
A multiperiod school location planning approach with free school choice
18
1 Introduction Due to low fertility rates the population has started to decline in Germany over the last decade. Particularly in the eastern parts of Germany this process has been intensified by negative net migration. Hence, there is a strong need for long-term and demand- meeting planning of public service facilities. In the City of Dresden (in the far east of Germany) the decreasing number of students has forced the education authority to close schools because of underuse. However, it is now expected that the number of students will increase in the near future. While making a decision about which school has to be closed or opened at a certain point in time, authorities should be aware of spatial ^ temporal and socioeconomic consequences. As there are numerous possible solutions for a given number of schools, demand points (blocks, for example), and periods, it will be nearly impossible to find manually an optimal solution related to a certain objective. So, sophisticated mathematical programming approaches are required. Therefore, we present a cost-minimizing approach toward school location planning with respect to dynamic number of students, choice-related probabilistic student allo- cation, and commuting mode choice. We refer to a probabilistic student allocation because German students are free to choose the secondary school to enroll at. That means enrollment is not mandatory as determined by the location of students. Although the literature mostly ignores free school choice (Lemberg and Church, 2000), it is evident that in recent years there has also been an emerging need for free school choice in countries other than Germany (Burgess and Briggs, 2006; Hoxby, 2003). The remainder of this paper is organized as follows. Section 2 is a literature review. Section 3 contains the construction of the model. The application of our approach and the data for the City of Dresden as well as the solution process and the computational results can be found in the fourth section. The paper finishes with some final remarks and comments on possible future research. A multiperiod school location planning approach with free school choice Sven Mu« ller, Knut Haase, Sascha Kless Transport and Economics, Technische Universita« t Dresden, Andreas-Schubert-Strasse 23, 01069 Dresden, Germany; e-mail: [email protected], [email protected], sascha [email protected] Received 24 October 2007; in revised form 20 February 2009; published online 19 October 2009 Environment and Planning A 2009, volume 41, pages 2929 ^ 2945 Abstract. The subject of this paper is a new approach to multiperiod school location planning in urban areas. Most of the existing approaches in the field do not consider free school choice nor are they able to consider substitution effects between school locations. We minimize the location and transport costs with respect to students choosing the school with the highest utility. Since these school choice probabilities (determined by a mixed multinominal logit model) depend on the available schools, we have to consider two steps. First, we generate for each period a set of scenarios indicating which school is open and which is not. For each scenario we allocate the students to available schools according to capacity and utility. Second, we select for each period one scenario in order to minimize total costs. Problems with a long planning horizon and a large number of demand points are solvable. We apply this approach to schools of the City of Dresden, Germany. doi:10.1068/a40285
-
Upload
universitat-hamburg -
Category
Documents
-
view
3 -
download
0
Transcript of A multiperiod school location planning approach with free school choice

1 IntroductionDue to low fertility rates the population has started to decline in Germany over the lastdecade. Particularly in the eastern parts of Germany this process has been intensifiedby negative net migration. Hence, there is a strong need for long-term and demand-meeting planning of public service facilities. In the City of Dresden (in the far east ofGermany) the decreasing number of students has forced the education authority toclose schools because of underuse. However, it is now expected that the number ofstudents will increase in the near future. While making a decision about which schoolhas to be closed or opened at a certain point in time, authorities should be aware ofspatial ^ temporal and socioeconomic consequences. As there are numerous possiblesolutions for a given number of schools, demand points (blocks, for example), andperiods, it will be nearly impossible to find manually an optimal solution related to acertain objective. So, sophisticated mathematical programming approaches are required.
Therefore, we present a cost-minimizing approach toward school location planningwith respect to dynamic number of students, choice-related probabilistic student allo-cation, and commuting mode choice. We refer to a probabilistic student allocationbecause German students are free to choose the secondary school to enroll at. Thatmeans enrollment is not mandatory as determined by the location of students. Althoughthe literature mostly ignores free school choice (Lemberg and Church, 2000), it isevident that in recent years there has also been an emerging need for free school choicein countries other than Germany (Burgess and Briggs, 2006; Hoxby, 2003).
The remainder of this paper is organized as follows. Section 2 is a literature review.Section 3 contains the construction of the model. The application of our approach andthe data for the City of Dresden as well as the solution process and the computationalresults can be found in the fourth section. The paper finishes with some final remarksand comments on possible future research.
A multiperiod school location planning approach with freeschool choice
Sven Mu« ller, Knut Haase, Sascha KlessTransport and Economics, Technische Universita« t Dresden, Andreas-Schubert-Strasse 23,01069 Dresden, Germany; e-mail: [email protected], [email protected],sascha [email protected] 24 October 2007; in revised form 20 February 2009; published online 19 October 2009
Environment and Planning A 2009, volume 41, pages 2929 ^ 2945
Abstract. The subject of this paper is a new approach to multiperiod school location planning inurban areas. Most of the existing approaches in the field do not consider free school choice nor arethey able to consider substitution effects between school locations. We minimize the location andtransport costs with respect to students choosing the school with the highest utility. Since theseschool choice probabilities (determined by a mixed multinominal logit model) depend on theavailable schools, we have to consider two steps. First, we generate for each period a set of scenariosindicating which school is open and which is not. For each scenario we allocate the students toavailable schools according to capacity and utility. Second, we select for each period one scenario inorder to minimize total costs. Problems with a long planning horizon and a large number of demandpoints are solvable. We apply this approach to schools of the City of Dresden, Germany.
doi:10.1068/a40285
2 Literature review2.1 General facility location modelsFor a general overview of different classes of location problems see Drezner andHamacher (2004) and ReVelle and Eiselt (2005). Drezner and Eiselt (2002) differentiatebetween location-allocation models and location-choice models. Within location-allocation models the demand is allocated to the facilities compulsorily (schools inthe United States or fire stations, for example). The most prominent models of thisclass are the p-median problem (Hakimi, 1964; 1965), covering models (Current et al,2002; Schilling et al, 1993), and centre models (Owen and Daskin, 1998). In location-choice models customers choose the location themselves (colleges in Germany orsupermarkets, for example). Eiselt et al (1993) discuss deterministic location-choicemodels, on the one hand, and probabilistic location-choice models, on the otherhand. The former assume that the whole demand of a given demand point is totallysatisfied by only one facility. The latter consider a distribution of the demand tomore than one facility. Both classes of model consider a utility function (this couldbe linear or nonlinear, additive or multiplicative). Although probabilistic location-choice models seem to be applicable to school location planning in Germany, thesemodels are basically designed for a competitive framework (maximizing marketshare, for example). But in the narrower sense, competition is not usual for publicservice facility location planning (Plastria, 2001). Furthermore, facility location mod-els for public service planning usually do not consider probabilistic demand (Dreznerand Hamacher, 2004). Our approach to school location planning in Germany con-siders costs minimization and probabilistic demand as well as closing and openingof facilities over a finite horizon. Hence, neither probabilistic location-choice modelsnor facility location models for public service planning seem to be directly applicableto school location planning in Germany.
2.2 School location modelsIn the following discussion of school location planning approaches we do not considerschool districting problems, because they do not enable us to decide whether to openor close a school. The interested reader is referred to Koenigsberg (1968), Hollowayet al (1975), Lemberg and Church (2000), and Caro et al (2004), for example.
