
YK-XG Series - 雅马哈发动机
282
YAMAHA 水平多关节机器人 维护手册 YK-XG Series YK250XG / YK350XG / YK400XG YK500XGL / YK600XGL YK500XG / YK600XG / YK600XGH YK700XG / YK800XG / YK900XG / YK1000XG YK300XGS / YK400XGS / YK500XGS / YK600XGS YK700XGS / YK800XGS / YK900XGS / YK1000XGS CMF0148304 C48 Ver. 3.04
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of YK-XG Series - 雅马哈发动机

YAMAHA 水平多关节机器人
维护手册YK-XG SeriesYK250XG / YK350XG / YK400XG
YK500XGL / YK600XGLYK500XG / YK600XG / YK600XGH
YK700XG / YK800XG / YK900XG / YK1000XGYK300XGS / YK400XGS / YK500XGS / YK600XGS
YK700XGS / YK800XGS / YK900XGS / YK1000XGS
CMF0148304
C48Ver. 3.04


目录 YK-XG维护手册
T-1
安全指南
1. 关于安全 S-1
2. 本书中安全标示 S-2
3. 警告标贴 S-3
3.1 警告标贴 S-3
3.1.1 主机(机器人、控制器)上的警告显示内容 S-3
3.1.2 关于附属的警告标贴 S-7
3.2 警告标记 S-8
4. 机器人生命周期中各阶段的重要注意事项 S-9
4.1 机器人与控制器的整体注意事项 S-9
4.2 关于线性传送带模块的重要注意事项 S-9
4.3 设计 S-10
4.3.1 机器人相关注意事项 S-10
4.3.2 机器人控制器相关注意事项 S-11
4.4 搬运与安装 S-11
4.4.1 机器人主机相关注意事项 S-11
4.4.2 机器人控制器相关注意事项 S-12
4.5. 安全对策 S-14
4.5.1安全对策 S-14
4.5.2 安全防护栏的设置 S-15
4.6 运行 S-16
4.6.1 试运行 S-16
4.6.2 自动运行 S-18
4.6.3 运行时的注意 S-18
4.7 点检维护 S-20
4.7.1 作业前 S-20
4.7.2 作业注意事项 S-21
4.8 废弃 S-22
5. 机器人夹到人体时的处理方法 S-23
6. 强力磁场相关注意 S-23
7. 为了安全使用 S-24
7.1 关于可动范围 S-24
7.2. 机器人的保护功能 S-25

目录 YK-XG维护手册
T-2
7.3 关于剩余风险 S-26
7.4 针对工业机器人作业者的特别教育 S-26
保修
第 1章 概要
1. 概要 1-1
第 2章 外盖的安装拆卸及更换
1. 外盖的安装拆卸及更换 2-1
第 3章 定期点检
1. 概要 3-1
2. 日常点检 3-2
3. 6 个月点检 3-3
4. 补充润滑油 3-6
4.1 对花键轴补充润滑油 3-6
4.2 对滚珠丝杠补充润滑油 3-7
第 4章 调整原点
1. 更改原点位置、调整机器参照量 4-1
1.1 传感器方式(YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS) 4-1
1.2 传感器方式(YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG)
(YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS) 4-9
2. 调整撞块方式的机器参照量(Z轴 ) 4-20
2.1 撞块方式(YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS) 4-20
2.2 撞块方式(YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG)
(YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS) 4-23
第 5章 更换谐波传动
1. 更换谐波传动时的注意事项 5-1
2. 谐波传动的更换步骤 5-2
2.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS 5-2
目录 YK-XG维护手册
T-3
2.1.1 更换 X轴的谐波传动 5-2
2.1.2 更换 Y轴的谐波传动 5-11
2.1.3 更换 R轴的谐波传动 5-17
2.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK500XGS,
YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 5-26
2.2.1 更换 X轴的谐波传动 5-26
2.2.2 更换 Y轴的谐波传动 5-35
2.2.3 更换 R轴的谐波传动 5-47
第 6章 更换机器线束
1. 更换机器线束 6-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS 6-1
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK500XGS,
YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 6-8
第 7章 更换 Z轴总成
1. 更换 Z轴总成 7-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS 7-1
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK500XGS,
YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 7-4
第 8章 更换花键轴
1. 更换花键轴 8-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS 8-1
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK500XGS,
YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 8-3
第 9章 更换马达
1. 更换马达 9-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS 9-1
1.1.1 更换 X、R轴马达 9-1
1.1.2 更换 Y轴马达 9-1
1.1.3 更换 Z轴马达 9-3
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK500XGS,
YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 9-4
1.2.1 更换 X、Y、R轴马达 9-4
1.2.2 更换 Z轴马达 9-4
目录 YK-XG维护手册
T-4
第 10 章更换传感器
1. 更换传感器 10-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS 10-1
1.1.1 更换 X、Y轴传感器 10-1
1.1.2 更换 R轴传感器 10-3
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK500XGS,
YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 10-5
1.2.1 更换 X轴传感器 10-5
1.2.2 更换 Y、R轴传感器 10-8
第 11 章更换机器人电缆
1. 更换机器人电缆 11-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS 11-1
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK500XGS,
YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 11-3
第 12 章更换限位器
1. 更换限位器 12-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS 12-1
1.1.1 X、Y轴限位器 12-1
1.1.2 Z 轴限位器 12-3
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK500XGS,
YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 12-7
1.2.1 X 轴限位器 12-7
1.2.2 Y 轴限位器 12-12
1.2.3 Z 轴限位器 12-16
第 13 章更换感应器螺丝
1. 更换感应器螺丝 13-1
第 14 章更换端面密封件
1. 更换端面密封件 14-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS 14-1
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK500XGS,
YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 14-3

目录 YK-XG维护手册
T-5
第 15 章维护零件
1. 维护零件 15-1
1.1 YK250XG,YK350XG,YK400XG 标准规格 15-1
1.2 YK500XGL,YK600XGL 标准规格 15-2
1.3 YK250XG,YK350XG,YK400XG 工具法兰安装规格 15-4
1.4 YK500XGL,YK600XGL 工具法兰安装规格 15-5
1.5 YK250XG,YK350XG,YK400XG 用户接线配管花键轴中空规格 15-7
1.6 YK500XGL,YK600XGL 用户接线配管花键轴中空规格 15-8
1.7 YK250XG,YK350XG,YK400XG 工具法兰安装、用户接线配管花键轴中空规格 15-10
1.8 YK500XGL,YK600XGL 工具法兰安装、用户接线配管花键轴中空规格 15-11
1.9 YK500XG,YK600XG Z 轴 200mm行程 15-13
1.10 YK500XG,YK600XG Z 轴 300mm行程 15-15
1.11 YK600XGH Z 轴 200mm行程 15-17
1.12 YK600XGH Z 轴 400mm行程 15-19
1.13 YK700XG,YK800XG Z 轴 200mm行程 15-21
1.14 YK700XG,YK800XG Z 轴 400mm行程 15-23
1.15 YK900XG,YK1000XG Z 轴 200mm行程 15-25
1.16 YK900XG,YK1000XG Z 轴 400mm行程 15-27
1.17 YK300XGS,YK400XGS 15-28
1.18 YK500XGS,YK600XGS 15-29
1.19 YK700XGS,YK800XGS,YK900XGS,YK1000XGS 15-31
2. 消耗品 15-33
3. 基本规格 15-34
3.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL 15-34
3.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG 15-36
3.3 YK300XGS,YK400XGS,YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 15-38


目录
1. 关于安全 S-1
2. 本书中安全标示 S-2
3. 警告标贴 S-3
3.1 警告标贴 S-3
3.1.1 主机(机器人、控制器)上的警告显示内容 S-3
3.1.2 关于附属的警告标贴 S-7
3.2 警告标记 S-8
4. 机器人生命周期中各阶段的重要注意事项 S-9
4.1 机器人与控制器的整体注意事项 S-9
4.2 关于线性传送带模块的重要注意事项 S-9
4.3 设计 S-10
4.3.1 机器人相关注意事项 S-10
4.3.2 机器人控制器相关注意事项 S-11
4.4 搬运与安装 S-11
4.4.1 机器人主机相关注意事项 S-11
4.4.2 机器人控制器相关注意事项 S-12
4.5. 安全对策 S-14
4.5.1安全对策 S-14
4.5.2 安全防护栏的设置 S-15
4.6 运行 S-16
4.6.1 试运行 S-16
4.6.2 自动运行 S-18
4.6.3 运行时的注意 S-18
4.7 点检维护 S-20
4.7.1 作业前 S-20
4.7.2 作业注意事项 S-21
4.8 废弃 S-22
5. 机器人夹到人体时的处理方法 S-23
6. 强力磁场相关注意 S-23
7. 为了安全使用 S-24
7.1 关于可动范围 S-24
7.2. 机器人的保护功能 S-25
安全指南
7.3 关于剩余风险 S-26
7.4 针对工业机器人作业者的特别教育 S-26

S-1
安全指南
1. 关于安全
本产品为工业机器人,可进行各种高级编程,在工作时具有极大的自由度。
为了正确安全地使用 YAMAHA 机器人及控制器,请务必遵守本《安全指南》中所述安全相关指示及注意事项。如
果疏忽了必要的安全对策或使用错误,不仅会造成机器人及控制器的故障或损伤,还有可能会导致使用者(安装者、
作业者或调整、检查者等)受伤或死亡等重大事故。
使用本产品时,请在阅读本书及相关使用说明书并充分注意安全的条件下正确使用本产品。
本书中所示的注意事项为本产品相关的事项。关于客户自行编入 YAMAHA 机器人作为最终产品时的相关安全注意
事项,请客户自行考虑。
为了安全正确使用 YAMAHA 机器人及控制器,请务必遵守相关安全规定及指示。
●关于具体安全信息及标准,请参阅当地的相应法规并遵照其中的说明。
●贴在机器人上的警告标贴采用英文、日文、中文和韩文。本手册提供英文版、日文版或中文版。如果作业者不
能解读上述语言,则请勿操作机器人。
●关于欧盟国家官方语言的注意事项
对于在欧盟国家安装的设备,其操作手册、警告标贴、操作画面及 CE 声明所使用的语言仅限英文。
警告标贴只包含图画,有时也会包含英文的警告信息。如果是后者,可能会加入中文或其他语言的信息。
本使用说明书难以列举所有的安全相关注意事项。因此,请注意,使用者自身正确的安全知识与准确的判断是非
常重要的。
在进行 YAMAHA 机器人及控制器的安装、操作及调整时,请务必采用以下任意一种方法,以便快速阅读
各手册。
1. 请将书籍版使用手册(收费版)放在身边进行安装、操作及调整。
2. 一边在电脑上显示 CD-ROM 版的手册内容,一边进行安装、操作及调整。
3. 把必要的部分事先将CD-ROM版操作手册中需要的部分打印出来,然后放在身边进行安装、操作
以及调整。

S-2
安全指南
2. 本书中安全标示
本书在介绍安全注意事项、使用上的注意、禁止、指示等项目时,添加了以下标记并加以说明。请在充分理解标
记内容之后,再阅读正文。
w 危险
使用错误可能会速致死亡或重伤。
w 警告
使用错误可能会导致死亡或重伤。
c 注意
使用错误可能会导致人身伤害或财物损失。
n 要点
介绍了机器人操作步骤的要点。

S-3
安全指南
3. 警告标贴
警告标贴粘贴在机器人主机和控制器上。为了确保安全正确使用本产品,请遵守警告上的内容。
3.1 警告标贴
w 警告
如果警告标贴被除去或难以辨识,则可能因不注意而导致事故发生。
・请勿除去、更改及污损机器人主机上的警告标贴。
・请勿因用户安装在机器人上的设备而挡住警告标贴。
・请确保照明能从安全防护栏外清楚地看见警告标贴上的图形符号和文字。
3.1.1 主机(机器人、控制器)上的警告显示内容
下列标贴上部所陈述的危险文、警告文以及注意文概述了各标贴的内容。
有关具体内容及指示,请参见警告标贴图右栏所示的“本标贴相关指示”。
关于可动范围,请参阅(安全指南)中的< 7.1关于可动范围>。
■ 警告标贴 1(水平多关节机器人、正交机器人)
w 危险
接触运行过程中的机器人可能会导致重伤。
・在自行运行中,请勿进入机器人安全防护栏内。 ・进入安全防护栏时,请按下紧急停止按钮。
本标贴相关指示
·为了防止作业者进入机器人的可动范围内、接触机器人的可动部位而负伤,请务必设置安全防护栏。
·请设置打开入口即启动紧急停止的联锁装置。
·请设置为只能从联锁装置附带入口进入。
·请将附带的警告标贴粘贴在入口的显眼位置。
影响人体危险程度 若碰触动作中的机器人则可能会负重伤。
避免危险的方法·在自行运行中,请勿进入机器人安全防护栏内。
·进入安全防护栏时,请按下紧急停止按钮。
90K41-001470
■ 警告标贴 2(水平多关节机器人、正交机器人、单轴机器人 ※)
※单轴小型机器人的标贴可能未粘贴,与产品放在同一包装内。
w 警告
如果被夹住,可能会导致人身伤害。
请勿使手等靠近机器人的可动部。
本标贴相关指示
搬运机器人及示教时,请注意勿使手等被机器人的可动部
夹到。
影响人体危险程度 会被夹伤。
避免危险的方法 手等请勿靠近机器人可动部分。
90K41-001460
S-4
安全指南
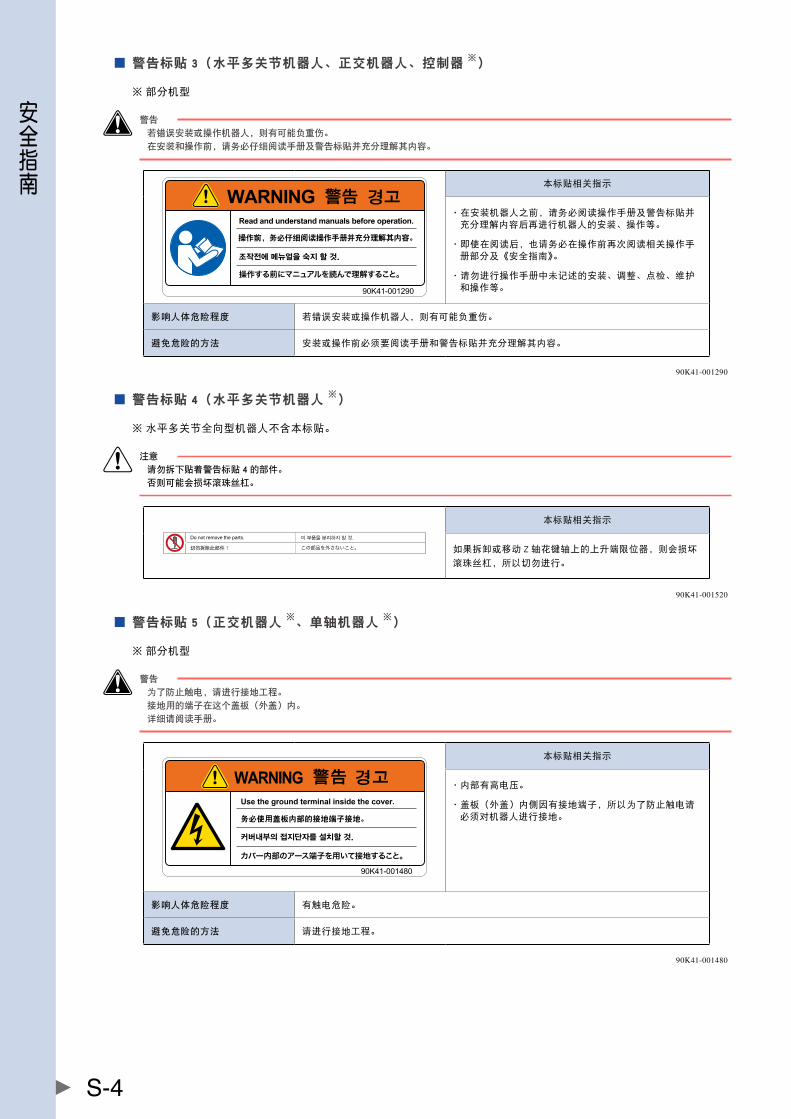
■ 警告标贴 3(水平多关节机器人、正交机器人、控制器 ※)
※部分机型
w 警告
若错误安装或操作机器人,则有可能负重伤。
在安装和操作前,请务必仔细阅读手册及警告标贴并充分理解其内容。
本标贴相关指示
·在安装机器人之前,请务必阅读操作手册及警告标贴并充分理解内容后再进行机器人的安装、操作等。
·即使在阅读后,也请务必在操作前再次阅读相关操作手册部分及《安全指南》。
·请勿进行操作手册中未记述的安装、调整、点检、维护和操作等。
影响人体危险程度 若错误安装或操作机器人,则有可能负重伤。
避免危险的方法 安装或操作前必须要阅读手册和警告标贴并充分理解其内容。
90K41-001290
■ 警告标贴 4(水平多关节机器人 ※)
※水平多关节全向型机器人不含本标贴。
c 注意
请勿拆下贴着警告标贴 4的部件。
否则可能会损坏滚珠丝杠。
本标贴相关指示
如果拆卸或移动 Z 轴花键轴上的上升端限位器,则会损坏
滚珠丝杠,所以切勿进行。
90K41-001520
■ 警告标贴 5(正交机器人 ※、单轴机器人 ※)
※部分机型
w 警告
为了防止触电,请进行接地工程。
接地用的端子在这个盖板(外盖)内。
详细请阅读手册。
本标贴相关指示
·内部有高电压。
·盖板(外盖)内侧因有接地端子,所以为了防止触电请必须对机器人进行接地。
影响人体危险程度 有触电危险。
避免危险的方法 请进行接地工程。
90K41-001480

S-5
安全指南
■ 警告标贴 6(控制器 TS-X/TS-P)
w 警告
・接触控制器外侧端子及连接器作业时,为了防止触电,请切断电源并闲置 10 钟以上,然后再进行作业。否则可能会导致烫伤或触电。
・马达、散热片带有高温,请勿触摸。
c 注意
・使用控制器之前,请务必熟读操作手册。
・请务必将接地端子进行接地。
本标贴相关指示
· 表示本产品使用高压。如果接触端子台或连接器连接部,可能会有触电的危险。
· 表示有可能会产生高温。马达、散热片带有高温。请勿触摸。否则可能会有烫伤的危险。
· 表示操作手册中记载了必须了解的内容。
使用控制器之前,请务必熟读操作手册。
尤其要熟读在构建外部安全电路或连接电源上的事项,
在确认的基础上进行作业。
· 请务必将接地端子进行接地。如果不接地,可能会触电。
影响人体危险程度 避免危险的方法
有触电危险。 切断电源后的 10 分钟内,请勿触摸端子部。
有烫伤危险。 通电时请勿触摸电机、散热装置。
若错误安装或操作机器人,则有可能负重伤。 在安装和操作前,请务必仔细阅读手册及警告标贴并充分理解其内容。
有触电危险。 请务必将接地端子进行接地。
90K41-000950
■ 警告标贴 7(控制器 RCX240、控制器 RCX340)
w 警告
以下是代理店维修人员的注意事项。
用户绝不可打开外盖。
w 警告
请在切断电源超过 100 秒后再打开外盖。
本标贴相关指示
·请在切断电源超过 100 秒后再打开外盖 (※)。
·切断电源后,控制器内部仍有残留高压,触摸有可能触电。
影响人体危险程度 有触电危险。
避免危险的方法 请在切断电源超过 100 秒后再打开外盖 (※)。
※ 以下是代理店维修人员的注意事项。用户绝不可打开外盖。
90K41-001390
S-6
安全指南
■ 警告标贴 8(线性马达单轴机器人)
c 注意
这个外盖内侧有磁性标尺。若接近磁铁会成为故障的原因。
本标贴相关指示
·为了防止磁性标尺故障,机器人不能正常动作,请勿让强力磁铁靠近外盖。
·请勿让工具等靠近磁性标尺。
90K41-001510
■ 警告标贴 9(线性马达单轴机器人)
c 注意
机器人内藏强力磁铁。
因可能会负伤,所以请勿拆卸机器人。
请勿让受磁力影响导致误动作的机械靠近。
本标贴相关指示
请务必阅读《安全指南》中的< 6. 强力磁场相关注意>,
并完全理解其内容后再进行机器人的操作。
影响人体危险程度 根据情况会成为死亡或负伤的原因。
避免危险的方法 请必须理解强力磁场相关注意事项。
90K41-001500
■ 警告标贴 10(控制器 ※)
※这张标贴贴在前面板上。
c 注意
请参阅操作手册。
取扱説明書参照
READ INSTRUCTIONMANUAL
本标贴相关指示
表示操作手册中记载了必须了解的内容。
使用控制器之前,请务必熟读操作手册。
尤其要熟读在构建外部安全电路或连接电源上的事项,并
在确认的基础上进行作业。
此外,连接器的连接具有方向性。请注意连接方向。
91005-X0-00
S-7
安全指南
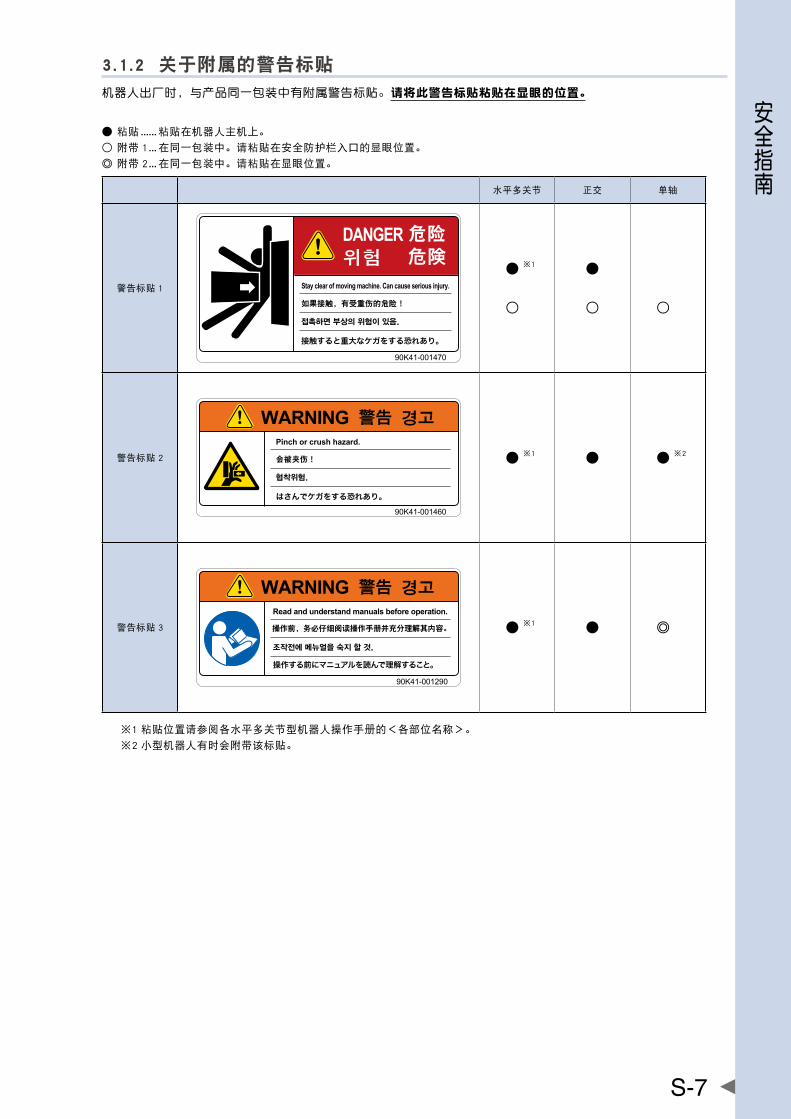
3.1.2 关于附属的警告标贴
机器人出厂时,与产品同一包装中有附属警告标贴。请将此警告标贴粘贴在显眼的位置。
●粘贴...... 粘贴在机器人主机上。
○附带 1...在同一包装中。请粘贴在安全防护栏入口的显眼位置。
◎附带 2...在同一包装中。请粘贴在显眼位置。
水平多关节 正交 单轴
警告标贴 1
● ※1
○
●
○ ○
警告标贴 2 ● ※1 ● ● ※2
警告标贴 3 ● ※1 ● ◎
※1粘贴位置请参阅各水平多关节型机器人操作手册的<各部位名称>。
※2小型机器人有时会附带该标贴。
S-8
安全指南
3.2 警告标记
为了促使作业者注意,在机器人主机和控制器上附带了如下标记。为了安全正确地使用 YAMAHA 机器人,请务必
遵照标记的指示或注意事项。
1.触电注意标记
w 警告
请注意如果接触端子台或连接器连接部,可能会有触电的危险。
本标记相关指示
表示本产品使用高压电。如果接触端子台或连接器连接部,可能会有触电的危险。
91006-X0-00
2.高温注意标记
w 警告
马达、散热片及再生装置带有高温,请勿触摸。
本标记相关指示
表示有可能会产生高温。马达、散热片和再生装置带有高温。请勿触摸。否则可能会有烫伤的危险。
91008-X0-00
3.注意标记
c 注意
使用控制器之前,请务必熟读操作手册。
!本标记相关指示
表示操作手册中记载了必须了解的内容。使用控制器之前,请务必熟读操作手册。尤其要熟读在构建外部安全电路或连接电源上的事项,在确认的基础上进行作业。此外,连接器的连接具有方向性。请注意连接方向。
91007-X0-00
S-9
安全指南
4. 机器人生命周期中各阶段的重要注意事项
在本部分中,介绍机器人及控制器在整体上特别重要的注意事项。不带有注意标记的记载内容也是重要事项,所
以请务必在熟读内容并充分理解的基础上进行使用。
4.1 机器人与控制器的整体注意事项
机器人及控制器使用上的整体注意事项如下。
1.不可使用的用途
机器人控制器以及机器人只限于一般工业设备使用。不可用于以下用途。
w 危险
机器人控制器以及机器人只限于一般产业设备使用。不可用于以下用途。
・涉及人命的医疗设备等装置 ・以移动或搬运人为目的的装置
・对社会性及公共性有重大影响的装置 ・在车载、船舶等受到振动环境中的使用
2.作业者的资格
操作人员或执行工业机器人作业(如示教、编程、移动确认、检验、调整和维修)的人员必须经过适当培训且具备正确安全
执行作业的技能。
这些作业必须由符合当地法规制定的要求和工业机器人标准的专业人员执行。他们在尝试机器人操作或维护前必须仔细阅读
说明书并理解其内容。
w 警告
・由不具备以上资质的人员执行工业机器人的作业是非常危险的。
・拆下外盖的调整和维护必须由具备以上资质的人员来执行。如果由不具备资质的人员执行此类作业,可能会造成事故,导致人员严重受伤或
死亡。
4.2 关于线性传送带模块的重要注意事项
线性传送带模块是雅马哈机器人的组件,需要同其他机器人一样,对其采取安全措施。
本项总结了有关线性传送带模块使用上的整体的重要注意事项。以下各项记载了有关机器人生命周期中各阶段的
注意事项,请务必通读本《安全指南》。
1.滑块的排出
w 危险
从线性传送带模块高速排出的滑块或工件等物有可能撞向操作者,从而造成重大伤害或死亡。请遵守以下事项。
・请勿进入线性传送带的导轨延长线(除排出方向外,还包括插入方向)范围内,或将手或面部对准该方向。
・线性传送带排出滑块时,请客户设置合适的排出机构(阻挡排出的滑块)。
・在插入滑块一侧,也请客户设置阻挡机构或构造物。
・请务必在线性传送带的可动范围外侧设置安全防护栏。设计安全防护栏时,请注意勿使线性传送带所排出的滑块或工件落在防护栏外。
2.防止触电
w 危险
对线性传送带模块实施安装、运行、点检等操作时,请务必遵守本书中记载的指示。否则,有可能造成触电、重伤或死亡。请遵守以下事项。
・安装前请遵守本书的指示,进行接地、安装终端模块。
・接通电源时,请尽量不要触碰线性传送带模块的马达部分。
・维护、点检时,请按本书的指示,在切断电源后再进行操作。
・如果发现马达的树脂部分残缺或损坏,请立即中止使用。
S-10
安全指南
3.强磁场
w 警告
线性传送带模块采用了强力的永久磁铁及电磁铁,因此会发出强磁场。使用线性传送带模块时,请务必遵守本书的注意事项。尤其植入起搏
器/助听器等医疗电子设备的人,如果不遵守规定,将可能导致重大伤害或死亡。
・从线性传送带模块的导轨中取出滑块,进行操作、搬运、保管时,请务必安装附带的磁铁保护盖。
・接通电源时,请勿靠近线性传送带模块的马达(相隔 100mm以上)。
・请勿拆卸线性传送带模块(包括周围的安全盖等)。
・请勿使工具靠近滑块的磁铁,以及接通电源时的线性传送带马达。
4.高温注意
w 警告
在线性传送带模块中,马达被配置在模块上,因此容易触及。
为了散去运行中马达产生的热量,请将模块安装在金属等导热性良好的台架上。
运行中及刚刚停止运行的马达可能会产生高温,若接触到人体,可能会造成烫伤。
若要接触设备,请切断控制器电源,稍等一段时间,确认温度已下降后再接触设备。
4.3 设计
4.3.1 机器人相关注意事项
1.机器人动作速度的限制
w 警告
机器人动作速度的限制不是安全关联功能。
根据客户风险评估的结果,为了减低机器人和作业者互相冲撞的风险,请用使能装置等实施必要的保护措施。
2.机器人可动范围的限制
关于可动范围,请参阅(安全指南)中的< 7.1关于可动范围>。
w 警告
软限制没有以保护人体为目的的安全关联功能。
以保护人体为目的限制机器人的可动范围时,请在机器人自带(或选配)的限位器上进行。
c 注意
机器人自带(或选配)的限位器在高速运行时冲撞机器人时,可能导致机器人故障。
3.末端执行器(把持部等)的安全对策
w 警告
・设计和制造末端执行器时,请确保其不会因为动力(电力、气压等)的消失或变动而产生危险(例如,工件松开)。
・末端执行器把持的物件存在飞出或掉落危险时,请根据其大小、重量、温度、化学性质采取合适的安全措施。
4.确保照明亮度
为了确保安全作业,请确保必要的照明亮度。
5.运行状态指示灯的设置
w 警告
请在容易看到的位置设置指示灯,以便作业人员能够了解机器人的停止状态(暂时停止、紧急停止、由于异常情况停止等)。

S-11
安全指南
4.3.2 机器人控制器相关注意事项
1.用于紧急停止的输入端子
w 危险
机器人控制器在紧急停止状态时配备了紧急停止输入端子。请使用此端子构建安全电路,使包含机器人控制器在内的系统能够安全运行。
2.确保间隙
c 注意
请勿将控制线或通信电缆和主电源电路或动力线等靠近或捆扎在一起。请离开 100mm以上的距离。如果靠近或捆扎这些线路,干扰则会成为
误动作的原因。
4.4 搬运与安装
4.4.1 机器人主机相关注意事项
■ 安装环境
1.禁止在具有强磁场的地方使用
w 警告
请勿在会产生强磁力装置的附近或地方使用机器人。这会成为机器人故障或误动作的主要原因。
2.禁止在可能存在电磁干扰的地方使用
w 警告
请勿在可能存在电磁干扰、静电放电、无线频率干扰的地方使用机器人。这可能会导致机器人误动作而造成危险。
3.禁止在易燃性气体等环境中使用
w 警告
・本机器人未采用防爆规格。
・请勿在会引起爆炸和点火的易燃性气体、易燃性粉尘、汽油及溶剂等可燃性液体的暴露场所使用机器人。如不遵守上述警告事项,可能会导
致人身伤害或死亡等重大事故或火灾。
■ 搬运
1.注意手等被夹住
w 警告
会被夹伤。
请勿使手等靠近机器人的可动部。
请遵照警告标贴 2 的内容,在搬运机器人等情况下注意手等不要被机器人的可动部夹到。关于警告标贴,请参阅(安全指南)
中的< 3.警告标贴>。
2.搬运时的安全对策
对于机械臂长度为 500mm 以上的水平多关节型机器人,请使用机器人附带的吊环螺栓以起到安全保护作用。
有关详细说明,请务必参阅机器人的操作手册。
3.机器人防坠落措施
使用吊车、起重机等搬运机器人时,参与搬运的作业者需穿戴个人防护装备,并且搬运时注意不要超过必要的搬运高度。
此外,请确保搬运路线周围没有其他人。
w 警告
从高处坠落的机器人如果砸到下面的作业者,可能造成死亡或者重伤。
搬运时,作业者需穿戴个人防护装备,并且确保周围没有其他人。

S-12
安全指南
■ 安装
1.电气接线和液气压配管的保护
当电气接线及液气压配管可能受到损伤时,请设置覆盖物进行保护。
■ 接线
1.防触电保护对策
w 警告
为了防止触电,请务必对机器人进行接地。
■ 调整
1.拆下外盖的调整
w 警告
拆下外盖的调整和维护必须具备专业知识与技术,如果由不具备上述能力的人员操作,
可能会造成危险。上述作业必须根据当地法律法规并由具备足够能力与资质的人员进行。
有关详细信息,请联系您购买产品所在的经销商。
4.4.2 机器人控制器相关注意事项
■ 安装环境
1.安装环境
w 警告
本机器人未采用防爆规格。请勿在会引起爆炸和点火的易燃性气体、易燃性粉尘、汽油及溶剂等可燃性液体的暴露场所使用机器人。如不遵守
上述警告事项,可能会导致人身伤害或死亡等重大事故或火灾。
w 警告
・请在操作手册记载的环境规格下使用机器人控制器。如果在环境规格范围外使用,则可能会成为触电、火灾、误动作、产品损伤或老化的原因。
・请将机器人控制器及手持编程器安装在机器人的安全防护栏之外且能够清楚看到机器人动作及便于操作的地方。
・务必安装在有足够空间能安全作业(示教、点检等)的场地。如果没有空间,不仅会造成难以作业,还可能会导致人身伤害等。
・请将机器人控制器安装在安定且水平的地方,并准确地固定住。请避免将机器人控制器上下颠倒或倾斜安装。
・请在周围留出充足空间并在通风良好的地方安装。如果通风不良,可能会成为误动作、故障或火灾的原因。
■ 安装
请按照操作手册上记载的安装条件和安装方法进行机器人控制器的安装。
1.安装
w 警告
请准确固定机器人控制器的安装用螺钉。如果固定不准确,会成为控制器掉落的原因。
2.连接
w 警告
・在安装或接线等作业时,请必须从外部全相切断电源后进行。如果不全相切断,可能会导致触电、产品损伤。
・请勿直接碰触露在机器人控制器外部的连接器或旋转开关、拨码开关以外的导电部分或电子元件。这会成为触电或故障的原因。
・请将各连接电缆的连接器准确地安装到安装部位。如果安装不准确,会因连接不良而成为误动做的原因。

S-13
安全指南
■ 接线
1.机器人与控制器的连接
出厂时,控制器上已设置了适合机器人的参数。请在确认机器人与控制器所指定组合之后,连接机器人与控制器。
因马达超负荷(过载)等异常检出由软件执行,所以有必要将控制器的参数和连接的马达型号进行正确的设置。
2.接线注意事项
w 警告
在安装或接线等作业时,请必须从外部全相切断电源后进行。如果不全相切断,可能会导致触电、产品损伤。
c 注意
・请注意不要让切屑或接线屑等异物进入机器人控制器内。如果进入异物,会成为误动作、故障或火灾的原因。
・在连接电缆时,请勿使连接器受到冲击或对其施加负荷。否则可能会导致连接器针脚变形或内部基板损伤。
・使用防干扰用铁芯时,电缆上的干扰对策用铁芯尽量装在靠近控制器或机器人的场所。干扰是导致误动作的原因。
3.接线方法
w 警告
连接器的接线连接由厂商指定工具进行压接、压焊或焊接,从而准确地安装连接器。
c 注意
取下连接在机器人控制器上的电缆时,手持电缆部分请勿拉拽。将连接器的固定部分松开后取下。如果在固定状态下拉拽电缆会导致连接器或
电缆的损坏或由于电缆接触不良成为误动作的原因。
4.处理电缆时的注意事项
c 注意
・请务必将连接机器人控制器的电缆收纳到线管内,或者用电缆夹进行固定处理。如果未收纳到线管中或者未通过电缆夹进行固定处理,则会
因电缆摇晃、移动或不注意而拉拽等,致使连接器或电缆破损、接触不良而成为误动作的原因。
・请勿对电缆进行加工、在电缆上放置重物或损伤电缆。若电缆损伤,则会成为误动作或触电的原因。
・连接机器人控制器的电缆如有受损可能,请采取覆盖等保护措施。
・请确认控制线或通信电缆与主电源电路或动力线等之间是否确保了充足的距离。束线或靠近会因干扰成为误动作的原因。
5.防触电保护对策
w 警告
请务必将机器人及控制器的接地端子进行接地。如果不接地,可能会触电。

S-14
安全指南
4.5. 安全对策
4.5.1安全对策
1.关于参阅警告标贴及操作手册
w 警告
・在进行安装和操作之前,请务必阅读警告标贴及操作手册,并遵守其内容。
・切勿进行操作手册中未记载的修理、部件更换或改造等作业。上述作业需要专业知识,有时会有危险存在。请与代理店联系。
n 要点
关于警告标贴,请参阅(安全指南)中的< 3. 警告标贴>。
2.《作业规定》的制定与贯彻
w 警告
为了启动机器人及维修等作业,请制定在机器人安全防护栏内作业的《作业规定》,并让作业者贯彻执行。
为了进行示教或维护点检等作业,请制定在机器人安全防护栏内作业时关于以下事项的《作业规定》,并让作业者贯彻执行。
1. 启动方法、开关的使用方法等作业必需的机器人操作步骤
2. 执行示教等作业时的机器人速度
3. 数名作业者进行作业时打手势的方法
4. 发生异常时,作业者应按异常的内容采取相应措施
5. 紧急停止装置等启动、机器人运行停止后,要再启动机器人时必须进行的异常状态解除确认及安全确认等措施
6. 上述以外,为了防止由于机器人突然动作或误操作导致的危险而采取以下必要的措施
·操作面板的显示
·对在安全防护栏内进行作业的作业者的安全防护
·彻底贯彻作业位置和姿势
能时常确认机器人的动作且异常时能立即躲避的位置及姿势
·实施防止干扰对策
·与相关设备作业者打手势的方法
·异常的种类及判别方法
请按照机器人种类、安装场所及作业内容制定恰当的《作业规定》。
在制定《作业规定》时,请尽量听取相关作业者、设备厂商的技术人员及劳动安全顾问等人的意见。
3.采取安全措施
w 危险
・机器人运行过程中及接通主电源时,切勿进入机器人的可动范围内。否则可能会导致人身伤害或死亡等重大事故。请采取安全防护栏或带有
区域传感器的联锁门等措施,以防止轻易靠近机器人的可动范围。
・为了执行示教或维护点检等作业,不得已进入机器人运行和操作的可动范围内时,请携带手持编程器以防发生异常时能够立即停止机器人的
运行。此外,请根据需要在外部电路中构建使能装置。请将机器人的动作速度设置为 3%以下。否则可能会导致包括人身伤害或死亡等重大事
故。
关于可动范围,请参阅(安全指南)中的< 7.1关于可动范围>。
w 警告
・为了防止在进行启动和维修作业过程中,作业者以外的人员不慎操作启动开关或切换开关,请采取措施挂出手持编程器或操作面板等正在“作
业中”的标识,或锁定操作面板盖子等。
・请务必正确组合机器人与机器人控制并进行连接。如果采用不当的组合方式进行使用,可能会成为火灾或故障的原因。
S-15
安全指南
4.构建系统
构建编入机器人自动化系统时,系统导致的危险性要高于单个机器人。因此,要求系统制造商必须针对各个系统采取相应的
安全对策。
系统制造商应针对系统安全对策、操作或维护等方面制作相应的操作手册。
w 警告
有关机器人控制器的状态,请参阅并确认本书及相关操作手册。此外,构建系统时,请确保包含机器人控制器的系统能够安全运行。
5.操作中的注意事项
w 警告
・请勿碰触端子。否则会成为触电、产品损伤或误动作的原因。
・请勿用湿手触摸、操作机器人控制器或手持编程器。如果用湿手触摸或操作,则会成为触电或故障的原因。
6.禁止拆卸和改造
w 警告
切勿对机器人、控制器及手持编程器进行拆卸或改造。此外,请勿打开机器人内部。否则会成为触电、故障、误动作、人身伤害或火灾的原因。
4.5.2 安全防护栏的设置
为了防止运行者或其他作业者因接触机器人的可动部而受伤,请务必设置安全防护栏,以防止人员进入机器人的
可动范围内。
关于可动范围,请参阅(安全指南)中的< 7.1关于可动范围>。
w 危险
接触运行过程中的机器人可能会导致重伤。
・在自动运行过程中,请勿进入机器人的安全防护栏内。 ・进入安全防护栏时,请按下紧急停止按钮。
w 警告
・请在安全防护栏的入口处安装打开入口即启动紧急停止的联锁装置。
・请将安全防护栏设置为只能从装有联锁装置入口进入。
・请将附带的警告标贴 1(请参阅(安全指南)中的< 3.警告标贴>。)粘贴在安全防护栏入口的显眼位置。
S-16
安全指南
4.6 运行
在运行机器人时疏忽了安全对策或确认事项,极有可能会导致重大事故。因此在运行时,请必须进行以下所示安
全措施或确认事项。
w 危险
机器人运行时,请确认以下事项。
・机器人的安全防护栏内不得有人
・手持编程器必须在指定位置
・机器人及相关设备无异常
4.6.1 试运行
进行机器人的安装、调整、点检、维护、修理等作业后,请确认并遵守以下事项,然后进行试运行。
1.当安装后未立即准备安全防护栏时
请在可动范围的外侧张起绳索或锁链替代安全防护栏,并遵守以下事项。
关于可动范围,请参阅(安全指南)中的< 7.1关于可动范围>。
w 危险
请在显眼位置张贴[运行中禁止入内]标识,以禁止作业者进入可动范围。
w 警告
・请勿随便摇动支柱。
・请使用周围容易辨识的绳索或锁链。
2.接通控制器电源前的确认
在接通控制器电源前,请进行以下确认。
·是否正确安装了机器人。
·是否正确安装了电气线路。
·与气源等连接是否正确。
·与周边设备的连接是否正确。
·是否实施了安全防护对策(安全防护栏等)。
·安装环境是否在指定范围内。
3.接通控制器电源后的确认
接通控制器的电源后,请从安全防护栏外面确认以下事项。
·启动、停止、模式选择等是否能按意图动作。
·各轴是否能按意图动作,是否受到软限制限制。
·末端执行器是否能按意图动作。
·末端执行器与周边设备的信号通信是否正常。
·紧急停止是否起作用。
·示教及再现功能是否正常。
·安全防护栏及联锁是否如预期那样起作用。
S-17
安全指南
4.在安全防护栏中的作业
请先在防护栏外确认各保护功能是否正常起作用后(参阅前项的 2.3.),再进行安全防护栏内的作业。
w 危险
在安全防护栏中,切勿进入机器人的可动范围内。
关于可动范围,请参阅(安全指南)中的< 7.1关于可动范围>。
w 警告
在安全防护栏中进行作业时,请挂出“作业中”标识,以免其他作业者操作控制器的电源开关或操作面板。
w 警告
在安全防护栏中进行作业时,除了以下例外情况以外,请切断控制器的电源。
例外
虽然接通电源,却要在紧急停止状态下进行作业
设置原点 水平多关节型机器人 请遵照第 3 章< 2. 原点的调整>的注意事项和步骤。
设置基准坐标 水平多关节型机器人 请遵照第 3 章< 4. 基准坐标的设置>中的注意事项和步骤。
设置软限制
水平多关节型机器人 请遵照第 3 章< 3. 软限制的设置>中的注意事项和步骤。
正交机器人
单轴机器人请遵照各控制器操作手册的<软限制>项中的注意事项和步骤。
在电源接通时进行作业
示教
水平多关节型机器人
正交机器人
单轴机器人
请参阅下文中的< 5.安全防护栏中的示教>。
5.在安全防护栏中的示教
必须在安全防护栏内进行示教时,请在进入安全防护栏之前先在安全防护栏的外面确认或执行以下事项。
w 危险
在安全防护栏中,切勿进入机器人的可动范围内。
关于可动范围,请参阅(安全指南)中的< 7.1关于可动范围>。
w 警告
・请目视确认安全防护栏内是否危险。
・请确认手持编程器 / 手持终端是否正常工作。
・请确认机器人是否有故障。
・请确认紧急停止装置是否正常起作用。
・禁止在示教模式中进行自动运行。
S-18
安全指南
4.6.2 自动运行
在进行自动运行时,请确认以下事项。在自动运行时及发生异常时,请遵照本项的记载。此外,此处所指的自动
运行包括自动模式中的所有运行。
1.进行自动运行前的确认
在进行自动运行前,请确认以下事项。
w 危险
・请确认安全防护栏内是否有人。
・请确认是否设置了安全防护栏且联锁装置等功能是否起作用。
w 警告
・请确认手持编程器 / 手持终端和工具等是否在指定位置。
・请确认安装在系统上的信号塔等,在机器人或周边设备异常时是否有显示。
2.自动运行时及发生异常时
自动运行开始后,请确认运行状态和指示灯是否显示正在自动运行。
请确认自动运行是否正常。
w 危险
自动运行过程中,切勿进入安全防护栏内。
w 警告
在机器人或周边设备发生异常等情况下,进入安全防护栏内时,请在进入之前执行以下步骤。
1)按紧急停止按钮,使机器人紧急停止。
2)在启动开关上显示正在作业中,并采取措施防止进行应急措施的作业者以外的人员操作机器人。
4.6.3 运行时的注意
1.机器人损伤及发生异常时的应对
w 警告
・如果在使用时出现异常的臭味、响声或冒烟,请立即切断电源。否则可能会导致触电、火灾或故障。
请立即停止使用,并与代理店联系。
・当机器人发生以下损伤及异常时,如果继续使用会有危险。请立即停止使用,并联系代理店。
损伤及异常的内容 危险的种类
机器线束、机器人电缆的损伤 触电、机器人的误动作
机器人外部损伤 机器人动作时损伤部件飞出
机器人动作的异常(位置偏移、振动等) 机器人的误动作
Z 轴(上下轴)制动器的动作不良 轴落下
2.高温注意
w 警告
・请勿触摸运行中的机器人控制器或机器人。运行中的机器人控制器或机器人主机可能会产生高温,若碰触可能会导致烫伤。
・自动运行后的马达及减速器外盖会产生高温,若碰触可能会导致烫伤。进行点检等会接触到设备时,请切断控制器电源,稍等一段时间,确
认温度已下降后再接触设备。
3.解除垂直规格机器人(上下轴)制动器时的注意事项
w 警告
解除制动器时,上下轴有掉落的危险。请考虑其重量和形状等,在有充分的安全对策后再进行。
・在按下紧急停止按钮后解除制动器之前,请用支座支撑上下轴,注意不让其掉落。
・解除制动器作业(直接示教等)时,请注意不要让身体夹在上下轴和台架等之间。

S-19
安全指南
4.控制器电源切断及紧急停止时 Z 轴动作(Z 轴气动规格)
w 警告
切断控制器电源、切断 PLC 电源、程序复位时、紧急停止时以及开始向 Z轴气缸用电磁阀供气时,Z轴会上升。
・请注意手等勿被 Z轴可动部夹到。
・当 Z 轴上升途中存在干扰物时,除紧急情况以外,请考虑机器人的位置。
5.与 Z 轴周边设备存在干扰时的注意事项(Z 轴气动规格)
w 警告
Z 轴受周边设备干扰并停止时,除去干扰物时可能存在 Z轴突然移动夹到手等部位的危险。
・请切断控制器电源,降低气动供压后,再除去干扰物。
・此时,Z轴会由于自重而掉落,请在降低气动供压前,用支座等进行支撑。
6.降低气动供压时 Z 轴的动作(Z 轴气动规格)
w 警告
如果降低供给到 Z轴气缸用电磁阀的气动供压,Z轴会掉落并有危险。
请切断控制器的电源,并在降低气动供压前用支座等支撑 Z轴。
7.设置参数时的注意事项
c 注意
运行机器人时,请遵照容许惯性力矩、前端重量及惯性力矩相对应的确切加速度系数。如果未遵照该系数,则会导致驱动部的寿命提早下降、
损坏及定位时的剩余振动。
8. X 轴、Y 轴、R 轴的动作角度较小时
c 注意
X 轴、Y轴或 R轴的动作角度小于 5°并经常在相同位置动作时,关节支撑轴承的油膜会难以形成,所以可能会导致轴承损坏。如果和上述情
况一致,请使关节每天做 5次左右 90°以上的动作。
S-20
安全指南
4.7 点检维护
请务必执行日常点检及定期点检,并在作业前确认机器人及相关设备是否异常。确认异常时,请立即采取维修及
其他必要措施。
进行定期点检或维修等作业时,请记录该内容并保存 3 年以上。
4.7.1 作业前
1.禁止进行操作手册中未记载的作业
切勿进行操作手册中未记载的作业。
发生异常时,请务必联系代理店。代理店的维修人员会接待您。
w 警告
切勿进行操作手册中未记载的点检、维护、修理、部件更换等作业。上述作业需要专业知识,可能存在危险。请必须与代理店联系。
2.修理、更换时的注意事项
w 警告
不可避免要对机器人或控制器部件进行更换及修理时,请必须联系代理店并遵照代理店的指示。由没有相应知识或接受过指导的人员点检和维
护控制器或机器人是非常危险的。
调整、维护和零部件更换需要专业知识与技术,如果由不具备上述能力的人员操作,可能伴随危险。请务必由参加过本公司
或代理店举办的机器人培训讲座的人员进行上述作业。
w 警告
拆下外盖的调整和维护必须具备专业知识与技术,如果由不具备上述能力的人员操作,可能会造成危险。
上述作业必须根据当地法律法规并由具备足够能力与资质的人员进行。有关详细信息,请联系您购买产品所在的经销商。
3.全相切断
w 警告
请务必从外部全相切断电源后,进行清洁或端子螺钉的再次拧紧。如果不全相切断,可能会成为触电、产品损伤或误动作的原因。
4.确保电源切断后的放置时间(确保温度及电压下降的时间)
w 警告
・按照代理店的指示进行机器人控制器的维护或点检作业时,请切断电源后,闲置各控制器所规定的时间以上 (※) 后再进行作业。机器人控
制器上存在高温部位及高压残留部位,可能会导致烫伤或触电。
・自动运行后的马达及减速器外盖会产生高温,若碰触可能会导致烫伤。
进行点检等接触设备时,请切断控制器电源,稍等一段时间,确认温度已下降后再接触设备。
关于“电源切断后的放置时间”,请参阅各控制器的操作手册。
5.控制器点检时的注意事项
w 警告
・在进行控制器点检等接触控制器外侧端子及连接接口作业时,为了防止触电,请切断控制器电源,供给电源也要切断。
・请勿拆卸控制器。也绝对不能接触内部。否则可能会成为故障、误动作、人身伤害或火灾的原因。
S-21
安全指南
4.7.2 作业注意事项
1.拆下马达时的注意事项(正交、单轴机器人的垂直规格)
w 警告
拆下马达时,上下轴会掉落并有危险。
・请切断控制器电源,并在拆下马达前用支座等支撑上下轴。
・请注意身体不要被上下轴的驱动部及上下轴与台架等之间夹到。
2.拆下 Z 轴马达时的注意事项(水平多关节型机器人)
w 警告
拆下 Z轴马达时,Z轴会掉落并有危险。
・请切断控制器的电源,并在拆下马达前用支座等支撑 Z轴。
・请注意身体不要被 Z轴的驱动部及 Z轴与台架等之间夹到。
3.禁止拆下 Z 轴上升端限位器
c 注意
水平多关节型机器人上贴有警告标贴 4。(请参阅(安全指南)中的< 3.警告标贴>。)拆下或移动 Z轴花键上的上升端限位器会导致 Z轴滚珠
丝杠损坏,所以切勿进行。
4.对于机器人内部强力磁铁的注意事项
w 警告
机器人内部带有强力磁铁。因可能导致人身伤害,所以请勿拆卸。请勿靠近因磁力而误动作的设备。
关于强力磁场的详细内容,请参阅(安全指南)中的< 6.强力磁场相关注意>。
5.拆卸及更换气动设备时的注意事项
w 警告
如果在供气状态下对气动设备进行拆卸或更换,则可能会导致部件及空气弹出。
・请在切断控制器电源并下降气动供压并排空气动设备内残余压力后,在进行作业。
・Z 轴(2轴 Z轴气动规格)会由于自重而掉落,请在降低气动供压前,用支座等进行支撑。
6.接触控制器冷却风扇的注意事项
w 警告
・接触旋转的风扇可能会导致人身伤害。
・拆下风扇外盖时,请在切断控制器电源并确认风扇已停止后,再开始拆卸。
7.机器人控制器相关注意事项
c 注意
・请将机器人控制器内部数据保存到外部记忆装置中。机器人控制器内部的数据(程序、坐标点数据等)可能会因意外原因丢失。请务必对数
据进行备份。
・在擦拭手持编程器表面的脏污时,请勿使用稀释剂、挥发油或酒精等物质。否则可能会使表面覆膜或印刷剥落而成为故障的原因。在进行保
养时,请用软布干擦。
・请勿用硬物或头部尖锐物操作手持编程器的按键。按键损伤可能会成为误动作或故障的原因。请用指尖操作按键。
S-22
安全指南
4.8 废弃
废弃产品时,请作为工业废物进行处理。请按照法令规定的方法或者委托专门的废物处理公司来处理。
1.锂电池的处理
锂电池的处理请按照法令规定的方法,或者委托专业处理公司进行处理。代理店不回收。
2.包装材料的废弃
请按规定的方法处理和废弃包装材料。代理店不回收。
3.强力磁铁
w 警告
机器人内部装有强力永久磁铁,废弃时请特别注意。
关于强力磁场的详细内容,请参阅(安全指南)中的< 6.强力磁场相关注意>。
S-23
安全指南
5. 机器人夹到人体时的处理方法
当人体被机器人与台架等机械部位之间夹到时,请松开轴。
■ 处理方法
请参阅机器人控制器各手册的以下部分松开轴。
控制器 参考章
RCX240 第 1 章“1. 被机器人夹到人员的放开方法”
RCX340 第 1 章“1. 被机器人夹到人员的放开方法”
n 要点
请将参考章节相关页面打印出来,并粘贴在控制器附近显眼的位置。
6. 强力磁场相关注意
一部分机器人身上会有产生强力磁场的部分,这会成为死亡、负伤或故障的原因。
请必须遵守以下项目的内容。
·装有起搏器/助听器等医疗电子机械的人勿靠近线性单轴机器人、线性传送带。(以 100mm 为基准。)
·在身上带有 ID 卡/皮夹/手表等人勿靠近线性单轴机器人、线性传送带。
·勿拆卸线性单轴机器人、线性传送带(包括周围的外盖等)。
·勿将工具靠近机器人内部以及线性传送带的磁铁。
·从模块中卸下线性传送带的滑块,进行处理、搬运、保管时,请一定安装附带的磁铁保护外盖。
S-24
安全指南
7. 为了安全使用
7.1 关于可动范围
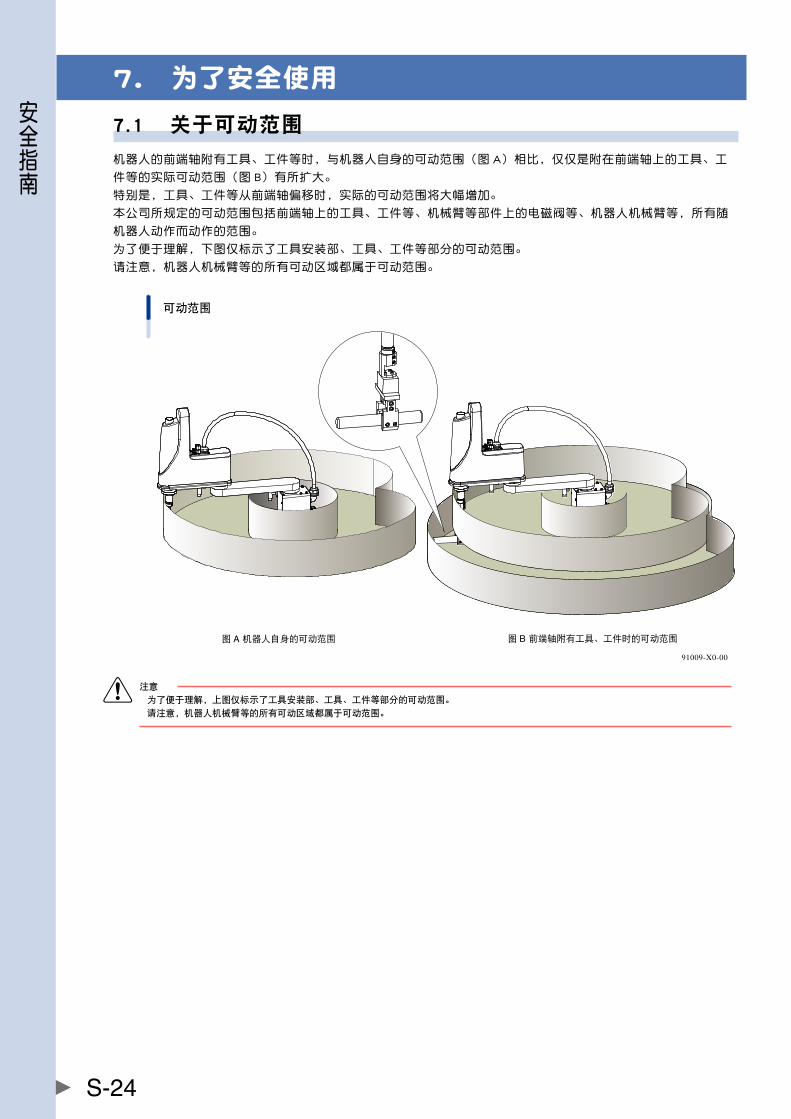
机器人的前端轴附有工具、工件等时,与机器人自身的可动范围(图 A)相比,仅仅是附在前端轴上的工具、工
件等的实际可动范围(图 B)有所扩大。
特别是,工具、工件等从前端轴偏移时,实际的可动范围将大幅增加。
本公司所规定的可动范围包括前端轴上的工具、工件等、机械臂等部件上的电磁阀等、机器人机械臂等,所有随
机器人动作而动作的范围。
为了便于理解,下图仅标示了工具安装部、工具、工件等部分的可动范围。
请注意,机器人机械臂等的所有可动区域都属于可动范围。
可动范围
图 A 机器人自身的可动范围 图 B 前端轴附有工具、工件时的可动范围
91009-X0-00
c 注意
为了便于理解,上图仅标示了工具安装部、工具、工件等部分的可动范围。
请注意,机器人机械臂等的所有可动区域都属于可动范围。
S-25
安全指南
7.2. 机器人的保护功能
介绍机器人带有的保护功能。
1.过载检出
检出马达过载并伺服禁止 (servoOFF)。
发生过载错误时,为了避免出错,请采取以下对策。
1. 在程序中加入定时。
2. 降低加速度系数。
2.过热检出
检出控制器驱动器的温度异常升高,并伺服禁止 (servoOFF)。
发生热错误时,为了避免出错,请采取以下对策。
1. 在程序中加入定时。
2. 降低加速度系数。
3.软限制
通过设置各轴的软限制,可限制返回原点后的手动运行或自动运行时的动作范围。
此外,软限制所限制的区域也称为动作范围。
w 警告
软限制没有以保护人体为目的的安全关联功能。
以保护人体为目的限制机器人的可动范围时,请在机器人自带(或选配)的限位器上进行。
4.限位器
当机器人移动过程中由于紧急停止操作或安全功能等伺服禁止 (servoOFF) 时,可防止轴超过可动范围。此外,限位器所限
制的区域称为可动范围。
水平多关节型机器人
·X·Y 轴的最大可动范围带有机械挡。虽然有的机型标配有限制可动范围的限位器,但是一部分机型则作为选
配件提供。
·Z 轴可动范围的上升端和下降端带有限位器,选配件可改变止动器位置。
·R 轴上不带有限位器。
单轴、正交机器人·直动轴的最大可动范围两端带有限位器,不可改变位置。
·旋转轴不带有限位器。
w 警告
请注意轴移动时即使由于紧急停止操作或保护功能等伺服禁止 (servoOFF) 时,轴也不会立即停止。
c 注意
机器人自带(或者是选件)限位器在高速中机器人有冲撞时,可能导致机器人故障。
w 危险
在线性传送带模块中插入或排出滑块时,结构上不能在模块主体上安装限位器。请在装置中配备能够阻挡从模块中高速排出的滑块的机构,采
取必要的安全措施。
5.垂直规格(上下轴)制动器
垂直规格(上下轴)带有可防止伺服禁止 (servoOFF) 时上下轴落下的电磁制动器。关闭控制器电源时以及控制器电源接通
状态下上下轴伺服禁止时,制动器将起作用。
可在控制器电源接通时、用手持编程器 / 手持终端及程序中解除上下轴制动。
w 警告
解除制动器时,上下轴有掉落的危险。请考虑其重量和形状等,在有充分地安全对策后再进行。
・按下紧急停止按钮后解除制动器之前,请用支座支撑上下轴,注意不让其掉落。
・解除制动器作业(直接示教等)时,请注意不要让身体夹在上下轴和台架等之间。
S-26
安全指南
7.3 关于剩余风险
为了安全正确使用YAMAHA机器人及控制器,请对系统构建者及(或者)使用者实施ISO12100规范后机械类
的安全设计。
关于 YAMAHA 机器人及控制器的剩余风险,作为危险文或警告文整理在各章各项。请参阅。
7.4 针对工业机器人作业者的特别教育
进行机器人的示教、编程、动作确认、点检、调整和修理等作业的作业者必须接受过相应的训练且必须具备安全
工作的能力。请务必在阅读操作手册并充分理解的基础上,进行作业。
此外,工业机器人的相关业务(示教、编程、动作的确认、点检、调整、修理等 ) 必须由各国法规、法令及标准认
定有资质的人员来进行。
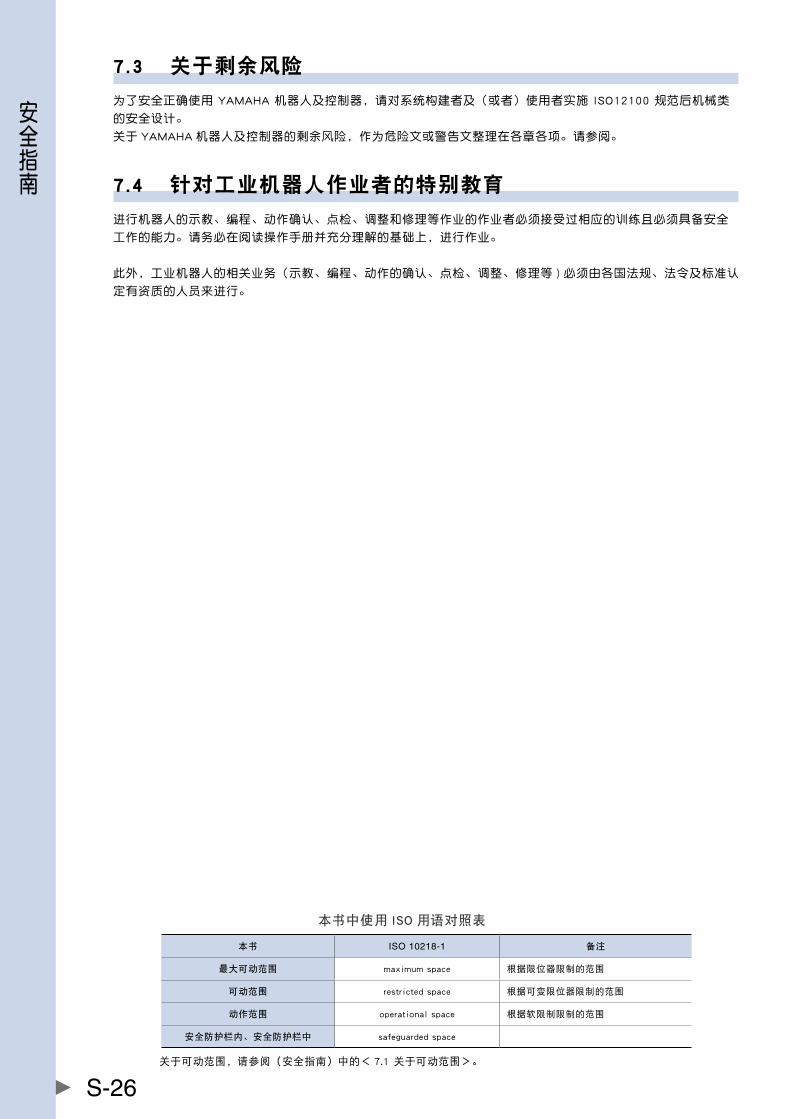
本书中使用 ISO 用语对照表
本书 ISO 10218-1 备注
最大可动范围 maximumspace 根据限位器限制的范围
可动范围 restrictedspace 根据可变限位器限制的范围
动作范围 operationalspace 根据软限制限制的范围
安全防护栏内、安全防护栏中 safeguardedspace
关于可动范围,请参阅(安全指南)中的< 7.1关于可动范围>。
S-27
安全指南

修订记录
修订日期 修订内容
2012年4月 1.00版 第一版
2012年6月 1.01版 增加“机器人夹到人体时的处理方法”、更改安全防护栏内作业顺序、笔误修正、其它
2012年10月 1.02版 添加警告标贴、更新“软限制”“限位器”、解除垂直规格制动器后进行作业的相关记载。增加剩余风险表示。
2012年12月 1.03版 添加关于机器人动作速度限制的警告文、更改关于标注语言的记载、其他
2013年6月 1.04版 增加了“关于可动范围”、其他
2013年8月 1.05版 增加了有关线性传送带模块的内容
2014年1月 1.06版 增加警告标贴、变更“作业者的资格”的记载内容、其他
雅马哈发动机株式会社 IM事业部
禁止复制或转印本书的全部或部分内容。
安全指南
2014年1月
1.06版

保修
保修
关于保修期限和条款信息,请您联系购买处的代理经销商。
■ 以下情况导致的故障不在本保修范围内:
1. 不符合工业标准或未按使用使用手册要求安装、接线、连接其他控制设备或使用、检查、保养;
2. 使用时超出使用说明书所示规格或标准性能;
3. 将本产品用于指定外的其他用途
4. 存放方法、工作条件和用途超出使用说明书的指定范围;
5. 由于运输方式、运输不当导致产品损坏;
6. 事故或碰撞损坏 ;
7. 安装非原装正品零部件、附件 ;
8. 对原装零部件进行改造,或未按照 YAMAHA 指定标准规格改造零部件(包括根据经销商或客户要求特殊制定的产品);
9. 污染、盐害、结露 ;
10. 火灾或地震、海啸、雷击、风和洪水等自然灾害;
11. 上述情况以外非 YAMAHA 责任导致的故障 ;
■ 示例不属于保修范围:
1. 无法识别序列号或生产日期(年月)。
2. 对软件或内部数据(如客户创建或更改程序或点位)的更改。
3. 无法再现故障或者故障无法由 YAMAHA 识别。
4. 在放射性设备、生物试验设备或 YAMAHA 判断为危险用途中使用本产品。
根据本协议,我公司只对向经销商出售的产品和零部件中出现的瑕疵和缺陷进行质保承诺。
任何其他明示或暗示的担保或责任,包括但不限于任何对适销性或特定用途的默示担保,YAMAHA 不承担相关担
保责任。此外,YAMAHA 对由相关产品产生的任何形式的间接损害或后果不承担相关责任。
本书不保证工业产权以及其他权利的执行或许诺执行权。此外,对于因本书刊载内容所引起的工业产权上的各种问题,
本公司一概不承担责任。
Ver.1.01_201210
保修


第1章 概要
目录
1. 概要 1-1
1-1
1
概要
1. 概要
w 警告
・拆下外盖的调整和维护必须具备专业知识与技术,如果由不具备上述能力的人员进行操作,可能会造成危险。上述作业必须由参加过本公司
或代理店举办的机器人培训讲座的人员,或者根据各国法令法规等具备足够能力与资质的人员参照本书来执行。
・在作业过程中,请挂出“作业中”标识,以防止其他作业者操作控制器的电源开关、手持编程器和操作面板等。
・如果无法在安装后立即准备安全防护栏,请在机器人的可动范围外侧张开安全绳索或锁来替代安全防护栏,并遵照以下事项。
1.必须使用不容易晃动的支柱。
2.必须使用周围容易识别的标识。
3.在显眼的位置挂出“作业中禁止入内”的标识,禁止从事机器人调试作业者以外的其他人员进入机器人的可动范围。
・进行调试后动作确认时,请参照安全指南中的< 4.5.1试运行>。
c 注意
润滑油类产品,请务必使用本公司指定产品。

第2章 外盖的安装拆卸及更换
目录
1. 外盖的安装拆卸及更换 2-1
2
外盖的安装拆卸及更换
2-1
1. 外盖的安装拆卸及更换
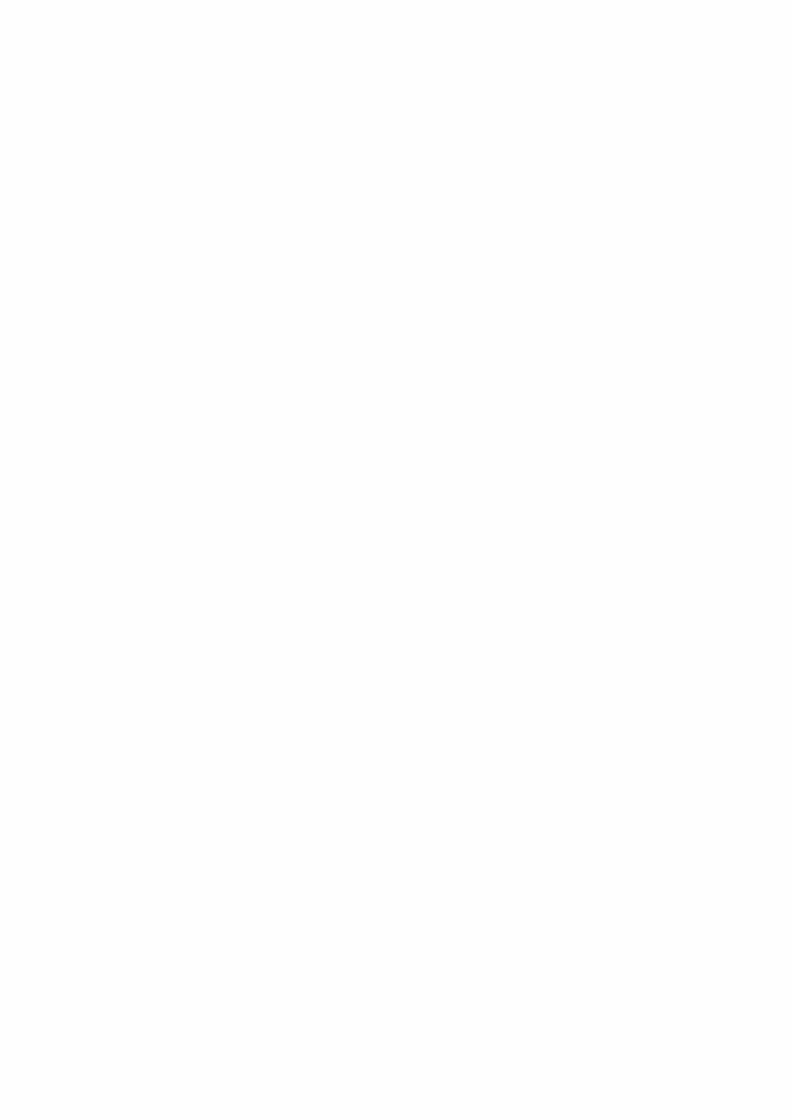
请先拆下下图中的螺钉类,然后再进行外盖的安装拆卸。
w 警告
由于维护作业等原因拆下外盖时,请务必使用原来固定外盖的螺钉、螺栓类将外盖装回原位。
螺钉类遗失时,请参阅下图,务必使用规定的螺钉类及个数固定外盖。
如果外盖固定不充分,可能会发生异响、外盖脱落飞出、示教等过程中手等部位被夹入驱动部或碰触到高温驱动部导致烫伤,所以请务必充分
固定。
c 注意
在用户接线配管花键轴中空规格中,如果不将 Z轴降至下降端,则无法取下外盖。
YK250XG, YK350XG, YK400XG, YK500XGL, YK600XGL
基座正面安全盖固定螺钉接线小螺钉 M4 长度 8 4 个(本公司零部件编号:90990-10J003)
Y 轴机械臂外盖(本公司零部件编号:KCY-M1314-001 (YK250XG, YK350XG, YK400XG) KCY-M1314-100 (YK500XGL, YK600XGL))
基座正面安全盖(本公司零部件编号:KCY-M1310-010)
基座背面盖固定螺栓内六角螺栓 M4 长度 8 4 个(本公司零部件编号:91312-04008)
基座背面盖(本公司零部件编号: KCY-M1311-001)
Y 轴机械臂外盖固定螺钉接线小螺钉 M3 长度 16 4 个(本公司零部件编号:98902-03016)
Y 轴机械臂外盖固定螺钉接线小螺钉 M3 长度 6 4 个(本公司零部件编号:98902-03006)
M3 用垫圈 4 个(本公司零部件编号:98903-03200)
凸台(内侧)
51201-F6-00
c 注意
安装拆卸外盖时,外盖内侧的凸台有可能碰到内部支架,因此请把外盖略微撑开或错开后再安装。
2
外盖的安装拆卸及更换
2-2
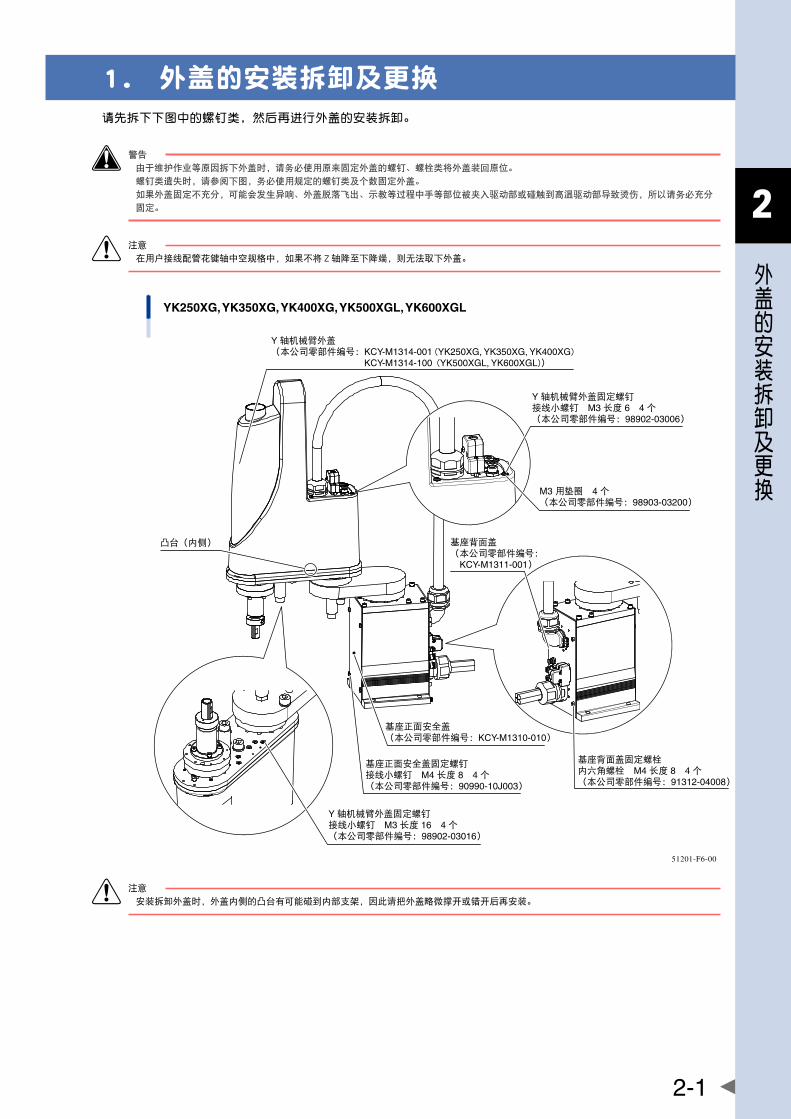
YK300XGS, YK400XGS
Y 轴机械臂外盖固定螺钉接线小螺钉 M3 长度 16 4 个(本公司零部件编号:98902-03016)
Y 轴机械臂外盖固定螺钉接线小螺钉 M3 长度 6 4 个(本公司零部件编号:98902-03006)
M3 用垫圈 4 个(本公司零部件编号:98903-03200)
Y 轴机械臂外盖(本公司零部件编号: KCY-M1314-001)
凸台(内侧)
基座正面安全盖
基座上表面安全盖
基座上表面安全盖固定螺栓内六角螺栓 M4 长度 8 4 个(本公司零部件编号:91312-04008)
基座正面安全盖固定螺钉接线小螺钉 M4 长度 8 4 个(本公司零部件编号:90990-10J003)
21203-GE-00
c 注意
安装拆卸外盖时,外盖内侧的凸台有可能碰到内部支架,因此请把外盖略微撑开或错开后再安装。
2
外盖的安装拆卸及更换
2-3
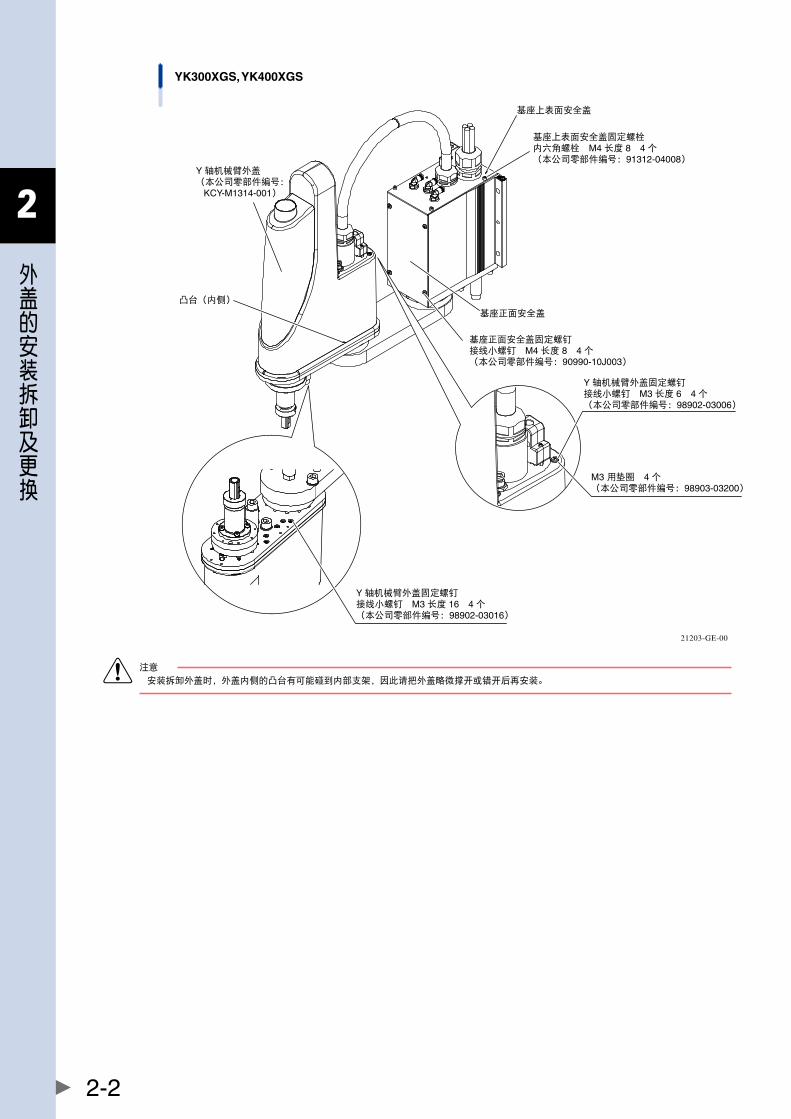
YK500XG, YK600XG
基座背面盖(本公司零部件编号:KBF-M1310-001)
Y 轴马达安全盖(本公司零部件编号:KBF-M1316-000)
Z 轴马达安全盖(本公司零部件编号:KBF-M1315-000)
基座背面盖固定螺钉接线小螺钉 M4 长度 8 4 个(本公司零部件编号:90990-10J003)
基座正面安全盖固定螺钉接线小螺钉 M4 长度 8 4 个(本公司零部件编号:90990-10J003)
Y 轴马达安全盖固定螺钉接线小螺钉 M3 长度 8 4 个(本公司零部件编号:98902-03008)
Y 轴机械臂背面安全盖(本公司零部件编号:KBF-M1313-000 (Z 200mm) KBF-M1313-100 (Z 300mm))
Z 轴马达安全盖固定螺钉接线小螺钉 M3 长度 12 4 个(本公司零部件编号:98902-03012)
Y 轴机械臂外盖(本公司零部件编号: KBF-M1314-002 (Z 200mm) KBF-M1314-102 (Z 300mm))
Y 轴机械臂外盖固定螺栓内六角螺栓 M3 长度 20 2 个(本公司零部件编号:91312-03020)
Y 轴机械臂外盖固定螺栓(水平拆下外盖时)• 内六角半圆头螺栓 M3 长度 8 4 个(Z 轴 200mm 行程)• 内六角半圆头螺栓 M3 长度 8 6 个(Z 轴 300mm 行程)(本公司零部件编号:92012-03008)
Y 轴机械臂外盖固定螺栓(垂直拆下外盖时)内六角螺栓 M3 长度 8 2 个(本公司零部件编号:91312-03008)
Y 轴机械臂端盖(本公司零部件编号:KBF-M1534-000)
X 轴机械臂端盖(本公司零部件编号:KBF-M1535-000)
基座正面安全盖(本公司零部件编号:KBF-M1311-001)
X 轴机械臂端盖固定螺栓内六角螺栓 M3 长度 16 4 个 × 2(本公司零部件编号:91312-03016)
Y 轴机械臂端盖固定螺栓内六角螺栓 M3 长度 16 4 个 × 2(本公司零部件编号:91312-03016)
线束外盖(本公司零部件编号:KBF-M1312-001)
线束外盖固定螺钉接线小螺钉 M4 长度 10 4 个(本公司零部件编号:90990-10J004)
51201-F9-00
2
外盖的安装拆卸及更换
2-4
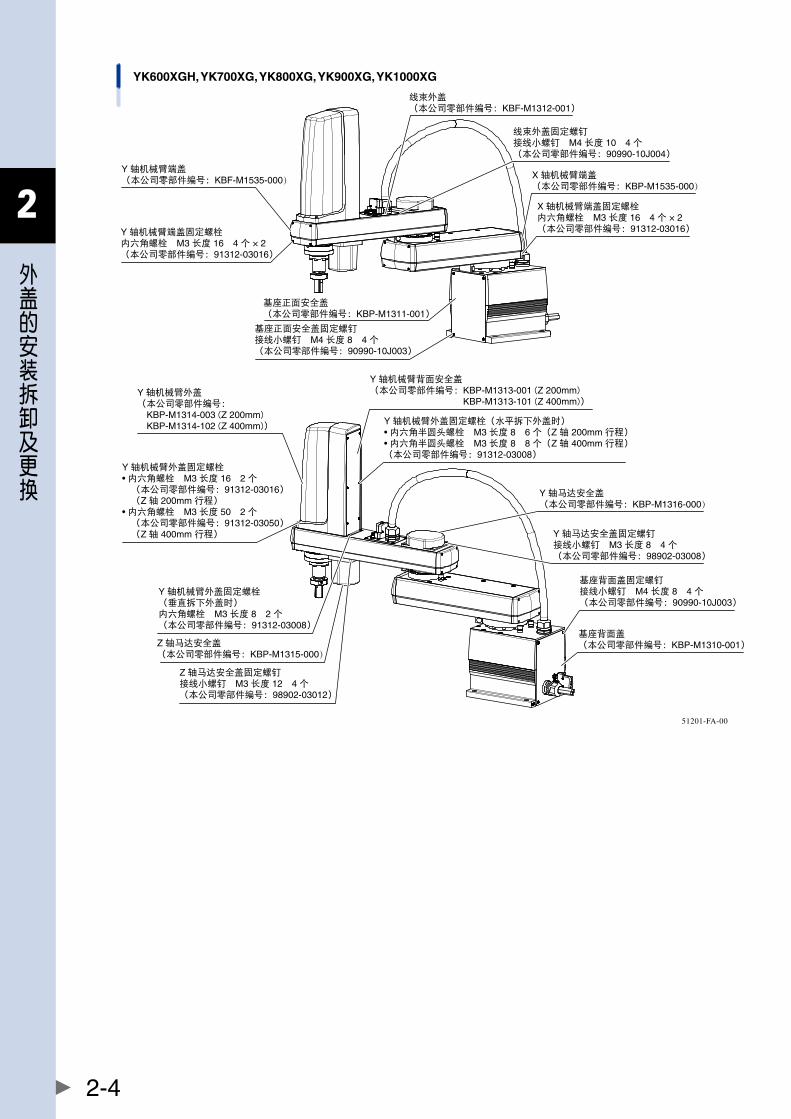
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
基座背面盖(本公司零部件编号:KBP-M1310-001)
Y 轴马达安全盖(本公司零部件编号:KBP-M1316-000)
Z 轴马达安全盖(本公司零部件编号:KBP-M1315-000)
基座背面盖固定螺钉接线小螺钉 M4 长度 8 4 个(本公司零部件编号:90990-10J003)
Y 轴马达安全盖固定螺钉接线小螺钉 M3 长度 8 4 个(本公司零部件编号:98902-03008)
Y 轴机械臂背面安全盖(本公司零部件编号:KBP-M1313-001 (Z 200mm) KBP-M1313-101 (Z 400mm))
Z 轴马达安全盖固定螺钉接线小螺钉 M3 长度 12 4 个(本公司零部件编号:98902-03012)
Y 轴机械臂外盖(本公司零部件编号: KBP-M1314-003 (Z 200mm) KBP-M1314-102 (Z 400mm))
Y 轴机械臂外盖固定螺栓• 内六角螺栓 M3 长度 16 2 个 (本公司零部件编号:91312-03016) (Z 轴 200mm 行程)• 内六角螺栓 M3 长度 50 2 个 (本公司零部件编号:91312-03050) (Z 轴 400mm 行程)
Y 轴机械臂外盖固定螺栓(水平拆下外盖时)• 内六角半圆头螺栓 M3 长度 8 6 个(Z 轴 200mm 行程)• 内六角半圆头螺栓 M3 长度 8 8 个(Z 轴 400mm 行程)(本公司零部件编号:91312-03008)
Y 轴机械臂外盖固定螺栓(垂直拆下外盖时)内六角螺栓 M3 长度 8 2 个(本公司零部件编号:91312-03008)
Y 轴机械臂端盖(本公司零部件编号:KBF-M1535-000) X 轴机械臂端盖
(本公司零部件编号:KBP-M1535-000)
基座正面安全盖(本公司零部件编号:KBP-M1311-001)
X 轴机械臂端盖固定螺栓内六角螺栓 M3 长度 16 4 个 × 2(本公司零部件编号:91312-03016)Y 轴机械臂端盖固定螺栓
内六角螺栓 M3 长度 16 4 个 × 2(本公司零部件编号:91312-03016)
线束外盖(本公司零部件编号:KBF-M1312-001)
线束外盖固定螺钉接线小螺钉 M4 长度 10 4 个(本公司零部件编号:90990-10J004)
基座正面安全盖固定螺钉接线小螺钉 M4 长度 8 4 个(本公司零部件编号:90990-10J003)
51201-FA-00
2
外盖的安装拆卸及更换
2-5
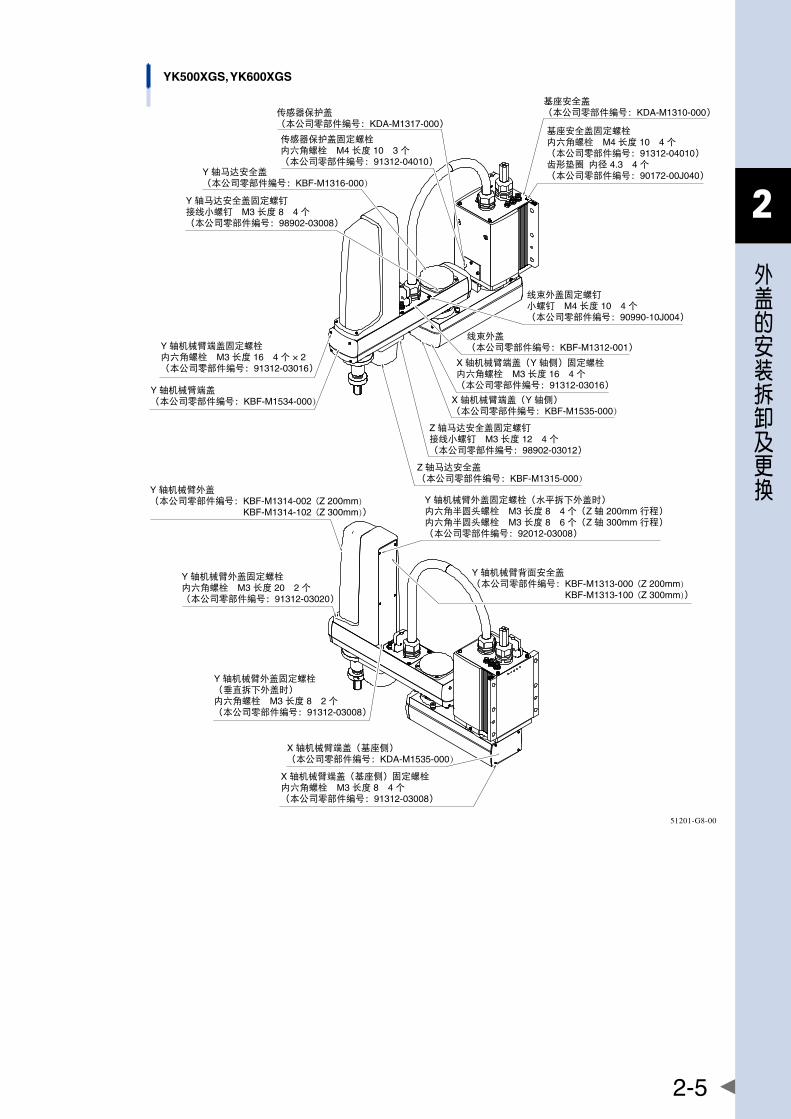
YK500XGS, YK600XGS
Y 轴机械臂端盖(本公司零部件编号:KBF-M1534-000)
线束外盖(本公司零部件编号:KBF-M1312-001)
X 轴机械臂端盖(Y 轴侧)(本公司零部件编号:KBF-M1535-000)
传感器保护盖(本公司零部件编号:KDA-M1317-000)
Z 轴马达安全盖(本公司零部件编号:KBF-M1315-000)
Y 轴马达安全盖(本公司零部件编号:KBF-M1316-000)
基座安全盖(本公司零部件编号:KDA-M1310-000)
Y 轴马达安全盖固定螺钉接线小螺钉 M3 长度 8 4 个(本公司零部件编号:98902-03008)
X 轴机械臂端盖(Y 轴侧)固定螺栓内六角螺栓 M3 长度 16 4 个(本公司零部件编号:91312-03016)
传感器保护盖固定螺栓内六角螺栓 M4 长度 10 3 个(本公司零部件编号:91312-04010)
Z 轴马达安全盖固定螺钉接线小螺钉 M3 长度 12 4 个(本公司零部件编号:98902-03012)
线束外盖固定螺钉小螺钉 M4 长度 10 4 个(本公司零部件编号:90990-10J004)
X 轴机械臂端盖(基座侧)(本公司零部件编号:KDA-M1535-000)
Y 轴机械臂外盖(本公司零部件编号:KBF-M1314-002 (Z 200mm) KBF-M1314-102 (Z 300mm))
Y 轴机械臂外盖固定螺栓(水平拆下外盖时)内六角半圆头螺栓 M3 长度 8 4 个(Z 轴 200mm 行程)内六角半圆头螺栓 M3 长度 8 6 个(Z 轴 300mm 行程)(本公司零部件编号:92012-03008)
Y 轴机械臂外盖固定螺栓内六角螺栓 M3 长度 20 2 个(本公司零部件编号:91312-03020)
Y 轴机械臂背面安全盖(本公司零部件编号:KBF-M1313-000 (Z 200mm) KBF-M1313-100 (Z 300mm))
Y 轴机械臂外盖固定螺栓(垂直拆下外盖时)内六角螺栓 M3 长度 8 2 个(本公司零部件编号:91312-03008)
X 轴机械臂端盖(基座侧)固定螺栓内六角螺栓 M3 长度 8 4 个(本公司零部件编号:91312-03008)
基座安全盖固定螺栓内六角螺栓 M4 长度 10 4 个(本公司零部件编号:91312-04010)齿形垫圈 内径 4.3 4 个(本公司零部件编号:90172-00J040)
Y 轴机械臂端盖固定螺栓内六角螺栓 M3 长度 16 4 个 × 2(本公司零部件编号:91312-03016)
51201-G8-00

