
A topological invariant for stable map germs
30
Inventiones math. 32, 103-132(1976) / r/v6v/t/ol/e$ mathematicae O by Springer-Verlag 1976 A Topological Invariant for Stable Map Germs James Damon* (Flushing, N.Y.) and Andr~ Galligo (Nice) Introduction Now we essentially know the structure of generic mappings from the differential point of view due to the work of John Mather in which he singles out those dimensions for which the set of stable mappings is open and dense, and for which he is able to give a classification using the local structure of the mapping. Such dimensions are called the nice dimensions. In the dimensions for which this method fails, he has used the ideas of Ren6 Thom to show that with the more general classification of topological stability and topological equivalence the results hold for all dimensions. Thus, for example, in the nice dimensions there are two classifications, the differentiable and the topological. The topological is coarser than the differen- tiable, but as yet it is not known whether it is strictly coarser. Also, outside of the nice dimensions very little is known about the topological classification. One way we can begin comparing the classifications is to construct topological invariants for C~-stable map germs so that we can distinguish C~ map germs that are topologically distinct. In this paper, we will prove that for C~-stable map germs which are either of S2-type or of discrete algebra type (i.e. of some Si-type with only a finite number of distinct Zi-types near-by) the dimension of the algebra associated to the map germ is a topological invariant. First, we remark that this is especially useful because the classification of C~ map germs given by Mather is determined by the associated algebra. Next, we observe that the germs of discrete algebra type include those in the nice dimensions so that the dimension is a topological invariant in the nice dimensions. Furthermore, it can be used together with other invariants to determine more precisely the topological classification in the nice dimensions. See for instance [5]. Lastly, we point out that very few of these germ-types occur in the nice dimensions * The first author was supported by grants from the City Universityof New York faculty Research Award Program and the National ScienceFoundation.
Transcript of A topological invariant for stable map germs

Inventiones math. 32, 103-132 (1976) / r/v6v/t/ol/e$ mathematicae O by Springer-Verlag 1976
A Topological Invariant for Stable Map Germs
James Damon* (Flushing, N.Y.) and Andr~ Galligo (Nice)
Introduction
Now we essentially know the structure of generic mappings from the differential point of view due to the work of John Mather in which he singles out those dimensions for which the set of stable mappings is open and dense, and for which he is able to give a classification using the local structure of the mapping. Such dimensions are called the nice dimensions.
In the dimensions for which this method fails, he has used the ideas of Ren6 Thom to show that with the more general classification of topological stability and topological equivalence the results hold for all dimensions.
Thus, for example, in the nice dimensions there are two classifications, the differentiable and the topological. The topological is coarser than the differen- tiable, but as yet it is not known whether it is strictly coarser. Also, outside of the nice dimensions very little is known about the topological classification. One way we can begin comparing the classifications is to construct topological invariants for C~-stable map germs so that we can distinguish C~ map germs that are topologically distinct.
In this paper, we will prove that for C~-stable map germs which are either of S2-type or of discrete algebra type (i.e. of some Si-type with only a finite number of distinct Zi-types near-by) the dimension of the algebra associated to the map germ is a topological invariant.
First, we remark that this is especially useful because the classification of C~ map germs given by Mather is determined by the associated algebra. Next, we observe that the germs of discrete algebra type include those in the nice dimensions so that the dimension is a topological invariant in the nice dimensions. Furthermore, it can be used together with other invariants to determine more precisely the topological classification in the nice dimensions. See for instance [5]. Lastly, we point out that very few of these germ-types occur in the nice dimensions
* The first author was supported by grants from the City University of New York faculty Research Award Program and the National Science Foundation.

104 J. Damon and A. Galligo
so this result gives a topological invariant for a large class of mappings outside of the nice dimensions.
It is not clear to what extent this result might be generalized for stable map germs in general. For instance, the method used is certainly applicable to other germs besides those we consider. On the other hand this type of result is restricted to stable map germs, for it is well-known that even the simplest function like f ( x ) = x 3 does not satisfy the principal result.
Notations. To refer to an ideal containing a power of the maximal ideal, instead of writing "ideal primary to the maximal ideal", we will shorten the expression to just m-primary ideal.
We will denote the number of elements of a finite set A by ]A] and the set of variables (x 1 . . . . . xk) by x k or by x.
Outline of the Proof The main idea involves first defining an invariant of a stable map germ f which is a topological invariant. This invariant is the real multiplicity re(f), which is the maximum number of points in the inverse image of a point which are in neighborhoods arbitrarily close to the source of the map germ. Then, we first show that this number is independent of the stable map germ for map germs with the same algebra. This is done using the normal form for stable map germs. Then, by a known result [7], m ( f ) < 6 ( f ) ( = d i m ~ Q ( f ) ) . Thus, the problem is reduced to showing that re(f) > 6(f). For this, we show that, in fact, it is sufficient to find another map germ g with Q(g)= Q(f ) and re(g)> 6(g).
Then, to find such map germs we use ideas which occur in the study of defor- mations of ideals.
Given a m-primary ideal I = (q , ..., rb)c R {x 1 . . . . . x,}, which satisfies certain conditions, we construct a deformation (RI . . . . . Rb) SO that the R~ .. . . , R b have q=dim~(lR{x 1 . . . . . x,/I}) solutions near zero for arbitrary small values of the parameters. This allows us to construct the required g. To construct the required deformations we use the ideas in [4] for ideals in ~ {x~, x2}, and then for ideals which satisfy appropriate conditions, we are able to generalize this method. Lastly, we use the analysis of Mather for the germs in the nice dimensions plus the additional classification in [10] to conclude that these ideals satisfy our criteria.
I. Preliminaries
In this section we will recall certain concepts and also certain results due to J. Mather. We will refer to C a - m a p germs f : IR" ---* RP which are germs at 0 with f ( 0 ) = 0 . Two such map-germs f : R"--~ IR p and g: I R " ~ IR p are called equivalent (resp. topologically equivalent) if there exist germs of C~-diffeomorphisms (resp. homeomorphisms) h: IR"--~IR" and k: IRP--~IR p, both with source and target 0, such that the germs f and k o g o h are equal.
(1.1) Then, by a topological invariant in the general sense, we mean an invariant associated to a map-germ such that when two map-germs are topologically equivalent, their invariants are equal. We will also speak of a topological invariant

A Topological Invariant for Stable Map Germs 105
in a more restricted sense for a set o f map-germs. By this we mean that if two map- germs belong to this set and are topologically equivalent then their invariants will be equal. Next we further recall that a map-germ f : IR" --~ RP is said to be stable if for a representative of f defined in a neighborhood of 0, f~ : ~ / ~ IR p, and a mapping f2: q / ~ IRP sufficiently near f~ in the Whitney topology, there are germs of diffeomorphisms h: IR"-~IR" and k: IRP---).~_ p but with h(0), k(0) possibly different from zero such that k -~ ~ ~ h = f as germs at 0.
(1.2) The important invariant of a stable map-germ which has been established by J. Mather is the associated algebra. We denote by C~(R"), the algebra of map- germs IR"~, IR at 0, with arbitrary target, and ~ , the maximal ideal of germs vanishing at 0. Then, a map-germ f : IR" ~ IR p induces a homomorphism of a l ~ b r a s
f * : C~(IRP)---~ C~(IR")
by f * ( g ) = g o f
Then, the algebra associated to a map-germ f : IR" ~ IR p is defined by
Q ( f ) = c ~ (lR")/ f * (~ . ) C~ (IR").
If now f : IR"--, IR v and g: IR"---, IR p are stable map-germs with n < p then Mather has shown [1] that
Q ( f ) = IR {x 1 . . . . . xa}/I
where d = n - Rank D o f (in this case f is of type Ea) , and I is a m-primary ideal = 2 so that cS(f), which we define to be
6 ( f ) = d i m ~ Q ( f ) ,
is finite.
More importantly, he has shown that Q(f )~-Q(g) as R-algebras if and only if f and g are equivalent.
(1.3) Lastly, to complete the classification Mather has also given a method for constructing a normal form for a stable map-germ. We also review this con- struction because we will need it later.
We suppose that
A___ lR {x l . . . . . x , } / % , . . . , rb),
where I = (q . . . . . rb) is an m-pr imary ideal, is a minimal representation for A in the sense that I = 2 and q, ..., r b is a minimal set of generators of I. The integers a and b can be shown to be determined by A. We let i (A)= b - a. Also, it is possible to choose the generators r~ to be polynomials so we will assume they are. In addition, for each positive integer c > i(A) we can define a number #c(A) as follows:
we let s = a + c and consider (ql . . . . . q) a set of generators for I. Such a set exists because s = a + c > a + i(A ) = b.
Then we form the lR{x~ . . . . . x,}-module ~ / s ~ - m ax x m , (s copies). We similarly consider I ts) and the submodule L of ~ ) generated by the s-tuples

