Pengaturan Kontrol
17
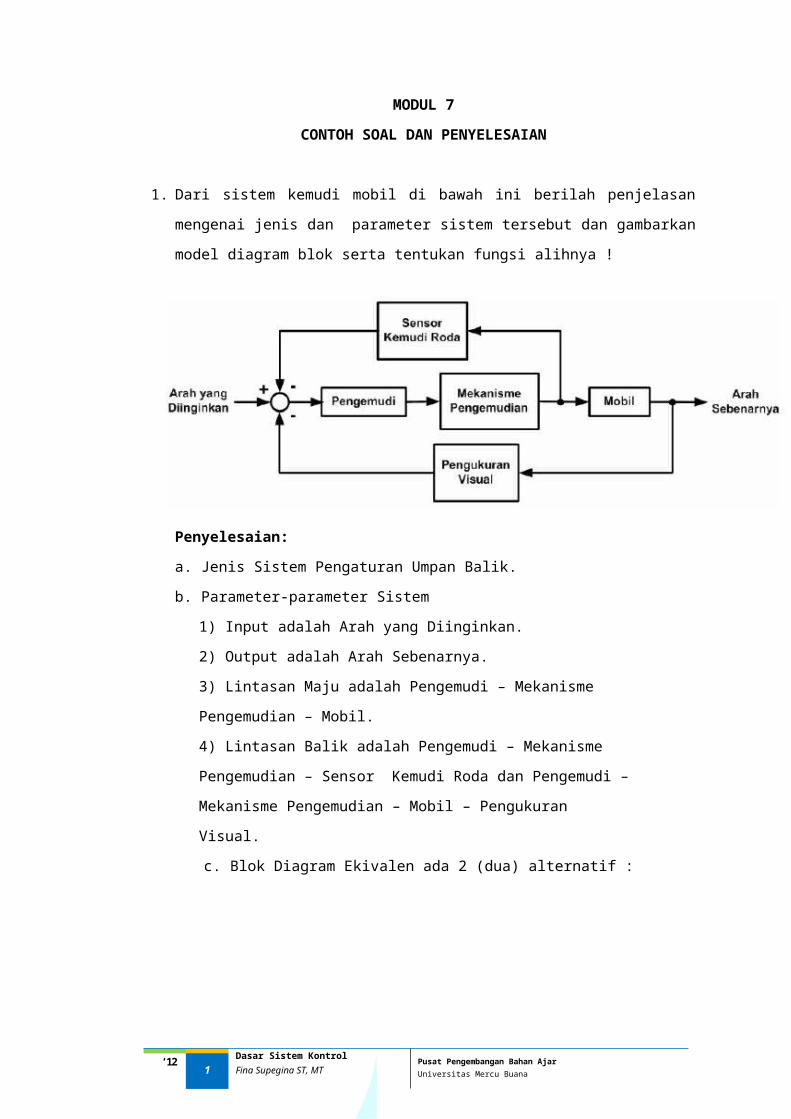
MODUL 7 CONTOH SOAL DAN PENYELESAIAN 1. Dari sistem kemudi mobil di bawah ini berilah penjelasan mengenai jenis dan parameter sistem tersebut dan gambarkan model diagram blok serta tentukan fungsi alihnya ! Penyelesaian: a. Jenis Sistem Pengaturan Umpan Balik. b. Parameter-parameter Sistem 1) Input adalah Arah yang Diinginkan. 2) Output adalah Arah Sebenarnya. 3) Lintasan Maju adalah Pengemudi – Mekanisme Pengemudian – Mobil. 4) Lintasan Balik adalah Pengemudi – Mekanisme Pengemudian – Sensor Kemudi Roda dan Pengemudi – Mekanisme Pengemudian – Mobil – Pengukuran Visual. c. Blok Diagram Ekivalen ada 2 (dua) alternatif : Dasar Sistem Kontrol Fina Supegina ST, MT Pusat Pengembangan Bahan Ajar Universitas Mercu Buana ‘12 1
-
Upload
joe-iku-chingchu -
Category
Documents
-
view
141 -
download
7
description
Materi Mata Kuliah Pengaturan kontrol
Transcript of Pengaturan Kontrol
MODUL 7
CONTOH SOAL DAN PENYELESAIAN
1. Dari sistem kemudi mobil di bawah ini berilah penjelasan mengenai jenis dan
parameter sistem tersebut dan gambarkan model diagram blok serta tentukan
fungsi alihnya !
Penyelesaian:
a. Jenis Sistem Pengaturan Umpan Balik.
b. Parameter-parameter Sistem
1) Input adalah Arah yang Diinginkan.
2) Output adalah Arah Sebenarnya.
3) Lintasan Maju adalah Pengemudi – Mekanisme Pengemudian – Mobil.
4) Lintasan Balik adalah Pengemudi – Mekanisme Pengemudian – Sensor
Kemudi Roda dan Pengemudi – Mekanisme Pengemudian – Mobil – Pen-
gukuran
Visual.
