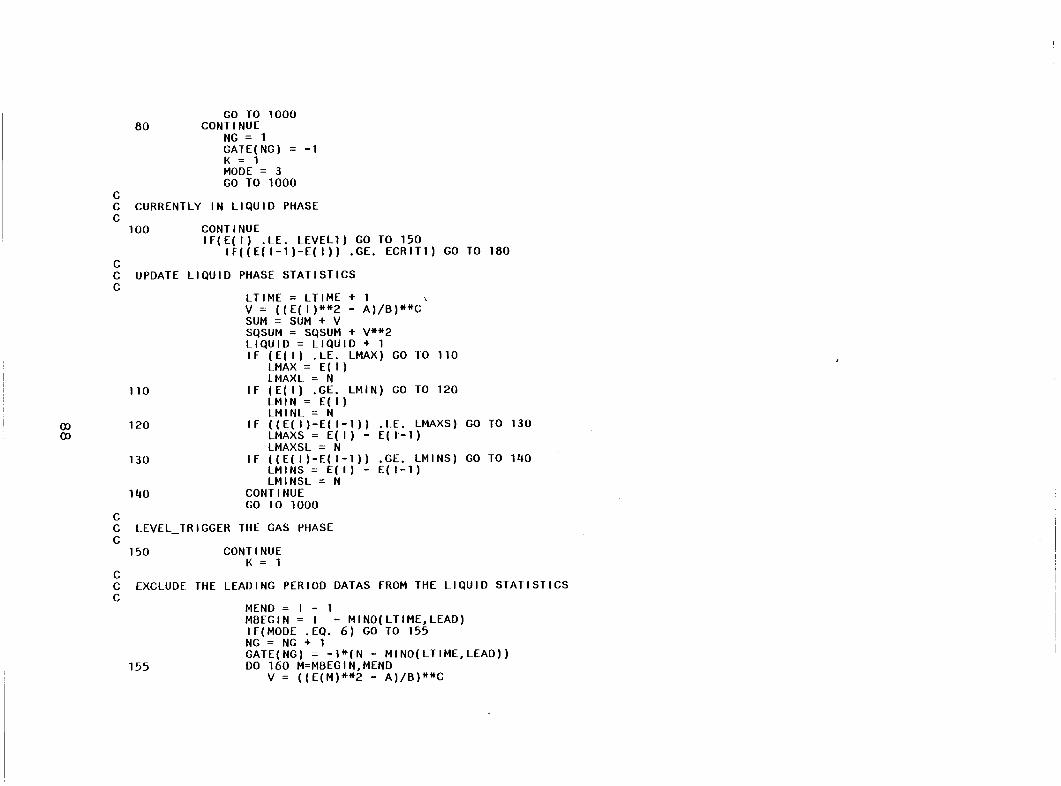
00 00
c
GO TO 1000 80 CONTINUE
NG = 1 GA TE ( NG) = -1 1< = 1 MODE = 3 GO TO 1000
C CURRENTLY IN LIQUID PHASE c
100 CONTINUE
c
IF(E( 1) .LE. LEVELl) GO TO 150 IF((E(I-1)-E(I)) .GE. ECRITl) GO TO 180
C UPDATE LIQUID PHASE STATISTICS c
110
120
130
140
c
LTIME = LTIME + 1 V= ((E( 1)**2- A)/B)**C SUM = SUM + V SQSUM = SQSUM + V**2 LIQUID = LIQUID + 1 IF (E( 1) .LE. LMAX) GO TO 110
LMAX = E( 1) LMAXL = N
1 F ( E ( 1 ) . GE. LM 1 N) GO TO 120 LMI N = E( 1) LMINL = N
IF ((E(I)-E(I-1)) .LE. LMAXS) GO TO 130 LMAXS = E ( 1 ) - E ( 1·-1 ) LMAXSL = N
IF ((E(I)-E(I-1)) .GE. LMINS) GO TO 140 LM 1 N S = E ( 1 ) - E ( 1 -1 ) LMINSL = N
CONTINUE GO TO 1000
C LEVEL TRIGGER THE GAS PHASE c -150
c
CONTINUE K = 1
C EXCLUDE THE LEADING PERIOD DATAS FROM THE LIQUID STATISTICS c
155
MEND = 1 - 1 MBEGIN = 1 - MINO(LTIME,LEAD) IF(MODE .EQ. 6) GO TO 155 NG = NG + 1 GATE(NG) = -l*(N- MINO(LTIME,LEAD)) DO 160 M=MBEGIN,MEND
V= ((E(M)**2- A)/B)**C