Trifon and Livnat (1973) made an attempt to model decisions on minimum-costschool locations over a finite horizon. They use a linear programme so the decisionwhether a school should be opened at a potential site is implicitly given by capacityexpansion. Henig and Gerchak (1986) present a dynamic programming approach.This model is suggested as a core of a procedure to determine the optimal numberof classrooms and schools per period. On the basis of age cohorts they enumerateassignment alternatives. The model captures the dynamics of the expansion processcaused by immigration. Moreover, the model is able to handle uncertain demand in thefuture. Therefore, the numbers of classrooms per period are considered to be randomvariables with a given probability (density) function. Greenleaf and Harrison (1987)used a binary programme to develop a minimum-cost configuration of open/closedecisions on schools and on the assignment of students to schools over a given numberof periods. Their approach considers schools to be sold and a deviation of studentnumbers from the capacity bounds. The model is applied to a region with dramaticdecline in student numbers. Diamond and Wright (1987) regard different objectiveslike distance, compactness, safety considerations, utilization, and student dislocation.For a given number of schools the model determines the schools to be openedand the assignment of students (or rather demand points) to these schools. Concerningthe assignment decision they apply a specific constraint in order to ensure contiguity
2930 S Mu« ller, K Haase, S Kless

of school districts. Church and Murray (1993) presented a reformulation of this modelto remove inconsistency in minimizing the deviations in capacity utilization. Thedynamic modular capacitated facility location problem (DMCFLP) by Antunes andPeeters (2000) minimizes fixed and variable location costs as well as costs for capacityexpansion/reduction over a finite horizon. Students are assigned to schools accordingto capacity and attendance costs (including transport costs). Capacity expansion/reduction is limited to a set of predefined standards (a given number of classrooms,for example). Moreover, the state of a facility will not change more than once over allperiods. They present a simulated annealing approach to solve the DMCFLP.
None of the school location models discussed so far considers probabilisticdemand (location choice models) and/or free school choice. In contrast, the followingcontributions consider the choice of a school location. Koroglu (1992) has developeda probabilistic approach to identify optimal locations for new universities in Turkey.On the basis of existing facilities the author considers combinations of new facilities.For a given combination the probabilistic demand (generated by a variation of theclassic gravity model) for facilities is determined. For each combination this yields theexpected market share of each facility. The objective is to select the combination withmaximum demand. The work of Church and Schoepfle (1993) allows for free schoolchoice. They do not consider demand points but individual students. The three mostpreferred schools per student are given. The objective of this single-period, multiple-knapsack problem is to maximize the total preference values and to minimize thepenalties associated with negotiated assignments of students. This is constrained bycapacity, utilization, and racial balance. Antunes et al (2004) present an approach basedon two mixed-integer problems which maximizes school accessibility under distance-sensitive demands. The weighted distances to a given number of opened schools areminimized given a maximum utilization of schools. The objective and capacity con-straints contain demand-decay factors to express the decrease in demand that occurswhen the distance to facilities increases. However, this entails some students notenrolling at all.
3 A new multiperiod school location planning problemOur approach minimizes the cost of a net of schoolsöwhich is the set of open schoolsin a given area (a city, for example)öover a given time horizon while it accountsfor maximum student utility for the resulting net of schools. In order to considerutility-maximizing school choice behaviour, we assume that a student k will choose theschool s with the highest utility, Uks , such that Uks > Uk~s , 8 ~s 6� s, with Uks � Vks � eks .Vks is the deterministic part of utility, containing observable variables like distanceto school and schools' authority, and eks is the stochastic part of utility. The resultingchoice probabilities, Pks , are determined by a random utility model (in particular,a discrete choice mode). Note that other approaches, like the Huff model (Huff,1963; 1964) and the multiplicative competitive interaction model (Nakanishi andCooper, 1974), yield a probabilistic student allocation as well. To our knowledge onlydiscrete choice models (for example, multinomial logit modelöMNL) incorporateindividual utility-maximization behaviour. Moreover, a disaggregate approach (discretechoice models) has several advantages (in transferability and efficiency) over theaggregate approach (gravity models). For more details on this issue see Koppelmanand Bhat (2006). In a spatial choice context one has to be aware of (spatial) sub-stitution patterns between alternatives and hence the `independence of irrelevantalternatives' property of the MNL is not valid. Thus, more sophisticated discretechoice models like the mixed multinomial logit model (MMNL) have to be applied.
Multiperiod school location planning 2931
In particular, the MMNL allows for flexible substitution patterns and random tastevariation within a spatial choice context (Hunt et al, 2004). Mu« ller and Haase (2009)and Hastings et al (2005) have shown that the MMNL is an appropriate approach tomodel the behaviour of school choice. The choice probabilities determined by theMMNL are the integrals of the well-known logit probabilities over a density ofparameters (Bhat, 2000).
Pks �y� ��
exp�b Tqks �X~s
exp�b Tqk~s �f�b jy� db , (1)
where y are the parameters of the density function f(.) to be estimated by maximumsimulated likelihood (Train, 2003), qks is a vector of observed variables such as thedistance to school or the authority (public or private), and b is a vector of parameters.The probabilities Pks will be interpreted as the empirically expected share of studentslocated at a given demand point attending available schools. However, this leads to twoproblems. First, there is no explicit capacity constraint within the MMNL. Within aforecasting framework this means that as many students will attend a certain school asdetermined by the MMNL. Thereby, very attractive schools would be overcrowded.Second, the choice probabilities could not be implemented in the school locationplanning problem directly, because the decision of students of which school to choosedepends on the choice set (available schools) which in turn is a result of the schoollocation planning problem itself. Therefore, a two-step approach is required.
