SEMINAR NASIONAL SAINS DAN TEKNOLOGI 2015 filefaktor-faktor yang memengaruhi keberhasilan...
12
Transcript of SEMINAR NASIONAL SAINS DAN TEKNOLOGI 2015 filefaktor-faktor yang memengaruhi keberhasilan...


SEMINAR NASIONAL SAINS DAN TEKNOLOGI 2015
Kuta, 29-30 Oktober 2015 | xiii
KATA PENGANTAR .............................................................................................................................. vii
SAMBUTAN KETUA PANITIA ............................................................................................................ ix
SAMBUTAN KETUA LPPM UNIVERSITAS UDAYANA ................................................................ xi
HUMANIORA
NILAI LOKAL DALAM PENGELOLAAN SUMBER DAYA IKAN
DAN PENGEMBANGAN HUKUM
Fenty U. Puluhulawa, Nirwan Yunus ..........................................................................................................3
KEBIJAKAN LOKAL DAN ETNISITAS MENUJU
INTEGRASI KELOMPOK ETNIS
DI KABUPATEN POHUWATO
Wantu Sastro ...............................................................................................................................................8
FAKTOR-FAKTOR YANG MEMENGARUHI KEBERHASILAN IMPLEMENTASI EKONOMI
HIJAU DALAM RESTORASI DAN KONSERVASI TERUMBU KARANG DI PEMUTERAN BALI
SEBAGAI DAYA TARIK EKOWISATA
I Ketut Surya Diarta, I Gede Setiawan Adi Putra ....................................................................................13
KEMAMPUAN BAHASA BALI GENERASI MUDA BALI DI UBUD GIANYAR BALI
Ni Luh Nyoman Seri Malini, Luh Putu Laksminy, I Ketut Ngurah Sulibra .............................................21
INTENSITAS KAPITAL INDUSTRI DAN DINAMISME KEUNGGULAN
KOMPARATIF PRODUK EKSPOR INDONESIA
Ni Putu Wiwin Setyari ..............................................................................................................................29
MODEL ESTIMASI KINERJA KEUANGAN BERDASARKAN FAKTOR-FAKTOR
INTERNAL UKM DI KABUPATEN BANDUNG
Rivan Sutrisno, Mardha Tri Meilani ..........................................................................................................38
KAMUS PRIMITIVA SEMANTIK BALI-INDONESIA-INGGRIS BIDANG ADAT DAN AGAMA
Dr. I Made Netra, S.S., M.Hum, Drs. I Nyoman Udayana, M.Litt., Ph.D,
Dr. Drs. I wayan Suardiana, M.Hum, Drs. I Ketut Ngurah Sulibra, M.Hum.,
Dr. Drs. Frans I Made Brata, M.Hum .......................................................................................................46
MODEL KONFIGURASI MAKNA TEKS CERITA RAKYAT TENTANG PRAKTIK-PRAKTIK
BUDAYA RANAH AGAMA DAN ADAT
UNTUK MEMPERKOKOH JATI DIRI MASYARAKAT BALI
Dr. Dra. Ni Ketut Ratna Erawati, M.Hum, Dr. I Made Netra, S.S., M.Hum,
Dr. Frans I Made Brata, M.Hum, Prof. Dr. I Made Suastika, S.U ............................................................ 54
DAFTAR ISI


SEMINAR NASIONAL SAINS DAN TEKNOLOGI 2015
Kuta, 29-30 Oktober 2015 | 1527
APLIKASI PROGRESI GEOMETRI TERBATAS
PADA PERANCANGAN SISTEM RASIO TRANSMISI KENDARAAN
PENGGERAK RODA BELAKANG
I.G.A.K. Suriadi1,I Ketut Adi Atmika2, AAIA. Sri Komaladewi3
1Jurusan Teknik Mesin, Fakultas Teknik, Universitas Udayana,
Bukit Jimbaran, Badung 80362
Telp/Fax : 0361 703321,E-mail: [email protected]
2,3Jurusan Teknik Mesin, Fakultas Teknik, Universitas Udayana, Bukit Jimbaran, Badung 80362
Abstrak
Karakteristik kopling, karakteristik torsi mesin, rasio dan tingkat transmisi, rasio gardan, karakteristik propeller
