Adaptive SVD-based AR model order determination for time-frequency analysis of Doppler ultrasound...
13
Pergamon l Original Contribution Ultrasound in Med. 81 Biol., Vol. 21, No. 6, pp. 74.3-805. 1995 Copyright 0 1995 Elsevier Science Ltd Printed in the USA. All rights reserved ON-5629/95 $9.50 + .I0 0301~5629( 95)00021-6 ADAPTIVE SVD-BASED AR MODEL ORDER DETERMINATION FOR TIME-FREQUENCY ANALYSIS OF DOPPLER ULTRASOUND SIGNALS A. FORT, C. MANFREDI and S. R~CCHI Electronic Engineering Department, University of Florence, Florence, Italy (Received 4 July 1994; in jnalform 3 January 1995)) Abstract-The short-time Fourier transform provides a picture of the spectral components temporal loca- tion in time-varying signals, but its performance is limited by the intrinsic trade-off between time and frequency resolutions.In the present study, thii problem is addressed using a spectral estimator basedon a combination of the autoregressive (AR) modeling technique and a new automatic model order selection method. The order estimation is achieved by means of the singular value decomposition (SVD) of an appropriate data matrix in conjunction with a new criterion (dynamic meanevaluation, DME) . The latter is usedto decide which singular values correspond to the signal and which to the noisesubspaces, avoiding an a priori threshold definition, thus giving the variable AR modelorder on consecutive short-time segments. Combination of the AR high frequency resolution capabilities and the SVD plus DME robustness and simplicity make the overall method reliable in many practical applications, mainly in the analysisof time- varying signalscorrupted by noise. The proposedprocedure has been applied to benchmark as well as to Doppler signal analysis.Some examplesare reported contirming the above-mentioned properties. Key W&k: Biomedical, Frequency domain, Modeling, Parameter estimation, Signal processing,System identification, Time series analysis, Doppler ultrasound signals. INTRODUCTION Doppler ultrasound is widely used in medical applica- tions to extract the blood flow velocity in the artery from the Doppler frequency shift. A real-time spectral analysis of the Doppler shift signals provides the time evolution of the velocity distribution in the vessels. The spectral analysis of nonstationary signals re- quires a signal processing tool that presents both good time and frequency resolutions. The most commonly used method is the short-time Fourier transform (STFT) (Cohen 1989). Specifically, for a signal y(t) and a window function h(t) centered at t, and equal to 0 for I r I > T/2, the STFI is calculated as follows: Y,(w) = q& ,I,;; e s -‘“‘y(T)h(t - T)dT (1) and the energy density spectrum (ESD), or spectro- gram, is defined as: P,,(t, w) = lYr(w)12 (2) Address correspondence to: Ada Fort, Department of Elec- tronic Engineering, Via S. Marta 3, 50139 Florence, Italy. which can be considered as the energy density at time t and angular frequency w. In practice, the experimental signals are always corrupted by noise; hence, the deterministic concepts of intensity and density must be interpreted in their probabilistic meaning of probability density and distri- bution, respectively. In this sense, the ESD definition is replaced by the power spectrum density (PSD) definition. The window function h(t) weights the signal on each time interval: the narrower the window in the time domain, the higher the achieved time resolution, but the lower the achieved frequency resolution. Hence, the choice of the window function represents an inherent trade-off between time and frequency reso- lutions in the spectrogram. This situation, likewise, occurs in the discrete signal processing framework. Moreover, when the frequency content of nonsta- tionary Doppler signals coming from quickly varying flows must be estimated, short data segments have to be analyzed to fall into the assumed local stationarity of the process. In this case, the FFT periodogram tech- nique is affected by a poor frequency resolution. Better frequency resolution can be achieved by estimating the PSD via the so-called parametric approach, which has 793
Transcript of Adaptive SVD-based AR model order determination for time-frequency analysis of Doppler ultrasound...

Pergamon
l Original Contribution
Ultrasound in Med. 81 Biol., Vol. 21, No. 6, pp. 74.3-805. 1995 Copyright 0 1995 Elsevier Science Ltd Printed in the USA. All rights reserved
ON-5629/95 $9.50 + .I0
0301~5629( 95)00021-6
ADAPTIVE SVD-BASED AR MODEL ORDER DETERMINATION FOR TIME-FREQUENCY ANALYSIS OF DOPPLER ULTRASOUND SIGNALS
A. FORT, C. MANFREDI and S. R~CCHI Electronic Engineering Department, University of Florence, Florence, Italy
(Received 4 July 1994; in jnalform 3 January 1995))
Abstract-The short-time Fourier transform provides a picture of the spectral components temporal loca- tion in time-varying signals, but its performance is limited by the intrinsic trade-off between time and frequency resolutions. In the present study, thii problem is addressed using a spectral estimator based on a combination of the autoregressive (AR) modeling technique and a new automatic model order selection method. The order estimation is achieved by means of the singular value decomposition (SVD) of an appropriate data matrix in conjunction with a new criterion (dynamic mean evaluation, DME) . The latter is used to decide which singular values correspond to the signal and which to the noise subspaces, avoiding an a priori threshold definition, thus giving the variable AR model order on consecutive short-time segments. Combination of the AR high frequency resolution capabilities and the SVD plus DME robustness and simplicity make the overall method reliable in many practical applications, mainly in the analysis of time- varying signals corrupted by noise. The proposed procedure has been applied to benchmark as well as to Doppler signal analysis. Some examples are reported contirming the above-mentioned properties.