106 J. Damon and A. Galligo
(remembering that I ~ ~2):
~3xi . . . . . ~xi] i= 1 . . . . . a.
Then, the quotient module V = ~ / ( I ~ + L), being a quotient module of ~ ) / I ~) = (~,,/I) ~, as a vector space over ~ has finite dimension l=dim~V.
We let #~(A)=l+s.
Let O < n < p be integers such that p - n =c, c> i(A), and p>t~c(A). Then, we can construct a stable map-germ f : 1R" --,/R p as follows: let {v~, ..., vz} be a basis for V. Then vj = (v j, t . . . . . v~, 2)-
We can give f by:
f (x I . . . . , x~, t 1 . . . . . t t, z 1 . . . . . z , _ , _ t )=(y l , . . . , yp)
with l
y~=qi(x)+ ~, t j . t~ii(x ) 1 < i N s , j=l
Ys+j =" tj 1 ~ j ~ I,
yt+s+k=Zk 1 < k < _ n - a - l .
We remark that by assumption p < _ _ p p _ , ( A ) = t + s = l + a + p - n , this implies n > a + I and n - a - I= p - l - s, and we have that the mapping f is between the stated dimensions.
By Mather's result on infinitesimal stability this f is a stable map-germ at 0. Such an f is a normal form for a stable map-germ.
Mather furthermore shows that iff~: IR"-~ IR v is a stable map-germ with n <p and A = Q ( f 0 then p - n > i ( A ) and p>#p_, (A% so that there is an f in normal form: IR" --* IR p which is stable and Q ( f ) ~ A = Q (fl). Thus f and fl are equivalent. So that any such stable map-germ f~ is equivalent to an f in normal form.
For such an f in normal form we will speak of the tj as parameters and the z k as suspension variables.
We remark that in the case of a map-germ f : IR" -~ IR p at 0 (n-_< p) with 6 ( f ) < ov we can repeat the construction above for C~(R") and t = ( f l . . . . . fp) to obtain a stable map-germ
F(x, t): IR "+"-~IR p+m
such that F(x, O)= (f(x), 0). This is usually called the universal unfolding o f f
2. The Invariant m ( f )
Here we wilt give the definition of the topological invariant re(f) and establish its relation with the dimension of the algebra associated to f
(2.1) First we will define re(f). For this we first assume that f : IR"--~ IR v is a map- germ at 0 with f ( 0 ) = 0 . Let us choose a representative o f f defined in some neigh- borhood U of 0, which we shall denote by )~
Then, we define r e ( f )=maximum me2g such that for every neighborhood

A Topological Invariant for Stable Map Germs 107
V of 0 in U, there is a y~N. v such that the number of points f - l ( y ) n V l = m . If no such m exists we let m(f)= oo.
We observe that re ( f )= m ( f 0 for f~ another representative of f defined in a neighborhood D), because there is a neighborhood W such that flW--j~l ~; then we have for all V= W, I f (Y)n V I= IJ~(y)n V I with y arbitrary. Then, we let re(f) be this common value re(f).
Definition. We call re(f) the real multiplicity o f f
(2.2) Lemma. The real multiplicity is a topological invariant (in the general sense).
Proof By definition of the topological equivalence of say f and g, f and k o g o h are equal as map-germs for appropriate h and k. Then, we can choose representatives for these germs which are also denoted by, f, g, k, and h and neighborhoods of 0 in N n and IR v, U clR", U1 c lR" and WeN. v, W~ c lR p such that the following diagram is commutative with h: U - , U~ and k: W ~ , W~
U 1 ~ , W
U I , i ~ .
This follows by the definition of equality of germs and the continuity of all maps concerned.
Then, if V i s a neighborhood of O in U, and ysW~
f - l ( y ) n V = h - X og-1 ok-l(y) n V
= h - ~ ( g - t ( y 0 n V 0
where y~ = k -~ (y) and ~ = h(V). Thus,
I f -~(y)nVt=tg-l(yO~VIj
as h is homeomorphism. As h: V--ol/] and k: y~-oy~ are bijections, we conclude that m(f) = m(g).
Our interest lies in stable map germs; here the real multiplicity is especially useful because, as we shall see, it is always finite.
We will, in fact, show this while actually computing m(f) from another known invariant 6(f).
(2.3) Theorem. I f f : IRn--~lR p is a stable map-germ (n<p), then in order that m(f) = ~5(f), it is sufficient that for some integers k ~ l there is a map-gelwa g: ~,k __, 1Rz at 0 such that Q(g) ~- Q(f) and re(g) > ~(g)(= 6(f)).
Part of this theorem follows from the following result which can be proven using algebraic geometry; however, there has also recently appeared a nice proof using the Malgrange preparation theorem in [Golubitsky and Guillemin: Prop. 2.4, Chap. 7].
(2.4) Proposition. Let f: IR"-~ ~v be a map-germ at 0 (not necessarily stable) such that 6 ( f ) < ~ , then m( f )< f ( f ) .

108 J. Damon and A. Galligo
Proof Thus, we have to prove that if there is a single map g: ]Rk---t'~J with Q(g)~-Q(f) and m(g)>6(g) then m ( f ) > 6 ( f ) when f is a stable map-germ f : R " ~ IR p. For this, we use the following proposi t ion which says that for stable germs f, re(f) really only depends on Q(f).
(2.5) Proposition. Let fl : ~" ' --~ Rm and f2: ~n2 ~ ]Rpz be stable map-germs at 0 with Q(fO~-Q(f2)(ni<p) then m(fO=m(f2).
Proof We will use notat ions and results recalled in paragraph 1.
Let Q ( f 0 - Q (f2) ~- A ~ R {x 1 . . . . , xa}/( q . . . . . rb) be a minimal representation. We are going to construct first what we will call a minimal unfolding: if v 1 . . . . . v 1
[ rl, ,Orq is a basis over IR for ~tb)/I(b)+L with L generated by \Sxi ... 8xi] i = 1 . . . . . a,
then we have F, the minimal unfolding, given by F(x 1 . . . . . x , , t a . . . . . t t)= (Yx . . . . . Yt+l) with
l
l <_i<_b yi=vi q- E tjvij j=l
l <=j<=l yb+j=tj.
It follows from the theorem for the normal form due to Mather that the C ~ equivalence class of F only depends on A. Next, we construct a normal form for f~. Let q = p ~ - n 1, then we choose a + q generators for I, (r 1 . . . . . r b, 0 . . . . . O) with a + q - b zeros. The theorem for the normal form shows that a + q - b > O. Then, we consider ~(a+c')/I("+cl)+L1.
Here L~ is generated by
8x i .... 8xi' 0 , . . . , 0 i= 1 . . . . . a.
Thus, ~(a+,)/ l( ,+c~)+ Lt ~_ ~(b)/I(b) + L (~ ~r c~-b)/l(,+c~ -b). Thus, if m t . . . . . m~_ (6 = dimRA) is a monomia l basis for re~I, the maximal ideal of A, then
(v,; O) . . . . , (vt; 0), (0; m, , 0 . . . . . O) . . . . , (0 ; m a _ l , 0 . . . . , 0 ) ,
(0; 0, m 1 . . . . . 0), . . . , (0; 0 . . . . . m~_l)
is a basis over IR and we have a normal form for f~, F 1 : IR "~ ---, IR m with parameters
tj(l<j<=l) and s~ , t~( l<~_<6-1 and l<=fl<__a+q-b)
and defined by:
F l ( x l , . . . , Xa; t l , . . . , t t ; St , . . . , S~_ La+c~_b ; Zl , ' " , Z , ~ _ a _ t _ O _ l ) ( a + c , _ b ) )
= (Yl . . . . . Yp) ~ - t
y~=r~+ ~ tjVij l <_i<_b, j = l
Yb+~ = tj 1 <j < 1, 0-1
yb+z+~= ~ s,,r l < f l < a + q - b , e = l
Ya+cl+l+(p_l)(f_l)+c~=S~, # 1 <-~<<_6- 1,
Ya+c,+t+(a+cl_b)O_l)+k=Zk l < - k < - n - a - - l - ( 6 - 1)(a+ q - b ) .

A Topological Invariant for Stable Map Germs 109
That F 1 is a normal form is equivalent to saying that F 1 and f~ are C ~ equivalent. Thus, re( f0 = re(F1).
Next, we will show m(F1)=m(F ). For this we consider neighborhoods of 0 in IR "1 of the form: U 1 x U 2 with U l c l R a + l = ( x , t ) and U 2 c R " l - " - t = ( s , z ) . By the definition of m(F O, there is a y=(y',y") with y'elR b+l and y"elR w-b-l, such that IFl-~(y)c~ U 1 x U2[=m(Ft). Then, Fla (y', y")= (x, t, s, z) such that (x,t) satisfies F(x, t )=y ' and if (x, t, s, z)e U 1 x U2, then (x, t)e U 1 .
Finally as t , s ,z are uniquely determined by y=(y',y"), there are m(Fx) dif- ferent (x) such that (x, t)e U~ and F(x, t )=y ' .
As this is true for any neighborhood U 1 c lR "+b we have rn(F)>m(F1). How- ever, if V is a neighborhood in IR"', then Vc~ IR "+b is a neighborhood, and thus, there is a y'elR b+z such that [F-X(y')c~ Vc~IR"+1[=rn(F).
Then, if (x, t )eF- l (y ' )c~ VnlR "+l, (x, t, 0, O)sFl-l(y)c~ V; thus
[F~-~ (y, O)n Vl >re(F).
As V was arbitrary, m(FO>m(F ). Thus, m(FO=m(F ). By a similar argument, m(F2)=m(F ) for F 2 a normal form for f2.
Thus: m (fl) = m (F 1) = m (F) = m (F2) = rn (f2) and the proposition is proven. As m ( f ) is independent of a stable f with given Q (f), it is enough to show re(f)> 6 (f) for one such f.
However, we do have a map-germ g:IRk---,lR t such that m(g)>6(g) and Q (g)~-Q(f). Then, g has a universal unfolding G(x, t), so that Q(G)= Q(g) and G(x, 0) = (g (x), 0). Then, exactly repeating the argument used in showing m(FO>m(F ), we have that m(G)>m(g). Thus, G is a stable map-germ with Q(G)=Q(g)~-Q(f) and then m(G)>m(g)> 6(g)=6(G).
Thus, as m(G)<=6(G), by the first proposition we have m(G)=6(G); and since Q(G)~-Q(f), by the second proposition m(f)=6(f). Q.E.D.
Thus for any algebra A of finite dimension, whether a stable f with Q(f)~-A satisfies m ( f ) = 6 ( f ) only depends on A and not the particular f.
For constructing such a g, we use ideas which have been used for constructing deformations of ideals.
Given an ideal I = (fl . . . . . fr) c IR {Xx . . . . . xk}, a deformation of I is a mapping f:~xk+n---~]Rr such that F(x, 0 ) = ( f l ( x ) . . . . . s We can write F (x , t )= (F 1 (x, t) . . . . . F r (x, t)).
(2.6) We are especially interested in a particular type of deformation.
Definition. We say that the deformation F: IR"+k--,IR r has q zeros near-by zero if given a neighborhood ~ of 0 in IR" and e>0 . There exists toER k with [Itoll <~ such that F(x, to)=0 has q solutions in ~ .
Given a deformation F(x,t):lR"+k--,lRr of f, we can construct F(x,t): lR"+k-*lR~+k by F(x, t)=(F(x, t), t).
P is, in a sense, the graph of the deformation and corresponds to the idea of an unfolding of f (though generally not universal). It is easy to see that if F has q zeros near-by zero, then m(F)>q. From this together with our earlier results we have

