
AmbiFly - OhioLINK ETD Center
95
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of AmbiFly - OhioLINK ETD Center
SYSTEMS ENGINEERING OF A MEDICAL
EMERGENCY DRONE - AmbiFly
A thesis submitted to
the Graduate School
of the University of
Cincinnati in partial
fulfillment of the
requirements for the
degree of
Master of Science
in the Department of Aerospace
Engineering of the College of
Engineering
by
Bhavika
Wani
M.S. University of Cincinnati
September 2, 2020
Committee Chair: Kelly Cohen, Ph.D.
Page | ii
ABSTRACT
There are innumerable applications of an unmanned aerial vehicles (UAV) in
today’s world. The level of impact of its application depends primarily on the
industry it is being applied to. One of the biggest challenges and a preeminent
sector of using UAVs is in the field of healthcare. The number of cars today on
the roads will only increase substantially with time. While the congestion on
roads has several disadvantages, one of the major issues is that an ambulance
could get stuck in traffic and be unable to reach the emergency scene on time.
Its situations like these wherein the challenge lies. While there are air medical
services that are currently being used to transport the patient to the hospital, the
cost of using the same is too expensive and highly unaffordable for normal people
[1]. Based on the statistics in different parts of the world, the congestion on roads
has different levels of severity. And as technology further improves, more chaos
on the roads will lead to more accidents and an increase in emergency situations.
This thesis focuses on discussing a solution for times where an Emergency
Medical Services (EMS) vehicle cannot reach the emergency situation in an
optimal and efficient manner due to traffic jams on roads or inaccessibility issues
such as rurality of the location of emergency cases. Here, we discuss the system
requirements engineering of an emergency drone equipped in the emergency
medical services, which has the potential to help buy the patient some time while
Page | iii
the ambulance arrives on the scene. Using drones allows the EMS to improve the
response time by equipping the EMS vehicles with a drone which has a
customized first aid kit that includes NARCAN, EpiPen, AED & Bleeder Kit. It is
controlled by a remote Pilot-in-command that operates the drone to fly from over
the top of the vehicle to the location of the emergency scene. This also involves a
by-stander helping the patient with his medical needs while the ambulance is on
its way by using the equipment of the first aid kit box that comes with the drone
and guidance of the paramedics back in the ambulance who are on their way to
the accident scene.
An estimation by U.S regulators reflects that 10,000 lives could be saved every
year by reducing 911 response times by just one minute. This is the problem the
current thesis aims to address [2].

Page | iv
Page | v
ACKNOWLEDGEMENT
Author would like to thank Dr. Kelly Cohen, Dr. Manish Kumar, Dr. Shaban
Abdallah & Dr. Anoop Sathyan from the University of Cincinnati for their
guidance, support, and assistance.
Author would like to thank Dr. Thomas Dalziel for his class on startups and his
support, Grant Hoffman, Director of Startups and his team, Nancy Koors,
Elizabeth Wetzel for the unending support and guidance and their determination
to help the students to build on their startup idea.
Author would like to thank Jennifer Krivickas, Assistant Vice President of the
Office of Research for supporting and believing in the idea of AmbiFly.
Author would like to thank Srikanth Pydala, Master’s student in Mechanical
Engineering for his help and support to accomplish initial goals in the journey
of this mission.
Author would like to thank Entrepreneur Organization for giving her the
opportunity to present the idea & experience the world of startups more closely.
Author would like to thank all her teachers since kindergarten until graduate
studies, all those who taught her, inspired her, and helped her learn the basics to
the most complicated equations one could imagine.
Author would like to thank the people who have mattered the most, her family
and friends, who have contributed in all the success she has achieved and have
believed in her, no matter what – Jyotee Wani, Dad - Pankaj Wani, Sister-
Ashana Wani, Shrenik Lad, Sonam Lad, Kushal Parikh, Purva Gaggar,
Page | vi
Narendra Wani, Paresh Wani, Kaniya Wani, Karan Laul, Saloni Rastogi,
Sambhavi Gami, Monisha Sinha and Neeharika Sharma.
This work is dedicated to my mom, Mrs. Jyotee Wani (1961 - 2017). A role
model to her children and a wall of support that held her children strong and
determined to do their best even after she left them. For, you are remembered,
missed and loved every single day!
I still remember those beautiful days,
Those sunny days when I would run to you from school
Those beautiful days when you taught us all we know today
For, none of us ever knew that those days would end
And it will be the memories we would hold onto forever.
Love you Mommy. This is for you.
Page | vii
TABLE OF CONTENTS
ABSTRACT ......................................................................................................... ii
ACKNOWLEDGEMENT .................................................................................. v
TABLE OF CONTENTS ................................................................................. vii
LIST OF FIGURES ............................................................................................ x
LIST OF TABLES ............................................................................................ xii
CHAPTER 1: INTRODUCTION ...................................................................... 1
1.1 Motivation .................................................................................................... 1
1.2 Thesis objective and Main contributions ..................................................... 3
1.3 Discovery journey ........................................................................................ 4
1.4 Assumptions and Thesis Layout .................................................................. 5
CHAPTER 2: LITERATURE SURVEY .......................................................... 7
2.1 Background .................................................................................................. 7
2.2 VTOL vs Fixed Wing .................................................................................. 8
2.3 Application of drones in Emergency services ........................................... 11
2.4 EMS services without drone technology & discussion of impact by
intervention of drone system............................................................................ 18
CHAPTER 3: OPERATIONAL CONCEPTS ............................................... 20
3.1 Strategy-to-task-to-need links organization policies to operational concepts
.......................................................................................................................... 21
3.2 System and its context ............................................................................... 22
3.3 What, Where, When, Who, Why, and How of the system operations ...... 23
3.4 User Needs ................................................................................................. 25
Page | viii
3.5 Brainstorming sessions .............................................................................. 26
3.6 Customer Interviews .................................................................................. 27
CHAPTER 4: TECHNOLOGY TRANSITION ............................................ 29
4.1 Problem Statement ..................................................................................... 29
4.2 Customer Discovery .................................................................................. 30
4.3 Bystanders – an untapped resource............................................................ 31
4.4 Finding a solution ...................................................................................... 32
4.4.1 Analysis – How many situations can the drone be of assistance? ...... 33
4.5 Market Research ........................................................................................ 34
4.6 Cost Analysis ............................................................................................. 37
4.7 Value Proposition ...................................................................................... 40
4.8 Interview results with potential customers ................................................ 41
CHAPTER 5: SYSTEM REQUIREMENTS ................................................. 43
5.1 Requirements of UAV for current application .......................................... 43
5.2 Design and contents of the customized first aid responder kit .................. 44
5.3 Selection of type of UAV .......................................................................... 46
5.4 Deciding the drone for the current purpose ............................................... 49
5.4.1 About the Prototype - Tarot X6 ........................................................... 49
5.4.2 Comparing AmbiFly with Tarot X6 .................................................... 53
5.5 Durability ................................................................................................... 54
CHAPTER 6: SYSTEM DESIGN AND SIMULATION .............................. 55
6.1 About the SUMO Simulator ...................................................................... 55
6.2 How Sumo Simulator is used in the current project? ................................ 56
6.3 Simulation of Traffic in the most congested areas in world ...................... 57
Page | ix
6.3.1 Simulation of Manhattan in NY – one of the most congested places in
USA .............................................................................................................. 58
6.3.2 Simulation of Mumbai – One of the most congested places in India,
Asia ............................................................................................................... 61
6.3.3 Simulation of Bogota – World’s most congested place ...................... 63
6.4 Impact on EMS by using the drone technology ........................................ 65
CHAPTER 7: CONCLUSIONS ...................................................................... 67
CHAPTER 8: FUTURE WORK ..................................................................... 70
8.1 Drone Technology in Military ................................................................... 71
8.2 Drone Technology for Commercial purposes ........................................... 71
8.3 Future Drone Technology .......................................................................... 72
8.4 AmbiFly: Wildest dreams and fondest hopes ............................................ 74
REFERENCES .................................................................................................. 76
Page | x
LIST OF FIGURES
Figure 1- Curtis N2C-2 drone [11] ............................................................................................ 8
Figure 2 – OSGC VTOL, Source – UC’s UAV Master Lab ................................................... 13
Figure 3 – Zipline drone carrying medical supplies [19] ......................................................... 14
Figure 4 – Matternet Drone [20] ............................................................................................ 15
Figure 5 – Amazon Prime Air Drone [21] ............................................................................ 15
Figure 6 – Impossible Aerospace Drone [22] ....................................................................... 16
Figure 7 – Flirtey Drone [23] ................................................................................................. 16
Figure 8 – Wing drone [24] .................................................................................................... 17
Figure 9 – Linking organization policies to operational concepts ........................................... 21
Figure 10 – System Context [31] ............................................................................................. 22
Figure 11 – System requirements [31] ..................................................................................... 23
Figure 12 – Map showing the most congested cities of USA .................................................. 30
Figure 13 – Picture showing Firemen at work [34] ................................................................. 31
Figure 14 – Picture showing paramedic at work [35] .............................................................. 31
Figure 15 – Drone being used to save life in time-critical situations ...................................... 33
Figure 16 – Showing number of emergencies drone can address ............................................ 34
Figure 17 – Fire engine [37] .................................................................................................... 35
Figure 18 – Ambulance [38] .................................................................................................... 36
Figure 19 – Police car [39] ....................................................................................................... 36
Figure 20 – Chart detailing market sectors .............................................................................. 37
Figure 21 – Graph showing the most congested cities and the market size ............................ 39
Figure 22 – Defining Value Proposition .................................................................................. 40
Figure 23– Outcome of using technology ................................................................................ 41
Figure 24 - Philips HeartStart Onsite AED [40] ...................................................................... 45
Figure 25 - Contents inside the box, Source – Google Images ................................................ 45
Figure 26 – Quadcopter Configuration [41] ............................................................................ 47
Figure 27 – Hexacopter Configuration [41]............................................................................. 47
Figure 28 – Octocopter Configuration [41] ............................................................................. 48
Figure 29 - Tarot X6 with foldable arms [45].......................................................................... 51
Figure 30 - Tarot X6 [45]......................................................................................................... 52
Figure 31 – Manhattan Network on Open Street Map (OSM) ................................................ 59
Figure 32 - Showing Manhattan Network of NY in real-world ............................................... 59
Page | xi
Figure 33 - Showing focused network – Traffic Analysis Zone (TAZ) .................................. 60
Figure 34 - Showing beginning of simulation at TAZ with traffic congestion ....................... 60
Figure 35 – Figure showing the zoomed in version of a traffic light in Manhattan ................ 61
Figure 36 – Mumbai Network on OpenStreetMap .................................................................. 62
Figure 37 - Mumbai SUMO Network ...................................................................................... 62
Figure 38 – Showing TAZ for Mumbai Network .................................................................... 63
Figure 39 – Bogota Network OSM .......................................................................................... 64
Figure 40 - Bogota SUMO network......................................................................................... 64
Figure 41 – Bogota Junction showing traffic congestion ........................................................ 65
Figure 42 - Drones in the healthcare industry .......................................................................... 73
Figure 43 - Drones in the transportation industry [54] ............................................................ 73
Figure 44 - Drones in the EMS/Public Sector ......................................................................... 74

Page | xii
LIST OF TABLES
Table 3. 1 Details of System Context ...................................................................................... 22
Table 4. 1 Market Research Analysis ...................................................................................... 35
Table 4. 2 Estimated profit in USA from sales based on market penetration .......................... 38
Table 4. 3 Estimated revenue sales in 5 most congested cities ................................................ 39
Table 5. 1 – Comparison between Quadcopter, Hexacopter & Octocopter ............................. 46
Table 5. 2 – Comparison between Tarot X6 & AmbiFly ........................................................ 53
Page | 1
CHAPTER 1: INTRODUCTION
1.1 Motivation
Unmanned Aired Vehicles (UAVs) are currently being used in different kinds of
applications that range from agricultural to military. With the increasing use of
UAVs across all the potential markets, it is about time to shift focus on the market
that is gradually starting to grow, i.e. the emergency medical services. While the
application of UAVs is pivotal in other sectors, to be able to use UAVs to possibly
increase the chances of survival of a human being is an incredible opportunity.
Growing up in a populous country like India, one can observe many different
challenges and possible areas of improvement. The biggest challenge faced in the
country is the congestion on roads. Be it a metropolitan city or a rural area,
traveling is a struggle everywhere. Sometimes it is the interminable congestion
and sometimes the poor road conditions. Whilst it does not seem like a big
problem, the situation becomes critical when an ambulance is stuck in the
aforementioned situations. I experienced the issue firsthand when I was traveling
with a loved one who was experiencing a medical emergency in an ambulance
that lacked critical medical equipment. No amount of horns or sirens stirred the
traffic away. I felt helpless at that moment. It was a very difficult time in my life.
I wished there were something I could do in that moment to help that person.
Snarled traffic prevented us from reaching the hospital in time to save the patient.
I lost someone I loved a lot that day. And that loss in my life is the biggest
motivation behind the topic of this thesis.
Page | 2
Accidents are inevitable; but we should at least have a possibility of saving a
human life. The congestion on roads or inaccessibility to certain areas takes away
the chances of us saving a human life.
Based on the report from the National Institute of Emergency Medicine (NIEM)
in September 2018, more than 20 percent of patients who required immediate
medical care died due to traffic delays from rural sectors every year. Like
developed cities, Indian cities cannot afford to have a separate lane for emergency
purpose due to lack of road planning and infrastructure [3]. In Thailand more than
20 percent of patients who needed emergency medication, died on their way to
the hospital because of delays due to traffic jams and unhelpful motorists,
National Institute of Emergency Medicine (NIEM) [4].
In the UK, it is believed that they can save more than 3,000 heart attack victims
every year if they could address 90 percent of calls on time [5]. There have been
cases where people potentially lost their lives waiting for an ambulance in India.
Paramedics claim that ambulance delays are killing people. The paramedic, who
has been working for the National Health Services (NHS) for almost 10 years,
was quoted saying: “We signed up to this job to help people but it's got to the
point where we are constantly so late to reach the most critical patients that by
the time we get there, there's nothing we can do - that's demoralizing," [6].
Another report highlighted the importance of data integration, whereby a fire
chief of Mifflin Township in Ohio said that “I can get Uber in some parts of the
country faster than I can get an ambulance.” [2].
Based on the research published by the American Journal of Surgery in July 2017,
Emergency medical services (EMS) take on an average of 7 minutes to reach the
scene after the 911 call. The time increases to 14 minutes in rural areas. Nearly 1
out of 10 cases wait for half an hour for the arrival of first responders [7].
Page | 3
Different countries are affected differently by the traffic congestion. But the
impact of a delayed ambulance remains the same. More damage to the patient and
chances of increase in mortality rate. Research states that bystanders educated in
first aid potentially assist the injured in their time of need. Data suggests that there
exists an interval for bystander intervention between 911 and EMS arrival. And
recognizing that “you are the help until help arrives” could possibly be lifesaving
[7].
And thus, we need to start thinking about developing a technology that helps us
with responding to emergency calls in a faster, better, and efficient way.
1.2 Thesis objective and Main contributions
This thesis aims at the conceptualization of an architecture for the proposed mode
of application as described in the introduction. The current work aims at
developing the different aspects of the systems engineering for the application
Unmanned Aircraft Systems (UAS) as a first responder during Medicare
emergencies. The system will aim to assist the first responders (fire officers and
paramedics) in cases when they are unable to respond in time. The research work
will aim at considering the following scenarios in the successful deployment of
the system.
1. The operational needs of the drone will be discussed, including the
customer interviews.
2. The problem statement, customer discovery, market research and value
proposition of the product will be analyzed.
3. Design of a UAS defining the type, size and weight of the vehicle will be
discussed.
Page | 4
4. As the vehicle is supposed to carry a customized first responder kit, the
maximum possible weight is calculated considering the content of the kit
and material used for the kit box.
5. Required payload capacity and the powerplant needed is worked out in the
research.
6. The control systems will address the requirement of obstacle detection
algorithms and path following programming.
7. Payload deployment system and return to original feature will be discussed.
8. The final choice of the prototype for the current application will be talked
about.
9. The simulation of real-world traffic will be shown and the distribution of
the drones in different cities based on the population density, frequency of
the EMS stations along with the response times will be examined.
The thesis topic will help the EMS responders to address emergency situations
while reducing their fatigue and stress levels. As the EMS officers would be
aware of what is happening and they have the data of the scene beforehand, it
improves their response towards the emergency. They are better prepared for
handling the situation, instead of them reaching on scene and analyzing the
condition. The current research advocates saving lives in case of time-critical
situations.
1.3 Discovery journey
The thesis is not a brainstorming idea. But rather, it is something a little more
personal than that. As already mentioned, a specific experience led to the birth of
the thesis topic. And it has continued to grow and achieve different milestones in
the journey. This idea is not just research but also a business that is in its
rudimentary stage.
Page | 5
Journey of AmbiFly until date:
➢ Winners of IQE Pitch competition 2019
Awarded from UC Ventures Lab & UC Office of Research
➢ Graduates of Cohort 5 of UC Ventures Lab [8]
➢ Featured in AmericanInno magazine - Cincy 25 Under 25 [9]
➢ EO GSEA Cleveland Winner - Regional competition
➢ EO GSEA Nationals Competitor at Silicon Valley
➢ Accepted into Women's Business Entrepreneurship National Council
(WBENC) National Conference & Business Fair in June 2020
➢ Studied and passed FAA Certified Drone Pilot exam – Part 107 Certified
➢ Working on the beta-testing of the product with Dallas EMS
This project will continue to grow until the goal of saving more lives has been
accomplished!
1.4 Assumptions and Thesis Layout
There are a few assumptions made to accomplish the goal of this thesis:
1. Presence of a bystander is considered in every emergency situation
2. The solution is based on the fact that the city is highly populated and
experiences large amount of congestion
3. The drone has a parachute in place for fail-safe design concept
4. The drone has received the waiver from FAA to fly over people and also
operate it in Beyond Visual Line of Sight (BVLOS) condition.
5. The drone has a safety system in place that helps it safeguard the first aid
kit inside it.
The thesis contains different chapters covering different parts of the thesis,
encompassing all the major areas. In the next chapter, the background of thesis
topic is covered. Also, fixed wing and Vertical Take-off and Landing (VTOL) are
Page | 6
compared, current application of drones in healthcare services and the current
EMS services that operate without the drone technology is discussed. Further,
chapter three goes over the operational needs of the solution and the product, the
user needs and the analysis of customer interviews. In the next chapter a
technology solution is addressed which discusses the business opportunity of the
idea entailing the problem statement, customer discovery, market research and
value proposition. System requirements for the solution are focused on in the
following chapter which includes the payload, range, the type of drone selected
and the different components. Next, system design of the product, simulation of
the model in real-time traffic performed in the Simulation of Urban Mobility
(SUMO) simulator and results of the simulation are discussed. Further on, system
level discussions, conclusions and future work are enveloped. The thesis
concludes with references that were the data points and source of support for
different statements and declarations made.
Page | 7
CHAPTER 2: LITERATURE SURVEY
2.1 Background
The history of flying objects, or the unmanned aerial vehicle in its earlier forms,
extends to primeval civilizations. In approximately 200 AD, the Chinese used
paper balloons with oil lamps to warm up the air so as to fly above the enemies
in dark, causing a sense of fear in the enemy soldiers who thought of flight
involving a divine power [10].
The idea of unmanned aerial vehicles preceded the idea of aircrafts. It was for the
apparent reason of not risking the loss of life together with the experimental
objects. Due to the progress in technology today, the operation and control of
piloted flight can be sufficiently imitated in the flying aerial vehicles without
having a pilot on board.
The major challenge encountered by the preliminary aerospace pioneers with
regards to the piloted and pilotless aircrafts was the concern of being able to
control the flight after the flying vehicle was up in the sky. It was in World War
I that the scientists and inventors were put under immense pressure to innovate
the flight design and thus modern-day aviation was born.
The world’s first unmanned aircraft system, Curtis N-9 was born 2 years(1918)
after a series of failure by Sperry Gyroscope Company (later named Sperry
Corporation), while receiving the funding from the US Navy to build an
unmanned torpedo that was able to fly following a guided path and help them
explode its warhead which was nearly the same as an enemy warship. The US
Navy restarted working on the drone technology in the late 1930s. This led to the
Page | 8
development of Curtis N2C-2 drone, a 2500-lb bi-plane configuration, helped in
testing the efficiency of the Navy anti-aircraft defense system.
Figure 1- Curtis N2C-2 drone [11]
The development of aviation, both manned and unmanned was catalyzed during
the World war II. It was during the Vietnam War when the most extensive
program was introduced as advances in technology made UAVs more effective.
Most recently, US forces have used drones in the wars in Bosnia, Iraq, and
Afghanistan, and drones are a pivotal tool during the war on terrorism and other
military activities around the world.
2.2 Vertical Takeoff & Landing (VTOL) vs Fixed Wing
There are different kinds of small, unmanned aircraft systems. Ranging from
vertical take-off and landing (VTOL) to fixed wing aircrafts.
A vertical take-off and landing (VTOL) aircraft is one that can hover, take-off
and land vertically [12]. As the name suggests, these kinds of aircraft do not need
any runway for take-off. They take-off from the place they are stationed at and
land as well in a small place.
Page | 9
A fixed wing aircraft on the other hand is the one which has wings that use
forward airspeed to generate lift. They are sometimes called airplanes or planes
[13]. A fixed wing generally is bigger in size as compared to the VTOLs and they
need a runway to both takeoff and land.
There are two main kinds of VTOL aircraft - Single rotor and multi rotor.
Single rotor is a helicopter that only has one rotor in comparison to multiple rotors
and also has a tail rotor to control its heading. It has higher efficiency than a multi-
rotor, and there is an option of being powered by a gas motor for longer flight
times. Helicopter rotors have long blades which spin more like a wing, enabling
higher efficiency as compared to when a propeller is used. For heavy payloads
and storage capacity, the helicopters are one of the best options. They are a perfect
combination of hover and fast forward flight.
