
A recursive state estimator in the presence of state inequality constraints
12
International Journal of Control, Automation, and Systems (2011) 9(2):237-248 DOI 10.1007/s12555-011-0205-4 http://www.springer.com/12555 A Recursive State Estimator in the Presence of State Inequality Constraints Mohamed Fahim Hassan, Mohamed Zribi*, and Hamed M. K. Alazemi Abstract: This paper proposes an optimal recursive estimator to estimate the states of a stochastic dis- crete time linear dynamic system when the states of the system are constrained with inequality con- straints. The case when the constraints are strictly satisfied is treated independently from the case when some of the constraints are violated. For the first case, the well known Kalman filter estimator is used. In the second case, an algorithm which uses a series of successive orthogonalizations on the measure- ment subspaces is employed to obtain the optimal estimate. It is shown that the proposed estimator has several attractive properties such that it is an unbiased estimator. More importantly, compared to other estimator found in the literature, the proposed estimator needs less computational efforts, is numerical- ly more stable and it leads to a smaller variance. To show the effectiveness of the proposed estimator, several simulation results are presented and discussed. Keywords: Inequality constraints, Kalman filter, recursive estimation. 1. INTRODUCTION The Kalman Filter has been extensively used to estimate the states of physical systems. The applications of Kalman filters are wide and diverse; they cover areas such as computer vision, navigation, missile tracking, etc. However, the state variables of physical systems are generally constrained by equality and inequality constraints. Examples of systems whose states are constrained include robotic systems, biomedical systems, chemical processes, navigation, etc. Several researchers have worked on the design of state estimations when the states of the system are constrained either by equality constraints or inequality constraints or both [1-6,8-16,19,21-31]. For example, Wen and Durrant-Whyte [30] reduced the model of the system by substituting the equality constraints into the model of the system. Therefore, the constrained problem is reduced to an unconstrained one. However, the proposed scheme cannot handle the case of inequality constraints; also the physical meaning of some of the states will be lost. Some researchers such as [29] dealt with equality constraints as measurements which are not corrupted with noise. They used the same state equation while they augmented the measurement equation. Again, this method can not handle the inequality constraints case. Simon and Chia [24] incorporated state equality constraints in the Kalman filter; they projected the unconstrained solution onto the state constraint surface. Another approach of handling the equality constraint is through putting restrictions on the gain of the Kalman filter so that the updated state estimate satisfies the constraints [5]. The paper proposes a recursive estimator to estimate the states of linear dynamic systems in the presence of state inequality constraints. The usual Kalman filter is used when the constraints are strictly satisfied. However, when some of the constraints are violated, the proposed algorithm uses a series of successive orthogonalizations on the measurement subspaces to obtain the optimal estimate. Simulation results are presented to show the effectiveness of the proposed algorithm. The paper is organized as follows. Section 2 gives the motivation of our research as well as examples of some engineering and non-engineering problems in which constraints are imposed either due to physical reasons or design objectives. For completeness of the presentation, Section 3 gives some background material needed for the paper. Section 4 describes the statement of the estimation problem. Section 5 presents the development of the optimal recursive estimator; the algorithm which can be used to implement the proposed estimator is also provided. The simulation results of two illustrative examples are presented and discussed in Section 6. Finally, some concluding remarks are given in Section 7. 2. MOTIVATION OF THE PROBLEM Many practical engineering and non-engineering problems are subject to constraints on the states and/or the control. These constraints are due to physical limitations and/or imposed constraints by the designer in order to keep safe, acceptable and economically viable operations. In this section, we describe some engineering and non-engineering systems which are subject to constraints. The first example is related to biological pollution in © ICROS, KIEE and Springer 2011 __________ Manuscript received March 7, 2009; April 21, 2010; accepted September 24, 2010. Recommended by Editorial Board member Sungshin Kim under the direction of Editor Young Il lee. Mohamed Fahim Hassan and Mohamed Zribi are with the Electrical Engineering Department, Kuwait University, P.O. Box 5969, Safat 13060 Kuwait (e-mails: {m.fahim, mohamed.zribi}@ ku.edu.kw). Hamed M. K. Alazemi is with the Computer Engineering De- partment, Kuwait University, P.O. Box 5969 Safat 13060, Kuwait (e-mail: [email protected]). * Corresponding author.
Transcript of A recursive state estimator in the presence of state inequality constraints

International Journal of Control, Automation, and Systems (2011) 9(2):237-248 DOI 10.1007/s12555-011-0205-4
http://www.springer.com/12555
A Recursive State Estimator in the Presence of State Inequality Constraints
Mohamed Fahim Hassan, Mohamed Zribi*, and Hamed M. K. Alazemi
Abstract: This paper proposes an optimal recursive estimator to estimate the states of a stochastic dis-
crete time linear dynamic system when the states of the system are constrained with inequality con-
straints. The case when the constraints are strictly satisfied is treated independently from the case when
some of the constraints are violated. For the first case, the well known Kalman filter estimator is used.
In the second case, an algorithm which uses a series of successive orthogonalizations on the measure-
ment subspaces is employed to obtain the optimal estimate. It is shown that the proposed estimator has
several attractive properties such that it is an unbiased estimator. More importantly, compared to other
estimator found in the literature, the proposed estimator needs less computational efforts, is numerical-
ly more stable and it leads to a smaller variance. To show the effectiveness of the proposed estimator,
several simulation results are presented and discussed.
Keywords: Inequality constraints, Kalman filter, recursive estimation.
1. INTRODUCTION
The Kalman Filter has been extensively used to
estimate the states of physical systems. The applications
of Kalman filters are wide and diverse; they cover areas
such as computer vision, navigation, missile tracking, etc.
However, the state variables of physical systems are
generally constrained by equality and inequality
constraints. Examples of systems whose states are
constrained include robotic systems, biomedical systems,
chemical processes, navigation, etc.
Several researchers have worked on the design of state
estimations when the states of the system are constrained
either by equality constraints or inequality constraints or
both [1-6,8-16,19,21-31]. For example, Wen and
Durrant-Whyte [30] reduced the model of the system by
substituting the equality constraints into the model of the
system. Therefore, the constrained problem is reduced to
an unconstrained one. However, the proposed scheme
cannot handle the case of inequality constraints; also the
physical meaning of some of the states will be lost. Some
researchers such as [29] dealt with equality constraints as
measurements which are not corrupted with noise. They
used the same state equation while they augmented the
measurement equation. Again, this method can not
handle the inequality constraints case. Simon and Chia
[24] incorporated state equality constraints in the Kalman
filter; they projected the unconstrained solution onto the
state constraint surface. Another approach of handling
the equality constraint is through putting restrictions on
the gain of the Kalman filter so that the updated state
estimate satisfies the constraints [5].
The paper proposes a recursive estimator to estimate
the states of linear dynamic systems in the presence of
state inequality constraints. The usual Kalman filter is
used when the constraints are strictly satisfied. However,
when some of the constraints are violated, the proposed
algorithm uses a series of successive orthogonalizations
on the measurement subspaces to obtain the optimal
estimate. Simulation results are presented to show the
effectiveness of the proposed algorithm.
The paper is organized as follows. Section 2 gives the
motivation of our research as well as examples of some
engineering and non-engineering problems in which
constraints are imposed either due to physical reasons or
design objectives. For completeness of the presentation,
Section 3 gives some background material needed for the
paper. Section 4 describes the statement of the estimation
problem. Section 5 presents the development of the
optimal recursive estimator; the algorithm which can be
used to implement the proposed estimator is also
provided. The simulation results of two illustrative
examples are presented and discussed in Section 6.
Finally, some concluding remarks are given in Section 7.
2. MOTIVATION OF THE PROBLEM
Many practical engineering and non-engineering
problems are subject to constraints on the states and/or
the control. These constraints are due to physical
limitations and/or imposed constraints by the designer in
order to keep safe, acceptable and economically viable
operations. In this section, we describe some engineering
and non-engineering systems which are subject to
constraints.