shaft, diameter efektif roda, karakteristik kontak roda dan jalan adalah beberapa factor yang mempengaruhi kinerja
traksi kendaraan. Rasio dan jumlah tingkat transmisi atau disebut dengan rasio sistem transmisi adalah faktor utama
yang paling besar pengaruhnya terhadap performan traksi kendaraan. Besar kecilnya traksi untuk setiap tingkat gigi
serta kecepatan kendaraan yang mampu dicapai dapat dikendalikan dengan mengatur atau merancang rasio dan
jumlah tingkat kecepatan gigi transmisi, sehingga didapatkan kinerja traksi yang optimum. Penelitian ini bertujuan
untuk mengkaji kinerja traksi sistem transmisi kendaraan roda empat dengan penggerak roda belakang, kemudian
YQY[PUm WM_U'YQ^MZOMZS _U_`QY ̀ Q^_QNa` PQZSMZ ¥^[S^Q_U SQ[YQ`^U ̀ Q^NM`M_& FQ`QXMT U`a PUXMWaWMZ MZMXU_M WQYMY¥aMZ
traksi yang dihasilkan sistem transmisi standar dan sistem transmisi hasil perancangan ketika melewati berbagai
kondisi jalan. Metode penelitian yang dilakukan dimulai dengan pengujian karakteristik torsi engine kendaraan
penggerak roda belakang pada chassis dynamometer. Data-data yang terkumpul dilakukan modeling, simulasi, dan
analisa dengan progresi geometri terbatas untuk mendapatkan performan traksi traksi kendaraan tersebut. Sistem
transmisi hasil rancangan menghasilkan traksi maksimum sebesar 10800 N sedangkan sistem transmisi standar
_QNQ_M^ )(-(( A$ PMZ VM^MW MZ`M^M Wa^bM NQ^a^a`MZ _QYMWUZ PQWM`& CQ^MZOMZSMZ M`Ma Y[PUm WM_U ^M`U[ PQZSMZ .
tingkat kecepatan menghasilkan kinerja traksi yang paling baik, dimana kurva traksi mendekati kondisi ideal.
Kata kunci: gaya traksi, rasio gigi, jumlah tingkat kecepatan, progresi geometri terbatas, penggerak roda
belakang.
Abstract
Characteristics of the clutch, the engine torque characteristics, ratio and rate of transmission, axle ratio, characteristics
of the propeller shaft, the effective diameter of the wheels, the wheels and the road contact characteristics are several
RMO`[^_ `TM` UZn aQZOQ `^MO`U[Z ¥Q^R[^YMZOQ [R `TQ bQTUOXQ& GTQ ^M`U[ MZP `TQ MY[aZ` [R `^MZ_YU__U[Z ^M`Q [^ OMXXQP
Ne `TQ ^M`U[ [R `TQ `^MZ_YU__U[Z _e_`QY M^Q `TQ YMUZ RMO`[^_ `TM` Y[_` UZn aQZOQ [Z `TQ ¥Q^R[^YMZOQ [R `^MO`U[Z
vehicles. Traction performance for any level of gear and vehicle speed that can be achieved can be controlled by
regulating or designing the ratio and the amount of gear transmission, so we get optimum traction performance. This
study aims to assess the performance of the traction transmission system of four-wheeled vehicles with the standard
conditions of rear-wheel drive, then modify such a system with limited geometric progression. After that analysis
generated traction capability standard transmission systems and transmission system design results when passing
through various road conditions. Research methodology starts with testing the engine torque characteristics of rear-
wheel drive vehicle on the chassis dynamometer. The data collected is done modeling, simulation, and analysis of the
limited geometric progression to get traction performance of the vehicle. Tranmssion system that the result design
get maximum traction at 10800 N while the standard transmission system amounted to 10500 N, and the distance
NQ`cQQZ _aOOQ__UbQ Oa^bQ_ SQ``UZS OX[_Q &̂ GTQ PQ_USZ [^ Y[PUm OM`U[Z ^M`U[ cU`T . XQbQX_ [R _¥QQP ¥^[PaOQ_ `TQ Y[_`
excellent traction performance, in which the traction curve approaching the ideal condition.
