A path-following driver/vehicle model with optimized lateral dynamic controller
19
-
Upload
independent -
Category
Documents
-
view
3 -
download
0
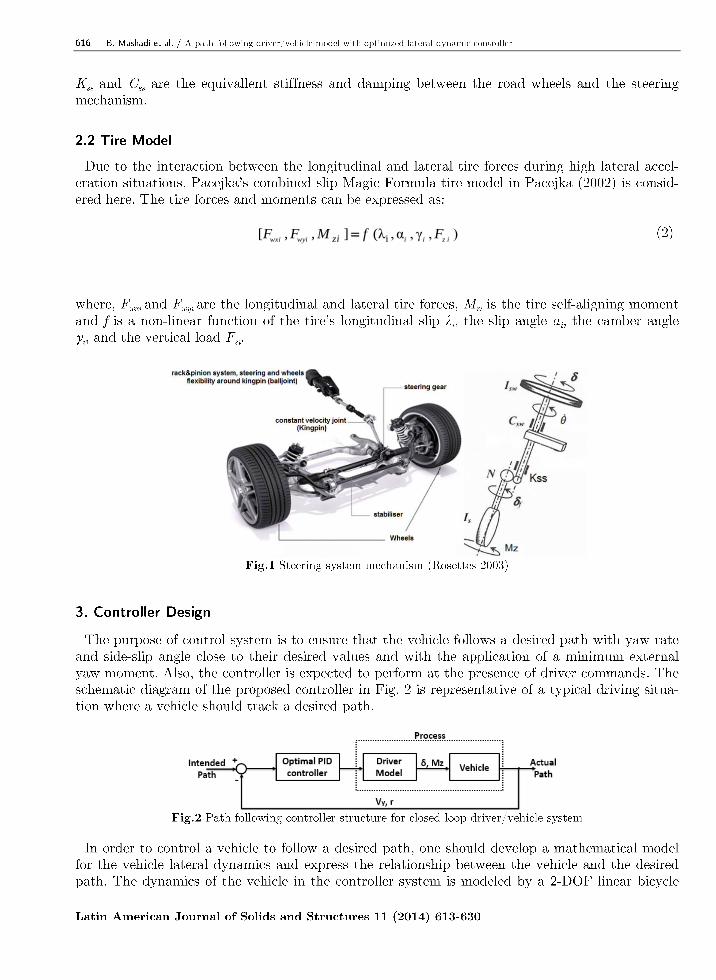
Transcript of A path-following driver/vehicle model with optimized lateral dynamic controller

δΦ
Φ( )(δ θ) - (δ -θ / ) δ -f
sw s f ss ss sw f z r yfI I K N K C M X F
i[ , , ] (λ ,α , γ , )wxi wyi i i z iziF F M f F
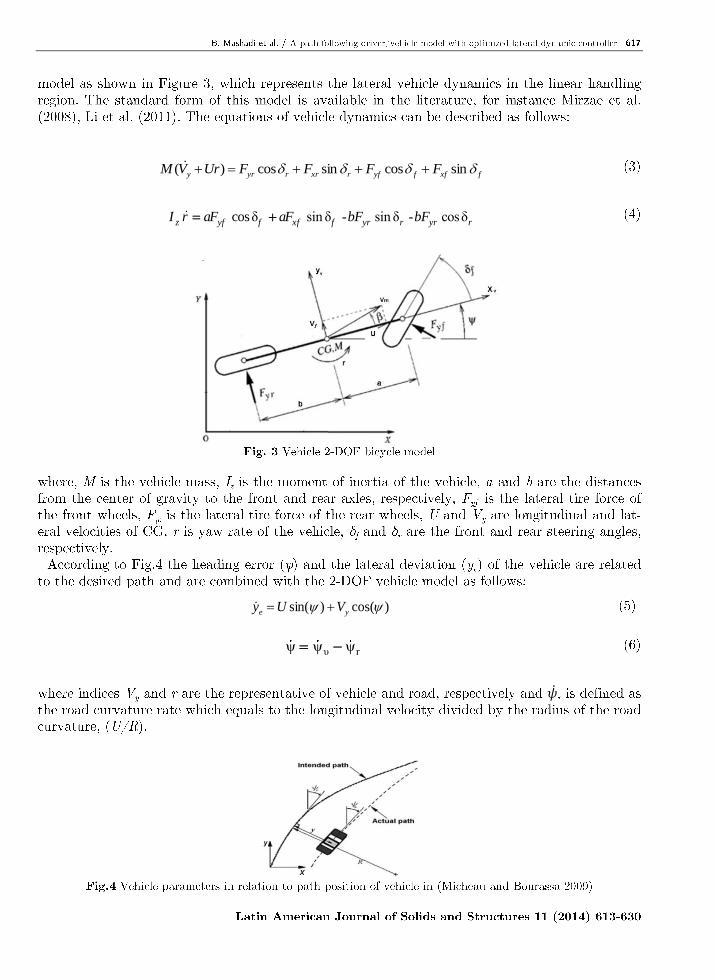
fxffyfrxrryry FFFFUrVM sincossincos)(
)cos()sin( ye VUy
υ rψ ψ ψ
cosδ sin δ - sin δ - cosδz yf f xf f yr r yr rI r aF aF bF bF

1 1 1 1 1δ (1 / ( ))zX A X E B M K R t