t 10 J. Damon and A. Galligo
(2.7) Corollary. Let f : N"---~IR p be a stable map-germ (n<p) whose algebra has a minimal representation.
Q ( f )~- IR { x 1 . . . . . x,} /( q . . . . . rb).
Then, m ( f ) = f ( f ) if and only if that there exists a deformation R(x, it) of r(x)= (r 1 (x) . . . . , rb(x)) with 6 ( f ) zeros near-by zero.
Proof Sufficiency follows from the above.
If m ( f ) = f ( f ) , then the universal unfolding of r, /~: ]Ra+k-~IR b+k, where R (x, t )= (y, t), induces a map by projection onto the y coordinates
R: lR"+k-* ]R b
(x, t)--* y .
Then, by the preceding proposition, m ( R ) = m ( f ) = 6 ( f ) .
Then, for a given neighborhood of 0, there are (y, t) close to zero such that /~-1 (y, t) has 6( f ) points in the neighborhood. Then,
R ( x , t ) - y = 0
has 6(f) solutions for these values of y, t with x in a neighborhood of 0. Thus, the deformation of r(x), with parameters t~lR k and se}R b, R ( x , t ) - s , has 6( f ) zeros near-by zero.
(2.8) Notations. We denote by re(I) the common value of the real multiplicity re(f) of all map-germs f with given Q ( f ) = I R {Xk}/I.
(2.9) Proposition. I f the m-primary ideal I = (r 1 . . . . . rb) ~ ~ {Xk} can be deformed into a family of ~-primary ideals I t = (R 1 . . . . . Rb) with the same colength 6 (It)= ~ (I) and such that for t 4= O, I t satisfies the hypothesis of Corollary (2.7), then m (I) = 6 (I).
(2.10) Lemma. I f f : U~IR"-~IR m is a representative of a map-germ at O, such that there are x arbitrarily close to 0 in U with m(fx) )=k (where fx) denotes the germ o f f at x), then m(f)>=k.
Proof of the Lemma. Let V be a neighborhood of 0 in U; we can find an x ~ V and a neighborhood Is] of x with V 1 ~ V such that m(fx))=k. Then, we can find a y such that If- l(y)c~ Vll=k. Thus if- l(y)c~ Vi>k and m(f)>_k.
Proof of the Proposition. Let us denote by F(x, t, s) a representative of a universal unfolding of
~ " xIR ~ lRb xlR
(x, t)-o (R (x, t), t).
This is also, for t o small, a representative of a universal unfolding of:
I R ~ i R b
x-+ R (x, to).

A Topological Invariant for Stable Map Germs
Now the germ of F at (0, t o, 0), F~o ' to, o), is stable and has algebra
IR {x, t - t o , s}/(F(x, t, s)) - IR {x}/Ito
thus m(Fto ' ,o, o))=6(I); then, by the lemma, re(F)=6(1).
111
3. Stairs and Deformations of H-Primary Ideals in IR {xl, x2}
In this section, we recall results which can be found in [4] and [9], and review in detail the proof of Theorem 3.8 (see [4] w 4), which gives part of our main result.
First we order N k by the reverse lexicographical ordering: let c~=(ct I . . . . , ek) and fl=(fll . . . . . flk)eNk; then
c ~ < f l ~ m , l<_m<k
such that
ek=flk . . . . . %+a=f lm+l and ~m<fl.,.
(3.1) Definition. We call the order of a series f = ~ 2 , x ' e l R {Xk}, which we ~Enq k
denote by o(f) , the first multiindex of N k such that 2,:t:0. Next, we define the stairs of an ideal I of 1R {Xk} to be the subset E(I) of N k which consists of the orders of the series of I.
Then, the boundary of E(I) is the smallest subset F(I) of E(I) such that
E(1)= L) (~+N~) �9 ~ F ( I )
Note that if c~eE(I), then c~+ Nk~ E(I) because there exists a series f e I such that o ( f ) = e , and for every f l e N k, xa . f e I ; then o(x ~ . f ) = e + f l e E ( I ) .
I
FII)
8
(3.2) Proposition. I f I and J are two ideals in IR {Xk} and I c J, then we have E (I) c E (J); but in general F(I) r F(J).
The complement ]NR-E(I) is finite if and only if I is a m-primary ideal in IR {xk}.
112 J. Damon and A. Galligo
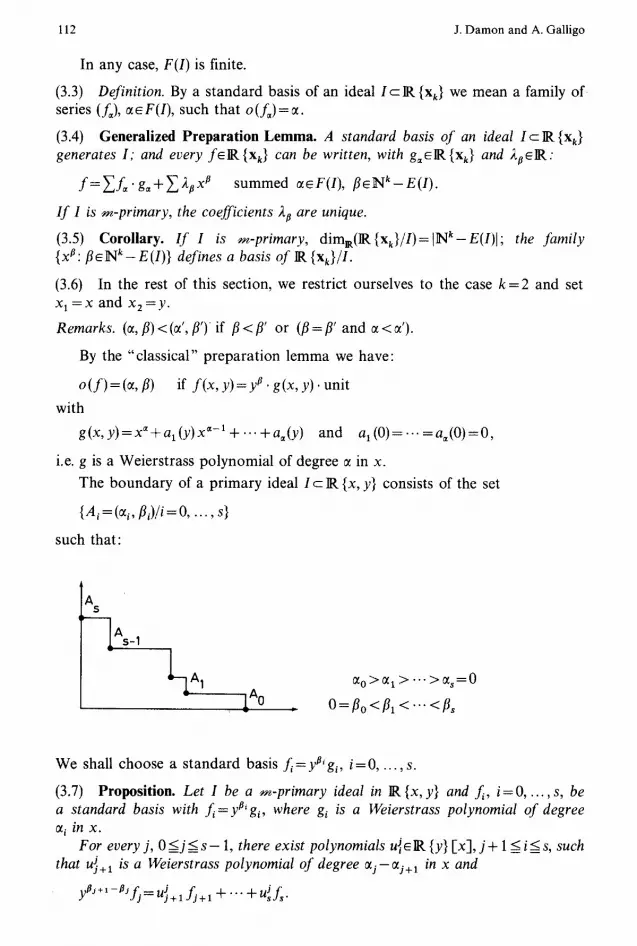
In any case, F(I) is finite.
(3.3) Definition. By a s tandard basis of an ideal I c l R {Xk} we mean a family o f series (f~), ~ F ( I ) , such that o ( f~ )=~ .
(3.4) Generalized Preparation Lemma. A standard basis of an ideal I c IR {Xk} generates I; and every f~lR{Xk} can be written, with g, EIR{Xk} and 2a6IR:
f = ~ , f ~ . g , + } - ' 2 p x t~ summed ~ F ( I ) , f l~Nk-E(1) .
I f I is m-primary, the coefficients 2t~ are unique.
(3.5) Corollary. I f I is m-primary, dim~(lR{Xk}/I)=lNk--E(I)l; the family {xt~: f l~N k - E(I)} defines a basis of IR {Xk}/I.
(3.6) In the rest of this section, we restrict ourselves to the case k = 2 and set xl = x and Xz --: y .
Remarks. (c~, fl) < (c(, fl') if fl < fl' or (fl = fl' and ~ < c().
By the "c lass ica l" p repa ra t ion l emma we have:
o ( f ) = (~, fl) if f (x , y)= ya. g(x, y). unit
with
g(x ,y )=x '+al (y )x=- l+ . . .+a=(y) and a l ( O ) . . . . . a=(0)=0,
i.e. g is a Weierstrass po lynomia l of degree ~ in x.
The bounda ry of a p r imary ideal I c l R {x, y} consists of the set
{A i =(~i, fli)/i=O . . . . . s}
such that:
A s
I A s _
~o>~1 > ... > 0~s=0
1_% 0=/~o</~ <"-<&
We shall choose a s tandard basis f~=YP'gi, i = 0 . . . . , s.
(3.7) Proposition. Let I be a m-primary ideal in lR{x,y} and fi, i = 0 . . . . . s, be a standard basis with fi=yP'gi, where gi is a Weierstrass polynomial of degree ct~ in x.
For every j, 0 < j< s - 1 , there exist polynomials u~ lR {y} I-x], j + 1 < i< s, such that uJ+ 1 is a Weierstrass polynomial of degree ~j-ctj+ 1 in x and
ypJ+,-~Jc-,,J c ,- . . .+u~L. ~j--~j+l .J j+l --

A Topological Invariant for Stable Map Germs 113
Proof. This proposition follows from the classical division theorem; for the details see [4].
Now we can construct the deformation we seek.
(3.8) Theorem. Let I be a ~r ideal in IR {x, y}, with 6(I)=dim~(IR {x, y}/1) and (fo . . . . ,f~) a standard basis for I; then there exists a deformation (Fo, ..., F~) with ~(I) zeros near-by zero.
Proof We first note that the equation of Proposition 3.7 yields:
(j) - - J --flJ+luJ yflS--flj+l J g j - - U j + l g j + l ..}_y#j+2 j + 2 g j + z ' J r - "'" + Usg s
(and g~= 1). We are going to construct a deformation in the form
#j Fj= I- [ (y -rh)Gj , O<=j<=s,
1=1
where ql are parameters in the deformation and G~(x, y, q, e) is a deformation ofgj. We define the Gj by decreasing induction on j using the equation (j) and
beginning with Gs= 1. We first deform u~+ 1 (deg(u~+l)=c~j-ej+a) to
~j--~j+l-- i
~]+1 = uj+l + ~" c}"'x" (c}"' parameters). m=0
Then, we define flj + 2 fl$
Gj=qlj+lGj+l+ 1-I (Y-rlt)uj+2Gj+2+'"+ I-I (Y-qt)u~G, �9 /=fl j+l / = ~ j + l + l
We first observe by induction, that when c~)=0 and ql=0, Gj(x,y,O,O)=gj; thus, Fj is a deformation of fi" We will show that there is an open subset of the space of the (y, q, c), which contains 0 in its closure, such that for points in this set, Gj has 0~j solutions in x. Furthermore, each G~ is a Weierstrass polynomial in x so for a point (y, r/, c) near zero, the solutions in x will be close to zero. To prove this we use the well-known fact that
{(a 1 . . . . . a,) E ]R n I xn q- al Xn- 1 + . . . + a, = 0 has n distinct solutions}
is open (semi-algebraic) and has 0 in its closure. We consider the Gj when y = O, ~/= O. We obtain
Gj= x~J-~J+l+ ~ c}")x m .Gj+ 1 l_~j<=s-1. m=0
s--1
Thus, if Hj = x ~-~+' + 2 c}"' x era), we have Gj= I~ Hk" Now the set of k=j
{c~" ) l j<k<s - 1, 0<m<~j - c~ j+ 1 - 1}
s--1
such t h a t I-[ Hk has ~ - e i distinct roots is open with 0 in its closure. Hence, k=j
for any point c for which Gx has e~ distinct solutions, we have by continuity that

