ACS550-01/U1 Drive User's Manual - Nicotra Gebhardt
198
Drive IT AC-drivsystem fr lgspnning Anvndarhandledning Frekvensomriktare ACS550-01 (0,7590 kW) Frekvensomriktare ACS550-U1 (1150 hk)
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of ACS550-01/U1 Drive User's Manual - Nicotra Gebhardt
DriveIT AC-drivsystem för lågspänning
Användarhandledning
Frekvensomriktare ACS550-01 (0,7590 kW) Frekvensomriktare ACS550-U1 (1150 hk)

2 ACS550 Användarhandledning
Frekvensomriktare ACS550, användarhandledningarGENERELLA HANDBÖCKER
ACS550-01/U1 Användarhandledning (0,7590 kW) / (1150 hk) Säkerhetsföreskrifter Installation Idrifttagning Diagnostik Underhåll Tekniska dataACS550-02/U2 Användarhandledning (110355 kW) / (150550 hk) Säkerhetsföreskrifter Installation Idrifttagning Diagnostik Underhåll Tekniska dataACS550 Teknisk referensmanual Detaljerad produktbeskrivning
Teknisk produktbeskrivning inklusive måttskisser Skåpmonteringsinformation inklusive förlusteffekt Programvara och styrning inklusive komplett
parameterbeskrivning Användargränssnitt och styranslutningar Komplett tillvalsbeskrivning Reservdelar Etc.
Praktiska konstruktionshandledningar PID- och PFC-konstruktionshandledning Dimensionering och dimensioneringsriktlinjer Diagnostik och underhåll Etc.
ANVÄNDARHANDLEDNINGAR FÖR TILLVAL (Fältbussmoduler, I/O-moduler etc., (tillvalshandböcker som medföljer tillvalsutrustning)
Tillvalsmodul för reläutgång (typisk titel) Installation Idrifttagning Diagnostik Tekniska data

ACS550 Användarhandledning 3
Säkerhetsföreskrifter
Varning! Det varvtalsreglerade AC-drivsystemet ACS550 får ENDAST installeras av kvalificerad elektriker.Varning! Även när motorn är stoppad finns det farlig spänning på kraftplintarna U1, V1, W1 och U2, V2, W2 och, beroende på byggstorlek, UDC+ och UDC-, eller BRK+ och BRK-.Varning! Farlig spänning föreligger när inkommande nät är anslutet. Efter frånskiljning av matningen, vänta minst 5 minuter (för att låta mellanledskondensatorerna ladda ur) före avtagning av kåpa. Varning! Även om spänningen skiljs från ingångsplintarna på ACS550 kan det finnas farliga spänningar (från externa källor) på plintarna till reläutgångarna R01R03.Varning! När styranslutningarna på två eller flera enheter är parallellkopplade måste hjälpspänningen till dessa styranslutningar tas från en gemensam källa som antingen kan vara en av enheterna eller vara extern.Varning! ACS550-01/U1 kan inte repareras i fält. Försök aldrig reparera en felaktig enhet; Kontakta fabriken eller en auktoriserad serviceverkstad för åtgärd.Varning! ACS550 återstartar automatiskt då matningsspänningen återkommer efter bortfall, om externt startkommando är aktivt.Varning! Kylelementet kan nå hög temperatur. Se "Tekniska data" på sid 175. Varning! Om drivsystemet ska användas i ett icke direktjordade distributionsnät, ta bort skruvarna vid EM1 och EM3 (byggstorlek R1R4), eller F1 och F2 (byggstorlek R5 eller R6). Se ritningarna på sid 21 respektive sid 22
Obs! För ytterligare teknisk information, kontakta fabriken eller närmaste ABB-försäljningskontor.
Säkerhetsföreskrifter

4 ACS550 Användarhandledning
Användning av varnings- och OBS-markeringarTvå typer av säkerhetsinstruktioner förekommer i denna handbok:
OBS-markeringar understryker särskilda förhållanden eller ger viktig information om ett ämne.
Varningar informerar om förhållanden som kan leda till allvarliga skador, dödsfall och/eller skada på utrustningen. Här anges även hur faran kan undvikas. Varningssymbolerna används på följande sätt:
Varning för farlig spänning varnar för situationer där höga spänningar kan orsaka kroppsskada och/eller skada på utrustning.
Allmän varning varnar för förhållanden, andra än sådana som är relaterade till elektricitet, som kan orsaka skada på personer och/eller skada på utrustningen.
Säkerhetsföreskrifter

ACS550 Användarhandledning 5
Innehåll
SäkerhetsföreskrifterAnvändning av varnings- och OBS-markeringar . . . . . . . . . . . . . . . . . . . . . . . . 4
Innehåll
Installation Flödesschema för installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Förberedelse för installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
ID-nummer för frekvensomriktare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Frekvensomriktaretiketter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Typkod. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Märkdata och byggstorlek . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Motorkompatibilitet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Nödvändiga verktyg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Lämplig miljö och kapsling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Lämplig monteringsplats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Anslutnings- och EMC-aspekter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
EMC-instruktioner (Europa, Australien och Nya Zeeland) . . . . . . . . . . . . . . . . 13CE-märkning (sökt vid tiden för tryckning) . . . . . . . . . . . . . . . . . . . . . . . . . . 13C-tick-märkning (sökt vid tiden för tryckning) . . . . . . . . . . . . . . . . . . . . . . . 14Val och förläggning av kablar. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14Inkommande matningskabel (nätkabel) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Nätövertoner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14Motorkabel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Minimikrav (CE och C-Tick). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Rekommendation för ledartyp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Effektiva motorkabelskärmar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Motorkablar som uppfyller EN61800-3 och AS/NZS 2064, 1997, Klass A 16
Styrkablar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Allmänna rekommendationer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Kablar för analoga signaler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Kablar för digitala signaler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Kabel till manöverpanel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Installation av frekvensomriktaren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Packa upp frekvensomriktaren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Förbered monteringsplatsen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Ta bort frontkåpan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
IP 21 / UL typ 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18IP 54 / UL typ 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Montera frekvensomriktaren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19IP 21 / UL typ 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19IP 54 / UL typ 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Installera kablarna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Kabelkanal-/kabelgenomföringssats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Innehåll
6 ACS550 Användarhandledning
Översikt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Kopplingsscheman. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Kabeldragning för kapsling IP 21 / UL typ 1 med kablar . . . . . . . . . . . . . . 23Kabeldragning för kapsling IP 21 / UL typ 1 med kabelkanal . . . . . . . . . . 24Kabeldragning för kapsling IP 54 / UL typ 12 med kablar . . . . . . . . . . . . . 25Kabeldragning för kapsling IP 54 / UL typ 12 med kabelkanal . . . . . . . . . 26
Kraftanslutningar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Tillval bromsning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Icke direktjordade nät. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Styranslutningar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Kommunikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Kontrollera installationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30Sätt tillbaka frontkåpan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
IP 21 / UL typ 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30IP 54 / UL typ 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Spänningssätt frekvensomriktaren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Idrifttagning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Motordata. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Makron . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Inställning Parametrar. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Fel- och larminställningar. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
IdrifttagningManöverpaneler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Avancerad manöverpanel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Funktioner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Översikt över manöver- och displayfunktioner . . . . . . . . . . . . . . . . . . . . . . . 34Manöverläge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Statusinformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Manövrering av frekvensomriktaren. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Övriga driftlägen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Att gå till Huvudmeny och Övriga driftlägen. . . . . . . . . . . . . . . . . . . . . . . . 36
Parameterläge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Idrifttagningsguide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Läge Ändrade parametrar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Parameterkopieringsläge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Klockinställningsläge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39I/O-inställningsläge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Basmanöverpanel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Funktioner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Översikt över manöver- och displayfunktioner . . . . . . . . . . . . . . . . . . . . . . . 41Manöverläge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Statusinformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Manövrering av frekvensomriktaren. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Referensläge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Parameterläge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Parameterkopieringsläge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44Larmkoder (Basmanöverpanel) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Tillämpningsmakron . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Innehåll
ACS550 Användarhandledning 7
Tillämpningsmakro: ABB-standard (grundvärde) . . . . . . . . . . . . . . . . . . . . 48Tillämpningsmakro: Pulsstyrning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Tillämpningsmakro: Växlande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Tillämpningsmakro: Motorpotentiometer . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Tillämpningsmakro: Hand-Auto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52Tillämpningsmakro: PID-regl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Tillämpningsmakro: PFC-styrning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Tillämpningsmakro: Moment-regl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Fullständig parameterlista för ACS550 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Kompletta parameterbeskrivningar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Grupp 99: Startparametrar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Grupp 01: Driftvärden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69Grupp 03: FB Fältbussövervakning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72Grupp 04: Felhistorik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74Grupp 10: Styringångar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75Grupp 11: Val av referens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77Grupp 12: Konstanta varvtal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81Grupp 13: Analoga ingångar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83Grupp 14: Reläutgångar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84Grupp 15: Analoga utgångar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87Grupp 16: Systemstyrning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88Grupp 20: Gränser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90Grupp 21: Start/Stopp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93Grupp 22: Accel/Retard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95Grupp 23: Varvtalsreglering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97Grupp 24: Momentregulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99Grupp 25: Kritiska frekv . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100Grupp 26: Motorstyrning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101Grupp 29: Underhåll . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103Grupp 30: Felfunktioner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104Grupp 31: Autom återställn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108Grupp 32: Övervakning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109Grupp 33: Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111Grupp 34: Processvariabler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112Grupp 35: Motortemp mätning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114Grupp 36: Tidur funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116Grupp 40: PID-reglering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120Grupp 41: PID-reglering (2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127Grupp 42: Extern / Trim PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128Grupp 51: Comm modul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130Grupp 52: Standard modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132Grupp 53: Inbyggd buskomm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133Grupp 81: PFC-styrning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135Grupp 98: Tillvalsmoduler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
Standard seriekommunikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148Introduktion till Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148Aktivering av Modbus-protokollet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148Kommunikationsinställningar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148Kommunikationsbortfall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149Diagnostiska räknare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
Innehåll

8 ACS550 Användarhandledning
Styrplatser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149Styrreläer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149ACS550-mappning till Modbus Reference Space . . . . . . . . . . . . . . . . . . . 150
Kommunikationsprofiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150Modbus-adressering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1500xxxx Mappning Modbus Coils . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1511xxxx Mappning Modbus diskreta ingångar . . . . . . . . . . . . . . . . . . . . . 1523xxxx Mapping Modbus Indata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1544xxxx Registermappning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154STYRORD och STATUSORD Standardprofil (ABB DRIVES) . . . . . . . 156Referenser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160Ärvärden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
Avvikelsekoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
DiagnostikVisning av diagnostik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
Röd Fel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162Blinkande grön Larm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
Att åtgärda fel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163Fellista . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163Återställning av felindikeringar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
Blinkande röd lysdiod. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167Röd lysdiod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
Historik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168Att åtgärda larm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
Larmlista . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
UnderhållUnderhållsintervall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171Kylflänsar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171Byte av huvudfläkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
Byggstorlek R1R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172Byggstorlek R5 och R6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Byte av intern kylfläkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173Byggstorlek R1 till R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173Byggstorlek R5 och R6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Kondensatorer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174Manöverpanelkabel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
Rengöring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174Batteri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
Tekniska dataMärkdata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
Märkdata för frekvensomriktare 380480 V . . . . . . . . . . . . . . . . . . . . . . . 175Märkdata för frekvensomriktare 208240 V . . . . . . . . . . . . . . . . . . . . . . . 176Symboler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176Dimensionering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176Nedstämpling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Temperaturnedstämpling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Innehåll

ACS550 Användarhandledning 9
Nedstämpling på grund av installationshöjd . . . . . . . . . . . . . . . . . . . . . . 177Nedstämpling för enfasmatning. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177Nedstämpling för moduleringsfrekvens . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Matningskabel och säkringar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178Säkringar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
Säkringar, 380480 V Frekvensomriktare . . . . . . . . . . . . . . . . . . . . . . . 178Säkringar, frekvensomriktare 208240 V . . . . . . . . . . . . . . . . . . . . . . . 179
Matningskablar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179Kabelplintar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180Matningsanslutning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181Motoranslutning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181Styrkabelanslutning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182Verkningsgrad: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182Kylning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
Luftflöde, frekvensomriktare 380480 V . . . . . . . . . . . . . . . . . . . . . . . . 182Luftflöde, frekvensomriktare 208240 V . . . . . . . . . . . . . . . . . . . . . . . . 183
Mått och vikt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184Enheter med kapsling IP 21 / UL typ 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
Yttermått . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184Monteringsmått . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185Vikt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
Enheter med kapsling IP 54 / UL typ 12 . . . . . . . . . . . . . . . . . . . . . . . . . . 186Yttermått . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186Monteringsmått . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186Vikt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
Skyddsgrad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186Miljöförhållanden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187Material . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188Tillämpade standarder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
UL-märkning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188Ansvarsbegränsning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
Index
Innehåll

10 ACS550 Användarhandledning
Installation
Läs dessa installationsanvisningar noga innan du börjar med själva installationarbetet. Om man inte följer varningarna och anvisningarna kan detta orsaka fel eller risk för personskada.
Varning! Innan du börjar, läs "Säkerhetsföreskrifter" på sid 3.
Flödesschema för installationInstallationen av det varvtalsreglerade AC-drivsystemet ACS550 går i princip till på följande sätt. Dessa steg måste utföras i angiven ordning. Till höger om varje steg finns referenser till den detaljerade information som behövs för korrekt installation av enheten.
Uppgift SeFÖRBERED för installation "Förberedelse för installation" på sid 11.
PACKA UPP frekvensomriktaren "Packa upp frekvensomriktaren" på sid 18.
FÖRBERED monteringsplatsen "Förbered monteringsplatsen" på sid 18.
TA AV frontkåpan "Ta bort frontkåpan" på sid 18.
MONTERA frekvensomriktaren "Montera frekvensomriktaren" på sid 19.
INSTALLERA kablar "Installera kablarna" på sid 20.
KONTROLLERA installationen "Kontrollera installationen" på sid 30.
ÅTERMONTERA kåpan "Sätt tillbaka frontkåpan" på sid 30.
SPÄNNINGSSÄTT frekvensomriktaren
"Spänningssätt frekvensomriktaren" på sid 31.
IDRIFTTAGNING "Idrifttagning" på sid 31.
Installation

ACS550 Användarhandledning 11
Förberedelse för installation
ID-nummer för frekvensomriktareFrekvensomriktaretiketter
För att fastställa typen av drivsystem som installeras, se etiketterna:
Serienummeretiketten som sitter på den övre delen av mellan monteringshålen.
Typkodetiketten sitter på kylelementet - på kåpans högra sida.
Typkod
Använd följande tabell för att tolka typkoden på etiketterna.
Märkdata och byggstorlek
Diagrammet i "Märkdata" på sid 175 anger tekniska data och identifierar frekvensomriktarens byggstorlek. Detta är viktigt eftersom vissa instruktioner i detta dokument skiljer sig beroende på aktuell byggstorlek. För att läsa tabellen Märkdata utgår man från värdet "Märkutström" i typkoden. Observera även, vid användning av tabellen Märkdata, att tabellen är indelad i kapitel beroende på frekvensomriktarens värde "Märkspänning".
Ser. no.
ACS550-01-08A8-4
*2030700001*U1 3~ 380...480 VI2N / I2hd 8.8 A / 6.9 APN/Phd 4 / 3 kW
Ser. no.
ACS550-01-08A8-4
*2030700001*
Input U1 3~ 380...480 VI1N 8.8 Af1 48...63 Hz
Output U2 3~ 0...U1VI2N / I2hd 8.8 A / 6.9 Af2 0...500 Hz
Motor PN/Phd 4 / 3 kW
ACS550-01-08A8-4+...
AC, standarddrivsystem produktserie 550
Se märkdatatabellen för närmare information
4 = 380480 V AC
U1 = Data och komponenter som är specifika för US-installation och NEMA-konformitet
2 = 208240 V AC
Konstruktion (regionspecifik)
Märkutström
Märkspänning
01 = Data och komponenter som är specifika för IEC-installation och -konformitet
Skåp, skyddsklassIngen specifikation = IP 21 / UL typ 1 B056 = IP 54 / UL typ 12
Installation
12 ACS550 Användarhandledning
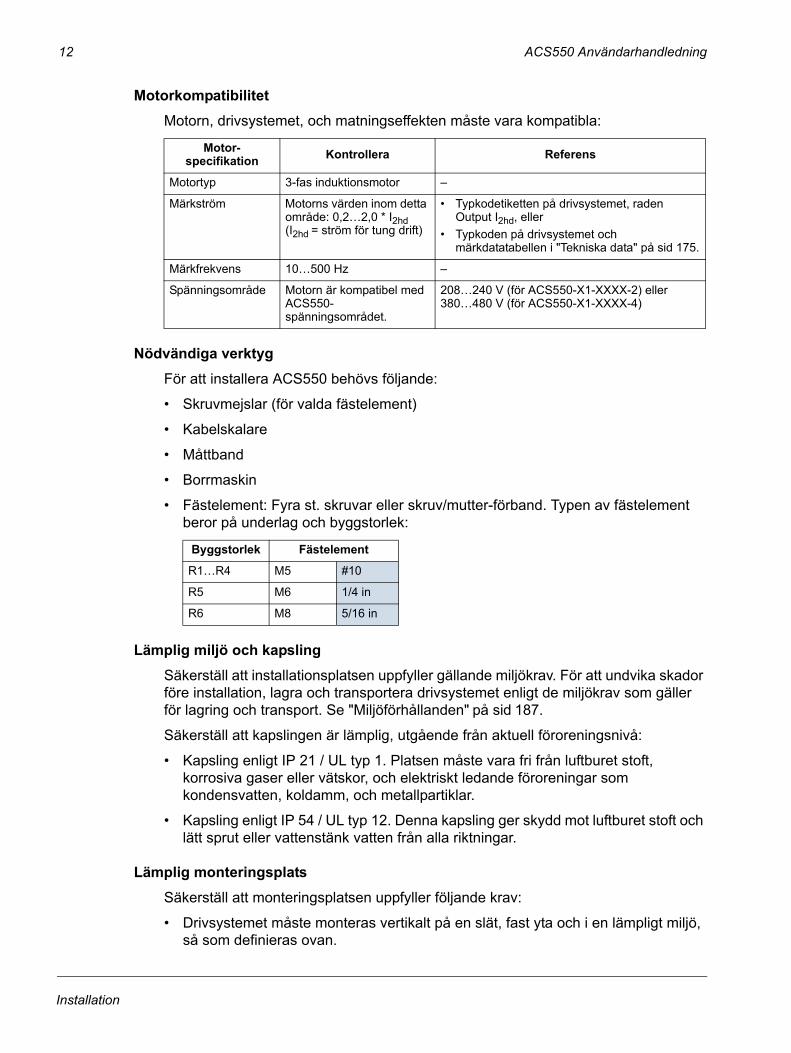
MotorkompatibilitetMotorn, drivsystemet, och matningseffekten måste vara kompatibla:
Nödvändiga verktygFör att installera ACS550 behövs följande:
Skruvmejslar (för valda fästelement)
Kabelskalare
Måttband
Borrmaskin
Fästelement: Fyra st. skruvar eller skruv/mutter-förband. Typen av fästelement beror på underlag och byggstorlek:
Lämplig miljö och kapslingSäkerställ att installationsplatsen uppfyller gällande miljökrav. För att undvika skador före installation, lagra och transportera drivsystemet enligt de miljökrav som gäller för lagring och transport. Se "Miljöförhållanden" på sid 187.
Säkerställ att kapslingen är lämplig, utgående från aktuell föroreningsnivå:
Kapsling enligt IP 21 / UL typ 1. Platsen måste vara fri från luftburet stoft, korrosiva gaser eller vätskor, och elektriskt ledande föroreningar som kondensvatten, koldamm, och metallpartiklar.
Kapsling enligt IP 54 / UL typ 12. Denna kapsling ger skydd mot luftburet stoft och lätt sprut eller vattenstänk vatten från alla riktningar.
Lämplig monteringsplatsSäkerställ att monteringsplatsen uppfyller följande krav:
Drivsystemet måste monteras vertikalt på en slät, fast yta och i en lämpligt miljö, så som definieras ovan.
Motor-specifikation Kontrollera Referens
Motortyp 3-fas induktionsmotor
Märkström Motorns värden inom detta område: 0,22,0 * I2hd (I2hd = ström för tung drift)
Typkodetiketten på drivsystemet, raden Output I2hd, eller
Typkoden på drivsystemet och märkdatatabellen i "Tekniska data" på sid 175.
Märkfrekvens 10500 Hz
Spänningsområde Motorn är kompatibel med ACS550-spänningsområdet.
208240 V (för ACS550-X1-XXXX-2) eller 380480 V (för ACS550-X1-XXXX-4)
Byggstorlek FästelementR1R4 M5 #10
R5 M6 1/4 in
R6 M8 5/16 in
Installation

ACS550 Användarhandledning 13
Minsta tillåtna utrymme för drivsystemet är yttermåtten (se "Yttermått" på sid 184 och 186), plus luftflödesutrymmet kring enheten (se "Kylning" på sid 182).
Avståndet mellan motorn och drivsystemet begränsas av maximal motorkabellängd. Se "Motoranslutning" på sid 181 .
Monteringsplatsen måste vara anpassad till drivsystemets vikt, som är förhållandevis liten. Se "Vikt" på sid 185.
Anslutnings- och EMC-aspekterTa reda på lokalt gällande krav med avseende på elektromagnetisk kompatibilitet (EMC). Allmänt gäller:
Följ lokalt gällande föreskrifter för kabeldimension.
Separera följande fyra kabelklasser: Inkommande matning, motorkablar, styr- och/kommunikationskablar, samt bromsenhetskablar.
Se "Motorkabel" på sid 15 för begränsning av motorkabellängd på grund av EMC-krav (CE eller C-Tick).
Se specifikationer/rekommendationer i: "Matningskabel och säkringar" på sid 178, "Kabelplintar" på sid 180 "Matningsanslutning" på sid 181 "Motoranslutning" på sid 181.
EMC-instruktioner (Europa, Australien och Nya Zeeland)Detta avsnitt behandlar uppfyllande av EMC-krav (i Europa, Australien och Nya Zeeland). För installation i USA och andra regioner utan speciella EMC-krav, fortsätt med "Styrkablar" på sid 17.
CE-märkning (sökt vid tiden för tryckning)Frekvensomriktaren ACS550 är försedd med ett CE-märke som visar att enheten uppfyller de krav som ställs av EGs Lågspänningsdirektiv och EMC-direktiv (direktiv 73/23/EEG, kompletterat av 93/68/EEG samt direktiv 89/336/EEG, kompletterat av 93/68/EEG).
EMC-direktivet definierar de krav på immunitet mot och emission av elektromagnetisk utstrålning som gäller för utrustning som används inom EES-området. EMC-produktstandarden EN 61800-3 behandlar de krav som definierats för drivsystem liknande ACS550. Frekvensomriktare ACS550 uppfyller de krav som anges i EN 61800-3 för Miljöklass 2 och Miljöklass 1, begränsad distribution:.
Produktstandarden EN 61800-3 (Varvtalsreglerade elektriska drivsystem - Del 3: EMC-produktstandard, inkluderande specifika testmetoder) definierar Miljöklass 1 som elektriska miljöer inkluderande bostadsmiljöer. Miljöklass 1 inkluderar även installationer som är anslutna utan mellanliggande transformator till ett allmänt distributionsnät för lågspänning som matar bostadsfastigheter.
Miljöklass 2 inkluderar installationer utom sådana som är direkt anslutna till ett allmänt distributionsnät för lågspänning som matar bostadsfastigheter.
Installation

14 ACS550 Användarhandledning
C-tick-märkning (sökt vid tiden för tryckning)Frekvensomriktare ACS550 förses med C-tick-märkning för att visa att de uppfyller föreskrifterna enligt Australiens "Statuary Rules nr 294, 1996, "Radiocommunication (Compliance Labelling - Incidental Emissions) Notice" samt "Radiocommunication Act", 1989 och Nya Zealands "Radiocommunication Regulations" 1993.
Föreskrifterna definierar de grundläggande kraven på emission från elektrisk utrustning som tillämpas i Australien och Nya Zeeland. Standarden AS/NZS 2064, 1997, "Limits and methods of measurement of electronic disturbance characteristics of industrial, scientific and medical (ISM) radio frequency equipment" (Gränser och metoder för mätning av elektronisk störningskarakteristik från högfrekvensutrustning för industriell, vetenskaplig och medicinsk användning) täcker de detaljerade kraven för trefasiga frekvensomriktare som ACS550.
Frekvensomriktare ACS550 uppfyller kraven enligt NZS 2064, 1997, för utrustning av Klass A. Utrustning av klass A lämpar sig för användning i alla miljöer utom bostadsmiljöer och miljöer direkt anslutna till lågspänningsnät som matar bostadsfastigheter. Överensstämmelsen gäller under följande förutsättningar:
Motorn och styrkablarna är valda enligt specifikationerna i denna handbok.
Installationsföreskrifterna i denna handbok har följts.
Val och förläggning av kablar.De oskärmade ledarna mellan kabelförskruvningarna och skruvplintarna ska hållas så korta som möjligt. Förlägg styrkablar på avstånd från kraftkablar
Inkommande matningskabel (nätkabel)En fyrledarkabel (trefas och jord/skyddsjord) rekommenderas för matningskabel. Ingen skärmning behövs. Dimensionera kablar och säkringar utgående från inströmmen. Följ alltid lokalt gällande föreskrifter vid dimensionering av kablar och säkringar.
Anslutningsplintarna för inkommande matningskabel sitter på frekvensomriktarens nederdel. Inkommande matningskabel ska förläggas så att avståndet från sidorna av frekvensomriktaren är minst 20 cm, för att undvika att inkommande matningskabel utsätts för kraftiga fält. Om kabeln är skärmad, tvinna skärmstrumpans ände till en ledare vars längd inte får överstiga fem gånger dess bredd och anslut till frekvensomriktarens skyddsjordanslutning (PE). (Eller till skyddsjordanslutning på ingångsfiltret om sådant finns.)
Nätövertoner
ACS550 är avsedd att användas inom näringsliv, yrkesverksamhet och industri. Produkten är inte avsedd att säljas till allmänheten. Uppmätta strömövertonsnivåer under märklastförhållanden översänds på begäran.
MotorkabelMinimikrav (CE och C-Tick)
Motorkabeln måste vara en symmetrisk treledarkabel med koncentrisk skyddsjordledare, eller en fyrledarkabel med koncentrisk skärm. I första hand
Installation

ACS550 Användarhandledning 15
rekommenderas symmetrisk skyddsjordledare. Följande figur visar minimikraven för motorkabelns skärm (till exempel, MCMK, NK Cables).
* Ingångsfilter avsedda för ACS550 kan inte användas i ett isolerat eller högimpedivt jordat distributionsnät för industriändamål.
Rekommendation för ledartyp
Följande figur jämför olika ledartyper i motorkabeln.
Effektiva motorkabelskärmar
Den generella regeln för en kabelskärms effektivitet är följande: Ju kraftigare och tätare kabelskärm desto lägre emissionsnivå. Följande figur visar ett exempel på en effektiv konstruktion (till exempel Ölflex-Servo-FD 780 CP, Lappkabel eller MCCMK, NK Cables).
Kläm fast kabeln i genomföringsplattan vid frekvensomriktaränden och tvinna kabelskärmen till en ledare vars längd inte överstiger fem gånger dess bredd och anslut till terminalen markerad (i frekvensomriktarens nedre högra hörn), om du använder en kabel utan separat skyddsjordledare.
Isolerande mantel Koppartrådskärm Spirallindat kopparband
Kabelkärna
Inre isolering
Symmetrisk skärmad kabel: tre fasledare och en koncentrisk eller på annat sätt symmetriskt konstruerad skyddsjordledare (PE), samt en skärm
Rek. kabeltyp (CE och C-Tick)
Skyddsjordledare och skärm
Separat skyddsjordledare fordras om kabelskärmens konduktivitet understiger 50% av fasledarnas konduktivitet.
Ej tillåtet för motorkablar (CE och C-Tick)Skärm
PE
PE
Ej tillåtet för motorkablar med fasledare vars tvärsnittsarea överstiger 10 mm2.
Ett fyrledarsystem: tre fasledare och skyddsjordledare, utan skärm.
Tillåtet (CE och C-Tick)
SkärmSkärm
Isolerande mantel
Flätad metallskärm
Inre isolering
L1
L2
L3
Installation

16 ACS550 Användarhandledning
Vid motoränden måste kabeln ha 360 grader runtomgående jordning. Detta kan åstadkommas med en EMC-kabelgenomföring eller genom att tvinna kabelskärmen till en ledare vars längd inte överstiger fem gånger dess bredd och ansluta den till PE-plinten.
Motorkablar som uppfyller EN61800-3 och AS/NZS 2064, 1997, Klass A
För att uppfylla EN61800-3, Miljöklass 1 och Miljöklass 2, Begränsad distribution, och AS/NZS 2064, 1997, Klass A, gäller följande för motorkablarna:
mindre än eller lika med 30 m: inget RFI-filter fordras.
längre än 30 m : begränsningar enligt tabellen nedan Följ instruktionerna i filterförpackningen för alla kabelskärmanslutningar.
Varning! Använd inte filter i ett icke direktjordat eller högimpedivt jordat nät.
måste ha en effektiv skärm så som beskrivs i "Effektiva motorkabelskärmar" på sid 15.
måste vara jordad vid motoränden med en EMC-kabelgenomföring. Jordningen måste ge kontakt med skärmen runt hela kabelns omkrets
Frekvensomriktar-typ Filter
Moduleringsfrekvens (Parameter 2606)1 eller 4 kHz (1 eller 4) 8 kHz (8)
Max rekommenderad motorkabellängd ACS550-x1-03A3-4 ACS400-IF11-3 100 m
(330 ft)
ACS550-x1-04A7-4
ACS550-x1-05A4-4
ACS550-x1-06A9-4
ACS550-x1-08A8-4
ACS550-x1-012A-4
ACS550-x1-016A-4 ACS400-IF21-3 100 m (330 ft)
100 m (330 ft)ACS550-x1-023A-4
ACS550-x1-031A-4 ACS400-IF31-3 100 m (330 ft)
100 m (330 ft)ACS550-x1-038A-4
ACS550-x1-044A-4 ACS400-IF41-3 100 m (330 ft)
100 m (330 ft)ACS550-x1-059A-4
ACS550-x1-072A-4
Installation

ACS550 Användarhandledning 17
StyrkablarAllmänna rekommendationer
Använd skärmad kabel, godkänd för 60 °C eller högre:
Styrkablar måste vara flertrådsledare med flätad koppartrådskärm.
Tvinna skärmstrumpans ände till en ledare vars längd inte får överstiga fem gånger dess bredd och anslut till terminal X1:1 (för digitala och analoga I/O-kablar) eller till antingen X1-28 eller X1-32 (för RS485-kablar).
Förlägg styrkablarna så att deras exponering för elektriska fält minimeras:
Förlägg dem så långt som möjligt från inkommande matningskablar och motorkablar (minst 20 cm).
I fall då styrkablar måste korsa kraftkablar ska korsningsvinkeln ligga så nära 90 som möjligt.
Förlägg styrkablarna minst 20 cm från sidorna av frekvensomriktaren.
Undvik om möjligt att blanda olika signaltyper i samma kabel:
Blanda inte analoga och digitala insignaler i samma kabel.
Förlägg relästyrda signalledare som tvinnade par (särskilt om U > 48 V). Relästyrda signalledare med spänning mindre än 48 V kan förläggas i samma kablar som digitala insignaler.
Obs! Blanda aldrig 24 VDC- och 115/230 VAC-signaler i samma kabel.
Kablar för analoga signaler
Rekommendationer för förläggning av analoga signalledare:
Använd dubbelskärmad kabel med tvinnade par
Använd ett individuellt skärmat par för varje signal.
Använd inte gemensam returledare för olika analoga signaler.
Kablar för digitala signaler
Rekommendationer för förläggning av digitala signalledare:
En dubbelskärmad kabel är det bästa valet, men enkelskärmad kabel med flera tvinnade par kan användas.
Kabel till manöverpanel
Om manöverpanelen är ansluten till frekvensomriktaren med en kabel, använd endast patchkabel av Kategori 5 för Ethernet.
Dubbelskärmad EnkelskärmadExempel: JAMAK från Draka NK Cables Exempel: NOMAK från Draka NK Cables
Installation

18 ACS550 Användarhandledning
Installation av frekvensomriktaren
Varning! Före installation av ACS550, kontrollera att inkommande matning är bruten.
Packa upp frekvensomriktaren1. Packa upp frekvensomriktaren.
2. Kontrollera om det finns några skador och meddela omgående transportföretaget om så är fallet.
3. Kontrollera innehållet mot ordern och följesedeln för att verifiera att allt har levererats.
Förbered monteringsplatsenACS550 får endast monteras på en plats där alla krav i "Förberedelse för installation" på sid 11 är uppfyllda.
1. Markera för monteringshålen.
2. Borra hålen.
Obs! Byggstorlekarna R3 och R4 har fyra hål längs överkanten. Använd endast två av dessa. Använd om möjligt de båda yttre hålen (för att ge mera plats för fläktbyte).
Obs! Om en frekvensomriktare ACS400 ersätts kan de ursprungliga monteringshålen användas. Monteringshålen har identisk placering för storlekarna R1 och R2. För storlekarna R3 och R4 motsvarar de inre monteringshålen i överkant av ACS550 monteringshålen för ACS400.
Ta bort frontkåpanIP 21 / UL typ 1
1. Avlägsna manöverpanelen i förekommande fall.
2. Lossa den oförlorbar skruven i kåpans överkant.
3. Dra nära frontkåpans överdel för att lossa den.
X0002
1
3
IP2000
1
2
Installation

ACS550 Användarhandledning 19
IP 54 / UL typ 12
1. Om lock finns: Ta bort skruvarna (2) som fixerar locket.
2. Om lock finns: Skjut locket uppåt och dra av det från kåpan.
3. Lossa de oförlorbara skruvarna kring kåpans kant.
4. Avlägsna kåpan.
Montera frekvensomriktarenIP 21 / UL typ 1
1. Häng ACS550 på sina fästskruvar och dra åt skruvförbanden i alla fyra hörnen.
Obs! Lyft ACS550 i metallchassit - inte i kåpan.
2. För regioner där engelska inte talas: Sätt en varningsetikett på lokalt språk över den befintliga varningsetiketten på modulens överdel.
IP 54 / UL typ 12
För kapslingar av klass IP54 / UL typ 12 krävs gummipluggar i hålen som ger åtkomst till monteringsspåren för frekvensomriktaren.
1. Ta bort gummipluggarna när så behövs för att komma åt. Skjut ut pluggarna från baksidan av frekvensomriktaren.
2. Häng ACS550 på sina fästskruvar och dra åt skruvförbanden i alla fyra hörnen.
Obs! Lyft ACS550 i metallchassit - inte i kåpan.
3. Sätt tillbaka gummipluggarna.
4. För regioner där engelska inte talas: Sätt en varningsetikett på lokalt språk över den befintliga varningsetiketten på modulens överdel.
3
4
12
FM
IP2002
1
2
2
1, 3
FM
Installation

20 ACS550 Användarhandledning
Installera kablarnaKabelkanal-/kabelgenomföringssats
För anslutning av frekvensomriktare med IP 21 / UL typ 1 krävs en kabelkanal-/kabelgenomföringssats med följande komponenter:
kabelkanal-/genomföringsbox
fem (5) kabelklammor (endast ACS550-01)
skruvar
kåpa
Denna sats medföljer kapslingar av klass IP 21 / UL typ 1.
Översikt
Observera följande vid kabeldragningen:
Det finns fyra uppsättningar kabeldragningsinstruktioner en uppsättning för varje kombination av frekvensomriktarkapsling (IP 21 / UL typ 1 och IP 54 / UL typ 12), och kabelförläggning (kabelkanal eller kabel). Var noga med att välja rätt procedur.
"Kopplingsscheman" på sid 20 visar anslutningspunkterna på frekvensomriktaren.
"Kraftanslutningar" på sid 27 ger specifika instruktioner för kraftkabelförläggning Tillämpa dessa tillsammans med de generella föreskrifterna.
"Styranslutningar" på sid 27 ger specifika instruktioner för styrkabelförläggning. Tillämpa dessa tillsammans med de generella föreskrifterna.
"Tillval bromsning" på sid 27, och "Icke direktjordade nät" på sid 27 ger specifika instruktioner för olika situationer.
"Kabelplintar" på sid 180 anger rekommenderade åtdragningsmoment.
I tillämpliga fall, följ EMC-rekommendationerna. Till exempel, jorda de flätade metallskärmarna korrekt.
Kopplingsscheman
Placeringen av anslutningsplintarna är densamma för alla storlekar (R1R6). Den endast större skillnaden är kraft- och jordplintarna för byggstorlekarna R5 och R6. Följande diagram visar:
Plintplaceringen i byggstorlek R3, som, generellt, gäller för alla byggstorlekar, med ovan angivna undantag.
Kraft- och jordplintplaceringarna i byggstorlekarna R5 och R6.
Installation

ACS550 Användarhandledning 21
Varning! För icke direktjordade nät, ta bort skruvarna vid EM1 och EM3.
Panelanslutning
Matning (Grön)Fel (Röd)
Tillvalsmodul 1J2/J5 DIP-omkopplare
X1 Kommunikation
Tillvalsmodul 2
GND
MotoranslutningarMatning
EM1
J1 DIP-omkopplare
X1 Analoga in- och utgångar
X1 Digitala ingångar
X1 Reläutgångar
för analoga ingångar
J2
ON
J5
ON
läge off läge on
J2
ON
J5
ON
J1AI1: (i spänningsposition)AI2: (i strömposition)
ON
ON
för RS485-terminering
(och 10 V Ref. spänn.-utg.)
(och 24 V extra spänn.-utg.)
EM3
PE
(U1, V1, W1) (U2, V2, W2)
Tillval bromsningBygg-storl. Plintetiketter Bromstillval
R1, R1 BRK+, BRK- BromsmotståndR3, R3 UDC+, UDC- Bromsenhet
Chopper + motstånd
X0003
(RS485)
R5/R6 skiljer sig. Se
Byggstorl.
nästa sida.
Diagrammet visar byggstorlek R3. Övriga byggstorlekar har liknande layout.
Installation
22 ACS550 Användarhandledning
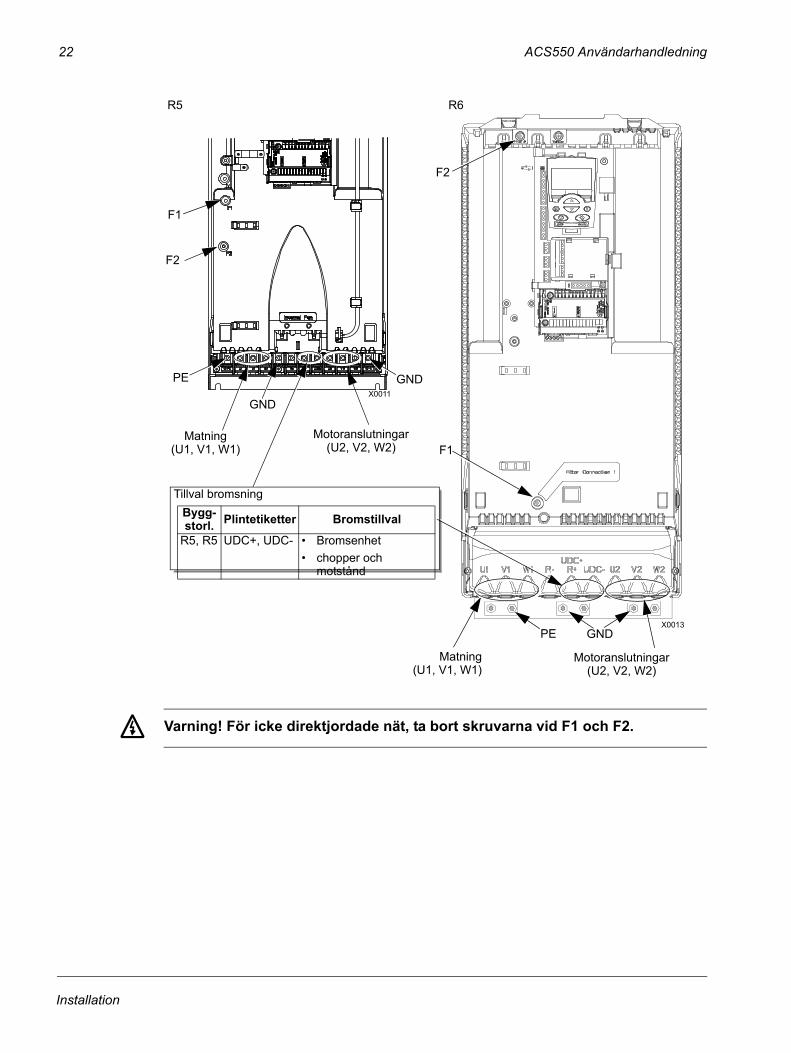
Varning! För icke direktjordade nät, ta bort skruvarna vid F1 och F2.
GND
Matning
PE
(U1, V1, W1)
Tillval bromsningBygg-storl. Plintetiketter Bromstillval
R5, R5 UDC+, UDC- Bromsenhet chopper och
motstånd
X0011
F1
F2
Matning
PE
(U1, V1, W1)
F1
F2
X0013
Motoranslutningar(U2, V2, W2)
R5 R6
GND
GND
Motoranslutningar(U2, V2, W2)
Installation

ACS550 Användarhandledning 23
Kabeldragning för kapsling IP 21 / UL typ 1 med kablar
1. Öppna de förberedda hål i kabelkanal-/genomföringsboxen som behövs för ändamålet. (Se "Kabelkanal-/kabelgenomföringssats" ovan.)
2. Installera kabelplintarna för kraft-/motorkablarna.
3. På inkommande matningskabel, skala höljet så mycket som behövs för att ansluta de enskilda ledarna.
4. På motorkabeln, skala höljet så mycket som behövs för att frigöra koppartrådsskärmen så att skärmtrådarna kan tvinnas samman till en kort ledare. Håll denna ledare så kort som möjligt för att undvika störande utstrålning.
5. Dra båda kablarna genom genomföringarna.
6. Skala och anslut kraft-/motorledare, och kraftkabelns jordledare till respektive plintar. Se "Kraftanslutningar" på sid 27.
7. Anslut den tvinnade skärmledaren från motorkabelns skärm.
8. Installera kabelkanal-/genomföringsboxen och dra åt genomföringarna.
9. Installera genomföringen/genomföringarna för styrkabeln/styrkablarna. (Kraft-/motorkablarna visas inte i figuren)
10. Skala styrkabeln och tvinna kopparskärmstrumpan till en kort ledare.
11. Dra styrkabeln/styrkablarna genom genomföringen/genomföringarna och dra åt.
12. Anslut jordskärmledaren för digitala och analoga I/O-kablar till X1-1.
13. Anslut jordskärmledaren för RS485-kablar till X1-28 eller X1-32.
14. Skala och anslut enskilda styrledare till respektive plintar. Se "Styranslutningar" på sid 27.
15. Installera kabelkanal-/genomföringsboxen (1 skruv).
1
2
X0004
6
3
IP2001
6
7
4
8
8
X0005
9X0006
12
IP2003
11
14
Installation

24 ACS550 Användarhandledning
Kabeldragning för kapsling IP 21 / UL typ 1 med kabelkanal
1. Öppna de förberedda hål i kabelkanal-/genomföringsboxen som behövs för ändamålet. (Se "Kabelkanal-/kabelgenomföringssats" ovan.)
2. Installera kabelgenomföringar för kabelkanaler (medföljer ej).
3. Installera kabelkanal-/genomföringsbox.
4. Koppla kabelkanalerna till boxen.
5. Förlägg inkommande nätkabel och motorkablar i kabelkanalen.
6. Skala ledarna.
7. Anslut kraft-, motor-, och jordledare till respektive plintar. Se "Kraftanslutningar" på sid 27.
8. Förlägg styrkabeln genom kabelkanalen.
9. Skala styrkabeln och tvinna kopparskärmstrumpan till en kort ledare.
10. Anslut jordskärmledaren för digitala och analoga I/O-kablar till X1-1.
11. Anslut jordskärmledaren för RS485-kablar till X1-28 eller X1-32.
12. Skala och anslut enskilda styrledare till respektive plintar. Se "Styranslutningar" på sid 27.
13. Installera kabelkanal-/genomföringsboxen (1 skruv).
2 X0007
3
X0005
4IP2004
7
7
5
10
8
IP2005
12
Installation
ACS550 Användarhandledning 25
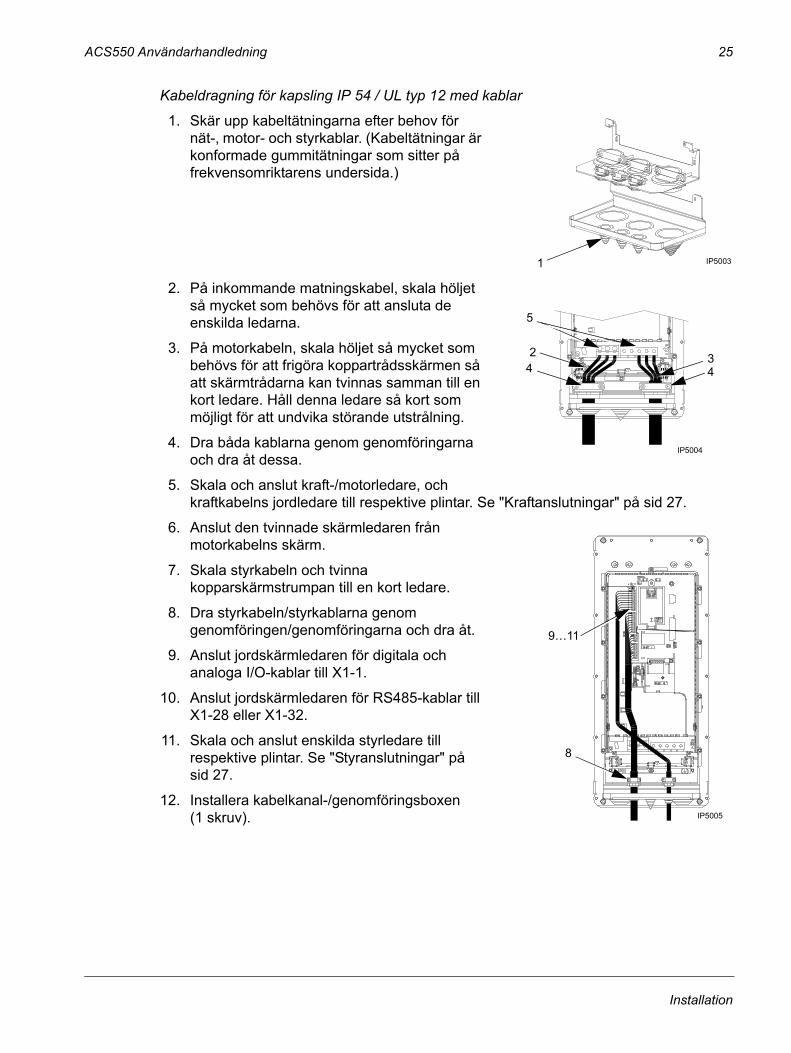
Kabeldragning för kapsling IP 54 / UL typ 12 med kablar
1. Skär upp kabeltätningarna efter behov för nät-, motor- och styrkablar. (Kabeltätningar är konformade gummitätningar som sitter på frekvensomriktarens undersida.)
2. På inkommande matningskabel, skala höljet så mycket som behövs för att ansluta de enskilda ledarna.
3. På motorkabeln, skala höljet så mycket som behövs för att frigöra koppartrådsskärmen så att skärmtrådarna kan tvinnas samman till en kort ledare. Håll denna ledare så kort som möjligt för att undvika störande utstrålning.
4. Dra båda kablarna genom genomföringarna och dra åt dessa.
5. Skala och anslut kraft-/motorledare, och kraftkabelns jordledare till respektive plintar. Se "Kraftanslutningar" på sid 27.
6. Anslut den tvinnade skärmledaren från motorkabelns skärm.
7. Skala styrkabeln och tvinna kopparskärmstrumpan till en kort ledare.
8. Dra styrkabeln/styrkablarna genom genomföringen/genomföringarna och dra åt.
9. Anslut jordskärmledaren för digitala och analoga I/O-kablar till X1-1.
10. Anslut jordskärmledaren för RS485-kablar till X1-28 eller X1-32.
11. Skala och anslut enskilda styrledare till respektive plintar. Se "Styranslutningar" på sid 27.
12. Installera kabelkanal-/genomföringsboxen (1 skruv).
1 IP5003
4
5
2
IP5004
34
911
8
IP5005
Installation

26 ACS550 Användarhandledning
Kabeldragning för kapsling IP 54 / UL typ 12 med kabelkanal
1. Ta bort genomföringsplåten och kassera den.
2. Ta bort kabeltätningarna där kabelkanalen ska installeras, och kassera dem. (Kabeltätningar är konformade gummitätningar som sitter på frekvensomriktarens undersida.)
3. För varje kabelkanalsträng, installera vattentäta kabelkanalkopplingar (medföljer ej).
4. Förlägg matningsledarna i kabelkanalen.
5. Förlägg motorledarna i kabelkanalen.
6. Skala ledarna.
7. Anslut matnings-, motor- och jordledare till respektive plintar. Se "Kraftanslutningar" på sid 27.
8. Förlägg styrkabeln i kabelkanalen.
9. Skala styrkabeln och tvinna kopparskärmstrumpan till en kort ledare.
10. Anslut jordskärmledaren för digitala och analoga I/O-kablar till X1-1.
11. Anslut jordskärmledaren för RS485-kablar till X1-28 eller X1-32.
12. Skala och anslut enskilda styrledare till respektive plintar. Se "Styranslutningar" på sid 27.
13. Installera kabelkanal-/genomföringsboxen (1 skruv).
1
IP50032
3
IP5006
4
IP5007
7
5
8IP5008
1012
Installation

ACS550 Användarhandledning 27
Kraftanslutningar
Varning! Se till att motorn passar ihop med ACS550. ACS550 måste installeras av kompetent personal och i enlighet med anvisningarna i "Förberedelse för installation" på sidan 11. Vid tveksamhet, kontakta ABB.
Se följande tabell för att slutföra kraftanslutningarna. Vid behov, följ de specifika anvisningarna för broms och icke direktjordade nät.
* ACS550 -x1-xxxx-2 (serie 208240 V) kan matas med enfas om utströmmen stämplas ner med 50%. För enfasmatning, anslut matningen till U1 och W1.
Tillval bromsning
För frekvensomriktare med bromsningsfunktion, installera en av följande, beroende på aktuell byggstorlek:
Icke direktjordade nät
För icke direktjordade nät (kallas även IT-nät, icke jordade nät eller högimpediva nät):
Koppla bort det inbyggda RFI-filtret genom att avlägsna skruvarna EM1 och EM3 (storlekarna R1R4, se sid 21), respektive skruvarna F1 och F2 (storlekarna R5R6, se sid 22).
Om EMC-krav föreligger, mät emissionen som överförs till intilliggande lågspänningsnät. Ibland räcker den naturliga dämpningen i transformatorer och kablar. I tveksamma fall kan en matningstransformator med statisk avskärmning mellan primär- och sekundärlindningen användas.
Installera INTE ett externt filter, som en av satserna som listas i filtertabellen på 16. Ett RFI-filter jordar inkommande matning via filterkondensatorerna, vilka skulle kunna orsaka fara och skada utrustningen.
StyranslutningarFör att slutföra styranslutningarna, använd:
Följande tabeller
"Tillämpningsmakron" på sid 47
"Kompletta parameterbeskrivningar" på sid 67
Kabelrekommendationerna i "Styrkablar" på sid 17
Plint Beskrivning ObsU1, V1, W1* 3-fas matning "Matningsanslutning" på sid 181.
PE Skyddsjord Följ lokalt gällande föreskrifter för kabeldimension.
U2, V2, W2 Motoranslutningar "Motoranslutning" på sid 181.
Byggstorlek Plint Beskrivning BromsningsfunktionR1, R2 BRK+, BRK- Bromsmotstånd Bromsmotstånd.
R3, R4, R5, R6 UDC+, UDC- DC-buss Bromsenhet eller Chopper och motstånd
Installation
28 ACS550 Användarhandledning
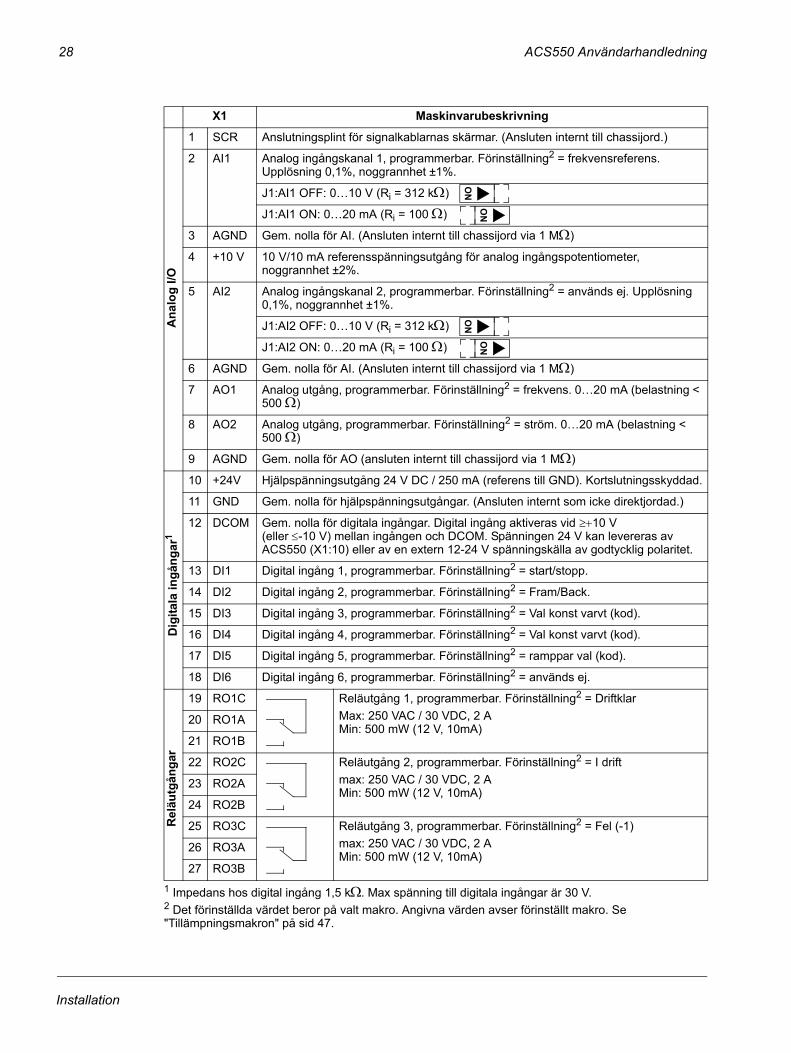
1 Impedans hos digital ingång 1,5 kΩ. Max spänning till digitala ingångar är 30 V.2 Det förinställda värdet beror på valt makro. Angivna värden avser förinställt makro. Se "Tillämpningsmakron" på sid 47.
X1 Maskinvarubeskrivning
1 SCR Anslutningsplint för signalkablarnas skärmar. (Ansluten internt till chassijord.)
2 AI1 Analog ingångskanal 1, programmerbar. Förinställning2 = frekvensreferens. Upplösning 0,1%, noggrannhet ±1%.
J1:AI1 OFF: 010 V (Ri = 312 kΩ)
J1:AI1 ON: 020 mA (Ri = 100 Ω)
3 AGND Gem. nolla för AI. (Ansluten internt till chassijord via 1 MΩ)
4 +10 V 10 V/10 mA referensspänningsutgång för analog ingångspotentiometer, noggrannhet ±2%.
5 AI2 Analog ingångskanal 2, programmerbar. Förinställning2 = används ej. Upplösning 0,1%, noggrannhet ±1%.
J1:AI2 OFF: 010 V (Ri = 312 kΩ)
J1:AI2 ON: 020 mA (Ri = 100 Ω)
6 AGND Gem. nolla för AI. (Ansluten internt till chassijord via 1 MΩ)
7 AO1 Analog utgång, programmerbar. Förinställning2 = frekvens. 020 mA (belastning < 500 Ω)
8 AO2 Analog utgång, programmerbar. Förinställning2 = ström. 020 mA (belastning < 500 Ω)
9 AGND Gem. nolla för AO (ansluten internt till chassijord via 1 MΩ)
10 +24V Hjälpspänningsutgång 24 V DC / 250 mA (referens till GND). Kortslutningsskyddad.
11 GND Gem. nolla för hjälpspänningsutgångar. (Ansluten internt som icke direktjordad.)
12 DCOM Gem. nolla för digitala ingångar. Digital ingång aktiveras vid ≥+10 V (eller ≤-10 V) mellan ingången och DCOM. Spänningen 24 V kan levereras av ACS550 (X1:10) eller av en extern 12-24 V spänningskälla av godtycklig polaritet.
13 DI1 Digital ingång 1, programmerbar. Förinställning2 = start/stopp.
14 DI2 Digital ingång 2, programmerbar. Förinställning2 = Fram/Back.
15 DI3 Digital ingång 3, programmerbar. Förinställning2 = Val konst varvt (kod).
16 DI4 Digital ingång 4, programmerbar. Förinställning2 = Val konst varvt (kod).
17 DI5 Digital ingång 5, programmerbar. Förinställning2 = ramppar val (kod).
18 DI6 Digital ingång 6, programmerbar. Förinställning2 = används ej.
19 RO1C Reläutgång 1, programmerbar. Förinställning2 = DriftklarMax: 250 VAC / 30 VDC, 2 A Min: 500 mW (12 V, 10mA)
20 RO1A
21 RO1B
22 RO2C Reläutgång 2, programmerbar. Förinställning2 = I driftmax: 250 VAC / 30 VDC, 2 A Min: 500 mW (12 V, 10mA)
23 RO2A
24 RO2B
25 RO3C Reläutgång 3, programmerbar. Förinställning2 = Fel (-1)max: 250 VAC / 30 VDC, 2 A Min: 500 mW (12 V, 10mA)
26 RO3A
27 RO3B
Ana
log
I/O
ON
ON
ON
ON
Dig
itala
ingå
ngar
1R
eläu
tgån
gar
Installation
ACS550 Användarhandledning 29
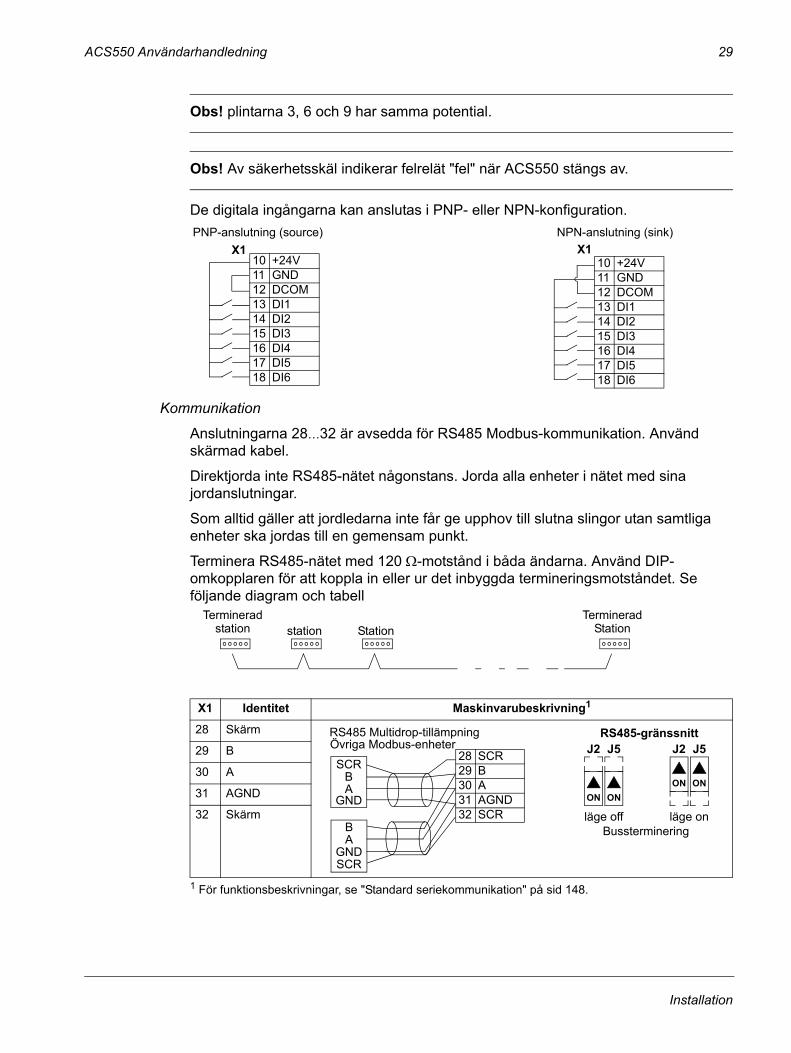
Obs! plintarna 3, 6 och 9 har samma potential.
Obs! Av säkerhetsskäl indikerar felrelät "fel" när ACS550 stängs av.
De digitala ingångarna kan anslutas i PNP- eller NPN-konfiguration.
Kommunikation
Anslutningarna 2832 är avsedda för RS485 Modbus-kommunikation. Använd skärmad kabel.
Direktjorda inte RS485-nätet någonstans. Jorda alla enheter i nätet med sina jordanslutningar.
Som alltid gäller att jordledarna inte får ge upphov till slutna slingor utan samtliga enheter ska jordas till en gemensam punkt.
Terminera RS485-nätet med 120 Ω-motstånd i båda ändarna. Använd DIP-omkopplaren för att koppla in eller ur det inbyggda termineringsmotståndet. Se följande diagram och tabell
1 För funktionsbeskrivningar, se "Standard seriekommunikation" på sid 148.
X1 Identitet Maskinvarubeskrivning1
28 Skärm
29 B
30 A
31 AGND
32 Skärm
NPN-anslutning (sink)PNP-anslutning (source) 10 +24V11 GND12 DCOM13 DI114 DI215 DI316 DI417 DI518 DI6
10 +24V11 GND12 DCOM13 DI114 DI215 DI316 DI417 DI518 DI6
X1X1
Terminerad Termineradstation station Station Station
28 SCR29 B30 A31 AGND32 SCR
SCRBA
GND
BA
GNDSCR
Övriga Modbus-enheterRS485 Multidrop-tillämpning
J2RS485-gränssnitt
Bussterminering
ON
J5
ON
läge off läge on
J2
ON
J5
ON
Installation

30 ACS550 Användarhandledning
Kontrollera installationenInnan matningsspänningen ansluts, kontrollera följande.
Sätt tillbaka frontkåpanIP 21 / UL typ 1
1. Rikta upp kåpan och skjut den på plats.
2. Dra åt den oförlorbara skruven.
3. Sätt tillbaka manöverpanelen.
Kontrollera
Installationsmiljön uppfyller frekvensomriktarens miljökrav.
Frekvensomriktaren är korrekt monterad.
Utrymmet kring frekvensomriktaren tillräckligt för korrekt kylning.
Motorn och den drivna utrustningen är klara för start.
För icke direktjordade nät: Det interna RFI-filtret bortkopplat.
Frekvensomriktaren är korrekt jordad.
Matningsspänningen motsvarar frekvensomriktarens märkspänning.
Matningsledarna U1, V1, och W1 är anslutna och åtdragna enligt specifikation.
Matningssäkringarna är installerade.
Motorledarna U2, V2, och W2 är anslutna och åtdragen enligt specifikation.
Motorkabeln är förlagd separat från andra kablar.
INGA effektfaktorkompenserande kondensatorer i motorkabeln.
Styrledarna är anslutna och åtdragna enligt specifikation.
INGA verktyg eller främmande föremål (som borrspån) i frekvensomriktaren.
INGEN alternativ matning till motorn (som en förbikoppling) är ansluten ingen spänning på frekvensomriktarens utgång.
3
1
2
IP2009
Installation

ACS550 Användarhandledning 31
IP 54 / UL typ 12
1. Rikta upp kåpan och skjut den på plats.
2. Dra åt de oförlorbara skruvarna kring kåpans kant.
3. Skjut ner locket över kåpans överdel.
4. Skruva fast de båda skruvarna som fixerar locket.
5. Sätt tillbaka manöverpanelen.
Obs! Manöverpanelens fönster måste vara slutet för att kraven enligt IP 54/UL typ 12 ska vara uppfyllda.
6. Tillval: Sätt på ett lås (medföljer ej) för att säkra manöverpanelens fönster.
Spänningssätt frekvensomriktarenSätt alltid på frontkåpan före spänningstillslag.
Varning! ACS550 startar automatiskt vid spänningssättning, om externt startkommando föreligger.
1. Anslut spänning.
När spänningen ansluts till ACS550 ska den gröna lysdioden tändas.
Obs! Innan motorns varvtal ökas, kontrollera att motorn roterar åt rätt håll.
IdrifttagningACS550 levereras med en uppsättning grundparametrar inställda som fungerar för många situationer. Granska emellertid situationerna nedan. Genomför motsvarande procedurer.
Motordata
Motordata på märkskylten kan skilja sig från grundinställningarna i ACS550. Frekvensomriktaren erbjuder bättre styrning och skyddas bättre mot övertemperatur om rätt märkdata matas in.
1. Avläs följande information på motorns märkskylt:
Spänning
Märkström
Märkfrekvens
Märkvarvtal
21
43
5
6
FM
Installation

32 ACS550 Användarhandledning
Märkeffekt
2. Redigera parametrarna 99059909 för att korrigera värdena.
Avancerad manöverpanel: Idrifttagningsguiden - Start-up Assistant - leder dig genom denna datainmatning (se sid 37)
Basmanöverpanel: Se "Parameterläge" på sid 43 för instruktioner om parameterredigering.
Makron
OBS! Val av makro är en del av den grundläggande systemkonstruktionen, eftersom valet av kabeldragning i "Styranslutningar" på sid 27 beror på valt makro.
1. Läs makrobeskrivningarna i "Tillämpningsmakron" på sid 47 Välj det makro som bäst löser den aktuella uppgiften.
2. Redigera parameter 9902 för att välja makro.
Avancerad manöverpanel Gör endera av följande:
Använd idrifttagningsguiden - Start-up Assistant - som visar makrovalet omedelbart efter val av motorparametrar.
Se "Parameterläge" på sid 36 för instruktioner om parameterredigering. Basmanöverpanel: Se "Parameterläge" på sid 43 för instruktioner om
parameterredigering.
Inställning Parametrar
Systemet kan dra nytta av en eller flera av specialfunktionerna i ACS550, och/eller fininställning.
1. Läs parameterbeskrivningarna i "Kompletta parameterbeskrivningar" som börjar på sid 67. Välj alternativ och fininställ parametervärden utgående från systemets behov.
2. Redigera parametrarna efter behov.
Fel- och larminställningar
ACS550 kan avslöja många potentiella systemproblem. Till exempel kan den första tidens systemdrift ge upphov till fel eller larm som tyder på inställningsproblem.
1. Fel och larm redovisas på manöverpanelen med ett nummer. Anteckna det nummer som rapporteras.
2. Se beskrivningen för angivet fel-/larmnummer:
Använd fel- och varningslistorna på sidorna 163 respektive 168, eller
Tryck på hjälptangenten (endast avancerad manöverpanel) när ett fel eller larm visas.
3. Justera systemet eller parametrarna efter behov.
Installation

ACS550 Användarhandledning 33
Idrifttagning
Vid idrifttagningen konfigureras frekvensomriktaren. Detta process sätter parametrar som definierar hur frekvensomriktaren ska fungera och kommunicera. Beroende på styrnings- och kommunikationskrav, kan igångkörningsprocessen kräva en eller flera av följande komponenter:
Idrifttagningsguide (kräver avancerad manöverpanel) som steg för steg leder dig genom grundkonfigureringen. Idrifttagningsguiden startar automatiskt vid den första igångkörningen, eller kan anropas senare via huvudmenyn.
Tillämpningsmakron kan väljas för att definiera ett antal vanligt förekommande systemkonfigurationer, med hjälp av grundinställningar. Se "Tillämpningsmakron" på sid 47.
Dessa grundinställningar kan förfinas genom att man med manöverpanelen väljer och ställer in enskilda parametrar. Se "Kompletta parameterbeskrivningar" på sid 67.
ManöverpanelerAnvänd en manöverpanel för att hantera ACS550, avläsa statusinformation och justera parametrar. ACS 550 kan hanteras med en av 2 olika manöverpaneltyper:
Avancerad manöverpanel Denna panel (beskrivs nedan) har förprogrammerade guider som automatiserar de vanligast förekommande parameterinställningarna.
Basmanöverpanel Denna panel (beskrivs i ett senare avsnitt) erbjuder grundläggande funktioner för inmatning av parametervärden.
Avancerad manöverpanel
FunktionerDen avancerade manöverpanelen till ACS550 erbjuder följande funktioner:
Alfanumerisk manöverpanel med en LCD-display
Språkval för displaytexter
Anslutningen till frekvensomriktaren kan aktiveras och deaktiveras när som helst
Idrifttagningsguide för att underlätta idrifttagning av frekvensomriktaren
Kopieringsfunktion Parametrar kan kopieras till manöverpanelens minne för senare överföring till andra frekvensomriktare, eller för backup av ett visst system.
Kontextkänslig hjälpfunktion
Idrifttagning

34 ACS550 Användarhandledning
Översikt över manöver- och displayfunktionerFöljande tabell sammanfattar tangentfunktioner och displaytexter på den avancerade manöverpanelen.
ManöverlägeAnvänd Manöver-läget för att läsa information om frekvensomriktarens status och för att manövrera frekvensomriktaren. För att nå Manöverläget, tryck på AVSLUTA tills LCD-displayen visar statusinformation så som beskrivs nedan.
Statusinformation
Överst. Översta raden på LCD-displayen visar grundläggande statusinformation för frekvensomriktaren.
LOC visar att frekvensomriktaren styrs lokalt, dvs. via manöverpanelen.
REM visar att frekvensomriktaren fjärrstyrs, t.ex. via I/O (X1) eller fältbuss.
anger frekvensomriktarstatus och motorns rotationsstatus enligt följande:
Manöverpaneldisplay Betydelse
Roterande pil (medurs eller moturs) Motorn roterar med varvtal lika med börvärdet Rotationsriktningen är fram eller back
LOC
DIR 12:45 MENU
400RPM
1200 RPM12.4 A
405 dm3/s
LCD-displayen är indelad i tre huvudområden: Övre raden - varierar beroende på aktuellt driftläge. Till exempel, se
"Statusinformation" på sid 34. Mittområdet varierar, men visar normalt parametervärden, menyer
eller listor. Nedre raden visar aktuell funktion för de båda funktionstangenterna,
samt klocka om denna funktion är aktiverad
Upp Rulla uppåt i en meny eller en lista
som visas i mittområdet av LCD-displayen.
Ökar värdet om en parameter är vald.
Ökar referensvärdet om övre högra hörnet är markerat (negativ visning).
Funktionstangent 1 Funktionen varierar och anges i text i nedre vänstra hörnet av LCD-displayen.
Funktionstangent 2 Funktionen varierar och anges i text i nedre högra hörnet av LCD-displayen.
Ner Rulla nedåt i en meny eller en lista
som visas i mittområdet av LCD-displayen.
Minskar värdet om en parameter är vald.
Minskar referensvärdet om övre högra hörnet är markerat (negativ visning).
Hjälp Visar kontextkänslig information när tangenten trycks ner. Informationen som visas beskriver det som markeras i displayens mittområde.
Stop Stoppar enheten.
Start Startar enheten.
LOC/REM Växlar mellan lokal styrning och fjärrstyrning av
Idrifttagning

ACS550 Användarhandledning 35
Övre höger visar aktiv referens.
Mitt. Med parametergrupp 34 kan LCD-displayens mittdel konfigureras för att visa:
Upp till tre parametervärden
Som grundinställning visar displayen tre parametrar. De specifika parametrarna styrs av parameter 9904 MOTOR STYRMETOD. Till exempel, om 9904 = 1, visar displayen parametrarna 0102 (VARVTAL), 0104 (STRÖM) och 0105 (MOMENT).
Använd parametrarna 3401, 3408, och 3415 för att välja vilka parametrar (från Grupp 01) som ska visas. Om du matar in "parameter" 0100 visas inga parametrar. Till exempel, om 3401 = 0100 och 3415 = 0100, visas endast den parameter som specificeras av 3408 på manöverpanelens display.
Du kan även skala varje parameter för visning på displayen. Till exempel, använd parametrarna 34023405 för att skala den parameter som specificeras av 3401. Till exempel, för att konvertera motorvarvtal till visning av transportörhastighet.
Ett stapeldiagram i stället för ett av parametervärdena.
Mata in ett negativt värde i enhetsparametern (3405, 3412, eller 3418) för att ändra parametervisningen till ett stapeldiagram.
Nederst. Den nedersta raden av LCD-displayen visar:
Nedre hörnen visar funktionerna som för närvarande är tilldelade de 2 funktionstangenterna.
Nederst i mitten visar aktuell tid (om tidvisning är konfigurerad).
Manövrering av frekvensomriktaren
LOC/REM Första gången frekvensomriktaren spänningssätts befinner den sig i fjärrstyrningsläge (REM) och styrs via styrplint X1.
För att övergå till lokal styrning (LOC) och hantera frekvensomriktaren via manöverpanelen, tryck och håll in tangenten tills först LOKAL STYRNING, eller senare, LOKAL, FORTS DRIFT visas:
Släpp upp knappen medan LOKAL STYRNING visas, för att sätta panelreferensen till aktuell Extern referens. Frekvensomriktaren stoppas.
Släpp upp knappen när LOKAL, FORTS DRIFT visas, för att kopiera aktuell till/från-status och referens från användar-I/O.
För att återgå till fjärrstyrning (REM), tryck och håll in knappen tills FJÄRRSTYRNING visas.
Start/stopp För att starta och stoppa frekvensomriktaren, tryck på knapparna START respektive STOP.
Roterande pil blinkande Motorn roterar med annat varvtal än börvärdet.
Stationär pil Motorn är stoppad.
Manöverpaneldisplay Betydelse
LOCREM
LOCREM
Idrifttagning