Key W&k: Biomedical, Frequency domain, Modeling, Parameter estimation, Signal processing, System identification, Time series analysis, Doppler ultrasound signals.
INTRODUCTION
Doppler ultrasound is widely used in medical applica- tions to extract the blood flow velocity in the artery from the Doppler frequency shift. A real-time spectral analysis of the Doppler shift signals provides the time evolution of the velocity distribution in the vessels.
The spectral analysis of nonstationary signals re- quires a signal processing tool that presents both good time and frequency resolutions. The most commonly used method is the short-time Fourier transform (STFT) (Cohen 1989). Specifically, for a signal y(t) and a window function h(t) centered at t, and equal to 0 for I r I > T/2, the STFI is calculated as follows:
Y,(w) = q& ,I,;; e s -‘“‘y(T)h(t - T)dT (1)
and the energy density spectrum (ESD), or spectro- gram, is defined as:
P,,(t, w) = lYr(w)12 (2)
Address correspondence to: Ada Fort, Department of Elec- tronic Engineering, Via S. Marta 3, 50139 Florence, Italy.
which can be considered as the energy density at time t and angular frequency w.
In practice, the experimental signals are always corrupted by noise; hence, the deterministic concepts of intensity and density must be interpreted in their probabilistic meaning of probability density and distri- bution, respectively. In this sense, the ESD definition is replaced by the power spectrum density (PSD) definition.
The window function h(t) weights the signal on each time interval: the narrower the window in the time domain, the higher the achieved time resolution, but the lower the achieved frequency resolution. Hence, the choice of the window function represents an inherent trade-off between time and frequency reso- lutions in the spectrogram. This situation, likewise, occurs in the discrete signal processing framework.
Moreover, when the frequency content of nonsta- tionary Doppler signals coming from quickly varying flows must be estimated, short data segments have to be analyzed to fall into the assumed local stationarity of the process. In this case, the FFT periodogram tech- nique is affected by a poor frequency resolution. Better frequency resolution can be achieved by estimating the PSD via the so-called parametric approach, which has
793

794 Ultrasound in Medicine and Biology Volume 2 1, Number 6. I995
been shown to be a powerful tool for discrete signal spectral analysis (Kay and Marple 198 1; Marple 1987; Rao and Arun 1992). In fact, both time and frequency resolutions can be enhanced, since model-based meth- ods implicitly extrapolate the data outside the window under consideration. The problem is thus shifted to that of the model identification; in particular, the order and the coefficients of an autoregressive (AR) process that best describes the limited duration of the Doppler signal must be estimated. For short data segments the correct order determination is particularly troublesome due to the failure of the traditional methods (Akaike information criterion, AIC; final prediction error, FPE; criterion autoregressive transfer function, CAT) (Mar- ple 1987): too low an order estimation results in a smoothed spectral estimation with the consequent loss of information, while too high an order introduces spu- rious details into the spectrum, thus mismatching the true underlying signal. This point is particularly mean- ingful for Doppler signals characterized by a low sig- nal-to-noise ratio (SNR) . It must be stressed here that for these signals the choice of a fixed model order, which may be based on an a priori knowledge of the data characteristics and on experimental results, must be considered with great care, since it is intimately related to a correct signal sampling. In particular, oversampling leads to mismatched results.
In the present study, the AR parametric modeling technique is proposed combined with an adaptive model order selection based on the singular value de- composition (SVD) method and a new criterion (dy- namic mean evaluation, DME), which allows an auto- matic separation of the signal subspace from the noise subspace, thus bypassing the problem of an ad hoc threshold value definition inherent to the SVD method.
Some examples are presented to outline the ro- bustness and simplicity of the proposed technique.
AR MODEL ORDER SELECTION
In the past, much effort has been devoted to the definition of an adequate technique for a correct AR model order selection. The most commonly used meth- ods are: the AIC (Akaike information criterion), the FPE (final prediction error) and the CAT (criterion autoregressive transfer function) (Marple 1987). Basi- cally, they consist of minimizing a function of the model order, based on statistics and information the- ory, and are proved asymptotically to converge to the true model order as the data sequence length tends to infinity (except perhaps the AIC method) (Kashyap 1980 ) . As far as spectral analysis is concerned, none of the criteria works well for short data records (Marple 1987 ) . In particular, for Doppler signal analysis, it was shown (Schlindwein and Evans 1990) that the AIC,
FPE and CAT methods give estimated orders that are uncorrelated with the spectral characteristics of the Doppler signal and that heavily lluctuate from frame to frame (mainly between 2 and 10) when the window is made up of 64 or 128 samples (~5 to 10 ms).
Since the length of each data segment (number of samples) cannot be arbitrarily increased, due to the nonstationarity of the Doppler signal, none of the tradi- tional methods can be successfully applied in the pres- ent context.