Keywords: traction force, the gear ratio, the number of levels of speed, limited geometric progression, rear-wheel
drive.

SEMINAR NASIONAL SAINS DAN TEKNOLOGI 2015
1528 | Kuta, 29-30 Oktober 2015
1. PENDAHULUAN
Salah satu alat transportasi yang banyak digunakan untuk memudahkan hidup manusia adalah
mobil atau kendaraan roda empat. Kendaraan yang mampu mengangkut penumpang dalam jumlah banyak
biasanya menggunakan sistem penggerak roda belakang (rear wheell drive). Dengan berkembangnya ilmu
pengetahuan dan teknologi mengakibatkan kita semakin selektif memilih kendaraan untuk memenuhi
kebutuhan sehari-hari. Melihat hal tersebut produsen secara terus-menerus berusaha meningkatkan kualitas
produknya agar bisa memenuhi keinginan konsumen serta mampu bersaing di pasaran. Seperti yang kita
lihat saat ini banyak kendaraan baru yang ditawarkan dengan keunggulan yang dimiliki masing-masing
jenis kendaraan.
Performa traksi adalah salah satu aspek penting dalam menentukan daya saing suatu produk
otomotif. Performa ini telah dihitung diatas kertas pada tahap perancangannya, namun karena proses
perancangan adalah proses yang iteratif maka diperlukan perhitungan berulang kali untuk melahirkan
suatu produk otomotif yang berkualitas [1]. Salah satu performa yang penting adalah kemampuan
kendaraan untuk melakukan percepatan, melawan hambatan angin, melawan hambatan rolling, melawan
gaya tanjakan dan kemungkinan untuk menarik suatu beban. Gaya yang timbul pada roda penggerak untuk
melawan hambatan tersebut disebut dengan gaya dorong atau gaya traksi. Gaya traksi yang terjadi pada
bidang kontak roda penggerak dan jalan dipengaruhi oleh banyak faktor diantaranya adalah: karakteristik
torsi mesin, karakteristik kopling, ratio dan tingkat transmisi, ratio gardan, karakteristik propeller shaft,
diameter efektif roda, karakteristik kontak roda dan jalan [2,3]. Dari sekian banyak parameter yang
mempengaruhi salah satu yang sangat besar pengaruhnya adalah rasio dan tingkat transmisi atau disebut
rasio sistem transmisi. Besar kecilnya traksi untuk setiap tingkat gigi serta kecepatan kendaraan yang
mampu dicapai dapat dikendalikan dengan mengatur atau merancang rasio dan jumlah tingkat kecepatan
gigi transmisi, sehingga didapatkan kinerja traksi yang optimum. Rasio transmisi berpengaruh terhadap
besarnya torsi yang dapat ditransmisikan, sedangkan jumlah tingkat kecepatannya berpengaruh terhadap
kehalusan (smoothness) proses transmisi dan transformasi daya pada sistem transmisi tersebut [4,5].
Pentingnya gaya traksi pada kendaraan roda dua maupun roda empat dalam mengatasi berbagai
hambatan menjadi perhatian serius beberapa peneliti. Kebutuhan traksi untuk truk muatan berlebih pada
jalur Denpasar-Gilimanuk digunakan paling banyak untuk mengatasi hambatan tanjakan [6]. Analisa
kebutuhan traksi kendaraan truk sampah di kota Denpasar diperlukan gaya 52000 N untuk mengatasi
tanjakan sebesar 24 derajat, sehingga layak dioperasikan [7]. Pada kendaraan roda dua, dilakukan analisa
traksi dengan Continuose Variable Transmission System [ 5,7]. Ary Subagia, et.all, [8], melakukan
penelitian mengenai desain sudut belok roda belakang dengan pengendalian traksi kendaraan. Sedangkan
penerapan traksi untuk mengontrol yaw rate roda belakang dilakukan dengan pemodelan sudut side slip
[9].