114 J. Damon and A. Galligo
there is a neighborhood of (0, c) in (y, t/, c) such that Gj(x, y, t/, c) still has ~j distinct solutions for each j. Thus, it follows that
{(y, t/, e ) leach Gj has c~j distinct solutions in x}
is open, non-empty, and has 0 in its closure.
Remark. In fact, this set is semi-analytic; and it is possible to choose an analytic curve (g(t), e(t)) so that for sufficiently small y, (y, r/(t), c(t)) will be in this set. We can use this with the deformation {Fj} to construct a deformation only depend- ing on one parameter t.
We now show that the deformation (Fj) has the desired properties. We have that the
r
F/= l~ (Y- t/,)G,/ t=1
will vanish if Y=t/t I N l<=fl i or Gj(x, y, tl, c)=O.
fls - - f ls - 1
A s
IAs- 1
As- 2
- J' l
I A
0 ~- O; s O~s- t Cts - 2 0~0
Now, by choosing c and then a neighborhood of 0 in (y, t/) so that each Gj has c~ distinct solutions we can count the solutions. The key to counting solutions is to observe that if G i = O and Y=t/t, f l i < l < f l i + l , then inductively all Gj=0, j>i; for such a Gj is a sum of terms which have as a factor either G~,, i < f <j , or ( y - th), fli < l=< fl/+ 1. Then we obtain the following 6 (I) points (Recall that there are 3(1) points under the stairs by (3.5)):
1) ~x~_l(fl~-fl,_l) points where Y=t/t, fl~-l<t<=fl~ and x is a solution to G~_ 1 =0.
Then, by examining the inductive definition of Fj we see all Fj vanish for these points.
2) cq_2(fl~_l-fl~_2) points where Y=t/l, fl~-2<l~-fl.~-l, and G~_2=0. By definition of F i and the inductive definition of the G~ we have all Fj vanish. s - l ) ~o(fll --fiE) points where Y-t/s, 1 ~=l~fll, and Go=0. Again, all Fj vanish.
As a corollary, we have part of our main result.
(3.9) Corollary. For all stable map-germs f : lR"--~ lR p of type ~2, the dimension of the associated algebra ~(f) is a topological invariant.

A Topological Invariant for Stable Map Germs 115
To generalize this result in the next section we need the following refinement of the preceding theorem.
(3.10) Proposition. I f {fi} is a standard basis for I and
I' = (f~," " , f~-I , fk+l, ..., fA ~ I ,
then there is a deformation {Fi} of the {fi} with 6(1) zeros near-by zero such that {F 1 . . . . . Fk_ l, Fk+ 1 . . . . , F~} has 6(1)+ 1 zeros near-by zero.
Proof We first note that for every 2(x, y), p(x, y), 1 - 2 x - # y is invertible. Thus, as Lr L - 2(x L)-u(yL)r Thus,
Lr yL,fo ..... L-I , fk+~ . . . . , f~) = J.
We will actually construct a deformation {Fi} of J with 6 (I)+ 1 zeros near-by zero such that there is a deformation of fk, FR, such that {Fi} w {Fk} is a deformation of I with 6 (I) zeros near-by zero.
Using the same notation as in the preceding theorem, we use for our deforma- tion
th F i = H ( y - q t ) G i i * k ,
/=1
//k+l
l= l
F~+2 = 1~ (Y-q,)" (X-Xo)Gk l= l
where for Gi,
G j=~ll] + a
(=(Y--q#k+l)Fk),
(=(X--xo) Fk)
i<k, Pk ,Ok + 1
G j + I + ' " + I ] (Y-th)Wj(X-Xo)Gk+ [J (Y- th) VjGk l=flj+l+l 1=~3+1+1
+ + H ( y - ~ , ) . u ~ . l= f l j+ l+ l
u~=xwj+yv j (after division by x, the remainder is divisible by y); if j = k - 1 , Wk_ 1 is Weierstrass polynomial of degree ak-1--~k--1. Then, we can check that together with
#k
Fk = H (Y -- rh) ak, /=1
we have 6(1) solutions. In addition, without F k, we have the additional solution
y = r / # k + l , x : x O.
4. Description and Deformation of Some m-Primary Ideals in ]R {Xk}
The construction we briefly described in Section 3 corresponds to the construction of a fiat deformation of the "point" (0, R {x, y}/l) in R 2 into 6(1) "simple points".
116 J. Damon and A. Galligo
Unfortunately for us, in [8] A. Iarrobino has shown that for k > 3 in general the "points" of Rk (0, ~,{Xk}/I ) do not admit flat deformations into 6(1) "simple points". So to generalize the preceding method for k > 3 we will have to place a restriction on the ideal I, namely, our condition (4.11)(d).
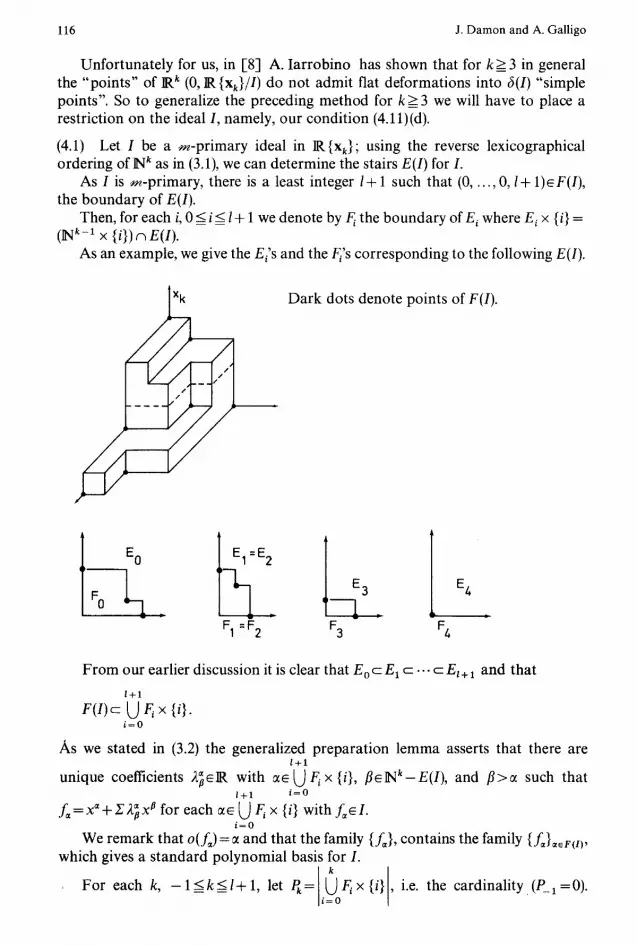
(4.1) Let 1 be a m-primary ideal in lR{Xk}; using the reverse lexicographical ordering of~l k as in (3.1), we can determine the stairs E(I) for I.
As I is m-primary, there is a least integer l+ 1 such that (0 . . . . ,0, l+ 1)~F(I), the boundary of E(I).
Then, for each i, 0_< i_< l+ 1 we denote by F~ the boundary of E~ where E i x {i} = (1N k-1 x {i}) n E(I).
As an example, we give the Ei's and the F:s corresponding to the following E(I).
Dark dots denote points of F(I).
" IS'" 'Fo~ E3
- FI :F2 F3 -
E 4
Ft,
From our earlier discussion it is clear that E o c E 1 c . . . c Et + 1 and that
/+1 F(I )c ~ F/• {i}.
i=0
As we stated in (3.2) the generalized preparation lemma asserts that there are /+1
unique coefficients 2~MR with ~ U F i x {i}, f l~ ,k - -E( I ) , and fl>c~ such that /+1 i=0
f~=x~'+7-,2~x # for each ~ U F~ x {i} with f ~ I . i=O
We remark that o(f~)= ~ and that the family {f~}, contains the family {f~}~e(i), which gives a standard polynomial basis for I.
=ok For each k, - 1 < k < l+ 1, let Pk = ~_JF~ x {i} i.e. the cardinali ty (P_I =0).