On the other hand, the practical rule that suggests an order selection between N/2 and N/3 (N = number of samples) can be satisfactory, but it always implies a subjective judgment. In the literature a fixed order p = 12 seems to be quite satisfactory for Doppler signals (Schlindwein and Evans 1990, 1992) ; however, the experimental results, which will be presented in the last section, will show that this choice is not suitable for short data records (5 ms), since the results rapidly deteriorate as the frame becomes shorter.
The model order selection problem will be ad- dressed in the next section, where a variable order selection technique tailored to the data characteristics will be presented in conjunction with the SVD method; it will be shown that the proposed technique is less sensitive than traditional order selection methods to the data sequence length, thus being successfully appli- cable to short data frames.
AR MODELING VIA SVD DECOMPOSITION
Among the parametric approaches, the AR model- ing method offers many advantages, mainly the simple linear relationship in the time domain between the sig- nal at time t and its past values up to a specified number p. Moreover, the AR modeling technique is largely insensitive to noise and, if properly implemented, is numerically efficient at a low computational cost.
The AR polynomial representation of a signal y ( t ) can be obtained when the signal can be described as the sum of p complex exponential functions:
y(t) = 2 Ckt?‘Y”’ (3) I := ,
where ck iS the amplitude and wk iS the frequency of the kth exponential; in fact, in the absence of noise, the signal is exactly predictable and it can be described as a linear combination of its p past samples:
yet) = i aky(t - k) (4) k=l
which corresponds to an AR model,

AR Model order determination 0 A. FOKT et al. 795
For a signal y ( t ) embedded in noise, the AR poly- nomial representation of order p, AR(p) is:
y(t) = i aky(t - k) + e(f) (5) 1-I
where the input driving sequence e(t) is assumed to be Gaussian white noise.
Once the model parameters ah are estimated, it can be shown that the frequencies of the underlying signal correspond to the roots of the polynomial:
H(z) = ;; (1 - eJ”“Z-1 ) = 1 - i akzPh (6) 1-I !.=I
(root approach), or to the position, along the fre- quency axis, of the peaks of the squared magnitude of 1 lH( e1y’a7 ) (spectral approach) where AT is the sampling period (Marple 1987; Rao and Arun 1992). In practice, the number p of the model parameters is unknown; consequently, if the chosen model order is wrong, the AR model spectral estimation will intro- duce a huge variance.
This problem can be solved by using the singular value decomposition (SVD) technique of an appro- priate data matrix, which allows the separation of the signal characteristics from the noise contribution.
The SVD method has been widely investigated as a powerful tool for signal analysis and model identifi- cation (Forsberg 1991; Rao and Arun 1992; Van der Veen et al. 1993). In the last decade, a great deal of attention has been devoted to SVD-based methods for sinusoid retrieval, which use the close-to-p rank prop- erty of a data matrix in the presence of additive noise to estimate the number of sinusoids p and the sinusoid frequencies and amplitudes (Fink et al. 1992; Rao and Arun 1992; Tsuji and Sano 1992). The application of the SVD method in the analysis of a signal y(t) basi- cally consists in finding a proper decomposition of the following 2( N - L) X L data matrix A :
where L is the maximum allowed order ( 5 N/2), N is the number of samples in the window under consider- ation and the superscript “ *” denotes conjugation.
If min(L, 2(N - L)) > p and if the data are noise-free, the singular values of A are the positive square roots of the signal autocorrelation matrix. If p is the number of nonzero singular values of A, then p corresponds to the rank of the autocorrelation matrix and thus to the maximum allowed order for the autore- gressive model of the signal. p is referred to in litera- ture as the dimension of the signal space.
The effect of noise superimposition on the data results in an increase of the A matrix rank, which be- comes full rank.
The SVD decomposition of a matrix A of rank r consists in finding three suitable matrices V, C, V such that:
A=V CJ~U~V :’ (8)
where V is a unitary 2(N - L) X 2(N - L) matrix, V is a unitary L x L matrix and 2 is an r X r diagonal matrix with real, positive diagonal entries. The diago- nal entries (T~ of X are called the singular values of A and the columns uk of V and uk of V the left and right singular vectors of A, respectively. The p-rank approximation of A is obtained by retaining the p domi- nant singular values and the corresponding singular vectors in the SVD of A (Rao and Arun 1992); the value of p corresponds to the AR model order. Since the singular values and singular vectors of a matrix are relatively insensitive to perturbations in the matrix entries as well as to finite precision errors, the SVD technique is used to evaluate the numerical rank of a noise-corrupted matrix.
In fact, when L is greater than p and at a high SNR (L + 1 - p) small singular values of the noisy matrix will generally be clustered together and sepa-
l-
A=
Y(L) Y(L - 1) * Y(l) Y(L + 1) Y(L) - YW
. . . .
. . . .
YW - 1) YW - 2) * YW - L) y*w - L + 1) y”(N - L + 2) l Y”(N)
Y”W - 0 y*w - L + 1) l y”(N - 1) . . . . . . .