Dengan demikian kemampuan kendaraan khususnya dengan penggerak roda belakang untuk
melakukan akselerasi, melalui tanjakan, melawan gaya angin, serta melawan rolling resistance dapat
dikendalikan melalui perancangan yang tepat terhadap rasio gigi dan jumlah tingkat kecepatan gigi
transmisi.
2. BAHAN DAN METODE
2.1. Formula Traksi dan hambatan
Karakteristik traksi pada kendaraan bermotor pada pokoknya meliputi kemampuan kendaraan
untuk dipercepat, dan mengatasi hambatan-hambatan yang terjadi, diantaranya hambatan rolling (rolling
resistance), hambatan tanjakan, juga hambatan aerodinamis [1].
(1)
dimana :
F= total gaya traksi yang dibutuhkan
Ra = hambatan aerodinamis
Rr= Rolling resistance
SEMINAR NASIONAL SAINS DAN TEKNOLOGI 2015
Kuta, 29-30 Oktober 2015 | 1529
Rd = hambatan karena menarik beban
Rg = hambatan tanjakan.
W = berat total kendaraan
a = percepatan kendaraan
Untuk memindahkan daya (power) dari putaran mesin ke roda penggerak diperlukan suatu
mekanisme tertentu. Mekanisme yang digunakan untuk memindahkan daya dari motor hingga ke roda
penggerak tersebut dinamakan Sistem Transmisi Daya atau Sistem Drive Train. Secara umum rangkaian
mekanisme yang digunakan untuk memindahkan daya dari motor ke roda penggerak yang terdiri dari
komponen kopling, gear box, poros propeler dan differensial
Dalam sistem drive train akan terjadi losses atau kerugian yang disebabkan oleh gesekan yang
terjadi antar gigi pada roda gigi, gesekan pada bantalan, juga akibat tahanan minyak pelumas. Berikut ini
OROZOV VO`UO STp aWS¥aW gO¥U PWOaO c¥bcY PSPS`O^O Y][^]¥S¥ aWabS[ R`WdS b`OW¥ "HcbO¥bO $̀ *(()#&
♦ Kopling : 99%
♦ Tiap pasangan roda gigi : 95-97 %
♦ Bantalan dan sambungan : 98-99%
8WZO acObc aWabS[ R`WdS b`OW¥ RWYO`OYbS`WabWYYO¥ RS¥UO¥ ^O`O[SbS`%^O`O[SbS` Sp aWS¥aW aWabS[ R`WdS
train (ηt) dan perbandingan gigi reduksi (i), maka traksi pada roda penggerak dapat dirumuskan:
(2)
dimana :
Fk = gaya traksi pada tingkat ke- k ( Kgf)
P = daya mesin (Hp)
N = putran mesin (Rpm)
r = jari-jari roda penggerak (m)
ik, i
d = ratio roda gigi ke-k dan ratio gigi differensal.
Atau persamaan 3 ditulis dalam bentuk lain :
(4)
dimana :
Fk = gaya traksi pada tingkat ke- k ( N)
Me = torsi mesin untuk kecepatan v (Nm)
Kemudian hubungan antara kecepatan kendaraan dan kecepatan putaran mesin adalah:
(5)
dimana :
V = Kecepatan kendaraan (km/jam)
a 5 A]Sp aWS¥ aZW^ ^ORO PO¥ "*%- !#
D = diameter roda (m)
N = putran mesin (Rpm)
Dalam perhitungan awal, ratio gigi antara yang tertinggi dan terendah dapat dicari dengan
menggunakan hukum Progresi Geometri. Dasar dari metoda ini adalah batas kecepatan operasi dari mesin
terendah (ne1) dan tertinggi (ne
2) harus ditentukan lebih dahulu. Penetapan ini berdasarkan karakteristik
torsi dari mesin, biasanya dipilih disekitar torsi maksimum mesin.

