
Uncertainty evaluation of displacements measured by ESPI with divergent wavefronts
14
Uncertainty evaluation of displacements measured by electronic speckle-pattern interferometry Rau ´l R. Cordero a,b, * , Amalia Martı ´nez c , Ramo ´n Rodrı ´guez-Vera c , Pedro Roth d a Faculty of Mechanical and Production Sciences Engineering, Escuela Superior Polite ´cnica del Litoral, Km. 30, 5 Via Perimetral, Guayaquil, Ecuador b Department of Mechanical and Metallurgical Engineering, Pontificia Universidad Cato ´ lica de Chile, Vicun ˜ a Mackenna 4860, Santiago, Chile c Centro de Investigaciones en O ´ ptica, Apartado Postal 1-948, C.P. 37000, Leo ´ n, Gto., Me ´xico d Department of Mechanical Engineering, Universidad Te ´ cnica Federico Santa Maria, Ave. Espan ˜ a 1680, Valparaı ´ so, Chile Received 31 March 2004; received in revised form 6 July 2004; accepted 16 July 2004 Abstract We have applied electronic speckle-pattern interferometry (ESPI), a whole-field optical technique, to measure the displacements induced by applying tensile load on a metallic sheet sample. Because we used a dual-beam ESPI inter- ferometer with collimated incident beams, our measurements were affected by errors in the collimation and in the align- ment of the illuminating beams of the optical setup. In this paper, the influences of these errors are characterized and compared with other systematic effects through an uncertainty analysis. We found that the displacement uncertainty depends strongly on the incidence angles of the illuminating beams of the interferometer. Moreover, faults in the align- ment of the incident beams have more influence on the uncertainty than errors in their collimation. The latter errors change the incident beams from collimated to slightly divergent, modifying in turn the interferometer sensitivity. We found that this sensitivity change can be generally neglected. Ó 2004 Elsevier B.V. All rights reserved. PACS: 42.30.M; 42.40.K; 07.60.L Keywords: Speckle interferometry; Displacement measurements; Uncertainty analysis 1. Introduction Electronic speckle-pattern interferometry (ESPI) [1] and Moire ´ interferometry [2] are used to obtain 0030-4018/$ - see front matter Ó 2004 Elsevier B.V. All rights reserved. doi:10.1016/j.optcom.2004.07.040 * Corresponding author. Tel.: +5632654501; fax: +5632797656. E-mail address: [email protected] (R.R. Cordero). Optics Communications 241 (2004) 279–292 www.elsevier.com/locate/optcom
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Uncertainty evaluation of displacements measured by ESPI with divergent wavefronts
Optics Communications 241 (2004) 279–292
www.elsevier.com/locate/optcom
Uncertainty evaluation of displacements measuredby electronic speckle-pattern interferometry
Raul R. Cordero a,b,*, Amalia Martınez c, Ramon Rodrıguez-Vera c,Pedro Roth d
a Faculty of Mechanical and Production Sciences Engineering, Escuela Superior Politecnica del Litoral, Km. 30,
5 Via Perimetral, Guayaquil, Ecuadorb Department of Mechanical and Metallurgical Engineering, Pontificia Universidad Catolica de Chile,
Vicuna Mackenna 4860, Santiago, Chilec Centro de Investigaciones en Optica, Apartado Postal 1-948, C.P. 37000, Leon, Gto., Mexico
d Department of Mechanical Engineering, Universidad Tecnica Federico Santa Maria, Ave. Espana 1680, Valparaıso, Chile
Received 31 March 2004; received in revised form 6 July 2004; accepted 16 July 2004
Abstract
We have applied electronic speckle-pattern interferometry (ESPI), a whole-field optical technique, to measure the
displacements induced by applying tensile load on a metallic sheet sample. Because we used a dual-beam ESPI inter-
ferometer with collimated incident beams, our measurements were affected by errors in the collimation and in the align-
ment of the illuminating beams of the optical setup. In this paper, the influences of these errors are characterized and
compared with other systematic effects through an uncertainty analysis. We found that the displacement uncertainty
depends strongly on the incidence angles of the illuminating beams of the interferometer. Moreover, faults in the align-
ment of the incident beams have more influence on the uncertainty than errors in their collimation. The latter errors
change the incident beams from collimated to slightly divergent, modifying in turn the interferometer sensitivity. We
found that this sensitivity change can be generally neglected.
� 2004 Elsevier B.V. All rights reserved.
PACS: 42.30.M; 42.40.K; 07.60.L
Keywords: Speckle interferometry; Displacement measurements; Uncertainty analysis
0030-4018/$ - see front matter � 2004 Elsevier B.V. All rights reserv
doi:10.1016/j.optcom.2004.07.040
* Corresponding author. Tel.: +5632654501; fax:
+5632797656.
E-mail address: [email protected] (R.R. Cordero).
1. Introduction
Electronic speckle-pattern interferometry (ESPI)
[1] and Moire interferometry [2] are used to obtain
ed.

280 R.R. Cordero et al. / Optics Communications 241 (2004) 279–292
relative displacement fields from fringe patterns
that may be interpreted as contour maps of the
phase difference induced by the specimen deforma-
tion. The automatic extraction of the information
encoded in a pattern, includes several stages: first,phase-shifting technique [3] or Fourier transform
method [4] is used to obtain the wrapped phase
map; second, phase unwrapping is performed to ob-
tain the phase differences induced by the deforma-
tion [5]; third, the relative displacements are
evaluated by using the unwrapped phase difference
values and the adequate sensitivity vector
components.Independently of the phase measuring tech-
nique or the interferometer used, displacement
measurements are affected by several random
and systematic influences. These include: optical
noise, environmental perturbations, characteristics
of the phase measuring technique, misalignments
and collimation faults of the beams, etc.
The measured values of the phase are mainly af-fected by optical noise and environmental perturba-
tions. In order to minimize and to compensate these
problems, efforts have been done in the determina-
tion of the influence of noise under some particular
conditions [6] and in the experimental quantifica-
tion of the effect of the environmental vibration
on Moire interferometry [7]. Moreover, some sys-
tematic errors in the measured phase, introducedby limitations in the phase measuring and unwrap-
ping techniques, have been reported [8–12].
The displacement measurements depend also on
the sensitivity vector of the interferometer. If colli-
mated wavefronts are used, a dual-beam interfer-
ometer can be set up with sensitivity along just
one spatial coordinate; this means that two com-
ponents of the sensitivity vector are nominallyzero. Alternatively, if one uses an interferometer
with divergent illumination, it inevitably has sensi-
tivity along all the spatial coordinates [13–15]. If
the illuminating beams are collimated, sensitivity
vector components are affected by errors in the
collimation and in the alignment of the beams.
The collimation errors produce slightly divergent
beams, hence changing the sensitivity of the inter-ferometer. Although, it has been reported a com-
parison between the components of the
sensitivity vectors of ESPI interferometers that
use either collimated or spherical illumination
[16], the problem of the uncertainty evaluation of
displacement measured by an interferometer with
nominally collimated illumination remains open.
In this work, we use internationally acceptedrecommendations [17] to evaluate the uncertainty
of the relative displacements measured by a sym-
metrical dual-beam ESPI interferometer that uses
collimated wavefronts. The displacements were in-
duced by applying tensile load to an aluminum
sheet sample. In our analysis, special attention
was paid to include the uncertainty sources associ-
ated to the change of the interferometer sensitivitycaused by faults in the collimation.
We found that the uncertainty of the components
of the sensitivity vector depend strongly on the inci-
dence angles, measured with respect to the specimen
normal. Furthermore, we established that the errors
in the alignment had more influence on the uncer-
tainty of the displacements, than the faults in the col-
limation.Although theuncertaintiesof thenominallynull components of the sensitivity vector were not
insignificant, their contributions to the displacement
uncertainty were negligible. Therefore, we conclude
that the changes of the interferometer sensitivity
caused by faults in the collimation can be ignored.