2
外盖的安装拆卸及更换
2-6
YK700XGS, YK800XGS, YK900XGS, YK1000XGS
Y 轴机械臂外盖(本公司零部件编号:KBP-M1314-003 (Z 200mm) KBP-M1314-102 (Z 400mm))
X 轴机械臂端盖(基座侧)(本公司零部件编号:KDB-M1535-000)
Y 轴机械臂端盖(本公司零部件编号:KBF-M1535-000)
线束外盖(本公司零部件编号:KBF-M1312-001)
X 轴机械臂端盖(Y 轴侧)(本公司零部件编号:KBP-M1535-000)
基座安全盖(本公司零部件编号:KDB-M1310-000)
传感器保护盖(本公司零部件编号:KDA-M1317-000)
Y 轴马达安全盖(本公司零部件编号:KBP-M1316-000)
Z 轴马达安全盖(本公司零部件编号:KBP-M1315-000)
基座安全盖固定螺栓内六角螺栓 M5 长度 12 6 个(本公司零部件编号:91312-05012)齿形垫圈 内径 5.3 6 个(本公司零部件编号:90172-00J050)
传感器保护盖固定螺栓内六角螺栓 M4 长度 10 3 个(本公司零部件编号:91312-04010)
Y 轴马达安全盖固定螺钉接线小螺钉 M3 长度 8 4 个(本公司零部件编号:98902-03008)
Y 轴机械臂端盖固定螺栓内六角螺栓 M3 长度 16 4 个 × 2(本公司零部件编号:91312-03016)
Z 轴马达安全盖固定螺钉接线小螺钉 M3 长度 12 4 个(本公司零部件编号:98902-03012)
线束外盖固定螺钉小螺钉 M4 长度 10 4 个(本公司零部件编号:90990-10J004)
X 轴机械臂端盖(Y 轴侧)固定螺栓内六角螺栓 M3 长度 16 4 个(本公司零部件编号:91312-03016
Y 轴机械臂外盖固定螺栓内六角螺栓 M3 长度 20 2 个(Z 轴 200mm 行程)(本公司零部件编号:91312-03020)内六角螺栓 M3 长度 50 2 个(Z 轴 400mm 行程)(本公司零部件编号:91312-03050)
Y 轴机械臂外盖固定螺栓(水平拆下外盖时)内六角半圆头螺栓 M3 长度 8 6 个(Z 轴 200mm 行程)内六角半圆头螺栓 M3 长度 8 8 个(Z 轴 400mm 行程)(本公司零部件编号:92012-03008)
Y 轴机械臂背面安全盖(本公司零部件编号:KBP-M1313-001 (Z 200mm) KBF-M1313-101 (Z 400mm))
Y 轴机械臂外盖固定螺栓(垂直拆下外盖时)内六角螺栓 M3 长度 8 2 个(本公司零部件编号:91312-03008)
X 轴机械臂端盖(基座侧)固定螺栓内六角螺栓 M3 长度 8 4 个(本公司零部件编号:91312-03008)
51201-GA-00
第3章 定期点检
目录
1. 概要 3-1
2. 日常点检 3-2
3. 6 个月点检 3-3
4. 补充润滑油 3-6
4.1 对花键轴补充润滑油 3-6
4.2 对滚珠丝杠补充润滑油 3-7

3
定期点检
3-1
1. 概要
为了能够使 YAMAHA 机器人更加安全高效的运行,进行定期点检非常重要。在本章节中,将向您介绍 YK-XG 系
列的定期点检项目及步骤。
定期点检分为
・日常点检 ・6 个月点检
两种类型。请在充分理解内容的基础上,根据注意事项进行作业。
w 警告
拆下外盖的调整和维护必须具备专业知识与技术,如果由不具备上述能力的人员进行操作,可能会造成危险。上述作业必须由参加过本公司或
代理店举办的机器人培训讲座的人员,或者根据各国法令法规等具备足够能力与资质的人员参照本书来执行。
w 警告
・在进行控制器点检等接触控制器外侧端子及连接接口作业时,为了防止触电,请切断控制器电源与供给电源。
・切勿接触控制器内部。
w 警告
・在安全防护栏内进行点检时,请在切断控制器电源及外部配电盘开关后,再进行点检。
・移动机器人点检时,请在安全防护栏之外进行。
・在点检过程中,为了防止从事机器人点检作业的作业者以外的人员不慎操作控制器电源开关、手持编程器、操作面板等,请挂出“作业中”
标识。
・确认点检后的动作时,请参阅本书(安全指南)中的〈4.5.1试运行〉。
c 注意
润滑油类产品,请务必使用本公司指定产品。
n 要点
控制器的相关注意事项,请参阅《YAMAHA 机器人控制器使用说明书》。

3
定期点检
3-2
2. 日常点检
在每天机器人运行前、运行后进行的点检。
■ 切断控制器电源后进行的点检
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器电源。
3 执行点检。
请进入安全防护栏内对以下内容进行点检。
点检位置 点检内容
机器线束
机器人电缆
用户预备接线
是否存在损伤、凹痕或强行弯折(如果机器线束、机器人电缆存在损伤,请联系本
公司。)
减压阀、连接器、输气管、电磁阀、
气缸
·气压是否正常
·是否存在漏气
·是否排水
·空气滤网是否脏污、损坏等
机器人的外观 是否存在损伤(如果存在损伤,请联系本公司。)
■ 接通控制器电源后进行的点检
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器、手持编程器和操作面板等。
3 执行点检。
请在安全防护栏之外对以下内容进行点检。
点检位置 点检内容
安全防护栏
是否位于指定位置
打开安全门时是否紧急停止
入口处是否贴着警告标贴
紧急停止装置 按下紧急停止按钮后,是否紧急停止
机器人的动作 是否存在动作异常、振动或异响(发生异常时,请联系本公司。)
Z 轴制动器的动作确认 * Z 轴从静止状态下落量在 3mm 以内(异常时,请联系本公司。)
*在安全防护栏之外按下紧急停止按钮及关闭控制器电源时,请目视进行点检。
■ 调整及更换
c 注意
・需要对点检结果进行调整及更换时,请在关闭控制器电源并进入安全防护栏内后,再进行作业。请根据上文中的“■切断控制器电源后进行
的点检”、“■接通控制器电源后进行的点检”执行作业后的确认。
・需要进行机器人及控制器修理、零部件更换时,请联系本公司。上述修理及零部件的更换必须具备专业知识,请勿擅自执行。
3
定期点检
3-3
3. 6 个月点检
每隔 6 个月进行点检。
w 警告
如果解除 Z轴的制动,Z轴有掉落的危险。对 Z轴零部件补充润滑油时,请勿解除制动。
对滚珠丝杠、花键轴补充润滑油时,请注意以下事项。
w 警告
使用润滑油时的注意事项
・润滑油如果进入眼睛,可能会引起眼睛发炎。
使用时,请使用护目镜等防止润滑油进入眼睛。
・润滑油接触皮肤可能会引起发炎。使用时,请使用防护手套等防止润滑油接触皮肤。
・请勿吞食润滑油。(吞食润滑油会造成腹泻及呕吐。)
・打开容器时,可能会划伤手。请使用防护手套。
・请将润滑油置于儿童够不到的地方。
・请勿对润滑油进行加热,或者使润滑油靠近火源。否则可能会造成起火或燃烧。
应急处理
・如果润滑油进入眼睛,请用洁净的水冲洗 15 分钟并就医。
・如果润滑油接触皮肤,请用水和肥皂充分洗净。
・不慎吞食时,请勿强行吐出,请立即就医。
润滑油及废容器的处理
・处理方法应遵照法令的规定。请根据相关法令进行正确处理。
・请勿对空容器施加压力。如果施加压力,可能会造成其破裂。
・请勿对容器进行焊接、加热、打孔或切断。随着爆炸,残留物可能会起火。
c 注意
如果不使用本公司推荐的润滑油,滚珠丝杠及滚珠花键轴的寿命会下降。

3
定期点检
3-4
■ 切断控制器电源后进行的点检
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器电源。
3 执行点检。
请进入安全防护栏内对以下内容进行点检。
点检位置 点检内容
机器人主机的主要螺栓及螺钉类
(仅限暴露在外部的部分)检查是否存在松动,如果存在松动,请再次拧紧(参见下表)
X、Y、R 轴原点传感器的检出部 如果存在脏污,请进行清洁
控制器
检查控制器外侧的端子是否松动
·检查连接接口是否松动
(参照安装手册的第 2 章< 4.机器人电缆的连接>)
对 Z 轴滚珠丝杠部及花键轴补充润滑油 请参照本章节中的< 4.补充润滑油>。
Z 轴滚珠丝杠、滚珠花键轴 是否发出喀哒声(发生异常时,请联系本公司。)
螺栓拧紧扭矩
螺栓尺寸 拧紧扭矩(kgfcm) 拧紧扭矩(Nm)
M3 半圆头 14 1.4
M4 固定螺钉 20 2.0
M3 20 2.0
M4 46 4.5
M5 92 9.0
M6 156 15.3
M8 380 37
M10 459 45.0
M12 1310 128
M14 2090 205
3
定期点检
3-5
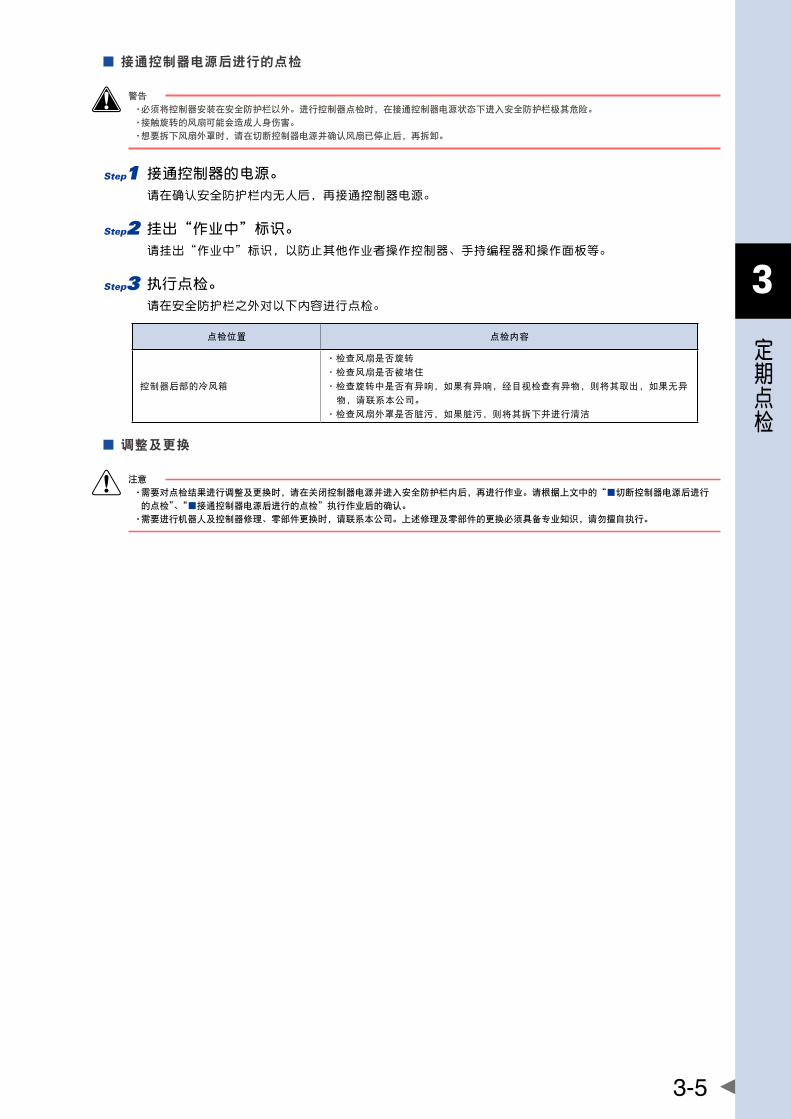
■ 接通控制器电源后进行的点检
w 警告
・必须将控制器安装在安全防护栏以外。进行控制器点检时,在接通控制器电源状态下进入安全防护栏极其危险。
・接触旋转的风扇可能会造成人身伤害。
・想要拆下风扇外罩时,请在切断控制器电源并确认风扇已停止后,再拆卸。
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器、手持编程器和操作面板等。
3 执行点检。
请在安全防护栏之外对以下内容进行点检。
点检位置 点检内容
控制器后部的冷风箱
·检查风扇是否旋转
·检查风扇是否被堵住
·检查旋转中是否有异响,如果有异响,经目视检查有异物,则将其取出,如果无异
物,请联系本公司。
·检查风扇外罩是否脏污,如果脏污,则将其拆下并进行清洁
■ 调整及更换
c 注意
・需要对点检结果进行调整及更换时,请在关闭控制器电源并进入安全防护栏内后,再进行作业。请根据上文中的“■切断控制器电源后进行
的点检”、“■接通控制器电源后进行的点检”执行作业后的确认。
・需要进行机器人及控制器修理、零部件更换时,请联系本公司。上述修理及零部件的更换必须具备专业知识,请勿擅自执行。

3
定期点检
3-6
4. 补充润滑油
4.1 对花键轴补充润滑油
请按照以下步骤对花键轴部补充润滑油。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 用废棉纱头等除去旧的润滑油。
5 补充润滑油。
请将 AlvaniaS2(昭和壳牌石油(株))加到 Z 轴花键轴部(参阅下图)。
补充润滑油YK250XG, YK350XG, YK400XG, YK500XGL, YK600XGL, YK300XGS,YK400XGS
将花键轴向下拉,并在槽部涂抹润滑油
21401-F6-00
补充润滑油補給
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XGYK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
将花键轴向下拉,并在槽部涂抹润滑油
21401-F9-00

3
定期点检
3-7
4.2 对滚珠丝杠补充润滑油
根据以下步骤对滚珠丝杠补充润滑油。
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 拆下 Y 轴机械臂的外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下外盖。
5 用废棉纱头等除去旧的润滑油。
6 补充润滑油。
请将 ALVANIAS2(昭和壳牌石油(株))加到滚珠丝杠的螺母部(参照下图)。
补充润滑油
YK250XG, YK350XG, YK400XG, YK500XGL, YK600XGL, YK300XGS, YK400XGS
外盖
螺丝
垫圈
螺丝
在槽部涂抹一层薄薄的润滑油
放置时,请注意不要损伤外盖。
51801-F6-00
补充润滑油補給
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XGYK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
外盖
从注油嘴补充润滑油補給
滚珠丝杠螺母部有润滑油漏出时,请停止注油。
51801-F9-00

第4章 调整原点
目录
1. 更改原点位置、调整机器参照量 4-1
1.1 传感器方式
(YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,
YK300XGS,YK400XGS) 4-1
1.2 传感器方式
(YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,
YK900XG,YK1000XG)(YK500XGS,YK600XGS,YK700XGS,
YK800XGS,YK900XGS,YK1000XGS) 4-9
2. 调整撞块方式的机器参照量(Z 轴 ) 4-20
2.1 撞块方式
(YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,
YK300XGS,YK400XGS) 4-20
2.2 撞块方式
(YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,
YK900XG,YK1000XG)(YK500XGS,YK600XGS,YK700XGS,
YK800XGS,YK900XGS,YK1000XGS) 4-23

4
调整原点
4-1
1. 更改原点位置、调整机器参照量
在本章节中,将向您介绍更改原点位置,以及调整机器参照量的步骤。
c 注意
・更改了原点位置时,需要进行绝对式原点复位、调整机器参照量、重新设置基准坐标及坐标点数据。
・调整机器参照量时,原点位置可能会发生变化。在进行调整前,请在机器人主机上采用划线等方式标记当前原点位置。调整机器参照量后,
必须确认原点位置没有偏移。调整机器参照量后,如果原点位置发生变化,则必须重新设置基准坐标及坐标点数据。
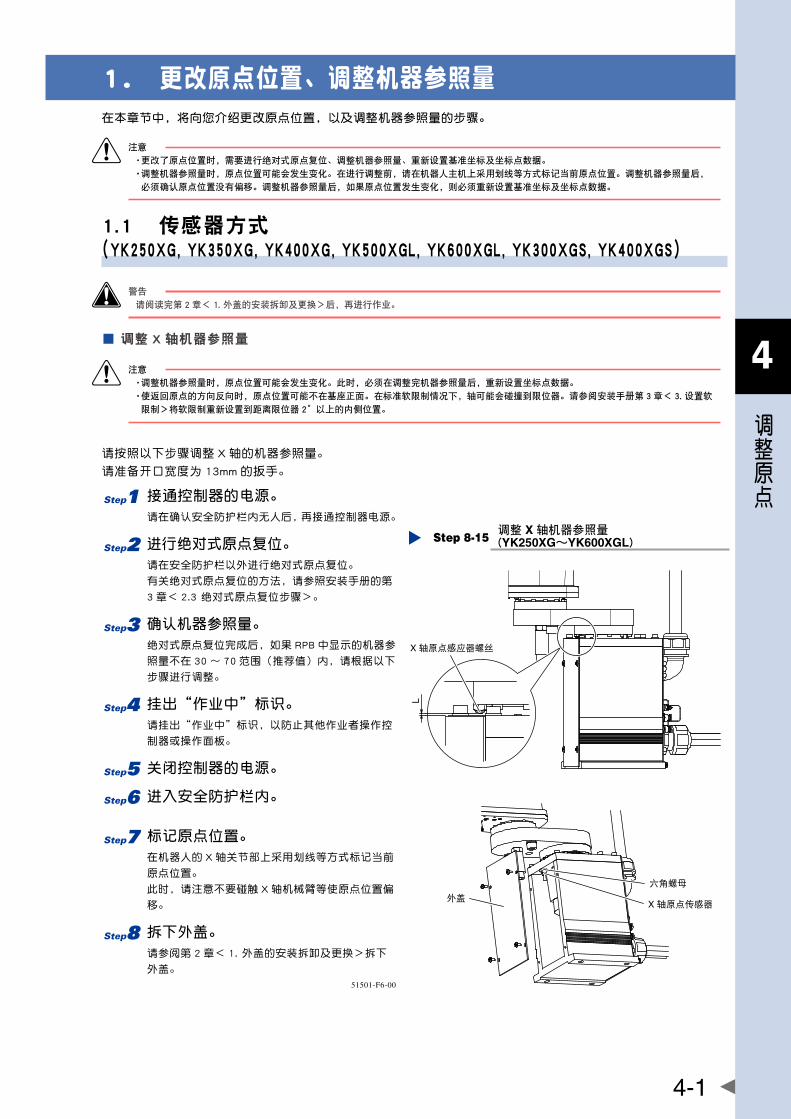
1.1 传感器方式(YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS)
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
■ 调整 X 轴机器参照量
c 注意
・调整机器参照量时,原点位置可能会发生变化。此时,必须在调整完机器参照量后,重新设置坐标点数据。
・使返回原点的方向反向时,原点位置可能不在基座正面。在标准软限制情况下,轴可能会碰撞到限位器。请参阅安装手册第 3章< 3.设置软
限制>将软限制重新设置到距离限位器 2°以上的内侧位置。
请按照以下步骤调整 X 轴的机器参照量。
请准备开口宽度为 13mm 的扳手。
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
有关绝对式原点复位的方法,请参照安装手册的第
3 章< 2.3绝对式原点复位步骤>。
3 确认机器参照量。
绝对式原点复位完成后,如果 RPB 中显示的机器参
照量不在 30 ~ 70 范围(推荐值)内,请根据以下
步骤进行调整。
4 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
5 关闭控制器的电源。
6 进入安全防护栏内。
7 标记原点位置。
在机器人的 X 轴关节部上采用划线等方式标记当前
原点位置。
此时,请注意不要碰触 X 轴机械臂等使原点位置偏
移。
8 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
调整 X 轴机器参照量(YK250XG~YK600XGL)Step 8-15
X 轴原点感应器螺丝
X 轴原点传感器外盖
六角螺母
L
51501-F6-00
4
调整原点
4-2
9 松开六角螺母。
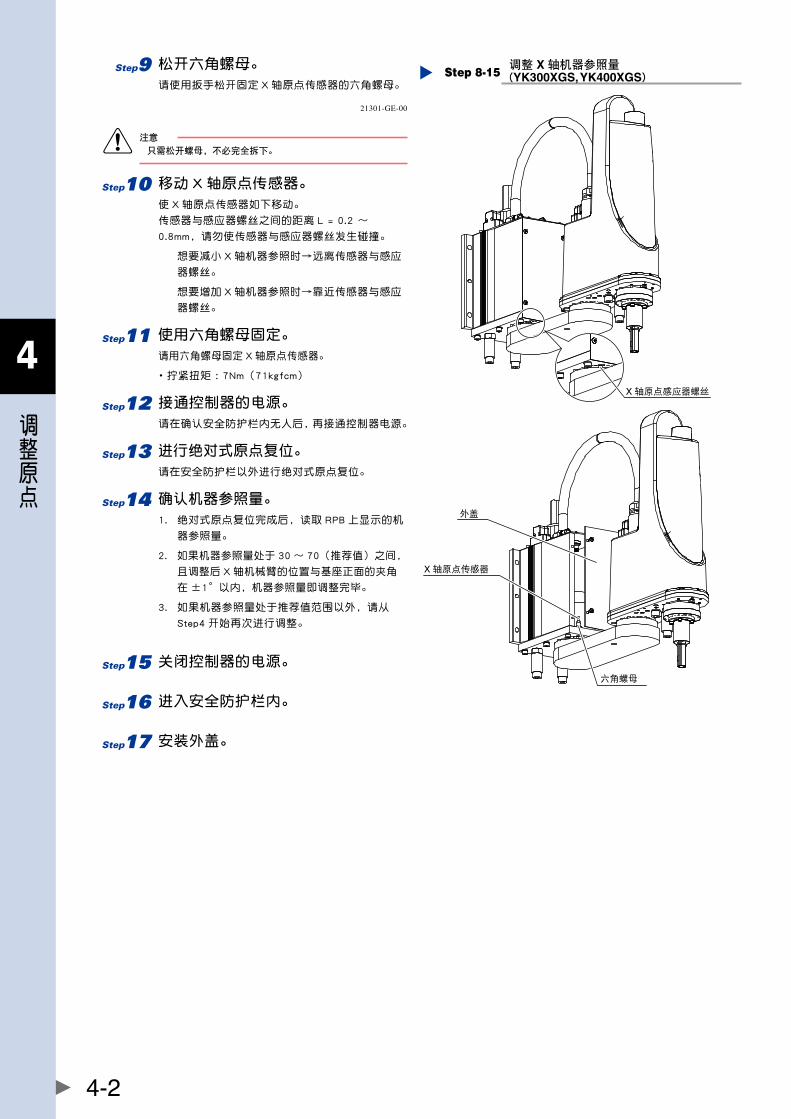
请使用扳手松开固定 X 轴原点传感器的六角螺母。
调整 X 轴机器参照量(YK300XGS, YK400XGS)Step 8-15
外盖
X 轴原点传感器
六角螺母
X 轴原点感应器螺丝
21301-GE-00
c 注意
只需松开螺母,不必完全拆下。
0 移动 X 轴原点传感器。
使 X 轴原点传感器如下移动。
传感器与感应器螺丝之间的距离 L=0.2~
0.8mm,请勿使传感器与感应器螺丝发生碰撞。
想要减小 X 轴机器参照时→远离传感器与感应
器螺丝。
想要增加 X 轴机器参照时→靠近传感器与感应
器螺丝。
q 使用六角螺母固定。
请用六角螺母固定 X 轴原点传感器。
·拧紧扭矩 :7Nm(71kgfcm)
w 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
e 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
r 确认机器参照量。
1. 绝对式原点复位完成后,读取 RPB 上显示的机
器参照量。
2. 如果机器参照量处于 30 ~ 70(推荐值)之间,
且调整后 X 轴机械臂的位置与基座正面的夹角
在±1°以内,机器参照量即调整完毕。
3. 如果机器参照量处于推荐值范围以外,请从
Step4 开始再次进行调整。
t 关闭控制器的电源。
y 进入安全防护栏内。
u 安装外盖。

4
调整原点
4-3
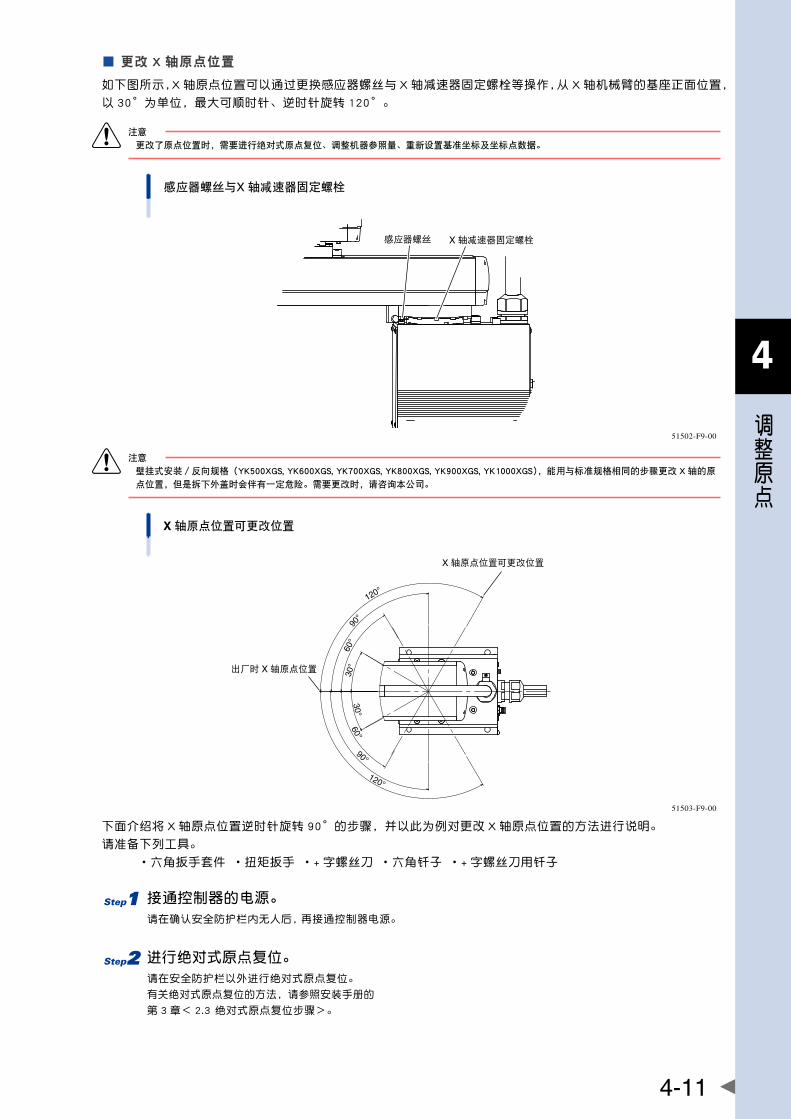
■ 更改 X 轴原点位置
如下图所示,X 轴原点位置可以通过更换感应器螺丝与 X 轴减速器固定螺栓等操作,从 X 轴机械臂的基座正面位置,
以 30°为单位,最大可顺时针、逆时针旋转 120°。
c 注意
更改了原点位置时,需要进行绝对式原点复位、调整机器参照量、重新设置基准坐标及坐标点数据。
感应器螺丝与 X 轴减速器固定螺栓感应器螺丝
X 轴减速器固定螺栓
51502-F6-00
X 轴原点位置可更改位置
X 轴原点位置可更改位置出厂时 X 轴原点位置
120°
90°
60°
30°
30°
60°
90°
120°
51503-F6-00
下面介绍将 X 轴原点位置逆时针旋转 90°的步骤,并以此为例对更改 X 轴原点位置的方法进行说明。
请准备下列工具。
·六角扳手套件·扭矩扳手·+ 字螺丝刀·六角钎子·+ 字螺丝刀用钎子
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
有关绝对式原点复位的方法,请参照安装手册的
第 3 章< 2.3绝对式原点复位步骤>。
3 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
4 关闭控制器的电源。
5 进入安全防护栏内。
6 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下外盖、连接器、X 轴原点传感器、感应器螺丝Step 6-9
感应器螺丝用六角螺母
感应器螺丝
X 轴原点传感器
传感器用六角螺母外盖
51504-F6-00

4
调整原点
4-4
7 拆下X轴原点传感器线XORG连接器。
8 拆下传感器。
请松开 X 轴原点传感器的六角螺母,拆下传感器。
9 拆下感应器螺丝。
请用传感器攻丝拆下感应器螺丝。请将六角螺母留
在基座上。
0 将 X 轴机械臂逆时针旋转 90°。
拆下螺栓Step 10-11
X 轴机械臂
螺栓
51505-F6-00
q 拆下传感器用攻丝对面的螺栓。
w 固定六角螺母和感应器螺丝。
以规定的拧紧扭矩将六角螺母和感应器螺丝固定在
拆下螺栓的攻丝上。
固定六角螺母和感应器螺丝Step 12
感应器螺丝用六角螺母
感应器螺丝
51506-F6-00
e 使 X 轴机械臂返回到原来的原点位置。
r 拧紧螺栓。
将螺栓放入有感应器螺丝的攻丝中,然后以规定的
拧紧扭矩拧紧。
51507-F6-00
t 用六角螺母固定 X 轴原点传感器。
请按照上述“■调整 X 轴机器参照量”的方法,固
定 X 轴原点传感器,注意使传感器与感应器螺丝之
间的距离达到 0.2~0.8mm。
安装螺栓Step 13-14
螺栓
X 轴原点传感器
传感器用六角螺母
c 注意
请勿使传感器与感应器螺丝发生碰撞。
y 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
u 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
i 确认机器参照量。
1. 绝对式原点复位完成后,读取 RPB 上显示的机
器参照量。
2. 如果机器参照量处于 30 ~ 70(推荐值)之间,
则机器参照量的调整即告完成。
n 要点
如果机器参照量处于推荐值范围以外,则参照上述“■调整 X
轴机器参照量”的方法调整机器参照。
感应器螺丝 拧紧扭矩(kgfcm) 拧紧扭矩(Nm)
M3×30 9 90
螺栓 拧紧扭矩(kgfcm) 拧紧扭矩(Nm)
M3×30 20 2.0
请使用本公司的螺栓、或 JISB1176内六角螺栓
(强度区分JISB105112.9)。

4
调整原点
4-5
o 拧紧 X 轴原点传感器的固定螺栓。
·拧紧扭矩:7Nm(71kgfcm)
p 关闭控制器的电源。
a 进入安全防护栏内。
s 安装外盖。
■ 调整 Y 轴机器参照量
c 注意
调整机器参照量时,原点位置可能会发生变化。此时,必须在调整完机器参照量后,重新设置坐标点数据。
请按照以下步骤调整 Y 轴的机器参照量。
请准备开口宽度为 13mm 的扳手。
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
有关绝对式原点复位的方法,请参照安装手册的
第 3 章< 2.3绝对式原点复位步骤>。
3 确认机器参照量。
绝对式原点复位完成后,如果 RPB 中显示的机器参
照量不在 30 ~ 70 范围(推荐值)内,请根据以下
步骤进行调整。
4 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
5 关闭控制器的电源。
6 进入安全防护栏内。
7 标记原点位置。
在机器人的 Y 轴关节部上采用划线等方式标记当前
原点位置。
此时,请注意不要碰触 Y 轴机械臂等使原点位置偏
移。
8 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下外盖Step 8
外盖
螺丝
垫圈
螺丝
请拆下 D-sub 连接器罩盖。
放置时,请注意不要损伤外盖。
51508-F6-00
4
调整原点
4-6
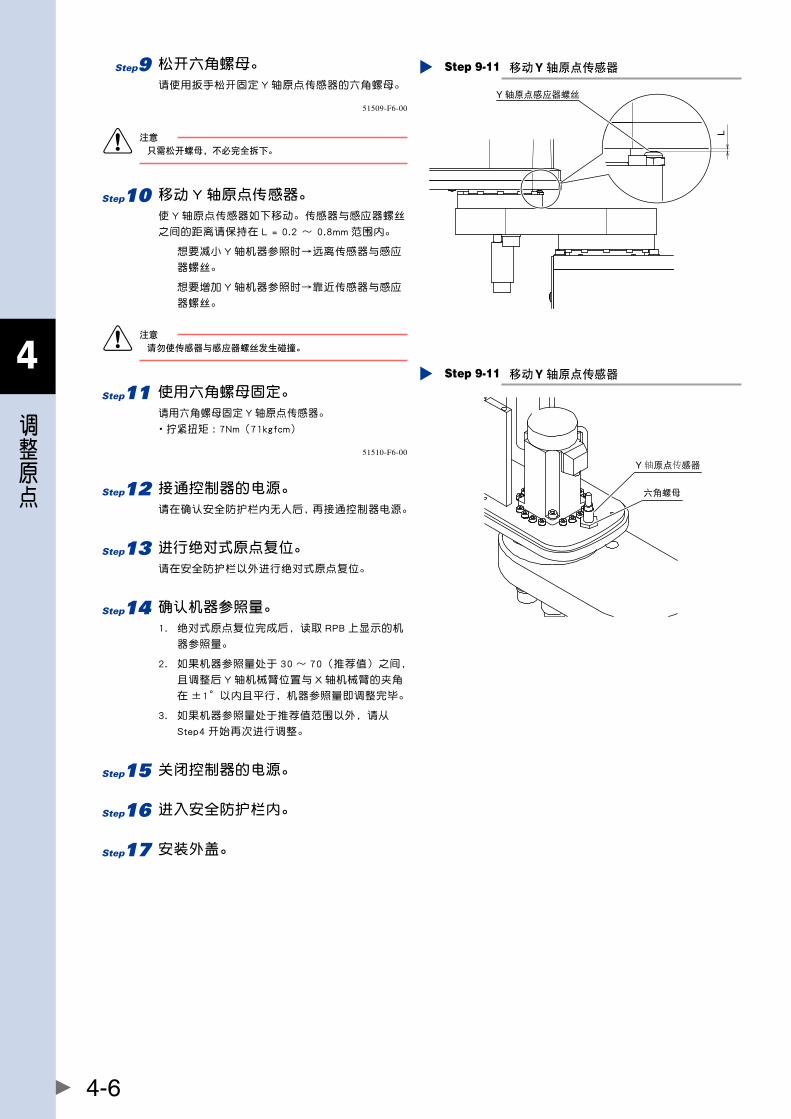
9 松开六角螺母。
请使用扳手松开固定 Y 轴原点传感器的六角螺母。
移动 Y 轴原点传感器動Step 9-11
Y 轴原点感应器螺丝
L
51509-F6-00
c 注意
只需松开螺母,不必完全拆下。
0 移动 Y 轴原点传感器。
使 Y 轴原点传感器如下移动。传感器与感应器螺丝
之间的距离请保持在 L=0.2~0.8mm 范围内。
想要减小 Y 轴机器参照时→远离传感器与感应
器螺丝。
想要增加 Y 轴机器参照时→靠近传感器与感应
器螺丝。
c 注意
请勿使传感器与感应器螺丝发生碰撞。
q 使用六角螺母固定。
请用六角螺母固定 Y 轴原点传感器。
·拧紧扭矩 :7Nm(71kgfcm)
移动 Y 轴原点传感器Step 9-11
Y 轴原点传感器
六角螺母
51510-F6-00
w 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
e 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
r 确认机器参照量。
1. 绝对式原点复位完成后,读取 RPB 上显示的机
器参照量。
2. 如果机器参照量处于 30 ~ 70(推荐值)之间,
且调整后 Y 轴机械臂位置与 X 轴机械臂的夹角
在 ±1°以内且平行,机器参照量即调整完毕。
3. 如果机器参照量处于推荐值范围以外,请从
Step4 开始再次进行调整。
t 关闭控制器的电源。
y 进入安全防护栏内。
u 安装外盖。

4
调整原点
4-7
■ 调整 R 轴机器参照量
c 注意
调整机器参照量时,原点位置可能会发生变化。此时,必须在调整完机器参照量后,重新设置坐标点数据。
请按照以下步骤调整 R 轴的机器参照量。
请准备开口宽度为 13mm 的扳手。
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
有关绝对式原点复位的方法,请参照安装手册的第
3 章< 2.3绝对式原点复位步骤>。
3 确认机器参照量。
绝对式原点复位完成后,如果 RPB 中显示的机器参
照量不在 30 ~ 70 范围(推荐值)内,请根据以下
步骤进行调整。
4 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
5 关闭控制器的电源。
6 进入安全防护栏内。
7 标记原点位置。
在机器人的 R 轴部上采用划线等方式标记当前原点
位置。
此时,请注意不要碰触前端工具等而使原点位置偏
移。
8 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下外盖Step 8
外盖
螺丝
垫圈
螺丝
请拆下 D-sub 连接器罩盖。
放置时,请注意不要损伤外盖。
51511-F6-00
9 松开六角螺母。
请使用扳手松开固定 R 轴原点传感器的六角螺母。移动 R 轴原点传感器Step 9-11
R 轴原点传感器
六角螺母
51512-F6-00
c 注意
只需松开螺栓,不必完全拆下。
4
调整原点
4-8
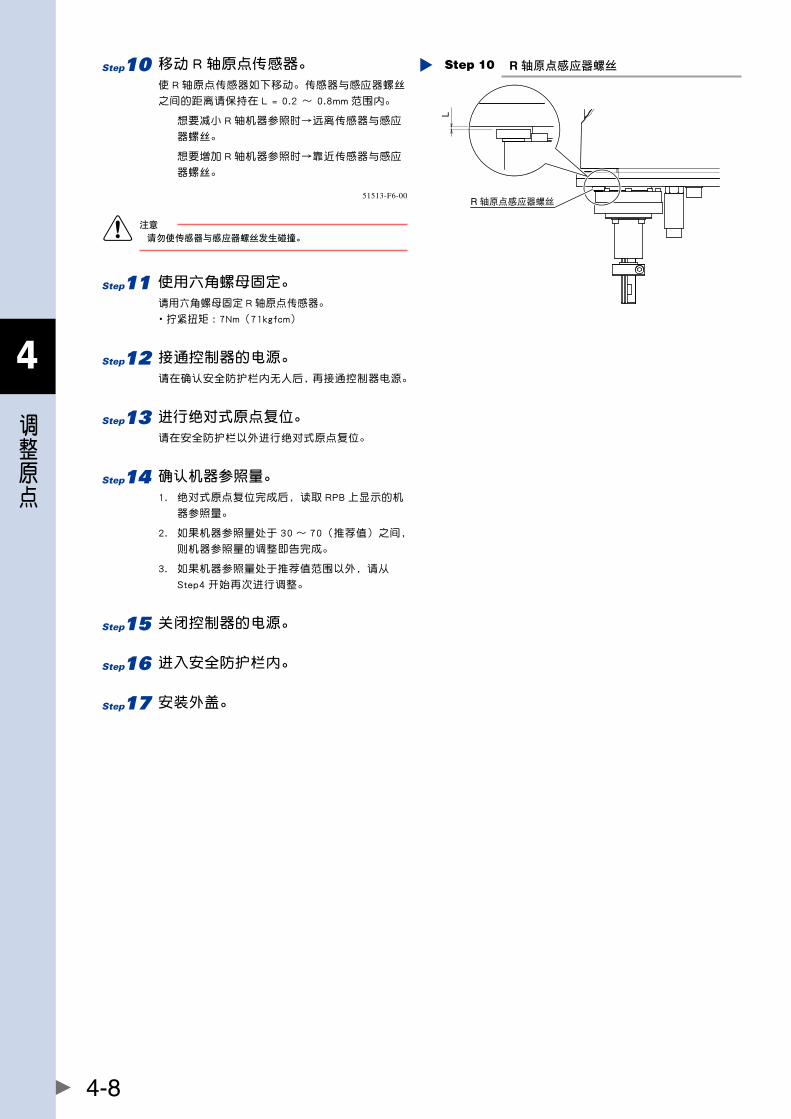
0 移动 R 轴原点传感器。
使 R 轴原点传感器如下移动。传感器与感应器螺丝
之间的距离请保持在 L=0.2~0.8mm 范围内。
想要减小 R 轴机器参照时→远离传感器与感应
器螺丝。
想要增加 R 轴机器参照时→靠近传感器与感应
器螺丝。
R 轴原点感应器螺丝Step 10
R 轴原点感应器螺丝
L
51513-F6-00
c 注意
请勿使传感器与感应器螺丝发生碰撞。
q 使用六角螺母固定。
请用六角螺母固定 R 轴原点传感器。
·拧紧扭矩 :7Nm(71kgfcm)
w 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
e 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
r 确认机器参照量。
1. 绝对式原点复位完成后,读取 RPB 上显示的机
器参照量。
2. 如果机器参照量处于 30 ~ 70(推荐值)之间,
则机器参照量的调整即告完成。
3. 如果机器参照量处于推荐值范围以外,请从
Step4 开始再次进行调整。
t 关闭控制器的电源。
y 进入安全防护栏内。
u 安装外盖。

4
调整原点
4-9
1.2 传感器方式(YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG)(YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS)
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
■ 调整 X 轴机器参照量
c 注意
调整机器参照量时,原点位置可能会发生变化。此时,必须在调整完机器参照量后,重新设置坐标点数据。
请按照以下步骤调整 X 轴的机器参照量。
请准备六角扳手。
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
有关绝对式原点复位的方法,请参照安装手册的第 3
章< 2.3绝对式原点复位步骤>。
3 确认机器参照量。
绝对式原点复位完成后,如果 RPB 中显示的机器参
照量不在 40 ~ 60 范围(推荐值)内,请根据以下
步骤进行调整。
4 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
5 关闭控制器的电源。
6 进入安全防护栏内。
7 标记原点位置。
在机器人的 X 轴关节部上采用划线等方式标记当前
原点位置。
此时,请注意不要碰触 X 轴机械臂等使原点位置偏
移。
8 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
调整 X 轴机器参照量(YK500XG~YK1000XG)Step 8-16
X 轴原点感应器螺丝
X 轴原点传感器支架
X 轴原点传感器
螺栓
外盖
(a)
(b)
51501-F9-00
9 采用划线等方式标记 X 轴原点传感器
支架的位置。
0 松开螺栓。
请使用六角扳手松开固定 X 轴原点传感器支架的螺
栓(2 个)。
c 注意
只需松开螺栓,不必完全拆下。
4
调整原点
4-10
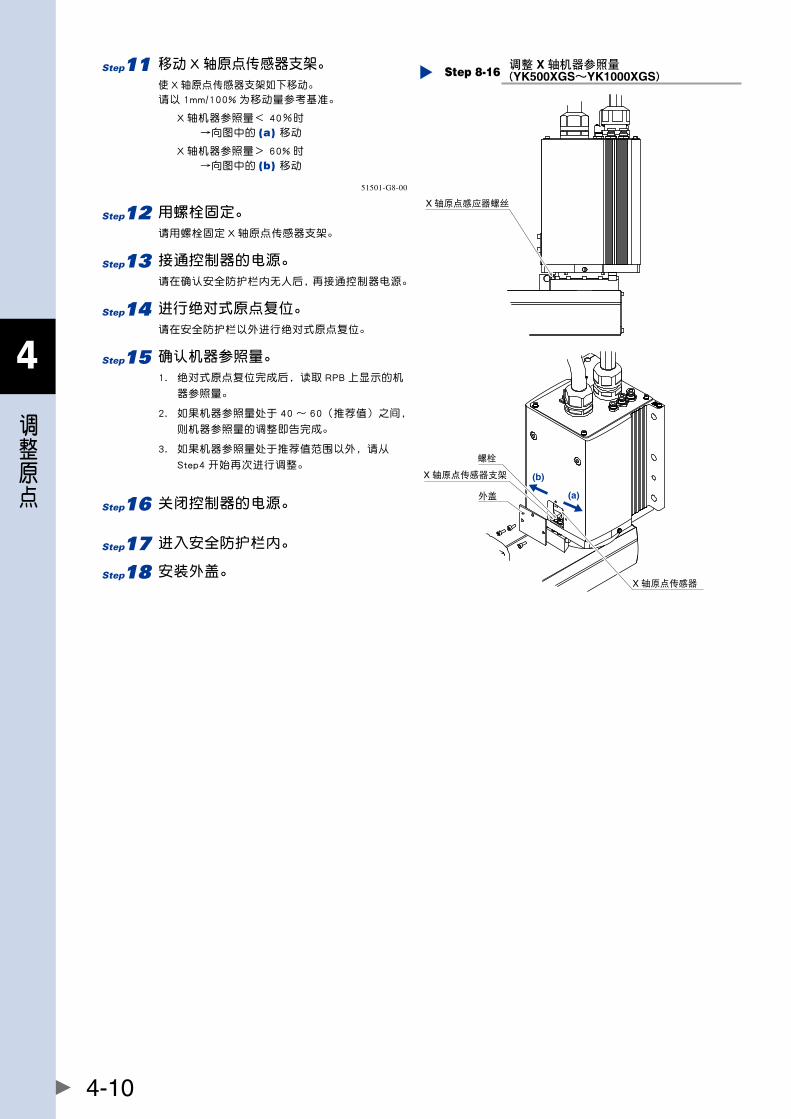
q 移动 X 轴原点传感器支架。
使 X 轴原点传感器支架如下移动。
请以 1mm/100% 为移动量参考基准。
X 轴机器参照量<40%时
→向图中的 (a)移动
X 轴机器参照量>60% 时
→向图中的 (b)移动
调整 X 轴机器参照量(YK500XGS~YK1000XGS)Step 8-16
(a)
(b)
X 轴原点感应器螺丝
外盖
螺栓
X 轴原点传感器支架
X 轴原点传感器
51501-G8-00
w 用螺栓固定。
请用螺栓固定 X 轴原点传感器支架。
e 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
r 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
t 确认机器参照量。
1. 绝对式原点复位完成后,读取 RPB 上显示的机
器参照量。
2. 如果机器参照量处于 40 ~ 60(推荐值)之间,
则机器参照量的调整即告完成。
3. 如果机器参照量处于推荐值范围以外,请从
Step4 开始再次进行调整。
y 关闭控制器的电源。
u 进入安全防护栏内。
i 安装外盖。
4
调整原点
4-11
■ 更改 X 轴原点位置
如下图所示,X 轴原点位置可以通过更换感应器螺丝与 X 轴减速器固定螺栓等操作,从 X 轴机械臂的基座正面位置,
以 30°为单位,最大可顺时针、逆时针旋转 120°。
c 注意
更改了原点位置时,需要进行绝对式原点复位、调整机器参照量、重新设置基准坐标及坐标点数据。
感应器螺丝与X 轴减速器固定螺栓
感应器螺丝 X 轴减速器固定螺栓
51502-F9-00
c 注意
壁挂式安装/反向规格(YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS),能用与标准规格相同的步骤更改 X轴的原
点位置,但是拆下外盖时会伴有一定危险。需要更改时,请咨询本公司。
120°
90°
60°
30°
120°
90°
60°30°
X 轴原点位置可更改位置
出厂时 X 轴原点位置
X 轴原点位置可更改位置
51503-F9-00
下面介绍将 X 轴原点位置逆时针旋转 90°的步骤,并以此为例对更改 X 轴原点位置的方法进行说明。
请准备下列工具。
·六角扳手套件·扭矩扳手·+ 字螺丝刀·六角钎子·+ 字螺丝刀用钎子
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
有关绝对式原点复位的方法,请参照安装手册的
第 3 章< 2.3绝对式原点复位步骤>。

4
调整原点
4-12
3 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
4 关闭控制器的电源。
5 进入安全防护栏内。
6 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下外盖、螺栓、X 轴原点传感器支架Step 6-9
长孔
螺栓
外盖
六角螺母
感应器螺丝
X 轴原点传感器支架
51504-F9-00
7 拆下螺栓。
请使用六角扳手取下固定 X 轴原点传感器支架的螺
栓(2 个)。
8 拆下 X 轴原点传感器支架。
9 拆下感应器螺丝和六角螺母。
请通过长孔,拆下感应器螺丝和六角螺母。请使用
+ 字螺丝刀用钎子和扳手拆下感应器螺丝。
0 将 X 轴机械臂逆时针旋转 90°。
拆下螺栓Step 10-11
螺栓
X 轴机械臂
51505-F9-00
q 取下长孔对面的螺栓。
w 固定六角螺母和感应器螺丝。
以规定的拧紧扭矩将六角螺母和感应器螺丝固定在
拆下螺栓的攻丝上。
固定六角螺母和感应器螺丝Step 12
感应器螺丝
六角螺母51506-F9-00
机型 感应器螺丝
拧紧扭矩 (kgfcm)
拧紧扭矩(Nm)
YK500XG,YK600XGYK500XGS,YK600XGS M4×30 16 160
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK700XGS,YK800XGS,YK900XGS,YK1000XGS
M5×40 32 320
4
调整原点
4-13
e 使 X 轴机械臂返回到原来的原点位置。
r 拧紧螺栓。
将螺栓放入有感应器螺丝的攻丝中,然后以规定的
拧紧扭矩拧紧。
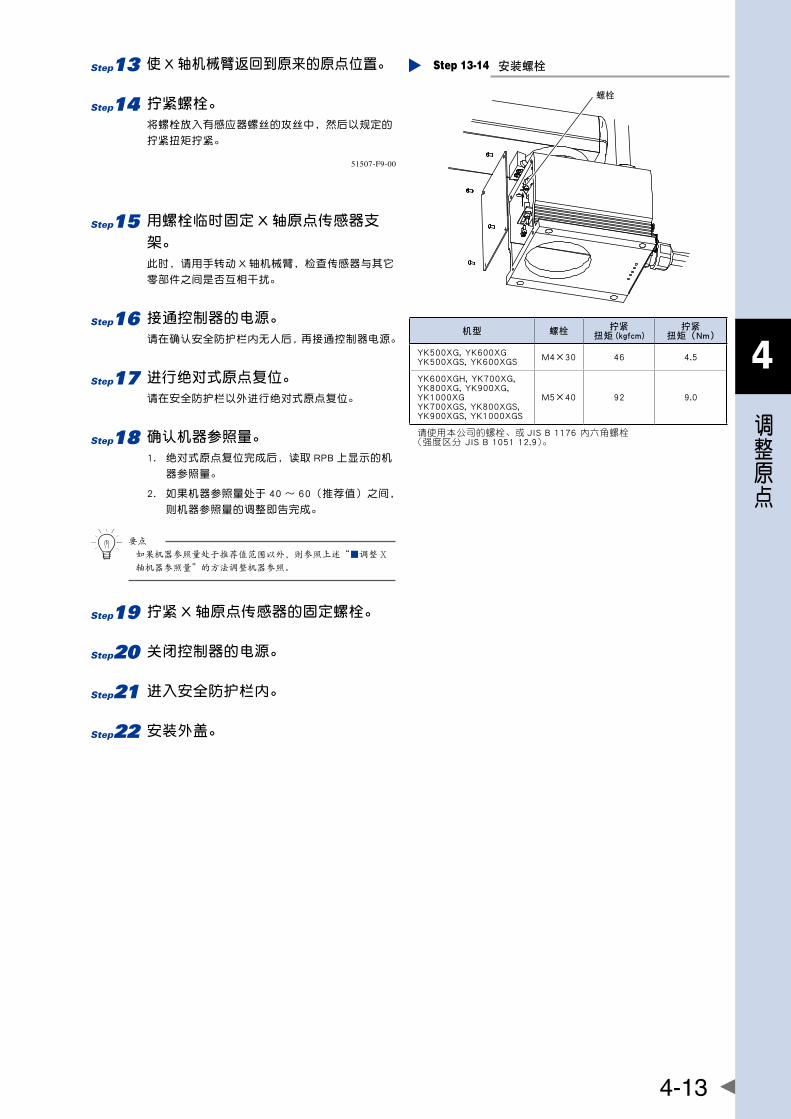
安装螺栓Step 13-14
螺栓
51507-F9-00
t 用螺栓临时固定 X 轴原点传感器支
架。
此时,请用手转动 X 轴机械臂,检查传感器与其它
零部件之间是否互相干扰。
y 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
u 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
i 确认机器参照量。
1. 绝对式原点复位完成后,读取 RPB 上显示的机
器参照量。
2. 如果机器参照量处于 40 ~ 60(推荐值)之间,
则机器参照量的调整即告完成。
n 要点
如果机器参照量处于推荐值范围以外,则参照上述“■调整 X
轴机器参照量”的方法调整机器参照。
o 拧紧 X 轴原点传感器的固定螺栓。
p 关闭控制器的电源。
a 进入安全防护栏内。
s 安装外盖。
机型 螺栓 拧紧扭矩 (kgfcm)
拧紧扭矩(Nm)
YK500XG,YK600XGYK500XGS,YK600XGS M4×30 46 4.5
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK700XGS,YK800XGS,YK900XGS,YK1000XGS
M5×40 92 9.0
请使用本公司的螺栓、或 JISB1176内六角螺栓 (强度区分JISB105112.9)。
4
调整原点
4-14
■ 调整 Y 轴机器参照量
c 注意
调整机器参照量时,原点位置可能会发生变化。此时,必须在调整完机器参照量后,重新设置坐标点数据。
请按照以下步骤调整 Y 轴的机器参照量。
请准备六角扳手。
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
有关绝对式原点复位的方法,请参照安装手册的第 3
章< 2.3绝对式原点复位步骤>。
3 确认机器参照量。
绝对式原点复位完成后,如果 RPB 中显示的机器参
照量不在 40 ~ 60 范围(推荐值)内,请根据以下
步骤进行调整。
4 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
5 关闭控制器的电源。
6 进入安全防护栏内。
7 标记原点位置。
在机器人的 Y 轴关节部上采用划线等方式标记当前
原点位置。
此时,请注意不要碰触 Y 轴机械臂等使原点位置偏
移。
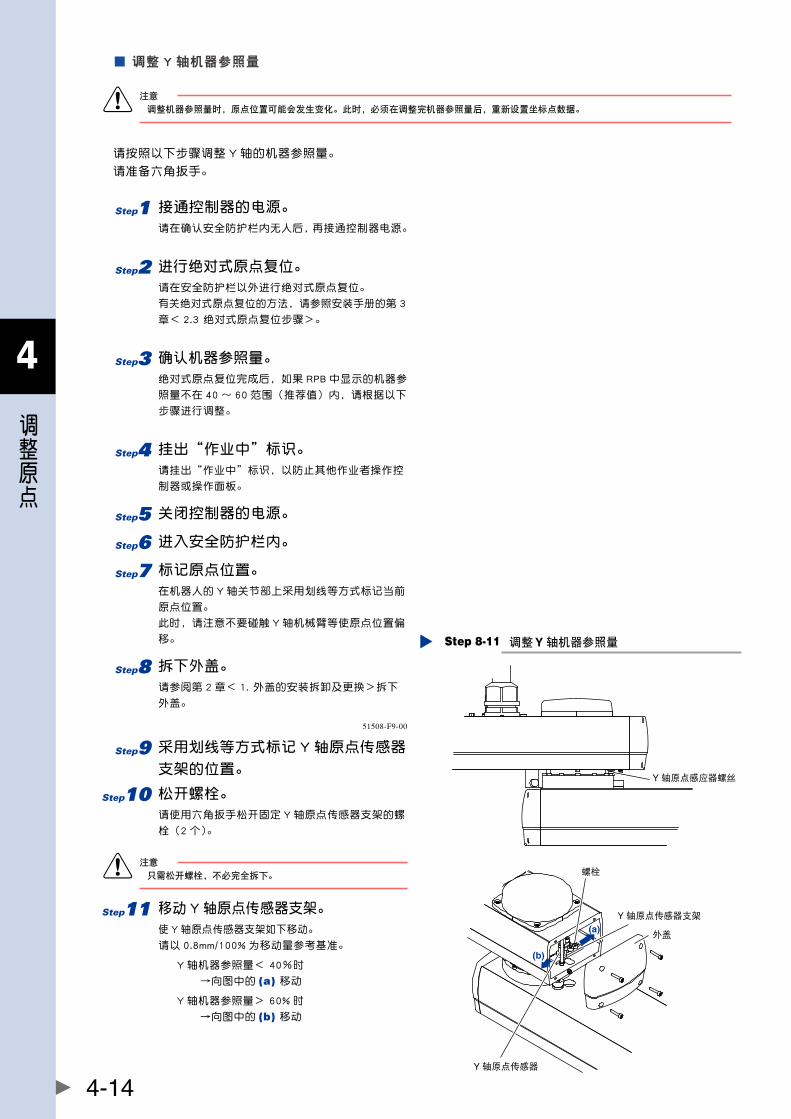
8 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
调整 Y 轴机器参照量Step 8-11
Y 轴原点感应器螺丝
Y 轴原点传感器支架
外盖
螺栓
Y 轴原点传感器
(a)
(b)
51508-F9-00
9 采用划线等方式标记 Y 轴原点传感器
支架的位置。
0 松开螺栓。
请使用六角扳手松开固定 Y 轴原点传感器支架的螺
栓(2 个)。
c 注意
只需松开螺栓,不必完全拆下。
q 移动 Y 轴原点传感器支架。
使 Y 轴原点传感器支架如下移动。
请以 0.8mm/100% 为移动量参考基准。
Y 轴机器参照量<40%时
→向图中的 (a)移动
Y 轴机器参照量>60% 时
→向图中的 (b)移动
4
调整原点
4-15
w 用螺栓固定。
请用螺栓固定 Y 轴原点传感器支架。
e 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
r 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
t 确认机器参照量。
1. 绝对式原点复位完成后,读取 RPB 上显示的机
器参照量。
2. 如果机器参照量处于 40 ~ 60(推荐值)之间,
则机器参照量的调整即告完成。
3. 如果机器参照量处于推荐值范围以外,请从
Step4 开始再次进行调整。
y 关闭控制器的电源。
u 进入安全防护栏内。
i 安装外盖。
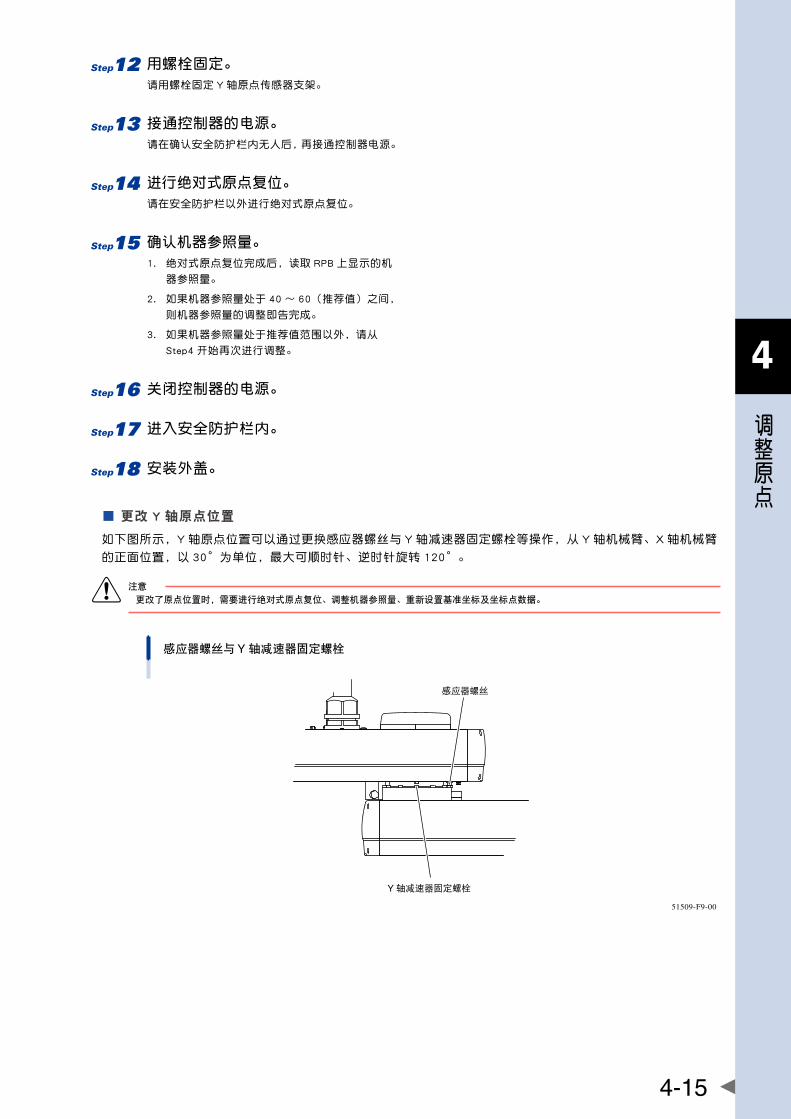
■ 更改 Y 轴原点位置
如下图所示,Y 轴原点位置可以通过更换感应器螺丝与 Y 轴减速器固定螺栓等操作,从 Y 轴机械臂、X 轴机械臂
的正面位置,以 30°为单位,最大可顺时针、逆时针旋转 120°。
c 注意
更改了原点位置时,需要进行绝对式原点复位、调整机器参照量、重新设置基准坐标及坐标点数据。
感应器螺丝与 Y 轴减速器固定螺栓
感应器螺丝
Y 轴减速器固定螺栓
51509-F9-00
4
调整原点
4-16
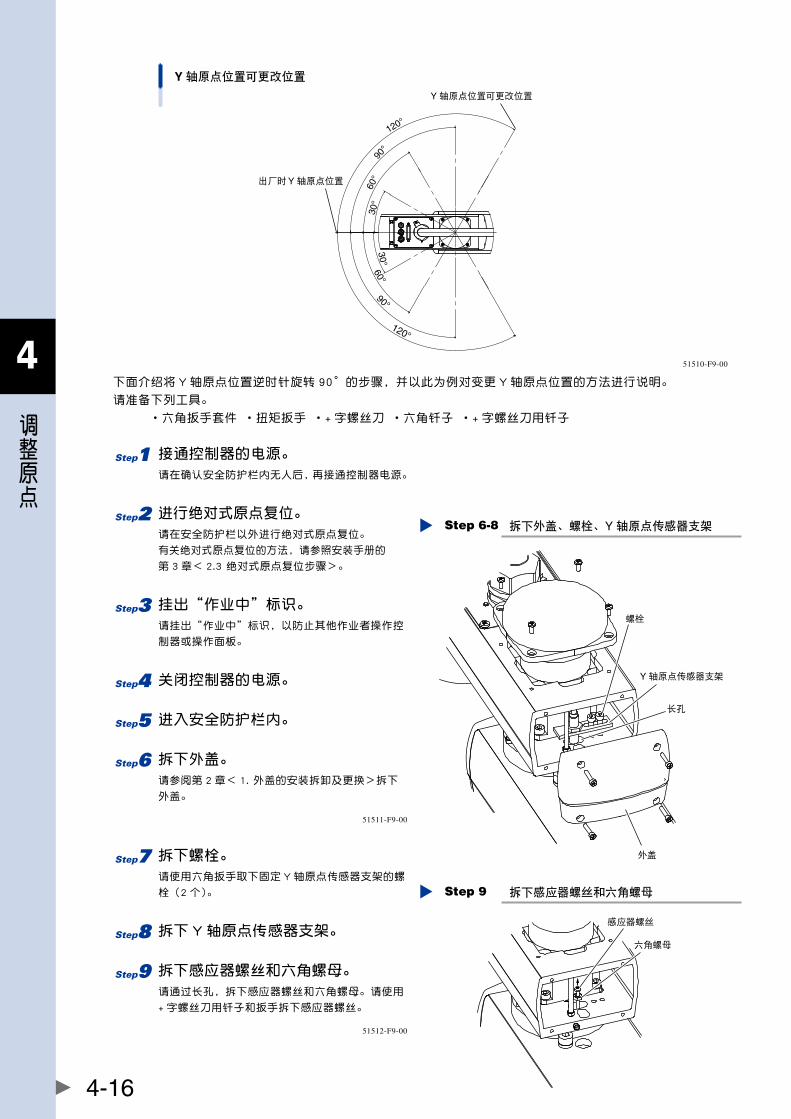
Y 轴原点位置可更改位置
出厂时 Y 轴原点位置
Y 轴原点位置可更改位置
120°
90°
60°
30°
120°
90°
60°30°
51510-F9-00
下面介绍将 Y 轴原点位置逆时针旋转 90°的步骤,并以此为例对变更 Y 轴原点位置的方法进行说明。
请准备下列工具。
·六角扳手套件·扭矩扳手·+ 字螺丝刀·六角钎子·+ 字螺丝刀用钎子
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
有关绝对式原点复位的方法,请参照安装手册的
第 3 章< 2.3绝对式原点复位步骤>。
3 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
4 关闭控制器的电源。
5 进入安全防护栏内。
6 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
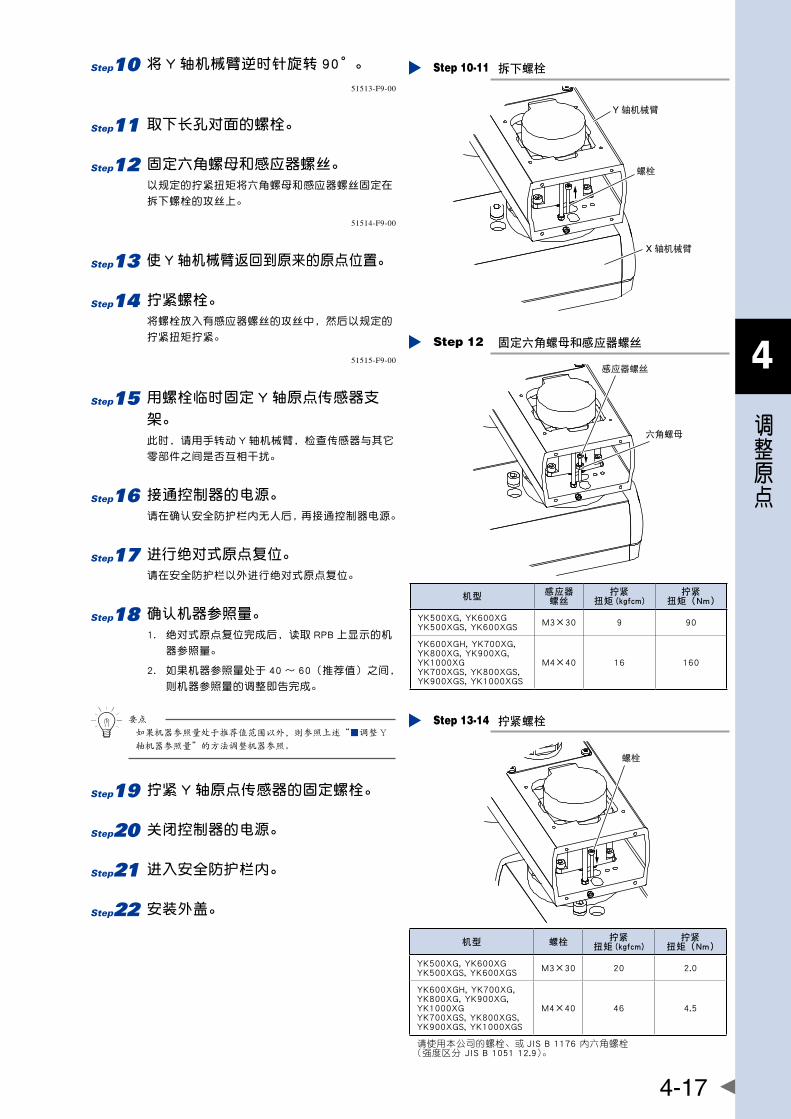
拆下外盖、螺栓、Y 轴原点传感器支架Step 6-8
外盖
长孔
Y 轴原点传感器支架
螺栓
51511-F9-00
7 拆下螺栓。
请使用六角扳手取下固定 Y 轴原点传感器支架的螺
栓(2 个)。
8 拆下 Y 轴原点传感器支架。
9 拆下感应器螺丝和六角螺母。
请通过长孔,拆下感应器螺丝和六角螺母。请使用
+ 字螺丝刀用钎子和扳手拆下感应器螺丝。
拆下感应器螺丝和六角螺母Step 9
感应器螺丝
六角螺母
51512-F9-00
4
调整原点
4-17
0 将 Y 轴机械臂逆时针旋转 90°。 拆下螺栓Step 10-11
螺栓
Y 轴机械臂
X 轴机械臂
51513-F9-00
q 取下长孔对面的螺栓。
w 固定六角螺母和感应器螺丝。
以规定的拧紧扭矩将六角螺母和感应器螺丝固定在
拆下螺栓的攻丝上。
51514-F9-00
e 使 Y 轴机械臂返回到原来的原点位置。
r 拧紧螺栓。
将螺栓放入有感应器螺丝的攻丝中,然后以规定的
拧紧扭矩拧紧。 固定六角螺母和感应器螺丝Step 12
感应器螺丝
六角螺母
51515-F9-00
t 用螺栓临时固定 Y 轴原点传感器支
架。
此时,请用手转动 Y 轴机械臂,检查传感器与其它
零部件之间是否互相干扰。
y 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
u 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
i 确认机器参照量。
1. 绝对式原点复位完成后,读取 RPB 上显示的机
器参照量。
2. 如果机器参照量处于 40 ~ 60(推荐值)之间,
则机器参照量的调整即告完成。
拧紧螺栓Step 13-14
螺栓
n 要点
如果机器参照量处于推荐值范围以外,则参照上述“■调整 Y
轴机器参照量”的方法调整机器参照。
o 拧紧 Y 轴原点传感器的固定螺栓。
p 关闭控制器的电源。
a 进入安全防护栏内。
s 安装外盖。
机型 感应器螺丝
拧紧扭矩 (kgfcm)
拧紧扭矩(Nm)
YK500XG,YK600XGYK500XGS,YK600XGS M3×30 9 90
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK700XGS,YK800XGS,YK900XGS,YK1000XGS
M4×40 16 160
机型 螺栓 拧紧扭矩 (kgfcm)
拧紧扭矩(Nm)
YK500XG,YK600XGYK500XGS,YK600XGS M3×30 20 2.0
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK700XGS,YK800XGS,YK900XGS,YK1000XGS
M4×40 46 4.5
请使用本公司的螺栓、或 JISB1176内六角螺栓 (强度区分JISB105112.9)。
4
调整原点
4-18
■ 调整 R 轴机器参照量
c 注意
调整机器参照量时,原点位置可能会发生变化。此时,必须在调整完机器参照量后,重新设置坐标点数据。
请按照以下步骤调整 R 轴的机器参照量。
请准备六角扳手。
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
有关绝对式原点复位的方法,请参照安装手册的第 3
章< 2.3绝对式原点复位步骤>。
3 确认机器参照量。
绝对式原点复位完成后,如果 RPB 中显示的机器参
照量不在 40 ~ 60 范围(推荐值)内,请根据以下
步骤进行调整。
4 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
5 关闭控制器的电源。
6 进入安全防护栏内。
7 标记原点位置。
在机器人的 R 轴部上采用划线等方式标记当前原点
位置。
此时,请注意不要碰触前端工具等而使原点位置偏
移。
8 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
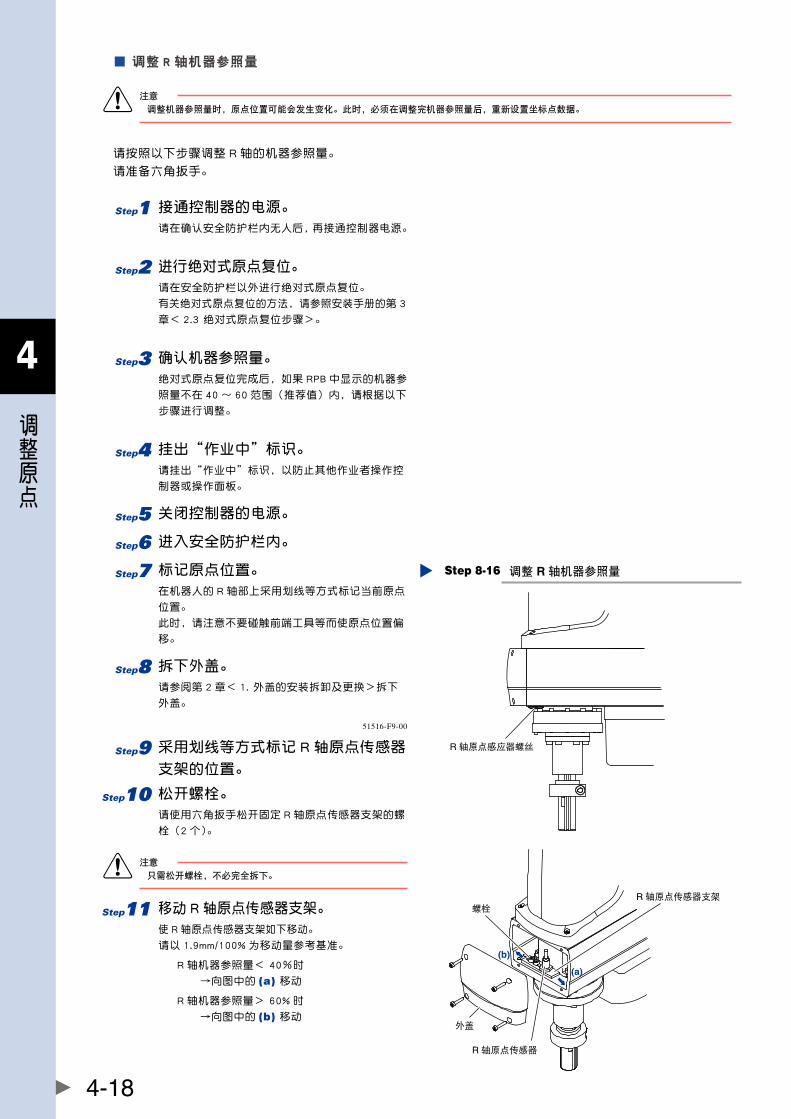
调整 R 轴机器参照量Step 8-16
R 轴原点感应器螺丝
螺栓R 轴原点传感器支架
R 轴原点传感器
外盖
(a)
(b)
51516-F9-00
9 采用划线等方式标记 R 轴原点传感器
支架的位置。
0 松开螺栓。
请使用六角扳手松开固定 R 轴原点传感器支架的螺
栓(2 个)。
c 注意
只需松开螺栓,不必完全拆下。
q 移动 R 轴原点传感器支架。
使 R 轴原点传感器支架如下移动。
请以 1.9mm/100% 为移动量参考基准。
R 轴机器参照量<40%时
→向图中的 (a)移动
R 轴机器参照量>60% 时
→向图中的 (b)移动

4
调整原点
4-19
w 用螺栓固定。
请用螺栓固定 R 轴原点传感器支架。
e 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
r 进行绝对式原点复位。
请在安全防护栏以外进行绝对式原点复位。
t 确认机器参照量。
1. 绝对式原点复位完成后,读取 RPB 上显示的机
器参照量。
2. 如果机器参照量处于 40 ~ 60(推荐值)之间,
则机器参照量的调整即告完成。
3. 如果机器参照量处于推荐值范围以外,请从
Step4 开始再次进行调整。
y 关闭控制器的电源。
u 进入安全防护栏内。
i 安装外盖。
4
调整原点
4-20
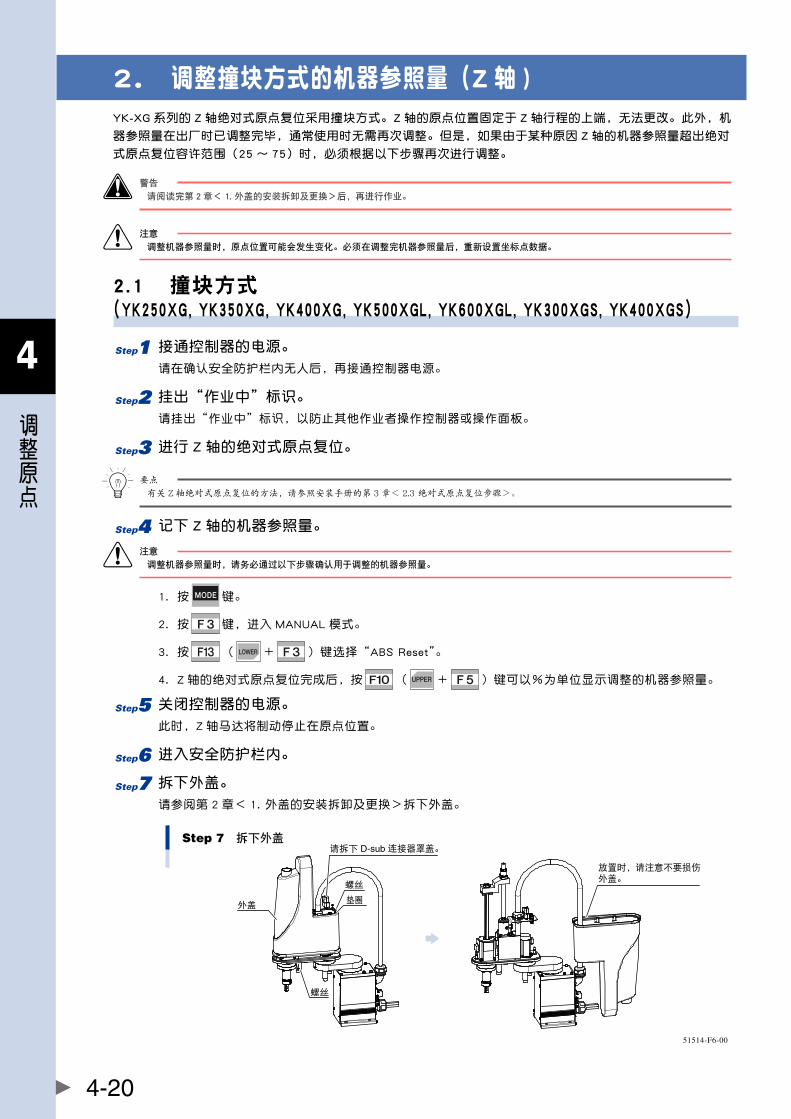
2. 调整撞块方式的机器参照量(Z 轴 )
YK-XG 系列的 Z 轴绝对式原点复位采用撞块方式。Z 轴的原点位置固定于 Z 轴行程的上端,无法更改。此外,机
器参照量在出厂时已调整完毕,通常使用时无需再次调整。但是,如果由于某种原因 Z 轴的机器参照量超出绝对
式原点复位容许范围(25 ~ 75)时,必须根据以下步骤再次进行调整。
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
c 注意
调整机器参照量时,原点位置可能会发生变化。必须在调整完机器参照量后,重新设置坐标点数据。
2.1 撞块方式(YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS)
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进行 Z 轴的绝对式原点复位。
n 要点
有关 Z 轴绝对式原点复位的方法,请参照安装手册的第 3 章< 2.3 绝对式原点复位步骤>。
4 记下 Z 轴的机器参照量。
c 注意
调整机器参照量时,请务必通过以下步骤确认用于调整的机器参照量。
1. 按 键。
2. 按 键,进入 MANUAL 模式。
3. 按 ( + )键选择“ABSReset”。
4. Z 轴的绝对式原点复位完成后,按 ( + )键可以%为单位显示调整的机器参照量。
5 关闭控制器的电源。
此时,Z 轴马达将制动停止在原点位置。
6 进入安全防护栏内。
7 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下外盖。
Step 7 拆下外盖
外盖
螺丝
垫圈
螺丝
请拆下 D-sub 连接器罩盖。
放置时,请注意不要损伤外盖。
51514-F6-00

4
调整原点
4-21
w 警告
如果解除 Z轴的制动,或松开以下螺栓,则 Z轴存在掉落危险。请务必用支座等支撑 Z轴。
8 为了防止 Z 轴落下,请使用支座等支撑花键轴或末端执行器。
9 解除 Z 轴的制动。
请在 Z 轴已采取防坠措施的前提下解除 Z 轴制动。
n 要点
有关解除方法,请参阅《YAMAHA 机器人控制器使用说明书》。
而 RCX240 控制器的详情,请参阅第 1 章< 1. 放开被机器人夹到人员的方法>。
0 启用 Z 轴制动。
启用制动时上下移动 Z 轴,使螺栓位于孔的中央。
Step 10-13 调整 Z 轴机器参照量
Z 轴限位器
滚珠丝杠轴
聚氨酯减震器
孔 标记
螺栓(本公司零部件编号:90990-01J068)
L
51515-F6-00
q 在滚珠丝杠和聚氨酯减震器上做好标记。
w 松开螺栓。
e 对着马达轴转动滚珠丝杠。
旋转 30°,机器参照会变化 33%。
顺时针方向(顶视)旋转滚珠丝杠,机器参照减少,逆时针方向旋转,机器参照增加。
决定滚珠丝杠的位置时,请使 Step4 中记下的 Z 轴机器参照量在 30~70 之间。
4
调整原点
4-22
r 拧紧螺栓。
·拧紧扭矩:1.1Nm(11kgfcm)
螺栓的内六角容易破损,操作时请注意。
t 走出安全防护栏。
y 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
u 进行 Z 轴的绝对式原点复位。
n 要点
有关 Z 轴绝对式原点复位的方法,请参照安装手册的第 3 章< 2.3 绝对式原点复位步骤>。
i 确认 Z 轴的机器参照量。
请确认调整的机器参照量是否在绝对式原点复位容许范围 (30 ~ 70) 以内。
如果机器参照量在容许范围 (30 ~ 70) 以外 , 请根据 Step5 以后的步骤重新调整。
o 关闭控制器的电源。
p 进入安全防护栏内。
a 安装外盖。
机器参照量符合容许值范围后,请安装外盖。

4
调整原点
4-23
2.2 撞块方式(YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG)(YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS)
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进行 Z 轴的绝对式原点复位。
n 要点
有关 Z 轴绝对式原点复位的方法,请参照安装手册的第 3 章< 2.3 绝对式原点复位步骤>。
4 记下 Z 轴的机器参照量。
c 注意
调整机器参照量时,请务必通过以下步骤确认用于调整的机器参照量。
1. 按 键。
2. 按 键,进入 MANUAL 模式。
3. 按 ( + )键选择“ABSReset”。
4. Z 轴的绝对式原点复位完成后,按 ( + )键可以%为单位显示调整的机器参照量。
5 关闭控制器的电源。
此时,Z 轴马达将制动停止在原点位置。
6 进入安全防护栏内。
7 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下外盖。
Step 7 拆下外盖
外盖
背面盖
51517-F9-00

4
调整原点
4-24
w 警告
Z 轴马达的滚珠丝杠松脱,Z轴会有掉落危险。请务必用支座等支撑 Z轴。
8 为了防止 Z 轴落下,请使用支座等支撑花键轴或末端执行器。
9 将 Z 轴下降端减震器略向上抬起。
不易抬起时,请在减震器和支架之间插入 - 字螺丝刀,利用杠杆作用撑起。
Step 9-11 调整 Z 轴机器参照量
滚珠丝杠
Z 轴下降端减震器
开口宽度
Z 轴马达轴(在法兰下侧)
法兰
标记
M3×12螺栓
*请使用本公司的螺栓、或 JIS B 1176 内六角螺栓(强度区分:JIS B1051 12.9)。
51518-F9-00
0 做好标记。
为了使相对于 Z 轴马达轴的当前法兰位置容易辨认,请做好标记。
q 拆下螺栓。
将扳手套在法兰的两个面上,松开并取下螺栓。
滚珠丝杠脱离 Z 轴马达,变为旋转自由状态。
w 对着马达轴转动法兰。
旋转 30°,机器参照会变化 33%。
顺时针方向(顶视)旋转法兰,机器参照减少,逆时针方向旋转,机器参照增加。
决定法兰的位置时,请使 Step4 中记下的 Z 轴机器参照量在 25~75%之间。
Step 12 调整法兰的位置
逆时针方向逆时针方向
顺时针方向顺时针方向
51519-F9-00

4
调整原点
4-25
e 拧紧螺栓。
请用对角线法慢慢拧紧螺栓。
·拧紧扭矩 :2.0Nm(20kgfcm)
将螺栓固定在 12 个通孔中的 10 个通孔里。
r 走出安全防护栏。
t 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
y 进行 Z 轴的绝对式原点复位。
n 要点
有关 Z 轴绝对式原点复位的方法,请参照安装手册的第 3 章< 2.3 绝对式原点复位步骤>。
u 重新确认 Z 轴的机器参照量。
请确认调整的机器参照量是否在绝对式原点复位容许范围 (25 ~ 75) 以内。
如果机器参照量在容许范围 (25 ~ 75) 以外 , 请根据 Step5 以后的步骤重新调整。
i 关闭控制器的电源。
o 进入安全防护栏内。
p 安装外盖。
机器参照量符合容许值范围后,使 Z 轴下降端减震器紧贴支架,然后安装外盖。请注意不要有漏拧的螺钉。

第5章 更换谐波传动
目录
1. 更换谐波传动时的注意事项 5-1
2. 谐波传动的更换步骤 5-2
2.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,
YK300XGS,YK400XGS 5-2
2.1.1 更换 X 轴的谐波传动 5-2
2.1.2 更换 Y 轴的谐波传动 5-11
2.1.3 更换 R 轴的谐波传动 5-17
2.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 5-26
2.2.1 更换 X 轴的谐波传动 5-26
2.2.2 更换 Y 轴的谐波传动 5-35
2.2.3 更换 R 轴的谐波传动 5-47

5
更换谐波传动
5-1
1. 更换谐波传动时的注意事项
更换谐波传动时的注意事项如下所示。请务必在仔细阅读本项更换步骤及注意事项后,再进行更换作业。
■ 更换谐波传动时的注意事项
w 警告
・自动运行后的马达及减速器外壳会产生高温,碰触到人体可能会造成烫伤。若要碰触设备,请切断控制器电源后稍等一段时间,确认温度已
下降后再碰触设备。
・从马达轴上拆下波发生器以及将波发生器安装到马达轴上时,请尽量勿对马达轴施加轴向负载。否则可能导致旋转变压器损坏及机器人误动作,
非常危险。
使用谐波润滑油及清洗油时的注意事项
・上述溶液如果进入眼睛,可能会引起眼睛发炎。
使用时,请使用护目镜等防止其进入眼睛。
・接触皮肤可能会引起发炎。使用时,请使用防护手套等防止润滑油或清洗油接触皮肤。
・请勿吞食。(吞食会造成腹泻及呕吐。)
・打开容器时,可能会划伤手。请使用防护手套。
・请置于儿童够不到的地方。
・请勿对润滑油或清洗油进行加热,或者使润滑油或清洗油靠近火源。否则可能会造成起火或燃烧。
应急处理
・如果进入眼睛,请用洁净的水冲洗 15 分钟并就医。
・如果接触皮肤,请用水和肥皂充分洗净。
・不慎吞食时,请勿强行吐出,请立即就医。
谐波润滑油、清洗油的废油及废弃物容器的处理
・处理方法应遵照法令的规定。请根据相关法令进行正确处理。
・请勿对空容器施加压力。如果施加压力,可能会造成其破裂。
・请勿对容器进行焊接、加热、打孔或切断。随着爆炸,残留物可能会起火。
c 注意
如果不使用本公司推荐的润滑油,谐波传动将损坏。
■ 推荐润滑油
请对谐波传动使用以下润滑油。
(株)HarmonicDriveSystemsInc. 制造的 4BNo.2
c 注意
关于谐波传动
・请勿使用锤子等工具对各零部件施加强力冲击。此外,请勿因为掉落等原因对各零部件造成损伤或瘪痕。否则可能会造成其损坏。
・若在损坏状态下使用,将无法保持规定的性能。还会造成破裂等故障。
・伴随着谐波传动的更换,将发生位置偏移。在更换谐波传动之后,必须进行绝对式原点复位及重新设置基准坐标和坐标点数据。
5
更换谐波传动
5-2
2. 谐波传动的更换步骤
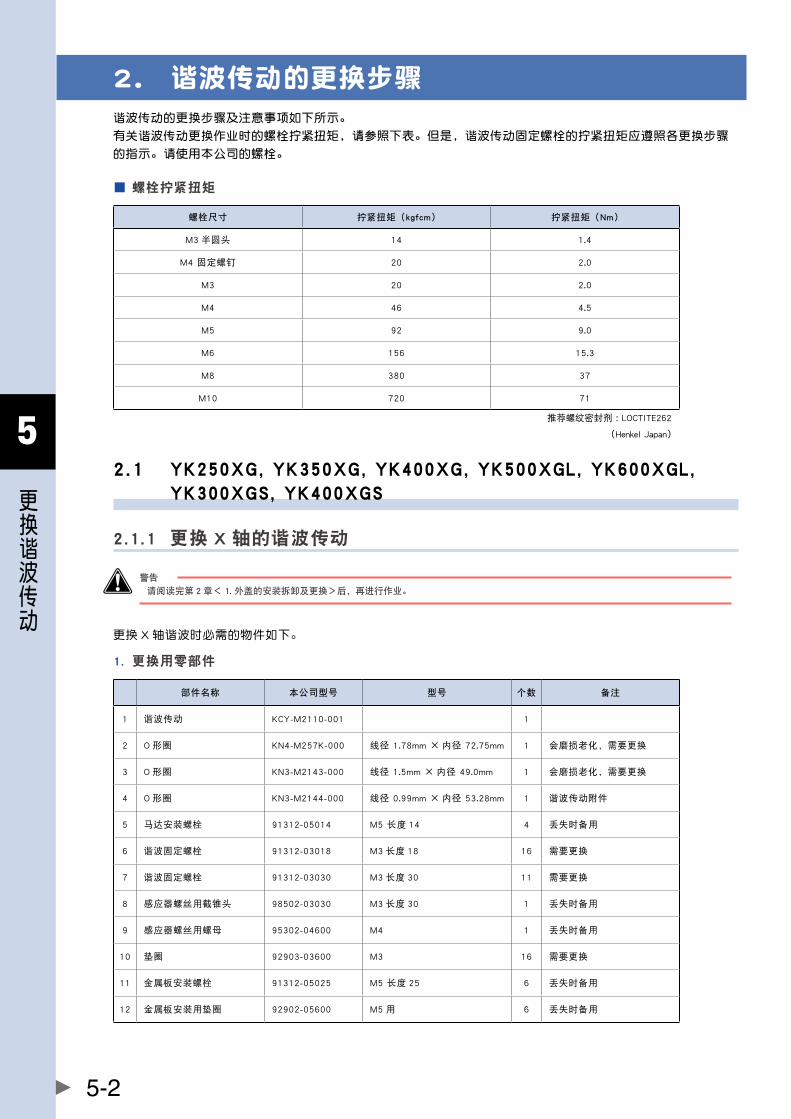
谐波传动的更换步骤及注意事项如下所示。
有关谐波传动更换作业时的螺栓拧紧扭矩,请参照下表。但是,谐波传动固定螺栓的拧紧扭矩应遵照各更换步骤
的指示。请使用本公司的螺栓。
■ 螺栓拧紧扭矩
螺栓尺寸 拧紧扭矩(kgfcm) 拧紧扭矩(Nm)
M3 半圆头 14 1.4
M4固定螺钉 20 2.0
M3 20 2.0
M4 46 4.5
M5 92 9.0
M6 156 15.3
M8 380 37
M10 720 71
推荐螺纹密封剂:LOCTITE262
(HenkelJapan)
2.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL, YK300XGS,YK400XGS
2.1.1 更换 X 轴的谐波传动
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
更换 X 轴谐波时必需的物件如下。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 谐波传动 KCY-M2110-001 1
2 O 形圈 KN4-M257K-000 线径1.78mm× 内径72.75mm 1 会磨损老化,需要更换
3 O 形圈 KN3-M2143-000 线径1.5mm× 内径49.0mm 1 会磨损老化,需要更换
4 O 形圈 KN3-M2144-000 线径0.99mm× 内径53.28mm 1 谐波传动附件
5 马达安装螺栓 91312-05014 M5长度 14 4 丢失时备用
6 谐波固定螺栓 91312-03018 M3 长度 18 16 需要更换
7 谐波固定螺栓 91312-03030 M3 长度 30 11 需要更换
8 感应器螺丝用截锥头 98502-03030 M3 长度 30 1 丢失时备用
9 感应器螺丝用螺母 95302-04600 M4 1 丢失时备用
10 垫圈 92903-03600 M3 16 需要更换
11 金属板安装螺栓 91312-05025 M5长度 25 6 丢失时备用
12 金属板安装用垫圈 92902-05600 M5 用 6 丢失时备用

5
更换谐波传动
5-3
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
名称 型号 厂商 备注
A
扭矩扳手 N120SPCKKANON
((株)中村制作所)M5内六角螺栓用、拧紧扭矩 7.4Nm(76kgfcm)
置换头 230HCK4KANON
((株)中村制作所)请插入 M5内六角用扳手(前端无球)110mm
B
扭矩螺丝刀 N30LTDKKANON
((株)中村制作所)M3内六角螺栓用、拧紧扭矩 1.8Nm(18kgfcm)
前端规格B35对边
2.5×75(株)Vessel
安装六角开口宽度 6.35mm、全长 75mm、
前端六角开口宽度 2.5mm
C
扭矩螺丝刀 N12LTDKKANON
((株)中村制作所)M3固定螺钉用、拧紧扭矩 0.7Nm(7kgfcm)
前端规格 3C1507NAC
(长堀工业株式会社)
安装六角开口宽度 6.35mm、全长 70mm、
前端六角开口宽度 1.5mm
D
扭矩螺丝刀 N12LTDKKANON
((株)中村制作所)M3十字螺钉用、拧紧扭矩 0.9Nm(9kgfcm)
前端规格 B35+2×50 (株)Vessel安装六角开口宽度 6.35mm、全长 50mm、
刀尖 No.2
※ 如需拧紧其它规格的螺栓,请使用市售的扭矩扳手。
3.其他工具类
名称 型号 厂商 备注
谐波润滑油 4BNo.2(*1)HarmonicDrive
Systems
购买后 4 年以上的零部件会磨损老化,不能继续使
用
旧棉纱头
十字螺丝刀
六角扳手套件
LOCTITE 螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
*1 :25g
■ 拆卸
请根据以下步骤拆卸 X 轴的各零部件。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
c 注意
在之后的作业中,如果不从 X轴机械臂上拆下 Y轴机械臂,而
是作为一体操作时,由于重量较大,因此操作时需小心。