The disadvantages of using a helicopter is that they are complex, costly, produce
a lot of vibrations and the large spinning blades are dangerous if someone were
to come in their way. While the helicopter can hover on the spot, has easier startup
and to work its way up, there is a possibility of bad landing and also has a
requirement of a lot of maintenance because of their mechanical complexity [14].
A multi-rotor aircraft is an aircraft with multiple rotors. Quadcopters,
Hexacopters and Octocopters are the examples of a multi-rotor. Using them
allows to get an eye in the sky in an affordable manner. They help increase
situational awareness. They are easy to control, do not require any take-off or
landing space and don’t occupy a lot of space if carried along. The size of a multi-
rotor increases as the number of rotors increases. These types of aircraft are
extensively used for serial photography, agricultural drones and even delivery of
packages.
Page | 10
The limited speed and endurance of a multi-rotor are two down-sides that make
them not the best option for applications such as large-scale aerial mapping, long
distance inspection of pipelines and powerlines. With the current battery
technology, the maximum flight time to get from these aircrafts is 20-40 mins
with no or minimum payload such as a lightweight camera. This makes the
operation of multi-rotors for long duration highly inefficient and time-consuming.
The heavier the payload, the shorter is the flight time. A gas-engine powered
multi-rotor is not highly practical because of their need to be fast and precise
control operations [14].
Fixed-wing drones have wings like the one in a normal aircraft which provides
the lift instead of the vertical rotors in case of rotary wing. Thus, they utilize the
energy to move forward and not hover at a particular place. This makes them
cover long distances and map larger areas and loiter around their point of interest
for longer times. These aircrafts can also use gas engines to power themselves.
Cons of using a fixed wing is that they are unable to hover in a particular spot like
a multi-rotor UAV. They also need a launch pad and a runway to land depending
on their size and their application. They are also towards the high cost end and it
is not as easy to learn to control as a multi-rotor.
In the current UAV market, there are applications whereby characteristics of a
fixed wing and a VTOL are combined to form a hybrid and get the best of both
the designs. A fixed wing hybrid VTOL that can hover along with taking-off and
landing vertically. Different designs are under development to get the best
features of different configurations into a single UAV. For example, fixed wing
designs with vertical lift motors bolted on, a tail sitter aircraft that rest on their
tails on the ground pointing straight up during take-off and then pitching over to
fly normally or a tilt rotor UAV whereby the rotors or sometimes the complete
wing with propellers can turn 90 degrees, from pointing upwards during take-off
Page | 11
to pointing horizontally for forward motion of flight. Although many of these
configurations have been tried during the 1950s, the current technology has made
it feasible and plausible [14].
2.3 Application of drones in Emergency services
Drones are being extensively used in the field of healthcare as the technology
becomes promising with the everyday innovations. The use of this technology
has been extensively tested for the situations firefighting crews are exposed to.
There has been a substantial increase in number of wildland fires worldwide,
which is majorly because of the depleting environmental conditions caused by
the activities of nature and man [15]. As per the National Interagency Fire Center,
the wildfires from January 1, 2020 to June 2, 2020 have been 19,762 as compared
to the wildfires in the same period in 2019 which were 14,968. There has been an
approximate increase of 5000 wildfires in 1 year. Along with that, the total acres
burned in the 2020 period is 439,422 million whereas in 2019, 277,745 million
acres was burned [16]. This indicates twice the increase of acres burned in a
matter of one year.
One of the important aspects to safe wildfire fighting is the Lookout,
Communication, Escape Route, and Safety Zone System (LCES). The lookout
aspect of which helps provide the required capacity to monitor firefighting crews,
fires, and terrain aspects in which if gone undetected, it could jeopardize the lives
of the emergency response teams. A team of University of Cincinnati, the
Surveillance for Intelligent Emergency Response Robotic Aircraft (SIERRA)
worked alongside West Virginia Forestry Department and Marcus UAV Corp. to
build together technology that will help in improving the lookout capacity for the
EMS. The focus of the group was to augment the capabilities of the LCES - a
lookout system which enables safety and efficiency at the tactical level for the
firefighters, especially during dangerous wildland fire conditions. The group
Page | 12
opted to tap the potential of UAS for the mission. They conducted an RC mode
flight of Zephyr UAS Vehicle at a controlled West Virginia Wild Land Fire Burn
which allowed them to showcase the power of UAVs and how they can be of
support to the fire personnel by being the eyes when the firefighters can’t see, by
being the protector of their lives during huge fires, and by creating a better
situational awareness for the fighters during all times [15].
The University of Cincinnati encompasses UAV Master Lab which allows
students to explore and innovate the UAV technology and gives an opportunity
to experiment before going in the real world. Students work in different
applications of UAVs starting from Disaster Management, Infrastructure
Inspection and Emergency Response [17]. A team of students from University
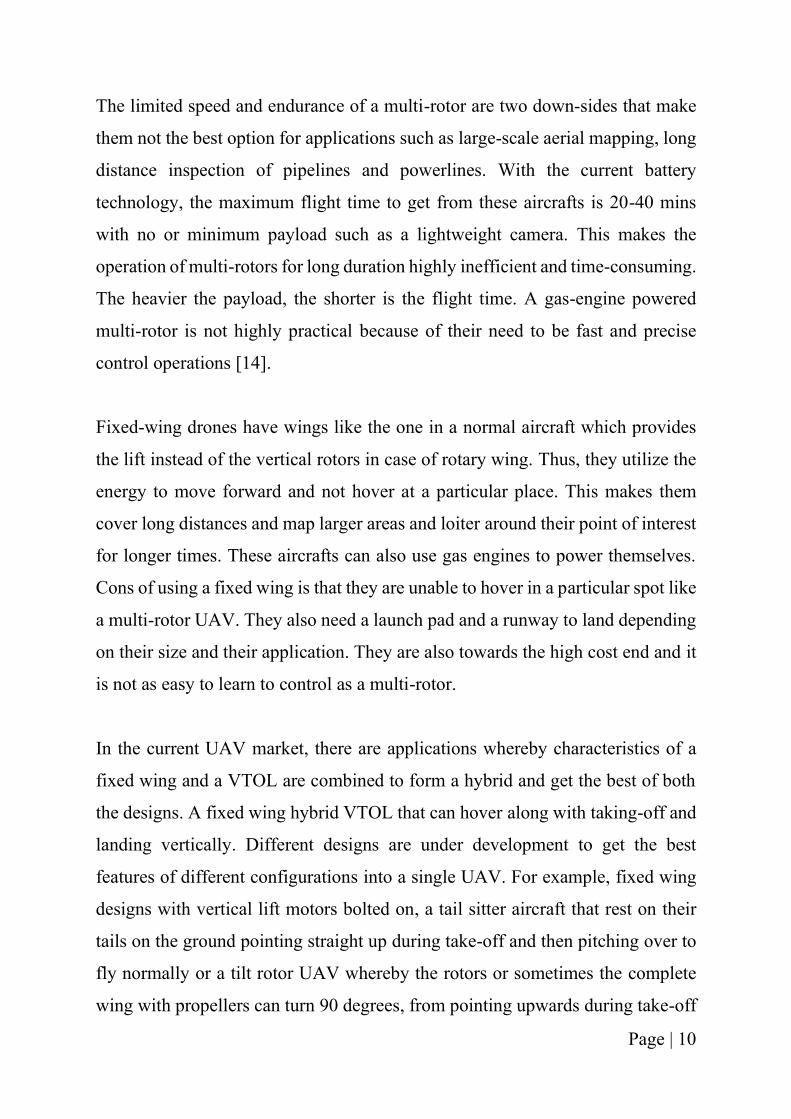
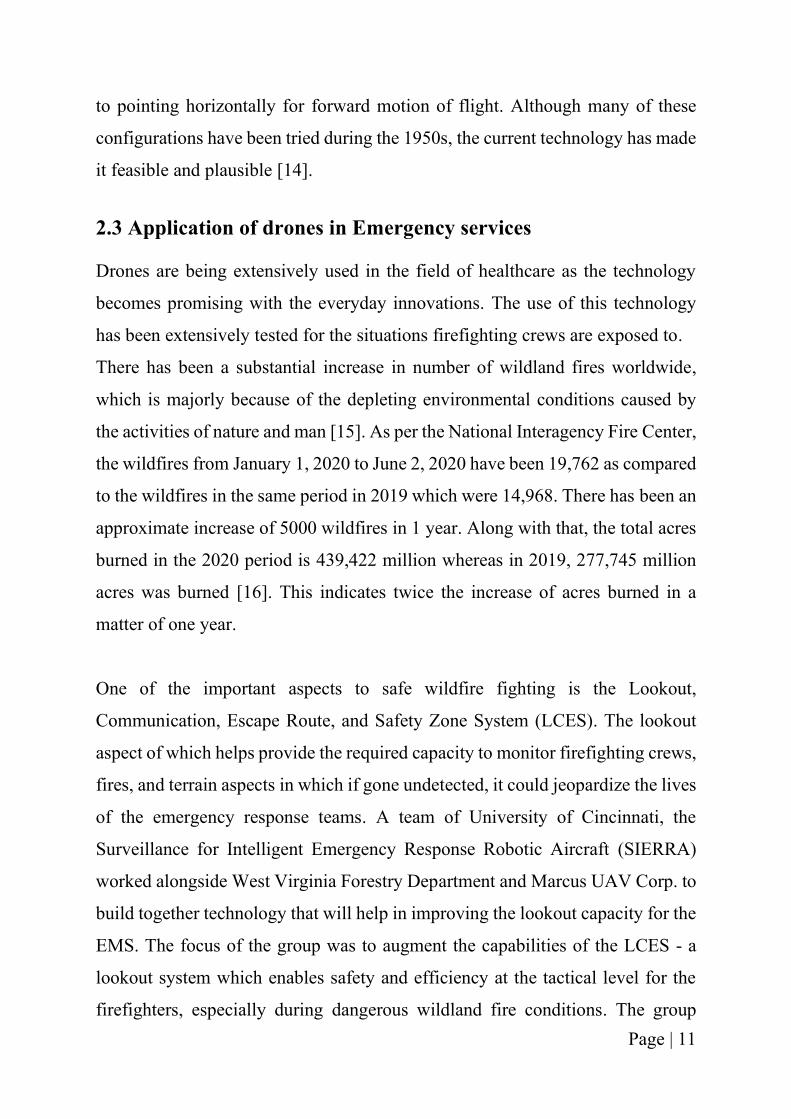
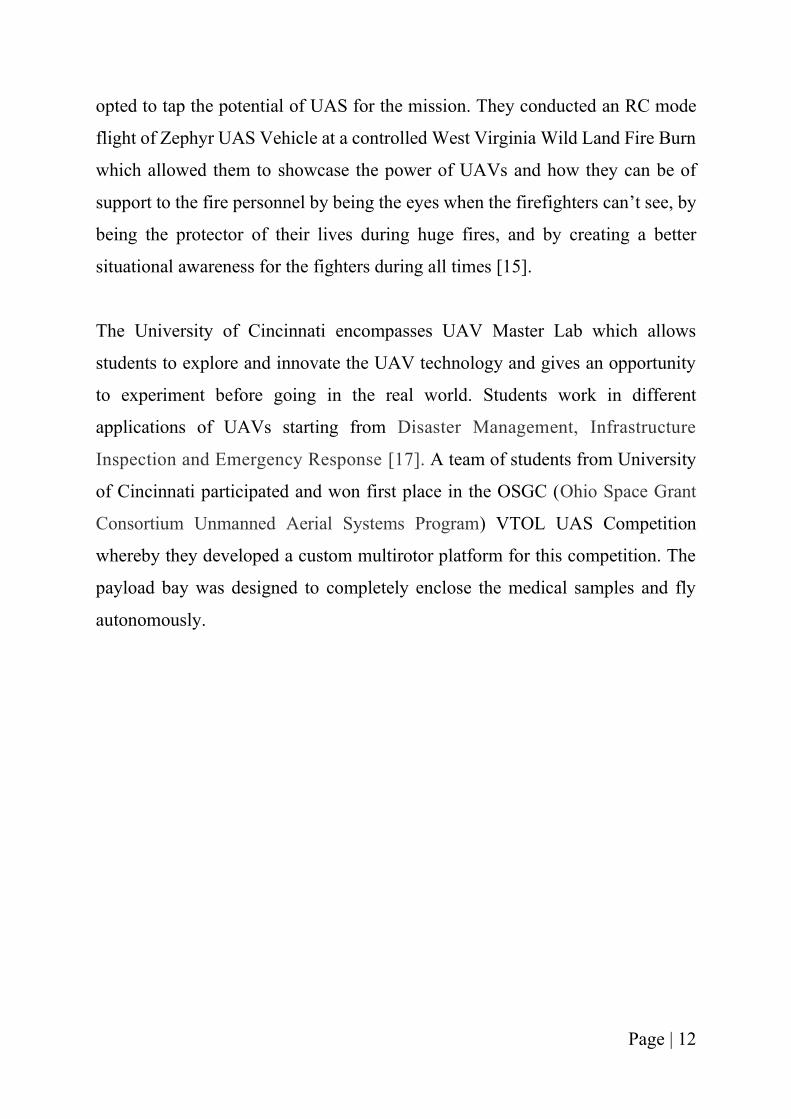
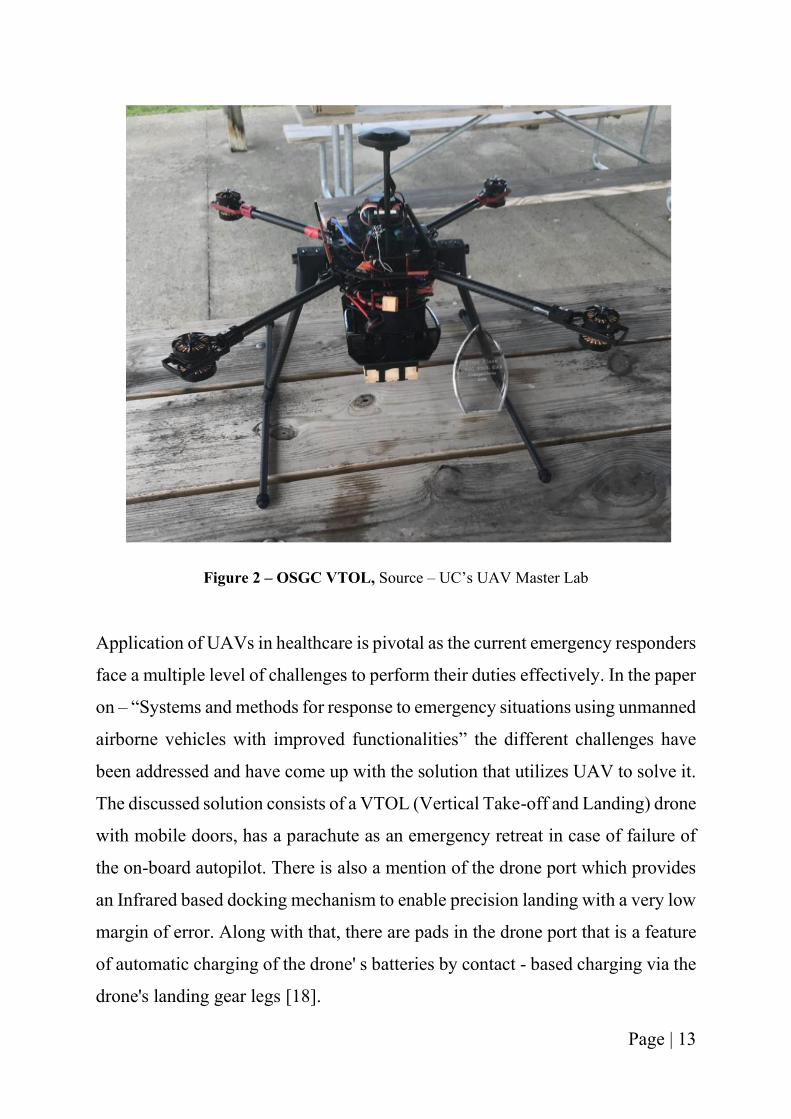
of Cincinnati participated and won first place in the OSGC (Ohio Space Grant
Consortium Unmanned Aerial Systems Program) VTOL UAS Competition
whereby they developed a custom multirotor platform for this competition. The
payload bay was designed to completely enclose the medical samples and fly
autonomously.
Page | 13
Figure 2 – OSGC VTOL, Source – UC’s UAV Master Lab
Application of UAVs in healthcare is pivotal as the current emergency responders
face a multiple level of challenges to perform their duties effectively. In the paper
on – “Systems and methods for response to emergency situations using unmanned
airborne vehicles with improved functionalities” the different challenges have
been addressed and have come up with the solution that utilizes UAV to solve it.
The discussed solution consists of a VTOL (Vertical Take-off and Landing) drone
with mobile doors, has a parachute as an emergency retreat in case of failure of
the on-board autopilot. There is also a mention of the drone port which provides
an Infrared based docking mechanism to enable precision landing with a very low
margin of error. Along with that, there are pads in the drone port that is a feature
of automatic charging of the drone' s batteries by contact - based charging via the
drone's landing gear legs [18].
Page | 14
With drones being constantly worked upon and different regulations and rules to
follow for flying them, there are companies that have received the FAA
certification and are currently flying their drones for different purposes. To name
a few of them, below is the list of companies:
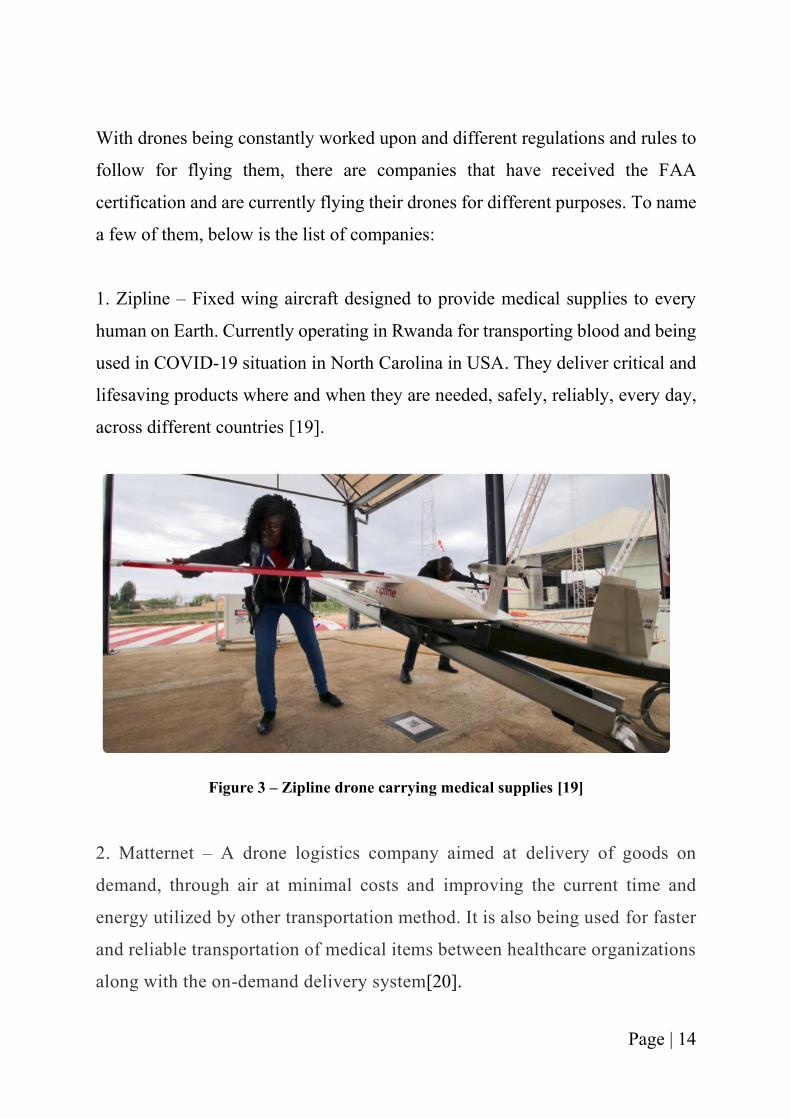
1. Zipline – Fixed wing aircraft designed to provide medical supplies to every
human on Earth. Currently operating in Rwanda for transporting blood and being
used in COVID-19 situation in North Carolina in USA. They deliver critical and
lifesaving products where and when they are needed, safely, reliably, every day,
across different countries [19].
Figure 3 – Zipline drone carrying medical supplies [19]
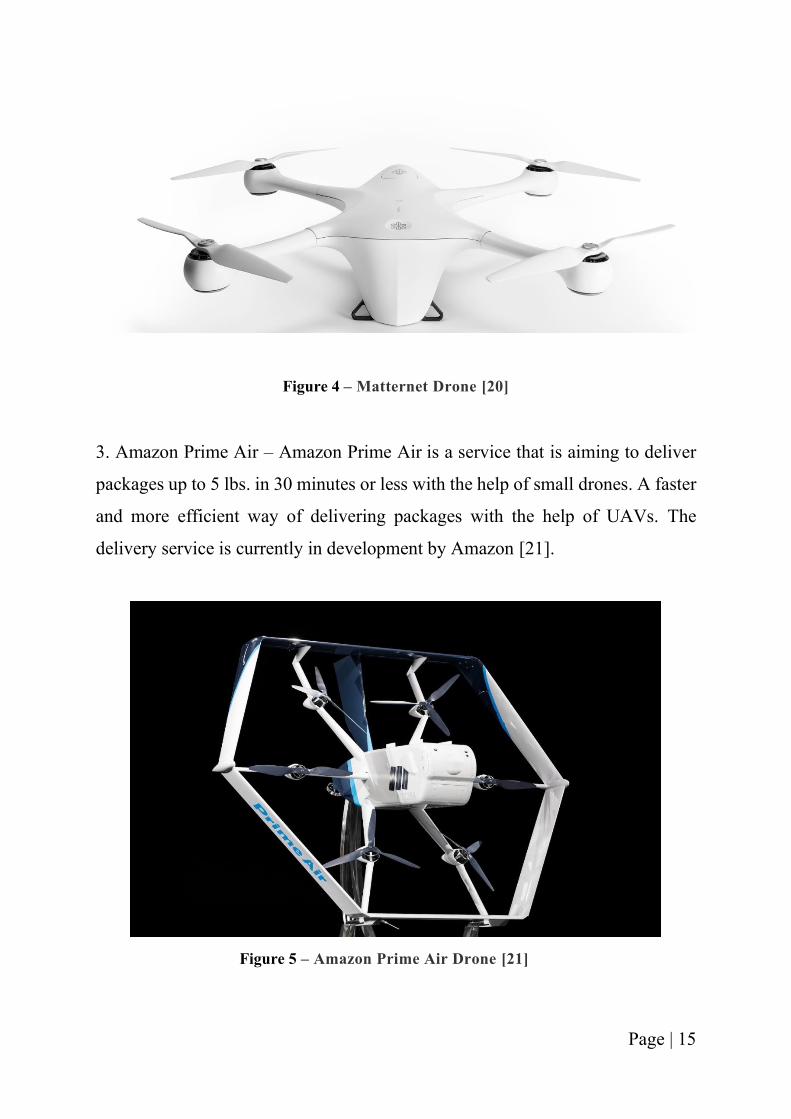
2. Matternet – A drone logistics company aimed at delivery of goods on
demand, through air at minimal costs and improving the current time and
energy utilized by other transportation method. It is also being used for faster
and reliable transportation of medical items between healthcare organizations
along with the on-demand delivery system[20].