c. Blok Diagram Ekivalen ada 2 (dua) alternatif :
Alternatif I
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘121
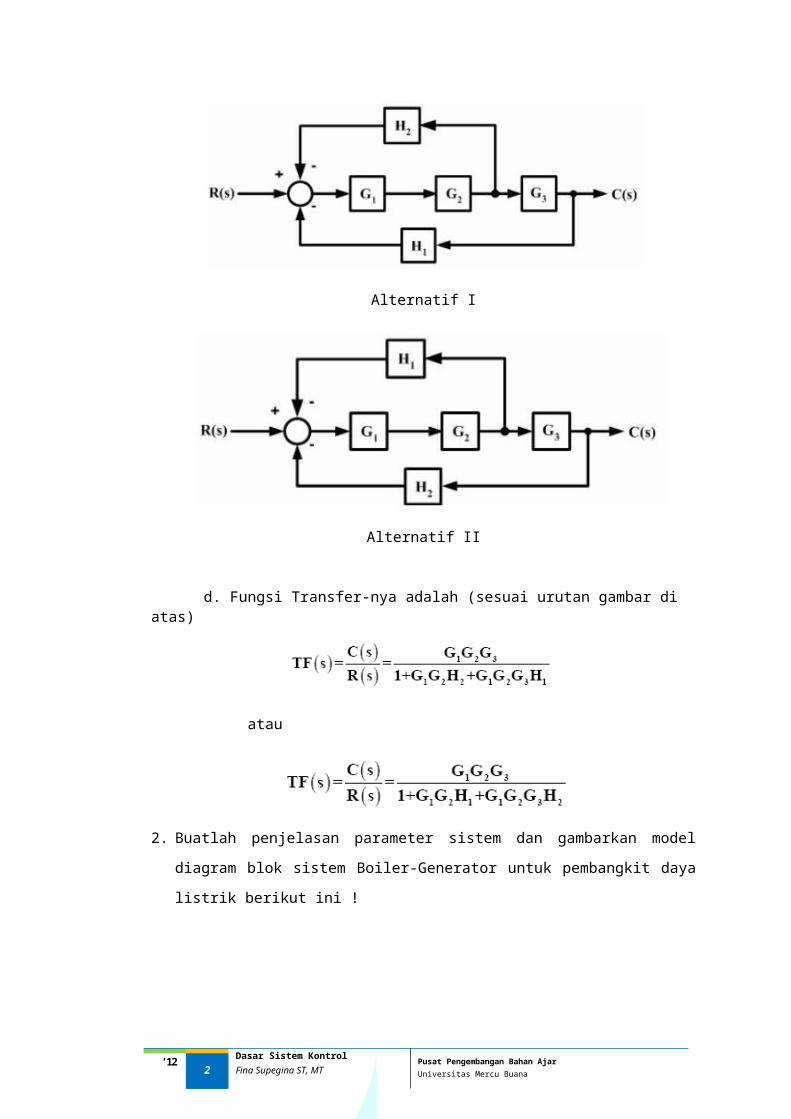
Alternatif II
d. Fungsi Transfer-nya adalah (sesuai urutan gambar di atas)
atau
2. Buatlah penjelasan parameter sistem dan gambarkan model diagram blok
sistem Boiler-Generator untuk pembangkit daya listrik berikut ini !
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘122
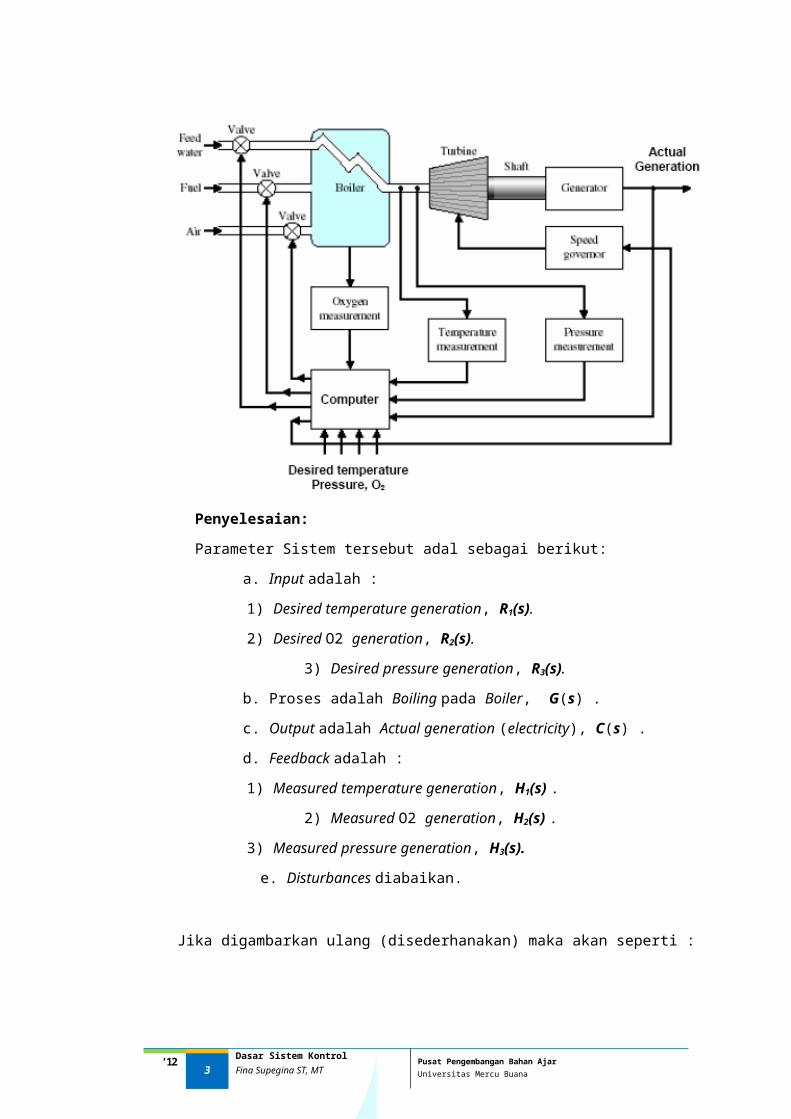
Penyelesaian:
Parameter Sistem tersebut adal sebagai berikut:
a. Input adalah :
1) Desired temperature generation, R1(s).
2) Desired O2 generation, R2(s).
3) Desired pressure generation, R3(s).
b. Proses adalah Boiling pada Boiler, G(s) .
c. Output adalah Actual generation (electricity), C(s) .
d. Feedback adalah :
1) Measured temperature generation, H1(s) .
2) Measured O2 generation, H2(s) .
3) Measured pressure generation, H3(s).
e. Disturbances diabaikan.
