Verfahren und Vorrichtung zum Bestimmen der 3D-Koordinaten ...
14
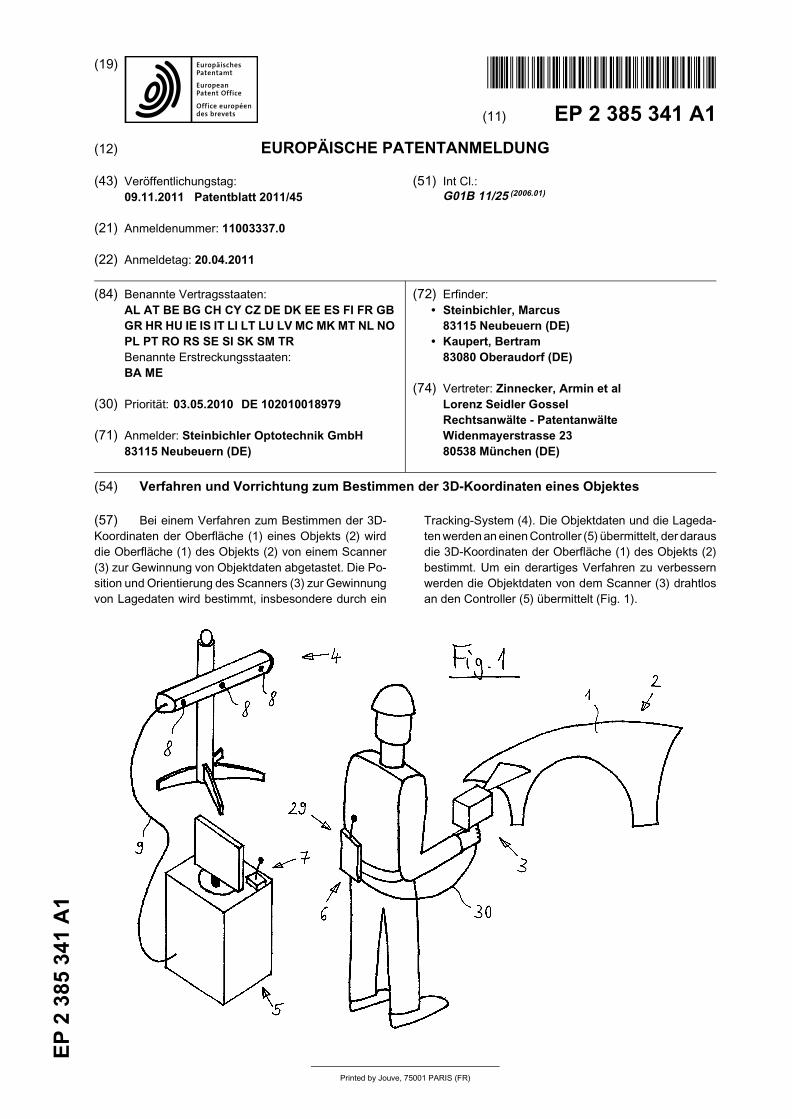
Printed by Jouve, 75001 PARIS (FR) (19) EP 2 385 341 A1 & (11) EP 2 385 341 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 09.11.2011 Patentblatt 2011/45 (21) Anmeldenummer: 11003337.0 (22) Anmeldetag: 20.04.2011 (51) Int Cl.: G01B 11/25 (2006.01) (84) Benannte Vertragsstaaten: AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR Benannte Erstreckungsstaaten: BA ME (30) Priorität: 03.05.2010 DE 102010018979 (71) Anmelder: Steinbichler Optotechnik GmbH 83115 Neubeuern (DE) (72) Erfinder: • Steinbichler, Marcus 83115 Neubeuern (DE) • Kaupert, Bertram 83080 Oberaudorf (DE) (74) Vertreter: Zinnecker, Armin et al Lorenz Seidler Gossel Rechtsanwälte - Patentanwälte Widenmayerstrasse 23 80538 München (DE) (54) Verfahren und Vorrichtung zum Bestimmen der 3D-Koordinaten eines Objektes (57) Bei einem Verfahren zum Bestimmen der 3D- Koordinaten der Oberfläche (1) eines Objekts (2) wird die Oberfläche (1) des Objekts (2) von einem Scanner (3) zur Gewinnung von Objektdaten abgetastet. Die Po- sition und Orientierung des Scanners (3) zur Gewinnung von Lagedaten wird bestimmt, insbesondere durch ein Tracking-System (4). Die Objektdaten und die Lageda- ten werden an einen Controller (5) übermittelt, der daraus die 3D-Koordinaten der Oberfläche (1) des Objekts (2) bestimmt. Um ein derartiges Verfahren zu verbessern werden die Objektdaten von dem Scanner (3) drahtlos an den Controller (5) übermittelt (Fig. 1).
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Verfahren und Vorrichtung zum Bestimmen der 3D-Koordinaten ...