5
更换谐波传动
5-4
4 拆下基座正面盖、基座背面盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下基座正面盖、背面盖Step 4-5
螺丝 M4 × 8
外盖螺栓 M4 × 8
此处有X轴马达的圆形端子,请将其拆下
此处有X轴马达的圆形端子,请将其拆下
YK250XG, YK350XG, YK400XG, YK500XGL, YK600XGL
YK300XGS, YK400XGS
外盖
螺丝 M4 × 8
螺栓 M4 × 8
51601-F6-00
5 拆下基座内的 X 轴马达电源线 XM、
旋转变压器线 XP 的连接器、X 轴马
达的圆形端子。
5
更换谐波传动
5-5
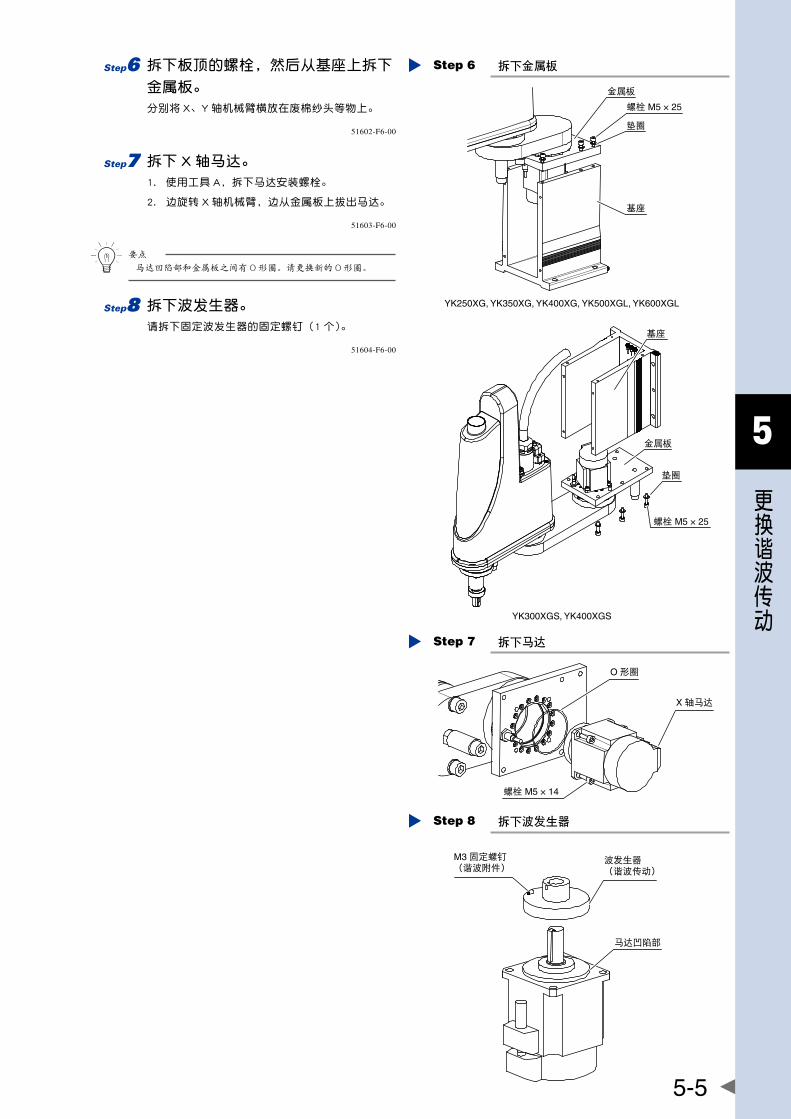
6 拆下板顶的螺栓,然后从基座上拆下
金属板。
分别将 X、Y 轴机械臂横放在废棉纱头等物上。
拆下金属板Step 6
垫圈
螺栓 M5 × 25
金属板
基座
YK250XG, YK350XG, YK400XG, YK500XGL, YK600XGL
YK300XGS, YK400XGS
基座
金属板
垫圈
螺栓 M5 × 25
51602-F6-00
7 拆下 X 轴马达。
1. 使用工具 A,拆下马达安装螺栓。
2. 边旋转 X 轴机械臂,边从金属板上拔出马达。
51603-F6-00
n 要点
马达凹陷部和金属板之间有 O 形圈。请更换新的 O 形圈。
8 拆下波发生器。
请拆下固定波发生器的固定螺钉(1 个)。
51604-F6-00
拆下马达Step 7
X 轴马达
螺栓 M5 × 14
O 形圈
拆下波发生器Step 8
M3 固定螺钉(谐波附件)
波发生器(谐波传动)
马达凹陷部

5
更换谐波传动
5-6
9 拆下 X 轴机械臂。
拆下 X 轴机械臂的安装螺栓。
请将拆下的 X 轴机械臂置于不妨碍作业的地方。
拆下X轴机械臂Step 9
垫圈
螺栓 M3 × 18
谐波附件 O 形圈
X 轴机械臂
51605-F6-00
0 从 X 轴机械臂上拆下 X 轴谐波传动。
拆下 X 轴谐波传动的安装螺栓、截锥头、螺母。
51606-F6-00
n 要点
X 轴机械臂上带有 O 形圈。请更换新的 O 形圈。
拆下谐波传动Step 10
O 形圈
M4 螺母
螺栓 M3 × 30截锥头 M3 × 30
谐波传动
■ 更换和组装
请按照以下步骤更换新的谐波传动并进行组装。
1 在组装前,请进行以下作业。
1. 在新的波发生器上涂抹谐波润滑油。涂抹要领,请参阅下图。
请对谐波的上下安装面进行脱脂。
Step 1 涂抹谐波润滑油
临时固定螺栓
柔轮
对安装面进行脱脂。
对安装面进行脱脂。
环形花键轴
波发生器
请将润滑油充分涂满滚珠的空间。请在十字头联轴器上涂满润滑油。合计润滑油量:3g
请在齿轮的间隙涂满润滑油。
51607-F6-00
2. 请将马达、金属板、X 轴机械臂上的旧润滑油、研磨粉去除干净。
c 注意
・在组装时如果与异物等咬合,可能会成为谐波传动异响或损坏的原因。
・切勿拆下临时固定的螺栓。否则可能会造成偏芯。
5
更换谐波传动
5-7
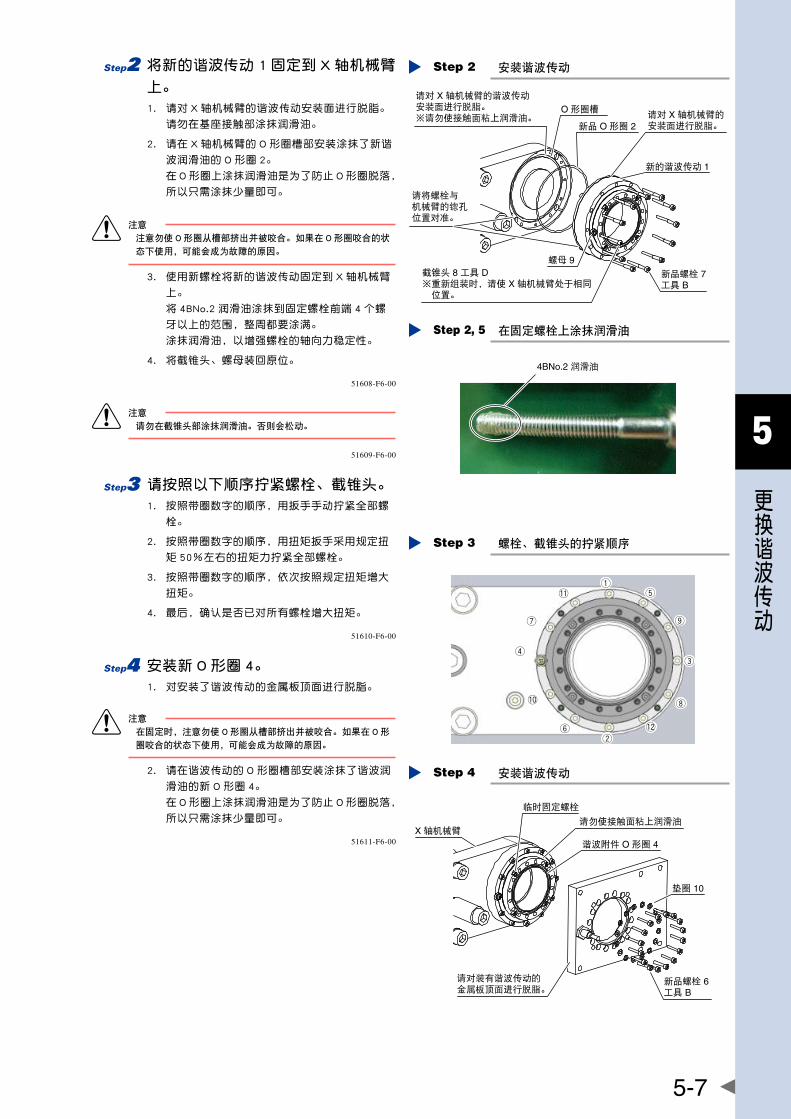
2 将新的谐波传动 1 固定到 X 轴机械臂
上。
1. 请对 X 轴机械臂的谐波传动安装面进行脱脂。
请勿在基座接触部涂抹润滑油。
2. 请在 X 轴机械臂的 O 形圈槽部安装涂抹了新谐
波润滑油的 O 形圈 2。
在 O形圈上涂抹润滑油是为了防止 O形圈脱落,
所以只需涂抹少量即可。
安装谐波传动Step 2
新品 O 形圈 2
螺母 9
新品螺栓 7工具 B
新的谐波传动 1
O 形圈槽
请对 X 轴机械臂的谐波传动安装面进行脱脂。※请勿使接触面粘上润滑油。 请对 X 轴机械臂的
安装面进行脱脂。
请将螺栓与机械臂的锪孔位置对准。
截锥头 8 工具 D※重新组装时,请使 X 轴机械臂处于相同 位置。
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
3. 使用新螺栓将新的谐波传动固定到 X 轴机械臂
上。
将 4BNo.2 润滑油涂抹到固定螺栓前端 4 个螺
牙以上的范围,整周都要涂满。
涂抹润滑油,以增强螺栓的轴向力稳定性。
4. 将截锥头、螺母装回原位。
51608-F6-00
c 注意
请勿在截锥头部涂抹润滑油。否则会松动。
在固定螺栓上涂抹润滑油Step 2, 5
4BNo.2 润滑油
51609-F6-00
3 请按照以下顺序拧紧螺栓、截锥头。
1. 按照带圈数字的顺序,用扳手手动拧紧全部螺
栓。
2. 按照带圈数字的顺序,用扭矩扳手采用规定扭
矩 50%左右的扭矩力拧紧全部螺栓。
3. 按照带圈数字的顺序,依次按照规定扭矩增大
扭矩。
4. 最后,确认是否已对所有螺栓增大扭矩。
螺栓、截锥头的拧紧顺序Step 3
51610-F6-00
4 安装新 O 形圈 4。
1. 对安装了谐波传动的金属板顶面进行脱脂。
c 注意
在固定时,注意勿使 O形圈从槽部挤出并被咬合。如果在 O形
圈咬合的状态下使用,可能会成为故障的原因。
2. 请在谐波传动的 O 形圈槽部安装涂抹了谐波润
滑油的新 O 形圈 4。
在 O形圈上涂抹润滑油是为了防止 O形圈脱落,
所以只需涂抹少量即可。
安装谐波传动Step 4
垫圈 10
新品螺栓 6工具 B
谐波附件 O 形圈 4
X 轴机械臂
请对装有谐波传动的金属板顶面进行脱脂。
请勿使接触面粘上润滑油
临时固定螺栓
51611-F6-00
5
更换谐波传动
5-8
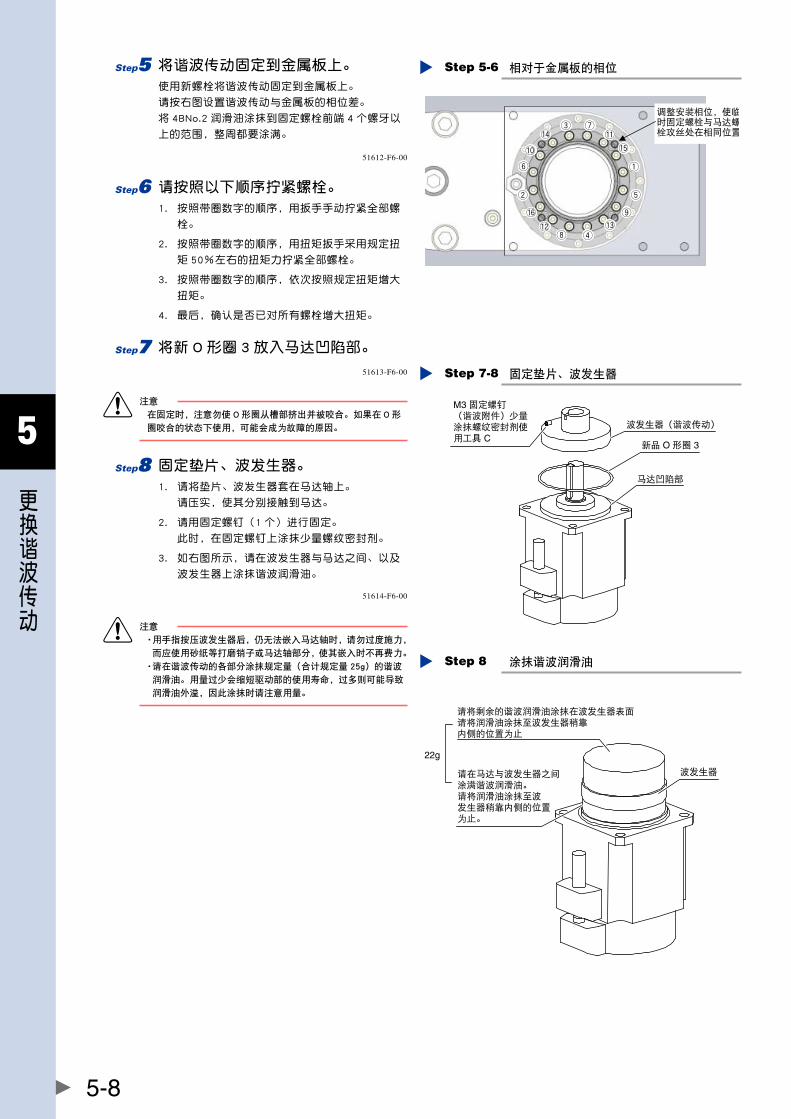
5 将谐波传动固定到金属板上。
使用新螺栓将谐波传动固定到金属板上。
请按右图设置谐波传动与金属板的相位差。
将 4BNo.2 润滑油涂抹到固定螺栓前端 4 个螺牙以
上的范围,整周都要涂满。
①
②
③
④
⑤
⑥
⑦
⑧
⑨
⑩
⑪
⑫
⑮
⑯
⑭
⑬
调整安装相位,使临时固定螺栓与马达螺栓攻丝处在相同位置
相对于金属板的相位Step 5-6
51612-F6-00
6 请按照以下顺序拧紧螺栓。
1. 按照带圈数字的顺序,用扳手手动拧紧全部螺
栓。
2. 按照带圈数字的顺序,用扭矩扳手采用规定扭
矩 50%左右的扭矩力拧紧全部螺栓。
3. 按照带圈数字的顺序,依次按照规定扭矩增大
扭矩。
4. 最后,确认是否已对所有螺栓增大扭矩。
7 将新 O 形圈 3 放入马达凹陷部。
固定垫片、波发生器Step 7-8
M3 固定螺钉(谐波附件)少量涂抹螺纹密封剂使用工具 C
波发生器(谐波传动)
马达凹陷部
新品 O 形圈 3
51613-F6-00
c 注意
在固定时,注意勿使 O形圈从槽部挤出并被咬合。如果在 O形
圈咬合的状态下使用,可能会成为故障的原因。
8 固定垫片、波发生器。
1. 请将垫片、波发生器套在马达轴上。
请压实,使其分别接触到马达。
2. 请用固定螺钉(1 个)进行固定。
此时,在固定螺钉上涂抹少量螺纹密封剂。
3. 如右图所示,请在波发生器与马达之间、以及
波发生器上涂抹谐波润滑油。
51614-F6-00
c 注意
・用手指按压波发生器后,仍无法嵌入马达轴时,请勿过度施力,
而应使用砂纸等打磨销子或马达轴部分,使其嵌入时不再费力。
・请在谐波传动的各部分涂抹规定量(合计规定量 25g)的谐波
润滑油。用量过少会缩短驱动部的使用寿命,过多则可能导致
润滑油外溢,因此涂抹时请注意用量。
涂抹谐波润滑油Step 8
波发生器请在马达与波发生器之间涂满谐波润滑油。请将润滑油涂抹至波发生器稍靠内侧的位置为止。
请将剩余的谐波润滑油涂抹在波发生器表面请将润滑油涂抹至波发生器稍靠内侧的位置为止
22g

5
更换谐波传动
5-9
9 安装 X 轴马达。
1. 用手移动 X 轴机械臂的同时,将 X 轴马达压入
金属板。
请注意,勿使润滑油沾到金属板上。
2. 将 X 轴机械臂向左右依次缓慢摆动 45°,同时
使用工具 A 拧紧 4 个螺栓。
此时,如果发现异常或进行得不顺利,则请重
新组装。
安装 X 轴马达Step 9
X 轴马达
金属板
螺栓 5工具 A
51615-F6-00
0 固定金属板。
用螺栓 11 将金属板固定在基座上。
组装时,请保持金属板与基座端面之间对齐。 固定金属板Step 10
垫圈 12
螺栓 11
金属板
基座
YK250XG, YK350XG, YK400XG, YK500XGL, YK600XGL
YK300XGS, YK400XGS
基座
金属板
垫圈
螺栓 M5 × 25
51616-F6-00
5
更换谐波传动
5-10
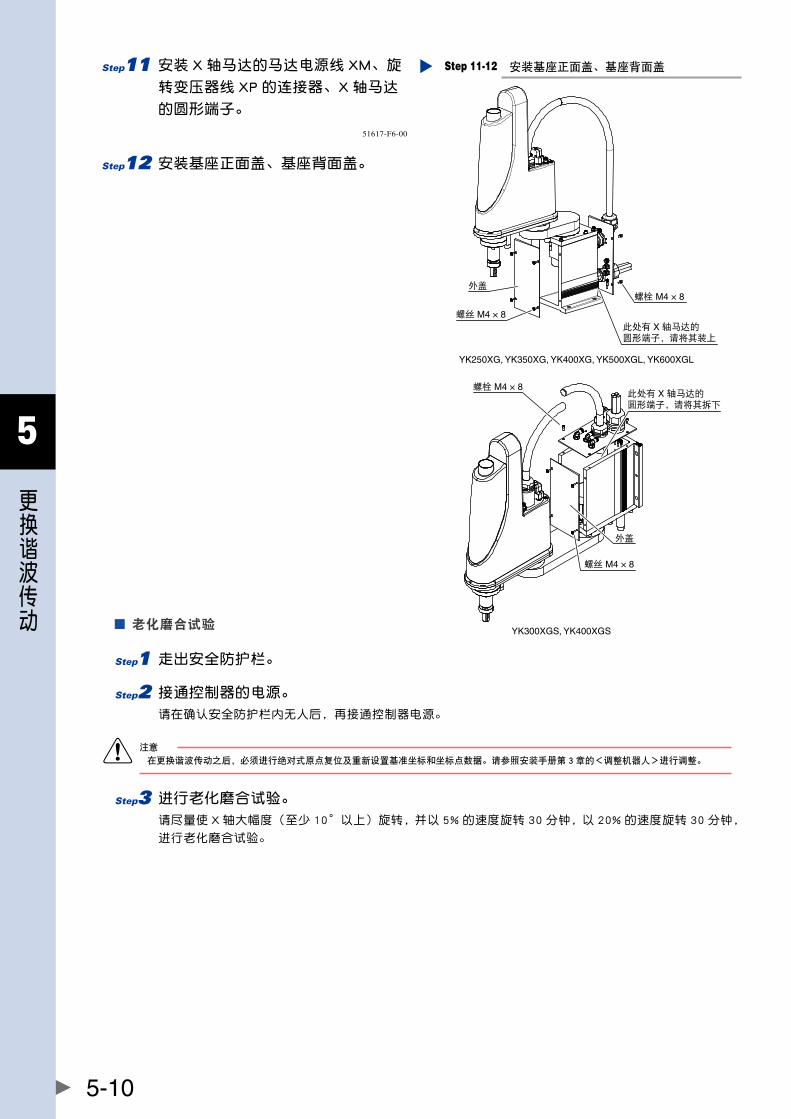
q 安装 X 轴马达的马达电源线 XM、旋
转变压器线 XP 的连接器、X 轴马达
的圆形端子。
安装基座正面盖、基座背面盖Step 11-12
螺丝 M4 × 8
外盖螺栓 M4 × 8
此处有 X 轴马达的圆形端子,请将其装上
此处有 X 轴马达的圆形端子,请将其拆下
YK250XG, YK350XG, YK400XG, YK500XGL, YK600XGL
YK300XGS, YK400XGS
外盖
螺丝 M4 × 8
螺栓 M4 × 8
51617-F6-00
w 安装基座正面盖、基座背面盖。
■ 老化磨合试验
1 走出安全防护栏。
2 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
c 注意
在更换谐波传动之后,必须进行绝对式原点复位及重新设置基准坐标和坐标点数据。请参照安装手册第 3章的<调整机器人>进行调整。
3 进行老化磨合试验。
请尽量使 X 轴大幅度(至少 10°以上)旋转,并以 5% 的速度旋转 30 分钟,以 20% 的速度旋转 30 分钟,
进行老化磨合试验。
5
更换谐波传动
5-11
2.1.2 更换 Y 轴的谐波传动
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
更换 Y 轴谐波时必需的物件如下。
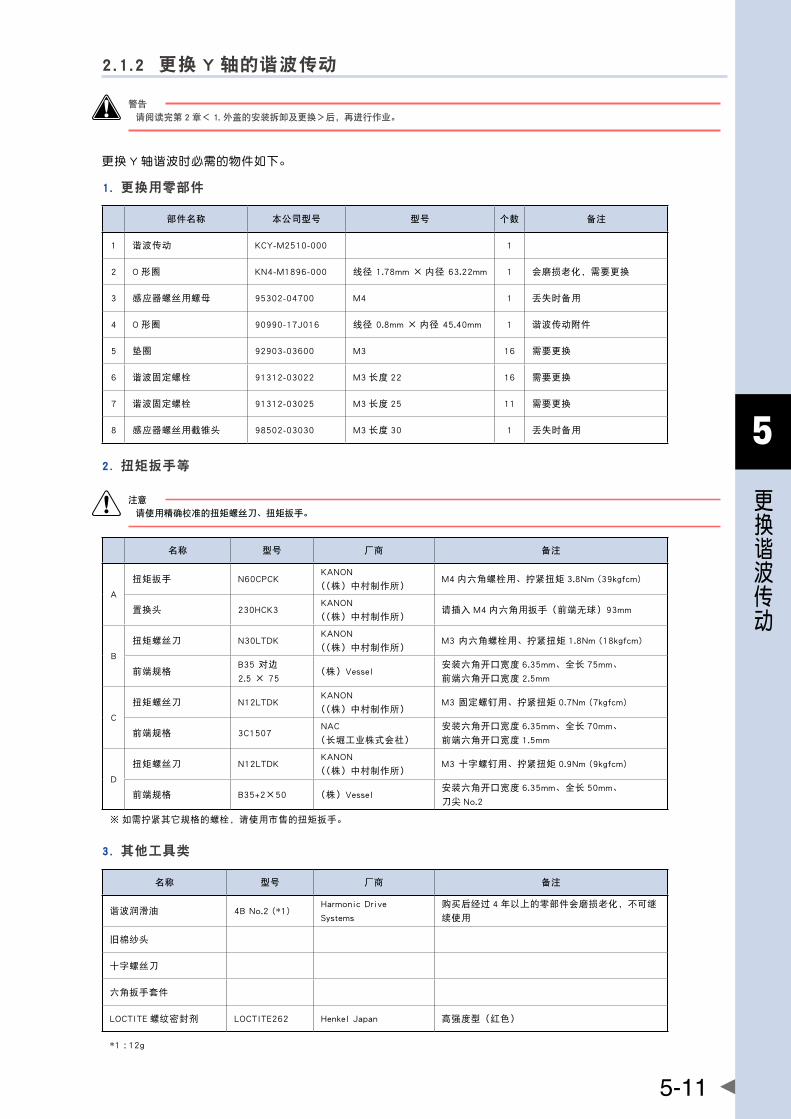
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 谐波传动 KCY-M2510-000 1
2 O 形圈 KN4-M1896-000 线径1.78mm× 内径63.22mm 1 会磨损老化,需要更换
3 感应器螺丝用螺母 95302-04700 M4 1 丢失时备用
4 O 形圈 90990-17J016 线径0.8mm× 内径45.40mm 1 谐波传动附件
5 垫圈 92903-03600 M3 16 需要更换
6 谐波固定螺栓 91312-03022 M3 长度 22 16 需要更换
7 谐波固定螺栓 91312-03025 M3 长度 25 11 需要更换
8 感应器螺丝用截锥头 98502-03030 M3 长度 30 1 丢失时备用
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
名称 型号 厂商 备注
A
扭矩扳手 N60CPCKKANON
((株)中村制作所)M4 内六角螺栓用、拧紧扭矩 3.8Nm(39kgfcm)
置换头 230HCK3KANON
((株)中村制作所)请插入 M4 内六角用扳手(前端无球)93mm
B
扭矩螺丝刀 N30LTDKKANON
((株)中村制作所)M3内六角螺栓用、拧紧扭矩 1.8Nm(18kgfcm)
前端规格B35对边
2.5×75(株)Vessel
安装六角开口宽度 6.35mm、全长 75mm、
前端六角开口宽度 2.5mm
C
扭矩螺丝刀 N12LTDKKANON
((株)中村制作所)M3固定螺钉用、拧紧扭矩 0.7Nm(7kgfcm)
前端规格 3C1507NAC
(长堀工业株式会社)
安装六角开口宽度 6.35mm、全长 70mm、
前端六角开口宽度 1.5mm
D
扭矩螺丝刀 N12LTDKKANON
((株)中村制作所)M3十字螺钉用、拧紧扭矩 0.9Nm(9kgfcm)
前端规格 B35+2×50 (株)Vessel安装六角开口宽度 6.35mm、全长 50mm、
刀尖 No.2
※ 如需拧紧其它规格的螺栓,请使用市售的扭矩扳手。
3.其他工具类
名称 型号 厂商 备注
谐波润滑油 4BNo.2(*1)HarmonicDrive
Systems
购买后经过 4 年以上的零部件会磨损老化,不可继
续使用
旧棉纱头
十字螺丝刀
六角扳手套件
LOCTITE 螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
*1 :12g

5
更换谐波传动
5-12
■ 拆卸
请按照以下步骤拆卸 Y 轴的各零部件。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
4 拆下外盖。
为 Y 轴马达接线时,由于各部分都被夹紧,所以不
易拆下连接器,此时请勿拆下连接器,直接进行更
换。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下外盖Step 4
外盖
螺丝
垫圈
螺丝
放置时,请注意不要损伤外盖
请拆下 D-sub 连接器罩盖。
51618-F6-00
w 警告
在 Step5 中,如果拆下 Y轴机械臂的安装螺栓,Y轴机械臂将脱
落,非常危险。
在机械臂前端附有较重的工具等物件时,机械臂可能会掉落,请
特别注意。
5 拆下 Y 轴机械臂。
1. 请拆下线束支撑板。
2. 请拆下 Y 轴机械臂的安装螺栓。
3. 请拆下 Y 轴机械臂。
请在不拉扯挤压线束的前提下,将拆下的 Y 轴
机械臂置于不妨碍作业的地方。
4. 请拆下 O 形圈。
51619-F6-00
n 要点
随后,请更换新的谐波传动 O 形圈。
有时 O 形圈会紧贴在 Y 轴机械臂底面,请注意彻底取下来。 拆下 Y 轴机械臂Step 5
谐波附件 O 形圈
螺栓 M3 × 22
线束支撑板
垫圈Y 轴机械臂

5
更换谐波传动
5-13
6 从马达轴上拆下波发生器。
请拆下固定波发生器的固定螺钉(2 个)。
拆下波发生器Step 6
马达轴
M3 固定螺钉
波发生器
51620-F6-00
7 从 X 轴机械臂上表面拆下 Y 轴谐波传
动。
1. 请拆下 Y 轴谐波传动的安装螺栓、截锥头、螺母。
2. 请拆下 O 形圈。
51621-F6-00
n 要点
随后,请更换新的 Y 轴谐波传动 O 形圈。
拆下 Y 轴谐波传动Step 7
O 形圈 X 轴机械臂
螺母
截锥头
螺栓
谐波传动
■ 更换和组装
请按照以下步骤更换新的谐波传动并进行组装。
1 在组装前,请进行以下作业。
1. 在新的谐波传动波发生器上涂抹谐波润滑油
4BNo.2。
2. 请将马达、X 轴机械臂、Y 轴机械臂上的旧润
滑油、研磨粉等去除干净。涂抹谐波润滑油(波发生器)Step 1
将润滑油充分涂满滚珠的空间。请涂抹润滑油合计润滑油量:2g
51622-F6-00
c 注意
在组装时如果与异物等咬合,可能会成为谐波传动异响或损坏
的原因。
3. 请在谐波传动的各部分涂抹规定量的谐波润滑
油。
c 注意
用量过少会缩短驱动部的使用寿命,过多则可能导致润滑油外
溢,因此涂抹时请注意用量。
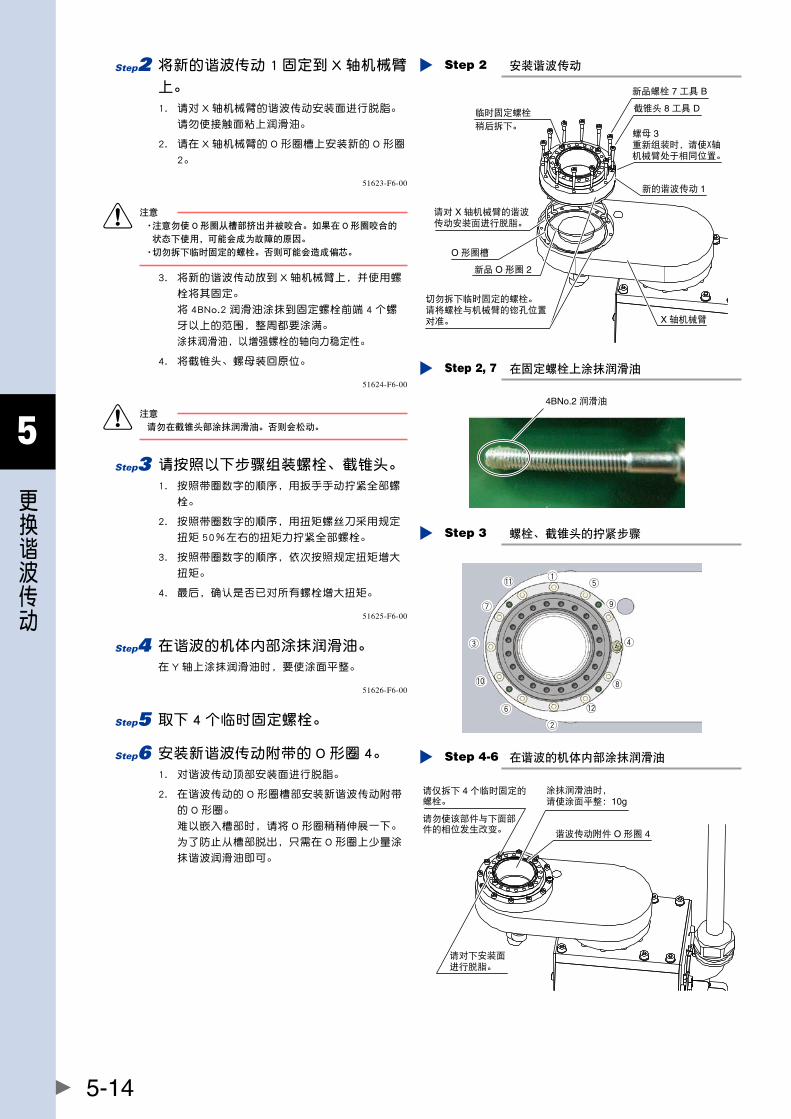
5
更换谐波传动
5-14
2 将新的谐波传动 1 固定到 X 轴机械臂
上。
1. 请对 X 轴机械臂的谐波传动安装面进行脱脂。
请勿使接触面粘上润滑油。
2. 请在 X 轴机械臂的 O 形圈槽上安装新的 O 形圈
2。
安装谐波传动Step 2
新品 O 形圈 2
X 轴机械臂
螺母 3重新组装时,请使X轴机械臂处于相同位置。
截锥头 8 工具 D
新品螺栓 7 工具 B
新的谐波传动 1
O 形圈槽
请对 X 轴机械臂的谐波传动安装面进行脱脂。
切勿拆下临时固定的螺栓。请将螺栓与机械臂的锪孔位置对准。
临时固定螺栓
稍后拆下。
51623-F6-00
c 注意
・注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的
状态下使用,可能会成为故障的原因。
・切勿拆下临时固定的螺栓。否则可能会造成偏芯。
3. 将新的谐波传动放到 X 轴机械臂上,并使用螺
栓将其固定。
将 4BNo.2 润滑油涂抹到固定螺栓前端 4 个螺
牙以上的范围,整周都要涂满。
涂抹润滑油,以增强螺栓的轴向力稳定性。
4. 将截锥头、螺母装回原位。在固定螺栓上涂抹润滑油Step 2, 7
4BNo.2 润滑油
51624-F6-00
c 注意
请勿在截锥头部涂抹润滑油。否则会松动。
3 请按照以下步骤组装螺栓、截锥头。
1. 按照带圈数字的顺序,用扳手手动拧紧全部螺
栓。
2. 按照带圈数字的顺序,用扭矩螺丝刀采用规定
扭矩 50%左右的扭矩力拧紧全部螺栓。
3. 按照带圈数字的顺序,依次按照规定扭矩增大
扭矩。
4. 最后,确认是否已对所有螺栓增大扭矩。
①
②
③ ④
⑤
⑥
⑦
⑧
⑨
⑩
⑪
⑫
螺栓、截锥头的拧紧步骤Step 3
51625-F6-00
4 在谐波的机体内部涂抹润滑油。
在 Y 轴上涂抹润滑油时,要使涂面平整。
51626-F6-00
5 取下 4 个临时固定螺栓。
6 安装新谐波传动附带的 O 形圈 4。
1. 对谐波传动顶部安装面进行脱脂。
2. 在谐波传动的 O 形圈槽部安装新谐波传动附带
的 O 形圈。
难以嵌入槽部时,请将 O 形圈稍稍伸展一下。
为了防止从槽部脱出,只需在 O 形圈上少量涂
抹谐波润滑油即可。
在谐波的机体内部涂抹润滑油Step 4-6
请对下安装面进行脱脂。
涂抹润滑油时,请使涂面平整:10g
谐波传动附件 O 形圈 4
请仅拆下 4 个临时固定的螺栓。
请勿使该部件与下面部件的相位发生改变。
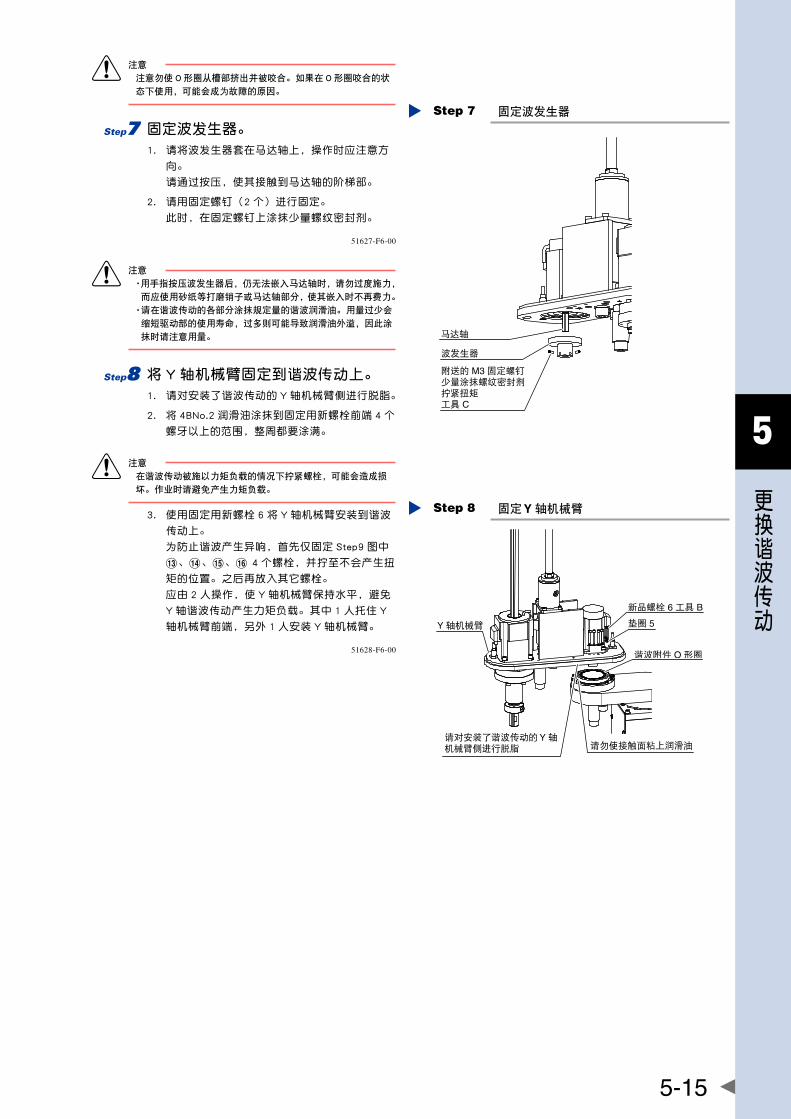
5
更换谐波传动
5-15
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
7 固定波发生器。
1. 请将波发生器套在马达轴上,操作时应注意方
向。
请通过按压,使其接触到马达轴的阶梯部。
2. 请用固定螺钉(2 个)进行固定。
此时,在固定螺钉上涂抹少量螺纹密封剂。
固定波发生器Step 7
马达轴
附送的 M3 固定螺钉少量涂抹螺纹密封剂拧紧扭矩工具 C
波发生器
51627-F6-00
c 注意
・用手指按压波发生器后,仍无法嵌入马达轴时,请勿过度施力,
而应使用砂纸等打磨销子或马达轴部分,使其嵌入时不再费力。
・请在谐波传动的各部分涂抹规定量的谐波润滑油。用量过少会
缩短驱动部的使用寿命,过多则可能导致润滑油外溢,因此涂
抹时请注意用量。
8 将 Y 轴机械臂固定到谐波传动上。
1. 请对安装了谐波传动的 Y 轴机械臂侧进行脱脂。
2. 将 4BNo.2 润滑油涂抹到固定用新螺栓前端 4 个
螺牙以上的范围,整周都要涂满。
c 注意
在谐波传动被施以力矩负载的情况下拧紧螺栓,可能会造成损
坏。作业时请避免产生力矩负载。
3. 使用固定用新螺栓 6 将 Y 轴机械臂安装到谐波
传动上。
为防止谐波产生异响,首先仅固定 Step9 图中
#、$、%、^4 个螺栓,并拧至不会产生扭
矩的位置。之后再放入其它螺栓。
应由 2 人操作,使 Y 轴机械臂保持水平,避免
Y 轴谐波传动产生力矩负载。其中 1 人托住 Y
轴机械臂前端,另外 1 人安装 Y 轴机械臂。
固定 Y 轴机械臂Step 8
请对安装了谐波传动的 Y 轴机械臂侧进行脱脂 请勿使接触面粘上润滑油
新品螺栓 6 工具 B
垫圈 5
谐波附件 O 形圈
Y 轴机械臂
51628-F6-00
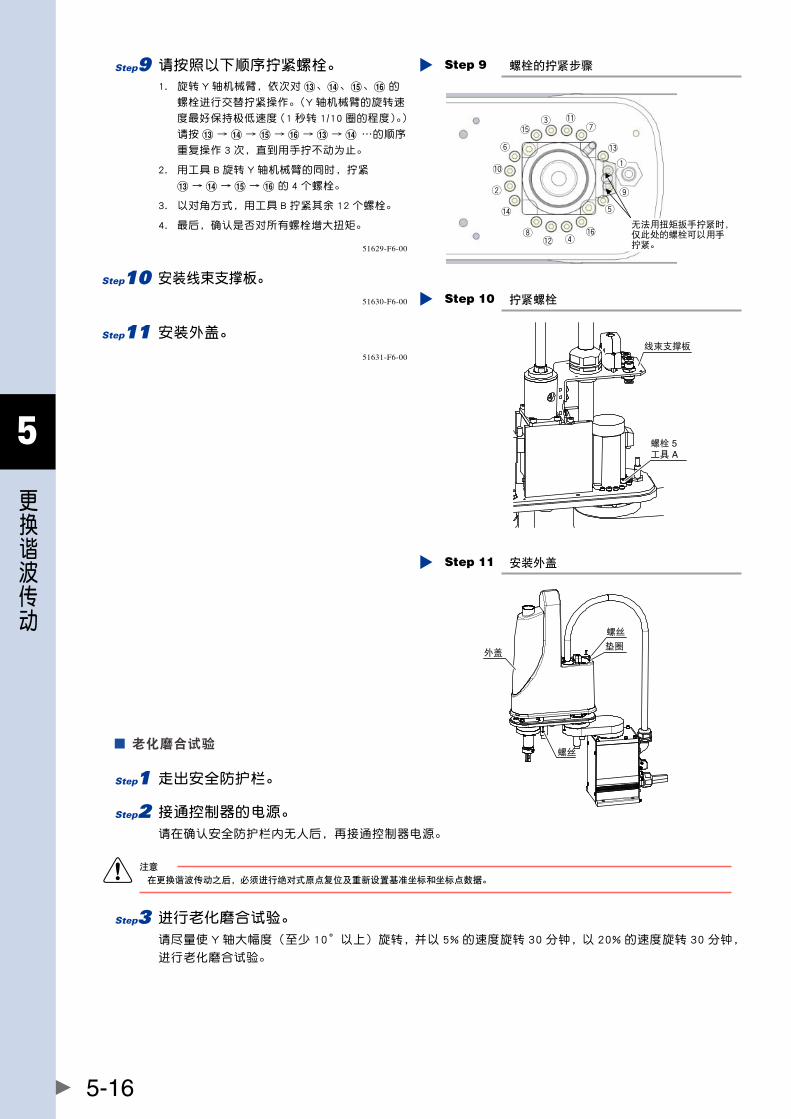
5
更换谐波传动
5-16
9 请按照以下顺序拧紧螺栓。
1. 旋转 Y 轴机械臂,依次对#、$、%、^的
螺栓进行交替拧紧操作。(Y 轴机械臂的旋转速
度最好保持极低速度(1 秒转 1/10 圈的程度)。)
请按#→$→%→^→#→$…的顺序
重复操作 3 次,直到用手拧不动为止。
2. 用工具 B 旋转 Y 轴机械臂的同时,拧紧
#→$→%→^的 4 个螺栓。
3. 以对角方式,用工具 B 拧紧其余 12 个螺栓。
4. 最后,确认是否对所有螺栓增大扭矩。
①
②
③
④
⑤
⑥
⑦
⑧
⑨
⑩
⑪
⑫
⑮
⑯
⑭
⑬
螺栓的拧紧步骤Step 9
无法用扭矩扳手拧紧时,仅此处的螺栓可以用手拧紧。51629-F6-00
0 安装线束支撑板。
51630-F6-00 拧紧螺栓Step 10
螺栓 5 工具 A
线束支撑板q 安装外盖。
51631-F6-00
安装外盖Step 11
外盖
螺丝
垫圈
螺丝■ 老化磨合试验
1 走出安全防护栏。
2 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
c 注意
在更换谐波传动之后,必须进行绝对式原点复位及重新设置基准坐标和坐标点数据。
3 进行老化磨合试验。
请尽量使 Y 轴大幅度(至少 10°以上)旋转,并以 5% 的速度旋转 30 分钟,以 20% 的速度旋转 30 分钟,
进行老化磨合试验。
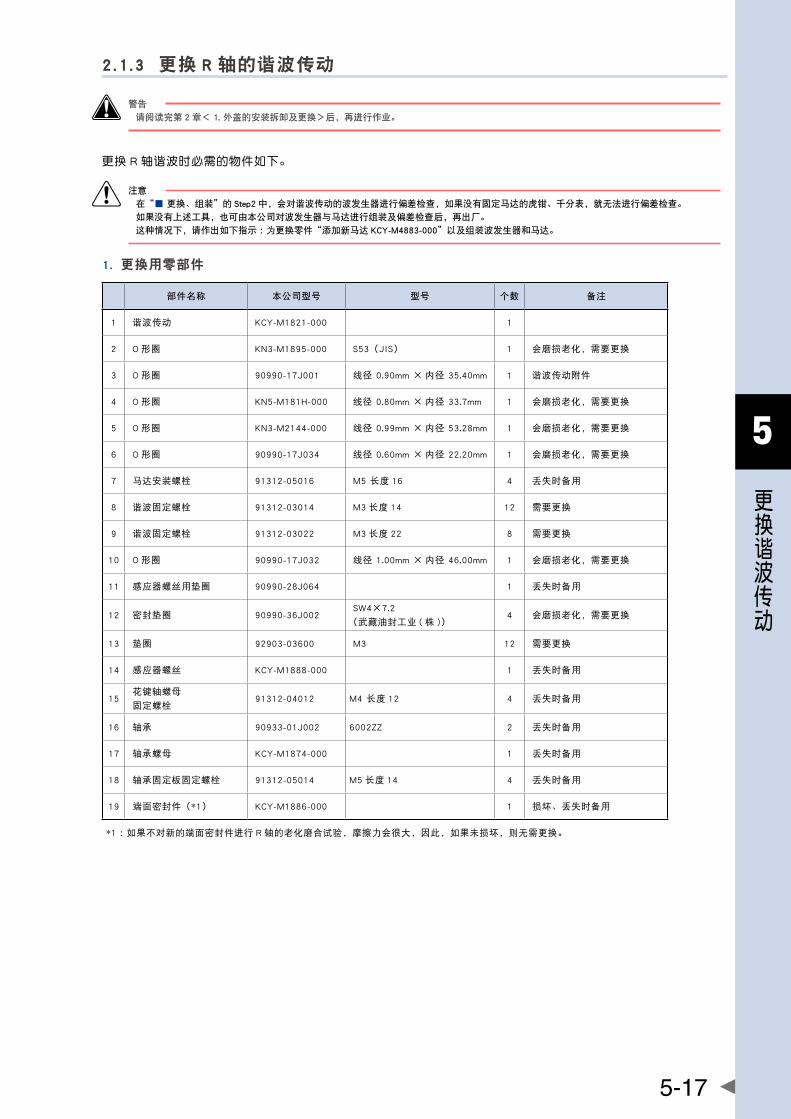
5
更换谐波传动
5-17
2.1.3 更换 R 轴的谐波传动
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
更换 R 轴谐波时必需的物件如下。
c 注意
在“■更换、组装”的 Step2 中,会对谐波传动的波发生器进行偏差检查,如果没有固定马达的虎钳、千分表,就无法进行偏差检查。
如果没有上述工具,也可由本公司对波发生器与马达进行组装及偏差检查后,再出厂。
这种情况下,请作出如下指示:为更换零件“添加新马达 KCY-M4883-000”以及组装波发生器和马达。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 谐波传动 KCY-M1821-000 1
2 O 形圈 KN3-M1895-000 S53(JIS) 1 会磨损老化,需要更换
3 O 形圈 90990-17J001 线径0.90mm× 内径35.40mm 1 谐波传动附件
4 O 形圈 KN5-M181H-000 线径0.80mm× 内径33.7mm 1 会磨损老化,需要更换
5 O 形圈 KN3-M2144-000 线径0.99mm× 内径53.28mm 1 会磨损老化,需要更换
6 O 形圈 90990-17J034 线径0.60mm× 内径22.20mm 1 会磨损老化,需要更换
7 马达安装螺栓 91312-05016 M5长度 16 4 丢失时备用
8 谐波固定螺栓 91312-03014 M3 长度 14 12 需要更换
9 谐波固定螺栓 91312-03022 M3 长度 22 8 需要更换
10 O 形圈 90990-17J032 线径1.00mm× 内径46.00mm 1 会磨损老化,需要更换
11 感应器螺丝用垫圈 90990-28J064 1 丢失时备用
12 密封垫圈 90990-36J002SW4×7.2
(武藏油封工业 ( 株 ))4 会磨损老化,需要更换
13 垫圈 92903-03600 M3 12 需要更换
14 感应器螺丝 KCY-M1888-000 1 丢失时备用
15花键轴螺母
固定螺栓91312-04012 M4长度 12 4 丢失时备用
16 轴承 90933-01J002 6002ZZ 2 丢失时备用
17 轴承螺母 KCY-M1874-000 1 丢失时备用
18 轴承固定板固定螺栓 91312-05014 M5 长度 14 4 丢失时备用
19 端面密封件(*1) KCY-M1886-000 1 损坏、丢失时备用
*1 :如果不对新的端面密封件进行 R 轴的老化磨合试验,摩擦力会很大,因此,如果未损坏,则无需更换。

5
更换谐波传动
5-18
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
名称 型号 厂商 备注
A
扭矩扳手 N120SPCKKANON
((株)中村制作所)M5内六角螺栓用、拧紧扭矩 7.4Nm(76kgfcm)
置换头 230HCK4KANON
((株)中村制作所)请插入 M5内六角用扳手(前端无球)110mm
B
扭矩螺丝刀 N30LTDKKANON
((株)中村制作所)M3内六角螺栓用、拧紧扭矩 1.8Nm(18kgfcm)
前端规格B35对边
2.5×75(株)Vessel
安装六角开口宽度 6.35mm、全长 75mm、
前端六角开口宽度 2.5mm
C
扭矩螺丝刀 N12LTDKKANON
((株)中村制作所)M3固定螺钉用、拧紧扭矩 0.55Nm(5.6kgfcm)
前端规格 3C1507NAC
(长堀工业株式会社)
安装六角开口宽度 6.35mm、全长 100mm、
前端六角开口宽度 1.5mm
D 扭矩扳手 N380SPK24KANON
((株)中村制作所)
宽 24mm 的扭矩扳手、拧紧扭矩设置为
20Nm(200kgfcm)
※ 如需拧紧其它规格的螺栓,请使用市售的扭矩扳手。
3.其他工具类
名称 型号 厂商 备注
谐波润滑油 4BNo.2(*1)HarmonicDrive
Systems
购买后经过 4 年以上的零部件会磨损老化,不可继
续使用
旧棉纱头
十字螺丝刀
六角扳手套件
宽 15mm 的扳手 6M-13-15 BAHCO(鱼牌)
宽 24mm 的扳手
LOCTITE 螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
*1 :4.2g
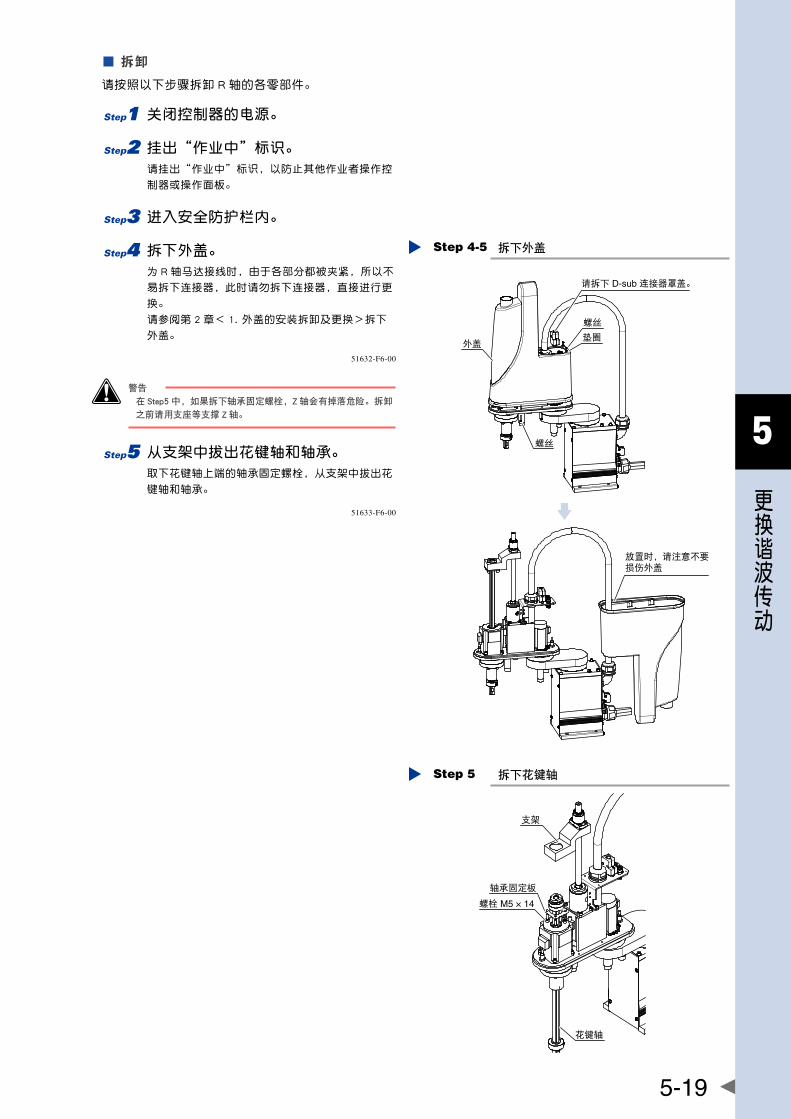
5
更换谐波传动
5-19
■ 拆卸
请按照以下步骤拆卸 R 轴的各零部件。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
4 拆下外盖。
为 R 轴马达接线时,由于各部分都被夹紧,所以不
易拆下连接器,此时请勿拆下连接器,直接进行更
换。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下外盖Step 4-5
外盖
螺丝
垫圈
螺丝
放置时,请注意不要损伤外盖
请拆下 D-sub 连接器罩盖。
51632-F6-00
w 警告
在 Step5 中,如果拆下轴承固定螺栓,Z轴会有掉落危险。拆卸
之前请用支座等支撑 Z轴。
5 从支架中拔出花键轴和轴承。
取下花键轴上端的轴承固定螺栓,从支架中拔出花
键轴和轴承。
51633-F6-00
拆下花键轴Step 5
支架
轴承固定板
螺栓 M5 × 14
花键轴
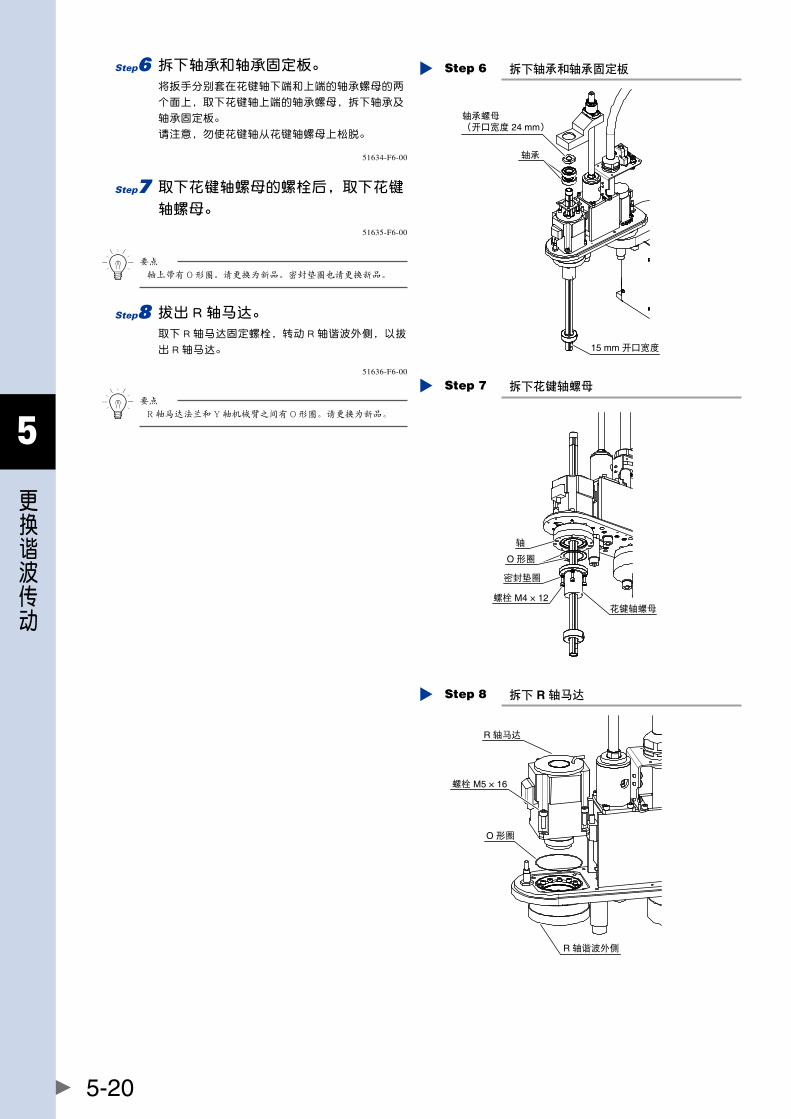
5
更换谐波传动
5-20
6 拆下轴承和轴承固定板。
将扳手分别套在花键轴下端和上端的轴承螺母的两
个面上,取下花键轴上端的轴承螺母,拆下轴承及
轴承固定板。
请注意,勿使花键轴从花键轴螺母上松脱。
拆下轴承和轴承固定板Step 6
轴承螺母(开口宽度 24 mm)
轴承
15 mm 开口宽度
51634-F6-00
7 取下花键轴螺母的螺栓后,取下花键
轴螺母。
51635-F6-00
n 要点
轴上带有 O 形圈。请更换为新品。密封垫圈也请更换新品。
8 拔出 R 轴马达。
取下 R 轴马达固定螺栓,转动 R 轴谐波外侧,以拔
出 R 轴马达。
51636-F6-00
n 要点
R 轴马达法兰和 Y 轴机械臂之间有 O 形圈。请更换为新品。
拆下花键轴螺母Step 7
花键轴螺母
轴
螺栓 M4 × 12
密封垫圈
O 形圈
拆下 R 轴马达Step 8
R 轴马达
螺栓 M5 × 16
O 形圈
R 轴谐波外侧

5
更换谐波传动
5-21
9 从 R 轴马达轴中拔出波发生器。
松开波发生器的 2 个固定螺钉,从 R 轴马达轴中拔
出波发生器。
拆下波发生器Step 9
波发生器(谐波传动)
M3 固定螺钉(谐波附件)
R 轴马达
O 形圈
51637-F6-00
n 要点
R 轴马达轴和波发生器之间有 O 形圈。请更换为新品。
0 拆下谐波传动。
请取下谐波传动的安装螺栓,然后拆下谐波传动。
51638-F6-00
n 要点
谐波传动上带有 O 形圈。请更换为新品。
q 从谐波传动上拆下轴。
请从谐波传动上拆下轴安装螺栓和感应器螺丝,而
后拆下轴。 拆下谐波传动Step 10
谐波
附件 O 形圈
螺栓 M3 × 14
垫圈
51639-F6-00
n 要点
谐波传动与轴之间有 O 形圈。请更换为新品。
拆下轴Step 11
O 形圈
轴
谐波传动
螺栓 M3 × 22
感应器螺丝
垫圈

5
更换谐波传动
5-22
■ 更换和组装
请按照以下步骤更换新的谐波传动并进行组装。
1 在新的波发生器上涂抹谐波润滑油。
涂抹要领,请参阅下图。
波发生器滚珠·将谐波润滑油 充分涂满滚珠的空间
Step 1 涂抹谐波润滑油
请在齿轮的间隙涂满润滑油。
请在端面密封件以下涂抹厚厚的润滑油,但端面密封件上不得残留润滑油。
滚珠以外的部分切勿残留润滑油
端面密封环之上的厚度在 0.5mm 以下
谐波润滑油·涂抹一圈·需注意上下涂抹厚度 3.2g
请在底部也涂抹润滑油。
端面密封环·仅在密封环涂抹极少量润滑油·密封环内侧切勿残留润滑油
新品谐波传动 1
柔轮
稍后取下该临时固定螺栓。
将润滑油涂在此处合计润滑油量1g
51640-F6-00
2 将新的波发生器固定在 R 轴马达上。
1. 请在新的波发生器内侧安装 O 形圈 6。
2. 将波发生器插入 R 轴马达轴的深处,在波发生
器上施加约 1kg 的载荷,安装 2 个固定螺钉。
3. 使波发生器的偏差符合右图中的值。请检查 O
形圈是否脱落。
安装波发生器Step 2
1kg
波发生器(谐波传动)
R 轴马达
O 形圈 6
M3 固定螺钉(谐波附件)工具 C
A
B
A
B
转动马达轴后的偏差A : 0.06mm 以下B : 0.10mm 以下
51641-F6-00
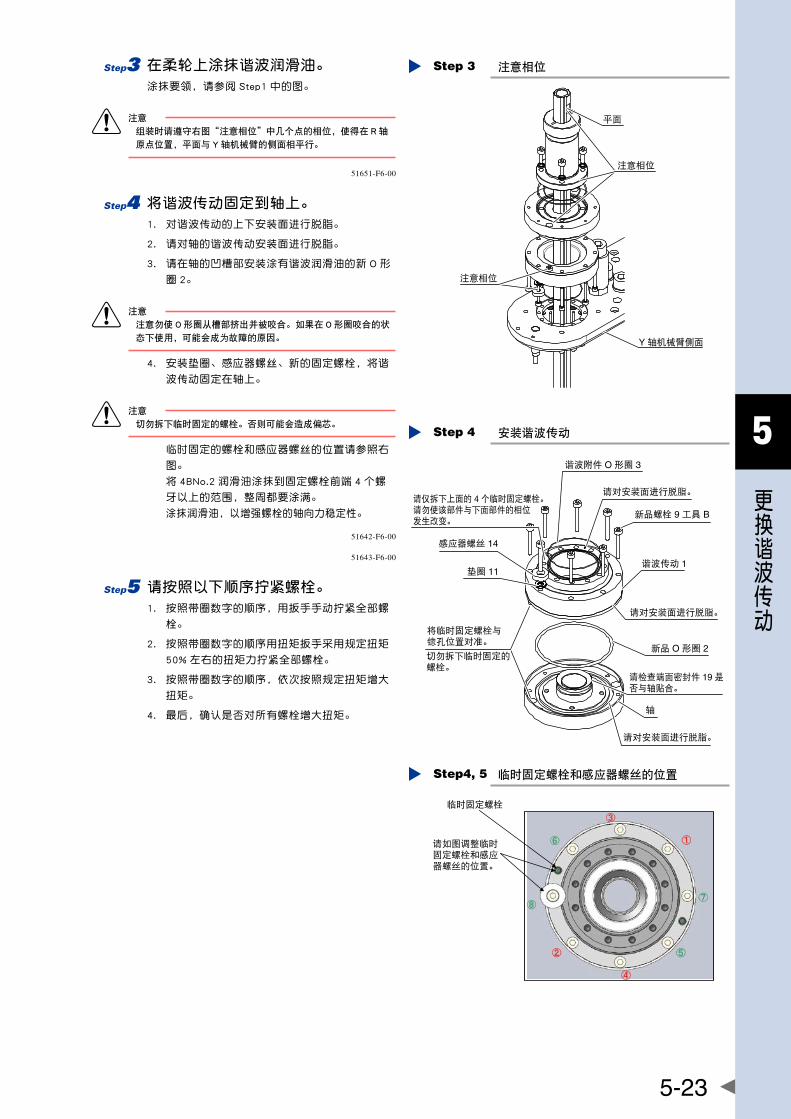
5
更换谐波传动
5-23
3 在柔轮上涂抹谐波润滑油。
涂抹要领,请参阅 Step1 中的图。
c 注意
组装时请遵守右图“注意相位”中几个点的相位,使得在 R轴
原点位置,平面与 Y轴机械臂的侧面相平行。
注意相位Step 3
注意相位
注意相位
Y 轴机械臂侧面
平面
51651-F6-00
4 将谐波传动固定到轴上。
1. 对谐波传动的上下安装面进行脱脂。
2. 请对轴的谐波传动安装面进行脱脂。
3. 请在轴的凹槽部安装涂有谐波润滑油的新 O 形
圈 2。
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
4. 安装垫圈、感应器螺丝、新的固定螺栓,将谐
波传动固定在轴上。
c 注意
切勿拆下临时固定的螺栓。否则可能会造成偏芯。
临时固定的螺栓和感应器螺丝的位置请参照右
图。
将 4BNo.2 润滑油涂抹到固定螺栓前端 4 个螺
牙以上的范围,整周都要涂满。
涂抹润滑油,以增强螺栓的轴向力稳定性。
安装谐波传动Step 4
新品螺栓 9 工具 B
谐波附件 O 形圈 3
轴
请检查端面密封件 19 是否与轴贴合。
感应器螺丝 14
垫圈 11
将临时固定螺栓与锪孔位置对准。
请仅拆下上面的 4 个临时固定螺栓。请勿使该部件与下面部件的相位发生改变。
新品 O 形圈 2
谐波传动 1
请对安装面进行脱脂。
请对安装面进行脱脂。
请对安装面进行脱脂。
切勿拆下临时固定的螺栓。
51642-F6-00
51643-F6-00
5 请按照以下顺序拧紧螺栓。
1. 按照带圈数字的顺序,用扳手手动拧紧全部螺
栓。
2. 按照带圈数字的顺序用扭矩扳手采用规定扭矩
50% 左右的扭矩力拧紧全部螺栓。
3. 按照带圈数字的顺序,依次按照规定扭矩增大
扭矩。
4. 最后,确认是否对所有螺栓增大扭矩。
临时固定螺栓和感应器螺丝的位置Step4, 5
请如图调整临时固定螺栓和感应器螺丝的位置。
临时固定螺栓
⑤
⑦
①
②
③
④
⑥
⑧
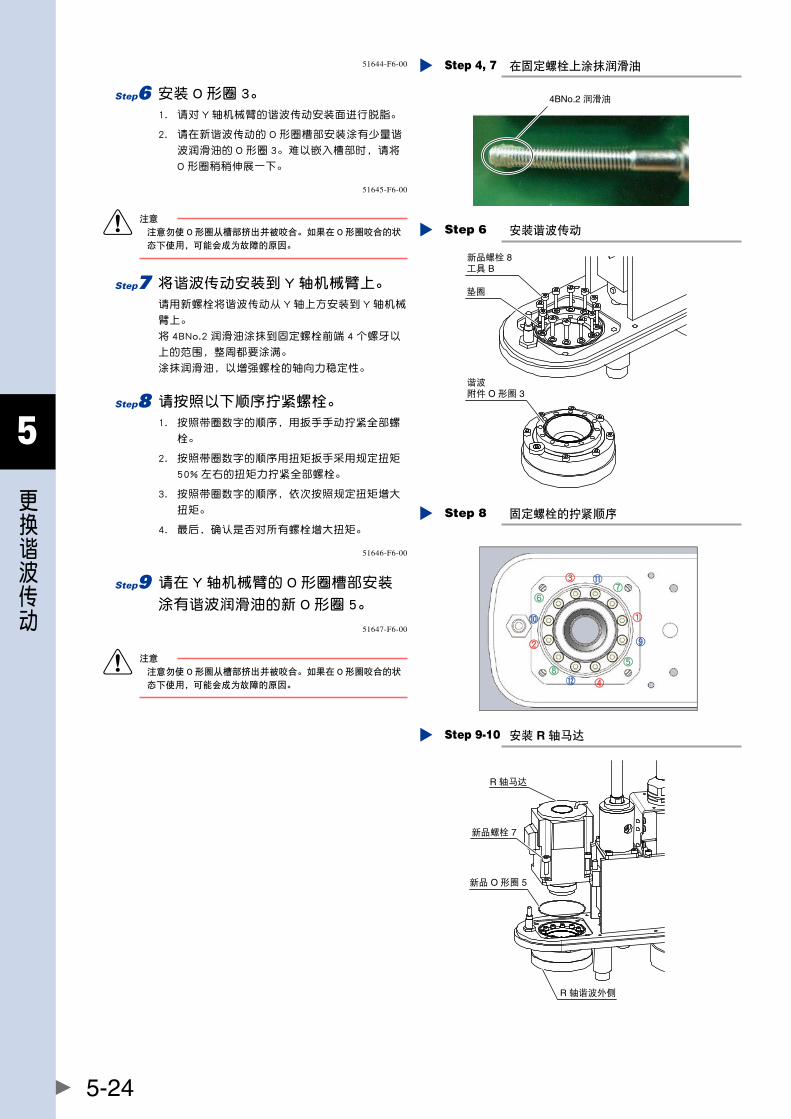
5
更换谐波传动
5-24
在固定螺栓上涂抹润滑油Step 4, 7
4BNo.2 润滑油
51644-F6-00
6 安装 O 形圈 3。
1. 请对 Y 轴机械臂的谐波传动安装面进行脱脂。
2. 请在新谐波传动的 O 形圈槽部安装涂有少量谐
波润滑油的 O 形圈 3。难以嵌入槽部时,请将
O 形圈稍稍伸展一下。
51645-F6-00
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
7 将谐波传动安装到 Y 轴机械臂上。
请用新螺栓将谐波传动从 Y 轴上方安装到 Y 轴机械
臂上。
将 4BNo.2 润滑油涂抹到固定螺栓前端 4 个螺牙以
上的范围,整周都要涂满。
涂抹润滑油,以增强螺栓的轴向力稳定性。
安装谐波传动Step 6
谐波附件 O 形圈 3
新品螺栓 8工具 B
垫圈
8 请按照以下顺序拧紧螺栓。
1. 按照带圈数字的顺序,用扳手手动拧紧全部螺
栓。
2. 按照带圈数字的顺序用扭矩扳手采用规定扭矩
50% 左右的扭矩力拧紧全部螺栓。
3. 按照带圈数字的顺序,依次按照规定扭矩增大
扭矩。
4. 最后,确认是否对所有螺栓增大扭矩。
固定螺栓的拧紧顺序Step 8
①
②
③
④
⑤
⑥⑦
⑧
⑨
⑩
51646-F6-00
9 请在 Y 轴机械臂的 O 形圈槽部安装
涂有谐波润滑油的新 O 形圈 5。
51647-F6-00
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
安装 R 轴马达Step 9-10
R 轴马达
新品螺栓 7
新品 O 形圈 5
R 轴谐波外侧
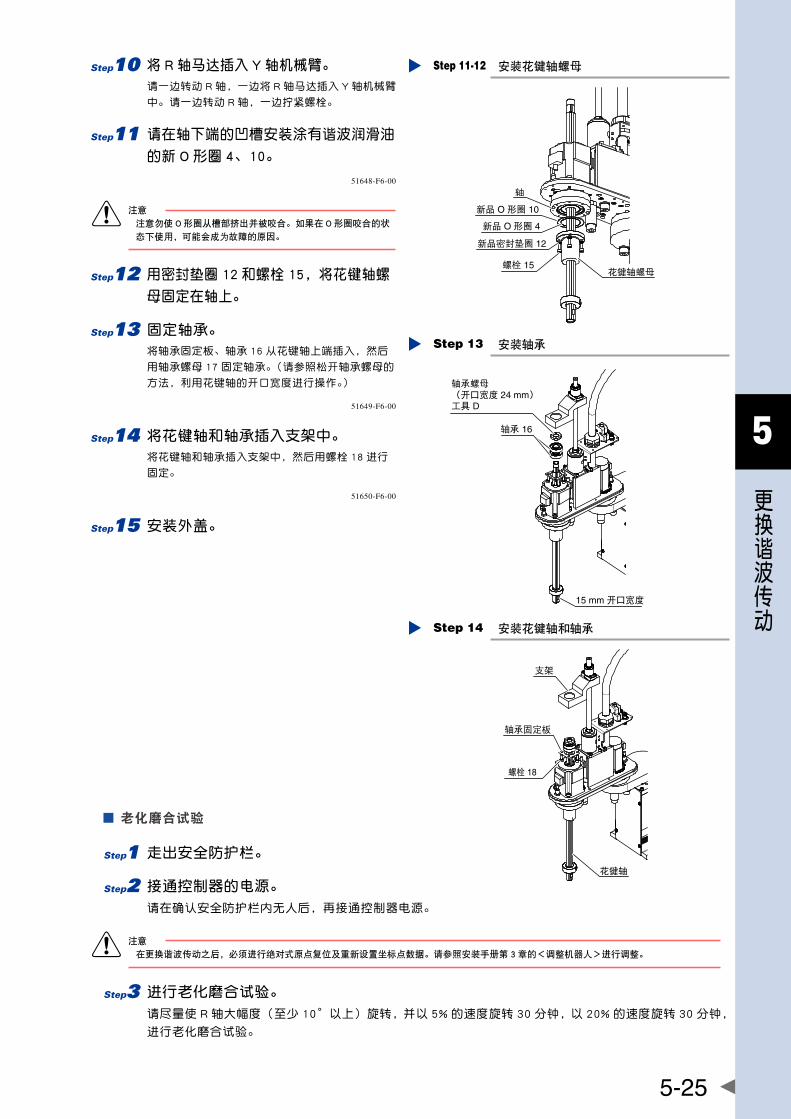
5
更换谐波传动
5-25
0 将 R 轴马达插入 Y 轴机械臂。
请一边转动 R 轴,一边将 R 轴马达插入 Y 轴机械臂
中。请一边转动 R 轴,一边拧紧螺栓。
q 请在轴下端的凹槽安装涂有谐波润滑油
的新 O 形圈 4、10。
安装花键轴螺母Step 11-12
花键轴螺母
轴
螺栓 15
新品密封垫圈 12
新品 O 形圈 10
新品 O 形圈 4
51648-F6-00
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
w 用密封垫圈 12 和螺栓 15,将花键轴螺
母固定在轴上。
e 固定轴承。
将轴承固定板、轴承 16 从花键轴上端插入,然后
用轴承螺母 17 固定轴承。(请参照松开轴承螺母的
方法,利用花键轴的开口宽度进行操作。)
安装轴承Step 13
轴承螺母(开口宽度 24 mm)工具 D
轴承 16
15 mm 开口宽度
51649-F6-00
r 将花键轴和轴承插入支架中。
将花键轴和轴承插入支架中,然后用螺栓 18 进行
固定。
51650-F6-00
t 安装外盖。
安装花键轴和轴承Step 14
支架
轴承固定板
螺栓 18
花键轴
■ 老化磨合试验
1 走出安全防护栏。
2 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
c 注意
在更换谐波传动之后,必须进行绝对式原点复位及重新设置坐标点数据。请参照安装手册第 3章的<调整机器人>进行调整。
3 进行老化磨合试验。
请尽量使 R 轴大幅度(至少 10°以上)旋转,并以 5% 的速度旋转 30 分钟,以 20% 的速度旋转 30 分钟,
进行老化磨合试验。

5
更换谐波传动
5-26
2.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS
2.2.1 更换 X 轴的谐波传动
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
更换 X 轴谐波时必需的物件如下。
1.更换用零部件
·YK500XG,YK600XG
YK500XGS,YK600XGS
部件名称 本公司型号 型号 个数 备注
1 谐波传动 KBF-M2110-000 1
2 O 形圈 KN4-M2143-000 S90(JIS) 1 会磨损老化,需要更换
3 O 形圈 90990-17J030 线径1.78mm× 内径66.4mm 1 会磨损老化,需要更换
4 O 形圈 KN5-M257L-000 线径1.30mm× 内径66.5mm 1 谐波传动附件
5 马达安装螺栓
KBP-M259A-000 M6长度 16 4机器人参照 KC346 以前、需
更换
91312-06016 M6长度 16 4机器人参照 KC346 以后、丢
失时备用
6 谐波固定螺栓 91312-04020 M4长度 20 16 需要更换
7 谐波固定螺栓 91312-04030 M4长度 30 11 需要更换
8 感应器螺丝用截锥头 98502-04030 M4长度 30 1 丢失时备用
9 感应器螺丝用螺母 95302-05600 M4 1 丢失时备用
10 垫圈 92903-04600 M4 16 需要更换
·YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK700XGS,YK800XGS,YK900XGS,YK1000XGS
部件名称 本公司型号 型号 个数 备注
1
谐波传动 KBP-M2110-000 1 标准用
谐波传动(*1) KBB-M2110-000 1 壁挂式安装·反向用
2 O 形圈 KN5-M2159-000 S115(JIS) 1 会磨损老化,需要更换
3 O 形圈 90990-17J035 线径1.50mm× 内径82.0mm 1 会磨损老化,需要更换
4 O 形圈 KN5-M2199-000 线径1.50mm× 内径87.5mm 1 谐波传动附件
5 马达安装螺栓 91312-5016 M5长度 16 4 丢失时备用
6 谐波固定螺栓 91312-05040 M5长度 40 16 需要更换
7 谐波固定螺栓 91312-05040 M5长度 40 11 需要更换
8 感应器螺丝用截锥头 98502-05040 M5长度 40 1 丢失时备用
9 感应器螺丝用螺母 95302-06600 M6 1 丢失时备用
10 垫圈 KBF-M2146-001 1 丢失时备用
*1 :对于 YK700XGS,YK800XGS,YK900XGS,YK1000XGS 系列,仅谐波传动与标准规格不同。
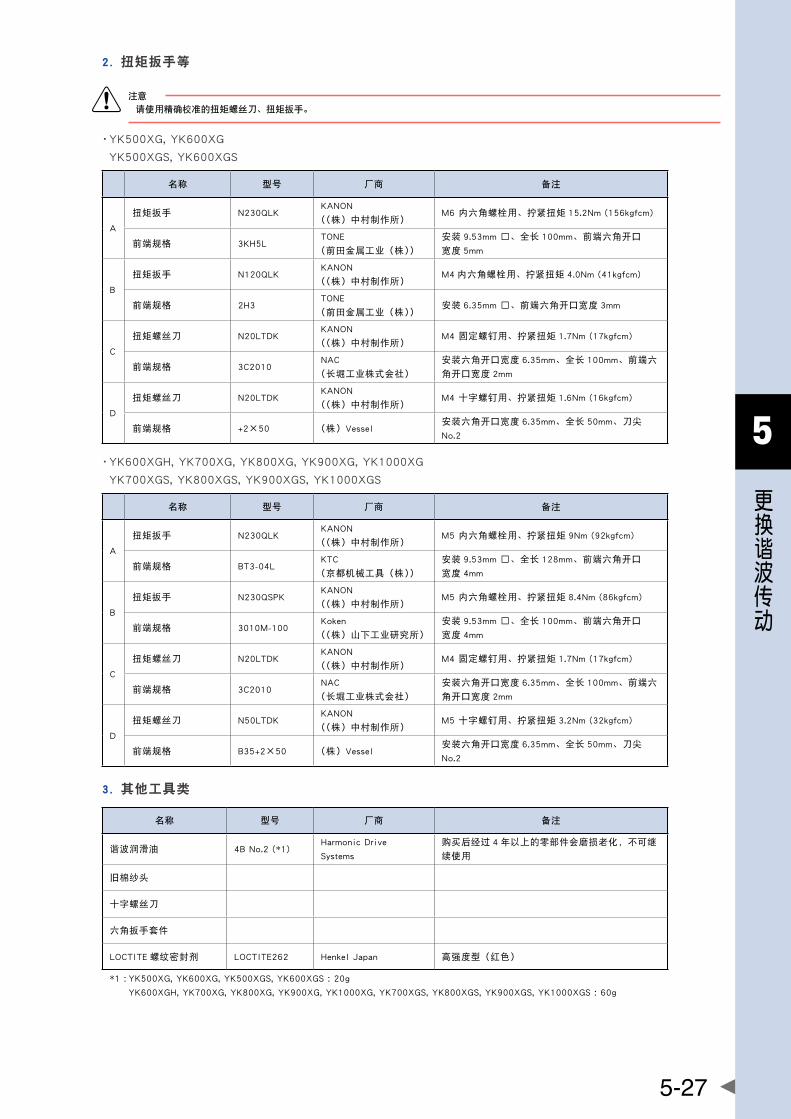
5
更换谐波传动
5-27
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
·YK500XG,YK600XG
YK500XGS,YK600XGS
名称 型号 厂商 备注
A
扭矩扳手 N230QLKKANON
((株)中村制作所)M6内六角螺栓用、拧紧扭矩 15.2Nm(156kgfcm)
前端规格 3KH5LTONE
(前田金属工业(株))
安装 9.53mm□、全长 100mm、前端六角开口
宽度 5mm
B
扭矩扳手 N120QLKKANON
((株)中村制作所)M4 内六角螺栓用、拧紧扭矩 4.0Nm(41kgfcm)
前端规格 2H3TONE
(前田金属工业(株))安装 6.35mm□、前端六角开口宽度 3mm
C
扭矩螺丝刀 N20LTDKKANON
((株)中村制作所)M4固定螺钉用、拧紧扭矩 1.7Nm(17kgfcm)
前端规格 3C2010NAC
(长堀工业株式会社)
安装六角开口宽度 6.35mm、全长 100mm、前端六
角开口宽度 2mm
D
扭矩螺丝刀 N20LTDKKANON
((株)中村制作所)M4十字螺钉用、拧紧扭矩 1.6Nm(16kgfcm)
前端规格 +2×50 (株)Vessel安装六角开口宽度 6.35mm、全长 50mm、刀尖
No.2
·YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK700XGS,YK800XGS,YK900XGS,YK1000XGS
名称 型号 厂商 备注
A
扭矩扳手 N230QLKKANON
((株)中村制作所)M5内六角螺栓用、拧紧扭矩 9Nm(92kgfcm)
前端规格 BT3-04LKTC
(京都机械工具(株))
安装 9.53mm□、全长 128mm、前端六角开口
宽度 4mm
B
扭矩扳手 N230QSPKKANON
((株)中村制作所)M5内六角螺栓用、拧紧扭矩 8.4Nm(86kgfcm)
前端规格 3010M-100Koken
((株)山下工业研究所)
安装 9.53mm□、全长 100mm、前端六角开口
宽度 4mm
C
扭矩螺丝刀 N20LTDKKANON
((株)中村制作所)M4固定螺钉用、拧紧扭矩 1.7Nm(17kgfcm)
前端规格 3C2010NAC
(长堀工业株式会社)
安装六角开口宽度 6.35mm、全长 100mm、前端六
角开口宽度 2mm
D
扭矩螺丝刀 N50LTDKKANON
((株)中村制作所)M5十字螺钉用、拧紧扭矩 3.2Nm(32kgfcm)
前端规格 B35+2×50 (株)Vessel安装六角开口宽度 6.35mm、全长 50mm、刀尖
No.2
3.其他工具类
名称 型号 厂商 备注
谐波润滑油 4BNo.2(*1)HarmonicDrive
Systems
购买后经过 4 年以上的零部件会磨损老化,不可继
续使用
旧棉纱头
十字螺丝刀
六角扳手套件
LOCTITE 螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
*1 :YK500XG,YK600XG,YK500XGS,YK600XGS :20g
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,YK700XGS,YK800XGS,YK900XGS,YK1000XGS :60g
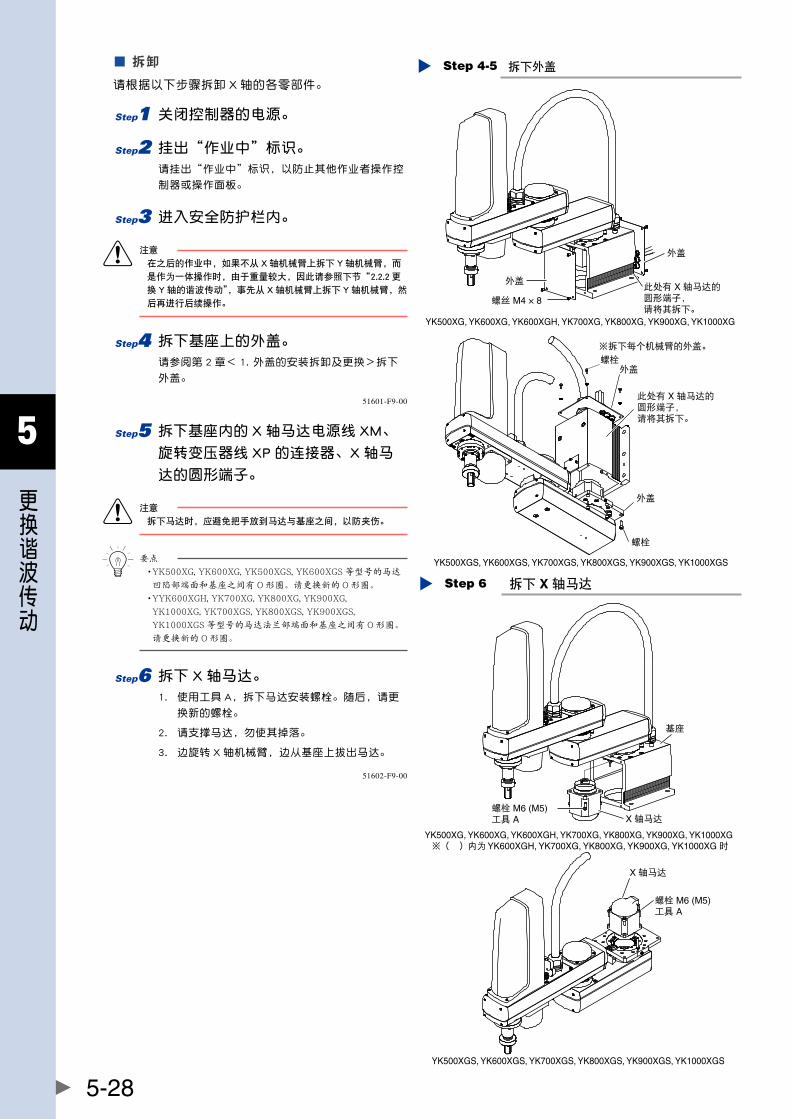
5
更换谐波传动
5-28
■ 拆卸
请根据以下步骤拆卸 X 轴的各零部件。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
c 注意
在之后的作业中,如果不从 X轴机械臂上拆下 Y轴机械臂,而
是作为一体操作时,由于重量较大,因此请参照下节“2.2.2更
换 Y轴的谐波传动”,事先从 X轴机械臂上拆下 Y轴机械臂,然
后再进行后续操作。
4 拆下基座上的外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
外盖
螺丝 M4 × 8
外盖
此处有 X 轴马达的圆形端子,请将其拆下。
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
※拆下每个机械臂的外盖。
YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
螺栓外盖
螺栓
外盖
此处有 X 轴马达的圆形端子,请将其拆下。
拆下外盖Step 4-5
51601-F9-00
5 拆下基座内的 X 轴马达电源线 XM、
旋转变压器线 XP 的连接器、X 轴马
达的圆形端子。
c 注意
拆下马达时,应避免把手放到马达与基座之间,以防夹伤。
n 要点
· YK500XG, YK600XG, YK500XGS, YK600XGS 等型号的马达
凹陷部端面和基座之间有 O 形圈。请更换新的 O 形圈。
· YYK600XGH, YK700XG, YK800XG, YK900XG,
YK1000XG, YK700XGS, YK800XGS, YK900XGS,
YK1000XGS 等型号的马达法兰部端面和基座之间有 O 形圈。
请更换新的 O 形圈。
6 拆下 X 轴马达。
1. 使用工具 A,拆下马达安装螺栓。随后,请更
换新的螺栓。
2. 请支撑马达,勿使其掉落。
3. 边旋转 X 轴机械臂,边从基座上拔出马达。
拆下 X 轴马达Step 6
螺栓 M6 (M5)工具 A X 轴马达
基座
�※( )内为 YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG 时YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
X 轴马达
螺栓 M6 (M5)工具 A
YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
51602-F9-00