36 ACS550 Användarhandledning
Rotationsriktning För att ändra axelns rotationsriktning, tryck på ROTRIKT (parameter 1003 måste vara satt till 3 (VALD)).
Referens För att ändra referensvärdet (endast möjligt om symbolen i övre högra hörnet visas negativt) tryck på tangenten UPP eller NER (värdet ändras omedelbart).
Referensen kan ändras vid lokal styrning (LOC) och kan parametersättas (med Grupp 11: Val av referens) för att även tillåta ändring vid fjärrstyrning (REM).
Övriga driftlägenFörutom Manöverläget erbjuder den avancerade manöverpanelen:
Övriga driftlägen som är tillgängliga via huvudmenyn.
Ett felläge som aktiveras i händelse av fel. I felläget ingår en diagnostikguide.
Att gå till Huvudmeny och Övriga driftlägen
För att nå huvudmenyn:
1. Tryck upprepade gånger på AVSLUTA för att stega tillbaka genom de menyer eller listor som ingår i ett visst driftläge. Fortsätt tills du har kommit tillbaka till Manöver-läge.
2. Tryck på MENU när du befinner dig i Manöverläget.
Nu visas på mitten av displayen en lista över andra driftlägen, och texten uppe till höger lyder "Huvudmeny"
3. Använd tangenterna UPP/NER för att komma till önskat driftläge.
4. Tryck på ENTER för att aktivera markerat driftläge (negativ text).
Följande kapitel beskriver vart och ett av de övriga driftlägena.
ParameterlägeAnvänd Parameterläge för att granska och ändra parametervärden:
1. Välj PARAMETRAR i huvudmenyn.
2. Tryck på tangenterna UPP/NED för att markera önskad parametergrupp, och tryck sedan på SEL.
3. Tryck på tangenterna UPP/NED för att markera önskad parameter i en grupp.
Obs! aktuellt parametervärde visas under markerad parameter.
Idrifttagning

ACS550 Användarhandledning 37
4. Tryck på ÄNDRA.
5. Tryck på UPP/NED för att gå till önskat parametervärde.
Obs! För att se parameterns grundvärde: I Inställningsläget, tryck på UPP/NED samtidigt.
Tryck på SPARA för att spara det ändrade värdet eller på AVBRYT för att lämna detta driftläge. Ej sparade ändringar raderas.
Tryck på AVSLUTA för att återgå till listan över parametergrupper, och ännu en gång för att återgå till huvudmenyn.
IdrifttagningsguideNär frekvensomriktaren spänningssätts första gången leder idrifttagningsguiden dig genom proceduren att konfigurera ett fåtal grundparametrar. Vid den första igångkörningen föreslår programmet som första åtgärd "Välj språk".
Idrifttagningsguiden är indelad i uppgifter. Du kan aktivera uppgifterna en i taget, så som idrifttagningsguiden föreslår, eller välja en viss uppgift direkt. (Du behöver inte använda guiden - utan du kan mata in värdena direkt via parameterläget.)
I vilken ordning uppgifterna presenteras av idrifttagningsguiden beror på den information du har angett. Uppgiftslistan i följande tabell är typisk.
Uppgiftsnamn BeskrivningVälj språk Väljer språket för displaytexter
Motorinställning Definierar motordata och motoridentitet
Tillämpning Väljer tillämpningsmakro
Tillvalsmoduler Aktiverar eventuella tillvalsmoduler på frekvensomriktaren.
Varvtalsreglering EXT1
Väljerkälla för varvtalsreferens Definierar referensgränser Definierar varvtalsgränser (eller frekvensgränser Definierar accelerations- och retardationstider Ställer in eventuell bromschopper
Varvtalsreglering EXT2
Definierar källa för varvtalsreferens Definierar referensgränser
Momentregulator Väljer källa för vridmomentreferens Definierar referensgränser Definierar momentrampens lutning vid ökning och minskning
PID-reglering Väljer källa för processreferens Definierar referensgränser Definierar varvtalsgränser (referens Definierar källa och gränsvärden för processärvärde
Idrifttagning

38 ACS550 Användarhandledning
1. Välj ASSISTENTER i huvudmenyn.
2. Tryck på UPP/NED för att välja IDRIFTTAGNINGSGUIDE (START-UP ASSISTANT).
Obs! I stället för idrifttagningsguiden kan du välja guider för enskilda uppgifter, som utsignaler.
3. Gör önskade inmatningar eller val.
4. Tryck på SPARA för att spara inställningar, eller AVSLUTA för att återställa parametrarna till sina ursprungliga värden.
Läge Ändrade parametrarAnvänd driftläget Ändrade parametrar för att granska (och ändra) en lista över alla parametrar som har ändrats från sina grundvärden.
Procedur:
1. Välj ÄNDRADE PAR i Huvudmenyn. Displayen visar alla ändrade parametrar.
2. Tryck på ENTER.
3. Tryck på UPP/NED för att välja önskad ändrad parameter. Värdet på den parameter som för tillfället är markerad visas.
4. Tryck på ÄNDRA för att ändra parametervärdet.
5. Tryck på UPP/NED för att välja ett nytt värde / ändra parametervärde. (Om du trycker på båda tangenterna samtidigt sätts parametern till sitt grundvärde.)
6. Tryck på SPARA för att spara det nya parametervärdet. (Om det nya värdet är lika med grundvärdet kommer denna parameter inte längre att visas på listan Ändrade parametrar.)
Parameterkopieringsläge Den avancerade manöverpanelen kan spara en hel uppsättning frekvensomriktarparametrar. Om två uppsättningar parametrar finns definierade kommer båda att kopieras och överföras med denna funktion.
Parameterkopieringsläget har tre funktioner:
Uppladdning till manöverpanel Kopierar alla parametrar från frekvensomriktaren till manöverpanelen. Här inkluderas en andra uppsättning parametrar (om en
Start/stopp Väljer antingen EXT1 eller EXT2 Definierar styrningen av rotationsriktning Definierar start- och stoppsätt Väljer användning av driftförreglingssignal
Skydd Definierar moment- och strömgräns
Utsignaler Väljer signalerna som indikeras via reläutgångarna RO1, RO2, RO3 och eventuella tillvalsreläutgångar).Val av signalerna som indikeras via de analoga utgångarna AO1 och AO2. Definierar min-, max-, skalnings- och inverteringsvärden.
Idrifttagning

ACS550 Användarhandledning 39
sådan är definierad) och interna parametrar som de som skapats vid identifieringskörningen. Manöverpanelens minne är beständigt och är oberoende av manöverpanelens batteri.
Återställ allt (ladda ner allt till frekvensomriktaren) återställer hela parameteruppsättningen (eller flera) från manöverpanelen till frekvensomriktaren. Använd detta alternativ för att återställa en frekvensomriktare, eller för att konfigurera flera identiska frekvensomriktare.
Obs! Funktionen Återställ allt skriver samtliga parametrar till frekvensomriktaren, inklusive motorparametrar. Använd denna funktion endast för att återställa en frekvensomriktare, eller för att överföra parametrar till system som är identiska med ursprungssystemet.
Kopiera applikation till frekvensomriktare Kopierar egna makron från manöverpanelen till en frekvensomriktare. Det egna makrot inkluderar inte interna motorparametrar, parametrarna 99059909, 1605, 1607, 5201, och inte heller några parametrar i Grupp 51. Använd detta alternativ för att överföra parametrar till system med liknande konfigurationer frekvensomriktar- och motorstorlekarna behöver inte vara identiska.
1. Välj KOPIERA i huvudmenyn.
2. Tryck på UPP/NED för att gå till önskat alternativ.
3. Tryck på SPARA.
Parameteruppsättningen överförs. Under överföringen visar displayen överföringsstatus som ett procentuellt värde.
4. Tryck på AVSLUTA för att återgå till Manöverläge.
Klockinställningsläge Använd Klockinställningsläge för att:
Aktivera/deaktivera klockfunktionen.
Ställa in datum och tid.
Välja visningsformat.
1. Välj DATUM & TID i huvudmenyn.
2. Tryck på UPP/NED för att gå till önskat alternativ.
3. Tryck på ÄNDRA.
4. Tryck på UPP/NED för att välja önskad inställning.
5. Tryck på SPARA för att spara inställningen.
I/O-inställningsläge Använd I/O-inställningsläge för att kontrollera (och ändra) inställningarna för valfri I/O-anslutning.
1. Välj I/O KONFIG i huvudmenyn.
Idrifttagning
40 ACS550 Användarhandledning
2. Tryck på UPP/NED för att gå till önskad I/O-grupp, till exempel Digitala ingångar.
3. Tryck på ENTER.
4. Tryck på UPP/NED för att gå till en viss post, till exempel DI1. Efter en kort paus visar displayen aktuellt värde för vald post.
5. Tryck på ÄNDRA.
6. Tryck på UPP/NED för att välja en ny inställning.
7. Tryck på SPARA för att spara.
Idrifttagning
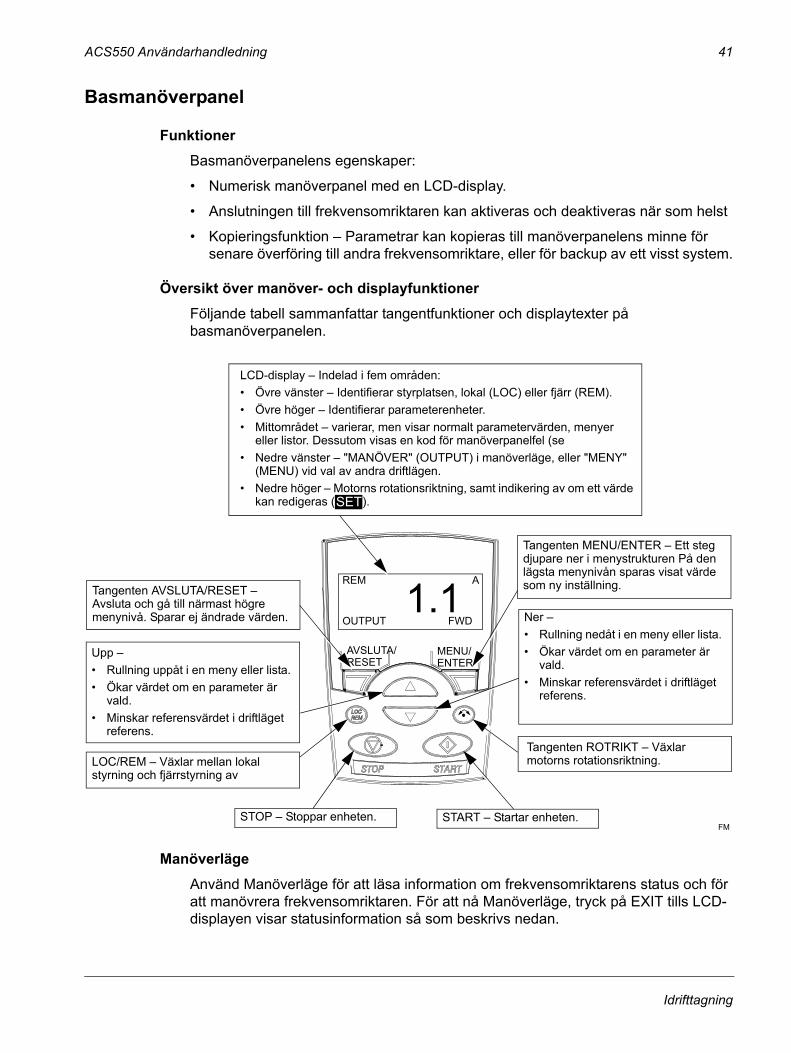
ACS550 Användarhandledning 41
Basmanöverpanel
FunktionerBasmanöverpanelens egenskaper:
Numerisk manöverpanel med en LCD-display.
Anslutningen till frekvensomriktaren kan aktiveras och deaktiveras när som helst
Kopieringsfunktion Parametrar kan kopieras till manöverpanelens minne för senare överföring till andra frekvensomriktare, eller för backup av ett visst system.
Översikt över manöver- och displayfunktionerFöljande tabell sammanfattar tangentfunktioner och displaytexter på basmanöverpanelen.
ManöverlägeAnvänd Manöverläge för att läsa information om frekvensomriktarens status och för att manövrera frekvensomriktaren. För att nå Manöverläge, tryck på EXIT tills LCD-displayen visar statusinformation så som beskrivs nedan.
REM
OUTPUT FWD
A
1.1AVSLUTA/RESET
MENU/ENTER
LCD-display Indelad i fem områden: Övre vänster Identifierar styrplatsen, lokal (LOC) eller fjärr (REM). Övre höger Identifierar parameterenheter. Mittområdet varierar, men visar normalt parametervärden, menyer
eller listor. Dessutom visas en kod för manöverpanelfel (se Nedre vänster "MANÖVER" (OUTPUT) i manöverläge, eller "MENY"
(MENU) vid val av andra driftlägen. Nedre höger Motorns rotationsriktning, samt indikering av om ett värde
kan redigeras ( ).SET
Upp Rullning uppåt i en meny eller lista. Ökar värdet om en parameter är
vald. Minskar referensvärdet i driftläget
referens.
Tangenten AVSLUTA/RESET Avsluta och gå till närmast högre menynivå. Sparar ej ändrade värden.
Tangenten MENU/ENTER Ett steg djupare ner i menystrukturen På den lägsta menynivån sparas visat värde som ny inställning.
Ner Rullning nedåt i en meny eller lista. Ökar värdet om en parameter är
vald. Minskar referensvärdet i driftläget
referens.
Tangenten ROTRIKT Växlar motorns rotationsriktning.
STOP Stoppar enheten. START Startar enheten.
LOC/REM Växlar mellan lokal styrning och fjärrstyrning av
FM
Idrifttagning
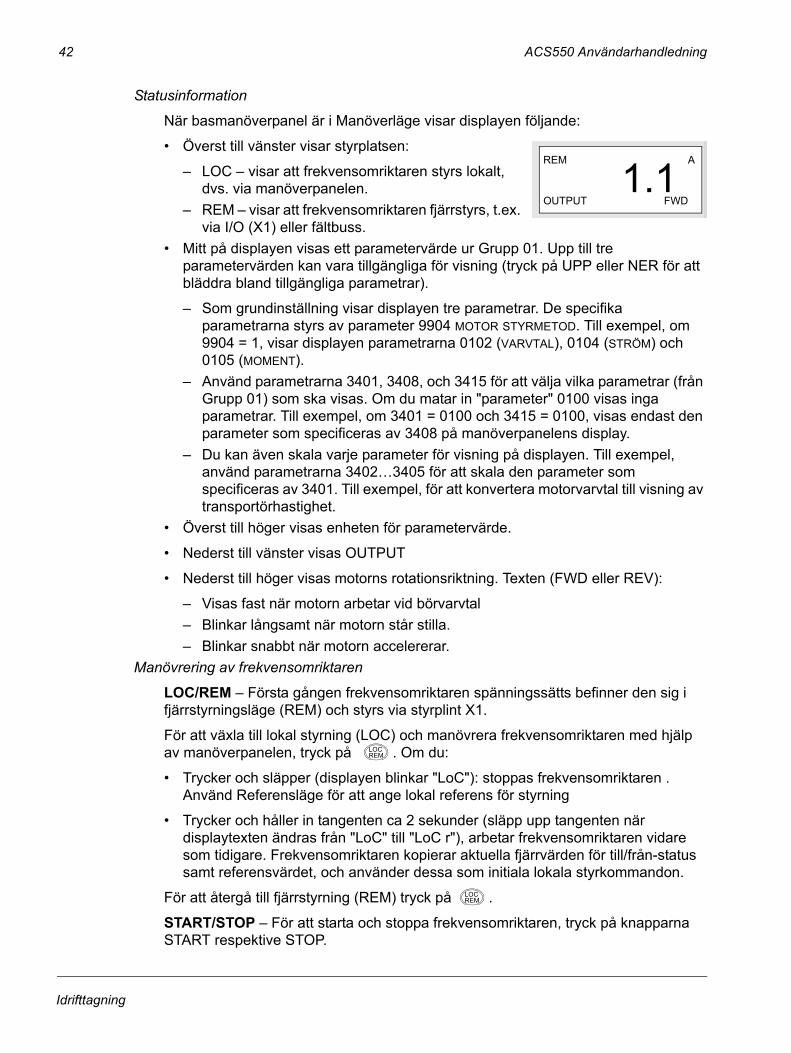
42 ACS550 Användarhandledning
Statusinformation
När basmanöverpanel är i Manöverläge visar displayen följande:
Överst till vänster visar styrplatsen:
LOC visar att frekvensomriktaren styrs lokalt, dvs. via manöverpanelen.
REM visar att frekvensomriktaren fjärrstyrs, t.ex. via I/O (X1) eller fältbuss.
Mitt på displayen visas ett parametervärde ur Grupp 01. Upp till tre parametervärden kan vara tillgängliga för visning (tryck på UPP eller NER för att bläddra bland tillgängliga parametrar).
Som grundinställning visar displayen tre parametrar. De specifika parametrarna styrs av parameter 9904 MOTOR STYRMETOD. Till exempel, om 9904 = 1, visar displayen parametrarna 0102 (VARVTAL), 0104 (STRÖM) och 0105 (MOMENT).
Använd parametrarna 3401, 3408, och 3415 för att välja vilka parametrar (från Grupp 01) som ska visas. Om du matar in "parameter" 0100 visas inga parametrar. Till exempel, om 3401 = 0100 och 3415 = 0100, visas endast den parameter som specificeras av 3408 på manöverpanelens display.
Du kan även skala varje parameter för visning på displayen. Till exempel, använd parametrarna 34023405 för att skala den parameter som specificeras av 3401. Till exempel, för att konvertera motorvarvtal till visning av transportörhastighet.
Överst till höger visas enheten för parametervärde.
Nederst till vänster visas OUTPUT
Nederst till höger visas motorns rotationsriktning. Texten (FWD eller REV):
Visas fast när motorn arbetar vid börvarvtal Blinkar långsamt när motorn står stilla. Blinkar snabbt när motorn accelererar.
Manövrering av frekvensomriktaren
LOC/REM Första gången frekvensomriktaren spänningssätts befinner den sig i fjärrstyrningsläge (REM) och styrs via styrplint X1.
För att växla till lokal styrning (LOC) och manövrera frekvensomriktaren med hjälp av manöverpanelen, tryck på . Om du:
Trycker och släpper (displayen blinkar "LoC"): stoppas frekvensomriktaren . Använd Referensläge för att ange lokal referens för styrning
Trycker och håller in tangenten ca 2 sekunder (släpp upp tangenten när displaytexten ändras från "LoC" till "LoC r"), arbetar frekvensomriktaren vidare som tidigare. Frekvensomriktaren kopierar aktuella fjärrvärden för till/från-status samt referensvärdet, och använder dessa som initiala lokala styrkommandon.
För att återgå till fjärrstyrning (REM) tryck på .
START/STOP För att starta och stoppa frekvensomriktaren, tryck på knapparna START respektive STOP.
REM
OUTPUT FWD
A
1.1
LOCREM
LOCREM
Idrifttagning

ACS550 Användarhandledning 43
Rotationsriktning För att ändra axelns rotationsriktning, tryck på ROTRIKT (parameter 1003 måste vara satt till 3 (VALD)).
Referens Se "Referensläge" nedan.
Referensläge Använd Referensläge för att ställa in varvtals- eller frekvensreferens. Normalt är sådan referensstyrning endast möjlig när frekvensomriktare styrs lokalt (LOC). Emellertid kan frekvensomriktaren ställas in (med Grupp 11: Val av referens) så att referensändring tillåts även när frekvensomriktaren fjärrstyrs (REM)
1. Utgå från Manöverläge och tryck på MENU/ENTER.
Displayen visar ett av följande driftlägen:
reF (Referens)
PAR (Parameter)
KoPIERA (Kopiera)
2. Använd piltangenterna för att stega till "reF" (Referensläge).
3. Tryck på MENU/ENTER.
Displayen visar aktuellt referensvärde med under värdet.
Obs! Normalt är referens inställning endast möjlig här, vid LOC-manövrering, men inställningar i Grupp 11 tillåter börvärdesinställning även i REM-läge. Texten visar om referensinställning är möjlig från manöverpanelen.
4. Använd piltangenterna för att stega till önskat parametervärde.
5. Tryck på AVSLUTA/RESET för att återgå till Manöverläge.
Parameterläge Använd Parameterläget för att ställa in parametervärden.
1. Utgå från Manöverläge och tryck på MENU/ENTER.
Displayen visar ett av följande driftlägen:
reF (Referens)
PAr (Parameter)
KoPIERA (Kopiera)
2. Använd piltangenterna för att stega till "PAr" (Parameterläge).
3. Tryck på MENU/ENTER.
Displayen visar en av parametergrupperna:
"01"
"99"
SET
SET
Idrifttagning
44 ACS550 Användarhandledning
4. Använd piltangenterna för att stega till önskad grupp, till exempel "03".
5. Tryck på MENU/ENTER.
Displayen visar en av parametrarna i vald parametergrupp. Till exempel, "0301".
6. Använd piltangenterna för att stega till önskad parameter.
7. Tryck på MENU/ENTER på ett av följande sätt:
Tryck och håll in ca 2 sekunder eller
Tryck på tangenten två gånger i snabb följd
Displayen visar värdet för vald parameter med texten under värdet.
Obs! En snabb tryckning på tangenten MENU/ENTER visar aktuellt parametervärde under ca 2 sekunder. Om du i detta läge trycker ännu en gång på tangenten MENU/ENTER aktiveras .
8. Använd piltangenterna för att stega till önskat parametervärde.
Obs! Om du i läge trycker samtidigt på uppåt- och nedåtpiltangenten visas parameterns grundvärde.
9. I läge , tryck på MENU/ENTER för att spara visat parametervärde.
Obs! Om du i stället trycker på AVSLUTA/RESET återställs ursprungligt eller senast sparat parametervärde som aktivt värde.
10. Tryck på AVSLUTA/RESET för att återgå till Manöverläge.
Parameterkopieringsläge Basmanöverpanelen kan spara en hel uppsättning frekvensomriktarparametrar. Om två uppsättningar parametrar finns definierade kommer båda att kopieras och överföras med denna funktion.
Parameterkopieringsläget har tre funktioner:
uL (Uppladdning till manöverpanel) Kopierar alla parametrar från frekvensomriktaren till manöverpanelen. Här inkluderas en andra uppsättning parametrar (om en sådan är definierad) och interna parametrar som de som skapats vid identifieringskörningen. Manöverpanelens minne är beständigt.
rE A (Återställ allt) Återställer den kompletta parameteruppsättningen (även flera) från manöverpanelen till frekvensomriktaren. Använd detta alternativ för att återställa en frekvensomriktare, eller för att konfigurera flera identiska frekvensomriktare.
SET
SET
SET
SET
Idrifttagning

ACS550 Användarhandledning 45
Obs! Funktionen Återställ allt skriver samtliga parametrar till frekvensomriktaren, inklusive motorparametrar. Använd denna funktion endast för att återställa en frekvensomriktare, eller för att överföra parametrar till system som är identiska med ursprungssystemet.
dL P (Kopiera Appl till FRO) Kopierar ett eget makro från manöverpanelen till en frekvensomriktare. Det egna makrot inkluderar inte interna motorparametrar, parametrarna 99059909, 1605, 1607, 5201, och inte heller några parametrar i Grupp 51. Använd detta alternativ för att överföra parametrar till system med liknande konfigurationer frekvensomriktar- och motorstorlekarna behöver inte vara identiska.
1. Utgå från Manöverläge och tryck på MENU/ENTER.
Displayen visar ett av följande driftlägen:
reF (Referens)
PAr (Parameter)
KoPIERA (Kopiera)
2. Använd piltangenterna för att stega till "KoPIERA" (Kopieringsläge).
3. Tryck på MENU/ENTER.
Displayen visar ett av följande kopieringsalternativ:
uL (Kopiera)
rE A (Återställ allt)
dL P (Kopiera Appl till FRO)
4. Använd piltangenterna för att stega till önskat alternativ.
5. Tryck på MENU/ENTER.
Parameteruppsättningen överförs. Under överföringen visar displayen överföringsstatus som ett procentuellt värde.
6. Tryck på AVSLUTA/RESET för att återgå till Manöverläge.
Larmkoder (Basmanöverpanel)Basmanöverpanelen visar manöverpanellarm med en kod, A3xxx. Följande tabell listar larmkoder och förklaringar till dessa.
Obs! Fel-/larmkoder som inte är specifika för basmanöverpanelen behandlas i "Diagnostik" avsnittet som börjar på sid 162.
Kod Beskrivning
3001 Val av felhantering i händelse av kommunikationsfel.
3002 Fel i gränssnittet mellan manöverpanel och frekvensomriktare. Kontakta ABB och uppge felkoden.
Idrifttagning
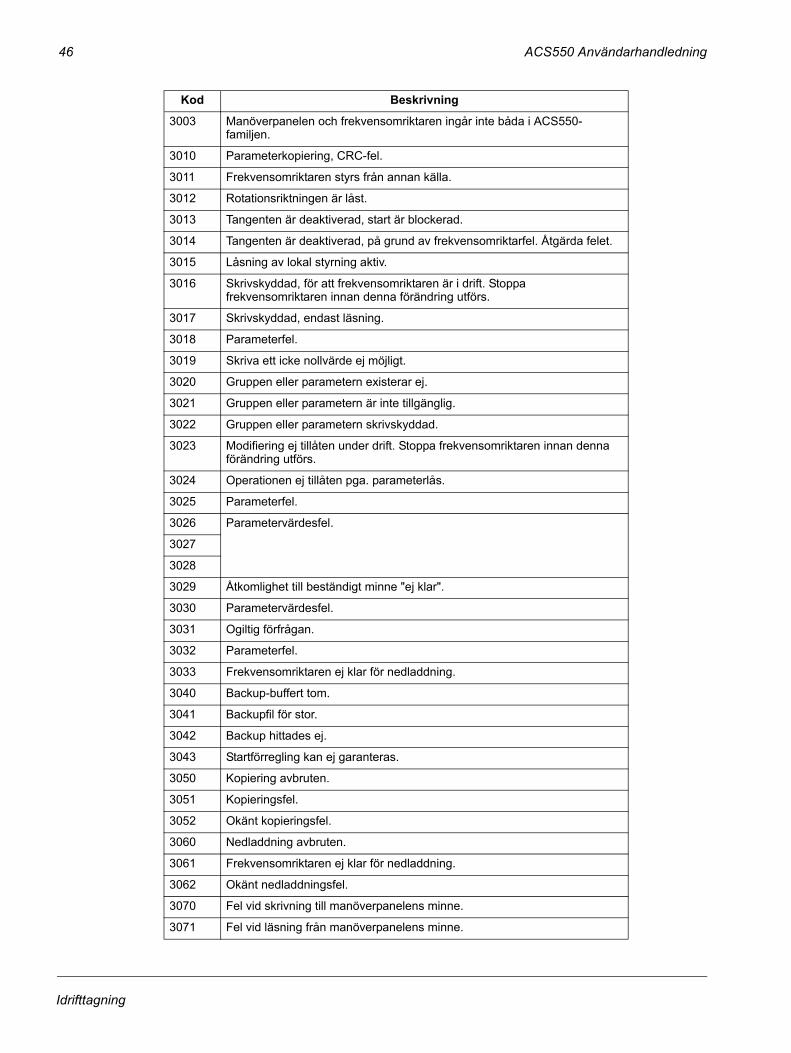
46 ACS550 Användarhandledning
3003 Manöverpanelen och frekvensomriktaren ingår inte båda i ACS550-familjen.
3010 Parameterkopiering, CRC-fel.
3011 Frekvensomriktaren styrs från annan källa.
3012 Rotationsriktningen är låst.
3013 Tangenten är deaktiverad, start är blockerad.
3014 Tangenten är deaktiverad, på grund av frekvensomriktarfel. Åtgärda felet.
3015 Låsning av lokal styrning aktiv.
3016 Skrivskyddad, för att frekvensomriktaren är i drift. Stoppa frekvensomriktaren innan denna förändring utförs.
3017 Skrivskyddad, endast läsning.
3018 Parameterfel.
3019 Skriva ett icke nollvärde ej möjligt.
3020 Gruppen eller parametern existerar ej.
3021 Gruppen eller parametern är inte tillgänglig.
3022 Gruppen eller parametern skrivskyddad.
3023 Modifiering ej tillåten under drift. Stoppa frekvensomriktaren innan denna förändring utförs.
3024 Operationen ej tillåten pga. parameterlås.
3025 Parameterfel.
3026 Parametervärdesfel.
3027
3028
3029 Åtkomlighet till beständigt minne "ej klar".
3030 Parametervärdesfel.
3031 Ogiltig förfrågan.
3032 Parameterfel.
3033 Frekvensomriktaren ej klar för nedladdning.
3040 Backup-buffert tom.
3041 Backupfil för stor.
3042 Backup hittades ej.
3043 Startförregling kan ej garanteras.
3050 Kopiering avbruten.
3051 Kopieringsfel.
3052 Okänt kopieringsfel.
3060 Nedladdning avbruten.
3061 Frekvensomriktaren ej klar för nedladdning.
3062 Okänt nedladdningsfel.
3070 Fel vid skrivning till manöverpanelens minne.
3071 Fel vid läsning från manöverpanelens minne.
Kod Beskrivning
Idrifttagning

ACS550 Användarhandledning 47
Tillämpningsmakron Makron används för att ställa om en grupp parametrar till nya fördefinierade värden. Använd makron för att minimera behovet av manuell redigering av parametrar. Då man väljer ett makro ändras alla andra parametrar till sina grundvärden, med undantag för:
Grupp 99: Startparametrar
PARAMETERLÅS 1602
SPARA PARAMETER 1607
Grupperna 5052 är seriekommunikationsparametrar
Efter val av ett makro kan ytterligare parameterförändringar göras manuellt med hjälp av manöverpanelen.
Tillämpningsmakron är fördefinierade parameteruppsättningar som aktiveras genom val av ett värde för parameter 9902 TILLÄMPN MAKRO. Grundvärdet är 1 - makrot ABB-standard.
Följande avsnitt beskriver varje enskilt tillämpningsmakro och ger anslutningsexempel.
Idrifttagning

48 ACS550 Användarhandledning
Tillämpningsmakro: ABB-standard (grundvärde)Detta makro ger en generell, 2-tråds I/O konfiguration, med tre (3) konstanta varvtal. Detta är det förinställda makrot. Parametervärdena är de grundvärden som definieras i "Fullständig parameterlista för ACS550" på sid 56.
Anslutningsexempel:
Insignaler Utsignaler Bygelinställningar Analog referens (AI1) Start, stopp och rotationsriktning
(DI1,2) Val konst varvt (DI3,4) Val av ramp 1/2 (DI5)
Analog utgång AO1: Frekvens Analog utgång AO2: Ström Reläutgång 1: Driftklar Reläutgång 2: Drift Reläutgång 3: Fel (-1)
1 SCR2 AI13 AGND4 10V5 AI26 AGND7 AO18 AO29 AGND
10 24V11 GND12 DCOM113 DI114 DI215 DI316 DI417 DI518 DI6
19 RO1C20 RO1A21 RO1B22 RO2C23 RO2A24 RO2B25 RO3C26 RO3A27 RO3B
Extern frekvensreferens 1: 010 V
Referensspänning 10 V DC
Utfrekvens: 020 mA
Start/Stopp: Aktivera för att startaFram/Back: Aktivera för ändra rotationsriktningVal konst varvt2Val konst varvt2Val av ramp: Aktivera för att välja 2a acc/ret ramp.
Reläutgång 1, programmerbarFörvald funktion:
Reläutgång 2, programmerbarFörvald funktion:
Reläutgång 3, programmerbarFörvald funktion:
Obs 1. Extern referens 1 används som varvtalsreferens om vektorreglering är vald,Obs 2. Kod: 0 = öppen, 1 = sluten
DI3 DI4 Utgång0 0 referens via AI11 0 KONST VARVTAL 1 (1202)0 1 KONST VARVTAL 2 (1203)1 1 KONST VARVTAL 3 (1204)
X1
Utström: 020 mA
Ej använd
Driftklar =>19 ansluten till 21
I drift =>22 ansluten till 24
Fel (-1) =>25 ansluten till 27
Gem. nolla för AI
Ej använd
Gem. nolla för AO
Hjälpspänningsutgång +24 V DCGem. nolla för de digitala insignalernas återledare.Gem. nolla för alla digitala insignaler
Signalkabelskärm
Gem. nolla för AI
(Fel =>25 ansluten till 26)
J1AI1: 010 VAI2: 0(4)20 mA
ON
ON
Idrifttagning

ACS550 Användarhandledning 49
Tillämpningsmakro: PulsstyrningDetta makro används när frekvensomriktaren manövreras med återfjädrande tryckknappar. Det erbjuder tre (3) konstanta varvtal. För att aktivera makrot, sätt parameter 9902 till 2 (PULSSTYRNING).
Obs! När stoppingången (DI2) är öppen (ingen insignal) är manöverpanelens start/stopp-knappar deaktiverade.
Anslutningsexempel:
Insignaler Utsignaler Bygelinställningar Analog referens (AI1) Start, stopp och rotationsriktning
(DI1,2,3) Val konst varvt (DI4,5)
Analog utgång AO1: Varvtal Analog utgång AO2: Ström Reläutgång 1: Driftklar Reläutgång 2: Drift Reläutgång 3: Fel (-1)
1 SCR2 AI13 AGND4 10V5 AI26 AGND7 AO18 AO29 AGND
10 24V11 GND12 DCOM113 DI114 DI215 DI316 DI417 DI518 DI6
19 RO1C20 RO1A21 RO1B22 RO2C23 RO2A24 RO2B25 RO3C26 RO3A27 RO3B
Extern varvtalsreferens 1: 010 V
Referensspänning 10 VDC
Motorvarvtal: 020 mA
Val konst varvt1Val konst varvt1
Reläutgång 1, programmerbarFörvald funktion:
Reläutgång 2, programmerbarFörvald funktion:
Reläutgång 3, programmerbarFörvald funktion:
X1
Utström: 020 mA
Driftklar =>19 ansluten till 21
I drift =>22 ansluten till 24
Fel (-1) =>25 ansluten till 26
Gem. nolla för AI
Ej använd
Gem. nolla för AO
Hjälpspänningsutgång +24 V DCGem. nolla för de digitala insignalernas återledare.Gem. nolla för alla digitala insignaler
Signalkabelskärm
Gem. nolla för AI
Obs 1. Kod: 0 = öppen, 1 = sluten
DI4 DI5 Utgång0 0 referens via AI11 0 KONST VARVTAL 1 (1202)0 1 KONST VARVTAL 2 (1203)1 1 KONSTANT VARVTAL 3
(1204)
Start: Momentan aktivering med DI2 aktiverad startar frekvensomriktaren.Stopp: Momentan deaktivering stoppar frekvensomriktaren.Fram/Back: Vid aktivering växlar frekvensomriktaren rotationsriktning.
Ej använd
(Fel =>25 ansluten till 26)
J1AI1: 010 VAI2: 0(4)20 mA
ON
ON
Idrifttagning
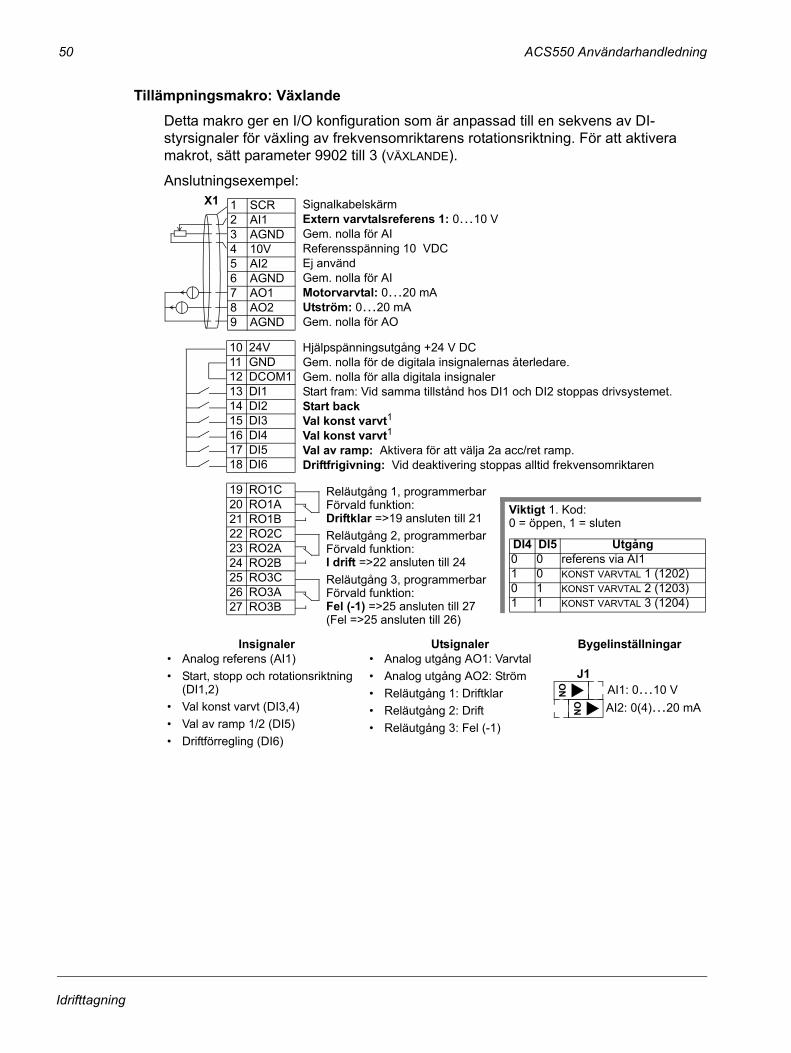
50 ACS550 Användarhandledning
Tillämpningsmakro: VäxlandeDetta makro ger en I/O konfiguration som är anpassad till en sekvens av DI-styrsignaler för växling av frekvensomriktarens rotationsriktning. För att aktivera makrot, sätt parameter 9902 till 3 (VÄXLANDE).
Anslutningsexempel:
Insignaler Utsignaler Bygelinställningar Analog referens (AI1) Start, stopp och rotationsriktning
(DI1,2) Val konst varvt (DI3,4) Val av ramp 1/2 (DI5) Driftförregling (DI6)
Analog utgång AO1: Varvtal Analog utgång AO2: Ström Reläutgång 1: Driftklar Reläutgång 2: Drift Reläutgång 3: Fel (-1)
1 SCR2 AI13 AGND4 10V5 AI26 AGND7 AO18 AO29 AGND
10 24V11 GND12 DCOM113 DI114 DI215 DI316 DI417 DI518 DI6
19 RO1C20 RO1A21 RO1B22 RO2C23 RO2A24 RO2B25 RO3C26 RO3A27 RO3B
Extern varvtalsreferens 1: 010 V
Referensspänning 10 VDC
Motorvarvtal: 020 mA
Val konst varvt1Val konst varvt1
Reläutgång 1, programmerbarFörvald funktion:
Reläutgång 2, programmerbarFörvald funktion:
Reläutgång 3, programmerbarFörvald funktion:
X1
Utström: 020 mA
Driftklar =>19 ansluten till 21
I drift =>22 ansluten till 24
Fel (-1) =>25 ansluten till 27
Gem. nolla för AI
Ej använd
Gem. nolla för AO
Hjälpspänningsutgång +24 V DCGem. nolla för de digitala insignalernas återledare.Gem. nolla för alla digitala insignaler
Signalkabelskärm
Gem. nolla för AI
Viktigt 1. Kod: 0 = öppen, 1 = sluten
DI4 DI5 Utgång0 0 referens via AI11 0 KONST VARVTAL 1 (1202)0 1 KONST VARVTAL 2 (1203)1 1 KONST VARVTAL 3 (1204)
Start fram: Vid samma tillstånd hos DI1 och DI2 stoppas drivsystemet. Start back
Val av ramp: Aktivera för att välja 2a acc/ret ramp. Driftfrigivning: Vid deaktivering stoppas alltid frekvensomriktaren
(Fel =>25 ansluten till 26)
J1AI1: 010 VAI2: 0(4)20 mA
ON
ON
Idrifttagning

ACS550 Användarhandledning 51
Tillämpningsmakro: MotorpotentiometerDetta makro erbjuder ett kostnadseffektivt gränssnitt mot programmerbara styrsystem som styr drivsystemets varvtal endast med digitala signaler (öka-/minska-signaler). För att aktivera makrot, sätt parameter 9902 till 4 (MOTORPOT).
Anslutningsexempel:
Insignaler Utsignaler Bygelinställningar Start, stopp och rotationsriktning
(DI1,2) Referens upp/ner (DI3,4) Val konst varvt (DI5) Driftförregling (DI6)
Analog utgång AO1: Varvtal Analog utgång AO2: Ström Reläutgång 1: Driftklar Reläutgång 2: Drift Reläutgång 3: Fel (-1)
1 SCR2 AI13 AGND4 10V5 AI26 AGND7 AO18 AO29 AGND
10 24V11 GND12 DCOM113 DI114 DI215 DI316 DI417 DI518 DI6
19 RO1C20 RO1A21 RO1B22 RO2C23 RO2A24 RO2B25 RO3C26 RO3A27 RO3B
Ej använd
Referensspänning 10 VDC
Motorvarvtal: 020 mA
Referens upp: Aktivering ökar värdet1. Referens ner: Aktivering minskar värdet1.
Reläutgång 1, programmerbarFörvald funktion:
Reläutgång 2, programmerbarFörvald funktion:
Reläutgång 3, programmerbarFörvald funktion:
X1
Utström: 020 mA
Driftklar =>19 ansluten till 21
I drift =>22 ansluten till 24
Fel (-1) =>25 ansluten till 27
Gem. nolla för AI
Ej använd
Gem. nolla för AO
Hjälpspänningsutgång +24 V DCGem. nolla för de digitala insignalernas återledare.Gem. nolla för alla digitala insignaler
Signalkabelskärm
Gem. nolla för AI
Viktigt 1. För DI3 och DI4: Om båda är aktiva eller inaktiva
förblir varvtalsref. oförändrad. Befintlig varvtalsreferens lagras i
samband med stopp eller
Start/Stopp: Vid aktivering startar frekvensomriktaren.Fram/Back: Vid aktivering växlar frekvensomriktaren rotationsriktning.
Konst varvtal 1: 1202 Driftfrigivning: Vid deaktivering stoppas alltid frekvensomriktaren.
(Fel =>25 ansluten till 26)
J1AI1: 010 VAI2: 0(4)20 mA
ON
ON
Idrifttagning

52 ACS550 Användarhandledning
Tillämpningsmakro: Hand-AutoDetta makro erbjuder en I/O-konfiguration som typiskt förekommer i HVAC-tillämpningar. För att aktivera makrot, sätt parameter 9902 till 5 (HAND/AUTO).
Obs! Parameter 2108 STARTFÖRREGLING måste kvarstå med grundvärdet 0 (OFF).
Anslutningsexempel:
Insignaler Utsignaler Bygelinställningar Två analoga referensvärden (AI1,
2) Start/stopp hand/auto (DI1, 6) Rot riktning hand/auto (DI2, 5) Val av styrplats (DI3) Driftförregling (DI4)
Analog utgång AO1: Varvtal Analog utgång AO2: Ström Reläutgång 1: Driftklar Reläutgång 2: Drift Reläutgång 3: Fel (-1)
1 SCR2 AI13 AGND4 10V5 AI26 AGND7 AO18 AO29 AGND
10 24V11 GND12 DCOM113 DI114 DI215 DI316 DI417 DI518 DI6
19 RO1C20 RO1A21 RO1B22 RO2C23 RO2A24 RO2B25 RO3C26 RO3A27 RO3B
Start/stopp (hand): Vid aktivering startar frekvensomriktaren.Fram/Back (hand): Vid aktivering växlar frekvensomriktaren rotationsriktningVal av EXT1/EXT2: Vid aktivering väljs automatisk styrning
Fram/Back (auto): Vid aktivering växlar frekvensomriktaren rotationsriktningStart/stopp (auto): Vid aktivering startar frekvensomriktaren.
X1
Driftförregling: Vid deaktivering stoppas alltid frekvensomriktaren
Extern referens 1: 010 V (Manuell styrning)
Referensspänning 10 VDC
Motorvarvtal: 020 mAUtström: 020 mA
Gem. nolla för AI
Gem. nolla för AO
Hjälpspänningsutgång +24 V DCGem. nolla för de digitala insignalernas återledare.Gem. nolla för alla digitala insignaler
Signalkabelskärm
Gem. nolla för AI Extern referens 2: 020 mA (Automatisk styrning)
Reläutgång 1, programmerbarFörvald funktion:
Reläutgång 2, programmerbarFörvald funktion:
Reläutgång 3, programmerbarFörvald funktion:
Driftklar =>19 ansluten till 21
I drift =>22 ansluten till 24
Fel (-1) =>25 ansluten till 27(Fel =>25 ansluten till 26)
J1AI1: 010 VAI2: 0(4)20 mA
ON
ON
Idrifttagning
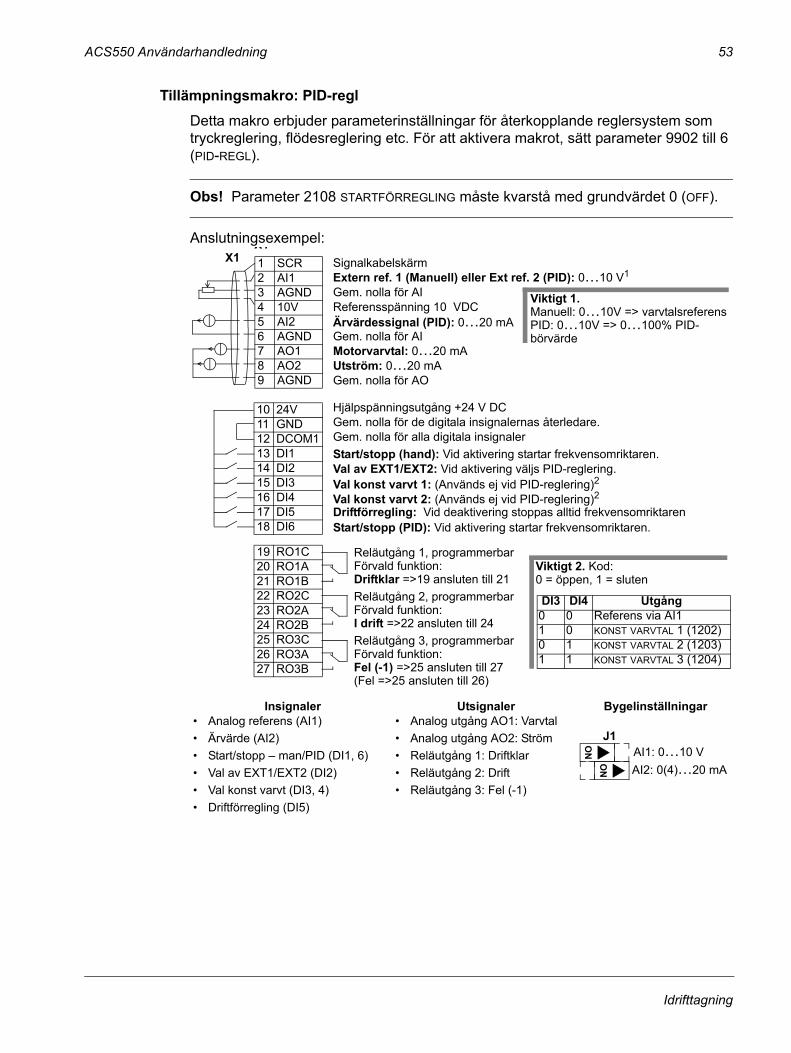
ACS550 Användarhandledning 53
Tillämpningsmakro: PID-reglDetta makro erbjuder parameterinställningar för återkopplande reglersystem som tryckreglering, flödesreglering etc. För att aktivera makrot, sätt parameter 9902 till 6 (PID-REGL).
Obs! Parameter 2108 STARTFÖRREGLING måste kvarstå med grundvärdet 0 (OFF).
Anslutningsexempel:
Insignaler Utsignaler Bygelinställningar Analog referens (AI1) Ärvärde (AI2) Start/stopp man/PID (DI1, 6) Val av EXT1/EXT2 (DI2) Val konst varvt (DI3, 4) Driftförregling (DI5)
Analog utgång AO1: Varvtal Analog utgång AO2: Ström Reläutgång 1: Driftklar Reläutgång 2: Drift Reläutgång 3: Fel (-1)
X11 SCR2 AI13 AGND4 10V5 AI26 AGND7 AO18 AO29 AGND
10 24V11 GND12 DCOM113 DI114 DI215 DI316 DI417 DI518 DI6
19 RO1C20 RO1A21 RO1B22 RO2C23 RO2A24 RO2B25 RO3C26 RO3A27 RO3B
Start/stopp (hand): Vid aktivering startar frekvensomriktaren.
Val konst varvt 1: (Används ej vid PID-reglering)2Val av EXT1/EXT2: Vid aktivering väljs PID-reglering.
Val konst varvt 2: (Används ej vid PID-reglering)2
Start/stopp (PID): Vid aktivering startar frekvensomriktaren.
X1
Driftförregling: Vid deaktivering stoppas alltid frekvensomriktaren
Extern ref. 1 (Manuell) eller Ext ref. 2 (PID): 010 V1
Referensspänning 10 VDC
Motorvarvtal: 020 mAUtström: 020 mA
Gem. nolla för AI
Gem. nolla för AO
Hjälpspänningsutgång +24 V DCGem. nolla för de digitala insignalernas återledare.Gem. nolla för alla digitala insignaler
Signalkabelskärm
Gem. nolla för AI Ärvärdessignal (PID): 020 mA
Reläutgång 1, programmerbarFörvald funktion:
Reläutgång 2, programmerbarFörvald funktion:
Reläutgång 3, programmerbarFörvald funktion:
Driftklar =>19 ansluten till 21
I drift =>22 ansluten till 24
Fel (-1) =>25 ansluten till 27
Viktigt 2. Kod: 0 = öppen, 1 = sluten
DI3 DI4 Utgång0 0 Referens via AI11 0 KONST VARVTAL 1 (1202)0 1 KONST VARVTAL 2 (1203)1 1 KONST VARVTAL 3 (1204)
Viktigt 1. Manuell: 010V => varvtalsreferens PID: 010V => 0100% PID-börvärde
(Fel =>25 ansluten till 26)
J1AI1: 010 VAI2: 0(4)20 mA
ON
ON
Idrifttagning

54 ACS550 Användarhandledning
Tillämpningsmakro: PFC-styrning Detta makro erbjuder parameterinställningar för pump- och fläktstyrningstillämpningar (PFC-styrning). För att aktivera makrot, sätt parameter 9902 till 7 (PFC-STYRNING).
Obs! Parameter 2108 STARTFÖRREGLING måste kvarstå med grundvärdet 0 (OFF).
Anslutningsexempel:
Insignaler Utsignaler Bygelinställningar Analog ref. och ärvärde (AI1, 2) Start/stopp manuell/PFC (DI1, 6) Driftförregling (DI2) Val av EXT1/EXT2 (DI3) Förregling (DI4, 5)
Analog utgång AO1: Frekvens Analog utgång AO2: ärvärde 1 Reläutgång 1: I drift Reläutgång 2: Fel (-1) Reläutgång 3: Hjälpmotor ON
1 SCR2 AI13 AGND4 10V5 AI26 AGND7 AO18 AO29 AGND
10 24V11 GND12 DCOM113 DI114 DI215 DI316 DI417 DI518 DI6
19 RO1C20 RO1A21 RO1B22 RO2C23 RO2A24 RO2B25 RO3C26 RO3A27 RO3B
Start/stopp (manuell): Vid aktivering startar frekvensomriktaren.
Val av EXT1/EXT2: Vid aktivering väljs PID-reglering.
Start/stopp (PFC-styrning): Vid aktivering startar frekvensomriktaren.
X1
Driftförregling: Vid deaktivering stoppas alltid frekvensomriktaren
Extern ref. 1 (Manuell) eller Ext ref. 2 (PID/PFC): 010 V1
Referensspänning 10 VDC
Utfrekvens: 020 mAÄrv1 (PID-regulator ärvärde): 0(4)20 mA
Gem. nolla för AI
Gem. nolla för AO
Hjälpspänningsutgång +24 V DCGem. nolla för de digitala insignalernas återledare.Gem. nolla för alla digitala insignaler
Signalkabelskärm
Gem. nolla för AI Ärvärdessignal (PID): 420 mA
Förregling: Vid deaktivering stoppas alltid frekvensomriktaren.Förregling: Deaktivering stoppar konstantvarvtalsmotorn.
Obs 1. Manuell: 010V => 050 Hz PID/PFC: 010V => 0100% PID-börvärde
Reläutgång 1, programmerbarFörvald funktion:
Reläutgång 2, programmerbarFörvald funktion:
Reläutgång 3, programmerbarFörvald funktion:
I drift =>19 ansluten till 21
Fel (-1) =>22 ansluten till 24 (Fel => 22 ansluten till 23)
Hjälpmotor tillslagen=>25 ansluten till 27
J1AI1: 010 VAI2: 0(4)20 mA
ON
ON
Idrifttagning

ACS550 Användarhandledning 55
Tillämpningsmakro: Moment-reglDetta makro erbjuder parameterinställningar för tillämpningar som kräver momentreglering av motorn. Det går även att välja varvtalsreglering. För att aktivera makrot, sätt parameter 9902 till 8 (MOMENT-REGL).
Anslutningsexempel:
Insignaler Utsignaler Bygelinställningar Två analoga referensvärden (AI1,
2) Start, stopp och rotationsriktning
(DI1, 2) Varvtal/momentreglering (DI3) Val konst varvt (DI4) Val av ramp 1/2 (DI5) Driftförregling (DI6)
Analog utgång AO1: Varvtal Analog utgång AO2: Ström Reläutgång 1: Driftklar Reläutgång 2: Drift Reläutgång 3: Fel (-1)
1 SCR2 AI13 AGND4 10V5 AI26 AGND7 AO18 AO29 AGND
10 24V11 GND12 DCOM113 DI114 DI215 DI316 DI417 DI518 DI6
19 RO1C20 RO1A21 RO1B22 RO2C23 RO2A24 RO2B25 RO3C26 RO3A27 RO3B
Extern varvtalsreferens 1: 010 V
Referensspänning 10 VDC
Motorvarvtal: 020 mA
Varvtal/momentreglering: Vid aktivering väljs momentreglering. Konst varvtal 1: 1202
Reläutgång 1, programmerbarFörvald funktion:
Reläutgång 2, programmerbarFörvald funktion:
Reläutgång 3, programmerbarFörvald funktion:
X1
Utström: 020 mA
Driftklar =>19 ansluten till 21
I drift =>22 ansluten till 24
Fel (-1) =>25 ansluten till 27
Gem. nolla för AI
Extern momentreferens: 4 20mA
Gem. nolla för AO
Hjälpspänningsutgång +24 V DCGem. nolla för de digitala insignalernas återledare.Gem. nolla för alla digitala insignaler
Signalkabelskärm
Gem. nolla för AI
Obs 1. Växlar rotationsriktning vid
varvtalsreglering. Växlar vridmomentriktning vid
momentreglering.
Start/Stopp: Vid aktivering startar frekvensomriktaren.Fram/Back: Vid aktivering växlar frekvensomriktaren rotationsriktning.1
Val av ramp: Aktivera för att välja 2a acc/ret ramp. Driftförregling: Vid deaktivering stoppas alltid frekvensomriktaren.
(Fel =>25 ansluten till 26)
J1AI1: 010 VAI2: 0(4)20 mA
ON
ON
Idrifttagning
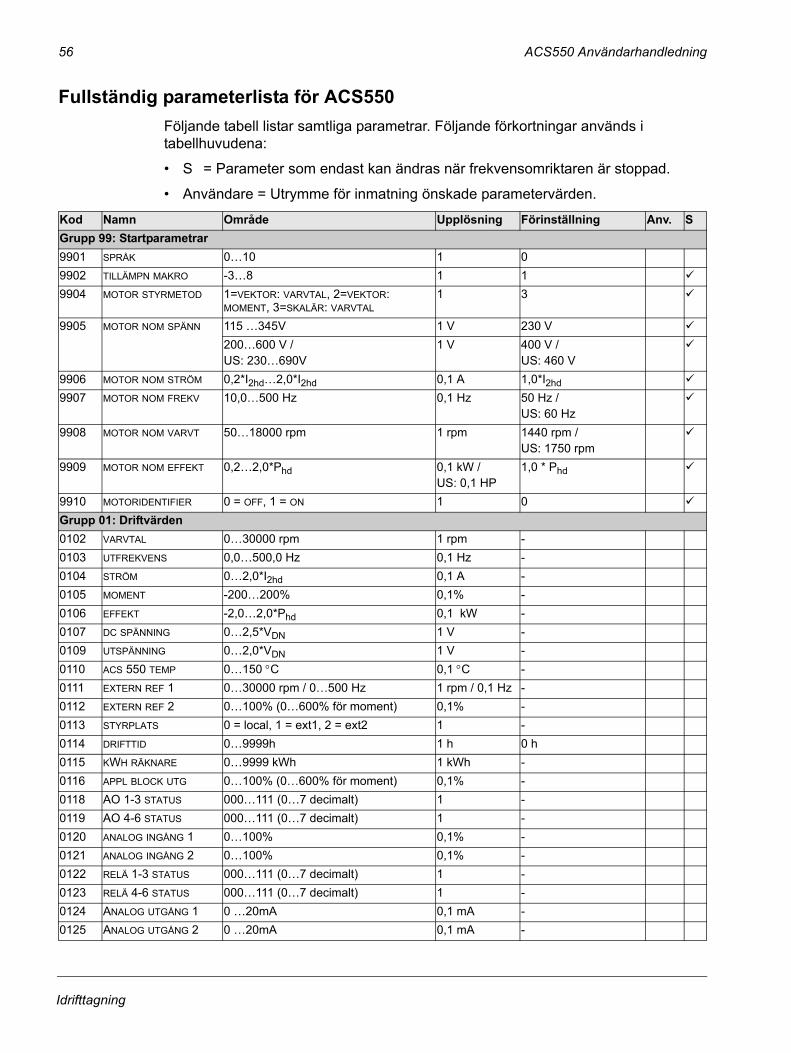
56 ACS550 Användarhandledning
Fullständig parameterlista för ACS550Följande tabell listar samtliga parametrar. Följande förkortningar används i tabellhuvudena:
S = Parameter som endast kan ändras när frekvensomriktaren är stoppad.
Användare = Utrymme för inmatning önskade parametervärden.Kod Namn Område Upplösning Förinställning Anv. SGrupp 99: Startparametrar9901 SPRÅK 010 1 09902 TILLÄMPN MAKRO -38 1 1 !
9904 MOTOR STYRMETOD 1=VEKTOR: VARVTAL, 2=VEKTOR: MOMENT, 3=SKALÄR: VARVTAL
1 3 !
9905 MOTOR NOM SPÄNN 115 345V 1 V 230 V !
200600 V / US: 230690V
1 V 400 V / US: 460 V
!
9906 MOTOR NOM STRÖM 0,2*I2hd2,0*I2hd 0,1 A 1,0*I2hd !
9907 MOTOR NOM FREKV 10,0500 Hz 0,1 Hz 50 Hz / US: 60 Hz
!
9908 MOTOR NOM VARVT 5018000 rpm 1 rpm 1440 rpm / US: 1750 rpm
!
9909 MOTOR NOM EFFEKT 0,22,0*Phd 0,1 kW / US: 0,1 HP
1,0 * Phd !
9910 MOTORIDENTIFIER 0 = OFF, 1 = ON 1 0 !
Grupp 01: Driftvärden0102 VARVTAL 030000 rpm 1 rpm -0103 UTFREKVENS 0,0500,0 Hz 0,1 Hz -0104 STRÖM 02,0*I2hd 0,1 A -0105 MOMENT -200200% 0,1% -0106 EFFEKT -2,02,0*Phd 0,1 kW -0107 DC SPÄNNING 02,5*VDN 1 V -0109 UTSPÄNNING 02,0*VDN 1 V -0110 ACS 550 TEMP 0150 °C 0,1 °C -0111 EXTERN REF 1 030000 rpm / 0500 Hz 1 rpm / 0,1 Hz -0112 EXTERN REF 2 0100% (0600% för moment) 0,1% -0113 STYRPLATS 0 = local, 1 = ext1, 2 = ext2 1 -0114 DRIFTTID 09999h 1 h 0 h0115 KWH RÄKNARE 09999 kWh 1 kWh -0116 APPL BLOCK UTG 0100% (0600% för moment) 0,1% -0118 AO 1-3 STATUS 000111 (07 decimalt) 1 -0119 AO 4-6 STATUS 000111 (07 decimalt) 1 -0120 ANALOG INGÅNG 1 0100% 0,1% -0121 ANALOG INGÅNG 2 0100% 0,1% -0122 RELÄ 1-3 STATUS 000111 (07 decimalt) 1 -0123 RELÄ 4-6 STATUS 000111 (07 decimalt) 1 -0124 ANALOG UTGÅNG 1 0 20mA 0,1 mA -0125 ANALOG UTGÅNG 2 0 20mA 0,1 mA -
Idrifttagning
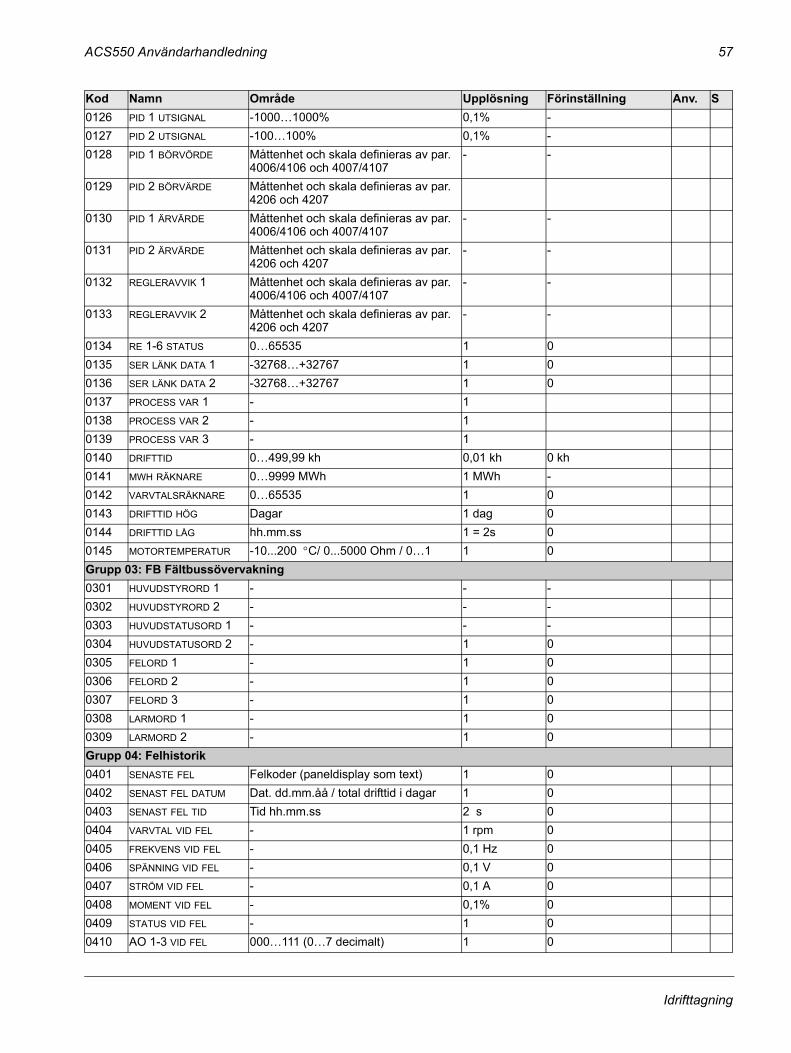
ACS550 Användarhandledning 57
0126 PID 1 UTSIGNAL -10001000% 0,1% -0127 PID 2 UTSIGNAL -100100% 0,1% -0128 PID 1 BÖRVÖRDE Måttenhet och skala definieras av par.
4006/4106 och 4007/4107- -
0129 PID 2 BÖRVÄRDE Måttenhet och skala definieras av par. 4206 och 4207
0130 PID 1 ÄRVÄRDE Måttenhet och skala definieras av par. 4006/4106 och 4007/4107
- -
0131 PID 2 ÄRVÄRDE Måttenhet och skala definieras av par. 4206 och 4207
- -
0132 REGLERAVVIK 1 Måttenhet och skala definieras av par. 4006/4106 och 4007/4107
- -
0133 REGLERAVVIK 2 Måttenhet och skala definieras av par. 4206 och 4207
- -
0134 RE 1-6 STATUS 065535 1 00135 SER LÄNK DATA 1 -32768+32767 1 00136 SER LÄNK DATA 2 -32768+32767 1 00137 PROCESS VAR 1 - 10138 PROCESS VAR 2 - 10139 PROCESS VAR 3 - 10140 DRIFTTID 0499,99 kh 0,01 kh 0 kh0141 MWH RÄKNARE 09999 MWh 1 MWh -0142 VARVTALSRÄKNARE 065535 1 00143 DRIFTTID HÖG Dagar 1 dag 00144 DRIFTTID LÅG hh.mm.ss 1 = 2s 00145 MOTORTEMPERATUR -10...200 °C/ 0...5000 Ohm / 01 1 0Grupp 03: FB Fältbussövervakning0301 HUVUDSTYRORD 1 - - -0302 HUVUDSTYRORD 2 - - -0303 HUVUDSTATUSORD 1 - - -0304 HUVUDSTATUSORD 2 - 1 00305 FELORD 1 - 1 00306 FELORD 2 - 1 00307 FELORD 3 - 1 00308 LARMORD 1 - 1 00309 LARMORD 2 - 1 0Grupp 04: Felhistorik0401 SENASTE FEL Felkoder (paneldisplay som text) 1 00402 SENAST FEL DATUM Dat. dd.mm.åå / total drifttid i dagar 1 00403 SENAST FEL TID Tid hh.mm.ss 2 s 00404 VARVTAL VID FEL - 1 rpm 00405 FREKVENS VID FEL - 0,1 Hz 00406 SPÄNNING VID FEL - 0,1 V 00407 STRÖM VID FEL - 0,1 A 00408 MOMENT VID FEL - 0,1% 00409 STATUS VID FEL - 1 00410 AO 1-3 VID FEL 000111 (07 decimalt) 1 0
Kod Namn Område Upplösning Förinställning Anv. S
Idrifttagning
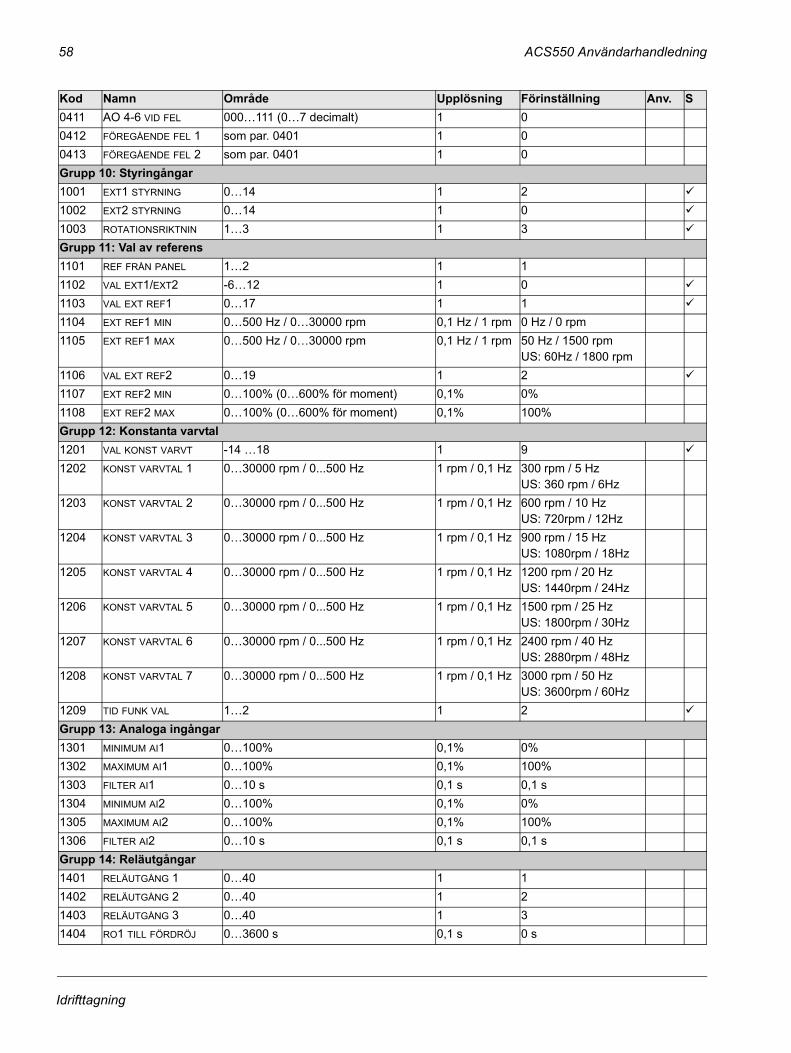
58 ACS550 Användarhandledning
0411 AO 4-6 VID FEL 000111 (07 decimalt) 1 00412 FÖREGÅENDE FEL 1 som par. 0401 1 00413 FÖREGÅENDE FEL 2 som par. 0401 1 0Grupp 10: Styringångar1001 EXT1 STYRNING 014 1 2 !
1002 EXT2 STYRNING 014 1 0 !
1003 ROTATIONSRIKTNIN 13 1 3 !
Grupp 11: Val av referens1101 REF FRÅN PANEL 12 1 11102 VAL EXT1/EXT2 -612 1 0 !
1103 VAL EXT REF1 017 1 1 !
1104 EXT REF1 MIN 0500 Hz / 030000 rpm 0,1 Hz / 1 rpm 0 Hz / 0 rpm1105 EXT REF1 MAX 0500 Hz / 030000 rpm 0,1 Hz / 1 rpm 50 Hz / 1500 rpm
US: 60Hz / 1800 rpm1106 VAL EXT REF2 019 1 2 !
1107 EXT REF2 MIN 0100% (0600% för moment) 0,1% 0%1108 EXT REF2 MAX 0100% (0600% för moment) 0,1% 100%Grupp 12: Konstanta varvtal1201 VAL KONST VARVT -14 18 1 9 !
1202 KONST VARVTAL 1 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 300 rpm / 5 HzUS: 360 rpm / 6Hz
1203 KONST VARVTAL 2 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 600 rpm / 10 HzUS: 720rpm / 12Hz
1204 KONST VARVTAL 3 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 900 rpm / 15 HzUS: 1080rpm / 18Hz
1205 KONST VARVTAL 4 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 1200 rpm / 20 HzUS: 1440rpm / 24Hz
1206 KONST VARVTAL 5 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 1500 rpm / 25 HzUS: 1800rpm / 30Hz
1207 KONST VARVTAL 6 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 2400 rpm / 40 HzUS: 2880rpm / 48Hz
1208 KONST VARVTAL 7 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 3000 rpm / 50 HzUS: 3600rpm / 60Hz
1209 TID FUNK VAL 12 1 2 !
Grupp 13: Analoga ingångar 1301 MINIMUM AI1 0100% 0,1% 0%1302 MAXIMUM AI1 0100% 0,1% 100%1303 FILTER AI1 010 s 0,1 s 0,1 s 1304 MINIMUM AI2 0100% 0,1% 0%1305 MAXIMUM AI2 0100% 0,1% 100%1306 FILTER AI2 010 s 0,1 s 0,1 s Grupp 14: Reläutgångar1401 RELÄUTGÅNG 1 040 1 11402 RELÄUTGÅNG 2 040 1 21403 RELÄUTGÅNG 3 040 1 31404 RO1 TILL FÖRDRÖJ 03600 s 0,1 s 0 s
Kod Namn Område Upplösning Förinställning Anv. S
Idrifttagning