Printed by Jouve, 75001 PARIS (FR)
(19)E
P2
385
341
A1
��&�� ���������(11) EP 2 385 341 A1
(12) EUROPÄISCHE PATENTANMELDUNG
(43) Veröffentlichungstag: 09.11.2011 Patentblatt 2011/45
(21) Anmeldenummer: 11003337.0
(22) Anmeldetag: 20.04.2011
(51) Int Cl.:G01B 11/25 (2006.01)
(84) Benannte Vertragsstaaten: AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TRBenannte Erstreckungsstaaten: BA ME
(30) Priorität: 03.05.2010 DE 102010018979
(71) Anmelder: Steinbichler Optotechnik GmbH83115 Neubeuern (DE)
(72) Erfinder: • Steinbichler, Marcus
83115 Neubeuern (DE)• Kaupert, Bertram
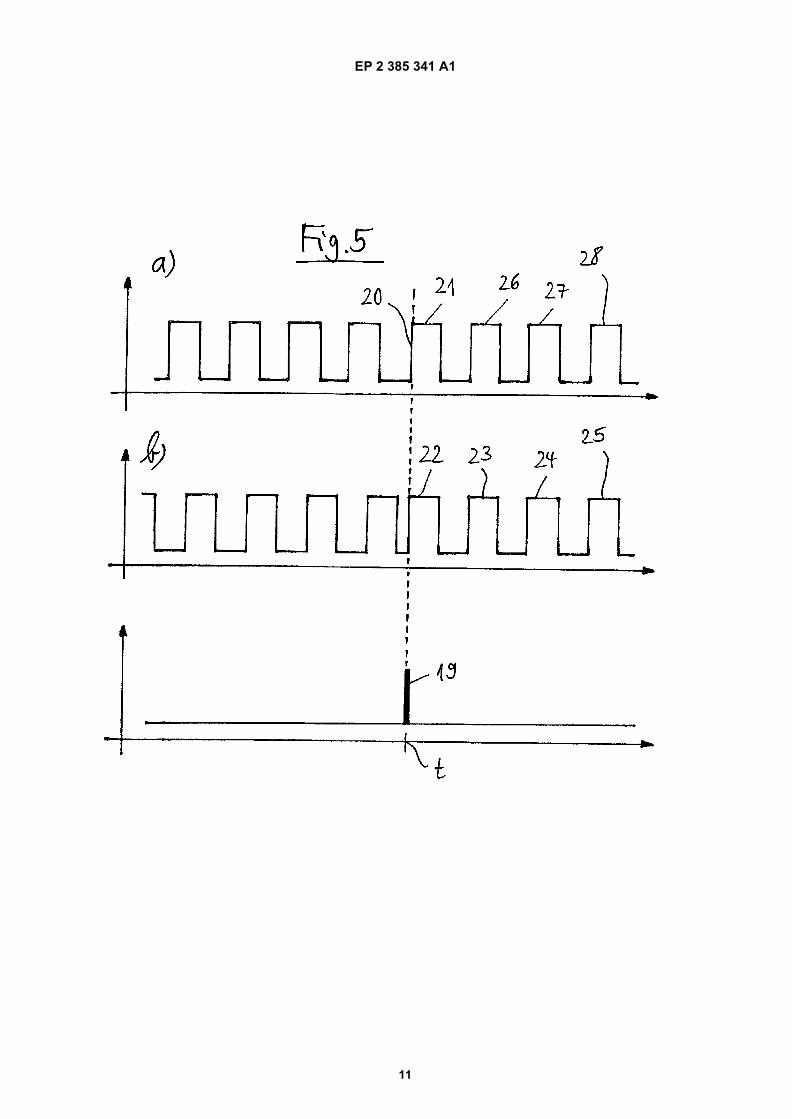
83080 Oberaudorf (DE)
(74) Vertreter: Zinnecker, Armin et alLorenz Seidler Gossel Rechtsanwälte - Patentanwälte Widenmayerstrasse 2380538 München (DE)
(54) Verfahren und Vorrichtung zum Bestimmen der 3D-Koordinaten eines Objektes
(57) Bei einem Verfahren zum Bestimmen der 3D-Koordinaten der Oberfläche (1) eines Objekts (2) wirddie Oberfläche (1) des Objekts (2) von einem Scanner(3) zur Gewinnung von Objektdaten abgetastet. Die Po-sition und Orientierung des Scanners (3) zur Gewinnungvon Lagedaten wird bestimmt, insbesondere durch ein
Tracking-System (4). Die Objektdaten und die Lageda-ten werden an einen Controller (5) übermittelt, der darausdie 3D-Koordinaten der Oberfläche (1) des Objekts (2)bestimmt. Um ein derartiges Verfahren zu verbessernwerden die Objektdaten von dem Scanner (3) drahtlosan den Controller (5) übermittelt (Fig. 1).

EP 2 385 341 A1
2
5
10
15
20
25
30
35
40
45
50
55
Beschreibung
[0001] Die Erfindung betrifft ein Verfahren zum Be-stimmen der 3D-Koordinaten der Oberfläche eines Ob-jekts und eine Vorrichtung zur Durchführung eines der-artigen Verfahrens.[0002] Bei dem Verfahren wird die Oberfläche des Ob-jekts von einem Scanner zur Gewinnung von Objektda-ten abgetastet. Ein derartiger Scanner ist aus der EP 1724 549 A2, auf die hiermit Bezug genommen wird, be-kannt. Bei dem Scanner kann es sich insbesondere umeinen Linienscanner handeln. Der Scanner kann eineProjektionseinrichtung zum Projizieren eines Mustersauf das Objekt umfassen. Insbesondere projiziert dieProjektionseinrichtung eine Linie auf das Objekt. Vor-zugsweise wird das Muster bzw. die Linie mit kohärentemLicht, insbesondere Laserlicht, auf das Objekt projiziert.Der Scanner kann ferner eine Kamera umfassen, die ge-eignet ist, das auf das Objekt projizierte Muster, insbe-sondere die auf das Objekt projizierte Linie, zu erfassen.Die Kamera kann eine Abbildungsoptik und einen Sensorumfassen, insbesondere einen flächenhaften Sensor,insbesondere einen CCD-Sensor oder einen CMOS-Sensor oder einen sonstigen Sensor.[0003] Die Objektdaten, die von dem Scanner aufge-nommen werden, beziehen sich auf das Bezugsystemdieses Scanners. Es ist allerdings erforderlich, absolute3D-Koordinaten der Oberfläche des Objekts zu erhalten,also 3D-Koordinaten der Oberfläche des Objekts, die ineinem raumfesten Koordinatensystem vorliegen. Hierfürist es erforderlich, die Position und Orientierung desScanners zu bestimmen. Auf diese Weise können dieLagedaten des Scanners erhalten werden, die es ermög-lichen, die in dem Koordinatensystem des Scanners vor-liegenden Objektdaten in absolute 3D-Koordinaten derOberfläche des Objekts umzurechnen.[0004] Die Objektdaten und die Lagedaten werden aneinen Controller übermittelt, der daraus die 3D-Koordi-naten der Oberfläche des Objekts bestimmt. Diese 3D-Koordinaten sind absolute Koordinaten, also Koordina-ten in einem raumfesten Bezugsystem.