
14063-8-656966738948.doc
24
MODUL VIII ROOT LOCUS Pada modul ini akan dibahas mengenai dasar root locus, plot root locus, aturan-aturan penggambaran root locus dan penggambaran root locus melalui MATLAB. Dibahas pula beberapa kasus khusus serta analisis sistem kendali melalui root locus. Karakteristik tanggapan transient sistem loop tertutup dapat ditentukan dari lokasi pole-pole (loop tertutupnya). Bila K berubah, maka letak pole-pole nya juga berubah. Kita perlu memahami pola perpindahan letak pole-pole dalam bidang s. Gambar 1 Sistem Loop Tertutup Desain sistem kendali melalui gain adjusment adalah dengan memilih sehingga pole-pole terletak ditempat yang diinginkan. Sedangkan desain sistem kendali melalui kompensasi adalah dengan memindahkan letak pole yang tak diinginkan melalui pole-zero cancellation. Mencari akar-akar persamaan karakteristik untuk orde tinggi sulit, terlebih dengan K sebagai variabel. (Alternatif: gunakan MATLAB ?!). W.R. Evan mengembangkan metoda untuk mencari akar-akar persamaan orde tinggi yaitu metoda Root Locus. Root Locus adalah tempat kedudukan akar-akar persamaan PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie ya Kadarina, ST, MT. SISTEM KENDALI LANJUT 1
Transcript of 14063-8-656966738948.doc

MODUL VIII
ROOT LOCUS
Pada modul ini akan dibahas mengenai dasar root locus, plot root locus, aturan-
aturan penggambaran root locus dan penggambaran root locus melalui MATLAB.
Dibahas pula beberapa kasus khusus serta analisis sistem kendali melalui root locus.
Karakteristik tanggapan transient sistem loop tertutup dapat ditentukan dari lokasi
pole-pole (loop tertutupnya). Bila K berubah, maka letak pole-pole nya juga berubah.
Kita perlu memahami pola perpindahan letak pole-pole dalam bidang s.
Gambar 1 Sistem Loop Tertutup
Desain sistem kendali melalui gain adjusment adalah dengan memilih sehingga pole-
pole terletak ditempat yang diinginkan. Sedangkan desain sistem kendali melalui
kompensasi adalah dengan memindahkan letak pole yang tak diinginkan melalui
pole-zero cancellation.
Mencari akar-akar persamaan karakteristik untuk orde tinggi sulit, terlebih dengan K
sebagai variabel. (Alternatif: gunakan MATLAB ?!). W.R. Evan mengembangkan
metoda untuk mencari akar-akar persamaan orde tinggi yaitu metoda Root Locus.
Root Locus adalah tempat kedudukan akar-akar persamaan karakterstik dengan K =
0 sampai K = tak hingga. Melalui Root Locus dapat diduga pergeseran letak pole-
pole terhadap perubahan K, terhadap penambahan pole-pole atau zero-zero loop
terbuka.
8.1 Dasar Root Locus
Perhatikan contoh sistem kendali pada gambar 2 berikut ini.
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 1

Gambar 2 Sistem kendali radar pesawat
Persamaan karakteristik sistem di atas : s2 + 2s + K =0
Akar-akar persamaan karakteristiknya :
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 2

Root Locus mempunyai sifat simetri terhadap sumbu nyata. Root Locus bermula dari
pole-pole G(s)H(s) (untuk K=0) dan berakhir di zero-zero G(s)H(s) (untuk Kà~)
termasuk zero-zero pada titik takhingga. Root Locus cukup bermanfaat dalam desain
sistem kendali linear karena Root Locus dapat menunjukkan pole-pole dan zero-zero
loop terbuka mana yang harus diubah sehingga spesifikasi unjuk kerja sistem dapat
dipenuhi. Pendekatan desain melalui Root Locus sangat cocok diterapkan untuk
memperoleh hasil secara cepat.
Sistem kendali yang membutuhkan lebih dari 1 parameter untuk diatur masih dapat
menggunakan pendekatan Root Locus dengan mengubah hanya 1 parameter pada
satu saat. Root Locus sangat memudahkan pengamatan pengaruh variasi suatu
parameter (K) terhadap letak pole-pole. Sketsa Root Locus secara manual tetap
dibutuhkan untuk dapat memahaminya dan untuk memperoleh idea dasar secara
cepat, meskipun MATLAB dapat melakukannya secara cepat dan akurat. Spesifikasi
transient (koefisien redaman) dapat ditentukan dengan mengatur nilai K melalui Root
Locus.
8.2 Plot Root Locus
Sistem kendali tertutup dengan umpan balik negatif seperti pada gambar 3 di bawah
ini memiliki persamaan karakteristik: 1 + G(s)H(s) = 0 atau: G(s)H(s) = -1.
Gambar 3 Sistem Kendali Loop Tertutup Umpan Balik Negatif
Dengan demikian :
ÐG(s)H(s) = + 180o(2k+1); (syarat sudut)
k = 0, 1, 2, ….
| G(s)H(s)| = 1 (syarat magnitude)
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 3