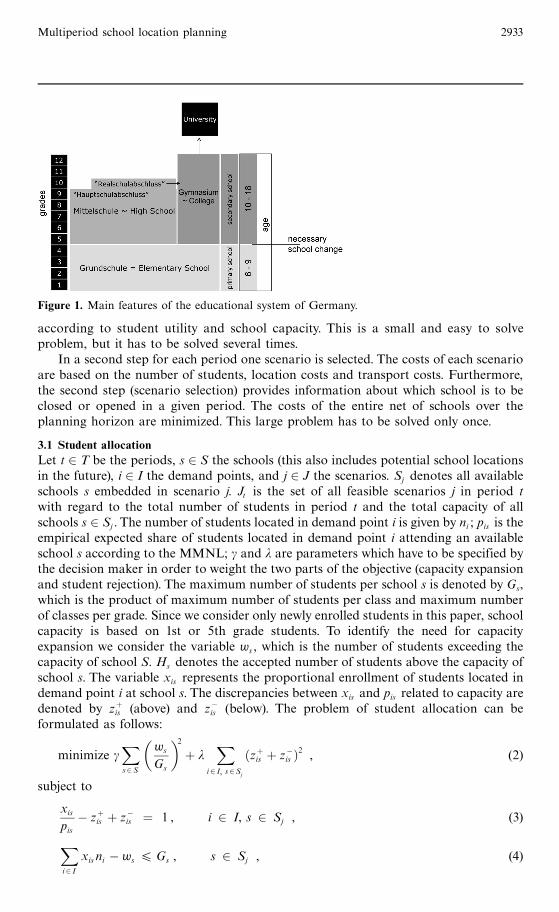
First, for each period of the planning horizon the enrollment has to be computedfor all possible combinations of open (available) and closed (nonavailable) schoolswith respect to capacity. We call the combination of open and closed schools thescenario. For a given scenario the MMNL has to be applied in order to determinethe expected share of students attending available schools. The possible deviationbetween the expected share of students and the computed proportional enrollmentis minimized. The result of the first step is the enrollment of students in schoolsaccording to the expected share of students and schools' specific capacity. Notethat we are considering only newly enrolled students (freshers). Once the decisionhas been made which school to enroll at, this decision is permanent for the wholeprimary or secondary school career. We model the enrollment decisions and deducethe number of students and the related costs from enrollment numbers. In general, it isvery unusual for students to switch from one school to another school on the sameeducational level: for example, from one college to another college. Around 5% of thestudents switch from college to high school from grade 5 to 6 while around 5% of highschool students enroll at a college after grade 10. Thus, the total number of studentsattending a given school is known by multiplying the number of 1st or 5th gradestudents by the number of grades. For the elements of the German educational systemsee figure 1 (for example, the number of grades and student age at school entry). Thisapproach does not allow students to change between schools due to closings duringschool career. For example: school A is closed in period 3. So, no enrollment for 1stgrade students is allowed in school A from period 3. However, 1st grade students ofperiods 2 and 1 still attend this school until the end of their school career. If a schoolcareer lasts four years, school A will finally be closed in period 6. At this point in timethe last student cohort has graduated and the school could be sold, for example.Unfortunately, this seems to be a limiting assumption, since in the case of a schoolclosure a remarkable number of students (100 to 500) is forced to switch to a differentschool (usually the students of grades 10, 11, and 12). This problem has to be tackledin future models. The first step (student allocation) computes enrollment numbers
2932 S Mu« ller, K Haase, S Kless
according to student utility and school capacity. This is a small and easy to solveproblem, but it has to be solved several times.
In a second step for each period one scenario is selected. The costs of each scenarioare based on the number of students, location costs and transport costs. Furthermore,the second step (scenario selection) provides information about which school is to beclosed or opened in a given period. The costs of the entire net of schools over theplanning horizon are minimized. This large problem has to be solved only once.
3.1 Student allocationLet t 2 T be the periods, s 2 S the schools (this also includes potential school locationsin the future), i 2 I the demand points, and j 2 J the scenarios. Sj denotes all availableschools s embedded in scenario j. Jt is the set of all feasible scenarios j in period twith regard to the total number of students in period t and the total capacity of allschools s 2 Sj . The number of students located in demand point i is given by ni ; pis is theempirical expected share of students located in demand point i attending an availableschool s according to the MMNL; g and l are parameters which have to be specified bythe decision maker in order to weight the two parts of the objective (capacity expansionand student rejection). The maximum number of students per school s is denoted by Gs,which is the product of maximum number of students per class and maximum numberof classes per grade. Since we consider only newly enrolled students in this paper, schoolcapacity is based on 1st or 5th grade students. To identify the need for capacityexpansion we consider the variable ws , which is the number of students exceeding thecapacity of school S. Hs denotes the accepted number of students above the capacity ofschool s. The variable xis represents the proportional enrollment of students located indemand point i at school s. The discrepancies between xis and pis related to capacity aredenoted by z�is (above) and zÿis (below). The problem of student allocation can beformulated as follows:
minimize gXs2S
�ws
Gs
�2� l
Xi2 I s2S
j
�z�is � zÿis �2 , (2)
subject to
xis
pisÿ z�is � zÿis � 1 , i 2 I, s 2 Sj , (3)
Xi2 I
xis ni ÿ ws 4 Gs , s 2 Sj , (4)
,
Figure 1. Main features of the educational system of Germany.
Multiperiod school location planning 2933
andXs2Sj
xis � 1 , i 2 I , (5)
xis 5 0 , i 2 I, s 2 Sj , (6)
z�is , zÿis 5 0 , i 2 I, S 2 Sj , (7)
ws 2 �0, Hs � , s 2 Sj . (8)
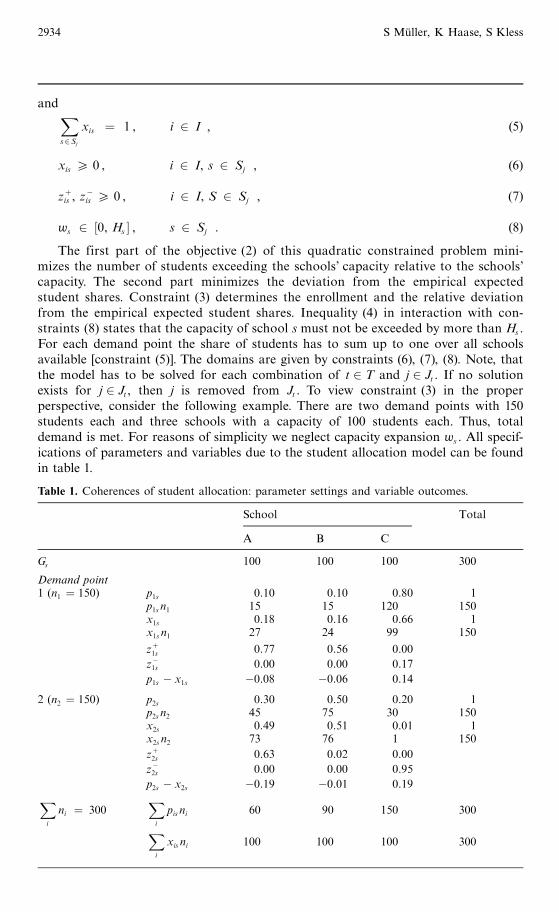
The first part of the objective (2) of this quadratic constrained problem mini-mizes the number of students exceeding the schools' capacity relative to the schools'capacity. The second part minimizes the deviation from the empirical expectedstudent shares. Constraint (3) determines the enrollment and the relative deviationfrom the empirical expected student shares. Inequality (4) in interaction with con-straints (8) states that the capacity of school s must not be exceeded by more than Hs .For each demand point the share of students has to sum up to one over all schoolsavailable [constraint (5)]. The domains are given by constraints (6), (7), (8). Note, thatthe model has to be solved for each combination of t 2 T and j 2 Jt . If no solutionexists for j 2 Jt , then j is removed from Jt . To view constraint (3) in the properperspective, consider the following example. There are two demand points with 150students each and three schools with a capacity of 100 students each. Thus, totaldemand is met. For reasons of simplicity we neglect capacity expansion ws . All specif-ications of parameters and variables due to the student allocation model can be foundin table 1.
Table 1. Coherences of student allocation: parameter settings and variable outcomes.