[0005] Ein Verfahren nach dem Oberbegriff des An-spruchs 1 ist aus der EP 0 553 266 B1 bekannt. DiesesVerfahren kann insbesondere bei der Prüfung derMaßhaltigkeit von Bauteilen eingesetzt werden, bei-spielsweise bei der Fertigung und Überwachung vonPreßwerkzeugen zur Herstellung von Karosserieble-chen von Fahrzeugen. Es wird von Automobilherstellern,im Flugzeugbau und im Consumerbereich eingesetzt.[0006] Bisher werden die Objektdaten von dem Scan-ner durch eine Leitung, insbesondere eine elektrischeoder optische Leitung, an den Controller übermittelt.Hierfür können mehradrige Kabel verwendet werden,beispielsweise ein bis zu 36-adriges Kabel, das die Ver-bindung zwischen dem Scanner und dem Controller her-stellt. Ein derartiges Kabel ist mit verschiedenen Nach-teilen behaftet. Es kann sich im Meßaufbau verhaken,es kann sich verdrillen, und es kann eine Stolpergefahr
für den Bediener darstellen. Bei empfindlichen Objekto-berflächen, beispielsweise von Clay-Modellen, kann esvorkommen, daß das Kabel beim Messen die Oberflächeberührt und durch Abdrücke beschädigt. Auch die be-grenzte Länge des Kabels von beispielsweise 10 m kanninsbesondere die Vermessung von großen Objekten ineinem Stück verhindern und es erforderlich machen, dasObjekt oder das komplette Meßgerät umsetzen zu müs-sen. Kabel sind empfindlich gegenüber kleinen Bieger-adien und Knick- oder Druckstellen, wodurch in hochbe-anspruchten Bereichen Unterbrechungen der Kabel-schirmung oder sogar einzelner Litzen auftreten können.[0007] Aufgabe der Erfindung ist es, ein verbessertesVerfahren und eine verbesserte Vorrichtung der ein-gangs angegebenen Art vorzuschlagen.[0008] Erfindungsgemäß wird diese Aufgabe bei ei-nem Verfahren zum Bestimmen der 3D-Koordinaten derOberfläche eines Objekts durch die Merkmale des An-spruchs 1 gelöst. Die Objektdaten werden von demScanner drahtlos an den Controller übermittelt. Hier-durch wird die Durchführung des Verfahrens vereinfacht.Die mit einem Kabel verbundenen Nachteile treten nichtauf. Insbesondere kann auch das auf das Kabel entfal-lende Gewicht des Scanners eingespart werden. Diedrahtlose Übermittlung der Objektdaten kann durchFunkwellen oder durch eine optische Übertragung erfol-gen, insbesondere durch Infrarotstrahlung.[0009] Vorteilhafte Weiterbildungen sind in den Unter-ansprüchen beschrieben.[0010] Vorteilhaft ist es, wenn die Objektdaten und dieLagedaten miteinander synchronisiert werden. Um die3D-Koordinaten der Oberfläche des Objekts mit einerausreichenden Präzision bestimmen zu können, ist eserforderlich, daß die 3D-Koordinaten aus Objektdatenund Lagedaten errechnet werden, die jeweils zur selbenZeit bestimmt worden sind. Die zeitliche Abweichung die-ser Daten voneinander darf eine bestimmte Grenze nichtüberschreiten, um eine hinreichende Präzision der dar-aus bestimmten 3D-Koordinaten zu gewährleisten. Einzeitlicher Versatz von nur wenigen Mikrosekunden kannbereits einen spürbaren Datenversatz bewirken, der zuwesentlich verschlechterten oder unbrauchbarenMeßdaten führen kann.[0011] Vorteilhaft ist es, wenn die Objektdaten und dieLagedaten durch eine drahtlose Übertragung synchroni-siert werden. Vorzugsweise werden die Objektdaten unddie Lagedaten wiederkehrend synchronisiert, vorzugs-weise regelmäßig wiederkehrend. Die drahtlose Über-tragung kann durch Funkwellen oder durch eine optischeÜbertragung erfolgen, insbesondere durch Infrarotstrah-lung. Für die drahtlose Übertragung der Synchronisationkann ein gesonderter Übertragungskanal verwendetwerden.[0012] Eine weitere vorteilhafte Weiterbildung ist da-durch gekennzeichnet, daß der Controller und/oder derScanner ein Synchronisationssignal erzeugt, das an denController und/oder den Scanner drahtlos übertragenwird. Das Synchronisationssignal kann also von dem
1 2

EP 2 385 341 A1
3
5
10
15
20
25
30
35
40
45
50
55