The first example is related to biological pollution in
© ICROS, KIEE and Springer 2011
__________
Manuscript received March 7, 2009; April 21, 2010; acceptedSeptember 24, 2010. Recommended by Editorial Board memberSungshin Kim under the direction of Editor Young Il lee. Mohamed Fahim Hassan and Mohamed Zribi are with theElectrical Engineering Department, Kuwait University, P.O. Box5969, Safat 13060 Kuwait (e-mails: {m.fahim, mohamed.zribi}@ku.edu.kw). Hamed M. K. Alazemi is with the Computer Engineering De-partment, Kuwait University, P.O. Box 5969 Safat 13060, Kuwait(e-mail: [email protected]).
* Corresponding author.

Mohamed Fahim Hassan, Mohamed Zribi, and Hamed M. K. Alazemi
238
streams. This pollution is mainly the result of the
damping of sewage, fertilizers, industrial wastes in water
streams [9]. These nutrients over-stimulate the growth of
bacteria (BOD) which use up dissolved oxygen (DO) as
they decompose. This contributes in harmfully affecting
the respiration ability of fish and other invertebrates
which reside in the water body. Three options are
available in controlling wastewater in order to satisfy the
constraints imposed by water authorities standards (BOD
concentration must be less or equal to a certain upper
limit; while DO concentration must be greater than or
equal a certain lower bound). In the first one, wastewater
is treated at a fixed level, stored in tanks and discharged
in a controlled manner into the water body. This option
imposes other physical constraints on the system. More
specifically, the volume of the treated wastewater in the
tanks must not be less than zero and it must not exceed
the capacity of the tanks to avoid overflow. In the second
option, wastes are discharged in the stream with a
constant rate and pollution control is carried out through
variable waste treatment. However, increasing the
treatment levels beyond certain limits will dramatically
increase the cost. Such an economical aspect imposes an
upper limit on the level of treatment (control). In the
third option, the above two techniques are combined
together which will lead to a nonlinear dynamic model
[10].
Another example of systems which are subject to
constraints on the states and/or the control is the problem
dealing with the analysis and design of controllers for
active queue management (AQM) routers supporting
transmission control protocol (TCP). A two state
dynamic fluid-flow model of TCP is used [13]. The first
state variable of the model is the average TCP window
size W (packets); and the second state variable is the
average queue length (packets). However, in this model
the size of the window must be within the upper and
lower bounds imposed physically on the window size
(0≤W ≤Wm) [13].
A third example of systems which are subject to
constraints on the states and/or the control is related to
interconnected power systems. For these systems, it is
unlikely that the outputs of the generation at any instant
of time will exactly be equal to the load of the system.
As a result, the frequency is not constant and it changes
continuously. If the frequency falls by more than 1 Hz,
the reduced speed of the power station pumps, fans, etc
may reduce the station output and a serious situation will
arise. To avoid this problem, a lower bound has to be
imposed on the frequency of the system [11].
In addition to the systems mentioned above, other
systems which are subject to constraints on the states
and/or the control can be found in the literature.
Examples of such systems include: the two state
continuous stirred tank reactor (CSTR) [17], the batch
reactor [17], the tracking of a land based vehicle [24] and
the tracking of a vehicle along circular roads [31].
Most of these systems are stochastic by nature, and not
all the state variables are available for direct
measurements. Therefore, it is necessary, to reconstruct
these states through an observer. However, in order to
keep track of the actual states of the system, it is neces-
sary to take into consideration the imposed constraints on
the system while designing such an observer. For this
reason, the problem of state estimation with constraints
has attracted many researchers and it is also the
motivation of the work to be developed in this paper.
3. BACKGROUND
It is well known that one of the most important
properties of the Kalman filter is its recursive nature.
This property arises from the fact that the existing
estimator is updated according to the received new set of
measurements. More precisely, the updating process is
based on the component of the new data which is
orthogonal to the old data set.
The actual orthogonalization procedure used in the
Kalman filter is based on the following theorems [18],
[7].
Theorem 1: Let β be a member of the space H of
random variables which is a closed subspace of L2, and
let 1
β̂ denote its orthogonal projection on a closed
subspace Y1 of H (thus 1
β̂ is the best estimate of β in
Y1). Let y2 be an m-vector of random variables
generating a subspace Y2 of H and let ŷ2 denote the m-
dimensional vector of the projections of the components
of y2 onto Y1 (thus ŷ2 is the vector of best estimates of y2
onto Y1). Also, let ỹ2=y - ŷ2. Then the projection of β on
to the subspace 1 2Y Y⊕ denoted by ˆ,β is given by:
β̂ =1
1 2 2 2 2
ˆ ,T Ty y y yβ β
−
+ E E� � � �
where E is the expected value.
The proof of Theorem 1 is given in [18].
The above equation can be interpreted as β̂ is 1
β̂
plus the best estimate of β in the subspace 2Y�
generated by ỹ2.
Accordingly, if we have a discrete time system which
is represented by the following state equation:
( 1) ( 1 ) ( ) ( 1 ) ( )x k k k x k k k w k+ = Φ + , + Γ + , (1)
with the output of the system given by:
( 1) ( 1) ( 1) ( 1),y k H k x k v k+ = + + + + (2)
where ( 1) n
x k + ∈ℜ is the state vector, ( 1 )k kΦ + , ∈
,
n n×
ℜ ( 1 ) n m
k k×
Γ + , ∈ℜ are the system matrices;
( ) m
w k ∈ℜ and ( ) pv k ∈ℜ are uncorrelated zero-mean
gaussian white noise sequences with positive semi-
definite covariance matrices Q and R respectively. Also,
( ) py k ∈ℜ is the output vector, and ( 1) p nH k
×
+ ∈ℜ is
the measurement matrix.
Consider the Hilbert space Y formed by the
measurement vectors y(k) (k=1,2,…). At the instant k+1,

A Recursive State Estimator in the Presence of State Inequality Constraints
239
this space is denoted by Y(k+1). The optimal minimum
variance estimator ˆ( 1 1)x k k+ | + is given by:
ˆ( 1 1) [ ( 1) ( 1)]
[ ( 1) ( )]
[ ( 1) ( 1 )],
x k k x k Y k
x k Y k
x k y k k
+ | + = + | +
= + |
+ + | + |
E
E
E �
(3)
where
( 1 ) ( 1) [ ( 1) ( )].y k k y k y k Y k+ | = + − + |E� (4)
Equation (3) is the algebraic form of the geometric
result of Theorem 1.
Now, let’s assume that the vector y(k+1) is
decomposed into N sub-vectors, i.e.,
1 2( 1) [ ( 1) ( 1) ( 1)].T T T T
Ny k y k y k y k+ = + + +� (5)
Then the optimal estimate ˆ( 1 1)x k k+ | + is obtained
after a succession of orthogonal projections of x(k+1) in
the Hilbert space generated by: [2,3]
1
1 2
2 1
3
{ ( ) ( 1 ) ( 1 1)
( 1 1) ( 1 1)},N
N
Y k k k k kY Y
Y k k Y k k−
⊕ + | ⊕ + | +
⊕ + | + ⊕ ⊕ + | +
� �
� ��
where 1( 1 1)i
ik kY
− + | +� is the subspace generated by the
subspace of measurements of Yi(k+1) and the projection
of it on the subspace generated by:
1 2 1{ ( ) ( 1) ( 1) ( 1)}.
iY k Y k Y k Y k
−
⊕ + ⊕ + ⊕ ⊕ +�
This leads to the following Theorem.
Theorem 2: The optimal estimate ˆ( 1 1)x k k+ | + is
given by the projection of x(k+1) on the space generated
by all the measurements up to the instant k, {Y(k)}, and
the projection of x(k+1) on the subspace generated by: 1 1
1 2{ ( 1 ) ( 1 1) ( 1 1)}.N
Nk k k k k kY Y Y
−
+ | ⊕ + | + ⊕ ⊕ + | +� � ��
The proof of Theorem 2 is given in [7].