2. Experimental details
Speckle-based methods, such as ESPI, are based
on the digital subtraction of two video frames cap-
tured meanwhile a sample undergoes mechanical
deformation. We used a dual-beam interferometer,
with two mutually coherent collimated beams
impinging from opposite sides upon a rough spec-
imen surface Lx · Ly of 30 mm per side (Fig. 1).The sample was an 1100 aluminum sheet sample,
0.58 mm thick in the ‘‘as received’’ state (i.e., cold
worked) and cut along the rolling direction. A first
scattered speckle pattern was captured by a CCD
camera of 512 · 512 pixels focused on the sample
surface. A second pattern was recorded after the
deformation of the specimen. The deformation
was induced by an Instron machine working intension along x. The digital subtraction of these
patterns yielded the ESPI fringe pattern shown in
Fig. 2(a). Conventional phase-shifting technique
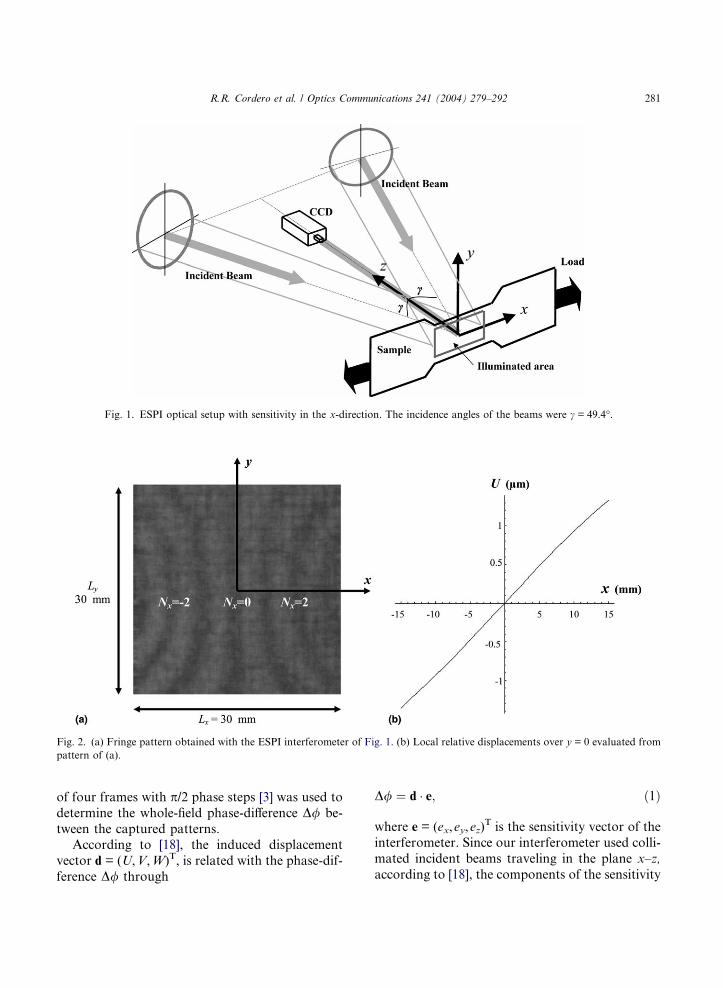
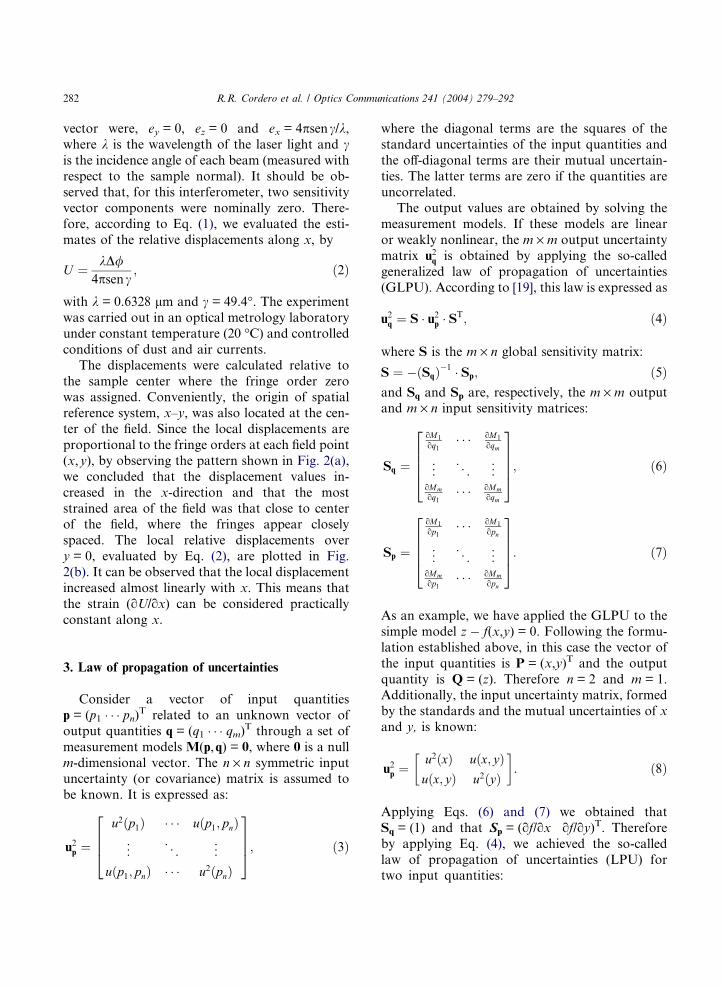
Fig. 1. ESPI optical setup with sensitivity in the x-direction. The incidence angles of the beams were c = 49.4�.
Fig. 2. (a) Fringe pattern obtained with the ESPI interferometer of Fig. 1. (b) Local relative displacements over y = 0 evaluated from
pattern of (a).
R.R. Cordero et al. / Optics Communications 241 (2004) 279–292 281
of four frames with p/2 phase steps [3] was used to
determine the whole-field phase-difference D/ be-
tween the captured patterns.According to [18], the induced displacement
vector d = (U,V,W)T, is related with the phase-dif-
ference D/ through
D/ ¼ d � e; ð1Þ
where e = (ex,ey,ez)T is the sensitivity vector of the
interferometer. Since our interferometer used colli-
mated incident beams traveling in the plane x–z,
according to [18], the components of the sensitivity
282 R.R. Cordero et al. / Optics Communications 241 (2004) 279–292
vector were, ey = 0, ez = 0 and ex = 4psenc/k,where k is the wavelength of the laser light and cis the incidence angle of each beam (measured with
respect to the sample normal). It should be ob-
served that, for this interferometer, two sensitivityvector components were nominally zero. There-
fore, according to Eq. (1), we evaluated the esti-
mates of the relative displacements along x, by
U ¼ kD/4psenc
; ð2Þ
with k = 0.6328 lm and c = 49.4�. The experiment
was carried out in an optical metrology laboratory
under constant temperature (20 �C) and controlled
conditions of dust and air currents.
The displacements were calculated relative to
the sample center where the fringe order zerowas assigned. Conveniently, the origin of spatial
reference system, x–y, was also located at the cen-
ter of the field. Since the local displacements are
proportional to the fringe orders at each field point
(x,y), by observing the pattern shown in Fig. 2(a),
we concluded that the displacement values in-
creased in the x-direction and that the most
strained area of the field was that close to centerof the field, where the fringes appear closely
spaced. The local relative displacements over
y = 0, evaluated by Eq. (2), are plotted in Fig.
2(b). It can be observed that the local displacement
increased almost linearly with x. This means that
the strain (oU/ox) can be considered practically
constant along x.
3. Law of propagation of uncertainties
Consider a vector of input quantities
p = (p1 � � � pn)T related to an unknown vector of
output quantities q = (q1 � � � qm)T through a set of
measurement models M(p,q) = 0, where 0 is a null
m-dimensional vector. The n · n symmetric inputuncertainty (or covariance) matrix is assumed to
be known. It is expressed as:
u2p ¼
u2ðp1Þ � � � uðp1; pnÞ... . .