Controller erzeugt werden, der es an den Scanner draht-los überträgt. Stattdessen oder zusätzlich kann das Syn-chronisationssignal von dem Scanner erzeugt werden,der es an den Controller drahtlos überträgt. Insbesonde-re kann in dem Controller ein Taktgeber integriert sein,der drahtlos einen vorzugsweise hochauflösenden Zeit-geber (Timer) synchronisiert, der in dem Scanner vorge-sehen ist. Durch die Synchronisation kann ein gemein-samer Startzeitpunkt für die Aufnahme und/oder Über-mittlung der Objektdaten und die Aufnahme und/oderÜbermittlung der zugehörigen Lagedaten festgelegt wer-den. Dies kann durch Einschalten und/oder Ausschaltendes Signals des Taktgebers (Taktsignals) und/oderdurch ein gesondertes Signal eines Triggers (Triggersi-gnal) bewirkt werden.[0013] Vorteilhaft ist es, wenn die Objektdaten vor derdrahtlosen Übermittlung an den Controller komprimiertwerden. Da die Übermittlung der Objektdaten von demScanner an den Controller drahtlos erfolgt, ist die Daten-übertragungsrate im Verhältnis zu einer Übermittlungdurch eine Leitung begrenzt. Bei einer leitungsgebunde-nen Übermittlung ist es insbesondere möglich, mehrereparallele Leitungen zu verwenden, wodurch die Daten-übertragungskapazität gesteigert werden kann. Dement-sprechend kann es vorteilhaft oder erforderlich sein, dieObjektdaten zu komprimieren und dadurch die zu über-tragende Datenmenge zu reduzieren.[0014] Die Reduzierung der Datenmenge kann in demScanner erfolgen oder in einer in dem Scanner vorhan-denen Signalaufbereitungseinheit. Die Reduktion der zuübertragenden Datenmenge kann in der Weise erfolgen,daß aus den gemessenen Rohdaten die Nutzdaten ex-trahiert werden. Bei den Nutzdaten kann es sich insbe-sondere um die Koordinaten der Punkte auf dem flächen-haften Sensor handeln, die den Punkten der auf das Ob-jekt projizierten Linie entsprechen.[0015] Der Scanner kann Bestandteil einer Koordina-tenmeßmaschine sein. In diesem Fall liefert die statio-näre Koordinatenmeßmaschine die Lagedaten für diePosition des Scanners. Der Scanner kann in der Koor-dinatenmeßmaschine in drei Achsen gelagert und ver-fahrbar sein. Die Koordinatenmeßmaschine kann die Ko-ordinaten der Position des Scanners übermitteln. DerScanner kann ferner verschwenkbar sein. In diesem Fallist es vorteilhaft, wenn die Koordinatenmeßmaschineauch die Daten der durch die Verschwenkung bestimm-ten Orientierung des Scanners überträgt. Es ist allerdingsauch möglich, daß der Scanner starr, also nicht ver-schwenkbar, an der Koordinatenmeßmaschine befestigtist. In diesem Fall wird die Orientierung des Scannersdurch dessen fest eingebaute Orientierung bestimmt.[0016] Der Scanner kann an einem Gelenkarm oderan einem Arm eines Industrieroboters vorgesehen sein.Bei dem Gelenkarm kann es sich um einen von Handgeführten Gelenkarm handeln. Es ist allerdings auchmöglich, daß der Gelenkarm von einem oder mehrerenMotoren, insbesondere Elektromotoren, angetriebenwird. In allen Fällen werden die Lagedaten für die Position
und Orientierung des Scanners aus den Winkeln der Ge-lenke und den Längen der Arme des Gelenkarms oderdes Industrieroboters bestimmt.[0017] Besonders vorteilhaft ist es, wenn der Scannerein handgehaltener Scanner ist. In diesem Fall ist es vor-teilhaft, wenn die Position und Orientierung des Scan-ners durch ein Tracking-System bestimmt werden. Bei-spiele für derartige Tracking-Systeme sind in der EP 0553 266 B1 und in der EP 1 724 549 A2 beschrieben,auf die hiermit Bezug genommen wird.[0018] Eine weitere vorteilhafte Weiterbildung ist da-durch gekennzeichnet, daß die Energieversorgung desScanners durch eine am Körper tragbare Energieversor-gungseinheit erfolgt. Vorzugsweise umfaßt die Energie-versorgungseinheit Batterien und/oder Akkus. Die Ener-gieversorgungseinheit kann auch weitere Vorrichtungenmit Energie versorgen, insbesondere einen Sender fürdie drahtlose Übermittlung der Objektdaten an den Con-troller.