A Topological Invariant for Stable Map Germs 117
Then, we can rewrite the preceding family {s as { f j l l < j N P l + l } so that if P~-I <J--<P~ then o(J))=(c~, i) with ejeF~. Then, by the division theorem we can write fo r P~ _ 1 <J < P/,
fj=x~(fj(O) + Xkfjm + . . .+ X~-if f -i)) with fj(r)~lR{Xk_l}.
If we let
h~=fj~O)+xkfj(I)+'"+Xlk-J-lfj~l-J-" and g j = f S ~-j)
then,
_ _ i l - i f j - -Xk(hj+x k gj) with hj~IR{Xk} and gj~lR{xk_l}.
(4.2) Definition. We will refer to this family {fj} as a s tandard basis for I in the Xk-direction; and for 0 (_i~l we define I i to be the ideal in IR {x k_l } generated by { fj(o)ip / -1 <J --< Pi}.
We next give the propert ies of the ideals I i that we shall need.
(4.3) Proposition. I f I is a ~-primary ideal ~lR{Xk} with IiclR{Xk_l} defined as above, 0 <= i <- I, then
l) each ideal I i is a ,~-primary ideal in IR {Xk_l} ,
2) we have Ei=E(It) , Fi=F(Ii) and {fj(~ is a set of standard generators of Ii,
3) I o ~ I i ~ . . . ~ l l , 4) I t is independent of the standard generators {fj} used to define it.
(4.4) Remark. One impor tan t consequence of (2) for us is that if
ql = codim Ii( = dim~(IR (x k_ 1 }/Ii))
and
q = codim I( = dim~(R {Xk}/I))
l
then q = ~ q~. We will use this fact when we construct deformat ions of I with q ~=o
solutions near-by zero.
Proof of the Proposition. (2) Fo r P~-I <J--<Pi, fjt~ so that o(fj(~ Then as {c~jIPi_t <JNPi} is the bounda ry F~ of E~ then any element f l e e t has the form c~i+- ~, some P~_t < j < ~ and some ?,eNk-L Then, as I t is an ideal, c~jeE(It) implies c~j + "/~ E(It). Th us, E i ~ E(I~). Conversely, ifh e I t, then there exist gj e IR {x k__ t } such that h = 2 ; g J g ~ summed over P~-~<J<Pi- Then, ~=Y.g~f~eI and h = X~k(h+x~h~). Thus, we have o(h)=(o(h),i)eE(I) and so o(h)eE(l)r~(Nk-~x {i}), that is, o(h)sE i. Thus, E(li)c E t and we have equality. Tha t {fj(~ ~ _~ < j < P/} is a s tandard set of generators for I i follows from F(Ii)= F i = {o(f~)lP~_ ~ < j < Pi}-
For (1), we use the result (3.2) and the fact that
(N k -~ - E(Ii) ) x {i} -- (N k -~ - El) x {i} c N k - E(I)
which is finite. Fo r (3) we need the following lemma.

118 J. Damon and A. Galligo
(4.5) Lemma. Every f =x~gEI (with g~IR{Xk} ) can be written f = ~ g i f i summed over j,/]/-1 <J--<Pl+l, with gjelR {xk_l}.
Proof of the Lemma. We can write such an f as
f = x~(g(~ . . . . . Xk_O+Xk g(l)(x 1 . . . . . Xk)).
Applying the generalized preparation theorem we obtain:
where the first sum is for P~_, <j<P~ and the second is over flelN k-1 \ E i with fl '= (fl, i). Recalling that f. = x~ fifo)+ x~+, ~oj with q~elR {Xk}, we can write x~ gin)=
gj fJ + x~ +* g" + E 2p, x )r with g" = - • gj ~o a. Then,
U= Z g Ja + xlk+ X (gm + g") + Z 2lr xp'.
We can now inductively repeat this process for x~ + 1 (gin + g,,). If we repeat this I - i times, we obtain f = Z ga f~ + Z 2e' x~', where P~-I <J < P~ +1 and fl'r E(I) ((fl, i)r E(I) if f l • ] N k - 1 - - E(Ii) ).
However, we have f f je I . Thus, ZJ, e, xP'eI and o(Z2e, xe')eE(I ), which is impossible so we must have Z 2~' xe' =0. Thus, f = y ' gjfa as asserted.
Now, we prove that 1~cI~+ 1. We apply the lemma to Xkfj, P~_~ <J<Pi. We obtain Xkf~=~, g~f~, P/< r < Pl+ 1 with g, eIR {Xk_l}. Now we equate the terms with x~ +1 to obtain x~+ lfj~~ = x~ +1 Z g, f~o!, p /<r < P/+1 ; or f to,= Z g, #o) and f~o)e ii +1"
Thus, I~ c I~ +x as all of its generators belong to I i + 1. Lastly, we show that I~ is independent of the standard generators {f~}. If {fj} is another set of standard generators we want to show that for I i = (fj{d)'lP/_ 1 <J < P3, I~cli.
Then, by symmetry they are equal. However, we can apply the lemma to f j to obtain g = Z g, f~ P~-t < r < P~ +1. Again equating terms involving x~, we obtain x~ fj, o)' = x~ Z g, fr {~ P/-~ < r < Pi. Thus, fS ~ = Z g, f{o)6 I,.
(4.6) Remark. If we wish to vary from the standard generators for 1~ and choose ( o ) ~ Co) instead generators {j~ } then we can find f~eI of the form x~(f~ +x k UP). In fact,
(o) (o) < as we can write ~ = ~ g,f , P/_ a < r = Pi, we can choose for
fj = Z g, f , = x~(fj ~~ + Xk(Z g, Up,)).
(4.7) Remark. _ i t-i Iff j -Xk(h j + x k gl) is a standard basis in the Xk-direction; then we can assume that for each Jo, Pi-1 <Jo < P/, either g~o = 0 or g~o r (ga[J eeJo) + Ir
This is because we can first remove terms in x~. I~ from the fj. Then, if gJo-- ~ rjgj, we can replace f~o by J~o=fJo-~ rjfj. Then {fj[j4=jo} to {fJo} is still
J* Jo a set of standard generators and ~o = x~(/~jo ) and ~,~o = 0.
If furthermore, all h~ ~ ~ {x k_ x }, then also, h~o ~ IR {x k _ 1 }, so we do not disturb this property.
(4.8) Now we begin to describe the condition which we will need for our gene- ralization. We will, first of all, restrict ourselves to those ideals I with standard generators in the Xk-direction with hj ~ P~ {x k_ 1 }, that is, we can write
fj=x~(f~m)+x~-igl) with fj~o), gj~x{Xk_l}"

A Topological Invariant for Stable Map Germs 119
Furthermore, by the Remark (4.7) we can assume that gjor this holding for each P~_t <Jo < P~.
With this restriction in mind, we next define a deformation with a subset of zeros near-by zero of a specific form.
(4.9) Definition. Let A c N k and I c IR {Xk} be a m-primary ideal with deformation F(x, t) having re(I) solutions near-by zero. Then, we say that F has tAI solutions in the form of A if given e>0 , there is a family of real numbers [x}J)l<el<_i<_k, j = 0 , 1 . . . . and t such that {(x(1 j') . . . . . X(kJ~)t(j: . . . . . jk)GA} gives IAI of the re(I) solutions to F = 0.
(4.10) Remark. If I has a deformation with solutions of the form A, then I has deformation with solution of the form A:, for any A~ c A .
(4.11) Lemma. I f I:IR{Xk} is a m-primary ideal generated by monomials, then there is a deformation F of I whose solutions have the form Nk--E(I) with xl j) arbitrarily choosen but different.
Proof We first note that if I is generated by monomials then it admits a standard basis in the xk-direction formed by monomials. Then we proceed by induction on k. If k-- 1 the result follows because in IR {x} the only ideals are (x ~) 1 = 1, 2 . . . . .
1 and these have I-I (x - xl) as deformations. Ifk > 1 the ideals I o . . . . . I t corresponding
i=1 to I are generated by monomials in IR {x k _ ~ }. By induction, there exist deformations F~, 0__< i N l, having solutions in the form N k-~ - El. Then, the deformation F defined
1 /+1
by (F o, (x k - - X(k 1}) F 1 . . . . . H (Xk -- x~ '~) F~, H (xk - X~k'))) suffices. i=1 i=1
The restriction which we place on ideals is contained in the following:
(4.12) Definition. We say that a m-primary ideal I c lR {Xk} satisfies condition (d) if it satisfies the restriction (4.8) and if:
1) the standard generators of I in the Xk-direction corresponding to I~ for j > 0 are monomials,
2) I o has a deformation F(x,t ,s) such that the coordinates of F(x, 0,x~) belong to I, and given e > 0 there are t, s with Iltll <~ and Isl <e such that
a) F(x, t, 0) has m(Io) solutions near-by zero.
b) F(x, t, s) has solutions in the form N k-~ - E ( I O.
(4.13) Theorem. I f IcN{Xk} is a ~-primary ideal which satisfies condition (d), then re(I) = flU).
Proof Let Fo(Xk_. 1 , to, s) given by condition (d) and let
F1 (Xk-l, tO . . . . . Fl(Xk_ 1, tz)
be deformations of 11 . . . . . I 1 given by Lemma (4.11). We know that Fo(xk_ t , to, s) has solutions of the form IN k-1 - E ( I O. Also, we can choose parameters t i so that F~ have solutions which agree with the solutions of
F0 (Xk_ : , t o, S) on N k-1 - E ( I i ) c l N *-1 - E(I O.