. ...
uðp1; pnÞ � � � u2ðpnÞ
2664
3775; ð3Þ
where the diagonal terms are the squares of the
standard uncertainties of the input quantities and
the off-diagonal terms are their mutual uncertain-
ties. The latter terms are zero if the quantities are
uncorrelated.The output values are obtained by solving the
measurement models. If these models are linear
or weakly nonlinear, the m · m output uncertainty
matrix u2q is obtained by applying the so-called
generalized law of propagation of uncertainties
(GLPU). According to [19], this law is expressed as
u2q ¼ S � u2p � ST; ð4Þ
where S is the m · n global sensitivity matrix:
S ¼ �ðSqÞ�1 � Sp; ð5Þand Sq and Sp are, respectively, the m · m outputand m · n input sensitivity matrices:
Sq ¼
oM1
oq1� � � oM1
oqm
..
. . .. ..
.
oMmoq1
� � � oMmoqm
26664
37775; ð6Þ
Sp ¼
oM1
op1� � � oM1
opn
..
. . .. ..
.
oMmop1
� � � oMmopn
26664
37775: ð7Þ
As an example, we have applied the GLPU to the
simple model z � f(x,y) = 0. Following the formu-
lation established above, in this case the vector of
the input quantities is P = (x,y)T and the output
quantity is Q = (z). Therefore n = 2 and m = 1.Additionally, the input uncertainty matrix, formed
by the standards and the mutual uncertainties of x
and y, is known:
u2p ¼u2ðxÞ uðx; yÞuðx; yÞ u2ðyÞ
� �: ð8Þ
Applying Eqs. (6) and (7) we obtained that
Sq = (1) and that Sp = (of/ox of/oy)T. Therefore
by applying Eq. (4), we achieved the so-called
law of propagation of uncertainties (LPU) fortwo input quantities:
R.R. Cordero et al. / Optics Communications 241 (2004) 279–292 283
u2ðzÞ ¼ ofox
� �2
u2ðxÞ þ ofoy
� �2
u2ðyÞ
þ 2ofox
� �ofoy
� �uðx; yÞ: ð9Þ
The generalization of this law to more than two in-
put quantities is straightforward. The terms (of/
ox)2u2(x) and (of/oy)2u2(y) are the contributions
of the input quantities x and y, to the square of
the uncertainty of the output quantity z.
It should be observed that in the case of a single
output quantity, the GLPU reduces to the LPU,
and the matrix formulation becomes unnecessary.There are two approaches to evaluate the stand-
ard uncertainties of the input quantities (diagonal
elements of the input uncertainty matrix). The type
A evaluation [17] applies only to quantities which
are measured directly several times under repeata-
bility conditions. Uncertainty of input quantities
that are measured only once, those are evaluated
from models that involve further quantities, or thatare imported from other sources, should be evalu-
ated by the type B method of evaluation [17]. In
many cases, this type involves obtaining an uncer-
tainty as the standard deviation of the probability
density function (pdf) that is assumed to apply.
For example, if a quantity X is assumed to vary
uniformly within a given range of width dX, is rec-
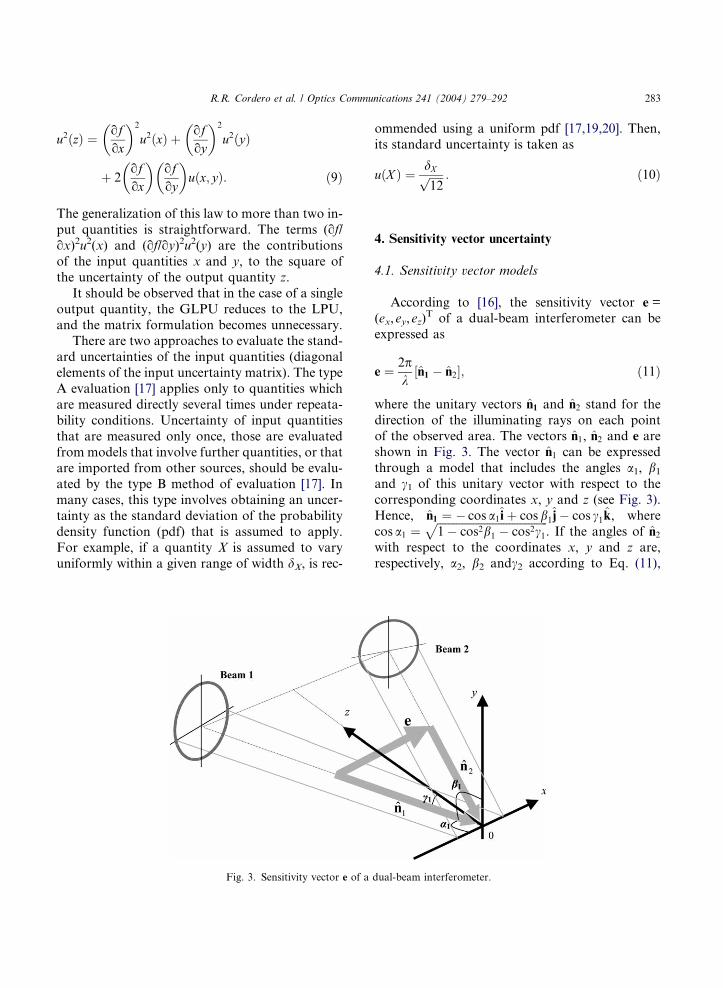
Fig. 3. Sensitivity vector e of a
ommended using a uniform pdf [17,19,20]. Then,
its standard uncertainty is taken as
uðX Þ ¼ dXffiffiffiffiffi12
p : ð10Þ
4. Sensitivity vector uncertainty
4.1. Sensitivity vector models
According to [16], the sensitivity vector e =(ex,ey,ez)
T of a dual-beam interferometer can be
expressed as
e ¼ 2pk
n1 � n2½ �; ð11Þ
where the unitary vectors n1 and n2 stand for the
direction of the illuminating rays on each pointof the observed area. The vectors n1, n2 and e are
shown in Fig. 3. The vector n1 can be expressed
through a model that includes the angles a1, b1and c1 of this unitary vector with respect to the
corresponding coordinates x, y and z (see Fig. 3).
Hence, n1 ¼ � cos a1iþ cos b1j� cos c1k, where
cos a1 ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� cos2b1 � cos2c1
p. If the angles of n2
with respect to the coordinates x, y and z are,respectively, a2, b2 andc2 according to Eq. (11),
dual-beam interferometer.
284 R.R. Cordero et al. / Optics Communications 241 (2004) 279–292
the components of the sensitivity vector e of Fig. 3
can be written as
ex ¼2pk
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� cos2 c1 þ Dc1ð Þ � cos2ðb1 þ Db1Þ
ph
þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� cos2 c2 þ Dc2ð Þ � cos2 b2 þ Db2ð Þ
p i;
ð12aÞ
ey ¼2pk
cos b1 þ Db1ð Þ � cos b2 þ Db2ð Þ½ �; ð12bÞ
ez ¼2pk
� cos c1 þ Dc1ð Þ þ cos c2 þ Dc2ð Þ½ �; ð12cÞ
where we included the quantities Dc1, Dc2 andDb2 to account for eventual errors in the colli-
mation of the incident beams. Although in our
experiment the estimates of Dc1, Dc2, Db1 and
b2 were zero, their corresponding uncertainties
were not. Since we used the symmetrical interfer-
ometer of Fig. 1, with collimated beams traveling
in the x–z plane, we considered that
b1 = b2 = 90� and that c1 = c2. Therefore, byevaluating Eqs. (12a–c) we obtained that the esti-
mates of the components of the sensitivity vector
of this interferometer were ex = 4p senc1/k, ey = 0
and ez = 0.
Estimates of the sensitivity vector components
can be affected by errors in the collimation and er-
rors in the alignment of the wavefronts used to
illuminate the sample. The latter errors can shiftthe values of b1, b2, c1 and c2; and the former er-
rors can affect the values of Dc1, Dc2, Db1 and
Db2. If Dc1, Dc2, Db1 and Db2 are not zero, eyand ez, evaluated by Eqs. (12b–c) are not zero.
This means that the collimation errors produce
slightly divergent beams changing in turn the sen-
sitivity of the interferometer.
