
Lapres Sistem Pengendalian Otomatik
29
LAPORAN RESMI PRAKTIKUM: “SISTEM PENGENDALIAN OTOMATIK– P3PENGGUNAAN SOFTWARE DISTRIBUTED CONTROL SYSTEM CENTUM CS3000 R3 YOKOGAWA” Disusun Oleh : Safira Noor M.P (2413 100 126) Asisten Laboratorium : Jovi Abi Rahman (2412100040) PROGRAM STUDI S1 TEKNIK FISIKA i
-
Upload
safira-noor-meidiana-putri -
Category
Documents
-
view
282 -
download
6
description
Lapres yang bagus
Transcript of Lapres Sistem Pengendalian Otomatik
LAPORAN RESMI PRAKTIKUM: “SISTEM PENGENDALIAN OTOMATIK– P3PENGGUNAAN SOFTWARE DISTRIBUTED CONTROL SYSTEM CENTUM CS3000 R3 YOKOGAWA”
Disusun Oleh :
Safira Noor M.P (2413 100 126)
Asisten Laboratorium :Jovi Abi Rahman
(2412100040)
PROGRAM STUDI S1 TEKNIK FISIKAJURUSAN TEKNIK FISIKAFAKULTAS TEKNOLOGI INDUSTRI
i
JOVI, 15/05/16,
Perbaiki format penulisan
INSTITUT TEKNOLOGI SEPULUH NOPEMBERSURABAYA20162016
LAPORAN RESMI PRAKTIKUM: “SISTEM PENGENDALIAN OTOMATIK-P3PENGGUNAAN SOFTWARE DISTRIBUTED CONTROL SYSTEM CENTUM CS3000 R3 YOKOGAWA
Disusun Oleh :
Safira Noor M.P (2413 100 126)
Asisten Laboratorium :Jovi Abi Rahman
(2412100040)
PROGRAM STUDI S1 TEKNIK FISIKA
ii
JURUSAN TEKNIK FISIKAFAKULTAS TEKNOLOGI INDUSTRIINSTITUT TEKNOLOGI SEPULUH NOPEMBERSURABAYA2016
ABSTRAK
Distributed Control System (DCS) merupakan sistem pengontrolan yang sering digunakan oleh pabrik-pabrik karena cara kerjanya menggunakan rangkaian logika untuk mengontrol peralatan secara tepat dan teliti. Pada praktikum kali ini, software DCS yang digunakan seri Yokogawa CS 3000. Dimana, terdapat dua konfigurasi yang akan dicoba, yaitu single-loop dan cascade. Dengan metode yang digunakan untuk single-loop yaitu trial error dan zieger-nichols, dan untuk cascade menggunakan metode zieger-nichols. Hasilnya, grafik yang sesuai adalah grafik single-loop untuk metode trial errorserta cascade. Dan diketahui pula, bahwa nilai P,I,D memiliki pengaruh terhadap respon sistem.
Kata Kunci : Distributed Control System, Single-loop, Cascade, metodeZieger Nichols.
iii
ABSTRACT
Distributed Control System (DCS) is a controllng system that always be used by the factories because the ways of working of the dcs is using lgoc series for controlling the stuff precisely and accurately. In this lab,we used DCS Yokogawa CS 3000. That we made an experiment with two configurations which is single-loop and cascade. For single-loop, we used two methods, trial error and zieger nichols. And for cascade, we only used zieger nichols method. And the result was that single-loop with trial error method, and cascade had the propriate graphics.And also known that P, I, D value has effect for system responses.