Gambar 4 Diagram yang menunjukkan pengukuran sudut dari pole loop-terbuka dan
zero loop-terbuka untuk pemeriksaan titik s
8.3 Prosedur Penggambaran Root Locus
Berikut ini adalah prosedur penggambaran Root Locus :
1. Letakkan pole-pole dan zero-zero loop terbuka pada bidang s.
2. Tentukan Root Locus pada sumbu nyata
- Syarat Sudut:
ÐG(s)H(s) = + 1800(2k+1); k = 0, 1, 2, …
- Ambil titik test : bila jumlah total pole dan zero di kanan titik ini ganjil, maka
titik tsb terletak di Root Locus.
3. Tentukan asimtot Root Locus:
- Banyaknya asimtot = n – m
n = banyaknya pole loop terbuka
m= banyaknya zero loop terbuka
- Sudut-sudut asimtot =
k = 0, 1, 2,...
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 4

- Titik Potong asimtot-asimtot pada sumbu nyata:
a
4. Tentukan titik-titik break-away dan titik-titik break-in:
– Untuk Persamaan Karakteristik: B(s) + KA(s) = 0,
– Maka titik-titik tsb harus berada di Root Locus dan memenuhi persamaan:
5. Tentukan sudut-sudut datang / sudut-sudut berangkat untuk pole-pole / zero-zero
kompleks sekawan.
– Sudut datang (dari suatu pole kompleks) = 1800 – (jumlah sudut vektor-
vektor dari pole-pole lain ke pole kompleks tsb) + ( jumlah sudut vektor-vektor
dari zerozero ke pole kompleks tsb).
– Sudut pergi (ke suatu zero kompleks) = 1800 – (jumlah sudut vektor-vektor
dari zero-zero lain ke zero kompleks tsb) + ( jumlah sudut vektor-vektor dari
polepole ke zero kompleks tsb).
Gambar 5 Kontruksi Root Locus : Sudut pergi (berangkat)=180o – (θ1+ θ2)+
6. Tentukan batas kestabilan mutlak sistem (K):
– Melalui Kriteria Routh Hurwitz.
– Secara analitis: memotong sumbu imajiner: s = jz
7. Sketsa Root Locus secara lebih teliti pada daerah-daerah selain sumbu nyata dan
asimtot.
8. Tentukan letak pole-pole melalui nilai K yang memenuhi syarat magnitude.
Sebalikya, bila letak pole-pole ditentukan (pada Root Locus), maka nilai K yang
memenuhi dapat dihitung secara grafis atau secara analitis:
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 5

Secara grafis:
CONTOH :
Gambarkan Root Locus sistem balikan satuan dengan
Tentukan juga nilai K agar koefisien redaman pole-pole kompleks sekawan loop
tertutup dominannya bernilai 0,5 !
Solusi :
1. Tentukan Root Locus pada sumbu nyata.
Gambar 7 Root Locus pada sumbu nyata
• Untuk titik uji 1 :
Syarat sudut : - Ðs - Ð(s +1) - Ð(s + 2) = 00 + 00 + 00 = 00 (tak terpenuhi).
• Untuk titik uji 2 :
Syarat sudut : - Ð - Ð(s +1) - Ð(s + 2) = -1800 - 00 - 00 = -1800 (terpenuhi).
2. Penentuan asimtot Root Locus
Banyaknya asimtot = banyaknya pole (n) – banyaknya zero (m) = 3 - 0 = 3
Sudut asimtot =
(k = 0,1, 2) = 60o ; 180o dan -60o
Titik potong asimtot pada sumbu nyata :
a
3. Penentuan titik pencar diperoleh dari
persamaan :
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 6