5
更换谐波传动
5-29
7 从马达轴上拆下波发生器。
请拆下固定波发生器的固定螺钉(1 个)。
对于 YK600XGH,YK700XG,YK800XG,YK900XG,
YK1000XG,YK700XGS,YK800XGS,YK900XGS,
YK1000XGS 等型号,还需另外拆下垫片和螺栓。
拆下波发生器Step 7
M4 固定螺钉(谐波附件)
波发生器(谐波传动)
马达凹陷部端面
请勿拆下垫片
马达法兰部端面
YK500XG, YK600XG, YK500XGS, YK600XGS
M4 固定螺钉(谐波附件)
M5×16(YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGSのみ)
波发生器(谐波传动)
垫片
马达法兰部端面
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
51603-F9-00
c 注意
波发生器和马达之间有垫片。请注意不要遗失。YK600XGH,
YK700XG,YK800XG,YK900XG,YK1000XG,YK700XGS,
YK800XGS,YK900XGS,YK1000XGS 中没有垫片。
w 警告
・在 Step8 的作业中,如果拆下 X轴机械臂的安装螺栓,X轴机
械臂将脱出,非常危险。在机械臂前端附有较重的工具等物件
时,机械臂可能会掉落,请特别注意(参照 Step8 的图)。
・1 人拆卸 X轴机械臂是危险的。请安排 2人以上进行操作,或
事先拆下 Y轴机械臂。拆下 Y轴机械臂时,请参照下节“2.2.2
更换 Y轴的谐波传动”。
8 拆下 X 轴机械臂。
请使用工具 B,拆下 X 轴机械臂安装螺栓。
请将拆下的 X 轴机械臂置于不妨碍作业的地方。
51604-F9-00
Step 8 拆下 X 轴机械臂
螺栓工具 B
O 形圈 O 形圈
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG,YK900XG, YK1000XG, YK700XGS, YK800XGS,YK900XGS, YK1000XGS
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
螺栓工具 B
YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
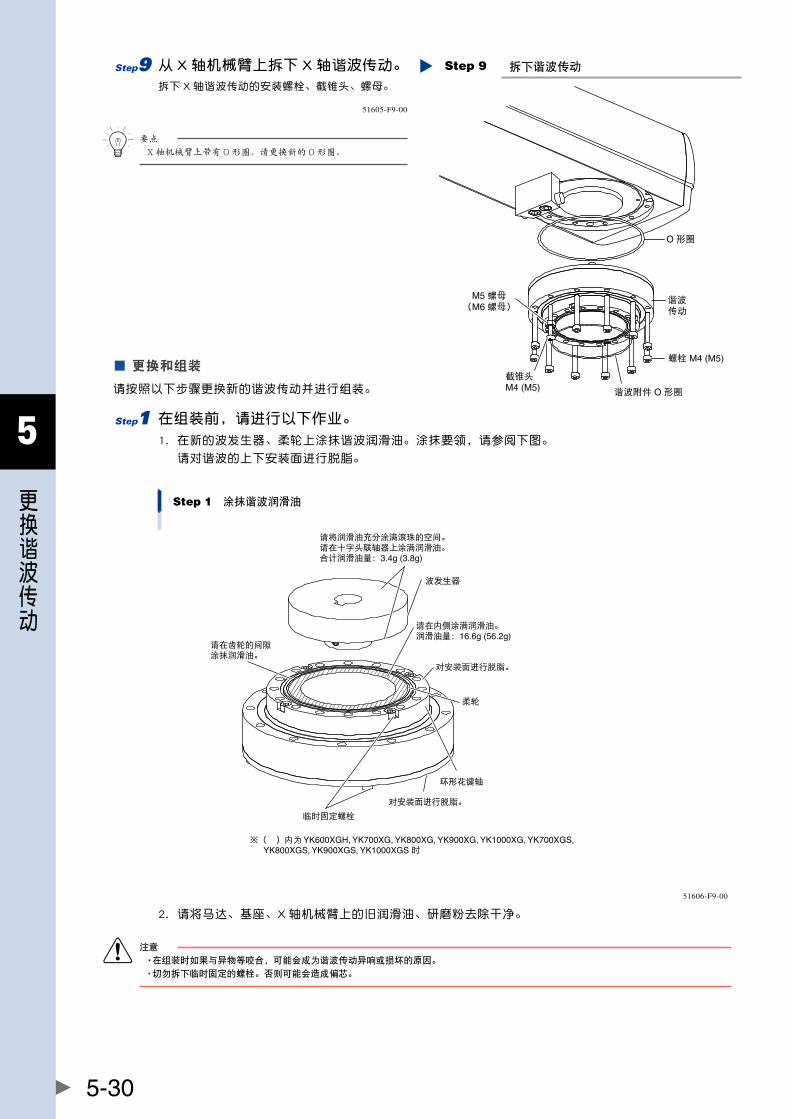
5
更换谐波传动
5-30
9 从 X 轴机械臂上拆下 X 轴谐波传动。
拆下 X 轴谐波传动的安装螺栓、截锥头、螺母。
拆下谐波传动Step 9
O 形圈
谐波传动
谐波附件 O 形圈
螺栓 M4 (M5)
M5 螺母(M6 螺母)
截锥头M4 (M5)
51605-F9-00
n 要点
X 轴机械臂上带有 O 形圈。请更换新的 O 形圈。
■ 更换和组装
请按照以下步骤更换新的谐波传动并进行组装。
1 在组装前,请进行以下作业。
1. 在新的波发生器、柔轮上涂抹谐波润滑油。涂抹要领,请参阅下图。
请对谐波的上下安装面进行脱脂。
Step 1 涂抹谐波润滑油
临时固定螺栓
对安装面进行脱脂。
环形花键轴
※( )内为 YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS 时
请在齿轮的间隙涂抹润滑油。
请在内侧涂满润滑油。润滑油量:16.6g (56.2g)
波发生器
请将润滑油充分涂满滚珠的空间。请在十字头联轴器上涂满润滑油。合计润滑油量:3.4g (3.8g)
对安装面进行脱脂。
柔轮
51606-F9-00
2. 请将马达、基座、X 轴机械臂上的旧润滑油、研磨粉去除干净。
c 注意
・在组装时如果与异物等咬合,可能会成为谐波传动异响或损坏的原因。
・切勿拆下临时固定的螺栓。否则可能会造成偏芯。
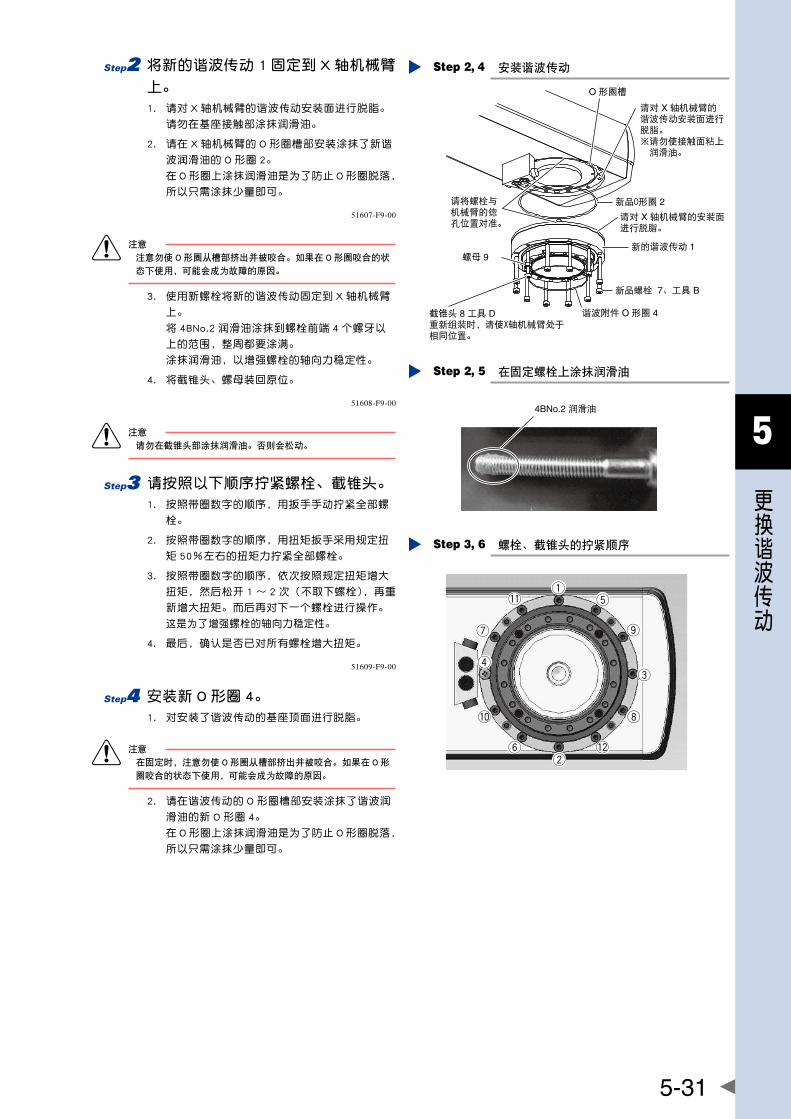
5
更换谐波传动
5-31
2 将新的谐波传动 1 固定到 X 轴机械臂
上。
1. 请对 X 轴机械臂的谐波传动安装面进行脱脂。
请勿在基座接触部涂抹润滑油。
2. 请在 X 轴机械臂的 O 形圈槽部安装涂抹了新谐
波润滑油的 O 形圈 2。
在 O形圈上涂抹润滑油是为了防止 O形圈脱落,
所以只需涂抹少量即可。
安装谐波传动Step 2, 4
新品O形圈 2
新的谐波传动 1
谐波附件 O 形圈 4
螺母 9
请将螺栓与机械臂的锪孔位置对准。
O 形圈槽
请对 X 轴机械臂的谐波传动安装面进行脱脂。※请勿使接触面粘上 润滑油。
请对 X 轴机械臂的安装面进行脱脂。
截锥头 8 工具 D重新组装时,请使X轴机械臂处于相同位置。
新品螺栓 7、工具 B
51607-F9-00
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
3. 使用新螺栓将新的谐波传动固定到 X 轴机械臂
上。
将 4BNo.2 润滑油涂抹到螺栓前端 4 个螺牙以
上的范围,整周都要涂满。
涂抹润滑油,以增强螺栓的轴向力稳定性。
4. 将截锥头、螺母装回原位。在固定螺栓上涂抹润滑油Step 2, 5
4BNo.2 润滑油51608-F9-00
c 注意
请勿在截锥头部涂抹润滑油。否则会松动。
3 请按照以下顺序拧紧螺栓、截锥头。
1. 按照带圈数字的顺序,用扳手手动拧紧全部螺
栓。
2. 按照带圈数字的顺序,用扭矩扳手采用规定扭
矩 50%左右的扭矩力拧紧全部螺栓。
3. 按照带圈数字的顺序,依次按照规定扭矩增大
扭矩,然后松开 1 ~ 2 次(不取下螺栓),再重
新增大扭矩。而后再对下一个螺栓进行操作。
这是为了增强螺栓的轴向力稳定性。
4. 最后,确认是否已对所有螺栓增大扭矩。
螺栓、截锥头的拧紧顺序Step 3, 6
51609-F9-00
4 安装新 O 形圈 4。
1. 对安装了谐波传动的基座顶面进行脱脂。
c 注意
在固定时,注意勿使 O形圈从槽部挤出并被咬合。如果在 O形
圈咬合的状态下使用,可能会成为故障的原因。
2. 请在谐波传动的 O 形圈槽部安装涂抹了谐波润
滑油的新 O 形圈 4。
在 O形圈上涂抹润滑油是为了防止 O形圈脱落,
所以只需涂抹少量即可。
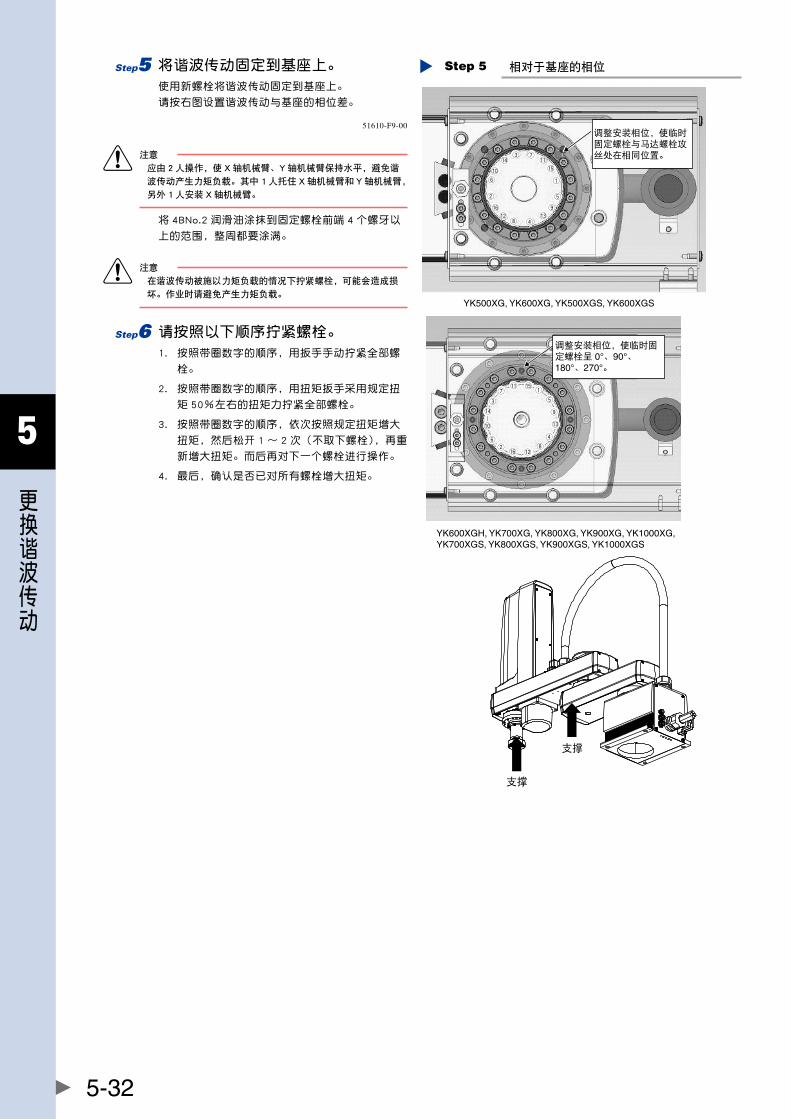
5
更换谐波传动
5-32
5 将谐波传动固定到基座上。
使用新螺栓将谐波传动固定到基座上。
请按右图设置谐波传动与基座的相位差。
相对于基座的相位Step 5
调整安装相位,使临时固定螺栓与马达螺栓攻丝处在相同位置。
调整安装相位,使临时固定螺栓呈 0°、90°、180°、270°。
支撑
支撑
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
51610-F9-00
c 注意
应由 2人操作,使 X轴机械臂、Y轴机械臂保持水平,避免谐
波传动产生力矩负载。其中 1人托住 X轴机械臂和 Y轴机械臂,
另外 1人安装 X轴机械臂。
将 4BNo.2 润滑油涂抹到固定螺栓前端 4 个螺牙以
上的范围,整周都要涂满。
c 注意
在谐波传动被施以力矩负载的情况下拧紧螺栓,可能会造成损
坏。作业时请避免产生力矩负载。
6 请按照以下顺序拧紧螺栓。
1. 按照带圈数字的顺序,用扳手手动拧紧全部螺
栓。
2. 按照带圈数字的顺序,用扭矩扳手采用规定扭
矩 50%左右的扭矩力拧紧全部螺栓。
3. 按照带圈数字的顺序,依次按照规定扭矩增大
扭矩,然后松开 1 ~ 2 次(不取下螺栓),再重
新增大扭矩。而后再对下一个螺栓进行操作。
4. 最后,确认是否已对所有螺栓增大扭矩。
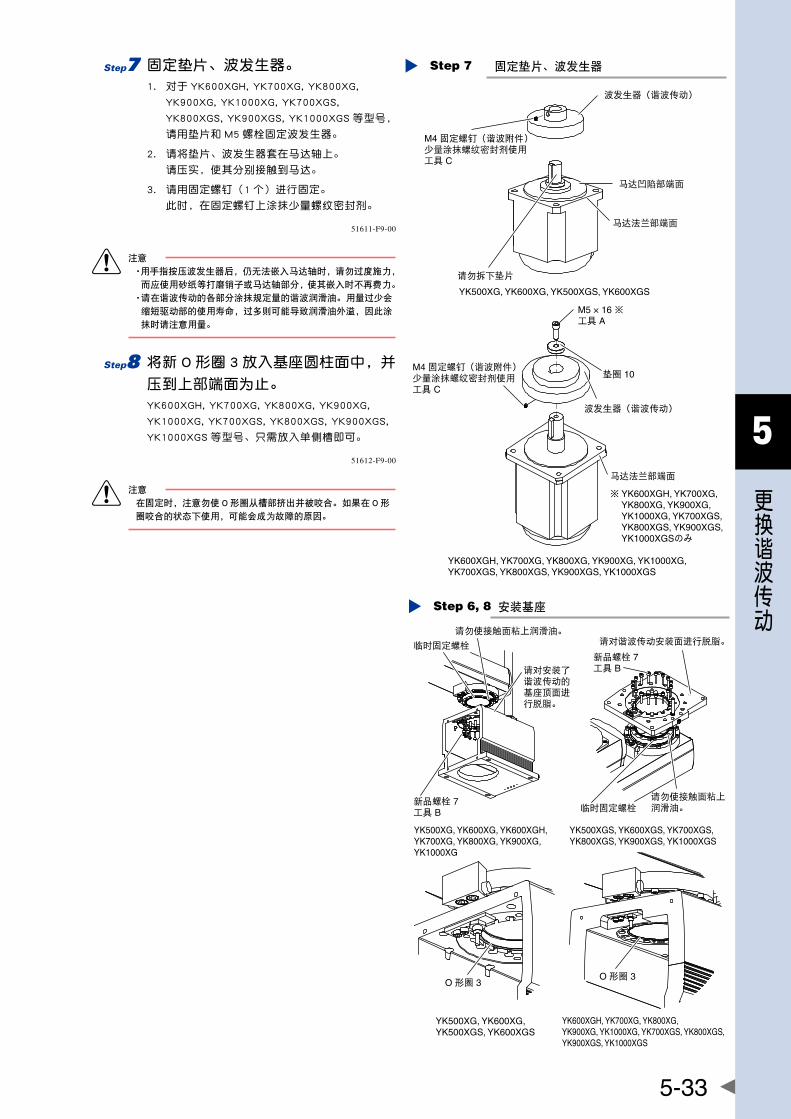
5
更换谐波传动
5-33
7 固定垫片、波发生器。
1. 对于 YK600XGH,YK700XG,YK800XG,
YK900XG,YK1000XG,YK700XGS,
YK800XGS,YK900XGS,YK1000XGS 等型号,
请用垫片和 M5 螺栓固定波发生器。
2. 请将垫片、波发生器套在马达轴上。
请压实,使其分别接触到马达。
3. 请用固定螺钉(1 个)进行固定。
此时,在固定螺钉上涂抹少量螺纹密封剂。
固定垫片、波发生器Step 7
波发生器(谐波传动)
马达凹陷部端面
请勿拆下垫片
马达法兰部端面
M4 固定螺钉(谐波附件)少量涂抹螺纹密封剂使用工具 C
M5 × 16 ※ 工具 A
M4 固定螺钉(谐波附件)少量涂抹螺纹密封剂使用工具 C
波发生器(谐波传动)
马达法兰部端面
垫圈 10
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
※ YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGSのみ
51611-F9-00
c 注意
・用手指按压波发生器后,仍无法嵌入马达轴时,请勿过度施力,
而应使用砂纸等打磨销子或马达轴部分,使其嵌入时不再费力。
・请在谐波传动的各部分涂抹规定量的谐波润滑油。用量过少会
缩短驱动部的使用寿命,过多则可能导致润滑油外溢,因此涂
抹时请注意用量。
8 将新 O 形圈 3 放入基座圆柱面中,并
压到上部端面为止。
YK600XGH,YK700XG,YK800XG,YK900XG,
YK1000XG,YK700XGS,YK800XGS,YK900XGS,
YK1000XGS 等型号、只需放入单侧槽即可。
51612-F9-00
c 注意
在固定时,注意勿使 O形圈从槽部挤出并被咬合。如果在 O形
圈咬合的状态下使用,可能会成为故障的原因。
安装基座Step 6, 8
新品螺栓 7工具 B
临时固定螺栓
请勿使接触面粘上润滑油。
请对安装了谐波传动的基座顶面进行脱脂。
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG,YK900XG, YK1000XG, YK700XGS, YK800XGS,YK900XGS, YK1000XGS
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
新品螺栓 7工具 B
临时固定螺栓请勿使接触面粘上润滑油。
请对谐波传动安装面进行脱脂。
O 形圈 3O 形圈 3
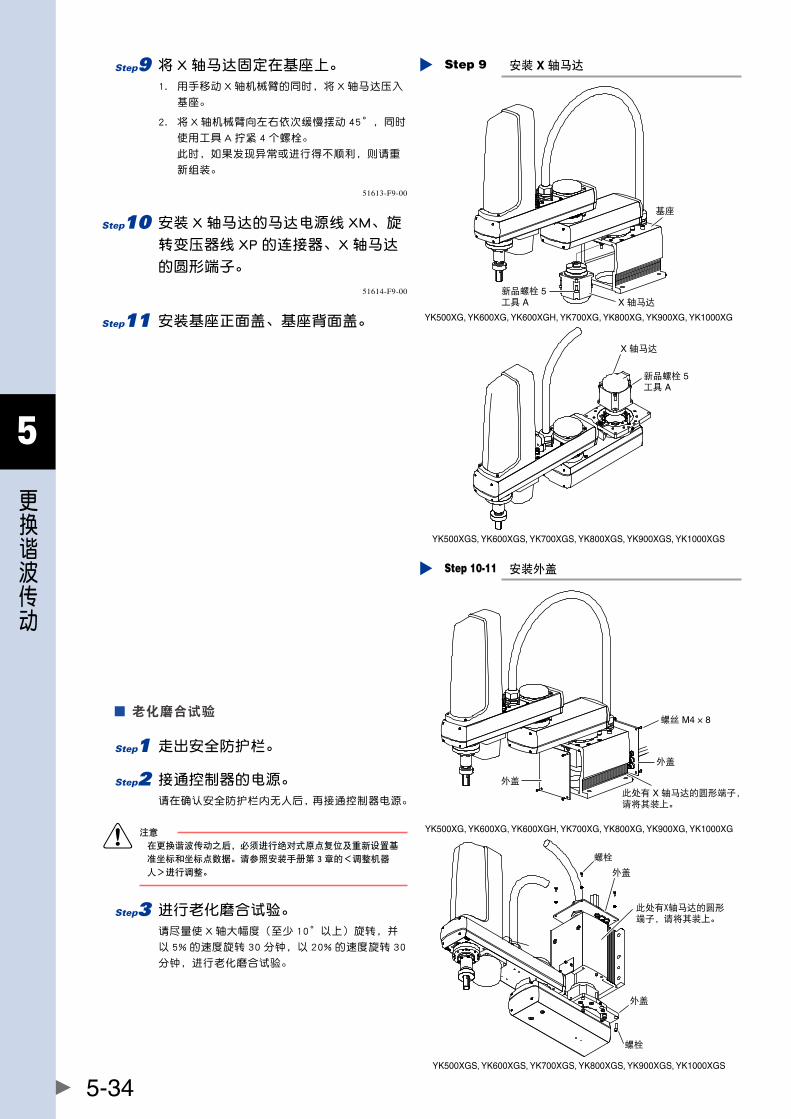
5
更换谐波传动
5-34
9 将 X 轴马达固定在基座上。
1. 用手移动 X 轴机械臂的同时,将 X 轴马达压入
基座。
2. 将 X 轴机械臂向左右依次缓慢摆动 45°,同时
使用工具 A 拧紧 4 个螺栓。
此时,如果发现异常或进行得不顺利,则请重
新组装。
安装 X 轴马达Step 9
新品螺栓 5工具 A
基座
X 轴马达
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
X 轴马达
新品螺栓 5工具 A
51613-F9-00
0 安装 X 轴马达的马达电源线 XM、旋
转变压器线 XP 的连接器、X 轴马达
的圆形端子。
51614-F9-00
q 安装基座正面盖、基座背面盖。
安装外盖Step 10-11
外盖
外盖
螺丝 M4 × 8
此处有 X 轴马达的圆形端子,请将其装上。
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
螺栓
外盖
螺栓
外盖
此处有X轴马达的圆形端子,请将其装上。
■ 老化磨合试验
1 走出安全防护栏。
2 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
c 注意
在更换谐波传动之后,必须进行绝对式原点复位及重新设置基
准坐标和坐标点数据。请参照安装手册第 3章的<调整机器
人>进行调整。
3 进行老化磨合试验。
请尽量使 X 轴大幅度(至少 10°以上)旋转,并
以 5% 的速度旋转 30 分钟,以 20% 的速度旋转 30
分钟,进行老化磨合试验。

5
更换谐波传动
5-35
2.2.2 更换 Y 轴的谐波传动
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
更换 Y 轴减速器时必须使用以下盘管,如发现机器未配,请及时备好。即使购买时已配置,也应再备一套,以备
将来更换之需。
不安装盘管,会导致润滑油泄漏。
n 要点
YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS 的反向规格未配盘管。不需要更换新品。
盘管
盘管
51615-F9-00
更换 Y 轴谐波时必需的物件如下。
1.更换用零部件
·YK500XG,YK600XG
YK500XGS,YK600XGS
部件名称 本公司型号 型号 个数 备注
1 谐波传动 KBF-M2510-000 1
2 O 形圈 KN4-M257K-000 线径1.78mm× 内径72.75mm 1 会磨损老化,需要更换
3 O 形圈 KN3-M2143-000 线径1.50mm× 内径49.00mm 1 会磨损老化,需要更换
4 O 形圈 KN3-M2144-000 线径0.99mm× 内径53.28mm 1 谐波传动附件
5 马达安装螺栓 91312-05012 M5长度 12 4 丢失时备用
6 谐波固定螺栓 91312-03016 M3 长度 16 16 需要更换
7 谐波固定螺栓 91312-03030 M3 长度 30 11 需要更换
8 感应器螺丝用截锥头 98502-03030 M3 长度 30 1 丢失时备用
9 感应器螺丝用螺母 95302-04600 M4 1 丢失时备用
10 盘管 KBF-M2511-000 1YK500XGS,YK600XGS 的反
向规格不需要
11 接头 $UEF4-M3 UEF4-M3(小金井) 1 配有盘管时不需要

5
更换谐波传动
5-36
·YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK700XGS,YK800XGS,YK900XGS,YK1000XGS
部件名称 本公司型号 型号 个数 备注
1 谐波传动 KBP-M2510-000 1
2 O 形圈 KN4-M2143-000 S90(JIS) 1 会磨损老化,需要更换
3 O 形圈 90990-17J030 线径1.78mm× 内径66.4mm 1 会磨损老化,需要更换
4 O 形圈 KN5-M257L-000 线径1.30mm× 内径66.5mm 1 谐波传动附件
5 马达安装螺栓 91312-06016 M6长度 16 4 丢失时备用
6 谐波固定螺栓 91312-04020 M4长度 20 16 需要更换
7 谐波固定螺栓 91312-04030 M4长度 30 11 需要更换
8 感应器螺丝用截锥头 98502-04030 M4长度 30 1 丢失时备用
9 感应器螺丝用螺母 95302-05600 M4 1 丢失时备用
10 垫圈 92903-04600 M4 16 需要更换
11 盘管 KBP-M2511-000 1
YK700XGS,YK800XGS,
YK900XGS,YK1000XGS 的反
向规格不需要
12 接头 $UEF4-M3 UEF4-M3(小金井) 1 配有盘管时不需要
13 垫圈 KBF-M2146-001 1 丢失时备用
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
·YK500XG,K600XG
YK500XGS,YK600XGS
名称 型号 厂商 备注
A
扭矩扳手 N120SPCKKANON
((株)中村制作所)M5内六角螺栓用、拧紧扭矩 7.4Nm(76kgfcm)
置换头 230HCK4KANON
((株)中村制作所)请插入 M5内六角用扳手(前端无球)110mm
B
扭矩螺丝刀 N30LTDKKANON
((株)中村制作所)M3内六角螺栓用、拧紧扭矩 1.8Nm(18kgfcm)
前端规格B35对边
2.5×75(株)Vessel
安装六角开口宽度 6.35mm、全长 75mm、前端六
角开口宽度 2.5mm
C
扭矩螺丝刀 N12LTDKKANON
((株)中村制作所)M3固定螺钉用、拧紧扭矩 0.7Nm(7kgfcm)
前端规格 3C1507NAC
(长堀工业株式会社)
安装六角开口宽度 6.35mm、全长 70mm、前端六
角开口宽度 1.5mm
D
扭矩螺丝刀 N12LTDKKANON
((株)中村制作所)M3十字螺钉用、拧紧扭矩 0.9Nm(9kgfcm)
前端规格 B35+2×50 (株)Vessel安装六角开口宽度 6.35mm、全长 50mm、刀尖
No.2
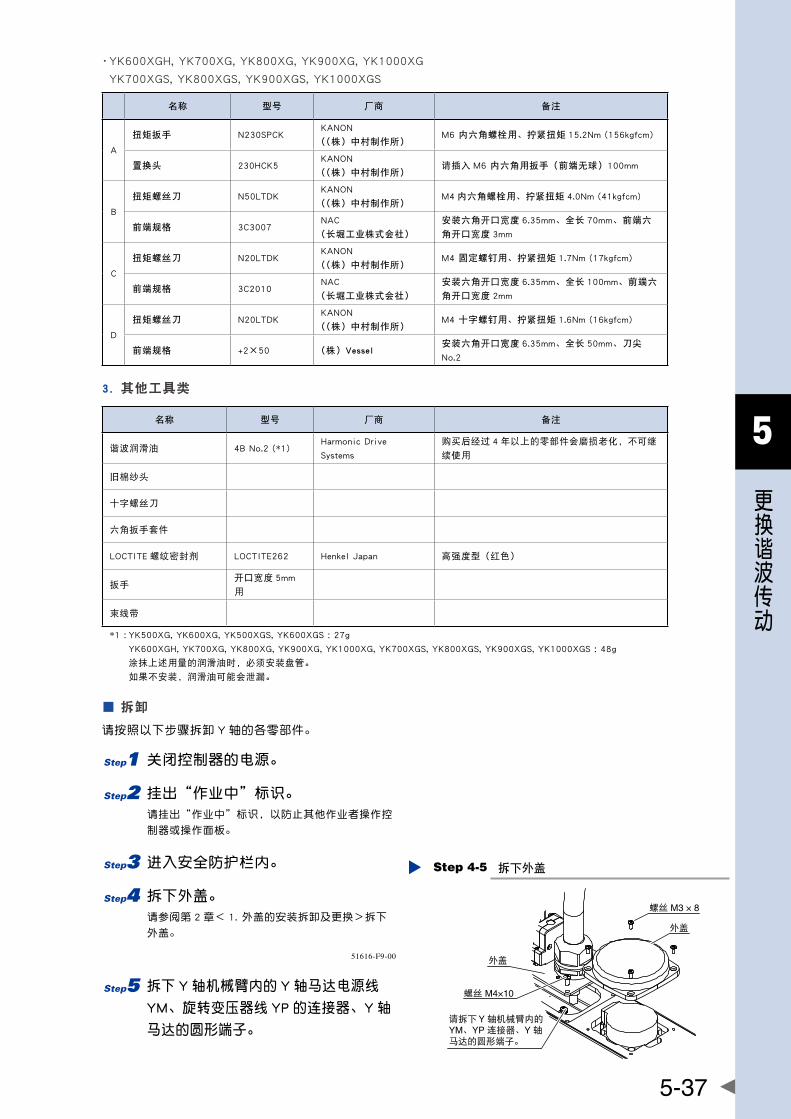
5
更换谐波传动
5-37
·YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK700XGS,YK800XGS,YK900XGS,YK1000XGS
名称 型号 厂商 备注
A
扭矩扳手 N230SPCKKANON
((株)中村制作所)M6内六角螺栓用、拧紧扭矩 15.2Nm(156kgfcm)
置换头 230HCK5KANON
((株)中村制作所)请插入 M6内六角用扳手(前端无球)100mm
B
扭矩螺丝刀 N50LTDKKANON
((株)中村制作所)M4内六角螺栓用、拧紧扭矩 4.0Nm(41kgfcm)
前端规格 3C3007NAC
(长堀工业株式会社)
安装六角开口宽度 6.35mm、全长 70mm、前端六
角开口宽度 3mm
C
扭矩螺丝刀 N20LTDKKANON
((株)中村制作所)M4固定螺钉用、拧紧扭矩 1.7Nm(17kgfcm)
前端规格 3C2010NAC
(长堀工业株式会社)
安装六角开口宽度 6.35mm、全长 100mm、前端六
角开口宽度 2mm
D
扭矩螺丝刀 N20LTDKKANON
((株)中村制作所)M4十字螺钉用、拧紧扭矩 1.6Nm(16kgfcm)
前端规格 +2×50 (株)Vessel安装六角开口宽度 6.35mm、全长 50mm、刀尖
No.2
3.其他工具类
名称 型号 厂商 备注
谐波润滑油 4BNo.2(*1)HarmonicDrive
Systems
购买后经过 4 年以上的零部件会磨损老化,不可继
续使用
旧棉纱头
十字螺丝刀
六角扳手套件
LOCTITE 螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
扳手开口宽度 5mm
用
束线带
*1 :YK500XG,YK600XG,YK500XGS,YK600XGS :27g
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,YK700XGS,YK800XGS,YK900XGS,YK1000XGS :48g
涂抹上述用量的润滑油时,必须安装盘管。
如果不安装,润滑油可能会泄漏。
■ 拆卸
请按照以下步骤拆卸 Y 轴的各零部件。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
4 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下外盖Step 4-5
螺丝 M3 × 8
外盖
请拆下 Y 轴机械臂内的 YM、YP 连接器、Y 轴马达的圆形端子。
外盖
螺丝 M4×10
51616-F9-00
5 拆下 Y 轴机械臂内的 Y 轴马达电源线
YM、旋转变压器线 YP 的连接器、Y 轴
马达的圆形端子。
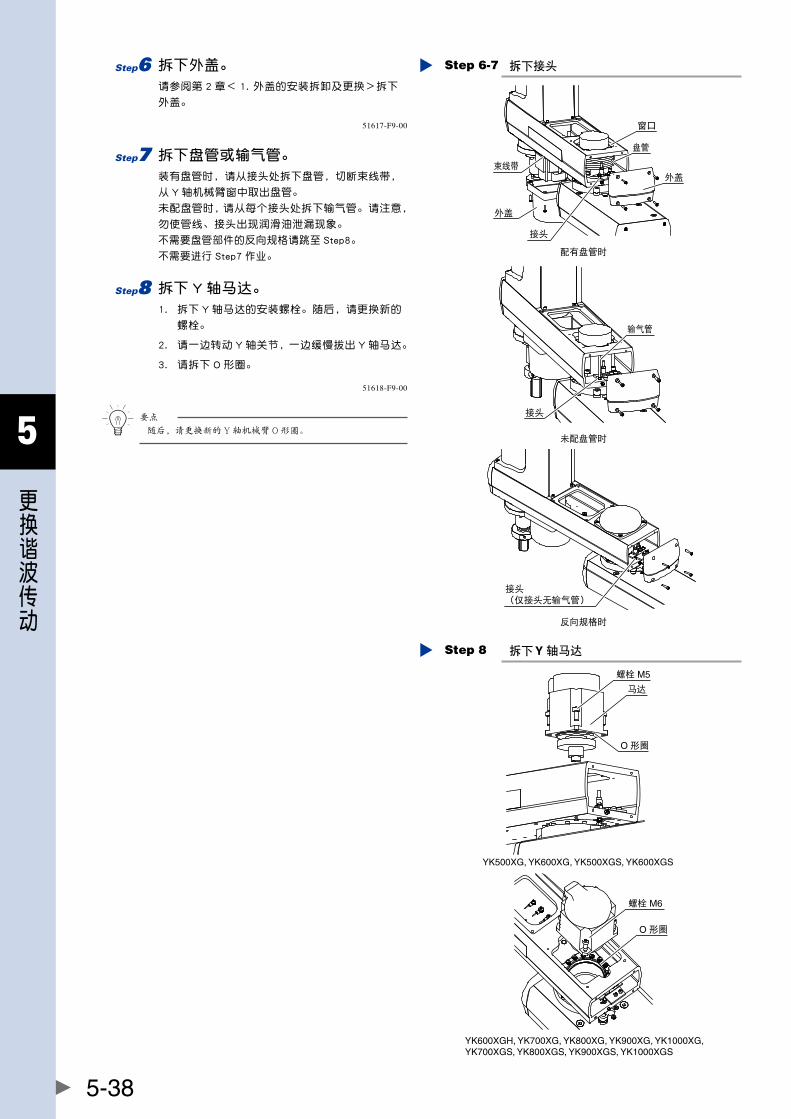
5
更换谐波传动
5-38
6 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下接头Step 6-7
窗口
盘管
外盖
外盖
束线带
接头
输气管
接头
配有盘管时
未配盘管时
反向规格时
接头(仅接头无输气管)
51617-F9-00
7 拆下盘管或输气管。
装有盘管时,请从接头处拆下盘管,切断束线带,
从 Y 轴机械臂窗中取出盘管。
未配盘管时,请从每个接头处拆下输气管。请注意,
勿使管线、接头出现润滑油泄漏现象。
不需要盘管部件的反向规格请跳至 Step8。
不需要进行 Step7 作业。
8 拆下 Y 轴马达。
1. 拆下 Y 轴马达的安装螺栓。随后,请更换新的
螺栓。
2. 请一边转动 Y 轴关节,一边缓慢拔出 Y 轴马达。
3. 请拆下 O 形圈。
51618-F9-00
n 要点
随后,请更换新的 Y 轴机械臂 O 形圈。
拆下 Y 轴马达Step 8
螺栓 M5
马达
O 形圈
螺栓 M6
O 形圈
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
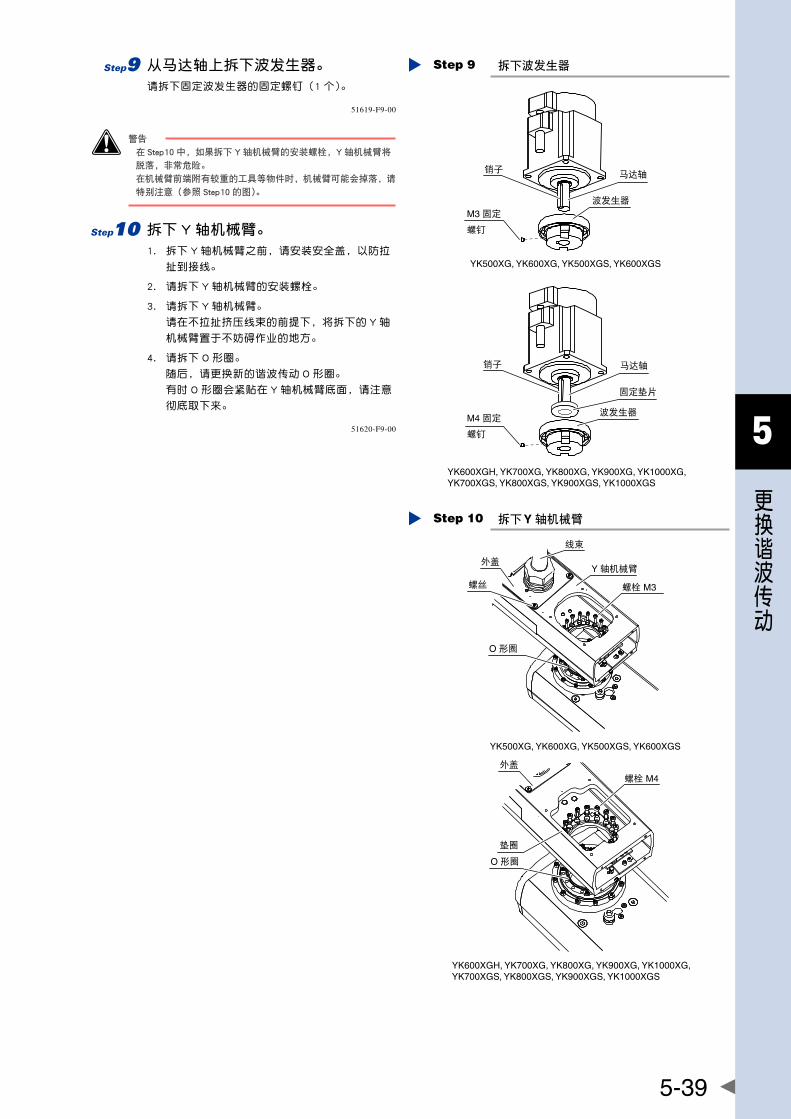
5
更换谐波传动
5-39
9 从马达轴上拆下波发生器。
请拆下固定波发生器的固定螺钉(1 个)。
拆下波发生器Step 9
波发生器
M3 固定
螺钉
销子马达轴
波发生器
马达轴
固定垫片
M4 固定
螺钉
销子
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
51619-F9-00
w 警告
在 Step10 中,如果拆下 Y轴机械臂的安装螺栓,Y轴机械臂将
脱落,非常危险。
在机械臂前端附有较重的工具等物件时,机械臂可能会掉落,请
特别注意(参照 Step10 的图)。
0 拆下 Y 轴机械臂。
1. 拆下 Y 轴机械臂之前,请安装安全盖,以防拉
扯到接线。
2. 请拆下 Y 轴机械臂的安装螺栓。
3. 请拆下 Y 轴机械臂。
请在不拉扯挤压线束的前提下,将拆下的 Y 轴
机械臂置于不妨碍作业的地方。
4. 请拆下 O 形圈。
随后,请更换新的谐波传动 O 形圈。
有时 O 形圈会紧贴在 Y 轴机械臂底面,请注意
彻底取下来。
51620-F9-00
拆下 Y 轴机械臂Step 10
Y 轴机械臂
螺栓 M3
O 形圈
外盖
螺丝
线束
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
O 形圈
垫圈
螺栓 M4
外盖

5
更换谐波传动
5-40
q 从 X 轴机械臂上表面拆下 Y 轴谐波传
动。
1. 请拆下 Y 轴谐波传动的安装螺栓、截锥头、螺母。
2. 请拆下 O 形圈。
拆下 Y 轴谐波传动Step 11
O 形圈
螺栓 M3 (M4)
螺母
截锥头
X 轴机械臂
谐波传动51621-F9-00
n 要点
随后,请更换新的 Y 轴谐波传动 O 形圈。
■ 更换和组装
请按照以下步骤更换新的谐波传动并进行组装。
1 在组装前,请进行以下作业。
1. 在新的谐波传动波发生器、主机底部上涂抹谐波润滑油 4BNo.2。
涂抹要领,请参阅下图。
Step 1 涂抹谐波润滑油
请将润滑油充分涂满滚珠的空间。请在十字头联轴器上涂满润滑油。合计润滑油量:3g (3.4g)
请在底部涂抹一层润滑油。润滑油量:24g (44.6g)
临时固定螺栓
请对下安装面进行脱脂。
请对安装面进行脱脂。
※( )内为YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS 时
请在齿轮的间隙涂抹润滑油。
51622-F9-00
2. 请将马达、X 轴机械臂、Y 轴机械臂上的旧润滑油、研磨粉等去除干净。
c 注意
・在组装时如果与异物等咬合,可能会成为谐波传动异响或损坏的原因。
・切勿拆下临时固定的螺栓。否则可能会造成偏芯。
3. 请在谐波传动的各部分涂抹规定量的谐波润滑油。
c 注意
用量过少会缩短驱动部的使用寿命,过多则可能导致润滑油外溢,因此涂抹时请注意用量。

5
更换谐波传动
5-41
2 将新的谐波传动 1 固定到 X 轴机械臂
上。
1. 请对 X 轴机械臂的谐波传动安装面进行脱脂。
请勿使接触面粘上润滑油。
2. 请在 X 轴机械臂的 O 形圈槽上安装新的 O 形
圈 2。
安装谐波传动Step 2-4
新品 O 形圈 2
新的谐波传动 1
O 形圈槽
新品螺栓 7工具 B
螺母 9重新组装时,请使X 轴机械臂处于相同位置。
截锥头 8工具 D
X 轴机械臂
请将螺栓与机械臂的锪孔位置对准请对 X 轴的谐波传动安装
面进行脱脂。请勿使接触面粘上润滑油。
谐波传动附带 O 形圈 4
51623-F9-00
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
3. 将新的谐波传动放到 X 轴机械臂上,并使用新
螺栓将其固定。
将 4BNo.2 润滑油涂抹到固定螺栓前端 4 个螺
牙以上的范围,整周都要涂满。
涂抹润滑油,以增强螺栓的轴向力稳定性。
4. 将截锥头、螺母装回原位。 在固定螺栓上涂抹润滑油Step 2, 5
4BNo.2 润滑油
51624-F9-00
c 注意
请勿在截锥头部涂抹润滑油。否则会松动。
3 请按照以下步骤组装螺栓、截锥头。
1. 按照带圈数字的顺序,用扳手手动拧紧全部螺
栓。
2. 按照带圈数字的顺序,用扭矩螺丝刀采用规定
扭矩 50%左右的扭矩力拧紧全部螺栓。
3. 按照带圈数字的顺序,依次按照规定扭矩增大
扭矩。
4. 最后,确认是否已对所有螺栓增大扭矩。
螺栓、截锥头的拧紧步骤Step 3
51625-F9-00
4 安装新谐波传动附带的 O 形圈 4。
1. 对谐波传动顶部安装面进行脱脂。
2. 在谐波传动的 O 形圈槽部安装新谐波传动附带
的 O 形圈。
难以嵌入槽部时,请将 O 形圈稍稍伸展一下。
为了防止从槽部脱出,只需在 O 形圈上少量涂
抹谐波润滑油即可。
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
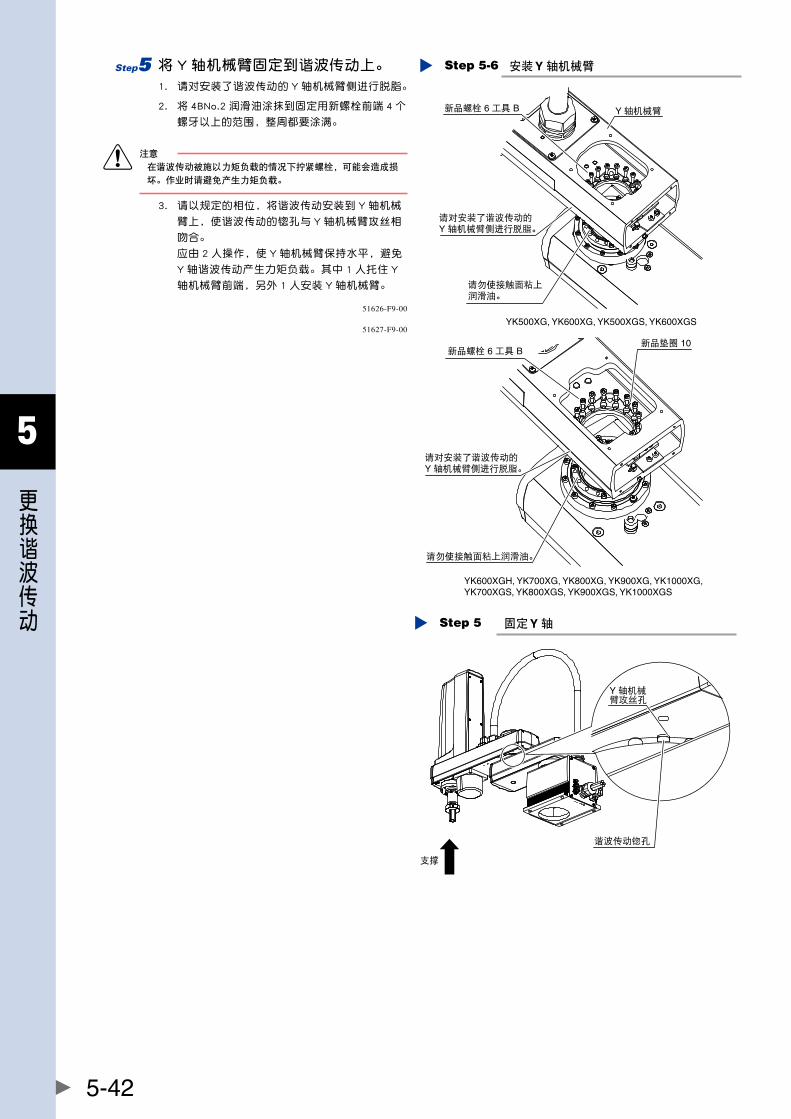
5
更换谐波传动
5-42
5 将 Y 轴机械臂固定到谐波传动上。
1. 请对安装了谐波传动的 Y 轴机械臂侧进行脱脂。
2. 将 4BNo.2 润滑油涂抹到固定用新螺栓前端 4 个
螺牙以上的范围,整周都要涂满。
c 注意
在谐波传动被施以力矩负载的情况下拧紧螺栓,可能会造成损
坏。作业时请避免产生力矩负载。
3. 请以规定的相位,将谐波传动安装到 Y 轴机械
臂上,使谐波传动的锪孔与 Y 轴机械臂攻丝相
吻合。
应由 2 人操作,使 Y 轴机械臂保持水平,避免
Y 轴谐波传动产生力矩负载。其中 1 人托住 Y
轴机械臂前端,另外 1 人安装 Y 轴机械臂。
安装 Y 轴机械臂Step 5-6
Y 轴机械臂新品螺栓 6 工具 B
请勿使接触面粘上润滑油。
请对安装了谐波传动的Y 轴机械臂侧进行脱脂。
新品螺栓 6 工具 B
请勿使接触面粘上润滑油。
请对安装了谐波传动的Y 轴机械臂侧进行脱脂。
新品垫圈 10
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
51626-F9-00
51627-F9-00
固定 Y 轴Step 5
支撑
谐波传动锪孔
Y 轴机械臂攻丝孔
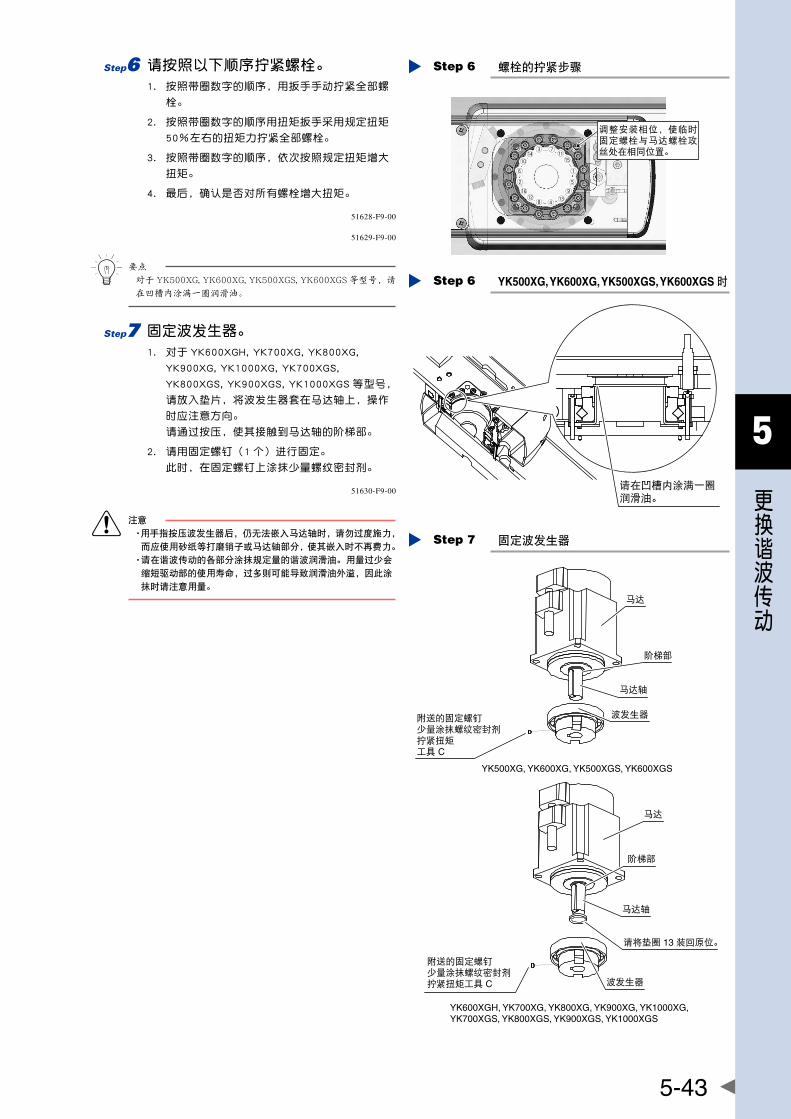
5
更换谐波传动
5-43
6 请按照以下顺序拧紧螺栓。
1. 按照带圈数字的顺序,用扳手手动拧紧全部螺
栓。
2. 按照带圈数字的顺序用扭矩扳手采用规定扭矩
50%左右的扭矩力拧紧全部螺栓。
3. 按照带圈数字的顺序,依次按照规定扭矩增大
扭矩。
4. 最后,确认是否对所有螺栓增大扭矩。
螺栓的拧紧步骤Step 6
调整安装相位,使临时固定螺栓与马达螺栓攻丝处在相同位置。
51628-F9-00
51629-F9-00
n 要点
对于 YK500XG, YK600XG, YK500XGS, YK600XGS 等型号,请
在凹槽内涂满一圈润滑油。
7 固定波发生器。
1. 对于 YK600XGH,YK700XG,YK800XG,
YK900XG,YK1000XG,YK700XGS,
YK800XGS,YK900XGS,YK1000XGS 等型号,
请放入垫片,将波发生器套在马达轴上,操作
时应注意方向。
请通过按压,使其接触到马达轴的阶梯部。
2. 请用固定螺钉(1 个)进行固定。
此时,在固定螺钉上涂抹少量螺纹密封剂。
YK500XG, YK600XG, YK500XGS, YK600XGS 时Step 6
请在凹槽内涂满一圈润滑油。
51630-F9-00
c 注意
・用手指按压波发生器后,仍无法嵌入马达轴时,请勿过度施力,
而应使用砂纸等打磨销子或马达轴部分,使其嵌入时不再费力。
・请在谐波传动的各部分涂抹规定量的谐波润滑油。用量过少会
缩短驱动部的使用寿命,过多则可能导致润滑油外溢,因此涂
抹时请注意用量。
固定波发生器Step 7
马达
附送的固定螺钉少量涂抹螺纹密封剂拧紧扭矩工具 C
马达轴
波发生器
阶梯部
马达
附送的固定螺钉少量涂抹螺纹密封剂拧紧扭矩工具 C
马达轴
请将垫圈 13 装回原位。
波发生器
阶梯部
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
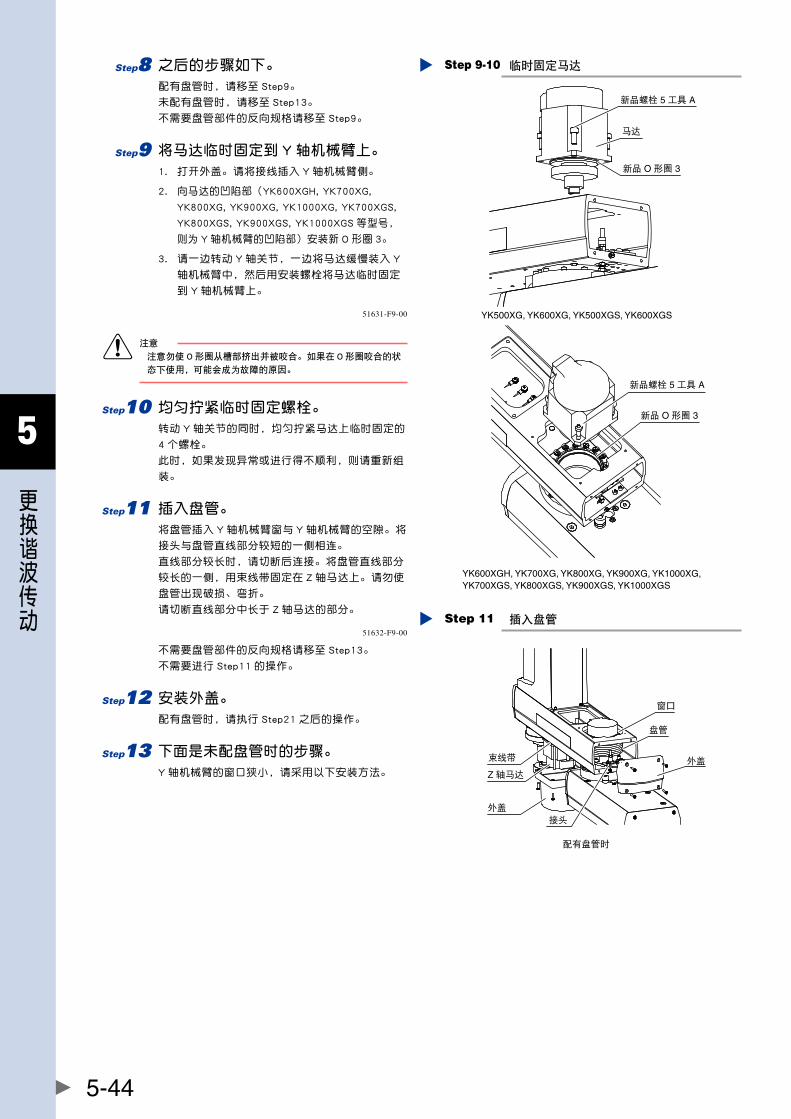
5
更换谐波传动
5-44
8 之后的步骤如下。
配有盘管时,请移至 Step9。
未配有盘管时,请移至 Step13。
不需要盘管部件的反向规格请移至 Step9。
9 将马达临时固定到 Y 轴机械臂上。
1. 打开外盖。请将接线插入 Y 轴机械臂侧。
2. 向马达的凹陷部(YK600XGH,YK700XG,
YK800XG,YK900XG,YK1000XG,YK700XGS,
YK800XGS,YK900XGS,YK1000XGS 等型号,
则为 Y 轴机械臂的凹陷部)安装新 O 形圈 3。
3. 请一边转动 Y 轴关节,一边将马达缓慢装入 Y
轴机械臂中,然后用安装螺栓将马达临时固定
到 Y 轴机械臂上。
临时固定马达Step 9-10
马达
新品 O 形圈 3
新品螺栓 5 工具 A
新品螺栓 5 工具 A
新品 O 形圈 3
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
51631-F9-00
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
0 均匀拧紧临时固定螺栓。
转动 Y 轴关节的同时,均匀拧紧马达上临时固定的
4 个螺栓。
此时,如果发现异常或进行得不顺利,则请重新组
装。
q 插入盘管。
将盘管插入 Y 轴机械臂窗与 Y 轴机械臂的空隙。将
接头与盘管直线部分较短的一侧相连。
直线部分较长时,请切断后连接。将盘管直线部分
较长的一侧,用束线带固定在 Z 轴马达上。请勿使
盘管出现破损、弯折。
请切断直线部分中长于 Z 轴马达的部分。插入盘管Step 11
窗口
盘管
外盖
外盖
Z 轴马达
束线带
接头
配有盘管时
51632-F9-00
不需要盘管部件的反向规格请移至 Step13。
不需要进行 Step11 的操作。
w 安装外盖。
配有盘管时,请执行 Step21 之后的操作。
e 下面是未配盘管时的步骤。
Y 轴机械臂的窗口狭小,请采用以下安装方法。

5
更换谐波传动
5-45
r 将盘管内径扩至 D,并用束线带固定。
YK500XG,YK600XG,YK500XGS,YK600XGS
D=85mm
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,YK700XGS,YK800XGS,YK900XGS,YK1000XGS
D=110mm
未配盘管时Step 14
束线带
盘管
D51633-F9-00
t 从 Y 轴机械臂端面,将盘管放入其中。
51634-F9-00
y 将马达临时固定到 Y 轴机械臂上。
1. 打开外盖。请将接线插入 Y 轴机械臂侧。
2. 向马达的凹陷部(YK600XGH,YK700XG,
YK800XG,YK900XG,YK1000XG,YK700XGS,
YK800XGS,YK900XGS,YK1000XGS 等型号,
则为 Y 轴机械臂的凹陷部)安装新 O 形圈 3。
3. 请一边转动 Y 轴关节,一边将马达缓慢装入 Y
轴机械臂中,然后用安装螺栓将马达临时固定
到 Y 轴机械臂上。
请勿使盘管被 Y 轴马达和机械臂夹住。
插入盘管Step 15
端面
束线带
盘管
51635-F9-00
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
u 均匀拧紧临时固定螺栓。
转动 Y 轴关节的同时,均匀拧紧马达上临时固定的
4 个螺栓。
此时,如果发现异常或进行得不顺利,则请重新组
装。
临时固定马达Step 16-17
马达
新品 O 形圈 3
新品螺栓 5 工具 A
新品螺栓 5 工具 A
新品螺栓 3
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
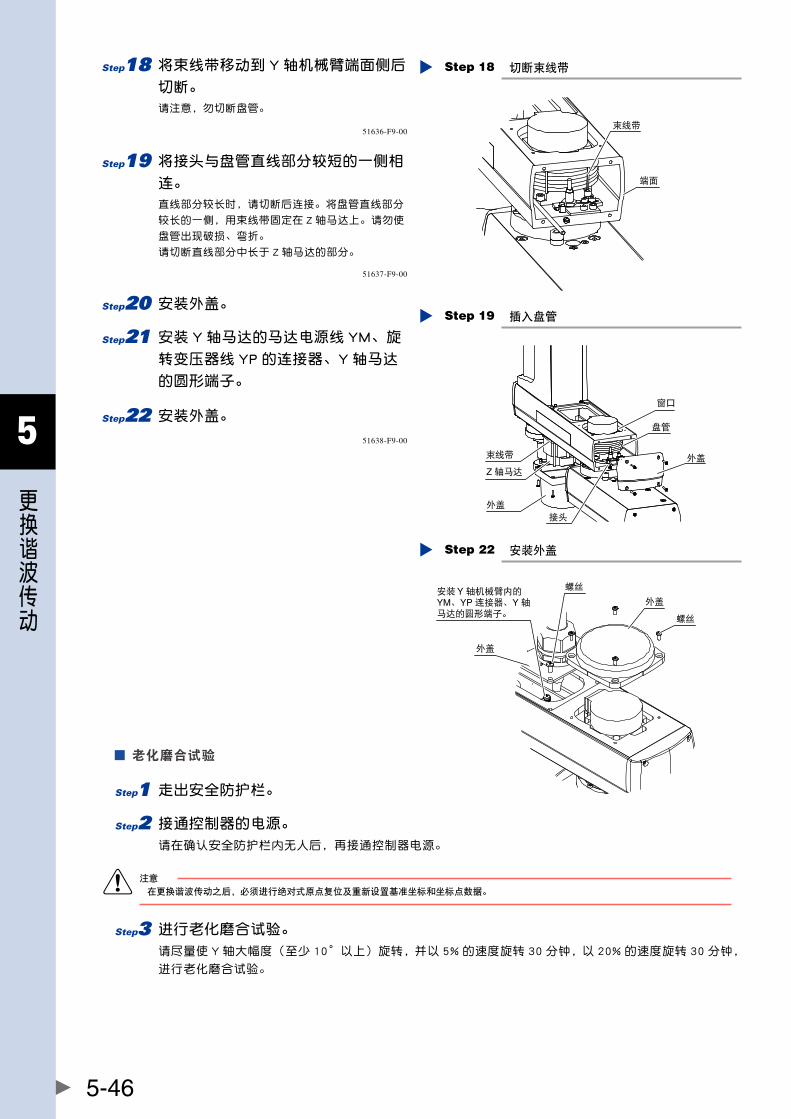
5
更换谐波传动
5-46
i 将束线带移动到 Y 轴机械臂端面侧后
切断。
请注意,勿切断盘管。
切断束线带Step 18
端面
束线带51636-F9-00
o 将接头与盘管直线部分较短的一侧相
连。
直线部分较长时,请切断后连接。将盘管直线部分
较长的一侧,用束线带固定在 Z 轴马达上。请勿使
盘管出现破损、弯折。
请切断直线部分中长于 Z 轴马达的部分。
51637-F9-00
p 安装外盖。
a 安装 Y 轴马达的马达电源线 YM、旋
转变压器线 YP 的连接器、Y 轴马达
的圆形端子。
插入盘管Step 19
窗口
盘管
外盖
外盖
Z 轴马达
束线带
接头
s 安装外盖。
51638-F9-00
安装外盖Step 22
螺丝
外盖安装 Y 轴机械臂内的YM、YP 连接器、Y 轴马达的圆形端子。
外盖
螺丝
■ 老化磨合试验
1 走出安全防护栏。
2 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
c 注意
在更换谐波传动之后,必须进行绝对式原点复位及重新设置基准坐标和坐标点数据。
3 进行老化磨合试验。
请尽量使 Y 轴大幅度(至少 10°以上)旋转,并以 5% 的速度旋转 30 分钟,以 20% 的速度旋转 30 分钟,
进行老化磨合试验。
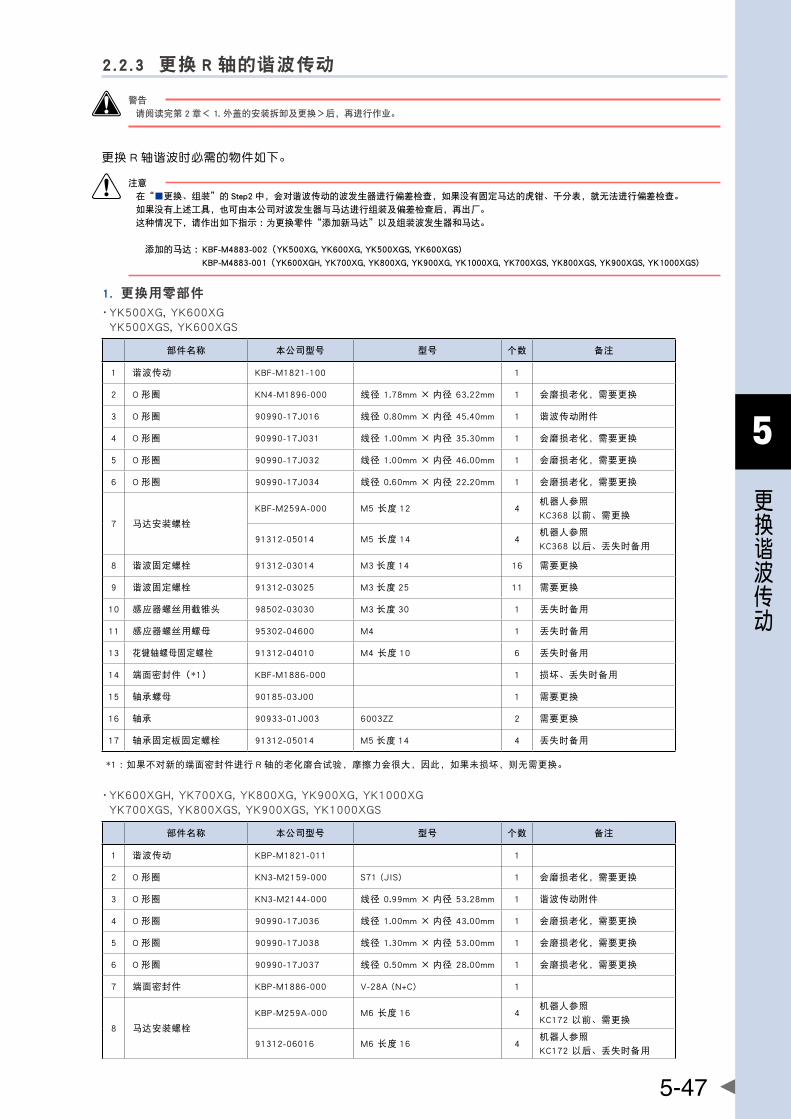
5
更换谐波传动
5-47
2.2.3 更换 R 轴的谐波传动
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
更换 R 轴谐波时必需的物件如下。
c 注意
在“■更换、组装”的 Step2 中,会对谐波传动的波发生器进行偏差检查,如果没有固定马达的虎钳、千分表,就无法进行偏差检查。
如果没有上述工具,也可由本公司对波发生器与马达进行组装及偏差检查后,再出厂。
这种情况下,请作出如下指示:为更换零件“添加新马达”以及组装波发生器和马达。
添加的马达:KBF-M4883-002(YK500XG,YK600XG,YK500XGS,YK600XGS)
KBP-M4883-001(YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,YK700XGS,YK800XGS,YK900XGS,YK1000XGS)
1.更换用零部件
·YK500XG,YK600XG YK500XGS,YK600XGS
部件名称 本公司型号 型号 个数 备注
1 谐波传动 KBF-M1821-100 1
2 O 形圈 KN4-M1896-000 线径1.78mm× 内径63.22mm 1 会磨损老化,需要更换
3 O 形圈 90990-17J016 线径0.80mm× 内径45.40mm 1 谐波传动附件
4 O 形圈 90990-17J031 线径1.00mm× 内径35.30mm 1 会磨损老化,需要更换
5 O 形圈 90990-17J032 线径1.00mm× 内径46.00mm 1 会磨损老化,需要更换
6 O 形圈 90990-17J034 线径0.60mm× 内径22.20mm 1 会磨损老化,需要更换
7 马达安装螺栓
KBF-M259A-000 M5长度 12 4机器人参照
KC368以前、需更换
91312-05014 M5长度 14 4机器人参照
KC368以后、丢失时备用
8 谐波固定螺栓 91312-03014 M3 长度 14 16 需要更换
9 谐波固定螺栓 91312-03025 M3 长度 25 11 需要更换
10 感应器螺丝用截锥头 98502-03030 M3 长度 30 1 丢失时备用
11 感应器螺丝用螺母 95302-04600 M4 1 丢失时备用
13 花键轴螺母固定螺栓 91312-04010 M4长度 10 6 丢失时备用
14 端面密封件(*1) KBF-M1886-000 1 损坏、丢失时备用
15 轴承螺母 90185-03J00 1 需要更换
16 轴承 90933-01J003 6003ZZ 2 需要更换
17 轴承固定板固定螺栓 91312-05014 M5 长度 14 4 丢失时备用
*1 :如果不对新的端面密封件进行 R 轴的老化磨合试验,摩擦力会很大,因此,如果未损坏,则无需更换。
·YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG YK700XGS,YK800XGS,YK900XGS,YK1000XGS
部件名称 本公司型号 型号 个数 备注
1 谐波传动 KBP-M1821-011 1
2 O 形圈 KN3-M2159-000 S71(JIS) 1 会磨损老化,需要更换
3 O 形圈 KN3-M2144-000 线径0.99mm× 内径53.28mm 1 谐波传动附件
4 O 形圈 90990-17J036 线径1.00mm× 内径43.00mm 1 会磨损老化,需要更换
5 O 形圈 90990-17J038 线径1.30mm× 内径53.00mm 1 会磨损老化,需要更换
6 O 形圈 90990-17J037 线径0.50mm× 内径28.00mm 1 会磨损老化,需要更换
7 端面密封件 KBP-M1886-000 V-28A(N+C) 1
8 马达安装螺栓
KBP-M259A-000 M6长度 16 4机器人参照
KC172以前、需更换
91312-06016 M6长度 16 4机器人参照
KC172以后、丢失时备用
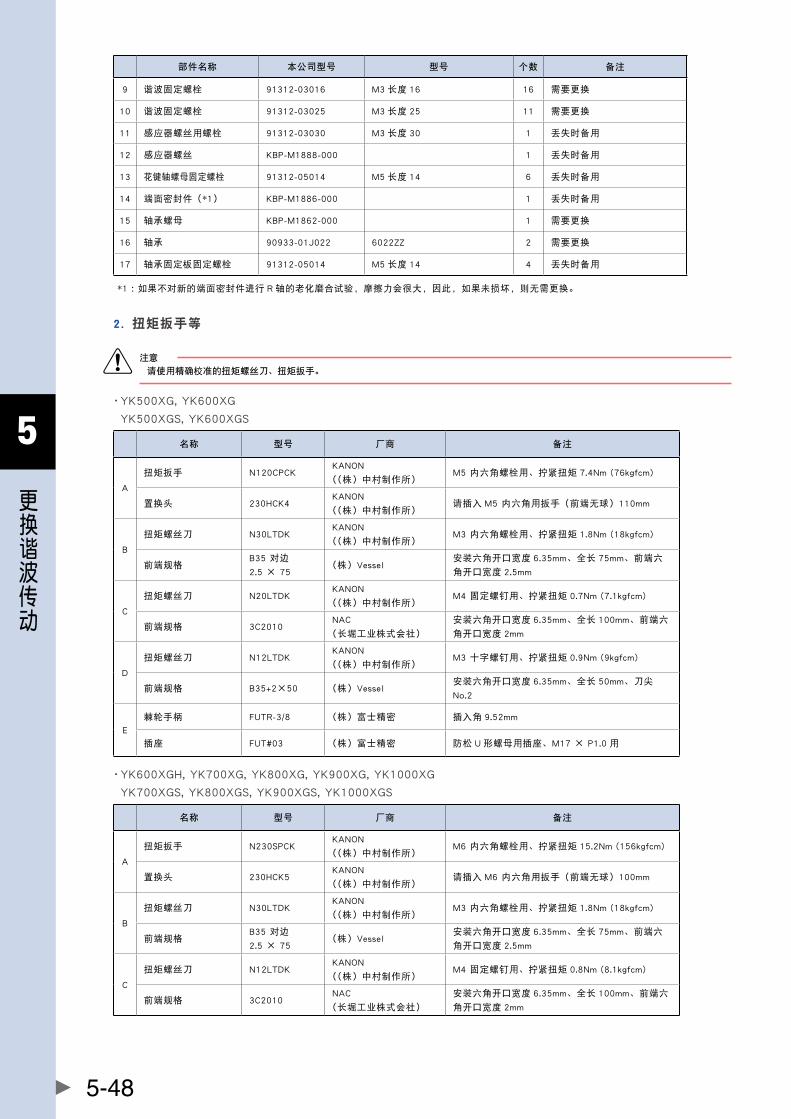
5
更换谐波传动
5-48
部件名称 本公司型号 型号 个数 备注
9 谐波固定螺栓 91312-03016 M3 长度 16 16 需要更换
10 谐波固定螺栓 91312-03025 M3 长度 25 11 需要更换
11 感应器螺丝用螺栓 91312-03030 M3 长度 30 1 丢失时备用
12 感应器螺丝 KBP-M1888-000 1 丢失时备用
13 花键轴螺母固定螺栓 91312-05014 M5 长度 14 6 丢失时备用
14 端面密封件(*1) KBP-M1886-000 1 丢失时备用
15 轴承螺母 KBP-M1862-000 1 需要更换
16 轴承 90933-01J022 6022ZZ 2 需要更换
17 轴承固定板固定螺栓 91312-05014 M5 长度 14 4 丢失时备用
*1 :如果不对新的端面密封件进行 R 轴的老化磨合试验,摩擦力会很大,因此,如果未损坏,则无需更换。
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
·YK500XG,YK600XG
YK500XGS,YK600XGS
名称 型号 厂商 备注
A
扭矩扳手 N120CPCKKANON
((株)中村制作所)M5内六角螺栓用、拧紧扭矩 7.4Nm(76kgfcm)
置换头 230HCK4KANON
((株)中村制作所)请插入 M5内六角用扳手(前端无球)110mm
B
扭矩螺丝刀 N30LTDKKANON
((株)中村制作所)M3内六角螺栓用、拧紧扭矩 1.8Nm(18kgfcm)
前端规格B35对边
2.5×75(株)Vessel
安装六角开口宽度 6.35mm、全长 75mm、前端六
角开口宽度 2.5mm
C
扭矩螺丝刀 N20LTDKKANON
((株)中村制作所)M4固定螺钉用、拧紧扭矩 0.7Nm(7.1kgfcm)
前端规格 3C2010NAC
(长堀工业株式会社)
安装六角开口宽度 6.35mm、全长 100mm、前端六
角开口宽度 2mm
D
扭矩螺丝刀 N12LTDKKANON
((株)中村制作所)M3十字螺钉用、拧紧扭矩 0.9Nm(9kgfcm)
前端规格 B35+2×50 (株)Vessel安装六角开口宽度 6.35mm、全长 50mm、刀尖
No.2
E
棘轮手柄 FUTR-3/8 (株)富士精密 插入角 9.52mm
插座 FUT#03 (株)富士精密 防松 U 形螺母用插座、M17×P1.0 用
·YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK700XGS,YK800XGS,YK900XGS,YK1000XGS
名称 型号 厂商 备注
A
扭矩扳手 N230SPCKKANON
((株)中村制作所)M6内六角螺栓用、拧紧扭矩 15.2Nm(156kgfcm)
置换头 230HCK5KANON
((株)中村制作所)请插入 M6内六角用扳手(前端无球)100mm
B
扭矩螺丝刀 N30LTDKKANON
((株)中村制作所)M3内六角螺栓用、拧紧扭矩 1.8Nm(18kgfcm)
前端规格B35对边
2.5×75(株)Vessel
安装六角开口宽度 6.35mm、全长 75mm、前端六
角开口宽度 2.5mm
C
扭矩螺丝刀 N12LTDKKANON
((株)中村制作所)M4固定螺钉用、拧紧扭矩 0.8Nm(8.1kgfcm)
前端规格 3C2010NAC
(长堀工业株式会社)
安装六角开口宽度 6.35mm、全长 100mm、前端六
角开口宽度 2mm

5
更换谐波传动
5-49
3.其他工具类
名称 型号 厂商 备注
谐波润滑油 4BNo.2(*1)HarmonicDrive
Systems
购买后经过 4 年以上的零部件会磨损老化,不可继续使用
谐波润滑油 (*2) SK-1A HarmonicDriveSystems 仅反向规格可替代 4BNo.2 使用
旧棉纱头
十字螺丝刀
六角扳手套件
19mm 扳手 YK500XG,YK600XG,YK500XGS,YK600XGS
钩形扳手防松 U 形螺母外径 φ28mmYK500XG,YK600XG,YK500XGS,YK600XGS
24mm 扳手 YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,YK700XGS,YK800XGS,YK900XGS,YK1000XGS32mm 扳手
LOCTITE 螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
*1 :YK500XG,YK600XG,YK500XGS,YK600XGS :8g
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,YK700XGS,YK800XGS,YK900XGS,YK1000XGS :10g
*2 :对反向规格的机器人使用 4BNo.2,可能会因润滑油泄漏或润滑不良而导致谐波传动损坏。
■ 拆卸
请按照以下步骤拆卸 R 轴的各零部件。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
4 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下外盖Step 4-5
外盖
半圆头螺栓 M3 × 8
螺栓 M3 × 20(M3×16)
此处有 R 轴马达的圆形端子,请将其拆下。
外盖
※ ( )内为 YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS 时
51639-F9-00
5 拆下 Y 轴机械臂内的 R 轴马达电源线
RM、旋转变压器线 RP 的连接器、R
轴马达的圆形端子。
w 警告
在 Step6 中,如果拆下轴承固定螺栓,Z轴会有掉落危险。拆卸
之前请用支座等支撑 Z轴。
6 从支架中拔出花键轴和轴承。
取下花键轴上端的轴承固定螺栓,从支架中拔出花
键轴和轴承。
拆下花键轴和轴承Step 6
螺栓 M5 × 14
轴承固定板
支架
花键轴
51640-F9-00
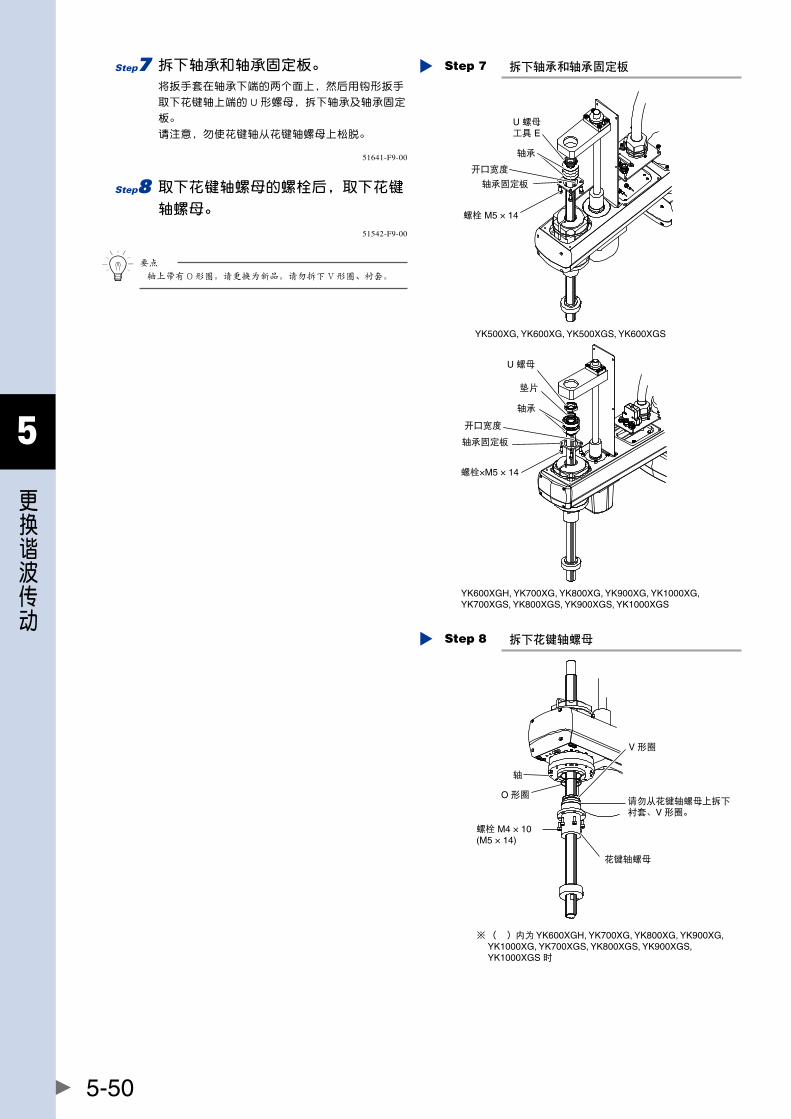
5
更换谐波传动
5-50
7 拆下轴承和轴承固定板。
将扳手套在轴承下端的两个面上,然后用钩形扳手
取下花键轴上端的 U 形螺母,拆下轴承及轴承固定
板。
请注意,勿使花键轴从花键轴螺母上松脱。
拆下轴承和轴承固定板Step 7
轴承固定板
轴承
U 螺母工具 E
开口宽度
螺栓 M5 × 14
U 螺母
垫片
轴承
开口宽度
轴承固定板
螺栓×M5 × 14
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
51641-F9-00
8 取下花键轴螺母的螺栓后,取下花键
轴螺母。
51542-F9-00
n 要点
轴上带有 O 形圈。请更换为新品。请勿拆下 V 形圈、衬套。
花键轴螺母
轴
O 形圈
V 形圈
螺栓 M4 × 10(M5 × 14)
请勿从花键轴螺母上拆下衬套、V 形圈。
※ ( )内为 YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS 时
拆下花键轴螺母Step 8
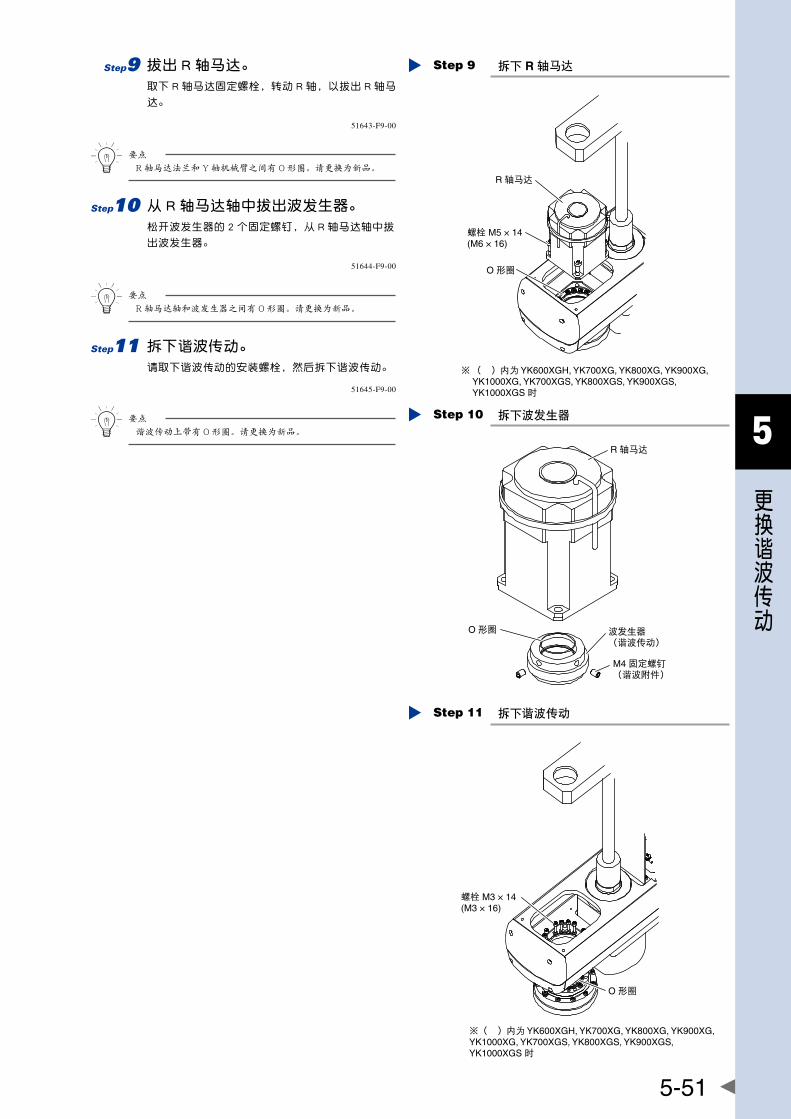
5
更换谐波传动
5-51
9 拔出 R 轴马达。
取下 R 轴马达固定螺栓,转动 R 轴,以拔出 R 轴马
达。
拆下 R 轴马达Step 9
O 形圈
螺栓 M5 × 14(M6 × 16)
R 轴马达
※ ( )内为 YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS 时
51643-F9-00
n 要点
R 轴马达法兰和 Y 轴机械臂之间有 O 形圈。请更换为新品。
0 从 R 轴马达轴中拔出波发生器。
松开波发生器的 2 个固定螺钉,从 R 轴马达轴中拔
出波发生器。
51644-F9-00
n 要点
R 轴马达轴和波发生器之间有 O 形圈。请更换为新品。
q 拆下谐波传动。
请取下谐波传动的安装螺栓,然后拆下谐波传动。
51645-F9-00
n 要点
谐波传动上带有 O 形圈。请更换为新品。
拆下波发生器Step 10
波发生器(谐波传动)
M4 固定螺钉(谐波附件)
R 轴马达
O 形圈
O 形圈
螺栓 M3 × 14(M3 × 16)
※( )内为 YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS 时
拆下谐波传动Step 11
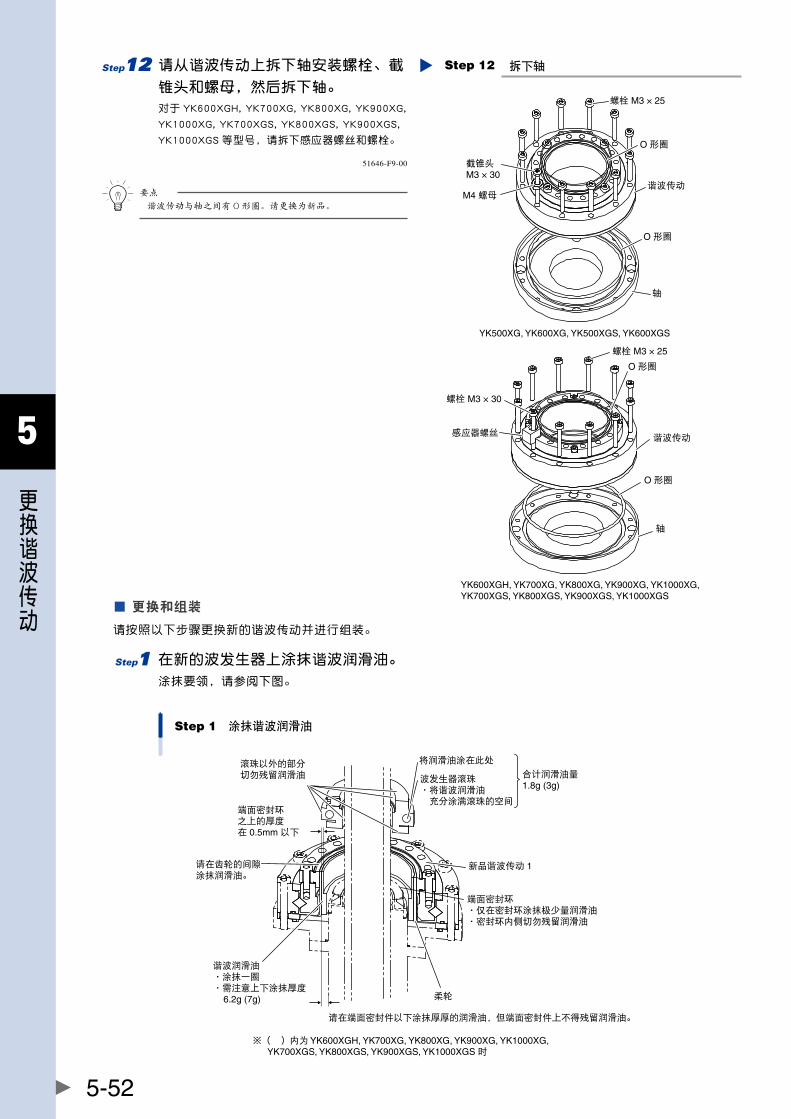
5
更换谐波传动
5-52
w 请从谐波传动上拆下轴安装螺栓、截
锥头和螺母,然后拆下轴。
对于 YK600XGH,YK700XG,YK800XG,YK900XG,
YK1000XG,YK700XGS,YK800XGS,YK900XGS,
YK1000XGS 等型号,请拆下感应器螺丝和螺栓。
拆下轴Step 12
谐波传动
轴
O 形圈
螺栓 M3 × 25
O 形圈
M4 螺母
截锥头M3 × 30
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
轴
O 形圈
谐波传动
O 形圈
感应器螺丝
螺栓 M3 × 25
螺栓 M3 × 30
51646-F9-00
n 要点
谐波传动与轴之间有 O 形圈。请更换为新品。
■ 更换和组装
请按照以下步骤更换新的谐波传动并进行组装。
1 在新的波发生器上涂抹谐波润滑油。
涂抹要领,请参阅下图。
Step 1 涂抹谐波润滑油
请在齿轮的间隙涂抹润滑油。
请在端面密封件以下涂抹厚厚的润滑油,但端面密封件上不得残留润滑油。
滚珠以外的部分切勿残留润滑油
端面密封环之上的厚度在 0.5mm 以下
谐波润滑油·涂抹一圈·需注意上下涂抹厚度 6.2g (7g)
端面密封环·仅在密封环涂抹极少量润滑油·密封环内侧切勿残留润滑油
新品谐波传动 1
柔轮
波发生器滚珠·将谐波润滑油 充分涂满滚珠的空间
将润滑油涂在此处
合计润滑油量1.8g (3g)
※( )内为 YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS 时
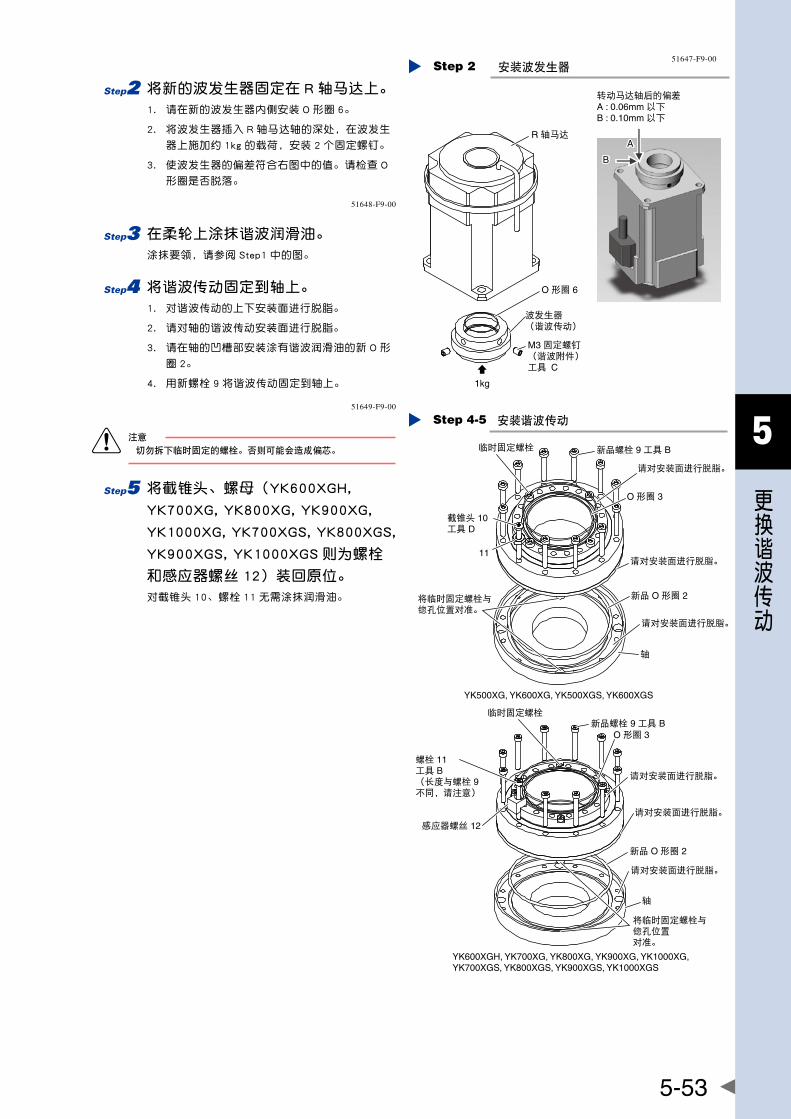
5
更换谐波传动
5-53
51647-F9-00
2 将新的波发生器固定在 R 轴马达上。
1. 请在新的波发生器内侧安装 O 形圈 6。
2. 将波发生器插入 R 轴马达轴的深处,在波发生
器上施加约 1kg 的载荷,安装 2 个固定螺钉。
3. 使波发生器的偏差符合右图中的值。请检查 O
形圈是否脱落。
安装波发生器Step 2
1kg
波发生器(谐波传动)
R 轴马达
O 形圈 6
M3 固定螺钉(谐波附件)工具 C
A
B
A
B
转动马达轴后的偏差A : 0.06mm 以下B : 0.10mm 以下
51648-F9-00
3 在柔轮上涂抹谐波润滑油。
涂抹要领,请参阅 Step1 中的图。
4 将谐波传动固定到轴上。
1. 对谐波传动的上下安装面进行脱脂。
2. 请对轴的谐波传动安装面进行脱脂。
3. 请在轴的凹槽部安装涂有谐波润滑油的新 O 形
圈 2。
4. 用新螺栓 9 将谐波传动固定到轴上。
51649-F9-00
安装谐波传动Step 4-5
截锥头 10工具 D
11
将临时固定螺栓与锪孔位置对准。
请对安装面进行脱脂。
轴
新品 O 形圈 2
请对安装面进行脱脂。
O 形圈 3
请对安装面进行脱脂。
临时固定螺栓 新品螺栓 9 工具 B
螺栓 11工具 B(长度与螺栓 9 不同,请注意)
感应器螺丝 12
临时固定螺栓新品螺栓 9 工具 B
轴
O 形圈 3
请对安装面进行脱脂。
请对安装面进行脱脂。
新品 O 形圈 2
请对安装面进行脱脂。
将临时固定螺栓与锪孔位置对准。
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
c 注意
切勿拆下临时固定的螺栓。否则可能会造成偏芯。
5 将截锥头、螺母(YK600XGH,
YK700XG,YK800XG,YK900XG,
YK1000XG,YK700XGS,YK800XGS,
YK900XGS,YK1000XGS 则为螺栓
和感应器螺丝 12)装回原位。
对截锥头 10、螺栓 11 无需涂抹润滑油。