0
0
0
0
0
0
0
0
00
1000
00
010
1
2
1
1
2221
1211
11U
K
b
B
e
eE
aa
aa
U
A
r
V
y
Xy
e
z
ff
z
rf
z
frfrrf
I
aCe
M
Ce
UI
CbCaa
UI
CbCaU
MU
CbCa
MU
CCa
222
222
21
22
22
211211
τ1
2
( )( )
( )
1Δ 1
1 1
τ
τ τd s
d r
ss
sH
E
she
N s s
Lyy eep

τ 2
2
1
1
τ
τd
d
s
d
se
s
12
2 2
τ 1δ= [ ( ψ) 2 ( ψ)] ( ψ)]+ [ (τ τ )δ - δ]
τ τ .τe e e n
n
W y L y L y L
2
1.τ .τn
Wh
N
[1 / ]zX AX BM K R
LUW
WU
U
K
Wb
bB
aaaaaa
eaa
eaa
Ar
v
ye
X
d
12
666564636216
22221
12111
20
0
0
0
0
0
0
0
100000
000
001000
000
000010

2
26621
1
651
222164
163
121116261
.
)(,
.
1,
2)(
2,
2)(
n
n
nd
dd
aLeeaLW
ULaaWa
WLUW
aW
LaaWaWa
( ) ic p d
kG s k k s