ACS550 Användarhandledning 59
1405 RO1 FRÅN FÖRDRÖJ 03600 s 0,1 s 0 s 1406 RO2 TILL FÖRDRÖJ 03600 s 0,1 s 0 s 1407 RO2 FRÅN FÖRDRÖJ 03600 s 0,1 s 0 s 1408 RO3 TILL FÖRDRÖJ 03600 s 0,1 s 0 s 1409 RO3 FRÅN FÖRDRÖJ 03600 s 0,1 s 0 s 1410 RELÄUTGÅNG 4 040 1 01411 RELÄUTGÅNG 5 040 1 01412 RELÄUTGÅNG 6 040 1 01413 RO4 TILL FÖRDRÖJ 03600 s 0,1 s 0 s 1414 RO4 FRÅN FÖRDRÖJ 03600 s 0,1 s 0 s 1415 RO5 TILL FÖRDRÖJ 03600 s 0,1 s 0 s 1416 RO5 FRÅN FÖRDRÖJ 03600 s 0,1 s 0 s 1417 RO6 TILL FÖRDRÖJ 03600 s 0,1 s 0 s 1418 RO6 FRÅN FÖRDRÖJ 03600 s 0,1 s 0 s Grupp 15: Analoga utgångar1501 AO1 INNEHÅLL 99...199 1 1031502 AO1 INNEHÅLL MIN - - Definierad av par. 01031503 AO1 INNEHÅLL MAX - - Definierad av par. 01031504 MINIMUM AO1 0,0 20,0mA 0,1 mA 0 mA1505 MAXIMUM AO1 0,0 20,0mA 0,1 mA 20,0 mA1506 FILTER AO1 010 s 0,1 s 0,1 s 1507 AO2 INNEHÅLL 99199 1 1041508 AO2 INNEHÅLL MIN - - Definierad av par. 01041509 AO2 INNEHÅLL MAX - - Definierad av par. 01041510 MINIMUM AO2 0,0 20,0mA 0,1 mA 0 mA1511 MAXIMUM AO2 0,0 20,0mA 0,1 mA 20,0 mA1512 FILTER AO2 010 s 0,1 s 0,1 s Grupp 16: Systemstyrning 1601 DRIFTFÖRREGLING 07, -1-6 1 0 !
1602 PARAMETERLÅS 02 1 11603 KOD 065535 1 01604 VAL FELÅTERST 08, -1-6 1 01605 ÄNDRA EGET MAKRO 06, -1-6 1 01606 LOKAL BLOCK 08, -1-6 1 01607 SPARA PARAMETER 0 = Klart, 1 = Spara 1 0Grupp 20: Gränser 2001 MIN VARVTAL -3000030000 rpm 1 rpm 0 rpm !
2002 MAX VARVTAL 030000 rpm 1 rpm 1500 rpm / US: 1800rpm
!
2003 MAX STRÖM 0 1,8 * I2hd 0,1 A 1,8 * I2hd !
2005 ÖVERSP REGL 0 = Från, 1 = Till 1 12006 UNDERSP REGL 0 = Från, 1 = Till 1 12007 MIN FREKVENS -500500 Hz 0,1 Hz 0Hz !
2008 MAX FREKVENS 0500 Hz 0,1 Hz 50 Hz / US: 60Hz !
2013 MIN MOMENT VAL 07, -1-6 1 0
Kod Namn Område Upplösning Förinställning Anv. S
Idrifttagning

60 ACS550 Användarhandledning
2014 MAX MOMENT VAL 07, -1-6 1 02015 MIN MOMENT GR1 -600,0%0% 0,1% -300,0%2016 MIN MOMENT GR2 -600,0%0% 0,1% -300,0%2017 MAX MOMENT GR1 0%600,0% 0,1% 300,0%2018 MAX MOMENT GR2 0%600,0% 0,1% 300,0%Grupp 21: Start/stopp2101 START FUNKTION 15 1 1 !
2102 STOPP FUNKTION 1 = utrullning, 2 = ramp 1 12103 FÖRMAGNETISERING 010s 0,01 s 0,3 s2104 DC FASTHÅLLNING 0, 2 - 0 !
2105 DC FASTH VARVTAL 03000 rpm 1 rpm 5 rpm2106 DC FASTH STRÖM 0%100% 1% 30%2107 DC BROMS TID 0250 s 0,1 s 0 s 2108 STARTFÖRREGLING 0 = off, 1 = on 1 0 !
2109 NÖDSTOPP FUNKTION 06, -1-6 1 02110 TUNG START STRÖM 0300% 1 100%Grupp 22: Accel/Retard2201 VAL ACC/RET 06, -1-6 1 52202 ACCEL TID 1 0,01800 s 0,1 s 5 s2203 RETARD TID 1 0,01800 s 0,1 s 5 s2204 RAMPFORM TID 1 0=linjär; 0.1...1000.0 s 0,1 s 0,0 s 2205 ACCEL TID 2 0,01800 s 0,1 s 60 s2206 RETARD TID 2 0,01800 s 0,1 s 60 s2207 RAMPFORM TID 2 0=linjär; 0.1...1000.0 s 0,1 s 0,0 s 2208 NÖDSTOP RAMP TID 0,01800 s 0,1 s 1,0 s 2209 VAL 0-RAMPS ING 06, -1-6 1 0Grupp 23: Varvtalsregulator2301 RELATIV FÖRST 0,00200,0 0,01 102302 INTEGRATIONSTID 0600,00 s 0,01 s 2,52303 DERIVERINGSTID 010000 ms 1 ms 02304 ACC KOMPENSERING 0600,00 s 0,01 s 02305 SJÄLVINSTÄLLNING 01 1 0 (FRÅN)Grupp 24: Momentregulator2401 MOMENT RAMP UPP 0,00120,00 s 0,01 s 02402 MOMENT RAMP NER 0,00120,00 s 0,01 s 0Grupp 25: Kritiska frekv2501 VAL KRIT VARVTAL 0 = OFF, 1 = ON 1 02502 KRIT VARVT 1 LÅG 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 0 r/min / 0 Hz2503 KRIT VARVT 1 HÖG 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 0 r/min / 0 Hz2504 KRIT VARVT 2 LÅG 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 0 r/min / 0 Hz2505 KRIT VARVT 2 HÖG 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 0 r/min / 0 Hz2506 KRIT VARVT 3 LÅG 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 0 r/min / 0 Hz2507 KRIT VARVT 3 HÖG 030000 rpm / 0...500 Hz 1 rpm / 0,1 Hz 0 r/min / 0 HzGrupp 26: Motorstyrning2601 FLÖDESOPTIMERING 01 1 0
Kod Namn Område Upplösning Förinställning Anv. S
Idrifttagning

ACS550 Användarhandledning 61
2602 FLÖDESBROMSNING 01 1 1 (PÅ)2603 IR-KOMPENSERING 0100V 1 502604 IR-KOMP OMRÅDE 0100% 1 502605 U/F FÖRHÅLLANDE 1 = linjärt, 2 = kvadratiskt 1 12606 MODULERINGS FREK 1,4,8 kHz - 4 kHz2607 MODUL FREK. REGL 0 = OFF, 1 = ON - 12608 EFTERSLÄPN. KOMP 0200% 1 0Grupp 29: Underhåll2901 BRYTP KYLFLÄKT 0,06553,5 kh 0,1 kh 20,0 kh2902 RÄKNARE KYLFLÄKT 0,06553,5 kh 0,1 kh 0,0 kh2903 BRYTP MEGAVARV 065535 Mrev 1 Mrev 32000 Mrev2904 RÄKNARE MEGAVARV 065535 Mrev 1 Mrev 0 Mrev2905 BRYTP DRIFTTID 0,06553,5 kh 0,1 kh 40,0 kh2906 RÄKNARE DRIFTTID 0,06553,5 kh 0,1 kh 0,0 kh2907 BRYTP MWH 0,06553,5 MWh 0,1 MWh 0,0 MWh2901 RÄKNARE MWH 0,06553,5 MWh 0,1 MWh 0,0 MWhGrupp 30: Felfunktioner3001 AI<MIN FUNKTION 03 1 03002 PANEL BORTFALL 13 1 13003 EXTERNT FEL 1 06, -1-6 1 03004 EXTERNT FEL 2 06, -1-6 1 03005 MOTOR ÖVERLAST 0 = EJ VALD, 1 = FEL, 2 = VARNING 1 1 (FEL)3006 MOTOR TERM TID 2569999 s 1 500 s 3007 MOTOR BEL KURVA 50150% 1 100%3008 NOLLVARV BEL 25150% 1 70%3009 BRYTPUNKT 1250 Hz 1 35 Hz3010 FASTLÅSN FUNK 02 1 0 (EJ VALD)3011 FASTLÅSN FREKV 0,550Hz 0,1Hz 20Hz3012 FASTLÅSN TID 10400s 1 s 20 s3013 LÅG LAST FUNK 0 = EJ VALD, 1 = FEL, 2 = VARNING - 0 (EJ VALD)3014 LÅG LAST TID 10400s 1 s 20 s3015 LÅG LAST KURVA 15 1 13017 JORDFEL 01 1 13018 KOMM MOD FELFUNK 03 1 03019 KOMM FEL TID 060,0 s 0,1 s 3,0 s 3021 AI1 FELNIVÅ 0100% 0,1% 0%3022 AI2 FELNIVÅ 0100% 0,1% 0%Grupp 31: Autom återställn3101 ANTAL FÖRSÖK 05 1 03102 FÖRSÖKSTID 1,0600,0 s 0,1 s 30 s 3103 FÖRDRÖJNING 0,0120,0 s 0,1 s 0 s 3104 ÖVERSTRÖM 0=från, 1=till 1 0 3105 ÖVERSPÄNNING 0=från, 1=till 1 0 3106 UNDERSPÄNNING 0=från, 1=till 1 0 3107 AI SIGNAL<MIN 0=från, 1=till 1 0
Kod Namn Område Upplösning Förinställning Anv. S
Idrifttagning

62 ACS550 Användarhandledning
3108 EXTERNT FEL 0=från, 1=till 1 0 Grupp 32: Övervakning3201 ÖVERV 1 PARAM 101199 1 1033202 ÖVERV 1 GR LÅG - - 03203 ÖVERV 1 GR HÖG - - 03204 ÖVERV 2 PARAM 101199 1 1033205 ÖVERV 2 GR LÅG - - 03206 ÖVERV 2 GR HÖG - - 03207 ÖVERVAK 3 PARAM 101199 1 1033208 ÖVERVAK 3 GR LÅG - - 03209 ÖVERVAK 3 GR HÖG - - 0Grupp 33: Information3301 PROGRAMVERSION 0000...FFFF hex 1 Mjukvaruversion3302 APPL PROGR VERS 0000...FFFF hex 1 03303 TEST DATUM yy.ww 1 03304 FRO DATA - - -Grupp 34: Processvariabler3401 SIGNAL 1 PARAM 100...199 1 1033402 SIGNAL 1 MIN - 1 -3403 SIGNAL 1 MAX - 1 -3404 UTDATA 1 DECIMAL 07 1 -3405 UTDATA 1 ENHET -128...127 1 .3406 UTDATA 1 MIN - 1 -3407 UTDATA 1 MAX - 1 -3408 SIGNAL 2 PARAM 100...199 1 1043409 SIGNAL 2 MIN - 1 -3410 SIGNAL 2 MAX - 1 -3411 UTDATA 2 DECIMAL 07 1 -3412 UTDATA 2 ENHET -128...127 1 .3413 UTDATA 2 MIN - 1 -3414 UTDATA 2 MAX - 1 -3415 SIGNAL 3 PARAM 100...199 1 1053416 SIGNAL 3 MIN - 1 -3417 SIGNAL 3 MAX - 1 -3418 UTDATA 3 DECIMAL 07 1 -3419 UTDATA 3 ENHET -128127 1 .3420 UTDATA 3 MIN - 1 -3421 UTDATA 3 MAX - 1 -Grupp 35: Motortemp mätning3501 TEMP MÄT METOD 06 1 03502 TEMP AI1/AI2 VAL 18 1 13503 TEMP LARMNIVÅ -10...200 °C / 0...5000 Ohm / 01 1 110 °C / 1500 Ohm / 03504 TEMP FELNIVÅ -10...200 °C / 0...5000 Ohm / 01 1 130 °C / 4000 Ohm / 0Grupp 36: Tidur funktion3601 VAL TID FUNK -67 1 0
Kod Namn Område Upplösning Förinställning Anv. S
Idrifttagning
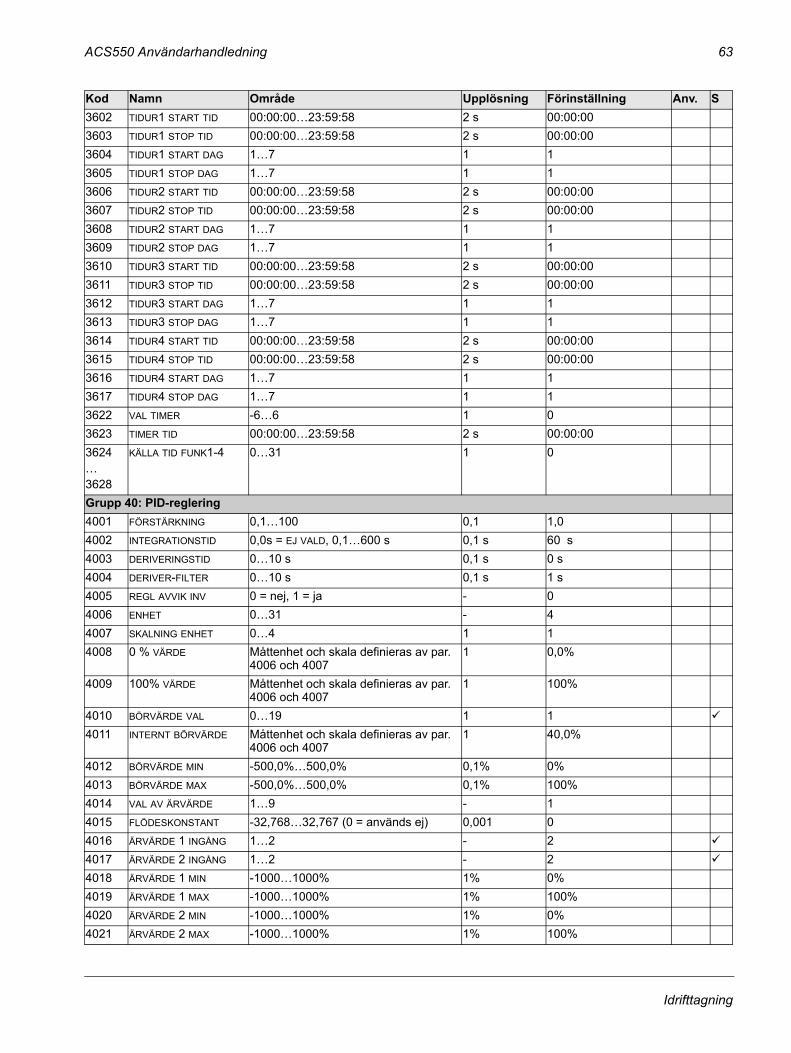
ACS550 Användarhandledning 63
3602 TIDUR1 START TID 00:00:0023:59:58 2 s 00:00:003603 TIDUR1 STOP TID 00:00:0023:59:58 2 s 00:00:003604 TIDUR1 START DAG 17 1 13605 TIDUR1 STOP DAG 17 1 13606 TIDUR2 START TID 00:00:0023:59:58 2 s 00:00:003607 TIDUR2 STOP TID 00:00:0023:59:58 2 s 00:00:003608 TIDUR2 START DAG 17 1 13609 TIDUR2 STOP DAG 17 1 13610 TIDUR3 START TID 00:00:0023:59:58 2 s 00:00:003611 TIDUR3 STOP TID 00:00:0023:59:58 2 s 00:00:003612 TIDUR3 START DAG 17 1 13613 TIDUR3 STOP DAG 17 1 13614 TIDUR4 START TID 00:00:0023:59:58 2 s 00:00:003615 TIDUR4 STOP TID 00:00:0023:59:58 2 s 00:00:003616 TIDUR4 START DAG 17 1 13617 TIDUR4 STOP DAG 17 1 13622 VAL TIMER -66 1 03623 TIMER TID 00:00:0023:59:58 2 s 00:00:0036243628
KÄLLA TID FUNK1-4 031 1 0
Grupp 40: PID-reglering4001 FÖRSTÄRKNING 0,1100 0,1 1,04002 INTEGRATIONSTID 0,0s = EJ VALD, 0,1600 s 0,1 s 60 s4003 DERIVERINGSTID 010 s 0,1 s 0 s 4004 DERIVER-FILTER 010 s 0,1 s 1 s 4005 REGL AVVIK INV 0 = nej, 1 = ja - 0 4006 ENHET 031 - 44007 SKALNING ENHET 04 1 14008 0 % VÄRDE Måttenhet och skala definieras av par.
4006 och 40071 0,0%
4009 100% VÄRDE Måttenhet och skala definieras av par. 4006 och 4007
1 100%
4010 BÖRVÄRDE VAL 019 1 1 !
4011 INTERNT BÖRVÄRDE Måttenhet och skala definieras av par. 4006 och 4007
1 40,0%
4012 BÖRVÄRDE MIN -500,0%500,0% 0,1% 0%4013 BÖRVÄRDE MAX -500,0%500,0% 0,1% 100%4014 VAL AV ÄRVÄRDE 19 - 14015 FLÖDESKONSTANT -32,76832,767 (0 = används ej) 0,001 04016 ÄRVÄRDE 1 INGÅNG 12 - 2 !
4017 ÄRVÄRDE 2 INGÅNG 12 - 2 !
4018 ÄRVÄRDE 1 MIN -10001000% 1% 0%4019 ÄRVÄRDE 1 MAX -10001000% 1% 100%4020 ÄRVÄRDE 2 MIN -10001000% 1% 0%4021 ÄRVÄRDE 2 MAX -10001000% 1% 100%
Kod Namn Område Upplösning Förinställning Anv. S
Idrifttagning

64 ACS550 Användarhandledning
4022 VAL VILOFUNKTION 07, -1-6 - 04023 GRÄNS VILOFUNK 07200 rpm / 0,0...120 Hz 1 rpm / 0,1 Hz 0 Hz4024 VILO FÖRDRÖJNING 0,03600 s 0,1 s 60 s4025 ÅTERSTARTS NIVÅ Måttenhet och skala definieras av par.
4006 och 40071 -
4026 ÅTER FÖRDRÖJNING 060 s 0,01 s 0,50 s 4027 VAL PID-REG 1-2 -611 1 0Grupp 41: PID-reglering (2)4101 FÖRSTÄRKNING 0,1100 0,1 1,04102 INTEGRATIONSTID 0,0s = EJ VALD, 0,1600 s 0,1 s 60 s4103 DERIVERINGSTID 010 s 0,1 s 0 s 4104 DERIVER-FILTER 010 s 0,1 s 1 s 4105 REGL AVVIK INV 0 = nej, 1 = ja - 0 4106 ENHET 031 - 44107 SKALNING ENHET 04 1 14108 0 % VÄRDE Måttenhet och skala definieras av par.
4106 och 41071 0,0%
4109 100 % VÄRDE Måttenhet och skala definieras av par. 4106 och 4107
1 100%
4110 BÖRVÄRDE VAL 019 1 1 !
4111 INTERNT BÖRVÄRDE Måttenhet och skala definieras av par. 4106 och 4107
1 40,0%
4112 BÖRVÄRDE MIN -500,0%500,0% 0,1% 0%4113 BÖRVÄRDE MAX -500,0%500,0% 0,1% 100%4114 VAL AV ÄRVÄRDE 19 - 14115 FLÖDESKONSTANT -32,76832,767 (0 = används ej) 0,001 04116 ÄRVÄRDE 1 INGÅNG 15 - 2 !
4117 ÄRVÄRDE 2 INGÅNG 15 - 2 !
4118 ÄRVÄRDE 1 MIN -10001000% 1% 0%4119 ÄRVÄRDE 1 MAX -10001000% 1% 100%4120 ÄRVÄRDE 2 MIN -10001000% 1% 0%4121 ÄRVÄRDE 2 MAX -10001000% 1% 100%4122 VAL VILOFUNKTION 07, -1-6 - 04123 GRÄNS VILOFUNK 07200 rpm / 0,0...120 Hz 1 rpm / 0,1 Hz 0 Hz4124 VILO FÖRDRÖJNING 0,03600 s 0,1 s 60 s4125 ÅTERSTARTS NIVÅ Måttenhet och skala definieras av par.
4106 och 4107- -
4126 ÅTER FÖRDRÖJNING 060 s 0,01 s 0,50 s Grupp 42: Extern / Trim PID4201 FÖRSTÄRKNING 0,1100 0,1 1,04202 INTEGRATIONSTID 0,0s = EJ VALD, 0,1600 s 0,1 s 60 s4203 DERIVERINGSTID 010 s 0,1 s 0 s 4204 DERIVER-FILTER 010 s 0,1 s 1 s 4205 REGL AVVIK INV 0 = nej, 1 = ja - 0 4206 ENHET 031 - 44207 SKALNING ENHET 04 1 1
Kod Namn Område Upplösning Förinställning Anv. S
Idrifttagning
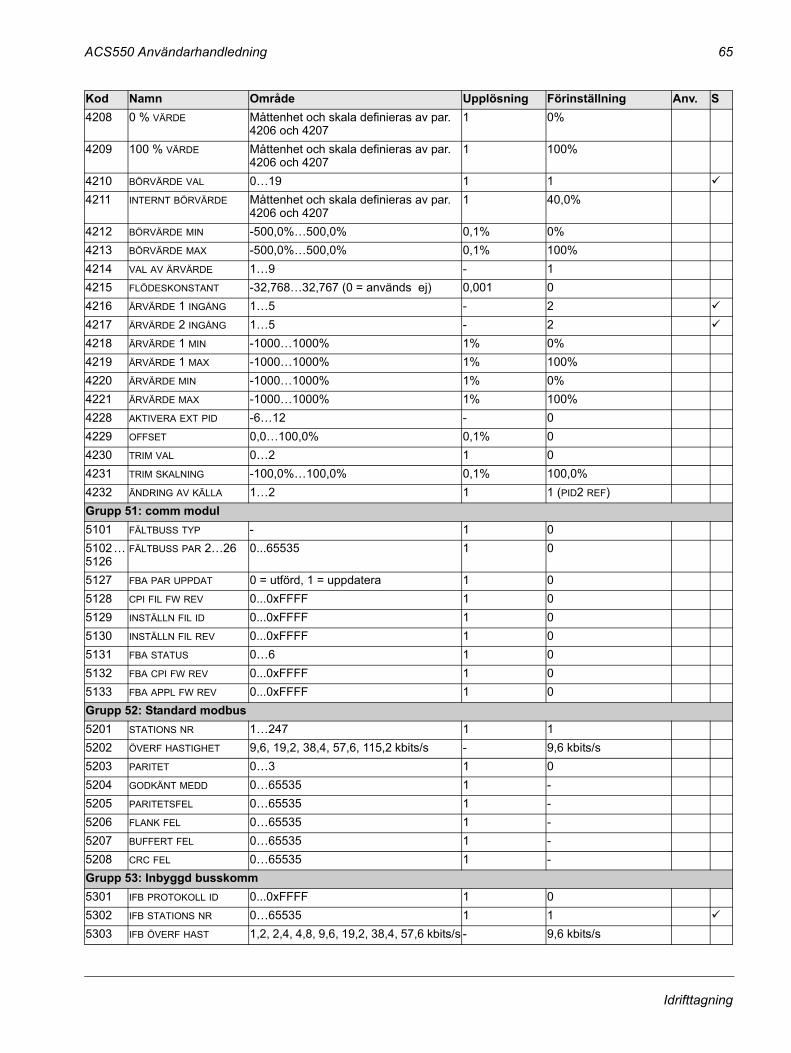
ACS550 Användarhandledning 65
4208 0 % VÄRDE Måttenhet och skala definieras av par. 4206 och 4207
1 0%
4209 100 % VÄRDE Måttenhet och skala definieras av par. 4206 och 4207
1 100%
4210 BÖRVÄRDE VAL 019 1 1 !
4211 INTERNT BÖRVÄRDE Måttenhet och skala definieras av par. 4206 och 4207
1 40,0%
4212 BÖRVÄRDE MIN -500,0%500,0% 0,1% 0%4213 BÖRVÄRDE MAX -500,0%500,0% 0,1% 100%4214 VAL AV ÄRVÄRDE 19 - 14215 FLÖDESKONSTANT -32,76832,767 (0 = används ej) 0,001 04216 ÄRVÄRDE 1 INGÅNG 15 - 2 !
4217 ÄRVÄRDE 2 INGÅNG 15 - 2 !
4218 ÄRVÄRDE 1 MIN -10001000% 1% 0%4219 ÄRVÄRDE 1 MAX -10001000% 1% 100%4220 ÄRVÄRDE MIN -10001000% 1% 0%4221 ÄRVÄRDE MAX -10001000% 1% 100%4228 AKTIVERA EXT PID -612 - 04229 OFFSET 0,0100,0% 0,1% 04230 TRIM VAL 02 1 04231 TRIM SKALNING -100,0%100,0% 0,1% 100,0%4232 ÄNDRING AV KÄLLA 12 1 1 (PID2 REF)Grupp 51: comm modul5101 FÄLTBUSS TYP - 1 05102 5126
FÄLTBUSS PAR 226 0...65535 1 0
5127 FBA PAR UPPDAT 0 = utförd, 1 = uppdatera 1 05128 CPI FIL FW REV 0...0xFFFF 1 05129 INSTÄLLN FIL ID 0...0xFFFF 1 05130 INSTÄLLN FIL REV 0...0xFFFF 1 05131 FBA STATUS 06 1 05132 FBA CPI FW REV 0...0xFFFF 1 05133 FBA APPL FW REV 0...0xFFFF 1 0Grupp 52: Standard modbus5201 STATIONS NR 1247 1 15202 ÖVERF HASTIGHET 9,6, 19,2, 38,4, 57,6, 115,2 kbits/s - 9,6 kbits/s5203 PARITET 03 1 05204 GODKÄNT MEDD 065535 1 -5205 PARITETSFEL 065535 1 -5206 FLANK FEL 065535 1 -5207 BUFFERT FEL 065535 1 -5208 CRC FEL 065535 1 -Grupp 53: Inbyggd busskomm5301 IFB PROTOKOLL ID 0...0xFFFF 1 05302 IFB STATIONS NR 065535 1 1 !
5303 IFB ÖVERF HAST 1,2, 2,4, 4,8, 9,6, 19,2, 38,4, 57,6 kbits/s - 9,6 kbits/s
Kod Namn Område Upplösning Förinställning Anv. S
Idrifttagning
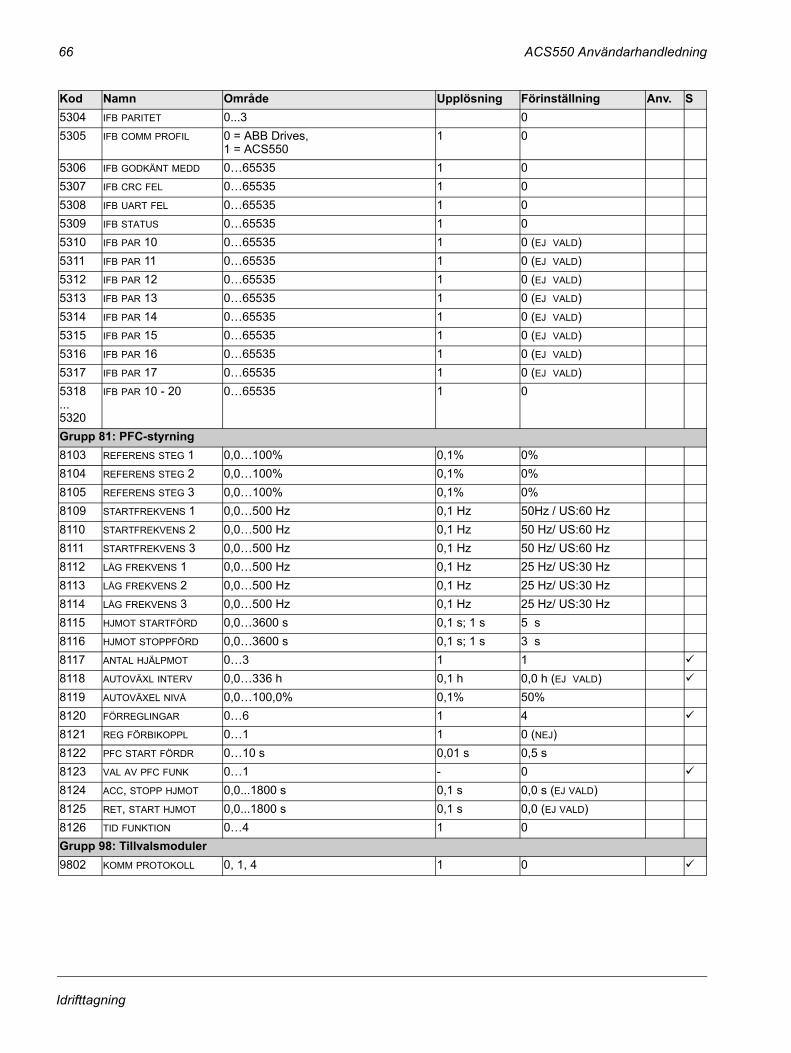
66 ACS550 Användarhandledning
5304 IFB PARITET 0...3 05305 IFB COMM PROFIL 0 = ABB Drives,
1 = ACS5501 0
5306 IFB GODKÄNT MEDD 065535 1 05307 IFB CRC FEL 065535 1 05308 IFB UART FEL 065535 1 05309 IFB STATUS 065535 1 05310 IFB PAR 10 065535 1 0 (EJ VALD)5311 IFB PAR 11 065535 1 0 (EJ VALD)5312 IFB PAR 12 065535 1 0 (EJ VALD)5313 IFB PAR 13 065535 1 0 (EJ VALD)5314 IFB PAR 14 065535 1 0 (EJ VALD)5315 IFB PAR 15 065535 1 0 (EJ VALD)5316 IFB PAR 16 065535 1 0 (EJ VALD)5317 IFB PAR 17 065535 1 0 (EJ VALD)5318 ... 5320
IFB PAR 10 - 20 065535 1 0
Grupp 81: PFC-styrning 8103 REFERENS STEG 1 0,0100% 0,1% 0%8104 REFERENS STEG 2 0,0100% 0,1% 0%8105 REFERENS STEG 3 0,0100% 0,1% 0%8109 STARTFREKVENS 1 0,0500 Hz 0,1 Hz 50Hz / US:60 Hz8110 STARTFREKVENS 2 0,0500 Hz 0,1 Hz 50 Hz/ US:60 Hz8111 STARTFREKVENS 3 0,0500 Hz 0,1 Hz 50 Hz/ US:60 Hz8112 LÅG FREKVENS 1 0,0500 Hz 0,1 Hz 25 Hz/ US:30 Hz8113 LÅG FREKVENS 2 0,0500 Hz 0,1 Hz 25 Hz/ US:30 Hz8114 LÅG FREKVENS 3 0,0500 Hz 0,1 Hz 25 Hz/ US:30 Hz8115 HJMOT STARTFÖRD 0,03600 s 0,1 s; 1 s 5 s8116 HJMOT STOPPFÖRD 0,03600 s 0,1 s; 1 s 3 s8117 ANTAL HJÄLPMOT 03 1 1 !
8118 AUTOVÄXL INTERV 0,0336 h 0,1 h 0,0 h (EJ VALD) !
8119 AUTOVÄXEL NIVÅ 0,0100,0% 0,1% 50%8120 FÖRREGLINGAR 06 1 4 !
8121 REG FÖRBIKOPPL 01 1 0 (NEJ)8122 PFC START FÖRDR 010 s 0,01 s 0,5 s 8123 VAL AV PFC FUNK 01 - 0 !
8124 ACC, STOPP HJMOT 0,0...1800 s 0,1 s 0,0 s (EJ VALD)8125 RET, START HJMOT 0,0...1800 s 0,1 s 0,0 (EJ VALD)8126 TID FUNKTION 04 1 0Grupp 98: Tillvalsmoduler9802 KOMM PROTOKOLL 0, 1, 4 1 0 !
Kod Namn Område Upplösning Förinställning Anv. S
Idrifttagning
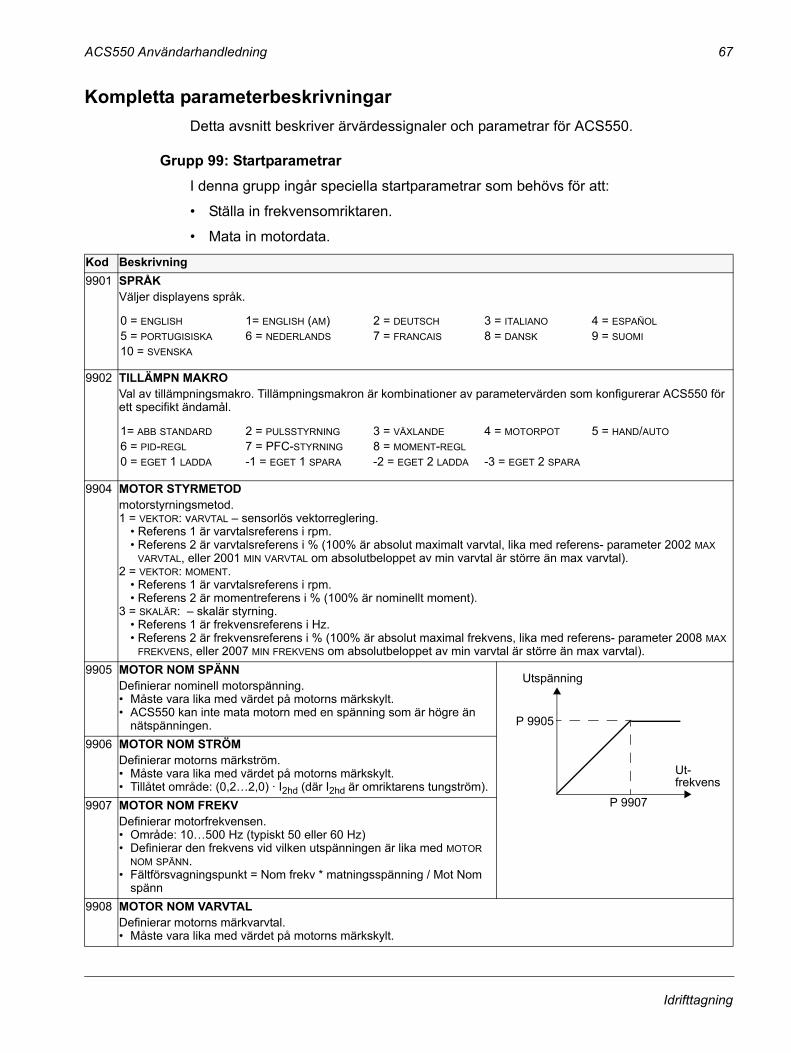
ACS550 Användarhandledning 67
Kompletta parameterbeskrivningarDetta avsnitt beskriver ärvärdessignaler och parametrar för ACS550.
Grupp 99: StartparametrarI denna grupp ingår speciella startparametrar som behövs för att:
Ställa in frekvensomriktaren.
Mata in motordata.Kod Beskrivning9901 SPRÅK
Väljer displayens språk.
9902 TILLÄMPN MAKRO Val av tillämpningsmakro. Tillämpningsmakron är kombinationer av parametervärden som konfigurerar ACS550 för ett specifikt ändamål.
9904 MOTOR STYRMETODmotorstyrningsmetod.1 = VEKTOR: vARVTAL sensorlös vektorreglering.
Referens 1 är varvtalsreferens i rpm. Referens 2 är varvtalsreferens i % (100% är absolut maximalt varvtal, lika med referens- parameter 2002 MAX
VARVTAL, eller 2001 MIN VARVTAL om absolutbeloppet av min varvtal är större än max varvtal). 2 = VEKTOR: MOMENT.
Referens 1 är varvtalsreferens i rpm. Referens 2 är momentreferens i % (100% är nominellt moment).
3 = SKALÄR: skalär styrning. Referens 1 är frekvensreferens i Hz. Referens 2 är frekvensreferens i % (100% är absolut maximal frekvens, lika med referens- parameter 2008 MAX
FREKVENS, eller 2007 MIN FREKVENS om absolutbeloppet av min varvtal är större än max varvtal).9905 MOTOR NOM SPÄNN
Definierar nominell motorspänning. Måste vara lika med värdet på motorns märkskylt. ACS550 kan inte mata motorn med en spänning som är högre än
nätspänningen.9906 MOTOR NOM STRÖM
Definierar motorns märkström. Måste vara lika med värdet på motorns märkskylt. Tillåtet område: (0,22,0) · I2hd (där I2hd är omriktarens tungström).
9907 MOTOR NOM FREKVDefinierar motorfrekvensen. Område: 10500 Hz (typiskt 50 eller 60 Hz) Definierar den frekvens vid vilken utspänningen är lika med MOTOR
NOM SPÄNN. Fältförsvagningspunkt = Nom frekv * matningsspänning / Mot Nom
spänn9908 MOTOR NOM VARVTAL
Definierar motorns märkvarvtal. Måste vara lika med värdet på motorns märkskylt.
0 = ENGLISH 1= ENGLISH (AM) 2 = DEUTSCH 3 = ITALIANO 4 = ESPAÑOL5 = PORTUGISISKA 6 = NEDERLANDS 7 = FRANCAIS 8 = DANSK 9 = SUOMI10 = SVENSKA
1= ABB STANDARD 2 = PULSSTYRNING 3 = VÄXLANDE 4 = MOTORPOT 5 = HAND/AUTO6 = PID-REGL 7 = PFC-STYRNING 8 = MOMENT-REGL0 = EGET 1 LADDA -1 = EGET 1 SPARA -2 = EGET 2 LADDA -3 = EGET 2 SPARA
Utspänning
Ut-
P 9907frekvens
P 9905
Idrifttagning

68 ACS550 Användarhandledning
9909 MOTOR NOM EFFEKTDefinierar motorns märkeffekt. Måste vara lika med värdet på motorns märkskylt.
9910 MOTOR IDENTIFIERDenna parameter styr motorns självkalibreringsprocess, vilken benämns "motoridentifieringskörning". Under denna process matar frekvensomriktaren motorn i syfte att identifera dess egenskaper. Därefter optimerar den regleringen genom att skapa en motormodell. Denna motormodell är särskilt effektiv när: Arbetspunkten ligger nära nollvarvtal. Driften kräver ett vridmomentområde som ligger ovanför motorns
nominella vridmoment, över ett brett varvtalsområde och utan någon uppmätt varvtalsåterkoppling, dvs utan pulsgivare.
Om ingen motoridentifieringskörning genomförs kommer frekvensomriktaren att använda en mindre detaljerad motormodell som skapas när drivsystemet körs första gången. Denna "Första start"-modell uppdateras automatiskt* efter varje förändring av motorparametrar. För att uppdatera modellen magnetiserar frekvensomriktaren motorn under 10 till 15 sekunder vid nollvarvtal.*För att skapa en "Första start"-modell fordras att antingen 9904 = 1 (
VARVTAL), eller 9904 = 3 (SKALÄR ) och 2101 = 3 (FLYGANDE) eller 5 (FLYG+MFÖRST).
Obs: Motormodeller arbetar med interna parametrar och användardefinierade motorparametrar. Frekvensomriktaren ändrar inte några användardefinierade parametrar då den skapar modellen.
0 = AV Deaktiverar processen motoridentifieringskörning. (Detta deaktiverar inte användningen av motormodellen.)
1 = PÅ Aktiverar en motoridentifieringskörning vid nästa startkommando. Efter avslutad identifieringskörning ändras värdet automatiskt till 0.
För att genomföra en identifieringskörning:1. Koppla bort den drivna utrustningen från
motorn (eller reducera på annat sätt lasten till nära noll).
2. Kontrollera att det är säkert att köra motorn: Identifieringskörningen låter motorn
rotera i riktning fram - verifiera att rotation framåt inte medför risker.
Identifieringskörningen låter motorn rotera vid 5080% av sitt märkvarvtal verifiera att drift vid detta varvtal inte medför risker.
3. Kontrollera följande parametrar (om de har förändrats från fabriksinställningarna): 2001 MIN VARVTAL < 0 2002 MAX VARVTAL > 80% av motorns
märkvarvtal. 2003 MAX STRÖM > 100% av I2hd-värdet. Max moment (parametrarna 2014, 2017
och/eller 2018) > 50%.4. Vid manöverpanelen, välj:
Välj parametrar Välj Grupp 99 Välj Parameter 9910 Ange värdet 1 och tryck på Enter
Displayen visar en varning. Tryck på START Displayen visar hur
mycket av ID-körningen som har utförts.Obs! Om du trycker på STOP, eller tar bort
driftförreglingssignalen stoppas ID-körningen. I så fall måste du upprepa ID-körningen för att skapa motormodellen.
Idrifttagning
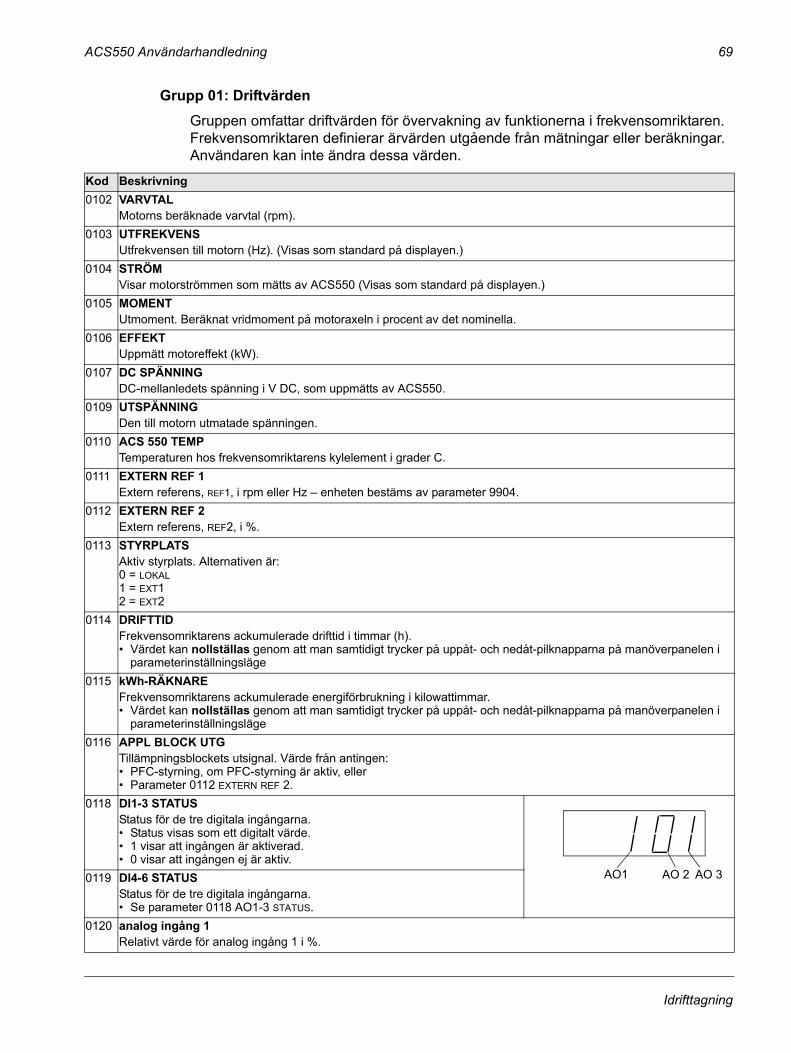
ACS550 Användarhandledning 69
Grupp 01: DriftvärdenGruppen omfattar driftvärden för övervakning av funktionerna i frekvensomriktaren. Frekvensomriktaren definierar ärvärden utgående från mätningar eller beräkningar. Användaren kan inte ändra dessa värden.
Kod Beskrivning0102 VARVTAL
Motorns beräknade varvtal (rpm).0103 UTFREKVENS
Utfrekvensen till motorn (Hz). (Visas som standard på displayen.)0104 STRÖM
Visar motorströmmen som mätts av ACS550 (Visas som standard på displayen.)0105 MOMENT
Utmoment. Beräknat vridmoment på motoraxeln i procent av det nominella.0106 EFFEKT
Uppmätt motoreffekt (kW). 0107 DC SPÄNNING
DC-mellanledets spänning i V DC, som uppmätts av ACS550.0109 UTSPÄNNING
Den till motorn utmatade spänningen.0110 ACS 550 TEMP
Temperaturen hos frekvensomriktarens kylelement i grader C.0111 EXTERN REF 1
Extern referens, REF1, i rpm eller Hz enheten bestäms av parameter 9904.0112 EXTERN REF 2
Extern referens, REF2, i %.0113 STYRPLATS
Aktiv styrplats. Alternativen är: 0 = LOKAL1 = EXT12 = EXT2
0114 DRIFTTIDFrekvensomriktarens ackumulerade drifttid i timmar (h). Värdet kan nollställas genom att man samtidigt trycker på uppåt- och nedåt-pilknapparna på manöverpanelen i
parameterinställningsläge0115 kWh-RÄKNARE
Frekvensomriktarens ackumulerade energiförbrukning i kilowattimmar. Värdet kan nollställas genom att man samtidigt trycker på uppåt- och nedåt-pilknapparna på manöverpanelen i
parameterinställningsläge0116 APPL BLOCK UTG
Tillämpningsblockets utsignal. Värde från antingen: PFC-styrning, om PFC-styrning är aktiv, eller Parameter 0112 EXTERN REF 2.
0118 DI1-3 STATUSStatus för de tre digitala ingångarna. Status visas som ett digitalt värde. 1 visar att ingången är aktiverad. 0 visar att ingången ej är aktiv.
0119 DI4-6 STATUSStatus för de tre digitala ingångarna. Se parameter 0118 AO1-3 STATUS.
0120 analog ingång 1Relativt värde för analog ingång 1 i %.
AO1 AO 2 AO 3
Idrifttagning
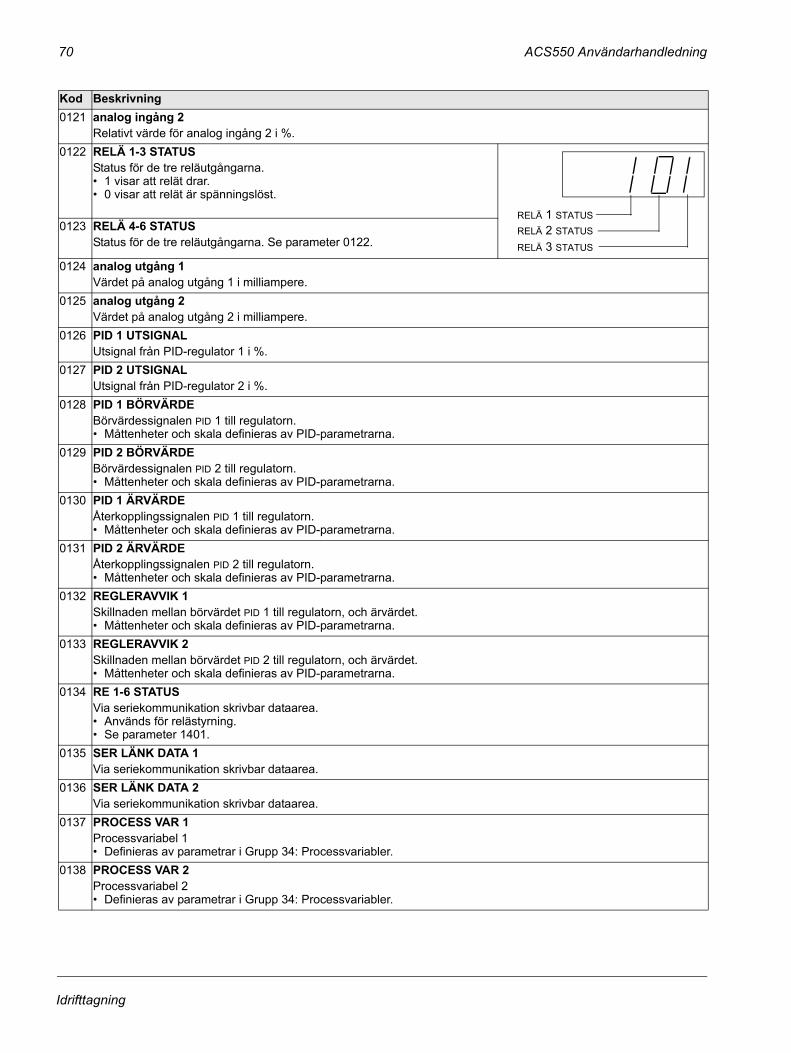
70 ACS550 Användarhandledning
0121 analog ingång 2Relativt värde för analog ingång 2 i %.
0122 RELÄ 1-3 STATUSStatus för de tre reläutgångarna. 1 visar att relät drar. 0 visar att relät är spänningslöst.
0123 RELÄ 4-6 STATUSStatus för de tre reläutgångarna. Se parameter 0122.
0124 analog utgång 1Värdet på analog utgång 1 i milliampere.
0125 analog utgång 2Värdet på analog utgång 2 i milliampere.
0126 PID 1 UTSIGNALUtsignal från PID-regulator 1 i %.
0127 PID 2 UTSIGNALUtsignal från PID-regulator 2 i %.
0128 PID 1 BÖRVÄRDEBörvärdessignalen PID 1 till regulatorn. Måttenheter och skala definieras av PID-parametrarna.
0129 PID 2 BÖRVÄRDEBörvärdessignalen PID 2 till regulatorn. Måttenheter och skala definieras av PID-parametrarna.
0130 PID 1 ÄRVÄRDEÅterkopplingssignalen PID 1 till regulatorn. Måttenheter och skala definieras av PID-parametrarna.
0131 PID 2 ÄRVÄRDEÅterkopplingssignalen PID 2 till regulatorn. Måttenheter och skala definieras av PID-parametrarna.
0132 REGLERAVVIK 1Skillnaden mellan börvärdet PID 1 till regulatorn, och ärvärdet. Måttenheter och skala definieras av PID-parametrarna.
0133 REGLERAVVIK 2Skillnaden mellan börvärdet PID 2 till regulatorn, och ärvärdet. Måttenheter och skala definieras av PID-parametrarna.
0134 RE 1-6 STATUSVia seriekommunikation skrivbar dataarea. Används för relästyrning. Se parameter 1401.
0135 SER LÄNK DATA 1Via seriekommunikation skrivbar dataarea.
0136 SER LÄNK DATA 2 Via seriekommunikation skrivbar dataarea.
0137 PROCESS VAR 1Processvariabel 1 Definieras av parametrar i Grupp 34: Processvariabler.
0138 PROCESS VAR 2Processvariabel 2 Definieras av parametrar i Grupp 34: Processvariabler.
Kod Beskrivning
RELÄ 1 STATUSRELÄ 2 STATUS
RELÄ 3 STATUS
Idrifttagning
ACS550 Användarhandledning 71
0139 PROCESS VAR 3Processvariabel 3 Definieras av parametrar i Grupp 34: Processvariabler.
0140 DRIFTTIDFrekvensomriktarens ackumulerade drifttid i tusental timmar (kh).
0141 MWH RÄKNAREFrekvensomriktarens ackumulerade energiförbrukning i megawattimmar. Kan inte återställas.
0142 VARVTALSRÄKNAREMotorns ackumulerade antal varv, i miljoner varv.
0143 DRIFTTID HÖGFrekvensomriktarens ackumulerade tid med spänning applicerad, i dagar.
0144 DRIFTTID LÅGFrekvensomriktarens ackumulerade tid med spänning applicerad, i 2-sekundersperioder (30 perioder = 60 sekunder).
0145 MOTORTEMPERATURMotortemperatur i grader Celsius / PTC-resistans i Ohm. Aktuellt endast om motortemperaturgivare är installerad. Se parameter 3501.
Kod Beskrivning
Idrifttagning

72 ACS550 Användarhandledning
Grupp 03: FB FältbussövervakningGruppen övervakar fältbusskommunikationen.
Kod Beskrivning0301 HUVUDSTYRORD 1
Endast läsbar kopia av Fältbusstyrord 1. Fältbusstyrord är det primära mediet
för att styra frekvensomriktaren från en fältbusstyrenhet. Kommandot består av 2 styrord. Bitkodade instruktioner i styrorden låter frekvensomriktaren växla status.
För att styra frekvensomriktaren, med hjälp av styrord måste en extern styrplats (EXT1 eller EXT2) vara aktiv och satt till COMM. (Se parametrarna 1001 och 1002.)
Manöverpanelen visar ordet i hexadecimalt format. Till exempel, bit 0 med bara nollor och en etta visas som 0001. Bit 15 med bara nollor och en etta visas som 8000.
0302 HUVUDSTYRORD 2Endast läsbar kopia av Fältbusstyrord 2. Se parameter 0301.
0303 HUVUDSTATUSORD 1Endast läsbar kopia av Statusord 1. Frekvensomriktaren skickar
statusinformation till fältbusstyrenheten. Status består av 2 statusord.
Manöverpanelen visar ordet i hexadecimalt format. Till exempel, bit 0 med tre nollor och en etta visas som 0001. Bit 15 med bara nollor och en etta visas som 8000.
0304 HUVUDSTATUSORD 2Endast läsbar kopia av Statusord 2. Se parameter 0303.
Bit # 0301, HUVUDSTYRORD 1 0302, HUVUDSTYRORD 20 STOPP Reserverad1 START Reserverad2 BACK Reserverad3 LOKAL Reserverad4 RESET Reserverad5 EXT2 Reserverad6 START FÖRREGL Reserverad7 STOPP_RAMP Reserverad8 STOPP_NSTOPP Reserverad9 STOPP_UTRULLN Reserverad10 RAMP_2 Reserverad11 RAMPGEN_UTG_0 REF_CONST12 RAMPGEN_FRYST REF_AVE13 RAMPGEN_ING_0 LINK_ON14 RREQ_LOCALLOC REQ_STARTFÖRR15 MOMENTGRÄNS2 OFF_INTERLOCK
Bit # 0303, STS CMD ORD 1 0304, HUVUDSTATUSORD 20 DRIFTKLAR LARM1 AKTIVERAD REQ_MAINT2 STARTAD DIRLOCK3 DRIFT LOCALLOCK4 NOLLVARV CTL_MODE5 ACCELERERAR Reserverad6 RETARDERAR Reserverad7 BÖRV UPPNÅTT Reserverad8 GRÄNS Reserverad9 ÖVERVAKNING Reserverad10 INV_BÖRVÄRDE REQ_CTL11 INV_ÄRVÄRDE REQ_REF112 PANEL LOKAL REQ_REF213 FB LOKAL REQ_REF2EXT14 EXT2 AKTIV ACK_STARTINH15 FEL ACK_OFF_ILCK
Idrifttagning

ACS550 Användarhandledning 73
0305 FELORD 1Endast läsbar kopia av Felord 1. När ett fel är aktivt sätts motsvarande
bit för aktivt fel i felorden. Varje fel har en specifikt tilldelad bit i
ett felord. Se "Fellista" på sid 163 för en
beskrivning av felen. Manöverpanelen visar ordet i
hexadecimalt format. Till exempel, bit 0 med tre nollor och en etta visas som 0001. Bit 15 med bara nollor och en etta visas som 8000.
0306 FELORD 2Endast läsbar kopia av Felord 2. Se parameter 0305.
0307 FELORD 3Endast läsbar kopia av Felord 3. Se parameter 0305.
0308 LARMORD 1 När ett larm är aktivt sätts
motsvarande bit för aktiv varning i larmorden.
Varje varning har en specifikt tilldelad bit inom larmorden.
Bi8tarna förblir satta tills hela larmordet återställs. (Återställning sker genom att man skriver noll till ordet.)
Manöverpanelen visar ordet i hexadecimalt format. Till exempel, bit 0 med tre nollor och en etta visas som 0001. Bit 15 med bara nollor och en etta visas som 8000.
0309 LARMORD 2Se parameter 0308.
Bit # 0305, FELORD 1 0306, FELORD 2 0307, FELORD 30 ÖVERSTRÖM LÅG LAST INTERN FÄLTBUS 1 1 ÖVERSPÄNNING INTERNT
TERMISTOR FEL INTERN FÄLTBUS 2
2 OMRIKTARE ÖVERTEMP
INT FIBEROPTISKT FEL
INTERN FÄLTBUS 3
3 KORTSLUTNING INT SPÄNN FÖRSÖRJ FEL
Reserverad
4 ÖVERLAST UTGÅNG
STRÖMMÄTNING Reserverad
5 UNDERSPÄNNING FASFEL INKOM MATNING
Reserverad
6 ANALOG INGÅNG 1 FEL
Reserverad Reserverad
7 ANALOG INGÅNG 2 FEL
ÖVERVARV Reserverad
8 MOTOR ÖVERLAST STRÖMRUSN DC Reserverad 9 PANELBORTFALL FREKVENSOMR NR
FEL Reserverad
10 ID KÖRNINGSFEL KONFIGURATIONSF Reserverad
* Gäller endast HVAC-drivsystem
Bit # 0308, LARMORD 1 0309, LARMORD 20 Reserverad Reserverad / STOPPKNAPP*1 PID VILOLÄGE 2 MOTOR IDENTIFIER 3 LÅST Reserverad4 I/O KOMMUNIKATIONSFEL 5 ANALOG INGÅNG 1 FEL 6 ANALOG INGÅNG 2 FEL 7 PANELBORTFALL 8 Reserverad9 MOTOR ÖVERLAST 10 LÅG LAST 11 MOT FASTLÅST 12 AUTOMATISKÅTERSTART 13 AUTOVÄXLING 14 PFC LÅS 15 reserverad BP BORTFALL
Idrifttagning

74 ACS550 Användarhandledning
Grupp 04: FelhistorikI denna grupp lagras näraliggande historik för fel som rapporterats av frekvensomriktaren.
Kod Beskrivning0401 SENASTE FEL
0 = Rensa felhistorik (på panelen = INGEN REGISTRERING).n = Felkod för senast registrerat fel.
0402 SENAST FEL DATUMDatum då det senaste felet inträffade. Antingen som: Ett datum om realtidsklockan fungerar korrekt. Antalet dagar efter spänningstillslag om realtidsklockan inte används eller inte har ställts in.
0403 SENAST FEL TIDTiden då det senaste felet inträffade. Antingen som: Realtid, i format hh:mm:ss om realtidsklockan fungerar korrekt. Tiden som gått sedan spänningstillslag (perioder kortare än hela dagar som rapporteras i 0402), i format hh:mm:ss
om realtidsklockan inte används eller inte har ställts in.0404 VARVTAL VID FEL
Motorvarvtalet (rpm) vid tiden då det senaste felet inträffade.0405 FREKVENS VID FEL
Frekvensen (Hz) vid tiden då det senaste felet inträffade.0406 SPÄNNING VID FEL
DC-mellanledets spänning (V) vid tiden då det senaste felet inträffade.0407 STRÖM VID FEL
Motorströmmen (A) vid tiden då det senaste felet inträffade.0408 MOMENT VID FEL
Motormomentet (%) vid tiden då det senaste felet inträffade.0409 STATUS VID FEL
Frekvensomriktarens status (hexadecimalt kodord) vid tiden då det senaste felet inträffade.0410 DI 1-3 VID FEL
Status för digitala ingångar 13 vid tiden då det senaste felet inträffade.0411 DI 4-6 VID FEL
Status för digitala ingångar 46 vid tiden då det senaste felet inträffade.0412 FÖREGÅENDE FEL 1
Felkod för näst senaste fel. Endast läsbar.0413 FÖREGÅENDE FEL 2
Felkod för tredje senaste fel. Endast läsbar.
Idrifttagning

ACS550 Användarhandledning 75
Grupp 10: StyringångarDenna grupp:
Definierar externa källor (EXT1, och EXT2) för kommandon som tillåter start, stopp och rotationsriktningsväxling.
Låser rotationsriktningen eller tillåter växling.
För att välja mellan de båda externa styrplatserna, använd nästa grupp (parameter 1102).
Kod Beskrivning1001 EXT1 STYRNING
Definierar Extern styrplats 1 (EXT1) konfigurering av start-, stopp- och rotationsriktningsstyrning.0 = EJ VALD Ingen extern kommandokälla för start, stopp och rotationsriktning.1 = AO1 Tvåtråds start/stop.
Start/stopp via digital ingång AO1 (AO1 aktiverad = Start; AO1 deaktiverad = Stopp). Parameter 1003 definierar riktningen. Val av 1003 = 3 (begäran) är ekvivalent med 1003 = 1 (fram).
2 = AO1, 2 - Tvåtråds start/stopp. riktning. Start/stopp via digital ingång AO1 (AO1 aktiverad = Start; AO1 deaktiverad = Stopp). Rotationsriktningsstyrning (kräver att parameter 1003 = 3 (vald)) via digital ingång AO2
(AO2 aktiverad = Back; deaktiverad = Fram). 3 = AO1P, 2P Tre-tråds start/stopp.
Start/stopp-kommandon genom tryckning på återfjädrande tryckknappar (P står för "puls"). Start med en normalt öppen tryckknapp, ansluten till digital ingång AO1. För att starta frekvensomriktaren måste
digital ingång AO2 aktiveras före pulsen i AO1. Om flera startknappar används, parallellkoppla dem. Stopp med en normalt sluten tryckknapp, ansluten till digital ingång AO2. Om flera stoppknappar används, seriekoppla dem. Parameter 1003 definierar riktningen. Val av 1003 = 3 (BEGÄRAN) är ekvivalent med 1003 = 1 (FRAM).
4 = AO1P, 2P, 3 Tretråds start/stopp- och rotationsriktning. Start/stopp-kommandon genom tryckning på återfjädrande tryckknappar, så som beskrivs för AO1P, 2P. Rotationsriktningsstyrning (kräver att parameter 1003 = 3 (VALD) via digital ingång AO3
(AO3 aktiverad = Back; deaktiverad = Fram). 5 = AO1P, 2P, 3P Start fram, Start back och Stopp.
Start- och rotationsriktningskommandon ges samtidigt med två återfjädrande tryckknappar (P står för "puls"). Kommandot Start fram ges via en normalt öppen tryckknapp, ansluten till digital ingång AO1. För att starta
frekvensomriktaren måste digital ingång AO3 vatra aktiverad före puldsen i AO1. Kommandot Start back ges via en normalt öppen tryckknapp, ansluten till digital ingång AO2. För att starta
frekvensomriktaren måste digital ingång AO3 vara aktiverad under pulsen i AO2. Om flera startknappar används, parallellkoppla dem. Stopp med en normalt sluten tryckknapp, ansluten till digital ingång AO3. Om flera stoppknappar används, seriekoppla dem. Kräver att parameter 1003 = 3 (VALD).
6 = AO6 Tvåtråds start/stop. Start/stopp via digital ingång AO6 (AO6 aktiverad = Start; AO6 deaktiverad = Stopp). Parameter 1003 definierar riktningen. Val av 1003 = 3 (BEGÄRAN) är ekvivalent med 1003 = 1 (FRAM).
7 = AO6, 5 - Tvåtråds start/stopp/riktning. Start/stopp via digital ingång AO6 (AO6 aktiverad = Start; AO6 deaktiverad = Stopp). Rotationsriktningsstyrning (kräver att parameter 1003 = 3 (VALD)) via digital ingång AO5.
(AO5 aktiverad = Back; deaktiverad = Fram). 8 = PANEL Manöverpanel.
Start/stopp och rotationsriktningsstyrning via manöverpanelen när EXT1 är aktiv. Rotationsriktningsstyrning kräver att parameter 1003 = 3 (VALD).
9 = AO1F, 2R Start/stopp/rotationsriktningsstyrning via kombinationer av AO1 och AO2. Start fram = AO1 aktiverad och AO2 deaktiverad. Start back = AO1 deaktiverad och AO2 aktiverad. Stopp = både AO1 och AO2 slutna, eller båda deaktiverade. Kräver att parameter 1003 = 3 (VALD).
10 = COMM Tilldelar fältbusstyrordet som källa för start/stopp och rotationsriktningsstyrning. Bitarna 0,1, 2 i Styrord 1 (parameter 0301) aktiverar start/stopp- och rotationsriktningskommandon. Se fältbussens användarhandbok för närmare instruktioner.
Idrifttagning

76 ACS550 Användarhandledning
11 = TIDUR FUNKTION 1. Tilldelar Start/stopp-styrning till tid funk 1 (tid funk aktiverad = START; Tid funk deaktiverad = STOPP). Se Grupp 36, Tidur funktion.
1214 = TID FUNK 2... 4 Tilldelar Start/stopp-styrning till tid funk 24. Se Tid funk 1 ovan.1002 EXT2 STYRNING
Definierar Extern styrplats 2 (EXT2) konfigurering av start-, stopp- och rotationsriktningsstyrning. Se parameter 1001 EXT1 STYRNING ovan.
1003 ROTATIONSRIKTNDefinierar styrningen av motorns rotationsriktning.1 = FRAM Rotation endast framåt.2 = BACK Rotation endast bakåt.3 = VALD Rotationsriktningen kan växlas på kommando.
Kod Beskrivning
Idrifttagning
ACS550 Användarhandledning 77
Grupp 11: Val av referensDenna grupp definierar:
Hur frekvensomriktaren väljer mellan styrkällor.
Egenskaper och källor för REF1 och REF2.Kod Beskrivning1101 REF FRÅN PANEL
Val av referens vid lokal styrning.1 = REF1 (Hz/rpm) Referenstypen beror på parameter 9904 MOTOR STYRMETOD.
Varvtalsreferens (rpm) om 9904 = 1 ( VARVTAL) eller 2 ( MOMENT). Frekvensreferens (Hz) om 9904 = 3 (SKALÄR ).
2 = REF2 (%)1102 VAL EXT1/EXT2
Definierar källan för val mellan de båda externa styrplatserna EXT1 eller EXT2. Definierar alltså källan för signalerna start/stopp/rotationsriktning samt referenssignaler.0 = EXT1 Val av extern styrplats 1 (EXT1).
Se parameter 1001 EXT1 STYRNING för EXT1 definitionerna av start/stopp/rotr. Se parameter 1103 VAL EXT REF1 för EXT1 referensdefinitioner.
1 = AO1 Tilldelar styrningen till EXT1 eller EXT2 beroende på status hos AO1 (AO1 aktiverad = EXT2; AO1 deaktiverad = EXT1).
2...6 = DI2...DI6 Tilldelar styrningen till EXT1 eller EXT2 beroende på status hos vald digital ingång. Se DI1 ovan.7 = EXT2 Väljer extern styrplats 2 (EXT2).
Se parameter 1002 EXT2 STYRNING för EXT2-definitionerna av start/stopp/rotr. Se parameter 1106 VAL EXR REF2 för EXT2-referensdefinitioner.
8 = COMM Tilldelar styrningen av frekvensomriktaren till extern styrplats EXT1 eller EXT2 utgående från fältbussens styrord. Bit 5 i Styrord 1 (parameter 0301) definierar aktiv extern styrplats (EXT1 eller EXT2). Se fältbussens användarhandbok för närmare instruktioner.
9 = TID FUNK 1 Tilldelar styrningen till EXT1 eller EXT2 beroende på status hos Tid funk 1 (tid funk aktiverad = EXT2; Tid funk deaktiverad = EXT1). Se Grupp 36, Tidur funktion.
1012 = TID FUNK 2... 4 Tilldelar styrningen till EXT1 eller EXT2 beroende på status hos tidsfunktionen. Se Tid funk 1 ovan.
-1 = DI1 (INV) Tilldelar styrningen till EXT1 eller EXT2 beroende på status hos DI1 (DI1 aktiverad = EXT1; DI1 deaktiverad = EXT2).
-2...-6 = DI2(INV)...DI6(INV) Tilldelar styrningen till EXT1 eller EXT2 beroende på status hos vald digital ingång. Se DI1(INV) ovan.
Idrifttagning

78 ACS550 Användarhandledning
1103 VAL EXT REF1Val av signalkälla för extern referens: REF1.0 = PANEL Definierar panelenheten som referenskälla.1 = AI1 Definierar analog ingång 1 (AI1) som referenskälla.2 = AI2 Definierar analog ingång 2 (AI2) som referenskälla.3 = AI1/JOYST Definierar analog ingång 1 (AI1),
konfigurerad för joystickdrift, som referenskälla. Min insignal styr drivsystemet med maximal referens i
backriktningen. Definition av minimum med parameter 1104.
Max insignal styr drivsystemet med maximal referens i framriktningen. Definition av maximum med parameter 1105.
Kräver att parameter 1003=3 (vald).Varning! Eftersom den lägre delen av referensområdet
medför full drift i backriktning, använd inte 0 V som nedre gräns för referensområdet. Detta skulle innebära att om styrsignalen går förlorad (en 0V-ingång) blir resultatet full drift i backriktning. Använd i stället följande inställning, så att bortfall av analoga ingångar genererar ett fel som stoppar frekvensomriktaren: Sätt parameter 1301 MINIMUM AI1 (1304 MINIMUM AI 2) till 20% (2 V eller 4 mA). Sätt parameter 3021 AI1 FELNIVÅ till ett värde på 5% eller högre. Sätt parameter 3001 AI<MIN FUNKTION. till 1 (FEL).
4 = AI2/JOYST Definierar analog ingång 2 (AI2), konfigurerad för joystickdrift, som referenskälla. Se ovan (AI2/JOYST) beskrivning
5 = DI3U,4D(R) Definierar digitala ingångar som hastighetsreferenskälla (motorpotentiometerstyrning) Digital ingång DI3 ökar hastigheten (U står för "up"). Digital ingång DI4 minskar hastigheten (D står för "down"). Ett stoppkommando återställer värdet till noll (R står för "reset"). Parameter- 2205 ACCEL TID 2 styr referenssignalens förändringshastighet.
6 = DI3U,4D Som ovan (DI3U,4D(R)), utom att: Ett stoppkommando återställer inte värdet till noll. Referensvärdet lagras. När frekvensomriktaren återstartas accelererar motorn (med vald acceleration) till lagrat referensvärde.
7 = DI5U,6D Som ovan (DI3U,4D), utom att DI5 och DI6 är de digitala ingångar som används.8 = COMM Definierar fältbussen som referenskälla.9 = COMM+AI1 Definierar en kombination av fältbuss och analog ingång 1 (AI1) som referenskälla. Se Analoga
ingångar, referenskorrigering nedan.10 = COMM*AI1 Definierar en kombination av fältbuss och analog ingång 1 (AI1) som referenskälla. Se Analoga
ingångar, referenskorrigering nedan.11 = DI3U, 4D(RNC) Samma som DI3U,4D(R) ovan, utom att:
Ändring av styrkälla (EXT1 till EXT2, EXT2 till EXT1, LOC till REM) kopierar inte referensvärdet. 12 = DI3U, 4D(NC) Samma som DI3U,4D ovan, utom att:
Ändring av styrkälla (EXT1 till EXT2, EXT2 till EXT1, LOC till REM) kopierar inte referensvärdet. 13 = DI5U,6D(NC) Samma somDI5U,6D ovan, utom att:
Ändring av styrkälla (EXT1 till EXT2, EXT2 till EXT1, LOC till REM) kopierar inte referensvärdet. 14 = AI1+AI2 Definierar en kombination av analog ingång 1 (AI1) och analog ingång 2 (AI2) som referenskälla. Se
Analoga ingångar, referenskorrigering nedan.15 = AI1*AI2 Definierar en kombination av analog ingång 1 (AI1) och analog ingång 2 (AI2) som referenskälla. Se
Analoga ingångar, referenskorrigering nedan.16 = AI1-AI2 Definierar en kombination av analog ingång 1 (AI1) och analog ingång 2 (AI2) som referenskälla. Se
Analoga ingångar, referenskorrigering nedan.17 = AI1/AI2 Definierar en kombination av analog ingång 1 (AI1) och analog ingång 2 (AI2) som referenskälla. Se
Analoga ingångar, referenskorrigering nedan.
+2 %-2 %
10 V /
Hysteres 4 % av fullt skalutslag
EXT REF 1 MIN
- EXT REF 1 MIN
- EXT REF 1 MAX
EXT REF 1 MIN
EXT REF 1 MAX
- EXT REF 1 MIN
2 V / 4 mA0 V / 0 mA
20 mA
Idrifttagning