ro \{)
160
c
SUM = SUM - V SQSUM = SQSUM - V**2 LIQUID = LIQUID - 1 GAS = GAS + 1
CONTINUE MODE = 3 START = E( 1-1) GO TO 1000
C SLOPE TRIGGER THE GAS PHASE c -
c
180 CONTINUE MODE = 2 GO TO 1000
C CURRENTLY IN THE BEGINNING OF LIQUID TO GAS INTERFACE c
c
200 CONTINUE IF((E(I-1)-E(I)) .LT. ECRITl .AND. E(l) .GT. LEVELl)GOTO 250
START = E( 1-2) K = 2 MODE = 3
C EXCLUDE THE LEADING PERIOD DATA FROM THE LIQUID STATISTICS c
220
c
MEND = 1 - 2 MBEGIN = 1 - 1 - MINO(LTIME,LEAD) NG = NG + 1 GATE(NG) = -1*(N- 1 - MINO(LTIME,LEAD)) DO 220 M=MBEGIN,MEND
V= ((E(M)**2- A)/B)**C SUM = SUM - V SQSUM = SQSUM - V**2 LIQUID = LIQUID - 1 GAS = GAS + 1
CONTINUE LTIME = 0 GO TO 1000
C SINCE THE SECOND DECREMENT IS SMALLER THAN ECRIT1, GO BACK TO LIQUID PHASE c
250 CONTINUE DO 280 M=1,2
J = 1 - M + 1 LTIME = LTIME + 1 V= ((E(J)**2- A)/B)**C SUM = SUM + V SQSUM = SQSUM + V**2 LIQUID = LIQUID + 1 IF (E(J) .LE. LMAX) GO TO 272
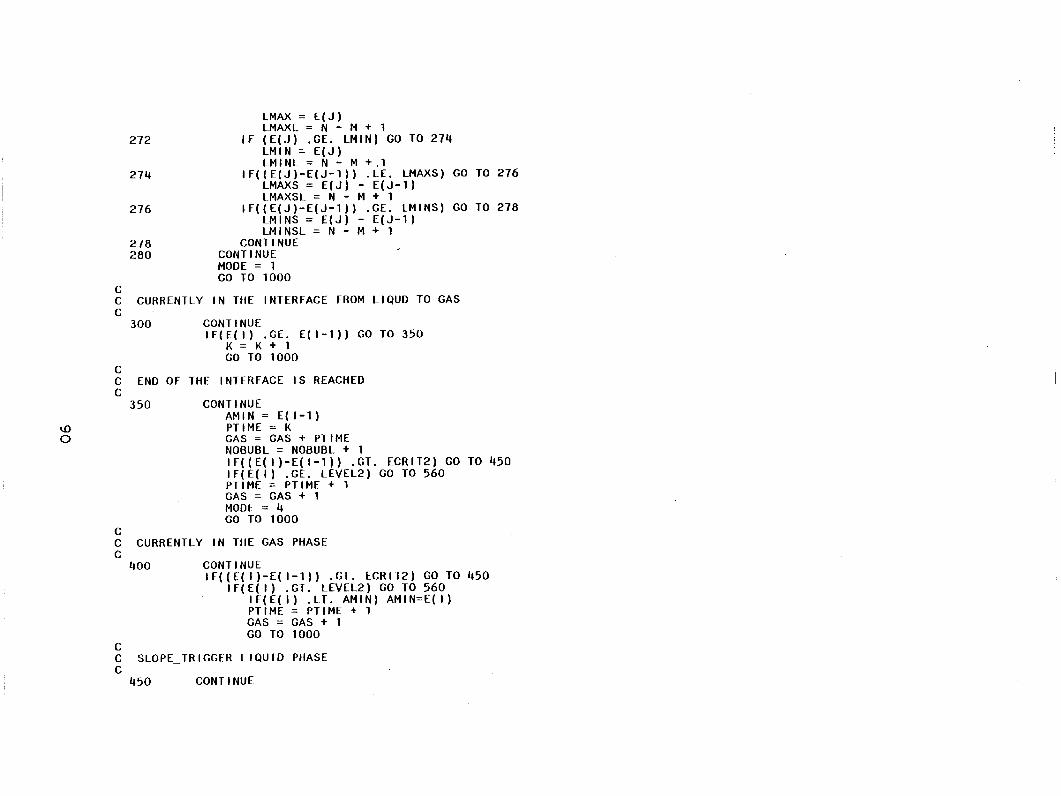
~ 0
c
272
274
276
278 280
LMAX = E( J) LMAXL = N - M + 1
If (E(J) .GE. LMIN) GO TO 274 LMI N = E(J) LMINL = N- M +.1
lf((E(J)-E(J-1)) .LE. LMAXS) GO TO 276 LMAXS = E(J) - E(J-1) LMAXSL = N - M + 1
lf((E(J)-E(J-1)) .GE. LMINS) GO TO 278 LMINS = E(J) - E(J-1) LMINSL = N - M + 1
CONTINUE CONTINUE MODE = 1 GO TO 1000
C CURRENTLY IN THE INTERFACE FROM LIQUD TO GAS c
c
300 CONTINUE IF(E(I) .GE. E(l-1)) GO TO 350
K = K + 1 GO TO 1000
C END OF THE INTERFACE IS REACHED c
350
c
CONTINUE AMIN = E( 1-1) PTIME = K GAS = GAS + PTIME NOBUBL = NOBUBL + 1 IF((E(I)-E(I-1)) .GT. ECRIT2) GO TO 450 IF(E( 1) .GE. LEVEL2) GO TO 560 PTIME = PTIME + 1 GAS = GAS + 1 MODE = 4 GO TO 1000
C CURRENTLY IN TllE GAS PHASE c
c
400 CONTINUE IF((E(I)-E(I-1)) .GT. ECRIT2) GO TO 450
IF(E( 1) .GT. LEVEL2) GO TO 560 1 f ( E ( 1 ) . l T. AM 1 N ) AM 1 N= E ( 1 ) PTIME = PTIME + 1 GAS = GAS + 1 GO TO 1000
C SLOPE TRIGGER LIQUID PHASE c -
450 CONTINUE

c
K = 1 MODE = 5 GO TO 1000
C CURRENTLY IN THE INTERFACE FROM GAS TO LIQUID PHASE c
c
500 CONTINUE lf(E(I) .LT. E(l-1)) GO TO 550
K = K + 1 GO TO 1000
C CHECK WHETHER END Of THE VOID PEAKS HIGHER THAN THE BEGINNING c
550 CONTINUE lf(E( l-1) .GT. START) GO TO 560
c C GO BACK TO THE GAS PHASE c
551
c
K = K + PTIME + 1 GAS = GAS - PTIME DOUBLE = DOUBLE + 1 If (OPTION .EQ. 1) WRITE(6,551) N FORMAT( lOX, 110) MODE = 3 GO TO 1000
C TERMINAlE THE GAS PHASE 1.0 c 1-' 560 CONTINUE
If (PTIME .LE. MAXPT) GO TO 562 MAXPT = PTIME MAXPTL = N
562 If (PTIME .GE. MINPT) GO TO 564 MINPT =PTIME MINPTL = N
564 If (AMIN .LE. AMAX) GO TO 566 AMAX = AMIN AMAXL = N
566 CONTINUE K = 1 MODE = 6 GO TO 1000
c C CURRENTLY IN THE DELAY PERIOD c
600 CONTINUE K = K + 1 If (K .GT. DELAY) GO TO 650
1 f ( E( 1 ) . LE. LEVELl) GO TO 150 GO TO 1000

U> N
c C DELAY TERMINATED. START TO UPDATE LIQUID STATISTICS c
650
1000 c
CONTINUE LTIME = 0 MODE = 1 NG = NG + 1 GATE(NG) = N + 1 GO TO 1000
CONTINUE
c PREPARE TO READ IN THE NEXT DATA RECORD c
1500 2000
c
DO 1500 1=1, 100 E(l) = E(1024+1)
CONTINUE CONTINUE
c CALCULATE TWO PHASE FLOW PARAMETERS c
c
MEAN = SUM/LIQUID STDEV = DSQRT(SQSUM/LIQUID- MEAN**2) VDFRN = FLOAT(GAS)/N
C PRINT OUT THE FLOW PARAMETERS AND THE STATISTICS c
2100
2200
2300
2400
WRITE(6,2100) MEAN FORMAT(1X,'MEAN AXIAL LIQUID VELOCITY IS ',F6.3, 1 CM/SEC') WRITE(6,2200) STDEV FORMAT(1X, 'STANDARD DEVIATION OF THE VELOCITY IS ',F6.3, 'CM/SEC') WRITE(6,2300) VDFRN FORMAT(lX,'VOID FRACTION IS 1 ,F6.5) WRITE(6 12400) FORMAT( O', 1
')
WRITE(6,STATIS) NG = NG + 1 GATE(NG) = 0 RETURN END
C SUBROUTINE VOID3 c C SUBPROGRAM TO PROCESS DIGITIZED DATA FROM THREE CHANNEL HOT FILM C ANEMOMETER IN TWO PHASE FLOW. FLOW PARAMETERS BEING COMPUTED ARE C TlfE VARIANCE MATRIX Of TlfE TlfREE DIMENSIONAL LIQUID PHASE VELOCITY C AND TIIE VOID FRACTION. TO SEPARATE GAS PlfASE SIGNALS, COMBINATION C Of SLOPE AND LEVEL TlfRESifOLDING IS USED. c c--------------------------------~--------------------------------------c C INPUT ARGUMENTS c C NORCRD - NUMBER Of DATA RECORDS C GSCALE(3) - SCALE FACTOR Of TlfE DIGITIZED DATA FOR EACif CHANNEL C GZER0(3) - ZERO Of THE DIGITIZED DATA: VOLTAGE= GSCALE*(DATA- GZERO) C A(3,3) - CALIBRATION MATRIX C ECRIT1(3) - GAS PlfASE IS INITIATED WlfEN TWO CONSECUTIVE VOLTAGE INCRE-e MENTS ARE BOTH GREATER TlfAN ECRIT1 C ECRIT2(3) -MINIMUM VOLTAGE DECREMENT REQUIRED TO TERMINAlE GAS PHASE C LEVEL1(3) - LIQUID PlfASE TERMINAlES WHEN TlfE SIGNAL FALLS BELOW TlfiS LEVEL C LEVEL2(3) - GAS PlfASE TERMINAlES WHEN TlfE SIGNAL RISES ABOVE TlfiS LEVEL C LEAD - TIME IN UNIT Of 0.1 MSEC BETWEEN THE PROBE-INTERFACE CONTACT AND PENETRATION C DELAY - INACTIVE PERIOD IN UNIT Of 0.1 MSEC FOLLOWING TlfE VOIDS POSTERIAL PEAK C OPTION - If EQUALS TO 1, LOCATIONS Of ALL VOID PAIRS TOUCHING EACif C OTifER ARE PRINTED c C OUTPUT ARGUMENT
~ c W C GATE - VECTOR CONTAINING THE LOCATIONS OF TlfE PifAS[ CHANGE
C -'VE SIGN TO INDICATE TlfE PHASE CHANGE FROM LIQUID TO GAS C +'VE SIGN TO INDICATE THE PHASE CHANGE FROM GAS TO LIQUID c C VARIABLES USED c C N - COUNTER FOR NUMBER Of DATA POINTS PROCESS (EACif DATA PO-e INT CONSISTS Of TlfREE DIGTIZED SIGNALS FROM TlfREE CHANNELS) C L - COUNTER FOR NUMBER Of DATA RECORDS PROCESSED C GAS1 - COUNTER FOR NUMBER Of DATA POINTS CORRESPONDING TO GAS PHASE C GAS2 - COUNTER FOR NUMBER Of DATA POINTS CORRESPONDING TO PSEUDO-C GAS PlfASE C LIQUID - COUNTER FOR NUMBER Of DATA POINTS CORRESPONDING TO LIQUID PHASE C G(3, 1) - lfALF LENGTif INTEGER CONTAINING 1-Tif DATA POINT IN THE RECORD C LTIME - COUNTER FOR THE LEAD TIME C IND - LEAD TIME INDICATOR C § 0 - NO LEAD TIME C 1 - LEAD TIME UPTO TlfE PREVIOUS DATA C 2 - LEAD TIME UPTO TlfE SECOND PREVIOUS DATA C E(3, 1) -VOLTAGE CORRESPONDING TO G( 1) C VDFRN1 - VOID FRACTION C VDFRN2 - PSEUDO-VOID FRACTION