SEMINAR NASIONAL SAINS DAN TEKNOLOGI 2015
1530 | Kuta, 29-30 Oktober 2015
Konsep dari metode progresi geometris, ditunjukkan seperti gambar 1.
Gambar 1. Pemilihan Rasio Gigi dengan Progresi Geometri (Sutantra, 2001)
2.2. Obyek dan Variabel Penelitian
Obyek penelitian ini adalah rasio sistem transmisi kendaraan dengan penggerak roda belakang.
Untuk memudahkan menggambarkan arah penelitian, maka variable penelitian yang akan dilakukan adalah
^cbO`O¥ [SaW¥ "¥S# RO¥ `OaW] aWabS[ b`O¥a[WaW abO¥RO`R'[]RWp YOaW YS¥RO`OO¥ "W# aSPOUOW dO`WOPZS PSPOa$
sedangkan variable terikatnya adalah torsi mesin (Me) dan kinerja traksi untuk berbagai sistem transmisi
gO¥U RW`O¥QO¥U "<#$ RW[O¥O YW¥S`XO aSQO`O ZS¥UYO^ RWbc¥XcYYO¥ RS¥UO¥ U`Op Y&
2.3. Rancangan Penelitian dan Teknik Pengumpulan Data
Untuk mengumpulkan data–data yang dibutuhkan dalam penelitian ini, proses pengumpulan data
dilakukan dengan pengujian/eksperimen. Penelitian dilakukan dengan menguji mesin kendaraan penggerak
roda belakang pada chassis dinamometer untuk mendapatkan data besarnya daya di poros penggerak, torsi
dan kecepatan yang mampu dihasilkan oleh kendaraan pada setiap interval kenaikan mesin pada tiap rasio
gigi transmisi. Skema pengujian ditunjukkan pada gambar 2.
Gambar 2. Skema Uji Mesin di Chasis Dynamometer (Sutantra, 2001)
2.4. Tahapan Pengolahan Data
Data-data yang terkumpul dilakukan analisa performa traksi pada sistem transmisi ketika disimulasikan
melintasi kondisi jalan tertentu. Setelah didapatkan karakteristik traksi dengan menggunakan transmisi
abO¥RO` YS[cRWO¥ RWZOYcYO¥ ^S`O¥QO¥UO¥'[]RWp YOaW bS`VORO^ aWabS[ b`O¥a[WaW RS¥UO¥ [S¥UUc¥OYO¥
metode progresi geometri. Perancangan dengan metode progresi geometri dilakukan dengan cara sistem
^S`O¥QO¥UO¥'[]RWp YOaW ^`]U`SaW US][Sb`W bS`PObOa$ [OYacR ¥gO OROZOV RS¥UO¥ [S¥UUc¥OYO¥ `OaW] UWUW
awal dan rasio gigi akhir yang ada pada sistem transmisi standar. Sedangkan yang dimaksud dengan
^S`O¥QO¥UO¥'[]RWp YOaW PSPOa OROZOV ̀ OaW] UWUW OeOZ RO¥ ̀ OaW] UWUW OYVW` RW`O¥QO¥U aS¥RW`W& HWabS[ b`O¥a[WaW
SEMINAR NASIONAL SAINS DAN TEKNOLOGI 2015
Kuta, 29-30 Oktober 2015 | 1531
gO¥U acROV bS`[]RWp YOaW aSZO¥Xcb¥gO RWUc¥OYO¥ c¥bcY [S¥RO^ObYO¥ YW¥S`XO b`OYaW gO¥U ]^bW[c[& 7¥OZWaO
RWZOYcYO¥ RS¥UO¥ PO¥bcO¥ ^S`O¥UYOb Zc¥OY CObQVOR RO¥ SfQSZ& :O`W U`Op Y YW¥S`XO b`OYaW RS¥UO¥ b`O¥a[WaW
abO¥RO` RO¥ b`O¥[WaW VOaWZ ^S`O¥QO¥UO¥'[]RWp YOaW RWZOYcYO¥ O¥OZWaO ^S`PO¥RW¥UO¥ bS`VORO^ YW¥S`XO b`OYaW
yang dihasilkan.