5
更换谐波传动
5-54
6 请按照以下顺序拧紧螺栓、截锥头。
1. 按照带圈数字的顺序,用扳手手动拧紧全部螺
栓。
2. 按照带圈数字的顺序用扭矩扳手采用规定扭矩
50% 左右的扭矩力拧紧全部螺栓。
3. 按照带圈数字的顺序,依次按照规定扭矩增大
扭矩。
4. 最后,确认是否对所有螺栓增大扭矩。
螺栓、截锥头的拧紧顺序Step 6
51650-F9-00
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
7 安装 O 形圈 3。
1. 请对 Y 轴机械臂的谐波传动安装面进行脱脂。
2. 请在新谐波传动的 O 形圈槽部安装涂有少量谐
波润滑油的 O 形圈 3。难以嵌入槽部时,请将
O 形圈稍稍伸展一下。
安装谐波传动Step 7-8
新品螺栓 8工具 B
谐波传动附件 O 形圈 3
请对 Y 轴机械臂的谐波传动安装面进行脱脂。
请将临时固定螺栓与Y轴机械臂的锪孔位置对准后进行组装。(YK500XG, YK600XG, YK500XGS, YK600XGS)YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS 等型号、请按照 Step9 中的图调整相位。
51651-F9-00
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
8 将谐波传动安装到 Y 轴机械臂上。
请用新螺栓将谐波传动从 Y 轴上方安装到 Y 轴机械
臂上。
9 请按照以下顺序拧紧螺栓。
1. 按照带圈数字的顺序,用扳手手动拧紧全部螺
栓。
2. 按照带圈数字的顺序用扭矩扳手采用规定扭矩
50% 左右的扭矩力拧紧全部螺栓。
3. 按照带圈数字的顺序,依次按照规定扭矩增大
扭矩。
4. 最后,确认是否对所有螺栓增大扭矩。
固定螺栓的拧紧顺序Step 9
调整安装相位,使临时固定螺栓呈0°、90°、180°、270°。
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
51652-F9-00
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
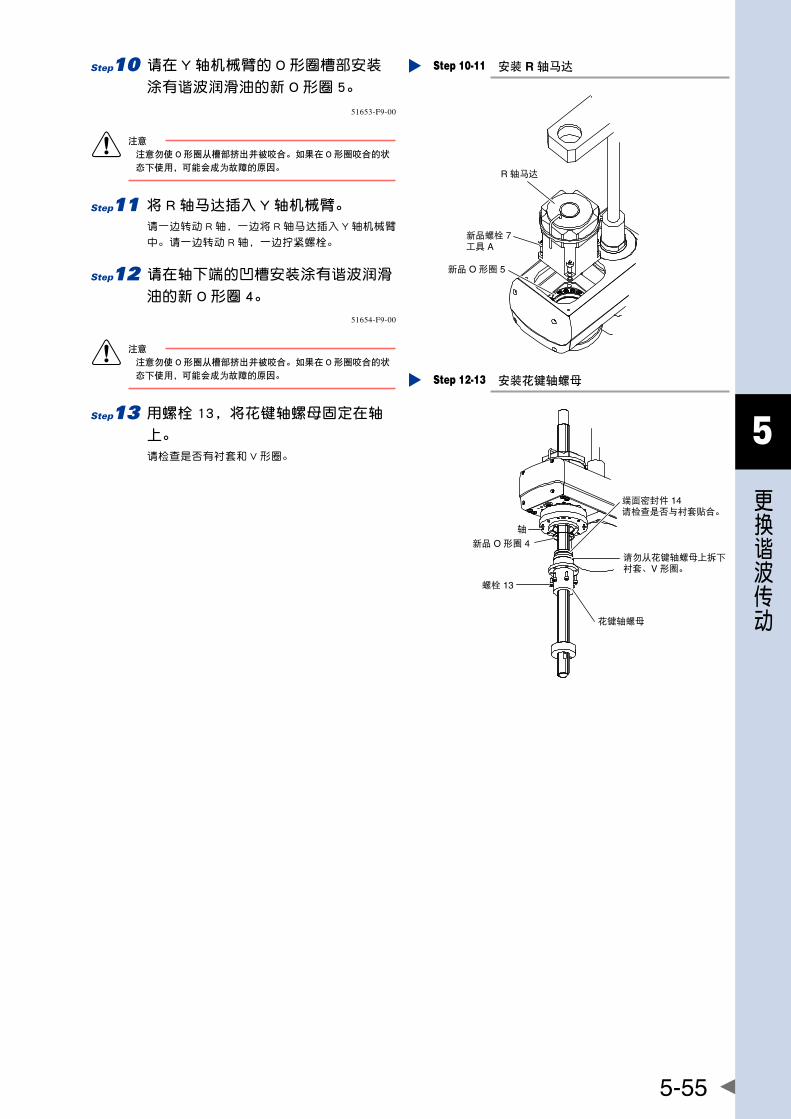
5
更换谐波传动
5-55
0 请在 Y 轴机械臂的 O 形圈槽部安装
涂有谐波润滑油的新 O 形圈 5。
安装 R 轴马达Step 10-11
新品 O 形圈 5
新品螺栓 7工具 A
R 轴马达
51653-F9-00
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
q 将 R 轴马达插入 Y 轴机械臂。
请一边转动 R 轴,一边将 R 轴马达插入 Y 轴机械臂
中。请一边转动 R 轴,一边拧紧螺栓。
w 请在轴下端的凹槽安装涂有谐波润滑
油的新 O 形圈 4。
51654-F9-00
c 注意
注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状
态下使用,可能会成为故障的原因。
e 用螺栓 13,将花键轴螺母固定在轴
上。
请检查是否有衬套和 V 形圈。
安装花键轴螺母Step 12-13
端面密封件 14请检查是否与衬套贴合。
请勿从花键轴螺母上拆下衬套、V 形圈。
花键轴螺母
轴
新品 O 形圈 4
螺栓 13
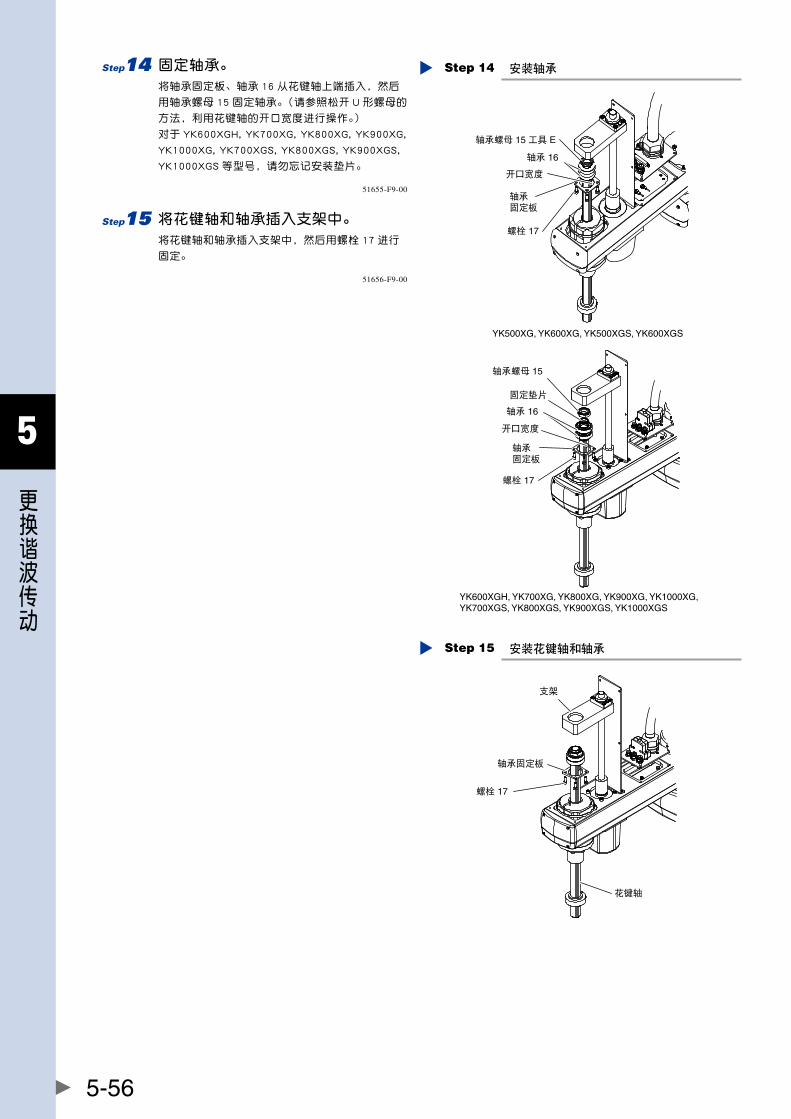
5
更换谐波传动
5-56
r 固定轴承。
将轴承固定板、轴承 16 从花键轴上端插入,然后
用轴承螺母 15 固定轴承。(请参照松开 U 形螺母的
方法,利用花键轴的开口宽度进行操作。)
对于 YK600XGH,YK700XG,YK800XG,YK900XG,
YK1000XG,YK700XGS,YK800XGS,YK900XGS,
YK1000XGS 等型号,请勿忘记安装垫片。
轴承固定板
轴承 16
轴承螺母 15 工具 E
开口宽度
螺栓 17
轴承螺母 15
固定垫片
轴承 16
开口宽度
轴承固定板
螺栓 17
YK500XG, YK600XG, YK500XGS, YK600XGS
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
安装轴承Step 14
51655-F9-00
t 将花键轴和轴承插入支架中。
将花键轴和轴承插入支架中,然后用螺栓 17 进行
固定。
51656-F9-00
安装花键轴和轴承Step 15
轴承固定板
支架
花键轴
螺栓 17
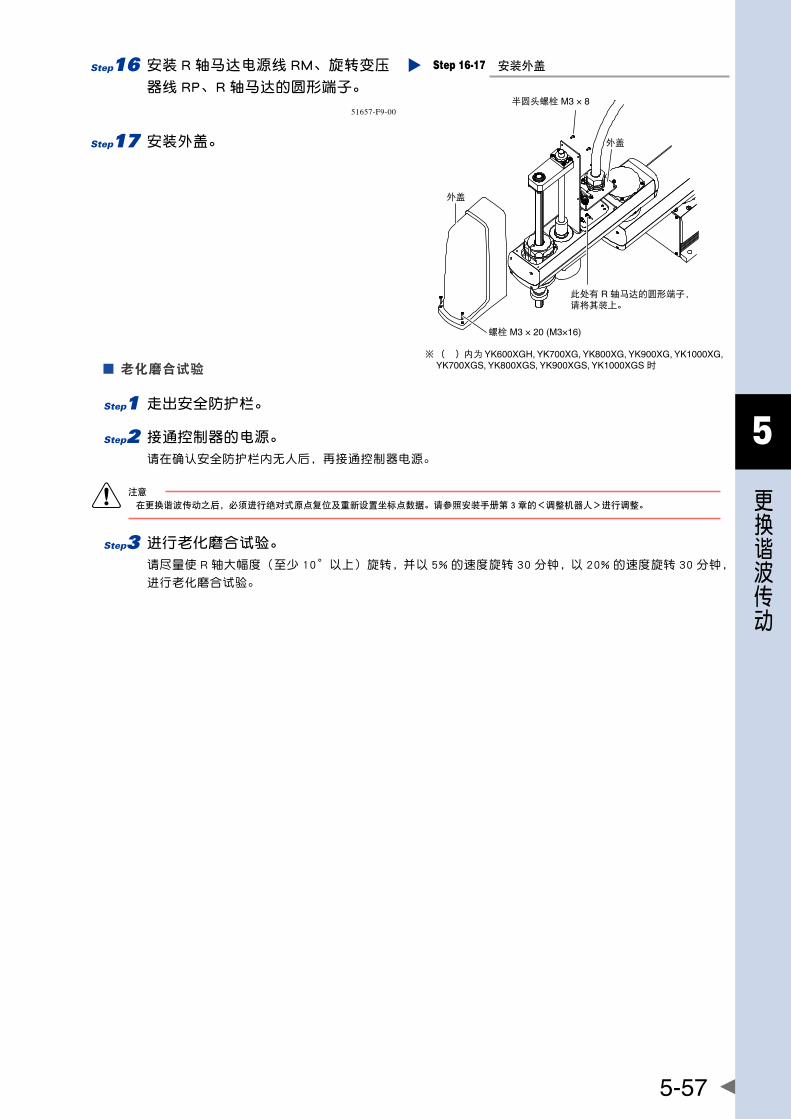
5
更换谐波传动
5-57
y 安装 R 轴马达电源线 RM、旋转变压
器线 RP、R 轴马达的圆形端子。
安装外盖Step 16-17
外盖
半圆头螺栓 M3 × 8
此处有 R 轴马达的圆形端子,请将其装上。
外盖
螺栓 M3 × 20 (M3×16)
※ ( )内为 YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS 时
51657-F9-00
u 安装外盖。
■ 老化磨合试验
1 走出安全防护栏。
2 接通控制器的电源。
请在确认安全防护栏内无人后,再接通控制器电源。
c 注意
在更换谐波传动之后,必须进行绝对式原点复位及重新设置坐标点数据。请参照安装手册第 3章的<调整机器人>进行调整。
3 进行老化磨合试验。
请尽量使 R 轴大幅度(至少 10°以上)旋转,并以 5% 的速度旋转 30 分钟,以 20% 的速度旋转 30 分钟,
进行老化磨合试验。


第6章 更换机器线束
目录
1. 更换机器线束 6-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,
YK300XGS,YK400XGS 6-1
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 6-8


6
更换机器线束
6-1
1. 更换机器线束
c 注意
・未给出螺栓等的拧紧扭矩时,请参阅第 5章< 2.谐波传动的更换步骤>中的拧紧扭矩。
・更换机器线束后,需要进行绝对式原点复位。
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL, YK300XGS,YK400XGS
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1.更换用零部件
关于 YK300XGS,YK400XGS 的零部件,请咨询本公司。
部件名称 本公司型号 型号 个数 备注
1 机器线束 KCY-M4843-002(*1) 1
2 圆形端子用螺丝 97602-04308 M4长度 8 2 丢失时备用
3 圆形端子用齿形防松垫圈 90172-00J040 M4 用 2 丢失时备用
4 D-Sub 用螺栓 KN3-M2296-000 M3 4 丢失时备用
5 D-Sub 用垫圈 92903-03100 M3 用 4 丢失时备用
6 D-Sub 用螺母 95302-03600 M3 用 4 丢失时备用
7 金属板 KCY-M1368-010 6 丢失时备用
8 板固定螺栓 91312-03006 M3长度 6 6 丢失时备用
*1 :KCY-M4843-002 无法用于 YK300XGS,YK400XGS。
2.其他工具类
名称 型号 厂商 备注
六角扳手套件
束线带
十字螺丝刀
钳子
扭矩扳手

6
更换机器线束
6-2
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源、供气。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
4 拆下 Y 轴机械臂外盖。
请拆下 D-Sub 连接器罩盖、螺丝、垫圈。
拆下 Y 轴机械臂的外盖Step 4
外盖
螺丝
D-sub 连接器罩盖
垫圈
螺丝
放置时,请注意不要损伤外盖。
51701-F6-00
5 拆下 D-Sub 连接器。
取下螺栓、螺母,拆下 D-Sub 连接器。
51702-F6-00
6 拆下输气管与圆形端子。
请拆下输气管和圆形端子(白色和黄色 / 绿色接线
的圆形端子)。
操作时请勿掉落齿形防松垫圈、螺丝等。
7 拆下接线连接器。
切断束线带并拆下接线连接器。
拆卸Step 5-7
齿形防松垫圈 3
螺丝 2圆形端子※
垫圈 5
螺栓 4
D-sub 连接器
接头
螺母 6
输气管(蓝色)
输气管(红色)
输气管(黑色)
※圆形端子的位置有时会不同。

6
更换机器线束
6-3
8 从支架上拆下机器线束。
请拆下锁紧螺母,然后从支架上拆下机器线束。
拆下机器线束Step 8
支架
机器线束 1
锁紧螺母
机器线束
管
支架
壁挂式/反向规格中没有锁紧螺母。逆时针旋转机器线束,将其从管中拔出。
51703-F6-00
9 拆下外盖。
51704-F6-00
拆下外盖Step 9
外盖
螺栓
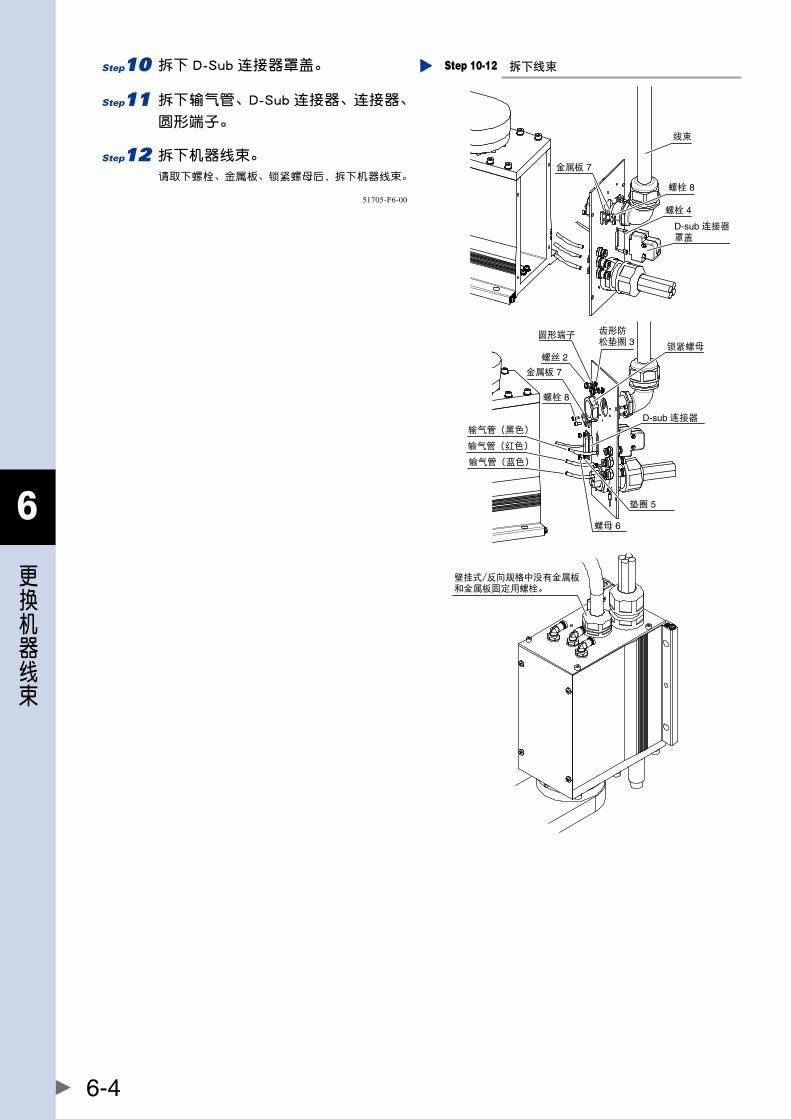
6
更换机器线束
6-4
0 拆下 D-Sub 连接器罩盖。
q 拆下输气管、D-Sub 连接器、连接器、
圆形端子。
w 拆下机器线束。
请取下螺栓、金属板、锁紧螺母后,拆下机器线束。
拆下线束Step 10-12
金属板 7
螺栓 4
线束
D-sub 连接器罩盖
螺栓 8
螺丝 2
圆形端子
金属板 7
螺栓 8
垫圈 5
齿形防松垫圈 3
D-sub 连接器
螺母 6
锁紧螺母
输气管(蓝色)
输气管(红色)
输气管(黑色)
壁挂式/反向规格中没有金属板和金属板固定用螺栓。
51705-F6-00
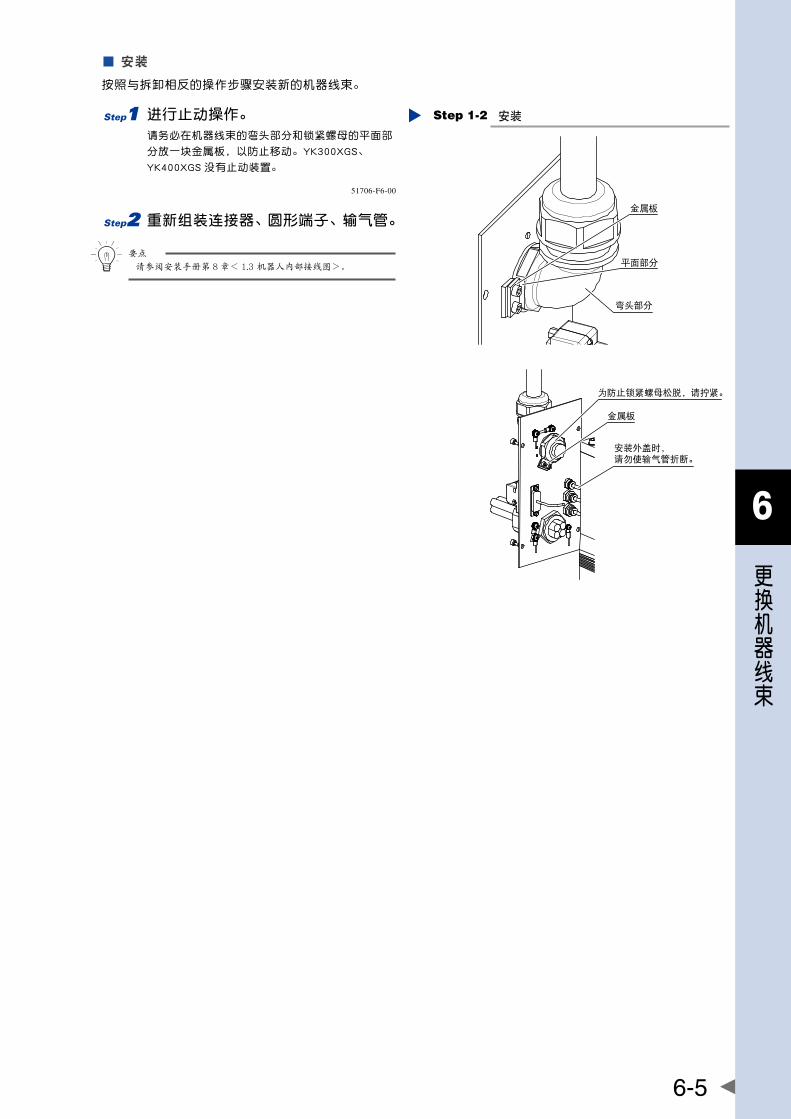
6
更换机器线束
6-5
■ 安装
按照与拆卸相反的操作步骤安装新的机器线束。
1 进行止动操作。
请务必在机器线束的弯头部分和锁紧螺母的平面部
分放一块金属板,以防止移动。YK300XGS、
YK400XGS 没有止动装置。
安装Step 1-2
金属板
平面部分
弯头部分
金属板
为防止锁紧螺母松脱,请拧紧。
安装外盖时,请勿使输气管折断。
51706-F6-00
2 重新组装连接器、圆形端子、输气管。
n 要点
请参阅安装手册第 8 章< 1.3 机器人内部接线图>。
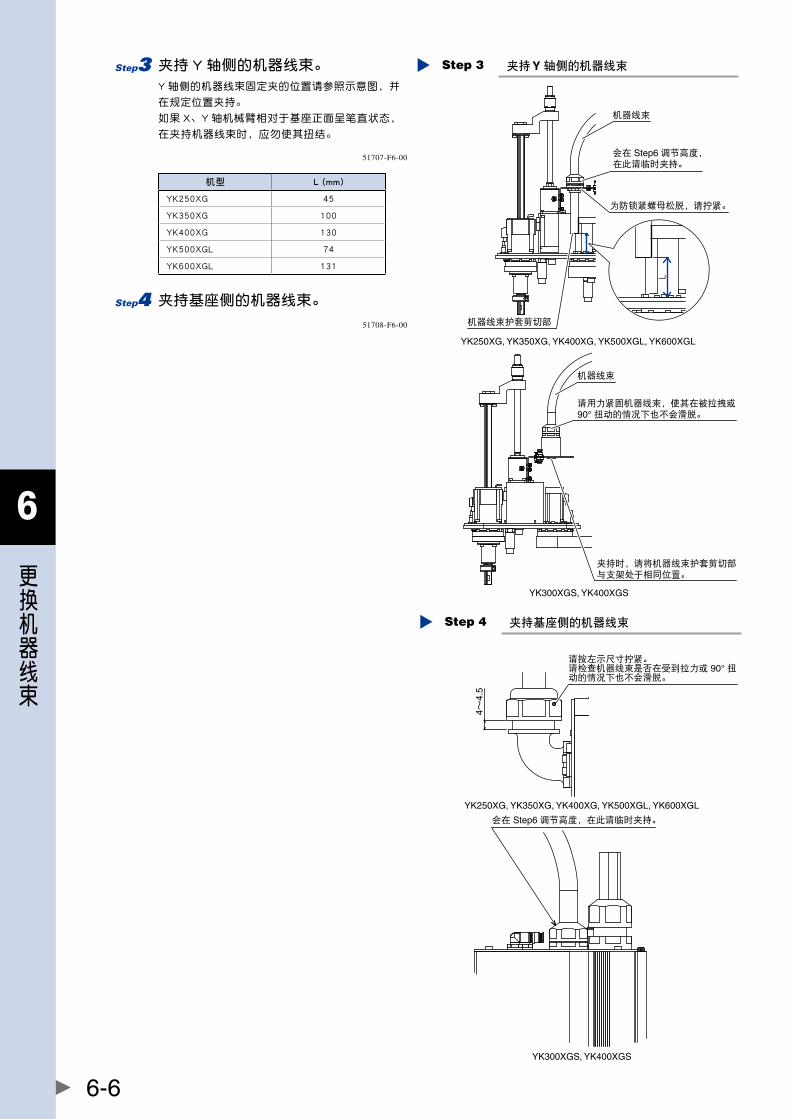
6
更换机器线束
6-6
3 夹持 Y 轴侧的机器线束。
Y 轴侧的机器线束固定夹的位置请参照示意图,并
在规定位置夹持。
如果 X、Y 轴机械臂相对于基座正面呈笔直状态,
在夹持机器线束时,应勿使其扭结。
夹持 Y 轴侧的机器线束Step 3
机器线束
会在 Step6 调节高度,在此请临时夹持。
为防锁紧螺母松脱,请拧紧。
机器线束护套剪切部
L
L
机器线束
夹持时,请将机器线束护套剪切部与支架处于相同位置。
请用力紧固机器线束,使其在被拉拽或90° 扭动的情况下也不会滑脱。
YK250XG, YK350XG, YK400XG, YK500XGL, YK600XGL
YK300XGS, YK400XGS
51707-F6-00
机型 L(mm)
YK250XG 45
YK350XG 100
YK400XG 130
YK500XGL 74
YK600XGL 131
4 夹持基座侧的机器线束。
51708-F6-00
夹持基座侧的机器线束Step 4
4~4.
5
会在 Step6 调节高度,在此请临时夹持。
YK300XGS, YK400XGS
请按左示尺寸拧紧。请检查机器线束是否在受到拉力或 90° 扭动的情况下也不会滑脱。
YK250XG, YK350XG, YK400XG, YK500XGL, YK600XGL
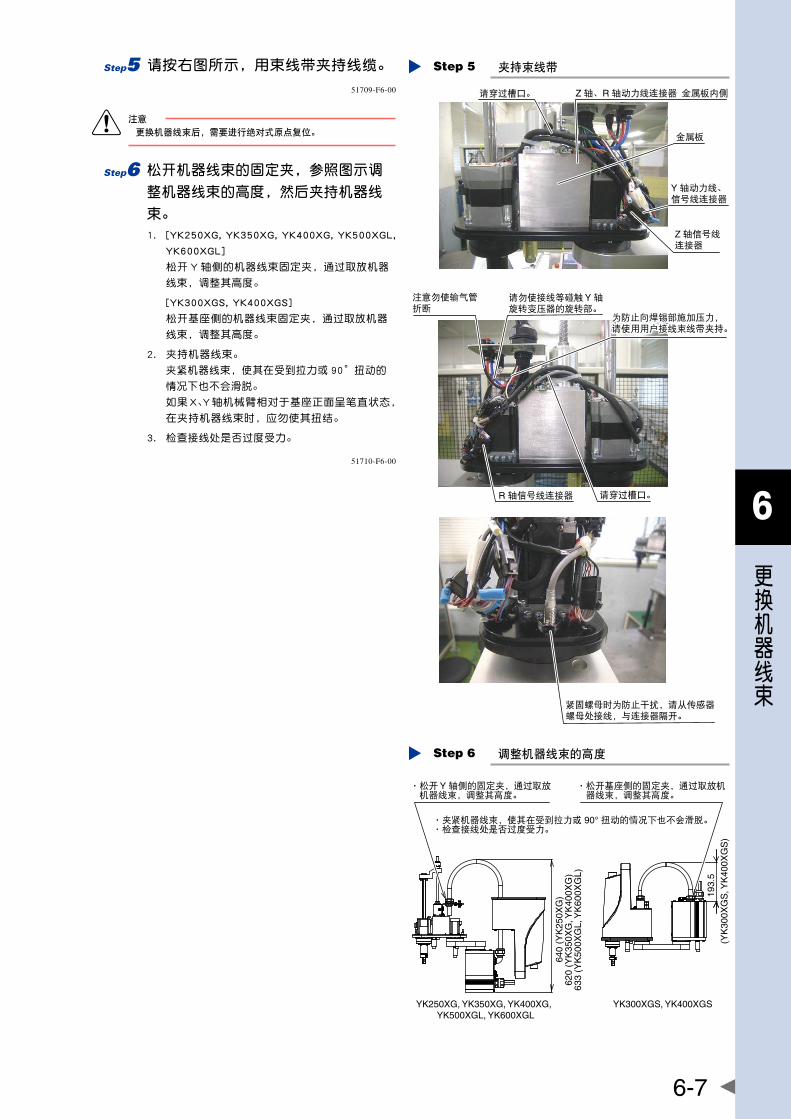
6
更换机器线束
6-7
5 请按右图所示,用束线带夹持线缆。 夹持束线带Step 5
请穿过槽口。
金属板
Z 轴、R 轴动力线连接器 金属板内侧
Y 轴动力线、信号线连接器
Z 轴信号线连接器
注意勿使输气管折断
请穿过槽口。R 轴信号线连接器
紧固螺母时为防止干扰,请从传感器螺母处接线,与连接器隔开。
请勿使接线等碰触 Y 轴旋转变压器的旋转部。
为防止向焊锡部施加压力,请使用用户接线束线带夹持。
51709-F6-00
c 注意
更换机器线束后,需要进行绝对式原点复位。
6 松开机器线束的固定夹,参照图示调
整机器线束的高度,然后夹持机器线
束。
1. [YK250XG,YK350XG,YK400XG,YK500XGL,
YK600XGL]
松开 Y 轴侧的机器线束固定夹,通过取放机器
线束,调整其高度。
[YK300XGS,YK400XGS]
松开基座侧的机器线束固定夹,通过取放机器
线束,调整其高度。
2. 夹持机器线束。
夹紧机器线束,使其在受到拉力或 90°扭动的
情况下也不会滑脱。
如果X、Y轴机械臂相对于基座正面呈笔直状态,
在夹持机器线束时,应勿使其扭结。
3. 检查接线处是否过度受力。
51710-F6-00
调整机器线束的高度Step 6
193.
5(Y
K30
0XG
S, Y
K40
0XG
S)
·夹紧机器线束,使其在受到拉力或 90° 扭动的情况下也不会滑脱。·检查接线处是否过度受力。
640
(YK
250X
G)
620
(YK
350X
G, Y
K40
0XG
)63
3 (Y
K50
0XG
L, Y
K60
0XG
L)
YK250XG, YK350XG, YK400XG, YK500XGL, YK600XGL
YK300XGS, YK400XGS
·松开 Y 轴侧的固定夹,通过取放机器线束,调整其高度。
·松开基座侧的固定夹,通过取放机器线束,调整其高度。
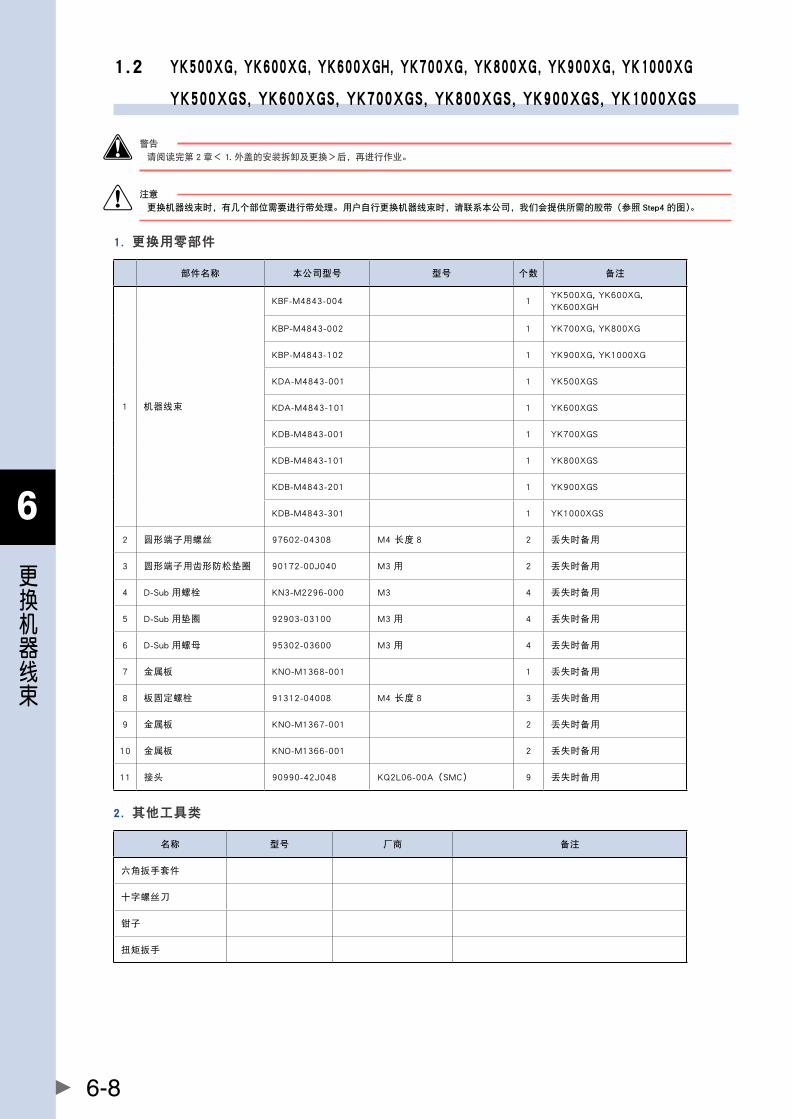
6
更换机器线束
6-8
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
c 注意
更换机器线束时,有几个部位需要进行带处理。用户自行更换机器线束时,请联系本公司,我们会提供所需的胶带(参照 Step4 的图)。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 机器线束
KBF-M4843-004 1YK500XG,YK600XG,YK600XGH
KBP-M4843-002 1 YK700XG,YK800XG
KBP-M4843-102 1 YK900XG,YK1000XG
KDA-M4843-001 1 YK500XGS
KDA-M4843-101 1 YK600XGS
KDB-M4843-001 1 YK700XGS
KDB-M4843-101 1 YK800XGS
KDB-M4843-201 1 YK900XGS
KDB-M4843-301 1 YK1000XGS
2 圆形端子用螺丝 97602-04308 M4长度 8 2 丢失时备用
3 圆形端子用齿形防松垫圈 90172-00J040 M3 用 2 丢失时备用
4 D-Sub 用螺栓 KN3-M2296-000 M3 4 丢失时备用
5 D-Sub 用垫圈 92903-03100 M3 用 4 丢失时备用
6 D-Sub 用螺母 95302-03600 M3 用 4 丢失时备用
7 金属板 KNO-M1368-001 1 丢失时备用
8 板固定螺栓 91312-04008 M4长度 8 3 丢失时备用
9 金属板 KNO-M1367-001 2 丢失时备用
10 金属板 KNO-M1366-001 2 丢失时备用
11 接头 90990-42J048 KQ2L06-00A(SMC) 9 丢失时备用
2.其他工具类
名称 型号 厂商 备注
六角扳手套件
十字螺丝刀
钳子
扭矩扳手
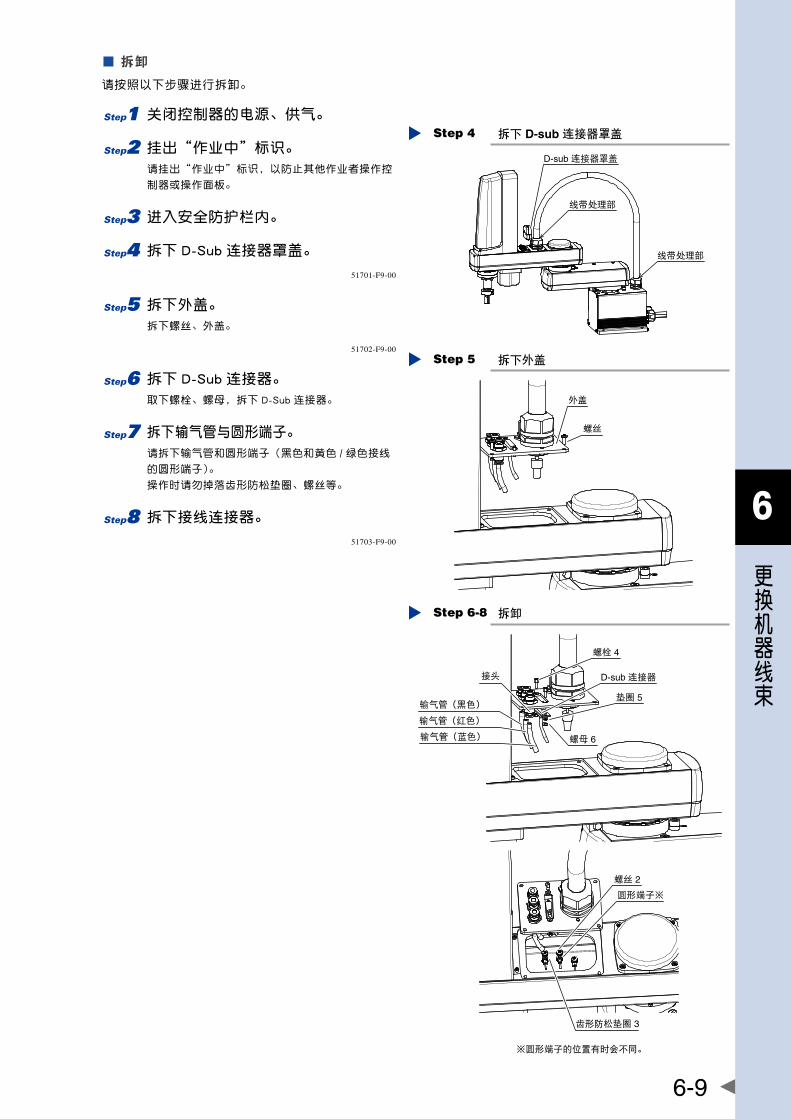
6
更换机器线束
6-9
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源、供气。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
4 拆下 D-Sub 连接器罩盖。
拆下 D-sub 连接器罩盖Step 4
D-sub 连接器罩盖
线带处理部
线带处理部
51701-F9-00
5 拆下外盖。
拆下螺丝、外盖。
拆下外盖Step 5
外盖
螺丝
51702-F9-00
6 拆下 D-Sub 连接器。
取下螺栓、螺母,拆下 D-Sub 连接器。
7 拆下输气管与圆形端子。
请拆下输气管和圆形端子(黑色和黄色 / 绿色接线
的圆形端子)。
操作时请勿掉落齿形防松垫圈、螺丝等。
8 拆下接线连接器。
51703-F9-00
拆卸Step 6-8
螺栓 4
接头
圆形端子※
垫圈 5
齿形防松垫圈 3
※圆形端子的位置有时会不同。
螺丝 2
D-sub 连接器
螺母 6输气管(蓝色)
输气管(红色)
输气管(黑色)

6
更换机器线束
6-10
9 拆下机器线束。
请拆下锁紧螺母、金属板、机器线束。
拆下机器线束Step 9
机器线束 1
螺栓 8
金属板 10
金属板 9
锁紧螺母
金属板 7
螺栓 8
51704-F9-00
0 拆下外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
51705-F9-00
拆下外盖Step 10
外盖
螺丝
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
外盖
螺栓
齿形垫圈
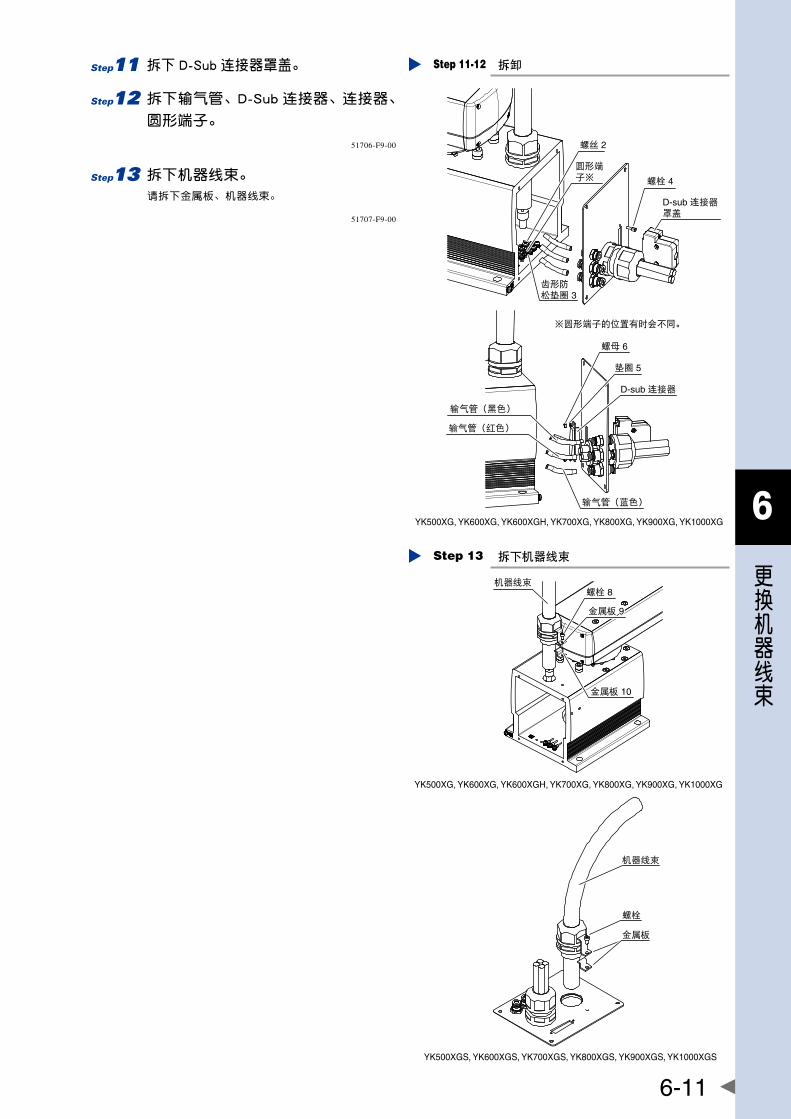
6
更换机器线束
6-11
q 拆下 D-Sub 连接器罩盖。
w 拆下输气管、D-Sub 连接器、连接器、
圆形端子。
拆卸Step 11-12
齿形防松垫圈 3
※圆形端子的位置有时会不同。
螺丝 2
D-sub 连接器罩盖
螺栓 4
圆形端子※
垫圈 5
D-sub 连接器
螺母 6
输气管(蓝色)
输气管(红色)
输气管(黑色)
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
51706-F9-00
e 拆下机器线束。
请拆下金属板、机器线束。
51707-F9-00
拆下机器线束Step 13
螺栓 8
金属板 9
金属板 10
机器线束
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
螺栓
机器线束
金属板
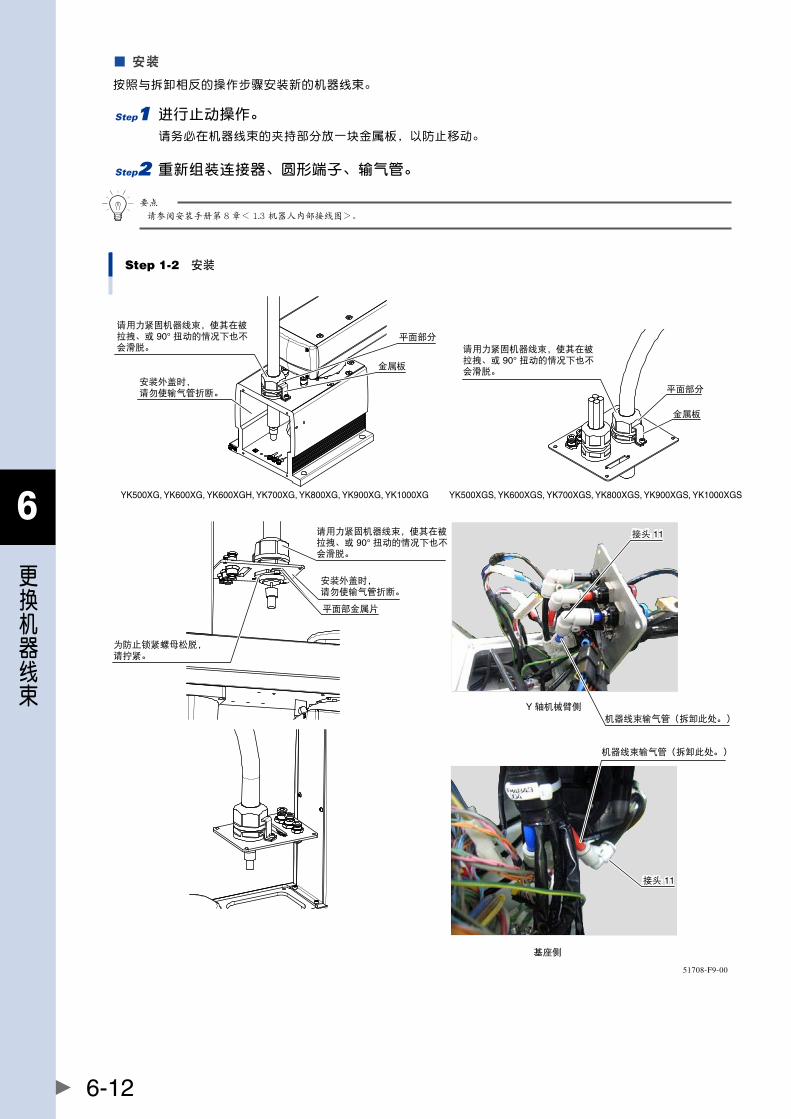
6
更换机器线束
6-12
■ 安装
按照与拆卸相反的操作步骤安装新的机器线束。
1 进行止动操作。
请务必在机器线束的夹持部分放一块金属板,以防止移动。
2 重新组装连接器、圆形端子、输气管。
n 要点
请参阅安装手册第 8 章< 1.3 机器人内部接线图>。
Step 1-2 安装
平面部分
金属板
请用力紧固机器线束,使其在被拉拽、或 90° 扭动的情况下也不会滑脱。
安装外盖时,请勿使输气管折断。
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
平面部分
基座侧
Y 轴机械臂侧
金属板
请用力紧固机器线束,使其在被拉拽、或 90° 扭动的情况下也不会滑脱。
请用力紧固机器线束,使其在被拉拽、或 90° 扭动的情况下也不会滑脱。
平面部金属片
安装外盖时,请勿使输气管折断。
为防止锁紧螺母松脱,请拧紧。
接头 11
机器线束输气管(拆卸此处。)
接头 11
机器线束输气管(拆卸此处。)
51708-F9-00
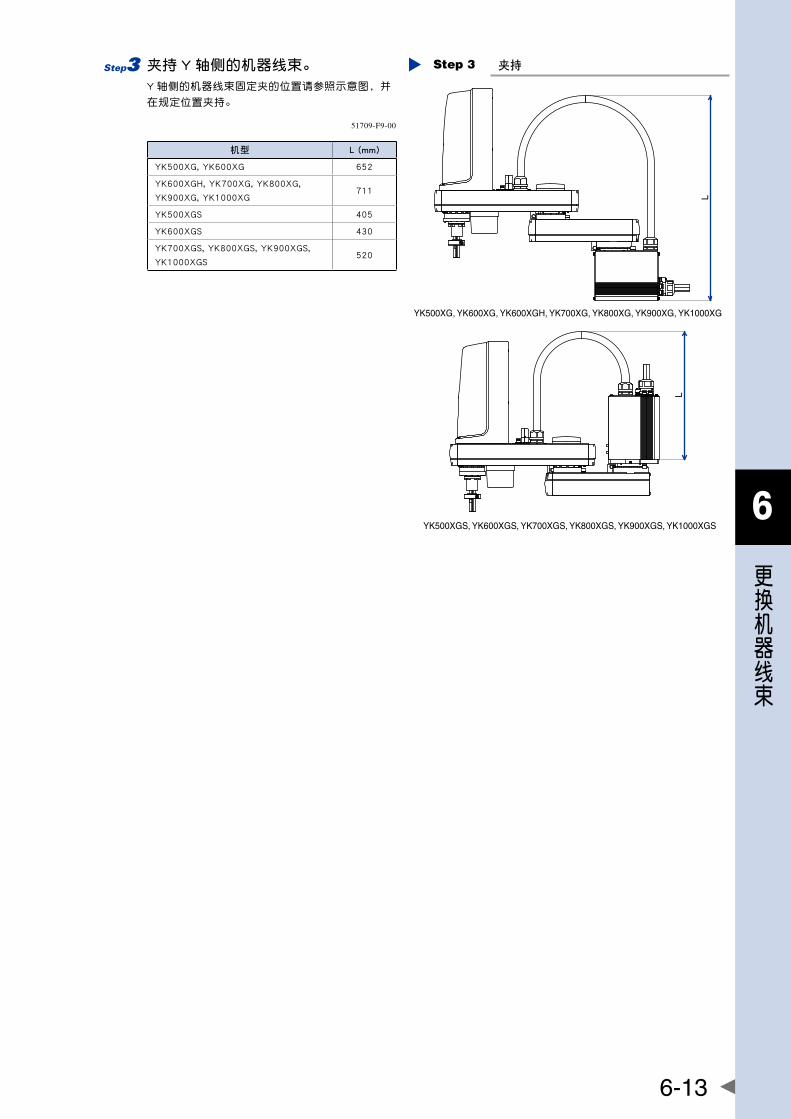
6
更换机器线束
6-13
3 夹持 Y 轴侧的机器线束。
Y 轴侧的机器线束固定夹的位置请参照示意图,并
在规定位置夹持。
夹持Step 3
L
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
L
51709-F9-00
机型 L(mm)
YK500XG,YK600XG 652
YK600XGH,YK700XG,YK800XG,
YK900XG,YK1000XG711
YK500XGS 405
YK600XGS 430
YK700XGS,YK800XGS,YK900XGS,
YK1000XGS520

第7章 更换 Z轴总成
目录
1. 更换 Z 轴总成 7-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,
YK300XGS,YK400XGS 7-1
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 7-4


7
更换更
更更更
7-1
1. 更换 Z 轴总成
更换 Z 轴滚珠丝杠、Z 轴马达时,请以下列 Z 轴总成方式进行更换。
c 注意
・未给出螺栓等的拧紧扭矩时,请参阅第 5章< 2.谐波传动的更换步骤>中的拧紧扭矩。
・更换 Z轴时会伴随位置偏移。更换后,需要重新设置绝对式原点复位、坐标点数据。
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL, YK300XGS,YK400XGS
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1
马达 KCY-M4882-000 1
组件
马达固定螺栓 91312-04012 M4长度 12 2
联轴器 KCY-M1753-000 1
滚珠丝杠 KCY-M1750-000 1
轴承外圈压板 KCY-M1744-000 1
滚珠丝杠支撑轴承 KA1-M2273-000 1
下降端减震器 KCY-M1788-000 1
外圈压板用
螺栓90112-2AJ010 8
轴承内圈压板 KCY-M1778-000 1
轴承座 KCY-M1712-000 1
2 滚珠丝杠固定螺栓 91312-03014 M3长度 14 4 丢失时备用
3 Z 轴总成固定螺栓 91312-04014 M4长度 14 4 丢失时备用
4 圆形端子用螺丝 97602-04308 M4长度 8 1 丢失时备用
5 圆形端子用齿形防松垫圈 90172-00J040 M4 用 1 丢失时备用
2.其他工具类
名称 型号 厂商 备注
旧棉纱头
六角扳手套件
束线带
十字螺丝刀
扭矩扳手
螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
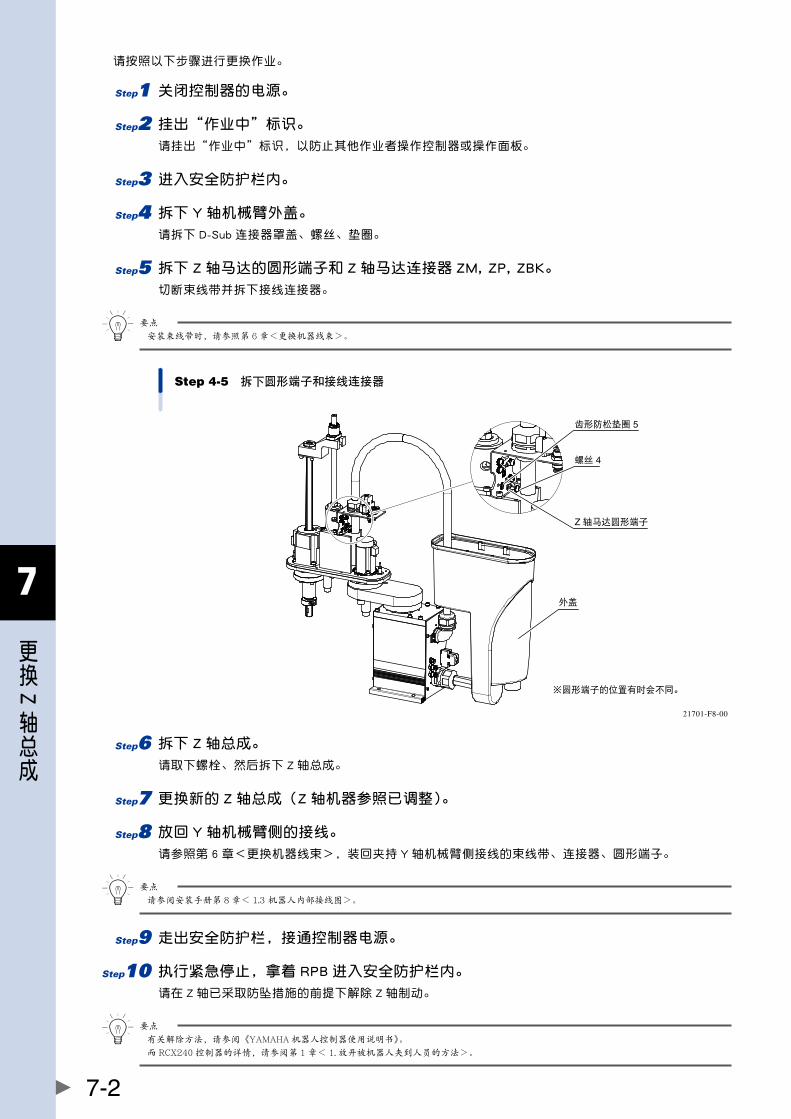
7
更换更
更更更
7-2
请按照以下步骤进行更换作业。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 拆下 Y 轴机械臂外盖。
请拆下 D-Sub 连接器罩盖、螺丝、垫圈。
5 拆下 Z 轴马达的圆形端子和 Z 轴马达连接器 ZM,ZP,ZBK。
切断束线带并拆下接线连接器。
n 要点
安装束线带时,请参照第 6 章<更换机器线束>。
Step 4-5 拆下圆形端子和接线连接器
齿形防松垫圈 5
螺丝 4
Z 轴马达圆形端子
外盖
※圆形端子的位置有时会不同。
21701-F8-00
6 拆下 Z 轴总成。
请取下螺栓、然后拆下 Z 轴总成。
7 更换新的 Z 轴总成(Z 轴机器参照已调整)。
8 放回 Y 轴机械臂侧的接线。
请参照第 6 章<更换机器线束>,装回夹持 Y 轴机械臂侧接线的束线带、连接器、圆形端子。
n 要点
请参阅安装手册第 8 章< 1.3 机器人内部接线图>。
9 走出安全防护栏,接通控制器电源。
0 执行紧急停止,拿着 RPB 进入安全防护栏内。
请在 Z 轴已采取防坠措施的前提下解除 Z 轴制动。
n 要点
有关解除方法,请参阅《YAMAHA 机器人控制器使用说明书》。
而 RCX240 控制器的详情,请参阅第 1 章< 1. 放开被机器人夹到人员的方法>。
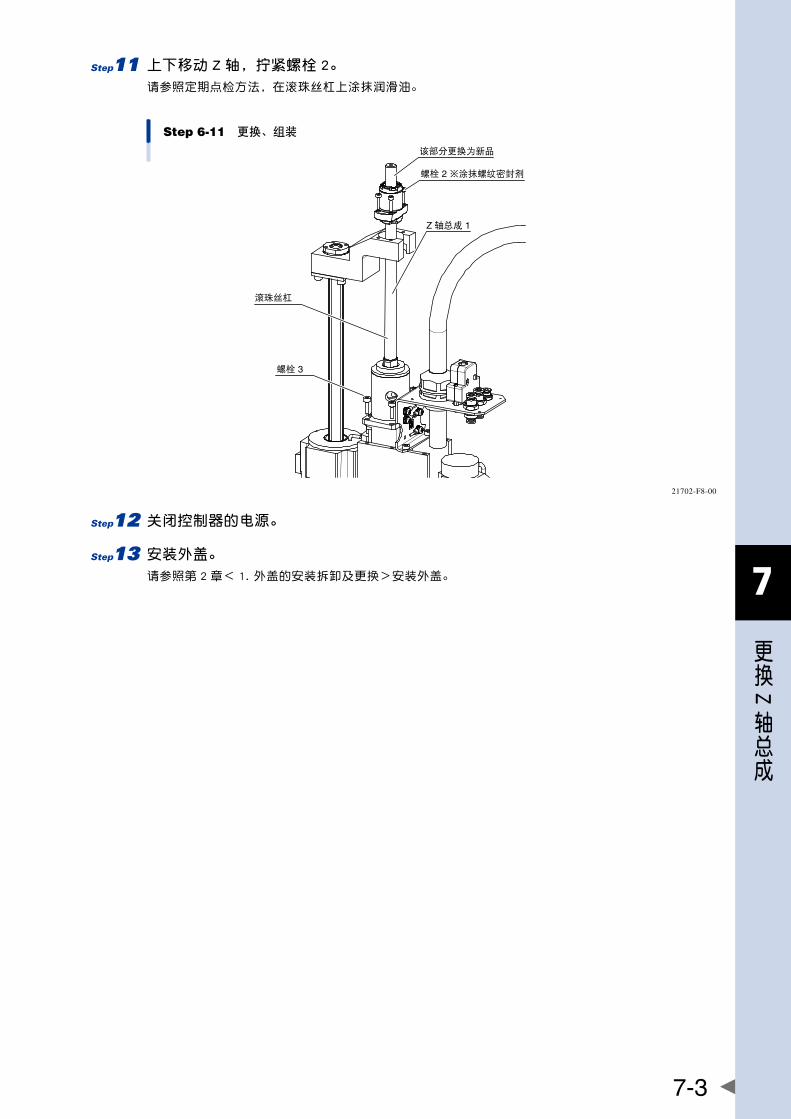
7
更换更
更更更
7-3
q 上下移动 Z 轴,拧紧螺栓 2。
请参照定期点检方法,在滚珠丝杠上涂抹润滑油。
Step 6-11 更换、组装
螺栓 2 ※涂抹螺纹密封剂
该部分更换为新品
Z 轴总成 1
滚珠丝杠
螺栓 3
21702-F8-00
w 关闭控制器的电源。
e 安装外盖。
请参照第 2 章< 1.外盖的安装拆卸及更换>安装外盖。

7
更换更
更更更
7-4
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1.更换用零部件
·YK500XG,YK600XG
YK500XGS,YK600XGS
部件名称 本公司型号 型号 个数 备注
1 马达 KBF-M4882-002 1 需要更换
2
滚珠丝杠
KBP-M1750-001 Z 轴行程 200mm 1
组件
KBP-M1750-101 Z 轴行程 300mm 1
尼龙螺母 KBP-M1778-001 1
马达、滚珠丝杠轴
联结法兰KBP-M1753-003 1
下降端减震器 KBP-M1788-001 1
3滚珠丝杠螺母
固定螺栓91312-05014 M5 长度 14 4 需要更换
4马达、滚珠丝杠轴
联结法兰固定螺栓91312-03020 M3长度 20 10 需要更换
5 马达固定螺栓 91312-05012 M5长度 12 2 需要更换
6 马达固定螺栓 91312-05016 M5 长度 16 2 需要更换
7 圆形端子用螺丝 97602-04308 M4长度 8 1 丢失时备用
8 圆形端子用齿形防松垫圈 90172-00J040 M4 用 1 丢失时备用
·YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK700XGS,YK800XGS,YK900XGS,YK1000XGS
部件名称 本公司型号 型号 个数 备注
1 马达 KBP-M4882-001 1 需要更换
2
滚珠丝杠
KBP-M1750-001 Z 轴行程 200mm 1
组件
KBP-M1750-201 Z 轴行程 400mm 1
尼龙螺母 KBP-M1778-001 1
马达、滚珠丝杠轴
联结法兰KBP-M1753-003 1
下降端减震器 KBP-M1788-001 1
3滚珠丝杠螺母
固定螺栓91312-05014 M5 长度 14 4 需要更换
4马达、滚珠丝杠轴
联结法兰固定螺栓91312-03020 M3长度 20 10 需要更换
5 马达固定螺栓 91312-05016 M5 长度 16 2 需要更换
6 马达固定螺栓 91312-05020 M5 长度 20 2 需要更换
7 圆形端子用螺丝 97602-04308 M4长度 8 1 丢失时备用
8 圆形端子用齿形防松垫圈 90172-00J040 M4 用 1 丢失时备用
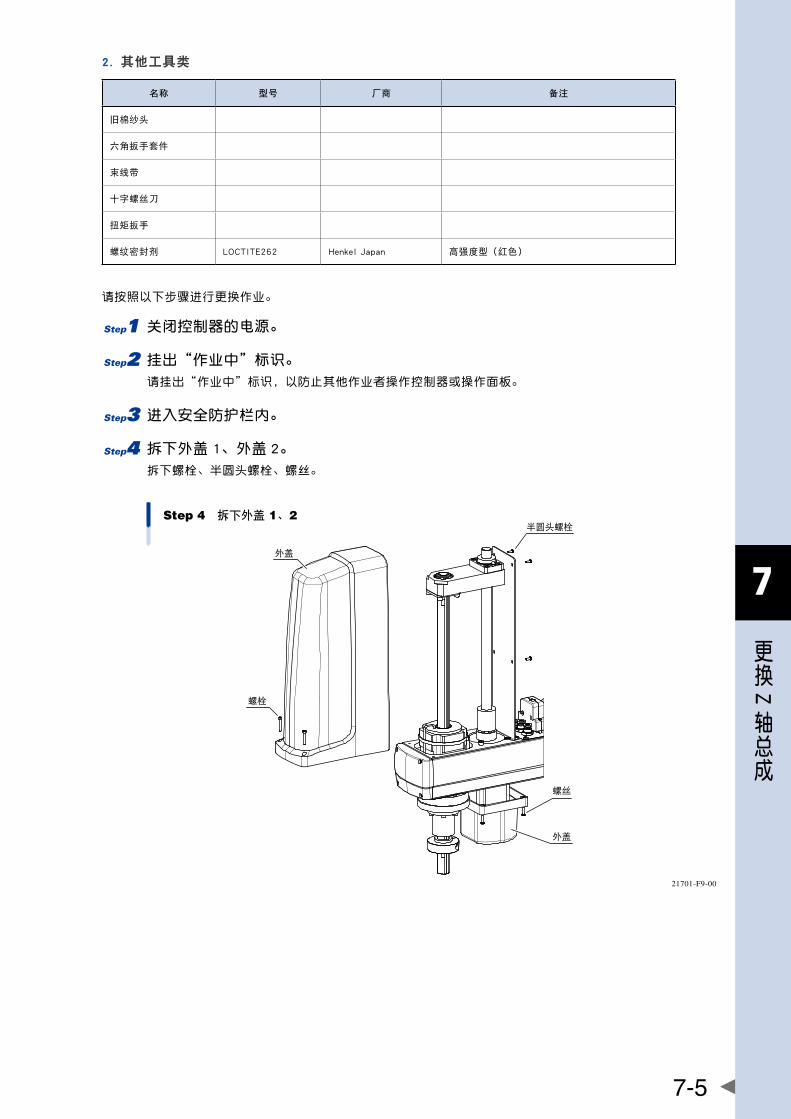
7
更换更
更更更
7-5
2.其他工具类
名称 型号 厂商 备注
旧棉纱头
六角扳手套件
束线带
十字螺丝刀
扭矩扳手
螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
请按照以下步骤进行更换作业。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 拆下外盖 1、外盖 2。
拆下螺栓、半圆头螺栓、螺丝。
Step 4 拆下外盖 1、2
外盖
螺栓
半圆头螺栓
外盖
螺丝
21701-F9-00

7
更换更
更更更
7-6
5 拆下 Z 轴马达圆形端子、连接器 ZM、ZP、以及制动器连接器 ZBK。
请拆下支架、圆形端子和连接器。
Step 5 拆下圆形端子、连接器
齿形防松垫圈 8
支架
螺丝
螺丝 7
Z 轴马达圆形端子
※圆形端子的位置有时会不同。
21702-F9-00
6 拆下滚珠丝杠组件、Z 轴马达。
请取下螺栓,拆下滚珠丝杠组件、Z 轴马达。
Step 6 拆下滚珠丝杠组件、Z 轴马达
螺栓
Z 轴马达
螺栓
滚珠丝杠组件
螺栓
螺栓
21703-F9-00
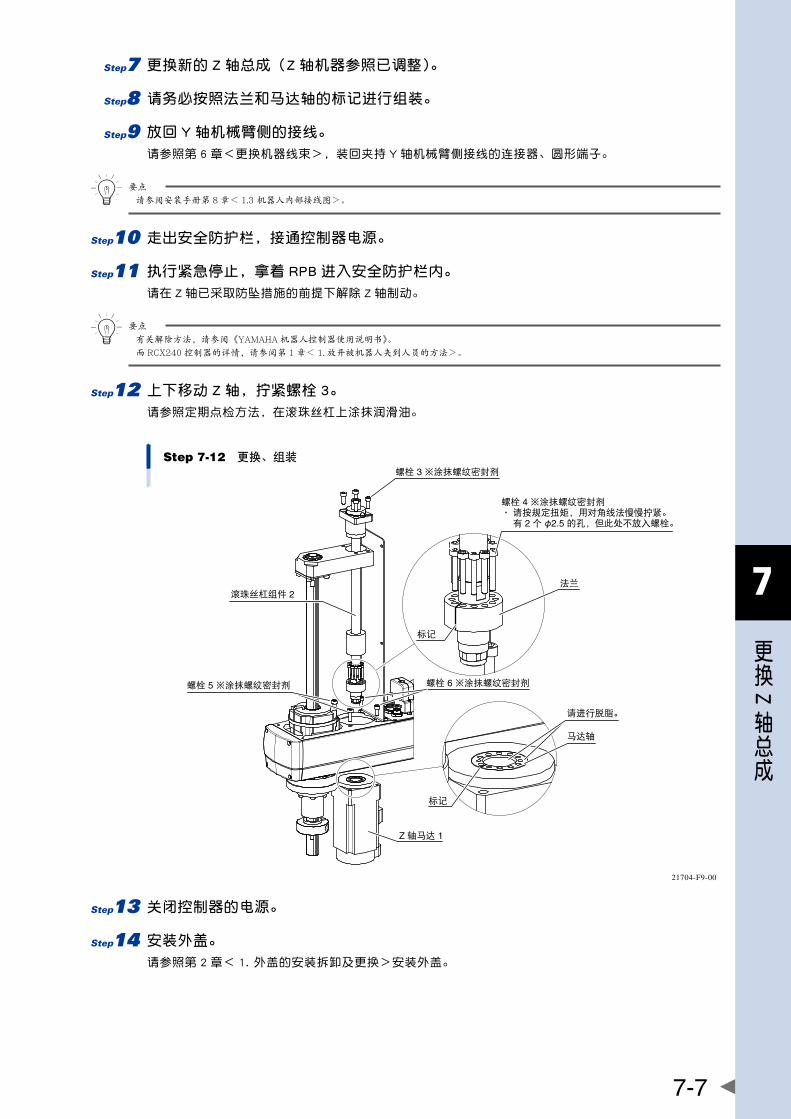
7
更换更
更更更
7-7
7 更换新的 Z 轴总成(Z 轴机器参照已调整)。
8 请务必按照法兰和马达轴的标记进行组装。
9 放回 Y 轴机械臂侧的接线。
请参照第 6 章<更换机器线束>,装回夹持 Y 轴机械臂侧接线的连接器、圆形端子。
n 要点
请参阅安装手册第 8 章< 1.3 机器人内部接线图>。
0 走出安全防护栏,接通控制器电源。
q 执行紧急停止,拿着 RPB 进入安全防护栏内。
请在 Z 轴已采取防坠措施的前提下解除 Z 轴制动。
n 要点
有关解除方法,请参阅《YAMAHA 机器人控制器使用说明书》。
而 RCX240 控制器的详情,请参阅第 1 章< 1. 放开被机器人夹到人员的方法>。
w 上下移动 Z 轴,拧紧螺栓 3。
请参照定期点检方法,在滚珠丝杠上涂抹润滑油。
Step 7-12 更换、组装螺栓 3 ※涂抹螺纹密封剂
滚珠丝杠组件 2
螺栓 6 ※涂抹螺纹密封剂螺栓 5 ※涂抹螺纹密封剂
法兰
标记
标记
螺栓 4 ※涂抹螺纹密封剂·请按规定扭矩,用对角线法慢慢拧紧。 有 2 个 φ2.5 的孔,但此处不放入螺栓。
请进行脱脂。
马达轴
Z 轴马达 1
21704-F9-00
e 关闭控制器的电源。
r 安装外盖。
请参照第 2 章< 1.外盖的安装拆卸及更换>安装外盖。

第8章 更换花键轴
目录
1. 更换花键轴 8-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,
YK300XGS,YK400XGS 8-1
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 8-3

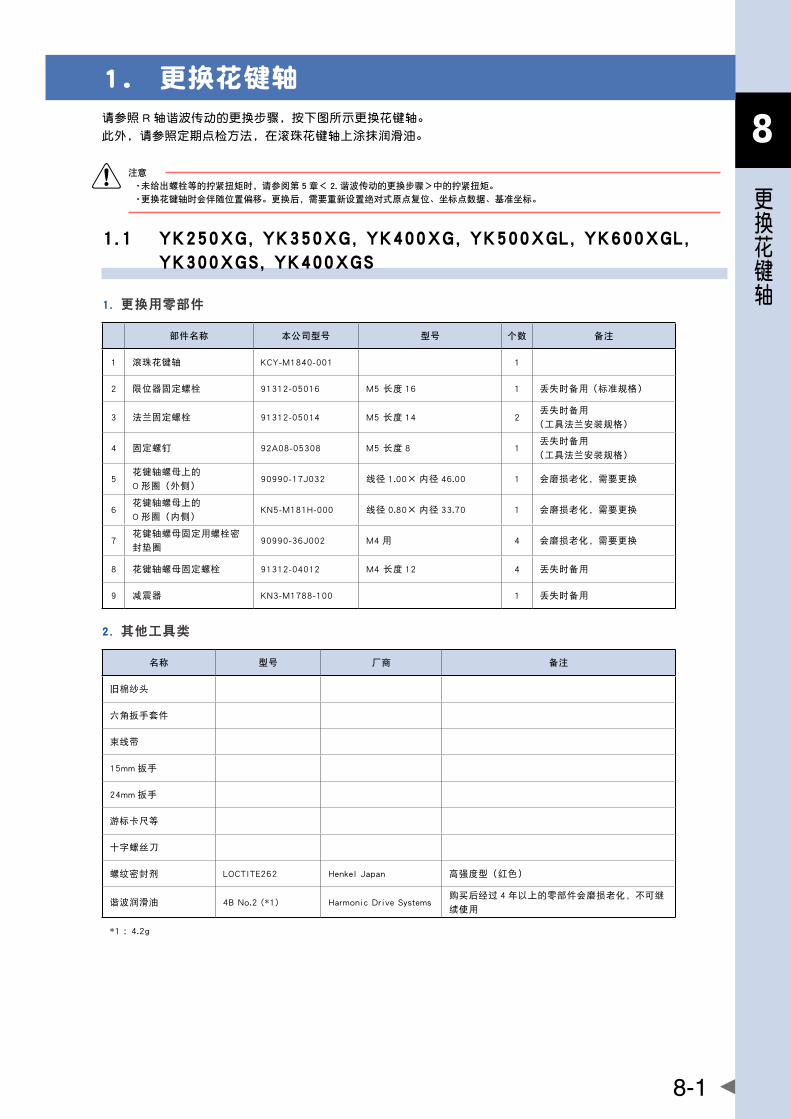
8-1
8
更换花键更
1. 更换花键轴
请参照 R 轴谐波传动的更换步骤,按下图所示更换花键轴。
此外,请参照定期点检方法,在滚珠花键轴上涂抹润滑油。
c 注意
・未给出螺栓等的拧紧扭矩时,请参阅第 5章< 2.谐波传动的更换步骤>中的拧紧扭矩。
・更换花键轴时会伴随位置偏移。更换后,需要重新设置绝对式原点复位、坐标点数据、基准坐标。
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL, YK300XGS,YK400XGS
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 滚珠花键轴 KCY-M1840-001 1
2 限位器固定螺栓 91312-05016 M5长度 16 1 丢失时备用(标准规格)
3 法兰固定螺栓 91312-05014 M5长度 14 2丢失时备用
(工具法兰安装规格)
4 固定螺钉 92A08-05308 M5长度 8 1丢失时备用
(工具法兰安装规格)
5花键轴螺母上的
O 形圈(外侧)90990-17J032 线径 1.00× 内径 46.00 1 会磨损老化,需要更换
6花键轴螺母上的
O 形圈(内侧)KN5-M181H-000 线径 0.80× 内径 33.70 1 会磨损老化,需要更换
7花键轴螺母固定用螺栓密
封垫圈90990-36J002 M4 用 4 会磨损老化,需要更换
8 花键轴螺母固定螺栓 91312-04012 M4长度 12 4 丢失时备用
9 减震器 KN3-M1788-100 1 丢失时备用
2.其他工具类
名称 型号 厂商 备注
旧棉纱头
六角扳手套件
束线带
15mm 扳手
24mm 扳手
游标卡尺等
十字螺丝刀
螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
谐波润滑油 4BNo.2(*1) HarmonicDriveSystems购买后经过 4 年以上的零部件会磨损老化,不可继
续使用
*1 :4.2g
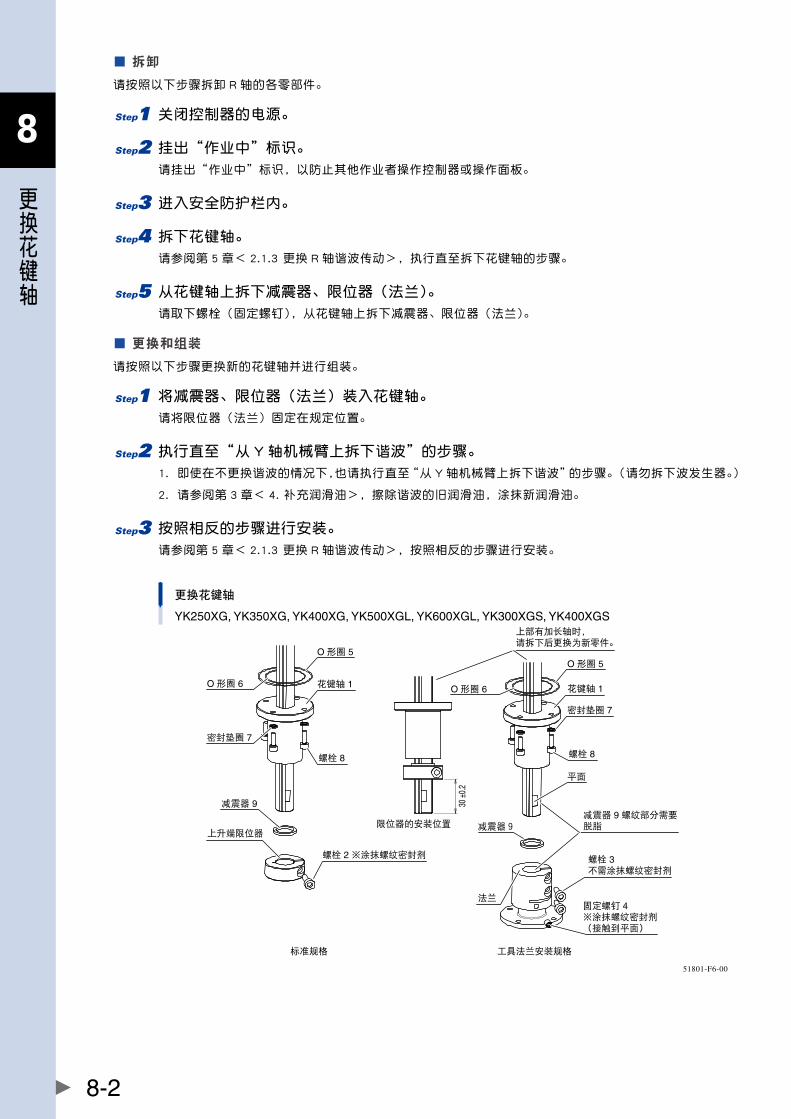
8-2
8
更换花键更
■ 拆卸
请按照以下步骤拆卸 R 轴的各零部件。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 拆下花键轴。
请参阅第 5 章< 2.1.3更换 R 轴谐波传动>,执行直至拆下花键轴的步骤。
5 从花键轴上拆下减震器、限位器(法兰)。
请取下螺栓(固定螺钉),从花键轴上拆下减震器、限位器(法兰)。
■ 更换和组装
请按照以下步骤更换新的花键轴并进行组装。
1 将减震器、限位器(法兰)装入花键轴。
请将限位器(法兰)固定在规定位置。
2 执行直至“从 Y 轴机械臂上拆下谐波”的步骤。
1. 即使在不更换谐波的情况下,也请执行直至“从 Y 轴机械臂上拆下谐波”的步骤。(请勿拆下波发生器。)
2. 请参阅第 3 章< 4.补充润滑油>,擦除谐波的旧润滑油,涂抹新润滑油。
3 按照相反的步骤进行安装。
请参阅第 5 章< 2.1.3更换 R 轴谐波传动>,按照相反的步骤进行安装。
更换花键轴
YK250XG, YK350XG, YK400XG, YK500XGL, YK600XGL, YK300XGS, YK400XGS
30 ±
0.2
上部有加长轴时,请拆下后更换为新零件。
花键轴 1
限位器的安装位置
减震器 9
上升端限位器
螺栓 2 ※涂抹螺纹密封剂
标准规格 工具法兰安装规格
减震器 9减震器 9 螺纹部分需要脱脂
平面
O 形圈 5O 形圈 5
花键轴 1
法兰固定螺钉 4※涂抹螺纹密封剂(接触到平面)
螺栓 8 螺栓 8
O 形圈 6O 形圈 6
密封垫圈 7
密封垫圈 7
螺栓 3 不需涂抹螺纹密封剂
51801-F6-00
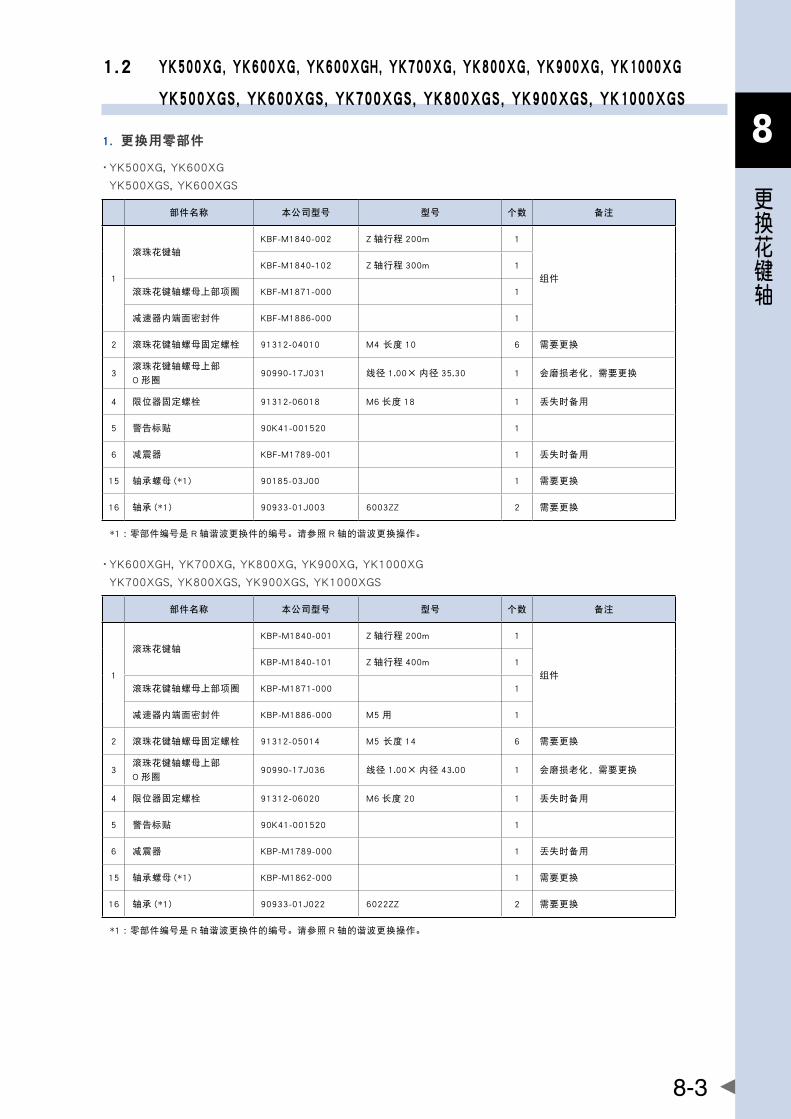
8-3
8
更换花键更
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS
1.更换用零部件
·YK500XG,YK600XG
YK500XGS,YK600XGS
部件名称 本公司型号 型号 个数 备注
1
滚珠花键轴
KBF-M1840-002 Z 轴行程 200m 1
组件
KBF-M1840-102 Z 轴行程 300m 1
滚珠花键轴螺母上部项圈 KBF-M1871-000 1
减速器内端面密封件 KBF-M1886-000 1
2 滚珠花键轴螺母固定螺栓 91312-04010 M4长度 10 6 需要更换
3滚珠花键轴螺母上部
O 形圈90990-17J031 线径 1.00× 内径 35.30 1 会磨损老化,需要更换
4 限位器固定螺栓 91312-06018 M6 长度 18 1 丢失时备用
5 警告标贴 90K41-001520 1
6 减震器 KBF-M1789-001 1 丢失时备用
15 轴承螺母 (*1) 90185-03J00 1 需要更换
16 轴承 (*1) 90933-01J003 6003ZZ 2 需要更换
*1 :零部件编号是 R 轴谐波更换件的编号。请参照 R 轴的谐波更换操作。
·YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK700XGS,YK800XGS,YK900XGS,YK1000XGS
部件名称 本公司型号 型号 个数 备注
1
滚珠花键轴
KBP-M1840-001 Z 轴行程 200m 1
组件
KBP-M1840-101 Z 轴行程 400m 1
滚珠花键轴螺母上部项圈 KBP-M1871-000 1
减速器内端面密封件 KBP-M1886-000 M5 用 1
2 滚珠花键轴螺母固定螺栓 91312-05014 M5长度 14 6 需要更换
3滚珠花键轴螺母上部
O 形圈90990-17J036 线径 1.00× 内径 43.00 1 会磨损老化,需要更换
4 限位器固定螺栓 91312-06020 M6 长度 20 1 丢失时备用
5 警告标贴 90K41-001520 1
6 减震器 KBP-M1789-000 1 丢失时备用
15 轴承螺母 (*1) KBP-M1862-000 1 需要更换
16 轴承 (*1) 90933-01J022 6022ZZ 2 需要更换
*1 :零部件编号是 R 轴谐波更换件的编号。请参照 R 轴的谐波更换操作。
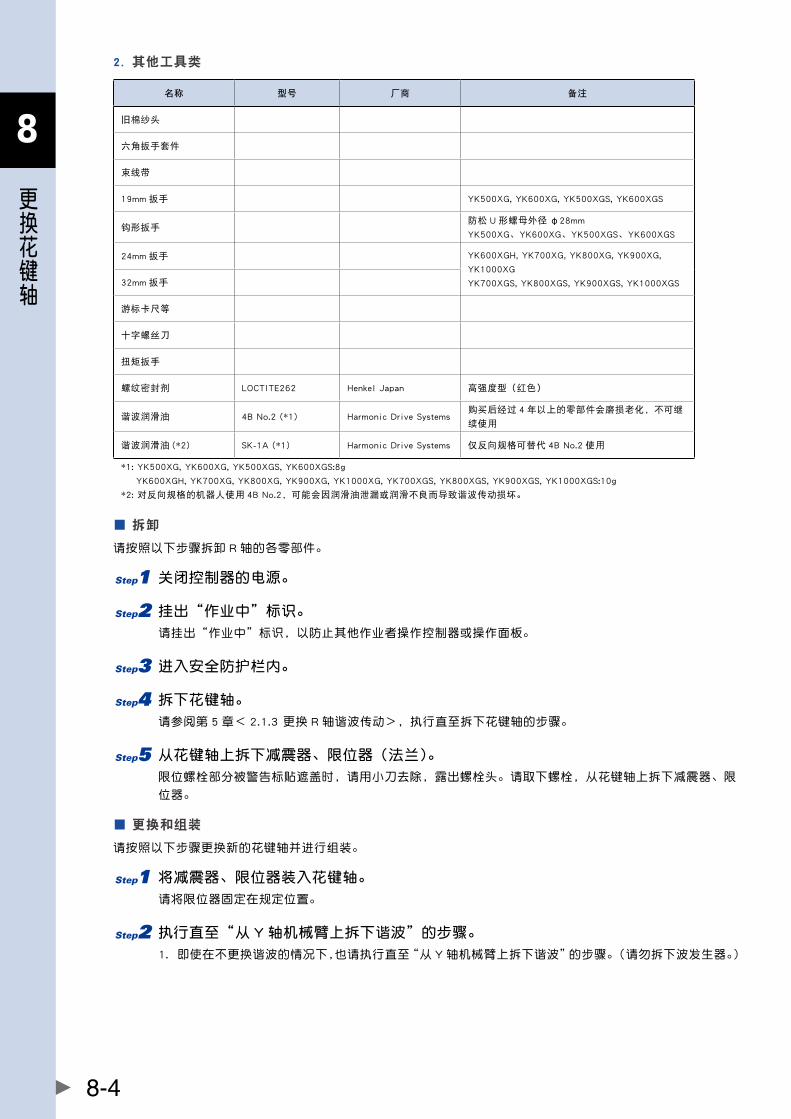
8-4
8
更换花键更
2.其他工具类
名称 型号 厂商 备注
旧棉纱头
六角扳手套件
束线带
19mm 扳手 YK500XG,YK600XG,YK500XGS,YK600XGS
钩形扳手防松 U 形螺母外径 φ28mm
YK500XG、YK600XG、YK500XGS、YK600XGS
24mm 扳手 YK600XGH,YK700XG,YK800XG,YK900XG,
YK1000XG
YK700XGS,YK800XGS,YK900XGS,YK1000XGS32mm 扳手
游标卡尺等
十字螺丝刀
扭矩扳手
螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
谐波润滑油 4BNo.2(*1) HarmonicDriveSystems购买后经过 4 年以上的零部件会磨损老化,不可继
续使用
谐波润滑油 (*2) SK-1A(*1) HarmonicDriveSystems 仅反向规格可替代 4BNo.2 使用
*1:YK500XG,YK600XG,YK500XGS,YK600XGS:8g
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,YK700XGS,YK800XGS,YK900XGS,YK1000XGS:10g
*2:对反向规格的机器人使用 4BNo.2,可能会因润滑油泄漏或润滑不良而导致谐波传动损坏。
■ 拆卸
请按照以下步骤拆卸 R 轴的各零部件。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 拆下花键轴。
请参阅第 5 章< 2.1.3更换 R 轴谐波传动>,执行直至拆下花键轴的步骤。
5 从花键轴上拆下减震器、限位器(法兰)。
限位螺栓部分被警告标贴遮盖时,请用小刀去除,露出螺栓头。请取下螺栓,从花键轴上拆下减震器、限
位器。
■ 更换和组装
请按照以下步骤更换新的花键轴并进行组装。
1 将减震器、限位器装入花键轴。
请将限位器固定在规定位置。
2 执行直至“从 Y 轴机械臂上拆下谐波”的步骤。
1. 即使在不更换谐波的情况下,也请执行直至“从 Y 轴机械臂上拆下谐波”的步骤。(请勿拆下波发生器。)

8-5
8
更换花键更
2. 请参阅第 3 章< 4.补充润滑油>,擦除谐波的旧润滑油,涂抹新润滑油。
3 按照相反的步骤进行安装。
请参阅第 5 章< 2.2.3更换 R 轴谐波传动>,按照相反的步骤进行安装。
4 在限位器上粘贴警告标贴。
更换花键轴
限位器安装位置
45±0
.2(
YK60
0XG
H, Y
K700
XG, Y
K800
XG,
YK90
0XG
, YK1
000X
G, Y
K700
XGS,
YK
800X
GS,
YK9
00XG
S, Y
K100
0XG
S)
40±0
.2(
K500
XG, Y
K600
XG, Y
K500
XGS,
YK6
00XG
S)
O 形圈 3
花键轴组件 1
减震器 6
上升端限位器 螺栓 4 ※涂抹螺纹密封剂
螺栓 2 ※涂抹螺纹密封剂
51801-F9-00
粘贴警告标贴
请用警告标贴完全覆盖锪孔。请勿使警告标贴遮住限位器 C 面。请对曲面进行充分脱脂后,粘贴标贴。
粘贴的开始位置
警告标贴
5 ※
51802-F9-00※警告标贴 5
YK500XG,YK600XG,YK500XGS,YK600XGS 2mm
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,
YK700XGS,YK800XGS,YK900XGS,YK1000XGS6mm


第9章 更换马达
目录
1. 更换马达 9-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,
YK300XGS,YK400XGS 9-1
1.1.1 更换 X、R 轴马达 9-1
1.1.2 更换 Y 轴马达 9-1
1.1.3 更换 Z 轴马达 9-3
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 9-4
1.2.1 更换 X、Y、R 轴马达 9-4
1.2.2 更换 Z 轴马达 9-4


9
更换马达
9-1
1. 更换马达
c 注意
・更换马达时会伴随位置偏移。更换后,需要重新设置绝对式原点复位、坐标点数据。更换 X、Y、R轴马达后,需要重新设置基准坐标。
・未给出螺栓等的拧紧扭矩时,请参阅第 5章< 2.谐波传动的更换步骤>中的拧紧扭矩。
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,
YK300XGS,YK400XGS
1.1.1 更换 X、R 轴马达
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
更换马达时,请参照各轴的谐波更换操作。
更换 X 轴马达时,拆卸至可取下 X 轴马达的步骤,参照谐波更换方法,擦除谐波的旧润滑油,涂抹新润滑油。
更换 R 轴马达时,执行直至“从 Y 轴机械臂上拆下谐波”的步骤,参照谐波更换方法,擦除谐波的旧润滑油,涂抹
新润滑油。
c 注意
更换 R轴马达时,参照谐波传动的更换步骤,而在“■更换、组装”的 Step2 中,会对更换新马达的谐波传动的波发生器进行偏差检查,如果
没有固定马达的虎钳、千分表,就无法进行偏差检查。
如果没有上述工具,也可由本公司对新的波发生器与马达进行组装及偏差检查后,再出厂。
这种情况下,请作出如下指示:为更换零件“添加新谐波传动 KCY-M1821-000”以及组装波发生器和马达。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 X 轴马达 KCY-M4880-001 1
2 R 轴马达 KCY-M4883-000 1
2.其他工具类
名称 型号 厂商 备注
旧棉纱头
六角扳手套件
十字螺丝刀
谐波润滑油 4BNo.2(*1) HarmonicDriveSystems购买后经过 4 年以上的零部件会磨损老化,不可继
续使用
*1 :X 轴 25g、R 轴 4.2g
1.1.2 更换 Y 轴马达
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 马达部 O 形圈 KN3-M257K-000 线径1.0mm× 内径29.5mm 1 会磨损老化,需要更换
2 马达 KCY-M4881-000 1
3 马达固定螺栓 91312-04008 M4长度 8 2 丢失时备用
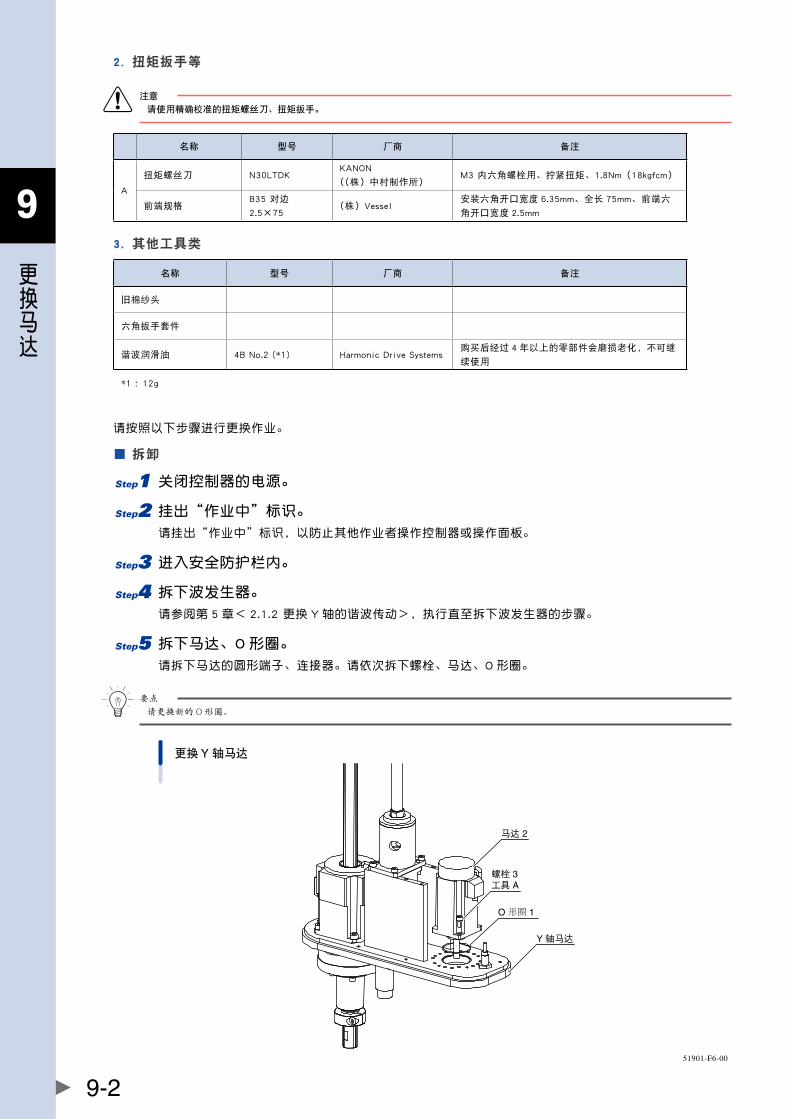
9
更换马达
9-2
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
名称 型号 厂商 备注
A
扭矩螺丝刀 N30LTDKKANON
((株)中村制作所)M3内六角螺栓用、拧紧扭矩、1.8Nm(18kgfcm)
前端规格B35对边
2.5×75(株)Vessel
安装六角开口宽度 6.35mm、全长 75mm、前端六
角开口宽度 2.5mm
3.其他工具类
名称 型号 厂商 备注
旧棉纱头
六角扳手套件
谐波润滑油 4BNo.2(*1) HarmonicDriveSystems购买后经过 4 年以上的零部件会磨损老化,不可继
续使用
*1 :12g
请按照以下步骤进行更换作业。
■ 拆卸
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 拆下波发生器。
请参阅第 5 章< 2.1.2更换 Y 轴的谐波传动>,执行直至拆下波发生器的步骤。
5 拆下马达、O 形圈。
请拆下马达的圆形端子、连接器。请依次拆下螺栓、马达、O 形圈。
n 要点
请更换新的 O 形圈。
更换 Y 轴马达
马达 2
O 形圈 1
Y 轴马达
螺栓 3 工具 A
51901-F6-00