Jika digambarkan ulang (disederhanakan) maka akan seperti :
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘123
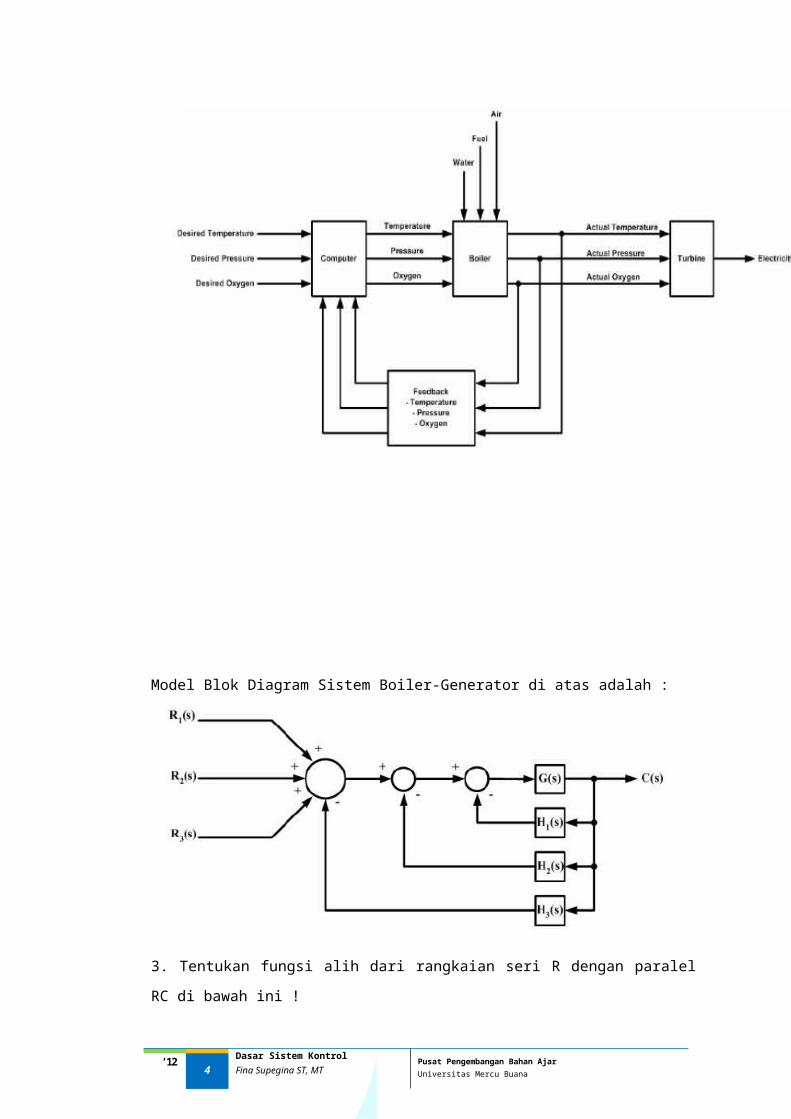
Model Blok Diagram Sistem Boiler-Generator di atas adalah :
3. Tentukan fungsi alih dari rangkaian seri R dengan paralel RC di bawah ini !
Penyelesaian :
Fungsi alih (transfer) adalah perbandingan antara output dan input suatu sistem.
Analisa KCL
Dalam bentuk Laplace
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘124
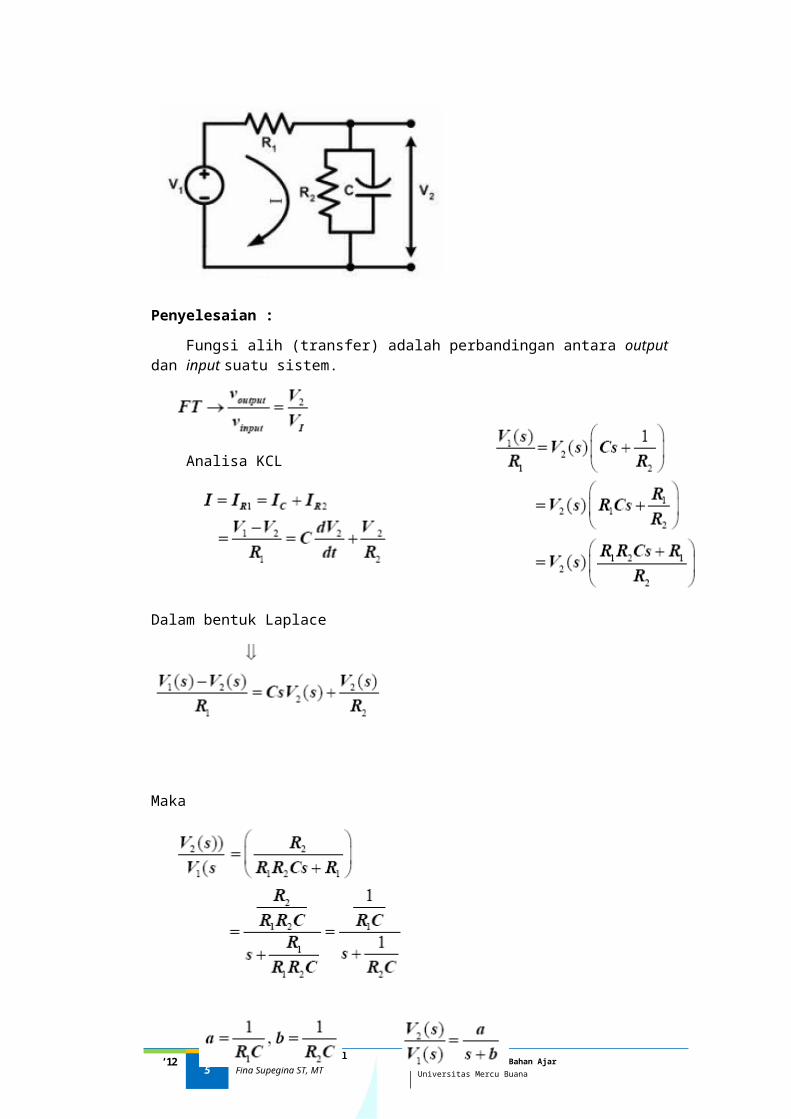
Maka
Bila maka
4. Tentukan fungsi alih dari rangkaian Rangkaian Seri R, L dan C dengan VR !
Penyelesaian : Fungsi alih (transfer)
adalah perbandingan antara output dan
input suatu sistem.