ACS550 Användarhandledning 79
Analoga ingångar, referenskorrigeringParametervärdena 9, 10, och 1417 använd formelna i följande tabell.
Där: C = Huvudreferensvärde
( = COMM för värdena 9, 10 och = AI1 för värdena 1417).
B = Korrigeringsreferens ( = AI1 för värdena 9, 10 och = AI2 för värdena 1417).
Exempel: Figuren visar referenskällkurvor för värdeinställningarna 9, 10, och
1417, där: C = 25%. P 4012 BÖRVÄRDE MIN = 0. P 4013 BÖRVÄRDE MAX = 0. B varierar längs horisontalaxeln.
1104 EXT REF1 MINDefinierar minimum för extern referens 1. Minsta tillåtna analoga insignal (som en procentsats
av maximal signal i V eller A) motsvarar REF1 MIN i Hz/rpm.
Parameter 1301 MINIMUM AI1 eller 1304 MINIMUM AI2 definierar minsta tillåtna analoga insignal.
Dessa parametrar (referens samt min- och maxvärden för analog signal) ger skalnings- och offsetvärden för referensvärdet.
1105 EXT REF1 MAXDefinierar maximum för extern referens 1. Maximal analog insignal (som en procentsats av
maximal signal i V eller A) motsvarar REF1 MAX in Hz/rpm.
Parameter 1302 MAXIMUM AI1 eller 1305 MAXIMUM AI2 definierar maximal analog insignal.
Värde-inst.
AI-referens beräknas enligt följande:
C + B C-värdet + (B-värdet - 50% av referensvärdet)C * B C-värde * (B-värdet / 50% av referensvärdet)C - B (C-värdet + 50% av referensvärdet) - B-värdetC / B (C-värdet * 50% av referensvärdet) / B-värdet
120
100
80
60
40
20
00 100%
9, 14 (+)
16 (-)
10, 15 (*)
17 (/)
B
Ext ref
Analog
P 1105
P 1104
P 1301 P 1302
insignal
P 1301 P 1302 insignal
Analog
Ext ref
eller 1304 eller 1305
eller 1304 eller 1305
(MAX)
(MIN)
P 1105
P 1104
(MAX)
(MIN)
Idrifttagning
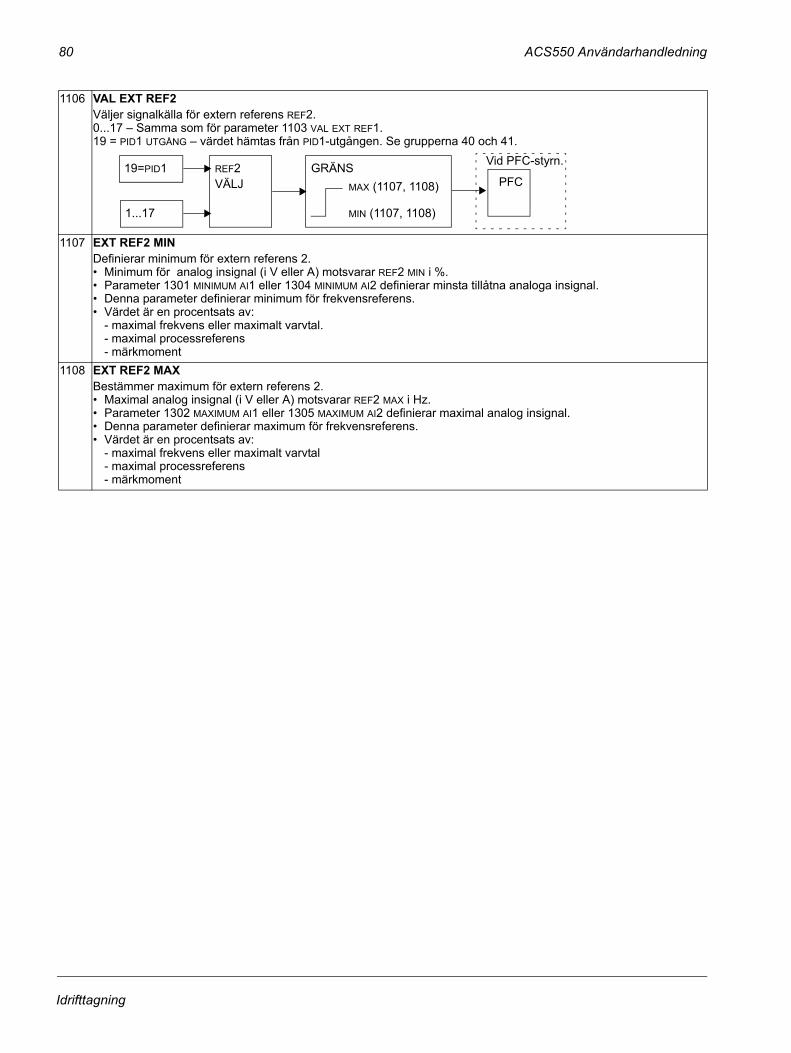
80 ACS550 Användarhandledning
1106 VAL EXT REF2Väljer signalkälla för extern referens REF2.0...17 Samma som för parameter 1103 VAL EXT REF1. 19 = PID1 UTGÅNG värdet hämtas från PID1-utgången. Se grupperna 40 och 41.
1107 EXT REF2 MINDefinierar minimum för extern referens 2. Minimum för analog insignal (i V eller A) motsvarar REF2 MIN i %. Parameter 1301 MINIMUM AI1 eller 1304 MINIMUM AI2 definierar minsta tillåtna analoga insignal. Denna parameter definierar minimum för frekvensreferens. Värdet är en procentsats av:
- maximal frekvens eller maximalt varvtal. - maximal processreferens - märkmoment
1108 EXT REF2 MAXBestämmer maximum för extern referens 2. Maximal analog insignal (i V eller A) motsvarar REF2 MAX i Hz. Parameter 1302 MAXIMUM AI1 eller 1305 MAXIMUM AI2 definierar maximal analog insignal. Denna parameter definierar maximum för frekvensreferens. Värdet är en procentsats av:
- maximal frekvens eller maximalt varvtal - maximal processreferens - märkmoment
19=PID1
1...17
REF2VÄLJ
GRÄNSMAX (1107, 1108)
MIN (1107, 1108)
PFC
Vid PFC-styrn.
Idrifttagning

ACS550 Användarhandledning 81
Grupp 12: Konstanta varvtalGruppen definierar konstanta varvtal. Allmänt:
Du kan programmera upp till 7 konstanta varvtal, 0500 Hz eller 030000 rpm.
Värdena måste vara positiva (inga negativa varvtalsvärden för konstanta varvtal).
Konstanta varvtal ignoreras om:
momentreglering är aktiv processens PID-referens följs frekvensomriktaren styrs lokalt PFC (Pump-Fläktstyrning) är aktiv.
Obs! Parameter 1208 KONST VARVTAL 7 fungerar också som ett så kallat felvarvtal som kan aktiveras vid bortfall av styrsignalen. Se också beskrivningen av parameter 3001 AI<MIN FUNKTION och parameter 3002 PANEL BORTFALL.
Kod Beskrivning1201 VAL KONST VARVT
Definierar vilka digitala ingångar som används för att välja konstanta varvtal. Se allmänna anmärkningar i inledningen.
0 = EJ VALD Deaktiverar funktionen för konstant varvtal.1 = DI1 Val konst varvt 1 med digital ingång DI1.
Aktiv insignal innebär att konstant varvtal 1 är valt.2...6 = DI2...DI6 Val konst varvt 1 med digital ingång DI2DI6. Se ovan7 = DI1,2 Val av ett av tre konstanta varvtal (13) med DI1 och DI2.
Använder två digitala ingångar, så som definieras nedan (0 = DI deaktiverad, 1 = DI aktiverad):
Kan definieras som ett så kallat felvarvtal som kan aktiveras vid bortfall av styrsignalen. Se också beskrivningen av parameter 3001 AI<MIN funktion och parameter 3002 PANEL BORTFALL.
8 = DI2,3 Val av ett av tre konstanta varvtal (13) med DI2 och DI3. Se ovan (DI1,2) för kod.
9 = DI3,4 Val av ett av tre konstanta varvtal (13) med DI3 och DI4. Se ovan (DI1,2) för kod.
10 = DI4,5 Val av ett av tre konstanta varvtal (13) med DI4 och DI5. Se ovan (DI1,2) för kod.
11 = DI5,6 Val av ett av tre konstanta varvtal (13) med DI5 och DI6. Se ovan (DI1,2) för kod.
12 = DI1,2,3 Val av ett av sju konstanta varvtal (17) med DI1, DI2 och DI3. Använder tre digitala ingångar, så som definieras nedan(0 = DI deaktiverad, 1 = DI aktiverad):
DI1 DI2 Funktion0 0 Ej konstant varvtal1 0 Konst varvtal 1 (1202)0 1 Konst varvtal 2 (1203)1 1 Konst varvtal 3 (1204)
DI1 DI2 DI3 Funktion0 0 0 Ej konstant varvtal1 0 0 Konst varvtal 1 (1202)0 1 0 Konst varvtal 2 (1203)1 1 0 Konst varvtal 3 (1204)0 0 1 Konst varvtal 4 (1205)1 0 1 Konst varvtal 5 (1206)0 1 1 Konst varvtal 6 (1207)1 1 1 Konst varvtal 7 (1208)
Idrifttagning

82 ACS550 Användarhandledning
13 = DI3,4,5 Val av ett av sju konstanta varvtal (17) med DI3, DI4 och DI5. Se ovan (DI1,2,3) för kod.
14 = DI4,5,6 Val av ett av sju konstanta varvtal (17) med DI5, DI6 och DI7. Se ovan (DI1,2,3) för kod.
1518 = TID FUNK 14 Val av konst varvtal 1 när tid funk är aktiv. Se Grupp 36, Tidur funktion.-1 = DI1(INV) Val konst varvt 1 med digital ingång DI1.
Inverterad funktion: Ej aktiv insignal innebär att konst varvt 1 är valt.-2...- 6 = DI2(INV)...DI6(INV) Val konst varvt 1 med digital ingång. Se ovan-7 = DI1,2(INV) Val av ett av tre konstanta varvtal (13) med DI1 och DI2.
Inverterad funktion använder två digitala ingångar, så som definieras nedan (0 = DI deaktiverad, 1 = DI aktiverad):
-8 = DI2,3(INV) Val av ett av tre konstanta varvtal (13) med DI2 och DI2. Se ovan (DI1,2(INV)) för kod.
-9 = DI3,4(INV) Val av ett av tre konstanta varvtal (13) med DI3 och DI4. Se ovan (DI1,2(INV)) för kod.
-10 = DI4,5(INV) Val av ett av tre konstanta varvtal (13) med DI4 och DI5. Se ovan (DI1,2(INV)) för kod.
-11 = DI5,6(INV) Val av ett av tre konstanta varvtal (13) med DI5 och DI6. Se ovan (DI1,2(INV)) för kod.
-12 = DI1,2,3(INV) Val av ett av sju konstanta varvtal (13) med DI1, DI2 och DI3. Inverterad funktion använder tre digitala ingångar, så som definieras nedan (0 = DI deaktiverad, 1 = DI aktiverad):
-13 = DI3,4,5(INV) Val av ett av sju konstanta varvtal (13) med DI3, DI4 och DI5. Se ovan (DI1,2,3(INV)) för kod.
-14 = DI4,5,6(INV) Val av ett av sju konstanta varvtal (13) med DI4, DI5 och DI6. Se ovan (DI1,2,3(INV)) för kod.
1202 KONST VARVTAL 1Inställning av värde för konst varvtal 1 Område och enhet beror på parameter 9904 MOTOR STYRMETOD. Område: 030000 rpm när 9904 = 1 ( VARVTAL) eller 2 ( MOMENT). Område: 0500 Hz när 9904 = 3 (SKALÄR ).
1203 1208
KONST VARVTAL 2KONST VARVTAL 7Varje parameter anger ett värde för ett konstant varvtal. Se KONST VARVTAL 1 ovan.
1209 TID FUNK VALDefinierar aktiverad timer vid konstant varvtal. Timer kan användas för att aktivera Konst varvtal 1 eller för att växla mellan 2 valbara varvtal: Konstant varvtal 1 och 2.
Kod Beskrivning
DI1 DI2 Funktion1 1 Ej konstant varvtal0 1 Konst varvtal 1 (1202)1 0 Konst varvtal 2 (1203)0 0 Konst varvtal 3 (1204)
DI1 DI2 DI3 Funktion1 1 1 Ej konstant varvtal0 1 1 Konst varvtal 1 (1202)1 0 1 Konst varvtal 2 (1203)0 0 1 Konst varvtal 3 (1204)1 1 0 Konst varvtal 4 (1205)0 1 0 Konst varvtal 5 (1206)1 0 0 Konst varvtal 6 (1207)0 0 0 Konst varvtal 7 (1208)
Idrifttagning

ACS550 Användarhandledning 83
Grupp 13: Analoga ingångarGruppen definierar gränser och filtrering av de analoga ingångarna.
Kod Beskrivning1301 MINIMUM AI1
Definierar minimivärde för den analoga ingången. Definierar värdet som en procentsats av fullt analogt skalutslag. Se nedanstående exempel. Minsta analoga insignal motsvarar 1104 EXT REF1 MIN eller 1107 EXT REF2 MIN. MINIMUM AI kan inte vara större än MAXIMUM AI. Dessa parametrar (referens samt min- och maxvärden för analog signal) ger skalnings- och offsetvärden för
referensvärdet. Se figur vid parameter 1104.Exempel. För att sätta minsta analoga ingångsvärde till 4 mA: Konfigurera den analoga ingången för 020 mA strömsignal. Beräkna minimum (4 mA) som en procentsats av fullt skalutslag (20 mA) = 4 mA / 20 mA * 100% = 20%
1302 MAXIMUM AI1Definition av maxvärde för analoga ingångar. Definierar värdet som en procentsats av fullt analogt skalutslag. Maximal analog insignal motsvarar 1105 EXT REF1 MAX eller 1108 EXT REF2 MAX. Se figur vid parameter 1104.
1303 FILTER AI1Definierar filtertidskonstant för analog ingång 1 (AI1). Den filtrerade signalen når 63% av en stegförändring inom
specificerad tid.
1304 MINIMUM AI2Definierar minimivärde för den analoga ingången. Se MINIMUM AI1 ovan.
1305 MAXIMUM AI2Definition av maxvärde för analoga ingångar. Se MAXIMUM AI1 ovan.
1306 FILTER AI2Definierar filtertidskonstant för analog ingång 2 (AI2). Se FILTER AI1 ovan.
100
63
%
t
Ofiltrerad signal
Filtrerad signal
Tidskonstant
Idrifttagning

84 ACS550 Användarhandledning
Grupp 14: ReläutgångarGruppen definierar villkoren som aktiverar reläfunktionerna.
Kod Beskrivning1401 RELÄUTGÅNG 1
Definition av händelsen eller villkoret som aktiverar relä 1 vad reläutgång 1 betyder.0 = EJ VALD Relät används ej och är spänningslös.1 = DRIFTKLAR Relät drar då frekvensomriktaren är klar för funktion. Krav:
Driftförtreglingssignal finns. Inga fel föreligger. Matningsspänning inom tillåtet område. Nödstoppkommando föreligger ej.
2 = DRIFT Relät drar då frekvensomriktaren är i drift.3 = FEL (-1) Relät drar då spänning finns. Relät släpper vid fel.4 = FEL Relät drar vid aktivt fel5 = VARNING Relät drar när ett larm är aktivt.6 = BACK Relät drar när motorn roterar i backriktning7 = STARTSIGNALReläet drar vid startsignal (även utan driftförreglingssignal). Relät släpper när frekvensomriktaren tar
emot ett stoppkommando eller ett fel uppträder8 = ÖVERVAK1 HÖG Relät drar när den första övervakade parametern (3201) överskrider gränsvärdet (3203).
Se "Grupp 32: Övervakning" som börjar på sid 109.9 =ÖVERVAK1 LÅG Relät drar när den första övervakade parametern (3201) underskrider gränsvärdet (3202).
Se "Grupp 32: Övervakning" som börjar på sid 109.10 = ÖVERVAK2 HÖG Relät drar när den andra övervakade parametern (3204) överskrider gränsvärdet (3206).
Se "Grupp 32: Övervakning" som börjar på sid 109.11 = ÖVERVAK2 LÅG Relät drar när den andra övervakade parametern (3204) underskrider gränsvärdet (3205).
Se "Grupp 32: Övervakning" som börjar på sid 109.12 = ÖVERVAK3 HÖG Relät drar när den tredje övervakade parametern (3207) överskrider gränsvärdet (3209).
Se "Grupp 32: Övervakning" som börjar på sid10913 = ÖVERVAK3 LÅG Relät drar när den tredje övervakade parametern (3207) underskrider gränsvärdet (3208).
Se "Grupp 32: Övervakning" som börjar på sid 109.14 =VID REFERENS Relät drar när utfrekvensen är lika med referensfrekvensen.15 = FAULT (RST) Relät drar när frekvensomriktaren befinner sig i feltillstånd och återställs efter programmerad auto-
reset-fördröjning. Se parameter 3103 fördröjning.
16 = FEL/VARNING Relät drar när fel eller varning uppträderregistrering.17 = EXT STYRNING Relät drar när extern styrning är vald.18 = REF 2 VALD Relät drar när EXT2 är vald.19 = KONST FREKV Relät drar när ett konstant varvtal är valt.20 = BORTFALL REF Relät drar när referenssignal eller aktiv styrplats går förlorad.21 = ÖVERSTRÖM Relät drar när ett överströmslarm eller -fel uppträder.22 = ÖVERSPÄNNING Relät drar när ett överspänningslarm eller -fel uppträder.23 = FRO TEMP Relät drar när ett övertemperaturlarm eller -fel uppträder.24 = UNDERSPÄNN Relät drar när ett underspänningslarm eller -fel uppträder.25 = ANALOG INGÅNG 1 FEL Relät drar när AI1-signalen går förlorad.26 = AI2 FEL Relät drar när AI2-signalen går förlorad.27 = MOTOR TEMP Relät drar när ett motoröverlastlarm eller -fel uppträder.28 = MOT FASTLÅS Relät drar när ett larm eller fel för fastlåst motor uppträder.29 = LÅG LAST Relät drar när ett larm eller fel för låg last uppträder.30 = PID VILOFUNKTION Relät drar när PID-regleringsmakrots vilofunktion är aktiv.31 = PFC Använd relä för att starta/stoppa motorn vid PFC-styrning (se Grupp 81: PFC-styrning).
Välj detta alternativ endast när PFC-styrning tillämpas. Urvalet aktiveras/deaktiveras när frekvensomriktaren inte är i drift.
32 = AUTOVÄXLING Relät drar när funktionen för automatisk lastutjämning i PFC-styrningsmakrot utförs. Välj detta alternativ endast när PFC-styrning tillämpas.
33 = FLUX KLAR Relät drar när motorn är magnetiserad och redo att leverera normalt moment (motorn har nått nominell magnetiseringsnivå).
34 = EGET MAKRO 2 Relät drar när Användarmakro 2 är aktivt.
Idrifttagning

ACS550 Användarhandledning 85
35 = COMM Relät drar baserat på indata från fältbusskommunikation. Fältbussen skriver binär kod i parameter 0134 som kan spänningssätta relä 1relä 6 enligt följande:
0 = Relä släpper, 1 = Relä drar.36 = COMM(-1) Relät drar baserat på indata från fältbusskommunikation.
Fältbussen skriver binär kod i parameter 0134 som kan spänningssätta relä 1relä 6 enligt följande:
0 = Relä släpper, 1 = Relä drar.37 = TID FUNK 1 Relät drar när tid funk 1 är aktiv. Se Grupp 36, Tidur funktion.3840 = TID FUNK 2...4 Relät drar när tid funk 2...4 är aktiv. Se Tid funk 1 ovan.
1402 RELÄUTGÅNG 2Definition av händelsen eller villkoret som aktiverar relä 2 vad reläutgång 2 betyder. Se 1401 RELÄUTGÅNG 1
1403 RELÄUTGÅNG 3Definition av händelsen eller villkoret som aktiverar relä 3 vad reläutgång 3 betyder. Se 1401 reläutgång 1
1404 RO1 TILL FÖRDRÖJDefinition av tillslagsfördröjning för relä 1. Till-/frånslagsfördröjning ignoreras när reläutgång 1401 är satt till
PFC.1405 RO1 FRÅN FÖRDR.
Definition av frånslagsfördröjning för relä 1. Till-/frånslagsfördröjning ignoreras när reläutgång 1401 är satt till
PFC.1406 RO2 TILL FÖRDR.
Definition av tillslagsfördröjning för relä 2. Se RO 1 TILL FÖRDR
1407 RO2 FRÅN FÖRDRÖJDefinition av frånslagsfördröjning för relä 2. Se RO 1 FRÅN FÖRDR.
1408 RO3 TILL FÖRDRÖJDefinition av tillslagsfördröjning för relä 3. Se RO 1 TILL FÖRDR
1409 RO3 FRÅN FÖRDRÖJFrånslagsfördröjning för relä 3. Se RO 1 FRÅN FÖRDR.
Kod Beskrivning
Par. 0134 Binärt RO6 RO5 RO4 RO3 RO2 RO10 000000 0 0 0 0 0 01 000001 0 0 0 0 0 12 000010 0 0 0 0 1 03 000011 0 0 0 0 1 14 000100 0 0 0 1 0 0
5...62 ... ... ... ... ... ... ...63 111111 1 1 1 1 1 1
Par. 0134 Binärt RO6 RO5 RO4 RO3 RO2 RO10 000000 1 1 1 1 1 11 000001 1 1 1 1 1 02 000010 1 1 1 1 0 13 000011 1 1 1 1 0 04 000100 1 1 1 0 1 1
5...62 ... ... ... ... ... ... ...63 111111 0 0 0 0 0 0
1404 TILL FÖRDR 1405 FRÅN FÖRDR
Styrhändelse
Reläets tillstånd
Idrifttagning
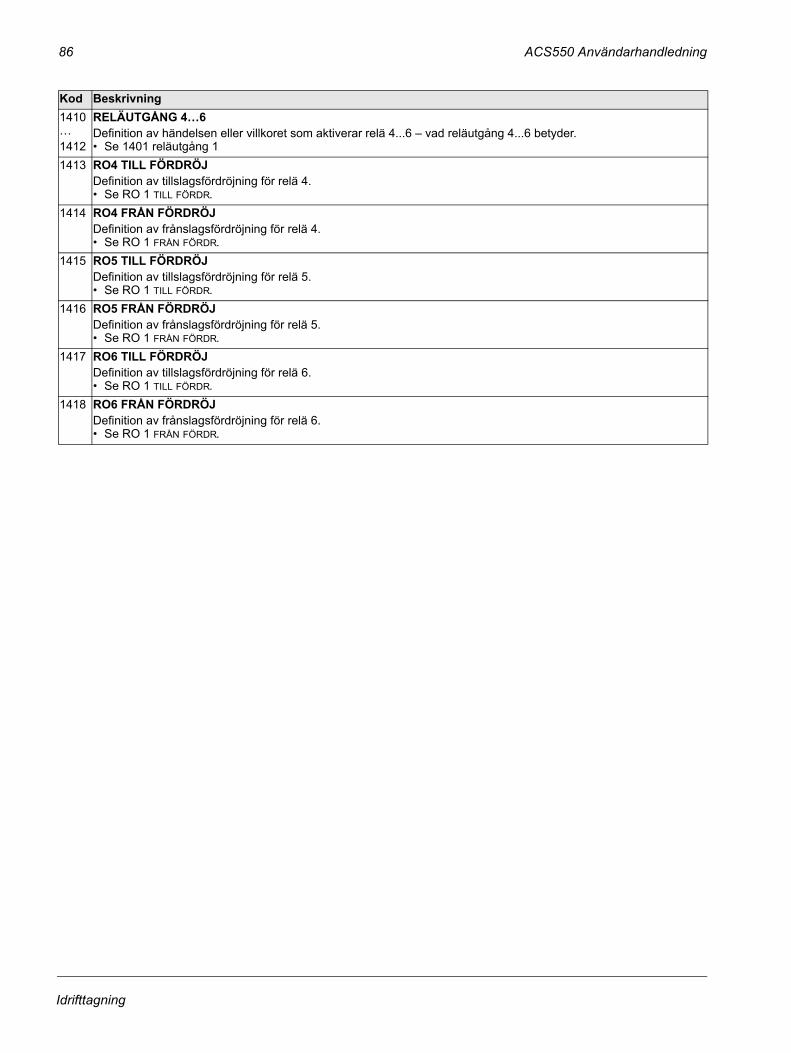
86 ACS550 Användarhandledning
14101412
RELÄUTGÅNG 46Definition av händelsen eller villkoret som aktiverar relä 4...6 vad reläutgång 4...6 betyder. Se 1401 reläutgång 1
1413 RO4 TILL FÖRDRÖJDefinition av tillslagsfördröjning för relä 4. Se RO 1 TILL FÖRDR.
1414 RO4 FRÅN FÖRDRÖJDefinition av frånslagsfördröjning för relä 4. Se RO 1 FRÅN FÖRDR.
1415 RO5 TILL FÖRDRÖJDefinition av tillslagsfördröjning för relä 5. Se RO 1 TILL FÖRDR.
1416 RO5 FRÅN FÖRDRÖJDefinition av frånslagsfördröjning för relä 5. Se RO 1 FRÅN FÖRDR.
1417 RO6 TILL FÖRDRÖJDefinition av tillslagsfördröjning för relä 6. Se RO 1 TILL FÖRDR.
1418 RO6 FRÅN FÖRDRÖJDefinition av frånslagsfördröjning för relä 6. Se RO 1 FRÅN FÖRDR.
Kod Beskrivning
Idrifttagning

ACS550 Användarhandledning 87
Grupp 15: Analoga utgångarGruppen definierar de analoga utgångarnas (strömsignalernas) gränser och innehåll. Frekvensomriktarens analoga utgångar kan vara:
Godtycklig parameter i gruppen Driftvärden (Grupp 01).
Begränsade till programmerbara min- och maxvärden för utström.
Skalade (och/eller inverterade) genom definition av min- och maxvärden för källparameter (eller innehåll). Definition av ett maxvärde (parameter 1503 eller 1509) som är mindre än innehållets minimivärde (parameter 1502 eller 1508) resulterar i en inverterad utsignal.
Filtrerad.Kod Beskrivning1501 AO1 INNEHÅLL
Definition av innehåll för analog utgång AO1. 99 = PTC-GIVARE Ger en strömkälla för givartyp PTC. Utgång = 1,6 mA. Se Grupp 35.100 = PT100-GIVARE Ger en strömkälla för givartyp Pt100. Utgång = 9,1 mA. Se Grupp 35.101...145 Utgången motsvarar en parameter i gruppen Driftvärden (Grupp 01). Parameter definierad genom sitt värde (värde 102 = parameter 0102)
1502 AO1 INNEHÅLL MINDefinierar innehållets minvärde. Innehållet är den parameter som är vald med parameter 1501. Minvärdet är det minsta tillåtna värde på innehållet som
konverteras till en analog utgång. Parametrarna (innehåll + min- och maxinställningar för ström)
ger skal- och offsetinställningar för utsignalen. Se figur.1503 AO1 INNEHÅLL MAX
Definierar innehållets maxvärde Innehållet är den parameter som är vald med parameter 1501. Maxvärdet är det största tillåtna värde på innehållet som
konverteras till en analog utgång.1504 MINIMUM AO1
Definierar minsta utström.1505 MAXIMUM AO1
Definierar största utström.1506 FILTER AO1
Definition av filtertidskonstant för AO1. Den filtrerade signalen når 63% av en stegförändring inom
specificerad tid. Se figur i parameter 1303
1507 AO2 INNEHÅLLDefinition av innehåll för analog utgång AO2. Se AO1 INNEHÅLL ovan.
1508 AO2 INNEHÅLL MINDefinierar innehållets minvärde. Se AO1 INNEHÅLL MIN ovan.
1509 AO2 INNEHÅLL MAXDefinierar innehållets maxvärde. Se AO1 INNEHÅLL MAX ovan.
1510 MINIMUM AO2Definierar minsta utström. Se MINIMUM AO1 ovan.
1511 MAXIMUM AO2Definierar största utström. Se MAXIMUM AO1 ovan.
1512 FILTER AO2Definition av filtertidskonstant för AO2. Se FILTER AO1 ovan.
AO (mA)
AO INNEHÅLLP 1504 /
P 1502 / 1508P 1503 / 1509
AO (mA)
AO INNEHÅLL
P 1505 /
P 1504 /
P 1503 / 1509P 1502 / 1508
P 1505 /P 1511
P 1510
P 1511
P 1510
Idrifttagning

88 ACS550 Användarhandledning
Grupp 16: SystemstyrningGruppen definierar ett flertal lås- och förreglingsfunktioner.
Kod Beskrivning1601 DRIFTFÖRREGLING
Väljer källa till driftförreglingssignalen.0 = EJ VALD - Tillåter drivsystemet att starta utan extern driftförreglingssignal.1 = DI1 Definierar digital ingång DI1 som driftförreglingssignal.
Denna digitala ingång måste vara aktiverad för driftförregling. Om spänningen sjunker så att ingången deaktiveras kommer drivsystemet att rulla ut och stanna. Systemet kan
inte starta igen med mindre än att driftförreglingssignalen åter aktiveras.2...6 = DI2DI6 Definierar digital ingång DI2DI6 som driftförreglingssignal.
Se DI1 ovan.7 = COMM Tilldelar fältbusstyrordet som källa för driftförreglingssignal.
Bit 6 i styrord 1 (parameter 0301) aktiverar drift_från-signalen. Se fältbussens användarhandbok för närmare instruktioner.
-1 = DI1(INV) Definierar en inverterad digital ingång DI1 som driftförreglingssignal. Denna digitala ingång måste vara deaktiverad för driftförregling. Om denna digitala ingång aktiveras kommer drivsystemet att rulla ut och stanna. Systemet kan inte starta igen
med mindre än att driftförreglingssignalen återkommer.-2-6 = DI2(INV)DI6(INV) Definierar en inverterad digital ingång DI2DI6 som driftförreglingssignal.
Se DI1(INV) ovan.1602 PARAMETERLÅS
Fastställer om manöverpanelen kan ändra parametervärden. Detta lås begränsar inte parameterförändringar på grund av makroval. Detta lås begränsar inte parameterförändringar som skrivs av fältbussinsignaler.0 = LÅST Du kan inte använda manöverpanelen för att ändra parametervärden.
Låset kan öppnas genom att man skriver giltig öppningskod till parameter 1603. 1 = ÖPPEN Du kan använda manöverpanelen för att ändra parametervärden. 2 = EJ SPARAD Du kan använda manöverpanelen för att ändra parametervärden, men ändringarna sparas inte
permanent. Sätt parameter 1607 SPARA PARAMETER till 1 (SPARA) för att parameterändringar ska skrivas till minnet.
1603 KODGenom att skriva in den korrekta öppningskoden öppnar man parameterlåset. Se parameter 1602 ovan. Koden 358 öppnar låset. Inmatningsvärdet återställs automatiskt till 0.
1604 VAL FELKVITTERINGVäljer källan för felkvitteringssignalen. Signalen återställer frekvensomriktaren efter en felutlösning, om orsaken till utlösningen inte längre föreligger.0 = PANEL Definierar manöverpanelen som enda källa för felåterställning.
Fel kan alltid återställas från manöverpanelen.1 = DI1 Definierar digital ingång DI1 som en källa för felåterställning.
Aktiverad digital ingång återställer frekvensomriktaren.2...6 = DI2DI6 Definierar digital ingång DI2DI6 som en källa för felåterställning.
Se DI1 ovan.7 = START/STOP Definierar stoppkommando som en källa för felåterställning.
Använd inte detta alternativ när start-, stopp- och rotationsriktningskommandon ges via fältbusskommunikation.8 = COMM Definierar fältbussen som en källa för felkvittering.
Kommandoordet ges via fältbusskommunikation. Bit 4 i styrord 1 (parameter 0301) återställer frekvensomriktaren.
-1 = DI1(INV) Definierar en inverterad digital ingång DI1 som en källa för felåterställning. Deaktiverad digital ingång återställer frekvensomriktaren.
-2...-6 = DI2(INV)...DI6(INV) Definierar en inverterad digital ingång DI2DI6 som en källa för felåterställning. Se DI1(INV) ovan.
Idrifttagning
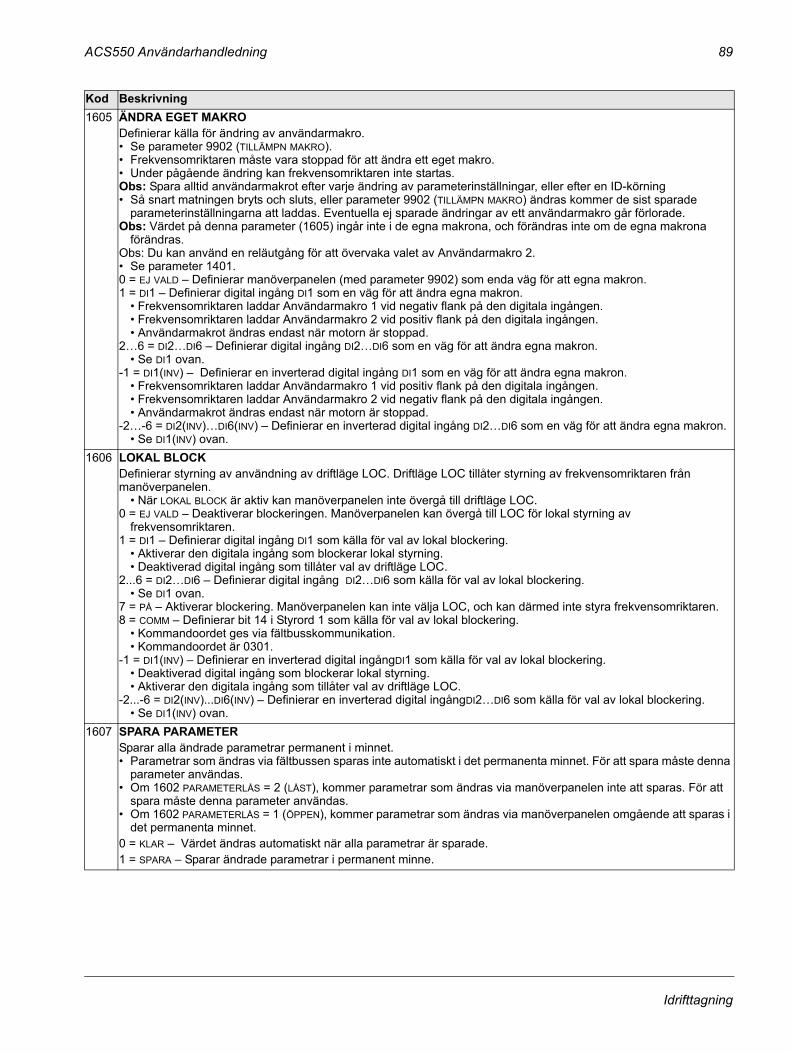
ACS550 Användarhandledning 89
1605 ÄNDRA EGET MAKRODefinierar källa för ändring av användarmakro. Se parameter 9902 (TILLÄMPN MAKRO). Frekvensomriktaren måste vara stoppad för att ändra ett eget makro. Under pågående ändring kan frekvensomriktaren inte startas.Obs: Spara alltid användarmakrot efter varje ändring av parameterinställningar, eller efter en ID-körning Så snart matningen bryts och sluts, eller parameter 9902 (TILLÄMPN MAKRO) ändras kommer de sist sparade
parameterinställningarna att laddas. Eventuella ej sparade ändringar av ett användarmakro går förlorade.Obs: Värdet på denna parameter (1605) ingår inte i de egna makrona, och förändras inte om de egna makrona
förändras. Obs: Du kan använd en reläutgång för att övervaka valet av Användarmakro 2. Se parameter 1401.0 = EJ VALD Definierar manöverpanelen (med parameter 9902) som enda väg för att egna makron.1 = DI1 Definierar digital ingång DI1 som en väg för att ändra egna makron.
Frekvensomriktaren laddar Användarmakro 1 vid negativ flank på den digitala ingången. Frekvensomriktaren laddar Användarmakro 2 vid positiv flank på den digitala ingången. Användarmakrot ändras endast när motorn är stoppad.
26 = DI2DI6 Definierar digital ingång DI2DI6 som en väg för att ändra egna makron. Se DI1 ovan.
-1 = DI1(INV) Definierar en inverterad digital ingång DI1 som en väg för att ändra egna makron. Frekvensomriktaren laddar Användarmakro 1 vid positiv flank på den digitala ingången. Frekvensomriktaren laddar Användarmakro 2 vid negativ flank på den digitala ingången. Användarmakrot ändras endast när motorn är stoppad.
-2-6 = DI2(INV)DI6(INV) Definierar en inverterad digital ingång DI2DI6 som en väg för att ändra egna makron. Se DI1(INV) ovan.
1606 LOKAL BLOCKDefinierar styrning av användning av driftläge LOC. Driftläge LOC tillåter styrning av frekvensomriktaren från manöverpanelen.
När LOKAL BLOCK är aktiv kan manöverpanelen inte övergå till driftläge LOC.0 = EJ VALD Deaktiverar blockeringen. Manöverpanelen kan övergå till LOC för lokal styrning av
frekvensomriktaren.1 = DI1 Definierar digital ingång DI1 som källa för val av lokal blockering.
Aktiverar den digitala ingång som blockerar lokal styrning. Deaktiverad digital ingång som tillåter val av driftläge LOC.
2...6 = DI2DI6 Definierar digital ingång DI2DI6 som källa för val av lokal blockering. Se DI1 ovan.
7 = PÅ Aktiverar blockering. Manöverpanelen kan inte välja LOC, och kan därmed inte styra frekvensomriktaren.8 = COMM Definierar bit 14 i Styrord 1 som källa för val av lokal blockering.
Kommandoordet ges via fältbusskommunikation. Kommandoordet är 0301.
-1 = DI1(INV) Definierar en inverterad digital ingångDI1 som källa för val av lokal blockering. Deaktiverad digital ingång som blockerar lokal styrning. Aktiverar den digitala ingång som tillåter val av driftläge LOC.
-2...-6 = DI2(INV)...DI6(INV) Definierar en inverterad digital ingångDI2DI6 som källa för val av lokal blockering. Se DI1(INV) ovan.
1607 SPARA PARAMETERSparar alla ändrade parametrar permanent i minnet. Parametrar som ändras via fältbussen sparas inte automatiskt i det permanenta minnet. För att spara måste denna
parameter användas. Om 1602 PARAMETERLÅS = 2 (LÅST), kommer parametrar som ändras via manöverpanelen inte att sparas. För att
spara måste denna parameter användas. Om 1602 PARAMETERLÅS = 1 (ÖPPEN), kommer parametrar som ändras via manöverpanelen omgående att sparas i
det permanenta minnet. 0 = KLAR Värdet ändras automatiskt när alla parametrar är sparade.1 = SPARA Sparar ändrade parametrar i permanent minne.
Kod Beskrivning
Idrifttagning
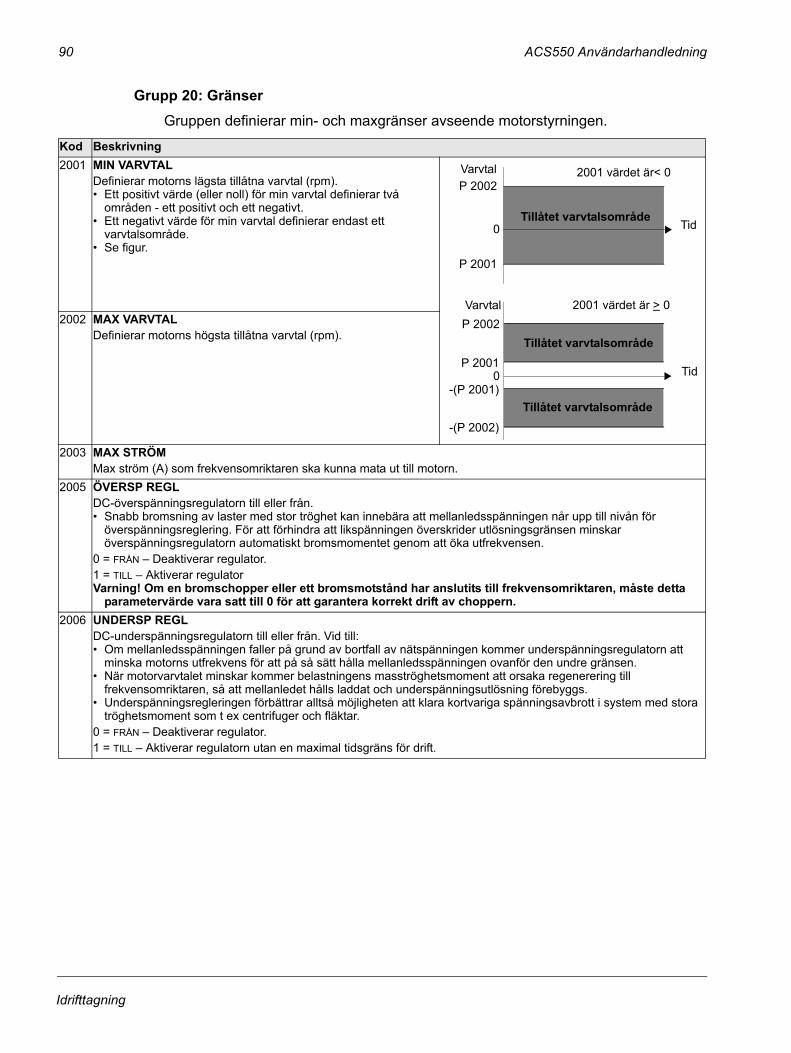
90 ACS550 Användarhandledning
Grupp 20: Gränser Gruppen definierar min- och maxgränser avseende motorstyrningen.
Kod Beskrivning2001 MIN VARVTAL
Definierar motorns lägsta tillåtna varvtal (rpm). Ett positivt värde (eller noll) för min varvtal definierar två
områden - ett positivt och ett negativt. Ett negativt värde för min varvtal definierar endast ett
varvtalsområde. Se figur.
2002 MAX VARVTALDefinierar motorns högsta tillåtna varvtal (rpm).
2003 MAX STRÖMMax ström (A) som frekvensomriktaren ska kunna mata ut till motorn.
2005 ÖVERSP REGLDC-överspänningsregulatorn till eller från. Snabb bromsning av laster med stor tröghet kan innebära att mellanledsspänningen når upp till nivån för
överspänningsreglering. För att förhindra att likspänningen överskrider utlösningsgränsen minskar överspänningsregulatorn automatiskt bromsmomentet genom att öka utfrekvensen.
0 = FRÅN Deaktiverar regulator.1 = TILL Aktiverar regulatorVarning! Om en bromschopper eller ett bromsmotstånd har anslutits till frekvensomriktaren, måste detta
parametervärde vara satt till 0 för att garantera korrekt drift av choppern.2006 UNDERSP REGL
DC-underspänningsregulatorn till eller från. Vid till: Om mellanledsspänningen faller på grund av bortfall av nätspänningen kommer underspänningsregulatorn att
minska motorns utfrekvens för att på så sätt hålla mellanledsspänningen ovanför den undre gränsen. När motorvarvtalet minskar kommer belastningens masströghetsmoment att orsaka regenerering till
frekvensomriktaren, så att mellanledet hålls laddat och underspänningsutlösning förebyggs. Underspänningsregleringen förbättrar alltså möjligheten att klara kortvariga spänningsavbrott i system med stora
tröghetsmoment som t ex centrifuger och fläktar.0 = FRÅN Deaktiverar regulator.1 = TILL Aktiverar regulatorn utan en maximal tidsgräns för drift.
P 2001
P 2002Varvtal
-(P 2001)
-(P 2002)
P 2002
P 2001
Tillåtet varvtalsområde
Tillåtet varvtalsområde
Tillåtet varvtalsområde
Tid
Varvtal
Tid
2001 värdet är > 0
0
0
2001 värdet är< 0
Idrifttagning

ACS550 Användarhandledning 91
2007 MIN FREKVENSDefinierar motorns lägsta tillåtna frekvens. Ett positivt värde (eller noll) för min varvtal definierar två
områden - ett positivt och ett negativt. Ett negativt värde för min varvtal definierar endast ett
varvtalsområde.Se figur.Obs! Håll MIN FREKVENS ≤ MAX FREKVENS.
2008 MAX FREKVENSDefinierar motorns högsta tillåtna frekvens.
2013 MIN MOMENT VALDefinierar funktionen för val mellan två min. momentgränser (2015 MIN MOMENT gr1 och 2016 MIN MOMENT gr2).0 = MIN MOMENT gr1 Val av 2015 MIN MOMENT gr1 som mingräns.1 = DI1 Definierar digital ingång DI1 som källa för val av mingräns
Aktivering av digital ingång väljer MIN MOMENT gr2. Deaktiverad digital ingång väljer MIN MOMENT gr1.
26 = DI2DI6 Definierar digital ingång DI2DI6 som källa för val av mingräns. Se DI1 ovan.
7 = COMM Definierar bit 15 i Styrord 1 som källa för val av mingräns. Kommandoordet ges via fältbusskommunikation. Kommandoordet är parameter 0301.
-1 = DI1(INV) Definierar en inverterad digital ingång DI1 som källa för val av mingräns. Aktivering av digital ingång väljer MIN MOMENT gr1. Deaktiverad digital ingång väljer MIN MOMENT gr2.
-2-6 = DI2(INV)...DI6(INV) Definierar en inverterad digital ingång DI2DI6 som källa för val av mingräns. Se DI1(INV) ovan.
2014 MAX MOMENT VALDefinierar funktionen för val mellan två max momentgränser (2017 MAX MOMENT gr1 och 2018 MAX MOMENT gr2).0 = MAX MOMENT gr1 Val av 2017 MAX MOMENT gr1 som maxgräns.1 = DI1 Definierar digital ingång DI1 som källa för val av maxgräns.
Aktivering av digital ingång väljer värdetMAX MOMENT gr2. Deaktiverad digital ingång väljer värdetMAX MOMENT gr1.
26 = DI2DI6 Definierar digital ingång DI2DI6 som källa för val av maxgräns. Se DI1 ovan.
7 = COMM Definierar bit 15 i Styrord 1 som källa för val av maxgräns. Kommandoordet ges via fältbusskommunikation. Kommandoordet är parameter 0301.
-1 = DI1(INV) Definierar en inverterad digital ingång di1 som källa för val av maxgräns. Aktivering av digital ingång väljer värdetMAX MOMENT gr1. Deaktiverad digital ingång väljer värdetMAX MOMENT gr2.
-2-6 = DI2(INV)...DI6(INV) Definierar en inverterad digital ingång DI2DI6 som källa för val av maxgräns. Se DI1(INV) ovan.
2015 MIN MOMENT GR1Definierar den första mingränsen för moment (%). Värdet är en procentsats av motorns nominella moment.
2016 MIN MOMENT GR2Definierar den andra mingränsen för moment (%). Värdet är en procentsats av motorns nominella moment.
2017 MAX MOMENT GR1Definierar den första maxgränsen för moment (%). Värdet är en procentsats av motorns nominella moment.
Kod Beskrivning
P 2007
P 2008Frekv
-(P 2007)
-(P 2008)
P 2008
P 2007
Tillåtet frekvensområde
Tillåtet frekvensområde
Tillåtet frekvensområde
Tid
Frekv
Tid
2007 värdet är > 0
0
0
2007 värdet är< 0
Idrifttagning

92 ACS550 Användarhandledning
2018 MAX MOMENT GR2Definierar den andra maxgränsen för moment (%). Värdet är en procentsats av motorns nominella moment.
Kod Beskrivning
Idrifttagning

ACS550 Användarhandledning 93
Grupp 21: Start/StoppGruppen definierar hur motorn startas och stoppas. ACS550 stöder flera start- och stoppsätt.
Kod Beskrivning2101 START FUNKTION
Val av motorns startmetod.1 = AUTO Val av automatiskt startsätt
Vektorstyrningslägen: Optimal start i de flesta fall. Flygande start vid roterande axel och start vid nollvarvtal. SKALÄR STYRNING: Omedelbar start från nollfrekvens.
2 = FÖRMAGN Val av startsättet FörmagnetiseringObs! Kan ej användas för start av roterande motor.Obs! Frekvensomriktaren startar när inställd förmagnetiseringstid (param. 2103) har löpt ut, även om
förmagnetiseringen då inte är komplett. Vektorstyrningslägen: Magnetiserar motorn inom den tid som fastställs av parameter 2103 FÖRMAGNETISERING
med likström. Normal styrning återupptas exakt i det ögonblick förmagnetiseringstiden löper ut. Detta val garanterar högsta möjliga lossbrytningsmoment.
SKALÄR STYRNING: Magnetiserar motorn inom den tid som fastställs av parameter 2103 FÖRMAGNETISERING med likström. Normal styrning återupptas exakt i det ögonblick förmagnetiseringstiden löper ut.
3 = FLYGANDE Val av startsättet flygande start. Vektorstyrningslägen: Ej tillämpligt. SKALÄR STYRNING: Frekvensomriktaren väljer automatiskt rätt utfrekvens vid start av roterande motor. Använd
denna inställning om motorn redan roterar för att få den att starta mjukt från aktuell utfrekvens. 4 = MOMENTFÖRST Val av automatisk start med momentförstärkning ( endast SKALÄR STYRNING).
Kan vara nödvändigt vid tung start. Momentförstärkning ges endast vid start och upphör när utfrekvensen överstiger 20 Hz eller när utfrekvensen är
lika med börvärdet. I början magnetiseras motorn inom den tid som fastställs av parameter 2103 FÖRMAGNETISERING med likström. Se parameter 2110 TUNG START STRÖM.
5 = FLYG+MFÖRST Val av både flygande start och momentförstärkning (endast SKALÄR STYRNING). Först utförs rutinen för flygande start och motorn magnetiseras. Om varvtalet då visar dig vara noll sätts
momentförstärkning in.2102 STOPP FUNKTION
Val av motorns stoppmetod.1 = UTRULLNING Väljer ren brytning av motormatning som stoppmetod Motorn stannar genom utrullning.2 = RAMP Väljer stopp av motorn via en retardationsramp.
Retardationsrampen definieras som 2203 RETARD TID 1 eller 2206 RETARD TID 2 (beroende på vilken som är aktiv).2103 FÖRMAGNETISERING
Definierar förmagnetiseringstiden vid startsättet Förmagnetisering. Använd parameter 2101 för att välja startsätt. Efter startkommando förmagnetiserar frekvensomriktaren motorn under den tid som definieras här, varefter motorn
startar. Ställ in precis så lång förmagnetiseringstid som behövs för att uppnå full magnetisering. För lång tid värmer motorn
i onödan.2104 DC FASTHÅLLNING
Val av om likström ska användas för bromsning. 0 = EJ VALD Deaktiverar likströmsdrift 2 = DC BROMS Aktiverar DC-bromsning efter att modulering har upphört.
Om parameter 2102 STOPP FUNKTION är 1 (UTRULLNING), aktiveras bromsning när startkommando inte längre föreligger.
Om parameter 2102 STOPP FUNKTION är 2 (RAMP), aktiveras bromsning efter rampen.2106 DC FASTH STRÖM
Definierar börvärdet för likström som en procentsats av parameter 9906 (MOTOR NOM STRÖM). 2107 DC BROMS TID
Definierar DC-bromstiden efter att modulering har upphört, om parameter 2104 är 2 (DC BROMS).
Idrifttagning
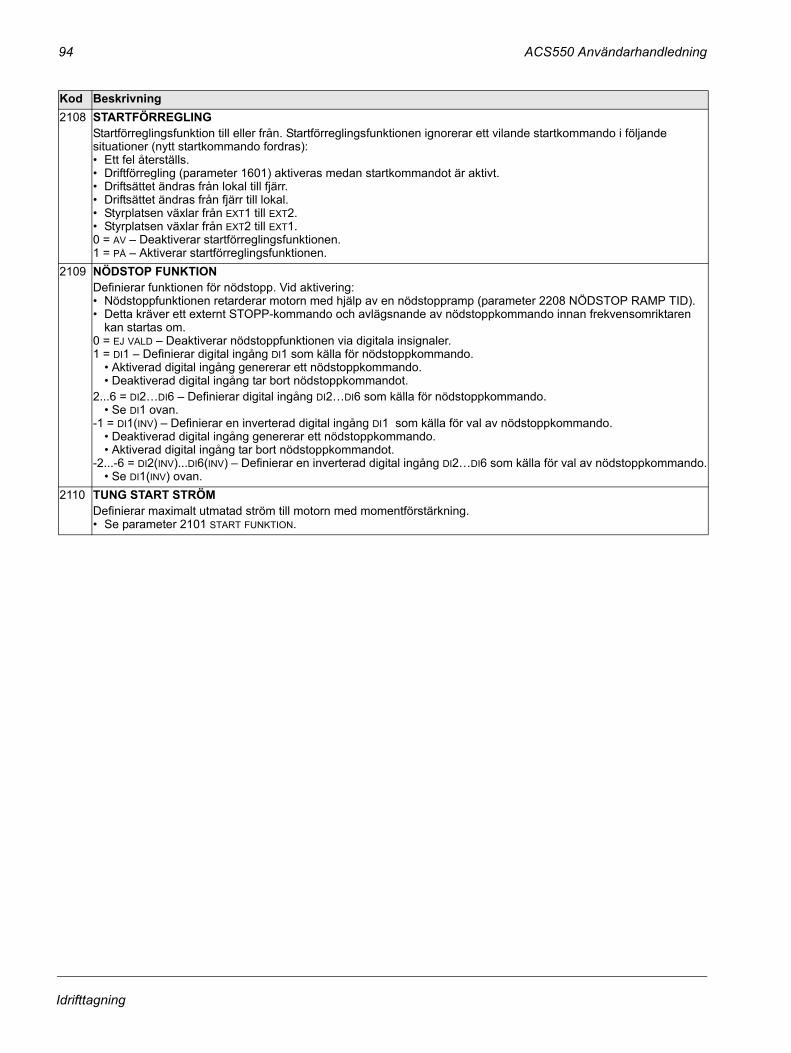
94 ACS550 Användarhandledning
2108 STARTFÖRREGLINGStartförreglingsfunktion till eller från. Startförreglingsfunktionen ignorerar ett vilande startkommando i följande situationer (nytt startkommando fordras): Ett fel återställs. Driftförregling (parameter 1601) aktiveras medan startkommandot är aktivt. Driftsättet ändras från lokal till fjärr. Driftsättet ändras från fjärr till lokal. Styrplatsen växlar från EXT1 till EXT2. Styrplatsen växlar från EXT2 till EXT1.0 = AV Deaktiverar startförreglingsfunktionen. 1 = PÅ Aktiverar startförreglingsfunktionen.
2109 NÖDSTOP FUNKTIONDefinierar funktionen för nödstopp. Vid aktivering: Nödstoppfunktionen retarderar motorn med hjälp av en nödstoppramp (parameter 2208 NÖDSTOP RAMP TID). Detta kräver ett externt STOPP-kommando och avlägsnande av nödstoppkommando innan frekvensomriktaren
kan startas om.0 = EJ VALD Deaktiverar nödstoppfunktionen via digitala insignaler.1 = DI1 Definierar digital ingång DI1 som källa för nödstoppkommando.
Aktiverad digital ingång genererar ett nödstoppkommando. Deaktiverad digital ingång tar bort nödstoppkommandot.
2...6 = DI2DI6 Definierar digital ingång DI2DI6 som källa för nödstoppkommando. Se DI1 ovan.
-1 = DI1(INV) Definierar en inverterad digital ingång DI1 som källa för val av nödstoppkommando. Deaktiverad digital ingång genererar ett nödstoppkommando. Aktiverad digital ingång tar bort nödstoppkommandot.
-2...-6 = DI2(INV)...DI6(INV) Definierar en inverterad digital ingång DI2DI6 som källa för val av nödstoppkommando. Se DI1(INV) ovan.
2110 TUNG START STRÖMDefinierar maximalt utmatad ström till motorn med momentförstärkning. Se parameter 2101 START FUNKTION.
Kod Beskrivning
Idrifttagning

ACS550 Användarhandledning 95
Grupp 22: Accel/RetardGruppen definierar accelerations- och retardationstider. Dessa ramper definieras som ett par, en accelerationsramp och en retardationsramp. Du kan definiera två ramppar och använda en digital ingång för att välja det ena eller det andra paret.
Kod Beskrivning2201 VAL ACC/RET
Definierar källa för val av ramptid för acceleration/retardation. Ramper definieras som ett par, en accelerationsramp och en retardationsramp. Se nedan för rampdefinitionsparametrar.0 = EJ VALD Deaktiverar valmöjligheten - det första rampparet väljs.1 = DI1 Definierar digital ingång DI1 som källa för val av ramp.
Aktiverad digital ingång väljer ramppar 2. Deaktiverad digital ingång väljer ramppar 1.
2...6 = DI2DI6 Definierar digital ingångDI2DI6 som källa för val av ramp. Se DI1 ovan.
-1 = DI1(INV) Definierar en inverterad digital ingång DI1 som källa för val av ramp. Deaktiverad digital ingång väljer ramppar 2 Aktiverad digital ingång väljer ramppar 1.
-2...-6 = DI2(INV)...DI6(INV) Definierar en inverterad digital ingång DI2DI6 som källa för val av ramp. Se DI1(INV) ovan.
2202 ACCEL TID 1Definierar accelerationstid från noll till maxfrekvens för ramppar 1. Se A i figur. Den faktiska accelerationstiden beror även på 2204 RAMPFORM TID. Se 2008 MAXIMAL FREKVENS.
2203 RETARD TID 1Definierar retardationstid från maxfrekvens till noll för ramp 1. Den faktiska retardationstiden beror även på 2204 RAMPFORM TID. Se 2008 MAXIMAL FREKVENS.
2204 RAMPFORM TID 1Väljer rampform för acceleration/retardation för ramppar 1. Se B i figur. Formen definieras som en ramp, om inte extra tid har specificerats här i syfte att
nå maxfrekvens. En längre tid ger en mjukare övergång i vardera änden av kurvan. Formen blir en S-kurva.
Tumregel: 1/5 är en lämpligt relation mellan ramp form tid och accelerationsramptid.
0,0 = LINJÄR Specificerar linjär accelerations-/retardationsramp för ramppar 1.0,1...1000,0 = S-KURVA Specificerar s-ramp för accelerations-/retardationsramp
för ramppar 1.
2205 ACCEL TID 2Definierar accelerationstid från noll till maxfrekvens för ramp 2. Se 2002 ACCEL TID 102 ACCEL TID 1ACCEL TID 1.
2206 RETARD TID 2Definierar retardationstid från maxfrekvens till noll för ramp 2. Se 2003 RETARD TID 1
2207 RAMPFORM TID 2Väljer rampform för acceleration/retardation för ramppar 2. Se 2004 RAMPFORM TID 1.
2208 NÖDSTOP RAMP TIDDefinierar retardationstid från maxfrekvens till noll vid onormal händelse. Se parameter 2109 NÖDSTOPP FUNKTION. Rampen är linjär.
T
FREKV
T
MAXFREKV
Linjär
S-kurva
AA = 2202 ACCELERATIONSTID
B
B (=0)
B = 2204 RAMPFORM TID
MAX
Idrifttagning
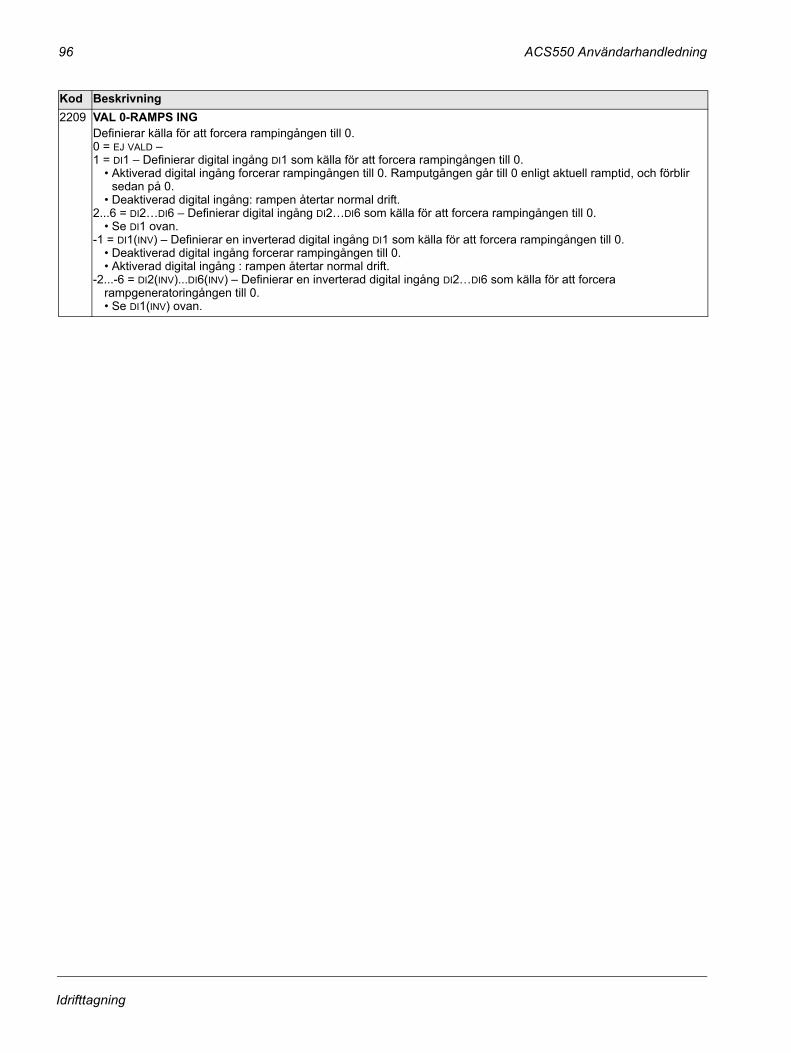
96 ACS550 Användarhandledning
2209 VAL 0-RAMPS INGDefinierar källa för att forcera rampingången till 0. 0 = EJ VALD 1 = DI1 Definierar digital ingång DI1 som källa för att forcera rampingången till 0.
Aktiverad digital ingång forcerar rampingången till 0. Ramputgången går till 0 enligt aktuell ramptid, och förblir sedan på 0.
Deaktiverad digital ingång: rampen återtar normal drift.2...6 = DI2DI6 Definierar digital ingång DI2DI6 som källa för att forcera rampingången till 0.
Se DI1 ovan.-1 = DI1(INV) Definierar en inverterad digital ingång DI1 som källa för att forcera rampingången till 0.
Deaktiverad digital ingång forcerar rampingången till 0. Aktiverad digital ingång : rampen återtar normal drift.
-2...-6 = DI2(INV)...DI6(INV) Definierar en inverterad digital ingång DI2DI6 som källa för att forcera rampgeneratoringången till 0. Se DI1(INV) ovan.
Kod Beskrivning
Idrifttagning

ACS550 Användarhandledning 97
Grupp 23: VarvtalsregleringGruppen definierar ingångsdata för varvtalsregulatorn.
Kod Beskrivning2301 RELATIV FÖRST
Definierar relativ förstärkning för varvtalsregulator. Större värden kan orsaka varvtalsoscillation. Figuren visar varvtalsregulatorns utsignal
efter en stegförändring på grund av fel (felet förblir konstant).
Obs! Du kan använda parameter 2305, SJÄLVINSTÄLLNING, för att automatiskt ställa in proportionell förstärkning.
2302 INTEGRATIONSTIDDefinierar integrationstiden för varvtalsregulator. Integrationstiden definierar kvoten vid vilken
regulatorns utsignal förändras vid konstant regleravvikelse.
Kortare integrationstid korrigerar konstanta fel snabbare.
För kort integrationstid leder till instabil reglering.
Figuren visar varvtalsregulatorns utsignal efter en stegförändring på grund av fel (felet förblir konstant).
Obs! Du kan använda parameter 2305, SJÄLVINSTÄLLNING, för att automatiskt ställa in integrationstid.
2303 DERIVERINGSTIDDefinierar deriveringstid för varvtalsregulator. Deriverande verkan gör regleringen känsligare för förändringar i regleravvikelsen. Ju längre deriveringstid desto kraftigare utslag ger regulatorutgången för att kompensera för förändringar. Om deriveringstiden är satt till 0 fungerar regulatorn som en PI-regulator. Annars fungerar den som en PID-
regulator. Nedanstående figur visar varvtalsregulatorns utgång efter en stegförändring på grund av ett fel, när felet är konstant.
Förstärkning = Kp = 1 TI = Integrationstid = 0 TD= Deriveringstid = 0
Regulator-
Regleravvikelse
Regulatorutgång
t
%
e = Regleravvikelseutgång = Kp * e
TI
Regulatorutgång
t
%
Förstärkning = Kp = 1 TI = Integrationstid > 0 TD= Deriveringstid = 0Kp * e
e = RegleravvikelseKp * e
Förstärkning = Kp = 1 TI = Integrationstid > 0 TD= Deriveringstid > 0 Ts= Samplingstid = 2 ms ∆e = Regleravvikelseförändring mellan två samplingar TI
Kp * e
Regleravvikelse
Regulatorutgång
t
%
e = Regleravvikelse
Kp * TD * ∆eTs Kp * e
Idrifttagning

98 ACS550 Användarhandledning
2304 ACC KOMPENSERINGDefinierar deriveringstid för accelerationskompensering. Genom att lägga till derivatan av börvärdet till utsignalen från varvtalsregulatorn kompenserar man för
tröghetsmomentet under acceleration. 2303 DERIVERINGSTID beskriver principen för den deriverande verkan. Tumregel: Sätt denna parameter till mellan 50 och 100% av summan av den mekaniska tidskonstanten för motorn
och den drivna utrustningen. Figuren visar varvtalsresponsen när en belastning med stort tröghetsmoment accelereras enligt en rampfunktion.
2305 SJÄLVINSTÄLLNINGStartar automatisk inställning av varvtalsregulatorn.0 = AV Deaktiverar självinställningsprocessen. (Deaktiverar inte driften enligt självinställningsvärdena.)1 = PÅ Aktiverar självinställning av varvtalsregulator Automatiskt återgång till AV.Procedur:Obs! Motorns belastning (driven utrustning) måste vara tillkopplad. Kör motorn vid ett konstant varvtal på 20 till 40% av märkvarvtal. Ändra självinställningsparametern 2305 till PÅ.
Frekvensomriktaren: Accelererar motorn. Beräknar värden för proportionell förstärkning och integrationstid. Ändrar parametrarna 2301 och 2302 till dessa värden. Återställer 2305 till AV.
Kod Beskrivning
VarvtalsreferensÄrvarvtal
Ingen accelerationskompensering Accelerationskompensering
tt
% %
Idrifttagning

ACS550 Användarhandledning 99
Grupp 24: MomentregulatorGruppen definierar ingångsdata för momentregulatorn.
Kod Beskrivning2401 MOMENT RAMP UPP
Definierar vridmomentbörvärdet för upprampningstiden - minsta tid för börvärdet att öka från noll till motorns märkmoment.
2402 MOMENT RAMP NERDefinierar vridmomentbörvärdet för nedrampningstiden - minsta tid för börvärdet att minska från motorns märkmoment till noll.
Idrifttagning
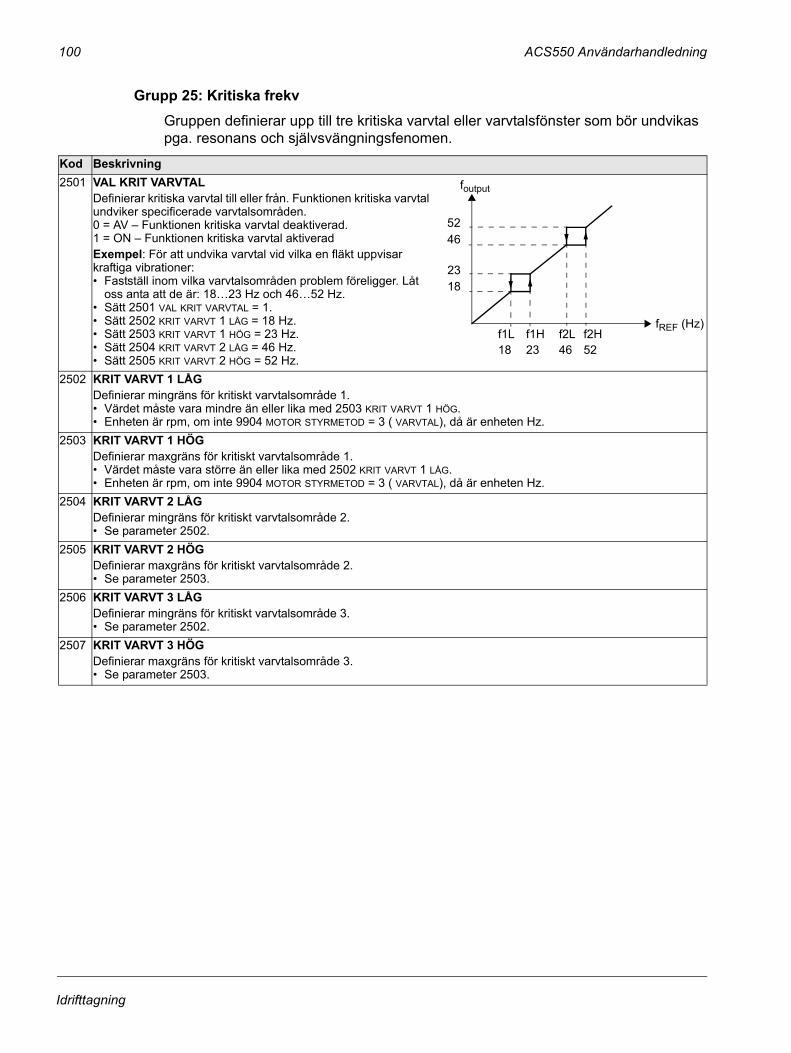
100 ACS550 Användarhandledning
Grupp 25: Kritiska frekvGruppen definierar upp till tre kritiska varvtal eller varvtalsfönster som bör undvikas pga. resonans och självsvängningsfenomen.
Kod Beskrivning2501 VAL KRIT VARVTAL
Definierar kritiska varvtal till eller från. Funktionen kritiska varvtal undviker specificerade varvtalsområden.0 = AV Funktionen kritiska varvtal deaktiverad.1 = ON Funktionen kritiska varvtal aktiveradExempel: För att undvika varvtal vid vilka en fläkt uppvisar kraftiga vibrationer: Fastställ inom vilka varvtalsområden problem föreligger. Låt
oss anta att de är: 1823 Hz och 4652 Hz. Sätt 2501 VAL KRIT VARVTAL = 1. Sätt 2502 KRIT VARVT 1 LÅG = 18 Hz. Sätt 2503 KRIT VARVT 1 HÖG = 23 Hz. Sätt 2504 KRIT VARVT 2 LÅG = 46 Hz. Sätt 2505 KRIT VARVT 2 HÖG = 52 Hz.
2502 KRIT VARVT 1 LÅGDefinierar mingräns för kritiskt varvtalsområde 1. Värdet måste vara mindre än eller lika med 2503 KRIT VARVT 1 HÖG. Enheten är rpm, om inte 9904 MOTOR STYRMETOD = 3 ( VARVTAL), då är enheten Hz.
2503 KRIT VARVT 1 HÖGDefinierar maxgräns för kritiskt varvtalsområde 1. Värdet måste vara större än eller lika med 2502 KRIT VARVT 1 LÅG. Enheten är rpm, om inte 9904 MOTOR STYRMETOD = 3 ( VARVTAL), då är enheten Hz.
2504 KRIT VARVT 2 LÅGDefinierar mingräns för kritiskt varvtalsområde 2. Se parameter 2502.
2505 KRIT VARVT 2 HÖGDefinierar maxgräns för kritiskt varvtalsområde 2. Se parameter 2503.
2506 KRIT VARVT 3 LÅGDefinierar mingräns för kritiskt varvtalsområde 3. Se parameter 2502.
2507 KRIT VARVT 3 HÖGDefinierar maxgräns för kritiskt varvtalsområde 3. Se parameter 2503.
foutput
5246
2318
fREF (Hz)f1L18
f2L46
f1H23
f2H52
Idrifttagning

ACS550 Användarhandledning 101
Grupp 26: Motorstyrning
Kod Beskrivning2601 FLÖDESOPTIMERING
Ändrar flödesvärdet beroende på aktuell belastning. Flödesoptimering kan minska den totala energiförbrukningen och ljudnivån. Funktionen bör aktiveras i drivsystem som arbetar under märkbelastning.0 = Deaktiverar funktionen. 1 = Aktiverar funktionen.
2602 FLÖDESBROMSNINGGer snabbare retardation genom att öka motorns magnetiseringsgrad vid behov, i stället för att begränsa retardationsrampen. Genom att öka statorflödet omvandlas det mekaniska systemets rörelseenergi till termisk energi i motorn.0 = Deaktiverar funktionen. 1 = Aktiverar funktionen.
2603 IR-KOMPENSERINGDefinierar IR-kompenseringsspänning som används för 0 Hz. Kräver att parameter 9904 MOTOR STYRMETOD = 3 (
SKALÄR: VARVTAL). Håll IR-kompenseringen så låg som möjligt för att
förebygga överhettning. Typiska värden för IR-kompensering är:
IR-kompensering När IR-kompensering är aktiverad får motorn extra
spänning vid låga varvtal. Använd IR-kompensering t.ex. i tillämpningar som fordrar högt lossbrytningsmoment.
2604 IR-KOMP OMRÅDEDefinierar den frekvens vid vilken IR-kompenseringen är 0 V (i % av motorfrekvens).
2605 U/F FÖRHÅLLANDEVal av formen hos U/f-förhållandet (spänning genom frekvens) under fältförsvagningspunkten. 1 = LINJÄR - Att föredra för tillämpningar med konstant moment.2 = KVADRATISK Att föredra för centrifugalpumpar och fläktar. (Ett kvadratiskt förhållande ger lägre motorljud för de
flesta driftfrekvenser.)2606 MODULERINGS FREK
Definierar frekvensomriktarens moduleringsfrekvens. Högre moduleringsfrekvens betyder mindre buller.
120%
80
40
0
Utan flödesbromsning
50
Med flödesbromsning
5 10 20 30 40
120%
80
40
0505 10 20 30 40
1
234
5
1
23
45
1
23
4
5
2,2 kW15 kW37 kW75 kW250 kW
Märkeffekt, motorBroms-
f (Hz)
f (Hz)
Moment (%)
380480 V-enheterPN (kW) 3 7,5 15 37 132IR komp (V) 21 18 15 10 4
Motor-
f (Hz)
A
B
spänning
A = IR-kompensering B = Ingen komp.
P 2603
P 2604
Idrifttagning