• Persamaan karakteristik sistem adalah :
• Diperoleh s1 = - 0,4226 (memenuhi) dan s2 = - 1,5774 (tak memenuhi)
4. Penentuan batas kestabilan sistem menggunakan kriteria Routh Hurwitz.
• Syarat stabil tercapai bila 0 < K < 6. Bila dihitung, perpotongan Root Locus
dengan sumbu khayal ini terjadi pada : s = ± j 2 .
• Cara lain untuk mengetahui titik potong ini adalah secara analisis: s = jw
(pada sumbu khayal).
5. Tentukan beberapa titik uji dekat titik pencar yang memenuhi syarat sudut Root
Locus agar diperoleh plot Root Locus secara akurat.
Gambar 8 Penentuan titik uji
6. Gambar Root Locus nya:
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 7

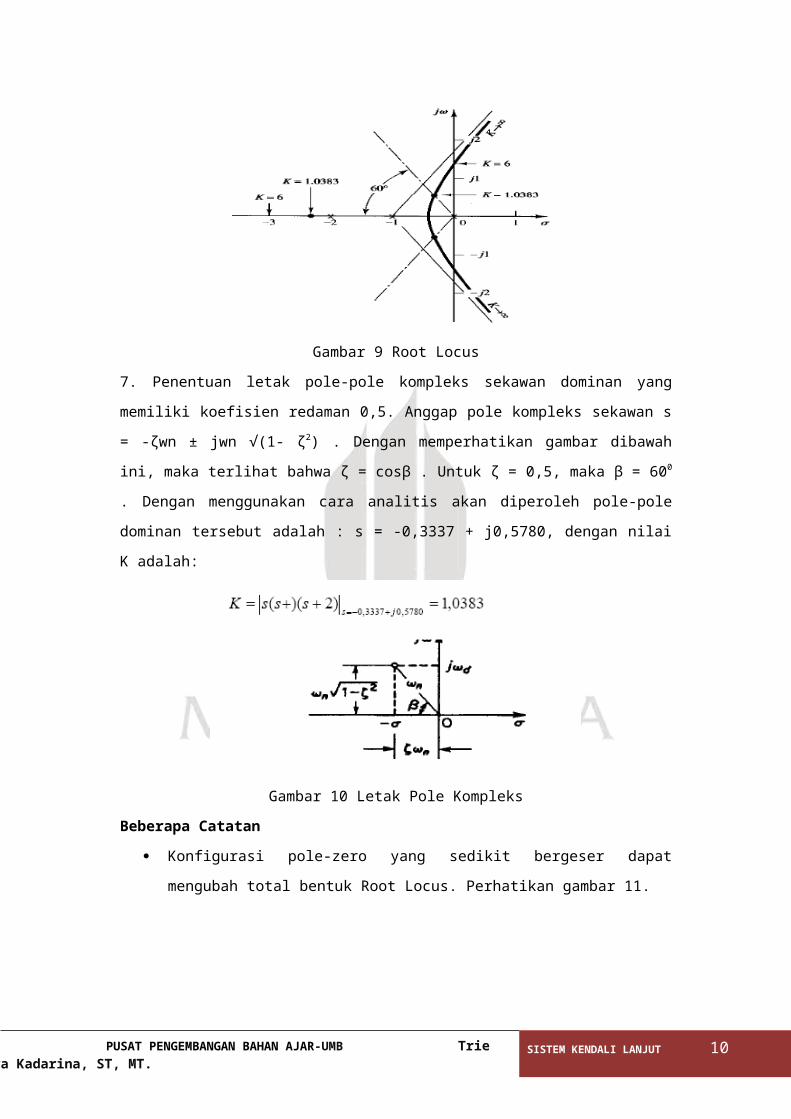
Gambar 9 Root Locus
7. Penentuan letak pole-pole kompleks sekawan dominan yang memiliki koefisien
redaman 0,5. Anggap pole kompleks sekawan s = -ζwn ± jwn √(1- ζ2) . Dengan
memperhatikan gambar dibawah ini, maka terlihat bahwa ζ = cosβ . Untuk ζ = 0,5,
maka β = 600 . Dengan menggunakan cara analitis akan diperoleh pole-pole
dominan tersebut adalah : s = -0,3337 + j0,5780, dengan nilai K adalah:
Gambar 10 Letak Pole Kompleks
Beberapa Catatan
Konfigurasi pole-zero yang sedikit bergeser dapat mengubah total bentuk
Root Locus. Perhatikan gambar 11.
Gambar 11 Perubahan bentuk Root Locus karena pergeseran pole dan zero
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 8

