Pert.1 Dan 2 (Bab1_kinematika)
11
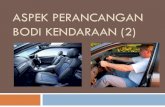
Diktat Kinematika Oleh : Program Fakultas Teknik prodi Mesin UMT 1 Bab I KONSEP – KONSEP DASAR KO N SEP – KO N SEP D A SAR 1.1 KINEMATIKA Kinematika mesin adalah suatu pengetahuan tentang gerak relatif dari bagian-bagian mesin yaitu posisi, kecepatan dan percepatan. 1.2 DIAGRAM KINEMATIS Dalam mempelajari gerakan-gerakan dari bagian-bagian mesin, biasanya kita gambarkan bagian-bagian tersebut dalam bentuk sketsa sehingga hanya bagian-bagian yang akan memberi efek pada gerakan yang diperhatikan. Gambar 1.1 Diagram kinematis Gambar 1.1 menyatakan elemen-elemen utama dalam sebuah mesin diesel. Bagian-bagian yang diam, terdidri dari bantalan-bantalan kruk as dan dinding silinder diberi label 1. Engkol dan kruk as adalah batang penghubung 2, batang penghubung 3, dan torak atau peluncur adalah penghubung 4. C 3 A B 1 2 4
description
.
Transcript of Pert.1 Dan 2 (Bab1_kinematika)
Document
Diktat KinematikaOleh : Program Fakultas Teknik prodi MesinUMT1 Bab IKONSEP KONSEP DASARKONSEPKONSEPDASAR1.1KINEMATIKAKinematika mesin adalah suatu pengetahuan tentang gerak relatifdari bagian-bagian mesin yaitu posisi, kecepatan dan percepatan.1.2DIAGRAM KINEMATISDalam mempelajari gerakan-gerakan dari bagian-bagian mesin,biasanya kita gambarkan bagian-bagian tersebut dalam bentuk sketsasehingga hanya bagian-bagian yang akan memberi efek pada gerakanyang diperhatikan.Gambar 1.1 Diagram kinematisGambar 1.1 menyatakan elemen-elemen utama dalam sebuah mesindiesel. Bagian-bagian yang diam, terdidri dari bantalan-bantalan kruk asdan dinding silinder diberi label 1. Engkol dan kruk as adalah batangpenghubung 2, batang penghubung 3, dan torak atau peluncur adalahpenghubung 4. C3 AB 124
Diktat KinematikaOleh : ProgramFakultas Teknik Prodi Mesin2 Batang penghubung (link0 adalah suatu nama yang diberikan padasetiap benda yang mempunyai gerakan relatif terhadap yang lainnya.Posisi, kecepatan dan percepatan sudut dari batang tergantung hanyapada panjang dari engkol dan batang hubung dan tidak dipenguruhioleh lebar atau ketebalan dari batang.Gambar sksla yang menyatakan suatu mesin sehingga hanya dimensiyang memberi efek pada gerakannya disebut diagram kinematis.1.3MEKANISMESebuah rantai kinematis adalah sebuah system dari batangbatang penghubung yang berupa benda benda kaku yang apakahdigabungkan bersama atau dalam keadaan saling bersinggungansehingga memungkinkan mereka untuk bergerak relatif satu terhadapyang lain . Jika salah satu dari batang penghubungnya tetap dangerakan dari sebarang batang penghubung yang lain ke posisinya yangbaru akan menyebabkan setiap batang penghubung yang lain bergerakke posisi posisi tertentu yang telah diramalkan system tersebut adalahsebuah rantai kinematis yang dibatasi .Jika salah satu dari batangpenghubung ditahan tetap gerakan dari batang penghubung yang lainke posisinya yang baru tidak akan menyebabkan setiap batang batangpenghubung yang lain bergerakke posisi tertentu yang telah diramalkanmaka system tersebut adalah suatu rantai kinematis tak terbatas.
Diktat KinematikaOleh : Program Fakultas Teknik prodi MesinUmt3 1.4INVERSIDengan membuat suatu batang penghubung yang berbedadalam rantai kinematis sebagai bagian yang tidak bergerak, kitamemperoleh mekanisme yang berbeda.Penting untuk dicatat bahwa inverse dari suatu mekanisme tidak akanmengubah gerakan antara batang-batang penghubungnya. Sebagaicontoh, gambar diatas jika batang penghubung 2 berputar ? searah0jarum jam relatif terhadap batang penghubung 1, batang penghubung 4akan bergerak kekanan sepanjang garis lurus pada penghubung1. Hal iniakan selalu demikian tidak peduli batang penghubung mana yangditahan tetap.1.5PASANGANDua benda yang saling kontak akan membentuk suatu pasangan.Pasangan lebih rendah (lower pairing) terjadi jika dua permukaan salingkontak. Contohnya dari pasangan lebih rendah adalah sebuah torakdengan dinding silindernya. 23 14
Diktat KinematikaOleh : Ir. Ali Program Fakultas Teknik prodi MesinUmt4 Pasangan lebih tinggi (higher pairing) menyatakan suatu kontak yangberupa titik atau garis. Contohnya dari pasangan lebih tinggi adalahtorak dengan silindernya tetapi toraknya dibuat seperti bola, makatoraknya akan kontak dengan dinding silinder sepanjang suatu lingkaran.1.6BIDANG GERAKANSebuah benda mempunyai bidang gerakan jika semua titik-titiknyabergerak dalam bidang-bidang parallel terhadap bidang referensinya.Bidang referensi tersebut disebut bidang gerakan (plane motion). Bidanggerakan dapat merupakan salah satu dari 3 tipe : gerakan menurut garislurus (translasi0, putaran atau kombinasi dari translasi dan rotasi.1.7TRANSLASISebuah benda mempunyai gerakan berupa translasi, jika iabergerak sedemikian hingga semua garis-garis lurus dalam benda 43 12 4 3 12