c c c c c c c c c c c c
EMEAN(3) EVAR(3,3) VVAR(3,3) TEMP(3,3) MODE(3)
C START(3) c
- MEAN VECTOR Of THE VOLTAGES - VARIANCE MATRIX Of THE VOLTAGES - VARIANCE MATRIX OF THE VOLTAGES - TEMPORARY STORAGE SPACES - INDICATOR Of CURRRENT STATUS AS
1 - LIQUID PHASE 2 - INITIATION Of GAS PHASE 3 - INTERFACE FROM LIQUID TO GAS 4 - GAS PHASE 5 - INTERFACE FROM GAS TO LIQUID 6 - INACTIVE PERIOD AfTER EACH VOID
STATISTIC IS UPDATED - LIQUID PHASE VOLTAGE JUSt BEFORE
FOLLOWING
DURING WHICH NO LIQUID
THE INITIATION Of GAS PHASE
c------------------------------------------------------------------------c SUBROUTINE VOID3(NORCRD,GSCALE,GZERO,A,ECRIT1,ECRIT2,LEVEL1,
+ LEVEL2,LEAD,DELAY,OPTION,GATE) INTEGER*2 G(3,1124) INTEGER R,N,L,LIQUID,GAS1,GAS2,DELAY,NORCRD,MODE(3),0PTION
+ , 11, 12,K(3),LEAD,LTIME, IND,FLAG,GATE(5000) REAL E(3,10000),ECRIT1(3),ECRIT2(3),LEVEL1(3),LEVEL2(3),START(3),
+ A(3,3),GSCALE(3),GZER0(3),VDfRN1,VDfRN2,VVAR(3,3),TEMP(3,3) REAL*8 EMEAN(3),EVAR(3,3) LOGICAL LPHASE(3),GPHASE(3)
c C INITIALIZE RUNNING STATISTICS
1.0 c .P. N=O
c
LIQU 1 D = 0 GAS1 = 0 GAS2 = 0 IND = 0 fLAG = 0 LT IME = 0 GATE(1) = NG = 1 DO 50 1=1,3
MODE( 1) = 6 K( 1 ) = DELAY + 1 DO 45 J=1,3
EVAR( I,J) =O. VV AR ( 1 , J ) = 0. TEMP(I,J) =O.
1t5 CONT 1 NUE 50 CONTINUE
C PROCESS EACH DATA RECORD c
DO 2000 L=l,NORCRD

\0 U1
c C EACH RECORD CONTAINS 1024 SETS Of DATA POINTS c
READ(5,85)(G( 1,1 ),1=101,1124) 85 FORMAT(128(8A2))
c C PROCESS EACH DATA POINT c
c
DO 1000 1=101,1124 N = N + 1 G(2,1) = G(1,1) G( 3, 1) = G( 1, 1) DO 900 R=1,3
LPHASE(R) = .FALSE. GPHASE(R) = .FALSE. G(R,I) = G(R,I )/16 E(R,I) = GSCALE(R)*(G(R,I) + 0.5- GZERO(R))
C PROCESS THE DATA POINT ACCORDING TO CURRENT STATUS c
MD = MODE(R) GO T0(100,200,300,400,500,600),MD
c C CURRENTLV IN LJQUJD PHASE c
100
c
CONTINUE lf((E(R,I-1)-E(R,I)) .GE. ECRITl(R)) GO TO 180
lf(E(R,I) .LE. lEVEll(R)) GO TO 150 LPHASE(R) = .TRUE. GO TO 900
C lEVEl TRIGGER THE GAS PHASE c -150
c
CONTINUE MODE(R) = 3 If (flAG .EQ. 0) IND = GPHASE(R) = .TRUE. START(R) = E(R, 1-1) GO TO 900
C SLOPE TRJGGER THE GAS PHASE c -
c
180 CONTINUE MODE(R) = 2 GPHASE(R) = .TRUE. GO TO 900
C CURRENTLV IN THE BEGINNING Of LIQUID TO GAS INTERFACE c
200 CONTINUE
1.0 (}'\
c
IF((E(R,I-1)-E(R,I)) .LT. ECRITl(R) .AND. E(R,I) .GT. + LEVEL1(R)) GO TO 250
START(R) = E(R,I-2) MODE(R) = 3 IF (FLAG .EQ. -1) IND = 2 GPHASE(R) = .TRUE. GO TO 900
C SINCE THE SECOND DECREMENT IS SMALLER THAN ECRIT1(R), GO BACK TO LIQUIO PHASE c
250
c
CONTINUE MODE(R) = LPHASE(R) GO TO 900
. TRUE.
C CURRENTLY IN THE INTERFACE FROM LIQUD TO GAS c
c
300 CONTINUE IF(E(R,I) .GE. E(R,I-1)) GO TO 350
GPHASE(R) = .TRUE. GO TO 900
C END OF THE INTERFACE IS REACHED c
350
c
CONTINUE IF((E(R,I)-E(R,I-1)) .GT. ECRIT2(R)) GO TO 450 IF(E(R,I) .GE. LEVEL2(R)) GO TO 560 MODE(R) = 4 GPHASE(R) = .TRUE. GO TO 900
C CURRENTLY IN THE GAS PHASE c
c
400 CONTINUE IF((E(R,I)-E(R,I-1)) .GT. ECRIT2(R)) GO TO 450
1 F( E( R. 1) • GT. LEVEL2( R)) GO TO 560 GPHASE(R) = .TRUE. GO TO 900
C SLOPE TRIGGER LIQUID PHASE c -
c
450 CONTINUE MODE(R) = 5 GO TO 900
C CURRENTLY IN THE INTERFACE FROM GAS TO LIQUID PHASE c
500 CONTINUE IF(E(R,I) .LT. E(R,I-1)) GO TO 550
GO TO 900