102 ACS550 Användarhandledning
2607 MODUL FREK. REGLModuleringsfrekvensen kan behöva minskas om den interna temperaturen i ACS550 stiger över 90 °C. Se figur. Denna funktion tillåter användning av högsta möjliga moduleringsfrekvens, beroende på omständigheterna. Högre moduleringsfrekvens betyder mindre buller.0 = AV Funktionen är deaktiverad.1 = PÅ Moduleringsfrekvensen begränsas enligt figur.
2608 EFTERSLÄPN. KOMPInställning av förstärkning för eftersläpningskompensation (i %). En kortsluten motor uppvisar en viss eftersläpning under belastning. Om frekvensen ökas med ökande
motormoment kompenseras eftersläpningen. Kräver att parameter 9904 MOTOR STYRMETOD = 3 (SKALÄR).0 = Ingen eftersläpningskompensation. 1200 = Ökande eftersläpningskompensation. 100% betyder full eftersläpningskompensation.
Kod Beskrivning
90 °C 100 °C
ACS5504 kHz
8 kHz
Moduleringsfrekvens
Temperatur
Idrifttagning

ACS550 Användarhandledning 103
Grupp 29: UnderhållDenna grupp innehåller utnyttjandenivåer och brytpunkter. När utnyttjandet når en inställd brytpunkt visas ett meddelande på manöverpanelen att det är dags för service.
Kod Beskrivning2901 BRYTP KYLFLÄKT
Definierar brytpunkt för drivsystemets drifttidräknare för kylfläkt. 0,0 = deaktiverad
2902 RÄKNARE KYLFLÄKTDefinierar ärvärdet för drivsystemets drifttidräknare för kylfläkt. Parametern återställs genom att man skriver 0,0 till den.
2903 BRYTP MEGAVARVDefinierar brytpunkt för motorns ackumulerade antal varv. 0,0 = deaktiverad
2904 RÄKNARE MEGAVARVDefinierar ärvärdet för motorns ackumulerade antal varv. Parametern återställs genom att man skriver 0 till den.
2905 BRYTP DRIFTTIDDefinierar brytpunkt för frekvensomriktarens drifttidräknare. 0,0 = deaktiverad
2906 RÄKNARE DRIFTTIDDefinierar ärvärdet för drivsystemets drifttidräknare. Parametern återställs genom att man skriver 0,0 till den.
2907 BRYTP MWhDefinierar brytpunkt för ackumulerad energiförbrukning (i megawattimmar). 0,0 = deaktiverad
2908 RÄKNARE MWhDefinierar ärvärdet för ackumulerad energiförbrukning (i megawattimmar). Parametern återställs genom att man skriver 0,0 till den.
Idrifttagning

104 ACS550 Användarhandledning
Grupp 30: FelfunktionerGruppen definierar vilka situationer som frekvensomriktaren ska tolka som potentiella fel och hur den ska reagera om fel detekteras.
Kod Beskrivning3001 AI<MIN FUNKTION
Definierar frekvensomriktarens reaktion om den analoga ingångens (AI) signal sjunker under felgränsen och AI används i referenskedjan. 3021 AI1 FELNIVÅ och 3022 AI2 FELNIVÅ definierar minimigränserna0 = EJ VALD Ingen reaktion.1 = FEL Visar ett fel (7, ANALOG INGÅNG 1 FEL eller 8, ANALOG INGÅNG 2 FEL) och drivsystemet stoppas genom
utrullning.2 = KONST HAST 7 Visar en varning (2006, ANALOG INGÅNG 1 FEL eller 2007, ANALOG INGÅNG 2 FEL) och varvtalet
bestäms av 1208 KONST HAST7.3 = SENAST VARVT visar en varning (2006, ANALOG INGÅNG 1 FEL eller 2007, ANALOG INGÅNG 2 FEL) och styr varvtalet
till senast angivna nivå. Detta värde är lika med genomsnittsvarvtalet under de senaste 10 sekunderna.Varning! Om du väljer KONST HAST 7 eller SENAST VARVT, kontrollera att fortsatt drift är säker när analog
insignal går förlorad.3002 PANEL BORTFALL
Definierar frekvensomriktarens respons på fel i kommunikationen med manöverpanelen.1 = FEL Visar ett fel (10, PANEL BORTFALL) och motorn stannar genom utrullning.2 = KONST HAST 7 Visar en varning (2008, PANEL BORTFALL) och varvtalet bestäms av parameter 1208 KONST HAST
7.3 = SENAST VARVT Visar en varning (2008, PANEL BORTFALL) och ställer in varvtalet utgående från senast gällande
nivå. Detta värde är lika med genomsnittsvarvtalet under de senaste 10 sekunderna.Varning! Om du väljer KONST HAST 7 eller SENAST VARVT, kontrollera att fortsatt drift är säker när
kommunikationen med manöverpanelen är bruten.3003 EXTERNT FEL 1
Val av ingång för extern felindikering samt frekvensomriktarens respons på extern felsignal0 = EJ VALD Extern felindikering ska inte användas.1 = DI1 Definierar digital ingång DI1 som ingång för extern felindikering.
Aktiverad digital ingång visar ett fel. Frekvensomriktaren visar ett fel (14, EXTERNT FEL 1) och drivsystemet stoppas genom utrullning.
2...6 = DI2DI6 Definierar digital ingång DI2DI6 som ingång för extern felindikering. Se DI1 ovan.
-1 = DI1(INV) Definierar en inverterad digital ingång DI1 som ingång för extern felindikering. Deaktiverad digital ingång visar ett fel. Frekvensomriktaren visar ett fel (14, EXTERNT FEL 1) och drivsystemet
stoppas genom utrullning.-2...-6 = DI2(INV)...DI6(INV) Definierar en inverterad digital ingång DI2DI6 som ingång för extern felindikering.
Se DI1(INV) ovan.3004 EXTERNT FEL 2
Val av ingång för extern felindikering 2 samt frekvensomriktarens respons på extern felsignal. Se parameter 3003 ovan.
3005 MOTOR ÖVERLASTDefinierar frekvensomriktarens respons vid överhettning av motorn.0 = EJ VALD Ingen respons, eller överhettningsskydd ej inställt.1 = FEL När beräknad motortemperatur överskrider 90°C, visas en varning (2010, MOTOR ÖVERLAST). När beräknad
motortemperatur överskrider 110°C, visas ett fel (9, MOTOR ÖVERLAST) och drivsystemet stoppas genom utrullning.2 = VARNING När beräknad motortemperatur överskrider 90°C, visar en varning (2010, MOTOR ÖVERLAST).
Idrifttagning

ACS550 Användarhandledning 105
3006 MOTOR TERM TIDDefinierar motorns termiska tidskonstant för motortemperaturmodellen. Detta är den tid som det tar motorn att nå 63% av
sluttemperaturen vid konstant belastning. För överhettningsskydd enligt UL-kraven för NEMA-klassade
motorer, använd följande tumregel: MOTOR TERM TID är lika med 35 gånger t6, där t6 (i sekunder) specificeras av motortillverkaren som den tid under vilken motorn kan arbeta säkert med sex gånger märkströmmen.
Den termiska tiden för en utlösningskurva i klass 10 är 350 s, för klass 20 700 s och för klass 30 1050 s.
3007 MOTOR BEL KURVADefinierar max tillåten driftbelastning för motorn. Vid 100% är denna strömgräns lika med startparametern 9906
MOTOR NOM STRÖM. Justera belastningskurvans nivå om omgivningstemperaturen
avviker från nominellt värde.3008 NOLLVARV BEL
Definierar maximalt tillåten ström vid nollvarvtal. Värdet styrs av 9906 MOTOR NOM STRÖM.
3009 BRYTPUNKTDefinierar brytpunkt för motorns belastningskurva.
Exempel: Fördröjningstider för utlösning av motorns överlastskydd med parametrarna 3005 MOTOR TERM TID, 3006 MOTOR BEL KURVA och 3007 NOLLVARV BEL vid sina respektive fabriksinställningar.
Kod Beskrivning
Temp. ökn.100%63%
t
t
P 3006
Motorlast
Frekvens
Utström (%) relativt9906 MOTOR NOM STRÖM
150
100
50
P 3007
P 3008
P 3009
60 s
3,5
IO = Utström IN = Motorns märkströmfO = UtfrekvensfBRK = BrytpunktA = Utlösningstid
3,0
2,5
2,0
1,5
1,0
0,5
00 0,2 0,4 0,8 1,0 1,2
IO/IN
fO/fBRK
90 s
180 s
300 s600 s
0,6
180 s
A
∞
Idrifttagning
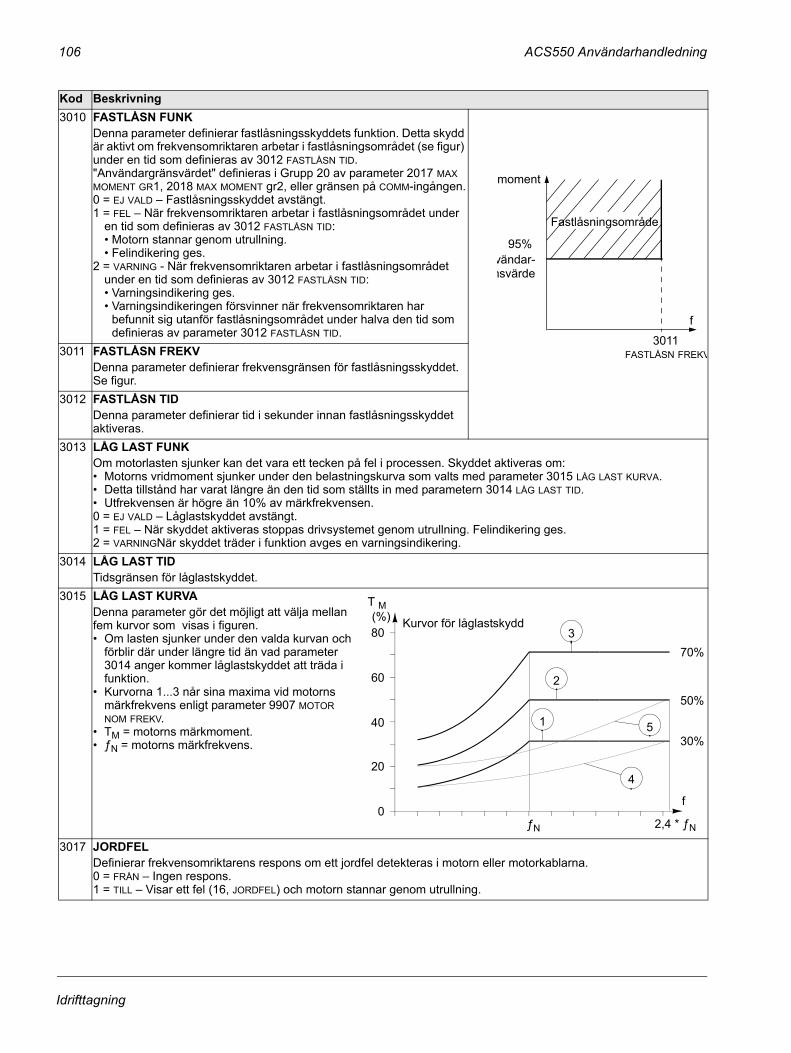
106 ACS550 Användarhandledning
3010 FASTLÅSN FUNKDenna parameter definierar fastlåsningsskyddets funktion. Detta skydd är aktivt om frekvensomriktaren arbetar i fastlåsningsområdet (se figur) under en tid som definieras av 3012 FASTLÅSN TID. "Användargränsvärdet" definieras i Grupp 20 av parameter 2017 MAX MOMENT GR1, 2018 MAX MOMENT gr2, eller gränsen på COMM-ingången.0 = EJ VALD Fastlåsningsskyddet avstängt.1 = FEL När frekvensomriktaren arbetar i fastlåsningsområdet under
en tid som definieras av 3012 FASTLÅSN TID: Motorn stannar genom utrullning. Felindikering ges.
2 = VARNING - När frekvensomriktaren arbetar i fastlåsningsområdet under en tid som definieras av 3012 FASTLÅSN TID: Varningsindikering ges. Varningsindikeringen försvinner när frekvensomriktaren har
befunnit sig utanför fastlåsningsområdet under halva den tid som definieras av parameter 3012 FASTLÅSN TID.
3011 FASTLÅSN FREKVDenna parameter definierar frekvensgränsen för fastlåsningsskyddet. Se figur.
3012 FASTLÅSN TIDDenna parameter definierar tid i sekunder innan fastlåsningsskyddet aktiveras.
3013 LÅG LAST FUNKOm motorlasten sjunker kan det vara ett tecken på fel i processen. Skyddet aktiveras om: Motorns vridmoment sjunker under den belastningskurva som valts med parameter 3015 LÅG LAST KURVA. Detta tillstånd har varat längre än den tid som ställts in med parametern 3014 LÅG LAST TID. Utfrekvensen är högre än 10% av märkfrekvensen.0 = EJ VALD Låglastskyddet avstängt.1 = FEL När skyddet aktiveras stoppas drivsystemet genom utrullning. Felindikering ges. 2 = VARNINGNär skyddet träder i funktion avges en varningsindikering.
3014 LÅG LAST TIDTidsgränsen för låglastskyddet.
3015 LÅG LAST KURVADenna parameter gör det möjligt att välja mellan fem kurvor som visas i figuren. Om lasten sjunker under den valda kurvan och
förblir där under längre tid än vad parameter 3014 anger kommer låglastskyddet att träda i funktion.
Kurvorna 1...3 når sina maxima vid motorns märkfrekvens enligt parameter 9907 MOTOR NOM FREKV.
TM = motorns märkmoment. N = motorns märkfrekvens.
3017 JORDFEL Definierar frekvensomriktarens respons om ett jordfel detekteras i motorn eller motorkablarna.0 = FRÅN Ingen respons.1 = TILL Visar ett fel (16, JORDFEL) och motorn stannar genom utrullning.
Kod Beskrivning
f
moment
95%
3011 FASTLÅSN FREKV
nsvärdevändar-
Fastlåsningsområde
80
60
40
20
02,4 * N
3
2
1 5
4
T M
70%
50%
30%
N
(%) Kurvor för låglastskydd
f
Idrifttagning

ACS550 Användarhandledning 107
3018 KOMM MOD FELFUNKDefinierar frekvensomriktarens respons om fältbusskommunikationen bryts.0 = EJ VALD Ingen reaktion.1 = FEL Visar ett fel (28, TIME-OUT FÄLTBUS) och motorn stannar genom utrullning.2 = KONST HAST 7 Visar en varning(2005, I/O KOMMUNIKATIONSFEL) och varvtalet bestäms av 1208 KONST HAST 7.
Detta "larmvarvtal" förblir aktivt tills fältbussen skriver ett nytt referensvärde. 3 = SENAST VARVT - Visar en varning(2005, I/O KOMMUNIKATIONSFEL) och ställer in varvtalet utgående från senast
gällande nivå. Detta värde är lika med genomsnittsvarvtalet under de senaste 10 sekunderna. Detta "larmvarvtal" förblir aktivt tills fältbussen skriver ett nytt referensvärde.
Varning: Om du väljer KONST HAST 7 eller SENAST VARVT, kontrollera att fortsatt drift är säker när kommunikationen med manöverpanelen är bruten.
3019 KOMM FEL TIDDefinierar den fördröjningstid för indikering av kommunikationsfel som används av 3018 KOMM MOD FELFUNK. Korta avbrott i fältbusskommunikationen hanteras inte som fel om varaktigheten understiger värdet på KOMM FEL
TID.3021 AI1 FELNIVÅ
Övervakning av felnivå för AI 1. Se 3001 AI<MIN FUNKTION.3022 AI2 FELNIVÅ
Övervakning av felnivå för AI 2. Se 3001 AI<MIN FUNKTION.
Kod Beskrivning
Idrifttagning
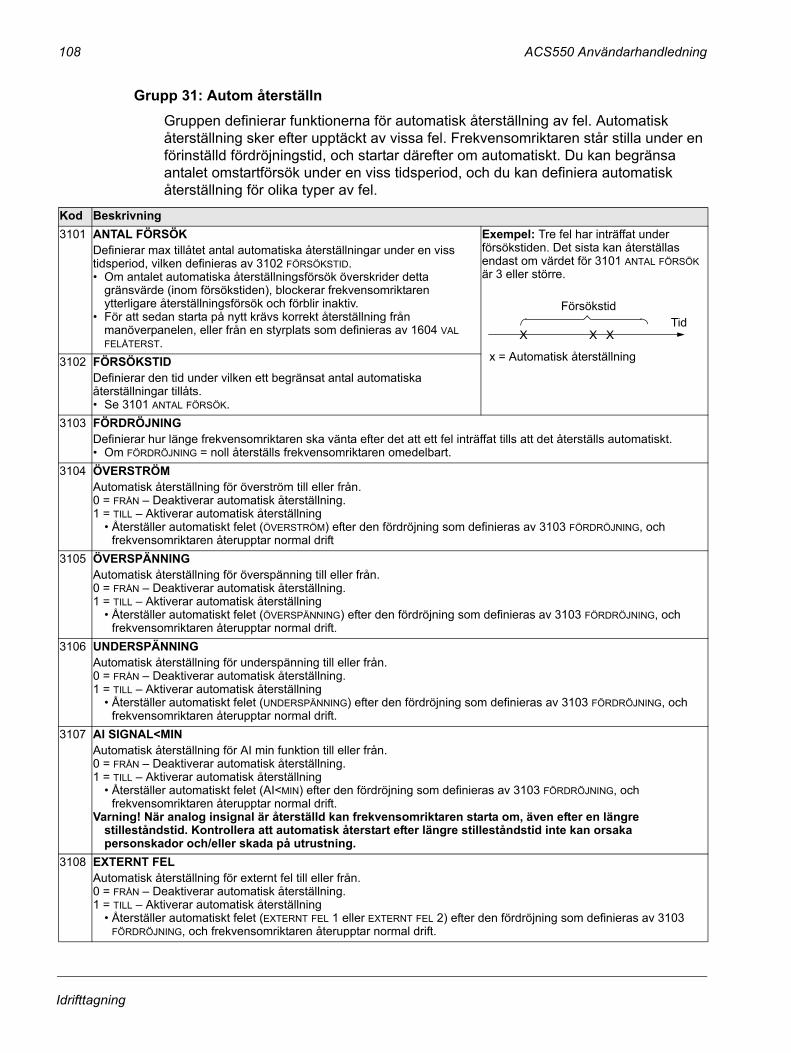
108 ACS550 Användarhandledning
Grupp 31: Autom återställn Gruppen definierar funktionerna för automatisk återställning av fel. Automatisk återställning sker efter upptäckt av vissa fel. Frekvensomriktaren står stilla under en förinställd fördröjningstid, och startar därefter om automatiskt. Du kan begränsa antalet omstartförsök under en viss tidsperiod, och du kan definiera automatisk återställning för olika typer av fel.
Kod Beskrivning3101 ANTAL FÖRSÖK
Definierar max tillåtet antal automatiska återställningar under en viss tidsperiod, vilken definieras av 3102 FÖRSÖKSTID. Om antalet automatiska återställningsförsök överskrider detta
gränsvärde (inom försökstiden), blockerar frekvensomriktaren ytterligare återställningsförsök och förblir inaktiv.
För att sedan starta på nytt krävs korrekt återställning från manöverpanelen, eller från en styrplats som definieras av 1604 VAL FELÅTERST.
Exempel: Tre fel har inträffat under försökstiden. Det sista kan återställas endast om värdet för 3101 ANTAL FÖRSÖK är 3 eller större.
3102 FÖRSÖKSTIDDefinierar den tid under vilken ett begränsat antal automatiska återställningar tillåts. Se 3101 ANTAL FÖRSÖK.
3103 FÖRDRÖJNING Definierar hur länge frekvensomriktaren ska vänta efter det att ett fel inträffat tills att det återställs automatiskt. Om FÖRDRÖJNING = noll återställs frekvensomriktaren omedelbart.
3104 ÖVERSTRÖMAutomatisk återställning för överström till eller från.0 = FRÅN Deaktiverar automatisk återställning.1 = TILL Aktiverar automatisk återställning
Återställer automatiskt felet (ÖVERSTRÖM) efter den fördröjning som definieras av 3103 FÖRDRÖJNING, och frekvensomriktaren återupptar normal drift
3105 ÖVERSPÄNNINGAutomatisk återställning för överspänning till eller från.0 = FRÅN Deaktiverar automatisk återställning.1 = TILL Aktiverar automatisk återställning
Återställer automatiskt felet (ÖVERSPÄNNING) efter den fördröjning som definieras av 3103 FÖRDRÖJNING, och frekvensomriktaren återupptar normal drift.
3106 UNDERSPÄNNINGAutomatisk återställning för underspänning till eller från.0 = FRÅN Deaktiverar automatisk återställning.1 = TILL Aktiverar automatisk återställning
Återställer automatiskt felet (UNDERSPÄNNING) efter den fördröjning som definieras av 3103 FÖRDRÖJNING, och frekvensomriktaren återupptar normal drift.
3107 AI SIGNAL<MIN Automatisk återställning för AI min funktion till eller från.0 = FRÅN Deaktiverar automatisk återställning.1 = TILL Aktiverar automatisk återställning
Återställer automatiskt felet (AI<MIN) efter den fördröjning som definieras av 3103 FÖRDRÖJNING, och frekvensomriktaren återupptar normal drift.
Varning! När analog insignal är återställd kan frekvensomriktaren starta om, även efter en längre stilleståndstid. Kontrollera att automatisk återstart efter längre stilleståndstid inte kan orsaka personskador och/eller skada på utrustning.
3108 EXTERNT FELAutomatisk återställning för externt fel till eller från.0 = FRÅN Deaktiverar automatisk återställning.1 = TILL Aktiverar automatisk återställning
Återställer automatiskt felet (EXTERNT FEL 1 eller EXTERNT FEL 2) efter den fördröjning som definieras av 3103 FÖRDRÖJNING, och frekvensomriktaren återupptar normal drift.
X X XTid
Försökstid
x = Automatisk återställning
Idrifttagning
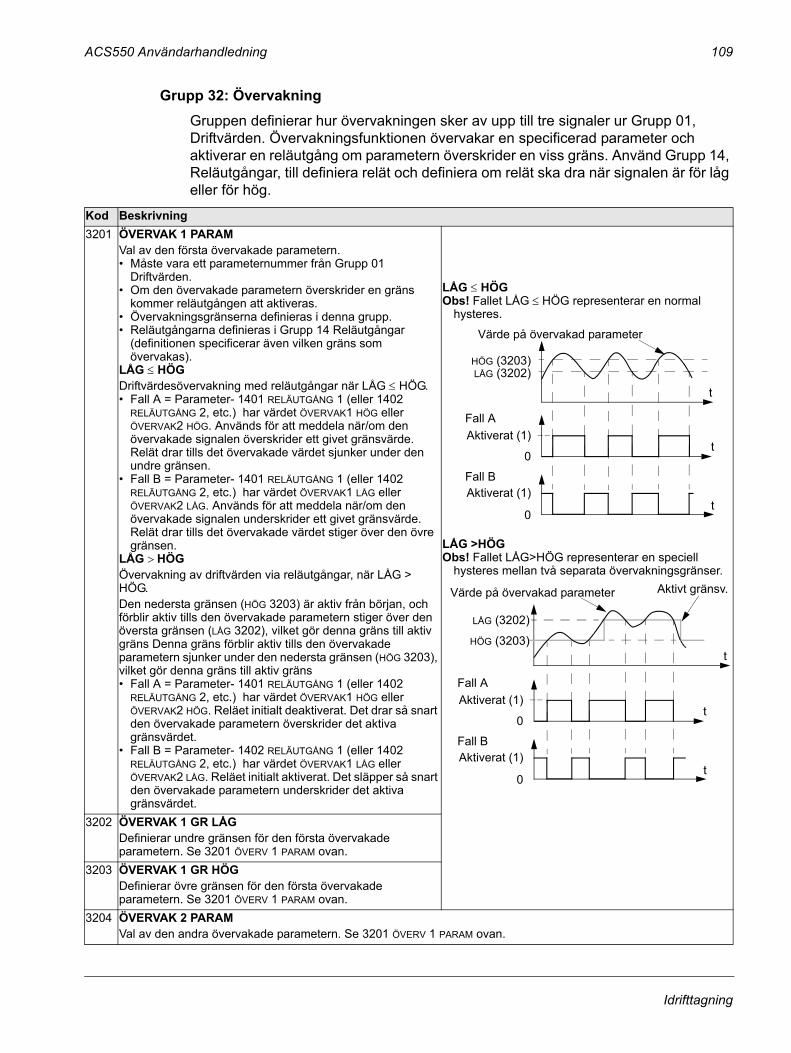
ACS550 Användarhandledning 109
Grupp 32: ÖvervakningGruppen definierar hur övervakningen sker av upp till tre signaler ur Grupp 01, Driftvärden. Övervakningsfunktionen övervakar en specificerad parameter och aktiverar en reläutgång om parametern överskrider en viss gräns. Använd Grupp 14, Reläutgångar, till definiera relät och definiera om relät ska dra när signalen är för låg eller för hög.
Kod Beskrivning3201 ÖVERVAK 1 PARAM
Val av den första övervakade parametern. Måste vara ett parameternummer från Grupp 01
Driftvärden. Om den övervakade parametern överskrider en gräns
kommer reläutgången att aktiveras. Övervakningsgränserna definieras i denna grupp. Reläutgångarna definieras i Grupp 14 Reläutgångar
(definitionen specificerar även vilken gräns som övervakas).
LÅG ≤ HÖGDriftvärdesövervakning med reläutgångar när LÅG ≤ HÖG. Fall A = Parameter- 1401 RELÄUTGÅNG 1 (eller 1402
RELÄUTGÅNG 2, etc.) har värdet ÖVERVAK1 HÖG eller ÖVERVAK2 HÖG. Används för att meddela när/om den övervakade signalen överskrider ett givet gränsvärde. Relät drar tills det övervakade värdet sjunker under den undre gränsen.
Fall B = Parameter- 1401 RELÄUTGÅNG 1 (eller 1402 RELÄUTGÅNG 2, etc.) har värdet ÖVERVAK1 LÅG eller ÖVERVAK2 LÅG. Används för att meddela när/om den övervakade signalen underskrider ett givet gränsvärde. Relät drar tills det övervakade värdet stiger över den övre gränsen.
LÅG > HÖGÖvervakning av driftvärden via reläutgångar, när LÅG > HÖG.Den nedersta gränsen (HÖG 3203) är aktiv från början, och förblir aktiv tills den övervakade parametern stiger över den översta gränsen (LÅG 3202), vilket gör denna gräns till aktiv gräns Denna gräns förblir aktiv tills den övervakade parametern sjunker under den nedersta gränsen (HÖG 3203), vilket gör denna gräns till aktiv gräns Fall A = Parameter- 1401 RELÄUTGÅNG 1 (eller 1402
RELÄUTGÅNG 2, etc.) har värdet ÖVERVAK1 HÖG eller ÖVERVAK2 HÖG. Reläet initialt deaktiverat. Det drar så snart den övervakade parametern överskrider det aktiva gränsvärdet.
Fall B = Parameter- 1402 RELÄUTGÅNG 1 (eller 1402 RELÄUTGÅNG 2, etc.) har värdet ÖVERVAK1 LÅG eller ÖVERVAK2 LÅG. Reläet initialt aktiverat. Det släpper så snart den övervakade parametern underskrider det aktiva gränsvärdet.
LÅG ≤ HÖGObs! Fallet LÅG ≤ HÖG representerar en normal
hysteres.
LÅG >HÖGObs! Fallet LÅG>HÖG representerar en speciell
hysteres mellan två separata övervakningsgränser.
3202 ÖVERVAK 1 GR LÅGDefinierar undre gränsen för den första övervakade parametern. Se 3201 ÖVERV 1 PARAM ovan.
3203 ÖVERVAK 1 GR HÖGDefinierar övre gränsen för den första övervakade parametern. Se 3201 ÖVERV 1 PARAM ovan.
3204 ÖVERVAK 2 PARAMVal av den andra övervakade parametern. Se 3201 ÖVERV 1 PARAM ovan.
Värde på övervakad parameter
Fall A
0
Aktiverat (1)
0
HÖG (3203)
t
t
tLÅG (3202)
Fall BAktiverat (1)
LÅG (3202)
tHÖG (3203)
Värde på övervakad parameter
Fall A
0
Aktiverat (1)
0
t
t
Fall BAktiverat (1)
Aktivt gränsv.
Idrifttagning
110 ACS550 Användarhandledning
3205 ÖVERVAK 2 GR LÅGDefinierar undre gränsen för den andra övervakade parametern. Se 3204 ÖVERV 2 PARAM ovan.
3206 ÖVERVAK 2 GR HÖGDefinierar övre gränsen för den andra övervakade parametern. Se 3204 ÖVERV 2 PARAM ovan.
3207 ÖVERVAK 3 PARAMVal av den första övervakade parametern. Se 3201 ÖVERV 1 PARAM ovan.
3208 ÖVERVAK 3 GR LÅGDefinierar undre gränsen för den andra övervakade parametern. Se 3207 ÖVERV 3 PARAM ovan.
3209 ÖVERVAK 3 GR HÖGDefinierar övre gränsen för den tredje övervakade parametern. Se 3207 ÖVERV 3 PARAM ovan.
Kod Beskrivning
Idrifttagning

ACS550 Användarhandledning 111
Grupp 33: InformationDenna grupp ger information om frekvensomriktarens programvara samt versioner och testdatum.
Kod Beskrivning3301 PROGRAMVERSION
Innehåller versionsnumret på frekvensomriktarens mjukvara.3302 APPL PROGR VERS
Innehåller programpaketets versionsnummer.3303 TEST DATUM
Innehåller testdatum (åå.vv).3304 FRO DATA
Innehåller frekvensomriktarens märkström och märkspänning. Formatet är XXXY, där: XXX = Frekvensomriktarens märkström i A. Ett eventuellt "A" står för decimalkommat i strömvärdet. Till exempel:
XXX = 8A8 visar märkströmmen 8,8 A. Y = Frekvensomriktarens märkspänning, där Y = 2 anger märkspänningen 208240 Volt, och Y = 4 anger
märkspänningen 380480 Volt.
Idrifttagning
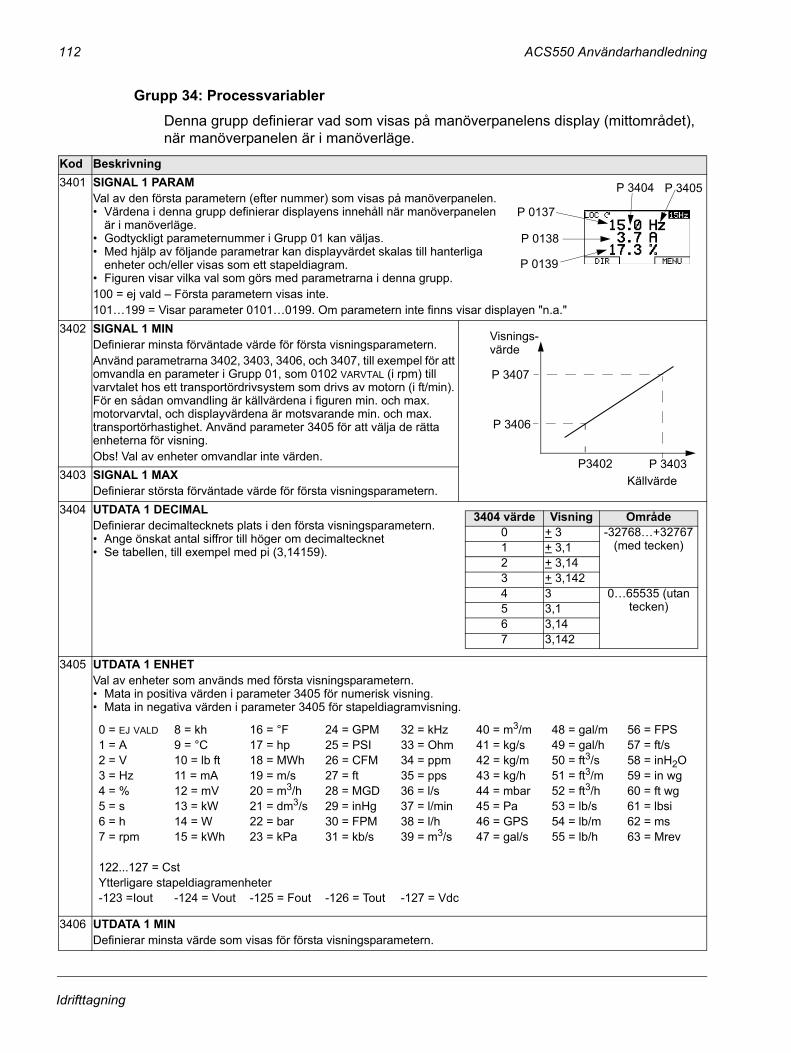
112 ACS550 Användarhandledning
Grupp 34: ProcessvariablerDenna grupp definierar vad som visas på manöverpanelens display (mittområdet), när manöverpanelen är i manöverläge.
Kod Beskrivning3401 SIGNAL 1 PARAM
Val av den första parametern (efter nummer) som visas på manöverpanelen. Värdena i denna grupp definierar displayens innehåll när manöverpanelen
är i manöverläge. Godtyckligt parameternummer i Grupp 01 kan väljas. Med hjälp av följande parametrar kan displayvärdet skalas till hanterliga
enheter och/eller visas som ett stapeldiagram. Figuren visar vilka val som görs med parametrarna i denna grupp.100 = ej vald Första parametern visas inte.101199 = Visar parameter 01010199. Om parametern inte finns visar displayen "n.a."
3402 SIGNAL 1 MINDefinierar minsta förväntade värde för första visningsparametern.Använd parametrarna 3402, 3403, 3406, och 3407, till exempel för att omvandla en parameter i Grupp 01, som 0102 VARVTAL (i rpm) till varvtalet hos ett transportördrivsystem som drivs av motorn (i ft/min). För en sådan omvandling är källvärdena i figuren min. och max. motorvarvtal, och displayvärdena är motsvarande min. och max. transportörhastighet. Använd parameter 3405 för att välja de rätta enheterna för visning.Obs! Val av enheter omvandlar inte värden.
3403 SIGNAL 1 MAXDefinierar största förväntade värde för första visningsparametern.
3404 UTDATA 1 DECIMALDefinierar decimaltecknets plats i den första visningsparametern. Ange önskat antal siffror till höger om decimaltecknet Se tabellen, till exempel med pi (3,14159).
3405 UTDATA 1 ENHETVal av enheter som används med första visningsparametern. Mata in positiva värden i parameter 3405 för numerisk visning. Mata in negativa värden i parameter 3405 för stapeldiagramvisning.
3406 UTDATA 1 MINDefinierar minsta värde som visas för första visningsparametern.
P 0137
P 0138
P 0139
P 3404 P 3405
Källvärde
P 3407
P 3406
P 3403P3402
Visnings- värde
3404 värde Visning Område0 + 3 -32768+32767
(med tecken)1 + 3,12 + 3,143 + 3,1424 3 065535 (utan
tecken)5 3,16 3,147 3,142
0 = EJ VALD 8 = kh 16 = °F 24 = GPM 32 = kHz 40 = m3/m 48 = gal/m 56 = FPS1 = A 9 = °C 17 = hp 25 = PSI 33 = Ohm 41 = kg/s 49 = gal/h 57 = ft/s2 = V 10 = lb ft 18 = MWh 26 = CFM 34 = ppm 42 = kg/m 50 = ft3/s 58 = inH2O3 = Hz 11 = mA 19 = m/s 27 = ft 35 = pps 43 = kg/h 51 = ft3/m 59 = in wg4 = % 12 = mV 20 = m3/h 28 = MGD 36 = l/s 44 = mbar 52 = ft3/h 60 = ft wg5 = s 13 = kW 21 = dm3/s 29 = inHg 37 = l/min 45 = Pa 53 = lb/s 61 = lbsi6 = h 14 = W 22 = bar 30 = FPM 38 = l/h 46 = GPS 54 = lb/m 62 = ms7 = rpm 15 = kWh 23 = kPa 31 = kb/s 39 = m3/s 47 = gal/s 55 = lb/h 63 = Mrev
122...127 = CstYtterligare stapeldiagramenheter-123 =Iout -124 = Vout -125 = Fout -126 = Tout -127 = Vdc
Idrifttagning
ACS550 Användarhandledning 113
3407 UTDATA 1 MAXDefinierar största värde som visas för första visningsparametern.
3408 SIGNAL 2 PARAMVal av den andra parametern (efter nummer) som visas på manöverpanelen. Se parameter 3401.
3409 SIGNAL 2 MINDefinierar minsta förväntade värde för den andra visningsparametern. Se parameter 3402.
3410 SIGNAL 2 MAXDefinierar största förväntade värde för den andra visningsparametern. Se parameter 3403.
3411 UTDATA 2 DECIMALDefinierar decimaltecknets plats i den andra visningsparametern. Se parameter 3404.
3412 UTDATA 2 ENHETVal av enheter som används med den andra visningsparametern. Se parameter 3405.
3413 UTDATA 2 MINDefinierar minsta värde som visas för den andra visningsparametern. Se parameter 3406.
3414 UTDATA 2 MAXDefinierar största värde som visas för den andra visningsparametern. Se parameter 3407.
3415 SIGNAL 3 PARAMVal av den tredje parametern (efter nummer) som visas på manöverpanelen. Se parameter 3401.
3416 SIGNAL 3 MINDefinierar minsta förväntade värde för den tredje visningsparametern. Se parameter 3402.
3417 SIGNAL 3 MAXDefinierar största förväntade värde för den tredje visningsparametern. Se parameter 3403.
3418 UTDATA 3 DECIMALDefinierar decimaltecknets plats i den tredje visningsparametern. Se parameter 3404.
3418 UTDATA 3 ENHETVal av enheter som används med den tredje visningsparametern. Se parameter 3405.
3420 UTDATA 3 MINDefinierar minsta värde som visas för den tredje visningsparametern. Se parameter 3406.
3421 UTDATA 3 MAXDefinierar största värde som visas för den tredje visningsparametern. Se parameter 3407.
Kod Beskrivning
Idrifttagning

114 ACS550 Användarhandledning
Grupp 35: Motortemp mätningGruppen definierar detektering och rapportering för ett specifikt potentiellt fel - överhettning av motor, som detekteras av en temperaturgivare. Typiska anslutningar definieras nedan.
Varning! IEC 60664 kräver dubbel eller förstärkt isolering mellan spänningsförande delar och ytorna på åtkomliga delar av elektrisk utrustning som är antingen icke-elektriskt ledande eller elektriskt ledande, men ej anslutna till skyddsjordFör att uppfylla detta krav, anslut en termistor (och andra liknande komponenter) till frekvensomriktarens styranslutningar enligt något av dessa alternativ: Separera termistorn från spänningsförande delar av motorn med dubbel
förstärkt isolering. Skydda alla kretsar som är anslutna till frekvensomriktarens digitala och
analoga ingångar. Skydda mot kontakt, och isolera från andra lågspänningskretsar med basisolering (avsedd för samma spänningsnivå som frekvensomriktarens huvudkrets).
Använd ett externt termistorrelä. Reläisoleringen måste vara avsedd för samma spänningsnivå som frekvensomriktarens huvudkrets.
Nedanstående figur visar alternativa termistoranslutningar. Vid motoränden ska kabelns skärm jordas via en 10 nF-kondensator. Om detta är inte möjligt, lämna skärmen oansluten.
Motor
T
10 nF
Motor
TTT
En givare Tre givare
10 nF
AI1
AGND
AO1
AGND
AI1
AGND
AO1
AGND
MotorT 10 nF
MotorT
Termistor relä OMIO-kort
DI6+24 VDC
Termistorrelä: Termistor (0) eller (1) Termistor (0)
OMIO-kort
DI6+24 VDC
Idrifttagning
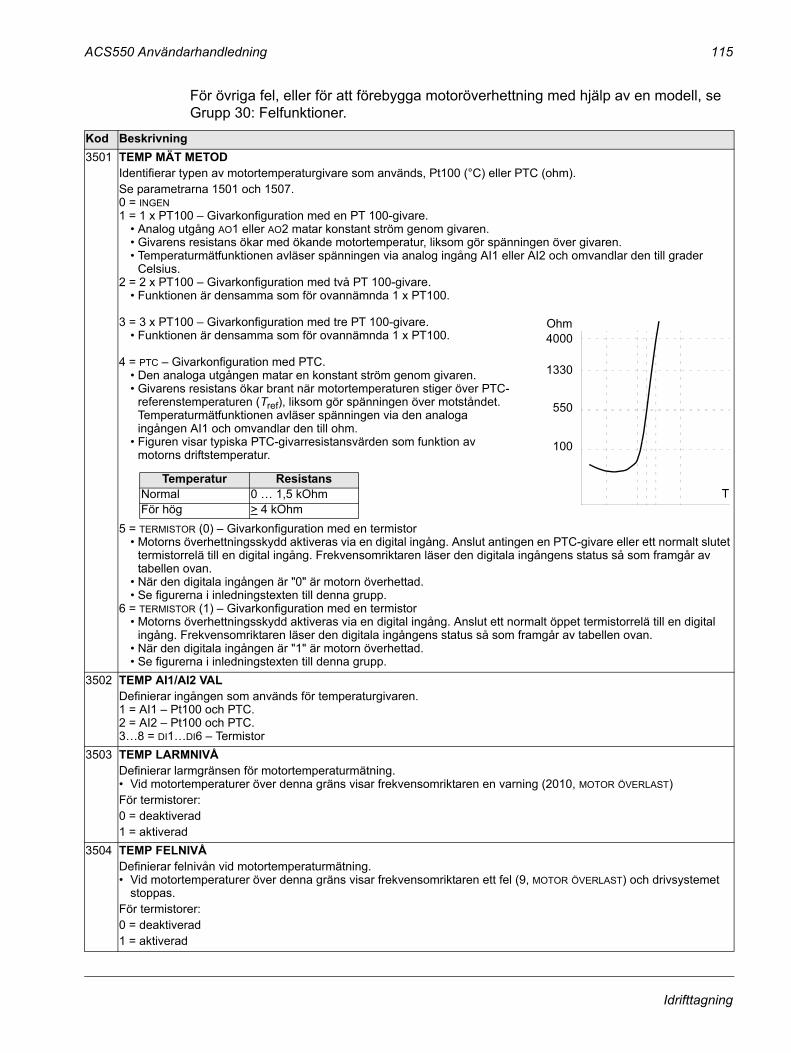
ACS550 Användarhandledning 115
För övriga fel, eller för att förebygga motoröverhettning med hjälp av en modell, se Grupp 30: Felfunktioner.
Kod Beskrivning3501 TEMP MÄT METOD
Identifierar typen av motortemperaturgivare som används, Pt100 (°C) eller PTC (ohm). Se parametrarna 1501 och 1507.0 = INGEN1 = 1 x PT100 Givarkonfiguration med en PT 100-givare.
Analog utgång AO1 eller AO2 matar konstant ström genom givaren. Givarens resistans ökar med ökande motortemperatur, liksom gör spänningen över givaren. Temperaturmätfunktionen avläser spänningen via analog ingång AI1 eller AI2 och omvandlar den till grader
Celsius.2 = 2 x PT100 Givarkonfiguration med två PT 100-givare.
Funktionen är densamma som för ovannämnda 1 x PT100.
3 = 3 x PT100 Givarkonfiguration med tre PT 100-givare. Funktionen är densamma som för ovannämnda 1 x PT100.
4 = PTC Givarkonfiguration med PTC. Den analoga utgången matar en konstant ström genom givaren. Givarens resistans ökar brant när motortemperaturen stiger över PTC-
referenstemperaturen (Tref), liksom gör spänningen över motståndet. Temperaturmätfunktionen avläser spänningen via den analoga ingången AI1 och omvandlar den till ohm.
Figuren visar typiska PTC-givarresistansvärden som funktion av motorns driftstemperatur.
5 = TERMISTOR (0) Givarkonfiguration med en termistor Motorns överhettningsskydd aktiveras via en digital ingång. Anslut antingen en PTC-givare eller ett normalt slutet
termistorrelä till en digital ingång. Frekvensomriktaren läser den digitala ingångens status så som framgår av tabellen ovan.
När den digitala ingången är "0" är motorn överhettad. Se figurerna i inledningstexten till denna grupp.
6 = TERMISTOR (1) Givarkonfiguration med en termistor Motorns överhettningsskydd aktiveras via en digital ingång. Anslut ett normalt öppet termistorrelä till en digital
ingång. Frekvensomriktaren läser den digitala ingångens status så som framgår av tabellen ovan. När den digitala ingången är "1" är motorn överhettad. Se figurerna i inledningstexten till denna grupp.
3502 TEMP AI1/AI2 VALDefinierar ingången som används för temperaturgivaren.1 = AI1 Pt100 och PTC.2 = AI2 Pt100 och PTC.38 = DI1DI6 Termistor
3503 TEMP LARMNIVÅDefinierar larmgränsen för motortemperaturmätning. Vid motortemperaturer över denna gräns visar frekvensomriktaren en varning (2010, MOTOR ÖVERLAST)För termistorer:0 = deaktiverad1 = aktiverad
3504 TEMP FELNIVÅDefinierar felnivån vid motortemperaturmätning. Vid motortemperaturer över denna gräns visar frekvensomriktaren ett fel (9, MOTOR ÖVERLAST) och drivsystemet
stoppas.För termistorer:0 = deaktiverad1 = aktiverad
100
550
1330
4000Ohm
TTemperatur Resistans
Normal 0 1,5 kOhmFör hög > 4 kOhm
Idrifttagning

116 ACS550 Användarhandledning
Grupp 36: Tidur funktionDenna grupp definierar tidsfunktionerna. Bland tidsfunktionerna kan nämnas:
Fyra dagliga start/stopp
Fyra veckovisa start/stopp, med överordnad funktion
Fyra tidsfunktioner för att gruppera valda tidur.
En tidsfunktion kan anslutas till flera tidur och ett tidur till flera tidsfunktioner.
En parameter kan anslutas till endast en tidsfunktion.
Tidur13602 tidur1 start tid3603 tidur1 stop tid3604 tidur1 start dag3605 tidur1 stop dag
Tidur23606 tidur2 start tid3607 tidur2 stop tid3608 tidur2 start dag3609 tidur2 stop dag
Tidur33610 tidur3 start tid3611 tidur3 stop tid3612 tidur3 start dag3613 tidur3 stop dag
Tidur43614 tidur4 start tid3615 tidur4 stop tid3616 tidur4 start dag3617 tidur4 stop dag
Timer3622 Val timer3623 Timer tid
Tid Funktion 13626 Källa tid funk 1
Tid Funktion 23627 Källa tid funk 2
Tid Funktion 33628 Källa tid funk 3
Tid Funktion 43629 Källa tid funk 4
Tidur2 Funktion3627 Källa tid funk 2
1001 EXT1 STYRNING1002 EXT2 STYRNING1102 EXT 1/2 VAL1201 VAL KONST VARVT1401 RELÄUTGÅNG 11403 RELÄUTGÅNG 3
4027 VAL PID-REG 1-2
Tidur1 Funktion3626 Källa tid funk 1
8126 TIMERSTYRD AUTOVÄXLING
1410 RELÄUTGÅNG 41412 RELÄUTGÅNG 6
Idrifttagning
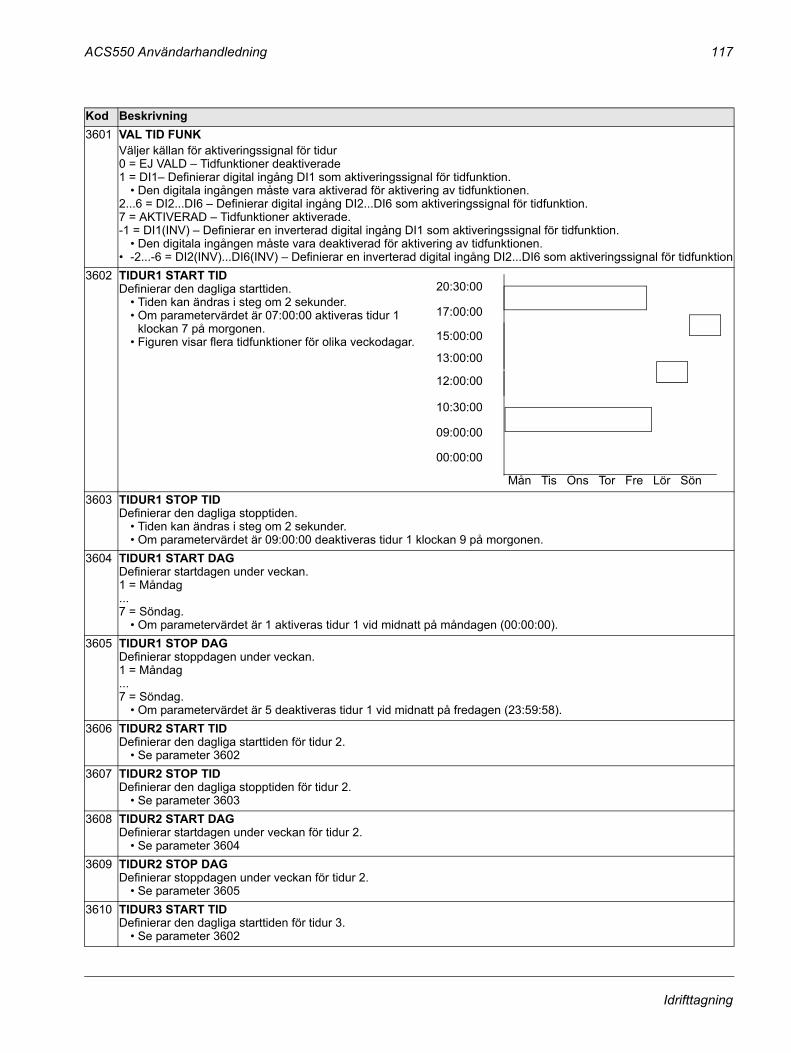
ACS550 Användarhandledning 117
Kod Beskrivning3601 VAL TID FUNK
Väljer källan för aktiveringssignal för tidur0 = EJ VALD Tidfunktioner deaktiverade1 = DI1 Definierar digital ingång DI1 som aktiveringssignal för tidfunktion.
Den digitala ingången måste vara aktiverad för aktivering av tidfunktionen.2...6 = DI2...DI6 Definierar digital ingång DI2...DI6 som aktiveringssignal för tidfunktion.7 = AKTIVERAD Tidfunktioner aktiverade.-1 = DI1(INV) Definierar en inverterad digital ingång DI1 som aktiveringssignal för tidfunktion.
Den digitala ingången måste vara deaktiverad för aktivering av tidfunktionen. -2...-6 = DI2(INV)...DI6(INV) Definierar en inverterad digital ingång DI2...DI6 som aktiveringssignal för tidfunktion
3602 TIDUR1 START TIDDefinierar den dagliga starttiden.
Tiden kan ändras i steg om 2 sekunder. Om parametervärdet är 07:00:00 aktiveras tidur 1
klockan 7 på morgonen. Figuren visar flera tidfunktioner för olika veckodagar.
3603 TIDUR1 STOP TIDDefinierar den dagliga stopptiden.
Tiden kan ändras i steg om 2 sekunder. Om parametervärdet är 09:00:00 deaktiveras tidur 1 klockan 9 på morgonen.
3604 TIDUR1 START DAGDefinierar startdagen under veckan.1 = Måndag...7 = Söndag.
Om parametervärdet är 1 aktiveras tidur 1 vid midnatt på måndagen (00:00:00).3605 TIDUR1 STOP DAG
Definierar stoppdagen under veckan.1 = Måndag...7 = Söndag.
Om parametervärdet är 5 deaktiveras tidur 1 vid midnatt på fredagen (23:59:58).3606 TIDUR2 START TID
Definierar den dagliga starttiden för tidur 2. Se parameter 3602
3607 TIDUR2 STOP TIDDefinierar den dagliga stopptiden för tidur 2.
Se parameter 36033608 TIDUR2 START DAG
Definierar startdagen under veckan för tidur 2. Se parameter 3604
3609 TIDUR2 STOP DAGDefinierar stoppdagen under veckan för tidur 2.
Se parameter 36053610 TIDUR3 START TID
Definierar den dagliga starttiden för tidur 3. Se parameter 3602
Mån Tis Ons Tor Fre Lör Sön
00:00:00
09:00:00
10:30:00
12:00:00
13:00:00
15:00:00
17:00:00
20:30:00
Idrifttagning

118 ACS550 Användarhandledning
3611 TIDUR3 STOP TIDDefinierar den dagliga stopptiden för tidur 3.
Se parameter 36033612 TIDUR3 START DAG
Definierar startdagen under veckan för tidur 3. Se parameter 3604
3613 TIDUR3 STOP DAGDefinierar stoppdagen under veckan för tidur 3.
Se parameter 36053614 TIDUR4 START TID
Definierar den dagliga starttiden för tidur 4. Se parameter 3602
3615 TIDUR4 STOP TIDDefinierar den dagliga starttiden för tidur 4.
Se parameter 36033616 TIDUR4 START DAG
Definierar startdagen under veckan för tidur 4. Se parameter 3604
3617 TIDUR4 STOP DAGDefinierar stoppdagen under veckan för tidur 4.
Se parameter 36053622 VAL TIMER
Väljer källan för aktivering av timer. 0 = EJ VALD Överordnad signal deaktiverad.1 = DI1 Definierar DI1 som timersignal.2...6 = DI2...DI6 Definierar DI2...DI6 som timersignal.-1 = DI1(INV) Definierar en inverterad digital ingång DI1 som timersignal.-2...-6 = DI2(INV)...DI6(INV) Definierar en inverterad digital ingång DI2...DI6 som timersignal.
3623 TIMER TIDDefinierar starttid för timer. Tiden räknas från när signalen "val timer" ges. Om parameterområdet är 01:30:00 kommer timern att vara aktiv under 1 timme och 30 minuter efter startsignal på en digital ingång.
Kod Beskrivning
Timer aktiv
Aktiverar DI
Timer tid
Idrifttagning

ACS550 Användarhandledning 119
3626 KÄLLA TID FUNK 1Samlar alla önskade tidur till en tidsfunktion.0 = EJ VALD Inga tidur valda1 = T1 Tidur 1 valt för tidsfunktionen.2 = T2 Tidur 2 valt för tidsfunktionen3 = T2 + T1 Tiduren 1 och 2 valda för tidsfunktionen.4 = T3 Tidur 3 valt för tidsfunktionen5 = T3 + T1 Tiduren 1 och 3 valda för tidsfunktionen.6 = T3 + T2 Tiduren 2 och 3 valda för tidsfunktionen.7 = T3 + T2 + T1 Tiduren 1, 2 och 3 valda för tidsfunktionen.8 = T4 Tidur 4 vald för tidsfunktionen9 = T4 + T1 Tiduren 4 och 1 valda för tidsfunktionen.10 = T4 + T2 Tiduren 4 och 2 valda för tidsfunktionen.11 = T4 + T2 + T1 Tiduren 4, 2 och 1 valda för tidsfunktionen.12 = T4 + T3 Tiduren 4 och 3 valda för tidsfunktionen.13 = T4 + T3 + T1 Tiduren 4, 3 och 1 valda för tidsfunktionen.14 = T4 + T3 + T2 Tiduren 4, 3 och 2 valda för tidsfunktionen.15 = T4 + T3 + T2 + T1 Tiduren 4, 3, 2 och 1 valda för tidsfunktionen. 16 = TIMER (B) Timer vald för tidsfunktionen:.17 = B + T1 Timer och tidur 1 valda för tidsfunktionen.18 = B+ T2 Timer och tidur 2 valda för tidsfunktionen.19 = B+ T2 + T1 Timer och tiduren 1 och 2 valda för tidsfunktionen.20 = B + T3 Timer och tidur 3 valda för tidsfunktionen.21 = B+ T3 + T1 Timer och tiduren 3 och 1 valda för tidsfunktionen.22 = B+ T3 + T2 Timer och tiduren 3 och 2 valda för tidsfunktionen.23 = B+ T3 + T2 + T1 Timer och tiduren 3, 2 och 1 valda för tidsfunktionen.24 = B + T4 Timer och tidur 4 valda för tidsfunktionen.25 = B + T4 + T1 Timer och tiduren 4 och 1 valda för tidsfunktionen.26 = B + T4 + T2 Timer och tiduren 4 och 2 valda för tidsfunktionen.27 = B + T4 + T2 + T1 Timer och tiduren 4, 2 och 1 valda för tidsfunktionen.28 = B + T4 + T3 Timer och tiduren 4 och 3 valda för tidsfunktionen. 29 = B + T4 + T3 + T1 Timer och tiduren 4, 3 och 1 valda för tidsfunktionen.30 = B + T4 + T3 + T2 Timer och tiduren 4, 3 och 2 valda för tidsfunktionen.31 = B + T4 + T3 + T2 + T1 Timer och tiduren 4, 3, 2 och 1 valda för tidsfunktionen.
3627 KÄLLA TID FUNK 2 Se parameter 3626.
3628 KÄLLA TID FUNK 3 Se parameter 3626.
3629 KÄLLA TID FUNK 4 Se parameter 3626.
Kod Beskrivning
Idrifttagning

120 ACS550 Användarhandledning
Grupp 40: PID-regleringGruppen definierar parametrar för att PID-reglera en process. I driftläget PID-REGL jämför frekvensomriktaren en referenssignal (börvärde) med en ärvärdessignal (återkoppling), och justerar automatiskt frekvensomriktarens varvtal för att de båda värdena ska bringas att sammanfalla. Skillnaden mellan de två signalerna är regleravvikelsen.
Tre parametergrupper definierar PID-regleringen:
Grupp 40 PID-reglering definierar PID-REGLERING. Normalt används denna parameteruppsättning.
Grupp 41 PID-reglering (2) definierar PID-reglering (2). Grupperna 40 och 41 har samma parametrar, utom den parameter som används för att välja parameteruppsättning (4027).
Grupp 42 Extern / Trim PID definierar:
en extern uppsättning PID-reglerparametrar, eller trimingångsparametrar för varvtals- /frekvensreferens.
Kod Beskrivning4001 FÖRSTÄRKNING
Definierar PID-regulatorns förstärkning Inställningsområde 0,1... 100. Vid 0,1 förändras PID-regulatorns utsignal en tiondel så mycket som regleravvikelsen. Vid 100 förändras PID-regulatorns utsignal 100 gånger så mycket som regleravvikelsen.Förstärkning och integrationstid för att justera reglersvaret till systemet. Ett lågt värde på förstärkningen och en lång integrationstid garanterar ett stabilt system men kan också ge en
tröghet i systemet. Om den proportionella förstärkningens värde är för stort eller integrationstiden för kort kan systemet bli instabilt. Procedur: Börja med följande inställningar:
4001 FÖRSTÄRKNING = 0,0. 4002 INTEGRATIONSTID = 20 sekunder.
Starta systemet och se om det snabbt når börvärdet och upprätthåller stabil drift. Om inte, öka FÖRSTÄRKNING (4001) tills ärvärdessignalen (eller drivsystemvarvtalet) oscillerar kontinuerligt. Den kan vara nödvändigt att starta och stoppa frekvensomriktaren för att inducera denna oscillering.
Minska FÖRSTÄRKNING (4001) tills oscilleringen upphör. Ställ in FÖRSTÄRKNING (4001) på 0,4 till 0,6 gånger värdet ovan. Minska INTEGRATIONSTID (4002) tills återkopplingssignaler (eller drivsystemvarvtalet) oscillerar kontinuerligt. Den
kan vara nödvändigt att starta och stoppa frekvensomriktaren för att inducera denna oscillering. Öka INTEGRATIONSTID (4002) tills oscilleringen upphör. Ställ in INTEGRATIONSTID (4002) på 1,15 till 1,5 gånger värdet ovan. Om återkopplingssignalen innehåller högfrekvent brus, öka värdet på parameter- 1303 FILTER AI1 eller 1306 FILTER
AI2 tills bruset filtreras bort från signalen.
Idrifttagning

ACS550 Användarhandledning 121
4002 INTEGRATIONSTIDDefinierar PID-regulatorns integrationstid. Integrationstiden är definitionsmässigt den tid som erfordras för att öka utsignalen med regleravvikelsen: Regleravvikelsen är konstant och 100%. Förstärkning = 1. Integrationstiden 1 sekund betyder att 100% förändring uppnås
på 1 sekund. 0,0 = EJ VALD Deaktiverar integrationsdelen (I-delen i regulatorn).0,1600,0 = Integrationstid (sekunder).Se 4001 för justeringsprocedur.
4003 DERIVERINGSTIDDefinierar PID-regulatorns deriveringstid. Du kan lägga till derivatan av felet på PID-regulatorns utgång.
Derivatan är regleravvikelsens förändringshastighet. Till exempel, om regleravvikelsen förändras linjärt, är derivatan en konstant som läggs till PID-regulatorns utsignal.
Felderivatan filtreras med ett enpoligt filter. Dess tidskonstant definieras med parameter 4004 PID DERIV FILTER.
0,0 = EJ VALD Deaktiverar den felderiverande delen av PID-regulatorns utsignal
0,110,0 = Deriveringstid (sekunder)
4004 DERIVER-FILTERTidskonstant för filtret i deriveringsdelen. Innan felderivatan adderas till PID-regulatorns utgång filtreras den med ett enpoligt filter. Ökande filtertid jämnar ut felderivatan och minskar bruset.0,0 = EJ VALD Deaktiverar felderiveringsfiltret 0,110,0 = Filtertidskonstant (sekunder).
4005 REGL AVVIK INVInvertering av regleravvikelsen.0 = NEJ Normal, minskad återkopplingssignal ger ökat drivsystemvarvtal. Fel = Ref - Ärvärde1 = JA Inverterad, minskad återkopplingssignal ger minskat drivsystemvarvtal. Error = Ärvärde - Ref
4006 ENHETVäljer enhet för PID-regulatorn. (PID1 parametrarna 0128, 0130, och 0132). Se parameter 3405 för lista över tillgängliga enheter.
4007 SKALNING ENHETDecimaltecknets plats för PID-regulatorns ärvärde. Ange decimaltecknets position, räknat inåt från värdets högra ände Se tabellen, till exempel med pi (3,14159).
Kod Beskrivning
t
P 4002
A
C (P 4001 = 1)
B
A = Fel B = Regleravvikelse steg C = Regulatorutg. med först. = 1 Regulatorutgång med förstärkning =
D (P 4001 = 10)
t
100%
Förstärkning
Regleravvikelse
P 4003
D-del av reg. utsignalPID-utsignal
Fel
t
0%
P 401
4007 värde Ingång Display0 0003 31 0031 3,12 0314 3,143 3142 3,142
Idrifttagning

122 ACS550 Användarhandledning
4008 0 % VÄRDEDefinierar (tillsammans med nästa parameter) skalningen av PID-regulatorns ärvärden (PID1 parametrarna 0128, 0130 och 0132). Måttenheter och skala definieras av parametrarna 4006 och
4007.4009 100 % VÄRDE
Definierar (tillsammans med föregående parameter) skalningen av PID-regulatorns ärvärden. Måttenheter och skala definieras av parametrarna 4006 och
4007.
4010 BÖRVÄRDE VALParametern definierar referenskällan för PID-regulatorn.
Parametern saknar funktion om PID-regulatorn är förbikopplad (se 8121 REG FÖRBIKOPPL).0 = Panel Manöverpanelenen är referenskälla1 = AI1 Analog ingång 1 är referenskälla.2 = AI2 Analog ingång 2 är referenskälla.8 = comm Fältbussen är referenskälla.9 = COMM+AI1 Definierar en kombination av fältbuss och analog ingång 1 (AI1) som referenskälla. Se Analoga
ingångar, referenskorrigering nedan.10 = COMM * AI1 Definierar en kombination av fältbuss och analog ingång 1 (AI1) som referenskälla. Se Analoga
ingångar, referenskorrigering nedan.11 = DI3U, 4D(RNC) Digitala ingångar, vilka fungerar som motorpotentiometerregulatorer, utgör referenskälla.
DI3 ökar varvtalet (U står för "up") DI4 minskar varvtalet (D står för "down"). Parameter- 2205 ACCEL TID 2 styr referenssignalens förändringshastighet. R = Ett stoppkommando nollställer referensvärdet. NC = Referensvärdet kopieras ej.
12 = DI3U, 4D(NC) Samma som DI3U, 4D(RNC) ovan, utom: Ett stoppkommando nollställer inte referensvärdet. När frekvensomriktaren återstartas accelererar motorn, med
vald acceleration, till lagrat referensvärde. 13 = DI5U, 6D(NC) Samma som DI3U, 4D(NC) ovan, utom:
Använder de digitala ingångarna DI5 och DI6.14 = AI1+AI2 Definierar en kombination av analog ingång 1 (AI1) och analog ingång 2 (AI2) som referenskälla. Se
Analoga ingångar, referenskorrigering nedan.15 = AI1*AI2 Definierar en kombination av analog ingång 1 (AI1) och analog ingång 2 (AI2) som referenskälla. Se
Analoga ingångar, referenskorrigering nedan.16 = AI1-AI2 Definierar en kombination av analog ingång 1 (AI1) och analog ingång 2 (AI2) som referenskälla. Se
Analoga ingångar, referenskorrigering nedan.17 = AI1/AI2 Definierar en kombination av analog ingång 1 (AI1) och analog ingång 2 (AI2) som referenskälla. Se
Analoga ingångar, referenskorrigering nedan.19 = INTERN Ett konstant värde som definieras av parameter 4011 utgör referenskälla.
Kod Beskrivning
Intern skala (%)
P 4009
P 4008
100% 0%
Måttenheter (P4006)Skala (P4007)
-1000%
+1000%
Idrifttagning
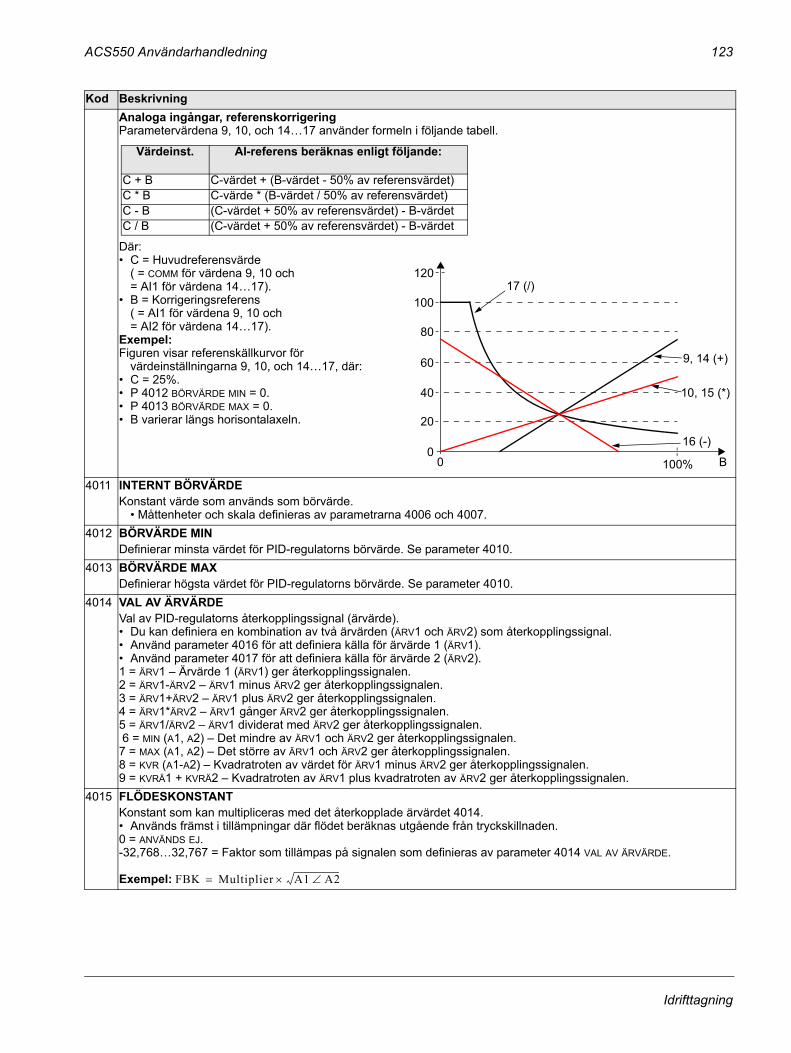
ACS550 Användarhandledning 123
Analoga ingångar, referenskorrigeringParametervärdena 9, 10, och 1417 använder formeln i följande tabell.
Där: C = Huvudreferensvärde
( = COMM för värdena 9, 10 och = AI1 för värdena 1417).
B = Korrigeringsreferens ( = AI1 för värdena 9, 10 och = AI2 för värdena 1417).
Exempel: Figuren visar referenskällkurvor för
värdeinställningarna 9, 10, och 1417, där: C = 25%. P 4012 BÖRVÄRDE MIN = 0. P 4013 BÖRVÄRDE MAX = 0. B varierar längs horisontalaxeln.
4011 INTERNT BÖRVÄRDEKonstant värde som används som börvärde.
Måttenheter och skala definieras av parametrarna 4006 och 4007.4012 BÖRVÄRDE MIN
Definierar minsta värdet för PID-regulatorns börvärde. Se parameter 4010.4013 BÖRVÄRDE MAX
Definierar högsta värdet för PID-regulatorns börvärde. Se parameter 4010.4014 VAL AV ÄRVÄRDE
Val av PID-regulatorns återkopplingssignal (ärvärde). Du kan definiera en kombination av två ärvärden (ÄRV1 och ÄRV2) som återkopplingssignal. Använd parameter 4016 för att definiera källa för ärvärde 1 (ÄRV1). Använd parameter 4017 för att definiera källa för ärvärde 2 (ÄRV2).1 = ÄRV1 Ärvärde 1 (ÄRV1) ger återkopplingssignalen.2 = ÄRV1-ÄRV2 ÄRV1 minus ÄRV2 ger återkopplingssignalen.3 = ÄRV1+ÄRV2 ÄRV1 plus ÄRV2 ger återkopplingssignalen.4 = ÄRV1*ÄRV2 ÄRV1 gånger ÄRV2 ger återkopplingssignalen.5 = ÄRV1/ÄRV2 ÄRV1 dividerat med ÄRV2 ger återkopplingssignalen. 6 = MIN (A1, A2) Det mindre av ÄRV1 och ÄRV2 ger återkopplingssignalen.7 = MAX (A1, A2) Det större av ÄRV1 och ÄRV2 ger återkopplingssignalen.8 = KVR (A1-A2) Kvadratroten av värdet för ÄRV1 minus ÄRV2 ger återkopplingssignalen.9 = KVRÄ1 + KVRÄ2 Kvadratroten av ÄRV1 plus kvadratroten av ÄRV2 ger återkopplingssignalen.
4015 FLÖDESKONSTANTKonstant som kan multipliceras med det återkopplade ärvärdet 4014. Används främst i tillämpningar där flödet beräknas utgående från tryckskillnaden.0 = ANVÄNDS EJ.-32,76832,767 = Faktor som tillämpas på signalen som definieras av parameter 4014 VAL AV ÄRVÄRDE.
Exempel:
Kod Beskrivning
Värdeinst. AI-referens beräknas enligt följande:
C + B C-värdet + (B-värdet - 50% av referensvärdet)C * B C-värde * (B-värdet / 50% av referensvärdet)C - B (C-värdet + 50% av referensvärdet) - B-värdetC / B (C-värdet + 50% av referensvärdet) - B-värdet
120
100
80
60
40
20
00 100%
9, 14 (+)
16 (-)
10, 15 (*)
17 (/)
B
FBK Multiplier A1 A2∠×=
Idrifttagning

124 ACS550 Användarhandledning
4016 ÄRVÄRDE 1 INGÅNG Definierar källa för ärvärde 1 (ÄRV1).0 = AI 1 Använder analog ingång 1 som ÄRV1.1 = AI 2 Använder analog ingång 2 som ÄRV1.2 = Ström Använder strömmen som ÄRV1, skalad enligt följande:
Min ÄRV1 = 0 ström Max ÄRV1 = 2 x märkström
3 = Moment Använder momentet som ÄRV1, skalat enligt följande: Min ÄRV1 = -2 x märkmoment Max ÄRV1 = 2 x märkmoment
4 = Effekt Använder effekten som ÄRV1, skalad enligt följande: Min ÄRV1 = -2 x märkeffekt Max ÄRV1 = 2 x märkeffekt
4017 ÄRVÄRDE 2 INGÅNGDefinierar källa för ärvärde 2 (ÄRV2). 0 = AI 1 Använder analog ingång 1 som ÄRV2.1 = AI 2 Använder analog ingång 2 som ÄRV2.2 = Ström Använder strömmen som ÄRV2, skalad enligt följande:
Min ÄRV2 = 0 ström Max ÄRV2 = 2 x märkström
3 = Vridmoment Använder vridmomentet som ÄRV2, skalat enligt följande: Min ÄRV2 = -2 x märkmoment Max ÄRV2 = 2 x märkmoment
4 = Effekt Använder effekten som ÄRV2, skalad enligt följande: Min ÄRV2 = -2 x märkeffekt Max ÄRV2 = 2 x märkeffekt
4018 ÄRVÄRDE 1 MINDefinierar minimivärdet för ÄRV1. Används med max-/min-inställningar för analoga ingångar (t.ex.
1301 MINIMUM AI1, 1302 MAXIMUM AI1). Skalar analoga ingångar som används som ärvärden. Se figur: A= Normal; B = Invertering (ÄRVÄRDE 1 MIN > ÄRV1
MAXIMUM)4019 ÄRVÄRDE 1 MAX
Definierar maxvärde för ÄRV1. Se 4018 ÄRVÄRDE 1 MIN.
4020 ÄRVÄRDE 2 MINDefinierar minimivärdet för ÄRV2. Se 4018 ÄRVÄRDE 1 MIN.
4021 ÄRVÄRDE 2 MAXDefinierar maxvärde för ÄRV2. Se 4018 ÄRVÄRDE 1 MIN.
Kod Beskrivning
Analog insignal
P 4019
P 4018
P 1301 P 1302
P 1301 P 1302
P 4018
P 4019
ÄRV1 (%)
Analog insignal
ÄRV1 (%) A
B
Idrifttagning

