
An Analysis of the Accuracy of Time Domain 3D Image ...
6
http://journal.uir.ac.id/index.php/JGEET E-ISSN : 2541-5794 P-ISSN : 2503-216X Journal of Geoscience, Engineering, Environment, and Technology Vol 04 No 01 2019 Irawan, S., et al./ JGEET Vol 04 No 01/2019 1 RESEARCH ARTICLE An Analysis of the Accuracy of Time Domain 3D Image Geology Model Resulted from PSTM and Depth Domain 3D Image Geology Model Resulted from PSDM in Oil and Gas Exploration Sudra Irawan 1, *, Yeni Rokhayati 2 , Satriya Bayu Aji 1 1 Geomatics Engineering Study Program, Politeknik Negeri Batam, Ahmad Yani Street Batam Center, Indonesia. 2 Multimedia and Network Engineering Study Program, Politeknik Negeri Batam, Ahmad Yani Street Batam Center, Indonesia. * Corresponding author : [email protected] Tel.: +62857-4341-9535 Received: Sept 14, 2018; Accepted: February 28, 2019. DOI: 10.25299/jgeet.2019.4.1.2121 Abstract This study aims to obtain a geological model which is close to the truth and compare accuracy between the time domain 3D image of the PSTM results with the depth domain 3D image of PSDM results. There are 3 parameters to determine the accuracy of an interval velocity model in the production of a geology model: depth gathering that is already flat, semblance that has concurred with zero residual move-out axes, and depth image which conforms to the marker (well seismic tie). The analytical method employed is Horizon Based Tomography, which is a method to correct the seismic wave travel time error along the analyzed horizon. Reducing errors in the travel time of the seismic wave will decrease depth errors. This improvement is expected to provide correct information about subsurface geological conditions. The results showed that the depth domain image generated by the PSDM process represents the actual geological model better than time domain image produced by the PSTM process, evidenced by the sharpening of the reflector continuity, reduction of pull-up effect, and high resolution. Keywords: Geology Model, Time Domain 3D Image, PSTM, PSDM, Horizon-Based Tomography 1. Introduction 3D seismic data processing is a method that is being widely used in the world of seismic exploration. 3-D seismic data processing consists of 3-D dip-moveout correction, 3-D refraction and residual statics corrections, and 3-D migration (Yilmaz, 2001). More complicated acquisition and longer, more expensive processing cause 3D seismic has only been used recently. 3D seismic method can provide a better subsurface picture compared to 2D seismic because it can provide complete information about the subsurface structure of the earth so that the surface image obtained is not just a 2D structure but a description of the entire volume of the acquisition area. Kirchhoff migration is the most popular method of 3D dimensional prestack depth migration because of its flexibility and efficiency (Hill, 2001). Pre Stack Depth Migration (PSDM) is a migration technique before stacking, with very complex medium velocity variations such as thrust belt, zone around carbonate (reef), salt dome, etc. The difference in time migration and depth migration is not a time domain or depth domain problem but depends on the velocity model used. Time migration has smooth velocity variations, while depth migration has a complex velocity (Evita et al., 2014). Pre Stack Time Migration (PSTM) only accommodates vertical velocity variations. A prestack reverse time‐migration image is not properly scaled with increasing depth. The main reason for the image being unscaled is the geometric spreading of the wavefield arising during the back‐propagation of the measured data and the generation of the forward- modeled wavefields (Shin et al., 2001). In PSDM using explicit extrapolators, the attenuation and dispersion of the seismic wave have been neglected so far (Mittet, 1995). Lateral velocity variations present complex geological models with variations in velocity not only in the vertical direction but also in the lateral direction (Irawan and Khoirunnisa, 2017). However, PSDM requires an accurate interval velocity model. Without an accurate velocity model, the final result obtained will not be better than time migration. This velocity model requires several stages starting from the creation of the Root Mean Square (RMS) velocity model, the creation of an interval velocity model to the improvement of the interval velocity model using specific methods. Strong refraction of waves in the migration velocity model introduces kinematic artifacts-coherent events not corresponding to actual reflectors-into the image volumes produced by prestack depth migration applied to individual data bins (Stolk, et al., 2004).
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of An Analysis of the Accuracy of Time Domain 3D Image ...
http://journal.uir.ac.id/index.php/JGEET
E-ISSN : 2541-5794 P-ISSN : 2503-216X
Journal of Geoscience, Engineering, Environment, and Technology Vol 04 No 01 2019
Irawan, S., et al./ JGEET Vol 04 No 01/2019 1
RESEARCH ARTICLE
An Analysis of the Accuracy of Time Domain 3D Image Geology Model Resulted from PSTM and Depth Domain 3D Image
Geology Model Resulted from PSDM in Oil and Gas Exploration
Sudra Irawan 1, *, Yeni Rokhayati2 , Satriya Bayu Aji1 1 Geomatics Engineering Study Program, Politeknik Negeri Batam, Ahmad Yani Street Batam Center, Indonesia.