9
更换马达
9-3
■ 更换和组装
请按照以下步骤更换新的马达并进行组装。
1 在谐波上涂抹新润滑油。
请参阅第 5 章< 2.1.2更换 Y 轴的谐波传动>,擦除谐波的旧润滑油,涂抹新润滑油。
2 安装马达、O 形圈。
c 注意
・在固定时,注意勿使 O形圈从槽部挤出并被咬合。如果在 O形圈咬合的状态下使用,可能会成为故障的原因。
・在组装时如果与异物等咬合,可能会成为谐波传动异响或损坏的原因。
3 固定圆形端子。
4 连接马达的连接器。
请参阅第 6 章<更换机器线束>,连接连接器。
5 执行安装波发生器以后的操作。
请参阅第 5 章< 2.1.2更换 Y 轴的谐波传动>,执行安装波发生器以后的步骤。
1.1.3 更换 Z 轴马达
YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,YK300XGS,YK400XGS 等型号如第 7 章<更换 Z 轴总
成>所述,Z 轴马达和滚珠丝杠组件需要整体更换,因此请按整套组件更换。

9
更换马达
9-4
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS
1.2.1 更换 X、Y、R 轴马达
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
更换马达时,请参照各轴的谐波更换操作。
更换 X、Y 轴马达时,请参照谐波更换方法,擦除谐波的旧润滑油,涂抹新润滑油。
更换 R 轴马达时,执行直至“从 Y 轴机械臂上拆下谐波”的步骤,参照谐波更换方法,擦除谐波的旧润滑油,涂抹
新润滑油。
c 注意
更换 R轴马达时,参照谐波传动的更换步骤,而在“■更换、组装”的 Step2 中,会对更换新马达的谐波传动的波发生器进行偏差检查,如果
没有固定马达的虎钳、千分表,就无法进行偏差检查。
如果没有上述工具,也可由本公司对新的波发生器与马达进行组装及偏差检查后,再出厂。
这种情况下,请作出如下指示:为更换零件“添加下列新谐波传动”以及组装波发生器和马达。
添加的马达:KBF-M1821-100(YK500XG,YK600XG,YK500XGS,YK600XGS)
KBP-M1821-011(YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,YK700XGS,YK800XGS,YK900XGS,YK1000XGS)
1.更换用零部件
·YK500XG,YK600XG YK500XGS,YK600XGS
部件名称 本公司型号 型号 个数 备注
1 X 轴马达 90K94-8417FX 1
2 Y 轴马达 90K94-6217FY 1
3 R 轴马达 KBF-M4883-002 1
·YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG YK700XGS,YK800XGS,YK900XGS,YK1000XGS
部件名称 本公司型号 型号 个数 备注
1 X 轴马达 90K94-8E173X 1
2 Y 轴马达 90K94-8417FY 1
3 R 轴马达 KBP-M4883-001 1
2.其他工具类
名称 型号 厂商 备注
旧棉纱头
六角扳手套件
十字螺丝刀
谐波润滑油 4BNo.2(*1)HarmonicDrive
Systems
购买后经过 4 年以上的零部件会磨损老化,不可继
续使用
谐波润滑油 SK-1A(*1)HarmonicDrive
Systems
购买后经过 4 年以上的零部件会磨损老化,不可继
续使用
仅反向规格 R 轴
*1 :润滑油量请参照各轴的谐波更换操作。
1.2.2 更换 Z 轴马达
YK500XG,YK600XG,YK500XGS,YK600XGS,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,
YK700XGS,YK800XGS,YK900XGS,YK1000XGS 等型号如第 7 章<更换 Z 轴总成>所述,Z 轴马达和滚珠丝杠
组件需要整体更换,因此请按整套组件更换。

第10章 更换传感器
目录
1. 更换传感器 10-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,
YK300XGS,YK400XGS 10-1
1.1.1 更换 X、Y 轴传感器 10-1
1.1.2 更换 R 轴传感器 10-3
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 10-5
1.2.1 更换 X 轴传感器 10-5
1.2.1.1 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG 10-5
1.2.1.2 YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 10-6
1.2.2 更换 Y、R 轴传感器 10-8

10
更换传感器
10-1
1. 更换传感器
c 注意
・更换传感器时可能出现位置偏移。更换后,有时需要重新设置绝对式原点复位、坐标点数据、基准坐标。
・未给出螺栓等的拧紧扭矩时,请参阅第 5章< 2.谐波传动的更换步骤>中的拧紧扭矩。
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL, YK300XGS,YK400XGS
1.1.1 更换 X、Y 轴传感器
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 X 轴传感器 KCY-M4850-400 1
2 Y 轴传感器 KCY-M4850-100 1
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
名称 型号 厂商 备注
A 扭矩扳手 N190SPK 13KANON
((株)中村制作所)
开口宽度 13mm
拧紧扭矩 5Nm(50kgfcm)
3.其他工具类
名称 型号 厂商 备注
旧棉纱头
扳手
十字螺丝刀
请按照以下步骤进行更换作业。
■ 拆卸
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。

10
更换传感器
10-2
在本章节中,将向您介绍 X 轴传感器的更换方法。(Y 轴传感器的方法亦同。)
4 拆下基座外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下传感器Step 4-6
X 轴传感器 1
螺母工具 A拧紧扭矩5Nm (50kgfcm)
Y 轴传感器 2
螺母工具 A拧紧扭矩5Nm (50kgfcm)
51A01-F6-00
5 拆下 XORG 连接器。
6 拆下传感器。
取下螺母,边转动传感器,边将其拔出。不易拔出时,
请使用端部的一组对边进行转动操作。
■ 更换和组装
请按照以下步骤更换新的传感器,并按相反顺序进行组装。
1 在传感器上装好螺母,并拧紧。
拧入困难时,请使用端部的一组对边拧紧。
请勿使传感器的螺纹部分损伤,以防无法旋入。
请勿使传感器电缆扭曲。否则容易断线。
2 用螺母将传感器临时固定在右图位
置。
0.5
0.5
更换传感器Step 2
X 轴传感器
Y 轴传感器
感应器螺丝
感应器螺丝
51A02-F6-00
3 连接 XORG 连接器。
4 调整机器参照。
请参照第 4 章<调整原点>中 X、Y 轴机器参照的
调整方法进行调整。

10
更换传感器
10-3
1.1.2 更换 R 轴传感器
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 R 轴传感器 KCY-M4850-400 1
2 R 轴马达固定螺栓 91312-05016 M5 长度 16 4 丢失时备用
3 R 轴马达部 O 形圈 KN3-M2144-000 线径 0.99× 内径 53.28 1 损坏、老化时需要更换
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
名称 型号 厂商 备注
A 扭矩扳手 N190SPK 13KANON
((株)中村制作所)
开口宽度 13mm
拧紧扭矩 5Nm(50kgfcm)
※ 如需拧紧其它规格的螺栓,请使用市售的扭矩扳手。
3.其他工具类
名称 型号 厂商 备注
旧棉纱头
六角扳手套件
束线带
扳手
十字螺丝刀
请按照以下步骤进行更换作业。
■ 拆卸
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
4 拆下 Y 轴机械臂的外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
5 切断束线带并拆下 RORG 连接器。
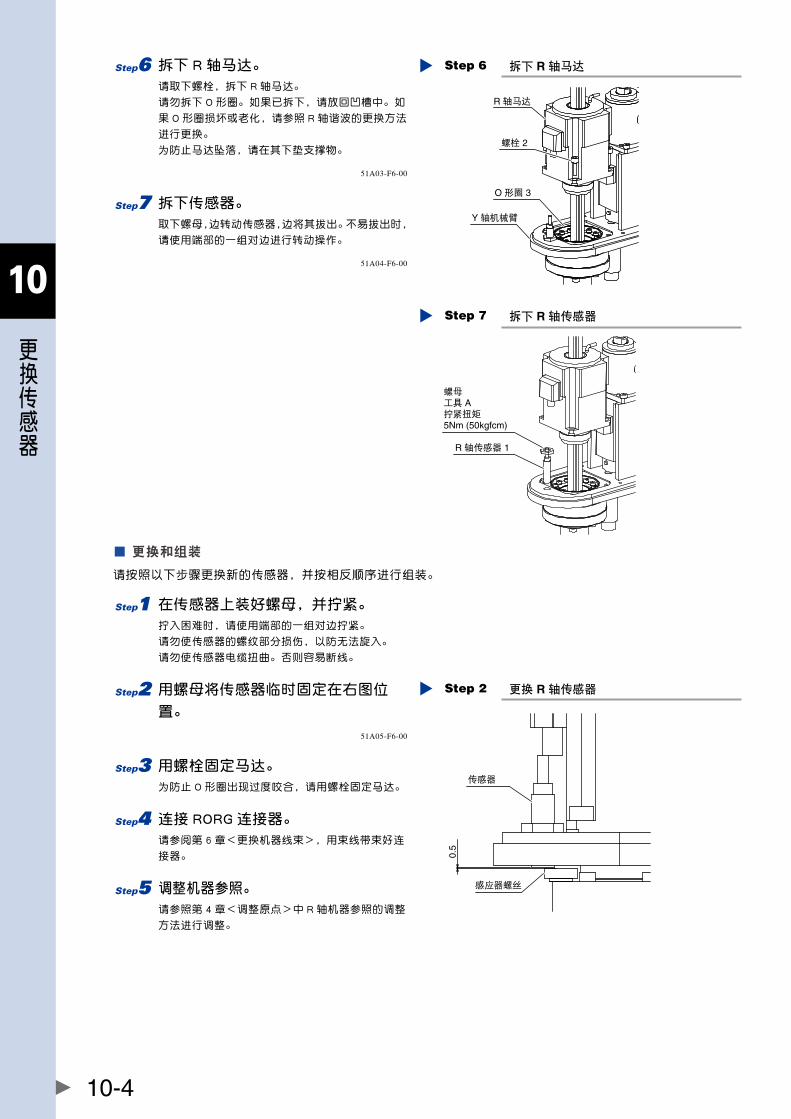
10
更换传感器
10-4
6 拆下 R 轴马达。
请取下螺栓,拆下 R 轴马达。
请勿拆下 O 形圈。如果已拆下,请放回凹槽中。如
果 O 形圈损坏或老化,请参照 R 轴谐波的更换方法
进行更换。
为防止马达坠落,请在其下垫支撑物。
拆下 R 轴马达Step 6
R 轴马达
螺栓 2
O 形圈 3
Y 轴机械臂
51A03-F6-00
7 拆下传感器。
取下螺母,边转动传感器,边将其拔出。不易拔出时,
请使用端部的一组对边进行转动操作。
51A04-F6-00
拆下 R 轴传感器Step 7
R 轴传感器 1
螺母工具 A拧紧扭矩5Nm (50kgfcm)
■ 更换和组装
请按照以下步骤更换新的传感器,并按相反顺序进行组装。
1 在传感器上装好螺母,并拧紧。
拧入困难时,请使用端部的一组对边拧紧。
请勿使传感器的螺纹部分损伤,以防无法旋入。
请勿使传感器电缆扭曲。否则容易断线。
2 用螺母将传感器临时固定在右图位
置。
0.5
更换 R 轴传感器Step 2
感应器螺丝
传感器
51A05-F6-00
3 用螺栓固定马达。
为防止 O 形圈出现过度咬合,请用螺栓固定马达。
4 连接 RORG 连接器。
请参阅第 6 章<更换机器线束>,用束线带束好连
接器。
5 调整机器参照。
请参照第 4 章<调整原点>中 R 轴机器参照的调整
方法进行调整。

10
更换传感器
10-5
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS
c 注意
未给出螺栓等的拧紧扭矩时,请参阅第 5章< 2.谐波传动的更换步骤>中的拧紧扭矩。
1.2.1 更换 X 轴传感器
1.2.1.1 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 X 轴传感器
KCY-M4850-400 1 YK500XG,YK600XG
KCY-M4850-500 1
YK600XGH,YK700XG,
YK800XG,YK900XG,
YK1000XG
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
名称 型号 厂商 备注
A 扭矩扳手 N190SPK 13KANON
((株)中村制作所)
开口宽度 13mm
拧紧扭矩 5Nm(50kgfcm)
3.其他工具类
名称 型号 厂商 备注
旧棉纱头
扳手
十字螺丝刀
请按照以下步骤进行更换作业。
■ 拆卸
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
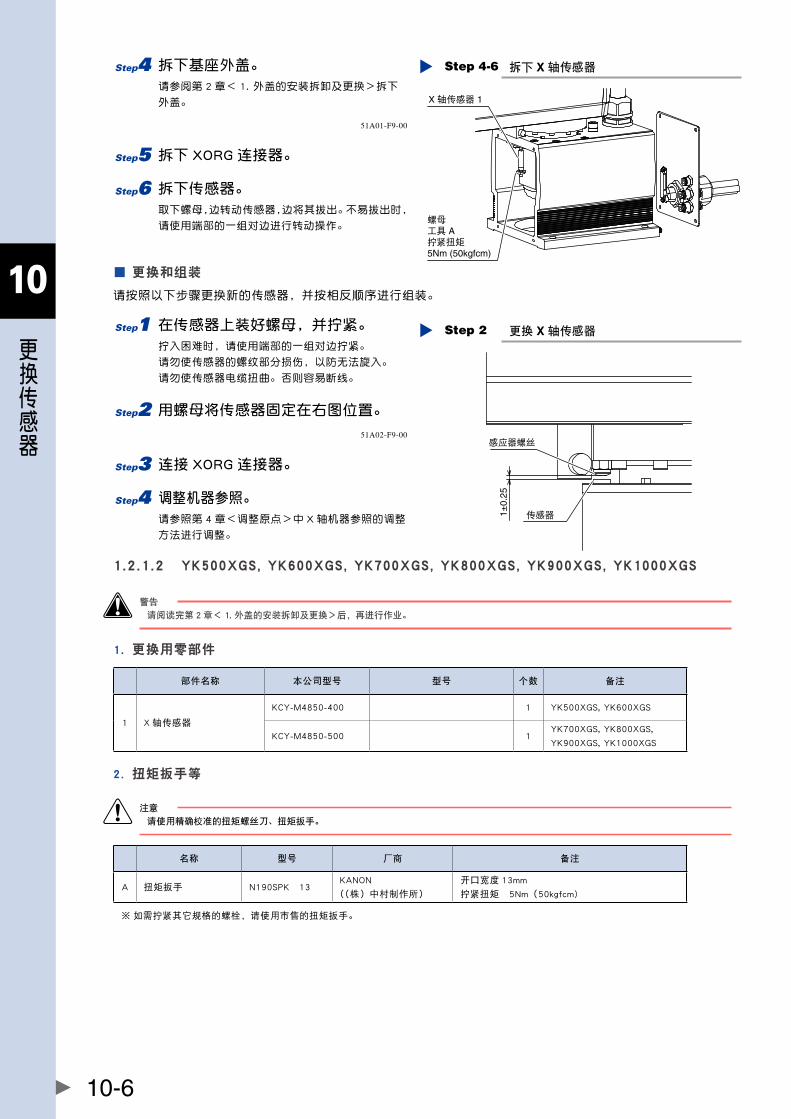
10
更换传感器
10-6
4 拆下基座外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下 X 轴传感器Step 4-6
X 轴传感器 1
螺母工具 A拧紧扭矩5Nm (50kgfcm)
51A01-F9-00
5 拆下 XORG 连接器。
6 拆下传感器。
取下螺母,边转动传感器,边将其拔出。不易拔出时,
请使用端部的一组对边进行转动操作。
■ 更换和组装
请按照以下步骤更换新的传感器,并按相反顺序进行组装。
1 在传感器上装好螺母,并拧紧。
拧入困难时,请使用端部的一组对边拧紧。
请勿使传感器的螺纹部分损伤,以防无法旋入。
请勿使传感器电缆扭曲。否则容易断线。
2 用螺母将传感器固定在右图位置。
1±0.
25
更换 X 轴传感器Step 2
感应器螺丝
传感器
51A02-F9-00
3 连接 XORG 连接器。
4 调整机器参照。
请参照第 4 章<调整原点>中 X 轴机器参照的调整
方法进行调整。
1.2.1.2 YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 X 轴传感器
KCY-M4850-400 1 YK500XGS,YK600XGS
KCY-M4850-500 1YK700XGS,YK800XGS,
YK900XGS,YK1000XGS
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
名称 型号 厂商 备注
A 扭矩扳手 N190SPK 13KANON
((株)中村制作所)
开口宽度 13mm
拧紧扭矩 5Nm(50kgfcm)
※ 如需拧紧其它规格的螺栓,请使用市售的扭矩扳手。
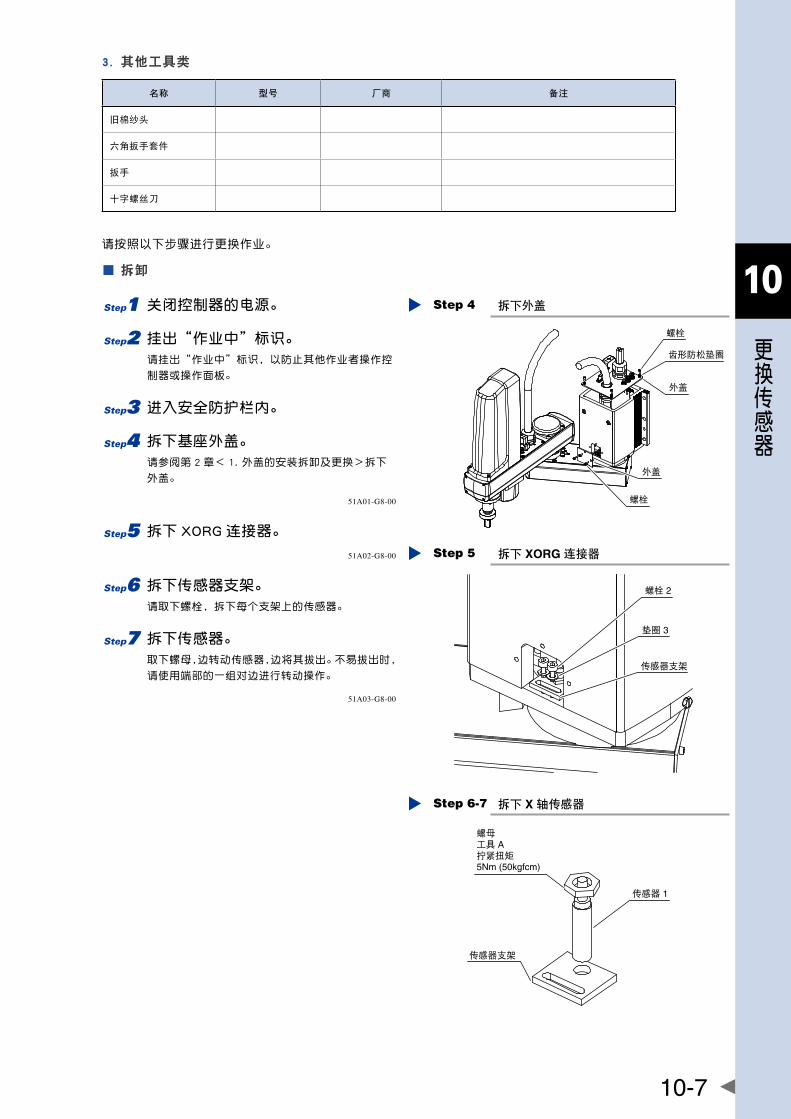
10
更换传感器
10-7
3.其他工具类
名称 型号 厂商 备注
旧棉纱头
六角扳手套件
扳手
十字螺丝刀
请按照以下步骤进行更换作业。
■ 拆卸
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
4 拆下基座外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆下外盖Step 4
外盖
螺栓
外盖
齿形防松垫圈
螺栓
51A01-G8-00
5 拆下 XORG 连接器。
拆下 XORG 连接器Step 5
螺栓 2
垫圈 3
传感器支架
51A02-G8-00
6 拆下传感器支架。
请取下螺栓,拆下每个支架上的传感器。
7 拆下传感器。
取下螺母,边转动传感器,边将其拔出。不易拔出时,
请使用端部的一组对边进行转动操作。
51A03-G8-00
拆下 X 轴传感器Step 6-7
传感器 1
传感器支架
螺母工具 A拧紧扭矩5Nm (50kgfcm)

10
更换传感器
10-8
■ 更换和组装
请按照以下步骤更换新的传感器,并按相反顺序进行组装。
1 在传感器上装好螺母,将传感器固定
在支架上。
拧入困难时,请使用端部的一组对边拧紧。
请勿使传感器的螺纹部分损伤,以防无法旋入。
请勿使传感器电缆扭曲。否则容易断线。
2 用螺栓将传感器支架临时固定在基座
上。
3 用螺母将传感器临时固定在右图位
置。
1±0.
25
更换 X 轴传感器Step 3
感应器螺丝
传感器
51A04-G8-00
4 连接 XORG 连接器。
5 调整机器参照。
请参照第 4 章<调整原点>中 X 轴机器参照的调整
方法进行调整。
1.2.2 更换 Y、R 轴传感器
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 Y 轴传感器
KCY-M4850-300 1YK500XG,YK600XG,
YK500XGS,YK600XGS
KCY-M4850-500 1
YK600XGH,YK700XG,
YK800XG,YK900XG,
YK1000XG,YK700XGS,
YK800XGS,YK900XGS,
YK1000XGS
2 R 轴传感器
KCY-M4850-500 1YK500XG,YK600XG,
YK500XGS,YK600XGS
KCY-M4850-900 1
YK600XGH,YK700XG,
YK800XG,YK900XG,
YK1000XG,YK700XGS,
YK800XGS,YK900XGS,
YK1000XGS
3 传感器支架固定螺栓 91312-04010 M4长度 10 4 丢失时备用
4 垫圈 92903-04600 M4 用 4 丢失时备用
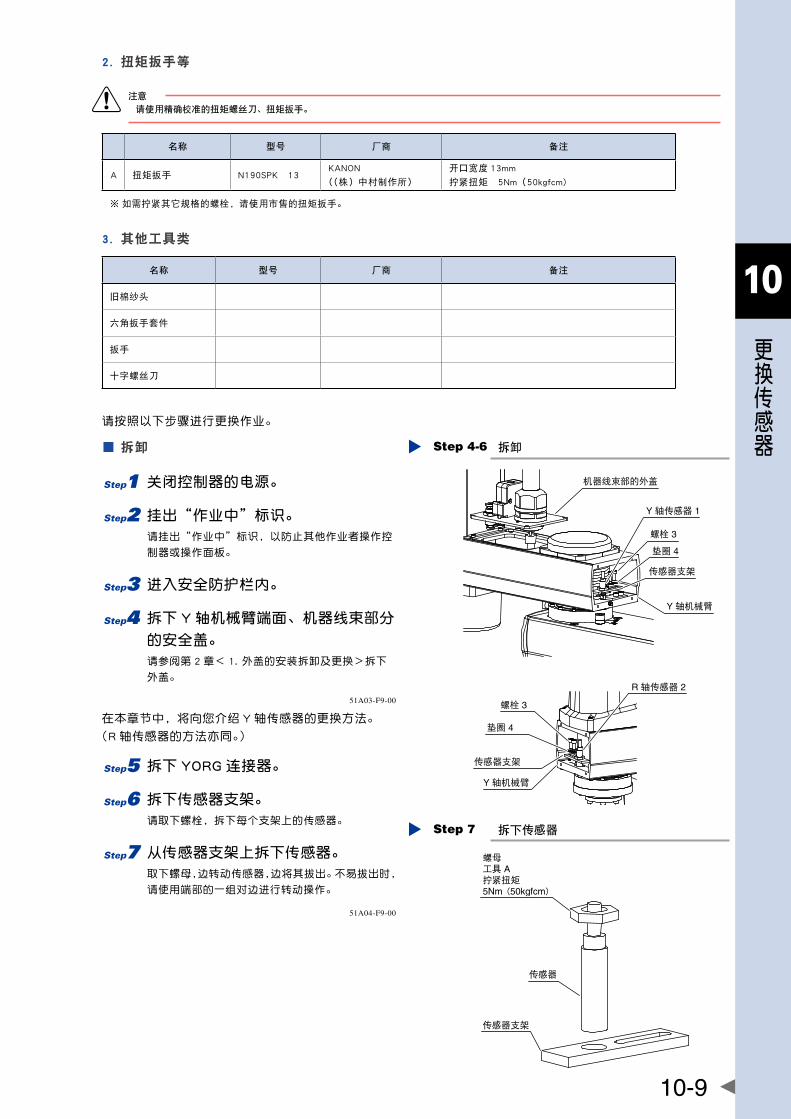
10
更换传感器
10-9
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
名称 型号 厂商 备注
A 扭矩扳手 N190SPK 13KANON
((株)中村制作所)
开口宽度 13mm
拧紧扭矩 5Nm(50kgfcm)
※ 如需拧紧其它规格的螺栓,请使用市售的扭矩扳手。
3.其他工具类
名称 型号 厂商 备注
旧棉纱头
六角扳手套件
扳手
十字螺丝刀
请按照以下步骤进行更换作业。
■ 拆卸
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
4 拆下 Y 轴机械臂端面、机器线束部分
的安全盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
拆卸Step 4-6
螺栓 3
垫圈 4
传感器支架
Y 轴机械臂
Y 轴传感器 1
机器线束部的外盖
R 轴传感器 2
螺栓 3
垫圈 4
传感器支架
Y 轴机械臂
51A03-F9-00
在本章节中,将向您介绍 Y 轴传感器的更换方法。
(R 轴传感器的方法亦同。)
5 拆下 YORG 连接器。
6 拆下传感器支架。
请取下螺栓,拆下每个支架上的传感器。
7 从传感器支架上拆下传感器。
取下螺母,边转动传感器,边将其拔出。不易拔出时,
请使用端部的一组对边进行转动操作。
拆下传感器Step 7
传感器支架
传感器
螺母工具 A拧紧扭矩5Nm (50kgfcm)
51A04-F9-00
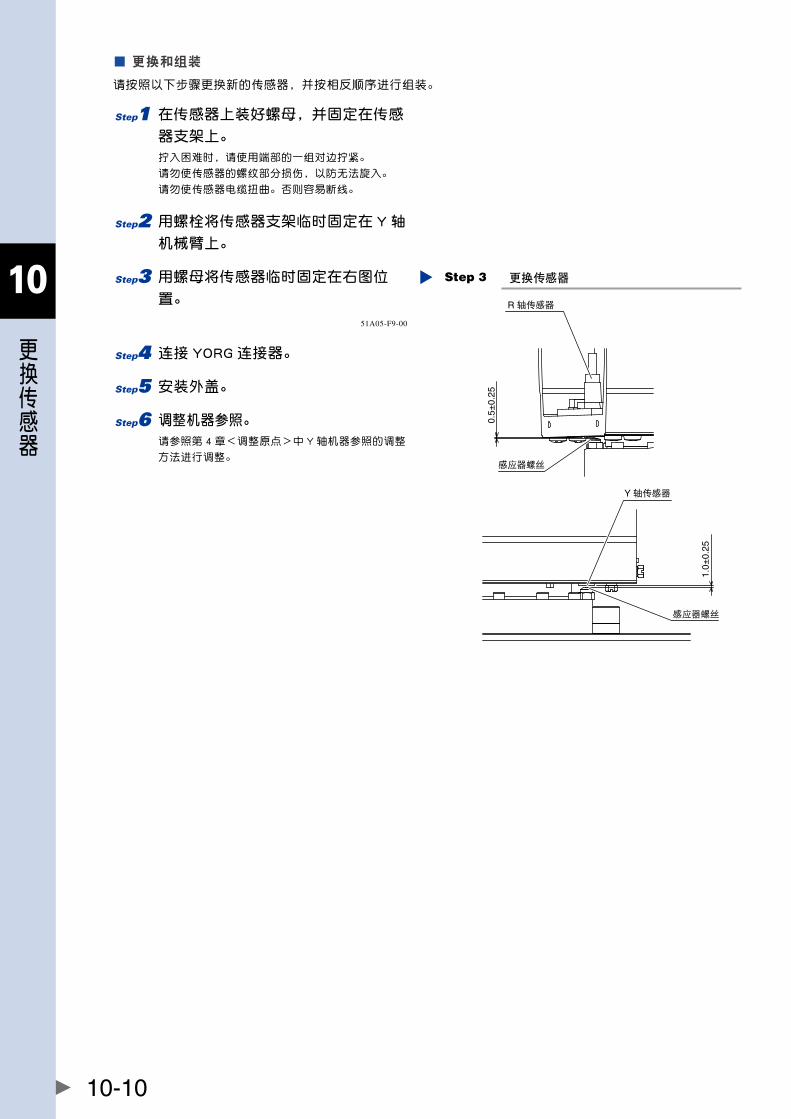
10
更换传感器
10-10
■ 更换和组装
请按照以下步骤更换新的传感器,并按相反顺序进行组装。
1 在传感器上装好螺母,并固定在传感
器支架上。
拧入困难时,请使用端部的一组对边拧紧。
请勿使传感器的螺纹部分损伤,以防无法旋入。
请勿使传感器电缆扭曲。否则容易断线。
2 用螺栓将传感器支架临时固定在 Y 轴
机械臂上。
3 用螺母将传感器临时固定在右图位
置。
1.0±
0.25
0.5±
0.25
更换传感器Step 3
感应器螺丝
Y 轴传感器
感应器螺丝
R 轴传感器
51A05-F9-00
4 连接 YORG 连接器。
5 安装外盖。
6 调整机器参照。
请参照第 4 章<调整原点>中 Y 轴机器参照的调整
方法进行调整。
第11章 更换机器人电缆
目录
1. 更换机器人电缆 11-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,
YK300XGS,YK400XGS 11-1
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 11-3

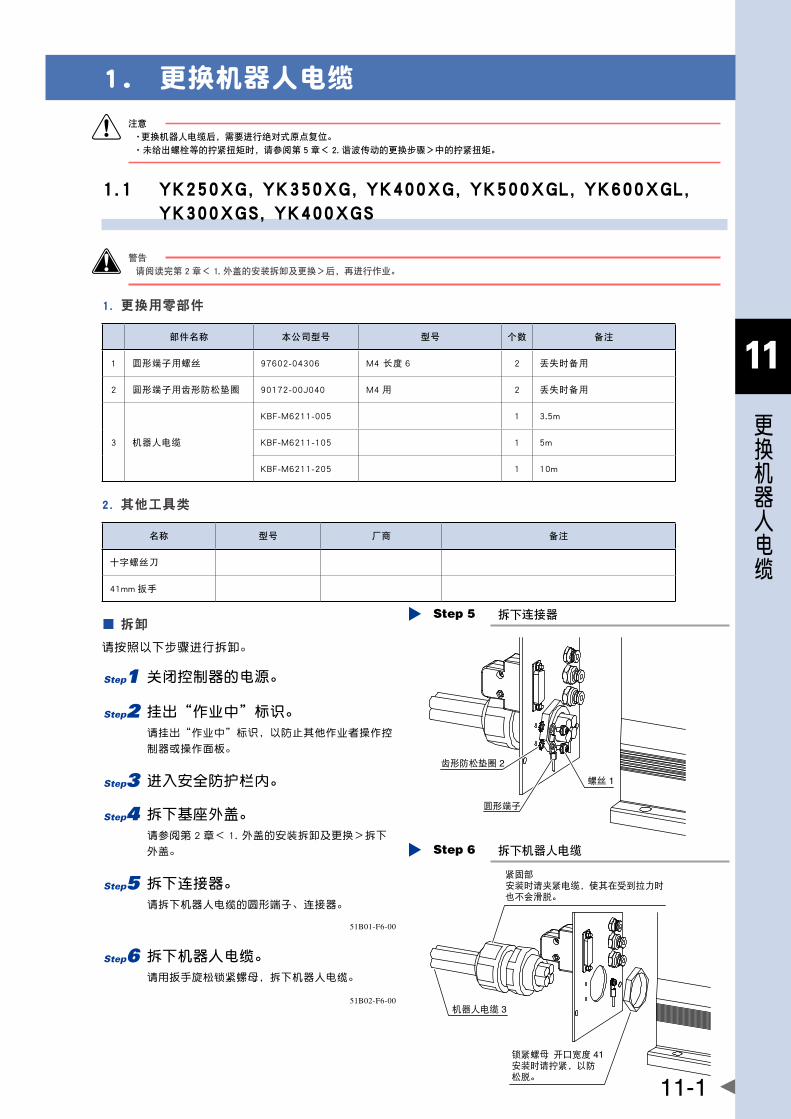
11
更换机器人电缆
11-1
1. 更换机器人电缆
c 注意
・更换机器人电缆后,需要进行绝对式原点复位。
・未给出螺栓等的拧紧扭矩时,请参阅第 5章< 2.谐波传动的更换步骤>中的拧紧扭矩。
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL, YK300XGS,YK400XGS
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 圆形端子用螺丝 97602-04306 M4长度 6 2 丢失时备用
2 圆形端子用齿形防松垫圈 90172-00J040 M4 用 2 丢失时备用
3 机器人电缆
KBF-M6211-005 1 3.5m
KBF-M6211-105 1 5m
KBF-M6211-205 1 10m
2.其他工具类
名称 型号 厂商 备注
十字螺丝刀
41mm 扳手
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
拆下连接器Step 5
齿形防松垫圈 2
圆形端子
螺丝 1
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。
3 进入安全防护栏内。
4 拆下基座外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
5 拆下连接器。
请拆下机器人电缆的圆形端子、连接器。
51B01-F6-00
6 拆下机器人电缆。
请用扳手旋松锁紧螺母,拆下机器人电缆。
拆下机器人电缆Step 6
机器人电缆 3
锁紧螺母 开口宽度 41安装时请拧紧,以防松脱。
紧固部安装时请夹紧电缆,使其在受到拉力时也不会滑脱。
51B02-F6-00

11
更换机器人电缆
11-2
■ 安装
按照与拆卸相反的操作步骤安装机器人电缆。
1 拧紧锁紧螺母与紧固部。
2 固定圆形端子,将连接器进行连接。
n 要点
请参阅安装手册第 8 章< 1.3 机器人内部接线图>。
3 安装外盖。
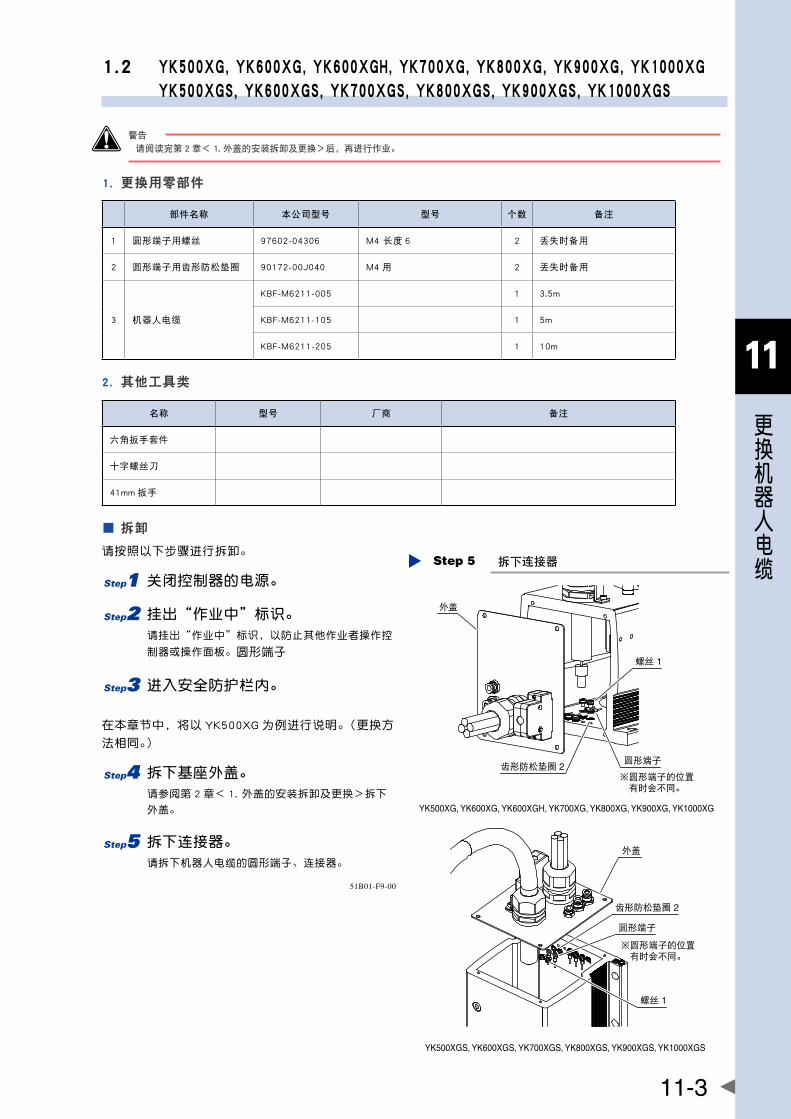
11
更换机器人电缆
11-3
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS
w 警告
请阅读完第 2章< 1.外盖的安装拆卸及更换>后,再进行作业。
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 圆形端子用螺丝 97602-04306 M4长度 6 2 丢失时备用
2 圆形端子用齿形防松垫圈 90172-00J040 M4 用 2 丢失时备用
3 机器人电缆
KBF-M6211-005 1 3.5m
KBF-M6211-105 1 5m
KBF-M6211-205 1 10m
2.其他工具类
名称 型号 厂商 备注
六角扳手套件
十字螺丝刀
41mm 扳手
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控
制器或操作面板。圆形端子
3 进入安全防护栏内。
在本章节中,将以 YK500XG 为例进行说明。(更换方
法相同。)
4 拆下基座外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下
外盖。
5 拆下连接器。
请拆下机器人电缆的圆形端子、连接器。
拆下连接器Step 5
齿形防松垫圈 2
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
※圆形端子的位置 有时会不同。
※圆形端子的位置 有时会不同。
外盖
螺丝 1
外盖
螺丝 1
齿形防松垫圈 2
圆形端子
圆形端子
51B01-F9-00

11
更换机器人电缆
11-4
6 拆下机器人电缆。
请用扳手旋松锁紧螺母,拆下机器人电缆。
拆下机器人电缆Step 6
机器人电缆 3
机器人电缆 3
锁紧螺母 开口宽度 41安装时请拧紧,以防松脱。
锁紧螺母 开口宽度 41安装时请拧紧,以防松脱。
紧固部安装时请夹紧电缆,使其在受到拉力时也不会滑脱。
紧固部安装时请夹紧电缆,使其在受到拉力时也不会滑脱。
YK500XG, YK600XG, YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
51B02-F9-00
■ 安装
按照与拆卸相反的操作步骤安装机器人电缆。
1 拧紧锁紧螺母与紧固部。
2 固定圆形端子,将连接器进行连接。
n 要点
请参阅安装手册第 8 章< 1.3 机器人内部接线图>。
3 安装外盖。

第12章 更换限位器
目录
1. 更换限位器 12-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,
YK300XGS,YK400XGS 12-1
1.1.1 X、Y 轴限位器 12-1
1.1.2 Z 轴限位器 12-3
1.1.2.1 上升端限位器 12-3
1.1.2.2 下降端限位器 12-6
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 12-7
1.2.1 X 轴限位器 12-7
1.2.1.1 可动侧限位器 12-7
1.2.1.2 固定侧限位器 12-11
1.2.2 Y 轴限位器 12-12
1.2.2.1 可动侧限位器 12-12
1.2.2.2 固定侧限位器 12-14
1.2.3 Z 轴限位器 12-16
1.2.3.1 上升端限位器 12-16
1.2.3.2 下降端限位器 12-18


12
更换限位器
12-1
1. 更换限位器
限位器损坏、变形或无法固定时,为了安全起见,应按下列步骤更换新品。
追加限位器损坏、变形或无法固定时,为了安全起见,应参照追加限位器的安装或组装步骤更换新品。
若机械臂、基座等损坏,请与本公司联系。
c 注意
未给出螺栓等的拧紧扭矩时,请参阅第 5章< 2.谐波传动的更换步骤>中的拧紧扭矩。
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL, YK300XGS,YK400XGS
1.1.1 X、Y 轴限位器
1.更换用零部件
· X 轴
部件名称 本公司型号 型号 个数 备注
1 限位器减震器 KCY-M2197-000 1
2 螺栓 90112-10J055 M10长度 55 1
3 螺母 90189-02J106 M10 1
· Y 轴
部件名称 本公司型号 型号 个数 备注
1 限位器减震器 KCY-M2197-000 1
2 螺栓 90112-10J055 M10长度 55 1
3 螺母 90189-02J106 M10 1
2.扭矩扳手等
c 注意
请使用精确校准的扭矩螺丝刀、扭矩扳手。
名称 型号 厂商 备注
A 扭矩扳手 N670SPK 17KANON
((株)中村制作所)
开口宽度 17mm
拧紧扭矩 42Nm(428kgfcm)
3.其他工具类
名称 型号 厂商 备注
六角扳手套件
扳手

12
更换限位器
12-2
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
在本章节中,将以 X 轴为例介绍更换方法。(Y 轴的方法亦同。)
4 松开 X 轴的螺母,拆下限位器减震器和螺栓。
更换限位器
螺母 3工具 A
M10 螺栓
M10 螺栓
螺栓 2
限位器减震器 1
Y 轴
X 轴螺栓 2
51C01-F6-00
■ 安装
按照与拆卸相反的步骤安装新的限位器。
1 用螺栓和螺母将减震器夹在中间进行固定。
1. 用螺栓 2 和螺母 3 夹住减震器 1。
请使用上表中的螺栓、螺母。
2. 请用 42Nm(428kgfcm)的拧紧扭矩,将螺母紧固在机械臂侧。
螺母紧固不便时,请取下周围的 M10 螺栓后再拧紧。M10 螺栓为预埋螺栓,请重新装回。(请参照安
装手册第 2 章<安装 X、Y 轴追加限位器>)
2 确认可动范围受到限制。
3 走出安全防护栏。
4 接通控制器的电源。
在确认安全防护栏内无人后,再接通控制器电源。
c 注意
请在安全防护栏的外侧确认 X轴是否停在受软限制限制的限位器前面。
5 确认 X 轴是否准确停住。
请在安全防护栏的外侧确认在最大软限制中 X 轴是否停在限位器前面。

12
更换限位器
12-3
1.1.2 Z 轴限位器
1.1.2.1 上升端限位器
1.标准规格
1. 更换用零部件
部件名称 本公司型号 型号 个数 备注
1 减震器 KN3-M1788-100 1
2 限位器 KCY-M780-001 1
3 警告标贴 90K41-001490 1 更换限位器时使用
2. 其他工具类
名称 型号 厂商 备注
旧棉纱头
游标卡尺等
六角扳手套件
扭矩扳手
螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 取下螺栓,从花键轴上拆下减震器、限位器。
30±
0.2
更换限位器
花键轴
减震器 1
限位器 2
限位器 2 附加螺栓 ※涂抹螺纹密封剂
51C02-F6-00
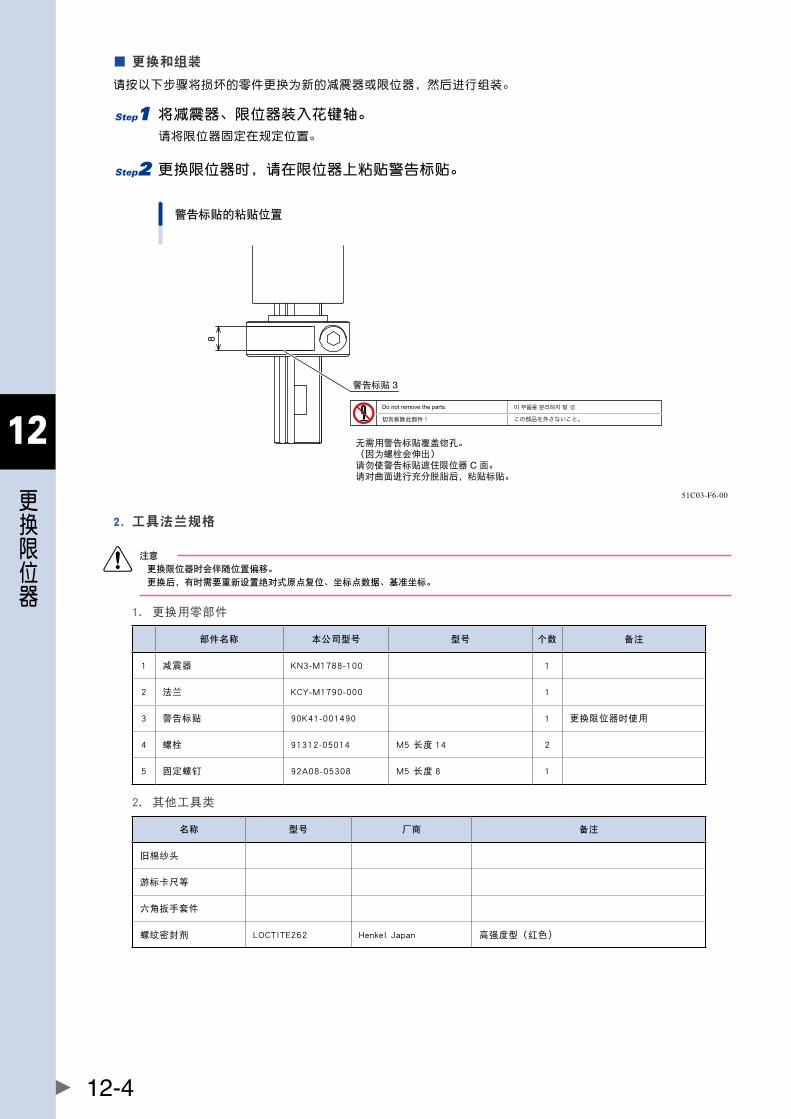
12
更换限位器
12-4
■ 更换和组装
请按以下步骤将损坏的零件更换为新的减震器或限位器,然后进行组装。
1 将减震器、限位器装入花键轴。
请将限位器固定在规定位置。
2 更换限位器时,请在限位器上粘贴警告标贴。
8警告标贴的粘贴位置
警告标贴 3
无需用警告标贴覆盖锪孔。(因为螺栓会伸出)请勿使警告标贴遮住限位器 C 面。请对曲面进行充分脱脂后,粘贴标贴。
51C03-F6-00
2.工具法兰规格
c 注意
更换限位器时会伴随位置偏移。
更换后,有时需要重新设置绝对式原点复位、坐标点数据、基准坐标。
1. 更换用零部件
部件名称 本公司型号 型号 个数 备注
1 减震器 KN3-M1788-100 1
2 法兰 KCY-M1790-000 1
3 警告标贴 90K41-001490 1 更换限位器时使用
4 螺栓 91312-05014 M5长度 14 2
5 固定螺钉 92A08-05308 M5长度 8 1
2. 其他工具类
名称 型号 厂商 备注
旧棉纱头
游标卡尺等
六角扳手套件
螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
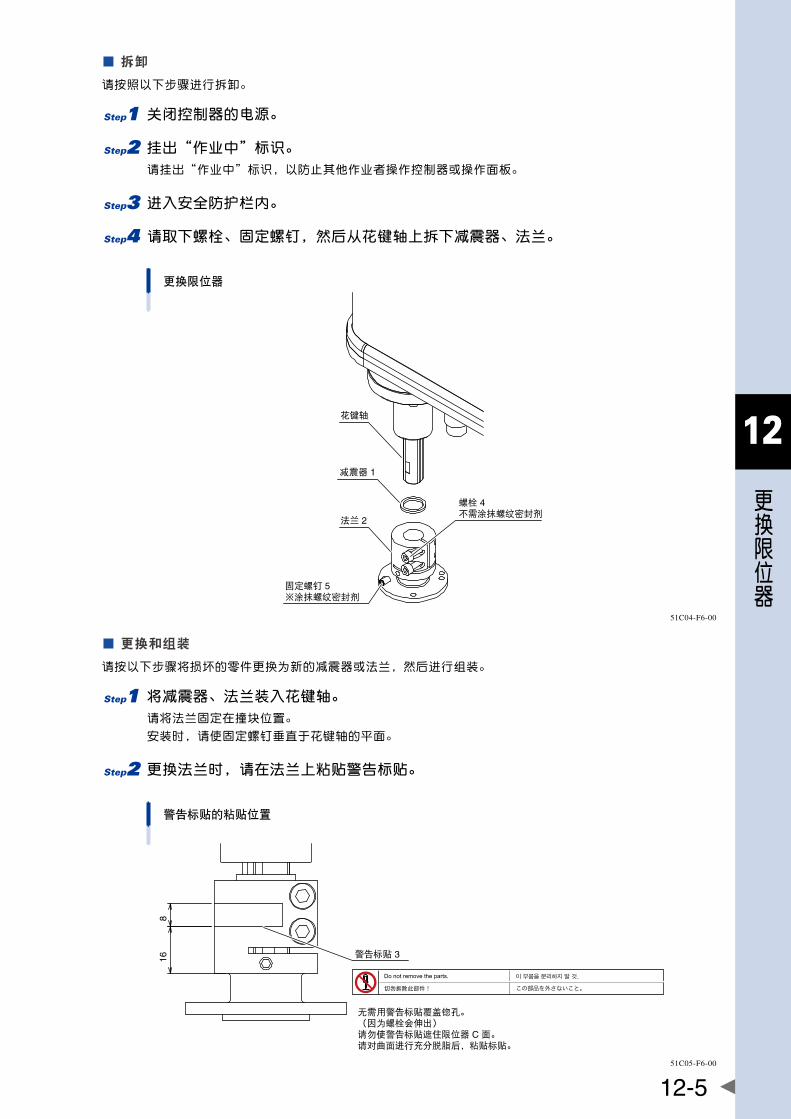
12
更换限位器
12-5
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 请取下螺栓、固定螺钉,然后从花键轴上拆下减震器、法兰。
更换限位器
花键轴
减震器 1
法兰 2
固定螺钉 5※涂抹螺纹密封剂
螺栓 4 不需涂抹螺纹密封剂
51C04-F6-00
■ 更换和组装
请按以下步骤将损坏的零件更换为新的减震器或法兰,然后进行组装。
1 将减震器、法兰装入花键轴。
请将法兰固定在撞块位置。
安装时,请使固定螺钉垂直于花键轴的平面。
2 更换法兰时,请在法兰上粘贴警告标贴。
816
警告标贴的粘贴位置
警告标贴 3
无需用警告标贴覆盖锪孔。(因为螺栓会伸出)请勿使警告标贴遮住限位器 C 面。请对曲面进行充分脱脂后,粘贴标贴。
51C05-F6-00
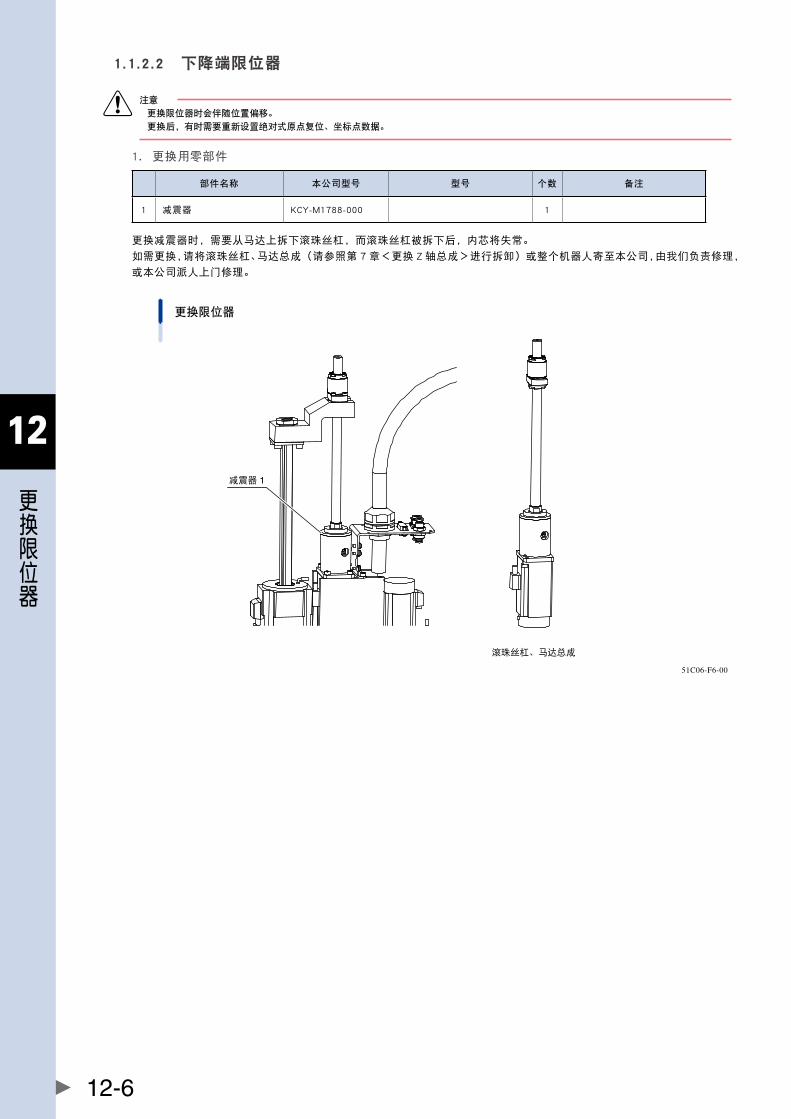
12
更换限位器
12-6
1.1.2.2 下降端限位器
c 注意
更换限位器时会伴随位置偏移。
更换后,有时需要重新设置绝对式原点复位、坐标点数据。
1. 更换用零部件
部件名称 本公司型号 型号 个数 备注
1 减震器 KCY-M1788-000 1
更换减震器时,需要从马达上拆下滚珠丝杠,而滚珠丝杠被拆下后,内芯将失常。
如需更换,请将滚珠丝杠、马达总成(请参照第 7 章<更换 Z 轴总成>进行拆卸)或整个机器人寄至本公司,由我们负责修理,
或本公司派人上门修理。
更换限位器
减震器 1
滚珠丝杠、马达总成
51C06-F6-00
12
更换限位器
12-7
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS
1.2.1 X 轴限位器
1.2.1.1 可动侧限位器
1. YK500XG,YK600XG,YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS
c 注意
更换限位器时会伴随位置偏移。
更换后,需要重新设置绝对式原点复位、坐标点数据、基准坐标。
1. 更换用零部件
·YK500XG,YK600XG
YK500XGS,YK600XGS
部件名称 本公司型号 型号 个数 备注
1 限位器 KBF-M2193-001 1
2 螺栓 91312-06030 M6 长度 30 2
3 减震器 KN3-M2596-002 2
· YK700XGS,YK800XGS,YK900XGS,YK1000XGS
部件名称 本公司型号 型号 个数 备注
1 限位器 KBP-M2193-001 1
2 螺栓 91312-08040 M8长度 40 2
3 减震器 KN5-M2596-001 2
2. 其他工具类
名称 型号 厂商 备注
六角扳手套件
瞬时粘合剂 1739 日本三键公司 高剥离强度、抗冲击用
螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
在本章节中,将以 YK500XG 为例进行说明。(更换方法相同。)
4 从基座或底板上拆下 X 轴机械臂。
请参照第 5 章< 2.谐波传动的更换步骤>,从基座(YK500XG,YK600XG)或底板(YK500XGS,
YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS)上拆下 X 轴机械臂。

12
更换限位器
12-8
5 取下螺栓,从 X 轴机械臂上拆下限位器。
更换限位器
X 轴机械臂
螺栓 2 ※涂抹螺纹密封剂
限位器 1
51C01-F9-00
■ 安装
按照与拆卸相反的步骤安装新的限位器。
1 将减震器粘在限位器上。
粘接减震器
限位器
减震器 3对限位器的锪孔圆柱面、端面、减震器进行脱脂,在限位器的锪孔圆柱面、端面粘接减震器
51C02-F9-00
2 用螺栓将限位器固定在 X 轴机械臂上。
3 参照谐波的更换步骤进行安装。
请参照第 5 章< 2.谐波传动的更换步骤>。
4 确认可动范围受到限制。
5 走出安全防护栏。
6 接通控制器的电源。
在确认安全防护栏内无人后,再接通控制器电源。
c 注意
请在安全防护栏的外侧确认 X轴是否停在受软限制限制的限位器前面。
7 确认 X 轴是否准确停住。
请在安全防护栏的外侧确认在最大软限制中 X 轴是否停在限位器前面。
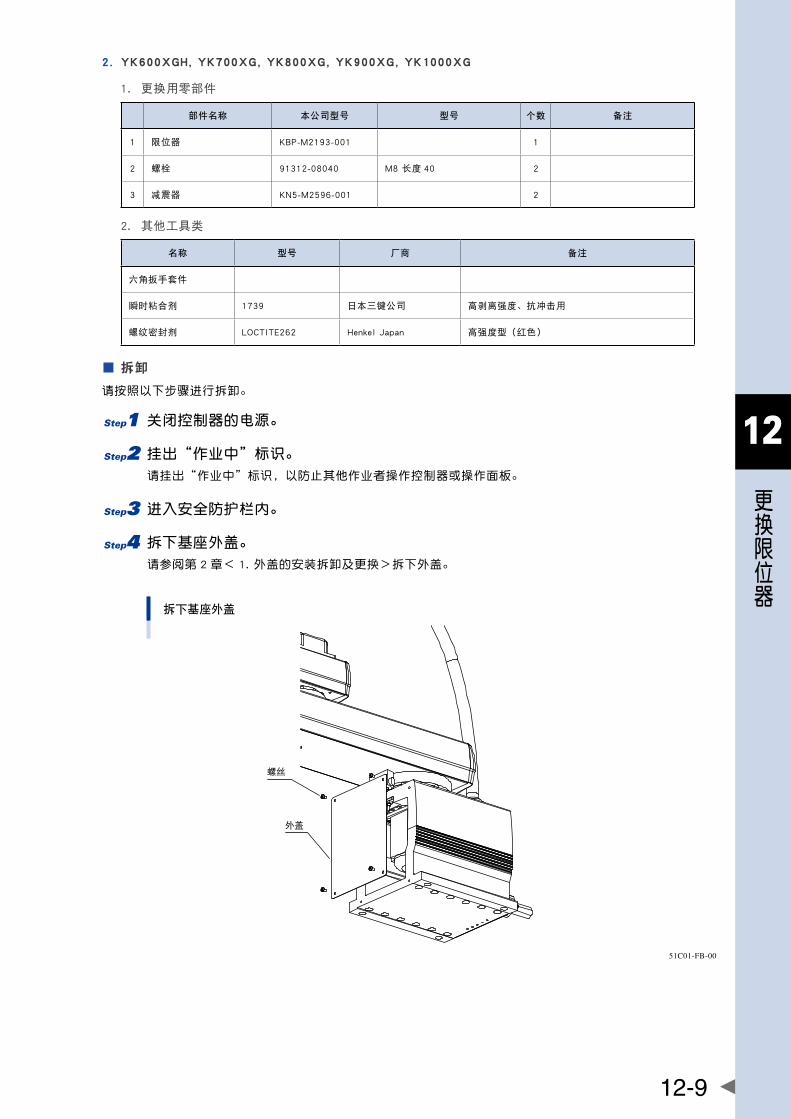
12
更换限位器
12-9
2. YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
1. 更换用零部件
部件名称 本公司型号 型号 个数 备注
1 限位器 KBP-M2193-001 1
2 螺栓 91312-08040 M8长度 40 2
3 减震器 KN5-M2596-001 2
2. 其他工具类
名称 型号 厂商 备注
六角扳手套件
瞬时粘合剂 1739 日本三键公司 高剥离强度、抗冲击用
螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 拆下基座外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下外盖。
拆下基座外盖
螺丝
外盖
51C01-FB-00
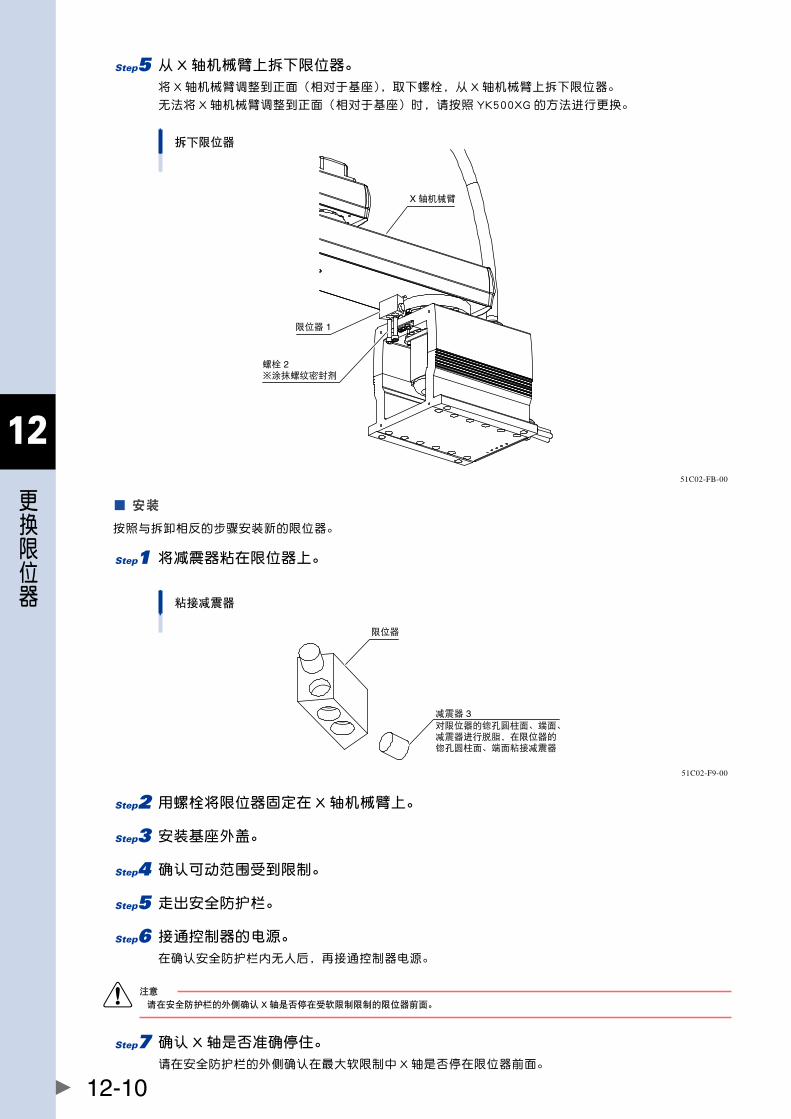
12
更换限位器
12-10
5 从 X 轴机械臂上拆下限位器。
将 X 轴机械臂调整到正面(相对于基座),取下螺栓,从 X 轴机械臂上拆下限位器。
无法将 X 轴机械臂调整到正面(相对于基座)时,请按照 YK500XG 的方法进行更换。
拆下限位器
限位器 1
X 轴机械臂
螺栓 2 ※涂抹螺纹密封剂
51C02-FB-00
■ 安装
按照与拆卸相反的步骤安装新的限位器。
1 将减震器粘在限位器上。
粘接减震器
限位器
减震器 3对限位器的锪孔圆柱面、端面、减震器进行脱脂,在限位器的锪孔圆柱面、端面粘接减震器
51C02-F9-00
2 用螺栓将限位器固定在 X 轴机械臂上。
3 安装基座外盖。
4 确认可动范围受到限制。
5 走出安全防护栏。
6 接通控制器的电源。
在确认安全防护栏内无人后,再接通控制器电源。
c 注意
请在安全防护栏的外侧确认 X轴是否停在受软限制限制的限位器前面。
7 确认 X 轴是否准确停住。
请在安全防护栏的外侧确认在最大软限制中 X 轴是否停在限位器前面。

12
更换限位器
12-11
1.2.1.2 固定侧限位器
1. 更换用零部件
·YK500XG,YK600XG
YK500XGS,YK600XGS
部件名称 本公司型号 型号 个数 备注
1 限位螺栓 91312-08016 M8长度 16 1
2 垫圈 90990-28J091 1
· YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK700XGS,YK800XGS,YK900XGS,YK1000XGS
部件名称 本公司型号 型号 个数 备注
1 限位螺栓 90112-10J030 M10长度 30 1
2 垫圈 90990-28J093 2
2. 其他工具类
名称 型号 厂商 备注
六角扳手套件
螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 拆下 X 轴机械臂的外盖。
对于 YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,YK700XGS,YK800XGS,YK900XGS,
YK1000XGS 等型号,请拆下 X 轴机械臂的外盖。不拆下外盖,将无法取下螺栓。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下外盖。
更换限位器
外盖
限位螺栓 1 ※涂抹螺纹密封剂
垫圈 2
51C03-F9-00
5 保持上图的角度,从基座上取下限位螺栓、垫圈。
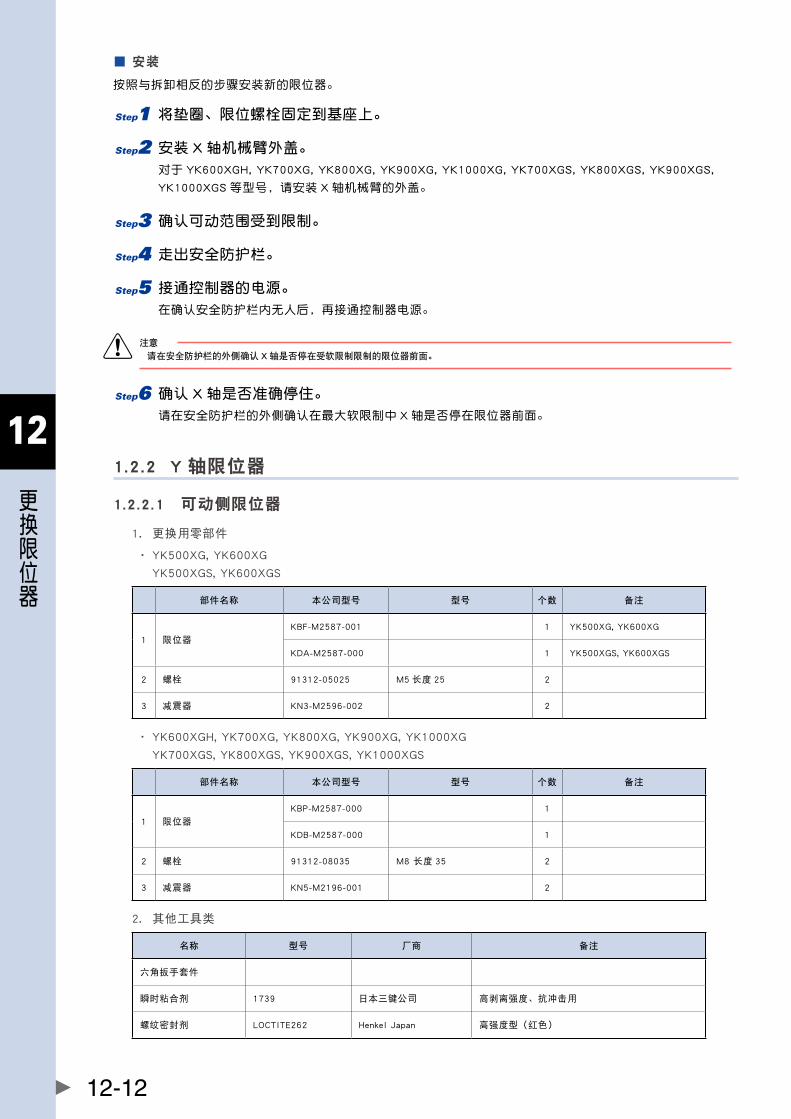
12
更换限位器
12-12
■ 安装
按照与拆卸相反的步骤安装新的限位器。
1 将垫圈、限位螺栓固定到基座上。
2 安装 X 轴机械臂外盖。
对于 YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,YK700XGS,YK800XGS,YK900XGS,
YK1000XGS 等型号,请安装 X 轴机械臂的外盖。
3 确认可动范围受到限制。
4 走出安全防护栏。
5 接通控制器的电源。
在确认安全防护栏内无人后,再接通控制器电源。
c 注意
请在安全防护栏的外侧确认 X轴是否停在受软限制限制的限位器前面。
6 确认 X 轴是否准确停住。
请在安全防护栏的外侧确认在最大软限制中 X 轴是否停在限位器前面。
1.2.2 Y 轴限位器
1.2.2.1 可动侧限位器
1. 更换用零部件
·YK500XG,YK600XG
YK500XGS,YK600XGS
部件名称 本公司型号 型号 个数 备注
1 限位器
KBF-M2587-001 1 YK500XG,YK600XG
KDA-M2587-000 1 YK500XGS,YK600XGS
2 螺栓 91312-05025 M5 长度 25 2
3 减震器 KN3-M2596-002 2
· YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK700XGS,YK800XGS,YK900XGS,YK1000XGS
部件名称 本公司型号 型号 个数 备注
1 限位器
KBP-M2587-000 1
KDB-M2587-000 1
2 螺栓 91312-08035 M8长度 35 2
3 减震器 KN5-M2196-001 2
2. 其他工具类
名称 型号 厂商 备注
六角扳手套件
瞬时粘合剂 1739 日本三键公司 高剥离强度、抗冲击用
螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)

12
更换限位器
12-13
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
在本章节中,将以 YK500XG 为例进行说明。(更换方法相同。)
4 拆下 X 轴机械臂的外盖。
请参阅第 2 章< 1.外盖的安装拆卸及更换>拆下外盖。
拆下机械臂的外盖
螺栓
外盖
51C04-F9-00
5 从 Y 轴机械臂上拆下限位器。
如下图所示,使 Y 轴机械臂相对于 X 轴机械臂呈略微倾斜的姿态。请取下螺栓,从 Y 轴机械臂上拆下限
位器。
无法调整到下图姿态时,请参照 Y 轴谐波更换方法,从 Y 轴机械臂上拆下谐波后,再拆下限位器。
拆下限位器
限位器 1
Y 轴机械臂
螺栓 2 ※涂抹螺纹密封剂

12
更换限位器
12-14
51C05-F9-00
■ 安装
按照与拆卸相反的步骤安装新的限位器。
1 将减震器粘在限位器上。
粘接减震器
限位器
减震器 3对限位器的锪孔圆柱面、端面、减震器进行脱脂,在限位器的锪孔圆柱面、端面粘接减震器
51C02-F9-00
2 用螺栓将限位器固定在 Y 轴机械臂上。
3 安装 X 轴机械臂外盖。
4 确认可动范围受到限制。
5 走出安全防护栏。
6 接通控制器的电源。
在确认安全防护栏内无人后,再接通控制器电源。
7 进行 Y 轴+方向软限制的设置。
在-方向安装限位器时,设置-方向软限制。
c 注意
请在安全防护栏的外侧确认 Y轴是否停在受软限制限制的限位器前面。
8 确认 Y 轴是否准确停住。
请在安全防护栏的外侧确认在最大软限制中 Y 轴是否停在限位器前面。
1.2.2.2 固定侧限位器
1. 更换用零部件
·YK500XG,YK600XG
YK500XGS,YK600XGS
部件名称 本公司型号 型号 个数 备注
1 限位螺栓 91312-08016 M8长度 16 1
2 垫圈 90990-28J091 1
· YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK700XGS,YK800XGS,YK900XGS,YK1000XGS
部件名称 本公司型号 型号 个数 备注
1 限位螺栓 90112-10J025 M10长度 25 1
2 垫圈 90990-28J093 2
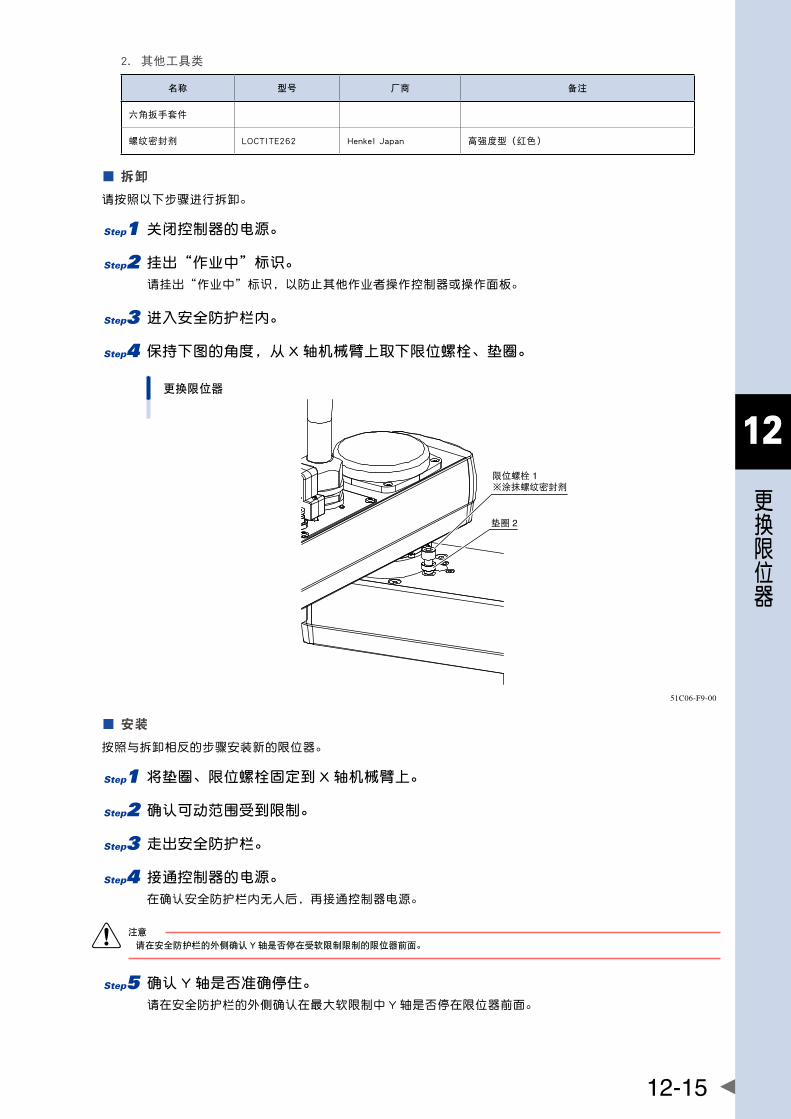
12
更换限位器
12-15
2. 其他工具类
名称 型号 厂商 备注
六角扳手套件
螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 保持下图的角度,从 X 轴机械臂上取下限位螺栓、垫圈。
更换限位器
限位螺栓 1 ※涂抹螺纹密封剂
垫圈 2
51C06-F9-00
■ 安装
按照与拆卸相反的步骤安装新的限位器。
1 将垫圈、限位螺栓固定到 X 轴机械臂上。
2 确认可动范围受到限制。
3 走出安全防护栏。
4 接通控制器的电源。
在确认安全防护栏内无人后,再接通控制器电源。
c 注意
请在安全防护栏的外侧确认 Y轴是否停在受软限制限制的限位器前面。
5 确认 Y 轴是否准确停住。
请在安全防护栏的外侧确认在最大软限制中 Y 轴是否停在限位器前面。
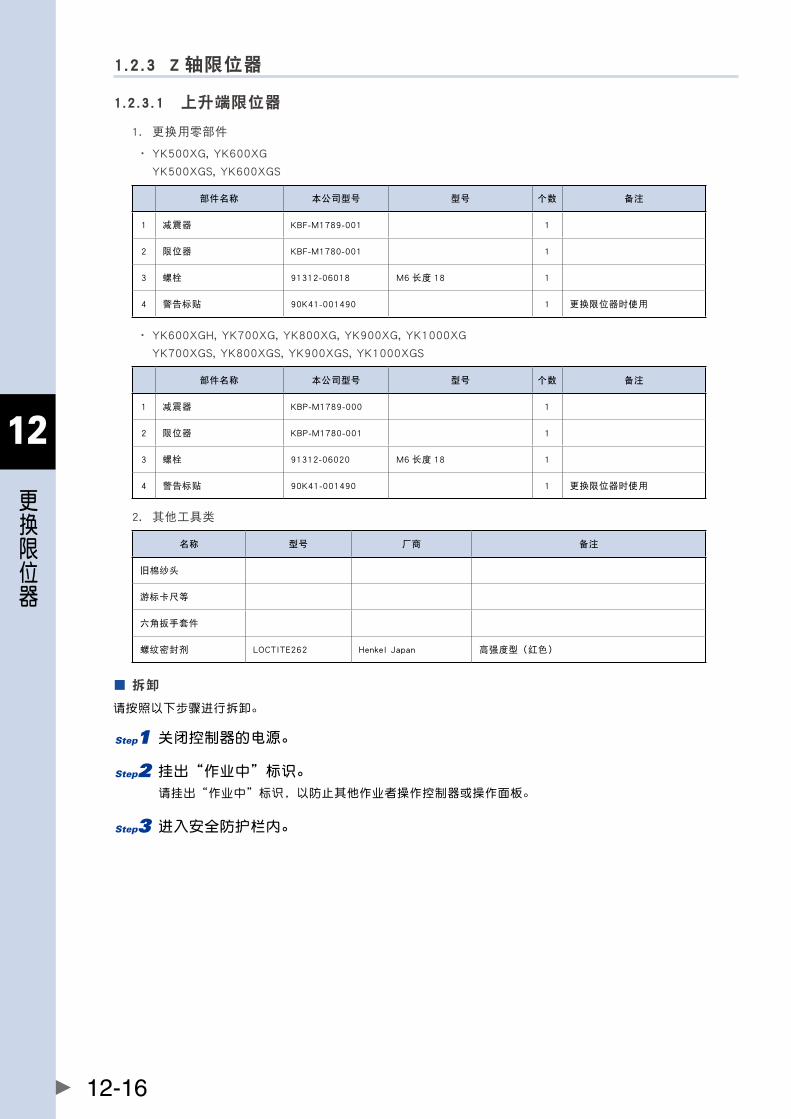
12
更换限位器
12-16
1.2.3 Z 轴限位器
1.2.3.1 上升端限位器
1. 更换用零部件
·YK500XG,YK600XG
YK500XGS,YK600XGS
部件名称 本公司型号 型号 个数 备注
1 减震器 KBF-M1789-001 1
2 限位器 KBF-M1780-001 1
3 螺栓 91312-06018 M6 长度 18 1
4 警告标贴 90K41-001490 1 更换限位器时使用
· YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK700XGS,YK800XGS,YK900XGS,YK1000XGS
部件名称 本公司型号 型号 个数 备注
1 减震器 KBP-M1789-000 1
2 限位器 KBP-M1780-001 1
3 螺栓 91312-06020 M6 长度 18 1
4 警告标贴 90K41-001490 1 更换限位器时使用
2. 其他工具类
名称 型号 厂商 备注
旧棉纱头
游标卡尺等
六角扳手套件
螺纹密封剂 LOCTITE262 HenkelJapan 高强度型(红色)
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
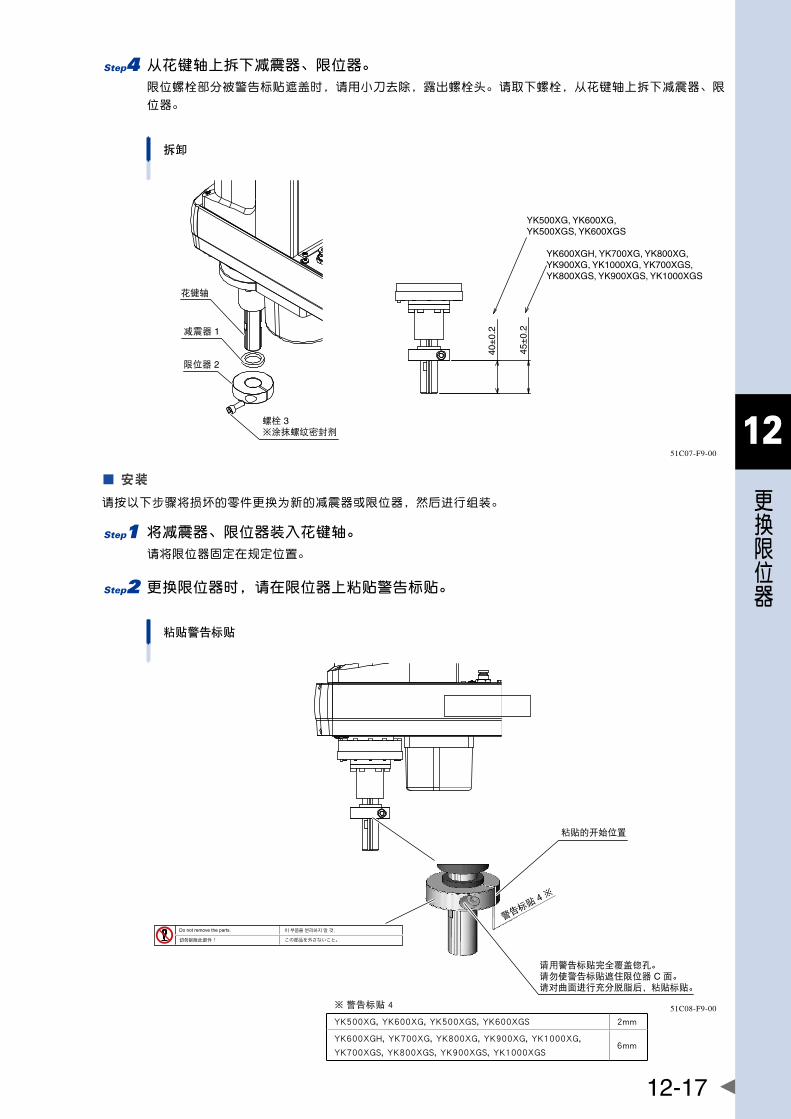
12
更换限位器
12-17
4 从花键轴上拆下减震器、限位器。
限位螺栓部分被警告标贴遮盖时,请用小刀去除,露出螺栓头。请取下螺栓,从花键轴上拆下减震器、限
位器。
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS
YK500XG, YK600XG, YK500XGS, YK600XGS
40±
0.2
45±
0.2
拆卸
花键轴
减震器 1
限位器 2
螺栓 3 ※涂抹螺纹密封剂
51C07-F9-00
■ 安装
请按以下步骤将损坏的零件更换为新的减震器或限位器,然后进行组装。
1 将减震器、限位器装入花键轴。
请将限位器固定在规定位置。
2 更换限位器时,请在限位器上粘贴警告标贴。
粘贴警告标贴
请用警告标贴完全覆盖锪孔。请勿使警告标贴遮住限位器 C 面。请对曲面进行充分脱脂后,粘贴标贴。
粘贴的开始位置
警告标贴
4 ※
51C08-F9-00※警告标贴 4
YK500XG,YK600XG,YK500XGS,YK600XGS 2mm
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,
YK700XGS,YK800XGS,YK900XGS,YK1000XGS6mm
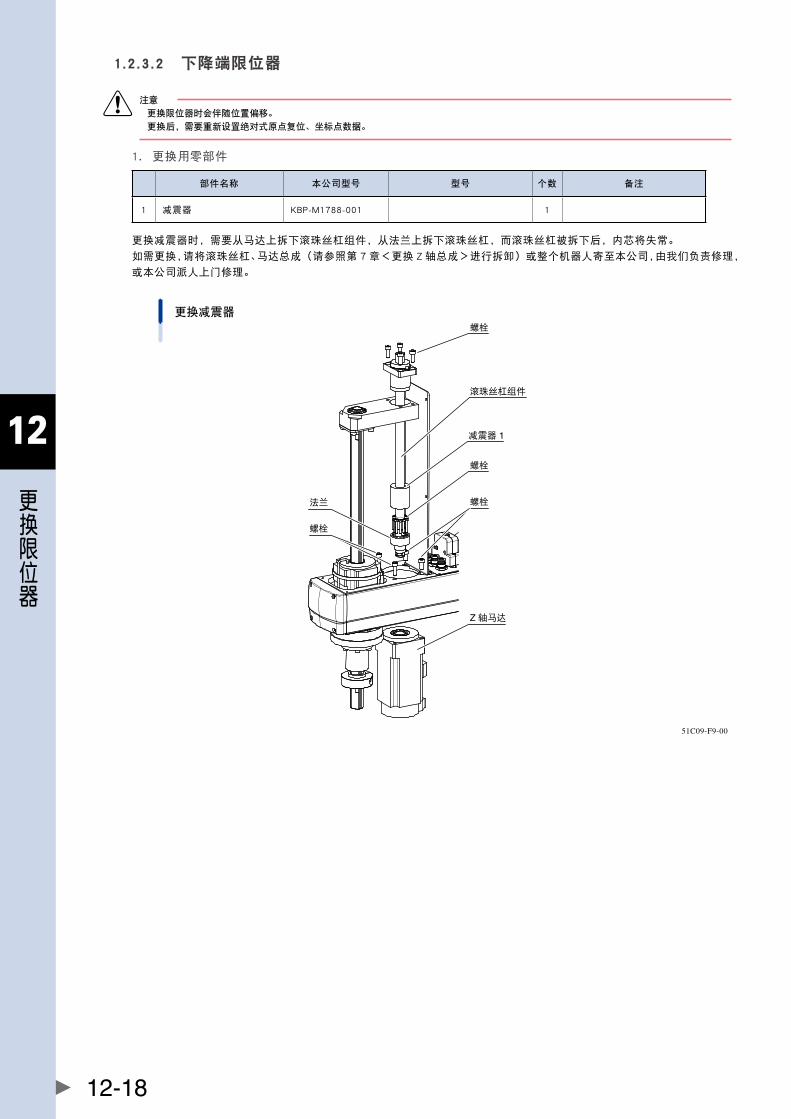
12
更换限位器
12-18
1.2.3.2 下降端限位器
c 注意
更换限位器时会伴随位置偏移。
更换后,需要重新设置绝对式原点复位、坐标点数据。
1. 更换用零部件
部件名称 本公司型号 型号 个数 备注
1 减震器 KBP-M1788-001 1
更换减震器时,需要从马达上拆下滚珠丝杠组件,从法兰上拆下滚珠丝杠,而滚珠丝杠被拆下后,内芯将失常。
如需更换,请将滚珠丝杠、马达总成(请参照第 7 章<更换 Z 轴总成>进行拆卸)或整个机器人寄至本公司,由我们负责修理,
或本公司派人上门修理。
更换减震器
螺栓
Z 轴马达
螺栓
滚珠丝杠组件
螺栓
减震器 1
螺栓
法兰
51C09-F9-00
第13章 更换感应器螺丝
目录
1. 更换感应器螺丝 13-1


13
更换感应器螺丝
13-1
1. 更换感应器螺丝
c 注意
更换感应器螺丝时会伴随位置偏移。
更换后,需要重新设置绝对式原点复位、坐标点数据、基准坐标。
X、Y、R 轴上均有感应器螺丝,由原点传感器检出感应器螺丝,并进行原点复位。
各轴的感应器螺丝位置如下。
感应器螺丝损坏时,请参照各机型、各轴的谐波更换方法,更换感应器螺丝。
更换感应器螺丝
螺栓
R 轴感应器螺丝
R 轴感应器螺丝(截锥头)
螺母
螺栓
R 轴感应器螺丝
垫圈
YK250XG, YK350XG, YK400XG, YK500XGL, YK600XGL, YK300XGS, YK400XGS(图为 YK250XG)
YK500XG, YK600XG, YK500XGS, YK600XGS(图为 YK500XG)
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG, YK700XGS, YK800XGS, YK900XGS, YK1000XGS(图为 YK700XG)
X 轴感应器螺丝(截锥头)
Y 轴感应器螺丝(截锥头)
螺母
螺母
X 轴感应器螺丝(截锥头)
螺母
X轴感应器螺丝(截锥头)
螺母
螺母
Y 轴感应器螺丝(截锥头)
螺母
Y 轴感应器螺丝(截锥头)
51D01-F6-00


第14章 更换端面密封件
目录
1. 更换端面密封件 14-1
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL,
YK300XGS,YK400XGS 14-1
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS 14-3

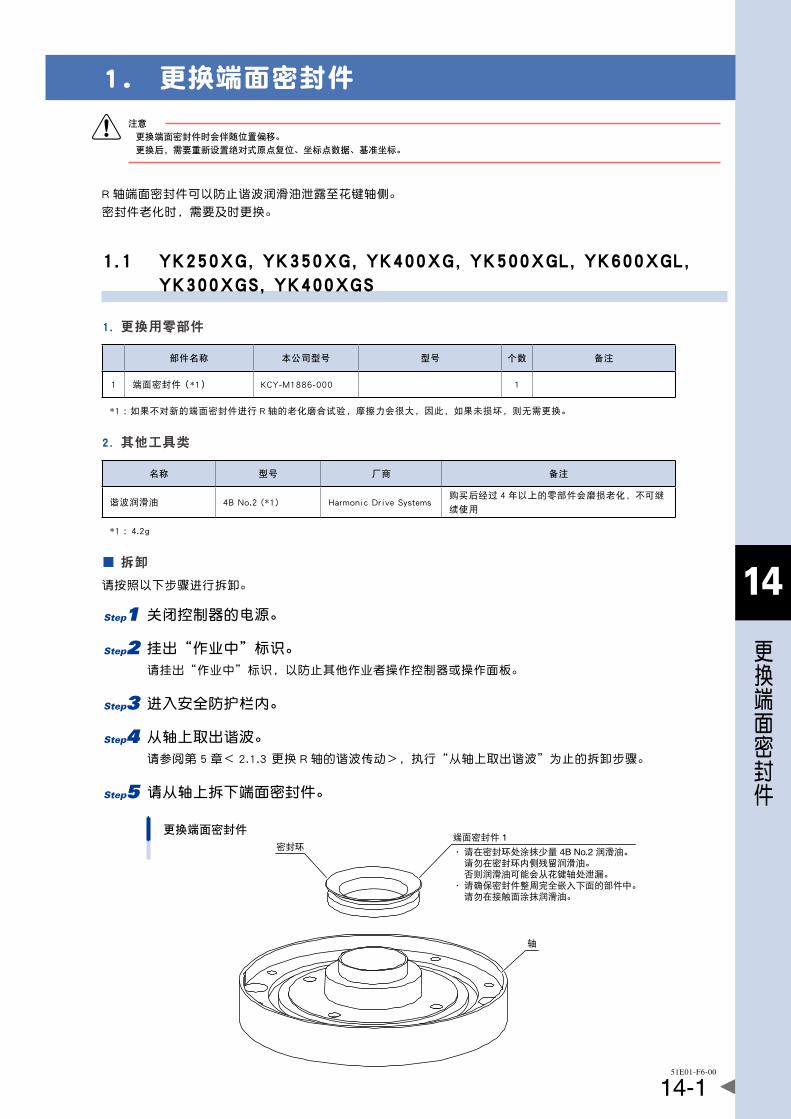
14
更换端面密封件
14-1
1. 更换端面密封件
c 注意
更换端面密封件时会伴随位置偏移。
更换后,需要重新设置绝对式原点复位、坐标点数据、基准坐标。
R 轴端面密封件可以防止谐波润滑油泄露至花键轴侧。
密封件老化时,需要及时更换。
1.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL, YK300XGS,YK400XGS
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 端面密封件(*1) KCY-M1886-000 1
*1 :如果不对新的端面密封件进行 R 轴的老化磨合试验,摩擦力会很大,因此,如果未损坏,则无需更换。
2.其他工具类
名称 型号 厂商 备注
谐波润滑油 4BNo.2(*1) HarmonicDriveSystems购买后经过 4 年以上的零部件会磨损老化,不可继
续使用
*1 :4.2g
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 从轴上取出谐波。
请参阅第 5 章< 2.1.3更换 R 轴的谐波传动>,执行“从轴上取出谐波”为止的拆卸步骤。
5 请从轴上拆下端面密封件。
更换端面密封件端面密封件 1
· 请在密封环处涂抹少量 4B No.2 润滑油。 请勿在密封环内侧残留润滑油。 否则润滑油可能会从花键轴处泄漏。· 请确保密封件整周完全嵌入下面的部件中。 请勿在接触面涂抹润滑油。
密封环
轴
51E01-F6-00