Analisa KVL
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘125
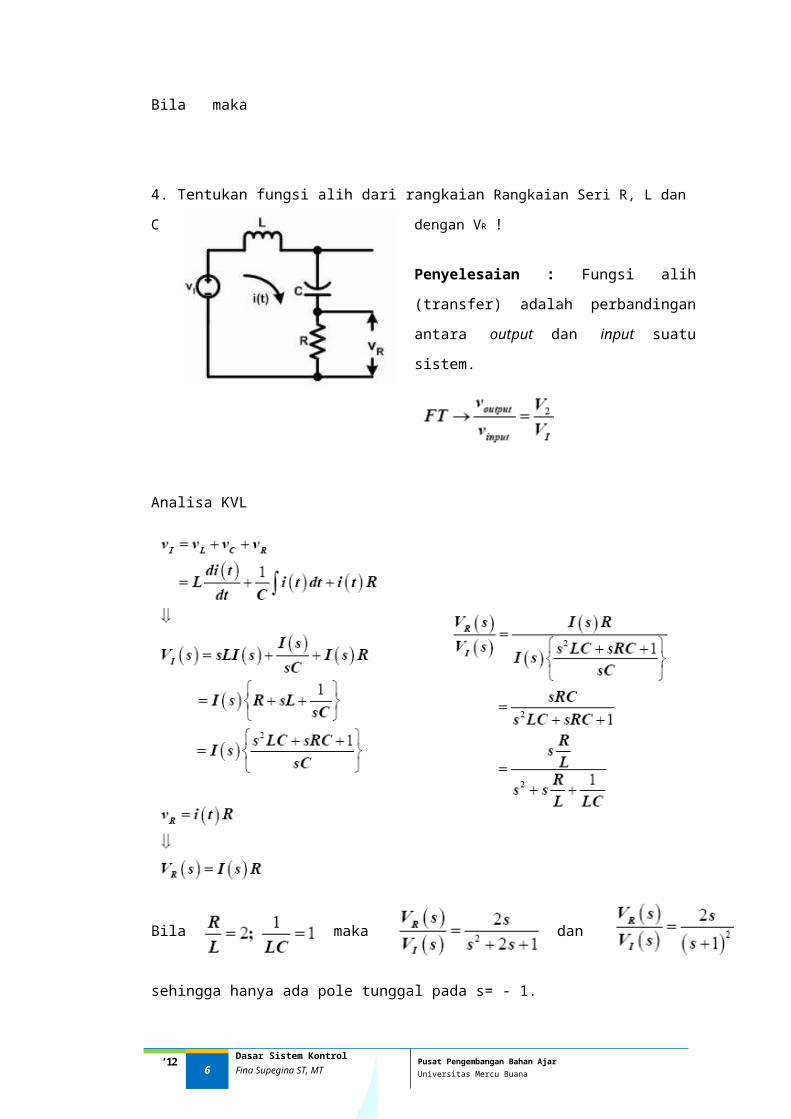
Bila maka dan
sehingga hanya ada pole tunggal pada s= - 1.
5. Tinjau sistem yang didefinisikan dengan persamaan ruang keadaan (state-
space) berikut
[ x1 ¿x.
2¿¿
.]=¿ [−5 −1¿ ]¿¿
¿¿
¿
¿
Tentukan fungsi alih G(s) untuk sistem di atas !
Penyelesaian :
Fungsi alih sistem dapat diperoleh dari perumusan sebagai berikut (perhatikan
dalam hal ini D =0)
G( s )=C (sI−A )−1 B=[ 1 2 ]
¿
[ s+5 1¿ ]¿¿
¿¿
6. Sederhanakan diagram blok sistem kendali di bawah ini !