120 J. Damon and A. Galligo
Then, consider the deformat ion of I with parameters t = (t o . . . . . h), (x~ 1) . . . . . x~ +1)), and s given by
I + 1
H (xk- 4')), i = 1
!
I-[ (xk -- x~')) F~ i = l
. (1)'~ E ( X k - - ' ~ k I 1 ,
Fo x k _ , , to, s - H (x~ - ~'/)) �9 i = 2 / + 1
The parameters x~ i) can be chosen so that s = H V-kt'~(t) -- ~k'~(~)~,' We proceed to count the solutions: i= 2
when . (1) X k = X k the equa t ions reduce to Fo(Xk_l , to ,0 )=0 which has % = IIN k-a - Eol solutions,
when Xk=X~ 2) the equat ions become F l ( X k _ l , h ) = 0 and Fo(Xk_l , to , s )=O which have ql = I Nk-~ ~ - E ( I1)] c o m m o n solutions;
we can repeat this for ~k--~k" _,,(3), ..., X~ ~+1) and we get respectively q3, ..., qt+l
c o m m o n solutions. Thus there are q = ~ q~ solutions. i = 0
5. A Generalization for Germs of Discrete Algebra Type
Section 3 allows us to construct deformations of ideals corresponding to germs of type X z. For discrete algebra types we also encounter germs of type s r > 2.
However, there is a special type of ideal which we call a tower (see definition below).
As we will be able to verify directly in Section 7, ideals corresponding to discrete algebra types are either towers or can be deformed to towers.
In this section, we will apply the method of the preceding section to construct deformations of towers.
(5.1) Definition. A m-pr imary ideal I c I R { x , y , z } will be called a tower in the z-direction if I c ~3z( = (x, y, z) 2) and 11 = ~3 .
The stairs of a tower will have the following form:

A Topological Invariant for Stable Map Germs 121
(5.2) Proposition. I f I is a tower, then m ( I ) = 6 ( I ) .
P r o o f We carry out three reductions to simplify the form of the ideal. We begin by recalling from (4.7) that such an ideal with 11 = ~3 can be written in the form.
( f i (x , y ) + ai z ~, x z + b z l, y z + c z t , z ~+1 )
where (fi(x, y)) = I o. We first perform a change of variables x' = x + b z t - 1, y , = y + c z z- 1, z' = z. Then,
x' z', y' z', z 'I+1 e l . Also, as fi(x, y)e(x , y)Z
fi(x, y) + a i z 1 - f i (x', y') + a' i z'* mod (x' z', y' z', z't + 1).
Thus, I = ( f i ( x ' , y ' ) + a ' i z ' t , x ' z ' , y ' z ' , z ' t + l ) . We will write x, y, z, a i instead of X', y', Z', a' i.
Secondly, we can assume that the f~'s form a s tandard basis for the ideal I o c l R { x , y }, because by (4.6) if (g j (x ,y) ) is a s tandard basis for I0, we have gj = ~ uji.l~ and
u j~(x, y) (.~(x, y) + ai z l) ~- gj(x, y) + dj z t mod(x z, y z, z z + 1).
Then I ---(z t+l, x z , y z , g i+d j z t ) .
Lastly, with the notat ions of (3.1), as O( fo )<O(J~)< ... < o(fr), if all the a i are not equal to zero, let j be the first integer such that a j , 0; by subtract ing multiples of f j from the generators fi, i > j , we can assume that (fi) is a s tandard basis and that for all i#:j , a~ = O.
Thus we have:
I = ( z l+t, x z , y z , fo . . . . . ~ - 1 , f i + a j z t , f ~ + l . . . . . J~).
Now, as z ' r f j r . . . , f j - , , f~+, . . . . . f,).
By Proposi t ion (3.10) there exists deformat ions Fi(x, y, t) of the f~'s having 6(lo) c o m m o n zeros near-by zero and such that F o . . . . ,Fj_.I ,F}+ I . . . . . F, have a (b(I0)+ 1)th-zero near-by zero, (x o, Yo), where Fj does not vanish. We can choose
1+1
different zi, i = 1 . . . . . I + 1, near-by zero such that Fj(x o, Yo, t) = I-I (zl - zi). Then, we claim that the following deformat ion of I will suffice, i= z
/+1
[ I (z - zi), (x - x 0)(z - z l ) , ( y - Yo)(z - zt) , Vo, . . . , ~ _ 1 , i = I
, ,+1 ~ F a.]
This is just the deformat ion which is given by T h e o r e m (4.13) once we know that 1 satisfies condi t ion (d). However, I~ = ~3 for i > 1 and the deformat ion
V 1 . . . . , F j _ t , F j + a j s , Fj+ 1 . . . . . V r
has qo solutions when s = 0 , and has an addi t ional solution (Xo, Yo, to) when ajs = - ~ ( X o , Yo, to)'
This is valid even if aj = 0, except that we then choose (xo, Yo, to) to be one of the b(Io) solutions for (F o, F 1 . . . . . Fr), and we are done.

122 J. Damon and A. Galligo
(5.3) We now examine two types of ideals which also occur as discrete a lgebra types and which we can view as generalized towers in k variables (see Section 6).
Proposition. The jb l lowing ideals are such that m(I) -- 6(1)
1) I = ( x ~ +1, x~ z 1 < _ i N k - I, x l x J 1 < i < j < k ) .
2) I = (x~ + 1, x~ + ~ x~ 1 <- i<_ k - I, x~ x i 1 <= i < j <= k) with ~ = +_ t or O.
Proof . Since (1) is generated by m o n o m i a l s it can easily be deformed with 6(I) zeros near -by zero, namely
/ + I H (m'l (1) (2) (I) (I) (Xk--x k "),(Xi--Xi )(Xi--X ~ ),(xi--X, )(Xj--Xj )
m = l 1 < _ i < k - 1 l < i < j < = k
where for each i, 1 <= i < k, the x~ "~ are a rb i t ra ry but different; and to de fo rm (2) we procede by induct ion on k, k = 2 is easy since it is an ideal in lR{x, y}: we deform (y/+l, X2 + g yl, x y) to
, + 1 ) , ,+t ) [ I O"- Y, (x - a) (x - x a) + e 1-I ( Y - Yi), (x - x 3)(y - Yl ) t = 1 / = 2
r when y = Yl there are two solut ions say x = x 2 and x = x 3, when y = y~ 2 < i < l + t there is one solut ion x = x 3. So re(I) = 6(I) = 2 + I.
y
J+1
2
If k > 2 we can suppose that Ck_,4=0 and we set e '~=--~k_le~l<-- i<--k--2 then we have
i_t.l+l X 2 1 . ~ . e k _ t l 2 t 2 ~ 2 - - I ,2~ k , Xk, Xk -2"~ t ; k -2Xk -1 , ' , , , X 2 + ~ i X k _ t , xlxjl<--i<j<--k)._ _
We consider the ideal I ; c IR {xk_l}
io=(Xk2 2 , z ' X ,Z+ , 2 1 N i < j < _ k - 1 ) . -1-'~/.,-,I X k - l ~ " " ~ gl X k - l ~ X i X j - - - -
3 t t Then, x k_ 1 e 10 and I o is of type (2) with k - 1 and 1 + t = 3.

A Topological Invariant for Stable Map Germs 123
Thus, we can assume by induct ion if ~k-2 4= 0, by applying (1) if all the gi = 0, that I'O admits a deformat ion F~ having: 6(1'o)-2 zeros with Xk_ 1 = X(kl~_l, one zero with
.~ _ ,.t3} We denote the coordinates of this X k _ l = X k - l " (2) and one zero with ~ k - 1 - - ~ k - I last zero by x~ = xl 3). Then, the following deformat ion o f / w i l l suffice:
l+l
l+l \ H (x~l)_x(k,.)), Fo ,, (Xk_Xktl))(Xi _ x l 3 ) ) l < i < _ k _ l } ~ ~ k ~ ~
m=2 /
if we choose x~ m) such that
l+l gk-1 ~ (X~) -v (m) i - (v (3 ) - -v( : ) ](v(3) --X(k2_)l). "~k ] - - ~ k - 1 ~ k - 1 ] ~ , ' k - 1
m=2
Indeed, it is a deformat ion of I and when x k = Xtk n the equations reduce to
( X k - 1 - - X(1}- l ) (Xk-1 -- X(k 2)1) = f o = 0
which has ,5(I'O)- 2 + 1 solutions; when x k = x~ m) 2 < m-< l + 1 there is one solution x i = x l 3) l < i < k - 1 . So the preceding deformat ion has 6 ( l o ) - 1 + l = 6 ( I ) zeros near-by zero.
6. Towers in ~ {xk} for k => 3
In this section, which is not necessary for paragraph 7, we use ideas suggested in the preceding section to give a definition of towers for ideals in IR {Xk} k > 3. We know that if I c ~ {Xk} is a m-pr imary ideal with 11 = ~k then we can write:
I = ( f l . . . . . f~_l , f~+ ax~,f i+l . . . . . fr, Xlk +1, x ixk 1<= i<k)
where ( f l , - . . , f~- i , J ) , f ~ + l , - . - , f ~ ) = I o . Now, if a = 0 or if there is a deformat ion f ( x k _ l , t ) = ( F 1 . . . . . Fr) of I o with qo zeros near-by zero such that (F 1 . . . . . F j_I , Fj+ 1 . . . . . F~) has a qo + 1 zero near-by zero, then
(el . . . . . r j _ l , F j + a s , Fj+ 1 . . . . . Fr)
is a deformat ion which satisfies condi t ion (d). Thus, m(I )=6( I ) . This leads us to define
(6.1) Definition. A ~,z-primary ideal I c l R { x k } is a tower in the Xk-direction if 11 =/~r and m(Io)=6(Io) such that when we write
I--(f~ i=gj, f~+ax~, x~ +1, x ix k I <=i<=k)
then there is a deformat ion (F/) of ( f i )= Io with qo solutions near-by zero, and so that (F 1 . . . . . F~_ 1 , Fj+ 1 . . . . . F.) has a q o + 1 zero near-by zero.
We see that this agrees with the previous definition for ~ . { x , y , z } upon identifying x, y, z with x 1 , x 2 , x a .