Keywords : Distributed Control System, Single-loop, Cascade, Ziegr Nichols method.
iv

DAFTAR ISIABSTRAK.........................................................................iii
DAFTAR GAMBAR..........................................................vi
BAB I PENDAHULUAN..................................................1
Latar Belakang................................................................1
1.3 Tujuan.......................................................................2
BAB II DASAR TEORI......................................................3
2.2 Konfigurasi Hardware..............................................7
2.3 DCS Centum CS 3000 Software...............................9
METODOLOGI.................................................................13
3.1 Peralatan..................................................................13
3.2 Prosedur Percobaan.................................................13
v
DAFTAR GAMBAR
Gambar 2.1 Arsitektur DCS Centrum CS 3000.....................3Gambar 2.2 Function Block...................................................5Gambar 3.1 System View.......................................................9Gambar 3.2 Pembuatan project..............................................10Gambar 3.3 Pembuatan HIS...................................................11Gambar 3.4 New FIO Mode...................................................12Gambar 3.5 Pembuatan IOM..................................................12Gambar 3.6 Tag I/O................................................................13
vi

BAB I PENDAHULUAN
Latar Belakang
Kemajuan teknologi yang sangat pesat dan perkembangan ilmu pengetahuan dan teknologi yang serba cepat dan akurat mampu menghemat waktu dan tenaga kerja. Manusia menciptakan teknologi yang dapat melakukan segala sesuatu dengan cepat, tepat sasaran dan hasil maksimal tanpa mengeluarkan biaya yang tinggi dengan kata lain semua bekerja secara otomatis.Didunia Industri dibutuhkan sistem pengontrolan pabrik yang membutuhkan ketelitian, ketepatan, dan kehandalan yang tinggi dalam proses mengurangi tingkat kerugian biaya produksi yang disebabkan oleh kesalahan. Adanya sistem kontrol/otomasi juga sebenarnya dapat memudahkan pekerja sebagai operation engineer suatu pabrik dalam mengelola dan menjalankan pabrik tersebut. Atas dasar hal tersebut maka digunakan suatu teknologi sistem pengontrolan secara otomatis yang dapat mengontrol atau mengamati seluruh peralatan yaitu dengan menggunakan teknologi control Distribued Control System (DCS). DCS mengontrol pengoperasian peralatan dalam pabrik dengan menggunakan program yang dibuat dengan sistem rangkaian tersebut alkan mengontrol peralatan secara teratur dan teliti, sehingga akan mengurangi kesalahan atau kekeliruan yang dilakukan oleh manusia. Oleh karena pentingnya DCS dalam dunia industri, maka perlu belajar tentang DCS. Dan untuk praktikum kali ini digunakan DCS Yokogawa CS 3000.
1

2
1.2 Rumusan MasalahAdapun rumusan masalah dari percobaan ini adalah
sebagaiberikut :a. Bagaiman sistem konfigurasi dan fungsi dari DCS
Centum CS 3000 Yokogawa sebagai sistem kontrol?
b. Bagaimana melakukan kontrol PID dan tunning PID menggunakan metode Ziegler-Nichols?
1.3 Tujuan
Adapun tujuan dari dilakukannya percobaan ini adalah sebagai berikut :a. Mengetahuisistem konfigurasi dan fungsi dari DCS
Centum CS 3000 Yokogawa sebagai sistem kontrol.
b. Mengetahuicaramelakukan kontrol PID dan tunning PID menggunakan metode Ziegler-Nichols.