4. STATEMENT OF THE ESTIMATION
PROBLEM
Consider the system described by the discrete time
model given by (1)-(2). The objective of the paper is to
obtain the best state estimator which minimizes the
expected value of the admissible cost function given by:
]
1
0
min min ( 1 1)
( 1 1) ( 1) ,
fk
T
k
J k kx
x k k Y k
−
=
= + | +
× + | + | +
∑ E �
�
(6)
such that,
( 1) ( 1 ) ( ) ( 1 ) ( ),x k k k x k k k w k+ = Φ + , + Γ + , (7)
( 1) ( 1) ( 1) ( 1),y k H k x k v k+ = + + + + (8)
( 1) ,x x k x≤ + ≤ (9)
where
( 1) ( 1) ( ) ( 1) ( 1 )
( 1 ) and ( 1) are as defined earlier.
x k y k w k v k k k
k k H k
+ , + , , + , Φ + , ,
Γ + , +
The error ( 1 1)x k k+ | +� is such that ( 1 1)x k k+ | + =�
ˆ( 1) ( 1 1)x k x k k+ − + | + where ˆ( 1 1)x k k+ | + is the
estimate of x(k +1). The vectors n
x x, ∈ℜ are the
minimum and maximum values of ˆ( 1 1)x k k+ | +
element by element.
The random processes w(k) and v( j ) appearing in the
model (7)-(8) are white gaussian with the following
properties:
[ ( )] 0 0 1 ,w k k= ∀ = , ,E � (10)
[ ( ) ( )] 0 1 ,Tjkw j w k Q j kδ= ∀ , = , ,E � (11)
where δjk is the Kronecker-delta function defined such
that δjk =1 if j=k and δjk =0 if j ≠ k.
[ ( )] 0 1 2 ,v k k= ∀ = , ,E � (12)
[ ( ) ( )] 1 2 .Tjkv j v k R j kδ= ∀ , = , ,E � (13)
The two random processes w(k) and v(k) are
independent, i.e.,
[ ( ) ( )] 0 1 2 0 1 .Tv j w k j k= ∀ = , , ; = , ,E � � (14)
Also, it is assumed that:
[ (0)] 0,x =E (15)
[ (0) (0)] (0),Tx x P=E (16)
where P(0) is a positive definite matrix, and x(0) is
independent of {w(k), k=0,1, …} and of {v(k+1), k=0, 1,
…} such that,
[ (0) ( )] 0 0 1 ,Tx w k k= ∀ = , ,E � (17)
[ (0) ( 1)] 0 0 1 .Tx v k k+ = ∀ = , ,E � (18)
Moreover, the model described by (7)-(8) has the
following properties.
P1: The stochastic processes {x(k), k=0,1, …} and
{y(j), j=0,1, …} are gaussian with zero means.
P2:
[ ( ) ( )] 0 0 1 .Tx j w k k j j k= ∀ ≥ ; , = , ,E � (19)
P3:
[ ( ) ( )] 0 1 2 0 1 .Ty j w k k j j k= ∀ ≥ ; = , , ; = , ,E � � (20)
P4:
[ ( ) ( )] 0 0 1 1 2 .Tx j v k k j j k= ∀ , ; = , , ; = , ,E � � (21)
P5:
[ ( ) ( )] 0 1 2 .Ty j v k k j j k= ∀ > ; , = , ,E � (22)
5. DEVELOPMENT OF THE OPTIMAL
RECURSIVE ESTIMATOR
To incorporate the inequality constraints into the
Kalman filter, we have to distinguish between two
different cases. In the first case, the constraints are
strictly satisfied, whilst in the second case some of the
constraints are violated.

Mohamed Fahim Hassan, Mohamed Zribi, and Hamed M. K. Alazemi
240
5.1. Optimal state estimator for strictly satisfied
constraints
Let us assume that we are at the (k +1) discrete instant of
time and that ˆ( )x k k| and ( )xxP k k|� �
are given.
The well known Kalman filter estimator when the
constraints are strictly satisfied is given by:
1
ˆ( 1 1)
ˆ ˆ( 1 ) K ( 1)[ ( 1) ( 1 )],
x k k
x k k k y k y k k
+ | +
= + | + + + − + | (23)
where
ˆ( 1 1) [ ( 1) ( 1)],x k k x k Y k+ | + = + | +E (24)
and
ˆ( 1 ) [ ( 1) ( )]
ˆ( 1 ) ( ),
x k k x k Y k
k k x k k
+ | = + |
= Φ + , |
E (25)
ˆ( 1 ) [ ( 1) ( )]
ˆ( 1) ( 1 )
y k k y k Y k
H k x k k
+ | = + |
= + + | .
E (26)
Define ( 1 )x k k+ |� and ( 1 )y k k+ |� such that:
ˆ( 1 ) ( 1) ( 1 ),x k k x k x k k+ | = + − + |� (27)
ˆ( 1 ) ( 1) ( 1 )y k k y k y k k+ | = + − + | .� (28)
The gain K1(k+1) in (23) is such that:
1
1
K ( 1) [ ( 1) ( 1 )]
( [ ( 1 ) ( 1 )])
T
T
k x k k ky
y k k k ky−
+ = + + |
× + | + |
E
E
�
� �
or
1
1
1
K ( 1) [ ( 1 ) ( 1 )]
( [ ( 1 ) ( 1 )])
( 1 ) ( 1) ( 1 ),
T
T
Txx yy
k x k k k ky
y k k k ky
P k k H k P k k
−
−
+ = + | + |
× + | + |
= + | + + |
E
E
� � � �
� �
� � (29)
where
( 1 ) ( 1 ) ( ) ( 1 )
( 1 ) ( 1 ),
T
xx xx
T
P k k k k P k k k k
k k Q k k
+ | = Φ + , | Φ + ,
+ Γ + , Γ + ,
� � � � (30)
( 1 ) ( 1) ( 1 ) ( 1)Tyy xxP k k H k P k k H k R+ | = + + | + + .� � � �
(31)
Hence, the covariance matrix of the filtered estimate
ˆ( 1 1)x k k+ | + is given by:
1
( 1 1)
[ ( 1 1) ( 1 1)]
[ K ( 1) ( 1)] ( 1 ),
xx
T
xx
P k k
x k k k kx
I k H k P k k
+ | +
= + | + + | +
= − + + + |
E
� �
� �
� � (32)
where
ˆ( 1 1) ( 1) ( 1 1)x k k x k x k k+ | + = + − + | + .� (33)
The recursive estimator will then proceed to the next
discrete instant of time.
5.2. Optimal state estimator for saturated constraints
If a subset of the state vector violates the constraints
imposed on the system, a set of equality constraints have
to be included into the model. Accordingly, the problem
(6)-(9) reduces to the following:
]
1
0
min min ( 1 1)
( 1 1) ( 1) ,
fk
T
k
J k kx
x k k Y k
−
=
= + | +
× + | + | +
∑ E �
�
(34)
such that,
( 1) ( 1 ) ( ) ( 1 ) ( ),x k k k x k k k w k+ = Φ + , + Γ + , (35)
( 1) ( 1) ( 1) ( 1),y k H k x k v k+ = + + + + (36)
( 1) ( 1) ( 1),d k D k x k+ = + + (37)
where ( 1)( 1) q kd k
++ ∈ℜ ; ( 1)q k n+ ≤ is the number of
violated constraints at the instant (k+1). Note that d(k+1)
includes the elements of x and of x which have to be
imposed on the subset of states which violated these
constraints. Also, ( 1)( 1) q k nD k
+ ×+ ∈ℜ is a matrix which
contains ones and zeros, where the ones are located at the
position of the state variable which has to be saturated at
the value corresponding to the associated element in the
d(k +1) vector.
In order to handle this situation, the measurement
vector given by (36) will be augmented by (37) as
measurements with zero variance. As a result, the new
augmented measurement equation will take the form:
( 1) ( 1) ( 1) ( 1),a a ay k H k x k v k+ = + + + + (38)
where
( 1) ( 1)( 1) , ( 1) ,
( 1) ( 1)
( 1) 0( 1) and ( 1)
0 0 0
a a
a a
y k H ky k H k
d k D k
v k Rv k R k
+ + + = + = + +
+ + = + = .