2 Multimedia and Network Engineering Study Program, Politeknik Negeri Batam, Ahmad Yani Street Batam Center, Indonesia.
* Corresponding author : [email protected] Tel.: +62857-4341-9535
Received: Sept 14, 2018; Accepted: February 28, 2019. DOI: 10.25299/jgeet.2019.4.1.2121
Abstract
This study aims to obtain a geological model which is close to the truth and compare accuracy between the time domain 3D image of the PSTM results with the depth domain 3D image of PSDM results. There are 3 parameters to determine the accuracy of an interval velocity model in the production of a geology model: depth gathering that is already flat, semblance that has concurred with zero residual move-out axes, and depth image which conforms to the marker (well seismic tie). The analytical method employed is Horizon Based Tomography, which is a method to correct the seismic wave travel time error along the analyzed horizon. Reducing errors in the travel time of the seismic wave will decrease depth errors. This improvement is expected to provide correct information about subsurface geological conditions. The results showed that the depth domain image generated by the PSDM process represents the actual geological model better than time domain image produced by the PSTM process, evidenced by the sharpening of the reflector continuity, reduction of pull-up effect, and high resolution. Keywords: Geology Model, Time Domain 3D Image, PSTM, PSDM, Horizon-Based Tomography
1. Introduction
3D seismic data processing is a method that is being widely used in the world of seismic exploration. 3-D seismic data processing consists of 3-D dip-moveout correction, 3-D refraction and residual statics corrections, and 3-D migration (Yilmaz, 2001). More complicated acquisition and longer, more expensive processing cause 3D seismic has only been used recently. 3D seismic method can provide a better subsurface picture compared to 2D seismic because it can provide complete information about the subsurface structure of the earth so that the surface image obtained is not just a 2D structure but a description of the entire volume of the acquisition area. Kirchhoff migration is the most popular method of 3D dimensional prestack depth migration because of its flexibility and efficiency (Hill, 2001).
Pre Stack Depth Migration (PSDM) is a migration technique before stacking, with very complex medium velocity variations such as thrust belt, zone around carbonate (reef), salt dome, etc. The difference in time migration and depth migration is not a time domain or depth domain problem but depends on the velocity model used. Time migration has smooth velocity variations, while depth migration has a complex velocity (Evita et al., 2014). Pre Stack Time Migration
(PSTM) only accommodates vertical velocity variations. A prestack reverse time‐migration image is not properly scaled with increasing depth. The main reason for the image being unscaled is the geometric spreading of the wavefield arising during the back‐propagation of the measured data and the generation of the forward-modeled wavefields (Shin et al., 2001). In PSDM using explicit extrapolators, the attenuation and dispersion of the seismic wave have been neglected so far (Mittet, 1995).
Lateral velocity variations present complex geological models with variations in velocity not only in the vertical direction but also in the lateral direction (Irawan and Khoirunnisa, 2017). However, PSDM requires an accurate interval velocity model. Without an accurate velocity model, the final result obtained will not be better than time migration. This velocity model requires several stages starting from the creation of the Root Mean Square (RMS) velocity model, the creation of an interval velocity model to the improvement of the interval velocity model using specific methods. Strong refraction of waves in the migration velocity model introduces kinematic artifacts-coherent events not corresponding to actual reflectors-into the image volumes produced by prestack depth migration applied to individual data bins (Stolk, et al., 2004).
2 Irawan, S., et al./ JGEET Vol 04 No 01/2019
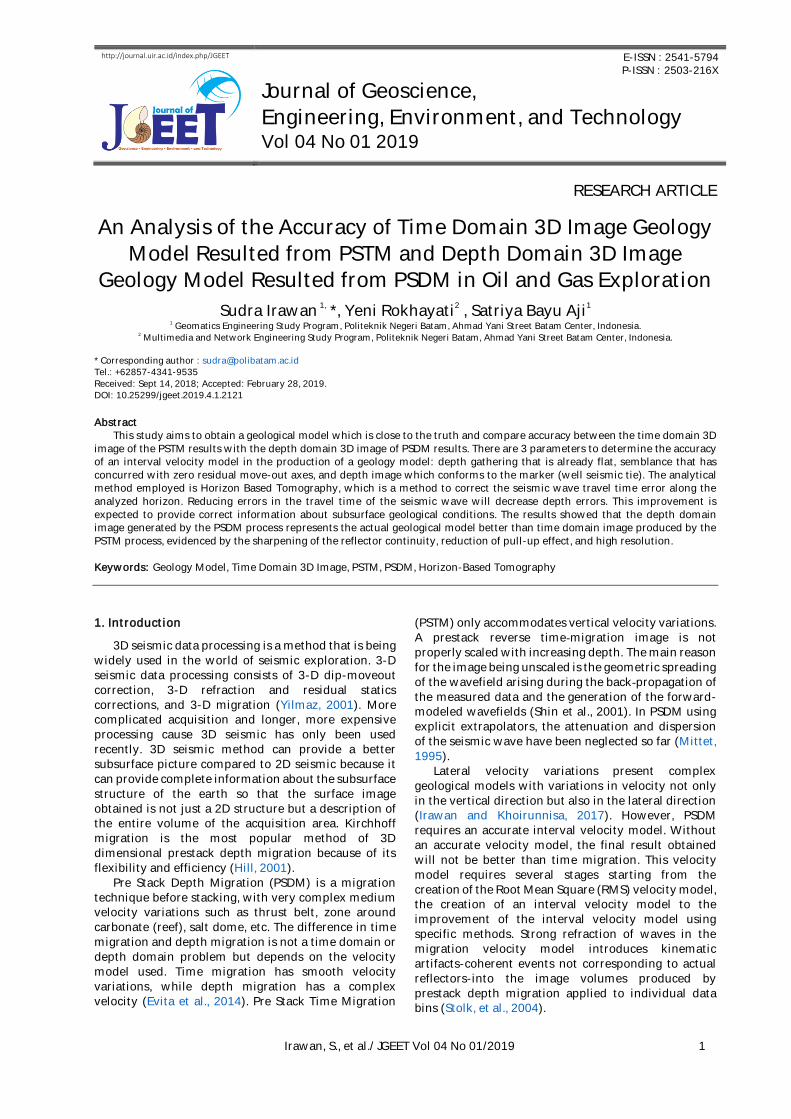
Fig. 1.a illustrates cases when the lateral velocity is constant, which produces a travel time curve in the form of hyperbole with its peak just below the geophone datum. In the event of time migration, the hyperbole curve will both be added to the top of hyperbole (Fig.1.b). If there are lateral velocity variations, the travel time curve will not form a hyperbole as in Fig. 1.b. In Fig. 1.c, the lateral velocity is not constant (varies), caused by overburden structures such as reef carbonates or salt domes. The formed hyperbole peak shifts its position to the geophone datum position of the signal recorder on the x-axis (Fig. 1.d). This distortion means that time migration is incompatible in areas that have high lateral velocity variations because of the occurrence of ray bending at the boundaries of the layers. This beam deflection causes the spreading time of the wave not to form a hyperbolic, making the amplitude and travel time unsuitable for the use of conventional Common Mid Point (CMP) stacking. This assumption is based on a hyperbolic curve. If conventional CMP stacking is still used, then the stack results will be farther from the ideal zero-offset section (Guo, N. and Fagin, S., 2002).