4.2. Uncertainty of the input quantities
According to the formulation established in
Section 3, with Eqs. (12a–c) we built up a set of
three measurement models that we represented
compactly as M(p,e) = 0, where the 8-dimensional
vector of input quantities p = (b1, b2, c1, c2, Dc1,Dc2, Db1, Db2)
T is related to the vector of output
quantities e = (ex,ey,ez)T. Since the maximum rea-
sonable error associated to the estimated value of kis just about 0.1 nm, we decided to neglect the con-
tribution of k to the uncertainty of the sensitivity
vector components. Therefore, k was not consid-ered as an element of the input vector p.
Because, we assumed that the input quantities
were uncorrelated, the 8 · 8 input uncertainty ma-
trix u2p was diagonal. Its diagonal terms were the
squares of the standard uncertainties of the input
quantities b1, b2, c1, c2, Dc1, Dc2, Db1 and Db2.c1 is the angle with respect to z of the symmetry
axis of the beam 1 of the interferometer of Fig. 3.Its standard uncertainty was taken as equal to the
standard deviation of the uniform probability den-
sity function (pdf) that we assumed to apply. The
width of the pdf was assigned considering the max-
imum reasonable deviation of c1 with respect to its
estimated value. This deviation is the alignment er-
ror. Thus, according to Eq. (10) and considering
that the maximum reasonable alignment errorwas 1�, we used
uðc1Þ ¼2 1�ð Þffiffiffiffiffi12
p : ð13Þ
Analogous equations to Eq. (13) were utilized to
evaluate the uncertainties of c2, b1 and b2, consid-ering for these input quantities the same maximum
reasonable alignment error.
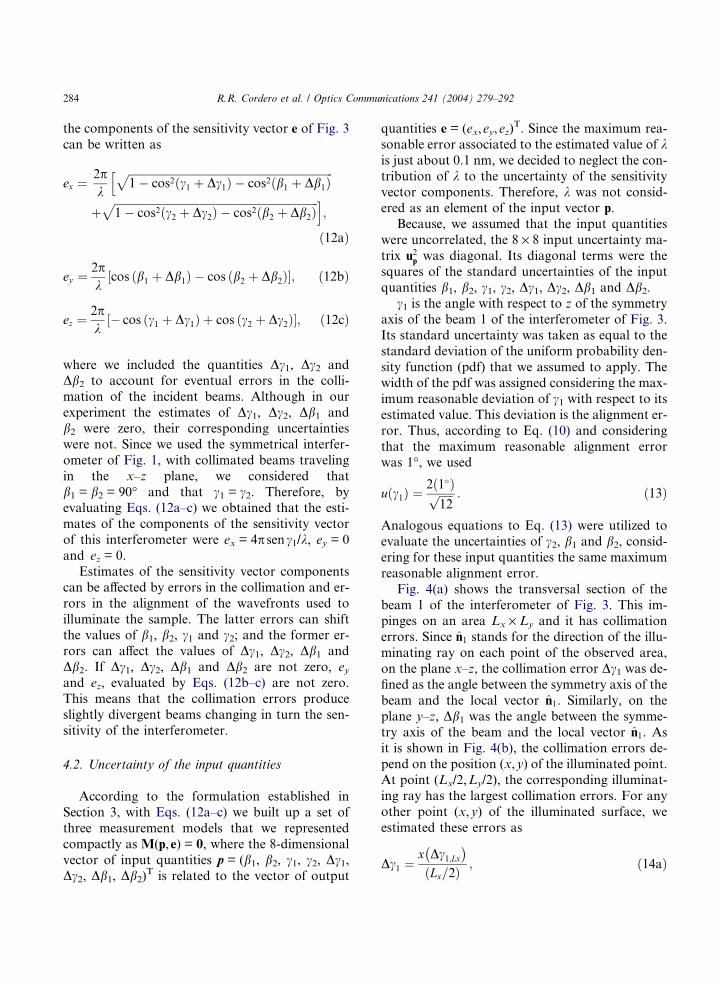
Fig. 4(a) shows the transversal section of the
beam 1 of the interferometer of Fig. 3. This im-pinges on an area Lx · Ly and it has collimation
errors. Since n1 stands for the direction of the illu-
minating ray on each point of the observed area,
on the plane x–z, the collimation error Dc1 was de-fined as the angle between the symmetry axis of the
beam and the local vector n1. Similarly, on the
plane y–z, Db1 was the angle between the symme-
try axis of the beam and the local vector n1. Asit is shown in Fig. 4(b), the collimation errors de-
pend on the position (x,y) of the illuminated point.
At point (Lx/2,Ly/2), the corresponding illuminat-
ing ray has the largest collimation errors. For any
other point (x,y) of the illuminated surface, we
estimated these errors as
Dc1 ¼x Dc1;Lx� �Lx=2ð Þ ; ð14aÞ
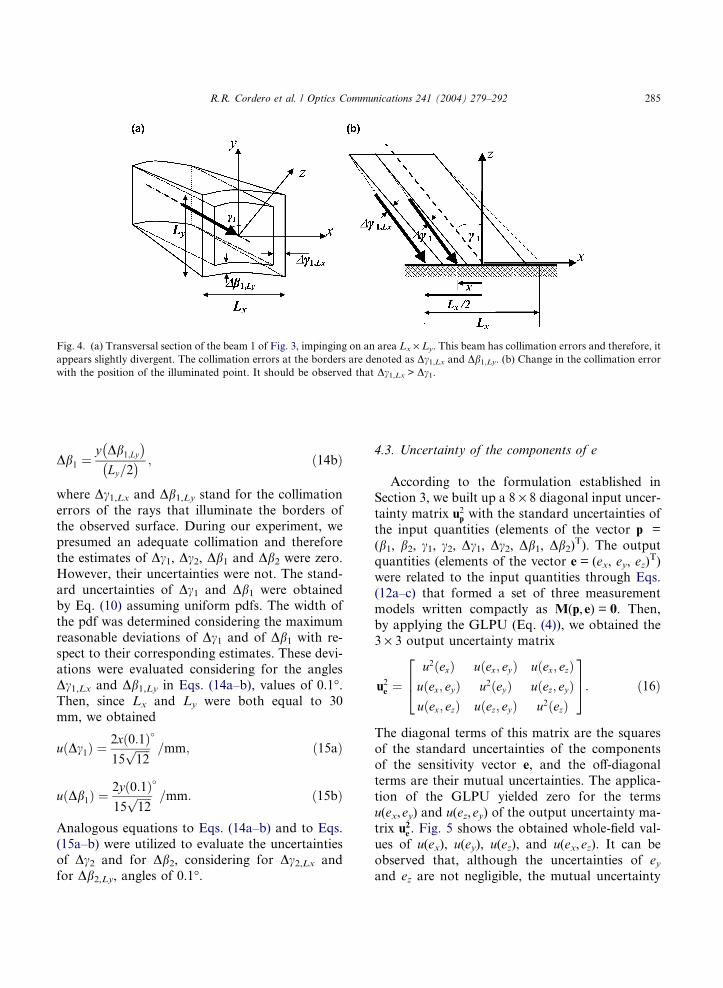
Fig. 4. (a) Transversal section of the beam 1 of Fig. 3, impinging on an area Lx · Ly. This beam has collimation errors and therefore, it
appears slightly divergent. The collimation errors at the borders are denoted as Dc1,Lx and Db1,Ly. (b) Change in the collimation error
with the position of the illuminated point. It should be observed that Dc1,Lx > Dc1.
R.R. Cordero et al. / Optics Communications 241 (2004) 279–292 285
Db1 ¼y Db1;Ly
� �Ly=2� � ; ð14bÞ
where Dc1,Lx and Db1,Ly stand for the collimation
errors of the rays that illuminate the borders of
the observed surface. During our experiment, wepresumed an adequate collimation and therefore
the estimates of Dc1, Dc2, Db1 and Db2 were zero.