[0019] Nach einer weiteren vorteilhaften Weiterbil-dung werden Fehler bei der Übermittlung der Objektda-ten automatisch erkannt und behoben. Hierdurch kannverhindert werden, daß beispielsweise durch Störsignaleaus der Umgebung nicht oder nicht korrekt erfaßte oderübermittelte Objektdaten mit einem entsprechenden Zu-satzaufwand und entsprechenden Zusatzkosten erneutaufgenommen werden müssen. Ferner gibt es Fälle, indenen Messungen nicht wiederholbar sind, weil dasMeßobjekt oder das Meßgerät nicht mehr zur Verfügungstehen. Fehler können insbesondere dadurch behobenwerden, daß nicht oder nicht richtig übermittelte Datenoder Datenpakete erneut übermittelt werden.[0020] Die erfindungsgemäße Vorrichtung zum Be-stimmen der 3D-Koordinaten der Oberfläche eines Ob-jekts, insbesondere zur Durchführung des erfindungsge-mäßen Verfahrens, umfaßt einen Scanner zur Gewin-nung von Objektdaten der Oberfläche des Objekts, eineVorrichtung zum Bestimmen der Position und Orientie-rung des Scanners zur Gewinnung von Lagedaten undeinen Controller zum Bestimmen der 3D-Koordinaten derOberfläche des Objekts aus den Objektdaten und denLagedaten. Erfindungsgemäß umfaßt die Vorrichtung ei-ne Übermittlungseinrichtung zum drahtlosen Übermittelnder Objektdaten von dem 3D-Meßgerät an den Control-ler.[0021] Vorteilhaft ist es, wenn die Vorrichtung eineSynchronisationseinrichtung zum Synchronisieren derObjektdaten mit den Lagedaten und/oder eine drahtloseÜbertragungseinrichtung für die Synchronisationsein-richtung und/oder eine Signalaufbereitungseinrichtungzum Komprimieren der Objektdaten vor der drahtlosenÜbermittlung an den Controller und/oder einen handge-haltenen Scanner und/oder ein Tracking-System zumBestimmen der Position und Orientierung des Scannersund/oder eine am Körper tragbare Energieversorgungs-einheit zur Energieversorgung des Scanners und/odereine Fehlerbeseitigungseinrichtung zum automatischenErkennen und Beheben von Fehlern bei der Übermittlung
3 4
EP 2 385 341 A1
4
5
10
15
20
25
30
35
40
45
50
55
der Objektdaten umfaßt.[0022] Die Erfindung betrifft ferner eine Koordinaten-meßmaschine oder einen Gelenkarm oder einen Indu-strieroboter, die durch eine erfindungsgemäße Vorrich-tung gekennzeichnet sind.[0023] Ein Ausführungsbeispiel der Erfindung wirdnachstehend anhand der beigefügten Zeichnung im ein-zelnen erläutert. In der Zeichnung zeigt
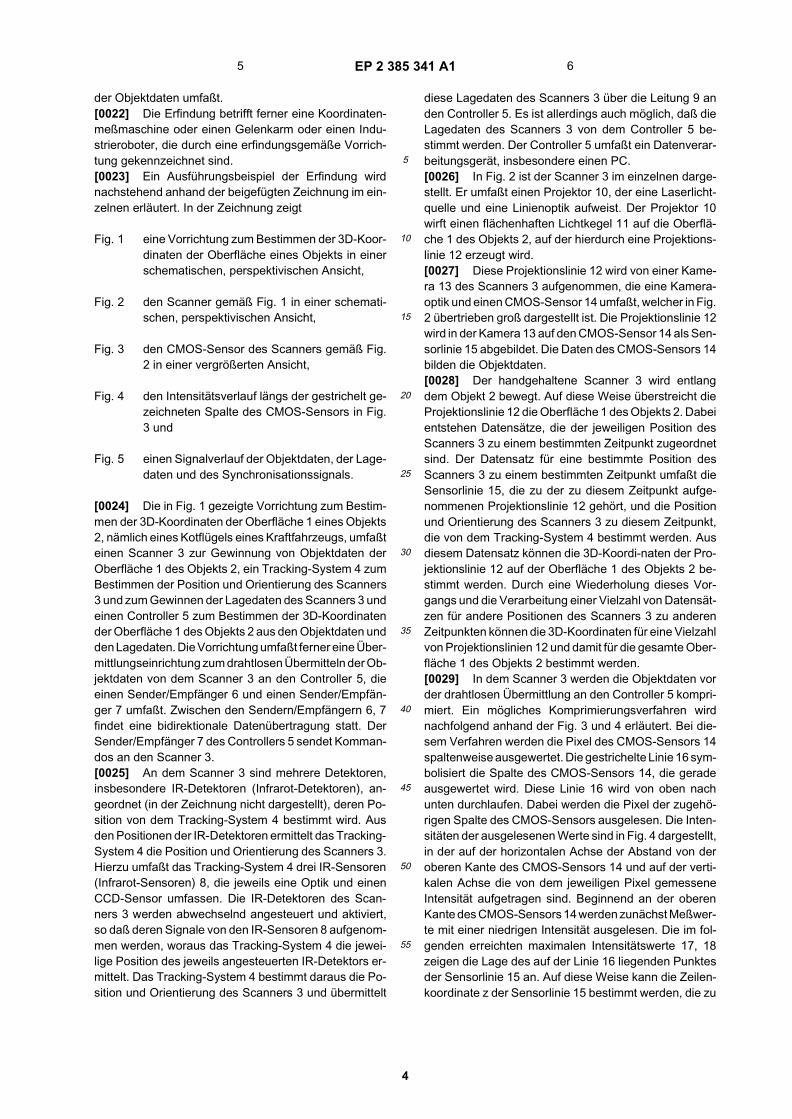
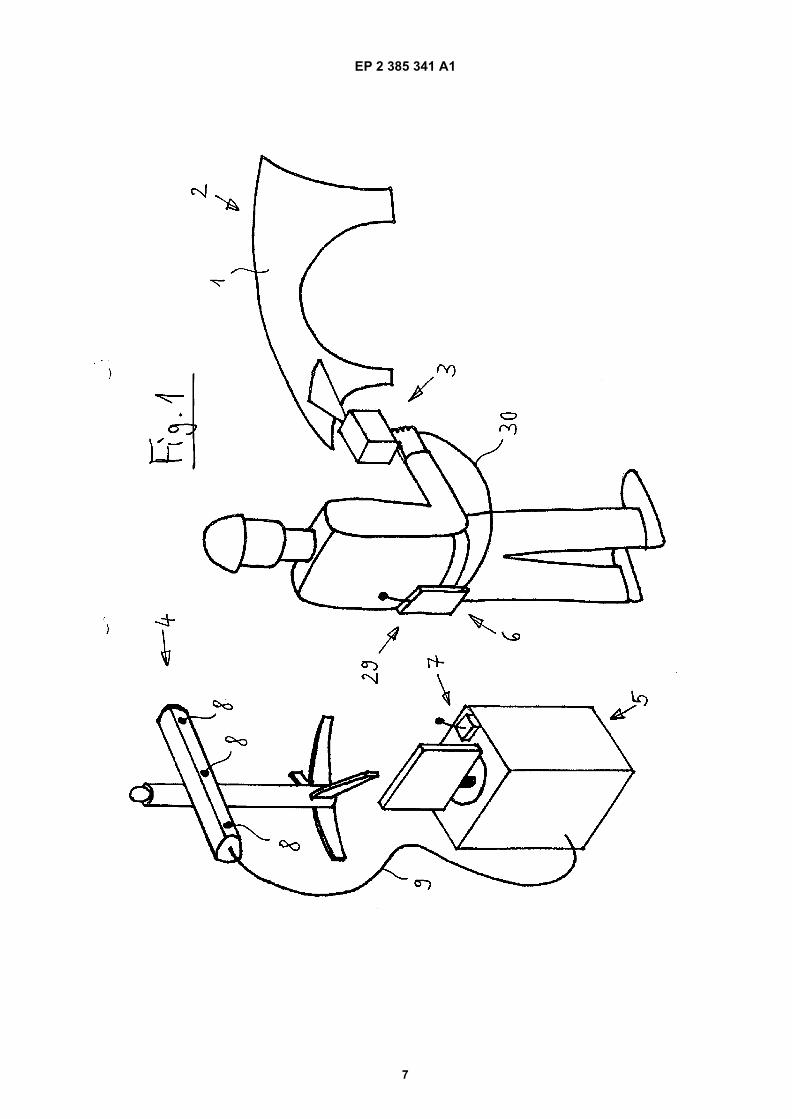
Fig. 1 eine Vorrichtung zum Bestimmen der 3D-Koor-dinaten der Oberfläche eines Objekts in einerschematischen, perspektivischen Ansicht,
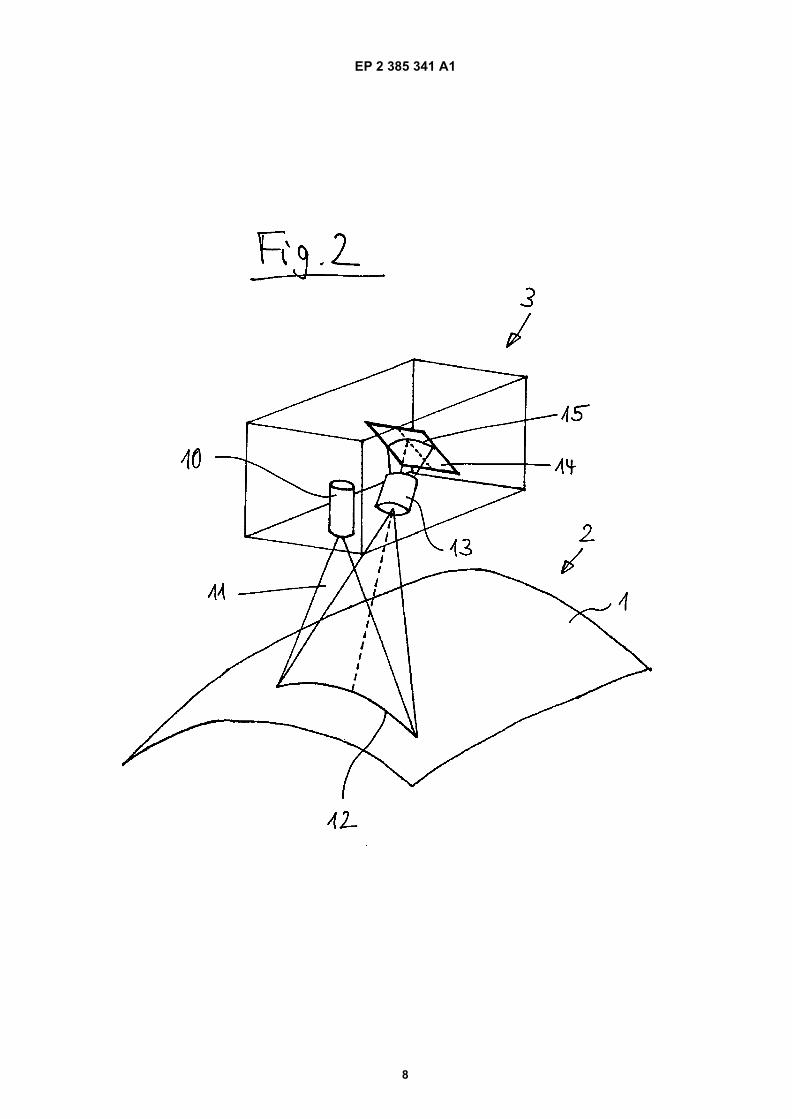
Fig. 2 den Scanner gemäß Fig. 1 in einer schemati-schen, perspektivischen Ansicht,
Fig. 3 den CMOS-Sensor des Scanners gemäß Fig.2 in einer vergrößerten Ansicht,
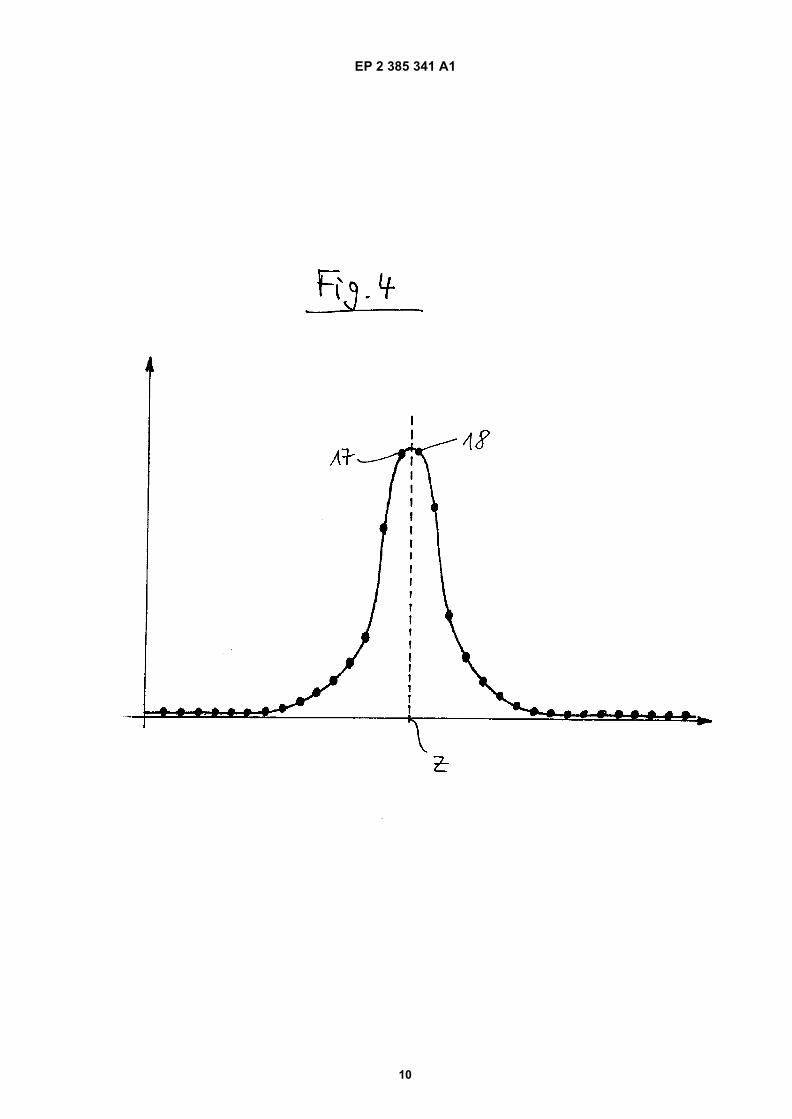
Fig. 4 den Intensitätsverlauf längs der gestrichelt ge-zeichneten Spalte des CMOS-Sensors in Fig.3 und
Fig. 5 einen Signalverlauf der Objektdaten, der Lage-daten und des Synchronisationssignals.