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘126
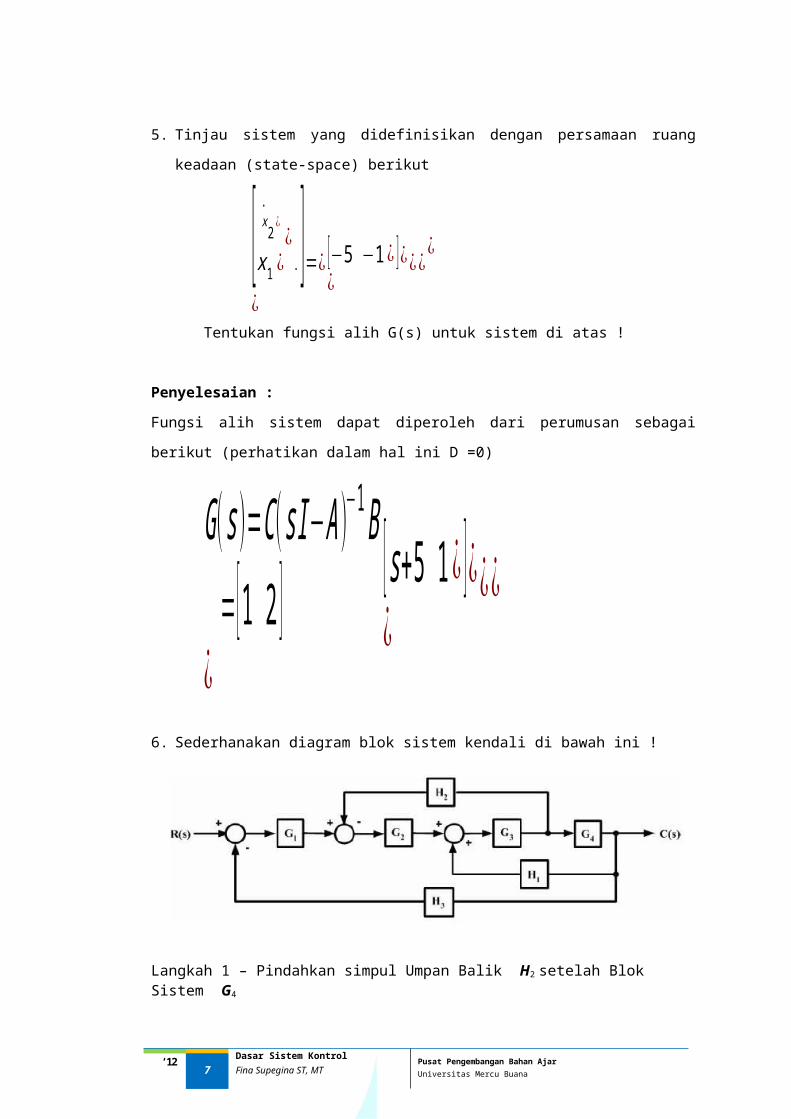
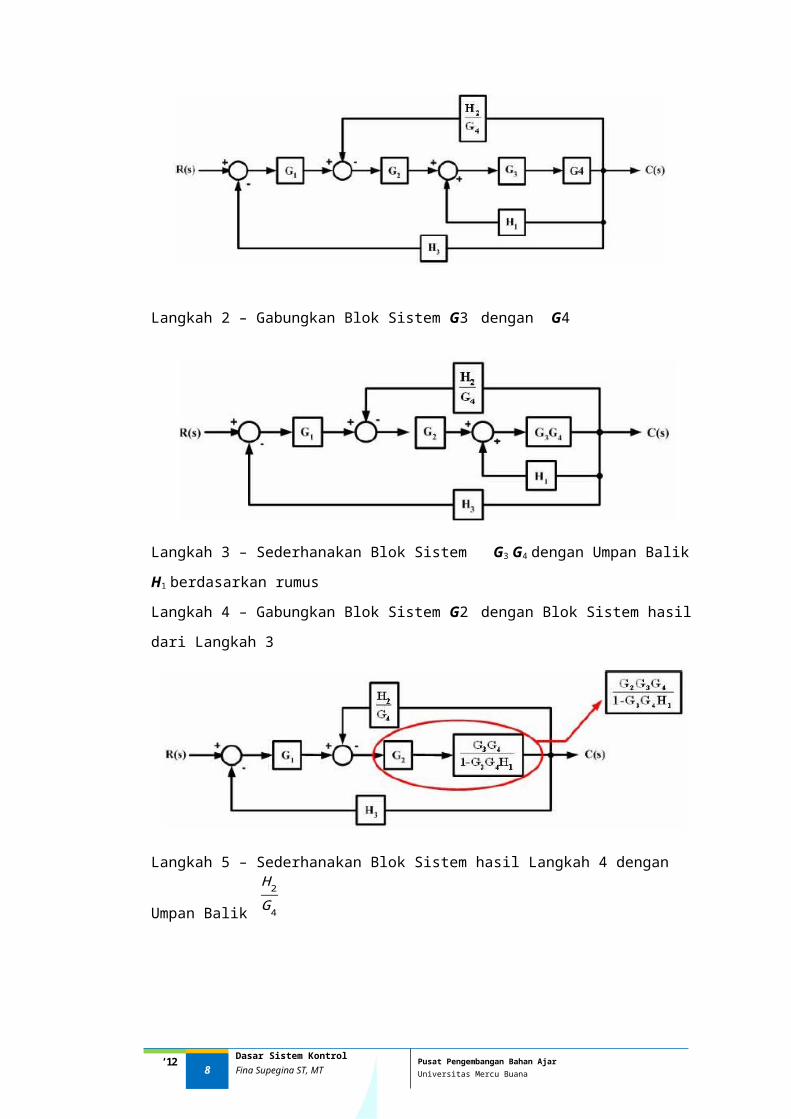
Langkah 1 – Pindahkan simpul Umpan Balik H2 setelah Blok Sistem G4
Langkah 2 – Gabungkan Blok Sistem G3 dengan G4
Langkah 3 – Sederhanakan Blok Sistem G3 G4 dengan Umpan Balik H1 ber-
dasarkan rumus
Langkah 4 – Gabungkan Blok Sistem G2 dengan Blok Sistem hasil dari Langkah 3
Langkah 5 – Sederhanakan Blok Sistem hasil Langkah 4 dengan Umpan Balik
H2
G4