School Total
A B C
Gs 100 100 100 300
Demand point1 (n1 � 150) p1s 0.10 0.10 0.80 1
p1s n1 15 15 120 150x1s 0.18 0.16 0.66 1x1s n1 27 24 99 150
z�1s 0.77 0.56 0.00
zÿ1s 0.00 0.00 0.17
p1s ÿ x1s ÿ0.08 ÿ0.06 0.14
2 (n2 � 150) p2s 0.30 0.50 0.20 1p2s n2 45 75 30 150x2s 0.49 0.51 0.01 1x2s n2 73 76 1 150
z�2s 0.63 0.02 0.00
zÿ2s 0.00 0.00 0.95
p2s ÿ x2s ÿ0.19 ÿ0.01 0.19Xi
ni � 300Xi
pis ni 60 90 150 300Xi
xis ni 100 100 100 300
2934 S Mu« ller, K Haase, S Kless

The school of major interest is school C since its capacity constraint is not met byempirically determined market share. The question is: how do we reduce the studentnumber of school C by 50 students? Basically, there are two points of view subject tothe enrollment policy of the (local) education authority. First, the probability of beingrejected is the same for all 150 students. Hence, the number of students of demandpoints 1 and 2 expected to enroll at school C is reduced by the same proportion (1/3).Second, the reduction is based on a weighting factor. For example, it could be morelikely to reject students who are located far away from the school under consideration(which is the actual policy in Dresden, Germany). For reasons of simplicity we con-sider the distance dis between demand point i and school s to be the only element of Vis
and d2C > d1C . However, school C is the empirically expected first choice school for 30students of demand point 2 (U2C > U2s 8 s 6� C). Nevertheless, V2C < V1C and thusp1C > p2C . Accordingly, the proportion of rejected students of demand point 2 is largerthan that of demand point 1 (zÿ1s < zÿ2s ) due to the weighting of the difference betweenpis and xis by pis [see equation (3)]. If capacity constraints are not met by empiricallyexpected student shares, our approach primarily intends to reject students from demandpoints located far away (low pis ). By a proper specification of Vis the distinction ofschools could be attractive/unattractive rather than near/far. Note that this problemof student allocation does not consider decisions on an individual basis: for example,which particular student is allowed to enroll at a given school and which is not.Instead, this problem approximates the market share measured in student numbersof each school. Finally we should mention that this approach is just one way ofallocating students to schools. A promising approach to be tracked in future researchis to modify Vis in such a way that the capacity constraints of the schools are met.
3.2 Scenario selectionLet Jst be the subset of all scenarios j 2 Jt which contain school s. Moreover, the costsof each scenario j 2 Jt for period t are given by ctj. This includes:(a) the fixed location costs of each available school,(b) the variable costs of each available school, and(c) the transport costs for all students.The fixed location costs (a) are costs related to rent, maintenance, and so forth. Thevariable costs (b) reflect the cost of 1st or 5th grade students for the whole of theirprimary or secondary school career. These costs include the penalty costs due toviolating minimum and maximum capacity. The transport costs (c) for each scenarioj 2 Jt and period t depend on the transport mode chosen for the commute to school.Since the allocation of students from demand point i to school s is known for eachperiod t and scenario j 2 Jt , it is straightforward to compute the share of studentschoosing a certain transport mode. Therefore, we use an MNL determining the choiceprobabilities of the commuting modes (walking, cycling, public transport, and car/motorcycle). Additionally, we have to define the costs of closing or opening a schools in period t by c�st and cÿst , respectively. Note, the costs of closing a school couldinclude the gain of selling or letting the school. The binary variable ytj equals one,if scenario j 2 Jt is selected in period t (0, otherwise); x�st denotes whether a school sis opened in period t (� 1) or not (� 0); and xÿst equals one for a school closure(0, otherwise). The scenarios are selected as follows:
minimizeX
t2T j2 Jtctj ytj �
Xs2S t2T
�c�st x�st � cÿst xÿst � , (9)
, ,
Multiperiod school location planning 2935

subject toXj2 Jt
ytj � 1 , t 2 T , (10)
Xj2 Jst
ytj ÿX
j2 Js tÿ 1
ytÿ 1 j ÿ x�st � xÿst � 0 , s 2 S, t 2 T , (11)
Xt2T�x�st � xÿst �4 1 , s 2 S , (12)
ytj 2 f0, 1g , j 2 Jt , t 2 T , (13)
x�st , xÿst 2 f0, 1g , s 2 S, t 2 T . (14)
The objective (9) of this combinatorial problem minimizes the total costs over theplanning horizon. Constraint (10) guarantees that exactly one scenario is selected perperiod. Constraint (11) forces a school s to be opened or closed, if two differentscenarios are chosen in successive periods and only one of the two scenarios containsschool s. Constraint (12) ensures that a school could be opened or closed only onceover all periods. A closed school could not be reopened and a opened school couldnot be closed in following periods. In interaction, constraint (11) and (12) decreasethe number of possible different scenarios selected over the planning horizon. Thedomains are constraints given by (13) and (14). To view constraint (11) in the properperspective, consider the following cases for a given school s and period t:(a) In periods t and tÿ 1 scenarios j 2 Jst and j 0 2 Js tÿ 1 are selected. Hence, ytj � 1and ytÿ 1 j 0 � 1 and in combination with the objective function (9) x�st and xÿst are zerosince c�st , c
ÿst > 0.
(b) In periods t and tÿ 1 scenario j with j =2 Jst and j =2 Js tÿ 1 is selected. Hence,Pj2 Jst ytj and
Pj2 j
s tÿ 1
ytÿ 1 j do not exist and therefore x�st and xÿst have to be zero
since the corresponding coefficients of the objective function (9) c�st , cÿst > 0.
(c) In period tÿ 1 scenario j 2 Js tÿ 1 is selected and in period t scenario j 0=2 Jst is
selected. Consequently,P
j 0 2 Jst ytj 0 does not exist. Hence xÿst � 1 (school closure).(d) In period tÿ 1 scenario j =2 Js tÿ 1 is selected and in period t scenario j 0 2 Jstis selected. Consequently,
Pj2 J
s tÿ 1
ytÿ 1 j does not exist. Hence, x�st � 1 (schoolopening).
4 ApplicationIn the aftermath of German reunification in 1990 a remarkable east ^ west migrationhas taken place. In particular, younger, highly educated families migrated from theformer German Democratic Republic to the western parts of Germany. At the sametime the fertility rate declined. These two facts led to the problem that particularly inthe following decade college student numbers decreased dramatically in eastern partsof Germany, like Saxony. Even urban regions faced this phenomenon. However, insome prospering regions (mostly urban areas) the student numbers have increased afterperiods of decline. Here, we take Dresden in the far east of Germany (south of Berlin,east of Leipzig) close to the Polish and Czech border as an example of an urban regionwith a temporary remarkable decline in student numbers.