Fig. 1. (a) Reflections on the medium with constant lateral velocity, (b) travel time curve from image (a) with the peak just below the geophone (datum B) the recipient, (c) reflection that occurs on the medium with lateral velocity changes, (d) there is an error in the peak position of the travel time that is no longer right under the receiving geophone.
Information from geological data shows that there is a complex structure in the North West Java extension field basin (SBI). This is characterized by the presence of reef carbonate. In complex structures such as this, high lateral velocity variations are expected. The presence of lateral velocity variations causes ray bending when it passes the boundaries of the layer, causing the propagation time of the wave to not form a hyperbole (Purnawati and Minarto, 2016).
High lateral velocity variations in the SBI Field of the North West Java Basin cause migration in the time domain, commonly known as PSTM. RMS velocity model is not accurate because it is only sensitive to vertical velocity variations. Therefore, migration is
required in the depth domain (PSDM) using the interval velocity model which is sensitive to vertical or horizontal velocity variations. However, PSDM requires an accurate interval velocity model. One way to produce accurate interval velocity models is by analyzing the residual depth move-out and employing horizon-based Tomography analysis (Irawan et al., 2014).
Tomography is a method used to improve velocity models when PSDM is done with an inaccurate velocity model. Tomography uses a measure of residual move-out as input and tries to find or even make other models by moving the error that occurred (Washbourne and Tomoseis, 2001). Tomography uses a residual move-out from the pre-stack migration gathers as an input, and turning error depth δz and offset into an extended time error (CRP) for the same offset. In determining the tomographic equation, the relationship between time error 𝛿𝜏, time model that has been updated 𝛿𝑡𝑣, and slowness error 𝛿𝑧 is required. The conversion from depth error into time error is done when point A, which has shifted vertically, is forrmulated as δz and result of change in running time (Woodward et al., 2008). Tomography and PSDM technology to compensate the phase, frequency and amplitude loss due to shallow absorption, thus improving structure imaging and potentially accurate AVO/DHI analysis underneath shallow gas (Zhou et al., 2011).
The accuracy level of the interval velocity model can be seen from the error value which is due to inaccuracies in the estimation of the layer velocity and reflector geometry. Based on the research conducted by Irawan et al. (2014), there are 3 ways to find out the error in the resulting interval velocity model: (1) the depth gathering analysis of PSDM result, (2) the semblance residual move-out analysis, and (3) the analysis of depth image PSDM with the marker. Based on these 3 methods, this research was conducted to obtain a geological model which is close to the truth and compare the accuracy of the time domain 3D image of the PSTM with the depth domain 3D image of PSDM.
2. Materials and Method
In this research, two main devices (hardware and
software) were used. The hardware consists of RedHat
Enterprise Linux AS 5.0 Central Processing Unit, two 24
inch monitors, SGI altix 450/SuSe Linux Enterprise
Server 9.0, 32 GB, 32 X 2,6 GHz Processor server, and
Gigabit 1 Gb/s network adapter. The software used is
Seismic Processing and Imaging by Paradigm. The
details are as follows: (1) GeoDepth Velocity Modeling
(Epos 41) to create a 3D model map with RMS velocity
as well as to create and improve interval velocity
model, (2) GeoDepth Migrations Software (Epos 41)
[3D K. PSTM (16 CPUs) to run the PSTM process and 3D
K; PSDM (Fermat/Eikonal) to run the PSDM process], (3)
GeoDepth 3D Tomograpy Software (Epos 4.1) to run
Tomography process.
The data consists of two types: seismic data and
well data. The seismic data consist of Common Depth
Point (CDP) gathers and RMS velocity, while the well
Irawan, S., et al./ JGEET Vol 04 No 01/2019 3
data comprise sonic log, density log, resistivity log,
Gamma Ray (GR) log, and neutron log. The log data is
used to calculate the estimated hydrocarbon reserves.
Data processing in this research consists of 3 main
activities: (1) creating a 3D RMS velocity model map,
(2) creating and correcting interval velocity models, (3)
creating a 3D PSTM and PSDM sectional drawing
model.