Y”(2) y”(3) : y”(L + 1)
(7)

796
time (s)
singular values in decreasing order I
1
5 IO 15 20 25 30 35 40
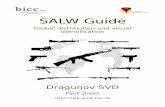
Fig. 1. (Above) Spectrogram of a simulated Doppler signal according to eqn (14), SNR = 80 dB. Window length: 10 ms (80 samples). (Below) Singular values for three signal windows: O-window starting at 0.01 s; *-window starting at 0.26 s; x-window starting at 0.51 s. AR model order estimated by the SVD + DME
method: O-order 5; * -order 9; x-order 14.
rated in magnitude from the p stronger ones. The SVD is thus a numerically reliable and robust means for estimating the signal and noise subspace dimensions starting from the white noise-corrupted data and to obtain the model order p; in fact, having eliminated the singular values related to noise, the signal subspace dimension can be recovered, thus giving the order p of the corresponding AR model.
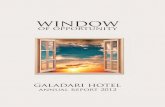
Figures 1 and 2 show the typical behavior of the singular values obtained from a simulated signal with a very high SNR ( 80 dB ) , and from a real CW Doppler signal coming from a fetal umbilical artery). In Fig. 2 it can be seen that the presence of noise causes a slower decrease of the singular values toward zero. In fact, in actual cases, large and small singular values do not neatly separate in the presence of strong noise (low SNR) . In particular, for a Gaussian white noise- corrupted data matrix the singular values are raised by an amount of the order of the largest singular value of the perturbation matrix (Van der Veen et al. 1993). The choice of a robust method for deciding which singular values correspond to the signal subspace (SS) and which to the noise subspace (NS) is still one of the crucial points of the SVD method ( Forsberg 199 1) . The most common methods are based on the compari- son with a static or dynamic threshold. The static threshold is simpler to apply, but a priori fixed: it usually depends on an a priori knowledge of the signal under consideration and/or the noise energy (Fink et al. 1992). Dynamic thresholds are generally based on
suitable cost functions to be minimized: this approach, while giving rather improved results with respect to the static one, always presents the drawback of an increase in the computational burden, making it inap- plicable in an on-line framework (Tsuji and Sano 1992).
The aim of the present study is the definition of a suitable criterion which allows the separation be- tween SS and NS on each data segment, avoiding the necessity of an ad hoc threshold value. Based on the previous considerations, the following processing flow, dynamic mean evaluation (DME), is proposed:
c = 0;
fork= 1,2....,$
then: p = k; c = 1.
if c = 0:
fork= 1,2,...,$

AR Model order determination l A. FORT et al. 191
spectrogram of a Doppler signal
"0 - 0.05 0.1 0.15 .‘. 0.2 0.25 0.3 0.35 0.4 0.45 0.5 time (s)
singular values in decreasing order 1
-: 0.8 F 60.6 .g
$0.4
c 0.2
0 0 5 10 15 20 25 30 35 40
Fig. 2. (Above) Spectrogram of a Doppler signal (fetal umbilical artery). Window length: 10 ms (80 samples). (Below) Singular values for four signal windows: O-window starting at 0.1 s; *-window starting at 0.2 s; X-window starting at 0.3 s; +-window starting at 0.4 s. AR model order estimated by the SVD + DME
method: O-order 4; * -order 16; x-order 6; +-order 4.
then: p = L - k.
otherwise: p = L. (9)
where the (Ti are the singular values of A, and L is the maximum allowed order.
Thus, the procedure works as follows: For the singular values (sv) in decreasing order: O, > cr2 > . . . > crL, the model order p is selected through an iterative scheme comparing the (k + 1) th (k = 1, . . . , L/2) s.v distance both from the arithmetic mean of the first k s.v and from that of the last L - k - 1 sv (SS and NS, respectively). If the first distance is larger than the second, the (k + 1 )th sv belongs to the NS; consequently, the model order is p = k. If no value of k can be found satisfying the above condition, the procedure is repeated starting from the index of the smallest sv (i.e., the sv which most probably belongs to the NS ), thus giving the SS and the model order p = L - k. Finally, if none of the above conditions is verified, the model order p is set equal to L, all the sv being of comparable dimension.
The proposed technique is reliable both in a well- defined situation, where the singular values of NS are clustered together and neatly separated from those of SS, as well as in the opposite case of uniformly de- creasing singular values, when the two subspaces may not be correctly separated on a mere threshold basis, thus implying an erroneous model order selection.
From an operative point of view, the following procedure can be adopted: 1. Given a discrete-time noise-corrupted data se-
quence of length N,:
Y( 1 )Y(2). * * Y(N,)
choose a suitable time interval I * AT (AT being the sampling period) and divide the data into M subsequences of I data each. Let:
S, =y,(l)***yi(I) i= 1, . . . . M
the ith subsequence. 2. For each Si, i = 1, M, form the corresponding data
matrix A [eqn (7)], with Li = Z/2 > pi and N = I.
3. Estimate the order of the AR model pi, by means of the SVD + DME technique described above [eqns (8) ad (911.
4. Estimate the coefficients Uk,i, k = 1, . . . , pi of the autoregressive model of order pi by means of a suitable numerical method (modified covariance, in this work).