,
,
,
,
,
,,
,
,
,,
2936 S Mu« ller, K Haase, S Kless
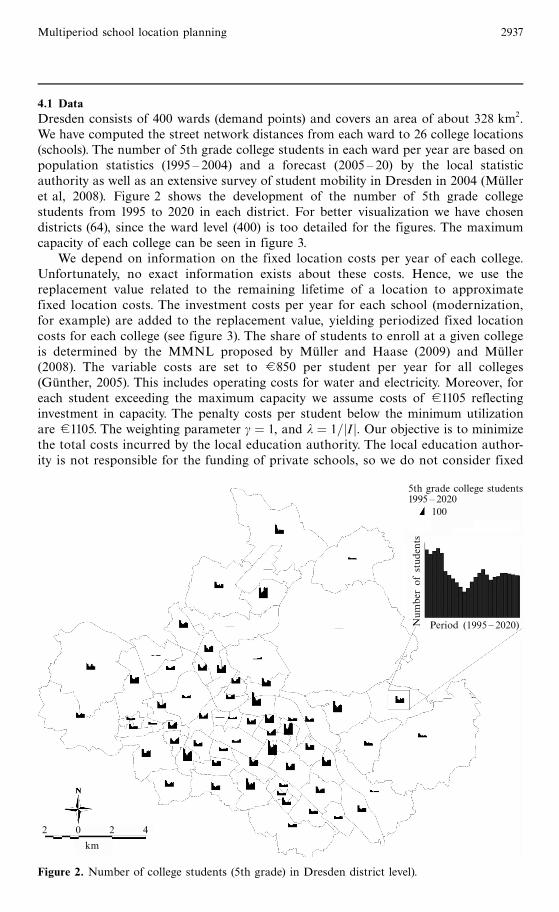
4.1 DataDresden consists of 400 wards (demand points) and covers an area of about 328 km2.We have computed the street network distances from each ward to 26 college locations(schools). The number of 5th grade college students in each ward per year are based onpopulation statistics (1995 ^ 2004) and a forecast (2005 ^ 20) by the local statisticauthority as well as an extensive survey of student mobility in Dresden in 2004 (Mu« lleret al, 2008). Figure 2 shows the development of the number of 5th grade collegestudents from 1995 to 2020 in each district. For better visualization we have chosendistricts (64), since the ward level (400) is too detailed for the figures. The maximumcapacity of each college can be seen in figure 3.
We depend on information on the fixed location costs per year of each college.Unfortunately, no exact information exists about these costs. Hence, we use thereplacement value related to the remaining lifetime of a location to approximatefixed location costs. The investment costs per year for each school (modernization,for example) are added to the replacement value, yielding periodized fixed locationcosts for each college (see figure 3). The share of students to enroll at a given collegeis determined by the MMNL proposed by Mu« ller and Haase (2009) and Mu« ller(2008). The variable costs are set to 850 per student per year for all colleges(Gu« nther, 2005). This includes operating costs for water and electricity. Moreover, foreach student exceeding the maximum capacity we assume costs of 1105 reflectinginvestment in capacity. The penalty costs per student below the minimum utilizationare 1105. The weighting parameter g � 1, and l � 1=jI j. Our objective is to minimizethe total costs incurred by the local education authority. The local education author-ity is not responsible for the funding of private schools, so we do not consider fixed
2 0 2 4
km
Period (1995 ± 2020)Number
ofstudents
5th grade college students1995 ^ 2020
100
Figure 2. Number of college students (5th grade) in Dresden district level).
Multiperiod school location planning 2937
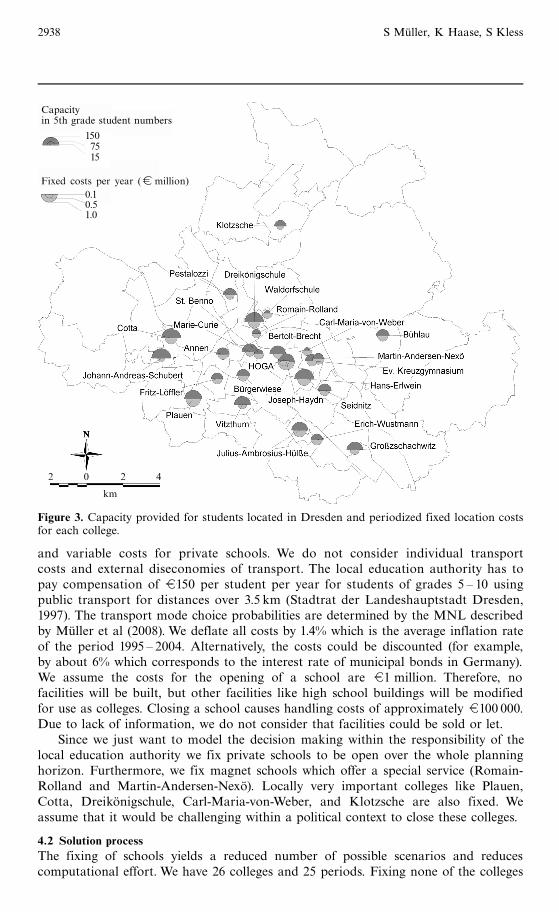
and variable costs for private schools. We do not consider individual transportcosts and external diseconomies of transport. The local education authority has topay compensation of 150 per student per year for students of grades 5 ^ 10 usingpublic transport for distances over 3.5 km (Stadtrat der Landeshauptstadt Dresden,1997). The transport mode choice probabilities are determined by the MNL describedby Mu« ller et al (2008). We deflate all costs by 1.4% which is the average inflation rateof the period 1995 ^ 2004. Alternatively, the costs could be discounted (for example,by about 6% which corresponds to the interest rate of municipal bonds in Germany).We assume the costs for the opening of a school are 1 million. Therefore, nofacilities will be built, but other facilities like high school buildings will be modifiedfor use as colleges. Closing a school causes handling costs of approximately 100 000.Due to lack of information, we do not consider that facilities could be sold or let.
Since we just want to model the decision making within the responsibility of thelocal education authority we fix private schools to be open over the whole planninghorizon. Furthermore, we fix magnet schools which offer a special service (Romain-Rolland and Martin-Andersen-Nexo« ). Locally very important colleges like Plauen,Cotta, Dreiko« nigschule, Carl-Maria-von-Weber, and Klotzsche are also fixed. Weassume that it would be challenging within a political context to close these colleges.
4.2 Solution processThe fixing of schools yields a reduced number of possible scenarios and reducescomputational effort. We have 26 colleges and 25 periods. Fixing none of the colleges
2 0 2 4
km
Capacityin 5th grade student numbers
1507515
0.10.51.0
Fixed costs per year ( million)
Figure 3. Capacity provided for students located in Dresden and periodized fixed location costsfor each college.
2938 S Mu« ller, K Haase, S Kless
yields 226 scenarios. Computing the student allocation (section 3.1) we would have toconsider 226 � 25 possible combinations. Some of these combinations are not feasiblefor capacity reasons. Nevertheless, this is an immensely high number of combinations.We fix 11 colleges to be open over the whole planning horizon. This yields a maximumof 819200 combinations of scenarios and periods.