However, their uncertainties were not. The stand-
ard uncertainties of Dc1 and Db1 were obtained
by Eq. (10) assuming uniform pdfs. The width of
the pdf was determined considering the maximum
reasonable deviations of Dc1 and of Db1 with re-
spect to their corresponding estimates. These devi-ations were evaluated considering for the angles
Dc1,Lx and Db1,Ly in Eqs. (14a–b), values of 0.1�.Then, since Lx and Ly were both equal to 30
mm, we obtained
u Dc1ð Þ ¼ 2x 0:1ð Þ15
ffiffiffiffiffi12
p�
=mm; ð15aÞ
u Db1ð Þ ¼ 2y 0:1ð Þ15
ffiffiffiffiffi12
p�
=mm: ð15bÞ
Analogous equations to Eqs. (14a–b) and to Eqs.
(15a–b) were utilized to evaluate the uncertainties
of Dc2 and for Db2, considering for Dc2,Lx and
for Db2,Ly, angles of 0.1�.
4.3. Uncertainty of the components of e
According to the formulation established inSection 3, we built up a 8 · 8 diagonal input uncer-
tainty matrix u2p with the standard uncertainties of
the input quantities (elements of the vector p =
(b1, b2, c1, c2, Dc1, Dc2, Db1, Db2)T). The output
quantities (elements of the vector e = (ex, ey, ez)T)
were related to the input quantities through Eqs.
(12a–c) that formed a set of three measurement
models written compactly as M(p,e) = 0. Then,by applying the GLPU (Eq. (4)), we obtained the
3 · 3 output uncertainty matrix
u2e ¼u2ðexÞ uðex; eyÞ uðex; ezÞuðex; eyÞ u2ðeyÞ uðez; eyÞuðex; ezÞ uðez; eyÞ u2ðezÞ
264
375: ð16Þ
The diagonal terms of this matrix are the squares
of the standard uncertainties of the componentsof the sensitivity vector e, and the off-diagonal
terms are their mutual uncertainties. The applica-
tion of the GLPU yielded zero for the terms
u(ex,ey) and u(ez,ey) of the output uncertainty ma-
trix u2e . Fig. 5 shows the obtained whole-field val-
ues of u(ex), u(ey), u(ez), and u(ex,ez). It can be
observed that, although the uncertainties of eyand ez are not negligible, the mutual uncertainty
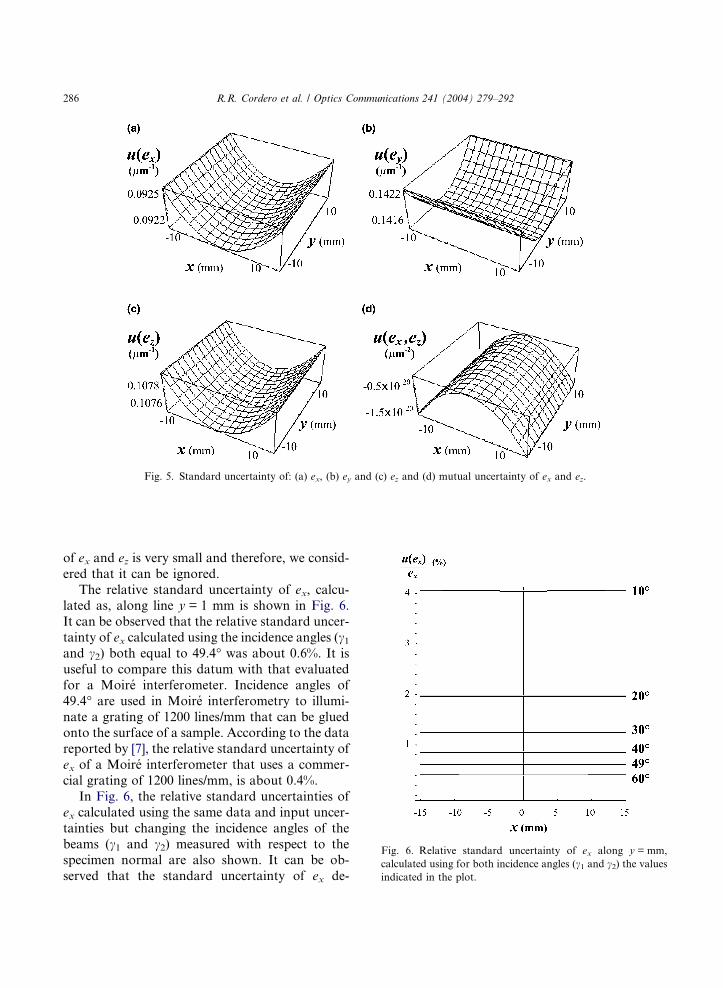
Fig. 5. Standard uncertainty of: (a) ex, (b) ey and (c) ez and (d) mutual uncertainty of ex and ez.
Fig. 6. Relative standard uncertainty of ex along y = mm,
calculated using for both incidence angles (c1 and c2) the valuesindicated in the plot.
286 R.R. Cordero et al. / Optics Communications 241 (2004) 279–292
of ex and ez is very small and therefore, we consid-
ered that it can be ignored.
The relative standard uncertainty of ex, calcu-lated as, along line y = 1 mm is shown in Fig. 6.
It can be observed that the relative standard uncer-
tainty of ex calculated using the incidence angles (c1and c2) both equal to 49.4� was about 0.6%. It is
useful to compare this datum with that evaluated
for a Moire interferometer. Incidence angles of
49.4� are used in Moire interferometry to illumi-
nate a grating of 1200 lines/mm that can be gluedonto the surface of a sample. According to the data
reported by [7], the relative standard uncertainty of
ex of a Moire interferometer that uses a commer-
cial grating of 1200 lines/mm, is about 0.4%.
In Fig. 6, the relative standard uncertainties of
ex calculated using the same data and input uncer-
tainties but changing the incidence angles of the
beams (c1 and c2) measured with respect to thespecimen normal are also shown. It can be ob-
served that the standard uncertainty of ex de-
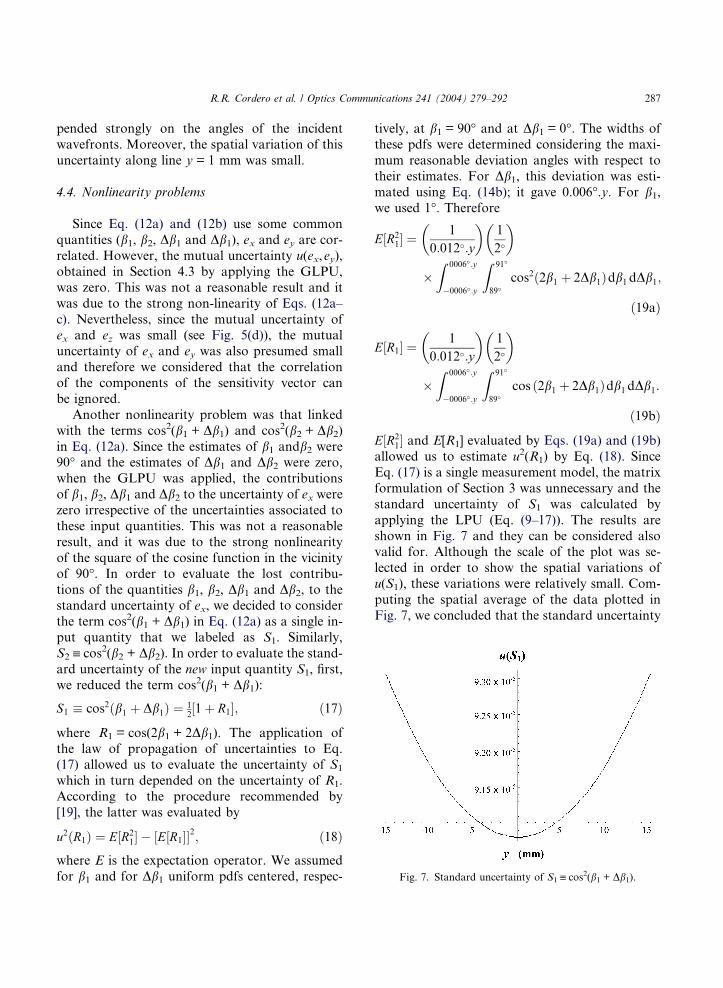
Fig. 7. Standard uncertainty of S1 ” cos2(b1 + Db1).