[0024] Die in Fig. 1 gezeigte Vorrichtung zum Bestim-men der 3D-Koordinaten der Oberfläche 1 eines Objekts2, nämlich eines Kotflügels eines Kraftfahrzeugs, umfaßteinen Scanner 3 zur Gewinnung von Objektdaten derOberfläche 1 des Objekts 2, ein Tracking-System 4 zumBestimmen der Position und Orientierung des Scanners3 und zum Gewinnen der Lagedaten des Scanners 3 undeinen Controller 5 zum Bestimmen der 3D-Koordinatender Oberfläche 1 des Objekts 2 aus den Objektdaten undden Lagedaten. Die Vorrichtung umfaßt ferner eine Über-mittlungseinrichtung zum drahtlosen Übermitteln der Ob-jektdaten von dem Scanner 3 an den Controller 5, dieeinen Sender/Empfänger 6 und einen Sender/Empfän-ger 7 umfaßt. Zwischen den Sendern/Empfängern 6, 7findet eine bidirektionale Datenübertragung statt. DerSender/Empfänger 7 des Controllers 5 sendet Komman-dos an den Scanner 3.[0025] An dem Scanner 3 sind mehrere Detektoren,insbesondere IR-Detektoren (Infrarot-Detektoren), an-geordnet (in der Zeichnung nicht dargestellt), deren Po-sition von dem Tracking-System 4 bestimmt wird. Ausden Positionen der IR-Detektoren ermittelt das Tracking-System 4 die Position und Orientierung des Scanners 3.Hierzu umfaßt das Tracking-System 4 drei IR-Sensoren(Infrarot-Sensoren) 8, die jeweils eine Optik und einenCCD-Sensor umfassen. Die IR-Detektoren des Scan-ners 3 werden abwechselnd angesteuert und aktiviert,so daß deren Signale von den IR-Sensoren 8 aufgenom-men werden, woraus das Tracking-System 4 die jewei-lige Position des jeweils angesteuerten IR-Detektors er-mittelt. Das Tracking-System 4 bestimmt daraus die Po-sition und Orientierung des Scanners 3 und übermittelt
diese Lagedaten des Scanners 3 über die Leitung 9 anden Controller 5. Es ist allerdings auch möglich, daß dieLagedaten des Scanners 3 von dem Controller 5 be-stimmt werden. Der Controller 5 umfaßt ein Datenverar-beitungsgerät, insbesondere einen PC.[0026] In Fig. 2 ist der Scanner 3 im einzelnen darge-stellt. Er umfaßt einen Projektor 10, der eine Laserlicht-quelle und eine Linienoptik aufweist. Der Projektor 10wirft einen flächenhaften Lichtkegel 11 auf die Oberflä-che 1 des Objekts 2, auf der hierdurch eine Projektions-linie 12 erzeugt wird.[0027] Diese Projektionslinie 12 wird von einer Kame-ra 13 des Scanners 3 aufgenommen, die eine Kamera-optik und einen CMOS-Sensor 14 umfaßt, welcher in Fig.2 übertrieben groß dargestellt ist. Die Projektionslinie 12wird in der Kamera 13 auf den CMOS-Sensor 14 als Sen-sorlinie 15 abgebildet. Die Daten des CMOS-Sensors 14bilden die Objektdaten.[0028] Der handgehaltene Scanner 3 wird entlangdem Objekt 2 bewegt. Auf diese Weise überstreicht dieProjektionslinie 12 die Oberfläche 1 des Objekts 2. Dabeientstehen Datensätze, die der jeweiligen Position desScanners 3 zu einem bestimmten Zeitpunkt zugeordnetsind. Der Datensatz für eine bestimmte Position desScanners 3 zu einem bestimmten Zeitpunkt umfaßt dieSensorlinie 15, die zu der zu diesem Zeitpunkt aufge-nommenen Projektionslinie 12 gehört, und die Positionund Orientierung des Scanners 3 zu diesem Zeitpunkt,die von dem Tracking-System 4 bestimmt werden. Ausdiesem Datensatz können die 3D-Koordi-naten der Pro-jektionslinie 12 auf der Oberfläche 1 des Objekts 2 be-stimmt werden. Durch eine Wiederholung dieses Vor-gangs und die Verarbeitung einer Vielzahl von Datensät-zen für andere Positionen des Scanners 3 zu anderenZeitpunkten können die 3D-Koordinaten für eine Vielzahlvon Projektionslinien 12 und damit für die gesamte Ober-fläche 1 des Objekts 2 bestimmt werden.[0029] In dem Scanner 3 werden die Objektdaten vorder drahtlosen Übermittlung an den Controller 5 kompri-miert. Ein mögliches Komprimierungsverfahren wirdnachfolgend anhand der Fig. 3 und 4 erläutert. Bei die-sem Verfahren werden die Pixel des CMOS-Sensors 14spaltenweise ausgewertet. Die gestrichelte Linie 16 sym-bolisiert die Spalte des CMOS-Sensors 14, die geradeausgewertet wird. Diese Linie 16 wird von oben nachunten durchlaufen. Dabei werden die Pixel der zugehö-rigen Spalte des CMOS-Sensors ausgelesen. Die Inten-sitäten der ausgelesenen Werte sind in Fig. 4 dargestellt,in der auf der horizontalen Achse der Abstand von deroberen Kante des CMOS-Sensors 14 und auf der verti-kalen Achse die von dem jeweiligen Pixel gemesseneIntensität aufgetragen sind. Beginnend an der oberenKante des CMOS-Sensors 14 werden zunächst Meßwer-te mit einer niedrigen Intensität ausgelesen. Die im fol-genden erreichten maximalen Intensitätswerte 17, 18zeigen die Lage des auf der Linie 16 liegenden Punktesder Sensorlinie 15 an. Auf diese Weise kann die Zeilen-koordinate z der Sensorlinie 15 bestimmt werden, die zu