Accordingly, the state estimator which satisfies the
improved system constraints and its corresponding
covariance matrix are given by the following lemma.
Lemma 1: The optimal state estimator which
minimizes the cost function (34) subject to the system
model described by (35) and (38) is given by:
1 2ˆ( 1 1) ( 1 1) K ( 1)[ ( 1)ˆ
ˆ( 1 1)],
x k k k k k d kx
d k k
+ | + = + | + + + +
− + | + (39)
1 12
( 1 1)
[ K ( 1) ( 1)] ( 1 1),
xx
x x
P k k
I k D k P k k
+ | +
= − + + + | +
� �
� �
(40)
where 1( 1 1)ˆ k kx + | + is obtained from (23) when
replacing ˆ( 1 1)x k k+ | + by 1( 1 1);ˆ k kx + | + the covari-
ance 1 1x x
P� �
is obtained from (32) when replacing x� by
1,x� and,
1ˆ ˆ( 1 1) ( 1) ( 1 1),d k k D k x k k+ | + = + + | + (41)
ˆ( 1 1) ( 1) ( 1 1),d k k d k d k k+ | + = + − + | +� (42)

A Recursive State Estimator in the Presence of State Inequality Constraints
241
1 1( 1 1) ( 1 1) ( 1),T
x xxdP k k P k k D k+ | + = + | + +� � �
(43)
1 1( 1 1) ( 1) ( 1 1) ( 1),T
x xddP k k D k P k k D k+ | + = + + | + +� � � �
(44) 1
2K ( 1) ( 1 1) ( 1 1)
xd ddk P k k P k k
−+ = + | + + | + .� � � (45)
The proof of this lemma is given in Appendix A.
5.3. Properties of the constrained estimator
The proposed recursive estimator has several attractive
properties.
Property 1: Using equation (40), it can be shown that
1 1( 1 1) ( 1 1).
xx x xP k k P k k+ | + ≤ + | +� � � �
Property 1 means that the constrained estimator has a
smaller covariance than the corresponding unconstrained
estimator.
Property 2: The proposed estimator is an unbiased
estimator.
To show this property, we use equations (39), (37),
(41) and (42) to obtain:
1 2
1 2
1 2
( 1 1)
ˆ( 1) ( 1 1)
( 1) ( 1 1) K ( 1) ( 1 1)ˆ
( 1 1) K ( 1) ( 1 1)
( 1 1) K ( 1) ( 1 1).
x k k
x k x k k
x k k k k d k kx
x k k k d k k
x k k k d k k
+ | +
= + − + | +
= + − + | + − + + | +
= + | + − + + | +
= + | + − + + | +
�
�
��
��
(46)
Taking the expected value of the above equation, we get:
1 12 1
[ ( 1 1)]
[ ( 1 1)]1
K ( 1) ( 1) [ ( )].k k
x k k
k kx
k D k x + | +
+ | +
= + | +
− + +
E
E
E
�
�
�
(47)
Since the unconstrained Kalman filter estimator is an
unbiased one, then,
1[ ( 1 1)] 0k kx + | + = .E � (48)
Therefore, equation (47) implies that:
[ ( 1 1)] 0x k k+ | + = .E � (49)
Property 3: Using the proposed estimator, the value
of the cost function is less than the cost obtained if the
covariance matrix of the unconstrained estimator is
always used to estimate the constrained one.
This property is clear from the fact that at the next
discrete time instant, ( 1 1)xxP k k+ | +� �
resulting from
(40) is used to calculate the new gain and hence the new
covariance matrix ( 2 2).xxP k k+ | +� �
Please note that
this property has also been verified through simulations.
Property 4: The proposed algorithm is based on the
multiple projection approach. It has been shown in [7]
and [20] that such an approach improves the numerical
stability of the estimator. Moreover, in most of the
techniques found in the literature, if a subset of the
constraints is violated, the correction procedure is carried
out only on the states corresponding to the violated
constraints while neglecting their effects on the other
states. In the developed procedure, the impact of this
action on the other states is also taken into consideration.
As a result, such a procedure increases the numerical
stability of the algorithm. This feature is more apparent
when dealing with nonlinear systems.
5.4. The Estimation algorithm
The algorithm which can be used to implement the
proposed recursive estimator is detailed below.
Step 1: Initialization: assign values to P(0), Q and R.
We assume that at the (k+1) discrete instant of time
ˆ( )x k k| and ( )xxP k k|� �
are given.
Step 2: Calculate the predictor estimator ˆ( 1 )x k k+ |
and ˆ( 1 )y k k+ | using (25) and (26) respectively. Then,
calculate the covariance matrices ( 1 )xxP k k+ |� �
and
( 1 )yy
P k k+ |� �
using (30) and (31). Finally, compute
1K ( 1)k + using (29).
Step 3: Calculate the unconstrained filter estimator
ˆ( 1 1)x k k+ | + using (23) and then compute the
corresponding covariance matrix ( 1 1)xxP k k+ | +� �
using
(32).
Step 4: If ˆ( 1 1)x k k+ | + is strictly satisfied, i.e.,
ˆ( 1 1) ,x x k k x≤ + | + ≤ then if k equals kf stop, Else let
k=k +1 and go back to Step 2.
Else Let 1̂( 1 1)x k k+ | + = ˆ( 1 1),x k k+ | + then calcu-
late ˆ( 1 1)d k k+ | + and ( 1 1)d k k+ | +� using (41), (42).
Compute the matrices ( 1 1),xdP k k+ | +� ( 1 1),
ddP k k+ | +� �
2ˆ( 1), ( 1 1)K k x k k+ + | + and ( 1 1)
xxP k k+ | +� �
using (43),
(44), (45), (39) and (40) respectively. If k equals kf stop,
Else let k=k+1 and go back to Step 2.
6. ILLUSTRATIVE EXAMPLES
This section presents the simulation results of two
examples using the developed constrained recursive
estimator. The first example is a numerical one; the
second example is a practical example involving the
control of pollution levels.
6.1. A numerical example
Consider the following estimation problem:
1
0
min min [ ( 1 1)
( 1 1) ( 1)],
fk
T
k
J k kx
x k k Y k
−
=
= + | +
× + | + | +
∑ E �
�
(50)
such that,
0 7326 0 0861( 1) ( )
0 1722 0 9909
0 0609 1 0( ) ( ),
0 0064 0 1
x k x k
u k w k
. − . + = . .
. + + .
(51)
( 1) ( 1) ( 1),y k Hx k v k+ = + + + (52)
( 1) ,x x k x≤ + ≤ (53)

Mohamed Fahim Hassan, Mohamed Zribi, and Hamed M. K. Alazemi
242
( ) ,u u k u≤ ≤ (54)
where E[x(0)xT(0)]=P(0)=I, with I being the 2 by 2
identity matrix, E[w(k)wT(j)]=0.01Iδjk; E[v(k)vT(j)]=0.01
Iδjk; y(k+1) is a scalar. The matrix 1 2H
×
∈ℜ will be
specified later on. The vectors x, ,x and the scalars u,
u are the lower and upper bounds of x(k +1), u(k)
respectively element by element. These values will be
specified later on.
The above problem is simulated for four different set
of parameters. To have a realistic situation, the control
strategy which minimizes the quadratic cost function
given by:
2 2 2
1 2
0
min min ( ) ( ) 0 01 ( ),k
J x k x k u k
∞
=
= + + .∑ (55)
while satisfying the model of the system (51) as well as
the system constraints given by (53) and (54) is firstly
designed for the deterministic system using the approach
developed by Hassan et Ali [6]. The obtained trajectories
as well as the output measurements are corrupted by the
noise signals w(k) and v(k +1) for estimation purposes.