5. Perform the ith subsequence PSD estimation by applying the following equation (Marple 1987):

798 Ultrasound in Medicine and Biology Volume 71. Number 6, 1995
time (s)
estimated order
0' I I 1 1 I I 0 0.2 0.4 0.6 0.6 1 1.2 1.4 1.6 1.6 2
time (s)
Fig. 3. Above-spectrogram of a Doppler signal (umbilical artery). Below-AR order p estimated via SVD + DME. Window length: 10 ms (80 samples).
PAR(i, w> = AT;:
1 + 5 ak,i (yJQkAT 2 (10)
k=l I
where i, 3 is an estimate of the variance of the driv- ing noise e(t), provided by the AR parameter esti- mation method (step 4). The subscript i of p indi- cates that the model order is adaptively selected; that is, it is automatically determined depending on the local properties of the signal on the ith time window.
The procedure, even if empirical, retains the advan- tages peculiar to parametric modeling over the tradi-
P(f) z f SIGNALSPECTRUM
FREQUENCY Fig. 4. Evaluation of the maximum frequency: the energy content of two windows, WI and Wz, sliding on the PSD is
calculated.
tional time-frequency analysis techniques based on the FFI algorithm and solves the problem of a correct AR model order selection (Dessi et al. 1994). In conclu- sion, the main advantages are the following: l The avoidance of the window side lobe effects. l The PSD estimation in an analytical form. l Good frequency resolution also for data records with
length prohibitive for traditional spectral estimators v-u.
l The robustness with respect to noise inherent to the SVD method.
l An automatic model order selection depending on the local signal characteristics.
An example of the results obtained by applying the SVD + DME procedure to a Doppler signal (fetal umbilical artery) is reported in Fig. 3, where an 80- sample window ( 10 ms) is considered; an evident cor- relation between the estimated order and the spectral characteristics of the Doppler signal is achieved.
In the next section, some examples are reported which demonstrate the effectiveness of the proposed technique.
EXPERIMENTAL RESULTS
The proposed technique was applied both to simu- lated and to experimental Doppler signals. Usually, the performance of a Doppler signal analysis technique is evaluated through the quality of some spectral parame- ter estimation, meaningful for diagnostic purposes. Particular interest is addressed to the mean frequency,

AR Model order determination 0 A. FORT et al. 199
simulated signal
-11 I / I 0 20 40 60 00 100 120 140 160 100
samples
FFT spectrum
0 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 normalized frequency
Fig. 5. Signal simulated according to eqn (14) (Above) Time domain. (Below) Frequency domain (FFT)
the spectral width of the Doppler PSD (the former related to the mean blood flow velocity and the latter to many parameters such as the ultrasonic beam width, the turbulence of the blood flow and so on) and to the maximum spectral frequency (related to the maximum
AR+SVD, iw=64,SNR=lO 53.51-j
2.2 2.4 2.6 2.8 3 3.2 theor. 1. max (kHz)
R AR+SVD, lw=64,SNR=iO g 11-j
g 0.8 3
2 0.6 /’ 5 /
. .
$0.4 / / , ,
X0.2 ,’ /’
5 /’ .- ; 0’ al 0.2 0.4
theor. spectral widthqic6Hz)
blood flow velocity). The third parameter, extremely relevant for clinical applications, is often critical, since many problems are encountered in its estimation (Hatle and Angelsen 1982; MO et al. 1988, and refer- ences therein). A significant assessment of the maxi-
AR+AIC, lw=64,SNR=fO g3.5 . 52 _’ rJ F
3 ‘c. $2.5 ‘0 8 2 E .- v al.5
2.2 2.4 2.6 2.8 3 3.2 theor. f . max (kHzl
R AR+AIC, lw=64,iNR:lO 2 11-1
theor. spectral width (kHz)
Fig. 6. Simulation results for a signal with fixed mean frequency and increasing spectral width: estimated spectral parameters versus theoretical spectral parameters. SNR = 10 dB, Iw = length of the window in samples. Sampling frequency = 8 kHz. Solid line: average estimated parameters; bars: standard deviation of the estimated parameters;
dashed line: theoretical values.

Ultrasound in Medicine and Biology
AR+SVD, lw=64,SNR=4
2.2 2.4 2.6 2.8 3 3.2 theor. f . max (kHz)
77 g
AFl+SVD, lw=64,SNR=4 11-1
Volume 2 1, Number 6, 1995
AR+AIC, iw=64,SNR=4 s3.5r ,
iti- AR+AIC, lw=64,bNd=4
theor. theor. spectral width (kHz) spectral width (kHz)
Fig. 7. Simulation results for a signal with fixed mean frequency and increasing spectral width: estimated spectral parameters versus theoretical spectral parameters. SNR = 4 dB, Iw = length of the window in samples. Sampling frequency = 8 kHz. Solid line: average estimated parameters; bars: standard deviation of the estimated parameters;
dashed line: theoretical values.