5 6
EP 2 385 341 A1
5
5
10
15
20
25
30
35
40
45
50
55
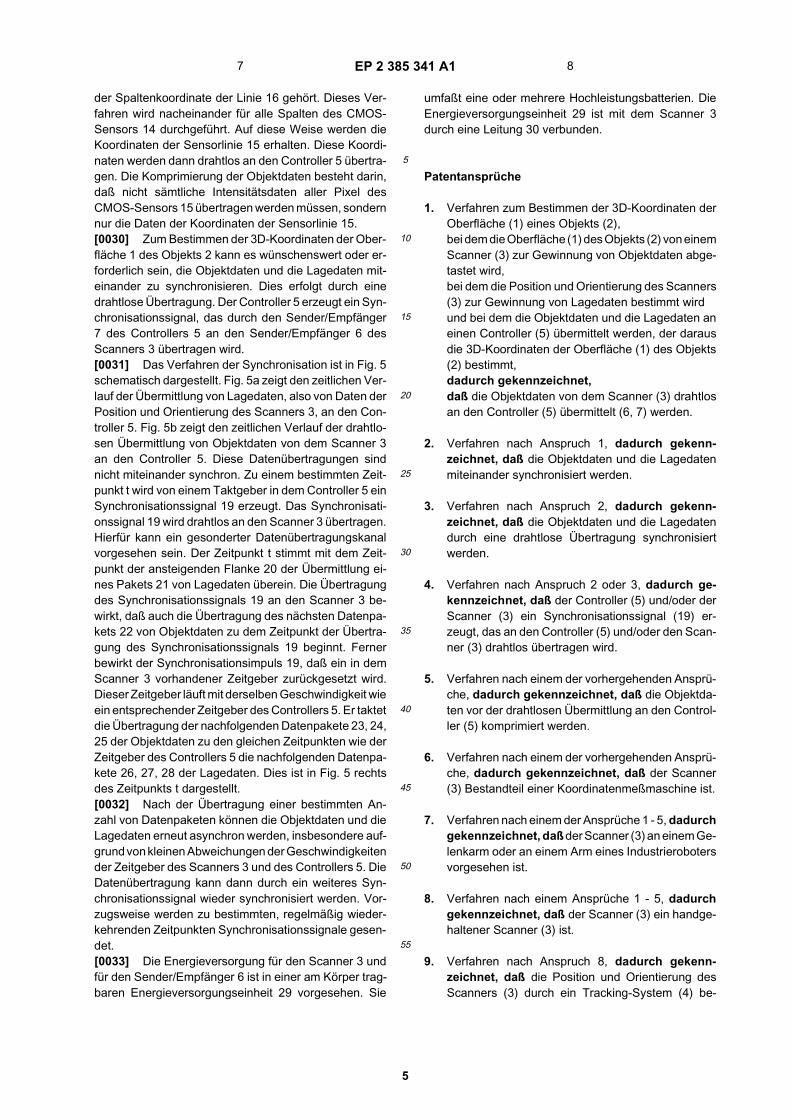
der Spaltenkoordinate der Linie 16 gehört. Dieses Ver-fahren wird nacheinander für alle Spalten des CMOS-Sensors 14 durchgeführt. Auf diese Weise werden dieKoordinaten der Sensorlinie 15 erhalten. Diese Koordi-naten werden dann drahtlos an den Controller 5 übertra-gen. Die Komprimierung der Objektdaten besteht darin,daß nicht sämtliche Intensitätsdaten aller Pixel desCMOS-Sensors 15 übertragen werden müssen, sondernnur die Daten der Koordinaten der Sensorlinie 15.[0030] Zum Bestimmen der 3D-Koordinaten der Ober-fläche 1 des Objekts 2 kann es wünschenswert oder er-forderlich sein, die Objektdaten und die Lagedaten mit-einander zu synchronisieren. Dies erfolgt durch einedrahtlose Übertragung. Der Controller 5 erzeugt ein Syn-chronisationssignal, das durch den Sender/Empfänger7 des Controllers 5 an den Sender/Empfänger 6 desScanners 3 übertragen wird.[0031] Das Verfahren der Synchronisation ist in Fig. 5schematisch dargestellt. Fig. 5a zeigt den zeitlichen Ver-lauf der Übermittlung von Lagedaten, also von Daten derPosition und Orientierung des Scanners 3, an den Con-troller 5. Fig. 5b zeigt den zeitlichen Verlauf der drahtlo-sen Übermittlung von Objektdaten von dem Scanner 3an den Controller 5. Diese Datenübertragungen sindnicht miteinander synchron. Zu einem bestimmten Zeit-punkt t wird von einem Taktgeber in dem Controller 5 einSynchronisationssignal 19 erzeugt. Das Synchronisati-onssignal 19 wird drahtlos an den Scanner 3 übertragen.Hierfür kann ein gesonderter Datenübertragungskanalvorgesehen sein. Der Zeitpunkt t stimmt mit dem Zeit-punkt der ansteigenden Flanke 20 der Übermittlung ei-nes Pakets 21 von Lagedaten überein. Die Übertragungdes Synchronisationssignals 19 an den Scanner 3 be-wirkt, daß auch die Übertragung des nächsten Datenpa-kets 22 von Objektdaten zu dem Zeitpunkt der Übertra-gung des Synchronisationssignals 19 beginnt. Fernerbewirkt der Synchronisationsimpuls 19, daß ein in demScanner 3 vorhandener Zeitgeber zurückgesetzt wird.Dieser Zeitgeber läuft mit derselben Geschwindigkeit wieein entsprechender Zeitgeber des Controllers 5. Er taktetdie Übertragung der nachfolgenden Datenpakete 23, 24,25 der Objektdaten zu den gleichen Zeitpunkten wie derZeitgeber des Controllers 5 die nachfolgenden Datenpa-kete 26, 27, 28 der Lagedaten. Dies ist in Fig. 5 rechtsdes Zeitpunkts t dargestellt.[0032] Nach der Übertragung einer bestimmten An-zahl von Datenpaketen können die Objektdaten und dieLagedaten erneut asynchron werden, insbesondere auf-grund von kleinen Abweichungen der Geschwindigkeitender Zeitgeber des Scanners 3 und des Controllers 5. DieDatenübertragung kann dann durch ein weiteres Syn-chronisationssignal wieder synchronisiert werden. Vor-zugsweise werden zu bestimmten, regelmäßig wieder-kehrenden Zeitpunkten Synchronisationssignale gesen-det.[0033] Die Energieversorgung für den Scanner 3 undfür den Sender/Empfänger 6 ist in einer am Körper trag-baren Energieversorgungseinheit 29 vorgesehen. Sie
umfaßt eine oder mehrere Hochleistungsbatterien. DieEnergieversorgungseinheit 29 ist mit dem Scanner 3durch eine Leitung 30 verbunden.