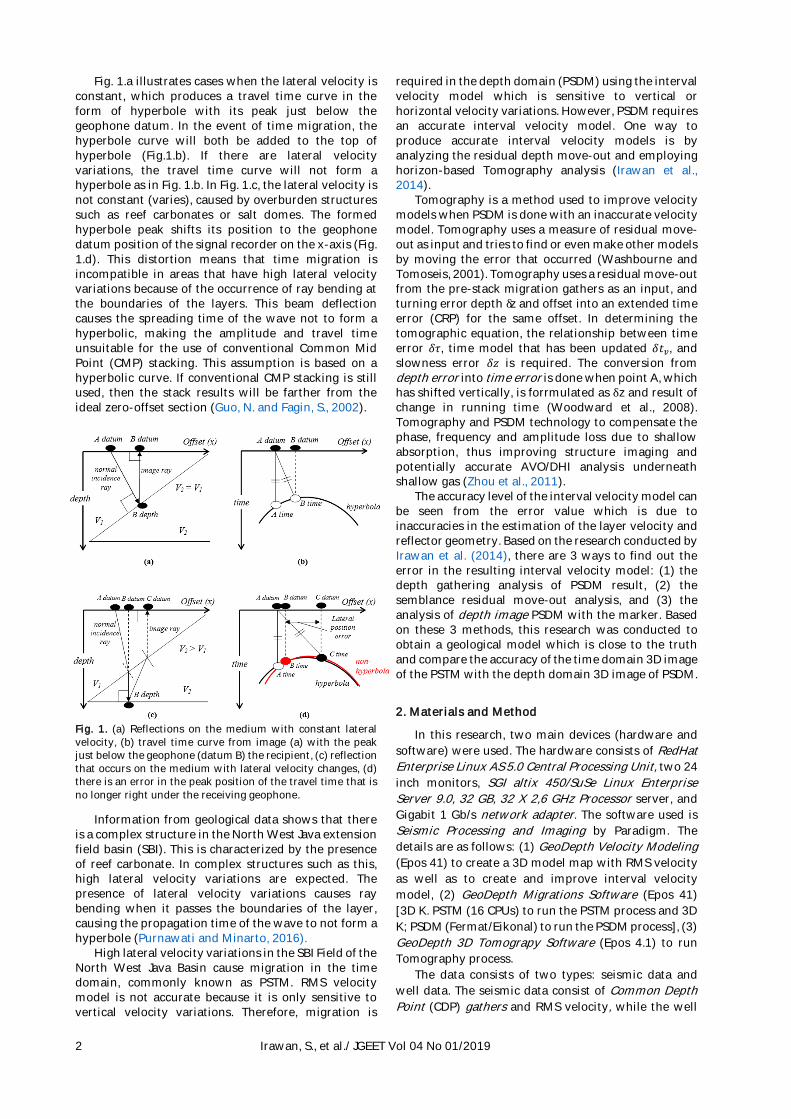
Fig. 2. Research Flow Chart
The input in the PSTM process consists of CDP gathering and RMS velocity volume obtained from research data. The PSTM results are used for horizon picking. Determination of the horizon is based on the
target to be searched, which is based on geological information and marker information taken from the log in the well. In this research, 9 horizons were used: horizon 1 (upper Cisubuh formation), horizon 2 (Parigi formation), horizon 3 (lower Parigi formation), horizon 4 (pre-Parigi formation), horizon 5 (Cibulakan formation), horizon 6 (upper MMC formation), horizon 7 (lower MMC formation), horizon 8 (Baturaja formation), dan horizon 9 (Talang Akar formation). Afterward, from the picking results for each horizon in the sectional drawing of the PSTM, a map of time migration interpretation is made. Furthermore, from the 9 horizons, three-dimensional (3D) model maps are created. From the 3D map, time migration model will be generated for each horizon, then intersection of vertical functions with RMS velocity from input data is done. This process is called the RMS velocity interpretation, which results in a 3D model map of RMS velocity interpretation for each horizon.
In converting RMS velocity maps to interval velocity maps, Dix Transformation is used. From the results of the conversion of the RMS velocity to the interval velocity, the velocity map of the interpretation interval is generated for each horizon. In the conversion process from the time map migrated horizon to the depth map, the Image Ray Migration method is used. Furthermore, depth map editing is carried out, which includes filtering, smoothing, and extrapolation. 3D model map of interval velocity and depth for each horizon are the inputs to make the initial interval velocity volume. The geometry weight calculation is then carried out to find the acquisition parameters and offset range values which will be used as an input parameter in the PSDM process.
The input data needed for PSDM processes consists of the 3D velocity interval model and CDP gathers. The type of migration used in this study is 3D Kirchoff Pre-Stack Depth Migration. There are two stages in this process: (1) calculation of travel time using the eikonal equation, (2) the migration process in the depth domain with the Kirchoff method. There are several parameters that must be included: inline and crossline target, aperture, offset range and type of input data (interval velocity model and CDP gathers) contained in the seismic data manager.
Residual move-out analysis is carried out after an inaccurate interval velocity model application is carried out on seismic data. If the interval velocity model has been estimated accurately, the depth gathering generated from PSDM with the interval velocity model should show have shown flat events. Unfortunately, this is not the case. This can be seen from the existence of a move-out, or the difference in travel time between far-offset and near-offset. This shows that there is still an error in the interval velocity model. This error can occur at the layer velocity or reflector geometry. Therefore, in the next step, a residual move-out is analyzed. In the next process, the results of residual move-out picking were put onto a grid and were processed into a depth residual move-out map for all layers analyzed. Finally, map editing, which includes filtering, smoothing, and extrapolation is performed to remove the remaining noises.
4 Irawan, S., et al./ JGEET Vol 04 No 01/2019
A depth map of the residual move-out 3D model resulted from the analysis of the residual move-out is used as the input for the Tomography process with the Horizon-Based Tomography method. This method calculates the travel time error used to correct (or update) the interval velocity model and depth map. One parameter that must be determined is ray-tracing step, which shows the origin of the location of the ray (ray-tracing starts or is traced from this point).