ACS550 Användarhandledning 125
4022 VAL VILOFUNKTIONDefinierar av källa för PID vilofunktion0 = EJ VALD Deaktiverar PID vilofunktion1 = DI1 Definierar digital ingång DI1 som källa för PID vilofunktion.
Aktiverad digital ingång aktiverar vilofunktionen. Deaktiverad digital ingång återställer PID-reglering.
2...6 = DI2...DI6 Definierar digital ingång DI2DI6 som källa för PID vilofunktion. Se DI1 ovan.
7 = INTERN Definierar utsignal rpm/frekvens, processbörvärde och processärvärde som källa för PID vilofunktion. Se parametrarna 4025 ÅTERSTARTS NIVÅ OCH 4023 PID STOPP NIVÅ.
-1 = DI1(INV) Definierar digital ingång DI1 som källa för PID vilofunktion Deaktiverad digital ingång aktiverar vilofunktionen. Aktiverad digital ingång återställer PID-reglering.
-2-6 = DI2(INV)DI6(INV) Definierar en inverterad digital ingång DI2DI6 som källa för PID vilofunktion. Se DI1(INV) ovan.
4023 GRÄNS VILOFUNKDefinierar motorvarvtal / frekvens som aktiverar PID vilofunktion ett motorvarvtal / frekvens under denna nivå under minst tidsperioden = 4024 PID STOPP FÖRDR aktiverar PID vilofunktion (stoppar drivsystemet). Kräver 4022 = 7 INTERN. Se figur: A = PID utsignalnivå; B = PID processåterkoppling.
4024 VILO FÖRDRÖJNINGDefinierar fördröjningen för PID vilofunktion - motorvarvtal / frekvens under 4023 GRÄNS VILOFUNK under minst denna tidsperiod aktiverar PID vilofunktion (stoppar drivsystemet). Se 4023 GRÄNS VILOFUNK ovan.
4025 ÅTERSTARTS NIVÅDefinierar återstartsnivån en avvikelse från börvärdet som är större än detta värde under minst tidsperioden 4026 ÅTER FÖRDRÖJNING, återstartar PID-regleringen. Parametrarna 4006 och 4007 definierar enheter och skala. Parameter 4005 = 0,
Återstarts nivå = Börvärde - Avvikelse vid återstart. Parameter 4005 = 1,
Återstarts nivå = Börvärde + Avvikelse vid återstart. Återstarts nivå kan ligga över eller under börvärdet. Se siffror: C = Återstarts nivå när parameter 4005 = 1 D = Återstarts nivå när parameter 4005 = 0 E = Återkopplingssignalen överstiger återstarts nivå och varar
längre än 4026 ÅTER FÖRDRÖJNING PID-reglering återupptas. F = Återkopplingssignalen understiger återstarts nivå och varar
längre än 4026 ÅTER FÖRDRÖJNING PID-reglering återupptas.4026 ÅTER FÖRDRÖJNING
Definierar återstartfördröjningen en avvikelse från börvärdet större än 4025 ÅTERSTARTS NIVÅ, under minst denna tidsperiod, återstartar PID-regulatorn.
Kod Beskrivning
Start
t < P 4024
t
t >P 4024
t
Stopp
P 4023
P 4025
P 4026Börvärde
A
B
P 4025Börvärde
P 4025C
D t
4005 = 1
4005 = 0
P 4025Börvärde
P 4025C
Dt
P 4026
E
F
P 4026
Idrifttagning

126 ACS550 Användarhandledning
4027 VAL PID-REG 1-2Definierar hur valet görs mellan PID-REGLERING och PID-REGLERING (2)Val av parameteruppsättning för PID-reglering. När regulator 1 väljs används parametrarna 40014026.När regulator 2 väljs används parametrarna 41014126.0 = REGULATOR 1 PID-REGLERING (parametrarna 40014026) är aktiva.1 = DI1 Definierar digital ingång DI1 som källa för val av börvärde.
Aktiverad digital ingång väljer PID-REGLERING (2). Deaktiverad digital ingång väljer PID-REGLERING.
2...6 = DI2DI6 Definierar digital ingångDI2DI6 som källa för val av börvärde. Se DI1 ovan.
7 = REGULATOR 2 PID-REGLERING (2) (parametrarna 41014126) är aktiva.8...11 = TID FUNK 1...4 Definierar tidsfunktionen som källa för val av börvärde (tid funk deaktiverad = PID-
REGLERING 1; Tidsfunktion aktiverad = PID-REGLERING (2) Se parametergrupp 36: Tidsfunktioner.
-1 = DI1(INV) Definierar en inverterad digital ingång DI1 som källa för val av börvärde. Aktiverad digital ingång väljer PID-REGLERING. Deaktiverad digital ingång väljer PID-REGLERING (2).
-2-6 = DI2(INV)...DI6(INV) Definierar en inverterad digital ingång DI2DI6 som källa för val av börvärde. Se DI1(INV) ovan.
Kod Beskrivning
Idrifttagning

ACS550 Användarhandledning 127
Grupp 41: PID-reglering (2)Parametrarna i denna grupp hör till PID-regulator 2 Funktionen hos parametrarna 41014126 är identiska med parametrarna för PID-regulator 1 40014026.
PID-regulator 2 kan väljas med parameter 4027 VAL PID-REG 1-2.
Idrifttagning
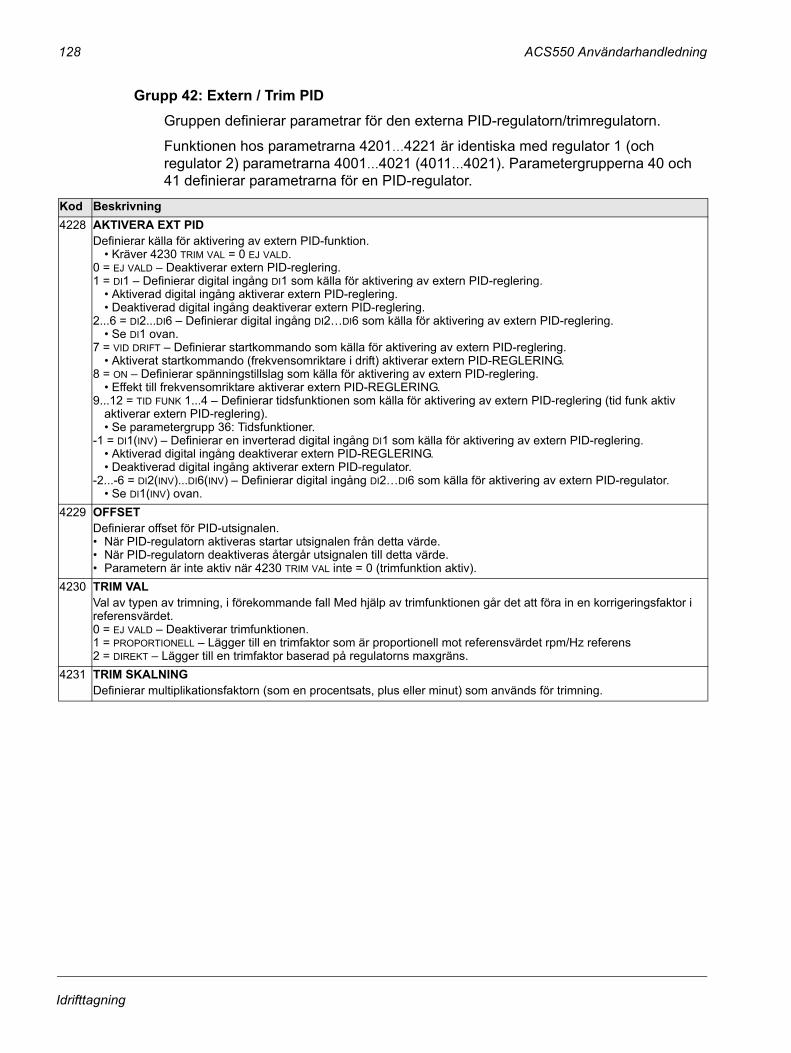
128 ACS550 Användarhandledning
Grupp 42: Extern / Trim PIDGruppen definierar parametrar för den externa PID-regulatorn/trimregulatorn.
Funktionen hos parametrarna 42014221 är identiska med regulator 1 (och regulator 2) parametrarna 40014021 (40114021). Parametergrupperna 40 och 41 definierar parametrarna för en PID-regulator.
Kod Beskrivning4228 AKTIVERA EXT PID
Definierar källa för aktivering av extern PID-funktion. Kräver 4230 TRIM VAL = 0 EJ VALD.
0 = EJ VALD Deaktiverar extern PID-reglering.1 = DI1 Definierar digital ingång DI1 som källa för aktivering av extern PID-reglering.
Aktiverad digital ingång aktiverar extern PID-reglering. Deaktiverad digital ingång deaktiverar extern PID-reglering.
2...6 = DI2...DI6 Definierar digital ingång DI2DI6 som källa för aktivering av extern PID-reglering. Se DI1 ovan.
7 = VID DRIFT Definierar startkommando som källa för aktivering av extern PID-reglering. Aktiverat startkommando (frekvensomriktare i drift) aktiverar extern PID-REGLERING.
8 = ON Definierar spänningstillslag som källa för aktivering av extern PID-reglering. Effekt till frekvensomriktare aktiverar extern PID-REGLERING.
9...12 = TID FUNK 1...4 Definierar tidsfunktionen som källa för aktivering av extern PID-reglering (tid funk aktiv aktiverar extern PID-reglering). Se parametergrupp 36: Tidsfunktioner.
-1 = DI1(INV) Definierar en inverterad digital ingång DI1 som källa för aktivering av extern PID-reglering. Aktiverad digital ingång deaktiverar extern PID-REGLERING. Deaktiverad digital ingång aktiverar extern PID-regulator.
-2...-6 = DI2(INV)...DI6(INV) Definierar digital ingång DI2DI6 som källa för aktivering av extern PID-regulator. Se DI1(INV) ovan.
4229 OFFSETDefinierar offset för PID-utsignalen. När PID-regulatorn aktiveras startar utsignalen från detta värde. När PID-regulatorn deaktiveras återgår utsignalen till detta värde. Parametern är inte aktiv när 4230 TRIM VAL inte = 0 (trimfunktion aktiv).
4230 TRIM VALVal av typen av trimning, i förekommande fall Med hjälp av trimfunktionen går det att föra in en korrigeringsfaktor i referensvärdet.0 = EJ VALD Deaktiverar trimfunktionen.1 = PROPORTIONELL Lägger till en trimfaktor som är proportionell mot referensvärdet rpm/Hz referens2 = DIREKT Lägger till en trimfaktor baserad på regulatorns maxgräns.
4231 TRIM SKALNINGDefinierar multiplikationsfaktorn (som en procentsats, plus eller minut) som används för trimning.
Idrifttagning
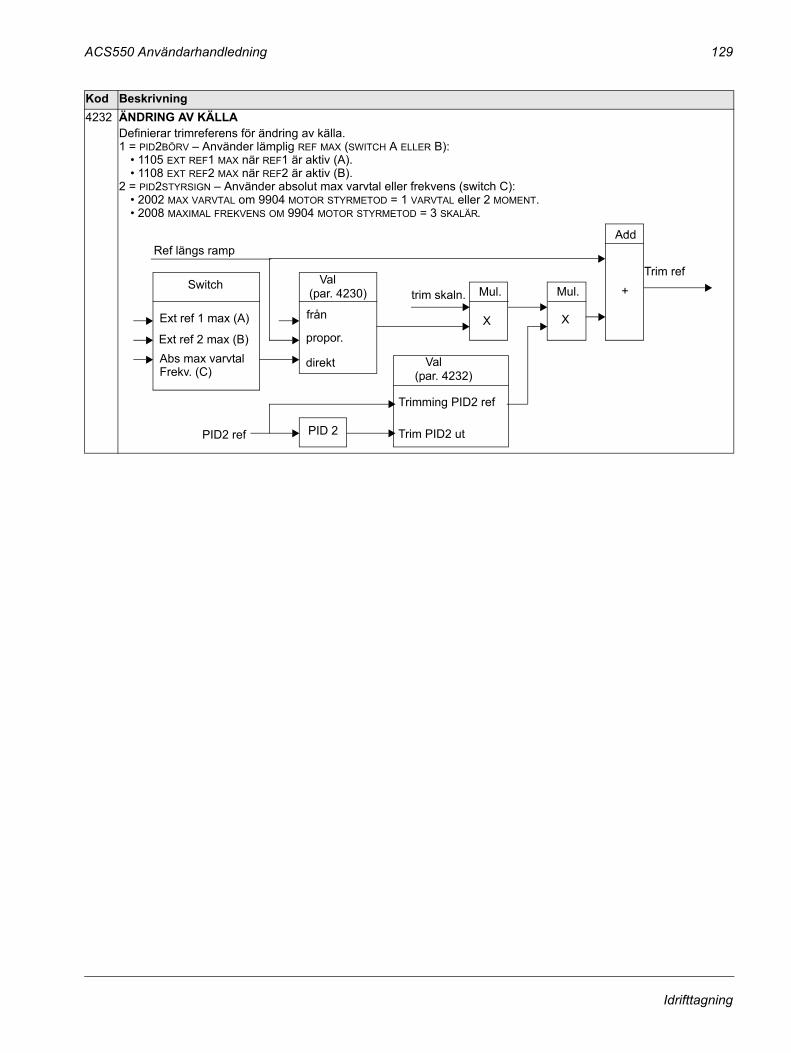
ACS550 Användarhandledning 129
4232 ÄNDRING AV KÄLLADefinierar trimreferens för ändring av källa.1 = PID2BÖRV Använder lämplig REF MAX (SWITCH A ELLER B):
1105 EXT REF1 MAX när REF1 är aktiv (A). 1108 EXT REF2 MAX när REF2 är aktiv (B).
2 = PID2STYRSIGN Använder absolut max varvtal eller frekvens (switch C): 2002 MAX VARVTAL om 9904 MOTOR STYRMETOD = 1 VARVTAL eller 2 MOMENT. 2008 MAXIMAL FREKVENS OM 9904 MOTOR STYRMETOD = 3 SKALÄR.
Kod Beskrivning
Switch Mul. Mul. +
Val
Add
XX
(par. 4232)
Trim ref
PID2 ref
Val (par. 4230)
Ext ref 1 max (A)
Ext ref 2 max (B)Abs max varvtal
Ref längs ramp
från
propor.
direkt
trim skaln.
PID 2 Trim PID2 ut
Trimming PID2 ref
Frekv. (C)
Idrifttagning

130 ACS550 Användarhandledning
Grupp 51: Comm modulGruppen definierar parametrar för att konfigurera den externa fältbusskommunikationen. Se information om aktuell kommunikationsutrustning och dito protokoll för ytterligare information om dessa parametrar.
Kod Beskrivning5101 FÄLTBUSS TYP
Visar typen av ansluten fältbussmodul.0 = Modul ej hittad eller ej ansluten. Kontrollera fältbussens användarhandbok, kapitlet "Mekanisk installation" och
kontrollera att parameter 9802 är satt till 4 = EXT FÄLTBUS.1 = PROFIBUS-DP 16 = INTERBUS 21 = LONWORKS 32 = CANOPEN 37 = DEVICENET 64 = MODBUS PLUS 101 = CONTROLNET 128 = ETHERNET
5102 5126
FÄLTBUSSS PAR 2FÄLTBUSS PAR 26Se information om aktuell kommunikationsutrustning och dito protokoll för ytterligare information om dessa parametrar.
5127 FBA PAR UPPDATValiderar eventuella förändringar i fältbussparameterinställningar. Efter uppdatering återgår värdet automatiskt till KLAR
5128 CPI FIL FW REVVisar CPI mjukvarurevision för konfigurationsfilen till frekvensomriktarens fältbussadapter. FormatET är xyz där: x = primärt revisionsnummer y = sekundärt revisionsnummer z = korrigeringsnummerExempel: 107 = revision 1.07
5129 INSTÄLLN FIL IDVisar revisionsnumret för konfigurationsfilen till frekvensomriktarens fältbussadapter. Filkonfigureringsinformationen beror på frekvensomriktarens tillämpningsprogram.
5130 INSTÄLLN FIL REVInnehåller revisionsnumret för konfigurationsfilen till frekvensomriktarens fältbussadapter. Exempel: 1 = revision 1
5131 FBA STATUSInnehåller fältbussadapterns status. 0 = IDLE Adapter ej konfigurerad.1 = EXEC. INIT Adaptern initieras.2 = TIME OUT En timeout har inträffat i kommunikationen mellan adapter och frekvensomriktare.3 = CONFIG ERROR Adapterkonfigurationsfel.
Den primära eller sekundära revisionskoden för fältbussadapterns CPI-mjukvara skiljer sig från angivelsen i frekvensomriktarens konfigurationsfil.
4 = OFF-LINE Adaptern är frånkopplad.5 = ON-LINE Adaptern är tillkopplad.6 = RESET Adaptern utför en maskinvaruåterställning.
5132 FBA CPI FW REVInnehåller revisionsnumret för fältbussadapterns CPI-program. Formatet är xyz där: x = primärt revisionsnummer y = sekundärt revisionsnummer z = korrigeringsnummerExempel: 107 = revision 1.07
Idrifttagning

ACS550 Användarhandledning 131
5133 FBA APPL FW REVInnehåller revisionsnumret för fältbussadapterns tillämpningsprogram Formatet är xyz där: x = primärt revisionsnummer y = sekundärt revisionsnummer z = korrigeringsnummerExempel: 107 = revision 1.07
Kod Beskrivning
Idrifttagning

132 ACS550 Användarhandledning
Grupp 52: Standard modbusDenna grupp definierar kommunikationsinställningarna för frekvensomriktarens manöverpanelport. Normalt, vid användning av den medföljande manöverpanelen, finns det inget behov av att ändra inställningarna i denna grupp.
Parameterändring i denna grupp träder i kraft vid närmast efterföljande spänningssättning.
Kod Beskrivning5201 STATIONS NR
Definierar frekvensomriktarens adress. Två enheter med samma adress får inte vara on-line samtidigt. Område: 1247
5202 ÖVERF HSTIGHETDefinierar kommunikationshastigheten för frekvensomriktaren i kilobits per sekund (kbits/s).9,619,238,457,6115,2
5203 PARITETDefinierar det teckenformat som ska användas vid kommunikation med manöverpanelen.0 = 8N1 Ingen paritet, en stoppbit.1 = 8N2 Ingen paritet, två stoppbitar.2 = 8E1 Jämn paritet, en stoppbit.3 = 8O1 Ojämn paritet, en stoppbit.
5204 GODKÄNT MEDDInnehåller antalet giltiga Modbus-meddelanden som har tagits emot av frekvensomriktaren. Under normal kommunikation inkrementeras denna räknare kontinuerligt.
5205 PARITETSFELInnehåller antalet tecken med paritetsfel som har tagits emot från bussen. Vid höga värden, kontrollera: Paritetsinställningar för enheter anslutna till bussen - de får inte skilja sig från varandra. Elektromagnetisk störningsnivå hög störningsnivå ger upphov till fel.
5206 FLANK FELInnehåller antalet tecken med flankfel som har tagits emot av bussen. Vid höga värden, kontrollera: Kommunikationshastighetsinställningar för enheter anslutna till bussen - de får inte skilja sig från varandra. Elektromagnetisk störningsnivå hög störningsnivå ger upphov till fel.
5207 BUFFERT FELInnehåller antalet mottagna tecken som inte kan placeras i bufferten. Maxlängden för meddelanden till drivsystemet är 128 bytes. Mottagna meddelanden längre än 128 byte orsakar overflow i bufferten. Överskottstecknen räknas.
5208 CRC FELInnehåller antalet meddelanden med CRC-fel som frekvensomriktaren tar emot. Vid höga värden, kontrollera: Elektromagnetisk störningsnivå hög störningsnivå ger upphov till fel. CRC-beräkningar med avseende på möjliga fel.
Idrifttagning

ACS550 Användarhandledning 133
Grupp 53: Inbyggd buskommGruppen definierar den interna fältbus- kommunikationen. Standardprotokollet för inbyggd busskommunikation i ACS550 är Modbus. Se "Standard seriekommunikation" som börjar på sid 148.
Kod Beskrivning5301 IFB PROTOKOLL ID
Innehåller ID och programrevision för protokollet. Format: XXYY, där XX = protokoll-ID, och YY = programrevision.
5302 IFB STATIONS NRDefinierar nodadressen för RS485-länken Varje enhets nodadress måste vara unik.
5303 IFB ÖVERF HASTDefinierar kommunikationshastigheten på RS485-länken i kilobits per sekund (kbits/s).1,2 kbits/s2,4 kbits/s4,8 kbits/s9,6 kbits/s19,2 kbits/s38,4 kbits/s57,6 kbits/s
5304 IFB PARITETDefinierar datalängd, paritet och antal stoppbitar som ska användas vid RS485-kommunikation. Samma inställningar måste göras för samtliga on-line-stationer.0 = 8N1 8 databitar, ingen paritet, en stoppbit.1 = 8N2 8 databitar, ingen paritet, två stoppbitar.2 = 8E1 8 databitar, jämn paritet, en stoppbit.3 = 8O1 8 databitar, ojämn paritet, en stoppbit.
5305 IFB COMM PROFILVal av kommunikationsprofil som används av den inbyggda busskommunikationen.0 = ABB DRIVES Hantering av styrord och statusord i enlighet med profilen ABB Drives.1 = ACS550 Alternativ 32-bitarsprofil (endast för avancerade användare).
5306 IFB GODKÄNT MEDDInnehåller antalet giltiga meddelanden som har tagits emot av frekvensomriktaren. Under normal kommunikation ökar detta räknarvärde kontinuerligt.
5307 IFB CRC FELInnehåller antalet meddelanden med CRC-fel som har tagits emot av frekvensomriktaren. Vid höga värden, kontrollera: Elektromagnetisk störningsnivå hög störningsnivå ger upphov till fel. CRC-beräkningar med avseende på möjliga fel.
5308 IFB UART FELInnehåller antalet meddelanden med teckenfel som har tagits emot av frekvensomriktaren.
5309 IFB STATUSInnehåller status för inbyggd busskommunikation. 0 = IDLE Inbyggd busskommunikation är konfigurerad, men tar inte emot några meddelanden.1 = EXEC. INIT Inbyggd buskomm är initierad.2 = TIME OUT En timeout har inträffat i kommunikationen mellan nätverksmastern och inbyggd busskommunikation.3 = CONFIG ERROR Inbyggd busskommunikation har ett konfigurationsfel 4 = OFF-LINE Inbyggd busskommunikation tar emot meddelanden som INTE är adresserade till denna
frekvensomriktare.5 = ON-LINE Inbyggd busskommunikation tar emot meddelanden som är adresserade till denna frekvensomriktare.6 = RESET Inbyggd busskommunikation utför en maskinvaruåterställning.7 = AVLYSSNA Inbyggd busskommunikation lyssnar endast
5310 IFB PAR 10Specificerar parametern som mappas till Modbus Register 40005.
Idrifttagning

134 ACS550 Användarhandledning
5311 IFB PAR 11Specificerar parametern som mappas till Modbus Register 40006.
5312 IFB PAR 12Specificerar parametern som mappas till Modbus Register 40007.
5313 IFB PAR 13Specificerar parametern som mappas till Modbus Register 40008.
5314 IFB PAR 14Specificerar parametern som mappas till Modbus Register 40009.
5315 IFB PAR 15Specificerar parametern som mappas till Modbus Register 40010.
5316 IFB PAR 16Specificerar parametern som mappas till Modbus Register 40011.
5317 IFB PAR 17Specificerar parametern som mappas till Modbus Register 40012.
5318 5320
IFB PAR 18IFB PAR 20Reserverad.
Kod Beskrivning
Idrifttagning

ACS550 Användarhandledning 135
Grupp 81: PFC-styrningGruppen definierar PFC-makrots (pump- och fläktstyrning) parameterinställningar. Huvudegenskaperna för PFC-styrning är:
ACS550 styr motorn till pump nr. 1, genom att variera motorvarvtalet för att påverka pumpens kapacitet. Denna motor är den varvtalsreglerade motorn.
Pumparna 2, 3 etc är direktanslutna till matningsnätet. ACS550 startar och stoppar pump nr 2 (och sedan pump nr 3, etc.) allt efter behov. Dessa motorer är hjälpmotorer.
PID-regleringen i ACS550 använder två signaler: en processreferenssignal och en återkopplad ärvärdessignal. PID-regulatorn styr varvtalet (frekvensen) hos den första pumpen så att ärvärdet följer processreferensvärdet.
När behovet (definieras av processreferensvärdet) överskrider den första motorns kapacitet (definieras av användaren som en frekvensgräns), startar PFC-styrningen automatiskt en hjälppump. PFC-styrningen minskar samtidigt den första pumpens varvtal för att ta hänsyn till den tillkommande pumpens kapacitetsbidrag. Liksom tidigare anpassar PID-regulatorn varvtalet (frekvensen) hos den första pumpen, så att ärvärdet följer processreferensvärdet. Vid behov startar PFC-styrningen ytterligare hjälppumpar på motsvarande sätt.
När behovet minskar, så att den första pumpens varvtal sjunker under en minimigräns (definieras av användaren som en frekvensgräns) stoppar PFC-styrningen automatiskt en hjälppump. PFC-styrningen ökar samtidigt den första pumpens varvtal för att kompensera för den minskade kapaciteten.
En förreglingsfunktion (om den är aktiverad) identifierar motorer som inte är i drift och PFC-styrningen hoppar till nästa tillgängliga motor i sekvensen.
En autoväxlingsfunktion (om den är aktiverad och har korrekt maskinvara) jämnar ut drifttiden mellan pumpmotorerna. Autoväxlingsfunktionen ökar varje motors position i sekvensen, så att den varvtalsreglerade motorn blir den sista hjälpmotorn, den första hjälpmotorn blir den varvtalsreglerade etc.
Kod Beskrivning8103 REFERENS STEG 1
Definierar ett procentuellt värde som läggs till processreferensvärdet. Gäller endast när minst en hjälpmotor (konstant varvtal) är i drift. Grundinställningen är 0%.Exempel: En ACS550 driver tre parallella pumpar som upprätthåller vattentryck i en rörledning. 4011 INTERNT BÖRVÄRDE definierar en konstant tryckreferens som styr trycket i rörledningen. Den varvtalsreglerade pumpen arbetar ensam under perioder med liten vattenförbrukning. När vattenförbrukningen ökar startar först den ena konstantvarvtalspumpen, och sedan den andra. Vid ökande flöde sjunker först trycket i rörledningens utlopp relativt det uppmätta trycket vid inloppet. När
hjälpmotorerna startar för att öka flödet kommer justeringarna nedan att korrigera referensvärdet så att det överensstämmer bättre med utloppstrycket.
När den första hjälppumpen arbetar ökar referensvärdet med parameter 8103 REFERENS STEG 1. När båda hjälppumparna arbetar ökar referensvärdet med parameter 8103 referens steg 1 + parameter 8104
referens steg 2. När alla tre hjälppumparna arbetar ökar referensvärdet med parameter 8103 REFERENS STEG 1 + parameter 8104
REFERENS STEG 2 + parameter 8105 REFERENS STEG 38104 REFERENS STEG 2
Definierar ett procentuellt värde som läggs till processreferensvärdet. Gäller endast när minst två hjälpmotorer (konstant varvtal) är i drift. Se parameter 8103 REFERENS STEG 1.
Idrifttagning

136 ACS550 Användarhandledning
8105 REFERENS STEG 3Definierar ett procentuellt värde som läggs till processreferensvärdet. Gäller endast när minst tre hjälpmotorer (konstant varvtal) är i drift. Se parameter 8103 REFERENS STEG 1.
8109 STARTFREKVENS 1Definierar frekvensgränsen vid vilken den första hjälpmotorn ska startas. Den första hjälpmotor startas om: Inga hjälpmotorer är igång. ACS550 utfrekvens överstiger gränsvärdet:
8109 + 1 Hz. Utfrekvensen förblir över gränsen
(8109 - 1 Hz) under tiden: 8115 HJMOT STARTFÖRD.Efter att den första hjälpmotorn startats: Utfrekvensen minskar med värde =
(8109 STARTFREKVENS 1) - (8112 LÅG FREKVENS 1) I praktiken sjunker uteffekten från den varvtalsreglerade
motorn, för att kompensera för den tillkommande kapaciteten från hjälpmotorn.
Se figur, där: A = (8109 STARTFREKVENS 1) - (8112 LÅG FREKVENS 1) B = Utfrekvensen ökar under startfördröjningen. C = Diagram som visar hjälpmotorns driftstatus när frekvensen
ökar (1 = På).Obs! 8109 STARTFREKVENS 1-värdet måste vara mellan: 8112 LÅG FREKVENS 1 (2008 MAX FREKVENS) -1.
8110 STARTFREKVENS 2Definierar frekvensgränsen vid vilken den andra hjälpmotorn ska startas. Se 8109 STARTFREKVENS 1 för en komplett beskrivning av funktionen.Den andra hjälpmotorn startas om: En hjälpmotor är igång. ACS550 utfrekvens överstiger gränsvärdet: 8110 + 1. Utfrekvensen förblir över gränsen (8110 - 1 Hz) under tiden: 8115 HJMOT STARTFÖRD.
8111 STARTFREKVENS 3Definierar frekvensgränsen vid vilken den tredje hjälpmotorn ska startas. Se 8109 STARTFREKVENS 1 för en komplett beskrivning av funktionen.Den tredje hjälpmotorn startas om: Två hjälpmotorer är igång. ACS550 utfrekvens överstiger gränsvärdet: 8111 + 1 Hz. Utfrekvensen förblir över gränsen (8111 - 1 Hz) under tiden: 8115 HJMOT STARTFÖRD.
Kod Beskrivning
t
P 8115
(P 8109)+1
P 8112 AB
f (Hz)
fMAX
fMIN
10 t
C
P 8109A
Idrifttagning

ACS550 Användarhandledning 137
8112 LÅG FREKVENS 1Definierar frekvensgränsen vid vilken den första hjälpmotorn ska stoppas. Den första hjälpmotorn stoppas om: Den första hjälpmotorn är i drift ensam. ACS550 utfrekvens sjunker under gränsvärdet:
8112 - 1. Utfrekvensen förblir under gränsen
(8112 + 1 Hz) under tiden: 8116 HJMOT STOPPFÖRD.Efter att den första hjälpmotorn stoppats: Utfrekvensen ökar med värdet =
(8109 STARTFREKVENS 1) - (8112 LÅG FREKVENS 1) I praktiken ökar uteffekten från den varvtalsreglerade motorn,
för att kompensera för förlusten av kapacitet från hjälpmotorn. Se figur, där: A = (8109 STARTFREKVENS 1) - (8112 LÅG FREKVENS 1) B = Utfrekvensminskning under stoppfördröjning. C = Diagram som visar hjälpmotorns driftstatus när frekvensen
minskar (1 = På). Grått område = Visar hysteresen om tiden reverseras är
vägen tillbaka inte densamma. För detaljinformation om startvägen, se diagrammet vid 8109 STARTFREKVENS 1.
Obs! Låg Frekvens 1-värdet måste vara mellan: (2007 MIN FREKVENS) +1. 8109 STARTFREKVENS 1
8113 LÅG FREKVENS 2Definierar frekvensgränsen vid vilken den andra hjälpmotorn ska stoppas. Se 8112 LÅG FREKVENS 1 för en komplett beskrivning av funktionen.Den andra hjälpmotorn stoppas om: Två hjälpmotorer är igång. ACS550 utfrekvens sjunker under gränsvärdet: 8113 - 1. Utfrekvensen förblir under gränsen (8113 - 1 Hz) under tiden: 8116 HJMOT STOPPFÖRD.
8114 LÅG FREKVENS 3Definierar frekvensgränsen vid vilken den tredje hjälpmotorn ska stoppas. Se 8112 LÅG FREKVENS 1 för en komplett beskrivning av funktionen.Den tredje hjälpmotorn stoppas om: Tre hjälpmotorer är i drift. ACS550 utfrekvens sjunker under gränsvärdet: 8114 - 1. Utfrekvensen förblir under gränsen (8114 - 1 Hz) under tiden: 8116 HJMOT STOPPFÖRD.
8115 HJMOT STARTFÖRDDefinierar tid för hjälpmotorernas startfördröjning. Utfrekvensen måste ligga över startfrekvensgränsen (parameter 8109, 8110, eller 8111) under denna tidsperiod
innan hjälpmotorn startar. Se 8109 STARTFREKVENS 1 för en komplett beskrivning av funktionen.
8116 HJMOT STOPPFÖRD.Definierar tid för hjälpmotorernas stoppfördröjning. Utfrekvensen måste ligga under aktuell gräns för låg frekvens (parameter 8112, 8113, eller 8114) under denna
tidsperiod innan hjälpmotorn stoppas. Se 8112 LÅG FREKVENS 1 för en komplett beskrivning av funktionen.
Kod Beskrivning
t
P 8116
(P 8112)-1
B
f (Hz)
fMAX
fMIN
t10
C
P 8112
P 8109A
A
Idrifttagning

138 ACS550 Användarhandledning
8117 ANTAL HJÄLPMOTDefinierar antalet hjälpmotorer. Varje hjälpmotor kräver en reläutgång, som frekvensomriktaren använder för att skicka start/stopp-signaler. Autoväxlingsfunktionen, om den används, kräver ytterligare en reläutgång för den varvtalsreglerade motorn. Nedan beskrivs konfigurationen av nödvändiga reläutgångar.ReläutgångarSå som nämnts ovan kräver en hjälpmotor en reläutgång, som frekvensomriktaren använder för att skicka start/stopp-signaler. Nedan beskrivs hur frekvensomriktaren håller reda på motorer och reläer. ACS550 erbjuder reläutgångarna RO1RO3. En extern digital utgångsmodul kan läggas till. Man får då även reläutgångarna RO4RO6. Parametrarna 14011403 och 14101412 definierar hur reläerna RO1RO6 används parametervärde 31 PFC
definierar relät som används för PFC. ACS550 tilldelar hjälpmotorer till reläer i stigande ordning. Om autoväxlingsfunktionen är deaktiverad är den första
hjälpmotorn den som är ansluten till det första relät med parameterinställning = 31 PFC, och så vidare på. Om autoväxlingsfunktionen används roterar tilldelningen. Till en början är den varvtalsreglerade motorn den som är ansluten till det första relät med parameterinställning = 31 PFC. Den första hjälpmotorn är den som är ansluten till det andra relät med parameterinställning = 31 PFC, och så vidare.
Kod Beskrivning
ACS550
Standard PFC Driftläge PFC med autoväxlingsläge
ACS550Relälogik
Idrifttagning

ACS550 Användarhandledning 139
Tabellen nedan visar ACS550 PFC-motortilldelningen för några typiska inställningar i reläutgångsparametrarna (14011403 och 14101412), där inställningar är antingen =31 (PFC), eller =X (vad som helst utom 31), och där autoväxlingsfunktionen är deaktiverad (8118 AUTOVÄXEL INTERV = 0).
*= En extra reläutgång för den PFC som används. En motor "vilar" medan den andra arbetar. Tabellen nedan visar ACS550 PFC-motortilldelningen för några typiska inställningar i reläutgångsparametrarna
(14011403 och 14101412), där inställningar är antingen =31 (PFC), eller =X (vad som helst utom 31), och där autoväxlingsfunktionen är aktiverad (8118 AUTOVÄXEL INTERV = värde > 0).
** = Inga hjälpmotorer, men autoväxlingsfunktionen används. Fungerar som en vanlig PID-regulator.8118 AUTOVÄXEL INTERV
Styr autoväxlingsfunktionen och definierar intervallet mellan växlingar. Autoväxlingsintervallet gäller endast under den tid som den
varvtalsreglerade motorn är i drift. Se parameter 8119 AUTOVÄXEL NIVÅ för en översikt av
autoväxlingsfunktionen. Drivsystemet stannar alltid genom utrullning när autoväxling
sker. Autoväxling aktiverad kräver att parameter 8120
FÖRREGLINGAR = värde > 0.0,0 = EJ VALD Deaktiverar autoväxlingsfunktionen.0,1336 = Drifttidintervallet (tiden när startsignal föreligger)
mellan automatiska motorväxlingar.Varning! Om den är aktiverad kräver
autoväxlingsfunktionen förreglingarna (8120 förreglingar = värde > 0) aktiverad. Under autoväxling bryter förreglingarna frekvensomriktarens effektutgång för att förebygga skador på kontakterna.
Kod Beskrivning
Parameterinställning ACS550 Relätilldelning1401
1402
1403
1410
1411
1412
8117
Autoväxling deaktiveradRO1 RO2 RO3 RO4 RO5 RO6
31 X X X X X 1 Hjälp X X X X X 31 31 X X X X 2 Hjälp Hjälp X X X X 31 31 31 X X X 3 Hjälp Hjälp Hjälp X X X X 31 31 X X X 2 X Hjälp Hjälp X X X X X X 31 X 31 2 X X X Hjälp X Hjälp 31 31 X X X X 1* Hjälp Hjälp X X X X
Parameterinställning ACS550 Relätilldelning1401
1402
1403
1410
1411
1412
8117
Autoväxling deaktiveradRO1 RO2 RO3 RO4 RO5 RO6
31 31 X X X X 1 PFC PFC X X X X 31 31 31 X X X 2 PFC PFC PFC X X X x 31 31 X X X 1 X PFC PFC X X X X X X 31 X 31 1 X X X PFC X PFC31 31 X X X X 0** PFC PFC X X X X
PFC med autoväxlingsläge
ACS550Relälogik
Idrifttagning

140 ACS550 Användarhandledning
8119 AUTOVÄXEL NIVÅInställning av en övre gräns, som en procentsats av utgångskapaciteten, för autoväxlingslogiken. När utsignalen från PID/PFC-styrblocket överskrider denna gräns förhindras autoväxling. Till exempel, använd denna parameter för att förhindra autoväxling när pump- eller fläktsystemet arbetar nära maximal kapacitet. Autoväxling, översiktSyftet med autoväxling är att jämna ut drifttiden mellan flera motorer i samma system. Vid varje autoväxlingsoperation: En annan motor tar vid, och ansluts till effektutgången från ACS550 - den varvtalsreglerade motorn. Startordningen för övriga motorer roterar ett steg.Autoväxlingsfunktionen kräver: Extern kopplingsutrustning för förändring av drivsystemets utgångsanslutningar Parameter- 8120 FÖRREGLINGAR = värde > 0.Autoväxling utförs när: Drifttiden sedan föregående autoväxling når den tid som definieras av 8118 AUTOVÄXEL INTERV PFC-insignalen är under den nivå som definieras av denna parameter, 8119 AUTOVÄXEL NIVÅ.Obs! ACS 550 stannar alltid genom utrullning när autoväxling sker.I samband med autoväxling utför autoväxlingsfunktionen alla följande moment (se figur): Initierar växling när drifttiden sedan den senaste
autoväxlingen når 8118 AUTOVÄXEL INTERV, och PFC-insignalen understiger gränsvärdet 8119 AUTOVÄXL NIVÅ.
Stoppar den varvtalsreglerade motorn. Öppnar kontaktorn i den varvtalsreglerade motorn. Inkrementerar startordningsräknaren, för att ändra
startordning för motorerna. Identifierar motorn som står på tur att bli den
varvtalsreglerade motorn. Öppnar ovannämnda motors kontaktor, om motorn var i
drift. Inga andra motorer i drift påverkas. Sluter kontaktorn på den nya varvtalsreglerade motorn.
Autoväxlingsomkopplarna ansluter motorn till effektutgången från ACS550.
Fördröjer motorstart under tiden 8122 PFC START FÖRDR. Startar den varvtalsreglerade motorn. Identifierar nästa konstantvarvtalsmotor i sekvensen. Startar ovannämnda motor, men endast om den nya
varvtalsreglerade motorn hade varit i drift (som en konstantvarvtalsmotor) Detta steg håller ett oförändrat antal motorer i drift före och efter en autoväxling.
Fortsätter med normal PFC-drift.StartordningsräknareFunktion hos startordningsräknare: Reläutgångsparameterdefinitioner (14011403 och
14101412) etablerar den initiala motorsekvensen. (Det lägsta parameternumret med värdet 31 (PFC) identifierar relät som är anslutet till 1PFC, den första motorn, och så vidare.)
Till en början, 1PFC = varvtalsreglerad motor, 2PFC = 1:a hjälpmotorn, etc.
Den första autoväxlingen ändrar sekvensen till: 2PFC = varvtalsreglerad motor, 3PFC = 1:a hjälpmotor, , 1PFC = sista hjälpmotor.
Nästa autoväxling ändrar sekvensen på nytt, och så vidare. Om autoväxling inte kan starta en erforderlig motor därför att
samtliga inaktiva motorer är förreglade visas en varning (2015, PFCFÖRREGLING).
När ACS550-matningen bryts memorerar räknaren aktuell autoväxlingsordning i det permanenta minnet. När matningen är återställd fortsätter autoväxlingen från den position som lagrats i minnet.
Om PFC-reläkonfiguration ändras (eller om värdet på VAL AV PFC FUNK ändras), återställs rotationsordningen (Se den första punkten ovan.)
Kod Beskrivning
t
P 8118B
PID-utsignal
P 8119
100%
P 8118
1PFC
2PFC
3PFC
4PFC
4PFC
2PFC
3PFC
A
P 8122
A = Arean över 8119 AUTOVÄXEL NIVÅ autoväxling tillåts ej.
B = Autoväxling sker.1PFC, etc. = PID-utsignal som är associerad med
varje motor.
Ingen hjälp- 1 hjälp-motor
2 hjälp-motormotorer
PID-utsignal
P 8119 100%
Utgång
fMAX
Area där
frekvens
autoväxlingtillåts
Idrifttagning

ACS550 Användarhandledning 141
8120 FÖRREGLINGARDefinierar förreglingsfunktionen. När förreglingsfunktionen är aktiverad: En förregling är aktiv när dess kommandosignal saknas. En förregling är inaktiv när dess kommandosignal föreligger. ACS550 startar inte om ett startkommando föreligger när den varvtalsreglerade motorns förregling är aktiv
manöverpanelen visar en varning (2015, PFCFÖRREGLING).Anslut varje förreglingskrets enligt följande: Anslut en kontakt från till/från-omkopplaren till förreglingskretsen frekvensomriktarens PFC-logik kan därmed
detektera att motorn är avstängd, så att nästa tillgängliga motor kan startas. Anslut en kontakt från motorns överhettningsskydd (eller annan vakt i motorkretsen) till förreglingsingången
frekvensomriktarens PFC-logik kan därmed detektera att motorfel föreligger och stoppa motorn.0 = EJ VALD Deaktiverar förreglingsfunktionen. Alla digitala ingångar är tillgängliga för andra ändamål.
Kräver att 8118 AUTOVÄXEL INTERV = 0 (autoväxlingsfunktionen måste vara deaktiverad om förreglingsfunktionen är deaktiverad.)
1 = DI1 Aktiverar förreglingsfunktionen, och tilldelar en digital ingång (med början från DI1) till förreglingssignalen för varje PFC-relä. Dessa tilldelningar definieras i följande tabell och beror på: Antalet PFC-reläer (antal parametrar 14011403 och 14101412) och med värde = 31 PFC) Autoväxlingsfunktionens status (deaktiverad om 8118 AUTOVÄXEL INTERV = 0, och annars aktiverad).
Kod Beskrivning
Ant. PFC-reläer
Autoväxling deaktiverad (P 8118)
Autoväxling aktiverad(P 8118)
0 DI1: Varvt.-reglerad motor DI2DI6: Fri
Tillåts ej
1 DI1: Varvt.-reglerad motor DI2: Första PFC-relä DI3DI6: Fri
DI1: Första PFC-relä DI2DI6: Fri
2 DI1: Varvt.-reglerad motor DI2: Första PFC-relä DI3: Andra PFC-relä DI4DI6: Fri
DI1: Första PFC-relä DI2: Andra PFC-relä DI3DI6: Fri
3 DI1: Varvt.-reglerad motor DI2: Första PFC-relä DI3: Andra PFC-relä DI4: Tredje PFC-relä DI5DI6: Fri
DI1: Första PFC-relä DI2: Andra PFC-relä DI3: Tredje PFC-relä DI4DI6: Fri
4 DI1: Varvt.-reglerad motor DI2: Första PFC-relä DI3: Andra PFC-relä DI4: Tredje PFC-relä DI5: Fjärde PFC-relä DI6: Fri
DI1: Första PFC-relä DI2: Andra PFC-relä DI3: Tredje PFC-relä DI4: Fjärde PFC-relä DI5...DI6: Fri
5 DI1: Varvt.-reglerad motor DI2: Första PFC-relä DI3: Andra PFC-relä DI4: Tredje PFC-relä DI5: Fjärde PFC-relä DI6: Femte PFC-relä
DI1: Första PFC-relä DI2: Andra PFC-relä DI3: Tredje PFC-relä DI4: Fjärde PFC-relä DI5: Femte PFC-relä DI6: Fri
6 Tillåts ej DI1: Första PFC-relä DI2: Andra PFC-relä DI3: Tredje PFC-relä DI4: Fjärde PFC-relä DI5: Femte PFC-relä DI6: Sjätte PFC-relä
Idrifttagning
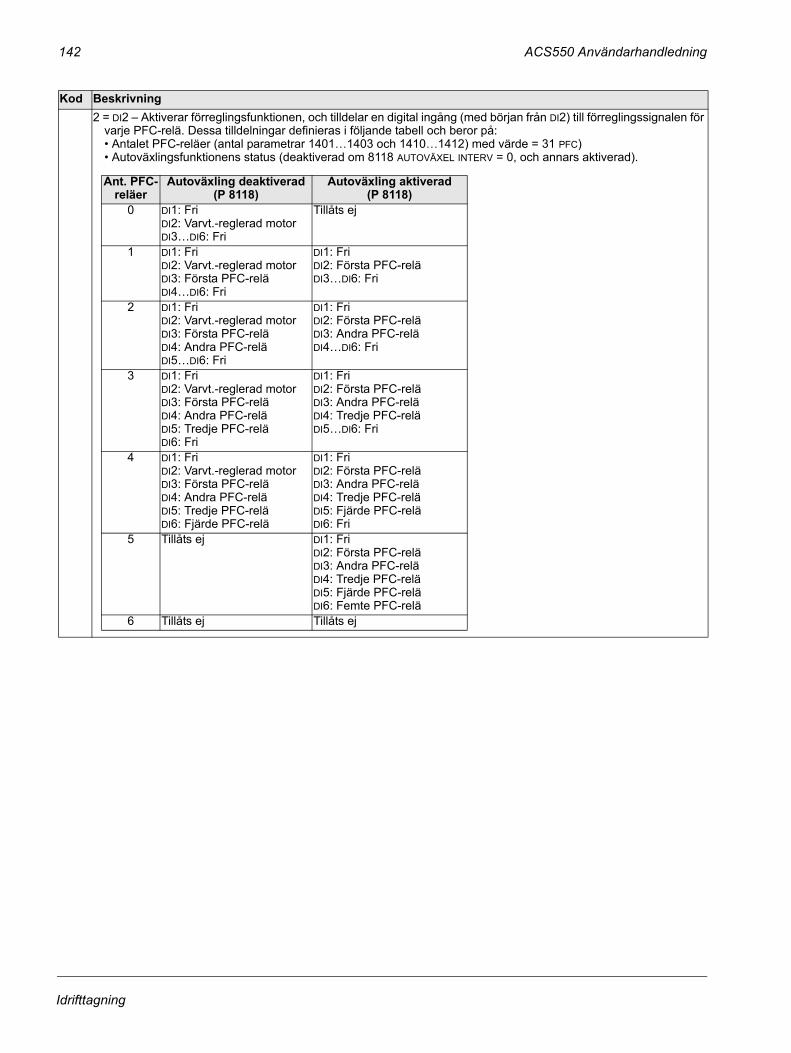
142 ACS550 Användarhandledning
2 = DI2 Aktiverar förreglingsfunktionen, och tilldelar en digital ingång (med början från DI2) till förreglingssignalen för varje PFC-relä. Dessa tilldelningar definieras i följande tabell och beror på: Antalet PFC-reläer (antal parametrar 14011403 och 14101412) med värde = 31 PFC) Autoväxlingsfunktionens status (deaktiverad om 8118 AUTOVÄXEL INTERV = 0, och annars aktiverad).
Kod Beskrivning
Ant. PFC-reläer
Autoväxling deaktiverad(P 8118)
Autoväxling aktiverad(P 8118)
0 DI1: Fri DI2: Varvt.-reglerad motor DI3DI6: Fri
Tillåts ej
1 DI1: Fri DI2: Varvt.-reglerad motor DI3: Första PFC-relä DI4DI6: Fri
DI1: Fri DI2: Första PFC-relä DI3DI6: Fri
2 DI1: Fri DI2: Varvt.-reglerad motor DI3: Första PFC-relä DI4: Andra PFC-relä DI5DI6: Fri
DI1: Fri DI2: Första PFC-relä DI3: Andra PFC-relä DI4DI6: Fri
3 DI1: Fri DI2: Varvt.-reglerad motor DI3: Första PFC-relä DI4: Andra PFC-relä DI5: Tredje PFC-relä DI6: Fri
DI1: Fri DI2: Första PFC-relä DI3: Andra PFC-relä DI4: Tredje PFC-relä DI5DI6: Fri
4 DI1: Fri DI2: Varvt.-reglerad motor DI3: Första PFC-relä DI4: Andra PFC-relä DI5: Tredje PFC-relä DI6: Fjärde PFC-relä
DI1: Fri DI2: Första PFC-relä DI3: Andra PFC-relä DI4: Tredje PFC-relä DI5: Fjärde PFC-relä DI6: Fri
5 Tillåts ej DI1: Fri DI2: Första PFC-relä DI3: Andra PFC-relä DI4: Tredje PFC-relä DI5: Fjärde PFC-relä DI6: Femte PFC-relä
6 Tillåts ej Tillåts ej
Idrifttagning
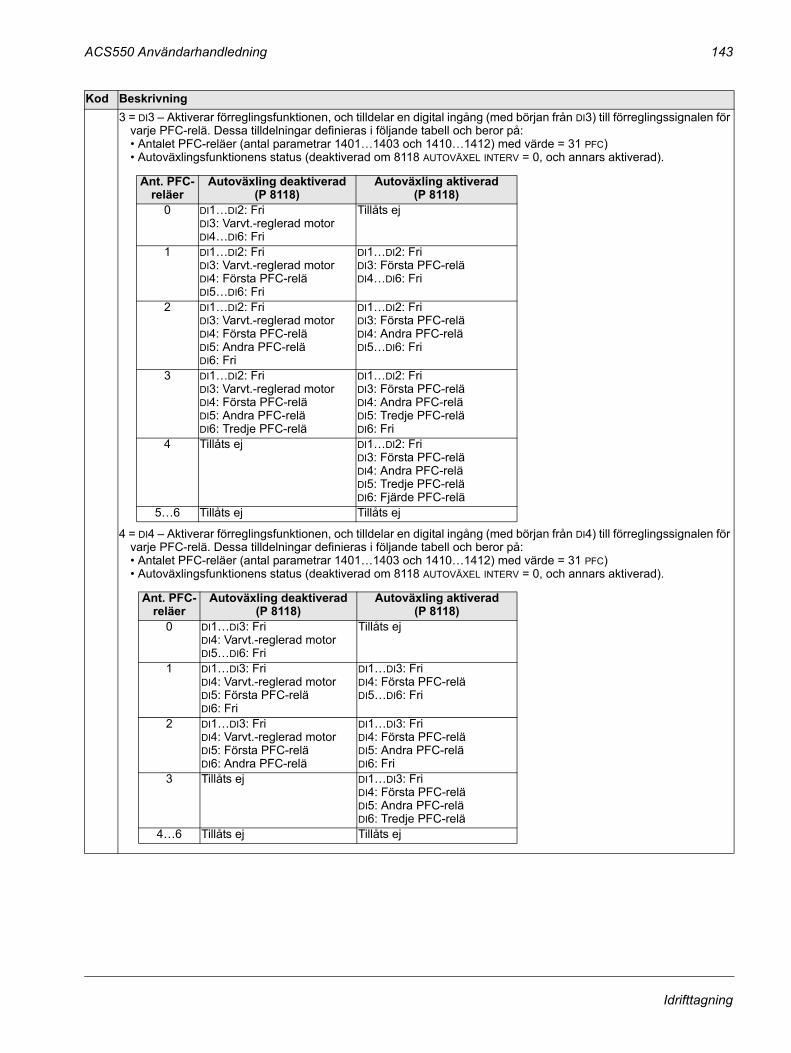
ACS550 Användarhandledning 143
3 = DI3 Aktiverar förreglingsfunktionen, och tilldelar en digital ingång (med början från DI3) till förreglingssignalen för varje PFC-relä. Dessa tilldelningar definieras i följande tabell och beror på: Antalet PFC-reläer (antal parametrar 14011403 och 14101412) med värde = 31 PFC) Autoväxlingsfunktionens status (deaktiverad om 8118 AUTOVÄXEL INTERV = 0, och annars aktiverad).
4 = DI4 Aktiverar förreglingsfunktionen, och tilldelar en digital ingång (med början från DI4) till förreglingssignalen för varje PFC-relä. Dessa tilldelningar definieras i följande tabell och beror på: Antalet PFC-reläer (antal parametrar 14011403 och 14101412) med värde = 31 PFC) Autoväxlingsfunktionens status (deaktiverad om 8118 AUTOVÄXEL INTERV = 0, och annars aktiverad).
Kod Beskrivning
Ant. PFC-reläer
Autoväxling deaktiverad(P 8118)
Autoväxling aktiverad(P 8118)
0 DI1DI2: Fri DI3: Varvt.-reglerad motor DI4DI6: Fri
Tillåts ej
1 DI1DI2: Fri DI3: Varvt.-reglerad motor DI4: Första PFC-relä DI5DI6: Fri
DI1DI2: Fri DI3: Första PFC-relä DI4DI6: Fri
2 DI1DI2: Fri DI3: Varvt.-reglerad motor DI4: Första PFC-relä DI5: Andra PFC-relä DI6: Fri
DI1DI2: Fri DI3: Första PFC-relä DI4: Andra PFC-relä DI5DI6: Fri
3 DI1DI2: Fri DI3: Varvt.-reglerad motor DI4: Första PFC-relä DI5: Andra PFC-relä DI6: Tredje PFC-relä
DI1DI2: Fri DI3: Första PFC-relä DI4: Andra PFC-relä DI5: Tredje PFC-relä DI6: Fri
4 Tillåts ej DI1DI2: Fri DI3: Första PFC-relä DI4: Andra PFC-relä DI5: Tredje PFC-relä DI6: Fjärde PFC-relä
56 Tillåts ej Tillåts ej
Ant. PFC-reläer
Autoväxling deaktiverad(P 8118)
Autoväxling aktiverad(P 8118)
0 DI1DI3: Fri DI4: Varvt.-reglerad motor DI5DI6: Fri
Tillåts ej
1 DI1DI3: Fri DI4: Varvt.-reglerad motor DI5: Första PFC-relä DI6: Fri
DI1DI3: Fri DI4: Första PFC-relä DI5DI6: Fri
2 DI1DI3: Fri DI4: Varvt.-reglerad motor DI5: Första PFC-relä DI6: Andra PFC-relä
DI1DI3: Fri DI4: Första PFC-relä DI5: Andra PFC-relä DI6: Fri
3 Tillåts ej DI1DI3: Fri DI4: Första PFC-relä DI5: Andra PFC-relä DI6: Tredje PFC-relä
46 Tillåts ej Tillåts ej
Idrifttagning

144 ACS550 Användarhandledning
5 = DI5 Aktiverar förreglingsfunktionen, och tilldelar en digital ingång (med början från DI5) till förreglingssignalen för varje PFC-relä. Dessa tilldelningar definieras i följande tabell och beror på: Antalet PFC-reläer (antal parametrar 14011403 och 14101412) med värde = 31 PFC) Autoväxlingsfunktionens status (deaktiverad om 8118 AUTOVÄXEL INTERV = 0, och annars aktiverad).
6 = DI6 Aktiverar förreglingsfunktionen och tilldelar digital ingång DI6 till förreglingssignalen för den varvtalsreglerade motorn. Erforderlig 8118 AUTOVÄXEL INTERV = 0.
Kod Beskrivning
Ant. PFC-reläer
Autoväxling deaktiverad(P 8118)
Autoväxling aktiverad(P 8118)
0 DI1DI4: Fri DI5: Varvt.-reglerad motor DI6: Fri
Tillåts ej
1 DI1DI4: Fri DI5: Varvt.-reglerad motor DI6: Första PFC Relä-
DI1DI4: Fri DI5: Första PFC-relä DI6: Fri
2 Tillåts ej DI1DI4: Fri DI5: Första PFC-relä DI6: Andra PFC-relä
36 Tillåts ej Tillåts ej
Ant. PFC-reläer
Autoväxling deaktiverad Autoväxling aktiverad
0 DI1DI5: Fri DI6: Varvt.-reglerad motor
Tillåts ej
1 Tillåts ej DI1DI5: Fri DI6: Första PFC Relä-
2...6 Tillåts ej Tillåts ej
Idrifttagning

ACS550 Användarhandledning 145
8121 REG FÖRBIKOPPLVal av regulatorförbikoppling. När regulatorn förbikopplas sker styrning på enkelt sätt utan PID-regulator. Använd regulatorförbikoppling endast i speciella
tillämpningar.0 = NEJ - Deaktiverar regulatorförbikoppling
Frekvensomriktaren använder normal PFC-referens: 1106 VAL EXT REF2.
1 = JA Aktiverar regulatorförbikoppling. PID-regulatorn är förbikopplad.
Ärvärdet för PID-regulatorn används som PFC-referens (insignal). Normalt används EXT REF2 som PFC-referens
Frekvensomriktaren använder återkopplingssignalen definierad av 4014 VAL AV ÄRVÄRDE (eller 4114) som PFC-frekvensreferens.
Figuren visar förhållandet mellan styrsignalen 4014 VAL AV ÄRVÄRDE (ELLER 4114) och den varvtalsreglerade motorns frekvens i ett tremotorsystem.
Exempel: I diagrammet nedan styrs pumpstationens flöde via det uppmätta inloppsflödet (A).
8122 PFC START FÖRDRDefinierar startfördröjning för alla motorer i systemet. Med hjälp av fördröjning fungerar frekvensomriktaren enligt följande: Aktiverar kontaktorn på den varvtalsreglerade motorn ansluter motorn till effektutgången från ACS550. Fördröjer motorstart under tiden 8122 PFC START FÖRDR. Startar den varvtalsreglerade motorn. Startar hjälpmotorer. Se parameter 8115 för fördröjning.Varning! Motorer utrustade med YD-startapparat kräver PFC-startfördröjning. Därefter aktiverar en reläutgång från ACS550 en motor. YD-startapparaten måste gå till Y-läge och sedan tillbaka
till D-läge innan frekvensomriktaren applicerar effekt. Fördröjningen måste vara längre än tidsinställningen för YD-startapparaten.
8123 VAL AV PFC FUNKVal av PFC-styrning. Om den är aktiverad utför PFC-styrningen följande: Kopplar till eller från hjälpmotorer med konstant varvtal, efter hand som kapacitetsbehovet ökar eller minskar.
Parametrarna 8109 STARTFREKVENS 1 till 8114 LÅG FREKVENS 3 definierar omkopplingspunkter uttryckt som frekvensomriktarens utfrekvens.
Justerar ner varvtalet hos den varvtalsreglerade motorn när hjälpmotorer tillkommer, och justerar upp det när hjälpmotorer stängs av.
Tillhandahåller förreglingsfunktioner, om dessa är aktiverade. Kräver att parameter 9904 MOTOR STYRMETOD = 3 SKALÄR.0 = EJ VALD Deaktiverar PFC-styrning1 = AKTIV Aktiverar PFC-styrning
Kod Beskrivning
P 4014
fMAX
P 8110P 8109
P 8113
P 8112
A = Inga hjälpmotorer igångB = En hjälpmotor igångC = Två hjälpmotorer igång
A
fMIN
B C (%)
fUT
M3~
M3~
M3~
Utloppsrörledning
Utloppsrörledning
UtloppsrörledningP1
P2
P3
Avlopps-tank
KontaktorerP1P2P3
Matning 3~
3
3
33
ACS55033
Inloppsrörledning
A
Idrifttagning
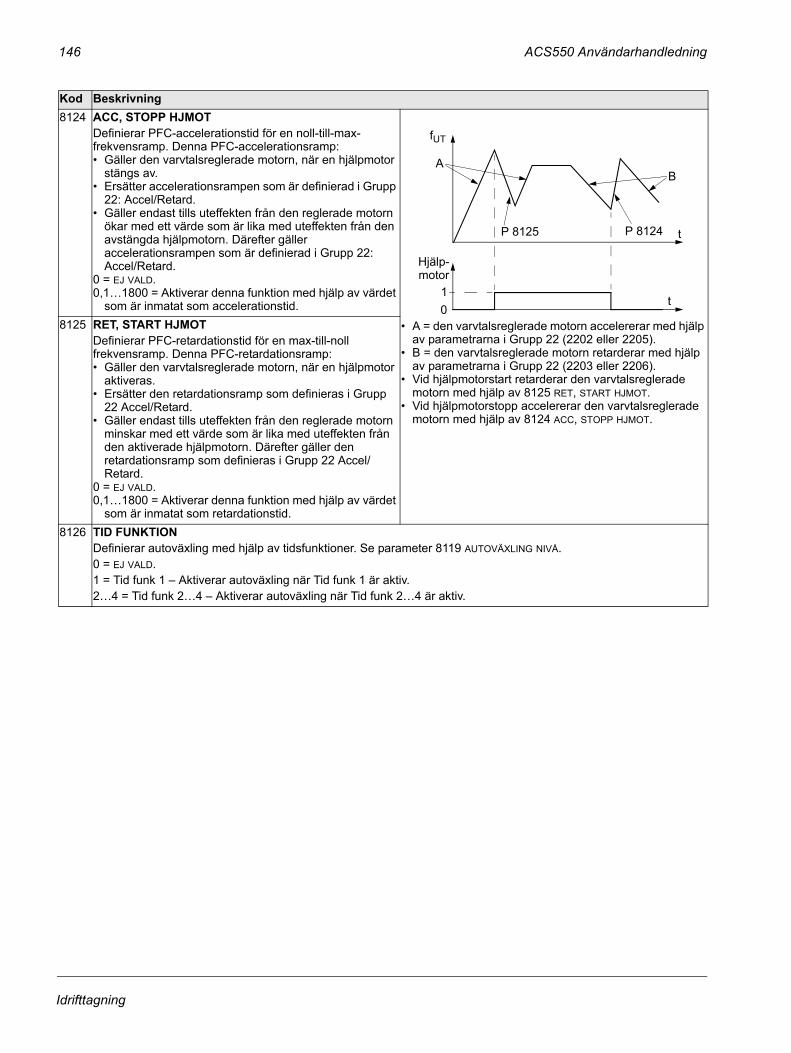
146 ACS550 Användarhandledning
8124 ACC, STOPP HJMOTDefinierar PFC-accelerationstid för en noll-till-max-frekvensramp. Denna PFC-accelerationsramp: Gäller den varvtalsreglerade motorn, när en hjälpmotor
stängs av. Ersätter accelerationsrampen som är definierad i Grupp
22: Accel/Retard. Gäller endast tills uteffekten från den reglerade motorn
ökar med ett värde som är lika med uteffekten från den avstängda hjälpmotorn. Därefter gäller accelerationsrampen som är definierad i Grupp 22: Accel/Retard.
0 = EJ VALD.0,11800 = Aktiverar denna funktion med hjälp av värdet
som är inmatat som accelerationstid. A = den varvtalsreglerade motorn accelererar med hjälp
av parametrarna i Grupp 22 (2202 eller 2205). B = den varvtalsreglerade motorn retarderar med hjälp
av parametrarna i Grupp 22 (2203 eller 2206). Vid hjälpmotorstart retarderar den varvtalsreglerade
motorn med hjälp av 8125 RET, START HJMOT. Vid hjälpmotorstopp accelererar den varvtalsreglerade
motorn med hjälp av 8124 ACC, STOPP HJMOT.
8125 RET, START HJMOTDefinierar PFC-retardationstid för en max-till-noll frekvensramp. Denna PFC-retardationsramp: Gäller den varvtalsreglerade motorn, när en hjälpmotor
aktiveras. Ersätter den retardationsramp som definieras i Grupp
22 Accel/Retard. Gäller endast tills uteffekten från den reglerade motorn
minskar med ett värde som är lika med uteffekten från den aktiverade hjälpmotorn. Därefter gäller den retardationsramp som definieras i Grupp 22 Accel/Retard.
0 = EJ VALD.0,11800 = Aktiverar denna funktion med hjälp av värdet
som är inmatat som retardationstid.8126 TID FUNKTION
Definierar autoväxling med hjälp av tidsfunktioner. Se parameter 8119 AUTOVÄXLING NIVÅ.0 = EJ VALD.1 = Tid funk 1 Aktiverar autoväxling när Tid funk 1 är aktiv.24 = Tid funk 24 Aktiverar autoväxling när Tid funk 24 är aktiv.
Kod Beskrivning
t
P 8125 P 8124
AB
10
t
fUT
Hjälp-motor
Idrifttagning

ACS550 Användarhandledning 147
Grupp 98: TillvalsmodulerGruppen definierar tillval, framför allt sådana som tillåter seriell kommunikation med drivsystemet.
Kod Beskrivning9802 KOMM PROTOKOLL
Väljer kommunikationsprotokollet.0 = EJ VALD Inget kommunikationsprotokoll valt.1 = STD MODBUS Frekvensomriktaren kommunicerar via en Modbus-adapter via RS485-länken (X1-
kommunikation, terminal). Se även parametergrupp; 53 INBYGGD BUSKOMM.
4 = EXT FÄLTBUS Frekvensomriktaren kommunicerar via en fältbussmodul i tillvalsuttag 2 på frekvensomriktaren. Se även parametergrupp; 51 COMM MODUL.
Idrifttagning
148 ACS550 Användarhandledning
Standard seriekommunikationDetta kapitel beskriver seriell kommunikation med ACS550.
I ACS550 ingår som standard, Modbus®-kommunikation på RS485-porten (plintarna 28...32).
Du kan ansluta andra fältbusstyper med en speciell fältbussmodul, som sätts i tillvalsuttag 2. För mer information om dessa möjligheter, kontakta leverantören.
Vid användning av seriekommunikation kan ACS550 antingen:
ta emot all styrinformation från fältbussen, eller
styras via en kombination av fältbusstyrning och andra tillgängliga styrplatser, som digitala eller analoga ingångar, och manöverpanelen.
Introduktion till ModbusModbus-protokollet lanserades av Modicon, Inc. för användning i styrmiljöer med PLC-enheter från Modicon. På grund av den enkla hanteringen och implementeringen kom detta PLC-språk snabbt att accepteras som de-facto-standard för integrering av de mest skilda master- och slavstyrenheter.
Modbus är ett seriellt asynkront kommunikationsprotokoll. Transaktionerna sker i halv duplex, där en enda master styr en eller flera slavar. RS232 kan användas för punkt-till-punkt kommunikation mellan en master och en slav, men en vanligare implementering är ett multidrop-RS485-nätverk där en master styr flera slavar. ACS550 använder RS485 för det fysiska Modbus-gränssnittet.
Modbus-specifikationen definierar två distinkta kommunikationslägen: ASCII och RTU. ACS550 stöder endast RTU.
I detta kapitel förutsätts att du har grundläggande kunskaper om Modbus-protokollet och dess användning processtyrmiljö. Om du behöver ytterligare information om Modbus, kontakt din ABB-leverantör för att få ett exemplar av Modbus Protocol Reference Guide.
Aktivering av Modbus-protokolletVid fabriksinställning är fältbusstyrning inte aktiverad. För att aktivera Standard Modbus, sätt parameter 9802 KOMM PROTOKOLL = 1 (STD MODBUS). Efter denna enda ändring är ACS550 är redo att kommunicera via RS485-porten med hjälp av fabriksinställda kommunikationsinställningar. Därmed kan du ladda upp och ner frekvensomriktarparametrar via seriell kommunikation.
KommunikationsinställningarKommunikationsinställningar definierar stationsnumret, kommunikationshastighet, paritetskontroll och antal stoppbitar. Dessa inställningar definieras med parametrar i Grupp 53: Inbyggd buskomm. Grundvärdesinställningarna anges i följande tabell
Kanal 1 KommunikationsinställningarStation
nummerKommunikations-
hastighet Paritet Stopp-bitar Databitar
Parameter 5302 5303 5304 Ingen
Idrifttagning
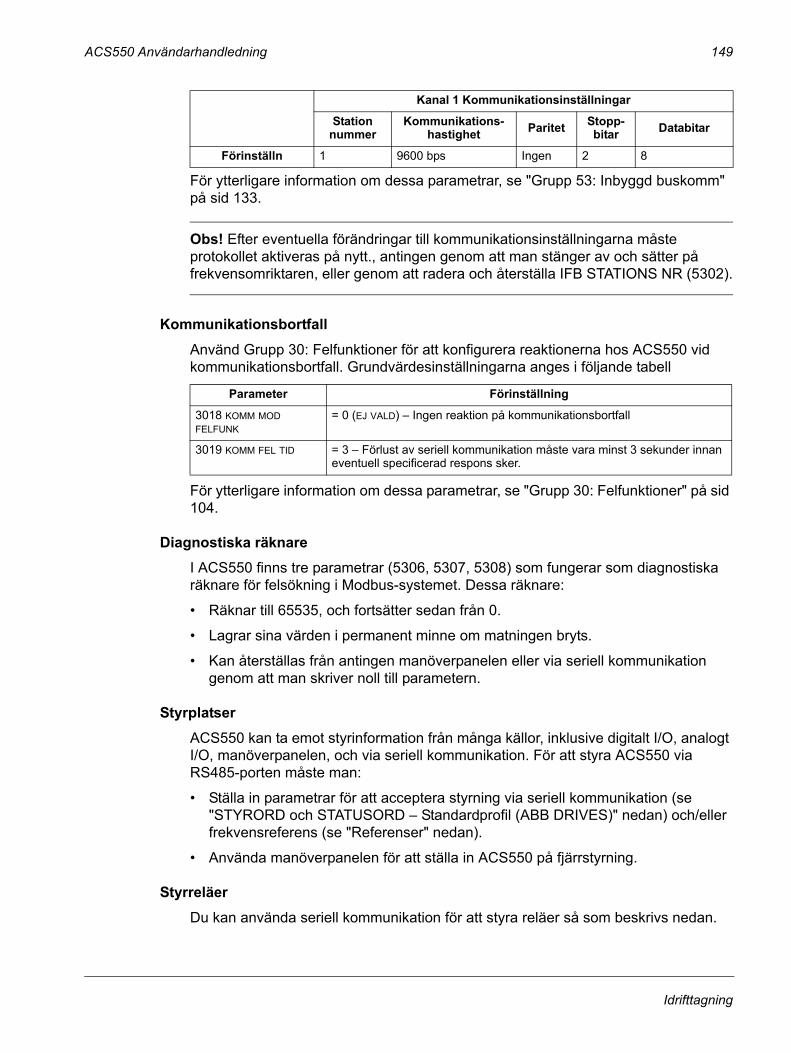
ACS550 Användarhandledning 149
För ytterligare information om dessa parametrar, se "Grupp 53: Inbyggd buskomm" på sid 133.
Obs! Efter eventuella förändringar till kommunikationsinställningarna måste protokollet aktiveras på nytt., antingen genom att man stänger av och sätter på frekvensomriktaren, eller genom att radera och återställa IFB STATIONS NR (5302).
KommunikationsbortfallAnvänd Grupp 30: Felfunktioner för att konfigurera reaktionerna hos ACS550 vid kommunikationsbortfall. Grundvärdesinställningarna anges i följande tabell
För ytterligare information om dessa parametrar, se "Grupp 30: Felfunktioner" på sid 104.
Diagnostiska räknareI ACS550 finns tre parametrar (5306, 5307, 5308) som fungerar som diagnostiska räknare för felsökning i Modbus-systemet. Dessa räknare:
Räknar till 65535, och fortsätter sedan från 0.
Lagrar sina värden i permanent minne om matningen bryts.
Kan återställas från antingen manöverpanelen eller via seriell kommunikation genom att man skriver noll till parametern.
StyrplatserACS550 kan ta emot styrinformation från många källor, inklusive digitalt I/O, analogt I/O, manöverpanelen, och via seriell kommunikation. För att styra ACS550 via RS485-porten måste man:
Ställa in parametrar för att acceptera styrning via seriell kommunikation (se "STYRORD och STATUSORD Standardprofil (ABB DRIVES)" nedan) och/eller frekvensreferens (se "Referenser" nedan).
Använda manöverpanelen för att ställa in ACS550 på fjärrstyrning.
Styrreläer Du kan använda seriell kommunikation för att styra reläer så som beskrivs nedan.
Förinställn 1 9600 bps Ingen 2 8
Parameter Förinställning3018 KOMM MOD FELFUNK
= 0 (EJ VALD) Ingen reaktion på kommunikationsbortfall
3019 KOMM FEL TID = 3 Förlust av seriell kommunikation måste vara minst 3 sekunder innan eventuell specificerad respons sker.
Kanal 1 Kommunikationsinställningar
Station nummer
Kommunikations-hastighet Paritet Stopp-
bitar Databitar
Idrifttagning
150 ACS550 Användarhandledning
Använd parametrarna i Grupp 14, Reläutgångar för att konfigurera en reläutgång att svara på seriell kommunikation.
Anslut valda reläer genom att skriva till parameter 0134 (Modbus holding register 40134) eller till rätt Modbus coil (Modbus coils 3338).
Till exempel: För att styra reläerna 1 och 2 via seriell kommunikation: Sätt parameter 1401 RELÄUTGÅNG 1 och 1402 RELÄUTGÅNG 1 = 35 (COMM).
Därefter:
För att få relä 1 att dra, antingen:
Skriv "1" till Modbus holding register 40134, eller Tvinga Modbus coil 33 till On.
För att få relä 2 att dra, antingen:
Skriv "2" till Modbus holding register 40134, eller Tvinga Modbus coil 34 till On.
För att få både relä- 1 och 2 att dra, antingen:
Skriv "3" till Modbus holding register 40134, eller Tvinga Modbus coils 33 och 34 till On.
ACS550-mappning till Modbus Reference SpaceKommunikationsprofiler
Vid kommunikation via Modbus stöder ACS550 multipla profiler för styr- och statusinformation. Parameter 5305 (IFB COMM PROFIL) val väljer den profil som ska användas.
ABB DRIVES (Standard) Den primära profilen (och grundvärdet) är ABB Drives Profile, som standardiserar styrgränssnittet för ABBs drivsystem. Denna profil bygger på PROFIBUS-gränssnittet, och diskuteras i närmare detalj i de efterföljande avsnitten.
ACS550 (Växlande) En alternativ profil kallas ACS550-profilen. Den utvidgar styr- och statusgränssnitten till 32 bitar och utgör internt gränssnitt mellan huvuddrivsystemtillämpningen och den inbäddade fältbussmiljön. Denna profil är endast avsedd för avancerade användare. Denna användarhandledning beskriver inte ACS550-profileni detalj. Kontakta din ABB-leverantör om du behöver mera information om denna profil.
Modbus-adressering
Med Modbus innebär varje funktionskod åtkomst till en viss referensuppsättning inom Modbus. Därför ingår inte den inledande siffran i adressfältet till ett Modbus-meddelande.
Obs: ACS550 stöder nollbaserad adressering av Modbus-specifikationen. Holding register 40002 adresseras som 0001 i ett Modbus-meddelande. På motsvarande sätt adresseras coil 33 som 0032 i ett Modbus-meddelande.
Idrifttagning