Page | 15
Figure 4 – Matternet Drone [20]
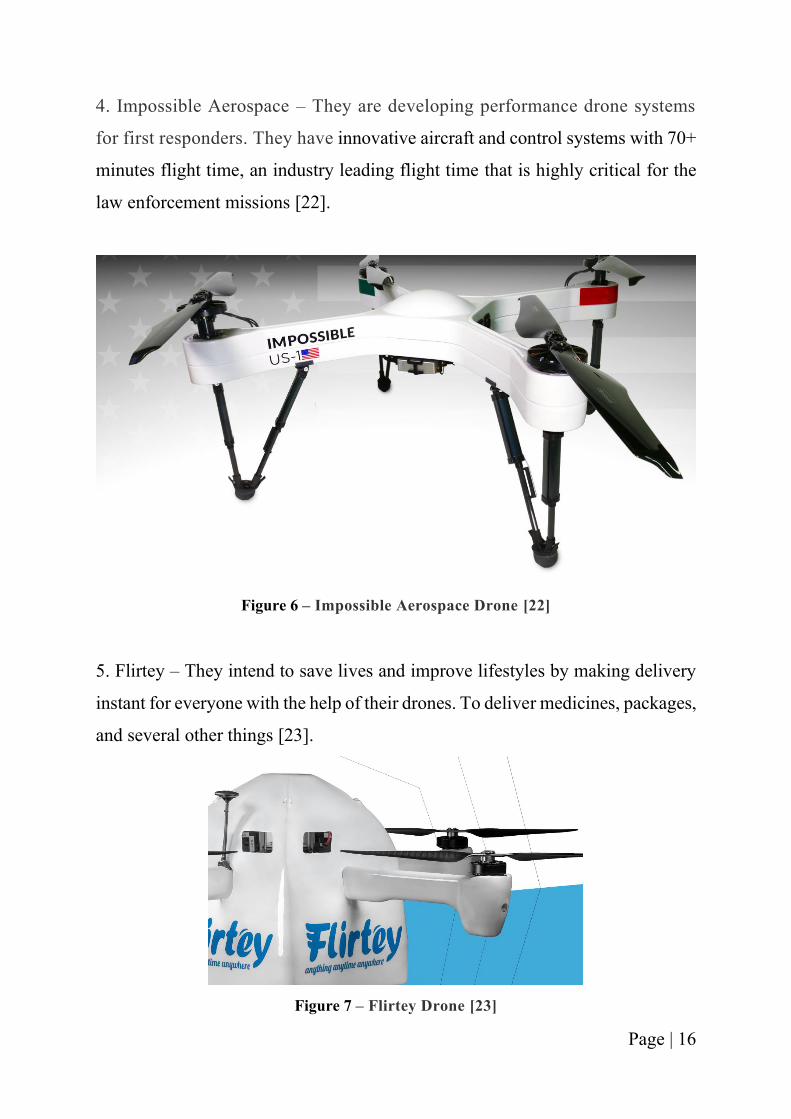
3. Amazon Prime Air – Amazon Prime Air is a service that is aiming to deliver
packages up to 5 lbs. in 30 minutes or less with the help of small drones. A faster
and more efficient way of delivering packages with the help of UAVs. The
delivery service is currently in development by Amazon [21].
Figure 5 – Amazon Prime Air Drone [21]
Page | 16
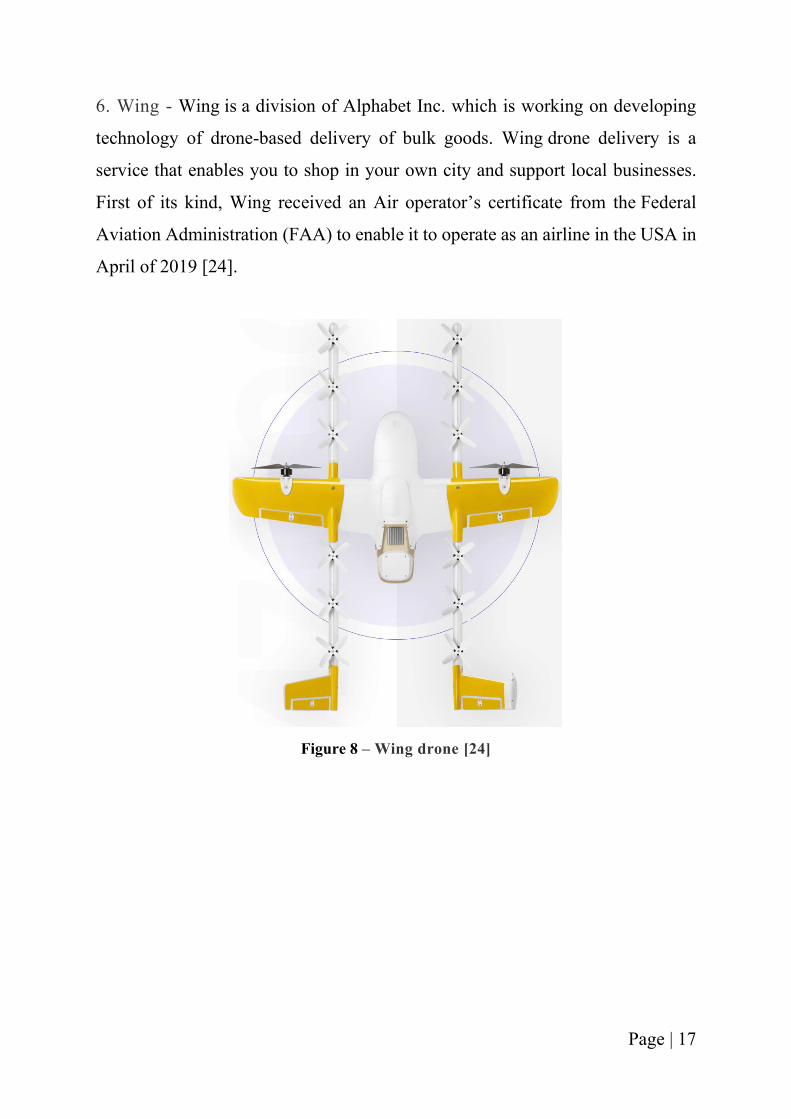
4. Impossible Aerospace – They are developing performance drone systems
for first responders. They have innovative aircraft and control systems with 70+
minutes flight time, an industry leading flight time that is highly critical for the
law enforcement missions [22].
Figure 6 – Impossible Aerospace Drone [22]
5. Flirtey – They intend to save lives and improve lifestyles by making delivery
instant for everyone with the help of their drones. To deliver medicines, packages,
and several other things [23].
Figure 7 – Flirtey Drone [23]
Page | 17
6. Wing - Wing is a division of Alphabet Inc. which is working on developing
technology of drone-based delivery of bulk goods. Wing drone delivery is a
service that enables you to shop in your own city and support local businesses.
First of its kind, Wing received an Air operator’s certificate from the Federal
Aviation Administration (FAA) to enable it to operate as an airline in the USA in
April of 2019 [24].
Figure 8 – Wing drone [24]
Page | 18
2.4 EMS services without drone technology & discussion of impact
by intervention of drone system
EMS has seen fast advancements during war times and is dated back to centuries.
Going as far back as the Greek & Roman eras, chariots were used to remove
injured soldiers from the battlefield. In today’s world, the Emergency Medical
Services (EMS) across the country face diverse challenges regarding the
workforce, management, infrastructure, and the funding [25].
Based on the statistics, Out-of-hospital cardiac arrest (OHCA) affects almost
360,000 people in the United States and almost 300,000 in Europe every year.
Survival rates in these cases are very low. Reports from the Swedish register for
cardio-pulmonary resuscitation (SRCR) show that nearly 5,312 OHCS cases were
reported and CPR was instituted at 2016.3 by bystanders while receiving the
instructions for the same from the dispatch center through a phone CPR or on
arrival of EMS, which takes places after a median of 13 minutes from when
cardiac arrest occurs. Altogether, the data shows that 11% of the total cases had
a survival rate of 30 days and other cases had a favorable neurological outcome,
with a cerebral performance category (CPC) score of 1–2.3 [26].
In a cardiac arrest issue, time taken to treat the patient with a defibrillator or via
CPR is the most important factor for survival, and every minute that a person is
without a CPR treatment, the chances of survival for the patient decreases by 10%
[27], [28].It has been seen that use of a defibrillator during the first five minutes
has a potential to save 50-70% of all the patients suffering from an OHCA [29],
[30]. If looked upon mathematically, the survival rate of 50% is a big number
when compared to the average survival rate of 11%.
Page | 19
In Stockholm, Public Access Defibrillation (PAD), early CPR performed by
bystanders and a first responder system has been executed which has led to
reduction in time to defibrillation [30].
The interventions have proved to be successful in both the urban and rural setting,
but there has been little or no effect on survival despite the reduction in EMS
response time. Irrespective of the different systems in place around the world to
increase the awareness of available AEDs for bystanders, the AED utilization in
cases of OHCA is still relatively small as compared to the available AEDs [30].
And thus, a possible way of reducing the long response time of EMS in remote
areas could be the potential use of an unmanned aerial vehicle that delivers an
AED to the bystanders. There is an increase in the usage of drones by EMS for
delivery of medical products. And thus, the current shifts in the market of using
drones in various sectors could potentially help in saving more lives.
Page | 20
CHAPTER 3: OPERATIONAL CONCEPTS
In this chapter, the operational needs and concepts are identified for the medical
emergency drone system. Systems are developed to satisfy the users’ and
operators’ operational needs [31]. The need for defining an operational concept
comes from the operational deficiency identified in the current system. For the
current mission of saving more lives and reducing the response time towards the
emergency situations, the current EMS services are not enough and so no longer
meet all the needs.
Further on, the desired system features and characteristics from an operational
perspective is described. A description of the users’ and operator’s environment
is discussed. How the system will be used along with the overall system goals
among users is outlined. An overall basis for long-range operations planning and
systems specification is defined. Lastly, the user organization and mission from
an integrated user-system point of view is discussed.
This chapter is used as an input to the system requirements analysis and design
phases to help establish the required framework within which proposed system
design and alternatives can be implemented and evaluated. It can also be adopted
as an element that helps in evaluating the completeness as well as the consistency
of a system design [31].
Page | 21
3.1 Strategy-to-task-to-need links organization policies to
operational concepts
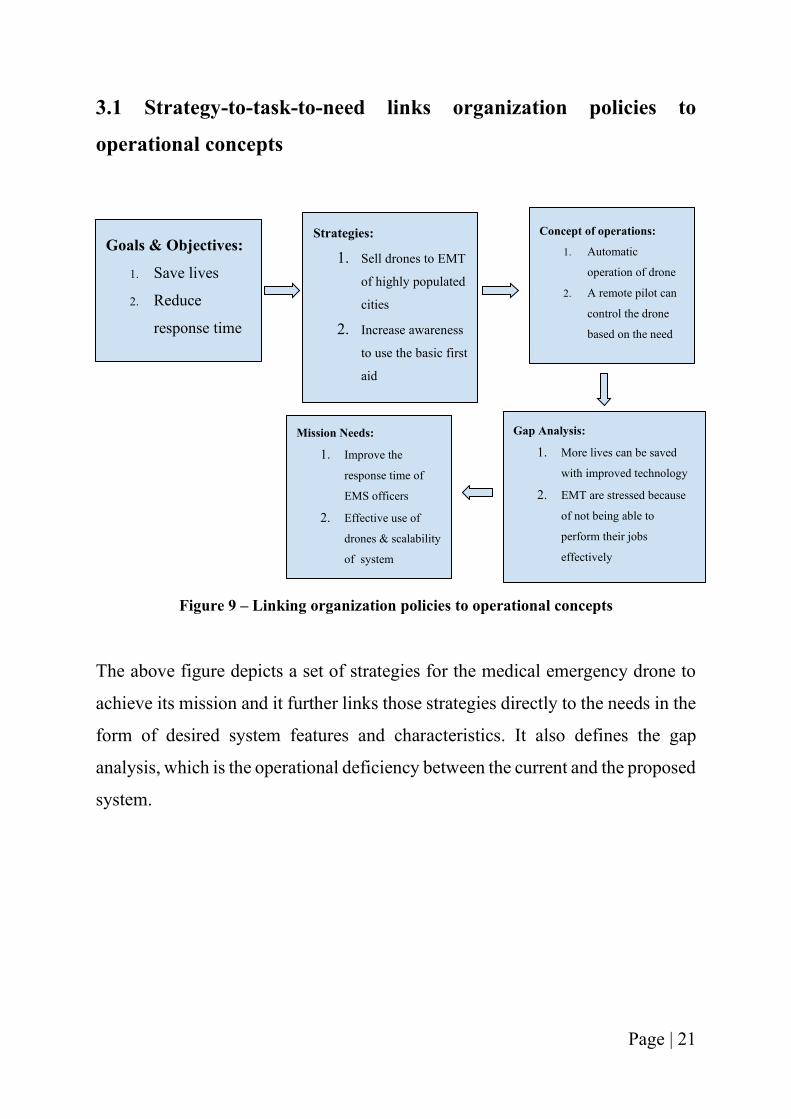
Figure 9 – Linking organization policies to operational concepts
The above figure depicts a set of strategies for the medical emergency drone to
achieve its mission and it further links those strategies directly to the needs in the
form of desired system features and characteristics. It also defines the gap
analysis, which is the operational deficiency between the current and the proposed
system.
Goals & Objectives:
1. Save lives
2. Reduce
response time
Strategies:
1. Sell drones to EMT
of highly populated
cities
2. Increase awareness
to use the basic first
aid
Concept of operations:
1. Automatic
operation of drone
2. A remote pilot can
control the drone
based on the need
Gap Analysis:
1. More lives can be saved
with improved technology
2. EMT are stressed because
of not being able to
perform their jobs
effectively
Mission Needs:
1. Improve the
response time of
EMS officers
2. Effective use of
drones & scalability
of system
Page | 22
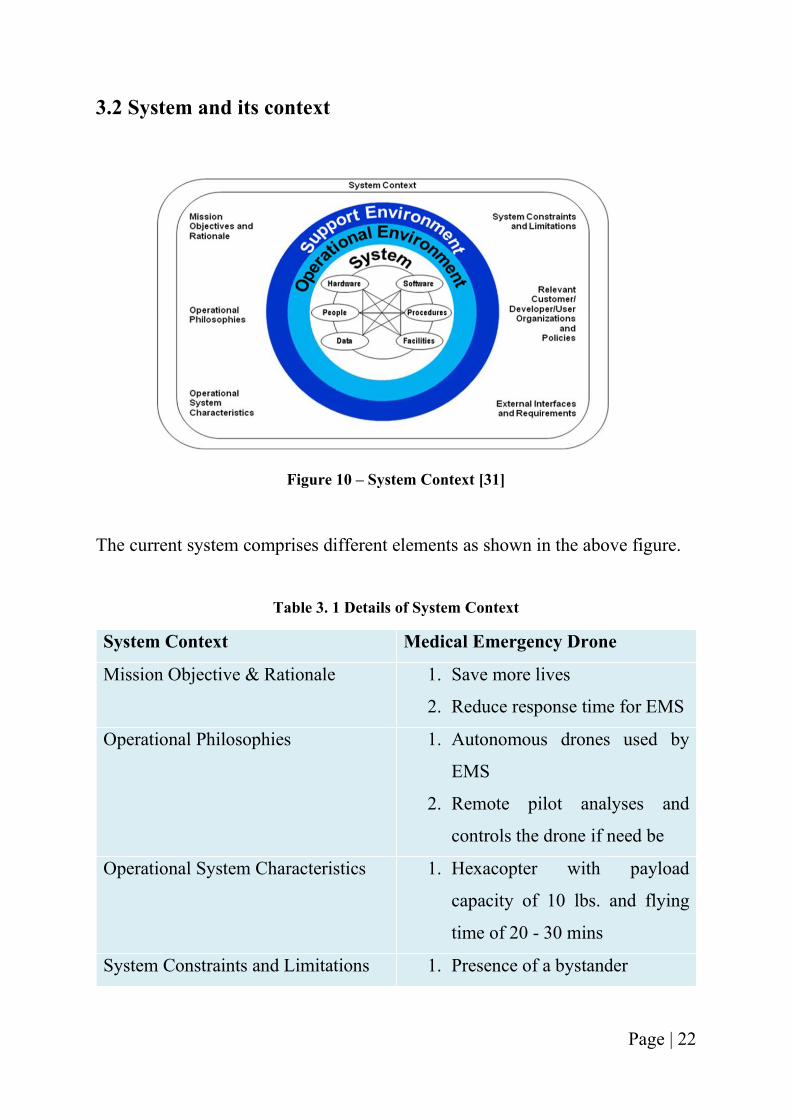
3.2 System and its context
Figure 10 – System Context [31]
The current system comprises different elements as shown in the above figure.
Table 3. 1 Details of System Context
System Context Medical Emergency Drone
Mission Objective & Rationale 1. Save more lives
2. Reduce response time for EMS
Operational Philosophies 1. Autonomous drones used by
EMS
2. Remote pilot analyses and
controls the drone if need be
Operational System Characteristics 1. Hexacopter with payload
capacity of 10 lbs. and flying
time of 20 - 30 mins
System Constraints and Limitations 1. Presence of a bystander
Page | 23
2. Receiving FAA certification to
fly BVLOS
Relevant Customer/User Organization
& Policies
1. Emergency Medical
Responders - Police, Fire and
Paramedics
External Interface & Requirements 1. Audio/Video Communication
2. Security system for drone
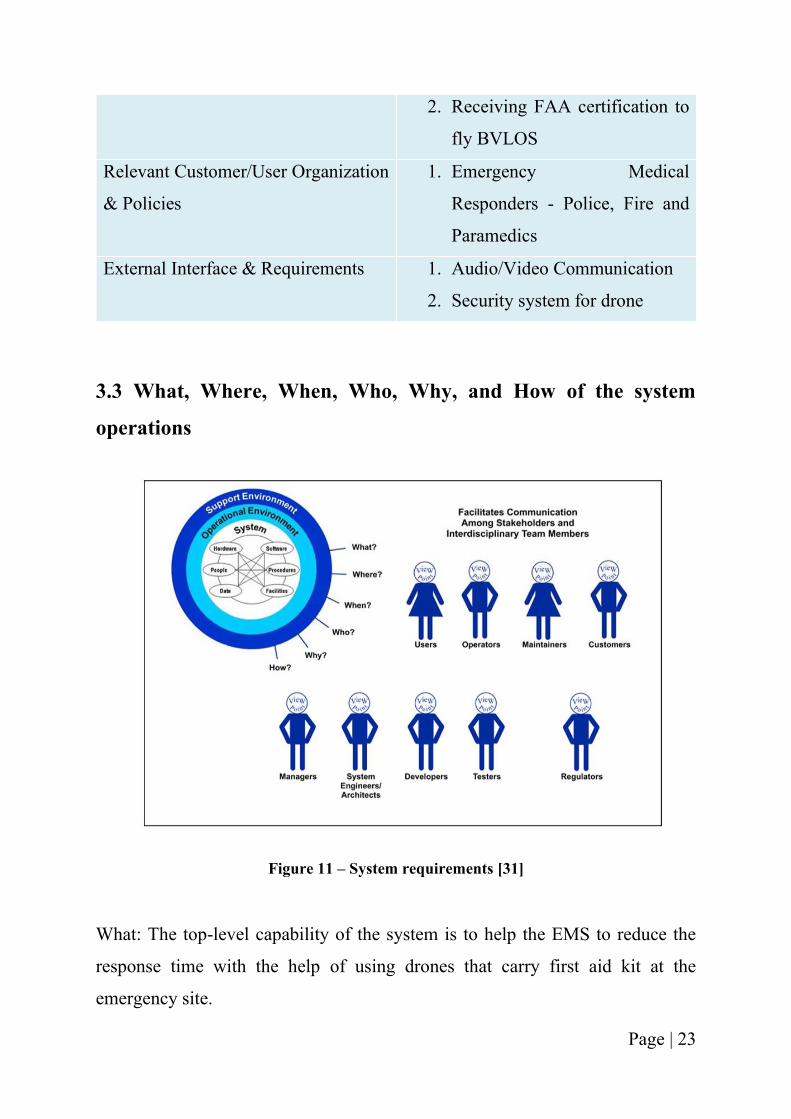
3.3 What, Where, When, Who, Why, and How of the system
operations
Figure 11 – System requirements [31]
What: The top-level capability of the system is to help the EMS to reduce the
response time with the help of using drones that carry first aid kit at the
emergency site.
Page | 24
Where’s: To accomplish the mission, the drone would be located at the top of the
EMS vehicle. It would be deployed to the accident/emergency scene whereby a
bystander can use the equipment that come with the drone and help the patient.
Depending on the location of the emergency scene, the drone could be flown to a
location on the road, a balcony of high-rise building, or a backyard of a house.