There are 3 analyses carried out: (1) Analysis of interval velocity models, which involves comparing interval velocity models before and after residual move-out correction using horizon based Tomography method. The analysis is prioritized for target areas where well data (sonic log and well marker) has been taken. In addition, identification of errors in interval velocity models is carried out at each stage, (2) analysis of sectional drawing of the obtained PSTM and final PSDM, especially the clarity and continuity of the reflector throughout the seismic section in the target area, which will then be compared, (3) analysis of the sectional drawing of PSDM of the target before and after Tomography by looking at the reflector on each seismic section.
3. Result and Discussion
3.1 Interval Velocity Model Analysis
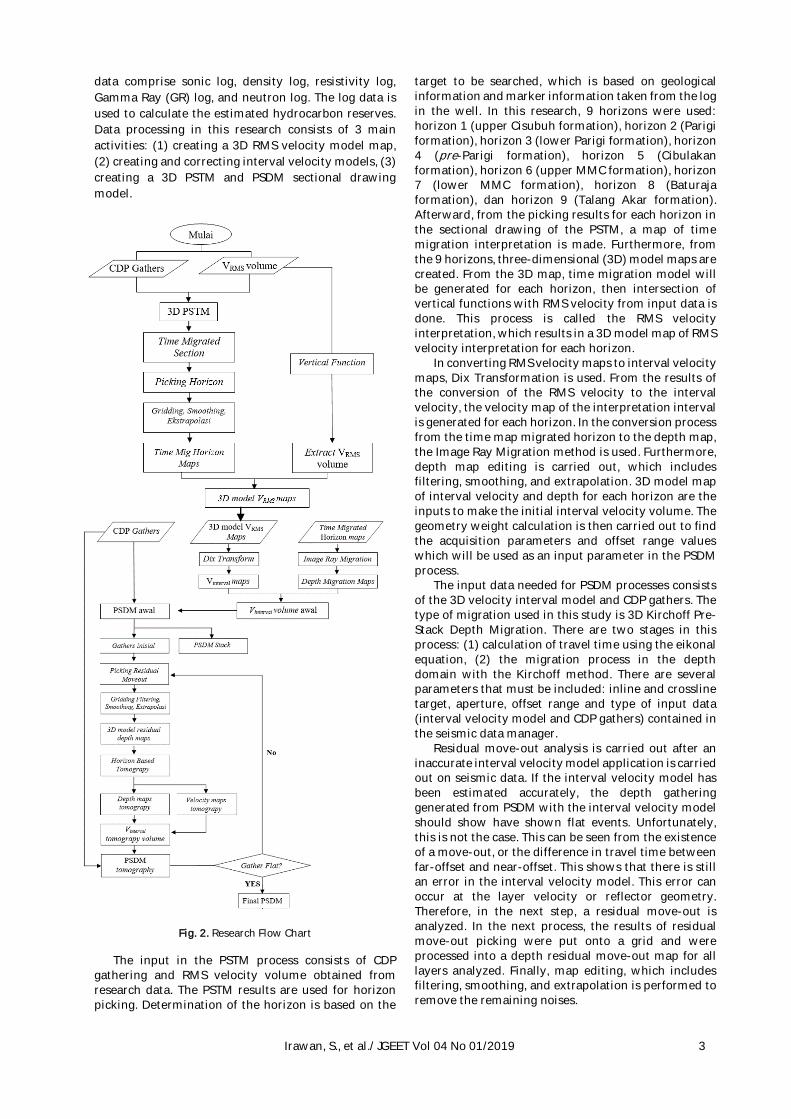
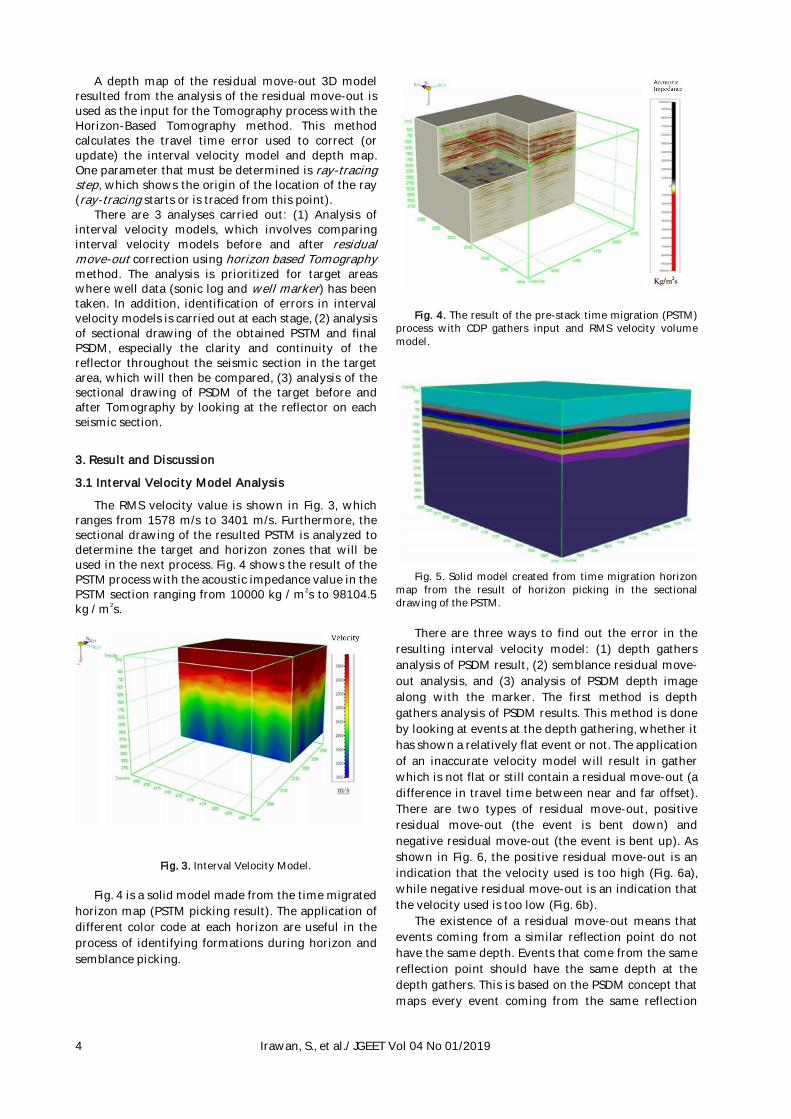
The RMS velocity value is shown in Fig. 3, which ranges from 1578 m/s to 3401 m/s. Furthermore, the sectional drawing of the resulted PSTM is analyzed to determine the target and horizon zones that will be used in the next process. Fig. 4 shows the result of the PSTM process with the acoustic impedance value in the PSTM section ranging from 10000 kg / m
2s to 98104.5
kg / m2s.