Diktat KinematikaOleh : Program Fakultas Teknik prodi MesinUmt5 tersebut bergerak mengikuti posisi-posisi yang sejajar. Translasi garis lurus(rectilinear translation) adalah suatu gerakan dimana semua titik darisuatu benda bergerak dalam jalur garis lurus. Suatu translasi dimana titik-titik dalam suatu benda bergerak sepanjang jalur yang berupakurvadisebut translasi menurut kurva (curvilinear translation).1.8PUTARANDalam putaran (rotasi) semua titik dalam sebuah benda selalumempunyai jarak yang tetap dari sebuah garis yang tegak lurus terhadapbidang geraknya. Garis ini adalah sumbu putaran (axis of rotation) dantitik-titik dalam benda tersebut membuat lintasan menurut jalur berupalingkaran terhadap garis tersebut.1.9TRANSLASI DAN ROTASIC CB B (a)
Diktat KinematikaOleh : ProgramFakultas Teknik prodi MesinUmt6 Kebanyakan bagian-bagian mesin mempunyai gerakan yangmerupakan kombinasi dari rotasi dan translasi. Dalam gambar (a)perhatikan gerakan dari batang hubung sewaktu ia bergerak dari posisiBC ke BC. Posisi-posisi ini ditunjukkan dalam gambar (b). Disini kita lihatbahwa gerakannya ekivalen terhadap suatu translasi dari BC ke BCyang diikuti oleh sutu rotasi dari BC ke BC. Gerakan ekivalen yang laindiilukiskan dalam ga mbar (c). Disini ditunjukkan suatu putaran dari suatubatang terhadap C dari posisi BC ke BC, diikuti dengan suatu translasidari BC ke BC. Jadi gerakan dari batang hubung dapat dianggapsebagai suatu putaran terhadap beberapa titik ditambah suatu translasi. BCCB B (b)BCCB B (c)
Diktat KinematikaOleh : Program Fakultas Teknik prodi MesinUmt7 1.10VEKTOR-VEKTORAda dua tipe besaran yang harus diperhatikan dalam mekanika.Besaran scalar adalah yang hanya mempenyai besar saja. Contohnya :jarak, luas, isi dan waktu. Besaran vector mempunyai besar dan arah.Contohnya : lintasan, kecepatan, percepatan dan gaya. Sebuahbesaran vector dapat dinyatakan dengan sebuah garis lurus dengananak panah. Besar dari vector diyatakan dengan panjangnya yangdigambarkan dengan skala tertentu.1.10.1Penjumlahan dan Pengurangan dari vector-vektorVektor-vektor Adan B dalam gambar dibawah dapatditambahkan dengan meletakkan mereka dalam suatu cara sepertipada gambar. Titik O adalah titik awal yang disebut kutub, dari kutub inivector A dan vector B diletakkan dengan ekor dari salah satunyadiletakkan pada ujung vector lainnya. Jumlah dari kedua vector disebutresultante dan dalam gambar ditunjukkan dengan garis putus-putus.Pada waktu meletakkan vector-vektor untuk tujuan menentukanresultantenya, besar dan arahnya yang diberikan harus dipertahankan, OBA + BAA B
Diktat KinematikaOleh : Program Fakultas Teknik prodi MesinUmt8 tetapi urutannya meletakkan tidak akan memberikan efek terhadapresultantenya. Resultante selalu berarah keluar dari kutubnya danmerupakan penutup dari suatu polygon.1.10.2Penggabungan dan Penguraian dari vector-vektorPenggabungan menyatakan penambahan bersama-sama darisejumlah vector-vektor. Jumlahnya disebut resultante dan vector-vektortersebut disebut komponen dari resultante.Penguraian menyatakan pemecahan dari vector ke dalamsejumlah komponen-komponen. Setiap vector dapat diuraokan ke dalam -ABB - AA - BOBA + BAA -B OO BA + B + CAOCBAO C + A + BC
Diktat KinematikaOleh : Program Fakultas Teknik prodi MesinUmt9 sejumlah komponen yang tak terbatas. Seringkali diinginkan untukmenguraikan sebuah vector kedalam dua komponen. Jika sebuah vectordiuraikan ke dalam dua komponen, tiap komponen mempunyai besardan arah. Jika dua dari empat besarannya diketahui, dua yang laindapat ditentukan.SOAL SOAL :1.Untuk setiap polygon vector dalam gambar dibawah, tuliskanpersamaan vector yangmemberikan resultante R. B ACA BC
Diktat KinematikaOleh : ProgramFakultas Teknik prodi MesinUmt10 2.Uraikan sebuah vector A yang mempunyai besar 20 unit dan arah1300kedalam dua vector B dan C. B mempunyai arah 80 dan C0mempunyai arah 210 .0Tentukan besar dari B dan C.3.Uraikan sebuah vector T yang mempunyai besar 50 unit dan arah1200kedalam dua vector R dan S. Besar R harus 30 unit dan besar Sadalah 66 unit.4.Uraikan sebuah vector A yang mempunyai besar 50 unit dan arah2100kedalam dua vector B dan C. Besar C harus 37.5 unit danberarah 75 . Tentukan besar dari B dan arahnya dalam derajat.0 -N-Q-M-P-NMRR-D-DCB-B-ACAOOO (a)(b)(d)(c)RORP
Diktat KinematikaOleh : ProgramFakultas Teknik prodi MesinUmt11 5.Uraikan sebuah vector A yang mempunyai besar 60 unit dan arah3450kedalam dua vector B dan C. C mempunyai arah 315 . Besar0dari B = 32.5 unit. Nyatakan dalam gambar besar dari C.