s
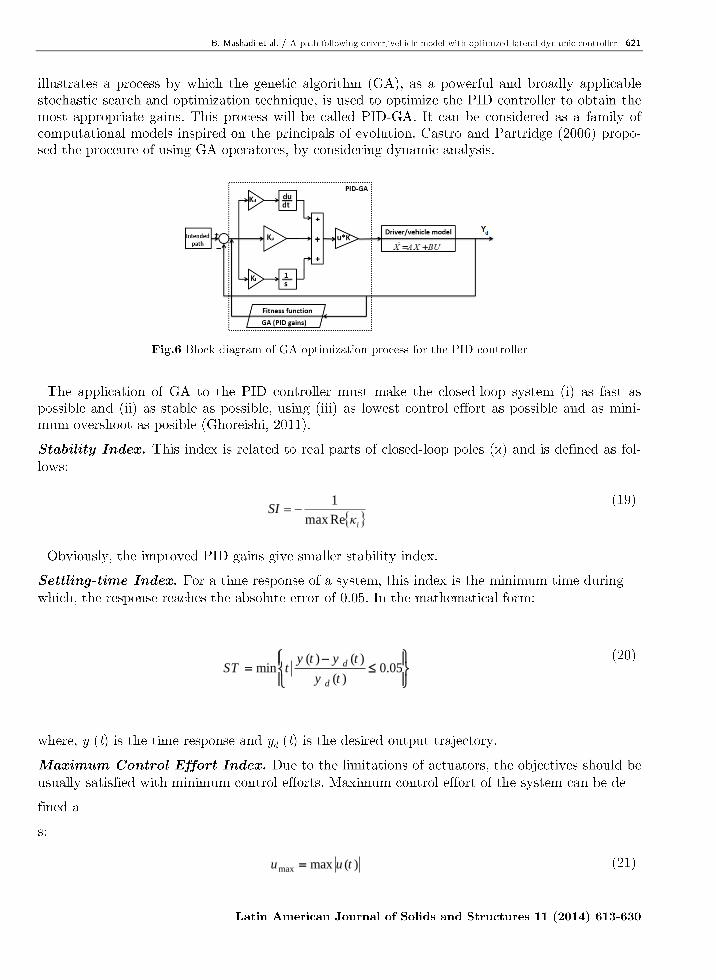
iκSI
Remax
1
( ) ( )min 0.05
( )
d
d
y t y tST t
y t
max max ( )u u t

0 2 4 6 8 10-6
-4
-2
0
2
4
6
8
time(s)
sid
e s
lip
(deg
)
ADAMS
Simulation
0 2 4 6 8 10-6
-4
-2
0
2
4
6
time(s)
ay(m
/s2)
ADAMS
Simulation
0.2 0.5 5 2r s ss pI t t E M
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
Time(sec)
Am
plitu
de
Step response
PID-GA
PID
-25 -20 -15 -10 -5 0 5 -30
-20
-10
0
10
20
-20 -15 -10 -5 0 5 -25 -20 -15 -10 -5 0 5
10 15 20 25
Root Locus Root Lucas
Ima
gin
ary
Ax
is
Real Axis Real Axis
Ima
gin
ary
Ax
is
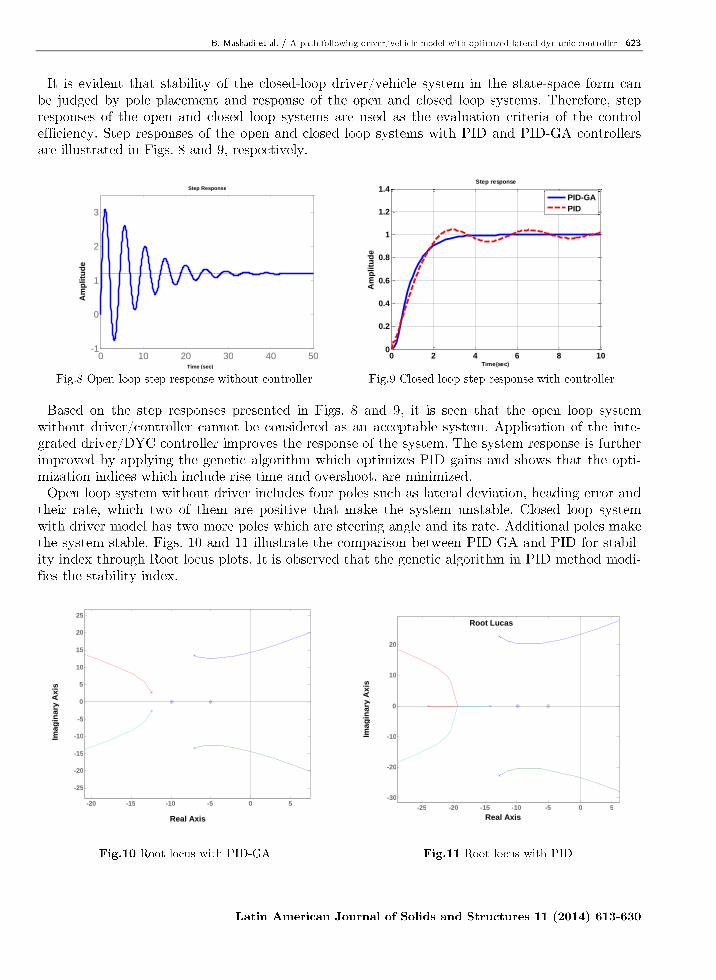
0 10 20 30 40 50 -1