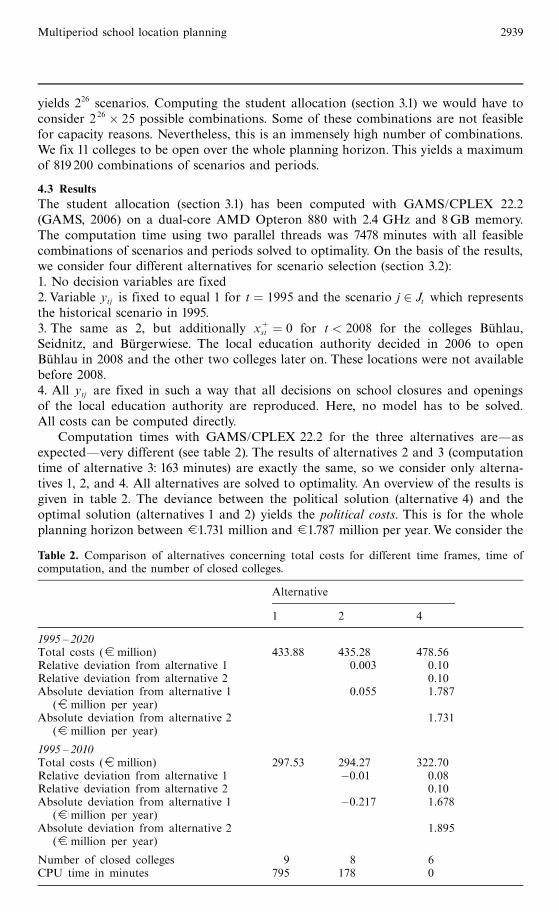
4.3 ResultsThe student allocation (section 3.1) has been computed with GAMS/CPLEX 22.2(GAMS, 2006) on a dual-core AMD Opteron 880 with 2.4 GHz and 8GB memory.The computation time using two parallel threads was 7478 minutes with all feasiblecombinations of scenarios and periods solved to optimality. On the basis of the results,we consider four different alternatives for scenario selection (section 3.2):1. No decision variables are fixed2.Variable ytj is fixed to equal 1 for t � 1995 and the scenario j 2 Jt which representsthe historical scenario in 1995.3. The same as 2, but additionally x�st � 0 for t < 2008 for the colleges Bu« hlau,Seidnitz, and Bu« rgerwiese. The local education authority decided in 2006 to openBu« hlau in 2008 and the other two colleges later on. These locations were not availablebefore 2008.4. All ytj are fixed in such a way that all decisions on school closures and openingsof the local education authority are reproduced. Here, no model has to be solved.All costs can be computed directly.
Computation times with GAMS/CPLEX 22.2 for the three alternatives areöasexpectedövery different (see table 2). The results of alternatives 2 and 3 (computationtime of alternative 3: 163 minutes) are exactly the same, so we consider only alterna-tives 1, 2, and 4. All alternatives are solved to optimality. An overview of the results isgiven in table 2. The deviance between the political solution (alternative 4) and theoptimal solution (alternatives 1 and 2) yields the political costs. This is for the wholeplanning horizon between 1.731 million and 1.787 million per year.We consider the
Table 2. Comparison of alternatives concerning total costs for different time frames, time ofcomputation, and the number of closed colleges.
Alternative
1 2 4
1995 ^ 2020Total costs ( million) 433.88 435.28 478.56Relative deviation from alternative 1 0.003 0.10Relative deviation from alternative 2 0.10Absolute deviation from alternative 1 0.055 1.787
( million per year)Absolute deviation from alternative 2 1.731
( million per year)
1995 ^ 2010Total costs ( million) 297.53 294.27 322.70Relative deviation from alternative 1 ÿ0.01 0.08Relative deviation from alternative 2 0.10Absolute deviation from alternative 1 ÿ0.217 1.678
( million per year)Absolute deviation from alternative 2 1.895
( million per year)
Number of closed colleges 9 8 6CPU time in minutes 795 178 0
Multiperiod school location planning 2939
time span from 1995 to 2010, since the future decisions of the local education authorityare not foreseeable. In this case the political costs still range from 1.678 million to1.895 million per year. Note that alternative 2 outperforms alternative 1 for the time
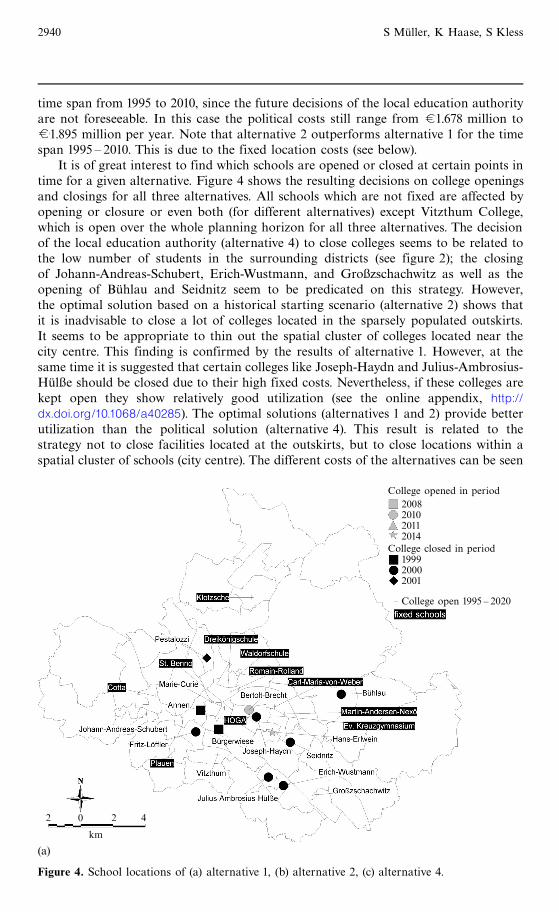
span 1995 ^ 2010. This is due to the fixed location costs (see below).It is of great interest to find which schools are opened or closed at certain points in
time for a given alternative. Figure 4 shows the resulting decisions on college openingsand closings for all three alternatives. All schools which are not fixed are affected byopening or closure or even both (for different alternatives) except Vitzthum College,which is open over the whole planning horizon for all three alternatives. The decisionof the local education authority (alternative 4) to close colleges seems to be related tothe low number of students in the surrounding districts (see figure 2); the closingof Johann-Andreas-Schubert, Erich-Wustmann, and GroÞzschachwitz as well as theopening of Bu« hlau and Seidnitz seem to be predicated on this strategy. However,the optimal solution based on a historical starting scenario (alternative 2) shows thatit is inadvisable to close a lot of colleges located in the sparsely populated outskirts.It seems to be appropriate to thin out the spatial cluster of colleges located near thecity centre. This finding is confirmed by the results of alternative 1. However, at thesame time it is suggested that certain colleges like Joseph-Haydn and Julius-Ambrosius-Hu« lÞe should be closed due to their high fixed costs. Nevertheless, if these colleges arekept open they show relatively good utilization (see the online appendix, http://dx.doi.org/10.1068/a40285). The optimal solutions (alternatives 1 and 2) provide betterutilization than the political solution (alternative 4). This result is related to thestrategy not to close facilities located at the outskirts, but to close locations within aspatial cluster of schools (city centre). The different costs of the alternatives can be seen
2 0 2 4
km
2008201020112014
199920002001
College open 1995 ^ 2020
College opened in period
College closed in period
(a)
Figure 4. School locations of (a) alternative 1, (b) alternative 2, (c) alternative 4.