\{) -....]
c C CHECK WHETHER END Of THE VOID PEAKS HIGHER THAN THE BEGINNING c
550 CONTINUE lf(E(R, l-1) .GT. START(R)) GO TO 560
c C GO BACK TO THE GAS PHASE c
c c c
c c c
c c c
c
551 552
If (OPTION .NE. 1) GO TO 552 LT = R*l.E6 + N WRITE(6,551) LT FORMAT( 10X, 110)
CONTINUE MODE(R) = 3 GPHASE(R) = .TRUE. GO TO 900
TERMINAlE THE GAS PHASE
560 CONTINUE K( R) = 1 MODE(R) = 6 GO TO 900
CURRENTLY IN THE DELAY PERIOD
600 CONTINUE K(R) = K(R) + 1 If (K(R) .GT. DELAY) GO TO 650
If (E(R,I) .LE. LEVELl(R)) GO TO 630 GO TO 900
LEVEL_TRIGGER THE GAS PHASE
630 CONTINUE K( R) = 1 MODE(R) = 3 GPHASE(R) = .TRUE. GO TO 900
C DELAY TERMINATED. START TO UPDATE LIQUID STATISTICS c
c
650 CONTINUE MODE(R) = GO TO 900
900 CONTINUE
C EXCLUDE THE LEADING PERIOD DATA FROM THE LIQUID PHASE STATISTICS c
If( INO .EQ. 0) GO TO 909

c
MEND = 1 - IND MBEGIN = 1 - IND- MINO(LTIME,LEAD) + 1 DO 908 M=MBEGIN,MEND
LIQUID = LIQUID - 1 GAS1 = GAS1 + 1 DO 907 11=1,3
EMEAN( 11 ) = EMEAN( 11) - E( 11, M) DO 906 12=1,3
EVAR( 11,12) = EVAR( 11,12) - E( 11,M)*E( 12,M) 906 CONTINUE 907 CONTINUE 908 CONTINUE
IND = 0 GO TO 950
C If ALL THREE SENSORS ARE IN LIQUID, UPDATE THE MEAN AND VARIANCE c
909 If( .NOT. LPHASE(1) .OR .. NOT. LPHASE(2) .OR .. NOT. + LPHASE(3)) GO TO 940
fLAG = 0 LIQUID = LIQUID + 1 LTIME = LTIME + 1 DO 910 11=1,3
EMEAN(11) = EMEAN(I1) + E(l1,1) DO 91 5 1 2= 1 , 3
EVAR(I1,12) = EVAR(I1,12) + E(11,1)*E(I2,1) 915 CONTINUE
~ 910 CONTINUE 00 lf(GATE(NG) .GT. 0) GO TO 1000
NG = NG + 1 GATE(NG) = N GO TO 1000
c C If ALL THREE SENSORS ARE IN GAS, INCREMENT THE NUMBER Of VOIDS c
940
950
980
1000 c
+
+
lf(GATE(NG) .LT. 0) GO TO 950 NG = NG + 1 GATE(NG) = -1*N fLAG = fLAG - 1 lf(fLAG .NE. -1) LTIME = 0 lf(.NOT. GPHASE(1) .OR .. NOT. GPHASE(2) .OR .. NOT.
GPHASE(3)) GO TO 980 GAS1 = GAS1 + 1 GO TO 1000
If( .NOT. GPHASE(1) .AND .. NOT. GPHASE(2) .AND .. NOT. GPHASE(3)) GO TO 1000 GAS2 = GAS2 + 1
CONTINUE
c PREPARE TO READ IN THE NEXT DATA RECORD

c
c
1300 1500 2000
DO 1500 1=1,100 DO 1300 J=1,3
E(J,I) = E(J,1024+1) .CONTINUE
CONTINUE CONTINUE
C COMPUTE THE VOID fRACTION c
c
VDFRNl = fLOAT(GASl)/N VDFRN2 = FLOAT(GAS2)/N
C COMPUTE THE MEAN AND VARIANCE Of THE VOLTAGE READINGS c
DO 2100 11=1,3 EMEAN( 11) = EMEAN( 11)/LIQUID DO 2200 12=1,3
2200 2100
c
EVAR( 11, 12) = EVAR( 11, 12)/LIQUID CONTINUE
CONTINUE
DO 2300 11=1,3 DO 2400 12=1,3
EVAR(I1,12) = EVAR(I1,12)- EMEAN(Il)*EMEAN(12) 2400 CONTINUE 2300 CONTINUE
\!) c \0 C RELATE THE VOLTAGE VARIANCE TO THE VELOCITY VARIANCE
c
c
c
2700 2600 2500
DO 2500 11=1,3 DO 2600 12=1,3
DO 2700 13=1,3 TEMP( 11, 12)
CONTINUE CONTINUE
CONTINUE
DO 2800 1 1 = 1 , 3 DO 2900 12=1,3
DO 3000 13=1,3
EVAR( 11, 13)*A( 12, 13) + TEMP( 11, 12)
VVAR( 11, 12) = VVAR( 11, 12) +A( 11, 13)*TEMP( 13, 12) 3000 CONTINUE 2900 CONTINUE 2800 CONTINUE
C PRINT OUT THE RESULTS c
WRITE(6 3100) VDFRN1 3100 FORMAT('O','VOID FRACTION IS ',f6.5)

l-' 0 0
WRITE(6,3200) VDFRN2 3200 FORMAT(1X, 1 PSEUDO-VOID FRACTION IS 1 ,F6.5)
WRITE(6 3300) 3300 FORMAT( 10 1
,1 THE VELOCITV VARIANCE MATRIX IS 1
)
DO 3600 1=1,3 WRITE(6,3400) (VVAR( I,J).J=1,3)
3600 CONTINUE 3400 FORMAT( 1 0 1 ,5X,F6.3,5X,F6.3,5X,F6.3)
NG = NG + 1 GATE(NG) = 0 RETURN END