When’s: The system will be used every time the EMT anticipates a delay in their
response times due to some unavoidable circumstances such as traffic jams,
rurality of the area or any drug overdose situation.
Who’s: The drone will be operated by a remote pilot in command. The
communication with the bystander who gets the drone will be done by the
paramedics back in the ambulance who are on their way to the scene.
Whys: People all over the world die because they don’t receive the first aid in
time. There are a high number of deaths every year all around the world that occur
just because an ambulance takes a lot of time to reach on scene. And therefore,
we need this technology to help us bridge the gap between the EMT and the
emergency cases.
How’s: The concept of the system is based on the integration of EMS with drone
technology. Drones would be on top of the EMS vehicle and every time they
experience an unanticipated delay, they can deploy the drone to the accident scene
whereby a bystander can help the patient by using the equipment’s that were
delivered by the drone with the help of paramedics back in the ambulance, buying
the patient sometime until the ambulance arrives.
Page | 25
3.4 User Needs
Traffic is a major issue in big cities and densely populated areas. Out of all the
problems and issues that traffic brings upon human lives, the worse one is the
scenario of ambulances and emergency vehicles being stuck in the traffic and not
being able to move forward. Asian countries such as India, Thailand and China
have the most congested places on the planet.
The current mission focuses on this problem of emergency vehicles not being
able to respond to emergencies on time and getting delayed.
Below is the data from different countries in the world regarding the emergency
medical services in their countries and what is the scope of improvement in the
same:
1. United States of America – EMS in the US respond to approximately 37
million calls every year. The average response time is 7 minutes, but the
time changes when the emergency is in a rural setting. And so, nearly 1 of
10 calls waits half-hour for the arrival of EMS. Meaning that 3.7 million
are not addressed by the EMS in the average response time of 7 mins [7].
2. India - 30% of deaths which accounts to 50,000 people dying every year
due to ambulance delays [32].
3. Thailand - Traffic jams are blamed for 20% of deaths of emergency
patients [4].
4. UK - It is analyzed that in the UK, more than 3,000 cardiac arrest victims
each year could be saved if EMS could address 90% of calls on time [5].
The data helps in understanding the situation in a better way. It helps in realizing
the importance of solution for the above scenario.
Page | 26
The user in this current situation is the Emergency Medical Team, the first
responders who would like to do their job at the best capacity and reduce the
stress as they tackle the most challenging situations.
3.5 Brainstorming sessions
Brainstorming sessions began with the idea of different technology that could be
potentially used by the EMT to make them more efficient.
These sessions focused on solving the problem and addressing the user needs.
Several solutions and several ways were thought of.
1. Building a drone for the EMTs to be able to reach even though they are
stuck in traffic. The drone would be a stand-alone drone which would
dispatch when the EMT asks the company to send it as they anticipate that
they will not be able to reach on time. Further, the possibility of having the
drone on top the EMT vehicles was explored. During the customer
interviews, the EMT vehicles were observed and different points were
noted down to understand the best option.
2. The payload for drone was considered before deciding on the type of drone
to be used. The payload was determined by the real-time data of the most
frequent emergency cases noted by a city. In this case, the example city for
designing the payload is Cincinnati. After deciding on the top most
frequent cases, the different equipment that could be used to save a
person’s life were determined and examined for reducing the payload
weight, in order to make the drone light weight and higher in efficiency.
One more factor that was considered was the user-friendliness of the
equipment for a non-medical person to be able to use it without having any
prior training. The user-friendliness feature was confirmed by the author
and a student by using the equipment on a training dummy.
Page | 27
3. Different types of drone designs exist in the market and hence quadcopters,
hexacopters and octocopters were elaborately discussed and analyzed. All
the pros and cons for each design were considered to make the decision for
the most efficient drone design.
4. After the decision of drone design, payload capacity and the equipment
inside the first aid box, one of the most important question was to whether
make the drone from scratch or to find a drone off the shelf that coincides
with the features of the current drone and can be used for a prototype. With
several iterations of trying to make the drone from scratch and trying to
find the right drone for the mission, decision was made to buy the drone
from the market.
5. To ensure easier transition for the user into using the product, several
features of the autopilot of the drone, the application that allows the user
to see the bystander was discussed and added to the drone.
3.6 Customer Interviews
Understanding the user problem is not enough unless the user believes and agrees
to buy the proposed solution.
As is said by the famous Laura Ashley – “We don’t want to push our ideas on to
customers, we simply want to make what they want [33].”
And to understand this better, there were different interview sessions with the fire
officers, paramedics, and police officers. The customer interviews were the
gateway to understand the problems faced by users and they were not biased by
telling the solution beforehand. 18 EMS responders were interviewed for the
same.
Page | 28
In one of the interviews, Mr. Kevin Erhart working at Short Vine Street Fire
Station in Cincinnati, a paramedic serving for 10 years was quoted saying – “The
fatigue caused is a major issue in our job. Sometimes I wish we had more medic
units.”
The problem perceived by Mr. Erhart could be solved by the current mission of
addition of drones to the EMT vehicles, enabling them to reach faster and further
than their usual radius. The fire officers when interviewed, agreed to the fact that
the equipment intended to be included in the first-aid kit were lifesaving and easy
to use for non-medical people. The police wanted a solution about how they can
solve the drug overdose situation in a more protected and safer way. As they
would always be in the fear of being injected by the drug users while they were
on their lookouts.
Different EMT responders face different challenge every day and these problems
could be solved with the help of drone technology. And this led to the further
work on the research for innovating and improving the current system of
emergency responders.
Page | 29
CHAPTER 4: TECHNOLOGY TRANSITION
4.1 Problem Statement
Need Statement: The long response time of the Emergency Medical Services
(EMS) is an active need whereby EMTs do not reach acute time sensitive
emergencies fast enough. The current mission - AmbiFly can help buy the patient
some time during the crucial period before the ambulance arrives!
The Problem: Long response time (14 to 30 minutes) of EMTs due to
accessibility issues (traffic/rural areas) & overworked EMT officers. The long
response time situation occurs due to the following factors:
➢ Scarcity of EMS vehicles (3 per 10,000 people)
➢ Staff shortage (30 per 10,000 people)
➢ Accessibility problem (remote areas or natural calamities leading to
roadblocks)
➢ High set-up and maintenance costs ($150,000)
➢ Expensive ($600-$1000 per trip)
In densely populated areas such as LA, NY, or Asian countries the traffic
congestion is painful. For high population areas like Asian countries the pain
scale is 9/10. Currently the problem of no-way on the road is solved by with the
help of sirens on the EMS vehicles. Sometimes the dispatcher guides the
procedures to the bystanders while the EMS is on its way. And there is redundant
medical equipment in the EMT vehicles for fail-safe option.
Page | 30
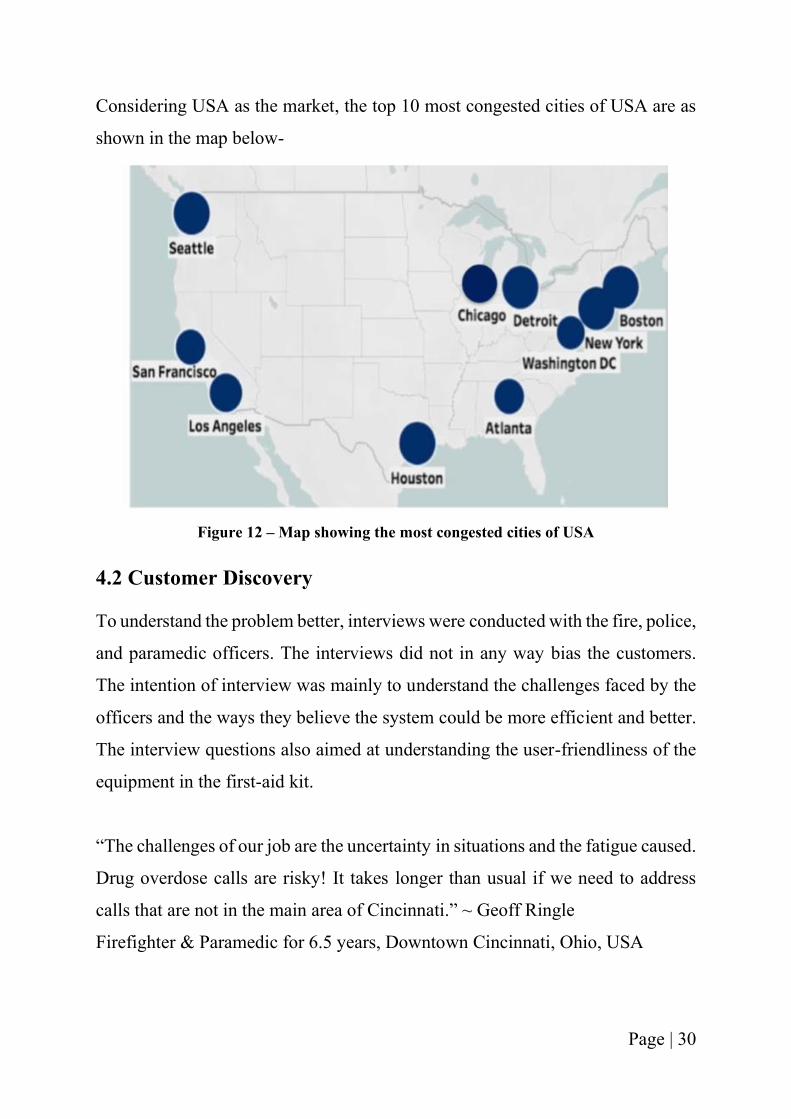
Considering USA as the market, the top 10 most congested cities of USA are as
shown in the map below-
Figure 12 – Map showing the most congested cities of USA
4.2 Customer Discovery
To understand the problem better, interviews were conducted with the fire, police,
and paramedic officers. The interviews did not in any way bias the customers.
The intention of interview was mainly to understand the challenges faced by the
officers and the ways they believe the system could be more efficient and better.
The interview questions also aimed at understanding the user-friendliness of the
equipment in the first-aid kit.
“The challenges of our job are the uncertainty in situations and the fatigue caused.
Drug overdose calls are risky! It takes longer than usual if we need to address
calls that are not in the main area of Cincinnati.” ~ Geoff Ringle
Firefighter & Paramedic for 6.5 years, Downtown Cincinnati, Ohio, USA
Page | 31
Figure 13 – Picture showing Firemen at work [34]
Figure 14 – Picture showing paramedic at work [35]
4.3 Bystanders – an untapped resource
While there are millions of emergency calls annually that are attended by the
emergency medical services, the presence of bystander has never been
emphasized enough.
Based on the data provided by the Cardiac Arrest Registry (Cardiac Arrest
Registry to Enhance Survival) reports from 2017 and 2018 for the city of
Cincinnati, Ohio, following can be summarized:
Case I. In 2017, total number of cardiac arrest cases = 513
Total cardiac arrests tracked = 471
Page | 32
➢ Bystander Witnessed = 107 (went into cardiac arrest prior to EMS arrival
on scene)
Survived 17; Survival rate = 16%
➢ 911 Witnessed = 56 (went into cardiac arrest while EMS on scene)
Survived = 3; Survival rate = 5%
Case II. In 2018, total number of cardiac arrest cases = 424
Total cardiac arrests tracked = 394
➢ Bystander Witnessed = 98
Survived 13; Survival rate = 13%
➢ 911 Witnessed = 46
Survived = 11; Survival rate = 24%
From the above data, it can be seen that the number of times when a bystander is
present on the scene is almost double the times as compared to when 911 is
present.
The current solution aims to improve the survival rate in the case when a
bystander is present on the scene and can potentially use friendly first-aid kits to
help an injured person.
4.4 Finding a solution
To overcome the challenges faced by the EMS team, drone technology is being
considered as a solution.
The way it is anticipated to work is: Every time an ambulance or a fire-engine or
a police car, while on a call to attend an emergency situation runs into traffic, a
congestion that is difficult to come out from, the drone which is equipped on top
of the EMS vehicle is deployed to the accident scene whereby a bystander can
potentially use the equipment’s of the drone, while communicating with the
paramedic back in ambulance through the audio-visual communication and help
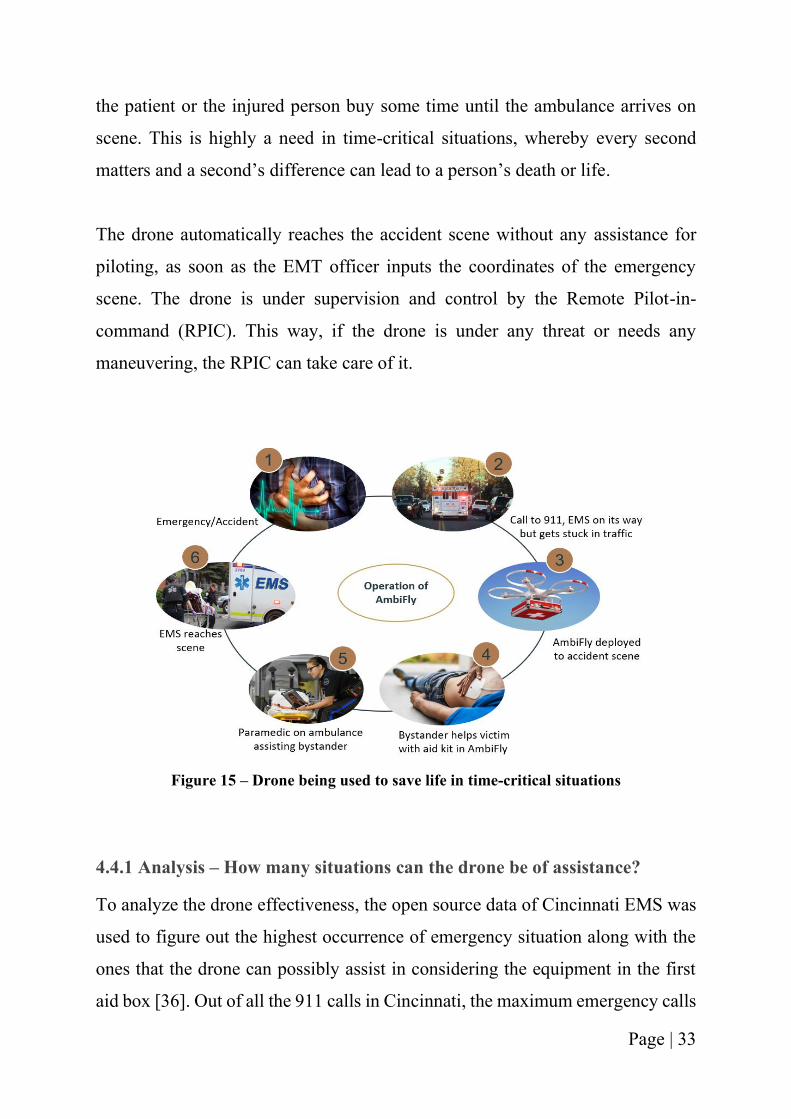
Page | 33
the patient or the injured person buy some time until the ambulance arrives on
scene. This is highly a need in time-critical situations, whereby every second
matters and a second’s difference can lead to a person’s death or life.
The drone automatically reaches the accident scene without any assistance for
piloting, as soon as the EMT officer inputs the coordinates of the emergency
scene. The drone is under supervision and control by the Remote Pilot-in-
command (RPIC). This way, if the drone is under any threat or needs any
maneuvering, the RPIC can take care of it.
Figure 15 – Drone being used to save life in time-critical situations
4.4.1 Analysis – How many situations can the drone be of assistance?
To analyze the drone effectiveness, the open source data of Cincinnati EMS was
used to figure out the highest occurrence of emergency situation along with the
ones that the drone can possibly assist in considering the equipment in the first
aid box [36]. Out of all the 911 calls in Cincinnati, the maximum emergency calls
Page | 34
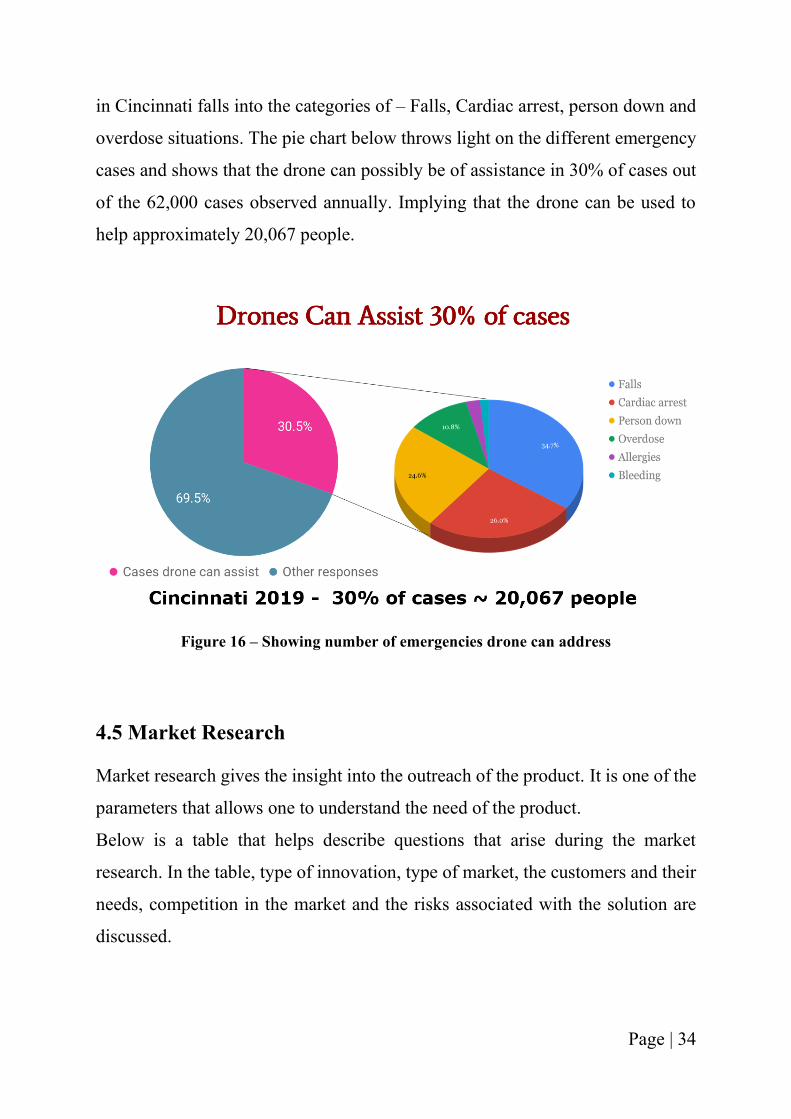
in Cincinnati falls into the categories of – Falls, Cardiac arrest, person down and
overdose situations. The pie chart below throws light on the different emergency
cases and shows that the drone can possibly be of assistance in 30% of cases out
of the 62,000 cases observed annually. Implying that the drone can be used to
help approximately 20,067 people.
Figure 16 – Showing number of emergencies drone can address
4.5 Market Research
Market research gives the insight into the outreach of the product. It is one of the
parameters that allows one to understand the need of the product.
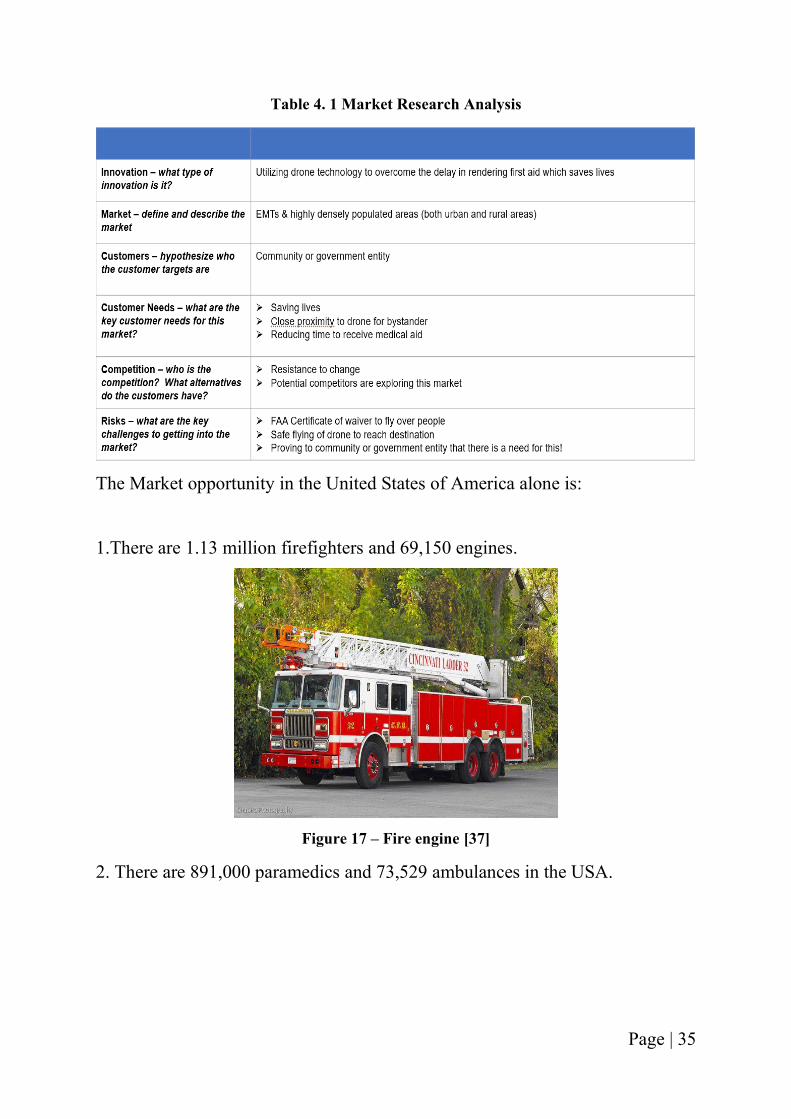
Below is a table that helps describe questions that arise during the market
research. In the table, type of innovation, type of market, the customers and their
needs, competition in the market and the risks associated with the solution are
discussed.