Fig. 3. Interval Velocity Model.
Fig. 4 is a solid model made from the time migrated
horizon map (PSTM picking result). The application of
different color code at each horizon are useful in the
process of identifying formations during horizon and
semblance picking.
Fig. 4. The result of the pre-stack time migration (PSTM) process with CDP gathers input and RMS velocity volume model.
Fig. 5. Solid model created from time migration horizon
map from the result of horizon picking in the sectional drawing of the PSTM.
There are three ways to find out the error in the
resulting interval velocity model: (1) depth gathers
analysis of PSDM result, (2) semblance residual move-
out analysis, and (3) analysis of PSDM depth image
along with the marker. The first method is depth
gathers analysis of PSDM results. This method is done
by looking at events at the depth gathering, whether it
has shown a relatively flat event or not. The application
of an inaccurate velocity model will result in gather
which is not flat or still contain a residual move-out (a
difference in travel time between near and far offset).
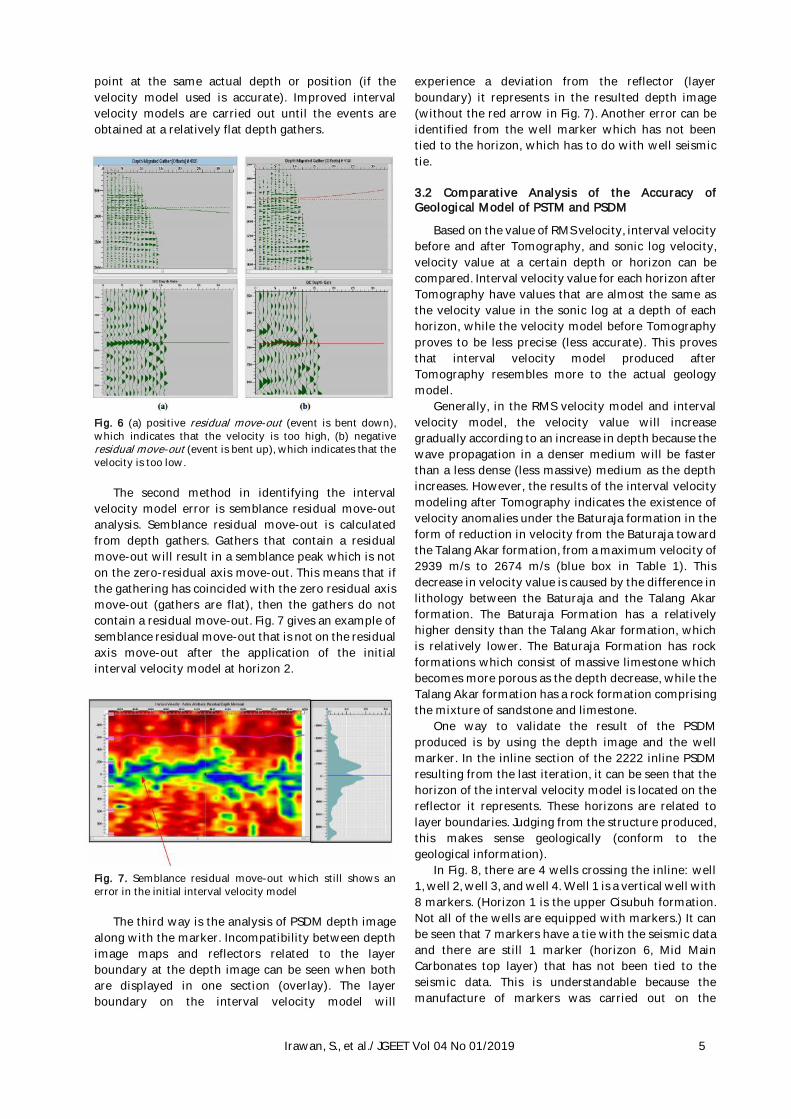
There are two types of residual move-out, positive
residual move-out (the event is bent down) and
negative residual move-out (the event is bent up). As
shown in Fig. 6, the positive residual move-out is an
indication that the velocity used is too high (Fig. 6a),
while negative residual move-out is an indication that
the velocity used is too low (Fig. 6b).