...... 0 ......
c-----------------------------------------------------------------------c c c c c c c c
SUBROUTINE POWER
ESTIMATES THE MEANS, VARIANCES, AUTOCOVARIANCES, CROSS-COVARIANCE, POWER SPECTRA, AND CROSS-SPECTRUM Of ONE OR TWO STATIONARV liME SERIES. FAST FOURIER TRANSFORM(ffT) WAS USED FOR ALL ESTIMATES EXCEPTS FOR THE MEANS AND THE VARIANCES.
c-----------------------------------------------------------------------c c c
INPUT ARGUMENTS
c x - VECTOR Of LENGTH N CONTAINING THE FIRST liME SERIES c v - VECTOR Of LENGTH N CONTAINING THE SECOND liME SERIES C N - LENGTH Of THE liME SERIES. N MUST BE EVENLV DIVISIBLE BV L. C L - SPECTRAL COMPUTATIONS ARE AT L+l FREQUENCIES. MUST BE A POWER
Of 2. c c c c c
PERIOD - liME INTERVAL BETWEEN EACH SAMPLES IN THE liME SERIES IND - If GREATER THAN ZERO, THEN ONLV ONE liME SERIES, X , IS THE
c c C IWIND c c c c
INPUT AND PSX, XACOV,XMEAN, AND XVAR ARE THE OUTPUT. If LESS OR EQUAL TO ZERO, THEN TWO liME SERIES,X AND V, ARE THE INPUT AND PSX, PSV, XPS, XACOV, VACOV, XCOV, XMEAN,VMEAN,XVAR,VVAR, AND COHE ARE THE OUTPUT.
- TYPE Of WINDOW USED TO SMOOTH THE POWER SPECTRA ESTIMATE 1 - RECTANGULAR WINDOW 2 - BARTLETT WINDOW 3 - HANNING WINDOW 4 - HAMMING WINDOW
c c c
OUTPUT ARGUMENTS
C PSX c c C PSV C XPS c c c C COli[ C XACOV c c c c c c c c
VACOV xcov XMEAN VMEAN XVAR YVAR
- VECTOR Of LENGTH L+l CONTAINING THE SPECTRAL ESTIMATE OF X AT FREQUENCIES F(l) = ( I-1)/(2*L*T) WHERE T IS THE SAMPLING PERIOD
- VECTOR OF LENGTH L+l CONTAINING TIIE SPECTRAL ESTIMATE OF V - THE FIRST L+l LOCATIONS CONTAIN THE MAGNITUDE Of THE
SPECTRUM, AND THE LAST L+l LOCATIONS CONTAIN THE PHASE OF TIIE CROSS-SPECTRUM, GIVEN IN FRACTIONS OF A CIRCLE(TUAT IS, ON THE CLOSED INTERVAL(O,l))
- VECTOR OF LENGTH L+l CONTAINING - VECTOR OF LENGTH L+l CONTAINING
AT liME DISPLACEMENT Of TD( 1) = SAM PLI NG PER 1 OD
THE COHERENCE ESTIMATE THE AUTO COVARIANCE ESTIMATE Of X ( 1-l)*T WHERE T IS THE
- VECTOR OF LENGTH L+l CONTAINING THE AUTO COVARIANCE ESTIMATE OF V - VECTOR OF LENGTH 2*L+1 CONTAINING THE CROSS-COVARIANCE ESTIMATE - MEAN OF THE FIRST liME SERIES - MEAN Of THE SECOND liME SERIES - VARIANCE OF THE fiRST liME SERIES - VARIANCE OF THE SECOND liME SERIES
1-' 0 N
c c-------------------------------------------------------------------c
SUBROUTINE POWER(X,Y,N,L,PERIOD, IND, IWIND,PSX,PSY,XPS,COHE,XACOV, + YACOV,XCOV,XMEAN,YMEAN,XVAR,YVAR)
INTEGER N,L, IND,Ml,M2,M3,M4,M5,K, IWIND REAL X(N),Y(N),PSX(513),PSY(513),XPS(513),COHE(513),
+ WINDOW(512),WK,SUM,PERIOD,XACOV(513),YACOV(513), + XCOV(512),XWK(513),YWK(513),XMEAN,YMEAN,XVAR,YVAR
REAL*8 XSUM,YSUM,XSQSUM,YSQSUM COMPLEX PSXY(512),XCWK(512),YCWK(512), IWK(50),C
c C INITIALIZE AND COMPUTE THE DATA WINDOW c
100
c
M3 = L + 1 M4 = 2*L M5 = M4 - 1 M6 = 3.3219281*ALOG10(FLOAT(M4)) PHI = 3.111159265 XSUM = O. YSUM = O. XSQSUM = O. YSQSUM = O. SUM = O. DO 100 J= 1, M5
K = J - L IF(IWIND .EQ. 1) WINDOW(J) IF( IWIND .EQ. 2) WINDOW(J) IF(IWIND .EQ. 3) WINDOW(J) IF( IWIND .EQ. 4) WINDOW(J) SUM = SUM + WINDOW(J)
CONTINUE Wl NDOW( Mit) = O. A = PERIOD
+ o. 1
1. 1. - ABS(FLOAT(K))/L 0.5 + 0.5*COS((PHI*K)/(L-1)) 0.54 + 0.46*COS((PHI*K)/(L-1))
C DETERMINE WHETHER ONE OR TWO TIME SERIES ARE TO BE PROCESSED c
IF( IND .LE. 0.) GO TO 500 c C PROCESS SINGLE liME SERIES c C ESTIMATE THE MEAN AND THE VARIANCE OF THE TIME SERIES c
DO 210 J=1,N XSUM = XSUM + X(J) XSQSUM = XSQSUM + X(J)**2
210 CONTINUE XMEAN = XSUM/N XVAR = (XSQSUM- N*XMEAN*XMEAN)/(N- 1)
c