0
1
2
3
Step Response
Am
pli
tud
e
Time (sec)
50 100 150 200
0
0.5
1
1.5
2
2.5
3
3.5
x(m)
y(m
)
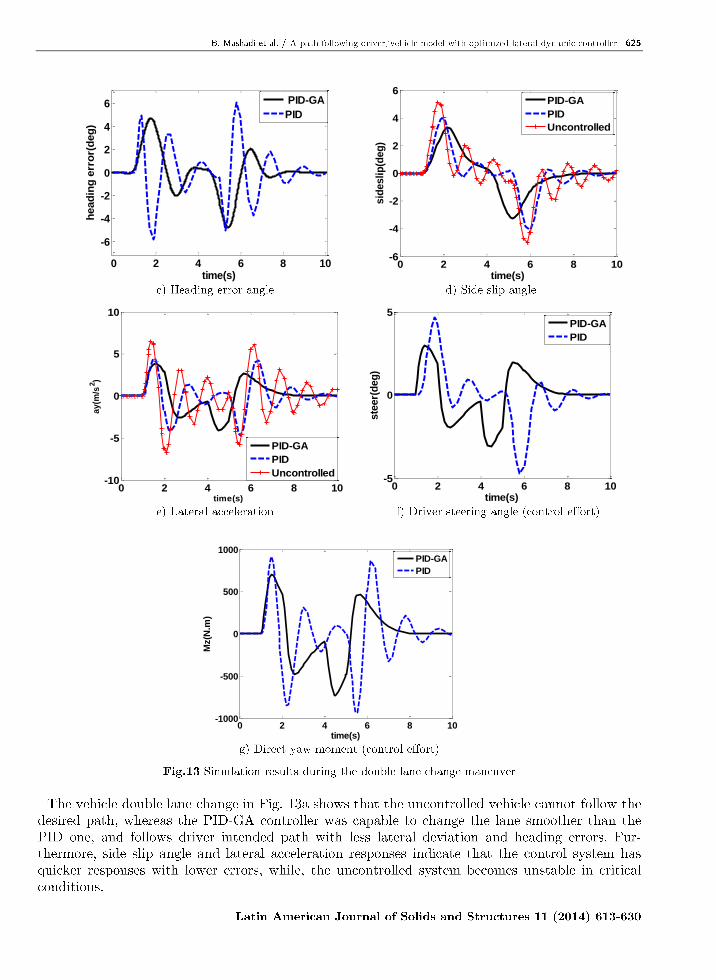
Desired
Uncontrolled
PID
PID-GA
0 2 4 6 8 10-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
time(s)
late
ral d
evia
tio
n(m
)
PID-GA
PID
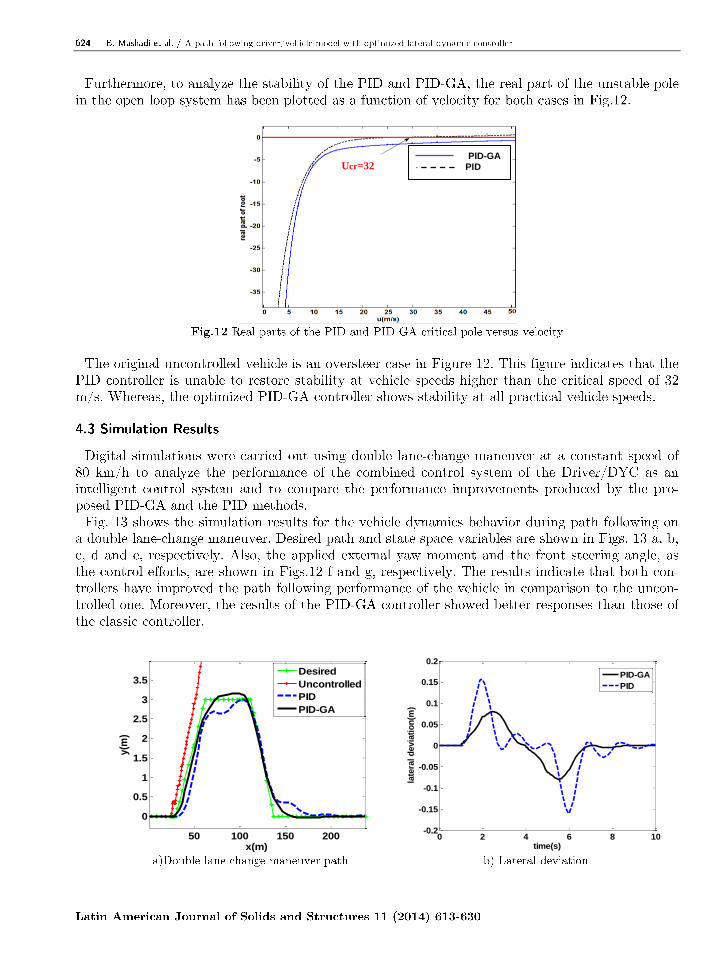
Ucr=32 PID-GA
PID
0 2 4 6 8 10
-6
-4
-2
0
2
4
6
time(s)
head
ing
err
or(
deg
)
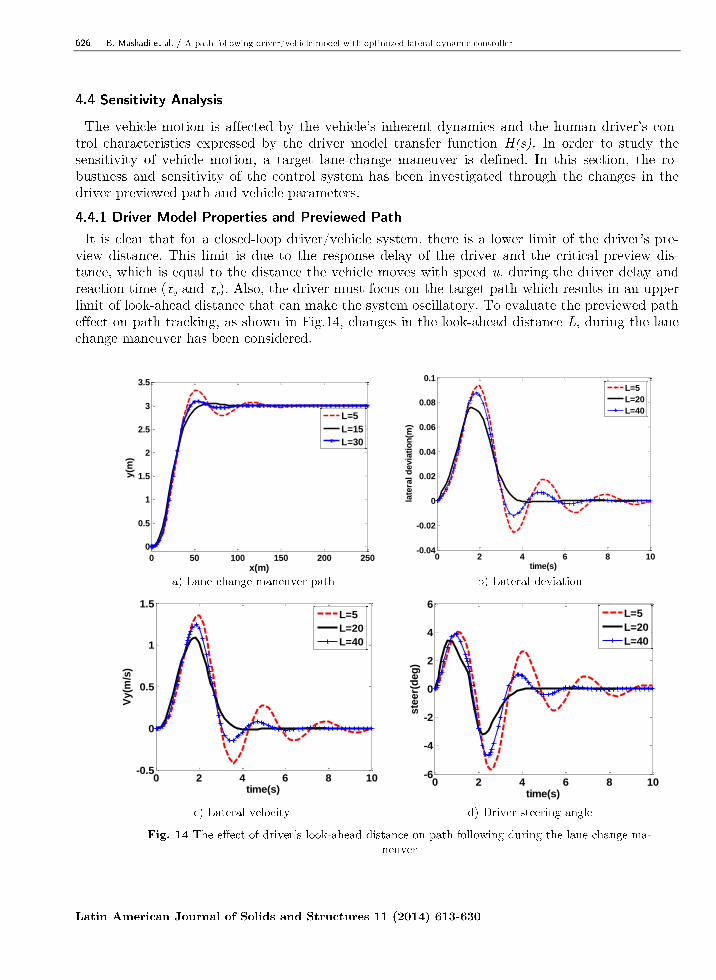
PID-GA
PID
0 2 4 6 8 10-6
-4
-2
0
2
4
6
time(s)
sid
eslip
(deg
)
PID-GA
PID
Uncontrolled
0 2 4 6 8 10-10
-5
0
5
10
time(s)
ay(m
/s2)
PID-GA
PID
Uncontrolled