Page | 35
Table 4. 1 Market Research Analysis
The Market opportunity in the United States of America alone is:
1.There are 1.13 million firefighters and 69,150 engines.
Figure 17 – Fire engine [37]
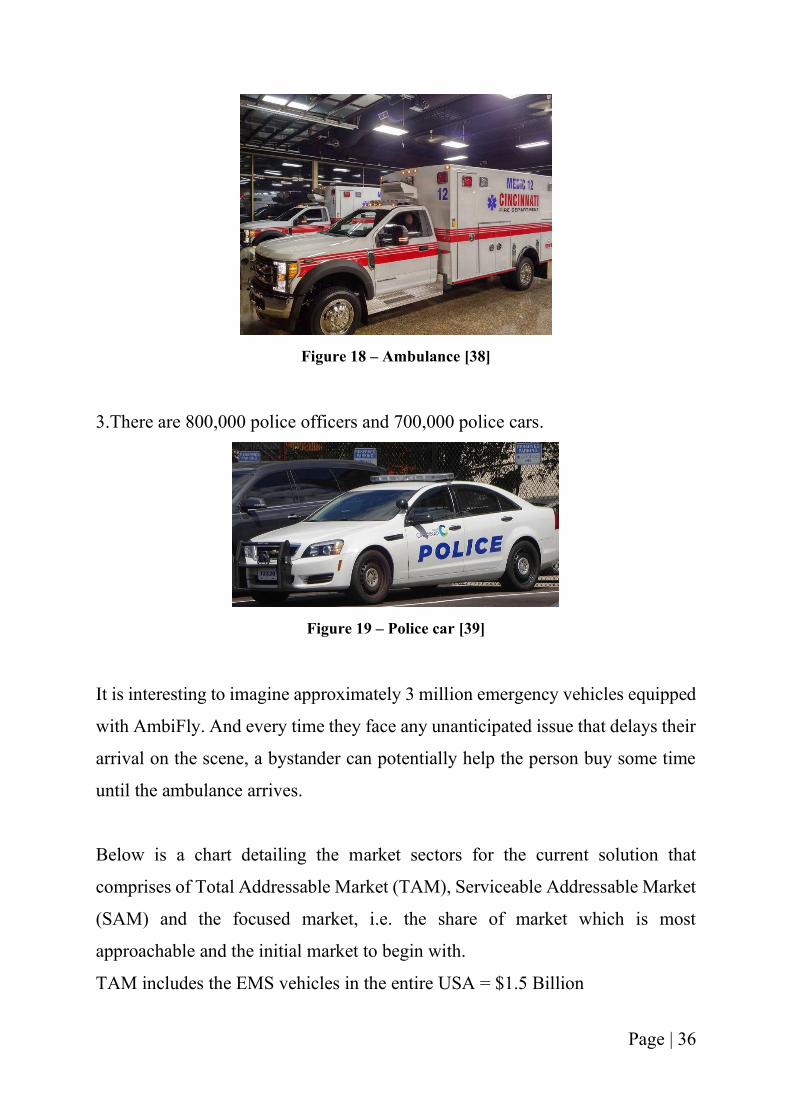
2. There are 891,000 paramedics and 73,529 ambulances in the USA.
Page | 36
Figure 18 – Ambulance [38]
3.There are 800,000 police officers and 700,000 police cars.
Figure 19 – Police car [39]
It is interesting to imagine approximately 3 million emergency vehicles equipped
with AmbiFly. And every time they face any unanticipated issue that delays their
arrival on the scene, a bystander can potentially help the person buy some time
until the ambulance arrives.
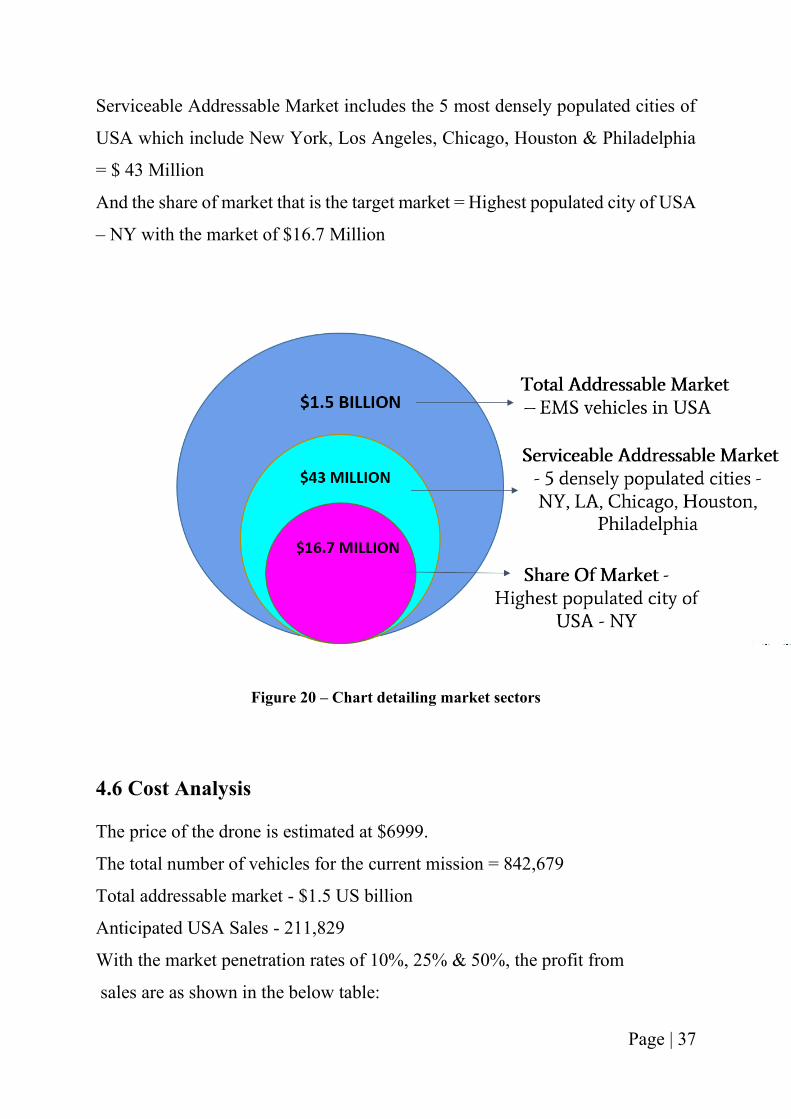
Below is a chart detailing the market sectors for the current solution that
comprises of Total Addressable Market (TAM), Serviceable Addressable Market
(SAM) and the focused market, i.e. the share of market which is most
approachable and the initial market to begin with.
TAM includes the EMS vehicles in the entire USA = $1.5 Billion
Page | 37
Serviceable Addressable Market includes the 5 most densely populated cities of
USA which include New York, Los Angeles, Chicago, Houston & Philadelphia
= $ 43 Million
And the share of market that is the target market = Highest populated city of USA
– NY with the market of $16.7 Million
Figure 20 – Chart detailing market sectors
4.6 Cost Analysis
The price of the drone is estimated at $6999.
The total number of vehicles for the current mission = 842,679
Total addressable market - $1.5 US billion
Anticipated USA Sales - 211,829
With the market penetration rates of 10%, 25% & 50%, the profit from
sales are as shown in the below table:
Page | 38
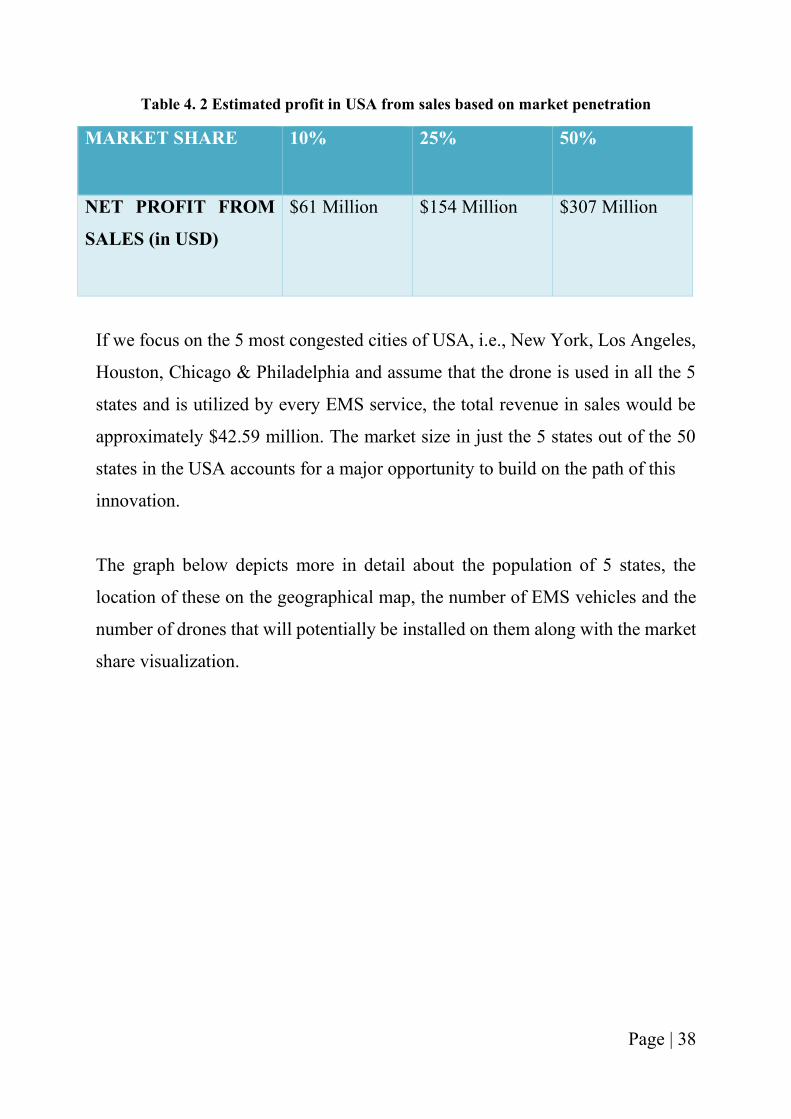
Table 4. 2 Estimated profit in USA from sales based on market penetration
MARKET SHARE 10% 25% 50%
NET PROFIT FROM
SALES (in USD)
$61 Million $154 Million $307 Million
If we focus on the 5 most congested cities of USA, i.e., New York, Los Angeles,
Houston, Chicago & Philadelphia and assume that the drone is used in all the 5
states and is utilized by every EMS service, the total revenue in sales would be
approximately $42.59 million. The market size in just the 5 states out of the 50
states in the USA accounts for a major opportunity to build on the path of this
innovation.
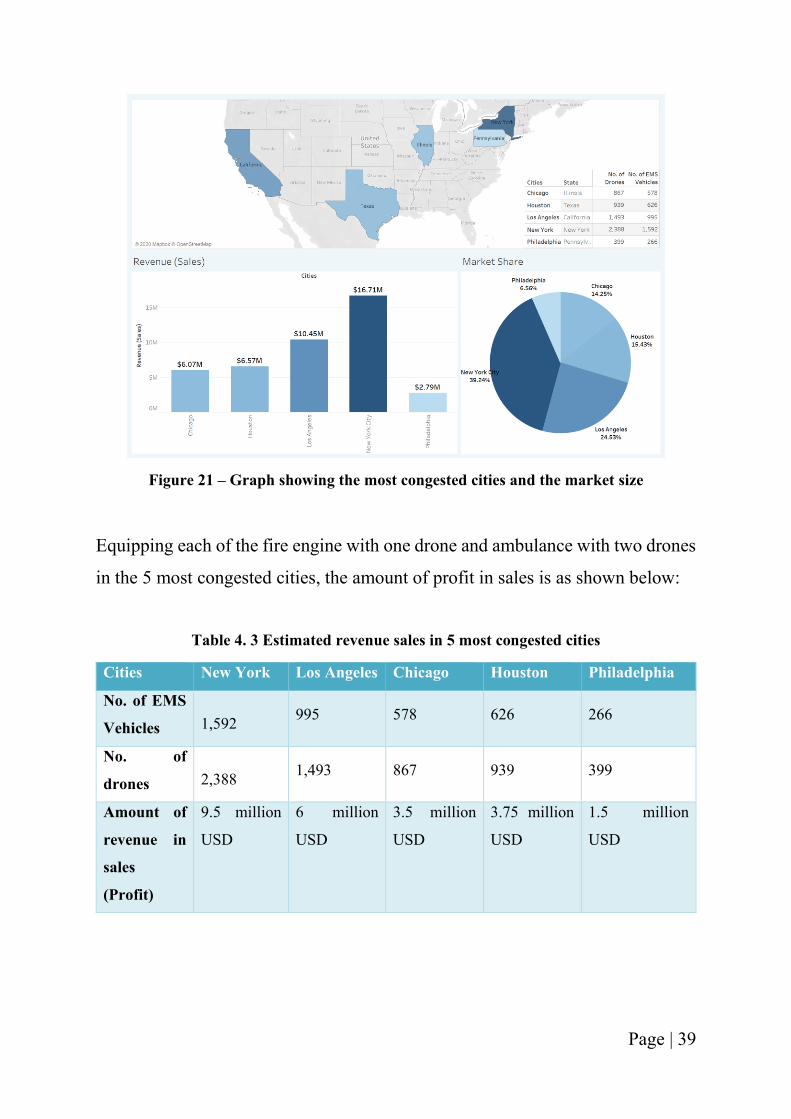
The graph below depicts more in detail about the population of 5 states, the
location of these on the geographical map, the number of EMS vehicles and the
number of drones that will potentially be installed on them along with the market
share visualization.
Page | 39
Figure 21 – Graph showing the most congested cities and the market size
Equipping each of the fire engine with one drone and ambulance with two drones
in the 5 most congested cities, the amount of profit in sales is as shown below:
Table 4. 3 Estimated revenue sales in 5 most congested cities
Cities New York Los Angeles Chicago Houston Philadelphia
No. of EMS
Vehicles
1,592 995 578 626 266
No. of
drones
2,388 1,493 867 939 399
Amount of
revenue in
sales
(Profit)
9.5 million
USD
6 million
USD
3.5 million
USD
3.75 million
USD
1.5 million
USD
Page | 40
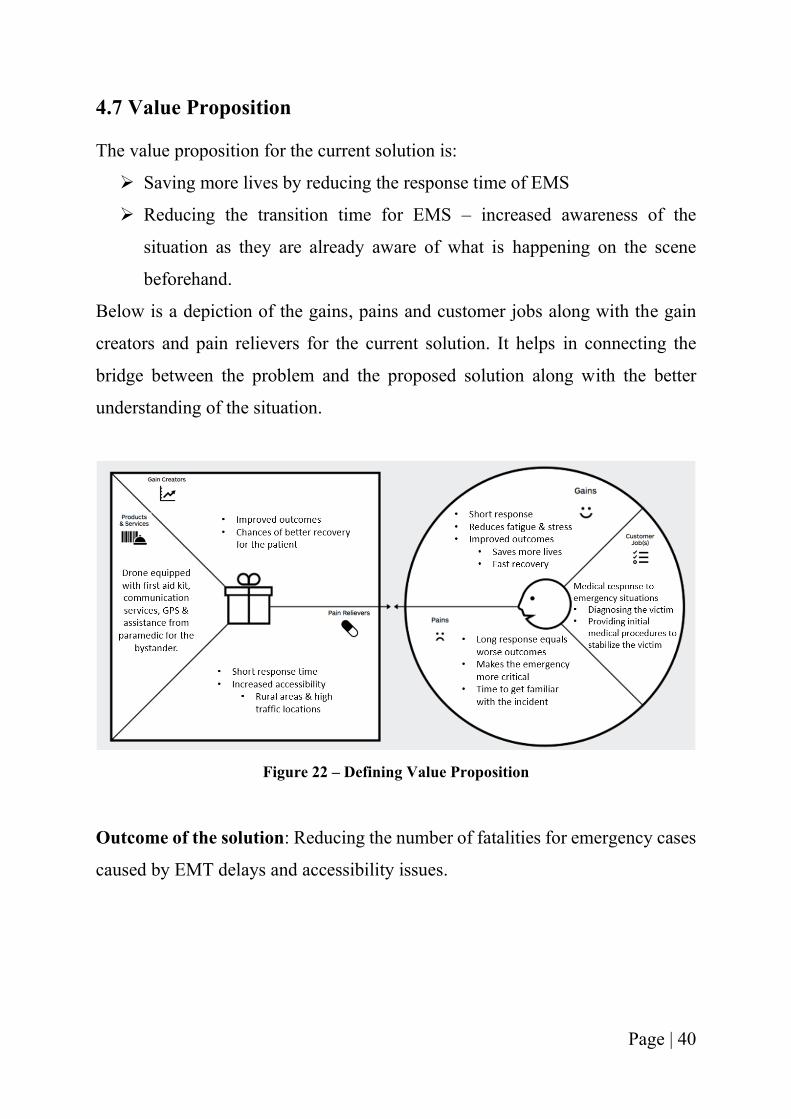
4.7 Value Proposition
The value proposition for the current solution is:
➢ Saving more lives by reducing the response time of EMS
➢ Reducing the transition time for EMS – increased awareness of the
situation as they are already aware of what is happening on the scene
beforehand.
Below is a depiction of the gains, pains and customer jobs along with the gain
creators and pain relievers for the current solution. It helps in connecting the
bridge between the problem and the proposed solution along with the better
understanding of the situation.
Figure 22 – Defining Value Proposition
Outcome of the solution: Reducing the number of fatalities for emergency cases
caused by EMT delays and accessibility issues.
Page | 41
MAXIMIZE
MINIMIZE
Figure 23– Outcome of using technology
4.8 Interview results with potential customers
Customer data is pivotal for any innovation. Without the need of customers, no
solution can ever persist for a long time in market.
After realizing the problem, the next step was to talk to the customers and gain
information from them about their problems and understand the challenges they
face in their job life. Customers were interviewed without being biased – no
mention of the proposed solution being worked on. Customers in this case are
the EMS – Fire fighters, Police officers and the paramedics.
Talking to them paved the path towards the possible solution. Customers stated
the difficulty of handling overdose cases as they are unaware of the person’s
condition and he/she can potentially harm the officer as well, the active firing
Page | 42
scenarios whereby police is needed before any other EMS department can help
and the alcohol abuse situation which generally involves young people. The
customers also conveyed that sometimes it takes them 40 mins to reach a scene
and the fact that there are many first aid equipment’s that are user friendly and
can be easily used by a rookie. Customer interviews helped in understanding the
pitfalls and the issues of their job profile and how their job entails danger to them
as well in a few scenarios.
Page | 43
CHAPTER 5: SYSTEM REQUIREMENTS
5.1 Requirements of UAV for current application
From the above 4 chapters, it can be concluded that the approach of enabling
EMS with a UAV could potentially help address the emergent situation of
extended response times. Based on the journal report, there is a strong connection
between higher response times and mortality rates [40]. And as the resources to
invest upon are analyzed to improve the healthcare system, the current solution
could be a possible solution. This chapter entails the type of UAV needed to
accomplish the mission, why and what behind the UAV selected for the mission
and details of the different components of the UAV along with the different
configurations.
The requirements of the UAV for the project are as given below:
1. Payload capacity of 10-15 lbs.
2. Durability - able to withstand the normal weather conditions and season
changes
3. Flight time of 30 - 45 mins
4. Compact design and mobile
5. Able to equip with audio & video transmission system
6. Weight of the drone – Should not be too bulky
7. Range – 20 to 30 miles
8. Speed – 50 to 60 mph
Page | 44
5.2 Design and contents of the customized first aid responder kit
Based on the current knowledge, one of the most important parameters for
deciding the components of a UAV is its weight. The lesser the weight of the
drone, it is more efficient and has a higher run time. Thus, before deciding the
contents of the customized first aid kit, analysis of the most frequent emergency
cases was done with the help of online data and interviews with first responders
across Cincinnati [36]. After doing the analysis, the equipment for those cases
were analyzed and selected, ensuring the user-friendliness factor for the same.