3. HASIL
3.1. Karakteristik Daya-Torsi Engine Kendaraan Model
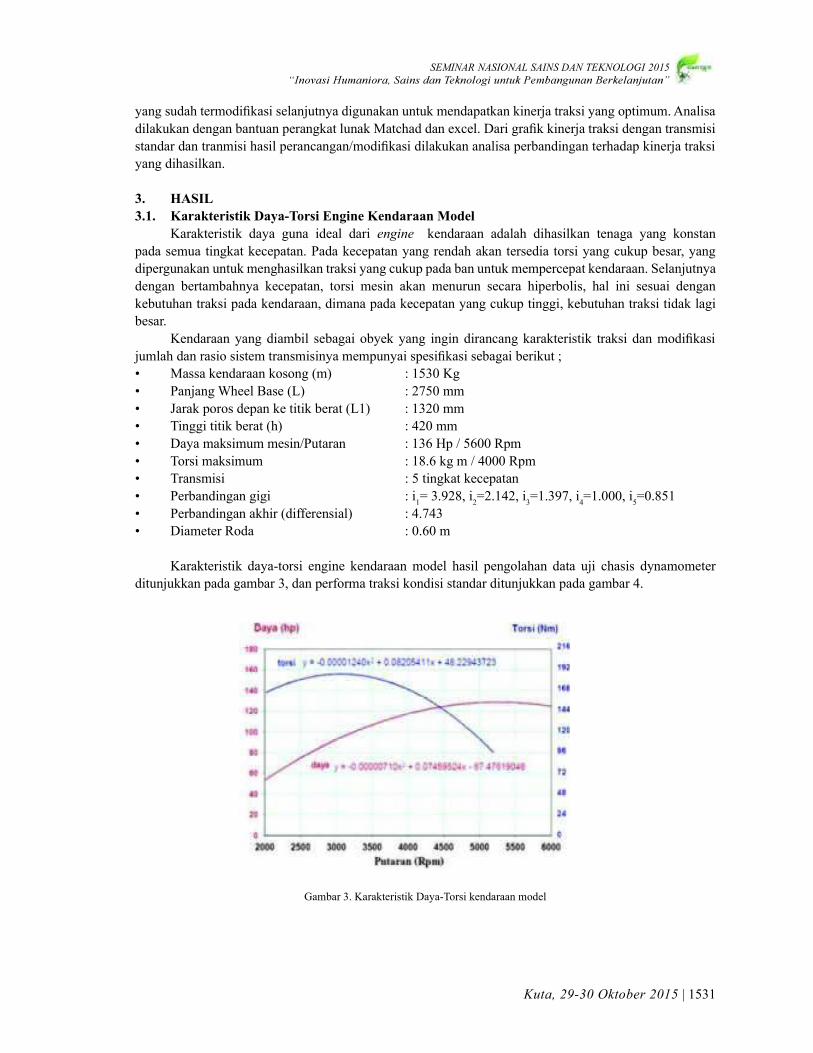
Karakteristik daya guna ideal dari engine kendaraan adalah dihasilkan tenaga yang konstan
pada semua tingkat kecepatan. Pada kecepatan yang rendah akan tersedia torsi yang cukup besar, yang
dipergunakan untuk menghasilkan traksi yang cukup pada ban untuk mempercepat kendaraan. Selanjutnya
dengan bertambahnya kecepatan, torsi mesin akan menurun secara hiperbolis, hal ini sesuai dengan
kebutuhan traksi pada kendaraan, dimana pada kecepatan yang cukup tinggi, kebutuhan traksi tidak lagi
besar.