R.R. Cordero et al. / Optics Communications 241 (2004) 279–292 287
pended strongly on the angles of the incident
wavefronts. Moreover, the spatial variation of this
uncertainty along line y = 1 mm was small.
4.4. Nonlinearity problems
Since Eq. (12a) and (12b) use some common
quantities (b1, b2, Db1 and Db1), ex and ey are cor-
related. However, the mutual uncertainty u(ex,ey),
obtained in Section 4.3 by applying the GLPU,
was zero. This was not a reasonable result and it
was due to the strong non-linearity of Eqs. (12a–
c). Nevertheless, since the mutual uncertainty ofex and ez was small (see Fig. 5(d)), the mutual
uncertainty of ex and ey was also presumed small
and therefore we considered that the correlation
of the components of the sensitivity vector can
be ignored.
Another nonlinearity problem was that linked
with the terms cos2(b1 + Db1) and cos2(b2 + Db2)in Eq. (12a). Since the estimates of b1 andb2 were90� and the estimates of Db1 and Db2 were zero,
when the GLPU was applied, the contributions
of b1, b2, Db1 and Db2 to the uncertainty of ex were
zero irrespective of the uncertainties associated to
these input quantities. This was not a reasonable
result, and it was due to the strong nonlinearity
of the square of the cosine function in the vicinity
of 90�. In order to evaluate the lost contribu-tions of the quantities b1, b2, Db1 and Db2, to the
standard uncertainty of ex, we decided to consider
the term cos2(b1 + Db1) in Eq. (12a) as a single in-
put quantity that we labeled as S1. Similarly,
S2 ” cos2(b2 + Db2). In order to evaluate the stand-
ard uncertainty of the new input quantity S1, first,
we reduced the term cos2(b1 + Db1):
S1 � cos2 b1 þ Db1ð Þ ¼ 121þ R1½ �; ð17Þ
where R1 = cos(2b1 + 2Db1). The application of
the law of propagation of uncertainties to Eq.(17) allowed us to evaluate the uncertainty of S1
which in turn depended on the uncertainty of R1.
According to the procedure recommended by
[19], the latter was evaluated by
u2ðR1Þ ¼ E½R21� � ½E½R1��2; ð18Þ
where E is the expectation operator. We assumed
for b1 and for Db1 uniform pdfs centered, respec-
tively, at b1 = 90� and at Db1 = 0�. The widths of
these pdfs were determined considering the maxi-
mum reasonable deviation angles with respect to
their estimates. For Db1, this deviation was esti-
mated using Eq. (14b); it gave 0.006�.y. For b1,we used 1�. Therefore
E½R21� ¼
1
0:012�:y
� �1
2�
� �
�Z 0006�:y
�0006�:y
Z 91�
89�cos2 2b1 þ 2Db1ð Þdb1 dDb1;
ð19aÞ
E½R1� ¼1
0:012�:y
� �1
2�
� �
�Z 0006�:y
�0006�:y
Z 91�
89�cos 2b1 þ 2Db1ð Þdb1 dDb1:
ð19bÞ
E½R21� and E[R1] evaluated by Eqs. (19a) and (19b)
allowed us to estimate u2(R1) by Eq. (18). Since
Eq. (17) is a single measurement model, the matrix
formulation of Section 3 was unnecessary and the
standard uncertainty of S1 was calculated by
applying the LPU (Eq. (9–17)). The results are
shown in Fig. 7 and they can be considered alsovalid for. Although the scale of the plot was se-
lected in order to show the spatial variations of
u(S1), these variations were relatively small. Com-
puting the spatial average of the data plotted in
Fig. 7, we concluded that the standard uncertainty
288 R.R. Cordero et al. / Optics Communications 241 (2004) 279–292
of was just about 9.2 · 10�5. This means that the
combined contribution of the input quantities b1and Db1 to the standard uncertainty of ex should
be very small. The same is valid for the contribu-
tions of b2 and Db2.Therefore, we concluded that the uncertainty
evaluation performed in Section 4.3 was not af-
fected significantly by the application of the
GLPU to the non-linear equations (12a–c). Never-
theless, the values of u(ex) shown in Fig. 5(a) in-
clude the combined contribution of b1, Db1, b2and Db2, calculated through the evaluation of
u(S1) and u(S2) following the procedure describedabove.
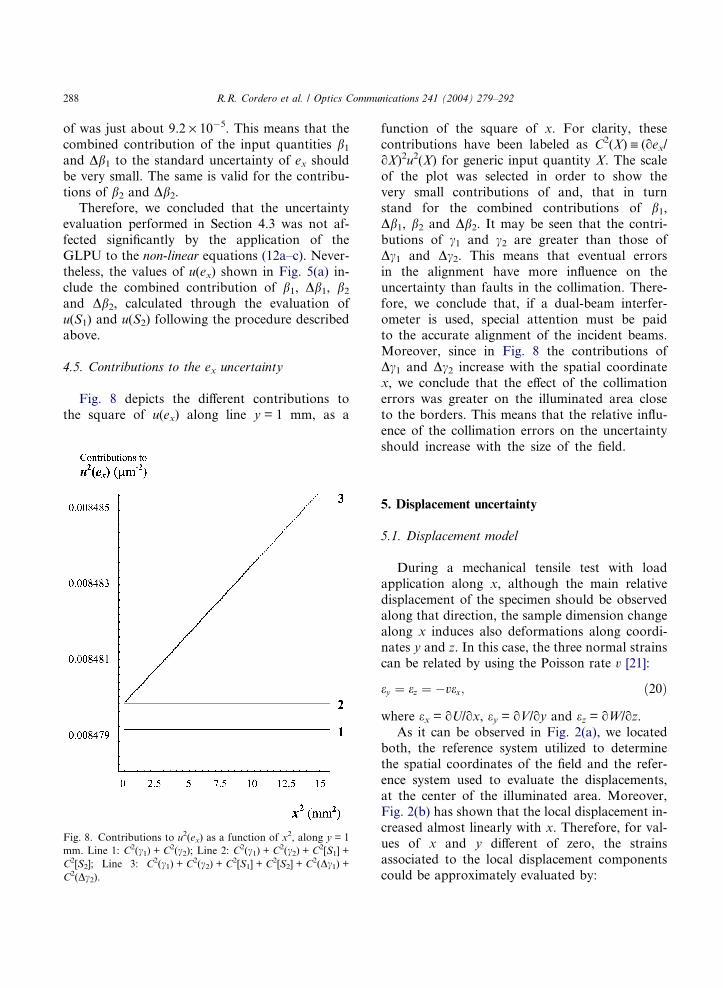
4.5. Contributions to the ex uncertainty
Fig. 8 depicts the different contributions to
the square of u(ex) along line y = 1 mm, as a
Fig. 8. Contributions to u2(ex) as a function of x2, along y = 1
mm. Line 1: C2(c1) + C2(c2); Line 2: C2(c1) + C2(c2) + C2[S1] +
C2[S2]; Line 3: C2(c1) + C2(c2) + C2[S1] + C2[S2] + C2(Dc1) +C2(Dc2).
function of the square of x. For clarity, these
contributions have been labeled as C2(X) ” (oex/
oX)2u2(X) for generic input quantity X. The scale
of the plot was selected in order to show the
very small contributions of and, that in turnstand for the combined contributions of b1,Db1, b2 and Db2. It may be seen that the contri-
butions of c1 and c2 are greater than those of
Dc1 and Dc2. This means that eventual errors
in the alignment have more influence on the
uncertainty than faults in the collimation. There-
fore, we conclude that, if a dual-beam interfer-
ometer is used, special attention must be paidto the accurate alignment of the incident beams.
Moreover, since in Fig. 8 the contributions of
Dc1 and Dc2 increase with the spatial coordinate
x, we conclude that the effect of the collimation
errors was greater on the illuminated area close
to the borders. This means that the relative influ-
ence of the collimation errors on the uncertainty
should increase with the size of the field.