14
更换端面密封件
14-2
■ 安装
请按照与拆卸相反的步骤进行安装。
1 将新的端面密封件装到轴上。
2 从“将谐波装到轴上”的位置开始安装。
3 在谐波上涂抹新润滑油。
请参阅第 5 章< 2.1.3更换 R 轴的谐波传动>,擦除谐波的旧润滑油,涂抹新润滑油。
c 注意
由于端面密封件接触到谐波的输入部,导致摩擦较大,R轴的老化磨合试验不充分时,有可能发生过载错误。请进行彻底的老化磨合试验。
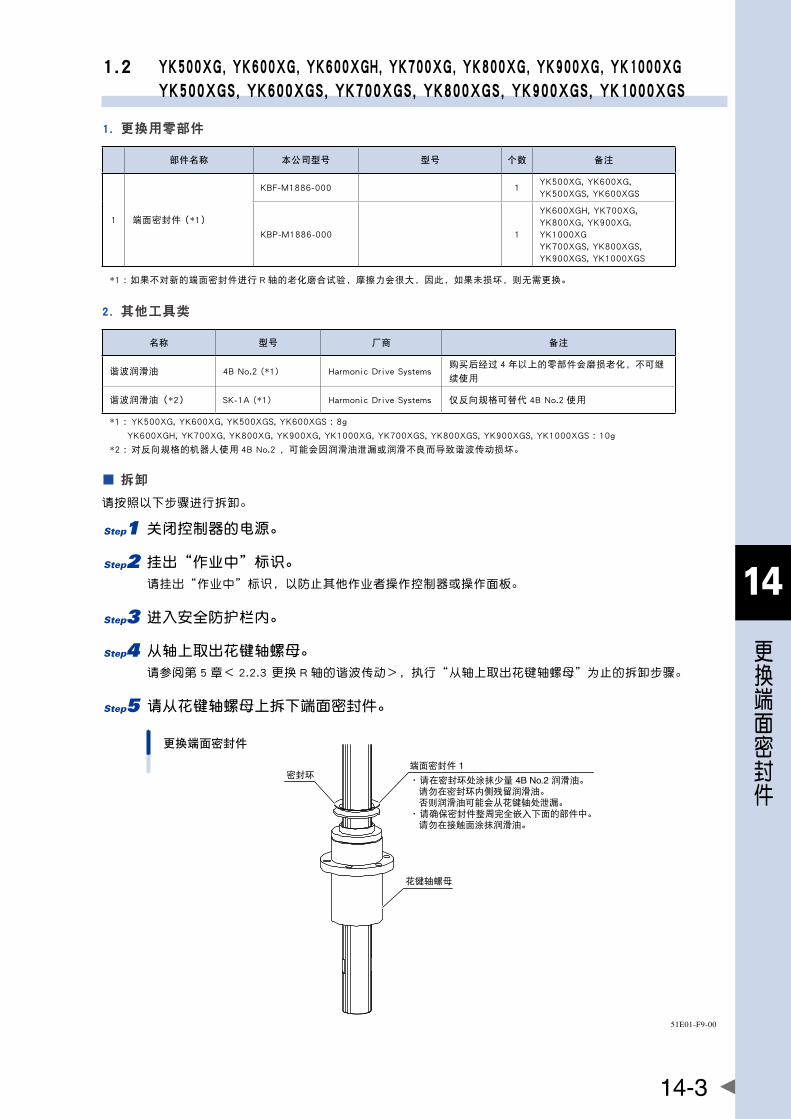
14
更换端面密封件
14-3
1.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG YK500XGS,YK600XGS,YK700XGS,YK800XGS,YK900XGS,YK1000XGS
1.更换用零部件
部件名称 本公司型号 型号 个数 备注
1 端面密封件(*1)
KBF-M1886-000 1YK500XG,YK600XG,YK500XGS,YK600XGS
KBP-M1886-000 1
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XGYK700XGS,YK800XGS,YK900XGS,YK1000XGS
*1 :如果不对新的端面密封件进行 R 轴的老化磨合试验,摩擦力会很大,因此,如果未损坏,则无需更换。
2.其他工具类
名称 型号 厂商 备注
谐波润滑油 4BNo.2(*1) HarmonicDriveSystems购买后经过 4 年以上的零部件会磨损老化,不可继
续使用
谐波润滑油(*2) SK-1A(*1) HarmonicDriveSystems 仅反向规格可替代 4BNo.2 使用
*1 :YK500XG,YK600XG,YK500XGS,YK600XGS :8g
YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG,YK700XGS,YK800XGS,YK900XGS,YK1000XGS :10g
*2 :对反向规格的机器人使用 4BNo.2,可能会因润滑油泄漏或润滑不良而导致谐波传动损坏。
■ 拆卸
请按照以下步骤进行拆卸。
1 关闭控制器的电源。
2 挂出“作业中”标识。
请挂出“作业中”标识,以防止其他作业者操作控制器或操作面板。
3 进入安全防护栏内。
4 从轴上取出花键轴螺母。
请参阅第 5 章< 2.2.3更换 R 轴的谐波传动>,执行“从轴上取出花键轴螺母”为止的拆卸步骤。
5 请从花键轴螺母上拆下端面密封件。
更换端面密封件
端面密封件 1
· 请在密封环处涂抹少量 4B No.2 润滑油。 请勿在密封环内侧残留润滑油。 否则润滑油可能会从花键轴处泄漏。· 请确保密封件整周完全嵌入下面的部件中。 请勿在接触面涂抹润滑油。
密封环
花键轴螺母
51E01-F9-00
14
更换端面密封件
14-4
■ 安装
请按照与拆卸相反的步骤进行安装。
1 将端面密封件安装到花键轴螺母上。
2 在谐波上涂抹新润滑油。
即使在不更换谐波的情况下,也请执行直至“从 Y 轴机械臂上拆下谐波”的步骤。(请勿拆下波发生器。)
请参阅第 5 章< 2.2.3更换 R 轴的谐波传动>,擦除谐波的旧润滑油,涂抹新润滑油。
3 参照谐波的更换步骤,按照相反的顺序进行安装。
c 注意
由于端面密封件接触到谐波的输入部,导致摩擦较大,R轴的老化磨合试验不充分时,有可能发生过载错误。请进行彻底的老化磨合试验。
第15章 维护零件 关于 YK300XGS,YK400XGS 的维护零件,请咨询本公司。
目录
1. 维护零件 15-1
1.1 YK250XG,YK350XG,YK400XG 标准规格 15-1
1.2 YK500XGL,YK600XGL 标准规格 15-2
1.3 YK250XG,YK350XG,YK400XG 工具法兰安装规格 15-4
1.4 YK500XGL,YK600XGL 工具法兰安装规格 15-5
1.5 YK250XG,YK350XG,YK400XG 用户接线配管花键轴中空规格 15-7
1.6 YK500XGL,YK600XGL 用户接线配管花键轴中空规格 15-8
1.7 YK250XG,YK350XG,YK400XG 工具法兰安装、
用户接线配管花键轴中空规格 15-10
1.8 YK500XGL,YK600XGL 工具法兰安装、
用户接线配管花键轴中空规格 15-11
1.9 YK500XG,YK600XG Z 轴 200mm 行程 15-13
1.10 YK500XG,YK600XG Z 轴 300mm 行程 15-15
1.11 YK600XGH Z 轴 200mm 行程 15-17
1.12 YK600XGH Z 轴 400mm 行程 15-19
1.13 YK700XG,YK800XG Z 轴 200mm 行程 15-21
1.14 YK700XG,YK800XG Z 轴 400mm 行程 15-23
1.15 YK900XG,YK1000XG Z 轴 200mm 行程 15-25
1.16 YK900XG,YK1000XG Z 轴 400mm 行程 15-27
1.17 YK300XGS,YK400XGS 15-28
1.18 YK500XGS,YK600XGS 15-29
1.19 YK700XGS,YK800XGS,YK900XGS,YK1000XGS 15-31
2. 消耗品 15-33
3. 基本规格 15-34
3.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL 15-34
3.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,
YK900XG,YK1000XG 15-36
3.3 YK300XGS,YK400XGS,YK500XGS,YK600XGS,
YK700XGS,YK800XGS,YK900XGS,YK1000XGS 15-38


15-1
15
维护零件
1. 维护零件
1.1 YK250XG,YK350XG,YK400XG 标准规格编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KCY-M2110-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 98502-03030 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X3 91312-03030 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
X4 95302-04600 NUTHEXAGON 1 感应器螺丝用螺母
X5 92903-03600 WASHER,PLAIN 16 减速器固定螺栓用垫圈
X6 91312-03018 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
X7 KN4-M257K-000 ORING,1 1 减速器上端 O 形圈
X8 KCY-M4880-001 MOTORASSY.,1 1 马达
X9 KN3-M2143-000 ORING.,2 1 马达凹陷部 O 形圈
X10 91312-05014 BOLTHEX.SOCKETHEAD 4 马达安装螺栓
X11 KCY-M4850-600 PROXIMITYSW.ASSY. 1 传感器
X12 KCY-M2197-000 DAMPER,2 1 限位器减震器
X13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓
X14 90189-02J106 NUT,HEXAGON 1 机械限位螺栓用螺母
Y 轴
Y1 KCY-M2510-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M1896-000 ORING,2 1 减速器下端 O 形圈
Y3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
Y4 98502-03030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y5 95302-04700 NUTHEXAGON 1 感应器螺丝用螺母
Y6 92903-03600 WASHER,PLAIN 16 减速器固定螺栓垫圈
Y7 91312-03022 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KCY-M4881-000 MOTORASSY.,2 1 马达
Y9 91312-04008 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Y10 KN3-M257K-000 ORING,1 1 马达凹陷部 O 形圈
Y11 KCY-M2197-000 DAMPER,2 1 限位器减震器
Y12 90189-02J106 NUT,HEXAGON 1 机械限位螺栓
Y13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓用螺母
Y14 KCY-M4850-100 PROXIMITYSW.ASSY 1 传感器
Y15 KCY-M1314-001 COVER,4 1 Y 轴外盖
Y16 92903-03200 WASHERPLAIN 4 Y 轴外盖螺丝用垫圈
Y17 98902-03006 SCREWBINDINGHEAD 4 Y 轴外盖螺丝
Y18 98902-03016 SCREW,BINDINGHEAD 4 Y 轴外盖螺丝
Y19 KCY-M1321-000 LABEL 1 Y 轴外盖上部密封件
Z 轴
Z1 KCY-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 91312-04012 BOLT,HEX.SOCKETHEAD 2 马达固定螺栓Z3 KCY-M1753-000 COUPLING 1 联轴器Z4 KCY-M1750-000 SCREW,BALL 1 滚珠丝杠Z5 KCY-M1744-000 PLATE 1 轴承外圈压板Z6 KAI-M2273-000 BEARING 1 滚珠丝杠支撑轴承Z7 KCY-M1788-000 DAMPER,1 1 下降端减震器Z8 90112-2AJ010 BOLT,HEX.SOCKETHEAD 8 外圈压板用螺栓Z9 KCY-M1778-000 SLEEVE,LOCK1 1 轴承内圈压板
Z10 KCY-M1712-000 HOLDER 1 轴承座
Z11 91312-03014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠固定螺栓Z12 91312-04014 BOLT,HEX.SOCKETHEAD 4 Z 轴总成固定螺栓
Z13 90933-01J002 BEARING 2 滚珠花键轴上侧轴承
Z14 KN3-M1788-100 DAMPER,1 1 上升端减震器
Z15 KCY-M1780-001 STOPPER,1 1 上升端限位器
R 轴
R1 KCY-M1821-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M1895-000 ORING 1 减速器下端 O 形圈
R3 91312-03022 BOLT,HEX.SOCKETHEAD 8 减速器固定螺栓
R4 90990-17J034 O-RING 1 减速器输入部 O 形圈
R5 92903-03600 WASHER,PLAIN 12 减速器固定螺栓垫圈
R6 91312-03014 BOLT,HEX.SOCKETHEAD 12 减速器固定螺栓
R7 KCY-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R8 90990-28J064 WASHER,PLAIN 1 减速器上侧感应器螺丝垫圈
R9 KCY-M4883-000 MOTORASSY.,3 1 马达
R10 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KN3-M2144-000 ORING,3 1 马达下端 O 形圈
R12 KCY-M4850-400 PROXIMITYSW.ASSY 1 传感器
R13 KCY-M1840-001 SPLINE,BALL 1 滚珠花键轴
需要更换总成R14 90990-17J032 O-RING 1 滚珠花键轴螺母上部 O 形圈(外侧)R15 KN5-M181H-000 ORING,4 1 滚珠花键轴螺母上部 O 形圈(内侧)R16 90990-36J002 WASHER,SEAL 4 滚珠花键轴螺母固定用螺栓密封垫圈R17 91312-04012 BOLT,HEX.SOCKETHEAD 4 滚珠花键轴螺母固定螺栓
R18 KCY-M1886-000 SEAL 1 减速器内端面密封件
电缆类
C1 KCY-M4843-002 HARNESS,MACHINE2 1 机器线束
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 K58-M4872-101 CONNECTORE/L2 1 基座侧 D-sub 连接器
C4 K58-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧D-sub 连接器固定螺母C8 K58-M4871-101 CONNECTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 K58-M4839-001 PANEL,CONNECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
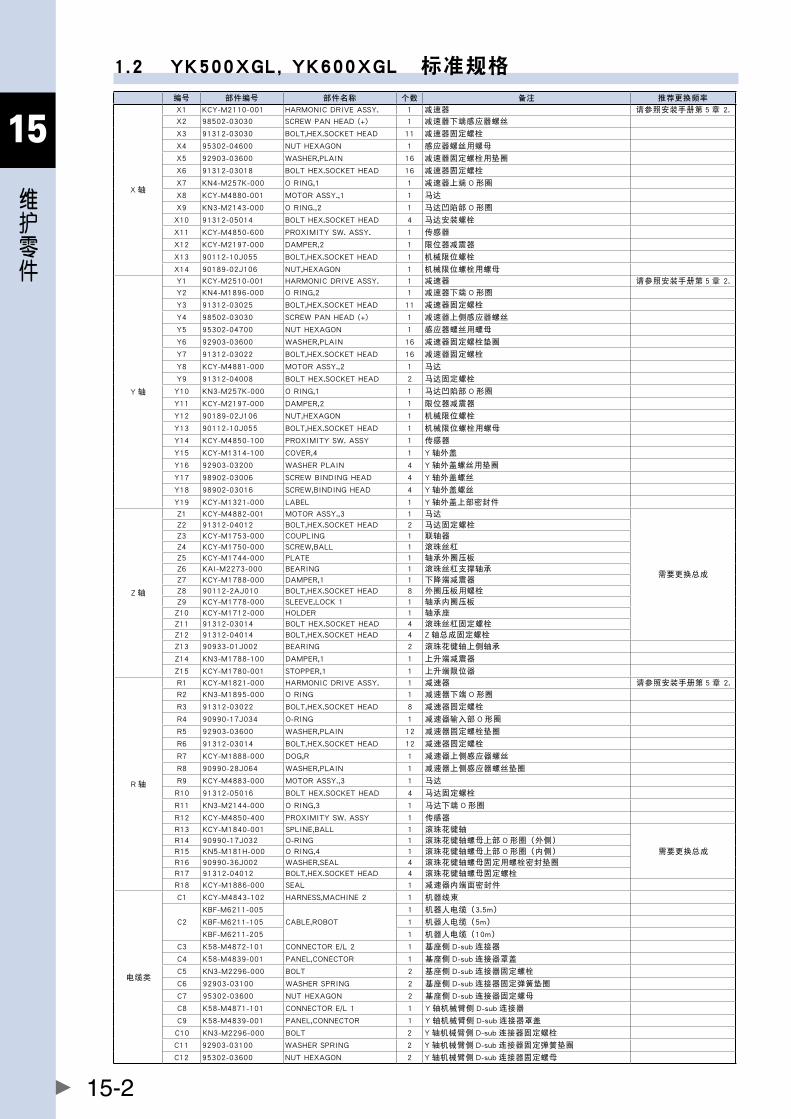
15-2
15
维护零件
1.2 YK500XGL,YK600XGL 标准规格编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KCY-M2110-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 98502-03030 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X3 91312-03030 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
X4 95302-04600 NUTHEXAGON 1 感应器螺丝用螺母
X5 92903-03600 WASHER,PLAIN 16 减速器固定螺栓用垫圈
X6 91312-03018 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
X7 KN4-M257K-000 ORING,1 1 减速器上端 O 形圈
X8 KCY-M4880-001 MOTORASSY.,1 1 马达
X9 KN3-M2143-000 ORING.,2 1 马达凹陷部 O 形圈
X10 91312-05014 BOLTHEX.SOCKETHEAD 4 马达安装螺栓
X11 KCY-M4850-600 PROXIMITYSW.ASSY. 1 传感器
X12 KCY-M2197-000 DAMPER,2 1 限位器减震器
X13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓
X14 90189-02J106 NUT,HEXAGON 1 机械限位螺栓用螺母
Y 轴
Y1 KCY-M2510-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M1896-000 ORING,2 1 减速器下端 O 形圈
Y3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
Y4 98502-03030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y5 95302-04700 NUTHEXAGON 1 感应器螺丝用螺母
Y6 92903-03600 WASHER,PLAIN 16 减速器固定螺栓垫圈
Y7 91312-03022 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KCY-M4881-000 MOTORASSY.,2 1 马达
Y9 91312-04008 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Y10 KN3-M257K-000 ORING,1 1 马达凹陷部 O 形圈
Y11 KCY-M2197-000 DAMPER,2 1 限位器减震器
Y12 90189-02J106 NUT,HEXAGON 1 机械限位螺栓
Y13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓用螺母
Y14 KCY-M4850-100 PROXIMITYSW.ASSY 1 传感器
Y15 KCY-M1314-100 COVER,4 1 Y 轴外盖
Y16 92903-03200 WASHERPLAIN 4 Y 轴外盖螺丝用垫圈
Y17 98902-03006 SCREWBINDINGHEAD 4 Y 轴外盖螺丝
Y18 98902-03016 SCREW,BINDINGHEAD 4 Y 轴外盖螺丝
Y19 KCY-M1321-000 LABEL 1 Y 轴外盖上部密封件
Z 轴
Z1 KCY-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 91312-04012 BOLT,HEX.SOCKETHEAD 2 马达固定螺栓
Z3 KCY-M1753-000 COUPLING 1 联轴器
Z4 KCY-M1750-000 SCREW,BALL 1 滚珠丝杠
Z5 KCY-M1744-000 PLATE 1 轴承外圈压板
Z6 KAI-M2273-000 BEARING 1 滚珠丝杠支撑轴承
Z7 KCY-M1788-000 DAMPER,1 1 下降端减震器
Z8 90112-2AJ010 BOLT,HEX.SOCKETHEAD 8 外圈压板用螺栓
Z9 KCY-M1778-000 SLEEVE,LOCK1 1 轴承内圈压板
Z10 KCY-M1712-000 HOLDER 1 轴承座
Z11 91312-03014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠固定螺栓
Z12 91312-04014 BOLT,HEX.SOCKETHEAD 4 Z 轴总成固定螺栓
Z13 90933-01J002 BEARING 2 滚珠花键轴上侧轴承
Z14 KN3-M1788-100 DAMPER,1 1 上升端减震器
Z15 KCY-M1780-001 STOPPER,1 1 上升端限位器
R 轴
R1 KCY-M1821-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M1895-000 ORING 1 减速器下端 O 形圈
R3 91312-03022 BOLT,HEX.SOCKETHEAD 8 减速器固定螺栓
R4 90990-17J034 O-RING 1 减速器输入部 O 形圈
R5 92903-03600 WASHER,PLAIN 12 减速器固定螺栓垫圈
R6 91312-03014 BOLT,HEX.SOCKETHEAD 12 减速器固定螺栓
R7 KCY-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R8 90990-28J064 WASHER,PLAIN 1 减速器上侧感应器螺丝垫圈
R9 KCY-M4883-000 MOTORASSY.,3 1 马达
R10 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KN3-M2144-000 ORING,3 1 马达下端 O 形圈
R12 KCY-M4850-400 PROXIMITYSW.ASSY 1 传感器
R13 KCY-M1840-001 SPLINE,BALL 1 滚珠花键轴
需要更换总成
R14 90990-17J032 O-RING 1 滚珠花键轴螺母上部 O 形圈(外侧)
R15 KN5-M181H-000 ORING,4 1 滚珠花键轴螺母上部 O 形圈(内侧)
R16 90990-36J002 WASHER,SEAL 4 滚珠花键轴螺母固定用螺栓密封垫圈
R17 91312-04012 BOLT,HEX.SOCKETHEAD 4 滚珠花键轴螺母固定螺栓
R18 KCY-M1886-000 SEAL 1 减速器内端面密封件
电缆类
C1 KCY-M4843-102 HARNESS,MACHINE2 1 机器线束
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 K58-M4872-101 CONNECTORE/L2 1 基座侧 D-sub 连接器
C4 K58-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 K58-M4871-101 CONNECTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 K58-M4839-001 PANEL,CONNECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母

15-3
15
维护零件
标准规格
X1
X2
X3X4
X5,X6(内部)
X7(内部)
X8~X10(内部)X11(内部)
X12
X13
X14
Y1
Y2(内部)
Y3
Y4Y5
Y6,Y7(内部)
Y8~Y10(内部)
Y11
Y12Y13
Y14(内部)
Y15Y16,Y17
Y18
Y19
Z1~Z12(内部)
Z13
Z14
Z10Z15
R1R2(内部)
R3
R4(内部)
R5,R6(内部)
R7,R8
R9(内部)
R10(内部)R11(内部)
R12(内部)
R13
R14,R15(内部)R16 R17
R18(内部)
C1
C2
C3~C7
C8~C12
21711-F6-00
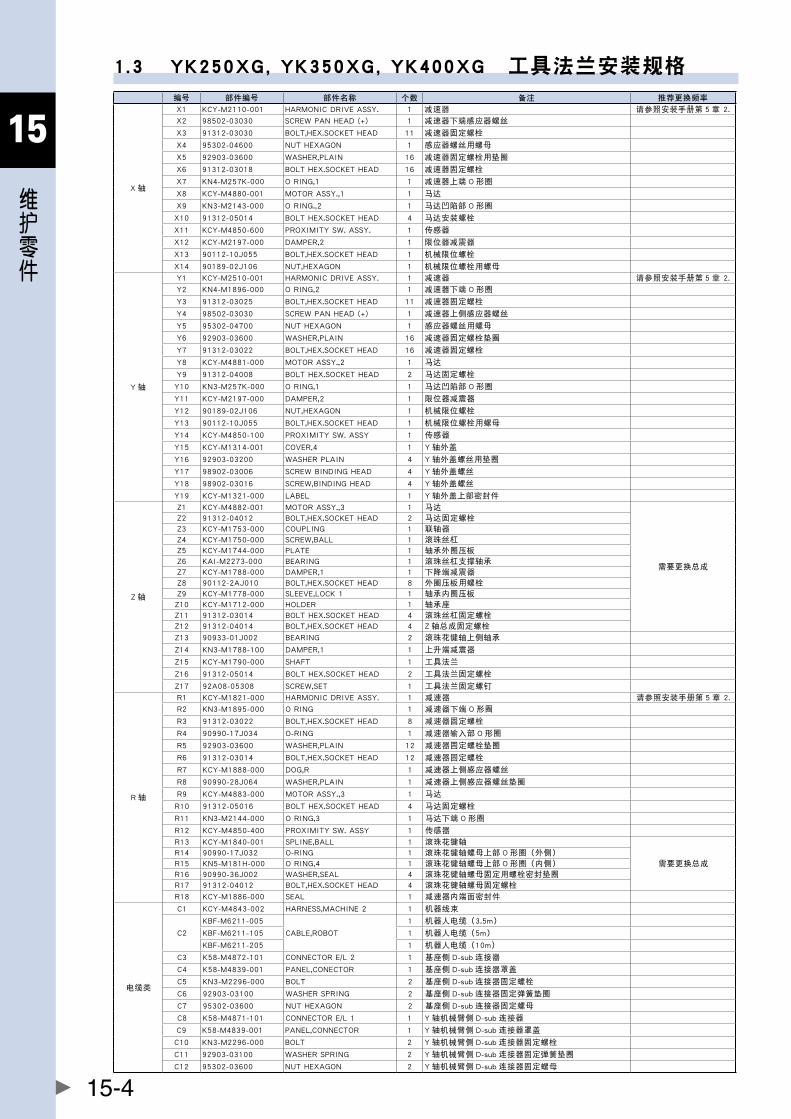
15-4
15
维护零件
1.3 YK250XG,YK350XG,YK400XG 工具法兰安装规格编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KCY-M2110-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 98502-03030 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X3 91312-03030 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
X4 95302-04600 NUTHEXAGON 1 感应器螺丝用螺母
X5 92903-03600 WASHER,PLAIN 16 减速器固定螺栓用垫圈
X6 91312-03018 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
X7 KN4-M257K-000 ORING,1 1 减速器上端 O 形圈
X8 KCY-M4880-001 MOTORASSY.,1 1 马达
X9 KN3-M2143-000 ORING.,2 1 马达凹陷部 O 形圈
X10 91312-05014 BOLTHEX.SOCKETHEAD 4 马达安装螺栓
X11 KCY-M4850-600 PROXIMITYSW.ASSY. 1 传感器
X12 KCY-M2197-000 DAMPER,2 1 限位器减震器
X13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓
X14 90189-02J106 NUT,HEXAGON 1 机械限位螺栓用螺母
Y 轴
Y1 KCY-M2510-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M1896-000 ORING,2 1 减速器下端 O 形圈
Y3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
Y4 98502-03030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y5 95302-04700 NUTHEXAGON 1 感应器螺丝用螺母
Y6 92903-03600 WASHER,PLAIN 16 减速器固定螺栓垫圈
Y7 91312-03022 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KCY-M4881-000 MOTORASSY.,2 1 马达
Y9 91312-04008 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Y10 KN3-M257K-000 ORING,1 1 马达凹陷部 O 形圈
Y11 KCY-M2197-000 DAMPER,2 1 限位器减震器
Y12 90189-02J106 NUT,HEXAGON 1 机械限位螺栓
Y13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓用螺母
Y14 KCY-M4850-100 PROXIMITYSW.ASSY 1 传感器
Y15 KCY-M1314-001 COVER,4 1 Y 轴外盖
Y16 92903-03200 WASHERPLAIN 4 Y 轴外盖螺丝用垫圈
Y17 98902-03006 SCREWBINDINGHEAD 4 Y 轴外盖螺丝
Y18 98902-03016 SCREW,BINDINGHEAD 4 Y 轴外盖螺丝
Y19 KCY-M1321-000 LABEL 1 Y 轴外盖上部密封件
Z 轴
Z1 KCY-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 91312-04012 BOLT,HEX.SOCKETHEAD 2 马达固定螺栓
Z3 KCY-M1753-000 COUPLING 1 联轴器
Z4 KCY-M1750-000 SCREW,BALL 1 滚珠丝杠
Z5 KCY-M1744-000 PLATE 1 轴承外圈压板
Z6 KAI-M2273-000 BEARING 1 滚珠丝杠支撑轴承
Z7 KCY-M1788-000 DAMPER,1 1 下降端减震器
Z8 90112-2AJ010 BOLT,HEX.SOCKETHEAD 8 外圈压板用螺栓
Z9 KCY-M1778-000 SLEEVE,LOCK1 1 轴承内圈压板
Z10 KCY-M1712-000 HOLDER 1 轴承座
Z11 91312-03014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠固定螺栓
Z12 91312-04014 BOLT,HEX.SOCKETHEAD 4 Z 轴总成固定螺栓
Z13 90933-01J002 BEARING 2 滚珠花键轴上侧轴承
Z14 KN3-M1788-100 DAMPER,1 1 上升端减震器
Z15 KCY-M1790-000 SHAFT 1 工具法兰
Z16 91312-05014 BOLTHEX.SOCKETHEAD 2 工具法兰固定螺栓
Z17 92A08-05308 SCREW,SET 1 工具法兰固定螺钉
R 轴
R1 KCY-M1821-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M1895-000 ORING 1 减速器下端 O 形圈
R3 91312-03022 BOLT,HEX.SOCKETHEAD 8 减速器固定螺栓
R4 90990-17J034 O-RING 1 减速器输入部 O 形圈
R5 92903-03600 WASHER,PLAIN 12 减速器固定螺栓垫圈
R6 91312-03014 BOLT,HEX.SOCKETHEAD 12 减速器固定螺栓
R7 KCY-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R8 90990-28J064 WASHER,PLAIN 1 减速器上侧感应器螺丝垫圈
R9 KCY-M4883-000 MOTORASSY.,3 1 马达
R10 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KN3-M2144-000 ORING,3 1 马达下端 O 形圈
R12 KCY-M4850-400 PROXIMITYSW.ASSY 1 传感器
R13 KCY-M1840-001 SPLINE,BALL 1 滚珠花键轴
需要更换总成
R14 90990-17J032 O-RING 1 滚珠花键轴螺母上部 O 形圈(外侧)
R15 KN5-M181H-000 ORING,4 1 滚珠花键轴螺母上部 O 形圈(内侧)
R16 90990-36J002 WASHER,SEAL 4 滚珠花键轴螺母固定用螺栓密封垫圈
R17 91312-04012 BOLT,HEX.SOCKETHEAD 4 滚珠花键轴螺母固定螺栓
R18 KCY-M1886-000 SEAL 1 减速器内端面密封件
电缆类
C1 KCY-M4843-002 HARNESS,MACHINE2 1 机器线束
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 K58-M4872-101 CONNECTORE/L2 1 基座侧 D-sub 连接器
C4 K58-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 K58-M4871-101 CONNECTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 K58-M4839-001 PANEL,CONNECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
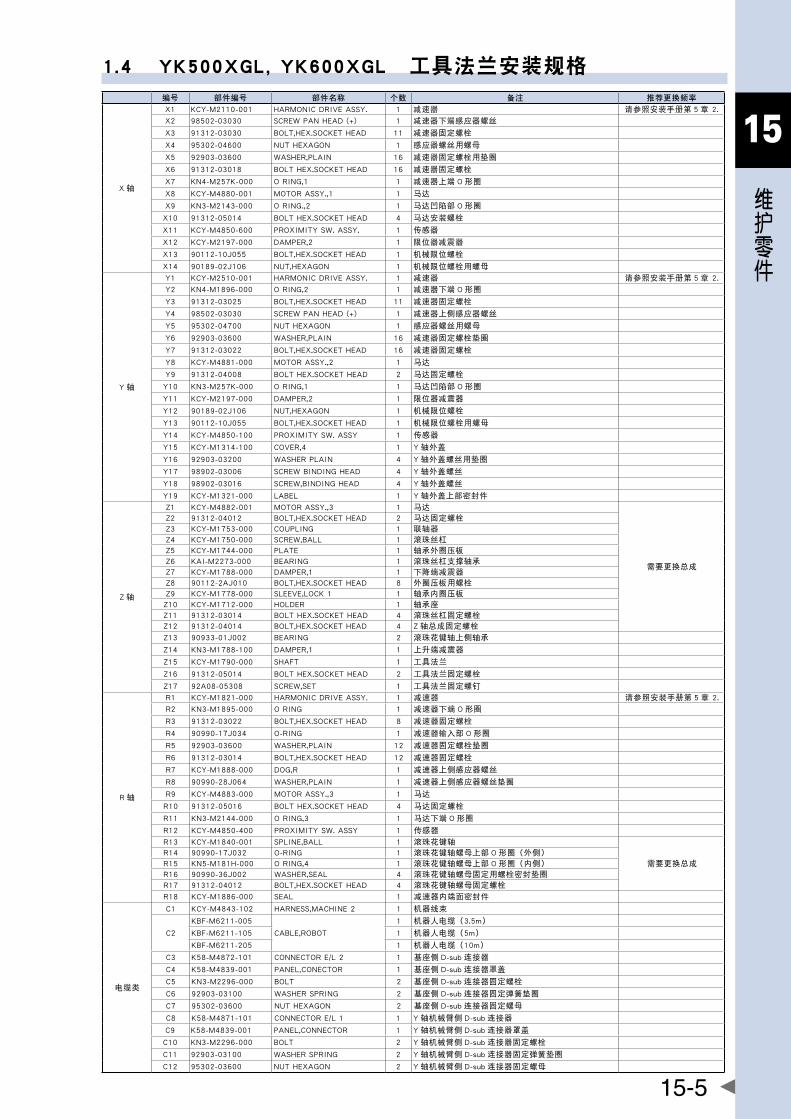
15-5
15
维护零件
1.4 YK500XGL,YK600XGL 工具法兰安装规格编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KCY-M2110-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 98502-03030 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X3 91312-03030 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
X4 95302-04600 NUTHEXAGON 1 感应器螺丝用螺母
X5 92903-03600 WASHER,PLAIN 16 减速器固定螺栓用垫圈
X6 91312-03018 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
X7 KN4-M257K-000 ORING,1 1 减速器上端 O 形圈
X8 KCY-M4880-001 MOTORASSY.,1 1 马达
X9 KN3-M2143-000 ORING.,2 1 马达凹陷部 O 形圈
X10 91312-05014 BOLTHEX.SOCKETHEAD 4 马达安装螺栓
X11 KCY-M4850-600 PROXIMITYSW.ASSY. 1 传感器
X12 KCY-M2197-000 DAMPER,2 1 限位器减震器
X13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓
X14 90189-02J106 NUT,HEXAGON 1 机械限位螺栓用螺母
Y 轴
Y1 KCY-M2510-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M1896-000 ORING,2 1 减速器下端 O 形圈
Y3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
Y4 98502-03030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y5 95302-04700 NUTHEXAGON 1 感应器螺丝用螺母
Y6 92903-03600 WASHER,PLAIN 16 减速器固定螺栓垫圈
Y7 91312-03022 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KCY-M4881-000 MOTORASSY.,2 1 马达
Y9 91312-04008 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Y10 KN3-M257K-000 ORING,1 1 马达凹陷部 O 形圈
Y11 KCY-M2197-000 DAMPER,2 1 限位器减震器
Y12 90189-02J106 NUT,HEXAGON 1 机械限位螺栓
Y13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓用螺母
Y14 KCY-M4850-100 PROXIMITYSW.ASSY 1 传感器
Y15 KCY-M1314-100 COVER,4 1 Y 轴外盖
Y16 92903-03200 WASHERPLAIN 4 Y 轴外盖螺丝用垫圈
Y17 98902-03006 SCREWBINDINGHEAD 4 Y 轴外盖螺丝
Y18 98902-03016 SCREW,BINDINGHEAD 4 Y 轴外盖螺丝
Y19 KCY-M1321-000 LABEL 1 Y 轴外盖上部密封件
Z 轴
Z1 KCY-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 91312-04012 BOLT,HEX.SOCKETHEAD 2 马达固定螺栓
Z3 KCY-M1753-000 COUPLING 1 联轴器
Z4 KCY-M1750-000 SCREW,BALL 1 滚珠丝杠
Z5 KCY-M1744-000 PLATE 1 轴承外圈压板
Z6 KAI-M2273-000 BEARING 1 滚珠丝杠支撑轴承
Z7 KCY-M1788-000 DAMPER,1 1 下降端减震器
Z8 90112-2AJ010 BOLT,HEX.SOCKETHEAD 8 外圈压板用螺栓
Z9 KCY-M1778-000 SLEEVE,LOCK1 1 轴承内圈压板
Z10 KCY-M1712-000 HOLDER 1 轴承座
Z11 91312-03014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠固定螺栓
Z12 91312-04014 BOLT,HEX.SOCKETHEAD 4 Z 轴总成固定螺栓
Z13 90933-01J002 BEARING 2 滚珠花键轴上侧轴承
Z14 KN3-M1788-100 DAMPER,1 1 上升端减震器
Z15 KCY-M1790-000 SHAFT 1 工具法兰
Z16 91312-05014 BOLTHEX.SOCKETHEAD 2 工具法兰固定螺栓
Z17 92A08-05308 SCREW,SET 1 工具法兰固定螺钉
R 轴
R1 KCY-M1821-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M1895-000 ORING 1 减速器下端 O 形圈
R3 91312-03022 BOLT,HEX.SOCKETHEAD 8 减速器固定螺栓
R4 90990-17J034 O-RING 1 减速器输入部 O 形圈
R5 92903-03600 WASHER,PLAIN 12 减速器固定螺栓垫圈
R6 91312-03014 BOLT,HEX.SOCKETHEAD 12 减速器固定螺栓
R7 KCY-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R8 90990-28J064 WASHER,PLAIN 1 减速器上侧感应器螺丝垫圈
R9 KCY-M4883-000 MOTORASSY.,3 1 马达
R10 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KN3-M2144-000 ORING,3 1 马达下端 O 形圈
R12 KCY-M4850-400 PROXIMITYSW.ASSY 1 传感器
R13 KCY-M1840-001 SPLINE,BALL 1 滚珠花键轴
需要更换总成
R14 90990-17J032 O-RING 1 滚珠花键轴螺母上部 O 形圈(外侧)
R15 KN5-M181H-000 ORING,4 1 滚珠花键轴螺母上部 O 形圈(内侧)
R16 90990-36J002 WASHER,SEAL 4 滚珠花键轴螺母固定用螺栓密封垫圈
R17 91312-04012 BOLT,HEX.SOCKETHEAD 4 滚珠花键轴螺母固定螺栓
R18 KCY-M1886-000 SEAL 1 减速器内端面密封件
电缆类
C1 KCY-M4843-102 HARNESS,MACHINE2 1 机器线束
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 K58-M4872-101 CONNECTORE/L2 1 基座侧 D-sub 连接器
C4 K58-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 K58-M4871-101 CONNECTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 K58-M4839-001 PANEL,CONNECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
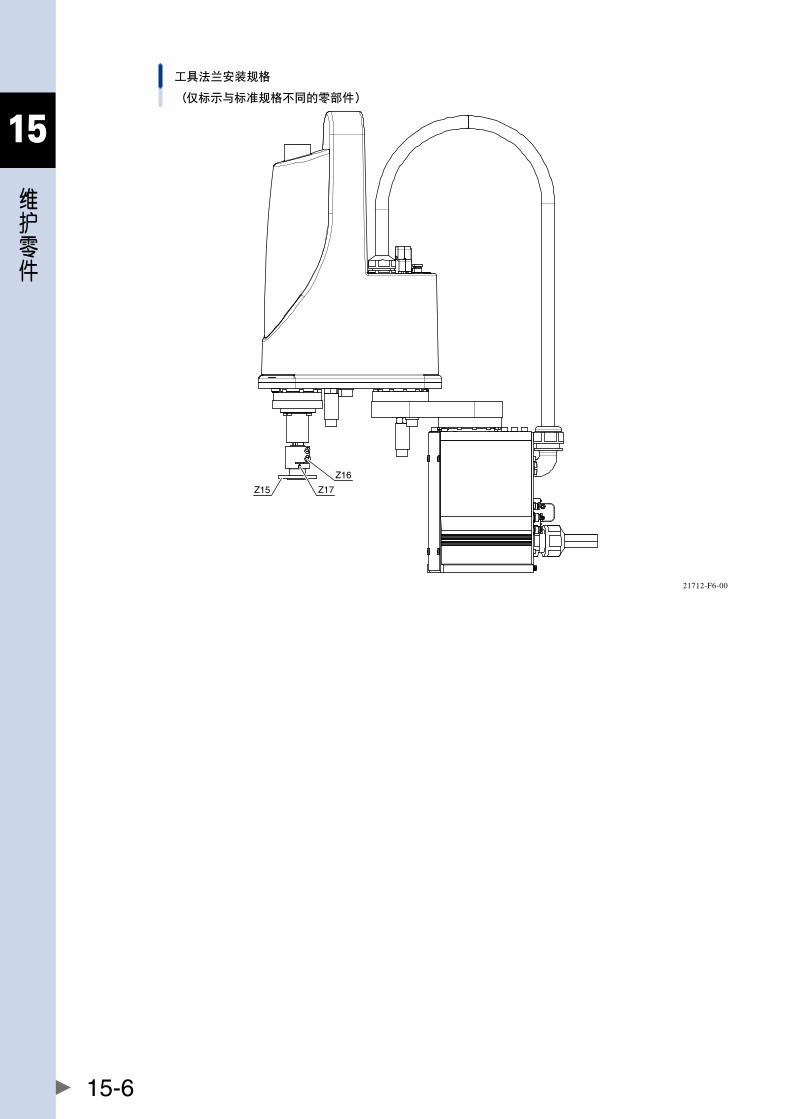
15-6
15
维护零件
工具法兰安装规格
(仅标示与标准规格不同的零部件)
Z15
Z16
Z17
21712-F6-00
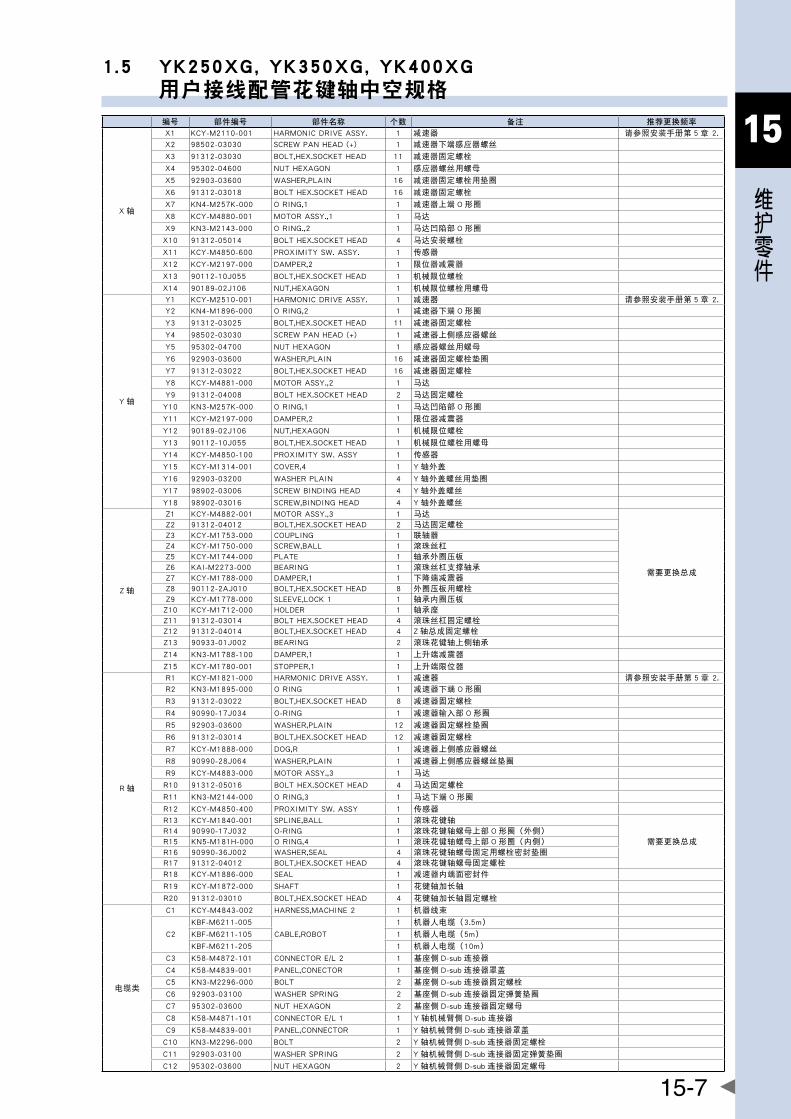
15-7
15
维护零件
1.5 YK250XG,YK350XG,YK400XG 用户接线配管花键轴中空规格
编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KCY-M2110-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 98502-03030 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X3 91312-03030 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
X4 95302-04600 NUTHEXAGON 1 感应器螺丝用螺母
X5 92903-03600 WASHER,PLAIN 16 减速器固定螺栓用垫圈
X6 91312-03018 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
X7 KN4-M257K-000 ORING,1 1 减速器上端 O 形圈
X8 KCY-M4880-001 MOTORASSY.,1 1 马达
X9 KN3-M2143-000 ORING.,2 1 马达凹陷部 O 形圈
X10 91312-05014 BOLTHEX.SOCKETHEAD 4 马达安装螺栓
X11 KCY-M4850-600 PROXIMITYSW.ASSY. 1 传感器
X12 KCY-M2197-000 DAMPER,2 1 限位器减震器
X13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓
X14 90189-02J106 NUT,HEXAGON 1 机械限位螺栓用螺母
Y 轴
Y1 KCY-M2510-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M1896-000 ORING,2 1 减速器下端 O 形圈
Y3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
Y4 98502-03030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y5 95302-04700 NUTHEXAGON 1 感应器螺丝用螺母
Y6 92903-03600 WASHER,PLAIN 16 减速器固定螺栓垫圈
Y7 91312-03022 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KCY-M4881-000 MOTORASSY.,2 1 马达
Y9 91312-04008 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Y10 KN3-M257K-000 ORING,1 1 马达凹陷部 O 形圈
Y11 KCY-M2197-000 DAMPER,2 1 限位器减震器
Y12 90189-02J106 NUT,HEXAGON 1 机械限位螺栓
Y13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓用螺母
Y14 KCY-M4850-100 PROXIMITYSW.ASSY 1 传感器
Y15 KCY-M1314-001 COVER,4 1 Y 轴外盖
Y16 92903-03200 WASHERPLAIN 4 Y 轴外盖螺丝用垫圈
Y17 98902-03006 SCREWBINDINGHEAD 4 Y 轴外盖螺丝
Y18 98902-03016 SCREW,BINDINGHEAD 4 Y 轴外盖螺丝
Z 轴
Z1 KCY-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 91312-04012 BOLT,HEX.SOCKETHEAD 2 马达固定螺栓
Z3 KCY-M1753-000 COUPLING 1 联轴器
Z4 KCY-M1750-000 SCREW,BALL 1 滚珠丝杠
Z5 KCY-M1744-000 PLATE 1 轴承外圈压板
Z6 KAI-M2273-000 BEARING 1 滚珠丝杠支撑轴承
Z7 KCY-M1788-000 DAMPER,1 1 下降端减震器
Z8 90112-2AJ010 BOLT,HEX.SOCKETHEAD 8 外圈压板用螺栓
Z9 KCY-M1778-000 SLEEVE,LOCK1 1 轴承内圈压板
Z10 KCY-M1712-000 HOLDER 1 轴承座
Z11 91312-03014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠固定螺栓
Z12 91312-04014 BOLT,HEX.SOCKETHEAD 4 Z 轴总成固定螺栓
Z13 90933-01J002 BEARING 2 滚珠花键轴上侧轴承
Z14 KN3-M1788-100 DAMPER,1 1 上升端减震器
Z15 KCY-M1780-001 STOPPER,1 1 上升端限位器
R 轴
R1 KCY-M1821-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M1895-000 ORING 1 减速器下端 O 形圈
R3 91312-03022 BOLT,HEX.SOCKETHEAD 8 减速器固定螺栓
R4 90990-17J034 O-RING 1 减速器输入部 O 形圈
R5 92903-03600 WASHER,PLAIN 12 减速器固定螺栓垫圈
R6 91312-03014 BOLT,HEX.SOCKETHEAD 12 减速器固定螺栓
R7 KCY-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R8 90990-28J064 WASHER,PLAIN 1 减速器上侧感应器螺丝垫圈
R9 KCY-M4883-000 MOTORASSY.,3 1 马达
R10 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KN3-M2144-000 ORING,3 1 马达下端 O 形圈
R12 KCY-M4850-400 PROXIMITYSW.ASSY 1 传感器
R13 KCY-M1840-001 SPLINE,BALL 1 滚珠花键轴
需要更换总成
R14 90990-17J032 O-RING 1 滚珠花键轴螺母上部 O 形圈(外侧)
R15 KN5-M181H-000 ORING,4 1 滚珠花键轴螺母上部 O 形圈(内侧)
R16 90990-36J002 WASHER,SEAL 4 滚珠花键轴螺母固定用螺栓密封垫圈
R17 91312-04012 BOLT,HEX.SOCKETHEAD 4 滚珠花键轴螺母固定螺栓
R18 KCY-M1886-000 SEAL 1 减速器内端面密封件
R19 KCY-M1872-000 SHAFT 1 花键轴加长轴
R20 91312-03010 BOLT,HEX.SOCKETHEAD 4 花键轴加长轴固定螺栓
电缆类
C1 KCY-M4843-002 HARNESS,MACHINE2 1 机器线束
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 K58-M4872-101 CONNECTORE/L2 1 基座侧 D-sub 连接器
C4 K58-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 K58-M4871-101 CONNECTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 K58-M4839-001 PANEL,CONNECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母

15-8
15
维护零件
1.6 YK500XGL,YK600XGL 用户接线配管花键轴中空规格编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KCY-M2110-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 98502-03030 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X3 91312-03030 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
X4 95302-04600 NUTHEXAGON 1 感应器螺丝用螺母
X5 92903-03600 WASHER,PLAIN 16 减速器固定螺栓用垫圈
X6 91312-03018 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
X7 KN4-M257K-000 ORING,1 1 减速器上端 O 形圈
X8 KCY-M4880-001 MOTORASSY.,1 1 马达
X9 KN3-M2143-000 ORING.,2 1 马达凹陷部 O 形圈
X10 91312-05014 BOLTHEX.SOCKETHEAD 4 马达安装螺栓
X11 KCY-M4850-600 PROXIMITYSW.ASSY. 1 传感器
X12 KCY-M2197-000 DAMPER,2 1 限位器减震器
X13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓
X14 90189-02J106 NUT,HEXAGON 1 机械限位螺栓用螺母
Y 轴
Y1 KCY-M2510-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M1896-000 ORING,2 1 减速器下端 O 形圈
Y3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
Y4 98502-03030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y5 95302-04700 NUTHEXAGON 1 感应器螺丝用螺母
Y6 92903-03600 WASHER,PLAIN 16 减速器固定螺栓垫圈
Y7 91312-03022 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KCY-M4881-000 MOTORASSY.,2 1 马达
Y9 91312-04008 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Y10 KN3-M257K-000 ORING,1 1 马达凹陷部 O 形圈
Y11 KCY-M2197-000 DAMPER,2 1 限位器减震器
Y12 90189-02J106 NUT,HEXAGON 1 机械限位螺栓
Y13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓用螺母
Y14 KCY-M4850-100 PROXIMITYSW.ASSY 1 传感器
Y15 KCY-M1314-100 COVER,4 1 Y 轴外盖
Y16 92903-03200 WASHERPLAIN 4 Y 轴外盖螺丝用垫圈
Y17 98902-03006 SCREWBINDINGHEAD 4 Y 轴外盖螺丝
Y18 98902-03016 SCREW,BINDINGHEAD 4 Y 轴外盖螺丝
Z 轴
Z1 KCY-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 91312-04012 BOLT,HEX.SOCKETHEAD 2 马达固定螺栓
Z3 KCY-M1753-000 COUPLING 1 联轴器
Z4 KCY-M1750-000 SCREW,BALL 1 滚珠丝杠
Z5 KCY-M1744-000 PLATE 1 轴承外圈压板
Z6 KAI-M2273-000 BEARING 1 滚珠丝杠支撑轴承
Z7 KCY-M1788-000 DAMPER,1 1 下降端减震器
Z8 90112-2AJ010 BOLT,HEX.SOCKETHEAD 8 外圈压板用螺栓
Z9 KCY-M1778-000 SLEEVE,LOCK1 1 轴承内圈压板
Z10 KCY-M1712-000 HOLDER 1 轴承座
Z11 91312-03014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠固定螺栓
Z12 91312-04014 BOLT,HEX.SOCKETHEAD 4 Z 轴总成固定螺栓
Z13 90933-01J002 BEARING 2 滚珠花键轴上侧轴承
Z14 KN3-M1788-100 DAMPER,1 1 上升端减震器
Z15 KCY-M1780-001 STOPPER,1 1 上升端限位器
R 轴
R1 KCY-M1821-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M1895-000 ORING 1 减速器下端 O 形圈
R3 91312-03022 BOLT,HEX.SOCKETHEAD 8 减速器固定螺栓
R4 90990-17J034 O-RING 1 减速器输入部 O 形圈
R5 92903-03600 WASHER,PLAIN 12 减速器固定螺栓垫圈
R6 91312-03014 BOLT,HEX.SOCKETHEAD 12 减速器固定螺栓
R7 KCY-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R8 90990-28J064 WASHER,PLAIN 1 减速器上侧感应器螺丝垫圈
R9 KCY-M4883-000 MOTORASSY.,3 1 马达
R10 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KN3-M2144-000 ORING,3 1 马达下端 O 形圈
R12 KCY-M4850-400 PROXIMITYSW.ASSY 1 传感器
R13 KCY-M1840-001 SPLINE,BALL 1 滚珠花键轴
需要更换总成
R14 90990-17J032 O-RING 1 滚珠花键轴螺母上部 O 形圈(外侧)
R15 KN5-M181H-000 ORING,4 1 滚珠花键轴螺母上部 O 形圈(内侧)
R16 90990-36J002 WASHER,SEAL 4 滚珠花键轴螺母固定用螺栓密封垫圈
R17 91312-04012 BOLT,HEX.SOCKETHEAD 4 滚珠花键轴螺母固定螺栓
R18 KCY-M1886-000 SEAL 1 减速器内端面密封件
R19 KCY-M1872-000 SHAFT 1 花键轴加长轴
R20 91312-03010 BOLT,HEX.SOCKETHEAD 4 花键轴加长轴固定螺栓
电缆类
C1 KCY-M4843-102 HARNESS,MACHINE2 1 机器线束
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 K58-M4872-101 CONNECTORE/L2 1 基座侧 D-sub 连接器
C4 K58-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 K58-M4871-101 CONNECTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 K58-M4839-001 PANEL,CONNECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
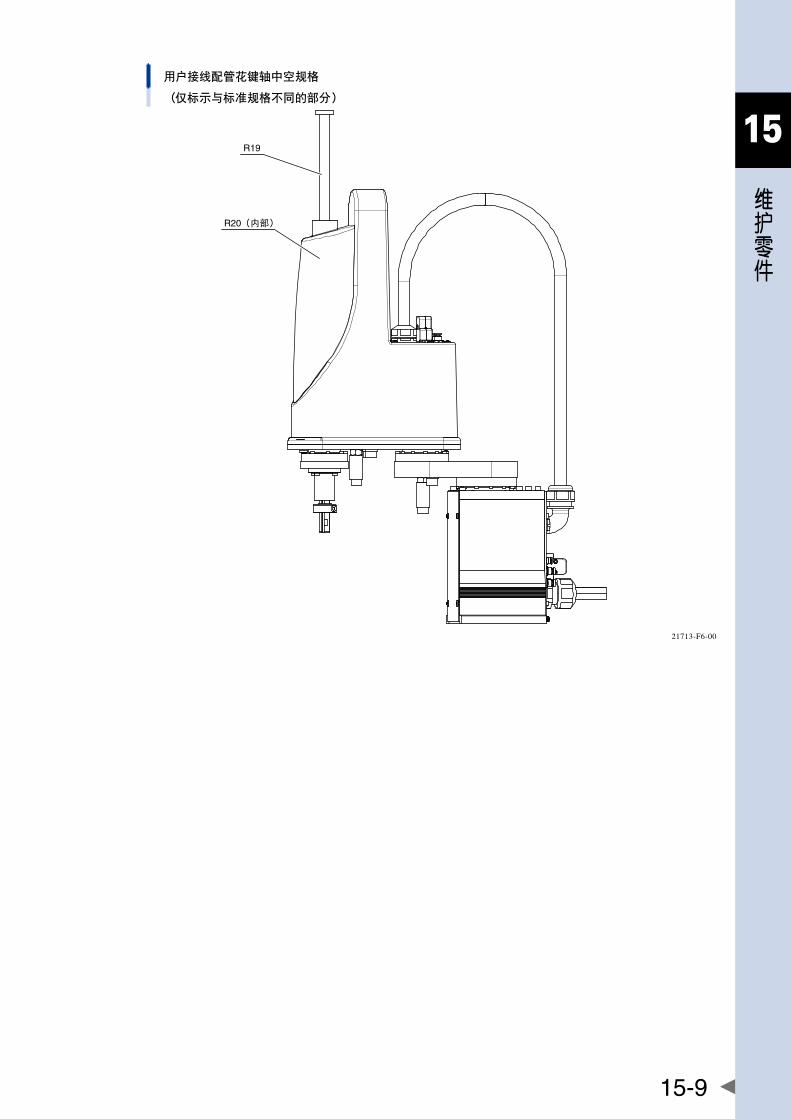
15-9
15
维护零件
用户接线配管花键轴中空规格
(仅标示与标准规格不同的部分)
R19
R20(内部)
21713-F6-00
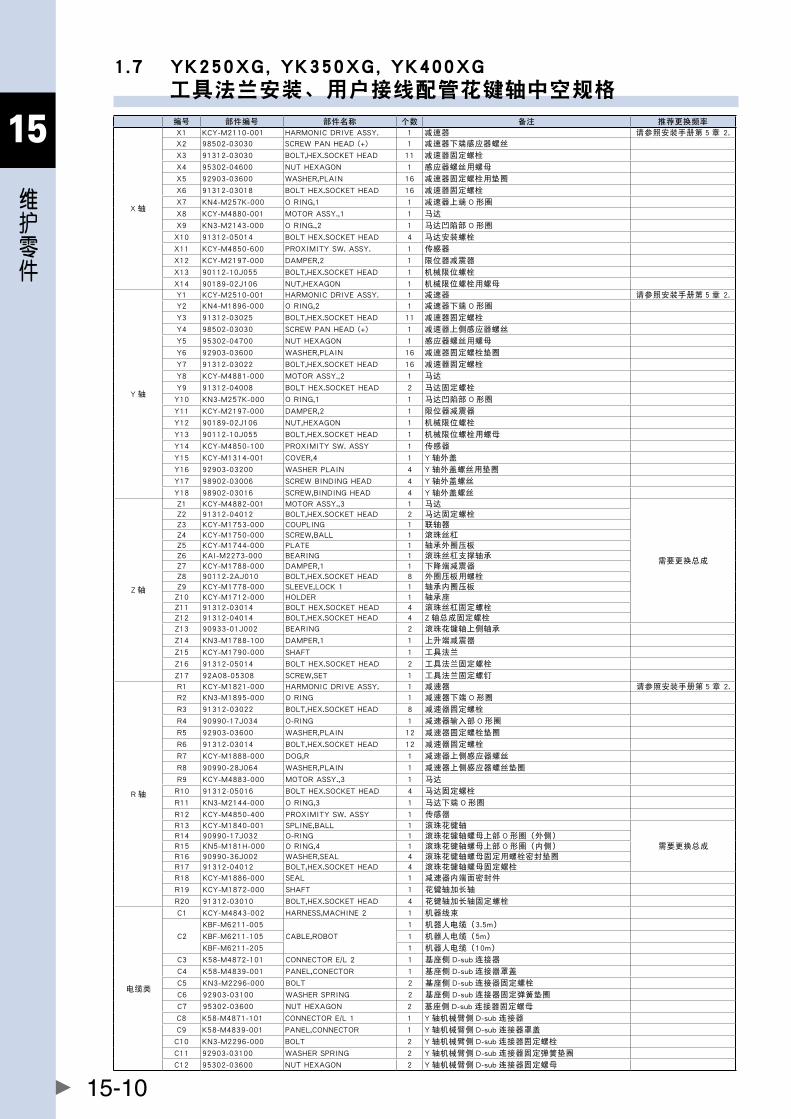
15-10
15
维护零件
1.7 YK250XG,YK350XG,YK400XG 工具法兰安装、用户接线配管花键轴中空规格
编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KCY-M2110-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 98502-03030 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X3 91312-03030 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
X4 95302-04600 NUTHEXAGON 1 感应器螺丝用螺母
X5 92903-03600 WASHER,PLAIN 16 减速器固定螺栓用垫圈
X6 91312-03018 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
X7 KN4-M257K-000 ORING,1 1 减速器上端 O 形圈
X8 KCY-M4880-001 MOTORASSY.,1 1 马达
X9 KN3-M2143-000 ORING.,2 1 马达凹陷部 O 形圈
X10 91312-05014 BOLTHEX.SOCKETHEAD 4 马达安装螺栓
X11 KCY-M4850-600 PROXIMITYSW.ASSY. 1 传感器
X12 KCY-M2197-000 DAMPER,2 1 限位器减震器
X13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓
X14 90189-02J106 NUT,HEXAGON 1 机械限位螺栓用螺母
Y 轴
Y1 KCY-M2510-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M1896-000 ORING,2 1 减速器下端 O 形圈
Y3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
Y4 98502-03030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y5 95302-04700 NUTHEXAGON 1 感应器螺丝用螺母
Y6 92903-03600 WASHER,PLAIN 16 减速器固定螺栓垫圈
Y7 91312-03022 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KCY-M4881-000 MOTORASSY.,2 1 马达
Y9 91312-04008 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Y10 KN3-M257K-000 ORING,1 1 马达凹陷部 O 形圈
Y11 KCY-M2197-000 DAMPER,2 1 限位器减震器
Y12 90189-02J106 NUT,HEXAGON 1 机械限位螺栓
Y13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓用螺母
Y14 KCY-M4850-100 PROXIMITYSW.ASSY 1 传感器
Y15 KCY-M1314-001 COVER,4 1 Y 轴外盖
Y16 92903-03200 WASHERPLAIN 4 Y 轴外盖螺丝用垫圈
Y17 98902-03006 SCREWBINDINGHEAD 4 Y 轴外盖螺丝
Y18 98902-03016 SCREW,BINDINGHEAD 4 Y 轴外盖螺丝
Z 轴
Z1 KCY-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 91312-04012 BOLT,HEX.SOCKETHEAD 2 马达固定螺栓Z3 KCY-M1753-000 COUPLING 1 联轴器Z4 KCY-M1750-000 SCREW,BALL 1 滚珠丝杠Z5 KCY-M1744-000 PLATE 1 轴承外圈压板Z6 KAI-M2273-000 BEARING 1 滚珠丝杠支撑轴承Z7 KCY-M1788-000 DAMPER,1 1 下降端减震器Z8 90112-2AJ010 BOLT,HEX.SOCKETHEAD 8 外圈压板用螺栓Z9 KCY-M1778-000 SLEEVE,LOCK1 1 轴承内圈压板Z10 KCY-M1712-000 HOLDER 1 轴承座Z11 91312-03014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠固定螺栓Z12 91312-04014 BOLT,HEX.SOCKETHEAD 4 Z 轴总成固定螺栓
Z13 90933-01J002 BEARING 2 滚珠花键轴上侧轴承
Z14 KN3-M1788-100 DAMPER,1 1 上升端减震器
Z15 KCY-M1790-000 SHAFT 1 工具法兰
Z16 91312-05014 BOLTHEX.SOCKETHEAD 2 工具法兰固定螺栓
Z17 92A08-05308 SCREW,SET 1 工具法兰固定螺钉
R 轴
R1 KCY-M1821-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M1895-000 ORING 1 减速器下端 O 形圈
R3 91312-03022 BOLT,HEX.SOCKETHEAD 8 减速器固定螺栓
R4 90990-17J034 O-RING 1 减速器输入部 O 形圈
R5 92903-03600 WASHER,PLAIN 12 减速器固定螺栓垫圈
R6 91312-03014 BOLT,HEX.SOCKETHEAD 12 减速器固定螺栓
R7 KCY-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R8 90990-28J064 WASHER,PLAIN 1 减速器上侧感应器螺丝垫圈
R9 KCY-M4883-000 MOTORASSY.,3 1 马达
R10 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KN3-M2144-000 ORING,3 1 马达下端 O 形圈
R12 KCY-M4850-400 PROXIMITYSW.ASSY 1 传感器
R13 KCY-M1840-001 SPLINE,BALL 1 滚珠花键轴
需要更换总成R14 90990-17J032 O-RING 1 滚珠花键轴螺母上部 O 形圈(外侧)R15 KN5-M181H-000 ORING,4 1 滚珠花键轴螺母上部 O 形圈(内侧)R16 90990-36J002 WASHER,SEAL 4 滚珠花键轴螺母固定用螺栓密封垫圈R17 91312-04012 BOLT,HEX.SOCKETHEAD 4 滚珠花键轴螺母固定螺栓
R18 KCY-M1886-000 SEAL 1 减速器内端面密封件
R19 KCY-M1872-000 SHAFT 1 花键轴加长轴
R20 91312-03010 BOLT,HEX.SOCKETHEAD 4 花键轴加长轴固定螺栓
电缆类
C1 KCY-M4843-002 HARNESS,MACHINE2 1 机器线束
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 K58-M4872-101 CONNECTORE/L2 1 基座侧 D-sub 连接器
C4 K58-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 K58-M4871-101 CONNECTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 K58-M4839-001 PANEL,CONNECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母

15-11
15
维护零件
1.8 YK500XGL,YK600XGL 工具法兰安装、用户接线配管花键轴中空规格
编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KCY-M2110-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 98502-03030 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X3 91312-03030 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
X4 95302-04600 NUTHEXAGON 1 感应器螺丝用螺母
X5 92903-03600 WASHER,PLAIN 16 减速器固定螺栓用垫圈
X6 91312-03018 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
X7 KN4-M257K-000 ORING,1 1 减速器上端 O 形圈
X8 KCY-M4880-001 MOTORASSY.,1 1 马达
X9 KN3-M2143-000 ORING.,2 1 马达凹陷部 O 形圈
X10 91312-05014 BOLTHEX.SOCKETHEAD 4 马达安装螺栓
X11 KCY-M4850-600 PROXIMITYSW.ASSY. 1 传感器
X12 KCY-M2197-000 DAMPER,2 1 限位器减震器
X13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓
X14 90189-02J106 NUT,HEXAGON 1 机械限位螺栓用螺母
Y 轴
Y1 KCY-M2510-001 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M1896-000 ORING,2 1 减速器下端 O 形圈
Y3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
Y4 98502-03030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y5 95302-04700 NUTHEXAGON 1 感应器螺丝用螺母
Y6 92903-03600 WASHER,PLAIN 16 减速器固定螺栓垫圈
Y7 91312-03022 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KCY-M4881-000 MOTORASSY.,2 1 马达
Y9 91312-04008 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Y10 KN3-M257K-000 ORING,1 1 马达凹陷部 O 形圈
Y11 KCY-M2197-000 DAMPER,2 1 限位器减震器
Y12 90189-02J106 NUT,HEXAGON 1 机械限位螺栓
Y13 90112-10J055 BOLT,HEX.SOCKETHEAD 1 机械限位螺栓用螺母
Y14 KCY-M4850-100 PROXIMITYSW.ASSY 1 传感器
Y15 KCY-M1314-100 COVER,4 1 Y 轴外盖
Y16 92903-03200 WASHERPLAIN 4 Y 轴外盖螺丝用垫圈
Y17 98902-03006 SCREWBINDINGHEAD 4 Y 轴外盖螺丝
Y18 98902-03016 SCREW,BINDINGHEAD 4 Y 轴外盖螺丝
Z 轴
Z1 KCY-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 91312-04012 BOLT,HEX.SOCKETHEAD 2 马达固定螺栓Z3 KCY-M1753-000 COUPLING 1 联轴器Z4 KCY-M1750-000 SCREW,BALL 1 滚珠丝杠Z5 KCY-M1744-000 PLATE 1 轴承外圈压板Z6 KAI-M2273-000 BEARING 1 滚珠丝杠支撑轴承Z7 KCY-M1788-000 DAMPER,1 1 下降端减震器Z8 90112-2AJ010 BOLT,HEX.SOCKETHEAD 8 外圈压板用螺栓Z9 KCY-M1778-000 SLEEVE,LOCK1 1 轴承内圈压板Z10 KCY-M1712-000 HOLDER 1 轴承座Z11 91312-03014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠固定螺栓Z12 91312-04014 BOLT,HEX.SOCKETHEAD 4 Z 轴总成固定螺栓
Z13 90933-01J002 BEARING 2 滚珠花键轴上侧轴承
Z14 KN3-M1788-100 DAMPER,1 1 上升端减震器
Z15 KCY-M1790-000 SHAFT 1 工具法兰
Z16 91312-05014 BOLTHEX.SOCKETHEAD 2 工具法兰固定螺栓
Z17 92A08-05308 SCREW,SET 1 工具法兰固定螺钉
R 轴
R1 KCY-M1821-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M1895-000 ORING 1 减速器下端 O 形圈
R3 91312-03022 BOLT,HEX.SOCKETHEAD 8 减速器固定螺栓
R4 90990-17J034 O-RING 1 减速器输入部 O 形圈
R5 92903-03600 WASHER,PLAIN 12 减速器固定螺栓垫圈
R6 91312-03014 BOLT,HEX.SOCKETHEAD 12 减速器固定螺栓
R7 KCY-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R8 90990-28J064 WASHER,PLAIN 1 减速器上侧感应器螺丝垫圈
R9 KCY-M4883-000 MOTORASSY.,3 1 马达
R10 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KN3-M2144-000 ORING,3 1 马达下端 O 形圈
R12 KCY-M4850-400 PROXIMITYSW.ASSY 1 传感器
R13 KCY-M1840-001 SPLINE,BALL 1 滚珠花键轴
需要更换总成R14 90990-17J032 O-RING 1 滚珠花键轴螺母上部 O 形圈(外侧)R15 KN5-M181H-000 ORING,4 1 滚珠花键轴螺母上部 O 形圈(内侧)R16 90990-36J002 WASHER,SEAL 4 滚珠花键轴螺母固定用螺栓密封垫圈R17 91312-04012 BOLT,HEX.SOCKETHEAD 4 滚珠花键轴螺母固定螺栓
R18 KCY-M1886-000 SEAL 1 减速器内端面密封件
R19 KCY-M1872-000 SHAFT 1 花键轴加长轴
R20 91312-03010 BOLT,HEX.SOCKETHEAD 4 花键轴加长轴固定螺栓
电缆类
C1 KCY-M4843-102 HARNESS,MACHINE2 1 机器线束
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 K58-M4872-101 CONNECTORE/L2 1 基座侧 D-sub 连接器
C4 K58-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 K58-M4871-101 CONNECTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 K58-M4839-001 PANEL,CONNECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
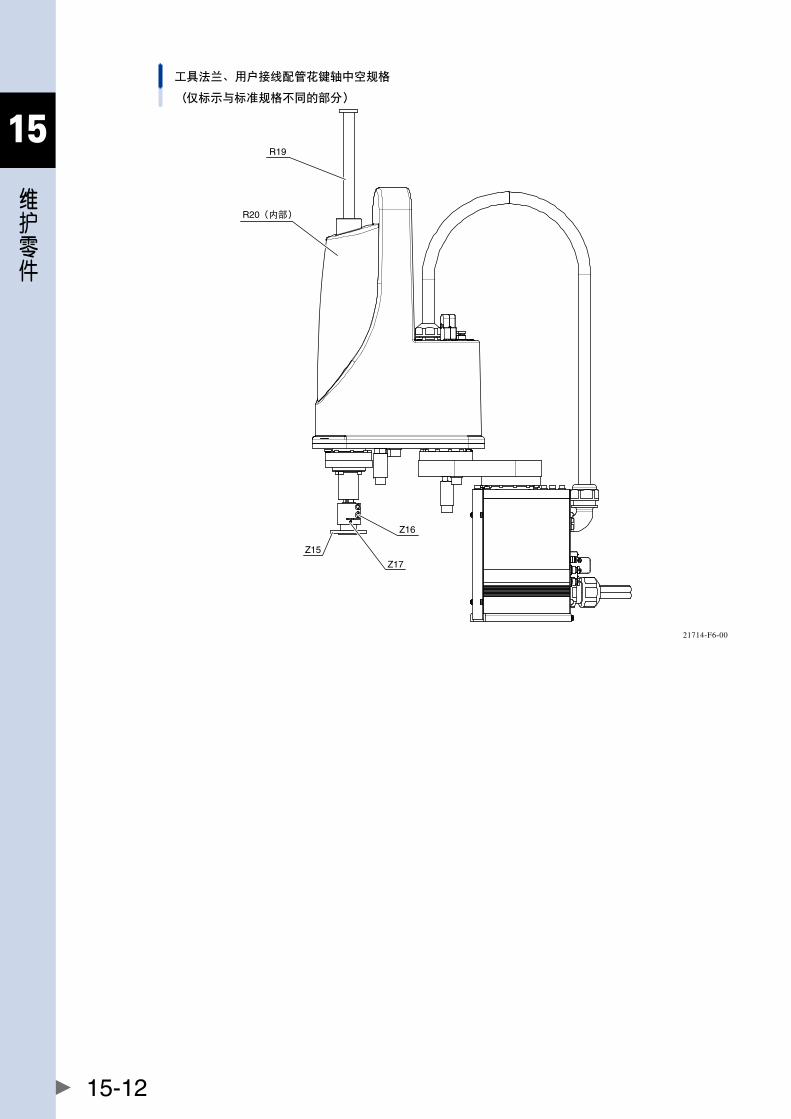
15-12
15
维护零件
工具法兰、用户接线配管花键轴中空规格
(仅标示与标准规格不同的部分)
R19
R20(内部)
Z15
Z16
Z17
21714-F6-00

15-13
15
维护零件
1.9 YK500XG,YK600XG Z 轴 200mm 行程编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KBF-M2110-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 91312-04030 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
X3 95302-05600 NUTHEXAGON 1 感应器螺丝用螺母
X4 98502-04030 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X5 91312-04020 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
X6 92903-04600 WASHERPLAIN 16 减速器固定螺栓用垫圈
X7 KN4-M2143-000 ORING,1 1 减速器上端 O 形圈
X8 90K94-8417FX MOTORASSY.,1 1 马达
X9 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
X10 90990-17J030 O-RING 1 马达凸缘上部 O 形圈
X11 KCY-M4850-400 PROXIMITYSW.ASSY 1 传感器
X12 KBF-M2193-001 STOPPER 1 限位器模块
X13 91312-06030 BOLTHEX.SOCKETHEAD 2 限位器模块用螺栓
X14 KN3-M2596-002 DAMPER 2 限位器模块用减震器
X15 91312-08016 BOLTHEX.SOCKETHEAD 2 限位螺栓
X16 90990-28J091 WASHER,PLAIN 2 限位螺栓用垫圈
X17 KBF-M1535-000 PLATE,2 2 X 轴机械臂端盖
Y 轴
Y1 KBF-M2510-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M257K-000 ORING,1 1 减速器下端 O 形圈
Y3 91312-03030 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
Y4 95302-04600 NUTHEXAGON 1 感应器螺丝用螺母
Y5 91312-03016 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
Y6 98502-03030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y7 KBF-M2511-000 TUBE 1 减速器盘管
Y8 90K94-6217FY MOTORASSY.,2 1 马达
Y9 KN3-M2143-000 ORING.,2 1 马达凹陷部 O 形圈
Y10 91312-05012 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
Y11 KBF-M2587-001 STOPPER,1 1 限位器模块
Y12 KN3-M2596-002 DAMPER 2 限位器模块用减震器
Y13 91312-05025 BOLTHEX.SOCKETHEAD 2 限位器模块用螺栓
Y14 91312-08016 BOLTHEX.SOCKETHEAD 1 限位螺栓用
Y15 90990-28J091 WASHER,PLAIN 1 限位螺栓用垫圈
Y16 KBF-M1534-000 PLATE,1 2 Y 轴机械臂端盖
Y17 KBF-M1314-002 COVER,4 1 Y 轴机械臂上部树脂外盖(Z 轴 200mm)
Y18 92012-03008 BOLT,BUTTONHEAD 4 Y 轴机械臂上部树脂外盖背面固定螺栓(Z 轴 200mm)
Y19 91312-03020 BOLTHEX.SOCKETHEAD 2 Y 轴机械臂上部树脂外盖正面固定螺栓
Y20 KCY-M4850-300 PROXIMITYSW.ASSY 1 传感器
Y21 KBF-M1316-000 COVER,6 1 Y 轴马达树脂外盖
Z 轴
Z1 KBF-M4882-002 MOTORASSY.,3 1 马达
需要更换总成
Z2 KBP-M1750-001 SCREW,BALL 1 滚珠丝杠(Z 轴 200mm)
Z3 KBP-M1778-001 SLEEVE,LOCK 1 尼龙螺母
Z4 KBP-M1753-003 FLANGE 1 马达、滚珠丝杠轴联结法兰
Z5 KBP-M1788-001 DAMPER,1 1 下降端减震器
Z6 91312-05014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠螺母固定螺栓
Z7 91312-03020 BOLT,HEX.SOCKETHEAD 10 马达、滚珠丝杠轴联结法兰固定螺栓
Z8 91312-05012 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z9 91312-05016 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z10 KBF-M1315-000 COVER,5 1 Z 轴马达安全盖
Z11 KBF-M1780-001 STOPPER,1 1 上升端限位器
Z12 91312-06018 BOLTHEX.SOCKETHEAD 1 上升端限位器固定螺栓
Z13 KBF-M1789-001 DAMPER,2 1 上升端限位器减震器
R 轴
R1 KBF-M1821-100 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN4-M1896-000 ORING,2 1 减速器下端 O 形圈
R3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
R4 95302-04600 NUTHEXAGON 1 减速器上侧感应器螺丝螺母
R5 98502-03030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝用
R6 91312-03014 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
R7 90990-17J034 O-RING 1 减速器输入部 O 形圈
R8 KBF-M1840-002 SPLINE,BALL 1 滚珠花键轴(Z 轴 200mm)
需要更换总成
R9 KBF-M1871-000 SHAFT,1 1 滚珠花键轴螺母上部项圈
R10 91312-04010 BOLTHEX.SOCKETHEAD 6 滚珠花键轴螺母固定螺栓
R11 90990-17J031 O-RING 1 滚珠花键轴上部 O 形圈
R12 KBF-M1886-000 SEAL 1 减速器内端面密封件
R13 91312-05014 BOLTHEX.SOCKETHEAD 4 马达螺栓
R14 90990-17J032 O-RING 1 马达下端 O 形圈
R15 KBF-M4883-002 MOTORASSY.,4 1 马达
R16 90933-01J003 BEARING 2 滚珠花键轴上侧轴承
R17 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
电缆类
C1 KBF-M4843-004 HARNESS,MACHINE2 1 机器线束
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 KN0-M4872-002 CONNCTORE/L2 1 基座侧 D-sub 连接器
C4 KN0-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 KN0-M4871-002 CONNCTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 KN0-M4839-001 PANEL,CONECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
C13 90990-42J048 JOINT 9 线束输气管接头
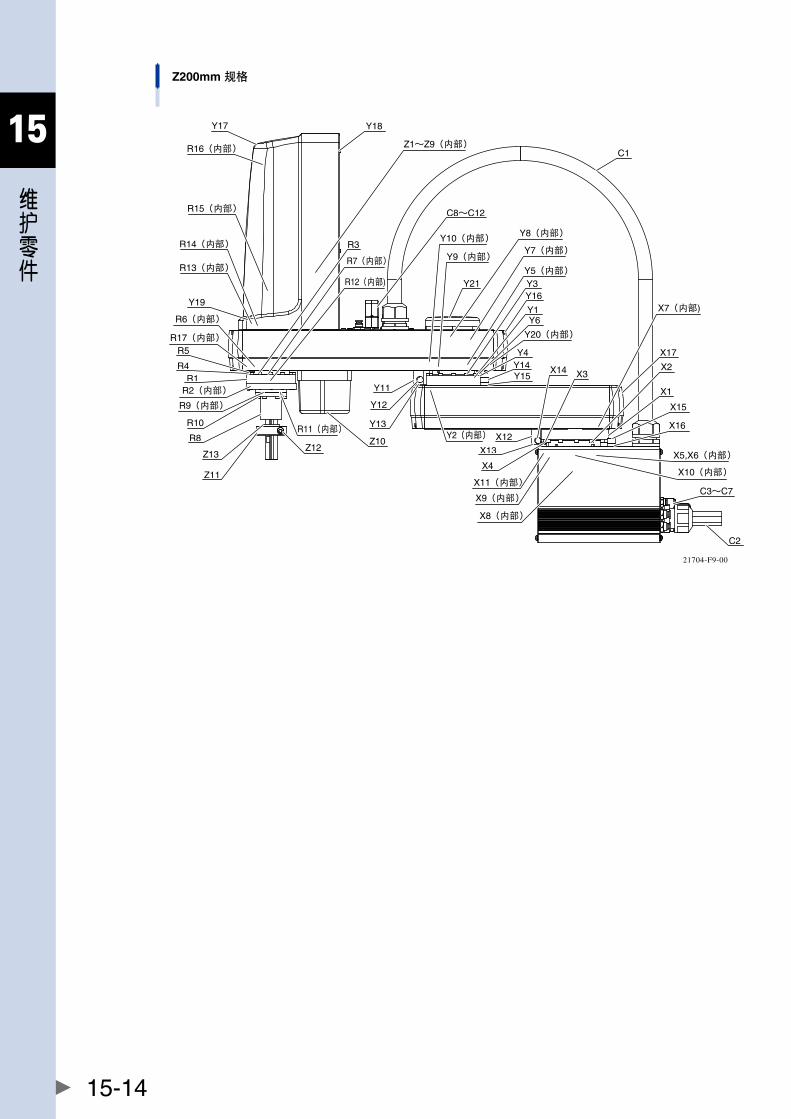
15-14
15
维护零件
Z200mm 规格
Y11
Y12
Y13
Y17 Y18
Y19
Z10
Z11
Z12Z13
R1R2(内部)
R4
R5
R6(内部)
R7(内部)
R8
R9(内部)
R10R11(内部)
R15(内部)
R13(内部)
R14(内部)
R12(内部)
R16(内部)
R17(内部)
X1
X2
X5,X6(内部)
X7(内部)
X10(内部)
X15
X16
X17
C2
C3~C7
X4
X8(内部)
X9(内部)
X11(内部)
X12
X13
Y2(内部)
X3X14
Y1
Y3
Y4
Y5(内部)
Y6
Y7(内部)
Y8(内部)
Y14Y15
Y16
Y20(内部)
Y9(内部)
Y10(内部)
Y21
C8~C12
Z1~Z9(内部)C1
R3
21704-F9-00

15-15
15
维护零件
1.10 YK500XG,YK600XG Z 轴 300mm 行程编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KBF-M2110-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 91312-04030 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
X3 95302-05600 NUTHEXAGON 1 感应器螺丝用螺母
X4 98502-04030 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X5 91312-04020 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
X6 92903-04600 WASHERPLAIN 16 减速器固定螺栓用垫圈
X7 KN4-M2143-000 ORING,1 1 减速器上端 O 形圈
X8 90K94-8417FX MOTORASSY.,1 1 马达
X9 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
X10 90990-17J030 O-RING 1 马达凸缘上部 O 形圈
X11 KCY-M4850-400 PROXIMITYSW.ASSY 1 传感器
X12 KBF-M2193-001 STOPPER 1 限位器模块
X13 91312-06030 BOLTHEX.SOCKETHEAD 2 限位器模块用螺栓
X14 KN3-M2596-002 DAMPER 2 限位器模块用减震器
X15 91312-08016 BOLTHEX.SOCKETHEAD 2 限位螺栓
X16 90990-28J091 WASHER,PLAIN 2 限位螺栓用垫圈
X17 KBF-M1535-000 PLATE,2 2 X 轴机械臂端盖
Y 轴
Y1 KBF-M2510-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M257K-000 ORING,1 1 减速器下端 O 形圈
Y3 91312-03030 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
Y4 95302-04600 NUTHEXAGON 1 感应器螺丝用螺母
Y5 91312-03016 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
Y6 98502-03030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y7 KBF-M2511-000 TUBE 1 减速器盘管
Y8 90K94-6217FY MOTORASSY.,2 1 马达
Y9 KN3-M2143-000 ORING.,2 1 马达凹陷部 O 形圈
Y10 91312-05012 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
Y11 KBF-M2587-001 STOPPER,1 1 限位器模块
Y12 KN3-M2596-002 DAMPER 2 限位器模块用减震器
Y13 91312-05025 BOLTHEX.SOCKETHEAD 2 限位器模块用螺栓
Y14 91312-08016 BOLTHEX.SOCKETHEAD 1 限位螺栓用
Y15 90990-28J091 WASHER,PLAIN 1 限位螺栓用垫圈
Y16 KBF-M1534-000 PLATE,1 2 Y 轴机械臂端盖
Y17 KBF-M1314-102 COVER,4 1 Y 轴机械臂上部树脂外盖(Z 轴 300mm)
Y18 92012-03008 BOLT,BUTTONHEAD 6 Y 轴机械臂上部树脂外盖背面固定螺栓(Z 轴 300mm)
Y19 91312-03020 BOLTHEX.SOCKETHEAD 2 Y 轴机械臂上部树脂外盖正面固定螺栓
Y20 KCY-M4850-300 PROXIMITYSW.ASSY 1 传感器
Y21 KBF-M1316-000 COVER,6 1 Y 轴马达树脂外盖
Z 轴
Z1 KBF-M4882-002 MOTORASSY.,3 1 马达
需要更换总成
Z2 KBP-M1750-101 SCREW,BALL 1 滚珠丝杠(Z 轴 300mm)
Z3 KBP-M1778-001 SLEEVE,LOCK 1 尼龙螺母
Z4 KBP-M1753-003 FLANGE 1 马达、滚珠丝杠轴联结法兰
Z5 KBP-M1788-001 DAMPER,1 1 下降端减震器
Z6 91312-05014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠螺母固定螺栓
Z7 91312-03020 BOLT,HEX.SOCKETHEAD 10 马达、滚珠丝杠轴联结法兰固定螺栓
Z8 91312-05012 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z9 91312-05016 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z10 KBF-M1315-000 COVER,5 1 Z 轴马达安全盖
Z11 KBF-M1780-001 STOPPER,1 1 上升端限位器
Z12 91312-06018 BOLTHEX.SOCKETHEAD 1 上升端限位器固定螺栓
Z13 KBF-M1789-001 DAMPER,2 1 上升端限位器减震器
R 轴
R1 KBF-M1821-100 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN4-M1896-000 ORING,2 1 减速器下端 O 形圈
R3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
R4 95302-04600 NUTHEXAGON 1 减速器上侧感应器螺丝螺母
R5 98502-03030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝用
R6 91312-03014 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
R7 90990-17J034 O-RING 1 减速器输入部 O 形圈
R8 KBF-M1840-102 SPLINE,BALL 1 滚珠花键轴(Z 轴 300mm)
需要更换总成R9 KBF-M1871-000 SHAFT,1 1 滚珠花键轴螺母上部项圈
R10 91312-04010 BOLTHEX.SOCKETHEAD 6 滚珠花键轴螺母固定螺栓
R11 90990-17J031 O-RING 1 滚珠花键轴上部 O 形圈
R12 KBF-M1886-000 SEAL 1 减速器内端面密封件
R13 91312-05014 BOLTHEX.SOCKETHEAD 4 马达螺栓
R14 90990-17J032 O-RING 1 马达下端 O 形圈
R15 KBF-M4883-002 MOTORASSY.,4 1 马达
R16 90933-01J003 BEARING 2 滚珠花键轴上侧轴承
R17 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
电缆类
C1 KBF-M4843-004 HARNESS,MACHINE2 1 机器线束
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 KN0-M4872-002 CONNCTORE/L2 1 基座侧 D-sub 连接器
C4 KN0-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 KN0-M4871-002 CONNCTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 KN0-M4839-001 PANEL,CONECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
C13 90990-42J048 JOINT 9 线束输气管接头

15-16
15
维护零件
Z300mm 规格
(仅标示与 Z200mm 规格不同的零部件)
Y17 Y18
Z1~Z9(内部)
R8
21705-F9-00
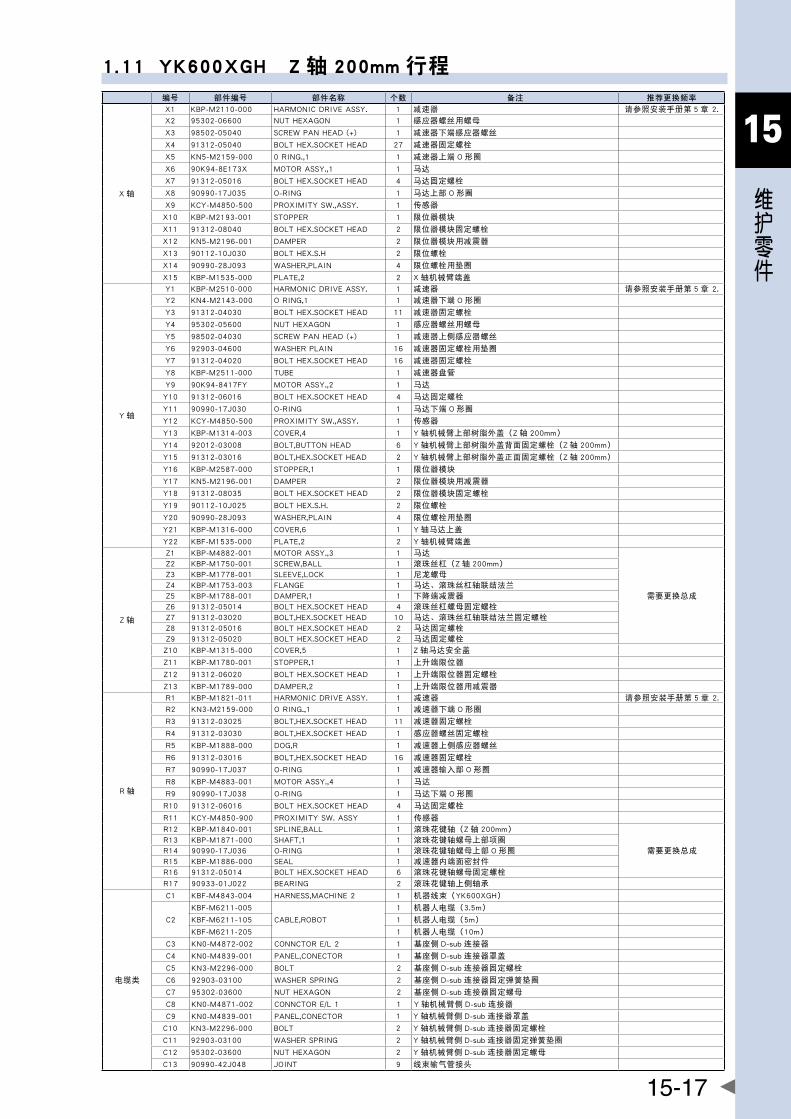
15-17
15
维护零件
1.11 YK600XGH Z 轴 200mm 行程编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KBP-M2110-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 95302-06600 NUTHEXAGON 1 感应器螺丝用螺母
X3 98502-05040 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X4 91312-05040 BOLTHEX.SOCKETHEAD 27 减速器固定螺栓
X5 KN5-M2159-000 0RING.,1 1 减速器上端 O 形圈
X6 90K94-8E173X MOTORASSY.,1 1 马达
X7 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
X8 90990-17J035 O-RING 1 马达上部 O 形圈
X9 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
X10 KBP-M2193-001 STOPPER 1 限位器模块
X11 91312-08040 BOLTHEX.SOCKETHEAD 2 限位器模块固定螺栓
X12 KN5-M2196-001 DAMPER 2 限位器模块用减震器
X13 90112-10J030 BOLTHEX.S.H 2 限位螺栓
X14 90990-28J093 WASHER,PLAIN 4 限位螺栓用垫圈
X15 KBP-M1535-000 PLATE,2 2 X 轴机械臂端盖
Y 轴
Y1 KBP-M2510-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M2143-000 ORING,1 1 减速器下端 O 形圈
Y3 91312-04030 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
Y4 95302-05600 NUTHEXAGON 1 感应器螺丝用螺母
Y5 98502-04030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y6 92903-04600 WASHERPLAIN 16 减速器固定螺栓用垫圈
Y7 91312-04020 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KBP-M2511-000 TUBE 1 减速器盘管
Y9 90K94-8417FY MOTORASSY.,2 1 马达
Y10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
Y11 90990-17J030 O-RING 1 马达下端 O 形圈
Y12 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
Y13 KBP-M1314-003 COVER,4 1 Y 轴机械臂上部树脂外盖(Z 轴 200mm)
Y14 92012-03008 BOLT,BUTTONHEAD 6 Y 轴机械臂上部树脂外盖背面固定螺栓(Z 轴 200mm)
Y15 91312-03016 BOLT,HEX.SOCKETHEAD 2 Y 轴机械臂上部树脂外盖正面固定螺栓(Z 轴 200mm)
Y16 KBP-M2587-000 STOPPER,1 1 限位器模块
Y17 KN5-M2196-001 DAMPER 2 限位器模块用减震器
Y18 91312-08035 BOLTHEX.SOCKETHEAD 2 限位器模块固定螺栓
Y19 90112-10J025 BOLTHEX.S.H. 2 限位螺栓
Y20 90990-28J093 WASHER,PLAIN 4 限位螺栓用垫圈
Y21 KBP-M1316-000 COVER,6 1 Y 轴马达上盖
Y22 KBF-M1535-000 PLATE,2 2 Y 轴机械臂端盖
Z 轴
Z1 KBP-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 KBP-M1750-001 SCREW,BALL 1 滚珠丝杠(Z 轴 200mm)
Z3 KBP-M1778-001 SLEEVE,LOCK 1 尼龙螺母
Z4 KBP-M1753-003 FLANGE 1 马达、滚珠丝杠轴联结法兰
Z5 KBP-M1788-001 DAMPER,1 1 下降端减震器
Z6 91312-05014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠螺母固定螺栓
Z7 91312-03020 BOLT,HEX.SOCKETHEAD 10 马达、滚珠丝杠轴联结法兰固定螺栓
Z8 91312-05016 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z9 91312-05020 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z10 KBP-M1315-000 COVER,5 1 Z 轴马达安全盖
Z11 KBP-M1780-001 STOPPER,1 1 上升端限位器
Z12 91312-06020 BOLTHEX.SOCKETHEAD 1 上升端限位器固定螺栓
Z13 KBP-M1789-000 DAMPER,2 1 上升端限位器用减震器
R 轴
R1 KBP-M1821-011 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M2159-000 ORING.,1 1 减速器下端 O 形圈
R3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
R4 91312-03030 BOLT,HEX.SOCKETHEAD 1 感应器螺丝固定螺栓
R5 KBP-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R6 91312-03016 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
R7 90990-17J037 O-RING 1 减速器输入部 O 形圈
R8 KBP-M4883-001 MOTORASSY.,4 1 马达
R9 90990-17J038 O-RING 1 马达下端 O 形圈
R10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KCY-M4850-900 PROXIMITYSW.ASSY 1 传感器
R12 KBP-M1840-001 SPLINE,BALL 1 滚珠花键轴(Z 轴 200mm)
需要更换总成
R13 KBP-M1871-000 SHAFT,1 1 滚珠花键轴螺母上部项圈
R14 90990-17J036 O-RING 1 滚珠花键轴螺母上部 O 形圈
R15 KBP-M1886-000 SEAL 1 减速器内端面密封件
R16 91312-05014 BOLTHEX.SOCKETHEAD 6 滚珠花键轴螺母固定螺栓
R17 90933-01J022 BEARING 2 滚珠花键轴上侧轴承
电缆类
C1 KBF-M4843-004 HARNESS,MACHINE2 1 机器线束(YK600XGH)
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 KN0-M4872-002 CONNCTORE/L2 1 基座侧 D-sub 连接器
C4 KN0-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 KN0-M4871-002 CONNCTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 KN0-M4839-001 PANEL,CONECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
C13 90990-42J048 JOINT 9 线束输气管接头