C CENTER THE TIME SERIES BY SUBTRACTING THE MEAN c
DO 220 J=l,N X(J) = X(J) - XMEAN
220 CONTINUE c C ESTIMATE THE AUTOCOVARIANCE c
CALL COVAR(X,X,N,L,XACOV) c C ESTIMATE THE POWER SPECTRUM c
1-' c
DO 300 J=L, M5 K=J-L+1 XCWK(J) = CMPLX(WINDOW(J)*XACOV(K),O.) XCWK(M4-J) = XCWK(J)
300 CONTINUE XCWK(M4) = (0.,0.) CALL FFT2C(XCWK,M6, IWK)
DO 310 J=1,M3 K = M3+J SHIFT = -2*(K-1)*PHI*(L-1)/(2*L) XCWK(J) = CMPLX(COS(SHIFT),SIN(SHIFT))*XCWK(J) PSX(J) = A*REAL(XCWK(J))
310 CONTINUE RETURN
500 CONTINUE
0 C PROCESS TWO TIME SERIES w c
C ESTIMATE THE MEANS AND THE VARIANCES OF THE TIME SERIES c
DO 610 J=1,N XSUM = XSUM + X(J) YSUM = YSUM + Y(J) XSQSUM = XSQSUM + X(J)**2 YSQSUM = YSQSUM + Y(J)**2
610 CONT 1 NUE XMEAN = XSUM/N XVAR = (XSQSUM- N*XMEAN*XMEAN)/(N- 1) YMEAN = YSUM/N YVAR = (YSQSUM- N*YMEAN*YMEAN)/(N- 1)
c C CENTER THE TIME SERIES BY SUBTRACTING THE MEAN c
c
DO 620 J=l,N X(J) = X(J) - XMEAN Y(J) = Y(J) - YMEAN
620 CONTINUE
1-' 0 >{::>
C COMPUTE THE AUTO AND THE CROSS-COVARIANCES c
c
CALL COVAR(X,X,N,L,XACOV) CALL COVAR(Y,Y,N,L,YACOV) CALL COVAR(X,Y,N,L,XPS) DO 650 J=l,M3
K = L + J XCOV(K) = XPS(J)
650 CONTINUE CALL COVAR(Y,X,N,L,XPS) DO 700 J=l,M3
K = M3 + 1 - J XCOV(K) = XPS(J)
700 CONTINUE
C ESTIMATE THE POWER AND THE CROSS-SPECTRUM c
DO 800 J=L,M5 K=J-L+l XCWK(J) = CMPLX(WINDOW(J)*XACOV(K),O.) XCWK(M4-J) = XCWK(J) YCWK(J) = CMPLX(WINDOW(J)*YACOV(K),O.) YCWK(M4-J) = YCWK(J)
800 CONTINUE XCWK(M4) = (0.,0.) YCWK(M4) = (0.,0.) DO 850 J=1,M4
K = J + 1 PSXY(J) = CMPLX(WINDOW(J)*XCOV(K),O.)
850 CONTINUE CALL FFT2C(XCWK,M6, IWK) CALL FFT2C(YCWK,M6, IWK) CALL FFT2C(PSXY,M6, IWK) COHE(1) = 1. DO 890 J=1,M3
K = M3 + J SHIFT = -2*(K-l)*PHI*(L-1)/(2*L) C = CMPLX(COS(SHIFT),SIN(SHIFT)) XCWK(J) = C*XCWK(J) YCWK(J) = C*YCWK(J) PSXY(J) = C*PSXY(J) PSX(J) = A*REAL(XCWK(J)) PSY(J) = A*REAL(YCWK(J)) XPS(J) = A*REAL(PSXY(J)) XPS(K) = ATAN2(AIMAG(PSXY(J)),REAL(PSXY(J)))/(2*PHI)+0.5 IF(J .EQ. 1) GO TO 890 COHE(J) = XPS(J)*XPS(J)/(PSX(J)*PSY(J)+1E-5)
890 CONTINUE RETURN
END
l-' 0 l/1
c
SUBROUTINE COVAR(X,Y,N,L,COV) INTEGER L,M1,M2,M3,M4,M5,N,J,K REAL COV(1024),V,W,X(N),Y(N) COMPLEX Z(1024),ZX,ZY, IWK(12) COMPLEX*16 ZZ(1024)
C INITIALIZE c
c
M3 = L + 1 M4 = 2*L V= FLOAT(M4) M5 = 3.3219281*ALOG10(V) + 0.1 DO 50 J=1,M4
zz ( J ) = ( 0 •• 0 • ) 50 CONTINUE
C LOOP TO ACCUMULATE RAW POWER SPECTRA c
c
N1 = N - L DO 1000 1=1,N1,L
DO 100 J=l,L K=I+J-1 Z(J) = CMPLX(X(K),-1*Y(K))
100 CONTINUE DO 400 J=M3,M4
K=I+J-1 Z(J) = CMPLX(0.,-1*Y(K))
400 CONTINUE 500 GALL FFT2C(Z,M5, IWK)
C DO EVEN-ODD SEPARATION AND ACCUMULATE CONJG(X)*Y c
ZZ(1) = CMPLX(-0.5*AIMAG(Z(1)*Z(1)). O.)+ ZZ(1) DO 600 J=2,M4
K = J - 1 K1 = M4 + 1 - K ZZ(J) = 0.25*CMPLX(-2*AIMAG(Z(J)*Z(K1)), CABS(Z(J))*
+ CABS(Z(J))-CABS(Z(K1))*CABS(Z(K1))) + ZZ(J) 600 CONTINUE
1000 CONTINUE c C INVERSE DFT TO GIVE COVARIANCE c
DO 1300 J=1,Mlt Z(J) = DCONJG(ZZ(J))
1300 CONTINUE GALL FFT2C(Z,M5, IWK) DO 1150 J= 1 , M4
Z(J) = Z(J)/M4 1150 CONTINUE

z .......
-, N
....J <
<""'W :E:O::
.-Il Il -,--,w o-~ o>zz .-o-c:: .-ul-~
Zl-0 0 owz 0 UO::L.J
0 0 ... ....
106

..... 0 --.]
c-----------------------------------------------------------------------c c c
SUBPROGRAM TO PLOT IN LOG-LOG SCALE
c-----------------------------------------------------------------------c c c c c c c c c c c c c c c c c c c c c c c c c c c
INPUT ARGUMENTS
N - NUMBER OF DATA POINTS TO BE PLOTED X( 1) -X-COORDINAT[ OF 1-TH DATA Y( 1) - Y-COORDINAT[ Of 1-TH DATA Y1( 1) - Y-COORDINATE OF 1-TH DATA OF TitE SECOND SET XORGIN - X-COORDINATE OF THE ORGIN YORGIN - Y-COORDINAT[ OF THE ORGIN OPTION - 1 - AUTOCORRELATION
2 - POWER SPECTRUM IN WAVE NUMBER DOMAIN 3 - POWER SPECTRUM IN FREQUENCY DOMAIN 4 - CROSS-CORRELATION 5 - CROSS-SPECTRUM IN WAVE NUMBER DOMAIN 6 - CROSS-SPECTRUM IN FREQUENCY DOMAIN 7 - COHERENCE SPECTRUM IN WAVE NUMBER DOMAIN 8 - COHERENCE SPECTRUM IN FREQUENCY DOMAIN
VARIABLES USED
XEXMIN - THE MINIMUM X-COORDINAT[ THE THE DATA DXEX - SCALE FACTOR FOR THE X-COORDINAT[ YEXMIN - THE MINIMUM Y-COORDINAT[ Of THE DATA DYEX - SCALE FACTOR FOR THE Y-COORDINAT[ YEXMI1 -THE MINIMUM Y-COORDINAT[ THE THE SECOND SET Of DATA DYEX1 - SCALE FACTOR FOR THE Y-COORDINATE Of THE SECOND SET
c-----------------------------------------------------------------------suBROUTINE LPLOT(N,X,Y,Y1,XORGIN,YORGIN,OPTION) INTEGER N,OPTION REAL X(N),Y(N),Y1(N),XORGIN,YORGIN,XEXMIN,DXEX,YEXMIN,DYEX,
+ YEXMI1,DYEX1,XMIN,XFACT,YMIN,YFACT c C DELETE THE FIRST SET OF THE DATA c
c
lf(OPTION .EQ. 1 .OR. OPTION .EQ. 4) GO TO 53 N = N - 1 DO 50 1=1, N
X( 1 ) = X( 1 +1) Y( 1 ) = Y( 1 +1) Y1 ( 1 ) = Y1 ( 1 + 1 )
50 CONTINUE 53 CONTINUE
C FIND THE MINIMUM VALUE AND SCALE FACTOR FOR A 5 INCH X AXIS AND Y AXIS