AR+SVD, lw=32,SNR=4 33.51 1 ,
ARiAIC, lw=32,SNR=4
z3.5------- B v t 0 3 p!
e3 2 o! ‘c:
2 2.5 2 2.5
$ 0 iii 2 0 E
2
‘Z ii
tz 1.5 ‘Z 2 1.5
2.2 2.4 2.6 2.8 3 3. theor. f . max (kHz)
AR+SVD, lw=32,SNR=4 theor. f . max (kHz)
a AR+AIC, lw=32,SNR=4
0.2 theor. spect:$widthqic6Hz)
Fig. 8. Simulation results for a signal with fixed mean frequency and increasing spectral width: estimated spectral parameters versus theoretical spectral parameters. SNR = 4 dB, lw = length of the window in samples. Sampling frequency = 8 kHz. Solid line: average estimated parameters; bars: standard deviation of the estimated parameters;
dashed line: theoretical values.

AR Model order determination 0 A. FOCI et al. 801
0.6 0.8 1 1.2 1.4 time (s)
AR, ord=l2,lw=80
time (s)
Fig. 9. Maximum frequency of a Doppler signal estimated by AR + SVD (above) and by fixed order AR, p = 12 (below). The estimated parameter is plotted on the spectrogram. The analyzed windows are made up of 80
samples corresponding to a time resolution of 10 ms.
mum frequency can be obtained only when the PSD estimation does not introduce relevant noisy peaks out- side the signal band, and can be improved if the applied spectral estimator performs also a noise rejection ac- tion. Therefore, the comparison among various spectral estimators is better performed through the examination of this critical parameter.
A unique definition for maximum spectral frequency does not exist; in the present work, the one given opera- tively in Hatle and Angelsen ( 1982) is considered.
Given a PSD, two windows of the same length, I,., sliding on the frequency axis, are defined; a fixed frequency delay between the two windows, Af, is as- sumed and the “energy” content of each window (E, , E2) is computed at each step:
where P(f) is the analyzed PSD, wIN (f, is the fre- quency window of length I, and 5 the starting fre- quency of the first window (see Fig. 4).
The maximum frequency can be found when the energy (E,) contained in the first window becomes significantly “larger” than the one contained in the
second ( E2), that is, when the following equation be- comes true:
EI (J; ) > p &(JL; )
( 12)
where p is a conveniently selected threshold. In the present study, a modified version of the method
in Hatle and Angelsen (1982) is proposed: the ratio of the energy content of the two windows is evaluated on each window and its value is weighted with the energy content of the first window. This allows to discard peaks in frequency regions where the spectral contribution is mainly due to noise. Therefore, a frequency function R (X ) is evaluated according to the following expression:
R(J) = s. 7 I (13)
The maximum frequency is then given by the frequency of the maximum of R (j ) , thus avoiding the problem of an appropriate threshold value selection.
The proposed AR + SVD technique was tested on a set of simulated signals and then applied on a set of experimental signals obtained from continuous Doppler waveforms coming from fetal umbilical vein. The simu- lated Doppler signals were produced as sequences of adja- cent stationary time windows (MO and Cobbold 1986); in each time window the signal is obtained by the superim-

x02 Ultrasound in Medicine and Biology Volume 3 I. Numbe! 6. 1995
max. freq. AFi+SVD
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 time (s)
max. freq.AR ord=12
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 time (s)
Fig. 10. (a) Maximum frequency of the Doppler signal estimated Fig. 10. (a) Maximum frequency of the Doppler signal estimated by AR -t SVD (above) and by fixed order AR, p = 12 (below). by AR -t SVD (above) and by fixed order AR, p = 12 (below). The analyzed windows are made up of 80 samples corresponding The analyzed windows are made up of 80 samples corresponding to a time resolution of 10 ms. (b) Part of the results reported in to a time resolution of 10 ms. (b) Part of the results reported in (a) slotted in one graph to highlight the differences. AR + SVD: (a) slotted in one graph to highlight the differences. AR + SVD:
solid line-fixed order AR, p = 12: dashed line.
0 01 0.2 0.3 0.4 0.5 0.6 0.7 0.6 0.9 1 ttme (s)
(b)
position of a set of sinusoids with random phases and amplitudes, embedded in noise. Simulated signals are char- acterized by rectangular or asymmetric PSD with increas- ing variance and fixed central frequency or with fixed variance and increasing mean frequency. The SNR was varied from 4 to 10 dB and a sampling frequency of 8 kHz is considered. The Doppler signal yj is simulated according to the following expression:
,I yi(j) = 2 Ak,isin((tio.i + 2rkAf)iAt
t--r,,
+ 45 (k)) + n,(t) j=l,..., I i=l,..,, M (14)
where I and M, previously defined, are the number of samples per window and the number of windows forming the whole time sequence, respectively.
In eqn ( 14), Af, the frequency step, is equal to 8 kHzINf, Iv” is the number of points used for spectral sampling, W0.i is the central frequency of the signal in the ith window and c$~ (k) is a random phase uniformly distributed between - rr and T. By appropriately select- ing the statistic properties of Ak,i (Rayleigh distribu- tion), different spectral distributions can be obtained; by adjusting w,,[ and vi the central frequency and the spectral width can be varied. ni (k) is a zero-mean Gaussian noise sequence with variance y? = E, /SNR, where Ei is the signal power in the ith window, given by:

AR Model order determination 0 A. FORT et al 803
time (s)
AR, ord=12,lw=40
time (s)
Fig. 11. Maximum frequency of a Doppler signal estimated by AR + SVD (above) and by fixed order AR, p = 12 (below). The estimated parameter is plotted on the spectrogram. The analyzed windows are made up of 40
samples corresponding to a time resolution of 5 ms.