BAB IIDASAR TEORI
2.1 Distributed Control System (DCS) Distributed Control System (DCS) merupakan suatu
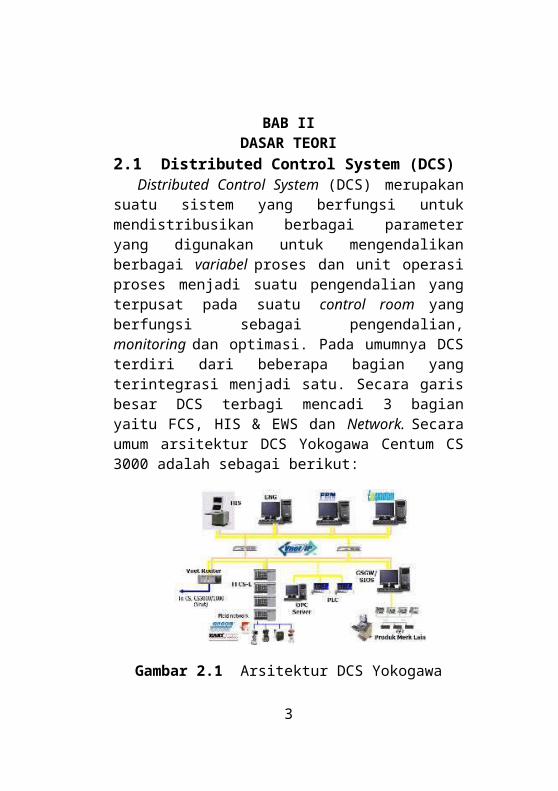
sistem yang berfungsi untuk mendistribusikan berbagai parameter yang digunakan untuk mengendalikan berbagai variabel proses dan unit operasi proses menjadi suatu pengendalian yang terpusat pada suatu control room yang berfungsi sebagai pengendalian, monitoring dan optimasi. Pada umumnya DCS terdiri dari beberapa bagian yang terintegrasi menjadi satu. Secara garis besar DCS terbagi mencadi 3 bagian yaitu FCS, HIS & EWS dan Network. Secara umum arsitektur DCS Yokogawa Centum CS 3000 adalah sebagai berikut:
Gambar 2.1 Arsitektur DCS Yokogawa
2.1.1 FCS (Field Control Station)FCS digunakan sebagai kendali proses dari suatu
plant dan komunikasi antara FCS dengan instrument yang lain. FCS generasi baru adalahFFCS-L yang mana komunikasi data dan kendali data menggunakan teknologi TCP/IP, serta ukuran yang kecil dibandingkan dengan FCS generasi sebelumnya, dengan keunggulan ini FCS
3
4
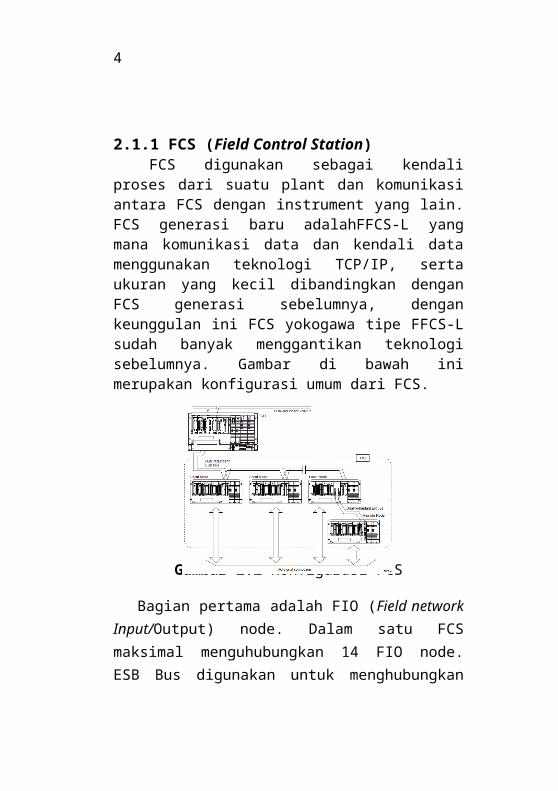
yokogawa tipe FFCS-L sudah banyak menggantikan teknologi sebelumnya. Gambar di bawah ini merupakan konfigurasi umum dari FCS.