AS¥RO`OO¥ gO¥U RWO[PWZ aSPOUOW ]PgSY gO¥U W¥UW¥ RW`O¥QO¥U YO`OYbS`WabWY b`OYaW RO¥ []RWp YOaW
Xc[ZOV RO¥ `OaW] aWabS[ b`O¥a[WaW¥gO [S[^c¥gOW a^SaWp YOaW aSPOUOW PS`WYcb 3
• Massa kendaraan kosong (m) : 1530 Kg
• Panjang Wheel Base (L) : 2750 mm
• Jarak poros depan ke titik berat (L1) : 1320 mm
• Tinggi titik berat (h) : 420 mm
• Daya maksimum mesin/Putaran : 136 Hp / 5600 Rpm
• Torsi maksimum : 18.6 kg m / 4000 Rpm
• Transmisi : 5 tingkat kecepatan
• Perbandingan gigi : i1= 3.928, i
2=2.142, i
3=1.397, i
4=1.000, i
5=0.851
• Perbandingan akhir (differensial) : 4.743
• Diameter Roda : 0.60 m
Karakteristik daya-torsi engine kendaraan model hasil pengolahan data uji chasis dynamometer
ditunjukkan pada gambar 3, dan performa traksi kondisi standar ditunjukkan pada gambar 4.
Gambar 3. Karakteristik Daya-Torsi kendaraan model

SEMINAR NASIONAL SAINS DAN TEKNOLOGI 2015
1532 | Kuta, 29-30 Oktober 2015
Gambar 4. Karakteristik kinerja transmisi ratio gigi standar
3.2. Rasio Sistem Transmisi dan Karakteristik Traksi Hasil Perancangan
Rasio dari roda awal dan akhir diambilkan dari rasio system transmisi standar, kemudian rasio
diantara kedua batas tersebut dirancang dengan progresi geometri. Hasil perancangan rasio gigi untuk
pemasangan 4, 5, dan 6 tingkat kecepatan ditunjukkan pada tabel 1.
Tabel 1. Rasio Gigi Hasil Perancangan
Rasio 4 kecepatan 5 kecepatan 6 kecepatan
I 3.928 3.928 3.928
II 2.359 2.680 2.893
III 1.417 1.828 2.130
IV 0.851 1.247 1.569
V 0.851 1.156
VI 0.851
>OaWZ ^S`VWbc¥UO¥ b`OYaW RWbO[^WZYO¥ ROZO[ PS¥bcY U`Op Y ^S`T]`[O b`OYaW VOaWZ ^S`O¥QO¥UO¥ ^ORO
masing-masing tingkat kecepatan ditunjukkan seperti pada gambar 5, gambar 6, dan gambar 7.
Gambar 5. Performa traksi pada 4 tingkat kecepatan

SEMINAR NASIONAL SAINS DAN TEKNOLOGI 2015
Kuta, 29-30 Oktober 2015 | 1533
Gambar 6. Performa traksi pada 5 tingkat kecepatan Gambar 7. Performa traksi pada 6 tingkat kecepatan
4. PEMBAHASAN
Sistem transmisi standar menghasilkan traksi maksimum sebesar 10500 N (gambar 4), dan jarak
gigi I dan II cukup jauh ini mengisyaratkan ada traksi yang terbuang saat perpindahan tingkat kecepatan
tersebut. Sedangkan sistem tranmsisi hasil rancangan menghasilkan traksi maksimum sebesar 10800 N
untuk 4 tingkat kecepatan, 5 tingkat kecepatan, maupun 6 tingkat kecepatan (gambar 5, gambar 6, dan
UO[OP` /#& AO`OYbS`WabWY b`OYaW aWabS[ b`O¥a[WaW VOaWZ ^S`O¥QO¥UO¥'[]RWp YOaW$ [S¥c¥XcYYO¥ XO`OY O¥bO`O
kurva gigi yang berurutan semakin dekat. Hal ini menunjukkan traksi yang terbuang waktu pemindahan
gigi transmisi semakin kecil, atau dengan kata lain kinerja traksinya semakin baik. Perancangan rasio gigi
dengan pemasangan 6 tingkat kecepatan (gambar 7), jarak antara kurva traksi sangat dekat dan mendekati
kurva ideal traksi, berarti kinerja traksinya paling baik.