124 J. Damon and A. Galligo
Then, because such a tower satisfies condition (d) we have:
(6.2) Proposition. I f l c l R {xk} is a tower, then m( I )=6( I ) .
Proof. Immediate from the preceding discussion.
Now, we proceed to describe a method for inductively showing the existence of such a deformation (Fi).
(6.3) We inductively construct a special type of ideal as follows: when k=2 , we let {f/(x 1 , x2) } be a standard basis for a m-primary ideal J(2)cIR {xl, x2}. Then, we let f(2) be a subset of the ~ which consists of minimal generators. Then we construct an ideal
J(3)= (fi(2) i4:j, j~(2) + a x I , a2 x l , x 1 x 3 , x2x3) j 1 3
where either a 1 •0 or a 2 , 0 . We denote the f~2 ) i# j , f )2 )+a lx~ ,a2x~ by f~3).
Now, suppose we have inductively constructed an ideal dCk-l~clR{Xk_~} given by
J ( k - l ) - - ( ~ i i f k - 1 ) , �9 XaX b 1 < a <b<k-_ 1, (a, b)=t= (1, 2)).
Then, we construct an ideal in IR {Xk} by
t=t=J,J), +ClXk ,C2Xk ,X~X b l < = a < b < k , ( a , b ) ~ ( l , 2)).
For these ideals we can prove:
(6.4) Proposition. I f I is constructed as above, then t is a tower and therefore m ( I ) = 6 ( l ) .
Proof. We will inductively construct a deformation for such I, (F~), which satisfies two properties:
1) with this deformation, I satisfies the condition for being a tower,
2) if Fi corresponds to f~(*) then (F 1 . . . . . /7/_1, F~+I . . . . . F,) has a q + 1 zero near-by zero.
We begin our induction with the case k = 2. For this, we use a generalization of proposition (3.10).
(6.5) Proposition. Let {f/} be a standard basis for a ~ -pr imary ideal t c l R {x, y}. Then, there is a deformation F = (Fi) o f I such that F has 6 (1) zeros near-by zero and fo r any j with
f~r , f2 , - - . , f~- , , -~+t . . . . . s
(171 . . . . . F i - , , ~ + 1 , . . . , g ) has a a(I)+ 1 zero near-by zero.
Proof. The proof consists of applying the method of proposition (3.10) to each j such that
f j~ (ft . . . . . f j-~ ,fj+~ . . . . . fr). If we have
gi-- Uf+l gi+l r "'" ~ y " ~ j l h j * " ' " ~ r ~st~s

A T o p o l o g i c a l I n v a r i a n t fo r S t a b l e M a p G e r m s 125
then, as fir i4:j), u]e~ 2. Thus, we can obtain u~=xw~+yv~. Then, we take the usual~deformat ion except that u i, becomes (x-x~))vS+(y-~tl, +l)w~; unless
�9 . . a , . , j
j = i + 1, m which case, it becomes (X - x~ )) V/+ ( y - t/,j + 1) w) where
# i + 1 - 1 ' /ji E cmy'.
m = O
Then if we remove Fj, we get the extra zero (x~), t/~+l ).
This propos i t ion gives the result for k = 2 . Suppose by induction that the result has been established for all j<k . Let {F~} be the deformat ion for the tower
(fi (k-l), x~x b 1 <a<b<=k- 1, (a, b)+(1, 2))
which satisfies bo th properties. Let
i= ( f{k -1 ) i , j ; fj?-l) +qx~ , CzX~; x ,x b 1 < a < b N k , (a, b)•(1, 2)).
We consider the following deformat ion
(F i i+j; F j+qs; Fi) of Io=(fi{k-1); X,X b l<-_a<j<=k-1 (a,b:#(1,2)) .
We use the proper ty of (Fi) that there are qo zeros near-by zero xCk~ and (Fi: ioej) has a qo + 1 zero near-by zero, x ~ .
Thus, if s = - t - F j ( x ~ l , t), x ~ 1 is a % + 1 zero of the deformation. Lastly, C 1
when s = x~ and t = 0, we get the terms of I corresponding to I o . Thus, I satisfies condi t ion (d) and we have the following deformat ion of I with q zeros near-by zero.
1 - 1
/ = 0
where l l
U ~- V I ( v ( 0 ) - - ~e(1)'l - -
i a l i = 1
We want to show that this deformat ion also satisfies proper ty 2), The zeros of the deformat ion are (Xr 1 X~, ~ i = 1, qo and /~{o) ,,{o~ where i = 1, l - 1 ' "" " ' t a g - 1 ' "~k ! "" " '
if C2 =l=0 , i = I, . . . , I if C 2 = 0 .
We will show that we obtain one more zero if we remove one of the following:
F i i+j, F j+qu, c2I-I(xk--X{k ~ when c2:l:0. i = 0
If we remove some F~, i + j , we obtain that {F,: n + i} has a qo + 1 zero X{k0f~, which differs from X~ki}_t for any i. Thus, the remaining terms have ,~x (~ x{~ ~ as a zero.
t,.(o}, ,.t% where x{k~ is a q o + l If we remove Fj+qu , again we have a zero v 'k-~,~k J l--1
solution for (F~: i+j). Lastly, if C2 : t=0 , then when we remove c z I-I (xk-xk-{ih~ we l = 0
t,,{o} y{t}~ Thus, the results follow by induction. have the addit ional zero v-k-1, ~k J.

126 J. Damon and A. Galligo
To illustrate this inductive construction we show that the ideals from Pro- position (5.3) are towers. We wilt only give the {f~k~} at each step.
(6.6) Example 1
xl j ( 3 ) = ( x 2 ' 2 2
X 1X2~X 2 ,X3) ,
"'~ /--1)~ J ( k ) : ( X 2 ' 2 2 2 t XIX2~X2~X3~-- -~X k i ~ X k )
to obtain (x~,x~ 1 <<_iNk- t, x~xj t <__i<j<k).
(6.7) Example 2
J ( 2 ) - - ( x 2 + 8' X 2 X X 2 -- ' , 1 ~I 2 ' r 1X2 ~ 2)~
j ( 3 ) _ (x12 , 2 _ _ ~ _ ~ , l X 2 ~ X l X 2 ~ X 2 , 2 2 -~- 'g2 X3, X3) ,
(x 2 ' , 2 , 2 .jr. El X2 ~ X1 X2 ~ X 2 2 2 -1- g2X3, ~"e; 1Xr) , �9 . . ~ X r _ 1
(X 2 , 2 2 , 2 2 "~ ~I X 2 , X 1 X 2 , . . . ~ X r _ l " J V ,~r_l Xr~ Xr )~
2 t 2 . 2 , 2 2 2 (X 1 + ' ~ I X 2 ~ X 1 X 2 , , . . . . . . ~ X k _ l ) ~ X r _ 1 "4-~r--I Xr ~ Xr~
(k) __ 2 ~ .2 2 r 2 2 f 1 j __(Xl + [ ; I X 2 , X 1 x 2 . . . . , 2 2 . . . ~ Xk-- 1) + 8 r X k , Xr--t + gr--t X r ' Xr X r + l
to obtain (x 2 + e; xi2+ 1 1 _ i <_ r - 1, g + e; x~, x 2 r + 1 < i_< k - 1, x i xj 1 _< i < j N k) which is equivalent to
(x2+eix~. l<_i<_k-1, xix j l<i<j<=k)
where
gi=O, r + l ~ i < - k - t .
In the next section, we will see that- all discrete algebra types are either towers or have deformations with the same 6, which are towers.
7. Discrete Algebra Types
We now have several methods to guarantee that m(f)=6(f ) for f a stable map- germ. In this section, we will use the classification of Mather [3] together with the additional classification in [10] to show that the ideals corresponding to the discrete algebra types (which we will define shortly) satisfy our conditions and yield that m(f )=6( f ) for discrete algebra types.
(7.1) Definition. We say that a stable map-germ f : tR"---~IR p of Zrtype is of discrete algebra type if the orbit a~fP+l(f) in jv+l (n, p) (the space of p + 1-jets: N"--,IR p at 0) has a neighborhood which contains only finitely many contact class orbits of type 1;~.
To describe the discrete algebra types we recall the classification which Mather gives in [3] to determine the nice dimensions. In [2] and [3], it is shown

A Topological Invariant for Stable Map Germs 127
that there is a smallest closed algebraic subset of X,~(n, p)(= {fsJk(n, p) f is of type 2;~}) whose complement contains only finitely many contact equivalence classes. This is denoted by llk(n, p). Then, a stable map-germ is of discrete algebra type if its jets belong to the complements of the IIk(n, p). The Hk(n, p) are deter- mined by where moduli first occur in the classification of the associated algebras. To determine the IIk(n, p), and the classification of the complement of it, Mather uses the second intrinsic derivative.
If K=Ker(Dof ) and C=Coker(Oof), then we can restrict the second derivative of.s which is the linear map:
Dgf: SZIR"-~ IR v
to the symmetric product of K with itself, S 2 K, and compose with the projection onto the coker C to obtain the intrinsic second derivative whose definition is due to Porteous:
d2f: S2K--* C.
We then say that f is of type Si, (j~ if dim~ker (d2f)=j, where we think of dZf as a linear map instead of a bilinear map.
As we recalled in section 1, the algebra associated to f has a presentation: Q( f )= IR {x 1 . . . . , xl}/I with I ~ , ~ 2. One can show easily that d2f determines Q(f)/~3 which is generally denoted by Q2(f), and that we have:
j=d im~Qe( f ) - ( i+ 1),
(7.2) Because of the analysis of the sets Hi, it follows that the only types which occur in the complement of H~, i ~ 4 are of the type 2;i,(j) with j = 0 , 1. Also, it follows that for those of type $3, they will belong to the complement if they are of type S3,(j ) with 0 < j ~ 2 . Then, we are interested in the types of map-germs:
a) type S 1 or 2; 2
b) type St, (~) i > 3, j = 0, 1.
c) type S3,(2 )
a) For type 2;1 the algebra Q(f) is of the form IR {x}/I and I =(x k) for some k. Thus, I is monomial and so satisfies the general condition; for type 2;2 the algebr a has the form: ~,, {x I , x2}/I and by the results of Section 2 we know that such an I has an appropriate deformation.
b) We use the classification of Mather to assert that for f of type 2;.,m t with Q(f )~ lR{x 1 . . . . . x,}/I where I has generators xix ~, lN i< jNn; x~ +eix .
t While f of type ei= - 1 , 0, or 1; if all e~=0, there is an additional generator x,. Z,,(o ) has Q( f ) "dR{x , } /~ , By (5.3) we know that these ideals are such that m(I)=6(I).
c) The first step is the classification of the algebras Q=~{xI,x2,x3}/I associated to germs of type 2;3, (2) using the analysis of their Q2 given by Mather in [3]. There are thirteen equivalences classes of Q2 which, following Mather,