Gambar 2.2 Konfigurasi FCS
Bagian pertama adalah FIO (Field network Input/Output) node. Dalam satu FCS maksimal menguhubungkan 14 FIO node. ESB Bus digunakan untuk menghubungkan field control unit dengan module FIO dalam mode local node (FIO dekat dari FCS). ESB Bus ini juga digunakan untuk mengekspan input output. Untuk menghubungkan antar FCU atau FIO maka digunakan ESB Bus conector. ER Bus digunakan untuk menghubungkan FCS dengan FIO dalam mode remote node (FIO jauh dari FCS). ER Bus juga memiliki ER Bus conector dan ER Bus Conector dengan terminal, untuk mengghubungkan antar ER Bus yang terpasang di FCU atau FIO digunakan konektor 10 base 2 tipe T.
Bagian kedua adalah power supply. Pada FCS tipe ini menggunakan dua buah power supply, power supply sebelah kiri dapat digunakan untuk memberikan tegangan ke processor sebelah kiri atau ke unit interface luar, begitu pula sebaliknya. Kemudian bagian yang ketiga adalah
5
processor module. DCS yokogawa menggunakan dua buah processor tipe CP 401 yang bekerja secara redudant. Processor utama merupakan tempat program DCS berada sedangkan processor ke dua digunakan untuk back up program dari processor satu sebagai cadangan.
Yang terakhir adalah module untuk input dan output dari field instrument. Pada FCS banyak sekali module input output dan module antar komunikasi yang digunakan sesuai dengan kebutuhannya. Module input output terbagi menjadi 3 bagian: digital input output, analog input output, dan komunikasi input output. Sedangkan komponen lain yang wajib digunakan diluar komponen dari FCS (Field Control Statiom) adalah Vnet/IP Interface Card mode VI701 yang dipasang pada sebuah PC digunakan untuk menghubungkan antara PC yang berisi program Centum dengan perangkat FCS. Vnet router digunakan untuk menghubungkan FCS ini dengan FCS Yokogawa lain yang masih menggunakan teknologi 10 base 2 dan 10 base 5 atau masih berdomain pada teknologi Vnet (komunikasi dengan menggunakan kabel koaxsial). Pemasanngan Vnet router ini juga dapat digunakan untuk menghubungkan FCS yang berbeda domain dan berbeda tipe teknologi komunikasi (Vnet/Ip dan Vnet).
2.1.2 HIS (Human Interface System) HIS (Human Interface System) merupakan tampilan
visual dari parameter-parameter dari plant yang ingin dikendalikan dalam sebuah layar monitor.
6
2.1.3 EWS (Engineering Work Station) EWS (Engineering Work Station) merupakan sebuah
personal komputer yang digunakan untuk memperbaiki atau menambahkan program pada DCS Yokogawa.
2.1.4 Network Pada gambar arsitektur DCS Yokogawa, FCS (Field
Control Station) terhubung dengan transmitter,control valve serta alat instrumentasi yang lain yang berfungsi sebagai kontrol proses yang digunakan untuk mengendalikan variable proces yang akan dikendalikan. GSGW/SIOS digunakan sebagai penghubung antara DCS Yokogawa dengan DCS lain diluar dari sistem DCS Yokogawa untuk dapat saling berkonumikasi baik dalam kontrol data maupun komunikasi data. OPC server juga digunakan untuk menghubungkan DCS dengan sistem lain di luar DCS Yokogawa, tetapi hanya dalam level software untuk dapat berkomunikasi satu sama lain, sebagai contoh adalah PLC Siemens yang dihubungkan dengan DCS Yokogawa dan Software SCADA (supervisory control and data acquisition). Jenis network atau jaringan dalam DCS Centum 3000 menggunakan teknologi Vnet/IP dengan topologi star. Garis kuning pada gambar diatas merupakan representasi jalur data komunikasi dan garis coklat merepresentasikan jalur data kendali. Sistem konfigurasi Vnet/IP diilustrasikan oleh gambar berikut:
7
Gambar 2.3 konfigurasi Vnet
2.2 Konfigurasi Hardware
Kabinet digunakan untuk menempatkan hardware DCS dan berlokasi diantara MCR (Main Control Room) dan LER (Local Equipment Room). Kabinet dapat diklasifikasikan menjadi FCS cabinet, FOC cabinet (untuk pemasangan serat optik dan aksesoris lainnya), marshalling cabinet, power distribution cabinet, interposing relay cabinet, dan console (untuk pemasangan SIS).