The existence of a residual move-out means that
events coming from a similar reflection point do not
have the same depth. Events that come from the same
reflection point should have the same depth at the
depth gathers. This is based on the PSDM concept that
maps every event coming from the same reflection
Irawan, S., et al./ JGEET Vol 04 No 01/2019 5
point at the same actual depth or position (if the
velocity model used is accurate). Improved interval
velocity models are carried out until the events are
obtained at a relatively flat depth gathers.
Fig. 6 (a) positive residual move-out (event is bent down), which indicates that the velocity is too high, (b) negative residual move-out (event is bent up), which indicates that the velocity is too low.
The second method in identifying the interval
velocity model error is semblance residual move-out
analysis. Semblance residual move-out is calculated
from depth gathers. Gathers that contain a residual
move-out will result in a semblance peak which is not
on the zero-residual axis move-out. This means that if
the gathering has coincided with the zero residual axis
move-out (gathers are flat), then the gathers do not
contain a residual move-out. Fig. 7 gives an example of
semblance residual move-out that is not on the residual
axis move-out after the application of the initial
interval velocity model at horizon 2.
Fig. 7. Semblance residual move-out which still shows an error in the initial interval velocity model
The third way is the analysis of PSDM depth image
along with the marker. Incompatibility between depth
image maps and reflectors related to the layer
boundary at the depth image can be seen when both
are displayed in one section (overlay). The layer
boundary on the interval velocity model will
experience a deviation from the reflector (layer
boundary) it represents in the resulted depth image
(without the red arrow in Fig. 7). Another error can be
identified from the well marker which has not been
tied to the horizon, which has to do with well seismic
tie.
3.2 Comparative Analysis of the Accuracy of Geological Model of PSTM and PSDM
Based on the value of RMS velocity, interval velocity
before and after Tomography, and sonic log velocity,
velocity value at a certain depth or horizon can be
compared. Interval velocity value for each horizon after
Tomography have values that are almost the same as
the velocity value in the sonic log at a depth of each
horizon, while the velocity model before Tomography
proves to be less precise (less accurate). This proves
that interval velocity model produced after
Tomography resembles more to the actual geology
model.
Generally, in the RMS velocity model and interval
velocity model, the velocity value will increase
gradually according to an increase in depth because the
wave propagation in a denser medium will be faster
than a less dense (less massive) medium as the depth
increases. However, the results of the interval velocity
modeling after Tomography indicates the existence of
velocity anomalies under the Baturaja formation in the
form of reduction in velocity from the Baturaja toward
the Talang Akar formation, from a maximum velocity of
2939 m/s to 2674 m/s (blue box in Table 1). This
decrease in velocity value is caused by the difference in
lithology between the Baturaja and the Talang Akar
formation. The Baturaja Formation has a relatively
higher density than the Talang Akar formation, which
is relatively lower. The Baturaja Formation has rock
formations which consist of massive limestone which
becomes more porous as the depth decrease, while the
Talang Akar formation has a rock formation comprising
the mixture of sandstone and limestone.
One way to validate the result of the PSDM
produced is by using the depth image and the well
marker. In the inline section of the 2222 inline PSDM
resulting from the last iteration, it can be seen that the
horizon of the interval velocity model is located on the
reflector it represents. These horizons are related to
layer boundaries. Judging from the structure produced,
this makes sense geologically (conform to the
geological information).
In Fig. 8, there are 4 wells crossing the inline: well
1, well 2, well 3, and well 4. Well 1 is a vertical well with
8 markers. (Horizon 1 is the upper Cisubuh formation.
Not all of the wells are equipped with markers.) It can
be seen that 7 markers have a tie with the seismic data
and there are still 1 marker (horizon 6, Mid Main
Carbonates top layer) that has not been tied to the
seismic data. This is understandable because the
manufacture of markers was carried out on the
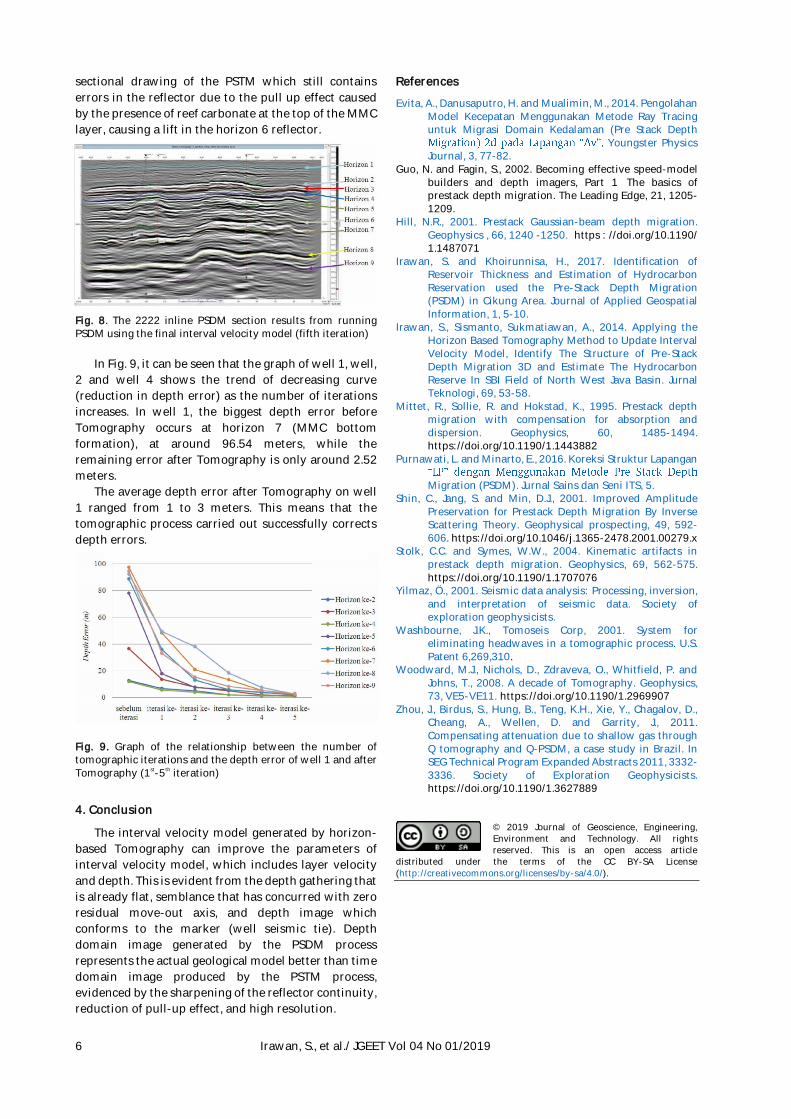
6 Irawan, S., et al./ JGEET Vol 04 No 01/2019
sectional drawing of the PSTM which still contains
errors in the reflector due to the pull up effect caused
by the presence of reef carbonate at the top of the MMC
layer, causing a lift in the horizon 6 reflector.