ACS550 Användarhandledning 151
ACS550-parametrar och I/O "mappar" till Modbus reference space så som visas i följande tabell
Följande avsnitt beskriver i detalj mappningen till varje Modbus-referensuppsättning
0xxxx Mappning Modbus Coils
Frekvensomriktaren mappar följande information till 0xxxx Modbus set som kallas Modbus Coils:
Bitvis mappning av STYRORD (valt med parameter 5305 IFB COMM PROFIL). Den första 32 coils är reserverade för detta ändamål.
Reläutgångstillstånd, numrerade sekventiellt med början från coil 00033.
Följande tabell sammanfattar referensuppsättningen 0xxxx:
ACS550 Modbus Reference Set Funktionskoder som stöds
Styrbitar Reläutgångar
Coils (0xxxx) 01 Läs coil status 05 Tvinga enskild coil 15 Tvinga flera coils (0x0F Hex)
Statusbitar Diskreta
ingångar
Diskreta ingångar (1xxxx) 02 Läs ingångsstatus
Analoga ingångar
Ingångsregister (3xxxx) 04 Läs ingångsregister
STYRORD
STATUSORD
Referenser Parametrar
Holding registers (4xxxx) 03 Läs 4xxxx register 06 Förinställ ett 4xxxx register 16 Förinställ flera 4xxxx register (0x10 Hex) 23 Läs/skriv 4xxxx register (0x17 Hex)
Modbus Ref.
ACS550
Intern placering(Alla profiler)
Standardprofil (ABB DRIVES)5305 IFB COMM PROFIL = 0
Alternativ profil (ACS550)5305 IFB COMM PROFIL = 1
00001 STYRORD - Bit 0 OFF1* STOP
00002 STYRORD - Bit 1 OFF2* START
00003 STYRORD - Bit 2 OFF3* BACK
00004 STYRORD - Bit 3 START LOCAL
00005 STYRORD - Bit 4 N/A RESET
00006 STYRORD - Bit 5 RAMP_HOLD* EXT2
00007 STYRORD - Bit 6 RAMP_IN_ZERO* RUN_DISABLE
00008 STYRORD - Bit 7 RESET STPMODE_R
00009 STYRORD - Bit 8 N/A STPMODE_EM
00010 STYRORD - Bit 9 N/A STPMODE_C
00011 STYRORD - Bit 10 N/A RAMP_2
00012 STYRORD - Bit 11 EXT2 RAMP_UT_0
00013 STYRORD - Bit 12 N/A RAMP_HOLD
00014 STYRORD - Bit 13 N/A RAMP_IN_0
00015 STYRORD - Bit 14 N/A REQ_LOCALLOCK
Idrifttagning

152 ACS550 Användarhandledning
Obs: * = Aktiv låg
För register 0xxxx:
Status är alltid läsbar.
Tvingande inställning tillåts genom användarkonfigurering av drivsystemet för fältbusstyrning.
Extra reläutgångar läggs till sekventiellt.
ACS550 stöder följande Modbus-funktionskoder för coils:
1xxxx Mappning Modbus diskreta ingångar
Frekvensomriktaren mappar följande information till Modbus-uppsättning 1xxxx som kallas Modbus Discrete Inputs:
Bitvis mappning av STATUSORD (valt med parameter 5305 IFB COMM PROFIL). Den första 32 ingångarna är reserverade för detta ändamål.
Diskreta maskinvaruingångar numreras sekventiellt med början från insignal 33.
Följande tabell sammanfattar referensuppsättningen 1xxxx:
00016 STYRORD - Bit 15 N/A TORQLIM2
00017 00032
Reserverad Reserverad Reserverad
00033 Reläutgång 1 Reläutgång 1 Reläutgång 1
00034 Reläutgång 2 Reläutgång 2 Reläutgång 2
00035 Reläutgång 3 Reläutgång 3 Reläutgång 3
00036 Reläutgång 4 Reläutgång 4 Reläutgång 4
00037 Reläutgång 5 Reläutgång 5 Reläutgång 5
00038 Reläutgång 6 Reläutgång 6 Reläutgång 6
Funktionskod Beskrivning01 Läs coil-status
05 Tvinga enskild coil
15 (0x0F Hex) Tvinga flera coils
Modbus Ref.
ACS550
Intern placering(Alla profiler)
Standardprofil (ABB DRIVES)5305 IFB COMM PROFIL = 0
Alternativ profil (ACS550)5305 IFB COMM PROFIL = 1
10001 STATUSORD - Bit 0 RDY_ON READY
10002 STATUSORD - Bit 1 RDY_RUN ENABLED
10003 STATUSORD - Bit 2 RDY_REF STARTED
10004 STATUSORD - Bit 3 TRIPPED RUNNING
10005 STATUSORD - Bit 4 OFF_2_STA* ZERO_SPEED
Modbus Ref.
ACS550
Intern placering(Alla profiler)
Standardprofil (ABB DRIVES)5305 IFB COMM PROFIL = 0
Alternativ profil (ACS550)5305 IFB COMM PROFIL = 1
Idrifttagning

ACS550 Användarhandledning 153
obs: * = Aktiv lågFör register 1xxxx:
Ytterligare diskreta ingångar läggs till sekventiellt.
10006 STATUSORD - Bit 5 OFF_3_STA* ACCELERATE
10007 STATUSORD - Bit 6 SWC_ON_INHIB DECELERATE
10008 STATUSORD - Bit 7 ALARM AT_SETPOINT
10009 STATUSORD - Bit 8 AT_SETPOINT LIMIT
10010 STATUSORD - Bit 9 REMOTE SUPERVISION
10011 STATUSORD - Bit 10 ABOVE_LIMIT REV_REF
10012 STATUSORD - Bit 11 EXT2 REV_ACT
10013 STATUSORD - Bit 12 RUN_ENABLE PANEL_LOCAL
10014 STATUSORD - Bit 13 N/A FIELDBUS_LOCAL
10015 STATUSORD - Bit 14 N/A EXT2_ACT
10016 STATUSORD - Bit 15 N/A FAULT
10017 STATUSORD - Bit 16 Reserverad ALARM
10018 STATUSORD - Bit 17 Reserverad REQ_MAINT
10019 STATUSORD - Bit 18 Reserverad DIRLOCK
10020 STATUSORD - Bit 19 Reserverad LOCALLOCK
10021 STATUSORD - Bit 20 Reserverad CTL_MODE
10022 STATUSORD - Bit 21 Reserverad Reserverad
10023 STATUSORD - Bit 22 Reserverad Reserverad
10024 STATUSORD - Bit 23 Reserverad Reserverad
10025 STATUSORD - Bit 24 Reserverad Reserverad
10026 STATUSORD - Bit 25 Reserverad Reserverad
10027 STATUSORD - Bit 26 Reserverad REQ_CTL
10028 STATUSORD - Bit 27 Reserverad REQ_REF1
10029 STATUSORD - Bit 28 Reserverad REQ_REF2
10030 STATUSORD - Bit 29 Reserverad REQ_REF2EXT
10031 STATUSORD - Bit 30 Reserverad ACK_STARTINH
10032 STATUSORD - Bit 31 Reserverad ACK_OFF_ILCK
10033 DI1 DI1 DI1
10034 DI2 DI2 DI2
10035 DI3 DI3 DI3
10036 DI4 DI4 DI4
10037 DI5 DI5 DI5
10038 DI6 DI6 DI6
Modbus Ref.
ACS550
Intern placering(Alla profiler)
Standardprofil (ABB DRIVES)5305 IFB COMM PROFIL = 0
Alternativ profil (ACS550)5305 IFB COMM PROFIL = 1
Idrifttagning

154 ACS550 Användarhandledning
ACS550 stöder följande Modbus-funktionskoder för diskreta ingångar:
3xxxx Mapping Modbus Indata
Frekvensomriktaren mappar följande information till 3xxxx Modbus-adresser som kallas Modbus input registers:
Varje användare kan definiera analoga ingångar.
Följande tabell sammanfattar ingångsregistren:
ACS550 stöder följande Modbus-funktionskoder för register 3xxxx:
4xxxx Registermappning
Frekvensomriktaren mappar sina parametrar och andra data till holding register 4xxxx enligt följande:
4000140099 mappas till motorstyrning och ärvärden . Dessa register beskrivs i tabellen nedan.
4010149999 mappas till frekvensomriktarparametrar 01019999. Registeradresser som inte överensstämmer med frekvensomriktarparametrar är ogiltiga. Försök att skriva eller läsa utanför parameteradressområdet gör att Modbus-gränssnittet returnerar en avvikelsekod (exception code) till styrenheten.
Följande tabell sammanfattar motorstyrningsregister 4xxxx 4000140099 (för 4xxxx-register över 40099, se frekvensomriktarens parameterlista, t.ex. 40102 är parameter 0102):
Funktionskod Beskrivning
02 Läs ingångsstatus
Modbus-referens
ACS550Alla profiler Anmärkning
30001 AI1 Detta register ska rapportera nivån hos analog ingång 1 (0100%).
30002 AI2 Detta register ska rapportera nivån hos analog ingång 2 (0100%).
Funktionskod Beskrivning04 Läs 3xxxx ingångsstatus
Modbus-register
ACS550Standardprofil (ABB
DRIVES)
Åtkomst Anmärkning
40001 STYRORD R/W Stöds endast om frekvensomriktaren är konfigurerad att använda profilen ABB Drives (5305 = 0).
40002 Referens 1 R/W Område = 0+20000 (skalat till 01105 EXT REF1 MAX), eller -200000 (skalat till 1105 EXT REF1 MAX0).
40003 Referens 2 R/W Område = 0+10000 (skalat till 01108 EXT REF2 MAX), eller -100000 (skalat till 1108 EXT REF2 MAX0).
40004 ABB DRIVES PROFIL R Detta register stöds endast om frekvensomriktaren är konfigurerad att använda profilen ABB Drives (5305 = 0).
Idrifttagning

ACS550 Användarhandledning 155
Med undantag för fall där frekvensomriktaren begränsar är alla parametrar tillgängliga för både avläsning och skrivning. Skrivoperationer till parametern verifieras med avseende på korrekt värde och giltig adress.
Obs! Skrivoperationer till parametrar via standard Modbus lagras alltid tillfälligt i minnet, dvs. ändrade värden sparas inte permanent automatiskt. Använd parameter 1607 PARAM. SPARA för att spara alla ändrade värden.
ACS550 stöder följande Modbus-funktionskoder för register 4xxxx:
40005 Ärvärde 1 (välj med 5310)
R Lagrar som grundvärde en kopia av 0103 UTFREKVENS. Använd parameter 5310 för att välja ett annat ärvärde för detta register.
40006 Ärvärde 2 (välj med 5311)
R Lagrar som grundvärde en kopia av 0104 STRÖM. Använd parameter 5311 för att välja ett annat ärvärde för detta register.
40007 Ärvärde 3 (välj med 5312)
R Lagrar som grundvärde ingenting. Använd parameter 5312 för att välja ett ärvärde för detta register.
40008 Ärvärde 4 (välj med 5313)
R Lagrar som grundvärde ingenting. Använd parameter 5313 för att välja ett ärvärde för detta register.
40009 Ärvärde 5 (välj med 5314)
R Lagrar som grundvärde ingenting. Använd parameter 5314 för att välja ett ärvärde för detta register.
40010 Ärvärde 6 (välj med 5315)
R Lagrar som grundvärde ingenting. Använd parameter 5315 för att välja ett ärvärde för detta register.
40011 Ärvärde 7 (välj med 5316)
R Lagrar som grundvärde ingenting. Använd parameter 5316 för att välja ett ärvärde för detta register.
40012 Ärvärde 8 (välj med 5317)
R Lagrar som grundvärde ingenting. Använd parameter 5317 för att välja ett ärvärde för detta register.
40031 ACS550 STYRORD LSW
R/W Mappar direkt till Minst Signifikanta Ord i ACS550 drivsystemprofil STYRORD. Se parameter 0301.
40032 ACS550 STYRORD MSW
R Mappar direkt till Mest Signifikanta Ord i ACS550 drivsystemprofil STYRORD. Se parameter 0302.
40033 ACS550 STATUSORD LSW
R Mappar direkt till Minst Signifikanta Ord i ACS550 drivsystemprofil STATUSORD. Se parameter 0303.
40034 ACS550 STATUSORD MSW
R Mappar direkt till Mest Signifikanta Ord i ACS550 drivsystemprofil STATUSORD. Se parameter 0304.
Funktionskod Beskrivning03 Läs holding 4xxxx register
06 Förinställ ett 4xxxx register
16 (0x10 Hex) Förinställ flera 4xxxx register
23 (0x17 Hex) Läs/skriv 4xxxx register
Modbus-register
ACS550Standardprofil (ABB
DRIVES)
Åtkomst Anmärkning
Idrifttagning

156 ACS550 Användarhandledning
STYRORD och STATUSORD Standardprofil (ABB DRIVES)
STYRORD. Innehållet på registeradress 40001 (STYRORD) är den huvudsakliga metoden för styrning av frekvensomriktaren från ett fältbussystem. Fältbussens masterstation skickar STYRORDET till frekvensomriktaren. Frekvensomriktaren växlar mellan tillstånden enligt bitkodade instruktioner i STYRORD. Användning av STYRORD kräver att:
Frekvensomriktaren är i fjärrstyrningsläge (REM).
Kanalen för seriell kommunikation är definierad som källa för styrkommandon (definieras med parametrarna 1001 EXT1 STYRNING, 1002 EXT2 STYRNING och 1102 VAL EXT1/EXT2).
Kanalen för seriell kommunikation som används är konfigurerad för Standard Modbus: Parameter 9802 KOMM PROTOKOLL = 1 (STD MODBUS).
Parameter- 5305 IFB COMM PROFIL = 0 (ABB DRIVES)
Följande tabell samt tillståndsdiagrammet senare i detta avsnitt beskriver innehållet i STYRORD.
40001 STYRORD
Bit Värde Kommando-tillstånd Anmärkningar
0 1 KLAR FÖR DRIFT
0 NÖDSTOPP FRÅN Driver rampen till stopp enligt parameter 2203 RETARD TID 1. Normal kommandosekvens: OFF1 AKTIV
KLAR FÖR START, såvida inte andra förreglingar (OFF2, OFF3) är aktiva.
1 1 I DRIFT OFF2 inaktiv
0 NÖDSTOPP FRÅN Motorn stannar genom utrullning. Normal kommandosekvens: OFF2 AKTIV
SWITCHKRETSAR BLOCKERADE
2 1 I FUNKTION OFF3 inaktiv
0 NÖDSTOPP Driver rampen till stopp enligt parameter 2205 RETARD TID 2. Normal kommandosekvens: OFF3 AKTIV
SWITCHKRETSAR BLOCKERADE
3 1 DRIFT TILLÅTEN Mata in DRIFT TILLÅTEN (OBS att också driftförreglingssignalen på anvisad digital ingång måste vara aktiv - se parameter 1601 DRIFT TILLÅTEN).
0 DRIFT BLOCKERAD Förhindra drift. Mata in DRIFT BLOCKERAD
4 Används ej.
5 1 RAMPGENERATORUTGÅNG AKTIVERAD
Normal drift.Mata in RAMPGENERATOR: ACCELERATOR AKTIVERAD
0 RAMPGENERATORUTGÅNG FRYST
Avbryt rampningen (genom att rampgenerators utgång blockeras)
Idrifttagning

ACS550 Användarhandledning 157
STATUSORD. Innehållet på registeradress 40004 (STATUSORD) är statusinformation, skickad av frekvensomriktaren till masterstationen. Följande tabell samt tillståndsdiagrammet senare i detta avsnitt beskriver innehållet i STYRORD.
6 1 RAMPGENERATORINGÅNG AKTIVERAD
Normal drift. Gå till I DRIFT
0 RAMPGENERATORINGÅNG NOLL
Tvinga rampgeneratorns ingång till noll.
7 0=>1 RESET Återställ felindikering (mata in START BLOCKERAD)
0 I FUNKTION (Fortsätt normal drift)
810 Används ej
11 1 val ext ref2 Välj extern styrplats 2 (EXT2)
0 val ext ref1 Välj extern styrplats 1 (EXT1)
1215 Används ej
40004 STATUSORD
Bit Värde Beskrivning (Motsvarar tillstånd/rutor i tillståndsdiagrammet)0 1 klar för start
0 ej klar för start
1 1 klar för drift
0 off1 aktiv
2 1 drift tillåten
0 Ej driftklar (DRIFT BLOCKERAD)
3 01 fel
0 Inget fel
4 1 OFF2 inaktiv
0 OFF2 AKTIV
5 1 OFF3 inaktiv
0 OFF3 AKTIV
6 1 start blockerad
0
7 1 Ett larm är aktivt. Se "Larmlista" på sid 168 för en lista över relevanta larm.
0 Inga larm
8 1 I FUNKTION. Ärvärdet överenstämmer med börvärdet (= är inom toleransgränserna).
0 Ärvärdet avviker från börvärdet (= utanför toleransgränserna)
9 1 Styrplats: FJÄRR
0 Styrplats: LOKAL
10 1 Värdet på den först övervakade parametern är vid eller över övervakningsgränsen. Se Grupp 32: Övervakning.
0 Värdet på den först övervakade parametern är under övervakningsgränsen
40001 STYRORD
Bit Värde Kommando-tillstånd Anmärkningar
Idrifttagning

158 ACS550 Användarhandledning
Obs! Funktionen hos STYRORD och STATUSORD motsvarar profilen ABB Drives, med ett undantag: STYRORDET bit 10 (REMOTE_CMD) används inte av ACS550.
Exempel. Använd STYRORD för att starta frekvensomriktaren
För det första måste kraven för användning av STYRORD vara uppfyllda. Se ovan.
När matningsspänning ansluts första gången är frekvensomriktarens tillstånd att inte vara klar för start. Se den prickade linjen i ( ) i tillståndsdiagrammet nedan.
Använd STYRORD för att stega genom maskintillstånden tills tillståndet I FUNKTION visas, vilket innebär att frekvensomriktaren är i funktion och följer det givna börvärdet. Se tabellen nedan.
11 1 Extern styrplats 2 (EXT2) vald
0 Extern styrplats 1 (EXT1) vald
12 1 Driftförreglingssignal mottagen
0 Driftförreglingssignal ej mottagen
13 15 Används ej
Steg STYRORD Värde Beskrivning1 CW = 0000 0000 0000 0110 Detta CW-värde ändrar frekvensomriktarens status till KLAR
FÖR START.
2 Vänta minst 100 ms före nästa steg.
3 CW = 0000 0000 0000 0111 Detta CW-värde ändrar frekvensomriktarens status till KLAR FÖR DRIFT.
4 CW = 0000 0000 0000 1111 Detta CW-värde ändrar frekvensomriktarens status till DRIFT TILLÅTEN. Frekvensomriktaren startar, men drivsystemet accelererar inte.
5 CW = 0000 0000 0010 1111 Detta CW-värde aktiverar rampgeneratorns (RFG) utgång och ändrar frekvensomriktarens status till RFG: ACCELERATOR AKTIVERAD.
6 CW = 0000 0000 0110 1111 Detta CW-värde aktiverar rampgeneratorns (RFG) utgång och ändrar frekvensomriktarens status till I DRIFT. Frekvensomriktaren accelererar till given referens och följer börvärdet.
40004 STATUSORD
Bit Värde Beskrivning (Motsvarar tillstånd/rutor i tillståndsdiagrammet)
bit 0bit 15
Idrifttagning

ACS550 Användarhandledning 159
Tillståndsdiagrammet nedan beskriver start/stopp-funktionen hos bitarna i STYRORD (CW) och STATUSORD (SW).
(CW xxxx xxxx xxxx x110)
SPÄNN. FRÅN
Spänn. TILL (CW Bit0=0)
(SW Bit6=1)
(SW Bit0=0)
Från godtyckl. tillst.
f=0 / I=0
OFF1 (CW Bit0=0)
A C D
(CW Bit3=0)
(SW Bit2=0) (SW Bit0=1)
(CW xxxx xxxx xxxx x111)
(SW Bit1=1)
(CW Bit3=1 och(CW Bit5=0)
f=0 / I=0
(SW Bit2=1)
Från godtyckl. tillst.
SWITCH-ONBLOCKERAD
EJ KLARFÖR TILLSLAG
FUNKTIONBLOCKERAD
KLAR FÖRTILLSLAG
KLAR FÖRDRIFT
FUNKTIONAKTIVERAD
C D
Från godtyckl. tillst.Nödstopp frånOFF2 (CW Bit1=0)
(SW Bit4=0)OFF2AKTIV
Från godtyckl. tillst.
Fel
(SW Bit3=1)FEL
(CW Bit7=1)*
(SW Bit5=0)
NödstoppOFF3 (CW Bit2=0)
SW Bit12=1)
RFG: ACCELERATORAKTIVERAD
(CW Bit5=1)(CW Bit6=0)
C(CW Bit6=1)
(SW Bit8=1)
D
A
D
I FUNKTION
OFF3AKTIV
*Denna övergång uppträder också om felet återställs från en annan källa (t.ex. en di).
TANGTENTTillståndCW = STYRORD
SW = STATUSORD
Väg som beskrivs i exempletI = Param.Param. 0104 STRÖM
f = Param.Param. 0103 UTFREKVENS
RFG = Rampgenerator
Idrifttagning

160 ACS550 Användarhandledning
Referenser
Referenser är 16-bitars ord som innehåller en teckenbit och ett 15-bitars heltal. Ett negativt referensvärde (vilket betyder backriktning) indikeras av 2-komplementet av motsvarande positiva referensvärde.
Referens 1. Innehållet i registeradress 40002 REFERENS 1 kan användas som frekvensreferens, REF1. Nödvändiga parameterinställningar är:
Använd 1102 VAL EXT1/EXT2 för att identifiera styringången som väljer mellan EXT1 och EXT2. Sedan måste den styringången välja EXT1.
1103 REF 1 VALD = 8 (COMM), 9 (COMM + AI1), eller 10 (COMM * AI).
För skalning med positiva värden: +20000 i holding register 40002 är ekvivalent med referensparameter 1105 EXT REF1 MAX, och noll i holding register 40002 är ekvivalent med ett nollvärde för ref 1. Diagrammen nedan visar både positiva och negativa värdesituationer. 1104 EXT REF1 MIN används inte.
Referens 2. Innehållet i registeradress 40003 REFERENS 2 kan användas som frekvensreferens, REF2. Nödvändiga parameterinställningar är:
Använd 1102 VAL EXT1/EXT2 för att identifiera styringången som väljer mellan EXT1 och EXT2. Sedan måste styringången välja EXT2.
1106 REF 2 VALD = 8 (COMM), 9 (COMM + AI2), eller 10 (COMM * AI).
För skalning med positiva värden: +10000 i holding register 40003 är ekvivalent med referensparameter 1108 EXT REF2 MAX, och noll i holding register 40003 är ekvivalent med ett nollvärde för ref 2. Diagrammen nedan visar både positiva och negativa värdesituationer. 1107 EXT REF2 MIN används inte.
Ärvärden
Innehållet i registeradresserna 4000540012 är ÄRVÄRDEN och är:
specificerade med parametrarna 53105317.
Ext refP 1105
020000
40002
(MAX)
Värde
0Ext ref
P 1105
0-20000
40002
(MAX)
Värde
0
ELLER
Positiva värden
Negativa värden
Ext refP 1108
010000
40003
(MAX)
Värde
0Ext ref
P 1108
0-10000
40003
(MAX)
Värde
0
ELLER
Positiva värden
Negativa värden
Idrifttagning

ACS550 Användarhandledning 161
Endast läsbara värden, med information om hur frekvensomriktaren arbetar.
16-bitars ord innehållande en teckenbit och ett 15-bitars heltal.
Negativa värden skrivs som 2-komplement av motsvarande positiva värde.
Skalat enligt definitionen för vald parameter.
AvvikelsekoderAvvikelsekoder är svar från frekvensomriktaren via seriell kommunikation. ACS550 stöder Modbus-avvikelsekoder av standardtyp, så som definieras nedan.
Avvik.-kod Namn Innebörd
01 OGILTIG FUNKTION Icke stött kommando
02 OGILTIG ADRESS Adressen i frågan är ogiltig. Den är inte en definierad parameter eller grupp
03 OGILTIGT VÄRDE Ett värde i frågefältet är inte ett giltigt värde för ACS550, av ett av följande skäl: Utanför min- eller maxgränser Parametern får endast läsas. Meddelandet är för långt. Skrivning ej tillåten under drift. Skrivning ej tillåten när fabriksmakrot är valt.
Idrifttagning
162 ACS550 Användarhandledning
Diagnostik
Varning! Utför inga mätningar, komponentbyten eller serviceingrepp som inte specifikt beskrivs i denna handbok. I sådana fall upphör garantin att gälla, samtidigt som utrustningen kan ta skada, produktionsstoppet förlängas och kostnaderna öka.
Varning! Allt installations- och underhållsarbete på elektrisk utrustning som beskrivs i detta kapitel måste utföras av en kompetent elektriker. Säkerhetsinstruktionerna på de inledande sidorna måste följas.
Visning av diagnostikFrekvensomriktaren detekterar felsituationer och rapporterar dem med:
Den gröna och den röda lysdioden på frekvensomriktarens kapsling.
Statuslysdioden på manöverpanelen (om en avancerad manöverpanel är ansluten till frekvensomriktaren)
Manöverpaneldisplayen (om en manöverpanel är ansluten till frekvensomriktaren)
Parameterbitarna FELORD och LARMORD (parametrarna 0305 till 0309). Se "Grupp 03: FB Fältbussövervakning" på sid 72 för definitioner av bitarna.
Hur informationen visas beror på hur allvarligt felet är. Du kan specificera allvarlighetsgraden för många fel genom att instruera frekvensomriktaren att:
Ignorera felsituationen.
Rapportera situationen som ett larm.
Rapportera situationen som ett fel.
Röd FelFrekvensomriktaren signalerar att den har detekterat att allvarligt fel, genom att:
tända den röda lysdioden på frekvensomriktaren (lysdioden lyser antingen med fast sken eller blinkar).
sätta motsvarande bit i ett felord, parameter (0305 till 0307).
ersätta det som visas på manöverpanelens display med en felkod.
stoppa motorn (om den var i drift).
Felkoden på manöverpanelens display är temporär. Felmeddelandet försvinner om man trycker på någon av följande tangenter: MENY, ENTER, UPP eller NER. Meddelandet återkommer efter några sekunder om man inte rör manöverpanelen och felet fortfarande är aktivt.
Diagnostik

ACS550 Användarhandledning 163
Blinkande grön LarmDå det gäller mindre allvarliga fel - som kallas larm - är diagnostiken att betrakta som rekommendation. I dessa situationer rapporterar frekvensomriktaren helt enkelt att den har detekterat någonting "ovanligt". Då gör frekvensomriktaren följande:
Grön lysdiod på frekvensomriktaren blinkar (gäller inte larm från felaktig hantering av manöverpanelen).
Motsvarande bit i ett larmord sätts, parameter (0308 till 0309). Se "Grupp 03: FB Fältbussövervakning" på sid 72för definitioner av bitarna.
Det som visas på manöverpanelens display ersätts med en larmkod och/eller ett namn.
Larmmeddelanden försvinner från displayen efter några sekunder. Meddelandet visas på nytt med jämna mellanrum så länge larmförhållandet föreligger.
Att åtgärda felRekommenderade åtgärder vid fel är:
Använd tabellen "Fellista" nedan för att söka och åtgärda grundorsaken till problemet.
Återställ frekvensomriktaren . Se "Återställning av felindikeringar" på sid 167.
Fellista
Fel-kod
Felnamn på displayen Beskrivning och rekommenderad åtgärd
1 ÖVERSTRÖM Utströmmen är för stor. Kontrollera och korrigera: För hög motorlast. Otillräcklig accelerationstid (parametrar 2202 ACCEL TID 1 och 2205
ACCEL TID 2 Fel i motor, motorkablar eller anslutningar.
2 ÖVERSPÄNNING Likspänningen i mellanledet är för stor. Kontrollera och korrigera: Statisk eller transient överspänning i matningskretsen. Otillräcklig retardationstid (parametrar 2203 RETARD TID 1 och 2206
RETARD TID 2). Underdimensionerad bromschopper (om sådan finns).
3 ÖVERTEMP OMRIKTARE
Frekvensomriktarens kylelement är överhettat. Temperaturen överstiger 115 °C Kontrollera och korrigera: Fläktfel. Hinder för luftflöde. Smuts eller damm på kylelementet. För hög omgivningstemperatur. För hög motorlast.
4 KORTSLUTNING Felström. Kontrollera och korrigera: Kortslutning i motorkabeln (-kablarna) eller i motorn. Matningsstörningar.
Diagnostik

164 ACS550 Användarhandledning
5 ÖVERLAST UTGÅNG
Växelriktaren är överbelastad. Frekvensomriktarens utström överskrider det märkvärde som anges "Märkdata" på sid 175 i denna användarhandledning.
6 UNDERSPÄNNING
Likspänningen i mellankretsen är inte tillräcklig. Kontrollera och korrigera: En fas saknas i matningskretsen Säkring utlöst. Underspänning i matningsnätet.
7 ANALOG INGÅNG 1 FEL
Analog ingång 1 bortfall. Den analoga ingångens värde understiger AI1 FELNIVÅ (3021). Kontrollera och korrigera: Källa och anslutning för analoga ingångar. Parameterinställningar för AI1 FELNIVÅ (3021) och 3001 AI<MIN
FUNKTION.
8 ANALOG INGÅNG 2 FEL
Analog ingång 2 bortfall. Den analoga ingångens värde understiger AI2 FELNIVÅ (3022). Kontrollera och korrigera: Källa och anslutning för analoga ingångar. Parameterinställningar för AI2 FELNIVÅ (3022) och 3001 AI<MIN
FUNKTION.
9 MOTOR ÖVERLAST
Motorn är för varm, utgående från antingen frekvensomriktarens uppskattningar eller temperaturåterkoppling. Kontrollera om motorn är överbelastad. Justera parametrarna som används för uppskattningar (30053009). Kontrollera temperaturgivare och parametrarna i Grupp 35.
10 PANELBORTFALL Kommunikationen med manöverpanelen bryts och antingen: Frekvensomriktaren styrs lokalt (manöverpanelen visar LOC), eller Fjärrstyrning är vald (REM i teckenfönstret) och frekvensomriktaren är
parameterinställd att ta emot start/stopp, rotationsriktning eller börvärde från manöverpanelen.
För att korrigera, kontrollera: Kommunikationsledningar och anslutningar Parameter 3002 PANEL BORTFALL. Parametrar i Grupp 10: Styringångar och Grupp 11: Val av referens (om
frekvensomriktaren fjärrstyrs - REM).
11 ID KÖRNINGSFEL Identifieringskörningen har inte genomförts på korrekt sätt. Kontrollera och korrigera: Motoranslutning
12 MOTOR FASTLÅST
Motor eller process fastlåst. Motorn arbetar i fastlåsningsområdet. Kontrollera och korrigera: Överbelastning. Otillräcklig motoreffekt Parametrar 30103012.
13 RESERVERAD Ej använd.
14 EXTERNT FEL1 Digital ingång, definierad att rapportera första externa felet, är aktiv. Se parameter 3003 EXTERNT FEL 1.
15 EXTERNT FEL2 Digital ingång, definierad att rapportera andra externa felet, är aktiv. Se parameter 3004 EXTERNT FEL 2.
16 JORDFEL UTGÅNG
Belastningen på matningsnätet är obalanserad. Kontrollera med avseende på fel i motor eller motorkabel. Kontrollera att motorkabeln inte är längre än den får vara.
Fel-kod
Felnamn på displayen Beskrivning och rekommenderad åtgärd
Diagnostik

ACS550 Användarhandledning 165
17 LÅG LAST Motorlasten är lägre än förväntat. Kontrollera och korrigera: Bortkopplad belastning. Parametrar 3013 LÅG LAST FUNK3015 LÅG LAST KURVA.
18 INTERNT TERMISKT FEL
Internt fel. Termistorn som mäter den interna temperaturen i frekvensomriktare är öppen eller kortsluten. Kontakta representant för ABB
19 INT FIBEROPTISKT FEL
Internt fel. Ett kommunikationsrelaterat problem har detekterats på den fiberoptiska länken mellan korten OITF och OINT Kontakta representant för ABB
20 SPÄNN FÖRSÖRJ FEL
Internt fel. För låg spänning detekterad på OINT-matningen. Kontakta representant för ABB
21 STRÖMMÄTNING Internt fel. Uppmätt ström är utanför området. Kontakta representant för ABB
22 FASFEL INKOM MATNING
Rippelspänningen i DC-mellankretsen för hög. Kontrollera och korrigera: Bortfall av matningsfas. Säkring utlöst.
23 RESERVERAD Ej använd.
24 ÖVERVARV Motorns varvtal är högre än 120% av det större värdet (i storlek) av 2001 MIN VARVTAL eller 2002 MAX VARVTAL. Kontrollera och korrigera: Parameterinställningar för 2001 och 2002. Lämplighet för motorns bromsmoment. Tillämpbarhet för momentreglering. Bromschopper och motstånd.
25 RESERVERAD Ej använd.
26 FREKVENSOMR NR FEL
Internt fel. Konfigurationsblockets FREKVENSOMR NR är inte giltig. Kontakta representant för ABB
27 KONFIGUR-ERINGSFIL
Den interna konfigurationsfilen har ett fel. Kontakta representant för ABB
28 TIME_OUT FÄLTBUS
Timeout för fältbusskommunikation. Kontrollera och korrigera: Felkonfigurering (3018 KOMM MOD FELFUNK och 3019 KOMM FEL TID). Kommunikationsinställningar (Grupp 51 eller 53 efter behov). Bristande kontakt och/eller brus på ledning.
29 IFB KONFIGURERINGSFIL
Fel i avläsning av konfigurationsfilen för fältbussadaptern.
30 FORCERAD UTLÖSNING
Felutlösning tvingad av fältbuss. Se fältbussens användarhandledning.
31 INTERN FÄLTBUS 1
Felkod reserverad för användning av Inbyggd buskomm. Betydelsen beror på protokollet.
32 INTERN FÄLTBUS 2
33 INTERN FÄLTBUS 3
Fel-kod
Felnamn på displayen Beskrivning och rekommenderad åtgärd
Diagnostik

166 ACS550 Användarhandledning
Fel som indikerar konflikter i parameterinställningarna listas nedan.
34 FASFEL MOTOR Fel i motorkrets. En av motorfaserna har fallit bort. Kontrollera och korrigera: Motorfel. Motorkabel fel. Överhettningsskydd fel (om sådant används). Internt fel.
35 KABELANASLUTNINGAR
Fel i matningskablar misstänkt. Kontrollera och korrigera: Inkommande matning kopplad till frekvensomriktarens utgång. Jordfel.
101 SERF CORRUPT
Internt fel i frekvensomriktare. Kontakta ABB och rapportera felnumret.
102 SERF IITFILE
103 SERF MAKRO
104 SERF EFBPROT
105 SERF BPFILE
201 DSP T1 OVERLOAD
Fel i systemet. Kontakta ABB och rapportera felnumret.
202 DSP T2 OVERLOAD
203 DSP T3 OVERLOAD
204 DSP STACK ERROR
205 DSP REV ERROR
206 OMIO ID ERROR
Felkod
Felnamn på displayen Beskrivning och rekommenderad åtgärd
1000 PARAMETERFEL HZ-RPM
Icke kompatibla parametervärden. Kontrollera följande: 2001 MIN VARVTAL > 2002 MAX VARVTAL. 2007 MIN FREKVENS > 2008 MAX FREKVENS. 2001 MIN VARVTAL / 9908 MOTOR NOM VARVT > 128 (eller < -128) 2002 MAX VARVTAL / 9908 MOTOR NOM VARVT > 128 (eller < -128) 2007 MIN FREKVENS / 9907 MOTOR NOM FREKV > 128 (eller < -128) 2008 MAX FREKVENS / 9907 MOTOR NOM FREKV > 128 (eller < -128)
1001 PARAMETERFEL PFC-NREF
Icke kompatibla parametervärden. Kontrollera följande: 2007 MIN FREKVENS är negativ, när 8123 VAL AV PFC FUNK är aktiv.
1002 PARAMETERFEL PFC-RELÄ
Icke kompatibla parametervärden. Antalet programmerade PFC-reläer motsvarar inte förreglingskonfigurationen, när 8123 VAL AV PFC FUNK är aktiv. Kontrollera att följande parametrar överensstämmer: RELÄUTGÅNG parametrar 14011403, och 14101412. 8117 ANTAL HJÄLPMOT, 8118 AUTOVÄXEL INTERV, och 8120 FÖRREGLINGAR.
Fel-kod
Felnamn på displayen Beskrivning och rekommenderad åtgärd
Diagnostik

ACS550 Användarhandledning 167
Återställning av felindikeringar ACS550 kan konfigureras för att återställa vissa fel automatiskt. Se parametergrupp 31: Autom återställn.
Varning! Om en extern källa för startorder valts, och denna är aktiv, kan ACS550 starta omedelbart när felindikeringen återställts.
Blinkande röd lysdiod
Att återställa frekvensomriktaren efter fel som indikeras av blinkande röd lysdiod:
Stäng av frekvensomriktaren och låt den vara avstängd i 5 minuter
Röd lysdiod
Att återställa frekvensomriktaren efter fel som indikeras av röd lysdiod (tänd, inte blinkande), åtgärda problemet och gör ett av följande:
Från manöverpanelen: Tryck på RESET
Stäng av frekvensomriktaren och låt den vara avstängd i 5 minuter
1003 PARAMETERFEL AI-SKALN
Icke kompatibla parametervärden. Kontrollera följande: 1301 MINIMUM AI 1 > 1302 MAXIMUM AI 1. 1304 MINIMUM AI 2 > 1305 MAXIMUM AI 2.
1004 PARFEL AOSKL Icke kompatibla parametervärden. Kontrollera följande: 1504 MINIMUM AO 1 > 1505 MAXIMUM AO 1. 1510 MINIMUM AO 2 > 1511 MAXIMUM AO 2.
1005 PARAMETERFEL MOTOR-KW
Parametervärden för effektstyrning överensstämmer ej. Felaktig märkvärde för kVA eller felaktig motormärkeffekt. Kontrollera följande: 1,1 < (9906 MOTOR NOM STRÖM * 9905 MOTOR NOM SPÄNN * 1,73 / PN) <
2,6 Där: PN = 1000 * 9909 MOTOR NOM EFFEKT (om enheten är kW)
eller PN = 746 * 9909 MOTOR NOM EFFEKT (om enheten är HP, t.ex. i USA)
1006 PARFEL EXT-RELÄ
Icke kompatibla parametervärden. Kontrollera följande: Extern relämodul ej ansluten och 14101412 RELÄUTGÅNGARNA 46 har värden skilda från noll.
1007 PARAMETERFEL FÄLTBUS
Icke kompatibla parametervärden. Kontrollera och korrigera: En parameter är satt för fältbusstyrning (t.ex. 1001 EXT1 STYRNING = 10
(COMM), men 9802 KOMM PROTOKOLL = 0.
1008 PARFEL PFC-SKAL
Parametervärden överensstämmer ej 9904 MOTOR STYRMETOD måste vara = 3 ( VARVTAL), när 8123 VAL AV PFC FUNK är aktiverad.
1009 PARAMETERFEL MOTOR-HZ
Parametervärden för effektstyrning överensstämmer ej. Felaktig motormärkfrekvens eller felaktigt motormärkvarvtal. Kontrollera båda de följande punkterna: 1 < (60 * 9907 MOTOR NOM FREKV / 9908 MOTOR NOM VARVT < 16 0,8 < 9908 MOTOR NOM VARVTal /
(120 * 9907 MOTOR NOM FREKV / motorpoler) < 0,992
Felkod
Felnamn på displayen Beskrivning och rekommenderad åtgärd
Diagnostik
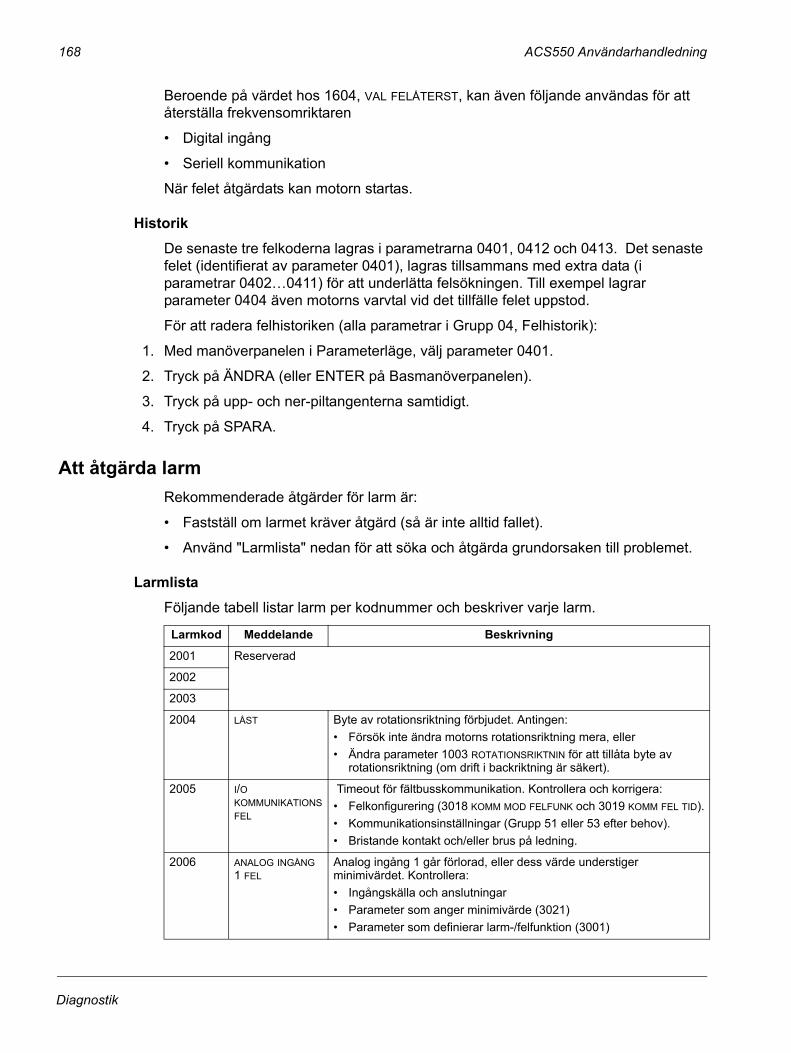
168 ACS550 Användarhandledning
Beroende på värdet hos 1604, VAL FELÅTERST, kan även följande användas för att återställa frekvensomriktaren
Digital ingång
Seriell kommunikation
När felet åtgärdats kan motorn startas.
HistorikDe senaste tre felkoderna lagras i parametrarna 0401, 0412 och 0413. Det senaste felet (identifierat av parameter 0401), lagras tillsammans med extra data (i parametrar 04020411) för att underlätta felsökningen. Till exempel lagrar parameter 0404 även motorns varvtal vid det tillfälle felet uppstod.
För att radera felhistoriken (alla parametrar i Grupp 04, Felhistorik):
1. Med manöverpanelen i Parameterläge, välj parameter 0401.
2. Tryck på ÄNDRA (eller ENTER på Basmanöverpanelen).
3. Tryck på upp- och ner-piltangenterna samtidigt.
4. Tryck på SPARA.
Att åtgärda larmRekommenderade åtgärder för larm är:
Fastställ om larmet kräver åtgärd (så är inte alltid fallet).
Använd "Larmlista" nedan för att söka och åtgärda grundorsaken till problemet.
LarmlistaFöljande tabell listar larm per kodnummer och beskriver varje larm.
Larmkod Meddelande Beskrivning2001 Reserverad
2002
2003
2004 LÅST Byte av rotationsriktning förbjudet. Antingen: Försök inte ändra motorns rotationsriktning mera, eller Ändra parameter 1003 ROTATIONSRIKTNIN för att tillåta byte av
rotationsriktning (om drift i backriktning är säkert).
2005 I/O KOMMUNIKATIONSFEL
Timeout för fältbusskommunikation. Kontrollera och korrigera: Felkonfigurering (3018 KOMM MOD FELFUNK och 3019 KOMM FEL TID). Kommunikationsinställningar (Grupp 51 eller 53 efter behov). Bristande kontakt och/eller brus på ledning.
2006 ANALOG INGÅNG 1 FEL
Analog ingång 1 går förlorad, eller dess värde understiger minimivärdet. Kontrollera: Ingångskälla och anslutningar Parameter som anger minimivärde (3021) Parameter som definierar larm-/felfunktion (3001)
Diagnostik

ACS550 Användarhandledning 169
2007 ANALOG INGÅNG 2 FEL
Analog ingång 2 går förlorad, eller dess värde understiger minimivärdet. Kontrollera: Ingångskälla och anslutningar Parameter som anger minimivärde (3022) Parameter som definierar larm-/felfunktion (3001)
2008 PANELBORTFALL Kommunikationen med manöverpanelen bryts och antingen: frekvensomriktaren styrs lokalt (manöverpanelen visar LOC), eller Fjärrstyrning är vald (REM i teckenfönstret) och parameterinställd
att ta emot start/stopp, rotationsriktning eller börvärde från manöverpanelen.
För att korrigera, kontrollera: Kommunikationsledningar och anslutningar Parameter 3002 PANELBORTFALL. Parametrarna i Grupp 10 STYRINGÅNGAR och 11 VAL AV REFERENS
(om frekvensomriktaren fjärrstyrs - REM).
2009 Reserverad
2010 MOTOR ÖVERLAST
Motorn är för varm, utgående från antingen frekvensomriktarens uppskattningar eller temperaturåterkoppling. Detta larm innebär att en felutlösning på grund av för låg motorbelastning kan vara nära förestående. Kontrollera: Kontrollera om motorn är överbelastad. Justera parametrarna som används för uppskattningar
(30053009). Kontrollera temperaturgivare och parametrarna i Grupp 35.
2011 LÅG LAST Motorlasten är lägre än förväntat. Detta larm innebär att en felutlösning på grund av för låg motorbelastning kan vara nära förestående. Kontrollera: Motor- och frekvensomriktardata överensstämmer (motorn är INTE
underdimensionerad för frekvensomriktaren) Inställningar av parametrarna 3013 till 3015
2012 MOTOR FASTLÅST Motorn arbetar i fastlåsningsområdet. Detta larm innebär att en felutlösning på grund av motorfastlåsning kan vara nära förestående.
2013 (Obs 1)
AUTOMATISK ÅTERSTART
Detta larm varnar för att frekvensomriktaren håller på att utföra en automatisk felåterställning som kan medföra att motorn startar på nytt. För att styra automatisk återställning, använd parametergrupp 31
AUTOM KVITTERING.
2014 (Obs 1)
AUTOMATISKT BYTE
Detta larm varnar för att PFC autoväxlingsfunktion är aktiv. För att styra PFC, använd parametergrupp 81 PFC STYRNING och
"Tillämpningsmakro: PFC-styrning" på sid 54.
2015 PFC LÅS Detta larm varnar för att PFC-förreglingar är aktiva, vilket innebär att frekvensomriktaren inte kan starta följande: Godtycklig motor (när autoväxling används), Den varvtalsreglerade motorn (när autoväxling inte används).
2016 Reserverad
2017
2018 (Obs 1)
PID SOVFUNKTION AKTIV
Detta larm varnar för att PID vilofunktion är aktiv, vilket betyder att motorn skulle kunna accelerera när PID vilofunktion avslutas. För att styra PID vilofunktion, använd parametrarna 40224026
eller 41224126.
Larmkod Meddelande Beskrivning
Diagnostik

170 ACS550 Användarhandledning
Obs 1. Även om reläutgångarna är konfigurerade att indikera larmförhållanden (t.ex. parameter 1401 RELÄUTGÅNG 1 = 5 (LARM) eller 16 (FEL/VARNING), indikeras detta larm inte av en reläutgång
Diagnostik
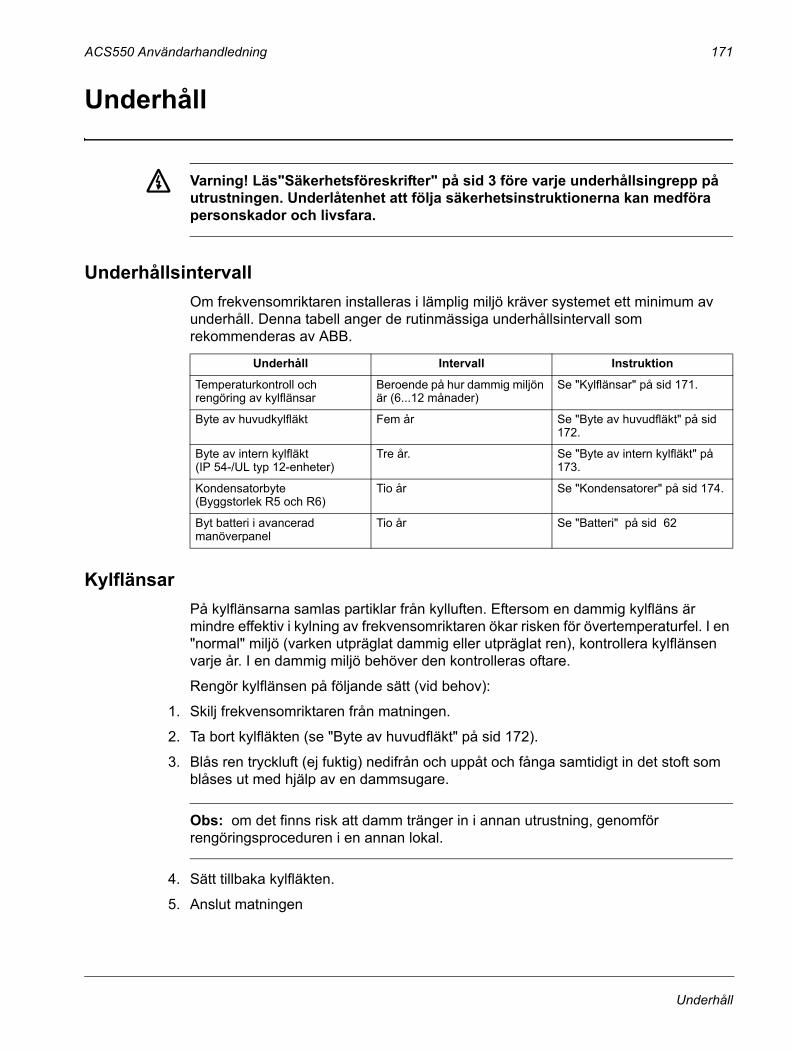
ACS550 Användarhandledning 171
Underhåll
Varning! Läs"Säkerhetsföreskrifter" på sid 3 före varje underhållsingrepp på utrustningen. Underlåtenhet att följa säkerhetsinstruktionerna kan medföra personskador och livsfara.
UnderhållsintervallOm frekvensomriktaren installeras i lämplig miljö kräver systemet ett minimum av underhåll. Denna tabell anger de rutinmässiga underhållsintervall som rekommenderas av ABB.
KylflänsarPå kylflänsarna samlas partiklar från kylluften. Eftersom en dammig kylfläns är mindre effektiv i kylning av frekvensomriktaren ökar risken för övertemperaturfel. I en "normal" miljö (varken utpräglat dammig eller utpräglat ren), kontrollera kylflänsen varje år. I en dammig miljö behöver den kontrolleras oftare.
Rengör kylflänsen på följande sätt (vid behov):
1. Skilj frekvensomriktaren från matningen.
2. Ta bort kylfläkten (se "Byte av huvudfläkt" på sid 172).
3. Blås ren tryckluft (ej fuktig) nedifrån och uppåt och fånga samtidigt in det stoft som blåses ut med hjälp av en dammsugare.
Obs: om det finns risk att damm tränger in i annan utrustning, genomför rengöringsproceduren i en annan lokal.
4. Sätt tillbaka kylfläkten.
5. Anslut matningen
Underhåll Intervall Instruktion
Temperaturkontroll och rengöring av kylflänsar
Beroende på hur dammig miljön är (6...12 månader)
Se "Kylflänsar" på sid 171.
Byte av huvudkylfläkt Fem år Se "Byte av huvudfläkt" på sid 172.
Byte av intern kylfläkt (IP 54-/UL typ 12-enheter)
Tre år. Se "Byte av intern kylfläkt" på 173.
Kondensatorbyte (Byggstorlek R5 och R6)
Tio år Se "Kondensatorer" på sid 174.
Byt batteri i avancerad manöverpanel
Tio år Se "Batteri" på sid 62
Underhåll

172 ACS550 Användarhandledning
Byte av huvudfläktFrekvensomriktarens huvudkylfläkt har en livslängd på ca 60 000 driftstimmar vid maximal driftstemperatur och frekvensomriktarbelastning. Förväntad livslängd fördubblades för varje 10 °C sänkning av fläkttemperaturen (fläkttemperaturen är en funktion av omgivningstemperaturen och frekvensomriktarbelastningen).
Ett förestående fläktfel indikeras av ökande ljudnivå från fläktens lager och av långsamt ökande temperatur hos kylelementet, trots rengöring av kylflänsar. Om frekvensomriktaren ingår i en kritisk del av den totala processen är det lämpligt att byta fläkten så snart de första symptomen på slitage visar sig. Reservfläktar kan beställas från ABB. Ersätt aldrig komponenter med annat än originalreservdelar från ABB.
Byggstorlek R1R4Att byta fläkten:
1. Skilj frekvensomriktaren från matningen.
2. Ta bort frekvensomriktarens kåpa.
3. För byggstorlek:
R1, R2: Tryck ihop fästklämmorna på fläktkåpans sida, och lyft.
R3, R4: Tryck på armen på vänster sida av fläktfästet och vrid fläkten uppåt och utåt.
4. Koppla bort fläktkabeln.
5. Sätt dit den nya fläkten i omvänd ordning.
6. Anslut matningen
X0021
3
4
2
Underhåll

ACS550 Användarhandledning 173
Byggstorlek R5 och R6Att byta fläkten:
1. Skilj frekvensomriktaren från matningen.
2. Ta bort skruvarna som fixerar fläkten.
3. Koppla bort fläktkabeln.
4. Sätt dit den nya fläkten i omvänd ordning.
5. Anslut matningen
Byte av intern kylfläktKapslingar av typ IP 54 / UL typ 12 har ytterligare en fläkt, med uppgift att skapa luftcirkulation inuti kapslingen.
Byggstorlek R1 till R4Att byta den interna fläkten i byggstorlekarna R1 till R4:
1. Skilj frekvensomriktaren från matningen.
2. Avlägsna skyddskåpan.
3. Fläktkapslingen har fästklämmor med spärrar vid varje hörn. Tryck alla fyra klämmorna mot mitten, så att spärrarna frigörs.
4. När klämmorna/spärrarna går fria, dra kapslingen uppåt för att ta bort den från frekvensomriktaren.
5. Koppla bort fläktkabeln.
6. Sätt dit den nya fläkten i omvänd ordning:
Fläkten ska driva luften uppåt (se pil på fläkten).
Fläktkablaget ska vara riktat framåt.
Spärren för fläktkapslingen sitter i det bakre högra hörnet.
Fläktkabeln ska anslutas precis framför fläkten högst upp i frekvensomriktaren.
Byggstorlek R5 och R6Att byta den interna fläkten i byggstorlekarna R5 till R6:
Skilj frekvensomriktaren från matningen.
Avlägsna skyddskåpan.
Lyft ut fläkten och koppla loss kabeln.
Sätt dit den nya fläkten i omvänd ordning.
Anslut matningen
X0022
Vy underifrån (R6)
2
3
Vy underifrån (R5)
2
3
X0023
43
5
FM
Underhåll

174 ACS550 Användarhandledning
KondensatorerI frekvensomriktarens mellanledskrets finns flera elektrolytkondensatorer. Deras livslängd är normalt 35 00090 000 timmar beroende på frekvensomriktarens belastning och omgivningstemperaturen. Kondensatorernas livslängd kan ökas genom att omgivningstemperaturen sänks.
Tidpunkten då en kondensator slutar fungera kan inte förutsägas. Om en kondensator går sönder brukar vanligen en nätsäkring eller ett skydd lösa ut. Kontakta ABB om ett kondensatorfel misstänks. För byggstorlek R5 och R6 kan reservdelar beställas från ABB. Ersätt aldrig komponenter med annat än originalreservdelar från ABB.
Manöverpanelkabel
RengöringAnvänd en mjuk trasa för att rengöra manöverpanelen. Undvik slitande rengöringsprodukter som kan repa displayen.
BatteriBatteri används endast i avancerade manöverpaneler som har aktiverad klockfunktion. Batteriet matar klockfunktionen även om systemet i övrigt är avstängt.
Batteriets förväntade livslängd överstiger 10 år. För att ta bort batteriet, använd ett mynt för att öppna batterilådan på baksidan av manöverpanelen. Byt batteriet till ett nytt av typ CR2032.
Underhåll
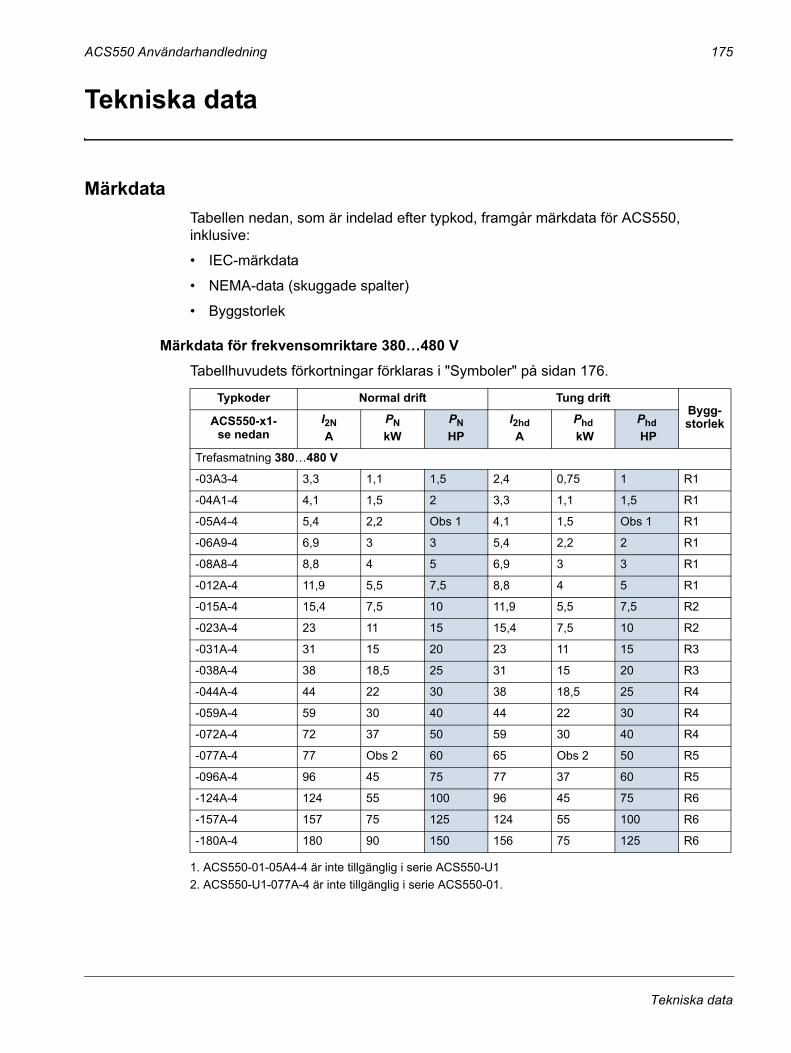
ACS550 Användarhandledning 175
Tekniska data
MärkdataTabellen nedan, som är indelad efter typkod, framgår märkdata för ACS550, inklusive:
IEC-märkdata
NEMA-data (skuggade spalter)
Byggstorlek
Märkdata för frekvensomriktare 380480 VTabellhuvudets förkortningar förklaras i "Symboler" på sidan 176.
1. ACS550-01-05A4-4 är inte tillgänglig i serie ACS550-U12. ACS550-U1-077A-4 är inte tillgänglig i serie ACS550-01.
Typkoder Normal drift Tung drift Bygg-storlekACS550-x1-
se nedan I2NA
PNkW
PNHP
I2hd A
Phd kW
Phd HP
Trefasmatning 380480 V -03A3-4 3,3 1,1 1,5 2,4 0,75 1 R1
-04A1-4 4,1 1,5 2 3,3 1,1 1,5 R1
-05A4-4 5,4 2,2 Obs 1 4,1 1,5 Obs 1 R1
-06A9-4 6,9 3 3 5,4 2,2 2 R1
-08A8-4 8,8 4 5 6,9 3 3 R1
-012A-4 11,9 5,5 7,5 8,8 4 5 R1
-015A-4 15,4 7,5 10 11,9 5,5 7,5 R2
-023A-4 23 11 15 15,4 7,5 10 R2
-031A-4 31 15 20 23 11 15 R3
-038A-4 38 18,5 25 31 15 20 R3
-044A-4 44 22 30 38 18,5 25 R4
-059A-4 59 30 40 44 22 30 R4
-072A-4 72 37 50 59 30 40 R4
-077A-4 77 Obs 2 60 65 Obs 2 50 R5
-096A-4 96 45 75 77 37 60 R5
-124A-4 124 55 100 96 45 75 R6
-157A-4 157 75 125 124 55 100 R6
-180A-4 180 90 150 156 75 125 R6
Tekniska data

176 ACS550 Användarhandledning
Märkdata för frekvensomriktare 208240 VTabellhuvudets förkortningar förklaras i "Symboler" på sidan 176.
Symboler
DimensioneringStrömdata är desamma, oberoende av matningspänning, inom ett och samma spänningsområde. För att motormärkeffekten enligt tabell ska uppnås måste märkströmmen för frekvensomriktaren vara högre än eller lika med motorns märkström.
Obs 1: Maximalt tillåten axeleffekt från motorn begränsas till 1,5 · Phd. Om gränsen överskrids kommer motormoment och ström automatiskt att reduceras. Funktionen skyddar ingångsbryggan på frekvensomriktaren mot överbelastning.
Obs 2: Värdena gäller i omgivningstemperaturen 40 °C.
Typkoder Normal drift Tung drift Bygg-storlekACS550-x1-
se nedan I2NA
PNkW
PNHP
I2hd A
Phd kW
Phd HP
Trefasmatning 208240 V
-04A6-2 4,6 1,1 1,0 3,5 0,75 0,75 R1
-06A6-2 6,6 1,5 1,5 4,6 1,1 1,0 R1
-07A5-2 7,5 2,2 2,0 6,6 1,5 1,5 R1
-012A-2 11,8 3,0 3,0 7,5 2,2 2,0 R1
-017A-2 16,7 4,0 5,0 11,8 3,0 3,0 R1
-024A-2 24,2 5,5 7,5 16,7 4,0 5,0 R2
-031A-2 30,8 7,5 10,0 24,2 5,5 7,5 R2
-046A-2 46,2 11,0 15,0 30,8 7,5 10,0 R3
-059A-2 59,4 15,0 20,0 46,2 11,0 15,0 R3
-075A-2 74,8 18,5 25,0 59,4 15,0 20,0 R4
-088A-2 88,0 22,0 30,0 74,8 18,5 25,0 R4
-114A-2 114 30,0 40,0 88,0 22,0 30,0 R4
-143A-2 143 37,0 50,0 114 30,0 40,0 R6
-178A-2 178 45,0 60,0 150 37,0 50,0 R6
-221A-2 221 55,0 75,0 178 45,0 60,0 R6
-248A-2 248 75,0 100 192 55,0 75,0 R6
Typiska data:Normal drift (10 % överbelastningskapacitet)I2N Kontinuerlig ström rms. 10% överbelastning tillåts under en minut. PN Typisk motoreffekt vid normal användning. Hk-angivelserna gäller de flesta IEC-motorer
med 4 eller flera poler. Hk-angivelserna gäller de flesta NEMA-motorer med 4 eller flera poler.
Tung drift (50 % överbelastningskapacitet)I2hd Kontinuerlig ström rms. 50% överbelastning tillåts under en minut.Phd Typisk motoreffekt vid tung drift. Hk-angivelserna gäller de flesta IEC-motorer med 4 eller
flera poler. Hk-angivelserna gäller de flesta NEMA-motorer med 4 eller flera poler.
Tekniska data

ACS550 Användarhandledning 177
NedstämplingBelastningskapaciteten (ström och effekt) minskar om installationsplatsens höjd över havet överskrider 1000 meter, eller om omgivningstemperaturen överskrider 40 °C eller om 8 kHz moduleringsfrekvens (parameter 2606) används.
Temperaturnedstämpling
I temperaturområdet +40 °C50 °C minskarmärkutströmmen med 1% per 1 °C över +40 °C. Utströmmen beräknas genom att strömmen enligt märkdatatabellen multipliceras med nedstämplingsfaktorn.
Exempel Om omgivningstemperaturen är 50 ° C blir nedmärkningsfaktorn 100% - 1%/°C x 10 °C = 90% eller 0,90. Utströmmen blir då 0,90 x I2N eller 0,90 x I2hd.
Nedstämpling på grund av installationshöjd
På höjder från 1000 till4000 m över havet ska max uteffekt stämplas ner 1 % per 100 m). Om installationsplatsen ligger högre än 2000 m.ö.h., kontakta ABB för närmare information.
Nedstämpling för enfasmatning
För frekvensomriktare i spänningsområdet 208240 V kan enfasmatning användas. Nedstämplingen uppgår i detta fall till 50%.
Nedstämpling för moduleringsfrekvens
Om 8 kHz moduleringsfrekvens (parameter 2606) används, stämpla ner PN/Phd och I2N/I2hd till 80%.
Tekniska data
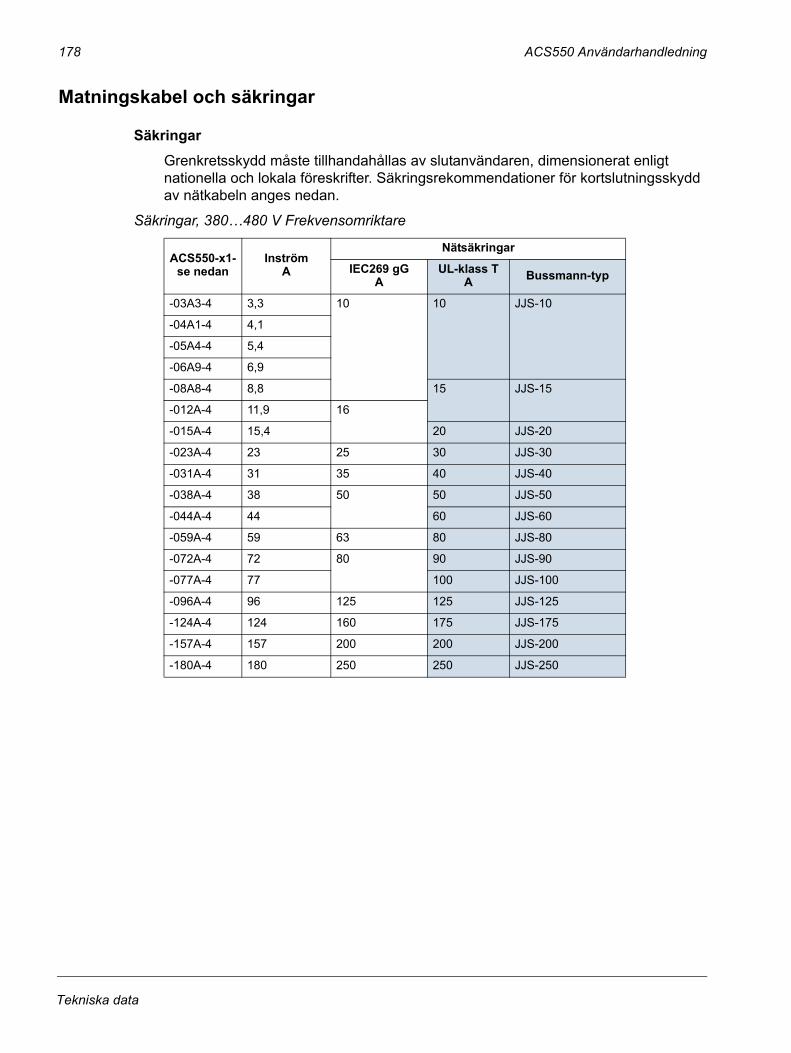
178 ACS550 Användarhandledning
Matningskabel och säkringar
SäkringarGrenkretsskydd måste tillhandahållas av slutanvändaren, dimensionerat enligt nationella och lokala föreskrifter. Säkringsrekommendationer för kortslutningsskydd av nätkabeln anges nedan.
Säkringar, 380480 V Frekvensomriktare
ACS550-x1-se nedan
InströmA
Nätsäkringar
IEC269 gGA
UL-klass TA Bussmann-typ
-03A3-4 3,3 10 10 JJS-10
-04A1-4 4,1
-05A4-4 5,4
-06A9-4 6,9
-08A8-4 8,8 15 JJS-15
-012A-4 11,9 16
-015A-4 15,4 20 JJS-20
-023A-4 23 25 30 JJS-30
-031A-4 31 35 40 JJS-40
-038A-4 38 50 50 JJS-50
-044A-4 44 60 JJS-60
-059A-4 59 63 80 JJS-80
-072A-4 72 80 90 JJS-90
-077A-4 77 100 JJS-100
-096A-4 96 125 125 JJS-125
-124A-4 124 160 175 JJS-175
-157A-4 157 200 200 JJS-200
-180A-4 180 250 250 JJS-250
Tekniska data