• Orde sistem dapat berkurang akibat pole-pole G(s) di ‘hilang’kan (cancelled)
oleh zero-zero H(s).
Gambar 12 Pengurangan orde sistem karena pole-pole G(s)
dihilangkan oleh zero H(s)
Fungsi Alih :
Persamaan karakteristik: [s(s+2)+K](s+1) = 0
Mengingat suku (s+1) muncul di G(s) dan di H(s) diperoleh
1 + G(s)H(s) = 1 +
=
Sehingga s(s+2)+K =0
Tabel 1 menunjukkan konfigurasi umum pole-zero loop terbuka & hubungan tempat
kedudukan akar (root locus).
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 9
Tabel 1 Konfigurasi Umum Pole-Zero Loop Terbuka & Hubungan Tempat
Kedudukan Akar
8.4 Root Locus Melalui MATLAB
Root Locus = persamaan karakteristiknya, dalam MATLAB:
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 10

Perintah MATLAB untuk menggambar Root Locus (Konsep Fungsi Alih):
rlocus(num, den)
Untuk konsep ruang waktu (State Space):
rlocus (A, B, C, D)
Pada kedua perintah tersebut, penguatan lup terbuka sistem K secara otomatis
ditentukan. Apabila pole-pole lup tertutup untuk beberapa nilai K ingin dihitung, maka
perintah berikut ini dapat digunakan :
rlocus(num,den,K), atau
rlocus(A,B,C,D,K)
K = vektor yang berisi semua nilai penguatan dimana pole-pole lup tertutup ingin
dihitung.
Cara lain penggambaran Root Locus adalah dengan menggunakan arguman berikut
ini :
[r,K] = rlocus(num,den)
[r,K] = rlocus(num,den,K)
[r,K] = rlocus(A,B,C,D)
[r,K] = rlocus(A,B,C,D,K)
Pada layar akan tampil matriks r dan vektor penguatan K.
Perintah :
r=rlocus(num,den)
plot(r,'o') atau, plot(r,'x')