5. KESIMPULAN
:O`W VOaWZ ̂ S`VWbc¥UO¥ gO¥U RWbc¥XcYYO¥ RS¥UO¥ U`Op Y Yc`dO b`OYaW%YSQS^ObO¥ YS¥RO`OO¥ RO¥ O¥OZWaO
dapat ditarik beberapa kesimpulan sebagai berikut :
gigi I dan II cukup jauh
sebesar 10800 N dengan jarak antara kurva gigi yang berurutan semakin dekat.
traksi yang paling baik, dimana kurvanya mendekati karakteristik traksi ideal.
UCAPAN TERIMA KASIH
Penelitian ini merupakan bagian dari penelitian Dosen Muda yang didanai dari PNBP Universitas
Udayana tahun 2015. Untuk itu penulis menyampaikan terima kasih yang sebesar-besarnya atas dukungan
dana penelitian ini.
DAFTAR PUSTAKA
[1] Sutantra I Nyoman, 2001, “Teknologi Otomotif – Teori dan Aplikasinya”, Guna Widya, Surabaya.
[2] Sri Komaladewi AAIA., Suriadi IGAK., Adi Atmika I Ketut, 2014, “Geometric Progression
Application In Design Transmission Gear Ratio”, International Conference on Suistanable
Technology Development , Denpasar-Bali.
[3] Suriadi IGAK, Adi Atmika I Ketut., Dwi Budiana Made., 2014, “Perbaikan Performa Traksi dengan
C]RWp YOaW GOaW] =WUW I`O¥a[WaWn$ Prosiding Konferensi Engineering Perhotelan V, Denpasar.

SEMINAR NASIONAL SAINS DAN TEKNOLOGI 2015
1534 | Kuta, 29-30 Oktober 2015
[4] Agus Sigit P., Sutantara I Nyoman, Iwan Fauzan, 2011, “Design and Performance of Gearless
Variable Transmission Applied for Automotive”, Prosiding FISITA 2011, Seoul-Korea Selatan.
[5] Adi Atmika I Ketut., Ary Subagia IDG., Tjok Gede Tirta N., 2014, “Design on Direct Crushing
Garbage in the Garbage Dump Truck (Case Study for Denpasar City, Bali, Indonesia)”, International
Conference on Renewable Energy and Environment (ICREE 2014), Kuta-Bali.
[6] Adi Atmika I Ketut., Gatot Karohika I Made, Agus Dwi Adnyana I Kadek, 2013, “Analisa Kinerja
Traksi Kendaraan Truk Muatan Berlebih (Studi Kasus Pada Jalur Denpasar-Gilimanuk)”, Prosiding
Seminar Nasional Mesin dan Industri 8, Jakarta.
[7] Adi Atmika I Ketut., Ary Subagia IDG., 2014, “Karakteristik Traksi Sepeda Motor dengan Continuose
Variable Transmission”, Prosiding Konferensi Engineering Perhotelan V, Denpasar.
[8] Ary Subagia IDG., Adi Atmika I Ketut., 2004, “Desain dan Simulasi Dinamik Sudut Belok Roda
Belakang dengan Pengendalian Traksi Kendaraan”, Laporan Penelitian Riset Grant TPSDP,
Universitas Udayana, Denpasar.
[9] Kihong Park, 2012, “Determining Reference Yaw – Rate and Side Slip Angle for Use in Vehicle
Dynamics Control Systems”, Proceeding FISITA Word Automotive Congress (FISITA – 34),
Beijing.