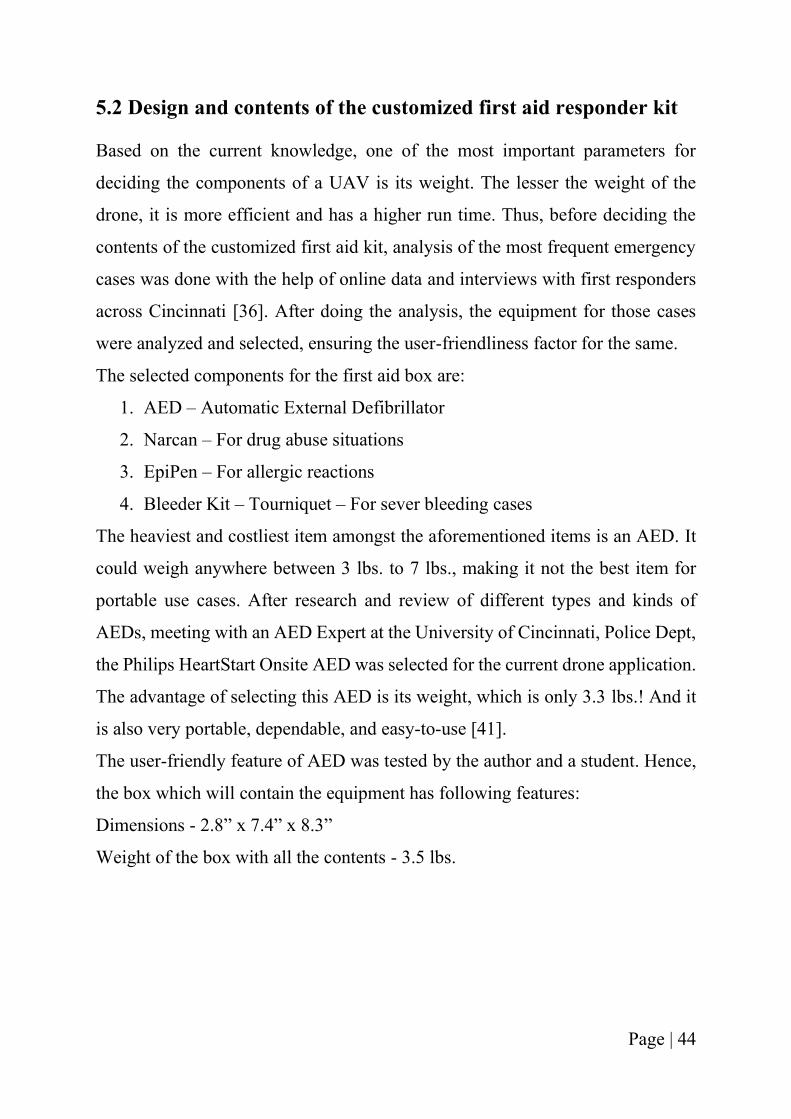
The selected components for the first aid box are:
1. AED – Automatic External Defibrillator
2. Narcan – For drug abuse situations
3. EpiPen – For allergic reactions
4. Bleeder Kit – Tourniquet – For sever bleeding cases
The heaviest and costliest item amongst the aforementioned items is an AED. It
could weigh anywhere between 3 lbs. to 7 lbs., making it not the best item for
portable use cases. After research and review of different types and kinds of
AEDs, meeting with an AED Expert at the University of Cincinnati, Police Dept,
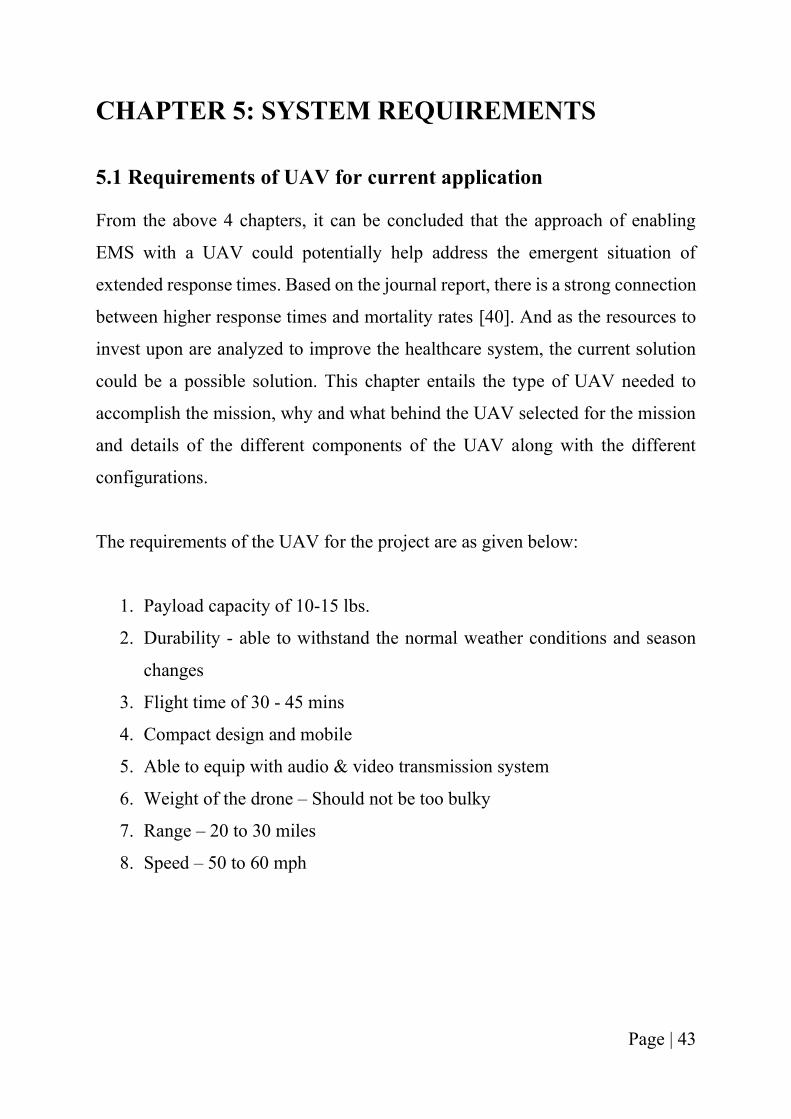
the Philips HeartStart Onsite AED was selected for the current drone application.
The advantage of selecting this AED is its weight, which is only 3.3 lbs.! And it
is also very portable, dependable, and easy-to-use [41].
The user-friendly feature of AED was tested by the author and a student. Hence,
the box which will contain the equipment has following features:
Dimensions - 2.8” x 7.4” x 8.3”
Weight of the box with all the contents - 3.5 lbs.
Page | 45
Figure 24 - Philips HeartStart Onsite AED [41]
Figure 25 - Contents inside the box, Source – Google Images
Page | 46
Thereby, it can be concluded from the above discussion, that the payload apart
from the weight of the battery and the self-weight of the drone is only 3.5 lbs.,
which is not too heavy, making it an ideal choice.
Currently only 4 items are opted to be in the box, to make it easier for the initial
prototype and testing. But it is definitely an option to make it a customizable kit.
Allowing the user to be able to put whatever necessary equipment is needed for
handling a particular emergency situation.
5.3 Selection of type of UAV
As per the discussion in the literature survey, VTOL proves to be a better suited
option for the proposed application. There are different types of VTOL available
in the market. Out of which, the ones that were potentially considered for the
current application are quadcopter, hexacopter and octocopter.
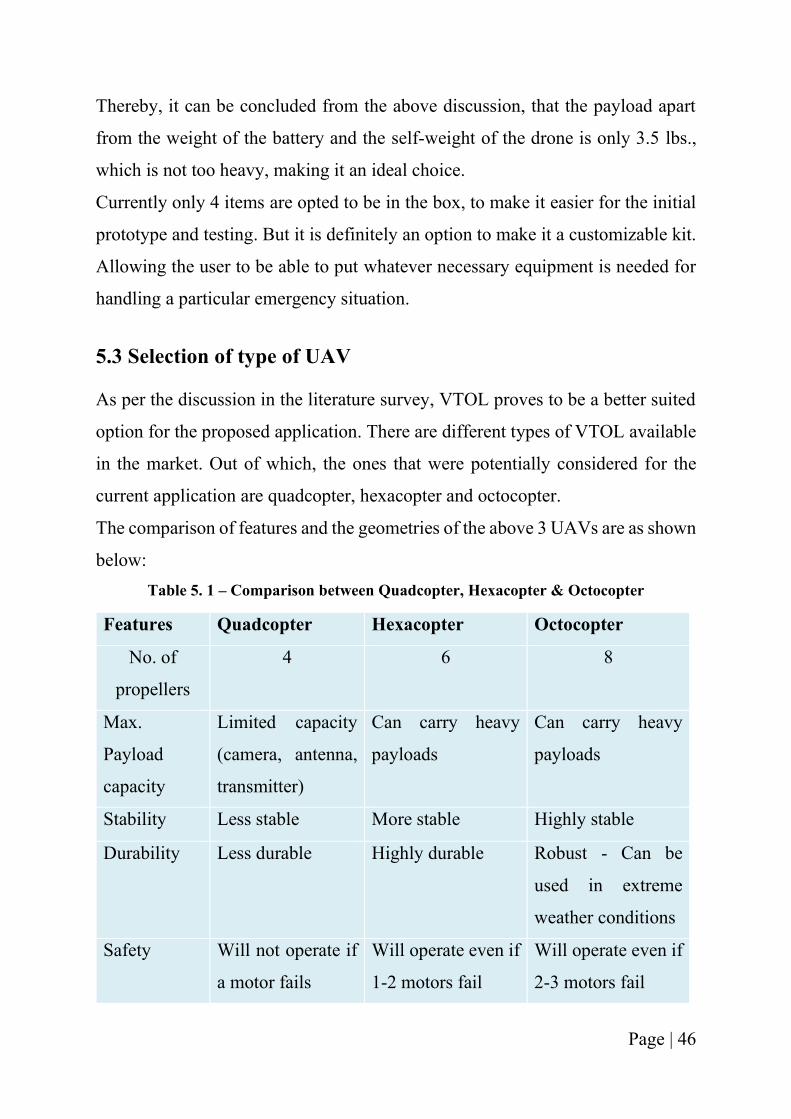
The comparison of features and the geometries of the above 3 UAVs are as shown
below:
Table 5. 1 – Comparison between Quadcopter, Hexacopter & Octocopter
Features Quadcopter Hexacopter Octocopter
No. of
propellers
4 6 8
Max.
Payload
capacity
Limited capacity
(camera, antenna,
transmitter)
Can carry heavy
payloads
Can carry heavy
payloads
Stability Less stable More stable Highly stable
Durability Less durable Highly durable Robust - Can be
used in extreme
weather conditions
Safety Will not operate if
a motor fails
Will operate even if
1-2 motors fail
Will operate even if
2-3 motors fail

Page | 47
Figure 26 – Quadcopter Configuration [42]
Figure 27 – Hexacopter Configuration [42]
Page | 48
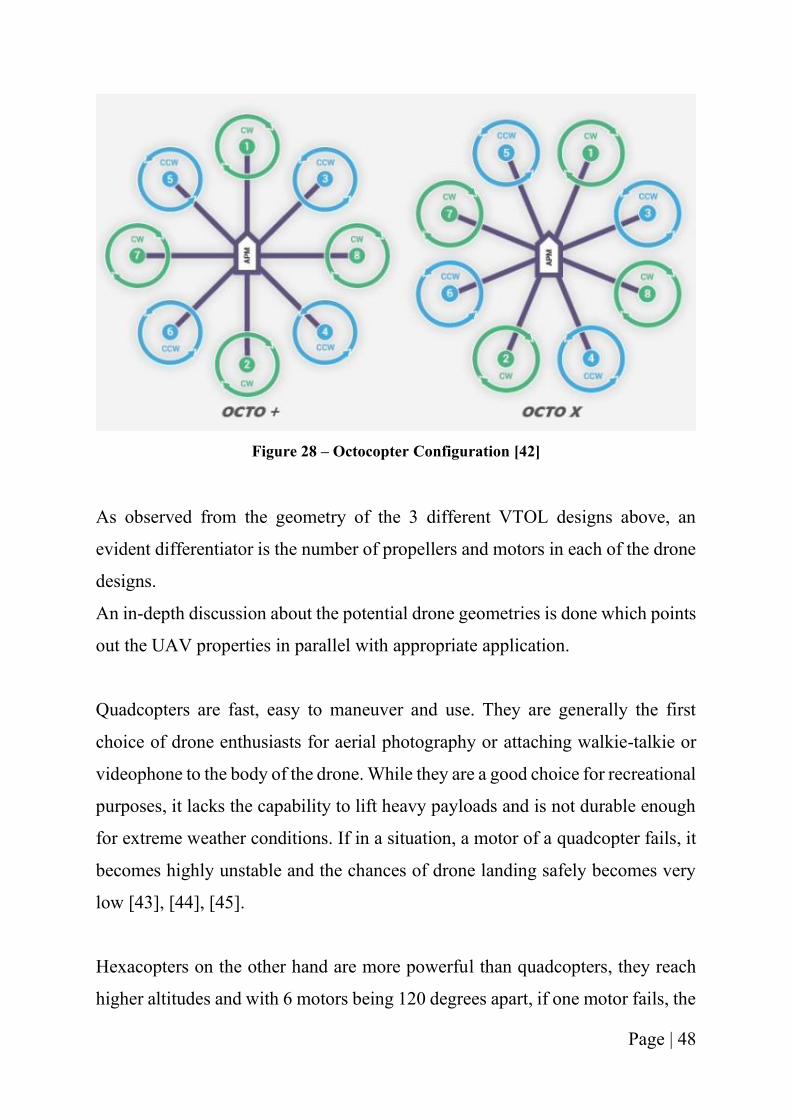
Figure 28 – Octocopter Configuration [42]
As observed from the geometry of the 3 different VTOL designs above, an
evident differentiator is the number of propellers and motors in each of the drone
designs.
An in-depth discussion about the potential drone geometries is done which points
out the UAV properties in parallel with appropriate application.
Quadcopters are fast, easy to maneuver and use. They are generally the first
choice of drone enthusiasts for aerial photography or attaching walkie-talkie or
videophone to the body of the drone. While they are a good choice for recreational
purposes, it lacks the capability to lift heavy payloads and is not durable enough
for extreme weather conditions. If in a situation, a motor of a quadcopter fails, it
becomes highly unstable and the chances of drone landing safely becomes very
low [43], [44], [45].
Hexacopters on the other hand are more powerful than quadcopters, they reach
higher altitudes and with 6 motors being 120 degrees apart, if one motor fails, the
Page | 49
drone safely lands and does not crash. They are bigger than quadcopters and can
lift heavier payloads than quadcopters. The cons of a hexacopter is its size and
prize [43], [44], [45].
Octocopters, most powerful amongst the three configurations and since they have
8 motors, they are the most stable configuration and can withstand extreme
weather conditions. It can reach higher altitudes with heavy payloads and if 2 or
3 motors fail, it has the capability to land safely without crashing. The drawbacks
of using an octocopter are that it is bigger in size, more expensive than the other
two configurations and its battery life is often less [43], [44], [45].
Considering the aforementioned features of UAV and weighing the pros and cons
of each drone type, hexacopter configuration was preferred for this application.
Hexacopter is more powerful and more stable than the quadcopter, can lift heavy
payloads that weigh approximately 10 lbs. and is smaller than an octocopter, thus
occupying less space. While hexacopters weigh more than the quadcopter they
are more suitable for the current mission as they have higher payload capacity as
compared to quadcopter.
5.4 Deciding the drone for the current purpose
5.4.1 About the Prototype - Tarot X6
For the current mission, decision was made to buy an off the shelf drone which
would closely align with the requirements of AmbiFly.
Through the research of different drones available in the market and with the
earlier decision of using a hexacopter, Tarot X6 was chosen for this project [46].
It is a great drone to carry heavy payloads. The drone is very tough as it uses high-
quality 3K carbon fiber plates and tubes, along with anodized aluminum CNC
parts. Due to the more strength and less weight of the drone, it offers high
Page | 50
precision and reliability for the missions. The propellers are foldable, making it
easier to protect them along with occupying less space in idle situations.
The features of Tarot X6:
1. Carry a payload up to 11lbs (5kg)
2. Range - 2 miles (3.2 km)
3. Flight time - 20 minutes with payload; 35 minutes without payload
4. Ready to fly package – has everything you need to fly
5. Landing gear controlled electrically and retract at the tap of a button
6. Made in USA Pixhawk 2.1 Flight Controller
7. Hexa-copter design offers enhanced stability and reliability
8. Plan waypoints & flight routing in Mission Planner / QGround Control
9. Highly customizable - custom cargo bay mounts can also be built
10. Herelink Ground Control station available as an optional add-on
11. Available Flying Modes: Manual, Stabilize Mode, Flight Plan, Return to
Home
12. Failsafe function - returns the Tarot X6 to home automatically in case of
signal loss or battery problems
The above features make it a good option for the current mission. To meet the
needs of the application, a few additional equipment will be added to the drone.
A camera will be attached so that object detection is enabled and allows safety
for both, the people around and the drone to fly and land safely. The drone being
a hexacopter, will be safe and stable if one of the motors stop working during the
operation. The drone will also be fitted with a parachute system for fail-safe
design – which would open up as the drone crashes or observes any kind of
damage that could lead to potential danger for the people on ground.
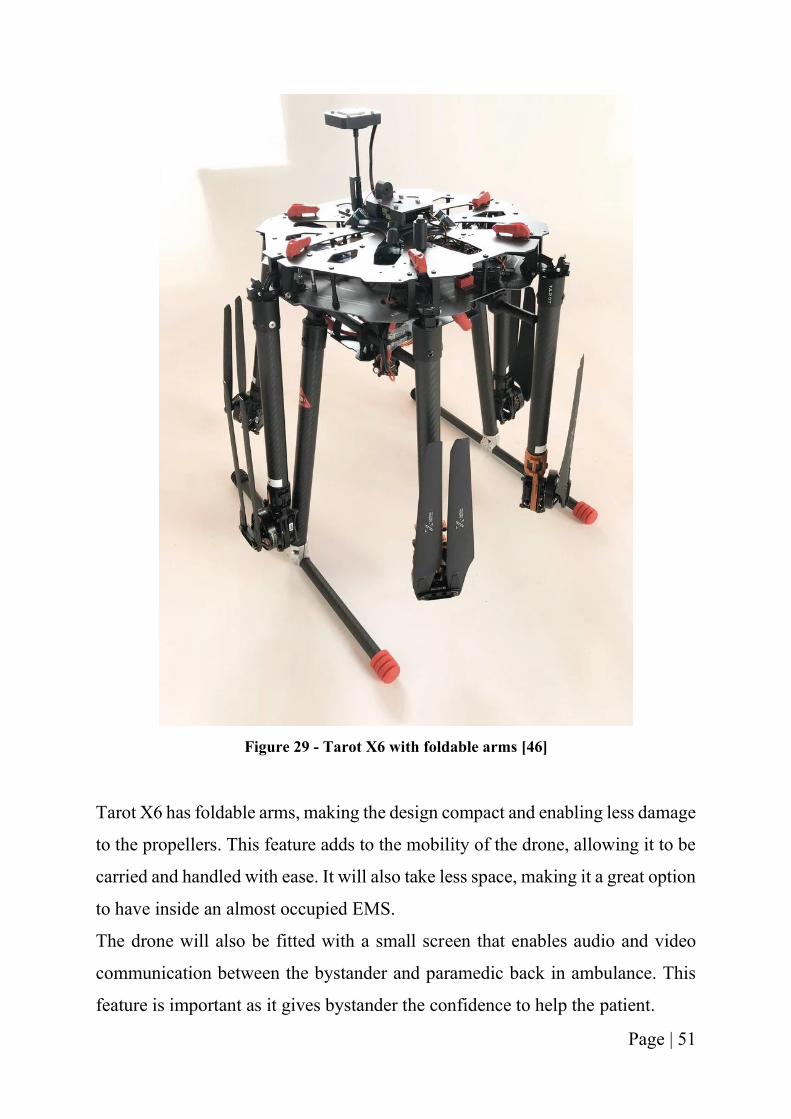
Page | 51
Figure 29 - Tarot X6 with foldable arms [46]
Tarot X6 has foldable arms, making the design compact and enabling less damage
to the propellers. This feature adds to the mobility of the drone, allowing it to be
carried and handled with ease. It will also take less space, making it a great option
to have inside an almost occupied EMS.
The drone will also be fitted with a small screen that enables audio and video
communication between the bystander and paramedic back in ambulance. This
feature is important as it gives bystander the confidence to help the patient.
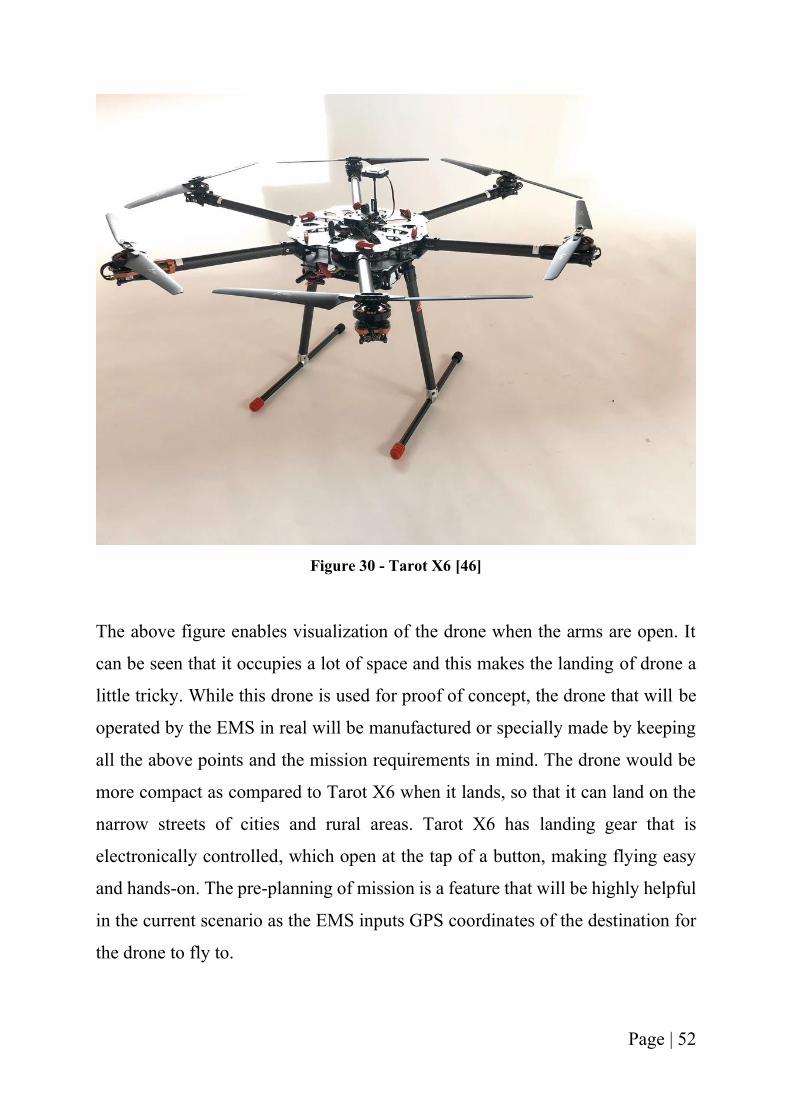
Page | 52
Figure 30 - Tarot X6 [46]
The above figure enables visualization of the drone when the arms are open. It
can be seen that it occupies a lot of space and this makes the landing of drone a
little tricky. While this drone is used for proof of concept, the drone that will be
operated by the EMS in real will be manufactured or specially made by keeping
all the above points and the mission requirements in mind. The drone would be
more compact as compared to Tarot X6 when it lands, so that it can land on the
narrow streets of cities and rural areas. Tarot X6 has landing gear that is
electronically controlled, which open at the tap of a button, making flying easy
and hands-on. The pre-planning of mission is a feature that will be highly helpful
in the current scenario as the EMS inputs GPS coordinates of the destination for
the drone to fly to.