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘127
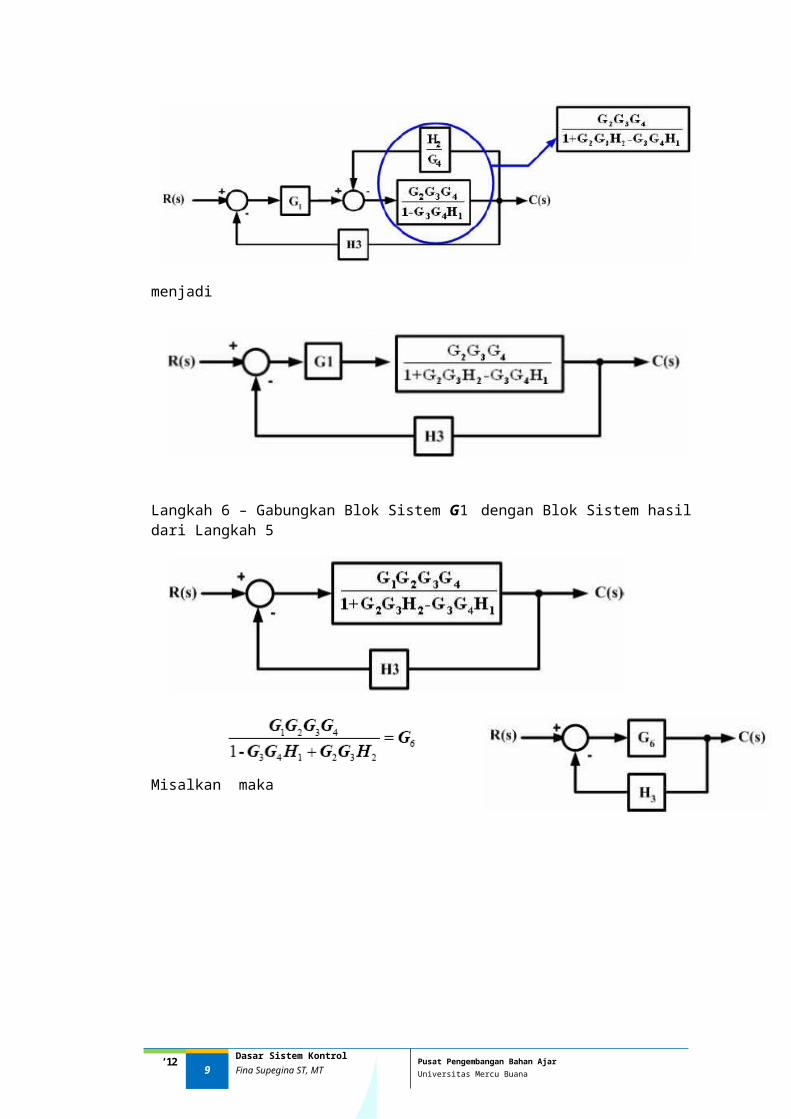
menjadi
Langkah 6 – Gabungkan Blok Sistem G1 dengan Blok Sistem hasil dari Langkah 5
Misalkan maka
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘128
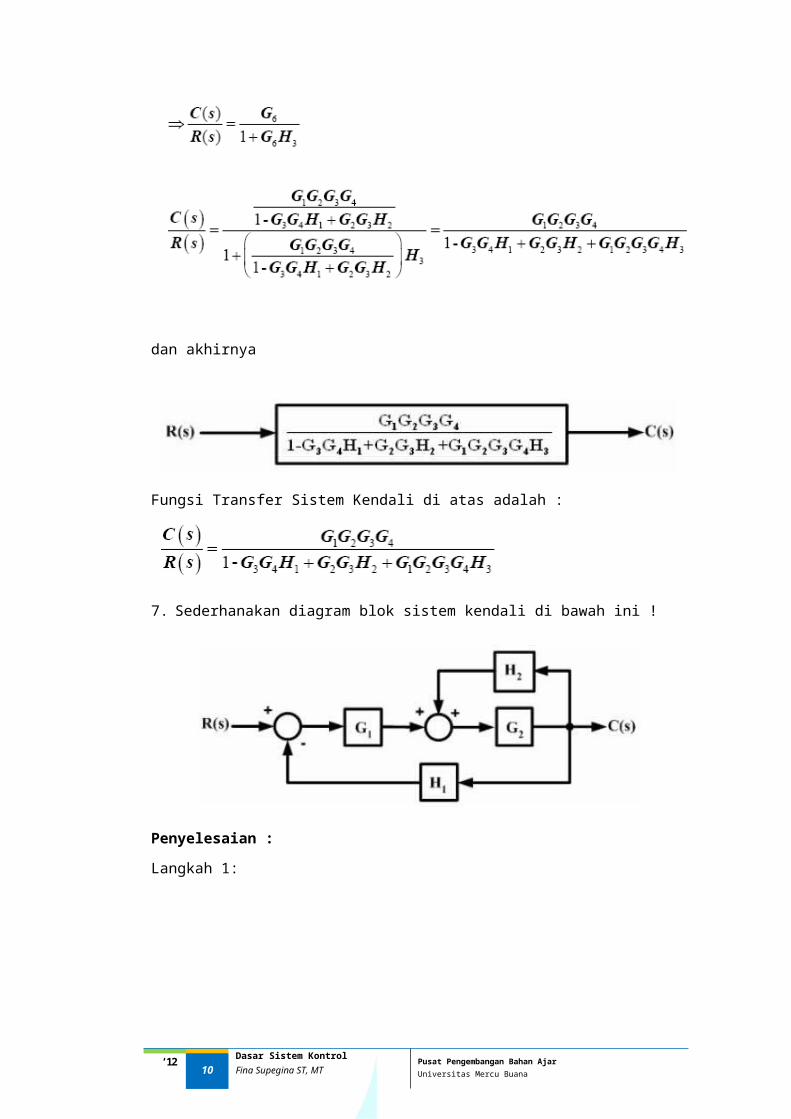
dan akhirnya
Fungsi Transfer Sistem Kendali di atas adalah :
7. Sederhanakan diagram blok sistem kendali di bawah ini !
Penyelesaian :
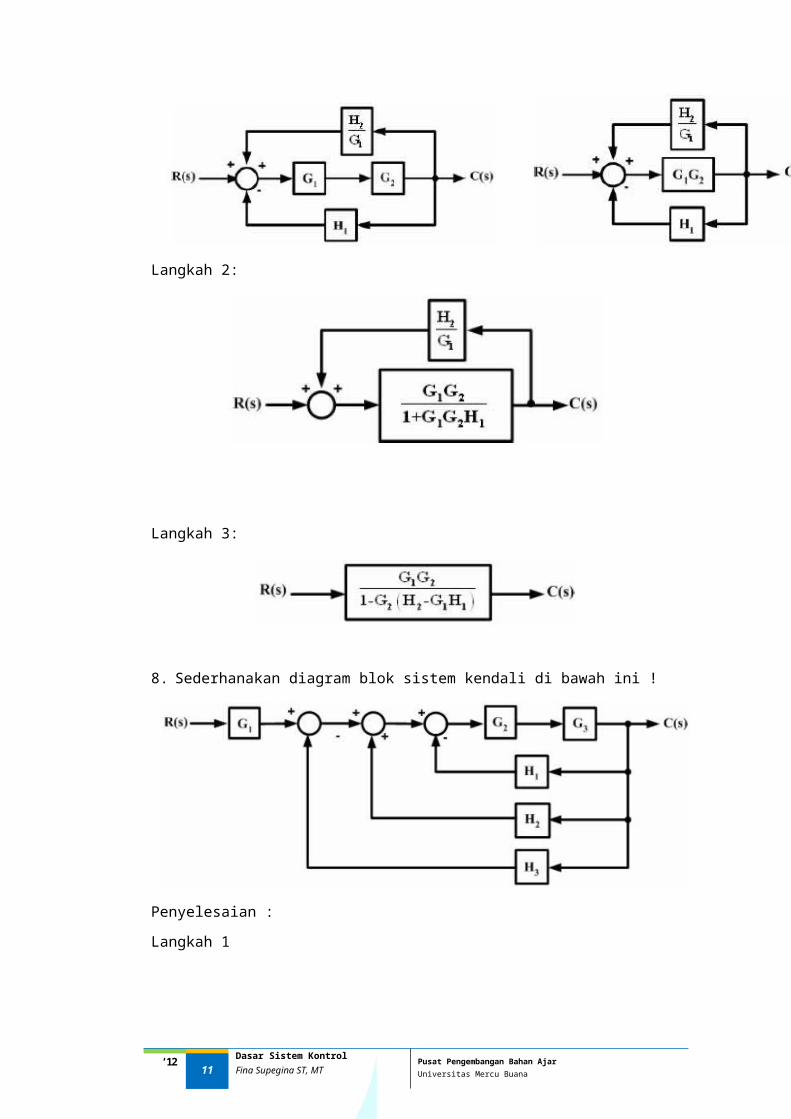
Langkah 1:
Langkah 2:
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘129
Langkah 3:
8. Sederhanakan diagram blok sistem kendali di bawah ini !
Penyelesaian :
Langkah 1
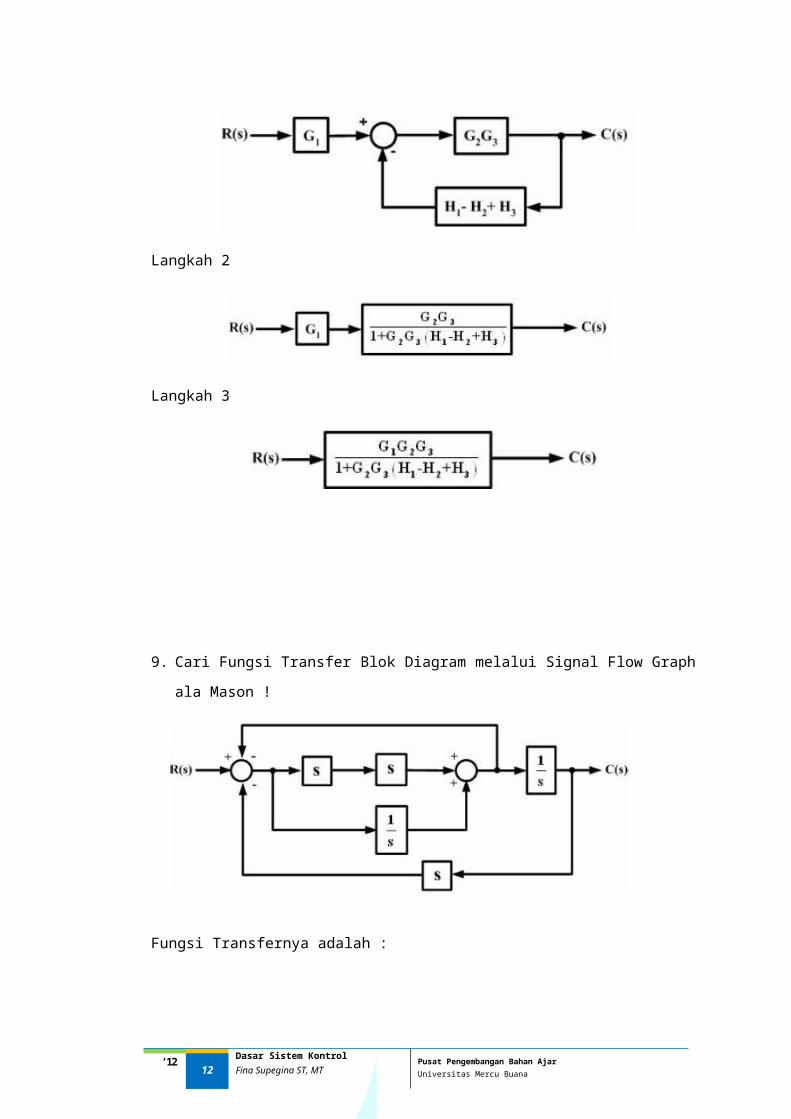
Langkah 2
Langkah 3
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘1210
9. Cari Fungsi Transfer Blok Diagram melalui Signal Flow Graph ala Mason !
Fungsi Transfernya adalah :
Penyelesaian :
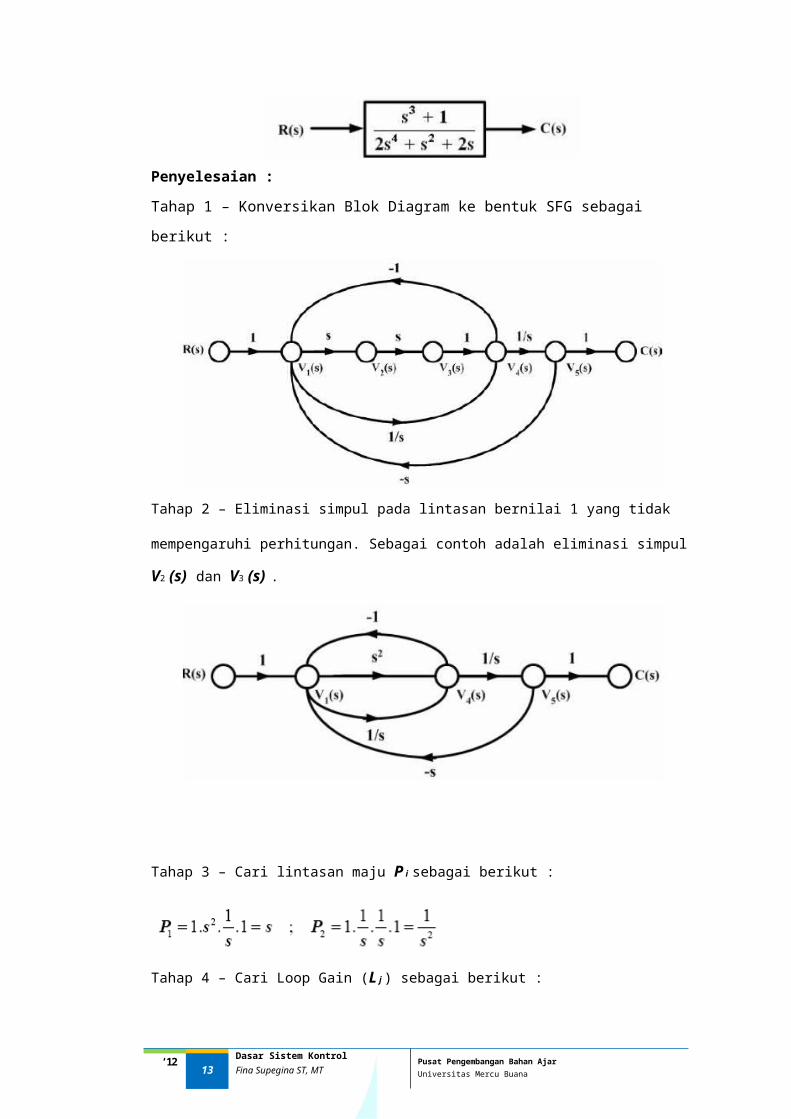
Tahap 1 – Konversikan Blok Diagram ke bentuk SFG sebagai berikut :
Tahap 2 – Eliminasi simpul pada lintasan bernilai 1 yang tidak mempengaruhi perhitun-
gan. Sebagai contoh adalah eliminasi simpul V2 (s) dan V3 (s) .