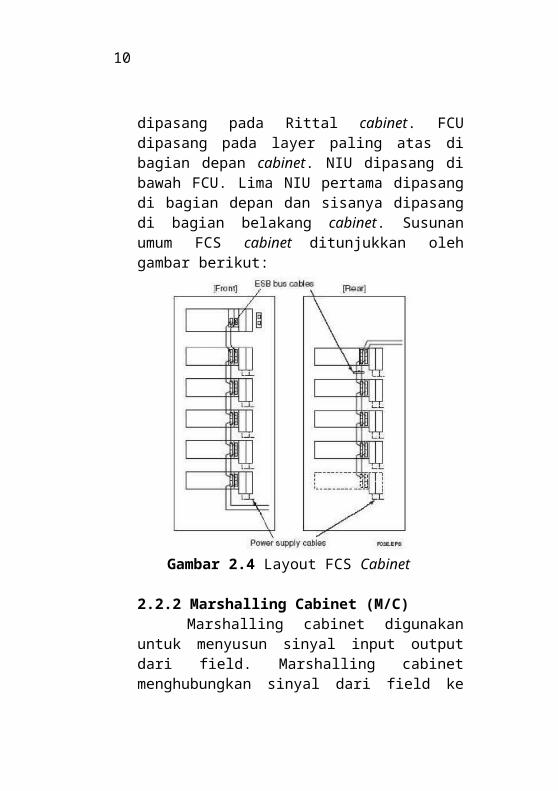
2.2.1 FCS Cabinet FCS cabinet didesain untuk mengakomodasi
FCU (Field Control Unit) dan NIU (Node Interface Unit). FCU dan NIU dipasang pada Rittal cabinet. FCU dipasang pada layer paling atas di bagian depan cabinet. NIU dipasang di bawah FCU. Lima NIU pertama dipasang di bagian depan dan sisanya dipasang di bagian belakang cabinet. Susunan umum FCS cabinet ditunjukkan oleh gambar berikut:

8
Gambar 2.4 Layout FCS Cabinet
2.2.2 Marshalling Cabinet (M/C) Marshalling cabinet digunakan untuk menyusun
sinyal input output dari field. Marshalling cabinet menghubungkan sinyal dari field ke FCS. M/C pada umumnya didesain untuk menempatkan PSU (Power Supply Unit) untuk digital input output, lampu, surge protection devices, alarm temperature atau thermostat, MCB (Miniature Circuit Breakers), terminal blocks, dan system terminal boards. Pada prinsipnya, marshalling cabinet harus mempunyai dua plat yang berada di dalam dan membagi cabinet menjadi bagian depan dan belakang. Kabel dari field diterminasi di bagian depan cabinet. Terminals mengelompokkan kabel-kabel. Masing-masing bagian kabel memiliki terminal header (sebagai label untuk nomor kabel), dan

9
label identifikasi terminal block. Bagian belakang cabinet digunakan untuk menempatkan system terminal boards. Cross wiring akan terjadi di antara field terminal dan system terminal board. Digital IO, PSU, MCB, dan lainnya ditempatkan di bagian depan. Kipas dengan filter akan diinstal ketika PSU diletakkan di dalam marshalling cabinet. Lampu akan tersedia di bagian depan dan belakang cabinet. Alarm temperature akan tersedia apabila cabinet memiliki power supply.