In order to compare the recursive algorithm developed
in this paper with the one presented in the paper by
Simon and Chia [24], the following situations will be
handled in each of our simulation cases.
Situation 1: To get the trajectories of x(k +1) and
y(k +1) and hence calculate the unconstrained Kalman
filter estimator, it will be assumed that the system
constraints are not applicable in this phase while they
will be applicable in the estimation phase. It is important
to note that this situation is not a physically realizable
one in real life applications since constraints are usually
applied on the system while it is running and hence the
measurement vector y(k +1) includes the already
constrained states. However, this scenario has to be
carried out to be able to compare our results to those in
[24]. Our technique as well as that developed in [24] will
be applied and comparisons will be made through the
estimation of the cost function.
Situation 2: In this situation, it will be assumed that
the constraints are applied within our system simulations
to get the measurement vector y(k +1). This is the
physically realizable case. Then, the constrained Kalman
filter estimator will be calculated using our technique
and that proposed by [24] in which we consider the
unconstrained estimator is the one resulting from the
Kalman filter before applying the proposed modification
to get the constrained one. Again, the two techniques will
be compared through the estimation of the cost function.
Case 1: Simulations using the first set of parameters In this case, we let x(0)=[1 1]T H=[0 1]T, x1 is
unconstrained, x2= −0.5, no upper bound on the second
state, u = −2, u = 2 and kf = 81.
At first the simulations are carried out for situation 1,
the cost is found to be 4.0666 using the proposed
recursive technique; the cost is found to be 4.1086 when
using the technique proposed by [24].
Then, the simulations are carried out for situation 2.
The actual and estimated states for x1 and x2 are shown in
Figs. 1 and 2 respectively. In this case, the cost is found
to be 4.1085 using the proposed recursive technique, the
cost is found to be 4.2407 when using the technique
proposed by [24].
Case 2: Simulations using the second set of param-
eters
In this case, we let x(0)=[1 1]T, H=[1 0]T, x1 is
unconstrained, x2= −0.5, no upper bound on the second
state, u= −2, u = 2 and kf = 81.
At first the simulations are carried out for situation 1,
the cost is found to be 14.517 using the proposed
recursive technique; the cost is found to be 14.549 when
using the technique proposed by [24].
Then, the simulations are carried out for situation 2.
The actual and estimated states for x1 and x2 are shown in
Figs. 3 and 4 respectively. In this case, the cost is found
to be 14.7646 using the proposed recursive technique,
the cost is found to be14.7721 when using the technique
proposed by [24].
Case 3: Simulations using the third set of param-
eters In this case, we let x(0)= [46.0825 -7.0175]T, H=[0 1],
0 10 20 30 40 50 60 70 80−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Time instant
The
sta
te x
1
x1x1^
Fig. 1. The plot of x1 and 1̂x versus time (Example 1,
Case 1).
0 10 20 30 40 50 60 70 800
0.2
0.4
0.6
0.8
1
1.2
1.4
Time instant
The
sta
te x
2
x2x2̂
Fig. 2. The plot of x2 and 2x̂ versus time (Example 1,
Case 1).
A Recursive State Estimator in the Presence of State Inequality Constraints
243
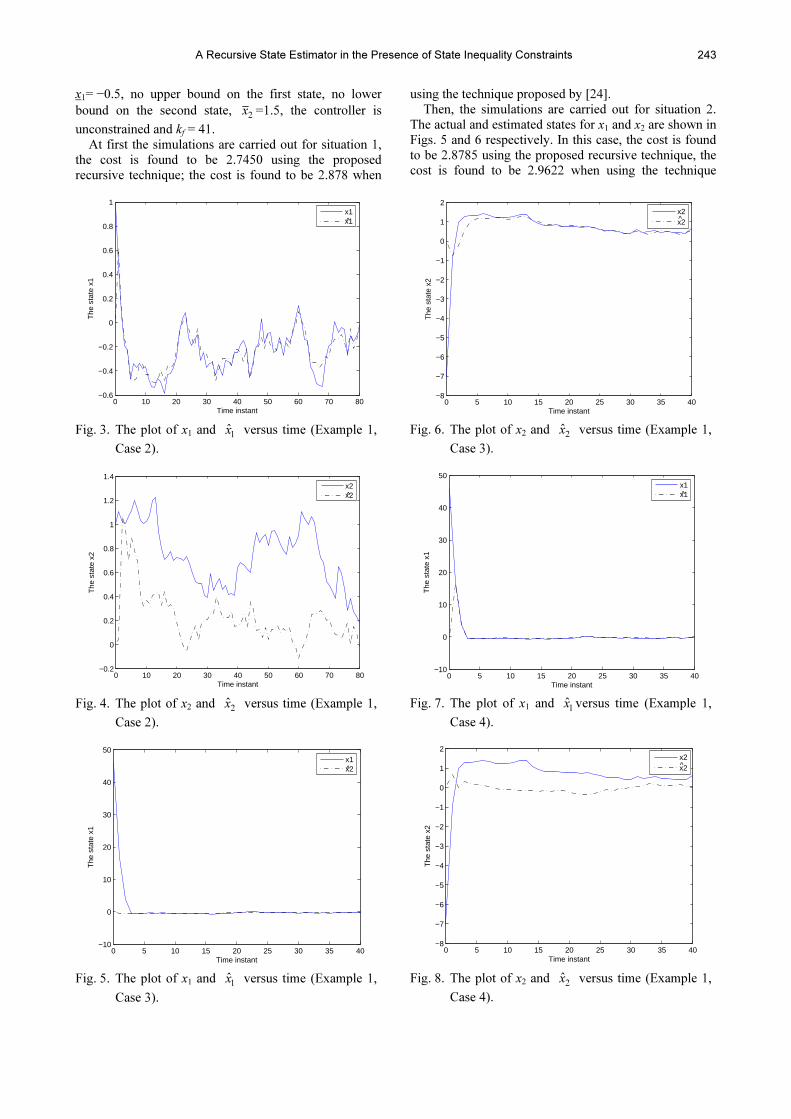
x1= −0.5, no upper bound on the first state, no lower
bound on the second state, 2x =1.5, the controller is
unconstrained and kf = 41.
At first the simulations are carried out for situation 1,
the cost is found to be 2.7450 using the proposed
recursive technique; the cost is found to be 2.878 when
using the technique proposed by [24].
Then, the simulations are carried out for situation 2.
The actual and estimated states for x1 and x2 are shown in
Figs. 5 and 6 respectively. In this case, the cost is found
to be 2.8785 using the proposed recursive technique, the
cost is found to be 2.9622 when using the technique
0 10 20 30 40 50 60 70 80−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Time instant
The
sta
te x
1
x1x1̂
Fig. 3. The plot of x1 and 1̂x versus time (Example 1,
Case 2).
0 10 20 30 40 50 60 70 80−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time instant
The
sta
te x
2
x2x2̂
Fig. 4. The plot of x2 and 2x̂ versus time (Example 1,
Case 2).
0 5 10 15 20 25 30 35 40−10
0
10
20
30
40
50
Time instant
The
sta
te x
1
x1x2^
Fig. 5. The plot of x1 and 1̂x versus time (Example 1,
Case 3).
0 5 10 15 20 25 30 35 40−8
−7
−6
−5
−4
−3
−2
−1
0
1
2
Time instant
The
sta
te x
2
x2x2̂
Fig. 6. The plot of x2 and 2x̂ versus time (Example 1,
Case 3).