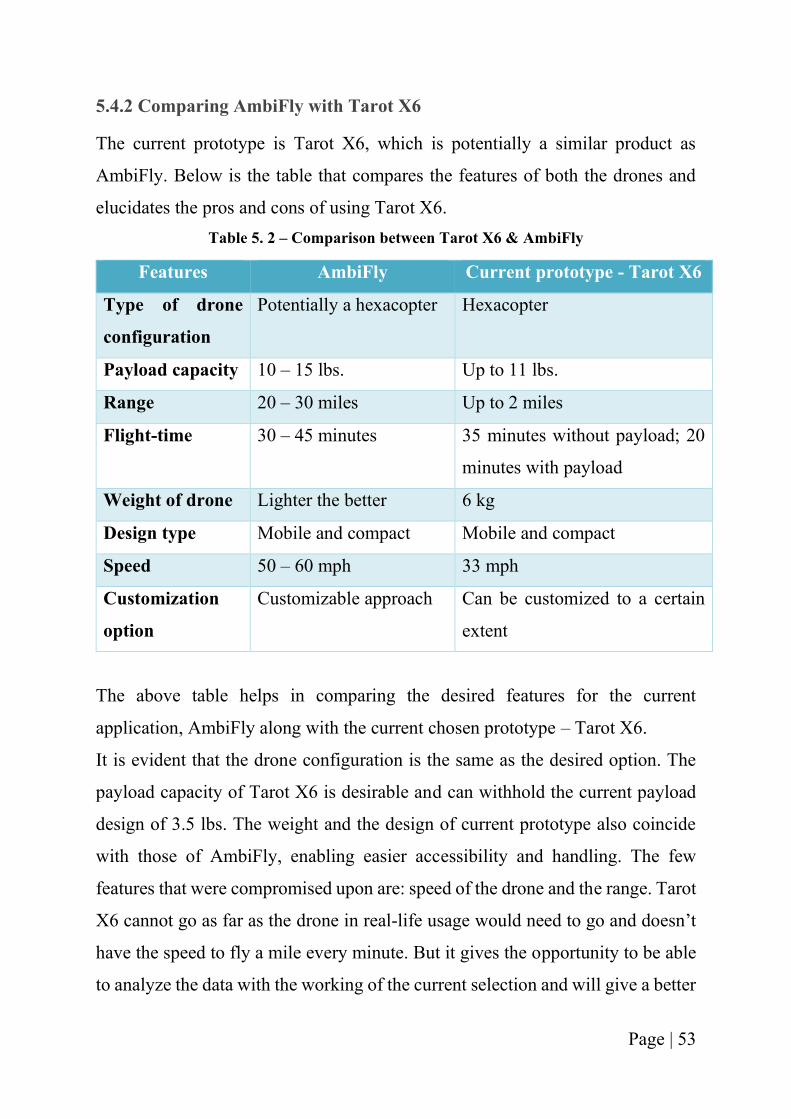
Page | 53
5.4.2 Comparing AmbiFly with Tarot X6
The current prototype is Tarot X6, which is potentially a similar product as
AmbiFly. Below is the table that compares the features of both the drones and
elucidates the pros and cons of using Tarot X6.
Table 5. 2 – Comparison between Tarot X6 & AmbiFly
Features AmbiFly Current prototype - Tarot X6
Type of drone
configuration
Potentially a hexacopter Hexacopter
Payload capacity 10 – 15 lbs. Up to 11 lbs.
Range 20 – 30 miles Up to 2 miles
Flight-time 30 – 45 minutes 35 minutes without payload; 20
minutes with payload
Weight of drone Lighter the better 6 kg
Design type Mobile and compact Mobile and compact
Speed 50 – 60 mph 33 mph
Customization
option
Customizable approach Can be customized to a certain
extent
The above table helps in comparing the desired features for the current
application, AmbiFly along with the current chosen prototype – Tarot X6.
It is evident that the drone configuration is the same as the desired option. The
payload capacity of Tarot X6 is desirable and can withhold the current payload
design of 3.5 lbs. The weight and the design of current prototype also coincide
with those of AmbiFly, enabling easier accessibility and handling. The few
features that were compromised upon are: speed of the drone and the range. Tarot
X6 cannot go as far as the drone in real-life usage would need to go and doesn’t
have the speed to fly a mile every minute. But it gives the opportunity to be able
to analyze the data with the working of the current selection and will give a better
Page | 54
understanding on what else is needed and should be taken into account as the
drone is further worked upon.
5.5 Durability
As described above in the expected tasks to be completed by the UAV, we expect
it to be as rigid and durable as possible. The drone’s task may include daily take
off carrying payload, flight in any kind of weather, soft landing and return to base.
As the drone is there to assist in an emergency situation, it is obvious that it needs
to have a quick setup procedure as well as the personnel handling the drone will
be in a hurry to set it up. During the course of these events the things to notice
will be that these drone operations will be different from conventional drone
operations wherein the UAVs are set up very carefully and skillfully.
Also when the drone is in flight it is expected to operate in weather conditions
such as windy, heavy rains or hot temperature and may have to return in different
weather conditions that will have a strong impact on the drone material and its
operation. Hence for the fabrication of the drone material the market standard
carbon fiber will be used.
Carbon fiber has been an industry standard for a few years. The process of
bonding together carbon atoms in the form of crystals to give a high strength to
fiber ratio making it strong for its respective size. There are several advantages to
use this structure such as high stiffness, high tensile strength, low weight, high
chemical resistance, high temperature tolerance and low thermal expansion which
makes it perfect for the application[47].
The most popular 3k is light, relatively stiff and easy to get and make. 3K has got
higher elongation before failure and ultimate strength than 6K, 9K or 12K.
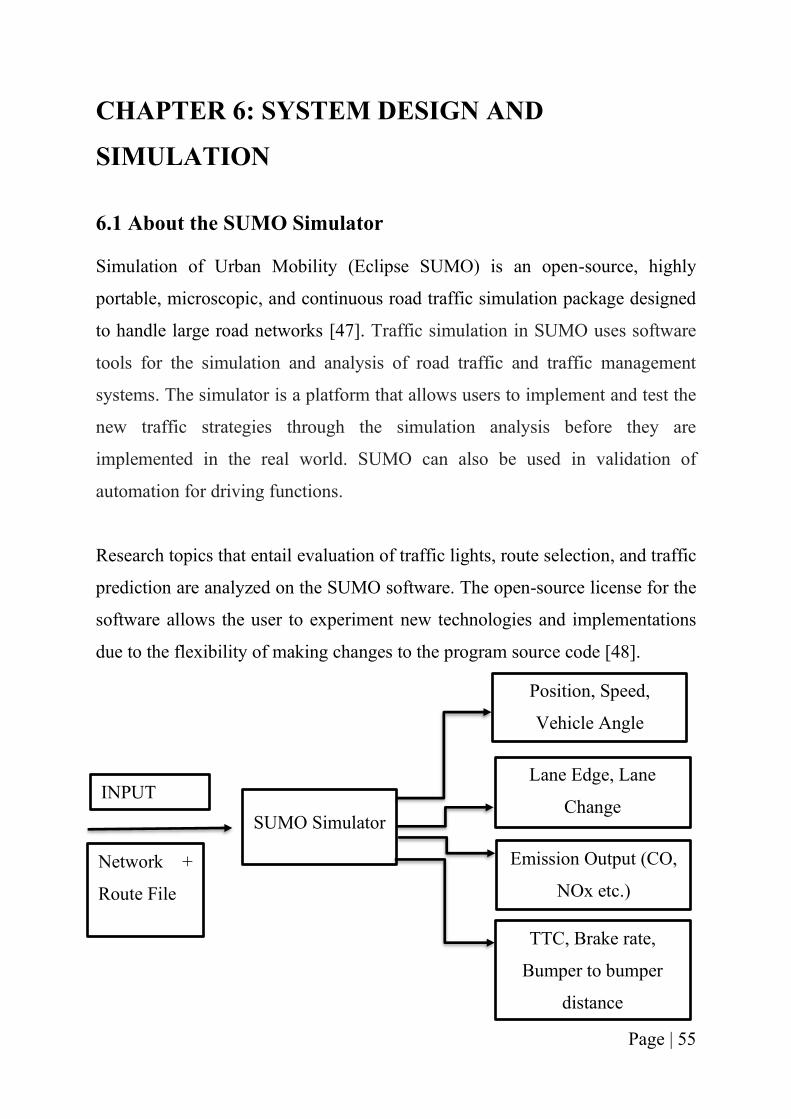
Page | 55
CHAPTER 6: SYSTEM DESIGN AND
SIMULATION
6.1 About the SUMO Simulator
Simulation of Urban Mobility (Eclipse SUMO) is an open-source, highly
portable, microscopic, and continuous road traffic simulation package designed
to handle large road networks [47]. Traffic simulation in SUMO uses software
tools for the simulation and analysis of road traffic and traffic management
systems. The simulator is a platform that allows users to implement and test the
new traffic strategies through the simulation analysis before they are
implemented in the real world. SUMO can also be used in validation of
automation for driving functions.
Research topics that entail evaluation of traffic lights, route selection, and traffic
prediction are analyzed on the SUMO software. The open-source license for the
software allows the user to experiment new technologies and implementations
due to the flexibility of making changes to the program source code [48].
INPUT
Network +
Route File
SUMO Simulator
Position, Speed,
Vehicle Angle
Lane Edge, Lane
Change
Emission Output (CO,
NOx etc.)
TTC, Brake rate,
Bumper to bumper
distance
Page | 56
Figure 6. 1 Showing the output and input of SUMO simulator
The figure above depicts the source of input for SUMO along with the different
outputs that can be generated from the simulation.
6.2 How Sumo Simulator is used in the current project?
In the current thesis, Sumo Simulator is used to simulate the real-world traffic
problem along with the estimation of time it takes for the Emergency Medical
Services to reach an emergency scene. This allows us to draw conclusions on how
the use of a drone can imply towards higher efficiency with regards to the current
scenario of how an EMS addresses situation.
Sumo was used to do the following:
❏ Build a Network and assign routes within a network
❏ Develop traffic light algorithm
❏ Simulate and analyze traffic within a network, given Origin-Destination
(OD) Matrix
In SUMO, road network can be generated in three ways:
❏ Manually by creating our own node, edge, route, connection files.
❏ Using netgenerate command.
❏ Importing road network from external sources such as OpenStreetMap
(OSM), VISSIM, VISUM etc.
In the current project matter, the road network was imported from OpenStreetMap
(OSM), an external source.
As any network that is downloaded, has n number of network options, random
trips are generated for a given network. The command randomTrips.py by default
does it by choosing source and destination edge uniformly at random distribution.
By default the resulting trips are stored in an XML file called as trips.trips.xml.
Page | 57
The trips are distributed proportionately in an interval defined by the beginning
time –b (default 0) and the end time -e (default 3600) in seconds.
Once the SUMO network is ready, a Traffic analysis zone (TAZ) file is made.
This allows us to define the edges of a particular area of the network that our
analysis will focus on. Once the TAZ file is ready, the Origin-Destination (OD)
Matrix file is generated. This file gives the user an opportunity to increase the
number of vehicles in the defined area of the network. The increase in cars in this
case, helps make the simulation similar to the real-world. Next, od2trips.config
file (.xml) is created which contains both the TAZ & OD file as input. The last
step involves generating the duarouter.config file which calculates the shortest
length path for each trip. The duarouter configuration file takes as input our
network and the OD Trips File and outputs the route file. This route is the defined
network which helps us analyze the traffic situation in real life scenarios.
6.3 Simulation of Traffic in the most congested areas in world
The current thesis topic utilizes SUMO to be able to visualize the pain of
congestion on roads. The simulator is used to run the Open Street Map files of a
particular geographic location, the origin-destination trips are generated based on
the traffic analysis zone decided based on the edges selected and the simulation
of the vehicles in TAZ is observed.
For the current simulation needs, three different cities of the world are chosen
that represent three continents out of the 7 continents of the world.
▪ Manhattan, New York, USA, North America
▪ Mumbai, Maharashtra, India, Asia
▪ Bogota, Colombia, South America
Page | 58
6.3.1 Simulation of Manhattan in NY – one of the most congested places in
USA
Based on the INRIX data from 2019, New York ranks as 14th in the most
congested cities around the world [50]. New York is one of the 10 cities of the
USA that are ranked in the 25 most congested areas of the world. On an average
a person loses 141 hours a year in NY just in traffic congestion. The street
network downloaded from OSM is from Manhattan, one of the most congested
areas of NY. Based on the steps mentioned above in section 6.2, the different files
were generated, and the route was finalized. Once the route was generated,
simulation with the number of vehicles equivalent to the original number was
done.
There are different settings that can be used to simulate the network such as,
standard, faster standard, rail, real-world and selection.
Figure 31 below shows the map of Manhattan considered for simulation from
OSM. This figure is then imported into SUMO and converted into a network file
that the SUMO can recognize and work on.
Figure 32 shows the Manhattan road network in SUMO, the same network
downloaded from OSM now generated to a set of network. The green background
is to give a real-world feeling to the simulation. The black lines are the
road/pathway networks in the area.
Figure 33 depicts the Traffic Analysis Zone (TAZ) which is the focused area for
simulation. This zone is defined by 4 different edges and the Origin and
destination is generated for the same with the possibility of change in number of
vehicles.
In figure 34, it is evident that the traffic is heavy and it is a two-way lane, with
not much big roads, similar to the Manhattan roads in reality [50]. If there were
to be an ambulance going through this traffic, the vehicles on the road will be
unable to give way to it, as per the rules in the USA.
Figure 35 is a zoomed-in version of the traffic light and the congestion on road.
Page | 59
Figure 31 – Manhattan Network on Open Street Map (OSM)
Figure 32 - Showing Manhattan Network of NY in real-world
Page | 60
Figure 33 - Showing focused network – Traffic Analysis Zone (TAZ)
Figure 34 - Showing beginning of simulation at TAZ with traffic congestion
Page | 61
Figure 35 – Figure showing the zoomed in version of a traffic light in Manhattan
6.3.2 Simulation of Mumbai – One of the most congested places in India, Asia
One of the recent studies on traffic congestion reported that Mumbai deals with
the worst traffic in the world. It said that the commuters have to deal with a 65%
increase in travel time because of traffic jams [51].
Figure 36 is an open street map of Dadar, Mumbai, one of the most congested
places in Mumbai. It generally observes heavy traffic throughout the day.
Figure 37 is the OSM network of Mumbai’s area converted into SUMO to be able
to analyze the same.
As can be seen from the Figure 38, not every road in Mumbai is controlled by
traffic lights, which leads to more chaos on the roads. The simulation pictures
below have a white light at every turn or road change as in reality there are large
number of streets that are not managed by the traffic lights. Despite of the local
transportation of local trains being highly used by the public of Mumbai, the
streets are always congested and heavily jammed. There are more challenges to
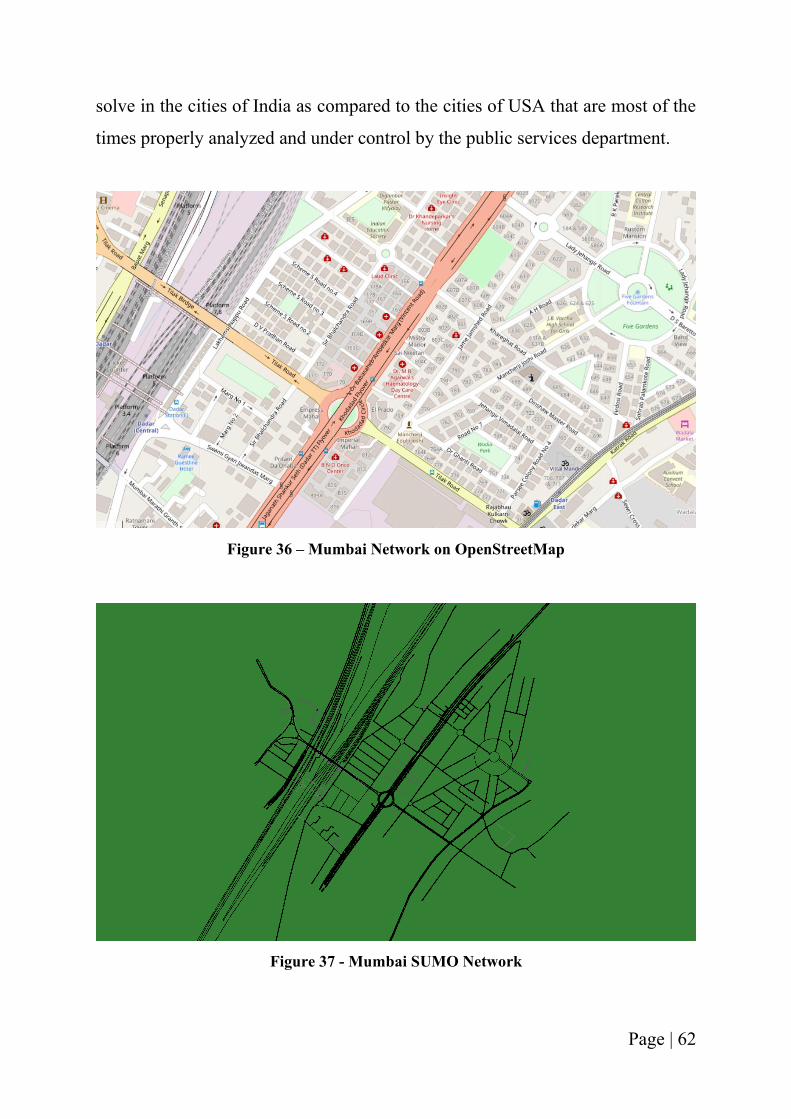
Page | 62
solve in the cities of India as compared to the cities of USA that are most of the
times properly analyzed and under control by the public services department.
Figure 36 – Mumbai Network on OpenStreetMap
Figure 37 - Mumbai SUMO Network
Page | 63
Figure 38 – Showing TAZ for Mumbai Network
6.3.3 Simulation of Bogota – World’s most congested place
Bogota ranks the award for the congested city of the world. Its number 1 based
on the reports of INRIX 2019 scorecard [49]. As per the data, the traffic
congestion leads to people losing 191 hours annually in traffic. The city that
ranked number 2 in congestion in 2018 has overtaken Rio Di Janeiro and became
number 1 in 2019. It is difficult to analyze the situation of ambulances and EMS
in a city which is highly gridlocked. An ambulance stuck in traffic in such a city
would be a complete nightmare.
Figure 39 below is the OSM of Bogota that is exported and converted into SUMO
network. Figure 40 is the SUMO network of roads and the whole area of Bogota.
Figure 41 depicts the worst congestion city’s traffic light scenario and the number
of vehicles. It helps in visualizing the impact of traffic in a city with such high
congestion scenario.
Page | 64
Figure 39 – Bogota Network OSM
Figure 40 - Bogota SUMO network
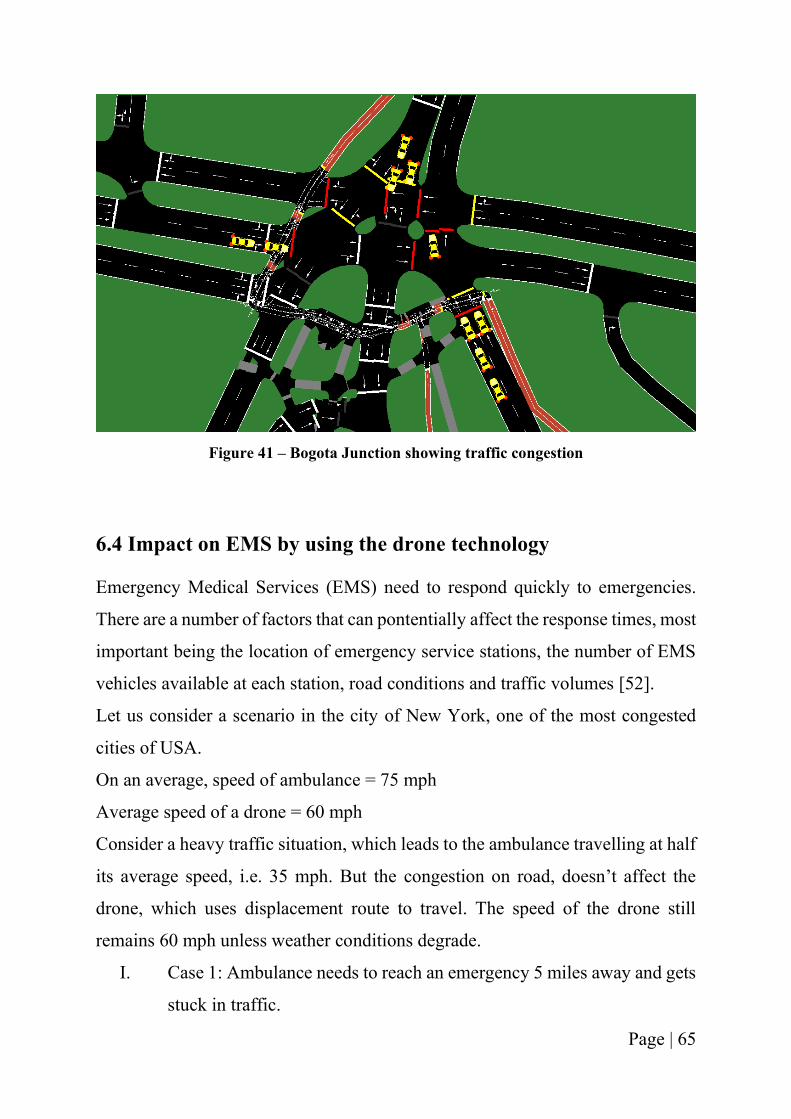
Page | 65
Figure 41 – Bogota Junction showing traffic congestion
6.4 Impact on EMS by using the drone technology
Emergency Medical Services (EMS) need to respond quickly to emergencies.
There are a number of factors that can pontentially affect the response times, most
important being the location of emergency service stations, the number of EMS
vehicles available at each station, road conditions and traffic volumes [52].
Let us consider a scenario in the city of New York, one of the most congested
cities of USA.