ACS550 Användarhandledning 179
Säkringar, frekvensomriktare 208240 V
MatningskablarTabellen nedan listar koppar- och aluminumkabeltyper för olika lastströmmar. Dessa rekommendationer gäller endast under sådana förhållanden som listas i tabellhuvudet.
Dimensionera kablarna i enlighet med lokala säkerhetsföreskrifter, aktuell matningsspänning och frekvensomriktarens lastström. Under alla omständigheter måste kabeldimensionen understiga det maxvärde som ges av plintdimensionen (se "Kabelplintar" på sid 180).
ACS550-x1-se nedan
InströmA
Nätsäkringar
A IEC269 gG
AUL-klass T Bussmann-typ
-04A6-2 4,6 10 10 JJS-10
-06A6-2 6,6
-07A5-2 7,5
-012A-2 11,8 16 15 JJS-15
-017A-2 16,7 25 25 JJS-25
-024A-2 24,2 30 JJS-30
-031A-2 30,8 40 40 JJS-40
-046A-2 46,2 63 60 JJS-60
-059A-2 59,4 80 JJS-80
-075A-2 74,8 80 100 JJS-100
-088A-2 88,0 100 110 JJS-110
-114A-2 114 125 150 JJS-150
-143A-2 143 200 200 JJS-200
-178A-2 178 250 250 JJS-250
-221A-2 221 315 300 JJS-300
-248A-2 248 350 JJS-350
IEC NECBaserat på: EN 60204-1 och IEC 60364-5-2/2001 PVC isolering 30 °C omgivningstemperatur 70 °C yttemperatur Aluminiumkablar med koncentrisk kopparskärm Max nio kablar sida vid sida på samma
kabelstege.
Baserat på: NEC Tabell 310-16 för kopparledare Ledarisolering för °90 C 40 °C omgivningstemperatur Max tre strömförande ledare i samma
kabelkanal, kabel eller jord (direktnedgrävda).
Kopparkablar med koncentrisk kopparskärm
Max last-ström
(A)Cu-kabel
(mm2)Max last-
ström(A)
Al-kabel(mm2)
Max last-ström
(A)Cu-ledararea (AWG/kcmil)
14 3x1,5 61 3x25 22,8 14
20 3x2,5 75 3x35 27,3 12
Tekniska data
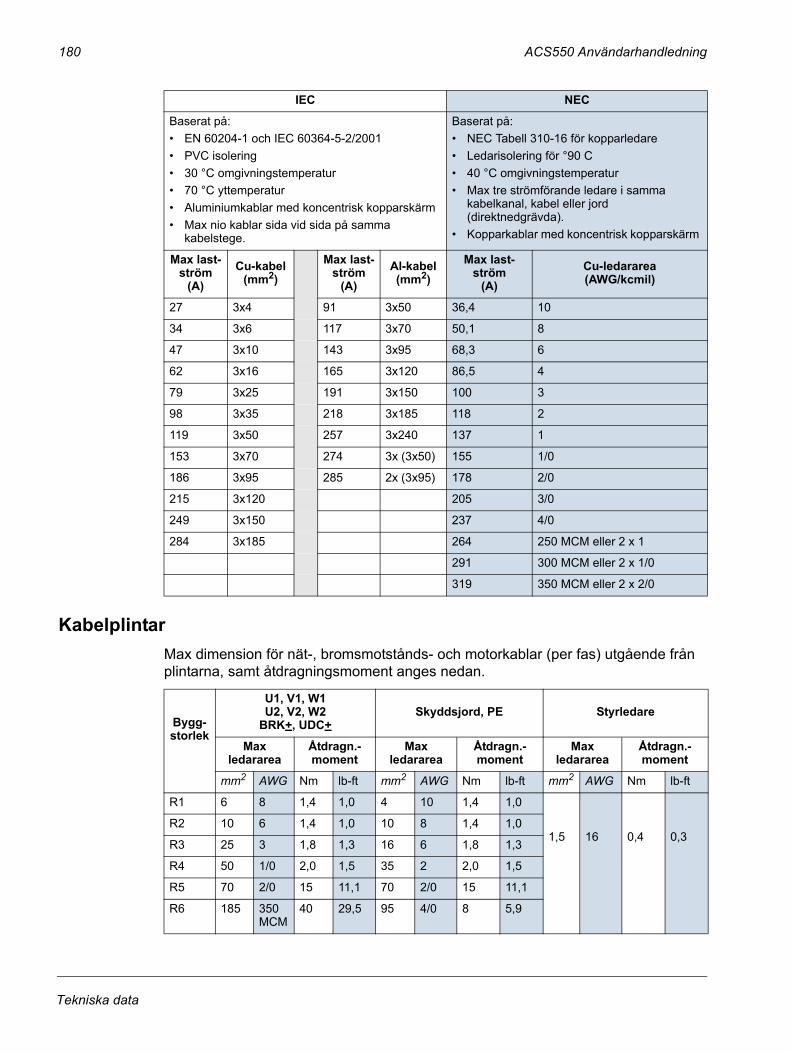
180 ACS550 Användarhandledning
KabelplintarMax dimension för nät-, bromsmotstånds- och motorkablar (per fas) utgående från plintarna, samt åtdragningsmoment anges nedan.
27 3x4 91 3x50 36,4 10
34 3x6 117 3x70 50,1 8
47 3x10 143 3x95 68,3 6
62 3x16 165 3x120 86,5 4
79 3x25 191 3x150 100 3
98 3x35 218 3x185 118 2
119 3x50 257 3x240 137 1
153 3x70 274 3x (3x50) 155 1/0
186 3x95 285 2x (3x95) 178 2/0
215 3x120 205 3/0
249 3x150 237 4/0
284 3x185 264 250 MCM eller 2 x 1
291 300 MCM eller 2 x 1/0
319 350 MCM eller 2 x 2/0
Bygg-storlek
U1, V1, W1U2, V2, W2
BRK+, UDC+Skyddsjord, PE Styrledare
Max ledararea
Åtdragn.-moment
Max ledararea
Åtdragn.-moment
Max ledararea
Åtdragn.-moment
mm2 AWG Nm lb-ft mm2 AWG Nm lb-ft mm2 AWG Nm lb-ft
R1 6 8 1,4 1,0 4 10 1,4 1,0
1,5 16 0,4 0,3R2 10 6 1,4 1,0 10 8 1,4 1,0
R3 25 3 1,8 1,3 16 6 1,8 1,3
R4 50 1/0 2,0 1,5 35 2 2,0 1,5
R5 70 2/0 15 11,1 70 2/0 15 11,1
R6 185 350 MCM
40 29,5 95 4/0 8 5,9
IEC NEC
Baserat på: EN 60204-1 och IEC 60364-5-2/2001 PVC isolering 30 °C omgivningstemperatur 70 °C yttemperatur Aluminiumkablar med koncentrisk kopparskärm Max nio kablar sida vid sida på samma
kabelstege.
Baserat på: NEC Tabell 310-16 för kopparledare Ledarisolering för °90 C 40 °C omgivningstemperatur Max tre strömförande ledare i samma
kabelkanal, kabel eller jord (direktnedgrävda).
Kopparkablar med koncentrisk kopparskärm
Max last-ström
(A)Cu-kabel
(mm2)Max last-
ström(A)
Al-kabel(mm2)
Max last-ström
(A)Cu-ledararea (AWG/kcmil)
Tekniska data

ACS550 Användarhandledning 181
Matningsanslutning
Motoranslutning
Specifikation för matningsanslutning
Spänning (U1)208/220/230/240 VAC 3-fas (eller 1-fas) +10% -15% för ACS550-x1-xxxx-2.400/415/440/460/480 VAC 3-fas +10% -15% för ACS550-x1-xxxx-4.
Förutsedd kortslutningsström
(IEC 629)
Max tillåten förutsedd kortslutningsström i matningsnätet är 65 kA under en sekund, förutsatt att frekvensomriktarens nätkabel är skyddad med lämpliga säkringar. US: 65 000 AIC.
Frekvens 4863 Hz
Osymmetri Max. ± 3% av märkspänning, fas-fas
Effektfaktor för grundvåg (cos fi1)
0,98 (vid märklast)
Kabeltemperatur-märkning
90 °C (194 °F) minimum.
Specifikation för motoranslutningSpänning (U2) 0U1, 3-fas symmetrisk, Umax vid fältförsvagningspunkten
Frekvens 0500 Hz
Frekvens-upplösning
0,01 Hz
Ström Se "Märkdata" på sid 175.
Effektgräns 1,5 x Phd
Fältförsvagningspunkt
10500 Hz
Modulerings-frekvens
Valbar: 1, 4, eller 8 kHz
Kabeltempera-turmärkning
90 °C minimum.
Max rekommenderad
motorkabel-längd
ByggstorlekMax. motorkabellängd
fsw = 1 eller 4 kHz fsw = 8 kHz
R1 100 m 50 m
R2 - R4 200m 100m
R5 - R6 300m 150m
* Varning! Användning av motorkabel längre än vad som specificeras ovan kan orsaka bestående skador på frekvensomriktaren.
Tekniska data
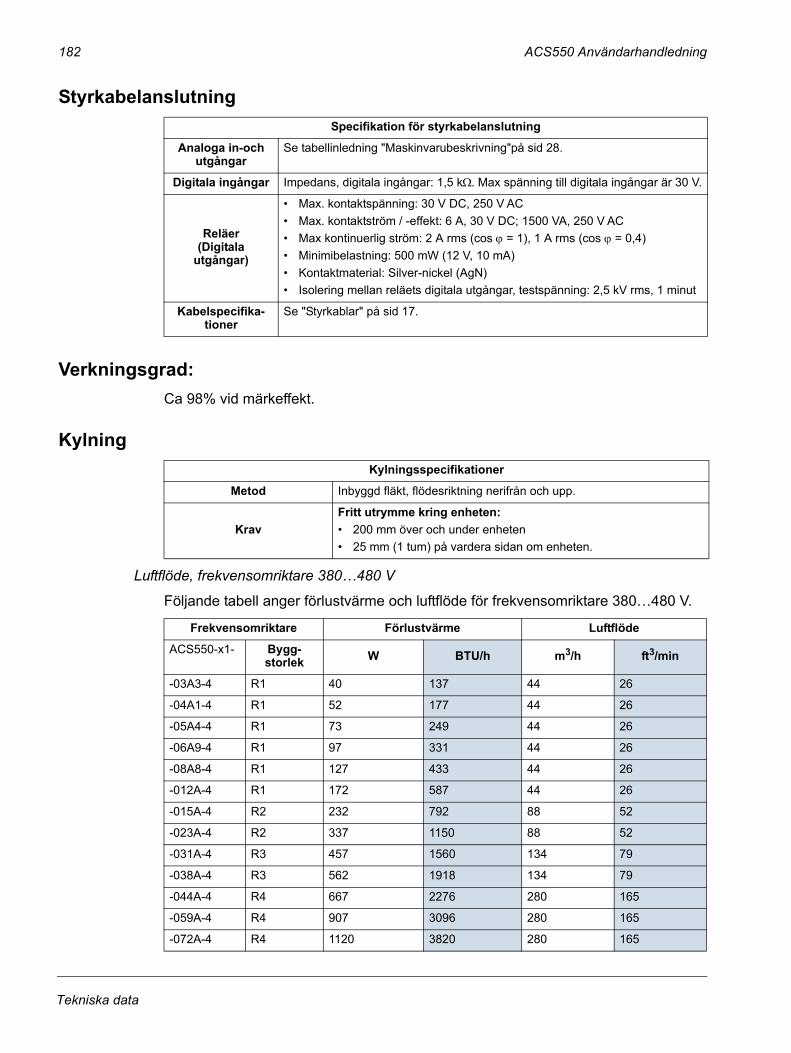
182 ACS550 Användarhandledning
Styrkabelanslutning
Verkningsgrad:Ca 98% vid märkeffekt.
Kylning
Luftflöde, frekvensomriktare 380480 V Följande tabell anger förlustvärme och luftflöde för frekvensomriktare 380480 V.
Specifikation för styrkabelanslutning
Analoga in-och utgångar
Se tabellinledning "Maskinvarubeskrivning"på sid 28.
Digitala ingångar Impedans, digitala ingångar: 1,5 kΩ. Max spänning till digitala ingångar är 30 V.
Reläer(Digitala
utgångar)
Max. kontaktspänning: 30 V DC, 250 V AC Max. kontaktström / -effekt: 6 A, 30 V DC; 1500 VA, 250 V AC Max kontinuerlig ström: 2 A rms (cos ϕ = 1), 1 A rms (cos ϕ = 0,4) Minimibelastning: 500 mW (12 V, 10 mA) Kontaktmaterial: Silver-nickel (AgN) Isolering mellan reläets digitala utgångar, testspänning: 2,5 kV rms, 1 minut
Kabelspecifika-tioner
Se "Styrkablar" på sid 17.
KylningsspecifikationerMetod Inbyggd fläkt, flödesriktning nerifrån och upp.
KravFritt utrymme kring enheten: 200 mm över och under enheten 25 mm (1 tum) på vardera sidan om enheten.
Frekvensomriktare Förlustvärme LuftflödeACS550-x1- Bygg-
storlek W BTU/h m3/h ft3/min
-03A3-4 R1 40 137 44 26
-04A1-4 R1 52 177 44 26
-05A4-4 R1 73 249 44 26
-06A9-4 R1 97 331 44 26
-08A8-4 R1 127 433 44 26
-012A-4 R1 172 587 44 26
-015A-4 R2 232 792 88 52
-023A-4 R2 337 1150 88 52
-031A-4 R3 457 1560 134 79
-038A-4 R3 562 1918 134 79
-044A-4 R4 667 2276 280 165
-059A-4 R4 907 3096 280 165
-072A-4 R4 1120 3820 280 165
Tekniska data

ACS550 Användarhandledning 183
Luftflöde, frekvensomriktare 208240 V
Följande tabell anger förlustvärme och luftflöde för frekvensomriktare 208240 V.
-077A-4 R5 1295 4420 168 99
-096A-4 R5 1440 4915 168 99
-124A-4 R6 1940 6621 405 238
-157A-4 R6 2310 7884 405 238
-180A-4 R6 2810 9590 405 238
Frekvensomriktare Förlustvärme Luftflöde
ACS550-x1- Bygg-storlek W BTU/h m3/h ft3/min
-005A-2 R1 55 189 44 26
-007A-2 R1 73 249 44 26
-008A-2 R1 81 276 44 26
-012A-2 R1 116 404 44 26
-017A-2 R1 161 551 44 26
-024A-2 R2 227 776 88 52
-031A-2 R2 285 373 88 52
-046A-2 R3 420 1434 134 79
-059A-2 R3 536 1829 134 79
-075A-2 R4 671 2290 280 165
-088A-2 R4 786 2685 280 165
-114A-2 R4 1014 3463 280 165
-143A-2 R6 1268 4431 405 238
-178A-2 R6 1575 5379 405 238
-221A-2 R6 1952 6666 405 238
-248A-2 R6 2189 7474 405 238
Frekvensomriktare Förlustvärme Luftflöde
ACS550-x1- Bygg-storlek W BTU/h m3/h ft3/min
Tekniska data
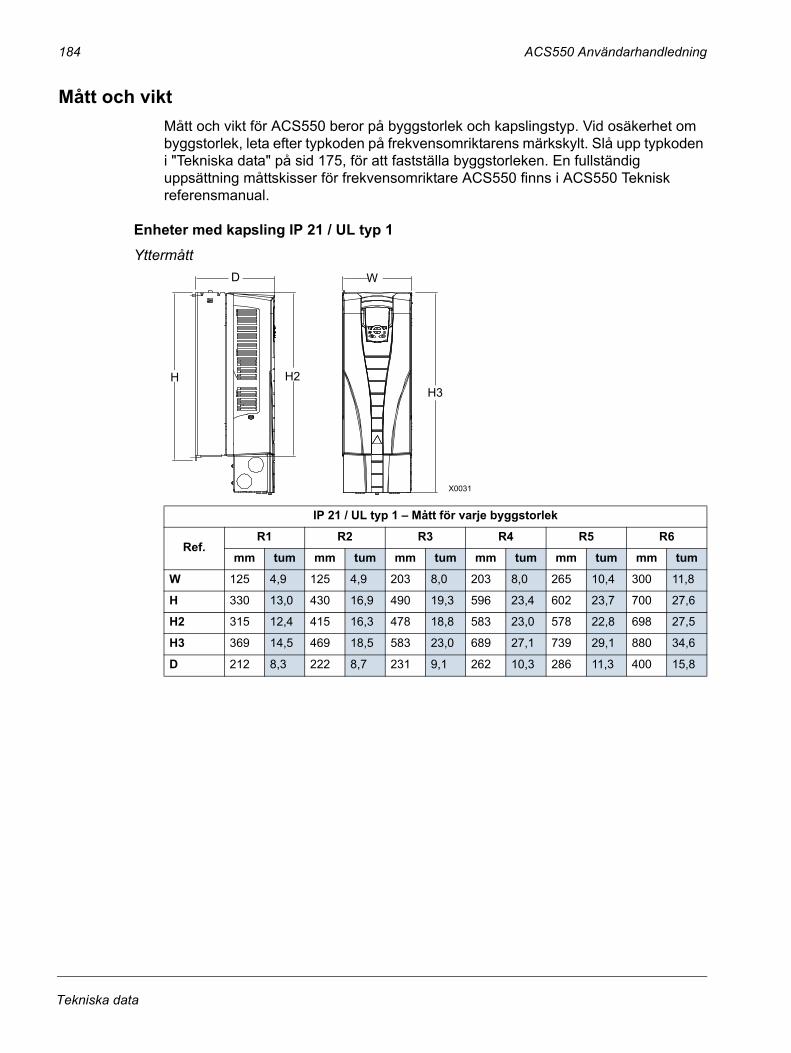
184 ACS550 Användarhandledning
Mått och viktMått och vikt för ACS550 beror på byggstorlek och kapslingstyp. Vid osäkerhet om byggstorlek, leta efter typkoden på frekvensomriktarens märkskylt. Slå upp typkoden i "Tekniska data" på sid 175, för att fastställa byggstorleken. En fullständig uppsättning måttskisser för frekvensomriktare ACS550 finns i ACS550 Teknisk referensmanual.
Enheter med kapsling IP 21 / UL typ 1Yttermått
IP 21 / UL typ 1 Mått för varje byggstorlek
Ref.R1 R2 R3 R4 R5 R6
mm tum mm tum mm tum mm tum mm tum mm tumW 125 4,9 125 4,9 203 8,0 203 8,0 265 10,4 300 11,8
H 330 13,0 430 16,9 490 19,3 596 23,4 602 23,7 700 27,6
H2 315 12,4 415 16,3 478 18,8 583 23,0 578 22,8 698 27,5
H3 369 14,5 469 18,5 583 23,0 689 27,1 739 29,1 880 34,6
D 212 8,3 222 8,7 231 9,1 262 10,3 286 11,3 400 15,8
X0031
H H2
W
H3
D
Tekniska data

ACS550 Användarhandledning 185
Monteringsmått
* Centrum-centrum-måttVikt
IP 21 / UL typ 1 Mått för varje byggstorlek
Ref.R1 R2 R3 R4 R5 R6
mm tum mm tum mm tum mm tum mm tum mm tumW1* 98,0 3,9 98,0 3,9 160 6,3 160 6,3 238 9,4 263 10,4
W2* -- -- -- -- 98,0 3,9 98,0 3,9 -- -- -- --
H1* 318 12,5 418 16,4 473 18,6 578 22,8 588 23,2 675 26,6
a 5,5 0,2 5,5 0,2 6,5 0,25 6,5 0,25 6,5 0,25 9,0 0,35
b 10,0 0,4 10,0 0,4 13,0 0,5 13,0 0,5 14,0 0,55 14,0 0,55
c 5,5 0,2 5,5 0,2 8,0 0,3 8,0 0,3 8,5 0,3 8,5 0,3
d 5,5 0,2 5,5 0,2 6,5 0,25 6,5 025 6,5 0,25 9,0 0,35
IP 21 / UL typ 1 Vikt för varje byggstorlekR1 R2 R3 R4 R5 R6
kg lb. kg lb. kg lb. kg lb. kg lb. kg lb.
6,1 13,4 8,9 19,5 14,7 32,4 22,8 50,2 37 82 78 176
X0032
b
H1
Se detalj A
a
W1
Se detalj B
W2
c
d
Detalj BDetalj A
Tekniska data

186 ACS550 Användarhandledning
Enheter med kapsling IP 54 / UL typ 12Yttermått
Monteringsmått
Monteringsmåtten är densamma som för kapsling IP 21 / UL typ 1. Se "Monteringsmått" på sid 185.
Vikt
SkyddsgradTillgängliga kapslingar:
Kapsling IP 21 / UL typ 1. Platsen måste vara fri från luftburet stoft, korrosiva gaser eller vätskor, och elektriskt ledande föroreningar som kondensvatten, koldamm, och metallpartiklar.
Kapsling IP 54 / UL typ 12. Denna kapsling ger skydd mot luftburet stoft och lätt sprut eller vattenstänk vatten från alla riktningar.
IP 54 / UL typ 12 Mått för varje byggstorlek
Ref. R1 R2 R3 R4 R5 R6mm tum mm tum mm tum mm tum mm tum mm tum
W 215 8,5 215 8,5 257 10,1 257 10,1 369 14,5 410 16,1
W2 225 8,9 225 8,9 267 10,5 267 10,5 369 14,5 410 16,1
H3 441 17,4 541 21,3 604 23,8 723 28,5 776 30,5 924 36,4
D 238 9,37 245 9,6 276 10,9 306 12,0 309 12,2 423 16,6
IP 54 / UL typ 12 Vikt för varje byggstorlekR1 R2 R3 R4 R5 R6kg lb. kg lb. kg lb. kg lb. kg lb. kg lb.
Vikt 8,4 18,6 11,5 25,4 18,1 40,0 26,6 58,7 42 93 86 190
H3
W D
W2
Tekniska data

ACS550 Användarhandledning 187
I jämförelse med kapsling IP 21 / UL typ 1 har kapsling IP 54 / UL typ 12:
Samma inre plastskal som kapsling IP 21
En annan yttre plastkåpa
Ytterligare en intern fläkt för att förbättra kylningen.
Större mått
Samma märkdata (kräver ej nedstämpling).
MiljöförhållandenFöljande tabell anger miljökraven för ACS550
Miljökrav
Installationsplats Förvaring och transport i skyddande förpackning
Installationshöjd
01000 m 10002000 m om PN och I2
stämplas ner 1% per 100 m över 1000 m
Omgivnings-temperatur
-1540 ºC Max. 50 ºC om P2n och I2 stämplas
ner till 90%
-4070 ºC
Relativ fuktighet < 95% (icke kondenserande)
Föroreningsnivå(IEC 721-3-3)
Inget ledande stoft tillåtet. ACS550 ska installeras i ren luft i
enlighet med gällande IP-klassificering.
Kylluften ska vara ren, utan frätande eller ledande partiklar.
Kemiska gaser: Klass 3C3 Fasta partiklar: Klass 3S2
Lagring Inget ledande stoft tillåtet. Gaser: Klass 1C2 Partiklar: Klass 1S2Transport Inget ledande stoft tillåtet. Kemiska gaser: Klass 2C2 Fasta partiklar: Klass 2S2
Sinusformade vibrationer
Mekaniska förhållanden: Klass 3M4 (IEC60721-3-3)
29 Hz 3,0 mm 9200 Hz 10 m/s2
I enlighet med ISTA-specifikationerna 1A och 1B.
Stöt (IEC 68-2-29)
Tillåts ej max. 100 m/s2 , 11ms
Fritt fall
Tillåts ej 76 cm, byggstorlek R1 61 cm, byggstorlek R2 46 cm, byggstorlek R3 31 cm, byggstorlek R4 25 cm, byggstorlek R5 15 cm, byggstorlek R6
Tekniska data

188 ACS550 Användarhandledning
Material
Tillämpade standarderFrekvensomriktaren uppfyller följande standarder. Överensstämmelse med EGs Lågspänningsdirektiv verifieras i enlighet med standarderna EN 50178 och EN 60204-1.
UL-märkningACS550 lämpar sig för användning i kretsar med matningskapacitet upp till 65 000 kA rms symmetriskt, 480 V max. ACS550 är utrustad med elektroniskt motorskydd som uppfyller kraven enligt UL 508C. När denna funktion är vald och är korrekt injusterad fordras inget separat överbelastningsskydd, om inte fler än en motor är anslutna till frekvensomriktaren eller om ytterligare skydd krävs av tillämpliga säkerhetsföreskrifter. Se parametrarna 3005 (MOTOR ÖVERLAST) och 3006 (MOTOR TERM TID).
Materialspecifikationer
Frekvensom-riktarens kapsling
PC/ABS 2,5 mm, färg NCS 1502-Y (RAL 90021 / PMS 420 C och 425 C) Varmförzinkad stålplåt 1,5...2 mm, skikttjocklek 100 um Gjuten aluminium AlSi Extruderad aluminium AlSi
Förpackning Wellpapp (frekvensomriktare och tillvalsmoduler), expanderad polystyren. Skyddsplast till förpackning: PE-LD, spännband i polypropen eller stål.
Material-återvinning
Frekvensomriktaren innehåller återvinningsbart råmaterial, vilket innebär möjlighet att spara energi och naturresurser. Förpackningsmaterialet är miljövänligt och återvinningsbart. Alla metalldelar kan återvinnas. Plastmaterialet kan antingen återvinnas eller brännas under kontrollerade förhållanden, i enlighet med lokalt gällande föreskrifter. De flesta återvinningsbara komponenter har motsvarande märkning.Om återvinning inte är en genomförbar lösning kan allt material utom elektrolytkondensatorerna och kretskorten deponeras utan miljörisker. DC-kondensatorerna innehåller elektrolyt och kretskorten innehåller bly. Dessa material klassificeras som farligt avfall inom EU. Elektrolytkondensatorerna måste tas ut och hanteras separat i enlighet med lokalt gällande föreskrifter. För ytterligare information om miljöaspekter, och detaljerad information om återvinning, kontakta närmaste ABB-försäljningskontor.
Tillämpade standarderEN 50178 (1997) Elektronisk utrustning för användning i kraftinstallationer.
EN 60204-1 (1997) Maskinsäkerhet - Elutrustning för maskiner. Del 1: Allmänna fordringar. Krav för överensstämmelse: Den som utför slutmonteringen av maskinen ansvarar för installation av: Nödstoppanordning Matningsfrånskiljare
EN 60529: 1991 (IEC 529), IEC 60664-1 (1992)
Skyddsklasser för kapslingar (IP-beteckningar).
EN 61800-3 (1996) + tillägg A11 (2000)
EMC-produktstandard, inklusive specifika testmetoder.
UL 508C UL-standard för säkerhet, effektomvandlingsutrustning, andra utgåvan
Tekniska data

ACS550 Användarhandledning 189
Frekvensomriktaren ska användas inomhus i lokal med kontrollerat klimat. Se "Miljöförhållanden" på sid 187 för specifika gränser.
Bromschopper - ABB erbjuder bromschopperenheter som tillsammans med lämpligt dimensionerade bromsmotstånd tillåter frekvensomriktaren att göra sig av med den energi som typiskt uppstår vid snabb retardation av en motor).
AnsvarsbegränsningTillverkaren är inte ansvarig för:
Haverikostnader i fall då installation, idrifttagning, reparation, ändring eller miljöförhållanden för frekvensomriktare inte motsvarar de krav som specificeras i dokumentationen som medföljer enheten, samt annan relevant dokumentation.
Enheter som skadats genom felaktig användning, bristande underhåll eller olyckshändelser.
Enheter som innehåller material som tillhandahållits av köparen eller som konstruerats enligt köparens specifikationer.
Tillverkaren och tillverkarens leverantörer och underentreprenörer kan under inga omständigheter göras ansvariga för speciella, indirekta eller oförutsedda skador eller för följdskador, förluster eller viten.
För eventuella frågor med avseende på frekvensomriktare från ABB hänvisar vi till lokal återförsäljare eller ABB-representant. Angivna tekniska data, specifikationer och övrig information är de som gäller vid tidpunkten för tryckning. Tillverkaren förbehåller sig rätten till ändringar utan föregående meddelande.
Tekniska data

190 ACS550 Användarhandledning
Index
Siffror0xxxx register
funktionskoder . . . . . . . . . . . . . . . . . . . . . . 152
AABB-standard (grundvärde . . . . . . . . . . . . . . . . . 48acceleration
/retardation, parametergruppparametergrupp 95kompensation, parameter . . . . . . . . . . . . . . . 98ramp noll val, parameter . . . . . . . . . . . . . . . . 96ramp val, parameter . . . . . . . . . . . . . . . . . . . 95rampform tid, parameter . . . . . . . . . . . . . . . . 95ramptid (PFC), parameter . . . . . . . . . . . . . . 146tid, parameter . . . . . . . . . . . . . . . . . . . . . . . . 95vid stopp hjmot (PFC), parameter. . . . . . . . 146
aktivera (extern PID), parameter . . . . . . . . . . . . 128analog I/O
anslutningar . . . . . . . . . . . . . . . . . . . . . . . . . 28specifikationer . . . . . . . . . . . . . . . . . . . . . . . . 28
analog ingångbortfall, felkoder . . . . . . . . . . . . . . . . . . . . . 164dataparameter . . . . . . . . . . . . . . . . . . . . . . . 69felnivå, parametrar . . . . . . . . . . . . . . . . . . . 107filter, parametrar . . . . . . . . . . . . . . . . . . . . . . 83maximum, parametrar. . . . . . . . . . . . . . . . . . 83mindre än min., felparameter . . . . . . . . . . . 104mindre än minvärde, automatisk återställning,parameter . . . . . . . . . . . . . . . . . . . . . . . . . . 108minimum, parametrar . . . . . . . . . . . . . . . . . . 83parametergrupp . . . . . . . . . . . . . . . . . . . . . . 83referenskorrigeringsformel . . . . . . . . . . . . . . 79
analog kabelkrav . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
analog utgångdatainnehåll, parametrar . . . . . . . . . . . . . . . . 87dataparameter . . . . . . . . . . . . . . . . . . . . . . . 70filter, parametrar . . . . . . . . . . . . . . . . . . . . . . 87innehåll max., parametrar . . . . . . . . . . . . . . . 87innehåll min., parametrar . . . . . . . . . . . . . . . 87parametergrupp . . . . . . . . . . . . . . . . . . . . . . 87ström max., parametrar. . . . . . . . . . . . . . . . . 87ström min., parametrar . . . . . . . . . . . . . . . . . 87
ändrade parametrar (avancerad manöverpanel). 38ändring av källa (PID), parameter . . . . . . . . . . . 129anslutningar
diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28kommunikation . . . . . . . . . . . . . . . . . . . . . . . 29kraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27styrning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27X1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
ansvarsbegränsning . . . . . . . . . . . . . . . . . . . . . 189användarmakro
förändringsstyrning, parameter . . . . . . . . . . . 89ärvärde max. (PID), parametrar . . . . . . . . . . . . 124ärvärde min. (PID), parametrar . . . . . . . . . . . . . 124ärvärde val (PID), parameter. . . . . . . . . . . . . . . 123
åter fördröjning (PID), parameter . . . . . . . . . . . . 125återkopplingsfaktor (PID), parameter . . . . . . . . . 123återställning, automatisk
analog ingång under minvärde, parameter . 108antal försök, parameter . . . . . . . . . . . . . . . . 108externt fel, parameter . . . . . . . . . . . . . . . . . . 108fördröjning, parameter . . . . . . . . . . . . . . . . . 108försökstid, parameter . . . . . . . . . . . . . . . . . . 108överström, parameter. . . . . . . . . . . . . . . . . . 108underspänning, parameter . . . . . . . . . . . . . . 108
återstarts nivå (PID), parameter . . . . . . . . . . . . . 125automatisk återställning
se återställning, automatisk återställning, automatisk parametergrupp
autoväxlingintervall, parameter . . . . . . . . . . . . . . . . . . . 139nivå, parameter . . . . . . . . . . . . . . . . . . . . . . 140översikt. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140startordningsräknare . . . . . . . . . . . . . . . . . . 140
Avancerad manöverpanelse manöverpanel (avancerad)
avancerad manöverpanel . . . . . . . . . . . . . . . . . . . 36avvikelsekoder . . . . . . . . . . . . . . . . . . . . . . . . . . 161
Bbatteri
avancerad manöverpanel. . . . . . . . . . . . . . . 174beskrivning, parametrar . . . . . . . . . . . . . . . . . . . . 67börvärde maximum (PID), parameter . . . . . . . . . 123börvärde minimum (PID), parameter . . . . . . . . . 123börvärde val (PID), parameter . . . . . . . . . . . . . . 122bromsning
anslutningar . . . . . . . . . . . . . . . . . . . . . . . . . . 27brytpunkt, felparameter. . . . . . . . . . . . . . . . . . . . 105buffert fel (inkr), parameter . . . . . . . . . . . . . . . . . 132bussterminering . . . . . . . . . . . . . . . . . . . . . . . . . . 29byggstorlek . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
CCE-märkning. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13comm
fältbuss CPI mjukvarurevision, parameter . . 130fältbuss parameter uppdatera, parameter . . 130fältbuss parametrar . . . . . . . . . . . . . . . . . . . 130fältbuss typ, parameter. . . . . . . . . . . . . . . . . 130fba status, parameter . . . . . . . . . . . . . . . . . . 130fel tid, parameter . . . . . . . . . . . . . . . . . . . . . 107felfunktion, parameter . . . . . . . . . . . . . . . . . 107inställn fil id, parameter . . . . . . . . . . . . . . . . 130inställn fil rev, parameter . . . . . . . . . . . . . . . 130konfigureringsfil CPI mjukvarurevision, parameter
130protokoll val, parameter . . . . . . . . . . . . . . . . 147reläutgångsord, dataparameter . . . . . . . . . . . 70värden, dataparameter. . . . . . . . . . . . . . . . . . 70
Index

ACS550 Användarhandledning 191
comm modul, parametergrupp . . . . . . . . . . . . . 130crc fel (inkr), parameter . . . . . . . . . . . . . . . . . . . 132C-tick-märkning . . . . . . . . . . . . . . . . . . . . . . . . . . 14
DDC strömref. parameter. . . . . . . . . . . . . . . . . . . . 93DC-bromstid, parameter . . . . . . . . . . . . . . . . . . . 93DC-överspänning, felkod . . . . . . . . . . . . . . . . . . 163DC-underspänning, felkod. . . . . . . . . . . . . . . . . 164deriveringstid (PID), parameter . . . . . . . . . . . . . 121deriveringstid, parameter. . . . . . . . . . . . . . . . . . . 97diagnostik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162digital ingång
anslutningar. . . . . . . . . . . . . . . . . . . . . . . . . . 28specifikationer . . . . . . . . . . . . . . . . . . . . . . . . 28status, dataparameter . . . . . . . . . . . . . . . . . . 69vid fel, historikparametrar . . . . . . . . . . . . . . . 74
digital utgånganslutningar. . . . . . . . . . . . . . . . . . . . . . . . . . 28specifikationer . . . . . . . . . . . . . . . . . . . . . . . 182
digitalkabelkrav . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
displayformat (PID), parameter . . . . . . . . . . . . . 121driftförregling
val av källa, parameter . . . . . . . . . . . . . . . . . 88drifttid, dataparameter . . . . . . . . . . . . . . . . . . 69, 71driftvärden, parametergrupp . . . . . . . . . . . . . . . . 69
Eeftersläpningskompensationsförhållande, parameter 102EMC
CE-märkning . . . . . . . . . . . . . . . . . . . . . . . . . 13C-tick-märkning . . . . . . . . . . . . . . . . . . . . . . . 14filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16motorkabel krav. . . . . . . . . . . . . . . . . . . . . . . 15
enfasmatninganslutning . . . . . . . . . . . . . . . . . . . . . . . . . . . 27nedstämpling. . . . . . . . . . . . . . . . . . . . . . . . 177
enheter (PID), parameter. . . . . . . . . . . . . . . . . . 121etikett
serienummer . . . . . . . . . . . . . . . . . . . . . . . . . 11typkod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
extern referens, dataparameter . . . . . . . . . . . . . . 69extern styrning val, parameter . . . . . . . . . . . . 75, 77externt fel
automatisk återställning, parameter . . . . . . 108felkoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164parametrar. . . . . . . . . . . . . . . . . . . . . . . . . . 104
Ffältbuss
aktivering . . . . . . . . . . . . . . . . . . . . . . . . . . . 148avvikelsekoder . . . . . . . . . . . . . . . . . . . . . . . 161CPI mjukvarurevision, parameter . . . . . . . . . 130konfigurera för kommunikationsborfall . . . . . 149parameter uppdatera, parameter . . . . . . . . . 130parameterinställningar . . . . . . . . . . . . . . . . . 148parametrar . . . . . . . . . . . . . . . . . . . . . . . . . . 130status, parameter . . . . . . . . . . . . . . . . . . . . . 130statusord, dataparametrar . . . . . . . . . . . . . . . 72styrord, dataparametrar . . . . . . . . . . . . . . . . . 72typ, parameter . . . . . . . . . . . . . . . . . . . . . . . 130
fältbussövervakning, parametergrupp. . . . . . . . . . 72fältförsvagningspunkt . . . . . . . . . . . . . . . . . . . . . 181fel
föregående, historikparameter . . . . . . . . . . . . 74frekvens vid, historikparameter . . . . . . . . . . . 74funktioner, parametergrupp . . . . . . . . . . . . . 104historik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168historik, parametergrupp . . . . . . . . . . . . . . . . 74koder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163lista . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163moment vid, historikparameter . . . . . . . . . . . . 74ord, dataparametrar . . . . . . . . . . . . . . . . . . . . 73reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167senaste, historikparameter . . . . . . . . . . . . . . . 74spänning vid, historikparameter . . . . . . . . . . . 74status för digitala ingångar vid, historikparameter . . . . . . . . . . . . . . . . . . . . . . 74status vid, historikparameter . . . . . . . . . . . . . 74ström vid, historikparameter . . . . . . . . . . . . . . 74tid för, historikparametrar . . . . . . . . . . . . . . . . 74val av felkvittering, parameter . . . . . . . . . . . . 88varvtal vid, historikparameter . . . . . . . . . . . . . 74
fjärrstyrning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34fläkt underhåll . . . . . . . . . . . . . . . . . . . . . . . . . . . 172flank fel (inkr), parameter . . . . . . . . . . . . . . . . . . 132flödesbromsning, parameter . . . . . . . . . . . . . . . . 101flödesoptimering, parameter . . . . . . . . . . . . . . . . 101forcerad utlösning, felkod . . . . . . . . . . . . . . . . . . 165förinställt makro. . . . . . . . . . . . . . . . . . . . . . . . . . . 48förmagnetiseringstid, parameter . . . . . . . . . . . . . . 93föroreningsnivå
miljöbegränsningar . . . . . . . . . . . . . . . . . . . . 187shipping limit. . . . . . . . . . . . . . . . . . . . . . . . . 187
förreglingarparameter . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
förstärkning (PID), parameter . . . . . . . . . . . . . . . 120frekvens
koppling, parameter . . . . . . . . . . . . . . . . . . . 101maxgräns, parameter . . . . . . . . . . . . . . . . . . . 91mingräns, parameter . . . . . . . . . . . . . . . . . . . 91specifikation . . . . . . . . . . . . . . . . . . . . . . . . . 181upplösning . . . . . . . . . . . . . . . . . . . . . . . . . . 181vid fel, historikparameter . . . . . . . . . . . . . . . . 74
frekvensomriktareid, felkod . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165märkdata, parameter . . . . . . . . . . . . . . . . . . 111temperatur, dataparameter. . . . . . . . . . . . . . . 69
frekvensomriktarens spänningssättningstid, dataparameter . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Index

192 ACS550 Användarhandledning
fritt fallshipping limit . . . . . . . . . . . . . . . . . . . . . . . . 187
frontkåpaåtermontera . . . . . . . . . . . . . . . . . . . . . . . . . 30ta bort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
funktionstangent . . . . . . . . . . . . . . . . . . . . . . . . . 34
Ggodkänt medd (inkr), parameter . . . . . . . . . . . . 132gränser, parametergrupp. . . . . . . . . . . . . . . . . . . 90
Hhand-auto-makro . . . . . . . . . . . . . . . . . . . . . . . . . 52handböcker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2hjälpmotor
se motor-, hjälp-högimpedivt nät
se icke direktjordat nät
huvudmenymanöverpanel (avancerad) . . . . . . . . . . . . . . 36
II/O-inställningar (avancerad manöverpanel) . . . . 39Icke direktjordat nät
varning om skruvarna vid F1, F2 . . . . . . . . . 22icke direktjordat nät
anslutningar . . . . . . . . . . . . . . . . . . . . . . . . . 27varning om filter . . . . . . . . . . . . . . . . . . . . . . 16varning om skruvar vid EM1, EM3 . . . . . . . . 21
icke jordat nätse icke direktjordat nät
id körningsfel, felkod . . . . . . . . . . . . . . . . . . . . . 164idrifttagningsguide . . . . . . . . . . . . . . . . . . . . . . . . 37IEC-märkdata
se märkdataIFB
comm profil, parameter . . . . . . . . . . . . . . . . 133crc fel (inkr), parameter. . . . . . . . . . . . . . . . 133felkoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165godkänt medd (inkr), parameter . . . . . . . . . 133konfigur-eringsfil, felkod . . . . . . . . . . . . . . . 165överf hastighet, parameter . . . . . . . . . . . . . 133parametrar . . . . . . . . . . . . . . . . . . . . . 133, 134paritet, parameter . . . . . . . . . . . . . . . . . . . . 133status, parameter . . . . . . . . . . . . . . . . . . . . 133UART fel (inkr), parameter . . . . . . . . . . . . . 133
igångkörninginställning . . . . . . . . . . . . . . . . . . . . . . . . . . . 32makron . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32motordata . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
inbyggd busskomm, parametergrupp inbyggd fältbussse EFB
informationparametergrupp . . . . . . . . . . . . . . . . . . . . . 111
inkommande matningskabelanslutning . . . . . . . . . . . . . . . . . . . . . . . . . . . 27dimensionering . . . . . . . . . . . . . . . . . . . . . . 179krav . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
installationflödesschema . . . . . . . . . . . . . . . . . . . . . . . . . 10förberedelse . . . . . . . . . . . . . . . . . . . . . . . . . . 11kabeldragning. . . . . . . . . . . . . . . . . . . . . . . . . 20kompatibilitet . . . . . . . . . . . . . . . . . . . . . . . . . 12miljö . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12plats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12procedurer . . . . . . . . . . . . . . . . . . . . . . . . . . . 10verktyg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
installationshöjdmiljöbegränsningar. . . . . . . . . . . . . . . . . . . . 187shipping limit . . . . . . . . . . . . . . . . . . . . . . . . 187
inställn filid-revision, parameter . . . . . . . . . . . . . . . . . 130revision, parameter . . . . . . . . . . . . . . . . . . . 130
INT FIBEROPTISKT FEL, felkod . . . . . . . . . . . . 165integrationstid (PID), parameter . . . . . . . . . . . . . 121integrationstid, parameter . . . . . . . . . . . . . . . . . . . 97INTERN FÄLTBUS
protokoll id, parameter . . . . . . . . . . . . . . . . . 133stations nr, parameter . . . . . . . . . . . . . . . . . 133
internt börvärde (PID), parameter. . . . . . . . . . . . 123internt termiskt fel, felkod . . . . . . . . . . . . . . . . . . 165IR-kompensering
frekvens, parameter . . . . . . . . . . . . . . . . . . . 101parametrar . . . . . . . . . . . . . . . . . . . . . . . . . . 101spänning, parameter . . . . . . . . . . . . . . . . . . 101
IT-nätse Icke direktjordat nät
Jjordfel
felkod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164parameter. . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Kkabelanslutningar
felkod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166kabeldragning
installation . . . . . . . . . . . . . . . . . . . . . . . . . . . 20kraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27styrning. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
kabelgenomföringssats. . . . . . . . . . . . . . . . . . . . . 20kabelkanal
sats. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20kapsling, skyddsklasskod . . . . . . . . . . . . . . . . . . . 11klockinställning (avancerad manöverpanel) . . . . . 39konfigureringsfil
CPI mjukvarurevision, parameter. . . . . . . . . 130konst varvtal
se varvtal, konstantkonstruktionskod. . . . . . . . . . . . . . . . . . . . . . . . . . 11kortslutning, felkod . . . . . . . . . . . . . . . . . . . . . . . 163kritiska varvtal (undvika)
hög, parametrar . . . . . . . . . . . . . . . . . . . . . . 100låg, parametrar. . . . . . . . . . . . . . . . . . . . . . . 100parametergrupp . . . . . . . . . . . . . . . . . . . . . . 100val, parameter . . . . . . . . . . . . . . . . . . . . . . . 100
kWh-räknare, dataparameter . . . . . . . . . . . . . . . . 69
Index
ACS550 Användarhandledning 193
kylningbrytpunkter för fläktunderhåll. . . . . . . . . . . . 103
Llåg frekvens (PFC), parametrar . . . . . . . . . . . . . 137låg last
felkod. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165funktion, felparameter . . . . . . . . . . . . . . . . . 106kurva, felparameter . . . . . . . . . . . . . . . . . . . 106tid, felparameter . . . . . . . . . . . . . . . . . . . . . 106
larmkoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168koder (basmanöverpanel) . . . . . . . . . . . . . . . 45lista . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168ord, dataparametrar . . . . . . . . . . . . . . . . . . . 73
LOC/REM (avancerad manöverpanel) . . . . . . . . 34LOC/REM (basmanöverpanel) . . . . . . . . . . . . . . 42Lokal styrning . . . . . . . . . . . . . . . . . . . . . . . . . . . 34lokal styrning
lås, parameter . . . . . . . . . . . . . . . . . . . . . . . . 89
Mmakron
ABB-standard (grundvärde) . . . . . . . . . . . . . 48hand-auto . . . . . . . . . . . . . . . . . . . . . . . . . . . 52moment-regl . . . . . . . . . . . . . . . . . . . . . . . . . 55motorpotentiometer . . . . . . . . . . . . . . . . . . . . 51PFC-styrning . . . . . . . . . . . . . . . . . . . . . . . . . 54PID-regl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53pulsstyrning . . . . . . . . . . . . . . . . . . . . . . . . . . 49växlande . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
manöverfunktioner, översikt (avancerad manöverpanel). . . . . . . . . . . . . . . . . . . . . . . . . . . 34manöverfunktioner, översikt (basmanöverpanel) 41manöverpanel . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
display enheter, parametrar . . . . . . . . . . . . 112display max., parametrar. . . . . . . . . . . . . . . 113display min., parametrar . . . . . . . . . . . . . . . 112display processvariabler, parametergrupp . 112display val, parametrar . . . . . . . . . . . . . . . . 112kabelkrav. . . . . . . . . . . . . . . . . . . . . . . . . . . . 17kod, parameter . . . . . . . . . . . . . . . . . . . . . . . 88panel bortfall, felparameter . . . . . . . . . . . . . 104parameterlås, parameter. . . . . . . . . . . . . . . . 88referensstyrning, parameter . . . . . . . . . . . . . 77signal max., parametrar . . . . . . . . . . . . . . . 112signal min., parametrar . . . . . . . . . . . . . . . . 112visning av decimaltecken (form), parametrar 112visning av stapeldiagram. . . . . . . . . . . . . . . 112
Manöverpanel (avancerad) . . . . . . . . . . . . . . . . . 33manöverpanel (avancerad)
batteri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174funktionstangent . . . . . . . . . . . . . . . . . . . . . . 34huvudmeny . . . . . . . . . . . . . . . . . . . . . . . . . . 36I/O-inställningsläge . . . . . . . . . . . . . . . . . . . . 39klockinställningsläge . . . . . . . . . . . . . . . . . . . 39läge ändrade parametrar. . . . . . . . . . . . . . . . 38manöverfunktioner, översikt . . . . . . . . . . . . . 34manöverläge . . . . . . . . . . . . . . . . . . . . . . . . . 34parameterkopieringsläge. . . . . . . . . . . . . . . . 38parameterläge . . . . . . . . . . . . . . . . . . . . . . . . 36roterande pil . . . . . . . . . . . . . . . . . . . . . . . . . 34
manöverpanel (avbancerad)idrifttagningsguide . . . . . . . . . . . . . . . . . . . . . 37
manöverpanel (bas)larmkoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45manöverfunktioner, översikt . . . . . . . . . . . . . . 41manöverläge. . . . . . . . . . . . . . . . . . . . . . . . . . 41parameterkopieringsläge . . . . . . . . . . . . . . . . 44parameterläge . . . . . . . . . . . . . . . . . . . . . . . . 43
märkdata. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175material . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188matn fasfel, felkod. . . . . . . . . . . . . . . . . . . . . . . . 165matning
dataparameter . . . . . . . . . . . . . . . . . . . . . . . . 69första spänningssättning . . . . . . . . . . . . . . . . 31gränsvärde . . . . . . . . . . . . . . . . . . . . . . . . . . 181
matningskrav. . . . . . . . . . . . . . . . . . . . . . . . . . . . 181mått
kapsling enligt IP 21 / UL typ 1. . . . . . . . . . . 184Kapsling IP54 / UL typ 12. . . . . . . . . . . . . . . 186montering . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
maxfrekvens, parameter . . . . . . . . . . . . . . . . . . . . 91moment val, parameter . . . . . . . . . . . . . . . . . 91momentgräns, parametrar . . . . . . . . . . . . . . . 91
mellanledsspänning, dataparameter. . . . . . . . . . . 69min
frekvens, parameter . . . . . . . . . . . . . . . . . . . . 91moment val, parameter . . . . . . . . . . . . . . . . . 91momentgräns, parametrar . . . . . . . . . . . . . . . 91
mjukvarutestdatum, parameter . . . . . . . . . . . . . . 111mjukvaruversion, parameter . . . . . . . . . . . . . . . . 111Modbus
adressering, konvention . . . . . . . . . . . . . . . . 150coils . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151diskreta ingångar . . . . . . . . . . . . . . . . . . . . . 152ingångsregister. . . . . . . . . . . . . . . . . . . . . . . 154reference space . . . . . . . . . . . . . . . . . . . . . . 150register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154se även, fältbuss
moduleringsfrekvens. . . . . . . . . . . . . . . . . . . . . . 181Moduleringsfrekvens, parameter . . . . . . . . . . . . 101moment
dataparameter . . . . . . . . . . . . . . . . . . . . . . . . 69maxgräns val, parameter . . . . . . . . . . . . . . . . 91maxgräns, parameter . . . . . . . . . . . . . . . . . . . 91mingräns val, parameter. . . . . . . . . . . . . . . . . 91mingräns, parametrar . . . . . . . . . . . . . . . . . . . 91momentförstärkning, parameter . . . . . . . . . . . 94rampa ned, parameter . . . . . . . . . . . . . . . . . . 99rampa upp, parameter . . . . . . . . . . . . . . . . . . 99vid fel, historikparameter . . . . . . . . . . . . . . . . 74
moment-reglmakro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
momentregleringparametergrupp . . . . . . . . . . . . . . . . . . . . . . . 99rampa ned, parameter . . . . . . . . . . . . . . . . . . 99rampa upp, parameter . . . . . . . . . . . . . . . . . . 99vektor: momentläge . . . . . . . . . . . . . . . . . . . . 67
Index

194 ACS550 Användarhandledning
mot fastlåsfrekvens, felparameter . . . . . . . . . . . . . . . . 106funktion, felparameter . . . . . . . . . . . . . . . . . 106region . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106tid, felparameter . . . . . . . . . . . . . . . . . . . . . 106
motorbelastningskurva brytpunkt . . . . . . . . . . . . . 105belastningskurva max., felparameter . . . . . 105belastningskurva nollvarv bel . . . . . . . . . . . 105fas, felkod . . . . . . . . . . . . . . . . . . . . . . . . . . 166kompatibilitet . . . . . . . . . . . . . . . . . . . . . . . . . 12märkeffekt, parameter. . . . . . . . . . . . . . . . . . 68märkfrekvens, parameter . . . . . . . . . . . . . . . 67märkspänning, parameter . . . . . . . . . . . . . . . 67märkström, parameter. . . . . . . . . . . . . . . . . . 67märkvarvtal, parameter . . . . . . . . . . . . . . . . . 67mot fastlås, felkod. . . . . . . . . . . . . . . . . . . . 164motor identifier, parameter . . . . . . . . . . . . . . 68underhållsbrytpunkter . . . . . . . . . . . . . . . . . 103
motor-, hjälp-hjmot startförd (PFC), parameter . . . . . . . . 137hjmot stoppförd (PFC), parameter . . . . . . . 137
motor, hjälpmotorantal hjälpmotorer, parameter. . . . . . . . . . . 138
motorkabelanslutning . . . . . . . . . . . . . . . . . . . . . . . . . . . 27EMC-krav . . . . . . . . . . . . . . . . . . . . . . . . . . . 15krav . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181max. längd . . . . . . . . . . . . . . . . . . . . . . . . . 181
motorpotmakro . . . . . . . . . . . . . . . . . . . . . . . . . . 51motorstyrning
IR-kompensering, parametrar . . . . . . . . . . . 101parametergrupp . . . . . . . . . . . . . . . . . . . . . 101styrmetod, parameter . . . . . . . . . . . . . . . . . . 67
motortempmätning, parametergrupp . . . . . . . . . . . . . . 114övertemperatur, felkod . . . . . . . . . . . . . . . . 164
motortemperaturdataparameter . . . . . . . . . . . . . . . . . . . . . . . 71givarval, parameter . . . . . . . . . . . . . . . . . . . 115motor term tid, felparameter . . . . . . . . . . . . 105överhettningsskydd, felparameter. . . . . . . . 104temp felnivå, parameter . . . . . . . . . . . . . . . 115temp larmnivå, parameter . . . . . . . . . . . . . . 115temp mät metod, parameter . . . . . . . . . . . . 115
MWh-räknare, dataparameter . . . . . . . . . . . . . . . 71
Nnätkabel
se inkommande matningskabelnedstämpling
enfasmatning . . . . . . . . . . . . . . . . . . . . . . . 177installationshöjd . . . . . . . . . . . . . . . . . . . . . 177temperatur . . . . . . . . . . . . . . . . . . . . . . . . . 177
nedstämpling på grund av installationshöjd . . . 177NEMA-data
se märkdatanollvarv bel, felparameter . . . . . . . . . . . . . . . . . 105NPN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Ooffset (PID), parameter . . . . . . . . . . . . . . . . . . . 128
onormal händelseretardationstid, parameter . . . . . . . . . . . . . . . 95stopp val, parameter . . . . . . . . . . . . . . . . . . . 94
överf hastighet (RS-232), parameter . . . . . . . . . 132överlast utgång, felkod . . . . . . . . . . . . . . . . . . . . 164överspänning
styrförregling, parameter . . . . . . . . . . . . . . . . 90överström
automatisk återställning, parameter . . . . . . . 108felkod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
övertemperatur i frekvensomriktare, felkod . . . . 163övertonsfenomen (undvika)
val, parameter . . . . . . . . . . . . . . . . . . . . . . . 100Övervakning
parameter undre gräns, parametrar . . . . . . . 109parameterval, parametrar. . . . . . . . . . . . . . . 109
övervakningparametergrupp . . . . . . . . . . . . . . . . . . . . . . 109
övervarv, felkod . . . . . . . . . . . . . . . . . . . . . . . . . 165
Ppanel
se manöverpanelpanelbortfall, felkod . . . . . . . . . . . . . . . . . . . . . . 164paneldisplay variabler, parametergrupp . . . . . . . 112parameter
analog utgång skalning, felkod. . . . . . . . . . . 167återställ (basmanöverpanel). . . . . . . . . . . . . . 44återställning (avancerad manöverpanel) . . . . 38beskrivning . . . . . . . . . . . . . . . . . . . . . . . . . . . 67extern reläutgång, felkod . . . . . . . . . . . . . . . 167fältbuss, felkod . . . . . . . . . . . . . . . . . . . . . . . 167förändringslås. . . . . . . . . . . . . . . . . . . . . . . . . 88hz rpm, felkod. . . . . . . . . . . . . . . . . . . . . . . . 166parameterfel AI-skaln, felkod . . . . . . . . . . . . 167PCU 1 (effektstyrenhet), felkod . . . . . . . . . . 167PCU 2 (effektstyrenhet), felkod . . . . . . . . . . 167PFC IO konfig, felkod . . . . . . . . . . . . . . . . . . 166PFC ref. neg., felkod . . . . . . . . . . . . . . . . . . 166PFC-läge, felkod . . . . . . . . . . . . . . . . . . . . . 167spara förändringar, parameter . . . . . . . . . . . . 89
parameterbackup (avancerad manöverpanel) . . . 38parameterkopiering (basmanöverpanel). . . . . . . . 44parameterläge . . . . . . . . . . . . . . . . . . . . . . . . . . . 36parameterläge (basmanöverpanel) . . . . . . . . . . . 43paritet (RS-232), parameter . . . . . . . . . . . . . . . . 132paritetsfel (inkr), parameter . . . . . . . . . . . . . . . . 132PE jord
jordfel, parameter . . . . . . . . . . . . . . . . . . . . . 106moment . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180plintdimension . . . . . . . . . . . . . . . . . . . . . . . 180
PFCaccelerationstid, parameter . . . . . . . . . . . . . 146aktivera, parameter . . . . . . . . . . . . . . . . . . . 145antal hjälpmot, parameter . . . . . . . . . . . . . . 138hjmot startförd, parameter . . . . . . . . . . . . . . 137hjmot stoppförd, parameter . . . . . . . . . . . . . 137låg frekvens, parametrar . . . . . . . . . . . . . . . 137referens steg, parametrar. . . . . . . . . . . . . . . 135retardationstid, parameter . . . . . . . . . . . . . . 146start fördr, parameter . . . . . . . . . . . . . . . . . . 145start frekvens,, parametrar . . . . . . . . . . . . . . 136
Index
ACS550 Användarhandledning 195
PFC-styrningmakrostyrning, parametergrupp . . . . . . . . . . . . . . 135
PID0% (ärvärdessignal), parameter . . . . . . . . . 122100% (ärvärdessignal), parameter . . . . . . . 122ändring av källa, parameter. . . . . . . . . . . . . 129ärvärde max., parametrar . . . . . . . . . . . . . . 124ärvärde min., parametrar. . . . . . . . . . . . . . . 124ärvärde val, parameter . . . . . . . . . . . . . . . . 123åter fördröjning, parameter . . . . . . . . . . . . . 125återkoppling, dataparameter . . . . . . . . . . . . . 70återkopplingsfaktor, parameter . . . . . . . . . . 123återstarts nivå, parameter . . . . . . . . . . . . . . 125avvikelse, dataparameter . . . . . . . . . . . . . . . 70börvärde maximum, parameter . . . . . . . . . . 123börvärde minimum, parameter . . . . . . . . . . 123börvärde val, parameter . . . . . . . . . . . . . . . 122börvärde, dataparameter. . . . . . . . . . . . . . . . 70decimaltecken (ärvärdessignal), parameter 121deriveringsfilter, parameter . . . . . . . . . . . . . 121deriveringstid, parameter . . . . . . . . . . . . . . 121enheter (ärvärdessignal), parameter. . . . . . 121extern / trimning, parametergrupp. . . . . . . . 128extern källa aktivera, parameter . . . . . . . . . 128förstärkning, parameter . . . . . . . . . . . . . . . . 120integrationstid, parameter . . . . . . . . . . . . . . 121internt börvärde, parameter. . . . . . . . . . . . . 123inverterad felåterkoppling, parameter . . . . . 121metod för justering . . . . . . . . . . . . . . . . . . . 120offset, parameter . . . . . . . . . . . . . . . . . . . . . 128parameteruppsättning val, parameter . . . . . 126PID stopp nivå, parameter . . . . . . . . . . . . . 125processinställningar, parametergrupper . . . 120regleringsmakro . . . . . . . . . . . . . . . . . . . . . . 53skalning (0%..0,100%), parametrar. . . . . . . 122trim skalning, parameter . . . . . . . . . . . . . . . 128trim val, parameter . . . . . . . . . . . . . . . . . . . 128utgång, dataparameter . . . . . . . . . . . . . . . . . 70val av ärvärdesingång, parametrar . . . . . . . 124val vilofunktion, parameter . . . . . . . . . . . . . 125vilo fördröjning, parameter . . . . . . . . . . . . . 125
PID-inställningar för process, parametergrupper 120PNP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29processvariabler, dataparameter. . . . . . . . . . . . . 70programpaketversion, parameter . . . . . . . . . . . 111proportionell förstärkning, parameter. . . . . . . . . . 97PTC-temperaturgivare . . . . . . . . . . . . . . . . . . . . 115pulsstyrningsmakro . . . . . . . . . . . . . . . . . . . . . . . 49pump- och fläktstyrning
se PFC-styrning
Rräknare
seriell kommunikation, diagnostik . . . . . . . . 149ramppar (accel/retard), parameter. . . . . . . . . . . . 95
referenskorrigering av analoga ingångar. . . . . . . . . . . 79korrigeringar för parametervärden . . . . . . . . . 79maximum, parametrar . . . . . . . . . . . . . . . . . . 79minimum, parametrar . . . . . . . . . . . . . . . . . . . 79val av panelstyrning, parameter . . . . . . . . . . . 77val, parametergrupp . . . . . . . . . . . . . . . . . . . . 77välj källa, parameter . . . . . . . . . . . . . . . . . . . . 78varvtals-/frekvensreglering (avancerad
manöverpanel) . . . . . . . . . . . . . . . . . 36referens steg (PFC), parametrar. . . . . . . . . . . . . 135reg förbikoppl, parameter . . . . . . . . . . . . . . . . . . 145register 0xxxx
mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151register 1xxxx
funktionskoder . . . . . . . . . . . . . . . . . . . . . . . 154mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
register 3xxxxfunktionskoder . . . . . . . . . . . . . . . . . . . . . . . 154mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
register 4xxxxfunktionskoder . . . . . . . . . . . . . . . . . . . . . . . 155mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
regleravvikelseinvertering (PID), parameter . . . . 121reglering av moduleringsfrekvens, parameter. . . 102reläer, specifikationer . . . . . . . . . . . . . . . . . . . . . 182relativ luftfuktighet
miljöbegränsningar . . . . . . . . . . . . . . . . . . . . 187shipping limit. . . . . . . . . . . . . . . . . . . . . . . . . 187
reläutgångaktiveringsvillkorsparametrar . . . . . . . . . . . . . 84frånslagsfördröjning, parametrar . . . . . . . . . . 85parametergrupp . . . . . . . . . . . . . . . . . . . . . . . 84status, dataparameter . . . . . . . . . . . . . . . . . . 70tillslagsfördröjning, parametrar . . . . . . . . . . . . 85
retardationonormal händelse, parameter . . . . . . . . . . . . 95parametergrupp . . . . . . . . . . . . . . . . . . . . . . . 95ramp noll val, parameter. . . . . . . . . . . . . . . . . 96ramp val, parameter . . . . . . . . . . . . . . . . . . . . 95rampform tid, parameter. . . . . . . . . . . . . . . . . 95ramptid (PFC), parameter . . . . . . . . . . . . . . 146tid, parameter . . . . . . . . . . . . . . . . . . . . . . . . . 95vid hjälpmotorstart (PFC), parameter . . . . . . 146
rot riktninstyrning. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36styrning, parameter . . . . . . . . . . . . . . . . . . . . 76
roterande pil, manöverpanel . . . . . . . . . . . . . . . . . 34RS-232
överf hastighet, parameter . . . . . . . . . . . . . . 132paritet, parameter . . . . . . . . . . . . . . . . . . . . . 132stations nr, parameter . . . . . . . . . . . . . . . . . 132
RS-232 inkrementeringarbuffert fel, parameter . . . . . . . . . . . . . . . . . . 132crc fel, parameter . . . . . . . . . . . . . . . . . . . . . 132flank fel, parameter. . . . . . . . . . . . . . . . . . . . 132godkänt medd, parameter . . . . . . . . . . . . . . 132paritetsfel, parameter . . . . . . . . . . . . . . . . . . 132
RS485. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Index
196 ACS550 Användarhandledning
Ssäkerhetsföreskrifter . . . . . . . . . . . . . . . . . . . . . . . 3säkringar
frekvensomriktare 208...240 V . . . . . . . . . . 179frekvensomriktare 380...480 V . . . . . . . . . . 178
sensorlös vektorreglering . . . . . . . . . . . . . . . . . . 67seriekommunikation
aktivering av . . . . . . . . . . . . . . . . . . . . . . . . 148se även, fältbuss. . . . . . . . . . . . . . . . . . . . . 148
seriell kommunikation stations nr . . . . . . . . . . . 148ärvärden . . . . . . . . . . . . . . . . . . . . . . . . . . . 160Diagnostiska räknare . . . . . . . . . . . . . . . . . 149kommunikationshastighet . . . . . . . . . . . . . . 148parameterinställningar . . . . . . . . . . . . . . . . 148paritet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148referenser . . . . . . . . . . . . . . . . . . . . . . . . . . 160relästyrning . . . . . . . . . . . . . . . . . . . . . . . . . 149statusord . . . . . . . . . . . . . . . . . . . . . . . . . . . 157styrord. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156styrplatser . . . . . . . . . . . . . . . . . . . . . . . . . . 149tillståndsdiagram. . . . . . . . . . . . . . . . . . . . . 159
serienummer . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11skalär: varvtal . . . . . . . . . . . . . . . . . . . . . . . . . . . 67s-kurveramp, parameter . . . . . . . . . . . . . . . . . . . 95spänn försörj fel, felkod . . . . . . . . . . . . . . . . . . . 165spänning
märkdatakod . . . . . . . . . . . . . . . . . . . . . . . . . 11vid fel, historikparameter. . . . . . . . . . . . . . . . 74
spänning/frekvens-förhållande, parameter . . . . 101språk, parameter . . . . . . . . . . . . . . . . . . . . . . . . . 67Standard modbus
parametergrupp . . . . . . . . . . . . . . . . . . . . . 132standarder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
CE-märkning . . . . . . . . . . . . . . . . . . . . . . . . . 13CSA-märkning . . . . . . . . . . . . . . . . . . . . . . 188C-tick-märkning. . . . . . . . . . . . . . . . . . . . . . . 14EN 50178 . . . . . . . . . . . . . . . . . . . . . . . . . . 188EN 60204-1. . . . . . . . . . . . . . . . . . . . . . . . . 188EN 60529 . . . . . . . . . . . . . . . . . . . . . . . . . . 188EN 61800-3. . . . . . . . . . . . . . . . . . . . . . . . . 188IEC 60664-1 . . . . . . . . . . . . . . . . . . . . . . . . 188Märkning . . . . . . . . . . . . . . . . . . . . . . . . . . . 188UL 508C . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
startfördr (PFC), parameter . . . . . . . . . . . . . . . . 145förmagnetiseringstid, parameter . . . . . . . . . . 93förregling, parameter . . . . . . . . . . . . . . . . . . 94frekvens (PFC), parametrar . . . . . . . . . . . . 136funktion, parameter . . . . . . . . . . . . . . . . . . . . 93hjälpmotor (PFC), parametrar . . . . . . . . . . . 136hjmot startförd . . . . . . . . . . . . . . . . . . . . . . . 137momentförstärkning, parameter . . . . . . . . . . 94parametergrupp . . . . . . . . . . . . . . . . . . . . . . 93styrning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
startordningsräknare . . . . . . . . . . . . . . . . . . . . . 140startparametrar, parametergrupp . . . . . . . . . . . . 67startsätt
auto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93automatisk tung start . . . . . . . . . . . . . . . . . . 93flygande start . . . . . . . . . . . . . . . . . . . . . . . . 93Förmagnetisering . . . . . . . . . . . . . . . . . . . . . 93
STATIONS NR . . . . . . . . . . . . . . . . . . . . . . . . . 148
stations nr (RS-232), parameter . . . . . . . . . . . . . 132status vid fel, historikparameter . . . . . . . . . . . . . . 74statusord, seriell kommunikation
bitdefinition . . . . . . . . . . . . . . . . . . . . . . . . . . 157definition. . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
stoppDC strömref. parameter . . . . . . . . . . . . . . . . . 93DC-bromstid, parameter. . . . . . . . . . . . . . . . . 93flödesbromsning, parameter . . . . . . . . . . . . 101funktion, parameter . . . . . . . . . . . . . . . . . . . . 93hjälpmotor (PFC), parametrar . . . . . . . . . . . 137hjmot stoppförd . . . . . . . . . . . . . . . . . . . . . . 137likströmsreglering, parameter. . . . . . . . . . . . . 93onormal händelse val, parameter. . . . . . . . . . 94parametergrupp . . . . . . . . . . . . . . . . . . . . . . . 93styrning. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
stötarshipping limit . . . . . . . . . . . . . . . . . . . . . . . . 187
strömdataparameter . . . . . . . . . . . . . . . . . . . . . . . . 69märkdatakod . . . . . . . . . . . . . . . . . . . . . . . . . 11mätning, felkod. . . . . . . . . . . . . . . . . . . . . . . 165maxgräns, parameter . . . . . . . . . . . . . . . . . . . 90vid fel, historikparameter . . . . . . . . . . . . . . . . 74
styringångar, parametergrupp . . . . . . . . . . . . 75, 93styrkabel
anslutningar . . . . . . . . . . . . . . . . . . . . . . . . . . 27krav . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
styrningplats, dataparameter . . . . . . . . . . . . . . . . . . . 69referens (avancerad manöverpanel) . . . . . . . 36rotationsriktning . . . . . . . . . . . . . . . . . . . . . . . 36Start/stopp . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
styrord, seriell kommunikationbeskrivning . . . . . . . . . . . . . . . . . . . . . . . . . . 156bitdefinition . . . . . . . . . . . . . . . . . . . . . . . . . . 156
systemstyrning, parametergrupp . . . . . . . . . . . . . 88
Tta bort kåpan. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18temp mät metod, parameter . . . . . . . . . . . . . . . . 115Temperaturgivare . . . . . . . . . . . . . . . . . . . . . . . . 115temperaturnedstämpling. . . . . . . . . . . . . . . . . . . 177testdatum, parameter . . . . . . . . . . . . . . . . . . . . . 111tidigare fel, historikparametrar . . . . . . . . . . . . . . . 74tidsfunktioner
aktivera, parameter . . . . . . . . . . . . . . . . . . . 117autoväxling, parameter. . . . . . . . . . . . . . . . . 146källa, parameter . . . . . . . . . . . . . . . . . . . . . . 119starttid, parameter . . . . . . . . . . . . . . . . . . . . 117stopptid, parameter . . . . . . . . . . . . . . . . . . . 117timer, parameter. . . . . . . . . . . . . . . . . . . . . . 118
Tidur funktionparametergrupp . . . . . . . . . . . . . . . . . . . . . . 116
tillämpningsblockutgång, dataparameter . . . . . . . 69tillämpningsmakro, parameter . . . . . . . . . . . . . . . 67tillståndsdiagram
seriell kommunikation. . . . . . . . . . . . . . . . . . 159tillval, parametergrupp . . . . . . . . . . . . . . . . . . . . 147time_out fältbus, felkod. . . . . . . . . . . . . . . . . . . . 165trim skalning (PID), parameter . . . . . . . . . . . . . . 128
Index

ACS550 Användarhandledning 197
trim val (PID), parameter . . . . . . . . . . . . . . . . . . 128typkod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
UU/f-förhållande, parameter. . . . . . . . . . . . . . . . . 101UL/CSA-märkning . . . . . . . . . . . . . . . . . . . . . . . 188underhåll
brytpunkter, parametergrupp. . . . . . . . . . . . 103huvud- fläkt . . . . . . . . . . . . . . . . . . . . . . . . . 172intern fläkt i kapslingen . . . . . . . . . . . . . . . . 173intervall . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171kondensatorer . . . . . . . . . . . . . . . . . . . . . . . 174kylfläns . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171manöverpanel . . . . . . . . . . . . . . . . . . . . . . . 174
underspänningautomatisk återställning, parameter . . . . . . 108styrförregling, parameter . . . . . . . . . . . . . . . . 90
utfrekvens, dataparameter. . . . . . . . . . . . . . . . . . 69
Vval av ärvärdesingång (PID), parametrar . . . . . 124val av panelreferens, parameter . . . . . . . . . . . . . 77val vilofunktion (PID), parameter . . . . . . . . . . . . 125varning
automatisk start. . . . . . . . . . . . . . . . . . . . . 3, 31farliga spänningar . . . . . . . . . . . . . . . . . . . . . . 3höga temperaturer. . . . . . . . . . . . . . . . . . . . . . 3kan ej repareras i fält. . . . . . . . . . . . . . . . . . . . 3kvalificerad elektriker. . . . . . . . . . . . . . . . . . . . 3lista . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3parallella styranslutningar . . . . . . . . . . . . . . . . 3termistor installation . . . . . . . . . . . . . . . . . . 114
varvtaldataparameter. . . . . . . . . . . . . . . . . . . . . . . . 69maxgräns, parameter . . . . . . . . . . . . . . . . . . 90mingräns, parameter . . . . . . . . . . . . . . . . . . . 90vektor: varvtalsläge . . . . . . . . . . . . . . . . . . . . 67vid fel, historikparameter . . . . . . . . . . . . . . . . 74
varvtal, konstantparameter . . . . . . . . . . . . . . . . . . . . . . . . . . . 82parameter för val av digital ingång . . . . . . . . 81parametergrupp. . . . . . . . . . . . . . . . . . . . . . . 81val av tidsfunktion, parameter . . . . . . . . . . . . 82
varvtalsräknare, dataparameter. . . . . . . . . . . . . . 71varvtalsreglering
accelerationskompensering, parameter . . . . 98automatisk inställning, parameter . . . . . . 97, 98deriveringstid, parameter . . . . . . . . . . . . . . . 97integrationstid, parameter . . . . . . . . . . . . . . . 97parametergrupp. . . . . . . . . . . . . . . . . . . . . . . 97proportionell förstärkning, parameter . . . . . . 97
växlande makro . . . . . . . . . . . . . . . . . . . . . . . . . . 50verkningsgrad
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182verktyg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12vibration
miljöbegränsningar . . . . . . . . . . . . . . . . . . . 187shipping limit . . . . . . . . . . . . . . . . . . . . . . . . 187
vikt kapsling enligt IP 54 / UL typ 12 . . . . . . . . . 186vikt Kapsling IP 21 / UL typ 1. . . . . . . . . . . . . . . 185
Index

ABB Motors and MachinesHuvudkontorS-72170 VästeråsSVERIGETelefon +46-21-342000Telefax +46-21-187841Internet www.abb.se
ACS5
50-U
S-04
3AFE
6478
3734
REV
C /
SVG
ÄLLE
R F
RÅN
: 5 s
ept 2
003
ERSÄ
TTER
: 3 ju
ni 2
003