15-18
15
维护零件
YK600XGH Z200mm 规格
Y13
Y15
Z11Z13
R1
R3
R4
R5
R7(内部)
R8(内部)
R11(内部)
R12
R14(内部)
R17(内部)
Y2(内部)
Y7(内部)
Y9(内部)
Y10(内部)
Y11(内部)
Y14
Y16
Y17
Y18
Y22
Z1~Z9(内部)
Z10
Z12
R9(内部)
R10(内部)
R16
R15(内部)
C8~C12
X1
X2
X3
X4
X5(内部)
X6(内部)
X7(内部)
X8(内部)
X9(内部)
X10
X11
X12
X13
X14
X15
Y1
Y3
Y3
Y5
Y6(内部)
Y12(内部)
Y19Y20
Y21
C1
C2
C3~C7
Y8(内部)
R2(内部)
R6(内部)
21705-FA-00

15-19
15
维护零件
1.12 YK600XGH Z 轴 400mm 行程编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KBP-M2110-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 95302-06600 NUTHEXAGON 1 感应器螺丝用螺母
X3 98502-05040 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X4 91312-05040 BOLTHEX.SOCKETHEAD 27 减速器固定螺栓
X5 KN5-M2159-000 0RING.,1 1 减速器上端 O 形圈
X6 90K94-8E173X MOTORASSY.,1 1 马达
X7 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
X8 90990-17J035 O-RING 1 马达上部 O 形圈
X9 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
X10 KBP-M2193-001 STOPPER 1 限位器模块
X11 91312-08040 BOLTHEX.SOCKETHEAD 2 限位器模块固定螺栓
X12 KN5-M2196-001 DAMPER 2 限位器模块用减震器
X13 90112-10J030 BOLTHEX.S.H 2 限位螺栓
X14 90990-28J093 WASHER,PLAIN 4 限位螺栓用垫圈
X15 KBP-M1535-000 PLATE,2 2 X 轴机械臂端盖
Y 轴
Y1 KBP-M2510-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M2143-000 ORING,1 1 减速器下端 O 形圈
Y3 91312-04030 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
Y4 95302-05600 NUTHEXAGON 1 感应器螺丝用螺母
Y5 98502-04030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y6 92903-04600 WASHERPLAIN 16 减速器固定螺栓用垫圈
Y7 91312-04020 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KBP-M2511-000 TUBE 1 减速器盘管
Y9 90K94-8417FY MOTORASSY.,2 1 马达
Y10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
Y11 90990-17J030 O-RING 1 马达下端 O 形圈
Y12 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
Y13 KBP-M1314-102 COVER,4 1 Y 轴机械臂上部树脂外盖(Z 轴 400mm)
Y14 92012-03008 BOLT,BUTTONHEAD 8 Y 轴机械臂上部树脂外盖背面固定螺栓(Z 轴 400mm)
Y15 91312-03050 BOLT,HEX.SOCKETHEAD 2 Y 轴机械臂上部树脂外盖正面固定螺栓(Z 轴 400mm)
Y16 KBP-M2587-000 STOPPER,1 1 限位器模块
Y17 KN5-M2196-001 DAMPER 2 限位器模块用减震器
Y18 91312-08035 BOLTHEX.SOCKETHEAD 2 限位器模块固定螺栓
Y19 90112-10J025 BOLTHEX.S.H. 2 限位螺栓
Y20 90990-28J093 WASHER,PLAIN 4 限位螺栓用垫圈
Y21 KBP-M1316-000 COVER,6 1 Y 轴马达上盖
Y22 KBF-M1535-000 PLATE,2 2 Y 轴机械臂端盖
Z 轴
Z1 KBP-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 KBP-M1750-201 SCREW,BALL 1 滚珠丝杠(Z 轴 400mm)
Z3 KBP-M1778-001 SLEEVE,LOCK 1 尼龙螺母
Z4 KBP-M1753-003 FLANGE 1 马达、滚珠丝杠轴联结法兰
Z5 KBP-M1788-001 DAMPER,1 1 下降端减震器
Z6 91312-05014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠螺母固定螺栓
Z7 91312-03020 BOLT,HEX.SOCKETHEAD 10 马达、滚珠丝杠轴联结法兰固定螺栓
Z8 91312-05016 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z9 91312-05020 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z10 KBP-M1315-000 COVER,5 1 Z 轴马达安全盖
Z11 KBP-M1780-001 STOPPER,1 1 上升端限位器
Z12 91312-06020 BOLTHEX.SOCKETHEAD 1 上升端限位器固定螺栓
Z13 KBP-M1789-000 DAMPER,2 1 上升端限位器用减震器
R 轴
R1 KBP-M1821-011 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M2159-000 ORING.,1 1 减速器下端 O 形圈
R3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
R4 91312-03030 BOLT,HEX.SOCKETHEAD 1 感应器螺丝固定螺栓
R5 KBP-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R6 91312-03016 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
R7 90990-17J037 O-RING 1 减速器输入部 O 形圈
R8 KBP-M4883-001 MOTORASSY.,4 1 马达
R9 90990-17J038 O-RING 1 马达下端 O 形圈
R10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KCY-M4850-900 PROXIMITYSW.ASSY 1 传感器
R12 KBP-M1840-101 SPLINE,BALL 1 滚珠花键轴(Z 轴 400mm)
需要更换总成
R13 KBP-M1871-000 SHAFT,1 1 滚珠花键轴螺母上部项圈
R14 90990-17J036 O-RING 1 滚珠花键轴螺母上部 O 形圈
R15 KBP-M1886-000 SEAL 1 减速器内端面密封件
R16 91312-05014 BOLTHEX.SOCKETHEAD 6 滚珠花键轴螺母固定螺栓
R17 90933-01J022 BEARING 2 滚珠花键轴上侧轴承
电缆类
C1 KBF-M4843-004 HARNESS,MACHINE2 1 机器线束(YK600XGH)
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 KN0-M4872-002 CONNCTORE/L2 1 基座侧 D-sub 连接器
C4 KN0-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 KN0-M4871-002 CONNCTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 KN0-M4839-001 PANEL,CONECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
C13 90990-42J048 JOINT 9 线束输气管接头

15-20
15
维护零件
YK600XGH Z400mm 规格
(仅标示与 YK600XGH Z200mm 规格不同的零部件)
Y13Y14
Y15
Z1~9(内部)
R12
21706-FA-00

15-21
15
维护零件
1.13 YK700XG,YK800XG Z 轴 200mm 行程编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KBP-M2110-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 95302-06600 NUTHEXAGON 1 感应器螺丝用螺母
X3 98502-05040 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X4 91312-05040 BOLTHEX.SOCKETHEAD 27 减速器固定螺栓
X5 KN5-M2159-000 0RING.,1 1 减速器上端 O 形圈
X6 90K94-8E173X MOTORASSY.,1 1 马达
X7 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
X8 90990-17J035 O-RING 1 马达上部 O 形圈
X9 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
X10 KBP-M2193-001 STOPPER 1 限位器模块
X11 91312-08040 BOLTHEX.SOCKETHEAD 2 限位器模块固定螺栓
X12 KN5-M2196-001 DAMPER 2 限位器模块用减震器
X13 90112-10J030 BOLTHEX.S.H 2 限位螺栓
X14 90990-28J093 WASHER,PLAIN 4 限位螺栓用垫圈
X15 KBP-M1535-000 PLATE,2 2 X 轴机械臂端盖
Y 轴
Y1 KBP-M2510-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M2143-000 ORING,1 1 减速器下端 O 形圈
Y3 91312-04030 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
Y4 95302-05600 NUTHEXAGON 1 感应器螺丝用螺母
Y5 98502-04030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y6 92903-04600 WASHERPLAIN 16 减速器固定螺栓用垫圈
Y7 91312-04020 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KBP-M2511-000 TUBE 1 减速器盘管
Y9 90K94-8417FY MOTORASSY.,2 1 马达
Y10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
Y11 90990-17J030 O-RING 1 马达下端 O 形圈
Y12 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
Y13 KBP-M1314-003 COVER,4 1 Y 轴机械臂上部树脂外盖(Z 轴 200mm)
Y14 92012-03008 BOLT,BUTTONHEAD 6 Y 轴机械臂上部树脂外盖背面固定螺栓(Z 轴 200mm)
Y15 91312-03016 BOLT,HEX.SOCKETHEAD 2 Y 轴机械臂上部树脂外盖正面固定螺栓(Z 轴 200mm)
Y16 KBP-M2587-000 STOPPER,1 1 限位器模块
Y17 KN5-M2196-001 DAMPER 2 限位器模块用减震器
Y18 91312-08035 BOLTHEX.SOCKETHEAD 2 限位器模块固定螺栓
Y19 90112-10J025 BOLTHEX.S.H. 2 限位螺栓
Y20 90990-28J093 WASHER,PLAIN 4 限位螺栓用垫圈
Y21 KBP-M1316-000 COVER,6 1 Y 轴马达上盖
Y22 KBF-M1535-000 PLATE,2 2 Y 轴机械臂端盖
Z 轴
Z1 KBP-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 KBP-M1750-001 SCREW,BALL 1 滚珠丝杠(Z 轴 200mm)
Z3 KBP-M1778-001 SLEEVE,LOCK 1 尼龙螺母
Z4 KBP-M1753-003 FLANGE 1 马达、滚珠丝杠轴联结法兰
Z5 KBP-M1788-001 DAMPER,1 1 下降端减震器
Z6 91312-05014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠螺母固定螺栓
Z7 91312-03020 BOLT,HEX.SOCKETHEAD 10 马达、滚珠丝杠轴联结法兰固定螺栓
Z8 91312-05016 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z9 91312-05020 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z10 KBP-M1315-000 COVER,5 1 Z 轴马达安全盖
Z11 KBP-M1780-001 STOPPER,1 1 上升端限位器
Z12 91312-06020 BOLTHEX.SOCKETHEAD 1 上升端限位器固定螺栓
Z13 KBP-M1789-000 DAMPER,2 1 上升端限位器用减震器
R 轴
R1 KBP-M1821-011 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M2159-000 ORING.,1 1 减速器下端 O 形圈
R3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
R4 91312-03030 BOLT,HEX.SOCKETHEAD 1 感应器螺丝固定螺栓
R5 KBP-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R6 91312-03016 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
R7 90990-17J037 O-RING 1 减速器输入部 O 形圈
R8 KBP-M4883-001 MOTORASSY.,4 1 马达
R9 90990-17J038 O-RING 1 马达下端 O 形圈
R10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KCY-M4850-900 PROXIMITYSW.ASSY 1 传感器
R12 KBP-M1840-001 SPLINE,BALL 1 滚珠花键轴(Z 轴 200mm)
需要更换总成
R13 KBP-M1871-000 SHAFT,1 1 滚珠花键轴螺母上部项圈
R14 90990-17J036 O-RING 1 滚珠花键轴螺母上部 O 形圈
R15 KBP-M1886-000 SEAL 1 减速器内端面密封件
R16 91312-05014 BOLTHEX.SOCKETHEAD 6 滚珠花键轴螺母固定螺栓
R17 90933-01J022 BEARING 2 滚珠花键轴上侧轴承
电缆类
C1 KBP-M4843-002 HARNESS,MACHINE2 1 机器线束(YK700XG、YK800XG)
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 KN0-M4872-002 CONNCTORE/L2 1 基座侧 D-sub 连接器
C4 KN0-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 KN0-M4871-002 CONNCTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 KN0-M4839-001 PANEL,CONECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
C13 90990-42J048 JOINT 9 线束输气管接头
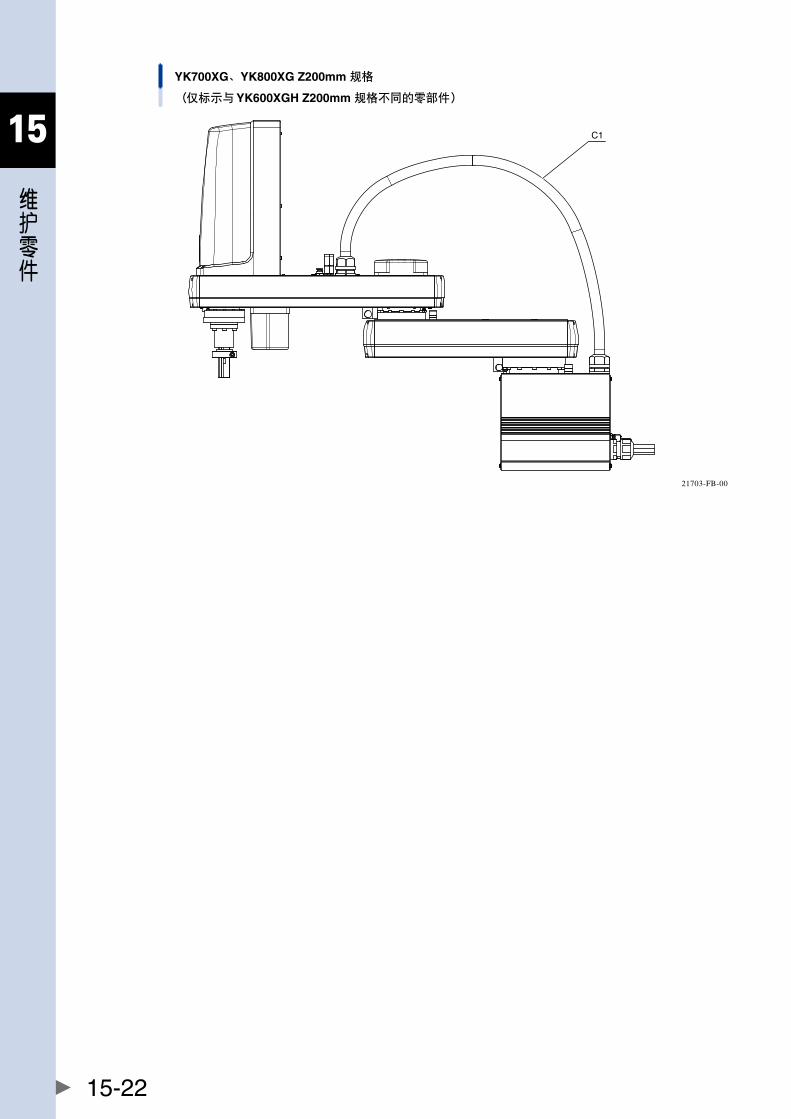
15-22
15
维护零件
YK700XG、YK800XG Z200mm 规格
(仅标示与 YK600XGH Z200mm 规格不同的零部件)
C1
21703-FB-00
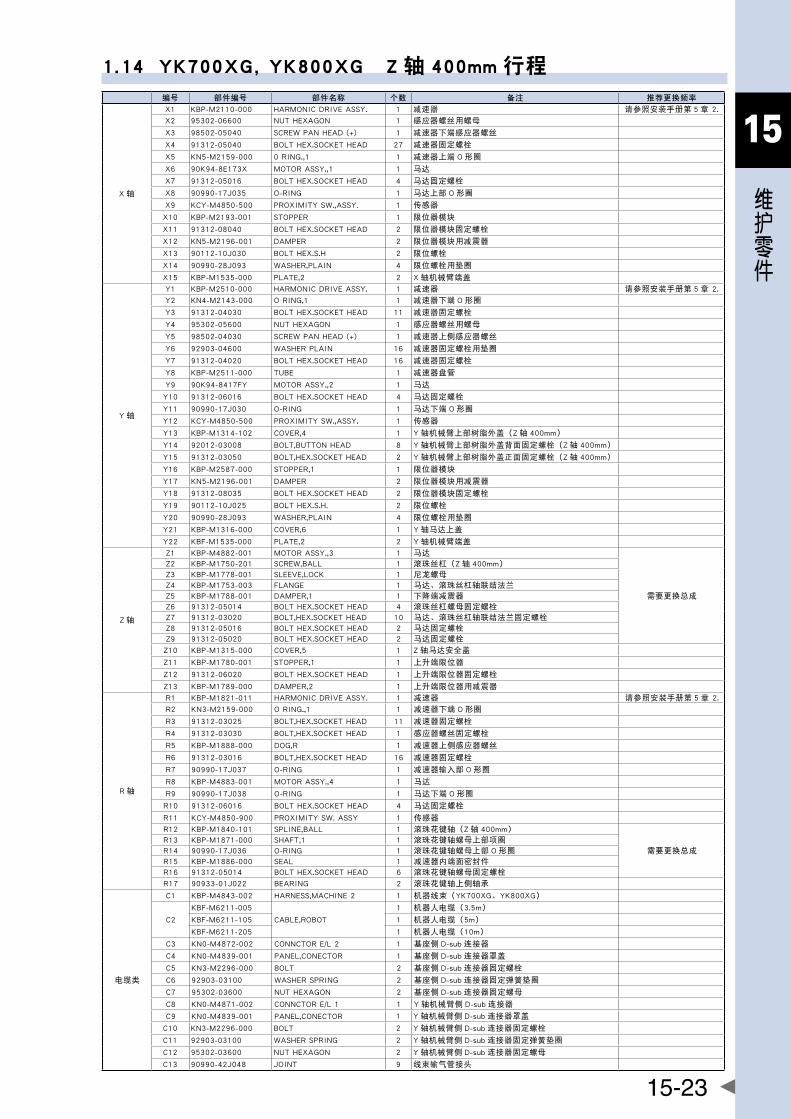
15-23
15
维护零件
1.14 YK700XG,YK800XG Z 轴 400mm 行程编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KBP-M2110-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 95302-06600 NUTHEXAGON 1 感应器螺丝用螺母
X3 98502-05040 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X4 91312-05040 BOLTHEX.SOCKETHEAD 27 减速器固定螺栓
X5 KN5-M2159-000 0RING.,1 1 减速器上端 O 形圈
X6 90K94-8E173X MOTORASSY.,1 1 马达
X7 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
X8 90990-17J035 O-RING 1 马达上部 O 形圈
X9 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
X10 KBP-M2193-001 STOPPER 1 限位器模块
X11 91312-08040 BOLTHEX.SOCKETHEAD 2 限位器模块固定螺栓
X12 KN5-M2196-001 DAMPER 2 限位器模块用减震器
X13 90112-10J030 BOLTHEX.S.H 2 限位螺栓
X14 90990-28J093 WASHER,PLAIN 4 限位螺栓用垫圈
X15 KBP-M1535-000 PLATE,2 2 X 轴机械臂端盖
Y 轴
Y1 KBP-M2510-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M2143-000 ORING,1 1 减速器下端 O 形圈
Y3 91312-04030 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
Y4 95302-05600 NUTHEXAGON 1 感应器螺丝用螺母
Y5 98502-04030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y6 92903-04600 WASHERPLAIN 16 减速器固定螺栓用垫圈
Y7 91312-04020 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KBP-M2511-000 TUBE 1 减速器盘管
Y9 90K94-8417FY MOTORASSY.,2 1 马达
Y10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
Y11 90990-17J030 O-RING 1 马达下端 O 形圈
Y12 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
Y13 KBP-M1314-102 COVER,4 1 Y 轴机械臂上部树脂外盖(Z 轴 400mm)
Y14 92012-03008 BOLT,BUTTONHEAD 8 Y 轴机械臂上部树脂外盖背面固定螺栓(Z 轴 400mm)
Y15 91312-03050 BOLT,HEX.SOCKETHEAD 2 Y 轴机械臂上部树脂外盖正面固定螺栓(Z 轴 400mm)
Y16 KBP-M2587-000 STOPPER,1 1 限位器模块
Y17 KN5-M2196-001 DAMPER 2 限位器模块用减震器
Y18 91312-08035 BOLTHEX.SOCKETHEAD 2 限位器模块固定螺栓
Y19 90112-10J025 BOLTHEX.S.H. 2 限位螺栓
Y20 90990-28J093 WASHER,PLAIN 4 限位螺栓用垫圈
Y21 KBP-M1316-000 COVER,6 1 Y 轴马达上盖
Y22 KBF-M1535-000 PLATE,2 2 Y 轴机械臂端盖
Z 轴
Z1 KBP-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 KBP-M1750-201 SCREW,BALL 1 滚珠丝杠(Z 轴 400mm)
Z3 KBP-M1778-001 SLEEVE,LOCK 1 尼龙螺母
Z4 KBP-M1753-003 FLANGE 1 马达、滚珠丝杠轴联结法兰
Z5 KBP-M1788-001 DAMPER,1 1 下降端减震器
Z6 91312-05014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠螺母固定螺栓
Z7 91312-03020 BOLT,HEX.SOCKETHEAD 10 马达、滚珠丝杠轴联结法兰固定螺栓
Z8 91312-05016 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z9 91312-05020 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z10 KBP-M1315-000 COVER,5 1 Z 轴马达安全盖
Z11 KBP-M1780-001 STOPPER,1 1 上升端限位器
Z12 91312-06020 BOLTHEX.SOCKETHEAD 1 上升端限位器固定螺栓
Z13 KBP-M1789-000 DAMPER,2 1 上升端限位器用减震器
R 轴
R1 KBP-M1821-011 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M2159-000 ORING.,1 1 减速器下端 O 形圈
R3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
R4 91312-03030 BOLT,HEX.SOCKETHEAD 1 感应器螺丝固定螺栓
R5 KBP-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R6 91312-03016 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
R7 90990-17J037 O-RING 1 减速器输入部 O 形圈
R8 KBP-M4883-001 MOTORASSY.,4 1 马达
R9 90990-17J038 O-RING 1 马达下端 O 形圈
R10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KCY-M4850-900 PROXIMITYSW.ASSY 1 传感器
R12 KBP-M1840-101 SPLINE,BALL 1 滚珠花键轴(Z 轴 400mm)
需要更换总成
R13 KBP-M1871-000 SHAFT,1 1 滚珠花键轴螺母上部项圈
R14 90990-17J036 O-RING 1 滚珠花键轴螺母上部 O 形圈
R15 KBP-M1886-000 SEAL 1 减速器内端面密封件
R16 91312-05014 BOLTHEX.SOCKETHEAD 6 滚珠花键轴螺母固定螺栓
R17 90933-01J022 BEARING 2 滚珠花键轴上侧轴承
电缆类
C1 KBP-M4843-002 HARNESS,MACHINE2 1 机器线束(YK700XG、YK800XG)
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 KN0-M4872-002 CONNCTORE/L2 1 基座侧 D-sub 连接器
C4 KN0-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 KN0-M4871-002 CONNCTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 KN0-M4839-001 PANEL,CONECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
C13 90990-42J048 JOINT 9 线束输气管接头
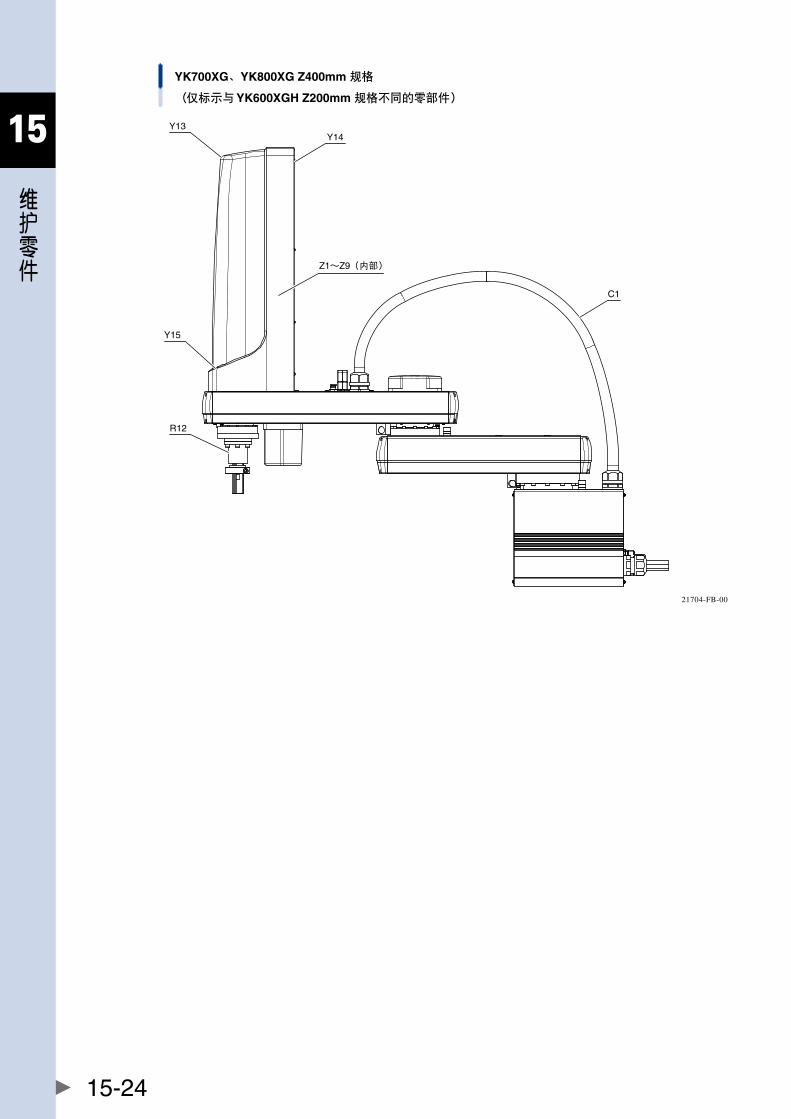
15-24
15
维护零件
YK700XG、YK800XG Z400mm 规格
(仅标示与 YK600XGH Z200mm 规格不同的零部件)
C1
Y14Y13
Y15
R12
Z1~Z9(内部)
21704-FB-00

15-25
15
维护零件
1.15 YK900XG,YK1000XG Z 轴 200mm 行程编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KBP-M2110-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 95302-06600 NUTHEXAGON 1 感应器螺丝用螺母
X3 98502-05040 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X4 91312-05040 BOLTHEX.SOCKETHEAD 27 减速器固定螺栓
X5 KN5-M2159-000 0RING.,1 1 减速器上端 O 形圈
X6 90K94-8E173X MOTORASSY.,1 1 马达
X7 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
X8 90990-17J035 O-RING 1 马达上部 O 形圈
X9 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
X10 KBP-M2193-001 STOPPER 1 限位器模块
X11 91312-08040 BOLTHEX.SOCKETHEAD 2 限位器模块固定螺栓
X12 KN5-M2196-001 DAMPER 2 限位器模块用减震器
X13 90112-10J030 BOLTHEX.S.H 2 限位螺栓
X14 90990-28J093 WASHER,PLAIN 4 限位螺栓用垫圈
X15 KBP-M1535-000 PLATE,2 2 X 轴机械臂端盖
Y 轴
Y1 KBP-M2510-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M2143-000 ORING,1 1 减速器下端 O 形圈
Y3 91312-04030 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
Y4 95302-05600 NUTHEXAGON 1 感应器螺丝用螺母
Y5 98502-04030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y6 92903-04600 WASHERPLAIN 16 减速器固定螺栓用垫圈
Y7 91312-04020 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KBP-M2511-000 TUBE 1 减速器盘管
Y9 90K94-8417FY MOTORASSY.,2 1 马达
Y10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
Y11 90990-17J030 O-RING 1 马达下端 O 形圈
Y12 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
Y13 KBP-M1314-003 COVER,4 1 Y 轴机械臂上部树脂外盖(Z 轴 200mm)
Y14 92012-03008 BOLT,BUTTONHEAD 6 Y 轴机械臂上部树脂外盖背面固定螺栓(Z 轴 200mm)
Y15 91312-03016 BOLT,HEX.SOCKETHEAD 2 Y 轴机械臂上部树脂外盖正面固定螺栓(Z 轴 200mm)
Y16 KBP-M2587-000 STOPPER,1 1 限位器模块
Y17 KN5-M2196-001 DAMPER 2 限位器模块用减震器
Y18 91312-08035 BOLTHEX.SOCKETHEAD 2 限位器模块固定螺栓
Y19 90112-10J025 BOLTHEX.S.H. 2 限位螺栓
Y20 90990-28J093 WASHER,PLAIN 4 限位螺栓用垫圈
Y21 KBP-M1316-000 COVER,6 1 Y 轴马达上盖
Y22 KBF-M1535-000 PLATE,2 2 Y 轴机械臂端盖
Z 轴
Z1 KBP-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 KBP-M1750-001 SCREW,BALL 1 滚珠丝杠(Z 轴 200mm)
Z3 KBP-M1778-001 SLEEVE,LOCK 1 尼龙螺母
Z4 KBP-M1753-003 FLANGE 1 马达、滚珠丝杠轴联结法兰
Z5 KBP-M1788-001 DAMPER,1 1 下降端减震器
Z6 91312-05014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠螺母固定螺栓
Z7 91312-03020 BOLT,HEX.SOCKETHEAD 10 马达、滚珠丝杠轴联结法兰固定螺栓
Z8 91312-05016 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z9 91312-05020 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z10 KBP-M1315-000 COVER,5 1 Z 轴马达安全盖
Z11 KBP-M1780-001 STOPPER,1 1 上升端限位器
Z12 91312-06020 BOLTHEX.SOCKETHEAD 1 上升端限位器固定螺栓
Z13 KBP-M1789-000 DAMPER,2 1 上升端限位器用减震器
R 轴
R1 KBP-M1821-011 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M2159-000 ORING.,1 1 减速器下端 O 形圈
R3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
R4 91312-03030 BOLT,HEX.SOCKETHEAD 1 感应器螺丝固定螺栓
R5 KBP-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R6 91312-03016 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
R7 90990-17J037 O-RING 1 减速器输入部 O 形圈
R8 KBP-M4883-001 MOTORASSY.,4 1 马达
R9 90990-17J038 O-RING 1 马达下端 O 形圈
R10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KCY-M4850-900 PROXIMITYSW.ASSY 1 传感器
R12 KBP-M1840-001 SPLINE,BALL 1 滚珠花键轴(Z 轴 200mm)
需要更换总成
R13 KBP-M1871-000 SHAFT,1 1 滚珠花键轴螺母上部项圈
R14 90990-17J036 O-RING 1 滚珠花键轴螺母上部 O 形圈
R15 KBP-M1886-000 SEAL 1 减速器内端面密封件
R16 91312-05014 BOLTHEX.SOCKETHEAD 6 滚珠花键轴螺母固定螺栓
R17 90933-01J022 BEARING 2 滚珠花键轴上侧轴承
电缆类
C1 KBP-M4843-102 HARNESS,MACHINE2 1 机器线束(YK900XG、YK1000XG)
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 KN0-M4872-002 CONNCTORE/L2 1 基座侧 D-sub 连接器
C4 KN0-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 KN0-M4871-002 CONNCTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 KN0-M4839-001 PANEL,CONECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
C13 90990-42J048 JOINT 9 线束输气管接头
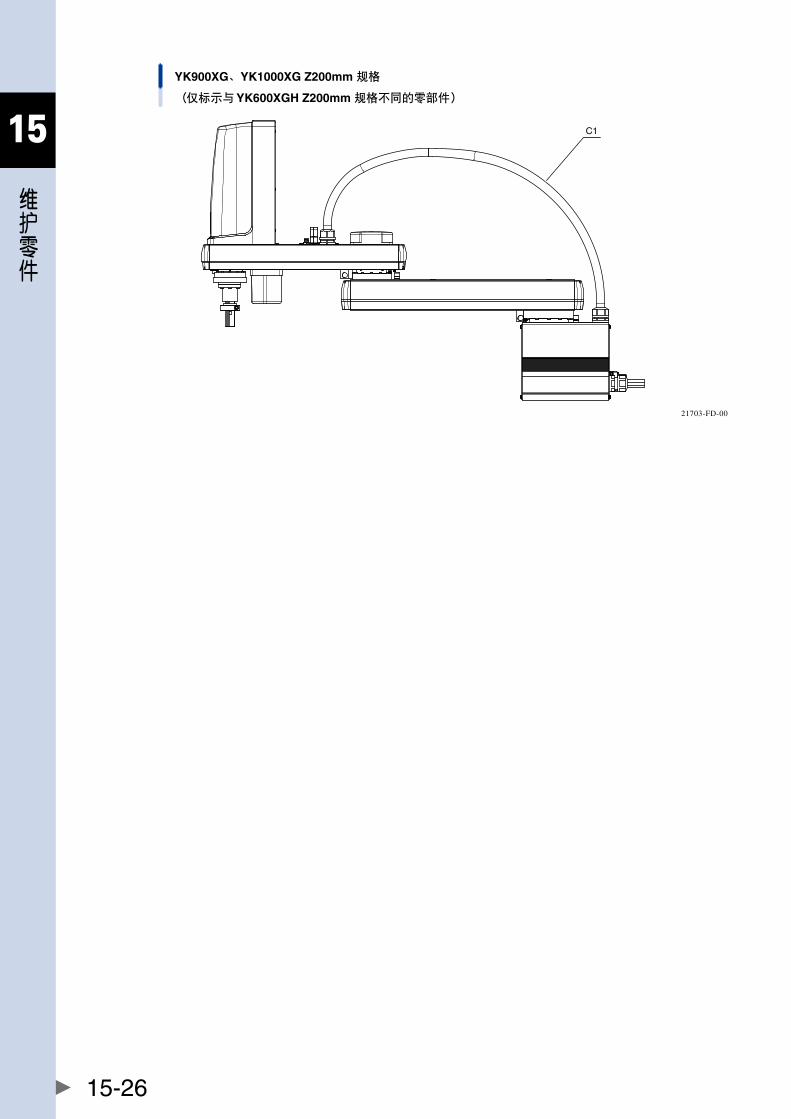
15-26
15
维护零件
YK900XG、YK1000XG Z200mm 规格
(仅标示与 YK600XGH Z200mm 规格不同的零部件)
C1
21703-FD-00

15-27
15
维护零件
1.16 YK900XG,YK1000XG Z 轴 400mm 行程编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KBP-M2110-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
X2 95302-06600 NUTHEXAGON 1 感应器螺丝用螺母
X3 98502-05040 SCREWPANHEAD(+) 1 减速器下端感应器螺丝
X4 91312-05040 BOLTHEX.SOCKETHEAD 27 减速器固定螺栓
X5 KN5-M2159-000 0RING.,1 1 减速器上端 O 形圈
X6 90K94-8E173X MOTORASSY.,1 1 马达
X7 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
X8 90990-17J035 O-RING 1 马达上部 O 形圈
X9 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
X10 KBP-M2193-001 STOPPER 1 限位器模块
X11 91312-08040 BOLTHEX.SOCKETHEAD 2 限位器模块固定螺栓
X12 KN5-M2196-001 DAMPER 2 限位器模块用减震器
X13 90112-10J030 BOLTHEX.S.H 2 限位螺栓
X14 90990-28J093 WASHER,PLAIN 4 限位螺栓用垫圈
X15 KBP-M1535-000 PLATE,2 2 X 轴机械臂端盖
Y 轴
Y1 KBP-M2510-000 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
Y2 KN4-M2143-000 ORING,1 1 减速器下端 O 形圈
Y3 91312-04030 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
Y4 95302-05600 NUTHEXAGON 1 感应器螺丝用螺母
Y5 98502-04030 SCREWPANHEAD(+) 1 减速器上侧感应器螺丝
Y6 92903-04600 WASHERPLAIN 16 减速器固定螺栓用垫圈
Y7 91312-04020 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
Y8 KBP-M2511-000 TUBE 1 减速器盘管
Y9 90K94-8417FY MOTORASSY.,2 1 马达
Y10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
Y11 90990-17J030 O-RING 1 马达下端 O 形圈
Y12 KCY-M4850-500 PROXIMITYSW.,ASSY. 1 传感器
Y13 KBP-M1314-102 COVER,4 1 Y 轴机械臂上部树脂外盖(Z 轴 400mm)
Y14 92012-03008 BOLT,BUTTONHEAD 8 Y 轴机械臂上部树脂外盖背面固定螺栓(Z 轴 400mm)
Y15 91312-03050 BOLT,HEX.SOCKETHEAD 2 Y 轴机械臂上部树脂外盖正面固定螺栓(Z 轴 400mm)
Y16 KBP-M2587-000 STOPPER,1 1 限位器模块
Y17 KN5-M2196-001 DAMPER 2 限位器模块用减震器
Y18 91312-08035 BOLTHEX.SOCKETHEAD 2 限位器模块固定螺栓
Y19 90112-10J025 BOLTHEX.S.H. 2 限位螺栓
Y20 90990-28J093 WASHER,PLAIN 4 限位螺栓用垫圈
Y21 KBP-M1316-000 COVER,6 1 Y 轴马达上盖
Y22 KBF-M1535-000 PLATE,2 2 Y 轴机械臂端盖
Z 轴
Z1 KBP-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2 KBP-M1750-201 SCREW,BALL 1 滚珠丝杠(Z 轴 400mm)
Z3 KBP-M1778-001 SLEEVE,LOCK 1 尼龙螺母
Z4 KBP-M1753-003 FLANGE 1 马达、滚珠丝杠轴联结法兰
Z5 KBP-M1788-001 DAMPER,1 1 下降端减震器
Z6 91312-05014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠螺母固定螺栓
Z7 91312-03020 BOLT,HEX.SOCKETHEAD 10 马达、滚珠丝杠轴联结法兰固定螺栓
Z8 91312-05016 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z9 91312-05020 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z10 KBP-M1315-000 COVER,5 1 Z 轴马达安全盖
Z11 KBP-M1780-001 STOPPER,1 1 上升端限位器
Z12 91312-06020 BOLTHEX.SOCKETHEAD 1 上升端限位器固定螺栓
Z13 KBP-M1789-000 DAMPER,2 1 上升端限位器用减震器
R 轴
R1 KBP-M1821-011 HARMONICDRIVEASSY. 1 减速器 请参照安装手册第 5 章2.
R2 KN3-M2159-000 ORING.,1 1 减速器下端 O 形圈
R3 91312-03025 BOLT,HEX.SOCKETHEAD 11 减速器固定螺栓
R4 91312-03030 BOLT,HEX.SOCKETHEAD 1 感应器螺丝固定螺栓
R5 KBP-M1888-000 DOG,R 1 减速器上侧感应器螺丝
R6 91312-03016 BOLT,HEX.SOCKETHEAD 16 减速器固定螺栓
R7 90990-17J037 O-RING 1 减速器输入部 O 形圈
R8 KBP-M4883-001 MOTORASSY.,4 1 马达
R9 90990-17J038 O-RING 1 马达下端 O 形圈
R10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KCY-M4850-900 PROXIMITYSW.ASSY 1 传感器
R12 KBP-M1840-101 SPLINE,BALL 1 滚珠花键轴(Z 轴 400mm)
需要更换总成
R13 KBP-M1871-000 SHAFT,1 1 滚珠花键轴螺母上部项圈
R14 90990-17J036 O-RING 1 滚珠花键轴螺母上部 O 形圈
R15 KBP-M1886-000 SEAL 1 减速器内端面密封件
R16 91312-05014 BOLTHEX.SOCKETHEAD 6 滚珠花键轴螺母固定螺栓
R17 90933-01J022 BEARING 2 滚珠花键轴上侧轴承
电缆类
C1 KBP-M4843-102 HARNESS,MACHINE2 1 机器线束(YK900XG、YK1000XG)
C2
KBF-M6211-005
CABLE,ROBOT
1 机器人电缆(3.5m)
KBF-M6211-105 1 机器人电缆(5m)
KBF-M6211-205 1 机器人电缆(10m)
C3 KN0-M4872-002 CONNCTORE/L2 1 基座侧 D-sub 连接器
C4 KN0-M4839-001 PANEL,CONECTOR 1 基座侧 D-sub 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-sub 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-sub 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-sub 连接器固定螺母
C8 KN0-M4871-002 CONNCTORE/L1 1 Y 轴机械臂侧 D-sub 连接器
C9 KN0-M4839-001 PANEL,CONECTOR 1 Y 轴机械臂侧 D-sub 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-sub 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-sub 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-sub 连接器固定螺母
C13 90990-42J048 JOINT 9 线束输气管接头

15-28
15
维护零件
YK900XG、YK1000XG Z400mm 规格
(仅标示与 YK600XGH Z200mm 规格不同的零部件)
C1
Y14Y13
Y15
R12
Z1~Z9(内部)
21704-FD-00
1.17 YK300XGS,YK400XGS
关于 YK300XGS,YK400XGS 的维护零件,请咨询本公司。
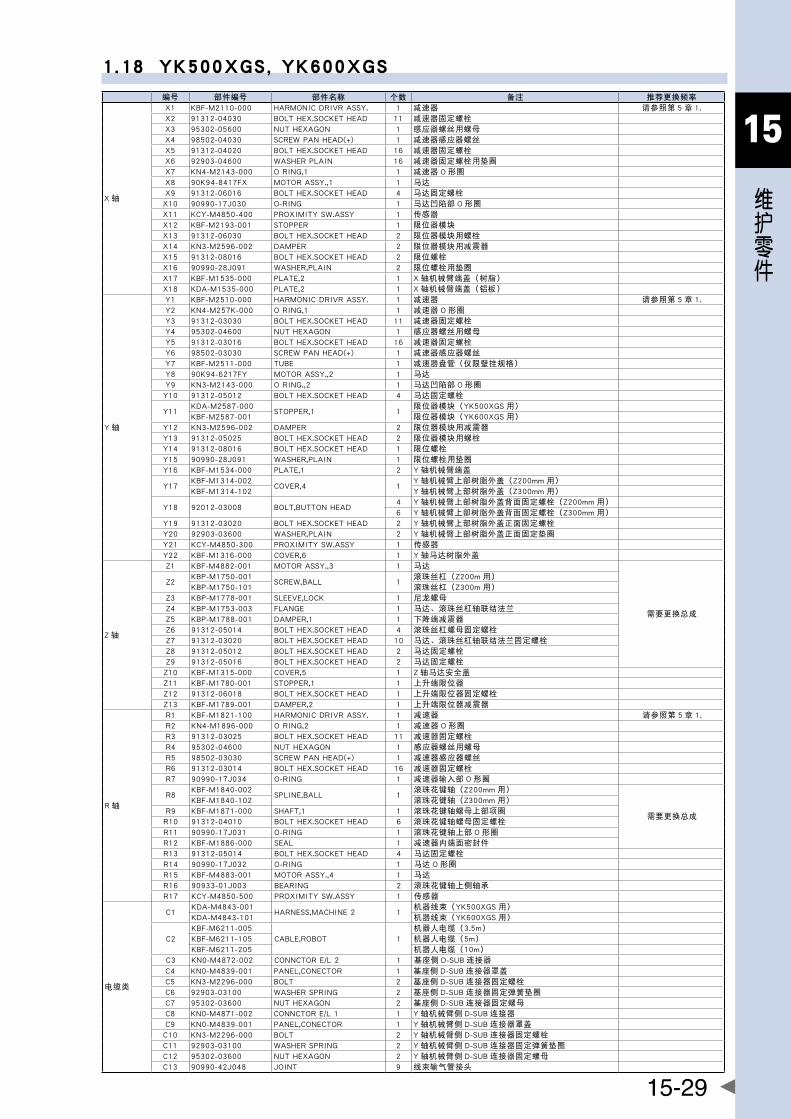
15-29
15
维护零件
1.18 YK500XGS,YK600XGS编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KBF-M2110-000 HARMONICDRIVRASSY. 1 减速器 请参照第 5 章 1.
X2 91312-04030 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
X3 95302-05600 NUTHEXAGON 1 感应器螺丝用螺母
X4 98502-04030 SCREWPANHEAD(+) 1 减速器感应器螺丝
X5 91312-04020 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
X6 92903-04600 WASHERPLAIN 16 减速器固定螺栓用垫圈
X7 KN4-M2143-000 ORING,1 1 减速器 O 形圈
X8 90K94-8417FX MOTORASSY.,1 1 马达
X9 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
X10 90990-17J030 O-RING 1 马达凹陷部 O 形圈
X11 KCY-M4850-400 PROXIMITYSW.ASSY 1 传感器
X12 KBF-M2193-001 STOPPER 1 限位器模块
X13 91312-06030 BOLTHEX.SOCKETHEAD 2 限位器模块用螺栓
X14 KN3-M2596-002 DAMPER 2 限位器模块用减震器
X15 91312-08016 BOLTHEX.SOCKETHEAD 2 限位螺栓
X16 90990-28J091 WASHER,PLAIN 2 限位螺栓用垫圈
X17 KBF-M1535-000 PLATE,2 1 X 轴机械臂端盖(树脂)
X18 KDA-M1535-000 PLATE,2 1 X 轴机械臂端盖(铝板)
Y 轴
Y1 KBF-M2510-000 HARMONICDRIVRASSY. 1 减速器 请参照第 5 章 1.
Y2 KN4-M257K-000 ORING,1 1 减速器 O 形圈
Y3 91312-03030 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
Y4 95302-04600 NUTHEXAGON 1 感应器螺丝用螺母
Y5 91312-03016 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
Y6 98502-03030 SCREWPANHEAD(+) 1 减速器感应器螺丝
Y7 KBF-M2511-000 TUBE 1 减速器盘管(仅限壁挂规格)
Y8 90K94-6217FY MOTORASSY.,2 1 马达
Y9 KN3-M2143-000 ORING.,2 1 马达凹陷部 O 形圈
Y10 91312-05012 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
Y11KDA-M2587-000
STOPPER,1 1限位器模块(YK500XGS 用)
KBF-M2587-001 限位器模块(YK600XGS 用)
Y12 KN3-M2596-002 DAMPER 2 限位器模块用减震器
Y13 91312-05025 BOLTHEX.SOCKETHEAD 2 限位器模块用螺栓
Y14 91312-08016 BOLTHEX.SOCKETHEAD 1 限位螺栓
Y15 90990-28J091 WASHER,PLAIN 1 限位螺栓用垫圈
Y16 KBF-M1534-000 PLATE,1 2 Y 轴机械臂端盖
Y17KBF-M1314-002
COVER,4 1Y 轴机械臂上部树脂外盖(Z200mm 用)
KBF-M1314-102 Y 轴机械臂上部树脂外盖(Z300mm 用)
Y18 92012-03008 BOLT,BUTTONHEAD4 Y 轴机械臂上部树脂外盖背面固定螺栓(Z200mm 用)
6 Y 轴机械臂上部树脂外盖背面固定螺栓(Z300mm 用)
Y19 91312-03020 BOLTHEX.SOCKETHEAD 2 Y 轴机械臂上部树脂外盖正面固定螺栓
Y20 92903-03600 WASHER,PLAIN 2 Y 轴机械臂上部树脂外盖正面固定垫圈
Y21 KCY-M4850-300 PROXIMITYSW.ASSY 1 传感器
Y22 KBF-M1316-000 COVER,6 1 Y 轴马达树脂外盖
Z 轴
Z1 KBF-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2KBP-M1750-001
SCREW,BALL 1滚珠丝杠(Z200m 用)
KBP-M1750-101 滚珠丝杠(Z300m 用)
Z3 KBP-M1778-001 SLEEVE,LOCK 1 尼龙螺母
Z4 KBP-M1753-003 FLANGE 1 马达、滚珠丝杠轴联结法兰
Z5 KBP-M1788-001 DAMPER,1 1 下降端减震器
Z6 91312-05014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠螺母固定螺栓
Z7 91312-03020 BOLTHEX.SOCKETHEAD 10 马达、滚珠丝杠轴联结法兰固定螺栓
Z8 91312-05012 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z9 91312-05016 BOLTHEX.SOCKETHEAD 2 马达固定螺栓
Z10 KBF-M1315-000 COVER,5 1 Z 轴马达安全盖
Z11 KBF-M1780-001 STOPPER,1 1 上升端限位器
Z12 91312-06018 BOLTHEX.SOCKETHEAD 1 上升端限位器固定螺栓
Z13 KBF-M1789-001 DAMPER,2 1 上升端限位器减震器
R 轴
R1 KBF-M1821-100 HARMONICDRIVRASSY. 1 减速器 请参照第 5 章 1.
R2 KN4-M1896-000 ORING,2 1 减速器 O 形圈
R3 91312-03025 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
R4 95302-04600 NUTHEXAGON 1 感应器螺丝用螺母
R5 98502-03030 SCREWPANHEAD(+) 1 减速器感应器螺丝
R6 91312-03014 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
R7 90990-17J034 O-RING 1 减速器输入部 O 形圈
R8KBF-M1840-002
SPLINE,BALL 1滚珠花键轴(Z200mm 用)
需要更换总成
KBF-M1840-102 滚珠花键轴(Z300mm 用)
R9 KBF-M1871-000 SHAFT,1 1 滚珠花键轴螺母上部项圈
R10 91312-04010 BOLTHEX.SOCKETHEAD 6 滚珠花键轴螺母固定螺栓
R11 90990-17J031 O-RING 1 滚珠花键轴上部 O 形圈
R12 KBF-M1886-000 SEAL 1 减速器内端面密封件
R13 91312-05014 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R14 90990-17J032 O-RING 1 马达 O 形圈
R15 KBF-M4883-001 MOTORASSY.,4 1 马达
R16 90933-01J003 BEARING 2 滚珠花键轴上侧轴承
R17 KCY-M4850-500 PROXIMITYSW.ASSY 1 传感器
电缆类
C1KDA-M4843-001
HARNESS,MACHINE2 1机器线束(YK500XGS 用)
KDA-M4843-101 机器线束(YK600XGS 用)
C2
KBF-M6211-005
CABLE,ROBOT 1
机器人电缆(3.5m)
KBF-M6211-105 机器人电缆(5m)
KBF-M6211-205 机器人电缆(10m)
C3 KN0-M4872-002 CONNCTORE/L2 1 基座侧 D-SUB 连接器
C4 KN0-M4839-001 PANEL,CONECTOR 1 基座侧 D-SUB 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-SUB 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-SUB 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-SUB 连接器固定螺母
C8 KN0-M4871-002 CONNCTORE/L1 1 Y 轴机械臂侧 D-SUB 连接器
C9 KN0-M4839-001 PANEL,CONECTOR 1 Y 轴机械臂侧 D-SUB 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-SUB 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-SUB 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-SUB 连接器固定螺母
C13 90990-42J048 JOINT 9 线束输气管接头

15-30
15
维护零件
YK500XGS, YK600XGS
X1
X2
X3
X4
X5,X6(内部)
X7(内部)
X8(内部)
X9(内部)X10(内部)X11(内部)
X12 X13X14
X15
X16
X17X18
Y1
Y2(内部)
Y3
Y4
Y6
Y5(内部)
Y7(内部)
Y8(内部)
Y9(内部)
Y10(内部)
Y11
Y12
Y13
Y14
Y15
Y16
Y17 Y18
Y19,Y20
Y21
Y22
Z1~Z9(内部)
Z10
Z11Z12
Z13
R1R2(内部)
R3
R4
R5
R6(内部)
R7(内部)
R8
R9(内部)R10
R11(内部)
R15(内部)
R13(内部)
R14(内部)
R12(内部)
R16(内部)
R17
C1
C2C3~C7
C8~C12
21701-G8-00
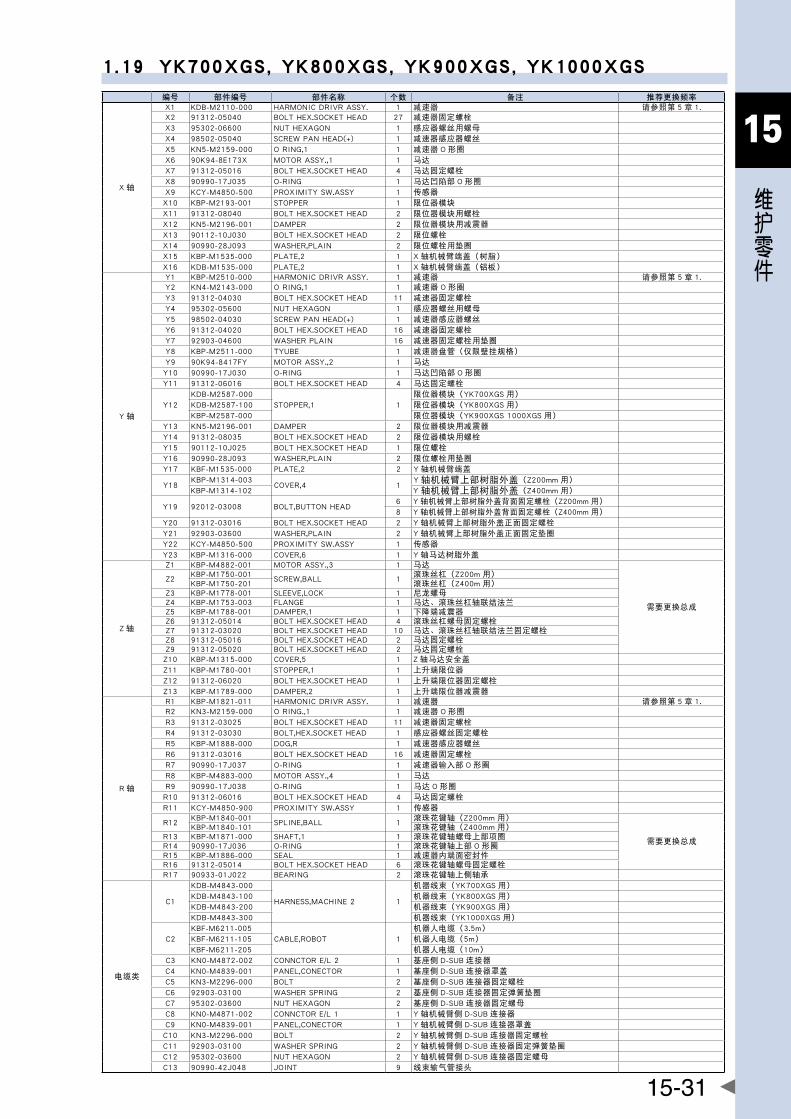
15-31
15
维护零件
1.19 YK700XGS,YK800XGS,YK900XGS,YK1000XGS编号 部件编号 部件名称 个数 备注 推荐更换频率
X 轴
X1 KDB-M2110-000 HARMONICDRIVRASSY. 1 减速器 请参照第 5 章 1.X2 91312-05040 BOLTHEX.SOCKETHEAD 27 减速器固定螺栓
X3 95302-06600 NUTHEXAGON 1 感应器螺丝用螺母
X4 98502-05040 SCREWPANHEAD(+) 1 减速器感应器螺丝
X5 KN5-M2159-000 ORING,1 1 减速器 O 形圈
X6 90K94-8E173X MOTORASSY.,1 1 马达
X7 91312-05016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
X8 90990-17J035 O-RING 1 马达凹陷部 O 形圈
X9 KCY-M4850-500 PROXIMITYSW.ASSY 1 传感器
X10 KBP-M2193-001 STOPPER 1 限位器模块
X11 91312-08040 BOLTHEX.SOCKETHEAD 2 限位器模块用螺栓
X12 KN5-M2196-001 DAMPER 2 限位器模块用减震器
X13 90112-10J030 BOLTHEX.SOCKETHEAD 2 限位螺栓
X14 90990-28J093 WASHER,PLAIN 2 限位螺栓用垫圈
X15 KBP-M1535-000 PLATE,2 1 X 轴机械臂端盖(树脂)
X16 KDB-M1535-000 PLATE,2 1 X 轴机械臂端盖(铝板)
Y 轴
Y1 KBP-M2510-000 HARMONICDRIVRASSY. 1 减速器 请参照第 5 章 1.Y2 KN4-M2143-000 ORING,1 1 减速器 O 形圈
Y3 91312-04030 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
Y4 95302-05600 NUTHEXAGON 1 感应器螺丝用螺母
Y5 98502-04030 SCREWPANHEAD(+) 1 减速器感应器螺丝
Y6 91312-04020 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
Y7 92903-04600 WASHERPLAIN 16 减速器固定螺栓用垫圈
Y8 KBP-M2511-000 TYUBE 1 减速器盘管(仅限壁挂规格)
Y9 90K94-8417FY MOTORASSY.,2 1 马达
Y10 90990-17J030 O-RING 1 马达凹陷部 O 形圈
Y11 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
Y12
KDB-M2587-000
STOPPER,1 1
限位器模块(YK700XGS 用)
KDB-M2587-100 限位器模块(YK800XGS 用)
KBP-M2587-000 限位器模块(YK900XGS1000XGS 用)
Y13 KN5-M2196-001 DAMPER 2 限位器模块用减震器
Y14 91312-08035 BOLTHEX.SOCKETHEAD 2 限位器模块用螺栓
Y15 90112-10J025 BOLTHEX.SOCKETHEAD 1 限位螺栓
Y16 90990-28J093 WASHER,PLAIN 2 限位螺栓用垫圈
Y17 KBF-M1535-000 PLATE,2 2 Y 轴机械臂端盖
Y18KBP-M1314-003
COVER,4 1Y 轴机械臂上部树脂外盖(Z200mm 用)
KBP-M1314-102 Y 轴机械臂上部树脂外盖(Z400mm 用)
Y19 92012-03008 BOLT,BUTTONHEAD6 Y 轴机械臂上部树脂外盖背面固定螺栓(Z200mm 用)
8 Y 轴机械臂上部树脂外盖背面固定螺栓(Z400mm 用)
Y20 91312-03016 BOLTHEX.SOCKETHEAD 2 Y 轴机械臂上部树脂外盖正面固定螺栓
Y21 92903-03600 WASHER,PLAIN 2 Y 轴机械臂上部树脂外盖正面固定垫圈
Y22 KCY-M4850-500 PROXIMITYSW.ASSY 1 传感器
Y23 KBP-M1316-000 COVER,6 1 Y 轴马达树脂外盖
Z 轴
Z1 KBP-M4882-001 MOTORASSY.,3 1 马达
需要更换总成
Z2KBP-M1750-001
SCREW,BALL 1滚珠丝杠(Z200m 用)
KBP-M1750-201 滚珠丝杠(Z400m 用)Z3 KBP-M1778-001 SLEEVE,LOCK 1 尼龙螺母Z4 KBP-M1753-003 FLANGE 1 马达、滚珠丝杠轴联结法兰Z5 KBP-M1788-001 DAMPER,1 1 下降端减震器Z6 91312-05014 BOLTHEX.SOCKETHEAD 4 滚珠丝杠螺母固定螺栓Z7 91312-03020 BOLTHEX.SOCKETHEAD 10 马达、滚珠丝杠轴联结法兰固定螺栓Z8 91312-05016 BOLTHEX.SOCKETHEAD 2 马达固定螺栓Z9 91312-05020 BOLTHEX.SOCKETHEAD 2 马达固定螺栓Z10 KBP-M1315-000 COVER,5 1 Z 轴马达安全盖
Z11 KBP-M1780-001 STOPPER,1 1 上升端限位器
Z12 91312-06020 BOLTHEX.SOCKETHEAD 1 上升端限位器固定螺栓
Z13 KBP-M1789-000 DAMPER,2 1 上升端限位器减震器
R 轴
R1 KBP-M1821-011 HARMONICDRIVRASSY. 1 减速器 请参照第 5 章 1.R2 KN3-M2159-000 ORING.,1 1 减速器 O 形圈
R3 91312-03025 BOLTHEX.SOCKETHEAD 11 减速器固定螺栓
R4 91312-03030 BOLT,HEX.SOCKETHEAD 1 感应器螺丝固定螺栓
R5 KBP-M1888-000 DOG,R 1 减速器感应器螺丝
R6 91312-03016 BOLTHEX.SOCKETHEAD 16 减速器固定螺栓
R7 90990-17J037 O-RING 1 减速器输入部 O 形圈
R8 KBP-M4883-000 MOTORASSY.,4 1 马达
R9 90990-17J038 O-RING 1 马达 O 形圈
R10 91312-06016 BOLTHEX.SOCKETHEAD 4 马达固定螺栓
R11 KCY-M4850-900 PROXIMITYSW.ASSY 1 传感器
R12KBP-M1840-001
SPLINE,BALL 1滚珠花键轴(Z200mm 用)
需要更换总成
KBP-M1840-101 滚珠花键轴(Z400mm 用)R13 KBP-M1871-000 SHAFT,1 1 滚珠花键轴螺母上部项圈R14 90990-17J036 O-RING 1 滚珠花键轴上部 O 形圈R15 KBP-M1886-000 SEAL 1 减速器内端面密封件R16 91312-05014 BOLTHEX.SOCKETHEAD 6 滚珠花键轴螺母固定螺栓R17 90933-01J022 BEARING 2 滚珠花键轴上侧轴承
电缆类
C1
KDB-M4843-000
HARNESS,MACHINE2 1
机器线束(YK700XGS 用)
KDB-M4843-100 机器线束(YK800XGS 用)
KDB-M4843-200 机器线束(YK900XGS 用)
KDB-M4843-300 机器线束(YK1000XGS 用)
C2
KBF-M6211-005
CABLE,ROBOT 1
机器人电缆(3.5m)
KBF-M6211-105 机器人电缆(5m)
KBF-M6211-205 机器人电缆(10m)
C3 KN0-M4872-002 CONNCTORE/L2 1 基座侧 D-SUB 连接器
C4 KN0-M4839-001 PANEL,CONECTOR 1 基座侧 D-SUB 连接器罩盖
C5 KN3-M2296-000 BOLT 2 基座侧 D-SUB 连接器固定螺栓
C6 92903-03100 WASHERSPRING 2 基座侧 D-SUB 连接器固定弹簧垫圈
C7 95302-03600 NUTHEXAGON 2 基座侧 D-SUB 连接器固定螺母
C8 KN0-M4871-002 CONNCTORE/L1 1 Y 轴机械臂侧 D-SUB 连接器
C9 KN0-M4839-001 PANEL,CONECTOR 1 Y 轴机械臂侧 D-SUB 连接器罩盖
C10 KN3-M2296-000 BOLT 2 Y 轴机械臂侧 D-SUB 连接器固定螺栓
C11 92903-03100 WASHERSPRING 2 Y 轴机械臂侧 D-SUB 连接器固定弹簧垫圈
C12 95302-03600 NUTHEXAGON 2 Y 轴机械臂侧 D-SUB 连接器固定螺母
C13 90990-42J048 JOINT 9 线束输气管接头

15-32
15
维护零件
YK700XGS, YK800XGS, YK900XGS, YK1000XGS
X1
X2
X3
X4
X5(内部)
X6(内部)
X7(内部)
X8(内部)
X9
X10X11
X12
X13
X14
X15X16
Y1Y2(内部)
Y3
Y4 Y5
Y6,Y7(内部)Y8(内部)
Y9(内部)Y10(内部)
Y11(内部)
Y12
Y13Y14
Y15Y16
Y17
Y18Y19
Y20,21
Y22
Y23
Z1~Z9(内部)
Z10
Z11
Z12
Z13
R1
R2(内部)
R3
R4R5
R6(内部)
R7(内部)
R12
R14(内部)
R13(内部)R16
R8(内部)
R10(内部)
R9(内部)
R15(内部)
R17(内部)
R11
C1
C2C3~C7
C8~C12
21701-GA-00
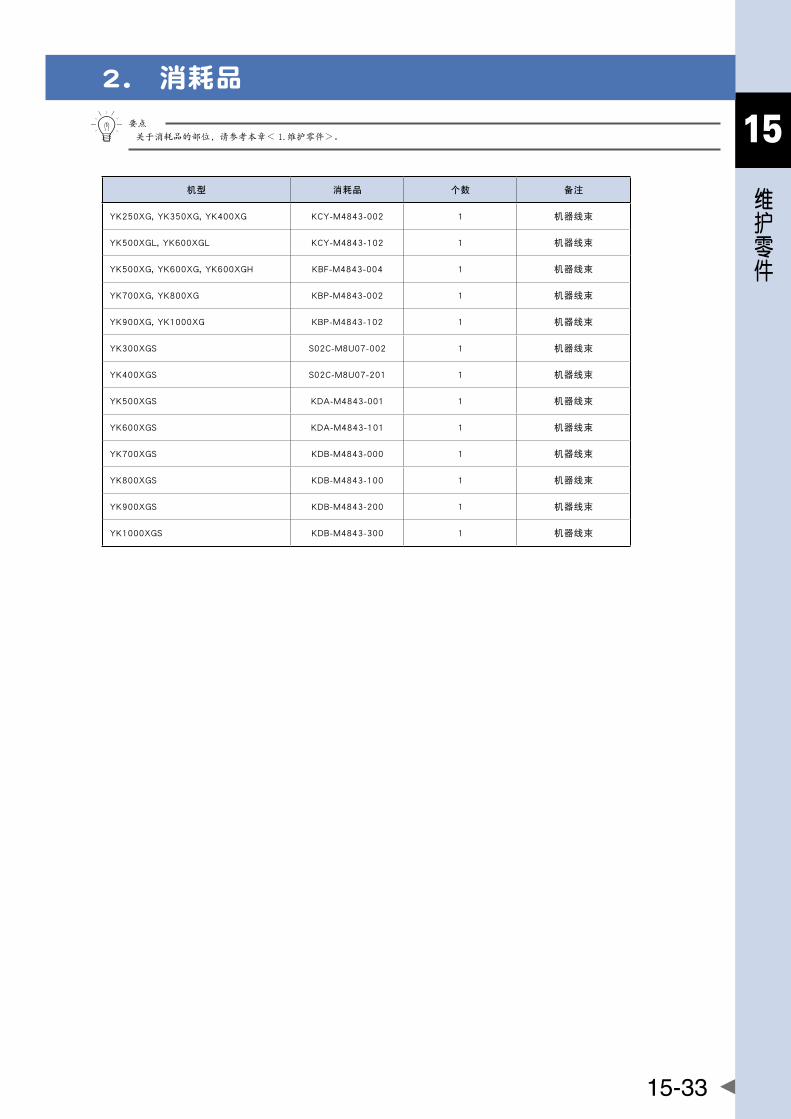
15-33
15
维护零件
2. 消耗品
n 要点
关于消耗品的部位,请参考本章< 1. 维护零件>。
机型 消耗品 个数 备注
YK250XG,YK350XG,YK400XG KCY-M4843-002 1 机器线束
YK500XGL,YK600XGL KCY-M4843-102 1 机器线束
YK500XG,YK600XG,YK600XGH KBF-M4843-004 1 机器线束
YK700XG,YK800XG KBP-M4843-002 1 机器线束
YK900XG,YK1000XG KBP-M4843-102 1 机器线束
YK300XGS S02C-M8U07-002 1 机器线束
YK400XGS S02C-M8U07-201 1 机器线束
YK500XGS KDA-M4843-001 1 机器线束
YK600XGS KDA-M4843-101 1 机器线束
YK700XGS KDB-M4843-000 1 机器线束
YK800XGS KDB-M4843-100 1 机器线束
YK900XGS KDB-M4843-200 1 机器线束
YK1000XGS KDB-M4843-300 1 机器线束

15-34
15
维护零件
3. 基本规格
3.1 YK250XG,YK350XG,YK400XG,YK500XGL,YK600XGL
机型 YK250XG YK350XG YK400XG
轴规格
X 轴
机械臂长度 100mm 200mm 250mm
旋转范围 ±140°
Y 轴
机械臂长度 150mm
旋转范围 ±144°
Z 轴 行程 150mm
R 轴 旋转范围 ±360°
马达
X 轴 200W
Y 轴 150W
Z 轴 50W
R 轴 100W
最高速度
X,Y 轴合成 4.5m/s 5.6m/s 6.1m/s
Z 轴 1.1m/s
R 轴 1020°/s
重复定位精度(*1)
X,Y 轴 ±0.01mm
Z 轴 ±0.01mm
R 轴 ±0.004°
最大搬运重量 标准规格5kg、选配规格4kg(*3)
R 轴容许惯性力矩(*2) 0.05kgm2(0.5kgfcms2)
用户接线 0.2sq×10 根
用户配管 φ4×3
动作限位设置 1.软限制 2.限位器(X、Y、Z 轴)
机器人电缆 3.5m、选配规格 :5m、10m
主机重量 18.5kg 19.0kg 19.5kg
*1: 环境温度固定时的数值。(X,Y 轴)
*2: 加速度系数的设置范围有限。
*3: 选配规格…工具法兰安装规格
用户接线配管花键轴中空规格
※ Z 轴速度在 20 ~ 40%时,根据机械臂位置、Z 轴位置,Z 轴可能会发生振动。请避开出现振动现象的速度范围进行使用。

15-35
15
维护零件
机型 YK500XGL YK600XGL
轴规格
X 轴
机械臂长度 250mm 350mm
旋转范围 ±140°
Y 轴
机械臂长度 250mm
旋转范围 ±144°
Z 轴 行程 150mm
R 轴 旋转范围 ±360°
马达
X 轴 200W
Y 轴 150W
Z 轴 50W
R 轴 100W
最高速度
X,Y 轴合成 5.1m/s 4.9m/s
Z 轴 1.1m/s
R 轴 1020°/s
重复定位精度(*1)
X,Y 轴 ±0.01mm
Z 轴 ±0.01mm
R 轴 ±0.004°
最大搬运重量 标准规格5kg、选配规格4kg(*3)
R 轴容许惯性力矩(*2) 0.05kgm2(0.5kgfcms2)
用户接线 0.2sq×10 根
用户配管 φ4×3
动作限位设置 1.软限制 2.限位器(X、Y、Z 轴)
机器人电缆 3.5m、选配规格 :5m、10m
主机重量 21.0kg 22.0kg
*1: 环境温度固定时的数值。(X,Y 轴)
*2: 加速度系数的设置范围有限。
*3: 选配规格…工具法兰安装规格
用户接线配管花键轴中空规格
※ Z 轴速度在 20 ~ 40%时,根据机械臂位置、Z 轴位置,Z 轴可能会发生振动。
请避开出现振动现象的速度范围进行使用。
噪音级别
机器人的等效声级 Laeq(A)
(与背景声压级相差 10dB 以上时)标示噪音级别的位置
76.2dB 距机器人的基座背面 1.25m、高度 1.6m
注)机器人周围若存在反射声音的物体,则噪音级别可能升高。
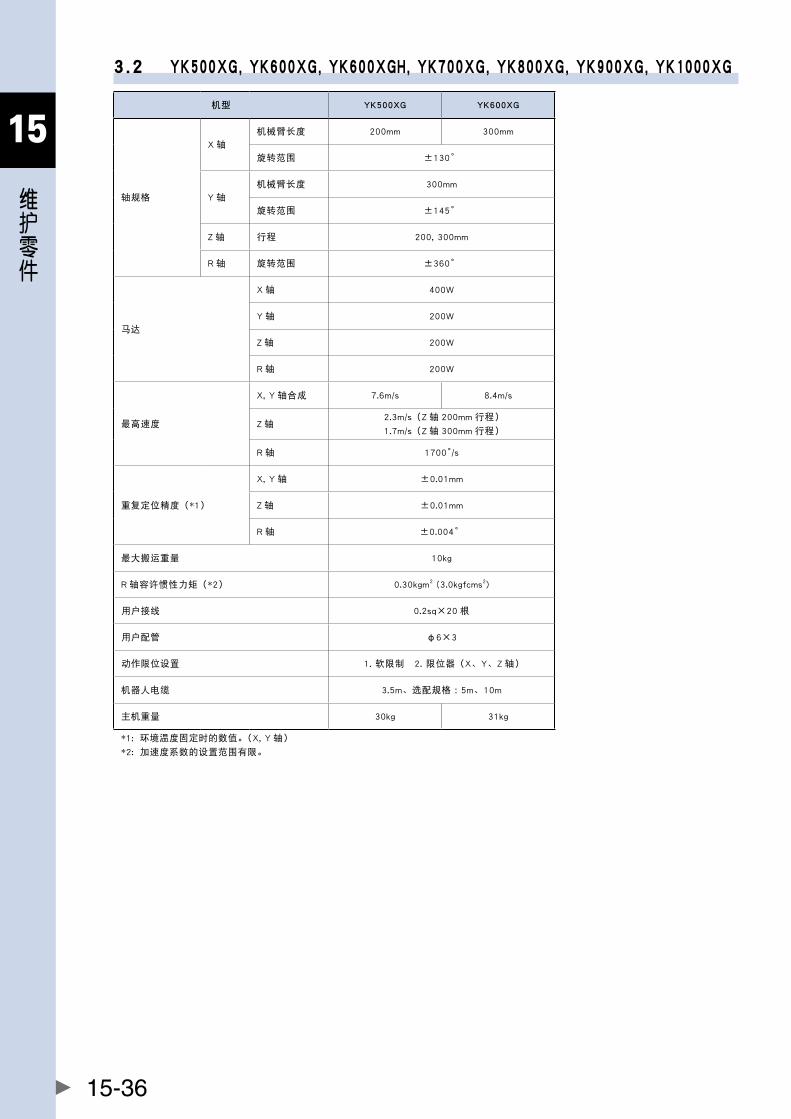
15-36
15
维护零件
3.2 YK500XG,YK600XG,YK600XGH,YK700XG,YK800XG,YK900XG,YK1000XG
机型 YK500XG YK600XG
轴规格
X 轴
机械臂长度 200mm 300mm
旋转范围 ±130°
Y 轴
机械臂长度 300mm
旋转范围 ±145°
Z 轴 行程 200,300mm
R 轴 旋转范围 ±360°
马达
X 轴 400W
Y 轴 200W
Z 轴 200W
R 轴 200W
最高速度
X,Y 轴合成 7.6m/s 8.4m/s
Z 轴2.3m/s(Z 轴 200mm 行程)
1.7m/s(Z 轴 300mm 行程)
R 轴 1700°/s
重复定位精度(*1)
X,Y 轴 ±0.01mm
Z 轴 ±0.01mm
R 轴 ±0.004°
最大搬运重量 10kg
R 轴容许惯性力矩(*2) 0.30kgm2(3.0kgfcms2)
用户接线 0.2sq×20 根
用户配管 φ6×3
动作限位设置 1.软限制 2.限位器(X、Y、Z 轴)
机器人电缆 3.5m、选配规格 :5m、10m
主机重量 30kg 31kg
*1: 环境温度固定时的数值。(X,Y 轴)
*2: 加速度系数的设置范围有限。
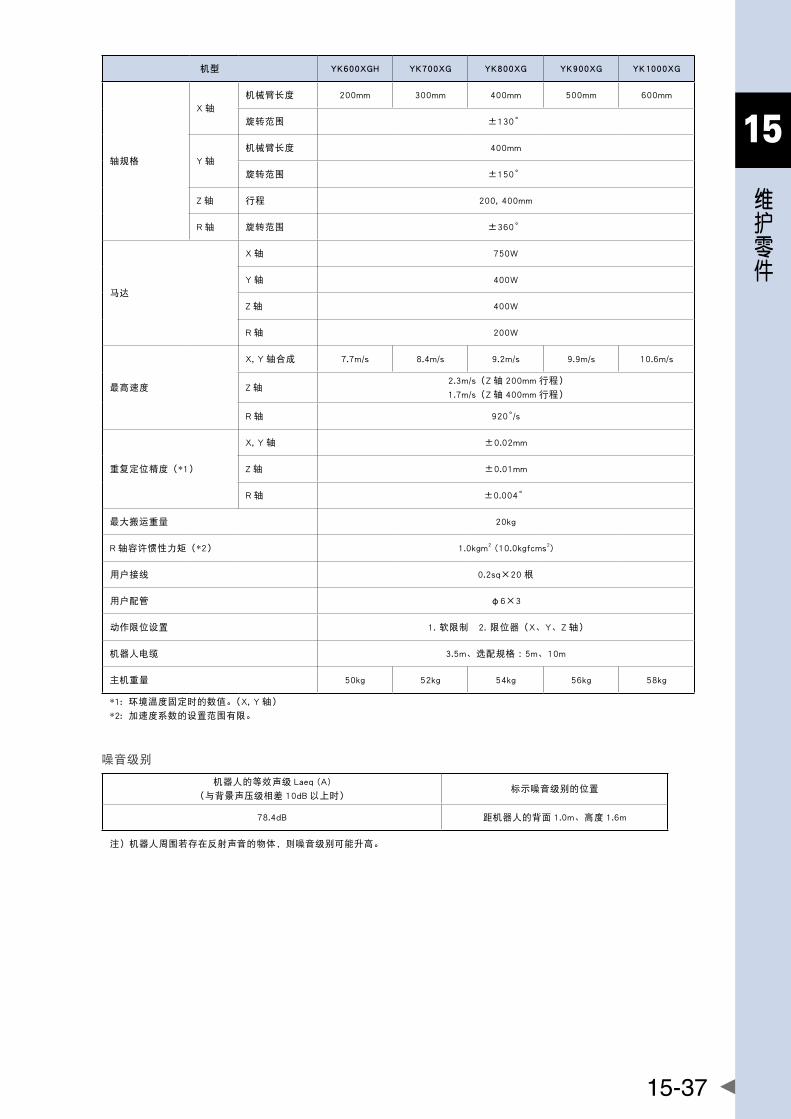
15-37
15
维护零件
机型 YK600XGH YK700XG YK800XG YK900XG YK1000XG
轴规格
X 轴
机械臂长度 200mm 300mm 400mm 500mm 600mm
旋转范围 ±130°
Y 轴
机械臂长度 400mm
旋转范围 ±150°
Z 轴 行程 200,400mm
R 轴 旋转范围 ±360°
马达
X 轴 750W
Y 轴 400W
Z 轴 400W
R 轴 200W
最高速度
X,Y 轴合成 7.7m/s 8.4m/s 9.2m/s 9.9m/s 10.6m/s
Z 轴2.3m/s(Z 轴 200mm 行程)
1.7m/s(Z 轴 400mm 行程)
R 轴 920°/s
重复定位精度(*1)
X,Y 轴 ±0.02mm
Z 轴 ±0.01mm
R 轴 ±0.004°
最大搬运重量 20kg
R 轴容许惯性力矩(*2) 1.0kgm2(10.0kgfcms2)
用户接线 0.2sq×20 根
用户配管 φ6×3
动作限位设置 1.软限制 2.限位器(X、Y、Z 轴)
机器人电缆 3.5m、选配规格 :5m、10m
主机重量 50kg 52kg 54kg 56kg 58kg
*1: 环境温度固定时的数值。(X,Y 轴)
*2: 加速度系数的设置范围有限。
噪音级别
机器人的等效声级 Laeq(A)
(与背景声压级相差 10dB 以上时)标示噪音级别的位置
78.4dB 距机器人的背面 1.0m、高度 1.6m
注)机器人周围若存在反射声音的物体,则噪音级别可能升高。
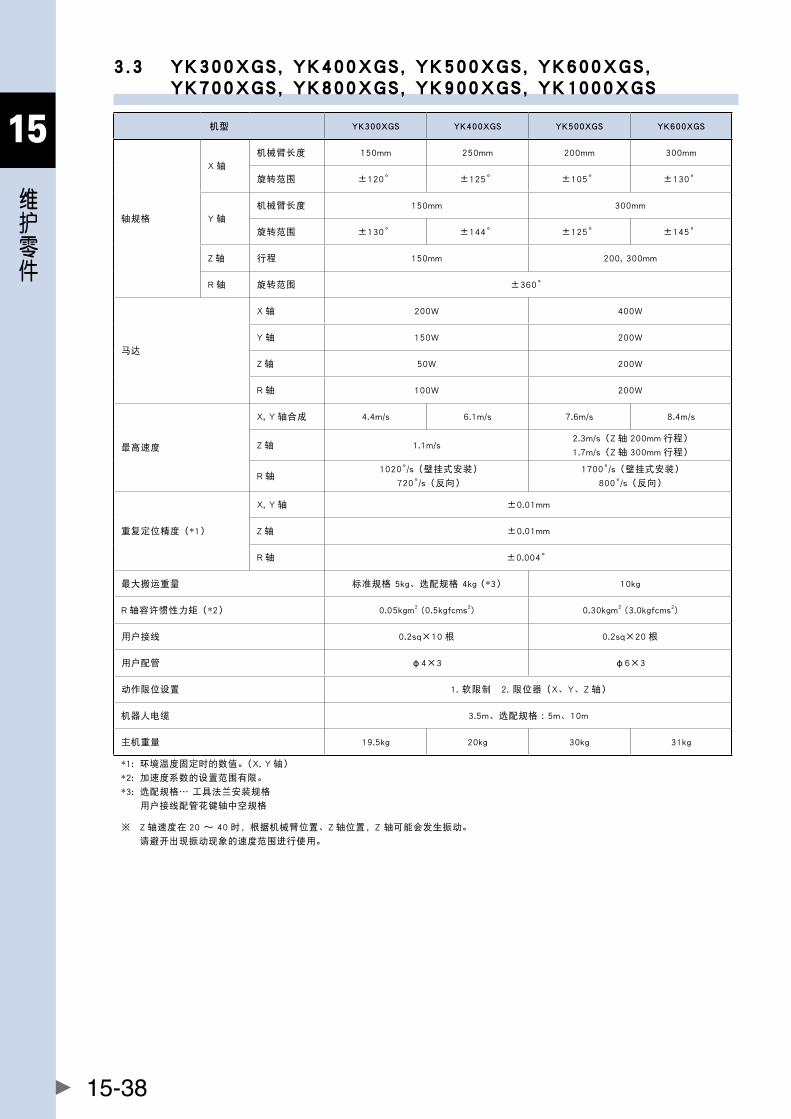
15-38
15
维护零件
3.3 YK300XGS,YK400XGS,YK500XGS,YK600XGS, YK700XGS,YK800XGS,YK900XGS,YK1000XGS
机型 YK300XGS YK400XGS YK500XGS YK600XGS
轴规格
X 轴
机械臂长度 150mm 250mm 200mm 300mm
旋转范围 ±120° ±125° ±105° ±130°
Y 轴
机械臂长度 150mm 300mm
旋转范围 ±130° ±144° ±125° ±145°
Z 轴 行程 150mm 200,300mm
R 轴 旋转范围 ±360°
马达
X 轴 200W 400W
Y 轴 150W 200W
Z 轴 50W 200W
R 轴 100W 200W
最高速度
X,Y 轴合成 4.4m/s 6.1m/s 7.6m/s 8.4m/s
Z 轴 1.1m/s2.3m/s(Z 轴 200mm 行程)
1.7m/s(Z 轴 300mm 行程)
R 轴1020°/s(壁挂式安装)
720°/s(反向)
1700°/s(壁挂式安装)
800°/s(反向)
重复定位精度(*1)
X,Y 轴 ±0.01mm
Z 轴 ±0.01mm
R 轴 ±0.004°
最大搬运重量 标准规格5kg、选配规格4kg(*3) 10kg
R 轴容许惯性力矩(*2) 0.05kgm2(0.5kgfcms2) 0.30kgm2(3.0kgfcms2)
用户接线 0.2sq×10 根 0.2sq×20 根
用户配管 φ4×3 φ6×3
动作限位设置 1.软限制 2.限位器(X、Y、Z 轴)
机器人电缆 3.5m、选配规格 :5m、10m
主机重量 19.5kg 20kg 30kg 31kg
*1: 环境温度固定时的数值。(X,Y 轴)
*2: 加速度系数的设置范围有限。
*3: 选配规格…工具法兰安装规格
用户接线配管花键轴中空规格
※ Z 轴速度在 20~40 时,根据机械臂位置、Z 轴位置,Z轴可能会发生振动。
请避开出现振动现象的速度范围进行使用。
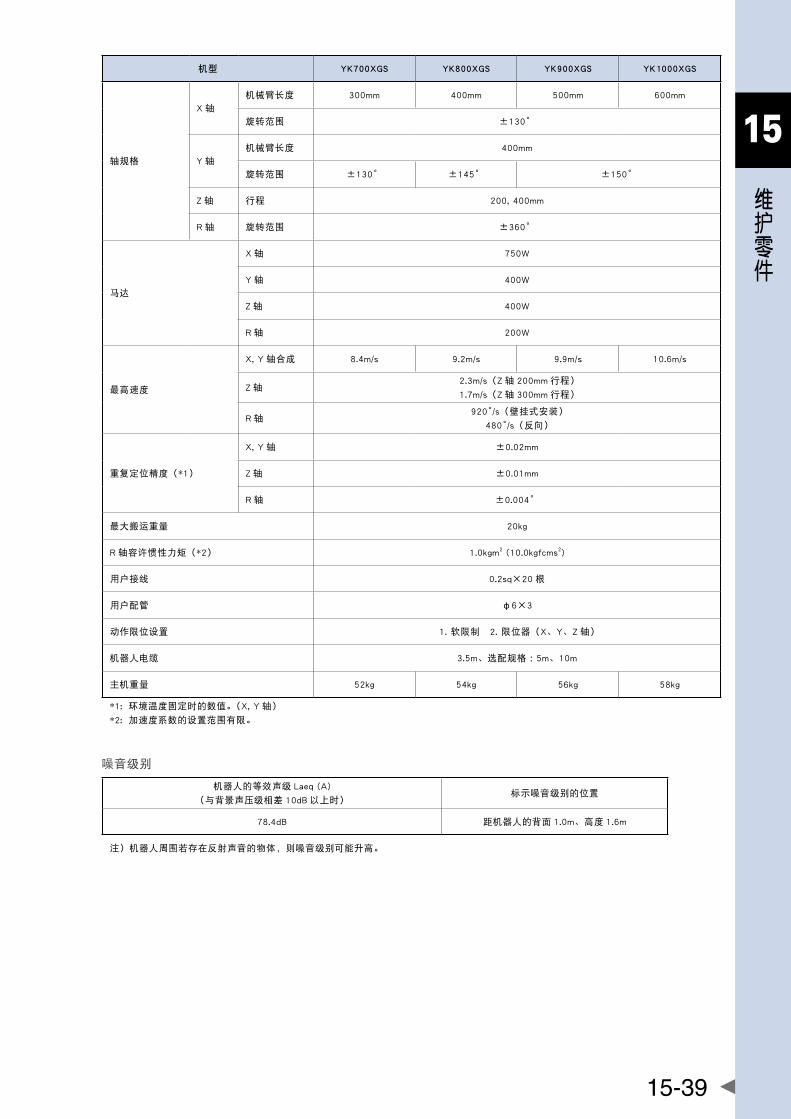
15-39
15
维护零件
机型 YK700XGS YK800XGS YK900XGS YK1000XGS
轴规格
X 轴
机械臂长度 300mm 400mm 500mm 600mm
旋转范围 ±130°
Y 轴
机械臂长度 400mm
旋转范围 ±130° ±145° ±150°
Z 轴 行程 200,400mm
R 轴 旋转范围 ±360°
马达
X 轴 750W
Y 轴 400W
Z 轴 400W
R 轴 200W
最高速度
X,Y 轴合成 8.4m/s 9.2m/s 9.9m/s 10.6m/s
Z 轴2.3m/s(Z 轴 200mm 行程)
1.7m/s(Z 轴 300mm 行程)
R 轴920°/s(壁挂式安装)
480°/s(反向)
重复定位精度(*1)
X,Y 轴 ±0.02mm
Z 轴 ±0.01mm
R 轴 ±0.004°
最大搬运重量 20kg
R 轴容许惯性力矩(*2) 1.0kgm2(10.0kgfcms2)
用户接线 0.2sq×20 根
用户配管 φ6×3
动作限位设置 1.软限制 2.限位器(X、Y、Z 轴)
机器人电缆 3.5m、选配规格 :5m、10m
主机重量 52kg 54kg 56kg 58kg
*1: 环境温度固定时的数值。(X,Y 轴)
*2: 加速度系数的设置范围有限。
噪音级别
机器人的等效声级 Laeq(A)
(与背景声压级相差 10dB 以上时)标示噪音级别的位置
78.4dB 距机器人的背面 1.0m、高度 1.6m
注)机器人周围若存在反射声音的物体,则噪音级别可能升高。
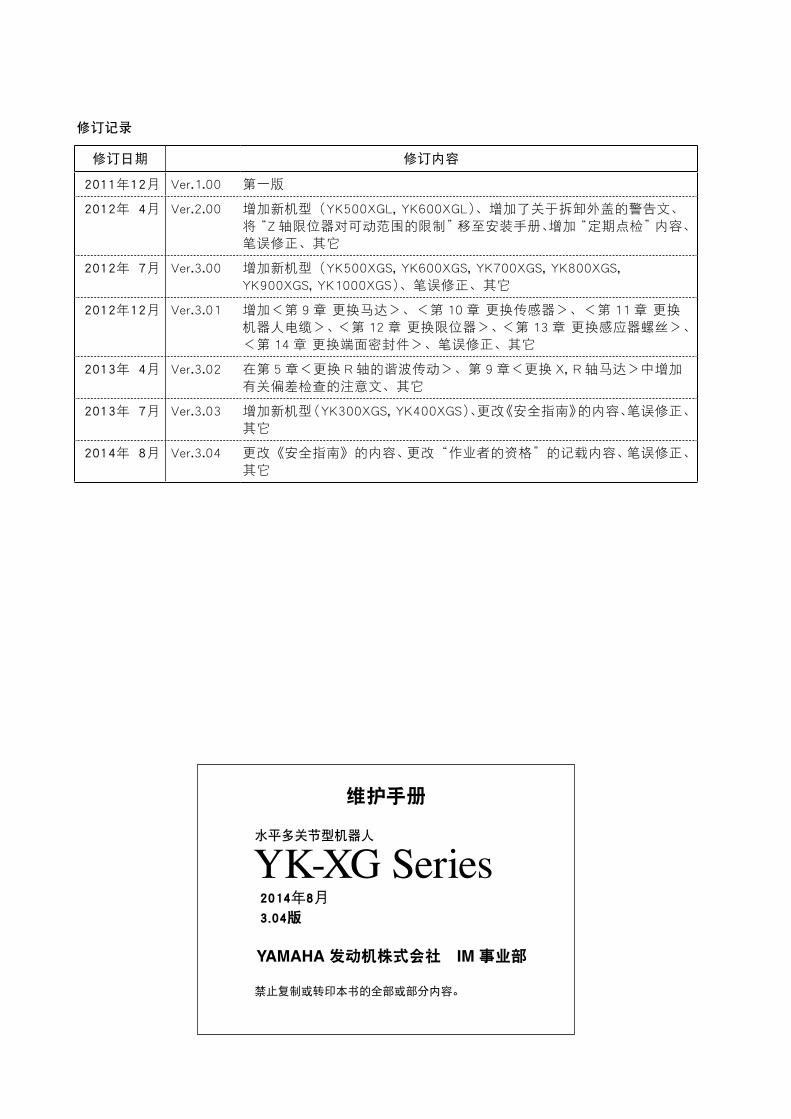
YAMAHA 发动机株式会社 IM 事业部
禁止复制或转印本书的全部或部分内容。
维护手册
水平多关节型机器人
YK-XG Series2014年8月
3.04版
修订记录
修订日期 修订内容
2011年12月 Ver.1.00 第一版
2012年 4月 Ver.2.00 增加新机型(YK500XGL, YK600XGL)、增加了关于拆卸外盖的警告文、将“Z 轴限位器对可动范围的限制”移至安装手册、增加“定期点检”内容、笔误修正、其它
2012年 7月 Ver.3.00 增加新机型(YK500XGS, YK600XGS, YK700XGS, YK800XGS, YK900XGS, YK1000XGS)、笔误修正、其它
2012年12月 Ver.3.01 增加<第 9 章 更换马达>、<第 10 章 更换传感器>、<第 11 章 更换机器人电缆>、<第 12 章 更换限位器>、<第 13 章 更换感应器螺丝>、<第 14 章 更换端面密封件>、笔误修正、其它
2013年 4月 Ver.3.02 在第 5 章<更换 R 轴的谐波传动>、第 9 章<更换 X, R 轴马达>中增加有关偏差检查的注意文、其它
2013年 7月 Ver.3.03 增加新机型(YK300XGS, YK400XGS)、更改《安全指南》的内容、笔误修正、其它
2014年 8月 Ver.3.04 更改《安全指南》的内容、更改“作业者的资格”的记载内容、笔误修正、其它


YAMAHA MOTOR CO., LTD.
联系我们
最新版的用户手册可从下记网站下载
http://www.yamaha-motor.com.cn/robot
雅马哈发动机智能机器(苏州)有限公司地址:江苏省苏州工业园区苏虹中路200号出口加工区A区3C幢邮编:215021电话:(0512) 6831 7091 / 6831 7092传真:(0512) 6831 7093
雅马哈发动机株式会社 IM事业部 机器人商务部静冈县滨松市中区早出町882 邮编 435-0054[总机] 电话:81-53-460-6103 传真:81-53-460-6811[营业] 电话:81-53-460-6602 [客服] 电话:81-53-460-6169








![[希腊罗马古代社会史]La Cité.Anitaue.(法)古朗士](https://static.fdokumen.com/doc/165x107/6337331920d9c9602f0b30bd/la-citeanitaue.jpg)