0 5 10 15 20 25 30 35 40−10
0
10
20
30
40
50
Time instant
The
sta
te x
1
x1x1̂
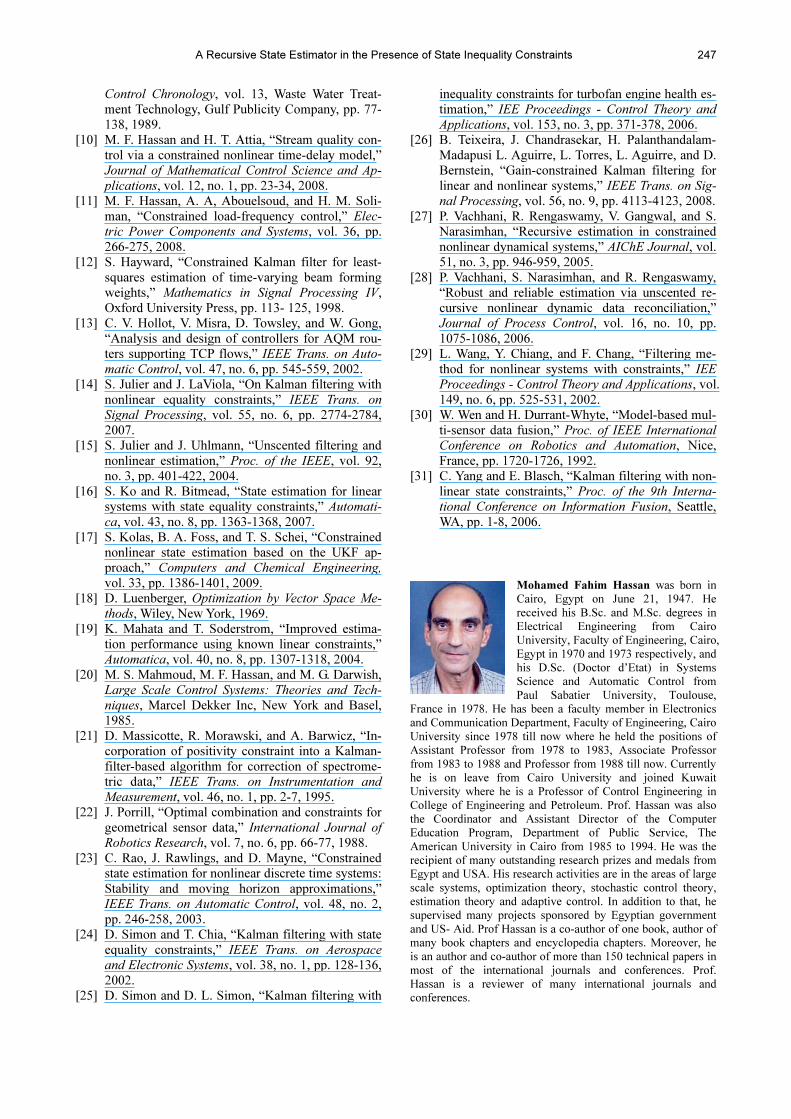
Fig. 7. The plot of x1 and 1̂x versus time (Example 1,
Case 4).
0 5 10 15 20 25 30 35 40−8
−7
−6
−5
−4
−3
−2
−1
0
1
2
Time instant
The
sta
te x
2
x2x2^
Fig. 8. The plot of x2 and 2x̂ versus time (Example 1,
Case 4).

Mohamed Fahim Hassan, Mohamed Zribi, and Hamed M. K. Alazemi
244
proposed by [24].
Case 4: Simulations using the fourth set of param-
eters In this case, we let x(0)= [46.0825 -7.0175]T, H=[1 0],
x1= −0.5, no upper bound on the first state, no lower
bound on the second state, 2x =1.5, the controller is
unconstrained and kf = 41.
At first the simulations are carried out for situation 1,
the cost is found to be 6.6464 using the proposed
recursive technique; the cost is found to be 8.911 when
using the technique proposed by [24].
Then, the simulations are carried out for situation 2.
The actual and estimated states for x1 and x2 are shown in
Figs. 7 and 8 respectively. In this case, the cost is found
to be 6.712 using the proposed recursive technique, the
cost is found to be 9.2528 when using the technique
proposed by [24].
6.2. A practical example
In this example, we consider a practical system in
which it is desired to control the pollution levels in the
two reach river system given in [9] and [20]:
102 2
0min min ( ) ( )d Q RJ x t x u t dt
= || − || + || ||∫ (56)
subject to:
1 32 0 0 0
0 32 1 2 0 0( ) ( )
0 9 0 1 32 0
0 0 5 0 32 1 2
0 1 0 5 35
0 0 10 9( ) ( ),
0 0 1 4 19
0 0 1 9
x t x t
u t w t
− . − . − . = . − .
. − . − .
. . . + + + . .
.
�
(57)
0 1 0 0( ) ( ) ( ),
0 0 0 1y t x t v t
= +
(58)
where the state variables x1(t) and x3(t) represent the
concentrations of the BOD in mg/l; the states x2(t) and
x4(t) are the concentrations of the DO in mg/l and the
vector containing the desired values of the state variables
is xd = [4.068 5.946]T. Also, u=[u1 u2]T is the deviation of
the waste water treatment from the nominal values.
The weighting matrices of the cost functions are
chosen such that Q=I4 and R=I4 where I4 is the 4 by 4
identity matrix; E[x(0)xT(0)]=P(0)=I4.The vectors w(t)
and v(t) are zero mean uncorrelated white Gaussian noise
vectors at the input and the output of the system with
covariances E[w(t) wT(t)]=5I4 and E[v(t) vT(t)]=I2.
To maintain the ecological balance of the system
while maintaining the cost of waste water treatment
within reasonable limits, the following constraints are
imposed on the system given by equations (56)-(58):
3( ) 6 5 mg l,x t ≤ . / (59)
( ) 25.u t ≥ − (60)
In order to implement the technique developed in this
paper, the problem given by equations (56)-(58) is
discretized using a first order approximation (Euler’s
method) with a sampling period ∆T=0.1 day. Figs. 9 to
12 depict the actual and estimated states of the system. It
is clear from Fig. 11 that the estimated trajectory 3x̂
satisfies the constraints imposed on the system.
Fig. 9. The plot of x1 and 1̂x vs time (Example 2).
Fig. 10. The plot of x2 and 2x̂ vs time (Example 2).
Fig. 11. The plot of x3 and 3x̂ vs time (Example 2).

A Recursive State Estimator in the Presence of State Inequality Constraints
245
Fig. 12. The plot of x4 and 4x̂ vs time (Example 2).
6.3. Comments on the simulation results
1) It is noticed that in most of our simulation results,
the difference between the two estimation costs is not
very large. This is simply due to the fact that the
constrained estimators did not hit the constraints except
in only few points. However, when the estimators reach
the constraints in a reasonable number of points (as in
case 4 of the first example when the the set of parameters
4 is used), the difference in the cost between the two
techniques is significant. It is natural to expect that the
two techniques will lead to the same value of the cost
function if the estimators did not hit the constraints
during the estimation period.
2) The results obtained from the recursive estimator is
optimal since Kalman filtering gains are based on the
actual covariance matrices resulting from the constrained
Kalman filter rather than the unconstrained Kalman filter
as proposed by [24].
7. CONCLUSION
The paper deals with the design of a recursive
estimator to estimate the states of linear dynamic system
in the presence of state inequality constraints. The
developed algorithm distinguishes between the case
when the constraints are strictly satisfied and the case
when some of the constraints are violated. The usual
Kalman filter is used when the constraints are strictly
satisfied. However, when some of the constraints are
violated, the proposed algorithm uses a series of
successive orthogonalizations on the measurement
subspaces to obtain the optimal estimate.
It is found that the proposed estimator has several
attractive properties. The constrained estimator has a
smaller covariance than the corresponding unconstrained
estimator. Also, the proposed estimator is an unbiased
estimator. In addition, when using the proposed estimator,
the value of the cost function is less than that obtained if
the covariance matrix of the unconstrained estimator is
always used to estimate the constrained one.
The proposed estimator is illustrated through
simulation results of a numerical example and a practical
example. The simulation results indicate that the
proposed estimator works well.
Future work will address the application of the
proposed recursive estimator to some real life problems
such that data transmission over networks.