0 2 4 6 8 10-5
0
5
time(s)
ste
er(
deg
)
PID-GA
PID
0 2 4 6 8 10-1000
-500
0
500
1000
time(s)
Mz(N
.m)
PID-GA
PID
0 50 100 150 200 250
0
0.5
1
1.5
2
2.5
3
3.5
x(m)
y(m
)
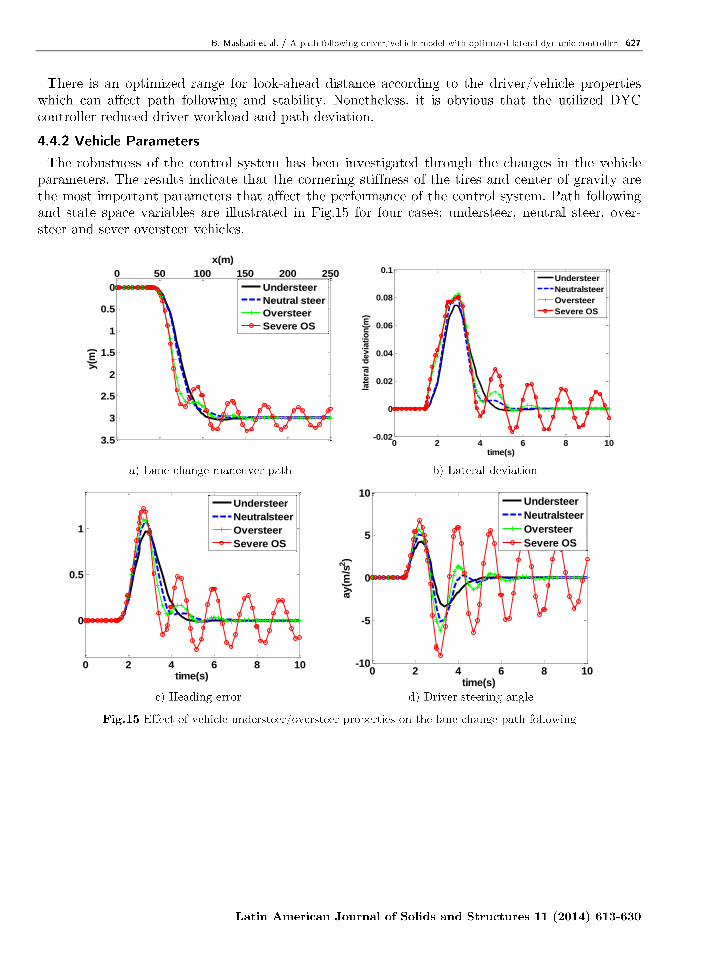
L=5
L=15
L=30
0 2 4 6 8 10-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
time(s)
late
ral d
evia
tio
n(m
)
L=5
L=20
L=40
0 2 4 6 8 10-0.5
0
0.5
1
1.5
time(s)
Vy(m
/s)
L=5
L=20
L=40
0 2 4 6 8 10-6
-4
-2
0
2
4
6
ste
er(
deg
)
time(s)
L=5
L=20
L=40
0 50 100 150 200 250
0
0.5
1
1.5
2
2.5
3
3.5
x(m)
y(m
)
Understeer
Neutral steer
Oversteer
Severe OS
0 2 4 6 8 10-0.02
0
0.02
0.04
0.06
0.08
0.1
time(s)