On an average, speed of ambulance = 75 mph
Average speed of a drone = 60 mph
Consider a heavy traffic situation, which leads to the ambulance travelling at half
its average speed, i.e. 35 mph. But the congestion on road, doesn’t affect the
drone, which uses displacement route to travel. The speed of the drone still
remains 60 mph unless weather conditions degrade.
I. Case 1: Ambulance needs to reach an emergency 5 miles away and gets
stuck in traffic.
Page | 66
The amount of time ambulance will take to reach the scene = 8.5 mins
The amount of time drone will take to reach the scene = 5 mins
Saving a total of 3.5 mins of response time. These 3.5 mins could
potentially help save a person’s life if the emergency is time critical.
II. Case 2: Ambulance needs to reach an emergency 10 miles away from
the current location and there is a lot of traffic.
The amount of time ambulance will takt to reach the scene = 17.1 mins
The amount of time drone will take to reach the scene = 10 mins
The above two cases help us understand that using the 3rd dimension to respond
to emergencies can potentially help us serve the people in need better.
Page | 67
CHAPTER 7: CONCLUSIONS
Working on building a system that can potentially be used to help save more lives
by increasing the survival rate has given the author a lot of motivation and
enthusiasm. Science has been the root for every innovation and technology. Every
problem has a solution when one looks up to science for answers.
Today, being able to serve the community in a bigger and better way has given
the author immense pleasure.
AmbiFly was an idea born out of a personal incident. But it is more than that
when looked at the world around us. It is a part of the evolving technology; it is
a part of the world that is looking for solutions to better care for the people in
need during emergency situations; it is an opportunity for public service officers
to do their work more efficiently and effectively.
It all began in the pilot class of startup. Learning from the mistakes as the idea
started getting more thoughts on how to build it in reality, how to scale it as a
business, the market opportunity, who are the customers, the value proposition,
the customer interviews and feedback. All these different segments started giving
more meaning to the idea. It started becoming a business model.
Once, the business acumen was put into it, winning the IQE pitch competition
boosted the morale and confidence of the team. Acquiring seed investment to be
able to achieve the pilot plan of business magnified the motivation and allowed
the team to explore and learn from the new resources. Leading the path to being
graduates of University of Cincinnati Ventures Lab and being featured in
Cincinnati magazine for being 25 under 25 further rocketed the spirits!
Learning through the hurdles that came along the way, participating in
competitions along with the different iterations for the business model has been
a never-ending process.
Page | 68
Presented here is the reason behind the concept, the problems faced around the
world and how using the 3rd dimension, one could achieve that is not being solved
by the roadways. This thesis has explored all the different objects attached to the
innovation while attaining to solve the problem.
The thesis comes together as a whole when all the operational requirements for
the user needs are understood, the market, customer and value proposition are in
place, the system requirements for achieving the mission are established and the
simulation of the real-time traffic in NY which helps in visualizing the problem.
There is a boom in the drone industry currently and this is the century whereby
drones will reach heights no one could anticipate.
It is the perfect time to try and build on a drone service company to be able to
increase the chances of survival by improving the availability of first aid
equipment along with increasing the public awareness.
The SUMO simulator here has been used as a system to visualize the real traffic
scenario and help the readers understand the viability of the current solution and
how using drones can possibly help reduce the mortality cases.
It is through the path of being a graduate student that the author has realized the
dream of building something from scratch, of being an entrepreneur. Graduate
studies have enabled her to become a person she could only imagine about until
2 years ago. A dream to help the community, to make the world a better place by
using the engineering knowledge she acquired through her aerospace studies.
This research holds a very special place in the heart of the author. She has never
been more thrilled about anything else in her entire life.
This graduate research has given her the opportunity to be able to explore the
world outside her expertise of aerospace. Different areas such as understanding
statistical analysis, marketing strategies, sales and simulation were learned in
order to fulfill the current ambition.
Page | 69
While this is the technical written up of the work done, the author has been
focusing on getting the proof of concept done and working on the beta-testing
with the EMS. Through the several issues that have come along the way, the
motivation to work on this mission has only grown stronger.
In the era of COVID-19 (2020), many things changed. With so many industries
closing temporarily or permanently, the one thing that changed for good is the
usage of UAVs. With people interaction becoming a risky thing, people in all the
different industries started using drones to accomplish their missions. The
breakdown of virus led to the breakthrough of drone technology.
With drones already being used in different sectors of the market, COVID-19
catalyzed the investments towards this technology.
As the world tries to understand how to come out of the world-spread virus, it
will also make people realize the potential of drones and the tremendous
applications and usage it offers.
With that said, the paved path will lead AmbiFly to heights one can only imagine!
Page | 70
CHAPTER 8: FUTURE WORK
Drones in the sky, drones in the sea, drones on land: the future of human
augmentation [53].
Drone industry has been booming for a while now. But they have been dated back
at the time when both USA & France were working on building an automated
aircraft system. The current world along with the last few years have turned out
to be an opportunity for the growth of drones in usage expansion and awareness
among the public. From being used in surveillance by the military to being used
by a farmer for optimizing the agricultural operations, drones have managed to
sway people in every industry. Let alone the hobbyists who enjoy spending hours
flying this technology in the air while capturing beautiful scenic sights that eyes
and normal cameras cannot capture. Individuals, businesses, and government
entities have all realized the multipurpose functionality of drones [54]! Below are
the few areas where drones are being used:
➢ Aerial photography for cinematography and journalism
➢ Shipping and delivery
➢ Helping in disaster management scenarios by finding information or
supplying essentials
➢ Using drones for surveying and inspection in Real estate
➢ Optimizing agricultural operations and monitor the crop growth
➢ Search and rescue drones
➢ Inspections and surveillance
➢ Inaccessible terrain and locations mapped geographically
➢ Unmanned cargo transport
➢ Law enforcement and border control surveillance
➢ Storm tracking and forecasting hurricanes and tornadoes
Page | 71
The list of drone applications is only increasing as the world is pouring money
into this new upcoming field that could possibly change our lives for better [54].
8.1 Drone Technology in Military
Drones have been used extensively in the military for a while now. Military
drones have been utilized as target decoys, for combat missions, R&D, and for
surveillance and inspections.
Based on the recent report from Goldman Sachs, military drones will continue to
be a major application for the technology. It has been estimated that
approximately $70 billion will be spent on military drones by the end of 2020.
And these drones will pave the path for a better and improved drone technology.
UAVs have and will always be a major part of military operations as they enable
execution of risky and time-sensitive missions conveniently by reducing losses
and operating efficiently [54].
8.2 Drone Technology for Commercial purposes
Drone technology for commercial purposes is gaining momentum and
progressing towards advancement as more and more people understand the power
of this technology in their businesses. As per the reports from BI Intelligence,
Business Insider’s premium research service, there will be a humungous growth
of 19% (compound annual growth rate) between 2015 and 2020 for commercial
and civilian drones as compared to that estimated for military drones of only 5%.
The commercial drone industry is continuously growing and has attracted some
big investments from industry conglomerates, IT companies, aerospace
companies along with the major defense contractors. Current statistics for the
industry leaders for drones are a few early-stage manufacturers in Europe, Asia,
and North America. With the constant improvements in the technology, making
it easier & affordable to be able to customize drones, many new companies will
Page | 72
join the league. Soon the drones could be seen in everyday lives such as
monitoring traffic accidents, surveying places difficult to reach or even perform
amazon deliveries.
At the end of the day, the impact of commercial drones could be $82 billion, and
a 100,000-job boost to the U.S. economy by 2025, according to AUVSI [54].
8.3 Future Drone Technology
Drone technology has been constantly advancing and the future of the drone
technology is undergoing breakthroughs that could impact the lives of human and
create a change for the better. As per the data gained from Airdronecraze, an
Amazon Services LLC affiliate advertising program website, the current drone
technology as we see it is in the fifth and sixth generation and the potential
generations for the same is seven [54].
The breakdown of the technology generations is as follows:
● Generation 1: Remote controlled aircraft
● Generation 2: Fixed camera mount on a static design UAV, enables video
recording and still phots and manual control of the drone
● Generation 3: Two-axis gimbals, static design of UAV, enables HD
video, has assisted piloting and safety models
● Generation 4: Transformative design of UAV, Three-axis gimbals, videos
in 1080 HD or higher value, improved safety modes, has autopilot modes.
● Generation 5: Transformative design of UAV, 360° gimbals, captures 4K
video or higher value, has intelligent piloting modes.
● Generation 6: Commercial suitability, compliant to safety and design
regulatory standards, has platform and payload adaptability, automated
safety modes, has intelligent piloting models and can be fully autonomous,
has airspace awareness.
● Generation 7: Full commercial suitability, compliant to safety and design
regulatory standards, has platform and payload interchangeability,
Page | 73
automated safety modes, allows enhanced intelligent piloting models and
can also be fully autonomous, complete airspace awareness, includes auto
action (during takeoff, land, and mission execution) [54].
Figure 42 - Drones in the healthcare industry
Figure 43 - Drones in the transportation industry [55]
Page | 74
Figure 44 - Drones in the EMS/Public Sector
8.4 AmbiFly: Wildest dreams and fondest hopes
What began as a mere idea from a personal life experience of mine, today has
attained so much of interest and gained momentum from all the different
competitions and the guidance of many mentors that crossed my path.
One can only imagine and wonder the next steps as the journey of life progresses!
I have been a firm believer of the quote - “Hope is not a dream, but a way of
making dreams become reality.” ― Leon Joseph Suenens.
If only one can dream, one can pursue it. And while the big-term goal for
AmbiFly is to be a successful company one day, the short-term goals that will
lead to it are as follows:
▪ Work with EMS services both in India and USA to be able to understand
the efficiency of the proof of concept and pivot if need be to solve the
problem of longer response times.
▪ Once the customers find AmbiFly useful, seek VC funding or apply to
accelerators to be able to raise capital and further expand the operations.
▪ Finding contacts in the field of EMS in both USA and India, to be able to
implement the idea on a larger scale.
Page | 75
▪ Increase employment in the sector of aircraft industry by employing people
in the company.
▪ Expand the use case of AmbiFly for different scenarios such as rescue and
safety, disaster management and police safety.
AmbiFly is an idea, an innovation to an existing concept which lacks
efficiency and contributes to increased fatality rate. And we at AmbiFly are
trying to decrease the fatality rate scenarios by using the parameters that have
been untapped until today.
Page | 76
REFERENCES
[1] "This is How Much Air Medical Transport Costs," AirMed, 1 June 2017.
[Online]. Available: https://tinyurl.com/y6ne7ofn. [Accessed 25 August
2020].
[2] A. Loten, "911 Response Times Are Getting Faster Thanks to Data
Integration," The Wall Street Journal, 13 June 2019. [Online]. Available:
https://www.wsj.com/articles/911-response-times-are-getting-faster-
thanks-to-data-integration-11560468747. [Accessed 20 July 2020].
[3] "Emergency Ambulance Services with Intelligent Transportation Systems,"
Ziqitza Health Care Limited, 27 December 2019. [Online]. Available:
https://tinyurl.com/y6gp66lw. [Accessed 5 August 2020].
[4] T. Nation, "20 per cent of emergency patient deaths blamed on traffic jam
delays," The Nation, Thailand, 16 January 2017. [Online]. Available:
https://www.nationthailand.com/national/30304268. [Accessed 15 July
2020].
[5] P. Kendall, "Thousands die from ambulance delays," Daily Mail, [Online].
Available: https://www.dailymail.co.uk/health/article-55521/Thousands-
die-ambulance-delays.html. [Accessed 10 August 2020].
[6] P. Russell, "'People are dying in front of us': Paramedic claims ambulance
delays are killing people every day," ITV News, 24 October 2017. [Online].
Available: https://www.itv.com/news/2017-10-24/people-are-dying-in-
front-of-us-paramedic-claims-ambulance-delays-are-killing-people-every-
day. [Accessed 10 August 2020].
[7] H. K. Mell, S. N. Mumma and B. Hiestand, "Emergency Medical Services
Response Times in Rural, Suburban, and Urban Areas," JAMA Surgery, vol.
152, no. 10, p. 983–984, 2017.
Page | 77
[8] M. Koesters, "UC Venture Lab graduates its fifth class, celebrates first
anniversary," University of Cincinnati News, 19 June 2019. [Online].
Available: https://www.uc.edu/news/articles/2019/06/n20840579.html.
[Accessed 25 August 2020].
[9] C. Gabrielson, "Cincy Inno's 2019 Inno Under 25," CincyInno, 19
September 2019. [Online]. Available:
https://www.bizjournals.com/cincinnati/inno/stories/inno-
insights/2019/09/19/cincy-innos-2019-inno-under-25.html. [Accessed 25
August 2020].
[10] Q. A. Abdullah, "Introduction to the Unmanned Aerial System - UAS
History," [Online]. Available: https://www.e-
education.psu.edu/geog892/node/643. [Accessed 11 August 2020].
[11] "N2C Fledgling," National Naval Aviation Museum , [Online]. Available:
https://www.navalaviationmuseum.org/aircraft/n2c-fledgling/. [Accessed
23 August 2020].
[12] "VTOL," Wikipedia, 26 July 2020. [Online]. Available:
https://en.wikipedia.org/wiki/VTOL. [Accessed 30 July 2020].
[13] "Fixed Wing aircraft," Wikipedia, 22 June 2020. [Online]. Available:
https://tinyurl.com/y347sn87. [Accessed 18 July 2020].
[14] A. Chapman, "Types of Drones: Multi-Rotor vs Fixed-Wing vs Single
Rotor vs Hybrid VTOL," Australian UAV , [Online]. Available:
https://www.auav.com.au/articles/drone-types/. [Accessed 10 August
2020].
[15] R. Charvat, M. R. Ozburn, S. Bushong, M. Kumar and K. Cohen, "SIERRA
Team Flight of Zephyr UAS at West Virginia Wild Land Fire Burn," in
AIAA, Garden Grove, California, 2012.
Page | 78
[16] "Facts + Statistics: Wildfires," Insurance Information Institue, [Online].
Available: https://tinyurl.com/yxlufjn4. [Accessed 1 August 2020].
[17] "Unmanned Aerial Vehicle Multi-Agent Systems Technology Research
(UAV MASTER) Lab," Univeristy of Cincinnati - CEAS, [Online].
Available: https://ceas.uc.edu/research/centers-labs/uav-master-lab.html.
[Accessed 29 July 2020].
[18] P. E. Burks, J. Nipp, J. D. Claridge and P. Miller, "Systems and methods for
response to emergency situations using unmanned airborne vehicles with
improved functionalities". United States of America Patent
US20180327091A1, 15 November 2018.
[19] "Vital, On-Demand," Zipline , [Online]. Available: https://flyzipline.com/.
[Accessed 20 August 2020].
[20] "Applications," Matternet, [Online]. Available:
https://mttr.net/applications. [Accessed 20 August 2020].
[21] "Amazon Prime Air," Amazon , [Online]. Available:
https://www.amazon.com/Amazon-Prime-
Air/b?ie=UTF8&node=8037720011. [Accessed 20 July 2020].
[22] "Performance Unmanned Aircraft," Impossible Aerospace, [Online].
Available: https://impossible.aero/. [Accessed 19 July 2020].
[23] "Flirtey is the premier independent drone delivery service," Flirtey,
[Online]. Available: https://www.flirtey.com/. [Accessed 13 July 2020].
[24] "Air delivery when you need it," Wing, [Online]. Available:
https://wing.com/. [Accessed 16 July 2020].
[25] Institute of Medicine of the National Academics, "History and Current State
of EMS," in Emergency Medical Services: At the Crossroads, Washington,
D.C., The National Academics Press, 2007, p. 273.
Page | 79
[26] A. Claesson, "Emergency Drone System Displays Effective EMS and
Rescue Applications," Journal of Emergency Medical Services, vol. 43, no.
6.
[27] D. J. R. S. C. D. W. S. M. P. L. T D Valenzuela, "Estimating effectiveness
of cardiac arrest interventions: a logistic regression survival model,"
Circulation, vol. 96, no. 10.
[28] R. d. V. J. G. T. R. W. K. R A Waalewijn, "Survival models for out-of-
hospital cardiopulmonary resuscitation from the perspectives of the
bystander, the first responder, and the paramedic," Resuscitation, vol. 51,
no. 2, 2001.
[29] M. M. D. J. R. D. G. N. M. M. L. L. C. B. D. W. S. M. a. R. G. H. B. Terence
D. Valenzuela, "Outcomes of Rapid Defibrillation by Security Officers after
Cardiac Arrest in Casinos," The New England Journal of Medicine, vol.
343, no. 17, 2000.
[30] M. J. ,. P. N. ,. D. F. I. H.-A. F. H. ,. A. C. G. R. J. H. Mattias Ringh,
"Survival after Public Access Defibrillation in Stockholm, Sweden--A
striking success," Resuscitation, 2015.
[31] American Institute of Aeronautics and Astronautics, American National
Standards Institute, "Guide to the Preparation of Operational," American
Institute of Aeronautics and Astronautics , 2018.
[32] A. A. George, A. Krishna, T. Dias, A. S. Vargheese and R. S. Divya,
"Golden aid an emergency ambulance system," in nternational Conference
on Networks & Advances in Computational Technologies (NetACT),
Thiruvanthapuram, 2017.
[33] S. Bernazzani, "15 Great Customer Service Quotes to Inspire You,"
Hubspot, [Online]. Available: https://blog.hubspot.com/service/customer-
service-quotes. [Accessed 12 August 2020].
Page | 80
[34] "Chief fire officer ousted," FSM, 24 July 2018. [Online]. Available:
https://www.fsmatters.com/Chief-fire-officer-ousted. [Accessed 23 August
2020].
[35] "Are urgent care centers hiring paramedics?," Experity , [Online].
Available: https://www.experityhealth.com/resources/are-urgent-care-
centers-hiring-paramedics/. [Accessed 24 August 2020].
[36] "Emergency Medical Services," City of Cincinnati, [Online]. Available:
https://insights.cincinnati-oh.gov/stories/s/Emergency-Medical-Services-
EMS-/9nen-2huk/. [Accessed 12 July 2020].
[37] "Cincinnati Fire Truck," Pinterest, [Online]. Available:
https://www.pinterest.com/pin/340725528035384224/. [Accessed 23
August 2020].
[38] "Cincinnati Fire Department," Emergency Vehicles Plus , [Online].
Available: https://emergencyvehiclesplus.com/2017/02/cincinnati-fire-
department-3/. [Accessed 23 August 2020 ].
[39] "Cincinnati Police Chevy Caprice," Flickr, [Online]. Available:
https://www.flickr.com/photos/caleb8155/28888829734. [Accessed 23
August 2020].
[40] E. T. Wilde, "Do Emergency Medical System Response times matter for
health outcomes?," Health Economics, 2012.
[41] "Philips HeartStart OnSite," American AED, [Online]. Available:
https://tinyurl.com/y6sqoeew. [Accessed 10 August 2020].
[42] O. Liang, "Types of Multirotor," [Online]. Available:
https://oscarliang.com/types-of-multicopter/. [Accessed 15 July 2020].
[43] M. Gortolev, "Quadcopter vs Hexacopter vs Octocopter: The Pros and
Cons," Dronebly, 24 November 2014. [Online]. Available:
Page | 81
http://dronebly.com/quadcopter-vs-hexacopter-vs-octocopter-the-pros-
and-cons. [Accessed 21 August 2020].
[44] David, "Hexacopter vs. Quadcopter: The Pros and Cons," Skilled Flyer,
[Online]. Available: https://skilledflyer.com/hexacopter-vs-quadcopter/.
[Accessed 23 July 2020].
[45] J. Flynt, "Differences Between Hexacopters, Quadcopters and
Octocopters," 3DINSIDER, 9 July 2017. [Online]. Available:
https://3dinsider.com/hexacopters-quadcopters-octocopters/. [Accessed 24
August 2020].
[46] UAV Systems International, "Tarot X6 V2.1 Ready To Fly," UAV Systems
International, [Online]. Available:
https://uavsystemsinternational.com/products/tarot-x6. [Accessed 24
August 2020].
[47] Wikipedia, "Carbon fibers," Encyclopedia, 9 November 2020. [Online].
Available: https://en.wikipedia.org/wiki/Carbon_fibers. [Accessed 9
November 2020].
[48] "SUMO User Documentation," German Aerospace Center (DLR), 8 July
2020. [Online]. Available: https://sumo.dlr.de/docs/index.html. [Accessed
16 July 2020].
[49] J. E. M. B. a. L. B. Daniel Krajzewicz, "Recent Development and
Applications of SUMO – Simulation of Urban MObility," International
Journal on Advances in Systems and Measurements, vol. 3 & 4, 2012.
[50] "Interactive Ranking & City Dashboards," Inrix, [Online]. Available:
https://inrix.com/scorecard/#. [Accessed 30 August 2020].
[51] S. Miller, "Why Is There So Much Traffic in NYC? It’s the Free Roads,
Stupid," StreetBlog NYC, 17 September 2015. [Online]. Available:
Page | 82
https://nyc.streetsblog.org/2015/09/17/message-from-brewers-congestion-
hearing-its-the-road-pricing-stupid/. [Accessed 29 August 2020].
[52] R. Arora, "Explained: Why Mumbai traffic is the worst in the world," Qrius,
19 June 2019. [Online]. Available: https://qrius.com/study-finds-mumbai-
traffic-is-the-worst-in-the-world-heres-why/. [Accessed 30 August 2020].
[53] H. M. C. G. a. G. M. Ethel Baloyi, "Evaluating public ambulance service
levels by applying a GIS based," South African Journal of Geomatics, vol.
6, no. 2, 2017.
[54] "The Future of Drones," Popular Mechanics, [Online]. Available:
https://www.popularmechanics.com/the-future-of-drones/ . [Accessed 20
August 2020].
[55] D. Joshi, "Drone technology uses and applications for commercial,
industrial and military drones in 2020 and the future," Business Insider, 18
December 20189. [Online]. Available:
https://www.businessinsider.com/drone-technology-uses-applications.
[Accessed 17 July 2020].
[56] "Passenger Transportation," Ehang, [Online]. Available:
https://www.ehang.com/ehangaav. [Accessed 20 August 2020].




