‘ j=l
Figure 5 shows an example of the obtained simulated signal in time and frequency domains.
A first evaluation of the proposed technique per- formance was obtained by comparing it to AR spectral estimators with standard order selection criteria ( AIC, FPE, etc.). Since these criteria give comparable re- sults, the comparison is limited to the AIC method. Moreover, it was shown by Vaitkus et al. (1988) that, for Doppler signals, the AIC method is difficult to use, due to the absence of a well-defined minimum in the criterion; hence, for comparison purposes, the AIC method was modified by selecting the “knee” in the criterion by applying the DME procedure.
For simulated signal, the spectral width, B, was evaluated and compared to its theoretical value, ac- cording to the following equation:
In this expression P is the analyzed PSD, f. is the mean frequency and the other symbols were previously defined.
In Figs. 6 to 8, some simulation results are pre- sented. The spectral analysis is applied to signals with fixed mean frequency, increasing spectral width and a rectangular PSD. The results are reported in terms of both average and standard deviation of the estimated parameters, performed on 20 simulated signals.
The results of simulations agree with the theoreti- cal prediction: When the time window is sufficiently long and the SNR is high, results obtained with stan- dard order selection methods are equivalent to those obtained by applying the proposed method. The advan- tage of the SVD + DME model order estimation be- comes evident when the time window length or the SNR is reduced. In particular, with the considered SNR values, when the time window falls below 128 samples ( 16 ms), the order estimation given by AIC becomes highly unstable. When an overestimation of the order occurs, noisy peaks appear, which severely affect the quality of the maximum frequency assessment, leading to an erroneous identification of the maximum fre- quency with the falling edge of a spurious spectral peak. On the other hand, an underestimation of the order produces a spectral broadening effect and a smoothing of the spectral falling edge with a conse- quent less sharp definition of the maximum frequency.
The spectral width proved to be a parameter far

x04 Ultrasound in Medicine and Biology Volume 2 I, Number 6, I995
max. freq. AR+SVD
2.5
0.5
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 time (s)
max. freq.AR ord=12
35 35i
3
0.5 0.5 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
time (s) time (s)
(4 (4
I I I / 1 1 I ,
; I I , 1 I I I I
1 I
Fig. 12. (a) Maximum frequency of a Doppler signal estimated by Fig. 12. (a) Maximum frequency of a Doppler signal estimated by AR + SVD (above) and by fixed order AR, p = 12 (below). The AR + SVD (above) and by fixed order AR, p = 12 (below). The analyzed windows are made up of 40 samples corresponding to a analyzed windows are made up of 40 samples corresponding to a time resolution of 5 ms. (b) Part of the results reported in (a) time resolution of 5 ms. (b) Part of the results reported in (a) plotted in one granh to highlight the differences. AR + SVD: solid plotted in one grauh to highlight the differences. AR + SVD: solid
link; ixed order AR, p = 12: dashed line.
Oi’ I
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.6 0.9 1 me 6)
@f
less sensitive to the order selection, but it results in being heavily affected by noise, which produces a large bias, especially where the signal bandwidth is nar- rower.
The bias in the estimation of the maximum fre- quency value can be attributed to the weighting of the “energy” ratio E, (&)/E?(J) with E, (A ), which shifts the maximum of the ratio toward the frequency region where E, (J) is larger. On the other hand, it can be noted that a small variance of the estimated parameter is achieved and the selection of an ad hoc threshold is avoided.
The described technique was applied to Doppler signals recorded from the umbilical artery of pregnant women. The cardiac cycle of a healthy fetus is very irregular and has a beat rate which is almost twice that
of an adult; for these highly nonstationary Doppler signals, time resolutions of 10 ms (80 samples) or 5 ms (40 samples) were considered. For these signals, a comparison between the maximum frequency values obtained via the proposed technique and those obtained with a fixed order AR (order 12) is presented in Figs. 9 to 12. For this application, involving both short-time windows and a low SNR, the model order estimation provided by standard methods is highly unreliable; this finding has also been confirmed by other workers (Schlindwein and Evans 1992). The selected fixed or- der was derived as an average value of the orders estimated by the SVD technique (when considering IO-ms time resolution), and it is in agreement with the value found by Schlindwein and Evans ( 1990).
In Figs. 9 to 12, the better results obtainable by

AR Model order determination 0 A. FORT et al. 805
the proposed technique are clearly shown: the adaptive order AR spectral estimator succeeds in avoiding the noisy spectral peaks, since it follows the time-varying signal characteristics according to the selected window length. In fact, when the time window is shortened, the estimated order tends to become lower: The estima- tion of a smaller number of model parameters results in a reduced sensitivity to noise of the spectral estimator.
CONCLUSIONS
The analysis of the spectral characteristics of fast time-varying noisy Doppler signals via the traditional periodogram technique suffers from poor frequency resolution as the data frame becomes shorter, with ob- vious drawbacks as far as the applications are con- cerned.