dapat digunakan untuk menggambar Root Locus dengan tanda ‘o’ atau `x’,
Mengingat vektor penguatan ditentukan secara otomatis, maka plot Root Locus
berikut ini :
adalah sama, dengan :
num = [ 0 0 1 1 ]
den = [ 1 5 6 0 ]
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 11
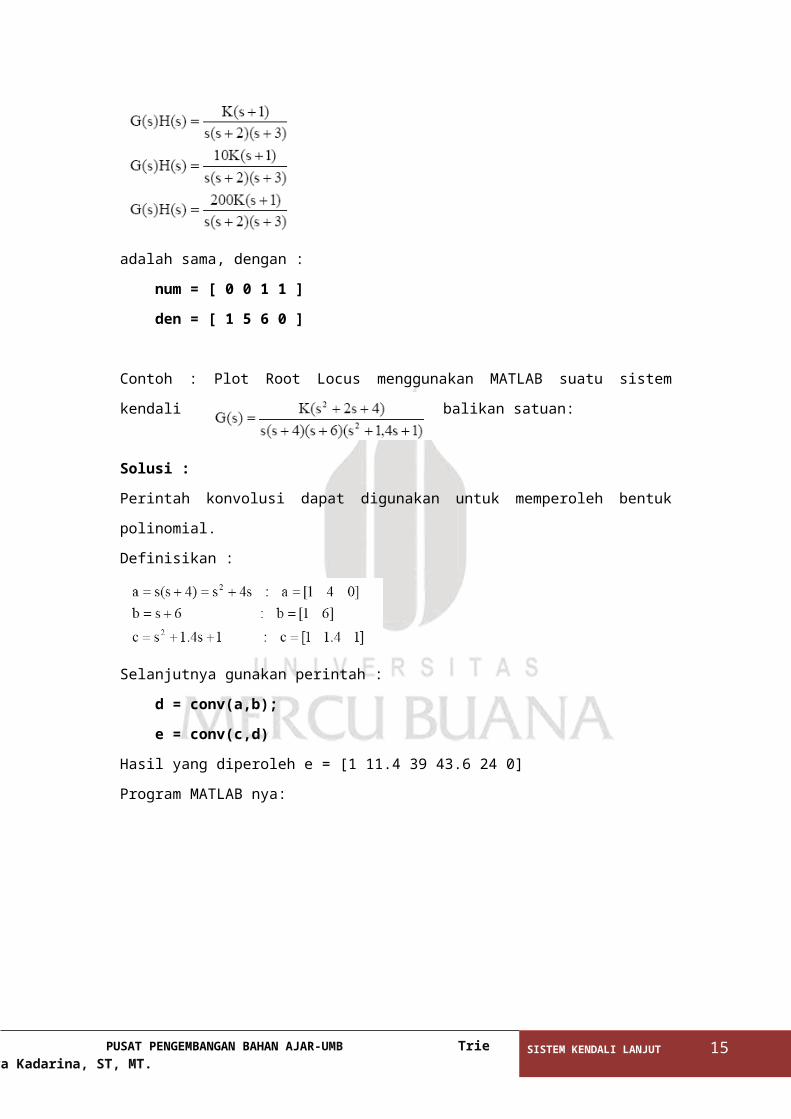
Contoh : Plot Root Locus menggunakan MATLAB suatu sistem kendali balikan
satuan:
Solusi :
Perintah konvolusi dapat digunakan untuk memperoleh bentuk polinomial.
Definisikan :
Selanjutnya gunakan perintah :
d = conv(a,b);
e = conv(c,d)
Hasil yang diperoleh e = [1 11.4 39 43.6 24 0]
Program MATLAB nya:
Penggambarannya ditunjukkan pada gambar 13.
Gambar 13 Root Locus melalui MATLAB
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 12

8.5 Kasus Khusus
Kita akan membahas 2 buah kasus khusus yaitu apabila :
- Parameter K bukan penguatan loop terbuka
- Terdapat umpan balik positif
8.5.1 Parameter K Bukan Penguatan Loop Terbuka
Sistem kendali pada gambar 14 berikut ini memiliki parameter K bukan penguatan
loop terbuka melainkan tertutup. Diinginkan koefisien pole-pole loop tertutup
dominannya adalah 0,4. Tentukan nilai K !
Gambar 14 Sistem kendali dengan parameter K bukan penguatan loop terbuka
Fungsi transfer loop terbuka =
Persamaan karakteristik : s3 + 5s2 + 4s + 20 + 20Ks= 0
Definisikan 20k = K
Sehingga: s3 + 5s2 + 4s + Ks +20= 0
Atau : 1+
Diperoleh persamaan standard:
1+
k = pada titik P
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 13