2940 S Mu« ller, K Haase, S Kless
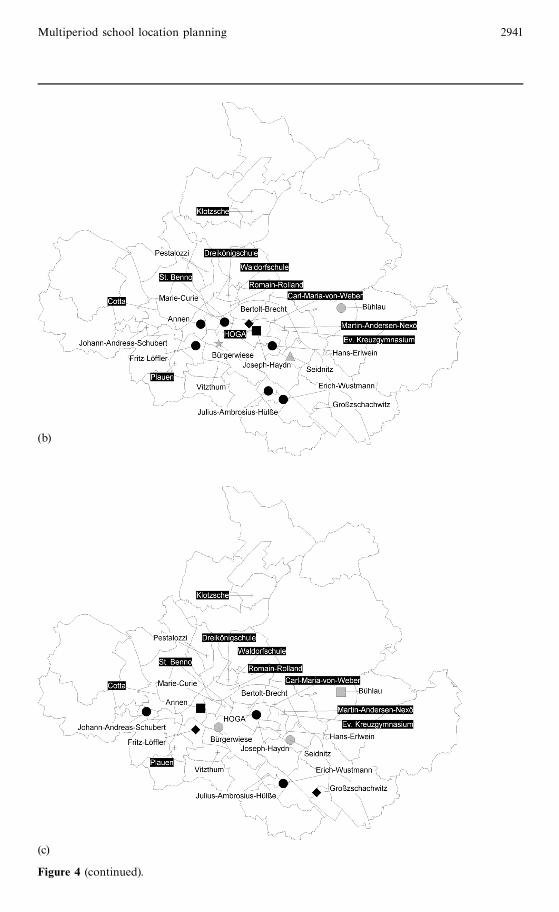
(b)
(c)
Figure 4 (continued).
Multiperiod school location planning 2941
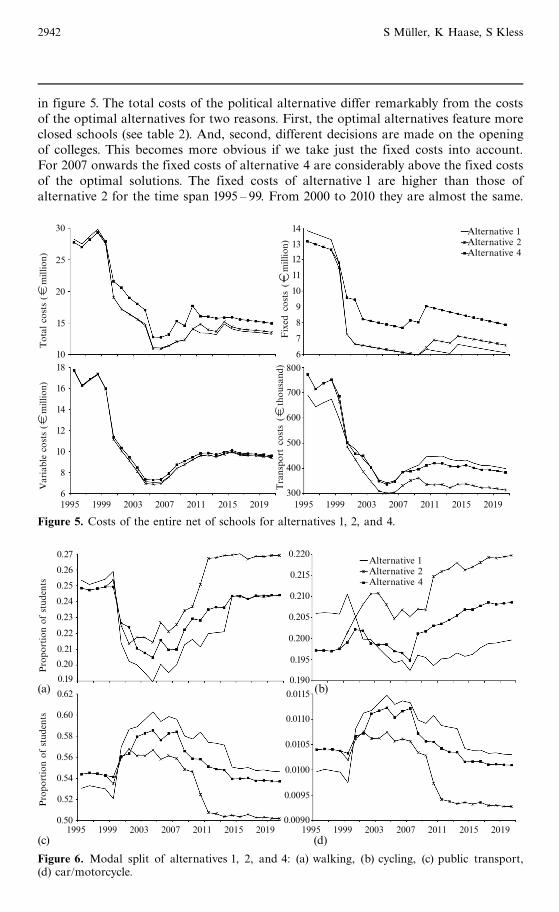
in figure 5. The total costs of the political alternative differ remarkably from the costsof the optimal alternatives for two reasons. First, the optimal alternatives feature moreclosed schools (see table 2). And, second, different decisions are made on the openingof colleges. This becomes more obvious if we take just the fixed costs into account.For 2007 onwards the fixed costs of alternative 4 are considerably above the fixed costsof the optimal solutions. The fixed costs of alternative 1 are higher than those ofalternative 2 for the time span 1995 ^ 99. From 2000 to 2010 they are almost the same.
30
25
20
15
1018
16
14
12
10
8
6
14
13
12
11
10
9
8
7
6800
700
600
500
400
3001995 1999 2003 2007 2011 2015 2019 1995 1999 2003 2007 2011 2015 2019
Variable
costs(
million)
Totalcosts(
million)
Transport
costs(
thousand)
Fixed
costs(
million)
Alternative 1Alternative 2Alternative 4
Figure 5. Costs of the entire net of schools for alternatives 1, 2, and 4.
0.27
0.26
0.25
0.24
0.23
0.22
0.21
0.20
0.19
0.62
0.60
0.58
0.56
0.54
0.52
0.50
Proportionofstudents
Proportionofstudents
0.220
0.215
0.210
0.205
0.200
0.195
0.1900.0115
0.0110
0.0105
0.0100
0.0095
0.00901995 1999 2003 2007 2011 2015 2019 1995 1999 2003 2007 2011 2015 2019
(a) (b)
(c) (d)
Alternative 1Alternative 2Alternative 4
Figure 6. Modal split of alternatives 1, 2, and 4: (a) walking, (b) cycling, (c) public transport,(d) car/motorcycle.
2942 S Mu« ller, K Haase, S Kless
Thus, alternative 2 outperforms alternative 1 for the planning horizon 1995 ^ 2010(see table 2).
The education authority decided to open Bu« hlau in 2008 and Bu« rgerwiese andSeidnitz in 2010. In contrast, the optimal solutions incorporate the opening of Bertold-Brecht in 2010 as well as Hans-Erlwein in 2014 (alternative 1) and Bu« hlau in 2010,Seidnitz in 2011, and Bu« rgerwiese in 2014 (alternative 2). So, the peaks later than2005 in total costs are related to the fixed costs of newly opened colleges as well as tothe opening costs. Compared with the fixed costs and the total costs, the variablecosts differ only slightly between the alternatives. This is because these costs dependon the number of attending students. Nevertheless, there is an observable discrepancybetween alternative 2 and alternative 4 for the years 2000 ^ 15. Besides the costs forattending students there are penalty costs included in variable costs for violatingminimum and maximum capacity constraints (section 4.1). The penalty costs ofalternative 4 due to overcapacity preponderates over the penalty costs due to theundercapacity of alternative 2.
Until 2000 the transport costs for alternative 1 are remarkably lower than thealternatives with a fixed (starting) scenario. The schools of alternative 1 are easier toaccess by cycling and walking than alternatives 2 and 4 (see figure 6). This net ofschools is optimally adjusted to the spatial ^ temporal patterns of student location untilthe year 2000. After the period of school closing (1999 ^ 2001) we see a different picture.Now alternative 2 outperforms alternatives 1 and 4öin particular, when the studentnumbers are increasing again. Fewer colleges are closed for alternative 4 and generallythe average distance to school is lower than is the case for alternative 1. So alterna-tive 4 yields less transport costs. But the spatial ^ temporal pattern of the schoollocations for alternative 2 is better than that of alternative 4 although it containsfewer schools: in alternative 2 more students choose walking or cycling for the journeyto school. These two modes are more appropriate for short travel distances and thusindicate a better spatial accessibility for the schools of alternative 2.
5 ConclusionWe have seen that free school choice is rather neglected for multiperiod school locationplanning. Nevertheless, we suppose that free school choice will become more impor-tant in the near future. In this contribution we have presented a two-step planningapproach for the multiperiod school location planning problem which incorporatesfree school choice. The first step allocates the students to available school locationsaccording to schools' capacity and students' utility (determined by an MMNL). Thisallocation has to be done for every feasible combination of period and scenario (setof available schools). This yields the costs of each scenario for every feasible combi-nation of scenario and period.Within a second step the scenarios are assigned to theperiods of the planning horizon to minimize the total costs over all periods.
The results show that with an improvement of at least 8% to 10% an amount of1.5 to 2 million per year could be saved. We interpret this gap between the optimal
solution found and the political solution as political costs. In other words, the commu-nity is willing to pay these costs in order to establish a desirable net of schools.Concerning the spatial patterns and economic consequences, the overall optimalsolution guarantees a net of schools with minimum costs as well as best accessibilityover time.