5. Displacement uncertainty
5.1. Displacement model
During a mechanical tensile test with load
application along x, although the main relative
displacement of the specimen should be observed
along that direction, the sample dimension change
along x induces also deformations along coordi-
nates y and z. In this case, the three normal strainscan be related by using the Poisson rate v [21]:
ey ¼ ez ¼ �vex; ð20Þ
where ex = oU/ox, ey = oV/oy and ez = oW/oz.
As it can be observed in Fig. 2(a), we located
both, the reference system utilized to determine
the spatial coordinates of the field and the refer-
ence system used to evaluate the displacements,
at the center of the illuminated area. Moreover,Fig. 2(b) has shown that the local displacement in-
creased almost linearly with x. Therefore, for val-
ues of x and y different of zero, the strains
associated to the local displacement components
could be approximately evaluated by:

R.R. Cordero et al. / Optics Communications 241 (2004) 279–292 289
ex ¼Ux; ð21aÞ
ey ¼Vy; ð21bÞ
ez ¼W T
Lz; ð21cÞ
where, the total displacement induced along z(WT)
and the sample thick (Lz) were used to evaluate ez.Combining Eqs. (1) and (20) and Eqs. (21a–c), and
solving for U, we obtain
U ¼ D/xexx� veyy � vezLz
: ð22Þ
Since the components of the sensitivity vector of
our ESPI interferometer were ex = 4p senc1/k,ey = 0 and ez = 0, Eq. (22) reduces to Eq. (2). How-
ever, because the uncertainties of ey and ez were
not negligible (see Fig. 5), we considered that Eq.
(2) does not include all the uncertainty sources.
Therefore, we took Eq. (22) as the measurement
model to evaluate the displacement uncertaintyby applying the law of propagation of
uncertainties.
5.2. Uncertainty of the input quantities
According to the formulation established in
Section 3, Eq. (22) is a single measurement model
where U is related to the input quantities D/, ex,ey and ez. Since the estimates of ey and ez were
zero, when the LPU (Eq. (9)) was applied to
Eq. (22), the contributions to the U uncertainty
of the terms v and Lz were zero. Although ithas been recommended several methods to in-
clude these lost contributions [19], independently
of the selected technique, these contributions are
very small compared to those of D/ and ex.
Therefore, we decided ignore the standard uncer-
tainties of v and Lz ; they were not considered as
input quantities.
As pointed out in Section 4.4, although thecomponents of the sensitivity vector are correlated,
in our case, their mutual uncertainties can be ig-
nored. Therefore, we applied the law of propaga-
tion of uncertainties to the model (22) assuming
that the input quantities were uncorrelated.
The standard uncertainty of D/ depends on sys-
tematic effects linked with the used phase-shifting
procedure and on the influence of noise and the
perturbing environment. Assuming that the first
one was compensated adequately, we have consid-ered just the eventual variations in the phase-dif-
ference caused by the optical noise and the
external influence. We estimated a maximum even-
tual error of about 0.5 rad in the measured D/ val-
ues. Therefore, assuming a uniform pdf, we took
u D/ð Þ ¼ 2 0:5ð Þffiffiffiffiffi12
p rad: ð23Þ
The standard uncertainty of D/, estimated by
Eq. (23), was 0.28 rad. This is a standard uncer-tainty considerably greater than that reported for
the D/ values measured under similar experimen-
tal conditions with a Moire interferometer of the
same sensitivity of our ESPI interferometer.
According to [7], for the D/ values measured by
phase-shifting Moire interferometry, u( D/) is justabout 0.13 rad. The difference can be explained by
considering the different signal-to-noise ratios ofESPI and of Moire interferometry. Since ESPI
yields patterns noisier than those obtained by
Moire, we speculate that in the former method,
the influence of optical noise should be greater
than in the case of Moire.
The standard uncertainties of ex,ey and ez were
evaluated in Section 4.3. Fig. 5 shows these stand-
ard uncertainties.
5.3. Standard uncertainty of the displacement
The standard uncertainty of U, at each point of
the illuminated field, was calculated by applying
the LPU (Eq. (9–22)). We used as input uncertain-
ties the data plotted in Fig. 5, and the outcome of
Eq. (23). Fig. 9 shows the whole-field results.Although the scale of the plot was selected in order
to shown the spatial variations of the local dis-
placement uncertainties, these variations were rel-
atively small. Computing the spatial average of
the data plotted in Fig. 9, we concluded that the
displacement uncertainty associated to our meas-
urements was about 0.019 lm.
The uncertainties associated to the displace-ment measurements performed by an ESPI
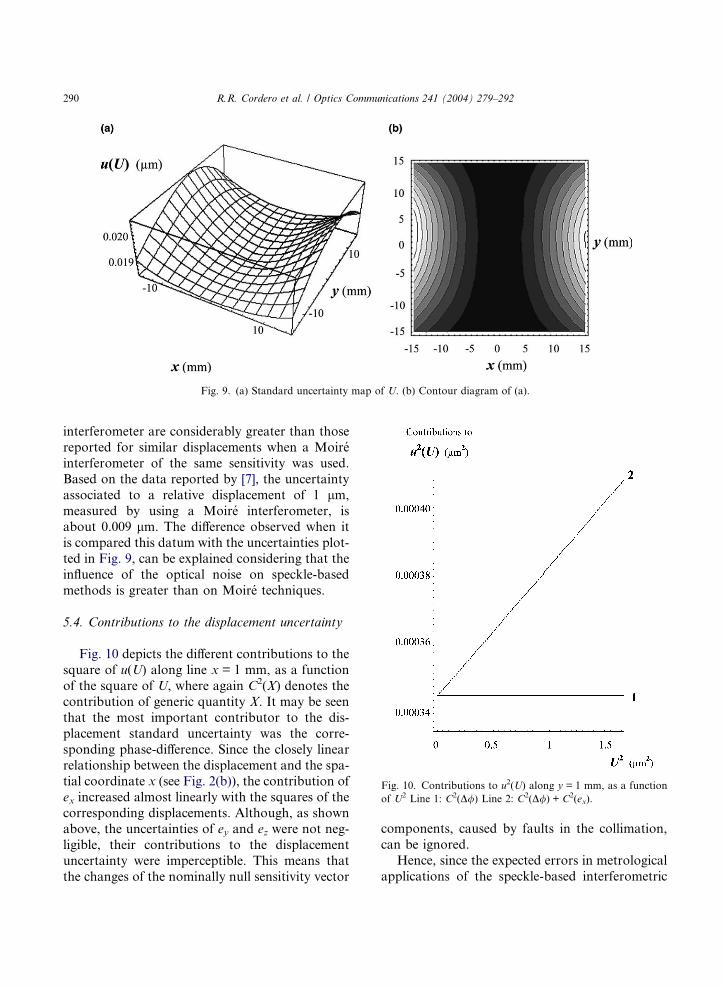
Fig. 9. (a) Standard uncertainty map of U. (b) Contour diagram of (a).
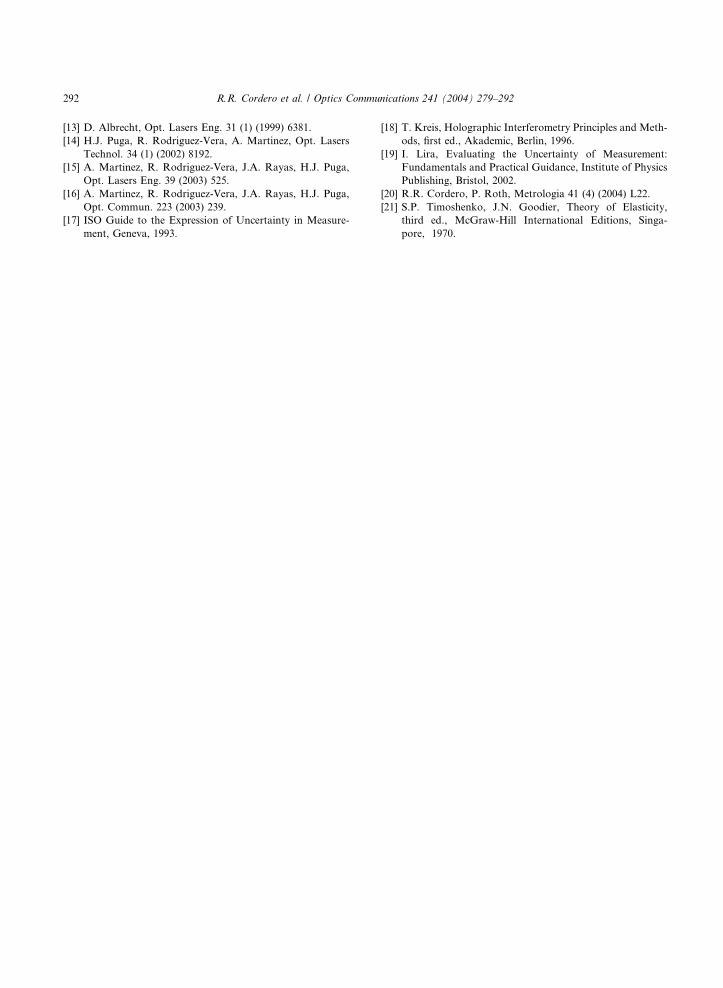
Fig. 10. Contributions to u2(U) along y = 1 mm, as a function
of U2 Line 1: C2(D/) Line 2: C2(D/) + C2(ex).