late
ral d
evia
tio
n(m
)
Understeer
Neutralsteer
Oversteer
Severe OS
0 2 4 6 8 10
0
0.5
1
time(s)
Vy(m
/s)
Understeer
Neutralsteer
Oversteer
Severe OS
0 2 4 6 8 10-10
-5
0
5
10
time(s)
ay(m
/s2)
Understeer
Neutralsteer
Oversteer
Severe OS
0 50 100 150 200 250
0
0.5
1
1.5
2
2.5
3
x(m)
y(m
)
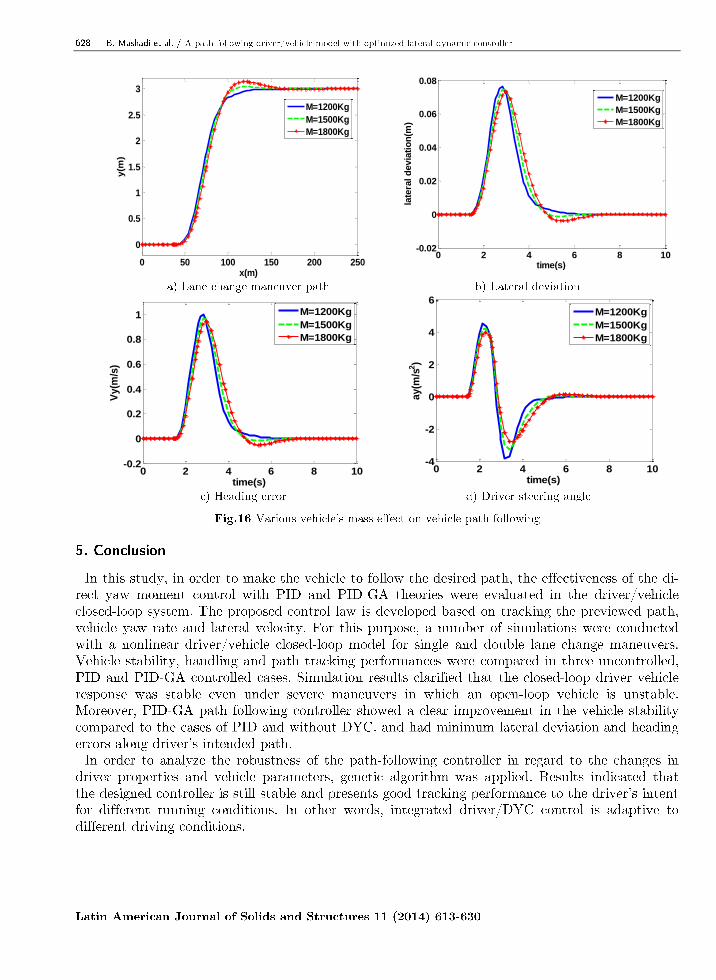
M=1200Kg
M=1500Kg
M=1800Kg
0 2 4 6 8 10-0.02
0
0.02
0.04
0.06
0.08
time(s)
late
ral d
evia
tio
n(m
)
M=1200Kg
M=1500Kg
M=1800Kg
0 2 4 6 8 10-0.2
0
0.2
0.4
0.6
0.8
1
time(s)
Vy(m
/s)
M=1200Kg
M=1500Kg
M=1800Kg
0 2 4 6 8 10-4
-2
0
2
4
6
time(s)
ay(m
/s2)
M=1200Kg
M=1500Kg
M=1800Kg