The AR parametric approach performs well in such critical situations, since it is characterized by good time and frequency resolutions, but always presents the problem of the correct model order selection. Most commonly, this problem has been addressed via a trial procedure or classical criteria such as AIC, FPE and others, but no result of general validity has yet been obtained. Undoubtedly, the crucial point is a correct separation between the signal and the noise subspaces, which allows the signal PSD evaluation devoid of spu- rious peaks. The SVD method provides a solution to this problem, but still requires a threshold value, usu- ally fixed a priori.
In the present article, an adaptive model order selection technique is proposed, tied to the SVD method, which overcomes the above-mentioned prob- lem with a small amount of computation: the model order is adaptively chosen on the basis of the varying signal characteristics. The method, called dynamic mean evaluation (DME), also performs well on short data sequences, whose length is prohibitive for the traditional techniques. Such advantages are confirmed by the reported experimental results.
However, it must be stressed that problems may rise in the time regions where the signal is character- ized by a narrow band centered at a very low frequency and where a low model order is correctly estimated by the SVD method. On the other hand, in that region, the signal is dramatically oversampled; therefore, an AR model which describes the present sample as a function of a few past samples may be highly inaccu- rate. In fact, when taking into account only a few sam- ples, noise and quantization error can completely hide the slow signal variation. For this reason, when analyz-
ing Doppler signals a minimum order, 4 or 5, may be advisable.
At present, the real-time implementation of the SVD technique is not feasible at a reasonable cost, due to its computational complexity (the number of operations is of the same order as the third power of the maximum matrix A dimension). However, the method proposed in the present study may be success- fully applied in an off-line and/or preliminary data analysis to determine the “optimum” order for a par- ticular application.
REFERENCES Cohen, L. Time-frequency distribution-a review. Proc. IEEE
77:941-981; 1989. Des& S.; Fort, A.; Manfredi, C.; Rocchi, S. Adaptive AR model
order estimation for Doppler signals spectral analysis. In: Pro- ceedings of IFAC SYSID’94,ltkh IFAC Symposium on System Identification, Vol. II. Oxford. UK: Pereamon Press: 1994:405- 410.
Fink, F. K.; Madsen, J. P.; Micheelsen, H.; Pharao, K. SVD-based parameter estimation as noise robust preprocessing for speech recognition. In: Proceedings of the 6th European Signal Pro- cessing Conference. New York: Elsevier Science; 1992:395- 398. -
Forsberg, F. On the usefulness of singular value decomposition- ARMA models in Douuler ultrasound. IEEE Trans. Ultrason. Ferroelect. Freq. Contr. UFFC-38:418-428; 1991.
Hatle, L.; Angelsen, B. Doppler ultrasound in cardiology. Philadel- phia: Lea & Febiger; 1982.
Kashyap, R. L. Inconsistency of the AIC rule for estimating the order of autoregressive models. IEEE Trans. Automat. Control 25:996-998; 1980.
Kay, S. M.; Marple, S. L. Spectrum analysis-a modem perspective. Proc. IEEE 69:1380-1419; 1981.
Marple, S. L.; Digital spectral analysis with applications. Englewood Cliffs, NJ: Prentice-Hall; 1987.
MO, L. Y. L.; Cobbold, R. S. C. “Speckle” in continuous wave Doppler ultrasound spectra: A simulation study. IEEE Trans. Ultrason. Ferr. Freq. Control UFFC-33:747-753; 1986.
MO, L. Y. L.; Yun, L. C. M.; Cobbold, R. S. C. Comparison of four digital maximum frequency estimators for Doppler ultrasound. Ultrasound Med. Biol. 14:355-363: 1988.
Rao, B. D.; Arun, K. S. Mode1 based processing of signals: A state- space approach. hoc. IEEE 80:283-309; 1992.
Schlindwein, F. S.; Evans, D. H. A real-time autoregressive spectrum analyzer for Doppler ultrasound signals. Ultrasound Med. Biol. 15:263-272; 1989.
Schlindwein, F. S.; Evans, D. H. Selection of the order of autoregres- sive models for spectral analysis of Doppler ultrasound signals. Ultrasound Med. Biol. 16:81-91; 1990.
Schlindwein, F. S.; Evans, D. H. Autoregressive spectral analysis as an alternative to fast Fourier transform analysis of Doppler ultrasound signals. In: Labs, K. H., et al. (ed.), Diagnostic vascu- lar ultrasound. London: Edward Arnold; 1992:74-84.
Tsuji, H.; Sano, A. Optimal SVD-based determination of number of sinusoids. Proceedings 6th European Signal Processing Confer- ence. New York: Elsevier Science; 1992:727-730.
Vaitkus, P. J.; Cobbold, R. S. C.; Johnston, K. W. A comparative study and assessment of Doppler ultrasound spectral estimation techniques. Part II: Methods and results. Ultrasound Med. Biol. 14:673-688; 1988.
Van der Veen. A. J.; Deprettere, E. F.; Swindlehurst, A. L. Subspace- based signal analysis using singular value decomposition. Proc IEEE 81:1277-1308; 1993.