Patentansprüche
1. Verfahren zum Bestimmen der 3D-Koordinaten derOberfläche (1) eines Objekts (2),bei dem die Oberfläche (1) des Objekts (2) von einemScanner (3) zur Gewinnung von Objektdaten abge-tastet wird,bei dem die Position und Orientierung des Scanners(3) zur Gewinnung von Lagedaten bestimmt wirdund bei dem die Objektdaten und die Lagedaten aneinen Controller (5) übermittelt werden, der darausdie 3D-Koordinaten der Oberfläche (1) des Objekts(2) bestimmt,dadurch gekennzeichnet,daß die Objektdaten von dem Scanner (3) drahtlosan den Controller (5) übermittelt (6, 7) werden.
2. Verfahren nach Anspruch 1, dadurch gekenn-zeichnet, daß die Objektdaten und die Lagedatenmiteinander synchronisiert werden.
3. Verfahren nach Anspruch 2, dadurch gekenn-zeichnet, daß die Objektdaten und die Lagedatendurch eine drahtlose Übertragung synchronisiertwerden.
4. Verfahren nach Anspruch 2 oder 3, dadurch ge-kennzeichnet, daß der Controller (5) und/oder derScanner (3) ein Synchronisationssignal (19) er-zeugt, das an den Controller (5) und/oder den Scan-ner (3) drahtlos übertragen wird.
5. Verfahren nach einem der vorhergehenden Ansprü-che, dadurch gekennzeichnet, daß die Objektda-ten vor der drahtlosen Übermittlung an den Control-ler (5) komprimiert werden.
6. Verfahren nach einem der vorhergehenden Ansprü-che, dadurch gekennzeichnet, daß der Scanner(3) Bestandteil einer Koordinatenmeßmaschine ist.
7. Verfahren nach einem der Ansprüche 1 - 5, dadurchgekennzeichnet, daß der Scanner (3) an einem Ge-lenkarm oder an einem Arm eines Industrierobotersvorgesehen ist.
8. Verfahren nach einem Ansprüche 1 - 5, dadurchgekennzeichnet, daß der Scanner (3) ein handge-haltener Scanner (3) ist.
9. Verfahren nach Anspruch 8, dadurch gekenn-zeichnet, daß die Position und Orientierung desScanners (3) durch ein Tracking-System (4) be-
7 8
EP 2 385 341 A1
6
5
10
15
20
25
30
35
40
45
50
55
stimmt werden.
10. Verfahren nach einem der vorhergehenden Ansprü-che, dadurch gekennzeichnet, daß die Energie-versorgung des Scanners (3) durch eine am Körpertragbare Energieversorgungseinheit (29) erfolgt.
11. Verfahren nach einem der vorhergehenden Ansprü-che, dadurch gekennzeichnet, daß Fehler bei derÜbermittlung der Objektdaten automatisch erkanntund behoben werden.
12. Vorrichtung zum Bestimmen der 3D-Koordinatender Oberfläche eines Objekts, insbesondere zurDurchführung des Verfahrens nach einem der vor-hergehenden Ansprüche, umfassendeinen Scanner (3) zur Gewinnung von Objektdatender Oberfläche (1) des Objekts (2),eine Vorrichtung zum Bestimmen der Position undOrientierung des Scanners (3) zur Gewinnung vonLagedatenund einen Controller (5) zum Bestimmen der 3D-Ko-ordinaten der Oberfläche (1) des Objekts (2) aus denObjektdaten und den Lagedaten,gekennzeichnet durcheine Übermittlungseinrichtung (6, 7) zum drahtlosenÜbermitteln der Objektdaten von dem Scanner (3)an den Controller (5).
13. Vorrichtung nach Anspruch 12, gekennzeichnetdurch eine Synchronisationseinrichtung zum Syn-chronisieren der Objektdaten mit den Lagedatenund/oder eine drahtlose Übertragungseinrichtungfür die Synchronisationseinrichtung und/oder eineSignalaufbereitungseinrichtung zum Komprimierender Objektdaten vor der drahtlosen Übermittlung anden Controller (5) und/oder einen handgehaltenenScanner (3) und/oder ein Tracking-System (4) zumBestimmen der Position und Orientierung des Scan-ners (3) und/oder eine am Körper tragbare Energie-versorgungseinheit (29) zur Energieversorgung desScanners (3) und/oder eine Fehlerbeseitigungsein-richtung zum automatischen Erkennen und Behe-ben von Fehlern bei der Übermittlung der Objektda-ten.
14. Koordinatenmeßmaschine oder Gelenkarm oder In-dustrieroboter, gekennzeichnet durch eine Vor-richtung nach Anspruch 12 oder 13.
9 10
EP 2 385 341 A1
7
EP 2 385 341 A1
8

EP 2 385 341 A1
9
EP 2 385 341 A1
10
EP 2 385 341 A1
11
EP 2 385 341 A1
12
EP 2 385 341 A1
13

EP 2 385 341 A1
14
IN DER BESCHREIBUNG AUFGEFÜHRTE DOKUMENTE
Diese Liste der vom Anmelder aufgeführten Dokumente wurde ausschließlich zur Information des Lesers aufgenommenund ist nicht Bestandteil des europäischen Patentdokumentes. Sie wurde mit größter Sorgfalt zusammengestellt; dasEPA übernimmt jedoch keinerlei Haftung für etwaige Fehler oder Auslassungen.
In der Beschreibung aufgeführte Patentdokumente
• EP 1724549 A2 [0002] [0017] • EP 0553266 B1 [0005] [0017]




