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘1211
Tahap 3 – Cari lintasan maju P i sebagai berikut :
Tahap 4 – Cari Loop Gain (L j ) sebagai berikut :
Tahap 5 – Cari kombinasi 2-Non Touching Loop (NTL 2 j ). Untuk SFG di atas tidak ada
atau bernilai 0.
Tahap 6 – Cari Δ menggunakan rumus sebagai berikut :
Tahap 7 – Cari Δ i , yakni Δ dikurangi semua L j yang menyentuh lintasan maju P i .
Dalam kasus ini Δ1 = Δ2 = Δ3 =1−0=1
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘1212
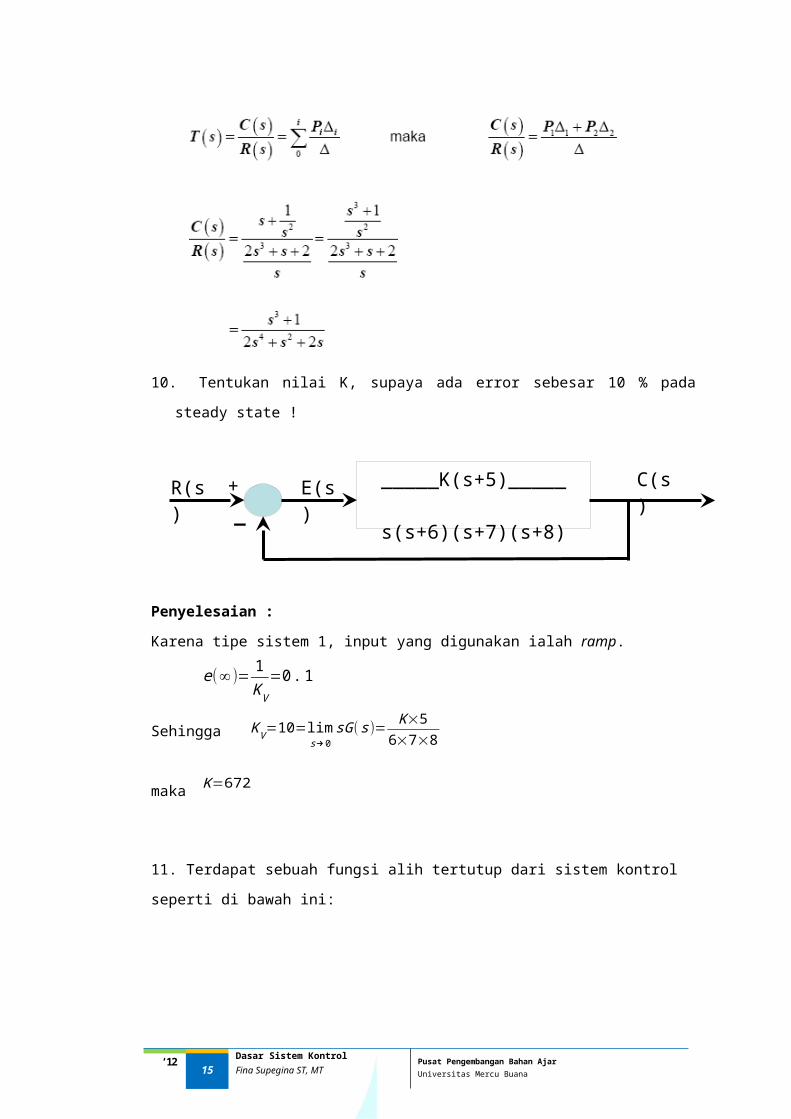
_____K(s+5)_____ s(s+6)(s+7)(s+8)
R(s) E(s) C(s)+
_
Tahap 8 – Cari Fungsi Transfer dengan memasukkan nilai-nilai diatas ke persamaan
Mason.
10. Tentukan nilai K, supaya ada error sebesar 10 % pada steady state !
Penyelesaian :
Karena tipe sistem 1, input yang digunakan ialah ramp.
Sehingga
maka
11. Terdapat sebuah fungsi alih tertutup dari sistem kontrol seperti di bawah ini:
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘1213
e (∞)= 1KV
=0.1
KV =10= lims→0
sG( s )= K×56×7×8
K=672

dimana terdapat sebuah penguatan K dan fungsi alih sistem:
G( s )= 2
s3+4 s2+5 s+2
maka fungsi alih lup tertutupnya adalah:
Ksss
K
sR
sCsT
2254
2
)(
)()(
23
dan persamaan karakteristiknya adalah:
02254)( 23 KssssQ
sehingga array Routh-nya adalah:
s3
s2
s1
s0
1
4
(18-2K)/4
2+2K
5
2+2K
dimana:
KK
K
Kc
KKK
b
2204/)21 8(
224
)21 8(
4
4/)21 8()2 022(4
1
224
51
1
1
1
1
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘1214
Agar sistem stabil, maka semua elemen pada kolom pertama harus lebih dari 0,
maka syarat pertamanya adalah harga elemen pada baris s1 harus positif, yaitu:
9
1 82
021 8
,04
21 8
K
K
K
K
dan syarat kedua adalah harga elemen pada baris s0 juga harus positif, yaitu:
2 + 2K > 0,
2K > -2
K > -1
Sehingga, dari syarat pertama dan kedua, agar sistem tetap stabil harga K adalah:
-1 < K < 9
Dasar Sistem KontrolFina Supegina ST, MT
Pusat Pengembangan Bahan AjarUniversitas Mercu Buana
‘1215



![image source : ReOf Sistem PLTS/PLTS Off... · solusi listrik mandiri ramah lingkungan untuk individual [individual off-grid system solution] ... dalam baterai melalui pengaturan/kontrol](https://static.fdokumen.com/doc/165x107/5ca16fab88c99335108c2b67/image-source-reof-sistem-pltsplts-off-solusi-listrik-mandiri-ramah-lingkungan.jpg)