290 R.R. Cordero et al. / Optics Communications 241 (2004) 279–292
interferometer are considerably greater than those
reported for similar displacements when a Moire
interferometer of the same sensitivity was used.
Based on the data reported by [7], the uncertainty
associated to a relative displacement of 1 lm,
measured by using a Moire interferometer, isabout 0.009 lm. The difference observed when it
is compared this datum with the uncertainties plot-
ted in Fig. 9, can be explained considering that the
influence of the optical noise on speckle-based
methods is greater than on Moire techniques.
5.4. Contributions to the displacement uncertainty
Fig. 10 depicts the different contributions to the
square of u(U) along line x = 1 mm, as a function
of the square of U, where again C2(X) denotes the
contribution of generic quantity X. It may be seen
that the most important contributor to the dis-
placement standard uncertainty was the corre-
sponding phase-difference. Since the closely linear
relationship between the displacement and the spa-tial coordinate x (see Fig. 2(b)), the contribution of
ex increased almost linearly with the squares of the
corresponding displacements. Although, as shown
above, the uncertainties of ey and ez were not neg-
ligible, their contributions to the displacement
uncertainty were imperceptible. This means that
the changes of the nominally null sensitivity vector
components, caused by faults in the collimation,
can be ignored.
Hence, since the expected errors in metrological
applications of the speckle-based interferometric

R.R. Cordero et al. / Optics Communications 241 (2004) 279–292 291
techniques are generally smaller than the assumed
maximum reasonable errors in the alignment and
in the collimation, we concluded that reliable
uncertainty evaluations of measurements obtained
by an ESPI interferometer with collimated illumi-nation, can be performed by applying the LPU
to the simple model:
U ¼ kD/2p sen c1 þ Dc1ð Þ þ sen c2 þ Dc2ð Þ½ � : ð24Þ
6. Summary and conclusions
An investigation was carried out to evaluate the
uncertainty of displacements measured by using a
dual-beam ESPI interferometer that used colli-
mated illuminating beams. Displacements were in-
duced by applying tensile load to a metallic sheetsample. The interferometer was sensible just along
the pulling direction. The other two sensitivity vec-
tor components were nominally zero.
Displacement measurements depend on the
interferometer sensitivity that is affected by errors
in the collimation and in the alignment of the illu-
minating beams. Collimation errors produce
slightly divergent beams changing in turn the inter-ferometer sensitivity.
In this work, special attention was paid to eval-
uate the contributions to the displacement uncer-
tainty of eventual changes of the interferometer
sensitivity produced by faults in the collimation
of the beams.
We found that the uncertainty of the sensitivity
vector components depended strongly on the angleof the incident wavefronts, measured with respect
to the specimen normal. We established that the
errors in the alignment had more influence on
the uncertainty evaluation than the faults in the
collimation. Moreover, we found that the effect
of the collimation errors was greater on the illumi-
nated area close to the borders. This means that
the relative influence of the collimation errorson the uncertainty should increase with the size
of the field.
Although the uncertainties of the nominally
null sensitivity vector components were not insig-
nificant, we found that their contributions to the
displacement uncertainty can be neglected if the
maximum reasonable errors in alignment and in
collimation are in the order of those assumed in
this work. Since the expected errors in metrologi-
cal applications of the speckle-based interferomet-ric techniques are generally smaller than the
assumed maximum reasonable errors, we conclude
that the changes of the ESPI interferometer sensi-
tivity, caused by faults in the collimation, can be
generally ignored.
Acknowledgements
R.R. Cordero thanks support of MECESUP
PUC/19903 Project and VLaamse Interuniversi-
taire Road (VLIR IUC, Componente 6). A.
Martınez and R. Rodrıguez-Vera thank Consejo
Nacional de Ciencia y Tecnologıa (CONACYT)
and Consejo de Ciencia y Tecnologıa del Estado
de Guanajuato (CONCYTEG) for their suportto carry out this research. We thank Dr. Gonzalo
Fuster, Dr. Luciano Laroze and the referee, for
helpful suggestions to the final draft of this paper.
References
[1] R. Jones, C. Wykes, Holographic and Speckle Interferom-
etry, first ed., Cambridge University Press, Cambridge,
1983.
[2] D. Post, B. Han, P. Ifju, High Sensitivity Moire: Exper-
imental Analysis for Mechanics and Materials, Springer,
New York, 1994.
[3] J.M. Huntley, in: P.K. Rastogi (Ed.), Digital Speckle
Pattern Interferometry and Related Techniques, Wiley,
Chichester, 2001.
[4] M. Takeda, H. Ina, S. Kobayashi, J. Opt. Soc. Am. 72 (1)
(1982) 156160.
[5] D.W. Robinson, G.T. Reid, Phase Unwrapping Methods.
Interferogram Analysis, Institute of Physics, Bristol, UK,
1993.
[6] M.R. Miller, I. Mohammed, P.S. Ho, Opt. Lasers Eng. 36
(2) (2001) 127.
[7] R.R. Cordero, I. Lira, Opt. Commun. 237 (2004) 25.
[8] J. Schwider, R. Burow, K.E. Elner, J. Grzanna, R.
Spolaczyk, K. Merkel, Appl. Opt. 22 (1983) 3421.
[9] J. Schmit, K. Creath, Appl. Opt. 34 (1995) 3610.
[10] H. Zhang, M. Lalor, D. Burton, Opt. Lasers Eng. 31
(1999) 381.
[11] K. Creath, J. Schmit, Opt. Laser Eng. 24 (1996) 365.
[12] P.J. de Groot, L.L. Deck, Appl. Opt. 35 (1996) 2172.
292 R.R. Cordero et al. / Optics Communications 241 (2004) 279–292
[13] D. Albrecht, Opt. Lasers Eng. 31 (1) (1999) 6381.
[14] H.J. Puga, R. Rodriguez-Vera, A. Martinez, Opt. Lasers
Technol. 34 (1) (2002) 8192.
[15] A. Martinez, R. Rodriguez-Vera, J.A. Rayas, H.J. Puga,
Opt. Lasers Eng. 39 (2003) 525.
[16] A. Martinez, R. Rodriguez-Vera, J.A. Rayas, H.J. Puga,
Opt. Commun. 223 (2003) 239.
[17] ISO Guide to the Expression of Uncertainty in Measure-
ment, Geneva, 1993.
[18] T. Kreis, Holographic Interferometry Principles and Meth-
ods, first ed., Akademic, Berlin, 1996.
[19] I. Lira, Evaluating the Uncertainty of Measurement:
Fundamentals and Practical Guidance, Institute of Physics
Publishing, Bristol, 2002.
[20] R.R. Cordero, P. Roth, Metrologia 41 (4) (2004) L22.
[21] S.P. Timoshenko, J.N. Goodier, Theory of Elasticity,
third ed., McGraw-Hill International Editions, Singa-
pore, 1970.




