1-' 0 ro
c
c c c
c c c
GO TO (51,52,52,51,52,52,52,52), OPTION 51 CALL PSCALE(5.,1.,XMIN,XFACT,X,N,1)
CALL PSCALE(5.,1.,YMIN,YFACT,Y,N,1) CALL PLTOFS(XMIN,XFACT,YMIN,YFACT,XORGIN,YORGIN) CALL PLTREC CALL PLINE(X,Y,N,1,0,0,1) GO TO 55
52 CALL PLGSCL(5.,XEXMIN,DXEX,X,N,1) CALL PLGSCL(5.,YEXMIN,DYEX,Y,N,1) CALL PLTOFS(XEXMIN,DXEX,YEXMIN,DYEX,XORGIN,YORGIN) CALL PLTLOG(3) CALL PLINE(X,Y,N,l,O,O, 1) lf(OPTION .NE. 5 .AND. OPTION .NE. 6) GO TO 55
CALL PSCALE(5.,1. 1YEXMI1,DYEX1,Y1,N,1) CALL PENCHG('RED ) CALL PLTOFS(XEXMIN,DXEX,YEXM11,DYEX1,XORGIN,YORGIN) CALL PLTLOG(2) CALL PLINE(X,Y1,N,1,0,0,1) CALL PLTREC CALL PAXIS(XORGIN-1.,YORGIN,'PHASE OF CROSS-SPECTRUM',
+ 23,5.,90.,YEXMI1,DYEX1,1.) CALL PENCHG('BLAC')
55 CONTINUE
DRAW X-AXES
IFIOPTI?N .EQ. 1 .OR. OPTION .EQ. 4) CALL PAXIS(XORGIN,YORGIN, + r(S) ,-4,5.,0.,XMIN,XFACT,1.)
lf(OPTION .EQ. 2 .OR. OPTION .EQ. 5 .OR. OPTION .EQ. 7) CALL + PLGAXS(XORGIN,YORGIN, 1 WAVE-NUMBER 1 ,-11,5.,0.,XEXMIN,DXEX)
IF(OPTION .EQ. 3 .OR. OPTION .EQ. 6 .OR. OPTION .EQ. 8) CALL + PLGAXS(XORGIN,YORGIN, 1 FREQUENCY(1/S)',-14,5.,0.,XEXMIN,DXEX)
DRAW Y-AXES
lf(OPTION .EQ. 1) CALL PAXIS(XORGIN,YORGIN,'AUTOCORRELATION', + 15,5.,90.,YMIN,YFACT, 1.)
IF(OPTION .EQ. 4) CALL PAXIS(XORGIN,YORGIN, 'CROSSCORRELATION', + 16,5.,90.,YMIN,YFACT,l.)
lf!OPTION .EQ. 2 .OR. OPTION .EQ. 3) CALL PLGAXS(XORGIN,YORGIN +, POWER SPECTRUM 1 ,14,5.,90.,YEXMIN,DYEX)
lf!OPTION .EQ. 5 iOR. OPTION .EQ. 6) CALL PLGAXS(XORGIN,YORGIN +, CROSS-SPECTRUM ,14,5.,90.,YEXMIN,DYEX)
IFIOPTION .EQ. 7 .OR. OPTION .EQ. 8) CALL PLGAXS(XORGIN,YORGIN + , COHERENCE',9,5.,90.,YEXMIN,DYEX)
c C READJUST THE X-ORGIN AND THE Y-ORGIN FOR THE NEXT PLOT c
IF (YORGIN .GT. 15) GO TO 1200
1--' 0 ID
YORGIN = YORGIN + 11. GO TO 1400
1200 CONTINUE YORGIN = 3.25 XORGIN = XORGIN + 9.
1400 CONTINUE RETURN END

1-' 1-' 0
c-----------------------------------------------------------------------c c c c c c c c
PROGRAM:TVOID3
THIS PROGRAM TESTS THE SUBROUTINE VOID3. SINGE ONLY SINGLE CHANNEL DATA IS AVAILABLE AT THIS MOMENT, DUPLICATES OF THE AVAILABLE DATA ARE USED FOR TUE OTUER TWO CUANNEL. ALSO, THE CALI BRAT 1 ON MATR 1 X IS CHOSEN SUCH THAl EACH PROBE IS SENSITIVE TO ONLY ONE DIRECTION.
c-----------------------------------------------------------------------REAL A(3,3),GSCALE(3),GZER0(3),ECRIT1(3),ECRIT2(3),
+ LEVEL1(3),LEVEL2(3) INTEGER DELAY,OPTION,GATE(5000) DO 100 1 =1, 3
DO 200 J=1,3 A(I,J) =O.
200 CONTINUE 100 CONTINUE
DO 300 1=1,3 A( 1 , 1 ) = 84. 4095 GSCALE( 1) = 9.768E-4 GZERO( 1) = O. ECRIT1( 1) = 0.025 ECRIT2( 1) = 0.02 LEVELl(l) = 0.9 LEVEL2( 1) = 0.85
300 CONTINUE NORCRD = 5 LEAD = 30 DELAY = 30 OPTION = 0 GALL VOID3(NORCRD,GSCALE,GZERO,A,ECRIT1,ECRIT2,LEVEL1,
+ LEVEL2,LEAD,DELAY,OPTION,GATE) 500 CONTINUE
STOP END

1-' 1-' 1-'
c-----------------------------------------------------------------------c c c c c c c c c c c
PROGRAM: TPOWERSIN
THIS PROGRAM TESTS THE SUBROUTINE POWER. SERIES
AND X= SIN(T) + 1 Y= 2*COS(T) + 2
IT GENERAlES TWO liME
AT THE SAMPLING RATE OF 5 PER UNIT liME. EACH liME SERIES CONTAINS 5120 SAMPLES. THIS IS DIVIDED INTO 20 EQUAL LENGTH ENSEMBLES FOR liME SERIES ANALYSIS.
c-------------------------------------~---------------------------------c REAL X(5120),Y(5120),F(129),D1(256),D2(512),W1(129),W2(129),
+ W12(129),PHI,C1,C2,C12,T,PSX(258),WPSX(258),PSY(258),WPSY(129) + ,XPS(258),WXPS(129),PHASE(129),COHE(258),XACOV(512),YACOV(512) + ,XCOV(512),XMEAN,YMEAN,XVAR,YVAR,SUM,AREA
c C GENERAlE THE liME SERIES c
c
N = 5120 DO 100 1=1, N
T = 0.2*1 X(l) = SIN(T) + 1. Y( 1) = 2*COS(T) + 2.
100 CONTINUE
C PREPARE INPUT ARGUMENTS AND GALL THE SUBROUTINE POWER c
c
L = 128 M3 = L + 1 M4 = 2*L M5 = M4 - 1 PERIOD = 0.2 IND = 0 IWIND = 3 CALL POWER(X,Y,N,L,PERIOD, IND, IWIND,PSX,PSY,XPS,COHE,XACOV,YACOV,
+ XCOV,XMEAN,YMEAN,XVAR,YVAR)
C USE TRAPEZOIDAL RULE TO ESTIMATE THE AREA UNDER THE POWER SPECTRUM c
c
SUM = PSX( 1 )/2. DO 200 1=2,L
SUM = SUM + PSX( 1) 200 CONTINUE
SUM = SUM + PSX(M3)/2. AREA = 2*SUM/(M4*PERIOO)
C PREPARE HIE SERIES FOR FREQUENCIES, liME OISPLACEMENTS, AND WAVE NUMBERS