One major shortcoming of our approach is inflexible capacity. It would be desirableto allow for modular capacity expansion and reduction. Another weak point is that nochange between schools due to closure is allowed for students. Future research shouldfocus on these items as well as on faster methods of student allocation and efficient
Multiperiod school location planning 2943
decomposition methods, like column generation, for the scenario selection. Moreover,if it is possible to speed up this process, one can use sensitivity analysis to cope withuncertainty in student number forecasts. The development of an easy-to-use decisionsupport system by incorporating this approach in a commercial geographic informa-tion system will probably lead to widespread application by education and planningauthorities.
Acknowledgements. We thank three anonymous referees for their very helpful comments on anearlier version of the paper.
ReferencesAntunes A, Peeters D, 2000, `A dynamic optimization model for school network planning''
Socio-Economic Planning Sciences 34 101 ^ 120Antunes A, Gomes C, Ribeiro A, 2004, `An accessibility-maximization approach to public facility
planning under distance-sensitive demands''Studies inRegional andUrbanPlanning10109 ^ 117Bhat C, 2000, ` Flexible model structures for discrete choice analysis'', in Handbooks in Transport,
Volume 1: Handbook of Transport Modelling (Pergamon, Oxford) pp 71 ^ 90Burgess S, Briggs A, 2006, ` School assignment, school choice and social mobility'',WP 06/157,
Centre for Market and Public Organisation, University of BristolCaro F, Shirabe T, Guignard M,Weintraub A, 2004, ` School redistricting: embedding GIS tools
with integer programming'' Journal of the Operational Research Society 55 836 ^ 849Church R L, Murray A T, 1993, ` Modeling school utilization and consolidation'' Journal of Urban
Planning and Development 119(1) 23 ^ 38Church R L, Schoepfle O B, 1993, ` The choice alternative to school assignment'' Environment
and Planning B: Planning and Design 20 447 ^ 457Current J, Daskin M, Schilling D, 2002, ` Discrete network location models'', in Facility Location:
Application and Theory Eds Z Drezner, H Hamacher (Springer, Berlin) pp 81 ^ 118Diamond J T,Wright J R, 1987, ``Multiobjective analysis of public school consolidation'' Journal
of Urban Planning and Development 113(1) 1 ^ 18Drezner T, Eiselt H, 2002, ` Consumers in competitive location models'', in Facility Location:
Applications and Theory Eds Z Drezner, H Hamacher (Springer, Berlin) pp 151 ^ 178Drezner Z,HamacherHW (Eds), 2004 Facility Location: Applications andTheory (Springer, Berlin)Eiselt H, Laporte G, Thisse J, 1993, ` Competitive location models: a framework and bibliography''
Transportation Science 27(1) 44 ^ 54GAMS, 2006 GAMS: AUser's Guide GAMS Development Corp.,Washington, DCGreenleaf N E, Harrison T P, 1987, `A mathematical programming approach to elementary school
facility decisions'' Socio-Economic Planning Sciences 21 395 ^ 401Gu« nther T, 2005, ` Gutachten zur Untersuchung der Sach- und Personalkosten o« ffentlicher Schulen
und Schulen in freier Tra« gerschaft im Freistaat Sachsen'', technical report, TechnischeUniversita« t Dresden
Hakimi S, 1964, ` Optimum locations of switching centers and the absolute centers and mediansof a graph''Operations Research 12 450 ^ 459
Hakimi S, 1965, ` Optimum distribution of switching centers in a communication network andsome related graph theoretic problems''Operations Research 13 462 ^ 475
Hastings J, Kane T, Staiger D, 2005, ` Parental preferences and school competition, evidence froma public school choice program'', technical report, National Bureau of Economic Research,Cambridge, MA
Henig M, Gerchak Y, 1986, ` Dynamic capacity planning of public schools in changing urbancommunities'' Socio-Economic Planning Sciences 20 319 ^ 324
Holloway C A,Wehrung D A, Zeitlin M P, Nelson R T, 1975, `An interactive procedure for theschool boundary problem with declining enrollment''Operations Research 23(2) 191 ^ 206
Hoxby C (Ed.), 2003 The Economics of School Choice (University of Chicago Press, Chicago, IL)Huff D, 1963, `A probalistic analysis of shopping centre trading areas''Land Economics 39(1) 81 ^ 90Huff D, 1964, ` Defining and estimating a trading area'' Journal of Marketing 28(3) 34 ^ 38Hunt L M, Boots B, Kanaroglou P, 2004, ` Spatial choice modelling: new opportunities to
incorporate space into substitution patterns'' Progress in Human Geography 28 746 ^ 766Koenigsberg E, 1968, ` Mathematical analysis applied to school attendance areas'' Socio-Economic
Planning Sciences 1 465 ^ 475
2944 S Mu« ller, K Haase, S Kless
Koppelman F S, Bhat C, 2006, `A self instructing course in mode choice modeling: multinomialand nested logit models'', technical report, US Department of Transportation, Federal TransitAdministration,Washington, DC
Koroglu D, 1992, ` Possible locations for new universities in Turkey'' Socio-Economic PlanningSciences 26 27 ^ 42
LembergD S, Church R L, 2000, ` The school boundary stability problem over time''Socio-EconomicPlanning Sciences 34 159 ^ 176
Mu« ller S, 2008 Dynamic School Network Planning in Urban Areas (LIT, Berlin)Mu« ller S, Haase K, 2009, ` Exposing unobserved spatial similarity: evidence from German school
choice data'', working paper, Technische Universita« t DresdenMu« ller S,Tscharaktschiew S, Haase K, 2008, ` Travel-to-school mode choice modelling and patterns
of school choice in urban areas'' Journal of Transport Geography 16 342 ^ 357Nakanishi M, Cooper L, 1974, ` Parameter estimation for a multiplicative competitive interaction
modelöa least square approach'' Journal of Marketing Research 11 303 ^ 311Owen S, Daskin M, 1998, ` Strategic facility location: a review'' European Journal of Operational
Research 111 423 ^ 447Plastria F, 2001, ` Static competitive facility location: an overview of optimisation approaches''
European Journal of Operational Research 129 461 ^ 470ReVelle C, Eiselt H, 2005, ``Location analysis: a synthesis and survey'' European Journal of
Operational Research 165 1 ^ 19Schilling D, Jayaraman V, Barkhi R, 1993, `A review of covering models in facility location''
Location Science 1 25 ^ 55Stadtrat der Landeshauptstadt Dresden, 1997 Satzung der Landeshauptstadt Dresden u« ber die
Erstattung der notweindigen Schu« lerbefo« rderungskosten, Satzung Schu« lerbefo« rderungskosten-Erstattung 37 Dresdner Amtsblatt
Train KE, 2003Discrete ChoiceMethods with Simulation (Cambridge University Press, Cambridge)Trifon R, Livnat A, 1973, ` The spatial allocation of schools over time in cities''Regional and Urban
Economics 2 387 ^ 400
ß 2009 Pion Ltd and its Licensors
Multiperiod school location planning 2945

Conditions of use. This article may be downloaded from the E&P website for personal researchby members of subscribing organisations. This PDF may not be placed on any website (or otheronline distribution system) without permission of the publisher.



