2.3 DCS Centum CS 3000 Software
Pada DCS Yokogawa CS 3000 ini, terdapat beberapa pemrograman algoritma kontrol, salah satunya menggunakan function block, dimana setiap block memiliki fungsinya masing-masing, seperti:
Gambar 2.5 Function Block
1. Link block PIO Digunakan sebagai input dan output dari Centum CS 3000.
2. PVI Digunakan sebagai block untuk monitoring.
3. PID Digunakan sebagai block untuk algoritma kontrol PID.
4. ST16 Digunakan untuk pemrograman sequential.
10
5. CALCU dan CALCU-L 6. LC64
Digunakan untuk pemrograman logika.
Dan masih banyak lagi yang function block lain yang terdapat dalam program Centum CS 3000 yang digunakan untuk membuat algoritma kontrol serta monitoring suatu plant. Pada DCS Yokogawa memiliki beberapa algoritma pengendalian PID , yaitu:
1. Tipe kontrol dasar PID (PID) • Melakukan aksi kontrol proporsional, integral
dan derivatif mengikuti perubahan nilai setpoint.
•Bertujuan untuk menghasilkan respon yang cepat terhadap perubahan nilai setpoint.
2. Tipe kontrol PID proporsional PV dan derivatif (I-PD) • Hanya melakukan aksi integral saat nilai
setpoint berubah. • Menjamin kestabilan sistem meskipun nilai
setpoint berubah secara mendadak.
3. Tipe kontrol PID derivatif PV (PI-D) Hanya melakukan aksi proporsional dan
integral saat nilai setpoint berubah. Digunakan jika memerlukan respon yang lebih
baik terhadap perubahan nilai, seperti blok kontrol hilir (downstream) pada loop kontrol kaskade.
4. Tipe penentuan otomatis
11
• Pada mode kascade (CAS) atau remote kaskade (RCAS), menggunakan tipe kontrol PID derivatif PV (PI-D) agar dapat lebih baik dalam mengikuti perubahan nilai setpoint.
•Pada mode automatis (AUT), menggunakan tipe kontrol PID proporsional PV dan derivatif (I-PD) untuk menjaga kestabilan sistem.
5. Tipe penentuan otomatis 2 • Pada mode kascade (CAS) menggunakan tipe
kontrol PID derivatif PV (PI-D). • Pada mode automatis (AUT) atau remote kaskae (RCAS), menggunakan tipe kontrol PID proporsional PV dan derivatif (I-PD) untuk menjaga kestabilan sistem.
Tabel 2.1 konfigurasi PID Yokogawa

Halaman ini sengaja dikosongkan
12
13
BAB IIIMETODOLOGI
3.1 Peralatan
Adapun alat dan bahan yang digunakan pada percobaan ini adalah sebagai berikut :
a. Laptop b. Software DCS Centum CS 3000 R3
Yokogawa
3.2 Prosedur Percobaan
Adapun langkah-langkah dalam percobaan ini adalah sebagai berikut :
a. Konfigurasi FCS-HIS pada software DCS Centum CS 3000 R3 Yokogawa dibuat dengan tujuan kontrol temperatur menggunakan singe loop (langkah-langkah pembuatan dapat dilihat dilampiran).
b. Tuning PID dilakukan dengan menggunakan metode trial-error sebanyak 3 kali, dengan variasi parameter PID.
c. Tuning PID mengggunakan metode ziegler-nichols dilakukan pada project tersebut.
d. Konfigurasi kontrol cascade pada software DCS Centum CS 3000 R3 Yokogawa dibuka.
e. Tuning PID pada loop slave dilakukan menggunakan metode ziegler-nichols [gunakan aksi kontrol PI].
f. Kemudaian tuning PID loop master dilakukan menggunakan persamaan berikut:
14
Scondary :PI Primary :PI
Kc=0 , 75[ K2
K1 ][ L1
T 1 ]−1, 07
[ T2
T1 ]0,1
T i=T 1 Secondary :PI Primary :PID
Kc=0 , 75[ K2
K1 ][ L1
T 1 ]−1,07
[ T2
T1 ]0,1
T i=T 1
T d=L1−T 2
2
15




