128
we represent in the figure:
J. Damon and A. Galligo
[ i~, 3 [
21
' , ,21 '---- I ' l
I
The second symbol in each box is the number of equivalence classes corre- sponding to each box.
First of all, there are seven classes to the right of the dotted line such that I ~ so that in fact Q=Q2. Thus, the corresponding map-germs are 2-deter- mined.
These are listed together with the conditions that they satisfy.
[ i~ ] (x2+y2++_Z2, Xy, XZ, yZ)
(Z 2 ..~ y2, zy, yx, y2 + X2)
[i/3"] (X 2, yZ, x y , Z 2 _{_ yZ)
[i6] (xZ+yz, xz, y2, z z)
[ii~] (x 2, y2, yz, z 2)
tower in the y direction
tower in the y direction
tower in the y direction
monomial generators.
These ideals correspond to algebras of dimension 6.
The remaining 5 cases belong to [i~], [iE i], liE2] and [ill3]: For [i7] these are the ideals
(x 2 + ? , y2 + ?, xz, yz)
(x z + ? , y2, xz, yz)
(x 2, y2, ? , xz, yz)
(x 2 _y2 + z k, xy, xz, yz)
(X 2 _y2, Z k, xy, XZ, yz).
These are all towers in the z-direction

A Topological Invariant for Stable Map Germs
For [ i e i ] , these are
(X 2 "~'-yz, 22 • yk, x y , XZ)
(X2.3ryz, Z 2, yk, x y, X Z)
(X 2 + y z , z 2 , x z + y k , x y )
We have that the first two are towers.
towers in the x direction
towers in the x direction
129
tower in each direction
tower in each direction
tower m each direction
tower m each direction
tower in the y-direction
tower m the y-direction
So we have to verify that the four ideals
( x 2 + y z , x z , yZ, z2), ( x 2 + y z , x y , x z + y k , z2),
( x 2 + y Z , x z + x l , y z , zZ), and ( xy , x z + y l , y z + x " , z z)
satisfy the general condition to complete the analysis of these types.
(7.4) Lastly, we consider the case lift. Here the classification comes from [10].
All towers in these cases are towers in the z-direction.
(x 2, x z, y z, z 2 , x y 2 , y3) tower
(x z, x z, y z, z z + x yZ, ya) tower
(x z, x z, y z, z 2, y3) tower
(x 1, x z , y z , z 2 +y3) tower
(x 2, x z, y4, y z, z 2, x y 3) tower
(x z, x z + y3, y z, z 2) tower
(z 2, xm, yl, x y , XZ, yZ)
(Z 2_.}_y,xm~yl x y , xz , y z )
(Z 2 ++_y~, X", x y , XZ, y z )
(Z z + yl i X " , x y , XZ, y z )
(Z z, X", x z + y z, x y, y z )
(Z z i X " , x z + y z, x y , y z )
(Z z, y Z + X", x z + y', x y )
Next we have [ ie2] which has two real types.
For the first type, we include two types that were left out of Mather's original classification in [3].
(x 2 + yZ, z z, x t, x ~ -x y, x z, y z) tower in the z-direction
(x2+ yZ, z 2, x ~, x z, y z) tower in the z-direction
(X 2 _~_y2, Z 2 _~_xl XZ, yz ) tower in the z-direction
(x z + y2, z 2, x ~, x z, y z) tower in the z-direction
(X 2..~y2 Z 2, XZAffxI, yz) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Again, the first four are towers in the z-direction.
The second [iE2] type has the following ideals together with their conditions.

130
1>3
I>3
1>3
1>3
1>__3
I>2
1>2
Type
M
N
P
Q
R
S
T
k > 4
k>=4
k > 4
k > 4
k > 4
k > 4
k > 5
k > 4
k>=4
k > 4
k > 3
k ~ 3
k > 3
k > 4
k > 4
k > 4
k>=4
(x 2, x z + x y 2 , y z, y4, z 2 ) . . . . . .
(x 2, x z , yz , y4, z 2 ) tower
(X 2 +y3, XZ, yz, 2 2 +y3) tower
(x z, y4, x z , yz , z 2 + x y 3 ) tower
(x 2, x z, y z, z 2 + x y z, y4) tower
(x2 + y3, x z + y3, y z, z2 + x y 2) . . . . . .
(X 2, X Z, y z, Z 2, x y 2, yt + I ) t o w e r
(xZ + y t, x z, y z, z 2 , x y z ) tower
(x2+yt , x z , yz , z2, xy2, y t+l) tower
(x2++_yZ, x z , y z , z2++_yt+l,xy 2) tower
(x2 + yt + t, x z, y z, z2 +_ yt + l, x y 2) tower
(x 2, x z , y z , z 2 + yl+l, xy2) tower
(x 2, x z + y ~+1, yz , z 2, x y 2) . . . . . .
Ideal (X2 + y3
(X2 + y3,
(x z + y3,
(X2 + y3,
(x 2 + ya,
(X2 + y3,
(X2 + y3,
(x 2 + y3,
x z, y z, z 2 + yk)
x z , y z , z2 ++_ yk, x y k - l )
XZ, y z , z 2 + yk, xyk -2 )
x z + y k, y z , z2+x> ~-1 )
x z + yk, y z , z 2)
x z + yk, yz , z 2, x y k - l )
x z + y k, yz , z 2 ,x y k -z )
x z , y z , z 2 + x y k - l )
(X 2 + y3, X Z, y z , Z 2 -t'-gy k - l , yk+l)
(X2 ..}_y3, XZ, yz , z 2 "-}-xy k - l , yk)
(x 2 + y3, XZ q_xyk-1, y2, Z 2 + yk-1)
(X 2 4 y 3, X,Z-l-xy k - l , yz , Z 2)
(x 2 +y3, X z + x y k - I , y z , z 2, yk+l)
(x z + y3, x z, y z, z 2, yk)
(x 2 + y3, x z , y z , z 2, yk, x yk-1)
(X 2 + y3, x z , y z , Z 2, yk+l, xyk-1)
(x 2 + y3, x z, yz , z 2, x y ~ -~)
J. Damon and A. Galligo
All Towers
All Towers
All Towers
(7.6) Then, for the remaining cases plus the four special cases from the earlier 2;3, (2)-types we use the method of constructing deformations It, of these ideals I with the same 6, but which are equivalent to towers J. Then, the towers have

A Topological Invariant for Stable Map Germs t3i
deformations with f-zeros near-by zero so since the I, are equivalent to J they also have a deformation with f-zeros near-by zero. We can apply the Proposi- tion (2,9) and the result follows.
For our cases we can construct the deformations by deforming only one term z2+v(x ,y) to z2+v(x , y )+ tu (x , y ) , where there is also a term x z + u ( x , y ) or yz+u(x ,y ) . Then, we apply the result of Mather [1, Lemma 3.1] to the sub- space (other terms . . . . . x z+su(or y z+su), zZ+ v+tu), where s is arbitrary but t+O.
It follows in each case that each component t>O, t<O lies in a single orbit so the deformation is equivalent to a tower of the form
(other terms . . . . . x z, y z, z2 + v + u).
In each case, we list the ideal, the deformation of z2+ v, and the tower or type of tower which the deformation is equivalent to.
Type Ideal Deformation Tower
ib (x 2 q-yz, xz , y2 z2) almost all in
i~i (xZ+yz , xy , xz+y~,z2) zZ+tk ~" (x2+yz , z2+yk, xy , xz)
i~2 (xZ+y2, yz, xz--}-xl, z 2) z 2 + t x t (xZq-y2, z2+.xl, xz , yz)
ie2 ( y z + x ' , x z + y t , xy, z z) zZ+ty t (zZ+_yt, yz+xm, xz, xy)
ii fl-types
Ideal or Ideal Types Deformation Towers
(x 2, x z + yl+l, yz, z 2, x y 2 ) zZ + ty 1+1 (x 2, xz , yz, z 2 + yt+l, xy2)
(X 2, X Z + X y 2, y z, y4, z 2 ) z z + t x yZ (x 2, y4, x z, y z, z z + x y 2)
(xZ+y3, x z + y 3 , yz, zZ+xy2) z 2 + x y 2 + t y 3 (xZ+y3, xz, yz, zZ+y 3)
Type N z 2 + x y k-1 + t y k Type M
Type P z 2 + t y k Type M
Type R z z + txyk-1 +_yk+l Type Q
Type S z2+ t x yk-1 Type Q
The relations between the deformations which we use here (and which is not meant to be complete nor to describe the particular relations for each ideal within a type) is given for a fixed k in the following table. A line indicates there is a deformation from the lower to the upper type.

t32 J. Damon and A. Galligo
For more details on the relations between the lift types, see [10]. Now, this concludes the verification for discrete algebra types, and we have
(7.7) Theorem. For stable map-germs of discrete algebra type f (for n N p), 6 ( f ) (= dim~Q(f)) is a topological invariant.
From this follows
(7.8) Corollary. For stable map-germ f in the nice dimensions (n<p), 6( f ) is a topological invariant.
References
1. Mather, J.: Classification of stable germs by N-algebras. Publ. Math. IHES 37, 223-248 (1969) 2. Mather, J.: Transversality. Advances in Math. 4 (3), 301-336 (1970) 3. Mather, J.: The nice dimensions. Proc. Liverpool Singularities L Springer Lectures Notes in
Mathematics no. 192, pp. 207-253. Berlin-Heidelberg-New York: Springer 1971 4. Briancon, J., Galligo, A.: Deformations distingu6es d'un point de IE 2 ou ~ . In: Singularit~ it
Carg~se, Ast6risque n ~ 7 et 8, pp. 129-138, 1973 5. Damon, J.: A partial topological classification for stable map-germs. To appear 6. Galligo, A.: Apropos du th6or6me de pr6paration de Weierstrass. Lecture Notes in Mathematics
no. 409, pp. 543-579. Berlin-Heidelberg-New York: Springer 1974 7. Golubitsky, M., Guillemin, V.: Stable mappings and their singularities. Berlin-Heidelberg-
New York: Springer 1974 8. Iarrobino, A.: Reducibility of the families of o-dimensional schemes on a variety. Inventiones math.
15, 72-77 (1972) 9. Briancon, J.: Weierstrass pr6par6 it la Hironaka. In: Singularit~ it Carg~se, Ast6risque n~ et 8,
pp. 67-73, 1973 10. Damon, J.: The classification of discrete algebra types. To appear
Received June 2, 1975
James Damon Department of Mathematics Queens College, C.U.N.Y. Flushing, New York 11367 USA
Andr6 Galligo D6partement de Math6matiques Universit6 de Nice Parc Valrose 06034 Nice Cedex France




