Gambar 15 Penggambaran Root Locus untuk contoh gambar 14
8.5 Umpan Balik Positif
Sistem kendali pada gambar 16 berikut ini memiliki umpan balik positif.
Gambar 16 Sistem Kendali dengan Umpan Balik Positif
Fungsi alih loop dalam :
Persamaan karakteristik : 1 –G(s)H(s) = 0
Atau : G(s)H(s) = 1
Sehingga (k=0,1,2,…)
Perhatikan syarat sudut berubah !
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 14
Modifikasi Aturan :
2. Bila jumlah total pole dan zero dikanan titik test, maka titik tsb berada di Root
Locus.
3. Sudut-sudut asimtot = ; k=0, 1, 2, …
5. Sudut datang dan sudut pergi : 1800 diganti dengan 00.
Contoh : Gambarkan Root Locus untuk sistem umpan-balik positif G(s)H(s)!
Gambar 17 Contoh Sistem Kendali dengan Umpan Balik Positif
Solusi:
1. Plot pole-pole lup terbuka (s = -1 + j1, s = -1 - j1, s = -3) dan zero (s = -2) pada
bidang kompleks. Dengan naiknya nilai K dari 0 hingga ¥, pole-pole lup tertutup
akan bergerak dari pole-pole lup terbuka dan berakhir pada zero-zero lup
terbuka (baik zero berhingga maupun tak berhingga), sebagaimana terjadi pada
sistem umpan-balik negatif.
2. Tentukan root locus pada sumbu nyata . Root locus akan berada pada penggal
garis antara -2 dan + ¥ dan antara -3 dan - ¥.
3. Tentukan asimtot-asimtot root locus. Sudut-sudut asimtot = ± k. 3600 /(3-1) =
±1800. (Kedua asimtot terletak pada sumbu nyata.)
4. Tentukan titik-titik pencar dan masuk.
K = [(s + 3)(s2 + 2s + 2)]/(s + 2).
dK/ds = 0, diperoleh: 2s3 + 11 s2 + 20 s + 10 = 0, atau
2(s + 0,8)(s + 2,35 + j0,77)( s + 2,35 - j0,77), sehingga titik masuk s = -0,8
5. Tentukan sudut berangkat root locus dari pole-pole kompleks. Untuk pole pada
s= -1 + j1, sudut berangkatnya adalah: θ= 0 - 270 - 900 + 450 = -720
6. Tentukan titik-titk uji disekitar sumbu imajiner dan titik asal untuk
menggambarkan root locus pada daerah ini secara lebih teliti.
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 15

Sistem tidak stabil untuk K > 3 (Gunakan metoda Root Hurwitz untuk
menghitungnya!). Sistem harus distabilkan dengan umpanbalik negatif diluarnya.
Gambar 18 Penggambaran Root Locus Contoh Soal Gambar 17
Tabel 2 Plot Root Locus untuk Sistem umpan balik Negatif dan Positif
Garis dan kurva tegas : Sistem umpan balik negatif,
Garis dan kurva terputus-putus : Sistem umpan balik positif
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 16

8.6 Analisis Sistem Kendali
Analisis sistem kendali melalui Root Locus :
• Ortogonalitas dan locus dengan penguatan konstan
• Sistem stabil kondisional
• Sistem fasa non-minimum
8.6.1 Ortogonalitas dan Locus dengan Penguatan Konstan
Root locus dan lokus dengan penguatan konstan merupakan pemetaan konformal
lokus ÐG(s)H(s)= ±1800(2k+1) dan |G(s)H(s)| = konstan dalam bidang G(s)H(s).
Gambar 19 Ortogonalitas dan Locus dengan Penguatan Konstan
8.6.2 Sistem Stabil Kondisional
Perhatikan sistem pada gambar 20 berikut. Sistem ini stabil untuk 0 < K < 14 dan
64<K <195. Pada prakteknya stabil kondisional tak diinginkan, karena sistem mudah
menjadi tak stabil. Stabil kondisional dapat terjadi pada sistem dengan lintasan maju
tak stabil (karena ada minor loop). Stabil kondisional dapat dihindari melalui
kompensasi yang sesuai (penambahan zero).
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 17

Gambar 20 Contoh sistem stabil kondisional
8.6.3 Sistem Fasa Non-Minimum (Pergeseran fasa bila diberi input sinus)
Sistem fasa minimum: bila semua pole dan zero sistem loop terbuka terletak
disebelah kiri bidang-s.
Sistem fasa non-minimum: bila sedikitnya ada satu pole atau zero sistem loop
terbuka terletak disebelah kanan bidang-s.
Sistem pada gambar 21 adalah contoh sistem fasa non-minimum.
Gambar 21 Sistem Fasa Non-minimum
Syarat Sudut :
Sehingga
PUSAT PENGEMBANGAN BAHAN AJAR-UMB Trie Maya Kadarina, ST, MT.
SISTEM KENDALI LANJUT 18




