APPENDIX A: PROOF OF LEMMA 1
The general filtered state estimator when a subset of
the state vector violates the constraints imposed on the
system is given by:
ˆ( 1 1) [ ( 1) ( 1)],a
x k k x k Y k+ | + = + | +E (61)
where
( )
( 1) ( 1)
( 1)
a
Y k
Y k y k
d k
+ = + . +
(62)
Equation (61) can be written in the form:
( 1) ( ) ( 1)ˆ( 1 1) .
( 1)
x k Y k y kx k k
d k
+ | , + , + | + = +
E (63)
Using Theorem 2, we can write,
( 1) ( ) ( 1)ˆ( 1 1) ,
( 1 1)
x k Y k y kx k k
d k k
+ | , + , + | + =
+ | + E
� (64)
where
( 1) ( )( 1 1) ( 1)
( 1)
d k Y kd k k d k
y k
+ | , + | + = + − . +
E� (65)
Now, since ( 1 1)d k k+ | +� is orthogonal to the
subspace generated by the measurement vector Y(k +1),
where YT(k +1)=[YT(k) yT(k +1)], then, it is possible to
write (64) in the form:
ˆ( 1 1) [ ( 1) ( ) ( 1)]
[ ( 1) ( 1 1)].
x k k x k Y k y k
x k d k k
+ | + = + | , +
+ + | + | +
E
E � (66)
Moreover, let
( 1 ) ( 1) [ ( 1) ( )].y k k y k y k Y k+ | = + − + |E� (67)
Again, since ỹ (k+1 | k) is orthogonal to the subspace
generated by the measurement vector Y(k), equation (66)
can take the following form:
ˆ( 1 1) [ ( 1) ( )]
[ ( 1) ( 1 )]
[ ( 1) ( 1 1)].
x k k x k Y k
x k y k k
x k d k k
+ | + = + |
+ + | + |
+ + | + | +
E
E
E
�
�
(68)
The first two terms in the right half of (68) correspond
to the optimal filtered estimate of the unconstrained state
variables. Denoting this estimate by 1( 1 1),ˆ k kx + | +
then using (68) we can write,
1ˆ ˆ( 1 1) ( 1 1)
[ ( 1) ( 1 1)],E
x k k x k k
x k d k k
+ | + = + | +
+ + | + | +� (69)

Mohamed Fahim Hassan, Mohamed Zribi, and Hamed M. K. Alazemi
246
where 1̂( 1 1)x k k+ | + and its associated predicted esti-
mator 1̂( 1 ),x k k+ | covariance matrices
1 1( 1 ),
x xP k k+ |� �
1 1( 1 1)
x xP k k+ | +� �
and K1(k +1) are as given by equations
(23)-(33) while replacing x by x1.
Now, we consider the impact of the second term in
(69) which reflects the effects of the saturated constraints
on the optimal filter estimator. Let ( 1 1)d k k+ | +� be
such:
ˆ( 1 1) ( 1) ( 1 1),d k k d k d k k+ | + = + − + | +� (70)
where
ˆ( 1 1) [ ( 1) ( ) ( 1)]
[ ( 1) ( ) ( 1 )]
d k k d k Y k y k
d k Y k y k k
+ | + = + | , +
= + | , + |
E
E �
(71)
1
[ ( 1) ( 1) ( ) ( 1 )]
( 1) ( 1 1)ˆ
D k x k Y k y k k
D k k kx
= + + | , + |
= + + | + .
E �
Let 1 1̂( 1 1) ( 1) ( 1 1).x k k x k x k k+ | + = + − + | +� Using
(70), the fact that ( 1) ( 1) ( 1)d k D k x k+ = + + and (71),
we obtain,
1
1
( 1 1) ( 1) ( 1)
ˆ( 1) ( 1 1)
( 1) ( 1 1)
d k k D k x k
D k x k k
D k x k k
+ | + = + +
− + + | +
= + + | + .
�
�
(72)
Now,
1
[ ( 1) ( 1 1)]
( 1 1) ( 1 1) ( 1 1),xd dd
x k d k k
P k k P k k d k k−
+ | + | +
= + | + + | + + | +
E
� � �
�
� (73)
where
1 1
11
1
( 1 1) [ ( 1) ( 1 1)]
ˆ[( ( 1 1) ( 1))
( ( 1 1) ( 1))]
( 1 1) ( 1)
T
xd
T T
T
x x
P k k x k k kd
x k k kx
x k k D k
P k k D k
+ | + = + + | +
= + | + + +
+ | + +
= + | + + .
E
E
�
� �
�
�
�
(74)
Similarly,
1 1
( 1 1) [ ( 1 1) ( 1 1)]
( 1) ( 1 1) ( 1).
T
dd
T
x x
P k k d k k k kd
D k P k k D k
+ | + = + | + + | +
= + + | + +
E� �
� �
� �
(75)
Using equations (72)-(75), equation (69) leads to,
1
2
ˆ ˆ( 1 1) ( 1 1)
K ( 1) ( 1 1)
x k k x k k
k d k k
+ | + = + | +
+ + + | +� (76)
where
1
2K ( 1) ( 1 1) ( 1 1)
xd ddk P k k P k k
−+ = + | + + | + .� � � (77)
Recall that:
ˆ( 1 1) ( 1) ( 1 1)x k k x k x k k+ | + = + − + | + .� (78)
Therefore, by using equation (76) we can write,
1 2
1 2
( 1 1)
ˆ( 1) ( 1 1)
( 1) ( 1 1) K ( 1) ( 1 1)ˆ
( 1 1) K ( 1) ( 1 1)
x k k
x k x k k
x k k k k d k kx
x k k k d k k
+ | +
= + − + | +
= + − + | + − + + | +
= + | + − + + | + .
�
�
��
(79)
Also,
1 2
1 2
( 1 1)
[ ( 1 1) ( 1 1)]
( ( 1 1) K ( 1) ( 1 1))
.( ( 1 1) K ( 1) ( 1 1))
xx
T
T
P k k
x k k k kx
k k k d k kx
x k k k d k k
+ | +
= + | + + | +
= + | + − + + | +
× + | + − + + | +
E
E
� �
� �
��
��
(80)
After simple mathematical manipulation, this leads to:
1 1
2( 1 1) [ K ( 1) ( 1)]
( 1 1)
xx
x x
P k k I k D k
P k k
+ | + = − + +
× + | + .
� �
� �
(81)
Then, the estimator will proceed to the next discrete
instant of time.
REFERENCES
[1] L. Chia, D. Simon, and H. J. Chizeck, “Kalman
filtering with statistical state constraints,” Control
and Intelligent Systems, vol. 34, no. 1, pp. 73-79,
2006.
[2] T. Chia, P. Chow, and H. Chizek, “Recursive para-
meter identification of constrained systems: an ap-
plication to electrically stimulated muscle,” IEEE
Trans. on Biomedical Engineering, vol. 38, no. 5,
pp. 429-441, 1991.
[3] H. E. Doran, “Constraining Kalman filter and
smoothing estimates to satisfy time-varying restric-
tions,” Rev. Econom. Statist., vol. 74, no. 3, pp.
568-572, 1992.
[4] J. D. Geeter, H. V. Brussel, and J. De Schutter, “A
smoothly constrained Kalman filter,” IEEE Trans.
Pattern Anal. Machine Intell., vol. 19, no. 10, pp.
1171-1177, 1997.
[5] N. Gupta and R. Hauser, “Kalman filtering with
equality and inequality state constraints,” http://
arxiv.org/abs/0709.2791, 2007.
[6] M. F. Hassan and A. K. Ali, “A coordinating ap-
proach for the solution of discrete linear servo-
mechanism problem with constraints,” Asian Jour-
nal of Control, vol. 10, no. 4, pp. 478-494, 2008.
[7] M. F. Hassan, G. Salut, M. G. Singh, and A. Titli,
“A new decentralized filter for large scale intercon-
nected dynamical system,” IEEE Trans. on Auto-
matic Control, vol. 23, no. 2, pp. 262-268, 1978.
[8] N. Haverbeke, B. Pluymers, and B. De Moor,
“Constrained state estimation: a critical evalua-
tion,” Proc. of 25th Benelux Meeting on Systems
and Control, The Netherlands, March 13-15, 2006.