Fig. 8. The 2222 inline PSDM section results from running PSDM using the final interval velocity model (fifth iteration)
In Fig. 9, it can be seen that the graph of well 1, well,
2 and well 4 shows the trend of decreasing curve
(reduction in depth error) as the number of iterations
increases. In well 1, the biggest depth error before
Tomography occurs at horizon 7 (MMC bottom
formation), at around 96.54 meters, while the
remaining error after Tomography is only around 2.52
meters.
The average depth error after Tomography on well
1 ranged from 1 to 3 meters. This means that the
tomographic process carried out successfully corrects
depth errors.
Fig. 9. Graph of the relationship between the number of tomographic iterations and the depth error of well 1 and after Tomography (1st-5th iteration)
4. Conclusion
The interval velocity model generated by horizon-
based Tomography can improve the parameters of
interval velocity model, which includes layer velocity
and depth. This is evident from the depth gathering that
is already flat, semblance that has concurred with zero
residual move-out axis, and depth image which
conforms to the marker (well seismic tie). Depth
domain image generated by the PSDM process
represents the actual geological model better than time
domain image produced by the PSTM process,
evidenced by the sharpening of the reflector continuity,
reduction of pull-up effect, and high resolution.
References
Evita, A., Danusaputro, H. and Mualimin, M., 2014. Pengolahan Model Kecepatan Menggunakan Metode Ray Tracing untuk Migrasi Domain Kedalaman (Pre Stack Depth
Youngster Physics Journal, 3, 77-82.
Guo, N. and Fagin, S., 2002. Becoming effective speed-model builders and depth imagers, Part 1 The basics of prestack depth migration. The Leading Edge, 21, 1205-1209.
Hill, N.R., 2001. Prestack Gaussian-beam depth migration. Geophysics , 66, 1240 -1250. https : //doi.org/10.1190/ 1.1487071
Irawan, S. and Khoirunnisa, H., 2017. Identification of Reservoir Thickness and Estimation of Hydrocarbon Reservation used the Pre-Stack Depth Migration (PSDM) in Cikung Area. Journal of Applied Geospatial Information, 1, 5-10.
Irawan, S., Sismanto, Sukmatiawan, A., 2014. Applying the Horizon Based Tomography Method to Update Interval Velocity Model, Identify The Structure of Pre-Stack Depth Migration 3D and Estimate The Hydrocarbon Reserve In SBI Field of North West Java Basin. Jurnal Teknologi, 69, 53-58.
Mittet, R., Sollie, R. and Hokstad, K., 1995. Prestack depth migration with compensation for absorption and dispersion. Geophysics, 60, 1485-1494. https://doi.org/10.1190/1.1443882
Purnawati, L. and Minarto, E., 2016. Koreksi Struktur Lapangan
Migration (PSDM). Jurnal Sains dan Seni ITS, 5. Shin, C., Jang, S. and Min, D.J., 2001. Improved Amplitude
Preservation for Prestack Depth Migration By Inverse Scattering Theory. Geophysical prospecting, 49, 592-606. https://doi.org/10.1046/j.1365-2478.2001.00279.x
Stolk, C.C. and Symes, W.W., 2004. Kinematic artifacts in prestack depth migration. Geophysics, 69, 562-575. https://doi.org/10.1190/1.1707076
Yilmaz, Ö., 2001. Seismic data analysis: Processing, inversion, and interpretation of seismic data. Society of exploration geophysicists.
Washbourne, J.K., Tomoseis Corp, 2001. System for eliminating headwaves in a tomographic process. U.S. Patent 6,269,310.
Woodward, M.J., Nichols, D., Zdraveva, O., Whitfield, P. and Johns, T., 2008. A decade of Tomography. Geophysics, 73, VE5-VE11. https://doi.org/10.1190/1.2969907
Zhou, J., Birdus, S., Hung, B., Teng, K.H., Xie, Y., Chagalov, D., Cheang, A., Wellen, D. and Garrity, J., 2011. Compensating attenuation due to shallow gas through Q tomography and Q-PSDM, a case study in Brazil. In SEG Technical Program Expanded Abstracts 2011, 3332-3336. Society of Exploration Geophysicists. https://doi.org/10.1190/1.3627889
© 2019 Journal of Geoscience, Engineering, Environment and Technology. All rights reserved. This is an open access article
distributed under the terms of the CC BY-SA License
(http://creativecommons.org/licenses/by-sa/4.0/).




