1--' 1--' N
c
c
PH 1 = 3. 14159265 Cl = 2*PHI/XMEAN C2 = 2*PHI/YMEAN C12 = 2*PHI/SQRT(XMEAN*XMEAN + YMEAN*YMEAN) DO 300 l=l,M3
Dl(l) = (1- l.)*PERIOD f( 1) = ( 1 - 1. )/(M4*PERIOD) Wl(l) = Cl*f(l) W2( 1) = C2*f( 1) W12( 1) = Cl2*f( 1) WPSX( 1) = PSX( 1)/Cl WPSY( 1) = PSY( I)/C2 WXPS( 1) = XPS( 1 )/C12 PliASE( 1 ) = XPS( M3 + 1 )
300 CONTINUE M2 = M4 + 1 DO 500 l=l,M2
D2( 1) = ( 1 - M3)*PERIOD 500 CONTINUE
C PRINT OUT THE RESULTS c
c
510
520
530
540
550
WRITE(6,5101 XMEAN FORMAT( '0', 1XMEAN = 1 ,f8.5) WRITE(6,520) XVAR fORMAT(lX,'XVAR = 1 ,f8.5) WRITE(6,530) YMEAN fORMAT(lX,'YMEAN = ',f8.5) WRITE(6,540) YVAR fORMAT( lX, 'YVAR = ',f8.5) WRITE(6,550) AREA fORMAT(lX,'AREA UNDER THE POWER SPECTRUM IS ',f8.5)
C PLOT THE RESULTS c C XORGIN = 2. C YORGIN = 3.25 C CALL LPLOT(M3,Dl,XACOV,PIIASE,XORGIN,YORGIN,l) C CALL LPLOT(M3,Dl,YACOV,PiiASE,XORGIN,YORGIN,l) C CALL LPLOT(M2,D2,XCOV,PHASE,XORGIN,YORGIN,4) C CALL LPLOT(M3,f,PSX,PHASE,XORGIN,YORGIN,3) C CALL LPLOT(M3,f,COI-IE,PHASE,XORGIN,YORGIN,8) C CALL LPLOT(M3,f,XPS,PHASE,XORGIN,YORGIN,6) C CALL PLTEND
STOP END

......
...... w
c-------------------------------------------------------------------c c c c c c c
PROGRAM:TESTPOWER1PH
TIIIS PROGRAM DEMONSTRATES USE Of SUBROUTINE 'POWER' TO COMPUTE AND PLOT THE POWER SPECTRUM AND THE AUTOCORRELATION FUNCTION Of TURBULENT VELOCITY FROM SINGLE-PHASE DATA.
c-------------------------------------------------------------------c INTEGER*2 G(1024) REAL GSCALE,GZERO,A,B,C,
+ V(25600),PERIOD,PSX(257),XACOV(257), + f(257),T(257)
NRCRD = 100 N = 25600 L = 256 PERIOD = 0.0004 M3 = L + 1 M4 = 2*L GSCALE = 9.768E-4 GZERO = 0 A= 35.76 B = 6.42 c = 1.53846 1< = 1 DO 200 1=1,NRCRD
READ(5,100)(G(J),J=1,1024) 100 FORMAT(128(8A2))
DO 1000 J=1, 1024,4 G(J) = G(J)/16 E = 1.1136*(G(J)+0.5)*2.442E-4+11.14323 V(K) = ((E*E-A)/B)**C 1< = 1<+1
1000 CONTINUE 200 CONTINUE
CALL POWER(V,V,N,L,PERIOD,1,3,PSX,PSY,XPS,COHE,XACOV,YACOV, + XCOV,XMEAN,YMEAN,XVAR,YVAR)
DO 3000 1=1,M3 WRITE(6,250) PSX( 1)
250 FORMAT(1X,E14.6) f( 1) = ( 1-1 )/(M4*PERIOD) T( 1) = ( 1-1 )*PERIOD
3000 CONTINUE XORGIN = 2. YORGIN = 3.25 CALL LPLOT(M3,T,XACOV,PHASE,XORGIN,YORGIN,1) CALL LPLOT(M3,f,PSX,PHASE,XORGIN,YORGIN,3) CALL PLTEND STOP

0 z w
114
c-----------------------------------------------------------------------c C PROGRAM: TPOWER2PH c C THIS PROGRAM DEMONSTRATES USE OF SUBROUTINES "VOIDl" AND "POWER" C TO COMPUTE AND PLOT THE POWER SPECTRUM Of LIQUID PHASE TURBULENCE C STRUCTURE FROM 2-PHASE fLOW DATA. Il ALSO PLOTS THE POWER SPECTRUM C Of TllE PHASE INDICATOR FUNCTION TO SHOW THE EFFECT OF SEGMENTED C LIQUID PHASE DATA DUE TO THE PRESENCE OF VOIDS. c c-----------------------------------------------------------------------
INTEGER*2 G(1024),LEN INTEGER GATE(5120),DELAY,OPTION REAL GSCALE,GZERO,A,B,C,ECRIT1,ECRIT2,LEVEL1,
+ LEVEL2,V(25600),W(25600),PERIOD,PSX(257), + PSY(257),F(257),XPS(513),COHE(257),XACOV(257), + YACOV(257),XCOV(513)
REAL*8 SUM NRCRD = 100 N = 25600 L = 256 PERIOD = 0.0004 M3 = L + 1 Mil = 2*L M5 = PERIOD*lOOOO + 0.1 GSCALE = 9.768E-4
~ GZERO = O. ~ A = O. 357 ~ B = 0.0627
c = 1.52 ECRITl = 0.025 ECRIT2 = 0.02 LEVELl = 0.9 LEVEL2 = 0.85 LEAD = 30 DELAY = 30 OPTION =0 GALL VOID1(NRCRD,GSCALE,GZERO,A,B,C,ECRIT1,ECRIT2,LEVEL1,
+ LEVEL2,LEAD,DELAY,OPTION,GATE) LEN = 7 CALL CNTRL( 'BSR 100 1 ,LEN,5) SUM = O. NSUM = 0 J = 1 NI = 0 DO 2000 IRCRD=l,NRCRD
READ(5,85)(G( 1), 1=1, 1024) 85 FORMAT(128(8A2))
DO 1000 1=1, 1024,M5 NI = NI + 1

1-' 1-' Q)
90
100 1000 2000
K = ( IRCRD-1)*1024 + 1 lf(K .GE. IABS(GATE(J+1))) J = J + 1 lf(GATE(J) .LT. 0) GOTO 90
G( 1) = G( 1 )/16 V(NI) = (((GSCALE*(G( 1)+0.5-GZER0))**2-A)/B)**C W( N 1) = 1. SUM = SUM + V(NI) NSUM = NSUM + 1 GO TO 100
CONTINUE V( N 1) = O. W( N 1) = O.
CONTINUE CONTINUE
CONTINUE SUM = SUM/NSUM
DO 3000 1=1,N
3000 c
lf(V(I) .GT. lE-3) V(I)=V(I)-SUM CONTINUE
C PRINT THE RESULTS c
c
WRITE(7,50) SUM VMEAN = 1. - fLOAT(M5)*NSUM/(1024*NRCRD)
50 fORMAT(1X,'MEAN LIQUID PHASE VELOCITY IS ',E14.5) WRITE(7,601 VMEAN
60 f0RMAT(1X, VOID fRACTION IS 1 ,E14.5)
C GET THE POWER SPECTRUM c
c
IND = 0 IWIND = 3 CALL POWER(V,W,N,L,PERIOD,IND, IWIND,PSX,PSY,XPS,COHE,XACOV,
+ YACOV,XCOV,XMEAN,YMEAN,XVAR,YVAR)
C PREPARE THE SERIES fOR fREQUENCIES c
DO 3500 l=l,M3 f(l) = (1- 1.)/(M4*PERIOD)
3500 CONTINUE c C PLOT THE RESULT c
XORGIN = 2. YOHGIN = 3.25 CALL LPLOT(M3,f,PSX,PHASE,XORGIN,YORGIN,3) CALL LPLOT(M3,f,PSY,PHASE,XORGIN,YORGIN,3) CALL PLTEND STOP END