[9] M. F. Hassan, “Water quality simulation and con-
trol in streams,” Encyclopedia of Environmental
A Recursive State Estimator in the Presence of State Inequality Constraints
247
Control Chronology, vol. 13, Waste Water Treat-
ment Technology, Gulf Publicity Company, pp. 77-
138, 1989.
[10] M. F. Hassan and H. T. Attia, “Stream quality con-
trol via a constrained nonlinear time-delay model,”
Journal of Mathematical Control Science and Ap-
plications, vol. 12, no. 1, pp. 23-34, 2008.
[11] M. F. Hassan, A. A, Abouelsoud, and H. M. Soli-
man, “Constrained load-frequency control,” Elec-
tric Power Components and Systems, vol. 36, pp.
266-275, 2008.
[12] S. Hayward, “Constrained Kalman filter for least-
squares estimation of time-varying beam forming
weights,” Mathematics in Signal Processing IV,
Oxford University Press, pp. 113- 125, 1998.
[13] C. V. Hollot, V. Misra, D. Towsley, and W. Gong,
“Analysis and design of controllers for AQM rou-
ters supporting TCP flows,” IEEE Trans. on Auto-
matic Control, vol. 47, no. 6, pp. 545-559, 2002.
[14] S. Julier and J. LaViola, “On Kalman filtering with
nonlinear equality constraints,” IEEE Trans. on
Signal Processing, vol. 55, no. 6, pp. 2774-2784,
2007.
[15] S. Julier and J. Uhlmann, “Unscented filtering and
nonlinear estimation,” Proc. of the IEEE, vol. 92,
no. 3, pp. 401-422, 2004.
[16] S. Ko and R. Bitmead, “State estimation for linear
systems with state equality constraints,” Automati-
ca, vol. 43, no. 8, pp. 1363-1368, 2007.
[17] S. Kolas, B. A. Foss, and T. S. Schei, “Constrained
nonlinear state estimation based on the UKF ap-
proach,” Computers and Chemical Engineering,
vol. 33, pp. 1386-1401, 2009.
[18] D. Luenberger, Optimization by Vector Space Me-
thods, Wiley, New York, 1969.
[19] K. Mahata and T. Soderstrom, “Improved estima-
tion performance using known linear constraints,”
Automatica, vol. 40, no. 8, pp. 1307-1318, 2004.
[20] M. S. Mahmoud, M. F. Hassan, and M. G. Darwish,
Large Scale Control Systems: Theories and Tech-
niques, Marcel Dekker Inc, New York and Basel,
1985.
[21] D. Massicotte, R. Morawski, and A. Barwicz, “In-
corporation of positivity constraint into a Kalman-
filter-based algorithm for correction of spectrome-
tric data,” IEEE Trans. on Instrumentation and
Measurement, vol. 46, no. 1, pp. 2-7, 1995.
[22] J. Porrill, “Optimal combination and constraints for
geometrical sensor data,” International Journal of
Robotics Research, vol. 7, no. 6, pp. 66-77, 1988.
[23] C. Rao, J. Rawlings, and D. Mayne, “Constrained
state estimation for nonlinear discrete time systems:
Stability and moving horizon approximations,”
IEEE Trans. on Automatic Control, vol. 48, no. 2,
pp. 246-258, 2003.
[24] D. Simon and T. Chia, “Kalman filtering with state
equality constraints,” IEEE Trans. on Aerospace
and Electronic Systems, vol. 38, no. 1, pp. 128-136,
2002.
[25] D. Simon and D. L. Simon, “Kalman filtering with
inequality constraints for turbofan engine health es-
timation,” IEE Proceedings - Control Theory and
Applications, vol. 153, no. 3, pp. 371-378, 2006.
[26] B. Teixeira, J. Chandrasekar, H. Palanthandalam-
Madapusi L. Aguirre, L. Torres, L. Aguirre, and D.
Bernstein, “Gain-constrained Kalman filtering for
linear and nonlinear systems,” IEEE Trans. on Sig-
nal Processing, vol. 56, no. 9, pp. 4113-4123, 2008.
[27] P. Vachhani, R. Rengaswamy, V. Gangwal, and S.
Narasimhan, “Recursive estimation in constrained
nonlinear dynamical systems,” AIChE Journal, vol.
51, no. 3, pp. 946-959, 2005.
[28] P. Vachhani, S. Narasimhan, and R. Rengaswamy,
“Robust and reliable estimation via unscented re-
cursive nonlinear dynamic data reconciliation,”
Journal of Process Control, vol. 16, no. 10, pp.
1075-1086, 2006.
[29] L. Wang, Y. Chiang, and F. Chang, “Filtering me-
thod for nonlinear systems with constraints,” IEE
Proceedings - Control Theory and Applications, vol.
149, no. 6, pp. 525-531, 2002.
[30] W. Wen and H. Durrant-Whyte, “Model-based mul-
ti-sensor data fusion,” Proc. of IEEE International
Conference on Robotics and Automation, Nice,
France, pp. 1720-1726, 1992.
[31] C. Yang and E. Blasch, “Kalman filtering with non-
linear state constraints,” Proc. of the 9th Interna-
tional Conference on Information Fusion, Seattle,
WA, pp. 1-8, 2006.
Mohamed Fahim Hassan was born in
Cairo, Egypt on June 21, 1947. He
received his B.Sc. and M.Sc. degrees in
Electrical Engineering from Cairo
University, Faculty of Engineering, Cairo,
Egypt in 1970 and 1973 respectively, and
his D.Sc. (Doctor d’Etat) in Systems
Science and Automatic Control from
Paul Sabatier University, Toulouse,
France in 1978. He has been a faculty member in Electronics
and Communication Department, Faculty of Engineering, Cairo
University since 1978 till now where he held the positions of
Assistant Professor from 1978 to 1983, Associate Professor
from 1983 to 1988 and Professor from 1988 till now. Currently
he is on leave from Cairo University and joined Kuwait
University where he is a Professor of Control Engineering in
College of Engineering and Petroleum. Prof. Hassan was also
the Coordinator and Assistant Director of the Computer
Education Program, Department of Public Service, The
American University in Cairo from 1985 to 1994. He was the
recipient of many outstanding research prizes and medals from
Egypt and USA. His research activities are in the areas of large
scale systems, optimization theory, stochastic control theory,
estimation theory and adaptive control. In addition to that, he
supervised many projects sponsored by Egyptian government
and US- Aid. Prof Hassan is a co-author of one book, author of
many book chapters and encyclopedia chapters. Moreover, he
is an author and co-author of more than 150 technical papers in
most of the international journals and conferences. Prof.
Hassan is a reviewer of many international journals and
conferences.

Mohamed Fahim Hassan, Mohamed Zribi, and Hamed M. K. Alazemi
248
Mohamed Zribi obtained his B.S. de-
gree in Electrical Engineering (Magna
Cum Laude Honors) in 1985 from the
University of Houston, Houston, Texas.
He received his M.S.E.E and Ph.D. de-
grees in Electrical Engineering in 1987
and 1992 from Purdue University, West
Lafayette, Indiana. He held a faculty
position in the School of Electrical Engi-
neering, Nanyang Technological University, Singapore from
1992 till 1998. He is currently a professor in the Electrical En-
gineering Department, College of Engineering & Petroleum,
Kuwait University. His research interests are in nonlinear con-
trol, adaptive control, control applications and robotics.
Hamed M. K. Alazemi received his
B.Sc. and M.S. degrees in Electrical
Engineering from Washington University
(Saint Louis) in 1992 and 1994
respectively, and his Ph.D. degree from
the University of Washington (Seattle) in
2000. He is currently an associate
professor at the Computer Engineering
Department at Kuwait University where
his research interests include analysis/design of Computer
communication network. His recent research emphasis includes
control and communication design, routing in WDM networks
and stochastic performance evaluation and combinatorial
optimization.




















